1 Ill-posed inverse problems and regularization methods 1. Inverse ill-posed problems: Examples 3. Theory of Regularization methods 2. Singular values and Pseudoinverse 4. Choosing the regularization parameters 5. Practical regularization methods

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript
1
Ill-posed inverse problems and regularization methods
1. Inverse ill-posed problems: Examples
3. Theory of Regularization methods
2. Singular values and Pseudoinverse
4. Choosing the regularization parameters
5. Practical regularization methods
2
Examples of inverse problems
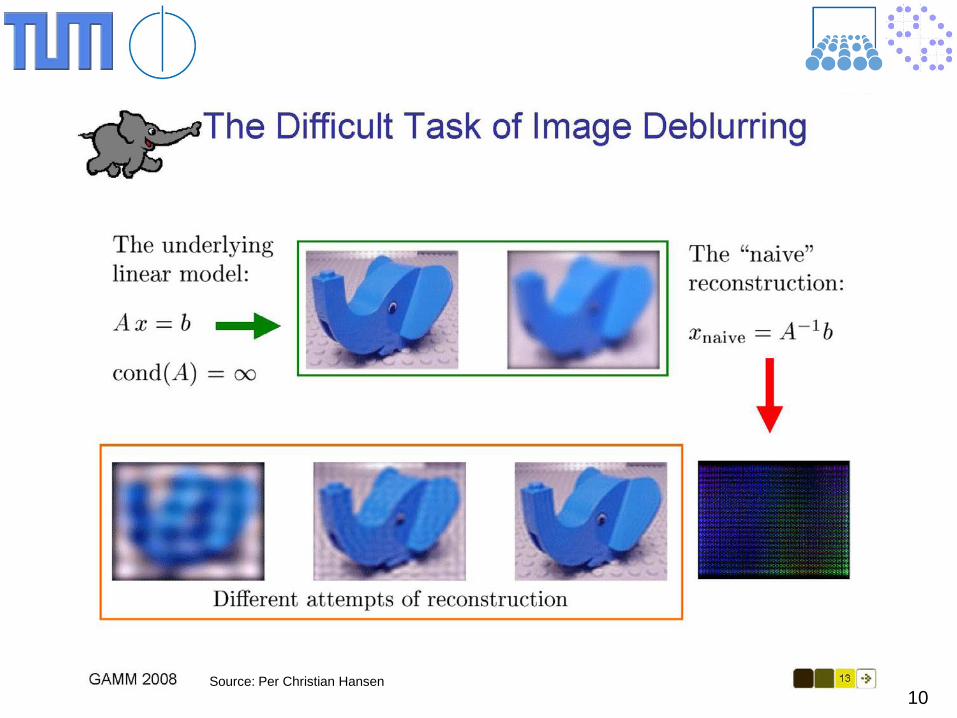
Image deblurring, image reconstruction
Ingredients: - Ill-conditioned (or singular) operator applied on data - added noise - recover original data as good as possible
3 Source: Per Christian Hansen
4
Some Types of Blur and Distortion
From the camera: the lens is out of focus, imperfections in the lens, and noise in the CCD and the analog/digital converter.
From the environments: motion of the object (or camera), fluctuations in the light’s path (turbulence), and false light, cosmic radiation (in astronomical images).
Given a mathematical/statistical model of the blur and distortion, we can try to deblur the image and compute a sharper reconstruction.
Source: Per Christian Hansen

5 Source: Per Christian Hansen
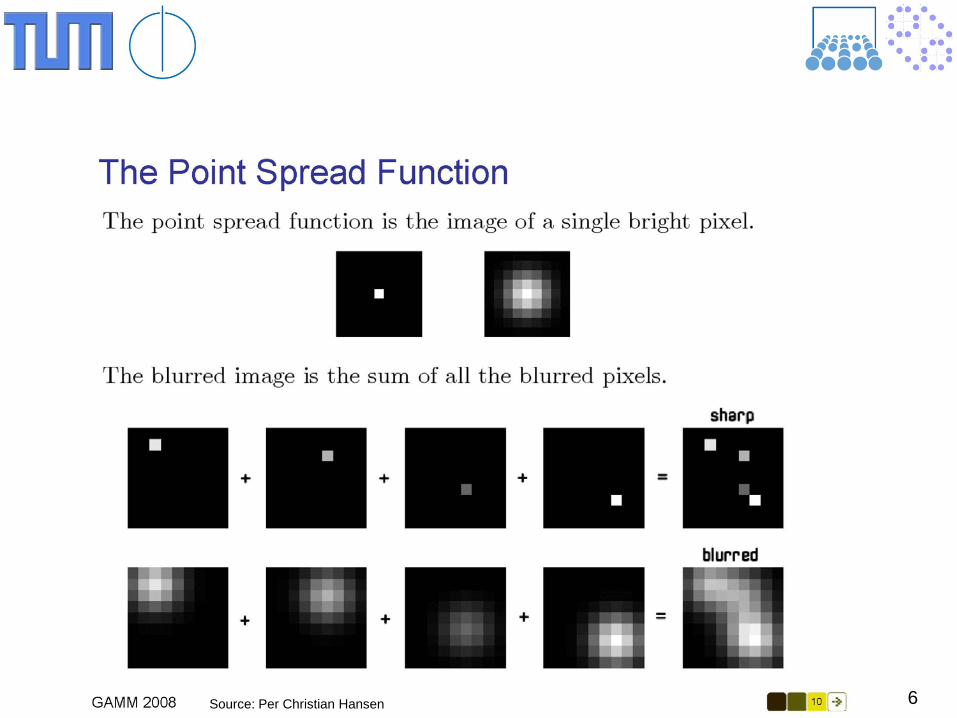
6 Source: Per Christian Hansen

7
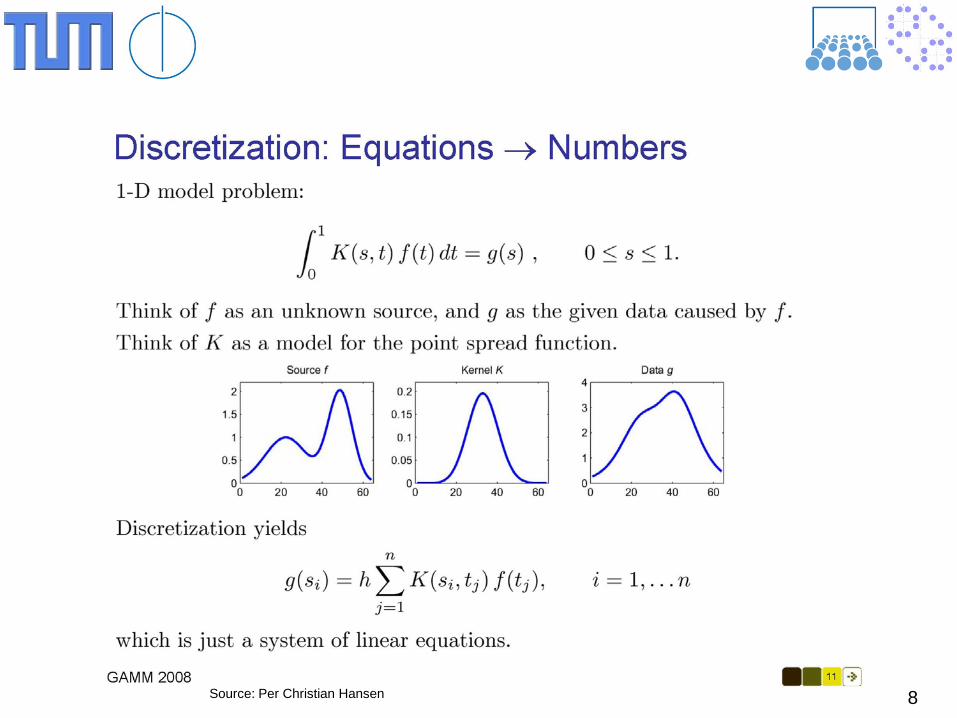
General Model
)()(),( sgdtftsK =Ω∫Ω
K(s,t): convolution, blur, point spread function f(t): original data g(s): measured data (perturbed by noise) Ω: area of the data, image pixels,
8 Source: Per Christian Hansen

9 Source: Per Christian Hansen
10 Source: Per Christian Hansen

11
Stationary Blur
)()(),( sgdtftsK =Ω∫Ω
with )(),( tsKtsK −=
Via discretization gives linear system Ax=b with jiij ta −=
Toeplitz matrix with constant diagonals.
Also stationary point spread function gives Toeplitz structure:
[ ] 4/)1,2,1(4/121 tridiag→

−
−
−
−−
011
101
101
110
....
.....
....
tttttt
tttttt
n
n
Toeplitz Matrix T nn×
Solve T x = b
( )1, =− jijit
n =

13
Periodic Stationary Case
Additional property: Signal is periodic. Periodic Toeplitz structure.

14
Circulant Matrices
Toeplitz Matrix with special structure:
=
−
−−
−−
−−
0121
1
012
2101
1210
ccccc
ccccccccccc
C
n
nn
nn
nn
related to Convolution ( )ij
n
jjii Cxxcy ==∑
=−
1
Circulant Matrix:
15
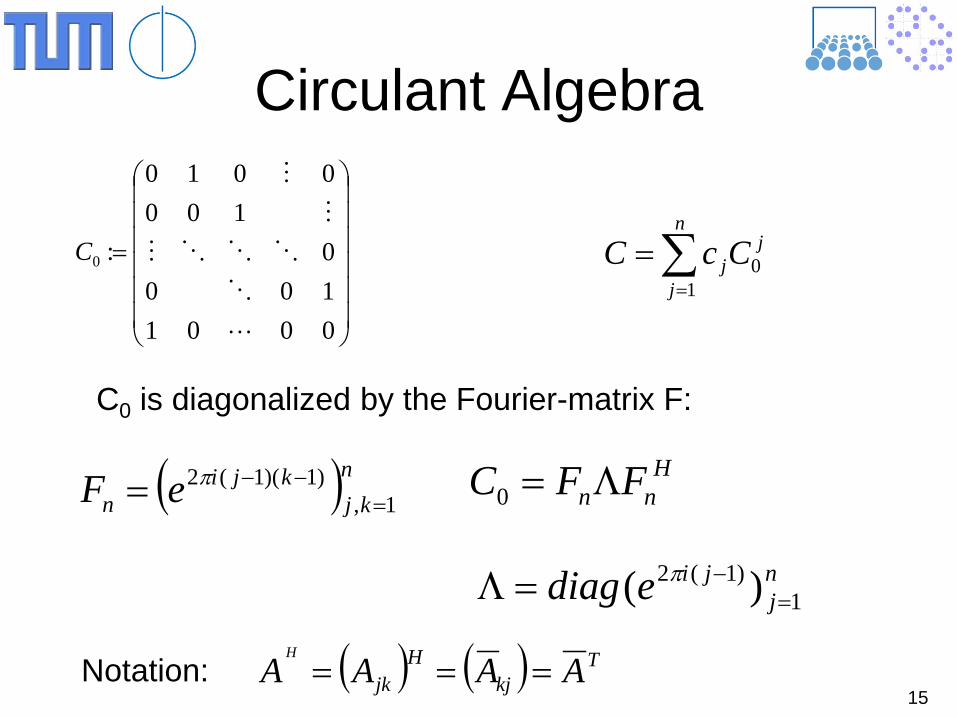
Circulant Algebra
=
00011000
1000010
:0
C ∑=
=n
j
jjCcC
10
C0 is diagonalized by the Fourier-matrix F:
( )n kjkji
n eF 1,)1)(1(2
=−−= π H
nn FFC Λ=0
nj
jiediag 1)1(2 )( =
−=Λ π
Notation: ( ) ( ) Tkj
Hjk AAAA
H
===
16
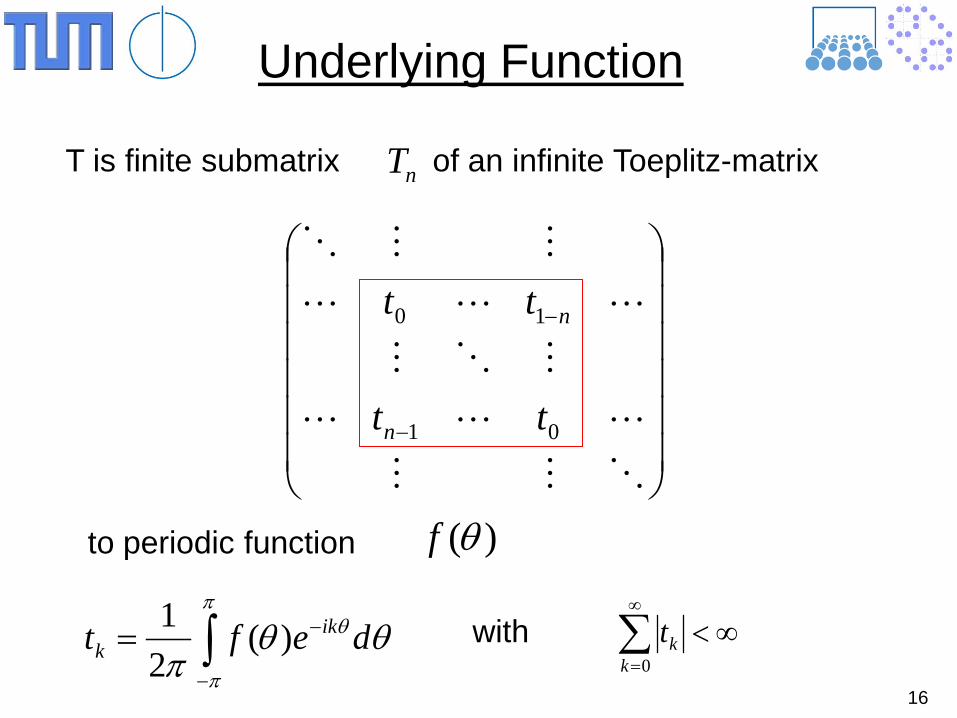
Underlying Function
T is finite submatrix of an infinite Toeplitz-matrix nT
−
−
01
10
tt
tt
n
n
to periodic function )(θf
∫−
−=π
π
θ θθπ
deft ikk )(
21 ∞<∑
∞
=0kktwith

17
Generating Function
++++++= −−
−−
ixixixix etettetetxf 22101
22)(
∫−
−=π
ππdxexft ikx
k )(21
Example: tridiag(1,2,1)/4 with function
( ) ( ) 2/)cos(14/2)( xeexf ixix +=++= −
Notation: ),,,,()( 101 −−= nnn ttttoeplitzfT

18
Spectrum of T and function f
=== ∑∑ − kjkj
kjkjkj
kjnH zztzztzTz
,,,
( ) =⋅=∑ ∫ −−kj
kj
xkji zzdxexf,
)()(
∈== ∫ ∑∑∫ − dxezxfdxzezexfk
ikxkk
ikxj
kj
ijx2
,)()(
[ ] zzxfxf H⋅∈ )(max),(min
[ ] ) ( max ), ( min : ) ( Range(f) x f x f z z z T z T Range H
n H
n = ∈

19
Spectrum with Preconditioner T and C Toeplitz to functions f and g.
∈
) ( ) (
x g x f
range λ
λ eigenvalue of TC 1−
∈
CzzTzzrange H
H
λ:
0)()( =− xgxf λ( ) 0=− zCTz H λ for some z:
Spectrum of preconditioned system described by gf
for some x
20
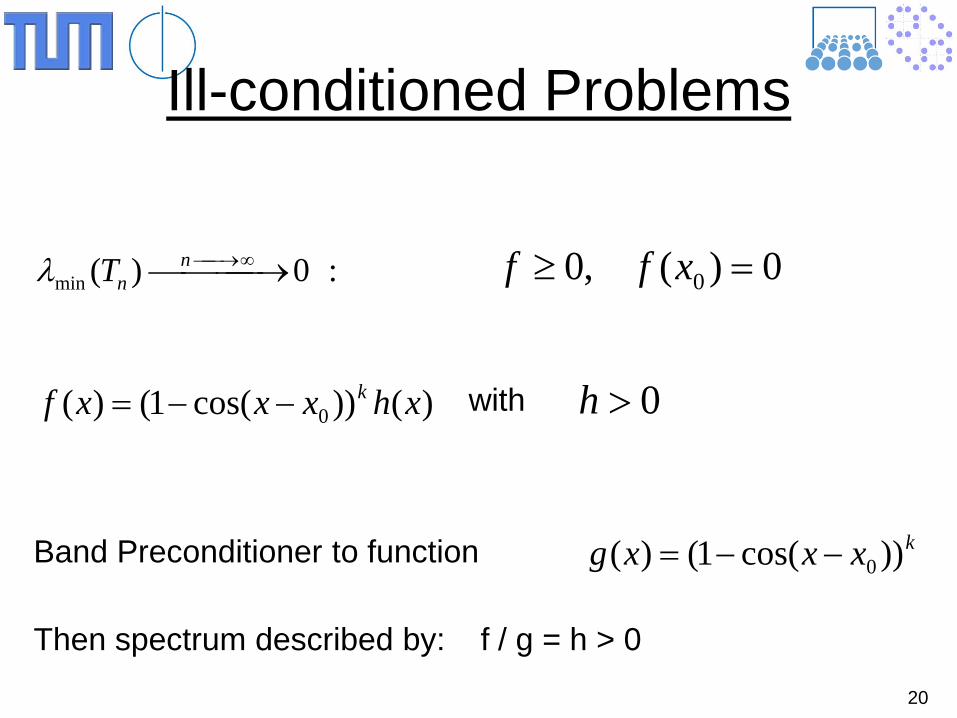
Ill-conditioned Problems
:0)(min → ∞→nnTλ 0)(,0 0 =≥ xff
Band Preconditioner to function kxxxg ))cos(1()( 0−−=
Then spectrum described by: f / g = h > 0
)())cos(1()( 0 xhxxxf k−−= 0>hwith

21
Relation Function - Matrix
)()( frangeTrange n ⊆
)/()( 1 gfrangeTGrange nn ⊆−
Tn and Gn Toeplitz, Gn sparse
22
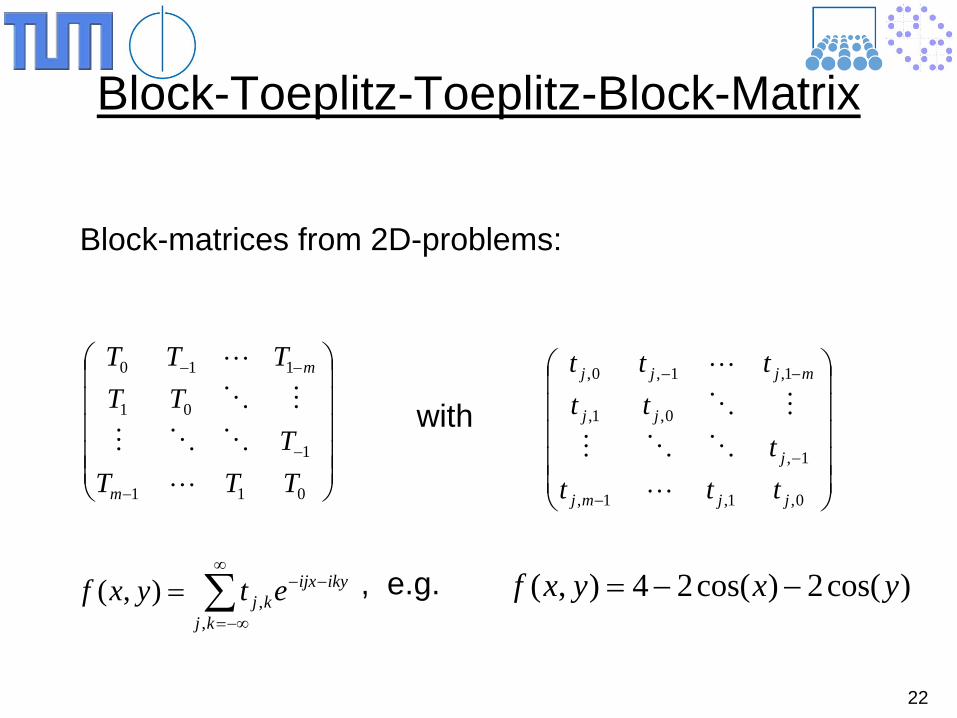
Block-Toeplitz-Toeplitz-Block-Matrix
Block-matrices from 2D-problems:
−
−
−−
011
1
01
110
TTTT
TTTTT
m
m
−
−
−−
0,1,1,
1,
0,1,
1,1,0,
jjmj
j
jj
mjjj
tttt
ttttt
with
ikyijx
kjkj etyxf −−
∞
−∞=∑=,
,),( )cos(2)cos(24),( yxyxf −−=, e.g.
23
Ill-posed Inverse Problems Further Examples
- Computer Tomography - Impedance Tomography - Supersonic Tomography - Inverse Heat Conduction
24
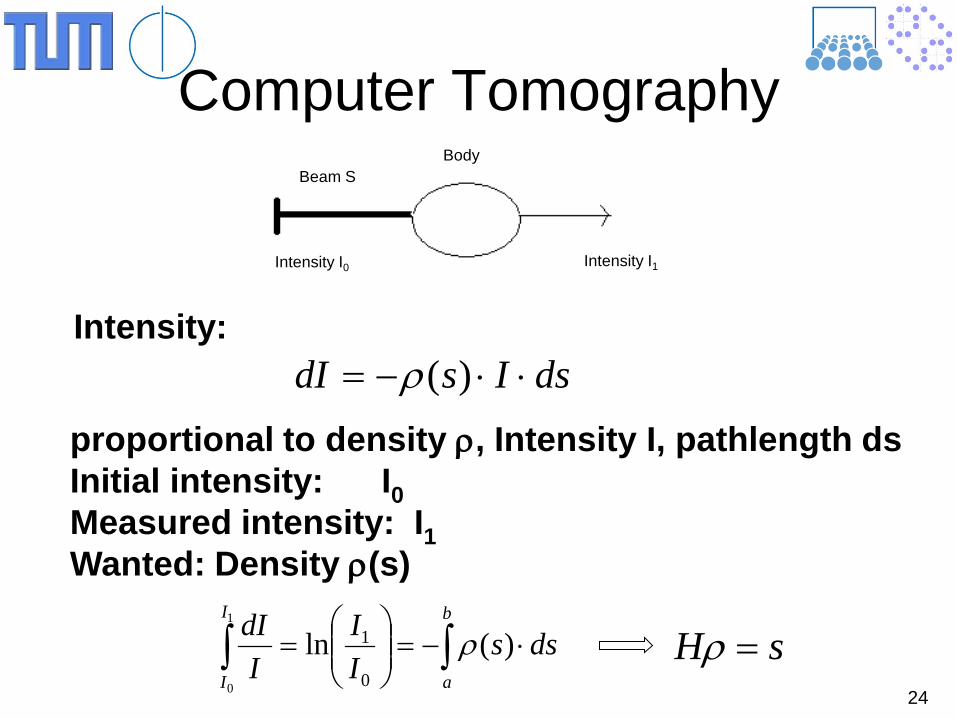
Computer Tomography
dsIsdI ⋅⋅−= )(ρ
∫∫ ⋅−=
=
b
a
I
I
dssII
IdI )(ln
0
11
0
ρ
Intensity:
proportional to density ρ, Intensity I, pathlength ds Initial intensity: I0 Measured intensity: I1 Wanted: Density ρ(s)
sH =ρ
Body Beam S
Intensity I0 Intensity I1
25
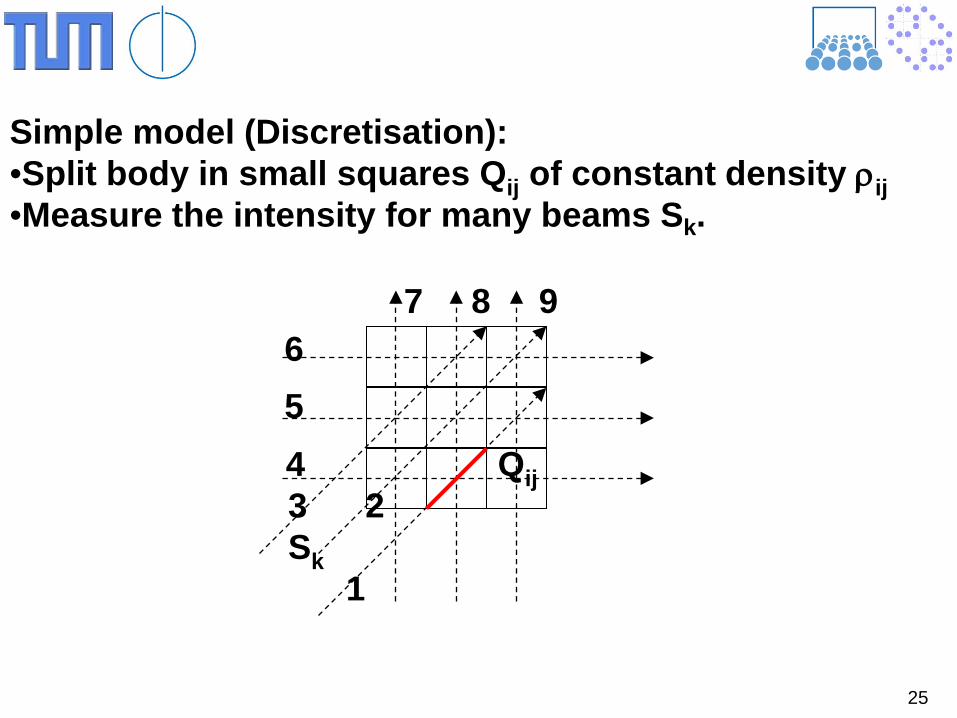
Simple model (Discretisation): •Split body in small squares Qij of constant density ρij •Measure the intensity for many beams Sk.
6 5
7 8 9
4 Qij 3 2 Sk 1
26
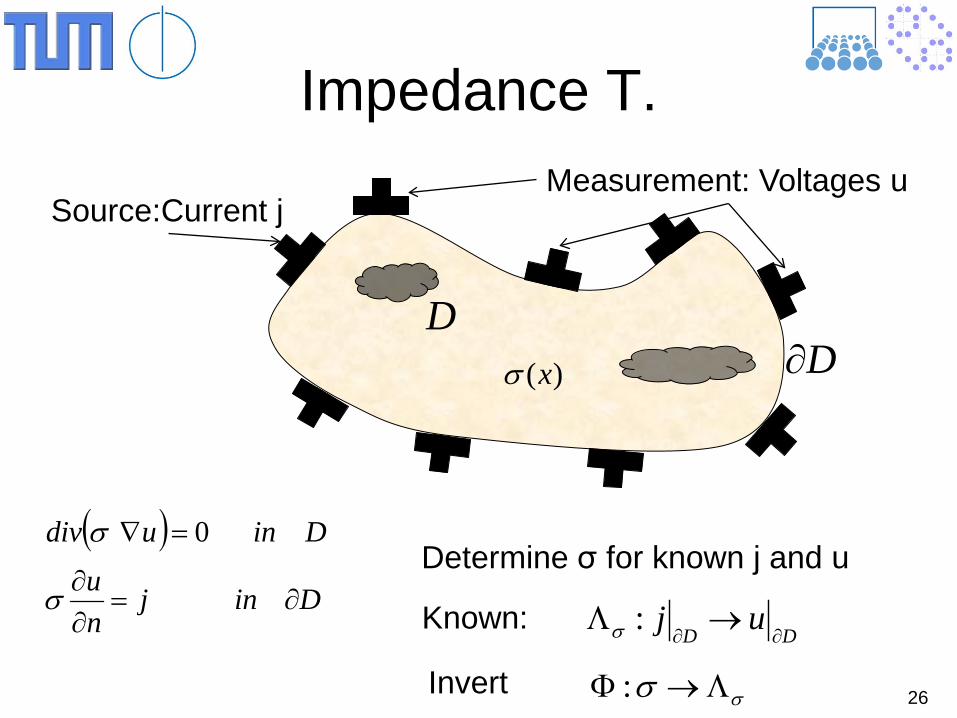
Impedance T.
Source:Current j Measurement: Voltages u
D)(xσ D∂
( )Dinj
nu
Dinudiv
∂=∂∂
=∇
σ
σ 0Determine σ for known j and u
DDuj
∂∂→Λ :σKnown:
σσ Λ→Φ :Invert
27
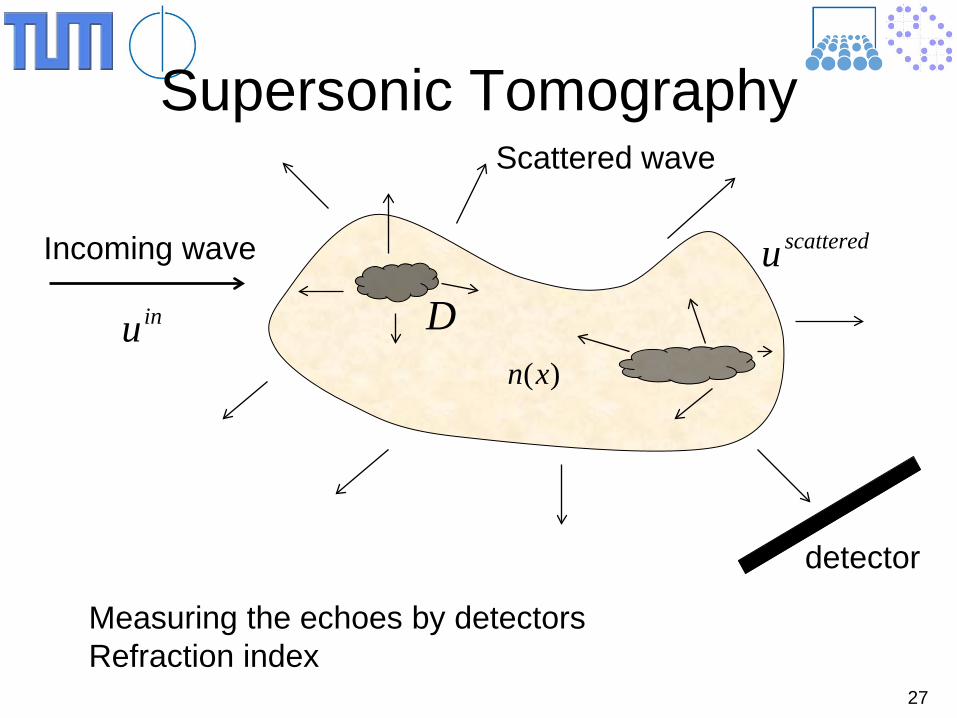
Supersonic Tomography
Incoming wave
Scattered wave
detector
inu
scattereduD
)(xn
Measuring the echoes by detectors Refraction index
28
Heat Conduction
1) Measuring the heat distribution at time T, determine the heat distribution at time t<T
2) From the heat conduction at the surface determine the heat distribution in the interior
3) Measuring the temperature on the surface, determine the thermal conductivity.
29 Source: Per Christian Hansen

30
Regularization Problem
x H x H x + η = b
Original data: x Operator (e.g. blur): H Noise: η Observed data: b
Problem: Solve Hx = b only on the signal subspace!
inv(H) b = x + inv(H)η ∞
on the signal subspace bHx −min

31
Eigenvalues 0, ≠= xxAx λ x: eigenvector, λ eigenvalue
For symmetric (Hermitian) n x n – matrix A exists an orthogonal basis of eigenvectors uj, j=1,…,n
nkjkjfor
kjforuuuAu k
Hjjjj ,...,1,
0
1, =
=
≠== λ
( ) ( ) Λ=⋅== UdiaguuuuAAU nnn ),...,( 111 λλ
∑=
=Λ=n
j
Hjjj
H uuUUA1λ

32
Computing Eigenpairs
Extreme eigenvalue: Power iteration, Lanczos, Arnoldi
Interior eigenvalues: Inverse Iteration, Jacobi Davidson, LOBPCG
All eigenpairs: Tridiagonalization + QR, Divide&Conquer, MR3,…
MATLAB: eig or eigs, LAPACK, ScaLAPACK,…

33
Singular Values For general n x m – matrix A we can apply this result by considering the Hermitian matrices AHA or AAH :
HHHHH VUAUUAAVVAA Σ=⇒Λ=Λ= 21 ,Where the diagonal matrices Λ1 and Λ2 contain the same eigenvalues, and the diagonal matrix ∑ contains the square roots of these values: 02 >= jj λσ
Hence the singular values are the square roots of the eigenvalues of AHA and AAH and the singular vectors are the eigenvectors of AHA and AAH.
HVUA Σ= is called the Singular Value Decomposition of A. )(),0,...,0,,...,(,, 1 ArankrdiagIVVIUU r
HH ==Σ== σσ
SVD:

34
Least Squares Problem: Rectangular or singular linear equations Ax=b
Replace Ax=b by minimzation of || Ax-b ||2, leads to the normal equations
bAAxAbAx HH =→=
Using SVD: bUVxUVUVA HTHTH Σ=ΣΣ→Σ=
( ) ( )bUdiagxUdiag Hrmn
Hrmn )0,...,0,,...,()0,...,0,,...,( 1,22
1, σσσσ =
Unique solution only for r=m.
Equivalent property: x solves bPAx Arange )(=
Normal equation: ⊥=∈−⇔=− )()(0)( ArangeANullbAxbAxA HH
35
Linear Systems
Solving Ax=b: Gaussian Elimination Pivot, LU-factorization
QR-decomposition for ill-conditioned rectangular rank revealing
Regularization one step further for extremely ill-conditioned singular systems
(Iterative methods: Gauss-Seidel, Krylov)

36
Norms
Vector norms: ∑=
=n
j
p
jp
pxx
1:
2: Lxx
L= for full-rank matrix L
Matrix norms: max2σ=A
∑=
==n
jj
HF
AAtraceA1
22 )( σ

37
)(:)()( xxAIbxxxIAAxb Φ=−+=⇔+−==
Stationary Methods: Richardson-Verfahren: Formulation of a fixed point problem
Question: Convergence of the vector sequence xk - starting with x0 - to the solution bAx 1−= ?
)()()(1 kkkkkkk xrxAxbxxAIbx Φ=+=−+=−+=+
Gives iteration:
with residual rk .
38
))(()()(1 kkkkkk xxAIAxxAxxAxbxxxx −−=−−−=−−−=− +
22221 ))(( kkk xxAIxxAIxx −⋅−≤−−=− +
2022
xxxx AIk
k −⋅≤− −
Error in the k-th step:
Gives convergence for || I – A ||2 < 1 .
222)()( yxAIyx −⋅−≤Φ−Φ
Richardson method makes sense for A ≈ I !
This gives a contraction condition for the iteration funktion Φ(x):

39
( ) ( ) bAxbDxADAdiagD =⇔== −− 11);(
Improvement:
Apply Richardson on the modified problem:
Condition D–1A ≈ I is easier to satisfy!
)()~~( 11 kkkkk AxbDxxAbxx −+=−+= −+
kkkk xADbAxbDxDx )()(1 −+=−+=+
Richardson for the tilde system leads to:
or
This is the Jacobi iteration for solving of Ax = b
ADA 1~ −= bDb 1~ −=
bxA ~~=
and
gives new system
Notation:
40
12
1 <− − ADI
Essential costs per step: Axk
Necessary condition: diagonal matrix D is regular!
UxxDLxUDLAxbAofnalpartupperdiagoUAoflpartsubdiagonaL
++=++== )()(
::
)()()()( 1
kk
kkk
AxbxDLxDLAbUxbxDL
−++=−−−=−=+ +
gives iteration
Matrix splitting
General idea for defining an iteration function:
Convergent, if
41
( ) k
kkk
xADLIbDLAxbDLxx
11
11
)()(
)()(−−
−+
+−++=
−++=
1)(2
1 <+− − ADLI
This defines the Gauss-Seidel-method
In every step a triangular linear system has to be solved.
( ) ( ) bAxbDLxADL =⇔+=+ −− 11 )()(
Gauss-Seidel is equivalent to Richardson applied on
Convergence condition
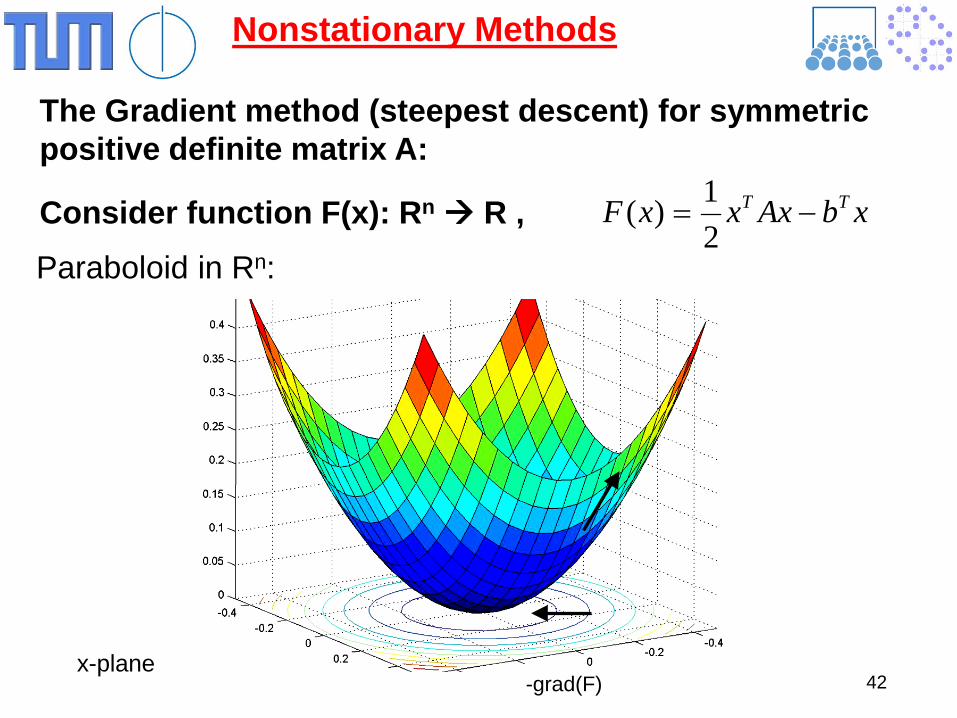
Nonstationary Methods The Gradient method (steepest descent) for symmetric positive definite matrix A: Consider function F(x): Rn R ,
42
xbAxxxF TT −=21)(
Paraboloid in Rn:
-grad(F) x-plane

43
bAxbAxxF =⇔=−=∇ 0)(
Minimum of this function is the point with horizontal tangent vector = the position with gradient zero:
x where the paraboloid takes its minimum is exactly the solution of the linear system!
Consider minimization! From actual position xk the next iterate xk+1 should be chosen in such a way, that it is closer to the minimum. xk+1 = xk + αkdk Search direction dk and stepsize αk. Find search direction, such that the function gets smaller:
Directional derivate in direction n is given by , and takes its maximum absolute value for .
Therefore, is locally the direction of the steepest descent towards the minimum.
44
nF ⋅∇Fn ∇=2F∇
Fn −∇=
Descent direction is given by the negative gradient!
)()(1 kkkkkkk AxbxxFxx −+=∇−=+ αα
Hence, the function values get smaller moving in this descent direction
Choose
It remains to determine the optimal stepsize αk, that leads as close as possible to the minimum!

45
( )
−+−
=
+−++
=−+=
bxAxxddAdd
dxbdxAdx
AxbxFg
Tkk
Tkk
Tkk
Tk
kkT
kkT
kk
kk
21
21min
)()()(21min
))((min:)(min
2 αα
ααα
αα
α
α
αα
kTkk
Tkk Adddd=α
Consider one-dimensional minimization:
with solution , dk:=b-Axk
)()()(
2
21 k
kT
k
kkk Axb
AxbAAxbAxb
xx −⋅−−
−+=+Overall:

46
Method of steepest descent or gradient method. Disadvantage: In case of strongly distorted paraboloid: Very slow convergence.

47
For A ≈ I the paraboloid is nearly symmetric with circular contour lines fast convergence!

48
Preconditioning of Ax=b: Replace Ax=b by M-1Ax= M-1b with M–1A ≈ I
kjforAdd jTk ≠= 0
Search direction not given by the negative gradient itself, but the projection of the gradient, such that all previous search directions are „orthogonal“ in some sense: Search directions A-conjugate
Results in an iterative method, that after k steps delivers The best approxiamtion to the exact solution in an k-dimensional subspace, and therefore gives the solution in n steps (in exact arithmetic).
Improving the gradient method: Conjugate Gradient method, cg.

49
Conjugate Gradient Method
Improving descent direction to more globally optimal: xk+1 := xk + αk pk with search direction not the negative gradient,
but the projection of the gradient,
that is A-conjugate to all previous search directions:
pk Apj for all j<k or pk A pj or pkT A pj = 0 for j<k
We choose the new search direction as the component of the last residual that is A-conjugate to all previous search directions. αk again by 1-dimensional minimization like before (for chosen pk)
50
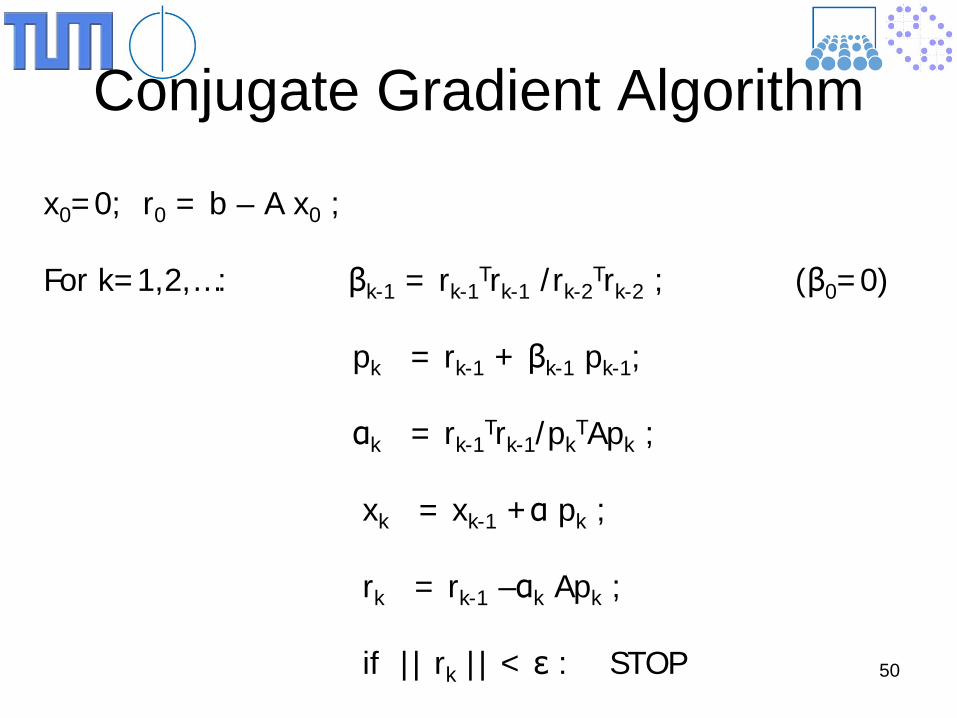
Conjugate Gradient Algorithm
x0=0; r0 = b – A x0 ; For k=1,2,…: βk-1 = rk-1
Trk-1 /rk-2Trk-2 ; (β0=0)
pk = rk-1 + βk-1 pk-1; αk = rk-1
Trk-1/pkTApk ;
xk = xk-1 +α pk ; rk = rk-1 –αk Apk ; if || rk || < ε : STOP

51
Conjugate Gradients
Main properties:
pjTApk = 0 = rj
Trk for j ≠ k
span(p1,…,pj) = span(r0,…,rj-1) = span(r0,Ar0,…,Aj-1r0) = Kj(A,r0)
Especially for x0 = 0: = span(b,Ab,…,Aj-1b)
xk is the best approximate solution to Ax=b in subspace Kk(A,r0)
AbAKx
Ak xxxxk
−=−∈min
),(
For x0=0: xk in Kk(A,b) Error:
Cheap 1-dim minimization gives optimal k-dim solution for free!

52
Conjugate Gradients
Consequence: After n steps Kn(A,b) = Rn and therefore
xn = A-1 b is the solution in exact arithmetic. Unfortunately this is not true in floating point arithmetic. Furthermore, also O(n) iteration steps would be too costly: costs: #iterations * matrix-vector-product Matrix-vector-product easy in parallel. But, how to get fast convergence and reduce the number of iterations?
53
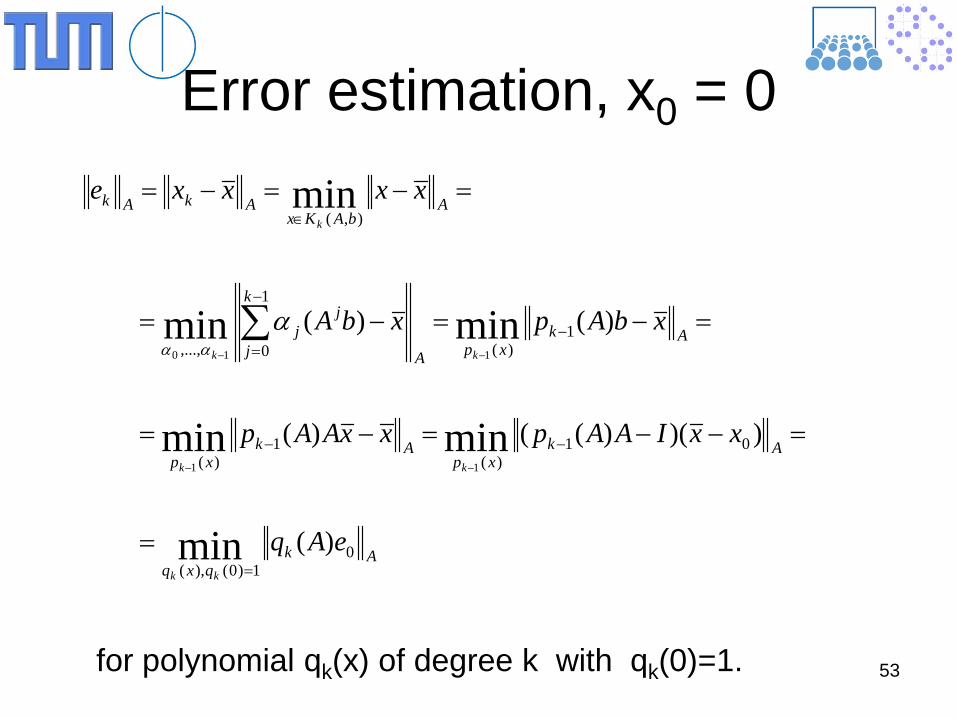
Error estimation, x0 = 0
Akqxq
Akxp
Akxp
AkxpA
k
j
jj
AbAKx
AkAk
eAq
xxIAApxxAAp
xbApxbA
xxxxe
kk
kk
kk
k
01)0(),(
01)(
1)(
1)(
1
0,...,
),(
)(
))()(()(
)()(
min
minmin
minmin
min
11
110
=
−−
−
−
=
∈
=
=−−=−=
=−=−=
=−=−=
−−
−−
∑ααα
for polynomial qk(x) of degree k with qk(0)=1.
54
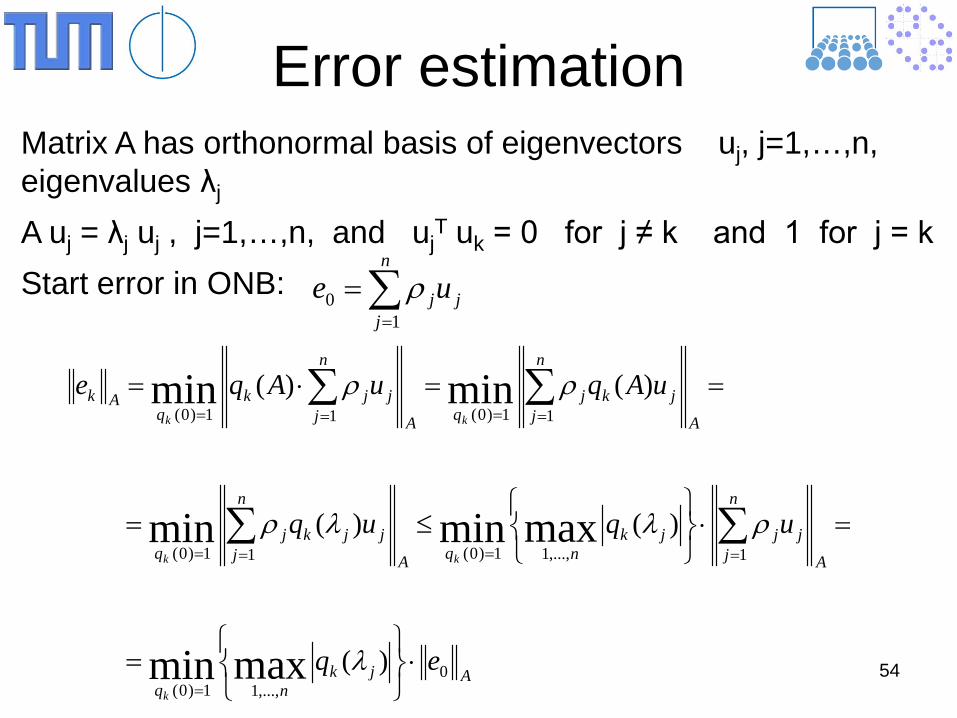
Error estimation
∑=
=n
jjjue
10 ρ
Matrix A has orthonormal basis of eigenvectors uj, j=1,…,n, eigenvalues λj
A uj = λj uj , j=1,…,n, and ujT uk = 0 for j ≠ k and 1 for j = k
Start error in ONB:
Ajknq
A
n
jjjjk
nqA
n
jjjkj
q
A
n
jjkj
qA
n
jjjk
qAk
eq
uquq
uAquAqe
k
kk
kk
0,...,11)0(
1,...,11)0(11)0(
11)0(11)0(
)(
)()(
)()(
maxmin
maxminmin
minmin
⋅
=
=⋅
≤=
==⋅=
=
====
====
∑∑
∑∑
λ
ρλλρ
ρρ

55
Error Estimates
k
k xxqminmax
21:)(λλ +
−=
By choosing polynomials with qk(0)=1 we can derive error estimates for the error after the k-th step: Choose e.g.
A
k
A
k
A
k
AjknjAk
eAcondAconde
eeqe
00minmax
minmax
0minmax
max0,...,1
1)(1)(
21)(max
+−
=
+−
=
+−=⋅≤
=
λλλλ
λλλλ

56
Better Estimates
A
k
AkAk eAcondAcond
eAcondAcondTe 00 1)(
1)(2
1)(1)(1
+−
⋅≤
−+
≤
Choose normalized Chebyshev polynomials Tn(x)=cos(n arccos(x))
For clustered eigenvalues choose special polynomial, e.g. assume that A has only two eigenvalues λ1 and λ2:
( )( )21
212 :)(
λλλλ xxxq −−
=
0)(max 022,12 =≤= AjjA
eqe λConvergence of cg after two steps!
Fast convergence with respect to large eigenvalues!
57
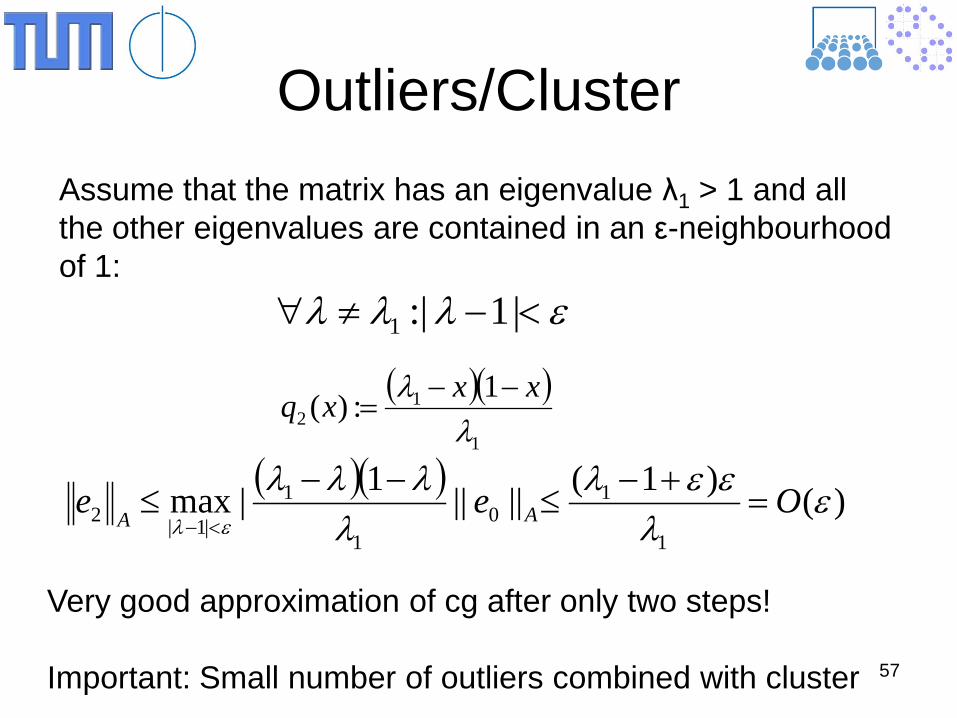
Outliers/Cluster
Assume that the matrix has an eigenvalue λ1 > 1 and all the other eigenvalues are contained in an ε-neighbourhood of 1:
( )( )1
12
1:)(λ
λ xxxq −−=
( )( ) )()1(||||1|max1
10
1
1
|1|2 ελ
εελλ
λλλελ
Oee AA=
+−≤
−−≤
<−
Very good approximation of cg after only two steps! Important: Small number of outliers combined with cluster
ελλλ <−≠∀ |1:|1
58
Pseudoinverse Generalization for A-1 for singular or rectangular matrix A. Looking for matrix A+ with additional properties, e.g.:
+++
+
++
++
====
AAAAivAAAAiii
AAAAiiAAAAi
H
H
)()(
)()()()(
A+ satisfying all four conditions is called the Moore-Penrose generalized inverse of A.
59
Properties of the Moore-Penrose Inverse
If A is square and nonsingular: A+ = A-1 A+ is uniquely determined by (i)-(iv)
x=A+b is a solution of the Least Squares problem
x=A+b is the solution of the Least Squares problem with minimal norm ||x||2.
If AHA is regular: A+ = (AHA)-1AH
)(
)(
HArange
Arange
PAA
PAA
=
=+
+

60
Further Properties
H
r
Hr
VdiagUA
UdiagVA
⋅⋅=
⋅⋅=
+ )0,...,0,1,...,1(
)0,...,0,,...,(
1
1
σσ
σσ
( )∑=
+ =⋅==r
j j
jH
jH bV
ubVdiagUbAx11
)0,...,1(σσ
Proof:
)(ker)(ker
)(
+
++
∈⇒∈
===
⇒∈=
AnzAnz
bAzAzAAbAA
ArangeAzb
H
bzAzAAAAbA
ArangezAb
HHHH
HH
===
⇒∈=
++
)(

61
Problem General solution minimizing the distance to f* :
*)( fPbAx AN+= ++
P is orthogonal projection on nullspace of A.
Noise and tiny singular values (compact operators nullspace, near singular A)
( )∑=
+ =⋅==r
j j
jH
jH bV
ubVdiagUbAx11
)0,...,1(σσ ≈ 0

62
Abstract Regularization Method
Given operator A we call a family of operators Rρ, ρ>0, R0=0, a regularization if there exists a function ρ(ε,bε), such that for all rhs b ϵ range(A) it holds
0sup0
),(
→+ →≤−−
εεε
ερεε bbbRbA b
Assumption: the rhs of Ax=b is perturbed by noise to bε: εε ≤−bb
Noise level: ε
In the limit for vanishing noise it solves the problem exact.
Regularization parameter: ρ

63
Reconstruction Error
)( ερρ
ερ bbRbRbAbRbA −+−≤− ++
Red: total error, blue: data error, green: approximation error
ρopt
64
Optimal Order
For smooth data we can define optimal regularization methods depending on the noise level ε and the regularization parameter ρ as the error in a best worst case limit satisfies:
( ) ( )111 ++ νννν ερC
Optimal: Cν = 1.
Here, we assume for the solution ( )νArangebA ∈+

65
Linear Regularization Filtering
Approximating A+ = (AHA)-1AH via filter function Fρ(λ) with
[ ]2
0,01)(lim AforF ∈=
→λλλρρ
bAAAFbR HH )(: ρρ =Define regularization
as approximation for A-1.
Fρ filters the influence of small singular values:
kHkk
kk
HH vbuFbAAAF ⋅= ∑ )()()( 2 σσρρ
66
Regularizing Filter:
Error:
bAAAp
bAAAAAFbA
bAAAFbAbRbA
H
HH
HH
+
++
++
=
−=
−=−
)(
)(
)(
ρ
ρ
ρρ
)(1:)( λλλ ρρ Fp −=with
We call F a regularizing filter iff:
[ ][ ] 0,0)(
,01)(lim
2
2
0
>∈≤
∈=→
ρλλλ
λλλ
ρ
ρρ
andAforCF
AforF
F

67
Qualification
Is the maximum μ0 such that for all μ ϵ [0,μ0] it holds
0)(sup 22
0→≤
≤≤ρρλλ
µ
ρ
µ
λforCp
A
Optimal approximation: ( ) εε µµ
≥+100
Qualification should be μ0=∞

68
Regularization Methods I
Truncated SVD: TT VUVUA Σ≈Σ= ~
>≥ΣΣ
=Σ−
−
otherwisefor iiii
ii 00~ ,
1,1
,
ρ
bAx +=
bUVx T1~−Σ=
instead of
( )∑=
=k
jj
Tjj buvx
1/σ

69
Regularization method I c’td The singular vectors to small singular values often have more sign changes in their entries These vectors correspond to highly oscillating functions or noise while the vectors to large singular vectors represent smooth functions or the signal itself.
Usually no gap between large and small singular values!
Filtering the coefficients:
( ) ( )∑=
+=n
jj
Tjj buvx
1/ ρσ ( )∑
=
=n
jjj
Tjj buvx
1/)( σσϕor

70
Analysis
<≥
=−
ρλρλλ
λρ :0:
:)(1
F
( )
( ) ( )∑∑
∑
=
−
≥
−
∞
=
==
==
k
jj
Hjj
jj
Hjj
jj
Hjjj
HH
vbuvbu
vbuFbAAAFbR
j 1
1
:
1
1
2 )()(
σσ
σσ
ρσ
ρρρ
λλρρ
1)(lim0
=→
F 1)(sup20
=≤≤
λλ ρλ
FA
and , therefore regularizing with CF=1
:0,0 2A≤<> ρµ22
0
2
0
2
0sup)(1sup)(sup
22
µµ
ρλρ
µ
λρ
µ
λρλλλλλλ ==−=
≤≤≤≤≤≤
FpAA
:0 ∞=µ Infinite qualification

71
Graphs of F and p
Fρ(λ) λFρ(λ)

72
Regularization Methods II Tikhonov-Phillips
22min xbAx ρ+−
( ) bAxIAAxbAx HH =+⇔+− ρρ 2
2
2
2min
( )xxbbAxbbAxAxAx HHHHHHH ρ++−−min
Filtering function: λρλ
λρ
ρ11)(
0→
→+
=F
1supsup1sup)(sup
2
2
0
2
0
2
0
2
0 2222+
=+
=+
−=≤≤≤≤≤≤≤≤
ρλρλ
ρρλρλ
ρλλλλλ
µ
µ
λ
µ
λ
µ
λρ
µ
λ AAAAp
73
Estimate:
,2
,,1
)( µρλ
==+
= rxxxxg
r
Discuss the limit of
( )( ) 0)1(
)1(1)1()('
!
2
1
2
1
=+++
=+
++=
−−
rxrxx
xxxrxxg
rrr
22 )(:20 µρ
µ ρλλµ pCp ≤≤<
ρλλµ µρ
µ 22 )(:2 −≤> Ap:0 2A≤≤ λ
Qualification: μ0=2

74
Special case L=I ( ) bAxIAAxbAx HH =+⇔+− ρρ 2
2
2
2min
Include SVD of H HHTHH VdiagVVVHHVUA ⋅⋅=ΣΣ=⇒Σ= )( 2σ
( ) bUdiagVxVdiagVxIAA HHH )()( 2 σρσρ ⋅=+⋅=+
bUdiagVx H)( 2 ρσσ+
⋅=
( ) ( )∑=
+=n
jjj
Tjj buvx
1
2/ ρσσ

75
Graphs of F and p
Fρ(λ) λFρ(λ)

76
Iterated Tikhonov Deriving better qualification by iterating:
( )( ) ,:,...,2,1
,
1
0
−+=+=
=+
iH
iH
HH
xbAxIAAnibAxIAA
ρρ
ρ
Other definition:
( )( ) ),()(:,...,2,1
,
11
0
−− −=−+=
=+
iH
iiH
HH
AxbAxxIAAnibAxIAA
ρ
ρ
minimizing 2
12
−−+− ixxbAx ρ
General idea: 22min guessxxbAx −+− ρ
77
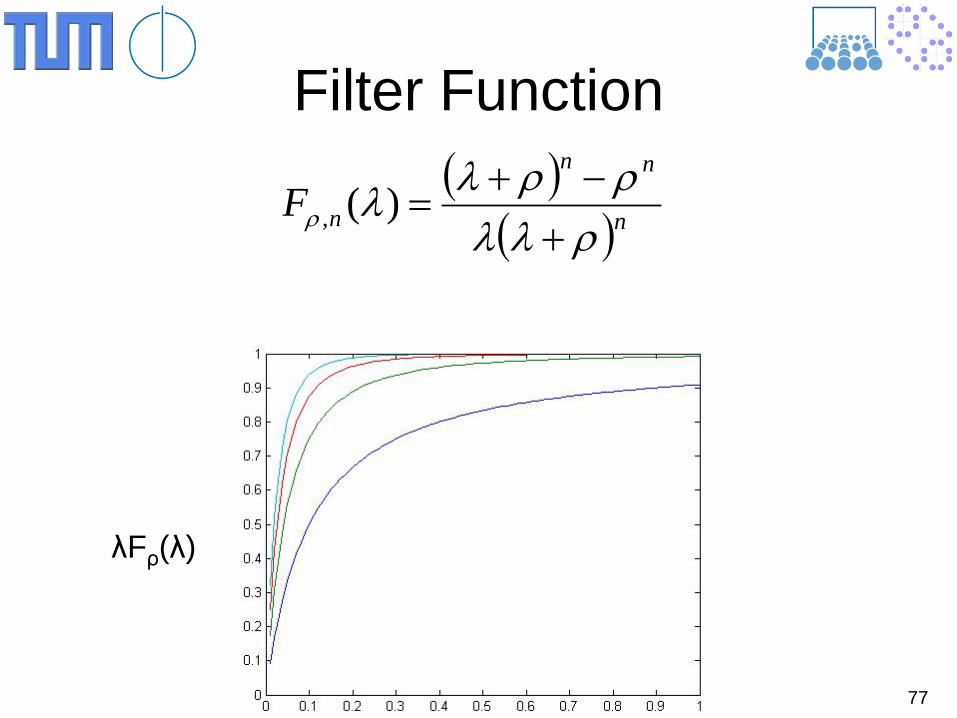
Filter Function ( )
( )nnn
nFρλλρρλλρ +
−+=)(,
λFρ(λ)
78
Limit: ( )
( ) ,:,...,2,1
,
1
0
−+=+=
=+
iH
iH
HH
xbAxIAAnibAxIAA
ρρ
ρ
For i ∞:
( )( ) bAAxAxbAxIAA
xbAxIAAHHHH
iH
iH
=⇔+=+
→+=+ −
ρρ
ρρ 1
So we should stop the iteration in order to avoid reconstruction of noise!
79
Proof ( )
( ) bbxbx ~~1~)( 11 ρλλρρλ
ρλρλ
+−+
=+
=⇒=+
( )( )( ) ( )
( )( )
bbbx
bbx
~~2~
~1~)(
2
22
2
2
22
2
ρλλρρλ
ρλλλρλ
ρλλρρλλ
ρλρρλ
+−+
=++
=
+++
=
⇒+
+=+
( )( )
( ) ( )( )( )
( )( )
bbx
bbx
~~
~~)(
3
33
3
222
3
2
22
3
ρλλρρλ
ρλλρρλρρλλ
ρλλρρλρρλ
+−+
=
+−+++
=
⇒+−+
+=+
and so on…
80
Regularization Methods III
Richardson/Landweber Iteration
( ))()()()1( )( kHkkHHk AxbAxxAAIbAx −⋅+=⋅−+⋅=+ ωωω
is damped Richardson on normal equations.
M
Assume x(0) = 0. Then it holds:
bAx k
k
+
∞→=)(lim
,...2,1,0,1
0
)( == ∑−
=
kbAMxk
j
Hjk ω
81
Proof
( )
( ) 01
0
1
0
1
0
∞→
++−
=
−
=
++−
=
+
→=
−−=
=−−=−
∑
∑∑
k
kk
j
HjH
k
j
HjHk
j
Hj
bMbAAAAII
AbAAAIbbAMb
ωω
ωωω
Define: b+ := A+ b
for , because then it holds: 2
20A
<<ω IAAII H <−<− ω

82
Filter Function
,...2,1,0,1
0
)( == ∑−
=
kbAMxk
j
Hjk ω
( ) ( )( )
( )
( )( )kk
kkk
kkk
j
jk
F
Fp
F
ωλλλ
ωλλλλ
λωλ
ωλωλωωλωλ
−−=
−=−=
−−=
−−−−
=−= ∑−
=
11)(
,1)(1)(
,1111111)(
1
0

83
Filter Function
k=1
k=5 k=10 k=50
Stopping Criteria!
λFk(λ)
84
Projection Methods
Idea: If we know good approximate basis for signal subspace: Project linear system in this subspace and compute the solution of this projected linear system. Examples: Krylov subspace, Sine basis
Similarly: choose a set of smooth basis functions and consider the Galerkin projection of the original problem with these ansatz.

85
Regularization Methods IV Multigrid: Don‘t solve on high frequency components!
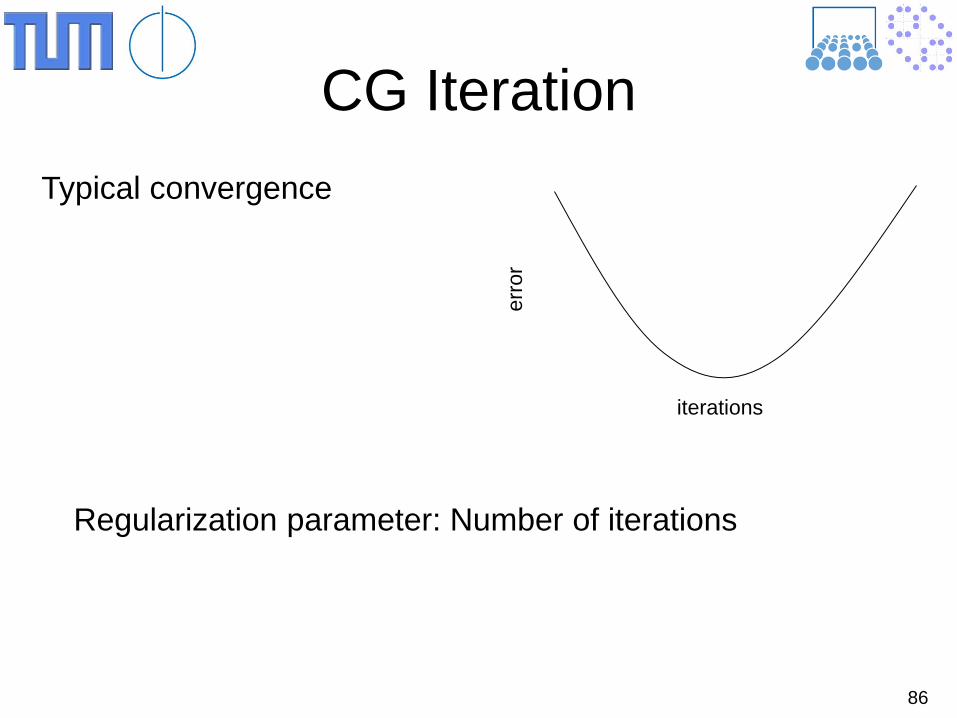
Conjugate Gradients:
In the first iteration steps: convergence relative to the large eigenvalues (signal subspace). Later iteration steps convergence relative to noise subspace! Stop!
86
CG Iteration
Regularization parameter: Number of iterations
Typical convergence
erro
r
iterations

87
Choosing regularization parameter
Discrepancy principle: ||b-Ax|| ~ ε , noise level and variations.
Unknown ε: Quasi-optimality criterion Generalized cross validation GCV L-curve criterion by P.-C.-Hansen: ||x|| compared to ||b-Hx||
88
Discrepancy Principle
If we know the noise level ε , we know that is impossible to recover the original signal better than ε.
Consider monotonic sequence of regularization parameter ρk, that converges to 0 for k∞.
Compute the solution (Tikhonov, cg, …) starting with ρ1, ρ2,… until for the first time it holds ||Ax-b|| <≈ ε. Then stop and accept the related x as solution.

89
Method of Gfrerer and Raus
Let xexact and bexact be the unperturbed data: Axexact = bexact
Similarly we can define the unperturbed regularized solution
( ) exactHH
exact bAIAAx 1,
−+= ρρ
This allows the error estimate
( )
−+≤
≤−+−≤−
2,
2
2,
2,
2
2
2
exactexact
exactexactexactexact
xx
xxxxxx
ρ
ρρρρ
ρε
τ

90
Proof of left inequality: ( ) ( )
( )( )
ρελε
ρλλεερε
ρρρ
41)(max
max
22
222
212,
==
=+
≤+=
=−+=−
−
−
g
AIAAA
bbAIAAxx
HHH
exHH
ex
Because ( ) ( ) ( )
( ) ρρρρλρ
ρλλρ
ρλλ
ρλλ
41
2)(
021)('
2
!
332
==⇒=⇔
⇔=+−
=+
−+
=
g
g
91
Gfrerer & Raus
Therefore, it makes sense to minimize the rhs.
( ) exactHH
exactexactexact bIAAbxxdd 32
, 2 −+=− ρρ
ρ ρ
2
22
ρε
τρε
τρ
−=
dd
Therefore, we have to solve for ρ:
( )( ) 2332 ετρρ =+−
exactHH
exact bIAAb
Use Newton’s method for determining the solution ρ.
92
Proof of derivative: ( ) exact
HHexactexactexact bIAAbxx
dd 32
, 2 −+=− ρρ
ρ ρ
( ) ( )( )
( )
( ) ( ) ( )( ) exact
HHexact
HHHHexactexact
bIAAb
dd
dd
bAIAAAAAbddxx
dd
3
33
2
2
2
22
2112,
2
222
11
−
−−
+⇔
⇔+
=+
−+
=
=+
=
+
−⇔
⇔+−=−
ρρ
ρσρ
ρσσ
ρ
ρσσ
ρ
ρσσ
ρ
ρρσσσ
ρ
ρρρ ρ

93
Gfrerer & Raus
( ) ( ) ( )( ) 2332, ερρρρ =+=−−
−
exactHH
exactH bIAAbAxbAxb
For τ=2 we choose ρ satisfying
where xρ,2 is the second iterate from „Iterated Tikhonov“
Compare discrepancy principle!

94
Proof: ( ) ( )
( )( ) ( ) ( )( )( )( )( ) ( ) ( )( )
( )
( )
( )( )( )exact
HHexact
HHHHHHH
HHHHH
HH
H
bIAAb
bAIAAAIAAAIAIAAAIb
bAIAAbAIAAAbbAIAAAb
AxbAxb
333
3
2
222
2
211
111
2,
2
11
−
−−−
−−−
+⇔+
=
=+
−−−++⋅
+=
=
+−
+−
+
−⇔
⇔+−+−+−=
=+++−+−=
=−−
ρρρσ
ρρσ
ρσρσσρρσσρσ
ρ
ρσσρ
ρσσ
ρσσ
ρρρρ
ρρρρ
ρρ
95
Quasi-Optimality
Heuristics: Choose ρ as flat minimum in || xρ – xexact ||2 :
( ) 0,)(min 12
>+==Φ−
ρρρρ
ρρ ρρ xIAAxdd H
It holds and ρρρ ρρ x
ddxx =− 2, ( ) ρρρ ρρ
xddxxxx
dd
exactexact −=− 22
Therefore: ( )
( )
=−≈
≈−=−≈
ρρρρρ
ρρρ
ρρρ
ρ
ρρ
xddx
ddx
ddxx
xddxxxx
dd
H
exactexact
22
20
2,
2

96
Proofs: ( )
( )( )
( ) ( ) ( )( )( ) ( )( )
( ) ρ
ρρ
ρ
ρρ
ρρρ
ρρρ
ρρρσ
ρρσρ
ρ
ρρ
ρρ
ρ
xIAA
bAIAAIAAxx
bAIAAbAIAAbAIAA
bAIAAdd
bAIAAddx
dd
H
HHH
HHHHHH
HH
HH
1
112,
111
2
2
1
1
−
−−
−−−
−
−
+−=
=++−=−=
=+++−+=
=+−⇔+
−=+
⇔
⇔+=
97
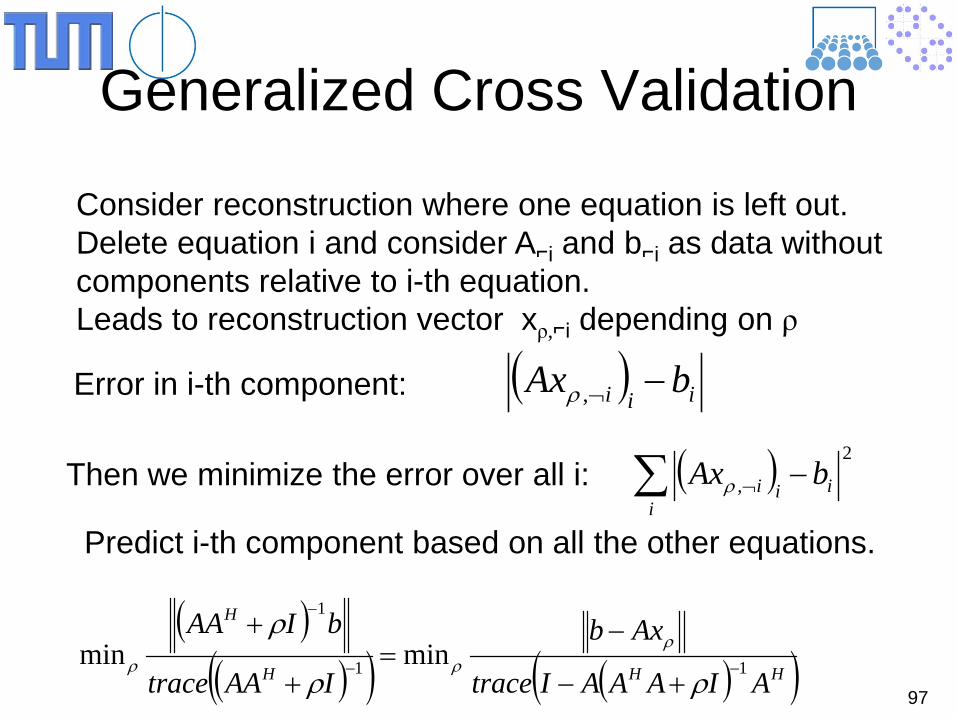
Generalized Cross Validation
Consider reconstruction where one equation is left out. Delete equation i and consider Ai and bi as data without components relative to i-th equation. Leads to reconstruction vector xρ,i depending on ρ
Then we minimize the error over all i: ( )∑ −¬i
iii bAx2
,ρ
( ) iii bAx −¬,ρError in i-th component:
( )( )( ) ( )( )HHH
H
AIAAAItrace
Axb
IAAtrace
bIAA11
1
minmin −−
−
+−
−=
+
+
ρρ
ρρ
ρρ
Predict i-th component based on all the other equations.

98
Proofs ( ) ( )( )
( )( )
( )( )( )21
2
2
1:,
2
1:,2
,
/1min
/1min
1minmin
mAIAAAtrace
bAx
mAIAAAtrace
bxA
AIAAA
bxAbAx
TT
m
iTT
ii
i iiTT
ii
iiii
−
−
−¬
+−
−=
=
+−
−=
=
+−
−=
−
∑
∑∑
ρ
ρ
ρ
ρρ
ρρ
ρρρρ
For TSVD: ( )22
minkm
bAx
−
−ρρ

99
L-curve
Consider the curve plotting ||x|| against ||Ax - b||
Heuristics: In the beginning Ax-b will get smaller with slight changes in x and in the end x will get larger with slight changes in Ax-b
||Ax-b||
||x||
Optimum solution

100
L-curve practical To enforce the L-shape of the curve we use a log-log scaling.
Right side: horizontal part is related to dominating regularization, not all information extracted Left side: vertical part is dominated by perturbation error, noise destroys the signal Optimum in the corner balancing both.
To estimate corner: Approximate curve by Splines. Determine point with maximum curvature
101
Tikhonov: suitable Seminorm
Find seminorm that removes noise without destroying important components of the signal:
||||||min 2
2xbAx ρ+−
with some norm.
Different properties of norms, especially for continuous vs. discontinuous signal

102
Example ( )
( ) ( )( )
≤<+
+≤≤−−
−
−<≤
=
.1^15.0,1
,15.015.0,2
1,15.00,0
:)(
xh
hxhhh
hx
hx
xf
h
1
1 0
11)(''0
1
01
=== ∫∫ dth
dttffh
hdt
hdttff
h 11)(''0
2
1
0
22
=== ∫∫2-norm punishes discontinuity much more!
103
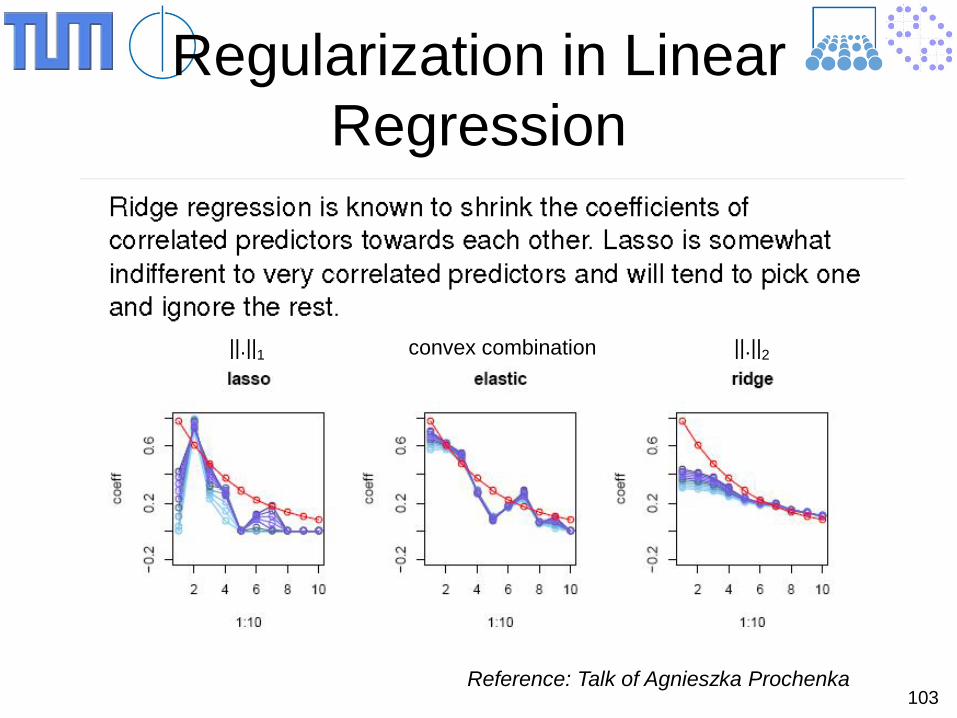
Regularization in Linear Regression
Reference: Talk of Agnieszka Prochenka
||.||1 convex combination ||.||2
104
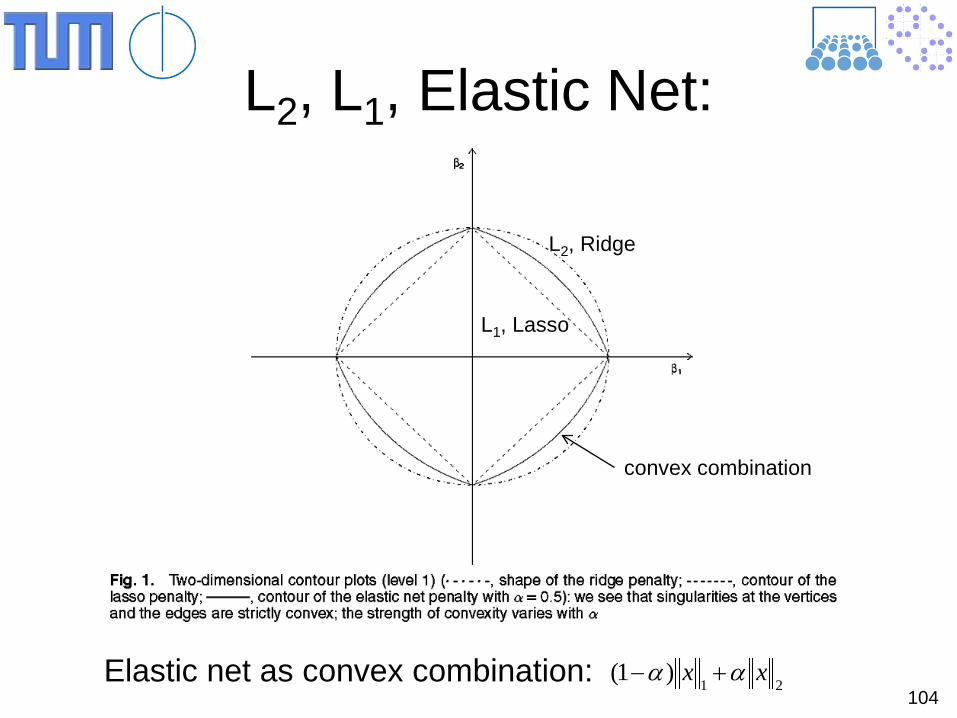
L2, L1, Elastic Net:
L2, Ridge
convex combination
L1, Lasso
Elastic net as convex combination: 21)1( xx αα +−
105
Discontinuous Signal
Use 1-norm. High frequency components also in the signal itself!
1
2
2min xbAx ρ+−
Convex minimization problem, but not everywhere differentiable.

106
Sparse Solution: Compressed Sensing
Use ||x||1 = ∑|xi| : Allows discontinuities, prefers sparse solutions!
Minimize linear function
solution

107
Continuous Signal
The seminorm ||Lx|| should vanish near the signal Subspace but penalize the noise subspace.
Therefore, L should model the derivative!

108
Tikhonov: suitable Seminorm
Find seminorm that removes noise without destroying important components of the signal:
Assume smooth data -xi-1 + 2xi – xi+1 ≈ 0 or -xi-1 + xi ≈ 0
−−−−
−−−−
=
121121
121121
2 L
−−
−−
=
1111
1111
1 L or
in ||Lx||2
109
Discontinuous Signal
The seminorm ||Lx|| should vanish near the signal subspace but penalize the noise subspace.
Therefore, L should model the derivative only of a transformed smooth data!
( )( )
+−=
==
−+
=
2
2
1)(
2
2)1(
,...,1)(
)(
minarg:
,...2,1,)(:
xDLbAxx
jxdiagD
jkj
nij
ij
ρ
Consider sequence of solutions x(j).
)(1)(
jj xD−
can be considered as smooth! Apply L1 or L2

110
01
1
/
/
2)(
)(11
2
1)( =
≈
=− kj
nn
j
kjk Lxx
xxLxDL
Necessary: xi(j) > 0.
Otherwise use |xi(j)| or replace 0 by some small ε>0.

111
Iteration Based on ||.||2
Algorithm: Solve Tikhonov Use approximate solution to define seminorm Solve Tikhonov with new seminorm
112
Simulating ||.||1 via ||.||2:
Simulate ||.||1 close to the solution vector. Let x(j) be the solution of Tikhonov regularization. Define diagonal matrix
)(: )()(
jij xdiagD =
1)(22
2
2/1)( / xxxxxD k
jkkj ∑∑ =≈=−
Necessary: xi(j) > 0.
Otherwise use |xi(j)| or replace 0 by some small ε>0.

113
Numerical results
114
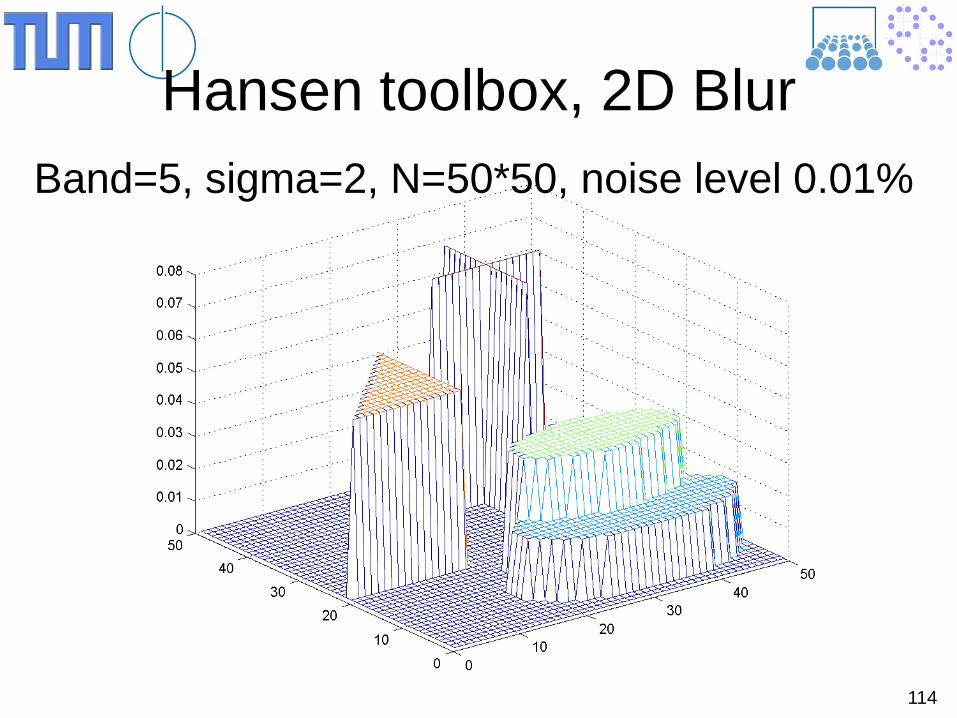
Hansen toolbox, 2D Blur Band=5, sigma=2, N=50*50, noise level 0.01%

115
CG, #94, 0.2704
116
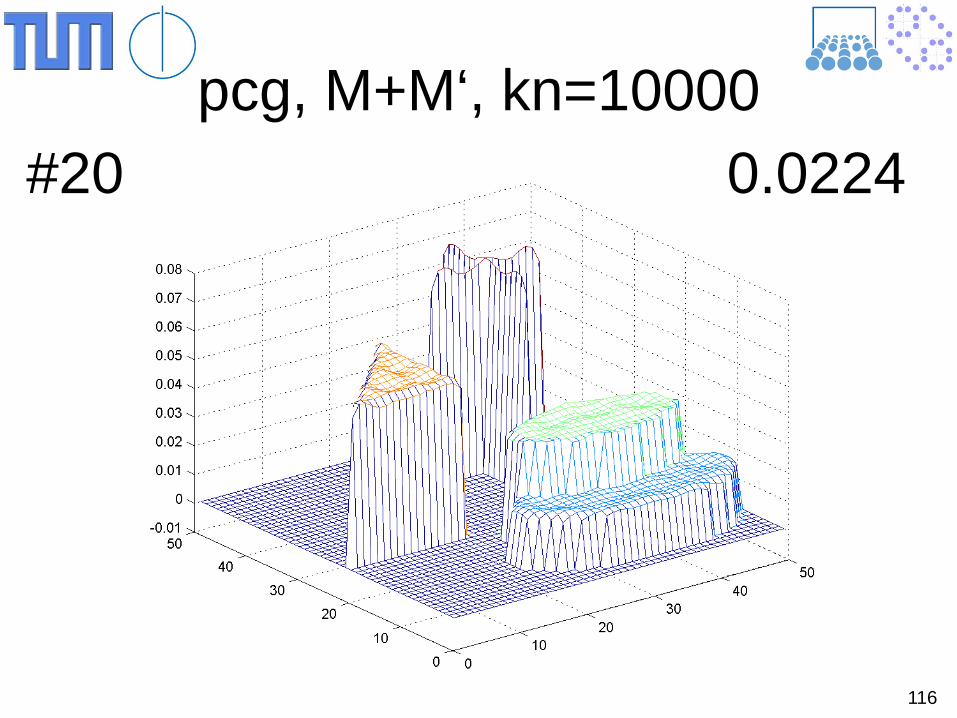
pcg, M+M‘, kn=10000 #20 0.0224
117
Idea for definition of L for nonsmooth signal: Compute approximate solution x(1). Define seminorm L(1), such that L(1)x(1)=0
Compute approximate solution x(2).
repeat
Advantage: on the signal subspace the seminorm has no influence
Similar Approach

118
Optimal Seminorm: Determine optimal matrix L, e.g. tridiagonal, Toeplitz,… with
21min LxL
Gives linear equations for the coefficients in L. Solve Least Squares problem L
With new seminorm L solve Tikhonov for improved x. Repeat.
0
0
0
0
00
0
0
0
1
321
21
1
321
21
2
1
=
⇔
=+
=++=+
⇔=
−−
bac
xx
xxxxx
axcx
bxaxcxbxax
x
xx
acb
acba
nnnnn

119
Combination with Fourier
For periodic boundary conditions we can transform the problem fast into Fourier space:
xxbb
diagonalDAA
~
~
~
→→
=→
Hence Tikhonov with the semimorm L=diagx leads to a diagonal linear system: Easy to solve for different Tikhonov parameter! Compare discrepancy, GCV,…
120
Generalization For symmetric A: transform unitarily on tridiag or banded form
xxbb
bandedDAUAUA H
~
~
~
→→
==→
Hence Tikhonov with the semimorm L=diagx leads to a banded linear system: Easy to solve for different Tikhonov parameter.
For general A: transform unitarily on bidiag or lower banded form
xxbb
triangularbandedDAUAVA H
~
~,~
→→
==→
121
Preconditioner vs Seminorm
( )( )
⇔=+−⇔
⇔=+⇔
⇔=+⇔
⇔+−
−
−−−
LxyybyAL
bALLxIALALbAxLLAA
LxbAx
TTTT
TTT
,min
)(
min
2
222
2
1
21
2
2
222
2
ρ
ρ
ρ
ρ
Tikhonov-Phillips regularization with seminorm L:
Tikhonov with preconditioner L.
Formulation with seminorm is more stable than preconditioning on Ax=b.
122
(2) Preconditioning relative to a subspace
Explicit preconditioners relative to A: - Jacobi - Gauss-Seidl - ILU - MILU
Implicit preconditioners relative to A-1: - Polynomial preconditioner - SPAI,FSAI - MSPAI
Probing, method of action Filtering decomposition
123
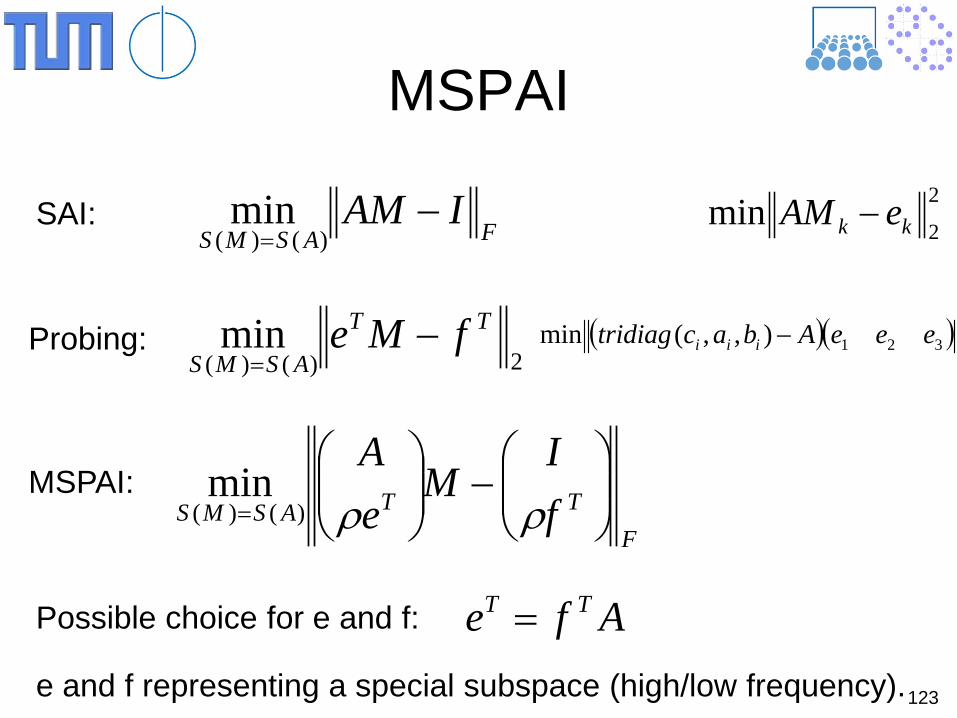
MSPAI
FASMSIAM −
= )()(minSAI:
2)()(min TT
ASMSfMe −
=Probing:
MSPAI:
FTTASMS f
IM
eA
−
= ρρ)()(
min
Possible choice for e and f: Afe TT =
e and f representing a special subspace (high/low frequency).
2
2min kk eAM −
( )( )321),,(min eeeAbactridiag iii −
124
MSPAI Probing
Advantage compared to classical probing / method of action: We don’t have to care about the unique solvability of the probing conditions.
Not necessarily 3 probing vectors for tridiagonal preconditioner!
Freedom to choose any vector and any matrix pattern!
125
Probing vectors
Vector f-=(1,-1,1,-1,..…) representing the high frequency part related to large eigenvalues/noise.
Vector f+=(1,1,1,1,..…) representing the low frequency part related to small eigenvalues/signal.
We are looking for a preconditioner esp. for large eigenvalues, resp. smooth probing vectors, that should be zero or I for noisy probing vectors.

126
Regularization
Preconditioner should not touch the noise and only work on smooth components.
AfewithfMe
MfTTTT
T
++++
−
=≈−
≈−
:0
00Vanish on noise: Recover signal:
127
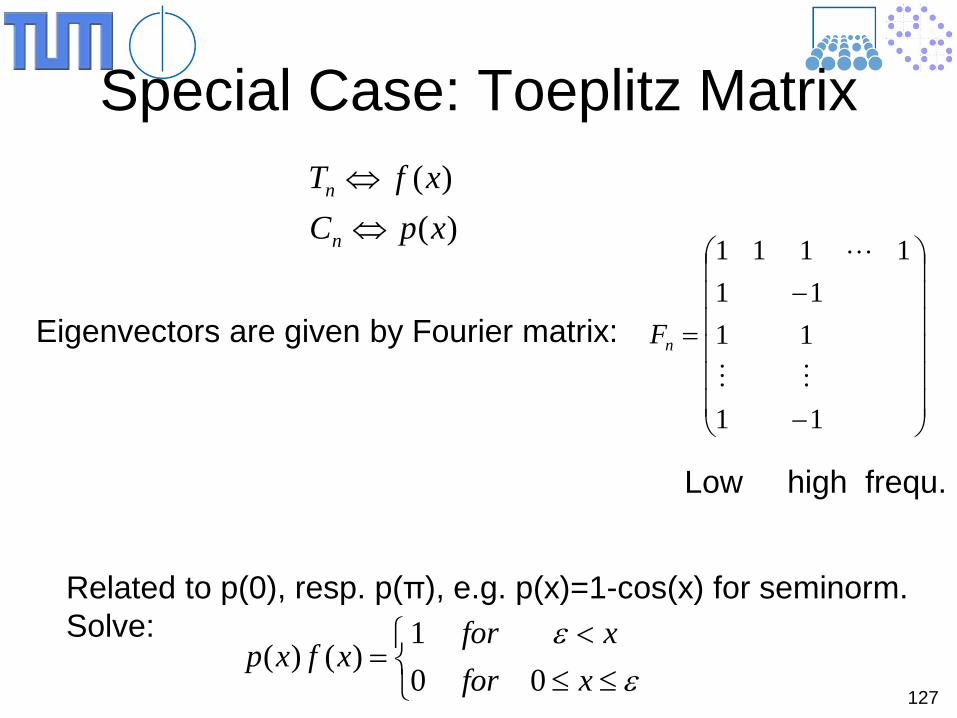
Special Case: Toeplitz Matrix
)()(
xpCxfT
n
n
⇔⇔
Eigenvectors are given by Fourier matrix:
−
−=
11
1111
1111
nF
Low high frequ.
Related to p(0), resp. p(π), e.g. p(x)=1-cos(x) for seminorm. Solve:
≤≤<
=ε
εxfor
xforxfxp
001
)()(
128
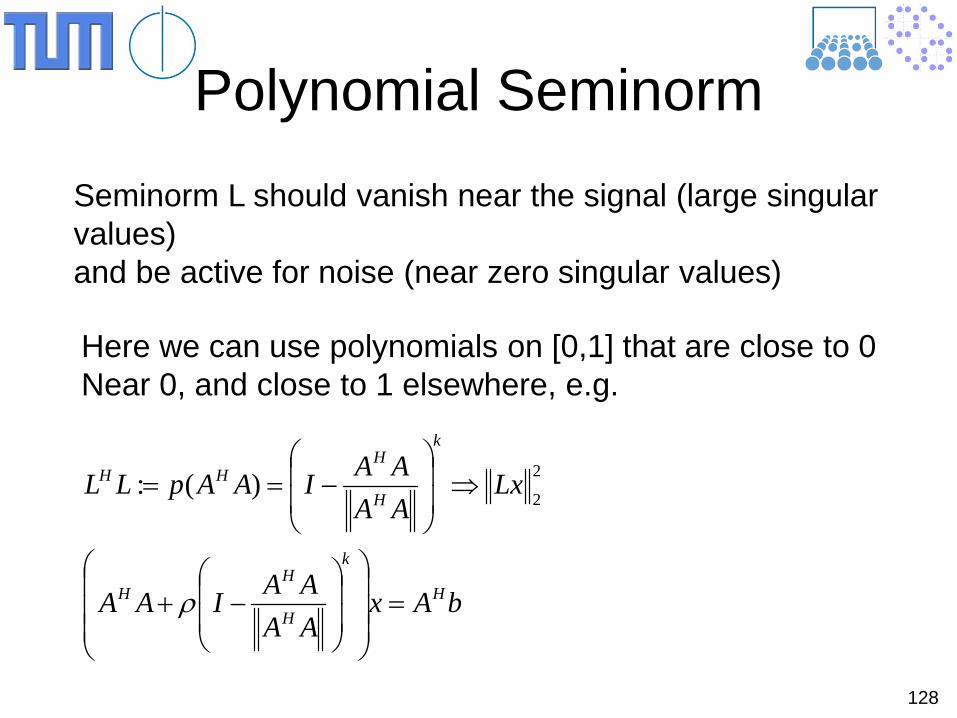
Polynomial Seminorm Seminorm L should vanish near the signal (large singular values) and be active for noise (near zero singular values)
Here we can use polynomials on [0,1] that are close to 0 Near 0, and close to 1 elsewhere, e.g.
bAxAAAAIAA
LxAAAAIAApLL
H
k
H
HH
k
H
HHH
=
−+
⇒
−==
ρ
2
2)(:
129
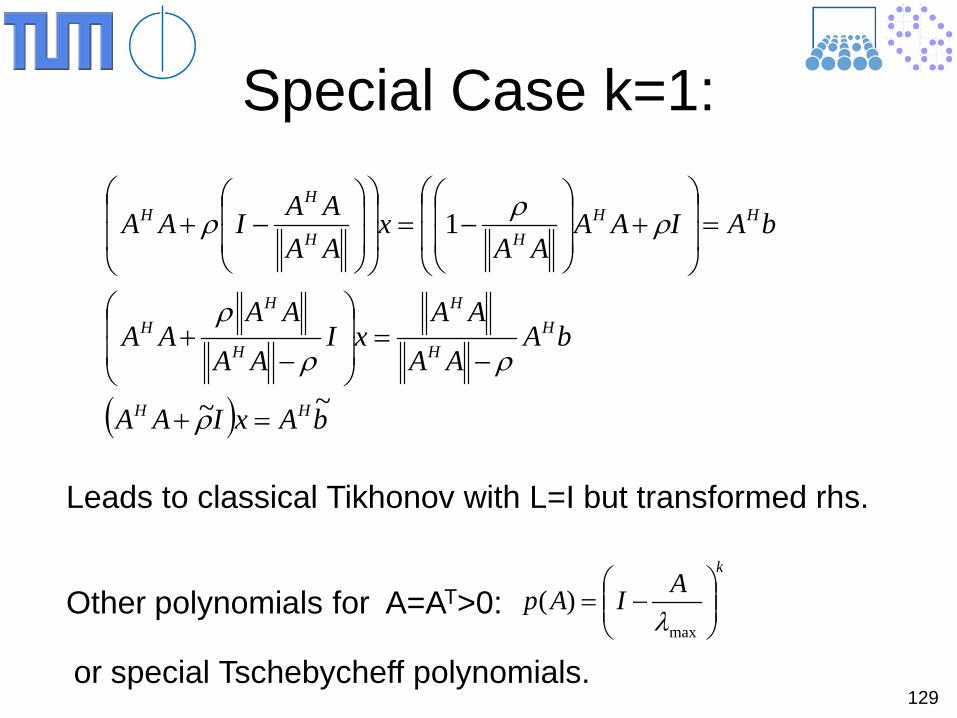
Special Case k=1:
( ) bAxIAA
bAAA
AAxI
AA
AAAA
bAIAAAA
xAAAAIAA
HH
HH
H
H
HH
HHHH
HH
~~
1
=+
−=
−+
=
+
−=
−+
ρ
ρρ
ρ
ρρρ
Leads to classical Tikhonov with L=I but transformed rhs.
Other polynomials for A=AT>0: k
AIAp
−=
max
)(λ
or special Tschebycheff polynomials.
Related Documents











