A PRESENTATION ON HAPTICS Co-ordinator:- Presented By:- Prof.(Dr.) Sudhir Kr. Sharma Dheeraj Pathak Mr. Kalyan Acharjya Roll No- 8EC-28 Department of Electronics and Communication Engineering Jaipur National University, Jaipur 1

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

A PRESENTATION ON
HAPTICS
Co-ordinator:- Presented By:-
Prof.(Dr.) Sudhir Kr. Sharma Dheeraj Pathak
Mr. Kalyan Acharjya Roll No- 8EC-28
Department of Electronics and Communication Engineering
Jaipur National University, Jaipur
1

OUTLINE
Introduction
Architecture
Principle & Working
Application
Challenges
Conclusion
References 2
INTRODUCTION
Haptic Technology, or Haptics, is a tactile feedback technology that
takes advantage of a user’s sense of touch by applying forces, vibration
and motions to the user.
Derived from Greek word ‘Haptikos’ meaning “Sense of Touch”.
It has been described as “doing for the sense of touch what computer
graphics does for vision”.
When virtual objects are touched, they seem real.
3

HAPTIC INTERACTION LOOP WITH USER AND
VIRTUAL ENVIRONMENT
Human hand Haptic Virtual
Device Environment
Fig1 : Interaction loop of Haptic4

ARCHITECTURE
Fig. 2: Basic Block Diagram of Haptic Environment5
Human
Operator
Video and
Audio
Audio –visual
Rendering
Heptic
Devices
Heptic
Rendering
Simulation
Engine

WORKING
6Fig.3: Basic System Configuration [3]
4
3
24 3
2
1
1
End effecter
Hand
Actuators
Muscles
Sensors
Virtual object
MachineHuman
Computer
hapticsSensors

HAPTIC INFORMATION & RENDERING
Basically the information provide by the system is the
combination of Tactile and Kinesthetic information.
The actual process used by the software to perform its
calculations is called haptic rendering.
7
Fig.4: Heptic Rendering Architecture[4]
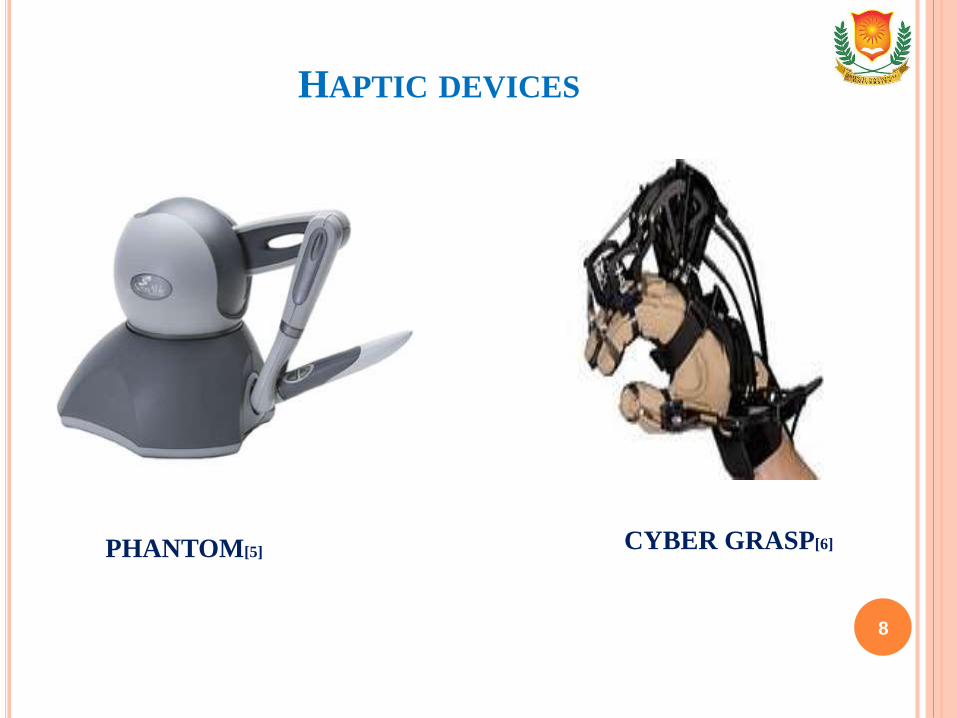
HAPTIC DEVICES
8
PHANTOM[5]CYBER GRASP[6]

APPLICATIONS OF HEPTIC TECHNOLOGY
Entertainment
Education
Medicine
Computer & mobiles
9

CHALLENGES
The precision of touch requires a lot of advance design.
Large weight, size & high cost involved of haptic devices
(especially wearable ones).
Haptic interfaces can only exert forces with limited magnitude
and not equally well in all directions.
Haptics projects rely on fixed installations of equipment and are
not easily portable.
Haptic-rendering algorithms operate in discrete time whereas
users operate in continuous time. 10

CONCLUSION
The next important step towards realistically simulated
environments that have been envisioned by science fiction
authors.
Haptic Technology enables users to simulate touch and
utilize a new input as well as output technology.
Still embryonic when compared to full fledged VR simulations.
Future generations of mobile devices and game console
accessories will implement more haptic feedback.
Holographic interaction, Military training, Medical & Textile
industry these are the future vision for the haptic technology.11

REFERENCES
[1].http://en.wikipedia.org/wiki/haptic_technology
[2].http://www.sensable.com/documents/documents/Salisbury_Haptics95.pdf
[3].B. Divya Jyothi and Dr. R.V. Krishnaiah, “Haptic Technology- A sense of touch”,International Journal of Science and Research (IJSR), India online ISSN:2319-7064.
[4].Kenneth Salisbury, Francois Conti and Federico Barbagil, “Haptic Rendering:Introductory Concept,” IEEE Computer Graphics and Applications, vol. 1, IEEE CSPress, 2004, pp. 24-32.
[5]. http://www.dentsable.com/haptic-phantom-omni.htm
[6]. http://www.senztech.cc/showpros.aspx?proid=82
[7]. http://www.slideshere.net/haptics
12

13
THANKYOU!!
Related Documents