ICT International Doctoral School, Trento @RT 2014 ICT International Doctoral School Department of Information Engineering and Computer Science University of Trento ICT International Doctoral School, Trento @RT 2014 Randomized Algorithms for Systems, Control and Networks Roberto Tempo CNR-IEIIT Consiglio Nazionale delle Ricerche Politecnico di Torino [email protected] ICT International Doctoral School, Trento @RT 2014 Objective and Prerequisites Objective: introduction to general purpose methods of randomization for analysis and design of uncertain systems Prerequisites: basic knowledge of probability theory and familiarity with state space methods for control system analysis and design ICT International Doctoral School, Trento @RT 2014 Course and Slides The course consists of three distinct sections - analysis - design - networks The slides include more material than that presented in the course pdf file with slides are provided ICT International Doctoral School, Trento @RT 2014 Final Project Course grade based on a final project to be discussed ICT International Doctoral School, Trento @RT 2014 Schedule Monday 15:00-17:00 Tuesday 9:00-12:00 and 15:00-17:00 Wednesday 9:00-12:00 and 15:00-17:00 Thursday 9:00-12:00 and 15:00-17:00 Friday 9:00-12:00

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

ICT International Doctoral School, Trento @RT 2014
ICT International Doctoral School
Department of Information Engineering and Computer Science
University of Trento
ICT International Doctoral School, Trento @RT 2014
Randomized Algorithms for Systems, Control and Networks
Roberto TempoCNR-IEIIT
Consiglio Nazionale delle Ricerche
Politecnico di Torino
ICT International Doctoral School, Trento @RT 2014
Objective and Prerequisites
Objective: introduction to general purpose methods of randomization for analysis and design of uncertain systems
Prerequisites: basic knowledge of probability theory and familiarity with state space methods for control system analysis and design
ICT International Doctoral School, Trento @RT 2014
Course and Slides
The course consists of three distinct sections
- analysis
- design
- networks
The slides include more material than that presented in the course
pdf file with slides are provided
ICT International Doctoral School, Trento @RT 2014
Final Project
Course grade based on a final project to be discussed
ICT International Doctoral School, Trento @RT 2014
Schedule
Monday 15:00-17:00Tuesday 9:00-12:00 and 15:00-17:00Wednesday 9:00-12:00 and 15:00-17:00Thursday 9:00-12:00 and 15:00-17:00 Friday 9:00-12:00

ICT International Doctoral School, Trento @RT 2014
Main References - 1
R. Tempo, G. Calafiore and F. Dabbene,
“Randomized Algorithms for Analysis
and Control of Uncertain Systems, with
Applications,” Second Edition,
Springer-Verlag, London, 2013
F. Dabbene and R. Tempo, “Randomized Methods for
Control,” Encyclopedia of Systems and Control, 2014
(to appear)
ICT International Doctoral School, Trento @RT 2014
Main References - 2
F. Dabbene and R. Tempo, “Probabilistic and
Randomized Tools for Control Design,” The Control
Handbook, second edition, Taylor & Francis, 2010
G. Calafiore, F. Dabbene and R. Tempo “Research on
Probabilistic Design Methods,” Automatica, 2011
R. Tempo and H. Ishii, “Monte Carlo and Las Vegas
Randomized Algorithms for Systems and Control: An
Introduction,” European Journal of Control, 2007
ICT International Doctoral School, Trento @RT 2014
Software
R-RoMulOC: Randomized and Robust Multi-Objective
Control toolbox
http://projects.laas.fr/OLOCEP/rromuloc/
RACT: Randomized Algorithms Control Toolbox for
Matlab
http://ract.sourceforge.net
ICT International Doctoral School, Trento @RT 2014
Research Interests and Background
Question: What are your research interests andbackground?
ICT International Doctoral School, Trento @RT 2014
Main Topics Studied in this Course
Preliminaries
Probabilistic Analysis
Probabilistic Design: The Big Picture
Sequential Methods for Convex Problems
Non-Sequential Methods
RACT
Opinion dynamics in social networks
PageRank computation in Google
Sensor localization in wireless networks
ICT International Doctoral School, Trento @RT 2014
Part 1: Analysis
Analysis Paradigm:
Understanding Phenomena

ICT International Doctoral School, Trento @RT 2014
Overview of Part 1 (Analysis)
1. Preliminaries
2. Uncertainty
3. Randomized Algorithms
4. Random Vector Generation
5. Random Matrix Generation
ICT International Doctoral School, Trento @RT 2014
CHAPTER 1
Preliminaries
Keywords: Uncertainty, robustness, probability
ICT International Doctoral School, Trento @RT 2014
Randomized Algorithms (RAs)
Randomized algorithms are frequently used in many
areas of engineering, computer science, physics,
finance, optimization,…
Main objective of this course: Introduction to rigorous
study of RAs for uncertain systems, control and
networks
The theory is ready for specific applications
ICT International Doctoral School, Trento @RT 2014
Randomized Algorithms (RAs)
Computer science (RQS for sorting, data structuring)
Robotics (motion and path planning problems)
Mathematics of finance (path integrals)
Bioinformatics (string matching problems)
Computer vision (computational geometry)
PageRank computation (distributed algorithms)
Opinion dynamics in social networks
ICT International Doctoral School, Trento @RT 2014
A Success Story: Randomization in Computer Science
ICT International Doctoral School, Trento @RT 2014
A Success Story in CS
Problem: Sorting N real numbers
Algorithm: RandQuickSort (RQS)
RQS is implemented in a C library of Linux for sortingnumbers[1-2]
[1] C.A.R. Hoare (1962)[2] D.E. Knuth (1998)

ICT International Doctoral School, Trento @RT 2014
A Success Story in CS
Problem: Sorting N real numbers
Algorithm: RandQuickSort (RQS)
RQS is implemented in a C library of Linux for sortingnumbers
Sorting Problem
given N real x1 x2 x3 sort them in
numbers x4 x5 x6 increasing order
S1ICT International Doctoral School, Trento @RT 2014
RandQuickSort (RQS)
The idea is to divide the original set S1 into two setshaving (approximately) the same cardinality
This requires finding the median of S1 (which may bedifficult)
This operation is performed using randomization
ICT International Doctoral School, Trento @RT 2014
RandQuickSort (RQS)
RQS is a recursive algorithm consisting of two phases
1. randomly select a number xi (e.g. x4)2. deterministic comparisons between xi and other (N-1) numbers
x2 x3 x1 x5
x6
numbers smaller than x4 numbers larger than x4
S2 S3
4x
ICT International Doctoral School, Trento @RT 2014
RQS: Binary Tree Structure
We use randomization at each step of the (binary) tree
ICT International Doctoral School, Trento @RT 2014
Running Time of RQS
Because of randomization, running time may bedifferent from one run of the algorithm to the next one
RQS is very fast: Average running time is O(N log(N))
This is a major improvement compared to brute forceapproach (e.g. when N = 2M)
Average running time holds for every input withprobability at least 1-1/N (i.e. it is highly probable)
The so-called Chernoff bound can be used to prove this
Improvements for RQS to avoid achieving the worstcase running time O(N 2)
ICT International Doctoral School, Trento @RT 2014
Find Algorithm
Find Algorithm: Find the k-th smallest number in a set
Basically it is a RQS but it terminates when the numberis found
Average running time of Find is O(N)

ICT International Doctoral School, Trento @RT 2014
Another Success Story: Randomization in Mathematical Finance
ICT International Doctoral School, Trento @RT 2014
(Quasi) Monte Carlo Methods for Computational Finance
QMC methods to estimate the prize of collaterizedmortgage obligations
The problem is to approximate the average mortgage
taking N samples for each variable, but we need Nn
total number of points
Curse of dimensionality: n = 360!
[0,1]( ) d
nf u u
ICT International Doctoral School, Trento @RT 2014
Uncertainty and Robustness
Some History
ICT International Doctoral School, Trento @RT 2014
Uncertainty
“The use of equalizing structures to compensate for the variation
in the phase and attenuation characteristics of transmission lines
and other pieces of apparatus is well known in the communication
art… the characteristics demanded of the equalizer cannot be
prescribed in advance, either because… are not known with
sufficient precision, or because they vary with time… transmission
lines the exact lengths of which are unknown, or the
characteristics of which may be affected by changes in
temperature and humidity.... and since the daily cycle of
temperature changes may be large…”
ICT International Doctoral School, Trento @RT 2014
Variable Equalizers
The quote is taken from the paper titled “Variable
Equalizers” by Hendrik W. Bode published in 1938 in
Bell System Technical Journal
The quote continues “it is almost essential that theadjustments made be so simple that they can readily beperformed automatically by a suitable auxiliary circuit.”
Bode fully recognized the importance to control a systemsubject to uncertainty
ICT International Doctoral School, Trento @RT 2014
Robustness
The examination of uncertainty in the mathematical
model of a system is known as robustness
Uncertainty is a central part of feedback and controllers
which guarantee an adequate level of performance are
called robust controllers

ICT International Doctoral School, Trento @RT 2014
History
Classical sensitivity period (before 1960)
State-variable period (1960-1975)
Modern robust control period (after 1975)
ICT International Doctoral School, Trento @RT 2014
Two Lines of Research in the Early Seventies
Design of adaptive guaranteed cost control in the
presence of large parameter variations[1]
Set-theoretic description of uncertainty (called
unknown-but-bounded) for estimation problems[2]
[1] S. Chang and T.K.C. Peng (1972)
[2] F. Schweppe (1973)
ICT International Doctoral School, Trento @RT 2014
Other Early Approaches where “Robust” Appeared
Robust controllers for linear regulators[1]
Robust control of general servomechanisms[2]
[1] J. Pearson and P.W. Staats (1974)
[2] E. Davison and A. Goldenberg (1975)
ICT International Doctoral School, Trento @RT 2014
Robustness and H Control
Lack of guaranteed robustness margins in LQG
control[1]
Robustness of systems with sector-type uncertainty[2]
Major stepping stone in 1981 by George Zames:
Formulation of the H control problem and solution of
the H sensitivity problem[3]
[1] J. Doyle (1978)
[2] M.G. Safonov (1980)
[3] G. Zames (1981)
ICT International Doctoral School, Trento @RT 2014
State Space Approach and Solution
Performance limitations in feedback control[1]
Further developments based on interpolation theory[2]
… but the theory moved in a state space direction[3]
[1] J. Freudenberg and D. Looze (1985)
[2] G. Zames and B. A. Francis (1983)
[3] J. C. Doyle, K. Glover, P. P. Khargonekar and B. Francis (1989)
ICT International Doctoral School, Trento @RT 2014
Today
Various “robust” methods to handle uncertainty now
exist: Structured singular values, Kharitonov,
optimization-based (LMI and SOS), integral quadratic
constraints (IQC), ℓ-one optimal control, quantitative
feedback theory (QFT), probabilistic/randomized
methods

ICT International Doctoral School, Trento @RT 2014
Automatica 50th Anniversary
I.R. Petersen and R. Tempo, “Robust Control of
Uncertain Systems: Classical Results and Recent
Developments,” Automatica, 2014 (to appear)ICT International Doctoral School, Trento @RT 2014
Example: H Performance
ICT International Doctoral School, Trento @RT 2014
Consider the linear system
with (nominal) parameters
a0 = 1 a1 = 0.8
The transfer function z = G(s) w is given by
Example: Frequency Response
0 1
0 1 0 0
1 1x x u w
a a
1 0z x
2
1( )
0.8 1G s
s s
disturbances
errors
w
z
ICT International Doctoral School, Trento @RT 2014
H performance
||G(s)|| = sup |G(j)| ≤ γ
Performance is satisfied for γ = 1.35
Example: H Norm
Bode plot (magnitude)
ICT International Doctoral School, Trento @RT 2014
System Performance with Uncertainty
Consider an uncertain stable transfer function G(s,q)
z = G(s,q) w
where w and z are disturbances and errors and qrepresents uncertainty bounded in a set Q of radius ρ > 0
G(s,q) w z
ICT International Doctoral School, Trento @RT 2014
Consider the uncertain linear system
with parameters
a0 = 1 + q0 a1 = 0.8 + q1
and bounding set
Q = {q = [q0 q1 ]T : ||q|| }
Example[1]: System Performance with Uncertainty
0 1
0 1 0 0
1 1x x u w
a a
1 0z x
[1] R. Tempo, G. Calafiore, F. Dabbene (2013)

ICT International Doctoral School, Trento @RT 2014
Given performance level the objective is tocompute the maximal radius of Q such that
G(s,q) is stable and ||G(s,q)|| for all q Q
G(s,q) is stable and ||G(s,q)|| if and only if
< 0.8 and
Example: Radius of Uncertainty
2(0 .8 ρ )1 ρ
2 2
ργ= 2
ICT International Doctoral School, Trento @RT 2014
Example: Radius of Uncertainty
Largest radius of Q suchthat performance is satisfied is = 0.025
Conclusion: Stability and performance are satisfied for all q Qwith radius = 0.025
ρ
ρ
ICT International Doctoral School, Trento @RT 2014
CHAPTER 2
Robustness
Keywords: parametric and nonparametric uncertainty
ICT International Doctoral School, Trento @RT 2014
Uncertain Linear Systems
M(s) UncertaintySystem
belongs to a structured set B
– Parametric uncertainty q
– Nonparametric uncertainty np
– Mixed uncertainty
ICT International Doctoral School, Trento @RT 2014
Worst Case Model
Worst case model: Set membership uncertainty
The uncertainty is bounded in a set B
B
Real parametric uncertainty q=[q1,…, q] R
qi [qi-, qi
+]
Nonparametric uncertainty
{np Rn,n : || np || 1}
ICT International Doctoral School, Trento @RT 2014
Robustness
Uncertainty is bounded in a structured set B
z = Fu(M,) w, where Fu(M,) is the upper LFT
M
w z

ICT International Doctoral School, Trento @RT 2014
Example: Flexible Structure - 1
Mass spring damper model
Real parametric uncertainty affecting stiffness and
damping
Complex unmodeled dynamics (nonparametric)
m1
l1
k1
m2
l2
k2
m3
l3
k3
m4
l4
k4
m5
l5
k5
l6
k6
ICT International Doctoral School, Trento @RT 2014
Objective of Robustness
Objective of robustness: To guarantee stability and
performance for all
B
For simplicity we often use the notation
q Q
ICT International Doctoral School, Trento @RT 2014
Performance Function
In classical robustness we guarantee that a certain
performance requirement is attained for all qQ
This can be stated in terms of a performance function
for analysis
J (q): Q → R
ICT International Doctoral School, Trento @RT 2014
Example: H Performance - 1
Compute the H norm of the upper LFT Fu(M,)
J() = || Fu(M, )||
For given > 0, check if
J()
for all B
ICT International Doctoral School, Trento @RT 2014
Example: H Performance - 2
Continuous time SISO systems with real parametricuncertainty q with upper LFT
Fu(M,) = Fu(M,q) =
where q1 [0.2, 0.6] and q2 [10-5,3·10-5]
Letting J(q) = || Fu(M,q) || we choose = 0.003
Check if J(q)≤ for all q in these intervals
)5.0102(5.000102.0)05.010(105.0
21
52
22
51
521
qsqsqqsqq
ICT International Doctoral School, Trento @RT 2014
Example: H Performance - 3
Using a brute force gridding approach we show anapproximation of the set of q1, q2 for which J(q) ≤
0.2 0.25 0.3 0.35 0.4 0.45 0.5 0.55 0.6 0.651
1.2
1.4
1.6
1.8
2
2.2
2.4
2.6
2.8
3x 10
-5
q1
q2

ICT International Doctoral School, Trento @RT 2014
Convex Optimization in Control
Many robust analysis and design problems may be castas convex optimization problems[1]
A unifying framework is based on Linear MatrixInequalities (LMIs)
Using LMIs, for generic uncertainty structures, we cancompute relaxations (i.e. sufficient conditions) of theoriginal robustness problem
[1] S. P. Boyd L. El Ghaoui, E. Feron and V. Balakrishnan (1994)
ICT International Doctoral School, Trento @RT 2014
Linear Matrix Inequalities (LMIs)
LMI: Find such thatF() ≤ 0
where
F() = F0 + 1 F1 + … + n Fn
and Fi are real symmetric matrices
ICT International Doctoral School, Trento @RT 2014
Robust LMIs
Find such thatF( ) ≤ 0
for all B where
F( ) = F0() + 1 F1() + … + n Fn()
and Fi() are real symmetric matrices depending(nonlinearly) on
This is a LMI robust feasibility problem
ICT International Doctoral School, Trento @RT 2014
Robust SDP
A robust semidefinite program is an optimizationproblem of the following form
s.t. (θ, ) 0 for all F B
θmin θTc
ICT International Doctoral School, Trento @RT 2014
CHAPTER 2
More Deeply into Robustness
Keywords: Structured uncertainty, structured singular value, stability radii, linear matrix inequalities, Kharitonov theorem
ICT International Doctoral School, Trento @RT 2014
General Robust Control Framework
Closed loop system
z = Fu(M, w
P(s)
K(s)
w z
u y
KPFMM
MMsM ,)(
2221
1211
(s) strictly proper

ICT International Doctoral School, Trento @RT 2014
Structured Uncertainty
Subspace defining uncertainty structure
Norm bounded structured uncertainty
11 1: blockdiag ,..., , ,...,r r bq I q I D
ρ : , ρ Β Β D
ICT International Doctoral School, Trento @RT 2014
Robust Stability
Let A,B,C be a realization of M11(s). Define the set
The feedback connection is robustly stable if and only ifevery element in A is stable.
The stability radius
ρ : , (ρ)A A A B C A Β
ρρ sup ρ : is robustly stable A
ICT International Doctoral School, Trento @RT 2014
Examples of Structures
Full complex block: = Cn,m
Full real block: = Rn,m
11 11
1 1ρ
sup ( ) ( )σ M j M s
111 11
20,1 111 11
Re( ( )) γIm( ( ))ρ sup inf
γ Im( ( )) Re( ( ))
M j M j
M j M j
complex stability radius
real stability radius
ICT International Doctoral School, Trento @RT 2014
Mixed Structured Uncertainty
Mixed uncertainty
is the structured singular value
))((sup1
jM
0))(det(:)(inf
1))((
11
jMIjM
D
structured stability radius
11 1: blockdiag ,..., , , ...,r r bq I q I D
ICT International Doctoral School, Trento @RT 2014
Interval Polynomials
An interval polynomial is of the form
where qiqi-, qi
+]
An interval polynomial is a box of polynomials, i.e.,
the coefficients q vary in a hyperrectangle B
Kharitonov Theorem: p(s,q) is Hurwitz (stable) if and
only if four particular vertex polynomials (Kharitonov
polynomials) are Hurwitz
ssqsqqqsp 2210),(
ICT International Doctoral School, Trento @RT 2014
Robust Stability of Interval Polynomials
Kharitonov Theorem
The interval polynomial p(s,q) is Hurwitz for all q Q ifand only if the four Kharitonov polynomials
p1(s) = q0++ q1
+ s + q2- s2 + q3
- s3 + q4+ s4 + …
p2(s) = q0- + q1
- s + q2+ s2 + q3
+ s3 + q4- s4 + …
p3(s) = q0++ q1
- s + q2- s2 + q3
+ s3 + q4+ s4 + …
p4(s) = q0- + q1
+ s + q2+ s2 + q3
- s3 + q4- s4 + …
are Hurwitz

ICT International Doctoral School, Trento @RT 2014
One-in-a-Box Problem
Design counterpart of Kharitonov problem: Does there
exist a stable polynomial p(s,q) in the interval family?
One-in-a-box problem: Find q Q such that p(s,q) is
Hurwitz stable
One-in-a box is a special case of fixed order stabilization
and static output feedback problems
Compute the volume of Hurwitz polynomials within Q
ICT International Doctoral School, Trento @RT 2014
Rank One Problem
Consider stable M11(s)=u(s)vT(s) where u(s) and v(s) are-dimensional vectors of rational functions
Let =diag(q1,…,q), then
This leads to a polytope of polynomials
Edge Theorem: The polytope is stable if and only if theone-dimensional exposed edges are stable
111 )()(1))(det(
iiii svsuqsMI
ICT International Doctoral School, Trento @RT 2014
Quadratic Stability of Uncertain Matrices
Consider A with B
The system
is said to be quadratically stable if there exists symmetric
positive definite matrix P = PT 0 such that
for all B
( ) ( ) 0TA P PA
( ) ( ) ( )x t A x t
ICT International Doctoral School, Trento @RT 2014
Quadratic Stability of Interval Matrices
If A and is an interval matrix, then A isquadratically stable if and only if there exists symmetric
positive definite matrix P = PT 0 such that
for all vertex matrices
Simultaneous solution of Lyapunov inequalities (e.g.finding P > 0) is a convex problem, but number ofmatrix inequalities grows exponentially
0 Ti iA P PA
ICT International Doctoral School, Trento @RT 2014
CHAPTER 2
Limits of Robustness
Keywords: Conservatism, discontinuity, computational complexity
ICT International Doctoral School, Trento @RT 2014
Traditional Application Areas
Late 80’s and early 90’s: Robust control theory became
a well-assessed area
Many successful industrial “traditional” applications in
aerospace, chemical, electrical, mechanical
engineering, …
However, …

ICT International Doctoral School, Trento @RT 2014
Limits of Robust Control - 1
Researchers realized some drawbacks of robust control
Consider uncertainty q bounded in a set Q of radius
Largest value of such that the system is stable for all
q Q is called (worst-case) robustness margin
Conservatism: Worst case robustness margin may be
small
Discontinuity: Worst case robustness margin may be
discontinuous wrt problem data
ICT International Doctoral School, Trento @RT 2014
Limits of Robust Control - 2
Computational Complexity: Worst case robustness is
often NP-hard (not solvable in polynomial time unless
P=NP )
Various robustness problems are NP-hard
– static output feedback
– fixed order stabilization
– structured singular value
– stability of interval matrices
ICT International Doctoral School, Trento @RT 2014
Successes of Robustness
Keywords: Robust economics
ICT International Doctoral School, Trento @RT 2014
Robust Economics
Thomas J. Sargent Nobel Prizein Economics in 2011
ICT International Doctoral School, Trento @RT 2014
Robust Economics
Lars Peter Hansen Nobel Prizein Economics in 2013
ICT International Doctoral School, Trento @RT 2014
Other Nontraditional Robustness Areas
Network systems[1]
Biological systems[2]
Optimization[3]
[1] R. Cohen and S. Havlin (2010)
[2] H. Kitano (2004)
[3] A. Ben Tal, L. El Ghaoui and A. Nemirovski (2009)

ICT International Doctoral School, Trento @RT 2014
Probabilistic Robustness
ICT International Doctoral School, Trento @RT 2014
Different Paradigm Proposed
Different paradigm based on a probabilistic model of
uncertainty which leads to randomized algorithms for
analysis and synthesis
Within this setting a different notion of problem
tractability is needed
Benefits and pitfalls of risk analysis
Objective: Breaking the curse of dimensionality[1]
[1] R. Bellman (1957)
ICT International Doctoral School, Trento @RT 2014
Probabilistic Robustness
The interplay of probability and robustness for control ofuncertain systems
Robustness: Deterministic uncertainty bounded
Probability: Random uncertainty (pdf is known)
Computation of the probability of performance
Controller which stabilizes most uncertain systems
Probability degradation function
ICT International Doctoral School, Trento @RT 2014
Probabilistic Robustness?
ICT International Doctoral School, Trento @RT 2014
Probabilistic Methods
ICT International Doctoral School, Trento @RT 2014
Probabilistic Model of Uncertainty
Assume that q is a random vector with given density
function and support set Q
Probability density function associated to q
Examples: Uniform
or Gaussian pdf

ICT International Doctoral School, Trento @RT 2014
Uniform Density U [Q]
Univariate uniform density
Multivariate uniform density U [Q]
1
ifvol( )
0 otherwise
q QQQ
U
a b
1/(b-a)
[ , ]a bU
ICT International Doctoral School, Trento @RT 2014
Probability of Performance
Define a performance function
J(q): Q → R
Given level , probability of performance (reliability) is
PJ = Prob{q Q: J(q) }
Example: If G(s,q) is stable and J(q) = ||G(s,q)||
PJ = Prob{q Q: ||G(s,q)|| }
ICT International Doctoral School, Trento @RT 2014
Measure of Performance Violation
Objective: Achieve probabilistic performance
PJ = Prob{q Q: J(q) } ≥ 1 -
where (0,1) is a probabilistic parameter calledaccuracy
ICT International Doctoral School, Trento @RT 2014
Computation of Probability of Performance
Computing
PJ = Prob{q Q: J(q) }
requires to solve a difficult integration problem
Taking uniform density U [Q]
In some special cases we can easily compute thisprobability
( ) γd
Prob : ( ) γvol( )J q
qq Q J q
Q
ICT International Doctoral School, Trento @RT 2014
Worst Case vs Probabilistic Approaches
ICT International Doctoral School, Trento @RT 2014
Example: H Performance

ICT International Doctoral School, Trento @RT 2014
Recall Performance Violation
Increase the radius
Observation: If we allow a small violationof performance we may increase the radius significantly
ICT International Doctoral School, Trento @RT 2014
Computation of Performance Violation
Take uniform pdf in Q
Allowing 5% violationwe increase of 54% obtaining 0.038 (instead of 0.025)
For several values of we compute PJ ()
ICT International Doctoral School, Trento @RT 2014
0.038
Performance Degradation Function
If a 5% violation is allowed we increase of 54%obtaining 0.038
Radius 0.038 compared to = 0.025ρ
PJ (ρ)
0.038=0.025ρ=0.025 ρ=0.038
ICT International Doctoral School, Trento @RT 2014
Probabilistic Robustness Analysis
ICT International Doctoral School, Trento @RT 2014
Probabilistic Model
Probability density function associated to B
We assume that is a random matrix (vector) with given
density function and support B
Example: Uniform density in B
ICT International Doctoral School, Trento @RT 2014
Uniform Density
Consider uniform density U[B] within B
In this case, for a subset S B
otherwise0
if)(vol
1B
BBU
)(vol
)(vol
)(vol
dProb
BS
BS S

ICT International Doctoral School, Trento @RT 2014
Good and Bad Sets
We define two subsets of B
Bgood = {: J( } BBbad = {: J( } B
Bgood is the set of satisfying performance
Measure of robustness is
good
dvol good ΒB
ICT International Doctoral School, Trento @RT 2014
Probability of Performance
Given a performance level , we define the probability of
performance
Prob{J() }
ICT International Doctoral School, Trento @RT 2014
Violation and Reliability
We define the violation probability
V = 1 - Prob{J() } = Prob{J() > }
Probability of performance is also denoted as reliability
R = Prob{J() } = 1 – V
ICT International Doctoral School, Trento @RT 2014
Computation of Violation and Reliability
Computing V and R requires to solve a difficultintegration problem
In some special cases we can easily compute violationand reliability
Otherwise use randomized algorithms to determineprobabilistic estimates of V and R
ICT International Doctoral School, Trento @RT 2014
Closed-Form Computation of Reliability
ICT International Doctoral School, Trento @RT 2014
Example[1]: Hurwitz Stability
Consider the closed loop uncertain polynomial
p(s,q) =
where q1 [0.3, 2.5], q2 [0,1.7] and r=0.5
The objective is to compute the reliability (probability of
Hurwitz stability)
3221212121
2 132661 ssqqsqqqqqqr
[1] G. Truxal (1961)

ICT International Doctoral School, Trento @RT 2014
Set of Hurwitz Polynomials
Set of unstable polynomials
Taking r=0 the unstable set reduces to a singleton
q1
q2
0.3 2.5
0
1.7
r
ICT International Doctoral School, Trento @RT 2014 107
Example of Good and Bad Sets - 1
q1
q2
0.3 2.5
0
1.7
Bbad
Bgood
ICT International Doctoral School, Trento @RT 2014 108
Example of Good and Bad Sets - 2
q1
q2
0.3 2.5
0
1.7
Bbad
Bgood
Taking small r
ICT International Doctoral School, Trento @RT 2014 109
Reliability and Violation
Recall that the reliability (probability of performance) is
given by
R = Prob{J() } = 1 - V
Notice that if the pdf is uniform then B
B
vol
vol goodR
badvol
volV
B
B
ICT International Doctoral School, Trento @RT 2014
Closed Form Computation of Reliability
Taking q as a random vector with uniform pdf in B, we
immediately compute the volume of Hurwitz stability
vol(Bgood) = 3.74 – r2
vol(B) = 3.74
Hence the probability of Hurwitz stability (or reliability)
is equal to
R = 1 – ( r2)/3.74
ICT International Doctoral School, Trento @RT 2014
Example: Schur Stability - 1
Letp(z,q) = q0 + q1 z + q2 z2 + ··· + zn
Define the set of Schur stable polynomials
Bgood {q: p(z,q) has roots in the unit circle}

ICT International Doctoral School, Trento @RT 2014
Example: Schur Stability - 2
The volume of stable polynomials voln+1 = Bgood is[1]
vol1=2, vol2=4, vol3=16/3
2
11
volvol odd
voln
nn
n
22nvol 2 0 as
nn n n
1
12
vol volvol even
1 voln n
nn
nn
n
[1] A.T. Fam (1989)
ICT International Doctoral School, Trento @RT 2014
Example: Schur Stability - 3
p(z,q) = q0 + q1 z + z2
Area of the triangle is equal to 4
q0
q1
Bgood
ICT International Doctoral School, Trento @RT 2014
p(z,q) = q0 + q1 z + z2
If Bgood B we compute in closed form thereliability
B
B
Example: Schur Stability - 3
q0
q1
Bgood
goodvol( )
vol( )R
BB
ICT International Doctoral School, Trento @RT 2014
p(z,q) = q0 + q1 z + z2
If Bgood B we need randomized algorithms toestimate reliability
B
Example: Schur Stability - 4
q0
q1
Bgood
/
ICT International Doctoral School, Trento @RT 2014
CHAPTER 3
Randomized Algorithms
Keywords: Monte Carlo methods, law of large numbers, Chernoff bound, log-over-log bound, binomial distribution
ICT International Doctoral School, Trento @RT 2014
Monte Carlo and Las Vegas Randomized Algorithms

ICT International Doctoral School, Trento @RT 2014
Monte Carlo and Las Vegas
Monte Carlo was invented by Metropolis, Ulam, vonNeumann, Fermi, … (Manhattan project)
Metropolis Fermi Ulam, Feymann, von Neumann
Las Vegas first appeared in computer science in the lateseventies
ICT International Doctoral School, Trento @RT 2014
Randomized Algorithm: Definition
Randomized Algorithm (RA): An algorithm that makesrandom choices during its execution to produce a result
Example of a “random choice” is a coin toss
heads or tails
ICT International Doctoral School, Trento @RT 2014
Randomized Algorithm: Definition
Randomized Algorithm (RA): An algorithm that makesrandom choices during its execution to produce a result
Example: Matlab code
set_r =1:0.01:3;for k =1:length(set_r)
if (rand > 0.5) then a_opt(k) = hel(k);else a_opt(k) = 3.7;end if
a_lin(k) =(e/(e-1))*r;a_sub(k) =(a/(a-1))*(r+log(a)-1);
end
ICT International Doctoral School, Trento @RT 2014
Randomized Algorithm: Definition
Randomized Algorithm (RA): An algorithm that makesrandom choices during its execution to produce a result
For hybrid systems, “random choices” could beswitching between different states or logical operations
For uncertain systems, “random choices” require (vectoror matrix) random sample generation
ICT International Doctoral School, Trento @RT 2014
Monte Carlo Randomized Algorithm
ICT International Doctoral School, Trento @RT 2014
Monte Carlo Randomized Algorithm
Monte Carlo Randomized Algorithm (MCRA): Arandomized algorithm that may produce incorrect results,but with bounded probability of error

ICT International Doctoral School, Trento @RT 2014
Monte Carlo Randomized Algorithm
Monte Carlo Randomized Algorithm (MCRA): Arandomized algorithm that may produce incorrect results,but with bounded probability of error
ICT International Doctoral School, Trento @RT 2014
Monte Carlo Randomized Algorithm
Monte Carlo Randomized Algorithm (MCRA): Arandomized algorithm that may produce incorrect results,but with bounded probability of error
Prob{error > } < 2e(-2N2) Hoeffding inequality
where is the probabilistic accuracy of the estimate, N isthe sample size (sample complexity) and e is the Eulernumber
ICT International Doctoral School, Trento @RT 2014
Example of Monte Carlo: Area/Volume Estimation
Estimate the volume of the red area: Generate N samplesuniformly in the rectangle; count how many (M) fallwithin the red area, then the estimated area = M/N
ICT International Doctoral School, Trento @RT 2014
One-Sided and Two-Sided Monte Carlo Randomized Algorithm
ICT International Doctoral School, Trento @RT 2014 128
Uncertain Decision Problems
Recall the definitions of reliability (probability ofperformance) and worst-case performance
R = Prob{J() }
Objective: Given a performance level , check if
and
These are uncertain decision problems
)(max
max
JJB
γR γmax J
ICT International Doctoral School, Trento @RT 2014
One-Sided and Two-Sided MCRA
Given we have two problem instances for probabilityof performance
and
and two problem instances for worst-case performance
and
This leads to one-sided and two-sided Monte Carlorandomized algorithms
γR γR
γmax Jγmax J

ICT International Doctoral School, Trento @RT 2014
One-Sided MCRA
One-sided MCRA: Always provides a correct solution inone of the instances (they may provide a wrong solutionin the other instance)
Consider the empirical maximum
Check if
)(maxˆ )(
,,1
iN JJ
Ni
γˆorγˆ NN JJ
ICT International Doctoral School, Trento @RT 2014
One-Sided MCRA: Case 1
1 2 3 4 5 6
J(1)
J(2)
J(3)
J(4)
J(5)
J(6)
J algorithm provides a correct solution
Jmax
NJ
γˆmax JJN
ICT International Doctoral School, Trento @RT 2014
One-Sided MCRA: Case 2
1 2 3 4 5 6
J(1)
J(2)
J(3)
J(4)
J(5)
J(6)
J algorithm may provide a wrong solution
Jmax
NJ
maxγˆ JJN
ICT International Doctoral School, Trento @RT 2014
Two-Sided MCRA
Two-sided MCRA: May provide a wrong solution inboth instances
Consider the empirical reliability
where Ngood is the number of samples such that J(i)) Check if
N
NRN
goodˆ
γˆorγˆ NN RR
ICT International Doctoral School, Trento @RT 2014
Two-Sided MCRA: Case 1
1 2 3 4 5 6
J(1)
J(2)
J(3)
J(4)
J(5)
J(6)
J algorithm may provide a wrong solution
RRN γˆ
R
NR
ICT International Doctoral School, Trento @RT 2014
Two-Sided MCRA: Case 2
1 2 3 4 5 6
J(1)
J(2)
J(3)
J(4)
J(5)
J(6)
J algorithm may provide a wrong solution
NRR ˆγ
R
NR

ICT International Doctoral School, Trento @RT 2014
Las Vegas Randomized Algorithm
ICT International Doctoral School, Trento @RT 2014
Las Vegas Randomized Algorithm
Las Vegas Randomized Algorithm (LVRA): Arandomized algorithm that always produces correctresults, the only variation from one run to another is therunning time
ICT International Doctoral School, Trento @RT 2014
Las Vegas Randomized Algorithm
Las Vegas Randomized Algorithm (LVRA): Arandomized algorithm that always produces correctresults, the only variation from one run to another is therunning time
Example: Randomized Quick Sort (RQS)
ICT International Doctoral School, Trento @RT 2014
Las Vegas Randomized Algorithm
Las Vegas Randomized Algorithm (LVRA): Arandomized algorithm that always produces correctresults, the only variation from one run to another is therunning time
ICT International Doctoral School, Trento @RT 2014
Example of Las Vegas: Discrete Random Variables
q1 q2 q3 q4 q5 q6 q7 q8 q9 q10
Consider discrete random variables
ICT International Doctoral School, Trento @RT 2014
Example of Las Vegas: Discrete Random Variables
q1 q2 q3 q4 q5 q6 q7 q8 q9 q10
Consider discrete random variables

ICT International Doctoral School, Trento @RT 2014
Example of Las Vegas: Discrete Random Variables
q1 q2 q3 q4 q5 q6 q7 q8 q9 q10
Consider discrete random variables
ICT International Doctoral School, Trento @RT 2014
Las Vegas Viewpoint
ICT International Doctoral School, Trento @RT 2014
Las Vegas Randomized Algorithms
Las Vegas Randomized Algorithm (LVRA): Alwaysgive the correct solution
They are also called zero-sided randomized algorithms
The solution obtained with a LVRA is probabilistic, so“always” means with probability one
Running time may be different from one run to another
We study the average running time
ICT International Doctoral School, Trento @RT 2014
Las Vegas Viewpoint
Consider discrete random variables
The sample space is discrete and MN possible choicescan be made
In the binary case we have 2N
Finding maximum requires ordering the 2N choices
Las Vegas can be used for ordering real numbers
Example: RQS
ICT International Doctoral School, Trento @RT 2014
Complexity Relaxation
If N is too large (e.g. when N=2M), we may want toconsider only a subset of K samples out of N
This leads to (one-sided) Monte Carlo which gives asuboptimal, but more efficient, solution
Close connections with Ordinal Optimization[1] havingthe objective not to find the maximum value, but thevalue which is within the top N-th percent (for given N)
Conclusion: Ordering between elements is easier thanfinding their values
[1] Y.C. Ho, R. Sreenivas, P. Vakili (1992)
ICT International Doctoral School, Trento @RT 2014
Continuous versus Discrete Sample Space
The underlying problem may be continuous or discrete
For Lyapunov stability the original problem iscontinuous, but it may be equivalent to another discreteproblem in various instances (depending how theuncertainty enter into the state space matrices)
For consensus problems the original problem is discrete(binary), e.g. Byzantine Agreement

ICT International Doctoral School, Trento @RT 2014
Randomized Algorithms for Control
ICT International Doctoral School, Trento @RT 2014
Ingredients for RAs
Assume that is random with given pdf and support B
Accuracy (0,1) and confidence (0,1) be assigned
Performance function for analysis and level
↓ ↓
J = J()
ICT International Doctoral School, Trento @RT 2014
Randomized Algorithms for Analysis
Different classes of randomized algorithms for
probabilistic analysis to estimate
Probability of performance
Worst-case performance
Probability of failure
They are based on uncertainty randomization of
Sample complexity is obtainedICT International Doctoral School, Trento @RT 2014
Estimating the Probability of Performance
ICT International Doctoral School, Trento @RT 2014
Estimate of the Probability of Performance
Objective: Construct a probabilistic estimate usingMonte Carlo randomized algorithms of reliability(probability of performance)
R = Prob{J() }
ICT International Doctoral School, Trento @RT 2014
Monte Carlo Experiment
We draw N i.i.d. random samples of according to thegiven probability measure
), 2), …, ) B
The multisample within B is
1,…,N = {(1), ... , N)}
We evaluate
J()), J()), …, J(N))

ICT International Doctoral School, Trento @RT 2014
Example
J
ICT International Doctoral School, Trento @RT 2014
Example
1 2 3 4 5 6
J
ICT International Doctoral School, Trento @RT 2014
Example
1 2 3 4 5 6
J(1)
J(2)
J(3)
J(4)
J(5)
J(6)
J
ICT International Doctoral School, Trento @RT 2014
Empirical Reliability
We construct the empirical reliability
where I (·) denotes the indicator function
Notice that
where Ngood is the number of samples such that J(i))
N
i
iN J
NR
1
)( )1ˆ I
( )
( ) 1 if ( )( )
0 otherwise
ii J γ
J
I
N
NRN
goodˆ
ICT International Doctoral School, Trento @RT 2014
Sample Complexity
We need to compute the size of the Monte Carloexperiment (sample complexity)
This requires to introduce probabilistic accuracy (0,1) and confidence (0,1)
Given , (0,1), we want to determine N such that theprobability event
holds with probability at least 1-
εˆ NRR
ICT International Doctoral School, Trento @RT 2014
A Good Estimate
If the probability event
holds with probability at least 1- , the we say that theempirical reliability is a “good” estimate of thereliability R
εˆ NRR

ICT International Doctoral School, Trento @RT 2014
Law of Large Numbers[1]
Bernoulli Bound
Given , (0,1), if
then the probability inequality
holds with probability at least 1-
be 2
1
4ε δN N
[1] J. Bernoulli (1713)
εˆ NRR
ICT International Doctoral School, Trento @RT 2014
Remarks
The number of samples computed with the Law of LargeNumbers is independent of the number and dimension ofblocks in , the density function f and the size of B
The number of samples N is very large
1-
Nbe
ICT International Doctoral School, Trento @RT 2014
Other Bounds
The Bernoulli bound is based on the Chebyshev
inequality
Other bounds are also available, such as those based
on the Bienaymé inequality
A bound that largely improves the previous ones, for
small values of and , is the (additive) Chernoff
bound
ICT International Doctoral School, Trento @RT 2014
(Additive) Chernoff Bound[1]
(Additive) Chernoff Bound
Given , (0,1), if
then the probability inequality
holds with probability at least 1-
2δ2
ch ε2
logNN
[1] H. Chernoff (1952)
εˆ NRR
ICT International Doctoral School, Trento @RT 2014
Remarks
Chernoff bound improves upon other bounds such asthe Law of Large Numbers (Bernoulli)
Dependence is logarithmic on 1/ and quadratic on 1/ Sample size is independent on the number of
controller and uncertain parameters
1-
Nch
ICT International Doctoral School, Trento @RT 2014
Comparison Between Bounds

ICT International Doctoral School, Trento @RT 2014
Accuracy vs Confidence
Confidence is “cheap” because of the logarithmicdependence
Acccuracy is computationally more expensive becauseof quadratic dependence
Can we improve the quadratic dependence?
The answer to this question is provided by the(multiplicative) Chernoff Bound
ICT International Doctoral School, Trento @RT 2014
(Multiplicative) Chernoff Bound
(Multiplicative) Chernoff Bound
Fox fixed and for given , (0,1), if
then the probability inequality
holds with probability at least 1-
1δ
mu 2
2log
ε(1-β)N N
εˆ NRR
ˆβ=β( )NR
ICT International Doctoral School, Trento @RT 2014
A Priori and A Posteriori Analysis
Multiplicative Chernoff Bound has sample complexity1/ but it requires the parameter which depends onthe empirical mean (a posteriori analysis)
Additive Chernoff Bound has sample complexitywhich depends as 1/2 (a priori analysis)
ICT International Doctoral School, Trento @RT 2014
Hoeffding Inequality and Chernoff Bound - 1
Given (0,1), from the Hoeffding inequality we obtain
Prob{1,…,N : } ≤ 2e(-2N2)
where e denotes the Euler number
To guarantee confidence (0,1), we need to take N
samples such that 2e(-2N2) ≤ holds
We obtain the (additive) Chernoff bound
N ≥ 1/ (22) log(2/ )
ˆ- εNR R
ICT International Doctoral School, Trento @RT 2014
Hoeffding Inequality and Chernoff Bound - 2
The Hoeffding inequality provides a bound on the tail
distribution
2e(-2N2)
From the computational point of view, computing the
minimum value of N that 2e(-2N2) ≤ is immediate
(given and it is a one-parameter problem)
The Chernoff bound provides a fundamental explicit
relation (sample complexity) N = N(, ) showing that
1/ enters quadratically and 1/ logarithmicallyICT International Doctoral School, Trento @RT 2014
Hoeffding Inequality and Chernoff Bound - 3
Chernoff bound and the Hoeffding inequality hold only
for fixed performance function J
Some results are available for a finite number of
performance functions
For an infinite number of performance functions we need
to use statistical learning theory (studied later in this
course)

ICT International Doctoral School, Trento @RT 2014
Parallel and Distributed Simulations
Samples q(1), q(2), …, q(N) are i.i.d.
Contrary to MCMC or sequential Monte Carlo, thisapproach leads to parallel and distributed simulations
IBM Blue Gene Cray-1 vector processorICT International Doctoral School, Trento @RT 2014
Parallel and Distributed Simulations
Samples q(1), q(2), …, q(N) are i.i.d.
Contrary to Markov Chain Monte Carlo (MCMC) orsequential Monte Carlo, this approach leads to paralleland distributed simulations
Sample generation requires tools from importantsampling techniques
Connections with the theory of random matrices[1]
[1] G. Calafiore, F. Dabbene, R. Tempo (2000)
ICT International Doctoral School, Trento @RT 2014
Estimating the Worst-Case Performance
ICT International Doctoral School, Trento @RT 2014
Worst-Case Performance
Using a Monte Carlo experiment compute aprobabilistic estimate of the worst-case performance
max max ( )J J Β
ICT International Doctoral School, Trento @RT 2014
Probabilistic Estimate of Worst-Case Performance
The multisample within B is
1,…,N = {(1), ... , N)}
We evaluate
J()), J()), …, J(N))
Compute the empirical maximum
)(maxˆ )(
,,1
iN JJ
Ni
ICT International Doctoral School, Trento @RT 2014
Log-over-log Bound[1]
Log-over-log Bound
Given , (0,1), if
then the probability inequality
holds with probability at least 1-
ε11
log
δ1
log
lolNN
[1] R. Tempo, E. W. Bai and F. Dabbene (1996)
ˆProb ( ) εNJ J

ICT International Doctoral School, Trento @RT 2014
Comments
Number of samples is much smaller than Chernoff
Bound is a specific instance of the fpras (fullypolynomial randomized approximated scheme) theory
Dependence on 1/ is basically linear
1-
Nlol
ε
ε1
1log
ICT International Doctoral School, Trento @RT 2014
Volumetric Interpretation
In the case of uniform pdf, we have
Therefore
is equivalent to
BB
vol
volˆ)(Prob bad NJJ
εˆ)(Prob NJJ
BB volε)(vol bad
ICT International Doctoral School, Trento @RT 2014
Volumetric Interpretation
1 2 3 4 5 6
J(1)
J(2)
J(3)
J(4)
J(5)
J(6)
J
Jmax
NJ
BB
vol
volˆ)(Prob bad NJJ
ICT International Doctoral School, Trento @RT 2014
Confidence Intervals
The Chernoff and worst-case bounds can be computed a-priori and are explicit
The sample size obtained with the confidence intervals isnot explicit
Given (0,1), upper and lower confidence intervals pL
and pU are such that
Pr 1 δL Up p p
ICT International Doctoral School, Trento @RT 2014
Confidence Intervals - 2
The probabilities pL and pU can be computed aposteriori when the value of Ngood is known, solvingequations of the type
with L+U
0
1 δ
1 δ
good
good
NN kk
L L Lk N
NN kk
U U Uk
Np p
k
Np p
k
ICT International Doctoral School, Trento @RT 2014
Confidence Intervals - 3
ˆNR
Up
Lp

ICT International Doctoral School, Trento @RT 2014
Bounds on the Binomial Distribution
ICT International Doctoral School, Trento @RT 2014
Bounds on the Binomial Distribution
The so-called probability of failure is studied in the
scenario approach and in statistical learning theory
(discussed later in the course)
This required bounding the binomial distribution
0
B( ,ε, ) ε 1 εm
N ii
i
NN m
i
ICT International Doctoral School, Trento @RT 2014
Bounding the Binomial Distribution and Sample Complexity
Theorem[1]: Given , (0,1) and m 0, if
then
[1] T. Alamo, R. Tempo and A. Luque (2010)
1
1 1inf log log( )
ε 1 δa
aN m a
a
0
B( ,ε, ) ε 1 ε δm
N ii
i
NN m
i
ICT International Doctoral School, Trento @RT 2014
Bounding the Binomial Distribution and Sample Complexity
Suboptimal value of a is the Euler number e
Sample complexity is given by
Sample complexity is linear in
- 1/ (not quadratic!)
- m
-
1 1log
ε 1 δ
eN m
e
1log
δ
ICT International Doctoral School, Trento @RT 2014
Probabilistic Methods:Benefits and Drawbacks
Benefits Drawbacks
very general method with immediatepractical applications, for example inaircraft design and process control industry
the results obtained provide no“deterministic certificate” of propertysatisfaction, for example H-infinityperformance
specific sample generation methods havebeen developed (e.g. for norm bounded sets,hit-and-run for convex sets, particlefiltering, importance sampling, MCMC)
for recursive methods the number ofrequired experiments is generally notspecified a priori
sample size bounds are available for non-recursive methods
the method does not cover the entire samplespace, but only a finite subset of it
Monte Carlo methods are very effective indealing with the “curse of dimensionality”;the probability of error is bounded
crucial points of the safety region can bemissed, this may lead to erroneousconclusions
ICT International Doctoral School, Trento @RT 2014
Probabilistic Sorting of Switched Systems

ICT International Doctoral School, Trento @RT 2014
Sorting of Switched Systems
Consider Lyapunov equations
L(P, A) = (Ai)T P + P Ai for all i =1, 2, …, N
The objective is to sort these N Lyapunov equations
according to their degree of stability (decay rate) using
a common P > 0 previously computed
Motivations: Deciding which systems are more stable
than others is useful information for the controller
ICT International Doctoral School, Trento @RT 2014
LVRA for Matrix Sorting
The sorting operation should be performed quickly
because we are switching between N = 22n systems
This requires finding a LVRA which provides a
matrix sorting for the N equations L(P)
Matrix version of RandQuickSort is developed[1]
Technical difficulty: The equations may be not
completely sortable because of sign indefiniteness
[1] H. Ishii, R. Tempo (2009)
ICT International Doctoral School, Trento @RT 2014
RandQuickSort for Matrices
Variation on RandQuickSort for sorting N = 22n
Lyapunov equations
Construction of the set of matrices which are not
sortable at that stage of the tree
We build a trinary (instead of binary) tree
ICT International Doctoral School, Trento @RT 2014
RQS for Matrices: Trinary Tree
We use randomization at each step of the (trinary) tree
ICT International Doctoral School, Trento @RT 2014
RQS for Matrices: Results
If the Lyapunov equations are completely sortable,
then the expected running time is (the same of RQS)
O(N log (N))
If the Lyapunov equations are not completely sortable,
then additional comparisons should be performed
The worst case number of additional comparisons is
N(N-1)/2
ICT International Doctoral School, Trento @RT 2014
Computational Complexity of RAs

ICT International Doctoral School, Trento @RT 2014
Computational Complexity of RAs
RAs are efficient (polynomial-time) because
1. Random sample generation of i) can be performed
in polynomial-time
2. Cost associated with the evaluation of J(i)) for
fixed i) is polynomial-time
3. Sample size is polynomial in the problem size and
probabilistic levels and
ICT International Doctoral School, Trento @RT 2014
1. Bounds on the Sample Size
Chernoff bound is independent on the size of B, on theuncertainty structure, on the pdf and on the number ofuncertainty blocks
It depends only on probabilistic accuracy andconfidence
Same comments can be made for other bounds (such
as Bernoulli)
ICT International Doctoral School, Trento @RT 2014
2. Cost of Checking Stability
Consider a polynomial
To check left half plane stability we can use the Routhtest. The number of multiplications needed is
The number of divisions and additions is equal to thisnumber
We conclude that checking stability is O(n2)
odd for 4
1 even for
4
22
nn
nn
nnsasaaasp 10),(
ICT International Doctoral School, Trento @RT 2014
3. Random Sample Generation
Random number generation (RNG): Linear and
nonlinear methods for uniform generation in [0,1) such
as Fibonacci, feedback shift register, BBS, MT, …
Non-uniform univariate random variables: Suitable
functional transformations (e.g., the inversion method)
Much harder problem: Multivariate generation of
samples of with given pdf and support B
.It can be resolved in polynomial-time
ICT International Doctoral School, Trento @RT 2014
Choice of the Probability Distribution
ICT International Doctoral School, Trento @RT 2014
Choice of the Probability Distribution - 1
The probability Prob{S}
depends on the underlying
It may vary between 0 and 1
depending on the pdf

ICT International Doctoral School, Trento @RT 2014
Choice of the ProbabilityDistribution - 2
The bounds discussed are independent on the choiceof the distribution but for computing an estimate ofProb{J() } we need to know the distribution
Research has been done in order to find the worst-casedistribution in a certain class[1]
Uniform distribution is the worst-case if a certaintarget is convex and centrally symmetric
[1] B. R. Barmish and C. M. Lagoa (1997)
ICT International Doctoral School, Trento @RT 2014
Choice of the ProbabilityDistribution - 3
Minimax properties of the uniform distribution have
been shown[1]
[1] E. W. Bai, R. Tempo and M. Fu (1998)
ICT International Doctoral School, Trento @RT 2014
CHAPTER 4
Random Vector Generation
Keywords: Radial distributions, inversion method, generalizedGamma density, uniform distribution in norm balls
ICT International Doctoral School, Trento @RT 2014
Random Sample Generation
ICT International Doctoral School, Trento @RT 2014
True Random Number Generators
Hardware sources of trulystatistically random numbers
High-voltage reverse-biasedP-N semiconductor junctions
Reverse-biased Zener diodes
Radioactive Decay
Lava-rand
Mechanical systems
entropy key
ICT International Doctoral School, Trento @RT 2014
Random Generation
(Pseudo) random number generation (RNG): Various
methods are available for generation in the interval [0,1)
Linear and nonlinear RNGs, Fibonacci, feedback shift
register, BBS, MT, …
Non-uniform univariate random variables: Suitable
functional transformations (e.g., the inversion method)
Multivariate random variables: Rejection and conditional
density methods
ICT International Doctoral School, Trento @RT 2014
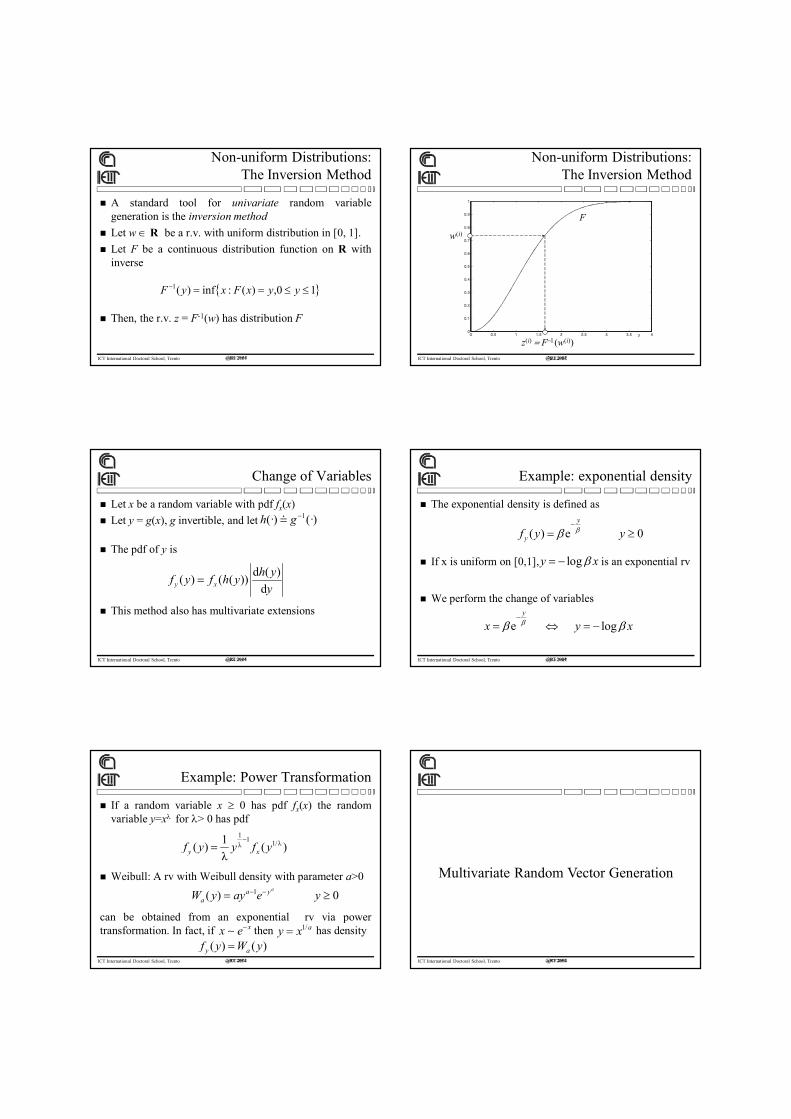
Non-uniform Distributions:The Inversion Method
A standard tool for univariate random variablegeneration is the inversion method
Let w R be a r.v. with uniform distribution in [0, 1].
Let F be a continuous distribution function on R withinverse
Then, the r.v. z = F-1(w) has distribution F
10,)(:inf)(1 yyxFxyF
ICT International Doctoral School, Trento @RT 2014
Non-uniform Distributions:The Inversion Method
F
w(i)
z(i) F(w(i))
ICT International Doctoral School, Trento @RT 2014
Change of Variables
Let x be a random variable with pdf fx(x)
Let y = g(x), g invertible, and let
The pdf of y is
This method also has multivariate extensions
d ( )( ) ( ( ))
dy x
h yf y f h y
y
1(·) (·)h g
ICT International Doctoral School, Trento @RT 2014
Example: exponential density
The exponential density is defined as
If x is uniform on [0,1], is an exponential rv
We perform the change of variables
( ) e 0y
yf y y
e logy
x y x
logy x
ICT International Doctoral School, Trento @RT 2014
Example: Power Transformation
If a random variable x 0 has pdf fx(x) the randomvariable y=x for > 0 has pdf
Weibull: A rv with Weibull density with parameter a>0
can be obtained from an exponential rv via powertransformation. In fact, if then has density
11 1/λλ
1( ) ( )
λy xf y y f y
1( ) 0aa y
aW y ay e y
xx e 1/ay x( ) ( )y af y W y
ICT International Doctoral School, Trento @RT 2014
Multivariate Random Vector Generation

ICT International Doctoral School, Trento @RT 2014
Parametric Uncertainty
We study parametric uncertainty q in ℓp norm balls
Objective: Sample generation in the ball
B {q : ||q||p 1}
We are interested in uniform
sample generation within B
-1 -0.8 -0.6 -0.4 -0.2 0 0.2 0.4 0.6 0.8 1-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1step 3
ICT International Doctoral School, Trento @RT 2014
ℓp Vector Norms
Recall the ℓp vector norm of xFn
and the ℓ vector norm
1/
1
|| || | | for [1, )pn
pp i
i
x x p
|| || max | |ii
x x
ICT International Doctoral School, Trento @RT 2014
Rejection Methods
Goal: to generate uniform samples in a set B (e.g. a
norm ball)
Idea: If we have a “simpler" set Bd that contains B, we
can generate uniform samples in Bd, and then reject
those that fall outside B
The rejection rate of the method is
Note: generation in Bd should be easy, membership of
B should be efficiently checkable
dvol( )
vol( )η
BB
ICT International Doctoral School, Trento @RT 2014
Rejection Methods
Bd
B Find a bounding set Bd
Generate points x(i) in Bd
Keep the points in B
and reject the others
ICT International Doctoral School, Trento @RT 2014
Rejection Methods:Curse of Dimensionality
Rejection rate for generation of
uniform samples in the sphere
using an hypercube as bounding
set
We obtain
)12/()π/2()(η n n n
n=1 n=2 n=3 n=4 n=10 n=20 n=30
1 1.2732 1.9099 3.2423 401.54 4.·107 5· 1013
Bd
B
ICT International Doctoral School, Trento @RT 2014
Hit and Run Methods
The H&R algorithm has been proposed by Turchin in1971 and independently later by Smith in 1984
It provides a way of generating approximately uniformpoints in a body via random walks
H&R is easy to implement and it works for any convexbody (and also for nonconvex sets)

ICT International Doctoral School, Trento @RT 2014
Hit and Run
Bz(0)
z(1) z(2)
z(3)
z(4)
z(T) x
Start with z(0) in B
Generate a random
direction
Take a random point
on the segment
Repeat T times
…
Return x z
ICT International Doctoral School, Trento @RT 2014
Properties of H&R
The properties of H&R have been studied in numerousworks by Lovász and co-authors
After the mixing time T, the distribution of points can beconsidered “practically uniform”
It has been shown that the mixing time dependspolynomially on the problem dimension
ICT International Doctoral School, Trento @RT 2014
Objective
Developments of techniques not based on asymptotic
methods such as Metropolis (random walk), MCMC,
Hit-or-Miss, importance sampling, …
These techniques are based on the univariate
(Generalized) Gamma density
Assume that we generate N i.i.d samples according to the
Gamma density, then with algebraic transformations we
obtain N i.i.d multivariate samples within B
ICT International Doctoral School, Trento @RT 2014
Multivariate Distributions:the Jacobian Rule
Let fx(x1,…,xn) be a continuous density on the support
, and let
be a one-to-one and onto mapping, so that the inverse
is well-defined
Let y = g(x), then
n RB
: , ng RB TT
1(·) (·)h g
( ) ( ( )) ( ),y xf y f h y J x y y T
ICT International Doctoral School, Trento @RT 2014
Multivariate Distributions:the Jacobian Rule
The Jacobian of the transformation is defined as follows
1 2
1 1 1
1 2
2 2 2
1 2
( )
n
n
n
p p n
xx x
y y y
xx x
y y yJ x y
xx x
y y y
( )i i
j j
x h
y y
y
ICT International Doctoral School, Trento @RT 2014
Gamma Density
A random variable x has (unilateral) Gamma densitywith parameters (a,b) if
where · is the Gamma function
1 /1( ) 0
( )a x b
x af x x e x
a b
We write x G(a,b)
There exist standard and efficient methods for randomgeneration according to G(a,b)
1 ξ
0
( ) ξ dξ 0xx e x

ICT International Doctoral School, Trento @RT 2014
Generalized Gamma Density
A random variable has (unilateral) Generalized Gammadensity with parameters (a,c) if
-1 -( ) , 0( )
cca xx
cf x x e x
a
We write x Gg(a,c)
ICT International Doctoral School, Trento @RT 2014
Generalized Gamma Density
11
G ,( )
pxg p
p
pp e
p=1p=2p=4p=10p=100
ICT International Doctoral School, Trento @RT 2014
Comments
Using power transformation method, a random variablex ~ Gg(a,c) is simply obtained as
x =z1/c
where z ~ G(a,1)
Samples distributed according to a (univariate) bilateral
density x ~ fx(x) can be easily obtained from a
(univariate) unilateral density z ~ fz(z)
Take x = sz, where s is an independent random sign
with values +1 and -1 with equal probability
ICT International Doctoral School, Trento @RT 2014
Joint Density
Let x=[x1,…,xn]T with components independentlydistributed according to the (bilateral) GeneralizedGamma density with parameters 1/p and p
The joint density of x is
|| ||
1
( ) 2 (1/ ) 2 (1/ )
p ppi
nnxx
x n ni
p pf x e e
p p
ICT International Doctoral School, Trento @RT 2014
Example: Multivariate Laplace
Recall that (1)=1 Multivariate (bilateral) Laplace
density
is a Generalized Gammadensity with parameters 1 and 1
1
| |1( )
2
n
ii
x
x nf x e
ICT International Doctoral School, Trento @RT 2014
Example: Multivariate Normal
Multivariate (bilateral) normal Nwith mean 0 and covariance
is a Generalized Gamma densitywith parameters 1/2 and 2
T/2( ) π n x xxf x e
2I

ICT International Doctoral School, Trento @RT 2014
Uniform Multivariate Generation in B
Theorem
Let xi be random variables distributed according to the(bilateral) Generalized Gamma density
Let w[0,1] be a random variable uniformly distributed
Then the vector
is uniformly distributed in B
px pgi ,G~ 1
T1 ,,,1
n
p
xxxx
xwy n
ICT International Doctoral School, Trento @RT 2014
Algorithm Vector Uniform Generation
Input: n, p
Output: uniform random sample y
• Generate n independent real scalars i ~Gg(1/p,p)
• Construct vector x of components xi=si i where si are randomsigns
• Generate w uniform in [0, 1]
• Return1/n
p
y wx
x
ICT International Doctoral School, Trento @RT 2014
Uniform Random Generation in ℓ2 - Step 1
-4 -3 -2 -1 0 1 2 3 4-4
-3
-2
-1
0
1
2
3
4step 1
Generate n iid randomreal scalars:
Construct xRn ofcomponents
(si i.i.d. random signs)
ξ ~ G 1( / , )g p p
11
G ,( )
pxg p
p
pp e
ICT International Doctoral School, Trento @RT 2014
Uniform Random Generation in ℓ2 - Step 2
-1 -0.8 -0.6 -0.4 -0.2 0 0.2 0.4 0.6 0.8 1-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1step 2 Construct the
normalized vector
The vector z isuniformly distributedon the surface of thep-norm ball
p
xz
x‖ ‖
ICT International Doctoral School, Trento @RT 2014
-1 -0.8 -0.6 -0.4 -0.2 0 0.2 0.4 0.6 0.8 1-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1step 3
Generate w uniform in[0,1], and return
.
The vector y isuniformly distributedinside the p-norm ball.
Uniform Random Generation in ℓ2 - Step 3
1/ 1/
p
n ny wzwx
x
ICT International Doctoral School, Trento @RT 2014
Uniform Random Generation in B for p=1
-1 -0.8 -0.6 -0.4 -0.2 0 0.2 0.4 0.6 0.8 1-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1

ICT International Doctoral School, Trento @RT 2014
Uniform Random Generation in B for p=0.7
-1 -0.8 -0.6 -0.4 -0.2 0 0.2 0.4 0.6 0.8 1-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
ICT International Doctoral School, Trento @RT 2014
Uniform Random Generation in B for p=4
-1 -0.8 -0.6 -0.4 -0.2 0 0.2 0.4 0.6 0.8 1-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
ICT International Doctoral School, Trento @RT 2014
T11 ηξ,,ηξ,21
nn
p
xx
xwy n
Uniform Multivariate Generation in B (Complex Case)
Theorem
Let i be a complex random variable uniformlydistributed on the unit circle and
Let w[0,1] be a random variable uniformly distributed
Then the vector
is uniformly distributed in the complex ball B
ppgi ,G~ξ 1
ICT International Doctoral School, Trento @RT 2014
Generation of Stable Polynomials
ICT International Doctoral School, Trento @RT 2014
Schur Stability
The n-th degree discrete-time monic polynomial
is Schur if all its roots lie in the unit circle
Schur region
p denotes both poly p(z) and coefficient vector
20 1 2( ) np s p p z p z z
: ( ) is SchurR nn p p zS
0 1 1 R T nnp p p p
ICT International Doctoral School, Trento @RT 2014
Hurwitz Stability
The n-th degree continuous-time polynomial
is Hurwitz if all its roots lie in the LHP
Hurwitz region
p denotes both poly p(s) and coefficient vector
10 1
R T nnp p p p
1 : ( ) is HurwitzR nn p p sH
20 1 2( ) n
np s p p s p s p s

ICT International Doctoral School, Trento @RT 2014
Uniform Generation in the Schur Region
The Schur region for monic polynomials is bounded
We are interested in results that provide uniformdistribution in Sn
p0
p1
S2
ICT International Doctoral School, Trento @RT 2014
Naive Method: Rejection
Lemma[1] The Schur region Sn lies inside the convex hullof (n+1) vertex polys
Generate random convex combinations
and pick only Schur stable ones
uniformly distributed in the unit simplex
( ) ( 1) ( 1) , 0, , k n kkv z z z k n
[1] A. T. Fam (1989)
0
( , ) ( )
n
k kk
p z v z 0, 1k k
ICT International Doctoral School, Trento @RT 2014
Rejection Rate
The rejection rate is
We need another method!
ICT International Doctoral School, Trento @RT 2014
Schur-Cohn-Jury Criterion
Given a polynomial p(z), define the reverse-orderpolynomial
Schur-Cohn-Jury Criterion: The polynomial p(z) is Schurstable if and only if |p0|<1 and the polynomial
of degree n-1 is Schur
10( ) ( )[ ] z p z p p z
1 10 1 1( ) ( ) 1n n n
np z z z z pp z pp z
ICT International Doctoral School, Trento @RT 2014
The Fam-Meditch Parameterization
FM recursion[1]: Any monic Schur polynomialp[n](z)=p(z) of degree n can be obtained via the recursion
The tk's are referred to as reflection coefficients or Fam-Meditch (FM) parameters
Sweeping t inside the unit cube [-1,1]n yields all monicSchur polys of degree up to n
[0]
[ 1] [ ] [ ]
( ) 1;
( ) ( ) ( )k k kk
p z
z z p z t p zp
| | 1, 0, , 1kt k n
[1] Fam and Meditch (1978)
ICT International Doctoral School, Trento @RT 2014
Uniform FM (UFM) Method
Various pdf's for tk lead to different coefficientdistributions
There exists a one-to-one mapping
Easily compute the Jacobian of the transformation
Hence we determine what pdf should be adopted for thetk to obtain a uniform pdf over Sn
[ 1,1]nnpt S
p t

ICT International Doctoral School, Trento @RT 2014
Uniform FM (UFM) Method
Lemma[1,2]: If t1 is uniform over (0,1) and, for k = 2,…,n,tk has pdf proportional to
then the coefficients of the polynomial constructed viaFM recursion are uniform over Sn
Hence, we determine what pdf should be adopted for thetk to obtain a uniform pdf over Sn
[1] Beadle and Djuric (1997)
[2] Andrieu and Doucet (1999)
1 1( ) ( ( 1) ) ( ) , 1kk k k k kJ t t J t J
ICT International Doctoral School, Trento @RT 2014
Algorithm: Uniform Schur Polynomials
Input: n,
Output: uniform Schur stable polynomial p[n](z).
• set t1=1, J1=1 and p[0](z)=1
• for k=2 to n
• construct Jk (tk) as
• generate tk according to
• construct p[k] via FM recursion;
• end for
( ) ( )kt k k kf t J t
1( ) ( ( 1) ) ( )kk k k k kJ t t J t
ICT International Doctoral School, Trento @RT 2014
Uniform Schur Polys
ICT International Doctoral School, Trento @RT 2014
Uniform Schur Polys: Roots Distribution
Root distribution (5th order poly)
ICT International Doctoral School, Trento @RT 2014
Harder: Both the coefficient and the root domains areunbounded: uniform generation does not make sense(uniform density not defined)
Way to go?
– bound the coefficients,
– generate uniformly
– use rejection
The probability of picking a Hurwitz poly quicklydecreases to zero as the degree grows[1]
[1] A. Nemirovski and B. T. Polyak (1994)
Hurwitz Polynomials
ICT International Doctoral School, Trento @RT 2014
Hurwitz: Conformal Mapping Method
Use the conformal mapping
which maps the interior of the unit disc to the open lefthalf plane
Generate a Schur stable poly
Compute a Hurwitz polynomial as
1( ) ( 1)
1n s
p s s ps
1 0( ) [1, , , ]npp z p
1
1
zz
z

ICT International Doctoral School, Trento @RT 2014
Hurwitz: Conformal Mapping Method
Root distribution (5th order poly)
ICT International Doctoral School, Trento @RT 2014
CHAPTER 5
Matrix Sample Generation
Keywords: Singular value decomposition, spectral norm, Haar density, conditional density method, Selberg integral
ICT International Doctoral School, Trento @RT 2014
Matrix Sample Generation
How to generate efficiently uniform matrix samples?
Vector case is completely solved for the real and
complex case, for any p norm ball
Matrix case is solved for the real and complex case, for
any Hilbert-Schmidt p-norm (reduces to the vector case)
For 1 and -induced matrix norms, the problem reduces
to the vector case
ICT International Doctoral School, Trento @RT 2014
Hilbert-Schmidt Matrix Norms
The Hilbert-Schmidt ℓp norm of a matrix XFn,m
and
For p=2 Hilbert-Schmidt norm corresponds to the
Frobenius matrix norm
1/
1 1
|| || | | for [1, )pn m
pp ik
i k
X X p
|| || max | |ikik
X X
2|| || Tr * || ||FX XX X
ICT International Doctoral School, Trento @RT 2014
ℓp nduced Matrix Norms
The ℓp induced norm of a matrix XFn,m
||ξ|| 1||| ||| max || ξ ||
pp pX X
ICT International Doctoral School, Trento @RT 2014
ℓ1 and ℓ nduced Matrix Norms
The ℓ1 induced norm of a matrix XFn,m
where z1, …, zm are the columns of X
The ℓ induced norm of a matrix XFn,m
where w1T, …, wn
T are the rows of X
1 11,...,
||| ||| max || ||ii m
X z
11,...,
||| ||| max || ||ii n
X w

ICT International Doctoral School, Trento @RT 2014
ℓ2 Induced Norm (Spectral Norm)
For XFn,m the spectral norm is defined as
2||| ||| ( )X X
ICT International Doctoral School, Trento @RT 2014
Matrix Sample Generation
Matrix spectral (max singular value) norm does notreduce to vector case
Hard problem for the spectral norm: Specific theory isneeded providing very technical results
ICT International Doctoral School, Trento @RT 2014
First Attempt: Rejection
Methods based on rejection of samples generated froman outer-bounding set fail due to dimensionality issues
Let
then
Uniform generation in BF and B is easy
,( ) C :F n n
Fn n B
,(1) C : 1n n
B
(1) ( ) (1) (1)F n B B B B
,(1) C : ( ) 1n n B
ICT International Doctoral School, Trento @RT 2014
Rejection Rates
Let be the average number of samples that one needsto generate in the outer set, to find one sample in thegood set
n= 2 3 4 5 6 8 10
12 8,640 8.7e8 2e16 2e26 5e54 1e95
F 8 468 1.8e5 4e8 6e12 2e23 1e37
ICT International Doctoral School, Trento @RT 2014
Singular Value Decomposition
Consider Fn,m, m n
Singular Value Decomposition
= U V*
where UFn,n and VFm,n have orthonormal columns,
and
= diag{1,,…,n}
where … > n > 0
ICT International Doctoral School, Trento @RT 2014
ℓ2 Induced Norm (Spectral Norm)
For Fn,m the spectral norm is defined as
2||| ||| ( )

ICT International Doctoral School, Trento @RT 2014
A Class of Matrix pdfs
Unitarily invariant densities: depend only on the s.v. of
Radial symmetric densities: depend only on norm of
Uniform distribution in B
is a special case of radial density
( ) ( )I f f F
( ) ( ( ))R f f F
( )f U B
ICT International Doctoral School, Trento @RT 2014
The pdf of theSingular Values – Real Case
Theorem[1]: Let Rn,m. The following statements are equivalent
The pdf f is unitarily invariant
The joint pdf of U, and V is )()()(),,(,, VffUfVUf VUVU
1,
2 2
1 1
( ) :
( ) : ,[ ] 0
( ) ( )
TU
TV i
nm n
R k i kk i k n
f U U UU I
f V V V V I V
f f
U
U
[1] G. Calafiore, F. Dabbene and R. Tempo (2001)
ICT International Doctoral School, Trento @RT 2014
Real Matrices
is a normalization constant
Proof of previous theorem is based on the computationof the Jacobian of the mapping between and its svdfactors U, V
Details are very technical
( 1)/2
( 1)/21 1
( 1) / 2 ( 1) / 2(8π)
2 1 1
n m n m
R n mk k m n
k k
k k
R
ICT International Doctoral School, Trento @RT 2014
Uniform Matrices – Real Case
For particular case of uniform matrices
with … > n > 0
The value of KR is obtained using the Selberg Integral
1/2
0
(( 1) / 2)!π
(3 / 2 / 2) ( / 2 1) (( 1) / 2)
nn
Ri
m iK n
i i i m n
2 2
1 1
( )n
m nR k i k
k i k n
f K
ICT International Doctoral School, Trento @RT 2014
The pdf of theSingular Values – Complex Case
Theorem[1]: Let Cn,m. The following statements are equivalent
The pdf f is unitarily invariant
The joint pdf of U, and V is ,Σ, ( , , ) ( ) ( ) ( )U V U Vf U V f U f f V
*
*1,
22 ( ) 1 2 2C
1 1
( ) :
( ) : ,[ ] 0
( ) ( )
U
V i
nm n
k i kk i k n
f U U UU I
f V V V V I V
f f
U
U
[1] G. Calafiore, F. Dabbene and R. Tempo (2001)
ICT International Doctoral School, Trento @RT 2014
Complex Matrices
is a normalization constant
Proof of previous theorem is based on the computationof the Jacobian of the mapping between and its svdfactors U, V
1
2 π
( )!( )!
n mn
C n
k
n k m k
C

ICT International Doctoral School, Trento @RT 2014
Uniform Matrices – Complex Case
Consider particular case of uniform matrices, and changeof variables xi=i
2 , with ordering condition removed
The value of Kx is obtained using the Selberg Integral
n
i nkiki
nmixx xxxKxf
1 1
2)()(
1
02 )1()1(
)1(!
1 n
ix nmii
imn
K
ICT International Doctoral School, Trento @RT 2014
Outline of Sample Generation Method
For uniform its svd factors are independentlydistributed
1. Generate the samples of U and V (easy problem)
2. Generate the samples of (hard problem)
3. Build matrix sample =U VT
ICT International Doctoral School, Trento @RT 2014
Generation of Haar Samples
Uniform distribution over orthogonal (or unitary) group
is known as the Haar invariant distribution
Fundamental property: If U is Haar, then QU has samedistribution as U, for any fixed orthogonal (unitary)matrix Q
ICT International Doctoral School, Trento @RT 2014
Generation of Haar Samples
Haar matrix URn,n may be generated by means of QRdecomposition as follows1. X=randn(n,n)
2. [Q,R]=QR(X)
3. U=Q;
Complex case works similarly
Rectangular Haar matrices work similarly
ICT International Doctoral School, Trento @RT 2014
Generation of the Singular Valuesfor Complex Matrices
ICT International Doctoral School, Trento @RT 2014
Conditional Density Method - 1
Is a general method that reduces generation according to
one n-dimensional distribution to n one-dimensional
sample generation problems
Drawback: requires computation of marginal densities
This is a very hard problem in general because requires
computing multiple integrals

ICT International Doctoral School, Trento @RT 2014
Conditional Densities Method - 2
Write as
where
and
),...,( 1 nx xxf
)|()|()(),...,( 11122111 nnnnx xxxfxxfxfxxf
)()(
)|(111
111
ii
iiiii xxf
xxfxxxf
1 1 1( ) ( ,..., ) d di i x n i nf x x f x x x x
ICT International Doctoral School, Trento @RT 2014
Conditional Density Method - 3
A vector xRn with density fx(x) can be obtained
generating sequentially the xi for i=1,…,n
Each xi is generated independently according to theunivariate distribution
)|( 11 iii xxxf
ICT International Doctoral School, Trento @RT 2014
Computing the Marginal Density: Complex Matrices - 1
Let
be a partial Vandermonde matrix
1 22 2 21 2 1 2
1 1 11 2
1 1 1
( ) ( ) ( )i
i i i
n n ni
x x x
x x x x x x
x x x
V X X X
1 1 1( ) ( ,..., ) d di i x n i nf x x f x x x x
ICT International Doctoral School, Trento @RT 2014
Computing the Marginal Density:Complex Matrices - 2
The marginal density is equal to
Where M=R-1
Proof of result based on Dyson-Mehta Theorem
1( ,..., )x if x x
T1
1
( )!( ,..., )
im n
x i x i i kk
n if x x K M x
M
V V
1for , 1, ,
1rlR r l nr l m n
ICT International Doctoral School, Trento @RT 2014
Dyson-Mehta Theorem
Dyson-Mehta Theorem: Let ZnRn,n be a symmetric matrix suchthat
1. [Zn]ij=(xi,xj)
2.
3.
where d is a suitable measure, and c is a constant. Then
where Zn-1 is the submatrix obtained from Zn removing the row
and column containing xn
ψ( , ) d ( )x x x c ψ( , )ψ( , ) d ( ) ψ( , )x y y z y x z
1det( ) d ( ) ( 1) det( )n n nZ x c n Z
ICT International Doctoral School, Trento @RT 2014
Computing the Marginal Density:Complex Matrices - 3
Given x1, x2,…, xi-1, the marginal density is expressed asa polynomial in xi
The constants Ci and the coefficients bi are computed bymeans of appropriate recursions
We have efficient way to compute conditional densities
2( 1)
0
( )n
m n ki i i i k i
k
p x K x b x
)1(2
011 ),,|(
n
k
kik
nmiiiii xbxKxxxf

ICT International Doctoral School, Trento @RT 2014
Generation of the Singular Valuesfor Real Matrices
ICT International Doctoral School, Trento @RT 2014
Computing the Marginal Density: Real Matrices - 1
Use again the conditional method
Mathematical details are different from the complex case
We again obtain marginals in “closed form”
ICT International Doctoral School, Trento @RT 2014
Computing the Marginal Density:Real Matrices - 2
The marginal density fi (1,…, i) may be computed as
where
and
1
2 212
1
( ) ( , , )Rn
iK m n
i i kk
f
1 1( , , ) | ( ) | d ( ) d ( )i
i i n n iDx x x x x V
10 1i nD x x
d ( ) dk k kx x x 12υ ( 1)m n
ICT International Doctoral School, Trento @RT 2014
Computation of
Theorem:i(x1,…, xi) is equal to
where i=(+1)(n-1)
and
12
1 1 1
2T
1 1
( , , )( )
0det
( , , ) 0 0
Rin
i iiK
i
i i
x xM x
x
x x
V
V
T
( ) ( )for even
( ) 0
( ) ( ) ( ) ( )
( ) 0 0 for odd,
( ) 0 0
i i
i
i i i iT
iT
i
S x xn i
x
M x S x x F x
x n i
F x
X
X
X
X
11 2
11 122 2 1
( ) ( )jj k
i ij k x xjk i j i jj k j k
S x F x
ICT International Doctoral School, Trento @RT 2014
The Marginal Densities
ICT International Doctoral School, Trento @RT 2014
Polynomial-Time Algorithms
Polynomial-time algorithms for the recursive generationof the singular values are been developed
The algorithms require at each step only additions andmultiplications of polynomial matrices
Technical details are very complicated
Methods becomes ill-conditioned for large n (n > 20)
For large n uniform matrices concentrate on theboundary of the norm-ball

ICT International Doctoral School, Trento @RT 2014
Sample Generation: Summary
The details are highly technical
Computation of the pdf of the singular values
Computation of the pdf of U,V (Haar distribution)
Conditional density method
Closed-form solution of a multiple integral
Dyson-Mehta Theorem
MATLABTM
codes are available
ICT International Doctoral School, Trento @RT 2014
Open Problem
Sample generation in the H ball
ω|| ( ) || sup ( ( jω))s
ICT International Doctoral School, Trento @RT 2014
Application 1: Stability of a Flexible Structure
ICT International Doctoral School, Trento @RT 2014
Example: Flexible Structure - 1
Mass spring damper model
Real parametric uncertainty affecting stiffness and
damping
Complex unmodeled dynamics (nonparametric)
m1
l1
k1
m2
l2
k2
m3
l3
k3
m4
l4
k4
m5
l5
k5
l6
k6
ICT International Doctoral School, Trento @RT 2014
Flexible Structure - 2
M- configuration for controlled system and study
robustness
q1, q2 R
np C4 ,4
B ={: () < 1}
BAsICsM 1)()(
np
62
61
00
00
00
Iq
Iq
ICT International Doctoral School, Trento @RT 2014
Probabilistic Radius
For fixed , we let
For given p*[0,1] we define the probabilistic radius
Clearly
(ρ) Pr is stablep A B C
ρ( *) sup ρ : (ρ) *p p p
1ρ( *)
μp

ICT International Doctoral School, Trento @RT 2014
Probability Degradation Function
0 .3 5 0 .4 0 .4 5 0 .5 0 .5 5 0 .6 0 .6 5 0 .7
0 .9 4
0 .9 5
0 .9 6
0 .9 7
0 .9 8
0 .9 9
1
1 .0 1
P ro b a b i lis ti c ra d ius
Es
tim
ate
d p
rob
ab
ility
de
gra
da
tio
n
1/μ 0.394
ICT International Doctoral School, Trento @RT 2014
Application 2: Probabilistic StructuredReal Stability Radius
ICT International Doctoral School, Trento @RT 2014
Structured Real Stability Radius
Let ARn,n be a stable matrix, and consider the perturbedmatrix
with B, C of appropriate dimensions
Given A, B, and C, the real stability radius is the size ofthe smallest destabilizing perturbation
( ) ,A A B C B
ICT International Doctoral School, Trento @RT 2014
Probabilistic Stability Radius
We assume random, and estimate the probability ofstability as a function of the uncertainty radius
For given p*, the probabilistic real stability radius isdefined as
We estimate the probabilistic stability radius usingrandomized algorithms
* *ρ ( , ) sup ρ : (ρ)R A p p p
(ρ) Pr ( ) is stable, p A B
ICT International Doctoral School, Trento @RT 2014
Numerical Example
We studied the example
ICB
A
9809.28238.11812.44435.10764.28445.2
7190.01026.09139.18681.03964.02169.1
6973.02107.04244.00580.06813.01946.0
8705.20364.13362.36874.11677.14202.1
2641.48212.22311.53962.24700.15667.3
3271.15852.18166.21021.19633.09319.0
ICT International Doctoral School, Trento @RT 2014
Numerical Example - 2
Compute p() for [0.01 0.05] with two differentstructures:
composed by three 2x2 full real blocks
composed by a 4x4 and
Related Documents











