HARMONIC DRIVE Se basa en una corona exterior rígida con dentado interior (circular spline) y un vaso flexible (flexspline) con dentado exterior que engrana en el circular spline. Interior al vaso gira un rodamiento elipsoidal (wave generator) que desforma el vaso, poniendo en contacto la corona exterior con la zona del vaso correspondiente al máximo diámetro de la elipse. Al haber una diferencia de dientes Z=Nc-Nf, tras una vuelta del wave generator, el flexible spline solo avanza Z dientes. Relación Z/Nf.Mecánica Sección transversal de una onda de tensión mecanismo de engranajes. A: spline circular (fijo) B: flexión spline (que se adjunta al eje de salida, no se muestra) C: generador de ondas (que se adjunta al eje de entrada, no se muestra) La onda de tensión engranaje teoría se basa en la dinámica elásticas y utiliza la flexibilidad de metal. El mecanismo tiene tres componentes básicos: un generador de onda, una flexión spline, y una spline circular. Las versiones más complejas tienen cuarto componente se utiliza normalmente para acortar la longitud total o para aumentar la reducción de engranajes dentro de un diámetro más pequeño, pero aún siguen los mismos principios básicos. El generador de ondas se compone de dos partes separadas: un disco elíptico llama un enchufe generador de ondas y un cojinete de bola exterior. El tapón de engranajes se inserta en el cojinete, el cojinete dando una forma elíptica también. El flex spline es como una copa poco profunda. Los lados de la spline son muy finas, pero la parte inferior es gruesa y rígida. Esto se traduce en una gran flexibilidad de las paredes en el extremo abierto debido a la delgada pared, pero en el lado cerrado de ser bastante rígida y capaz de ser firmemente asegurado (a un eje, por ejemplo).

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript
HARMONIC DRIVESe basa en una corona exterior rígida con dentado interior (circular spline) y un vaso flexible (flexspline) con dentado exterior que engrana en el circular spline. Interior al vaso gira un rodamiento elipsoidal (wave generator) que desforma el vaso, poniendo en contacto la corona exterior con la zona del vaso correspondiente al máximo diámetro de la elipse. Al haber una diferencia de dientes Z=Nc-Nf, tras una vuelta del wave generator, el flexible spline solo avanza Z dientes. Relación Z/Nf.Mecánica
Sección transversal de una onda de tensión mecanismo de engranajes. A: spline circular (fijo) B: flexión spline (que se adjunta al eje de salida, no se muestra) C: generador de ondas (que se adjunta al eje de entrada, no se muestra)
La onda de tensión engranaje teoría se basa en la dinámica elásticas y utiliza la flexibilidad de metal. El mecanismo tiene tres componentes básicos: un generador de onda, una flexión spline, y una spline circular. Las versiones más complejas tienen cuarto componente se utiliza normalmente para acortar la longitud total o para aumentar la reducción de engranajes dentro de un diámetro más pequeño, pero aún siguen los mismos principios básicos.
El generador de ondas se compone de dos partes separadas: un disco elíptico llama un enchufe generador de ondas y un cojinete de bola exterior. El tapón de engranajes se inserta en el cojinete, el cojinete dando una forma elíptica también.
El flex spline es como una copa poco profunda. Los lados de la spline son muy finas, pero la parte inferior es gruesa y rígida. Esto se traduce en una gran flexibilidad de las paredes en el extremo abierto debido a la delgada pared, pero en el lado cerrado de ser bastante rígida y capaz de ser firmemente asegurado (a un eje, por ejemplo). Los dientes están posicionados radialmente alrededor del exterior de la flexión spline. La flexión spline ajusta con firmeza sobre el generador de ondas, de modo que cuando el tapón de generador de onda se hace girar, la flexión spline se deforma a la forma de una elipse giratorio pero no gira con el generador de onda.
La Circular Spline es un anillo circular rígida con los dientes en el interior. La flexión spline y generador de ondas se colocan dentro de la acanaladura circular, que engranan los dientes de la flexión spline y el Circular Spline. Debido a la flexión spline tiene una forma elíptica, sus dientes en realidad sólo engranar con los dientes de la Circular Spline en dos regiones en lados opuestos de la flexión spline, a lo largo del eje mayor de la elipse.
Ventajas
Excelente Precisión de Posicionamiento y Repetibilidad
Los reductores Harmonic Drive permiten una precisión de posicionamiento < 1 arcmin. y repetibilidad de arc/seg.
Gran Capacidad de Par
Debido a que la potencia se transmite mediante el contacto de múltiples dientes de engrane Harmonic Drive ofrece una gran capacidad de par de salida equivalente a los reductores convencionales de doble tamaño y tres veces más de peso.
Juego Cero
Los reductores Harmonic Drive® pueden trabajar con juego cero en el engrane gracias a una precarga natural en el dentado.
Ratios de Reducción en una sola etapa
Con solamente tres elementos y una sola etapa se obtienen ratios entre 30:1 y 320:1.
Alta Eficiencia
Se puede obtener hasta un 85% de eficiencia (Cifras basadas en tests reales eje a eje).
Mínimo Desgaste, Máxima Duración
En los reductores Harmonic Drive lo dientes entran en contacto con un movimiento puramente radial y tienen una velocidad de deslizamiento nula, incluso a grandes velocidades de entrada.La fricción entre dientes y el desgaste son despreciables.
Gran Rigidez Torsional
Los reductores Harmonic Drive muestran una elevada rigidez torsional en todo el rango de velocidad. Las características de rigidez casi lineal garantizan un comportamiento operativo óptimo.
Reversibilidad
Las Unidades Harmonic Drive son reversibles y se pueden usar como multiplicadores de velocidad en caso de emergencia.
Eje Hueco Central
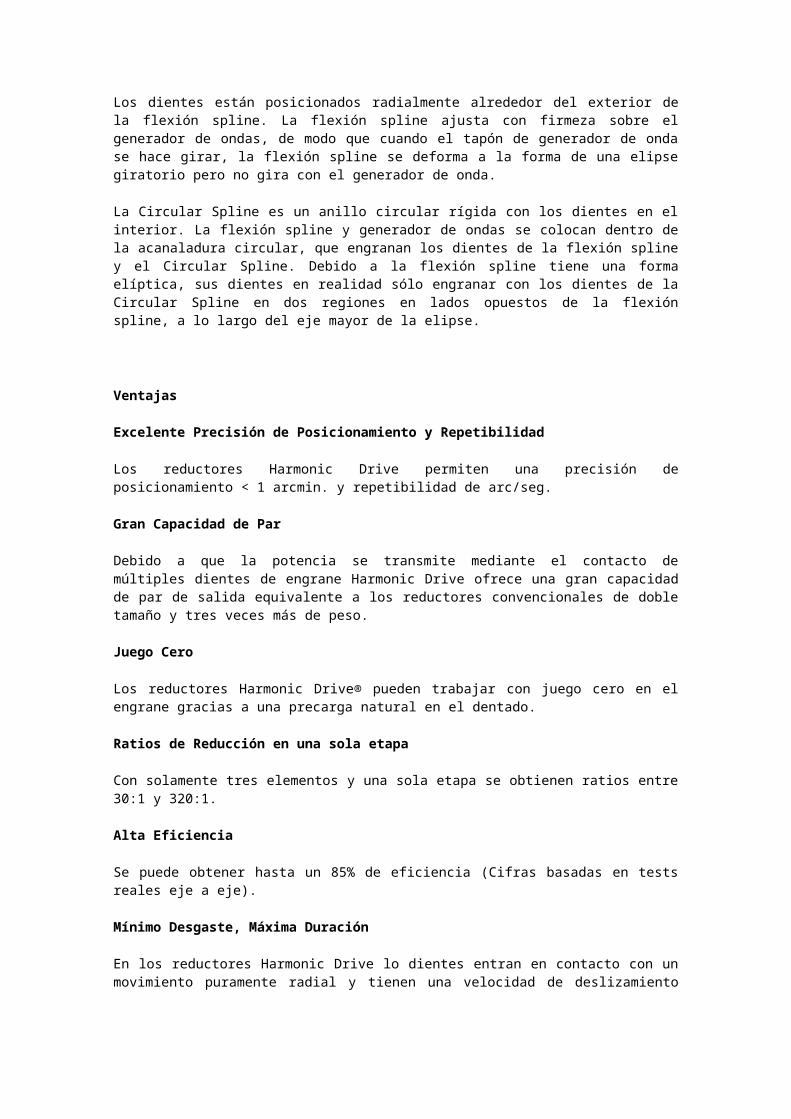
Los reductores Harmonic Drive pueden disponer de un gran eje hueco central por el que se pueden introducir ejes, cables, rayos láser, etc... a través del eje de rotación del reductor simplificando en gran medida los diseños.
CICLOIDAL
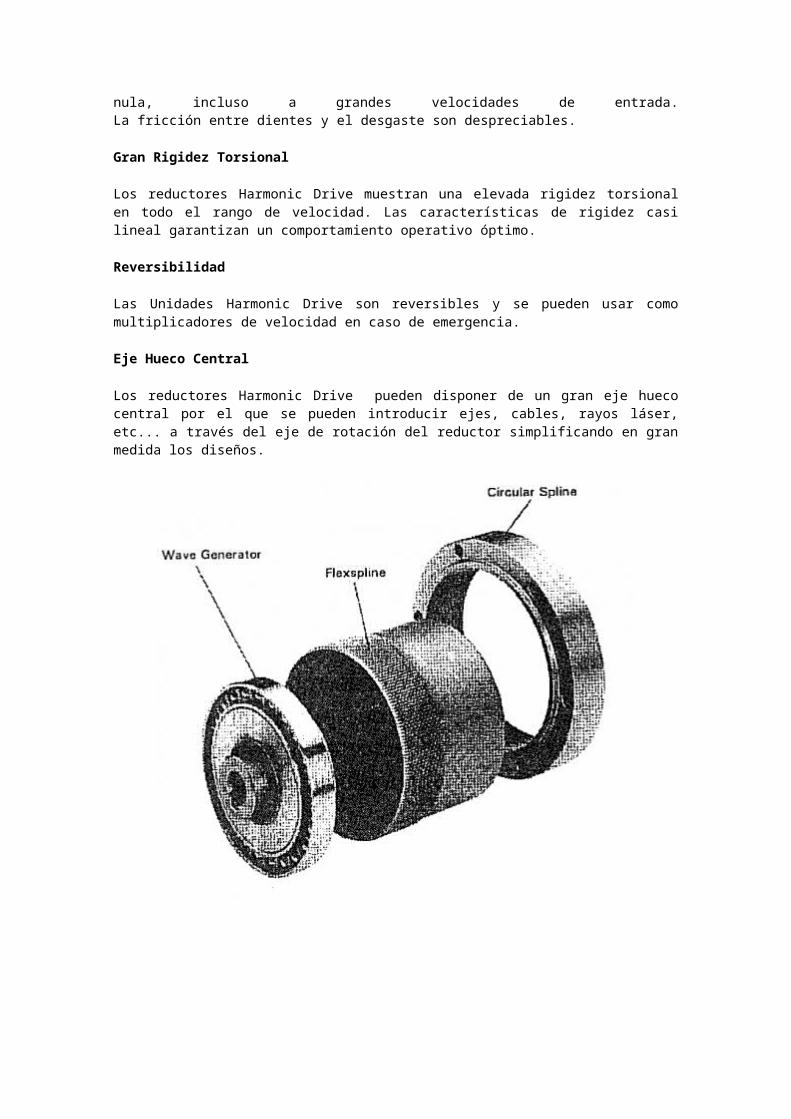
Por otra parte el sistema de reducción CYCLO se basa en el movimiento cicloidal de un disco de curvas movido por una excentricidad solidara al árbol de entrada. Por cada revolución de la excentricidad el disco de curvas avanza un saliente rodando sobre los rodillos exteriores. Este avance arrastra a su vez a los pernos del árbol de salida que describiran una cicloide dentro de los huecos del disco de curvas. La componente de traslación angular de este movimiento se corresponde con la rotación del árbol de salida. La relación de reducción viene dada, por tanto, determinada por el número de salientes. Para compensar los momentos de flexión y de las masas de cada disco excentrico, generalmente se utilizan dos discos desfasados entre sí 180º.
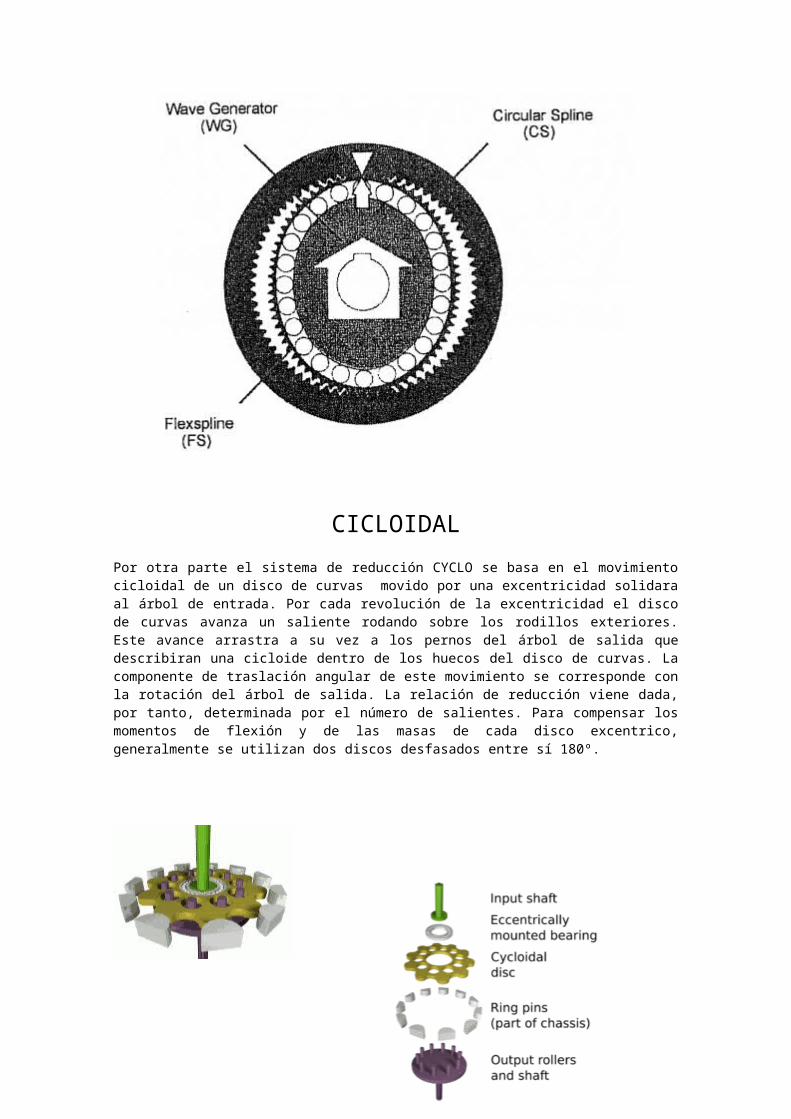
Partes de un mecanismo reductor cicloidal 10:01 Velocidad
El eje de entrada está montado excéntricamente con respecto al cojinete de bolas , haciendo que el disco cicloidal se mueva en un círculo. El disco cicloidal será girar independientemente alrededor del cojinete, ya que es empujado contra el engranaje de anillo. Esto es similar a los engranajes planetarios , y la dirección de rotación es opuesta a la del eje de entrada.
El número de pines en el engranaje de anillo es mayor que el número de pines en el disco cicloidal. Esto hace que el disco cicloidal para girar alrededor del cojinete más rápido que el eje de entrada que se está moviendo alrededor, dando una rotación general en la dirección opuesta a la rotación del eje de entrada.
El disco cicloidal tiene agujeros que son ligeramente más grandes que los pasadores de rotación de salida que van dentro de ellos. Los pines de salida se moverá en torno a los agujeros para lograr la rotación constante del eje de salida del movimiento de cabeceo del disco cicloidal.
La tasa de reducción de la unidad de cicloidal se obtiene de la siguiente fórmula, en la que P significa el número de los pasadores de la corona y L es el número de pines en el disco cicloidal.
Individual eficiencia etapa se acerca 93% y doble etapa se aproxima a 86% [2] con una relación de reducción de una sola etapa hasta la fase de 119:1 y doble hasta 7569:1 [3]
Desventajas
Los ejes de entrada y de salida de la unidad cicloidal no se pueden revertir. Esto se debe a la rotación de los pines de salida no girará el disco cicloidal en la forma correcta.
Sin embargo, en el caso de que el disco cicloidal este desgastado o fabricado con una tolerancia suelta, un gran par de entrada en la salida se puede propagar a través de la unidad y la parte posterior alimentar la entrada. Esta no es una operación típica de la eficiencia y de que la transmisión es muy pobre, lo que lleva a un fallo prematuro.
Además, el disco cicloidal montado excéntricamente provocará vibraciones en el coche que se propagan a través de la unidad / ejes accionados. Esto también conlleva un fuerte desgaste en los dientes exteriores del disco cicloidal, así como la interfaz con los pasadores de rodillo de salida debido a la pequeña movimiento relativo causado por las vibraciones. Un segundo disco cicloidal instalado un medio-giro relativo a la primera va a equilibrar el eje de entrada y reducir la vibración.
• Los cocientes de reducción de la sola etapa hasta 87:1 ahorran el espacio
• El movimiento de balanceo reduce al mínimo la fricción y el desgaste, reduciendo calor, dando por resultado un grado de eficacia del 95% por etapa
• la capacidad de la carga de choque del 500% como allí es solamente fuerzas de compresión algo que fuerzas de esquileo en el diente
• De poca velocidad de la rueda cycloidal da lugar a inercia reflejada mínima, a menos desgaste, y a vida de servicio extremadamente larga
• Debido al área de contacto total grande del “diente/del perno”, seleccione un reductor usando factores mecánicos más pequeños del servicio
Reductor SIN-FIN CORONA
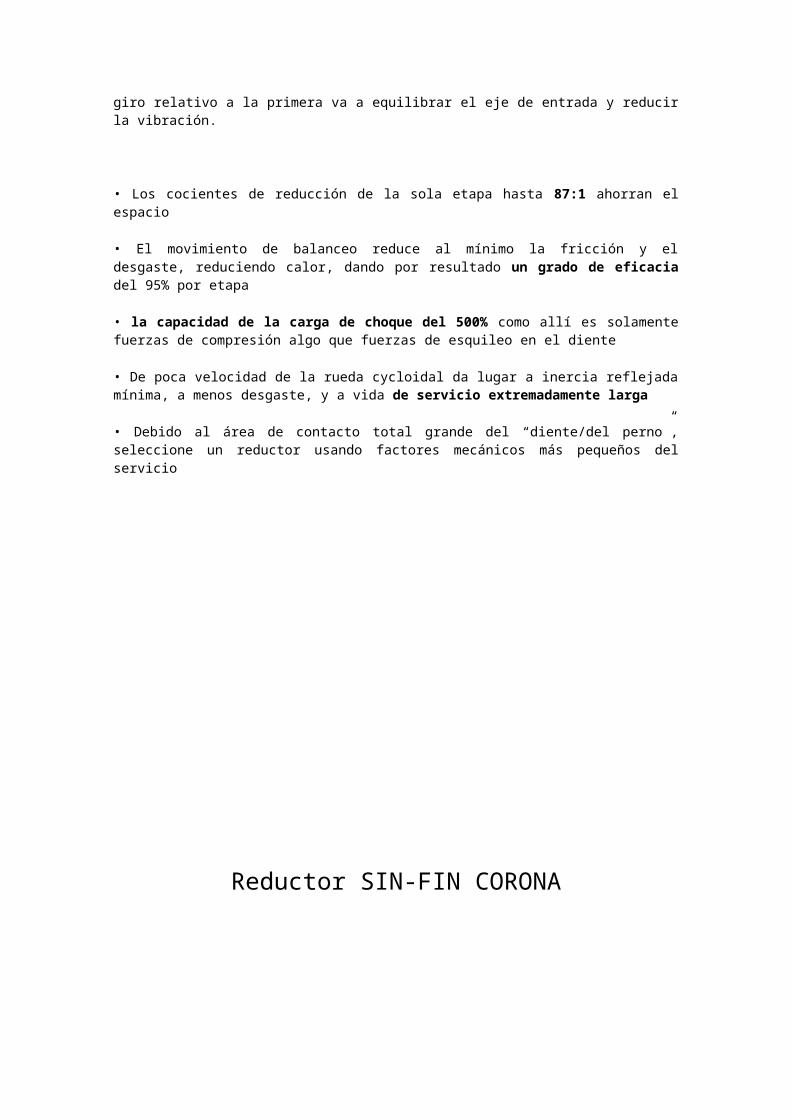
Es quizás el tipo de reductor de velocidad más sencillo, se compone de una corona dentada, normalmente de bronce en cuyo centro se ha embutido un eje de acero (eje lento), esta corona esta en contacto permanente con un husillo de acero en forma de tornillo sin-fin. Una vuelta del tornillo sin fin provoca el avance de un diente de la corona y en consecuencia la reducción de velocidad. La reducción de velocidad de un corona sin fin se calcula con el producto del número de dientes de la corona por el número de entradas del tornillo sin fin.
Paradójicamente es el tipo de reductor de velocidad más usado y comercializado a la par que todas las tendencias de ingeniería lo consideran obsoleto por sus grandes defectos que son, el bajo rendimiento energético y la perdida de tiempo entre ciclos
REDUCTOR DE ENGRANAJES
Los reductores de engranajes son aquellos en que toda la transmisión mecánica se realiza por pares de engranajes de cualquier tipo excepto los basados en tornillo sin fin. Sus ventajas son el mayor rendimiento energético, menor mantenimiento y menor tamaño.
REDUCTOR DE ENGRANAJES PLANETARIOS
Son reductores de engranaje con la particularidad de que no están compuestos de pares de sino de una disposición algo distinta, y sirve para diferentes tipos de variaciones de velocidad.
Hay dos tipos de engranajes planetarios para reducir la velocidad de la hélice con respecto a la del cigüeñal.
Un sistema tiene el engranaje principal sol fijado rígidamente a la sección delantera del motor, y una corona interna es impulsada por el cigüeñal. El piñón está unido al eje de lo que quiere mover. y montado en ella y son una serie de piñones que cuando el cigüeñal gira, los piñones giran en torno al principal fijo, en compañía de la hélice en la misma dirección, pero a una velocidad reducida.
Los reductores de velocidad de engranajes planetarios, interiores o anulares son variaciones del engranaje recto en los que los dientes están tallados en la parte interior de un anillo o de una rueda con reborde, en vez de en el exterior. Los engranajes interiores suelen ser impulsados por un piñón, (también llamado piñón Sol, que es un engranaje pequeño con pocos dientes). Este tipo de engrane mantiene el sentido de la velocidad angular. El tallado de estos engranajes se realiza mediante talladoras mortajadoras de generación.
La eficiencia de este sistema de reductores planetarios es igual a 98^(#etapas); es decir si tiene 5 etapas de reducción la eficiencia de este reductor seria 0,904 o 90,4%.

DIRECT DRIVE
Un mecanismo de accionamiento directo es el que tiene la potencia procedente de un motor sin reducciones (tal como una caja de cambios ).
Ventajas
Mayor eficiencia: (Del La alimentación no se pierde en la fricción cinta , cadena , etc, y en especial, cajas de cambios .)
Reducción de ruido: Al ser un dispositivo más simple, un mecanismo de accionamiento directo tiene menos piezas que pudiesen vibrar, y la emisión de ruido total del sistema es generalmente más bajos.
Mayor vida útil: tener menos partes móviles también significa tener menos partes propensas al fracaso. Los fallos en otros sistemas se producen generalmente por el envejecimiento del componente (tal como un estirado del cinturón ), o el estrés.
Alto par a bajas rpm. Posicionamiento más rápido y preciso. Alto par y baja inercia permite tiempos de
posicionamiento más rápido en síncrono de imanes permanentes servomotores. Sensor de retroalimentación directa por parte giratoria permite detectar la posición angular precisa.
Se elimina la rigidez Drive. Reacción mecánica, la histéresis y la elasticidad de evitar el uso de mecanismos de tornillo caja de cambios o la pelota.
Desventajas
La principal desventaja del sistema es que necesita un especial del motor . Por lo general, los motores se construyen para lograr el máximo par motor a altas velocidades de rotación, por lo general 1500 o 3000 rpm . Si bien esto es útil para muchas aplicaciones (tal como un ventilador eléctrico ), otros mecanismos necesitan un par de torsión relativamente alta a velocidades muy bajas, tales como un fonógrafo plato giratorio , que necesita una constante (y muy precisa) 33 ⅓ rpm o 45 rpm.
El motor lento también tiene que ser físicamente más grande que su contraparte más rápido. Por ejemplo, en un plato giratorio acoplado a la correa, el diámetro del motor es de aproximadamente 1 pulgada (2,5 cm). En un tocadiscos de tracción directa, el motor es de aproximadamente 4 "(10 cm).
Además, los mecanismos de accionamiento directo necesitan un mecanismo de control más preciso. Los motores de alta velocidad, con reducción de la velocidad tienen relativamente alta inercia, que ayuda a suavizar el movimiento de salida. La mayoría de los motores exhiben ondulación del par posicional conocido como reluctancia par . En motores de alta velocidad, este efecto es normalmente
insignificante, como la frecuencia a la que se produce es demasiado alto para afectar de forma significativa el rendimiento del sistema, las unidades de accionamiento directo van a sufrir más de este fenómeno, a menos que se añade inercia adicional (es decir, por un volante de inercia) o la sistema utiliza la retroalimentación para contrarrestar activamente el efecto.
MOTOR LINEAL
Un motor lineal es un motor eléctrico que posee su estator y su rotor "distribuidos" de forma tal que en vez de producir un torque (rotación) produce una fuerza lineal en el sentido de su longitud. El modo más común de funcionamiento es como un actuador tipo Lorentz, en el cual la fuerza aplicada es linealmente
proporcional a la corriente eléctrica y al campo magnético .
Se han desarrollado varios diseños de motores lineales, los cuales se enmarcan en dos categorías principales, motores lineales de baja aceleración y de alta aceleración. Los motores lineales de baja aceleración son apropiados para el tren Maglev y otros usos en el campo del transporte de superficie. Los motores lineales de alta aceleración por lo general son relativamente cortos y se diseñan para acelerar un objeto a muy alta velocidad, por ejemplo véase el railgun.
Por lo general son utilizados para realizar estudios de colisiones con hipervelocidad, como armas, o como impulsores de masa de sistemas de propulsión de naves espaciales. Los motores de alta aceleración por lo general poseen diseños tipo motor de inducción lineal AC con un bobinado trifásico activo de un lado del entre hierro de aire y una placa conductora pasiva del otro lado. El motor lineal de corriente directa homopolar tipo railgun es otro diseño de un motor lineal de alta aceleración. Los motores de baja aceleración, alta velocidad y alta potencia por lo general son del tipo motores lineales sincrónicos (LSM), con un bobinado activo de un lado del entre hierro de aire y un conjunto de imanes con sus polos alternados del otro lado. Estos imanes pueden ser imanes permanentes o electroimanes. El motor del Shanghai Transrapid es un LSM.
Related Documents











