Human Interaction with Robots Working in Complex and Hazardous Environments Bill Hamel, Professor & Head IEEE Fellow RAS Vice President for Publication Activities Mechanical, Aerospace, & Biomedical Engineering Department University of Tennessee

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

Human Interaction with RobotsWorking in Complex and Hazardous
Environments
Bill Hamel, Professor & HeadIEEE FellowRAS Vice President for Publication Activities
Mechanical, Aerospace, & BiomedicalEngineering Department
University of Tennessee

Colloquium on Robotics and AutomationUniversita` degli Studi di Napoli Federico II
Napoli 18 December 2006 2
Human Interaction with Robots Working inComplex and Hazardous Environments
Preliminaries Complex and Hazardous? Robots? �Human Interaction? Needs for Performance Improvements?
Modern Telerobot? System Concept & Architecture Where should research foci be?
Current Research…Telerobotics Experimental System Results Future Directions
Closing Remarks

Colloquium on Robotics and AutomationUniversita` degli Studi di Napoli Federico II
Napoli 18 December 2006 3
Complex and Hazardous? Remote operations in
hazardous and uncertainenvironments…unstructured Nuclear, Space, Underwater,
Medical Surgery… Remote work systems that
involve: Remote sensing Manipulators Mobility Use of tools
Human-in-the-loopoperations/control

Colloquium on Robotics and AutomationUniversita` degli Studi di Napoli Federico II
Napoli 18 December 2006 4
Robot?…Telerobotics Telerobots?
Telerobot = Teleoperator U Robot tR = Robot U Teleoperator Tr = Teleoperator U Robot tR ≠ Tr Manual control U Autonomous
operations Human interaction Computer assisted
teleoperation Selective autonomy

Colloquium on Robotics and AutomationUniversita` degli Studi di Napoli Federico II
Napoli 18 December 2006 5
teleaction
telepresence
Physical/Temporal/HazardsBarriers
Tasks
Manipulators
MobileTransporter
Power
Tools
Human/MachineInterface
Sensors Signals
Human Interaction…

Colloquium on Robotics and AutomationUniversita` degli Studi di Napoli Federico II
Napoli 18 December 2006 6
Decades of Refinements…

Colloquium on Robotics and AutomationUniversita` degli Studi di Napoli Federico II
Napoli 18 December 2006 7
Needs… Reality:
Too expensive Too slow Too complicated
Improve remote workefficiency Best: direct/teleaction ≥ 10 Worst: direct/teleaction ~
100’s Open engineering
Power supply andtransmission; cable handling
3D remote viewing andsensing

Colloquium on Robotics and AutomationUniversita` degli Studi di Napoli Federico II
Napoli 18 December 2006 8
Telerobot Functional Architecture
Mobility
Manipulation
Tooling
In Situ ModelBuilder
Interactive TaskPlanner
CooperativeAssists Planner
Control
HMIAutonomousOperations
HMITeleoperations
Fault Detection& Recovery
Task Space
RTSATR Control
Computer assisted teleops

Colloquium on Robotics and AutomationUniversita` degli Studi di Napoli Federico II
Napoli 18 December 2006 9
Critical Performance Issues
Manual teleoperation
REMOTE OPERATIONSTASK SEQUENCE
Subtaski
manual
Subtaski+1 Subtaski+2
automatic
Subtaski+3 Subtaski+4
manual
Build in situ
3D modelPlan
subtaskExecute
automaticallyVerifyresults
Select and configureassistance strategy
Execute manuallywith assistance
HUMAN-MACHINE COOPERATIVE TELEROBOTIC PROCESS
Manual teleoperation
ROBOT TASK SCENE ANALYZER PROCESS
Seamless Transfer Essential

Colloquium on Robotics and AutomationUniversita` degli Studi di Napoli Federico II
Napoli 18 December 2006 10
Telerobot Control StructureSystem ON
IDLE
MANUAL_TELEOP AUTOEXEC
ESTOP
ERROR ERROR
OK OK
d
dtJu
!
!�!
K m
B m
Bs-1
�!Bs
-1Ks
!!
+
+
+
+
+
+
+
+
-
-
-
Ju-1
�
Cartesian Controller
TrajectoryGenerator
RTSA3D Task Geometry
& Action Points
Task Planner& Assist Functions
Colloquium on Robotics and AutomationUniversita` degli Studi di Napoli Federico II
Napoli 18 December 2006 11
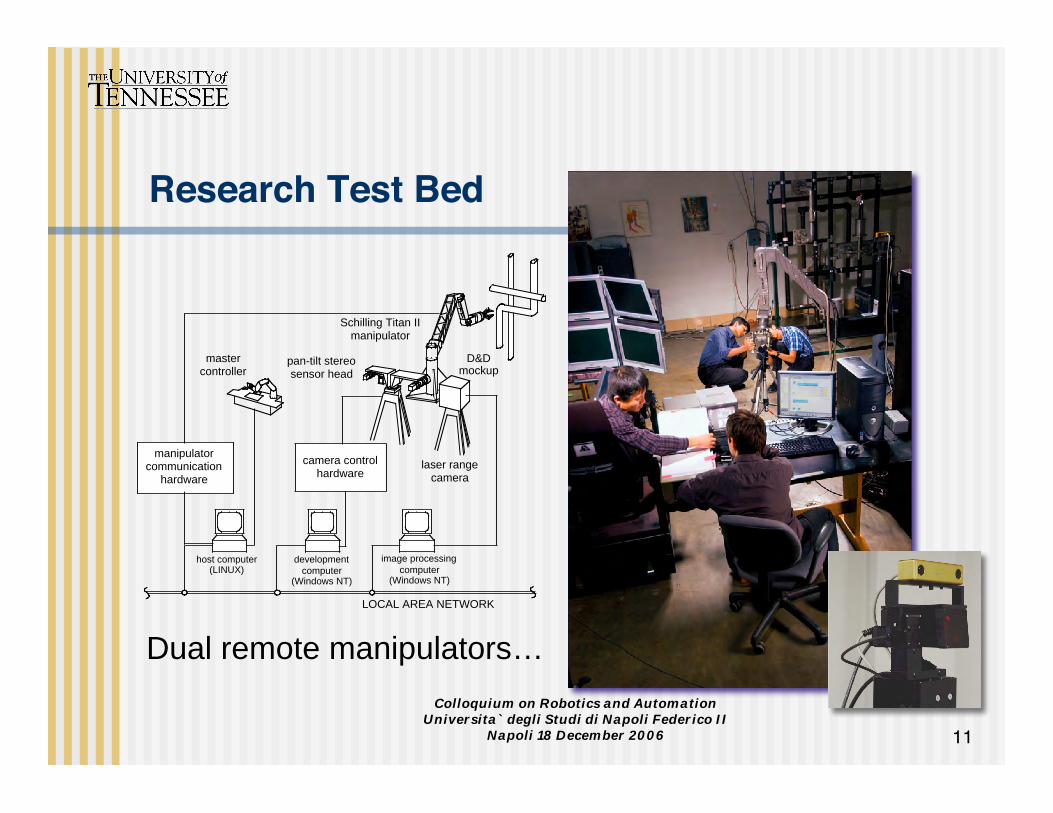
Research Test Bed
Dual remote manipulators…
host computer(LINUX)
Schilling Titan IImanipulator
pan-tilt stereosensor head
laser rangecamera
D&Dmockup
mastercontroller
developmentcomputer
(Windows NT)
image processingcomputer
(Windows NT)
camera controlhardware
manipulatorcommunication
hardware
LOCAL AREA NETWORK

Colloquium on Robotics and AutomationUniversita` degli Studi di Napoli Federico II
Napoli 18 December 2006 12
Human Interactive Task Space Modeling andPlanning
Max use of a prioriknowledgeParallel Execution
Manual Foreground.AutonomousBackground.
Operator ControlWhere, what, andhow.Acceptance of results.
Simplified GUI5 pop-up windowmenusColor overlays
ROI1
ROI2
ROI3
ROI5
ROI4
User points
camera
OOIs
OOIs
OOIs
ROI4
ROI2
ROI1
Confirm
window
Okay?
No
Yes
Place
part
QueueSelect
ROI
PANORAMIC VIEW
AUTOSCAN
(BACKGROUND)
MANUAL
(FOREGROUND)

Colloquium on Robotics and AutomationUniversita` degli Studi di Napoli Federico II
Napoli 18 December 2006 13
Laser pointing designatorLaser pointing designator
± 10 mm in robotworkspace

Colloquium on Robotics and AutomationUniversita` degli Studi di Napoli Federico II
Napoli 18 December 2006 14
REMOTE OPERATIONS TASK SEQUENCE
SUBTASKi:
Manual
SUBTASKi+1:
Auto
SUBTASKi+3:
Auto
SUBTASKi+2: Man-
ual
SUBTASKi+4:
Auto
RTSA
BUILD IN SITU
3D Model
PLAN SUB-
TASK
EXE-
CUTEVERIFY
RESULTS
TELEROBOTIC SUBTASK
SEQUENCE i+3
8-10 min 4 min 18 min
32 minversus 45-90
min Teleop

Colloquium on Robotics and AutomationUniversita` degli Studi di Napoli Federico II
Napoli 18 December 2006 15
Recent activities… 7 dof “haptic” controller
Barrett TechnologiesWAM
Large-scale multi-fingered end effector Barrett Technologies
Wraptor Reduced tool
specializations Controller integration
Tooling:behavior-basedgrasping
Test & evaluation

Colloquium on Robotics and AutomationUniversita` degli Studi di Napoli Federico II
Napoli 18 December 2006 16
Continuing Research
Abort Plan Sequence
Original Plan Sequence
Re-Plan Sequence
Return to original
Retrace/restart
original
Start re-plan
Fault state/step
“Drift” state/step
subtasks
Mobility
Manipulation
Tooling
In Situ ModelBuilder
Interactive TaskPlanner
CooperativeAssists Planner
Control
HMIAutonomousOperations
HMITeleoperations
Fault Detection& Recovery
Task Space
RTSA
TR Control
Computer assisted teleops
Tool-based Control
OperationalSpace FaultDetection Intelligent/interactive
State Management

Colloquium on Robotics and AutomationUniversita` degli Studi di Napoli Federico II
Napoli 18 December 2006 17
Higher-fidelity telepresence andteleaction…needs, directions… Perception/Sensing
3D viewing 3D graphics augmentation Natural kinesthetic/tactile feedback
Intelligence/Control Human relationships
• Interactivity reduced through increasing autonomy• More cooperative• Humans move up in hierarchy
Machine learning• By observation – symbiosis
Action/Manipulation Multi-fingered end effectors
Human Machine Interface Algorithmic complexity VR-based interfaces

Colloquium on Robotics and AutomationUniversita` degli Studi di Napoli Federico II
Napoli 18 December 2006 18
Summary “True” Telerobots are being realized. There is hope for improving the
effectiveness of remote operations incomplex environments.
Ongoing research will continue to drivethis trend.

Thank you for your attention!Thank you for your attention!
Related Documents











