Chul-Min Park*: Graduate Student Graduate Student, KAIST, Korea Hyung-Jo Jung: Professor, Sejong University, Ko rea Ji-Eun Jang: Graduate Student Graduate Student, KAIST, Korea Kyu-Sik Park: Post Doctoral Fellow, UIUC, USA In-Won Lee: Professor, KAIST, Korea The 18 The 18 th th KKCNN, Kaohsiung, Taiwa KKCNN, Kaohsiung, Taiwa n n 18-21, December, 2005 18-21, December, 2005 Scissor-Jack-Damper System Scissor-Jack-Damper System for Reduction of Stay Cable for Reduction of Stay Cable

Graduate Student Chul-Min Park*: Graduate Student, KAIST, Korea Hyung-Jo Jung: Professor, Sejong University, Korea Graduate Student Ji-Eun Jang: Graduate.
Dec 14, 2015
Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript
Chul-Min Park*: Graduate StudentGraduate Student, KAIST, Korea
Hyung-Jo Jung: Professor, Sejong University, KoreaJi-Eun Jang: Graduate StudentGraduate Student, KAIST, Korea
Kyu-Sik Park: Post Doctoral Fellow, UIUC, USA
In-Won Lee: Professor, KAIST, Korea
The 18The 18thth KKCNN, Kaohsiung, Taiwan KKCNN, Kaohsiung, Taiwan
18-21, December, 200518-21, December, 2005
Scissor-Jack-Damper SystemScissor-Jack-Damper System
for Reduction of Stay Cablefor Reduction of Stay Cable
Scissor-Jack-Damper SystemScissor-Jack-Damper System
for Reduction of Stay Cablefor Reduction of Stay Cable
22Structural Dynamics & Vibration Control Lab., KAIST, KoreaStructural Dynamics & Vibration Control Lab., KAIST, Korea
IntroductionIntroduction
Toggle-Brace-Damper SystemToggle-Brace-Damper System
Analytical Study on Performance of Analytical Study on Performance of Scissor-Jack-DamperScissor-Jack-Damper
ConclusionsConclusions
ContentsContents
33Structural Dynamics & Vibration Control Lab., KAIST, KoreaStructural Dynamics & Vibration Control Lab., KAIST, Korea
Introduction Introduction BackgroundsBackgrounds
• The novel configuration of Scissor-Jack-Damper The novel configuration of Scissor-Jack-Damper results in results in
device displacements that are larger than the cable drift.device displacements that are larger than the cable drift.
• The potential for The potential for cost savingscost savings and and improved performanceimproved performance
44Structural Dynamics & Vibration Control Lab., KAIST, KoreaStructural Dynamics & Vibration Control Lab., KAIST, Korea
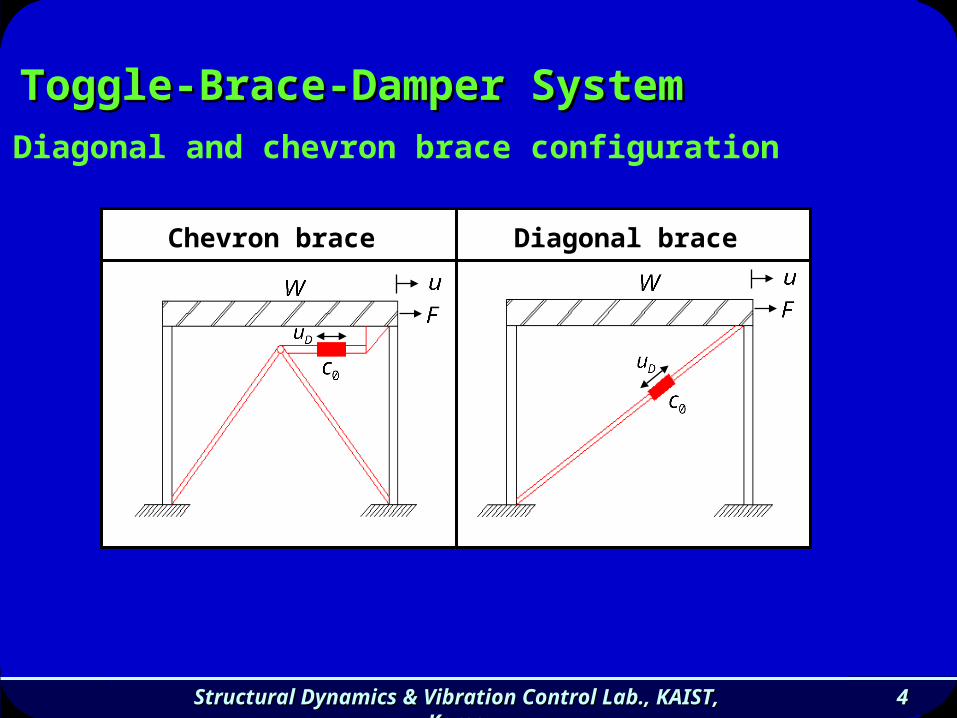
Diagonal and chevron brace configuration
Toggle-Brace-Damper SystemToggle-Brace-Damper System
Chevron brace Diagonal brace
55Structural Dynamics & Vibration Control Lab., KAIST, KoreaStructural Dynamics & Vibration Control Lab., KAIST, Korea
damper theof axis thealongnt displaceme relative:
drift interstory:
factor ion magnificat:,where
Du
u
(1)
(2)
damper theof axis thealong force the
forcecomponent horizontalwhere,
DF
F
The theory of brace-damper system
66Structural Dynamics & Vibration Control Lab., KAIST, KoreaStructural Dynamics & Vibration Control Lab., KAIST, Korea
(4)
(3)DD uCF 0
damper theof ends ebetween th velocity relative:
tcoefficien damping:,where 0
Du
C
frame on the exerted force damping the:F
velocityinterstory:,where u
• Magnification factor in brace system
77Structural Dynamics & Vibration Control Lab., KAIST, KoreaStructural Dynamics & Vibration Control Lab., KAIST, Korea
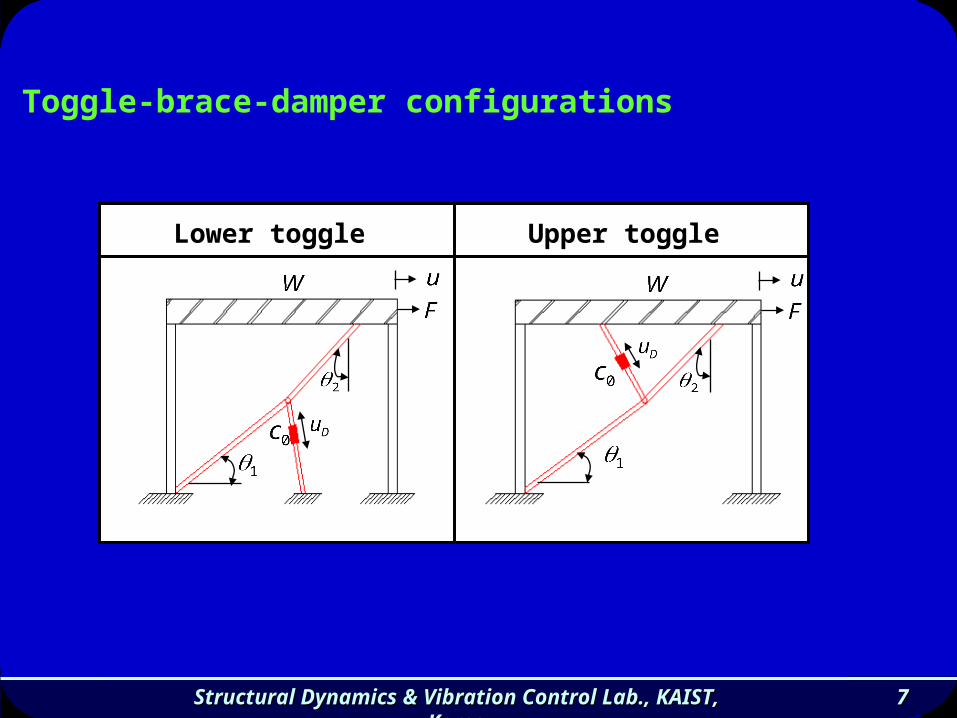
Toggle-brace-damper configurations
Lower toggle Upper toggle
88Structural Dynamics & Vibration Control Lab., KAIST, KoreaStructural Dynamics & Vibration Control Lab., KAIST, Korea
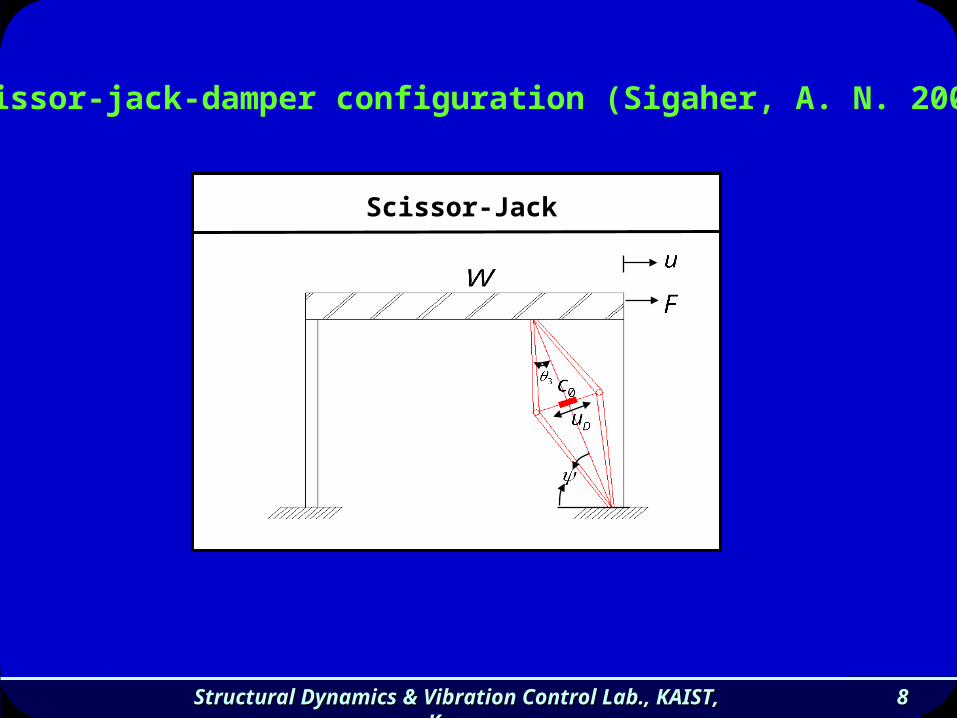
Scissor-jack-damper configuration (Sigaher, A. N. 2003)
Scissor-Jack
99Structural Dynamics & Vibration Control Lab., KAIST, KoreaStructural Dynamics & Vibration Control Lab., KAIST, Korea
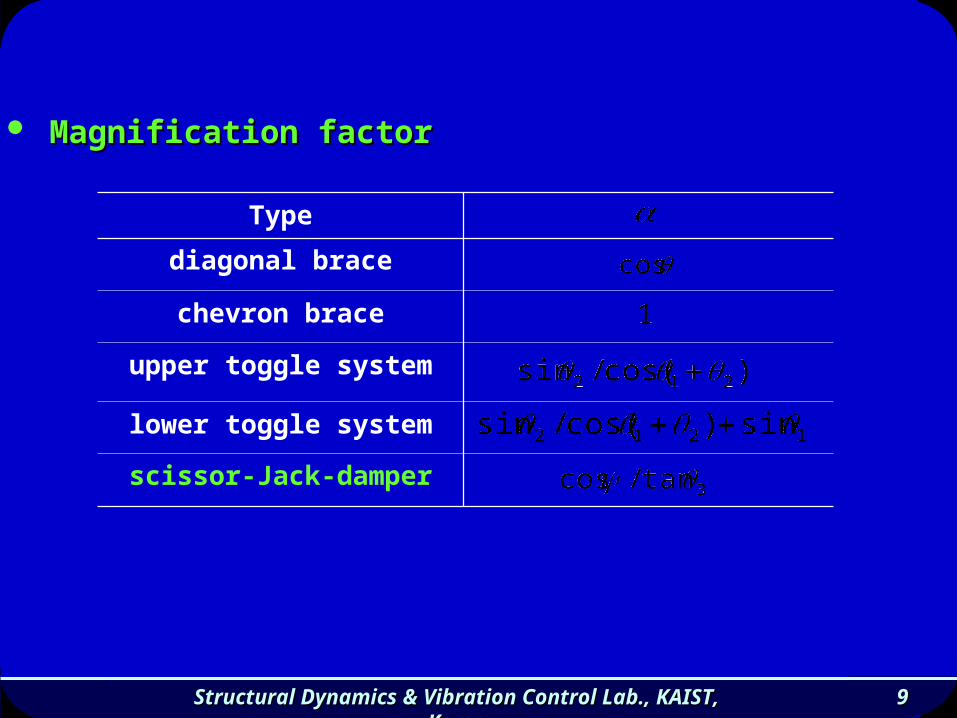
Magnification factorMagnification factor
Type
diagonal brace
chevron brace
upper toggle system
lower toggle system
scissor-Jack-damper
1010Structural Dynamics & Vibration Control Lab., KAIST, KoreaStructural Dynamics & Vibration Control Lab., KAIST, Korea
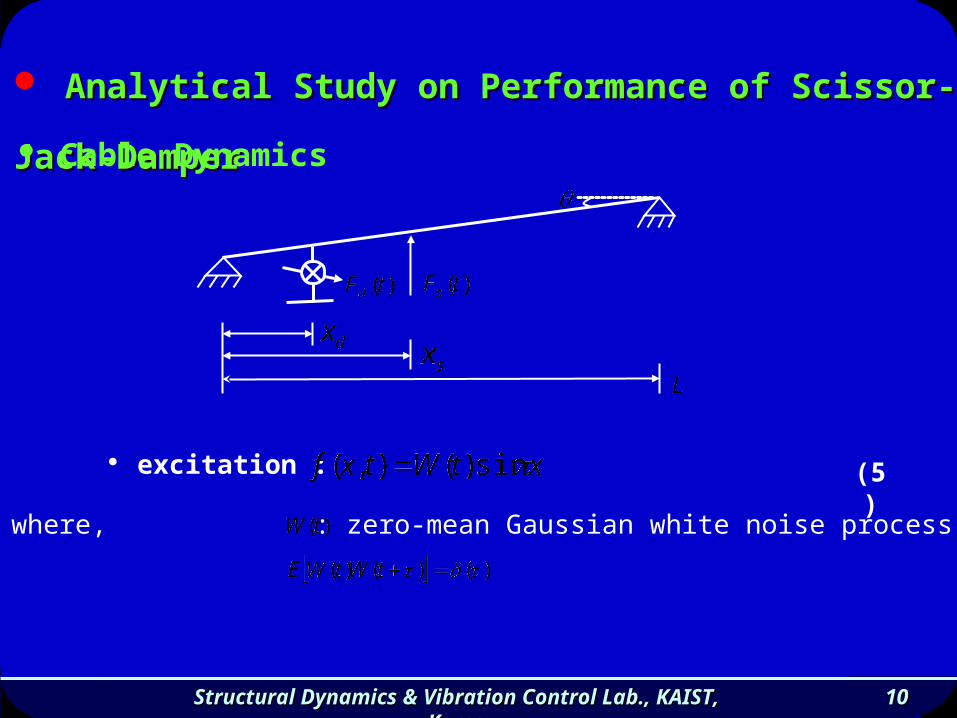
Analytical Study on Performance of Scissor-Jack-DamperAnalytical Study on Performance of Scissor-Jack-Damper
Cable Dynamics
excitation :
where, : zero-mean Gaussian white noise process
(5)
1111Structural Dynamics & Vibration Control Lab., KAIST, KoreaStructural Dynamics & Vibration Control Lab., KAIST, Korea
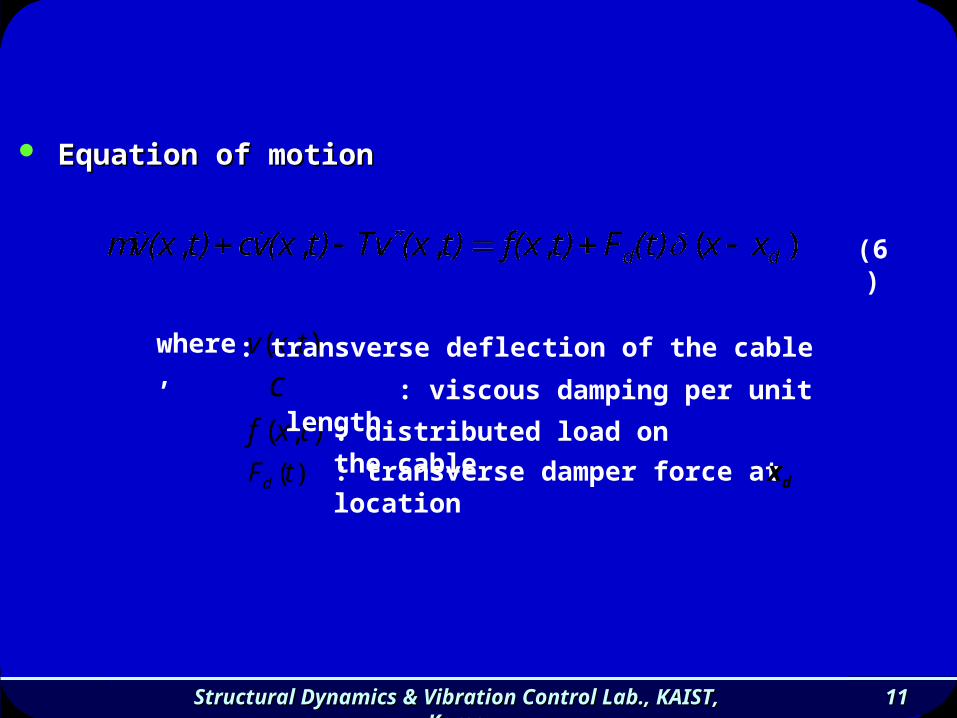
where, ),( txv
c),( txf
)(tFd
: transverse deflection of the cable
: viscous damping per unit length
: transverse damper force at location
: distributed load on the cable
Equation of motionEquation of motion
(6)
dx
1212Structural Dynamics & Vibration Control Lab., KAIST, KoreaStructural Dynamics & Vibration Control Lab., KAIST, Korea
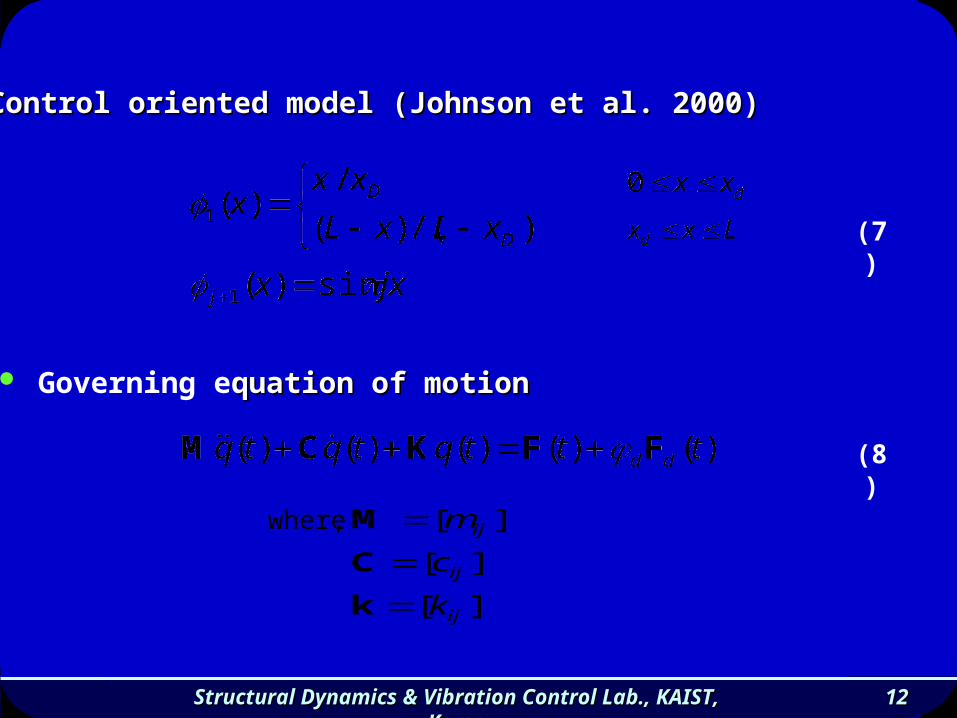
Governing equation of motionquation of motion
,where
][
][
][
ij
ij
ij
k
c
m
k
C
M
Control oriented model (Johnson et al. 2000)Control oriented model (Johnson et al. 2000)
(7)
(8)
1313Structural Dynamics & Vibration Control Lab., KAIST, KoreaStructural Dynamics & Vibration Control Lab., KAIST, Korea
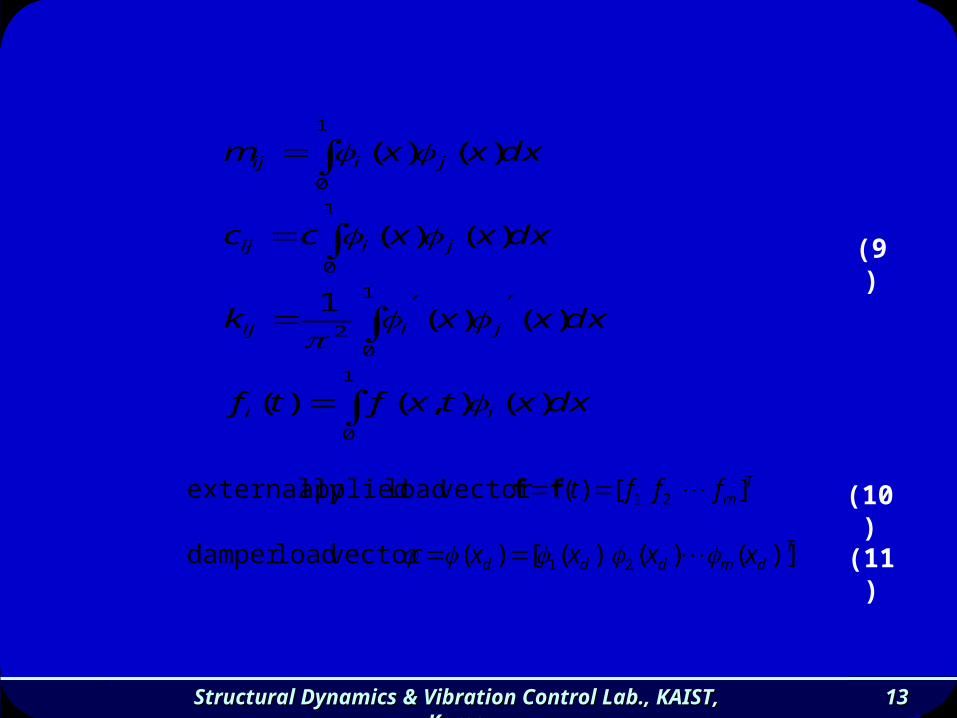
dxxtxftf
dxxxk
dxxxcc
dxxxm
ii
jiij
jiij
jiij
1
0
1
02
1
0
1
0
)(),()(
)()(1
)()(
)()(
Tmffft ][)(vectorloadappliedexternally 21 ff
Tdmddd xxxx )]()()([)(vectorloaddamper 21
(9)
(10)
(11)
1414Structural Dynamics & Vibration Control Lab., KAIST, KoreaStructural Dynamics & Vibration Control Lab., KAIST, Korea
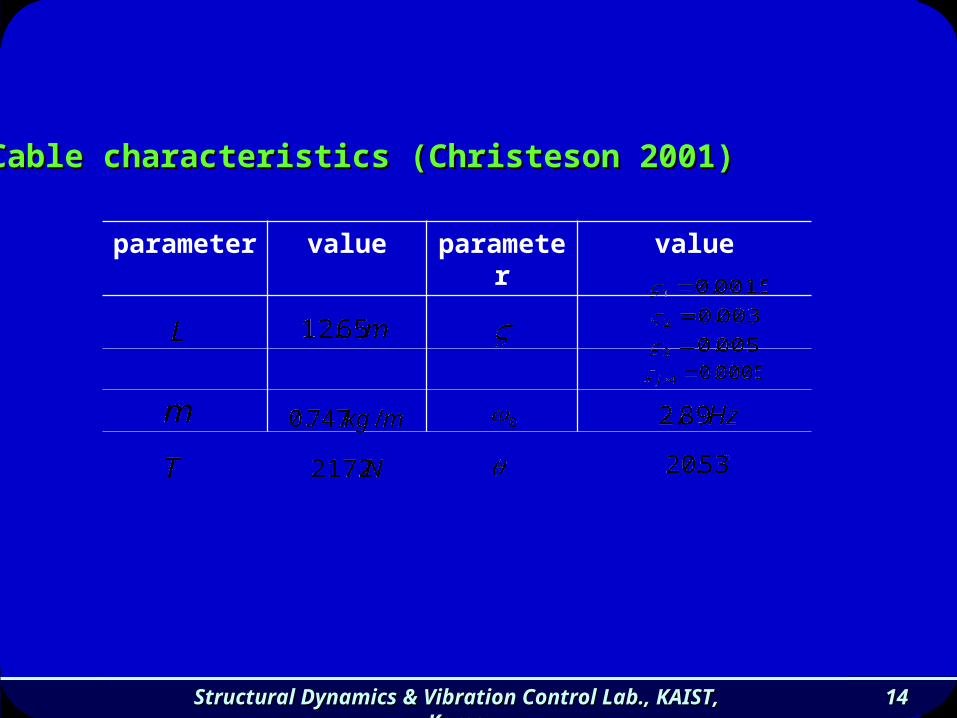
Cable characteristics (Christeson 2001)Cable characteristics (Christeson 2001)
parameter
value parameter
value
1515Structural Dynamics & Vibration Control Lab., KAIST, KoreaStructural Dynamics & Vibration Control Lab., KAIST, Korea
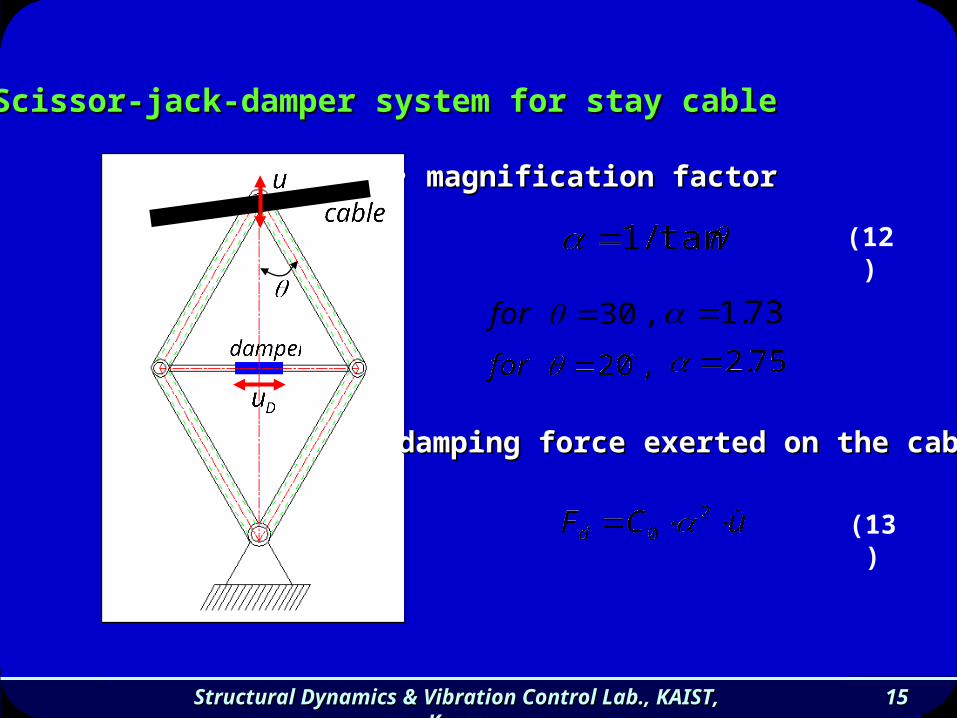
Scissor-jack-damper system for stay cableScissor-jack-damper system for stay cable
,30for
• magnification factormagnification factor
• damping force exerted on the cabledamping force exerted on the cable
(12)
(13)
73.1
1616Structural Dynamics & Vibration Control Lab., KAIST, KoreaStructural Dynamics & Vibration Control Lab., KAIST, Korea
0.025
0.03
0.035
0.04
0.045
0 300 600 900 1200
Damping coefficient(Nsec/m)
RM
S_di
spl(m
)
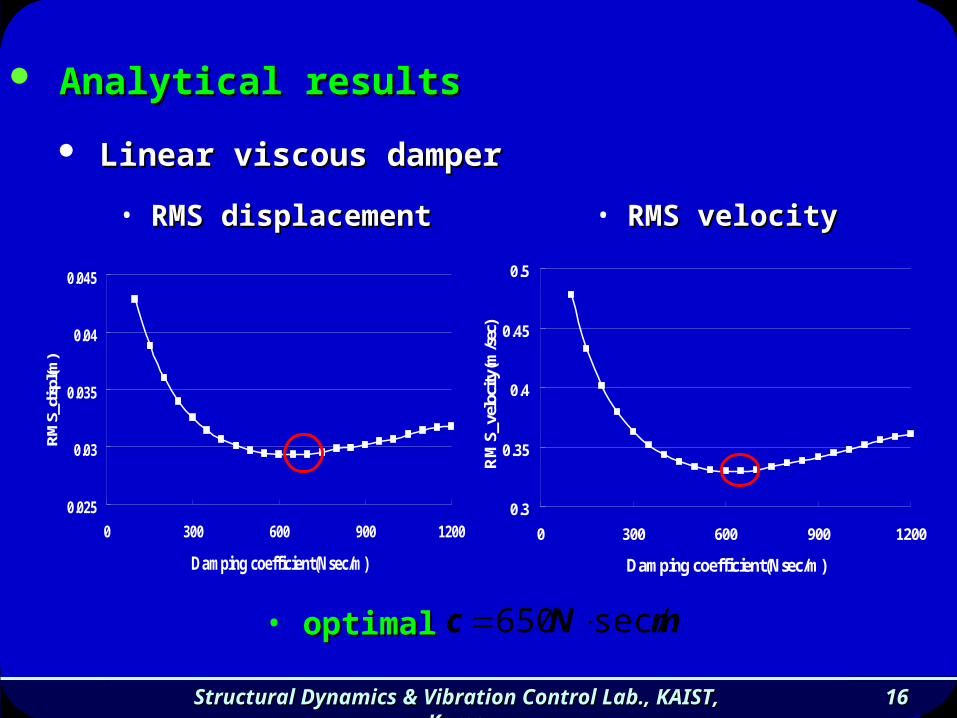
Analytical resultsAnalytical results
• optimaloptimal mNc sec/650
Linear viscous damperLinear viscous damper
• RMS displacementRMS displacement • RMS velocityRMS velocity
0.3
0.35
0.4
0.45
0.5
0 300 600 900 1200
Damping coefficient(Nsec/m)
RM
S_ve
loci
ty(m
/sec
)
1717Structural Dynamics & Vibration Control Lab., KAIST, KoreaStructural Dynamics & Vibration Control Lab., KAIST, Korea
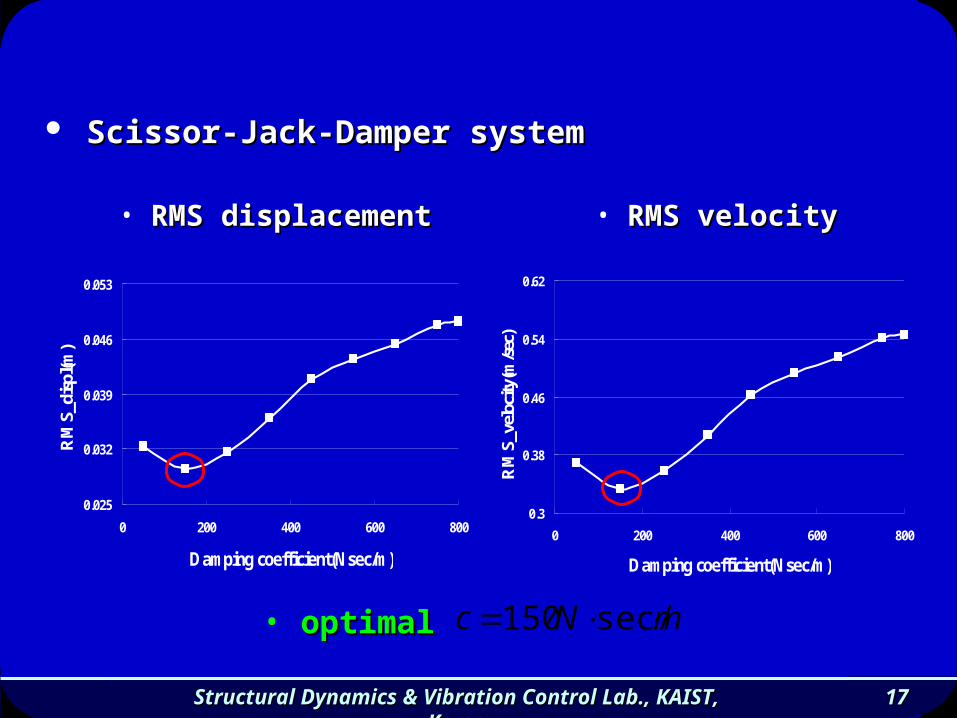
• optimaloptimal mNc sec/150
Scissor-Jack-Damper system Scissor-Jack-Damper system
• RMS displacementRMS displacement • RMS velocityRMS velocity
0.3
0.38
0.46
0.54
0.62
0 200 400 600 800
Damping coefficient(Nsec/m)
RM
S_ve
loci
ty(m
/sec
)0.025
0.032
0.039
0.046
0.053
0 200 400 600 800
Damping coefficient(Nsec/m)
RM
S_di
spl(m
)
Structural Dynamics & Vibration Control Lab., KAIST, KoreaStructural Dynamics & Vibration Control Lab., KAIST, Korea 1818
Conclusions
Scissor-Jack-DamperScissor-Jack-Damper configuration
- more efficient to stay cable
- increases the damping force exerted on the cable
- reduces the required damper capacity
Limitation of passive damping systempassive damping system
- performance degradation
dependent on damper location
Structural Dynamics & Vibration Control Lab., KAIST, KoreaStructural Dynamics & Vibration Control Lab., KAIST, Korea 1919
Thank you for your attention!
Related Documents











