Review of Prerequisite Skills, p. 487 1. a. Yes; b. No; c. Yes; d. No; There is no value of t that satisfies the equation. 2. Answers may vary. For example: a. Vector: Parametric: , b. Vector: Parametric: , c. Vector: Parametric: , d. Vector: Parametric: , , , e. Vector: Parametric: , , , f. Vector: Parametric: , , 3. a. Since the Cartesian equation of the plane is of the form where D is to be determined. Since is on the plane, it must satisfy the equation. So and the equation of the plane is . b. Since the Cartesian equation of the plane is of the form where D is to be determined. Since is on the plane, it must satisfy the equation. So thus The equation of the plane is c. Since the Cartesian equation of the plane is of the form where D is to be determined. Since is on the plane, it must satisfy the equation. So and the equation of the plane is d. Since the Cartesian equation of the plane is of the form , where D is to be determined. Since is on the plane, it must satisfy the equation. So . The equation of the plane is e. Since the Cartesian equation of the plane is of the form where D is to be determined. Since is on the plane, it must satisfy the equation. So and the equation of the plane is f. Since the Cartesian equation of the plane is of the form where D is to be determined. Since is on the plane, it must satisfy the equation. So and the equation of the plane is 4. Start by writing the given line in parametric form: so and Solving for s in each component, we get and substituting this into gives z 5 3(1 2 y ) 2 5t 5 3 2 3y 2 5t. z 5 3s 2 5t s 5 1 2 y z 5 3s 2 5t. y 5 1 2 s, x 5 2 1 s 1 2t, ( x, y, z ) 5 (2 1 s 1 2t, 1 2 s, 3s 2 5t ), x 1 y 2 z 2 6 5 0. D 526, 2 1 5 2 1 1 D 5 6 1 D 5 0. P 0 (2, 5, 1) x 1 y 12 z 1 D 5 0, n > 5 (1, 1, 21), 11x 2 6y 2 38 5 0. D 5238, 11(4) 2 6(1) 1 D 5 44 2 6 1 D 5 38 1 D 5 0. P 0 (4, 1, 8) 11x 2 6y 1 D 5 0, n > 5 (11, 26, 0), 6x 2 5y 1 3z 5 0. 6(0) 2 5(0) 1 3(0) 1 D 5 0, or D 5 0 P 0 (0, 0, 0) 6x 2 5y 1 3z 1 D 5 0 n > 5 (6, 5, 23), 4x 1 3y 2 15 5 0. D 5215, 4(3) 2 3( 21) 1 D 5 12 1 3 1 D 5 15 1 D 5 0. P 0 (3, 21, 22) 4x 2 3y 1 D 5 0, n > 5 (4, 23, 0), 7y 5 0, or y 5 0. D 5 0. 7(0) 1 D 5 0 1 D 5 0 P 0 ( 22, 0, 5) 7y 1 D 5 0, n > 5 (0, 7, 0), 2x 1 6y 2 z 2 17 5 0 D 5217, 5 17 1 D 5 0. 2(4) 1 6(1) 2 1( 23) 1 D 5 8 1 6 1 3 1 D P 0 (4, 1, 23) 2x 1 6y 2 z 1 D 5 0, n > 5 (2, 6, 21), t PR z 521 2 6t, y 5 5 2 10t x 5 2 1 10t , t PR r > 5 (2, 5, 21) 1 t (10, 210, 26) 5 (10, 210, 26) m > 5 (12, 25, 27) 2 (2, 5, 21) t PR z 521 1 3t y 525t x 5 2 2 3t , t PR r > 5 (2, 0, 21) 1 t ( 23, 5, 3) 5 ( 23, 5, 3) m > 5 ( 21, 5, 2) 2 (2, 0, 21) t PR z 5 5 2 5t y 5 3 2 10t x 5 1 1 5t , t PR r > 5 (1, 3, 5) 1 t (5, 210, 25) 5 (5, 210, 25) m > 5 (6, 27, 0) 2 (1, 3, 5) , t PR y 5211t x 521 12 2t , t PR r > 5 ( 21, 0) 1 t ( 22, 211) 5 ( 22, 211) m > 5 ( 23, 211) 2 ( 21, 0) y 5 7 2 14t, t PR x 523 1 7t r > 5 ( 23, 7) 1 t (7, 214), t PR m > 5 (4, 27) 2 ( 23, 7) 5 (7, 214) y 5 5 2 2t, t PR x 5 2 1 5t r > 5 (2, 5) 1 t (5, 22), t PR m > 5 (7, 3) 2 (2, 5) 5 (5, 22) ( 21, 21, 7) 2 t (4, 21, 2) (1, 0, 5) 5 (2, 1, 22) 1 t (4, 21, 2) (7, 23, 8) 5 (1, 0, 24) 1 3(2, 21, 4) (7, 23, 8) 5 (1, 0, 24) 1 t (2, 21, 4) 12(1) 1 5(2) 2 13 5 9 2 0 (2, 25) 5 (10, 212) 1 1(8, 27) (2, 25) 5 (10, 212) 1 t (8, 27) 9-1 Calculus and Vectors Solutions Manual CHAPTER 9 Relationships Between Points, Lines, and Planes

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript
Review of Prerequisite Skills, p. 4871. a. Yes;
b. No; c. Yes;
d. No;
There is no value of t that satisfies the equation.2. Answers may vary. For example:a. Vector:
Parametric: ,b. Vector:
Parametric: ,c. Vector:
Parametric: ,d. Vector:
Parametric: , , ,
e. Vector:
Parametric: , , ,
f. Vector:
Parametric: , ,
3. a. Since the Cartesian equationof the plane is of the form where D is to be determined. Since is on the plane, it must satisfy the equation. So
and the equation of theplane is .b. Since the Cartesian equation of the plane is of the form where D is tobe determined. Since is on the plane, itmust satisfy the equation. So thus The equation of the plane is
c. Since the Cartesian equation ofthe plane is of the form where D is to be determined. Since is on the plane, it must satisfy the equation. So
and the equation of the plane is
d. Since the Cartesian equation ofthe plane is of the form ,where D is to be determined. Since is onthe plane, it must satisfy the equation. So
. The equation of the plane is e. Since the Cartesian equation of the plane is of the form where D is to be determined. Since is on the plane, it must satisfy the equation. So
and the equation of the plane is
f. Since the Cartesian equation ofthe plane is of the form where D is to be determined. Since is on the plane, it must satisfy the equation. So and theequation of the plane is 4. Start by writing the given line in parametric form: so
and Solving for s in each component, we get and substituting this into givesz 5 3(1 2 y) 2 5t 5 3 2 3y 2 5t.
z 5 3s 2 5ts 5 1 2 y
z 5 3s 2 5t.y 5 1 2 s,x 5 2 1 s 1 2t,(x, y, z) 5 (2 1 s 1 2t, 1 2 s, 3s 2 5t),
x 1 y 2 z 2 6 5 0.
D 5 26,2 1 5 2 1 1 D 5 6 1 D 5 0.
P0(2, 5, 1)
x 1 y 1 2 z 1 D 5 0,
n>
5 (1, 1, 21),
11x 2 6y 2 38 5 0.
D 5 238,
11(4) 2 6(1) 1 D 5 44 2 6 1 D 5 38 1 D 5 0.
P0(4, 1, 8)
11x 2 6y 1 D 5 0,
n>
5 (11, 26, 0),
6x 2 5y 1 3z 5 0.
6(0) 2 5(0) 1 3(0) 1 D 5 0, or D 5 0
P0(0, 0, 0)
6x 2 5y 1 3z 1 D 5 0
n>
5 (6, 5, 23),
4x 1 3y 2 15 5 0.
D 5 215,
4(3) 2 3(21) 1 D 5 12 1 3 1 D 5 15 1 D 5 0.
P0(3, 21, 22)
4x 2 3y 1 D 5 0,
n>
5 (4, 23, 0),
7y 5 0, or y 5 0.
D 5 0.
7(0) 1 D 5 0 1 D 5 0
P0(22, 0, 5)
7y 1 D 5 0,
n>
5 (0, 7, 0),
2x 1 6y 2 z 2 17 5 0
D 5 217,5 17 1 D 5 0.
2(4) 1 6(1) 2 1(23) 1 D 5 8 1 6 1 3 1 D
P0(4, 1, 23)
2x 1 6y 2 z 1 D 5 0,
n>
5 (2, 6, 21),
tPRz 5 21 2 6t,y 5 5 2 10tx 5 2 1 10t
, tPRr>
5 (2, 5, 21) 1 t(10, 210, 26)
5 (10, 210, 26)
m>
5 (12, 25, 27) 2 (2, 5, 21)
tPRz 5 21 1 3ty 5 25tx 5 2 2 3t
, tPRr>
5 (2, 0, 21) 1 t(23, 5, 3)
5 (23, 5, 3)
m>
5 (21, 5, 2) 2 (2, 0, 21)
tPRz 5 5 2 5ty 5 3 2 10tx 5 1 1 5t
, tPRr>
5 (1, 3, 5) 1 t(5, 210, 25)
5 (5, 210, 25)
m>
5 (6, 27, 0) 2 (1, 3, 5)
, tPRy 5 211tx 5 21 1 2 2t, tPRr
>
5 (21, 0) 1 t(22, 211)
5 (22, 211)
m>
5 (23, 211) 2 (21, 0)
y 5 7 2 14t, tPRx 5 23 1 7tr>
5 (23, 7) 1 t(7, 214), tPRm>
5 (4, 27) 2 (23, 7) 5 (7, 214)
y 5 5 2 2t, tPRx 5 2 1 5tr>
5 (2, 5) 1 t(5, 22), tPRm>
5 (7, 3) 2 (2, 5) 5 (5, 22)
(21, 21, 7) 2 t(4, 21, 2)
(1, 0, 5) 5 (2, 1, 22) 1 t(4, 21, 2)
(7, 23, 8) 5 (1, 0, 24) 1 3(2, 21, 4)
(7, 23, 8) 5 (1, 0, 24) 1 t(2, 21, 4)
12(1) 1 5(2) 2 13 5 9 2 0
(2, 25) 5 (10, 212) 1 1(8, 27)
(2, 25) 5 (10, 212) 1 t(8, 27)
9-1Calculus and Vectors Solutions Manual
CHAPTER 9Relationships Between Points,
Lines, and Planes

So now and
Finally, substituting both equations for s and t into
we get
Rearranging, we get
5. is not parallel to the plane because (3, 0, 2) isa point on the line and the plane. Substitute theexpressions for the components of the parametricequation of the line into the equation of the plane.
This last statement is always true. So every point onthe line is also in the plane. Therefore, the line lieson the plane.For substitute the expressions for the componentsof the parametric equation of the line into the equation of the plane.
This last statement is never true. So the line and theplane have no points in common. Therefore, isparallel to the plane. The line cannot lie on theplane.For use the symmetric equation to rewrite x andz in terms of y.
Substitute into the equation of the plane.
This equation has a solution. Therefore, and theplane have a point in common and are not parallel.However, is a point that lies on the linethat does not lie on the plane. Therefore, doesnot lie in the plane.6. a. A normal vector to this plane is determined bycalculating the cross product of the position vectors,
and
If is any point on the plane, then
and if the normal to theplane is then
soand thus,
b.
Since we will useas the normal vector so that the coefficient
of x is positive. If is any point on the plane,then and if the normalto the plane is then
so and thus .7. Answers may vary. For example: One directionvector is Now we need to find a normal to the plane suchthat So Now wehave A possible solution to this is
So and theCartesian equation of the plane is Since the plane is parallel to the y-axis, (0, 1, 0) isanother direction vector for the plane. Therefore, avector equation for the plane is
8. We are given the point We need tofind a normal vector such that
The normal vector also must be perpendicular to thetwo planes and their normals, and
One possible solution for the normal isSo we have
And the equation of the plane is 3y 1 z 5 13.
3y 1 z 2 9 2 4 5 0
3(y 2 3) 1 z 2 4 5 0
n>
5 (0, 3, 1).
(5, 1, 23).
(2, 21, 3)
a(x 1 1) 1 b(y 2 3) 1 c(z 2 4) 1 d 5 0.
n>
5 (a, b, c)
A(21, 3, 4).
r>
5 (1, 24, 3) 1 t(1, 3, 3) 1 s(0, 1, 0), s, tPR.
3x 2 z 5 0.
n>
5 (3, 0, 21)c 5 21.a 5 3,
a 1 3c 5 0.
(1, 3, 3) ? (a, 0, c) 5 0.n>
? m>
5 0.
(1, 24, 3) 5 (1, 3, 3).m>
5 (2, 21, 6) 2
x 1 6y 2 10z 2 30 5 0
5 0,x 2 4 1 6y 2 6 2 10z 2 20
(1, 6, 210) 5 0,(x 2 4, y 2 1, z 1 2) ?(1, 6, 210),
AP>
5 (x 2 4, y 2 1, z 1 2),
P(x, y, z)
(1, 6, 210)
(21, 26, 10) 5 21(1, 6, 210),
5 (23 1 2, 28 1 2, 22 1 12) 5 (21, 26, 10)
2(21) 2 3(4))
22(21),5 (3(21) 2 2(21)), 2(24)
n>
5 PQ>
3 PR>
PR>
5 (0, 0, 23) 2 (4, 1, 22) 5 (24, 21, 21)
PQ>
5 (6, 4, 0) 2 (4, 1, 22) 5 (2, 3, 2)
x 2 y 2 z 2 2 5 0
x 2 1 2 y 2 z 2 1 5 0
(1, 21, 21) 5 0,(x 2 1, y, z 1 1) ?
(1, 21, 21),
AP>
5 (x 2 1, y, z 1 1),
P(x, y, z)
5 (1, 21, 21) 5 n>
.
5 (0 1 1, 5 2 6, 21 2 0)
2 (1 ? 6), (1 ? 21) 2 (0 ? 5))
AB>
3 AC>
5 ((0 ? 6) 2 (1 ? 21), (1 ? 5)
AC>
5 (6, 21, 5) 2 (1, 0, 21) 5 (5, 21, 6)
AB>
5 (2, 0, 0) 2 (1, 0, 21) 5 (1, 0, 1)
AC>
.AB>
L3
(5, 27, 1)
L3
214y 2 96 5 0
216y 2 92 1 y 1 y 1 6 2 10 5 0
4(24y 2 23) 1 y 2 (2y 2 6) 2 10 5 0
z 5 2y 2 6
x 5 24y 2 23
L3
L2
215 5 0
212t 2 5 1 2t 1 10t 2 10 5 0
4(23t) 1 (25 1 2t) 2 (210t) 2 10 5 0
L2
0 5 0
12 1 4t 2 2t 2 2 2 2t 2 10 5 0
4(3 1 t) 1 (22t) 2 (2 1 2t) 2 10 5 0
L1
5x 1 11y 1 2z 2 21 5 0.
5x 5 10 1 5 2 5y 1 6 2 6y 2 2z
a3 2 3y 2 z5
b .x 5 2 1 (1 2 y) 1 2
x 5 2 1 s 1 2t,
t 53 2 3y 2 z
5.23 1 3y 1 z 5 25t
9-2 Chapter 9: Relationships Between Points, Lines, and Planes
9.1 The Intersection of a Line with a Plane and the Intersection of Two Lines, pp. 496–498
1. a. First, show the parametric equations asThen the
plane can be written as and the vector equation of the line is
b. When we substitute the parametric equations intothe Cartesian equation for the plane, we get
Note that by finishing the solution, we get Since any real number will satisfy this equation, wehave an infinite number of solutions, and this linelies on the plane.2. a. A line and a plane can intersect in three ways:Case 1: The line and the plane have zero points ofintersection. This occurs when the lines are notincidental, meaning they do not intersect.Case 2: The line and the plane have only one pointof intersection. This occurs when the line crossesthe plane at a single point.Case 3: The line and the plane have an infinitenumber of intersections. This occurs when the lineis coincident with the plane, meaning the line lieson the plane.b. Assume that the line and the plane have morethan one intersection, but not an infinite number.For simplicity, assume two intersections. At the first intersection, the line crosses the plane. In orderfor the line to continue on, it must have the samedirection vector. If the line has already crossed theplane, then it continues to move away from theplane, and can not intersect again. So the line andthe plane can only intersect zero, one, or infinitelymany times.3. a. The line is the x-axis.b. The plane has the form where x, and z are any values in R. So the plane isparallel to the xz-plane, but just one unit away to the right.
c.
d. There are no intersections between the line andthe plane.4. a. For if we substitute theparametric equations, we have
All values of t give a solution to the equation,so all points on the line are also on the plane.b. For the plane we cansubstitute the parametric equations derived from
So we have
Similar to part a., all values of t give a solution tothis equation, so all points on the line are also onthe plane.5. a. First, we should determine the parametricequations from the vector form:
Substituting these into theequation of the plane, we get
Since there are no values of s such that thisline and plane do not intersect.b. Substituting the parametric equations into theequation of the plane, we get
Since there are no values of t such that thereare no solutions, and the plane and the line do notintersect.
1 5 0,
5 1 1 0t16t2 1 8 1 4 2 13 1 4t 2 20t 1
4(1 1 4t) 2 132(1 1 2t) 2 4(22 1 5t) 1
25 5 0,
5 25 1 0s5 22 2 2 2 1 2 2s 2 4s 1 6s
3(2s) 2 12(21 2 s) 2 2(1 1 2s) 1
z 5 2s.y 5 1 1 2s,
x 5 21 2 s,
5 0
5 0t 1 0
5 2 2 15 1 24 2 11 1 2t 1 6t 2 8t2 3(5 2 2t) 1 4(6 2 2t) 2 112(1 1 t)
z 5 6 2 2t.y 5 5 2 2t,x 5 1 1 t,r>
5 (1, 5, 6) 1 t(1, 22, 22):
2x 2 3y 1 4z 2 11 5 0,
5 0.
5 0t 1 0
5 22 1 4 1 2 1 t 2 4t 1 3t 2 4
1 (2 1 3t) 1 4(22 1 t) 1 4(1 2 t)
x 1 4y 1 z 2 4 5 0,
yx
z
r>
5 (x, 1, z),y 5 1
r>
5 s(1, 0, 0)
0s 5 0.
1 2 4 1 9 1 5s 2 2s 2 3s 5 6 2 0s 5 6
(1 1 5s) 2 2(2 1 s) 2 3(23 1 s) 5 6
s(5, 1, 1), sPR.r>
5 (1, 2, 23) 1
p: x 2 2y 2 3z 5 6,
z 5 23 1 s.y 5 2 1 s,x 5 1 1 5s,
9-3Calculus and Vectors Solutions Manual

6. a. The direction vector is and the normal is so if the line andthe plane meet at right angles, So
,but So thepoint on the line is not on the plane.b. The direction vector is and the normal is so if the line and the plane meet at right angles, So
but So thepoint on the line is not on the plane.7. a. If the line and the plane intersect, then they areequal at a particular point p. So we must substitutethe parametric equations into the equation of theplane, and then solve for p.
So now and Now we must find the point at which the line and plane intersect. To do this, just substitute into the vector form of the line:
.b. If the line and the plane intersect, then they areequal at a particular point p. So we must substitutethe parametric equations into the equation of theplane, and then solve for p.
So now and Now we mustfind the point at which the line and plane intersect.To do this, just substitute into the vectorform of the line:
8. a. Comparing the x and y components in andwe have
We can easily solve for one of the variables byusing the second equation: Substituting thisback into the first equation: so
and thus So now we must solve for s:and Placing these back
into the equations for and
The points must be equal for intersection to occur,so there is no intersection and the lines are skew.b. If we compare the z components of the two lines,we see or Substituting this backinto the x component (the y component would workjust as well), we have or
So now we can substitute m and s back intothe equations for the line, and we get
So is the only point of intersection betweenthese two lines.9. a. Comparing the y and z components of eachvector equation, we get the system of equations:
Note that from the first equation, So thesecond equation becomes Solving for q, we get So from the earlierrelation, Placing these two values back intothe vector equations, we get
This shows that these two lines intersect at b. Comparing the x and z components of eachvector equation, we get the system of equations:
Note that from the first equation, So thesecond equation becomes Solving for r, we get So from the earlierrelation, Placing these two values back intothe vector equations, we get
This shows that these two lines intersect at c. Comparing the x and z components of eachvector equation, we get the system of equations:
Note that from the second equation, Sothe first equation becomes Solving for p, we get So from the earlierrelation, Placing these two values backinto the vector equations, we get
m 5 21.
p 5 1.
2 2 p 5 22 1 3p.
m 5 2p.
1 1 m 5 1 2 p 2 1 m 5 22 1 3p
(8, 1, 22).
(2, 1, 28) 1 6(1, 0, 5) 5 (8, 1, 22)
(4, 1, 6) 1 4(1, 0, 4) 5 (8, 1, 22)
s 5 6.
r 5 4.
6 1 4r 5 2 1 5r.
s 5 2 1 r.
6 1 4r 5 28 1 5s 4 1 r 5 2 1 s
(4, 1, 7).
(22, 3, 24) 1 (6, 22, 11) 5 (4, 1, 7)
(22, 3, 4) 1 (6, 22, 3) 5 (4, 1, 7)
p 5 1.
q 5 1.
4 1 3q 5 24 1 11q.
p 5 q.
4 1 3p 5 24 1 11q 3 2 2p 5 3 2 2q
(4, 1, 2)
L4 : (23, 2, 8) 1 (7, 21, 26) 5 (4, 1, 2)
L3 : (3, 7, 2) 1 (1, 26, 0) 5 (4, 1, 2)
m 5 1.
3 1 m 5 23 1 7(1) 5 4,
s 5 1.2 5 8 2 6s
L2: a4 113
7, 1 2
5
7,
5
7b 5 a41
7,
2
7,
5
7b
L1: (3, 1, 5) 15
7(4, 21, 2) 5 a41
7,
2
7,
45
7b
L2:L1
s 5 2028 5 5
7.3 1 4s 5 4 1 137
t 5 17.1 5 7t
3 1 20t 5 4 1 13ts 5 5t.
1 2 s 5 1 2 5t 3 1 4s 5 4 1 13tL2,
L1
(1, 22, 3) 1 23(4, 21, 1) 5 (211, 1, 0)
s 5 23
s 5 23.22s 5 65 0.
5 6 1 2s5 2 2 14 1 3 1 15 1 8s 2 7s 1 s
2(1 1 4s) 1 7(22 2 s) 1 (3 1 s) 1 15
z 5 3 1 sy 5 22 2 s,x 5 1 1 4s,
(21, 3, 4) 1 23(6, 1, 22) 5 (219, 0, 10)
p 5 23
p 5 23.210p 5 305 0.
5 30 1 10p5 21 1 6 2 4 1 6p 1 2p 1 2p 1 29
(21 1 6p) 1 2(3 1 p) 2 (4 2 2p) 1 29
2(1) 2 4(22) 1 4(1) 2 13 5 1 2 0.
(2 ? 2) 1 (5 ? 24) 1 (4 ? 4) 5 4 2 20 1 16 5 0,
m>
? n>
5 0.
n>
5 (2, 24, 4),
m>
5 (2, 5, 4)
2(21) 2 2(1) 1 3(0) 2 1 5 25 2 0.
(21 ? 2) 1 (2 ? 22) 1 (2 ? 3) 5 22 2 4 1 6 5 0
m>
? n>
5 0.
n>
5 (2, 22, 3),
m>
5 (21, 2, 2)
9-4 Chapter 9: Relationships Between Points, Lines, and Planes

This shows that these two lines intersect at d. Comparing the x and y components of eachvector equation, we get the system of equations:
Note that from the first equation, So thesecond equation becomes Solving for m, we get Placing these twovalues back into the vector equations, we get
The two lines do not intersect, so they are skew.10. At the point where the line intersects the z-axis,the point equals the vector equation. Sofor the x component, or Substituting this into the vector equation, we get
So 11. a. Comparing the x components, we get
which can be reduced toor Comparing the other
components, the same equation results.b. From we see that at Whenthis occurs, Substituting this into we get
Sinceboth of these lines have the same direction vectorand a common point, the lines are coincidental.12. a. First, we must determine the values of s and t.So comparing the x and z components, we get
From the second equation, Substitutingthis back into the first equation,
or Substituting back into the second equation,
and solving for s,Now we can solve for k. Compare
the y components after substituting s and t.
or b. The lines intersect when . The point of
intersection is or
13. On the xz-plane, the point A has the coordinatesfor any x, z. Similarly, on the yz-plane, the
point B has the coordinates for any y, z. Nowthe task is to find the required values of s for thesepoints. Starting with the x component of point B,we have or So point B is
For point A,we need the y coordinate to equal 0. So or So point A is
Now we need to find the distance.
14. a. Comparing the y and z components of eachvector equation, we get the system of equations:
Note that from the first equation, orSo the second equation becomes
or Placing these two values back into the vectorequations to find the intersection point A, we get
Thus, the intersection point is b. A point on the xy plane has the form Ifsuch a point is then the distance from
this point is 15. a. Comparing the x and y components of eachvector equation, we get the system of equations:
Note that from the first equation, or So the second equation becomes or Placing these two values back into the vector equations to find the intersection point A,we get
Thus, the intersection point is b. We need to find a vector such that
A possible solution to the second equation isIf we substitute this into the first
equation, we get 5a 2 22 2 20 5 0 S 5a 5 42.
(a, 11, 22).
2b 1 11c 5 0
5a 2 2b 1 10c 5 0
(a, b, c)
(4, 1, 12).
(4, 21, 1) 1 (0, 2, 11) 5 (4, 1, 12)
(21, 3, 2) 1 (5, 22, 10) 5 (4, 1, 12)
t 5 1.
3 2 2 5 21 1 2ts 5 1.5 5 5s
3 2 2s 5 21 1 2t21 1 5s 5 4 1 0t
d 5 "0 1 0 1 32 5 3.
(26, 1, 0)
(x, y, 0).
(26, 1, 3).
(3, 21, 1) 2 (9, 22, 22) 5 (26, 1, 3)
(2, 1, 1) 2 2(4, 0, 21) 5 (26, 1, 3)
p 5 22.1 2 p 5 1 1 2
q 5 21.
2 5 22q 1 2 p 5 1 2 2q
1 1 0p 5 21 2 2q
5 3
5 "9
5 "4 1 4 1 1
d 5 "(0 2 (22))2 1 (2 2 0)2 1 (3 2 2)2
5 (22, 0, 2).1 3(2, 2, 1)(28, 26, 21)
s 5 3.
0 5 26 1 2s(28, 26, 21) 1 4(2, 2, 1) 5 (0, 2, 3).
s 5 4.0 5 28 1 2s
(0, y, z)
(x, 0, z),
( 211,
5311,
4611).
(23 1 3511, 8 2 35
11, 1 1 3511)
s 5 3511
k 5 3.
53 5 44 1 3k
8 235
115 4 1
3
11k
s 5 211 1 3 5 35
11.
23 1 s 5 1 2 911 5 2
11,
t 5 311.1 2 3t23 1 1 1 8t 5
s 5 1 1 8t. 1 1 s 5 2 1 8t
23 1 s 5 1 2 3t
(230, 11, 24) 1 4(7, 22, 2) 5 (22, 3, 4).
L2,t 5 4.
s 5 0.(22, 3, 4),L1,
s 2 t 5 4.28 1 7s 5 7t22 1 7s 5 230 1 7t,
q 5 8.(23, 2, 1) 1 (3, 22, 7) 5 (0, 0, 8).
s 5 1.23 1 3s 5 0
Q(0, 0, q)
(8, 2, 3) 2 (4, 1, 22) 5 (4, 1, 5)
(9, 1, 2) 23
4(5, 0, 4) 5 a21
4, 1, 21b
m 5 34.
2 1 4m 5 5.
s 5 21.
2 1 4m 5 3 2 2s 1 1 0m 5 2 1 s
(1, 1, 0).
(22, 2, 1) 1 (3, 21, 21) 5 (1, 1, 0)
(2, 2, 1) 2 (1, 1, 1) 5 (1, 1, 0)
9-5Calculus and Vectors Solutions Manual

We can use this to get a solution of Toeliminate the fraction, we get So thevector equation is ,
16. a.
b. The only point of intersection is at the origin
c. If and the intersection occurs at
17. a. Represent the lines parametrically, and then substitute into the equation for the plane.For the first equation,
Substituting into the plane equation,Simplifying,
So the line lies on the plane.For the second line,Substituting into the plane equation,
Simplifying,This line also lies on the plane.
b. Compare the x and y components:
From the second equation, Substituting backinto the first equation, or Determine the point of intersection:
The point of intersection is 18. Answers may vary. For example:
9.2 Systems of Equations, pp. 507–5091. a. linearb. not linearc. lineard. not linear2. Answers may vary. For example:
a.
b. Subtract the first equation from the second, andsubtract twice the first equation from the third.
Add the second and third equation.
From the third equation,Substitute z back into the second equation,
So Now substitute y and z back into the firstequation.
And so Thus the solution is as expected.
3. a.
Yes, is a solution.b.
Because the second equation fails to produce anequality, is not a solution.4. a. Solve for y. The solution is b. Multiply the second equation by 6
Add 3 times the first equation to 5 times the secondequation.
From the second equation,Substituting x back into the first equation,
So The two systems are equivalent because they havethe same solution.5. a. Add the second equation to 5 times the firstequation.
y 5 23.
5y 5 215
3(22) 1 5y 5 221
x 5 22.
14x 5 228
3x 1 5y 5 221
x 2 3y 5 7
3x 1 5y 5 221
(22, 23).
y 5 23(27, 5, 34)
8(27) 2 5 1 4a3
4b 5 256 2 5 1 3 5 258
2232
3(27) 2 2(5) 5 221 2 10 5 231
3(27) 2 2(5) 1 16a3
4b 5 221 2 10 1 12 5 219
(27, 5, 34)27 1 2(5) 5 3
27 2 8a3
4b 5 27 2 6 5 213
27 2 3(5) 1 4a3
4b 5 27 2 15 1 3 5 219
(23, 4, 28)x 5 23.
x 1 4 1 2(28) 5 x 2 12 5 215
y 5 4.
2y 5 212 1 8 5 24
2y 2 8 5 212
z 5 28.
0x 1 0y 2 4z 5 32
0x 2 y 1 z 5 212
x 1 y 1 2z 5 215
0x 2 y 2 3z 5 20
0x 2 y 1 z 5 212
x 1 y 1 2z 5 215
2x 1 y 1 z 5 210
x 1 2y 1 z 5 23
x 1 y 1 2z 5 215
pPRr>
5 (2, 0, 0) 1 p(2, 0, 1),
(1, 21, 3).
(4 2 3, 21, 1 1 2) 5 (1, 21, 3)
(1, 7 2 8, 1 1 2) 5 (1, 21, 3)
s 5 21.4 1 3s 5 1,
t 5 1.
7 2 8t 5 21
4 1 3s 5 t
0s 5 0.
8 1 6s 2 1 1 3 2 6s 2 10 5 0.
z 5 1 2 2sy 5 21,x 5 4 1 3s,
0t 5 0.
2t 1 7 2 8t 1 3 1 6t 2 10 5 0.
z 5 1 1 2t.y 5 7 2 8t,x 5 t,
(0, 0, 0).
q 5 0,p 5 0
(0, 0, 0).
y
z
x
L1
L2
tPR.
r>
5 (4, 1, 12) 1 t(42, 55, 210)
(42, 55, 210).(42
5 , 11, 22).
9-6 Chapter 9: Relationships Between Points, Lines, and Planes

Solve for x in the second equation, Substitute xback into the first equation
So Therefore, the solution is b. Subtract three times the first equation from twicethe second equation.
From the second equation,Substitute y back into the first equation.
So Therefore, the solution is c. Add the second equation to 3 times the firstequation to the second equation
From the second equation,Substitute y back into the first equation.
So Therefore the solution is 6. a. These two lines are parallel, and thereforecannot have an intersection.b. The second equation is five times the first,therefore the lines are coincident.7. a. Let So then b. Let Then and
8. a. If then and so is the required linear equation.b.
9. a. The two equations will have no solutions whensince they will be parallel should this occur.
b. It is impossible to have only one solution for thesetwo equations. They have exactly the same directionvector. They will never intersect at exactly one place.c. The two equations will have infinitely manysolutions when When this occurs, the twoequations are coincident.
10. a. There are infinitely many solutions to thisequation. This is reason why it is representedgraphically as a line.b. Let So then and c. This equation will not have any integer solutionsbecause the left hand side is an even function andthe right side is an odd function.11. a. Add the second equation to times thefirst.
Divide the second equation by to getNow substitute this back into
the first equation.
b. Since they have different direction vectors, thesetwo equations are not parallel or coincident and willintersect somewhere.12. a. Add the third equation to the first to eliminate z.
Add twice the second equation to the third equationto eliminateAdd twice the second equation to the third equationto eliminate y.
Divide the third equation by to get Now substitute into the second equation.
Finally, substitute x and y to get
So Therefore, the solution is b. Add the first equation to times the second,and add the first equation to times the third.
Now add the second equation to times the third.
0x 2 4y 1 0z 5 216
0x 2 5y 2 3z 5 256
2x 2 3y 1 z 5 6
21
0x 2 y 1 3z 5 40
0x 2 5y 2 3z 5 256
2x 2 3y 1 z 5 6
22
22
(21, 22, 3).z 5 3.
21 1 22 1 z 5 0
y 5 22
21 2 y 5 1
x 5 21.23
3x 1 0y 1 0z 5 23
x 2 y 1 0z 5 1
x 1 y 1 z 5 0
x 1 2y 1 0z 5 25
x 2 y 1 0z 5 1
x 1 y 1 z 5 0
x 5 2a 1 bx 2 b 1 2a 5 a
x 1 3a21
3b 1
2
3ab 5 a
y 5 213 b 1 2
3 a.
23
0x 2 3y 5 b 2 2a x 1 3y 5 a
22
tPRy 5 114 2 1
2 t,
4y 5 11 2 2t2t 1 4y 5 11,x 5 t.
k 5 12.
k 2 12,
5 211
2(3t 1 3) 1 (26t 2 17) 5 6t 2 6t 1 6 2 17
2x 1 y 5 211
2x 1 y 5 211
y 5 22x 2 11y 5 22t 2 11,x 5 t,z 5 2s 1 t.
t 2 2s 1 z 5 0y 5 s.x 5 t,y 5 2t 2 3.2t 2 y 5 3x 5 t.
(24, 3).
x 5 24.
2x 5 4
2x 1 2(3) 5 10
y 5 3.
0x 1 11y 5 33
2x 1 2y 5 10
(23, 5).
x 5 23
2x 5 19 2 25 5 26
2x 1 5(5) 5 19
y 5 5.
0x 2 7y 5 235
2x 1 5y 5 19
(6, 1).
y 5 1
2y 5 11 2 12 5 21
2(6) 2 y 5 11
x 5 6.
11x 5 66
2x 2 y 5 11
9-7Calculus and Vectors Solutions Manual

From the third equation,Now substitute this into the second equation.
Now substitute these two values back into the firstequation.
So the solution is c. Add the second equation to times the third.
Add the third equation to the first equation.
So Now substitute into the other twoequations.
So the solution is d. To eliminate fractions, multiply each of theequations by 60.
Add 3 times the first equation to times thesecond, and add 3 times the first equation to times the third.
Now add 55 times the second equation to timesthe third equation.
Divide the third equation through by to getSubstituting z back into the second
equation.
So Now substitute these two values backinto the first equation.
So Therefore the solution is
e. Note that if andSo we substitute these two
relations into the second equation.
So now and the solution is f. Add the first equation to times the secondequation.
Add the second and third equations.
So from the third equation,Substituting into the second equation,
Finally, substituting both values into the firstequation,
So the final solution is 13. Answers may vary. For example:a.
y
L1L3
z
Two lines coincidentand the third parallel
x
L2
y
L1
L3
zThree lines parallel
x
L2
(22, 3, 6).
22 1 y 1 12 5 13 S y 5 3.
22x 5 4 S x 5 22
22x 2 42 5 238
z 5 6.
0x 1 0y 2 z 5 26
22x 1 0y 2 7z 5 238
x 1 y 1 2z 5 13
2x 1 0y 1 6z 5 32
22x 1 0y 2 7z 5 238
x 1 y 1 2z 5 13
22
(2, 4, 1).y 5 4,z 5 1,
2(2x) 21
2x 5
7
2x 5 7 S x 5 2
2z 2 x 5 0 S z 5 12 x.
2x 2 y 5 0 S y 5 2x,
(60, 120, 2180).x 5 60.
20x 5 840 2 1800 1 2160 5 1200
20x 1 15(120) 1 12(2180) 5 840
y 5 120.
23y 2 44(2180) 5 7560 S 23y 5 2360
z 5 2180.
22303
0x 1 0y 2 2303z 5 414 540
0x 2 3y 2 44z 5 7560
20x 1 15y 1 12z 5 840
23
0x 2 55y 2 39z 5 420
0x 2 3y 2 44z 5 7560
20x 1 15y 1 12z 5 840
25
24
12x 1 20y 1 15z 5 420
15x 1 12y 1 20z 5 21260
20x 1 15y 1 12z 5 840
(4, 6, 28).
6 1 z 5 22 S z 5 28
x 1 6 5 10 S x 5 4
y 5 6.
0x 1 2y 1 0z 5 12
0x 1 y 1 z 5 22
x 1 y 1 0z 5 10
2x 1 y 1 0z 5 2
0x 1 y 1 z 5 22
x 1 y 1 0z 5 10
21
(3, 4, 12).
2x 5 6, x 5 3
2x 2 3(4) 1 12 5 6
z 5 12
23z 5 236
25(4) 2 3z 5 256
y 5 4.
9-8 Chapter 9: Relationships Between Points, Lines, and Planes

9-9Calculus and Vectors Solutions Manual
b.
c.
14. a. Add times the first equation and thesecond equation. Add times the first equationand the third equation.
So Then substitute into thefirst equation.
So the final solution is 15. a. For two equations to have no solutions, theymust be parallel—meaning it must have a the samedirection vector. So if then the lines areparallel.b. If two equations have an infinite number ofsolutions, then the lines must be coincident. Oneway to do this is if the second equation is a multipleof the first equation. To achieve this,c. For two equations to have a unique solution, theymust have only one intersection. From a., we sawthat if the lines are parallel, and if then they are coincident. Since the only other optionis for the lines to have a unique solution,
9.3 The Intersection of Two Planes,pp. 516–517
1. a. This means that the two equations representplanes that are parallel and not coincident.b. Answers may vary. For example:
2. a. The solution to the system of equations is:. The two
planes are coincident.b. Answers may vary. For example:
3. a.
The two planes intersect in a line.b. Answers may vary. For example:
4. a. For the planes to be coincident equation must bea multiple of equation . Since the coefficients ofx and z in equation are twice that of the x and zcoefficients in equation all of the coefficientsand constants in equation must be half of thecorresponding coefficients in equation . So:
and
The value for m is unique, but p just has to be twiceq and arbitrary values can be chosen.
p 5 2.q 5 1,p 5 2q.m 51
2,
1
2
2
1
1
2
x 1 my 1 3z 5 q22x 1 y 1 6z 5 p;1
x 2 y 2 z 5 3.x 2 y 1 z 5 21;
sPRz 5 22,y 5 s,x 5 1 1 s,
x 2 y 1 1.
x 2 y 1 (22) 1 21
2z 5 24 1 z 5 22.
2x 2 2y 1 2z 5 22x 2 y 1 z 1 21;
s, tPRz 5 t,y 5 s,x 5 12 1 1
2s 2 t,
x 2 y 1 z 5 22
x 2 y 1 z 5 1,
k 2 6 2.
k 5 22,k 5 2,
k 5 22.
k 5 2,
(a 2 c, 2a 1 b 1 c, a 2 b).
y 5 2a 1 b 1 c a 2 c 1 y 1 a 2 b 5 a
x 5 a 2 c.z 5 a 2 b,
2x 1 0y 1 0z 5 c 2 a 0x 1 0y 2 z 5 b 2 a
x 1 y 1 z 5 a
21
21
y
z
x
L2
Three coincident lines
L3
L1
y
z
x
L1
L3L2
Lines meet in a point
y
z
xL1
L3L2
The lines form a triangle
y
L1
L3
z
Two parallel lines cutby the third line
x
L2

b. For parallel planes all of the coefficients of thevariables must be multiples of each other, but theconstant terms must differ by a different constant.So a possible solution is:
and
The value for m is again unique but p and q can bearbitrarily chosen as long as c. For the two planes to intersect at right angles thetwo normal vectors, and
must satisfy:
This value is unique, since only onevalue was found to satisfy the given conditions.d. From c. we know that in order to intersect inright angles Choose The value for m is unique from the solution to c.,but the values for p and q can be arbitrary since theonly value which can change the angle between theplanes is m.5. a. Letting
The solution is:
b. Letting
The solution is:
c. Since t is an arbitrary real number we can express t as:
.Substituting this into the solution for b. shows thatthe two solutions are equivalent.6. a. Equation is twice that of equation , sothey represent intersecting coincident planes.b. The coefficients of each variable are the same,but the constant terms are different, so the equationsrepresent non-intersecting parallel planes.
c. The coefficients of the x and z variables are thesame but the y coefficients are different. So theequations represent planes that intersect in a line.d. The coefficients of each variable from equation to are not the same multiple. Therefore theequations represent planes that intersect in a line.e. The intersection is a line by the same reasoningas d.f. The intersection is a line by the same reasoning as d.7. a. b. There is no solution since the planes are parallel.c. :
.d. Let .From :
.e. :Adding :
Let .
f.
.8. a. The system will have an infinite number ofsolutions for any value of k. When equation
will be twice that of so the solution is a plane:.
For any other value of k the solution will be a line.For example
y 5 22z.
2y 5 24zk 5 0:
z 5 t, s, tPRy 5 s,x 5 1 2 s 2 2t,12
k 5 2
sPRz 5 4,y 5 s,x 5 s 2 8,
x 5 y 2 8.
x 2 y 1 2(4) 5 0
sPRz 5 1 23
4s,y 5 s,x 5
5
4s,
z 5 1 23
4s.
3
2s 1 2z 5 2
2a5
4sb 2 s 1 2z 5 2
sPRy 5 s,
x 55
4y.
4x 2 5y 5 0.
1
2x 2 4y 2 2z 5 22222 ?
sPRz 5 s,y 5 2s 2 1,x 5 2s 1 5,
y 5 2s 2 1.
2y 1 2s 5 22
(y 1 6) 1 y 1 2s 5 4
x 5 y 1 6.
2
sPRz 5 s;
sPRz 5 s,y 5 22,x 5 22s,
x 5 22z.
x 1 2z 5 0
x 2 2 1 2z 5 22
y 5 22.
22y 5 4
221
z 5 t, s, tPRy 5 s,x 5 1 2 s 2 t,
2
1
12
sPRt 5 23s;
tPR.z 5 21
3t;y 5 t,x 5 23t,
x 5 23t. x 1 3t 5 0
x 1 2t 2 3a21
3bt 5 0
z 5 21
3t.
3z 5 2t t 1 3z 5 0
y 5 t.sPRz 5 s,y 5 23s,x 5 9s,
x 5 9sx 1 2(23s) 2 3s 5 0.
y 5 23s.
z 5 s:
q 5 1.p 5 1,m 5 220.
m 5 220.
n1
>
? n2
>
5 2 1 m 1 18 5 0
n1
>
? n2
>
5 0.
n2
>
5 (1, m, 3),
n1
>
5 (2, 1, 6)
p 2 2q.
p 5 3.q 5 1,m 51
2,
9-10 Chapter 9: Relationships Between Points, Lines, and Planes

.b. No there is no value of k for which the system willnot have a solution. The only time when there is nosolution is when the corresponding coefficients foreach variable differ by a common multiple betweenequations, and the constant terms differ by a differentmultiple. The only way the first condition is satisfied iswhen but when this happens the constant termsdiffer by the same factor as the variables, namely 2.9. The line of intersection of the two planes:
is:
The direction vector is or
Since the line we are looking for is parallel to this line, we know that thedirection vector must be the same. The line passesthrough and has direction vector
The equation of the line is
10. The line of intersection of the two planes,and is:
.In order for the a line to be contained in the planewe need to check that the values for x, y, and zalways satisfy the plane equation:
Since this is true the line is contained in theplane.11. a.
.sPRz 5 s,y 5 1 1 s,x 5 1 1 s,
x 5 1 1 z.
2x 2 2z 5 2
2x 1 (1 1 z) 2 3z 5 3
y 5 1 1 z.
5y 2 5z 5 5p1 2 2p2:
x 2 2y 1 z 5 21.p2:2x 1 y 2 3z 5 3,p1:
0 5 0.
5 1 6 2 11 2 10s 2 6s 1 16s 5 0
5(1 2 2s) 1 3(2 2 2s) 1 16(s) 2 11 5 0
5x 1 3y 1 16z 2 11 5 0.
sPRz 5 s,y 5 2 2 2s,x 5 1 2 2s,
y 5 2 2 2z.
2 2 y 2 2z 5 0
2(1 2 2z) 2 y 1 2z 5 0
x 5 1 2 2z.
4x 1 8z 5 4
2x 1 y 1 6z 5 42x 2 y 1 2z 5 0
r2
>
5 (22, 3, 6) 1 s(25, 28, 2), sPR.
(25, 28, 2).
(22, 3, 6)
sPR.r1
>
5 s(25, 28, 2),
(25, 28, 2).(252, 24, 1)
sPR.z 5 s,y 5 24s,x 5 25
2s,
x 5 25
2z.
2x 5 25z2x 2 (24z) 1 z 5 0
y 5 24zy 1 4z 5 0p2:2x 2 y 1 z 5 0,p1:
k 5 2,
sPRz 5 s,y 5 22s,x 5 1,
x 5 1.
x 1 (22z) 1 2z 5 1
9-11Calculus and Vectors Solutions Manual
b. L meets the xy-plane when
L meets the z-axis when both x and y are zero:
The length of AB is therefore:
or about 1.73.12. The line with equation hasparametric equations: .This has the equivalent vector form:
.
The line of intersection of the two planesand is:
. Which has a vectorequation of:
. The vector equation of the plane with the given properties isthus:
.
The normal vector for the plane is then:
Or equivalently The Cartesian equation is then:
and must contain the point (1, 0, 0).
Mid-Chapter Review, pp. 518–5191. a.
t 5 23
0 5 15 1 5tz 5 15 1 5ty 5 23 2 3t,x 5 4 1 2t,
tPRr>
5 (4, 23, 15) 1 t(2, 23, 5),
8x 1 14y 2 3z 2 8 5 0.
D 5 28.
8(1) 1 D 5 0.
8x 1 14y 2 3z 1 D 5 0,
(8, 14, 23).
1 ? 1 2 a21
2?
1
3b, 2
1
2a21
2b 2
1
2? 1 5 a2
3,
7
6, 2
1
4b.
a21
2,
1
2, 1b 3 a1, 2
1
2,
1
3b 5 a1
2?
1
3b 2 a1 ? 2
1
2b,
s, tPRr>
5 (1, 0, 0) 1 t a21
2,
1
2, 1b 1 s a1, 2
1
2,
1
3b,
tPRr>
5 (1, 0, 0) 1 t (212,
12, 1),
tPRz 5 t,y 5 12 t,x 5 1 2 1
2 t,
x 5 1 21
2z.
x 21
2z 1 z 5 1
y 51
2z
2y 2 z 5 0x 2 y 1 z 5 1
sPRr>
5 sa1, 21
2,
1
3b,
sPRz 5 13 s,y 5 21
2 s,x 5 s,
x 5 22y 5 3z"12 1 12 1 12 5 "3
B 5 (0, 0, 21)
z 5 21.
s 5 21.
A 5 (1, 1, 0).y 5 1.x 5 1,
z 5 0.

b.
c.
2. a.–e. Answers may vary. For example:
Then substitute in the point and the direction vectorto find the equation of the line.
A:B:C:
A:B:C:
The three medians meet at 3. a.
So
b.
c.
4. a.x 2 13y 2 3z 2 38 5 0p2:
3x 1 y 1 7z 1 3 5 0p1:
(27, 0, 10)
z 5 10y 5 0,x 5 27,
z 5 27a230
21b
y 530
71 3a2
30
21b,x 5 2
19
71 3a2
30
21b,
t 5 230
212
19
71 3t 5 27,
z 5 27ty 530
71 3t,x 5 2
19
71 3t,L2:
z 5 ty 5 20 2 2t,x 5 27,L1:
tPRL2: r>
5 a219
7,
30
7, 0b 1 t(3, 3, 27),
tPRL1: r>
5 (27, 20, 0) 1 t(0, 22, 1),
tPRr>
5 a219
7,
30
7, 0b 1 t(3, 3, 27),
y 5 23t 130
7
4a23t 219
7b 1 3y 1 3(7t) 2 2 5 0
x 5 23t 219
7
27x 2 3(7t) 2 19 5 0,
z 5 7t, 2L1 2 3L2: 27x 2 3z 2 19 5 0
L2: 5x 1 2y 1 3z 1 5 5 0
L1: 4x 1 3y 1 3z 2 2 5 0
tPRr>
5 (27, 20, 0) 1 t(0, 22, 1),
y 5 20 2 2ty 1 2(t) 2 20 5 0
z 5 t,L2: y 1 2z 2 20 5 0
L1: y 1 2z 2 20 5 0
x 5 27.
L1 2 L2: x 1 7 5 0
L2: 4x 1 y 1 2z 1 8 5 0
L1: 5x 1 y 1 2z 1 15 5 0
(21, 22, 5).
(21, 22, 5)
z 5 5y 5 22,x 5 21,
z 5 7 2 2(1)y 5 25 1 3(1),x 5 28 1 7(1),
t 5 1
y 5 22 5 25 1 3ttPRz 5 7 2 2t,y 5 25 1 3t,x 5 28 1 7t,
tPRz 5 5,y 5 22,x 5 3 1 t,tPRz 5 3 2 2t,y 5 1 1 3t,x 5 2 1 3t,
(21, 22, 5)
z 5 5y 5 22,x 5 21,
z 5 3 2 2(21)
y 5 1 1 3(21),x 5 2 1 3(21),
t 5 21
y 5 22 5 1 1 3ttPRz 5 7 2 2t,y 5 25 1 3t,x 5 28 1 7t,
tPRz 5 5,y 5 22,x 5 3 1t,tPRz 5 3 2 2t,y 5 1 1 3t,x 5 2 1 3t,
tPRz 5 7 2 2t,y 5 25 1 3t,x 5 28 1 7t,tPRC: r
>
5 (28, 25, 7) 1 t(7, 3, 22),
tPRz 5 5,y 5 22,x 5 3 1 t,tPRB: r
>
5 (3, 22, 5) 1 t(1, 0, 0),
tPRx 5 2 1 3t, y 5 1 1 3t, z 5 3 2 2t,tPRA: r
>
5 (2, 1, 3) 1 t(3, 3, 22),
m3 5 (Cc) 5 (10.5, 4.5, 23) 5 (7, 3, 22)
m2 5 (Bb) 5 (26, 0, 0) 5 (1, 0, 0)
m1 5 (Aa) 5 (24.5, 24.5, 3) 5 (3, 3, 22)
C(28, 25, 7)B(3, 22, 5),A(2, 1, 3),
m3 5 (Cc) 5 (10.5, 4.5, 23) 5 (7, 3, 22)
m2 5 (Bb) 5 (26, 0, 0) 5 (1, 0, 0)
m1 5 (Aa) 5 (24.5, 24.5, 3) 5 (3, 3, 22)
c 5 (2.5, 20.5, 4)
b 5 (23, 22, 5)
a 5 (22.5, 23.5, 6)
C(28, 25, 7)B(3, 22, 5),A(2, 1, 3),
(0, 3, 5)
z 5 5y 5 3,x 5 0,
z 5 15 1 5(22)
y 5 23 2 3(22),x 5 4 1 2(22),
t 5 22
0 5 4 1 2tz 5 15 1 5ty 5 23 2 3t,x 5 4 1 2t,
tPRr>
5 (4, 23, 15) 1 t(2, 23, 5),
(2, 0, 10)
z 5 10y 5 0,x 5 2,
z 5 15 1 5(21)
y 5 23 2 3(21),x 5 4 1 2(21),
t 5 21
0 5 23 2 3tz 5 15 1 5ty 5 23 2 3t,x 5 4 1 2t,
tPRr>
5 (4, 23, 15) 1 t(2, 23, 5),
(22, 6, 0)
z 5 0y 5 6,x 5 22,
z 5 15 1 5(23)
y 5 23 2 3(23),x 5 4 1 2(23),
9-12 Chapter 9: Relationships Between Points, Lines, and Planes

b.
c. The lines found in 4. a. and 4. b. do not intersect,because they are in parallel planes.5. a. For there to be no solution the lines must beinconsistent with each other.
For
For the equations are equivalent.So there is no solution when b. To have an infinite number of solutions, the linesmust be proportional.
c. The system has one solution when orbecause other values lead to an infinite
number of solutions or no solution.
6.
Since there is no t-value that satisfies the equations,there is no intersection, and these lines are skew.
7. a.
b. Since there is no t-value that satisfies the equations, there is no intersection, and these linesare skew.8.
9. a.
b.
These lines are the same, so either one of theselines can be used as their intersection.
tPRr>
5 (28, 1, 29) 1 t(5, 21, 6),L2:
sPRr>
5 (2, 21, 3) 1 s(5, 21, 6),L1:
(3, 1, 2)
z 5 2y 5 1,x 5 3,
z 5 3 2 (1)
y 5 21 1 2(1),x 5 21 1 4(1),
t 5 1
y 5 1 5 21 1 2t,z 5 3 2 ty 5 21 1 2t,x 5 21 1 4t,L2:
z 5 7 1 5sy 5 1,x 5 5 1 2s,L1:
tPRr>
5 (21, 21, 3) 1 t(4, 2, 21),L2:
sPRr>
5 (5, 1, 7) 1 s(2, 0, 5),L1:
(23, 6, 6)
z 5 6y 5 6,x 5 23,
s 5 22
x 5 23 5 1 1 2stPRz 5 2t,y 5 t 1 3,x 5 23,L2:
sPRz 5 23s,y 5 4 2 s,x 5 1 1 2s,L1:
t 5 2116t 1 16 5 0,3L3 1 2L5:
t 5 3.810t 2 38 5 0,L3 1 2L4:
5t 1 3s 1 11 5 0L5:
4t 1 s 2 18 5 0L4:
2t 2 2s 2 2 5 0L3:
z 5 23s 2 4 5 5t 1 7
y 5 s 1 2 5 24t 1 20
x 5 2t 1 3 5 2s 1 5
z 5 5t 1 7y 5 24t 1 20,x 5 2t 1 3,L2:
z 5 23s 2 4y 5 s 1 2,x 5 2s 1 5,L1:
tPR(x 2 3, y 2 20, z 2 7) 5 t(2, 24, 5),L2:
x 2 5
25 y 2 2 5
z 1 4
235 sL1:
t 5 27
4z 5 20.5 5 3 1 2t,
t 5 225
3y 5 26 5 1 2 3t,
z 5 20.5y 5 26,x 5 0,
z 5 27 1 5(25.5)y 5 24(25.5) 1 4,
s 5 25.5
x 5 0 5 2s 1 11,
z 5 27 1 5sy 5 24s 1 4,x 5 2s 1 11,L1:
tPRz 5 3 1 2t,y 5 1 2 3t,x 5 0,L2:
x 2 11
25
y 2 4
245
z 2 27
55 sL1:
a 2 23,
a 2 3
a 5 23
ax 1 9y 5 227L2:
23x 2 3ay 5 227L1:
23(x 1 ay 5 9) 5 23x 2 3ay 5 227
ax 1 9y 5 227L2:
x 1 ay 5 9L1:
a 5 3.
a 5 23,
3x 1 9y 5 227L2:
x 1 3y 5 9L1:
a 5 3:
a 5 63
1
a5
a9
ax 1 9y 5 227L2:
x 1 ay 5 9L1:
sPRz 5 s,y 5 22
5s 1
94
5,x 5 2
11
5s 1
227
5,
x 5 211
5s 1
227
5
x 2 3a22
5s 1
94
5b 1 (s) 1 11 5 0
y 5 22
5s 1
94
5
5y 1 2(s) 2 94 5 0
z 5 s,5y 1 2z 2 94 5 026p1 1 p2:
6x 2 13y 1 8z 2 28 5 0p2:
x 2 3y 1 z 1 11 5 0p1:
tPRz 5 t,y 5 22t5
2117
40,x 5 2
11t5
21
40,
y 5 22t5
2117
40
3a211t5
21
40b 1 y 1 7(t) 1 3 5 0
x 5 211t5
21
40
40x 1 88(t) 1 1 5 0
z 5 t,40x 1 88z 1 1 5 013p1 1 p2:
9-13Calculus and Vectors Solutions Manual

10. a. Answers may vary. For example:i. coincident
ii. parallel and distinct
iii. skew
iv. intersect in a point
b. i. When lines are the same, they are a multiple of each other.ii. When lines are parallel, one equation is a multiple of the other equation, except for the constant term.
iii. When lines are skew, there are no common solutions to make each equation consistent.iv. When the solution meets in a point, there is onlyone unique solution for the system.11. a. A line and plane have an infinite number ofpoints of intersection when the line lies in the plane. b. Answers may vary. For example:
12. a.
Equation equation ):
b.
There is no solution to this system, because theplanes are parallel, but one plane lies above theother.c.
Equation equation ):Equation equation ):
13. a. The two lines intersect at a point.b. The two planes are parallel and do not meet.c. The three planes intersect at a point.14. a.
y 2 z 5 0
z 5 23
2
a21
2b 1 z 5 22
x 1 z 5 22
x 5 21
2L1: y 2 z 5 0,
5 x 1 z 5 22
L:(x 2 y 5 1) 1 (y 1 z 5 23)
(2, 1, 4)
z 5 4
(2) 2 3(1) 2 2z 5 29
x 5 2
5x 2 13(1) 5 23
y 5 1
211y 5 211
1 5(22x 1 3y 5 21)
2(5x 2 13y 5 23)
22x 1 3y 5 2131 (2
5x 2 13y 5 2321 (2 31
23x 1 6y 1 2z 5 83
2x 2 5y 1 z 5 32
x 2 3y 2 2z 5 291
2x 1 8y 2 6z 1 11 5 02
x 1 4y 2 3z 1 6 5 01
(3, 8)
x 5 3
2x 1 24 5 30
y 5 8
7y 5 5622 (2 31
x 2 2y 5 2132
2x 1 3y 5 301
t, sPRr>
5 t(3, 25, 23) 1 s(1, 1, 1),
tPRr>
5 t(3, 25, 23),
y
z
x
L1
L2
y
z
x
L1
L2
y
z
x
L1
L2
y
z
x
L1 L2
9-14 Chapter 9: Relationships Between Points, Lines, and Planes

b.
c.
9.4 The Intersection of Three Planes,pp. 531–533
1. a.
The system can be solved by first solving equation for z. Thus,
If we use the method of back substitution, we cansubstitute into equation and solve for y.
If we substitute and into equation we obtain the value of x.
or The three planes intersect at the point with coordinates Check:Substituting into equation :
Substituting into equation :
Substituting into equation :
b. This solution is the point at which all threeplanes meet.2. a.
The answer may vary depending upon the constantyou multiply the equations by. For example,
and areequations that could work.b. These three planes are intersecting in one singleplane, because all three equations can be changedinto one equivalent equation. They are coincidentplanes.c. Setting and leads to
or d. Setting and leads to
or 3. a.
The answer may vary depending upon the constantsand equations you use to determine your answer.For example,Equation equation equation
orequation equation
andis one system of equations that
could produce the original system composed ofequations , , and .
andis another system of equations
that could produce the original system composed ofequations , , and . b. The systems have no solutions.4. a.
The system can be solved by first solving equation for x. So,
3
2x 1 0y 1 0z 5 263
x 1 0y 2 2z 5 02
x 1 2y 2 z 5 41
321
2x 2 2y 1 8z 5 5
x 2 y 1 4z 5 3,2x 2 y 1 3z 5 22,
321
3x 2 2y 1 7z 5 2
x 2 y 1 4z 5 3,2x 2 y 1 3z 5 22,
2x 2 2y 1 8z 5 5
2 (0x 1 0y 1 0z 5 1) (2x 2 2y 1 8z 5 6)
53222 3
3x 2 2y 1 7z 5 2
1 (0x 1 0y 1 0z 5 1)1 (x 2 y 1 4z 5 3)
(2x 2 y 1 3z 5 22)
531211
0x 1 0y 1 0z 5 13
x 2 y 1 4z 5 32
2x 2 y 1 3z 5 221
s, tPRx 5 t 2 s 1 4,x 2 t 1 s 5 4
z 5 sy 5 ts, tPRz 5 s 2 t 1 4,t 2 s 1 z 5 4
y 5 sx 5 t
2x 2 2y 1 2z 5 83x 2 3y 1 3z 5 12
3 3 (x 2 y 1 z 5 4) 5 3x 2 3y 1 3z 5 12
2 3 (x 2 y 1 z 5 4) 5 2x 2 2y 1 2z 5 8
0x 1 0y 1 0z 5 03
0x 1 0y 1 0z 5 02
x 2 y 1 z 5 41
0x 1 0y 1 3z 5 2123
4 5 210x 1 y 2 z 5 25 1
2
15 2 4 5 2x 2 3y 1 z 5 29 1
1
(29, 25, 24)
x 5 29x 2 3(25) 2 4 5 2
1z 5 24y 5 25
y 5 25
y 2 (24) 5 21
2z 5 24
z 5 24
3z 5 212
3
0x 1 0y 1 3z 5 2123
0x 1 y 2 z 5 212
x 2 3y 1 z 5 21
2x 2 y 1 z 1 1 5 0
D 5 1
2a21
2b 2 a23
2b 1 a23
2b 1 D 5 0
2x 2 y 1 z 1 D 5 0
Ax 1 By 1 Cz 1 D 5 0
5 (2, 21, 1)
(0, 1, 1) 3 (1, 1, 21) 5 (22, 1, 21)
u 5 90 °
cos u 50
@"3 @ @"2 @
n1 5 (0, 1, 1)
n 5 (1, 1, 21)
cos u 50 n ? n1 00 n 0 0 n1 0
a21
2, 2
3
2, 2
3
2b
y 5 23
2
y 2 a23
2b 5 0
9-15Calculus and Vectors Solutions Manual

If we use the method of back substitution, we cansubstitute into equation and solve for z.
If we substitute and into equation we obtain the value of y.
or
The equations intersect at the point with coordinates
Check:Substituting into equation :
Substituting into equation :
Substituting into equation :b. This solution is the point at which all threeplanes meet.5. a.
Since equation equation equation and equation are consistent or lie in the sameplane. Equation meets this plane in a line.b. Adding equation and equation creates anequivalent equation, or Substituting
into equation and equation givesequation and equation
Equations and indicate theproblem has infinite solutions. Substituting into equation or leads to
and Check:
6.
There is no solution to this system of equations,because if you multiply equation by 5 youobtain a new equation,which is inconsistent with equation .7. a. Yes when this equation is alone, this is true,because any constants can be substituted into thevariables in the equation and theequation will always be consistent.
b. Answers may vary. For example: To obtain a nosolution and an equation with you must have two equal planes and one paralleldistinct plane. For example one solution is:
8. a.
equation equation which gives
Equation equation Substituting into this equation leads
to: or Substituting and into equation gives: or is the point at which the three planes meet.Check:Substituting into equation :
Substituting into equation :
Substituting into equation :
b.
Equation equation which gives Equation Equation or
. Substituting and into equation leads to:
or
is the point at which the three planes meet.Check:Substituting into equation :
Substituting into equation :
Substituting into equation :
c.
Equation equation equation 5 x 1 y 5 1
45312
y 2 z 5 2013
x 1 z 5 22002
x 2 y 5 21991
x 2 2y 1 3z 5 26 2 1 1 9 5 2
3
2x 1 2y 2 3z 5 212 1 1 2 9 5 220
2
x3
2y4
1 z 5 22 21
81 3 5
7
8
1
(26, 12, 3)
z 5 3.26 2 2a1
2b 1 3z 5 2
3y 5 12x 5 26y 5 1
2
5 254y 5 25
812 3 33
x 5 26.
2185 3x 1 0y 1 0z 5312
x 2 2y 1 3z 5 23
2x 1 2y 2 3z 5 2202
x3
2y4
1 z 57
81
3x 1 2y 2 z 5 23 2 2 1 0 5 25
3
x 2 y 1 2z 5 21 1 1 1 0 5 0
2
2x 1 y 2 z 5 22 2 1 1 0 5 23
1
(21, 21, 0)y 5 21.2(21)y 2 0 5 23
1x 5 21z 5 0
z 5 0.3(21) 1 z 5 23
x 5 15 23.
1z3x 1 0y 15211
x 5 21.5 25
5 5x 1 0y 1 0z3122 3
3x 1 2y 2 z 5 253
x 2 y 1 2z 5 02
2x 1 y 2 z 5 231
3x 1 3y 1 3z 5 12
2x 1 2y 1 2z 5 4
x 1 y 1 z 5 2
0x 1 0y 1 0z 5 0,
0x 1 0y 1 0z 5 0
3
5x 2 5y 1 15z 5 21005,
2
5x 2 5y 1 15z 5 210043
x 2 y 1 3z 5 22012
2x 1 3y 2 4z 5 251
23(0) 2 3(s) 1 3(s 1 1) 5 3
0 1 s 2 (s 1 1) 5 21
2(0) 2 s 1 (s 1 1) 5 1
tPRz 5 1 1 t,y 5 t,x 5 0,
54
y 5 t54y 2 z 5 21.
5z 2 y 5 14
21x 5 0
x 5 0.3x 5 0
12
1
3
2,25 23
23x 2 3y 1 3z 5 33
x 1 y 2 z 5 212
2x 2 y 1 z 5 11
2x 1 0y 1 0z 5 263
x 1 0y 2 2z 5 23 1 3 5 0
2
x 1 2y 2 z 5 23 1 224 1 3
2 5 4
1
(23, 114 , 23
2)
y 511
423 1 2y 1
3
25 4
1z 5 232x 5 23
z 5 23
2
23 2 2z 5 0
2x 5 23
x 5 23
2x 5 26
9-16 Chapter 9: Relationships Between Points, Lines, and Planes

Equation equation or. Substituting into equation
leads to:or Substituting
into equation , you obtain:or is the point at which the three
planes meet.Check:Substituting into equation :
Substituting into equation :
Substituting into equation :
d.
Rearranging equation gives Solving for xin equation gives Substituting and into equation leads to:
or (4, 2, 3) is the point at which all three planes meet.9. a.
Equation equation equation
Setting Equation equation equation
Setting and The
planes intersect in a line.b.
Equation equation or Equation equation or Since the solutions for y are different from thesetwo equations, there is no solution to this system ofequations.c.
Equation equation equation
Setting
Using and Solve equation or
and The planes intersect in a line.10. a.
Equation equation equation or
Setting Equation : or
and b.
Equation equation equation or
Setting and equation :
or
and
11. a.
Equation equation equation or
Equation equation equation or
Since the y-variable is different in equation andequation , the system is inconsistent and has nosolution.b. Answers may vary. For example: If you use thenormals from equations , , and , you candetermine the direction vectors from the equations’coefficients.
c. The three lines of intersection are parallel and arepairwise coplanar, so they form a triangular prism.d. is perpendicular to So since,
a triangular prism forms.12. a.
3x 2 5z 5 03
x 2 y 1 3z 5 62
x 2 y 1 3z 5 31
(n1
>
3 n2
>
) ? n3
>
5 0,
n3
>
.n1
>
3 n2
>
m3 5 n2
>
3 n3
>
5 (21, 0, 1)
m2 5 n1
>
3 n3
>
5 (2, 0, 22)
m1 5 n1
>
3 n2
>
5 (3, 0, 23)
n3
>
5 (1, 21, 1)
n2
>
5 (1, 22, 1)
n1
>
5 (1, 1, 1)
321
5
4
y 5 02y 5 05
55322
y 5 122y 5 15
45321
x 2 y 1 z 5 03
x 2 2y 1 z 5 02
x 1 y 1 z 5 11
s, tPRz 5 s,y 5 t,x 5t 2 3s
2,
x 5t 2 3s
22x 2 t 1 3s 5 0
1z 5 s,y 5 tx 5 0.2x 5 05
45311
22x 1 y 2 3z 5 03
4x 2 2y 1 6z 5 02
2x 2 y 1 3z 5 01
tPRz 5 t,y 5 t 2 2,x 5 0,
y 5 t 2 20 2 y 1 t 5 21
z 5 t,x 5 0.2x 5 05
45311
x 1 y 2 z 5 223
2x 2 2y 1 2z 5 42
x 2 y 1 z 5 21
tPRz 5 t,y 5 2,x 5 2t,y 5 22t 2 y 1 t 5 22
1x 5 2t,z 5 t
x 5 2tz 5 t,5 2x 1 2y 5 0.
45211
x 2 3y 1 z 5 263
x 1 y 1 z 5 22
x 2 y 1 z 5 221
y 5 95 21y 5 29123
y 5 25 24y 5 28223
x 2 3y 1 z 5 263
x 1 y 1 z 5 22
x 2 2y 1 z 5 31
tPRz 5 t,y 5 2157 1 3
7 t,x 5 217 t 2 9
7,
y 5 2157 1 3
7 tz 5 t,5 7y 1 23z 5 215.
5512 2 32
x 5 217 t 2 9
7z 5 t,5 7x 1 1z 5 29.
45213
5x 2 3y 1 2z 5 03
2x 1 3y 2 z 5 292
x 2 2y 1 z 5 31
z 5 3.4 2 2 2 z 5 21
1y 5 2x 5 4
x 5 4.3
y 5 2.2
x 1 1 5 53
y 2 2 5 02
x 2 y 2 z 5 211
y 2 z 5 100 2 (2101) 5 201
3
x 1 z 5 299 2 101 5 2200
2
x 2 y 5 299 2 (100) 5 2199
1
(299, 100, 2101)
z 5 2101299 1 z 5 2200
2
x 5 299y 5 100.299 2 y 5 2199
1x 5 299x 5 299
5 2x 5 2198114
9-17Calculus and Vectors Solutions Manual

Equation and equation have the same set ofcoefficients and variables, however, equations equals 3 while equation equals 6, which meansthere is no possible solution.b.
All three equations equal different numbers so thereis no possible solution.c.
Equation equals 18 while equation equals 17,which means there is no possible solution.d. The coefficients of equation are half the coefficients of equation , but the constant term is not half the other constant term.13. a.
Equation equation equation :or Substituting into
equation and equation gives:or or
b.
Equation equation :
Setting
Equation equation :
Setting
c.
Equation equation : or Setting and in equation gives,
or
d.
If you multiply equation by two, you obtainSince equation and
equation equal different numbers, there is nosolution to this system.e.
Equation equation : or Setting and in equation ,
or
f.
Equation equation equation
Equation equation equation
Equation equation :Setting in equation and equation ,Equation Equation Equation equation : or Setting and in equation leads to
(0, 0, 0)14. a. First, reorder these equations so that equation
is first, equation is second, and equation last.
To eliminate x from the last two equations, subtract4 times equation from equation , and subtract2 times equation from equation .
There will be an infinite number of solutions ifand because then
equation will be 3 times equation . This meansthat b. Based on what was found in part a., substitutingin we will arrive at the equivalent system
which is really the same as
Letting we see that equation delivers2z 5 t,3y 2 z 5 262
x 2 y 1 z 5 51
3y 2 z 5 263
9y 2 3z 5 2182
x 2 y 1 z 5 51
p 5 q 5 5
p 5 q 5 5.
32
3(4 2 2p) 5 2 2 4pq 1 4 5 9
3y 2 z 5 4 2 2p3
(q 1 4)y 2 3z 5 2 2 4p2
x 2 y 1 z 5 p1
31
21
2x 1 y 1 z 5 43
4x 1 qy 1 z 5 22
x 2 y 1 z 5 p1
132
x 5 0
1z 5 0y 5 0
y 5 03y 5 0726
5 x 2 2y 5 07
5 x 1 y 5 06
21z 5 0
z 5 0524
5 3y 2 3z 5 0
52232 23
5 3y 2 2z 5 0
45221
2x 2 y 1 3z 5 03
x 2 2y 1 3z 5 02
x 1 y 1 z 5 01
tPRz 5 t,y 5 2,x 5 2t,x 5 2tx 2 2 1 t 5 22
1z 5 ty 5 2
y 5 222y 5 24211
3x 1 y 1 3z 5 23
x 1 y 1 z 5 22
x 2 y 1 z 5 221
3
22x 2 20y 1 26z 5 216.
2
x 2 10y 1 13z 5 283
2x 2 20y 1 26z 5 282
x 2 10y 1 13z 5 241
tPRz 5 t,y 5 t,x 5 0,
y 5 t2(0) 2 y 1 t 5 0
2z 5 tx 5 0
x 5 03x 5 0211
4x 2 5y 1 5z 5 03
2x 2 y 1 z 5 02
x 1 y 2 z 5 01
tPRz 5 t,y 55t 1 5
3,x 5
t 2 2
3,
y 55t 1 5
3z 5 t,
23y 1 5z 5 25.232 21
x 5t 2 2
3z 5 t,
3x 2 z 5 22.211
5x 1 2y 2 5z 5 03
x 1 y 2 2z 5 12
2x 2 y 1 z 5 231
(4, 3, 25)
z 5 25 0x 1 3 2 z 5 8
x 5 4 x 1 3 1 0z 5 7
32
y 5 3y 5 3.1224y 5 2
3222 2 31
0x 1 y 2 z 5 83
x 1 y 1 0z 5 72
2x 2 y 2 z 5 101
2
1
32
2x 2 2y 1 2z 5 173
2x 2 2y 1 2z 5 182
x 2 y 1 z 5 91
5x 2 2y 1 3z 5 133
5x 2 2y 1 3z 5 212
5x 2 2y 1 3z 5 11
2
1
21
9-18 Chapter 9: Relationships Between Points, Lines, and Planes

and so equation gives
So the parametric equation of the line of intersection is
.
15. a. First, eliminate x from two of these equations.To make things easier, switch equation withequation , and multiply equation by 2.
Now eliminate x from the last two equations byusing proper multiples of the first equation.
Now eliminate y from the third equation by using aproper multiple of the second equation.
If (the coefficient of z in the thirdequation), then However, if thethird equation would become which has nosolutions. So there is no solution if b. Working with what was found in part a., if then the third equation in the equivalent system foundthere will have a unique solution for z, namely
and back-substituting into the other two equationswill give unique solutions for x and y also. So thereis a unique solution if c. Again using the equivalent system found in part a.,setting will deliver the third equation which allows for z to be anything at all. So will give an infinite number of solutions.
16. a.
Equation equation :
equation
Equation equation :
equation
Equation equation :
or
Substituting into equation :
or
Substituting and into equation :
or
(3, 6, 2)
9.5 The Distance from a Point to a Line in R2 and R3, pp. 540–541
1. a.
b.
or 4.31
c.
or 5.76
2. a. and In order to find the distance between these two parallel lines, you must first find a point on one of
2x 2 y 1 6 5 02x 2 y 1 1 5 0
5236
"1681
d 50 9(24) 2 40(5) 0"92 1 (40)2
d 50Ax0 1 By0 1 C 0
"A2 1 B2
9x 2 40y 5 0
556
13
d 50 5(24) 2 12(5) 1 24 0
"52 1 (212)2
d 50Ax0 1 By0 1 C 0
"A2 1 B2
5x 2 12y 1 24 5 0
53
5
d 50 3(24) 1 4(5) 2 5 0
"32 1 42
d 50Ax0 1 By0 1 C 0
"A2 1 B2
3x 1 4y 2 5 5 0
a 5 31
a1
1
62
1
25 0
1b 5 6c 5 2
b 5 61
b1 2 5
13
6
4c 5 2
c 5 231
c5 15.5
41 6 35
5m3 5 n>
3 n1
>
5 (21, 0, 1) 55
25
26
b1
7
c12 4 33
41
b1
4
c5
13
65
12 2 32
4
a2
2
b1
3
c5
5
23
2
a1
3
b1
2
c5
13
62
1
a1
1
b2
1
c5 01
m 5 22
0z 5 0,m 5 22
m 2 62.
z 52m 1 4
2m2 2 8,
m 2 62,
m 5 2.
0z 5 8,
m 5 2,m 5 6 2.
2m2 2 8 5 0
(2m2 2 8)z 5 2m 1 43
y 1 z 5 02
2x 1 y 1 z 5 241
27y 1 (2m2 2 15)z 5 2m 1 43
y 1 z 5 02
2x 1 y 1 z 5 241
6x 2 4y 1 (2m2 2 12)z 5 2m 2 83
4x 1 3y 1 3z 5 282
2x 1 y 1 z 5 241
32
1
tPRz 5 t,y 51
3t 2 2,x 5 2
2
3t 1 3,
5 22
3t 1 3
x 51
3(t 2 6) 2 t 1 5
1
51
3t 2 2
y 51
3(t 2 6)
9-19Calculus and Vectors Solutions Manual

the lines. It is easiest to find a point where the linecrosses the x or y-axis.
or which corresponds tothe point
or 2.24
b. and In order to find the distance between these two parallel lines, you must first find a point on one ofthe lines. It is easiest to find a point where the linecrosses the x or y-axis.
or which correspondsto the point
or 20.16
3. a. We start by writing the given equation of the line inparametric form. Doing so gives
We construct a vector from to a general point on the line.
This means that the minimal distance between and the line occurs when
This point corresponds to The distancebetween this point and is 1.4.b.We start by writing the given equation of the line inparametric form. Doing so gives
We construct a vector from to ageneral point on the line.
This means that the minimal distance between and the line occurs when
This point corresponds to The distancebetween this point and is about 3.92.c.We start by writing the given equation of the line inparametric form. Doing so gives
We construct a vector from to a general point on the line.
This means that the minimal distance betweenand the line occurs when
This point corresponds to The distance between this point and isabout 2.88.
4. a.
If you substitute in the coordinates the
formula changes to
which reduces to
b. and
The distance between these parallel lines is because one of the lines is below
the origin and the other is above the origin.c. and In order to find the distance between these two parallel lines, you must first find a point on one ofthe lines. It is easiest to find a point where the linecrosses the x or y-axis.
3x 2 4y 1 12 5 03x 2 4y 2 12 5 0
125 1 12
5 5 245 ,
512
5
d(L2) 50C 0
"A2 1 B25
0 12 0"32 1 (24)2
512
5
d(L1) 50C 0
"A2 1 B25
0212 0"32 1 (24)2
3x 2 4y 1 12 5 03x 2 4y 2 12 5 0
d 50C 0
"A2 1 B2.
d 50A(0) 1 B(0) 1 C 0
"A2 1 B2,
(0, 0),
d 50Ax0 1 By0 1 C 0
"A2 1 B2
(22, 3)
A478625,
2379625 B.
p 5 2 21625.R(22, 3)
p 5 221
625
(221 2 49p) 1 (2576p) 5 0
(7, 224) ? (23 2 7p, 24p) 5 0
5 (23 2 7p, 24p).
a>
5 322 2 (1 1 7p), 3 2 (3 2 24p)4R(22, 3)y 5 3 2 24p.
x 5 1 1 7p,
pPRr>
5 (1, 3) 1 p(7, 224),
(22, 3)
A274169,
252169B.
t 5 21169.R(22, 3)
t 521
169
(215 2 25t) 1 (36 2 144t) 5 0
(5, 12) ? (23 2 5t, 3 2 12t) 5 0
5 (23 2 5t, 3 2 12t).
a>
5 322 2 (1 1 5t), 3 2 (12t)4R(22, 3)y 5 12t.
x 5 1 1 5t,
tPRr>
5 (1, 0) 1 t(5, 12),
(22, 3)
A22225,
5425B.
s 5 125.R(22, 3)
s 51
25
(23 2 9s) 1 (4 2 16s) 5 0
(3, 4) ? (21 2 3s, 1 2 4s) 5 0
5 (21 2 3s, 1 2 4s).
a>
5 322 2 (21 1 3s), 3 2 (2 1 4s)4R(22, 3)y 5 2 1 4s.
x 5 21 1 3s,
sPRr>
5 (21, 2) 1 s(3, 4),
5504
25
d 50 7(0) 2 24(7) 2 336 0
"72 1 (224)2
d 50Ax0 1 By0 1 C 0
"A2 1 B2
(0, 7)
y 5 77(0) 2 24y 1 168 5 0
7x 2 24y 2 336 5 07x 2 24y 1 168 5 0
55
"5
d 50 2(0) 2 1(1) 1 6 0"22 1 (21)2
d 50Ax0 1 By0 1 C 0
"A2 1 B2
(0, 1).
y 5 12(0) 2 y 1 1 5 0
9-20 Chapter 9: Relationships Between Points, Lines, and Planes

or which correspondsto the point
Both the answers to 4.b. and 4.c. are the same.5. a.
First find a random point on one of the lines. Wewill use from the first equation. We start bywriting the second equation in parametric form.Doing so gives We construct avector from to a general point on the line.
This means that the minimal distance between and line occurs when This point
corresponds to The distance between this point and is 3
b. and
First change one equation into a Cartesian equation,which leads to and take a pointfrom the other equation such as
c. and In order to find the distance between these two parallel lines, you must first find a point on one ofthe lines. It is easiest to find a point where the linecrosses the x or y-axis.
or which correspondsto the point
or 1.11
d. and In order to find the distance between these two parallel lines, you must first find a point on one ofthe lines. It is easiest to find a point where the linecrosses the x or y-axis.
or which corresponds tothe point
or 18.46
6. a.We start by writing the given equation of the line inparametric form. Doing so gives
and We construct a vector fromto a general point on the line.
This means that the minimal distance betweenand the line occurs when
This point corresponds to The distancebetween this point and is 1.80.b.We start by writing the given equation of the line inparametric form. Doing so gives
and We construct a vectorfrom to a general point on the line.
This means that the minimal distance between and the line occurs when t 5 2 2
441.P(0, 21, 0)
t 5 22
441
(8 2 16t) 1 (210 2 25t) 1 (2400t) 5 0
(24, 5, 20) ? (22 1 4t, 22 2 5t, 220t) 5 0
5 (22 1 4t, 22 2 5t, 20t).
a>
5 30 2 (2 2 4t), 21 2 (1 1 5t), 0 2 (20t)4P(0, 21, 0)
z 5 20t.y 5 1 1 5t,x 5 2 2 4t,
tPRr>
5 (2, 1, 0) 1 t(24, 5, 20),P(0, 21, 0)
P(1, 2, 21)
A19, 49, 289B.
s 5 249.P(1, 2, 21)
s 5 24
9
(24s) 1 (22 2 s) 1 (22 2 4s) 5 0
(2, 21, 2) ? (22s, 2 1 s, 21 2 2s) 5 0
5 (22s, 2 1 s, 21 2 2s).
a>
5 31 2 (1 1 2s), 2 2 (2s), 21 2 (2s)4P(1, 2, 21)
z 5 2s.y 5 2s,
x 5 1 1 2s,
sPRr>
5 (1, 0, 0) 1 s(2, 21, 2),P(1, 2, 21)
5240
13
d 50 5(0) 1 12(10) 1 120 0
"52 1 122
d 50Ax0 1 By0 1 C 0
"A2 1 B2
(0, 10).
y 5 105(0) 1 12y 5 120
5x 1 12y 1 120 5 05x 1 12y 5 120
54
"13
d 50 2(0) 2 3(21) 1 1 0
"22 1 (23)2
d 50Ax0 1 By0 1 C 0
"A2 1 B2
(0, 21).
y 5 212(0) 2 3y 2 3 5 0
2x 2 3y 2 3 5 02x 2 3y 1 1 5 0
57
5 or 1.4
d 50 3(4) 1 4(24) 2 3 0
"32 1 42
d 50Ax0 1 By0 1 C 0
"A2 1 B2
(4, 24).
3x 1 4y 2 3 5 0
x4
5y 1 1
23
x 2 1
45
y23
(22, 1)
A25, 245B.
t 5 215.P(22, 1)
t 5 21
5
(29 2 9t) 1 (4 2 16t) 5 0
(3, 4) ? (23 2 3t, 1 2 4t) 5 0
5 (23 2 3t, 1 2 4t).
a>
5 322 2 (1 1 3t), 1 2 (4t)4P(22, 1)
y 5 4t.x 5 1 1 3t,
(22, 1)
tPRr>
5 (1, 0) 1 t(3, 4),
sPRr>
5 (22, 1) 1 s(3, 4),
524
5
d 50 3(0) 2 4(23) 1 12 0
"32 1 (24)2
d 50Ax0 1 By0 1 C 0
"A2 1 B2
(0, 3).
y 5 233(0) 2 4y 2 12 5 0
9-21Calculus and Vectors Solutions Manual

This point corresponds to Thedistance between this point and is 2.83.c. P(2, 3, 1) We start by writing the given equation of the line inparametric form. Doing so gives and We construct a vector from P(2, 3, 1)to a general point on the line.
This means that the minimal distance between P(2, 3, 1) and the line occurs when This point corresponds to The distancebetween this point and P(2, 3, 1) is 3.44.7. a.
First find a random point on one of the lines. Wewill use from the second equation. Wethen write the first equation in parametric form.Doing so gives and
We construct a vector from to a general point on the line.
This means that the minimal distance betweenand line occurs when This point
corresponds to The distance between thispoint and is 2.83b.
First find a random point on one of the lines. We will use P(1, 0, 1) from the second equation. We then write the first equation in parametric form.Doing so gives and
We construct a vector from P(1, 0, 1)to a general point on the line.
This means that the minimal distance between P(1, 0, 1) and line occurs when This point corresponds to The distance between this point and is 3.288. a.First we write the equation in parametric form.Doing so gives and
We construct a vector from P(2, 1, 3) toa general point on the line.
This means that the minimal distance between P(2, 1, 3) and line occurs when This pointcorresponds to b. The distance between and is 1.65.9. First, find the line L of intersection between theplanes
Subtract the first equation from the second toeliminate x and get the equivalent system
Let Then the second equation gives
So substituting these into the first equation gives
So the equation of the line of intersection for thesetwo planes in parametric form is
The direction vector for this line is which is parallel to So, to make thingseasier, the parametric form of this line ofintersection could also be expressed as
In vector form, this is the same astPRz 5 2t,y 5 3t 2 2,x 5 2t,
(21, 3, 2).
A212,
32, 1B,
tPR.z 5 t,y 53
2t 2 2,x 5 2
1
2t,
5 21
2t
5 a3
2t 2 2b 2 2t 1 2
x 5 y 2 2z 1 2
y 53
2 t 2 2
2y 5 3t 2 4
z 5 t.2y 2 3z 5 242
x 2 y 1 2z 5 21
x 1 y 2 z 5 222
x 2 y 1 2z 5 21
(2, 1, 3)A1711,
711,
1611B
A1711,
711,
1611B.
s 5 611.
s 56
11
(1 2 s) 1 (6 2 9s) 1 (1 1 s) 5 0
(1, 3, 21) ? (1 2 s, 2 2 3s, 1 1 s) 5 0
5 (1 2 s, 2 2 3s, 1 1 s).
a>
5 32 2 (1 1 s), 1 2 (21 1 3s), 3 2 (2 2 s)4z 5 2 2 s.
y 5 21 1 3s,x 5 1 1 s,
sPRr>
5 (1, 21, 2) 1 s(1, 3, 21),
(1, 0, 1)
A4513,
1913, 2
613B.
m 5 613.
m 56
13
(22 2 3m) 1 (21 2 m) 1 (9 2 9m) 5 0
(1, 1, 3) ? (22 2 3m, 21 2 m, 3 2 3m) 5 0
5 (22 2 3m, 21 2 m, 3 2 3m).
a>
5 31 2 (3 1 m), 0 2 (1 1 m), 1 2 (22 1 3m)4z 5 22 1 3m.
y 5 1 1 m,x 5 3 1 m,
nPRr>
5 (1, 0, 1) 1 n(1, 1, 3),
mPRr>
5 (3, 1, 22) 1 m(1, 1, 3),
(21, 1, 2)
(1, 1, 0).
s 5 0.P(21, 1, 2)
s 5 0
(24 2 4s) 1 (2s) 1 (4 2 4s) 5 0
(2, 1, 2) ? (22 2 2s, 2s, 2 2 2s) 5 0
5 (22 2 2s, 2 2 2s).
a>
5 321 2 (1 1 2s), 1 2 (1 1 s), 2 2 2s4P(21, 1, 2)z 5 0 1 2s.
y 5 1 1 s,x 5 1 1 2s,
P(21, 1, 2)
tPRr>
5 (21, 1, 2) 1 t(2, 1, 2),
sPRr>
5 (1, 1, 0) 1 s(2, 1, 2),
A228169, 2
57169,
76169B.
p 5 19169.
p 519
169
(24 2 144p) 1 (29 2 9p) 1 (4 2 16p) 5 0
(12, 23, 4) ? (2 2 12p, 3 1 3p, 1 2 4p) 5 0
5 (2 2 12p, 3 1 3p, 1 2 4p).
a>
5 32 2 (12p), 3 2 (23p), 1 2 (4p)4z 5 4p.
y 5 23p,x 5 12p,
pPRr>
5 p(12, 23, 4),
P(0, 21, 0)
A890441,
431441, 2
40441B.
9-22 Chapter 9: Relationships Between Points, Lines, and Planes

.Since is on this line,
So the distance from to the line ofintersection is
To find the point on the line that gives this minimaldistance, let be a point on the line. Then,using the parametric equations,
So the distance from P to this point is
To get the minimal distance, set this quantityequal to
So the point on the line at minimal distance from P is
10. A point on the line
has parametric equations
Let this point be calledThen
If Q is at minimal distance from A, then this vectorwill be perpendicular to the direction vector for theline, This means that
So the point Q on the line at minimal distance fromA is
Also
So the point A will satisfy
So and That is,
11. a. Think of H as being the origin, E as being onthe x-axis, D as being on the z-axis, and G as beingon the y-axis. That is,
and so on for the other points as well. Then linesegment HB has direction vector
Also, So the distance formula saysthat the distance between A and line segment HB is
8 1.75
5 Å52
17
50 4, 0, 26 00 (3, 2, 2) 0
d 50 (3, 2, 2) 3 (3, 0, 2) 0
0 (3, 2, 2) 0
HA>
5 (3, 0, 2).
B(3, 2, 2) 2 H(0, 0, 0) 5 (3, 2, 2).
D(0, 0, 2)
G(0, 2, 0)
E(3, 0, 0)
H(0, 0, 0)
Ar(3821, 2
4421,
16721 ).
c 5 16721 .b 5 244
21,a 5 3821,
5 aa 240
21, b 2
20
21, c 2
31
21b
5 Ar(a, b, c) 2 Q
5 a22
21, 2
64
21,
136
21b
QAr>
5 2QA>
r
5 a 2
21,
64
21, 2
136
21b
QA>
5 a2 240
21, 4 2
20
21, 25 2
31
21b
5 Qa40
21,
20
21,
31
21b
Q(4s, 2s, 1 1 s) 5 Qa4a10
21b, 2a10
21b, 1 1
10
21b
s 510
21
5 10 2 21s 0 5 (2 2 4s, 4 2 2s, 26 2 s) ? (4, 2, 1)
(4, 2, 1).
5 (2 2 4s, 4 2 2s, 26 2 s)
QA>
5 (2, 4, 25) 2 (4s, 2s, 1 1 s)
Q(4s, 2s, 1 1 s).
sPR.z 5 1 1 s,y 5 2s,x 5 4s,
sPR.r>
5 (0, 0, 1) 1 s(4, 2, 1),
5 a211
14,
5
14,
22
14b
5 a211
14, 3a11
14b 2 2, 2a11
14bb
(x, y, z) 5 (2t, 3t, 22, 2t)
511
14
t 5308 6 "0
392
196t2 2 308t 1 121 5 0
196t2 2 308t 1 252 5 131
14t2 2 22t 1 18 5131
14
"14t2 2 22t 1 18 5 Å131
14
#13114 .
5 "14t2 2 22t 1 18
5 "(1 2 t)2 1 (3t 2 4)2 1 (2t 1 1)2
"(x 1 1)2 1 (y 2 2)2 1 (z 1 1)2
(x, y, z) 5 (2t, 3t 2 2, 2t)
(x, y, z)
8 3.06
5 Å131
14
50 (211, 23, 21) 0
0 (21, 3, 2) 0
d 50 (21, 3, 2) 3 (21, 4, 21) 0
0 (21, 3, 2) 0
P(21, 2, 21)
5 (21, 4, 21)
QP>
5 (21, 2, 21) 2 (0, 22, 0)
Q(0, 22, 0)
tPRr>
5 (0, 22, 0) 1 t(21, 3, 2),
9-23Calculus and Vectors Solutions Manual

b. Vertices D and G will give the same distance toHB because they are equidistant to the segment HB.(This is easy to check with the distance formulaused similarly to part a. The vertices C, E, and Fgive different distances than those found in part a.)c. The height of triangle AHB was found in part a.,and was The base length of this triangle is themagnitude of which is Sothe area of this triangle is
9.6 The Distance from a Point to a Plane, pp. 549–550
1. a. Yes the calculations are correct, Point A lies inthe plane.b. The answer 0 means that the point lies in theplane.2. Use the distance formula.
a. The distance from A to the plane is
b. The distance from to the planeis
c. The distance from to the planeis
d. The distance from to the planeis
or 0.38
e. The distance from to the planeis
or 0.41
3. a. and
First find a point in the second plane such as
Then use
to solve.
b.
c. Answers may vary. Any point on the planewill work, for example
4. a. The distance from to the planeis
b. The distance from to the planeis
c. The distance from to the planeis
5. First you have to find an equation of a plane tothe three points. The equation to this plane is
Then use
to solve for the distance.
or 0.6752
3
d 50 14(1) 2 28(21) 1 28(1) 2 42 0
"142 1 (228)2 1 282
d 50Ax0 1 By0 1 Cz0 1 D 0
!A2 1 B2 1 C2
14x 2 28y 1 28z 2 42 5 0.
5 2
d 50 0(1) 1 0(0) 1 1(1) 1 1 0
"02 1 02 1 12
z 1 1 5 0
R(1, 0, 1)
5 4
d 50 1(21) 1 0(1) 1 0(4) 2 3 0
"12 1 02 1 02
x 2 3 5 0
Q(21, 1, 4)
5 4
d 50 0(1) 1 1(1) 1 0(23) 1 3 0
"02 1 (1)2 1 02
y 1 3 5 0
P(1, 1, 23)
(216, 0, 12).
6x 1 8y 2 24z 1 13 5 0
6x 1 8y 2 24z 1 13 5 0
1 3x 1 4y 2 12z 1 39 5 0
3x 1 4y 2 12z 2 26 5 0
5 5
d 50 3(213) 1 4(0) 2 12(0) 2 26 0
"32 1 42 1 (212)2
d 50Ax0 1 By0 1 Cz0 1 D 0
!A2 1 B2 1 C2(23, 0, 0).
3x 1 4y 2 12z 1 39 5 0
3x 1 4y 2 12z 2 26 5 0
511
27
d 50 18(21) 2 9(0) 1 18(1) 2 11 0
"182 1 (29)2 1 182
18x 2 9y 1 18z 2 11 5 0
E(21, 0, 1)
55
13
d 50 5(1) 2 12(0) 1 0(0) 1 0 0
"52 1 (212)2 1 02
5x 2 12y 5 0
D(1, 0, 0)
5 2
d 50 3(5) 1 24(1) 1 0(4) 2 1 0
"32 1 (24)2 1 02
3x 2 4y 2 1 5 0
C(5, 1, 4)
5 3
d 50 2(0) 1 1(21) 1 2(0) 2 8 0
"22 1 12 1 22
2x 1 y 1 2z 2 8 5 0
B(0, 21, 0)
5 3
d 50 20(3) 1 24(1) 1 5(0) 1 7 0
"202 1 (24)2 1 52
20x 2 4y 1 5z 1 7 5 0
(3, 1, 0)
d 50Ax0 1 By0 1 Cz0 1 D 0
"A2 1 B2 1 C2
8 3.6 units2
1
2 aÅ
52
17b ("17) 5
1
2 ("52)
#52.HB>
5 (3, 2, 2),
#5217.
9-24 Chapter 9: Relationships Between Points, Lines, and Planes

6.
is the only solution to this equation.7. These lines are skew lines, and the plane containingthe second line,that is parallel to the first line will have directionvectors and So a normal to thisplane is So the equation of this plane will be of the form
. We want the point to be on this plane, and substituting this into theequation above gives So the equation of theplane containing and parallel to the first line is
Since is on the first line, the distancebetween these skew lines is the same as the distancebetween this point and the plane just determined.By the distance formula, this distance is
8. a. –b. We will do both of these parts at once. The two given lines are
By converting to parametric form, a general pointon the first line is
and on the second line is
So the vector
If the points U and V are those that produce theminimal distance between these two lines, then will be perpendicular to both direction vectors,
and In the first case, we get
In the second case, we get
Substituting into this second equation,we get
Substituting these values for s and t into U and V,we get
So is the point on the first line thatproduces the minimal distance to the second line at point This minimal distance isgiven by
Review Exercise, pp. 552–5551.
2.
)or Substituting into equation gives
or However, when yousubstitute this coordinates into the third equation,the third equation is not consistent, so there is no solution to this problem.3. a.
orSubstituting into all of the equations
gives
There are no x and y variables that satisfy theseequations, so the answer is no solution.
2x 2 2y 2 2 5 116
2x 2 2y 2 6 5 15
x 2 y 2 4 5 34
z 5 22z 5 22.
5 5z 5 21032 equation2Equation
2x 2 2y 1 z 5 113
2x 2 2y 1 3z 5 12
x 2 y 1 2z 5 31
y 5 29.(4) 2 y 5 13
1x 5 4x 5 4.
5 5x 1 0y 5 2021 equation 1(2 3 Equation
x 1 2y 5 2193
3x 1 2y 5 262
x 2 y 5 131
k 5 24
99
3a214
17b 1 ka299
17b 5 38
x 5214
17y 5 2
99
17,
5 0x 2 17y 5 99
(2x 2 y 5 31) 2 2(x 1 8y 5 234)
3x 1 ky 5 38x 1 8y 5 234,2x 2 y 5 31,
8 3.46
5 "12
0UV> 0 5 0 (22, 22, 22) 0
V(21, 21, 0).
U(1, 1, 2)
V(21, 21, 0)
U(1, 1, 2)
t 5 22 t 5 2s 2 8 s 5 3
2(2s 2 8) 2 s 1 7 5 0
t 5 2s 2 8
5 2t 2 s 1 7
0 5 (t, 1 2 s, s 2 t 2 7) ? (1, 0, 21)
t 5 2s 2 8
5 8 2 2s 1 t 0 5 (t, 1 2 s, s 2 t 2 7) ? (0, 1, 21)
(1, 0, 21).(0, 1, 21)
UV>
UV>
5 (t, 1 2 s, s 2 t 2 7).
V(1 1 t, 21, 22 2 t).
U(1, s 2 2, 5 2 s),
tPR.r>
5 (1, 21, 22) 1 t(1, 0, 21),
sPR,r>
5 (1, 22, 5) 1 s(0, 1, 21),
8 1.51.
55
"11
d 50 (0) 2 (1) 2 3(21) 1 3 0"12 1 (21)2 1 (23)2
(0, 1, 21)
x 2 y 2 3z 1 3 5 0.
r>
5 (0, 0, 1) 1 t(1, 1, 0), tPRD 5 3.
(0, 0, 1)x 2 y 2 3z 1 D 5 0
(1, 1, 0) 3 (3, 0, 1) 5 (1, 21, 23).
(3, 0, 1).(1, 1, 0)
r>
5 (0, 0, 1) 1 t(1, 1, 0), tPR,
A 5 3
3 5 A24 5 8A
A2 1 40 5 A2 1 8A 1 16
"(A2 1 40) 5 ZA 1 4 Z3"(A2 1 40) 5 Z3A 1 12 Z
3 50A(3) 2 2(23) 1 6(1) 1 0 0
"A2 1 (22)2 1 62
9-25Calculus and Vectors Solutions Manual

b.
Substituting into all three equations gives:
orYou then get after substituting
both x and y into equation .
Check:
4. a. These four points will lie in the same plane ifand only if the line determined by the first twopoints intersects the line determined by the last twopoints. The direction vector determined by the firsttwo is
So these first two points determine the line withvector equation
The direction vector determined by the last twopoints is
So these first two points determine the line withvector equation
Converting these two lines to parametric form, weobtain the equations
Adding the first and second equations givesSubstituting this into the third
equation, we get
So We need to check this s and t forconsistency. Substituting into the vectorequation for the first line gives
as a point on this line. Substituting into thevector equation for the second line gives
as a point on this line. This means the two linesintersect, and so the four points given lie in thesame plane.b. Direction vectors for the plane containing thefour points in part a. are and
. So a normal to this plane is
We will use the parallel normal . So theequation of this plane is of the form
Substitute in the point to find D.
The equation of the plane is
So, using the distance formula, this plane is distance
from the origin.5. Use the distance formula.
a. The distance from to
b. The distance from to
or 0.08
6.
Find the parametric equations from the firstequation, then substitute those equations into thesecond equation. Solve for t. Substitute that t-valueinto the first equation.
x 5 3 1 2ttPR r
>
5 (3, 1, 1) 1 t(2, 21, 2),
3x 2 4y 2 5z 5 0
tPRr>
5 (3, 1, 1) 1 t(2, 21, 2),
51
12
d 50 8(3) 2 8(1) 1 4(22) 2 7 0
"82 1 (28)2 1 (4)2
4z 2 7 5 08x 2 8y 1
B(3, 1, 22)
5 3
d 50 3(21) 2 4(1) 2 12(2) 2 8 0"32 1 (24)2 1 (212)2
12z 2 8 5 03x 2 4y 2
A(21, 1, 2)
d 50Ax0 1 By0 1 Cz0 1 D 0
"A2 1 B2 1 C2
8 0.19
51
"29
d 5Z3(0) 1 4(0) 2 2(0) 1 1 Z
Z (3, 4, 22) Z
3x 1 4y 2 2z 1 1 5 0.
D 5 1
3(1) 1 4(2) 2 2(6) 1 D 5 0
(1, 2, 6)
3x 1 4y 2 2z 1 D 5 0.
(3, 4, 22)
(6, 27, 25) 3 (24, 4, 2) 5 (6, 8, 24).
(24, 4, 2)
(6, 27, 25)
r>
5 (1, 1, 4) 1 a23
2b (24, 4, 2)
5 (1, 1, 4) 1 (6, 26, 23)
5 (7, 25, 1)
t 5 232
r>
5 (1, 2, 6) 1 (1)(6, 27, 25)
5 (7, 25, 1)
s 5 1
t 5 232.
23 5 2t1 5 4 1 2t
3 2 s 5 2, so s 5 1.
6 2 5s 5 4 1 2t3
2 2 7s 5 1 1 4t2
1 1 6s 5 1 2 4t1
r>
5 (1, 1, 4) 1 t(24, 4, 2), tPR.
b>
5 (23, 5, 6) 2 (1, 1, 4)
5 (24, 4, 2)
r>
5 (1, 2, 6) 1 s(6,27,25), sPR.
5 (6, 27, 25)
a>
5 (7, 25, 1) 2 (1, 2, 6)
99 2 100 1 101 5 1003
99 1 100 2 101 5 982
99 1 100 1 101 5 3001
(99, 100, 101)
1
z 5 101y 5 100.
5 2y 5 20051 equation4Equation
2y 1 z 5 16
y 2 z 5 215
y 1 z 5 2014
x 5 99
x 5 99.5 2x 5 19831 equation2Equation
x 2 y 1 z 5 1003
x 1 y 2 z 5 982
x 1 y 1 z 5 3001
9-26 Chapter 9: Relationships Between Points, Lines, and Planes

t can be any value to satisfy this value, so the twoequations intersect along
7. a.
There is no solution because the first and thirdequations are inconsistent.b.
There is no solution because the first and secondequations are inconsistent.c.
There is no solution because the first and thirdequations are inconsistent.8. a.
Letting then and
b.
or Letting creates:
or Substituting in and gives
c.
Letting then gives or
s,9. a.
Setting
or
Substituting these two values into the first equationgives
b.
Setting
or
Substituting these two values into the first equation gives
10. a.
The first equation the second equation givesor Substituting into the
third equation, or Substituting these two values into the first equation,
or These three planes meet at the point b.
These two equations are inconsistent, so the planesdo not intersect at any point. Geometrically theplanes form a triangular prism.c.
9x 1 2y 2 z 5 03
x 2 2y 1 3z 5 02
2x 1 y 2 z 5 01
5 22.
5 25x 2 z)12 (3 3 equation3Equation
5 5x 1 z 5 321 equation1Equation
x 2 3y 1 5z 5 43
3x 1 y 2 z 5 12
2x 2 y 1 2z 5 21
(21, 5, 3).
z 5 32(21) 1 5 1 z 5 6
y 5 5.3(21) 1 y 5 2
x 5 21x 5 21.3x 5 23
1
3x 1 y 5 2
x 2 y 2 z 5 29
2x 1 y 1 z 5 6
tPRz 5 t,y 51
41
1
12t,x 5
9
82
31
24t,
x 5 98 2 31
24 t
y 51
41
1
12t12y 2 t 5 3
z 5 t,5 12y 2 z 5 3
)1) 2 (2 3 equation2(Equation
2x 1 7y 1 2z 5 43
4x 1 2y 1 5z 5 52
2x 2 5y 1 3z 5 11
tPRz 5 t,y 521
21
5
12t,x 5
1
21
1
36t,
x 5 12 1 1
36 t
y 5 21
21
5
12t12y 2 5t 5 26
z 5 t,5 26
) 5 12y 2 5z1) 2 (2 3 equation2(Equation
6x 2 3y 1 8z 5 61
6x 1 2y 2 z 5 21
3x 2 5y 1 2z 5 41
tPRz 5 s,y 5 t,x 5 3t 2 3s 1 7,
x 5 23s 1 3t 1 7
x 2 3t 1 3s 5 7y 5 tz 5 s,
2x 1 3y 2 3z 5 273
2x 2 6y 1 6z 5 142
x 2 3y 1 3z 5 71
z 5 21
2y 5
1
4,x 5 3,
y 5 14
z 5 212x 5 3x 5 3.
) 5 8x 5 242) 1 (2 3 equation1(Equation
2x 1 4y 5 75
4x 2 8y 5 104
z 5 212z 5 21
2.5 24z 5 212
)3) 1 (4 3 equation1(Equation
x 2 2y 2 3z 5 43
2x 1 4y 1 6z 5 42
4x 2 8y 1 12z 5 41
tPRz 5 t,y 5 1 12
7t,x 5 2
5
7t,
y 5 1 1 27 t.x 5 25
7 tz 5 t,5 27x 2 5z 5 0
)2) 2 (2 3 equation1(Equation
6x 1 8y 1 2z 5 83
5x 1 2y 1 3z 5 22
3x 1 4y 1 z 5 41
3 3 (4x 2 3y 1 2z 5 2) 5 12x 2 9y 1 6z 5 6
12x 2 9y 1 6z 5 13
8x 2 6y 1 4z 5 42
4x 2 3y 1 2z 5 21
2 3 (2x 1 3y 1 4z 5 3) 5 4x 1 6y 1 8z 5 6
5x 1 y 2 z 5 13
4x 1 6y 1 8z 5 42
2x 1 3y 1 4z 5 31
3 3 (3x 2 4y 1 5z 5 9) 5 9x 2 12y 1 15z 5 27
9x 2 12y 1 15z 5 93
6x 2 9y 1 10z 5 92
3x 2 4y 1 5z 5 91
tPR.r>
5 (3, 1, 1) 1 t(2, 21, 2),
3(3 1 2t) 2 4(1 2 t) 2 5(1 1 2t) 5 0
z 5 1 1 2t y 5 1 2 t
9-27Calculus and Vectors Solutions Manual

equation equation so
Equation equation , so
Let The intersection of the planes is a linethrough the origin with equation
11. By substituting in different s-values, you can findwhen the plane intersects the xz-plane when and the xy-plane when The plane intersects the xz-plane at andthe xy-plane at Then find the distancebetween these two points using the distanceformula. The distance between these two points is 4.90.12. a.
Since the line’sdirection vector is perpendicular to the normal ofthe plane and the point lies on both theline and the plane, the line is in the plane.b.
Solve for the parametric equations of both equationsand then set them equal to each other.
corresponds to the point c.
The point is on the plane since itsatisfies the equation of the plane.d.
13. a.
gives the lowest distance of 5.48
b. corresponds to the point 14. a.
Set the equations parametric equations equal toeach other, and determine either the s or t-value.Find the point that corresponds to this value.
corresponds to the point b.
15. a. Since the plane we want contains L, we canuse the direction vector for L, , as one of the plane’s direction vectors. Since the planecontains the point (which is on L) and thepoint , it will contain the direction vector
To find a normal vector for the plane we want, takethe cross product of these two direction vectors.
So the plane we seek will be of the form
To determine the value of D, substitute in the pointthat is to be on this plane.
The equation of the plane we seek is
b. Using the distance formula, the distance fromto the plane
is
16. a.
3x 2 4y 5 05
45 equation21 equation1Equation
7x 2 7y 2 z 5 k3
2x 2 5y 1 z 5 212
x 1 y 2 z 5 11
8 0.45
57
"245
d 5Z210(1) 1 9(1) 1 8(21) 1 16 Z
Z (210, 9, 8) Z
16 5 0
210x 1 9y 1 8z 1S(1, 1, 21)
210x 1 9y 1 8z 1 16 5 0.
D 5 16
210(1) 1 9(2) 1 8(23) 1 D 5 0
(1, 2, 23)
210x 1 9y 1 8z 1 D 5 0.
(2, 24, 7) 3 (1, 2, 21) 5 (210, 9, 8)
(3, 22, 4) 2 (1, 2, 23) 5 (2, 24, 7)
K(3, 22, 4)
(1, 2, 23)
(1, 2, 21)
tPRr>
5 (22, 23, 0) 1 t(1, 22, 1),
5 (4, 28, 4) 5 (1, 22, 1)
n1
S3 n2
S5 (3, 2, 1) 3 (1, 2, 3)
P(22, 23, 0)
sPRr>
5 (22, 23, 0) 1 s(1, 2, 3),
tPRr>
5 (1, 21, 1) 1 t(3, 2, 1),
(22, 23, 0).s 5 0
t 5 21s 5 0,
z 5 1 1 t 5 3sy 5 21 1 2t 5 23 1 2sx 5 1 1 3t 5 22 1 s
z 5 3sy 5 23 1 2s,L2: x 5 22 1 s,
z 5 1 1 ty 5 21 1 2t,L1: x 5 1 1 3t,
sPRr>
5 (22, 23, 0) 1 s(1, 2, 3),
tPRr>
5 (1, 21, 1) 1 t(3, 2, 1),
(3, 0, 21)t 5 0
t 5 0
"6t2 1 30
"(3 1 t 1 2)2 1 (t 2 1)2 1 (21 1 2t 2 1)2
"(3 1 t 2 x)2 1 (t 2 y)2 1 (21 1 2t 2 z)2
0 5 21 1 2t 2 z0 5 t 2 y,0 5 3 1 t 2 x,
z 5 21 1 2ty 5 t,x 5 3 1 t,A(22, 1, 1)
tPRr>
5 (3, 0, 21) 1 t(1, 1, 2),
7x 2 2y 2 11z 2 50 5 0
D 5 250
7x 2 2y 2 11z 1 D 5 0
C 5 211B 5 22,A 5 7,
(A, B, C) ? (4, 3, 2) 5 0
tPRr>
5 (7, 5, 21) 1 t(4, 3, 2),
(21, 21, 25)
21 2 2(21) 1 (25) 1 4 5 0
x 2 2y 1 z 1 4 5 0
(21, 21, 25)t 5 22
z 5 25y 5 21,x 5 21,t 5 22,
t 5 22z 5 25 5 21 1 2t,z 5 25y 5 1 1 s,L2: x 5 3 1 2s,
z 5 21 1 2ty 5 5 1 3t,L1: x 5 7 1 4t,
sPRr>
5 (3, 1, 25) 1 s(2, 1, 0),
tPRr>
5 (7, 5, 21) 1 t(4, 3, 2),
(3, 1, 25)
m>
? n>
5 (2, 1, 0) ? (1, 22, 1) 5 0
sPRr>
5 (3, 1, 25) 1 s(2, 1, 0),
x 2 2y 1 z 1 4 5 0
(1, 22, 0).
(3, 0, 24)
z 5 0.
y 5 0
sPRr>
5 (2, 21, 22) 1 s(1, 1, 22),
tPR.z 5 25t,x 5 t, y 5 27t,
x 5 t.y 5 27x.
5 7x 1 y 5 0123
z 5 25x.
5 5x 1 z 5 0,2112 3
9-28 Chapter 9: Relationships Between Points, Lines, and Planes

For the solution to this system to be a line,equation and equation must be the proportional.
makes these two line proportional and thesolution to this system a line.b. In part a., we found that by arriving at theequivalent system
As the first and third equations are proportional,this is really the same system as
Letting in the first equation, we see thatSubstituting these values for x and y into the
second equation, we find that
So the direction vector for the line that solves thissystem is ), which is parallel to .So equivalent parametric equations of this line are
So one possible vector equation of this line is
b. In part a., we found that by arriving at theequivalent system
As the first and third equations are proportional,this is really the same system as
Letting in the first equation, we see thatSubstituting these values for x and y into the
second equation, we find that
So the direction vector for the line that solves thissystem is which is parallel to (4, 3, 7). So equivalent parametric equations of this line are
So one possible vector equation of this line is
17. a.
equation or Substituting into equation :Substituting into equation :or
b.
equation Setting
or Substituting and into equation :
or
18.
5 15z 5 102311
3x 2 4z 5 03
23x 1 4z 5 02
9x 1 3z 5 101
y 53
4
5 8y 5 6213
3x 1 4y 2 4z 5 33
23x 1 4y 1 4z 5 32
9x 2 8y 1 3z 5 41
z 5cb
y 5 b,x 5ab
,
3ab
1 4b 24cb
5 33
23ab
1 4b 14cb
5 32
9ab
2 8b 13cb
5 41
tPRz 5 t,y 5 3 2 t,x 5 7 2 3t,x 5 7 2 3tx 2 2(3 2 t) 1 t 5 1
1z 5 ty 5 3 2 ty 5 3 2 t2y 2 t 5 23
z 5 t,5 2y 2 z 5 23,55
)12 (2 3 equation2Equation
6x 2 14y 1 4z 5 04
3x 2 7y 1 2z 5 03
2x 2 5y 1 z 5 212
x 2 2y 1 z 5 11
(2, 21, 1)
z 5 1.
2 1 22 1 z 5 11
6 2 y 5 7y 5 21.5
x 5 25 210x 5 220y75
6) 1 equation5(7 3 equation
11x 2 7y 5 295
65 equation3) 1 equation2(4 3 equation
3x 2 y 5 75
55 equation21 equation1Equation
4x 1 y 1 z 5 84
3x 1 5y 1 4z 5 53
2x 2 3y 2 z 5 62
x 1 2y 1 z 5 11
tPR.r>
5 (0, 0, 21) 1 t(4, 3, 7),
tPR.z 5 21 1 7t, y 5 3tx 5 4t
Q1, 34, 74R,
57
4t 2 1.
z 5 5a3
4tb 2 2t 2 1
y 5 34t.
x 5 t2x 2 5y 1 z 5 212
3x 2 4y 5 01
9x 2 12y 5 03
2x 2 5y 1 z 5 212
3x 2 4y 5 01
k 5 1
r>
5 (0, 0, 21) 1 t(4, 3, 7), tPR.
z 5 21 1 7t, tPR.
y 5 3tx 5 4t
(4, 3, 7)74(1, 34,
57
4t 2 1.
z 5 5a3
4tb 2 2t 2 1
y 5 34 t.
x 5 t2x 2 5y 1 z 5 212
3x 2 4y 5 01
9x 2 12y 5 03
2x 2 5y 1 z 5 212
3x 2 4y 5 01
k 5 1
k 5 1
54
9x 2 12y 5 21 1 k5
55 equation31 equation2Equation
9-29Calculus and Vectors Solutions Manual

19. First put the equation into parametric form.Then substitute the x, y, and z-values into
to determine t. Thensubstitute t back into the parametric equations to determine the coordinates.
20. Let denote the image point under thisreflection. We want to find a, b, and c. The equationof the plane is , so letting and , we get , These arethe parametric equations of this plane, so a generalpoint on this plane has coordinates .
So
The normal vector to this plane is , and in order for to be perpendicular to the plane, itmust be parallel to this normal. This means that and will have a cross product equal tothe zero vector.
So we get the system of equations
Adding the first two equations gives
Substituting this value for t into the third equationgives
Substituting these values for s and t into the equationfor we get
This is the vector that is normal to the plane, withits head at point and tail at the point inthe plane
So the vector
This means that and That is, the reflected point is .21. a. The first plane has normal and thesecond has normal . Their line ofintersection will be perpendicular to both of thesenormals. So we can take as direction vector thecross product of these two normals.
5 8(11, 2, 25)
(3, 1, 7) 3 (4, 212, 4) 5 (88, 16, 240)
(4, 212, 4)
(3, 1, 7)
43)
83,Ar(25
3,
c 5 243, b 5 28
3, a 5 253,
PAr>
5 2PA>
5 a24
3,
4
3, 2
4
3b
5 (a, b, c) 2 a21
3,
4
3,
8
3b
5 aa 11
3, b 2
4
3, c 2
8
3b
5 a21
3,
4
3,
8
3b
P(1 2 t 1 s, s, t) 5 Pa1 28
31
4
3,
4
3,
8
3b
A(1, 0, 4)
PA>
5 (t 2 s, 2s, 4 2 t)
5 a8
32
4
3, 2
4
3, 4 2
8
3b
5 a4
3, 2
4
3,
4
3b
PA>
,
s 54
3
5 2s 28
3
0 5 2s 2 t
t 58
3
8 2 3t 5 0
2s 2 t 5 03
4 1 s 2 2t 5 02
4 2 s 2 t 5 01
5 (0, 0, 0)
5 (4 2 s 2 t, 4 1 s 2 2t, 2s 2 t)(t 2 s, 2s, 4 2 t) 3 (1, 21, 1)
(1, 21, 1)
PA>
PA>
(1, 21, 1)
PA>
5 (1, 0, 4) 2 (1 2 t 1 s, s, t) 5 (t 2 s, 2s, 4 2 t)
P(1 2 t 1 s, s, t)
s, tPR.x 5 1 2 t 1 sz 5 ty 5 sx 2 y 1 z 2 1 5 0
Ar(a, b, c)
a4, 27
4,
7
2b
z 5 22a25
4b 1 1
y 5 3a25
4b 1 2,x 5 24a2
5
4b 2 1,
t 5 25
4
(24t 2 1) 1 2(3t 1 2) 2 3(22t 1 1) 1 10 5 0
x 1 2y 2 3z 1 10 5 0
z 5 22t 1 1y 5 3t 1 2,x 5 24t 2 1,
x 1 1
245
y 2 2
35
z 2 1
225 t
x 1 2y 2 z 1 10 5 0
a2
3,
3
4,
1
2b
c 51
2z 5
2
35
cb
5c3
4
,
a 52
3x 5
8
95
ab
5a3
4
,
y 53
45 b,
x 58
9z 5
2
3,
9-30 Chapter 9: Relationships Between Points, Lines, and Planes

So let’s use as the direction vector forthis line of intersection. To find a point on both ofthese planes, solve for z in the second plane, andsubstitute this into the equation for the first plane.
If in this last equation, then and
The point lies on both planes. So thevector equation of the line of intersection for thefirst two planes is
The corresponding parametric form is
,
We will use a similar procedure for the other twolines of intersection. For the third plane, the normalvector is (1, 2, 3). So a direction vector for the lineof intersection between the first and third planes is
We may use as the direction vector forthis line of intersection. We find a point on both ofthese planes in the same way as before.
Taking in this last equation, we get and
A point on both the first and third planes is. So the vector equation for this line of
intersection is
and the corresponding parametric equations are
Finally, we consider the line of intersection betweenthe second and third planes. In this case, a directionvector is
We may use as the direction vector forthis line of intersection. We find a point on both ofthese planes in the same way as before.
Taking in this last equation, we get and
A point on both the second and third planes is. So the vector equation for this line of
intersection is
and the corresponding parametric equations are
b. All three lines of intersection found in part a.have direction vector , and so they areall parallel. Since no pair of normal vectors forthese three planes is parallel, no pair of these planesis coincident.
22.
9
a2 25
b2 14
c2 5 673
3
a2 26
b2 21
c2 5 232
2
a2 15
b2 13
c2 5 401
(11, 2, 25)
z 5 21 2 5t, PR.
y 5 2tx 5 7 1 11t
r>
5 (7, 0, 21) 1 t(11, 2, 25), tPR,
(7, 0, 21)
5 7
5 4 2 2(0) 2 3(21)
x 5 4 2 2y 2 3z
z 5 21y 5 0
5 220y 2 8z 2 8
5 4(4 2 2y 2 3z) 2 12y 1 4z 2 24
0 5 4x 2 12y 1 4z 2 24
x 5 4 2 2y 2 3zx 1 2y 1 3z 2 4 5 0
(11, 2, 25)
5 24(11, 2, 25)
(4, 212, 4) 3 (1, 2, 3) 5 (244, 28, 20)
z 515
22 5t, tPR.
y 5 2t
x 5 237
21 11t
r>
5 a237
2, 0,
15
2b 1 t(11, 2, 25), tPR,
(2372 , 0, 15
2 )
5 237
2
5 4 2 2(0) 2 3a15
2b
x 5 4 2 2y 2 3z
z 5 152y 5 0
5 26y 2 2z 1 15
5 3(4 2 2y 2 3z) 1 y 1 7z 1 3
0 5 3x 1 y 1 7z 1 3
x 5 4 2 2y 2 3zx 1 2y 1 3z 2 4 5 0
(11, 2, 25)
5 2 (11, 2, 25)
(3, 1, 7) 3 (1, 2, 3) 5 (211, 22, 5)
tPR.z 5 221
42 5t
y 5 2t
x 545
41 11t
r>
5 a45
4, 0, 2
21
4b 1 t(11, 2, 25), tPR.
0, 214 ), (45
4 ,
5 221
4
5 6 245
41 3(0)
z 5 6 2 x 1 3yx 5 45
4y 5 0
5 24x 1 22y 1 45
1 3
5 3x 1 y 1 7(6 2 x 1 3y)
0 5 3x 1 y 1 7z 1 3
z 5 6 2 x 1 3y4z 5 24 2 4x 1 12y
4x 2 12y 1 4z 2 24 5 0
(11, 2, 25)
9-31Calculus and Vectors Solutions Manual

21 11
Because each equation has each of , and thepossible solutions are all combinations of the positive and negative values for a, b, and c: ,
,
and
23. The general form of such a parabola isWe need to determine a, b, and c.
Since , , and all lie on theparabola, we get the system of equations
Adding the first and second equations gives
Subtracting the first from the second equation gives
Using the fact that and in thethird equation gives
So using once more that we substitutethis value in for a and get
So the equation of the parabola we seek is
24. The equation of the plane iswhich has normal .
Converting this plane to parametric form gives
So for any point on this plane,we can form the vector
This vector is perpendicular to the plane when it is parallel to the normal vector . Two vectors are parallel precisely when their cross product is the zero vector.
So we get the system of equations
Subtracting four times the third equation from thefirst equation gives
Substituting this value for t into the second equationgives
Substituting these values for s and t into the equationfor Y gives
So the point M we wanted is .M(297 , 47, 2
337 )
5 a29
7,
4
7, 2
33
7b1 5a4
7bb
Y(s, t, 9 2 4s 1 5t) 5 Ya29
7,
4
7, 9 2 4a29
7b
s 529
7
17s 5493
7
5 59 1 20a4
7b 2 17s
0 5 59 1 20t 2 17s
t 54
7
42t 2 24 5 0
23 2 4t 2 5s 5 03
59 1 20t 2 17s 5 02
68 1 26t 2 20s 5 01
5 (0, 0, 0)
5 (68 1 26t 2 20s, 59 1 20t 2 17s, 23 2 4t 2 5s)
(s 2 3, t 2 2, 14 2 4s 1 5t) 3 (4, 25, 1)
(4, 25, 1)
XY>
5 (s, t, 9 2 4s 1 5t) 2 (3, 2, 25)
5 (s 2 3, t 2 2, 14 2 4s 1 5t)
Y(s, t, 9 2 4s 1 5t)z 5 9 2 4s 1 5t, s, tPR.
y 5 tx 5 s
(4, 25, 1)4x 2 5y 1 z 2 9 5 0,
y 57
6x2 2
3
2x 2
2
3.
c 5 22
3
57
61 c
1
25 a 1 c
a 1 c 5 12,
a 57
6
7
25 3a
5 3a 25
2
5 3a 1 2a23
2b 1
1
2
5 3a 1 2b 1 (a 1 c)
1 5 4a 1 2b 1 c
b 5 232a 1 c 5 1
2
b 5 23
2
2b 5 23
a 1 c 51
2
4a 1 2b 1 c 5 13
a 1 b 1 c 5 212
a 2 b 1 c 5 21
(2, 1)(1, 21)(21, 2)
y 5 ax2 1 bx 1 c.
(12, 21, 21
3).(212, 21, 13),(21
2, 1, 213),
(212, 1, 13),(1
2, 21, 213),(1
2, 21, 13)(12, 1, 21
3),
(12, 1, 13)
c2,a2, b2
c 5 21
3c 5
1
3,b 5 21,b 5 1,a 5 2
1
2,a 5
1
2,
c 5 21
3c 5
1
3,
2
0.251
5
11
3
c2 5 40,
a 5 21
2a 5
1
2,
21
a2 1229
15 55,
b 5 21b 5 11,546
b2 5 46,524
521
a2 1229
b2 5 55552413
511
a2 1213
b2 5 31452311
9-32 Chapter 9: Relationships Between Points, Lines, and Planes

25.
26. a. The vector
This is a direction vector for the line containing thesegment . The point is on thisline, so the vector equation of this line is
b. Based on the equation of the line found in part a.,a general point on this line is of the form
For this general point, the vector
This vector will be perpendicular to the directionvector for the line found in part a. at the point J weseek. This means that
Substituting this value of t into the equation for thegeneral point on the line in part a.,
These are the coordinates for the point J we wanted.c. Using the coordinates for J found in part b.,
This vector forms the height of DEF, and thelength of this vector is
The length of the base of DEF is
So the area of DEF equals
units2
27.
Chapter 9 Test, p. 5561. a.
b.
2. Use the distance equation.
a. 8x 2 8y 1 4z 2 7 5 0
A(3, 2, 3)
d 50Ax0 1 By0 1 Cz0 1 D 0
"A2 1 B2 1 C2
0 5 0
3 1 1 2 5 1 1 5 0
3 2 (21) 1 (25) 1 1 5 0
x 2 y 1 z 1 1 5 0
(3, 21, 25)
z 5 25y 5 21,x 5 3,
z 5 6 1 11(21)
y 5 2 1 3(21),x 5 4 1 (21),L1:
s 5 21
y 5 21 5 2 1 3sz 5 4 1 9ty 5 21,x 5 5 1 2t,L2:
z 5 6 1 11sy 5 2 1 3s,x 5 4 1 s,L1:
tPRr>
2 5 (5, 21, 4) 1 t(2, 0, 9),
sPR,r>
1 5 (4, 2, 6) 1 s(1, 3, 11),
6x 2 8y 1 9z 2 115 5 0
D 5 2115
6x 2 8y 1 9z 1 D 5 0
n1
>
3 n2
>
5 (3, 0, 22) 3 (4, 3, 0) 5 (6, 28, 9)
(5, 25, 5)
4x 1 3y 1 7 5 0
3x 2 2z 1 1 5 0
8 33.26
1
2(!50)aÅ
177
2b 5
5
2!177
^8 7.07
5 "50
5 "(25)2 1 (24)2 1 (23)2
@EF>
@ 5 0 (25, 24, 23) 0^
8 9.41
5 Å177
72
5 Åa27
2b2
1 (22)2 1 a17
2b2
@ JD>
@ 5 ` a27
2, 22,
17
2b `
^
JD>
5 (3, 0, 7) 2 a13
2, 2, 2
3
2b
5 a27
2, 22,
17
2b
5 a13
2, 2, 2
3
2b
5 Ja21 2 5a23
2b, 24 2 4a2
3
2b, 26 2 3a2
3
2bb
J(21 2 5t, 24 2 4t, 26 2 3t)
t 5 23
2
5 275 2 50t5 25(4 1 5t) 2 4(4 1 4t) 2 3(13 1 3t)
0 5 (4 1 5t, 4 1 4t, 13 1 3t) ? (25, 24, 23)
JD>
5 (3, 0, 7) 2 (21 2 5t, 24 24t, 26 2 3t) 5 (4 1 5t, 4 1 4t, 13 1 3t)
J(21 2 5t, 24 2 4t, 26 2 3t), tPR.
r>
5 (21, 24, 26) 1 t(25, 24, 23), tPR.
E(21, 24, 26)EF
5 (25, 24, 23)
EF>
5 (21, 24, 26) 2 (4, 0, 3)
C 5 24B 5 2,A 5 5,
A 5 (24) 1 9 5 5B 5 3(24) 1 14 5 2,
C 5 2410C 5 240,
(C 1 9) 1 9C 5 231
A 1 9C 5 231A 1 3(3C 1 14) 5 11,
A 5 C 1 9B 5 3C 1 14,
A 1 3B 5 113C 2 B 5 214,A 2 C 5 9,
1 (A 2 C)
(3C 2 B)x11x2 2 14x 1 9 5 (A 1 3B)x2 1
5A(x2 1 1) 1 (Bx 1 C) 3x 2 1
(3x 2 1)(x2 1 1)
11x2 2 14x 1 9
(3x 2 1)(x2 1 1)
11x2 2 14x 1 9
(3x 2 1)(x2 1 1)5
A3x 2 1
1Bx 1 Cx2 1 1
9-33Calculus and Vectors Solutions Manual

or 1.08
b. First, find any point on one of the planes, then usethe other plane equation with the distance formula.
or 13.33
3. a.
b. To determine the point of intersection with thexz-plane, set the above y parametric equation equalto 0 and solve for the t. This t corresponds to thepoint of intersection.
4. a.
b. The three planes intersect at this point.5. a.
b. The three planes intersect at this line.6. a.
Then set the two new equations to each other andsolve for a m and n value that would give equivalentequations.
5 5x 1 0y 15
3(m 1 1)z 5
5
3n
5
3(3x 1 0y 1 (m 1 1)z 5 n)
3x 1 0y 1 (m 1 1)z 5 n1 L3:L1
5x 1 0y 1 (2m 1 2)z 5 2n 1 11 2L3: L2
2x 2 y 1 mz 5 nL3:
x 1 2y 1 2z 5 1L2:
x 1 y 1 z 5 0L1:
tPRz 5 t,y 53t4
11
2,x 5 2
1
22
t4
,
y 53t4
11
2
a21
22
t4b 2 y 1 (t) 5 21
x 2 y 1 z 5 21
x 5 21
22
t4
4x 1 (t) 5 22
z 5 t 4x 1 z 5 22
4x 1 z 5 22
) 511 (2 3 equation2Equation
x 2 5y 1 4z 5 233
2x 1 2y 2 z 5 02
x 2 y 1 z 5 211
(1, 25, 4)
z 5 4
(1) 2 (25) 1 z 5 10
y 5 25
4(1) 1 y 5 21
x 5 1
1 a6x 131
5y 5 225b
218.8x 5 218.8
231
5(4x 1 y 5 21)
6x 131
5y 5 225
) 531 (8 3 equation2Equation
4x 1 y 5 21
) 511 (2 3 equation2Equation
1
2x 1
2
5y 1
1
4z 5 2
1
23
2x 1 3y 2 2z 5 2212
x 2 y 1 z 5 101
(4, 0, 5)
tPRz 5 (5),y 5 1 2(5)
5,x 5
4(5)
5,
t 5 5
0 5 1 2t5
tPRz 5 t,y 5 1 2t5
,x 54t5
,
tPRz 5 t,y 5 1 2t5
,x 54t5
,
x 54t5
2x 1 a1 2t5b 1 (t) 5 1
2x 1 y 1 z 5 1
y 5 1 2t5
5y 1 (t) 5 5
z 5 t,L1 1 2L2: 5y 1 z 5 5
2x 1 y 1 z 5 1L2:
2x 1 3y 2 z 5 3L1:
540
3
50 2(8) 2 1(0) 1 2(0) 1 24 0"(2)2 1 (21)2 1 (2)2
d 50 2x0 2 1y0 1 2z0 1 24 0"(2)2 1 (21)2 1 (2)2
A(8, 0, 0)
2(8) 2 (0) 1 2(0) 2 16 5 0
2x 2 y 1 2z 1 24 5 0
2x 2 y 1 2z 2 16 5 0
513
12
50 8(3) 2 8(2) 1 4(3) 2 7 0"(8)2 1 (28)2 1 (4)2
d 50 8x0 2 8y0 1 4z0 2 7 0"(8)2 1 (28)2 1 (4)2
9-34 Chapter 9: Relationships Between Points, Lines, and Planes

b.
7. First find the parametric equations of each line.Then set these equations equal to each other to finda set of new equations. Use the dot product todetermine another set of equations that you willsolve for t and s. Find the corresponding points tothese values and the distance between them, whichis the distance between the two lines.
yields so
Then The points corresponding to these values of s and t are
and
Cumulative Review of Vectors,pp. 557–560
1. a. The angle, between the two vectors is found
from the equation
So
b. The scalar projection of on is equal towhere is the angle between the two
vectors. So from the above work,
and so the scalar projection of on is The vector projection of on
is equal to the scalar projection multiplied by the unit vector in the direction of So the vector projection is c. The scalar projection of on is equal to
where is the angle between the twovectors. So from the above work,and so the scalar projection of on is
The vector projection of on is equal to the scalar projection multiplied by theunit vector in the direction of So the vector projection is 2. a. Since the normal of the first plane is (4, 2, 6)and the normal of the second is whichare not scalar multiples of each other, there is a lineof intersection between the planes.The next step is to use the first and second equationsto find an equation with a zero for the coefficient of x.The first equation minus four times the second equation yields We maydivide by two to simplify, so If welet then or Substituting these into the second equation yields
or So the equation of the line in parametric form is
tPR.z 5 23 2 3t,y 5 t,x 5 8 1 4t,
x 5 8 1 4t.x 2 (t) 1 (23 2 3t) 2 5 5 0
z 5 23 2 3t.3t 1 z 1 3 5 0,y 5 t,3y 1 z 1 3 5 0.
0x 1 6y 1 2z 1 6 5 0.
(1, 21, 1),
2143 3 1
3(2, 21, 22) 5 (2289 , 14
9 , 289 ).
a>
.
a>
b>
2143 3 13 3 13 5 214
3 .
b>
a>0 b> 0 5 13,
cos (u) 5 2143 3 13
u0 b> 0cos (u),
a>
b>
21413 3 1
13(3, 24, 12) 5 (2 52169,
56169, 2
168169).
b>
.
b>
a>214
3 3 13 3 3 5 21413.
b>
a>0 a> 0 5 3,
cos (u) 5 2143 3 13
u0 a> 0 cos (u),
b>
a>
8 111.0°
u 5 cos21 ( 2143 3 13)
5 13
0 b> 0 5 "32 1 (24)2 1 122
5 3
0 a> 0 5 "22 1 (21)2 1 (22)2
5 214
5 2(3) 2 1(24) 2 2(12)
a>
? b>
5 (2, 21, 22) ? (3, 24, 12)
cos (u) 5a>
? b>
@a>
@ @b>
@.
u,
5 "104 or 10.20
5 "36 1 64 1 4
5 "(6)2 1 (28)2 1 (2)2
d 5 "(3 2 (23))2 1 (1 2 9)2 1 (4 2 2)2
5 (23, 9, 2).
2(1, 2, 5)(25, 5, 28) 15 (3, 1, 4)
(21, 3, 0) 1 4(1, 1, 1)
s 5 4.
t 5 2.84 2 24s 1 90t 5 0,32 1 24s 2 64t 2
8 3 L1 1 (23) 3 L2
28 1 8s 2 30t 5 0L5:
4 1 3s 2 8t 5 0,L4:
(1, 2, 5) ? (4 1 s 2 t, 28 1 s 2 2t, s 1 8 2 5t) 5 0
(1, 1, 1) ? (4 1 s 2 t, 28 1 s 2 2t, s 1 8 2 5t) 5 0
m1 ? UV>
5 0
UV>
5 (4 1 s 2 t, 28 1 s 2 2t, s 1 8 2 5t)s 2 (28 1 5t)42 (5 1 2t),
(23 1 s)UV>
5 3(21 1 s) 2 (25 1 t),
z 5 28 1 5ty 5 5 1 2t,x 5 25 1 t,L2:
z 5 sy 5 23 1 s,x 5 21 1 s,L1:
tPRr>
5 (25, 5, 28) 1 t(1, 2, 5),L2:
sPRr>
5 (21, 23, 0) 1 s(1, 1, 1),L1:
tPRz 5 t,y 5 1 2 t,x 5 21,
y 5 1 2 t (21) 1 y 1 (t) 5 0
z 5 t (21) 1 y 1 z 5 0
x 5 213x 5 23,1 L2:L1
2x 2 y 2 z 5 23L3:
x 1 2y 1 2z 5 1L2:
x 1 y 1 z 5 0L1:
n 5 23
5
3 n 5 2n 1 1
m 5 21
2m 1 2 55
3(m 1 1)
5x 1 0y 1 (2m 1 2)z 5 2n 1 1
5x 1 0y 15
3(m 1 1)z 5
5
3 n
9-35Calculus and Vectors Solutions Manual

To check that this is correct, we substitute in thesolution to both initial equations
and
Hence the line given by the parametric equationabove is the line of intersection for the planes.b. The angle between two planes is the same as theangle between their corresponding normal vectors.
so the angle between the planes is
3. a. We have that Also since
and are unit vectors, and moreover
So
b. Scalar multiples can be brought out to the frontof dot products. Hence and so by part a.,c. The dot product is distributive,so
Since and are unit vectors,and so by using the values found in part a. and b.,
4. a.
b.
5. The direction vectors for the positive x-axis,y-axis, and z-axis are (1, 0, 0), (0, 1, 0), and (0, 0, 1),respectively.
and
so the angle the vector
makes with the x-axis is
so the angle the vector
makes with the y-axis is
hence the angle the
vector makes with the z-axis is
6. a.
b. By the scalar law for vector multiplication,
c. The area of a parallelogram determined by andis equal to the magnitude of the cross product ofand
d.
So
7. A unit vector perpendicular to both and canbe determined from any vector perpendicular toboth and is a vector perpendicular toboth and
5 (21, 21, 0)
1(22) 2 (21)(2))
5 (21(3) 2 1(22), 1(2) 2 1(3),
a>
3 b>
5 (1, 21, 1) 3 (2, 22, 3)
b>
.a>
a>
3 b>
b>
.a>
b>
a>
5 0
5 3(7) 2 4(5) 2 1(1)
c>
? (b>
3 a>
) 5 (3, 24, 21) ? (7, 5, 1)
5 (7, 5, 1)
5 2 (27, 25, 21)
(b>
3 a>
) 5 2 (a>
3 b>
)
8 8.66 square units
5 "(27)2 1 (25)2 1 (21)2
5 0 (27, 25, 21) 0 5 0 a> 3 b
> 0 A 5 area of parallelogram
b>
.a>
b>
a>
5 6(27, 25, 21) 5 (242, 230, 26)
5 6(a>
3 b>
)
2a>
3 3b>
5 2(3)(a>
3 b>
)
5 (27, 25, 21)
1(1) 2 (22)(21))
5 (22(2) 2 3(1), 3(21) 2 1(2),
a>
3 b>
5 (1, 22, 3) 3 (21, 1, 2)
Q 231!29R 8 123.9°.cos21
(4,22,23) ? (0, 0, 1) 5 23,
Q 221!29R 5 111.8°.cos21
(4, 22, 23) ? (0, 1, 0) 5 22,
42.0°.Q 41!29R 8cos21
(4, 22, 23) ? (1, 0, 0) 5 4,
5 1.
5 !1
5 0 (0, 0, 1) 0 0 (1, 0, 0) 0 5 0 (0, 1, 0) 0
5 !29,
0 (4, 22, 23) 0 5 "42 1 (22)2 1 (23)2
5 18
5 22(29) 1 2(0)
1 0(3) 1 0(22))
5 22(3(2) 2 4(0) 2 5(3)) 1 2(1(0)
1 2(i>
1 0j>
1 0k>
) ? (0i>
1 3j>
2 2k>
)
5 22(3i>
2 4j>
2 5k>
) ? (2i>
1 0j>
1 3k>
)
22(3i>
2 4j>
2 5k>
) ? (2i>
1 3k>
) 1 2i>
? (3j>
2 2k>
)
5 27i>
2 19j>
2 14k>
5 2i>
2 4j>
1 6k>
2 8i>
2 16j>
2 20k>
2 i>
1 j>
2(i>
2 2j>
1 3k>
) 2 4(2i>
1 4j>
1 5k>
) 2 (i>
2 j>
)
53
2
(2x>
2 y>
) ? (x>
1 3y>
) 5 2(1) 1 (3) 2 A12B 2 3(1)
x>
? x>
5 y>
? y>
5 1,y>
x>
5 2x>
? x>
1 2x>
? 3y>
2 x>
? y>
2 3y>
? y>
5 2x>
? x>
1 2x>
? 3y>
2 y>
? x>
2 y>
? 3y>
5 2x>
? (x>
1 3y>
) 2 y>
? (x>
1 3y>
)
(x>
1 3y>
)(2x>
2 y>
) ?
2x>
? 3y>
5 2 3 3 3 12 5 3.
2x>
? 3y>
5 (2)(3)(x>
? y>
),
x>
? y>
5x>
? y>
1 3 15
1
2.cos (60°) 5
1
2.
0 x> 0 5 0 y> 0 5 1,y>
x>
cos (60°) 5x>
? y>
0 x> 0 0 y> 0 .Q 8!3!56R 8 51.9°.cos21
(4, 2, 6) ? (1, 21, 1) 5 8,
5 !3
0 (1, 21, 1) 0 5 "12 1 12 1 12
5 !56
0 (4, 2, 6) 0 5 "42 1 22 1 62
5 0.
5 (8 1 4t) 2 (t) 1 (23 2 3t) 2 5
x 2 y 1 z 2 5
5 0
1 6(23 2 3t) 2 14
4x 1 2y 1 6z 2 14 5 4(8 1 4t) 1 2(t)
9-36 Chapter 9: Relationships Between Points, Lines, and Planes

So is an unit vector
perpendicular to both and is another.
8. a. Answers may vary. For example:A direction vector for the line is
Since is a point on the line,is a vector
equation for a line and the corresponding parametricequation is
b. If the x-coordinate of a point on the line is 4, thenor At the point on the
line is Hence is a point on the line.9. The direction vector of the first line is while the direction vector for the second line is
So the direction vectorsfor the line are collinear. Hence the lines are parallel.The lines coincide if and only if for any point onthe first line and any point on the second line, thevector connecting the two points is a multiple of thedirection vector for the lines.(2, 0, 9) is a point on the first line and isa point on the second line.
for any Hence the lines are parallel and distinct.10. The direction vector for the parallel line is (0, 1, 1). Since parallel lines have collinear directionvectors, (0, 1, 1) can be used as a direction vectorfor the line. Since (0, 0, 4) is a point on the line,
is a vector equationfor a line and the corresponding parametric equationis 11. The line is parallel to the plane if and only if thedirection vector for the line is perpendicular to thenormal vector for the plane. The normal vector forthe plane is (2, 3, c). The direction vector for theline is (2, 3, 1). The vectors are perpendicular if andonly if the dot product between the two is zero.
So if then the dot product of normalvector and the direction vector is zero. Hence for
the line and plane are parallel.
12. First put the line in its corresponding parametricform. (3, 1, 5) is a direction vector and isthe origin point, so a parametric equation for theline is If we substitute these coordinates into the equationof the plane, we may find the s value where the lineintersects the plane.
So if then or At the point on the line is
To check that this point is also on the plane, we substitute the x, y, z values into the plane equation and check that it equals zero.
Hence is the point of intersection between
the line and the plane.13. a.
Two direction vectors are:
and(6, 0, 0) 2 (0, 0, 3) 5 (6, 0, 23).
(0, 3, 0) 2 (0, 0, 3) 5 (0, 3, 23)
y
(0, 0, 3)
(0, 3, 0)
(6, 0, 0)
z
x
(32, 2
316 , 13
6 ) 5 0
5x 1 y 2 2z 1 2 5 5a3
2b 1 a2
31
6b 2 2a13
6b 1 2
(32, 2
316 , 13
6 ).s 5 216,s 5 21
6.
1 1 6s 5 05x 1 y 2 2z 1 2 5 0,
5 1 1 6s 5 10 1 15s 1 2 5 1 s 2 6 2 10s 1 2
5 5(2 1 3s) 1 (25 1 s) 2 2(3 1 5s) 1 2
5x 1 y 2 2z 1 2
sPR.z 5 3 1 5s,y 5 25 1 s,x 5 2 1 3s,
(2, 25, 3)
c 5 213,
c 5 213, 5 13 1 c
(2, 3, c) ? (2, 3, 1) 5 2(2) 1 3(3) 1 c(1)
tPR.z 5 4 1 t,y 5 t,x 5 0,
tPR,r>
5 (0, 0, 4) 1 t(0, 1, 1),
kPR.
2 k(21, 5, 2)(21, 5, 21)(2, 0, 9) 2 (3, 25, 10) 5
(3, 25, 10)
(1, 25, 22) 5 2 (21, 5, 2).
(21, 5, 2),
C(4, 213, 23)
(2, 23, 1) 2 2(21, 5, 2) 5 (4, 213, 23).
t 5 22,t 5 22.2 2 t 5 4,
tPR.
z 5 1 1 2t,y 5 23 1 5t,x 5 2 2 t,
tPR,r>
5 (2, 23, 1) 1 t(21, 5, 2),
A(2, 23, 1)
5 (21, 5, 2)
AB>
5 (1, 2, 3) 2 (2, 23, 1)
AB>
.
Q 1!2, 1!2
, 0Rb>
.a>
1!2(21, 21, 0) 5 Q2 1!2
, 2 1!2, 0R
5 !2
5 "(21)2 1 (21)2 1 02
0 a> 3 b> 0 5 0 (21, 21, 0) 0
9-37Calculus and Vectors Solutions Manual

b.
Two direction vectors are:
and
c.
Two direction vectors are:
and
14. The plane is the right bisector joiningand its image. The line connecting the
two points has a direction vector equal to that of thenormal vector for the plane. The normal vector forthe plane is So the line connecting thetwo points is or in
corresponding parametric form is
The intersection of this line and the plane is thebisector between P and its image. To find this pointwe substitute the parametric equation into the planeequation and solve for t.
So if then or So the point of intersection is occurs at sincethe origin point is P and the intersection occurs at themidpoint of the line connecting P and its image, theimage point occurs at So the image point is at
So the image point is 15. Let (a, b, c) be the direction vector for this line.So a line equation is Since (1, 0, 2) is not on the other line, we maychoose a, b, and c such that the intersection occursat Since the line is supposed to intersect thegiven line at a right angle, the direction vectorsshould be perpendicular. The direction vectors areperpendicular if and only if their dot product is zero.The direction vector for the given line is (1, 1, 2).
so
Also is thepoint of intersection.By substituting for b,
So for some s value,
Subtracting the first equation from the second yieldsthe equation,Simplifying this gives or just
Subtracting twice the first equation from the thirdyields the equation,So and which is twoequations with two unknowns. Twice the first plus the second equations gives or Solving back for a gives and since
Since the direction vectors,a 1 b 1 2c 5 0,b 5 73.
b 5 2a 2 2c,2113
c 5 23.0a 1 3c 5 2
22a 1 c 5 8,a 1 c 5 23
8 5 22a 1 c.
a 1 c 5 23.
6 5 22a 2 2c5 1 0s 5 22a 2 2c 2 1.
z 5 4 1 2s 5 2 1 c y 5 3 1 s 5 2a 2 2c x 5 22 1 s 5 1 1 a
2a 2 2c, 2 1 c).(1 1 a, b, 2 1 c) 5 (1 1 a,
(1, 0, 2) 1 (a, b, c) 5 (1 1 a, b, 2 1 c)
b 5 2a 2 2c.
(a, b, c) ? (1, 1, 2) 5 a 1 b 1 2c 5 0,
t 5 1.
tPR.r>
5 (1, 0, 2) 1 t(a, b, c),
(27, 10, 20).
z 5 4 2 4(24) 5 20.3(24) 5 10,y 5 22 2
x 5 1 1 2(24) 5 27,
t 5 2 3 (22) 5 24.
t 5 22,
t 5 22.
58 1 29t 5 0,2x 2 3y 2 4z 1 66 5 0,
5 58 1 29t 5 2 1 4t 1 6 1 9t 2 16 1 16t 1 66
5 2(1 1 2t) 2 3(22 2 3t) 2 4(4 2 4t) 1 66
2x 2 3y 2 4z 1 66
tPR.z 5 4 2 4t,y 5 22 2 3t,x 5 1 1 2t,
tPR,(1, 22, 4) 1 t(2, 23, 24),
(2, 23, 24).
P(1, 22, 4)
(1, 1, 21) 2 (0, 0, 0) 5 (1, 1, 21).
(0, 3, 6) 2 (0, 0, 0) 5 (0, 3, 6)
y
(0, 0, 0)
(1, 1, –1)
(0, 3, 6)
z
x
(3, 2, 1) 2 (0, 0, 0) 5 (3, 2, 1).
(23, 22, 2) 2 (0, 0, 0) 5 (23, 22, 2)
(0, 0, 0)
(3, 2, 1)y
z
x
(–3, –2, 2)
9-38 Chapter 9: Relationships Between Points, Lines, and Planes

(1, 1, 2) and (a, b, c) are perpendicular. A directionvector for the line is .We need to check that
is a point on thegiven line.
at The point on the given line at is Hence
is a line thatintersects the given line at a right angle.16. a. The Cartesian equation is found by taking thecross product of the two direction vectors, and
So is a normal vector for theplane, so the plane has the form
for some constant D. Tofind D, we know that is a point on theplane, so So
or So the Cartesianequation for the plane is b. Substitute into the formula to determine distancebetween a point and a plane. So the distance, d, of(0, 0, 0) to the plane is
equal to
So 17. a. is a normal vector for the plane, sothe plane has the form forsome constant D. To find D, we know that
is a point on the plane, so So
or So the Cartesian equation for the planeis b. Since the plane is perpendicular to the line connecting (2, 1, 8) and a direction vector for the line acts as a normal vector for theplane. So is anormal vector for the plane. So the plane has theform for some constant D.To find D, we know that is a point on theplane, so So
or So the Cartesian equation for the plane is
c. Since the plane is perpendicular to the z-axis, adirection vector for the z-axis acts as a normal vectorfor the plane. Hence (0, 0, 1) is a normal vector forthe plane. So the plane has the form forsome constant D. To find D, we know that is a point on the plane, so
So orSo the Cartesian equation for the plane is
d. The Cartesian equation can be found by takingthe cross product of the two direction vectors forthe plane. Since and are twopoints on the plane
is adirection vector for the plane. Since the plane isparallel to the y-axis, (0, 1, 0) is also a directionvector for the plane.
So (1, 0, 2) is a normal vector for the plane, so theplane has the form for someconstant D. To find D, we know that is apoint on the plane, so
So or So the Cartesian equation for the plane is
18.
From the triangle DEF and the cosine law, we have
km h.To find the direction of the vector, the sine law isapplied.
sin 45°
336.808
sin /EDF100
.
sin /DEF
0R> 0 5sin /EDF
100
>8 336.80
0R> 0 2 5 4002 1 1002 2 2(400)(100) cos (45°)
400 km/h
100 km/h
Position Diagram Vector Diagram
45°
400 km/h
100 km/h45°
R
D
E
F
x 1 2z 1 1 5 0.
D 5 1.
21 1 D 5 0,D 5 0.(3) 1 0(1) 1 2(22) 1
(3, 1, 22)
x 1 0y 1 2z 1 D 5 0,
5 (1, 0, 2)
(21)(1), (21)(0)2 (2)(0), 2(1) 2 (22)(0))
(2, 22, 21) 3 (0, 1, 0) 5 (22(0) 2
(2, 22, 21)(3, 1, 22) 2 (1, 3, 21) 5
(1, 3, 21)(3, 1, 22)
z 2 3 5 0.
D 5 23.
3 1 D 5 0,D 5 0.0(3) 1 0(21) 1 (3) 1
(3, 21, 3)
z 1 D 5 0,
x 2 y 1 12z 2 27 5 0.
D 5 227.27 1 D 5 0,
(4) 2 (1) 1 12(2) 1 D 5 0.
K(4, 1, 2)
x 2 y 1 12z 1 D 5 0,
(2, 1, 8) 2 (1, 2, 24) 5 (1, 21, 12)
(1, 2, 24),
4z 2 7 5 0.3x 2 5y 1
D 5 27.
7 1 D 5 0,3(21) 2 5(2) 1 4(5) 1 D 5 0.
A(21, 2, 5)
3x 2 5y 1 4z 1 D 5 0,
(3, 25, 4)
d 5 24!2618 1.49.
@ 12(0) 2 9(0) 2 6(0) 1 24 @
"122 1 (29)2 1 (26)2 .
12x 2 9y 2 6z 1 24 5 0
12x 2 9y 2 6z 1 24 5 0.
D 5 24.224 1 D 5 0,
12(1) 2 9(2) 2 6(3) 1 D 5 0.
A(1, 2, 3)
D 5 0,12x 2 9y 2 6z 1
5 (12, 29, 26)
5 (12, 29, 26)
23(2) 2 (22)(0))
23(0) 2 (23)(23),
AB>
3 AC>
5 (22(23) 2 (23)(2),
AC>
5 (1, 4, 0) 2 (1, 2, 3) 5 (0, 2, 23)
5 (23, 22, 23)
AB>
5 (22, 0, 0) 2 (1, 2, 3)
AC>
.
AB>
tPR,t(211, 7, 2),q>
5 (1, 0, 2) 1
Q283 , 73,
83R.s 5 22
3
s 5 223.x 5 22 1 s 5 28
3,
(283 , 73,
83)(1, 0, 2) 1 (a, b, c) 5
(211, 7, 2)
9-39Calculus and Vectors Solutions Manual

Thus so the resultant velocity is336.80 km h, N 12.1° W.19. a. The simplest way is to find the parametricequation, then find the corresponding vector equation.If we substitute and and solve for z, weobtain or This yields the parametric equations and So the corresponding vectorequation is s, To check that this is correct, find theCartesian equation corresponding to the abovevector equation and see if it is equivalent to theCartesian equation given in the problem. A normalvector to this plane is the cross product of the twodirectional vectors.
So is a normal vector for the plane, so theplane has the form for someconstant D. To find D, we know that (0, 0, 6) is a pointon the plane, so So or So the Cartesian equationfor the plane is Since this isthe same as the initial Cartesian equation, the vectorequation for the plane is correct.b.
20. a. The angle, between the plane and the lineis the complementary angle of the angle betweenthe direction vector of the line and the normal
vector for the plane. The direction vector of the lineis and the normal vector for the plane is (1, 2, 1).
So the angle between the normal vector and thedirection vector is So
To the nearest degree, .b. The two planes are perpendicular if and only iftheir normal vectors are also perpendicular. A normal vector for the first plane is anda normal vector for the second plane is
The two vectors are perpendicular ifand only if their dot product is zero.
Hence the normal vectors are perpendicular. Thusthe planes are perpendicular.c. The two planes are parallel if and only if theirnormal vectors are also parallel. A normal vector forthe first plane is and a normal vector forthe second plane is Since both normalvectors are the same, the planes are parallel. Since
the pointis on the second plane. Yet since
isnot on the first plane. Thus the two planes areparallel but not coincident.21.
Vector diagram
Position diagram
25 N
40 N
40 N
R
D
FE
60°
25 N
40 N
60°
120°
120°
(0, 21, 0)2(0) 2 3(21) 1 2(0) 2 1 5 2 2 0,
(0, 21, 0)
2(0) 2 3(21) 1 2(0) 2 3 5 0,
(2, 23, 2).
(2, 23, 2)
5 0.
1 1(217)
(2, 23, 1) ? (4, 23, 217) 5 2(4) 2 3(23)
(4, 23, 217).
(2, 23, 1)
u 5 16°
u 8 90° 2 74.21° 5 15.79°.
Q 23!6R 8 74.21°.cos21
(2, 21, 2) ? (1, 2, 1) 5 2(1) 2 1(2) 1 2(1) 5 2
5 !6
0 (1, 2, 1) 0 5 "12 1 22 1 12
5 3.
5 !9
5 "22 1 (21)2 1 220 (2, 21, 2) 0(2, 21, 2)
u,
y
(0, 0, 6)
(0, –3, 0)
(2, 0, 0)
z
x
3x 2 2y 1 z 2 6 5 0.
D 5 26.6 1 D 5 0,
3(0) 2 2(0) 1 (6) 1 D 5 0.
3x 2 2y 1 z 1 D 5 0,
(3, 22, 1)
5 (3, 22, 1)
23(0) 2 1(2), 1(1) 2 0(0))
n>
5 (1, 0, 23) 3 (0, 1, 2) 5 (0(2) 2 (23)(1),
tPR.
r>
5 (0, 0, 6) 1 s(1, 0, 23) 1 t(0, 1, 2),
z 5 6 2 3s 1 2t.y 5 t,x 5 s,
z 5 6 2 3s 1 2t.3s 2 2t 1 z 2 6 5 0
y 5 tx 5 s
>/EDF 8 12.1°,
sin /EDF 8 0.2100.
sin /EDF 8sin 45°
336.803 100.
9-40 Chapter 9: Relationships Between Points, Lines, and Planes

From the triangle DEF and the cosine law, we have
N.To find the direction of the vector, the sine law isapplied.
Thus so the resultant force isapproximately 56.79 N, 37.6° from the 25 N forcetowards the 40 N force. The equilibrant force hasthe same magnitude as the resultant, but it is in the opposite direction. So the equilibrant is approximately 56.79 N,from the 25 N force away from the 40 N force.22.
b.
23. a. The unit vector in the same direction of issimply divided by the magnitude of
So the unit vector in the same direction of is
b. The unit vector in the opposite direction of issimply the negative of the unit vector found in parta. So the vector is 24. a. Since OBCD is a parallelogram, the point Coccurs at So is onevector equivalent to a diagonal and is the other.
b.
So the angle between these diagonals is
c. and
So the angle between these diagonals is
25. a. First step is to use the first equation toremove x from the second and third.
So we have
Hence or Since both equations arethe same, this implies that there are infinitely manysolutions. Let then by substituting into theequation 2, we obtain
or Hence the solution to these equations is
b. First step is to use the first equation to remove xfrom the second and third.
So we have2
2Now the fourth and fifth equations are used tocreate a sixth equation where the coefficient of y is zero.
So or z 5 23.22z 5 6
5140x 1 0y 2 2z 5 6,6
33210x 2 1y 2 5z 5 13,5
23110x 1 1y 1 3z 5 27,4
2x 2 y 1 3z 5 2123
x 1 2y 1 z 5 22
22x 2 3y 1 z 5 2111
tPR.z 5 1,y 5 21 1 t,x 5 t,
y 5 21 1 t.2t 1 y 1 2(1) 5 1,
x 5 t,
z 5 1.3z 5 3,
3113210x 1 0y 1 3z 5 3,5
2110x 1 0y 1 3z 5 3,4
x 2 y 1 4z 5 53
2x 1 y 1 2z 5 12
x 2 y 1 z 5 21
A 5!50!85B 8 85.6°.cos21
5 5
(21, 7) ? (9, 2) 5 2 (9) 1 7(2)
5 "85
0 (9, 2) 0 5 "92 1 22
5 "50
0 (21, 7) 0 5 "(21)2 1 72.
OD>
5 (9, 2)OB>
5 (21, 7)
A 235!145!125B 8 74.9°.cos21
5 235
(8, 9) ? (10, 25) 5 8(10) 1 9(25)
5 "125
0 (10, 25) 0 5 "102 1 (25)2
5 "145
0 (8, 9) 0 5 "82 1 92
BD>
5 (9, 2) 2 (1, 7) 5 (10, 25)
OC>
5 (8, 9) 2 (0, 0) 5 (8, 9)
BD>
OC>
(21, 7) 1 (9, 2) 5 (8, 9).
2 A67, 27, 237B 5 A26
7, 227,
37B.
a>
1
0 a> 0a>
5 17(6, 2, 23) 5 (6
7, 27, 2
37).
a>
5 7
5 "49
0 a> 0 5 "62 1 22 1 (23)2
a>
.a>
a>
2a2a
2a12b
12b
12b+
a
a
b –b
–b
a–b
180° 2 37.6° 5 142.4°
/EDF 8 37.6°,
sin /EDF 8 0.610.
sin /EDF 8sin 120°
56.793 40.
sin 120°
56.798
sin /EDF40
.
sin /DEF
0R> 0 5sin /EDF
100
8 56.79
0R> 0 2 5 402 1 252 2 2(40)(25) cos (120°)
9-41Calculus and Vectors Solutions Manual

Substituting this into equation yields,or Finally substitute z and
y values into equation to obtain the x value.or
Hence the solution to these three equations is
c. First step is to notice that the second equation issimply twice the first equation.
So the solution to these equations is the same as thesolution to just the first and third equations.Moreover since this is two equations with threeunknowns, there will be infinitely many solutions.
Hence or Let and solve for zusing the first equation.
so Hence the solution to these equations is
d. First step is to notice that the second equations is simply twice the first and the third equation issimply times the first equation.
So the solution to these equations is the same as thesolution to just the first equation. So the solution tothese equations is a plane. To solve this in parametricequation form, simply let and and findthe x value.
or So the solution to these equations is
s,26. a. Since the normal of the first equation is and the normal of the second is
which are not scalar multiples of eachother, there is a line of intersection between theplanes. The next step is to use the first and secondequations to find an equation with a zero for thecoefficient of x. The second equation minus the firstequation yields We maydivide by three to simplify, so If we let then or Substituting these into the first equation yields
or So theequation of the line in parametric form is
To check that this is correct, we substitute in thesolution to both initial equations
and
Hence the line given by the parametric equationabove is the line of intersection for the planes.b. The normal vector for the first plane is
while the normal vector for the secondplane is Hence theplanes have collinear normal vectors, and so areparallel.The second equation is equivalent to
since we may divide the equationby two. Since the constant on the right in the firstequation is 28, while the constant on the right in thesecond equivalent equation is 30, these planes are parallel and not coincident. So there is no intersection.c. The normal vector for the first equation is
while the normal vector for the secondequation is (2, 1, 1). Since the normal vectors arenot scalar multiples of each other, there is a line ofintersection between the planes.The next step is to use the first and second equationsto find an equation with a zero for the coefficient of x.The second equation minus twice the first equationyields Solving for z yields, If we let then
Substituting these into the first equation yieldsor So the
equation of the line in parametric form is
To check that this is correct, we substitute in thesolution to both initial equations
and
Hence the line given by the parametric equationabove is the line of intersection for the planes.27. The angle, between the plane and the line isthe complementary angle of the angle between thedirection vector of the line and the normal vectorfor the plane. The direction vector of the line is
u,
5 0.
2x 1 y 1 z 2 4 5 2(2 2 2t) 1 (t) 1 (3t) 2 4
5 0
x 2 y 1 z 2 2 5 (2 2 2t) 2 (t) 1 (3t) 2 2
tPR.z 5 3t,y 5 t,x 5 2 2 2t,
x 5 2 2 2t.x 2 (t) 1 (3t) 2 2 5 0
z 5 3(t) 5 3t.y 5 t,z 5 3y.
0x 1 3y 2 z 1 0 5 0.
(1, 21, 1),
x 2 4y 1 7z 5 30,
(2, 28, 14) 5 2(1, 24, 7).
(1, 24, 7),
5 0.
x 1 2y 2 2z 1 2 5 (0) 1 2(21 1 t) 2 2(t) 1 2
5 0
x 2 y 1 z 2 1 5 (0) 2 (21 1 t) 1 (t) 2 1
tPR.z 5 t,y 5 21 1 t,x 5 0,
x 5 0.x 2 (21 1 t) 1 t 2 1 5 0
y 5 21 1 t.y 2 t 1 1 5 0,z 5 t,y 2 z 1 1 5 0.
0x 1 3y 2 3z 1 3 5 0.
(1, 2, 22),
(1, 21, 1)
tPR.z 5 s,y 5 t,x 5 1 1 3s 1 t,
x 5 1 1 t 1 3sx 2 t 2 3s 5 1,
z 5 sy 5 t
24x 1 4y 1 12z 5 243
2x 2 2y 2 6z 5 22
x 2 y 2 3z 5 11
24
tPR.z 5 23 1 t,y 5 t,x 5 1,
z 5 23 1 t2(1) 2 t 1 z 5 21,
y 5 tx 5 1.4x 5 4
3114x 1 0y 1 0z 5 4,4
2x 1 y 2 z 5 53
4x 2 2y 1 2z 5 222
2x 2 y 1 z 5 211
(1, 2, 23).
x 5 1.x 1 2(2) 1 (23) 5 2
2
y 5 2.y 1 3(23) 5 27
4
9-42 Chapter 9: Relationships Between Points, Lines, and Planes

and the normal vector for the plane is
So the angle between the normal vector and thedirection vector is So
28. a. We have that Also
since and are unit vectors, andand moreover So
The dot product is distributive, so
b. We have that Also since
and Also
and The dot product is distributive, so
29. The origin, (0, 0, 0), and are twopoints on this line. So is a direction vectorfor this line and since the origin is on the line, a possible vector equation is
is a normal vector for the plane. So theequation of the plane is
is a point on the plane. Substitute thecoordinates to determine the value of D.
The equation of the plane is 30. The plane is the right bisector joining
and its image. The line connecting thetwo points has a direction vector equal to that of thenormal vector for the plane. The normal vector forthe plane is So the line connecting thetwo points is or incorrespondingparametric form is The intersection of this line and the plane is thebisector between P and its image. To find this pointwe plug the parametric equation into the planeequation and solve for t.
So if then or So the point of intersection is occurs at sincethe origin point is P and the intersection occurs atthe midpoint of the line connecting P and its image,the image point occurs at So theimage point is at So the image point is 31. a. Thinking of the motorboat’s velocity vector(without the influence of the current) as starting at the origin and pointing northward toward theopposite side of the river, the motorboat has velocityvector (0, 10) and the river current has velocity vector (4, 0). So the resultant velocity vector of themotorboat is
To reach the other side of the river, the motorboatneeds to cover a vertical distance of 2 km. So thehypotenuse of the right triangle formed by the marina, the motorboat’s initial position, and themotorboat’s arrival point on the opposite side of the river is represented by the vector
(We multiplied by to create a vertical componentof 2 in the motorboat’s resultant velocity vector,the distance needed to cross the river.) Since thisnew vector has horizontal component equal to this means that the motorboat arrives kmdownstream from the marina.
45 5 0.8
45,
15
1
5(4, 10) 5 a4
5, 2b
(0, 10) 1 (4, 0) 5 (4, 10)
(21, 1, 0).
z 5 1 2 (1) 5 0.y 5 1,x 5 21,
t 5 2 3 12 5 1.
t 5 12,
t 5 12.21 1 2t 5 0,y 2 z 5 0,
5 21 1 2t 0x 1 y 2 z 5 0(21) 1 (t) 2 (1 2 t)
tPR.y 5 t, z 5 1 2 t,x 5 21,
tPR,(21, 0, 1) 1 t(0, 1, 21),
(0, 1, 21).
P(21, 0, 1)
2x 1 3y 1 z 2 11 5 0.
D 5 211
1 1 9 1 1 1 D 5 0
(21, 3, 1)
2x 1 3y 1 z 1 D 5 0.
(21, 3, 1)
tPR.r>
5 t(21, 3, 1),
(21, 3, 1)
(21, 3, 1)
5 84
2 3(16)
5 8(9) 1 12(6) 2 2(6)
2 3y>
? y>
5 8x>
? x>
1 12x>
? y>
2 2y>
? x>
2 y>
? (2x>
1 3y>
)
(4x>
2 y>
) ? (2x>
1 3y>
) 5 4x>
? (2x>
1 3y>
)
y>
? y>
5 0 y> 0 2 5 16.
x>
? x>
5 0 x> 0 2 5 9x>
? y>
5 12(4)(3) 5 6.
cos (60°) 5 12,0 y> 0 5 4,0 x> 0 5 3,
cos (60°) 5x>
? y>
0 x> 0 0 y> 0 .5 2
3
2
2 2(1)
5 6(1) 2 12a1
2b 1 a1
2b
2 2b>
? b>
5 6a>
? a>
2 12a>
? b>
1 a>
? b>
1 b>
? a>
1 b>
? (22b>
)
5 6a>
? a>
1 6a>
? (22b>
)
1 b>
? (a>
2 2b>
)
(6a>
1 b>
) ? (a>
2 2b>
) 5 6a>
? (a>
2 2b>
)
a>
? b>
5a>
? b>
1 3 15 1
2.
cos (60°) 5 12.a
>
? a>
5 b>
? b>
5 1,
0 a> 0 5 0 b> 0 5 1b>
a>
cos (60°) 5a>
? b>
0 a> 0 0 b> 0 .u 5 90 260° 5 30°.
A 2!2 !8B 5 60°.cos21
(1, 21, 0) ? (2, 0, 22) 5 1(2) 2 1(0) 1 0(22) 5 2
0 (2, 0, 22) 0 5 "22 1 02 1 (22)2 5 "8
5 "2
0 (1, 21, 0) 0 5 "12 1 (21)2 1 02
(2, 0, 22).
(1, 21, 0)
9-43Calculus and Vectors Solutions Manual

b. The motorboat is travelling at 10 km h, and inpart a. we found that it will travel along the vector
The length of this vector is
So the motorboat travels a total of km tocross the river which, at 10 km h, takes
hoursminutes.
32. a. Answers may vary. For example:A direction vector for this line is
So, since the point is on this line, thevector equation of this line is
The equivalent parametric form is
b. The line found in part a. will lie in the planeif and only if both points
and lie in this plane. We verify this by substituting these points into theequation of the plane, and checking for consistency.For A:
For B:
Since both points lie on the plane, so does the linefound in part a.33. The wind velocity vector is represented by (16, 0),and the water current velocity vector is representedby (0, 12). So the resultant of these two vectors is
.Thinking of this vector with tail at the origin andhead at point (16, 12), this vector forms a right triangle with vertices at points (0, 0), (0, 12), and(16, 12). Notice that
This means that the sailboat is moving at a speed of 20 km h once we account for wind and watervelocities. Also the angle, , this resultant vectormakes with the positive y-axis satisfies
So the sailboat is travelling in the directionN E, or equivalently E N.34. Think of the weight vector for the crane with tailat the origin at head at (we use one unitfor every kilogram of mass). We need to express thisweight vector as the sum of two vectors: one that isparallel to the inclined plane and pointing down thisincline (call this vector and one that isperpendicular to the inclined plane and pointingtoward the plane (call this vector Theangle between and is and the anglebetween and is Of course, and are perpendicular. Using the formula for dot product,we get
So, since c is positive and d is negative (thinking ofthe inclined plane as moving upward from left toright as we look at it means that points down and
to the right), this last equation means that
So a vector in the same direction as is We can find the length of by computing the scalar
projection of on which equals
That is, Now we can find the lengthof as well by using the fact that
5 200
5 "40 000
0 x> 0 5 "160 000 2 120 000
0 x> 0 2 1 (200"3)2 5 4002
0 x> 0 2 1 0 y> 0 2 5 0 (0, 2400) 0 2x>
0 y> 0 5 200"3.
5 200"3
(0, 2400) ? (1, 2"3)
0 (1, 2"3) 0 5400"3
2
(1, 2!3),(0, 2400)
y>
(1, 2"3).y>
dc
5 2"3
y>
d2 5 3c2
4d2 5 3(c2 1 d2)
22d 5 "3 ? "c2 1 d2
2400d 5 400a"3
2b"c2 1 d2
y>
? (0, 2400) 5 0 y> 0 0 (0, 2400) 0cos 30°
y>
x>
30°.(0, 2400)y>
60°(0, 2400)x>
y>
5 (c, d)).
x>
5 (a, b)),
(0, 2400)
36.9°53.1°
8 53.1°
u 5 cos 21a12
20b
cos u 512
20
u
> 5 20
5 "400
0 (16, 12) 0 5 "162 1 122
(16, 0) 1 (0, 12) 5 (16, 12)
6 2 2(3) 1 4(4) 2 16 5 0
2 2 2(21) 1 4(3) 2 16 5 0
B(6, 3, 4)A(2, 21, 3)
x 2 2y 1 4z 2 16 5 0
tPR.z 5 4 1 t,y 5 3 1 4tx 5 6 1 4t
tPR.r>
5 (6, 3, 4) 1 t(4, 4, 1),
B(6, 3, 4)
5 (4, 4, 1)
AB>
5 (6, 3, 4) 2 (2, 21, 3)
5 12
"4.64 4 10 8 0.2
>!4.64
5 "4.64
a4
5, 2b ` 5 Åa4
5b2
1 22
(45, 2).
>
9-44 Chapter 9: Relationships Between Points, Lines, and Planes

So we get thatand This means that the
component of the weight of the mass parallel to theinclined plane is
N,and the component of the weight of the mass perpendicular to the inclined plane is
35. a. True; all non-parallel pairs of lines intersectin exactly one point in However, this is not the case for lines in (skew lines provide a counterexample).b. True; all non-parallel pairs of planes intersect in aline in .c. True; the line has direction vector(1, 1, 1), which is not perpendicular to the normalvector to the plane k any constant. Since these vectors are notperpendicular, the line is not parallel to the plane,and so they will intersect in exactly one point.d. False; a direction vector for the line
is (2, 1, 2). A direction vector
for the line is
or (2, 1, 1) (which is parallel to Since (2, 1, 2) and (2, 1, 1) are obviously not parallel, these two lines are not parallel.36. a. A direction vector for
is (0, 3, 1), and a direction vector for
is (1, 1, k). But (0, 3, 1) is not a nonzero scalar multiple of (1, 1, k) for any k since the first
component of (0, 3, 1) is 0. This means that thedirection vectors for and are never parallel,which means that these lines are never parallel forany k.b. If and intersect, in particular their x-coordinates will be equal at this intersection point.But always in so we get the equation
Also, from we know that so substitutingthis in for z in we get
So since we already know that we now get
So these two lines intersect when We havealready found that at this intersection point,but now we know that
So the point of intersection of these two lines isand this occurs when k 5 6.(2, 24, 22),
5 22
524 2 2
3
z 5y 2 2
3
5 24
5 6(6) 2 40
y 5 6k 2 40
x 5 2
k 5 6.
k 5 6
7k 5 42
2 2 k 5 6k 2 40
y 5 2 2 k,
y 5 6k 2 40
3(2k 2 14) 5 y 2 2
2k 5y 2 2
31 14
2k 5 z 1 14
L2
z 5y 2 2
3,L1
y 5 2 2 k2 5 y 1 k
L1x 5 2
L2L1
L2L1
L2: x 5 y 1 k 5z 1 14
k
y 2 2
35 zL1: x 5 2,
(24, 22, 22)).
(24, 22, 22),x 2 1
245
y 2 1
225
z 1 1
22
x2
5 y 2 1 5z 1 1
2
x 2 2y 1 2z 5 k,(1, 22, 2)
x 5 y 5 zR3
R3
R2.
8 3394.82 N.
9.8 3 0 y> 0 5 9.8 3 200"3
5 1960
9.8 3 0 x> 0 5 9.8 3 200
0 y> 0 5 200"3.0 x> 0 5 200
9-45Calculus and Vectors Solutions Manual

Review of Prerequisite Skills, p. 4871. a. Yes;
b. No; c. Yes;
d. No;
There is no value of t that satisfies the equation.2. Answers may vary. For example:a. Vector:
Parametric: ,b. Vector:
Parametric: ,c. Vector:
Parametric: ,d. Vector:
Parametric: , , ,
e. Vector:
Parametric: , , ,
f. Vector:
Parametric: , ,
3. a. Since the Cartesian equationof the plane is of the form where D is to be determined. Since is on the plane, it must satisfy the equation. So
and the equation of theplane is .b. Since the Cartesian equation of the plane is of the form where D is tobe determined. Since is on the plane, itmust satisfy the equation. So thus The equation of the plane is
c. Since the Cartesian equation ofthe plane is of the form where D is to be determined. Since is on the plane, it must satisfy the equation. So
and the equation of the plane is
d. Since the Cartesian equation ofthe plane is of the form ,where D is to be determined. Since is onthe plane, it must satisfy the equation. So
. The equation of the plane is e. Since the Cartesian equation of the plane is of the form where D is to be determined. Since is on the plane, it must satisfy the equation. So
and the equation of the plane is
f. Since the Cartesian equation ofthe plane is of the form where D is to be determined. Since is on the plane, it must satisfy the equation. So and theequation of the plane is 4. Start by writing the given line in parametric form: so
and Solving for s in each component, we get and substituting this into givesz 5 3(1 2 y) 2 5t 5 3 2 3y 2 5t.
z 5 3s 2 5ts 5 1 2 y
z 5 3s 2 5t.y 5 1 2 s,x 5 2 1 s 1 2t,(x, y, z) 5 (2 1 s 1 2t, 1 2 s, 3s 2 5t),
x 1 y 2 z 2 6 5 0.
D 5 26,2 1 5 2 1 1 D 5 6 1 D 5 0.
P0(2, 5, 1)
x 1 y 1 2 z 1 D 5 0,
n>
5 (1, 1, 21),
11x 2 6y 2 38 5 0.
D 5 238,
11(4) 2 6(1) 1 D 5 44 2 6 1 D 5 38 1 D 5 0.
P0(4, 1, 8)
11x 2 6y 1 D 5 0,
n>
5 (11, 26, 0),
6x 2 5y 1 3z 5 0.
6(0) 2 5(0) 1 3(0) 1 D 5 0, or D 5 0
P0(0, 0, 0)
6x 2 5y 1 3z 1 D 5 0
n>
5 (6, 5, 23),
4x 1 3y 2 15 5 0.
D 5 215,
4(3) 2 3(21) 1 D 5 12 1 3 1 D 5 15 1 D 5 0.
P0(3, 21, 22)
4x 2 3y 1 D 5 0,
n>
5 (4, 23, 0),
7y 5 0, or y 5 0.
D 5 0.
7(0) 1 D 5 0 1 D 5 0
P0(22, 0, 5)
7y 1 D 5 0,
n>
5 (0, 7, 0),
2x 1 6y 2 z 2 17 5 0
D 5 217,5 17 1 D 5 0.
2(4) 1 6(1) 2 1(23) 1 D 5 8 1 6 1 3 1 D
P0(4, 1, 23)
2x 1 6y 2 z 1 D 5 0,
n>
5 (2, 6, 21),
tPRz 5 21 2 6t,y 5 5 2 10tx 5 2 1 10t
, tPRr>
5 (2, 5, 21) 1 t(10, 210, 26)
5 (10, 210, 26)
m>
5 (12, 25, 27) 2 (2, 5, 21)
tPRz 5 21 1 3ty 5 25tx 5 2 2 3t
, tPRr>
5 (2, 0, 21) 1 t(23, 5, 3)
5 (23, 5, 3)
m>
5 (21, 5, 2) 2 (2, 0, 21)
tPRz 5 5 2 5ty 5 3 2 10tx 5 1 1 5t
, tPRr>
5 (1, 3, 5) 1 t(5, 210, 25)
5 (5, 210, 25)
m>
5 (6, 27, 0) 2 (1, 3, 5)
, tPRy 5 211tx 5 21 1 2 2t, tPRr
>
5 (21, 0) 1 t(22, 211)
5 (22, 211)
m>
5 (23, 211) 2 (21, 0)
y 5 7 2 14t, tPRx 5 23 1 7tr>
5 (23, 7) 1 t(7, 214), tPRm>
5 (4, 27) 2 (23, 7) 5 (7, 214)
y 5 5 2 2t, tPRx 5 2 1 5tr>
5 (2, 5) 1 t(5, 22), tPRm>
5 (7, 3) 2 (2, 5) 5 (5, 22)
(21, 21, 7) 2 t(4, 21, 2)
(1, 0, 5) 5 (2, 1, 22) 1 t(4, 21, 2)
(7, 23, 8) 5 (1, 0, 24) 1 3(2, 21, 4)
(7, 23, 8) 5 (1, 0, 24) 1 t(2, 21, 4)
12(1) 1 5(2) 2 13 5 9 2 0
(2, 25) 5 (10, 212) 1 1(8, 27)
(2, 25) 5 (10, 212) 1 t(8, 27)
9-1Calculus and Vectors Solutions Manual
CHAPTER 9Relationships Between Points,
Lines, and Planes

So now and
Finally, substituting both equations for s and t into
we get
Rearranging, we get
5. is not parallel to the plane because (3, 0, 2) isa point on the line and the plane. Substitute theexpressions for the components of the parametricequation of the line into the equation of the plane.
This last statement is always true. So every point onthe line is also in the plane. Therefore, the line lieson the plane.For substitute the expressions for the componentsof the parametric equation of the line into the equation of the plane.
This last statement is never true. So the line and theplane have no points in common. Therefore, isparallel to the plane. The line cannot lie on theplane.For use the symmetric equation to rewrite x andz in terms of y.
Substitute into the equation of the plane.
This equation has a solution. Therefore, and theplane have a point in common and are not parallel.However, is a point that lies on the linethat does not lie on the plane. Therefore, doesnot lie in the plane.6. a. A normal vector to this plane is determined bycalculating the cross product of the position vectors,
and
If is any point on the plane, then
and if the normal to theplane is then
soand thus,
b.
Since we will useas the normal vector so that the coefficient
of x is positive. If is any point on the plane,then and if the normalto the plane is then
so and thus .7. Answers may vary. For example: One directionvector is Now we need to find a normal to the plane suchthat So Now wehave A possible solution to this is
So and theCartesian equation of the plane is Since the plane is parallel to the y-axis, (0, 1, 0) isanother direction vector for the plane. Therefore, avector equation for the plane is
8. We are given the point We need tofind a normal vector such that
The normal vector also must be perpendicular to thetwo planes and their normals, and
One possible solution for the normal isSo we have
And the equation of the plane is 3y 1 z 5 13.
3y 1 z 2 9 2 4 5 0
3(y 2 3) 1 z 2 4 5 0
n>
5 (0, 3, 1).
(5, 1, 23).
(2, 21, 3)
a(x 1 1) 1 b(y 2 3) 1 c(z 2 4) 1 d 5 0.
n>
5 (a, b, c)
A(21, 3, 4).
r>
5 (1, 24, 3) 1 t(1, 3, 3) 1 s(0, 1, 0), s, tPR.
3x 2 z 5 0.
n>
5 (3, 0, 21)c 5 21.a 5 3,
a 1 3c 5 0.
(1, 3, 3) ? (a, 0, c) 5 0.n>
? m>
5 0.
(1, 24, 3) 5 (1, 3, 3).m>
5 (2, 21, 6) 2
x 1 6y 2 10z 2 30 5 0
5 0,x 2 4 1 6y 2 6 2 10z 2 20
(1, 6, 210) 5 0,(x 2 4, y 2 1, z 1 2) ?(1, 6, 210),
AP>
5 (x 2 4, y 2 1, z 1 2),
P(x, y, z)
(1, 6, 210)
(21, 26, 10) 5 21(1, 6, 210),
5 (23 1 2, 28 1 2, 22 1 12) 5 (21, 26, 10)
2(21) 2 3(4))
22(21),5 (3(21) 2 2(21)), 2(24)
n>
5 PQ>
3 PR>
PR>
5 (0, 0, 23) 2 (4, 1, 22) 5 (24, 21, 21)
PQ>
5 (6, 4, 0) 2 (4, 1, 22) 5 (2, 3, 2)
x 2 y 2 z 2 2 5 0
x 2 1 2 y 2 z 2 1 5 0
(1, 21, 21) 5 0,(x 2 1, y, z 1 1) ?
(1, 21, 21),
AP>
5 (x 2 1, y, z 1 1),
P(x, y, z)
5 (1, 21, 21) 5 n>
.
5 (0 1 1, 5 2 6, 21 2 0)
2 (1 ? 6), (1 ? 21) 2 (0 ? 5))
AB>
3 AC>
5 ((0 ? 6) 2 (1 ? 21), (1 ? 5)
AC>
5 (6, 21, 5) 2 (1, 0, 21) 5 (5, 21, 6)
AB>
5 (2, 0, 0) 2 (1, 0, 21) 5 (1, 0, 1)
AC>
.AB>
L3
(5, 27, 1)
L3
214y 2 96 5 0
216y 2 92 1 y 1 y 1 6 2 10 5 0
4(24y 2 23) 1 y 2 (2y 2 6) 2 10 5 0
z 5 2y 2 6
x 5 24y 2 23
L3
L2
215 5 0
212t 2 5 1 2t 1 10t 2 10 5 0
4(23t) 1 (25 1 2t) 2 (210t) 2 10 5 0
L2
0 5 0
12 1 4t 2 2t 2 2 2 2t 2 10 5 0
4(3 1 t) 1 (22t) 2 (2 1 2t) 2 10 5 0
L1
5x 1 11y 1 2z 2 21 5 0.
5x 5 10 1 5 2 5y 1 6 2 6y 2 2z
a3 2 3y 2 z5
b .x 5 2 1 (1 2 y) 1 2
x 5 2 1 s 1 2t,
t 53 2 3y 2 z
5.23 1 3y 1 z 5 25t
9-2 Chapter 9: Relationships Between Points, Lines, and Planes

9.1 The Intersection of a Line with a Plane and the Intersection of Two Lines, pp. 496–498
1. a. First, show the parametric equations asThen the
plane can be written as and the vector equation of the line is
b. When we substitute the parametric equations intothe Cartesian equation for the plane, we get
Note that by finishing the solution, we get Since any real number will satisfy this equation, wehave an infinite number of solutions, and this linelies on the plane.2. a. A line and a plane can intersect in three ways:Case 1: The line and the plane have zero points ofintersection. This occurs when the lines are notincidental, meaning they do not intersect.Case 2: The line and the plane have only one pointof intersection. This occurs when the line crossesthe plane at a single point.Case 3: The line and the plane have an infinitenumber of intersections. This occurs when the lineis coincident with the plane, meaning the line lieson the plane.b. Assume that the line and the plane have morethan one intersection, but not an infinite number.For simplicity, assume two intersections. At the first intersection, the line crosses the plane. In orderfor the line to continue on, it must have the samedirection vector. If the line has already crossed theplane, then it continues to move away from theplane, and can not intersect again. So the line andthe plane can only intersect zero, one, or infinitelymany times.3. a. The line is the x-axis.b. The plane has the form where x, and z are any values in R. So the plane isparallel to the xz-plane, but just one unit away to the right.
c.
d. There are no intersections between the line andthe plane.4. a. For if we substitute theparametric equations, we have
All values of t give a solution to the equation,so all points on the line are also on the plane.b. For the plane we cansubstitute the parametric equations derived from
So we have
Similar to part a., all values of t give a solution tothis equation, so all points on the line are also onthe plane.5. a. First, we should determine the parametricequations from the vector form:
Substituting these into theequation of the plane, we get
Since there are no values of s such that thisline and plane do not intersect.b. Substituting the parametric equations into theequation of the plane, we get
Since there are no values of t such that thereare no solutions, and the plane and the line do notintersect.
1 5 0,
5 1 1 0t16t2 1 8 1 4 2 13 1 4t 2 20t 1
4(1 1 4t) 2 132(1 1 2t) 2 4(22 1 5t) 1
25 5 0,
5 25 1 0s5 22 2 2 2 1 2 2s 2 4s 1 6s
3(2s) 2 12(21 2 s) 2 2(1 1 2s) 1
z 5 2s.y 5 1 1 2s,
x 5 21 2 s,
5 0
5 0t 1 0
5 2 2 15 1 24 2 11 1 2t 1 6t 2 8t2 3(5 2 2t) 1 4(6 2 2t) 2 112(1 1 t)
z 5 6 2 2t.y 5 5 2 2t,x 5 1 1 t,r>
5 (1, 5, 6) 1 t(1, 22, 22):
2x 2 3y 1 4z 2 11 5 0,
5 0.
5 0t 1 0
5 22 1 4 1 2 1 t 2 4t 1 3t 2 4
1 (2 1 3t) 1 4(22 1 t) 1 4(1 2 t)
x 1 4y 1 z 2 4 5 0,
yx
z
r>
5 (x, 1, z),y 5 1
r>
5 s(1, 0, 0)
0s 5 0.
1 2 4 1 9 1 5s 2 2s 2 3s 5 6 2 0s 5 6
(1 1 5s) 2 2(2 1 s) 2 3(23 1 s) 5 6
s(5, 1, 1), sPR.r>
5 (1, 2, 23) 1
p: x 2 2y 2 3z 5 6,
z 5 23 1 s.y 5 2 1 s,x 5 1 1 5s,
9-3Calculus and Vectors Solutions Manual

6. a. The direction vector is and the normal is so if the line andthe plane meet at right angles, So
,but So thepoint on the line is not on the plane.b. The direction vector is and the normal is so if the line and the plane meet at right angles, So
but So thepoint on the line is not on the plane.7. a. If the line and the plane intersect, then they areequal at a particular point p. So we must substitutethe parametric equations into the equation of theplane, and then solve for p.
So now and Now we must find the point at which the line and plane intersect. To do this, just substitute into the vector form of the line:
.b. If the line and the plane intersect, then they areequal at a particular point p. So we must substitutethe parametric equations into the equation of theplane, and then solve for p.
So now and Now we mustfind the point at which the line and plane intersect.To do this, just substitute into the vectorform of the line:
8. a. Comparing the x and y components in andwe have
We can easily solve for one of the variables byusing the second equation: Substituting thisback into the first equation: so
and thus So now we must solve for s:and Placing these back
into the equations for and
The points must be equal for intersection to occur,so there is no intersection and the lines are skew.b. If we compare the z components of the two lines,we see or Substituting this backinto the x component (the y component would workjust as well), we have or
So now we can substitute m and s back intothe equations for the line, and we get
So is the only point of intersection betweenthese two lines.9. a. Comparing the y and z components of eachvector equation, we get the system of equations:
Note that from the first equation, So thesecond equation becomes Solving for q, we get So from the earlierrelation, Placing these two values back intothe vector equations, we get
This shows that these two lines intersect at b. Comparing the x and z components of eachvector equation, we get the system of equations:
Note that from the first equation, So thesecond equation becomes Solving for r, we get So from the earlierrelation, Placing these two values back intothe vector equations, we get
This shows that these two lines intersect at c. Comparing the x and z components of eachvector equation, we get the system of equations:
Note that from the second equation, Sothe first equation becomes Solving for p, we get So from the earlierrelation, Placing these two values backinto the vector equations, we get
m 5 21.
p 5 1.
2 2 p 5 22 1 3p.
m 5 2p.
1 1 m 5 1 2 p 2 1 m 5 22 1 3p
(8, 1, 22).
(2, 1, 28) 1 6(1, 0, 5) 5 (8, 1, 22)
(4, 1, 6) 1 4(1, 0, 4) 5 (8, 1, 22)
s 5 6.
r 5 4.
6 1 4r 5 2 1 5r.
s 5 2 1 r.
6 1 4r 5 28 1 5s 4 1 r 5 2 1 s
(4, 1, 7).
(22, 3, 24) 1 (6, 22, 11) 5 (4, 1, 7)
(22, 3, 4) 1 (6, 22, 3) 5 (4, 1, 7)
p 5 1.
q 5 1.
4 1 3q 5 24 1 11q.
p 5 q.
4 1 3p 5 24 1 11q 3 2 2p 5 3 2 2q
(4, 1, 2)
L4 : (23, 2, 8) 1 (7, 21, 26) 5 (4, 1, 2)
L3 : (3, 7, 2) 1 (1, 26, 0) 5 (4, 1, 2)
m 5 1.
3 1 m 5 23 1 7(1) 5 4,
s 5 1.2 5 8 2 6s
L2: a4 113
7, 1 2
5
7,
5
7b 5 a41
7,
2
7,
5
7b
L1: (3, 1, 5) 15
7(4, 21, 2) 5 a41
7,
2
7,
45
7b
L2:L1
s 5 2028 5 5
7.3 1 4s 5 4 1 137
t 5 17.1 5 7t
3 1 20t 5 4 1 13ts 5 5t.
1 2 s 5 1 2 5t 3 1 4s 5 4 1 13tL2,
L1
(1, 22, 3) 1 23(4, 21, 1) 5 (211, 1, 0)
s 5 23
s 5 23.22s 5 65 0.
5 6 1 2s5 2 2 14 1 3 1 15 1 8s 2 7s 1 s
2(1 1 4s) 1 7(22 2 s) 1 (3 1 s) 1 15
z 5 3 1 sy 5 22 2 s,x 5 1 1 4s,
(21, 3, 4) 1 23(6, 1, 22) 5 (219, 0, 10)
p 5 23
p 5 23.210p 5 305 0.
5 30 1 10p5 21 1 6 2 4 1 6p 1 2p 1 2p 1 29
(21 1 6p) 1 2(3 1 p) 2 (4 2 2p) 1 29
2(1) 2 4(22) 1 4(1) 2 13 5 1 2 0.
(2 ? 2) 1 (5 ? 24) 1 (4 ? 4) 5 4 2 20 1 16 5 0,
m>
? n>
5 0.
n>
5 (2, 24, 4),
m>
5 (2, 5, 4)
2(21) 2 2(1) 1 3(0) 2 1 5 25 2 0.
(21 ? 2) 1 (2 ? 22) 1 (2 ? 3) 5 22 2 4 1 6 5 0
m>
? n>
5 0.
n>
5 (2, 22, 3),
m>
5 (21, 2, 2)
9-4 Chapter 9: Relationships Between Points, Lines, and Planes

This shows that these two lines intersect at d. Comparing the x and y components of eachvector equation, we get the system of equations:
Note that from the first equation, So thesecond equation becomes Solving for m, we get Placing these twovalues back into the vector equations, we get
The two lines do not intersect, so they are skew.10. At the point where the line intersects the z-axis,the point equals the vector equation. Sofor the x component, or Substituting this into the vector equation, we get
So 11. a. Comparing the x components, we get
which can be reduced toor Comparing the other
components, the same equation results.b. From we see that at Whenthis occurs, Substituting this into we get
Sinceboth of these lines have the same direction vectorand a common point, the lines are coincidental.12. a. First, we must determine the values of s and t.So comparing the x and z components, we get
From the second equation, Substitutingthis back into the first equation,
or Substituting back into the second equation,
and solving for s,Now we can solve for k. Compare
the y components after substituting s and t.
or b. The lines intersect when . The point of
intersection is or
13. On the xz-plane, the point A has the coordinatesfor any x, z. Similarly, on the yz-plane, the
point B has the coordinates for any y, z. Nowthe task is to find the required values of s for thesepoints. Starting with the x component of point B,we have or So point B is
For point A,we need the y coordinate to equal 0. So or So point A is
Now we need to find the distance.
14. a. Comparing the y and z components of eachvector equation, we get the system of equations:
Note that from the first equation, orSo the second equation becomes
or Placing these two values back into the vectorequations to find the intersection point A, we get
Thus, the intersection point is b. A point on the xy plane has the form Ifsuch a point is then the distance from
this point is 15. a. Comparing the x and y components of eachvector equation, we get the system of equations:
Note that from the first equation, or So the second equation becomes or Placing these two values back into the vector equations to find the intersection point A,we get
Thus, the intersection point is b. We need to find a vector such that
A possible solution to the second equation isIf we substitute this into the first
equation, we get 5a 2 22 2 20 5 0 S 5a 5 42.
(a, 11, 22).
2b 1 11c 5 0
5a 2 2b 1 10c 5 0
(a, b, c)
(4, 1, 12).
(4, 21, 1) 1 (0, 2, 11) 5 (4, 1, 12)
(21, 3, 2) 1 (5, 22, 10) 5 (4, 1, 12)
t 5 1.
3 2 2 5 21 1 2ts 5 1.5 5 5s
3 2 2s 5 21 1 2t21 1 5s 5 4 1 0t
d 5 "0 1 0 1 32 5 3.
(26, 1, 0)
(x, y, 0).
(26, 1, 3).
(3, 21, 1) 2 (9, 22, 22) 5 (26, 1, 3)
(2, 1, 1) 2 2(4, 0, 21) 5 (26, 1, 3)
p 5 22.1 2 p 5 1 1 2
q 5 21.
2 5 22q 1 2 p 5 1 2 2q
1 1 0p 5 21 2 2q
5 3
5 "9
5 "4 1 4 1 1
d 5 "(0 2 (22))2 1 (2 2 0)2 1 (3 2 2)2
5 (22, 0, 2).1 3(2, 2, 1)(28, 26, 21)
s 5 3.
0 5 26 1 2s(28, 26, 21) 1 4(2, 2, 1) 5 (0, 2, 3).
s 5 4.0 5 28 1 2s
(0, y, z)
(x, 0, z),
( 211,
5311,
4611).
(23 1 3511, 8 2 35
11, 1 1 3511)
s 5 3511
k 5 3.
53 5 44 1 3k
8 235
115 4 1
3
11k
s 5 211 1 3 5 35
11.
23 1 s 5 1 2 911 5 2
11,
t 5 311.1 2 3t23 1 1 1 8t 5
s 5 1 1 8t. 1 1 s 5 2 1 8t
23 1 s 5 1 2 3t
(230, 11, 24) 1 4(7, 22, 2) 5 (22, 3, 4).
L2,t 5 4.
s 5 0.(22, 3, 4),L1,
s 2 t 5 4.28 1 7s 5 7t22 1 7s 5 230 1 7t,
q 5 8.(23, 2, 1) 1 (3, 22, 7) 5 (0, 0, 8).
s 5 1.23 1 3s 5 0
Q(0, 0, q)
(8, 2, 3) 2 (4, 1, 22) 5 (4, 1, 5)
(9, 1, 2) 23
4(5, 0, 4) 5 a21
4, 1, 21b
m 5 34.
2 1 4m 5 5.
s 5 21.
2 1 4m 5 3 2 2s 1 1 0m 5 2 1 s
(1, 1, 0).
(22, 2, 1) 1 (3, 21, 21) 5 (1, 1, 0)
(2, 2, 1) 2 (1, 1, 1) 5 (1, 1, 0)
9-5Calculus and Vectors Solutions Manual

We can use this to get a solution of Toeliminate the fraction, we get So thevector equation is ,
16. a.
b. The only point of intersection is at the origin
c. If and the intersection occurs at
17. a. Represent the lines parametrically, and then substitute into the equation for the plane.For the first equation,
Substituting into the plane equation,Simplifying,
So the line lies on the plane.For the second line,Substituting into the plane equation,
Simplifying,This line also lies on the plane.
b. Compare the x and y components:
From the second equation, Substituting backinto the first equation, or Determine the point of intersection:
The point of intersection is 18. Answers may vary. For example:
9.2 Systems of Equations, pp. 507–5091. a. linearb. not linearc. lineard. not linear2. Answers may vary. For example:
a.
b. Subtract the first equation from the second, andsubtract twice the first equation from the third.
Add the second and third equation.
From the third equation,Substitute z back into the second equation,
So Now substitute y and z back into the firstequation.
And so Thus the solution is as expected.
3. a.
Yes, is a solution.b.
Because the second equation fails to produce anequality, is not a solution.4. a. Solve for y. The solution is b. Multiply the second equation by 6
Add 3 times the first equation to 5 times the secondequation.
From the second equation,Substituting x back into the first equation,
So The two systems are equivalent because they havethe same solution.5. a. Add the second equation to 5 times the firstequation.
y 5 23.
5y 5 215
3(22) 1 5y 5 221
x 5 22.
14x 5 228
3x 1 5y 5 221
x 2 3y 5 7
3x 1 5y 5 221
(22, 23).
y 5 23(27, 5, 34)
8(27) 2 5 1 4a3
4b 5 256 2 5 1 3 5 258
2232
3(27) 2 2(5) 5 221 2 10 5 231
3(27) 2 2(5) 1 16a3
4b 5 221 2 10 1 12 5 219
(27, 5, 34)27 1 2(5) 5 3
27 2 8a3
4b 5 27 2 6 5 213
27 2 3(5) 1 4a3
4b 5 27 2 15 1 3 5 219
(23, 4, 28)x 5 23.
x 1 4 1 2(28) 5 x 2 12 5 215
y 5 4.
2y 5 212 1 8 5 24
2y 2 8 5 212
z 5 28.
0x 1 0y 2 4z 5 32
0x 2 y 1 z 5 212
x 1 y 1 2z 5 215
0x 2 y 2 3z 5 20
0x 2 y 1 z 5 212
x 1 y 1 2z 5 215
2x 1 y 1 z 5 210
x 1 2y 1 z 5 23
x 1 y 1 2z 5 215
pPRr>
5 (2, 0, 0) 1 p(2, 0, 1),
(1, 21, 3).
(4 2 3, 21, 1 1 2) 5 (1, 21, 3)
(1, 7 2 8, 1 1 2) 5 (1, 21, 3)
s 5 21.4 1 3s 5 1,
t 5 1.
7 2 8t 5 21
4 1 3s 5 t
0s 5 0.
8 1 6s 2 1 1 3 2 6s 2 10 5 0.
z 5 1 2 2sy 5 21,x 5 4 1 3s,
0t 5 0.
2t 1 7 2 8t 1 3 1 6t 2 10 5 0.
z 5 1 1 2t.y 5 7 2 8t,x 5 t,
(0, 0, 0).
q 5 0,p 5 0
(0, 0, 0).
y
z
x
L1
L2
tPR.
r>
5 (4, 1, 12) 1 t(42, 55, 210)
(42, 55, 210).(42
5 , 11, 22).
9-6 Chapter 9: Relationships Between Points, Lines, and Planes

We can use this to get a solution of Toeliminate the fraction, we get So thevector equation is ,
16. a.
b. The only point of intersection is at the origin
c. If and the intersection occurs at
17. a. Represent the lines parametrically, and then substitute into the equation for the plane.For the first equation,
Substituting into the plane equation,Simplifying,
So the line lies on the plane.For the second line,Substituting into the plane equation,
Simplifying,This line also lies on the plane.
b. Compare the x and y components:
From the second equation, Substituting backinto the first equation, or Determine the point of intersection:
The point of intersection is 18. Answers may vary. For example:
9.2 Systems of Equations, pp. 507–5091. a. linearb. not linearc. lineard. not linear2. Answers may vary. For example:
a.
b. Subtract the first equation from the second, andsubtract twice the first equation from the third.
Add the second and third equation.
From the third equation,Substitute z back into the second equation,
So Now substitute y and z back into the firstequation.
And so Thus the solution is as expected.
3. a.
Yes, is a solution.b.
Because the second equation fails to produce anequality, is not a solution.4. a. Solve for y. The solution is b. Multiply the second equation by 6
Add 3 times the first equation to 5 times the secondequation.
From the second equation,Substituting x back into the first equation,
So The two systems are equivalent because they havethe same solution.5. a. Add the second equation to 5 times the firstequation.
y 5 23.
5y 5 215
3(22) 1 5y 5 221
x 5 22.
14x 5 228
3x 1 5y 5 221
x 2 3y 5 7
3x 1 5y 5 221
(22, 23).
y 5 23(27, 5, 34)
8(27) 2 5 1 4a3
4b 5 256 2 5 1 3 5 258
2232
3(27) 2 2(5) 5 221 2 10 5 231
3(27) 2 2(5) 1 16a3
4b 5 221 2 10 1 12 5 219
(27, 5, 34)27 1 2(5) 5 3
27 2 8a3
4b 5 27 2 6 5 213
27 2 3(5) 1 4a3
4b 5 27 2 15 1 3 5 219
(23, 4, 28)x 5 23.
x 1 4 1 2(28) 5 x 2 12 5 215
y 5 4.
2y 5 212 1 8 5 24
2y 2 8 5 212
z 5 28.
0x 1 0y 2 4z 5 32
0x 2 y 1 z 5 212
x 1 y 1 2z 5 215
0x 2 y 2 3z 5 20
0x 2 y 1 z 5 212
x 1 y 1 2z 5 215
2x 1 y 1 z 5 210
x 1 2y 1 z 5 23
x 1 y 1 2z 5 215
pPRr>
5 (2, 0, 0) 1 p(2, 0, 1),
(1, 21, 3).
(4 2 3, 21, 1 1 2) 5 (1, 21, 3)
(1, 7 2 8, 1 1 2) 5 (1, 21, 3)
s 5 21.4 1 3s 5 1,
t 5 1.
7 2 8t 5 21
4 1 3s 5 t
0s 5 0.
8 1 6s 2 1 1 3 2 6s 2 10 5 0.
z 5 1 2 2sy 5 21,x 5 4 1 3s,
0t 5 0.
2t 1 7 2 8t 1 3 1 6t 2 10 5 0.
z 5 1 1 2t.y 5 7 2 8t,x 5 t,
(0, 0, 0).
q 5 0,p 5 0
(0, 0, 0).
y
z
x
L1
L2
tPR.
r>
5 (4, 1, 12) 1 t(42, 55, 210)
(42, 55, 210).(42
5 , 11, 22).
9-6 Chapter 9: Relationships Between Points, Lines, and Planes

Solve for x in the second equation, Substitute xback into the first equation
So Therefore, the solution is b. Subtract three times the first equation from twicethe second equation.
From the second equation,Substitute y back into the first equation.
So Therefore, the solution is c. Add the second equation to 3 times the firstequation to the second equation
From the second equation,Substitute y back into the first equation.
So Therefore the solution is 6. a. These two lines are parallel, and thereforecannot have an intersection.b. The second equation is five times the first,therefore the lines are coincident.7. a. Let So then b. Let Then and
8. a. If then and so is the required linear equation.b.
9. a. The two equations will have no solutions whensince they will be parallel should this occur.
b. It is impossible to have only one solution for thesetwo equations. They have exactly the same directionvector. They will never intersect at exactly one place.c. The two equations will have infinitely manysolutions when When this occurs, the twoequations are coincident.
10. a. There are infinitely many solutions to thisequation. This is reason why it is representedgraphically as a line.b. Let So then and c. This equation will not have any integer solutionsbecause the left hand side is an even function andthe right side is an odd function.11. a. Add the second equation to times thefirst.
Divide the second equation by to getNow substitute this back into
the first equation.
b. Since they have different direction vectors, thesetwo equations are not parallel or coincident and willintersect somewhere.12. a. Add the third equation to the first to eliminate z.
Add twice the second equation to the third equationto eliminateAdd twice the second equation to the third equationto eliminate y.
Divide the third equation by to get Now substitute into the second equation.
Finally, substitute x and y to get
So Therefore, the solution is b. Add the first equation to times the second,and add the first equation to times the third.
Now add the second equation to times the third.
0x 2 4y 1 0z 5 216
0x 2 5y 2 3z 5 256
2x 2 3y 1 z 5 6
21
0x 2 y 1 3z 5 40
0x 2 5y 2 3z 5 256
2x 2 3y 1 z 5 6
22
22
(21, 22, 3).z 5 3.
21 1 22 1 z 5 0
y 5 22
21 2 y 5 1
x 5 21.23
3x 1 0y 1 0z 5 23
x 2 y 1 0z 5 1
x 1 y 1 z 5 0
x 1 2y 1 0z 5 25
x 2 y 1 0z 5 1
x 1 y 1 z 5 0
x 5 2a 1 bx 2 b 1 2a 5 a
x 1 3a21
3b 1
2
3ab 5 a
y 5 213 b 1 2
3 a.
23
0x 2 3y 5 b 2 2a x 1 3y 5 a
22
tPRy 5 114 2 1
2 t,
4y 5 11 2 2t2t 1 4y 5 11,x 5 t.
k 5 12.
k 2 12,
5 211
2(3t 1 3) 1 (26t 2 17) 5 6t 2 6t 1 6 2 17
2x 1 y 5 211
2x 1 y 5 211
y 5 22x 2 11y 5 22t 2 11,x 5 t,z 5 2s 1 t.
t 2 2s 1 z 5 0y 5 s.x 5 t,y 5 2t 2 3.2t 2 y 5 3x 5 t.
(24, 3).
x 5 24.
2x 5 4
2x 1 2(3) 5 10
y 5 3.
0x 1 11y 5 33
2x 1 2y 5 10
(23, 5).
x 5 23
2x 5 19 2 25 5 26
2x 1 5(5) 5 19
y 5 5.
0x 2 7y 5 235
2x 1 5y 5 19
(6, 1).
y 5 1
2y 5 11 2 12 5 21
2(6) 2 y 5 11
x 5 6.
11x 5 66
2x 2 y 5 11
9-7Calculus and Vectors Solutions Manual

From the third equation,Now substitute this into the second equation.
Now substitute these two values back into the firstequation.
So the solution is c. Add the second equation to times the third.
Add the third equation to the first equation.
So Now substitute into the other twoequations.
So the solution is d. To eliminate fractions, multiply each of theequations by 60.
Add 3 times the first equation to times thesecond, and add 3 times the first equation to times the third.
Now add 55 times the second equation to timesthe third equation.
Divide the third equation through by to getSubstituting z back into the second
equation.
So Now substitute these two values backinto the first equation.
So Therefore the solution is
e. Note that if andSo we substitute these two
relations into the second equation.
So now and the solution is f. Add the first equation to times the secondequation.
Add the second and third equations.
So from the third equation,Substituting into the second equation,
Finally, substituting both values into the firstequation,
So the final solution is 13. Answers may vary. For example:a.
y
L1L3
z
Two lines coincidentand the third parallel
x
L2
y
L1
L3
zThree lines parallel
x
L2
(22, 3, 6).
22 1 y 1 12 5 13 S y 5 3.
22x 5 4 S x 5 22
22x 2 42 5 238
z 5 6.
0x 1 0y 2 z 5 26
22x 1 0y 2 7z 5 238
x 1 y 1 2z 5 13
2x 1 0y 1 6z 5 32
22x 1 0y 2 7z 5 238
x 1 y 1 2z 5 13
22
(2, 4, 1).y 5 4,z 5 1,
2(2x) 21
2x 5
7
2x 5 7 S x 5 2
2z 2 x 5 0 S z 5 12 x.
2x 2 y 5 0 S y 5 2x,
(60, 120, 2180).x 5 60.
20x 5 840 2 1800 1 2160 5 1200
20x 1 15(120) 1 12(2180) 5 840
y 5 120.
23y 2 44(2180) 5 7560 S 23y 5 2360
z 5 2180.
22303
0x 1 0y 2 2303z 5 414 540
0x 2 3y 2 44z 5 7560
20x 1 15y 1 12z 5 840
23
0x 2 55y 2 39z 5 420
0x 2 3y 2 44z 5 7560
20x 1 15y 1 12z 5 840
25
24
12x 1 20y 1 15z 5 420
15x 1 12y 1 20z 5 21260
20x 1 15y 1 12z 5 840
(4, 6, 28).
6 1 z 5 22 S z 5 28
x 1 6 5 10 S x 5 4
y 5 6.
0x 1 2y 1 0z 5 12
0x 1 y 1 z 5 22
x 1 y 1 0z 5 10
2x 1 y 1 0z 5 2
0x 1 y 1 z 5 22
x 1 y 1 0z 5 10
21
(3, 4, 12).
2x 5 6, x 5 3
2x 2 3(4) 1 12 5 6
z 5 12
23z 5 236
25(4) 2 3z 5 256
y 5 4.
9-8 Chapter 9: Relationships Between Points, Lines, and Planes

9-9Calculus and Vectors Solutions Manual
b.
c.
14. a. Add times the first equation and thesecond equation. Add times the first equationand the third equation.
So Then substitute into thefirst equation.
So the final solution is 15. a. For two equations to have no solutions, theymust be parallel—meaning it must have a the samedirection vector. So if then the lines areparallel.b. If two equations have an infinite number ofsolutions, then the lines must be coincident. Oneway to do this is if the second equation is a multipleof the first equation. To achieve this,c. For two equations to have a unique solution, theymust have only one intersection. From a., we sawthat if the lines are parallel, and if then they are coincident. Since the only other optionis for the lines to have a unique solution,
9.3 The Intersection of Two Planes,pp. 516–517
1. a. This means that the two equations representplanes that are parallel and not coincident.b. Answers may vary. For example:
2. a. The solution to the system of equations is:. The two
planes are coincident.b. Answers may vary. For example:
3. a.
The two planes intersect in a line.b. Answers may vary. For example:
4. a. For the planes to be coincident equation must bea multiple of equation . Since the coefficients ofx and z in equation are twice that of the x and zcoefficients in equation all of the coefficientsand constants in equation must be half of thecorresponding coefficients in equation . So:
and
The value for m is unique, but p just has to be twiceq and arbitrary values can be chosen.
p 5 2.q 5 1,p 5 2q.m 51
2,
1
2
2
1
1
2
x 1 my 1 3z 5 q22x 1 y 1 6z 5 p;1
x 2 y 2 z 5 3.x 2 y 1 z 5 21;
sPRz 5 22,y 5 s,x 5 1 1 s,
x 2 y 1 1.
x 2 y 1 (22) 1 21
2z 5 24 1 z 5 22.
2x 2 2y 1 2z 5 22x 2 y 1 z 1 21;
s, tPRz 5 t,y 5 s,x 5 12 1 1
2s 2 t,
x 2 y 1 z 5 22
x 2 y 1 z 5 1,
k 2 6 2.
k 5 22,k 5 2,
k 5 22.
k 5 2,
(a 2 c, 2a 1 b 1 c, a 2 b).
y 5 2a 1 b 1 c a 2 c 1 y 1 a 2 b 5 a
x 5 a 2 c.z 5 a 2 b,
2x 1 0y 1 0z 5 c 2 a 0x 1 0y 2 z 5 b 2 a
x 1 y 1 z 5 a
21
21
y
z
x
L2
Three coincident lines
L3
L1
y
z
x
L1
L3L2
Lines meet in a point
y
z
xL1
L3L2
The lines form a triangle
y
L1
L3
z
Two parallel lines cutby the third line
x
L2

9-9Calculus and Vectors Solutions Manual
b.
c.
14. a. Add times the first equation and thesecond equation. Add times the first equationand the third equation.
So Then substitute into thefirst equation.
So the final solution is 15. a. For two equations to have no solutions, theymust be parallel—meaning it must have a the samedirection vector. So if then the lines areparallel.b. If two equations have an infinite number ofsolutions, then the lines must be coincident. Oneway to do this is if the second equation is a multipleof the first equation. To achieve this,c. For two equations to have a unique solution, theymust have only one intersection. From a., we sawthat if the lines are parallel, and if then they are coincident. Since the only other optionis for the lines to have a unique solution,
9.3 The Intersection of Two Planes,pp. 516–517
1. a. This means that the two equations representplanes that are parallel and not coincident.b. Answers may vary. For example:
2. a. The solution to the system of equations is:. The two
planes are coincident.b. Answers may vary. For example:
3. a.
The two planes intersect in a line.b. Answers may vary. For example:
4. a. For the planes to be coincident equation must bea multiple of equation . Since the coefficients ofx and z in equation are twice that of the x and zcoefficients in equation all of the coefficientsand constants in equation must be half of thecorresponding coefficients in equation . So:
and
The value for m is unique, but p just has to be twiceq and arbitrary values can be chosen.
p 5 2.q 5 1,p 5 2q.m 51
2,
1
2
2
1
1
2
x 1 my 1 3z 5 q22x 1 y 1 6z 5 p;1
x 2 y 2 z 5 3.x 2 y 1 z 5 21;
sPRz 5 22,y 5 s,x 5 1 1 s,
x 2 y 1 1.
x 2 y 1 (22) 1 21
2z 5 24 1 z 5 22.
2x 2 2y 1 2z 5 22x 2 y 1 z 1 21;
s, tPRz 5 t,y 5 s,x 5 12 1 1
2s 2 t,
x 2 y 1 z 5 22
x 2 y 1 z 5 1,
k 2 6 2.
k 5 22,k 5 2,
k 5 22.
k 5 2,
(a 2 c, 2a 1 b 1 c, a 2 b).
y 5 2a 1 b 1 c a 2 c 1 y 1 a 2 b 5 a
x 5 a 2 c.z 5 a 2 b,
2x 1 0y 1 0z 5 c 2 a 0x 1 0y 2 z 5 b 2 a
x 1 y 1 z 5 a
21
21
y
z
x
L2
Three coincident lines
L3
L1
y
z
x
L1
L3L2
Lines meet in a point
y
z
xL1
L3L2
The lines form a triangle
y
L1
L3
z
Two parallel lines cutby the third line
x
L2

b. For parallel planes all of the coefficients of thevariables must be multiples of each other, but theconstant terms must differ by a different constant.So a possible solution is:
and
The value for m is again unique but p and q can bearbitrarily chosen as long as c. For the two planes to intersect at right angles thetwo normal vectors, and
must satisfy:
This value is unique, since only onevalue was found to satisfy the given conditions.d. From c. we know that in order to intersect inright angles Choose The value for m is unique from the solution to c.,but the values for p and q can be arbitrary since theonly value which can change the angle between theplanes is m.5. a. Letting
The solution is:
b. Letting
The solution is:
c. Since t is an arbitrary real number we can express t as:
.Substituting this into the solution for b. shows thatthe two solutions are equivalent.6. a. Equation is twice that of equation , sothey represent intersecting coincident planes.b. The coefficients of each variable are the same,but the constant terms are different, so the equationsrepresent non-intersecting parallel planes.
c. The coefficients of the x and z variables are thesame but the y coefficients are different. So theequations represent planes that intersect in a line.d. The coefficients of each variable from equation to are not the same multiple. Therefore theequations represent planes that intersect in a line.e. The intersection is a line by the same reasoningas d.f. The intersection is a line by the same reasoning as d.7. a. b. There is no solution since the planes are parallel.c. :
.d. Let .From :
.e. :Adding :
Let .
f.
.8. a. The system will have an infinite number ofsolutions for any value of k. When equation
will be twice that of so the solution is a plane:.
For any other value of k the solution will be a line.For example
y 5 22z.
2y 5 24zk 5 0:
z 5 t, s, tPRy 5 s,x 5 1 2 s 2 2t,12
k 5 2
sPRz 5 4,y 5 s,x 5 s 2 8,
x 5 y 2 8.
x 2 y 1 2(4) 5 0
sPRz 5 1 23
4s,y 5 s,x 5
5
4s,
z 5 1 23
4s.
3
2s 1 2z 5 2
2a5
4sb 2 s 1 2z 5 2
sPRy 5 s,
x 55
4y.
4x 2 5y 5 0.
1
2x 2 4y 2 2z 5 22222 ?
sPRz 5 s,y 5 2s 2 1,x 5 2s 1 5,
y 5 2s 2 1.
2y 1 2s 5 22
(y 1 6) 1 y 1 2s 5 4
x 5 y 1 6.
2
sPRz 5 s;
sPRz 5 s,y 5 22,x 5 22s,
x 5 22z.
x 1 2z 5 0
x 2 2 1 2z 5 22
y 5 22.
22y 5 4
221
z 5 t, s, tPRy 5 s,x 5 1 2 s 2 t,
2
1
12
sPRt 5 23s;
tPR.z 5 21
3t;y 5 t,x 5 23t,
x 5 23t. x 1 3t 5 0
x 1 2t 2 3a21
3bt 5 0
z 5 21
3t.
3z 5 2t t 1 3z 5 0
y 5 t.sPRz 5 s,y 5 23s,x 5 9s,
x 5 9sx 1 2(23s) 2 3s 5 0.
y 5 23s.
z 5 s:
q 5 1.p 5 1,m 5 220.
m 5 220.
n1
>
? n2
>
5 2 1 m 1 18 5 0
n1
>
? n2
>
5 0.
n2
>
5 (1, m, 3),
n1
>
5 (2, 1, 6)
p 2 2q.
p 5 3.q 5 1,m 51
2,
9-10 Chapter 9: Relationships Between Points, Lines, and Planes

.b. No there is no value of k for which the system willnot have a solution. The only time when there is nosolution is when the corresponding coefficients foreach variable differ by a common multiple betweenequations, and the constant terms differ by a differentmultiple. The only way the first condition is satisfied iswhen but when this happens the constant termsdiffer by the same factor as the variables, namely 2.9. The line of intersection of the two planes:
is:
The direction vector is or
Since the line we are looking for is parallel to this line, we know that thedirection vector must be the same. The line passesthrough and has direction vector
The equation of the line is
10. The line of intersection of the two planes,and is:
.In order for the a line to be contained in the planewe need to check that the values for x, y, and zalways satisfy the plane equation:
Since this is true the line is contained in theplane.11. a.
.sPRz 5 s,y 5 1 1 s,x 5 1 1 s,
x 5 1 1 z.
2x 2 2z 5 2
2x 1 (1 1 z) 2 3z 5 3
y 5 1 1 z.
5y 2 5z 5 5p1 2 2p2:
x 2 2y 1 z 5 21.p2:2x 1 y 2 3z 5 3,p1:
0 5 0.
5 1 6 2 11 2 10s 2 6s 1 16s 5 0
5(1 2 2s) 1 3(2 2 2s) 1 16(s) 2 11 5 0
5x 1 3y 1 16z 2 11 5 0.
sPRz 5 s,y 5 2 2 2s,x 5 1 2 2s,
y 5 2 2 2z.
2 2 y 2 2z 5 0
2(1 2 2z) 2 y 1 2z 5 0
x 5 1 2 2z.
4x 1 8z 5 4
2x 1 y 1 6z 5 42x 2 y 1 2z 5 0
r2
>
5 (22, 3, 6) 1 s(25, 28, 2), sPR.
(25, 28, 2).
(22, 3, 6)
sPR.r1
>
5 s(25, 28, 2),
(25, 28, 2).(252, 24, 1)
sPR.z 5 s,y 5 24s,x 5 25
2s,
x 5 25
2z.
2x 5 25z2x 2 (24z) 1 z 5 0
y 5 24zy 1 4z 5 0p2:2x 2 y 1 z 5 0,p1:
k 5 2,
sPRz 5 s,y 5 22s,x 5 1,
x 5 1.
x 1 (22z) 1 2z 5 1
9-11Calculus and Vectors Solutions Manual
b. L meets the xy-plane when
L meets the z-axis when both x and y are zero:
The length of AB is therefore:
or about 1.73.12. The line with equation hasparametric equations: .This has the equivalent vector form:
.
The line of intersection of the two planesand is:
. Which has a vectorequation of:
. The vector equation of the plane with the given properties isthus:
.
The normal vector for the plane is then:
Or equivalently The Cartesian equation is then:
and must contain the point (1, 0, 0).
Mid-Chapter Review, pp. 518–5191. a.
t 5 23
0 5 15 1 5tz 5 15 1 5ty 5 23 2 3t,x 5 4 1 2t,
tPRr>
5 (4, 23, 15) 1 t(2, 23, 5),
8x 1 14y 2 3z 2 8 5 0.
D 5 28.
8(1) 1 D 5 0.
8x 1 14y 2 3z 1 D 5 0,
(8, 14, 23).
1 ? 1 2 a21
2?
1
3b, 2
1
2a21
2b 2
1
2? 1 5 a2
3,
7
6, 2
1
4b.
a21
2,
1
2, 1b 3 a1, 2
1
2,
1
3b 5 a1
2?
1
3b 2 a1 ? 2
1
2b,
s, tPRr>
5 (1, 0, 0) 1 t a21
2,
1
2, 1b 1 s a1, 2
1
2,
1
3b,
tPRr>
5 (1, 0, 0) 1 t (212,
12, 1),
tPRz 5 t,y 5 12 t,x 5 1 2 1
2 t,
x 5 1 21
2z.
x 21
2z 1 z 5 1
y 51
2z
2y 2 z 5 0x 2 y 1 z 5 1
sPRr>
5 sa1, 21
2,
1
3b,
sPRz 5 13 s,y 5 21
2 s,x 5 s,
x 5 22y 5 3z"12 1 12 1 12 5 "3
B 5 (0, 0, 21)
z 5 21.
s 5 21.
A 5 (1, 1, 0).y 5 1.x 5 1,
z 5 0.

.b. No there is no value of k for which the system willnot have a solution. The only time when there is nosolution is when the corresponding coefficients foreach variable differ by a common multiple betweenequations, and the constant terms differ by a differentmultiple. The only way the first condition is satisfied iswhen but when this happens the constant termsdiffer by the same factor as the variables, namely 2.9. The line of intersection of the two planes:
is:
The direction vector is or
Since the line we are looking for is parallel to this line, we know that thedirection vector must be the same. The line passesthrough and has direction vector
The equation of the line is
10. The line of intersection of the two planes,and is:
.In order for the a line to be contained in the planewe need to check that the values for x, y, and zalways satisfy the plane equation:
Since this is true the line is contained in theplane.11. a.
.sPRz 5 s,y 5 1 1 s,x 5 1 1 s,
x 5 1 1 z.
2x 2 2z 5 2
2x 1 (1 1 z) 2 3z 5 3
y 5 1 1 z.
5y 2 5z 5 5p1 2 2p2:
x 2 2y 1 z 5 21.p2:2x 1 y 2 3z 5 3,p1:
0 5 0.
5 1 6 2 11 2 10s 2 6s 1 16s 5 0
5(1 2 2s) 1 3(2 2 2s) 1 16(s) 2 11 5 0
5x 1 3y 1 16z 2 11 5 0.
sPRz 5 s,y 5 2 2 2s,x 5 1 2 2s,
y 5 2 2 2z.
2 2 y 2 2z 5 0
2(1 2 2z) 2 y 1 2z 5 0
x 5 1 2 2z.
4x 1 8z 5 4
2x 1 y 1 6z 5 42x 2 y 1 2z 5 0
r2
>
5 (22, 3, 6) 1 s(25, 28, 2), sPR.
(25, 28, 2).
(22, 3, 6)
sPR.r1
>
5 s(25, 28, 2),
(25, 28, 2).(252, 24, 1)
sPR.z 5 s,y 5 24s,x 5 25
2s,
x 5 25
2z.
2x 5 25z2x 2 (24z) 1 z 5 0
y 5 24zy 1 4z 5 0p2:2x 2 y 1 z 5 0,p1:
k 5 2,
sPRz 5 s,y 5 22s,x 5 1,
x 5 1.
x 1 (22z) 1 2z 5 1
9-11Calculus and Vectors Solutions Manual
b. L meets the xy-plane when
L meets the z-axis when both x and y are zero:
The length of AB is therefore:
or about 1.73.12. The line with equation hasparametric equations: .This has the equivalent vector form:
.
The line of intersection of the two planesand is:
. Which has a vectorequation of:
. The vector equation of the plane with the given properties isthus:
.
The normal vector for the plane is then:
Or equivalently The Cartesian equation is then:
and must contain the point (1, 0, 0).
Mid-Chapter Review, pp. 518–5191. a.
t 5 23
0 5 15 1 5tz 5 15 1 5ty 5 23 2 3t,x 5 4 1 2t,
tPRr>
5 (4, 23, 15) 1 t(2, 23, 5),
8x 1 14y 2 3z 2 8 5 0.
D 5 28.
8(1) 1 D 5 0.
8x 1 14y 2 3z 1 D 5 0,
(8, 14, 23).
1 ? 1 2 a21
2?
1
3b, 2
1
2a21
2b 2
1
2? 1 5 a2
3,
7
6, 2
1
4b.
a21
2,
1
2, 1b 3 a1, 2
1
2,
1
3b 5 a1
2?
1
3b 2 a1 ? 2
1
2b,
s, tPRr>
5 (1, 0, 0) 1 t a21
2,
1
2, 1b 1 s a1, 2
1
2,
1
3b,
tPRr>
5 (1, 0, 0) 1 t (212,
12, 1),
tPRz 5 t,y 5 12 t,x 5 1 2 1
2 t,
x 5 1 21
2z.
x 21
2z 1 z 5 1
y 51
2z
2y 2 z 5 0x 2 y 1 z 5 1
sPRr>
5 sa1, 21
2,
1
3b,
sPRz 5 13 s,y 5 21
2 s,x 5 s,
x 5 22y 5 3z"12 1 12 1 12 5 "3
B 5 (0, 0, 21)
z 5 21.
s 5 21.
A 5 (1, 1, 0).y 5 1.x 5 1,
z 5 0.

b.
c.
2. a.–e. Answers may vary. For example:
Then substitute in the point and the direction vectorto find the equation of the line.
A:B:C:
A:B:C:
The three medians meet at 3. a.
So
b.
c.
4. a.x 2 13y 2 3z 2 38 5 0p2:
3x 1 y 1 7z 1 3 5 0p1:
(27, 0, 10)
z 5 10y 5 0,x 5 27,
z 5 27a230
21b
y 530
71 3a2
30
21b,x 5 2
19
71 3a2
30
21b,
t 5 230
212
19
71 3t 5 27,
z 5 27ty 530
71 3t,x 5 2
19
71 3t,L2:
z 5 ty 5 20 2 2t,x 5 27,L1:
tPRL2: r>
5 a219
7,
30
7, 0b 1 t(3, 3, 27),
tPRL1: r>
5 (27, 20, 0) 1 t(0, 22, 1),
tPRr>
5 a219
7,
30
7, 0b 1 t(3, 3, 27),
y 5 23t 130
7
4a23t 219
7b 1 3y 1 3(7t) 2 2 5 0
x 5 23t 219
7
27x 2 3(7t) 2 19 5 0,
z 5 7t, 2L1 2 3L2: 27x 2 3z 2 19 5 0
L2: 5x 1 2y 1 3z 1 5 5 0
L1: 4x 1 3y 1 3z 2 2 5 0
tPRr>
5 (27, 20, 0) 1 t(0, 22, 1),
y 5 20 2 2ty 1 2(t) 2 20 5 0
z 5 t,L2: y 1 2z 2 20 5 0
L1: y 1 2z 2 20 5 0
x 5 27.
L1 2 L2: x 1 7 5 0
L2: 4x 1 y 1 2z 1 8 5 0
L1: 5x 1 y 1 2z 1 15 5 0
(21, 22, 5).
(21, 22, 5)
z 5 5y 5 22,x 5 21,
z 5 7 2 2(1)y 5 25 1 3(1),x 5 28 1 7(1),
t 5 1
y 5 22 5 25 1 3ttPRz 5 7 2 2t,y 5 25 1 3t,x 5 28 1 7t,
tPRz 5 5,y 5 22,x 5 3 1 t,tPRz 5 3 2 2t,y 5 1 1 3t,x 5 2 1 3t,
(21, 22, 5)
z 5 5y 5 22,x 5 21,
z 5 3 2 2(21)
y 5 1 1 3(21),x 5 2 1 3(21),
t 5 21
y 5 22 5 1 1 3ttPRz 5 7 2 2t,y 5 25 1 3t,x 5 28 1 7t,
tPRz 5 5,y 5 22,x 5 3 1t,tPRz 5 3 2 2t,y 5 1 1 3t,x 5 2 1 3t,
tPRz 5 7 2 2t,y 5 25 1 3t,x 5 28 1 7t,tPRC: r
>
5 (28, 25, 7) 1 t(7, 3, 22),
tPRz 5 5,y 5 22,x 5 3 1 t,tPRB: r
>
5 (3, 22, 5) 1 t(1, 0, 0),
tPRx 5 2 1 3t, y 5 1 1 3t, z 5 3 2 2t,tPRA: r
>
5 (2, 1, 3) 1 t(3, 3, 22),
m3 5 (Cc) 5 (10.5, 4.5, 23) 5 (7, 3, 22)
m2 5 (Bb) 5 (26, 0, 0) 5 (1, 0, 0)
m1 5 (Aa) 5 (24.5, 24.5, 3) 5 (3, 3, 22)
C(28, 25, 7)B(3, 22, 5),A(2, 1, 3),
m3 5 (Cc) 5 (10.5, 4.5, 23) 5 (7, 3, 22)
m2 5 (Bb) 5 (26, 0, 0) 5 (1, 0, 0)
m1 5 (Aa) 5 (24.5, 24.5, 3) 5 (3, 3, 22)
c 5 (2.5, 20.5, 4)
b 5 (23, 22, 5)
a 5 (22.5, 23.5, 6)
C(28, 25, 7)B(3, 22, 5),A(2, 1, 3),
(0, 3, 5)
z 5 5y 5 3,x 5 0,
z 5 15 1 5(22)
y 5 23 2 3(22),x 5 4 1 2(22),
t 5 22
0 5 4 1 2tz 5 15 1 5ty 5 23 2 3t,x 5 4 1 2t,
tPRr>
5 (4, 23, 15) 1 t(2, 23, 5),
(2, 0, 10)
z 5 10y 5 0,x 5 2,
z 5 15 1 5(21)
y 5 23 2 3(21),x 5 4 1 2(21),
t 5 21
0 5 23 2 3tz 5 15 1 5ty 5 23 2 3t,x 5 4 1 2t,
tPRr>
5 (4, 23, 15) 1 t(2, 23, 5),
(22, 6, 0)
z 5 0y 5 6,x 5 22,
z 5 15 1 5(23)
y 5 23 2 3(23),x 5 4 1 2(23),
9-12 Chapter 9: Relationships Between Points, Lines, and Planes

b.
c. The lines found in 4. a. and 4. b. do not intersect,because they are in parallel planes.5. a. For there to be no solution the lines must beinconsistent with each other.
For
For the equations are equivalent.So there is no solution when b. To have an infinite number of solutions, the linesmust be proportional.
c. The system has one solution when orbecause other values lead to an infinite
number of solutions or no solution.
6.
Since there is no t-value that satisfies the equations,there is no intersection, and these lines are skew.
7. a.
b. Since there is no t-value that satisfies the equations, there is no intersection, and these linesare skew.8.
9. a.
b.
These lines are the same, so either one of theselines can be used as their intersection.
tPRr>
5 (28, 1, 29) 1 t(5, 21, 6),L2:
sPRr>
5 (2, 21, 3) 1 s(5, 21, 6),L1:
(3, 1, 2)
z 5 2y 5 1,x 5 3,
z 5 3 2 (1)
y 5 21 1 2(1),x 5 21 1 4(1),
t 5 1
y 5 1 5 21 1 2t,z 5 3 2 ty 5 21 1 2t,x 5 21 1 4t,L2:
z 5 7 1 5sy 5 1,x 5 5 1 2s,L1:
tPRr>
5 (21, 21, 3) 1 t(4, 2, 21),L2:
sPRr>
5 (5, 1, 7) 1 s(2, 0, 5),L1:
(23, 6, 6)
z 5 6y 5 6,x 5 23,
s 5 22
x 5 23 5 1 1 2stPRz 5 2t,y 5 t 1 3,x 5 23,L2:
sPRz 5 23s,y 5 4 2 s,x 5 1 1 2s,L1:
t 5 2116t 1 16 5 0,3L3 1 2L5:
t 5 3.810t 2 38 5 0,L3 1 2L4:
5t 1 3s 1 11 5 0L5:
4t 1 s 2 18 5 0L4:
2t 2 2s 2 2 5 0L3:
z 5 23s 2 4 5 5t 1 7
y 5 s 1 2 5 24t 1 20
x 5 2t 1 3 5 2s 1 5
z 5 5t 1 7y 5 24t 1 20,x 5 2t 1 3,L2:
z 5 23s 2 4y 5 s 1 2,x 5 2s 1 5,L1:
tPR(x 2 3, y 2 20, z 2 7) 5 t(2, 24, 5),L2:
x 2 5
25 y 2 2 5
z 1 4
235 sL1:
t 5 27
4z 5 20.5 5 3 1 2t,
t 5 225
3y 5 26 5 1 2 3t,
z 5 20.5y 5 26,x 5 0,
z 5 27 1 5(25.5)y 5 24(25.5) 1 4,
s 5 25.5
x 5 0 5 2s 1 11,
z 5 27 1 5sy 5 24s 1 4,x 5 2s 1 11,L1:
tPRz 5 3 1 2t,y 5 1 2 3t,x 5 0,L2:
x 2 11
25
y 2 4
245
z 2 27
55 sL1:
a 2 23,
a 2 3
a 5 23
ax 1 9y 5 227L2:
23x 2 3ay 5 227L1:
23(x 1 ay 5 9) 5 23x 2 3ay 5 227
ax 1 9y 5 227L2:
x 1 ay 5 9L1:
a 5 3.
a 5 23,
3x 1 9y 5 227L2:
x 1 3y 5 9L1:
a 5 3:
a 5 63
1
a5
a9
ax 1 9y 5 227L2:
x 1 ay 5 9L1:
sPRz 5 s,y 5 22
5s 1
94
5,x 5 2
11
5s 1
227
5,
x 5 211
5s 1
227
5
x 2 3a22
5s 1
94
5b 1 (s) 1 11 5 0
y 5 22
5s 1
94
5
5y 1 2(s) 2 94 5 0
z 5 s,5y 1 2z 2 94 5 026p1 1 p2:
6x 2 13y 1 8z 2 28 5 0p2:
x 2 3y 1 z 1 11 5 0p1:
tPRz 5 t,y 5 22t5
2117
40,x 5 2
11t5
21
40,
y 5 22t5
2117
40
3a211t5
21
40b 1 y 1 7(t) 1 3 5 0
x 5 211t5
21
40
40x 1 88(t) 1 1 5 0
z 5 t,40x 1 88z 1 1 5 013p1 1 p2:
9-13Calculus and Vectors Solutions Manual

10. a. Answers may vary. For example:i. coincident
ii. parallel and distinct
iii. skew
iv. intersect in a point
b. i. When lines are the same, they are a multiple of each other.ii. When lines are parallel, one equation is a multiple of the other equation, except for the constant term.
iii. When lines are skew, there are no common solutions to make each equation consistent.iv. When the solution meets in a point, there is onlyone unique solution for the system.11. a. A line and plane have an infinite number ofpoints of intersection when the line lies in the plane. b. Answers may vary. For example:
12. a.
Equation equation ):
b.
There is no solution to this system, because theplanes are parallel, but one plane lies above theother.c.
Equation equation ):Equation equation ):
13. a. The two lines intersect at a point.b. The two planes are parallel and do not meet.c. The three planes intersect at a point.14. a.
y 2 z 5 0
z 5 23
2
a21
2b 1 z 5 22
x 1 z 5 22
x 5 21
2L1: y 2 z 5 0,
5 x 1 z 5 22
L:(x 2 y 5 1) 1 (y 1 z 5 23)
(2, 1, 4)
z 5 4
(2) 2 3(1) 2 2z 5 29
x 5 2
5x 2 13(1) 5 23
y 5 1
211y 5 211
1 5(22x 1 3y 5 21)
2(5x 2 13y 5 23)
22x 1 3y 5 2131 (2
5x 2 13y 5 2321 (2 31
23x 1 6y 1 2z 5 83
2x 2 5y 1 z 5 32
x 2 3y 2 2z 5 291
2x 1 8y 2 6z 1 11 5 02
x 1 4y 2 3z 1 6 5 01
(3, 8)
x 5 3
2x 1 24 5 30
y 5 8
7y 5 5622 (2 31
x 2 2y 5 2132
2x 1 3y 5 301
t, sPRr>
5 t(3, 25, 23) 1 s(1, 1, 1),
tPRr>
5 t(3, 25, 23),
y
z
x
L1
L2
y
z
x
L1
L2
y
z
x
L1
L2
y
z
x
L1 L2
9-14 Chapter 9: Relationships Between Points, Lines, and Planes

b.
c.
9.4 The Intersection of Three Planes,pp. 531–533
1. a.
The system can be solved by first solving equation for z. Thus,
If we use the method of back substitution, we cansubstitute into equation and solve for y.
If we substitute and into equation we obtain the value of x.
or The three planes intersect at the point with coordinates Check:Substituting into equation :
Substituting into equation :
Substituting into equation :
b. This solution is the point at which all threeplanes meet.2. a.
The answer may vary depending upon the constantyou multiply the equations by. For example,
and areequations that could work.b. These three planes are intersecting in one singleplane, because all three equations can be changedinto one equivalent equation. They are coincidentplanes.c. Setting and leads to
or d. Setting and leads to
or 3. a.
The answer may vary depending upon the constantsand equations you use to determine your answer.For example,Equation equation equation
orequation equation
andis one system of equations that
could produce the original system composed ofequations , , and .
andis another system of equations
that could produce the original system composed ofequations , , and . b. The systems have no solutions.4. a.
The system can be solved by first solving equation for x. So,
3
2x 1 0y 1 0z 5 263
x 1 0y 2 2z 5 02
x 1 2y 2 z 5 41
321
2x 2 2y 1 8z 5 5
x 2 y 1 4z 5 3,2x 2 y 1 3z 5 22,
321
3x 2 2y 1 7z 5 2
x 2 y 1 4z 5 3,2x 2 y 1 3z 5 22,
2x 2 2y 1 8z 5 5
2 (0x 1 0y 1 0z 5 1) (2x 2 2y 1 8z 5 6)
53222 3
3x 2 2y 1 7z 5 2
1 (0x 1 0y 1 0z 5 1)1 (x 2 y 1 4z 5 3)
(2x 2 y 1 3z 5 22)
531211
0x 1 0y 1 0z 5 13
x 2 y 1 4z 5 32
2x 2 y 1 3z 5 221
s, tPRx 5 t 2 s 1 4,x 2 t 1 s 5 4
z 5 sy 5 ts, tPRz 5 s 2 t 1 4,t 2 s 1 z 5 4
y 5 sx 5 t
2x 2 2y 1 2z 5 83x 2 3y 1 3z 5 12
3 3 (x 2 y 1 z 5 4) 5 3x 2 3y 1 3z 5 12
2 3 (x 2 y 1 z 5 4) 5 2x 2 2y 1 2z 5 8
0x 1 0y 1 0z 5 03
0x 1 0y 1 0z 5 02
x 2 y 1 z 5 41
0x 1 0y 1 3z 5 2123
4 5 210x 1 y 2 z 5 25 1
2
15 2 4 5 2x 2 3y 1 z 5 29 1
1
(29, 25, 24)
x 5 29x 2 3(25) 2 4 5 2
1z 5 24y 5 25
y 5 25
y 2 (24) 5 21
2z 5 24
z 5 24
3z 5 212
3
0x 1 0y 1 3z 5 2123
0x 1 y 2 z 5 212
x 2 3y 1 z 5 21
2x 2 y 1 z 1 1 5 0
D 5 1
2a21
2b 2 a23
2b 1 a23
2b 1 D 5 0
2x 2 y 1 z 1 D 5 0
Ax 1 By 1 Cz 1 D 5 0
5 (2, 21, 1)
(0, 1, 1) 3 (1, 1, 21) 5 (22, 1, 21)
u 5 90 °
cos u 50
@"3 @ @"2 @
n1 5 (0, 1, 1)
n 5 (1, 1, 21)
cos u 50 n ? n1 00 n 0 0 n1 0
a21
2, 2
3
2, 2
3
2b
y 5 23
2
y 2 a23
2b 5 0
9-15Calculus and Vectors Solutions Manual

b.
c.
9.4 The Intersection of Three Planes,pp. 531–533
1. a.
The system can be solved by first solving equation for z. Thus,
If we use the method of back substitution, we cansubstitute into equation and solve for y.
If we substitute and into equation we obtain the value of x.
or The three planes intersect at the point with coordinates Check:Substituting into equation :
Substituting into equation :
Substituting into equation :
b. This solution is the point at which all threeplanes meet.2. a.
The answer may vary depending upon the constantyou multiply the equations by. For example,
and areequations that could work.b. These three planes are intersecting in one singleplane, because all three equations can be changedinto one equivalent equation. They are coincidentplanes.c. Setting and leads to
or d. Setting and leads to
or 3. a.
The answer may vary depending upon the constantsand equations you use to determine your answer.For example,Equation equation equation
orequation equation
andis one system of equations that
could produce the original system composed ofequations , , and .
andis another system of equations
that could produce the original system composed ofequations , , and . b. The systems have no solutions.4. a.
The system can be solved by first solving equation for x. So,
3
2x 1 0y 1 0z 5 263
x 1 0y 2 2z 5 02
x 1 2y 2 z 5 41
321
2x 2 2y 1 8z 5 5
x 2 y 1 4z 5 3,2x 2 y 1 3z 5 22,
321
3x 2 2y 1 7z 5 2
x 2 y 1 4z 5 3,2x 2 y 1 3z 5 22,
2x 2 2y 1 8z 5 5
2 (0x 1 0y 1 0z 5 1) (2x 2 2y 1 8z 5 6)
53222 3
3x 2 2y 1 7z 5 2
1 (0x 1 0y 1 0z 5 1)1 (x 2 y 1 4z 5 3)
(2x 2 y 1 3z 5 22)
531211
0x 1 0y 1 0z 5 13
x 2 y 1 4z 5 32
2x 2 y 1 3z 5 221
s, tPRx 5 t 2 s 1 4,x 2 t 1 s 5 4
z 5 sy 5 ts, tPRz 5 s 2 t 1 4,t 2 s 1 z 5 4
y 5 sx 5 t
2x 2 2y 1 2z 5 83x 2 3y 1 3z 5 12
3 3 (x 2 y 1 z 5 4) 5 3x 2 3y 1 3z 5 12
2 3 (x 2 y 1 z 5 4) 5 2x 2 2y 1 2z 5 8
0x 1 0y 1 0z 5 03
0x 1 0y 1 0z 5 02
x 2 y 1 z 5 41
0x 1 0y 1 3z 5 2123
4 5 210x 1 y 2 z 5 25 1
2
15 2 4 5 2x 2 3y 1 z 5 29 1
1
(29, 25, 24)
x 5 29x 2 3(25) 2 4 5 2
1z 5 24y 5 25
y 5 25
y 2 (24) 5 21
2z 5 24
z 5 24
3z 5 212
3
0x 1 0y 1 3z 5 2123
0x 1 y 2 z 5 212
x 2 3y 1 z 5 21
2x 2 y 1 z 1 1 5 0
D 5 1
2a21
2b 2 a23
2b 1 a23
2b 1 D 5 0
2x 2 y 1 z 1 D 5 0
Ax 1 By 1 Cz 1 D 5 0
5 (2, 21, 1)
(0, 1, 1) 3 (1, 1, 21) 5 (22, 1, 21)
u 5 90 °
cos u 50
@"3 @ @"2 @
n1 5 (0, 1, 1)
n 5 (1, 1, 21)
cos u 50 n ? n1 00 n 0 0 n1 0
a21
2, 2
3
2, 2
3
2b
y 5 23
2
y 2 a23
2b 5 0
9-15Calculus and Vectors Solutions Manual

If we use the method of back substitution, we cansubstitute into equation and solve for z.
If we substitute and into equation we obtain the value of y.
or
The equations intersect at the point with coordinates
Check:Substituting into equation :
Substituting into equation :
Substituting into equation :b. This solution is the point at which all threeplanes meet.5. a.
Since equation equation equation and equation are consistent or lie in the sameplane. Equation meets this plane in a line.b. Adding equation and equation creates anequivalent equation, or Substituting
into equation and equation givesequation and equation
Equations and indicate theproblem has infinite solutions. Substituting into equation or leads to
and Check:
6.
There is no solution to this system of equations,because if you multiply equation by 5 youobtain a new equation,which is inconsistent with equation .7. a. Yes when this equation is alone, this is true,because any constants can be substituted into thevariables in the equation and theequation will always be consistent.
b. Answers may vary. For example: To obtain a nosolution and an equation with you must have two equal planes and one paralleldistinct plane. For example one solution is:
8. a.
equation equation which gives
Equation equation Substituting into this equation leads
to: or Substituting and into equation gives: or is the point at which the three planes meet.Check:Substituting into equation :
Substituting into equation :
Substituting into equation :
b.
Equation equation which gives Equation Equation or
. Substituting and into equation leads to:
or
is the point at which the three planes meet.Check:Substituting into equation :
Substituting into equation :
Substituting into equation :
c.
Equation equation equation 5 x 1 y 5 1
45312
y 2 z 5 2013
x 1 z 5 22002
x 2 y 5 21991
x 2 2y 1 3z 5 26 2 1 1 9 5 2
3
2x 1 2y 2 3z 5 212 1 1 2 9 5 220
2
x3
2y4
1 z 5 22 21
81 3 5
7
8
1
(26, 12, 3)
z 5 3.26 2 2a1
2b 1 3z 5 2
3y 5 12x 5 26y 5 1
2
5 254y 5 25
812 3 33
x 5 26.
2185 3x 1 0y 1 0z 5312
x 2 2y 1 3z 5 23
2x 1 2y 2 3z 5 2202
x3
2y4
1 z 57
81
3x 1 2y 2 z 5 23 2 2 1 0 5 25
3
x 2 y 1 2z 5 21 1 1 1 0 5 0
2
2x 1 y 2 z 5 22 2 1 1 0 5 23
1
(21, 21, 0)y 5 21.2(21)y 2 0 5 23
1x 5 21z 5 0
z 5 0.3(21) 1 z 5 23
x 5 15 23.
1z3x 1 0y 15211
x 5 21.5 25
5 5x 1 0y 1 0z3122 3
3x 1 2y 2 z 5 253
x 2 y 1 2z 5 02
2x 1 y 2 z 5 231
3x 1 3y 1 3z 5 12
2x 1 2y 1 2z 5 4
x 1 y 1 z 5 2
0x 1 0y 1 0z 5 0,
0x 1 0y 1 0z 5 0
3
5x 2 5y 1 15z 5 21005,
2
5x 2 5y 1 15z 5 210043
x 2 y 1 3z 5 22012
2x 1 3y 2 4z 5 251
23(0) 2 3(s) 1 3(s 1 1) 5 3
0 1 s 2 (s 1 1) 5 21
2(0) 2 s 1 (s 1 1) 5 1
tPRz 5 1 1 t,y 5 t,x 5 0,
54
y 5 t54y 2 z 5 21.
5z 2 y 5 14
21x 5 0
x 5 0.3x 5 0
12
1
3
2,25 23
23x 2 3y 1 3z 5 33
x 1 y 2 z 5 212
2x 2 y 1 z 5 11
2x 1 0y 1 0z 5 263
x 1 0y 2 2z 5 23 1 3 5 0
2
x 1 2y 2 z 5 23 1 224 1 3
2 5 4
1
(23, 114 , 23
2)
y 511
423 1 2y 1
3
25 4
1z 5 232x 5 23
z 5 23
2
23 2 2z 5 0
2x 5 23
x 5 23
2x 5 26
9-16 Chapter 9: Relationships Between Points, Lines, and Planes

Equation equation or. Substituting into equation
leads to:or Substituting
into equation , you obtain:or is the point at which the three
planes meet.Check:Substituting into equation :
Substituting into equation :
Substituting into equation :
d.
Rearranging equation gives Solving for xin equation gives Substituting and into equation leads to:
or (4, 2, 3) is the point at which all three planes meet.9. a.
Equation equation equation
Setting Equation equation equation
Setting and The
planes intersect in a line.b.
Equation equation or Equation equation or Since the solutions for y are different from thesetwo equations, there is no solution to this system ofequations.c.
Equation equation equation
Setting
Using and Solve equation or
and The planes intersect in a line.10. a.
Equation equation equation or
Setting Equation : or
and b.
Equation equation equation or
Setting and equation :
or
and
11. a.
Equation equation equation or
Equation equation equation or
Since the y-variable is different in equation andequation , the system is inconsistent and has nosolution.b. Answers may vary. For example: If you use thenormals from equations , , and , you candetermine the direction vectors from the equations’coefficients.
c. The three lines of intersection are parallel and arepairwise coplanar, so they form a triangular prism.d. is perpendicular to So since,
a triangular prism forms.12. a.
3x 2 5z 5 03
x 2 y 1 3z 5 62
x 2 y 1 3z 5 31
(n1
>
3 n2
>
) ? n3
>
5 0,
n3
>
.n1
>
3 n2
>
m3 5 n2
>
3 n3
>
5 (21, 0, 1)
m2 5 n1
>
3 n3
>
5 (2, 0, 22)
m1 5 n1
>
3 n2
>
5 (3, 0, 23)
n3
>
5 (1, 21, 1)
n2
>
5 (1, 22, 1)
n1
>
5 (1, 1, 1)
321
5
4
y 5 02y 5 05
55322
y 5 122y 5 15
45321
x 2 y 1 z 5 03
x 2 2y 1 z 5 02
x 1 y 1 z 5 11
s, tPRz 5 s,y 5 t,x 5t 2 3s
2,
x 5t 2 3s
22x 2 t 1 3s 5 0
1z 5 s,y 5 tx 5 0.2x 5 05
45311
22x 1 y 2 3z 5 03
4x 2 2y 1 6z 5 02
2x 2 y 1 3z 5 01
tPRz 5 t,y 5 t 2 2,x 5 0,
y 5 t 2 20 2 y 1 t 5 21
z 5 t,x 5 0.2x 5 05
45311
x 1 y 2 z 5 223
2x 2 2y 1 2z 5 42
x 2 y 1 z 5 21
tPRz 5 t,y 5 2,x 5 2t,y 5 22t 2 y 1 t 5 22
1x 5 2t,z 5 t
x 5 2tz 5 t,5 2x 1 2y 5 0.
45211
x 2 3y 1 z 5 263
x 1 y 1 z 5 22
x 2 y 1 z 5 221
y 5 95 21y 5 29123
y 5 25 24y 5 28223
x 2 3y 1 z 5 263
x 1 y 1 z 5 22
x 2 2y 1 z 5 31
tPRz 5 t,y 5 2157 1 3
7 t,x 5 217 t 2 9
7,
y 5 2157 1 3
7 tz 5 t,5 7y 1 23z 5 215.
5512 2 32
x 5 217 t 2 9
7z 5 t,5 7x 1 1z 5 29.
45213
5x 2 3y 1 2z 5 03
2x 1 3y 2 z 5 292
x 2 2y 1 z 5 31
z 5 3.4 2 2 2 z 5 21
1y 5 2x 5 4
x 5 4.3
y 5 2.2
x 1 1 5 53
y 2 2 5 02
x 2 y 2 z 5 211
y 2 z 5 100 2 (2101) 5 201
3
x 1 z 5 299 2 101 5 2200
2
x 2 y 5 299 2 (100) 5 2199
1
(299, 100, 2101)
z 5 2101299 1 z 5 2200
2
x 5 299y 5 100.299 2 y 5 2199
1x 5 299x 5 299
5 2x 5 2198114
9-17Calculus and Vectors Solutions Manual

Equation and equation have the same set ofcoefficients and variables, however, equations equals 3 while equation equals 6, which meansthere is no possible solution.b.
All three equations equal different numbers so thereis no possible solution.c.
Equation equals 18 while equation equals 17,which means there is no possible solution.d. The coefficients of equation are half the coefficients of equation , but the constant term is not half the other constant term.13. a.
Equation equation equation :or Substituting into
equation and equation gives:or or
b.
Equation equation :
Setting
Equation equation :
Setting
c.
Equation equation : or Setting and in equation gives,
or
d.
If you multiply equation by two, you obtainSince equation and
equation equal different numbers, there is nosolution to this system.e.
Equation equation : or Setting and in equation ,
or
f.
Equation equation equation
Equation equation equation
Equation equation :Setting in equation and equation ,Equation Equation Equation equation : or Setting and in equation leads to
(0, 0, 0)14. a. First, reorder these equations so that equation
is first, equation is second, and equation last.
To eliminate x from the last two equations, subtract4 times equation from equation , and subtract2 times equation from equation .
There will be an infinite number of solutions ifand because then
equation will be 3 times equation . This meansthat b. Based on what was found in part a., substitutingin we will arrive at the equivalent system
which is really the same as
Letting we see that equation delivers2z 5 t,3y 2 z 5 262
x 2 y 1 z 5 51
3y 2 z 5 263
9y 2 3z 5 2182
x 2 y 1 z 5 51
p 5 q 5 5
p 5 q 5 5.
32
3(4 2 2p) 5 2 2 4pq 1 4 5 9
3y 2 z 5 4 2 2p3
(q 1 4)y 2 3z 5 2 2 4p2
x 2 y 1 z 5 p1
31
21
2x 1 y 1 z 5 43
4x 1 qy 1 z 5 22
x 2 y 1 z 5 p1
132
x 5 0
1z 5 0y 5 0
y 5 03y 5 0726
5 x 2 2y 5 07
5 x 1 y 5 06
21z 5 0
z 5 0524
5 3y 2 3z 5 0
52232 23
5 3y 2 2z 5 0
45221
2x 2 y 1 3z 5 03
x 2 2y 1 3z 5 02
x 1 y 1 z 5 01
tPRz 5 t,y 5 2,x 5 2t,x 5 2tx 2 2 1 t 5 22
1z 5 ty 5 2
y 5 222y 5 24211
3x 1 y 1 3z 5 23
x 1 y 1 z 5 22
x 2 y 1 z 5 221
3
22x 2 20y 1 26z 5 216.
2
x 2 10y 1 13z 5 283
2x 2 20y 1 26z 5 282
x 2 10y 1 13z 5 241
tPRz 5 t,y 5 t,x 5 0,
y 5 t2(0) 2 y 1 t 5 0
2z 5 tx 5 0
x 5 03x 5 0211
4x 2 5y 1 5z 5 03
2x 2 y 1 z 5 02
x 1 y 2 z 5 01
tPRz 5 t,y 55t 1 5
3,x 5
t 2 2
3,
y 55t 1 5
3z 5 t,
23y 1 5z 5 25.232 21
x 5t 2 2
3z 5 t,
3x 2 z 5 22.211
5x 1 2y 2 5z 5 03
x 1 y 2 2z 5 12
2x 2 y 1 z 5 231
(4, 3, 25)
z 5 25 0x 1 3 2 z 5 8
x 5 4 x 1 3 1 0z 5 7
32
y 5 3y 5 3.1224y 5 2
3222 2 31
0x 1 y 2 z 5 83
x 1 y 1 0z 5 72
2x 2 y 2 z 5 101
2
1
32
2x 2 2y 1 2z 5 173
2x 2 2y 1 2z 5 182
x 2 y 1 z 5 91
5x 2 2y 1 3z 5 133
5x 2 2y 1 3z 5 212
5x 2 2y 1 3z 5 11
2
1
21
9-18 Chapter 9: Relationships Between Points, Lines, and Planes

and so equation gives
So the parametric equation of the line of intersection is
.
15. a. First, eliminate x from two of these equations.To make things easier, switch equation withequation , and multiply equation by 2.
Now eliminate x from the last two equations byusing proper multiples of the first equation.
Now eliminate y from the third equation by using aproper multiple of the second equation.
If (the coefficient of z in the thirdequation), then However, if thethird equation would become which has nosolutions. So there is no solution if b. Working with what was found in part a., if then the third equation in the equivalent system foundthere will have a unique solution for z, namely
and back-substituting into the other two equationswill give unique solutions for x and y also. So thereis a unique solution if c. Again using the equivalent system found in part a.,setting will deliver the third equation which allows for z to be anything at all. So will give an infinite number of solutions.
16. a.
Equation equation :
equation
Equation equation :
equation
Equation equation :
or
Substituting into equation :
or
Substituting and into equation :
or
(3, 6, 2)
9.5 The Distance from a Point to a Line in R2 and R3, pp. 540–541
1. a.
b.
or 4.31
c.
or 5.76
2. a. and In order to find the distance between these two parallel lines, you must first find a point on one of
2x 2 y 1 6 5 02x 2 y 1 1 5 0
5236
"1681
d 50 9(24) 2 40(5) 0"92 1 (40)2
d 50Ax0 1 By0 1 C 0
"A2 1 B2
9x 2 40y 5 0
556
13
d 50 5(24) 2 12(5) 1 24 0
"52 1 (212)2
d 50Ax0 1 By0 1 C 0
"A2 1 B2
5x 2 12y 1 24 5 0
53
5
d 50 3(24) 1 4(5) 2 5 0
"32 1 42
d 50Ax0 1 By0 1 C 0
"A2 1 B2
3x 1 4y 2 5 5 0
a 5 31
a1
1
62
1
25 0
1b 5 6c 5 2
b 5 61
b1 2 5
13
6
4c 5 2
c 5 231
c5 15.5
41 6 35
5m3 5 n>
3 n1
>
5 (21, 0, 1) 55
25
26
b1
7
c12 4 33
41
b1
4
c5
13
65
12 2 32
4
a2
2
b1
3
c5
5
23
2
a1
3
b1
2
c5
13
62
1
a1
1
b2
1
c5 01
m 5 22
0z 5 0,m 5 22
m 2 62.
z 52m 1 4
2m2 2 8,
m 2 62,
m 5 2.
0z 5 8,
m 5 2,m 5 6 2.
2m2 2 8 5 0
(2m2 2 8)z 5 2m 1 43
y 1 z 5 02
2x 1 y 1 z 5 241
27y 1 (2m2 2 15)z 5 2m 1 43
y 1 z 5 02
2x 1 y 1 z 5 241
6x 2 4y 1 (2m2 2 12)z 5 2m 2 83
4x 1 3y 1 3z 5 282
2x 1 y 1 z 5 241
32
1
tPRz 5 t,y 51
3t 2 2,x 5 2
2
3t 1 3,
5 22
3t 1 3
x 51
3(t 2 6) 2 t 1 5
1
51
3t 2 2
y 51
3(t 2 6)
9-19Calculus and Vectors Solutions Manual

and so equation gives
So the parametric equation of the line of intersection is
.
15. a. First, eliminate x from two of these equations.To make things easier, switch equation withequation , and multiply equation by 2.
Now eliminate x from the last two equations byusing proper multiples of the first equation.
Now eliminate y from the third equation by using aproper multiple of the second equation.
If (the coefficient of z in the thirdequation), then However, if thethird equation would become which has nosolutions. So there is no solution if b. Working with what was found in part a., if then the third equation in the equivalent system foundthere will have a unique solution for z, namely
and back-substituting into the other two equationswill give unique solutions for x and y also. So thereis a unique solution if c. Again using the equivalent system found in part a.,setting will deliver the third equation which allows for z to be anything at all. So will give an infinite number of solutions.
16. a.
Equation equation :
equation
Equation equation :
equation
Equation equation :
or
Substituting into equation :
or
Substituting and into equation :
or
(3, 6, 2)
9.5 The Distance from a Point to a Line in R2 and R3, pp. 540–541
1. a.
b.
or 4.31
c.
or 5.76
2. a. and In order to find the distance between these two parallel lines, you must first find a point on one of
2x 2 y 1 6 5 02x 2 y 1 1 5 0
5236
"1681
d 50 9(24) 2 40(5) 0"92 1 (40)2
d 50Ax0 1 By0 1 C 0
"A2 1 B2
9x 2 40y 5 0
556
13
d 50 5(24) 2 12(5) 1 24 0
"52 1 (212)2
d 50Ax0 1 By0 1 C 0
"A2 1 B2
5x 2 12y 1 24 5 0
53
5
d 50 3(24) 1 4(5) 2 5 0
"32 1 42
d 50Ax0 1 By0 1 C 0
"A2 1 B2
3x 1 4y 2 5 5 0
a 5 31
a1
1
62
1
25 0
1b 5 6c 5 2
b 5 61
b1 2 5
13
6
4c 5 2
c 5 231
c5 15.5
41 6 35
5m3 5 n>
3 n1
>
5 (21, 0, 1) 55
25
26
b1
7
c12 4 33
41
b1
4
c5
13
65
12 2 32
4
a2
2
b1
3
c5
5
23
2
a1
3
b1
2
c5
13
62
1
a1
1
b2
1
c5 01
m 5 22
0z 5 0,m 5 22
m 2 62.
z 52m 1 4
2m2 2 8,
m 2 62,
m 5 2.
0z 5 8,
m 5 2,m 5 6 2.
2m2 2 8 5 0
(2m2 2 8)z 5 2m 1 43
y 1 z 5 02
2x 1 y 1 z 5 241
27y 1 (2m2 2 15)z 5 2m 1 43
y 1 z 5 02
2x 1 y 1 z 5 241
6x 2 4y 1 (2m2 2 12)z 5 2m 2 83
4x 1 3y 1 3z 5 282
2x 1 y 1 z 5 241
32
1
tPRz 5 t,y 51
3t 2 2,x 5 2
2
3t 1 3,
5 22
3t 1 3
x 51
3(t 2 6) 2 t 1 5
1
51
3t 2 2
y 51
3(t 2 6)
9-19Calculus and Vectors Solutions Manual

the lines. It is easiest to find a point where the linecrosses the x or y-axis.
or which corresponds tothe point
or 2.24
b. and In order to find the distance between these two parallel lines, you must first find a point on one ofthe lines. It is easiest to find a point where the linecrosses the x or y-axis.
or which correspondsto the point
or 20.16
3. a. We start by writing the given equation of the line inparametric form. Doing so gives
We construct a vector from to a general point on the line.
This means that the minimal distance between and the line occurs when
This point corresponds to The distancebetween this point and is 1.4.b.We start by writing the given equation of the line inparametric form. Doing so gives
We construct a vector from to ageneral point on the line.
This means that the minimal distance between and the line occurs when
This point corresponds to The distancebetween this point and is about 3.92.c.We start by writing the given equation of the line inparametric form. Doing so gives
We construct a vector from to a general point on the line.
This means that the minimal distance betweenand the line occurs when
This point corresponds to The distance between this point and isabout 2.88.
4. a.
If you substitute in the coordinates the
formula changes to
which reduces to
b. and
The distance between these parallel lines is because one of the lines is below
the origin and the other is above the origin.c. and In order to find the distance between these two parallel lines, you must first find a point on one ofthe lines. It is easiest to find a point where the linecrosses the x or y-axis.
3x 2 4y 1 12 5 03x 2 4y 2 12 5 0
125 1 12
5 5 245 ,
512
5
d(L2) 50C 0
"A2 1 B25
0 12 0"32 1 (24)2
512
5
d(L1) 50C 0
"A2 1 B25
0212 0"32 1 (24)2
3x 2 4y 1 12 5 03x 2 4y 2 12 5 0
d 50C 0
"A2 1 B2.
d 50A(0) 1 B(0) 1 C 0
"A2 1 B2,
(0, 0),
d 50Ax0 1 By0 1 C 0
"A2 1 B2
(22, 3)
A478625,
2379625 B.
p 5 2 21625.R(22, 3)
p 5 221
625
(221 2 49p) 1 (2576p) 5 0
(7, 224) ? (23 2 7p, 24p) 5 0
5 (23 2 7p, 24p).
a>
5 322 2 (1 1 7p), 3 2 (3 2 24p)4R(22, 3)y 5 3 2 24p.
x 5 1 1 7p,
pPRr>
5 (1, 3) 1 p(7, 224),
(22, 3)
A274169,
252169B.
t 5 21169.R(22, 3)
t 521
169
(215 2 25t) 1 (36 2 144t) 5 0
(5, 12) ? (23 2 5t, 3 2 12t) 5 0
5 (23 2 5t, 3 2 12t).
a>
5 322 2 (1 1 5t), 3 2 (12t)4R(22, 3)y 5 12t.
x 5 1 1 5t,
tPRr>
5 (1, 0) 1 t(5, 12),
(22, 3)
A22225,
5425B.
s 5 125.R(22, 3)
s 51
25
(23 2 9s) 1 (4 2 16s) 5 0
(3, 4) ? (21 2 3s, 1 2 4s) 5 0
5 (21 2 3s, 1 2 4s).
a>
5 322 2 (21 1 3s), 3 2 (2 1 4s)4R(22, 3)y 5 2 1 4s.
x 5 21 1 3s,
sPRr>
5 (21, 2) 1 s(3, 4),
5504
25
d 50 7(0) 2 24(7) 2 336 0
"72 1 (224)2
d 50Ax0 1 By0 1 C 0
"A2 1 B2
(0, 7)
y 5 77(0) 2 24y 1 168 5 0
7x 2 24y 2 336 5 07x 2 24y 1 168 5 0
55
"5
d 50 2(0) 2 1(1) 1 6 0"22 1 (21)2
d 50Ax0 1 By0 1 C 0
"A2 1 B2
(0, 1).
y 5 12(0) 2 y 1 1 5 0
9-20 Chapter 9: Relationships Between Points, Lines, and Planes

or which correspondsto the point
Both the answers to 4.b. and 4.c. are the same.5. a.
First find a random point on one of the lines. Wewill use from the first equation. We start bywriting the second equation in parametric form.Doing so gives We construct avector from to a general point on the line.
This means that the minimal distance between and line occurs when This point
corresponds to The distance between this point and is 3
b. and
First change one equation into a Cartesian equation,which leads to and take a pointfrom the other equation such as
c. and In order to find the distance between these two parallel lines, you must first find a point on one ofthe lines. It is easiest to find a point where the linecrosses the x or y-axis.
or which correspondsto the point
or 1.11
d. and In order to find the distance between these two parallel lines, you must first find a point on one ofthe lines. It is easiest to find a point where the linecrosses the x or y-axis.
or which corresponds tothe point
or 18.46
6. a.We start by writing the given equation of the line inparametric form. Doing so gives
and We construct a vector fromto a general point on the line.
This means that the minimal distance betweenand the line occurs when
This point corresponds to The distancebetween this point and is 1.80.b.We start by writing the given equation of the line inparametric form. Doing so gives
and We construct a vectorfrom to a general point on the line.
This means that the minimal distance between and the line occurs when t 5 2 2
441.P(0, 21, 0)
t 5 22
441
(8 2 16t) 1 (210 2 25t) 1 (2400t) 5 0
(24, 5, 20) ? (22 1 4t, 22 2 5t, 220t) 5 0
5 (22 1 4t, 22 2 5t, 20t).
a>
5 30 2 (2 2 4t), 21 2 (1 1 5t), 0 2 (20t)4P(0, 21, 0)
z 5 20t.y 5 1 1 5t,x 5 2 2 4t,
tPRr>
5 (2, 1, 0) 1 t(24, 5, 20),P(0, 21, 0)
P(1, 2, 21)
A19, 49, 289B.
s 5 249.P(1, 2, 21)
s 5 24
9
(24s) 1 (22 2 s) 1 (22 2 4s) 5 0
(2, 21, 2) ? (22s, 2 1 s, 21 2 2s) 5 0
5 (22s, 2 1 s, 21 2 2s).
a>
5 31 2 (1 1 2s), 2 2 (2s), 21 2 (2s)4P(1, 2, 21)
z 5 2s.y 5 2s,
x 5 1 1 2s,
sPRr>
5 (1, 0, 0) 1 s(2, 21, 2),P(1, 2, 21)
5240
13
d 50 5(0) 1 12(10) 1 120 0
"52 1 122
d 50Ax0 1 By0 1 C 0
"A2 1 B2
(0, 10).
y 5 105(0) 1 12y 5 120
5x 1 12y 1 120 5 05x 1 12y 5 120
54
"13
d 50 2(0) 2 3(21) 1 1 0
"22 1 (23)2
d 50Ax0 1 By0 1 C 0
"A2 1 B2
(0, 21).
y 5 212(0) 2 3y 2 3 5 0
2x 2 3y 2 3 5 02x 2 3y 1 1 5 0
57
5 or 1.4
d 50 3(4) 1 4(24) 2 3 0
"32 1 42
d 50Ax0 1 By0 1 C 0
"A2 1 B2
(4, 24).
3x 1 4y 2 3 5 0
x4
5y 1 1
23
x 2 1
45
y23
(22, 1)
A25, 245B.
t 5 215.P(22, 1)
t 5 21
5
(29 2 9t) 1 (4 2 16t) 5 0
(3, 4) ? (23 2 3t, 1 2 4t) 5 0
5 (23 2 3t, 1 2 4t).
a>
5 322 2 (1 1 3t), 1 2 (4t)4P(22, 1)
y 5 4t.x 5 1 1 3t,
(22, 1)
tPRr>
5 (1, 0) 1 t(3, 4),
sPRr>
5 (22, 1) 1 s(3, 4),
524
5
d 50 3(0) 2 4(23) 1 12 0
"32 1 (24)2
d 50Ax0 1 By0 1 C 0
"A2 1 B2
(0, 3).
y 5 233(0) 2 4y 2 12 5 0
9-21Calculus and Vectors Solutions Manual

This point corresponds to Thedistance between this point and is 2.83.c. P(2, 3, 1) We start by writing the given equation of the line inparametric form. Doing so gives and We construct a vector from P(2, 3, 1)to a general point on the line.
This means that the minimal distance between P(2, 3, 1) and the line occurs when This point corresponds to The distancebetween this point and P(2, 3, 1) is 3.44.7. a.
First find a random point on one of the lines. Wewill use from the second equation. Wethen write the first equation in parametric form.Doing so gives and
We construct a vector from to a general point on the line.
This means that the minimal distance betweenand line occurs when This point
corresponds to The distance between thispoint and is 2.83b.
First find a random point on one of the lines. We will use P(1, 0, 1) from the second equation. We then write the first equation in parametric form.Doing so gives and
We construct a vector from P(1, 0, 1)to a general point on the line.
This means that the minimal distance between P(1, 0, 1) and line occurs when This point corresponds to The distance between this point and is 3.288. a.First we write the equation in parametric form.Doing so gives and
We construct a vector from P(2, 1, 3) toa general point on the line.
This means that the minimal distance between P(2, 1, 3) and line occurs when This pointcorresponds to b. The distance between and is 1.65.9. First, find the line L of intersection between theplanes
Subtract the first equation from the second toeliminate x and get the equivalent system
Let Then the second equation gives
So substituting these into the first equation gives
So the equation of the line of intersection for thesetwo planes in parametric form is
The direction vector for this line is which is parallel to So, to make thingseasier, the parametric form of this line ofintersection could also be expressed as
In vector form, this is the same astPRz 5 2t,y 5 3t 2 2,x 5 2t,
(21, 3, 2).
A212,
32, 1B,
tPR.z 5 t,y 53
2t 2 2,x 5 2
1
2t,
5 21
2t
5 a3
2t 2 2b 2 2t 1 2
x 5 y 2 2z 1 2
y 53
2 t 2 2
2y 5 3t 2 4
z 5 t.2y 2 3z 5 242
x 2 y 1 2z 5 21
x 1 y 2 z 5 222
x 2 y 1 2z 5 21
(2, 1, 3)A1711,
711,
1611B
A1711,
711,
1611B.
s 5 611.
s 56
11
(1 2 s) 1 (6 2 9s) 1 (1 1 s) 5 0
(1, 3, 21) ? (1 2 s, 2 2 3s, 1 1 s) 5 0
5 (1 2 s, 2 2 3s, 1 1 s).
a>
5 32 2 (1 1 s), 1 2 (21 1 3s), 3 2 (2 2 s)4z 5 2 2 s.
y 5 21 1 3s,x 5 1 1 s,
sPRr>
5 (1, 21, 2) 1 s(1, 3, 21),
(1, 0, 1)
A4513,
1913, 2
613B.
m 5 613.
m 56
13
(22 2 3m) 1 (21 2 m) 1 (9 2 9m) 5 0
(1, 1, 3) ? (22 2 3m, 21 2 m, 3 2 3m) 5 0
5 (22 2 3m, 21 2 m, 3 2 3m).
a>
5 31 2 (3 1 m), 0 2 (1 1 m), 1 2 (22 1 3m)4z 5 22 1 3m.
y 5 1 1 m,x 5 3 1 m,
nPRr>
5 (1, 0, 1) 1 n(1, 1, 3),
mPRr>
5 (3, 1, 22) 1 m(1, 1, 3),
(21, 1, 2)
(1, 1, 0).
s 5 0.P(21, 1, 2)
s 5 0
(24 2 4s) 1 (2s) 1 (4 2 4s) 5 0
(2, 1, 2) ? (22 2 2s, 2s, 2 2 2s) 5 0
5 (22 2 2s, 2 2 2s).
a>
5 321 2 (1 1 2s), 1 2 (1 1 s), 2 2 2s4P(21, 1, 2)z 5 0 1 2s.
y 5 1 1 s,x 5 1 1 2s,
P(21, 1, 2)
tPRr>
5 (21, 1, 2) 1 t(2, 1, 2),
sPRr>
5 (1, 1, 0) 1 s(2, 1, 2),
A228169, 2
57169,
76169B.
p 5 19169.
p 519
169
(24 2 144p) 1 (29 2 9p) 1 (4 2 16p) 5 0
(12, 23, 4) ? (2 2 12p, 3 1 3p, 1 2 4p) 5 0
5 (2 2 12p, 3 1 3p, 1 2 4p).
a>
5 32 2 (12p), 3 2 (23p), 1 2 (4p)4z 5 4p.
y 5 23p,x 5 12p,
pPRr>
5 p(12, 23, 4),
P(0, 21, 0)
A890441,
431441, 2
40441B.
9-22 Chapter 9: Relationships Between Points, Lines, and Planes

.Since is on this line,
So the distance from to the line ofintersection is
To find the point on the line that gives this minimaldistance, let be a point on the line. Then,using the parametric equations,
So the distance from P to this point is
To get the minimal distance, set this quantityequal to
So the point on the line at minimal distance from P is
10. A point on the line
has parametric equations
Let this point be calledThen
If Q is at minimal distance from A, then this vectorwill be perpendicular to the direction vector for theline, This means that
So the point Q on the line at minimal distance fromA is
Also
So the point A will satisfy
So and That is,
11. a. Think of H as being the origin, E as being onthe x-axis, D as being on the z-axis, and G as beingon the y-axis. That is,
and so on for the other points as well. Then linesegment HB has direction vector
Also, So the distance formula saysthat the distance between A and line segment HB is
8 1.75
5 Å52
17
50 4, 0, 26 00 (3, 2, 2) 0
d 50 (3, 2, 2) 3 (3, 0, 2) 0
0 (3, 2, 2) 0
HA>
5 (3, 0, 2).
B(3, 2, 2) 2 H(0, 0, 0) 5 (3, 2, 2).
D(0, 0, 2)
G(0, 2, 0)
E(3, 0, 0)
H(0, 0, 0)
Ar(3821, 2
4421,
16721 ).
c 5 16721 .b 5 244
21,a 5 3821,
5 aa 240
21, b 2
20
21, c 2
31
21b
5 Ar(a, b, c) 2 Q
5 a22
21, 2
64
21,
136
21b
QAr>
5 2QA>
r
5 a 2
21,
64
21, 2
136
21b
QA>
5 a2 240
21, 4 2
20
21, 25 2
31
21b
5 Qa40
21,
20
21,
31
21b
Q(4s, 2s, 1 1 s) 5 Qa4a10
21b, 2a10
21b, 1 1
10
21b
s 510
21
5 10 2 21s 0 5 (2 2 4s, 4 2 2s, 26 2 s) ? (4, 2, 1)
(4, 2, 1).
5 (2 2 4s, 4 2 2s, 26 2 s)
QA>
5 (2, 4, 25) 2 (4s, 2s, 1 1 s)
Q(4s, 2s, 1 1 s).
sPR.z 5 1 1 s,y 5 2s,x 5 4s,
sPR.r>
5 (0, 0, 1) 1 s(4, 2, 1),
5 a211
14,
5
14,
22
14b
5 a211
14, 3a11
14b 2 2, 2a11
14bb
(x, y, z) 5 (2t, 3t, 22, 2t)
511
14
t 5308 6 "0
392
196t2 2 308t 1 121 5 0
196t2 2 308t 1 252 5 131
14t2 2 22t 1 18 5131
14
"14t2 2 22t 1 18 5 Å131
14
#13114 .
5 "14t2 2 22t 1 18
5 "(1 2 t)2 1 (3t 2 4)2 1 (2t 1 1)2
"(x 1 1)2 1 (y 2 2)2 1 (z 1 1)2
(x, y, z) 5 (2t, 3t 2 2, 2t)
(x, y, z)
8 3.06
5 Å131
14
50 (211, 23, 21) 0
0 (21, 3, 2) 0
d 50 (21, 3, 2) 3 (21, 4, 21) 0
0 (21, 3, 2) 0
P(21, 2, 21)
5 (21, 4, 21)
QP>
5 (21, 2, 21) 2 (0, 22, 0)
Q(0, 22, 0)
tPRr>
5 (0, 22, 0) 1 t(21, 3, 2),
9-23Calculus and Vectors Solutions Manual

b. Vertices D and G will give the same distance toHB because they are equidistant to the segment HB.(This is easy to check with the distance formulaused similarly to part a. The vertices C, E, and Fgive different distances than those found in part a.)c. The height of triangle AHB was found in part a.,and was The base length of this triangle is themagnitude of which is Sothe area of this triangle is
9.6 The Distance from a Point to a Plane, pp. 549–550
1. a. Yes the calculations are correct, Point A lies inthe plane.b. The answer 0 means that the point lies in theplane.2. Use the distance formula.
a. The distance from A to the plane is
b. The distance from to the planeis
c. The distance from to the planeis
d. The distance from to the planeis
or 0.38
e. The distance from to the planeis
or 0.41
3. a. and
First find a point in the second plane such as
Then use
to solve.
b.
c. Answers may vary. Any point on the planewill work, for example
4. a. The distance from to the planeis
b. The distance from to the planeis
c. The distance from to the planeis
5. First you have to find an equation of a plane tothe three points. The equation to this plane is
Then use
to solve for the distance.
or 0.6752
3
d 50 14(1) 2 28(21) 1 28(1) 2 42 0
"142 1 (228)2 1 282
d 50Ax0 1 By0 1 Cz0 1 D 0
!A2 1 B2 1 C2
14x 2 28y 1 28z 2 42 5 0.
5 2
d 50 0(1) 1 0(0) 1 1(1) 1 1 0
"02 1 02 1 12
z 1 1 5 0
R(1, 0, 1)
5 4
d 50 1(21) 1 0(1) 1 0(4) 2 3 0
"12 1 02 1 02
x 2 3 5 0
Q(21, 1, 4)
5 4
d 50 0(1) 1 1(1) 1 0(23) 1 3 0
"02 1 (1)2 1 02
y 1 3 5 0
P(1, 1, 23)
(216, 0, 12).
6x 1 8y 2 24z 1 13 5 0
6x 1 8y 2 24z 1 13 5 0
1 3x 1 4y 2 12z 1 39 5 0
3x 1 4y 2 12z 2 26 5 0
5 5
d 50 3(213) 1 4(0) 2 12(0) 2 26 0
"32 1 42 1 (212)2
d 50Ax0 1 By0 1 Cz0 1 D 0
!A2 1 B2 1 C2(23, 0, 0).
3x 1 4y 2 12z 1 39 5 0
3x 1 4y 2 12z 2 26 5 0
511
27
d 50 18(21) 2 9(0) 1 18(1) 2 11 0
"182 1 (29)2 1 182
18x 2 9y 1 18z 2 11 5 0
E(21, 0, 1)
55
13
d 50 5(1) 2 12(0) 1 0(0) 1 0 0
"52 1 (212)2 1 02
5x 2 12y 5 0
D(1, 0, 0)
5 2
d 50 3(5) 1 24(1) 1 0(4) 2 1 0
"32 1 (24)2 1 02
3x 2 4y 2 1 5 0
C(5, 1, 4)
5 3
d 50 2(0) 1 1(21) 1 2(0) 2 8 0
"22 1 12 1 22
2x 1 y 1 2z 2 8 5 0
B(0, 21, 0)
5 3
d 50 20(3) 1 24(1) 1 5(0) 1 7 0
"202 1 (24)2 1 52
20x 2 4y 1 5z 1 7 5 0
(3, 1, 0)
d 50Ax0 1 By0 1 Cz0 1 D 0
"A2 1 B2 1 C2
8 3.6 units2
1
2 aÅ
52
17b ("17) 5
1
2 ("52)
#52.HB>
5 (3, 2, 2),
#5217.
9-24 Chapter 9: Relationships Between Points, Lines, and Planes

b. Vertices D and G will give the same distance toHB because they are equidistant to the segment HB.(This is easy to check with the distance formulaused similarly to part a. The vertices C, E, and Fgive different distances than those found in part a.)c. The height of triangle AHB was found in part a.,and was The base length of this triangle is themagnitude of which is Sothe area of this triangle is
9.6 The Distance from a Point to a Plane, pp. 549–550
1. a. Yes the calculations are correct, Point A lies inthe plane.b. The answer 0 means that the point lies in theplane.2. Use the distance formula.
a. The distance from A to the plane is
b. The distance from to the planeis
c. The distance from to the planeis
d. The distance from to the planeis
or 0.38
e. The distance from to the planeis
or 0.41
3. a. and
First find a point in the second plane such as
Then use
to solve.
b.
c. Answers may vary. Any point on the planewill work, for example
4. a. The distance from to the planeis
b. The distance from to the planeis
c. The distance from to the planeis
5. First you have to find an equation of a plane tothe three points. The equation to this plane is
Then use
to solve for the distance.
or 0.6752
3
d 50 14(1) 2 28(21) 1 28(1) 2 42 0
"142 1 (228)2 1 282
d 50Ax0 1 By0 1 Cz0 1 D 0
!A2 1 B2 1 C2
14x 2 28y 1 28z 2 42 5 0.
5 2
d 50 0(1) 1 0(0) 1 1(1) 1 1 0
"02 1 02 1 12
z 1 1 5 0
R(1, 0, 1)
5 4
d 50 1(21) 1 0(1) 1 0(4) 2 3 0
"12 1 02 1 02
x 2 3 5 0
Q(21, 1, 4)
5 4
d 50 0(1) 1 1(1) 1 0(23) 1 3 0
"02 1 (1)2 1 02
y 1 3 5 0
P(1, 1, 23)
(216, 0, 12).
6x 1 8y 2 24z 1 13 5 0
6x 1 8y 2 24z 1 13 5 0
1 3x 1 4y 2 12z 1 39 5 0
3x 1 4y 2 12z 2 26 5 0
5 5
d 50 3(213) 1 4(0) 2 12(0) 2 26 0
"32 1 42 1 (212)2
d 50Ax0 1 By0 1 Cz0 1 D 0
!A2 1 B2 1 C2(23, 0, 0).
3x 1 4y 2 12z 1 39 5 0
3x 1 4y 2 12z 2 26 5 0
511
27
d 50 18(21) 2 9(0) 1 18(1) 2 11 0
"182 1 (29)2 1 182
18x 2 9y 1 18z 2 11 5 0
E(21, 0, 1)
55
13
d 50 5(1) 2 12(0) 1 0(0) 1 0 0
"52 1 (212)2 1 02
5x 2 12y 5 0
D(1, 0, 0)
5 2
d 50 3(5) 1 24(1) 1 0(4) 2 1 0
"32 1 (24)2 1 02
3x 2 4y 2 1 5 0
C(5, 1, 4)
5 3
d 50 2(0) 1 1(21) 1 2(0) 2 8 0
"22 1 12 1 22
2x 1 y 1 2z 2 8 5 0
B(0, 21, 0)
5 3
d 50 20(3) 1 24(1) 1 5(0) 1 7 0
"202 1 (24)2 1 52
20x 2 4y 1 5z 1 7 5 0
(3, 1, 0)
d 50Ax0 1 By0 1 Cz0 1 D 0
"A2 1 B2 1 C2
8 3.6 units2
1
2 aÅ
52
17b ("17) 5
1
2 ("52)
#52.HB>
5 (3, 2, 2),
#5217.
9-24 Chapter 9: Relationships Between Points, Lines, and Planes

6.
is the only solution to this equation.7. These lines are skew lines, and the plane containingthe second line,that is parallel to the first line will have directionvectors and So a normal to thisplane is So the equation of this plane will be of the form
. We want the point to be on this plane, and substituting this into theequation above gives So the equation of theplane containing and parallel to the first line is
Since is on the first line, the distancebetween these skew lines is the same as the distancebetween this point and the plane just determined.By the distance formula, this distance is
8. a. –b. We will do both of these parts at once. The two given lines are
By converting to parametric form, a general pointon the first line is
and on the second line is
So the vector
If the points U and V are those that produce theminimal distance between these two lines, then will be perpendicular to both direction vectors,
and In the first case, we get
In the second case, we get
Substituting into this second equation,we get
Substituting these values for s and t into U and V,we get
So is the point on the first line thatproduces the minimal distance to the second line at point This minimal distance isgiven by
Review Exercise, pp. 552–5551.
2.
)or Substituting into equation gives
or However, when yousubstitute this coordinates into the third equation,the third equation is not consistent, so there is no solution to this problem.3. a.
orSubstituting into all of the equations
gives
There are no x and y variables that satisfy theseequations, so the answer is no solution.
2x 2 2y 2 2 5 116
2x 2 2y 2 6 5 15
x 2 y 2 4 5 34
z 5 22z 5 22.
5 5z 5 21032 equation2Equation
2x 2 2y 1 z 5 113
2x 2 2y 1 3z 5 12
x 2 y 1 2z 5 31
y 5 29.(4) 2 y 5 13
1x 5 4x 5 4.
5 5x 1 0y 5 2021 equation 1(2 3 Equation
x 1 2y 5 2193
3x 1 2y 5 262
x 2 y 5 131
k 5 24
99
3a214
17b 1 ka299
17b 5 38
x 5214
17y 5 2
99
17,
5 0x 2 17y 5 99
(2x 2 y 5 31) 2 2(x 1 8y 5 234)
3x 1 ky 5 38x 1 8y 5 234,2x 2 y 5 31,
8 3.46
5 "12
0UV> 0 5 0 (22, 22, 22) 0
V(21, 21, 0).
U(1, 1, 2)
V(21, 21, 0)
U(1, 1, 2)
t 5 22 t 5 2s 2 8 s 5 3
2(2s 2 8) 2 s 1 7 5 0
t 5 2s 2 8
5 2t 2 s 1 7
0 5 (t, 1 2 s, s 2 t 2 7) ? (1, 0, 21)
t 5 2s 2 8
5 8 2 2s 1 t 0 5 (t, 1 2 s, s 2 t 2 7) ? (0, 1, 21)
(1, 0, 21).(0, 1, 21)
UV>
UV>
5 (t, 1 2 s, s 2 t 2 7).
V(1 1 t, 21, 22 2 t).
U(1, s 2 2, 5 2 s),
tPR.r>
5 (1, 21, 22) 1 t(1, 0, 21),
sPR,r>
5 (1, 22, 5) 1 s(0, 1, 21),
8 1.51.
55
"11
d 50 (0) 2 (1) 2 3(21) 1 3 0"12 1 (21)2 1 (23)2
(0, 1, 21)
x 2 y 2 3z 1 3 5 0.
r>
5 (0, 0, 1) 1 t(1, 1, 0), tPRD 5 3.
(0, 0, 1)x 2 y 2 3z 1 D 5 0
(1, 1, 0) 3 (3, 0, 1) 5 (1, 21, 23).
(3, 0, 1).(1, 1, 0)
r>
5 (0, 0, 1) 1 t(1, 1, 0), tPR,
A 5 3
3 5 A24 5 8A
A2 1 40 5 A2 1 8A 1 16
"(A2 1 40) 5 ZA 1 4 Z3"(A2 1 40) 5 Z3A 1 12 Z
3 50A(3) 2 2(23) 1 6(1) 1 0 0
"A2 1 (22)2 1 62
9-25Calculus and Vectors Solutions Manual

6.
is the only solution to this equation.7. These lines are skew lines, and the plane containingthe second line,that is parallel to the first line will have directionvectors and So a normal to thisplane is So the equation of this plane will be of the form
. We want the point to be on this plane, and substituting this into theequation above gives So the equation of theplane containing and parallel to the first line is
Since is on the first line, the distancebetween these skew lines is the same as the distancebetween this point and the plane just determined.By the distance formula, this distance is
8. a. –b. We will do both of these parts at once. The two given lines are
By converting to parametric form, a general pointon the first line is
and on the second line is
So the vector
If the points U and V are those that produce theminimal distance between these two lines, then will be perpendicular to both direction vectors,
and In the first case, we get
In the second case, we get
Substituting into this second equation,we get
Substituting these values for s and t into U and V,we get
So is the point on the first line thatproduces the minimal distance to the second line at point This minimal distance isgiven by
Review Exercise, pp. 552–5551.
2.
)or Substituting into equation gives
or However, when yousubstitute this coordinates into the third equation,the third equation is not consistent, so there is no solution to this problem.3. a.
orSubstituting into all of the equations
gives
There are no x and y variables that satisfy theseequations, so the answer is no solution.
2x 2 2y 2 2 5 116
2x 2 2y 2 6 5 15
x 2 y 2 4 5 34
z 5 22z 5 22.
5 5z 5 21032 equation2Equation
2x 2 2y 1 z 5 113
2x 2 2y 1 3z 5 12
x 2 y 1 2z 5 31
y 5 29.(4) 2 y 5 13
1x 5 4x 5 4.
5 5x 1 0y 5 2021 equation 1(2 3 Equation
x 1 2y 5 2193
3x 1 2y 5 262
x 2 y 5 131
k 5 24
99
3a214
17b 1 ka299
17b 5 38
x 5214
17y 5 2
99
17,
5 0x 2 17y 5 99
(2x 2 y 5 31) 2 2(x 1 8y 5 234)
3x 1 ky 5 38x 1 8y 5 234,2x 2 y 5 31,
8 3.46
5 "12
0UV> 0 5 0 (22, 22, 22) 0
V(21, 21, 0).
U(1, 1, 2)
V(21, 21, 0)
U(1, 1, 2)
t 5 22 t 5 2s 2 8 s 5 3
2(2s 2 8) 2 s 1 7 5 0
t 5 2s 2 8
5 2t 2 s 1 7
0 5 (t, 1 2 s, s 2 t 2 7) ? (1, 0, 21)
t 5 2s 2 8
5 8 2 2s 1 t 0 5 (t, 1 2 s, s 2 t 2 7) ? (0, 1, 21)
(1, 0, 21).(0, 1, 21)
UV>
UV>
5 (t, 1 2 s, s 2 t 2 7).
V(1 1 t, 21, 22 2 t).
U(1, s 2 2, 5 2 s),
tPR.r>
5 (1, 21, 22) 1 t(1, 0, 21),
sPR,r>
5 (1, 22, 5) 1 s(0, 1, 21),
8 1.51.
55
"11
d 50 (0) 2 (1) 2 3(21) 1 3 0"12 1 (21)2 1 (23)2
(0, 1, 21)
x 2 y 2 3z 1 3 5 0.
r>
5 (0, 0, 1) 1 t(1, 1, 0), tPRD 5 3.
(0, 0, 1)x 2 y 2 3z 1 D 5 0
(1, 1, 0) 3 (3, 0, 1) 5 (1, 21, 23).
(3, 0, 1).(1, 1, 0)
r>
5 (0, 0, 1) 1 t(1, 1, 0), tPR,
A 5 3
3 5 A24 5 8A
A2 1 40 5 A2 1 8A 1 16
"(A2 1 40) 5 ZA 1 4 Z3"(A2 1 40) 5 Z3A 1 12 Z
3 50A(3) 2 2(23) 1 6(1) 1 0 0
"A2 1 (22)2 1 62
9-25Calculus and Vectors Solutions Manual

b.
Substituting into all three equations gives:
orYou then get after substituting
both x and y into equation .
Check:
4. a. These four points will lie in the same plane ifand only if the line determined by the first twopoints intersects the line determined by the last twopoints. The direction vector determined by the firsttwo is
So these first two points determine the line withvector equation
The direction vector determined by the last twopoints is
So these first two points determine the line withvector equation
Converting these two lines to parametric form, weobtain the equations
Adding the first and second equations givesSubstituting this into the third
equation, we get
So We need to check this s and t forconsistency. Substituting into the vectorequation for the first line gives
as a point on this line. Substituting into thevector equation for the second line gives
as a point on this line. This means the two linesintersect, and so the four points given lie in thesame plane.b. Direction vectors for the plane containing thefour points in part a. are and
. So a normal to this plane is
We will use the parallel normal . So theequation of this plane is of the form
Substitute in the point to find D.
The equation of the plane is
So, using the distance formula, this plane is distance
from the origin.5. Use the distance formula.
a. The distance from to
b. The distance from to
or 0.08
6.
Find the parametric equations from the firstequation, then substitute those equations into thesecond equation. Solve for t. Substitute that t-valueinto the first equation.
x 5 3 1 2ttPR r
>
5 (3, 1, 1) 1 t(2, 21, 2),
3x 2 4y 2 5z 5 0
tPRr>
5 (3, 1, 1) 1 t(2, 21, 2),
51
12
d 50 8(3) 2 8(1) 1 4(22) 2 7 0
"82 1 (28)2 1 (4)2
4z 2 7 5 08x 2 8y 1
B(3, 1, 22)
5 3
d 50 3(21) 2 4(1) 2 12(2) 2 8 0"32 1 (24)2 1 (212)2
12z 2 8 5 03x 2 4y 2
A(21, 1, 2)
d 50Ax0 1 By0 1 Cz0 1 D 0
"A2 1 B2 1 C2
8 0.19
51
"29
d 5Z3(0) 1 4(0) 2 2(0) 1 1 Z
Z (3, 4, 22) Z
3x 1 4y 2 2z 1 1 5 0.
D 5 1
3(1) 1 4(2) 2 2(6) 1 D 5 0
(1, 2, 6)
3x 1 4y 2 2z 1 D 5 0.
(3, 4, 22)
(6, 27, 25) 3 (24, 4, 2) 5 (6, 8, 24).
(24, 4, 2)
(6, 27, 25)
r>
5 (1, 1, 4) 1 a23
2b (24, 4, 2)
5 (1, 1, 4) 1 (6, 26, 23)
5 (7, 25, 1)
t 5 232
r>
5 (1, 2, 6) 1 (1)(6, 27, 25)
5 (7, 25, 1)
s 5 1
t 5 232.
23 5 2t1 5 4 1 2t
3 2 s 5 2, so s 5 1.
6 2 5s 5 4 1 2t3
2 2 7s 5 1 1 4t2
1 1 6s 5 1 2 4t1
r>
5 (1, 1, 4) 1 t(24, 4, 2), tPR.
b>
5 (23, 5, 6) 2 (1, 1, 4)
5 (24, 4, 2)
r>
5 (1, 2, 6) 1 s(6,27,25), sPR.
5 (6, 27, 25)
a>
5 (7, 25, 1) 2 (1, 2, 6)
99 2 100 1 101 5 1003
99 1 100 2 101 5 982
99 1 100 1 101 5 3001
(99, 100, 101)
1
z 5 101y 5 100.
5 2y 5 20051 equation4Equation
2y 1 z 5 16
y 2 z 5 215
y 1 z 5 2014
x 5 99
x 5 99.5 2x 5 19831 equation2Equation
x 2 y 1 z 5 1003
x 1 y 2 z 5 982
x 1 y 1 z 5 3001
9-26 Chapter 9: Relationships Between Points, Lines, and Planes

t can be any value to satisfy this value, so the twoequations intersect along
7. a.
There is no solution because the first and thirdequations are inconsistent.b.
There is no solution because the first and secondequations are inconsistent.c.
There is no solution because the first and thirdequations are inconsistent.8. a.
Letting then and
b.
or Letting creates:
or Substituting in and gives
c.
Letting then gives or
s,9. a.
Setting
or
Substituting these two values into the first equationgives
b.
Setting
or
Substituting these two values into the first equation gives
10. a.
The first equation the second equation givesor Substituting into the
third equation, or Substituting these two values into the first equation,
or These three planes meet at the point b.
These two equations are inconsistent, so the planesdo not intersect at any point. Geometrically theplanes form a triangular prism.c.
9x 1 2y 2 z 5 03
x 2 2y 1 3z 5 02
2x 1 y 2 z 5 01
5 22.
5 25x 2 z)12 (3 3 equation3Equation
5 5x 1 z 5 321 equation1Equation
x 2 3y 1 5z 5 43
3x 1 y 2 z 5 12
2x 2 y 1 2z 5 21
(21, 5, 3).
z 5 32(21) 1 5 1 z 5 6
y 5 5.3(21) 1 y 5 2
x 5 21x 5 21.3x 5 23
1
3x 1 y 5 2
x 2 y 2 z 5 29
2x 1 y 1 z 5 6
tPRz 5 t,y 51
41
1
12t,x 5
9
82
31
24t,
x 5 98 2 31
24 t
y 51
41
1
12t12y 2 t 5 3
z 5 t,5 12y 2 z 5 3
)1) 2 (2 3 equation2(Equation
2x 1 7y 1 2z 5 43
4x 1 2y 1 5z 5 52
2x 2 5y 1 3z 5 11
tPRz 5 t,y 521
21
5
12t,x 5
1
21
1
36t,
x 5 12 1 1
36 t
y 5 21
21
5
12t12y 2 5t 5 26
z 5 t,5 26
) 5 12y 2 5z1) 2 (2 3 equation2(Equation
6x 2 3y 1 8z 5 61
6x 1 2y 2 z 5 21
3x 2 5y 1 2z 5 41
tPRz 5 s,y 5 t,x 5 3t 2 3s 1 7,
x 5 23s 1 3t 1 7
x 2 3t 1 3s 5 7y 5 tz 5 s,
2x 1 3y 2 3z 5 273
2x 2 6y 1 6z 5 142
x 2 3y 1 3z 5 71
z 5 21
2y 5
1
4,x 5 3,
y 5 14
z 5 212x 5 3x 5 3.
) 5 8x 5 242) 1 (2 3 equation1(Equation
2x 1 4y 5 75
4x 2 8y 5 104
z 5 212z 5 21
2.5 24z 5 212
)3) 1 (4 3 equation1(Equation
x 2 2y 2 3z 5 43
2x 1 4y 1 6z 5 42
4x 2 8y 1 12z 5 41
tPRz 5 t,y 5 1 12
7t,x 5 2
5
7t,
y 5 1 1 27 t.x 5 25
7 tz 5 t,5 27x 2 5z 5 0
)2) 2 (2 3 equation1(Equation
6x 1 8y 1 2z 5 83
5x 1 2y 1 3z 5 22
3x 1 4y 1 z 5 41
3 3 (4x 2 3y 1 2z 5 2) 5 12x 2 9y 1 6z 5 6
12x 2 9y 1 6z 5 13
8x 2 6y 1 4z 5 42
4x 2 3y 1 2z 5 21
2 3 (2x 1 3y 1 4z 5 3) 5 4x 1 6y 1 8z 5 6
5x 1 y 2 z 5 13
4x 1 6y 1 8z 5 42
2x 1 3y 1 4z 5 31
3 3 (3x 2 4y 1 5z 5 9) 5 9x 2 12y 1 15z 5 27
9x 2 12y 1 15z 5 93
6x 2 9y 1 10z 5 92
3x 2 4y 1 5z 5 91
tPR.r>
5 (3, 1, 1) 1 t(2, 21, 2),
3(3 1 2t) 2 4(1 2 t) 2 5(1 1 2t) 5 0
z 5 1 1 2t y 5 1 2 t
9-27Calculus and Vectors Solutions Manual
equation equation so
Equation equation , so
Let The intersection of the planes is a linethrough the origin with equation
11. By substituting in different s-values, you can findwhen the plane intersects the xz-plane when and the xy-plane when The plane intersects the xz-plane at andthe xy-plane at Then find the distancebetween these two points using the distanceformula. The distance between these two points is 4.90.12. a.
Since the line’sdirection vector is perpendicular to the normal ofthe plane and the point lies on both theline and the plane, the line is in the plane.b.
Solve for the parametric equations of both equationsand then set them equal to each other.
corresponds to the point c.
The point is on the plane since itsatisfies the equation of the plane.d.
13. a.
gives the lowest distance of 5.48
b. corresponds to the point 14. a.
Set the equations parametric equations equal toeach other, and determine either the s or t-value.Find the point that corresponds to this value.
corresponds to the point b.
15. a. Since the plane we want contains L, we canuse the direction vector for L, , as one of the plane’s direction vectors. Since the planecontains the point (which is on L) and thepoint , it will contain the direction vector
To find a normal vector for the plane we want, takethe cross product of these two direction vectors.
So the plane we seek will be of the form
To determine the value of D, substitute in the pointthat is to be on this plane.
The equation of the plane we seek is
b. Using the distance formula, the distance fromto the plane
is
16. a.
3x 2 4y 5 05
45 equation21 equation1Equation
7x 2 7y 2 z 5 k3
2x 2 5y 1 z 5 212
x 1 y 2 z 5 11
8 0.45
57
"245
d 5Z210(1) 1 9(1) 1 8(21) 1 16 Z
Z (210, 9, 8) Z
16 5 0
210x 1 9y 1 8z 1S(1, 1, 21)
210x 1 9y 1 8z 1 16 5 0.
D 5 16
210(1) 1 9(2) 1 8(23) 1 D 5 0
(1, 2, 23)
210x 1 9y 1 8z 1 D 5 0.
(2, 24, 7) 3 (1, 2, 21) 5 (210, 9, 8)
(3, 22, 4) 2 (1, 2, 23) 5 (2, 24, 7)
K(3, 22, 4)
(1, 2, 23)
(1, 2, 21)
tPRr>
5 (22, 23, 0) 1 t(1, 22, 1),
5 (4, 28, 4) 5 (1, 22, 1)
n1
S3 n2
S5 (3, 2, 1) 3 (1, 2, 3)
P(22, 23, 0)
sPRr>
5 (22, 23, 0) 1 s(1, 2, 3),
tPRr>
5 (1, 21, 1) 1 t(3, 2, 1),
(22, 23, 0).s 5 0
t 5 21s 5 0,
z 5 1 1 t 5 3sy 5 21 1 2t 5 23 1 2sx 5 1 1 3t 5 22 1 s
z 5 3sy 5 23 1 2s,L2: x 5 22 1 s,
z 5 1 1 ty 5 21 1 2t,L1: x 5 1 1 3t,
sPRr>
5 (22, 23, 0) 1 s(1, 2, 3),
tPRr>
5 (1, 21, 1) 1 t(3, 2, 1),
(3, 0, 21)t 5 0
t 5 0
"6t2 1 30
"(3 1 t 1 2)2 1 (t 2 1)2 1 (21 1 2t 2 1)2
"(3 1 t 2 x)2 1 (t 2 y)2 1 (21 1 2t 2 z)2
0 5 21 1 2t 2 z0 5 t 2 y,0 5 3 1 t 2 x,
z 5 21 1 2ty 5 t,x 5 3 1 t,A(22, 1, 1)
tPRr>
5 (3, 0, 21) 1 t(1, 1, 2),
7x 2 2y 2 11z 2 50 5 0
D 5 250
7x 2 2y 2 11z 1 D 5 0
C 5 211B 5 22,A 5 7,
(A, B, C) ? (4, 3, 2) 5 0
tPRr>
5 (7, 5, 21) 1 t(4, 3, 2),
(21, 21, 25)
21 2 2(21) 1 (25) 1 4 5 0
x 2 2y 1 z 1 4 5 0
(21, 21, 25)t 5 22
z 5 25y 5 21,x 5 21,t 5 22,
t 5 22z 5 25 5 21 1 2t,z 5 25y 5 1 1 s,L2: x 5 3 1 2s,
z 5 21 1 2ty 5 5 1 3t,L1: x 5 7 1 4t,
sPRr>
5 (3, 1, 25) 1 s(2, 1, 0),
tPRr>
5 (7, 5, 21) 1 t(4, 3, 2),
(3, 1, 25)
m>
? n>
5 (2, 1, 0) ? (1, 22, 1) 5 0
sPRr>
5 (3, 1, 25) 1 s(2, 1, 0),
x 2 2y 1 z 1 4 5 0
(1, 22, 0).
(3, 0, 24)
z 5 0.
y 5 0
sPRr>
5 (2, 21, 22) 1 s(1, 1, 22),
tPR.z 5 25t,x 5 t, y 5 27t,
x 5 t.y 5 27x.
5 7x 1 y 5 0123
z 5 25x.
5 5x 1 z 5 0,2112 3
9-28 Chapter 9: Relationships Between Points, Lines, and Planes

For the solution to this system to be a line,equation and equation must be the proportional.
makes these two line proportional and thesolution to this system a line.b. In part a., we found that by arriving at theequivalent system
As the first and third equations are proportional,this is really the same system as
Letting in the first equation, we see thatSubstituting these values for x and y into the
second equation, we find that
So the direction vector for the line that solves thissystem is ), which is parallel to .So equivalent parametric equations of this line are
So one possible vector equation of this line is
b. In part a., we found that by arriving at theequivalent system
As the first and third equations are proportional,this is really the same system as
Letting in the first equation, we see thatSubstituting these values for x and y into the
second equation, we find that
So the direction vector for the line that solves thissystem is which is parallel to (4, 3, 7). So equivalent parametric equations of this line are
So one possible vector equation of this line is
17. a.
equation or Substituting into equation :Substituting into equation :or
b.
equation Setting
or Substituting and into equation :
or
18.
5 15z 5 102311
3x 2 4z 5 03
23x 1 4z 5 02
9x 1 3z 5 101
y 53
4
5 8y 5 6213
3x 1 4y 2 4z 5 33
23x 1 4y 1 4z 5 32
9x 2 8y 1 3z 5 41
z 5cb
y 5 b,x 5ab
,
3ab
1 4b 24cb
5 33
23ab
1 4b 14cb
5 32
9ab
2 8b 13cb
5 41
tPRz 5 t,y 5 3 2 t,x 5 7 2 3t,x 5 7 2 3tx 2 2(3 2 t) 1 t 5 1
1z 5 ty 5 3 2 ty 5 3 2 t2y 2 t 5 23
z 5 t,5 2y 2 z 5 23,55
)12 (2 3 equation2Equation
6x 2 14y 1 4z 5 04
3x 2 7y 1 2z 5 03
2x 2 5y 1 z 5 212
x 2 2y 1 z 5 11
(2, 21, 1)
z 5 1.
2 1 22 1 z 5 11
6 2 y 5 7y 5 21.5
x 5 25 210x 5 220y75
6) 1 equation5(7 3 equation
11x 2 7y 5 295
65 equation3) 1 equation2(4 3 equation
3x 2 y 5 75
55 equation21 equation1Equation
4x 1 y 1 z 5 84
3x 1 5y 1 4z 5 53
2x 2 3y 2 z 5 62
x 1 2y 1 z 5 11
tPR.r>
5 (0, 0, 21) 1 t(4, 3, 7),
tPR.z 5 21 1 7t, y 5 3tx 5 4t
Q1, 34, 74R,
57
4t 2 1.
z 5 5a3
4tb 2 2t 2 1
y 5 34t.
x 5 t2x 2 5y 1 z 5 212
3x 2 4y 5 01
9x 2 12y 5 03
2x 2 5y 1 z 5 212
3x 2 4y 5 01
k 5 1
r>
5 (0, 0, 21) 1 t(4, 3, 7), tPR.
z 5 21 1 7t, tPR.
y 5 3tx 5 4t
(4, 3, 7)74(1, 34,
57
4t 2 1.
z 5 5a3
4tb 2 2t 2 1
y 5 34 t.
x 5 t2x 2 5y 1 z 5 212
3x 2 4y 5 01
9x 2 12y 5 03
2x 2 5y 1 z 5 212
3x 2 4y 5 01
k 5 1
k 5 1
54
9x 2 12y 5 21 1 k5
55 equation31 equation2Equation
9-29Calculus and Vectors Solutions Manual

19. First put the equation into parametric form.Then substitute the x, y, and z-values into
to determine t. Thensubstitute t back into the parametric equations to determine the coordinates.
20. Let denote the image point under thisreflection. We want to find a, b, and c. The equationof the plane is , so letting and , we get , These arethe parametric equations of this plane, so a generalpoint on this plane has coordinates .
So
The normal vector to this plane is , and in order for to be perpendicular to the plane, itmust be parallel to this normal. This means that and will have a cross product equal tothe zero vector.
So we get the system of equations
Adding the first two equations gives
Substituting this value for t into the third equationgives
Substituting these values for s and t into the equationfor we get
This is the vector that is normal to the plane, withits head at point and tail at the point inthe plane
So the vector
This means that and That is, the reflected point is .21. a. The first plane has normal and thesecond has normal . Their line ofintersection will be perpendicular to both of thesenormals. So we can take as direction vector thecross product of these two normals.
5 8(11, 2, 25)
(3, 1, 7) 3 (4, 212, 4) 5 (88, 16, 240)
(4, 212, 4)
(3, 1, 7)
43)
83,Ar(25
3,
c 5 243, b 5 28
3, a 5 253,
PAr>
5 2PA>
5 a24
3,
4
3, 2
4
3b
5 (a, b, c) 2 a21
3,
4
3,
8
3b
5 aa 11
3, b 2
4
3, c 2
8
3b
5 a21
3,
4
3,
8
3b
P(1 2 t 1 s, s, t) 5 Pa1 28
31
4
3,
4
3,
8
3b
A(1, 0, 4)
PA>
5 (t 2 s, 2s, 4 2 t)
5 a8
32
4
3, 2
4
3, 4 2
8
3b
5 a4
3, 2
4
3,
4
3b
PA>
,
s 54
3
5 2s 28
3
0 5 2s 2 t
t 58
3
8 2 3t 5 0
2s 2 t 5 03
4 1 s 2 2t 5 02
4 2 s 2 t 5 01
5 (0, 0, 0)
5 (4 2 s 2 t, 4 1 s 2 2t, 2s 2 t)(t 2 s, 2s, 4 2 t) 3 (1, 21, 1)
(1, 21, 1)
PA>
PA>
(1, 21, 1)
PA>
5 (1, 0, 4) 2 (1 2 t 1 s, s, t) 5 (t 2 s, 2s, 4 2 t)
P(1 2 t 1 s, s, t)
s, tPR.x 5 1 2 t 1 sz 5 ty 5 sx 2 y 1 z 2 1 5 0
Ar(a, b, c)
a4, 27
4,
7
2b
z 5 22a25
4b 1 1
y 5 3a25
4b 1 2,x 5 24a2
5
4b 2 1,
t 5 25
4
(24t 2 1) 1 2(3t 1 2) 2 3(22t 1 1) 1 10 5 0
x 1 2y 2 3z 1 10 5 0
z 5 22t 1 1y 5 3t 1 2,x 5 24t 2 1,
x 1 1
245
y 2 2
35
z 2 1
225 t
x 1 2y 2 z 1 10 5 0
a2
3,
3
4,
1
2b
c 51
2z 5
2
35
cb
5c3
4
,
a 52
3x 5
8
95
ab
5a3
4
,
y 53
45 b,
x 58
9z 5
2
3,
9-30 Chapter 9: Relationships Between Points, Lines, and Planes

So let’s use as the direction vector forthis line of intersection. To find a point on both ofthese planes, solve for z in the second plane, andsubstitute this into the equation for the first plane.
If in this last equation, then and
The point lies on both planes. So thevector equation of the line of intersection for thefirst two planes is
The corresponding parametric form is
,
We will use a similar procedure for the other twolines of intersection. For the third plane, the normalvector is (1, 2, 3). So a direction vector for the lineof intersection between the first and third planes is
We may use as the direction vector forthis line of intersection. We find a point on both ofthese planes in the same way as before.
Taking in this last equation, we get and
A point on both the first and third planes is. So the vector equation for this line of
intersection is
and the corresponding parametric equations are
Finally, we consider the line of intersection betweenthe second and third planes. In this case, a directionvector is
We may use as the direction vector forthis line of intersection. We find a point on both ofthese planes in the same way as before.
Taking in this last equation, we get and
A point on both the second and third planes is. So the vector equation for this line of
intersection is
and the corresponding parametric equations are
b. All three lines of intersection found in part a.have direction vector , and so they areall parallel. Since no pair of normal vectors forthese three planes is parallel, no pair of these planesis coincident.
22.
9
a2 25
b2 14
c2 5 673
3
a2 26
b2 21
c2 5 232
2
a2 15
b2 13
c2 5 401
(11, 2, 25)
z 5 21 2 5t, PR.
y 5 2tx 5 7 1 11t
r>
5 (7, 0, 21) 1 t(11, 2, 25), tPR,
(7, 0, 21)
5 7
5 4 2 2(0) 2 3(21)
x 5 4 2 2y 2 3z
z 5 21y 5 0
5 220y 2 8z 2 8
5 4(4 2 2y 2 3z) 2 12y 1 4z 2 24
0 5 4x 2 12y 1 4z 2 24
x 5 4 2 2y 2 3zx 1 2y 1 3z 2 4 5 0
(11, 2, 25)
5 24(11, 2, 25)
(4, 212, 4) 3 (1, 2, 3) 5 (244, 28, 20)
z 515
22 5t, tPR.
y 5 2t
x 5 237
21 11t
r>
5 a237
2, 0,
15
2b 1 t(11, 2, 25), tPR,
(2372 , 0, 15
2 )
5 237
2
5 4 2 2(0) 2 3a15
2b
x 5 4 2 2y 2 3z
z 5 152y 5 0
5 26y 2 2z 1 15
5 3(4 2 2y 2 3z) 1 y 1 7z 1 3
0 5 3x 1 y 1 7z 1 3
x 5 4 2 2y 2 3zx 1 2y 1 3z 2 4 5 0
(11, 2, 25)
5 2 (11, 2, 25)
(3, 1, 7) 3 (1, 2, 3) 5 (211, 22, 5)
tPR.z 5 221
42 5t
y 5 2t
x 545
41 11t
r>
5 a45
4, 0, 2
21
4b 1 t(11, 2, 25), tPR.
0, 214 ), (45
4 ,
5 221
4
5 6 245
41 3(0)
z 5 6 2 x 1 3yx 5 45
4y 5 0
5 24x 1 22y 1 45
1 3
5 3x 1 y 1 7(6 2 x 1 3y)
0 5 3x 1 y 1 7z 1 3
z 5 6 2 x 1 3y4z 5 24 2 4x 1 12y
4x 2 12y 1 4z 2 24 5 0
(11, 2, 25)
9-31Calculus and Vectors Solutions Manual

21 11
Because each equation has each of , and thepossible solutions are all combinations of the positive and negative values for a, b, and c: ,
,
and
23. The general form of such a parabola isWe need to determine a, b, and c.
Since , , and all lie on theparabola, we get the system of equations
Adding the first and second equations gives
Subtracting the first from the second equation gives
Using the fact that and in thethird equation gives
So using once more that we substitutethis value in for a and get
So the equation of the parabola we seek is
24. The equation of the plane iswhich has normal .
Converting this plane to parametric form gives
So for any point on this plane,we can form the vector
This vector is perpendicular to the plane when it is parallel to the normal vector . Two vectors are parallel precisely when their cross product is the zero vector.
So we get the system of equations
Subtracting four times the third equation from thefirst equation gives
Substituting this value for t into the second equationgives
Substituting these values for s and t into the equationfor Y gives
So the point M we wanted is .M(297 , 47, 2
337 )
5 a29
7,
4
7, 2
33
7b1 5a4
7bb
Y(s, t, 9 2 4s 1 5t) 5 Ya29
7,
4
7, 9 2 4a29
7b
s 529
7
17s 5493
7
5 59 1 20a4
7b 2 17s
0 5 59 1 20t 2 17s
t 54
7
42t 2 24 5 0
23 2 4t 2 5s 5 03
59 1 20t 2 17s 5 02
68 1 26t 2 20s 5 01
5 (0, 0, 0)
5 (68 1 26t 2 20s, 59 1 20t 2 17s, 23 2 4t 2 5s)
(s 2 3, t 2 2, 14 2 4s 1 5t) 3 (4, 25, 1)
(4, 25, 1)
XY>
5 (s, t, 9 2 4s 1 5t) 2 (3, 2, 25)
5 (s 2 3, t 2 2, 14 2 4s 1 5t)
Y(s, t, 9 2 4s 1 5t)z 5 9 2 4s 1 5t, s, tPR.
y 5 tx 5 s
(4, 25, 1)4x 2 5y 1 z 2 9 5 0,
y 57
6x2 2
3
2x 2
2
3.
c 5 22
3
57
61 c
1
25 a 1 c
a 1 c 5 12,
a 57
6
7
25 3a
5 3a 25
2
5 3a 1 2a23
2b 1
1
2
5 3a 1 2b 1 (a 1 c)
1 5 4a 1 2b 1 c
b 5 232a 1 c 5 1
2
b 5 23
2
2b 5 23
a 1 c 51
2
4a 1 2b 1 c 5 13
a 1 b 1 c 5 212
a 2 b 1 c 5 21
(2, 1)(1, 21)(21, 2)
y 5 ax2 1 bx 1 c.
(12, 21, 21
3).(212, 21, 13),(21
2, 1, 213),
(212, 1, 13),(1
2, 21, 213),(1
2, 21, 13)(12, 1, 21
3),
(12, 1, 13)
c2,a2, b2
c 5 21
3c 5
1
3,b 5 21,b 5 1,a 5 2
1
2,a 5
1
2,
c 5 21
3c 5
1
3,
2
0.251
5
11
3
c2 5 40,
a 5 21
2a 5
1
2,
21
a2 1229
15 55,
b 5 21b 5 11,546
b2 5 46,524
521
a2 1229
b2 5 55552413
511
a2 1213
b2 5 31452311
9-32 Chapter 9: Relationships Between Points, Lines, and Planes

25.
26. a. The vector
This is a direction vector for the line containing thesegment . The point is on thisline, so the vector equation of this line is
b. Based on the equation of the line found in part a.,a general point on this line is of the form
For this general point, the vector
This vector will be perpendicular to the directionvector for the line found in part a. at the point J weseek. This means that
Substituting this value of t into the equation for thegeneral point on the line in part a.,
These are the coordinates for the point J we wanted.c. Using the coordinates for J found in part b.,
This vector forms the height of DEF, and thelength of this vector is
The length of the base of DEF is
So the area of DEF equals
units2
27.
Chapter 9 Test, p. 5561. a.
b.
2. Use the distance equation.
a. 8x 2 8y 1 4z 2 7 5 0
A(3, 2, 3)
d 50Ax0 1 By0 1 Cz0 1 D 0
"A2 1 B2 1 C2
0 5 0
3 1 1 2 5 1 1 5 0
3 2 (21) 1 (25) 1 1 5 0
x 2 y 1 z 1 1 5 0
(3, 21, 25)
z 5 25y 5 21,x 5 3,
z 5 6 1 11(21)
y 5 2 1 3(21),x 5 4 1 (21),L1:
s 5 21
y 5 21 5 2 1 3sz 5 4 1 9ty 5 21,x 5 5 1 2t,L2:
z 5 6 1 11sy 5 2 1 3s,x 5 4 1 s,L1:
tPRr>
2 5 (5, 21, 4) 1 t(2, 0, 9),
sPR,r>
1 5 (4, 2, 6) 1 s(1, 3, 11),
6x 2 8y 1 9z 2 115 5 0
D 5 2115
6x 2 8y 1 9z 1 D 5 0
n1
>
3 n2
>
5 (3, 0, 22) 3 (4, 3, 0) 5 (6, 28, 9)
(5, 25, 5)
4x 1 3y 1 7 5 0
3x 2 2z 1 1 5 0
8 33.26
1
2(!50)aÅ
177
2b 5
5
2!177
^8 7.07
5 "50
5 "(25)2 1 (24)2 1 (23)2
@EF>
@ 5 0 (25, 24, 23) 0^
8 9.41
5 Å177
72
5 Åa27
2b2
1 (22)2 1 a17
2b2
@ JD>
@ 5 ` a27
2, 22,
17
2b `
^
JD>
5 (3, 0, 7) 2 a13
2, 2, 2
3
2b
5 a27
2, 22,
17
2b
5 a13
2, 2, 2
3
2b
5 Ja21 2 5a23
2b, 24 2 4a2
3
2b, 26 2 3a2
3
2bb
J(21 2 5t, 24 2 4t, 26 2 3t)
t 5 23
2
5 275 2 50t5 25(4 1 5t) 2 4(4 1 4t) 2 3(13 1 3t)
0 5 (4 1 5t, 4 1 4t, 13 1 3t) ? (25, 24, 23)
JD>
5 (3, 0, 7) 2 (21 2 5t, 24 24t, 26 2 3t) 5 (4 1 5t, 4 1 4t, 13 1 3t)
J(21 2 5t, 24 2 4t, 26 2 3t), tPR.
r>
5 (21, 24, 26) 1 t(25, 24, 23), tPR.
E(21, 24, 26)EF
5 (25, 24, 23)
EF>
5 (21, 24, 26) 2 (4, 0, 3)
C 5 24B 5 2,A 5 5,
A 5 (24) 1 9 5 5B 5 3(24) 1 14 5 2,
C 5 2410C 5 240,
(C 1 9) 1 9C 5 231
A 1 9C 5 231A 1 3(3C 1 14) 5 11,
A 5 C 1 9B 5 3C 1 14,
A 1 3B 5 113C 2 B 5 214,A 2 C 5 9,
1 (A 2 C)
(3C 2 B)x11x2 2 14x 1 9 5 (A 1 3B)x2 1
5A(x2 1 1) 1 (Bx 1 C) 3x 2 1
(3x 2 1)(x2 1 1)
11x2 2 14x 1 9
(3x 2 1)(x2 1 1)
11x2 2 14x 1 9
(3x 2 1)(x2 1 1)5
A3x 2 1
1Bx 1 Cx2 1 1
9-33Calculus and Vectors Solutions Manual

25.
26. a. The vector
This is a direction vector for the line containing thesegment . The point is on thisline, so the vector equation of this line is
b. Based on the equation of the line found in part a.,a general point on this line is of the form
For this general point, the vector
This vector will be perpendicular to the directionvector for the line found in part a. at the point J weseek. This means that
Substituting this value of t into the equation for thegeneral point on the line in part a.,
These are the coordinates for the point J we wanted.c. Using the coordinates for J found in part b.,
This vector forms the height of DEF, and thelength of this vector is
The length of the base of DEF is
So the area of DEF equals
units2
27.
Chapter 9 Test, p. 5561. a.
b.
2. Use the distance equation.
a. 8x 2 8y 1 4z 2 7 5 0
A(3, 2, 3)
d 50Ax0 1 By0 1 Cz0 1 D 0
"A2 1 B2 1 C2
0 5 0
3 1 1 2 5 1 1 5 0
3 2 (21) 1 (25) 1 1 5 0
x 2 y 1 z 1 1 5 0
(3, 21, 25)
z 5 25y 5 21,x 5 3,
z 5 6 1 11(21)
y 5 2 1 3(21),x 5 4 1 (21),L1:
s 5 21
y 5 21 5 2 1 3sz 5 4 1 9ty 5 21,x 5 5 1 2t,L2:
z 5 6 1 11sy 5 2 1 3s,x 5 4 1 s,L1:
tPRr>
2 5 (5, 21, 4) 1 t(2, 0, 9),
sPR,r>
1 5 (4, 2, 6) 1 s(1, 3, 11),
6x 2 8y 1 9z 2 115 5 0
D 5 2115
6x 2 8y 1 9z 1 D 5 0
n1
>
3 n2
>
5 (3, 0, 22) 3 (4, 3, 0) 5 (6, 28, 9)
(5, 25, 5)
4x 1 3y 1 7 5 0
3x 2 2z 1 1 5 0
8 33.26
1
2(!50)aÅ
177
2b 5
5
2!177
^8 7.07
5 "50
5 "(25)2 1 (24)2 1 (23)2
@EF>
@ 5 0 (25, 24, 23) 0^
8 9.41
5 Å177
72
5 Åa27
2b2
1 (22)2 1 a17
2b2
@ JD>
@ 5 ` a27
2, 22,
17
2b `
^
JD>
5 (3, 0, 7) 2 a13
2, 2, 2
3
2b
5 a27
2, 22,
17
2b
5 a13
2, 2, 2
3
2b
5 Ja21 2 5a23
2b, 24 2 4a2
3
2b, 26 2 3a2
3
2bb
J(21 2 5t, 24 2 4t, 26 2 3t)
t 5 23
2
5 275 2 50t5 25(4 1 5t) 2 4(4 1 4t) 2 3(13 1 3t)
0 5 (4 1 5t, 4 1 4t, 13 1 3t) ? (25, 24, 23)
JD>
5 (3, 0, 7) 2 (21 2 5t, 24 24t, 26 2 3t) 5 (4 1 5t, 4 1 4t, 13 1 3t)
J(21 2 5t, 24 2 4t, 26 2 3t), tPR.
r>
5 (21, 24, 26) 1 t(25, 24, 23), tPR.
E(21, 24, 26)EF
5 (25, 24, 23)
EF>
5 (21, 24, 26) 2 (4, 0, 3)
C 5 24B 5 2,A 5 5,
A 5 (24) 1 9 5 5B 5 3(24) 1 14 5 2,
C 5 2410C 5 240,
(C 1 9) 1 9C 5 231
A 1 9C 5 231A 1 3(3C 1 14) 5 11,
A 5 C 1 9B 5 3C 1 14,
A 1 3B 5 113C 2 B 5 214,A 2 C 5 9,
1 (A 2 C)
(3C 2 B)x11x2 2 14x 1 9 5 (A 1 3B)x2 1
5A(x2 1 1) 1 (Bx 1 C) 3x 2 1
(3x 2 1)(x2 1 1)
11x2 2 14x 1 9
(3x 2 1)(x2 1 1)
11x2 2 14x 1 9
(3x 2 1)(x2 1 1)5
A3x 2 1
1Bx 1 Cx2 1 1
9-33Calculus and Vectors Solutions Manual

or 1.08
b. First, find any point on one of the planes, then usethe other plane equation with the distance formula.
or 13.33
3. a.
b. To determine the point of intersection with thexz-plane, set the above y parametric equation equalto 0 and solve for the t. This t corresponds to thepoint of intersection.
4. a.
b. The three planes intersect at this point.5. a.
b. The three planes intersect at this line.6. a.
Then set the two new equations to each other andsolve for a m and n value that would give equivalentequations.
5 5x 1 0y 15
3(m 1 1)z 5
5
3n
5
3(3x 1 0y 1 (m 1 1)z 5 n)
3x 1 0y 1 (m 1 1)z 5 n1 L3:L1
5x 1 0y 1 (2m 1 2)z 5 2n 1 11 2L3: L2
2x 2 y 1 mz 5 nL3:
x 1 2y 1 2z 5 1L2:
x 1 y 1 z 5 0L1:
tPRz 5 t,y 53t4
11
2,x 5 2
1
22
t4
,
y 53t4
11
2
a21
22
t4b 2 y 1 (t) 5 21
x 2 y 1 z 5 21
x 5 21
22
t4
4x 1 (t) 5 22
z 5 t 4x 1 z 5 22
4x 1 z 5 22
) 511 (2 3 equation2Equation
x 2 5y 1 4z 5 233
2x 1 2y 2 z 5 02
x 2 y 1 z 5 211
(1, 25, 4)
z 5 4
(1) 2 (25) 1 z 5 10
y 5 25
4(1) 1 y 5 21
x 5 1
1 a6x 131
5y 5 225b
218.8x 5 218.8
231
5(4x 1 y 5 21)
6x 131
5y 5 225
) 531 (8 3 equation2Equation
4x 1 y 5 21
) 511 (2 3 equation2Equation
1
2x 1
2
5y 1
1
4z 5 2
1
23
2x 1 3y 2 2z 5 2212
x 2 y 1 z 5 101
(4, 0, 5)
tPRz 5 (5),y 5 1 2(5)
5,x 5
4(5)
5,
t 5 5
0 5 1 2t5
tPRz 5 t,y 5 1 2t5
,x 54t5
,
tPRz 5 t,y 5 1 2t5
,x 54t5
,
x 54t5
2x 1 a1 2t5b 1 (t) 5 1
2x 1 y 1 z 5 1
y 5 1 2t5
5y 1 (t) 5 5
z 5 t,L1 1 2L2: 5y 1 z 5 5
2x 1 y 1 z 5 1L2:
2x 1 3y 2 z 5 3L1:
540
3
50 2(8) 2 1(0) 1 2(0) 1 24 0"(2)2 1 (21)2 1 (2)2
d 50 2x0 2 1y0 1 2z0 1 24 0"(2)2 1 (21)2 1 (2)2
A(8, 0, 0)
2(8) 2 (0) 1 2(0) 2 16 5 0
2x 2 y 1 2z 1 24 5 0
2x 2 y 1 2z 2 16 5 0
513
12
50 8(3) 2 8(2) 1 4(3) 2 7 0"(8)2 1 (28)2 1 (4)2
d 50 8x0 2 8y0 1 4z0 2 7 0"(8)2 1 (28)2 1 (4)2
9-34 Chapter 9: Relationships Between Points, Lines, and Planes

b.
7. First find the parametric equations of each line.Then set these equations equal to each other to finda set of new equations. Use the dot product todetermine another set of equations that you willsolve for t and s. Find the corresponding points tothese values and the distance between them, whichis the distance between the two lines.
yields so
Then The points corresponding to these values of s and t are
and
Cumulative Review of Vectors,pp. 557–560
1. a. The angle, between the two vectors is found
from the equation
So
b. The scalar projection of on is equal towhere is the angle between the two
vectors. So from the above work,
and so the scalar projection of on is The vector projection of on
is equal to the scalar projection multiplied by the unit vector in the direction of So the vector projection is c. The scalar projection of on is equal to
where is the angle between the twovectors. So from the above work,and so the scalar projection of on is
The vector projection of on is equal to the scalar projection multiplied by theunit vector in the direction of So the vector projection is 2. a. Since the normal of the first plane is (4, 2, 6)and the normal of the second is whichare not scalar multiples of each other, there is a lineof intersection between the planes.The next step is to use the first and second equationsto find an equation with a zero for the coefficient of x.The first equation minus four times the second equation yields We maydivide by two to simplify, so If welet then or Substituting these into the second equation yields
or So the equation of the line in parametric form is
tPR.z 5 23 2 3t,y 5 t,x 5 8 1 4t,
x 5 8 1 4t.x 2 (t) 1 (23 2 3t) 2 5 5 0
z 5 23 2 3t.3t 1 z 1 3 5 0,y 5 t,3y 1 z 1 3 5 0.
0x 1 6y 1 2z 1 6 5 0.
(1, 21, 1),
2143 3 1
3(2, 21, 22) 5 (2289 , 14
9 , 289 ).
a>
.
a>
b>
2143 3 13 3 13 5 214
3 .
b>
a>0 b> 0 5 13,
cos (u) 5 2143 3 13
u0 b> 0cos (u),
a>
b>
21413 3 1
13(3, 24, 12) 5 (2 52169,
56169, 2
168169).
b>
.
b>
a>214
3 3 13 3 3 5 21413.
b>
a>0 a> 0 5 3,
cos (u) 5 2143 3 13
u0 a> 0 cos (u),
b>
a>
8 111.0°
u 5 cos21 ( 2143 3 13)
5 13
0 b> 0 5 "32 1 (24)2 1 122
5 3
0 a> 0 5 "22 1 (21)2 1 (22)2
5 214
5 2(3) 2 1(24) 2 2(12)
a>
? b>
5 (2, 21, 22) ? (3, 24, 12)
cos (u) 5a>
? b>
@a>
@ @b>
@.
u,
5 "104 or 10.20
5 "36 1 64 1 4
5 "(6)2 1 (28)2 1 (2)2
d 5 "(3 2 (23))2 1 (1 2 9)2 1 (4 2 2)2
5 (23, 9, 2).
2(1, 2, 5)(25, 5, 28) 15 (3, 1, 4)
(21, 3, 0) 1 4(1, 1, 1)
s 5 4.
t 5 2.84 2 24s 1 90t 5 0,32 1 24s 2 64t 2
8 3 L1 1 (23) 3 L2
28 1 8s 2 30t 5 0L5:
4 1 3s 2 8t 5 0,L4:
(1, 2, 5) ? (4 1 s 2 t, 28 1 s 2 2t, s 1 8 2 5t) 5 0
(1, 1, 1) ? (4 1 s 2 t, 28 1 s 2 2t, s 1 8 2 5t) 5 0
m1 ? UV>
5 0
UV>
5 (4 1 s 2 t, 28 1 s 2 2t, s 1 8 2 5t)s 2 (28 1 5t)42 (5 1 2t),
(23 1 s)UV>
5 3(21 1 s) 2 (25 1 t),
z 5 28 1 5ty 5 5 1 2t,x 5 25 1 t,L2:
z 5 sy 5 23 1 s,x 5 21 1 s,L1:
tPRr>
5 (25, 5, 28) 1 t(1, 2, 5),L2:
sPRr>
5 (21, 23, 0) 1 s(1, 1, 1),L1:
tPRz 5 t,y 5 1 2 t,x 5 21,
y 5 1 2 t (21) 1 y 1 (t) 5 0
z 5 t (21) 1 y 1 z 5 0
x 5 213x 5 23,1 L2:L1
2x 2 y 2 z 5 23L3:
x 1 2y 1 2z 5 1L2:
x 1 y 1 z 5 0L1:
n 5 23
5
3 n 5 2n 1 1
m 5 21
2m 1 2 55
3(m 1 1)
5x 1 0y 1 (2m 1 2)z 5 2n 1 1
5x 1 0y 15
3(m 1 1)z 5
5
3 n
9-35Calculus and Vectors Solutions Manual

b.
7. First find the parametric equations of each line.Then set these equations equal to each other to finda set of new equations. Use the dot product todetermine another set of equations that you willsolve for t and s. Find the corresponding points tothese values and the distance between them, whichis the distance between the two lines.
yields so
Then The points corresponding to these values of s and t are
and
Cumulative Review of Vectors,pp. 557–560
1. a. The angle, between the two vectors is found
from the equation
So
b. The scalar projection of on is equal towhere is the angle between the two
vectors. So from the above work,
and so the scalar projection of on is The vector projection of on
is equal to the scalar projection multiplied by the unit vector in the direction of So the vector projection is c. The scalar projection of on is equal to
where is the angle between the twovectors. So from the above work,and so the scalar projection of on is
The vector projection of on is equal to the scalar projection multiplied by theunit vector in the direction of So the vector projection is 2. a. Since the normal of the first plane is (4, 2, 6)and the normal of the second is whichare not scalar multiples of each other, there is a lineof intersection between the planes.The next step is to use the first and second equationsto find an equation with a zero for the coefficient of x.The first equation minus four times the second equation yields We maydivide by two to simplify, so If welet then or Substituting these into the second equation yields
or So the equation of the line in parametric form is
tPR.z 5 23 2 3t,y 5 t,x 5 8 1 4t,
x 5 8 1 4t.x 2 (t) 1 (23 2 3t) 2 5 5 0
z 5 23 2 3t.3t 1 z 1 3 5 0,y 5 t,3y 1 z 1 3 5 0.
0x 1 6y 1 2z 1 6 5 0.
(1, 21, 1),
2143 3 1
3(2, 21, 22) 5 (2289 , 14
9 , 289 ).
a>
.
a>
b>
2143 3 13 3 13 5 214
3 .
b>
a>0 b> 0 5 13,
cos (u) 5 2143 3 13
u0 b> 0cos (u),
a>
b>
21413 3 1
13(3, 24, 12) 5 (2 52169,
56169, 2
168169).
b>
.
b>
a>214
3 3 13 3 3 5 21413.
b>
a>0 a> 0 5 3,
cos (u) 5 2143 3 13
u0 a> 0 cos (u),
b>
a>
8 111.0°
u 5 cos21 ( 2143 3 13)
5 13
0 b> 0 5 "32 1 (24)2 1 122
5 3
0 a> 0 5 "22 1 (21)2 1 (22)2
5 214
5 2(3) 2 1(24) 2 2(12)
a>
? b>
5 (2, 21, 22) ? (3, 24, 12)
cos (u) 5a>
? b>
@a>
@ @b>
@.
u,
5 "104 or 10.20
5 "36 1 64 1 4
5 "(6)2 1 (28)2 1 (2)2
d 5 "(3 2 (23))2 1 (1 2 9)2 1 (4 2 2)2
5 (23, 9, 2).
2(1, 2, 5)(25, 5, 28) 15 (3, 1, 4)
(21, 3, 0) 1 4(1, 1, 1)
s 5 4.
t 5 2.84 2 24s 1 90t 5 0,32 1 24s 2 64t 2
8 3 L1 1 (23) 3 L2
28 1 8s 2 30t 5 0L5:
4 1 3s 2 8t 5 0,L4:
(1, 2, 5) ? (4 1 s 2 t, 28 1 s 2 2t, s 1 8 2 5t) 5 0
(1, 1, 1) ? (4 1 s 2 t, 28 1 s 2 2t, s 1 8 2 5t) 5 0
m1 ? UV>
5 0
UV>
5 (4 1 s 2 t, 28 1 s 2 2t, s 1 8 2 5t)s 2 (28 1 5t)42 (5 1 2t),
(23 1 s)UV>
5 3(21 1 s) 2 (25 1 t),
z 5 28 1 5ty 5 5 1 2t,x 5 25 1 t,L2:
z 5 sy 5 23 1 s,x 5 21 1 s,L1:
tPRr>
5 (25, 5, 28) 1 t(1, 2, 5),L2:
sPRr>
5 (21, 23, 0) 1 s(1, 1, 1),L1:
tPRz 5 t,y 5 1 2 t,x 5 21,
y 5 1 2 t (21) 1 y 1 (t) 5 0
z 5 t (21) 1 y 1 z 5 0
x 5 213x 5 23,1 L2:L1
2x 2 y 2 z 5 23L3:
x 1 2y 1 2z 5 1L2:
x 1 y 1 z 5 0L1:
n 5 23
5
3 n 5 2n 1 1
m 5 21
2m 1 2 55
3(m 1 1)
5x 1 0y 1 (2m 1 2)z 5 2n 1 1
5x 1 0y 15
3(m 1 1)z 5
5
3 n
9-35Calculus and Vectors Solutions Manual

To check that this is correct, we substitute in thesolution to both initial equations
and
Hence the line given by the parametric equationabove is the line of intersection for the planes.b. The angle between two planes is the same as theangle between their corresponding normal vectors.
so the angle between the planes is
3. a. We have that Also since
and are unit vectors, and moreover
So
b. Scalar multiples can be brought out to the frontof dot products. Hence and so by part a.,c. The dot product is distributive,so
Since and are unit vectors,and so by using the values found in part a. and b.,
4. a.
b.
5. The direction vectors for the positive x-axis,y-axis, and z-axis are (1, 0, 0), (0, 1, 0), and (0, 0, 1),respectively.
and
so the angle the vector
makes with the x-axis is
so the angle the vector
makes with the y-axis is
hence the angle the
vector makes with the z-axis is
6. a.
b. By the scalar law for vector multiplication,
c. The area of a parallelogram determined by andis equal to the magnitude of the cross product ofand
d.
So
7. A unit vector perpendicular to both and canbe determined from any vector perpendicular toboth and is a vector perpendicular toboth and
5 (21, 21, 0)
1(22) 2 (21)(2))
5 (21(3) 2 1(22), 1(2) 2 1(3),
a>
3 b>
5 (1, 21, 1) 3 (2, 22, 3)
b>
.a>
a>
3 b>
b>
.a>
b>
a>
5 0
5 3(7) 2 4(5) 2 1(1)
c>
? (b>
3 a>
) 5 (3, 24, 21) ? (7, 5, 1)
5 (7, 5, 1)
5 2 (27, 25, 21)
(b>
3 a>
) 5 2 (a>
3 b>
)
8 8.66 square units
5 "(27)2 1 (25)2 1 (21)2
5 0 (27, 25, 21) 0 5 0 a> 3 b
> 0 A 5 area of parallelogram
b>
.a>
b>
a>
5 6(27, 25, 21) 5 (242, 230, 26)
5 6(a>
3 b>
)
2a>
3 3b>
5 2(3)(a>
3 b>
)
5 (27, 25, 21)
1(1) 2 (22)(21))
5 (22(2) 2 3(1), 3(21) 2 1(2),
a>
3 b>
5 (1, 22, 3) 3 (21, 1, 2)
Q 231!29R 8 123.9°.cos21
(4,22,23) ? (0, 0, 1) 5 23,
Q 221!29R 5 111.8°.cos21
(4, 22, 23) ? (0, 1, 0) 5 22,
42.0°.Q 41!29R 8cos21
(4, 22, 23) ? (1, 0, 0) 5 4,
5 1.
5 !1
5 0 (0, 0, 1) 0 0 (1, 0, 0) 0 5 0 (0, 1, 0) 0
5 !29,
0 (4, 22, 23) 0 5 "42 1 (22)2 1 (23)2
5 18
5 22(29) 1 2(0)
1 0(3) 1 0(22))
5 22(3(2) 2 4(0) 2 5(3)) 1 2(1(0)
1 2(i>
1 0j>
1 0k>
) ? (0i>
1 3j>
2 2k>
)
5 22(3i>
2 4j>
2 5k>
) ? (2i>
1 0j>
1 3k>
)
22(3i>
2 4j>
2 5k>
) ? (2i>
1 3k>
) 1 2i>
? (3j>
2 2k>
)
5 27i>
2 19j>
2 14k>
5 2i>
2 4j>
1 6k>
2 8i>
2 16j>
2 20k>
2 i>
1 j>
2(i>
2 2j>
1 3k>
) 2 4(2i>
1 4j>
1 5k>
) 2 (i>
2 j>
)
53
2
(2x>
2 y>
) ? (x>
1 3y>
) 5 2(1) 1 (3) 2 A12B 2 3(1)
x>
? x>
5 y>
? y>
5 1,y>
x>
5 2x>
? x>
1 2x>
? 3y>
2 x>
? y>
2 3y>
? y>
5 2x>
? x>
1 2x>
? 3y>
2 y>
? x>
2 y>
? 3y>
5 2x>
? (x>
1 3y>
) 2 y>
? (x>
1 3y>
)
(x>
1 3y>
)(2x>
2 y>
) ?
2x>
? 3y>
5 2 3 3 3 12 5 3.
2x>
? 3y>
5 (2)(3)(x>
? y>
),
x>
? y>
5x>
? y>
1 3 15
1
2.cos (60°) 5
1
2.
0 x> 0 5 0 y> 0 5 1,y>
x>
cos (60°) 5x>
? y>
0 x> 0 0 y> 0 .Q 8!3!56R 8 51.9°.cos21
(4, 2, 6) ? (1, 21, 1) 5 8,
5 !3
0 (1, 21, 1) 0 5 "12 1 12 1 12
5 !56
0 (4, 2, 6) 0 5 "42 1 22 1 62
5 0.
5 (8 1 4t) 2 (t) 1 (23 2 3t) 2 5
x 2 y 1 z 2 5
5 0
1 6(23 2 3t) 2 14
4x 1 2y 1 6z 2 14 5 4(8 1 4t) 1 2(t)
9-36 Chapter 9: Relationships Between Points, Lines, and Planes
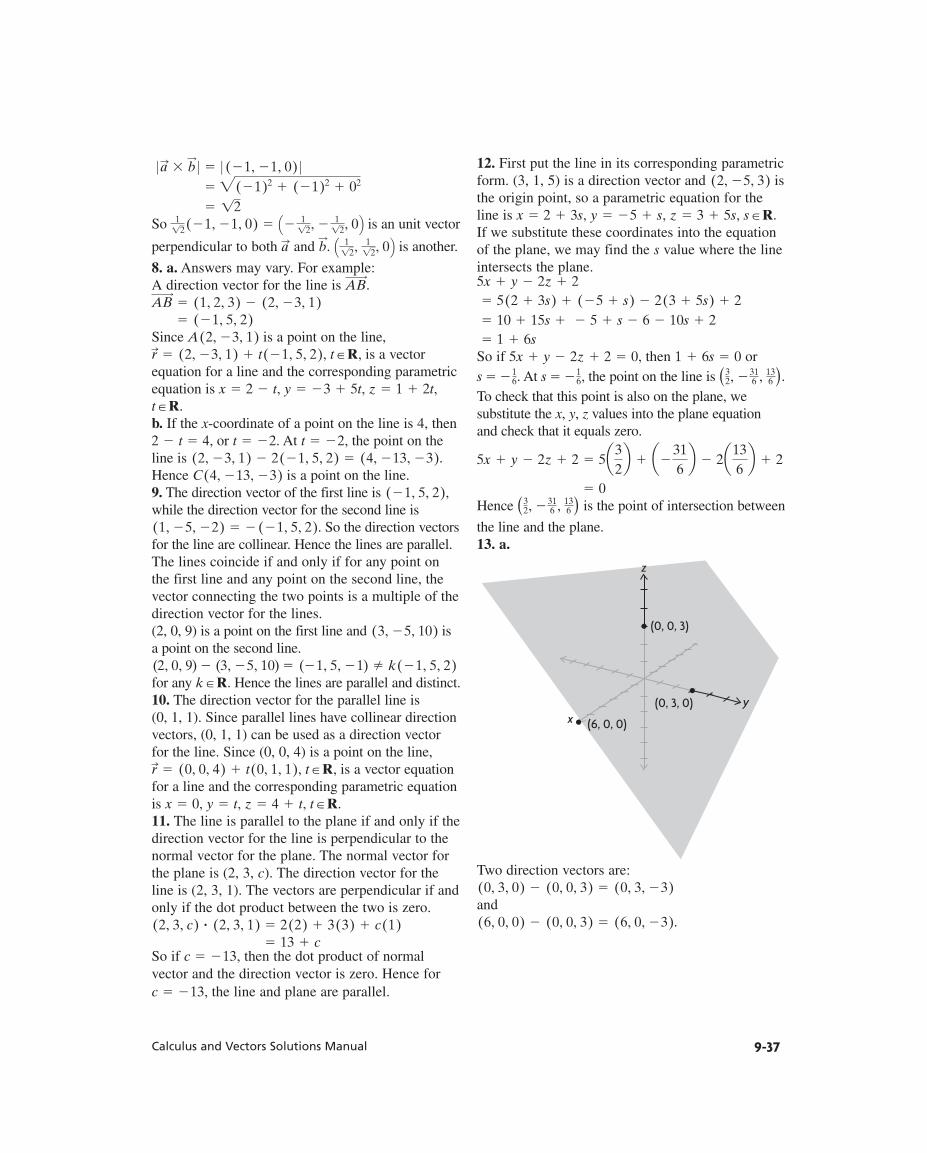
So is an unit vector
perpendicular to both and is another.
8. a. Answers may vary. For example:A direction vector for the line is
Since is a point on the line,is a vector
equation for a line and the corresponding parametricequation is
b. If the x-coordinate of a point on the line is 4, thenor At the point on the
line is Hence is a point on the line.9. The direction vector of the first line is while the direction vector for the second line is
So the direction vectorsfor the line are collinear. Hence the lines are parallel.The lines coincide if and only if for any point onthe first line and any point on the second line, thevector connecting the two points is a multiple of thedirection vector for the lines.(2, 0, 9) is a point on the first line and isa point on the second line.
for any Hence the lines are parallel and distinct.10. The direction vector for the parallel line is (0, 1, 1). Since parallel lines have collinear directionvectors, (0, 1, 1) can be used as a direction vectorfor the line. Since (0, 0, 4) is a point on the line,
is a vector equationfor a line and the corresponding parametric equationis 11. The line is parallel to the plane if and only if thedirection vector for the line is perpendicular to thenormal vector for the plane. The normal vector forthe plane is (2, 3, c). The direction vector for theline is (2, 3, 1). The vectors are perpendicular if andonly if the dot product between the two is zero.
So if then the dot product of normalvector and the direction vector is zero. Hence for
the line and plane are parallel.
12. First put the line in its corresponding parametricform. (3, 1, 5) is a direction vector and isthe origin point, so a parametric equation for theline is If we substitute these coordinates into the equationof the plane, we may find the s value where the lineintersects the plane.
So if then or At the point on the line is
To check that this point is also on the plane, we substitute the x, y, z values into the plane equation and check that it equals zero.
Hence is the point of intersection between
the line and the plane.13. a.
Two direction vectors are:
and(6, 0, 0) 2 (0, 0, 3) 5 (6, 0, 23).
(0, 3, 0) 2 (0, 0, 3) 5 (0, 3, 23)
y
(0, 0, 3)
(0, 3, 0)
(6, 0, 0)
z
x
(32, 2
316 , 13
6 ) 5 0
5x 1 y 2 2z 1 2 5 5a3
2b 1 a2
31
6b 2 2a13
6b 1 2
(32, 2
316 , 13
6 ).s 5 216,s 5 21
6.
1 1 6s 5 05x 1 y 2 2z 1 2 5 0,
5 1 1 6s 5 10 1 15s 1 2 5 1 s 2 6 2 10s 1 2
5 5(2 1 3s) 1 (25 1 s) 2 2(3 1 5s) 1 2
5x 1 y 2 2z 1 2
sPR.z 5 3 1 5s,y 5 25 1 s,x 5 2 1 3s,
(2, 25, 3)
c 5 213,
c 5 213, 5 13 1 c
(2, 3, c) ? (2, 3, 1) 5 2(2) 1 3(3) 1 c(1)
tPR.z 5 4 1 t,y 5 t,x 5 0,
tPR,r>
5 (0, 0, 4) 1 t(0, 1, 1),
kPR.
2 k(21, 5, 2)(21, 5, 21)(2, 0, 9) 2 (3, 25, 10) 5
(3, 25, 10)
(1, 25, 22) 5 2 (21, 5, 2).
(21, 5, 2),
C(4, 213, 23)
(2, 23, 1) 2 2(21, 5, 2) 5 (4, 213, 23).
t 5 22,t 5 22.2 2 t 5 4,
tPR.
z 5 1 1 2t,y 5 23 1 5t,x 5 2 2 t,
tPR,r>
5 (2, 23, 1) 1 t(21, 5, 2),
A(2, 23, 1)
5 (21, 5, 2)
AB>
5 (1, 2, 3) 2 (2, 23, 1)
AB>
.
Q 1!2, 1!2
, 0Rb>
.a>
1!2(21, 21, 0) 5 Q2 1!2
, 2 1!2, 0R
5 !2
5 "(21)2 1 (21)2 1 02
0 a> 3 b> 0 5 0 (21, 21, 0) 0
9-37Calculus and Vectors Solutions Manual
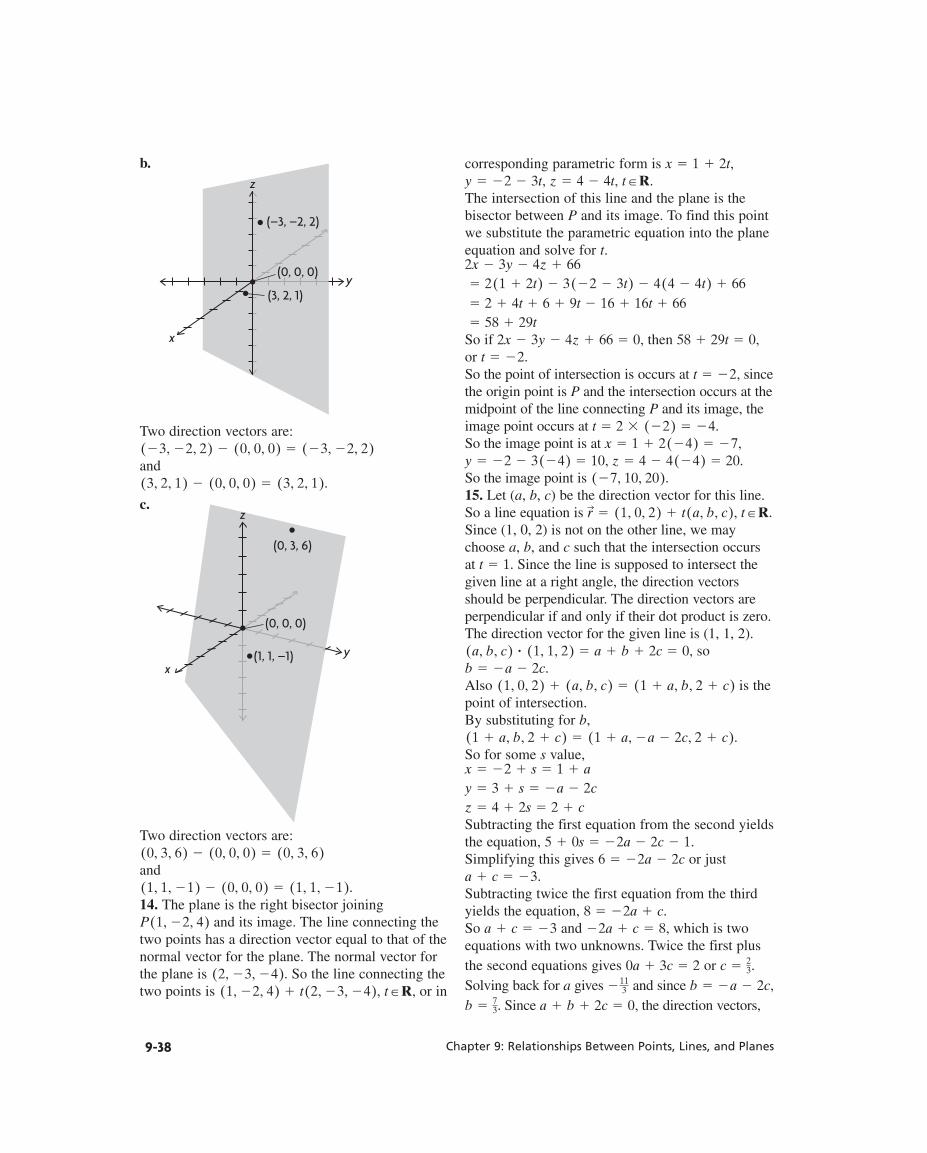
b.
Two direction vectors are:
and
c.
Two direction vectors are:
and
14. The plane is the right bisector joiningand its image. The line connecting the
two points has a direction vector equal to that of thenormal vector for the plane. The normal vector forthe plane is So the line connecting thetwo points is or in
corresponding parametric form is
The intersection of this line and the plane is thebisector between P and its image. To find this pointwe substitute the parametric equation into the planeequation and solve for t.
So if then or So the point of intersection is occurs at sincethe origin point is P and the intersection occurs at themidpoint of the line connecting P and its image, theimage point occurs at So the image point is at
So the image point is 15. Let (a, b, c) be the direction vector for this line.So a line equation is Since (1, 0, 2) is not on the other line, we maychoose a, b, and c such that the intersection occursat Since the line is supposed to intersect thegiven line at a right angle, the direction vectorsshould be perpendicular. The direction vectors areperpendicular if and only if their dot product is zero.The direction vector for the given line is (1, 1, 2).
so
Also is thepoint of intersection.By substituting for b,
So for some s value,
Subtracting the first equation from the second yieldsthe equation,Simplifying this gives or just
Subtracting twice the first equation from the thirdyields the equation,So and which is twoequations with two unknowns. Twice the first plus the second equations gives or Solving back for a gives and since
Since the direction vectors,a 1 b 1 2c 5 0,b 5 73.
b 5 2a 2 2c,2113
c 5 23.0a 1 3c 5 2
22a 1 c 5 8,a 1 c 5 23
8 5 22a 1 c.
a 1 c 5 23.
6 5 22a 2 2c5 1 0s 5 22a 2 2c 2 1.
z 5 4 1 2s 5 2 1 c y 5 3 1 s 5 2a 2 2c x 5 22 1 s 5 1 1 a
2a 2 2c, 2 1 c).(1 1 a, b, 2 1 c) 5 (1 1 a,
(1, 0, 2) 1 (a, b, c) 5 (1 1 a, b, 2 1 c)
b 5 2a 2 2c.
(a, b, c) ? (1, 1, 2) 5 a 1 b 1 2c 5 0,
t 5 1.
tPR.r>
5 (1, 0, 2) 1 t(a, b, c),
(27, 10, 20).
z 5 4 2 4(24) 5 20.3(24) 5 10,y 5 22 2
x 5 1 1 2(24) 5 27,
t 5 2 3 (22) 5 24.
t 5 22,
t 5 22.
58 1 29t 5 0,2x 2 3y 2 4z 1 66 5 0,
5 58 1 29t 5 2 1 4t 1 6 1 9t 2 16 1 16t 1 66
5 2(1 1 2t) 2 3(22 2 3t) 2 4(4 2 4t) 1 66
2x 2 3y 2 4z 1 66
tPR.z 5 4 2 4t,y 5 22 2 3t,x 5 1 1 2t,
tPR,(1, 22, 4) 1 t(2, 23, 24),
(2, 23, 24).
P(1, 22, 4)
(1, 1, 21) 2 (0, 0, 0) 5 (1, 1, 21).
(0, 3, 6) 2 (0, 0, 0) 5 (0, 3, 6)
y
(0, 0, 0)
(1, 1, –1)
(0, 3, 6)
z
x
(3, 2, 1) 2 (0, 0, 0) 5 (3, 2, 1).
(23, 22, 2) 2 (0, 0, 0) 5 (23, 22, 2)
(0, 0, 0)
(3, 2, 1)y
z
x
(–3, –2, 2)
9-38 Chapter 9: Relationships Between Points, Lines, and Planes
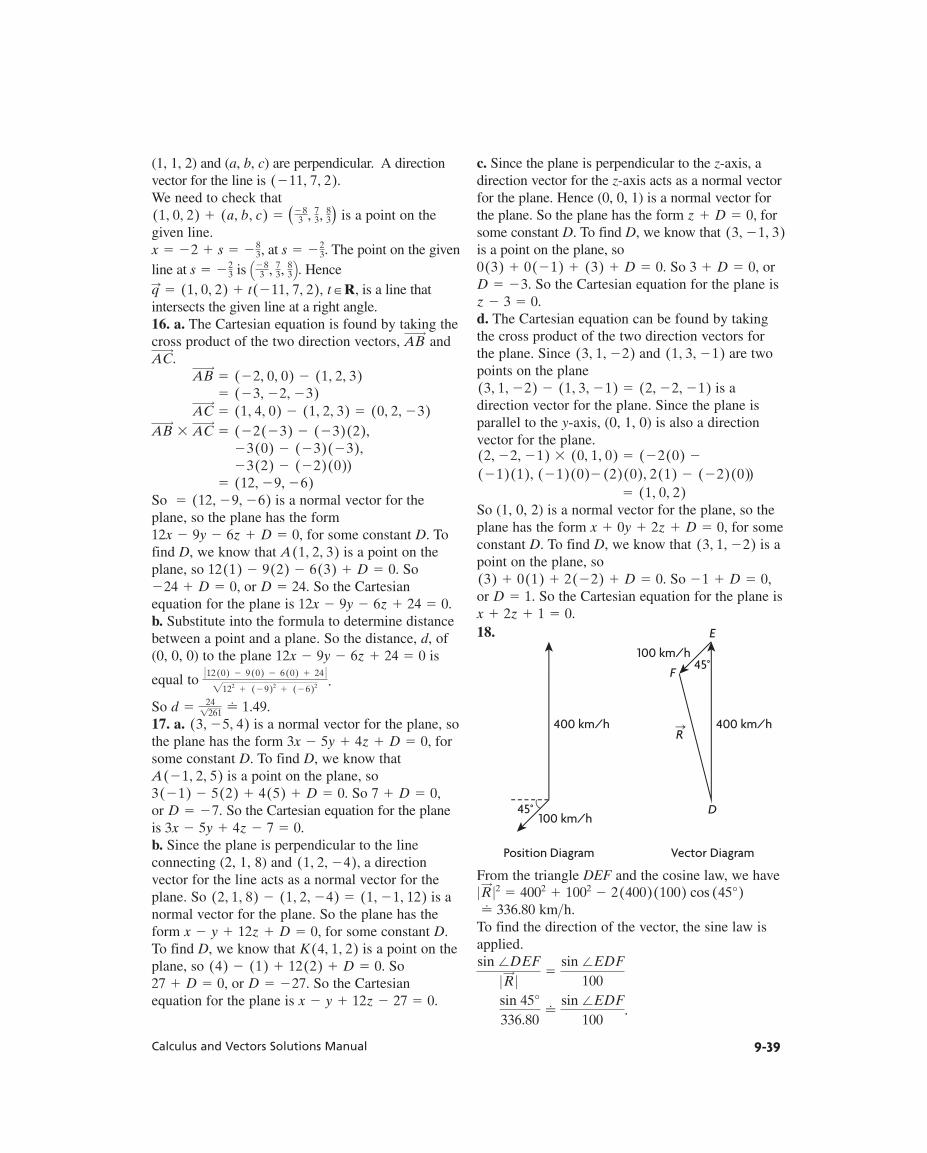
(1, 1, 2) and (a, b, c) are perpendicular. A directionvector for the line is .We need to check that
is a point on thegiven line.
at The point on the given line at is Hence
is a line thatintersects the given line at a right angle.16. a. The Cartesian equation is found by taking thecross product of the two direction vectors, and
So is a normal vector for theplane, so the plane has the form
for some constant D. Tofind D, we know that is a point on theplane, so So
or So the Cartesianequation for the plane is b. Substitute into the formula to determine distancebetween a point and a plane. So the distance, d, of(0, 0, 0) to the plane is
equal to
So 17. a. is a normal vector for the plane, sothe plane has the form forsome constant D. To find D, we know that
is a point on the plane, so So
or So the Cartesian equation for the planeis b. Since the plane is perpendicular to the line connecting (2, 1, 8) and a direction vector for the line acts as a normal vector for theplane. So is anormal vector for the plane. So the plane has theform for some constant D.To find D, we know that is a point on theplane, so So
or So the Cartesian equation for the plane is
c. Since the plane is perpendicular to the z-axis, adirection vector for the z-axis acts as a normal vectorfor the plane. Hence (0, 0, 1) is a normal vector forthe plane. So the plane has the form forsome constant D. To find D, we know that is a point on the plane, so
So orSo the Cartesian equation for the plane is
d. The Cartesian equation can be found by takingthe cross product of the two direction vectors forthe plane. Since and are twopoints on the plane
is adirection vector for the plane. Since the plane isparallel to the y-axis, (0, 1, 0) is also a directionvector for the plane.
So (1, 0, 2) is a normal vector for the plane, so theplane has the form for someconstant D. To find D, we know that is apoint on the plane, so
So or So the Cartesian equation for the plane is
18.
From the triangle DEF and the cosine law, we have
km h.To find the direction of the vector, the sine law isapplied.
sin 45°
336.808
sin /EDF100
.
sin /DEF
0R> 0 5sin /EDF
100
>8 336.80
0R> 0 2 5 4002 1 1002 2 2(400)(100) cos (45°)
400 km/h
100 km/h
Position Diagram Vector Diagram
45°
400 km/h
100 km/h45°
R
D
E
F
x 1 2z 1 1 5 0.
D 5 1.
21 1 D 5 0,D 5 0.(3) 1 0(1) 1 2(22) 1
(3, 1, 22)
x 1 0y 1 2z 1 D 5 0,
5 (1, 0, 2)
(21)(1), (21)(0)2 (2)(0), 2(1) 2 (22)(0))
(2, 22, 21) 3 (0, 1, 0) 5 (22(0) 2
(2, 22, 21)(3, 1, 22) 2 (1, 3, 21) 5
(1, 3, 21)(3, 1, 22)
z 2 3 5 0.
D 5 23.
3 1 D 5 0,D 5 0.0(3) 1 0(21) 1 (3) 1
(3, 21, 3)
z 1 D 5 0,
x 2 y 1 12z 2 27 5 0.
D 5 227.27 1 D 5 0,
(4) 2 (1) 1 12(2) 1 D 5 0.
K(4, 1, 2)
x 2 y 1 12z 1 D 5 0,
(2, 1, 8) 2 (1, 2, 24) 5 (1, 21, 12)
(1, 2, 24),
4z 2 7 5 0.3x 2 5y 1
D 5 27.
7 1 D 5 0,3(21) 2 5(2) 1 4(5) 1 D 5 0.
A(21, 2, 5)
3x 2 5y 1 4z 1 D 5 0,
(3, 25, 4)
d 5 24!2618 1.49.
@ 12(0) 2 9(0) 2 6(0) 1 24 @
"122 1 (29)2 1 (26)2 .
12x 2 9y 2 6z 1 24 5 0
12x 2 9y 2 6z 1 24 5 0.
D 5 24.224 1 D 5 0,
12(1) 2 9(2) 2 6(3) 1 D 5 0.
A(1, 2, 3)
D 5 0,12x 2 9y 2 6z 1
5 (12, 29, 26)
5 (12, 29, 26)
23(2) 2 (22)(0))
23(0) 2 (23)(23),
AB>
3 AC>
5 (22(23) 2 (23)(2),
AC>
5 (1, 4, 0) 2 (1, 2, 3) 5 (0, 2, 23)
5 (23, 22, 23)
AB>
5 (22, 0, 0) 2 (1, 2, 3)
AC>
.
AB>
tPR,t(211, 7, 2),q>
5 (1, 0, 2) 1
Q283 , 73,
83R.s 5 22
3
s 5 223.x 5 22 1 s 5 28
3,
(283 , 73,
83)(1, 0, 2) 1 (a, b, c) 5
(211, 7, 2)
9-39Calculus and Vectors Solutions Manual

Thus so the resultant velocity is336.80 km h, N 12.1° W.19. a. The simplest way is to find the parametricequation, then find the corresponding vector equation.If we substitute and and solve for z, weobtain or This yields the parametric equations and So the corresponding vectorequation is s, To check that this is correct, find theCartesian equation corresponding to the abovevector equation and see if it is equivalent to theCartesian equation given in the problem. A normalvector to this plane is the cross product of the twodirectional vectors.
So is a normal vector for the plane, so theplane has the form for someconstant D. To find D, we know that (0, 0, 6) is a pointon the plane, so So or So the Cartesian equationfor the plane is Since this isthe same as the initial Cartesian equation, the vectorequation for the plane is correct.b.
20. a. The angle, between the plane and the lineis the complementary angle of the angle betweenthe direction vector of the line and the normal
vector for the plane. The direction vector of the lineis and the normal vector for the plane is (1, 2, 1).
So the angle between the normal vector and thedirection vector is So
To the nearest degree, .b. The two planes are perpendicular if and only iftheir normal vectors are also perpendicular. A normal vector for the first plane is anda normal vector for the second plane is
The two vectors are perpendicular ifand only if their dot product is zero.
Hence the normal vectors are perpendicular. Thusthe planes are perpendicular.c. The two planes are parallel if and only if theirnormal vectors are also parallel. A normal vector forthe first plane is and a normal vector forthe second plane is Since both normalvectors are the same, the planes are parallel. Since
the pointis on the second plane. Yet since
isnot on the first plane. Thus the two planes areparallel but not coincident.21.
Vector diagram
Position diagram
25 N
40 N
40 N
R
D
FE
60°
25 N
40 N
60°
120°
120°
(0, 21, 0)2(0) 2 3(21) 1 2(0) 2 1 5 2 2 0,
(0, 21, 0)
2(0) 2 3(21) 1 2(0) 2 3 5 0,
(2, 23, 2).
(2, 23, 2)
5 0.
1 1(217)
(2, 23, 1) ? (4, 23, 217) 5 2(4) 2 3(23)
(4, 23, 217).
(2, 23, 1)
u 5 16°
u 8 90° 2 74.21° 5 15.79°.
Q 23!6R 8 74.21°.cos21
(2, 21, 2) ? (1, 2, 1) 5 2(1) 2 1(2) 1 2(1) 5 2
5 !6
0 (1, 2, 1) 0 5 "12 1 22 1 12
5 3.
5 !9
5 "22 1 (21)2 1 220 (2, 21, 2) 0(2, 21, 2)
u,
y
(0, 0, 6)
(0, –3, 0)
(2, 0, 0)
z
x
3x 2 2y 1 z 2 6 5 0.
D 5 26.6 1 D 5 0,
3(0) 2 2(0) 1 (6) 1 D 5 0.
3x 2 2y 1 z 1 D 5 0,
(3, 22, 1)
5 (3, 22, 1)
23(0) 2 1(2), 1(1) 2 0(0))
n>
5 (1, 0, 23) 3 (0, 1, 2) 5 (0(2) 2 (23)(1),
tPR.
r>
5 (0, 0, 6) 1 s(1, 0, 23) 1 t(0, 1, 2),
z 5 6 2 3s 1 2t.y 5 t,x 5 s,
z 5 6 2 3s 1 2t.3s 2 2t 1 z 2 6 5 0
y 5 tx 5 s
>/EDF 8 12.1°,
sin /EDF 8 0.2100.
sin /EDF 8sin 45°
336.803 100.
9-40 Chapter 9: Relationships Between Points, Lines, and Planes

From the triangle DEF and the cosine law, we have
N.To find the direction of the vector, the sine law isapplied.
Thus so the resultant force isapproximately 56.79 N, 37.6° from the 25 N forcetowards the 40 N force. The equilibrant force hasthe same magnitude as the resultant, but it is in the opposite direction. So the equilibrant is approximately 56.79 N,from the 25 N force away from the 40 N force.22.
b.
23. a. The unit vector in the same direction of issimply divided by the magnitude of
So the unit vector in the same direction of is
b. The unit vector in the opposite direction of issimply the negative of the unit vector found in parta. So the vector is 24. a. Since OBCD is a parallelogram, the point Coccurs at So is onevector equivalent to a diagonal and is the other.
b.
So the angle between these diagonals is
c. and
So the angle between these diagonals is
25. a. First step is to use the first equation toremove x from the second and third.
So we have
Hence or Since both equations arethe same, this implies that there are infinitely manysolutions. Let then by substituting into theequation 2, we obtain
or Hence the solution to these equations is
b. First step is to use the first equation to remove xfrom the second and third.
So we have2
2Now the fourth and fifth equations are used tocreate a sixth equation where the coefficient of y is zero.
So or z 5 23.22z 5 6
5140x 1 0y 2 2z 5 6,6
33210x 2 1y 2 5z 5 13,5
23110x 1 1y 1 3z 5 27,4
2x 2 y 1 3z 5 2123
x 1 2y 1 z 5 22
22x 2 3y 1 z 5 2111
tPR.z 5 1,y 5 21 1 t,x 5 t,
y 5 21 1 t.2t 1 y 1 2(1) 5 1,
x 5 t,
z 5 1.3z 5 3,
3113210x 1 0y 1 3z 5 3,5
2110x 1 0y 1 3z 5 3,4
x 2 y 1 4z 5 53
2x 1 y 1 2z 5 12
x 2 y 1 z 5 21
A 5!50!85B 8 85.6°.cos21
5 5
(21, 7) ? (9, 2) 5 2 (9) 1 7(2)
5 "85
0 (9, 2) 0 5 "92 1 22
5 "50
0 (21, 7) 0 5 "(21)2 1 72.
OD>
5 (9, 2)OB>
5 (21, 7)
A 235!145!125B 8 74.9°.cos21
5 235
(8, 9) ? (10, 25) 5 8(10) 1 9(25)
5 "125
0 (10, 25) 0 5 "102 1 (25)2
5 "145
0 (8, 9) 0 5 "82 1 92
BD>
5 (9, 2) 2 (1, 7) 5 (10, 25)
OC>
5 (8, 9) 2 (0, 0) 5 (8, 9)
BD>
OC>
(21, 7) 1 (9, 2) 5 (8, 9).
2 A67, 27, 237B 5 A26
7, 227,
37B.
a>
1
0 a> 0a>
5 17(6, 2, 23) 5 (6
7, 27, 2
37).
a>
5 7
5 "49
0 a> 0 5 "62 1 22 1 (23)2
a>
.a>
a>
2a2a
2a12b
12b
12b+
a
a
b –b
–b
a–b
180° 2 37.6° 5 142.4°
/EDF 8 37.6°,
sin /EDF 8 0.610.
sin /EDF 8sin 120°
56.793 40.
sin 120°
56.798
sin /EDF40
.
sin /DEF
0R> 0 5sin /EDF
100
8 56.79
0R> 0 2 5 402 1 252 2 2(40)(25) cos (120°)
9-41Calculus and Vectors Solutions Manual

Substituting this into equation yields,or Finally substitute z and
y values into equation to obtain the x value.or
Hence the solution to these three equations is
c. First step is to notice that the second equation issimply twice the first equation.
So the solution to these equations is the same as thesolution to just the first and third equations.Moreover since this is two equations with threeunknowns, there will be infinitely many solutions.
Hence or Let and solve for zusing the first equation.
so Hence the solution to these equations is
d. First step is to notice that the second equations is simply twice the first and the third equation issimply times the first equation.
So the solution to these equations is the same as thesolution to just the first equation. So the solution tothese equations is a plane. To solve this in parametricequation form, simply let and and findthe x value.
or So the solution to these equations is
s,26. a. Since the normal of the first equation is and the normal of the second is
which are not scalar multiples of eachother, there is a line of intersection between theplanes. The next step is to use the first and secondequations to find an equation with a zero for thecoefficient of x. The second equation minus the firstequation yields We maydivide by three to simplify, so If we let then or Substituting these into the first equation yields
or So theequation of the line in parametric form is
To check that this is correct, we substitute in thesolution to both initial equations
and
Hence the line given by the parametric equationabove is the line of intersection for the planes.b. The normal vector for the first plane is
while the normal vector for the secondplane is Hence theplanes have collinear normal vectors, and so areparallel.The second equation is equivalent to
since we may divide the equationby two. Since the constant on the right in the firstequation is 28, while the constant on the right in thesecond equivalent equation is 30, these planes are parallel and not coincident. So there is no intersection.c. The normal vector for the first equation is
while the normal vector for the secondequation is (2, 1, 1). Since the normal vectors arenot scalar multiples of each other, there is a line ofintersection between the planes.The next step is to use the first and second equationsto find an equation with a zero for the coefficient of x.The second equation minus twice the first equationyields Solving for z yields, If we let then
Substituting these into the first equation yieldsor So the
equation of the line in parametric form is
To check that this is correct, we substitute in thesolution to both initial equations
and
Hence the line given by the parametric equationabove is the line of intersection for the planes.27. The angle, between the plane and the line isthe complementary angle of the angle between thedirection vector of the line and the normal vectorfor the plane. The direction vector of the line is
u,
5 0.
2x 1 y 1 z 2 4 5 2(2 2 2t) 1 (t) 1 (3t) 2 4
5 0
x 2 y 1 z 2 2 5 (2 2 2t) 2 (t) 1 (3t) 2 2
tPR.z 5 3t,y 5 t,x 5 2 2 2t,
x 5 2 2 2t.x 2 (t) 1 (3t) 2 2 5 0
z 5 3(t) 5 3t.y 5 t,z 5 3y.
0x 1 3y 2 z 1 0 5 0.
(1, 21, 1),
x 2 4y 1 7z 5 30,
(2, 28, 14) 5 2(1, 24, 7).
(1, 24, 7),
5 0.
x 1 2y 2 2z 1 2 5 (0) 1 2(21 1 t) 2 2(t) 1 2
5 0
x 2 y 1 z 2 1 5 (0) 2 (21 1 t) 1 (t) 2 1
tPR.z 5 t,y 5 21 1 t,x 5 0,
x 5 0.x 2 (21 1 t) 1 t 2 1 5 0
y 5 21 1 t.y 2 t 1 1 5 0,z 5 t,y 2 z 1 1 5 0.
0x 1 3y 2 3z 1 3 5 0.
(1, 2, 22),
(1, 21, 1)
tPR.z 5 s,y 5 t,x 5 1 1 3s 1 t,
x 5 1 1 t 1 3sx 2 t 2 3s 5 1,
z 5 sy 5 t
24x 1 4y 1 12z 5 243
2x 2 2y 2 6z 5 22
x 2 y 2 3z 5 11
24
tPR.z 5 23 1 t,y 5 t,x 5 1,
z 5 23 1 t2(1) 2 t 1 z 5 21,
y 5 tx 5 1.4x 5 4
3114x 1 0y 1 0z 5 4,4
2x 1 y 2 z 5 53
4x 2 2y 1 2z 5 222
2x 2 y 1 z 5 211
(1, 2, 23).
x 5 1.x 1 2(2) 1 (23) 5 2
2
y 5 2.y 1 3(23) 5 27
4
9-42 Chapter 9: Relationships Between Points, Lines, and Planes

and the normal vector for the plane is
So the angle between the normal vector and thedirection vector is So
28. a. We have that Also
since and are unit vectors, andand moreover So
The dot product is distributive, so
b. We have that Also since
and Also
and The dot product is distributive, so
29. The origin, (0, 0, 0), and are twopoints on this line. So is a direction vectorfor this line and since the origin is on the line, a possible vector equation is
is a normal vector for the plane. So theequation of the plane is
is a point on the plane. Substitute thecoordinates to determine the value of D.
The equation of the plane is 30. The plane is the right bisector joining
and its image. The line connecting thetwo points has a direction vector equal to that of thenormal vector for the plane. The normal vector forthe plane is So the line connecting thetwo points is or incorrespondingparametric form is The intersection of this line and the plane is thebisector between P and its image. To find this pointwe plug the parametric equation into the planeequation and solve for t.
So if then or So the point of intersection is occurs at sincethe origin point is P and the intersection occurs atthe midpoint of the line connecting P and its image,the image point occurs at So theimage point is at So the image point is 31. a. Thinking of the motorboat’s velocity vector(without the influence of the current) as starting at the origin and pointing northward toward theopposite side of the river, the motorboat has velocityvector (0, 10) and the river current has velocity vector (4, 0). So the resultant velocity vector of themotorboat is
To reach the other side of the river, the motorboatneeds to cover a vertical distance of 2 km. So thehypotenuse of the right triangle formed by the marina, the motorboat’s initial position, and themotorboat’s arrival point on the opposite side of the river is represented by the vector
(We multiplied by to create a vertical componentof 2 in the motorboat’s resultant velocity vector,the distance needed to cross the river.) Since thisnew vector has horizontal component equal to this means that the motorboat arrives kmdownstream from the marina.
45 5 0.8
45,
15
1
5(4, 10) 5 a4
5, 2b
(0, 10) 1 (4, 0) 5 (4, 10)
(21, 1, 0).
z 5 1 2 (1) 5 0.y 5 1,x 5 21,
t 5 2 3 12 5 1.
t 5 12,
t 5 12.21 1 2t 5 0,y 2 z 5 0,
5 21 1 2t 0x 1 y 2 z 5 0(21) 1 (t) 2 (1 2 t)
tPR.y 5 t, z 5 1 2 t,x 5 21,
tPR,(21, 0, 1) 1 t(0, 1, 21),
(0, 1, 21).
P(21, 0, 1)
2x 1 3y 1 z 2 11 5 0.
D 5 211
1 1 9 1 1 1 D 5 0
(21, 3, 1)
2x 1 3y 1 z 1 D 5 0.
(21, 3, 1)
tPR.r>
5 t(21, 3, 1),
(21, 3, 1)
(21, 3, 1)
5 84
2 3(16)
5 8(9) 1 12(6) 2 2(6)
2 3y>
? y>
5 8x>
? x>
1 12x>
? y>
2 2y>
? x>
2 y>
? (2x>
1 3y>
)
(4x>
2 y>
) ? (2x>
1 3y>
) 5 4x>
? (2x>
1 3y>
)
y>
? y>
5 0 y> 0 2 5 16.
x>
? x>
5 0 x> 0 2 5 9x>
? y>
5 12(4)(3) 5 6.
cos (60°) 5 12,0 y> 0 5 4,0 x> 0 5 3,
cos (60°) 5x>
? y>
0 x> 0 0 y> 0 .5 2
3
2
2 2(1)
5 6(1) 2 12a1
2b 1 a1
2b
2 2b>
? b>
5 6a>
? a>
2 12a>
? b>
1 a>
? b>
1 b>
? a>
1 b>
? (22b>
)
5 6a>
? a>
1 6a>
? (22b>
)
1 b>
? (a>
2 2b>
)
(6a>
1 b>
) ? (a>
2 2b>
) 5 6a>
? (a>
2 2b>
)
a>
? b>
5a>
? b>
1 3 15 1
2.
cos (60°) 5 12.a
>
? a>
5 b>
? b>
5 1,
0 a> 0 5 0 b> 0 5 1b>
a>
cos (60°) 5a>
? b>
0 a> 0 0 b> 0 .u 5 90 260° 5 30°.
A 2!2 !8B 5 60°.cos21
(1, 21, 0) ? (2, 0, 22) 5 1(2) 2 1(0) 1 0(22) 5 2
0 (2, 0, 22) 0 5 "22 1 02 1 (22)2 5 "8
5 "2
0 (1, 21, 0) 0 5 "12 1 (21)2 1 02
(2, 0, 22).
(1, 21, 0)
9-43Calculus and Vectors Solutions Manual

b. The motorboat is travelling at 10 km h, and inpart a. we found that it will travel along the vector
The length of this vector is
So the motorboat travels a total of km tocross the river which, at 10 km h, takes
hoursminutes.
32. a. Answers may vary. For example:A direction vector for this line is
So, since the point is on this line, thevector equation of this line is
The equivalent parametric form is
b. The line found in part a. will lie in the planeif and only if both points
and lie in this plane. We verify this by substituting these points into theequation of the plane, and checking for consistency.For A:
For B:
Since both points lie on the plane, so does the linefound in part a.33. The wind velocity vector is represented by (16, 0),and the water current velocity vector is representedby (0, 12). So the resultant of these two vectors is
.Thinking of this vector with tail at the origin andhead at point (16, 12), this vector forms a right triangle with vertices at points (0, 0), (0, 12), and(16, 12). Notice that
This means that the sailboat is moving at a speed of 20 km h once we account for wind and watervelocities. Also the angle, , this resultant vectormakes with the positive y-axis satisfies
So the sailboat is travelling in the directionN E, or equivalently E N.34. Think of the weight vector for the crane with tailat the origin at head at (we use one unitfor every kilogram of mass). We need to express thisweight vector as the sum of two vectors: one that isparallel to the inclined plane and pointing down thisincline (call this vector and one that isperpendicular to the inclined plane and pointingtoward the plane (call this vector Theangle between and is and the anglebetween and is Of course, and are perpendicular. Using the formula for dot product,we get
So, since c is positive and d is negative (thinking ofthe inclined plane as moving upward from left toright as we look at it means that points down and
to the right), this last equation means that
So a vector in the same direction as is We can find the length of by computing the scalar
projection of on which equals
That is, Now we can find the lengthof as well by using the fact that
5 200
5 "40 000
0 x> 0 5 "160 000 2 120 000
0 x> 0 2 1 (200"3)2 5 4002
0 x> 0 2 1 0 y> 0 2 5 0 (0, 2400) 0 2x>
0 y> 0 5 200"3.
5 200"3
(0, 2400) ? (1, 2"3)
0 (1, 2"3) 0 5400"3
2
(1, 2!3),(0, 2400)
y>
(1, 2"3).y>
dc
5 2"3
y>
d2 5 3c2
4d2 5 3(c2 1 d2)
22d 5 "3 ? "c2 1 d2
2400d 5 400a"3
2b"c2 1 d2
y>
? (0, 2400) 5 0 y> 0 0 (0, 2400) 0cos 30°
y>
x>
30°.(0, 2400)y>
60°(0, 2400)x>
y>
5 (c, d)).
x>
5 (a, b)),
(0, 2400)
36.9°53.1°
8 53.1°
u 5 cos 21a12
20b
cos u 512
20
u
> 5 20
5 "400
0 (16, 12) 0 5 "162 1 122
(16, 0) 1 (0, 12) 5 (16, 12)
6 2 2(3) 1 4(4) 2 16 5 0
2 2 2(21) 1 4(3) 2 16 5 0
B(6, 3, 4)A(2, 21, 3)
x 2 2y 1 4z 2 16 5 0
tPR.z 5 4 1 t,y 5 3 1 4tx 5 6 1 4t
tPR.r>
5 (6, 3, 4) 1 t(4, 4, 1),
B(6, 3, 4)
5 (4, 4, 1)
AB>
5 (6, 3, 4) 2 (2, 21, 3)
5 12
"4.64 4 10 8 0.2
>!4.64
5 "4.64
a4
5, 2b ` 5 Åa4
5b2
1 22
(45, 2).
>
9-44 Chapter 9: Relationships Between Points, Lines, and Planes

So we get thatand This means that the
component of the weight of the mass parallel to theinclined plane is
N,and the component of the weight of the mass perpendicular to the inclined plane is
35. a. True; all non-parallel pairs of lines intersectin exactly one point in However, this is not the case for lines in (skew lines provide a counterexample).b. True; all non-parallel pairs of planes intersect in aline in .c. True; the line has direction vector(1, 1, 1), which is not perpendicular to the normalvector to the plane k any constant. Since these vectors are notperpendicular, the line is not parallel to the plane,and so they will intersect in exactly one point.d. False; a direction vector for the line
is (2, 1, 2). A direction vector
for the line is
or (2, 1, 1) (which is parallel to Since (2, 1, 2) and (2, 1, 1) are obviously not parallel, these two lines are not parallel.36. a. A direction vector for
is (0, 3, 1), and a direction vector for
is (1, 1, k). But (0, 3, 1) is not a nonzero scalar multiple of (1, 1, k) for any k since the first
component of (0, 3, 1) is 0. This means that thedirection vectors for and are never parallel,which means that these lines are never parallel forany k.b. If and intersect, in particular their x-coordinates will be equal at this intersection point.But always in so we get the equation
Also, from we know that so substitutingthis in for z in we get
So since we already know that we now get
So these two lines intersect when We havealready found that at this intersection point,but now we know that
So the point of intersection of these two lines isand this occurs when k 5 6.(2, 24, 22),
5 22
524 2 2
3
z 5y 2 2
3
5 24
5 6(6) 2 40
y 5 6k 2 40
x 5 2
k 5 6.
k 5 6
7k 5 42
2 2 k 5 6k 2 40
y 5 2 2 k,
y 5 6k 2 40
3(2k 2 14) 5 y 2 2
2k 5y 2 2
31 14
2k 5 z 1 14
L2
z 5y 2 2
3,L1
y 5 2 2 k2 5 y 1 k
L1x 5 2
L2L1
L2L1
L2: x 5 y 1 k 5z 1 14
k
y 2 2
35 zL1: x 5 2,
(24, 22, 22)).
(24, 22, 22),x 2 1
245
y 2 1
225
z 1 1
22
x2
5 y 2 1 5z 1 1
2
x 2 2y 1 2z 5 k,(1, 22, 2)
x 5 y 5 zR3
R3
R2.
8 3394.82 N.
9.8 3 0 y> 0 5 9.8 3 200"3
5 1960
9.8 3 0 x> 0 5 9.8 3 200
0 y> 0 5 200"3.0 x> 0 5 200
9-45Calculus and Vectors Solutions Manual
Related Documents