Group theory is the study of symmetry (more than just proofs) • Symmetric = anything invariant under transformations • Examples: circle invariant under rotation • x 2 + y 2 + z 2 (invariant under rearrangement of x, y & z) • sin t and cos t are invariant when t → t+2π • Laws of physics are unchanging in time (invariance in time) → conservation of energy • Invariance under "translation" in space → conservation of momentum • Invariance under rotations → conservation of angular momentum • Predicted many elementary particles. • The structure and behavior of molecules and crystals depends on their different symmetries.

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

Group theory is the study of symmetry (more than just proofs)
• Symmetric = anything invariant under transformations• Examples: circle invariant under rotation• x2 + y2 + z2 (invariant under rearrangement of x, y & z)• sin t and cos t are invariant when t → t+2π• Laws of physics are unchanging in time (invariance in time) →
conservation of energy • Invariance under "translation" in space → conservation
of momentum• Invariance under rotations → conservation of angular
momentum• Predicted many elementary particles. • The structure and behavior of molecules and crystals depends
on their different symmetries.

Behavior of Crystals• Many measurable quantities depend on material
symmetry. Ex: The 3x3 dielectric tensor ij consists of 6 independent components.
• Crystal symmetry can reduce the number of independent quantities.

Compliance tensor Cijkl represents elastic constants. In triclinic systems, it has 21 independent
components, which are reduced to 3 in cubic materials.
Reminder: Related to Stress and Strain (Section 3.5)

Group Theory can be used to solve the Rubik’s Cube
I put a reference on the class website for more details about this.

Introduction to Group Theory
Outline for today:Start easy: Discuss/identify types of
symmetryCombine to Assign Point Groups
Introduce Some Notation of Point Groups(If time) Explore Character Tables
Extra slides on today’s powerpoint

Point Symmetry• Defined as operation on a point that leaves
structure the same• Each Bravais lattice has one or more types of
symmetry • Point symmetry also occurs in molecules

Symmetry and the Hamiltonian
• No difference if symmetry operation occurs before or after Hamiltonian (aka, it commutes with H)
• Meaning: rotate/flip/etc and get same energy• Commuting operators have common eigenstates
• Thus, possible to classify eigenvalues of the Hamiltonian with respect to symmetry operations
• So?
nnn
nnn
PEHP
PEPH
nP is also an eigenstate of H

Examples of Symmetry Ease• Calculating eigenfunctions (i.e., diagonalization of a
Hamiltonian) can be hard.• Easier if symmetry restricts your choice of
wavefunctions. Example?• Example 1: Atom invariant under rotations, Lz and
L2, leads to spherical harmonics!• Example 2: Simplify vibrational problem, invariant
under inversion means 1 eigenfunctions
Start with the Basics

A line on which an object can be folded so that both sides match exactly.
Trace half a heart onto folded paper, then cut it out.
The two halves make a whole heart.
The two halves are symmetrical.
What is a line of symmetry?

In 3D: Reflection (Mirror) Plane
A plane such that, when a mirror reflection across this plane is performed
(e.g., x’=-x, y’=y, z’=z), the object looks identical. Mirror plane indicated by symbol m
m
Approximately

Matrix Representation of Mirror Planes
100
010
001
'
axis-Xabout Reflection
xM
zzyyxx
100
010
001
'
axis-Yabout Reflection
yM
zzyyxx
(1,1)
(1,-1)
Y
X
z
y
x
???
???
???
'
'
'
z
y
x(-1,1) (1,1)
X
Y
m m
(1,1,0)
(1,-1,0)
(-1,1,0) (1,1,0)

Identify a mirror plane in water
Water molecule has two mirror symmetries

Group: How many lines of symmetry do these polygons have?
Do you see a
pattern?
equilateral

Group: How many mirror planes are in a cube?Note: can re-label the axes but leave the object
unchanged.
[100]
[100][010] [010][001]
[001]
Mirror Planes in 3D

Some Symmetry Definitions
Motif: the part of a symmetric design that, when repeated, creates the whole pattern
(in a crystal, motif = basis)
Operation: some act that reproduces the motif to create the pattern
Element: an operation located at a particular point in space

Symmetry Elements1. Reflection (m)
Reflection across a “mirror plane” reproduces a motif
= symbol for a mirror plane
Practice: 2-D Symmetry

Practice: 2-D Symmetry
2a. Two-fold rotation
= 360o/2 rotation to reproduce a motif in a symmetrical pattern
6
6
A Symmetrical Pattern
Rotation through an angle about a certain axis

a. Two-fold rotation
= 360o/2 rotation to reproduce a motif in a symmetrical pattern
= the symbol for a two-fold rotation
Motif
Element
Operation
6
6Practice: 2-D Symmetry

6
6
first operation
step
second operation
step
2-D Symmetry
a. Two-fold rotation
= 360o/2 rotation to reproduce a motif in a symmetrical pattern
= the symbol for a two-fold rotation

b. Three-fold rotation
= 360o/3 rotation to reproduce a motif in a symmetrical pattern 6
6
6
2-D Symmetry

6
66
step 1
step 2
step 3
2-D Symmetry
b. Three-fold rotation
= 360o/3 rotation to reproduce a motif in a symmetrical pattern

Rotation Axes• Trivial case is 360o rotation• Order of rotation: 2-, 3-, 4-, and 6-
correspond to 180o, 120o, 90o, and 60o. – These are only symmetry rotations
allowed in crystals with long-range order– Small aggregates (short-range order) or
molecules can also have 5-, 7-, etc. fold rotational symmetry
Rotational Symmetry Linkhttp://www.staff.ncl.ac.uk/j.p.goss/
symmetry/Molecules_pov.html
Cut out a snowflake
Identify the different symmetry elements in your snowflake. Discuss with your neighbor.

Analogy to straining a crystalGroup Exercise:
Identify the mirror planes and rotation for the pattern on my shirt.
How does the pattern sym. change if I stretch?

Rotation RepresentationWhat about the sign?
Rotate about x by 180 degreesCos(180°)=-1Sine(180°)=0
100
010
001
180,xR
Compare to reflection matrix

Inversion Center
• Center of symmetry: A point at the center of a molecule.(x,y,z) --> (-x,-y,-z)
• It is not necessary to have an atom in the center (benzene, ethane).• Tetrahedral, triangles, pentagons do not have a center of inversion
symmetry. • All Bravais lattices are inversion symmetric. • Once you add the basis, this symmetry may be lost. (SHG)
Mo(CO)6
100
010
001
I

Symmetry Elements3. Inversion (i)
inversion through a center to reproduce a motif
= symbol for an inversion centerInversion is identical to 2-fold rotation in 2-D, but is unique in 3-D (try it with your hands)
6
62-D Symmetry
X → - X Y → -Y (2D)

Using the Rubik’s Cube to Introduce Group Theory
http://www.youtube.com/watch?v=FeVysczKR_k

Crystal Symmetry
• We now have 6 unique 2-D symmetry operations: 1 2 3 4 6 m (inversion not unique)
• Combinations of symmetry elements are also possible
• The group of operations that can map a crystal into itself defines the crystal symmetry
• Groups with lots of operations have high symmetry
• Let’s start with 2-D examples

Try combining a 2-fold rotation axis with a mirror2-D Symmetry

Try combining a 2-fold rotation axis with a mirror
Step 1: reflect
(could do either step first)
2-D Symmetry

Try combining a 2-fold rotation axis with a mirror
Step 1: reflect
Step 2: rotate (everything)
2-D Symmetry
Are those the only operations?
No! A second mirror is required

Try combining a 2-fold rotation axis with a mirror
The result is Point Group 2mm
“2mm” indicates 2 mirrors
The mirrors are different (not equivalent by symmetry)
2-D Symmetry

Now try combining a 4-fold rotation axis with a mirror2-D Symmetry

Now try combining a 4-fold rotation axis with a mirror
Step 1: reflect
2-D Symmetry

Now try combining a 4-fold rotation axis with a mirror
Step 1: reflect
Step 2: rotate 1
2-D Symmetry

Now try combining a 4-fold rotation axis with a mirror
Step 1: reflect
Step 2: rotate 2
2-D Symmetry

Now try combining a 4-fold rotation axis with a mirror
Step 1: reflect
Step 2: rotate 3
2-D Symmetry

Now try combining a 4-fold rotation axis with a mirror
Any other elements?
2-D Symmetry

Now try combining a 4-fold rotation axis with a mirror
Yes, two more mirrors
Any other elements?
2-D Symmetry

Now try combining a 4-fold rotation axis with a mirror
Point group name??
Yes, two more mirrors
Any other elements?
2-D Symmetry

Now try combining a 4-fold rotation axis with a mirror
4mm
Point group name??
Yes, two more mirrors
Any other elements?
2-D Symmetry
Why not 4mmmm?

3-fold rotation axis with a mirror Guess the point group.
Point group 3m
Why not 3mmm?
2-D Symmetry

6-fold rotation axis with a mirror creates ???
2-D Symmetry

6-fold rotation axis with a mirror creates ???point group 6mm
2-D Symmetry

The original 6 elements plus the 4 combinations creates 10 possible 2-D Point Groups:
1 2 3 4 6 m 2mm 3m 4mm 6mm
Any 2-D pattern of objects surrounding a point must conform to one of these groups
Surfaces or interfaces sometimes have a different symmetry than the bulk.
2-D Symmetry

Back to your snowflake
Identify the point group of your snowflake. Discuss with your neighbor.

Group Exercise (if time)2D Analogy for strained vs unstrained crystal
Identify the point groups of the unstretched and stretched patterns.

2D vs 3D
• We now have 6 unique 2-D symmetry operations: 1 2 3 4 6 m (inversion not unique)
• 2D has 10 point groups: 1 2 3 4 6 m 2mm 3m 4mm 6mm
• In 3D, inversion is unique• Now 7 symmetry operations• Every crystal described by a combination of point-
symmetry elements

Rotation-inversion Axes• Combination of simultaneous
rotation and inversion results in new symmetry element
• International symbol representation: 6,4,3,2
This operation involves a rotation by (360/3) °
followed by an inversion through the center of the object.

3-D Symmetry
New Symmetry Elements4. Rotoinversion
b. 2-fold rotoinversion ( 2 )
Step 1: rotate 360/2
Note: this is a temporary step, the intermediate motif element does not exist in the final pattern

3-D Symmetry
New Symmetry Elements4. Rotoinversion
b. 2-fold rotoinversion ( 2 )
Step 1: rotate 360/2
Step 2: invert

3-D Symmetry
New Symmetry Elements4. Rotoinversion
b. 2-fold rotoinversion ( 2 )
The result:

3-D Symmetry
New Symmetry Elements4. Rotoinversion
b. 2-fold rotoinversion ( 2 )
This is the same as m, so not a new operation

3-D Symmetry
New 3-D Symmetry Elements4. Rotoinversion
a. 1-fold rotoinversion ( 1 )

3-D Symmetry
New 3-D Symmetry Elements4. Rotoinversion
a. 1-fold rotoinversion ( 1 )
Step 1: rotate 360/1(identity)

3-D Symmetry
New 3-D Symmetry Elements4. Rotoinversion
a. 1-fold rotoinversion ( 1 )
Step 1: rotate 360/1(identity)
Step 2: invert (x,y,z) ->(-x,-y,-z)
This is the same as i, so also not a new operation

3-D SymmetryWe now have 10 unique 3-D symmetry operations:
1 2 3 4 6 i m 3 4 6
Combinations of these elements are also possible
A complete analysis of symmetry about a point in space requires that we try all possible combinations of these symmetry elements
Examples of others at end of PPT (no time)
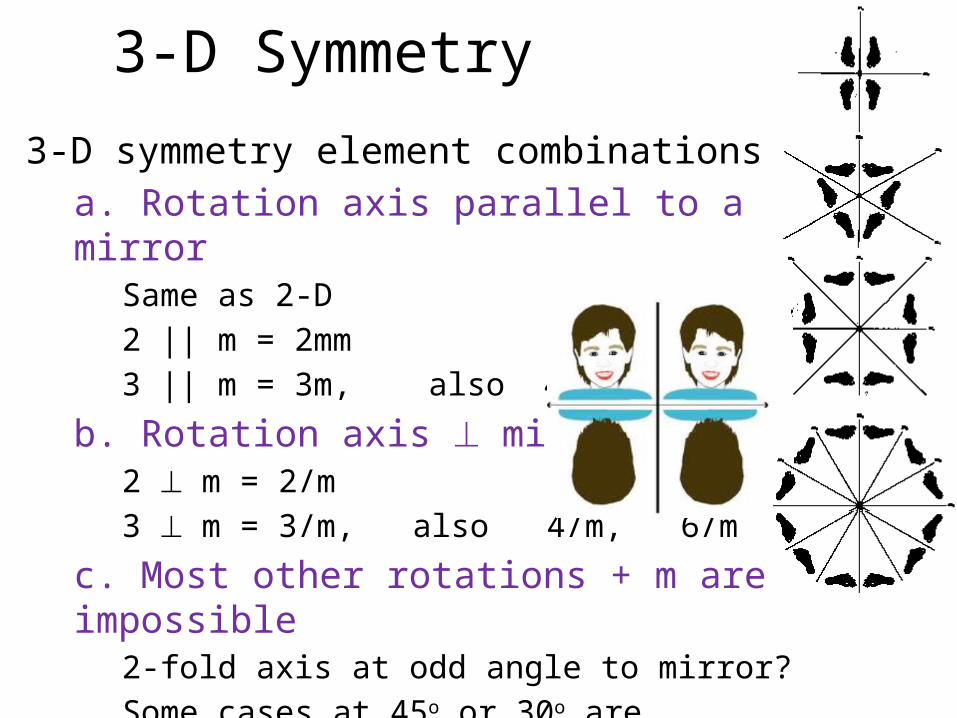
3-D symmetry element combinationsa. Rotation axis parallel to a mirror
Same as 2-D2 || m = 2mm3 || m = 3m, also 4mm, 6mm
b. Rotation axis mirror2 m = 2/m3 m = 3/m, also 4/m, 6/m
c. Most other rotations + m are impossible2-fold axis at odd angle to mirror?Some cases at 45o or 30o are possible
3-D Symmetry

3-D Symmetry
3-D symmetry element combinationsd. Combinations of rotations
2 + 2 at 90o 222 (third 2 required from combination)4 + 2 at 90o 422 ( “ “ “ )6 + 2 at 90o 622 ( “ “ “ )

3-D Symmetry
As in 2-D, the number of possible combinations is limited only by incompatibility and redundancy
There are only 22 possible unique 3-D combinations, when combined with the 10 original
3-D elements yields the 32 3-D Point Groups

Symmetry operations
E The identity transformationCn Rotation (clockwise) through an angle of 2π/n radians, where n is an integer.
Sn An improper rotation (clockwise) through an angle of 2π/n radians. Improper rotations are regular rotations followed by a reflection in the plane perpendicular to the axis of rotation. Also known as alternating axis of symmetry and rotation-reflection axis.
i The inversion operator (the same as S2). In Cartesian coordinates, (x, y, z)→(−x, −y, −z). Irreducible representations that are even under this symmetry operation are usually denoted with the subscript g, and those that are odd are denoted with the subscript u.
σ A mirror planeσh Horizontal reflection plane
σv Vertical reflection plane
σd Diagonal reflection in a plane through the origin.
http://www.staff.ncl.ac.uk/j.p.goss/symmetry/CharacterTables.html
Various Terminology
Element Schoenflies Hermann-Mauguin
Operation
Rotation axis Cn n n-fold rotation (360º/n)
Identity E 1 nothing
Plane of symmetry m Reflection
Center of symmetry i -1 Inversion
Improper rotation axis Sn - n-fold rotation + reflection
Rotary Inversion axis - -n or “n bar” n-fold rotation + inversion

Rules:Each component refers to a different directionThe position of an “m” in a symbol indicates the direction of the normal to the mirror plane.• e.g. “mm2” indicates mirror planes
perpendicular to x & y; the “2” indicates a 2-fold rotation along z. (mm2 = m2m = 2mm; just renaming the axes.)
The terms 2/m (read ‘two over m”), 4/m. 6/m combine as 1 component and refer to only 1 direction.• e.g. 4/m ≡ there is a mirror plane
perpendicular to the 4-fold rotation axis.
Two Notations for Point Groups
Element Sc Hermann-Mauguin
Operation
Rotation axis Cn n n-fold rotation
Identity E 1 nothing
Plane of symmetry m Reflection
Center of symmetry i -1 Inversion
Improper rotation axis Sn - n-fold rotation + reflection
Rotary Inversion axis - -n or “n bar” n-fold rotation + inversion

axis principle one than more have groups Cubic
C3
C3
C3
C3Td
C2 S4
dDiamond Structure
Identify the symmetry operations.

Simple Crystal Structures Face-centered Cubic
• 12 nearest neighbors (coordination number)
• Close-packed planes are perpendicular to cube diagonal
• Close-packed planes are 6-fold symmetric (hexagons)
• Stacking (ABCAB…) reduces symmetry to three-fold
• Four 3-fold rotation axes + mirror plane, therefore Oh point group (octahedral symmetry)
• Examples: Cu, Ag, Au, Ni, Pd, Pt, Al

Schoenflies TerminologyE The identity transformationCn Rotation through an angle of 2π/n radians. Sn Improper rotations are regular rotations followed
by a reflection in the plane perpendicular to the axis of rotation.
i The inversion operator (x, y, z)→(−x, −y, −z).
σ A mirror plane
σh Horizontal reflection plane
σv Vertical reflection plane
σd Diagonal reflection in a plane through the origin.
h
v
v
d dPoint group C2v=mm2
What operations?
Can you think of an example?

Representations of Point Groups• The C2v Point Group consists of the following elements:
E C2 σ(xz) σ(yz)
• Choose set of x,y,z axes– z is usually the Cn (rotation) axis– xz plane is usually the plane of the molecule
• Examine what happens after the molecule undergoes each symmetry operation in the point group (E, C2, 2s)
σ(xz) σ(yz)
What single number might represent this transformation?
e.g. H2O, CH2, NH2

C2 Transformation Matrix
a.x,y,z -x, -y, zb.Correct matrix is:
sv(xz) Transformation Matrix
c.x,y,z x,-y,zd.Correct matrix is:
sv(yz) Transformation Matrix
e.x,y,z -x,y,zf. Correct matrix is:
z
y-
x-
z
y
x
100
010
001
z
y-
x
z
y
x
100
010
001
z
y
x-
z
y
x
100
010
001
With a partner: Write down the 4 matrices for these operationsE C2 σ(xz) σ(yz)
σ(xz) σ(yz)

These 4 matrices are the “Matrix Representation” of the C2v point group
a.All point group properties transfer to the matrices as well
– Example: A * B = C C2 * sv(xz) =?
100
010
001
100
010
001
100
010
001
– A * B = C– A*B = B*A – Associative: (A*B)*C = A*B*C– Identity element E: A*E = A– Inverse: A-1 *A = E
C2 * sv(xz) = sv(yz)

• The C2v Point Group elements: E C2 σ(xz) σ(yz)
• What is the effect of C2 rotation on a px orbital?
• Quantitate the description of symmetry by using numbers to represent symmetry operation; these numbers are called Representations.
• Again, what single number might represent this change? C2 px = -1px
Character of others?
σ(xz) σ(xz) px = +1px
σ(yz) σ(yz) px = -1px
E E px = +1px
Representations
C2v E C2 σ(xz) σ(yz) character 1 -1 1 -1 x
Character table selection
— + → x C2 x ← + —z z
σ(xz) σ(yz)

Defining Representations
• Representations are subsets of the complete point group – they indicate the effect of the symmetry operations on different kinds of mathematical functions. (like the x axis)
• Representations are orthogonal to one another.
• Thus, what other functions might we have?
C2v E C2 σ(xz) σ(yz) B1 1 -1 1 -1 x

Representations• What set of numbers represent the effect of
the operations on a py?
• How about the z axis?Since they are spherical and the most highly
symmetric, s orbitals always belong to the first symmetry class of any point group.
C2v E C2 σ(xz) σ(yz) character 1 -1 -1 1 y
C2v E C2 σ(xz) σ(yz) character 1 1 1 1 z σ(xz) σ(yz)
y

Reducible and Irreducible Representationsa. Each matrix in the C2v matrix representation can be block diagonalized
b. To block diagonalize, make each nonzero element into a 1x1 matrix
When you do this, the x,y, and z axes can be treated independently» Positions 1,1 always describe x-axis» Positions 2,2 always describe y-axis» Positions 3,3 always describe z-axis
Generate a partial character table from this treatment
100
010
001
100
010
001
100
010
001
100
010
001
E C2 sv(xz) sv(yz)
Axis used E C2 sv(xz) sv(yz)
x 1 -1 1 -1
y 1 -1 -1 1
z 1 1 1 1
G 3 -1 1 1
IrreducibleRepresentations
Reducible Repr.

Representations• The full set of representations is included in the
Character Table of the group.
• The numbers in this table formally called The Characters of the Irreducible Representations. [NOT irreproducible!]
s orbital is totally symmetric and always
belongs to the A1 representation.
rotations about an axis
σ(xz) σ(yz)
z
Axis used E C2 sv(xz) sv(yz)
x 1 -1 1 -1
y 1 -1 -1 1
z 1 1 1 1
G 3 -1 1 1
IrreducibleRepresentations
Reducible Repr.

Character Table Representations1. A representations indicate that the functions
are symmetric with respect to rotation about the principal axis of rotation (z).
2. B representations are asymmetric with respect to rotation about the principal axis.
3. E representations are doubly degenerate.4. T representations are triply degenerate.5. Subscripts u and g indicate asymmetric
(ungerade) or symmetric (gerade) with respect to a center of inversion.

Application for C2vConsider that an atom with a single electron in a p orbital (B or Al) is placed at a site in a crystal with C2v symmetry.
The character table tells us that in general, the px, py, and pz states will all have different energies.
On the other hand if the symmetry were that of a square (D4h), px and py would be degenerate, but pz might be different, and in the symmetry of an octahedron (Oh) or tetrahedron (Td), the three p states will be degenerate.

Why Else Should I Care?
• Character tables of point groups are used to classify molecular and crystal vibrations according to their symmetry and to predict whether a transition between two states is forbidden for symmetry reasons.

Motivation: Orbital parityWe could determine whether orbitals are even = gerade (g) or
odd=ungerade (u) (in German).An orbital is g if it has a center of inversion, and u if it does not.
Whether absorption of a photon to produce an electronic transition can occur is determined by whether the two orbitals involved are g or u. According to selection rules, transitions from gu and ug are allowed, but gg and uu are forbidden.
s-orbital p-orbital d-orbitalgerade (g) ungerade (u) gerade (g)
aa a
b b b
center ofinversion a = b
not a center of inversion a ≠ b
Color is wave function phase

Infrared Absorption and Raman
For IR spectra, a vibrational mode is active in the infrared only if it corresponds to a representation with the same symmetry as the x,y, or z axis.

Example: Raman of Water
Hydrogen-bonded 5-molecule tetrahedral
nearest-neighbor structure commonly found in liquid
water
Hydrogen bond bending at 65 cm-1 involves O–O–O bending., whereas the hydrogen bond
stretching at 162 cm-1 involves O–O stretching along the O–H…O or hydrogen bond direction--
or transverse and longitudinal acoustic phonons
http://scitation.aip.org/docserver/fulltext/aip/journal/jcp/108/7/1.475659.pdf?expires=1385042105&id=id&accname=freeContent&checksum=00E3502AB081540BD222BBF58986D09C

Simple Crystal StructuresHexagonal Close-packed
• Similar to fcc, but stacking is ABAB…
• Smallest possible unit cell contains two atoms
• This leads to 6-fold symmetry• Three 2-fold rotation axes perp.
to 3-fold axis & close-packed layer lies in mirror plane
• Point group is therefore D3h • E.G. Zn, Cd, Be, Mg, Re, Ru, Os
points of primitive cell
a
b
c
120
o

Double Degeneracy
The C4 rotation turns px into py. These orbitals do NOT have separate identities in this point group ... there exists a symmetry operation in a D4h molecule that turns one into the other.There is no symmetry operation that turns pz into px or py so this one remains separate.
Note the d orbitals here that are doubly degenerate.

Triple Degeneracy
In a pure octahedron, there are symmetry elements that turn any of the p orbitals into any others. A triply degenerate set of orbitals.
By the way, these are the labels for the on-axis d orbitals ...Note the “long form” here for dz2.

Each point group has a set of possible symmetry operations that are conveniently listed as a matrix known as a Character Table.
C2V E C2 v (xz) ’v (yz)
A1 1 1 1 1
A2 1 1 -1 -1
B1 1 -1 1 -1
B2 1 -1 -1 1Representation of B2
Point Group Label Symmetry Operations – The Order is the total number of operations
Symmetry Representation Labels
Representations are subsets of the complete point group – they indicate the effect of the symmetry operations on different kinds of mathematical functions. Representations are orthogonal. Character: integer that indicates the effect of operation in a representation.
In C2v the order is 4:1 E, 1 C2, 1 v and 1 ’v
Character
Summary of Character Tables

Symmetry of orbitals and functions
C2V E C2 v (xz) ’v (yz)
A1 1 1 1 1 z x2,y2,z2
A2 1 1 -1 -1 Rz xy
B1 1 -1 1 -1 x, Ry xz
B2 1 -1 -1 1 y, Rx yz
z
y
x
z
y
x
A pz orbital has the same symmetry as an arrow pointing along the z-axis.
EC2
v (xz)’v (yz) No change
symmetric 1’s in table

C2V E C2 v (xz) ’v (yz)
A1 1 1 1 1 z x2,y2,z2
A2 1 1 -1 -1 Rz xy
B1 1 -1 1 -1 x, Ry xz
B2 1 -1 -1 1 y, Rx yz
z
y
x
A px orbital has the same symmetry as an arrow pointing along the x-axis.
Ev (xz)
No change symmetric 1’s in table
z
y
x
z
y
xC2
’v (yz)Opposite anti-symmetric -1’s in table
z
y
x
Symmetry of orbitals and functions

C2V E C2 v (xz) ’v (yz)
A1 1 1 1 1 z x2,y2,z2
A2 1 1 -1 -1 Rz xy
B1 1 -1 1 -1 x, Ry xz
B2 1 -1 -1 1 y, Rx yz
z
y
x
A py orbital has the same symmetry as an arrow pointing along the y-axis.
E’v (yz)
No change symmetric 1’s in table
z
y
x
z
y
xC2
v (xz)Opposite anti-symmetric -1’s in table
z
y
x
Symmetry of orbitals and functions

C2V E C2 v (xz) ’v (yz)
A1 1 1 1 1 z x2,y2,z2
A2 1 1 -1 -1 Rz xy
B1 1 -1 1 -1 x, Ry xz
B2 1 -1 -1 1 y, Rx yz
y
x
Rotation about the n axis, Rn, can be treated in a similar way.
EC2
No change symmetric 1’s in table
y
x
y
xv (xz)’v (yz)
Opposite anti-symmetric -1’s in table
y
x
Symmetry of orbitals and functions
The z axis is pointing out of the screen!
If the rotation is still in the same direction (e.g. counter clock-wise), then the result is considered symmetric.
If the rotation is in the opposite direction (i.e. clock-wise), then the result is considered anti-symmetric.

C2V E C2 v (xz) ’v (yz)
A1 1 1 1 1 z x2,y2,z2
A2 1 1 -1 -1 Rz xy
B1 1 -1 1 -1 x, Ry xz
B2 1 -1 -1 1 y, Rx yz
y
x
d orbital functions can also be treated in a similar way
EC2
No change symmetric 1’s in table
y
x
y
xv (xz)’v (yz)
Opposite anti-symmetric -1’s in table
y
x
Symmetry of orbitals and functions
The z axis is pointing out of the screen!

C2V E C2 v (xz) ’v (yz)
A1 1 1 1 1 z x2,y2,z2
A2 1 1 -1 -1 Rz xy
B1 1 -1 1 -1 x, Ry xz
B2 1 -1 -1 1 y, Rx yz
y
x
d orbital functions can also be treated in a similar way
EC2
v (xz)’v (yz)
No change symmetric 1’s in table
y
x
Symmetry of orbitals and functions
The z axis is pointing out of the screen! So these are representations of the view of the dz2 orbital and dx2-y2 orbital down the z-axis.
y
x
y
x
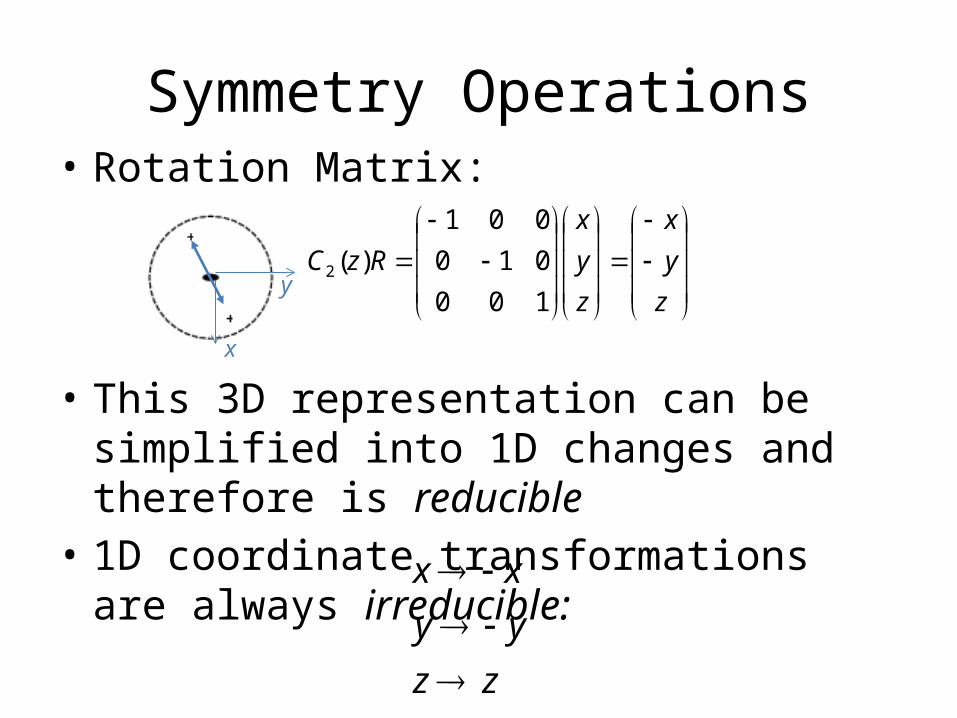
Symmetry Operations• Rotation Matrix:
• This 3D representation can be simplified into 1D changes and therefore is reducible
• 1D coordinate transformations are always irreducible:
z
y
x
z
y
x
RzC
100
010
001
)(2
zz
yy
xx
x
y

Symmetry Operations
• What is the matrix for this rotation?
• In this case, there are two coordinate changes; irreducible representation for 3-, 4-, 6-fold rotation axes are 2D
z
x
y
z
y
x
RzC
100
001
010
)(4
x
y
Note: in general, ccw rotation about angle q represented by
100
0cossin
0sincos

σd
σv
Character Table for C4V
• What symmetry operations do you expect?• All members of a class have the same character.

Energy Degeneracies• For operators with 2D irreducible
representations result in intrinsic degeneracies– Operator can produce new state (e.g., C3y )– New state must also be eigenstate of H– State can be same as original state (C3 = y y
)– Or it is a new state; in this case, new state
and unchanged state must be degenerate• For diamond, fcc, bcc lattices 3D irreducible
representations apply– Td (e.g., diamond) and Oh point symmetry
groups– Result in 3-fold degeneracies
z
x
y
z
y
x
RzC
100
001
010
)(4

Vibrational Modes
Bond stretching and bending involves moving of the atoms in water along their individual x, y, and z axes.
“Degrees of Freedom”
Since there are 3 atoms and each can go 3 different directions, there are 9 (3N) different motions to keep track of.
- 3 are “translational”
- 3 are “rotational”
Leaving 3N – 6=3 “vibrations”

(Chiral)

Stereographic Projections
• Represents 3-D object on 2-D surface• Frequently project up, down or through equator• Frequently done with the Earth’s map

CRYSTAL PROJECTIONS – represents 3-D crystal on 2-D surface
Representation of Crystal Symmetry in Stereographic Projection
• Unit cell axis with highest symmetry is usually selected as the polar axis.
• Rotation axes not in the equatorial plane are drawn with the symbol representing the rotation order of the axis at the projection point on the equatorial plane.
• Mirror planes are drawn as thickened lines.
• Inversion centers are drawn as open circles (o) in the center of the polar axis, inversion center.
Rotation (2, 3, 4, 6):
Rotation-inversion:
Reference: http://www.metafysica.nl/derivation_32.html

Stereographic projections
Relationship between spherical & stereographic projection
Plane of projection -equatorial plane of sphere
Primitive Circle outlining projection -equator
Plane of half the spherical projection (N hemisphere)
Stereographic projection of an isometric crystal with the faces identified by vectors

Stereographic projections of symmetry groups
Types of pure rotation symmetry
Stereographic projections of symmetry groups
Types of pure rotation symmetry
Draw point group diagrams (stereographic projections)Draw point group diagrams (stereographic projections)
Rotation 1, 2, 3, 4, 6
Rotoinversion 1 (= i), 2 (= m), 3, 4, 6
Rotation 1, 2, 3, 4, 6
Rotoinversion 1 (= i), 2 (= m), 3, 4, 6
symmetry elements equivalent pointssymmetry elements equivalent points
001

symmetry elements equivalent pointssymmetry elements equivalent points
Stereographic projections of symmetry groups
Types of pure rotation symmetry
Stereographic projections of symmetry groups
Types of pure rotation symmetry
Draw point group diagrams (stereographic projections)Draw point group diagrams (stereographic projections)
Rotation 1, 2, 3, 4, 6
Rotoinversion 1 (= i), 2 (= m), 3, 4, 6
Rotation 1, 2, 3, 4, 6
Rotoinversion 1 (= i), 2 (= m), 3, 4, 6
010

symmetry elements equivalent pointssymmetry elements equivalent points
Stereographic projections of symmetry groups
Types of pure rotation symmetry
Stereographic projections of symmetry groups
Types of pure rotation symmetry
Draw point group diagrams (stereographic projections)Draw point group diagrams (stereographic projections)
Rotation 1, 2, 3, 4, 6
Rotoinversion 1 (= i), 2 (= m), 3, 4, 6
Rotation 1, 2, 3, 4, 6
Rotoinversion 1 (= i), 2 (= m), 3, 4, 6

Stereographic projections of symmetry groups
More than one rotation axis - point group 222
Stereographic projections of symmetry groups
More than one rotation axis - point group 222
symmetry elements equivalent pointssymmetry elements equivalent points

symmetry elements equivalent pointssymmetry elements equivalent points
Stereographic projections of symmetry groups
More than one rotation axis - point group 222
Stereographic projections of symmetry groups
More than one rotation axis - point group 222
orthorhombicorthorhombic
Orthorhombica ≠ b ≠ c, a = b = g = 90º

[001][001]
symmetry elements equivalent points
Stereographic projections of symmetry groups
Rotation + mirrors - point group 4mm
Stereographic projections of symmetry groups
Rotation + mirrors - point group 4mm

Stereographic projections of symmetry groups
Rotation + mirrors - point group 4mm
Stereographic projections of symmetry groups
Rotation + mirrors - point group 4mm
symmetry elements equivalent points

symmetry elements equivalent points
Stereographic projections of symmetry groups
Rotation + mirrors - point group 4mm
Stereographic projections of symmetry groups
Rotation + mirrors - point group 4mm

symmetry elements equivalent points
tetragonal
Tetragonala = b ≠ c, a = b = g = 90º
(by definition c is the unique axis)
Stereographic projections of symmetry groups
Rotation + mirrors - point group 4mm
Stereographic projections of symmetry groups
Rotation + mirrors - point group 4mm

Group Exercise
• In groups, plot the rotations on the stereographic projection of a cube.

Stereographic projections of symmetry groups
Rotation + mirrors - point group 2/m
Stereographic projections of symmetry groups
Rotation + mirrors - point group 2/m
[010][010]

symmetry elements equivalent points
monoclinic
Stereographic projections of symmetry groups
Rotation + mirrors - point group 2/m
Stereographic projections of symmetry groups
Rotation + mirrors - point group 2/m

There are a total of 32 independent point
groups

Fun Motivation: Gaming
• http://escher.epfl.ch/escher/• Escher Mobile runs on phones and PCs • create symmetrical images to “effortlessly
master the main crystallographic concepts”.• “Not only does this application make the
fundamentals of crystallography a cinch, but it’s been designed to actually be a lot of fun”
• Check out the P6mm rotationally symmetrical “Duck Crystal”

Point GroupsThere are a total of 32 point groups that conform to this rule (the “crystallographic point groups”) and the combination of crystallographically acceptable point groups with the 14 Bravais lattices gives rise to space groups.
Crystal System
Point groups Laue Class
Patterson Symmetry
Triclinc 1, -1 -1 P-1 Monoclinic 2, m, 2/m 2/m P2/m, C2/m
Orthorhombic 222, mm2 , mmm mmm Pmmm, Cmmm, Fmmm, Immm
Tetragonal 4, -4, 4/m, 422, 4mm, -42m, 4/mmm
4/m, 4/mmm
P4/m, I4/m, P4/mmm, I4/mmm
Trigonal 3, -3, 32, 3m, -3 m
-3, -3m
P-3, R-3, P-3m1, P-31m, R-3m
Hexagonal 6, -6, 6/m, 622, 6mm, -62m, 6/mmm
6/m, 6/mmm
P6/m, P6/mmm
Cubic 23, m-3, 432, -43m, m3m
m3, m3m
Pm-3, Im-3, F-3m, Pm-3m, Fm-3m, Im-3m

3-D SymmetryThe 32 3-D Point Groups
Every 3-D pattern must conform to one of them.This includes every crystal, and every point within a crystal
Rotation axis only 1 2 3 4 6
Rotoinversion axis only 1 (= i ) 2 (= m) 3 4 6 (= 3/m)
Combination of rotation axes 222 32 422 622
One rotation axis mirror 2/m 3/m (= 6) 4/m 6/m
One rotation axis || mirror 2mm 3m 4mm 6mm
Rotoinversion with rotation and mirror 3 2/m 4 2/m 6 2/m
Three rotation axes and mirrors 2/m 2/m 2/m 4/m 2/m 2/m 6/m 2/m 2/m
Additional Isometric patterns 23 432 4/m 3 2/m
2/m 3 43m
Increasing Rotational Symmetry
Table 5.1 of Klein (2002) Manual of Mineral Science, John Wiley and Sons

3-D SymmetryThe 32 3-D Point Groups
Regrouped by Crystal System (more later when we consider translations)
Crystal System No Center Center
Triclinic 1 1
Monoclinic 2, 2 (= m) 2/m
Orthorhombic 222, 2mm 2/m 2/m 2/m
Tetragonal 4, 4, 422, 4mm, 42m 4/m, 4/m 2/m 2/m
Hexagonal 3, 32, 3m 3, 3 2/m
6, 6, 622, 6mm, 62m 6/m, 6/m 2/m 2/m
Isometric 23, 432, 43m 2/m 3, 4/m 3 2/m
Table 5.3 of Klein (2002) Manual of Mineral Science, John Wiley and Sons

3-D SymmetryThe 32 3-D Point Groups
After Bloss, Crystallography and Crystal Chemistry. © MSA


Determination of Symmetry Point Groups(Group Theory)
• Many papers have this information about the materials.

Determining Point Groups1. Find the highest order rotation axis = n.2. Are there n C2 axes perpendicular to this principle axis?
3. Is there a mirror plane perpendicular to the principle axis?
4. Are there dihedral mirror planes? 4. Are there vertical mirror planes?
yes noDn set Cn set
yes no
Dnh
yes no
Cnh
yes no
Dnd Dn
yes no
Cnv
5. Is there a S2n? yes no
S2n Cn

Draw and describe the symmetry elements of all
Bravais lattices.

Group ExampleIn groups, determine the point group (Schoenflies notation) of
an equilateral triangle. Then define the matrices that leave
the triangle invariant.

123
-
Matrixrepresentation of the rotation point groups
What is a group? A group is a set of objects that form a closed set: if you combine any two of them together, the result is simply a different member of that same group of objects. Rotations in a given point group form closed sets - try it for yourself!
Note: the 3rd matrix in the 1st column (x-diad) is missing a “-” on the 33 element; this is corrected in this slide. Also, in the 2nd from the bottom, last column: the 33 element should be +1, not -1. In some versions of the book, in the last matrix (bottom right corner) the 33 element is incorrectly given as -1; here the +1 is correct.
Kocks: Ch. 1 Table II

Symmetry Representations: Mulliken Symbols and their Meaning
singly degenerate state which is symmetric with respect to rotation about the principal
axis,
singly degenerate state which is antisymmetric with respect to rotation about the principal axis,
doubly degenerate,
triply degenerate,
(gerade, symmetric) the sign of the wavefunction does not change on inversion through the center of the atom,
(ungerade, antisymmetric) the sign of the wavefunction changes on inversion through the center of the atom,
(on or ) the sign of the wavefunction does not change upon rotation about the center of the atom,
(on or ) the sign of the wavefunction changes upon rotation about the center of the atom,
' = symmetric with respect to a horizontal symmetry plane ,
" = antisymmetric with respect to a horizontal symmetry plane .

Character Table Representations
1. Characters of +1 indicate that the basis function is unchanged by the symmetry operation.
2. Characters of -1 indicate that the basis function is reversed by the symmetry operation.
3. Characters of 0 indicate that the basis function undergoes a more complicated change.

C3V
• What symmetry operations do you expect?

• Stretches always have a symmetric mode (doesn’t change the symmetry)
• Also flattening doesn’t change the symmetry (until completely flat)

Symmetry Product Table

Graphene with and without Strain
• Without strain Graphene is in space group 191 which has a factor group isomorphic to D6h
• 2 atoms/unit cell 3 optical phonon modes
• E2g and B2g modes exist
F Tuinstra and JL Koenig. Jour of Chem Phy, 55 3, 1126 (1970) http://img.chem.ucl.ac.uk/

• Only one mode Raman active (first order)• G band, doubly degenerate

Strain
• Under uni-axial strain the symmetry group is broken along with the degeneracy
Huang et al. PNAS April 21, 2009, 106 (16)

Identify the cubic groups.
The O-group has no
inversion symmetry
Applets: http://www.tele.ed.nom.br/rx/cub19i.html (Gold)
Which one is diamond?

Which of these flags have a line of symmetry?
United States of America Canada
Maryland England

Invariance to transformation as an indicator of facial symmetry:
Mirror image
Symmetry frequently considered more pleasing.

Examples
• (Groups) Determine the number of mirror planes.• Triclinic has no mirror planes.• Monoclinic has one plane midway between and
parallel to the bases.

Group Exercise• Below are two “crystals” and a polygon.• Identify the point group symmetry operations of the
three objects (assume the crystals are of infinite size). Show that the point group of the two crystals are different and that one of them has the equivalent point group to the polygon.
a b c

Lattice goes into itself through Symmetry without translation
Operation Element
Inversion Point
Reflection Plane
Rotation Axis
Rotoinversion Axes
• The system of symmetry operations• The point group symbol
• Or the Schonflies symbol (popular for group theory or spectroscopy)

High Symmetry Means Many Operations recreate the same crystal (after operation it is impossible to tell that an operation occurred)
Which crystal lattice has higher symmetry?

Symmetry Element Properties(also true for 2D)
• Must satisfy conditions:– Two successive symmetry operations result in a further
symmetry element: A * B = C– Associative rule: (A*B)*C = A*B*C– Identity element E: A*E = A– Every symmetry element possesses inverse:
A-1 *A = E– A*B = B*A – This leads to 32 distinct crystallographic groups– If you were also to allow translations, 7 --> 14, allowing
230 combinations, known as space groups

3-D Symmetry
New Symmetry Elements4. Rotoinversion
c. 3-fold rotoinversion ( 3 )

3-D Symmetry
New Symmetry Elements4. Rotoinversion
c. 3-fold rotoinversion ( 3 )
Step 1: rotate 360o/3 Again, this is a temporary
step, the intermediate motif element does not exist in the final pattern
1

3-D Symmetry
New Symmetry Elements4. Rotoinversion
c. 3-fold rotoinversion ( 3 )
Step 2: invert through center

3-D Symmetry
New Symmetry Elements4. Rotoinversion
c. 3-fold rotoinversion ( 3 )
Completion of the first sequence
1
2

3-D Symmetry
New Symmetry Elements4. Rotoinversion
c. 3-fold rotoinversion ( 3 )
Rotate another 360/3

3-D Symmetry
New Symmetry Elements4. Rotoinversion
c. 3-fold rotoinversion ( 3 )
Invert through center

3-D Symmetry
New Symmetry Elements4. Rotoinversion
c. 3-fold rotoinversion ( 3 )
Complete second step to create face 3
1
2
3

3-D Symmetry
New Symmetry Elements4. Rotoinversion
c. 3-fold rotoinversion ( 3 )
Third step creates face 4 (3 (1) 4)
1
2
3
4

3-D Symmetry
New Symmetry Elements4. Rotoinversion
c. 3-fold rotoinversion ( 3 )
Fourth step creates face 5 (4 (2) 5)
1
2
5

3-D Symmetry
New Symmetry Elements4. Rotoinversion
c. 3-fold rotoinversion ( 3 )
Fifth step creates face 6 (5 (3) 6)
Sixth step returns to face 1
1
6
5

3-D Symmetry
New Symmetry Elements4. Rotoinversion
c. 3-fold rotoinversion ( 3 )
This is unique1
6
5
2
3
4

3-D Symmetry
New Symmetry Elements4. Rotoinversion
d. 4-fold rotoinversion ( 4 )

3-D Symmetry
New Symmetry Elements4. Rotoinversion
d. 4-fold rotoinversion ( 4 )

3-D Symmetry
New Symmetry Elements4. Rotoinversion
d. 4-fold rotoinversion ( 4 )
1: Rotate 360/4

3-D Symmetry
New Symmetry Elements4. Rotoinversion
d. 4-fold rotoinversion ( 4 )
1: Rotate 360/4
2: Invert

3-D Symmetry
New Symmetry Elements4. Rotoinversion
d. 4-fold rotoinversion ( 4 )
1: Rotate 360/4
2: Invert

3-D Symmetry
New Symmetry Elements4. Rotoinversion
d. 4-fold rotoinversion ( 4 )
3: Rotate 360/4

3-D Symmetry
New Symmetry Elements4. Rotoinversion
d. 4-fold rotoinversion ( 4 )
3: Rotate 360/4
4: Invert

3-D Symmetry
New Symmetry Elements4. Rotoinversion
d. 4-fold rotoinversion ( 4 )
3: Rotate 360/4
4: Invert

3-D Symmetry
New Symmetry Elements4. Rotoinversion
d. 4-fold rotoinversion ( 4 )
5: Rotate 360/4

3-D Symmetry
New Symmetry Elements4. Rotoinversion
d. 4-fold rotoinversion ( 4 )
5: Rotate 360/4
6: Invert

3-D Symmetry
New Symmetry Elements4. Rotoinversion
d. 4-fold rotoinversion ( 4 )
This is also a unique operation

3-D Symmetry
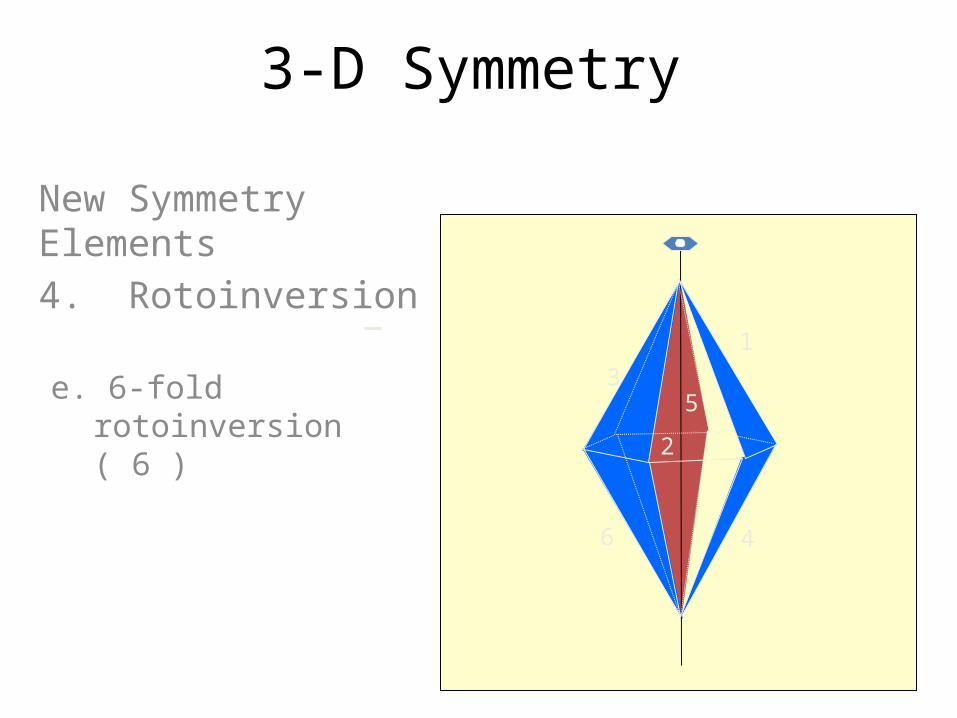
New Symmetry Elements4. Rotoinversion
e. 6-fold rotoinversion ( 6 )
Begin with this framework:

3-D Symmetry
New Symmetry Elements4. Rotoinversion
e. 6-fold rotoinversion ( 6 ) 1

3-D Symmetry
1
New Symmetry Elements4. Rotoinversion
e. 6-fold rotoinversion ( 6 )

3-D Symmetry
1
2
New Symmetry Elements4. Rotoinversion
e. 6-fold rotoinversion ( 6 )

3-D Symmetry
1
2
New Symmetry Elements4. Rotoinversion
e. 6-fold rotoinversion ( 6 )

3-D Symmetry
13
2
New Symmetry Elements4. Rotoinversion
e. 6-fold rotoinversion ( 6 )

3-D Symmetry
13
2
New Symmetry Elements4. Rotoinversion
e. 6-fold rotoinversion ( 6 )

3-D Symmetry
13
4
2
New Symmetry Elements4. Rotoinversion
e. 6-fold rotoinversion ( 6 )

3-D Symmetry
1
2
3
4
New Symmetry Elements4. Rotoinversion
e. 6-fold rotoinversion ( 6 )

3-D Symmetry
1
2
3
4
5
New Symmetry Elements4. Rotoinversion
e. 6-fold rotoinversion ( 6 )

3-D Symmetry
1
2
3
4
5
New Symmetry Elements4. Rotoinversion
e. 6-fold rotoinversion ( 6 )
3-D Symmetry
1
2
3
4
5
6
New Symmetry Elements4. Rotoinversion
e. 6-fold rotoinversion ( 6 )

3-D Symmetry
New Symmetry Elements4. Rotoinversion
e. 6-fold rotoinversion ( 6 )
Note: this is the same as a 3-fold rotation axis perpendicular to a mirror plane
(combinations of elements follows)Top View

Hermann-Mauguin Symbols• To begin, write a number representing each
of the unique rotation axes present. • A unique rotation axis is one that exists by
itself and is not produced by another symmetry operation.
• In this case, all three 2-fold axes are unique, because each is perpendicular to a different shaped face, so we write a 2 (for 2-fold) for each axis, A:
2 2 2

Hermann-Mauguin Symbols• Next we write an "m" for each
unique mirror plane. • Again, a unique mirror plane is one
that is not produced by any other symmetry operation.
• In this example, we can tell that each mirror is unique because each one cuts a different looking face. So, we write:
2 m 2 m 2 m

Hermann-Mauguin Symbols• If any of the axes are perpendicular to
a mirror plane we put a slash (/) between the symbol for the axis and the symbol for the mirror plane. In this case, each of the 2-fold axes are perpendicular to mirror planes, so our symbol becomes:
2/m 2/m 2/m• The Dnh Groups:
• Briefly know as, D2h =mmm, • D4h =4/mmm, D6h =6/mmm,
mmm
n 22

OhC4
C3d S6
23C
Let’s try another…
26C
What happens if we stretch the cube along one direction?
Related Documents







![arXiv:1603.08881v1 [hep-ph] 29 Mar 2016the invariant form factors associated with the operators. The transverse densities are frame-independent (invariant under longitudinal boosts)](https://static.cupdf.com/doc/110x72/5e83229230fe573260157f3e/arxiv160308881v1-hep-ph-29-mar-2016-the-invariant-form-factors-associated-with.jpg)



