H. MAINAUD DURAND on behalf of the CLIC active pre-alignement team with 3D views and data from Hubert Gerwig, Richard Rosing and Juha Kemppinen Pre-alignment status MDI meeting, 02/09/2011

H. MAINAUD DURAND on behalf of the CLIC active pre-alignement team with 3D views and data from Hubert Gerwig, Richard Rosing and Juha Kemppinen Pre-alignment.
Dec 23, 2015
Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

H. MAINAUD DURAND
on behalf of the CLIC active pre-alignement team
with 3D views and data from Hubert Gerwig, Richard Rosing and Juha Kemppinen
Pre-alignment status
MDI meeting, 02/09/2011
2
SUMMARY
Monitoring of QD0
Study on cam movers on a 5 DOF setup
3
Monitoring of QD0
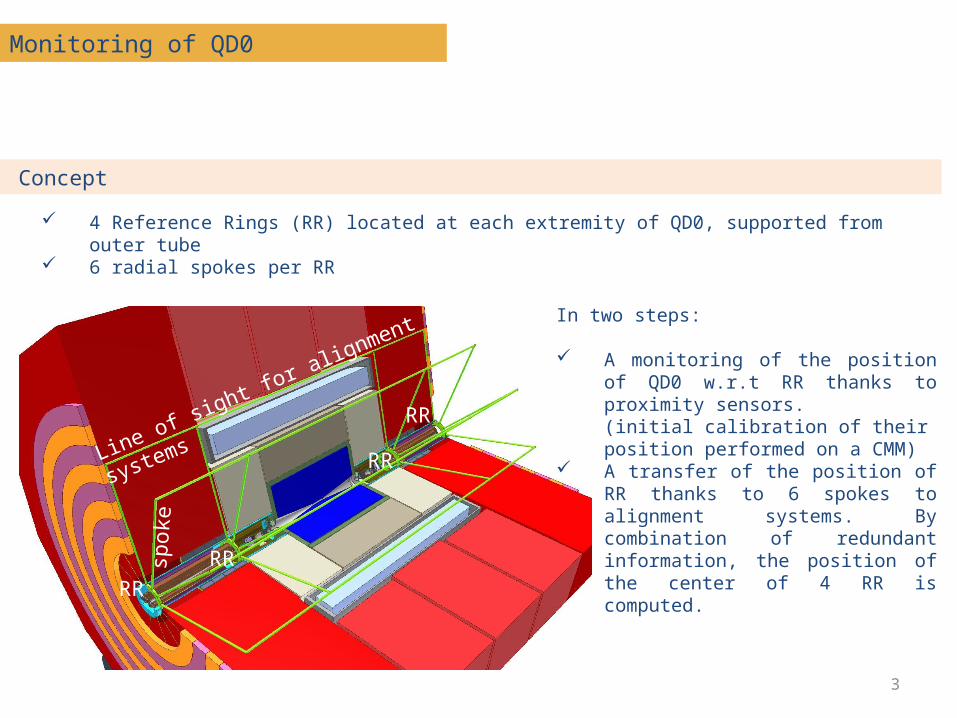
Concept
4 Reference Rings (RR) located at each extremity of QD0, supported from outer tube 6 radial spokes per RR
RRRR
RR
RR
spoke
Line of sight for alignment
systems
In two steps:
A monitoring of the position of QD0 w.r.t RR thanks to proximity sensors.(initial calibration of their position performed on a CMM)
A transfer of the position of RR thanks to 6 spokes to alignment systems. By combination of redundant information, the position of the center of 4 RR is computed.

4
Monitoring of QD0
Concept: alignment systems
RasNik
RasCLIC
laser +beam expander
diffractionplate
pixel imagesensor

5
Monitoring of QD0
Latest results: choice of material
RR and spokes in Zerodur
6
Monitoring of QD0
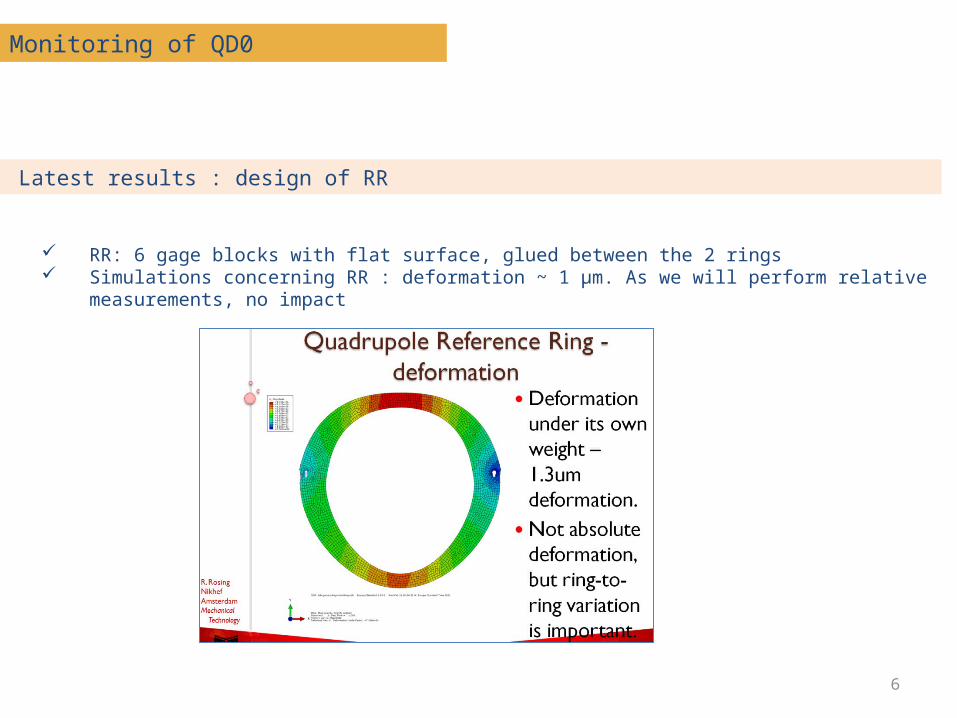
Latest results : design of RR
RR: 6 gage blocks with flat surface, glued between the 2 rings Simulations concerning RR : deformation ~ 1 μm. As we will perform relative measurements, no
impact

7
Monitoring of QD0
Latest results : design of spokes
Squares rods in zerodur (6 mm x 6 mm), with a length of 200 mm, glued together (final length 1 m)
At the RR extremity of spoke: a hard stainless steel precision ball, pressed against the reference surface of gage block of RR (a screwing concept using torque screw is being studied.
Each spoke is supported by a square aluminium pipe. Flexo, made of silicon rubber will be the link between spoke and pipe, allowing that no radial force is applied, except the load of the bar itself.
8
Monitoring of QD0
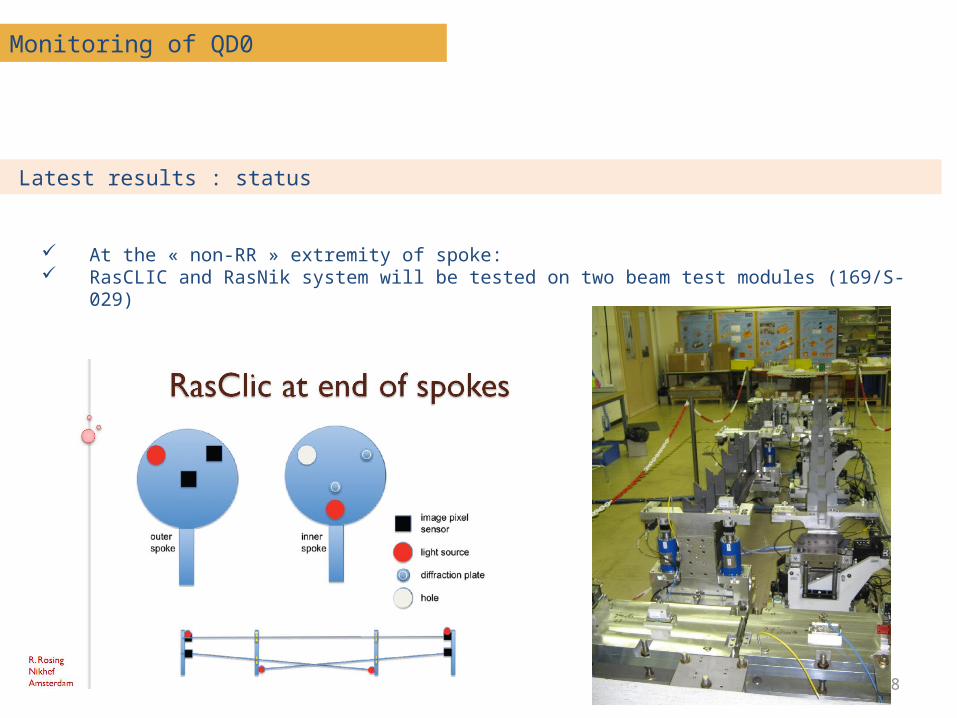
Latest results : status
At the « non-RR » extremity of spoke: RasCLIC and RasNik system will be tested on two beam test modules (169/S-029)

9
Monitoring of QD0
Latest results : status
First tests will concern the assembly of 1m of zerodur rods: guiding, then heating / thermal expansion behavior
10
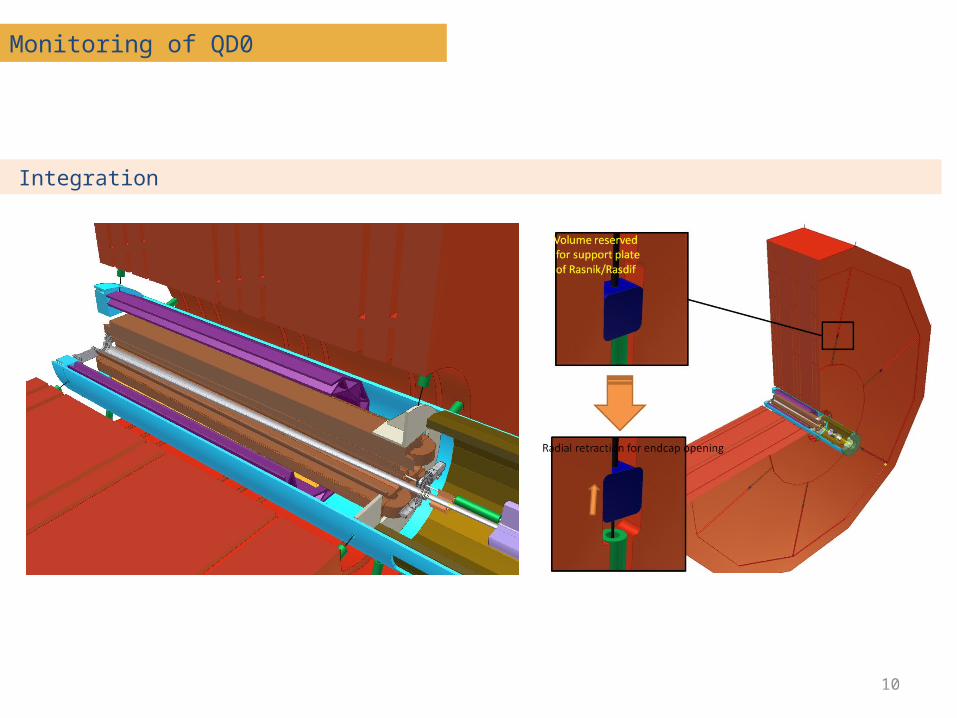
Monitoring of QD0
Integration

11
SUMMARY
Monitoring of QD0
Study on cam movers on a 5 DOF setup

12
Monitoring of QD0
Why a 5 DOF mock-up to validate cam movers?
In order to have a better knowledge of cam movers and algorithms of repositioning
For the MB quads of Main linac and BDS, we are looking for a resolution and repeatability of adjstument never reached before (below 1 μm). These requirements are not fulfilled on other facilities where cam movers are installed (LCLS @ SLAC, SLS @ PSI).
Cam movers were validated on a 1 DOF setup (where a repeatibility below 1 μm) was reached , but the setup was too rigid to measure resonant frequencies. (Target on the 5 DOF mock-up: first resonant frequency > 50 Hz, in order to be compatible with stabilization requirements).

13
Monitoring of QD0
Description of 5 DOF mock-up

14
Monitoring of QD0
Cam movers
Configuration:
5 cam movers in order to provide 5 DOF
A kinematic mount interface below the common support of MB quad support providing a unique solution of interface
4 interface with ground for higher stiffness
Cam mover
s from SLS
Upgraded SLS cam movers:(optimization of clearancesand links between parts)
Cam movers from ZTS vvu Kosice:•A more rigid structure• Higher gear ratio (Worm gearbox ratio = 60,
bearing reducer ratio = 85) • Different worm gear and stepper motor• The stepper motor and the worm gear unit
are coupled to the cam shaft via a zero backlash bearing reducer instead of a planetary gear
• A high resolution absolute rotary angle encoder from Renishaw is directly mounted on the cam shaft

15
Monitoring of QD0
Latest results
Blank assembly of the setup
Resolution of displacements:
According to the manufacturer, the cam mover’s movement resolution is 3.8’’. Based on this, the 5 DOF setup theoretical resolution in translations is below 1µm and in rotations below 1µrad.
The cam movers were not calibrated before the blank assembly of the 5 DOF setup so the control algorithm cannot be fully exploited. Therefore it was not possible to test the resolution of re-adjustment of all translations and rotations separately.
First tests do however indicate that the re-adjustment resolution of translations are below 2 µm.
But area very noisy: standard deviation of WPS measurements ~ 1.3 μm.
Eigenfrequencies measurements:
Before concrete is added around the plates Several natural frequencies were measured below 50 Hz, coming from the mechanical
plates and their anchoring screws (see edms report n°1152988 from Mechanical Measurement Lab).
A RMS integrated level close to 9 nm at 1 Hz was computed; this confirmed that the area is too noisy for our measurements.

16
Monitoring of QD0
Next steps
Find a new area Calibration of cam movers Remounting of 5 DOF setup, with higher rigidity of mechanical plates Determination of the first resonant frequencies of the support
Extrapolation at MDI case
Related Documents











