Modelação, Identificação e Controlo Digital Métodos Não Paramétricos 1 J. Miranda Lemos, A. Bernardino IST-Secção de Sistemas e Controlo Identificação por Métodos Não Paramétricos Estimação da resposta impulsiva e da resposta em frequência Análise espectral e métodos de correlação J. Miranda Lemos, A. Bernardino

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript
Modelação, Identificação e Controlo Digital Métodos Não Paramétricos 1
J. Miranda Lemos, A. Bernardino IST-Secção de Sistemas e Controlo
Identificação por Métodos Não Paramétricos
Estimação da resposta impulsiva e da resposta em frequência
Análise espectral e métodos de correlação
J. Miranda Lemos, A. Bernardino
Modelação, Identificação e Controlo Digital Métodos Não Paramétricos 2
J. Miranda Lemos, A. Bernardino IST-Secção de Sistemas e Controlo
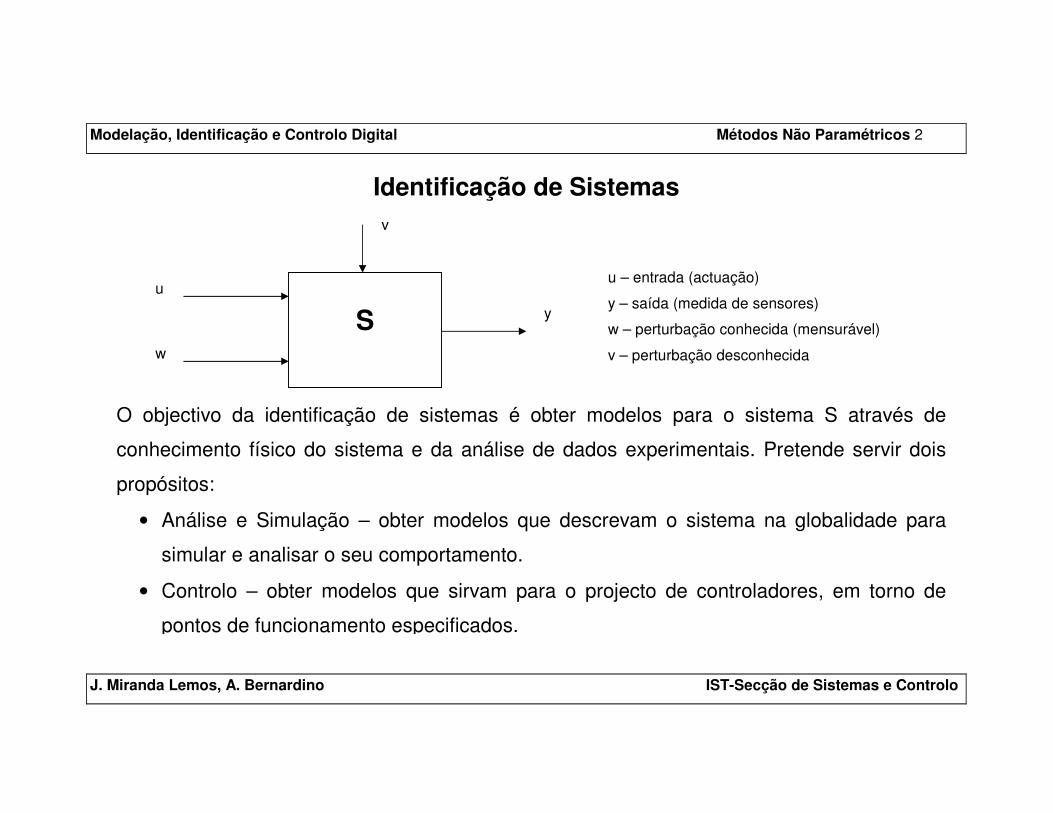
Identificação de Sistemas
S u
w
v
y
u – entrada (actuação)
y – saída (medida de sensores)
w – perturbação conhecida (mensurável)
v – perturbação desconhecida
O objectivo da identificação de sistemas é obter modelos para o sistema S através de
conhecimento físico do sistema e da análise de dados experimentais. Pretende servir dois
propósitos:
• Análise e Simulação – obter modelos que descrevam o sistema na globalidade para
simular e analisar o seu comportamento.
• Controlo – obter modelos que sirvam para o projecto de controladores, em torno de
pontos de funcionamento especificados.
Modelação, Identificação e Controlo Digital Métodos Não Paramétricos 3
J. Miranda Lemos, A. Bernardino IST-Secção de Sistemas e Controlo
Primeiros passos
• Utilizar conhecimento prévio (física, química, biologia, economia) para estabelecer
as equações base que descrevem o funcionamento do sistema.
• Efectuar algumas experiências simples que permitam observar os efeitos estáticos
e dinâmicos dominantes, no tempo e na frequência.
• Para efectuar o projecto de controladores lineares é necessário linearizar o
sistema em torno de pontos de funcionamento desejados.
Modelação, Identificação e Controlo Digital Métodos Não Paramétricos 4
J. Miranda Lemos, A. Bernardino IST-Secção de Sistemas e Controlo
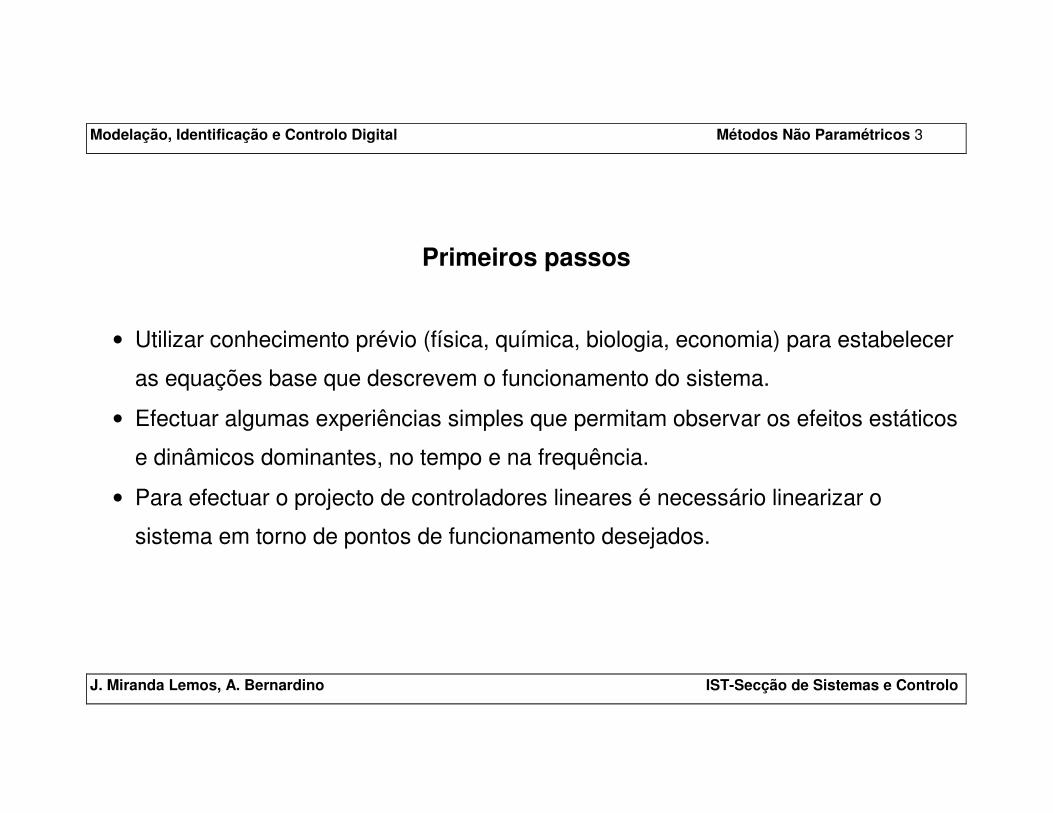
Exemplo – Sistema de 2ª ordem
Testar o sistema com entradas escalão e observar a resposta no tempo
0 1 2 3 4 5 6 7 80
0.2
0.4
0.6
0.8
1
1.2
1.4Step Response
Time (sec)
Am
plitu
de
tp
S
ts
tr
± 1%�� �
������
���
ωξω ++=
�
�� ω���≈
��� ξωπ−
=�
��
�
�� ξω���≈ �
�� ξ
ξπ
−−
= ��
Modelação, Identificação e Controlo Digital Métodos Não Paramétricos 5
J. Miranda Lemos, A. Bernardino IST-Secção de Sistemas e Controlo
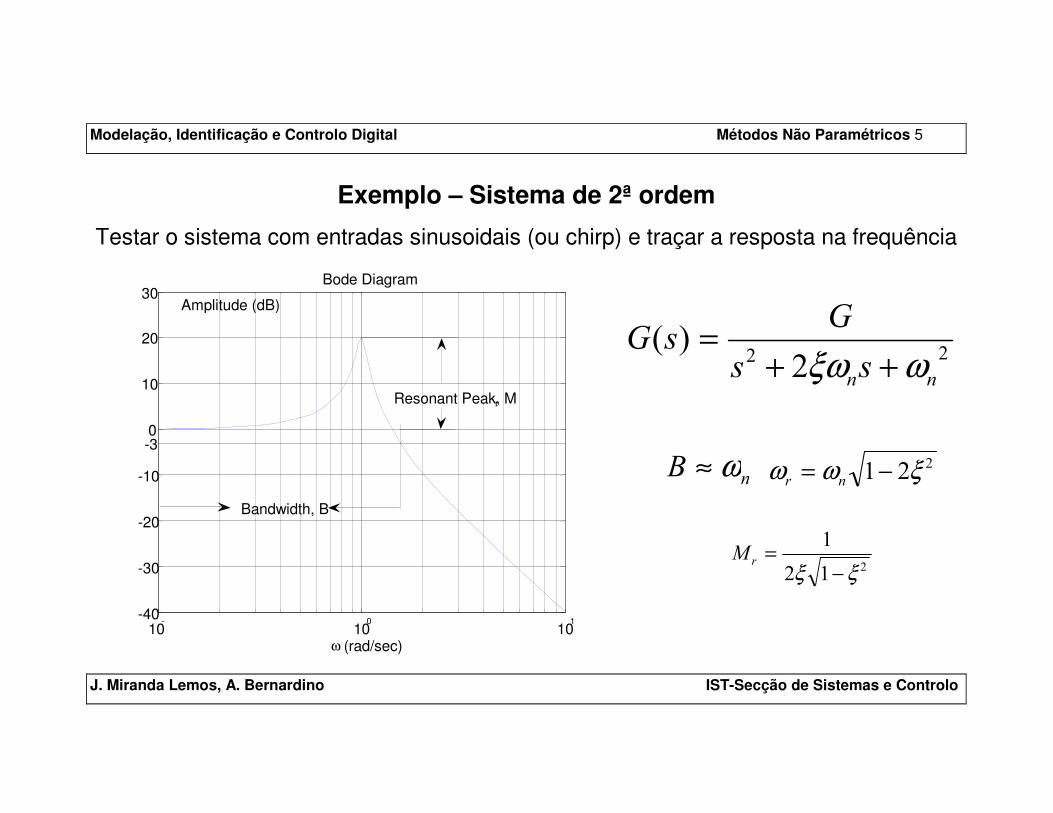
Exemplo – Sistema de 2ª ordem
Testar o sistema com entradas sinusoidais (ou chirp) e traçar a resposta na frequência
10 -
10 0
10 1 -40
-30
-20
-10
0
10
20
30
ω (rad/sec)
Amplitude (dB)
Bode Diagram
-3
Resonant Peak, M r
Bandwidth, B
�� ���
����
���
ωξω ++=
� ω≈ ��� ξωω −= ��
���
�
ξξ −=�
Modelação, Identificação e Controlo Digital Métodos Não Paramétricos 6
J. Miranda Lemos, A. Bernardino IST-Secção de Sistemas e Controlo
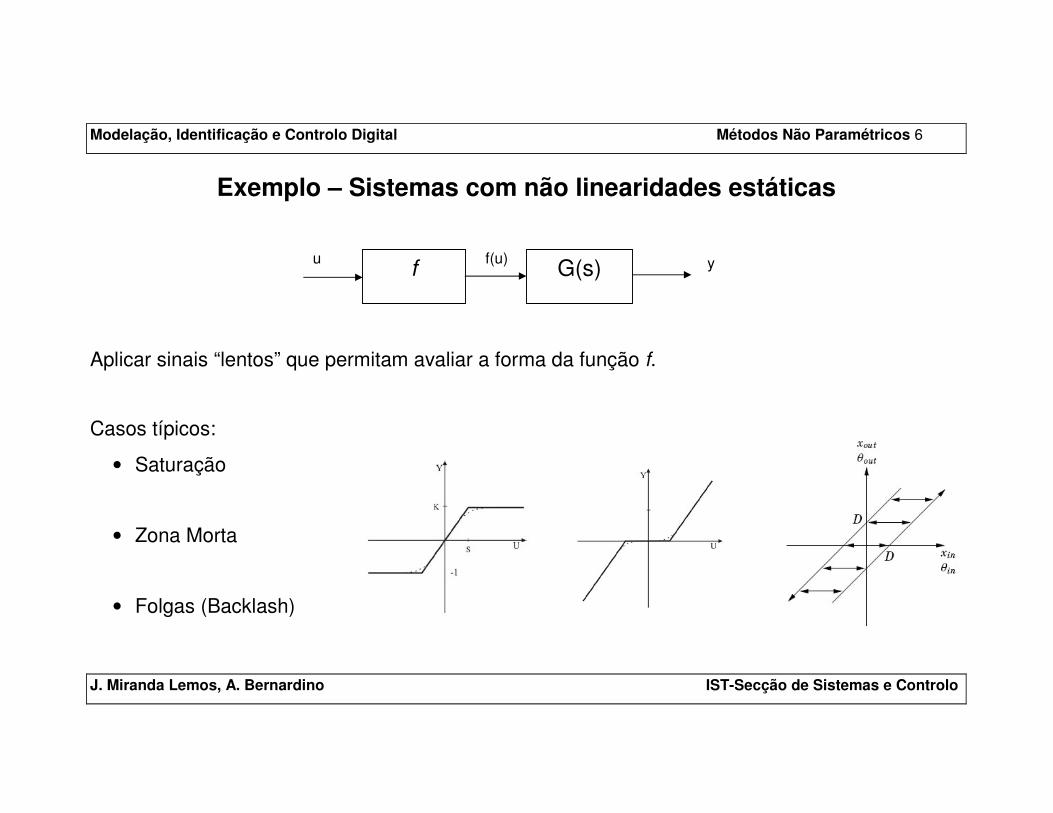
Exemplo – Sistemas com não linearidades estáticas
Aplicar sinais “lentos” que permitam avaliar a forma da função f.
Casos típicos:
• Saturação
• Zona Morta
• Folgas (Backlash)
f G(s) u f(u) y
Modelação, Identificação e Controlo Digital Métodos Não Paramétricos 7
J. Miranda Lemos, A. Bernardino IST-Secção de Sistemas e Controlo
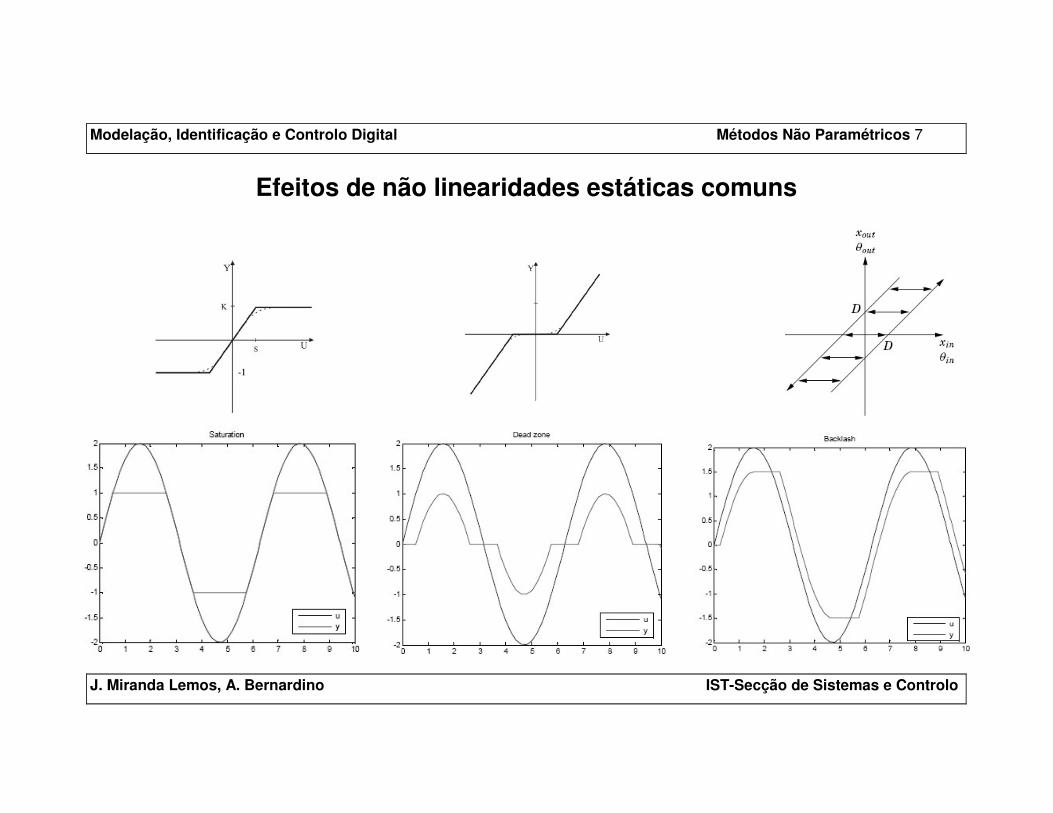
Efeitos de não linearidades estáticas comuns
Modelação, Identificação e Controlo Digital Métodos Não Paramétricos 8
J. Miranda Lemos, A. Bernardino IST-Secção de Sistemas e Controlo
Métodos não paramétricos?
A resposta de um sistema linear é completamente caracterizada pela
resposta impulsiva, ou pelas suas curvas de resposta em frequência.
Os métodos não paramétricos visam determinar estas respostas, não na
forma de uma expressão matemática, mas como uma tabela (ou gráfico) em
função do tempo (resposta impulsiva) ou da frequência (resposta em
frequência).
Modelação, Identificação e Controlo Digital Métodos Não Paramétricos 9
J. Miranda Lemos, A. Bernardino IST-Secção de Sistemas e Controlo
Porquê métodos não paramétricos?
Os métodos não paramétricos são úteis numa fase inicial do processo de
identificação.
Permitem ter uma primeira ideia das principais características dinâmicas
do processo, como a presença de atraso puro, as constantes de tempo
dominantes (que influenciam a escolha do intervalo de amostragem) e os
ganhos estáticos.
Modelação, Identificação e Controlo Digital Métodos Não Paramétricos 10
J. Miranda Lemos, A. Bernardino IST-Secção de Sistemas e Controlo
Limitações dos Métodos Não Paramétricos
A informação que fornecem é limitada e nem sempre adequada aos
objectivos visados (listas de números ou gráficos).
Os limites práticos impostos na amplitude da entrada, as perturbações e o
facto de o processo a identificar ter de trabalhar em cadeia fechada dificultam
a obtenção de modelos precisos.
Estudaremos apenas métodos para sistemas lineares (discretos), embora
sejam possíveis generalizações para classes de sistemas não lineares.
Modelação, Identificação e Controlo Digital Métodos Não Paramétricos 11
J. Miranda Lemos, A. Bernardino IST-Secção de Sistemas e Controlo
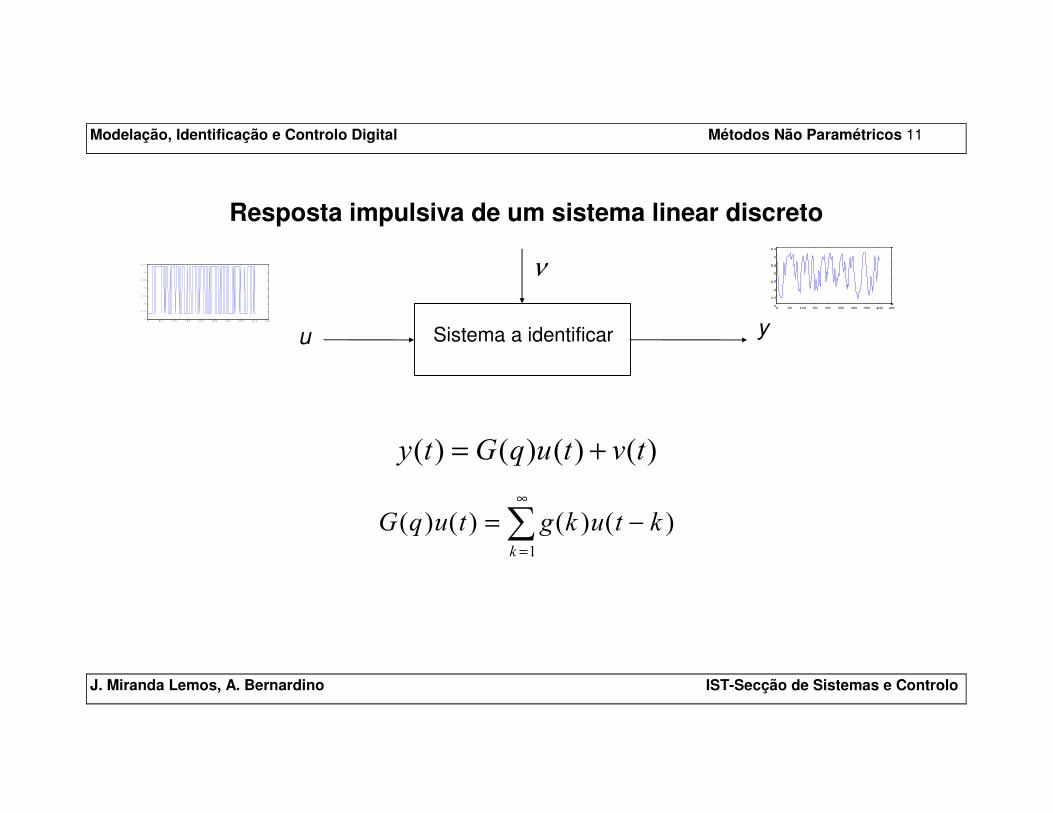
Resposta impulsiva de um sistema linear discreto
� � � � � � � �� � � � � ��= +
� � � � � � ��
� � � � � � � �= −=
∞
��
u y
ν 0 50 100 150 200 250 300 350 400 4503
3.5
4
4.5
5
5.5
6
6.5
0 5 0 1 0 0 1 5 0 2 0 0 2 5 0 3 0 0 3 5 0 4 0 0 4 5 0
3
3 . 5
4
4 . 5
5
5 . 5
6
6 . 5
Sistema a identificar
Modelação, Identificação e Controlo Digital Métodos Não Paramétricos 12
J. Miranda Lemos, A. Bernardino IST-Secção de Sistemas e Controlo
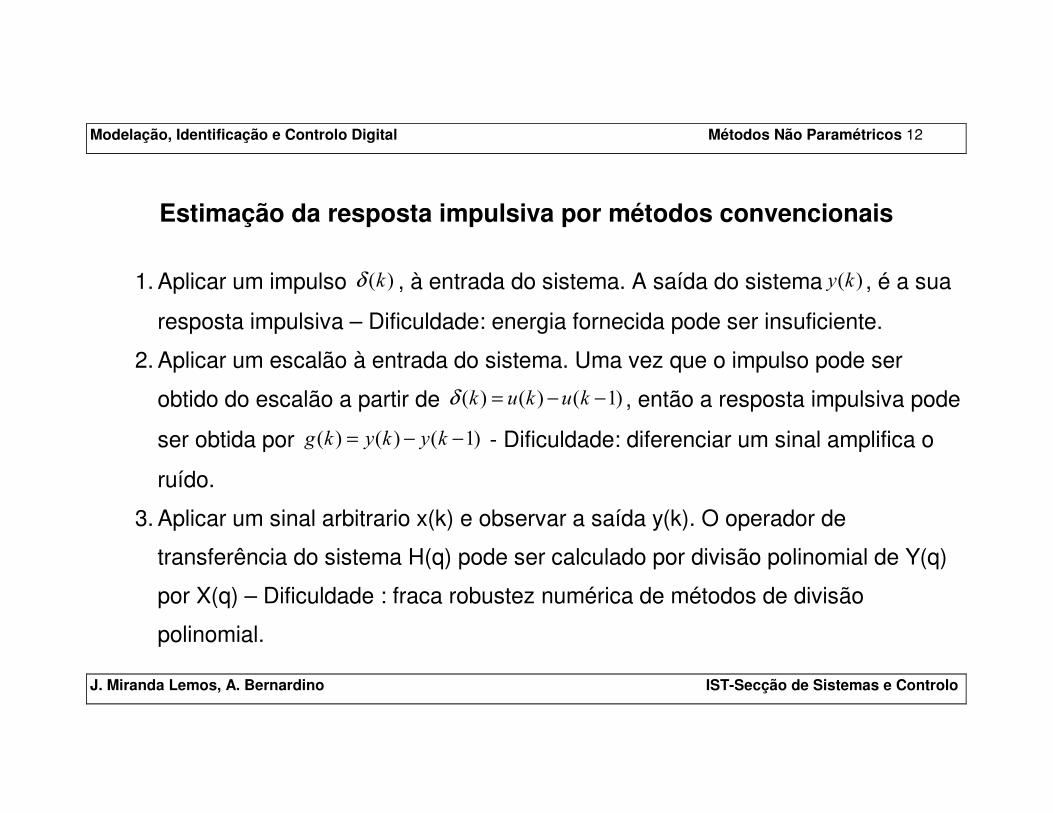
Estimação da resposta impulsiva por métodos convencionais
1. Aplicar um impulso � ��δ , à entrada do sistema. A saída do sistema � �� � , é a sua
resposta impulsiva – Dificuldade: energia fornecida pode ser insuficiente.
2. Aplicar um escalão à entrada do sistema. Uma vez que o impulso pode ser
obtido do escalão a partir de � � � � � ��� � �δ = − − , então a resposta impulsiva pode
ser obtida por � � � � � ��� � � � � �= − − - Dificuldade: diferenciar um sinal amplifica o
ruído.
3. Aplicar um sinal arbitrario x(k) e observar a saída y(k). O operador de
transferência do sistema H(q) pode ser calculado por divisão polinomial de Y(q)
por X(q) – Dificuldade : fraca robustez numérica de métodos de divisão
polinomial.
Modelação, Identificação e Controlo Digital Métodos Não Paramétricos 13
J. Miranda Lemos, A. Bernardino IST-Secção de Sistemas e Controlo
Estimação da resposta impulsiva por correlação
Os métodos indicados anteriormente funcionam mal no caso de exitirem perturbações.
A resposta impulsiva vem afectada dos valores da perturbação naquela experiência.
Uma forma de atenuar isto seria fazer várias experiência e calcular o valor esperado da
resposta impulsiva. No entanto, há métodos em que basta efectuar uma experiência.
Um desses método consiste na análise de correlação descrita a seguir.
O resultado do método é uma lista de números que constituem as primeiras N
amostras da resposta impulsiva do sistema a determinar.
Modelação, Identificação e Controlo Digital Métodos Não Paramétricos 14
J. Miranda Lemos, A. Bernardino IST-Secção de Sistemas e Controlo
Considere-se o sistema discreto com resposta impulsiva { }�� .
A resposta deste sistema a um sinal { } �� � é descrita pelo somatório de
convolução:
� � � � � ��
�
� � � � � �= − +=
∞
� ν
Seja { } �� � um signal que é a realização de um processo estacionário com
média nula e função de covariância:
[ ]� � � � � � � � � �τ τ= −
e tal que { } �� � e { }� ��� são incorrelacionados (exigindo experiências em
malha aberta).
Modelação, Identificação e Controlo Digital Métodos Não Paramétricos 15
J. Miranda Lemos, A. Bernardino IST-Secção de Sistemas e Controlo
A covariância cruzada entre u e y é então dada por
[ ] [ ] [ ]� � � � � � � � � � � � �� �
�
� � � � � � � � � � � � � �τ τ τ ν τ= − = − − + −=
∞
�
� � � �� �
�
� � � �τ τ= −=
∞
�
= − − − � � �� � ��τ
Modelação, Identificação e Controlo Digital Métodos Não Paramétricos 16
J. Miranda Lemos, A. Bernardino IST-Secção de Sistemas e Controlo
Se a entrada fôr ruído branco
�� � �
� �
σ τττ
� == �
≠�
obtém-se
�� �� � �ττ σ=
A função de covariância cruzada �� � �τ é pois proporcional à resposta
impulsiva.
Modelação, Identificação e Controlo Digital Métodos Não Paramétricos 17
J. Miranda Lemos, A. Bernardino IST-Secção de Sistemas e Controlo
A função de covariância cruzada entre a entrada e a saída é desconhecida,
mas pode ser estimada por
� � � � ���
� � ��
�
�
�
= −=�
�
�
τ
Analogamente se pode estimar a covariância na origem do sinal de entrada:
� �
�
�� � �
�
�
�
��
σ=
= �
A resposta impulsiva vem então estimada por
�
� �� � ��
� �
�
�
� �τ τσ
=
Modelação, Identificação e Controlo Digital Métodos Não Paramétricos 18
J. Miranda Lemos, A. Bernardino IST-Secção de Sistemas e Controlo
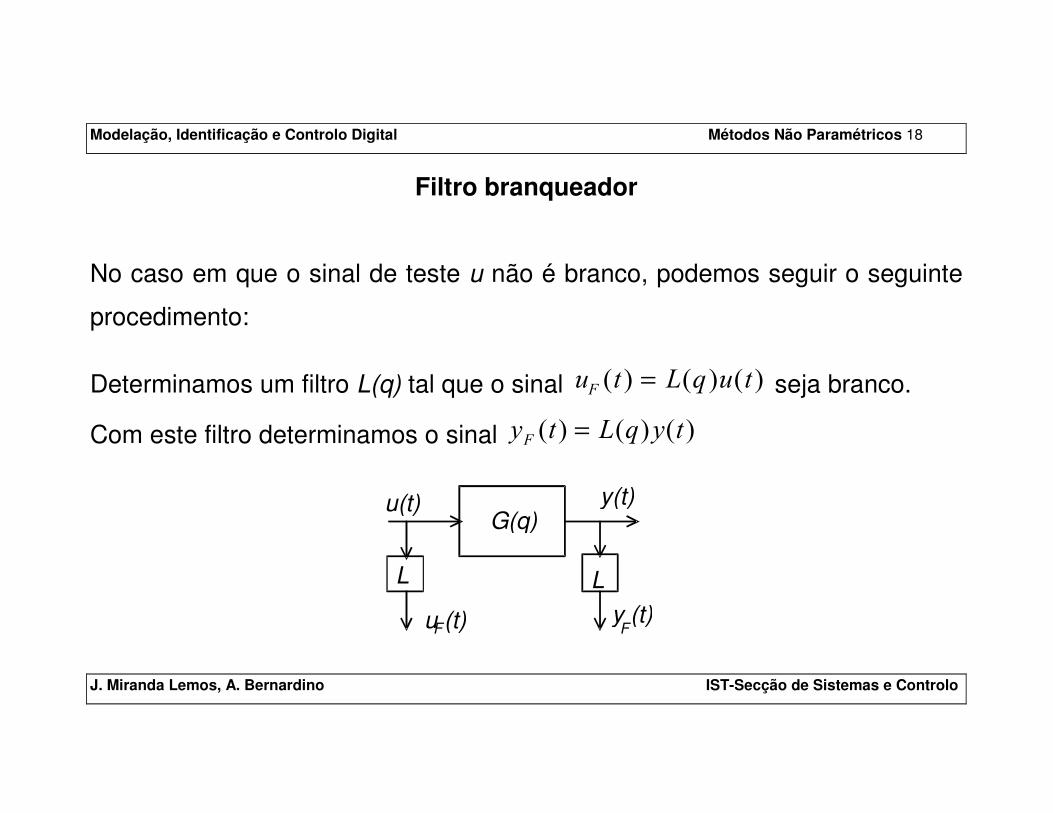
Filtro branqueador
No caso em que o sinal de teste u não é branco, podemos seguir o seguinte
procedimento:
Determinamos um filtro L(q) tal que o sinal � � � �� � � � � � �= seja branco.
Com este filtro determinamos o sinal � � � � � �� � � � � � �=
G(q)u(t) y(t)
u (t) y (t)FF
L L
Modelação, Identificação e Controlo Digital Métodos Não Paramétricos 19
J. Miranda Lemos, A. Bernardino IST-Secção de Sistemas e Controlo
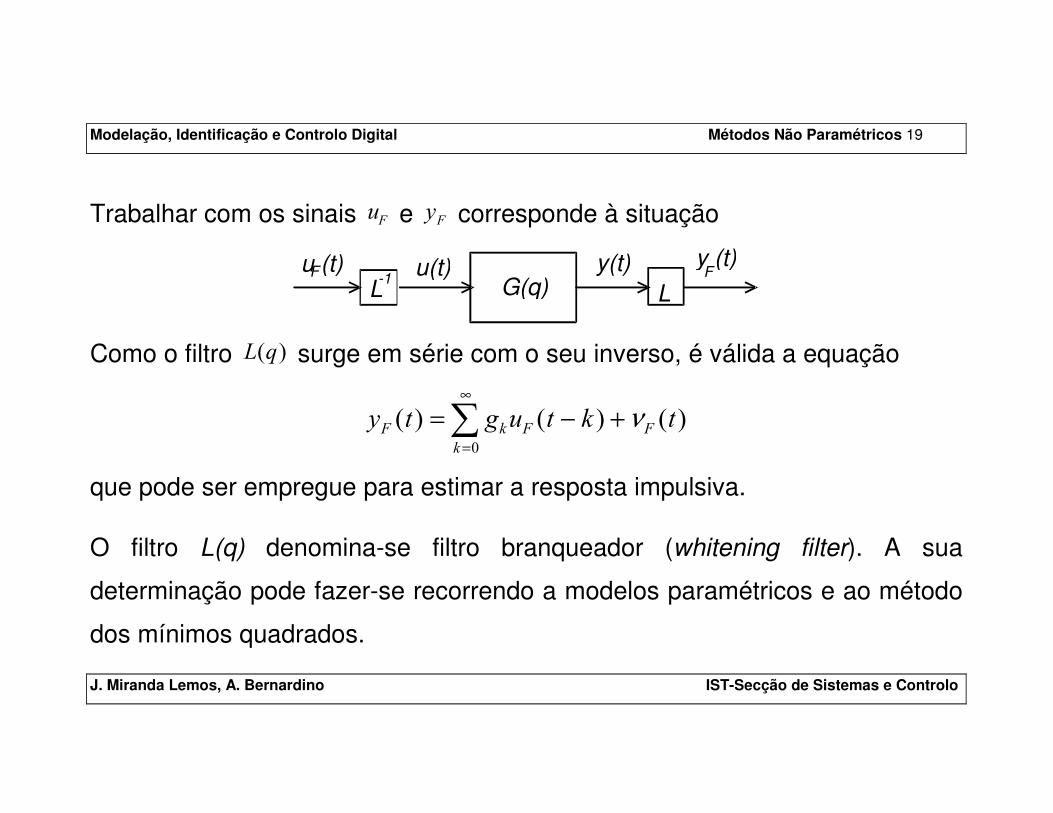
Trabalhar com os sinais � e �� corresponde à situação
G(q)u(t) y(t)u (t) y (t)
FFL L
-1
Como o filtro � �� � surge em série com o seu inverso, é válida a equação
� � � � � �� � � �
�
� � � � � �= − +=
∞
� ν
que pode ser empregue para estimar a resposta impulsiva.
O filtro L(q) denomina-se filtro branqueador (whitening filter). A sua
determinação pode fazer-se recorrendo a modelos paramétricos e ao método
dos mínimos quadrados.
Modelação, Identificação e Controlo Digital Métodos Não Paramétricos 20
J. Miranda Lemos, A. Bernardino IST-Secção de Sistemas e Controlo
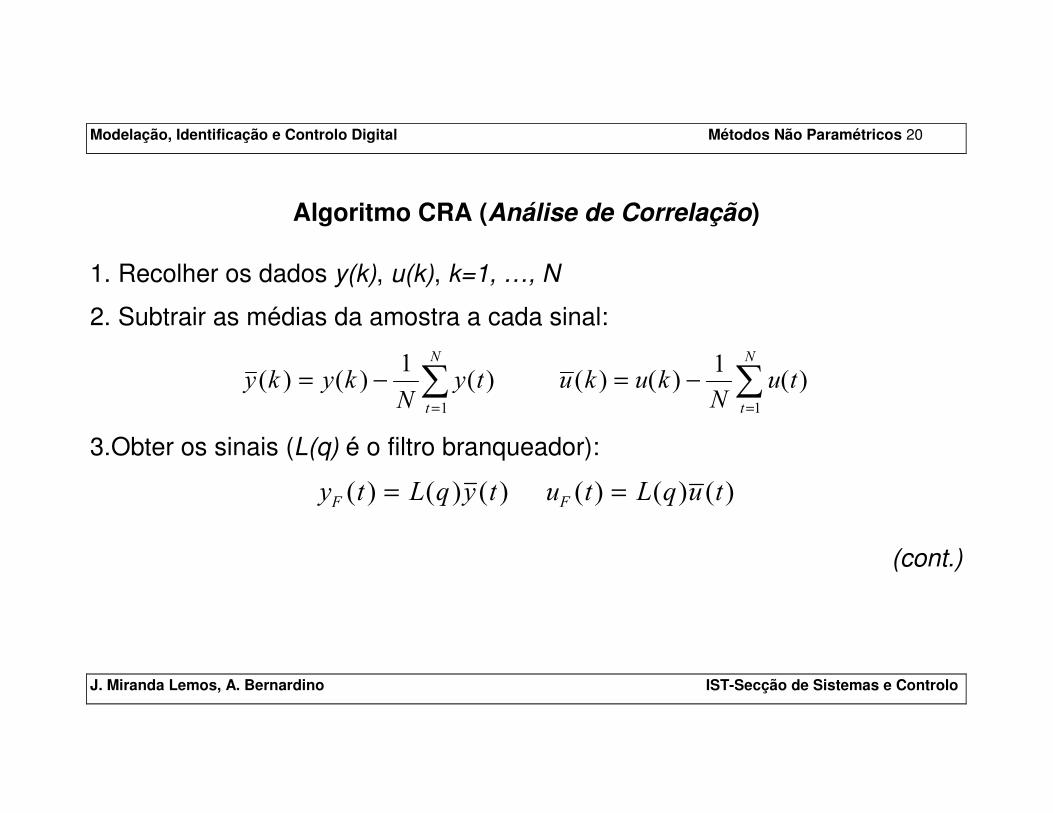
Algoritmo CRA (Análise de Correlação)
1. Recolher os dados y(k), u(k), k=1, …, N
2. Subtrair as médias da amostra a cada sinal:
� � � ��
� ��
�
� � � � � �= −=�
�
� � �
� �
�
�
� � � � � �= −=�
�
�
3.Obter os sinais (L(q) é o filtro branqueador):
� � � � � �� � � � � � �= � � � �� � � � � � �=
(cont.)
Modelação, Identificação e Controlo Digital Métodos Não Paramétricos 21
J. Miranda Lemos, A. Bernardino IST-Secção de Sistemas e Controlo
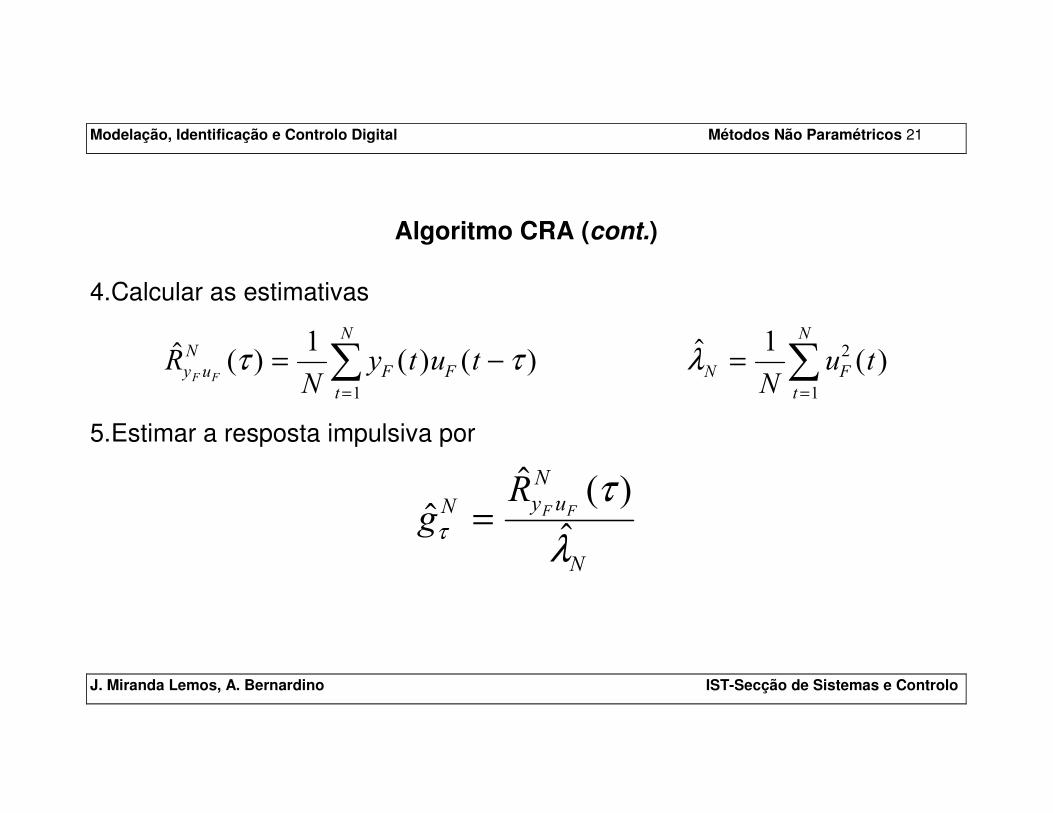
Algoritmo CRA (cont.)
4.Calcular as estimativas
� � � � � � ���
� � ��
�
� �
�
�
� �τ τ= −
=�
�
�
� � �λ� �
�
�
� �=
=�
� �
�
5.Estimar a resposta impulsiva por
�
� � �
��
�� �
�
�
� �
τ
τλ
=
Modelação, Identificação e Controlo Digital Métodos Não Paramétricos 22
J. Miranda Lemos, A. Bernardino IST-Secção de Sistemas e Controlo
Implementação no MATLAB 5.3
(Control Syst. Toolbox)
O algoritmo CRA está implementado através da função cra
Formar uma colecção de pares entrada/saída (y é um vector coluna com
as amostras da saída, u da entrada):
z=[y u];
Calcular as primeiras 20 amostras da resposta impulsiva e pô-las no
vector ir (inclui branqueamento e gráfico);
ir=cra(z);
Modelação, Identificação e Controlo Digital Métodos Não Paramétricos 23
J. Miranda Lemos, A. Bernardino IST-Secção de Sistemas e Controlo
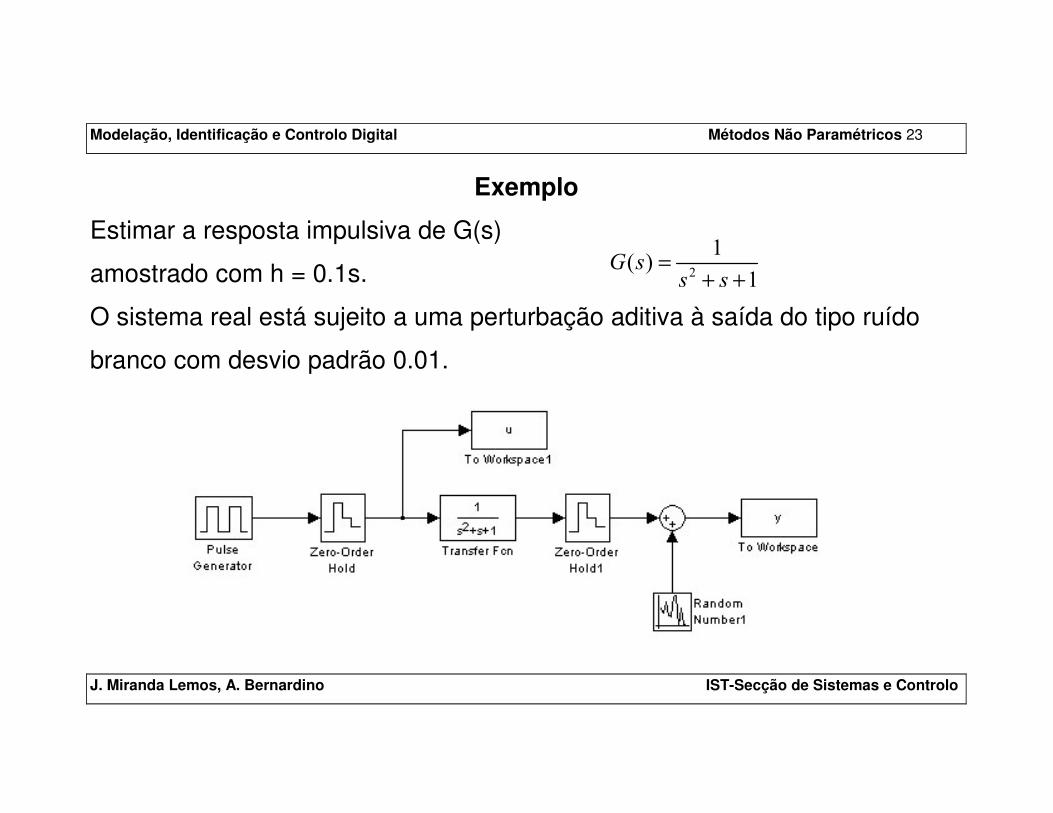
Exemplo
Estimar a resposta impulsiva de G(s)
amostrado com h = 0.1s.
O sistema real está sujeito a uma perturbação aditiva à saída do tipo ruído
branco com desvio padrão 0.01.
�
�� �
�� �
� �=
+ +
Modelação, Identificação e Controlo Digital Métodos Não Paramétricos 24
J. Miranda Lemos, A. Bernardino IST-Secção de Sistemas e Controlo
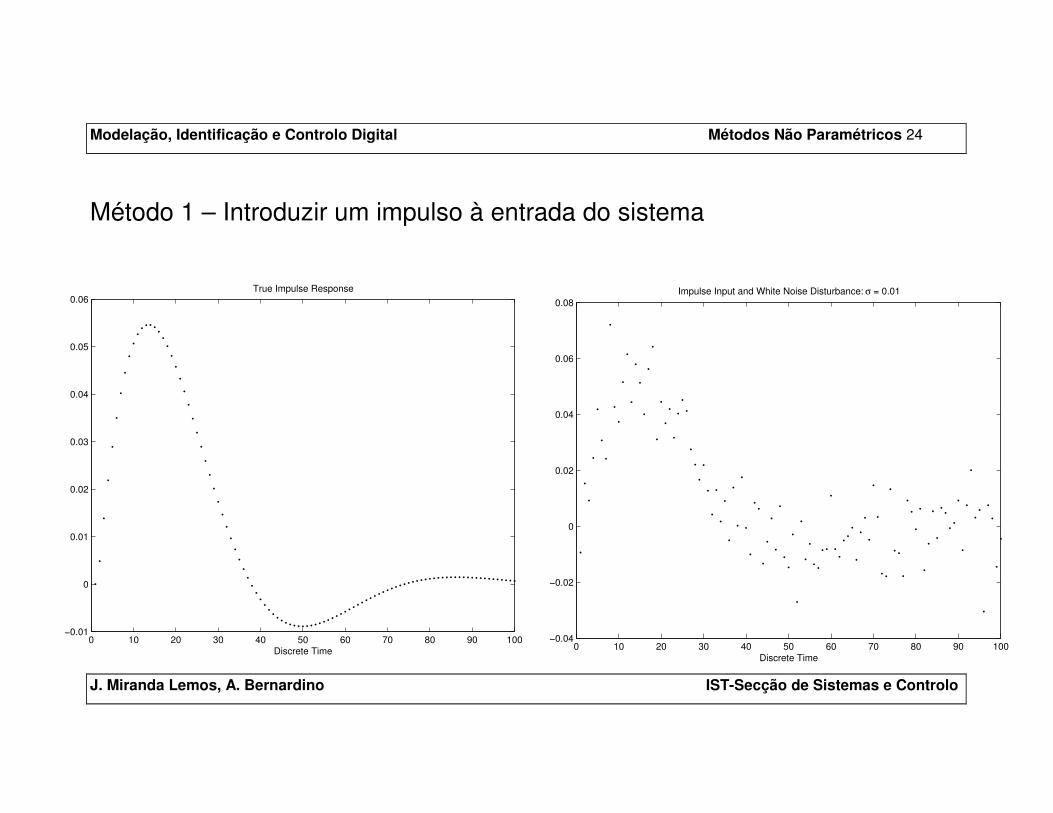
Método 1 – Introduzir um impulso à entrada do sistema
0 10 20 30 40 50 60 70 80 90 100−0.01
0
0.01
0.02
0.03
0.04
0.05
0.06True Impulse Response
Discrete Time 0 10 20 30 40 50 60 70 80 90 100−0.04
−0.02
0
0.02
0.04
0.06
0.08Impulse Input and White Noise Disturbance: σ = 0.01
Discrete Time
Modelação, Identificação e Controlo Digital Métodos Não Paramétricos 25
J. Miranda Lemos, A. Bernardino IST-Secção de Sistemas e Controlo
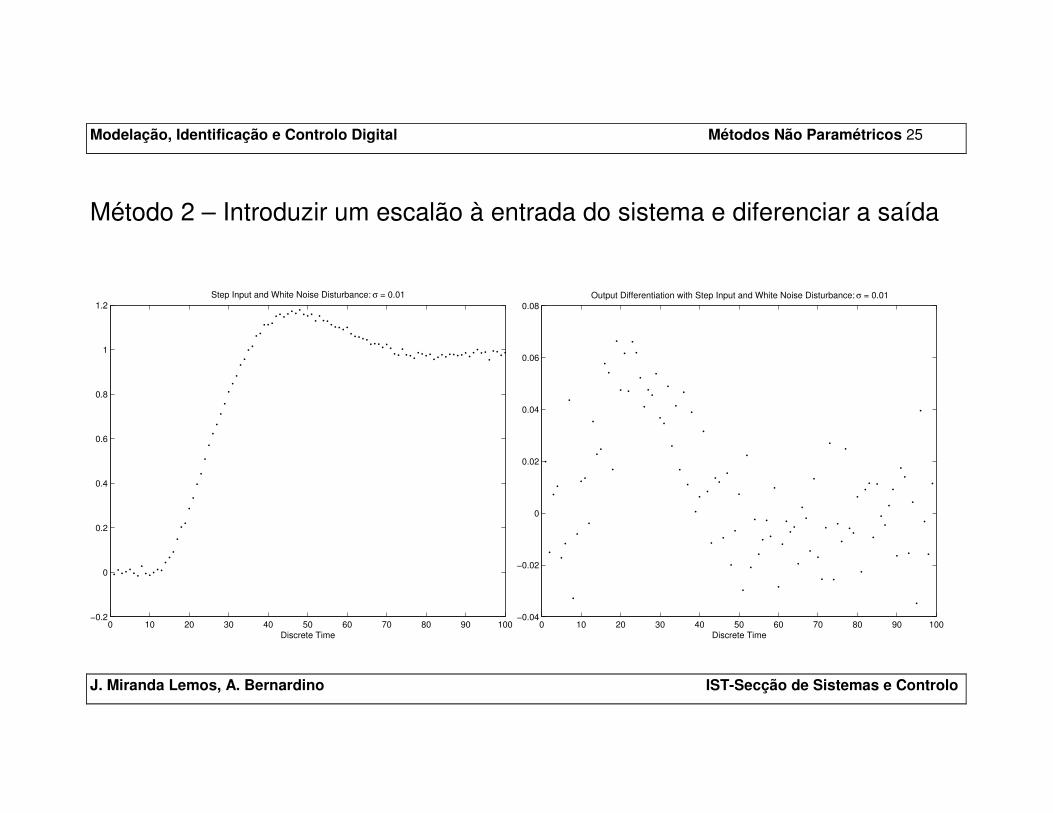
Método 2 – Introduzir um escalão à entrada do sistema e diferenciar a saída
0 10 20 30 40 50 60 70 80 90 100−0.2
0
0.2
0.4
0.6
0.8
1
1.2Step Input and White Noise Disturbance: σ = 0.01
Discrete Time0 10 20 30 40 50 60 70 80 90 100
−0.04
−0.02
0
0.02
0.04
0.06
0.08Output Differentiation with Step Input and White Noise Disturbance: σ = 0.01
Discrete Time
Modelação, Identificação e Controlo Digital Métodos Não Paramétricos 26
J. Miranda Lemos, A. Bernardino IST-Secção de Sistemas e Controlo
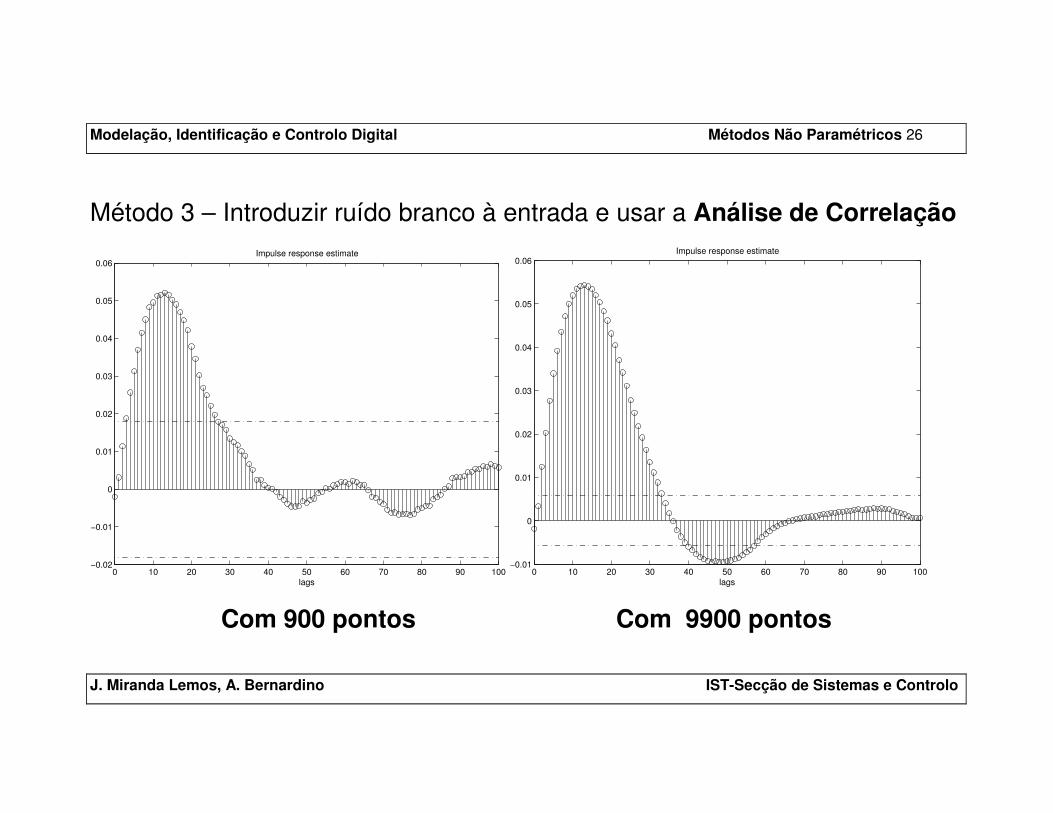
Método 3 – Introduzir ruído branco à entrada e usar a Análise de Correlação
0 10 20 30 40 50 60 70 80 90 100−0.02
−0.01
0
0.01
0.02
0.03
0.04
0.05
0.06Impulse response estimate
lags0 10 20 30 40 50 60 70 80 90 100
−0.01
0
0.01
0.02
0.03
0.04
0.05
0.06Impulse response estimate
lags Com 900 pontos Com 9900 pontos
Modelação, Identificação e Controlo Digital Métodos Não Paramétricos 27
J. Miranda Lemos, A. Bernardino IST-Secção de Sistemas e Controlo
Conselhos Práticos
Na análise de correlação devem-se utilizar apenas pontos da experiência que
correspondam ao regime estacionário. Nas experiências anteriores anularam-se os
primeiros 100 pontos porque correspondem ao regime transitório do sistema.
A dimensão da resposta impulsiva a usar na função ‘cra’ não deverá ser superior a
cerca de 1/10 do número total de pontos para que os valores da função de covariancia
sejam calculados com um número suficiente de pontos.
Quanto maior amplitude tiver a perturbação à saída, maior número de pontos deverão
ser utilizados.
Modelação, Identificação e Controlo Digital Métodos Não Paramétricos 28
J. Miranda Lemos, A. Bernardino IST-Secção de Sistemas e Controlo
Sistemas Instáveis
Em sistemas instáveis, os regimes transitórios não se extinguem, e portanto não
podemos considerar o processo estacionário. Não pode ser feita uma aplicação directa
dos métodos de correlação.
No entanto, se forem conhecidos os modos instáveis do sistema, podemos factorizá-
los e formular um problema de estimação apenas da parte estável do sistema. Na
prática isto só é factível para polos em z = 1.
A solução final obtém-se por combinação da parte estável estimada com a parte
instável conhecida.
Modelação, Identificação e Controlo Digital Métodos Não Paramétricos 29
J. Miranda Lemos, A. Bernardino IST-Secção de Sistemas e Controlo
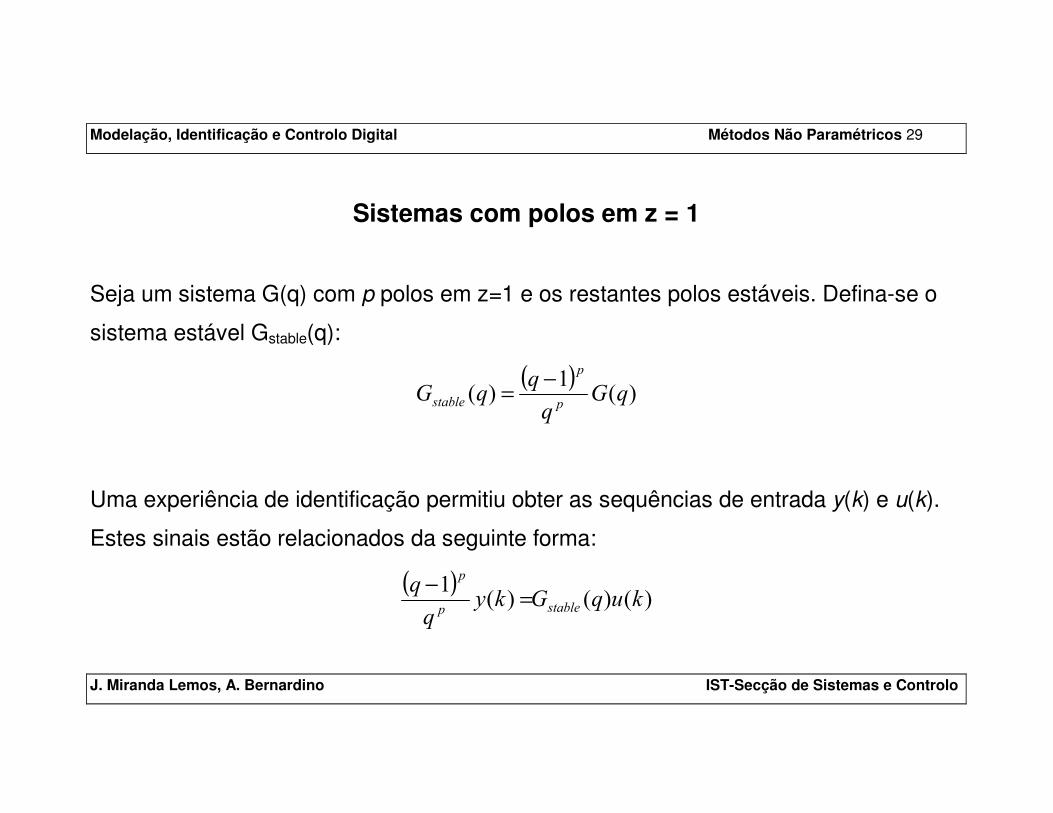
Sistemas com polos em z = 1
Seja um sistema G(q) com p polos em z=1 e os restantes polos estáveis. Defina-se o
sistema estável Gstable(q):
( )��
��� ��
�
���
�
�
������
−=
Uma experiência de identificação permitiu obter as sequências de entrada y(k) e u(k).
Estes sinais estão relacionados da seguinte forma:
( )������
�� ����
�
��������
�
=−
Modelação, Identificação e Controlo Digital Métodos Não Paramétricos 30
J. Miranda Lemos, A. Bernardino IST-Secção de Sistemas e Controlo
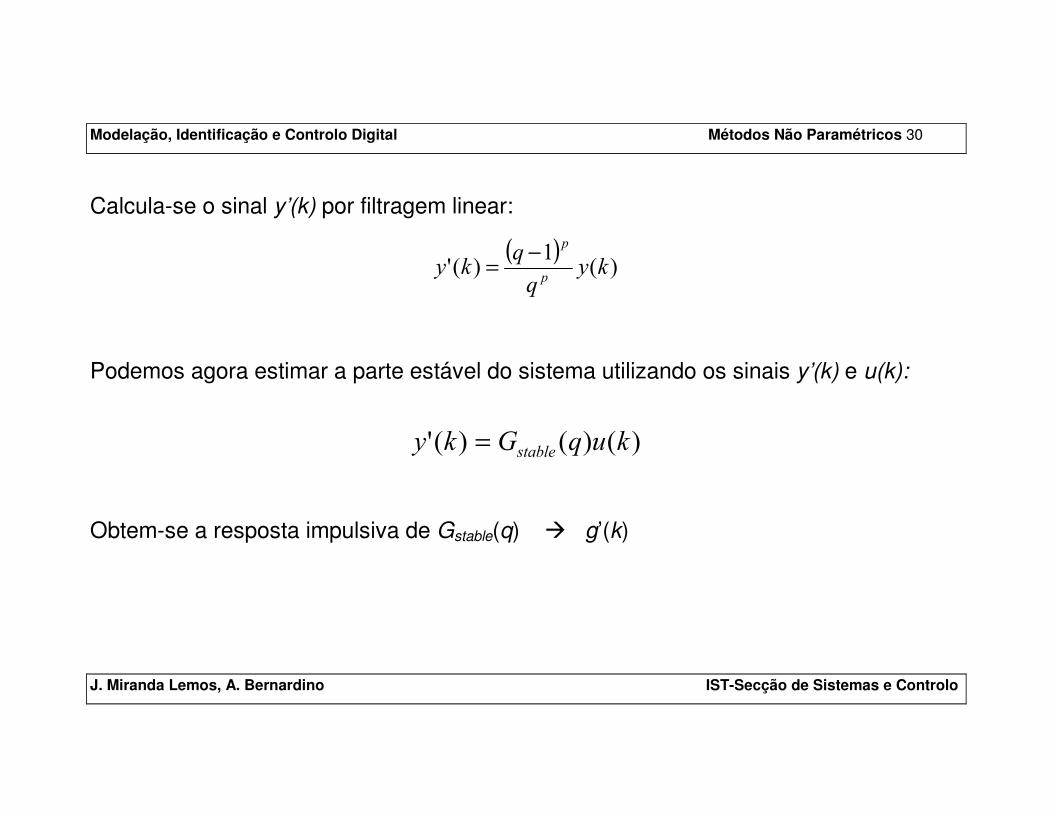
Calcula-se o sinal y’(k) por filtragem linear:
( )��
��� ��
�
���
�
�−=
Podemos agora estimar a parte estável do sistema utilizando os sinais y’(k) e u(k):
������ � ���� ������=
Obtem-se a resposta impulsiva de Gstable(q) � g’(k)
Modelação, Identificação e Controlo Digital Métodos Não Paramétricos 31
J. Miranda Lemos, A. Bernardino IST-Secção de Sistemas e Controlo
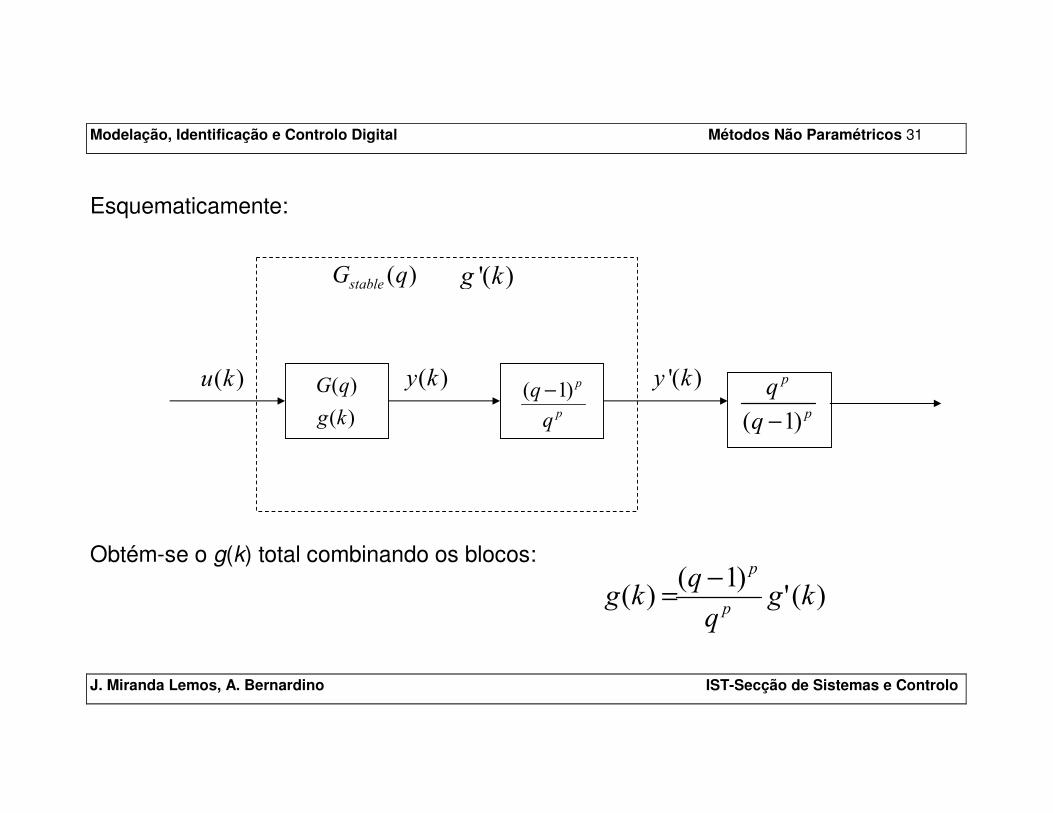
Esquematicamente:
Obtém-se o g(k) total combinando os blocos:
� �� � � �� �� � �
� �������� �
� ��
�
�
�
� −
� �� �
�
�
�
� ��� −��
��
��
��
�� ���
�� ���
���
�
�−=
Modelação, Identificação e Controlo Digital Métodos Não Paramétricos 32
J. Miranda Lemos, A. Bernardino IST-Secção de Sistemas e Controlo
Exercícios
É sabido que um sistema G(s) tem a seguinte estrutura:
� �
�� �
� �� �
� �� �� �=
+ +
e está inserido num sistema de controlo digital com período de amostragem h = 0.5.
Pretende-se estimar a resposta impulsiva do sistema por análise de correlação.
Efectue uma simulação matlab/simulink com os parâmetros a=1, b = 0.25 e c=1, para
obter os sinais a usar na função de estimação. Compare a resposta impulsiva estimada
com a resposta impulsiva verdadeira do sistema discretizado.
Related Documents











![RESOLUÇÃO SIMULADO 2ª SÉRIE D2 TARDE 1º BIMESTRE … · Resposta da questão 18: [A] Resposta da questão 19: [D] Resposta da questão 20: [B] Resposta da questão 21: [E] Resposta](https://static.cupdf.com/doc/110x72/5be61a8909d3f22b448d0f25/resolucao-simulado-2a-serie-d2-tarde-1o-bimestre-resposta-da-questao-18.jpg)