HKUST Aerial Robotics Group Principle Investigator : Shaojie Shen B. Design and control of long range vertical takeoff and landing (VTOL) UAV. A. Autonomous flight and obstacle avoidance of UAVs in complex environments. Vertical take-off and landing (VTOL) unmanned aerial vehicles (UAVs) have recently attracted increasing interest due to their potentially immense applications in light weight goods delivery (e.g. pharmacy), reconnaissance, search and rescue missions, disaster relief, mapping and remote sensing. A VTOL aerial vehicle has flight efficiency comparable to a fixed-wing airplane and at the same time can maintain the agility of a multi-copter (i.e. vertical take-off, landing and hovering). 0 50 100 150 200 0 2 4 6 Range (km) Payload (kg) Fixed Wing Copter VTOL 0 1 2 3 4 5 6 0 50 100 150 200 Endurance (hour) Max speed (km/h) Fixed-Wing Copter VTOL Figure 6. Survey of 272 small UAVs worldwide. Multicopter UAVs have low efficiency, low range (below 10km) and endurance (around 30 min). Fixed wing UAVs are highly efficient, but less maneuverable. New VTOL UAVs are necessary because of the blank market, technical specs superior and wide applications. Figure 8. The manufactured hybrid UAV. • Sky hunter (1.24m) • Quadrotor + Fixed-wing • APC 10x7 push propeller • Sunnsky X2826 push motor • DJI E310 lifting motors • Lipo 4-C 8000mAh battery • Active motor braking • Augmented yawing control by motor inclination Figure 9. The manufactured tail-sitter UAV. • X5 (1.01m) • Quadrotor • DJI E310 propulsion system • Lipo 4-C 5200mAh battery • Augmented yawing control by motor inclination • Improved vibration characteristics • Safe landing at wind gust less than 5.2 m/s (tested) Design, analysis and manufacture of UAVs Aerodynamics Figure 10. CFD simulation for 2-D airfoil MH60. Figure 11. Full scale wind tunnel test of quadrotor tail-sitter. Research results Stable pitch response Wide flight envelope Wind tunnel test setup Lift and drag coefficients Figure 12. Modeling and simulation of quadrotor VTOL UAV. Figure 13. Design and implementation of quadrotor VTOL UAV. Yawing torque is increased by Figure 7. The working principle of VTOL UAV (take-off, landing, hover and forward flight). Autonomous micro aerial vehicles (MAVs) have cost and mobility benefits, making them ideal robotic platforms for applications including aerial photography, surveillance, and search and rescue. A monocular visual-inertial navigation system (VINS), consisting only of an inertial measurement unit (IMU) and a camera, becomes the most suitable sensor suite in this case, thanks to its ultra-light weight and small footprint. In fact, it is the minimum sensor suite allowing autonomous flight with sufficient environmental awareness. Monocular dense mapping State estimation Trajectory planning Figure 4. The real scene (left) and our reconstructed 3D map (right). We use temporal cost aggregation from multiple images from the monocular to eliminate baseline limitation, semi-global smoothing to for outlier removal and depth propagation on texture-less environments. Utilizing the GPUs onboard the NVIDIA TX1, we implement our algorithm with CUDA. Figure 3. Our state estimation accuracy compared with ground truth. We present a monocular tightly-coupled sliding window based visual-inertial state estimator, which provides accurate states for the whole system. Figure 5. Gradient-based trajectory optimization (left) and the voxel map in the UAV view (right). We use a sampling-based method directly applied on the dense map built in our mapping module, where a path with asymptotic optimality is searched on a rapidly-exploring random graph (RRG). Figure 1. Hardware overview. (1) Perception core; (2) DJI Lightbridge 2; (3) DJI Phantom 4 Pro battery; (4) DJI Takyon Z425-M ESC; (5) DJI E310 motors; (6) iPad Pro; (7) Radio controller. Figure 2. Demonstration of our autonomous flight system in both cluttered indoor and outdoor environment. Experiment video can be found in http://ece.ust.hk/~eeshaojie/jfr2017yi.mp4

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

HKUST Aerial Robotics GroupPrinciple Investigator : Shaojie Shen
B. Design and control of long range vertical takeoff and landing (VTOL) UAV.
A. Autonomous flight and obstacle avoidance of UAVs in complex environments.
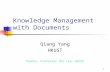
Vertical take-off and landing (VTOL) unmanned aerialvehicles (UAVs) have recently attracted increasinginterest due to their potentially immenseapplications in light weight goods delivery (e.g.pharmacy), reconnaissance, search and rescuemissions, disaster relief, mapping and remote sensing.A VTOL aerial vehicle has flight efficiency comparableto a fixed-wing airplane and at the same time canmaintain the agility of a multi-copter (i.e. verticaltake-off, landing and hovering).
0
50
100
150
200
0 2 4 6
Ran
ge (
km)
Payload (kg)
Fixed Wing Copter VTOL
0
1
2
3
4
5
6
0 50 100 150 200
End
ura
nce
(h
ou
r)
Max speed (km/h)
Fixed-Wing Copter VTOL
Figure 6. Survey of 272 small UAVs worldwide. Multicopter UAVshave low efficiency, low range (below 10km) and endurance(around 30 min). Fixed wing UAVs are highly efficient, but lessmaneuverable. New VTOL UAVs are necessary because of theblank market, technical specs superior and wide applications.
Figure 8. The manufactured hybrid UAV.• Sky hunter (1.24m)• Quadrotor + Fixed-wing
• APC 10x7 push propeller• Sunnsky X2826 push motor• DJI E310 lifting motors• Lipo 4-C 8000mAh battery
• Active motor braking• Augmented yawing control by motor
inclination
Figure 9. The manufactured tail-sitter UAV.• X5 (1.01m)• Quadrotor
• DJI E310 propulsion system• Lipo 4-C 5200mAh battery
• Augmented yawing control by motor inclination• Improved vibration characteristics• Safe landing at wind gust less than 5.2 m/s (tested)
Design, analysis and manufacture of UAVs Aerodynamics
Figure 10. CFD simulation for 2-D airfoil MH60.
Figure 11. Full scale wind tunnel test ofquadrotor tail-sitter.
Research resultsStable pitch response
Wide flight envelope
Wind tunnel test setup
Lift and drag coefficients
Figure 12. Modeling and simulation of quadrotor VTOL UAV.
Figure 13. Design and implementation of quadrotor VTOL UAV.
Yawing torque is increased by 𝑚𝑔𝑑 𝑠𝑖𝑛 𝛿
Figure 7. The working principle of VTOL UAV
(take-off, landing, hover and forward flight).
Autonomous micro aerial vehicles (MAVs) havecost and mobility benefits, making them idealrobotic platforms for applications including aerialphotography, surveillance, and search and rescue.A monocular visual-inertial navigation system(VINS), consisting only of an inertial measurementunit (IMU) and a camera, becomes the mostsuitable sensor suite in this case, thanks to itsultra-light weight and small footprint. In fact, it isthe minimum sensor suite allowing autonomousflight with sufficient environmental awareness.
Monocular dense mappingState estimation Trajectory planning
Figure 4. The real scene (left) and our reconstructed 3D map (right). Weuse temporal cost aggregation from multiple images from the monocularto eliminate baseline limitation, semi-global smoothing to for outlierremoval and depth propagation on texture-less environments. Utilizing theGPUs onboard the NVIDIA TX1, we implement our algorithm with CUDA.
Figure 3. Our state estimation accuracycompared with ground truth. We present amonocular tightly-coupled sliding windowbased visual-inertial state estimator, whichprovides accurate states for the whole system.
Figure 5. Gradient-based trajectory optimization (left) and thevoxel map in the UAV view (right). We use a sampling-basedmethod directly applied on the dense map built in ourmapping module, where a path with asymptotic optimality issearched on a rapidly-exploring random graph (RRG).
Figure 1. Hardware overview. (1) Perception core; (2) DJI Lightbridge 2; (3) DJI Phantom 4 Pro battery; (4) DJI Takyon Z425-M ESC; (5) DJI E310 motors; (6) iPad Pro; (7) Radio controller.
Figure 2. Demonstration of our autonomous flight system in both cluttered indoor and outdoor environment. Experiment video can be found in http://ece.ust.hk/~eeshaojie/jfr2017yi.mp4
Related Documents