Human-Computer Interaction Human-Computer Interaction Kalman Filter Kalman Filter Hanyang University Jong-Il Park

Human-Computer Interaction Kalman Filter Hanyang University Jong-Il Park.
Jan 03, 2016
Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

Human-Computer InteractionHuman-Computer Interaction Kalman FilterKalman Filter
Hanyang University
Jong-Il Park

Rudolf Emil KalmanRudolf Emil Kalman
Born 1930 in Hungary Born 1930 iHungary
BS and MS from MIT BS and MS from MIT
PhD 1957 from Columbia Filter developed in 1960-61 Filter Now retired Now retired

What is a Kalman filter?What is a Kalman filter?
Just some applied math. A linear system: f(a+b) = f(a) + f(b). Noisy data in hopefully less noisy
out. But delay is the price for filtering... Pure KF does not even adapt to the
data.
What is it used for?What is it used for?
Tracking missiles Tracking missiles Tracking heads/hands/drumsticks Extracting lip motion from video Fitting Bezier patches to point data Lots of computer vision
applications Economics Navigation Navigation

Typical Kalman filter Typical Kalman filter applicationapplication
system
measuring device
Kalmanfilter
measurement noise
system noise
systemstate(desired but not known )
controls
observedmeasurement
optimalestimate
(system state)

Simple exampleSimple example

Observation 1Observation 1

Observation 2Observation 2

Combine the twoCombine the two Combine estimates
Combine variances

Combined estimatesCombined estimates
Online weighted average!

But suppose we are But suppose we are movingmoving……
Not all the difference is error Some may be motion Some may be
motion KF can include a motion model Estimate velocity and position

Process modelProcess model
Describes how the state changes over time
The state for the first example was scalar
The process model was nothing changes
A better model might be A State is a 2-vector [ position, velocity ] positionn+1= positionn + velocityn * time
velocityn+1= velocityn

Measurement modelMeasurement model
“What you see from where you are”

Predict Predict Correct Correct
KF operates by KF operates by Predicting the new state and its
uncertainty Correcting with the new
measurement Correcting with the new measurementPredict
Correct
Kalmanfilter

FormulationFormulation

Kalman FilterKalman Filter

Kalman filter assumes Kalman filter assumes linearitylinearity Only matrix operations allowed Measurement is a linear function of
state Next state is linear function of
previous state state
If nonlinear No way?projection

If nonlinear If nonlinear Extended Kalman Extended Kalman ilter(EKF)ilter(EKF)Nonlinear Process (Model)
Process dynamics: A becomes a(x)Measurement: H becomes h(x)
Filter ReformulationUse functions instead of matricesUse Jacobians to project forward, and
to relate measurement to state

Formulation - EKFFormulation - EKF

Extended Kalman filterExtended Kalman filter

JacobianJacobian
Partial derivative of measurement with respect to state
If measurement is a vector of length M and state has length N
Jacobian of measurement fucntion will be MxN matrix of numbers (not equations)
Often evaluating h(x) and Jacobian(h(x)) at the same time cost only a little extra

Simulation Simulation –– Exact R Exact R
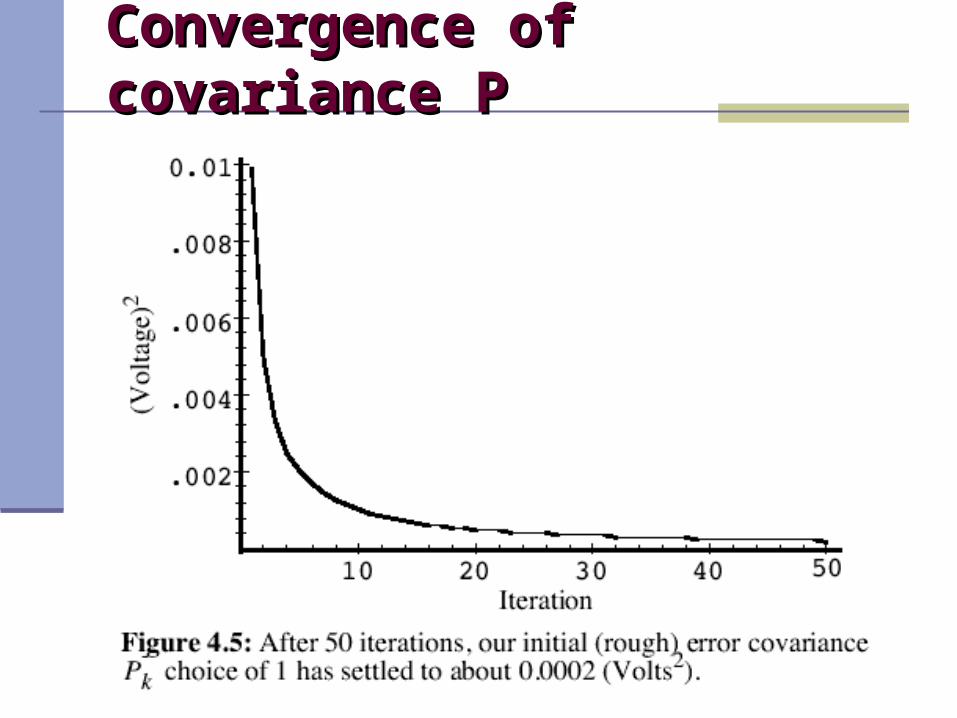
Convergence of Convergence of covariance Pcovariance P

Simulation Simulation –– Bigger R Bigger R

Simulation Simulation –– Smaller R Smaller R

Concluding remarksConcluding remarks Kalman filter is a very useful and
powerful Optimal in many sense Linear system -> Kalman filter Nonlinear system -> Extended Kalman
filter Effect of initial value
Covariance matrix – less sensitive Measurement noise
Over-estimated -> slow convergence Under-estimated -> noisy output

ResourcesResources
Kalman filter website maintained by Greg Welch
Related Documents