INSTITUTO POLITÉCNICO NACIONAL ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA UNIDAD CULHUACÁN INGENIERÍA EN COMUNICACIONES Y ELECTRÓNICA TESIS COLECTIVA CIRCUITO INALÁMBRICO DE ALERTA Y LOCALIZACIÓN DE MENORES HASTA DE DIEZ AÑOS DENTRO DE ZONAS CERRADAS Y CONCURRIDAS SIN TRANSITO VIAL PRESENTAN América Giovanna Pizano López Carlos Alberto Peña Gordillo ASESOR: M. en C. José Efrén Pérez Carmona M. en C. María Dolores Zamorano Saavedra MÉXICO D.F. ENERO DE 2015

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript
INSTITUTO POLITÉCNICO NACIONAL
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
UNIDAD CULHUACÁN
INGENIERÍA EN COMUNICACIONES Y ELECTRÓNICA
TESIS COLECTIVA
CIRCUITO INALÁMBRICO DE ALERTA Y LOCALIZACIÓN DE
MENORES HASTA DE DIEZ AÑOS DENTRO DE ZONAS
CERRADAS Y CONCURRIDAS SIN TRANSITO VIAL
PRESENTAN
América Giovanna Pizano López Carlos Alberto Peña Gordillo
ASESOR:
M. en C. José Efrén Pérez Carmona
M. en C. María Dolores Zamorano Saavedra
MÉXICO D.F. ENERO DE 2015
INSTITUTO POLITÉCNICO NACIONAL ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
UNIDAD CULHUACAN
TESIS COLECTIVA
Que como prueba escrita de su Examen Profesional para obtener el Título de Ingeniero en Comunicaciones y Electrónica, que deberán desarrollar los C. C:
PIZANO LOPEZ AMERICA GIOVANNA PEÑA GORDILLO CARLOS ALBERTO
“CIRCUITO INALÁMBRICO DE ALERTA Y LOCALIZACIÓN DE MENORES HASTA DE DIEZ AÑOS
DENTRO DE ZONAS CERRADAS Y CONCURRIDAS SIN TRANSITO VIAL” Se propone un circuito inalámbrico de alerta y localización de menores para evitar y prevenir el robo y extravío de los infantes porque hoy en día esto suele suceder con mucha frecuencia. El circuito inalámbrico será un sistema emisor y receptor el cual opera con señal de radio frecuencia para la intercomunicación entre sistemas, este se energizará por medio de una pila recargable y tendrá una distancia prestablecida modulable que será de uno hasta diez metros la cual podrá seleccionar quien maneje el sistema.
CAPITULADO
CAPITULO 1.- ESTADO DEL ARTE (ANTECEDENTES) CAPITULO 2.- MARCO TEORICO CAPITULO 3.- DISEÑO E IMPLEMENTACION CAPITULO 4.- PRUEBAS Y RESULTADOS
México D. F., a 23 de enero del 2015 PRIMER ASESOR: SEGUNDO ASESOR: M. EN C. JOSÉ EFRÉN PÉREZ CARMONA M. EN C. MARÍA DOLORES ZAMORANO SAAVEDRA Vo. Bo. APROBADO ING. JUAN MANUEL MORELOS CASTRO M. en C. HECTOR BECERRIL MENDOZA JEFE DE LA CARRERA DE I.C.E. SUBDIRECTOR ACADÉMICO
Índice Título i Planteamiento del Problema i Justificación i Objetivo General ii Objetivos Específicos ii Capítulo 1. Estado del Arte (antecedentes) 1 1.1 Telecomunicación 2
1.1.1 Antecedentes 2 1.2 Origen de la Comunicación Inalámbrica 4 1.3 Emisor y Receptor 4 1.4 Radiofrecuencia 6 1.5 Antena 7 1.6 Vibración 8 1.7 Origen de las Baterías 8 1.7.1 Pilas Recargables 10 1.8 Circuitos Integrados 11 1.9 Altavoz 14 Capítulo 2. Marco Teórico 15 2.1 Transmisor y Receptor 16 2.2 Sistemas de Radiocomunicación 18
2.2.1 Ventajas 20 2.2.2 Limitaciones 20
2.3 Radiofrecuencia 20 2.3.1 Espectro de Radiofrecuencia 21 2.3.2 Características de la Propagación de RF 22 2.3.3 Conceptos Básicos para la Propagación de RF 23
2.4 Refracción 23 2.5 Reflexión 24 2.6 Dispersión 24 2.7 Difracción 24 2.8 Comunicaciones Inalámbricas 25 2.9 Propagación por Onda Terrestre 25
2.9.1 Onda de Superficie 26 2.9.2 Onda Reflejada 26 2.9.3 Propagación por Onda Directa 28
2.10 Interferencia Terrestre 30 2.11 Propagación de las Ondas de Radio 30 2.12 Polarización de una Antena 31 2.13 Modulación 32
2.13.1 Modulación de Frecuencia 34 2.14 Alimentación de Radiorreceptores 34
2.14.1 Clases de Alimentación 35 2.15 Resistencia 36
2.15.1 Resistencia Variable: Potenciómetro, Reóstato 37
2.15.2 Potenciómetro 38 2.15.3 Reóstato 38
2.16 Capacitor 40 2.17 Diodo Emisor de Luz (LED) 42 2.18 Altavoz 43 2.19 Circuitos integrados 44 2.19.1 Circuito Integrado 555 44 2.19.2 HT12D 45 2.19.2.1 Características 46 2.19.2 .2 Aplicaciones 47 2.19.3 HT12E 47 2.19.3.1 Características 48 2.19.3.2 Aplicaciones 48 2.20 Baterías (Níquel Cadmio) 49
2.20.1Cargadores lentos y cargadores rápidos 50 2.21 Diodo rectificador 51 2.22 Interruptor 52 2.23 Push Button 53 2.24 Regulador de Voltaje 54 2.25 Dieléctrico o Aislante 55 2.26 Transmisor 56 2.27 Interferencia 56 2.28 Atenuación 57 2.29 Diagrama a Bloques 58 Capítulo 3 Diseño e Implementación 59 3.1 Circuito de Comunicación de Radiofrecuencia 60 3.1.1 Circuito Transmisor 60 3.1.2 Circuito Receptor 62 3.2 Circuito de Reloj 64 3.3 Circuitos de Alarma 67 3.3.1 Circuito de Alarma Sonora 67 3.3.2 Circuito de Alarma Vibrante 69 Capítulo 4 Pruebas y Resultados 74 4.1 Prueba de Distancia 75 4.2 Prueba de Sonido 76 4.3 Prueba de Timer 78 4.4 Prueba de Continuidad 79 Bibliografía 82 Ciberografía 83 Anexo 5.Normatividad II
5.1 Objetivo II 5.2 Campo de Aplicación II 5.3 Referencias II 5.4 Símbolos y Abreviaturas III 5.5 Terminología III
5.5.1 Ancho de Banda III 5.5.2 Ancho de Banda Ocupado IV 5.5.3 Emisiones No Esenciales IV 5.5.4 Equipo Bajo Prueba IV 5.5.5 Frecuencia Asignada IV 5.5.6 Frecuencia Central IV 5.5.7 Potencia Media IV 5.5.8 Potencia Nominal IV 5.5.9 Tolerancia de Frecuencia V
5.6. Especificaciones V 5.6.1 Frecuencia de Operación V 5.6.2 Ancho de Banda Ocupado V 5.6.3 Emisiones No Esenciales V 5.6.4 Potencia Media V 5.6.5 Tolerancia de Frecuencia VI
5.7 Métodos de Prueba VI 5.7.1 Medición de la Frecuencia de Operación VII
5.7.1.1 Procedimiento VII 5.7.1.2 Resultados VII
5.7.2 Medición del Ancho de Banda Ocupado VII 5.7.2.1 Procedimiento VIII 5.7.2.2 Resultados VIII
5.7.3 Medición de las Emisiones No Esenciales VIII 5.7.3.1 Procedimiento VIII 5.7.3.2 Resultados IX
5.7.4 Medición de la Potencia Media IX 5.7.4.1 Procedimiento IX 5.7.4.2 Resultados X
5.7.5 Medición de la Tolerancia en Frecuencia X 5.7.5.1 Procedimiento X 5.7.5.2 Resultados X
5.8 Bibliografía XI 5.9 Concordancia con Normas Internacionales XI 5.10 Evaluación de la Conformidad y Vigilancia
del Cumplimiento XI 6 Viabilidad XII Datasheet HT12A/HT12E XIII Datasheet HTD XXVII Datasheet LM7805C/LM7812C/LM7815C XXXV Datasheet LM555 XLV
Listado de figuras Capítulo 1 Figura 1.1 Pila Recargable de 9 Volts 10 Figura 1.2 Circuitos Integrados 13 Figura 1.3 Altavoz 14 Capítulo 2 Figura 2.1 Sistema de Radiocomunicación Punto a Punto 19 Figura 2.2 Propagación de RF Sobre la Superficie de la Tierra 27 Figura 2.3 Propagación de RF con Línea de Vista 29 Figura 2.4 Resistencia 37 Figura 2.5 Potenciómetro y Reóstato 39 Figura 2.6 Capacitores 41 Figura 2.7 LED 42 Figura 2.8 Sirena de Alarma 43 Figura 2.9 Circuito Integrado 555 44 Figura 2.10 Circuito Integrado HT12D 45 Figura 2.11 Circuito Integrado HT12E 47 Figura 2.12 Baterías de Níquel Cadmio 49 Figura 2.13 Cargador de Pilas de 9 Volts de Níquel Cadmio 50 Figura 2.14 Diodo Rectificador 51 Figura 2.15 Interruptor a 2 Pasos 52 Figura 2.16 Push Button 53 Figura 2.17 Regulador de Voltaje 54 Capítulo 3 Figura 3.1 Módulo Transmisor 61 Figura 3.2 Diagrama de Circuito Transmisor 61 Figura 3.3 Diseño de Tarjeta del Circuito Transmisor 61 Figura 3.4 Módulo Receptor 62 Figura 3.5 Diagrama de Circuito Receptor 63 Figura 3.6 Diseño de Tarjeta del Circuito Receptor 63 Figura 3.7 Ejemplo de un Pulso de Reloj 65 Figura 3.8 Diagrama de Circuito de Reloj 66 Figura 3.9 Diseño de Tarjeta del Circuito de Reloj 67 Figura 3.10 Diagrama de Circuito de Alarma Sonora 68 Figura 3.11 Diseño de Tarjeta de Circuito de Alarma Sonora 69 Figura 3.12 Eliminación del Exceso de Cobre de la Tablilla 70 Figura 3.13 Perforación de la Tablilla 71 Figura 3.14 Soldado de Componentes 71 Figura 3.15.a Prueba de Funcionamiento de Circuitos 72 Figura 3.15.b Prueba de Funcionamiento de Circuitos 72 Figura 3.15.c Prueba de Funcionamiento de Circuitos 73 Figura 3.15.d Prueba de Funcionamiento de Circuitos 73
Capítulo 4 Figura 4.1 Prueba de Alcance entre Emisor y Receptor 75 Figura 4.2 Transmisor 75 Figura 4.3 Receptor 76 Figura 4.4 Circuito de Alarma con Baja Potencia Sonora 76 Figura 4.5 Circuito de Alarma con Alta Potencia Sonora 77 Figura 4.6 Pistas del Circuito de Alarma Sonora 77 Figura 4.7 Verificación de la Frecuencia del Circuito de Reloj 78 Figura 4.8 Prueba de Continuidad 79 Figura 4.9 Pistas del Circuito Transmisor 80 Figura 4.10 Pistas del Circuito Receptor 80 Listado de tablas Tabla 2.1 Espectro de Radiofrecuencia 21 Tabla 5.1 Símbolos y Significados III Tabla 5.2 Frecuencias de Operación V Tabla 5.3 Tolerancia de Frecuencia VI Tabla 5.4 Condiciones Atmosféricas Normales para las Mediciones y las Pruebas VI Tabla 5.5 Equipo de Medición VII Tabla 5.6 Resolución en el Dominio de la Frecuencia del Equipo de Medición para el Procedimiento de Medición de la Tolerancia de Frecuencia X Tabla 5.7 Costos XII
Título Circuito Inalámbrico de Alerta y Localización de Menores Hasta de Diez Años Dentro de Zonas Cerradas y Concurridas sin Transito Vial. Planteamiento del Problema El descuido y la falta de atención al cuidar de un niño menor de 10 años estando en lugares concurridos es una de las principales causas de extravío, secuestro o robo de menores. En el primer caso el menor puede o no ser encontrado, pero si es secuestrado la cantidad exorbitante del rescate no siempre puede ser cubierta por los padres dando como resultado que el menor sea usado para la venta de órganos, prostitución o en el peor de los casos la muerte. No se pueden cometer errores de descuido que puedan orillarnos a todo lo antes mencionado. Justificación Se propone un circuito inalámbrico de alerta y localización de menores para evitar y prevenir el robo y extravío de los infantes porque hoy en día esto suele suceder con mucha frecuencia. El circuito inalámbrico será un sistema emisor y receptor el cual opera con señales de radiofrecuencia para la intercomunicación entre el sistema, este se energizará por medio de una pila recargable y tendrá una distancia prestablecida modulable que será de uno hasta diez metros la cual podrá seleccionar quien maneje el sistema. Cuando el niño haya salido del rango establecido, el receptor comenzará a vibrar y sonará con un tono que será capaz de escuchar el usuario mientras que el equipo emisor emitirá un tono mayor para la posible localización de este. Cabe mencionar que el receptor tendrá los cuatro ejes cardinales (una flecha que nos indicará hacia que dirección se encuentra el emisor) y con esto podremos conocer la posible ubicación del emisor y esta alarma una vez activada solo podrá ser desactivada manualmente por el portador del receptor activo.
i
Objetivo General Realizar un Circuito Inalámbrico de Alerta y Localización de Menores Hasta de Diez Años Dentro de Zonas Cerradas y Concurridas sin Transito Vial. Objetivos Específicos Implementar un sistema de comunicación con tecnología de radiofrecuencia. Utilizar coordenadas para conocer la ubicación entre emisor y receptor en caso de no encontrarse a la vista. Realizar un emisor que sea resistente al agua y a los golpes. Instalar un candado para que ninguna persona ajena al menor pueda quitarlo.
ii
Capítulo I
Estado del Arte
2
1.1 TELECOMUNICACIÓN
La telecomunicación (del prefijo griego tele, "distancia" o "lejos",
"comunicación a distancia") es una técnica que consiste en transmitir un
mensaje desde un punto a otro, normalmente con el atributo típico adicional de
ser bidireccional. El término telecomunicación cubre todas las formas de
comunicación a distancia, incluyendo radio, telegrafía, televisión, telefonía,
transmisión de datos e interconexión de ordenadores a nivel de enlace.
1.1.1 Antecedentes
Los sistemas de telecomunicaciones, comienzan en la primera mitad del
siglo XIX con el telégrafo eléctrico, que permitió enviar mensajes cuyo
contenido eran letras y números. A esta invención se le hicieron dos notables
mejorías: la adición, por parte de Charles Wheatstone, de una cinta perforada
para poder recibir mensajes sin que un operador estuviera presente, y la
capacidad de enviar varios mensajes por la misma línea, que luego se llamó
telégrafo múltiple, añadida por Emile Baudot.
Más tarde se desarrolló el teléfono, con el que fue posible comunicarse
utilizando la voz, y posteriormente, la revolución de la comunicación
inalámbrica: las ondas de radio.
(JARDON-LINARES, Sistemas de comunicaciones por fibras ópticas, México, Alfaomega, 1995, pp 2-3)
3
A principios del siglo XX aparece el teletipo que, utilizando el código
Baudot, permitía enviar texto en algo parecido a una máquina de escribir y
también recibir texto, que era impreso por tipos movidos por relés.
El término telecomunicación fue definido por primera vez en la reunión
conjunta de la XIII Conferencia de la UTI (Unión Telegráfica Internacional) y la
III de la URI (Unión Radiotelegráfica Internacional) que se inició en Madrid el
día 3 de septiembre de 1932. La definición entonces aprobada del término fue:
"Telecomunicación es toda transmisión, emisión o recepción, de signos,
señales, escritos, imágenes, sonidos o informaciones de cualquier naturaleza
por hilo, radioelectricidad, medios ópticos u otros sistemas electromagnéticos".
El siguiente artefacto revolucionario en las telecomunicaciones fue el
módem que hizo posible la transmisión de datos entre computadoras y otros
dispositivos. En los años 60's comienza a ser utilizada la telecomunicación en
el campo de la informática con el uso de satélites de comunicación y las redes
de conmutación de paquetes.
La década siguiente se caracterizó por la aparición de las redes de
computadoras y los protocolos y arquitecturas que servirían de base para las
telecomunicaciones modernas.
(JARDON-LINARES, Sistemas de comunicaciones por fibras ópticas, México, Alfaomega, 1995, pp 2-3)
4
En los años 80’s, cuando los ordenadores personales se volvieron
populares, aparecen las redes digitales. En la última década del siglo XX
aparece Internet, que se expandió enormemente y a principios del siglo XXI se
están viviendo los comienzos de la interconexión total a la que convergen las
telecomunicaciones, a través de todo tipo de dispositivos que son cada vez
más rápidos, más compactos, más poderosos y multifuncionales.
1.2 ORIGEN DE LA COMUNICACIÓN INALÁMBRICA
En 1873 James Clerk Maxwell estableció la teoría de la naturaleza
electromagnética de la luz que posteriormente Heinrich Hertz corroboró para
así descubrir las ondas electromagnéticas en 1887, estableciendo la base para
la transmisión telegráfica sin cables. En 1896 el inventor italiano Guglielmo
Marconi logró enviar una señal sin cables.
1.3 EMISOR Y RECEPTOR
En 1894, en una finca que poseía la familia en Pontecchio, cerca de
Bolonia, Marconi comenzó a realizar sus primeros experimentos, para lo cual
construyó un emisor y un receptor basado en el modelo creado por Hertz.
(JARDON-LINARES, Sistemas de comunicaciones por fibras ópticas, México, Alfaomega, 1995, pp 2-3) (VASSALLO,Radio, México, CEAC, 1990, pp 9-16)
5
En sus experimentos comprobó que era posible mejorar el alcance de las
transmisiones que realizaba, utilizando antenas verticales. Trató, además, de
mejorar la sensibilidad del oscilador y del receptor inalámbrico, incrementar su
potencia y hacer que cubriera una mayor distancia.
En el otoño de 1895, después de haber realizado muchas pruebas,
Marconi logró que su transmisor cubriera una distancia de 2 kilómetros e
incluso superara obstáculos naturales. Para entonces, con tan sólo 23 años de
edad, había logrado hacer realidad la transmisión inalámbrica, para lograrlo.
Édouard Branly descubrió una especie de tubo de vidrio lleno de limaduras
metálicas que es capaz de recoger las ondas hertzianas a largas distancias.
Este aparato no fue patentado por Branly y Guglielmo Marconi lo utilizó para la
telegrafía sin cables.
Aunque el físico ruso Aleksandr Popov decía haber inventado y presentado
el receptor primero que Marconi este último ya había realizado la transmisión
de señales sin cables, días antes de que Popov lo hubiera presentado frente a
un auditorio de científicos.
(VASSALLO,Radio, México, CEAC, 1990, pp 9-16)
6
1.4 RADIOFRECUENCIA
Es un término que se refiere que si una antena es alimentada con una
corriente esta generará un campo electromagnético adecuado para la
transmisión de datos de modo inalámbrico.
Estas frecuencias cubren un rango significativo del espectro de radiación
electromagnética, desde 9 Kilo Hertz (9 KHz), frecuencia que se encuentra
todavía en el rango captable por el oído humano, hasta miles de Gigahertz
(GHz).
Muchos de los dispositivos inalámbricos emplean los campos de
radiofrecuencia, (en adelante mencionado como RF), tal es el caso de sistemas
de comunicación: teléfono, radio. Al aplicar (RF) se pueden reducir precios a
favor de los usuarios, ya que en estos momentos no son exclusivas de grandes
empresas sino que son accesibles y rentables. RF permite enlaces de punto a
punto con una distancia de hasta 15 Km.
(VASSALLO,Radio, México, CEAC, 1990, pp 35-36)
7
1.5 ANTENA
Una antena es un dispositivo diseñado con el objetivo de emitir o recibir
ondas electromagnéticas hacia el espacio libre. Una antena transmisora
transforma voltajes en ondas electromagnéticas, y una receptora realiza la
función inversa. En el caso que las antenas estén conectadas por medio de
guía de ondas, esta función de transformación se realiza en el propio emisor o
receptor.
Existe una gran diversidad de tipos de antena, dependiendo del uso a que
van a ser destinadas. En unos casos deben expandir en lo posible la potencia
radiada, es decir, no deben ser directivas (ejemplo: una emisora de radio
generalista o la central de los teléfonos móviles), otras veces deben serlo para
canalizar la potencia y no interferir a otros servicios (antenas entre estaciones
de radioenlaces). También es una antena la ferrita que permite oír un radio-
receptor a transistores, o la que está integrada en la computadora portátil para
conectarse a las redes Wi-Fi.
Las características de las antenas dependen de la relación entre sus
dimensiones y la longitud de onda de la señal de radiofrecuencia transmitida o
recibida. Si las dimensiones de la antena son mucho más pequeñas que la
longitud de onda, las antenas se denominan elementales. Las antenas
resonantes tienen dimensiones del orden de media longitud de onda.
(VASSALLO,Radio, México, CEAC, 1990, pp 541-542)
8
1.6 VIBRACIÓN
Es una oscilación o el movimiento repetitivo de un objeto alrededor de una
posición de equilibrio. La posición de equilibrio es a la que llegará cuando la
fuerza que actúa sobre el sea cero. Este tipo de vibración se llama de cuerpo
entero, lo que quiere decir que todas las partes del cuerpo se mueven juntas en
la misma dirección en cualquier momento.
La vibración de un objeto es causada por la fuerza de excitación. Esta
fuerza se puede aplicar externamente al objeto o puede tener su origen dentro
del objeto.
1.7 ORIGEN DE LAS BATERÍAS
Alrededor de los años 1800, Alessandro Volta profesor de filosofía natural
en la universidad de Pavia, construyó el primer aparato conocido que generó
corriente continua.
Lo que hizo fue poner dos pequeños discos del tamaño de una moneda
pequeña, uno de plata y el otro de zinc en un recipiente, separados por un
material esponjoso como el cuero. Todo este conjunto estaba sumergido en
agua salada o en otra solución alcalina. A este conjunto le podemos llamar una
pila.
9
Volta después de dio cuenta de que si ponía estas pilas una seguida de
otra, unidas por tiras de metal se lograba que el voltaje final fuera mayor.
En 1813, Sir Humphrey Davy conecto una batería gigante en el sótano de
la Sociedad Real Británica. Esta batería estaba hecha de 2,000 pares de
platinas y tenía el tamaño de más o menos 100 m2. Con esta batería realizó
muchos experimentos que permitieron un más profundo conocimiento de la
naturaleza de la electricidad.
Michael Faraday estaba utilizando pilas voltaicas para realizar estudios en
electricidad y magnetismo. Descubrió que enviando corriente por un conductor,
un campo magnético se inducía en un conductor paralelo.
Poco a poco los científicos fueron mejorando la idea original de la batería
de Volta y en 1860 George Leclanch de Francia desarrollo la primera batería
utilizada ampliamente (la célula de zinc carbón) El ánodo era de zinc y una
aleación de mercurio y el cátodo era un compuesto de dióxido de magnesio y
un poco de carbón. Ambos: ánodo y cátodo fueron sumergidos en una solución
de cloruro de amonio, que actuaba como electrolito. Aunque la idea de
Leclanche era barata fue desplazada en 1880.
10
1.7.1 Pilas Recargables
Existen tres tipos de baterías recargables la de níquel y cadmio (NI-CAD),
la de hidruro de níquel (NiMH) y la de iones de litio (Li-ion). La primera tiene
una desventaja en la memoria ya que estas cada vez van trabajando por
periodos de tiempo cada vez más cortos. Las segundas trabajan de una
manera muy parecida a las anteriores, su ventaja es que tienen una vida más
prolongada que las de (Ni-CAD) estas si cuentan con una memoria. Su
principal desventaja es que tienen pérdidas elevadas de carga cuando se
encuentran guardadas. Las terceras son las más recientes, su principal ventaja
es que su carga perdura por más tiempo y es posible maximizar su vida si se
mantienen por más tiempo en el cargador.
Figura 1.1 Pila Recargable de 9 volts
11
1.8 CIRCUITOS INTEGRADOS
En abril de 1949, el ingeniero alemán Werner Jacobi completa la primera
solicitud de patente para circuitos integrados (en adelante mencionado como
CI) con dispositivos amplificadores de semiconductores. Jacobi realizó una
típica aplicación industrial para su patente, la cual no fue registrada.
El primer CI fue desarrollado en 1958 por el ingeniero Jack Kilby (1923-
2005) pocos meses después de haber sido contratado por la firma Texas
Instruments. Se trataba de un dispositivo de germanio que integraba seis
transistores en una misma base semiconductora para formar un oscilador de
rotación de fase.
En el año 2000 Kilby fue galardonado con el Premio Nobel de Física por la
contribución de su invento al desarrollo de la tecnología de la información.
El desarrollo de los circuitos integrados fue posible gracias a
descubrimientos experimentales que demostraron que
los semiconductores pueden realizar algunas de las funciones de las válvulas
de vacío.
La integración de grandes cantidades de diminutos transistores en
pequeños chips fue un enorme avance sobre el ensamblaje manual de los
tubos de vacío (válvulas) y fabricación de circuitos utilizando componentes
discretos.
12
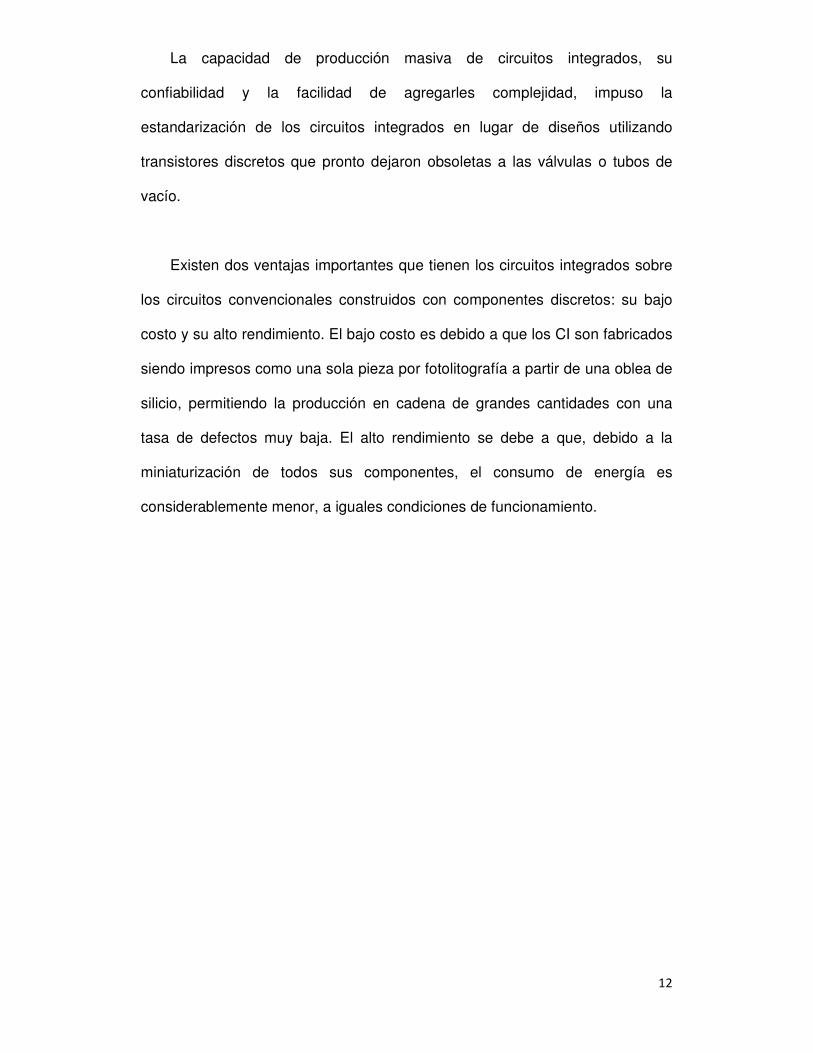
La capacidad de producción masiva de circuitos integrados, su
confiabilidad y la facilidad de agregarles complejidad, impuso la
estandarización de los circuitos integrados en lugar de diseños utilizando
transistores discretos que pronto dejaron obsoletas a las válvulas o tubos de
vacío.
Existen dos ventajas importantes que tienen los circuitos integrados sobre
los circuitos convencionales construidos con componentes discretos: su bajo
costo y su alto rendimiento. El bajo costo es debido a que los CI son fabricados
siendo impresos como una sola pieza por fotolitografía a partir de una oblea de
silicio, permitiendo la producción en cadena de grandes cantidades con una
tasa de defectos muy baja. El alto rendimiento se debe a que, debido a la
miniaturización de todos sus componentes, el consumo de energía es
considerablemente menor, a iguales condiciones de funcionamiento.
13
Los avances que hicieron posible el circuito integrado han sido,
fundamentalmente, los desarrollos en la fabricación de dispositivos
semiconductores a mediados del siglo XX y los descubrimientos
experimentales que mostraron que estos dispositivos podían reemplazar las
funciones de las válvulas o tubos de vacío, que se volvieron rápidamente
obsoletos al no poder competir con el pequeño tamaño, el consumo de energía
moderada, los tiempos de conmutación mínimos, la confiabilidad, la capacidad
de producción en masa y la versatilidad de los CI.
Figura 1.2 Circuitos Integrados
14
1.9 ALTAVOZ
En 1877 Edison diseñó un aparato capaz de transcribir telegramas, y el
mismo año inventó un transductor para el teléfono.
El primer transductor que utilizó fuerza electromotriz fue realizado por
Graham Bell, siendo luego mejorado por Mac Lachlan. Luego se desarrollaron
modelos como el Termógrafo, el Altavoz de arco, el condensador cantante y el
de cuarzo, pero el que mas éxito ha tenido durante un siglo ha sido el Altavoz
electrodinámico.
Figura 1.3 Altavoz
Capítulo Il
Marco Teórico
16
2.1 TRANSMISOR Y RECEPTOR
E n las comunicaciones electrónicas, se logra que las señales
eléctricas se puedan transmitir a distancias mucho mayores, a
velocidades sumamente altas y con menores pérdidas.
Por comunicaciones electrónicas puede entenderse el proceso de
transmisión, recepción y procesamiento de información con ayuda de
circuitos electrónicos. Dicha comunicación puede ser de tres tipos: simplex
(en una sola dirección), Half-Duplex (en ambas direcciones pero no al
mismo tiempo) o dúplex (en ambas direcciones simultáneamente).
Dado que para el desarrollo del proyecto no es necesario establecer
comunicación en ambas direcciones, la estructura básica del sistema
implementado consiste de tres secciones principales: un transmisor, un medio
de transmisión y un receptor.
El transmisor es el encargado de modificar la información original de tal
manera que pueda ser adecuada para su transmisión.
17
El medio de transmisión es aquel por el que viaja la información del
transmisor al receptor, por lo que bien puede considerarse como una
conexión entre ambos elementos. Finalmente, el receptor cumple con la tarea
de convertir a su forma original la información recibida para posteriormente
transferirla a su destino y donde será procesada.
En un sistema de comunicaciones analógico, como el empleado en este
proyecto, la energía electromagnética se transmite y recibe como una señal
que se encuentra variando continuamente.
Para que la transmisión pueda llevarse a cabo resulta necesario convertir
la señal de información a una forma adecuada. Este es precisamente el
objetivo fundamental de la modulación: convertir a energía
electromagnética la información de la fuente para que ésta pueda
propagarse a través de los sistemas de comunicación, sin importar que
sean analógicos o digitales. Dicha transformación de la información se lleva
a cabo en el transmisor en un circuito conocido como modulador.
18
2.2 SISTEMAS DE RADIOCOMUNICACIÓN
Todos los sistemas de radiofrecuencia emplean el espacio como medio de
transmisión. La información viaja en forma de ondas electromagnéticas no
guiadas desde el transmisor hasta el receptor.
Para que el transmisor radie energía electromagnética al espacio
circunvecino es necesario emplear un transductor, el cual transforma ondas de
voltaje y corriente u ondas electromagnéticas guiadas en ondas
electromagnéticas no guiadas, este transductor es la antena transmisora, que
dependiendo de la frecuencia y de la aplicación del sistema puede radiar
energía de igual manera en todas la direcciones o en una dirección preferida.
En el receptor también se tiene que emplear un transductor que transforme
ondas electromagnéticas no guiadas en ondas de voltaje y corriente o en ondas
electromagnéticas guiadas.
19
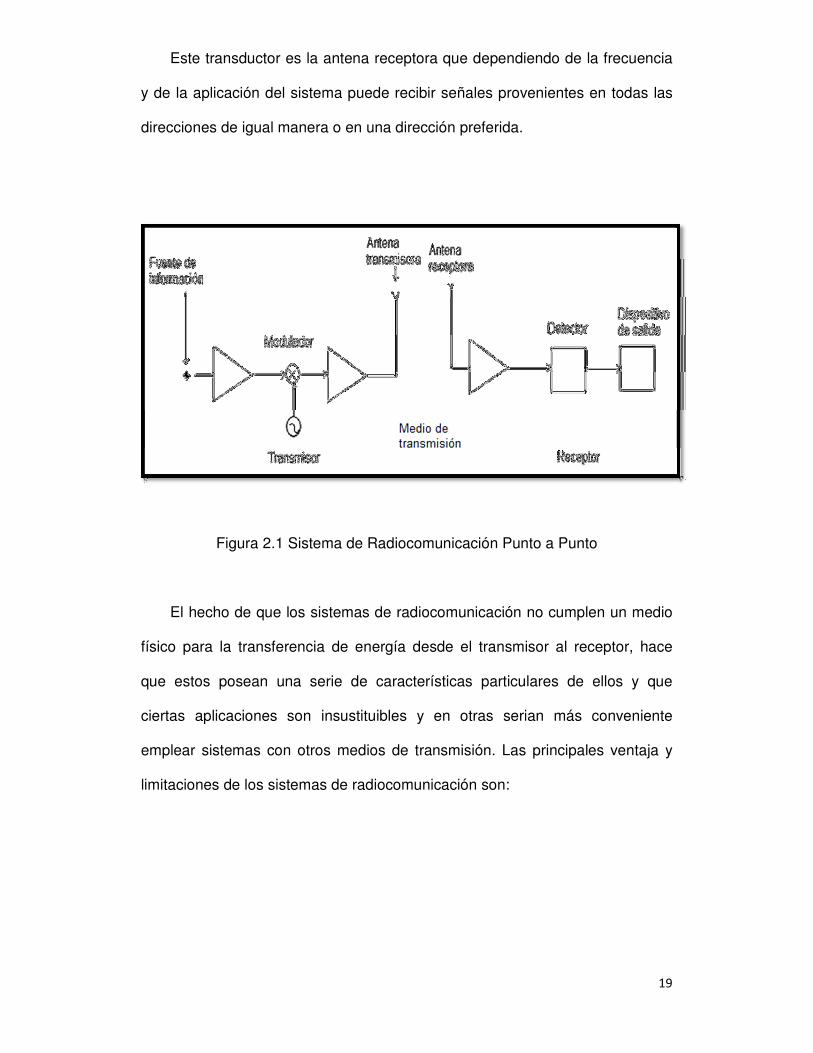
Este transductor es la antena receptora que dependiendo de la frecuencia
y de la aplicación del sistema puede recibir señales provenientes en todas las
direcciones de igual manera o en una dirección preferida.
Figura 2.1 Sistema de Radiocomunicación Punto a Punto
El hecho de que los sistemas de radiocomunicación no cumplen un medio
físico para la transferencia de energía desde el transmisor al receptor, hace
que estos posean una serie de características particulares de ellos y que
ciertas aplicaciones son insustituibles y en otras serian más conveniente
emplear sistemas con otros medios de transmisión. Las principales ventaja y
limitaciones de los sistemas de radiocomunicación son:
20
2.2.1 Ventajas
Facilidad de comunicaciones móviles
Facilidad de reconfiguración
Facilidad de comunicaciones multipunto
Facilidad de establecer enlaces en áreas de difícil acceso o sin
infraestructura
Económicos
Menor tiempo de instalación
2.2.2 Limitaciones
Susceptibilidad a interferencias electromagnéticas
Espectro electromagnético limitado
Privacidad pequeña
Dependencia de las condiciones ambientales
2.3 RADIOFRECUENCIA
Son radiaciones electromagnéticas y pertenecen a la categoría de
radiaciones no ionizantes. Las radiaciones ionizantes son aquellas que al
interactuar con la materia la ionizan, es decir, producen átomos o moléculas
con carga eléctrica. Las no ionizantes carecen de energía suficiente para
producir ionización.
21
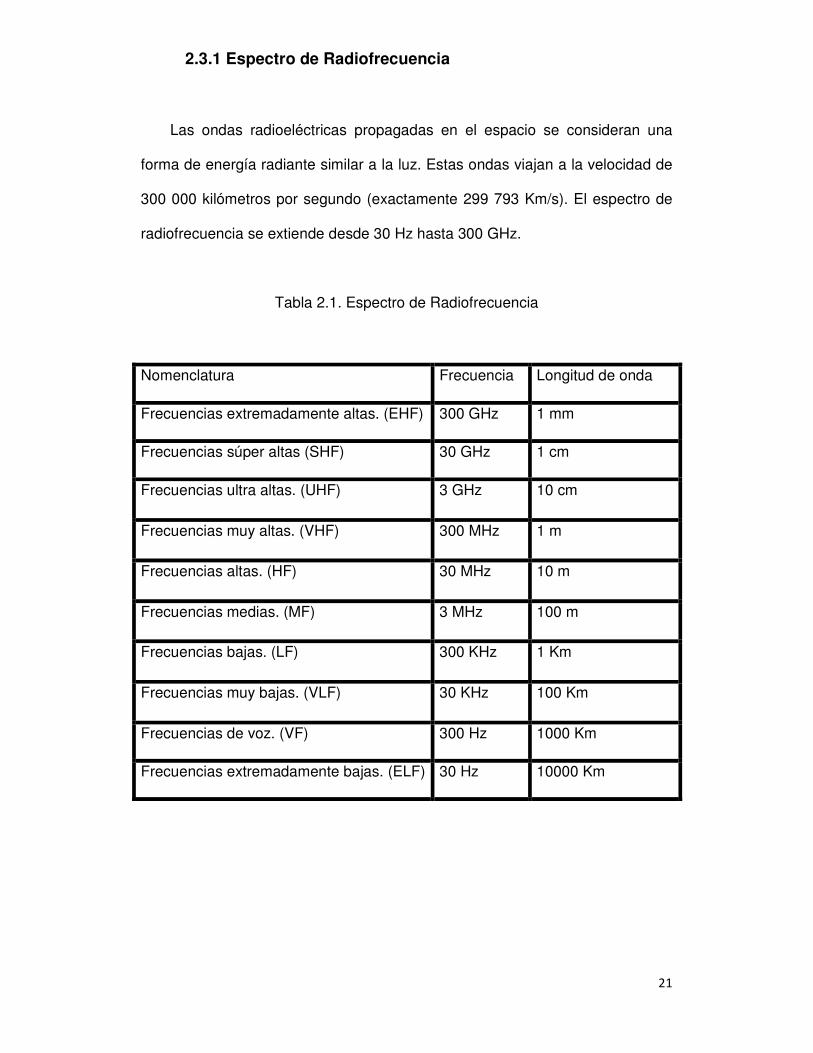
2.3.1 Espectro de Radiofrecuencia
Las ondas radioeléctricas propagadas en el espacio se consideran una
forma de energía radiante similar a la luz. Estas ondas viajan a la velocidad de
300 000 kilómetros por segundo (exactamente 299 793 Km/s). El espectro de
radiofrecuencia se extiende desde 30 Hz hasta 300 GHz.
Tabla 2.1. Espectro de Radiofrecuencia
Nomenclatura Frecuencia Longitud de onda
Frecuencias extremadamente altas. (EHF) 300 GHz 1 mm
Frecuencias súper altas (SHF) 30 GHz 1 cm
Frecuencias ultra altas. (UHF) 3 GHz 10 cm
Frecuencias muy altas. (VHF) 300 MHz 1 m
Frecuencias altas. (HF) 30 MHz 10 m
Frecuencias medias. (MF) 3 MHz 100 m
Frecuencias bajas. (LF) 300 KHz 1 Km
Frecuencias muy bajas. (VLF) 30 KHz 100 Km
Frecuencias de voz. (VF) 300 Hz 1000 Km
Frecuencias extremadamente bajas. (ELF) 30 Hz 10000 Km
22
2.3.2 Características de la Propagación de RF
Las ondas de radio son ondas electromagnéticas que poseen una
componente eléctrica y una componente magnética y como tales, están
expuestas a ciertos fenómenos los cuales son capaces de modificar el
patrón de propagación de las ondas. En condiciones especiales y con una
atmósfera uniforme, las ondas de radio tienden a desplazarse en línea recta,
esto quiere decir que siempre que haya una línea de vista entre el emisor y
el receptor, este tipo de comunicación será bastante eficiente, pero si se
requiere de una comunicación de un punto a otro, el cual se encuentra más
allá del horizonte, tendremos que tomar en cuenta las distintas condiciones de
propagación y las adecuadas frecuencias para su correcta comunicación.
Para realizar comunicaciones seguras entre dos puntos lejanos y sin salir
de la atmósfera, se utilizan frecuencias denominadas altas frecuencias (High
frequency) ó HF que van de 3 MHz a los 30 MHz, ya que estas frecuencias
son reflejadas en la atmósfera y regresan a la tierra a grandes distancias.
Las frecuencias en orden de VHF, UHF Y SHF no se reflejan en la
atmósfera salvo en ciertas circunstancias, es por esto que solo son
útiles en comunicaciones de punto a punto y satelitales.
23
No se podría hablar de comunicación por medio de ondas de radio a
grandes distancias si no se toman ciertos fenómenos en cuenta como lo
son la refracción, reflexión, dispersión y difracción los cuales hacen posible
la comunicación entre dos puntos más allá del horizonte.
2.3.3 Conceptos Básicos para la Propagación de RF
Coma ya se dijo antes, los fenómenos de refracción, reflexión,
dispersión y difracción son de gran importancia para las comunicaciones
inalámbricas. Este tipo de ondas pueden viajar en el vacío a la velocidad de la
luz y aproximadamente a un 95% de esta velocidad en otros medios, en la
atmósfera terrestre la velocidad se reduce insignificantemente.
2.4 REFRACCIÓN
Las ondas de radio están expuestas a sufrir una desviación en su
trayectoria cuando atraviesan de un medio a otro con densidad distinta, en
comunicaciones este efecto sucede cuando las ondas electromagnéticas
atraviesan las distintas capas de la atmósfera variando su trayectoria en un
cierto ángulo.
24
2.5 REFLEXIÓN
Las ondas de radio atraviesan las diversas capas de la atmósfera,
desde la tropósfera hasta la ionósfera y si los índices de refractividad de cada
una de estas capas son muy diferentes. Estos distintos índices pueden
llegar a producir reflexión total, siendo las frecuencias de VHF y superiores
las más propensas a esta desviación de trayectoria.
2.6 DISPERSIÓN
El efecto de la dispersión ocurre cuando las ondas de radio atraviesan
alguna masa de electrones o pequeñas gotas de agua en áreas
suficientemente grandes.
2.7 DIFRACCIÓN
Se puede entender a la difracción como el esparcimiento de las ondas
en los límites de una superficie, esto quiere decir que para que exista la
difracción tiene que haber un obstáculo, así es como este fenómeno permite
que parte de la señal llegue al otro lado del objeto. Este fenómeno es de
gran utilidad para las zonas de sombra de señal que pueden ser producidas
por grandes edificios o montañas.
25
2.8 COMUNICACIONES INALÁMBRICAS
Como ya se dijo antes gracias a los fenómenos de reflexión,
refracción, difracción y dispersión, se pueden realizar las comunicaciones
inalámbricas a grandes distancias. A continuación se mostrarán las distintas
formas de comunicación que existen gracias a estos fenómenos.
2.9 PROPAGACIÓN POR ONDA TERRESTRE
Las ondas de campo de radiación de una antena se desplazan en el
espacio en todas las direcciones.
Aquellas ondas que se desplazan por la superficie de la tierra están
afectadas por la presencia de esta y por las características del terreno, por lo
que reciben el nombre de ondas terrestres.
Las ondas terrestres son las ondas que viajan por la superficie de la tierra,
estas deben de estar polarizadas verticalmente debido a que el campo eléctrico
en una onda polarizada horizontalmente seria paralelo a la superficie de la
tierra y se pondría en corto por la conductividad del suelo.
En las ondas terrestres el campo eléctrico variable induce voltajes en la
superficie terrestre que hacen circular corrientes muy parecidas a las de una
línea de transmisión.
26
La onda terrestre está integrada por tres componentes:
2.9.1 Onda de Superficie
Sigue una trayectoria a lo largo del contorno terrestre. La onda de
superficie sufre una atenuación debido al grado de conductividad de la Tierra,
por lo que su alcance es limitado, dependiendo este de la atenuación.
2.9.2 Onda Reflejada
Llega al receptor después de una reflexión en la superficie de la Tierra.
Nota: Como regla general, la intensidad de campo en VHF y UHF aumenta
directamente con el aumento de la altura de las antenas emisora y receptora
27
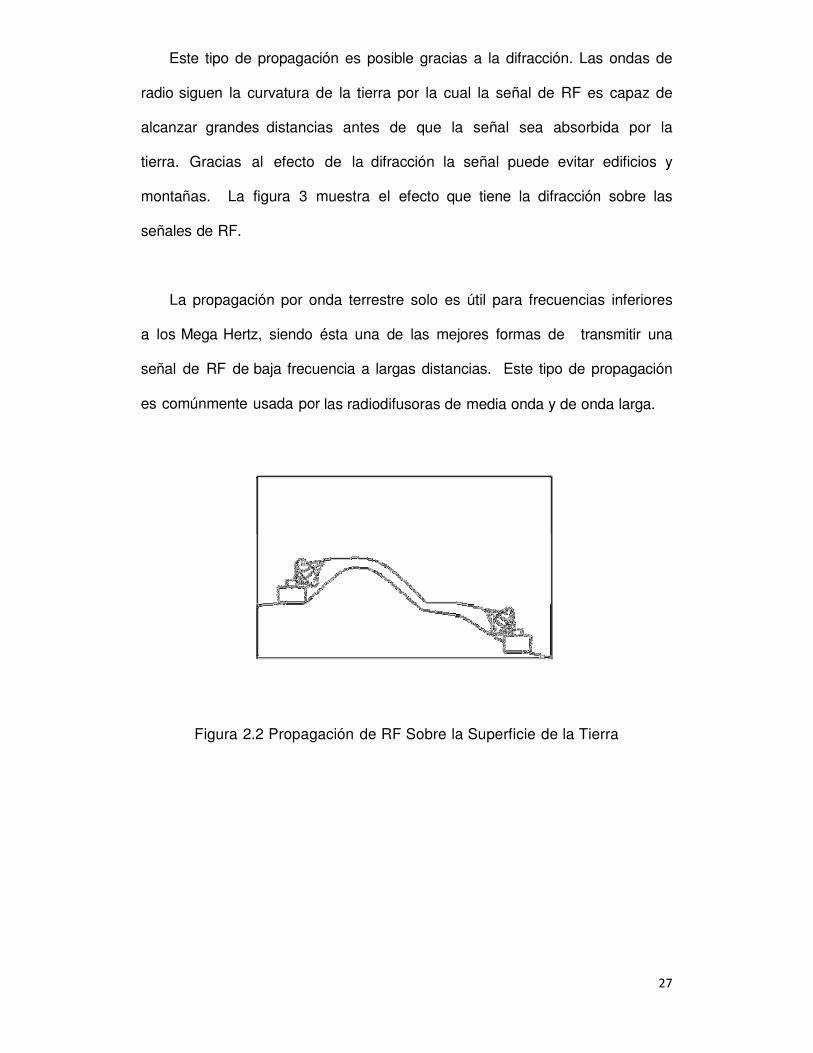
Este tipo de propagación es posible gracias a la difracción. Las ondas de
radio siguen la curvatura de la tierra por la cual la señal de RF es capaz de
alcanzar grandes distancias antes de que la señal sea absorbida por la
tierra. Gracias al efecto de la difracción la señal puede evitar edificios y
montañas. La figura 3 muestra el efecto que tiene la difracción sobre las
señales de RF.
La propagación por onda terrestre solo es útil para frecuencias inferiores
a los Mega Hertz, siendo ésta una de las mejores formas de transmitir una
señal de RF de baja frecuencia a largas distancias. Este tipo de propagación
es comúnmente usada por las radiodifusoras de media onda y de onda larga.
Figura 2.2 Propagación de RF Sobre la Superficie de la Tierra
28
2.9.3 Propagación por Onda Directa
Sigue una trayectoria recta desde la antena emisora a la receptora. La
onda directa viaja sobre una trayectoria óptica, es decir sobre una línea recta
imaginaria que une la antena emisora con la receptora. Si debido a la curvatura
de la tierra, ambas antenas no se ven, la onda directa no alcanzara a la antena
receptora. Sin embargo la onda directa es refractada en la baja atmosfera
debido a los cambios en la conductividad relativa de sus capas. Así la
presencia de grandes masas de aire frio y caliente cercanas entre si y el
contenido de vapor de agua en la atmosfera son causas de refracción de la
onda directa.
Otro factor que influye en la refracción de la onda directa es la frecuencia:
las ondas de baja frecuencia son refractadas en mayor grado que las de alta
frecuencia, razón por la cual se consiguen alcances considerablemente
mayores en emisores de frecuencias bajas que en VHF o UHF, en los cuales la
componente directa del campo irradiado tiene un alcance prácticamente óptico.
29
Para realizar este tipo de propagación es necesario que exista una línea
de vista entre el transmisor y el receptor. En este tipo de comunicación se
utilizan frecuencias por encima de los 50 MHz, e s t o se debe a que las
frecuencias altas se ven menos afectadas por los fenómenos atmosféricos,
además de que no requiere de antenas grandes para tener una
transmisión efectiva de gran directividad, lo que provoca la confiabilidad de
que la información llegue a otro lado del transmisor, este tipo de
propagación se utiliza para la televisión y la radio FM. La figura 2
muestra la propagación por onda directa.
Figura 2.3 Propagación de RF con Línea de Vista
30
2.10 INTERFERENCIA TERRESTRE
La interferencia terrestre ocurre gracias a otras antenas que transmiten
sobre la Tierra. Pero si se eleva el ángulo de las antenas de las estaciones
terrestres el riesgo de interferencia terrestre será menor.
El espectro de ondas radioeléctricas ha sido dividido en multitud de bandas
siendo las gamas de frecuencias abarcadas por ellas de valores muy diversos.
Nota: nosotros ocuparemos la frecuencia denominada como frecuencias muy
elevadas (UHF) que va desde 300 hasta 3000 Mhz tomando una longitud de
onda de .1 a 1 metro.
2.11 PROPAGACIÓN DE LAS ONDAS DE RADIO
Si una corriente alterna de radiofrecuencia se aplica a una antena que no
es más que un conductor eléctrico de características especiales, producirá
campos magnéticos y eléctricos variables alrededor de ella.
31
Estos cambios periódicos de la intensidad del campo produce una onda del
campo móvil que se aleja de la antena, los componentes de esta onda de
campo reciben la denominación de:
Campo de inducción.
Campo de radiación.
Esta acción periódica dura mientras que el emisor suministra energía de
alta frecuencia a la antena y se lleva acabo tantas veces por segundo como
valor de frecuencia tenga la corriente alterna aplicada.
2.12 POLARIZACIÓN DE UNA ANTENA
El término polarización, aplicado a una antena se refiere a los campos
magnéticos de esta. La polarización de una antena está determinada por la
dirección del plano de la onda eléctrica. Una antena horizontal con respecto a
la superficie de la tierra produce un plano de onda. Por lo tanto se dice que
dicha antena esta polarizada horizontalmente.
Si la antena es vertical a la tierra producirá un plano de ondas donde el
campo eléctrico es vertical, se dice que esta polarizada verticalmente.
32
En ambas polarizaciones salvo la inversión de 180° durante el ciclo la
dirección del campo eléctrico no varía, es decir, una onda polarizada
horizontalmente permanece siempre horizontal y una onda polarizada
verticalmente permanece siempre vertical.
La elección de una u otra forma de polarización depende de la frecuencia
de emisión y de los efectos resultantes de los modos de propagación terrestre
e ionosfera.
2.13 MODULACIÓN
Es la modificación de una magnitud física a través de una información. La
palabra modulación tiene un doble significado, pues designa tanto el proceso
en si como al resultado del mismo.
A la magnitud física que debe modularse se le llama portadora. La
portadora es una corriente alterna de alta frecuencia que se transmite por el
espacio en todas direcciones desde la antena emisora, llegando a todas las
antenas receptoras por los diferentes caminos.
33
La portadora se modula con una señal de baja frecuencia, de forma que
esta señal pueda llegar a los receptores. El proceso de modulación consiste en
hacer variar alguna característica de una onda portadora de acuerdo a la onda
de baja frecuencia.
Para recibir información el receptor recibe una señal es decir, una
portadora modulada.
En toda oscilación eléctrica hay tres magnitudes:
Amplitud
Frecuencia
Angulo de fase
Cada una de estas magnitudes puede ser modulada dando lugar a los
siguientes tipos o formas de modulación:
Modulación de amplitud (AM)
Modulación de frecuencia (FM)
Modulación de Fase (FaM)
Nota: en este caso se ocupara únicamente la modulación de frecuencia (FM)
34
2.13.1 Modulación de Frecuencia
En la modulación la frecuencia de la portadora es variada al ritmo de la
tensión de baja frecuencia. Es decir, al aumentar la tensión de baja frecuencia
crece el valor de la frecuencia de la portadora y al disminuir la tensión de baja
frecuencia, la frecuencia de la portadora decrece a su vez.
La modulación de frecuencia presenta la ventaja de necesitar una potencia
de modulación pequeña pero sobretodo su gran ventaja que ofrece reside en
que las señales moduladas en frecuencia son menos afectadas por tensiones
moduladoras.
Estas tensiones perturbadoras producen una modulación adicional de
amplitud en cualquier señal, distorsionando la recepción del sonido, en la
modulación de frecuencia estas tensiones perturbadoras pueden eliminarse
fácilmente mediante circuitos adecuados.
2.14 ALIMENTACIÓN DE RADIORRECEPTORES
La etapa de alimentación de un radiorreceptor es aquella que suministra
las tensiones adecuadas a los diferentes circuitos del aparato para su correcto
funcionamiento.
35
2.14.1 Clases de Alimentación
Podemos dividir las fuentes de alimentación en dos grupos:
Alimentación autónoma
Alimentación por fuentes de alimentación externa
Dentro del primer grupo nos encontramos con las pilas y acumuladores las
cuales permiten una autonomía total del receptor en cualquier lugar y
circunstancia. Este tipo de alimentación es obligatoria en los receptores
portátiles.
Dentro del segundo grupo podemos encontrarnos con dos subgrupos:
Alimentación mediante conexión a red: con etapa transformadora y
rectificadora incorporada al receptor y alimentación mediante conexión a red a
través de un equipo convertidor externo al receptor.
Alojamiento de pilas en el receptor: El receptor cuenta con unos contactos
a base de una placa metálica que irán conectados al positivo y al negativo del
circuito para alimentar a los componentes del circuito.
36
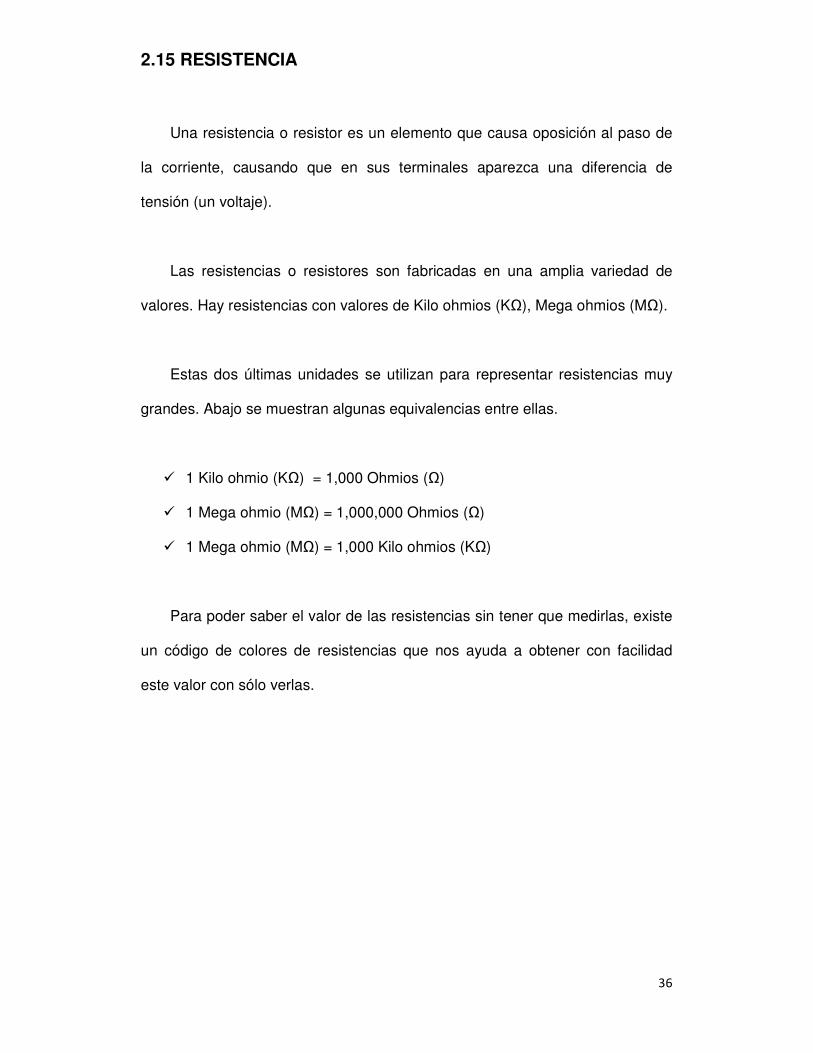
2.15 RESISTENCIA
Una resistencia o resistor es un elemento que causa oposición al paso de
la corriente, causando que en sus terminales aparezca una diferencia de
tensión (un voltaje).
Las resistencias o resistores son fabricadas en una amplia variedad de
valores. Hay resistencias con valores de Kilo ohmios (KΩ), Mega ohmios (MΩ).
Estas dos últimas unidades se utilizan para representar resistencias muy
grandes. Abajo se muestran algunas equivalencias entre ellas.
1 Kilo ohmio (KΩ) = 1,000 Ohmios (Ω)
1 Mega ohmio (MΩ) = 1,000,000 Ohmios (Ω)
1 Mega ohmio (MΩ) = 1,000 Kilo ohmios (KΩ)
Para poder saber el valor de las resistencias sin tener que medirlas, existe
un código de colores de resistencias que nos ayuda a obtener con facilidad
este valor con sólo verlas.
37
Para obtener la resistencia de cualquier elemento de un material
específico, es necesario conocer algunos datos propios de éste, como son: su
longitud, área transversal, resistencia específica o resistividad del material con
que está fabricada.
Figura 2.4 Resistencia
2.15.1 Resistencia Variable: Potenciómetro, Reóstato
La resistencia variable es un dispositivo que tiene un contacto móvil que se
mueve a lo largo de la superficie de una resistencia de valor total constante.
Este contacto móvil se llama cursor o flecha y divide la resistencia en dos
resistencias cuyos valores son menores y cuya suma tendrá siempre el valor
de la resistencia total.
Las resistencias variables se dividen en dos categorías:
38
2.15.2 Potenciómetro
Los potenciómetros y los reóstatos se diferencian entre sí, entre otras
cosas, por la forma en que se conectan. En el caso de los potenciómetros,
éstos se conectan en paralelo al circuito y se comporta como un divisor de
voltaje.
2.15.3 Reóstato
En el caso del reóstato, éste va conectado en serie con el circuito y se debe
tener cuidado de que su valor (en ohmios) y su la potencia (en Watts (vatios))
que puede aguantar sea el adecuado para soportar la corriente I en amperios
(ampere) que va a circular por él.
Como regla general:
Los potenciómetros se utilizan para variar niveles de voltaje y los reóstatos
para variar niveles de corriente.
39
Las resistencias también se pueden dividir tomando en cuenta otras
características:
Si son resistencias bobinadas.
Si no son bobinadas.
De débil disipación.
De fuerte disipación.
De precisión.
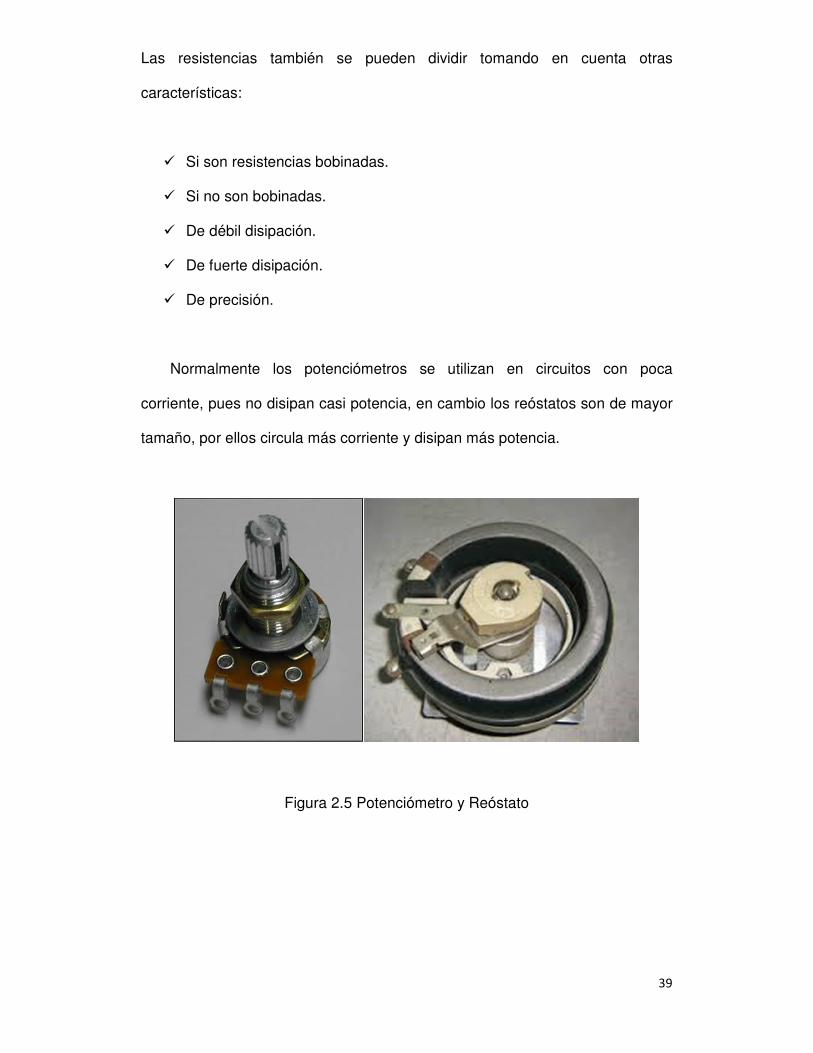
Normalmente los potenciómetros se utilizan en circuitos con poca
corriente, pues no disipan casi potencia, en cambio los reóstatos son de mayor
tamaño, por ellos circula más corriente y disipan más potencia.
Figura 2.5 Potenciómetro y Reóstato
40
2.16 CAPACITOR
El condensador es un dispositivo formado por dos placas metálicas
separadas por un aislante llamado dieléctrico. Un dieléctrico o aislante es un
material que evita el paso de la corriente.
El condensador o capacitor almacena energía en la forma de un campo
eléctrico (es evidente cuando el capacitor funciona con corriente directa) y se
llama capacitancia o capacidad a la cantidad de cargas eléctricas que es capaz
de almacenar.
41
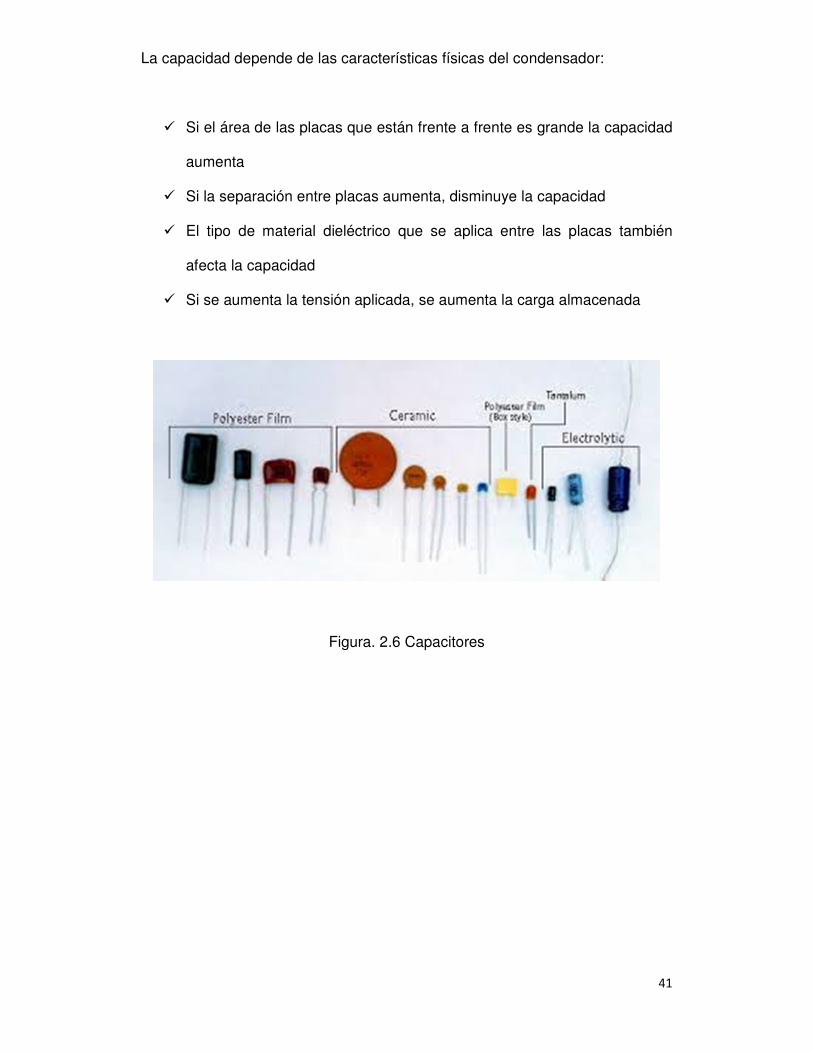
La capacidad depende de las características físicas del condensador:
Si el área de las placas que están frente a frente es grande la capacidad
aumenta
Si la separación entre placas aumenta, disminuye la capacidad
El tipo de material dieléctrico que se aplica entre las placas también
afecta la capacidad
Si se aumenta la tensión aplicada, se aumenta la carga almacenada
Figura. 2.6 Capacitores
42
2.17 DIODO EMISOR DE LUZ (LED)
El diodo emisor de luz (en adelante mencionado como LED) es un tipo
especial de diodo, que trabaja como un diodo común, pero que al ser
atravesado por la corriente eléctrica, emite luz. Existen diodos LED de varios
colores que dependen del material con el cual fueron construidos. Hay de color
rojo, verde, amarillo, ámbar, infrarrojo, entre otros.
Eléctricamente el diodo LED se comporta igual que un diodo de silicio o
germanio. Si se pasa una corriente a través del diodo semiconductor, se
inyectan electrones y huecos en las regiones P y N, respectivamente.
Dependiendo de la magnitud de la corriente, hay recombinación de los
portadores de carga (electrones y huecos). Dependiendo del material de que
está hecho el LED, será la emisión de la longitud de onda y por ende el color.
Figura 2.7 LED
43
2.18 ALTAVOZ
Un altavoz es un transductor electro acústico utilizado para la
reproducción. En la transducción sigue un doble procedimiento: eléctrico-
mecánico-acústico. En la primera etapa convierte las ondas eléctricas en
energía mecánica, y en la segunda convierte la energía mecánica en energía
acústica.
El sonido se transmite mediante ondas sonoras a través del aire.
El oído capta estas ondas y las transforma en impulsos nerviosos que llegan al
cerebro. Si se dispone de una grabación de voz o de música en soporte
magnético o digital, o si se recibe estas señales por radio, se dispondrá a la
salida del aparato de unas señales eléctricas que deben ser convertidas en
sonidos audibles; para ello se utiliza el altavoz.
Figura 2.8 Sirena de Alarma
44
2.19 CIRCUITOS INTEGRADOS
2.19.1 Circuito Integrado 555
El temporizador 555 es un circuito integrado que se utiliza en una variedad
de aplicaciones y se aplica en la generación de pulsos y de oscilaciones. El 555
puede ser utilizado para proporcionar retardos de tiempo, como un oscilador, y
como un circuito integrado flip-flop. Sus derivados proporcionan hasta cuatro
circuitos de sincronización en un solo paquete.
Figura 2.9 Circuito Integrado 555
45
2.19.2 HT12D
El decodificador HT12D es un LSI CMOS para las aplicaciones de sistema
de control remoto. El decodificador recibe la serie de direcciones y datos de un
codificador programado que son transmitidas medio de una portadora usando
transmisión de RF o IR. El decodificador compara los datos de entrada serie
tres veces continuamente con sus direcciones locales. Si no se encuentran
ningún error o códigos desiguales, los datos de entrada son decodificados y
enviados a los pines de salida. El pin de VT también va alto para indicar una
transmisión válida. El decodificador HT12D es capaz de decodificar
informaciones que se componen de N bits de dirección y 12-N bits de datos. El
HT12D está diseñado para proporcionar 8 bits de dirección y de 4 bits de datos.
Figura 2.10 Circuito Integrado HT12D
46
2.19.2.1 Características
Voltaje de operación: 2.4V ~ 12V.
Baja potencia y la alta inmunidad al ruido de la tecnología CMOS.
Bajo consumo de corriente en modo de espera.
Capaz de decodificar 12 bits de información.
Configuración de dirección binaria. -Códigos recibidos se comprueban 3
veces.
Número de combinación de dirección y datos: 8 bits de dirección y 4 bits
de datos.
Oscilador integrado que solo necesita 5 % de resistencia.
Indicador de transmisión válido.
Fácil interfaz con medios de transmisión de RF e infrarrojos.
Mínimos componentes externos.
Protocolo seguro y sólido.
Ideal para aplicaciones de seguridad y control remoto.
Compatible con el codificador HT12E IC.
Dispositivo de 18 pines.

47
2.19.2.2 Aplicaciones
Sistema de alarma antirrobo.
Sistema de alarma de incendios.
Controladores de puerta garaje.
Controladores de puerta coche.
Sistema de alarma para automóvil.
Sistema de seguridad.
Teléfonos inalámbricos.
2.19.3 HT12E
El codificador HT12E es un LSI CMOS para aplicaciones de sistemas de
control remoto. El oscilador es configurado simplemente con agregar un
resistor. Es capaz de codificar información que consiste en N bits de dirección y
12-N bits de datos. Cada entrada de dirección y datos se puede definir con uno
de los dos estados lógicos. Las direcciones y datos programados se transmiten
junto con los bits de encabezado por un medio de transmisión de RF al recibir
una señal de activación.
Figura 2.11 Circuito Integrado HT12E
48
2.19.3.1 Características
Voltaje de operación: 2.4V ~ 12V.
Bajo consumo de corriente en modo de espera: 0.1uA en VDD = 5.
Mínima transmisión de palabra: cuatro palabras.
El oscilador integrado, necesita sólo de 5 % de resistencia.
El código de dato tiene polaridad positiva.
Mínimo de componentes externos.
Protocolo seguro y sólido.
Ideal para aplicaciones de seguridad y control remoto.
Compatible con el decodificador HT12D IC.
Dispositivo de 18 pines.
2.19.3.2 Aplicaciones:
Sistema de alarma antirrobo.
Sistema de alarma de incendios.
Controladores de puerta garaje.
Controladores de puerta coche.
Sistema de alarma para automóvil.
Sistema de seguridad.
Teléfonos inalámbricos.
49
2.20 BATERÍAS (NI-CAD)
Están basadas en un sistema formado por hidróxido de níquel, hidróxido
de potasio y cadmio metálico. Poseen ciclos de vida múltiples, presentando la
desventaja de su relativamente baja tensión. Pueden ser recargadas hasta
1000 veces y alcanzan a durar decenas de años. No contienen mercurio, pero
el cadmio es un metal con características tóxicas.
Figura 2.12 Baterías de Níquel Cadmio
50
2.20.1 Cargadores Lentos y Cargadores Rápidos
Los cargadores de baterías son para regenerar la corriente y el voltaje.
Existen cargadores lentos que necesitan 14 o 16 horas para recargar una
batería completamente agotada. También se tienen cargadores rápidos
diseñados para proporcionar mas corriente y voltaje, completando la recarga de
la pila en 15 minutos. Se debe tener en cuenta que la recarga solo debe
hacerse cuando la batería esta completamente descargada para no dañarla.
Figura 2.13 Cargador de Pilas de 9 Volts de Níquel Cadmio
51
2.21 DIODO RECTIFICADOR
Los diodos rectificadores son los que en principio conocemos, estos
facilitan el paso de la corriente continua en un sólo sentido (polarización
directa), en otras palabras, si hacemos circular corriente alterna a través de
un diodo rectificador esta solo lo hará en la mitad de los semiciclos, aquellos
que polaricen directamente el diodo, por lo que a la salida del mismo
obtenemos una señal de tipo pulsatoria pero continua. Se conoce por señal o
tensión continua aquella que no varia su polaridad.
Figura 2.14 Diodo Rectificador
52
2.22 INTERRUPTOR
Un interruptor es un dispositivo para cambiar el curso de un circuito. Que
puede ser desconectado de un curso y unido (conectado) al otro. El término "el
interruptor" se refiere típicamente a la electricidad o a circuitos electrónicos.
Figura 2.15 Interruptor a 2 Pasos
53
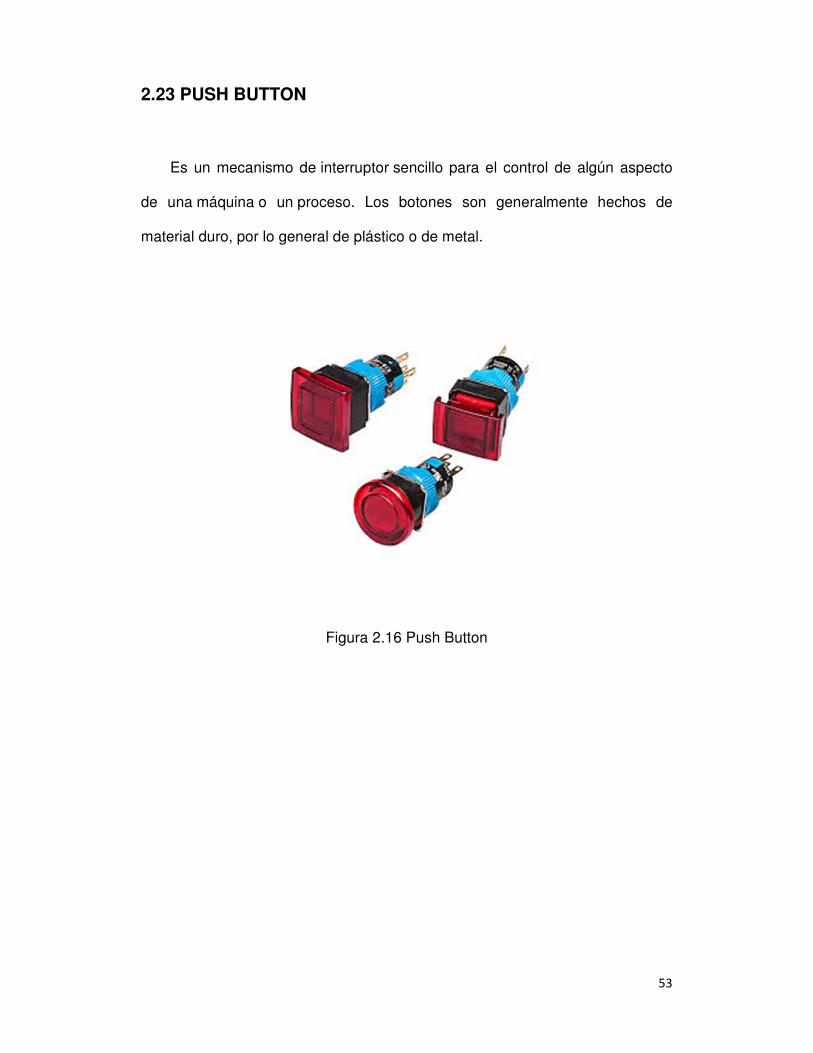
2.23 PUSH BUTTON
Es un mecanismo de interruptor sencillo para el control de algún aspecto
de una máquina o un proceso. Los botones son generalmente hechos de
material duro, por lo general de plástico o de metal.
Figura 2.16 Push Button
54
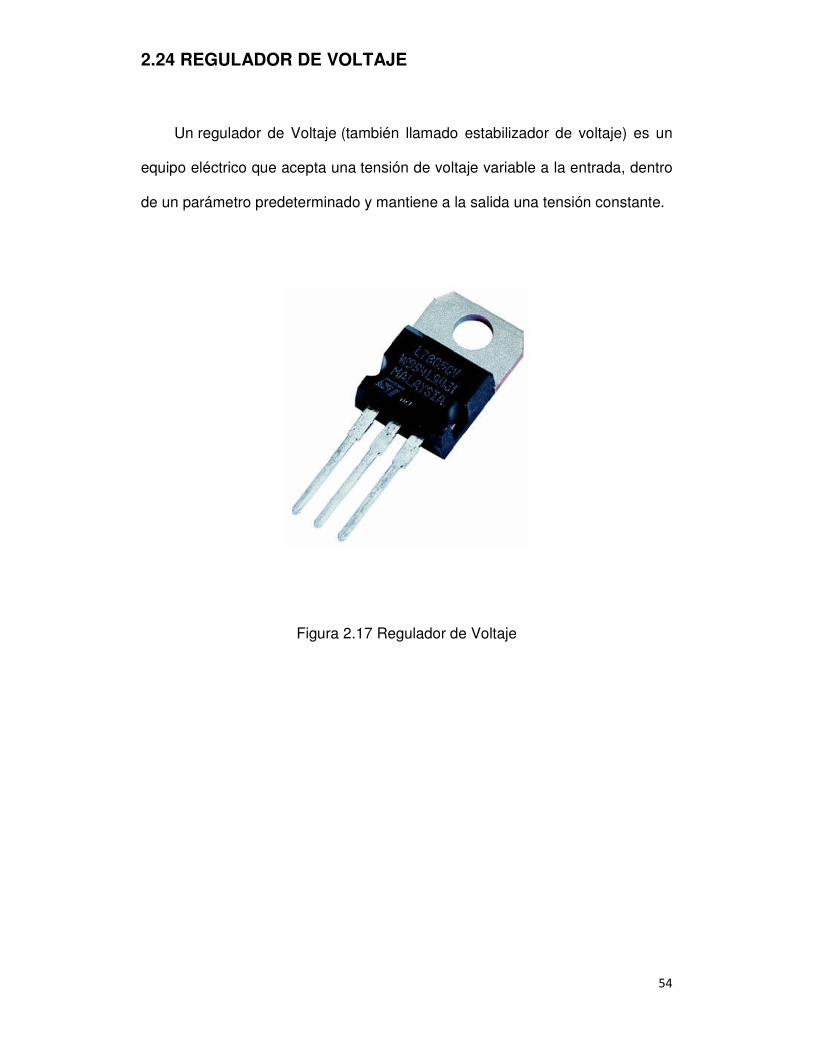
2.24 REGULADOR DE VOLTAJE
Un regulador de Voltaje (también llamado estabilizador de voltaje) es un
equipo eléctrico que acepta una tensión de voltaje variable a la entrada, dentro
de un parámetro predeterminado y mantiene a la salida una tensión constante.
Figura 2.17 Regulador de Voltaje
55
2.25 DIELÉCTRICO O AISLANTE
Un dieléctrico o aislante es un material que evita el paso de la corriente, y
su función es aumentar la capacitancia del capacitor.
Los diferentes materiales que se utilizan como dieléctricos tienen
diferentes grados de permitividad (diferente capacidad para el establecimiento
de un campo eléctrico. Mientras mayor sea la permitividad, mayor es la
capacidad del condensador.
La unidad de medida es el faradio. Hay submúltiplos como el mili Faradio
(mF), micro Faradio (uF), el nano Faradio (nF) y el pico Faradio (pF).
Las principales características eléctricas de un condensador son su
capacidad o capacitancia y su máxima tensión entre placas (máxima tensión
que es capaz de aguantar sin dañarse).
56
2.26 TRANSMISOR
Transmisor en el área de comunicaciones es el origen de una sesión de
comunicación.
Un transmisor es un equipo que emite una señal, código o mensaje a
través de un medio y suele tener un protocolo industrial.
2.27 INTERFERENCIA
Es la combinación por superposición de dos o más ondas que concurren
en un punto del espacio.
Cuando las ondas se cruzan puede resultar que no estén en fase porque
ya fueron emitidas desfasadas o porque se desfasaron en el recorrido.
La onda resultante será una onda armónica cuya amplitud va a depender
de las fases de las que concurren en el punto. Las ondas viajeras se desfasan
por efecto de la diferencia de camino recorrido.
57
Los puntos del medio que no están a la misma distancia de los dos focos
reciben las ondas desfasadas por efecto del desigual camino recorrido para
llegar a ellos. Este desfase puede dar lugar a que en unos puntos una onda
anule a la otra y a que en otros se refuercen.
2.28 ATENUACIÓN
Las señales de transmisión a través de largas distancias están sujetas a
distorsión que es una pérdida de fuerza o amplitud de la señal. La atenuación
es la razón principal de que el largo de las redes tenga varias restricciones. Si
la señal se hace muy débil, el equipo receptor no interceptará bien o no
reconocerá esta información.
Esto causa errores, bajo desempeño al tener que transmitir la señal. Se
usan repetidores o amplificadores para extender las distancias de la red más
allá de las limitaciones del cable. La atenuación se mide con aparatos que
inyectan una señal de prueba en un extremo del cable y la miden en el otro
extremo.
58
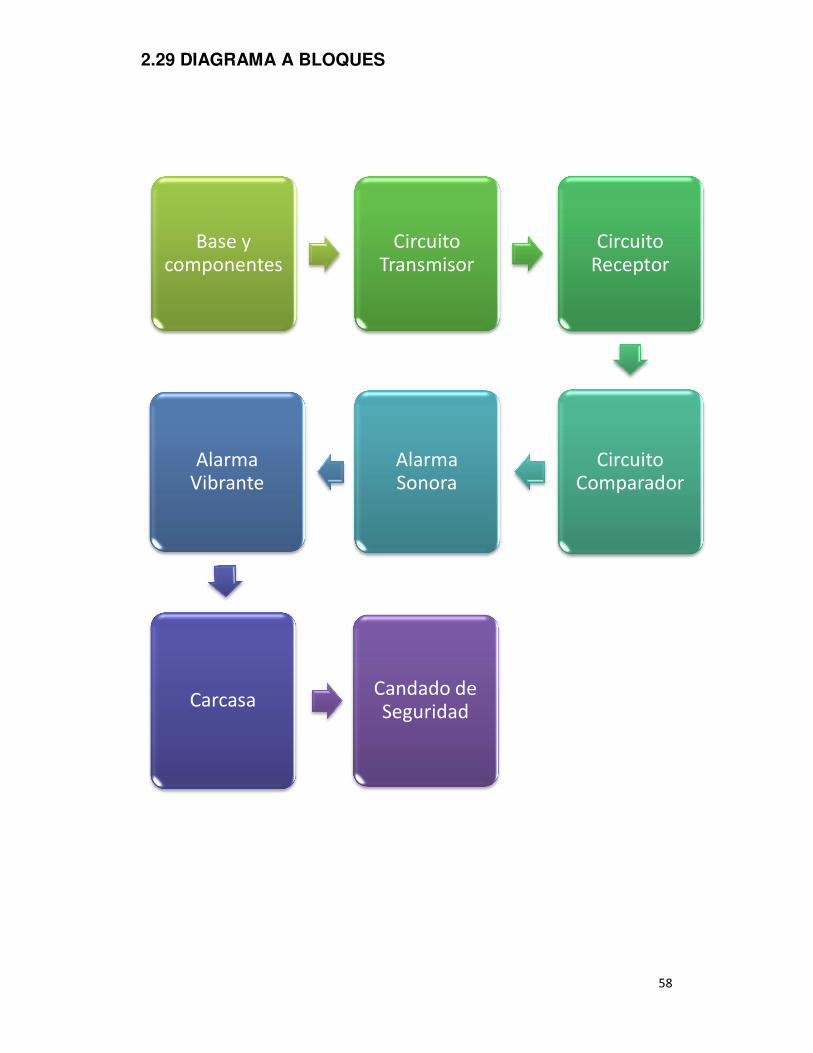
2.29 DIAGRAMA A BLOQUES
Base y
componentes
Circuito
Transmisor
Circuito
Receptor
Circuito
Comparador
Alarma
Sonora
Alarma
Vibrante
CarcasaCandado de
Seguridad
Capítulo Ill
Diseño e Implementación
60
3.1 CIRCUITO DE COMUNICACIÓN DE RADIOFRECUENCIA
El circuito se compone principalmente por un sistema de comunicación de
radiofrecuencia (RF) adquirido en ROBODACTA el cual trabaja en la banda
UHF (Ultra alta frecuencia) a 315 MHz, que contiene un módulo transmisor y
uno receptor así como un circuito integrado codificador y uno decodificador.
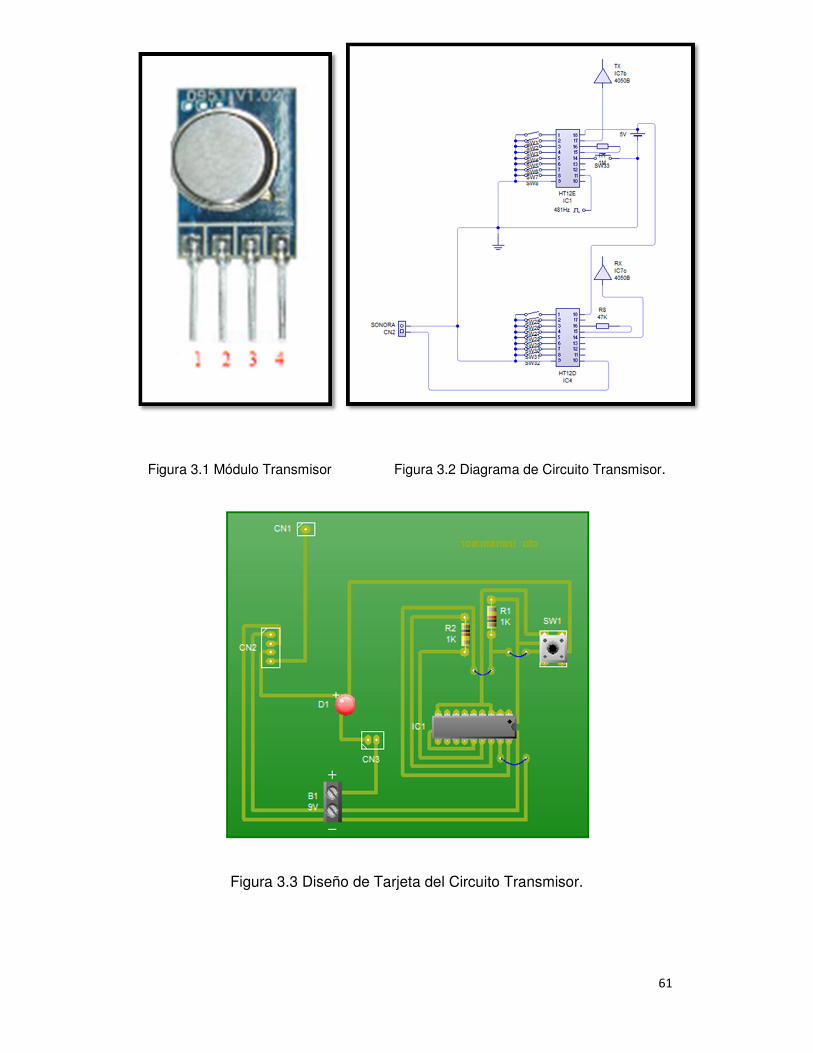
3.1.1 Circuito Transmisor
Este circuito cuenta con 4 salidas de datos de las cuales solo se utilizó
una, puesto que al circuito se le implementó un pulso de reloj en esta última
que es el que mantiene la comunicación con el receptor de manera constante.
Este circuito se complemento con una alarma sonora la cual es activada
por medio de un circuito comparador el cual dispara la alarma al momento en
que se pierde la comunicación con el aparato receptor.
El circuito transmisor está integrado por los siguientes elementos:
1 módulo transmisor.
1 codificador HT12E.
1 resistencia de 1 Mohms a ¼ de watt.
1 resistencia de 220 ohms a ¼ de watt.
1 push button de 2 terminales.
61
Figura 3.1 Módulo Transmisor Figura 3.2 Diagrama de Circuito Transmisor.
Figura 3.3 Diseño de Tarjeta del Circuito Transmisor.
62
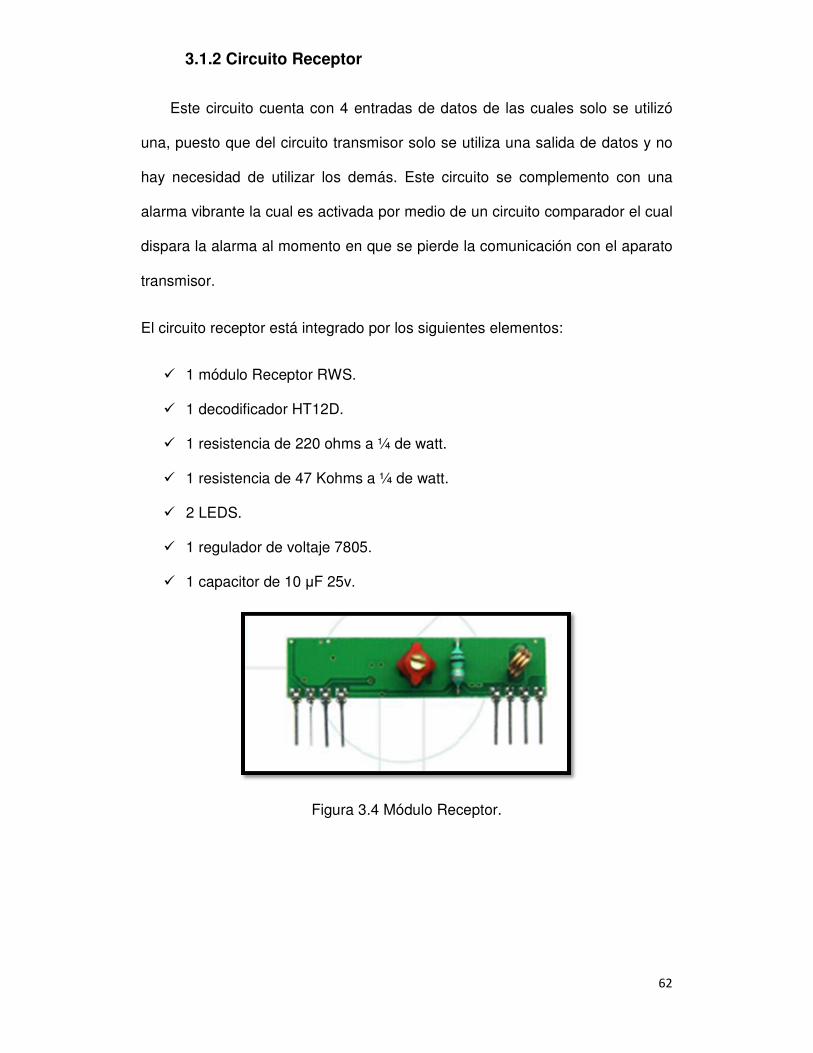
3.1.2 Circuito Receptor
Este circuito cuenta con 4 entradas de datos de las cuales solo se utilizó
una, puesto que del circuito transmisor solo se utiliza una salida de datos y no
hay necesidad de utilizar los demás. Este circuito se complemento con una
alarma vibrante la cual es activada por medio de un circuito comparador el cual
dispara la alarma al momento en que se pierde la comunicación con el aparato
transmisor.
El circuito receptor está integrado por los siguientes elementos:
1 módulo Receptor RWS.
1 decodificador HT12D.
1 resistencia de 220 ohms a ¼ de watt.
1 resistencia de 47 Kohms a ¼ de watt.
2 LEDS.
1 regulador de voltaje 7805.
1 capacitor de 10 µF 25v.
Figura 3.4 Módulo Receptor.
63
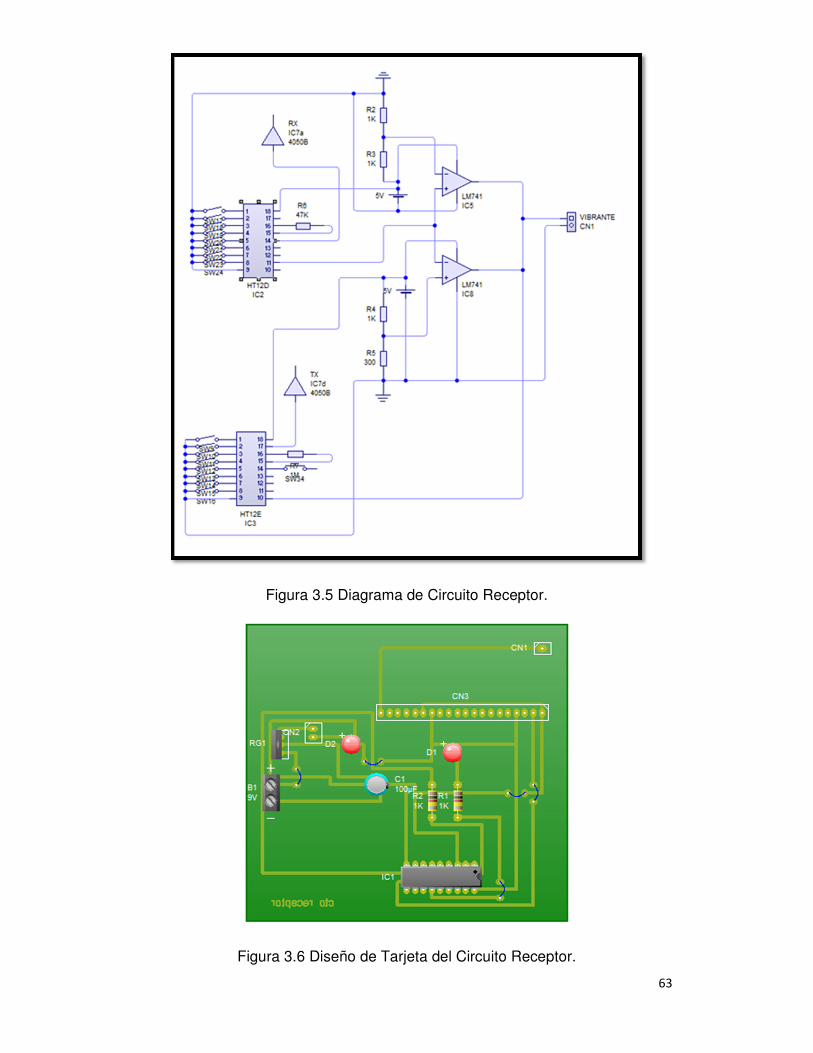
Figura 3.5 Diagrama de Circuito Receptor.
Figura 3.6 Diseño de Tarjeta del Circuito Receptor.
64
3.2 CIRCUITO DE RELOJ
El pulso de reloj es un circuito que ha sido diseñado para ser parte del
transmisor y mantener la comunicación entre este y el receptor, se calculo que
trabajara a una frecuencia relativamente baja para poder ahorrar en el
consumo de la batería, dichos cálculos son los siguientes:
Para calcular la frecuencia del pulso:
F= 1/(0.693)(C1)(R1+2*R2)=481 Hz.
Donde:
C1=.1 uf
R1=R2=10K
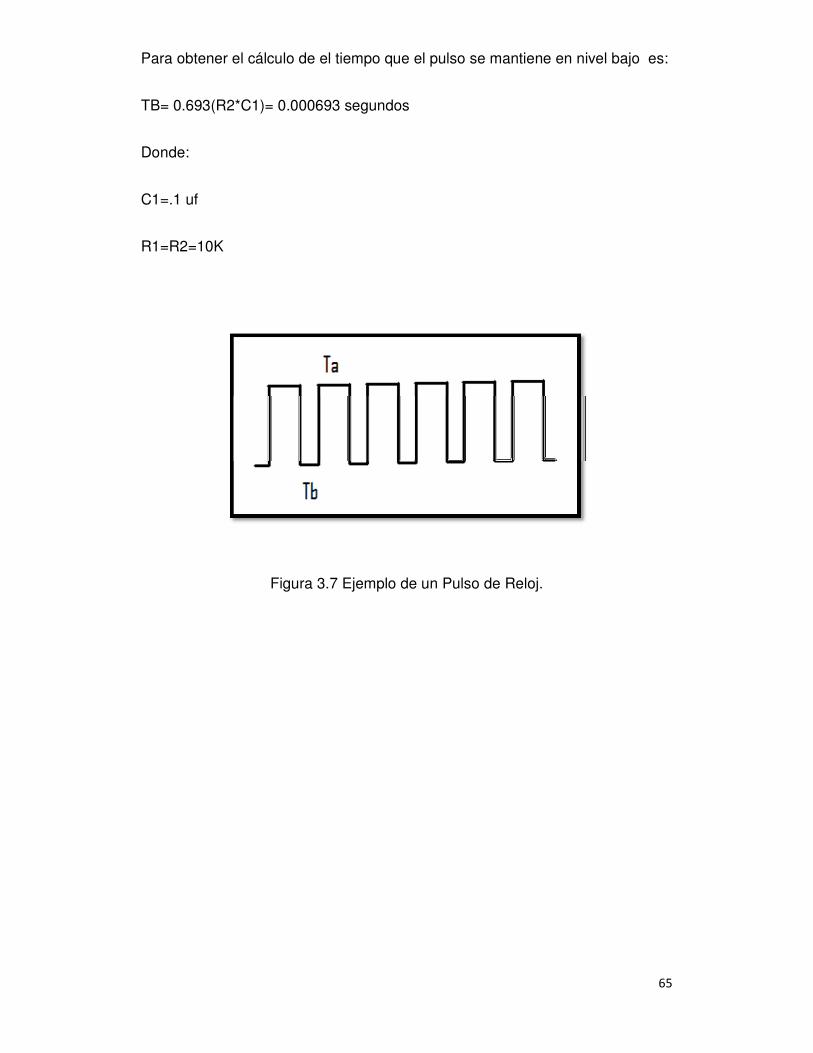
Para obtener el cálculo de el tiempo que el pulso se mantiene en nivel alto es:
TA= 0.693(R1+R2)C1= 0.001386 segundos
Donde:
C1=.1 uf
R1=R2=10K
65
Para obtener el cálculo de el tiempo que el pulso se mantiene en nivel bajo es:
TB= 0.693(R2*C1)= 0.000693 segundos
Donde:
C1=.1 uf
R1=R2=10K
Figura 3.7 Ejemplo de un Pulso de Reloj.
66
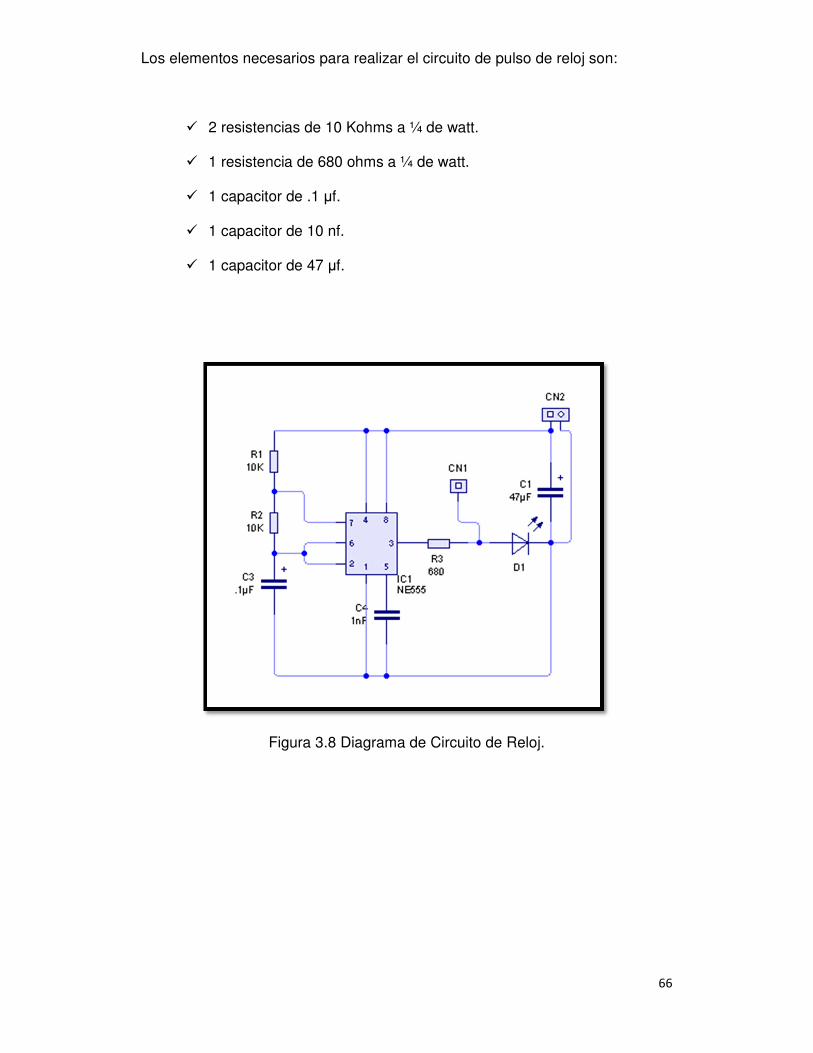
Los elementos necesarios para realizar el circuito de pulso de reloj son:
2 resistencias de 10 Kohms a ¼ de watt.
1 resistencia de 680 ohms a ¼ de watt.
1 capacitor de .1 µf.
1 capacitor de 10 nf.
1 capacitor de 47 µf.
Figura 3.8 Diagrama de Circuito de Reloj.
67
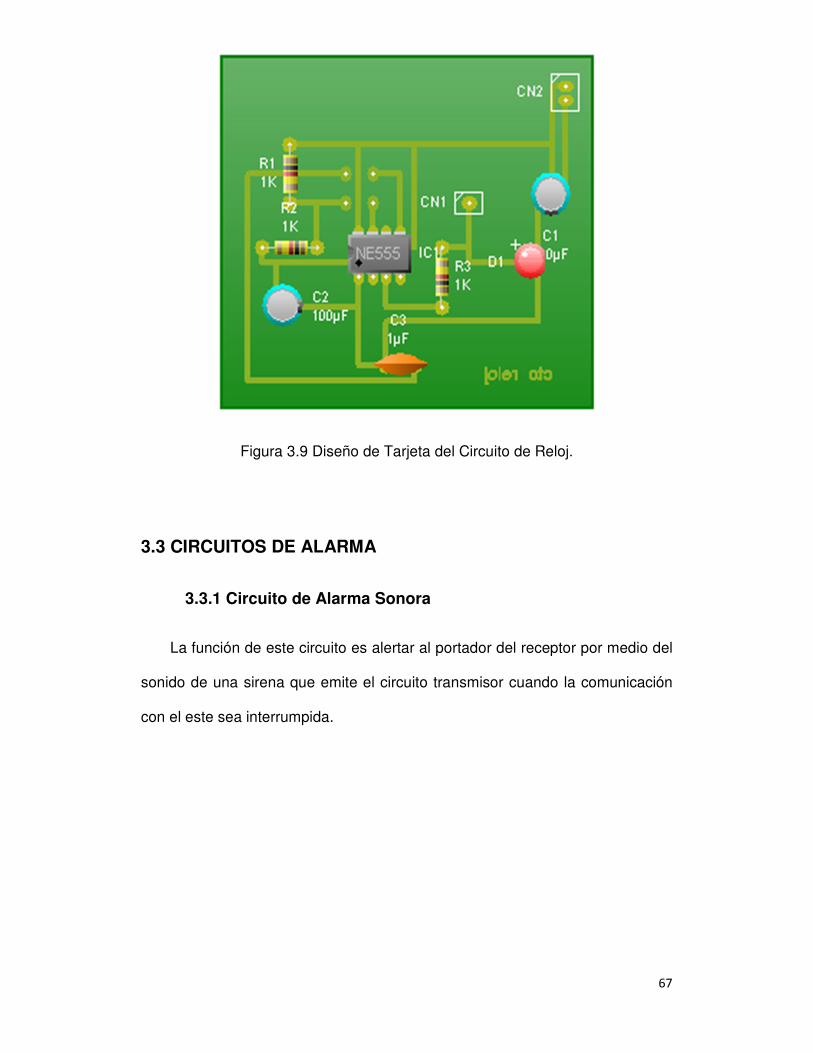
Figura 3.9 Diseño de Tarjeta del Circuito de Reloj.
3.3 CIRCUITOS DE ALARMA
3.3.1 Circuito de Alarma Sonora
La función de este circuito es alertar al portador del receptor por medio del
sonido de una sirena que emite el circuito transmisor cuando la comunicación
con el este sea interrumpida.
68
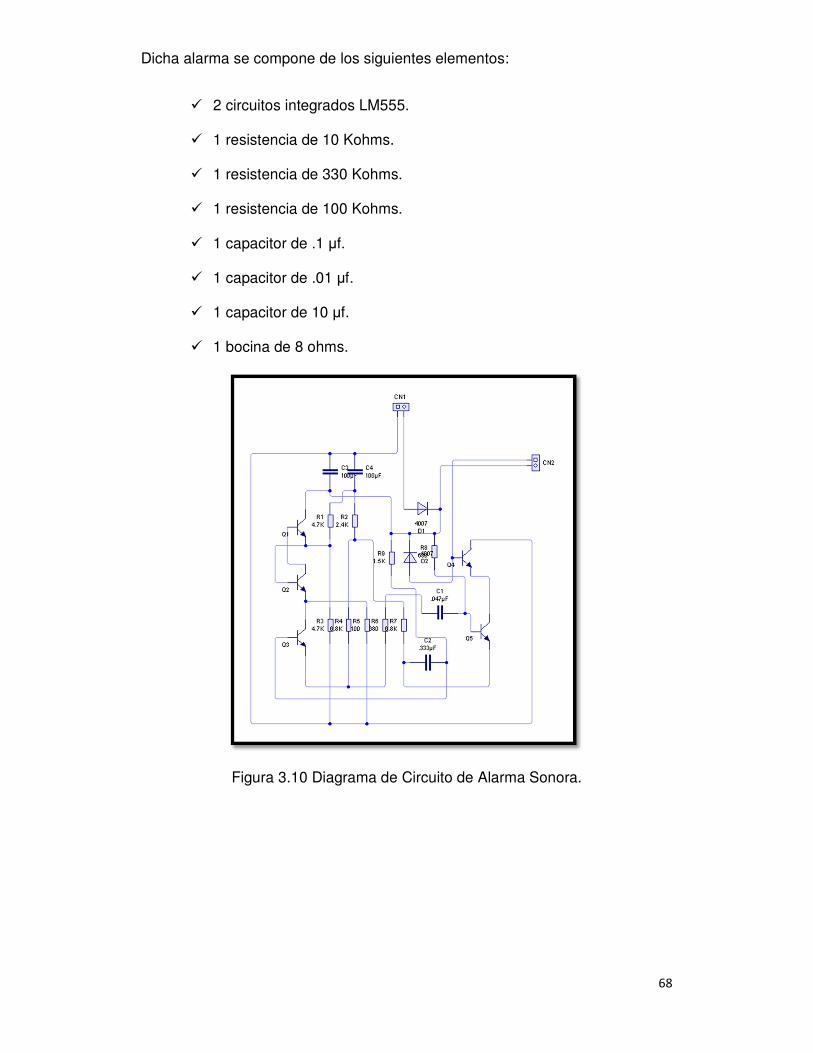
Dicha alarma se compone de los siguientes elementos:
2 circuitos integrados LM555.
1 resistencia de 10 Kohms.
1 resistencia de 330 Kohms.
1 resistencia de 100 Kohms.
1 capacitor de .1 µf.
1 capacitor de .01 µf.
1 capacitor de 10 µf.
1 bocina de 8 ohms.
Figura 3.10 Diagrama de Circuito de Alarma Sonora.
69
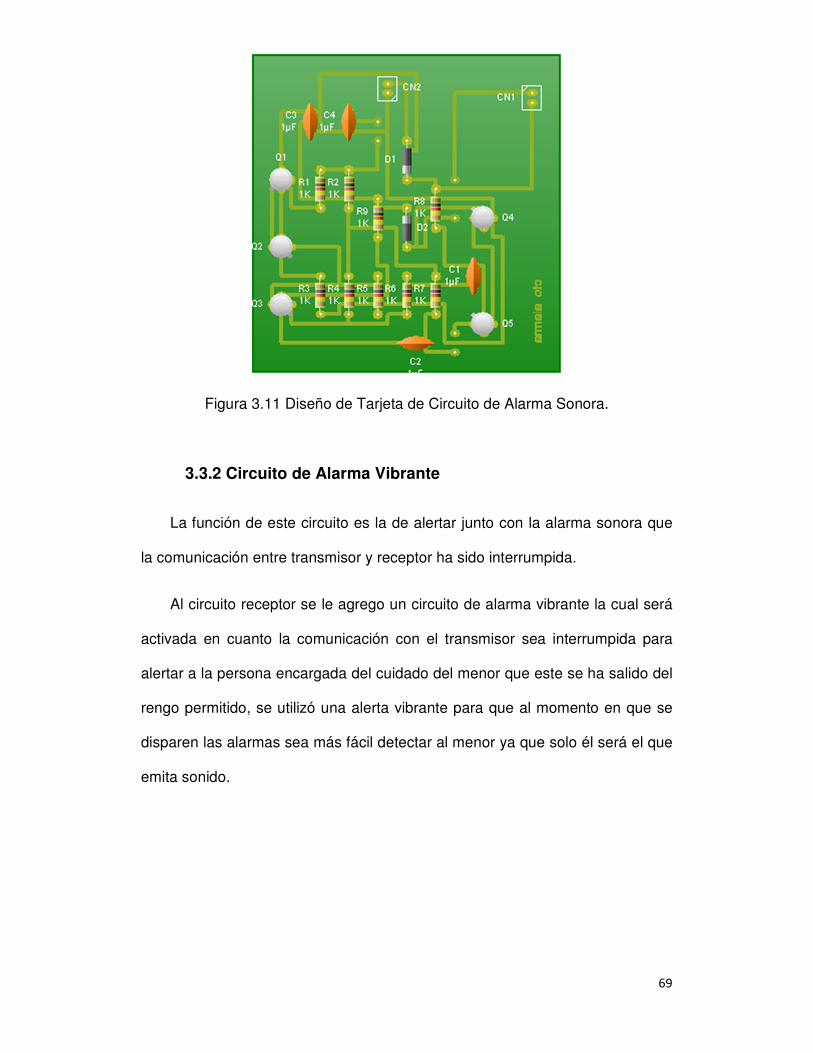
Figura 3.11 Diseño de Tarjeta de Circuito de Alarma Sonora.
3.3.2 Circuito de Alarma Vibrante
La función de este circuito es la de alertar junto con la alarma sonora que
la comunicación entre transmisor y receptor ha sido interrumpida.
Al circuito receptor se le agrego un circuito de alarma vibrante la cual será
activada en cuanto la comunicación con el transmisor sea interrumpida para
alertar a la persona encargada del cuidado del menor que este se ha salido del
rengo permitido, se utilizó una alerta vibrante para que al momento en que se
disparen las alarmas sea más fácil detectar al menor ya que solo él será el que
emita sonido.
70
Para la realización de los circuitos antes mencionados se siguieron diferentes
pasos :
Una vez realizado el diagrama de cada uno de los circuitos se colocaron
sobre la tablilla fenólica para posteriormente meterlos en una solución de
cloruro férrico y quitarle el exceso de cobre a la tablilla.
Figura 3.12 Eliminación del Exceso de Cobre de la Tablilla.
71
Una vez que se tiene la tablilla grabada se perfora la tablilla a la altura en
donde van cada uno de los elementos.
Figura 3.13 Perforación de la Tablilla.
Después de perforar la tablilla se realiza el solado de los componentes del
circuito.
Figura 3.14 Soldado de Componentes.
72
Por último ya que están listos los circuitos se pasa a realizar las pruebas
correspondientes para revisar su correcto funcionamiento de cada uno de ellos
como se muestra en las siguientes imágenes:
Figura 3.15.a Prueba de Funcionamiento de Circuitos.
Figura 3.15.b Prueba de Funcionamiento de Circuitos.

73
Figura 3.15.c Prueba de Funcionamiento de Circuitos.
Figura 3.15.d Prueba de funcionamiento de circuitos.
Capítulo lV
Pruebas y Resultados
75
4.1 PRUEBA DE DISTANCIA
La primera prueba la cual se realizó, fue medir la distancia de la comunicación con el circuito de radiofrecuencia la cual nos daba como resultado una distancia de 50 metros por lo tanto esta se tuvo que disminuir y eso se logro con un circuito atenuador.
Figura 4.1 Prueba de Alcance entre Emisor y Receptor
Figura 4.2 Transmisor
76
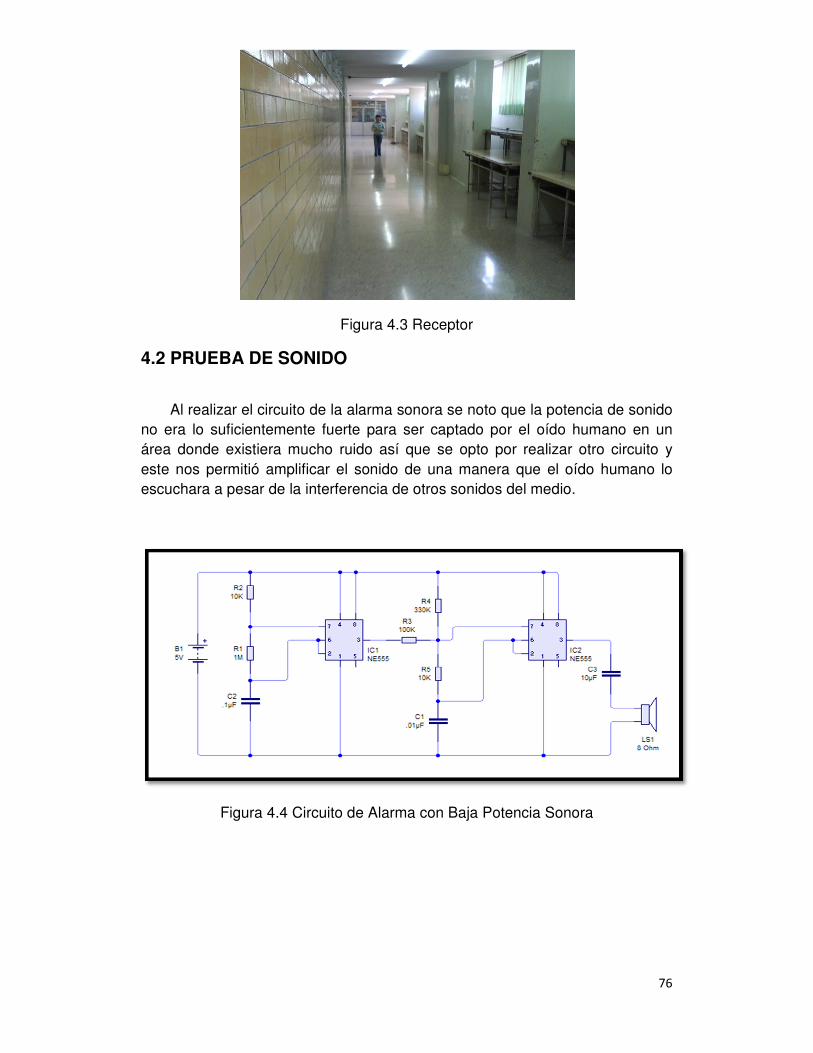
Figura 4.3 Receptor
4.2 PRUEBA DE SONIDO
Al realizar el circuito de la alarma sonora se noto que la potencia de sonido no era lo suficientemente fuerte para ser captado por el oído humano en un área donde existiera mucho ruido así que se opto por realizar otro circuito y este nos permitió amplificar el sonido de una manera que el oído humano lo escuchara a pesar de la interferencia de otros sonidos del medio.
Figura 4.4 Circuito de Alarma con Baja Potencia Sonora
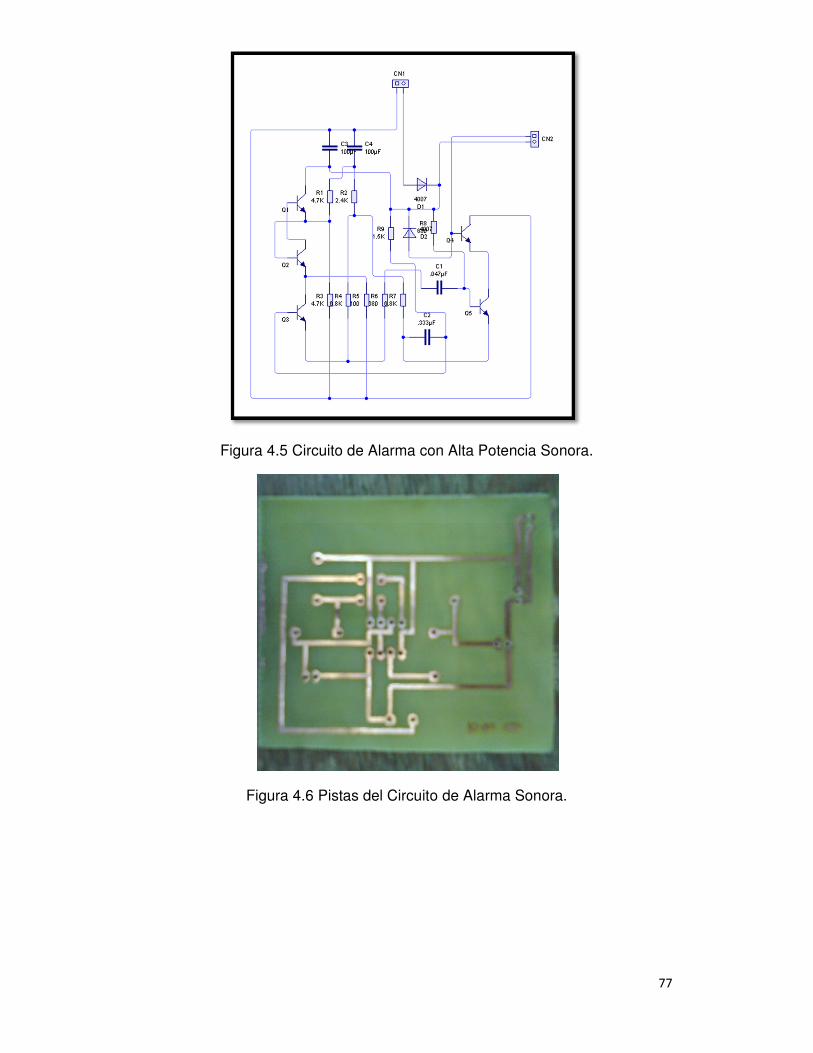
77
Figura 4.5 Circuito de Alarma con Alta Potencia Sonora.
Figura 4.6 Pistas del Circuito de Alarma Sonora.
78
4.3 PRUEBA DE TIMER
En el circuito de reloj hicieron los cálculos correspondientes para obtener una frecuencia que fuera lenta a modo de reducir el consumo de batería dentro del sistema de comunicación ya que al existir un una frecuencia demasiado alta los sistemas involucrados estarían en continuo contacto.
4.7 Verificación de la Frecuencia del Circuito de Reloj.
79
4.4 PRUEBA DE CONTINUIDAD
Es muy necesario probar la continuidad que existe dentro del circuito ya que en ocasiones las pistas de estos llegan a desaparecer en el proceso de limpiar la tablilla o al soldarse se pueden llegar a juntar las pistas.
Figura 4.8 Prueba de Continuidad.
Al pasar los circuitos del protoboard a los impresos en tablilla tuvimos que ocupar el programa PCB WIZAR y al imprimir los circuitos para pasarlos a la tablilla nos dimos cuenta que no habíamos ocupado la función espejo lo que nos hizo volver a repetir esta operación.
80
Figura 4.9 Pistas del Circuito Transmisor.
Figura 4.10 Pistas del Circuito Receptor.
81
Conclusiones
Con el terminó del desarrollo y pruebas realizadas al prototipo se logra determinar que es viable su construcción de este para su producción a nivel comercial ya que los resultados fueron favorables para el equipo, además de que los materiales que se emplearon para su construcción lo hacen accesible para casi todo tipo de mercados. Cabe mencionar que al principio del proyecto estaba contemplado incluir un eje cardinal en el dispositivo receptor para una mejor ubicación del menor pero se decidió no hacerlo ya que con esto el tamaño del dispositivo tanto receptor como emisor incrementarían, por lo que no lo haría viable para el objetivo buscado. Durante las pruebas realizadas en este proyecto llegamos a la conclusión que el producto terminado no solo puede abarcar el sector infantil sino que podemos aplicarlo a otros sectores como los adultos mayores ya que estos también requieren atención por parte de los familiares para evitar que puedan perderse e incluso prevenir accidentes, en este caso el dispositivo propuesto servirá para alertar a los familiares de la persona se está alejando demasiado y así poder estar más al pendiente de su seguridad.
82
Bibliografía
Sistemas de comunicaciones por fibras ópticas
Autor: Hidelberto Jardon Aguilar y Roberto linares y Miranda
Año: 1995
Editorial: Alfaomega
Primera edición
Paginas consultadas: 2 y 3
Radio
Autor: Francisco Ruiz Vassallo
Año: 1990
Editorial: ceac
Tercera edición
Paginas consultadas: 9-16, 35,36 y 541, 542
83
Ciberografía
http://www.eveliux.com.mx/historiadelastelecomunicaciones.phb
02-03-09 17:38 hrs.
http://www.asifunciona.com/biografias/marconi/marconi.htm
04-03-09 13:50hrs. Guglielmo Marconi
http://www.wordreference.com/definicion/emisor/receptor
04-03-09 14:00hrs. Emisor y receptor
http://www.tec-mex.com.mx/promos/bit/bit0302.htm
04-03-09 14:15hrs. Radiofrecuencia
http://dliengineering.com/vibman-spanish/queesvibracin.htm
04-03-09 15:05hrs. Vibración
http://www.biografiasyvidas.com/biografia/p/popov.htm
04-03-09 15:20hrs. Alexander Popov
http://www.rrppnet.com.ar/hiscomunicacion.htm
04-03-09 19:02hrs. Orígenes de la comunicación
http://www.biografiasyvidas.com/biografia/m/marconi.htm
04-03-09 23:43hrs. Guglielmo Marconi
http://www.biografiasyvidas.com/biografia/b/branly.htm
05-03-09 00:04hrs. Eduard Branly
http://www.asifunciona.com/biografias/marconi/marconi.htm
22-04-09 21:00hrs. Guglielmo Marconi
http://www.arqhys.com/arquitectura/cableado-atenuacion.html
220409 21:20hrs. Capacitancia e impedancia
http://www.unicrom.com/Tut_resistenciavariable.asp
22-04-09 23:00hrs. Resistencia variable
84
http://74.125.155.132/search?q=cache:gVIHZpTyWX8J:www.scielosp.org/pdf/r
psp/v20n2-
3/17.pdf+mexico+normas+de+radiofrecuencia&cd=7&hl=es&ct=clnk&gl=mx
10-06-09 18:30hrs. Normatividad
http://www.steren.com.mx/catalogo/interior2.asp?NumeroDePaginaActual=1&P
aginaAnterior=True&texto_busqueda=potenciometro&CuantosXPagina=5&Ord
enarX
10-06-09 19:10hrs. Viabilidad
http://www.cft.gob.mx/wb/Cofetel_2008/Cofe_normas_oficiales_mexicanas
11-06-09 19:11hrs. Normas Oficiales Mexicanas
www.labc.usb.ve/EC4514/AUDIO/.../Altavoces.html
16-11-09 14:30 Altavoces
http://www.alihuen.org.ar/informacion-en-general/informacion-sobre-pilas-y-
baterias.html
16-11-09 15:30 Pilas
www.pegatiros.com/airsoft/.../baterias_nicad.htm
16-11-09 17:25 Baterías de Níquel
Anexos
II
5 NORMATIVIDAD La Comisión Federal de Telecomunicaciones de México, COFETEL, reitera en su Programa Nacional de Normalización 2005 (PNN-2005) la necesidad de aprobar una norma oficial mexicana (NOM) que regule las radiaciones no ionizantes en todo el espectro radioeléctrico. Este reclamo, planteado hace varios años en la NOM-126, refleja la preocupación social expresada por sectores cada vez más amplios de la población. NORMA OFICIAL MEXICANA NOM-083-SCT1-2002, TELECOMUNICACIONES- RADIOCOMUNICACION ESPECIFICACIONES TECNICAS PARA LOS EQUIPOS TRANSMISORES UTILIZADOS EN EL SERVICIO DE RADIOLOCALIZACION MOVIL DE PERSONAS DE UNA VIA 5.1 OBJETIVO El objetivo de la presente Norma Oficial Mexicana es establecer las especificaciones técnicas mínimas necesarias que deben cumplir los equipos de transmisión utilizados en el servicio de radio-localización móvil de una vía y los correspondientes métodos de prueba. 5.2 CAMPO DE APLICACIÓN La presente Norma Oficial Mexicana es aplicable a todos los equipos de transmisión para el envío de mensajes por radio de una vía. 5.3 REFERENCIAS Para la correcta aplicación de la presente Norma se debe consultar la siguiente Norma Oficial Mexicana vigente: NOM-008-SCFI Sistema General de Unidades de Medida
III
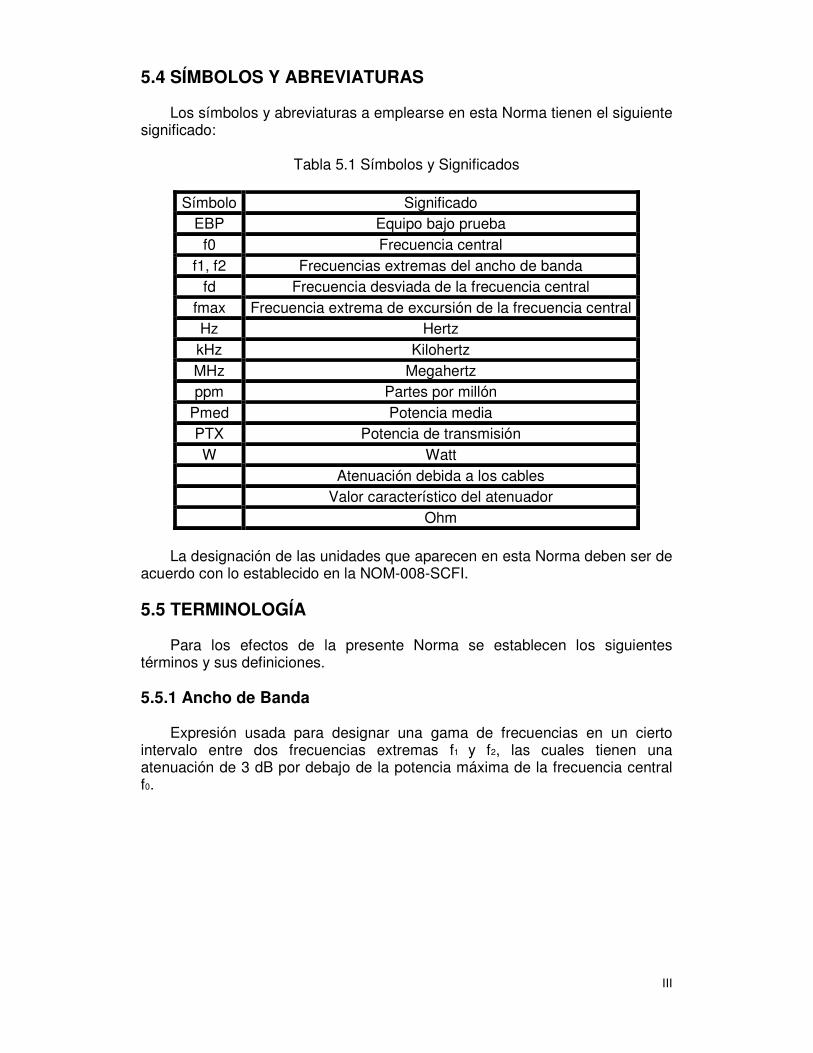
5.4 SÍMBOLOS Y ABREVIATURAS Los símbolos y abreviaturas a emplearse en esta Norma tienen el siguiente significado:
Tabla 5.1 Símbolos y Significados
Símbolo Significado EBP Equipo bajo prueba
f0 Frecuencia central f1, f2 Frecuencias extremas del ancho de banda
fd Frecuencia desviada de la frecuencia central fmax Frecuencia extrema de excursión de la frecuencia central Hz Hertz kHz Kilohertz MHz Megahertz ppm Partes por millón
Pmed Potencia media PTX Potencia de transmisión W Watt Atenuación debida a los cables Valor característico del atenuador Ohm
La designación de las unidades que aparecen en esta Norma deben ser de acuerdo con lo establecido en la NOM-008-SCFI. 5.5 TERMINOLOGÍA Para los efectos de la presente Norma se establecen los siguientes términos y sus definiciones. 5.5.1 Ancho de Banda Expresión usada para designar una gama de frecuencias en un cierto intervalo entre dos frecuencias extremas f1 y f2, las cuales tienen una atenuación de 3 dB por debajo de la potencia máxima de la frecuencia central f0.
IV
5.5.2 Ancho de Banda Ocupado Miércoles 16 de abril de 2003 DIARIO OFICIAL (Primera Sección) 67 Ancho de la banda de frecuencias, tal que, por debajo de su frecuencia límite inferior y por encima de su frecuencia límite superior, se emitan potencias medias iguales cada una a un porcentaje especificado ( 0,5%) de la potencia media total de una emisión dada. 5.5.3 Emisiones no Esenciales Es la emisión en una o varias frecuencias situadas fuera del ancho de banda necesario, cuyo nivel puede reducirse sin influir, en la transmisión de la información correspondiente. Las emisiones armónicas, las emisiones parásitas, los productos de intermodulación y los productos de la conversión de frecuencias, están comprendidas en las emisiones no esenciales, pero están excluidas las emisiones fuera de banda. 5.5.4 Equipo Bajo Prueba Es el equipo transmisor de los mensajes que forma parte de un sistema para prestar el servicio de radio localización móvil de una vía. 5.5.5 Frecuencia Asignada Asignación de una frecuencia o canal radioeléctrico: es aquella que autoriza la Secretaría de Comunicaciones y Transportes para un servicio determinado. 5.5.6 Frecuencia Central La frecuencia promedio de la onda radiada cuando se modula con una señal senoidal o la frecuencia de la onda radiada en ausencia de modulación. 5.5.7 Potencia Media La media de la potencia suministrada a la línea de alimentación de la antena por un transmisor en condiciones normales de funcionamiento, evaluada durante un intervalo de tiempo suficientemente largo comparado con el periodo correspondiente a la frecuencia más baja que existe realmente como componente en la modulación. 5.5.8 Potencia Nominal Es la potencia de operación especificada por el fabricante del equipo y se mide en el conector de salida de radiofrecuencia del transmisor.
V
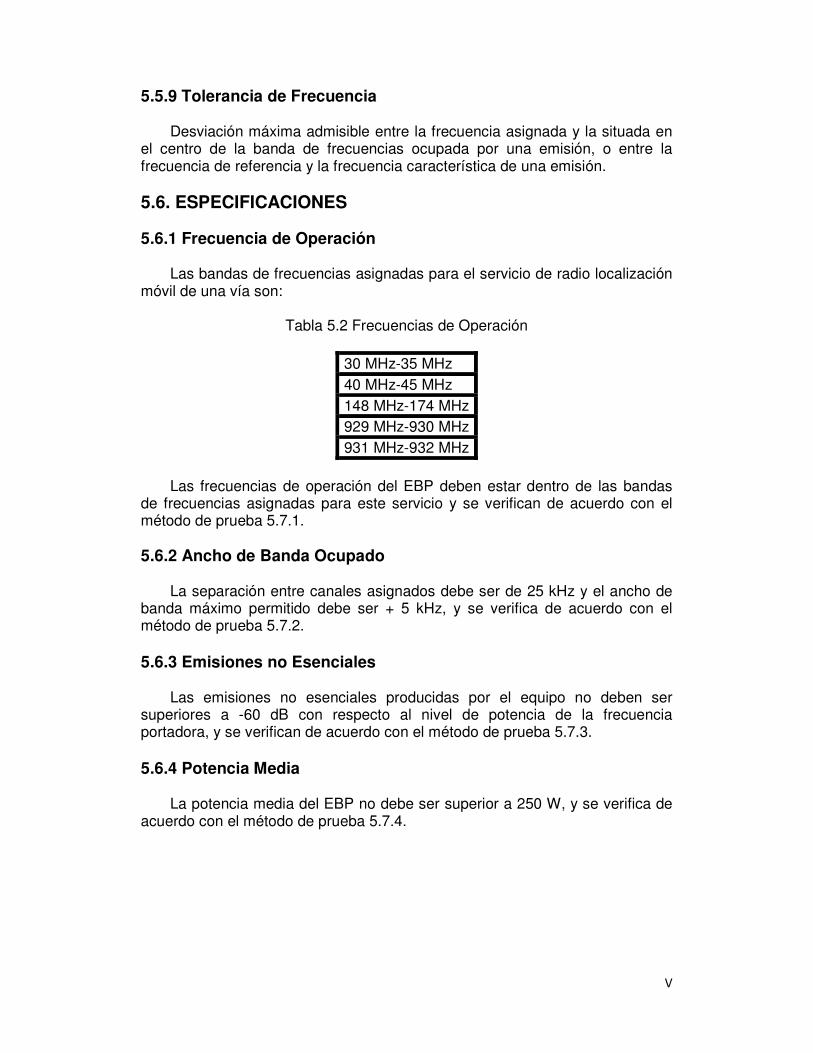
5.5.9 Tolerancia de Frecuencia Desviación máxima admisible entre la frecuencia asignada y la situada en el centro de la banda de frecuencias ocupada por una emisión, o entre la frecuencia de referencia y la frecuencia característica de una emisión. 5.6. ESPECIFICACIONES 5.6.1 Frecuencia de Operación Las bandas de frecuencias asignadas para el servicio de radio localización móvil de una vía son:
Tabla 5.2 Frecuencias de Operación
30 MHz-35 MHz 40 MHz-45 MHz 148 MHz-174 MHz 929 MHz-930 MHz 931 MHz-932 MHz
Las frecuencias de operación del EBP deben estar dentro de las bandas de frecuencias asignadas para este servicio y se verifican de acuerdo con el método de prueba 5.7.1. 5.6.2 Ancho de Banda Ocupado La separación entre canales asignados debe ser de 25 kHz y el ancho de banda máximo permitido debe ser + 5 kHz, y se verifica de acuerdo con el método de prueba 5.7.2. 5.6.3 Emisiones no Esenciales Las emisiones no esenciales producidas por el equipo no deben ser superiores a -60 dB con respecto al nivel de potencia de la frecuencia portadora, y se verifican de acuerdo con el método de prueba 5.7.3. 5.6.4 Potencia Media La potencia media del EBP no debe ser superior a 250 W, y se verifica de acuerdo con el método de prueba 5.7.4.
VI
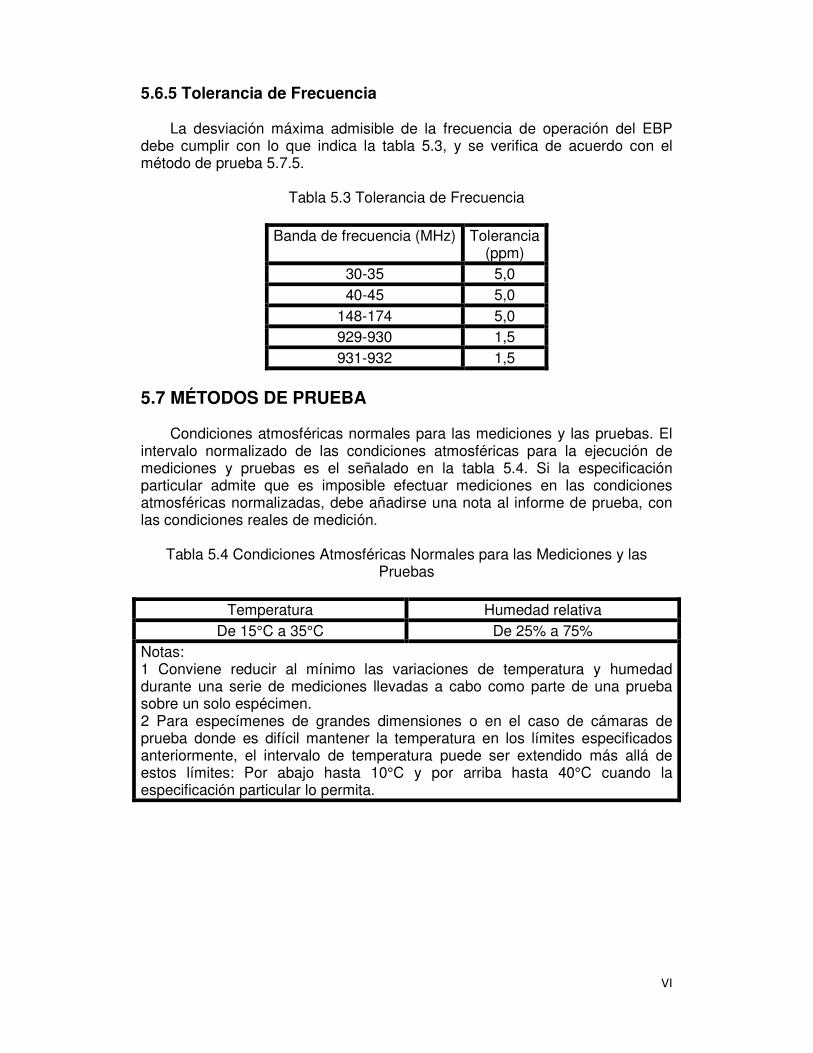
5.6.5 Tolerancia de Frecuencia La desviación máxima admisible de la frecuencia de operación del EBP debe cumplir con lo que indica la tabla 5.3, y se verifica de acuerdo con el método de prueba 5.7.5.
Tabla 5.3 Tolerancia de Frecuencia
Banda de frecuencia (MHz) Tolerancia (ppm)
30-35 5,0 40-45 5,0
148-174 5,0 929-930 1,5 931-932 1,5
5.7 MÉTODOS DE PRUEBA Condiciones atmosféricas normales para las mediciones y las pruebas. El intervalo normalizado de las condiciones atmosféricas para la ejecución de mediciones y pruebas es el señalado en la tabla 5.4. Si la especificación particular admite que es imposible efectuar mediciones en las condiciones atmosféricas normalizadas, debe añadirse una nota al informe de prueba, con las condiciones reales de medición.
Tabla 5.4 Condiciones Atmosféricas Normales para las Mediciones y las Pruebas
Temperatura Humedad relativa
De 15°C a 35°C De 25% a 75% Notas: 1 Conviene reducir al mínimo las variaciones de temperatura y humedad durante una serie de mediciones llevadas a cabo como parte de una prueba sobre un solo espécimen. 2 Para especímenes de grandes dimensiones o en el caso de cámaras de prueba donde es difícil mantener la temperatura en los límites especificados anteriormente, el intervalo de temperatura puede ser extendido más allá de estos límites: Por abajo hasta 10°C y por arriba hasta 40°C cuando la especificación particular lo permita.
VII
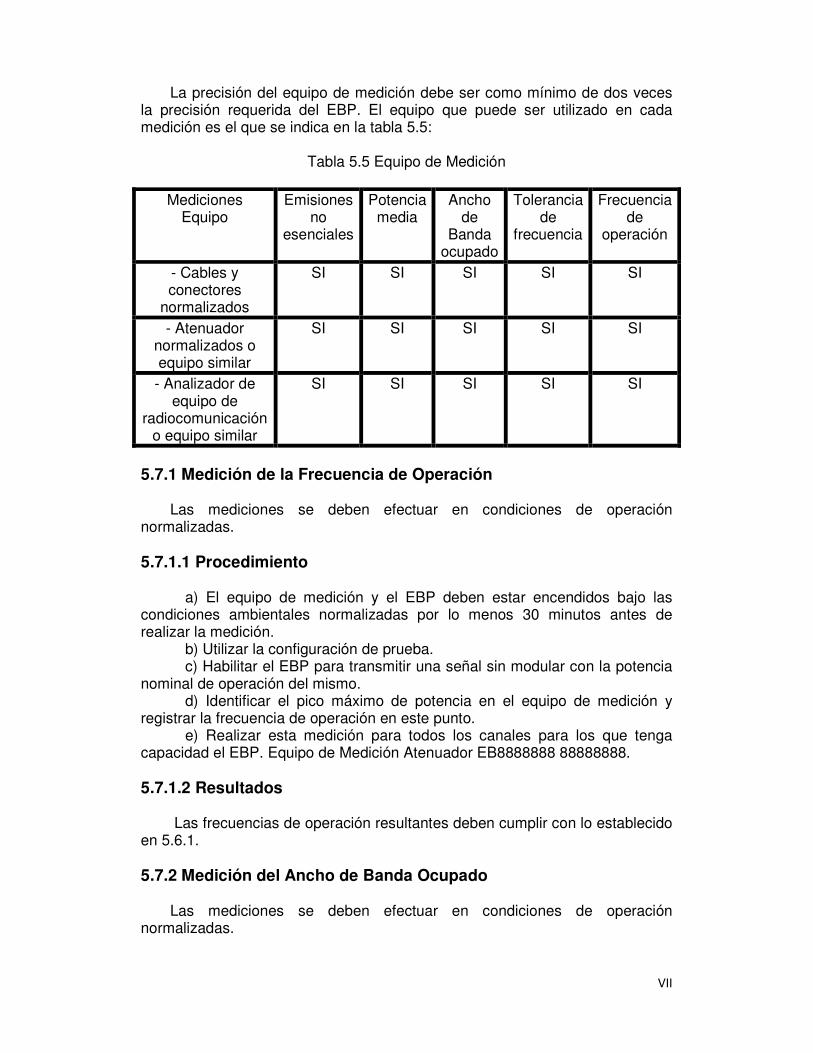
La precisión del equipo de medición debe ser como mínimo de dos veces la precisión requerida del EBP. El equipo que puede ser utilizado en cada medición es el que se indica en la tabla 5.5:
Tabla 5.5 Equipo de Medición
Mediciones Equipo
Emisiones no
esenciales
Potencia media
Ancho de
Banda ocupado
Tolerancia de
frecuencia
Frecuencia de
operación
- Cables y conectores
normalizados
SI SI SI SI SI
- Atenuador normalizados o equipo similar
SI SI SI SI SI
- Analizador de equipo de
radiocomunicación o equipo similar
SI SI SI SI SI
5.7.1 Medición de la Frecuencia de Operación Las mediciones se deben efectuar en condiciones de operación normalizadas. 5.7.1.1 Procedimiento
a) El equipo de medición y el EBP deben estar encendidos bajo las condiciones ambientales normalizadas por lo menos 30 minutos antes de realizar la medición.
b) Utilizar la configuración de prueba. c) Habilitar el EBP para transmitir una señal sin modular con la potencia
nominal de operación del mismo. d) Identificar el pico máximo de potencia en el equipo de medición y
registrar la frecuencia de operación en este punto. e) Realizar esta medición para todos los canales para los que tenga
capacidad el EBP. Equipo de Medición Atenuador EB8888888 88888888. 5.7.1.2 Resultados Las frecuencias de operación resultantes deben cumplir con lo establecido en 5.6.1. 5.7.2 Medición del Ancho de Banda Ocupado Las mediciones se deben efectuar en condiciones de operación normalizadas.
VIII
5.7.2.1 Procedimiento
a) Utilizar la configuración de prueba. b) Para equipos analógicos, habilitar el EBP para transmitir una señal
modulada con un tono de 1000 Hz con un nivel que produzca una desviación de ± 5 kHz, con 3 dB de atenuación en los extremos.
c) Para equipos digitales, generar una trama de datos con la máxima velocidad de datos permisible por las especificaciones del EBP que en algunos equipos la genera él mismo, y en otros se tiene que aplicar por medio de un generador.
d) Ajustar el equipo de medición para que ofrezca una resolución en el dominio de la potencia de 2 dB/división.
e) Localizar dentro del canal de operación el nivel máximo de potencia para utilizarlo como referencia.
f) Hacer un barrido hacia las frecuencias inferiores hasta encontrar la frecuencia a la que el nivel de la señal es 3 dB por debajo del nivel de referencia; se registra el valor de esta frecuencia como f1.
g) Repetir el proceso indicado en el inciso e) para frecuencias superiores y registrar el valor de esta frecuencia como f2.
h) El ancho de banda se obtiene de la diferencia: Ancho de banda = f2 - f1
i) Realizar esta medición en todos los canales para los que tenga capacidad el EBP. 5.7.2.2 Resultados El ancho de banda resultante en cada canal para el que tenga capacidad el EBP debe cumplir con lo establecido en 5.6.2. 5.7.3 Medición de las Emisiones no Esenciales Las mediciones se deben efectuar en condiciones de operación normalizadas. 5.7.3.1 Procedimiento
a) Utilizar la configuración de prueba. b) Para equipos analógicos, habilitar el EBP para transmitir una señal
modulada con un tono de 1000 Hz con un nivel que produzca una desviación de ± 5 kHz, con 3dB de atenuación en los extremos.
c) Para equipos digitales, generar una trama de datos con la máxima
velocidad de datos permisible por las especificaciones del EBP que en algunos equipos la genera él mismo, y en otros se tiene que aplicar por medio de un generador.
d) Habilitar el EBP para que transmita una señal modulada de tal manera que se presente la máxima desviación de frecuencia especificada.
e) Localizar el nivel máximo dentro del canal de operación. f) Registrar el valor de la frecuencia como la frecuencia central f0. g) Registrar el valor de la potencia a esta frecuencia como PTX.
IX
h) Ajustar el equipo de medición de manera que la resolución total en pantalla en el dominio de la frecuencia muestre sólo el intervalo entre f0 y 2f0.
i) Identificar las emisiones no esenciales en este intervalo y registrar la frecuencia a la que ocurre cada una de ellas.
j) Ajustar el equipo de medición de manera que la resolución total en pantalla en el dominio de la frecuencia muestre sólo el intervalo entre 0,5f0 y f0.
k) Identificar las emisiones no esenciales en este intervalo y registrar la frecuencia a la que ocurre cada una de ellas.
l) Ajustar el equipo de medición a una resolución de la pantalla en el dominio de la potencia de tal manera que la amplitud de la señal se aprecie claramente, y en el dominio de la frecuencia de 50 kHz/división.
m) Para cada una de las emisiones no esenciales identificadas, aplicar el siguiente subproceso.
m.1) Ajustar la frecuencia central en el equipo de medición a manera que coincida con la frecuencia identificada de la emisión no esencial.
m.2) Identificar el nivel máximo de la emisión no esencial junto con su correspondiente valor de frecuencia y registrar ambos valores.
m.3) Obtener el valor del nivel de la emisión no esencial y de la frecuencia central, considerando los factores de atenuación y β, y registrarlos.
m.4) Las emisiones no esenciales que se obtienen a partir de la siguiente expresión:
Emisiones no esenciales= PTX - nivel de la emisión no esencial 5.7.3.2 Resultados Todas las emisiones no esenciales deben cumplir con lo establecido en 5.6.3. 5.7.4 Medición de la Potencia Media Las mediciones se deben efectuar en condiciones de operación normalizadas. 5.7.4.1 Procedimiento
a) Utilizar la configuración de prueba. b) Habilitar el EBP para que transmita, a la máxima potencia para la que
tenga capacidad, una señal modulada de tal manera que se presente la máxima desviación de frecuencia permitida.
c) Localizar el nivel máximo dentro del canal de operación y registrarlo
como Pmed; considerando los factores de atenuación. d) Realizar la medición en cada canal para el que tenga capacidad el
EBP.
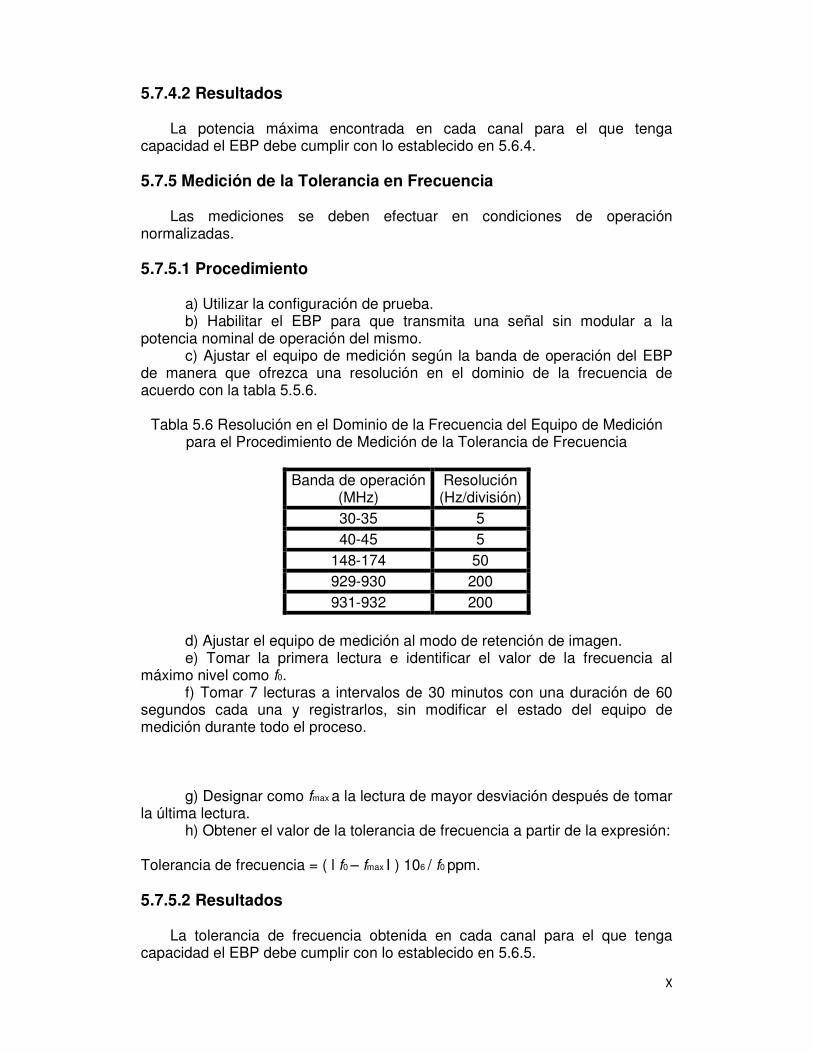
X
5.7.4.2 Resultados La potencia máxima encontrada en cada canal para el que tenga capacidad el EBP debe cumplir con lo establecido en 5.6.4. 5.7.5 Medición de la Tolerancia en Frecuencia Las mediciones se deben efectuar en condiciones de operación normalizadas. 5.7.5.1 Procedimiento
a) Utilizar la configuración de prueba. b) Habilitar el EBP para que transmita una señal sin modular a la
potencia nominal de operación del mismo. c) Ajustar el equipo de medición según la banda de operación del EBP
de manera que ofrezca una resolución en el dominio de la frecuencia de acuerdo con la tabla 5.5.6.
Tabla 5.6 Resolución en el Dominio de la Frecuencia del Equipo de Medición para el Procedimiento de Medición de la Tolerancia de Frecuencia
Banda de operación
(MHz) Resolución (Hz/división)
30-35 5 40-45 5
148-174 50 929-930 200 931-932 200
d) Ajustar el equipo de medición al modo de retención de imagen. e) Tomar la primera lectura e identificar el valor de la frecuencia al
máximo nivel como f0. f) Tomar 7 lecturas a intervalos de 30 minutos con una duración de 60
segundos cada una y registrarlos, sin modificar el estado del equipo de medición durante todo el proceso.
g) Designar como fmax a la lectura de mayor desviación después de tomar
la última lectura. h) Obtener el valor de la tolerancia de frecuencia a partir de la expresión:
Tolerancia de frecuencia = ( l f0 – fmax I ) 106 / f0 ppm. 5.7.5.2 Resultados La tolerancia de frecuencia obtenida en cada canal para el que tenga capacidad el EBP debe cumplir con lo establecido en 5.6.5.
XI
5.8 BIBLIOGRAFÍA Ley Federal de Telecomunicaciones publicada en el Diario Oficial de la Federación del 7 de junio de 1995. Ley Federal sobre Metrología y Normalización publicada en el Diario Oficial de la Federación del 20 de mayo de 1997. Reglamento de Telecomunicaciones de la Secretaría de Comunicaciones y Transportes, publicado en el Diario Oficial de la Federación del 29 de octubre de 1990. Reglamento de la Ley Federal sobre Metrología y Normalización publicado en el Diario Oficial de la Federación del 4 de enero de 1999. Reglamento de Radiocomunicaciones de la Unión Internacional de Telecomunicaciones, Ginebra, 1990. Cuadro Nacional de Atribución de Frecuencias publicado en el Diario Oficial de la Federación del 11 de enero de 1999. 5.9 CONCORDANCIA CON NORMAS INTERNACIONALES
Esta Norma no coincide con ninguna norma internacional, por no existir norma internacional sobre el tema tratado. 5.10. EVALUACIÓN DE LA CONFORMIDAD Y VIGILANCIA DEL CUMPLIMIENTO La Secretaría de Comunicaciones y Transportes (SCT), a través de la Comisión Federal de Telecomunicaciones (COFETEL), es la encargada de vigilar el cumplimiento de esta Norma Oficial Mexicana. La evaluación de la conformidad debe ser realizada por personas acreditadas y aprobadas en los términos de la Ley Federal sobre Metrología y Normalización y su Reglamento o por la COFETEL, de conformidad con las políticas y procedimientos que para tal efecto expida la SCT a través de la COFETEL.
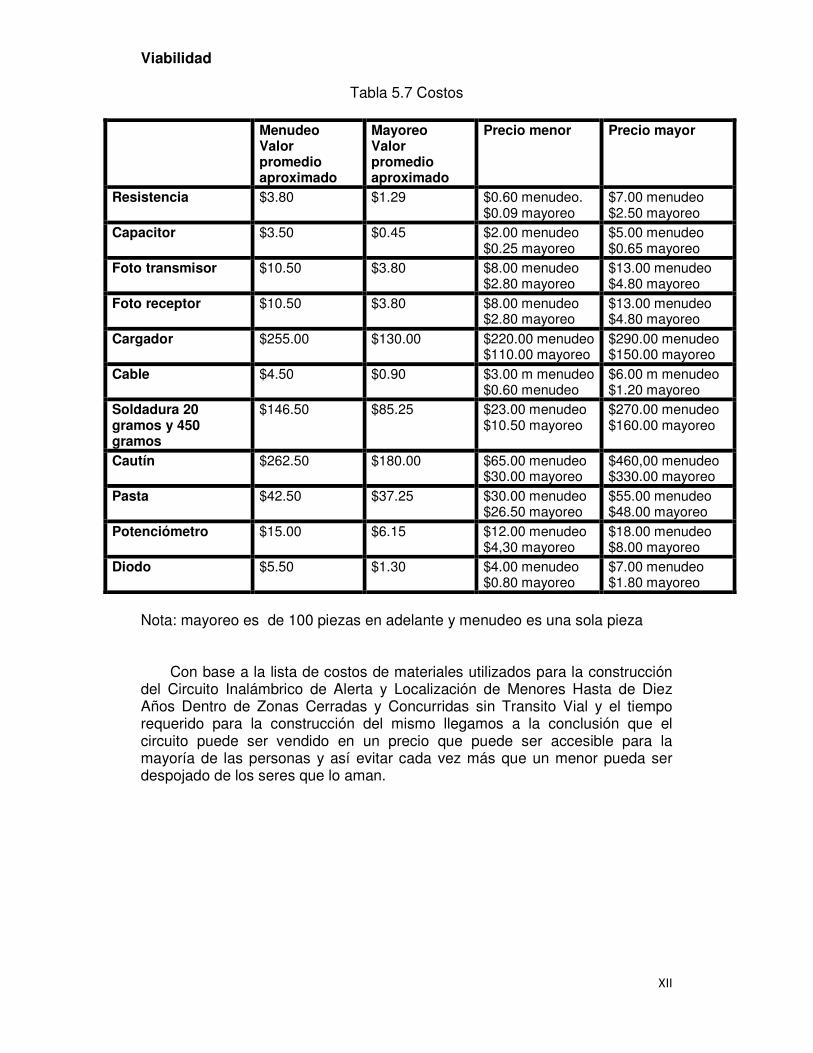
XII
Viabilidad
Tabla 5.7 Costos
Menudeo Valor promedio aproximado
Mayoreo Valor promedio aproximado
Precio menor Precio mayor
Resistencia $3.80 $1.29 $0.60 menudeo. $0.09 mayoreo
$7.00 menudeo $2.50 mayoreo
Capacitor $3.50 $0.45 $2.00 menudeo $0.25 mayoreo
$5.00 menudeo $0.65 mayoreo
Foto transmisor $10.50 $3.80 $8.00 menudeo $2.80 mayoreo
$13.00 menudeo $4.80 mayoreo
Foto receptor $10.50 $3.80 $8.00 menudeo $2.80 mayoreo
$13.00 menudeo $4.80 mayoreo
Cargador $255.00 $130.00 $220.00 menudeo $110.00 mayoreo
$290.00 menudeo $150.00 mayoreo
Cable $4.50 $0.90 $3.00 m menudeo $0.60 menudeo
$6.00 m menudeo $1.20 mayoreo
Soldadura 20 gramos y 450 gramos
$146.50 $85.25 $23.00 menudeo $10.50 mayoreo
$270.00 menudeo $160.00 mayoreo
Cautín $262.50 $180.00 $65.00 menudeo $30.00 mayoreo
$460,00 menudeo $330.00 mayoreo
Pasta $42.50 $37.25 $30.00 menudeo $26.50 mayoreo
$55.00 menudeo $48.00 mayoreo
Potenciómetro $15.00 $6.15 $12.00 menudeo $4,30 mayoreo
$18.00 menudeo $8.00 mayoreo
Diodo $5.50 $1.30 $4.00 menudeo $0.80 mayoreo
$7.00 menudeo $1.80 mayoreo
Nota: mayoreo es de 100 piezas en adelante y menudeo es una sola pieza Con base a la lista de costos de materiales utilizados para la construcción del Circuito Inalámbrico de Alerta y Localización de Menores Hasta de Diez Años Dentro de Zonas Cerradas y Concurridas sin Transito Vial y el tiempo requerido para la construcción del mismo llegamos a la conclusión que el circuito puede ser vendido en un precio que puede ser accesible para la mayoría de las personas y así evitar cada vez más que un menor pueda ser despojado de los seres que lo aman.

XIII
HT12A/HT12E 2
12 Series of Encoders
Features
Operating voltage 2.4V~5V for the HT12A 2.4V~12V for the HT12E
Low power and high noise immunity CMOS technology
Low standby current: 0.1 A (typ.) at VDD=5V HT12A with a 38kHz carrier for infrared transmission
medium
Minimum transmission word
Four words for the HT12E One word for the HT12A
Built-in oscillator needs only 5% resistor Data code has positive polarity Minimal external components
Pair with Holtek s 212 series of decoders 18-pin DIP, 20-pin SOP package
Applications
Burglar alarm system Smoke and fire alarm system Garage door controllers Car door controllers
Car alarm system Security system Cordless telephones Other remote control systems
General Description
The 212 encoders are a series of CMOS LSIs for remote control system applications. They are capable of encod- ing information which consists of N address bits and
12 N data bits. Each address/data input can be set to one of the two logic states. The programmed ad- dresses/data are transmitted together with the header
bits via an RF or an infrared transmission medium upon receipt of a trigger signal. The capability to select a TE trigger on the HT12E or a DATA trigger on the HT12A further enhances the application flexibility of the 212 se- ries of encoders. The HT12A additionally provides a 38kHz carrier for infrared systems.
Selection Table
Function
Part No.
Address No.
Address/ Data No.
Data No.
Oscillator
Trigger
Carrier Output
Negative Polarity
Package
HT12A
8
0
4 455kHz
resonator
D8~D11
38kHz
No 18DIP, 20SOP
HT12E
8
4
0 RC
oscillator
TE
No
No 18DIP, 20SOP
Note: Address/Data represents pins that can be either address or data according to the application requirement.
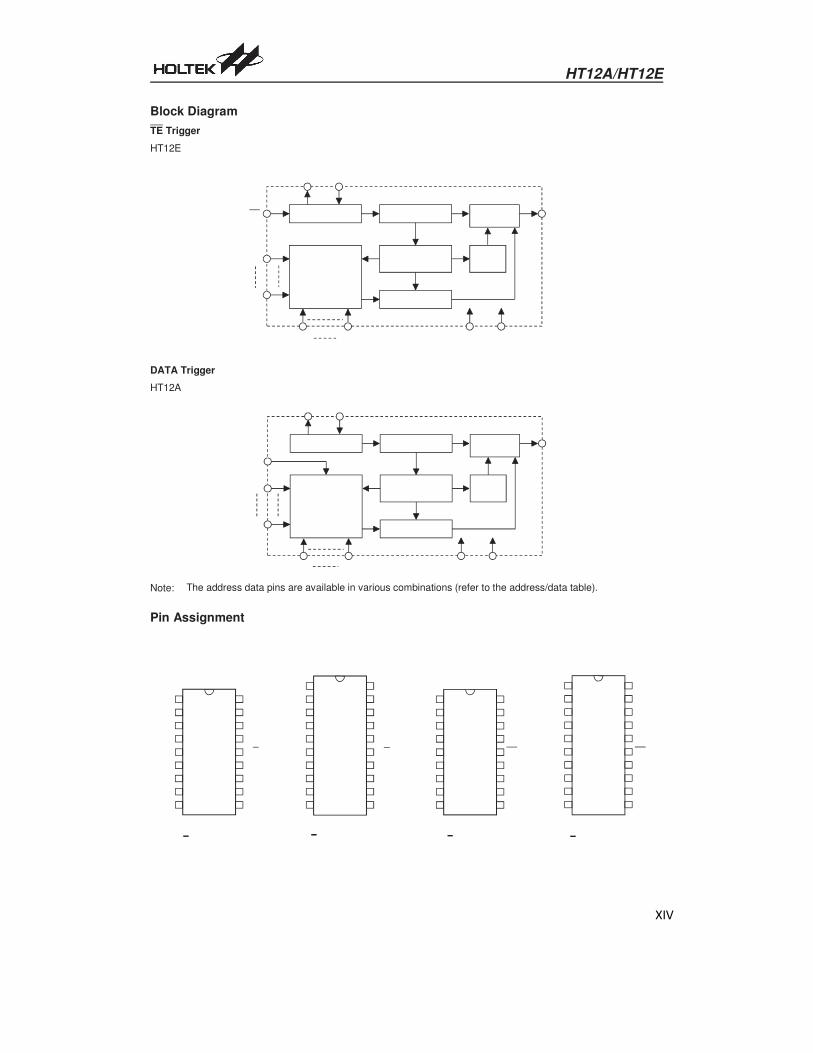
HT12A/HT12E
XIV
Block Diagram
TE Trigger
HT12E
DATA Trigger
HT12A
Note: The address data pins are available in various combinations (refer to the address/data table).
Pin Assignment
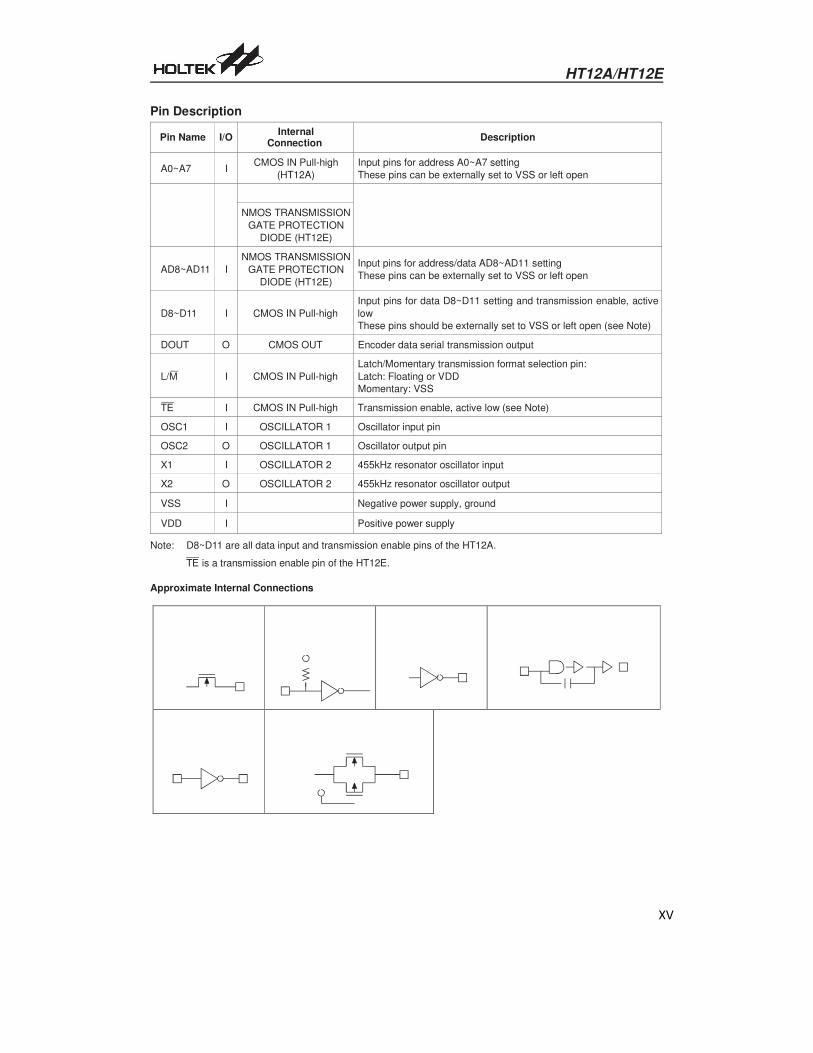
HT12A/HT12E
XV
Pin Description
Pin Name
I/O Internal
Connection
Description
A0~A7
I CMOS IN Pull-high
(HT12A) Input pins for address A0~A7 setting These pins can be externally set to VSS or left open
NMOS TRANSMISSION GATE PROTECTION
DIODE (HT12E)
AD8~AD11
I
NMOS TRANSMISSION GATE PROTECTION
DIODE (HT12E)
Input pins for address/data AD8~AD11 setting These pins can be externally set to VSS or left open
D8~D11
I
CMOS IN Pull-high
Input pins for data D8~D11 setting and transmission enable, active low These pins should be externally set to VSS or left open (see Note)
DOUT O CMOS OUT Encoder data serial transmission output
L/M
I
CMOS IN Pull-high
Latch/Momentary transmission format selection pin: Latch: Floating or VDD Momentary: VSS
TE I CMOS IN Pull-high Transmission enable, active low (see Note)
OSC1 I OSCILLATOR 1 Oscillator input pin
OSC2 O OSCILLATOR 1 Oscillator output pin
X1 I OSCILLATOR 2 455kHz resonator oscillator input
X2 O OSCILLATOR 2 455kHz resonator oscillator output
VSS I Negative power supply, ground
VDD I Positive power supply
Note: D8~D11 are all data input and transmission enable pins of the HT12A.
TE is a transmission enable pin of the HT12E.
Approximate Internal Connections
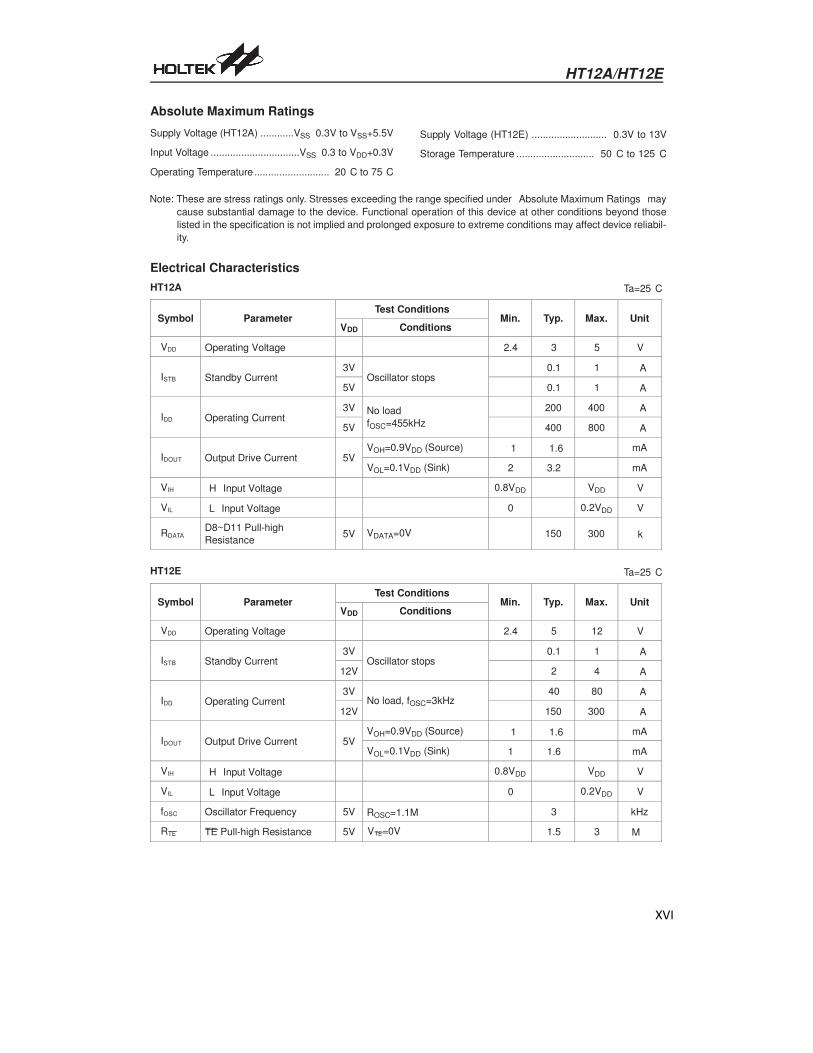
HT12A/HT12E
XVI
Absolute Maximum Ratings
Supply Voltage (HT12A) ............VSS 0.3V to VSS+5.5V Supply Voltage (HT12E) ........................... 0.3V to 13V
Input Voltage ................................VSS 0.3 to VDD+0.3V Storage Temperature ............................ 50 C to 125 C
Operating Temperature ........................... 20 C to 75 C
Note: These are stress ratings only. Stresses exceeding the range specified under Absolute Maximum Ratings may
cause substantial damage to the device. Functional operation of this device at other conditions beyond those listed in the specification is not implied and prolonged exposure to extreme conditions may affect device reliabil- ity.
Electrical Characteristics
HT12A Ta=25 C
Symbol
Parameter
Test Conditions Min.
Typ.
Max.
Unit
VDD Conditions
VDD Operating Voltage 2.4 3 5 V
ISTB Standby Current
3V Oscillator stops 0.1 1 A
5V 0.1 1 A
IDD Operating Current
3V
No load fOSC=455kHz
200 400 A
5V 400 800 A
IDOUT Output Drive Current
5V
VOH=0.9VDD (Source) 1 1.6 mA
VOL=0.1VDD (Sink) 2 3.2 mA
VIH H Input Voltage 0.8VDD VDD V
VIL L Input Voltage 0 0.2VDD V
RDATA D8~D11 Pull-high Resistance
5V
VDATA=0V
150
300
k
HT12E Ta=25 C
Symbol
Parameter
Test Conditions Min.
Typ.
Max.
Unit
VDD Conditions
VDD Operating Voltage 2.4 5 12 V
ISTB Standby Current
3V Oscillator stops 0.1 1 A
12V 2 4 A
IDD Operating Current
3V No load, fOSC=3kHz 40 80 A
12V 150 300 A
IDOUT Output Drive Current
5V
VOH=0.9VDD (Source) 1 1.6 mA
VOL=0.1VDD (Sink) 1 1.6 mA
VIH H Input Voltage 0.8VDD VDD V
VIL L Input Voltage 0 0.2VDD V
fOSC Oscillator Frequency 5V ROSC=1.1M 3 kHz
RTE TE Pull-high Resistance 5V VTE=0V 1.5 3 M
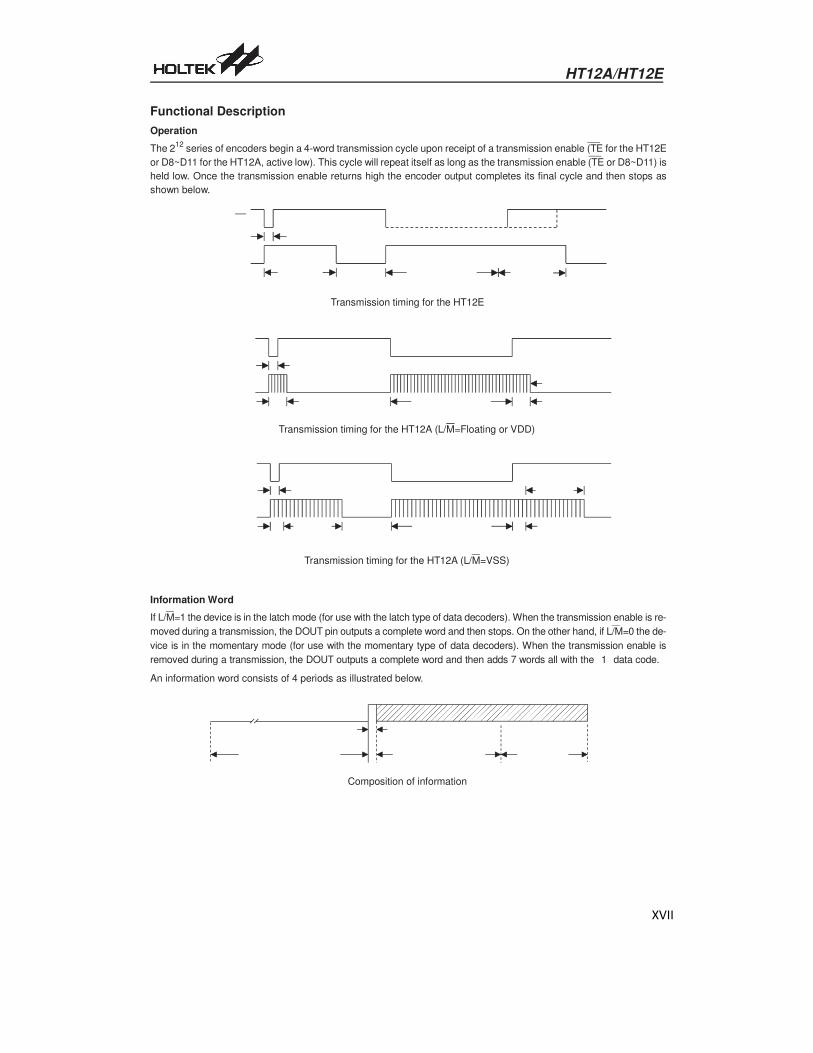
HT12A/HT12E
XVII
Functional Description
Operation
The 212 series of encoders begin a 4-word transmission cycle upon receipt of a transmission enable (TE for the HT12E or D8~D11 for the HT12A, active low). This cycle will repeat itself as long as the transmission enable (TE or D8~D11) is held low. Once the transmission enable returns high the encoder output completes its final cycle and then stops as shown below.
Transmission timing for the HT12E
Transmission timing for the HT12A (L/M=Floating or VDD)
Transmission timing for the HT12A (L/M=VSS)
Information Word
If L/M=1 the device is in the latch mode (for use with the latch type of data decoders). When the transmission enable is re- moved during a transmission, the DOUT pin outputs a complete word and then stops. On the other hand, if L/M=0 the de- vice is in the momentary mode (for use with the momentary type of data decoders). When the transmission enable is removed during a transmission, the DOUT outputs a complete word and then adds 7 words all with the 1 data code.
An information word consists of 4 periods as illustrated below.
Composition of information
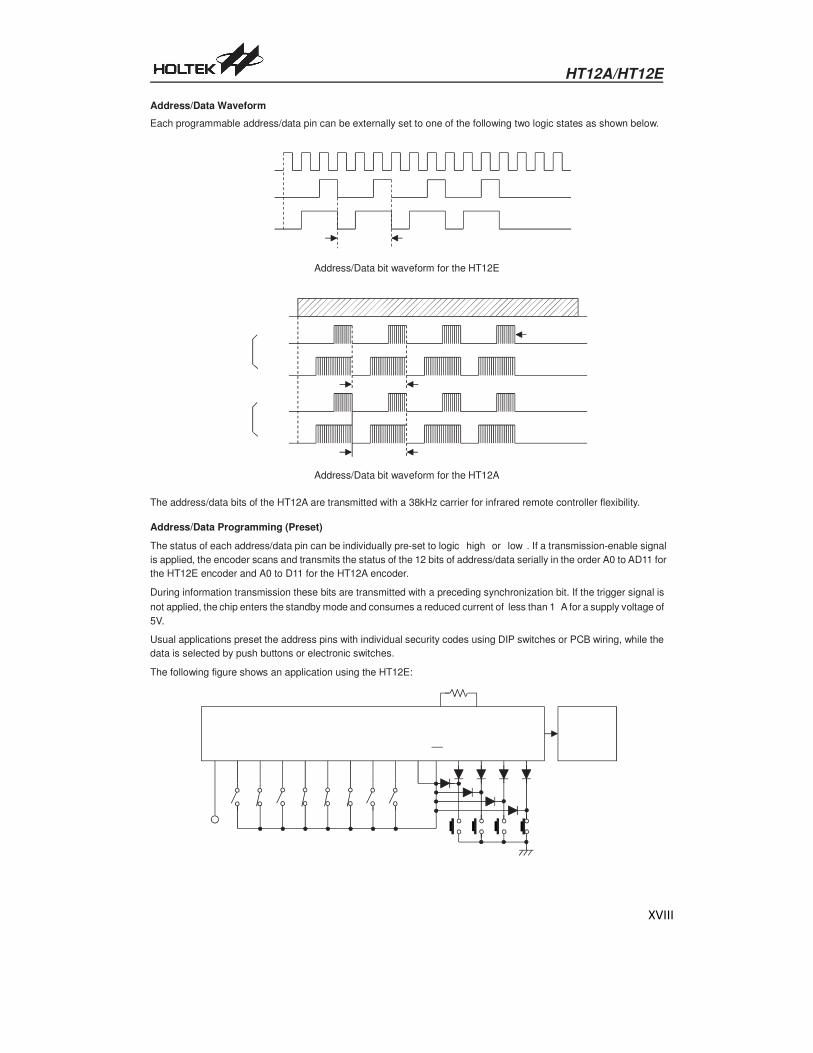
HT12A/HT12E
XVIII
Address/Data Waveform
Each programmable address/data pin can be externally set to one of the following two logic states as shown below.
Address/Data bit waveform for the HT12E
Address/Data bit waveform for the HT12A
The address/data bits of the HT12A are transmitted with a 38kHz carrier for infrared remote controller flexibility.
Address/Data Programming (Preset)
The status of each address/data pin can be individually pre-set to logic high or low . If a transmission-enable signal is applied, the encoder scans and transmits the status of the 12 bits of address/data serially in the order A0 to AD11 for the HT12E encoder and A0 to D11 for the HT12A encoder.
During information transmission these bits are transmitted with a preceding synchronization bit. If the trigger signal is
not applied, the chip enters the standby mode and consumes a reduced current of less than 1 A for a supply voltage of 5V.
Usual applications preset the address pins with individual security codes using DIP switches or PCB wiring, while the data is selected by push buttons or electronic switches.
The following figure shows an application using the HT12E:
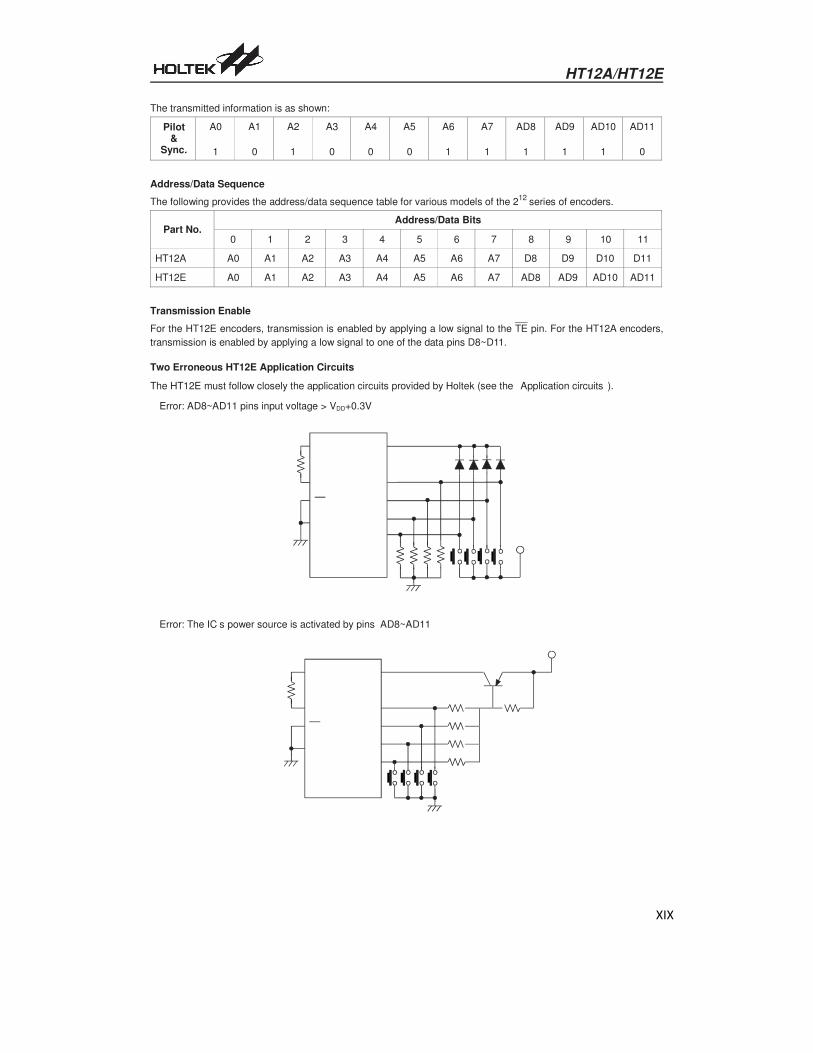
HT12A/HT12E
XIX
The transmitted information is as shown:
Pilot &
Sync.
A0
1
A1
0
A2
1
A3
0
A4
0
A5
0
A6
1
A7
1
AD8
1
AD9
1
AD10
1
AD11
0
Address/Data Sequence
The following provides the address/data sequence table for various models of the 212 series of encoders.
Part No.
Address/Data Bits
0 1 2 3 4 5 6 7 8 9 10 11
HT12A A0 A1 A2 A3 A4 A5 A6 A7 D8 D9 D10 D11
HT12E A0 A1 A2 A3 A4 A5 A6 A7 AD8 AD9 AD10 AD11
Transmission Enable
For the HT12E encoders, transmission is enabled by applying a low signal to the TE pin. For the HT12A encoders, transmission is enabled by applying a low signal to one of the data pins D8~D11.
Two Erroneous HT12E Application Circuits
The HT12E must follow closely the application circuits provided by Holtek (see the Application circuits ).
Error: AD8~AD11 pins input voltage > VDD+0.3V
Error: The IC s power source is activated by pins AD8~AD11
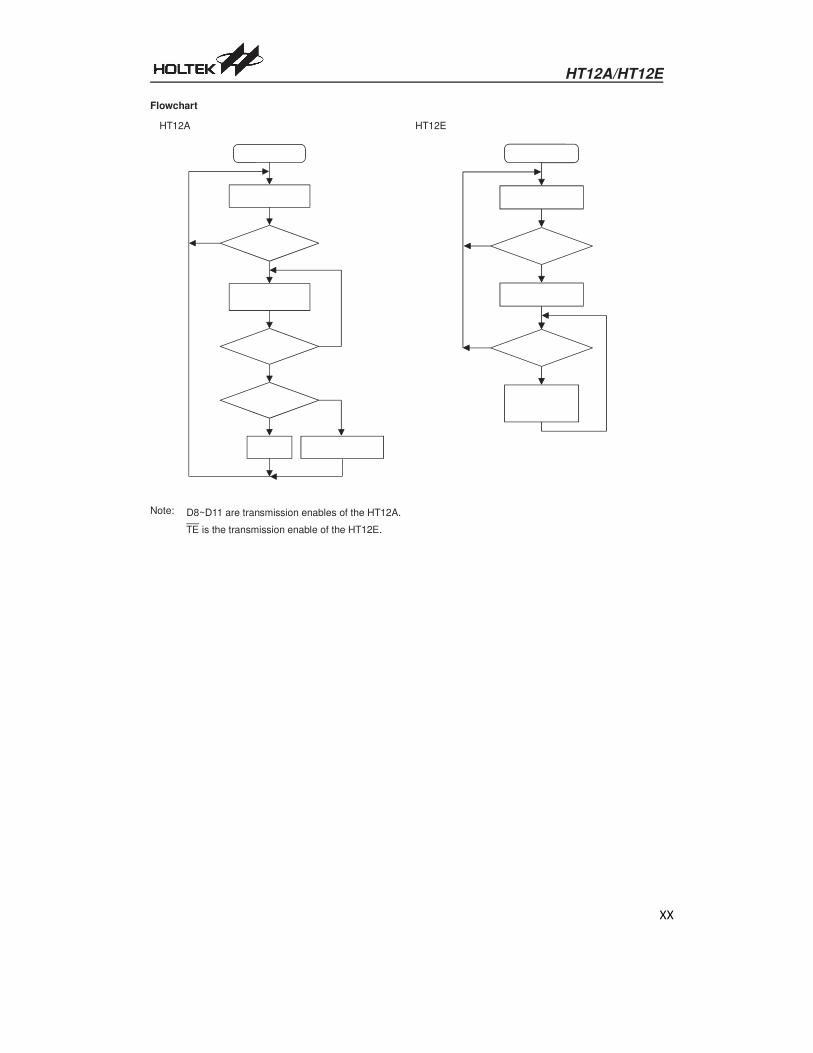
HT12A/HT12E
XX
Flowchart
HT12A HT12E
Note: D8~D11 are transmission enables of the HT12A.
TE is the transmission enable of the HT12E.
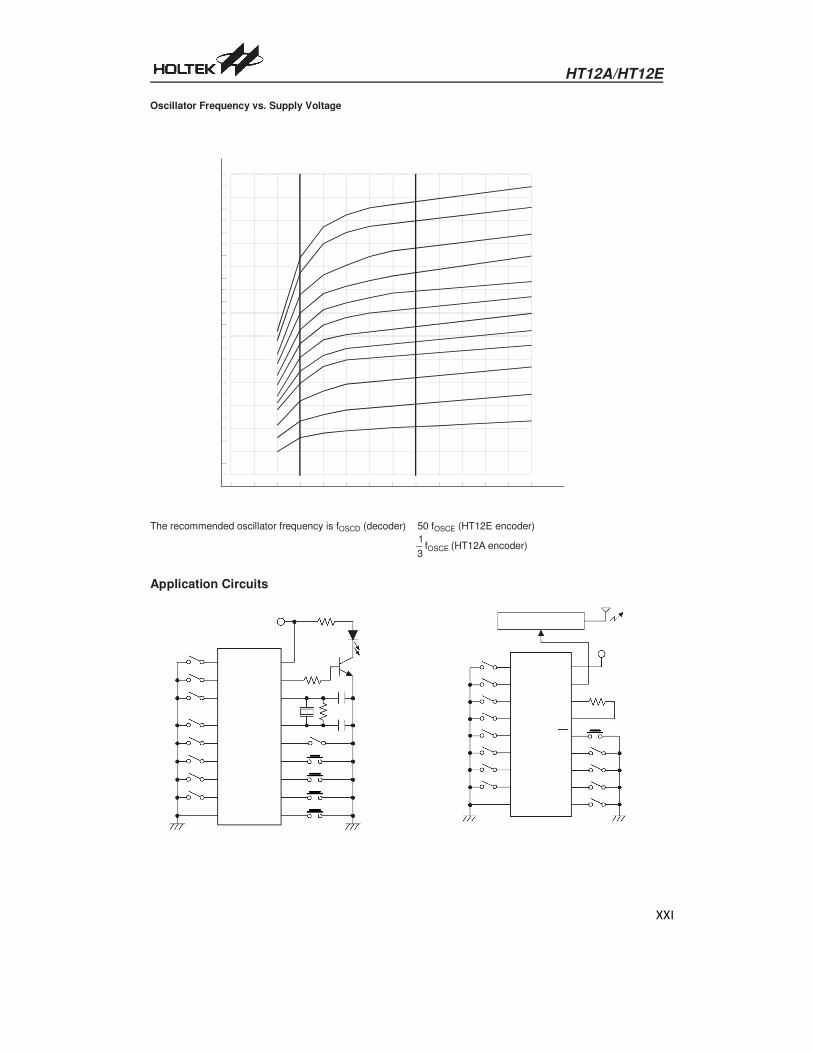
HT12A/HT12E
XXI
Oscillator Frequency vs. Supply Voltage
The recommended oscillator frequency is fOSCD (decoder) 50 fOSCE (HT12E encoder) 1
fOSCE (HT12A encoder) 3
Application Circuits
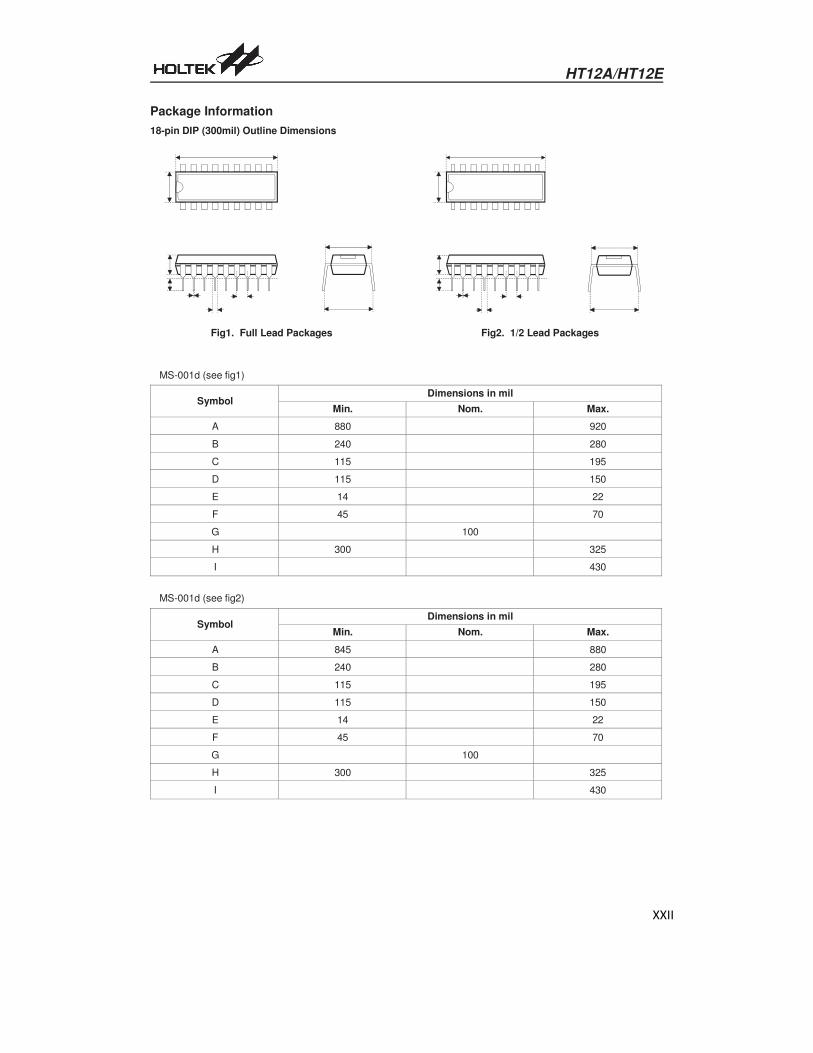
HT12A/HT12E
XXII
Package Information
18-pin DIP (300mil) Outline Dimensions
Fig1. Full Lead Packages Fig2. 1/2 Lead Packages
MS-001d (see fig1)
Symbol
Dimensions in mil Min. Nom. Max.
A 880 920 B 240 280 C 115 195 D 115 150 E 14 22 F 45 70 G 100 H 300 325 I 430
MS-001d (see fig2)
Symbol
Dimensions in mil Min. Nom. Max.
A 845 880 B 240 280 C 115 195 D 115 150 E 14 22 F 45 70 G 100 H 300 325 I 430
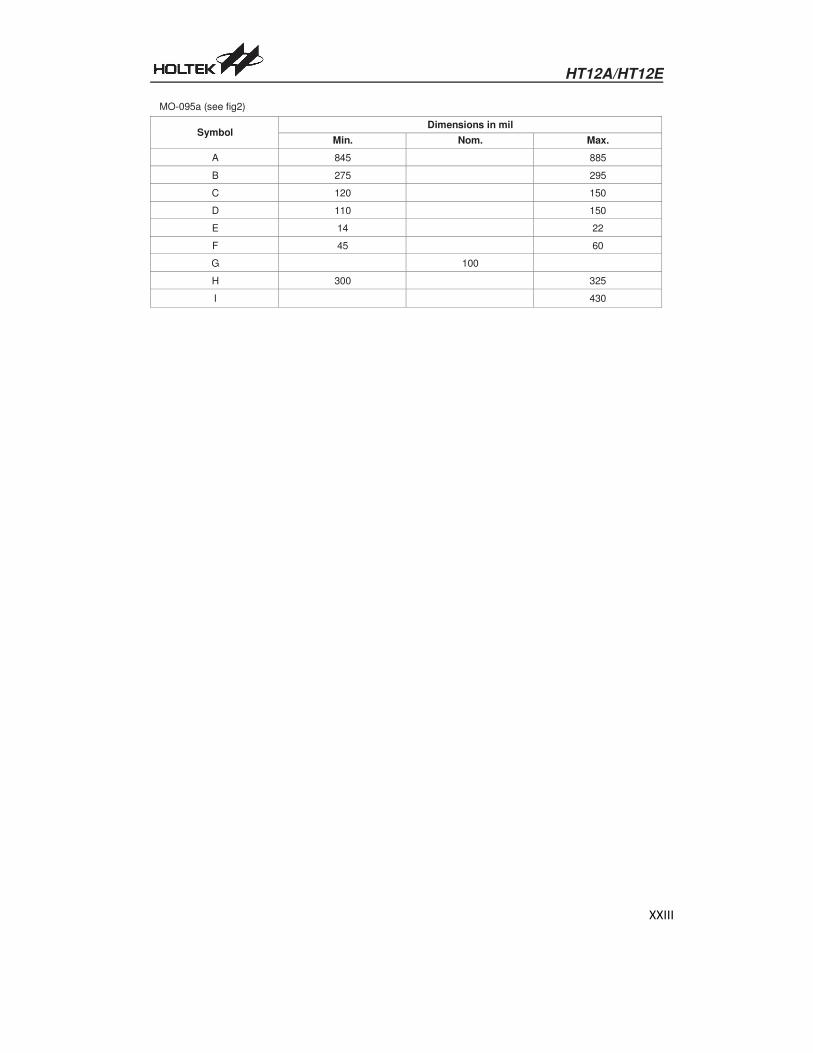
HT12A/HT12E
XXIII
MO-095a (see fig2)
Symbol
Dimensions in mil Min. Nom. Max.
A 845 885 B 275 295 C 120 150 D 110 150 E 14 22 F 45 60 G 100 H 300 325 I 430
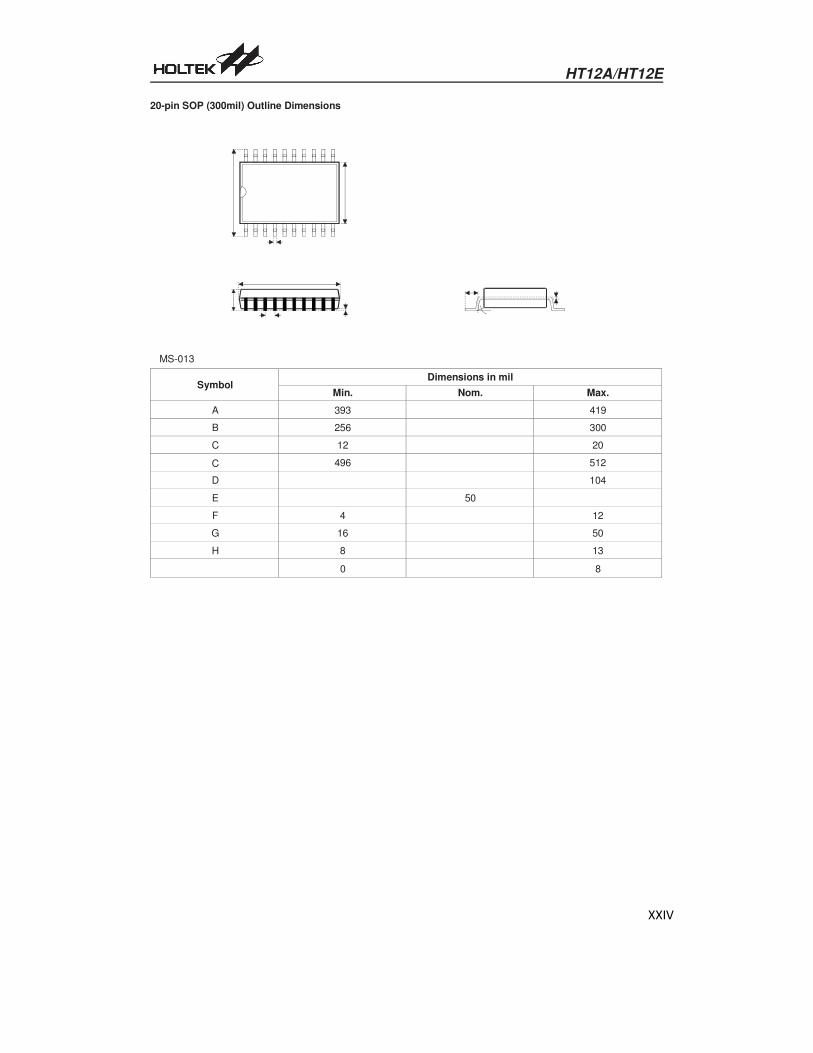
HT12A/HT12E
XXIV
20-pin SOP (300mil) Outline Dimensions
MS-013
Symbol
Dimensions in mil Min. Nom. Max.
A 393 419 B 256
300 C 12
20 C 496 512 D 104 E 50 F 4 12 G 16 50 H 8 13
0 8
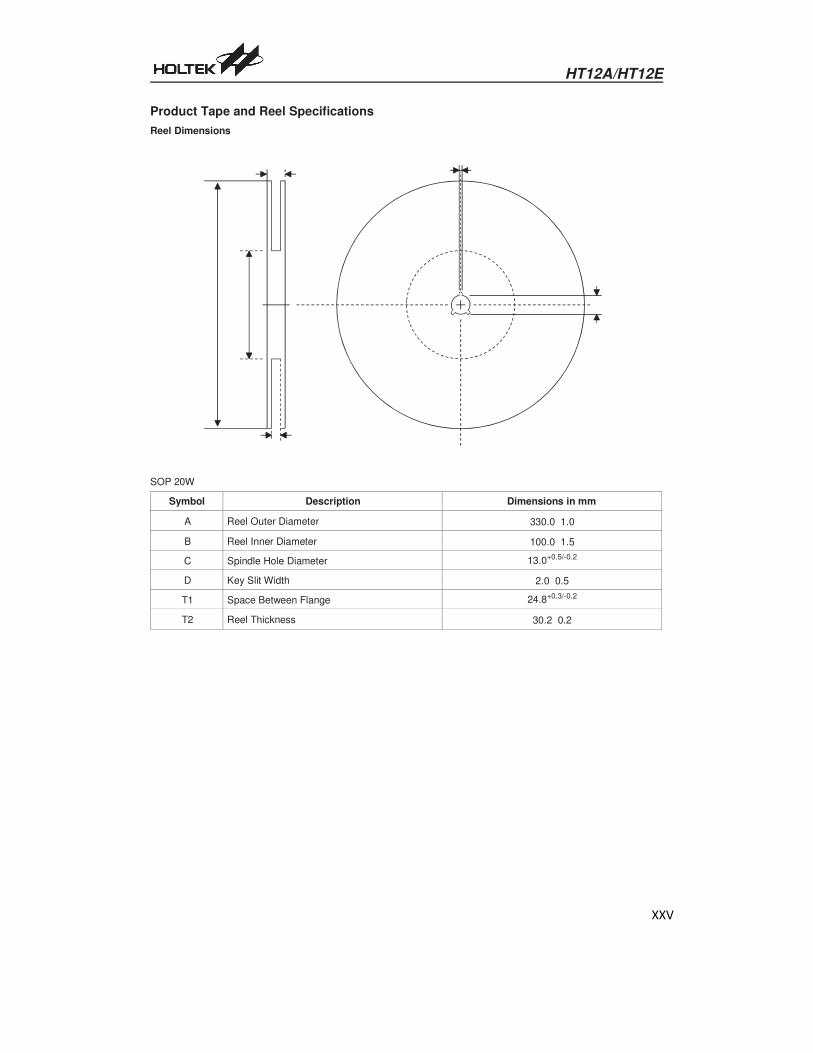
HT12A/HT12E
XXV
Product Tape and Reel Specifications
Reel Dimensions
SOP 20W
Symbol Description Dimensions in mm
A Reel Outer Diameter 330.0 1.0
B Reel Inner Diameter 100.0 1.5
C Spindle Hole Diameter 13.0+0.5/-0.2
D Key Slit Width 2.0 0.5
T1 Space Between Flange 24.8+0.3/-0.2
T2 Reel Thickness 30.2 0.2
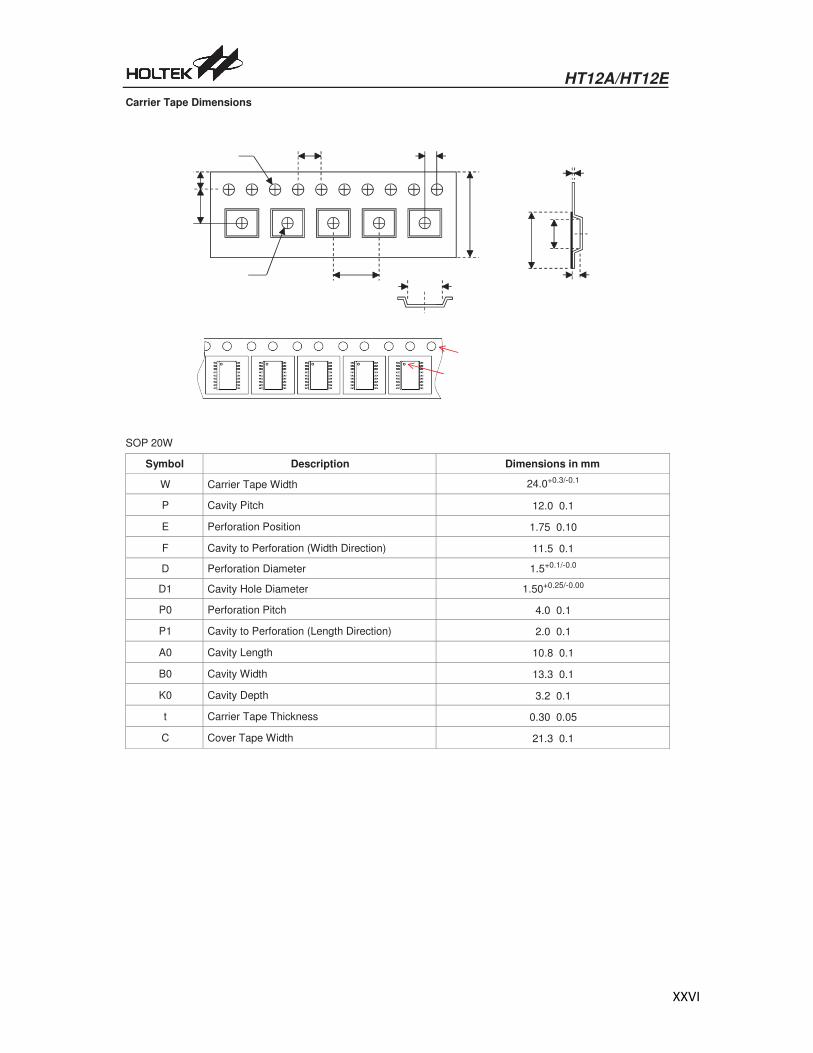
HT12A/HT12E
XXVI
Carrier Tape Dimensions
SOP 20W
Symbol Description Dimensions in mm
W Carrier Tape Width 24.0+0.3/-0.1
P Cavity Pitch 12.0 0.1
E Perforation Position 1.75 0.10
F Cavity to Perforation (Width Direction) 11.5 0.1
D Perforation Diameter 1.5+0.1/-0.0
D1 Cavity Hole Diameter 1.50+0.25/-0.00
P0 Perforation Pitch 4.0 0.1
P1 Cavity to Perforation (Length Direction) 2.0 0.1
A0 Cavity Length 10.8 0.1
B0 Cavity Width 13.3 0.1
K0 Cavity Depth 3.2 0.1
t Carrier Tape Thickness 0.30 0.05
C Cover Tape Width 21.3 0.1

XXVII
212
Series of Decoders
Features
Operating voltage: 2.4V~12V
Low power and high noise immunity CMOS
technology
Low standby current
Capable of decoding 12 bits of information 12
Address/Data number combination
HT12D: 8 address bits and 4 data bits HT12F: 12 address bits only
Built-in oscillator needs only 5% resistor
Valid transmission indicator
Pair with Holtek s 2 series of encoders Easy interface with an RF or an infrared
Binary address setting
Received codes are checked 3 times
transmission medium
Minimal external components
Applications
Burglar alarm system
Smoke and fire alarm system
Garage door controllers
Car door controllers
Car alarm system
Security system
Cordless telephones
Other remote control systems
General Description
12
The 2 decoders are a series of CMOS LSIs for their local addresses. If no error or unmatched
remote control system applications. They are 12
codes are found, the input data codes are de-
paired with Holtek s 2 series of encoders (re- coded and then transferred to the output pins.
fer to the encoder/decoder cross reference ta-
ble) . For proper operation, a pair o f
encoder/decoder with the same number of ad-
dresses and data format should be chosen.
The decoders receive serial addresses and data 12
The VT pin also goes high to indicate a valid
transmission.
The 212
series of decoders are capable of decod-
ing informations that consist of N bits of ad-
dress and 12 N bits of data. Of this series, the
from a programmed 2 series of encoders that HT12D is arranged to provide 8 address bits
are transmitted by a carrier using an RF or an
IR transmission medium. They compare the se-
rial input data three times continuously with
and 4 data bits, and HT12F is used to decode 12
bits of address information.
Selection Table
Function
Part No.
Address
No. Data
VT
Oscillator
Trigger
Package No. Type
HT12D 8 4 L RC oscillator DIN active Hi 18 DIP/20 SOP
HT12F 12 0 RC oscillator DIN active Hi 18 DIP/20 SOP
Notes: Data type: L stands for latch type data output.
VT can be used as a momentary data output.
July 12, 1999
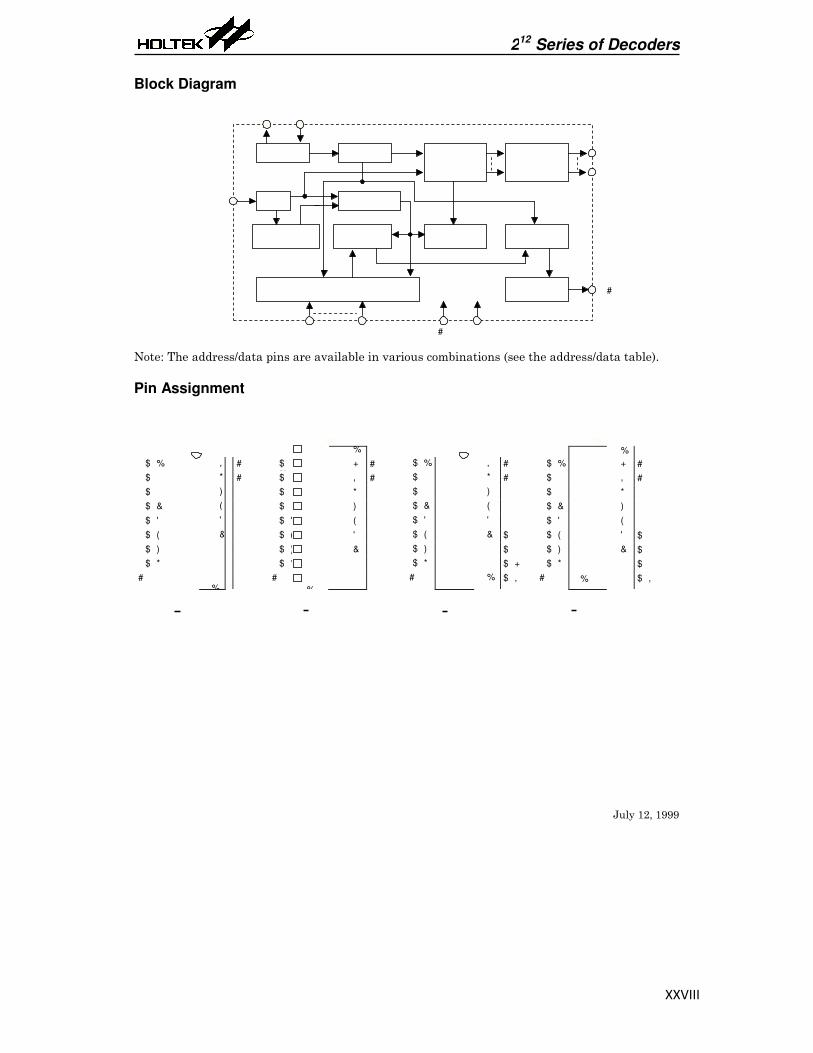
212
Series of Decoders
XXVIII
Block Diagram
#
#
Note: The address/data pins are available in various combinations (see the address/data table).
Pin Assignment
%
%
$ % , # $ %
+ # $ % , # $ % + #
$ * # $ , # $ * # $ , #
$ ) $ * $ ) $ * $ & ( $
& ) $ & ( $ & )
$ ' ' $ ' ( $ ' ' $ ' ( $ ( & $ ( ' $ ( & $ $ ( ' $
$ ) $ ) & $ ) $ $ ) & $
$ * $ * $ * $ + $ * $
+ # %
# % # % $ , # %
$ ,
July 12, 1999
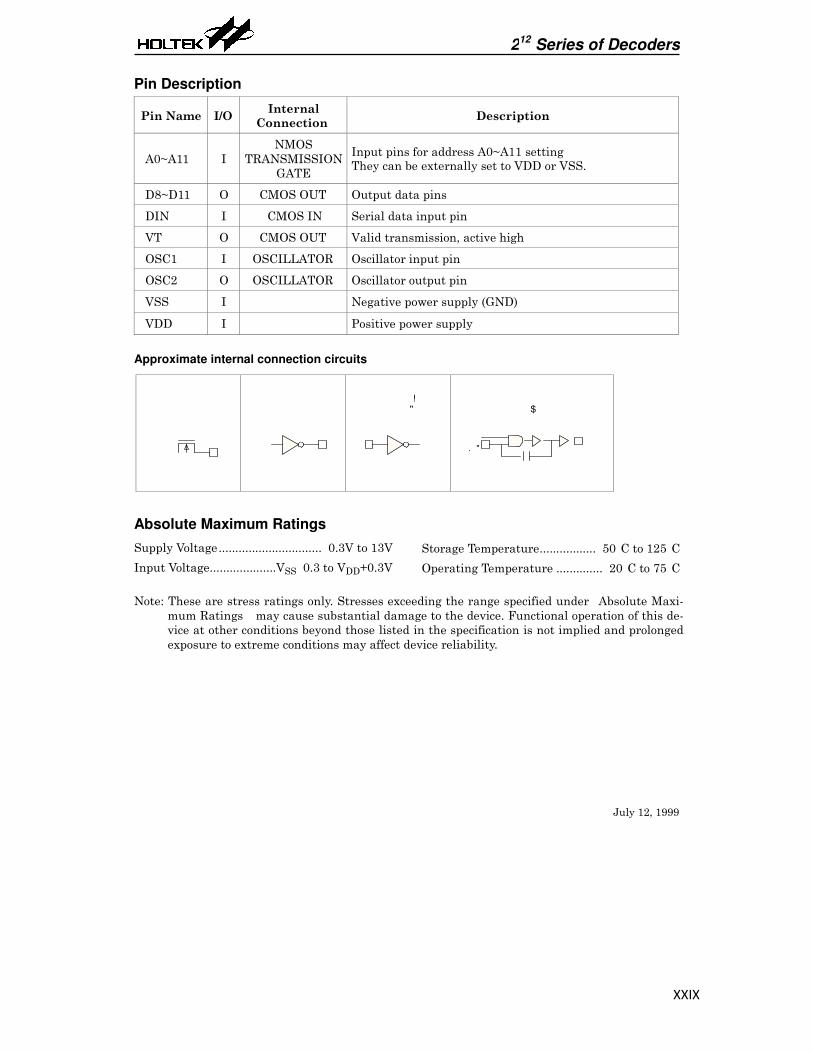
212
Series of Decoders
XXIX
Pin Description
Pin Name
I/O Internal
Connection
Description
A0~A11
I
NMOS
TRANSMISSION
GATE
Input pins for address A0~A11 setting
They can be externally set to VDD or VSS.
D8~D11 O CMOS OUT Output data pins
DIN I CMOS IN Serial data input pin
VT O CMOS OUT Valid transmission, active high
OSC1 I OSCILLATOR Oscillator input pin
OSC2 O OSCILLATOR Oscillator output pin
VSS I Negative power supply (GND)
VDD I Positive power supply
Approximate internal connection circuits
! "
$
. "
Absolute Maximum Ratings
Supply Voltage ............................... 0.3V to 13V Storage Temperature................. 50 C to 125 C
Input Voltage....................VSS 0.3 to VDD+0.3V Operating Temperature .............. 20 C to 75 C
Note: These are stress ratings only. Stresses exceeding the range specified under Absolute Maxi-
mum Ratings may cause substantial damage to the device. Functional operation of this de-
vice at other conditions beyond those listed in the specification is not implied and prolonged
exposure to extreme conditions may affect device reliability.
July 12, 1999
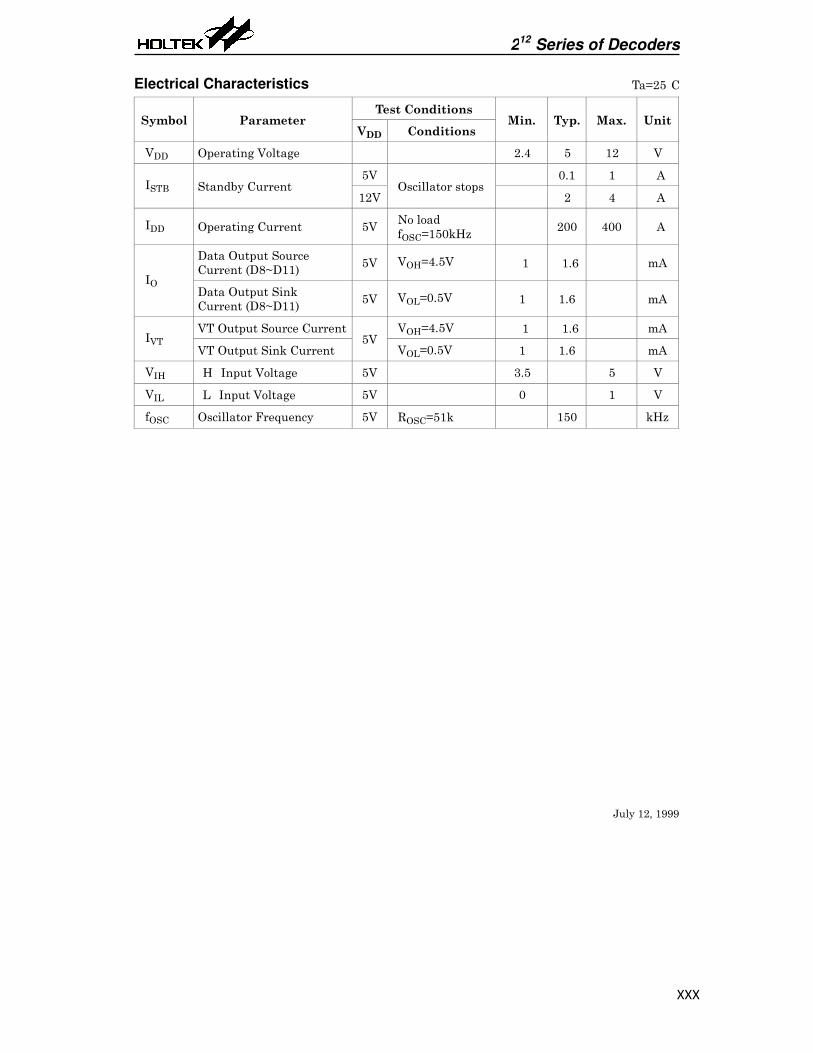
212
Series of Decoders
XXX
Electrical Characteristics Ta=25 C
Symbol
Parameter
Test Conditions Min.
Typ.
Max.
Unit
VDD Conditions
VDD Operating Voltage 2.4 5 12 V
ISTB Standby Current
5V Oscillator stops 0.1 1 A
12V 2 4 A
IDD
Operating Current
5V No load
fOSC=150kHz
200
400
A
IO
Data Output Source
Current (D8~D11)
5V
VOH=4.5V
1
1.6
mA
Data Output Sink
Current (D8~D11)
5V
VOL=0.5V
1
1.6
mA
IVT
VT Output Source Current 5V
VOH=4.5V 1 1.6 mA
VT Output Sink Current VOL=0.5V 1 1.6 mA
VIH H Input Voltage 5V 3.5 5 V
VIL L Input Voltage 5V 0 1 V
fOSC Oscillator Frequency 5V ROSC=51k 150 kHz
July 12, 1999
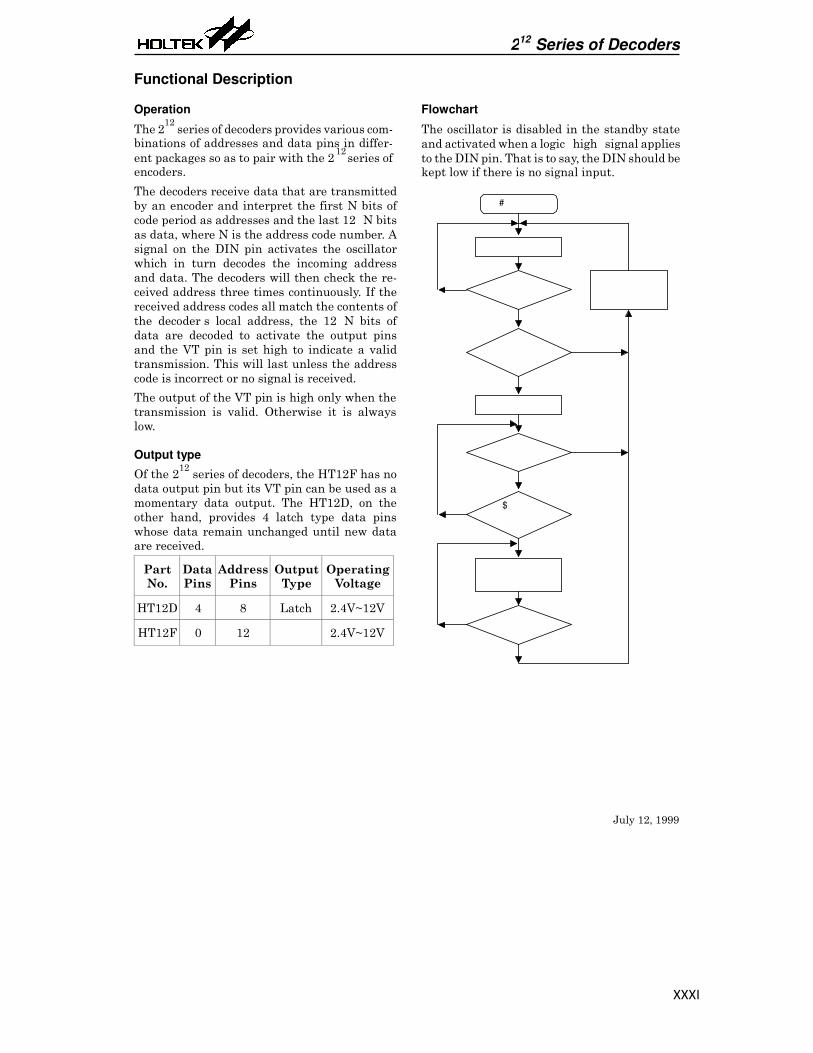
212
Series of Decoders
XXXI
Part
No. Data
Pins Address
Pins Output
Type Operating
Voltage
HT12D 4 8 Latch 2.4V~12V
HT12F 0 12 2.4V~12V
Functional Description
Operation 12
Flowchart
The 2 series of decoders provides various com- The oscillator is disabled in the standby state binations of addresses and data pins in differ-
12 and activated when a logic high signal applies
ent packages so as to pair with the 2 encoders.
series of to the DIN pin. That is to say, the DIN should be kept low if there is no signal input.
The decoders receive data that are transmitted
by an encoder and interpret the first N bits of
code period as addresses and the last 12 N bits
as data, where N is the address code number. A
signal on the DIN pin activates the oscillator
which in turn decodes the incoming address
and data. The decoders will then check the re-
ceived address three times continuously. If the
received address codes all match the contents of
the decoder s local address, the 12 N bits of
data are decoded to activate the output pins
and the VT pin is set high to indicate a valid
transmission. This will last unless the address
code is incorrect or no signal is received.
The output of the VT pin is high only when the
transmission is valid. Otherwise it is always
low.
Output type
Of the 212
series of decoders, the HT12F has no
data output pin but its VT pin can be used as a
momentary data output. The HT12D, on the
other hand, provides 4 latch type data pins
whose data remain unchanged until new data
are received.
#
$
July 12, 1999
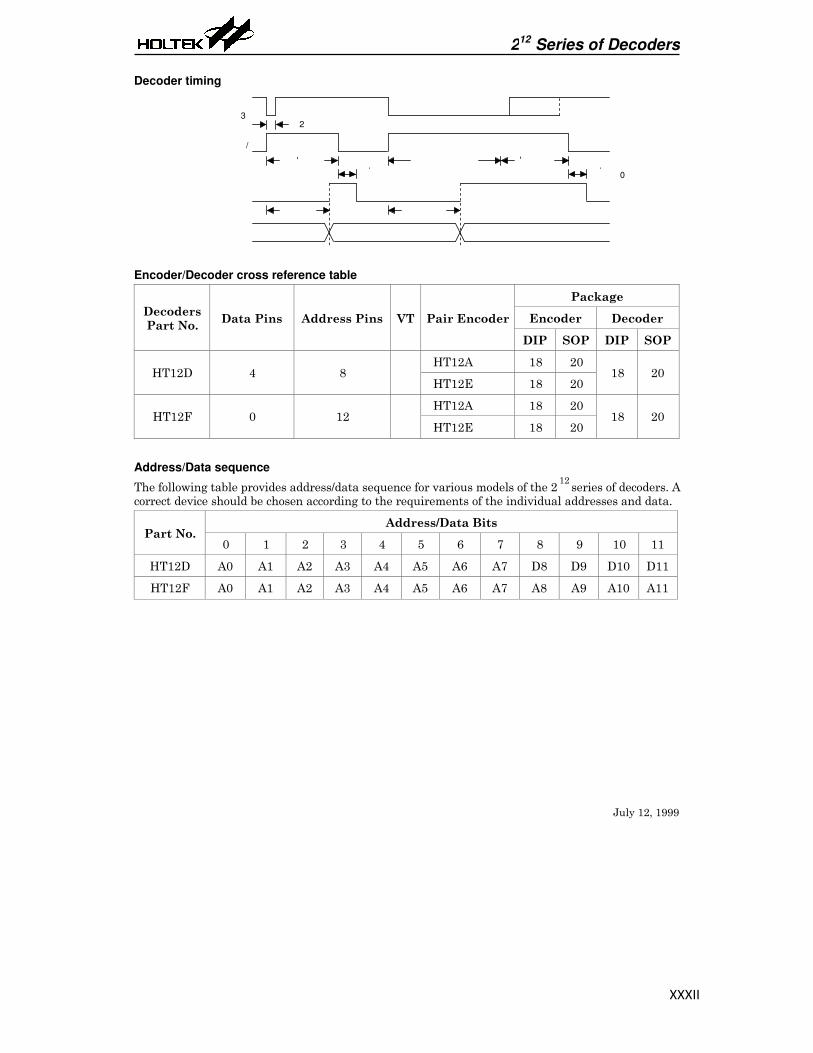
212
Series of Decoders
XXXII
Decoder timing
3 2
/
'
'
'
' 0
Encoder/Decoder cross reference table
Decoders
Part No.
Data Pins
Address Pins
VT
Pair Encoder
Package
Encoder Decoder
DIP SOP DIP SOP
HT12D
4
8
HT12A 18 20
18
20 HT12E 18 20
HT12F
0
12
HT12A 18 20 18
20
HT12E 18 20
Address/Data sequence
12
The following table provides address/data sequence for various models of the 2 series of decoders. A correct device should be chosen according to the requirements of the individual addresses and data.
Part No.
Address/Data Bits
0 1 2 3 4 5 6 7 8 9 10 11
HT12D A0 A1 A2 A3 A4 A5 A6 A7 D8 D9 D10 D11
HT12F A0 A1 A2 A3 A4 A5 A6 A7 A8 A9 A10 A11
July 12, 1999
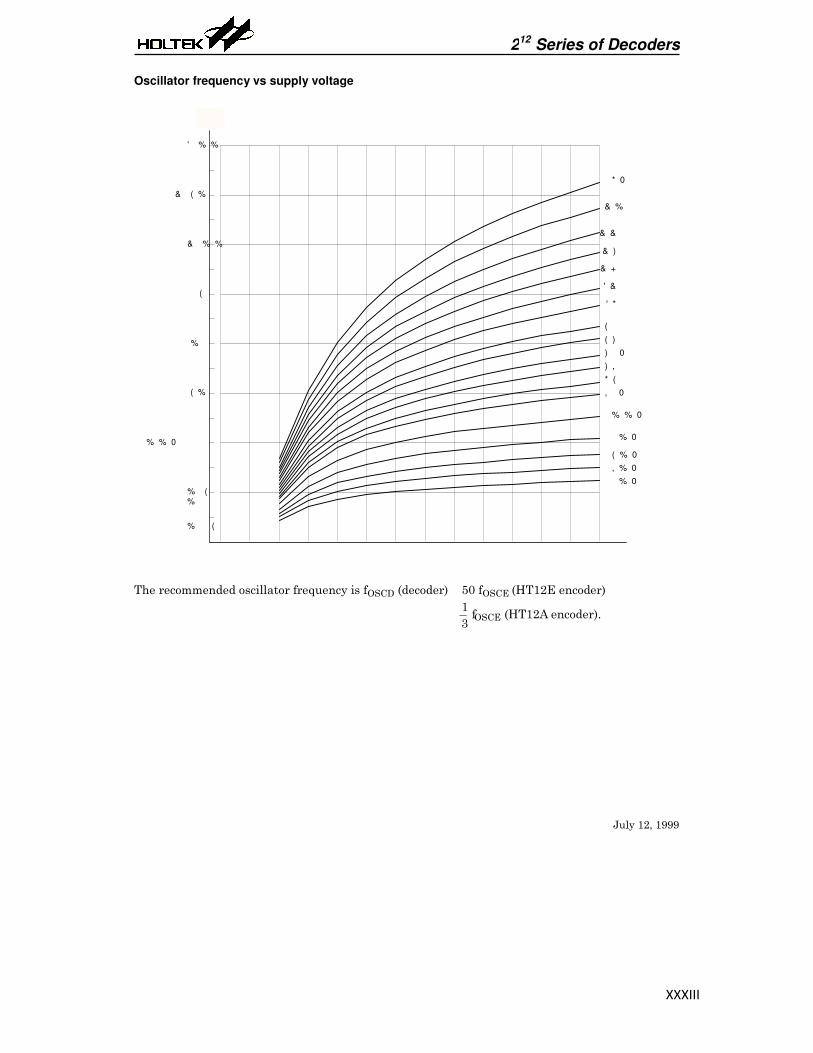
212
Series of Decoders
XXXIII
Oscillator frequency vs supply voltage
' % %
& ( %
* 0
& %
& &
& % % & )
& +
' & (
' *
%
( %
(
( )
) 0
) ,
* (
, 0
% % 0
% ( %
% % 0
% 0
( % 0
, % 0
% 0
% (
The recommended oscillator frequency is fOSCD (decoder) 50 fOSCE (HT12E encoder)
1
f 3
OSCE
(HT12A encoder).
July 12, 1999
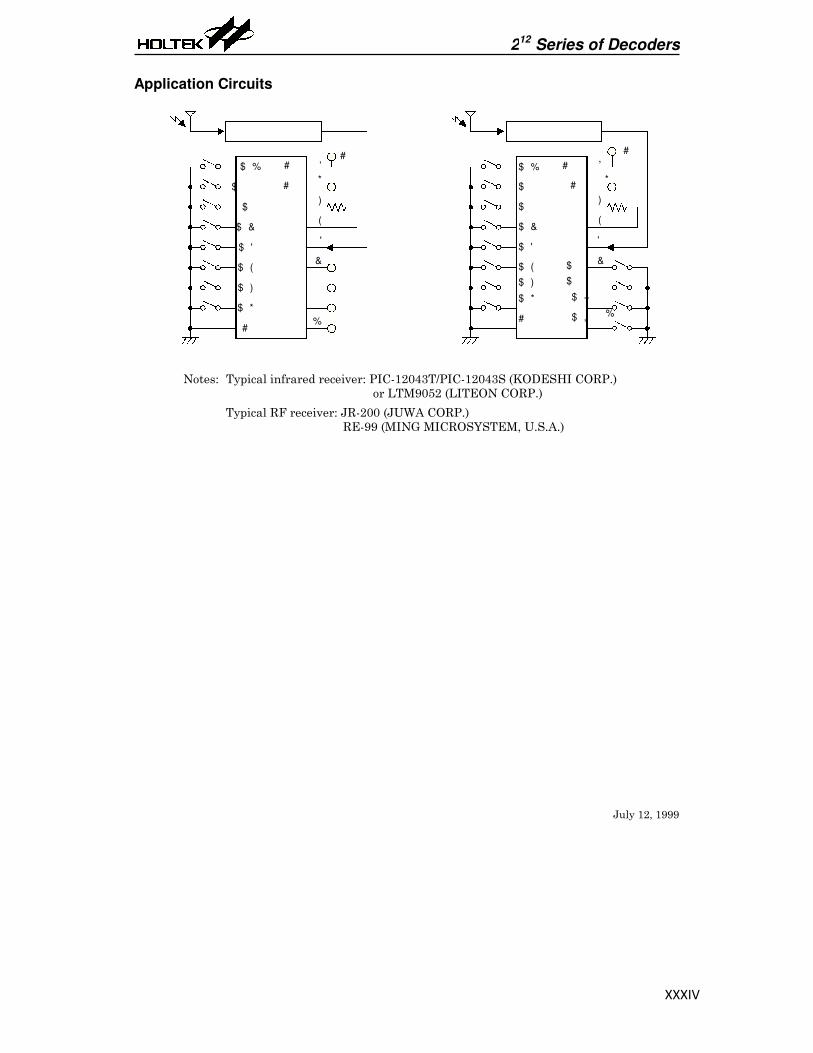
212
Series of Decoders
XXXIV
#
Application Circuits
$ % #
,
$ # *
) $
( $ &
' $ '
& $ (
$ )
$ *
% #
# ,
$ % #
$ # *
) $
( $ &
$ ' '
$ ( $ &
$ ) $
$ * $ +
# $ , %
Notes: Typical infrared receiver: PIC-12043T/PIC-12043S (KODESHI CORP.)
or LTM9052 (LITEON CORP.)
Typical RF receiver: JR-200 (JUWA CORP.)
RE-99 (MING MICROSYSTEM, U.S.A.)
July 12, 1999
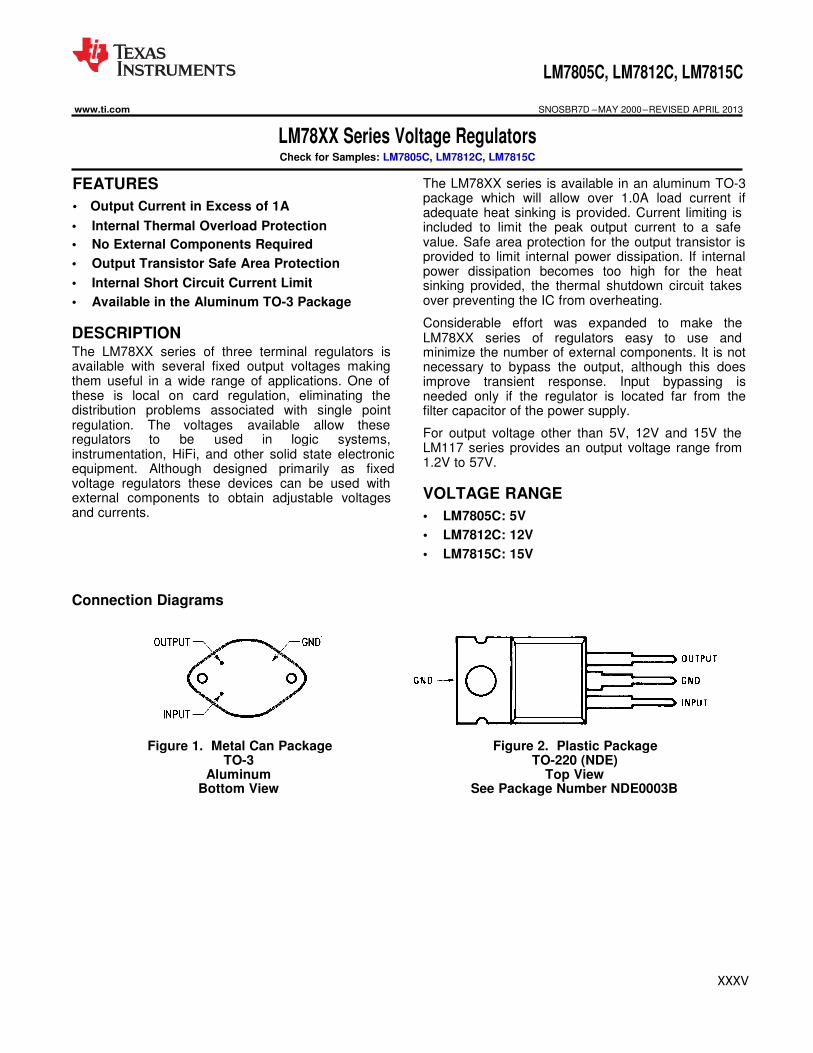
XXXV
1.2V to 57V.LM117 series provides an output voltage range from
regulators to be used in logic systems,
LM7805C, LM7812C, LM7815C
www.ti.com SNOSBR7D – MAY 2000 – REVISED APRIL 2013
LM78XX Series Voltage Regulators Check for Samples: LM7805C, LM7812C, LM7815C
FEATURES • Output Current in Excess of 1A
The LM78XX series is available in an aluminum TO-3 package which will allow over 1.0A load current if adequate heat sinking is provided. Current limiting is
• Internal Thermal Overload Protection included to limit the peak output current to a safe • No External Components Required • Output Transistor Safe Area Protection
value. Safe area protection for the output transistor is provided to limit internal power dissipation. If internal power dissipation becomes too high for the heat
• Internal Short Circuit Current Limit sinking provided, the thermal shutdown circuit takes • Available in the Aluminum TO-3 Package over preventing the IC from overheating.
Considerable effort was expanded to make the DESCRIPTION LM78XX series of regulators easy to use and The LM78XX series of three terminal regulators is minimize the number of external components. It is not available with several fixed output voltages making necessary to bypass the output, although this does them useful in a wide range of applications. One of improve transient response. Input bypassing is these is local on card regulation, eliminating the needed only if the regulator is located far from the distribution problems associated with single point filter capacitor of the power supply. regulation. The voltages available allow these
For output voltage other than 5V, 12V and 15V the
instrumentation, HiFi, and other solid state electronic equipment. Although designed primarily as fixed voltage regulators these devices can be used with external components to obtain adjustable voltages VOLTAGE RANGE and currents. • LM7805C: 5V
• LM7812C: 12V • LM7815C: 15V
Connection Diagrams
Figure 1. Metal Can Package Figure 2. Plastic Package TO-3 TO-220 (NDE)
Aluminum Top View Bottom View See Package Number NDE0003B
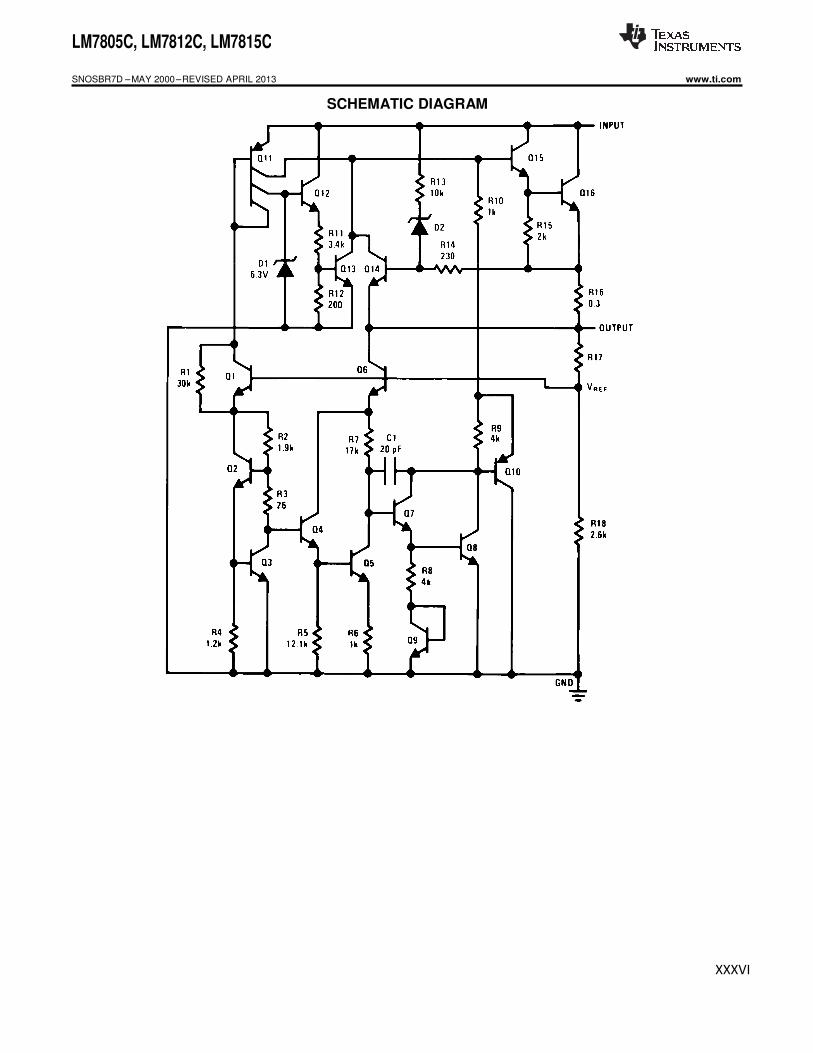
LM7805C, LM7812C, LM7815C
SNOSBR7D – MAY 2000 – REVISED APRIL 2013 www.ti.com
XXXVI
SCHEMATIC DIAGRAM
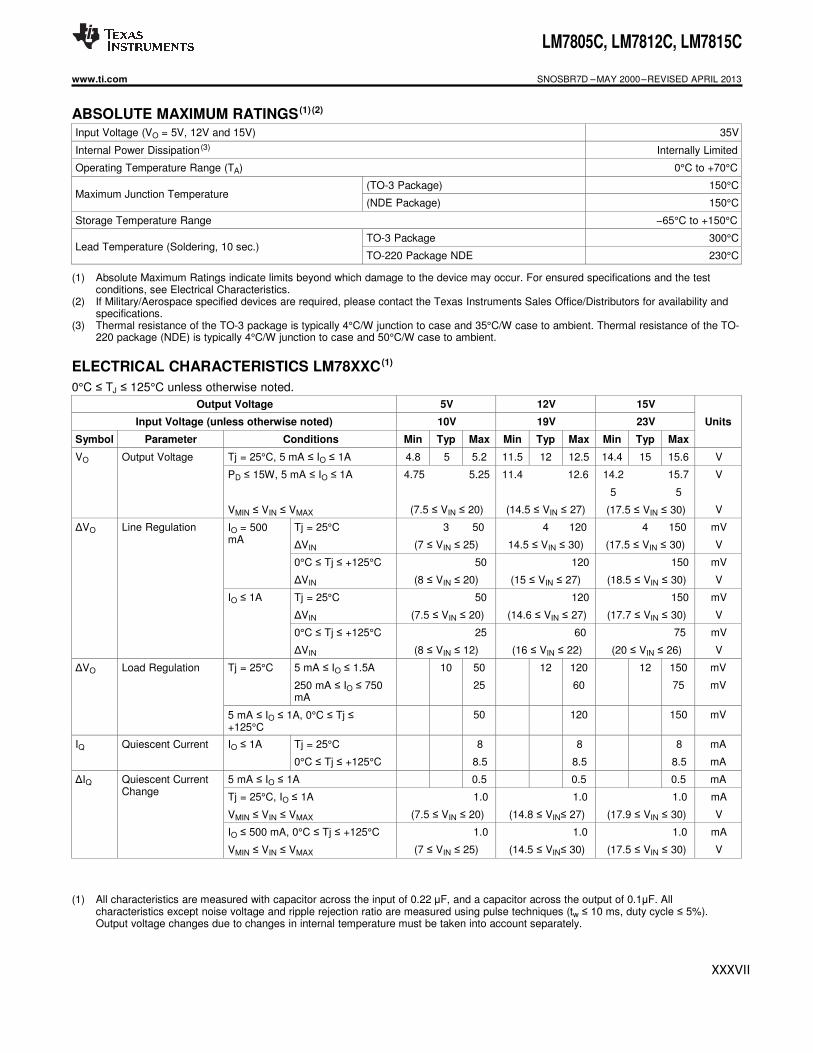
LM7805C, LM7812C, LM7815C
www.ti.com SNOSBR7D – MAY 2000 – REVISED APRIL 2013
XXXVII
ABSOLUTE MAXIMUM RATINGS (1) (2)
Input Voltage (VO = 5V, 12V and 15V) 35V Internal Power Dissipation (3) Internally Limited Operating Temperature Range (TA) 0°C to +70°C
Maximum Junction Temperature
(TO-3 Package) 150°C (NDE Package) 150°C
Storage Temperature Range −65°C to +150°C Lead Temperature (Soldering, 10 sec.)
TO-3 Package 300°C TO-220 Package NDE 230°C
(1) Absolute Maximum Ratings indicate limits beyond which damage to the device may occur. For ensured specifications and the test conditions, see Electrical Characteristics.
(2) If Military/Aerospace specified devices are required, please contact the Texas Instruments Sales Office/Distributors for availability and specifications.
(3) Thermal resistance of the TO-3 package is typically 4°C/W junction to case and 35°C/W case to ambient. Thermal resistance of the TO- 220 package (NDE) is typically 4°C/W junction to case and 50°C/W case to ambient.
ELECTRICAL CHARACTERISTICS LM78XXC (1)
0°C ≤ TJ ≤ 125°C unless otherwise noted. Output Voltage 5V 12V 15V
Units Input Voltage (unless otherwise noted) 10V 19V 23V
Symbol Parameter Conditions Min Typ Max Min Typ Max Min Typ Max VO Output Voltage Tj = 25°C, 5 mA ≤ IO ≤ 1A 4.8 5 5.2 11.5 12 12.5 14.4 15 15.6 V
PD ≤ 15W, 5 mA ≤ IO ≤ 1A
VMIN ≤ VIN ≤ VMAX
4.75 5.25
(7.5 ≤ VIN ≤ 20)
11.4 12.6
(14.5 ≤ VIN ≤ 27)
14.2 15.7
5 5
(17.5 ≤ VIN ≤ 30)
V
V
∆VO Line Regulation IO = 500 mA
Tj = 25°C
∆VIN 3 50
(7 ≤ VIN ≤ 25) 4 120
14.5 ≤ VIN ≤ 30) 4 150
(17.5 ≤ VIN ≤ 30) mV
V 0°C ≤ Tj ≤ +125°C
∆VIN 50
(8 ≤ VIN ≤ 20) 120
(15 ≤ VIN ≤ 27) 150
(18.5 ≤ VIN ≤ 30) mV
V IO ≤ 1A Tj = 25°C
∆VIN 50
(7.5 ≤ VIN ≤ 20) 120
(14.6 ≤ VIN ≤ 27) 150
(17.7 ≤ VIN ≤ 30) mV
V 0°C ≤ Tj ≤ +125°C
∆VIN 25
(8 ≤ VIN ≤ 12) 60
(16 ≤ VIN ≤ 22) 75
(20 ≤ VIN ≤ 26) mV
V ∆VO Load Regulation Tj = 25°C 5 mA ≤ IO ≤ 1.5A
250 mA ≤ IO ≤ 750 mA
10 50
25 12 120
60 12 150
75 mV
mV
5 mA ≤ IO ≤ 1A, 0°C ≤ Tj ≤ +125°C
50 120 150 mV
IQ Quiescent Current IO ≤ 1A Tj = 25°C
0°C ≤ Tj ≤ +125°C 8
8.5 8
8.5 8
8.5 mA
mA ∆IQ Quiescent Current
Change 5 mA ≤ IO ≤ 1A 0.5 0.5 0.5 mA Tj = 25°C, IO ≤ 1A
VMIN ≤ VIN ≤ VMAX 1.0
(7.5 ≤ VIN ≤ 20) 1.0
(14.8 ≤ VIN≤ 27) 1.0
(17.9 ≤ VIN ≤ 30) mA
V IO ≤ 500 mA, 0°C ≤ Tj ≤ +125°C
VMIN ≤ VIN ≤ VMAX 1.0
(7 ≤ VIN ≤ 25) 1.0
(14.5 ≤ VIN≤ 30) 1.0
(17.5 ≤ VIN ≤ 30) mA
V
(1) All characteristics are measured with capacitor across the input of 0.22 µF, and a capacitor across the output of 0.1µF. All
characteristics except noise voltage and ripple rejection ratio are measured using pulse techniques (tw ≤ 10 ms, duty cycle ≤ 5%). Output voltage changes due to changes in internal temperature must be taken into account separately.
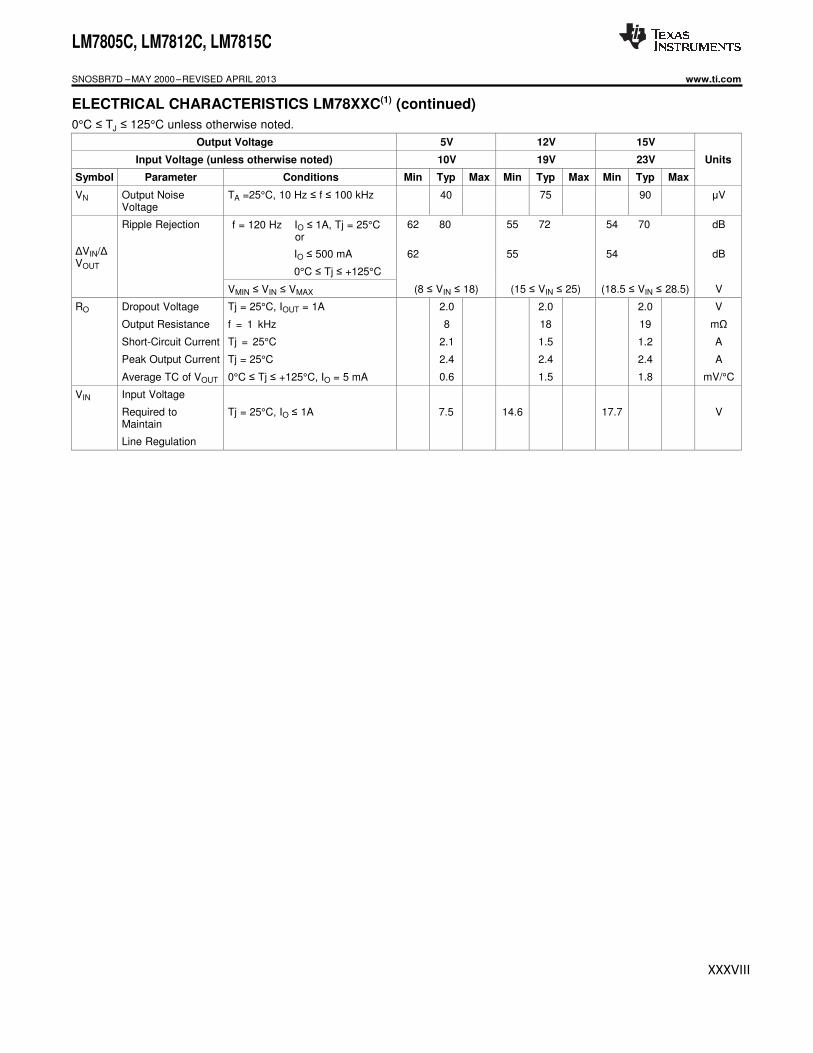
LM7805C, LM7812C, LM7815C
SNOSBR7D – MAY 2000 – REVISED APRIL 2013 www.ti.com
XXXVIII
ELECTRICAL CHARACTERISTICS LM78XXC(1) (continued) 0°C ≤ TJ ≤ 125°C unless otherwise noted.
Output Voltage 5V 12V 15V
Units Input Voltage (unless otherwise noted) 10V 19V 23V
Symbol Parameter Conditions Min Typ Max Min Typ Max Min Typ Max VN Output Noise
Voltage TA =25°C, 10 Hz ≤ f ≤ 100 kHz 40 75 90 µV
∆VIN/∆ VOUT
Ripple Rejection f = 120 Hz IO ≤ 1A, Tj = 25°C or
IO ≤ 500 mA
0°C ≤ Tj ≤ +125°C
62 80
62
(8 ≤ VIN ≤ 18)
55 72
55
(15 ≤ VIN ≤ 25)
54 70
54
(18.5 ≤ VIN ≤ 28.5)
dB
dB
V VMIN ≤ VIN ≤ VMAX
RO Dropout Voltage
Output Resistance
Short-Circuit Current
Peak Output Current
Average TC of VOUT
Tj = 25°C, IOUT = 1A
f = 1 kHz
Tj = 25°C
Tj = 25°C
0°C ≤ Tj ≤ +125°C, IO = 5 mA
2.0
8
2.1
2.4
0.6
2.0
18
1.5
2.4
1.5
2.0
19
1.2
2.4
1.8
V
mΩ
A
A
mV/°C VIN Input Voltage
Required to Maintain
Line Regulation
Tj = 25°C, IO ≤ 1A
7.5
14.6
17.7
V
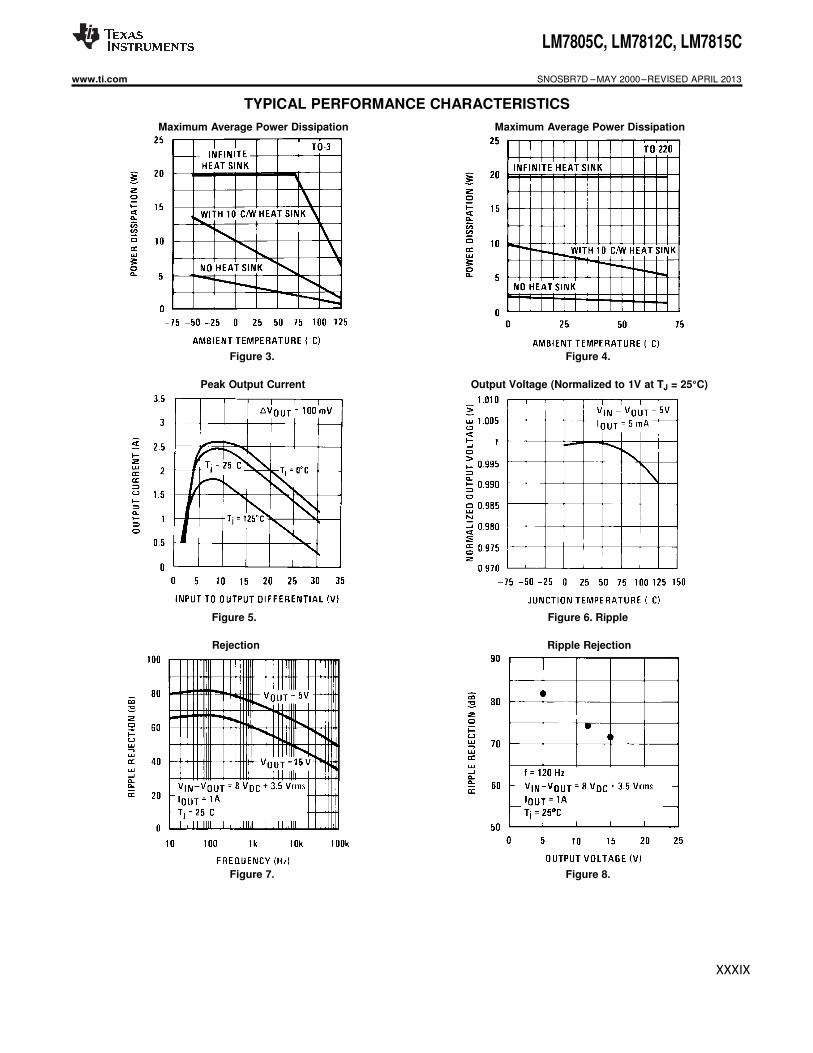
LM7805C, LM7812C, LM7815C
www.ti.com SNOSBR7D – MAY 2000 – REVISED APRIL 2013
XXXIX
TYPICAL PERFORMANCE CHARACTERISTICS
Maximum Average Power Dissipation Maximum Average Power Dissipation
Figure 3. Figure 4.
Peak Output Current Output Voltage (Normalized to 1V at TJ = 25°C)
Figure 5. Figure 6. Ripple
Rejection Ripple Rejection
Figure 7. Figure 8.

LM7805C, LM7812C, LM7815C
SNOSBR7D – MAY 2000 – REVISED APRIL 2013 www.ti.com
XL
TYPICAL PERFORMANCE CHARACTERISTICS (continued) Output Impedance Dropout Voltage
Figure 9. Figure 10.
Dropout Characteristics Quiescent Current
Figure . Figure 11.
Quiescent Current
Figure 12.
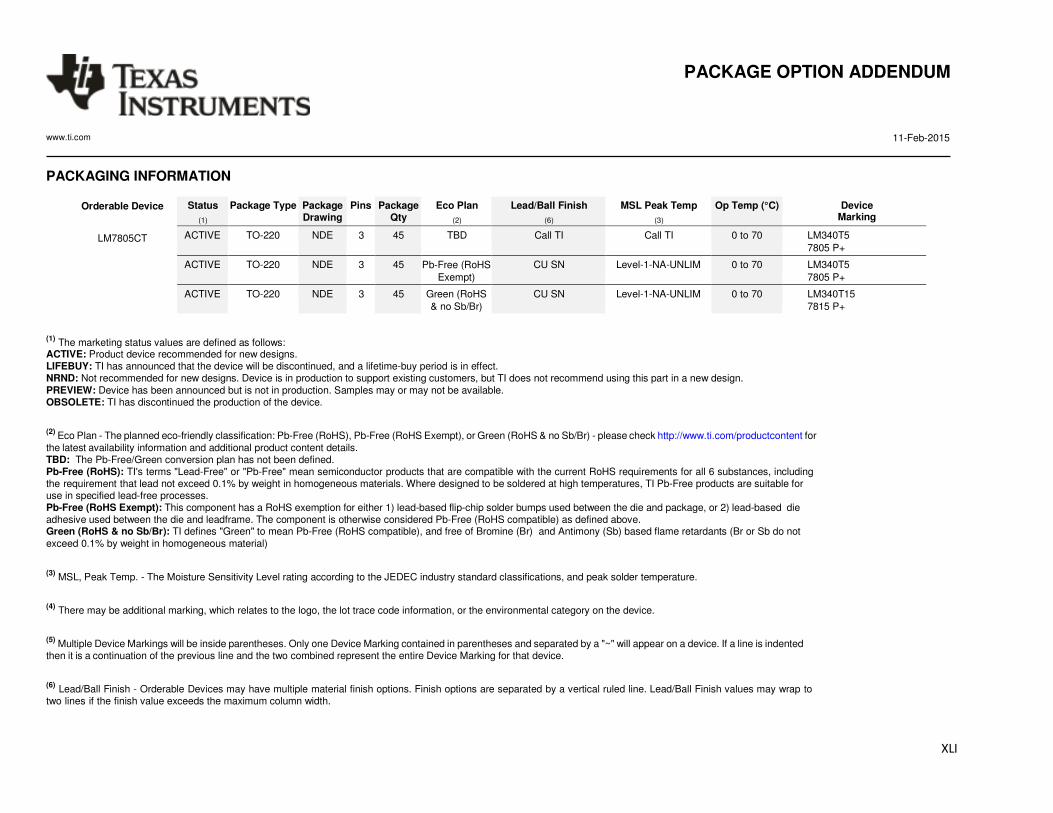
XLI
Status (1)
Package Type Package Drawing
Pins Package Qty
Eco Plan (2)
Lead/Ball Finish (6)
MSL Peak Temp (3)
Op Temp (°C) Device Marking
ACTIVE TO-220 NDE 3 45 TBD Call TI Call TI 0 to 70 LM340T5 7805 P+
ACTIVE TO-220 NDE 3 45 Pb-Free (RoHS Exempt)
CU SN Level-1-NA-UNLIM 0 to 70 LM340T5 7805 P+
ACTIVE TO-220 NDE 3 45 Green (RoHS & no Sb/Br)
CU SN Level-1-NA-UNLIM 0 to 70 LM340T15 7815 P+
PACKAGE OPTION ADDENDUM
www.ti.com 11-Feb-2015 PACKAGING INFORMATION
Orderable Device
LM7805CT
(1) The marketing status values are defined as follows: ACTIVE: Product device recommended for new designs. LIFEBUY: TI has announced that the device will be discontinued, and a lifetime-buy period is in effect. NRND: Not recommended for new designs. Device is in production to support existing customers, but TI does not recommend using this part in a new design. PREVIEW: Device has been announced but is not in production. Samples may or may not be available. OBSOLETE: TI has discontinued the production of the device.
(2) Eco Plan - The planned eco-friendly classification: Pb-Free (RoHS), Pb-Free (RoHS Exempt), or Green (RoHS & no Sb/Br) - please check http://www.ti.com/productcontent for the latest availability information and additional product content details. TBD: The Pb-Free/Green conversion plan has not been defined. Pb-Free (RoHS): TI's terms "Lead-Free" or "Pb-Free" mean semiconductor products that are compatible with the current RoHS requirements for all 6 substances, including the requirement that lead not exceed 0.1% by weight in homogeneous materials. Where designed to be soldered at high temperatures, TI Pb-Free products are suitable for use in specified lead-free processes. Pb-Free (RoHS Exempt): This component has a RoHS exemption for either 1) lead-based flip-chip solder bumps used between the die and package, or 2) lead-based die adhesive used between the die and leadframe. The component is otherwise considered Pb-Free (RoHS compatible) as defined above. Green (RoHS & no Sb/Br): TI defines "Green" to mean Pb-Free (RoHS compatible), and free of Bromine (Br) and Antimony (Sb) based flame retardants (Br or Sb do not exceed 0.1% by weight in homogeneous material)
(3) MSL, Peak Temp. - The Moisture Sensitivity Level rating according to the JEDEC industry standard classifications, and peak solder temperature.
(4) There may be additional marking, which relates to the logo, the lot trace code information, or the environmental category on the device.
(5) Multiple Device Markings will be inside parentheses. Only one Device Marking contained in parentheses and separated by a "~" will appear on a device. If a line is indented then it is a continuation of the previous line and the two combined represent the entire Device Marking for that device.
(6) Lead/Ball Finish - Orderable Devices may have multiple material finish options. Finish options are separated by a vertical ruled line. Lead/Ball Finish values may wrap to two lines if the finish value exceeds the maximum column width.
XLII
Important Information and Disclaimer:The information provided on this page represents TI's knowledge and belief as of the date that it is provided. TI bases its knowledge and belief on information provided by third parties, and makes no representation or warranty as to the accuracy of such information. Efforts are underway to better integrate information from third parties. TI has taken andcontinues to take reasonable steps to provide representative and accurate information but may not have conducted destructive testing or chemical analysis on incoming materials and chemicals. TI and TI suppliers consider certain information to be proprietary, and thus CAS numbers and other limited information may not be available for release.
In no event shall TI's liability arising out of such information exceed the total purchase price of the TI part(s) at issue in this document sold by TI to Customer on an annual basis.
Addendum-Page 2
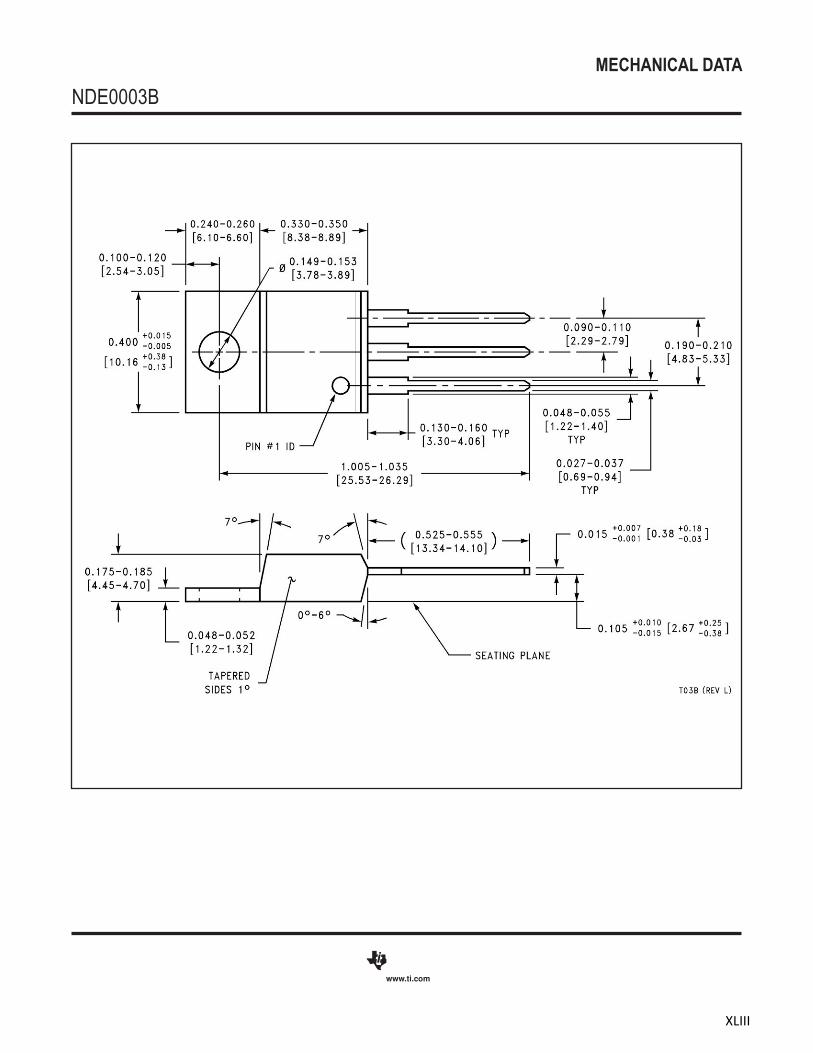
XLIII
NDE0003B
MECHANICAL DATA
www.ti.com

XLIV
IMPORTANT NOTICE
Texas Instruments Incorporated and its subsidiaries (TI) reserve the right to make corrections, enhancements, improvements and other changes to its semiconductor products and services per JESD46, latest issue, and to discontinue any product or service per JESD48, latest issue. Buyers should obtain the latest relevant information before placing orders and should verify that such information is current and complete. All semiconductor products (also referred to herein as “components”) are sold subject to TI’s terms and conditions of sale supplied at the time of order acknowledgment.
TI warrants performance of its components to the specifications applicable at the time of sale, in accordance with the warranty in TI’s terms and conditions of sale of semiconductor products. Testing and other quality control techniques are used to the extent TI deems necessary to support this warranty. Except where mandated by applicable law, testing of all parameters of each component is not necessarily performed.
TI assumes no liability for applications assistance or the design of Buyers’ products. Buyers are responsible for their products and applications using TI components. To minimize the risks associated with Buyers’ products and applications, Buyers should provide adequate design and operating safeguards.
TI does not warrant or represent that any license, either express or implied, is granted under any patent right, copyright, mask work right, or other intellectual property right relating to any combination, machine, or process in which TI components or services are used. Information published by TI regarding third-party products or services does not constitute a license to use such products or services or a warranty or endorsement thereof. Use of such information may require a license from a third party under the patents or other intellectual property of the third party, or a license from TI under the patents or other intellectual property of TI.
Reproduction of significant portions of TI information in TI data books or data sheets is permissible only if reproduction is without alteration and is accompanied by all associated warranties, conditions, limitations, and notices. TI is not responsible or liable for such altered documentation. Information of third parties may be subject to additional restrictions.
Resale of TI components or services with statements different from or beyond the parameters stated by TI for that component or service voids all express and any implied warranties for the associated TI component or service and is an unfair and deceptive business practice. TI is not responsible or liable for any such statements.
Buyer acknowledges and agrees that it is solely responsible for compliance with all legal, regulatory and safety-related requirements concerning its products, and any use of TI components in its applications, notwithstanding any applications-related information or support that may be provided by TI. Buyer represents and agrees that it has all the necessary expertise to create and implement safeguards which anticipate dangerous consequences of failures, monitor failures and their consequences, lessen the likelihood of failures that might cause harm and take appropriate remedial actions. Buyer will fully indemnify TI and its representatives against any damages arising out of the use of any TI components in safety-critical applications.
In some cases, TI components may be promoted specifically to facilitate safety-related applications. With such components, TI’s goal is to help enable customers to design and create their own end-product solutions that meet applicable functional safety standards and requirements. Nonetheless, such components are subject to these terms.
No TI components are authorized for use in FDA Class III (or similar life-critical medical equipment) unless authorized officers of the parties have executed a special agreement specifically governing such use.
Only those TI components which TI has specifically designated as military grade or “enhanced plastic” are designed and intended for use in military/aerospace applications or environments. Buyer acknowledges and agrees that any military or aerospace use of TI components which have not been so designated is solely at the Buyer's risk, and that Buyer is solely responsible for compliance with all legal and regulatory requirements in connection with such use.
TI has specifically designated certain components as meeting ISO/TS16949 requirements, mainly for automotive use. In any case of use of non-designated products, TI will not be responsible for any failure to meet ISO/TS16949.
Products Applications Audio www.ti.com/audio Automotive and Transportation www.ti.com/automotive Amplifiers amplifier.ti.com Communications and Telecom www.ti.com/communications Data Converters dataconverter.ti.com Computers and Peripherals www.ti.com/computers DLP® Products www.dlp.com Consumer Electronics www.ti.com/consumer-apps DSP dsp.ti.com Energy and Lighting www.ti.com/energy Clocks and Timers www.ti.com/clocks Industrial www.ti.com/industrial Interface interface.ti.com Medical www.ti.com/medical Logic logic.ti.com Security www.ti.com/security Power Mgmt power.ti.com Space, Avionics and Defense www.ti.com/space-avionics-defense Microcontrollers microcontroller.ti.com Video and Imaging www.ti.com/video RFID www.ti-rfid.com OMAP Applications Processors www.ti.com/omap TI E2E Community e2e.ti.com Wireless Connectivity www.ti.com/wirelessconnectivity
Mailing Address: Texas Instruments, Post Office Box 655303, Dallas, Texas 75265
Copyright © 2015, Texas Instruments Incorporated
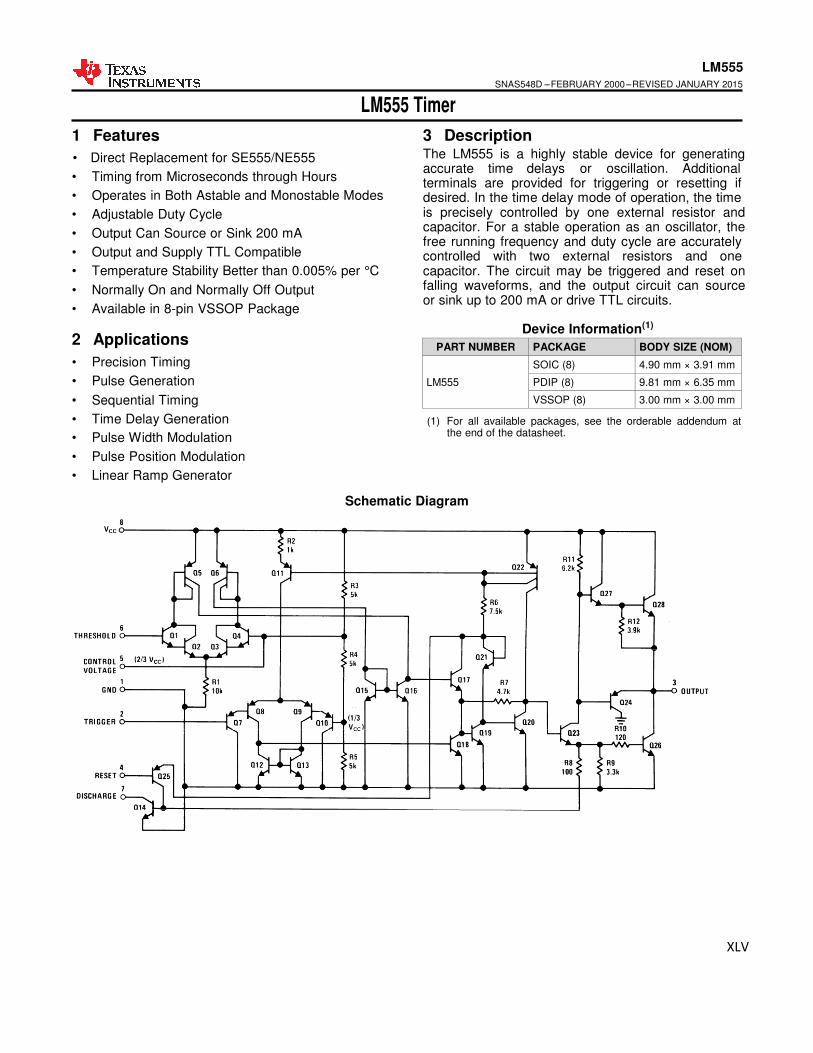
XLV
PART NUMBER PACKAGE BODY SIZE (NOM)
LM555
SOIC (8) 4.90 mm × 3.91 mm PDIP (8) 9.81 mm × 6.35 mm VSSOP (8) 3.00 mm × 3.00 mm
LM555 Timer
LM555 SNAS548D – FEBRUARY 2000 – REVISED JANUARY 2015
1 Features 3 Description • Direct Replacement for SE555/NE555 • Timing from Microseconds through Hours
The LM555 is a highly stable device for generating accurate time delays or oscillation. Additional terminals are provided for triggering or resetting if
• Operates in Both Astable and Monostable Modes desired. In the time delay mode of operation, the time • Adjustable Duty Cycle • Output Can Source or Sink 200 mA
is precisely controlled by one external resistor and capacitor. For a stable operation as an oscillator, the free running frequency and duty cycle are accurately
• Output and Supply TTL Compatible controlled with two external resistors and one • Temperature Stability Better than 0.005% per °C • Normally On and Normally Off Output • Available in 8-pin VSSOP Package
2 Applications • Precision Timing • Pulse Generation
• Sequential Timing
capacitor. The circuit may be triggered and reset on falling waveforms, and the output circuit can source or sink up to 200 mA or drive TTL circuits.
Device Information(1)
• Time Delay Generation (1) For all available packages, see the orderable addendum at
• Pulse Width Modulation • Pulse Position Modulation • Linear Ramp Generator
the end of the datasheet. Schematic Diagram
LM555 SNAS548D – FEBRUARY 2000 – REVISED JANUARY 2015 www.ti.com
XLVI
Table of Contents
1 Features .................................................................. 1 2 Applications ........................................................... 1 3 Description ............................................................. 1 4 Revision History..................................................... 2 5 Pin Configuration and Functions ......................... 3 6 Specifications......................................................... 4
6.1 Absolute Maximum Ratings ...................................... 4 6.2 ESD Ratings.............................................................. 4 6.3 Recommended Operating Conditions ....................... 4 6.4 Thermal Information ................................................. 4 6.5 Electrical Characteristics .......................................... 5 6.6 Typical Characteristics .............................................. 6
7 Detailed Description .............................................. 8 7.1 Overview ................................................................... 8 7.2 Functional Block Diagram ......................................... 8
4 Revision History
7.3 Feature Description................................................... 8 7.4 Device Functional Modes.......................................... 9
8 Application and Implementation ........................ 12 8.1 Application Information............................................ 12 8.2 Typical Application ................................................. 12
9 Power Supply Recommendations ...................... 15 10 Layout................................................................... 15
10.1 Layout Guidelines ................................................. 15 10.2 Layout Example .................................................... 15
11 Device and Documentation Support ................. 16 11.1 Trademarks ........................................................... 16 11.2 Electrostatic Discharge Caution ............................ 16 11.3 Glossary ................................................................ 16
12 Mechanical, Packaging, and Orderable Information ........................................................... 16
Changes from Revision C (March 2013) to Revision D Page
• Added Pin Configuration and Functions section, ESD Ratings table, Feature Description section, Device Functional
Modes, Application and Implementation section, Power Supply Recommendations section, Layout section, Device and Documentation Support section, and Mechanical, Packaging, and Orderable Information section .............................. 1
Changes from Revision B (March 2013) to Revision C Page
• Changed layout of National Data Sheet to TI format ........................................................................................................... 13
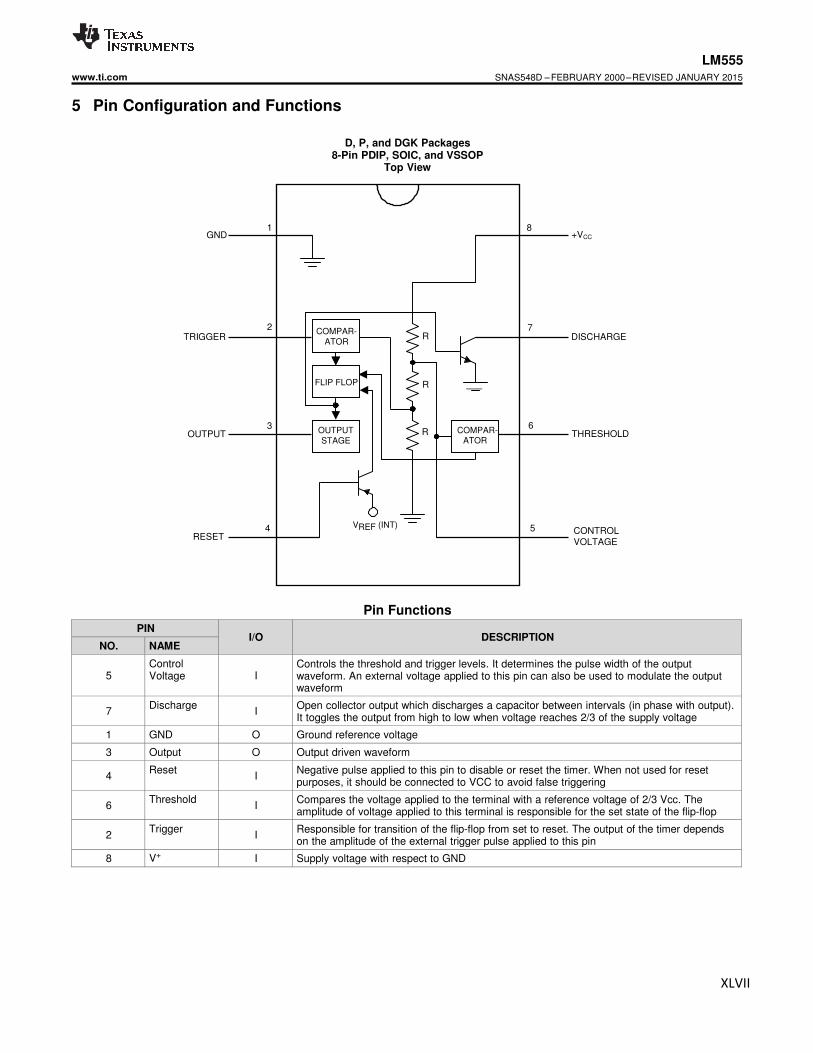
LM555SNAS548D – FEBRUARY 2000 – REVISED JANUARY 2015 www.ti.com
XLVII
5 Pin Configuration and Functions
D, P, and DGK Packages 8-Pin PDIP, SOIC, and VSSOP
Top View
1 GND
8 +VCC
2 TRIGGER
COMPAR-
ATOR
FLIP FLOP
7 R DISCHARGE R
3 OUTPUT
4 RESET
OUTPUT R STAGE
VREF (INT)
COMPAR- 6 ATOR
5
THRESHOLD CONTROL VOLTAGE
Pin Functions
PIN I/O
DESCRIPTION
NO. NAME
5 Control Voltage
I
Controls the threshold and trigger levels. It determines the pulse width of the output waveform. An external voltage applied to this pin can also be used to modulate the output waveform
7 Discharge
I Open collector output which discharges a capacitor between intervals (in phase with output). It toggles the output from high to low when voltage reaches 2/3 of the supply voltage
1 GND O Ground reference voltage 3 Output O Output driven waveform
4 Reset
I Negative pulse applied to this pin to disable or reset the timer. When not used for reset purposes, it should be connected to VCC to avoid false triggering
6 Threshold
I Compares the voltage applied to the terminal with a reference voltage of 2/3 Vcc. The amplitude of voltage applied to this terminal is responsible for the set state of the flip-flop
2 Trigger
I Responsible for transition of the flip-flop from set to reset. The output of the timer depends on the amplitude of the external trigger pulse applied to this pin
8 V+ I Supply voltage with respect to GND
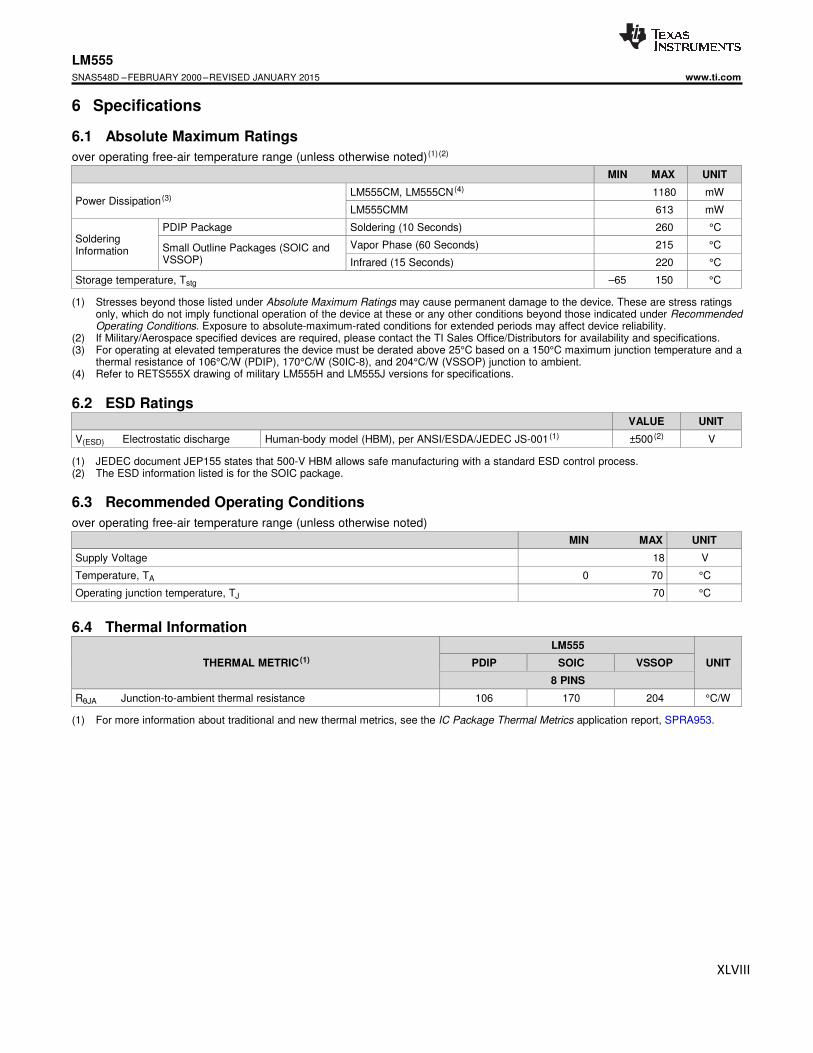
LM555 SNAS548D – FEBRUARY 2000 – REVISED JANUARY 2015 www.ti.com
XLVIII
6 Specifications 6.1 Absolute Maximum Ratings over operating free-air temperature range (unless otherwise noted) (1) (2)
MIN MAX UNIT
Power Dissipation (3) LM555CM, LM555CN (4) 1180 mW LM555CMM 613 mW
Soldering Information
PDIP Package Soldering (10 Seconds) 260 °C
Small Outline Packages (SOIC and VSSOP)
Vapor Phase (60 Seconds) 215 °C Infrared (15 Seconds) 220 °C
Storage temperature, Tstg –65 150 °C
(1) Stresses beyond those listed under Absolute Maximum Ratings may cause permanent damage to the device. These are stress ratings only, which do not imply functional operation of the device at these or any other conditions beyond those indicated under Recommended Operating Conditions. Exposure to absolute-maximum-rated conditions for extended periods may affect device reliability.
(2) If Military/Aerospace specified devices are required, please contact the TI Sales Office/Distributors for availability and specifications. (3) For operating at elevated temperatures the device must be derated above 25°C based on a 150°C maximum junction temperature and a
thermal resistance of 106°C/W (PDIP), 170°C/W (S0IC-8), and 204°C/W (VSSOP) junction to ambient. (4) Refer to RETS555X drawing of military LM555H and LM555J versions for specifications.
6.2 ESD Ratings
VALUE UNIT V(ESD) Electrostatic discharge Human-body model (HBM), per ANSI/ESDA/JEDEC JS-001 (1) ±500 (2) V
(1) JEDEC document JEP155 states that 500-V HBM allows safe manufacturing with a standard ESD control process. (2) The ESD information listed is for the SOIC package.
6.3 Recommended Operating Conditions over operating free-air temperature range (unless otherwise noted)
MIN MAX UNIT Supply Voltage 18 V Temperature, TA 0 70 °C Operating junction temperature, TJ 70 °C
6.4 Thermal Information
THERMAL METRIC (1)
LM555
UNIT PDIP SOIC VSSOP
8 PINS RθJA Junction-to-ambient thermal resistance 106 170 204 °C/W
(1) For more information about traditional and new thermal metrics, see the IC Package Thermal Metrics application report, SPRA953.
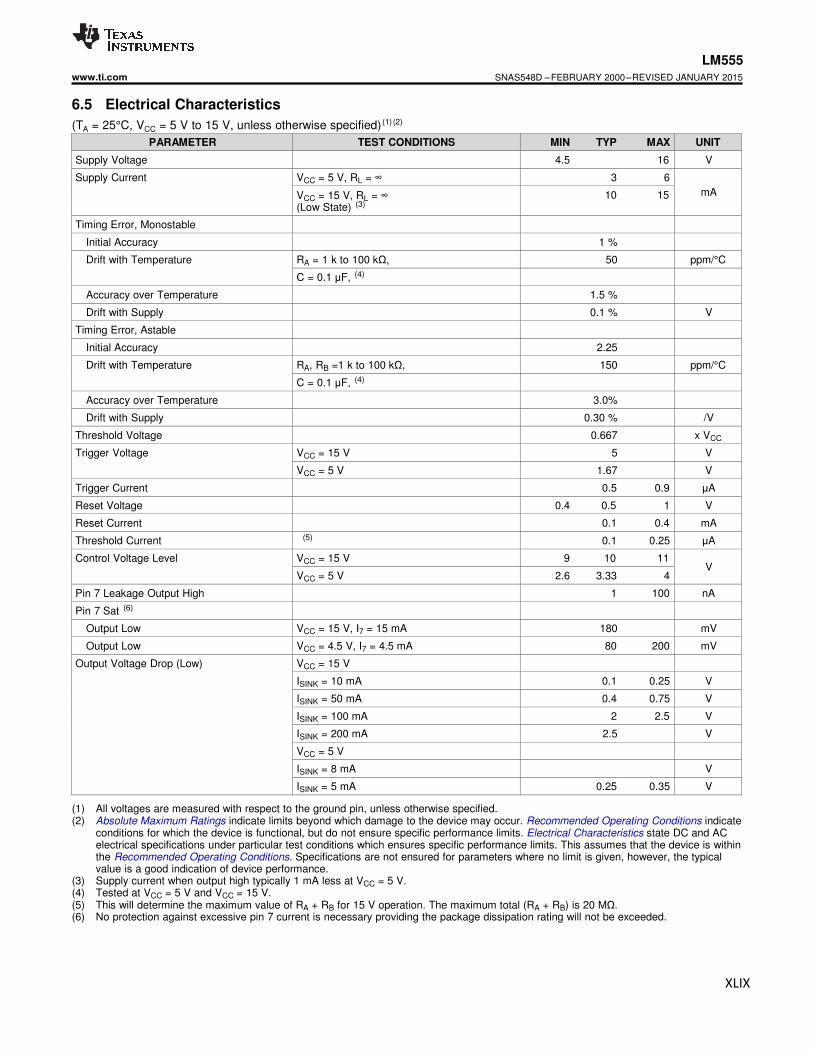
LM555SNAS548D – FEBRUARY 2000 – REVISED JANUARY 2015 www.ti.com
XLIX
6.5 Electrical Characteristics (TA = 25°C, VCC = 5 V to 15 V, unless otherwise specified) (1) (2)
PARAMETER TEST CONDITIONS MIN TYP MAX UNIT Supply Voltage 4.5 16 V Supply Current VCC = 5 V, RL = ∞ 3 6
mA VCC = 15 V, RL = ∞ (Low State) (3)
10 15
Timing Error, Monostable Initial Accuracy 1 % Drift with Temperature RA = 1 k to 100 kΩ, 50 ppm/°C
C = 0.1 µF, (4) Accuracy over Temperature 1.5 % Drift with Supply 0.1 % V
Timing Error, Astable Initial Accuracy 2.25 Drift with Temperature RA, RB =1 k to 100 kΩ, 150 ppm/°C
C = 0.1 µF, (4) Accuracy over Temperature 3.0% Drift with Supply 0.30 % /V
Threshold Voltage 0.667 x VCC Trigger Voltage VCC = 15 V 5 V
VCC = 5 V 1.67 V Trigger Current 0.5 0.9 µA Reset Voltage 0.4 0.5 1 V Reset Current 0.1 0.4 mA Threshold Current (5) 0.1 0.25 µA Control Voltage Level VCC = 15 V 9 10 11
V VCC = 5 V 2.6 3.33 4
Pin 7 Leakage Output High 1 100 nA Pin 7 Sat (6)
Output Low VCC = 15 V, I7 = 15 mA 180 mV Output Low VCC = 4.5 V, I7 = 4.5 mA 80 200 mV
Output Voltage Drop (Low) VCC = 15 V ISINK = 10 mA 0.1 0.25 V ISINK = 50 mA 0.4 0.75 V ISINK = 100 mA 2 2.5 V ISINK = 200 mA 2.5 V VCC = 5 V ISINK = 8 mA V ISINK = 5 mA 0.25 0.35 V
(1) All voltages are measured with respect to the ground pin, unless otherwise specified. (2) Absolute Maximum Ratings indicate limits beyond which damage to the device may occur. Recommended Operating Conditions indicate
conditions for which the device is functional, but do not ensure specific performance limits. Electrical Characteristics state DC and AC electrical specifications under particular test conditions which ensures specific performance limits. This assumes that the device is within the Recommended Operating Conditions. Specifications are not ensured for parameters where no limit is given, however, the typical value is a good indication of device performance.
(3) Supply current when output high typically 1 mA less at VCC = 5 V. (4) Tested at VCC = 5 V and VCC = 15 V. (5) This will determine the maximum value of RA + RB for 15 V operation. The maximum total (RA + RB) is 20 MΩ. (6) No protection against excessive pin 7 current is necessary providing the package dissipation rating will not be exceeded.
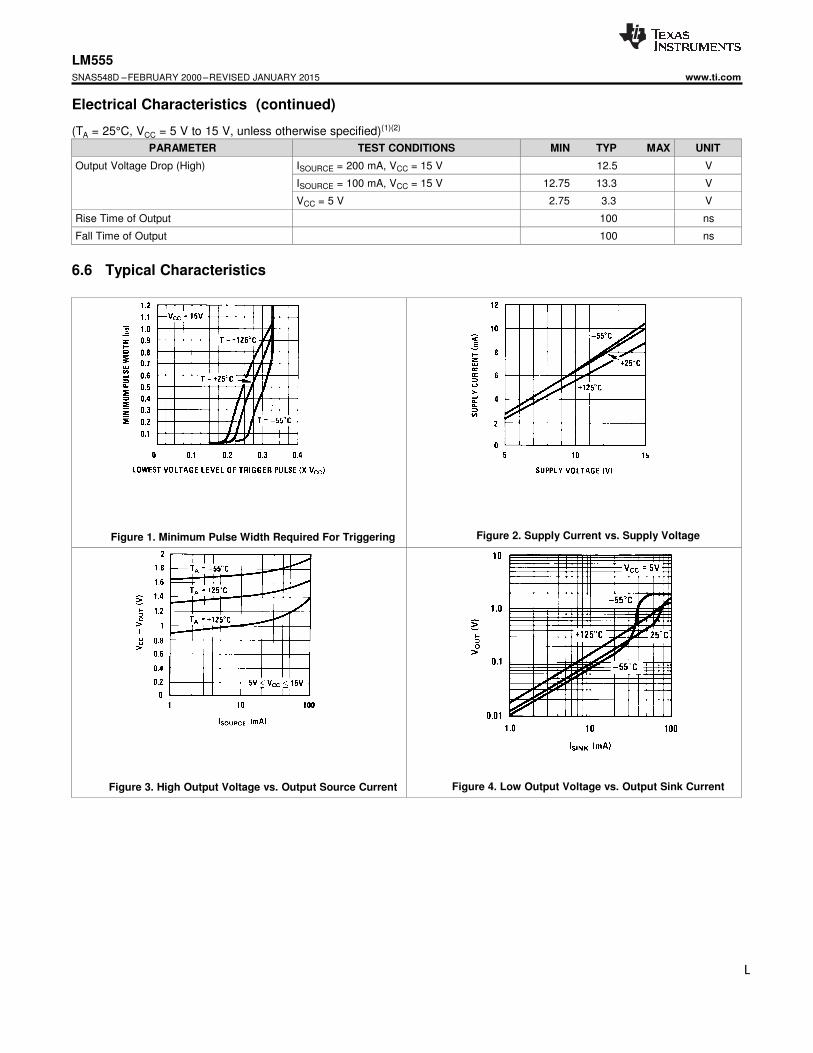
LM555 SNAS548D – FEBRUARY 2000 – REVISED JANUARY 2015 www.ti.com
L
Electrical Characteristics (continued)
(TA = 25°C, VCC = 5 V to 15 V, unless otherwise specified)(1)(2)
PARAMETER TEST CONDITIONS MIN TYP MAX UNIT Output Voltage Drop (High) ISOURCE = 200 mA, VCC = 15 V 12.5 V
ISOURCE = 100 mA, VCC = 15 V 12.75 13.3 V VCC = 5 V 2.75 3.3 V
Rise Time of Output 100 ns Fall Time of Output 100 ns
6.6 Typical Characteristics
Figure 1. Minimum Pulse Width Required For Triggering
Figure 2. Supply Current vs. Supply Voltage
Figure 3. High Output Voltage vs. Output Source Current
Figure 4. Low Output Voltage vs. Output Sink Current
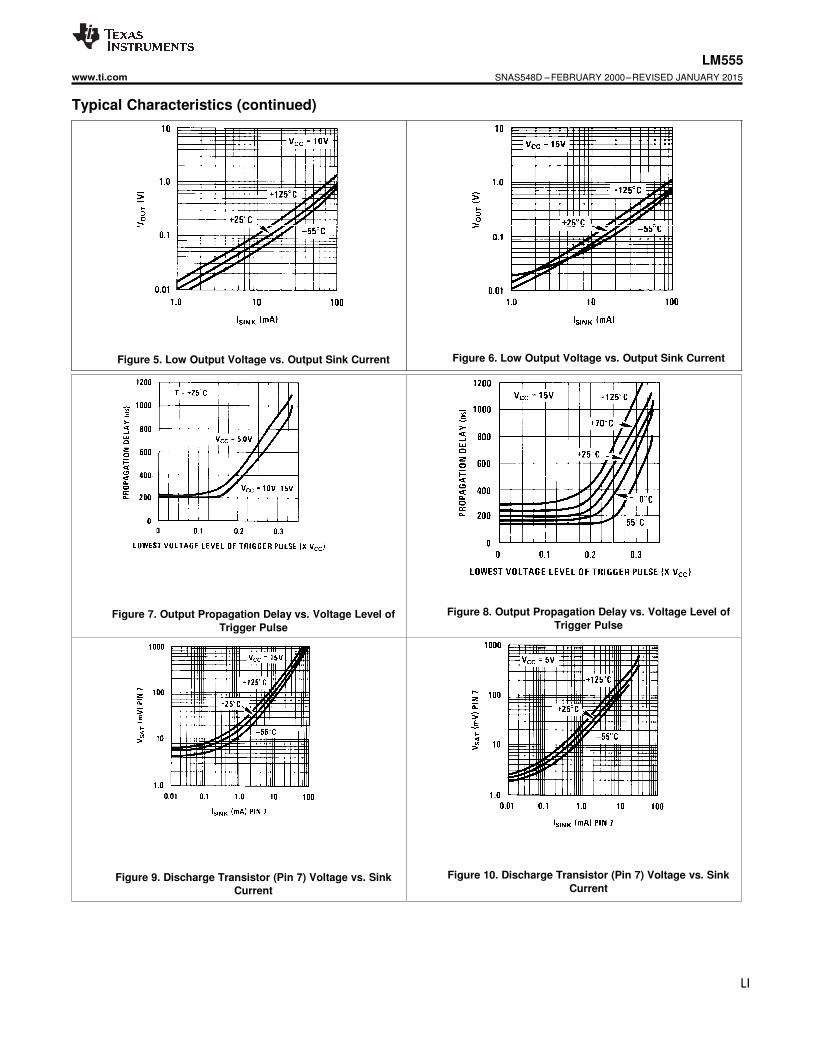
LM555SNAS548D – FEBRUARY 2000 – REVISED JANUARY 2015 www.ti.com
LI
Typical Characteristics (continued)
Figure 5. Low Output Voltage vs. Output Sink Current Figure 6. Low Output Voltage vs. Output Sink Current
Figure 7. Output Propagation Delay vs. Voltage Level of Trigger Pulse
Figure 8. Output Propagation Delay vs. Voltage Level of Trigger Pulse
Figure 9. Discharge Transistor (Pin 7) Voltage vs. Sink Current
Figure 10. Discharge Transistor (Pin 7) Voltage vs. Sink Current
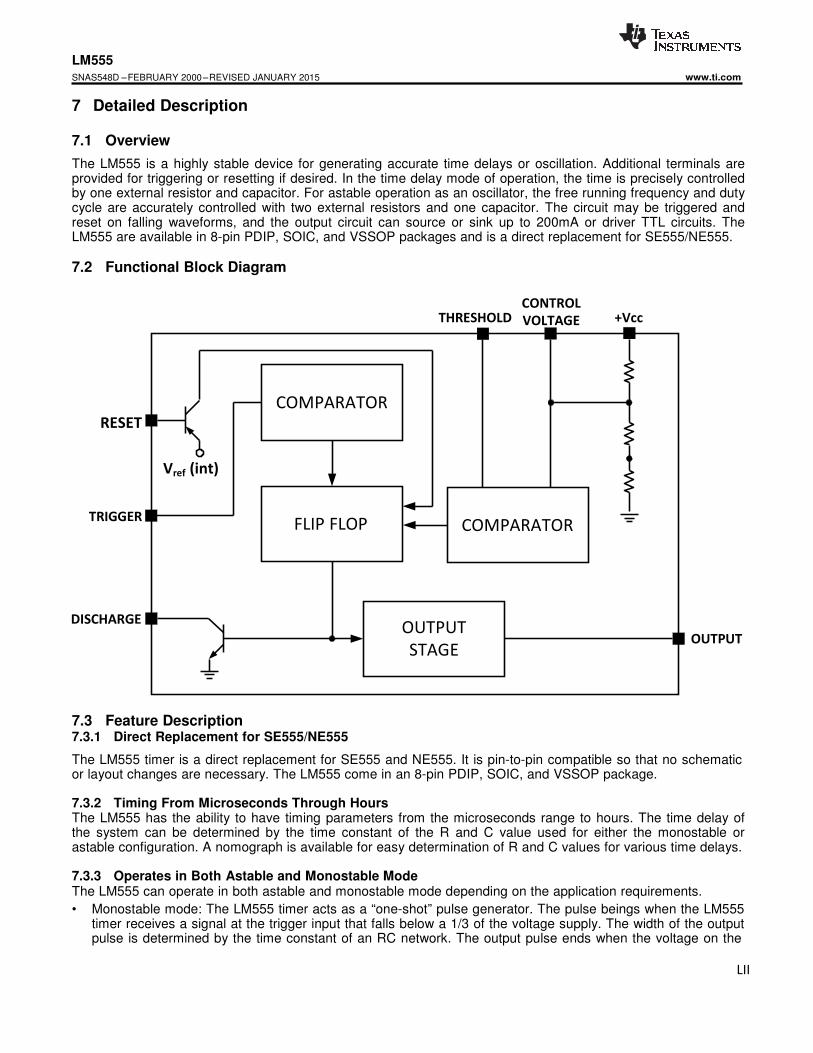
LM555 SNAS548D – FEBRUARY 2000 – REVISED JANUARY 2015 www.ti.com
LII
7 Detailed Description 7.1 Overview
The LM555 is a highly stable device for generating accurate time delays or oscillation. Additional terminals are provided for triggering or resetting if desired. In the time delay mode of operation, the time is precisely controlled by one external resistor and capacitor. For astable operation as an oscillator, the free running frequency and duty cycle are accurately controlled with two external resistors and one capacitor. The circuit may be triggered and reset on falling waveforms, and the output circuit can source or sink up to 200mA or driver TTL circuits. The LM555 are available in 8-pin PDIP, SOIC, and VSSOP packages and is a direct replacement for SE555/NE555.
7.2 Functional Block Diagram
THRESHOLD
CONTROL
VOLTAGE
+Vcc
RESET
COMPARATOR
Vref (int)
TRIGGER FLIP FLOP COMPARATOR
DISCHARGE
OUTPUT
STAGE
OUTPUT
7.3 Feature Description 7.3.1 Direct Replacement for SE555/NE555
The LM555 timer is a direct replacement for SE555 and NE555. It is pin-to-pin compatible so that no schematic or layout changes are necessary. The LM555 come in an 8-pin PDIP, SOIC, and VSSOP package.
7.3.2 Timing From Microseconds Through Hours The LM555 has the ability to have timing parameters from the microseconds range to hours. The time delay of the system can be determined by the time constant of the R and C value used for either the monostable or astable configuration. A nomograph is available for easy determination of R and C values for various time delays.
7.3.3 Operates in Both Astable and Monostable Mode The LM555 can operate in both astable and monostable mode depending on the application requirements. • Monostable mode: The LM555 timer acts as a “one-shot” pulse generator. The pulse beings when the LM555
timer receives a signal at the trigger input that falls below a 1/3 of the voltage supply. The width of the output pulse is determined by the time constant of an RC network. The output pulse ends when the voltage on the
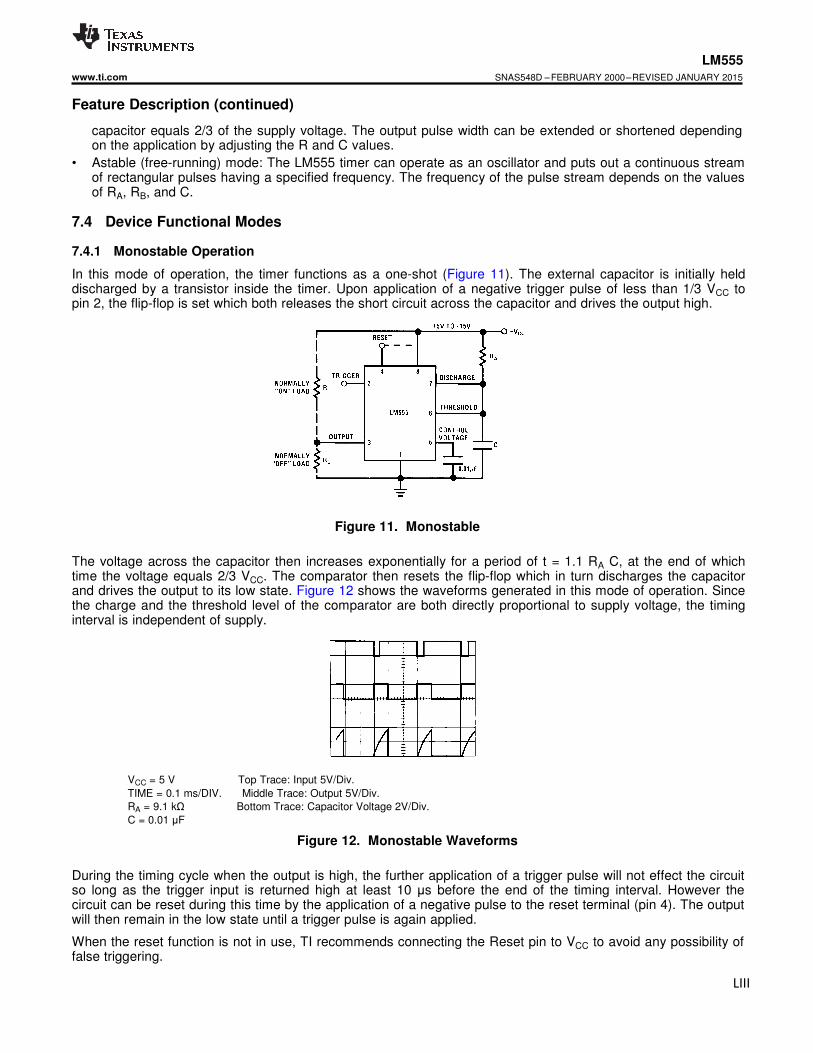
LM555SNAS548D – FEBRUARY 2000 – REVISED JANUARY 2015 www.ti.com
LIII
Feature Description (continued)
capacitor equals 2/3 of the supply voltage. The output pulse width can be extended or shortened depending on the application by adjusting the R and C values.
• Astable (free-running) mode: The LM555 timer can operate as an oscillator and puts out a continuous stream of rectangular pulses having a specified frequency. The frequency of the pulse stream depends on the values of RA, RB, and C.
7.4 Device Functional Modes
7.4.1 Monostable Operation
In this mode of operation, the timer functions as a one-shot (Figure 11). The external capacitor is initially held discharged by a transistor inside the timer. Upon application of a negative trigger pulse of less than 1/3 VCC to pin 2, the flip-flop is set which both releases the short circuit across the capacitor and drives the output high.
Figure 11. Monostable
The voltage across the capacitor then increases exponentially for a period of t = 1.1 RA C, at the end of which time the voltage equals 2/3 VCC. The comparator then resets the flip-flop which in turn discharges the capacitor and drives the output to its low state. Figure 12 shows the waveforms generated in this mode of operation. Since the charge and the threshold level of the comparator are both directly proportional to supply voltage, the timing interval is independent of supply.
VCC = 5 V Top Trace: Input 5V/Div. TIME = 0.1 ms/DIV. Middle Trace: Output 5V/Div. RA = 9.1 kΩ Bottom Trace: Capacitor Voltage 2V/Div. C = 0.01 µF
Figure 12. Monostable Waveforms
During the timing cycle when the output is high, the further application of a trigger pulse will not effect the circuit so long as the trigger input is returned high at least 10 µs before the end of the timing interval. However the circuit can be reset during this time by the application of a negative pulse to the reset terminal (pin 4). The output will then remain in the low state until a trigger pulse is again applied.
When the reset function is not in use, TI recommends connecting the Reset pin to VCC to avoid any possibility of false triggering.
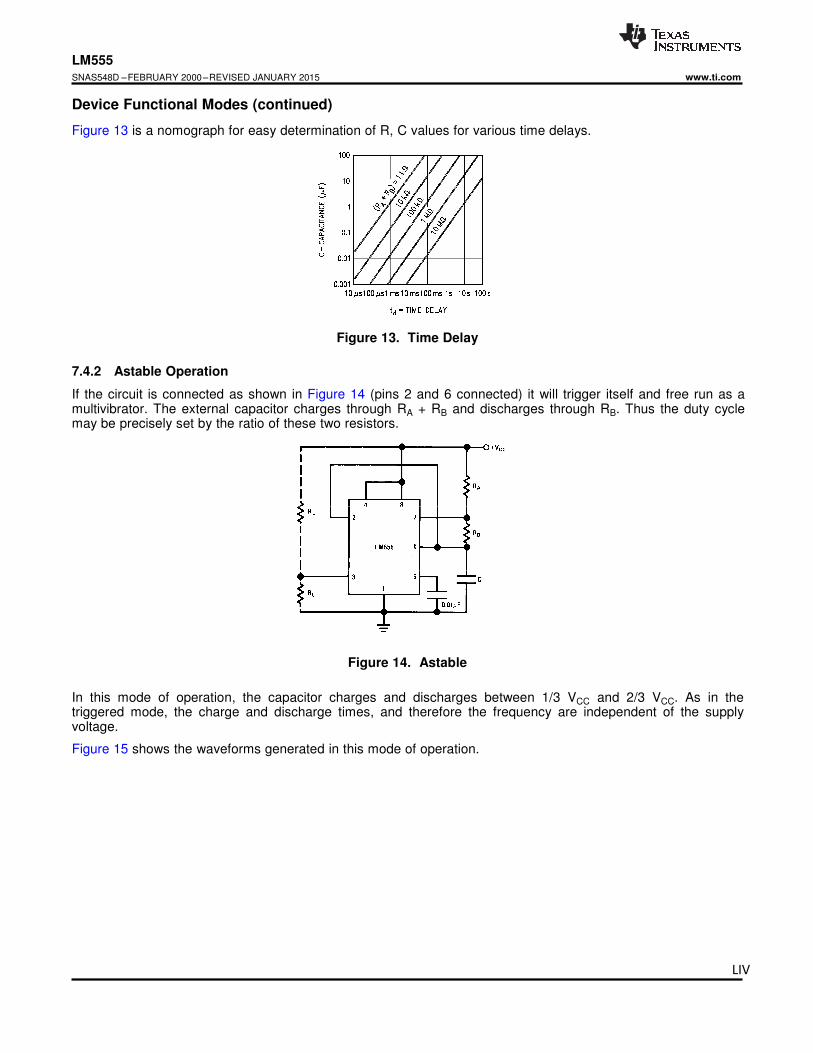
LM555 SNAS548D – FEBRUARY 2000 – REVISED JANUARY 2015 www.ti.com
LIV
Device Functional Modes (continued)
Figure 13 is a nomograph for easy determination of R, C values for various time delays.
Figure 13. Time Delay
7.4.2 Astable Operation
If the circuit is connected as shown in Figure 14 (pins 2 and 6 connected) it will trigger itself and free run as a multivibrator. The external capacitor charges through RA + RB and discharges through RB. Thus the duty cycle may be precisely set by the ratio of these two resistors.
Figure 14. Astable
In this mode of operation, the capacitor charges and discharges between 1/3 VCC and 2/3 VCC. As in the triggered mode, the charge and discharge times, and therefore the frequency are independent of the supply voltage.
Figure 15 shows the waveforms generated in this mode of operation.
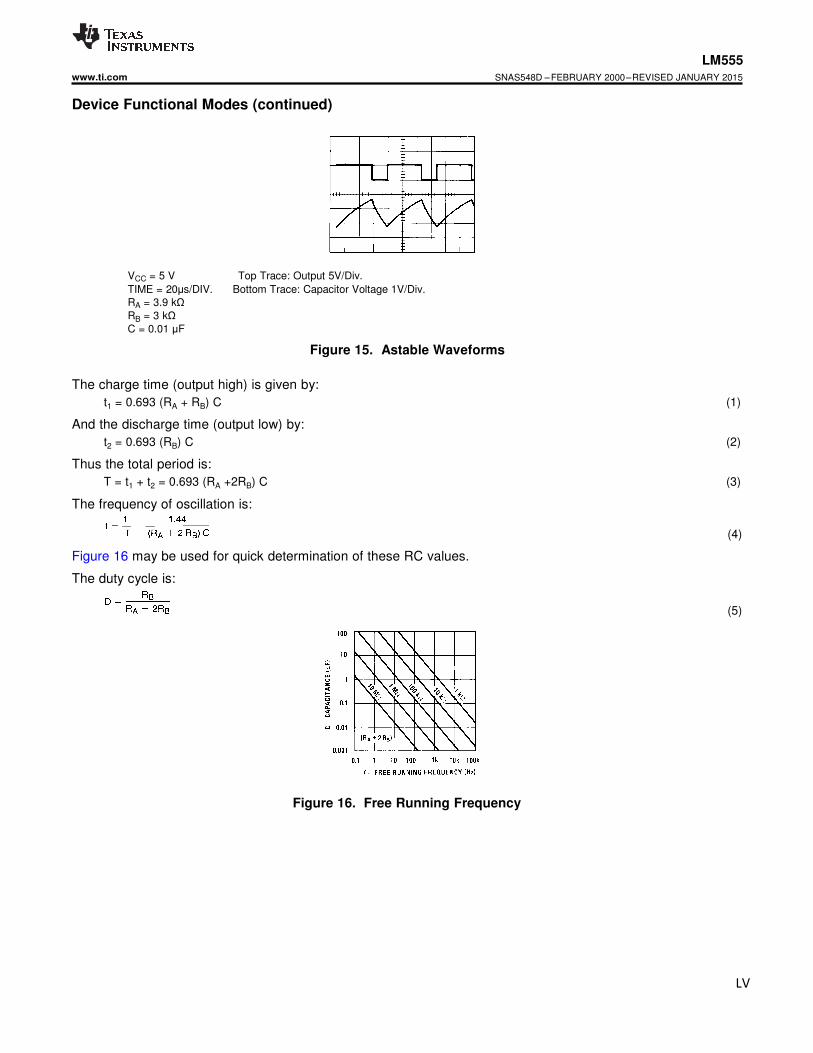
LM555SNAS548D – FEBRUARY 2000 – REVISED JANUARY 2015 www.ti.com
LV
Device Functional Modes (continued)
VCC = 5 V Top Trace: Output 5V/Div. TIME = 20µs/DIV. Bottom Trace: Capacitor Voltage 1V/Div. RA = 3.9 kΩ RB = 3 kΩ C = 0.01 µF
Figure 15. Astable Waveforms
The charge time (output high) is given by: t1 = 0.693 (RA + RB) C (1)
And the discharge time (output low) by: t2 = 0.693 (RB) C (2)
Thus the total period is: T = t1 + t2 = 0.693 (RA +2RB) C (3)
The frequency of oscillation is:
Figure 16 may be used for quick determination of these RC values.
The duty cycle is:
Figure 16. Free Running Frequency
(4) (5)
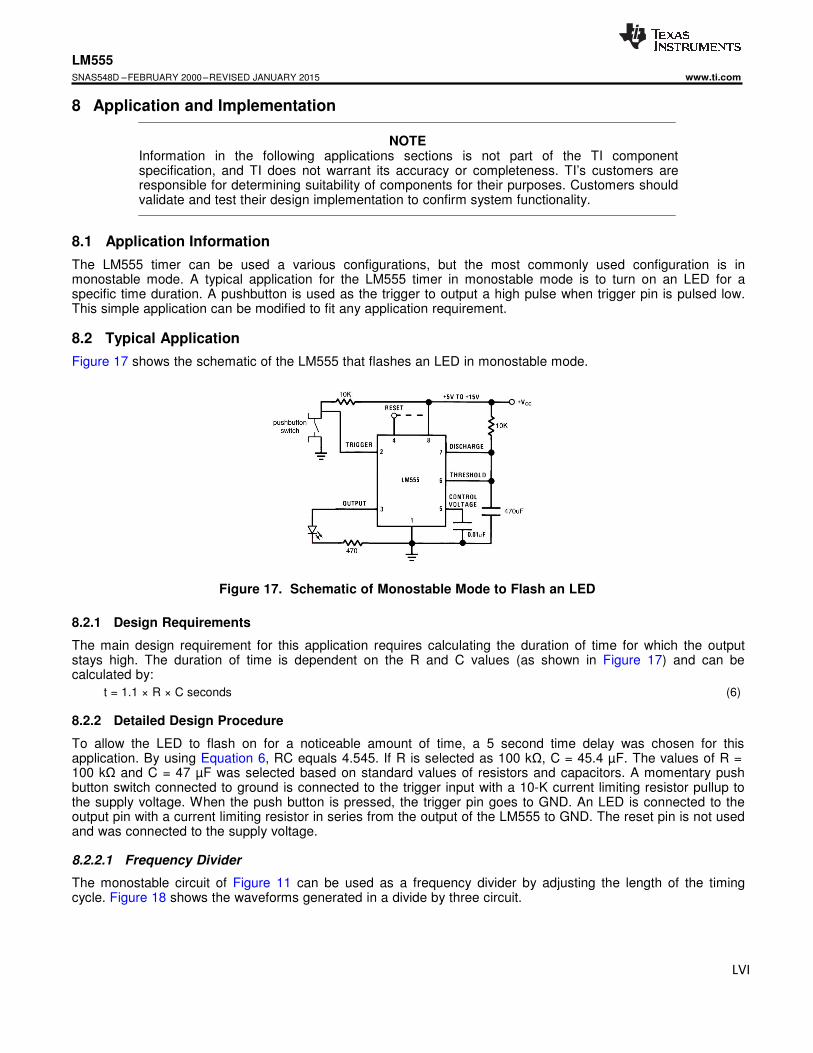
LM555 SNAS548D – FEBRUARY 2000 – REVISED JANUARY 2015 www.ti.com
LVI
8 Application and Implementation
NOTE Information in the following applications sections is not part of the TI component specification, and TI does not warrant its accuracy or completeness. TI’s customers are responsible for determining suitability of components for their purposes. Customers should validate and test their design implementation to confirm system functionality.
8.1 Application Information
The LM555 timer can be used a various configurations, but the most commonly used configuration is in monostable mode. A typical application for the LM555 timer in monostable mode is to turn on an LED for a specific time duration. A pushbutton is used as the trigger to output a high pulse when trigger pin is pulsed low. This simple application can be modified to fit any application requirement.
8.2 Typical Application
Figure 17 shows the schematic of the LM555 that flashes an LED in monostable mode.
Figure 17. Schematic of Monostable Mode to Flash an LED
8.2.1 Design Requirements
The main design requirement for this application requires calculating the duration of time for which the output stays high. The duration of time is dependent on the R and C values (as shown in Figure 17) and can be calculated by:
t = 1.1 × R × C seconds (6)
8.2.2 Detailed Design Procedure
To allow the LED to flash on for a noticeable amount of time, a 5 second time delay was chosen for this application. By using Equation 6, RC equals 4.545. If R is selected as 100 kΩ, C = 45.4 µF. The values of R = 100 kΩ and C = 47 µF was selected based on standard values of resistors and capacitors. A momentary push button switch connected to ground is connected to the trigger input with a 10-K current limiting resistor pullup to the supply voltage. When the push button is pressed, the trigger pin goes to GND. An LED is connected to the output pin with a current limiting resistor in series from the output of the LM555 to GND. The reset pin is not used and was connected to the supply voltage.
8.2.2.1 Frequency Divider
The monostable circuit of Figure 11 can be used as a frequency divider by adjusting the length of the timing cycle. Figure 18 shows the waveforms generated in a divide by three circuit.
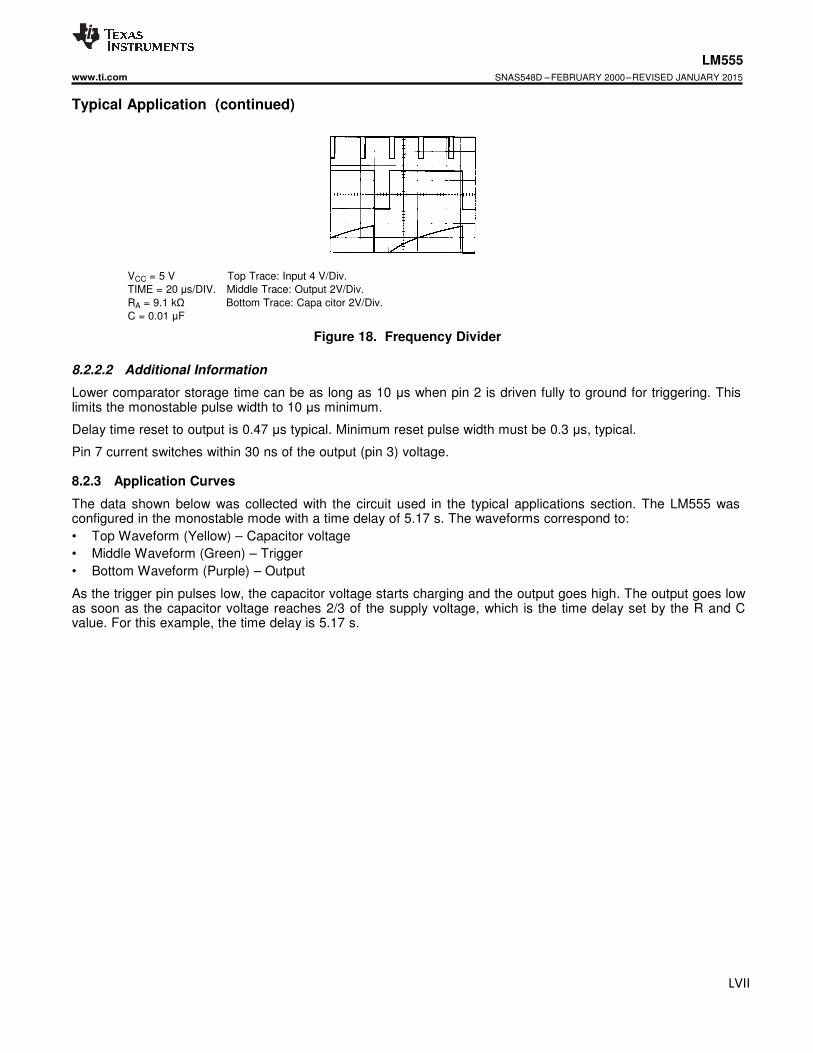
LM555SNAS548D – FEBRUARY 2000 – REVISED JANUARY 2015 www.ti.com
LVII
Typical Application (continued)
VCC = 5 V Top Trace: Input 4 V/Div. TIME = 20 µs/DIV. Middle Trace: Output 2V/Div. RA = 9.1 kΩ Bottom Trace: Capa citor 2V/Div. C = 0.01 µF
Figure 18. Frequency Divider
8.2.2.2 Additional Information
Lower comparator storage time can be as long as 10 µs when pin 2 is driven fully to ground for triggering. This limits the monostable pulse width to 10 µs minimum.
Delay time reset to output is 0.47 µs typical. Minimum reset pulse width must be 0.3 µs, typical.
Pin 7 current switches within 30 ns of the output (pin 3) voltage.
8.2.3 Application Curves
The data shown below was collected with the circuit used in the typical applications section. The LM555 was configured in the monostable mode with a time delay of 5.17 s. The waveforms correspond to: • Top Waveform (Yellow) – Capacitor voltage • Middle Waveform (Green) – Trigger • Bottom Waveform (Purple) – Output
As the trigger pin pulses low, the capacitor voltage starts charging and the output goes high. The output goes low as soon as the capacitor voltage reaches 2/3 of the supply voltage, which is the time delay set by the R and C value. For this example, the time delay is 5.17 s.
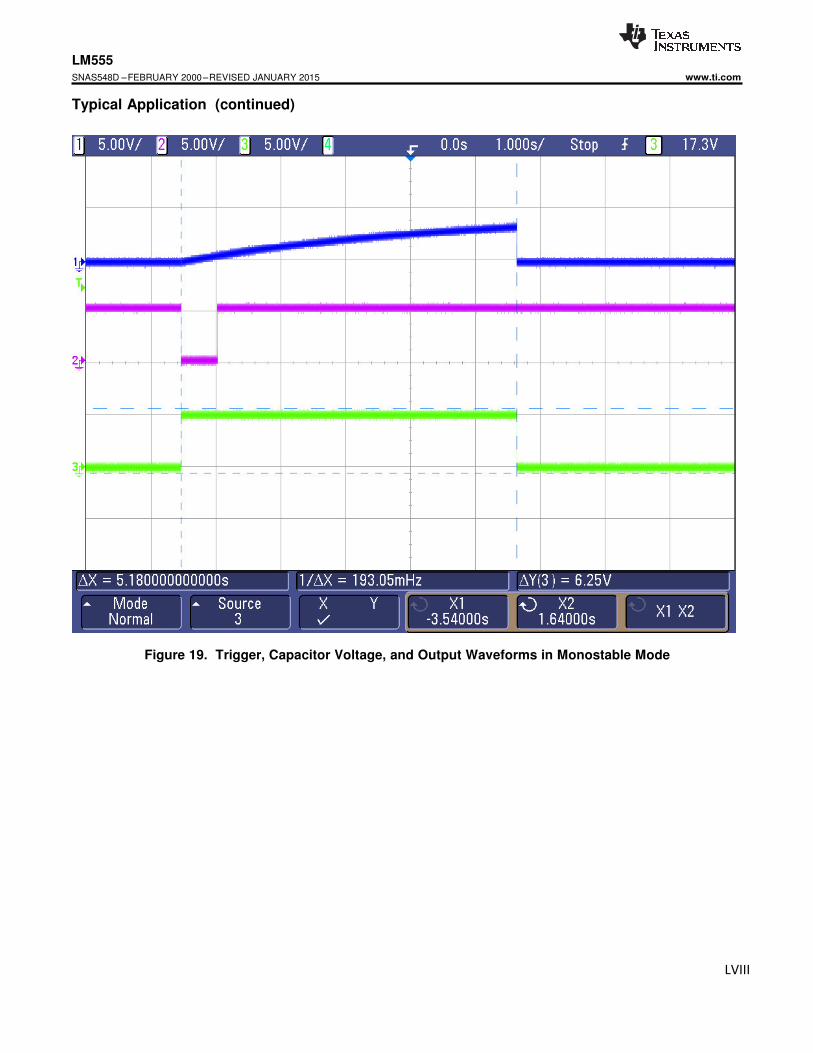
LM555 SNAS548D – FEBRUARY 2000 – REVISED JANUARY 2015 www.ti.com
LVIII
Typical Application (continued)
Figure 19. Trigger, Capacitor Voltage, and Output Waveforms in Monostable Mode
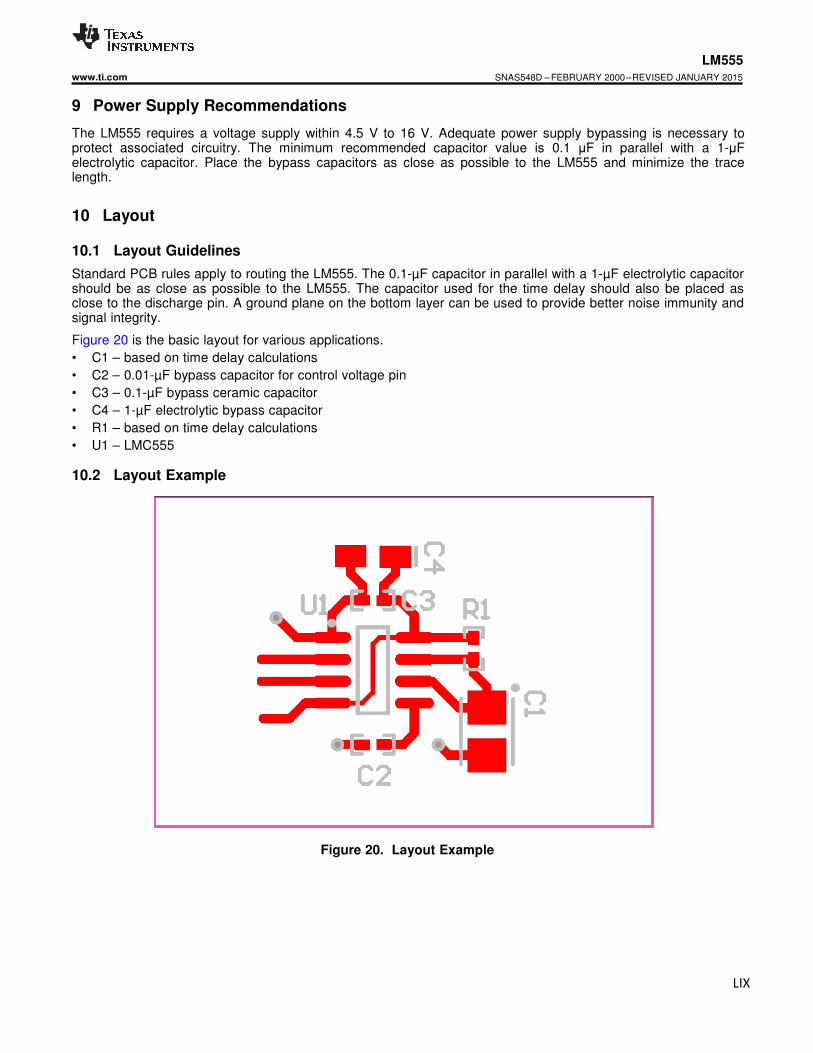
LM555SNAS548D – FEBRUARY 2000 – REVISED JANUARY 2015 www.ti.com
LIX
9 Power Supply Recommendations
The LM555 requires a voltage supply within 4.5 V to 16 V. Adequate power supply bypassing is necessary to protect associated circuitry. The minimum recommended capacitor value is 0.1 µF in parallel with a 1-µF electrolytic capacitor. Place the bypass capacitors as close as possible to the LM555 and minimize the trace length.
10 Layout
10.1 Layout Guidelines
Standard PCB rules apply to routing the LM555. The 0.1-µF capacitor in parallel with a 1-µF electrolytic capacitor should be as close as possible to the LM555. The capacitor used for the time delay should also be placed as close to the discharge pin. A ground plane on the bottom layer can be used to provide better noise immunity and signal integrity.
Figure 20 is the basic layout for various applications. • C1 – based on time delay calculations • C2 – 0.01-µF bypass capacitor for control voltage pin • C3 – 0.1-µF bypass ceramic capacitor • C4 – 1-µF electrolytic bypass capacitor • R1 – based on time delay calculations • U1 – LMC555
10.2 Layout Example
Figure 20. Layout Example
LM555 SNAS548D – FEBRUARY 2000 – REVISED JANUARY 2015 www.ti.com
LX
11 Device and Documentation Support
11.1 Trademarks All trademarks are the property of their respective owners.
11.2 Electrostatic Discharge Caution
These devices have limited built-in ESD protection. The leads should be shorted together or the device placed in conductive foam during storage or handling to prevent electrostatic damage to the MOS gates.
11.3 Glossary
SLYZ022 — TI Glossary. This glossary lists and explains terms, acronyms, and definitions.
12 Mechanical, Packaging, and Orderable Information
The following pages include mechanical, packaging, and orderable information. This information is the most current data available for the designated devices. This data is subject to change without notice and revision of this document. For browser-based versions of this data sheet, refer to the left-hand navigation.
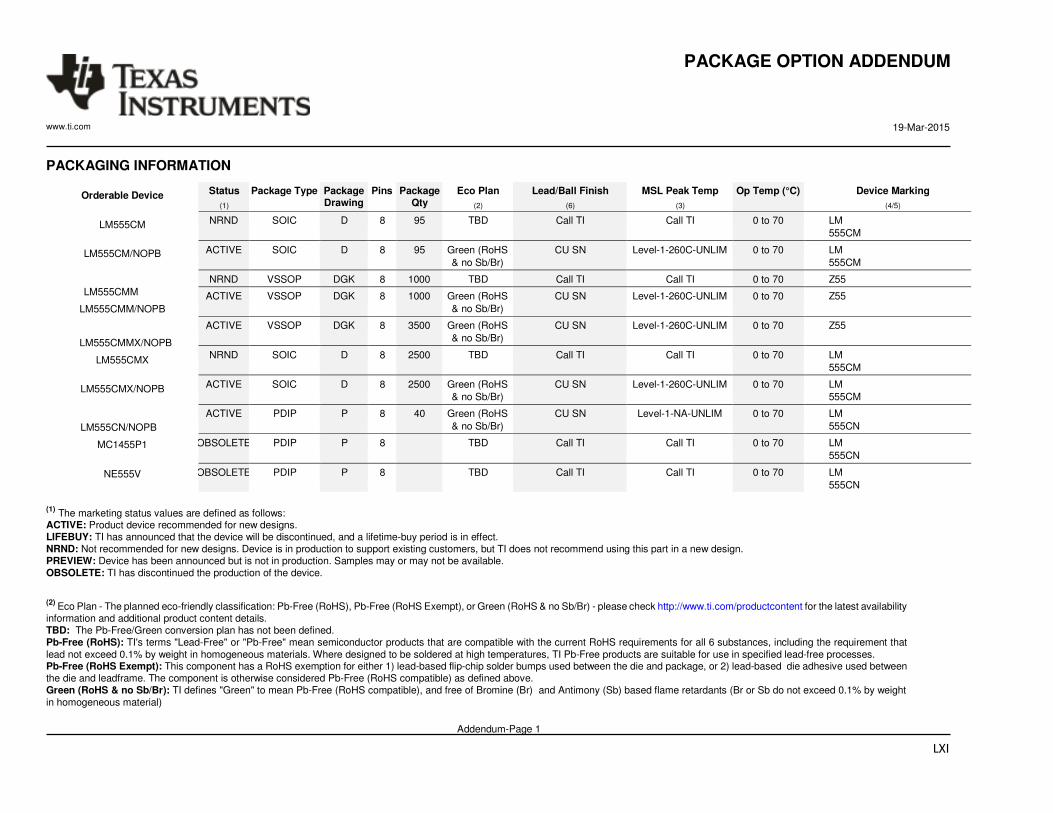
LXI
Status (1)
Package Type Package Drawing
Pins Package Qty
Eco Plan (2)
Lead/Ball Finish (6)
MSL Peak Temp (3)
Op Temp (°C) Device Marking (4/5)
NRND SOIC D 8 95 TBD Call TI Call TI 0 to 70 LM 555CM
ACTIVE SOIC D 8 95 Green (RoHS & no Sb/Br)
CU SN Level-1-260C-UNLIM 0 to 70 LM 555CM
NRND VSSOP DGK 8 1000 TBD Call TI Call TI 0 to 70 Z55 ACTIVE VSSOP DGK 8 1000 Green (RoHS
& no Sb/Br) CU SN Level-1-260C-UNLIM 0 to 70 Z55
ACTIVE VSSOP DGK 8 3500 Green (RoHS & no Sb/Br)
CU SN Level-1-260C-UNLIM 0 to 70 Z55
NRND SOIC D 8 2500 TBD Call TI Call TI 0 to 70 LM 555CM
ACTIVE SOIC D 8 2500 Green (RoHS & no Sb/Br)
CU SN Level-1-260C-UNLIM 0 to 70 LM 555CM
ACTIVE PDIP P 8 40 Green (RoHS & no Sb/Br)
CU SN Level-1-NA-UNLIM 0 to 70 LM 555CN
OBSOLETE PDIP P 8 TBD Call TI Call TI 0 to 70 LM 555CN
OBSOLETE PDIP P 8 TBD Call TI Call TI 0 to 70 LM 555CN
PACKAGE OPTION ADDENDUM
www.ti.com 19-Mar-2015 PACKAGING INFORMATION
Orderable Device
LM555CM
LM555CM/NOPB
LM555CMM
LM555CMM/NOPB
LM555CMMX/NOPB
LM555CMX
LM555CMX/NOPB
LM555CN/NOPB
MC1455P1
NE555V
(1) The marketing status values are defined as follows: ACTIVE: Product device recommended for new designs. LIFEBUY: TI has announced that the device will be discontinued, and a lifetime-buy period is in effect. NRND: Not recommended for new designs. Device is in production to support existing customers, but TI does not recommend using this part in a new design. PREVIEW: Device has been announced but is not in production. Samples may or may not be available. OBSOLETE: TI has discontinued the production of the device.
(2) Eco Plan - The planned eco-friendly classification: Pb-Free (RoHS), Pb-Free (RoHS Exempt), or Green (RoHS & no Sb/Br) - please check http://www.ti.com/productcontent for the latest availability information and additional product content details. TBD: The Pb-Free/Green conversion plan has not been defined. Pb-Free (RoHS): TI's terms "Lead-Free" or "Pb-Free" mean semiconductor products that are compatible with the current RoHS requirements for all 6 substances, including the requirement that lead not exceed 0.1% by weight in homogeneous materials. Where designed to be soldered at high temperatures, TI Pb-Free products are suitable for use in specified lead-free processes. Pb-Free (RoHS Exempt): This component has a RoHS exemption for either 1) lead-based flip-chip solder bumps used between the die and package, or 2) lead-based die adhesive used between the die and leadframe. The component is otherwise considered Pb-Free (RoHS compatible) as defined above. Green (RoHS & no Sb/Br): TI defines "Green" to mean Pb-Free (RoHS compatible), and free of Bromine (Br) and Antimony (Sb) based flame retardants (Br or Sb do not exceed 0.1% by weight in homogeneous material)
Addendum-Page 1
LXII
PACKAGE OPTION ADDENDUM
www.ti.com 19-Mar-2015
(3) MSL, Peak Temp. - The Moisture Sensitivity Level rating according to the JEDEC industry standard classifications, and peak solder temperature.
(4) There may be additional marking, which relates to the logo, the lot trace code information, or the environmental category on the device.
(5) Multiple Device Markings will be inside parentheses. Only one Device Marking contained in parentheses and separated by a "~" will appear on a device. If a line is indented then it is a continuation of the previous line and the two combined represent the entire Device Marking for that device.
(6) Lead/Ball Finish - Orderable Devices may have multiple material finish options. Finish options are separated by a vertical ruled line. Lead/Ball Finish values may wrap to two lines if the finish value exceeds the maximum column width.
Important Information and Disclaimer:The information provided on this page represents TI's knowledge and belief as of the date that it is provided. TI bases its knowledge and belief on information provided by third parties, and makes no representation or warranty as to the accuracy of such information. Efforts are underway to better integrate information from third parties. TI has taken and continues to take reasonable steps to provide representative and accurate information but may not have conducted destructive testing or chemical analysis on incoming materials and chemicals. TI and TI suppliers consider certain information to be proprietary, and thus CAS numbers and other limited information may not be available for release.
In no event shall TI's liability arising out of such information exceed the total purchase price of the TI part(s) at issue in this document sold by TI to Customer on an annual basis.
Addendum-Page 2
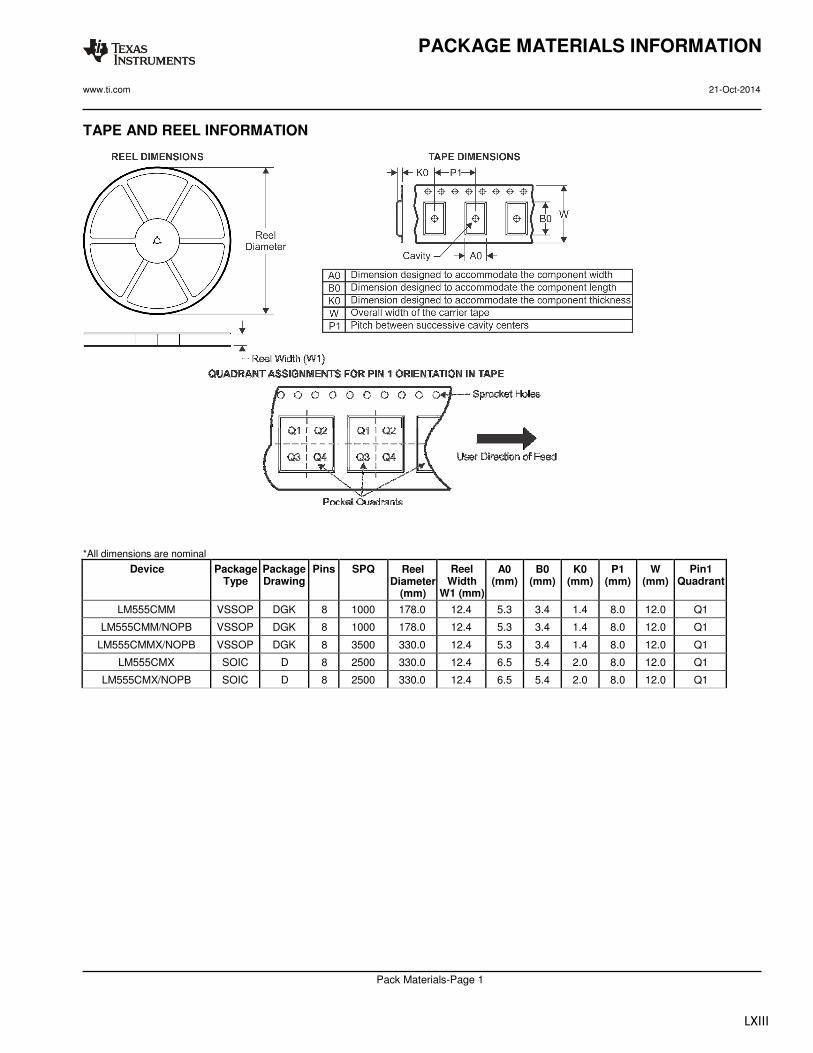
LXIII
PACKAGE MATERIALS INFORMATION
www.ti.com 21-Oct-2014 TAPE AND REEL INFORMATION
*All dimensions are nominal
Device Package Type
Package Drawing
Pins SPQ Reel Diameter
(mm)
Reel Width
W1 (mm)
A0 (mm)
B0 (mm)
K0 (mm)
P1 (mm)
W (mm)
Pin1 Quadrant
LM555CMM VSSOP DGK 8 1000 178.0 12.4 5.3 3.4 1.4 8.0 12.0 Q1 LM555CMM/NOPB VSSOP DGK 8 1000 178.0 12.4 5.3 3.4 1.4 8.0 12.0 Q1
LM555CMMX/NOPB VSSOP DGK 8 3500 330.0 12.4 5.3 3.4 1.4 8.0 12.0 Q1 LM555CMX SOIC D 8 2500 330.0 12.4 6.5 5.4 2.0 8.0 12.0 Q1
LM555CMX/NOPB SOIC D 8 2500 330.0 12.4 6.5 5.4 2.0 8.0 12.0 Q1
Pack Materials-Page 1
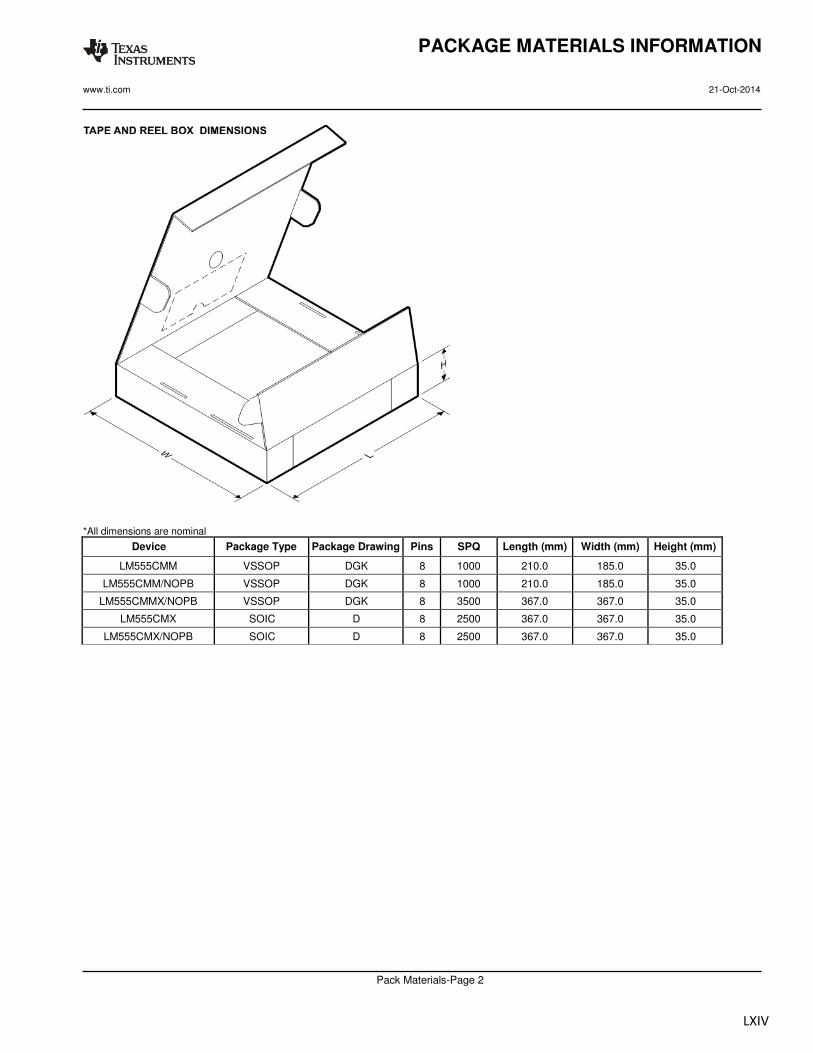
LXIV
PACKAGE MATERIALS INFORMATION
www.ti.com 21-Oct-2014
*All dimensions are nominal
Device Package Type Package Drawing Pins SPQ Length (mm) Width (mm) Height (mm) LM555CMM VSSOP DGK 8 1000 210.0 185.0 35.0
LM555CMM/NOPB VSSOP DGK 8 1000 210.0 185.0 35.0 LM555CMMX/NOPB VSSOP DGK 8 3500 367.0 367.0 35.0
LM555CMX SOIC D 8 2500 367.0 367.0 35.0 LM555CMX/NOPB SOIC D 8 2500 367.0 367.0 35.0
Pack Materials-Page 2
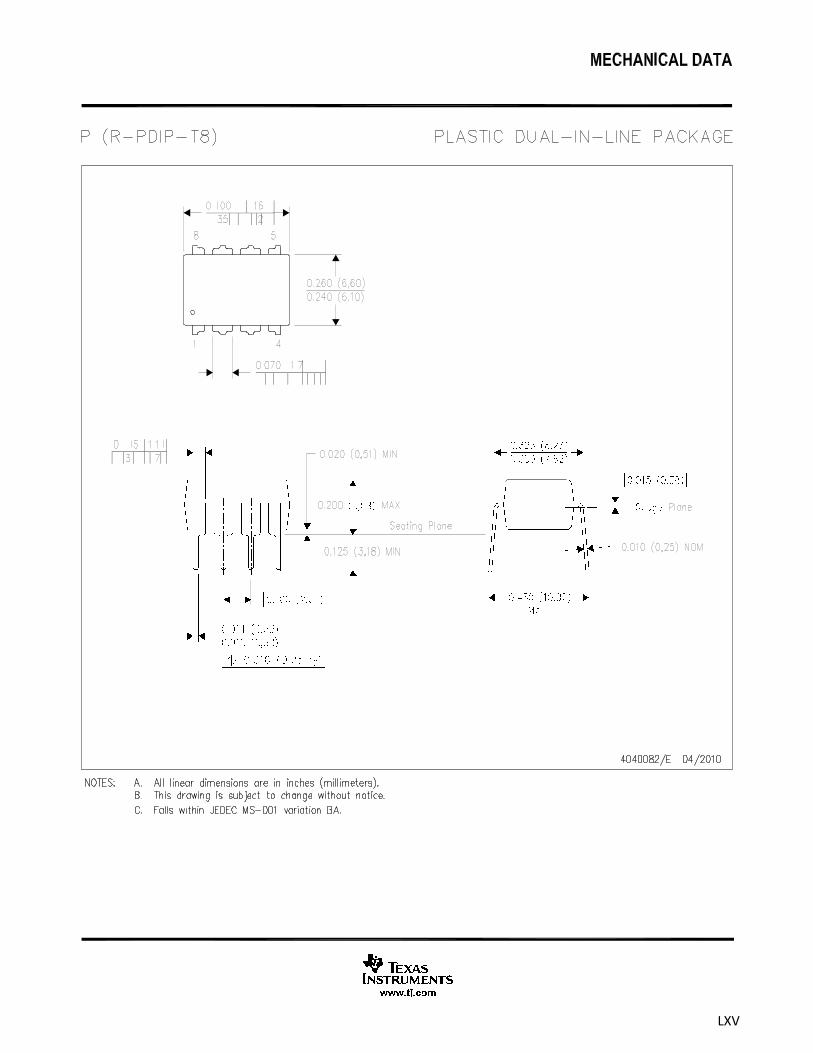
LXV
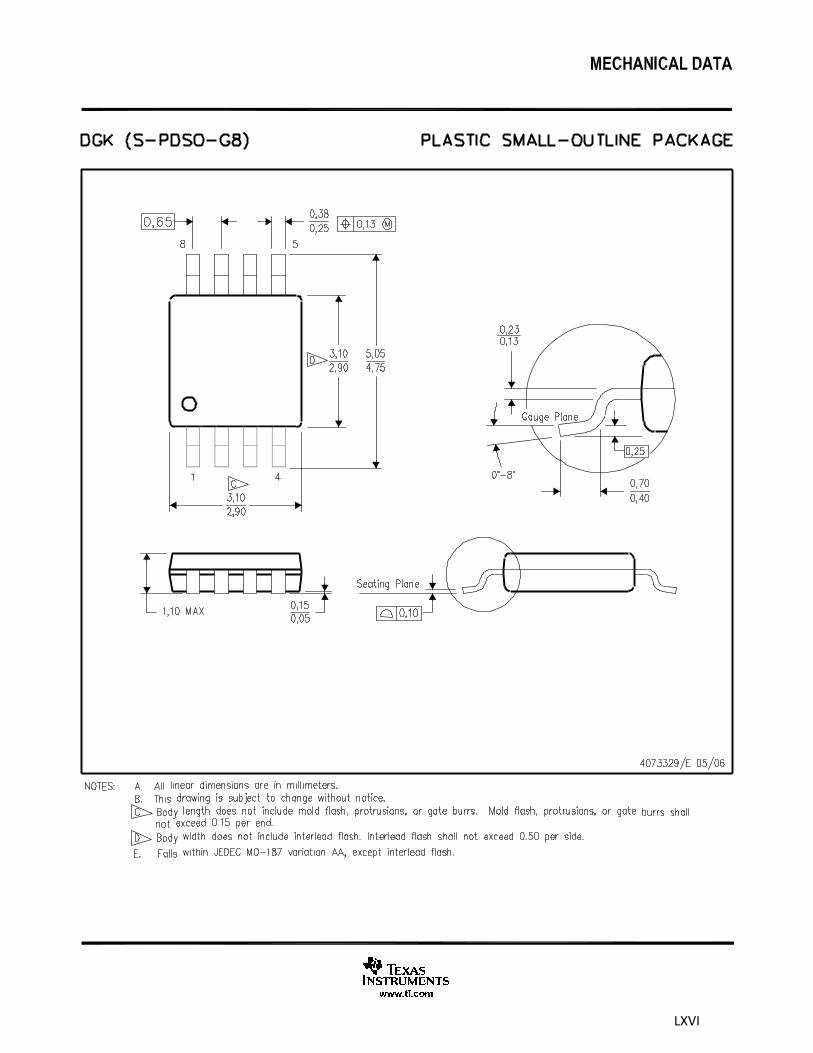
LXVI
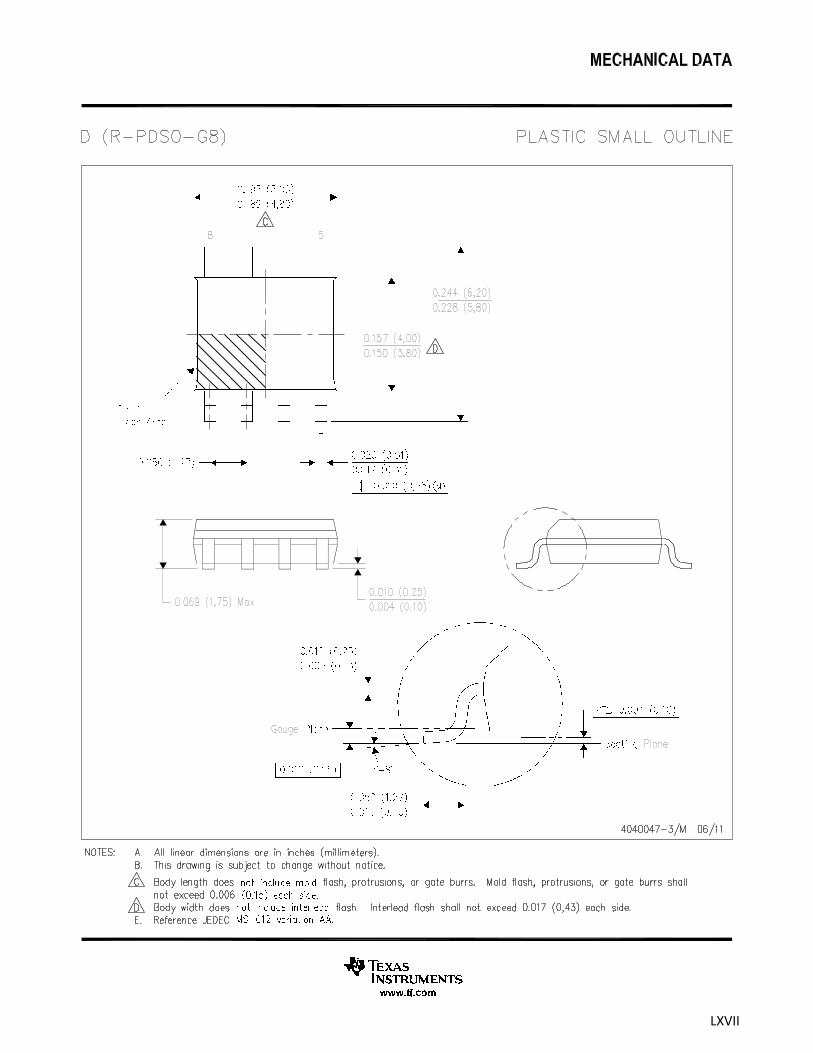
LXVII

LXVIII
IMPORTANT NOTICE
Texas Instruments Incorporated and its subsidiaries (TI) reserve the right to make corrections, enhancements, improvements and other changes to its semiconductor products and services per JESD46, latest issue, and to discontinue any product or service per JESD48, latest issue. Buyers should obtain the latest relevant information before placing orders and should verify that such information is current and complete. All semiconductor products (also referred to herein as “components”) are sold subject to TI’s terms and conditions of sale supplied at the time of order acknowledgment.
TI warrants performance of its components to the specifications applicable at the time of sale, in accordance with the warranty in TI’s terms and conditions of sale of semiconductor products. Testing and other quality control techniques are used to the extent TI deems necessary to support this warranty. Except where mandated by applicable law, testing of all parameters of each component is not necessarily performed.
TI assumes no liability for applications assistance or the design of Buyers’ products. Buyers are responsible for their products and applications using TI components. To minimize the risks associated with Buyers’ products and applications, Buyers should provide adequate design and operating safeguards.
TI does not warrant or represent that any license, either express or implied, is granted under any patent right, copyright, mask work right, or other intellectual property right relating to any combination, machine, or process in which TI components or services are used. Information published by TI regarding third-party products or services does not constitute a license to use such products or services or a warranty or endorsement thereof. Use of such information may require a license from a third party under the patents or other intellectual property of the third party, or a license from TI under the patents or other intellectual property of TI.
Reproduction of significant portions of TI information in TI data books or data sheets is permissible only if reproduction is without alteration and is accompanied by all associated warranties, conditions, limitations, and notices. TI is not responsible or liable for such altered documentation. Information of third parties may be subject to additional restrictions.
Resale of TI components or services with statements different from or beyond the parameters stated by TI for that component or service voids all express and any implied warranties for the associated TI component or service and is an unfair and deceptive business practice. TI is not responsible or liable for any such statements.
Buyer acknowledges and agrees that it is solely responsible for compliance with all legal, regulatory and safety-related requirements concerning its products, and any use of TI components in its applications, notwithstanding any applications-related information or support that may be provided by TI. Buyer represents and agrees that it has all the necessary expertise to create and implement safeguards which anticipate dangerous consequences of failures, monitor failures and their consequences, lessen the likelihood of failures that might cause harm and take appropriate remedial actions. Buyer will fully indemnify TI and its representatives against any damages arising out of the use of any TI components in safety-critical applications.
In some cases, TI components may be promoted specifically to facilitate safety-related applications. With such components, TI’s goal is to help enable customers to design and create their own end-product solutions that meet applicable functional safety standards and requirements. Nonetheless, such components are subject to these terms.
No TI components are authorized for use in FDA Class III (or similar life-critical medical equipment) unless authorized officers of the parties have executed a special agreement specifically governing such use.
Only those TI components which TI has specifically designated as military grade or “enhanced plastic” are designed and intended for use in military/aerospace applications or environments. Buyer acknowledges and agrees that any military or aerospace use of TI components which have not been so designated is solely at the Buyer's risk, and that Buyer is solely responsible for compliance with all legal and regulatory requirements in connection with such use.
TI has specifically designated certain components as meeting ISO/TS16949 requirements, mainly for automotive use. In any case of use of non-designated products, TI will not be responsible for any failure to meet ISO/TS16949.
Products Applications Audio www.ti.com/audio Automotive and Transportation www.ti.com/automotive Amplifiers amplifier.ti.com Communications and Telecom www.ti.com/communications Data Converters dataconverter.ti.com Computers and Peripherals www.ti.com/computers DLP® Products www.dlp.com Consumer Electronics www.ti.com/consumer-apps DSP dsp.ti.com Energy and Lighting www.ti.com/energy Clocks and Timers www.ti.com/clocks Industrial www.ti.com/industrial Interface interface.ti.com Medical www.ti.com/medical Logic logic.ti.com Security www.ti.com/security Power Mgmt power.ti.com Space, Avionics and Defense www.ti.com/space-avionics-defense Microcontrollers microcontroller.ti.com Video and Imaging www.ti.com/video RFID www.ti-rfid.com OMAP Applications Processors www.ti.com/omap TI E2E Community e2e.ti.com Wireless Connectivity www.ti.com/wirelessconnectivity
Mailing Address: Texas Instruments, Post Office Box 655303, Dallas, Texas 75265
Copyright © 2015, Texas Instruments Incorporated
Related Documents










![INSTITUTO POLITÉCNICO NACIONAL · Instituto Politécnico Nacional ÍNDICE [Escribir texto] INSTITUTO POLITÉCNICO NACIONAL ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA](https://static.cupdf.com/doc/110x72/5e727d63eb19c64ebc38993a/instituto-politcnico-nacional-instituto-politcnico-nacional-ndice-escribir.jpg)
