I I n the name of God n the name of God Evolutionary Based Nonlinear Multivariable Control System Design Presented by: M. Eftekhari Supervisor : DR. S. D. Katebi Dept. of Computer Science and Engineering Shiraz University

I n the name of God Evolutionary Based Nonlinear Multivariable Control System Design Presented by: M. Eftekhari Supervisor : DR. S. D. Katebi Dept. of.
Dec 16, 2015
Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

IIn the name of Godn the name of God
Evolutionary Based Nonlinear Multivariable Control System Design
Presented by: M. EftekhariSupervisor : DR. S. D. Katebi
Dept. of Computer Science and Engineering Shiraz University
ContentsContents
Introduction Nonlinear systems Multi-objective optimization Robust Control Nonlinear Multivariable systems Implementation Results Conclusions Future works

Nonlinear ControlNonlinear Control
Most practical dynamic systems exhibit nonlinear Most practical dynamic systems exhibit nonlinear behavior.behavior.
The theory of nonlinear systems is not as well The theory of nonlinear systems is not as well advanced as the linear systems theory.advanced as the linear systems theory.
A general and coherent theory dose not exist for A general and coherent theory dose not exist for nonlinear design and analysis. nonlinear design and analysis.
Nonlinear systems are dealt with on the case by case Nonlinear systems are dealt with on the case by case bases.bases.

Nonlinear DesignNonlinear Design
Most Nonlinear Design techniques are based on:Most Nonlinear Design techniques are based on: Linearization of some formLinearization of some form
Quasi–Linearization Quasi–Linearization Linearization around the operating Linearization around the operating
conditionsconditions

Extension of linear techniquesExtension of linear techniques
Rosenbrock:Rosenbrock: extended Nyquist techniques to extended Nyquist techniques to MIMO Systems in the form of Inverse Nyquist MIMO Systems in the form of Inverse Nyquist ArrayArray
MacFarlane:MacFarlane: extended Bode to MIMO in the form extended Bode to MIMO in the form of characteristic lociof characteristic loci
Soltine:Soltine: extends feedback linearization extends feedback linearization Astrom:Astrom: extends Adaptive Control extends Adaptive Control Katebi:Katebi: extends SIDF to Inverse Nyquist Array extends SIDF to Inverse Nyquist Array Others…..Others…..

ContentsContents
Introduction Nonlinear systems Multi-objective optimization Robust Control Nonlinear Multivariable systems Implementation Results Conclusions Future works

Types of NonlinearitiesTypes of Nonlinearities
Implicit:Implicit: friction changes with speed in a nonlinear friction changes with speed in a nonlinear mannermanner
Explicit Explicit Single-valued : Single-valued : eg. dead-zone, hard limit, saturation in op eg. dead-zone, hard limit, saturation in op
Amp.Amp. Multi-valued Multi-valued
eg. Hysteresis in mechanical systemseg. Hysteresis in mechanical systems
22 5V x xx

Methods for nonlinear systems DesignMethods for nonlinear systems Design
Build Prototype and test Build Prototype and test (expensive)(expensive)Computer simulation Computer simulation (trial and error)(trial and error)Closed form Solutions Closed form Solutions (only for rare cases)(only for rare cases)Lyapunov’s Direct Method Lyapunov’s Direct Method (only Stability)(only Stability)Series–Expansion solution Series–Expansion solution (only implicit)(only implicit)Linearization around the operating conditions Linearization around the operating conditions
(only small changes)(only small changes)Quasi–Linearization: Quasi–Linearization: (Describing Function)(Describing Function)
Exponential Input Describing Function Exponential Input Describing Function (EIDF)(EIDF)
One particular form of Describing function is EIDFOne particular form of Describing function is EIDF
Assuming an exponential waveform at the input of a Assuming an exponential waveform at the input of a single value nonlinear element and minimizing the single value nonlinear element and minimizing the integral-squared errorintegral-squared error
Then Then
Where applicable, EIDF facilitate the study of the Where applicable, EIDF facilitate the study of the transient response in nonlinear systems transient response in nonlinear systems
Output Amp.
Input Amp.EIDF

EIDF DerivationEIDF DerivationSingle value nonlinear elementSingle value nonlinear element
ErrorError
ISEISE
)]([)(.)( txytxNEte
0 0 0
22
0
22 )]([)]([).(.2)()( dttxydttxytxNEdttxNEdtte

Example of EIDFExample of EIDF
2( ) (1 )
2
DEIDF E
E E

ContentsContents
Introduction Nonlinear systems Multi-objective optimization Robust Control Nonlinear Multivariable systems Implementation Results Conclusions Future works

Multi-Objective OptimizationMulti-Objective OptimizationMOOMOO
Optimization deals with the problem of searching Optimization deals with the problem of searching feasible solutions over a set of possible choices to feasible solutions over a set of possible choices to optimize certain criteriaoptimize certain criteria.
MOO implies that there are more than one criterion MOO implies that there are more than one criterion and they must be treated simultaneouslyand they must be treated simultaneously

Formulation of MOOFormulation of MOO
Single objectiveSingle objective
Straight forward extension to MOOStraight forward extension to MOO
i
n
maximize ( )Subject to; g ( ) 0, i=1,2,...m
x R , f ( ) Objective, ( ) Inequality Constraints
| ( ) 0, 1,2,..., , 0
S= feasible area in decision space
i
Z f xx
x g xnS x R g x i m xi
1 1 2 2
i
1 1 2 2
( ),.... ( )}maximize { ( ),
Subject to; g ( ) 0 i=1,2,...m
| ( ), ( ),..., ( ),
| ( ) 0, 1,2,..., , 0
Z= feasible region in the criterion space
q q
qq q
f x z f xZ z f x z
x
Z z R z f x z f x z f x x S
nS x R g x i m xi

Solution Of MOOSolution Of MOO
Several numerical techniquesSeveral numerical techniquesGradient basedGradient based
Steepest decentSteepest decentNon-gradient basedNon-gradient based
Hill-climbingHill-climbingnonlinear programmingnonlinear programmingnumerical search (Tabu, random,..)numerical search (Tabu, random,..)We focus on Evolutionary techniquesWe focus on Evolutionary techniquesGA,GP, EP, ESGA,GP, EP, ES

GA at a glanceGA at a glance

Wide rang Applications of MOOWide rang Applications of MOO
Design, modeling and planning Design, modeling and planning Urban transportation. Urban transportation. Capital budgeting Capital budgeting Forest managementForest management Reservoir management Reservoir management Layout and landscaping of new cities Layout and landscaping of new cities Energy distribution Energy distribution Etc…Etc…

MOO and Control DesignMOO and Control DesignAny Control systems design can be formulated Any Control systems design can be formulated
as MOOas MOO
Ogata, 1950s; optimization of ISE, ISTE (analyticOgata, 1950s; optimization of ISE, ISTE (analytic))Zakian, 1960s;optimazation of time response Zakian, 1960s;optimazation of time response
parameters (numeric);parameters (numeric);Clark, 1970s, LQR, LQG (analytic)Clark, 1970s, LQR, LQG (analytic)Doyle and Grimble, 1980s, (analytic)Doyle and Grimble, 1980s, (analytic)MacFarlane, 1990s, loop shaping (grapho-analytic)MacFarlane, 1990s, loop shaping (grapho-analytic)
Whidborn,2000s, suggest GA for solution of Whidborn,2000s, suggest GA for solution of all the aboveall the above
H

ContentsContents
Introduction Nonlinear systems Multi-objective optimization Robust Control Nonlinear Multivariable systems Implementation Results Conclusions Future works

UncertaintyUncertainty
Structured (parametric): is caused by Structured (parametric): is caused by undesired parameter changes. undesired parameter changes.
Unstructured: is due to un-modeled Unstructured: is due to un-modeled dynamicsdynamics
Uncertainty can influence and degrade Uncertainty can influence and degrade the plant operation in 2 waysthe plant operation in 2 ways

InfluenceInfluence of Uncertainty of Uncertainty
MultiplicativeMultiplicative: G(s)=G: G(s)=G00(s)(1+w(s)(1+wmm(s).(s).ΔΔ(s))(s))
G(s): Perturbed Transfer FunctionG(s): Perturbed Transfer Function
GG00(s): Nominal Transfer Function(s): Nominal Transfer Function
ΔΔ(s): disturbance (perturbation)(s): disturbance (perturbation)
WWmm(s): weighting, upper bound(s): weighting, upper bound AdditiveAdditive: G(s)=G: G(s)=G00(s)+w(s)+waa(s).(s).ΔΔ(s)(s) A good design must be robust in the presence of A good design must be robust in the presence of
uncertainty and undesired perturbation uncertainty and undesired perturbation of the plant parametersof the plant parameters

MeasureMeasureof performance and robustnessof performance and robustness
A SISO block diagramA SISO block diagram
Sensitivity is:Sensitivity is:
Complementary Sensitivity is:Complementary Sensitivity is: T+S=IT+S=I
1
1TfCS
G C
C GR(t)
y(t)
CG
CGT
1
n
d

Robust Performance & robust Robust Performance & robust stabilitystability
Robust PerformanceRobust Performance
Robust stabilityRobust stability
Objective:Objective:
Find WFind W11 and W2 such that objective is satisfied under constraints and W2 such that objective is satisfied under constraints . .
S+T=IS+T=I W1 and w2 effect a trade-off between S and TW1 and w2 effect a trade-off between S and T
1 . 1w S for RP
1 2min W S W T
2 w 1 T for RS

=H=H∞ ∞ NormNorm
Defined as;Defined as; HH∞∞ Norm: Norm:
where where
( ) max ( )F s F j
pp
pjFjF
)(lim)(max

ContentsContents
Introduction Nonlinear systems Multi-objective optimization Robust Control Nonlinear Multivariable systems Implementation Results Conclusions Future works

A general MIMO nonlinear SystemA general MIMO nonlinear System
Close loop Transfer functionClose loop Transfer function
( )GNCY RI GCN
1 1
mod m n
Y output vectore mR input vectore nG linear model n mN nonlinear elC controller matrix n n

Nonlinear Multivariable systemsNonlinear Multivariable systems Block diagram of 2-input 2-output feedback system. Belongs Block diagram of 2-input 2-output feedback system. Belongs
to a special configuration with a class of separable, single to a special configuration with a class of separable, single value Nonlinear systemvalue Nonlinear system
C11 G11
C22 G22
C12 G12
C21 G21
N11
N22
N12
N21

ProblemsProblems
The behavior of multi-loop nonlinear systems is not The behavior of multi-loop nonlinear systems is not as well understood as the single-loop systems as well understood as the single-loop systems
Generally, extensions of single-loop techniques can Generally, extensions of single-loop techniques can result in methods that are valid for multi-loop systems result in methods that are valid for multi-loop systems
Cross coupling and Loop interaction pose major Cross coupling and Loop interaction pose major difficulties in MIMOdifficulties in MIMO
Little is known about Stability and Robustness Little is known about Stability and Robustness for the case of MIMO nonlinear systems for the case of MIMO nonlinear systems

Absolute StabilityAbsolute Stability
Rosenbrock 1965, purposed Multivariable Circle Rosenbrock 1965, purposed Multivariable Circle Criterion as a test for Bounded Input Bounded OutputCriterion as a test for Bounded Input Bounded Output
stability.stability. If applied for controller design, it will result in a very If applied for controller design, it will result in a very
conservative controllerconservative controller Several similar methods for the absolute stability test Several similar methods for the absolute stability test
exist, but non suitable for design.exist, but non suitable for design.

ContentsContents
Introduction Nonlinear systems Multi-objective optimization Robust Control Nonlinear Multivariable systems Implementation Results Conclusions Future works

Design procedureDesign procedure
Replace: Nonlinear elements EIDFS
The structure of controller is chosen
Time domain objectives are formulated
Another objective to ensure RP and RS
MOGA is applied to solve MOO
End
Start
1 2w S w T
Rise time, settling time,…

Uncertainty exist due to EIDF linearizationUncertainty exist due to EIDF linearization
Assuming linear model is accurateAssuming linear model is accurate Uncertainty exist due to linearizing the nonlinear Uncertainty exist due to linearizing the nonlinear
elementelement Modeling the Modeling the AdditiveAdditive UncertaintyUncertainty
Where K is a Where K is a vectorvector sampled from EIDF gains. n is an sampled from EIDF gains. n is an integer.integer.
)(__
EIDFijij Kmeann
)( EIDFij
nij KSD
npp GG
__
nij
nij
nij
nij
n

UsingUsing HH∞∞ Weighted Sensitivity Weighted Sensitivity
= uncertain plant = Nominal plant= uncertain plant = Nominal plant
1 pGIS
ijijijp CnGjiG ..),(____
pG pG

Time Domain objectivesTime Domain objectives
Find a set of M admissible points Find a set of M admissible points Such that;Such that;
is real number, p is a real vector andis real number, p is a real vector and
is real function of P (controller parameter) and is real function of P (controller parameter) and t (time)t (time)
Any value of p which satisfies the above inequalities Any value of p which satisfies the above inequalities characterizes an acceptable designcharacterizes an acceptable design
, 1, 2,...jP j M
( , ) , ( 1,.... , 1,.... )ji ip t j M i n
i 1 2( , ,..., )np p p
i

Time domain specificationsTime domain specifications
In a control systems represents functionalsIn a control systems represents functionalsSuch as:Such as:Rise time, settling time, overshoot, steady state Rise time, settling time, overshoot, steady state
error, loops interaction (For multivariable error, loops interaction (For multivariable systems), ISE, ITSE.systems), ISE, ITSE.
For a given time response which is provided For a given time response which is provided by the SIMULINK, these are calculated by the SIMULINK, these are calculated numerically based on usual formulanumerically based on usual formula
i

Frequency Domain ObjectivesFrequency Domain Objectives
may represent any specification in the frequency domain may represent any specification in the frequency domain such as bandwidth, GM, PM etc.such as bandwidth, GM, PM etc.
In order to make the design more robust, we used the followingIn order to make the design more robust, we used the following
measure of stability (noise rejection)measure of stability (noise rejection) performance index (disturbance rejection)performance index (disturbance rejection)
( , ) , ( 1,.... , 1,.... )ji ip j M i n
i
11
12
( ) norm of the sensetivity function
( ) norm of complemetary sent.
I GNC H
GNC I GNC H
21

Mixed Time and Frequency Mixed Time and Frequency Domain optimizationDomain optimization
Using ITSE or ISE as performance Indices, With RP and Using ITSE or ISE as performance Indices, With RP and RS Constraints. RS Constraints.
Other objectives have also been testdOther objectives have also been testd
Eg. Weighted sumEg. Weighted sum
1 2
1 2
1
2
min( ), st.
min( ),st.
ISE
ISTE
1 2 1 2 st., T + S = 1 and 1obj S T

ContentsContents
Introduction Nonlinear systems Multi-objective optimization Robust Control Nonlinear Multivariable systems Implementation Results Conclusions Future works

Example 1Example 1
A 2 by 2 Uncompensated SystemA 2 by 2 Uncompensated System

Nonlinear elements are replaced byNonlinear elements are replaced bythe EIDF gain and the place of the the EIDF gain and the place of the
compensator is decidedcompensator is decided

Design in time domainDesign in time domain
Structure of the compensator is now decideStructure of the compensator is now decide We started with simplest diagonal and constant We started with simplest diagonal and constant
controllerscontrollers The desired time domain specifications are now given The desired time domain specifications are now given
to the MOGA programto the MOGA program MOGA is initialized randomly and the parameter MOGA is initialized randomly and the parameter
limits are setlimits are set
MOGA searches the space of the controller MOGA searches the space of the controller parameters to find at least one set that satisfy all the parameters to find at least one set that satisfy all the specified objectivesspecified objectives

The evolved controller and its The evolved controller and its performanceperformance

Name of Name of objectivesobjectives
Desired Desired objectivesobjectives
Resulted Resulted objectivesobjectives
Rise time1Rise time1 1515 11.031811.0318
Rise time 2Rise time 2 22 1.16911.1691
Over shoot1Over shoot1 0.50.5 0.03970.0397
Over shoot2Over shoot2 0.50.5 0.19160.1916
settling1settling1 1515 12.189512.1895
settling2settling2 1515 6.95336.9533
Steady state1Steady state1 0.10.1 00
Steady state2Steady state2 0.10.1 00
Interaction 1Interaction 122 5%5% 0.89 %0.89 %
Interaction 2Interaction 211 5%5% 0.03 %0.03 %
Design criterion in time domain are metDesign criterion in time domain are met

Time responsesTime responses

Conflicting objectivesConflicting objectives
It is observed after 50 generation of MOGA It is observed after 50 generation of MOGA with a population size of 50with a population size of 50
That although trade-off have been made That although trade-off have been made between the objectivesbetween the objectives
But due to conflict, all the required design But due to conflict, all the required design criterion are not metcriterion are not met
Alternative: we decided to use a more Alternative: we decided to use a more sophisticated controllersophisticated controller

Diagonal dynamic compensatorDiagonal dynamic compensator
DSC
BSA

Design criterion in time domain are metDesign criterion in time domain are metName of Name of objectivesobjectives
Desired Desired objectivesobjectives
Resulted Resulted objectivesobjectives
Rise time1Rise time1 22 1.16681.1668
Rise time 2Rise time 2 22 0.74280.7428
Over shoot1Over shoot1 0.20.2 0.06350.0635
Over shoot2Over shoot2 0.20.2 0.01790.0179
settling1settling1 33 2.95612.9561
settling2settling2 33 2.15972.1597
Steady state1Steady state1 0.010.01 00
Steady state2Steady state2 0.010.01 00
Interaction 1Interaction 122 5%5% 0.23%0.23%
Interaction 2Interaction 211 5%5% 0.09%0.09%

ResponsesResponses

Making the design robustMaking the design robust
In addition to the time domain specificationsIn addition to the time domain specificationsThe criterion for robust stability and robust The criterion for robust stability and robust
performance is now added to the objectivesperformance is now added to the objectivesThe controllers are modified by MOGA to The controllers are modified by MOGA to
take care of these additional objectivestake care of these additional objectivesIn addition to robust stability to the design, In addition to robust stability to the design,
the overall performance has also improved.the overall performance has also improved.

ResponsesResponsesName of Name of objectivesobjectives
Resulted Resulted objectivesobjectives
Rise time1Rise time1 1.28551.2855
Rise time 2Rise time 2 0.97700.9770
Over shoot1Over shoot1 00
Over shoot2Over shoot2 0.00080.0008
settling1settling1 1.41521.4152
settling2settling2 2.09832.0983
Steady state1Steady state1 00
Steady state2Steady state2 00
Interaction Interaction 1122
0.23%0.23%
Interaction Interaction 2211
0.09%0.09%

Plant uncertainty taken into accountPlant uncertainty taken into account
Still a more comprehensive controller is requiredStill a more comprehensive controller is required

Responses from time and frequency domain Responses from time and frequency domain objectives for uncertain plantobjectives for uncertain plant
Time Domain objectives Mixed Time and Frequency domain objectives

Characteristics of responsesCharacteristics of responsesName of Name of objectivesobjectives
Desired Desired objectivesobjectives
Resulted Resulted objectivesobjectives
Rise time1Rise time1 22 1.47511.4751
Rise time 2Rise time 2 22 0.85980.8598
Over shoot1Over shoot1 0.20.2 00
Over shoot2Over shoot2 0.20.2 0.00040.0004
settling1settling1 33 1.65221.6522
settling2settling2 33 1.85001.8500
Steady state1Steady state1 0.010.01 00
Steady state2Steady state2 0.010.01 00
Interaction Interaction 1122
1%1% 0%0%
Interaction Interaction 2211
1%1% 0%0%
Name of Name of objectivesobjectives
Desired Desired objectivesobjectives
Resulted Resulted objectivesobjectives
Rise time1Rise time1 22 1.38971.3897
Rise time 2Rise time 2 22 0.88950.8895
Over shoot1Over shoot1 0.20.2 00
Over shoot2Over shoot2 0.20.2 0.0010.001
settling1settling1 33 1.64741.6474
settling2settling2 33 2.28152.2815
Steady state1Steady state1 0.010.01 00
Steady state2Steady state2 0.010.01 00
Interaction Interaction 1122
1%1% 0.1%0.1%
Interaction Interaction 2211
1%1% 0%0%

Analysis and SynthesisAnalysis and Synthesis
EIDF accuracy is investigatedEIDF accuracy is investigated
Robust stability and robust Robust stability and robust performancesperformances
are examinedare examined
Convergence of MOGA and aspects Convergence of MOGA and aspects of local minima is also look into.of local minima is also look into.

EIDF AccuracyEIDF Accuracy
The response of compensated system withThe response of compensated system with
EIDF in place and the actual nonlinearities are comparedEIDF in place and the actual nonlinearities are compared When the basic assumption of exponential input is satisfied When the basic assumption of exponential input is satisfied
EIDF is very accurateEIDF is very accurate

Test for Robust stabilityTest for Robust stability
The compensated system is subjected to a disturbanceThe compensated system is subjected to a disturbance It is seen that instability do not occur and system recovers to its It is seen that instability do not occur and system recovers to its
optimal operating conditionsoptimal operating conditions
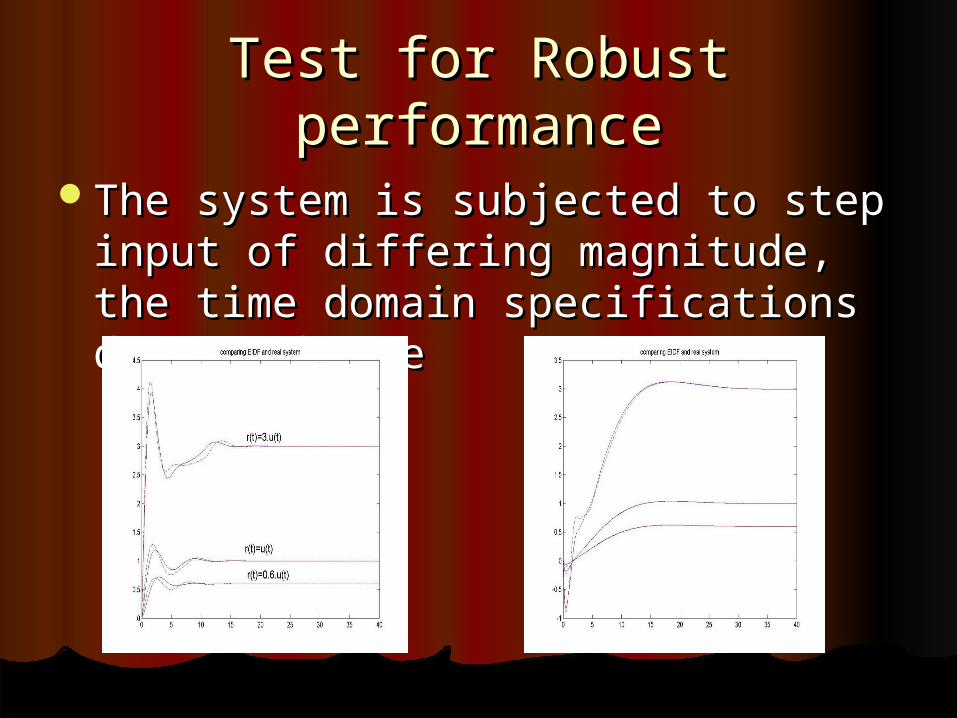
Test for Robust performanceTest for Robust performance
The system is subjected to step input of The system is subjected to step input of differing magnitude, the time domain differing magnitude, the time domain specifications do not changespecifications do not change

MOGAMOGA
ObservationsObservations1.1. The range of controller parameters The range of controller parameters
should be chosen carefully (domain should be chosen carefully (domain knowledge is useful)knowledge is useful)
2.2. The Parameters of MOGA such as X-over The Parameters of MOGA such as X-over and mutation rates should be initially of and mutation rates should be initially of nominal vale (Pc=0.7, Pm=0.01)nominal vale (Pc=0.7, Pm=0.01)
3.3. If a premature convergence occurs then these If a premature convergence occurs then these values have to be investigatedvalues have to be investigated

ContentsContents
Introduction Nonlinear systems Multi-objective optimization Robust Control Nonlinear Multivariable systems Implementation Results Conclusions Future works

ConclusionsConclusions
A new technique based on MOGA for design of A new technique based on MOGA for design of controller for MIMO nonlinear systems were controller for MIMO nonlinear systems were describeddescribed
The EIDF linearization facilitate the time response The EIDF linearization facilitate the time response synthesis and the extension of robustness in the synthesis and the extension of robustness in the frequency domain to the MIMO nonlinear systemsfrequency domain to the MIMO nonlinear systems
As the MOGA design progresses the designer obtain As the MOGA design progresses the designer obtain more knowledge about the systemmore knowledge about the system
Based on the domain knowledge the designer is able Based on the domain knowledge the designer is able to effect trade off between the conflicting objectives to effect trade off between the conflicting objectives and also modifies the structure of the controller, if and also modifies the structure of the controller, if and when necessary.and when necessary.

ConclusionsConclusionsTime domain approach is more explicit with Time domain approach is more explicit with
regards to the system time performanceregards to the system time performanceBy combining the time and the frequency By combining the time and the frequency
domain objectives design robustness is domain objectives design robustness is guaranteedguaranteed
Taking ISTE or ISE as objectives, Taking ISTE or ISE as objectives,
subject to S<Msubject to S<M1 1 and T<Mand T<M22 can also guarantee can also guarantee
the robustness.the robustness.

ConclusionConclusion
The design technique described is compared [Katebi] and The design technique described is compared [Katebi] and contrasted with other methods for MIMO nonlinear systemscontrasted with other methods for MIMO nonlinear systems
The approach was shown to be effective and has several The approach was shown to be effective and has several advantages over other techniquesadvantages over other techniques
1.1. The easy formulation of MOGAThe easy formulation of MOGA2.2. Provides degree of freedom for the designerProvides degree of freedom for the designer3.3. Acceptable computational demandAcceptable computational demand4.4. Accurate and multiple solutionsAccurate and multiple solutions5.5. Very suitable for the powerful MATLAB environment Very suitable for the powerful MATLAB environment
Several other examples with different linear and nonlinear Several other examples with different linear and nonlinear model have been solved and will be included in the thesismodel have been solved and will be included in the thesis

ContentsContents
Introduction Nonlinear systems Multi-objective optimization Robust Control Nonlinear Multivariable systems Implementation Results Conclusions Future works

Future ResearchFuture Research
Different MIMO nonlinear configuration exist, further works Different MIMO nonlinear configuration exist, further works may be undertaken for other configurationmay be undertaken for other configuration
The class of nonlinearity considered here only encompass the The class of nonlinearity considered here only encompass the memoryless (single value) elements.memoryless (single value) elements.
As the EIDF is not applicable to the multi-valued As the EIDF is not applicable to the multi-valued nonlinearities, theoretical works are required to extend the nonlinearities, theoretical works are required to extend the design to those class on nonlinearities.design to those class on nonlinearities.
Several explicit parallel version of MOGA exist,Several explicit parallel version of MOGA exist, For higher dimensional systems parallel algorithms may For higher dimensional systems parallel algorithms may
become necessary.become necessary. Application of other evolutionary algorithms such as EP, ES, Application of other evolutionary algorithms such as EP, ES,
GP and swarm optimization is another line of further researchGP and swarm optimization is another line of further research

Question TimeQuestion Time
Related Documents











