FORMULACIÓN DE LAGRANGE 1. Considérese un sistema con N grados de libertad descrito por el conjunto de coordenadas generalizadas {q i } (i=1,...,N ), cuyas energías cinética y potencial, T y V , vienen dadas por ( ) ( ) i N i i i i N i i q V V q q f T ∑ ∑ = = = = 1 2 1 , & Demuéstrese que las ecuaciones de Lagrange son separables, de modo que los distintos grados de libertad no están acoplados y redúzcase el problema a cuadraturas. A partir de la lagrangiana, L = T − V , calculemos las derivadas 2 i i i f q q L & & = ∂ ∂ 2 d d 2 d d 2 i i i i i i f q q f q q L t & & & & + = ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ ∂ ∂ d d d d 2 i i i i i i q V q q f q L − = & ∂ ∂ Así pues la ecuación de Lagrange para cada grado de libertad q i es 0 = d d 2 d d 2 i i i i i i i q V q f q q f + + & & & que como vemos sólo depende del propio grado de libertad q i , de manera que los distintos grados de libertad están desacoplados y cada cual evoluciona independientemente de los demás. En particular, la energía contenida en cada grado de libertad 2 i i i i V q f E + = & se conserva constante durante la evolución como es fácil ver, pues d d d d 2 i i i i i i i q V q q f q E + = & ∂ ∂ 2 i i i i f q q E & & = ∂ ∂ resultando que = 2 + d d d d d d d d d d 3 i i i i i i i i i i i i i i i i i q q f q q V q q f t q q E t q q E t E t E & & & & & & & + = + + = ∂ ∂ ∂ ∂ ∂ ∂ 0 = 2 + d d d d = 2 ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ + i i i i i i i i q f q V q q f q & & & & 3

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

8/12/2019 Goldstein solucionario.pdf
http://slidepdf.com/reader/full/goldstein-solucionariopdf 1/195
FORMULACIÓN DE LAGRANGE
1. Considérese un sistema con N grados de libertad descrito por el conjunto decoordenadas generalizadas qi (i=1,...,N ), cuyas energías cinética y potencial, T
y V , vienen dadas por
( ) ( )i
N
iiii
N
ii qV V qq f T ∑∑
==
==1
2
1
, &
Demuéstrese que las ecuaciones de Lagrange son separables, de modo que losdistintos grados de libertad no están acoplados y redúzcase el problema acuadraturas.
A partir de la lagrangiana, L = T − V , calculemos las derivadas
2 ii
i
f qq
L &&
=∂
∂
2d
d2
d
d 2
ii
i
ii
i
f qq
f q
q
L
t &&&
& +=⎟⎟
⎠
⎞⎜⎜⎝
⎛
∂
∂
d
d
d
d 2
i
ii
i
i
i q
V q
q
f
q
L−= &
∂
∂
Así pues la ecuación de Lagrange para cada grado de libertad qi es
0=dd2
dd 2
i
iiii
i
i
qV q f q
q f ++ &&&
que como vemos sólo depende del propio grado de libertad qi, de manera que los
distintos grados de libertad están desacoplados y cada cual evoluciona
independientemente de los demás. En particular, la energía contenida en cada grado de
libertad
2
iiii V q f E += &
se conserva constante durante la evolución como es fácil ver, pues
dd
dd 2
i
ii
i
i
i
i
qV q
q f
q E += &∂ ∂
2 ii
i
i f qq
E &
& =
∂
∂
resultando que
=2+d
d
d
d
d
d
d
d
d
d
3
iiii
i
i
i
i
ii
i
ii
i
iii qq f qq
V q
q
f
t
q
q
E
t
q
q
E
t
E
t
E &&&&&
&
& +=++=
∂
∂
∂
∂
∂
∂
0=2+d
d
d
d
=2
⎟⎟ ⎠
⎞
⎜⎜⎝
⎛
+ ii
i
i
i
i
i
i q f q
V
f
q &&&&
3

8/12/2019 Goldstein solucionario.pdf
http://slidepdf.com/reader/full/goldstein-solucionariopdf 2/195
Así pues, las energías E i son constantes determinadas por las condiciones iniciales,
, 00 , ii qq &
( ) ( ) 0
2
00 iiiiii qV qq f E += &
de manera que la evolución de cada grado de libertad viene dada por la integral
t f
V E qq
t
i
ii
ii d00 ∫
−±=−
----------------------------------------------
2. Un punto de masa M describe, en el plano 0 XY , una curva dada por la ecuación
y = f ( x) cuando está sometida a un potencial que sólo depende de y. Si v0 es laproyección de la velocidad sobre el eje 0 X , se pide:
a) hallar una expresión general del potencial en función de f .
b) Aplique la expresión obtenida en el apartado anterior al caso de que laecuación de la curva sea ay
2 = x
3.
a) Sea V ( y) el potencial pedido. La lagrangiana de la masa puntual será
( ) ( ) yV y x M
L −+= 22
2&&
de donde se obtienen las ecuaciones de Lagrange
( )
( )⎪⎪⎩
⎪⎪⎨⎧
−=
=
y
V y M
t
x M t
d
d
d
d
0d
d
&
&
Integrando dos veces la primera ecuación se obtiene que la proyección del movimiento
sobre el eje 0 X es un movimiento uniforme con velocidad 0v x =& . La integral de la
segunda ecuación con respecto de y determina el potencial
∫−= y y M C V d&&
donde C es una constante arbitraria. Como por otra parte
( ) ( )
( ) 2
0
0
d
d
v x f y
v x f x x x
f y
′′=
′==
&&
&&
la expresión del potencial es
( ) y x f MvC V d 2
0 ∫ ′′−=
y, para realizar la integral, hay que sustituir .)(1
y f x −=
4

8/12/2019 Goldstein solucionario.pdf
http://slidepdf.com/reader/full/goldstein-solucionariopdf 3/195
b) Para el caso particular en que la función esa
x y
3
= , la función inversa es
, de manera que( ) 3/12ay x =
( )
( ) 3/1
3/24
3
4
3
2
3
−==′′
=′
yaax
x f
a
x x f
Sustituyendo en la ecuación del apartado anterior y realizando la integral se llega alresultado.
-------------------------------------------------
3. Considérese una transformación desde un sistema estacionario de ejes
cartesianos Oxyz a otro Ox’y’z’ que gira con velocidad angular constante ω alrededor del eje Oz . Transforme la lagrangiana de una partícula consideradalibre en el sistema Oxyz a la correspondiente en el sistema Ox’y’z’, e identifiqueen esta última los términos que corresponden a las fuerzas de Coriolis ycentrífuga.
La transformación de Oxyz a Ox’y’z’ es:
t xt y y
t yt x x
ϖ ϖ sincos
sincos
′+′=
′−′=
La energía cinética de la partícula viene dada por:
)(~
2
1)(~)(
2
1)(
2
1 222222222 y xm y x y xm z y xm z y xmT ′+′+′′−′′+′+′+′=++= ω ω &&&&&&&&
La expresión que aparece en las ecuaciones de Lagrange puede considerarse
como una fuerza ficticia que aparece debida a las peculiaridades del sistema decoordenadas. En nuestro caso:
iqT ∂∂ /
xm ym x
T
′+′=′∂∂ 2
~~ ω ω & ,
con una expresión similar para i yT ′∂∂ / (la correspondiente parcial con respecto a z ’es
nula). Los dos términos de la expresión anterior pueden identificarse como las
componentes de la mitad de las fuerzas de Coriolis y centrífuga, respectivamente. La
otra mitad de la fuerza de Coriolis procede del término ⎟ ⎠ ⎞⎜
⎝ ⎛
∂∂
iqT
dt d
&de las ecuaciones
de Lagrange.
------------------------------------------
5

8/12/2019 Goldstein solucionario.pdf
http://slidepdf.com/reader/full/goldstein-solucionariopdf 4/195
4. Una cuenta de masa m desliza sin rozamiento a lo largo de un alambre circularde radio a. El alambre, situado verticalmente en un campo gravitatorio, giraalrededor de su diámetro vertical con velocidad angular ω . Para una velocidadangular ω mayor que un cierto valor crítico ω
c, la cuenta tiene un punto de
equilibrio mecánico estable en una posición dada por un ángulo θ 0 respecto dela vertical. Se pide:
a) Encontrar ω c y θ 0 ;
b) Obtener las ecuaciones del movimiento para pequeñas oscilaciones alrededorde 0 y encontrar su periodo.
a) La energía cinética de la cuenta y el Lagrangiano son:
2222 )sen(21
21 θ ω θ ammaT += & .
θ θ ω θ cossin mgamama L −+= 22222
2
1
2
1&
donde θ es el ángulo que forma la posición de la masa con el eje vertical de giro,
correspondiendo 0θ = con la partícula en la posición más baja en el alambre.
La ecuación de Lagrange nos lleva a:
0sencossen 2 =−+ θ θ ω θ θ a g a &&
En el punto de equilibrio,
0=θ && , g = aω 2 cos θ , ó.: ω 2 = g/(a cos θ) .
Esta última ecuación tiene una solución para ω sólo si ω 2 ≥ g/a, con lo que lavelocidad angular crítica es
a g
C =ω
y el ángulo de equilibrio es
⎟ ⎠
⎞
⎜⎝
⎛
= 20 cosarc ω θ a
g
b) Si la cuenta efectúa pequeñas oscilaciones alrededor de θ 0, podemos describir el
movimiento en términos de un pequeño parámetro ε = θ − θ 0. La ecuación del
movimiento se transforma en
0)(sen)(cos)(sen 00
2
0 =++−++ ε θ ε θ ω ε θ ε a g a &&
6

8/12/2019 Goldstein solucionario.pdf
http://slidepdf.com/reader/full/goldstein-solucionariopdf 5/195
Para pequeños valores de ε , 1cosysen ≈≈ ε ε ε . Teniendo en cuenta esto y el valor
obtenido de θ 0 , la ecuación anterior queda en
0142
22 =⎟⎟
⎠
⎞⎜⎜⎝
⎛ −+ ε
ω ω ε
a
g &&
La frecuencia de oscilación será:
42
2
1ω
ω a
g −=Ω
---------------------------------------------
5. Un elemento diferencial de arco de una cierta superficie se puede poner de laforma
221
21
2 )( dqqadqds +=
Se pide:
a) La ecuación que cumplen las líneas geodésicas de la superficie
b) Demostrar que las curvas cte.2 =q son geodésicas
c) ¿Qué dependencia con el tiempo tiene, en el caso contemplado en b), lacoordenada ? (Nota: las geodésicas son las trayectorias que sigue un puntosobre la superficie en ausencia de toda fuerza).
1q
a) En ausencia de toda fuerza, y considerando m=1,
( )2
21
2
1 )(2
1qqaqT L && +==
La coordenada es cíclica; luego2q
21
2
)( qqaC q
T &
& ==
∂∂
(1)
donde C es una constante. Por otra parte, la energía total:
( )2
21
2
1 )(21 qqaq E && += (2)
es también una constante del movimiento. Eliminando dt de (1) y (2), se obtiene una
ecuación diferencial entre las coordenadas y que es precisamente la ecuación de
las geodésicas. Integrando dicha ecuación se obtiene:1q 2q
∫⎟
⎠
⎞⎜⎝
⎛ −
=
)(1)(2
12
1
1
2
qaC
qa E
dqq
7

8/12/2019 Goldstein solucionario.pdf
http://slidepdf.com/reader/full/goldstein-solucionariopdf 6/195
b) Las curvas , recorridas con la ley horariacte.2 =q E t q E q 2,2 11 ==& , son
soluciones de las ecuaciones (1) y (2).
c) De acuerdo con lo visto en b), la coordenada evoluciona según un movimiento
uniforme.
1q
-----------------------------------------------
6. Si el sistema solar estuviese sumergido en una nube esférica uniforme departículas sólidas, los objetos en el sistema solar experimentarían una fuerzagravitatoria total que sería
br r
k F r −−=
2
Podemos asumir que la fuerza extra debida a la presencia de la nube es débil)( 3r k b << . Encuentre la frecuencia de las oscilaciones radiales de una órbita
cuasicircular (ésta es una órbita con pequeñas desviaciones radiales de laórbita circular).
La ecuación de movimiento es:
dr
r dV r m
ef )(−=&&
Si la partícula está en una órbita circular de radio , se cumple:0r
02
0
3
0
2
0
)(br
r
k
mr
l
dr
r dV
r r
ef −−=−=
Estamos interesado en perturbaciones alrededor de esta órbita circular. Si esta
perturbación es pequeña, podemos expandir el potencial efectivo alrededor de ,0r
L+′′−+′−+= )()(2
1)()()()( 0
2
0000 r V r r r V r r r V r V ef ef ef ef
Si utilizamos esta expansión en la expresión del lagrangiano, encontramos:
),()(2
1
2
10
2
0
2 r V r r r m L ef ′′−−= &
donde hemos eliminado el término constante. La expresión anterior es el lagrangiano de
un oscilador armónico, de frecuencia
m
r V ef )( 02′′
=ω
Diferenciando dos veces el potencial efectivo encontramos, para la frecuencia de las
pequeñas oscilaciones radiales alrededor de la órbita circular,
8

8/12/2019 Goldstein solucionario.pdf
http://slidepdf.com/reader/full/goldstein-solucionariopdf 7/195
1 2
3
0
k b
mr mω
⎛ ⎞= +⎜ ⎟
⎝ ⎠
-----------------------------------------------
7. Una cuenta de masa m puede deslizar sin rozamiento a lo largo de una varillarectilínea. La varilla gira en un plano vertical, teniendo a uno de sus extremoscomo centro de giro y con velocidad angular constante, ω . En presencia de uncampo gravitatorio constante, calcúlese la posición radial, r , de la cuenta comofunción del tiempo, si las condiciones iniciales son: r R r ( ) ; &( ) .0 0 v= =
Si θ es al ángulo que forma la varilla con respecto a la horizontal, y r es la posición de
la cuenta a lo largo de la varilla, la energía cinética en coordenadas polares es:
( ) ( )222222
21
21 ω θ r r mr r mT +=+= &&&
y la lagrangiana
( ) t mgr r r m L ω ω sen2
1 222 −+= &
La ecuación del movimiento resulta:
t g r r ω ω sen2 −=−&& ,
siendo su solución
⎟ ⎠
⎞⎜⎝
⎛ +−+= tsen
2senh
2cosh
22 ω
ω ω
ω ω ω
g t
g vt Rr
---------------------------------------
8. La lagrangiana para una partícula cargada moviéndose en un campoelectromagnético es, en coordenadas cartesianas,
vA ⋅+−=c
eeT L φ
a) Evaluar cuál es la dependencia en φ y A de los campos eléctrico y magnético,para que L genere la conocida ecuación newtoniana de movimiento en un campoelectromagnético.
b) Seguidamente, demostrar que los campos son invariantes bajo latransformación (conocida como gauge)
).,(1
),,(
t t c
t
r
rAA
Ψ−→
Ψ∇+→
∂
∂ φ φ
A partir de la lagrangiana dada se verifica que:
9

8/12/2019 Goldstein solucionario.pdf
http://slidepdf.com/reader/full/goldstein-solucionariopdf 8/195
,
,
3
1
3
1
⎟⎟ ⎠
⎞⎜⎜⎝
⎛ ++=+=
+−=
∑
∑
=
=
k
i
k
ik i
ii
i
k i
k k
ii
t
A
r
Av
c
em
dt
dA
c
evm
v
L
dt
d
r
Av
c
e
r e
r
L
∂
∂
∂
∂ ν
∂
∂
∂
∂
∂
∂φ
∂
∂
&&&
quedando la ecuación del movimiento:
⎟⎟ ⎠
⎞⎜⎜⎝
⎛ −+⎟⎟
⎠
⎞⎜⎜⎝
⎛ −−= ∑
= k
i
i
k
k k
i
i
ir
A
r
Av
c
e
t
A
cr evm
∂
∂
∂
∂
∂
∂
∂
∂φ 3
1
1& .
Comparando con la conocida forma,
( )iii Bvc
eeE vm ×+=& ,
queda,
).,(),(
),,(1
),(),(
t t
t t c
t t
r
r
rArB
rArrE
×∇=
−−∇=∂
∂ φ
Una vez conocidas estas expresiones para los campos, verificar que son invariantes bajola transformación gauge anterior es un ejercicio simple.
------------------------------------
9. Si dos lagrangianas, L y L’ , son tales que:
( ) ( ) ;),(
,,,,dt
t dM t Lt L qqqqq +=′ &&
a) demostrar que llevan a las mismas ecuaciones del movimiento.
b) Comprobar que la transformación de potenciales del problema anteriorpertenece a este caso, si L es la lagrangiana ahí detallada.
Calculamos para L y L’ las ecuaciones de Lagrange, pudiendo observar que para quesean idénticas debe cumplirse que:
.0=⎟⎟ ⎠ ⎞⎜⎜
⎝ ⎛ −
dt dM
qdt d
q k k &∂
∂ ∂ ∂
El ejercicio es trivial. Por otra parte, el efecto de la transformación gauge sobre la
lagrangiana del problema anterior es:
),(2
1t
c
e
dt
d L
t c
e L
c
eem L rvAvvv Ψ+=⎟
⎠
⎞⎜⎝
⎛ Ψ∇⋅+Ψ
+=′⋅+′−⋅=′∂
∂ φ ,
tal como queríamos demostrar.
---------------------------------------------
10

8/12/2019 Goldstein solucionario.pdf
http://slidepdf.com/reader/full/goldstein-solucionariopdf 9/195
10. Hallar y resolver las ecuaciones de Lagrange para el sistema formado por dospéndulos acoplados según indica la figura. Las varillas de longitud L y sonrígidas de masa nula, mientras que la barra horizontal rígida de longitud
tiene una masa .
L′
D bm
Posición de los puntos de la barra:
D xa y xa x ≤′≤−=′+= 0;cos;sin θ θ
θ θ θ θ &&&& sin;cos a ya x ==
Energía cinética barra 22
0
22
22
1θ θ ρ && a
ma xd
Db∫ =′=
T= )(2
1 2222 am LmmL b+′′+θ &
)(cos)coscoscos( LmmLam g LmmLam g V bb ′′++−=′′++−= θ θ θ θ
Se comporta como un péndulo simple de longitud λ y masa µ tal que:
2222 am LmmL b+′′+=µ λ
am LmmL b+′′+=λ
Entonces:
am LmmL
am LmmL
b
b
+′′+
+′′+=
222
λ
222
2)(
am LmmL
am LmmL
b
b
+′′+
+′′+=µ
-------------------------------------
11. Estudiar y resolver por el método de Lagrange el movimiento de la máquina deAtwood compuesta de la figura, en donde las masas de las poleas son y . 0 2m
11

8/12/2019 Goldstein solucionario.pdf
http://slidepdf.com/reader/full/goldstein-solucionariopdf 10/195
Como las longitudes de los hilos son constantes, tenemos las ligaduras:
DConst x x x x
C Const x x
==−+−
==+
.)()(
.
2324
21
de donde:
134
12
22 x xC D x
xC x
−−+=
−=
Además, la polea 2, de radio R gira a una velocidad angular , de modo
que su energía cinética rotativa es:
)( 23
1 x x R && −= −ω
2
23 )(2
1 x xT p && −= α
donde la constante α esta relacionada elementalmente con .2m
Así, pues, usando y como las dos coordenadas independientes:1 x 3 x
2
134
2
33
2
22
2
11
2
13
2
44
2
33
2
22
2
11
)2(2
1
2
1
2
1
2
1)(
2
1
4
1
2
1
2
1
2
1
x xm xm xm xm x x
xm xm xm xmT T p
&&&&&&&
&&&&
++++++
=++++=
α
- energía cinética.
)( 44332211 xm xm xm xm g V +++−= - energía potencial
)2(( 134331211 x xm xm xm xm g V +−+−−= + Constante-irrelevante.
Finalmente:
))()2(( 4334211 mm xmmm x g V −+−−−=
Ambos grados de libertad y están uniformemente acelerados, mientras que la
energía es una función cuadrática de las velocidades.1 x 3 x
---------------------------------------
12. Consideramos la evolución de un cuerpo puntual de masa , constreñido amoverse sin rozamiento sobre un anillo fijo circular en presencia de una
m
12
8/12/2019 Goldstein solucionario.pdf
http://slidepdf.com/reader/full/goldstein-solucionariopdf 11/195
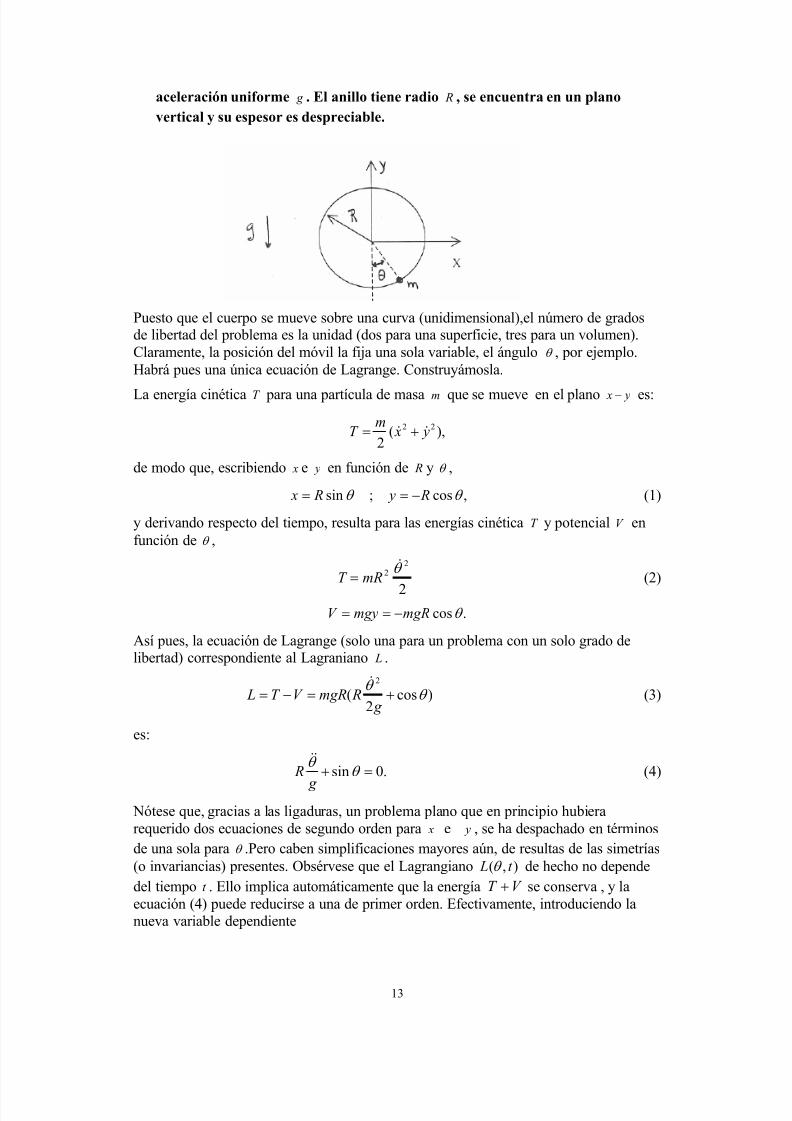
aceleración uniforme g . El anillo tiene radio , se encuentra en un planovertical y su espesor es despreciable.
R
Puesto que el cuerpo se mueve sobre una curva (unidimensional),el número de gradosde libertad del problema es la unidad (dos para una superficie, tres para un volumen).
Claramente, la posición del móvil la fija una sola variable, el ángulo θ , por ejemplo.
Habrá pues una única ecuación de Lagrange. Construyámosla.
La energía cinética T para una partícula de masa m que se mueve en el plano y x − es:
2 2( )2
mT x y= +& & ,
de modo que, escribiendo x e en función de y y R θ ,
,cos;sin θ θ R y R x −== (1)
y derivando respecto del tiempo, resulta para las energías cinética T y potencial V en
función de θ ,
2
22 θ &
mRT = (2)
.cosθ mgRmgyV −==
Así pues, la ecuación de Lagrange (solo una para un problema con un solo grado delibertad) correspondiente al Lagraniano L .
)cos2
(2
θ θ
+=−= g
RmgRV T L&
(3)
es:
.0sin =+ θ θ
g R
&& (4)
Nótese que, gracias a las ligaduras, un problema plano que en principio hubiera
requerido dos ecuaciones de segundo orden para x e , se ha despachado en términos
de una sola para
y
θ .Pero caben simplificaciones mayores aún, de resultas de las simetrías
(o invariancias) presentes. Obsérvese que el Lagrangiano ),( t L θ de hecho no depende
del tiempo t . Ello implica automáticamente que la energía T V + se conserva , y la
ecuación (4) puede reducirse a una de primer orden. Efectivamente, introduciendo la
nueva variable dependiente
13

8/12/2019 Goldstein solucionario.pdf
http://slidepdf.com/reader/full/goldstein-solucionariopdf 12/195
θ &= p , (5)
y usando a θ como la nueva variable independiente (fórmula tradicional para reducir
ecuaciones diferenciales ordinarias en las que la variable independiente , aquí , no
aparece explícitamente)
t
θ θ
θ
d
d pd
d
dt
d
dt
d == (6)
de modo que (4), que era de segundo orden, se vuelve de primer orden:
p R .0sin =+ θ θ
g d
dp (7)
Integrando, se obtiene la ecuación de la energía
teCons E g
p R tancos
2
2
==− θ (8)
La solución ahora se reduce a una cuadratura, puesto que al ser conocida )(θ p (ecuación
8), (5) se convierte en la ecuación separable (y por tanto integrable)
R E g
d
p
d dt
/)cos(2)( θ
θ
θ
θ
−== (9)
-----------------------------------------
13. Péndulo plano de masa , cuyo punto de suspensión (de masa ) puededesplazarse en el mismo plano sobre una recta horizontal.
2m 1m
− Hay dos grados de libertad, que pueden caracterizarse por la coordenada de la
primera masa, y por el ángulo
1 x
θ entre la varilla del péndulo y la vertical.
2
2
111
xmT
&= ; 01 =V
)(2
2
2
2
22
2 y xm
T && += ; 222 m gyV =
Pero θ cos2 R y −= , θ sin12 R x x += , de modo que
[ ]2
1
22
2 )cos()sin(2
θ θ θ θ &&& R x Rm
T ++=
.cos22 θ gRmV −=
14

8/12/2019 Goldstein solucionario.pdf
http://slidepdf.com/reader/full/goldstein-solucionariopdf 13/195
El Lagrangiano resulta inmediatamente de su definición, 2121 V V T T L −−+= , y
análogamente resultarían las ecuaciones de Lagrange (el alumno deberá escribirlas
como ejercicio).
Nótese que L no depende ni del tiempo (se conserva la energía total), ni det x ( x es
coordenada cíclica , 0=∂∂− x L , y se conserva su cantidad de movimiento conjugada,
L p
∂∂
= ). El sistema de las ecuaciones de Lagrange de cuarto orden (dos de segundo
orden), pueden pues reducirse a una de segundo orden. Las dos integrales primeras
asociadas a las consideraciones anteriores son
Const Rmmm x x
L p =++=
∂∂
= θ θ cos)( 2211
1
&&&
(4)
.2121 Const V V T T E =+++= (5)
La ecuación (4) es fácil de interpretar como el hecho de la conservación de la cantidad
de movimiento en la dirección (como siempre, esta propiedad resulta de la
invariancia del problema ante traslaciones en la dirección ).
x
x
.2211 xm xm p && += (6)
Para mayor simplificación, esta última ecuación también admite otra integración exacta
(Problema para alumnos imaginativos: a ver quien es capaz de interpretar este hechomatemático como la invariancia de algún ente físico ante una transformación de alguna
clase), igual que en el movimiento de una partícula libre(la suma de fuerzas en la
dirección es nula). x
.sin)( 2121 Const Rm xmmtp =+++− θ (7)
Así pues, el problema queda reducido a uno de primer orden. Bastaría con resolver la
ecuación de la energía total en la que la única variable desconocida sería θ , ya que y
pueden expresarse en función de
1 x
1 x& θ y mediante las ecuaciones (6) y (7).θ &
El lector deberá terminar el problema en detalle. Para ello, hacemos notar que esta únicaecuación pendiente de resolución toma la forma más sencilla en el sistema de referencia
que se mueve en la dirección con la velocidad constante del centro de masa de las dos
partículas. Usando como coordenadas
x
)()(
21
2211
mm xm xmc
++= y θ ,
c (la coordenada horizontal del centro de gravedad) resulta ser también cíclica, y la
integral de la energía se reduce a:
22θ & R [ ]2
22 cos2sincosm
E gRa =−+ θ θ θ ,
donde).( 21
1
mm
ma
+=
El problema queda pues reducido a una cuadratura, como los anteriores,
15

8/12/2019 Goldstein solucionario.pdf
http://slidepdf.com/reader/full/goldstein-solucionariopdf 14/195
2
22
cos2
sincos
m
E gR
a Rd dt
+
+=
θ
θ θ θ .
Ahora podemos pasar a completar la descripción del problema. Empezamos por :
θ θ θ θ θ θ θ cos)cos2cossin(2
1
2
121
2222
1
2222
11 gRm x R R x R xmV T L +++++=−= &&&&&& =
θ θ θ θ coscos2
1
2212
22
2
2
1
21 gRm x Rm Rm xmm
++++ &&&&
Ecuaciones de Lagrange:
[ ] 0cos)(0 221
11
=++⇒=∂∂−⎟⎟
⎠ ⎞⎜⎜
⎝ ⎛
∂∂ θ θ &&
& Rm xmmdt d
x L
x L
dt d
0sincos 2
2
21 =−++
⇒ θ θ θ θ &&&&& x Rm
mm
θ θ θ θ θ θ θ
sinsin)cos(0;0 12212
2
2&&&&&
& x Rm gRm x Rm
dt
d Rm
L L
dt
d +++==
∂∂
−⎟ ⎠
⎞⎜⎝
⎛ ∂
∂
0sincos1 =++ θ θ θ g x R &&&&
Coordenadas del centro de masas: ⇒−=++= 21
21
2211 ; x xr mm
xm xmc eliminando
y en función de c y
1 x
2 x r :
r mm
mc xr
mm
mc x
21
1
2
21
2
1 ;+
−=+
+=
2
22
2
22
2
112
1
2
1
2
1 ym xm xmT &&& ++=
Pero
=⎥⎦
⎤⎢⎣
⎡+
++
++⎥⎦
⎤⎢⎣
⎡+
++
−=+ 22
21
2
21
22122
21
1
21
12
2
222
211 )(2
2)(
2
2
1
22r
mm
mr c
mm
mc
mr
mm
mr c
mm
mcm
xm xm&&&&&&&&
&&
2)(
2
1 22
21
r cmm && µ ++
con21
21
mm
mm
+≡µ y =2
222
1 ym & θ cos2 R y −= = .sin
2
1 222
2 θ θ & Rm
Así pues,
16

8/12/2019 Goldstein solucionario.pdf
http://slidepdf.com/reader/full/goldstein-solucionariopdf 15/195
θ
θ θ µ θ
cos
)sincos(22
)(
2
2
2
222
21
2
gRmV
m Rmmc
T
−=
+++
= &&
c es coordenada cíclica )0( =∂
∂
c
L de modo que .const c =& Además se conserva la
energía de modo que
E const gRmm R ≡=−+ θ θ θ µ θ cos2)sincos( 2
2
2
222 & (el doble de la energía total)
θ θ µ
θ θ
2
2
2
2
sincos
cos2
m R
gRm E
+
+=&
θ
θ θ µ θ
cos2
sincos
2
2
2
2
gRm E
m Rd dt
+
+=⇒
-------------------------------------
14. Considérese el regulador ilustrado en la figura. ¿Cuántos grados de libertadhay? En función de los ángulos θ y φ , obténgase el Lagrangiano del sistema yescríbanse las ecuaciones de Lagrange. Utilizando las simetrías, redúzcase elproblema a una cuadratura. Interprétense físicamente cada una de lasecuaciones de conservación (o integrales del movimiento) obtenidas.
φ θ cossin1 R x =
φ θ sinsin1 R y =
121 2;cos z z R z =−= θ
φ θ φ φ θ θ sinsincoscos1 R R x &&& −=
φ θ θ sincos1 R y && = 222222
1
2
1
2
1 sincossin φ θ θ φ φ θ &&&&&& R R z y x R +=++⇒+
θ θ && sin1 R z =
)sin4sin( 22222222 θ θ φ θ θ &&& R R RmT ++=
θ cos6)(2 21 mgR z z mg V −=+=
El Lagrangiano es:
θ θ θ φ θ θ cos6)sin4sin( 222222 mgRmR L +++= &&&
17

8/12/2019 Goldstein solucionario.pdf
http://slidepdf.com/reader/full/goldstein-solucionariopdf 16/195
Nuevamente hay una variable cíclica, .0: =∂∂φ
φ L
Evidentemente, si se varia φ en una
cantidad fija (por ejemplo girando el eje x a un ángulo dado φ ∆ ), el sistema no se
inmuta. Es invariante ante desplazamientos constantes de la variable φ . Se conserva
pues la cantidad φ θ φ
&&22
2 sin2mR L p =∂∂= , fácilmente identificable con el momento
angular en la dirección vertical. Nuevamente, eliminando
φ & en términos de (constante) y haciendo uso de la ecuación de la energía,2 p
,sin4
)sin41(cos622
2
2222
θ θ θ θ
mR
pmRmgRV T E +++−=+= &
El problema se reduce a dos cuadraturas (o meras integrales):
θ
θ θ
θ θ ⇒
−+
+=∫ ∫
22
2
2
22
sin4cos6
)sin41(
mR
pmgR E
mRd dt )(t θ =
----------------------------------
15. Dos puntos de masa están unidos por una varilla rígida sin peso de longitud,el punto medio de la cual está obligado a moverse sobre una circunferencia
de radio . Escríbase la energía cinética en coordenadas generalizadas.
Obténgase el Lagrangiano del sistema y escríbanse las ecuaciones de Lagrange.Utilizando las simetrías existentes, redúzcase el problema a una cuadratura.Interprétense físicamente cada una de las ecuaciones de conservación (ointegrales del movimiento) obtenidas. Toda la acción ocurre en el planovertical; la constante gravitatoria es
m
b2
R
g .
+r =posición pto. superior = ; ji ++ + y x
=−r posición pto. inferior = ji −− + y x
Para simplificar el álgebra, introducimos la notación compleja (no es absolutamente
imprescindible)
18

8/12/2019 Goldstein solucionario.pdf
http://slidepdf.com/reader/full/goldstein-solucionariopdf 17/195
)1( −=+= iiy xr
−−−+++ +=+= iy xr iy xr ;
Claramente
21Re θ θ ii
ber ±= −
±
21
21 Re θ θ
θ θ ii
eibir &&& ±=± .
*rr =⋅ rr , donde *r es el complejo conjugado de r ; iy xr −=*
=±±= −−± )Re)(Re( 2121
2121
2 θ θ θ θ θ θ θ θ
iiiibeber &&&&&
)()()(
21
2
2
22
1
2 1221 ϑ θ θ θ θ θ θ θ
−− +±+= iiee Rbb R &&&&
)()(2
1 2
2
22
1
222
θ θ &&&&
b Rmr r mT +=+= −+
121 sin2)( θ mgR y ymg V =+=
)sin2( 1
2
2
22
1
2θ θ θ Rg b Rm L −+= &&
Nótese que 2θ es coordenada cíclica, pues .02
=∂
∂
θ
L En otras palabras, al sistema no le
afecta que se le dé a la variable 2θ un desplazamiento constante θ ∆ . Es por tanto
“invariante ante traslación (giro)” de la variable 2θ . Se conserva pues 2 p
teconsmb L p tan2 22
2
2 ==∂∂= θ θ
&& ,
t mb
p2
2202
2+= θ θ
claramente asociado al momento de giro del sistema de las dos masas alrededor de su
centro. También el momento angular de la Tierra alrededor del eje polar se conserva
indepedientemente de su giro alrededor del Sol. El resto del problema es trivial,reduciéndose al de un péndulo simple plano.
----------------------------------------
16. Una partícula de masa m, sometida al campo gravitatorio terrestre, se muevesin rozamiento sobre la superficie interior de un paraboloide de revolucióncolocado verticalmente.
a) Calcúlese su lagrangiana e identifíquense las magnitudes que se conservandurante el movimiento.
b) Hállese el potencial efectivo para el problema unidimensional equivalente ydiscútase el tipo de órbitas.
c) ¿Qué velocidad inicial ha de imprimirse a la partícula para que la órbita sea
circular?
19

8/12/2019 Goldstein solucionario.pdf
http://slidepdf.com/reader/full/goldstein-solucionariopdf 18/195
d) Calcúlese la frecuencia de las oscilaciones de pequeña amplitud en torno aesta órbita circular.
a) Sea ( )22 y xk z += la ecuación del paraboloide. Utilicemos coordenadas cilíndricas
( ρ ,ϕ ) como se indica en la figura.
ϕ
ρ
m
z
y
xAsí pues,
⎪⎩
⎪⎨
⎧
=
=
=
2
cos
ρ
ϕ ρ
ϕ ρ
k z
sen y
x
⇒ ⇒ ⎪⎩
⎪⎨
⎧
=
+=
−=
ρ ρ
ϕ ϕ ρ ϕ ρ
ϕ ϕ ρ ϕ ρ
&&
&&&
&&&
k z
sen y
sen x
2
cos
cos
⎪⎩
⎪⎨
⎧
=++=
−+=
2222
222222
222222
4cos2cos
cos2cos
ρ ρ ϕ ϕ ϕ ρ ρ ϕ ϕ ρ ϕ ρ
ϕ ϕ ϕ ρ ρ ϕ ϕ ρ ϕ ρ
&&&&&&&
&&&&&
k z sen sen y
sen sen x
De modo que la energía cinética de la partícula es
( )222222 42
1
2
1 ρ ρ ϕ ρ ρ &&& k mmT ++=≡ 2
v .
Siendo la energía potencial
2 ρ mgk mgz V =≡ .
En la lagrangiana L=T −V , la coordenada ϕ es cíclica, luego el correspondiente momentogeneralizado se conserva
l&&
≡=∂
∂ϕ ρ
ϕ
2m L
,
que corresponde a la componente vertical del momento angular. Además, como lalagrangiana no depende del tiempo, la energía total se conserva.
b) La energía total de la partícula, suponiendo que 0≠l ,
( ) 22
2
222
241
21 ρ
ρ ρ ρ mgk
mk mV T E +++=+≡ l&
20
8/12/2019 Goldstein solucionario.pdf
http://slidepdf.com/reader/full/goldstein-solucionariopdf 19/195
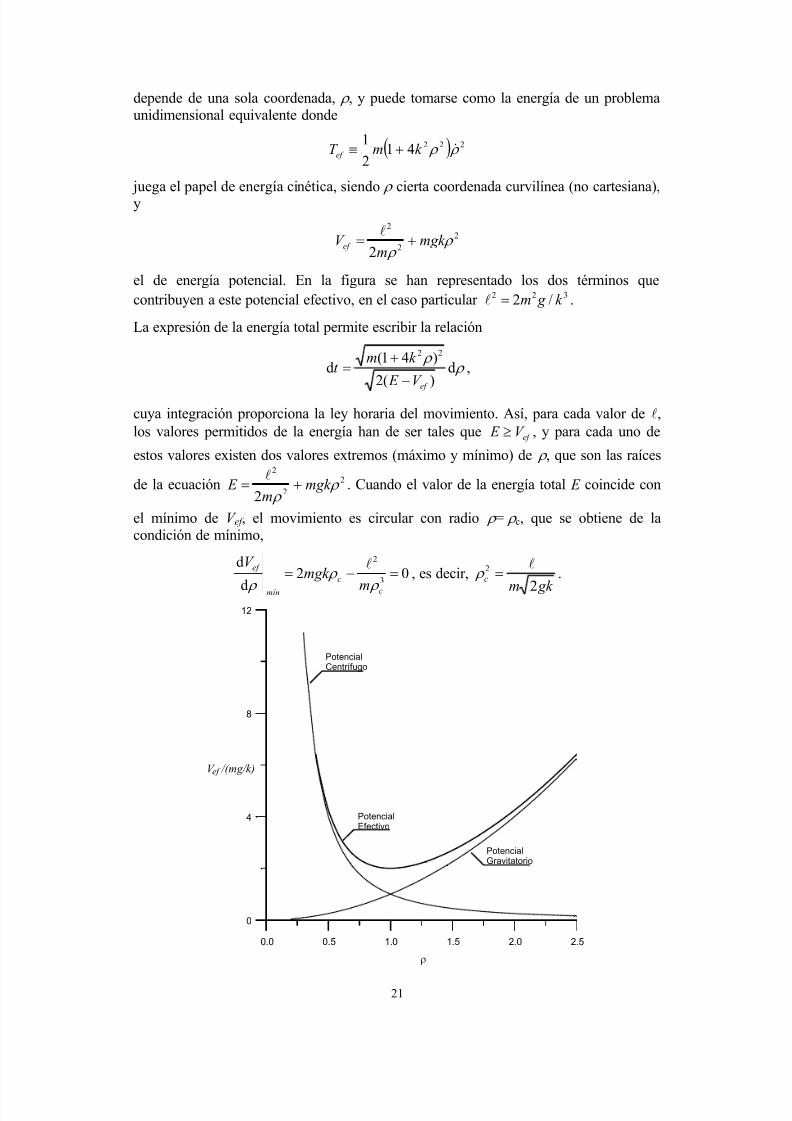
depende de una sola coordenada, ρ , y puede tomarse como la energía de un problemaunidimensional equivalente donde
( ) 222412
1 ρ ρ &k mT ef +≡
juega el papel de energía cinética, siendo ρ cierta coordenada curvilínea (no cartesiana),y
2
2
2
2 ρ
ρ mgk
mV ef +=
l
el de energía potencial. En la figura se han representado los dos términos que
contribuyen a este potencial efectivo, en el caso particular .322 /2 k g m=l
La expresión de la energía total permite escribir la relación
ρ ρ
d)(2
)41(d
22
ef V E
k mt −
+= ,
cuya integración proporciona la ley horaria del movimiento. Así, para cada valor de l,
los valores permitidos de la energía han de ser tales que , y para cada uno de
estos valores existen dos valores extremos (máximo y mínimo) de ρ , que son las raíces
de la ecuación
ef V E ≥
2
2
2
2 ρ
ρ mgk
m E +=
l. Cuando el valor de la energía total E coincide con
el mínimo de V ef , el movimiento es circular con radio ρ = ρ c, que se obtiene de lacondición de mínimo,
02d
d3
2
=−=c
c
mín
ef
mmgk
V
ρ ρ
ρ
l, es decir,
gk mc
2
2 l= ρ .
0.0 0.5 1.0 1.5 2.0 2.5
0
4
8
12
PotencialGravitatorio
PotencialCentrífugo
PotencialEfectivo
ρ
V ef /(mg/k)
21

8/12/2019 Goldstein solucionario.pdf
http://slidepdf.com/reader/full/goldstein-solucionariopdf 20/195
c) En la órbita circular, como el radio es constante, se tiene evidentemente 0=c ρ & . Por
otra parte, utilizando la expresión obtenida para el radio de la órbita, ρ c, en la de la
componente vertical del momento angular resulta el valor de la componente azimutal dela velocidad de la partícula,
gk c 2=ϕ & .
Así pues para conseguir que la partícula se mueva según una trayectoria circular con
determinado valor del radio, c ρ ρ = , hay que imprimirle una velocidad de componente
únicamente azimutal y de módulo c gk ρ 2 .
d) Para escribir la ecuación del movimiento general de la partícula, calculemos lasderivadas
⎪⎪⎩
⎪⎪⎨
⎧
+=∂
∂
−+=∂
∂
ρ ρ ρ ρ
ρ ρ ρ ϕ ρ ρ
&&&
&&
22
222
4
24
mk m L
mgk mk m L
La ecuación de Lagrange correspondiente conduce a la ecuación:
( ) 024413
22222 =+−++ ρ
ρ ρ ρ ρ ρ mgk
mmk k m
l&&& .
Supongamos ahora que el movimiento se aparta poco de una órbita circular, de manera
que
( )ε ρ ρ += 1c , con ε « 1.
Sustituyendo en la ecuación del movimiento y despreciando los términos en ε de orden
superior al primero, se llega a la ecuación
0
2
41
82
=+
+ ε ε
gk m
k
gk
l&&
que es la ecuación de un oscilador armónico de frecuencia
gk m
k
gk
2
41
82
2
l+
=ω .
------------------------------------------
17. Plantee las ecuaciones del movimiento para el péndulo doble en el caso de
pequeñas oscilaciones, escogiendo como coordenadas las longitudes de arcodescritos por cada uno de los péndulos. Halle las frecuencias de los modos
22

8/12/2019 Goldstein solucionario.pdf
http://slidepdf.com/reader/full/goldstein-solucionariopdf 21/195
normales en el caso en el que la masa del péndulo superior es mucho mayor quela del péndulo inferior.
La forma usual de abordar este problema puede quedar resumida en lo siguiente. Si
describimos el problema en las variables generalizadas dadas por los ángulos de los péndulos daremos con una formulación que puede englobarse en la siguiente formageneral de lagrangiano:
)()(2
1
,
qU qqq M L j ji
i ji −= ∑ &&
con un punto de equilibrio en . El estudio de las desviaciones pequeñas alrededor
del punto de equilibrio equivale a tomar sólo los términos lineales en las ecuaciones del
movimiento, o lo que es lo mismo, la aproximación cuadrática a L:
0=iq
j ji i ji j ji i ji
qq K qqT L
∑∑ −=
,, 2
1
2
1&&
El problema de hallar las frecuencias de los modos normales es el de resolver laecuación especial de valores propios:
k k k AK AT ⋅=⋅2ω
en donde T no es una matriz diagonal. Para evitar el complicado problema de la
diagonalización en este estadio, podemos en algunos casos diagonalizar la energíacinética ya de partida, en el lagrangiano cuadrático. Esto es lo que pasa en el problema
presente. Veamos cómo podemos hacerlo.
El problema nos plantea un péndulo doble, con el superior de longitud L, y masa M , y elinferior,
de longitud l y masa m. La energía cinética no es difícil de hallar:
[ ])-cos(22
1
2
1 222222 θ ϕ ϕ θ ϕ θ θ &&&&& Ll l Lm MLT +++=
Para pequeños valores de θ y ϕ , podemos aproximar el coseno por 1. Como hay un
término producto de sus derivadas temporales, estas coordenadas no son ortogonales(no diagonalizan la energía cinética), pero podemos hacerlas ortogonales sumando un
múltiplo apropiado de θ a ϕ . De hecho, es fácil ver que una pareja de coordenadasortogonales está dada por los desplazamientos
θ θ l L y L x += = ,
que no son otra cosa que las longitudes de arco descritos por cada una de las masas deambos péndulos. Es fácil ver que, entonces, la energía cinética se convierte en:
2
2
12
2
1 ym x M T && +=
En función de estas nuevas coordenadas ortogonales es fácil ver que las ecuaciones delmovimiento son:
23

8/12/2019 Goldstein solucionario.pdf
http://slidepdf.com/reader/full/goldstein-solucionariopdf 22/195
( )m g mg mg x x y
L M l M l
g g y x y
l l
⎡ ⎤+= − + +⎢ ⎥
⎣ ⎦
= −
&&
&&
Hallar la ecuación característica para las frecuencias de los modos normales esrelativamente trivial, sobre todo en el límite M >>m, quedando:
l
g
L
g ≈≈ 22 y ω ω
-----------------------------------------
18. Una partícula de masa unidad que puede moverse libremente en el plano XY , seencuentra inicialmente en reposo en el origen de coordenadas y está sometida a
la fuerza que deriva del potencial V ( x, y). El potencial es analítico cerca delorigen, admitiendo el desarrollo
( ) ( ) ( ) ( ) 2
2
2
1, 3
2
2
22
2
2232
r O y x
V xy
y
V y
x
V x
y
V y
x
V xr OV V y xV +++++≡+∇⋅+∇⋅=
∂ ∂
∂
∂
∂
∂
∂
∂
∂
∂
∂ rr
Estúdiense los instantes iniciales del movimiento, desarrollando las ecuacionesde Lagrange en torno a la condición inicial. Resuélvanse estas ecuacionessuponiendo que, durante estos instantes, el desplazamiento es de laforma ( ) ( ) 5432
t Ot t t t +++= cbar , y determínense los vectores constantes a, b y
c. Calcúlese, así mismo, la trayectoria durante este tiempo y la expresión de lalagrangiana.
La lagrangiana de la partícula es L = T − V , siendo22
2
12
2
1 y xT && +== v . Así pues,
cerca del origen, se tiene
( ) ( ) ( )
( ) ( ) ( )
000 ;
000 ;
2
2
2
2
2
2
⎪⎪
⎩
⎪⎪⎨
⎧
−−−==
−−−==
y x
V x
y
V y
y
V
y
L y
y
L
y x
V y
x
V x
x
V
x
L x
x
L
∂ ∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂ ∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
&&
&&
lo que conduce a las ecuaciones de movimiento de Newton:
( ) ( ) ( )
( ) ( ) ( )
000
000
2
2
2
2
2
2
⎪⎪⎩
⎪⎪⎨
⎧
−−−=
−−−=
y x
V x
y
V y
y
V y
y x
V y
x
V x
x
V x
∂ ∂
∂
∂
∂
∂
∂
∂ ∂
∂
∂
∂
∂
∂
&&
&&
con las condiciones iniciales
( ) ( ) ( ) ( ) 00000 ==== y x y x &&
Por otra parte, según el enunciado, se tiene
24
8/12/2019 Goldstein solucionario.pdf
http://slidepdf.com/reader/full/goldstein-solucionariopdf 23/195
( ) 1262 32 t Ot t +++= cbar&&
Sustituyendo r y en las ecuaciones del movimiento e igualando las potencias delmismo orden en t , se obtienen los vectores buscados:
&& r
( )02
1
V
a x ∂
∂
−=
0= xb
( ) ( ) ( ) ( )⎥⎦
⎤⎢⎣
⎡+= 0000
24
1
2
2
2
y x
V
y
V
x
V
x
V c x
∂ ∂
∂
∂
∂
∂
∂
∂
∂
Haciendo en estas expresiones el intercambio x↔ y, se obtienen las componentes y
correspondientes.
Para calcular la trayectoria, x = x( y), hay que eliminar el tiempo t entre lascomponentes x e y de la ley de movimiento r(t ). Para ello invertimos la serie de una de
las componentes, la componente x por ejemplo, suponiendo para t un desarrollo de la
forma
( ) 22/32/1 xO x x xt +++= γ β α
de manera que
( ) 2 22/322 xO x xt ++= αβ α
( )M
22/333 xO xt += α
Sustituyendo en la ley de movimiento, se tiene:
( ( 2 22/32 xO x xa x x ++= αβ α
de donde, igualando las potencias del mismo orden en x se encuentran los coeficientesdel desarrollo de t ,
,0= ,2/1
K β α −= xa
lo que llevado a la componente y de la ley de movimiento, y = a yt 2 + ..., proporciona la
trayectoria pedida
( ) /
/
2
0 xO x xV
yV y
x+⎟ ⎠
⎞⎜⎝
⎛ =
=∂ ∂
∂ ∂
que puede calcularse consecutivamente a todos los órdenes
---------------------------------------
19. Considérese un sistema formado por dos esferas de masa m unidas por unavarilla rígida de masa despreciable y longitud 2l. El conjunto puede girarlibremente en torno al punto medio de la varilla, equidistante de ambas esferas.Este punto está forzado a moverse sobre una circunferencia de radio R
colocada verticalmente en el campo gravitatorio terrestre. Determínense lascoordenadas generalizadas apropiadas para describir el movimiento del
25

8/12/2019 Goldstein solucionario.pdf
http://slidepdf.com/reader/full/goldstein-solucionariopdf 24/195
sistema y calcúlese la expresión de su lagrangiana, si la gravedad es la únicafuerza presente. Escríbanse las ecuaciones de Lagrange correspondientes ydiscútase el movimiento del sistema.
z
y
x
θ
ϕ g
Para especificar el movimiento del sistema, lo más conveniente es dar la posición del
centro de masas y referir a éste las posiciones de las dos esferas. Como el centro demasas está forzado a moverse sobre una circunferencia, su posición queda determinada
dando el ángulo α que forma su radio vector. En cuanto a las esferas, como están unidas
por una barra rígida, la distancia que las separa es fija y basta con especificar los
ángulos polares esféricos (ϕ ,θ ) que determinan la orientación de la barra en el espacio.
Así, como coordenadas generalizadas del sistema pueden tomarse los tres ángulos
(α ,ϕ ,θ ).
Con respecto a un sistema de coordenadas cartesianas con origen en el centro dela circunferencia de radio R, como en la figura, las posiciones de las esferas son:
cos
cos
cos
1
1
1
⎪⎩
⎪⎨
⎧
+=
+=
=
θ α
ϕ θ α
ϕ θ
l Rsen z
senlsen R y
lsen x
cos
cos
cos
2
2
2
⎪⎩
⎪⎨
⎧
−=
−=
−=
θ α
ϕ θ α
ϕ θ
l Rsen z
senlsen R y
lsen x
Calculando por derivación temporal las velocidades respectivas, resultan las siguientesexpresiones para las energías cinéticas:
( )[ ]θ α θ ϕ θ α ϕ ϕ θ α θ α α θ ϕ θ sen sen sen sen sen Rl R senl l m
mT
coscoscos22
2
1
2222222
2
11
&&&&&&& ++−++=
=≡ v
( )[ ]θ α θ ϕ θ α ϕ ϕ θ α θ α α θ ϕ θ sen sen sen sen sen Rl R senl l m
mT
coscoscos22
2
1
2222222
2
22
&&&&&&& +++++=
=≡ v
de modo que la energía total del sistema es
( ) ( ) ( )222
21 α θ ϕ θ &&& R senl l mT T T ++=+=
Por otra parte, las energías potenciales de las esferas y la energía potencial totalson
26

8/12/2019 Goldstein solucionario.pdf
http://slidepdf.com/reader/full/goldstein-solucionariopdf 25/195
( )θ α cos11 l Rsenmg mgz V +==
( )θ α cos22 l Rsenmg mgz V −==
α mgRsenV V V 221 =+=
A partir de la lagrangiana, L ≡ T − V , calculemos las derivadas
⎪⎪⎪
⎩
⎪⎪⎪
⎨
⎧
=∂∂
=∂
∂
=∂∂
θ ϕ ϕ
θ θ
α α
22
2
2
2
2
2
sin&&
&&
&&
ml L
ml L
mR L
⎪⎪⎪
⎩
⎪⎪⎪
⎨
⎧
=∂∂
=∂∂
=∂∂
0
2
2
22
ϕ
θ θ ϕ θ
α α
L
ml L
mgR L
cossin
cos
&
La ecuación asociada al grado de libertad α ,
( ) 0cos22d
d 2 =− α α mgRmRt
&
está desacoplada de θ y de ϕ . Esta ecuación es precisamente la ecuación del péndulosimple,
cos g
Rα α = −&&
de manera que el centro de masas de las esferas ejecuta un movimiento pendularindependientemente de como estén girando las esferas. Es decir, el sistema en conjunto
se comporta como un péndulo de masa 2m con dos grados de libertad internos que
determinan el movimiento relativo de las dos esferas respecto de su centro de masas.
Por otra parte, la coordenada ϕ es cíclica de manera que una constante del
movimiento es
C senml L
== θ ϕ ϕ ∂
∂ 222 &&
de donde, despejando, se obtiene
2
22 θ ϕ
senml
C =&
La ecuación para θ es
( ) 0cos22d
d 222 =− θ θ ϕ θ senml ml t
&&
es decir, sustituyendo el resultado anterior,
2
2 2
cot0
2 sin
C
ml
θ θ
θ
⎛ ⎞− =⎜ ⎟⎝ ⎠
&&
que es la ecuación que determina el movimiento relativo de las esferas.
-----------------------------------------
27

8/12/2019 Goldstein solucionario.pdf
http://slidepdf.com/reader/full/goldstein-solucionariopdf 26/195
20. Una partícula de masa m se mueve sobre la superficie de una esfera de radio R y se encuentra sometida al campo gravitatorio terrestre.
a) Calcúlese su lagrangiana e identifíquense las magnitudes que se conservandurante el movimiento.
b) Hállese el potencial efectivo para el problema unidimensional equivalente ydiscútase el tipo de órbitas.
Tomemos un sistema de coordenadas cartesianas centrado en la esfera, tal como se
indica en la figura
θ R m
Utilizando coordenadas esféricas, la posición y velocidad de la partícula vendrán dadas
por
⎪⎩
⎪⎨
⎧
−=
+=
−=
⎪⎩
⎪⎨
⎧
=
=
=
θ θ
ϕ θ ϕ ϕ θ θ
ϕ θ ϕ ϕ θ θ
θ
ϕ θ
ϕ θ
sen
cossensencos
sensencoscos
cos
sensen
cossen
&&
&&&
&&&
R z
R R y
R R x
R z
R y
R x
de manera que las energías cinética y potencial de la partícula son, respectivamente,
( ) ( ) sen2
1
2
1
2
1 22222222 θ ϕ θ &&&&& +=++== mR z y xmmT v
θ cos00 mgRV mgz V V +=+=
A partir de la lagrangiana, L = T − V , las ecuaciones correspondientes a los ángulos deorientación son
0d
d=−⎟
⎠
⎞⎜⎝
⎛ ∂θ
∂
θ ∂
∂ L L
t &
0d
d=−⎟⎟
⎠
⎞⎜⎜⎝
⎛
∂ϕ
∂
ϕ ∂
∂ L L
t &
Como la coordenada ϕ es cíclica su momento conjugado se conserva constante, lo que
traduce la conservación de la componente correspondiente del momento angular, esdecir,
28
8/12/2019 Goldstein solucionario.pdf
http://slidepdf.com/reader/full/goldstein-solucionariopdf 27/195
sen22
l mR =θ ϕ &
y la ecuación para θ se escribe como:
sen
cossen
33
2
θ
θ θ θ
mR
l mg mR +=&&
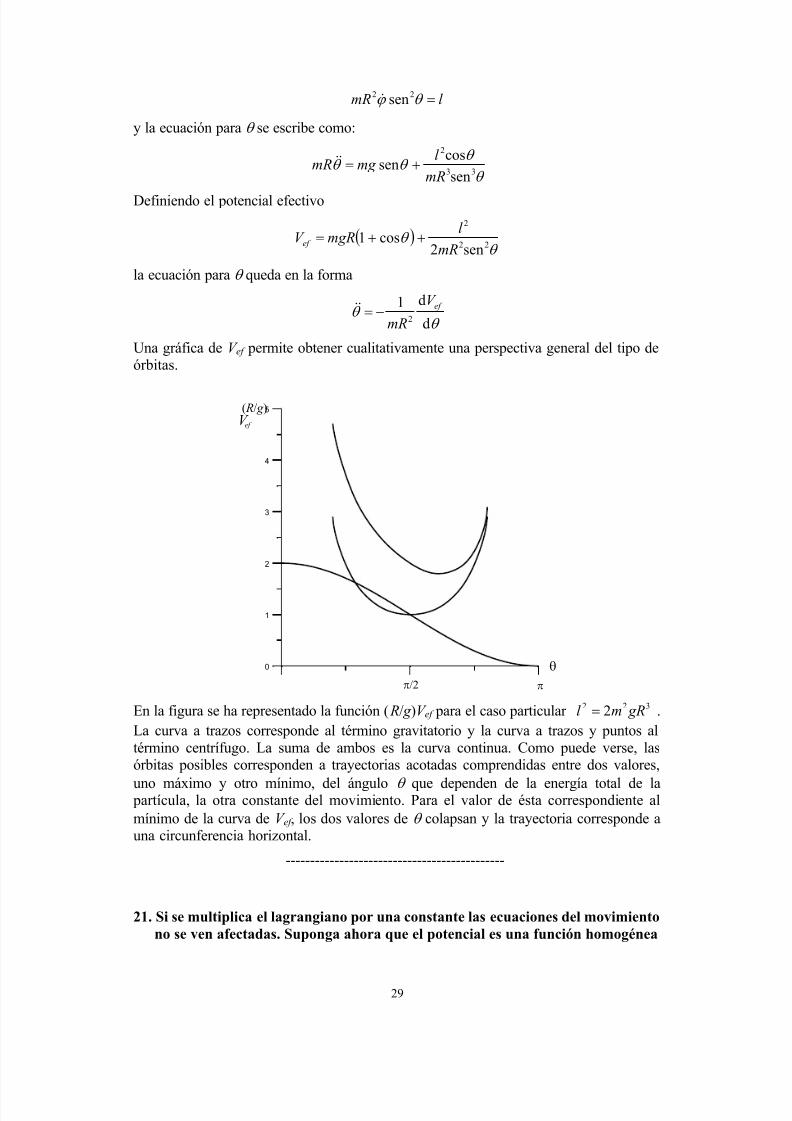
Definiendo el potencial efectivo
( ) sen2
cos122
2
θ θ
mR
l mgRV ef ++=
la ecuación para θ queda en la forma
d
d1
2 θ θ
ef V
mR−=&&
Una gráfica de V ef permite obtener cualitativamente una perspectiva general del tipo de
órbitas.
0
1
2
3
4
5
ππ/2
θ
V ef
( R/ g )
En la figura se ha representado la función ( R/ g )V ef para el caso particular .
La curva a trazos corresponde al término gravitatorio y la curva a trazos y puntos altérmino centrífugo. La suma de ambos es la curva continua. Como puede verse, lasórbitas posibles corresponden a trayectorias acotadas comprendidas entre dos valores,
uno máximo y otro mínimo, del ángulo θ que dependen de la energía total de la partícula, la otra constante del movimiento. Para el valor de ésta correspondiente al
mínimo de la curva de V
2322
gRml =
ef , los dos valores de θ colapsan y la trayectoria corresponde auna circunferencia horizontal.
---------------------------------------------
21. Si se multiplica el lagrangiano por una constante las ecuaciones del movimientono se ven afectadas. Suponga ahora que el potencial es una función homogénea
29
8/12/2019 Goldstein solucionario.pdf
http://slidepdf.com/reader/full/goldstein-solucionariopdf 28/195
de grado m de las coordenadas: ( ) ( ) (n
r r r V mn
r r r V n
r r r V ,,2
,1
,,2
,1
,,2
,1
KKK α α α α =′′′= ) . Si
se reescala simultáneamente el tiempo (por un factor: β =t
t ' ) y las coordenadas
espaciales (por dicho factor: α =′l
l , con señalando una coordenada con
dimensiones de longitud), una elección apropiada de ambos factores puedetener como efecto neto el de multiplicar el lagrangiano por una constante.
l
a) ¿Cuál es la relación entre α y β para que así suceda?b) Una vez obtenida ésta derive a partir de ella, como función de m, lasrelaciones entre
l l ′ y cada uno de las reescalamientos siguientes: tiempos (
t t ′ ), velocidades (
vv′ ), energía (
E E ' ) y momento angular (
J J ′ ).
c) Obtenga de las relaciones del apartado b) lo siguiente:- la tercera ley de Kepler,
- la relación cuando el potencial gravitatorio se aproxima por
mgh
( ) 2 constante t l ×=
- la independencia del período con la amplitud en el oscilador armónico
a) Si el potencial reescala como , la energía cinética lo hace comomα 22
β α . Para sacar
factor común a ambos términos del lagrangiano ⎟ ⎠ ⎞⎜
⎝ ⎛ = 22 β α α m , o
( )21 m−= α β
b) las relaciones solicitadas son:
21;;2;21
m
l
l
J
J m
l
l
E
E
m
l
l
v
v
m
l
l
t
t +⎟ ⎠ ⎞⎜
⎝ ⎛ ′=⎟
⎠ ⎞⎜
⎝ ⎛ ′⎟
⎠ ⎞⎜
⎝ ⎛ ′=⎟
⎠ ⎞⎜
⎝ ⎛ ′⎟
⎠ ⎞⎜
⎝ ⎛ ′=⎟
⎠ ⎞⎜
⎝ ⎛ ′−⎟
⎠ ⎞⎜
⎝ ⎛ ′=⎟
⎠ ⎞⎜
⎝ ⎛ ′
c)
- En el potencial gravitatorio 1−=m . Sustituyendo en la primera relación en b),
obtenemos ( ) ( )32 l l t t ′=′ , que es la ley de Kepler (las distintas órbitas se transforman
unas en otras mediante reescalamientos en el tiempo y el la longitud)
- En el caso del potencial mgh, 1=m , encontramos la clásica relación parabólica
entre distancia y tiempo.
- Aquí . El período debe ser independiente de la amplitud.2=m
22. Considérese un circuito clásico ( inductor-condensador) sin generador,estudiado en Física General. Recordando que la energía almacenada en el
inductor es
LC
2L21 I , siendo I la corriente que circula por él, y que la almacenada
en el condensador esC
Q2
21 , establezca una analogía entre estos conceptos
eléctricos y los correspondientes de un sistema mecánico simple. A
continuación plantee el Lagrangiano del sistema y obtenga la ecuacióndiferencial y la frecuencia intrínseca de este circuito resonante.
C L
30
8/12/2019 Goldstein solucionario.pdf
http://slidepdf.com/reader/full/goldstein-solucionariopdf 29/195
El problema es muy simple. La analogía puede establecerse de la siguiente forma:
Posición – carga
Velocidad – corriente
Fuerza – diferencia de potencial
Masa – inductancia L
Constante del muelle – inversa de la capacitancia 1/C
La energía almacenada en el inductor 2
21 L I puede asociarse formalmente a un término
de energía “cinética”. Por su parte, la energía almacenada en el condensador es
asimilable, también desde un punto de vista formal, al término de energía potencial de
un muelle. En definitiva:
( ) 2
212
21 1QL Q
C V T L −=−= &
de la que se obtiene la ecuación: ( ) 0L
1 =+ QC
Q&& ,de la que sigue fácilmente la frecuencia.
---------------------------------------------
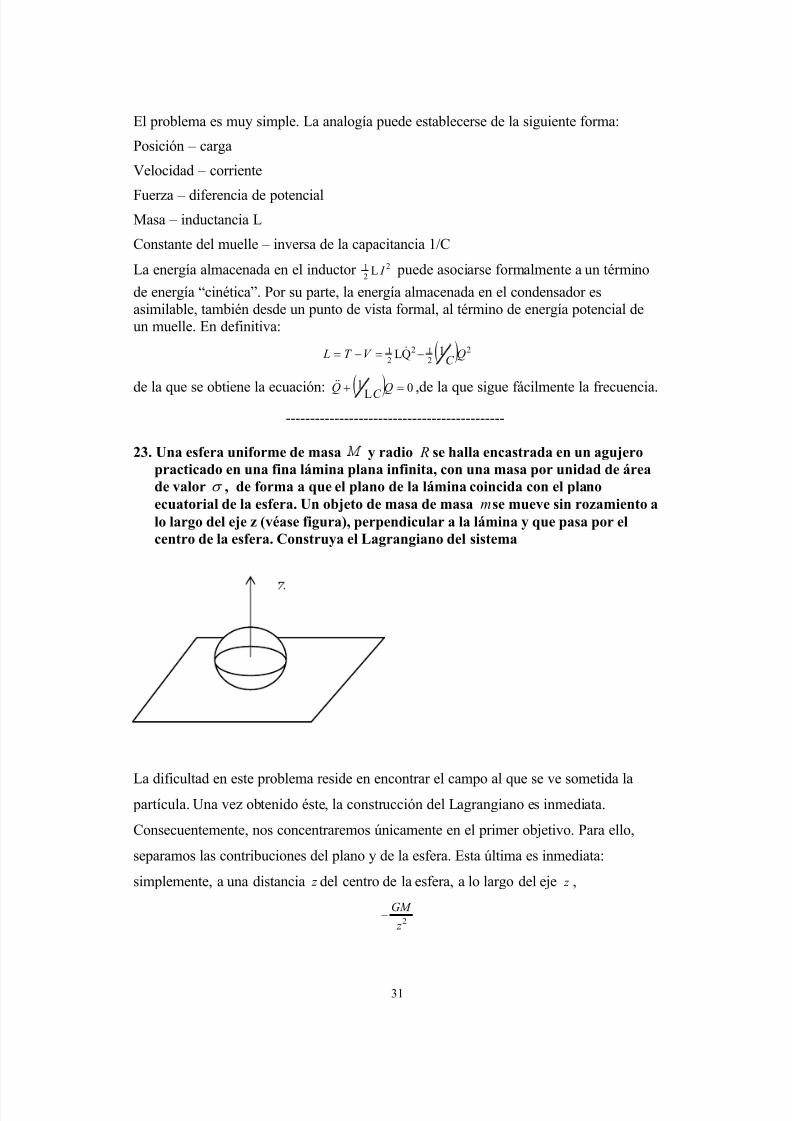
23. Una esfera uniforme de masa y radio R se halla encastrada en un agujeropracticado en una fina lámina plana infinita, con una masa por unidad de áreade valor σ , de forma a que el plano de la lámina coincida con el planoecuatorial de la esfera. Un objeto de masa de masa se mueve sin rozamiento alo largo del eje z (véase figura), perpendicular a la lámina y que pasa por elcentro de la esfera. Construya el Lagrangiano del sistema
m
La dificultad en este problema reside en encontrar el campo al que se ve sometida la
partícula. Una vez obtenido éste, la construcción del Lagrangiano es inmediata.
Consecuentemente, nos concentraremos únicamente en el primer objetivo. Para ello,
separamos las contribuciones del plano y de la esfera. Esta última es inmediata:
simplemente, a una distancia del centro de la esfera, a lo largo del eje z z ,
2 z
GM −
31
8/12/2019 Goldstein solucionario.pdf
http://slidepdf.com/reader/full/goldstein-solucionariopdf 30/195
La contribución del plano puede calcularse de la forma siguiente. Tomemos un anillo de
radio ρ , alrededor del centro de la esfera.. Por razón de simetría, sólo tendremos que
calcular la componente del campo producido por el anillo a la misma distancia
anterior . En definitiva,( )( )( ) 2222
2
ρ ρ
ρ σ πρ
++−
z
z
z
d G
El campo total producido por el plano resultará de integrar la expresión para el anillo en
el intervalo [ :)∞, R
22
2
R z
z G
+−
σ π
---------------------------------------------
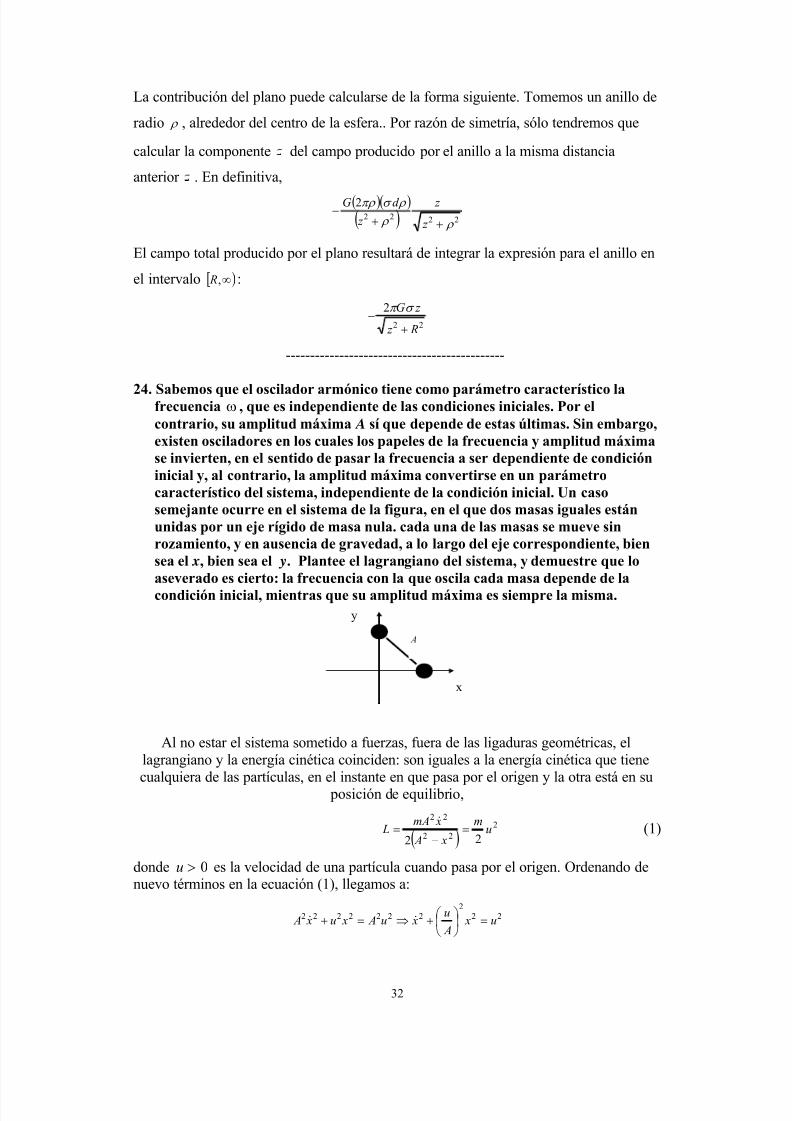
24. Sabemos que el oscilador armónico tiene como parámetro característico lafrecuencia ω , que es independiente de las condiciones iniciales. Por elcontrario, su amplitud máxima A sí que depende de estas últimas. Sin embargo,existen osciladores en los cuales los papeles de la frecuencia y amplitud máximase invierten, en el sentido de pasar la frecuencia a ser dependiente de condicióninicial y, al contrario, la amplitud máxima convertirse en un parámetrocaracterístico del sistema, independiente de la condición inicial. Un casosemejante ocurre en el sistema de la figura, en el que dos masas iguales estánunidas por un eje rígido de masa nula. cada una de las masas se mueve sinrozamiento, y en ausencia de gravedad, a lo largo del eje correspondiente, biensea el x, bien sea el y. Plantee el lagrangiano del sistema, y demuestre que loaseverado es cierto: la frecuencia con la que oscila cada masa depende de lacondición inicial, mientras que su amplitud máxima es siempre la misma.
x
y
A
Al no estar el sistema sometido a fuerzas, fuera de las ligaduras geométricas, el
lagrangiano y la energía cinética coinciden: son iguales a la energía cinética que tiene
cualquiera de las partículas, en el instante en que pasa por el origen y la otra está en su posición de equilibrio,
( )2
22
22
22u
m
x A
xmA L =
−=
& (1)
donde es la velocidad de una partícula cuando pasa por el origen. Ordenando denuevo términos en la ecuación (1), llegamos a:
u > 0
222
2222222
u x A
u xu A xu x A =⎟ ⎠
⎞⎜⎝
⎛ +⇒=+ &&
32
8/12/2019 Goldstein solucionario.pdf
http://slidepdf.com/reader/full/goldstein-solucionariopdf 31/195
La ecuación final expresa la conservación de la energía de un oscilador armónico cuya
frecuencia y amplitud máxima son, respectivamente, u A
y . El movimiento es el de
oscilador armónico, pero en el cual la frecuencia depende de la condición inicial (a
través de u ), mientras que la amplitud máxima es siempre constante.
A
---------------------------------------------
25- Suponga que el lagrangiano para un cierto movimiento unidimensional viene
dado por ⎟ ⎠
⎞⎜⎝
⎛ −= 22
2
1
2
1e kqqm
t L &
γ .
a) Escriba la ecuación del movimiento. ¿A qué sistema corresponde?b) ¿Existe alguna constante del movimiento?c) Ponga de manifiesto los distintos movimientos posibles
Suponga seguidamente que se define una nueva coordenada, , dada porS
qt
S ⎟ ⎠
⎞⎜⎝
⎛ =
2exp
γ .
d) Escriba la ecuación del movimiento. ¿A qué sistema corresponde?e) ¿Existe alguna constante del movimiento?f) Ponga de manifiesto los distintos movimientos posiblesg) ¿Cómo pondría en relación ambas descripciones?
Nota aclaratoria.
En el enunciado propuesto en la hoja de examen se deslizó un error. Se sugería el
cambio ( )t qS γ exp= en lugar del que aparece en el presente enunciado. Está claro que
con este último cambio el resultado carece de interés conceptual, tal como ha podidoconstatar la mayoría de los alumnos. La corrección, evidentemente, se ha hecho según el
enunciado del examen, y no con el que aparece aquí. Sin embargo, sí que da interés al problema el cambio propuesto aquí, por lo que será aquél sobre el que elaboraremos.
Para terminar, quiero felicitar a los tres alumnos que se han dado cuenta del “buen”cambio. Así lo han hecho constar en el examen a título de comentario y su iniciativa ha
sido debidamente valorada a la hora de calificar.
a) La ecuación de Lagrange lleva a:
( ) 0=++ kqqmqme t &&& γ γ ,
o
0=++ qm
k qq &&& γ ,
b) Aparentemente, podríamos contestar que no existe constante del movimiento al
depender L explícitamente del tiempo. Pero esta respuesta es un poco precipitada.
Veamos por qué. En un sistema mecánico, podemos disponer, en principio, defunciones que permanecen constantes a lo largo del
movimiento: =constante. Estas se denominan constantes del movimiento o
integrales primeras. Sin embargo, la definición de estas cantidades es más general,
englobando una posibles dependencia explícita del tiempo, de forma que:
= constante. Nada , en principio, excluye la existencia de este último caso de constantedel movimiento, aunque, bueno es decirlo, se piensa en la primera forma al hablar de
( ) ( )( t qt q F &, )
( ) ( )( )t t qt q F ,, &
33

8/12/2019 Goldstein solucionario.pdf
http://slidepdf.com/reader/full/goldstein-solucionariopdf 32/195
constante del movimiento. Lo que sí queda claro es que, si existe ( ) ( )( )t t qt q F ,, & =
constante, no es aparente. Sigamos la evolución del problema para aclarar este extremo.
c) Para una solución general del tipo , obtenemos la ecuación característicat
eq α ∝
02 =++ m
k α γ α
con soluciones
m
k −⎟
⎠
⎞⎜⎝
⎛ ±−=2
22
γ γ α
Las distintas posibilidades de movimiento nos vendrán dadas por el valor del
discriminantem
k −⎟
⎠
⎞⎜⎝
⎛ =∆2
2
γ , siempre que 0>γ .
Primer caso: . En este caso, la solución general queda como un movimiento oscilatorio amortiguado0<∆
( )t Bt Aeq
t
∆+∆= −
sencos2
γ
Segundo caso: . Movimiento puramente amortiguado0=∆
20
t
eqq
γ −
=
Tercer caso: . Movimiento también puramente amortiguado0>∆
( )t t
t
Bee Aeq ∆−∆−
+= 2
γ
d) Escribimos el lagrangiano en función de la nueva variable
2
2
2
1
2
1
2
1kS S S m L −⎟
⎠
⎞⎜⎝
⎛ −= γ & ,
del que se obtiene la siguiente ecuación del movimiento2
02
k S S
m
γ ⎡ ⎤⎛ ⎞+ − =⎢ ⎥⎜ ⎟⎝ ⎠⎢ ⎥⎣ ⎦
&& .
e) Ahora, sí que podemos hablar de una constante del movimiento. La ecuación anterior
es la del oscilador armónico, que tiene formalmente la constante
22 2 cte
2
k S S
m
γ ⎡ ⎤⎛ ⎞+ − =⎢ ⎥⎜ ⎟⎝ ⎠⎢ ⎥⎣ ⎦
&
Llegados a este punto, enlazamos con el apartado b). La expresión anterior, una vez
desecho el cambio , nos proporciona la contestación a la pregunta que nos
hacíamos ahí.
S q →
f) Es fácil responder a este apartado manejando el signo de 2γ −mk , al igual que
hicimos en el apartado c). Sin embargo, a la hora de hacer un análisis completo no
deberá olvidarse el factor exponencial en la definición de .S
34

8/12/2019 Goldstein solucionario.pdf
http://slidepdf.com/reader/full/goldstein-solucionariopdf 33/195
g) Ambas descripciones son totalmente equivalentes. La única diferencia es que en lasegunda se enmascara el factor exponencial –que no por ello ha desaparecido-
pudiéndose con ello poner en evidencia la constante del movimiento –cosa que no era
trivial en la primera descripción.
---------------------------------------------
26- Tres puntos de masa pueden deslizarse sobre un círculo de radio , talcomo indica la figura de la izquierda, sometidos a fuerzas derivables del potencial
m b
( ) ( )γ β α γ β α −−− ++= eee,, 0V V los ángulos de separación γ β α ,, son medidos en
radianes. Cuando3
2π γ β α === , el sistema se halla en equilibrio. Encuentre las
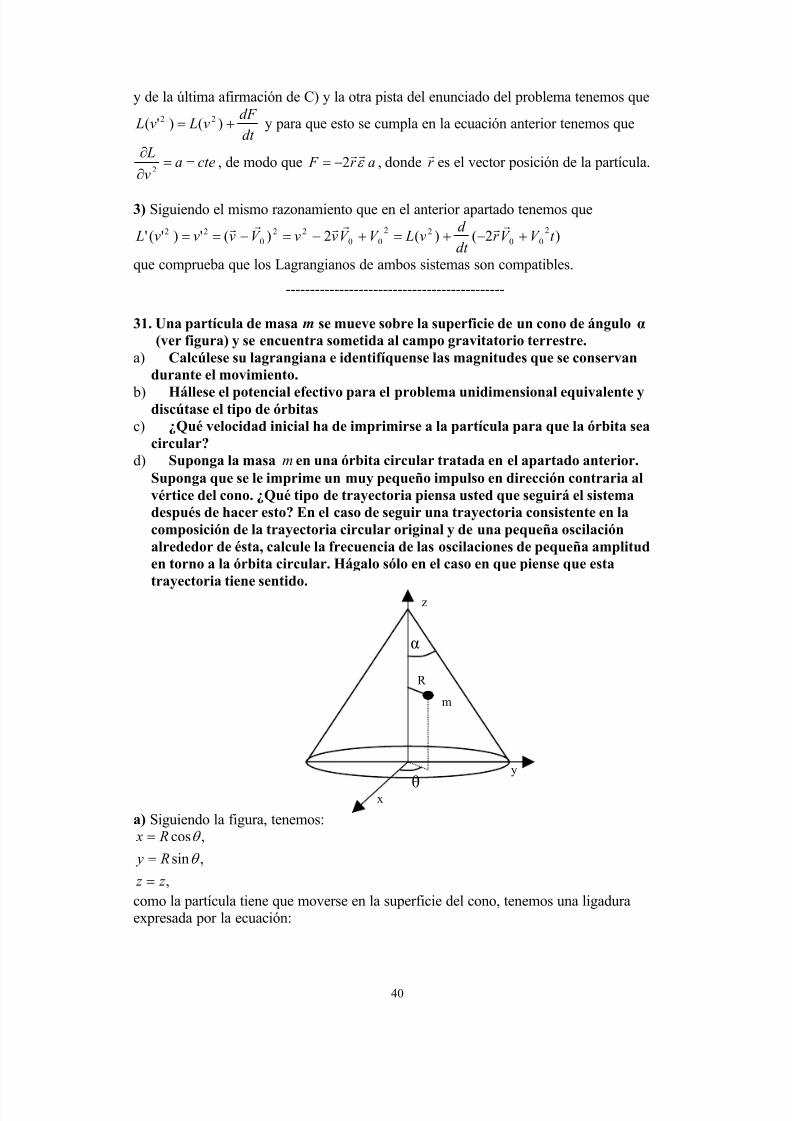
frecuencias de los modos normales del sistema para pequeños desplazamientos delequilibrio (ángulos 321 ,, θ θ θ ilustrados en la figura de la derecha)
Los ángulos α , β y γ , en términos de 21,θ θ y 3θ , son:
123
2θ θ
π α −+= ,
233
2θ θ
π β −+= ,
313
2θ θ
π γ −+= .
Por su parte, el potencial queda:
⎟⎟
⎟
⎠
⎞
⎜⎜
⎜
⎝
⎛ −−
+
−−
+
−−−
=
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
3123123
2
0
θ θ θ θ θ θ π
eeeeV V
Habida cuenta de que estamos hablando de pequeños valores de 21,θ θ y 3θ , esta
expresión del potencial puede aproximarse por
( ) ( ) ([ 3123123
2
0 3 θ θ θ θ θ θ
π
−−−−−−≈ −eV V )
( ) ( ) ( ) ⎥⎦
⎤−+−+−+ 2
31
2
23
2
122
1
2
1
2
1θ θ θ θ θ θ
La energía cinética va a ser dependiente de las velocidades lineales de las tres
partículas. Como el radio b es constante, éstas serán b , paraiθ & 3,2,1=i . En definitiva,
el lagrangiano quedará
35

8/12/2019 Goldstein solucionario.pdf
http://slidepdf.com/reader/full/goldstein-solucionariopdf 34/195
( )23
2 2 2 2 230 1 2 3 1 2 2 3
1
13
2 i
i
L mb V eπ
3 1θ θ θ θ θ θ θ θ θ θ −
=
= − + + + − − −∑ & ,
con sus correspondientes ecuaciones de Lagrange
( )
2
2 31 0 1 2 32 0mb V e
π
θ θ θ θ −
+ − − =&&
( )2
2 32 0 2 3 12 0mb V e
π
θ θ θ θ −
+ − − =&&
( )2
2 33 0 3 1 22 0mb V e
π
θ θ θ θ −
+ − − =&&
Proceder en el análisis de modos normales es relativamente trivial, por lo que se dejanlos detalles como ejercicio. La ecuación característica resulta ser
22
2 2 2303 0mb V e mb
π
ω ω −⎛ ⎞
− + =⎜ ⎟
⎝ ⎠
con soluciones
⎪⎪⎩
⎪⎪⎨
⎧
⎟⎟
⎠
⎞⎜⎜⎝
⎛ =−
3031
0
π ω
em
V
b
siendo la segunda degenerada.
---------------------------------------------
27.- En un sistema dinámico de 2 grados de libertad la energía cinética es2
2
2
2
2
2
1
2
1
)(2qq
bqa
qT &
&+
+= , y la energía potencial esta dada por 2dqcU += , con a, b,
c y d constantes. Mostrar que en función del tiempo es una ecuación de la
forma con h, k y constantes.2q
2
0
2
22 )()2)(( t t hk qk q −=+− 0t
NOTA: bxab
bxa
bxa
xdx+
−−=
+∫ 23
)2(2
Dado que la energía cinética y la potencial no dependen ni del tiempo ni de la
coordenada tenemos 2 constantes del movimiento:1q V T E += y1q
L
&∂∂
, es decir:
cte pbqa
q
q
L==
+=
∂∂
1
2
1
1
&
&
cdqqqbqa p
dqcqqbqa
q E V T ++++=+++
+==+ 2
2
2
2
22
2
1
2
2
2
2
2
2
2
1
2
1)(
22
1
)(2&&
&
que podemos rescribir como:
221
2
2
2
2 C qC qq =−&
con y constantes: , .1C 2C d b pC 2
2
11 −−= ca p E C 22
2
12 −−=Y de ahí integrar:
36

8/12/2019 Goldstein solucionario.pdf
http://slidepdf.com/reader/full/goldstein-solucionariopdf 35/195
2
2
2122
2q
qC C q
+=& → 0
212
22 t t dt qC C
dqq−==
+ ∫∫
2122
1
212
03
)2(2qC C
C
qC C t t +
−−=−
que conduce directamente a la ecuación que queremos encontrar con1
2
C
C k −= y
14
9C h = .
---------------------------------------------
28.- Una partícula de masa y carga e se mueve bajo la influencia de camposeléctrico y magnético uniformes, mutuamente ortogonales. En un sistema de ejescartesianos, estos campos son
m
jE rr E = y k B
rr B= . Encuentre las ecuaciones de
movimiento y la trayectoria en el caso en el que la partícula se encuentrainicialmente en reposo en el origen de coordenadas.Las relaciones siguientes le pueden servir de ayuda
( ) ( Avvv
AB
AE
⋅−−⋅=
×∇=∂
)
∂−−∇=
φ
φ
em L
t
2
1
Los potenciales escalar y vectorial que dan los campos correctos, son Ey−=φ
( ) jiA x y B +−=2
1
El correspondiente lagrangiano queda
( ) ( ) x y y xeBeEy z y xm L &&&&& −++++=2
1
2
1 222
Las ecuaciones de Lagrange correspondientes quedan0mx eBy− =&& &
eE xeB ym =+ &&&
0= z m &&
Queda claro de la tercera ecuación y de las condiciones iniciales ( ) 00 = z y ,
que el movimiento está confinado al plano
( ) 00 = z &
xy . Las ecuaciones para e x son lineales,
por lo que podemos considerar una solución general del tipo ( )t λ exp , quedando la
ecuación característica como
022242 =+ λ λ Bem
con autovalores
2
222
2,1 ,0m
Be−=λ
Con estos resultados en mano, podemos escribir la solución para la trayectoria de la
partícula
37

8/12/2019 Goldstein solucionario.pdf
http://slidepdf.com/reader/full/goldstein-solucionariopdf 36/195
⎟ ⎠
⎞⎜⎝
⎛ −= t m
eB
eB
mE t
B
E x sen
2
⎥⎦
⎤⎢⎣
⎡⎟
⎠
⎞⎜⎝
⎛ −= t m
eB
eB
mE y cos1
2
Es fácil dibujar la correspondiente trayectoria. Es un cicloide con cúspides sobre el eje, separadas por una distancia x 22 eBmE π . Esta distancia es la velocidad promedio en
la dirección , x B E , multiplicada por el período, eBmπ 2 , de los términos
sinusoidales.
x
y
E
---------------------------------------------
29.- Razónese si la siguiente afirmación es verdadera o falsa:a) Las lagrangianas y),,(1 t qq L & t t q At qq L L ∂∂+= ),(),,(12
& son equivalentes, estoes, proporcionan las mismas ecuaciones de movimiento.
a) La elección del Lagrangiano de un sistema nunca es única y dada una función
lagrangiana, cualquier función de la forma),,(1 t qq L & dt t qdF t qq L L ),(),,(12 += & ,
también lo es (Sección 1.4 Goldstein, puede mostrarse por sustitución directa en las
ecuaciones de Lagrange de y de2 Lt
F q
q
F
dt
dF
∂∂
+∂∂
= & ).
Por tanto para que sea cierto en el caso que preguntado tendría que cumplirse
que la función añadida solo dependiera del tiempo: .)(t A
---------------------------------------------
30. Suponga por un momento que no sabe usted qué forma tiene la energía cinéticay desconoce también las Leyes del movimiento de Newton. Le dicen a usted que elpunto de partida para describir el movimiento de una partícula viene dado por lasecuaciones de Lagrange, cuya forma le dan, especificándole, sin más detalles, queel lagrangiano es un funcional de la forma ),,( t qq L L ii
&= . Le piden que con estos
datos descubra usted las leyes del movimiento de la partícula libre en coordenadascartesianas. Usted sabe que ésta es una partícula en el espacio vacío sin fuerzasactuando sobre ella y le dan como pista el concepto de sistema inercial y elprincipio de relatividad de Galileo.1. Explique por qué el lagrangiano no puede ser función de z, y, x , ni de cada una
de las componentes de la velocidad, , , por separado. Tampoco del tiempo.¿Sobre qué propiedades del espacio se basará su argumentación?
xv yv z v
38

8/12/2019 Goldstein solucionario.pdf
http://slidepdf.com/reader/full/goldstein-solucionariopdf 37/195
Usted llega a la conclusión de que , donde)( 2v L vr
es la velocidad de la partícula enun sistema inercial K y quiere descubrir la forma exacta. Para ello toma unsegundo sistema inercial K’ que se mueve con velocidad constanteinfinitesimalmente pequeña ε − respecto de K .2. Pruebe que L _ (a constante). Le puede ayudar hacer una expansión enserie de Taylor, despreciar los términos cuadráticos en _ y recordar la propiedad
de invariancia bajo transformación
2av L =
dt
dF L L +→ ' L .
3. Pruebe que es una elección consistente para el lagrangiano en cualquier
sistema K’ que se mueva con velocidad finita
2'' v L =
0V r
− respecto de K ; es decir, se
satisface el principio de relatividad de Galileo.
Los datos del problema son:
A) El Lagrangiano es funcional de la forma: ),,( t qq L L ii &= .
B) Ecuaciones de Lagrange: 0=∂∂
−∂∂
ii q
L
dt
d
q
L
&.
C) Estudiamos el movimiento en un sistema inercial. En este sistema de referencia una partícula libre permanecerá en reposo o en movimiento rectilíneo uniforme por tiempo
ilimitado. Esto es equivalente a decir que para este sistema el espacio es homogéneo e
isótropo y el tiempo uniforme y de hecho esta es una de las posibles maneras de definirun sistema inercial (basta pensar, en el caso de la isotropía por ejemplo, que con una
partícula de velocidad inicial no nula es imposible definir una dirección privilegiada delespacio, dado que sea cual sea la dirección inicial de la partícula el tipo de
comportamiento siempre es el mismo). Por supuesto los sistemas inerciales son
indistinguibles entre si por lo que las ecuaciones del movimiento han de ser iguales entodos ellos.
D) Principio de relatividad de Galileo aplicado a un sistema de referencia inercial K’ se
desplaza con velocidad infinitesimal ε − respecto a otro sistema inercial K nos informa
que si la partícula libre se mueve con velocidad vr
en el sistema K lo hará con velocidad
ε rr
−v en el sistema K’.
1) Con los datos A) y C) es directo. La inclusión de una dependencia explicita respecto
a las coordenadas o al tiempo implicaría que las ecuaciones del movimiento no
respetarían la homogeneidad del espacio y el tiempo. Cualquier referencia a unadirección privilegiada, como sería una dependencia de la dirección del vector velocidad,
no respetaría la isotropía del espacio. Por tanto el Lagrangiano solamente puede
depender del módulo de la velocidad, es decir: .)( 2v L L = 2) Siguiendo las indicaciones del enunciado desarrollamos en serie el Lagrangiano para
el sistema K’:
)(2)()2()'( 2
2
2222 ε ε ε ε Ovv
Lv Lvv Lv L +
∂
∂−=+−=
rrrr,
39
8/12/2019 Goldstein solucionario.pdf
http://slidepdf.com/reader/full/goldstein-solucionariopdf 38/195
y de la última afirmación de C) y la otra pista del enunciado del problema tenemos que
dt
dF v Lv L += )()'( 22 y para que esto se cumpla en la ecuación anterior tenemos que
cteav
L==
∂
∂2
, de modo que ar F ε rr
2−= , donde r r
es el vector posición de la partícula.
3) Siguiendo el mismo razonamiento que en el anterior apartado tenemos que
)2()(2)(')'('2
00
22
00
22
0
22 t V V r dt
d v LV V vvV vvv L +−+=+−=−==
rrrrrr
que comprueba que los Lagrangianos de ambos sistemas son compatibles.
---------------------------------------------
31. Una partícula de masa m se mueve sobre la superficie de un cono de ángulo α (ver figura) y se encuentra sometida al campo gravitatorio terrestre.
a) Calcúlese su lagrangiana e identifíquense las magnitudes que se conservandurante el movimiento.
b) Hállese el potencial efectivo para el problema unidimensional equivalente ydiscútase el tipo de órbitas
c) ¿Qué velocidad inicial ha de imprimirse a la partícula para que la órbita seacircular?
d) Suponga la masa m en una órbita circular tratada en el apartado anterior.Suponga que se le imprime un muy pequeño impulso en dirección contraria alvértice del cono. ¿Qué tipo de trayectoria piensa usted que seguirá el sistemadespués de hacer esto? En el caso de seguir una trayectoria consistente en lacomposición de la trayectoria circular original y de una pequeña oscilación
alrededor de ésta, calcule la frecuencia de las oscilaciones de pequeña amplituden torno a la órbita circular. Hágalo sólo en el caso en que piense que estatrayectoria tiene sentido.
a) Siguiendo la figura, tenemos:
θ
α
m
z
y
x
R
,
,sin
,cos
z z
R y
R x
=
=
=
θ
θ
como la partícula tiene que moverse en la superficie del cono, tenemos una ligadura
expresada por la ecuación:
40

8/12/2019 Goldstein solucionario.pdf
http://slidepdf.com/reader/full/goldstein-solucionariopdf 39/195
Z
R
z h
R=
−=α tan dónde definimos z h Z −= , siendo h la distancia del origen al
vértice del cono.
Elegimos como coordenadas generalizadas a Z (que sólo tendrá sentido para ) y θ
y definiendo
0≥ Z
α β tg ≡ obtenemos
,
),cossin(
)sincos(
Z z
Z Z y
Z Z x
&&
&&&
&&&
−=
+−=
−−=
θ θ θ β
θ θ θ β
con lo que el lagrangiano tiene la forma
( )( ) mgZ Z Z m L +++= 22222 12
1θ β β && ,
en que la coordenada θ es cíclica y el correspondiente momento conjugado se conserva
θ β θ θ
&
&
22mZ L
p =∂
∂=
que corresponde a la componente vertical del momento angular. Como la lagrangiana
no depende del tiempo, también se conserva la energía.b) Si sustituimos la ecuación anterior en la ecuación del movimiento para la otravariable tenemos
)(122
g Z m Z m +=+ θ β β &&&
Distinguimos ahora dos casos:
1) Inicialmente el momento angular es nulo, 0=θ p , bien por estar situados en el
vértice del cono, , o por no tener velocidad inicial en el plano xy, .
En este caso el problema se reduce al movimiento de un cuerpo sobre un plano
inclinado. La ecuación anterior se simplifica a
0= Z 0=θ &
( )12 +=
β
g Z && , es decir es un
movimiento uniformemente acelerado en la coordenada Z . El potencial efectivo
es: Z g Z g
V eff α β
2
2cos
1=
+= .
2) Si podemos despejar de la ecuación del momento angular0≠θ p
22 β θ θ
mZ
p=& , que introducimos en la ecuación para la variable Z
⎟⎟ ⎠
⎞⎜⎜⎝
⎛ ++
=232
2
21
1
β β
θ
Z m
p g Z && ,
y si tomando como potencial efectivo la función tal que
Z
V Z
eff
∂
∂−=&& , obtenemos
⎟⎟ ⎠
⎞⎜⎜⎝
⎛ −
+= gz
Z m
pV eff 222
2
221
1
β β
θ .
Si dibujamos este potencial obtenemos una función monótonamente decrecientecomo la siguiente:
41
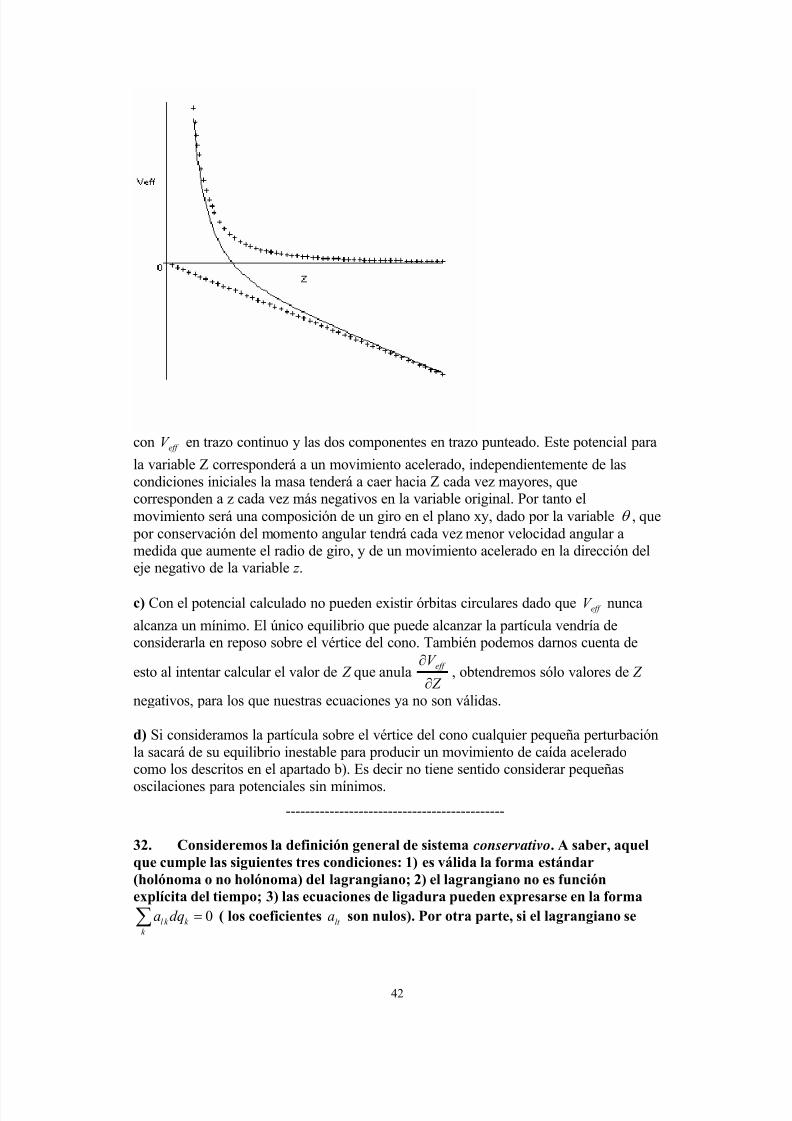
8/12/2019 Goldstein solucionario.pdf
http://slidepdf.com/reader/full/goldstein-solucionariopdf 40/195
con en trazo continuo y las dos componentes en trazo punteado. Este potencial para
la variable Z corresponderá a un movimiento acelerado, independientemente de las
condiciones iniciales la masa tenderá a caer hacia Z cada vez mayores, quecorresponden a z cada vez más negativos en la variable original. Por tanto el
movimiento será una composición de un giro en el plano xy, dado por la variable
eff V
θ , que
por conservación del momento angular tendrá cada vez menor velocidad angular a
medida que aumente el radio de giro, y de un movimiento acelerado en la dirección deleje negativo de la variable z .
c) Con el potencial calculado no pueden existir órbitas circulares dado que nunca
alcanza un mínimo. El único equilibrio que puede alcanzar la partícula vendría deconsiderarla en reposo sobre el vértice del cono. También podemos darnos cuenta de
esto al intentar calcular el valor de Z que anula
eff V
Z
V eff
∂
∂, obtendremos sólo valores de Z
negativos, para los que nuestras ecuaciones ya no son válidas.
d) Si consideramos la partícula sobre el vértice del cono cualquier pequeña perturbaciónla sacará de su equilibrio inestable para producir un movimiento de caída aceleradocomo los descritos en el apartado b). Es decir no tiene sentido considerar pequeñas
oscilaciones para potenciales sin mínimos.
---------------------------------------------
32. Consideremos la definición general de sistema conservativo. A saber, aquelque cumple las siguientes tres condiciones: 1) es válida la forma estándar(holónoma o no holónoma) del lagrangiano; 2) el lagrangiano no es funciónexplícita del tiempo; 3) las ecuaciones de ligadura pueden expresarse en la forma
( los coeficientes son nulos). Por otra parte, si el lagrangiano se0l k k k a dq =∑
lt a
42

8/12/2019 Goldstein solucionario.pdf
http://slidepdf.com/reader/full/goldstein-solucionariopdf 41/195
expresa en la forma estándar holónoma y la energía cinética es una formacuadrática homogénea de las q& ’s, un sistema conservativo es además natural.
a) Demostrar que la definición anterior de sistema conservativo lleva a la
conservación de la llamada función energía: j
j j
Lq
q L
∂−
∂∑ &&
(integral de Jacobi),
que se reduce a la energía total en el caso de un sistema natural.
b) Ahora sea una masa m desliza sin rozamiento dentro de un tubo circular deradio r (véase figura). El tubo gira alrededor de su diámetro vertical (eje Z) conuna velocidad angular constante ω . En las coordenadas polares de la figura,compare los sistemas de referencia asociados a un observador externo y a otro quegira con el tubo, respectivamente. ¿En cuál de los dos es este sistema simplementeconservativo y en cuál es también natural? Justifique su respuesta.c) Describa el sistema anterior en coordenadas esféricas. ¿Es el sistema ahoraconservativo? Justifique su respuesta. En caso de no serlo, ¿cuál es la razón física
para ello?
z
O r
θ
m
Si , entonces2 1 0 L T T T V = + + − 2 0 j
j j
Lh q L T T
qV
∂= − = − +
∂∑ &&
. Si reagrupamos
términos:
2 0
V
h T V T T V
′
′ ′== + − = +
Todo el truco del problema reside en “manejar” apropiadamente los términos en elLagrangiano. Empecemos con los términos T y V en polares
2 2 2 2 212
( se
cos
T m r r
V mgr
n )θ ω θ
θ
= +
=
&
dando el lagrangiano en sistema “laboratorio”2 2 2 2 21
2( sen ) L m r r mgr cosθ ω θ = + −& θ (1)
Cumplimos las condiciones impuestas a un sistema conservativo y, por tanto, lo es. La
integral de Jacobi es:2 2 2 2 21
2( sen )h m r r mgr cosθ ω θ = − +& θ ,
que NO ES la energía total. Sin embargo, si escribimos de nuevo (1) de forma que
L T V ′ ′= −
con2 21
2 2
2 2 20 cos sen
T T mr
V V T mgr r
θ
θ ω θ
′ = =
′ = − = −
&
43

8/12/2019 Goldstein solucionario.pdf
http://slidepdf.com/reader/full/goldstein-solucionariopdf 42/195
T’ es la energía cinética relativa a un sistema que gira con el tubo. La energía potencial
V’ incluye el término gravitacional y el término 0T − que tiene en cuenta la fuerza
centrífuga. En este caso nuestro sistema es natural y h T V ′ ′= + , la energía total
(¡cuidado, no en el sistema inercial!)
En el caso de coordenadas esféricas ( ), ,r θ φ tenemos
2 2 2 2 212
( se
cos
T m r r
V mgr
n )θ φ θ
θ
= +
=
& &
con la ligadura 0d dt φ ω − = . El sistema en esta representación NO ES conservativo ya
que 0k t
a ω = − ≠ . Además, la expresión de Jacobi (T V + , en este caso) no es constante
ya que la ligadura efectúa trabajo sobre el sistema.
----------------------------------------------
33. Un bloque de masa M2 desliza sobre otro de masa M1 que, a su vez, desliza
sobre un plano horizontal (Véase figura). Usando las coordenadas X1 y X2 de lafigura, obtenga las ecuaciones diferenciales del movimiento a través de laformulación de Lagrange. Asuma ausencia de rozamientos.
X2
X1
M2
M1
La coordenada 1 es el desplazamiento absoluto de , mientras que1m 2 x es el
desplazamiento de con respecto a Para obtener la velocidad absoluta de ,
usamos la ley del coseno para sumar la velocidad de y la velocidad de respecto
de . Obtenemos:
2m
1m
2v
2m
1m 2m
1m2 2 2
2 1 2 1 22 cosv x x x x α = + −& & & &
siendo α el ángulo formado por el plano con la horizontal. Por lo tanto,
( )2 2 2
1 1 2 1 2 1 2
1 12 cos
2 2T m x m x x x x α = + + −& & & & &
En presencia del campo gravitatorio, los cambios en energía potencial proceden de
cambios en el valor de 2 :
2senV mgx α = −
De aquí
( )2 2 2
1 1 2 1 2 1 2 2
1 12 cos sen
2 2 L m x m x x x x mgxα α = + + − +& & & & &
Las ecuaciones correspondientes:
( )1 1 2 1 2 cos 0m x m x x α + − =&& && &&
44

8/12/2019 Goldstein solucionario.pdf
http://slidepdf.com/reader/full/goldstein-solucionariopdf 43/195
2 2 2 1 2cos sen 0m x m x m g α α − −&& && =
----------------------------------------------
34.- Un modelo simple, y de gran utilidad, de molécula triatómica lineal es el de la
figura. Vamos a examinar el caso en el que M>m. Plantee el problema en lascoordenadas definidas por los desplazamientos de las tres masas de su posición deequilibrio, con sus correspondientes ecuaciones de Lagrange. Intente una solución
0i t
x x ei iω = , siendo ω una frecuencia de modo normal
a) ¿Cuántas frecuencias independientes hay y cuáles son éstas?b) ¿A qué movimiento corresponde la menor de ellas?
mM M
kk
X1
1
2
3
( ) ( )2 22 2 2
1 2 3 2 1 3
1 1 1 1 1
2 2 2 2 22
L T V Mx mx Mx k x x k x x= − = + + − − − −& & &
Ecuaciones :
( )( ) ( )
( )
1 1 2
1 2 1 2 3
3 3 2
0
0
0
Mx k x x
mx k x x k x x
Mx k x x
+ − =+ − + − =
+ − =
&&
&&
&&
El determinante para las frecuencias
2
2
2
0
2 0
0
k M k
k k m k
k k M
ω
ω
ω
− −
− − −
− −
=
con soluciones
⎟ ⎠
⎞⎜⎝
⎛ +===
m
M
M
k
M
k 210 321 ω ω ω ,,
Para1
0ω = , los desplazamientos son1 2 3
x x x= = , dando a entender que el conjunto de
las tres masas se mueve como un sólido rígido, sin oscilaciones internas.
----------------------------------------------
45
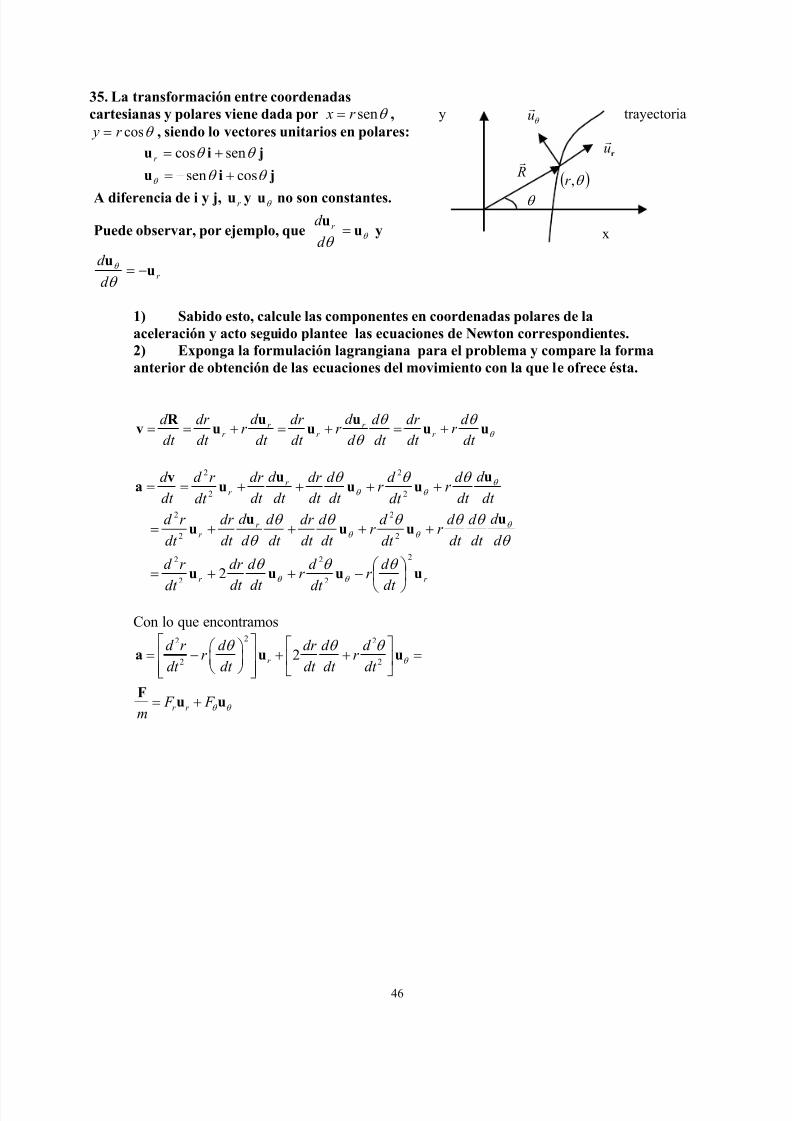
8/12/2019 Goldstein solucionario.pdf
http://slidepdf.com/reader/full/goldstein-solucionariopdf 44/195
35. La transformación entre coordenadascartesianas y polares viene dada por θ senr x = ,
θ cosr y = , siendo lo vectores unitarios en polares:
jiu
jiu
θ θ
θ θ
θ
cossen
sencos
+−=
+=r
A diferencia de i y j, y no son constantes.
Puede observar, por ejemplo, que
r u θ u
θ θ
uu
=d
d r y
r d
d u
u−=
θ
θ
y
x
( )θ ,r
ur
r
uθ
rtrayectoria
θ
Rr
1) Sabido esto, calcule las componentes en coordenadas polares de laaceleración y acto seguido plantee las ecuaciones de Newton correspondientes.2) Exponga la formulación lagrangiana para el problema y compare la forma
anterior de obtención de las ecuaciones del movimiento con la que le ofrece ésta.
θ
θ θ
θ uu
uu
uu
R v
dt
d r
dt
dr
dt
d
d
d r
dt
dr
dt
d r
dt
dr
dt
d r
r r
r r +=+=+==
r r
r r
r r
dt
d r
dt
d r
dt
d
dt
dr
dt
r d
d
d
dt
d
dt
d r
dt
d r
dt
d
dt
dr
dt
d
d
d
dt
dr
dt
r d
dt
d
dt
d r
dt
d r
dt
d
dt
dr
dt
d
dt
dr
dt
r d
dt
d
uuuu
uuu
uu
uuu
uu
va
2
2
2
2
2
2
2
2
2
2
2
2
2
2 ⎟ ⎠
⎞⎜⎝
⎛ −++=
++++=
++++==
θ θ θ
θ
θ θ θ θ θ
θ
θ θ θ
θ θ
θ θ θ
θ θ θ
Con lo que encontramos22 2
2 22r
r r
d r d dr d d r r
dt dt dt dt dt
F F m
θ
θ θ
θ θ ⎡ ⎤ ⎡ ⎤⎛ ⎞= − + +⎢ ⎥⎜ ⎟ ⎢ ⎥⎝ ⎠⎢ ⎥ ⎣ ⎦⎣ ⎦
= +
a u
Fu u
θ =u
46

8/12/2019 Goldstein solucionario.pdf
http://slidepdf.com/reader/full/goldstein-solucionariopdf 45/195
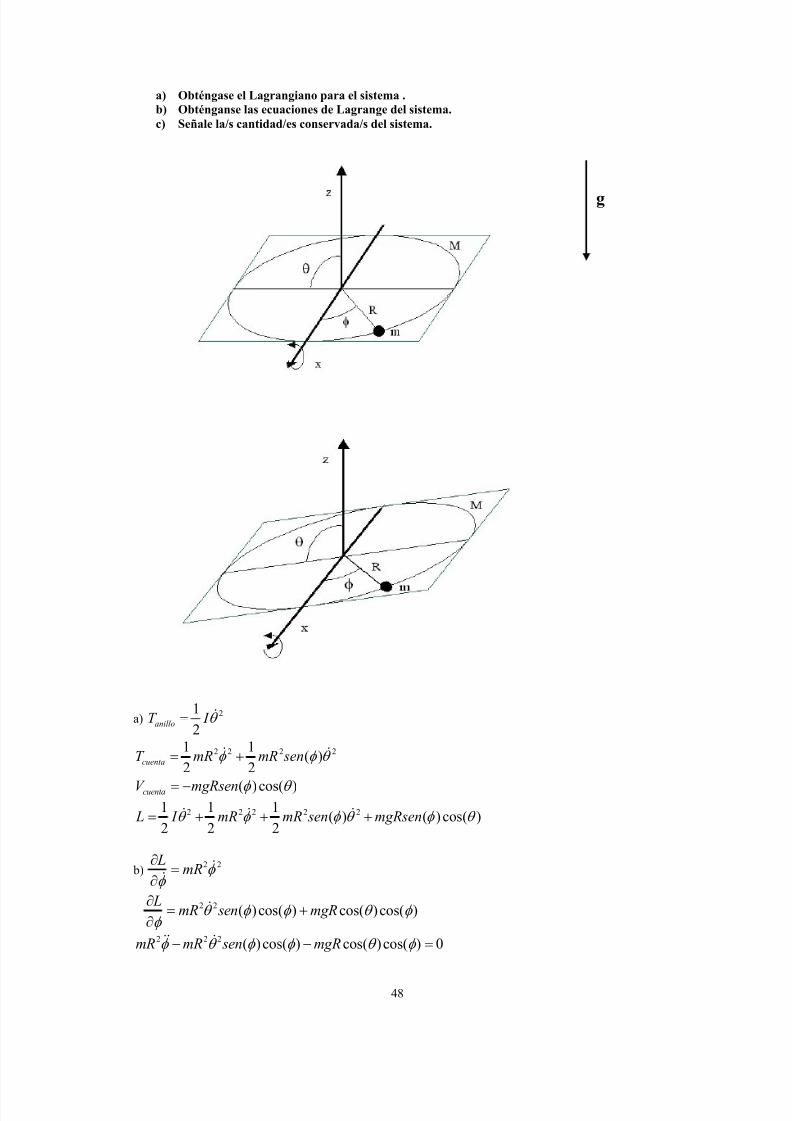
8/12/2019 Goldstein solucionario.pdf
http://slidepdf.com/reader/full/goldstein-solucionariopdf 46/195
a) Obténgase el Lagrangiano para el sistema .b) Obténganse las ecuaciones de Lagrange del sistema.c) Señale la/s cantidad/es conservada/s del sistema.
g
a)21
2
anilloT I θ = &
2 2 2 21 1( )
2 2cuenta
T mR mR senφ φ θ = +& &
( )cos( )cuentaV mgRsen φ θ = −
2 2 2 2 21 1 1( ) ( )cos( )
2 2 2 L I mR mR sen mgRsenθ φ φ θ φ = + + +& & & θ
b)2 2 L
mR φ φ
∂=
∂&
&
2 2 ( )cos( ) cos( )cos( ) L
mR sen mgRθ φ φ θ
φ
∂= +
∂
& φ
=
2 2 2 ( )cos( ) cos( )cos( ) 0mR mR sen mgRφ θ φ φ θ φ − −&& &
48
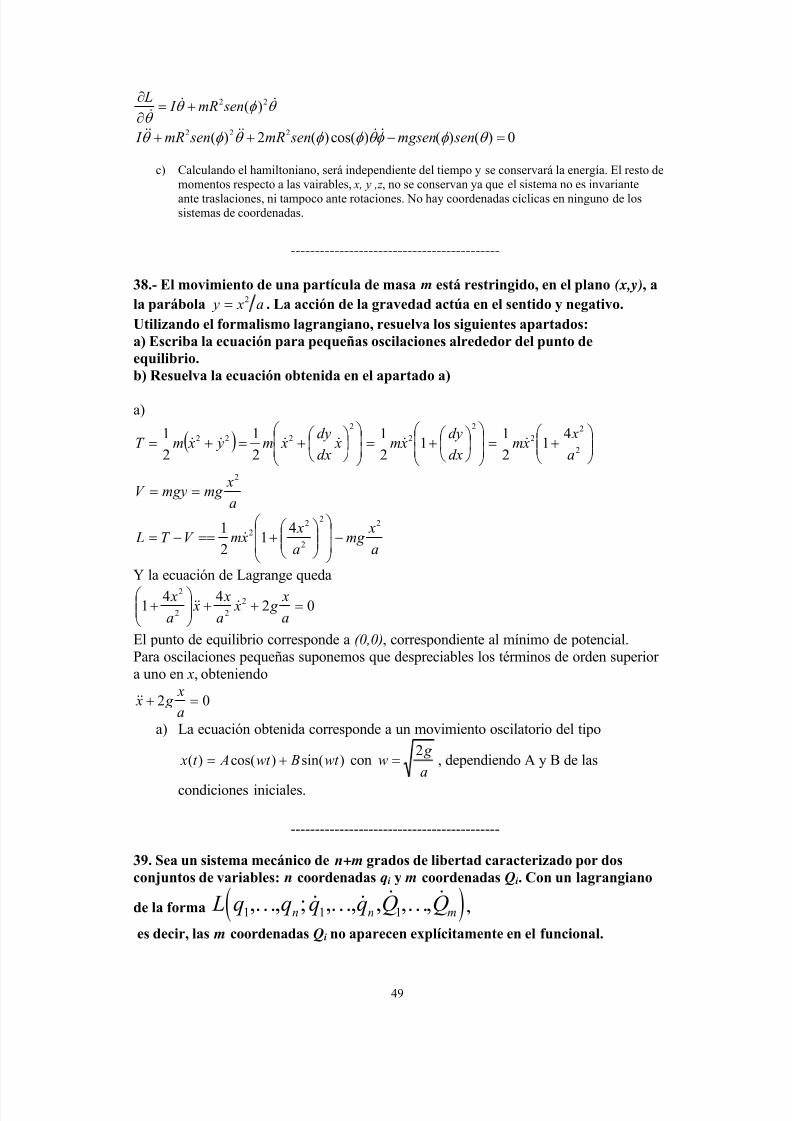
8/12/2019 Goldstein solucionario.pdf
http://slidepdf.com/reader/full/goldstein-solucionariopdf 47/195
2 2( ) L
I mR senθ φ θ θ
∂= +
∂& &
&
2 2 2( ) 2 ( )cos( ) ( ) ( ) 0 I mR sen mR sen mgsen senθ φ θ φ φ θφ φ θ + + −&& && & & =
c) Calculando el hamiltoniano, será independiente del tiempo y se conservará la energía. El resto de
momentos respecto a las vairables, x, y ,z , no se conservan ya que el sistema no es invarianteante traslaciones, ni tampoco ante rotaciones. No hay coordenadas cíclicas en ninguno de lossistemas de coordenadas.
-------------------------------------------
38.- El movimiento de una partícula de masa m está restringido, en el plano (x,y), ala parábola a x y
2= . La acción de la gravedad actúa en el sentido y negativo.Utilizando el formalismo lagrangiano, resuelva los siguientes apartados:a) Escriba la ecuación para pequeñas oscilaciones alrededor del punto deequilibrio.b) Resuelva la ecuación obtenida en el apartado a)
a)
( ) ⎟⎟ ⎠
⎞⎜⎜⎝
⎛ +=⎟
⎟ ⎠
⎞⎜⎜⎝
⎛ ⎟
⎠
⎞⎜⎝
⎛ +=⎟⎟
⎠
⎞⎜⎜⎝
⎛ ⎟
⎠
⎞⎜⎝
⎛ +=+=2
22
2
2
2
222 41
2
11
2
1
2
1
2
1
a
x xm
dx
dy xm x
dx
dy xm y xmT &&&&&&
a
xmg mgyV
2
==
a
xmg
a
x xmV T L
22
2
22 4
1
2
1−
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛ ⎟⎟
⎠
⎞⎜⎜
⎝
⎛ +==−= &
Y la ecuación de Lagrange queda
0244
1 2
22
2
=++⎟⎟ ⎠
⎞⎜⎜⎝
⎛ +
a
x g x
a
x x
a
x&&&
El punto de equilibrio corresponde a (0,0), correspondiente al mínimo de potencial.
Para oscilaciones pequeñas suponemos que despreciables los términos de orden superior
a uno en x, obteniendo
02 =+a
x g x&&
a) La ecuación obtenida corresponde a un movimiento oscilatorio del tipo
con)sin()cos()( wt Bwt At x +=a
g w
2= , dependiendo A y B de las
condiciones iniciales.
-------------------------------------------
39. Sea un sistema mecánico de n+m grados de libertad caracterizado por dosconjuntos de variables: n coordenadas qi y m coordenadas Qi. Con un lagrangiano
de la forma
( )1 1 1, , ; , , , , ,n n L q q q q Q Q& && &K K K m ,
es decir, las m coordenadas Qi no aparecen explícitamente en el funcional.
49

8/12/2019 Goldstein solucionario.pdf
http://slidepdf.com/reader/full/goldstein-solucionariopdf 48/195
a) ¿Cuántas cantidades conservadas independientes puede tener este sistema?b) Recordemos que mediante un cambio de coordenadas del lagrangiano
similar al que da lugar al hamiltoniano pero únicamente sobre lascoordenadas cíclicas se obtiene el routhiano. ¿Cuál es la forma genérica deeste routhiano R cuando los momentos asociados a las coordenadas cíclicas
tienen valor inicial M i, es decir, ( ) i
t i
i M Q
Lt P =
∂∂==
=0
0& ?
c) Supongamos que se construye un nuevo lagrangiano, L’, a partir delanterior tomando
( ) ( )1 1 1 1
1
' , , ; , , , ' , , ' , ,m
n n m i i
i
n L L q q q q Q Q q q β ν =
= −∑& && &K K K K⋅
en el que ( )1' , ,i i iQ Q q qν = +& & K
n y las ( )nqq ,,K1ν sonfunciones generales. ¿Qué se puede decir de las cantidades conservadas de estenuevo sistema? Dar el nuevo routhiano, R’, cuando los momentos asociados alas coordenadas cíclicas tienen ese mismo valor inicial M i, es decir,
( ) i
t i
i M Q
Lt P =
∂
∂==
=0
0'
''
& .
d) ¿Cuánto han de valer las constantes i β para que ambos routhianos R y R’
sean iguales? ¿Qué relación habrá entonces entre la dinámica, las
ecuaciones del movimiento, de los sistemas L y L’?e) Supongamos una partícula de masa unidad, m=1, en un potencial
')',( ar r
ar W && ⋅⋅−−
= 31α , y lagrangiano en polares
( ) )',('
,' ar W ar
r ar L &&
& −+=22
1 222
. Dar las trayectorias de este
sistema por el método apuntado en los apartados anteriores en función delas soluciones de una partícula en un potencial central gravitatorio ,
( )r
ar r ar L
1
22
1 222 ++= &&,
a) En principio podría haber hasta m+n cantidades conservadas en un sistemamecánico de m+n grados de libertad. Con la forma dada para el lagrangiano
sabemos que tiene al menos m momentos conservados, por las m coordenadascíclicas Qi, más la energía, ya que es independiente del tiempo.
50

8/12/2019 Goldstein solucionario.pdf
http://slidepdf.com/reader/full/goldstein-solucionariopdf 49/195
b) Los momentos asociados a las coordenadas cíclicas se conservan por lo que
i
i
i M Q
L P =
∂∂
=& para todo tiempo. Por tanto
.( )mnn
m
i
ii QQqqqq L M Q R &K&&K&K& ,,,,,;,, 111
1
−⋅= ∑=
c) Se aplica lo comentado en el apartado a) y b) sin cambios.
( ) ∑∑==
⋅+++−⋅=m
i
niimmnn
m
i
ii qqQQqqqq L M Q R1
11111
1
,,,,,,,;,,'' K&K&&K&K& ν β ν ν ( )
d) Si comparamos los dos routhianos obtenemos
( )∑∑∑∑====
⋅−=⋅−+⋅−−⋅=−m
i
iii
m
i
ii
m
i
ii
m
i
ii M L M Q L M Q R R1111
ν β ν β '' &&
con lo que es evidente que si ii M = β ambos routhianos son idénticos. Por tanto, para
las condiciones iniciales dadas en el enunciado se pueden relacionar las ecuaciones delmovimiento de ambos sistemas. Si ( ) ( ) ( ) ( ) t Qt Qt qt q mn ,,,,, KK 11 es una solución de L,
el conjunto ( ) ( ) ( ) ( ) ( ) ( )∫∫ ⋅−⋅− dt qqt Qdt qqt Qt qt q nmmnn ,,,,,,,,, KKKK 11111 ν ν es
una solución de L’ . Dado que las funciones ( )ni qq ,,K1ν son completamente arbitrarias
esto permite relacionar problemas aparentemente diferentes resolviendo únicamente las
ecuaciones más sencillas para L.
-------------------------------------------
40. En algunos problemas de mecánica es interesante conocer el movimiento en lavecindad de un punto de equilibrio. Tal cuestión se suele abordar con ayuda de la
aproximación lineal al problema, en la forma de un sistemad
X AX dt
=
en el cual el vector X simboliza una pequeña perturbación alrededor del punto deequilibrio
0 X y A es la denominada matriz jacobiana. Suponga un sistema mecánico caracterizado por dos variables (¡cuidado! dosvariables, no dos grados de libertad), que denominaremos
1 2 y x . Nuestro problema
lineal se reduce a estudiar las distintas clases de movimientos alrededor del origen y
que dependerán del carácter y signo de los valores propios de la matriz A . Sean estosúltimos1 2 yλ λ
a) Considere los distintos casos posibles de movimiento según el carácter real ocomplejo, positivo o negativo, de los valores de 1 y 2λ λ . Considere sólo aquellos casos
en los que1 y 2λ λ son distintos.
b) Dibuje en el plano ( )1 2, x las trayectorias correspondientes a los casos estudiados
en el apartado anterior.
a) y b)
51

8/12/2019 Goldstein solucionario.pdf
http://slidepdf.com/reader/full/goldstein-solucionariopdf 50/195
d X AX
dt = , es una ecuación diferencial ordinaria de orden 1 y además autónoma, esto es,
no depende del tiempo. Si X es la perturbación alrededor del punto de equilibrio, entonces:
( ) ( )( ) ( )
0
1 1 1
0
2 2 2
x t x x t
t x x t
δ
δ
= +
= +
Puesto que es un sistema lineal su solución pasa por hallar los valores propios de la matriz
Jacobiana, esto es:
11 12 11 12
21 22 21 22
0a a a a
Aa a a a
λ
λ
−⎛ ⎞= → =⎜ ⎟ −⎝ ⎠
Cuya solución es:
( )( ) ( ) ( )2
11 22 12 21 11 22 11 22 12 210 ; 0a a a a a a a a a aλ λ λ λ − − − = − + + − =
11 22 11 22 12 21Si T a a y a a a a= + ∆ = −
Finalmente:2 4
2
T T λ
± − ∆=
Por tanto, la solución del sistema de ecuaciones diferenciales es:
( )( )
1 2
1 21 1 2
2 3 4
t t
t t
x t c e c e
x t c e c e
λ λ
λ λ
δ
δ
= +
= +
Donde son constantes que dependen de las condiciones iniciales y1 2 3 4, ,c c c y c 1 2 yλ λ
los autovalores de la matriz A , Jacobiano de la transformación. Según el enunciado no
tenemos en cuenta los valores degenerados, esto es, los valores en los que1 2λ λ = .
Entonces los casos posibles de movimiento según los autovalores a la vista de las
soluciones del sistema serían:
1. Si1 y 2λ λ son autovalores reales negativos tenemos un nodo estable, el estado
generado por la perturbación es asintoticamente estable.
( )
( )
1 2
1 2
1 1 2
2 3 4
t t
t t
x t c e c e
x t c e c e
λ λ
λ λ
δ
δ
= +
= +
52

8/12/2019 Goldstein solucionario.pdf
http://slidepdf.com/reader/full/goldstein-solucionariopdf 51/195
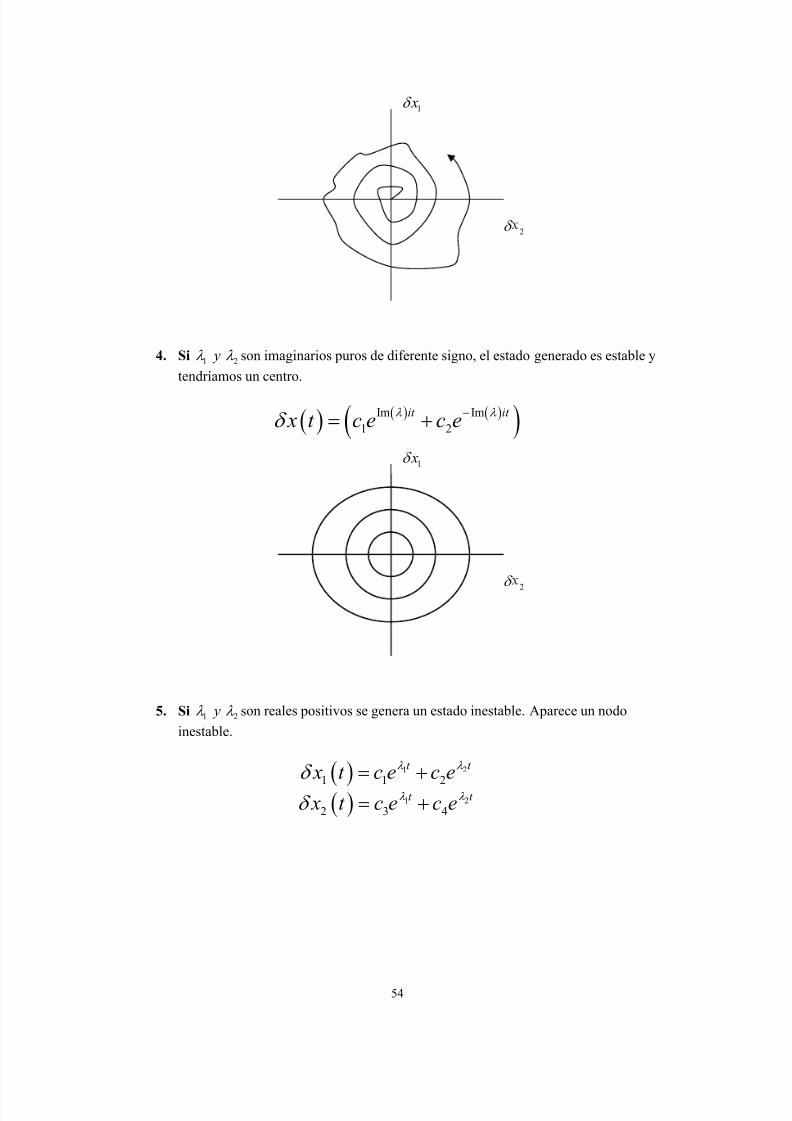
8/12/2019 Goldstein solucionario.pdf
http://slidepdf.com/reader/full/goldstein-solucionariopdf 52/195
1 xδ
2δ
4. Si1 y
2λ λ son imaginarios puros de diferente signo, el estado generado es estable y
tendríamos un centro.
( ) ( ) ( )( )Im Im
1 2
it it x t c e c e
λ λ δ
−= +
1 xδ
2δ
5. Si 1 y 2λ λ son reales positivos se genera un estado inestable. Aparece un nodo
inestable.
( )( )
1 2
1 2
1 1 2
2 3 4
t t
t t
x t c e c e
x t c e c e
λ λ
λ λ
δ
δ
= +
= +
54
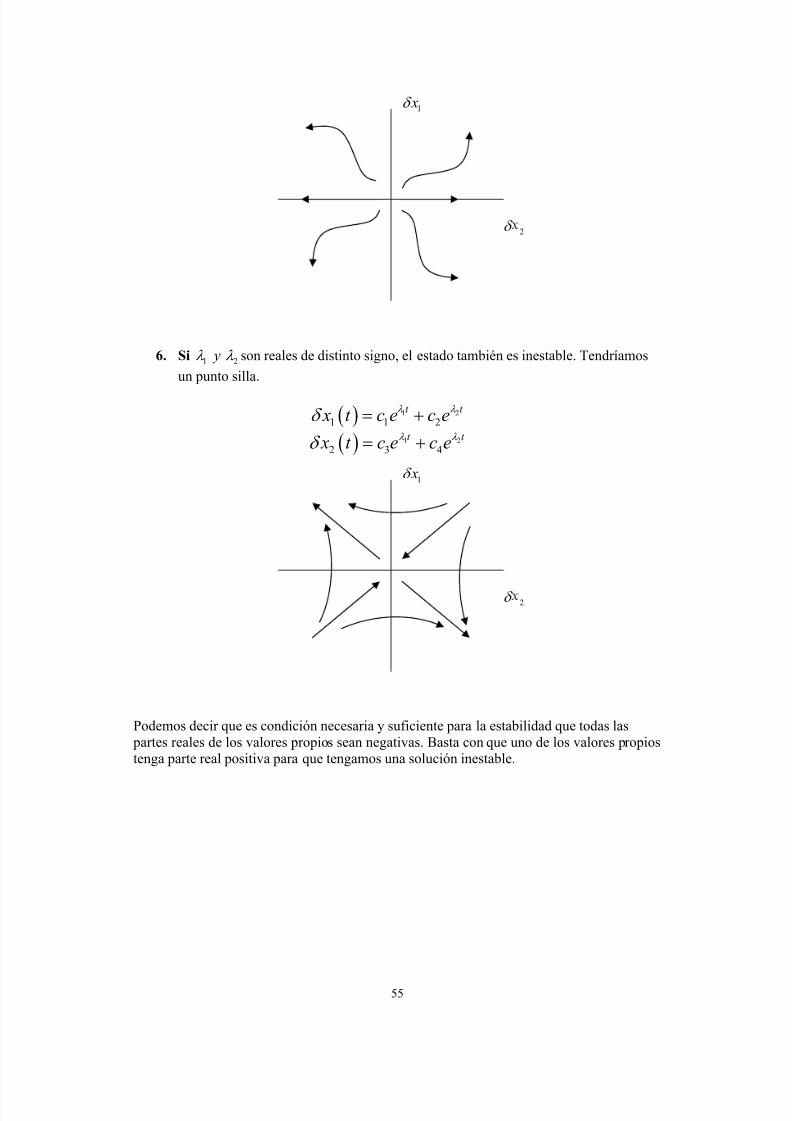
8/12/2019 Goldstein solucionario.pdf
http://slidepdf.com/reader/full/goldstein-solucionariopdf 53/195
1 xδ
2δ
6. Si1 y
2λ λ son reales de distinto signo, el estado también es inestable. Tendríamos
un punto silla.
( )( )
1 2
1 2
1 1 2
2 3 4
t t
t t
x t c e c e
x t c e c e
λ λ
λ λ
δ
δ
= +
= +
1 xδ
2δ
Podemos decir que es condición necesaria y suficiente para la estabilidad que todas las
partes reales de los valores propios sean negativas. Basta con que uno de los valores propiostenga parte real positiva para que tengamos una solución inestable.
55

8/12/2019 Goldstein solucionario.pdf
http://slidepdf.com/reader/full/goldstein-solucionariopdf 54/195
FORMULACIÓN DE LAGRANGE
1. Considérese un sistema con N grados de libertad descrito por el conjunto decoordenadas generalizadas qi (i=1,...,N ), cuyas energías cinética y potencial, T
y V , vienen dadas por
( ) ( i
N
iiii
N
ii qV V qq f T ∑∑
==
==1
2
1
, )
Demuéstrese que las ecuaciones de Lagrange son separables, de modo que losdistintos grados de libertad no están acoplados y redúzcase el problema acuadraturas.
A partir de la lagrangiana, L = T − V , calculemos las derivadas
2 ii
i
f qq L
=∂ ∂
2d
d2
d
d 2
ii
i
ii
i
f qq
f q
q
L
t
+=
∂
∂
d
d
d
d 2
i
ii
i
i
i q
V q
q
f
q
L−=
∂
∂
Así pues la ecuación de Lagrange para cada grado de libertad qi es
0=dd2
dd 2
i
iiii
i
i
qV q f q
q f ++
que como vemos sólo depende del propio grado de libertad qi, de manera que los
distintos grados de libertad están desacoplados y cada cual evolucionaindependientemente de los demás. En particular, la energía contenida en cada grado de
libertad
2
iiii V q f E +=
se conserva constante durante la evolución como es fácil ver, pues
dd
dd 2
i
ii
i
i
i
i
qV q
q f
q E += ∂ ∂
2 ii
i
i f qq
E
=
∂
∂
resultando que
=2+d
d
d
d
d
d
d
d
d
d 3
iiii
i
i
i
i
ii
i
ii
i
iii qq f qq
V q
q
f
t
q
q
E
t
q
q
E
t
E
t
E
+=++=
∂
∂
∂
∂
∂
∂
0=2+d
d
d
d
=2
+ ii
i
i
i
i
i
i q f q
V
f
q
3

8/12/2019 Goldstein solucionario.pdf
http://slidepdf.com/reader/full/goldstein-solucionariopdf 55/195
Así pues, las energías E i son constantes determinadas por las condiciones iniciales,
, 00 , ii qq
( ) ( ) 0
2
00 iiiiii qV qq f E +=
de manera que la evolución de cada grado de libertad viene dada por la integral
t f
V E qq
t
i
ii
ii d00 ∫
−±=−
----------------------------------------------
2. Un punto de masa M describe, en el plano 0 XY , una curva dada por la ecuación
y = f ( x) cuando está sometida a un potencial que sólo depende de y. Si v0 es laproyección de la velocidad sobre el eje 0 X , se pide:
a) hallar una expresión general del potencial en función de f .
b) Aplique la expresión obtenida en el apartado anterior al caso de que laecuación de la curva sea ay2 = x3.
a) Sea V ( y) el potencial pedido. La lagrangiana de la masa puntual será
( ) ( ) yV y x M
L −+= 22
2
de donde se obtienen las ecuaciones de Lagrange
( )
( )
−=
=
y
V y M
t
x M t
d
d
d
d
0d
d
Integrando dos veces la primera ecuación se obtiene que la proyección del movimiento
sobre el eje 0 X es un movimiento uniforme con velocidad 0v x = . La integral de la
segunda ecuación con respecto de y determina el potencial
∫−= y y M C V d
donde C es una constante arbitraria. Como por otra parte
( ) ( )
( ) 2
0
0
d
d
v x f y
v x f x x x
f y
′′=
′==
la expresión del potencial es
( ) y x f MvC V d 2
0 ∫ ′′−=
y, para realizar la integral, hay que sustituir .)(1 y f x −=
4

8/12/2019 Goldstein solucionario.pdf
http://slidepdf.com/reader/full/goldstein-solucionariopdf 56/195
b) Para el caso particular en que la función esa
x y
3
= , la función inversa es
, de manera que( ) 3/12ay x =
( )
( ) 3/1
3/24
3
4
3
2
3
−==′′
=′
yaax
x f
a
x x f
Sustituyendo en la ecuación del apartado anterior y realizando la integral se llega al
resultado.
-------------------------------------------------
3. Considérese una transformación desde un sistema estacionario de ejescartesianos Oxyz a otro Ox’y’z’ que gira con velocidad angular constante ω alrededor del eje Oz . Transforme la lagrangiana de una partícula consideradalibre en el sistema Oxyz a la correspondiente en el sistema Ox’y’z’, e identifiqueen esta última los términos que corresponden a las fuerzas de Coriolis ycentrífuga.
La transformación de Oxyz a Ox’y’z’ es:
t xt y y
t yt x x
ϖ ϖ sincos
sincos
′+′=
′−′=
La energía cinética de la partícula viene dada por:
)(~
2
1)(~)(
2
1)(
2
1 222222222 y xm y x y xm z y xm z y xmT ′+′+′′−′′+′+′+′=++= ω ω
La expresión que aparece en las ecuaciones de Lagrange puede considerarse
como una fuerza ficticia que aparece debida a las peculiaridades del sistema de
coordenadas. En nuestro caso:
iqT ∂∂ /
xm ym x
T
′+′=′∂∂ 2
~~ ω ω ,
con una expresión similar para i yT ′∂∂ (la correspondiente parcial con respecto a z ’es
nula). Los dos términos de la expresión anterior pueden identificarse como las
componentes de la mitad de las fuerzas de Coriolis y centrífuga, respectivamente. La
otra mitad de la fuerza de Coriolis procede del término
/
∂∂
iqT
dt d
de las ecuaciones
de Lagrange.
------------------------------------------
5

8/12/2019 Goldstein solucionario.pdf
http://slidepdf.com/reader/full/goldstein-solucionariopdf 57/195
4. Una cuenta de masa m desliza sin rozamiento a lo largo de un alambre circularde radio a. El alambre, situado verticalmente en un campo gravitatorio, giraalrededor de su diámetro vertical con velocidad angular ω . Para una velocidadangular ω mayor que un cierto valor crítico ω
c, la cuenta tiene un punto de
equilibrio mecánico estable en una posición dada por un ángulo θ 0 respecto dela vertical. Se pide:
a) Encontrar ω c y θ 0 ;
b) Obtener las ecuaciones del movimiento para pequeñas oscilaciones alrededorde 0 y encontrar su periodo.
a) La energía cinética de la cuenta y el Lagrangiano son:
2222 )sen(21
21 θ ω θ ammaT += .
2 2 2 21 1sin cos
2 2 L ma ma w mgaθ θ θ = + −
donde θ es el ángulo que forma la posición de la masa con el eje vertical de giro,
correspondiendo 0θ = con la partícula en la posición más baja en el alambre.
La ecuación de Lagrange nos lleva a:
0sencossen 2 =−+ θ θ ω θ θ a g a
En el punto de equilibrio,
0=θ , g = aω 2 cos θ , ó.: ω 2 = g/(a cos θ) .
Esta última ecuación tiene una solución para ω sólo si ω 2 ≥ g/a, con lo que la
velocidad angular crítica es
a g
C =ω
y el ángulo de equilibrio es
=
20
cosarcω
θ a
g
b) Si la cuenta efectúa pequeñas oscilaciones alrededor de θ 0, podemos describir el
movimiento en términos de un pequeño parámetro ε = θ − θ 0. La ecuación del
movimiento se transforma en
0)(sen)(cos)(sen 00
2
0 =++−++ ε θ ε θ ω ε θ ε a g a
6

8/12/2019 Goldstein solucionario.pdf
http://slidepdf.com/reader/full/goldstein-solucionariopdf 58/195
Para pequeños valores de ε , 1cosysen ≈≈ ε ε ε . Teniendo en cuenta esto y el valor
obtenido de θ 0 , la ecuación anterior queda en
0142
22 =
−+ ε
ω ω ε
a
g
La frecuencia de oscilación será:
42
2
1ω
ω a
g −=Ω
---------------------------------------------
5. Un elemento diferencial de arco de una cierta superficie se puede poner de laforma
221
21
2 )( dqqadqds +=
Se pide:
a) La ecuación que cumplen las líneas geodésicas de la superficie
b) Demostrar que las curvas cte.2 =q son geodésicas
c) ¿Qué dependencia con el tiempo tiene, en el caso contemplado en b), lacoordenada ? (Nota: las geodésicas son las trayectorias que sigue un puntosobre la superficie en ausencia de toda fuerza).
1q
a) En ausencia de toda fuerza, y considerando m=1,
( )2
21
2
1 )(2
1qqaqT L +==
La coordenada q es cíclica; luego2
21
2
)( qqaC q
T
==
∂∂
(1)
donde C es una constante. Por otra parte, la energía total:
( )2
21
2
1 )(21 qqaq E += (2)
es también una constante del movimiento. Eliminando dt de (1) y (2), se obtiene una
ecuación diferencial entre las coordenadas y q que es precisamente la ecuación de
las geodésicas. Integrando dicha ecuación se obtiene:1q 2
∫
−
=
)(1)(2
12
1
12
qaC
qa E
dqq
7

8/12/2019 Goldstein solucionario.pdf
http://slidepdf.com/reader/full/goldstein-solucionariopdf 59/195
b) Las curvas , recorridas con la ley horariacte.2 =q E t q E q 2,2 11 == , son
soluciones de las ecuaciones (1) y (2).
c) De acuerdo con lo visto en b), la coordenada evoluciona según un movimiento
uniforme.
1q
-----------------------------------------------
6. Si el sistema solar estuviese sumergido en una nube esférica uniforme departículas sólidas, los objetos en el sistema solar experimentarían una fuerzagravitatoria total que sería
br r
k F r −−=
2
Podemos asumir que la fuerza extra debida a la presencia de la nube es débil)( 3r k b << . Encuentre la frecuencia de las oscilaciones radiales de una órbita
cuasicircular (ésta es una órbita con pequeñas desviaciones radiales de laórbita circular).
La ecuación de movimiento es:
dr
r dV r m
ef )(−=
Si la partícula está en una órbita circular de radio , se cumple:0r
02
0
3
0
2
0
)(br
r
k
mr
l
dr
r dV
r r
ef −−=−=
Estamos interesado en perturbaciones alrededor de esta órbita circular. Si esta
perturbación es pequeña, podemos expandir el potencial efectivo alrededor de r ,0
+′′−+′−+= )()(2
1)()()()( 0
2
0000 r V r r r V r r r V r V ef ef ef ef
Si utilizamos esta expansión en la expresión del lagrangiano, encontramos:
),()(2
1
2
10
2
0
2 r V r r r m L ef ′′−−=
donde hemos eliminado el término constante. La expresión anterior es el lagrangiano de
un oscilador armónico, de frecuencia
m
r V ef )( 02 ′′
=ω
Diferenciando dos veces el potencial efectivo encontramos, para la frecuencia de las
pequeñas oscilaciones radiales alrededor de la órbita circular,
8

8/12/2019 Goldstein solucionario.pdf
http://slidepdf.com/reader/full/goldstein-solucionariopdf 60/195
21
3
0
4
+=
m
b
mr
k ω
-----------------------------------------------
7. Una cuenta de masa m puede deslizar sin rozamiento a lo largo de una varillarectilínea. La varilla gira en un plano vertical, teniendo a uno de sus extremoscomo centro de giro y con velocidad angular constante, ω . En presencia de uncampo gravitatorio constante, calcúlese la posición radial, r , de la cuenta comofunción del tiempo, si las condiciones iniciales son: r R r ( ) ; ( ) .0 0 v= =
Si θ es al ángulo que forma la varilla con respecto a la horizontal, y r es la posición de
la cuenta a lo largo de la varilla, la energía cinética en coordenadas polares es:
( ) ( )222222
21
21 ω θ r r mr r mT +=+=
y la lagrangiana
( ) t mgr r r m L ω ω sen2
1 222 −+=
La ecuación del movimiento resulta:
t g r r ω ω sen2 −=− ,
siendo su solución
+−+= tsen
2senh
2cosh
22 ω
ω ω
ω ω ω
g t
g vt Rr
---------------------------------------
8. La lagrangiana para una partícula cargada moviéndose en un campoelectromagnético es, en coordenadas cartesianas,
vA ⋅+−=c
eeT L φ
a) Evaluar cuál es la dependencia en φ y A de los campos eléctrico y magnético,para que L genere la conocida ecuación newtoniana de movimiento en un campoelectromagnético.
b) Seguidamente, demostrar que los campos son invariantes bajo latransformación (conocida como gauge)
).,(1
),,(
t t c
t
r
rAA
Ψ−→
Ψ∇+→
∂
∂ φ φ
A partir de la lagrangiana dada se verifica que:
9

8/12/2019 Goldstein solucionario.pdf
http://slidepdf.com/reader/full/goldstein-solucionariopdf 61/195
,
,
3
1
3
1
++=+=
+−=
∑
∑
=
=
k
i
k
ik i
ii
i
k i
k k
ii
t
A
r
Av
c
em
dt
dA
c
evm
v
L
dt
d
r
Av
c
e
r e
r
L
∂
∂
∂
∂ ν
∂
∂
∂
∂
∂
∂φ
∂
∂
quedando la ecuación del movimiento:
−+
−−= ∑
= k
i
i
k
k k
i
i
ir
A
r
Av
c
e
t
A
cr evm
∂
∂
∂
∂
∂
∂
∂
∂φ 3
1
1 .
Comparando con la conocida forma,
( )iii Bvc
eeE vm ×+= ,
queda,
).,(),(
),,(1),(),(
t t
t t c
t t
r
r
rArB
rArrE
×∇=
−−∇=∂
∂ φ
Una vez conocidas estas expresiones para los campos, verificar que son invariantes bajo
la transformación gauge anterior es un ejercicio simple.
------------------------------------
9. Si dos lagrangianas, L y L’ , son tales que:
( ) ( ) ;),(,,,,dt
t dM t Lt L qqqqq +=′
a) demostrar que llevan a las mismas ecuaciones del movimiento.
b) Comprobar que la transformación de potenciales del problema anteriorpertenece a este caso, si L es la lagrangiana ahí detallada.
Calculamos para L y L’ las ecuaciones de Lagrange, pudiendo observar que para que
sean idénticas debe cumplirse que:
.0=
−
dt dM
qdt d
q k k ∂
∂ ∂ ∂
El ejercicio es trivial. Por otra parte, el efecto de la transformación gauge sobre la
lagrangiana del problema anterior es:
),(2
1t
c
e
dt
d L
t c
e L
c
eem L rvAvvv Ψ+=
Ψ∇⋅+Ψ
+=′⋅+′−⋅=′∂
∂ φ ,
tal como queríamos demostrar.
---------------------------------------------
10

8/12/2019 Goldstein solucionario.pdf
http://slidepdf.com/reader/full/goldstein-solucionariopdf 62/195
10. Hallar y resolver las ecuaciones de Lagrange para el sistema formado por dospéndulos acoplados según indica la figura. Las varillas de longitud y sonrígidas de masa nula, mientras que la barra horizontal rígida de longitud
tiene una masa .
L L′
D bm
Posición de los puntos de la barra:
D xa y xa x ≤′≤−=′+= 0;cos;sin θ θ
θ θ θ θ sin;cos a ya x ==
Energía cinética barra 22
0
22
22
1θ θ ρ a
ma xd
Db∫ =′=
T= )(2
1 2222 am LmmL b+′′+θ
)(cos)coscoscos( LmmLam g LmmLam g V bb ′′++−=′′++−= θ θ θ θ
Se comporta como un péndulo simple de longitud λ y masa µ tal que:
2222 am LmmL b+′′+=µ λ
am LmmL b+′′+=λ
Entonces:
am LmmL
am LmmL
b
b
+′′+
+′′+=
222
λ
222
2)(
am LmmL
am LmmL
b
b
+′′+
+′′+=µ
-------------------------------------
11. Estudiar y resolver por el método de Lagrange el movimiento de la máquina deAtwood compuesta de la figura, en donde las masas de las poleas son y . 0 2m
11

8/12/2019 Goldstein solucionario.pdf
http://slidepdf.com/reader/full/goldstein-solucionariopdf 63/195
Como las longitudes de los hilos son constantes, tenemos las ligaduras:
DConst x x x x
C Const x x
==−+−
==+
.)()(
.
2324
21
de donde:
134
12
22 x xC D x
xC x
−−+=
−=
Además, la polea 2, de radio R gira a una velocidad angular , de modo
que su energía cinética rotativa es:
)( 23
1 x x R −= −ω
2
23 )(2
1 x xT p −= α
donde la constante esta relacionada elementalmente con .2m
Así, pues, usando y como las dos coordenadas independientes:1 x 3 x
2
134
2
33
2
22
2
11
2
13
2
44
2
33
2
22
2
11
)2(2
1
2
1
2
1
2
1)(
2
1
4
1
2
1
2
1
2
1
x xm xm xm xm x x
xm xm xm xmT T p
++++++
=++++=
α
- energía cinética.
)( 44332211 xm xm xm xm g V +++−= - energía potencial
)2(( 134331211 x xm xm xm xm g V +−+−−= + Constante-irrelevante.
Finalmente:
))()2(( 4334211 mm xmmm x g V −+−−−=
Ambos grados de libertad y están uniformemente acelerados, mientras que la
energía es una función cuadrática de las velocidades.1 x 3 x
---------------------------------------
12. Consideramos la evolución de un cuerpo puntual de masa , constreñido amoverse sin rozamiento sobre un anillo fijo circular en presencia de una
m
12
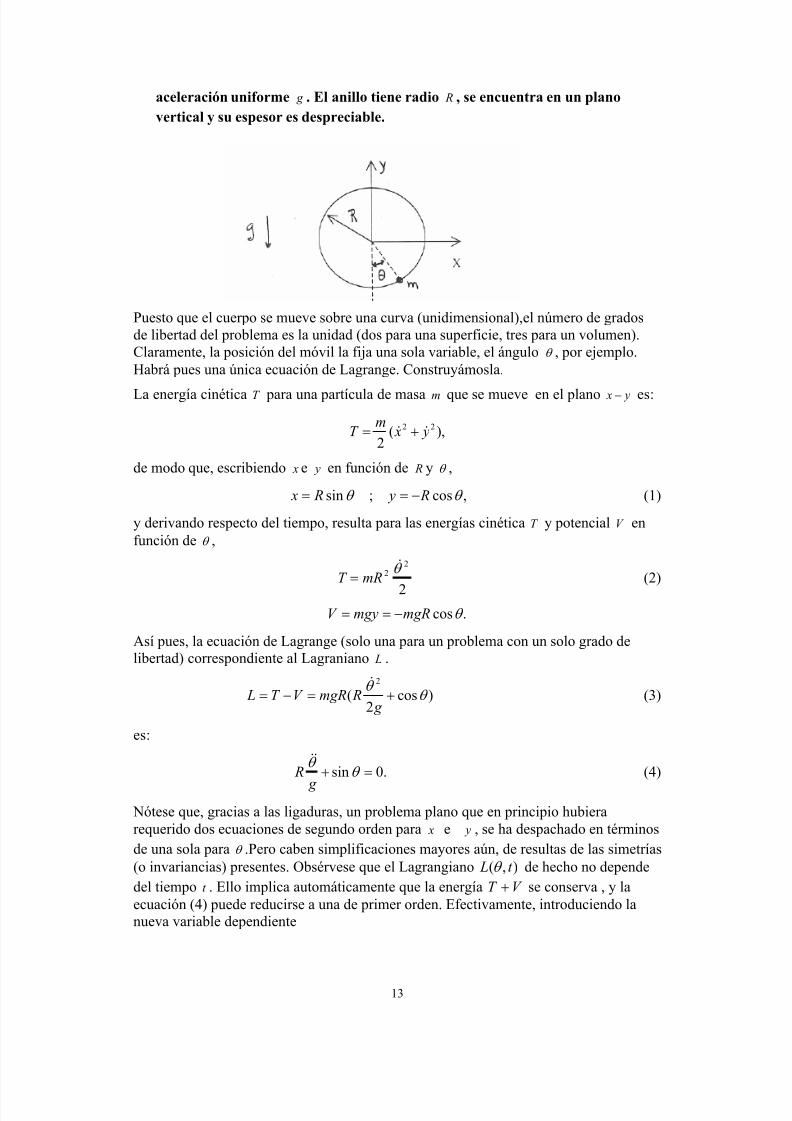
8/12/2019 Goldstein solucionario.pdf
http://slidepdf.com/reader/full/goldstein-solucionariopdf 64/195
aceleración uniforme g . El anillo tiene radio , se encuentra en un planovertical y su espesor es despreciable.
R
y
x θ
cos x =
cos
V
R
Puesto que el cuerpo se mueve sobre una curva (unidimensional),el número de grados
de libertad del problema es la unidad (dos para una superficie, tres para un volumen).
Claramente, la posición del móvil la fija una sola variable, el ángulo θ , por ejemplo.
Habrá pues una única ecuación de Lagrange. Construyámosla.
La energía cinética T para una partícula de masa que se mueve en el planom y x − es:
2 2( )2
mT x= + ,
de modo que, escribiendo e en función de y y R ,
,;sin θ θ R y R −= (1)
y derivando respecto del tiempo, resulta para las energías cinética T y potencial V en
función de θ ,
2
22 θ
mRT = (2)
.θ mgRmgyV −==
Así pues, la ecuación de Lagrange (solo una para un problema con un solo grado de
libertad) correspondiente al Lagraniano . L
)cos2
(2
θ θ
+=−= g
RmgRT L
(3)
es:
.0sin =+ θ θ
g
(4)
Nótese que, gracias a las ligaduras, un problema plano que en principio hubiera
requerido dos ecuaciones de segundo orden para x e , se ha despachado en términos
de una sola para
y
θ .Pero caben simplificaciones mayores aún, de resultas de las simetrías
(o invariancias) presentes. Obsérvese que el Lagrangiano ),( t L θ de hecho no depende
del tiempo t . Ello implica automáticamente que la energía T V + se conserva , y la
ecuación (4) puede reducirse a una de primer orden. Efectivamente, introduciendo la
nueva variable dependiente
13

8/12/2019 Goldstein solucionario.pdf
http://slidepdf.com/reader/full/goldstein-solucionariopdf 65/195
θ = p , (5)
y usando a θ como la nueva variable independiente (fórmula tradicional para reducir
ecuaciones diferenciales ordinarias en las que la variable independiente , t aquí , no
aparece explícitamente)
θ θ
θ
d
d pd
d
dt
d
dt
d == (6)
de modo que (4), que era de segundo orden, se vuelve de primer orden:
p R .0sin =+ θ θ
g d
dp (7)
Integrando, se obtiene la ecuación de la energía
teCons E g
p R tancos
2
2
==− θ (8)
La solución ahora se reduce a una cuadratura, puesto que al ser conocida )(θ p (ecuación
8), (5) se convierte en la ecuación separable (y por tanto integrable)
R E g
d
p
d dt
/)cos(2)( θ
θ
θ
θ
−== (9)
-----------------------------------------
13. Péndulo plano de masa , cuyo punto de suspensión (de masa ) puede
desplazarse en el mismo plano sobre una recta horizontal.
2m 1m
− Hay dos grados de libertad, que pueden caracterizarse por la coordenada de la
primera masa, y por el ángulo
1 x
θ entre la varilla del péndulo y la vertical.
2
2
111
xmT
= ; 01 =V
)(2
2
2
2
22
2 y xm
T += ; 222 m gyV =
Pero θ cos2 R y −= , θ sin12 R x x += , de modo que
[ ]2
1
22
2 )cos()sin(2
θ θ θ θ R x Rm
T ++=
.cos22 θ gRmV −=
14

8/12/2019 Goldstein solucionario.pdf
http://slidepdf.com/reader/full/goldstein-solucionariopdf 66/195
El Lagrangiano resulta inmediatamente de su definición, 2121 V V T T L −−+= , y
análogamente resultarían las ecuaciones de Lagrange (el alumno deberá escribirlas
como ejercicio).
Nótese que no depende ni del tiempo (se conserva la energía total), ni de L t x ( x es
coordenada cíclica , 0=∂∂− x L , y se conserva su cantidad de movimiento conjugada,
x
L p
∂∂
= ). El sistema de las ecuaciones de Lagrange de cuarto orden (dos de segundo
orden), pueden pues reducirse a una de segundo orden. Las dos integrales primeras
asociadas a las consideraciones anteriores son
Const Rmmm x x
L p =++=
∂∂
= θ θ cos)( 2211
1
(4)
.2121 Const V V T T E =+++= (5)
La ecuación (4) es fácil de interpretar como el hecho de la conservación de la cantidad
de movimiento en la dirección x (como siempre, esta propiedad resulta de la
invariancia del problema ante traslaciones en la dirección ).
.2211 xm xm p += (6)
Para mayor simplificación, esta última ecuación también admite otra integración exacta
(Problema para alumnos imaginativos: a ver quien es capaz de interpretar este hecho
matemático como la invariancia de algún ente físico ante una transformación de alguna
clase), igual que en el movimiento de una partícula libre(la suma de fuerzas en la
dirección es nula).
.sin)( 2121 Const Rm xmmtp =+++− θ (7)
Así pues, el problema queda reducido a uno de primer orden. Bastaría con resolver la
ecuación de la energía total en la que la única variable desconocida sería θ , ya que y
pueden expresarse en función de
1 x
1 x θ y mediante las ecuaciones (6) y (7).θ
El lector deberá terminar el problema en detalle. Para ello, hacemos notar que esta única
ecuación pendiente de resolución toma la forma más sencilla en el sistema de referencia
que se mueve en la dirección con la velocidad constante del centro de masa de las dos
partículas. Usando como coordenadas
)()(
21
2211
mm xm xmc
++= y θ ,
c (la coordenada horizontal del centro de gravedad) resulta ser también cíclica, y la
integral de la energía se reduce a:
22θ R [ ]2
22 cos2sincosm
E gRa =−+ θ θ θ ,
donde).( 21
1
mm
ma
+=
El problema queda pues reducido a una cuadratura, como los anteriores,
15

8/12/2019 Goldstein solucionario.pdf
http://slidepdf.com/reader/full/goldstein-solucionariopdf 67/195
2
22
cos2
sincos
m
E gR
a Rd dt
+
+=
θ
θ θ θ .
Ahora podemos pasar a completar la descripción del problema. Empezamos por :
θ θ θ θ θ θ θ cos)cos2cossin(2
1
2
121
2222
1
2222
11 gRm x R R x R xmV T L +++++=−= =
θ θ θ θ coscos2
1
2212
22
2
2
1
21 gRm x Rm Rm xmm
++++
Ecuaciones de Lagrange:
[ ] 0cos)(0 221
11
=++⇒=∂∂−
∂∂ θ θ
Rm xmmdt d
x L
x L
dt d
0sincos 2
2
21 =−++
⇒ θ θ θ θ x Rm
mm
θ θ θ θ θ θ θ
sinsin)cos(0;0 12212
2
2
x Rm gRm x Rm
dt
d Rm
L L
dt
d +++==
∂∂
−
∂
∂
0sincos1 =++ θ θ θ g x R
Coordenadas del centro de masas: ⇒−=++= 21
21
2211 ; x xr mm
xm xmc eliminando
y en función de y
1 x
2 x c r :
r mm
mc xr
mm
mc x
21
1
2
21
2
1 ;+
−=+
+=
2
22
2
22
2
112
1
2
1
2
1 ym xm xmT ++=
Pero
=
+
++
++
+
++
−=+ 22
21
2
21
22122
21
1
21
12
2
222
211 )(2
2)(
2
2
1
22r
mm
mr c
mm
mc
mr
mm
mr c
mm
mcm
xm xm
2)(
2
1 22
21
r cmm µ ++
con21
21
mm
mm
+≡µ y =2
222
1 ym θ cos2 R y −= = .sin
2
1 222
2 θ θ Rm
Así pues,
16

8/12/2019 Goldstein solucionario.pdf
http://slidepdf.com/reader/full/goldstein-solucionariopdf 68/195
θ
θ θ µ θ
cos
)sincos(22
)(
2
2
2
222
21
2
gRmV
m Rmmc
T
−=
+++
=
c es coordenada cíclica )0( =∂
∂
c
L de modo que .const c = Además se conserva la
energía de modo que
E const gRmm R ≡=−+ θ θ θ µ θ cos2)sincos( 2
2
2
222 (el doble de la energía total)
θ θ µ
θ θ
2
2
2
2
sincos
cos2
m R
gRm E
+
+=
θ
θ θ µ θ
cos2
sincos
2
2
2
2
gRm E
m Rd dt
+
+=⇒
-------------------------------------
14. Considérese el regulador ilustrado en la figura. ¿Cuántos grados de libertadhay? En función de los ángulos θ y φ , obténgase el Lagrangiano del sistema yescríbanse las ecuaciones de Lagrange. Utilizando las simetrías, redúzcase elproblema a una cuadratura. Interprétense físicamente cada una de lasecuaciones de conservación (o integrales del movimiento) obtenidas.
φ θ cossin1 R x =
φ θ sinsin1 R y =
121 2;cos z z R z =−= θ
φ θ φ φ θ θ sinsincoscos1 R R x −=
φ θ θ sincos1 R y = 222222
1
2
1
2
1 sincossin φ θ θ φ φ θ R R z y x R +=++⇒+
θ θ sin1 R z =
)sin4sin( 22222222 θ θ φ θ θ R R RmT ++=
θ cos6)(2 21 mgR z z mg V −=+=
El Lagrangiano es:
θ θ θ φ θ θ cos6)sin4sin( 222222 mgRmR L +++=
17

8/12/2019 Goldstein solucionario.pdf
http://slidepdf.com/reader/full/goldstein-solucionariopdf 69/195

8/12/2019 Goldstein solucionario.pdf
http://slidepdf.com/reader/full/goldstein-solucionariopdf 70/195
)1( −=+= iiy xr
−−−+++ +=+= iy xr iy xr ;
Claramente
21Re θ θ ii
ber ±= −
±
21
21 Re θ θ
θ θ ii
eibir ±=± .
*rr =⋅ rr , donde *r es el complejo conjugado de r ; iy xr −=*
=±±= −−± )Re)(Re( 2121
2121
2 θ θ θ θ θ θ θ θ iiii beber
)( )()(
21
2
2
22
1
2 1221 ϑ θ θ θ θ θ θ θ −− +±+= ii ee Rbb R
)()(2
1 2
2
22
1
222
θ θ
b Rmr r mT +=+= −+
121 sin2)( θ mgR y ymg V =+=
)sin2( 1
2
2
22
1
2 θ θ θ Rg b Rm L −+=
Nótese que 2θ es coordenada cíclica, pues .02
=∂
∂
θ
L En otras palabras, al sistema no le
afecta que se le dé a la variable 2θ un desplazamiento constante θ ∆ . Es por tanto
“invariante ante traslación (giro)” de la variable 2θ . Se conserva pues 2 p
teconsmb L p tan2 22
2
2 ==∂∂= θ θ
,
t mb
p2
2202
2+= θ θ
claramente asociado al momento de giro del sistema de las dos masas alrededor de su
centro. También el momento angular de la Tierra alrededor del eje polar se conserva
indepedientemente de su giro alrededor del Sol. El resto del problema es trivial,
reduciéndose al de un péndulo simple plano.
----------------------------------------
16. Una partícula de masa m, sometida al campo gravitatorio terrestre, se muevesin rozamiento sobre la superficie interior de un paraboloide de revolucióncolocado verticalmente.
a) Calcúlese su lagrangiana e identifíquense las magnitudes que se conservandurante el movimiento.
b) Hállese el potencial efectivo para el problema unidimensional equivalente ydiscútase el tipo de órbitas.
c) ¿Qué velocidad inicial ha de imprimirse a la partícula para que la órbita sea
circular?
19

8/12/2019 Goldstein solucionario.pdf
http://slidepdf.com/reader/full/goldstein-solucionariopdf 71/195
d) Calcúlese la frecuencia de las oscilaciones de pequeña amplitud en torno aesta órbita circular.
a) Sea ( )22 y xk z += la ecuación del paraboloide. Utilicemos coordenadas cilíndricas
( ρ ,ϕ ) como se indica en la figura.
m
ϕ
ρ
z
y
xAsí pues,
=
=
=
2
cos
ρ
ϕ ρ
ϕ ρ
k z
sen y
x
==
=
2222
222
222
4
cos
ρ ρ ϕ ρ
ϕ ρ
k z sen y
x
⇒ ⇒
=
+=
−=
ρ ρ
ϕ ϕ ρ ϕ ρ
ϕ ϕ ρ ϕ ρ
k z
sen y
sen x
2
cos
cos
+
−222
222
2cos
2
ϕ ϕ ρ ρ ϕ ϕ ρ
ϕ ϕ ρ ρ ϕ ϕ ρ
sen
sen sen
+
+
cos
cos
ϕ
ϕ
De modo que la energía cinética de la partícula es
( )222222 42
1
2
1 ρ ρ ϕ ρ ρ k mmT ++=≡ 2
v .
Siendo la energía potencial
2 ρ mgk mgz V =≡ .
En la lagrangiana L=T −V , la coordenada ϕ es cíclica, luego el correspondiente momentogeneralizado se conserva
≡=∂
∂ϕ ρ
ϕ
2m L
,
que corresponde a la componente vertical del momento angular. Además, como la
lagrangiana no depende del tiempo, la energía total se conserva.
b) La energía total de la partícula, suponiendo que 0≠l ,
( ) 22
2
222
241
21 ρ
ρ ρ ρ mgk
mk mV T E +++=+≡
20
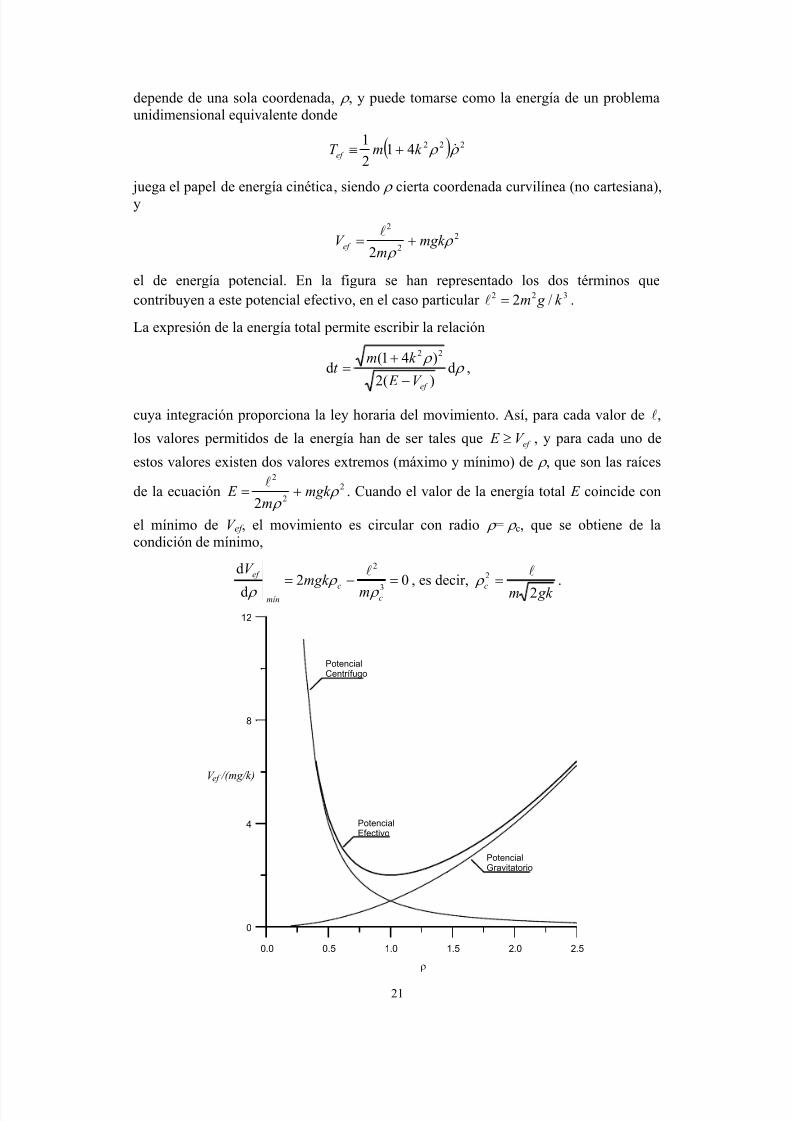
8/12/2019 Goldstein solucionario.pdf
http://slidepdf.com/reader/full/goldstein-solucionariopdf 72/195
depende de una sola coordenada, ρ , y puede tomarse como la energía de un problema
unidimensional equivalente donde
( ) 222412
1 ρ ρ k mT ef +≡
juega el papel de energía cinética, siendo ρ cierta coordenada curvilínea (no cartesiana),y
2
2
2
2 ρ
ρ mgk
mV ef +=
el de energía potencial. En la figura se han representado los dos términos que
contribuyen a este potencial efectivo, en el caso particular .322 /2 k g m=
La expresión de la energía total permite escribir la relación
ρ ρ
d)(2
)41(d
22
ef V E
k mt −
+= ,
cuya integración proporciona la ley horaria del movimiento. Así, para cada valor de ,
los valores permitidos de la energía han de ser tales que , y para cada uno de
estos valores existen dos valores extremos (máximo y mínimo) de ρ , que son las raíces
de la ecuación
ef V E ≥
2
2
2
2 ρ
ρ mgk
m E +=
. Cuando el valor de la energía total E coincide con
el mínimo de V ef , el movimiento es circular con radio ρ = ρ c, que se obtiene de la
condición de mínimo,
02d
d3
2
=−=c
c
mín
ef
mmgk
V
ρ ρ
ρ
, es decir,
gk mc
2
2 = ρ .
0.0 0.5 1.0 1.5 2.0 2.5
0
4
8
12
PotencialGravitatorio
PotencialCentrífugo
PotencialEfectivo
ρ
V ef /(mg/k)
21

8/12/2019 Goldstein solucionario.pdf
http://slidepdf.com/reader/full/goldstein-solucionariopdf 73/195
c) En la órbita circular, como el radio es constante, se tiene evidentemente 0=c ρ . Por
otra parte, utilizando la expresión obtenida para el radio de la órbita, ρ c, en la de la
componente vertical del momento angular resulta el valor de la componente azimutal dela velocidad de la partícula,
gk c 2=ϕ .
Así pues para conseguir que la partícula se mueva según una trayectoria circular con
determinado valor del radio, c ρ ρ = , hay que imprimirle una velocidad de componente
únicamente azimutal y de módulo c gk ρ 2 .
d) Para escribir la ecuación del movimiento general de la partícula, calculemos las
derivadas
+=∂
∂
−+=∂
∂
ρ ρ ρ ρ
ρ ρ ρ ϕ ρ ρ
22
222
4
24
mk m L
mgk mk m L
La ecuación de Lagrange correspondiente conduce a la ecuación:
( ) 024413
22222 =+−++ ρ
ρ ρ ρ ρ ρ mgk
mmk k m
.
Supongamos ahora que el movimiento se aparta poco de una órbita circular, de manera
que
( )ε ρ ρ += 1c , con ε « 1.
Sustituyendo en la ecuación del movimiento y despreciando los términos en ε de orden
superior al primero, se llega a la ecuación
0
2
41
82
=
+
+ ε ε
gk m
k
gk
que es la ecuación de un oscilador armónico de frecuencia
gk m
k
gk
2
41
82
2
+
=ω .
------------------------------------------
17. Plantee las ecuaciones del movimiento para el péndulo doble en el caso de
pequeñas oscilaciones, escogiendo como coordenadas las longitudes de arcodescritos por cada uno de los péndulos. Halle las frecuencias de los modos
22

8/12/2019 Goldstein solucionario.pdf
http://slidepdf.com/reader/full/goldstein-solucionariopdf 74/195
normales en el caso en el que la masa del péndulo superior es mucho mayor quela del péndulo inferior.
La forma usual de abordar este problema puede quedar resumida en lo siguiente. Si
describimos el problema en las variables generalizadas dadas por los ángulos de los péndulos daremos con una formulación que puede englobarse en la siguiente forma
general de lagrangiano:
)()(2
1
,
qU qqq M L j ji
i ji −= ∑
con un punto de equilibrio en q . El estudio de las desviaciones pequeñas alrededor
del punto de equilibrio equivale a tomar sólo los términos lineales en las ecuaciones del
movimiento, o lo que es lo mismo, la aproximación cuadrática a L:
0=i
j ji i ji j ji i ji qq K qqT L
∑∑ −=
,, 2
1
2
1
El problema de hallar las frecuencias de los modos normales es el de resolver la
ecuación especial de valores propios:
k k k AK AT ⋅=⋅2ω
en donde T no es una matriz diagonal. Para evitar el complicado problema de la
diagonalización en este estadio, podemos en algunos casos diagonalizar la energía
cinética ya de partida, en el lagrangiano cuadrático. Esto es lo que pasa en el problema
presente. Veamos cómo podemos hacerlo.
El problema nos plantea un péndulo doble, con el superior de longitud L, y masa M , y elinferior,
de longitud l y masa m. La energía cinética no es difícil de hallar:
[ ])-cos(22
1
2
1 222222 θ ϕ ϕ θ ϕ θ θ Ll l Lm MLT +++=
Para pequeños valores de θ y ϕ , podemos aproximar el coseno por 1. Como hay un
término producto de sus derivadas temporales, estas coordenadas no son ortogonales
(no diagonalizan la energía cinética), pero podemos hacerlas ortogonales sumando un
múltiplo apropiado de θ a ϕ . De hecho, es fácil ver que una pareja de coordenadasortogonales está dada por los desplazamientos
θ θ l L y L x += = ,
que no son otra cosa que las longitudes de arco descritos por cada una de las masas de
ambos péndulos. Es fácil ver que, entonces, la energía cinética se convierte en:
2
2
12
2
1 ym x M T +=
En función de estas nuevas coordenadas ortogonales es fácil ver que las ecuaciones del
movimiento son:
23

8/12/2019 Goldstein solucionario.pdf
http://slidepdf.com/reader/full/goldstein-solucionariopdf 75/195
( )m g mg mg x x y
L M l M l
g g y x y
l l
+= − + +
= −
Hallar la ecuación característica para las frecuencias de los modos normales es
relativamente trivial, sobre todo en el límite M >>m, quedando:
l
g
L
g ≈≈ 22 y ω ω
-----------------------------------------
18. Una partícula de masa unidad que puede moverse libremente en el plano XY , seencuentra inicialmente en reposo en el origen de coordenadas y está sometida a
la fuerza que deriva del potencial V ( x , y). El potencial es analítico cerca delorigen, admitiendo el desarrollo
( ) ( ) ( ) ( ) 2
2
2
1, 3
2
2
22
2
2232
r O y x
V xy
y
V y
x
V x
y
V y
x
V xr OV V y xV +++++≡+∇⋅+∇⋅=
∂ ∂
∂
∂
∂
∂
∂
∂
∂
∂
∂ rr
Estúdiense los instantes iniciales del movimiento, desarrollando las ecuacionesde Lagrange en torno a la condición inicial. Resuélvanse estas ecuacionessuponiendo que, durante estos instantes, el desplazamiento es de laforma ( ) ( ) 5432 t Ot t t t +++= cbar , y determínense los vectores constantes a, b y
c. Calcúlese, así mismo, la trayectoria durante este tiempo y la expresión de lalagrangiana.
La lagrangiana de la partícula es L = T − V , siendo 22
2
12
2
1 y xT +== v . Así pues,
cerca del origen, se tiene
( ) ( ) ( )
( ) ( ) ( )
000 ;
000 ;
2
2
2
2
2
2
−−−==
−−−==
y x
V x
y
V y
y
V
y
L y
y
L
y x
V y
x
V x
x
V
x
L x
x
L
∂ ∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂ ∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
lo que conduce a las ecuaciones de movimiento de Newton:
( ) ( ) ( )
( ) ( ) ( )
000
000
2
2
2
2
2
2
−−−=
−−−=
y x
V x
y
V y
y
V y
y x
V y
x
V x
x
V x
∂ ∂
∂
∂
∂
∂
∂
∂ ∂
∂
∂
∂
∂
∂
con las condiciones iniciales
( ) ( ) ( ) ( ) 00000 ==== y x y x
Por otra parte, según el enunciado, se tiene
24

8/12/2019 Goldstein solucionario.pdf
http://slidepdf.com/reader/full/goldstein-solucionariopdf 76/195
( ) 1262 32 t Ot t +++= cbar
Sustituyendo r y en las ecuaciones del movimiento e igualando las potencias del
mismo orden en t , se obtienen los vectores buscados:
r
( )02
1
V
a x ∂
∂
−=
0= xb
( ) ( ) ( ) ( )
+= 0000
24
1
2
2
2
y x
V
y
V
x
V
x
V c x
∂ ∂
∂
∂
∂
∂
∂
∂
∂
Haciendo en estas expresiones el intercambio x↔ y, se obtienen las componentes y
correspondientes.
Para calcular la trayectoria, x = x( y), hay que eliminar el tiempo t entre las
componentes x e y de la ley de movimiento r (t ). Para ello invertimos la serie de una de
las componentes, la componente x por ejemplo, suponiendo para t un desarrollo de la
forma
( ) 22/32/1 xO x x xt +++= γ β α
de manera que
( ) 2 22/322 xO x xt ++= αβ α
( )
22/333 xO xt += α
Sustituyendo en la ley de movimiento, se tiene:
( ) ( ) 2 22/32 xO x xa x x ++= αβ α
de donde, igualando las potencias del mismo orden en x se encuentran los coeficientes
del desarrollo de t ,
,0= ,2/1
… β α −= xa
lo que llevado a la componente y de la ley de movimiento, y = a yt 2 + ..., proporciona la
trayectoria pedida
( ) /
/
2
0 xO x xV
yV y
x+
=
=∂ ∂
∂ ∂
que puede calcularse consecutivamente a todos los órdenes
---------------------------------------
19. Considérese un sistema formado por dos esferas de masa m unidas por unavarilla rígida de masa despreciable y longitud 2l. El conjunto puede girarlibremente en torno al punto medio de la varilla, equidistante de ambas esferas.Este punto está forzado a moverse sobre una circunferencia de radio R
colocada verticalmente en el campo gravitatorio terrestre. Determínense lascoordenadas generalizadas apropiadas para describir el movimiento del
25

8/12/2019 Goldstein solucionario.pdf
http://slidepdf.com/reader/full/goldstein-solucionariopdf 77/195
sistema y calcúlese la expresión de su lagrangiana, si la gravedad es la únicafuerza presente. Escríbanse las ecuaciones de Lagrange correspondientes ydiscútase el movimiento del sistema.
z
y
x
θ
ϕ g
Para especificar el movimiento del sistema, lo más conveniente es dar la posición del
centro de masas y referir a éste las posiciones de las dos esferas. Como el centro demasas está forzado a moverse sobre una circunferencia, su posición queda determinada
dando el ángulo α que forma su radio vector. En cuanto a las esferas, como están unidas
por una barra rígida, la distancia que las separa es fija y basta con especificar los
ángulos polares esféricos (ϕ ,θ ) que determinan la orientación de la barra en el espacio.
Así, como coordenadas generalizadas del sistema pueden tomarse los tres ángulos
(α ,ϕ ,θ ).
Con respecto a un sistema de coordenadas cartesianas con origen en el centro de
la circunferencia de radio R, como en la figura, las posiciones de las esferas son:
cos
cos
cos
1
1
1
+=
+=
=
θ α
ϕ θ α
ϕ θ
l Rsen z
senlsen R y
lsen x
cos
cos
cos
2
2
2
−=
−=
−=
θ α
ϕ θ α
ϕ θ
l Rsen z
senlsen R y
lsen x
Calculando por derivación temporal las velocidades respectivas, resultan las siguientes
expresiones para las energías cinéticas:
( )[ ]θ α θ ϕ θ α ϕ ϕ θ α θ α α θ ϕ θ sen sen sen sen sen Rl R senl l m
mT
coscoscos22
2
1
2222222
2
11
++−++=
=≡ v
( )[ ]θ α θ ϕ θ α ϕ ϕ θ α θ α α θ ϕ θ sen sen sen sen sen Rl R senl l m
mT
coscoscos22
2
1
2222222
2
22
+++++=
=≡ v
de modo que la energía total del sistema es
( ) ( ) ( )222
21 α θ ϕ θ R senl l mT T T ++=+=
Por otra parte, las energías potenciales de las esferas y la energía potencial totalson
26

8/12/2019 Goldstein solucionario.pdf
http://slidepdf.com/reader/full/goldstein-solucionariopdf 78/195
( )θ α cos11 l Rsenmg mgz V +==
( )θ α cos22 l Rsenmg mgz V −==
α mgRsenV V V 221 =+=
A partir de la lagrangiana, L ≡ T − V , calculemos las derivadas
2
2
2 2
2
2
2
LmR
Lml
Lml sen
∂ α
∂α
∂ θ
∂θ
∂ ϕ θ
∂ϕ
= −
=
=
=
=
=
0
cos2
cos2
22
∂ϕ
∂
θ θ ϕ ∂θ
∂
α ∂α
∂
L
senml L
mgR L
La ecuación asociada al grado de libertad α ,
( ) 0cos22dd 2 =− α α mgRmRt
está desacoplada de θ y de ϕ . Esta ecuación es precisamente la ecuación del péndulo
simple,
cos g
Rα α = −
de manera que el centro de masas de las esferas ejecuta un movimiento pendular
independientemente de como estén girando las esferas. Es decir, el sistema en conjunto
se comporta como un péndulo de masa 2m con dos grados de libertad internos que
determinan el movimiento relativo de las dos esferas respecto de su centro de masas.
Por otra parte, la coordenada ϕ es cíclica de manera que una constante del
movimiento es
C senml L
== θ ϕ ϕ ∂
∂ 222
de donde, despejando, se obtiene
2
22 θ ϕ
senml
C =
La ecuación para θ es
( ) 0cos22d
d 222 =− θ θ ϕ θ senml ml t
es decir, sustituyendo el resultado anterior,
2
2 2
cot0
2 sin
C
ml
θ θ
θ
− =
que es la ecuación que determina el movimiento relativo de las esferas.
-----------------------------------------
27

8/12/2019 Goldstein solucionario.pdf
http://slidepdf.com/reader/full/goldstein-solucionariopdf 79/195
20. Una partícula de masa m se mueve sobre la superficie de una esfera de radio R y se encuentra sometida al campo gravitatorio terrestre.
a) Calcúlese su lagrangiana e identifíquense las magnitudes que se conservandurante el movimiento.
b) Hállese el potencial efectivo para el problema unidimensional equivalente ydiscútase el tipo de órbitas.
Tomemos un sistema de coordenadas cartesianas centrado en la esfera, tal como se
indica en la figura
m R θ
Utilizando coordenadas esféricas, la posición y velocidad de la partícula vendrán dadas
por
−=
+=
−=
=
=
=
θ θ
ϕ θ ϕ ϕ θ θ
ϕ θ ϕ ϕ θ θ
θ
ϕ θ
ϕ θ
sen
cossensencos
sensencoscos
cos
sensen
cossen
R z
R R y
R R x
R z
R y
R x
de manera que las energías cinética y potencial de la partícula son, respectivamente,
( ) ( ) sen2
1
2
1
2
1 22222222 θ ϕ θ +=++== mR z y xmmT v
θ cos00 mgRV mgz V V +=+=
A partir de la lagrangiana, L = T − V , las ecuaciones correspondientes a los ángulos de
orientación son
0d
d=−
∂θ
∂
θ ∂
∂ L L
t
0d
d=−
∂ϕ
∂
ϕ ∂
∂ L L
t
Como la coordenada ϕ es cíclica su momento conjugado se conserva constante, lo que
traduce la conservación de la componente correspondiente del momento angular, esdecir,
28
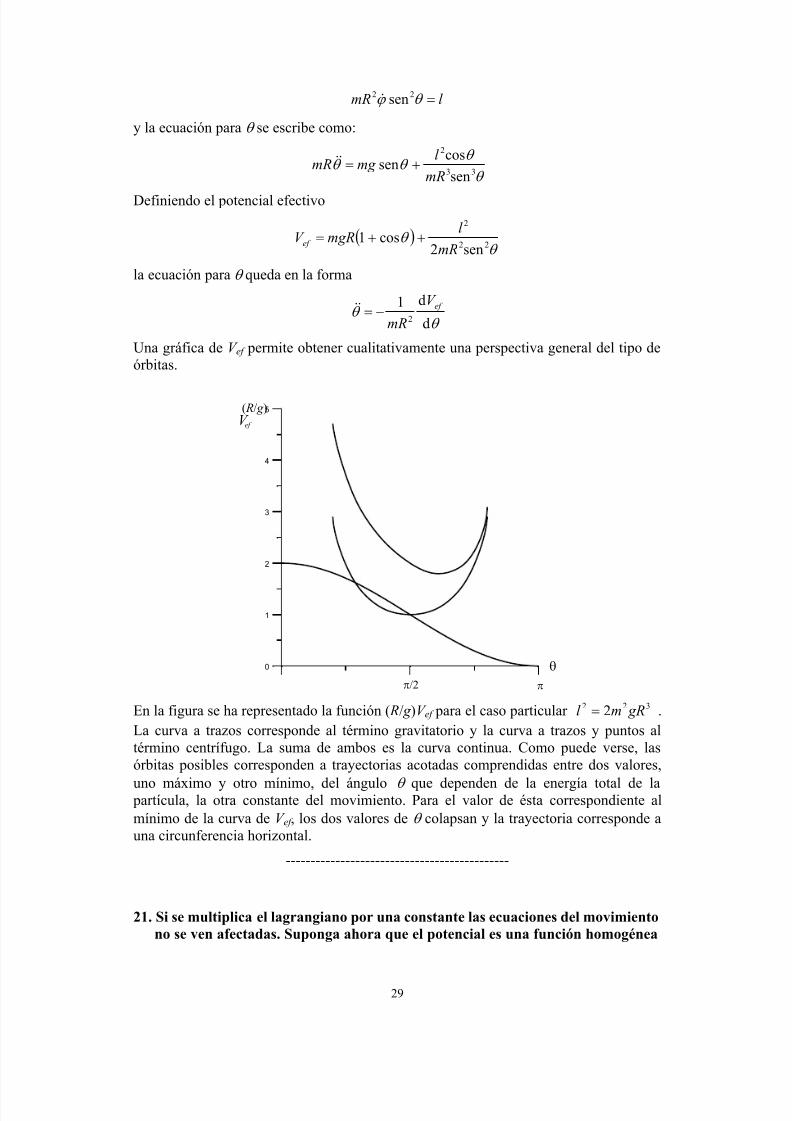
8/12/2019 Goldstein solucionario.pdf
http://slidepdf.com/reader/full/goldstein-solucionariopdf 80/195
sen 22 l mR =θ ϕ
y la ecuación para θ se escribe como:
sen
cossen
33
2
θ
θ θ θ
mR
l mg mR +=
Definiendo el potencial efectivo
( ) sen2
cos122
2
θ θ
mR
l mgRV ef ++=
la ecuación para θ queda en la forma
d
d1
2 θ θ
ef V
mR−=
Una gráfica de V ef permite obtener cualitativamente una perspectiva general del tipo de
órbitas.
0
1
2
3
4
ππ/2
θ
V ef
5( R/ g )
En la figura se ha representado la función ( R/ g )V ef para el caso particular .
La curva a trazos corresponde al término gravitatorio y la curva a trazos y puntos altérmino centrífugo. La suma de ambos es la curva continua. Como puede verse, las
órbitas posibles corresponden a trayectorias acotadas comprendidas entre dos valores,
uno máximo y otro mínimo, del ángulo θ que dependen de la energía total de la
partícula, la otra constante del movimiento. Para el valor de ésta correspondiente al
mínimo de la curva de V
2 322 gRml =
ef , los dos valores de θ colapsan y la trayectoria corresponde a
una circunferencia horizontal.
---------------------------------------------
21. Si se multiplica el lagrangiano por una constante las ecuaciones del movimientono se ven afectadas. Suponga ahora que el potencial es una función homogénea
29

8/12/2019 Goldstein solucionario.pdf
http://slidepdf.com/reader/full/goldstein-solucionariopdf 81/195
de grado m de las coordenadas: ( ) ( ) (n
r r r V mn
r r r V n
r r r ,,2
,1
,,2
,1
,,2
,1
……… α α α α =′′′= )V . Si
se reescala simultáneamente el tiempo (por un factor: β =t
t ' ) y las
coordenadas espaciales (por dicho factor: α =′l
l l , con señalando una
coordenada con dimensiones de longitud), una elección apropiada de ambosfactores puede tener como efecto neto el de multiplicar el lagrangiano por unaconstante.
a) ¿Cuál es la relación entre α y β para que así suceda?b) Una vez obtenida ésta derive a partir de ella, como función de m, lasrelaciones entre
l l ′ y cada uno de las reescalamientos siguientes: tiempos (
t t ′ ), velocidades (
v′v ), energía (
E E ' ) y momento angular (
J J ′ ).
c) Obtenga de las relaciones del apartado b) lo siguiente:- la tercera ley de Kepler,
-
la relación l cuando el potencial gravitatorio se aproxima pormgh ( )2
constante t ×=
- la independencia del período con la amplitud en el oscilador armónico
a) Si el potencial reescala como , la energía cinética lo hace comomα 22
β α . Para sacar
factor común a ambos términos del lagrangiano
= 22 β α α m , o
( )21 m−= α β
b) las relaciones solicitadas son:
21
;;2;21
m
l
l
J
J m
l
l
E
E
m
l
l
v
v
m
l
l
t
t +
′=
′
′=
′
′=
′−
′=
′
c)
- En el potencial gravitatorio 1−=m . Sustituyendo en la primera relación en b),
obtenemos ( ) ( )32 l l t t ′=′ , que es la ley de Kepler (las distintas órbitas se transforman
unas en otras mediante reescalamientos en el tiempo y el la longitud)
-
En el caso del potencial mgh, 1=m , encontramos la clásica relación parabólicaentre distancia y tiempo.
- Aquí m . El período debe ser independiente de la amplitud.2=
22. Considérese un circuito clásico ( inductor-condensador) sin generador,estudiado en Física General. Recordando que la energía almacenada en el
inductor es
LC
2L21 I , siendo I la corriente que circula por él, y que la almacenada
en el condensador esC
Q2
21 , establezca una analogía entre estos conceptos
eléctricos y los correspondientes de un sistema mecánico simple. A
30
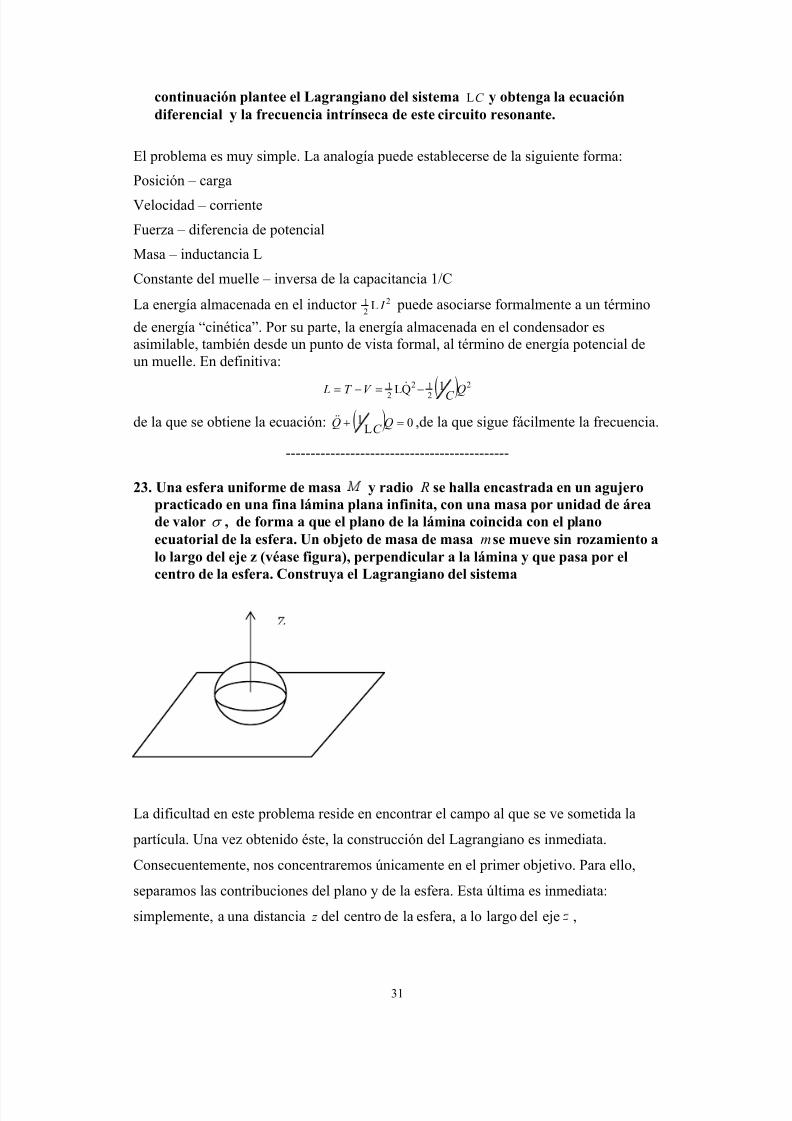
8/12/2019 Goldstein solucionario.pdf
http://slidepdf.com/reader/full/goldstein-solucionariopdf 82/195
continuación plantee el Lagrangiano del sistema y obtenga la ecuacióndiferencial y la frecuencia intrínseca de este circuito resonante.
C L
2Q
m
El problema es muy simple. La analogía puede establecerse de la siguiente forma:
Posición – cargaVelocidad – corriente
Fuerza – diferencia de potencial
Masa – inductancia L
Constante del muelle – inversa de la capacitancia 1/C
La energía almacenada en el inductor 2
21 L I puede asociarse formalmente a un término
de energía “cinética”. Por su parte, la energía almacenada en el condensador es
asimilable, también desde un punto de vista formal, al término de energía potencial de
un muelle. En definitiva:( )
212
21 1QL
C V T L −=−=
de la que se obtiene la ecuación: ( ) 0L
1 =+ QC
Q ,de la que sigue fácilmente la frecuencia.
---------------------------------------------
23. Una esfera uniforme de masa y radio R se halla encastrada en un agujeropracticado en una fina lámina plana infinita, con una masa por unidad de áreade valor σ , de forma a que el plano de la lámina coincida con el planoecuatorial de la esfera. Un objeto de masa de masa se mueve sin rozamiento a
lo largo del eje z (véase figura), perpendicular a la lámina y que pasa por elcentro de la esfera. Construya el Lagrangiano del sistema
La dificultad en este problema reside en encontrar el campo al que se ve sometida la
partícula. Una vez obtenido éste, la construcción del Lagrangiano es inmediata.
Consecuentemente, nos concentraremos únicamente en el primer objetivo. Para ello,
separamos las contribuciones del plano y de la esfera. Esta última es inmediata:
simplemente, a una distancia del centro de la esfera, a lo largo del eje z ,
31

8/12/2019 Goldstein solucionario.pdf
http://slidepdf.com/reader/full/goldstein-solucionariopdf 83/195
2 z
GM −
La contribución del plano puede calcularse de la forma siguiente. Tomemos un anillo de
radio ρ , alrededor del centro de la esfera.. Por razón de simetría, sólo tendremos que
calcular la componente del campo producido por el anillo a la misma distancia
anterior . En definitiva,
( )( )( ) 2222
2
ρ ρ
ρ σ πρ
++−
z
z
z
d G
El campo total producido por el plano resultará de integrar la expresión para el anillo en
el intervalo [ :)∞, R
22
2
R z
z G
+−
σ π
---------------------------------------------
24. Sabemos que el oscilador armónico tiene como parámetro característico lafrecuencia ω , que es independiente de las condiciones iniciales. Por elcontrario, su amplitud máxima A sí que depende de estas últimas. Sin embargo,existen osciladores en los cuales los papeles de la frecuencia y amplitud máximase invierten, en el sentido de pasar la frecuencia a ser dependiente de condicióninicial y, al contrario, la amplitud máxima convertirse en un parámetrocaracterístico del sistema, independiente de la condición inicial. Un caso
semejante ocurre en el sistema de la figura, en el que dos masas iguales estánunidas por un eje rígido de masa nula. cada una de las masas se mueve sinrozamiento, y en ausencia de gravedad, a lo largo del eje correspondiente, biensea el x , bien sea el y. Plantee el lagrangiano del sistema, y demuestre que loaseverado es cierto: la frecuencia con la que oscila cada masa depende de lacondición inicial, mientras que su amplitud máxima es siempre la misma.
x
y
A
Al no estar el sistema sometido a fuerzas, fuera de las ligaduras geométricas, el
lagrangiano y la energía cinética coinciden: son iguales a la energía cinética que tiene
cualquiera de las partículas, en el instante en que pasa por el origen y la otra está en su
posición de equilibrio,
( )2
22
22
22u
m
x A
xmA L =
−=
(1)
donde es la velocidad de una partícula cuando pasa por el origen. Ordenando de
nuevo términos en la ecuación (1), llegamos a:
u > 0
32

8/12/2019 Goldstein solucionario.pdf
http://slidepdf.com/reader/full/goldstein-solucionariopdf 84/195
222
2222222u x
A
u xu A xu x A =
+⇒=+
La ecuación final expresa la conservación de la energía de un oscilador armónico cuya
frecuencia y amplitud máxima son, respectivamente, u A
y . El movimiento es el de
oscilador armónico, pero en el cual la frecuencia depende de la condición inicial (a
través de , mientras que la amplitud máxima es siempre constante.
A
u
---------------------------------------------
25- Suponga que el lagrangiano para un cierto movimiento unidimensional viene
dado por
−= 22
2
1
2
1e kqqm
t L
γ .
a) Escriba la ecuación del movimiento. ¿A qué sistema corresponde?b) ¿Existe alguna constante del movimiento?c) Ponga de manifiesto los distintos movimientos posibles
Suponga seguidamente que se define una nueva coordenada, , dada porS
qt
S
=
2exp
γ .
d) Escriba la ecuación del movimiento. ¿A qué sistema corresponde?e) ¿Existe alguna constante del movimiento?f) Ponga de manifiesto los distintos movimientos posiblesg) ¿Cómo pondría en relación ambas descripciones?
Nota aclaratoria.
En el enunciado propuesto en la hoja de examen se deslizó un error. Se sugería elcambio ( t qS )γ exp= en lugar del que aparece en el presente enunciado. Está claro que
con este último cambio el resultado carece de interés conceptual, tal como ha podido
constatar la mayoría de los alumnos. La corrección, evidentemente, se ha hecho según el
enunciado del examen, y no con el que aparece aquí. Sin embargo, sí que da interés al
problema el cambio propuesto aquí, por lo que será aquél sobre el que elaboraremos.
Para terminar, quiero felicitar a los tres alumnos que se han dado cuenta del “buen”
cambio. Así lo han hecho constar en el examen a título de comentario y su iniciativa ha
sido debidamente valorada a la hora de calificar.
a) La ecuación de Lagrange lleva a:( ) 0=++ kqqmqme t γ γ ,
o
0=++ qm
k qq γ ,
b) Aparentemente, podríamos contestar que no existe constante del movimiento al
depender explícitamente del tiempo. Pero esta respuesta es un poco precipitada.
Veamos por qué. En un sistema mecánico, podemos disponer, en principio, de
funciones que permanecen constantes a lo largo del
movimiento: =constante. Estas se denominan constantes del movimiento ointegrales primeras. Sin embargo, la definición de estas cantidades es más general,
L
( ) ( )( t qt q F
, )
33

8/12/2019 Goldstein solucionario.pdf
http://slidepdf.com/reader/full/goldstein-solucionariopdf 85/195
englobando una posibles dependencia explícita del tiempo, de forma que:
= constante. Nada , en principio, excluye la existencia de este último caso de constante
del movimiento, aunque, bueno es decirlo, se piensa en la primera forma al hablar de
constante del movimiento. Lo que sí queda claro es que, si existe
( ) ( )( )t t qt q F ,,
( )( )( )t t ,qt q F , =
constante, no es aparente. Sigamos la evolución del problema para aclarar este extremo.
c) Para una solución general del tipo , obtenemos la ecuación característicat eq α ∝
02 =++m
k α γ α
con soluciones
m
k −
±−=2
22
γ γ α
Las distintas posibilidades de movimiento nos vendrán dadas por el valor del
discriminantemk − =∆
2
2γ , siempre que 0>γ .
Primer caso: ∆ . En este caso, la solución general queda como un movimiento
oscilatorio amortiguado
0<
( )t Bt Aeq
t
∆+∆= −
sencos2
γ
Segundo caso: . Movimiento puramente amortiguado0=∆
20
t
eqq
γ −
=
Tercer caso: ∆ . Movimiento también puramente amortiguado0>
( )t t
t
Bee Aeq ∆−∆−
+= 2
γ
d) Escribimos el lagrangiano en función de la nueva variable
2
2
2
1
2
1
2
1kS S S m L −
−= γ ,
del que se obtiene la siguiente ecuación del movimiento
02
22
=
−+ S
m
k S
γ .
e) Ahora, sí que podemos hablar de una constante del movimiento. La ecuación anterior
es la del oscilador armónico, que tiene formalmente la constante
cte2
2
22
2 =
−+ S
m
k S
γ
Llegados a este punto, enlazamos con el apartado b). La expresión anterior, una vez
desecho el cambio , nos proporciona la contestación a la pregunta que nos
hacíamos ahí.
S q →
34

8/12/2019 Goldstein solucionario.pdf
http://slidepdf.com/reader/full/goldstein-solucionariopdf 86/195
f) Es fácil responder a este apartado manejando el signo de 2γ −mk , al igual que
hicimos en el apartado c). Sin embargo, a la hora de hacer un análisis completo no
deberá olvidarse el factor exponencial en la definición de .S
g) Ambas descripciones son totalmente equivalentes. La única diferencia es que en la
segunda se enmascara el factor exponencial –que no por ello ha desaparecido-
pudiéndose con ello poner en evidencia la constante del movimiento –cosa que no era
trivial en la primera descripción.
---------------------------------------------
26- Tres puntos de masa pueden deslizarse sobre un círculo de radio b , talcomo indica la figura de la izquierda, sometidos a fuerzas derivables del potencial
m
( ) γ β α γ β α −− ++= ee,, 0V V −e los ángulos de separación γ β α ,, son medidos en
radianes. Cuando3
2π γ β α ==
21 ,,
=
3
, el sistema se halla en equilibrio. Encuentre las
frecuencias de los modos normales del sistema para pequeños desplazamientos delequilibrio (ángulos θ θ θ ilustrados en la figura de la derecha)
Los ángulos α , β y γ , en términos de 21 ,θ θ y 3θ , son:
123
2θ θ
π α −+= ,
233
2θ θ
π β −+= ,
313
2
θ θ
π
γ −+= .
Por su parte, el potencial queda:
−−+
−−+
−−−=
3123123
2
0
θ θ θ θ θ θ π
eeeeV V
Habida cuenta de que estamos hablando de pequeños valores de 21 ,θ θ y 3θ , esta
expresión del potencial puede aproximarse por
( ) ( ) ([ 3123123
2
0 3 θ θ θ θ θ θ
π
−−−−−−≈
−
eV V )
35

8/12/2019 Goldstein solucionario.pdf
http://slidepdf.com/reader/full/goldstein-solucionariopdf 87/195
( ) ( ) ( )
−+−+−+ 2
31
2
23
2
122
1
2
1
2
1θ θ θ θ θ θ
La energía cinética va a ser dependiente de las velocidades lineales de las tres
partículas. Como el radio b es constante, éstas serán b , paraiθ 3,2,1=i . En definitiva,
el lagrangiano quedará
( )23
2 2 2 2 230 1 2 3 1 2 2 3
1
13
2 i
i
L mb V eπ
3 1θ θ θ θ θ θ θ θ θ θ
−
=
= − + + + − − −∑ ,
con sus correspondientes ecuaciones de Lagrange
( )2
2 31 0 1 2 32 0mb V e
π
θ θ θ θ −
+ − − =
( )2
2 32 0 2 3 1
2 0mb V eπ
θ θ θ θ −
+ − − =
( )2
2 33 0 3 1 2
2 0mb V eπ
θ θ θ θ −
+ − − =
Proceder en el análisis de modos normales es relativamente trivial, por lo que se dejan
los detalles como ejercicio. La ecuación característica resulta ser2
2
2 2 230
3 0mb V e mbπ
ω ω −
− + =
con soluciones
=−
30
31
0
π ω
em
V
b
siendo la segunda degenerada.
---------------------------------------------
27.- En un sistema dinámico de 2 grados de libertad la energía cinética es
2
2
2
2
2
2
1
2
1
)(2qq
bqa
qT
+
+= , y la energía potencial esta dada por U 2dqc += , con a, b,
c y d constantes. Mostrar que en función del tiempo es una ecuación de la
forma con h, k y constantes.
2q
t −2
0 )(t h=2
22 )2)(( k qk q +− 0t
NOTA: bxab
bxa
bxa
xdx+
−−=
+∫ 23
)2(2
Dado que la energía cinética y la potencial no dependen ni del tiempo ni de la
coordenada tenemos 2 constantes del movimiento:1q V T E += y1q
L
∂∂
, es decir:
cte pa
q
q
L=
+=
∂∂
1
1
1
bq2
=
36

8/12/2019 Goldstein solucionario.pdf
http://slidepdf.com/reader/full/goldstein-solucionariopdf 88/195
8/12/2019 Goldstein solucionario.pdf
http://slidepdf.com/reader/full/goldstein-solucionariopdf 89/195
8/12/2019 Goldstein solucionario.pdf
http://slidepdf.com/reader/full/goldstein-solucionariopdf 90/195
cartesianas. Usted sabe que ésta es una partícula en el espacio vacío sin fuerzasactuando sobre ella y le dan como pista el concepto de sistema inercial y elprincipio de relatividad de Galileo.1. Explique por qué el lagrangiano no puede ser función de z, y, x , ni de cada unade las componentes de la velocidad, , , por separado. Tampoco del tiempo.
¿Sobre qué propiedades del espacio se basará su argumentación?
xv yv z v
Usted llega a la conclusión de que , donde)( 2v L v
es la velocidad de la partícula en
un sistema inercial K y quiere descubrir la forma exacta. Para ello toma unsegundo sistema inercial K’ que se mueve con velocidad constanteinfinitesimalmente pequeña ε − respecto de K .2. Pruebe que L _ (a constante). Le puede ayudar hacer una expansión enserie de Taylor, despreciar los términos cuadráticos en _ y recordar la propiedad
de invariancia bajo transformación
2av L =
dt
dF L L +→ ' L .
3. Pruebe que es una elección consistente para el lagrangiano en cualquier
sistema K’ que se mueva con velocidad finita
2'' v L =
0V − respecto de K ; es decir, se
satisface el principio de relatividad de Galileo.
Los datos del problema son:
A) El Lagrangiano es funcional de la forma: ),,( t qq L L ii = .
B) Ecuaciones de Lagrange: 0=∂∂
−∂∂
ii q
L
dt
d
q
L
.
C) Estudiamos el movimiento en un sistema inercial. En este sistema de referencia una
partícula libre permanecerá en reposo o en movimiento rectilíneo uniforme por tiempoilimitado. Esto es equivalente a decir que para este sistema el espacio es homogéneo e
isótropo y el tiempo uniforme y de hecho esta es una de las posibles maneras de definir
un sistema inercial (basta pensar, en el caso de la isotropía por ejemplo, que con una
partícula de velocidad inicial no nula es imposible definir una dirección privilegiada del
espacio, dado que sea cual sea la dirección inicial de la partícula el tipo de
comportamiento siempre es el mismo). Por supuesto los sistemas inerciales son
indistinguibles entre si por lo que las ecuaciones del movimiento han de ser iguales en
todos ellos.
D) Principio de relatividad de Galileo aplicado a un sistema de referencia inercial K’ se
desplaza con velocidad infinitesimal ε − respecto a otro sistema inercial K nos informaque si la partícula libre se mueve con velocidad v
en el sistema K lo hará con velocidad
ε
en el sistema K’.
−v
1) Con los datos A) y C) es directo. La inclusión de una dependencia explicita respecto
a las coordenadas o al tiempo implicaría que las ecuaciones del movimiento no
respetarían la homogeneidad del espacio y el tiempo. Cualquier referencia a una
dirección privilegiada, como sería una dependencia de la dirección del vector velocidad,
no respetaría la isotropía del espacio. Por tanto el Lagrangiano solamente puede
depender del módulo de la velocidad, es decir: .)( 2v L L =
39

8/12/2019 Goldstein solucionario.pdf
http://slidepdf.com/reader/full/goldstein-solucionariopdf 91/195
2) Siguiendo las indicaciones del enunciado desarrollamos en serie el Lagrangiano para
el sistema K’:
)(2)()2()'( 2
2
2222 ε ε ε ε Ovv
Lv Lvv Lv L +
∂
∂−=+−=
,
y de la última afirmación de C) y la otra pista del enunciado del problema tenemos que
dt
dF v Lv L += )()'( 22 y para que esto se cumpla en la ecuación anterior tenemos que
cteav
L==
∂
∂2
, de modo que ar F ε
2−= , donde r
es el vector posición de la partícula.
3) Siguiendo el mismo razonamiento que en el anterior apartado tenemos que
)2()(2)(')'('2
00
22
00
22
0
22 t V V r dt
d v LV V vvV vvv L +−+=+−=−==
que comprueba que los Lagrangianos de ambos sistemas son compatibles.
---------------------------------------------
31. Una partícula de masa m se mueve sobre la superficie de un cono de ángulo α (ver figura) y se encuentra sometida al campo gravitatorio terrestre.
a) Calcúlese su lagrangiana e identifíquense las magnitudes que se conservandurante el movimiento.
b) Hállese el potencial efectivo para el problema unidimensional equivalente ydiscútase el tipo de órbitas
c) ¿Qué velocidad inicial ha de imprimirse a la partícula para que la órbita seacircular?
d) Suponga la masa m en una órbita circular tratada en el apartado anterior.
Suponga que se le imprime un muy pequeño impulso en dirección contraria alvértice del cono. ¿ Qué tipo de trayectoria piensa usted que seguirá el sistemadespués de hacer esto? En el caso de seguir una trayectoria consistente en lacomposición de la trayectoria circular original y de una pequeña oscilaciónalrededor de ésta, calcule la frecuencia de las oscilaciones de pequeña amplituden torno a la órbita circular. Hágalo sólo en el caso en que piense que estatrayectoria tiene sentido.
a) Siguiendo la figura, tenemos:
θ
α
m
z
y
x
R
40

8/12/2019 Goldstein solucionario.pdf
http://slidepdf.com/reader/full/goldstein-solucionariopdf 92/195
,
,sin
,cos
z z
R y
R x
=
=
=
θ
θ
como la partícula tiene que moverse en la superficie del cono, tenemos una ligadura
expresada por la ecuación:
Z
R
z h
R=
−=α tan dónde definimos z h Z −= , siendo h la distancia del origen al
vértice del cono.
Elegimos como coordenadas generalizadas a Z (que sólo tendrá sentido para ) y θ
y definiendo
0≥ Z
α β tg ≡ obtenemos
,
),cossin(
)sincos(
Z z
Z Z y
Z Z x
−=
+−=
−−=
θ θ θ β
θ θ θ β
con lo que el lagrangiano tiene la forma
( )( ) mgZ Z Z m L +++= 22222 12
1θ β β ,
en que la coordenada θ es cíclica y el correspondiente momento conjugado se conserva
θ β θ
θ
22mZ
L p =
∂
∂=
que corresponde a la componente vertical del momento angular. Como la lagrangiana
no depende del tiempo, también se conserva la energía.
b) Si sustituimos la ecuación anterior en la ecuación del movimiento para la otra
variable tenemos
( ) )(1 22 g Z m Z m +=+ θ β β
Distinguimos ahora dos casos:
1) Inicialmente el momento angular es nulo, 0=θ p , bien por estar situados en el
vértice del cono, , o por no tener velocidad inicial en el plano xy, .
En este caso el problema se reduce al movimiento de un cuerpo sobre un plano
inclinado. La ecuación anterior se simplifica a
0= Z 0=θ
( )12 +=
β
g Z , es decir es un
movimiento uniformemente acelerado en la coordenada Z . El potencial efectivo
es: Z g eff α β
22 cos
1+= g Z =V .
2) Si podemos despejar de la ecuación del momento angular0≠θ p
22 β θ θ
mZ
p= , que introducimos en la ecuación para la variable Z
+
+=
232
2
21
1
β β
θ
Z m
p g Z ,
y si tomando como potencial efectivo la función tal que
Z
V
Z
eff
∂
∂
−=
, obtenemos
41
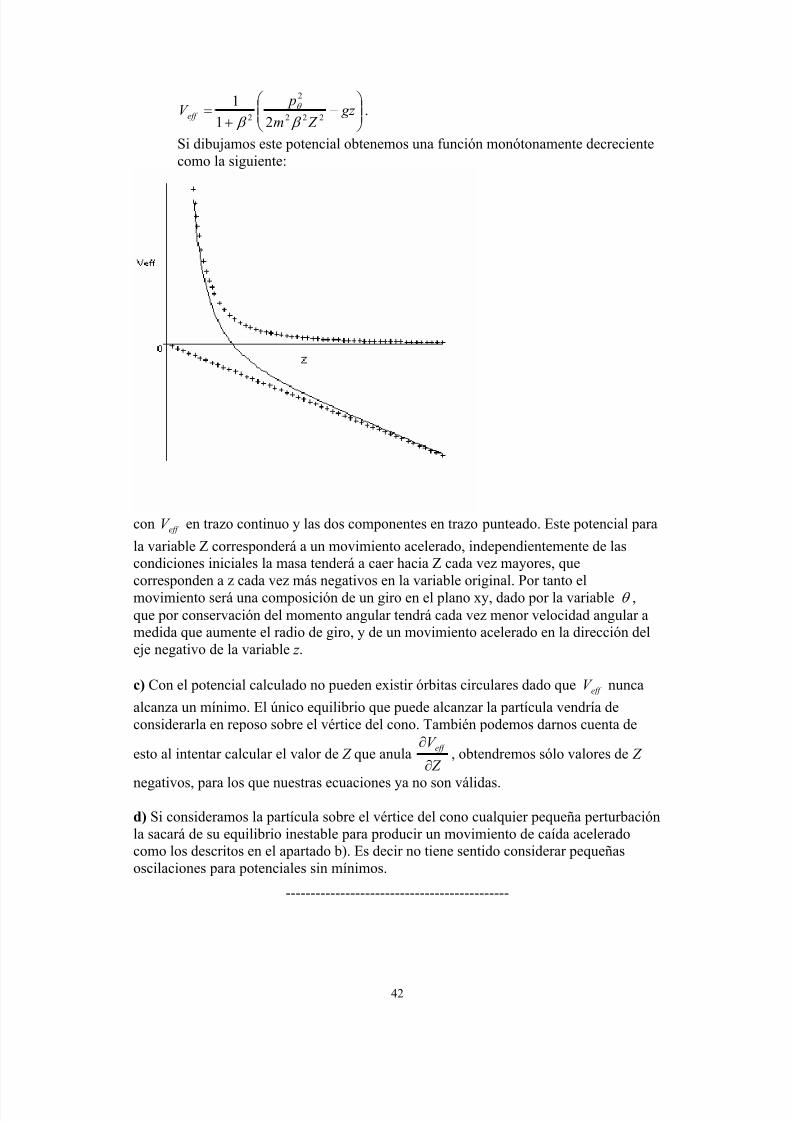
8/12/2019 Goldstein solucionario.pdf
http://slidepdf.com/reader/full/goldstein-solucionariopdf 93/195
−
+= gz
Z m
pV eff 222
2
2 21
1
β β
θ .
Si dibujamos este potencial obtenemos una función monótonamente decreciente
como la siguiente:
con V en trazo continuo y las dos componentes en trazo punteado. Este potencial para
la variable Z corresponderá a un movimiento acelerado, independientemente de lascondiciones iniciales la masa tenderá a caer hacia Z cada vez mayores, que
corresponden a z cada vez más negativos en la variable original. Por tanto el
movimiento será una composición de un giro en el plano xy, dado por la variable
eff
θ ,
que por conservación del momento angular tendrá cada vez menor velocidad angular a
medida que aumente el radio de giro, y de un movimiento acelerado en la dirección del
eje negativo de la variable z .
c) Con el potencial calculado no pueden existir órbitas circulares dado que V nunca
alcanza un mínimo. El único equilibrio que puede alcanzar la partícula vendría de
considerarla en reposo sobre el vértice del cono. También podemos darnos cuenta de
esto al intentar calcular el valor de Z que anula
eff
Z
V eff
∂∂
, obtendremos sólo valores de Z
negativos, para los que nuestras ecuaciones ya no son válidas.
d) Si consideramos la partícula sobre el vértice del cono cualquier pequeña perturbación
la sacará de su equilibrio inestable para producir un movimiento de caída acelerado
como los descritos en el apartado b). Es decir no tiene sentido considerar pequeñas
oscilaciones para potenciales sin mínimos.
---------------------------------------------
42

8/12/2019 Goldstein solucionario.pdf
http://slidepdf.com/reader/full/goldstein-solucionariopdf 94/195
32. La relación entre las leyes cuánticas y clásicas puede expresarse en la formaen la que se trata en este problema. Para ello tomemos un sistema de un grado delibertad. La frecuencia de la radiación emitida por este sistema de acuerdo con lasleyes cuánticas viene dada por h E ∆=cuanν , siendo k n E E E −=∆ . Estos estados
estacionarios de energía se calculan con ayuda de la condición de cuantización de
la acción, ∫ == nh pdq I . En consecuencia, ( )hk n I I k n −=− . Si , es decir,
examinamos dos estados vecinos:
1=− k n
h I k I I k =−=∆ +1 . Combinando esta expresión
con la que nos da la frecuencia cuántica, obtenemos I E ∆∆=cuan
*ν (1)para dos estados contiguos.Obtenga el equivalente clásico de la expresión (1) para el caso del osciladorarmónico. ¿Encuentra usted alguna similitud entre las dos expresiones? ¿Podríacomentar algo sobre las posibles diferencias?
( )dqV E m pdq I ∫ ∫ −== 2Tanto la acción como la energía clásicas son funciones continuas. Busquemos la
derivada de una respecto de la otra:
( )dq
V E m
m
dE
dI ∫ −
=2
que, para el caso del oscilador armónico, queda
∫∫∫ ==== T dt q
dqdq
p
m
dE
dI
en donde T es el período de oscilación. En consecuencia,
dI
dE
T ==1*
clasν
a comparar con (1). Tanto en mecánica clásica como cuántica las frecuencias vienen
dadas por la relación de incrementos de la energía y de la acción, aunque en clásica
estos incrementos son infinitamente pequeños mientras que en cuántica son finitos.
De hecho, este resultado, demostrado para el oscilador armónico, es válido para todos
los sistemas periódicos de un grado de libertad, aunque no haremos la demostración
aquí.
---------------------------------------------
33. Consideremos la definición general de sistema conservativo. A saber, aquel
que cumple las siguientes tres condiciones: 1) es válida la forma estándar(holónoma o no holónoma) del lagrangiano; 2) el lagrangiano no es funciónexplícita del tiempo; 3) las ecuaciones de ligadura pueden expresarse en la forma
( los coeficientes son nulos). Por otra parte, si el lagrangiano se
expresa en la forma estándar holónoma y la energía cinética es una formacuadrática homogénea de las q ’s, un sistema conservativo es además natural.
0l k k
k
a dq =∑ lt a
j
a) Demostrar que la definición anterior de sistema conservativo lleva a la
conservación de la llamada función energía: j
j j
Lq
q L
∂−
∂∑
(integral de Jacobi),
que se reduce a la energía total en el caso de un sistema natural.
43

8/12/2019 Goldstein solucionario.pdf
http://slidepdf.com/reader/full/goldstein-solucionariopdf 95/195
b) Ahora sea una masa m desliza sin rozamiento dentro de un tubo circular deradio r (véase figura). El tubo gira alrededor de su diámetro vertical (eje Z) conuna velocidad angular constante ω . En las coordenadas polares de la figura,compare los sistemas de referencia asociados a un observador externo y a otro quegira con el tubo, respectivamente. ¿En cuál de los dos es este sistema simplemente
conservativo y en cuál es también natural? Justifique su respuesta.c) Describa el sistema anterior en coordenadas esféricas. ¿Es el sistema ahoraconservativo? Justifique su respuesta. En caso de no serlo, ¿cuál es la razón físicapara ello?
z
O r
θ
m
Si , entonces2 1 0
L T T T V = + + −2 0 j
j j
L L T T
qh q V
∂= − = − +
∂∑
V ′ ′
. Si reagrupamos
términos:
2 0
V
V T T
′
− = +h T == +
Todo el truco del problema reside en “manejar” apropiadamente los términos en el
Lagrangiano. Empecemos con los términos T y V en polares2 2 2 2 21
2( se
cos
T m r r
V mgr
n )θ ω θ
θ
= +
=
dando el lagrangiano en sistema “laboratorio”2 2 2 2 21
2( sen ) L m r r mgr cosθ ω θ = + − θ (1)
Cumplimos las condiciones impuestas a un sistema conservativo y, por tanto, lo es. La
integral de Jacobi es:2 2 2 2 21
2( sen )h m r r mgr cosθ ω θ = − + θ ,
que NO ES la energía total. Sin embargo, si escribimos de nuevo (1) de forma que
L T V ′ ′= −
con2 21
2 2
2 2 2
0cos sen
T T mr
V V T mgr r
θ
θ ω θ
′ = =
′ = − = −
T’ es la energía cinética relativa a un sistema que gira con el tubo. La energía potencial
V’ incluye el término gravitacional y el término0
T − que tiene en cuenta la fuerza
centrífuga. En este caso nuestro sistema es natural y h T V ′ ′= + , la energía total
(¡cuidado, no en el sistema inercial!)
En el caso de coordenadas esféricas ( ), ,r θ φ tenemos
2 2 2 2 212
( se
cos
T m r r
V mgr
n )θ φ θ
θ
= +
=
44

8/12/2019 Goldstein solucionario.pdf
http://slidepdf.com/reader/full/goldstein-solucionariopdf 96/195
con la ligadura 0d dt φ ω − =0
. El sistema en esta representación NO ES conservativo ya
quek t
a ω = − ≠ . Además, la expresión de Jacobi ( T V + , en este caso) no es constante
ya que la ligadura efectúa trabajo sobre el sistema.
----------------------------------------------
34. Un bloque de masa M2 desliza sobre otro de masa M1 que, a su vez, deslizasobre un plano horizontal (Véase figura). Usando las coordenadas X1 y X2 de lafigura, obtenga las ecuaciones diferenciales del movimiento a través de laformulación de Lagrange. Asuma ausencia de rozamientos.
X2
X1
M2
M1
La coordenada1 es el desplazamiento absoluto de , mientras que
1m
2 x es el
desplazamiento de m con respecto a Para obtener la velocidad absoluta v de ,
usamos la ley del coseno para sumar la velocidad de m y la velocidad de respecto
de . Obtenemos:
2 1m
2
2
2m
1 m
1m
2 2 2
2 1 2 1 22 cosv x x x x α = + −
siendo α el ángulo formado por el plano con la horizontal. Por lo tanto,
( )2 2 2
1 1 2 1 2 1 2
1 12 cos
2 2T m x m x x x x α = + + −
En presencia del campo gravitatorio, los cambios en energía potencial proceden de
cambios en el valor de2:
2senV mgx α = −
De aquí
( )2 2 2
1 1 2 1 2 1 2 2
1 1
2 cos sen2 2 L m x m x x x x mgxα α = + + − +
Las ecuaciones correspondientes:
( )1 1 2 1 2cos 0m x m x x α + − =
2 2 2 1 2cos sen 0m x m x m g α α − − =
----------------------------------------------
35.- Un modelo simple, y de gran utilidad, de molécula triatómica lineal es el de lafigura. Vamos a examinar el caso en el que M>m. Plantee el problema en lascoordenadas definidas por los desplazamientos de las tres masas de su posición de
45

8/12/2019 Goldstein solucionario.pdf
http://slidepdf.com/reader/full/goldstein-solucionariopdf 97/195
equilibrio, con sus correspondientes ecuaciones de Lagrange. Intente una solución
0i t
x x ei iω = , siendo ω una frecuencia de modo normal
a) ¿Cuántas frecuencias independientes hay y cuáles son éstas?b) ¿A qué movimiento corresponde la menor de ellas?
mM M
kk
X1
1
2
3
( ) ( )2 22 2 2
1 2 3 2 1 3
1 1 1 1 1
2 2 2 2 2 L T V Mx mx Mx k x x k x x= − = + + − − − −
2
Ecuaciones :
( )
( ) ( )
( )
1 1 2
1 2 1 2 3
3 3 2
0
0
0
Mx k x x
mx k x x k x x
Mx k x x
+ − =
+ − + − =
+ − =
El determinante para las frecuencias
2
2
2
02 0
0
k M k k k m k
k k M
ω ω
ω
− −− − −
− −
=
con soluciones
1 2 3
20, , 1
k k M
m mω ω ω
= = = +
Para1
0ω = , los desplazamientos son1 2 3
x x x= = , dando a entender que el conjunto de
las tres masas se mueve como un sólido rígido, sin oscilaciones internas.
----------------------------------------------
36. La transformación entre coordenadascartesianas y polares viene dada por θ senr x = ,
θ cosr y = , siendo lo vectores unitarios en polares:
jiu
jiu
θ θ
θ θ
θ cossen
sencos
+−=
+=r
A diferencia de i y j, u y u no son constantes.
Puede observar, por ejemplo, que
r θ
θ θ
uu
=d
d r y
y
x
( )θ ,r
ur
uθ
trayectoria
θ
R
46

8/12/2019 Goldstein solucionario.pdf
http://slidepdf.com/reader/full/goldstein-solucionariopdf 98/195
r d
d u
u−=
θ
θ
1) Sabido esto, calcule las componentes en coordenadas polares de laaceleración y acto seguido plantee las ecuaciones de Newton correspondientes.
2) Exponga la formulación lagrangiana para el problema y compare la formaanterior de obtención de la ecuaciones del movimiento con la que le ofrece ésta.
θ
θ θ
θ uu
uu
uu
R v
dt
d r
dt
dr
dt
d
d
d r
dt
dr
dt
d r
dt
dr
dt
d r
r r
r r +=+=+==
r r
r r
r r
dt
d r
dt
d r
dt
d
dt
dr
dt
r d
d
d
dt
d
dt
d
r dt
d
r dt
d
dt
dr
dt
d
d
d
dt
dr
dt
r d
dt
d
dt
d r
dt
d r
dt
d
dt
dr
dt
d
dt
dr
dt
r d
dt
d
uuuu
uuu
uu
uuu
uu
va
2
2
2
2
2
2
2
2
2
2
2
2
2
2
−++=
++++=
++++==
θ θ θ
θ
θ θ θ θ θ
θ
θ θ θ
θ θ
θ θ θ
θ θ θ
Con lo que encontramos22 2
2 22
r
r r
d r d dr d d r r
dt dt dt dt dt
F F
m
θ
θ θ
θ θ = − + +
= +
a u
Fu u
θ =u
47

8/12/2019 Goldstein solucionario.pdf
http://slidepdf.com/reader/full/goldstein-solucionariopdf 99/195
Extremos condicionados de funciones. Multiplicadores de Lagrange.
Resulta más sencillo entender primero el significado de los extremos condicionados
sobre las funciones que estamos acostumbrados a manejar.
Ejemplo.
Encontrar los extremos de la función ( ) 22 y x y x f +=, sujeta a la restricción
01 =−+ y x y x :),( . Es decir, en lugar de optimizar sobre todo el plano (x,y) nos
limitamos a una curva, unidimensional, sobre ese plano.
Es evidente que el modo más sencillo de resolver este problema es reducir el problema
al mínimo de una función con una sola variable:
x x y −= 1)( , que sustituyendo en f , ( )22 1 x x y x f −+=),( , y podemos derivar y
calcular el extremo: ( ) 0122 =−−=
x xdx
df
, 2
1
2
100
== y x , .
Aunque el mismo proceso sería aplicable en funciones dependientes de un mayor
número de variables, una manera de sistematizarlo es aplicar los multiplicadores de
Lagrange:
Construimos una nueva función ),(),();,( y x y x f y x λ λ φ ⋅+= que comparte los
extremos con f en la región que nos interesa, 0=),( y x . El extremo de dicha función
viene dado por un sistema de tres ecuaciones con tres incógnitas
.
,
,
0
0
0
=
=∂
∂+
∂
∂=
∂
∂
=∂
∂+∂
∂=∂
∂
ϕ
ϕ λ
φ
ϕ λ φ
y y
f
y
x x f
x
que, teniendo en cuenta y x y x ∂
∂−=
∂
∂→=
∂
∂+
∂
∂=→= ϕ
ϕ ϕ 00 & las dos primeras
ecuaciones se reducen a 0=∂
∂+
∂
∂=
y x
ϕ ϕ & , es decir al mismo problema de antes.
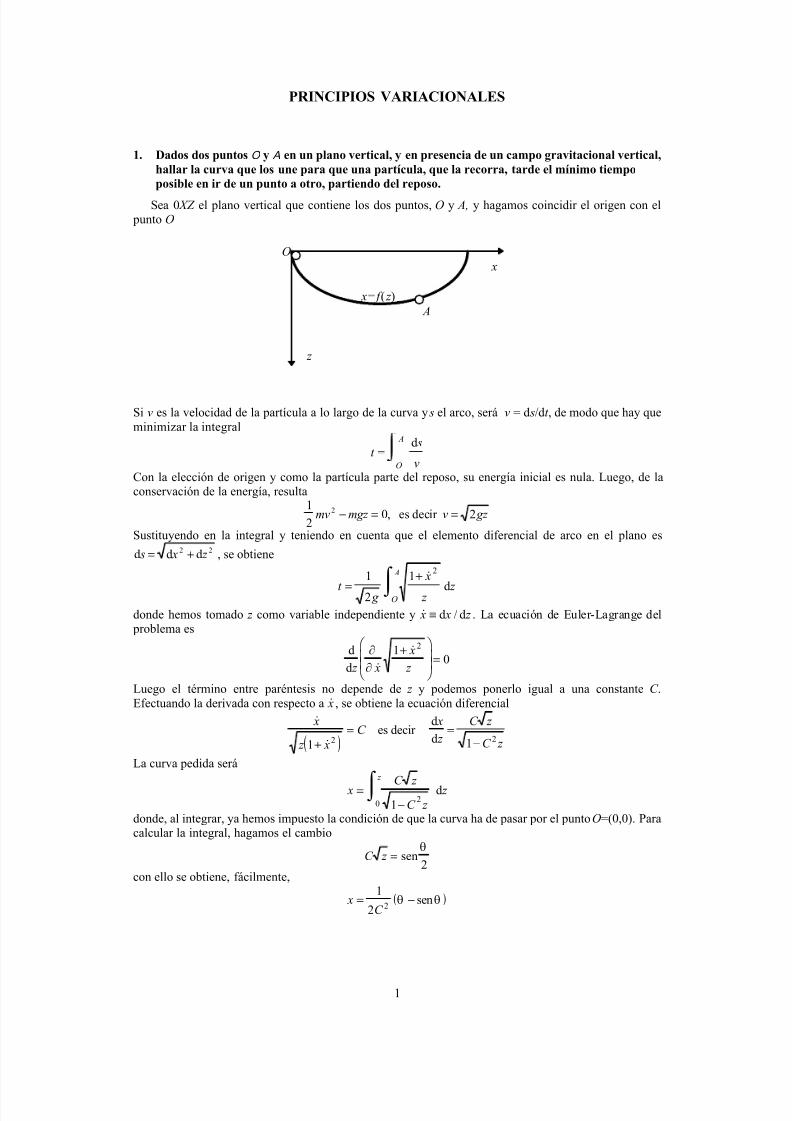
8/12/2019 Goldstein solucionario.pdf
http://slidepdf.com/reader/full/goldstein-solucionariopdf 100/195

8/12/2019 Goldstein solucionario.pdf
http://slidepdf.com/reader/full/goldstein-solucionariopdf 101/195
2
Por lo tanto, teniendo en cuenta la relación trigonométrica sencos2
2
1
2
θ θ=
−, la curva pedida viene
dada, de forma paramétrica, por
( )
( )
x r
z r
= −
= −
θ θ
θ
sen
cos1
donde r C = 1
2 2 . Esta es precisamente la ecuación paramétrica de la cicloide desarrollada por una
circunferencia de radio r . El valor de r se determinada imponiendo que la cicloide ha de pasar por el punto A = ( x A, z A). Por ejemplo, dividiendo las ecuaciones paramétricas de la curva y particularizando en A, resulta
x
z
A
A
A A
A
= −
−θ θ
θ
sen
cos1
que es una ecuación transcendente para θ A . Por último, utilizando una de las ecuaciones paramétricas se
encuentra
r z A
A
=−1 cosθ
Nótese que necesariamente el punto inicial O, desde el que se suelta la partícula, ha de ser un extremo de
la cicloide, tal como hemos esquematizado en la figura.
------------------
2. Como ejemplo de aplicación del cálculo de variaciones tenemos el siguiente problema. Sea unmuro rectilíneo, de longitud 2a. Deseamos instalar una alambrada de longitud L, que partiendo
de un extremo del muro, termine en el otro extremo de éste ¿Cuál debe ser la forma dada al
recorrido de la alambrada para que el área encerrada sea máxima?
El área encerrada por la alambrada es ydxa
a
−∫ , mientras que la longitud de la alambrada es
1
2
+ ′ =−∫ y dx La
a
. La ecuación de Lagrange se transforma en:
11
02
− ′
+ ′
=
d
dx
y
y
λ
Integrando y despejando ′ y , queda:
( );
)(
2
1
2
1
C x
C x y
+−
+−=′
λ
que, integrado a su vez da:
( ) 2
2
1
2 C C x y ++−= λ
Las constantes C C 1 2y se hallan con las condiciones de contorno de la alambrada, quedando: y x a= − − −λ λ2 2 2 2 .
Para determinar λ volvemos a la condición
1 2+ ′ =−∫ y dx La
a
que nos lleva a:
( )λ
λa L=
1
2sen
Para hacer posible una solución de esta última ecuación trascendental, escojamos L a= π , para lo cual
λ = = −a y a xe 2 2 . Para esta elección y x( ) es un semicírculo centrado en el origen; solución que
podíamos esperar intuitivamente.

8/12/2019 Goldstein solucionario.pdf
http://slidepdf.com/reader/full/goldstein-solucionariopdf 102/195
FORMULACIÓN HAMILTONIANA: ECUACIONES
1. El punto de suspensión de un péndulo simple de masa y de longitud l estáobligado a moverse a lo largo de una pista horizontal, y está conectado a unpunto de la periferia de un volante de masa
m
y de radio . El volante giralibremente alrededor de un centro fijo en la pista. Hallar la hamiltoniana delsistema, y las correspondientes ecuaciones del movimiento de Hamilton.
a
φ
φ θ
cos
sincos2
l y
l a x
−=
+=
φ φ
φ φ θ θ
lsin y
l asin x
=
+−= cos2
( )
( )
⋅⋅=
+−
++=
−=
=====
=
−+=
∫
θ
φ θ φ
φ φ θ φ θ θ θ φ
φ
ρ π ρ π π ρ
θ
φ θ φ θ θ θ φ
A,2
1
coscossin2sin222
cos
4
122
2
1
cossin2sin22
22222
224
0
2
2
22222
L
mgl almma I l m L
mgl V
MRl a M l ar rdr l I
I T
almmal m
T
a
D
p
48

8/12/2019 Goldstein solucionario.pdf
http://slidepdf.com/reader/full/goldstein-solucionariopdf 103/195
φ θ θ
φ θ
φ θ θ
θ
φ
θ
φ
θ φ θ
φ θ
2cos2sin2224)2sin24(2
1
2cossin2
cossin22sin24)1(
)1(
2
1
2sin24cossin2
cossin22
ml ama I ml
ml alm
al ma I
T T
P
P
ma I alm
almml
−+≡∆
∆⋅
+=
−
⋅−
⋅=
⋅=
=
+−
−=
A
PAP
AP
A
φ φ θ φ θ θ φ θ coscossin4222)2sin24(2
1mgl P P alm P ml P ma I H − +++∆=
No hay ninguna que sea obviamente cíclica, aunque H se conserva: H=E, al no
depender explícitamente del tiempo.
Las ecuaciones de Hamilton son:
θ
θ θ θ
φ
φ φ φ
P H H P
P
H H P
∂∂=
∂∂−=
∂
∂=
∂
∂−=
;
;
-------------------------------------------
2. La Lagrangiana de un sistema con dos grados de libertad puede escribirse en laforma
])()cos[(2
22 t qsint qt sinqm
L ω ω ω ω ω ++=
¿Cuál es la Hamiltoniana correspondiente?¿Se conserva? Introduciendo lanueva coordenada
t qsinQ ω = , hallar la Lagrangiana en función de Q y su derivada, y también lacorrespondiente Hamiltoniana H .¿Se conserva H ?
49

8/12/2019 Goldstein solucionario.pdf
http://slidepdf.com/reader/full/goldstein-solucionariopdf 104/195
[ ]
22
)cos(
)()cos(2
2222
22
mqt sinqm H
Lq p H
t qt sinqt msinq
L p
t qtsint qt sinqm
L
ω ω
ω ω ω ω
ω ω ω ω ω
−=
−=
+=∂
∂=
++=
donde
t sint q
t msin
pq
ω ω ω
ω
1)cos( −=
Entonces la Hamiltoniana es:
2)cos(
2
222 mqt q
t msin
pm H ω ω ω
ω −−=
No se conserva al depender del tiempo.
22211
1222
1
2
1
2
1
)(2
cos
Qm P m
H
Qm P QQm
L
t qt sinqQ
t qsinQ
ω
ω
ω ω ω
ω
−=
=+=
+=
=
Sí, se conserva.
-----------------------------------------
3. Considérese un cilindro de radio R, libre de girar respecto de su eje de simetría,
situado verticalmente, y cuyo momento de inercia respecto de tal eje es I .
Sobre la superficie lateral del cilindro está fija rígidamente una espira
uniforme ó pista helicoidal, a lo largo de la cual puede deslizarse sin
rozamiento un punto material de masa . El ángulo formado por la hélice
respecto de la vertical es tal que desciende una altura
m
πα 2 por cada vuelta que
se da alrededor del cilindro. Supóngase que la partícula parte del reposo desde
la parte superior del cilindro y se desliza bajo la influencia de la gravedad.
Usando un sistema de coordenadas cualquiera, obtener la Hamiltoniana para el
sistema combinado partícula-cilindro, y resolver completamente el movimientodel sistema. Interprétense todas las variables cíclicas del sistema.
50

8/12/2019 Goldstein solucionario.pdf
http://slidepdf.com/reader/full/goldstein-solucionariopdf 105/195
αφ
θ φ θ φ
−=
+=+=
z
r yr x )sin(;)cos(
siendo la constante de la espiral: πα 2= L
[ ]2222 )((21 φ α θ φ ++= RmT particula
2
2
1θ I T cilindro =
αφ mg V −=
[ ] φ θ
θ θ φ φ φ α mga I Rm L +++++=2
)2(2
1 222222
=
+
+=
θ
φ θ φ
θ
φ α θ φ
A),(
2
1)(),(
2
122
222
I mRmR
mR RmT
⋅=
2
1
2
1
φ
φ
A p
p
( )
+−
−+
∆=
2
1
222
22
21)(
,2
1
p
p
RmmR
mR I mR p pT
α
siendo
42222 ))(( RmmR I Rm −++=∆ α
pero θ es cíclica de modo que es constante:2 p .2 const p == β Lo que equivale a la
conservación del momento angular total. De hecho, como el sistema parte del reposo
0= β ,
.0)( 22 =++ θ φ I mRmR
Entonces,
.)(
2
1 2
1
2 p I mRT +
∆
=
51

8/12/2019 Goldstein solucionario.pdf
http://slidepdf.com/reader/full/goldstein-solucionariopdf 106/195
Definiendo∆
+≡
I mR 21
µ ,
αφ µ
mg p
H −=2
2
1
Las ecuaciones de movimiento son:
1 p
H
∂
∂=φ ;
φ ∂
∂−= H
p1
µ φ 1 p
= ; α mg p =1
)0(;)( 01 ===−= φ θ α α t mg t t mg p en .0=t
2
0 2t
mg
µ
α φ φ +=
2
42222
2
0))((2
t RmmR I Rm
I mRmg
−++
++=
α
α φ φ
Movimiento uniformemente acelerado:
µ
α φ
mg = ;
I mR
mRmg
+=
2
2
µ
α θ
----------------------------------------
4. Una Hamiltoniana de un grado de libertad tiene la forma
[ ]k beebq
pqbe p
t q p H t t t +++−= −−− )(22
),,(22
α α α α α α
en donde b,α y son constantes.k
a) Hallar la Lagrangiana asociada a esta Hamiltoniana.
b) Obtener una Lagrangiana equivalente que no dependa del tiempoexplícitamente, explicando someramente la base del procedimiento seguido.
c) Escribir la Hamiltoniana correspondiente a esta segunda Lagrangiana yexplicar su relación con la Hamiltoniana anterior.
22
22q pq
p H
γ β
α +−=
con k beebbe t t t ++≡≡ −−− )(; α α α α α γ β
H pqqq L −= ),( q
p
p
H
β α −=∂q
∂
=
52
8/12/2019 Goldstein solucionario.pdf
http://slidepdf.com/reader/full/goldstein-solucionariopdf 107/195

8/12/2019 Goldstein solucionario.pdf
http://slidepdf.com/reader/full/goldstein-solucionariopdf 108/195
1 x θ cos)( z l −= , entonces θ θ θ cossin)(1 z z l x −−−=
θ sin)(1 z l y −= , entonces θ θ θ sincos)(1 z z l y −−=
2212212
2
2
1
2
11 )(
222
1)(
2
1θ z l
m z
mm z m y xmT −+
+=++=
gz mV 2−=
gz m z l m
z mm
L 2
221221 )(22
+−++
= θ
Nótese que θ es coordenada cíclica: .0=∂
∂
θ
LEl correspondiente momento conjugado
es constante
.)( 2
12 α θ
θ
==−=
∂
∂= const z l m
L p
2. Routhiano.
Es V z l m
z mm
z l m L p p p z R +−−+
−−=−= 22122122
1221 )(22
)();,( θ θ θ
Finalmente:
2
1);,( 21 = p p z R 221
22
1
2
2
2)( z
mm gz m
z l m
p
+−−
−
Las correspondientes ecuaciones de Lagrange tienen un solo grado de libertad, z ,
puesto que .2 α == const p
El potencial efectivo es .)(2 2
1
2
2 z l m
gz m−
+− α
.0=∂
∂−
∂
∂
z
R
z
R
dt
d
Entonces,
).)(2
()(2
1
2
2221
z l m p gz m
z z mm
−−
∂∂=+
Naturalmente, una primera integral de la ultima ecuación es la ecuación de la energía:
const E z l m
p gz m z
mm==
−+−
+2
1
2
2
2
221
)(22
Despejando z , se obtiene la solución para :)(t z
∫∫ ∫
−−++
==
2
1
2
22
21 )(2
)(
z l m p gz m E
mm z
dz
t z
dz dt
54
8/12/2019 Goldstein solucionario.pdf
http://slidepdf.com/reader/full/goldstein-solucionariopdf 109/195
Para la coordenada cíclica )(t θ tenemos:
[ ],
)(2
1
2 dt t z l m
pd ∫ ∫
−=θ
lo que reduce la solución a dos cuadraturas.
El Hamiltoniano es trivial de obtener al ser diagonal la matriz
a invertir:
21
1
211 ;)(mm
p z z mm
z
L p
+=+=
∂
∂=
2
1
22
12)(
;)( z l m
p z l m
L p
−=−=
∂
∂= θ θ
θ
T=2
1
2
2
21
2
1
)(2)(2 z l m
p
mm
p
−+
+
=+= V T H gz m z l m
p
mm
p22
1
22
21
21
)(2)(2−
−+
+
Evidentemente H es también cíclico en .0: 2 α θ
θ ==⇒=∂
∂const p
H
Nótese que la existencia de una coordenada cíclica reduce en dos(no en uno) el orden
del sistema a integrar, al desaparecer tanto la coordenada como su momento conjugado
del problema diferencial. Ello no era obvio en los ejemplos anteriores en los que usamosel formalismo lagrangiano en vez del hamiltoniano.
------------------------------------------
6. A partir de la formulación de Lagrange para un sistema descrito por n coordenadas generalizadas q :
i
a) constrúyase una función ( )t pqG ii ,,
i
pi
, análoga a la hamiltoniana, en la que lasvariables independientes sean q y .
b) Dedúzcanse las correspondientes ecuaciones de movimiento.
a) A partir de la lagrangiana , construimos la función( t qq L ii ,, ) ( )t pq ii ,, G mediante
una transformación de Legendre:
( )t qq L pqG iiii ,, −= .
Diferenciando esta expresión se obtiene:
t t
Lq
q
Lq
q
Lq p pqG i
i
i
i
iiii dddddd∂
∂−
∂
∂−
∂
∂−+=
55

8/12/2019 Goldstein solucionario.pdf
http://slidepdf.com/reader/full/goldstein-solucionariopdf 110/195
8/12/2019 Goldstein solucionario.pdf
http://slidepdf.com/reader/full/goldstein-solucionariopdf 111/195

8/12/2019 Goldstein solucionario.pdf
http://slidepdf.com/reader/full/goldstein-solucionariopdf 112/195
H
x
xmg x
m
p p
p
H
m
p x
∂
∂
∂
∂
−=−−=
==
cosh
tanhtanh
,
2
Queda claro que, con estas ecuaciones, no se cumple p x H x p H ∂ ∂ ∂ ∂ ∂ ∂ 22= . No
pueden, por lo tanto, derivar de un formalismo hamiltoniano.
b) La energía potencial es V )(),( x f mg mgy y x == . Mientras, la cinética viene dada
por:
( )22222 )(2
)(2
x f x xm
y xm
T ′+=+=
Una vez construido el lagrangiano, llegamos a la siguiente ecuación de Lagrange:
( )[ ]
( ) ( ) 0)()()(2)(1
)()(1
2
2
=′′+′′′+′+
=′+′+
x f mg x f x f x xm x f xm
x f mg x f xmdt
d
Identificando términos con los de la ecuación del enunciado:
x x f
x x x f x f
x x f
senh)(
;coshsenh)()(2
;cosh)(1 22
=′
=′′′
=′+
De lo que deducimos fácilmente que:
x x f cosh)( =
Dicho todo lo anterior, es fácil ver que:
( )( ) xm
p x x xm
x
L p
2
2
senh1;senh1
+=+==
∂
∂
c)
( )
( ) xmg
xm
p
xmg x xm p x L p x H
coshsenh12
1
coshsenh12
1
2
2
22
++
=++−=−=
-------------------------------------------
9. Obtenga el hamiltoniano de un móvil, sometido a un potencial V , que sedesplaza sobre un disco horizontal que gira con una velocidad angularconstante ω . Hágalo en los sistemas de referencia del laboratorio y del disco yestablezca la relación entre ambos hamiltonianos. Utilice la notación ( )
para las coordenadas en el sistema “laboratorio” y para lascorrespondientes en el sistema que gira con el disco.
lablab , y x
( y x, )
58

8/12/2019 Goldstein solucionario.pdf
http://slidepdf.com/reader/full/goldstein-solucionariopdf 113/195
Lo importante aquí, es tener en cuenta que, para la construcción del hamiltoniano, T y V
tienen que ser evaluadas en el sistema inercial (laboratorio).
( )lablab
2
lab ,2
y xV vm
L −=
Las ecuaciones que relacionan las coordenadas del sistema laboratorio y las del sistema
no inercial giratorio, son:
θ θ
θ θ
sencos
sencos
lab
lab
x y y
y x x
+=
−=
Si el disco gira, por ejemplo, en el sentido contrario a las agujas del reloj, la
diferenciación con respecto al tiempo de las ecuaciones (con t θ = )
( )( )θ θ ω θ θ
θ θ θ θ
sencossencos
cossensencos
lab,
lab,
y xvvv
y xvvv
x y y
y x x
−++=
+−−=
Un simple cálculo nos lleva a:
( ) 22222
lab 2 r yv xvvvv x y y x ω ω +−+=
( )222 y xr += . Sustituyendo la expresión anterior en el lagrangiano inicial, obtenemos
su representación en las coordenadas del sistema giratorio. El paso siguiente es el de la
obtención de los momentos en el sistema giratorio.
( )
( ) xvmv
L p
yvmv
L p
y
y
y
x
x
x
ω
ω
+=∂
∂=
−=∂
∂=
El hamiltoniano en el sistema no inercial se construye de la forma usual
Lv pv p H y y x x −+= =
( ) ),(2
22
y xV xp ypm p p
y x
y x+−++ ω
Finalmente, la relación entre ambos hamiltonianos se obtiene teniendo en cuenta que el
correspondiente al sistema inercial será aquél que resulta de hacer nula la velocidad
angular en la ecuación anterior:
z l H H ω ω −= =≠ 00
-------------------------------------------
10. La relación entre los hamiltonianos de una partícula moviéndose en unpotencial V , definidos, respectivamente, en un sistema inercial y en un sistemano inercial que gira alrededor del eje z con velocidad angular constante , es
59

8/12/2019 Goldstein solucionario.pdf
http://slidepdf.com/reader/full/goldstein-solucionariopdf 114/195
z inercial inercial no l H H ω −=− ( l es la componente correspondiente del momentoangular definido en el sistema no-inercial). Haciendo uso de esta últimarelación demuestre el Teorema de Larmor, que asegura que puede eliminarseel efecto de un campo magnético estacionario uniforme sobre una partículacargada en movimiento colocándose el observador en un sistema de referencia
giratorio. Halle la frecuencia con la que debe girar el sistema de referencia noinercial (frecuencia de Larmor).
z
+c
e
Ayuda: Recuerde que el lagrangiano de una partícula cargada en un campo
electromagnético viene dado por Avc
eemv L
⋅+Φ−=
221 . Recuerde también que la
ecuación ( r B A )×=
21 define un campo magnético uniforme. Por último, tome el eje z
como dirección del campo uniforme B
y como eje de giro del sistema giratorio.
Dado el lagrangiano del enunciado del problema es fácil obtener el momento conjugado
y el hamiltoniano (recuerde que estamos en un sistema inercial). Son, respectivamente,
Φ+
−== e A
c
e p
m H Avm p inercial
2
2
1 ,
H es constante sólo si los campos son estacionarios. En el campo magnético de
características impuestas en el enunciado –campo magnético uniforme en la dirección z
y ( r B A )
×=21 – el hamiltoniano se transforma en:
( )2 2
2 21 2
22 4 22 x y
p e eB
H B e z inercial m mmc += + + Φ −
l c
)
Podemos, ahora, invocar el problema 9. Es posible establecer una comparación con la
relación del enunciado si tenemos claro que la componente del momento cinético
canónico en el sistema inercial y en el no-inercial. Esto siempre puede comprobarse
aplicando una transformación del sistema de coordenadas del laboratorio, ( 1 1, y , a las
del sistema giratorio ( ), X Y :
1 1
1 1
sin sin ,
sin sin
X x u wt y wt
Y y u wt x wt
= +
= −
.
Una vez comprobado esto es inmediato encontrar la frecuencia de Larmor y el
hamiltoniano en el sistema giratorio:
mc
eB
L2
−=ω
Φ+
+= e Br
mc
e
m
p giratorio H 22
4
1
22
2
2
2
Vemos que el término lineal en B está ausente. Esto indica que, si el campo es pequeño,
la dependencia en éste es despreciable (en términos de segundo orden).
60

8/12/2019 Goldstein solucionario.pdf
http://slidepdf.com/reader/full/goldstein-solucionariopdf 115/195
-------------------------------------------
11. Sabemos que no existe una forma estándar de obtener una función generatrizque lleve a una formulación más conveniente. Sin embargo, el empleo de laspropiedades que deseamos en la formulación de destino, permite obtenerlafácilmente. Un ejemplo clásico es el de la función ( )t Qq F ,,
1 en el caso de la caídalibre de un cuerpo en un campo gravitatorio . Queremos que en la nuevaformulación, el Hamiltoniano,
mgq
K , sea sólo función de la coordenada, Q , y quese cumpla la equivalencia entre los dos momentos, p P = . Obtenga a partir deestos requisitos la forma de la función ( )t ,Qq F ,
1. (Recuerde que q F p ∂= ∂
1,
Q F P ∂∂−=1
y t F H K ∂∂+=1
)
Partimos de la expresión H K = , que se traduce en el contexto presente en
( ) mgqm
p
Q +=2f
2
,entendiéndose que f expresa la forma de( )Q K . De esta última expresión obtenemos
( )[ ]2
12
2f 2 gqmQm p −=
Podemos hacer uso del requisito dado por la identificación de ambos momentos
Q
F
q
F P p
∂
∂−=
∂
∂== 11
Se desprende que ( ) mgQQ =f . Finalmente, la función generatriz resulta de la integración
de la ecuación
( )[ ]q
F qQ g m p
∂
∂=−= 12 2
1
2
dando
( ) ( )[ ]2
32
21 23
1, qQ g m
g mQq F −−=
-------------------------------------------
12. ·Un cuerpo, de masa m=1, se mueve en un campo en el cual la energía potenciales , siendo g la aceleración de la gravedad. Se sabe que la ecuación delmovimiento es
g f x( )
0)()()( =++ x gC x x B x x A ,
siendo A( x ), B( x ) y C ( x ) tres funciones continuas.Si ,axaaxaaxa x A 4-e243-e282-e241)( +−+=
a.- ¿Cuál es la expresión de la energía potencial?; Dibújela;b.- ¿ Cuál es la expresión del hamiltoniano?;c.- ¿ Cuál es la frecuencia de las pequeñas oscilaciones alrededor delequilibrio?
Sea V la energía potencia. La ecuación de Lagrange es:f(x)),( g gy y x ==
( ) ( ) 0f f f 2f 12 =′′+′′′+′+ g x x x , con
dxdf f =′ .
Comparando con la ecuación
0)()()( =++ x gC x x B x x A ,identificamos
61

8/12/2019 Goldstein solucionario.pdf
http://slidepdf.com/reader/full/goldstein-solucionariopdf 116/195
2f 1)( ′+= x A
Si A( ) es la expresión dada en el enunciado, tendremos:
2axe1f
axe1
axae2f
ax4e24ax3e28ax2e242f
−−=⇒
−−−=′⇒
−+−−−=′ aaa
a) La energía potencial es V y su gráfica es:2
axe1
−−= g
b) El hamiltoniano es , con:V T H +=
( ) ( )
( )
( )2ax
2ax42ax32ax222
22222
e1
);(2
e4e8e412
f 22
−
−−−
−=
=+−+
=′+=+=
g V
x A xm
aaa xm
x xm
y xm
T
c) La frecuencia de las pequeñas oscilaciones alrededor del equilibrio ( x=0) vendrá dada
a partir del desarrollo de V para pequeños desplazamientos:
( ) )(e13222ax
xO x ga g V +≈−= −
quedándonos con el término cuadrático, obtenemos el potencial de un oscilador
armónico, de frecuencia:
m
g a
2=ω
-------------------------------------------
13.- Encontrar el Lagrangiano y el Hamiltoniano de un péndulo que consta de unamasa m unida a una vara rígida y sin masa AB de longitud l,libre de moverse en elplano vertical. El extremo A de la vara sólo puede moverse en la dirección verticaly de modo que su desplazamiento respecto al origen de coordenadas O esta fijadopor una función del tiempo )(t γ . La gravedad actúa verticalmente y hacia abajo.b)Mostrar que la aceleración vertical del punto A, )(t γ , tiene el mismo efecto sobrela ecuación del movimiento que una campo gravitacional dependiente deltiempo.¿Se conserva el Hamiltoniano? ¿Es el Hamiltoniano igual a la energía totaldel sistema?
62

8/12/2019 Goldstein solucionario.pdf
http://slidepdf.com/reader/full/goldstein-solucionariopdf 117/195
a) Tomando como coordenada la variable θ de la figura tenemos
θ lsen x = , θ γ cosl z −= → ,θ θ cosl x = θ θ γ lsen z +=
( )2 2 21 12
2 2T mv m l l sen 2θ γ θ θ γ = = + + ; ( )γ θ −−= cosl mg V ,
( ) ( )2 2 212 c
2 L m l l sen mg l osθ γ θ θ γ θ γ = + + + − ;
θ γ θ θ
θ senl ml m p L
+==∂
∂ 2 → 2ml
senl m p θ γ θ θ
−=
V mml
senml p L p H +−
−=−= 2
2
2
2
1)(
2
1γ
θ γ θ θ
θ
b) θ θ γ θ γ θ θ cos2
ml senml ml L
dt
d
++=∂
∂; θ θ θ γ θ mglsenml
L
−=∂
∂cos
0coscos2 =+−++ θ θ θ γ θ θ γ θ γ θ mglsenml ml senml ml
.)(
θ θ θ γ
θ senl
t g sen
l
g
l
sen−=−−=
dónde γ += g t g )( .
Dado que el Hamiltoniano depende del tiempo, a través de γ (t), no es una cantidad
conservada. La ecuación que define la coordenada θ, z t
xtg
−=
)(γ θ , también depende
del tiempo por lo que la Hamiltoniana no representa la energía total del sistema (puede
comprobarse directamente sobre la expresión calculada).
-------------------------------------------
14. Razónese si las siguientes afirmaciones son verdaderas o falsas:a) Dado un sistema hamiltoniano (por simplicidad de un grado de libertad) unacantidad dinámica que depende explícitamente del tiempo podría serconstante del movimiento.
),,( t pq F
b) El sistema dinámico 212
2
212
11 ;2
x x x x x x
ax x −=−−= , es un sistema
hamiltoniano.
a) No existe ninguna condición que exija que una constante del movimiento no dependadel tiempo, siempre y cuando cumpla la condición:
63

8/12/2019 Goldstein solucionario.pdf
http://slidepdf.com/reader/full/goldstein-solucionariopdf 118/195
[ ]t
F F H
∂
∂=, .
b) Para que un sistema sea hamiltoniano tiene que existir una matriz H tal que el
sistema tenga la siguiente estructura
1
2
2
1 ; x
H x x
H x∂∂−=
∂∂=
y esto solo se cumplirá si2
1 2
1 1 2 2
x H
x x x
∂ ∂∂= = −
∂ ∂ ∂ ∂
y fácilmente vemos que no se cumple para el sistema propuesto.
-------------------------------------------
15. A partir de la formulación de Lagrange para un sistema descrito por n
coordenadas generalizadas :iq1. Constrúyase una función G análoga a la hamiltoniana, en la que las
variables independientes sean q y .
),,( t pq ii
i i p
2. Dedúzcanse las correspondientes ecuaciones de movimiento.
Realicemos una transformación de Legendre para
y diferenciemos dicha expresión
que, reorganizando queda
Por otro lado, teniendo en cuenta la forma funcional requerida para su
diferencial total debe ser
Igualando ambas expresiones diferenciales
y reorganizando
Debido a la independencia de variables ha de cumplirse
64

8/12/2019 Goldstein solucionario.pdf
http://slidepdf.com/reader/full/goldstein-solucionariopdf 119/195
Teniendo en cuenta las ecuaciones de Lagrange
obtenemos
con lo que las ecuaciones del movimiento con la nueva funcional G serán
-------------------------------------------
16. En el sistema representado en la figura, el cilindro se mueve por rodadurasobre una superficie lisa, la varilla del pédulo es rígida y muy ligera y la bola delpéndulo es pequeña. (ver figura al inicio de la solución).Se pide:1 - Hallar el lagrangiano , el hamiltoniano y las ecuaciones del movimientosuponiendo que la unión entre el péndulo y el cilindro es rígida.2 - Hallar lo mismo que en el apartado anterior pero suponiendo que la uniónentre el péndulo y el cilindro es articulada y sin rozamiento.3 - En el caso anterior, hallar la reacción a la que está sometida la unión péndulo-
cilindro.4 - Hallar las frecuencias de oscilación para pequeñas desviaciones de la posiciónde equilibrio. Discutir los límites para M << m y m << M .
(Nota: Este problema fue propuesto por un alumno en la sección de Buzón deIntercambio de la pagina web de la asignatura. NO es un problema planteado enlos EXAMENES)
1). En el caso de una unión rígida el conjunto cilindro-péndulo tiene un único grado de
libertad, ya que el desplazamiento del cilindro sobre el plano y el ángulo de oscilación
del péndulo son proporcionales. Tomaremos como coordenada el ángulo θ que forma la
horizontal con el péndulo.
65

8/12/2019 Goldstein solucionario.pdf
http://slidepdf.com/reader/full/goldstein-solucionariopdf 120/195
-θ
La coordenada cartesiana X del cilindro, tomando como origen la posición del
cilindro en la que θ=0, será:
X Rθ = − → X Rθ = − ,
y las coordenadas del péndulo son:
lsen Rθ θ = − → cos x l Rθ θ θ = − ,
θ cosl y −= → .θ θ senl y =
La Energía Cinética es la suma de las energías de la masa suspendida en el
péndulo y del cilindro, que tiene energía de translación y de rotación:
( ) ( )
( )
2
2 2 2 2 2 2 2 2
2 2 2 2 2 2
1 1 1 1 1 1 12 2 2 2 2 2 2
3 1 1 32 cos
4 2 2 2
X T Iw MX m x y MR MX m x y R
MX m x y M m R ml mlR θ θ
= + + + = + + +
+ + = + + −
=
Construir ahora el Lagrangiano y el Hamiltoniano es inmediato:
2 2 21 32 cos cos
2 2 L M m R ml mlR mgl θ θ θ
= + + − +
,
2 23
2 cos2
L
p M m R ml mlRθ θ θ θ
∂
= = + + − ∂
,
( )
2
2 2
1cos
2 3 2 2 cos
p H p L mgl
m M R ml mlR
θ θ θ θ
θ = − = −
+ + − .
Las ecuaciones del movimiento son también inmediatas, calculemos ahora la
ecuación de Lagrange
( )( )2 2 2 23 2 2 cos 0
L d L
dt
mlR sen mgl sen m M R ml mlR mlR sen mglsen
θ θ
θ θ θ θ θ θ θ θ
∂ ∂− =
∂ ∂
− − + + − + +
=
(1).
Si consideramos la ecuación de movimiento E T V = + , con
66

8/12/2019 Goldstein solucionario.pdf
http://slidepdf.com/reader/full/goldstein-solucionariopdf 121/195
22 23
2 cos cos2 2
E M m R ml mlR mgl θ
θ θ
= + + − −
( ) 2
2 2
2 cos
32 cos
2
E mgl
M m R mlR ml
θ θ
θ
+=
+ − +
, y por tanto
( )
2 2
0 0
32 cos
2
2 cos
t M m R mlR ml
dt d E mgl
θ θ
θ θ
+ − +
=+∫ ∫ (2)
2). En el caso en que la unión es articulada tenemos dos grados de libertad. Necesitamos
dos coordenadas generalizadas: mantendremos el ángulo θ del apartado anterior, y
X, posición del cilindro
sin
cos
x X l
y l
θ
θ
= +
= −,
cos
sin
x X l
y l
θ θ
θ θ
= +
=
.
Y el Lagrangiano
( )2 2 2 21 32 cos cos
2 4 L m X l Xl MX mgl θ θ θ = + + + + θ (3)
y las ecuaciones de Lagrange:
2
2
3cos sin 0
2
cos sin 0
x m M ml ml
xml ml ml
θ θ θ θ
θ θ θ
+ + − =
+ − =
, (4)
y a partir de ellas podemos despejar la ecuación para el ángulo
23 sincos sin 0
cos 2 cos 2
l ml m M ml g m M
θ θ θ θ θ
θ θ
− + − − +
3
= (5)
A partir de aquí es directo calcular el hamiltoniano y las ecuaciones del movimiento.
3). La reacción a la que esta sometida la unión péndulo-cilindro es igual a la fuerza
ejercida para mantener la ligadura de esta unión. Para calcular esta fuerza sólo tenemos
que plantear el problema ignorando la ligadura, con tres grados de libertad
correspondientes a los movimientos horizontales de M y m y al vertical de m, y a partir
de la expresión de la ligadura calcular el multiplicador de Lagrange correspondiente.
Si suponemos que la masa m no esta ligada al cilindro y tomando como
coordenadas generalizadas: z , coordenada horizontal del centro de masas, θ y r
coordenadas polares de la masa m con el origen de coordenadas en el centro del
cilindro, tenemos que
θ rsenm z X '−= → ,θ θ θ senr mr m z X 'cos' −−=
θ rsen M z x '+= → ,θ θ θ senr M r M z x 'cos' ++=
θ cosr y −= → ,θ θ θ cosr senr y −=
conm
mm
+=' y '1' m
m
M M −=
+=
y la ligadura vendrá dada por (notación del apartado 2.4 del Goldstein):
0),,( =−= l r r z f θ → → 0=dr 11 =r a , 011 == z aa θ .
Por tanto la Lagrangiana tendrá la siguiente expresión:
67

8/12/2019 Goldstein solucionario.pdf
http://slidepdf.com/reader/full/goldstein-solucionariopdf 122/195
( ) ( ))
2 2 2 2 2 2 2 222
2
1 2
1 3sin cos
2 2
cos sin 2 sin cos cos
m L m M z m r r r r
m
z r r rr m mgr
µ 2θ θ µ θ θ µ
µ θ θ θ θ θ θ µ θ
= + + + + +
− + + − +
, con
)(1 M mmM += ,2
2 )()23( M mm M mM ++=µ .La única ecuación de Lagrange que necesitamos para calcular el valor de λ es:
01 =+∂
∂−
∂
∂r a
r
L
dt
d
r
Lλ
11 =r a
, donde substituimos las condiciones de ligadura r ,
, para obtener la expresión de la fuerza de ligadura:
0, === r r l
2 2 212 2
sin ( ) cos ( cos ) cos2
z l m sen l m sen mg µ
λ θ θ µ θ θ θ θ µ θ θ = − + − − + − .
4). A) Para el primer caso, tenemos que el punto de equilibrio es 0=θ , por lo que para
oscilaciones pequeñas la ecuación (1), con 1cos, ≈≈ θ θ θ sen y despreciando términos
de orden mayor a 1, toma la forma2 23
2 02
mgl m M R ml mlRθ θ
+ + + − =
,
y por tanto la frecuencia de oscilación será
2 23( ) 2
2
mgl w
m M R ml ml
=+ + − R
.
Sobre la que podemos tomar los siguientes limites:
- M>>m, y entonces . Se comportaría prácticamente como un cilindro
girando sobre el plano, en el que no habría movimiento periódico.
0→w
- m>>M, y( )
22 2 2
gl gl w
R l lR R l → =
+ − −.
B) Idem para el segundo caso. La ecuación (5) la podemos escribir como:
( )32
03
2
g m M
M θ θ
++ =
y por tanto
( )3
23
2
g m M w
M
+= ,
y los limites son:
- M>>m, y entoncesl
g w = , que corresponde a la frecuencia de un péndulo
simple. El movimiento del cilindro será igual al del centro de masas, velocidad
constante, y estará desacoplado del péndulo.
- m>>M, y3
2
g w
l
m
→ , es decir cómo un péndulo de longitud3
'2
l l .m
=
68

8/12/2019 Goldstein solucionario.pdf
http://slidepdf.com/reader/full/goldstein-solucionariopdf 123/195

8/12/2019 Goldstein solucionario.pdf
http://slidepdf.com/reader/full/goldstein-solucionariopdf 124/195
-------------------------------------------
19.- Una partícula de masa se mueve sobre la superficie de rotación dada
por la ecuación
1=m
ρ
1
ρ
12 −−= z , dónde . La partícula está sometida a la
acción de la gravedad (tomar por comodidad
222 y x += ρ
1= g ) dirigida en el sentido negativodel eje z .
a) escribir el lagrangiano y el hamiltoniano del sistema.b) Determinar las integrales primeras del movimiento.c) Discutir las condiciones para las que existe movimiento en todo tiempo (no
alcanza reposo), las que producen una órbita acotada (en ρ ) y las queproducen una órbita ilimitada.
a) Tomando coordenadas polares ya que es una superficie de revolución tenemos que el
lagrangiano y el hamiltoniano vienen dados por
2
222
32
2 11
2
211
2
1
ρ ρ
θ ρ
ρ ρ ρ +++
++=
L y
22
2
2
32
2 11
2211
2
1
ρ ρ ρ
ρ ρ
−−+
++
= J P
H , dónde θ ρ P J P P == , .
b) Las integrales primeras son la energía y el momento .θ ρ 2= J
c) Podemos interpretar el movimiento como uno unidimensional sujeto a un potencial
efectivo
ρ ρ
111
2 2
2
−
−=
J V eff .
Podemos distinguir ahora dos comportamientos
i. Si el potencial esta acotado inferiormente22 > J
Por tanto si el movimiento esta limitado, la variable0< E ρ esta acotada superior
e inferiormente. Si la variable0≥ E ρ aumenta indefinidamente.
ii Si la gráfica del potencial efectivo tiende a menos infinito en el origen22 ≤ J
70
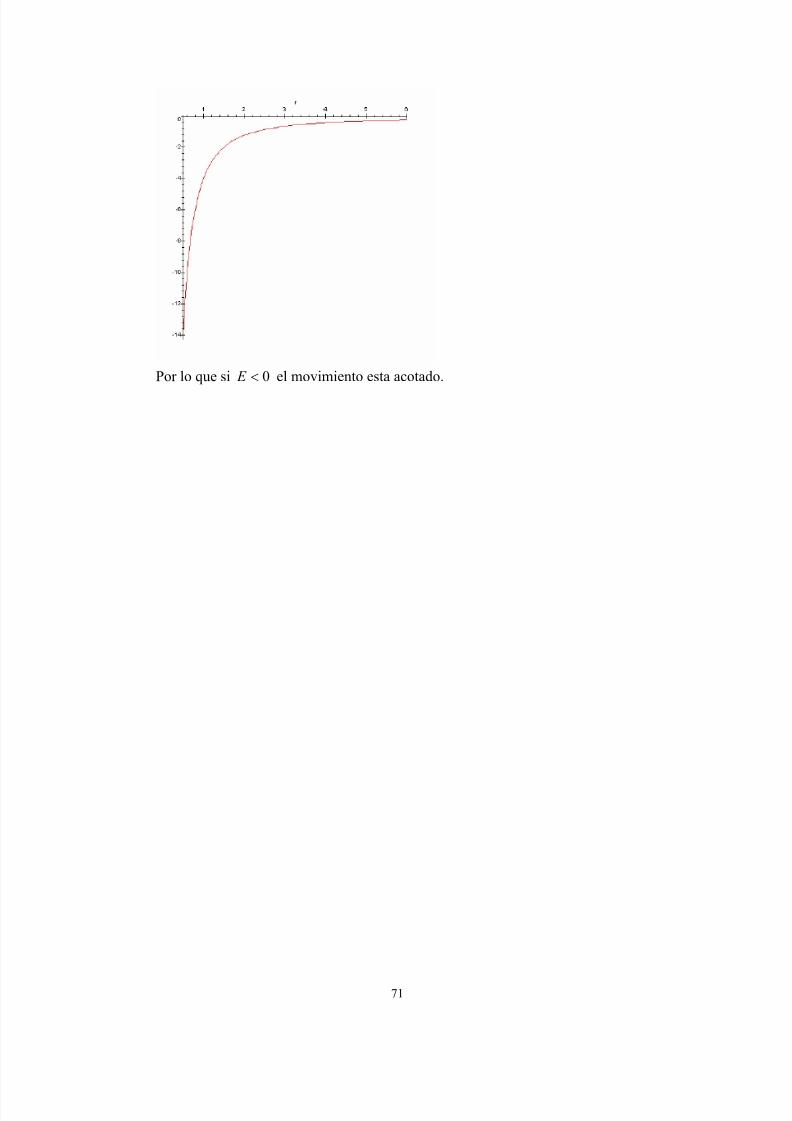
8/12/2019 Goldstein solucionario.pdf
http://slidepdf.com/reader/full/goldstein-solucionariopdf 125/195
Por lo que si 0< E el movimiento esta acotado.
71
8/12/2019 Goldstein solucionario.pdf
http://slidepdf.com/reader/full/goldstein-solucionariopdf 126/195
TRANSFORMACIONES CANÓNICAS, CORCHETES DE POISSON YECUACIÓN DE HAMILTON-JACOBI
1. En un Hamiltoniano de dos grados de libertad independiente del tiempo nos
basta encontrar otra constante del movimiento para poder decir que elproblema está integrado. Si esta segunda constante, I(p,q), es a su vezindependiente del tiempo, debe satisfacer la condición: [ I ,H ] = 0. Supongamosuna partícula de masa unidad moviéndose en un potencial bidimensional
. Hallar: la constante más simple de la forma, donde e y f son funciones a determinar, y una forma
correspondiente del potencial V , para poder asegurar que el problema estáintegrado. ¿Cuál es el significado físico de I ? Con lo que usted sabe demecánica, ¿ hay una forma consistente de hallar la forma general del potencialsin resolver ecuación alguna?
),( 21 qqV
21 )()()( p f pe I qqqp, +=
Si insertamos H e I en la condición [ I ,H ] = 0, e igualamos los coeficientes de los
términos en los momentos, encontramos:
.0 ,0 ,0 ,0212121
=+=+==q
V f
q
V e
q
e
q
f
q
f
q
e
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
De las tres primeras ecuaciones podemos obtener, por ejemplo:
12 , q f qe =−= .
La constante es entonces:1221 pq pq I −= ,
que no es otra cosa mas que el momento angular. Es razonable pensar que el potencial
es un potencial central,
)(2
2
2
1 qqV V += ,
enteramente consistente con la cuarta ecuación en derivadas parciales.
--------------------------------
2. En el caso de un sistema unidimensional con la hamiltoniana
2
2
2
1
2 q
p H −=
determínense las funciones f (q, p) y g(q, p) de manera que
( ) ( )t pqg pq f D ,, +=
sea una constante del movimiento.
La función D debe ser solución de:
73

8/12/2019 Goldstein solucionario.pdf
http://slidepdf.com/reader/full/goldstein-solucionariopdf 127/195
[ ] , D H t
D=
∂
∂
lo que, utilizando la forma de D, lleva a la ecuación
+
H
t
g H f H
g t q
g
p
H
q
f
p pq pq ∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
−
Igualando los coeficientes de t , se llega a las ecuaciones
−=
0=−q
g H g H ∂ ∂ ∂ ∂
p pq ∂ ∂ ∂ ∂
gq
f
p
H
p
f
q
H =−
∂
∂
∂
∂
∂
∂
∂
∂
La primer ecuación muestra que g = H es solución. Utilizando este resultado en la
segunda, ésta queda
2
1
2
1
2
2
3q
p
q
f p
p
f
q−=−
∂
∂
∂
∂
con lo que
2 ;
2
p
q
f q
p
f −=−=
∂
∂
∂
∂
es decir:
2
pq
f −=
--------------------------
. Sean q y p la coordenada y el momento generalizados de un sistema material
terminar Q de la forma más general posible, de modo que la
b) ra P la solución general
------------
3de un grado de libertad; sean Q y P funciones de q y p tales que P = q + p. Sepide
a) De
transformación de (q,p) a (Q,P) sea canónica;Demostrar que cualquiera que sea la expresión pa
viene dada por
),()( pqgP f Q +=
donde g(q, p) es solución particular de la ec ación [Q,P] = 1.
ara que la transformación sea canónica debe cumplirse
u
P
1=
∂
∂
∂
∂−
∂
∂
∂
∂
pqq p
QPQP
74

8/12/2019 Goldstein solucionario.pdf
http://slidepdf.com/reader/full/goldstein-solucionariopdf 128/195
Si P = p + q, la condición anterior queda como:
.1=∂∂ pq
∂−
La solución de la ecuación anterior es suma de la correspondiente a la ecuación
homogénea y de una solución particular de la ecuación completa. La integral de laecuación homogénea es de la forma:
)(hom q p f Q +=
siendo f una función arbitraria. Por otra parte, Q = q es una solución particular de la
ecuación inhomogénea, luego la solución general es:
)( q p f qQ ++=
Para el caso general en que P es una función cualquiera de p y q, la solución a la
ecuación homogénea, [P,Q] = 0, es de la forma Q , como puede verificarse por
4. Una masa m está conectada a un resorte de constante k 1 y oscilaarmónicamente sin rozamiento con una amplitud inicial A1. Se reduce la
uy despacio)
)(hom P f
simple sustitución.
-----------------------------------
constante del resorte de modo adiabático (equivalente a hacerlo mde forma constante hasta llegar a un valor k 2 (suponga, por ejemplo, quecalentamos el resorte). Calcúlese la nueva amplitud de oscilación.
I.NOTA: Si p y q son el momento y la posición de la masa, la cantidad
∫=π 2
pdq I
donde la integral se define a lo largo de una sola oscilación completa, es lo que
se llama un invariante adiabático. Ello quiere decir que, aunque la enegía del
oscilador varíe, I permanece constante cuando la constante del resorte se reduce
adiabáticamente. Utilícese este hecho para responder al problema. También
podrá resultarle de utilidad saber que:
∫ +−= 2sen1
sen2 x
xdx x . 24
Para solucionar el problema hemos de recordar que, según el teorema de Stokes el
variante adiabático I también puede escribirse como la integral de área sobre la perficie encerrada por la trayectoria de una oscilación completa en el espacio de fases:
insu
∫ ∫=π 2
dpdq I
Para el oscilador armónico la ecuación de la trayectoria en el espacio de fases es la
elipse
75

8/12/2019 Goldstein solucionario.pdf
http://slidepdf.com/reader/full/goldstein-solucionariopdf 129/195
E qm p =+ 222 11ω
m 22
con un área encerrada dada por 2π E/ ω . Por lo tanto el invariante adiabático es I = E/ ω . La condición de invariancia adiabática viene dada por:
2
2
1
1
ω ω
E E =
Si escribimos la expresión anterior en términos de amplitudes de oscilación, la amplitudfinal puede expresarse como:
41
1 ⎞⎛ k
2
12 ⎟⎟ ⎠
⎜⎜⎝
=k
A A
-----------------------------------
5. La transformación desd o a otro móvil es, siendo la distancia entre los orígenes (siendo t el tiempo).
a) la transf par
del hamiltoniano en variables , cuando su representación en
e un sistema de referencia fij)(t DqQ −= D t ( )
Encuentre:
ormación a los momentos generalizados;
b) la forma ),( PQ
variables ( , ) p q es )(22qV m p + ;
c) las ecuaciones del movimiento en variab ), P .les (Q
) La función generatriz para la transformacióna )(t DqQ −= , es , tal que:),(2 qPF
pq
QP
=∂ ∂
22 ;F F
=∂ ∂
Si , tendremos( ))(2 t DqPF −= Pq
F p ==
∂ ∂ 2 .
El nuevo hamiltb) oniano será:
DP DQV m
P
DPqV m
p
t qPF t
t pq H t PQK ,,(
&
&
−++
=−+
=+=
)(2
)(2
),,(),,()
2
2
2∂
∂
c) Las ecuaciones del movimiento son:
76

8/12/2019 Goldstein solucionario.pdf
http://slidepdf.com/reader/full/goldstein-solucionariopdf 130/195
)( DQV Q
P
Dm
P
P
K Q
+−=
−==
∂
∂
∂
∂
&
&&
Combinándolas:
Dm DQV Q
Qm &&&& −+−= )(∂
∂
-------------------------------------------
6. Supongamos que en el problema de una partícula, de masa m, en caída libre enun campo gravitatorio, queremos efectuar una transformación canónica,
, que nos permita escribir el hamiltoniano en la nuevasvariables como . Demuestre que la correspondiente función
generatriz, , viene dada por:
),(),( QPq p →mgQK =
),(1 QqF
( )( ) gmqQgmF 2232
1 32 −−= .
Deseamos pasar de mgqm
p H +=
2
2
a mgQK = . De la identificación de ambas
expresiones, obtenemos:
( )q
F mgqmgQm p
∂
∂ 12121)2( =−= ,
en donde es la función generatriz problema. Integrando la ecuación anterior,F 1
( ) ( )( ) 232
2
2121
1 23
1~~)2( qQgmgm
qd qmgmgQmF q
−−=−= ∫ .
----------------------------------
7. Dada la transformación ),();,( pqPP pqQQ == para un problema mecánicounidimensional, demostrar que la condición simplética para que ésta seacanónica se reduce a que una cierta función escalar tome un determinadovalor(¿cuál?).
Para el caso unidimensional, la condición simplética es:
∆=⎟⎟
⎠
⎞⎜⎜
⎝
⎛ ⎟⎟
⎠
⎞⎜⎜
⎝
⎛
−⎟⎟
⎠
⎞⎜⎜
⎝
⎛ = JMJM
p p
pq
pqT
PQ
PQ
PP
01
10
77

8/12/2019 Goldstein solucionario.pdf
http://slidepdf.com/reader/full/goldstein-solucionariopdf 131/195
siendo . Es pues necesario y suficiente que el determinante ∆ sea la
unidad.
q p pq PQPQ −≡∆
--------------------------------
8. Dadas las siguientes transformaciones ),();,( pqPP pqQQ == , determinarcuales son y cuales no son canónicas. Para aquéllas en las que la transformacióncontiene parámetros libres, determínense las condiciones que éstos debenverificar para que la transformación sea canónica. Razónense las respuestas encada caso.
a) iiii pQqP =−= ;
b) iiii pQqP == ;
c) jiji jiji pbQqaP =−= ;
d) jiji jiji q BQ p AP =−= ;
e) , donde es una función arbitraria de q 1)/(;)( −== dqdf pPq f Q f
f) qP pQ cos;sin ==
a) canónica; b) NO; c) canónica si 1−=a b% , siendo b la matriz transpuesta de b %
d) canónica si 1−−= BA ; e) canónica f) no canónica
-----------------------------------
9. ¿Para qué valores de los parámetros α y β representan las ecuaciones
pqP
pqQ
β
β
α
α
sin
cos
=
=
una transformación canónica? ¿Cuál es la forma de la función generatriz ?3F
Para un sistema unidimensional la condición simpléctica se reduce a que el
determinante
p
P
q
P
p
Q
q
Q
∂
∂
∂
∂∂
∂
∂
∂
≡∆ sea la unidad.
En nuestro caso:
pq pq
pq pq
β β β α
β β β α α α
α α
cossin
sincos1
1
−
− −=∆ 12 −= α α β q
Deberá ser cierto que , lo que exige que112 =−α βα q
78

8/12/2019 Goldstein solucionario.pdf
http://slidepdf.com/reader/full/goldstein-solucionariopdf 132/195
2;2
1== β α
La transformación es:
pqP
pqQ
2sin
2cos
=
=
además,q
F p
p
F q
∂
∂−=
∂
∂−= 33 ; y ),(33 Q pF F =
Rescribiendo las variables P y q en función de p y Q:
pQtgP p
Qq 2;
2cos
2
==
de modo que p
F
p
Q
∂
∂
−=3
2
2cos y Q
F
pQtg ∂
∂
−=3
2
Las dos ultimas ecuaciones se integran inmediatamente a
)(22
2
3 p ptgQ
F ϕ +−=
donde )( p =constante de modo que,salvo una constante irrelevante se verifica
finalmente que
2
),(2
3
Q pQF −= ptg2 .
-------------------------------------------
10. Resuelva el problema de Hamilton-Jacobi para una partícula que se mueve enun plano vertical sobre la parábola .2
ax z =
)41(2
12;)(
2
1 22222 xa xmT xax z z xmT +=⇒=+= &&&&&
2mgaxmgzV ==
2222 )41(2
1mgax xa xm L −+= &
Solo un grado de libertad, x . Para obtener el Hamiltoniano ,
2 2(1 4 ) L
p mx a x x
∂= − = +
∂ & , y:
.412
1 2
22
2
mgax xa
p
m H +
+=
79

8/12/2019 Goldstein solucionario.pdf
http://slidepdf.com/reader/full/goldstein-solucionariopdf 133/195
La ecuación de Hamilton-Jacobi se obtiene de substituir pori p
iq
F
∂
∂ 2 en la expresión
0),,( 2 =∂
∂+
t
F t q p H ii
, de modo que:
)41(2
122
xam +022
2
2 =∂
∂++⎟
⎠
⎞⎜⎝
⎛ ∂
∂t
F mgax
x
F (Ecuación de Hamilton-Jacobi).
Puesto que H no depende explícitamente de t , t W F α −=2 donde const =α , y
α =+⎟ ⎠
⎞⎜⎝
⎛ ∂
∂
+2
2
22 )41(2
1mgax
x
W
xam,
que admite una integral inmediata, ya que
)41)((2222
2
xamgaxm x
W
+−=⎟ ⎠
⎞
⎜⎝
⎛
∂
∂α
∫ +−=⇒ x
xa xmga
dxmW 0
222 )41)(1(2α
α .
La determinación de t W F α −=2 queda pues reducida a una cuadratura.
--------------------------------
11. Dado el Hamiltoniano , encontrar la transformación canónica que
lo convierte en
22 x p H x +=
2
42 1
QQP H += utilizando las propiedades de tales
transformaciones y la relaciónQ
x1
= .
Como sabemos que Q viene dada solo en función de x (normalmente llamada ),
usaremos la función generadora , para la cual
q
),(2 xPF
x
xPF
p ∂
∂
=
),(2
(1)
xP
xPF Q
1),(2 =∂
∂= (2)
Integrando (2),
)(2 q L x
PF += (3)
y usando (1)
)()( 22 QGPQq L
x
P p +−=′+−= (4)
80

8/12/2019 Goldstein solucionario.pdf
http://slidepdf.com/reader/full/goldstein-solucionariopdf 134/195

8/12/2019 Goldstein solucionario.pdf
http://slidepdf.com/reader/full/goldstein-solucionariopdf 135/195
q
F q f Q p
∂
∂=′= 1)( ,
e integrando,
)()(1 QqQf F +=
siendo ϕ una función arbitraria.
b).- De (1,b) )()( Qq f P ′−−=⇒ y en función de y q : p
)(q f
pQ
′=
))(
()(q f
pq f P
′′−−= ϕ (2)
c).- La condición para que la transformación sea canónica es independiente del
Hamiltoniano, Nada puede pues decirse de H .
d).-
qP
pqQ
ln−=
= (3)
Está claro que este es un caso particular de (2) con q f ln;0 ==′ϕ . Por tanto la
transformación es canónica. Si no supiésemos la forma de , podríamos hacer una
comprobación directa de que se cumple la condición general1F
JMJMT = , con
⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜
⎝
⎛
∂
∂
∂
∂∂
∂
∂
∂
=
p
P
q
P
p
Q
q
Q
M , y .⎟⎟ ⎠
⎞⎜⎜⎝
⎛
−=
01
10J
De hecho
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
−=0
1
q
q p
M ; ⎟⎟ ⎠
⎞⎜⎜⎝
⎛
−=
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛ −
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
−
−=
01
10
0
1
10
q
q p
q
pqTMJM
Se verifica pues que , de modo que la transformación (3) es canónica, por
verificación directa. Nótese, por cierto, que para problemas con solo grado de libertad
como éste, la condición
JMJM T =
1Det =⇔= MJMJM T , que es aún más trivial de probar.
-------------------------------------------
13. Resuelva el problema de una partícula con hamiltoniano
( )
2 2 212 x y zm
H p p p mg= + + + z , resolviendo su correspondiente ecuación de
Hamilton-Jacobi.
82

8/12/2019 Goldstein solucionario.pdf
http://slidepdf.com/reader/full/goldstein-solucionariopdf 136/195
La ecuación, una vez hecha la separación de variables, queda como
( ) ( ) ( ) E mgz
dz
zdW
dy
ydW
dx
xdW
m=+
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛ +
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛ +
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛ 2
32
22
1
2
1
Si E es constante, cada uno de los sumandos diferenciales debe serlo a su vez
( ) ( )
( )
3
23
2
1
2
22
2
1 ,
1
21
2
1
α
α α
=+⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
=⎟⎟
⎠
⎞
⎜⎜
⎝
⎛ =
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
mgzdz
zdW
m
dy
xdW
mdx
xdW
m
Y las soluciones
( ) ( )
( ) ( ) 23
329
8
3
222 ,121
mgzmg
zW
m x yW m x xW
−±=
±=±=
α
α α
Las constantes 321 ,, α α α definen los nuevos momentos en una transformación canónica
generada por ( )321 ,,,,, α α α z y xS S = . La otra mitad de las nuevas coordenadas
generalizadas definen las ecuaciones
( )t
mg
mgzS
t m
xS
t m
xS
−−
±=∂
∂=
−±=∂
∂=−±=
∂
∂=
23
2
33
22
22
,
12
11
α
α β
α α β
α α β
que, invertidas, dan
( ) ( )
( )232
3
222 ,
112
t g
mg z
t m
yt m
x
+−=
+±=+±=
β α
β α β α
-------------------------------------------
14. El hamiltoniano de Toda caracteriza un conjunto de partículas que se muevensobre un anillo, sometidas a fuerzas repulsivas, exponencialmente decrecientes.
En el caso de tres partículas (véase figura), este hamiltoniano viene dado por:
83

8/12/2019 Goldstein solucionario.pdf
http://slidepdf.com/reader/full/goldstein-solucionariopdf 137/195
( )[ ] ( )[ ] ( )[ ] 323
exp12
exp31
exp3
1
2
2
1−−−+−−+−−+∑
== φ φ φ φ φ φ
ii
p H
Aparte del hamiltoniano, existe una integral del movimiento obvia ¿Cuál es?Genere una transformación canónica que `ponga en evidencia esta nuevaintegral en el hamiltoniano transformado. ( Nota: en la segunda parte del
problema utilice la función generatriz , definiendo como nuevo momento esa
integral de movimiento adicional ) F 2
φ1
φ 3
φ 2
p1
p3
p2
φ
Hay una integral del movimiento obvia, que es el momento total
cte.3213
=++= p p pP (1)
ya que el hamiltoniano es invariante frente a rotaciones
0φ φ φ +
iia
Transformamos a los nuevos momentos 11 pP = , 22 pP = y dado por (1), con:3P
( ) .321322112 φ φ φ PPPPPF −−++= .
Encontramos el nuevo hamiltoniano:
( )
( ) ( ) ( )
22 2
1 2 3 1 2
1 2 1 2
1
2
exp - exp - exp 3.
H P P P P P⎡ ⎤′ = + + − − +⎣ ⎦
Φ + Φ − Φ + Φ −⎡ ⎤⎣ ⎦
′ H no depende de Φ3 : lo que demuestra la invariancia de P3
-------------------------------------------
15. Compruebe que para tres funciones se cumple
. Proceda expandiendo el lado izquierdo de la
igualdad y reorganizando términos para obtener el lado derecho. ¿De qué
relación se trata?
hg f ,,
[ ][ ] [ ][ ] [[ g f h f hghg f ,,,,,, −=+ ]]
Reconocemos aquí la identidad de Jacobi y su comprobación aparece con detalle en la
página 487 del Goldstein.
16. Sean q y p la coordenada generalizada y el momento generalizado de un
sistema material de un grado de libertad; sean Q y P funciones de q y p, tales
84

8/12/2019 Goldstein solucionario.pdf
http://slidepdf.com/reader/full/goldstein-solucionariopdf 138/195
que . Se pide determinar P de la forma más general posible, de modoque la transformación de q y p a Q y P sea canónica.
pqQ tan=
Se tiene que
,tan;cos
2 p
pq
pQ ==
∂ ∂
∂ ∂
y una integral particular de la ecuación
1cos
tan2
=− p
q
q
P p
p
P
∂
∂
∂
∂ ,
se obtiene fácilmente haciendo P solamente función de p , por ser
pP pdp
dPsenln
tan
1=⇒= .
Luego( ) pq pP tanf senln +=
es la solución del problema.
-------------------------------------------
17.- Un sistema de una partícula tiene como lagrangiano: ( ))(e 2
21t2
qV qm L −= &γ .
a) ¿A qué sistema corresponde?b) Una vez encontrado el hamiltoniano en variables ( )q p, , ¿cuál ha ser la
buena expresión para la función ( )t f tal que la función generatriz
transforme el hamiltoniano en una constante del
movimiento en el caso en que
( ) ( )qPt f t PqF =,,2
( ) 22
21 qmqV ω = ?
a) La ecuación del movimiento es
qmq
V qm &&& γ 2−
∂
∂−=
que corresponde a una partícula en un potencial V y bajo la influencia de un frenado
qm &γ 2− .
b) El hamiltoniano viene dado por la expresión
( ) t t eqV e
m
p H
γ γ 222
2+= − ,
que se reduce, en nuestro caso, a
t t eqme
m
p H
γ γ ω 22222
2
1
2+= − .
Nos piden ahora una función generatriz de la forma ( ) ( )qPt f t PqF =,,2 para que transforme H en un nuevo hamiltoniano K que sea constante del movimiento. Nos
bastará para ello asegurar que K no depende explícitamente del tiempo. Para ello,
aplicando las ecuaciones de transformación
85

8/12/2019 Goldstein solucionario.pdf
http://slidepdf.com/reader/full/goldstein-solucionariopdf 139/195
( ) ( )t
f qP H K qt f QPt f p
∂
∂+=== ;;
tenemos
t
f f QPe f Qme f
m
PK
t t
∂
∂++= −−− 1222222
2
2
1
2
γ γ ω
Si hacemos la identificación
( ) t et f
γ =
obtenemos el resultado exigido.
-------------------------------------------
18.- Un conjunto de coordenadas generalizadas, se transforma en un nuevoconjunto , a través de:),( 11 PQ ),( 22 PQ
),,,(, 221111
2
11 pq pqPPqQ == ),,,(, 221122212 pq pqPPqqQ =+= .
a) Encontrar la expresión más general de y para que la transformaciónsea canónica.
1P 2P
b) Mostrar la elección que reduce el hamiltoniano
( )2
212
2
1
21
2qq p
q
p p H +++⎟⎟
⎠
⎞⎜⎜⎝
⎛ −= a .2
2
1 PPK +=
c) Resolver las ecuaciones de Hamilton en términos de las nuevas variables.
a) Buscaremos una función tal que),,(2 t PqF i
iP
F Q
∂
∂= 2 y
i
iq
F p
∂
∂= 2 , de :
211 qQ = y 212 qqQ += → .),,()( 212211
212 t qqgPqqPqF +++=
Por tanto:
1
2111 2q
gPPq p
∂
∂++= ;
2
22q
gP p
∂
∂+=
con lo que
2
22q
g pP
∂
∂−= ; ⎟⎟
⎠
⎞⎜⎜⎝
⎛
∂
∂−
∂
∂+−=⎟⎟
⎠
⎞⎜⎜⎝
⎛
∂
∂−−=
12
21
11
21
1
12
1
2
1
q
g
q
g p p
gP p
qP
b) Si suponemos que g es independiente del tiempo, H K = y si sustituimos las
expresiones anteriores de y en K tenemos que1P 2P
2
2
2
1211
21
2
1
2 q
g p
q
g
q
g
p pK H
∂
∂−+⎟
⎟ ⎠
⎞⎜⎜⎝
⎛ ⎟⎟
⎠
⎞⎜⎜⎝
⎛
∂
∂−
∂
∂+
−==
que será igual a la hamiltoniana original si
21 q
g
q
g
∂
∂=
∂
∂ y ( ) 21
2
2
2
1
2
21
2
2 qqqqqqq
g−−−=+−=
∂
∂
y esta última expresión es fácilmente integrable a
)(3
11
2
21
3
22
2
1 q f qqqqqg +−−−= y de la condición 21
2
2
2
1
21
2 qqqqq
g
q
g−−−=
∂
∂=
∂
∂
tenemos que2
1
1qq
f
−=∂
∂ y por tanto
86

8/12/2019 Goldstein solucionario.pdf
http://slidepdf.com/reader/full/goldstein-solucionariopdf 140/195
( ) 3
1
2
21
3
22
2
12211
2
123
1
3
1qqqqqqPqqPqF −−−−++= .
c) En el nuevo Hamiltoniano no aparecen ni ni por lo que y son
constantes y1Q 2Q 1P 2P
1
1
1 2PP
H Q =∂
∂=& → α += t PQ 11 2 ,
12
2 =∂
∂=
P
H Q& → β += t Q2 .
-------------------------------------------
19. Un sistema de dos grados de libertad está descrito por la hamiltoniana
)()()( 232121
2
211 qg pqg pbqqg H −++−= ,
dónde es función únicamente de la variable .)( ji qg jq
a) Encontrar unas funciones, , y para que las funciones)( 11 qg )( 12 qg )( 23 qg
211 qqF = y2
112
q
aq pF
−=
sean constantes del movimiento.
b) ¿Existen más constantes del movimiento algebraicas independientes? Encaso de respuesta afirmativa, ¿ podría dar alguna sugerencia de constante?
c)
¿Puede construirse alguna constante más a partir de la identidad deJacobi?. (Nota: identidad de Jacobi para las funciones H , v, w es[ ][ ] [ ][ ] [ ][ ] 0,,,,,, =++ w H v H wvwv H )
d) Resolver la ecuación de Hamilton-Jacobi: 0, =∂
∂+⎟⎟
⎠
⎞⎜⎜⎝
⎛
∂
∂
t
S
q
W q H , con
( ) ( ) 1 2, , ,S q P t W q P t t α α = − − ¿Qué constantes del movimiento obtenemos?
a) Para que sea constante del movimiento tiene que cumplir queiF [ ] 0, =iF H , de la
definición de corchete de Poisson tenemos:
[ ] 0)()(, 123212
2
1
22
1
21
1
11
1
1
1 =+−=∂∂
∂∂
−∂∂
∂∂
+∂∂
∂∂
−∂∂
∂∂
= qqgqqgq
F
p
H
p
F
q
H
q
F
p
H
p
F
q
H F H
que tiene como solución y112 )( qqg = 223 )( qqg = (o con los signos cambiados).
Introduciendo esto en el corchete de la segunda constante:
[ ] 011
, 1111
1
1
2
2
2
113
2
2
21
21
1
12 =⎟⎟
⎠
⎞⎜⎜⎝
⎛ −+++
∂
∂−=⎟⎟
⎠
⎞⎜⎜⎝
⎛ −++⎟⎟
⎠
⎞⎜⎜⎝
⎛
∂
∂+
∂
∂−= paqaq p
q
g
paqg
q
ag
g p
q
gF H
que se cumple si .2
11 1)( aqqg =
b) Con las funciones halladas el hamiltoniano tiene la forma2211
2
2
2
1 q pq pbqaq H −++−=
87

8/12/2019 Goldstein solucionario.pdf
http://slidepdf.com/reader/full/goldstein-solucionariopdf 141/195

8/12/2019 Goldstein solucionario.pdf
http://slidepdf.com/reader/full/goldstein-solucionariopdf 142/195
c) [ ] ⎥⎦
⎤⎢⎣
⎡∂∂
+⎥⎦
⎤⎢⎣
⎡∂∂
=∂∂
t
g f g
t
f g f
t ,,,
d) [ ]k
k p
f q f
∂
∂−=,
e) [ ]k
k q f p f
∂∂=,
-------------------------------------------
21.- Supongamos un sistema en una dimensión con coordenadas q y p.a) Demuestre que para la hamiltoniana del sistema la evolución deuna función esta dada por
),,( t pq H
),,( t pq f
[ ]t
f H f
dt
df
∂
∂+= ,
b) Encuentre las condiciones que han de cumplir las constantes a,b y c para quesea canónica la transformación
pqaQ += 2 , . (1)4cpbqP +=
c) Para el sistema dado por la hamiltoniana2242 44 p pqqq H +++=
encuentre la transformación del tipo (1) tal que la nueva hamiltoniana, H’, sea ladel oscilador armónico.d) Si tuviéramos una nueva transformación canónica sobre las coordenadas delapartado c): y , ¿cómo calcularíamos la transformación desde
las variables originales a las finales,
( )t PQP ,,~ ( t PQQ ,,
~)
( )t pqP ,,
~
( )t pqQ ,,
~
?. ¿Será canónica?. En casode conocer una transformación que simplifique la hamiltoniana H’ apunte elprocedimiento.
a) Se obtiene de la definición del corchete de Poisson y las ecuaciones del
movimiento de hamilton para el sistema. (Ver en el apartado 9-5 del Goldstein). b) En notación matricial tiene que cumplir:
J MJM T =
y para este sistema tenemos
32 1
4
Q Q
aqq p M P P b cp
q p
∂ ∂⎛ ⎞⎜ ⎟
∂ ∂ ⎛ ⎞⎜ ⎟= = ⎜ ⎟∂ ∂⎜ ⎟ ⎝ ⎠⎜ ⎟∂ ∂⎝ ⎠
,3
30 10 81 08 0
T b acp q MJM b acp q
⎛ ⎞− + ⎛ ⎞= =⎜ ⎟ ⎜ ⎟−− ⎝ ⎠⎝ ⎠
es decir, hay dos soluciones: 1,0 −== bc y a sin determinar y 0, 1a b= = − y c sin
determinar.
c) Probamos con la primera de las soluciones. Como la transformación es
independiente del tiempo la nueva hamiltoniana se obtiene de la substitución de las
nuevas variables, Pq −= y en la antigua hamiltoniana:2aPQ p −=
22224 )24()44(' QPaQPaaP H H ++−++−==
en la que tomando nos lleva a2=a
89

8/12/2019 Goldstein solucionario.pdf
http://slidepdf.com/reader/full/goldstein-solucionariopdf 143/195
22' QP H += , formalmente la del oscilador armónico. Con lo que encontramos la
transformación requerida. Se puede comprobar que la otra solución no conduce al
hamiltoniano pedido.
Para esta hamiltoniana la transformación )~
cos(~
2 QPP = )~
(~
2 QsenPQ = , nos lleva
a P H 2'~
= . Sencillamente podemos igualar las expresiones de P y Q en ambascoordenadas para obtener:
qQPP −== )~
cos(~
2 y pqQsenPQ +== 22)~
(~
2
y de aquí despejar para cualquier conjunto:
QPQsenP p
QPq
~cos
~4
~~2
,~
cos~
2
2−=
−= o
21
2 2
2
(2 )
2
q pQ tn
q
q q pP
− ⎛ ⎞+= −⎜ ⎟
⎝ ⎠
+ +=
%
%2
)
La composición de 2 transformaciones canónicas siempre es canónica.
-------------------------------------------
22.- Supongamos un sistema de un grado de libertad, con coordenadas q y p yhamiltoniana H , y una transformación canónica a las coordenadas y
junto con su función generatriz
( ) pqQ ,
( pqP , ( )t QqF ,,1 .a) En general, ¿cree usted que pueden obtenerse todas las funcionesgeneratrices , y( )t PqF ,,2 ( )t Q pF ,,3 ( )t P pF ,,4 de esa transformación? Ilustre su
respuesta con ejemplo/s sencillo/s. En caso de poder disponer de más de unafunción generatriz ¿obtendremos siempre la misma hamiltoniana?.b) ¿Existe una única función generatriz del tipo ( )t QqF ,,1 asociada al cambio
de coordenadas ( ) pqQ , y ? En caso de poder disponer de más de unafunción generatriz ¿obtenemos siempre la misma hamiltoniana?. Détambién ejemplo/s sencillo/s.
( pqP , ))
)
( t QqF ,,1
a) No siempre será posible encontrar funciones de los 4 tipos para una misma
transformación canónica. Partiendo de las ecuaciones de las nuevas variables,
y , hay que comprobar qué parejas formadas por una variable antigua y una
nueva son expresables en función de las otras dos. Como ejemplo simple de este caso
tenemos la transformación:
( )t pqQ ,,
( t pqP ,,
( ) qQt QqF =,,1 . Esta genera el cambio
QqF p =∂∂= 1 , 1F P
Q∂= − = −∂
q , para el que no es posible expresar p como función de q y
P, ni q como función de p y Q. Por tanto existirán sólo las funciones y
.
( )t QqF ,,1
( )t P pF ,,4
Sin embargo sí hay casos en los que es posible, un ejemplo simple sería:
2
2
2
2
QqP
qQ p
−=
=, generada por la función . Para este caso tenemos todas las
combinaciones:
22
1 QqF =
90

8/12/2019 Goldstein solucionario.pdf
http://slidepdf.com/reader/full/goldstein-solucionariopdf 144/195
2
3
2
2
2
P p
q
pQ
q
=
= −
,
3
2
2
4
2
2
Q
pP
Q
pq
−=
=
,
3
12
3
12
2
2
⎟⎟
⎠
⎞
⎜⎜⎝
⎛ =
⎟⎟ ⎠
⎞⎜⎜⎝
⎛ =
P
pQ
p
Pq
y podremos calcular todas las funciones
generatrices:
2
2
24q
PF −= ,
2
2
34Q
pF −= ,
3
2
2
5
42 ⎟⎟
⎠
⎞⎜⎜⎝
⎛ =
P
pF .
Estas funciones generatrices, obtenidas unas de otras a través de QPF F −= 21 ,
yqpF F −= 31 QPqpF F −+= 41 y del oportuno cambio de coordenadas (ver sección
9-1 del Goldstein) siempre generan la misma hamiltoniana.
b) No, no es única. Dado que la relación entre el cambio de coordenadas y la
función generatriz viene dado por ecuaciones del tipo:q
F p
∂
∂= 1
Q
F P
∂
∂= 1 siempre
podemos añadir una constante y/o una función dependiente del tiempo. En este último
caso las hamiltonianas serán diferentes según la función dependiente del tiempo que
consideremos.
Para el primer ejemplo de la sección anterior las transformaciones canónicas dadas por
las funciones y( ) qQt QqF =,,1 ( ) 2
1 ,,' t qQt QqF += , generan las mismas ecuaciones
y , pero tiene hamiltonianas diferentes.Q p = qP −=
--------------------------------------------
23.- Sean un sistema hamiltoniano )(2
1),( 22
q pq p H += , la variable dinámica
y las condiciones iniciales pqq pg =),( 0)0(,0)0( pt pt q ==== . Calcule la
evolución temporal de la variable, siguiendo los siguientes procedimientos
y comente brevemente las diferencias:
),( 0 pt g
a) Integración directa de las ecuaciones de Hamilton.b) A partir del formalismo de Poisson obtenga la ecuación diferencial de
segundo orden de .),( 0 pt g
c) Encuentre una transformación canónica cualquiera tal que la nueva variablesea . Calcule el nuevo hamiltoniano y obtenga a partir de
las nuevas ecuaciones de Hamilton.
),( q pgQ = ),( 0 pt g
NOTA: las siguientes fórmulas pueden serle de utilidad:
Q
F P
q
F pt QqF F
∂
∂−=
∂
∂== 11
11 ,),,,( P
F Q
q
F pt PqF F
∂
∂=
∂
∂== 22
22 ,),,,(
Q
F P
p
F qt Q pF F
∂
∂−=
∂
∂−== 33
33 ,),,,(P
F Q
p
F qt P pF F
∂
∂=
∂
∂−== 44
44 ,),,,(
91

8/12/2019 Goldstein solucionario.pdf
http://slidepdf.com/reader/full/goldstein-solucionariopdf 145/195

8/12/2019 Goldstein solucionario.pdf
http://slidepdf.com/reader/full/goldstein-solucionariopdf 146/195
b.- Utilícese esto para encontrar una constante de movimiento para una partícula
en dos dimensiones bajo el potencial3
)(r
r ar V
rrr ⋅
= (siendo ar
un vector constante
dado).
a) Para demostrar que 0=dt
df utilizaremos el formalismo de Poisson:
[ ] 0,111111111
=∂∂
∂∂
∂∂
−∂∂
∂∂
∂∂
=∂∂
∂∂
−∂∂
∂∂
=∂∂
∂∂
−∂∂
∂∂
== ∑= q
f
f
H
p
f
p
f
f
H
q
f
q
H
p
f
p
H
q
f
q
H
p
f
p
H
q
f H f f
ii
s
i ii
&
b) El hamiltoniano de una particula sometida al potencial del problema la podemos
escribir en coordenadas polares como:
32
22
22 r
r a
mr
p
m
p H r
rr⋅
++= θ , si elegimos el eje xr
coincidiendo con el vector a podemos
escribir
r
mr
ma p
m
p
r
r a
mr
p
m
p H r r
2
22
32
22
2
cos2
2
cos
22
θ θ θ θ ⋅++=
⋅++= de modo que podemos
escribir quemr
p f
m
p p f pr H r
r 2
2
2
),(
2)),(,,( θ
θ
θ θ += , con =),( θ θ p f θ θ cos22 ⋅+ ma p ,
constante del movimiento.
--------------------------------------------
25.- Sea θ ρ θ ρ ρ
θ ρ
222
2
2 sin2
1cos
2
1
2
1−−+= PP H , y para el instante inicial
0)0( == θ θ P y 1== ρ ρ P . Sea θ ρ α θ ρ θ ρ sincos),,,( 2121 PPPPS += una función
generatriz, siendo las nuevas coordenadas y momentos.2121 ,,, PP x x
a) Determinar los valores de α tales que el hamiltoniano de las nuevasvariables sea integrable.b) Utiliza la transformación para determinar el valor de ρ ρ ρ θ PP ,,, en el
tiempo π =t . NOTA: las siguientes fórmulas pueden serle de utilidad:
QF PqF pt QqF F ∂∂−=∂∂== 1111 ,),,,( PF QqF pt PqF F ∂∂=∂∂== 2222 ,),,,(
QF P pF qt Q pF F ∂∂−=∂∂−== 3333 ,),,,( PF Q pF qt P pF F ∂∂=∂∂−== 4444 ,),,,(
Lo primero es expresar las viejas variables en función de las nuevas
θ ρ α θ ρ
θ α θ
θ
ρ
cossin
sincos
21
21
PPP
PPP
+−=
+=,
θ αρ
θ ρ
sin
cos
2
1
=
=
x
x, de lo que obtenemos que )0( ≠α
2
2
2
1
21 x x += α
α ρ
y después de algunos cálculos tenemos que
( )2
2
21
2
2
22
122
1
α α
x xPPK −−+= , que para cualquier valor de 0≠α es separable y por
tanto integrable.
Tenemos que
93

8/12/2019 Goldstein solucionario.pdf
http://slidepdf.com/reader/full/goldstein-solucionariopdf 147/195
2
22
1 1
α
xP
P
=
=
&
&
, , que podemos integrar directamente por separado2
2
2
11
P x
P x
α =
=
&
&
B At t
t x
At t P
++=
+=
2)(
)(
2
1
1
y ( )t t
t t
DeCet P
DeCet x
−
−
−=
+=
22
2
1)(
)(
α
.
Con las condiciones iniciales dadas obtenemos el valor de las constantes
0)0(,1)0(,0)0(,1)0( 2121 ==== PP x x , 0,1 ==== DC B A .
Por tanto para π =t tenemos que1
2)(
1)(
2
1
1
++=
+=
π π
π
π π
x
P
,0)(
0)(
2
2
=
=
π
π
P
x, que en las variables
originales da lugar a 12
)()(,0)()(2
1 ++==== π π
π π ρ π θ θ xt
0
1
=+=
θ
ρ π
P
P .
----------------------------------------------
26. Considere el hamiltoniano )sin( 2
2
2
12
2
2
2
2
1
2
1 qqq
p
q
p H +++= y la función generatriz
2
2
11
2
2
2
1
2PqP
qqS +
+= .
a) Determinar la trasformación canónica asociada a la función S, en la región
.0, 21 >qqb) Determinar el nuevo hamiltoniano en función de .ii PQ ,
c) Dar las integrales primeras. Determinar las soluciones de la ecuación delmovimiento dadas por el nuevo hamiltonianod) Estudiar la posibilidad de obtener las soluciones a las ecuaciones delmovimiento en las variables originales a partir de la solución obtenida en c).NOTA: las siguientes fórmulas pueden serle de utilidad:
QF PqF pt QqF F ∂∂−=∂∂== 1111 ,),,,( PF QqF pt PqF F ∂∂=∂∂== 2222 ,),,,(
QF P pF qt Q pF F ∂∂−=∂∂−== 3333 ,),,,( PF Q pF qt P pF F ∂∂=∂∂−== 4444 ,),,,(
a) La función generatriz depende de las coordenadas originales ( ) y de los nuevos
momentos ( ), por tanto corresponde a y tenemos que
21 ,qq
21 , PP ),,(2 t PqF
2
12
2
2
2
11
2
qqQ
=
+=
122
21111 2
Pq p
PqPq p
=
+=
Por lo que la trasformación canónica viene dada por
212
21
2 QQq
−±=
±= ( )
1212
2121
2
2
PQQ p
PPQ p
−±=
+±=, y para la región tomaremos el signo
+.
0, 21 >qq
b) Substituyendo el cambio en la expresión de H obtenemos el hamiltoniano en las
nuevas varibles
94

8/12/2019 Goldstein solucionario.pdf
http://slidepdf.com/reader/full/goldstein-solucionariopdf 148/195
( ) )2sin(2 1
2
1
2
21 QPPPK +++=
c) La variable 2Q es cíclica, por lo que se conserva y el hamiltoniano no depende
el tiempo por lo que también es constante:
2P
E K P == ,2 α .d
El resto de ecuaciones del movimiento:
)(4),2cos(2 11
1
1P
QQQ
P =∂=−=∂−= 21
1
P (1)
De este modo
PK K +∂∂ &&
( ) ( ) )2sin(22)2sin(2 1
2
11
2
1
2
1
si definimos
QPQPP E +++=+++= α α α
α +≡ 11' PP , tenemos que
2 2
)2sin(24
)2' 11
E P
−±= y
2sin( Q−α '4 11 PQ =& 1Q E −−
±= α
con lo que reducimos el problema a la integral
∫ −−
±=)0( 1
11
1 ))2sin(2(8Q Q E
t
α
de cuya integ)(t Q dQ
ración obtendríamos
A partir de esto y teniendo en cuenta (1) y
)(11 t QQ =
)2(4 21
2
2 PPK
Q +=P∂
∂=& tenemos el resto en
función de ella y α =2P :
1 1( ) ( )4
P t Q t 1
α = −& t )( α t Qt QQ Q 4)0()()0( 1122 +−+=
d) Como la transfo ación entre variables sólo es válida si
>+−+=rm
04)0()()0()( 1122 α t QQQt Q t
04)0()()0()0(2)()(2 1 >12121 −−+−=− α t Qt QQQt Qt Q , hay que tener cuidado que no
siempre será válida.Podemos mencionar que en cuanto 0≠α y esté ac
a de las fronteras.
-----------------------
7.- a ) Mostrar, mediante cualquiera de los métodos posibles, que latransformación
)(1 t Q otado, el movimiento
terminará cruzando algun
-----------------------
2
⎟ ⎠
⎞⎜⎛ −
−=⎟
⎞⎜⎝
⎛ += p
iaqPa
piaq
iQ
1,
2
1
⎝ ⎠ ai2
donde a es una constante, es canónica.
b) Aplicar esta transformación al oscilador armónico unidimensional deHamiltoniano
( )2222
2
1qwm p
m H +=
y encontrar un valor de la constante a que simplifique el nuevo Hamiltoniano(debe tener un único término).
ilador armónico original.
iera de las opciones permite comprobar que es una transformacióncanónica:
c) Encontrar las ecuaciones de Hamilton para Q y P y mostrar que permitenrecuperar las soluciones del osc
II. Solución
a) Cualqu
95

8/12/2019 Goldstein solucionario.pdf
http://slidepdf.com/reader/full/goldstein-solucionariopdf 149/195
i) Los corchetes de Poisson satisfacen las siguientes condiciones:
[ ] [ ] 0,, == PPQQ por la propia definición de los corchetes.
[ ], =PQ e prueba del siguiente modo1, s com
[ ] 1
2222
, =−
−=
∂
∂
∂
∂−
∂ iaii pq pq
∂
∂
∂=
ai
PQPQ
ii) Se Escriben las variables antiguas en función de las nuevas
iaiaQP
( )PQa
q −=2
,i2
( )PQi
p +=2
(1)a
y, con éstas y las originales, se com que prueba
Pq ∂=
∂ pQ ∂∂
yQq ∂ pP ∂
−=∂
y∂
P p ∂qQ ∂
−=∂
∂ y
Q
q
p ∂P ∂
=∂
∂.
Los cálculos llevan a
Piq ∂==
∂ paQ ∂∂
2 Q
p
i
a
q
P
∂∂
−=−
=∂∂
2
P
q
ai
i
p
Q
∂∂−==
∂∂
2
Q
q
ai
i
p
P
∂∂==
∂∂
2
iii) Encontrar una función generatriz.
b) Aplicando la transformación (1) al Hamiltoniano original se obtiene que
( ) ⎥⎢ ⎟⎟ ⎠
⎜⎜⎝
+++⎟⎟ ⎠
⎜⎜⎝
−= QPa
waPQ
aa
im H
2
222
2
2 24
⎦
⎤
⎣
⎡ ⎞2
que se puede simplificar notablemente mediante la elección
⎛ ⎞⎛ mwm2221
2
2
aa = o lo que es lo mismo
22wm
mwiamwa ±=±= , .
mosTome mw para obtener:a ±=
c) iwQP H −=
Las ecuaciones de Hamilton son
iwQP
Q −=∂
=& , H ∂
iwQ
P =∂
−=& P H ∂
y las soluciones son
P 0= , donde es iniciales.
Ahora hay que llevar estas solucione p q
cuenta que las condiciones iniciale
P y 0P son las condicioniwt eQQ
−= 0 , iwt e 0Q
s a las variables originales y teniendo en
s antiguas dependen de las nuevas:
⎟ ⎠
⎞⎜⎝
⎛ −
−=⎟
⎠
⎞⎜⎝
⎛ +=
a
piaq
iP
a
piaq
iQ 0
00
0
00 2
1,
2
1
con lo que recuperamos las soluciones del oscilador armónico.
28. Recuerde que las fu por
----------------------------------------------
nciones hiperbólicas vienen definidas
( ) ( ) ( )12
inh x exp x exp x= − −⎡ ⎤⎣ ⎦ ys ( ) ( ) ( )12
cosh x exp x exp x= + −⎡ ⎤⎣ ⎦transformaciones
.¿Cuál de las dos
sinh cosh
1 ,
p p
Q Pq qα α
β β
→ = =
96

8/12/2019 Goldstein solucionario.pdf
http://slidepdf.com/reader/full/goldstein-solucionariopdf 150/195
cosh sinh2 ,
p pQ P
q qα α
β β → = =% %
puede representar una transformación canónica, siendo α y β reales?
Tran uce a
ue el determinante
sformación 1:Para un sistema unidimensional la condición simplectica se red
q
p
P
q
P
p
Q
q
Q
∂
∂
∂
∂
∂
∂
∂
∂≡∆ sea la unidad.
En nuestro caso:1
1
sinh cosh
cosh sinh
q p q p
pq p q
α α
α α
α β β β
α β β
− − −
− − −
−∆ =
− β
2 1q
α β α − −=
Deberá ser cierto que . No hay valores posibles.2 1 1q α βα − − =
Transformación 2:
En este caso:1
1
cosh sinh
sinh cosh
q p q p
pq p q
α α
α α
α β β β
α β β
− −
− − −
−=
−2 1
q−
∆ β
α β α − −= −
Deberá ser cierto que
o
2 1 1q α βα − −− =
1
2α = − y 2 β =
2;2
1== β α
La transformación es:
psinqP
pqQ
2
2cos
=
=
q
F p
p
F q
∂
∂−=
∂
∂−= 33 ; y 33 Q pF F ),además, (=
do las variables P y q en función de p y Q:Reexpresan
pQPQ
2
p2cosq 2tg; ==
de modo que p
F
p
Q
∂
∂
−=
32
2cos y Q
F
pQ ∂
∂
−=
3
2tg
Las dos ultim diatamas ecuaciones se integran inme ente a
)(2tg2
3
donde )( p
2
p pQ
F ϕ +−=
=constante de modo que,salvo una constante irrelevante se verifica
finalmente que
2),(
2Q
pQF −= p2tg . 3
-------------------------------------------
97

8/12/2019 Goldstein solucionario.pdf
http://slidepdf.com/reader/full/goldstein-solucionariopdf 151/195
29.- Una partícula se mueve bajola gravedad en el plano vertical xz (el eje z es
la influencia de
vertical y se dirige hacia arriba). La partícula estáconectada por una varilla rígida sin masa, delongitud l, a un punto que se mueve con velocidad
constante de 0u > a lo largo del eje x (verfigura).a) Usando el ángulo θ que forma la varillaeje vertic
con unal como coordenada generalizada
l E. (1
rcuál/es de ellas se conserva/n. (1,5 pto)
encontrar el Lagrangiano (1 pto)b) Encontrar la ecuación del movimiento, lafunción Hamiltoniana H y la energía totapto)c) Comentar brevemente si H y E son iguales, poqué yd) Encuentre el Hamiltoniano del sistema enfunción de dos nuevas variables canónicas Q y P
con la única condición de que cosQ θ = . (1,5
pto)
NOTA: las siguientes fórmulas pueden serle de utilidad:
( , , ), ,1 1 1 1
F F q Q t p F q P F Q= = ∂ ∂ = −∂ ∂ ( ,2 2
F F q , ), ,2 2
P t p F q Q F P= = ∂ ∂ = ∂ ∂
( , , ), ,3 3 3 3
F F p Q t q F p P F Q= =−∂ ∂ =−∂ ∂ ( , , ), ,4 4 4 4
F F p P t q F p Q F P= = −∂ ∂ =∂ ∂
El punto del que está suspendida o coordenadas ,a) la vara tiene com 0 , 0 x x ut z= + =con 0 x constante. Las coordenadas cartesianas de la partícula en términos de θ son
0sin , cos x x ut l z lθ θ = + + = −
y sus derivadas
cos , sin x u l z lθ θ θ = + =& && & θ
ica:La energía cinét
( )2
2 2cos2
l mmlu uθ θ θ + +& &
La energía potencia debida a la gravedad
2 2
2 2
m mT x z= + =& &
cosV mgz mgl θ = = −
y por tanto el Lagrang ano esi2
2 cos2 2
ml L T V mlu
2 cosm
u mglθ θ = − = +& & θ θ + +
b) La ecuación de Lagrange:
( θ θ θ
mldt
d L L
dt
d =
∂
∂−⎟
⎠
⎞⎜⎝
⎛ ∂
∂= &
&
20 ) ( )
θ θ θ θ θ θ θ θ
θ θ θ θ
sinsinsinsin
sinsincos
mglmlmglmlumluml
mglmlumlu
+=++−=
−−−+
&&&&&&
&
22
l momento correspondiente a la coordenadaE θ es
98

8/12/2019 Goldstein solucionario.pdf
http://slidepdf.com/reader/full/goldstein-solucionariopdf 152/195

8/12/2019 Goldstein solucionario.pdf
http://slidepdf.com/reader/full/goldstein-solucionariopdf 153/195
b) Para encontrar la función generatriz de tipo 2 que genera la transformación habráque resolver el siguiente sistema de ecuaciones diferenciales:
2 2,F F
p Qq P
∂ ∂= =
∂ ∂
De la segunda relación deducimos inmediatamente
( ) (2
,F P q t f q t = ⋅ + + ))
, con una
función arbitraria ( , f q t . De la primera obtenemos ( ) (2 )F P q t h t = ⋅ + + . A partir
de ahora tomamos ( ) 0h t =
c) El nuevo hamiltoniano tiene la siguiente expresión
2 22F K H w PQ P
t
∂= + = +
∂
d) Las ecuaciones de Hamilton que se obtienen de estas ecuaciones son
2 2
2
1
2
K Q Q w Q
P
K P P w
Q
∂= ⇒ = +
∂∂
= − ⇒ = −∂
& &
& & PQ
.
Si integramos la ecuación primera por separación de variables:
( )2
0 02 2
2 2 1arctan tan
1 2 2
dQ w Qdt t t Q w t t
w Q w w w= → = + → = +
+
y substituyendo esto en la ecuación de P obtenemos también una ecuación separable
2
0 02 tan ( ) ln ( ) ln 2ln cos ( ) ( ) cos ( )
Pw w t t P t c w t t P t c w t t
P= − + → − = + → = +
&
0
e) Finalmente obtenemos para p(t) y q(t)
0
2
0
1( ) tan ( ) ,
( ) ( ) cos ( ).
q t w t t t w
p t P t c w t t
= + −
= = +
-------------------------------------------
31.- Consideremos un sistema con un único grado de libertad, con una variable generalizada y
su momento asociado
q
p .
a) Usando los corchetes de Poisson, demuestre que toda función ( , , ) A q p t genera un
Transformación Canónica Infinitesimal del tipo:[ , ],
[ , ],
Q q A q
P p A p
α
α = += +
(1)
es decir, que la transformación (1) es canónica para el primer orden de α .b) ¿Cuál es la transformación infinitesimal dada por A q= ? ¿Cuál es su función generatriz
? ¿Es posible encontrar las otras tres funciones generatrices , ,
?
( , )2
F q P ( , )1
F q Q ( , )3
F p Q
( , )4
F p P
c) Consideremos ahora que el Hamiltoniano del sistema es independiente de la variablegeneralizada :q ( , , ) ( , ) H p q t H p t = . ¿Qué efecto tiene esta transformación sobre este
Hamiltoniano? Interprete esto en función de la/s cantidad/es conservada/s y las simetrías delsistema.
100

8/12/2019 Goldstein solucionario.pdf
http://slidepdf.com/reader/full/goldstein-solucionariopdf 154/195
a) La única condición que tienen que cumplir es [ , ] 1Q P = , que aplicando la definición
de corchete de Poisson
[ ] [ ]2 2
[ , ] [ , ] , , , , (2)
1 , , (2) 1 (2) 1 (2)
Q P q p q A p A q p O
A A A Aq p O Oq p q p q p
α α
α α α α
⎡ ⎤ ⎡ ⎤= + + +⎣ ⎦ ⎣ ⎦
⎡ ⎤ ⎡ ⎤∂ ∂ ∂ ∂= + + − + = + − + = +⎢ ⎥ ⎢ ⎥∂ ∂ ∂ ∂ ∂ ∂⎣ ⎦ ⎣ ⎦O
b) Sustituyendo directamente tenemos que ,Q q P p α = = − .
Cuya función generatriz es2( , )F q P Pq qα = − .
También es posible encontrar la función 3( , )F p Q pQ Qα = − +
No se pueden encontrar las funciones ( )1, ,F q Q t , ( )4
, ,F p P t puesto que no es posible
escribir momentos en función de coordenadas, ni viceversa.c) Si el Hamiltoniano no depende de la coordenada generalizada (el ejemplo más
simple: una partícula que no está sometida a ninguna fuerza2
2 p H
m= ) el Hamiltoniano
no es invariante bajo la transformación canónica del apartado b) ( ( )
2
2
PK
m
α −= ) y no
corresponde a una simetría del sistema. Sin embargo, la variable q sí es cíclica y
correspondería a la invariancia bajo translaciones en el esa coordenada, es decir, que la
cantidad de movimiento asociada p P= , generatriz de la transformación, se conserva.
-------------------------------------------
32.- a) Demuestre que el corchete de Poisson de dos constantes del movimientosindependientes del tiempo, f y g, es también constante del movimiento.b) Aplicando el procedimiento anterior podríamos generar infinitas constantes delmovimientos. Sin embargo, también sabemos que en un sistema de n grados delibertad el número de integrales primeras está limitado a (2n-1). ¿Cómo puedencongeniarse estas dos proposiciones?Puede serle de interés la identidad de Jacobi: la suma de las permutaciones cíclicasde corchete doble de Poisson de tres funciones es nula.
a) Una función f es constante del movimiento si [ ],df f
f H dt t
∂= +
∂, que para
funciones independientes del tiempo [ ], f H 0= . Por tanto
[ ] [ ], 0 , f H H = = − f
[ ] [ ], 0 ,g H H g= = −
y aplicando la identidad de Jacobi
[ ] [ ] [ ], , , , , , 0u v w v w u w u v⎡ ⎤ ⎡ ⎤ ⎡ ⎤+ +⎣ ⎦ ⎣ ⎦ ⎣ ⎦ = , identificando w=H , u=f , v= g
obtenemos
[ ] [ ], , 0 , H f g f g cte⎡ ⎤ = → =⎣ ⎦
101

8/12/2019 Goldstein solucionario.pdf
http://slidepdf.com/reader/full/goldstein-solucionariopdf 155/195
b) A partir de la identidad de Jacobi, suponiendo u, v, w, como constantes del
movimiento distintas, se pueden obtener tan sólo dos permutaciones linealmente
independientes. La tercera ha de ser, necesariamente combinación lineal de las otras
dos. Se llega, pues, a un momento en el que no se obtienen nuevas constantes del
movimiento linealmente independientes.
-------------------------------------------
33.- El Hamiltoniano de un cuerpo en caida libre es
( )2
,2
p H q p
m= + mgq
donde q es la altura de la particula y m es su masa.( )a) Expresar q como una función de , p P
4 4( , )F F p P=
para determinar la función
generatriz , y la transformación canónica asociada, tal que el
nuevo Hamiltoniano tenga la expresión ( ),K Q P P= .
b) Resolver las ecuaciones para Q t y e invertir la transformación paradeterminar q t y
( ) P t
( ) ( )
( )
p t
4 4( , )F F p P
a) Buscamos una función = tal que4 4
,q F p Q F P= − ∂ ∂ = ∂ ∂
( ) ( )( )
y
2
, , ,2
pP H q Q P p Q P mgq
m= = +
4 4( , )F F p P=
En esta última ecuación podemos despejar q y determinar una ecuación para
determinar :
2
42 F P p m qmg p
∂− = = −∂
cuya integral nos lleva a3
4 21 ( )
6 pP pF h P
g m m⎛ ⎞−= + +⎜ ⎟⎝ ⎠
( )h P
,
donde es una función cualquiera.
4Q F P= ∂ ∂Utilizando esta ecuación en se obtiene que
'( ) p
Q h Pmg
−= +
[
Para que la transformación sea canónica debe cumplirse la condición ], 1Q P =
[ ]
, es
decir2 ' 1 ' ' '
, '( ), 1 1 ''2
p p h p h h p h P p
Q P h P mgq mg mg hmg m q m mg p q m p q m
⎡ ⎤ ⎛ ⎞ ⎛ ⎞ ⎛ − ∂ ∂ ∂ ∂ ∂
= + + = − − + = + − = + −⎜ ⎟ ⎜ ⎟ ⎜⎢ ⎥ ∂ ∂ ∂ ∂ ∂⎝ ⎠ ⎝ ⎠ ⎝ ⎣ ⎦
( )h P
que vemos se cumple para cualquier función . El caso más sencillo es cuando
es una función nula.
La transformación canónica queda pues2
,2
p pQ P mgq
mg m= − = + .
( ),K Q P P= , P es una variable cíclica y por tanto b) En el nuevo Hamiltoniano
0, 1
dP K dQ K
dt Q dt P
∂ ∂
= − = = =∂ ∂ 0 0,P cte P Q t t , es decir = = = − ,
102
8/12/2019 Goldstein solucionario.pdf
http://slidepdf.com/reader/full/goldstein-solucionariopdf 156/195

8/12/2019 Goldstein solucionario.pdf
http://slidepdf.com/reader/full/goldstein-solucionariopdf 157/195
formulación, el Hamiltoniano, K , sea sólo función de la coordenada, Q , y que secumpla la equivalencia entre los dos momentos, pP = . Obtenga a partir de estosrequisitos la forma de la función ( )t QqF ,,
1. (Recuerde que , yqF p ∂∂=
1 QF P ∂∂−=
1
)t F H K ∂∂+=1
Partimos de la expresión H K =
( )
, que se traduce en el contexto presente en
mgqm
pQ +=
2f
2
( )Q
,
entendiéndose que f expresa la forma de K . De esta última expresión obtenemos
( )[ ]2
12
2 gqm f 2 Qm p −=
Podemos hacer uso del requisito dado por la identificación de ambos momentos
Q
F
∂
∂−= 1
q
F P p
∂
∂== 1
( ) mgQQ =f Se desprende que . Finalmente, la función generatriz resulta de la integración
de la ecuación
( )[ ]q
F qQgm p
∂
∂=−= 12 2
1
2
dando
( ) ( )[ ]2
32
21
, qQgmQqF −−=
)t
213 gm
-------------------------------------------
36. Razónese si la siguiente afirmación es verdadera o falsa:
a) Dado un sistema hamiltoniano (por simplicidad de un grado de libertad) unacantidad dinámica que depende explícitamente del tiempo podría serconstante del movimiento.
,,( pqF
a) No existe ninguna condición que exija que una constante del movimiento no dependa
del tiempo, siempre y cuando cumpla la condición:
[ ]t
H ∂
F F
∂=, .
-------------------------------------------
37. El problema de la curva braquistócrona (curva que da el recorrido en untiempo mínimo de una partícula en un campo gravitatorio entre dos puntos,digamos 0 y b) es un ejemplo clásico de cálculo de variaciones. La solución vienedada por la función y(x) que minimice una integral que, sin tener en cuenta
constantes, tiene la forma dx Ldx x y
x y J
bb
∫∫ ⋅=+
=00
21'
)(
)(&, donde x es la coordenada
horizontal e y la vertical.a) Comparando esta ecuación con la acción, integral del lagrangiano, plantee
la/s ecuación/es de Euler-Lagrange de este problema (no es necesario dar suexpresión más simple).
b) Siguiendo con la analogía escriba la ecuación de Hamilton equivalente paraeste problema.
104

8/12/2019 Goldstein solucionario.pdf
http://slidepdf.com/reader/full/goldstein-solucionariopdf 158/195
c) Escriba la ecuación de Hamilton-Jacobi equivalente para este problema.¿Es resoluble mediante separación de variables? En caso afirmativo de unaexpresión para las soluciones e indique cómo recuperar la solución y(x).
Solución.
a) La acción tiene la forma . Por tanto sólo hay que tener
cuidado de identificar bien los términos dependientes e independientes. La x
jugará el papel de variable independiente en nuestro problema, en lugar del
tiempo de un problema típico en mecánica; la variable dependiente será y en
lugar de q, y por tanto será el equivalente de q :
dt t qq LS = f t
t ⋅∫
0
),,( &
y& &
Braquistócrona Sistema mecánico
Variable independiente x t
Variable dependiente
(coordenada generalizada)
y q
Derivada de variable
dependiente
y& q&
Por tanto la ecuación de Lagrange es:
0=∂
−∂ Ld L ''
se obtiene una expresión difícil de manejar.∂∂ ydx y &
( )21 y y
y
y
L p
&
&
& +=
∂∂
='
b) La variable conjugada será por lo que el hamiltoniano
será y
p y L
21 ⋅−−=' y p H −⋅=' &
0=∂∂
+∂∂
x
S x
y
S y H );,('c) La ecuación de Hamilton-Jacobi tendrá la forma
0=∂
+⎟⎟ ⎠
⎜⎜⎝ ∂
−− x y
12
∂ ⎞⎛ ∂ S S
y x
S
y
S 122
=⎟ ⎠
⎞⎜⎝
⎛ ∂∂
+⎟⎟ ⎠
⎞
⎝ ∂∂
⎜⎜⎛
, y
que es claramente separable en dos ecuaciones:
)(, yW xS x
S +⋅==⎟
⎠
⎞⎜⎝
⎛
∂
∂α α 2
2
dww
y
y
∫ −= 21α )(
y y
S 12
2
=+⎟⎟ ⎠
⎞⎜⎜⎝
⎛
∂∂
α W , por lo que,
dww
xS
y
∫ −+⋅= 21α α
105

8/12/2019 Goldstein solucionario.pdf
http://slidepdf.com/reader/full/goldstein-solucionariopdf 159/195
y
S p
∂∂
=Siendo S la función principal de Hamilton tenemos que y
∫−
−=∂
∂=
y
dww
xS
21
1
α α
α β que una vez resuelta la integral nos da la relación entre
x e y en función de las constantes α y β dependientes de las condiciones iniciales.
-------------------------------------------
38. Sean las siguientes transformaciones de variables:21
2=Q q ,
pP
q=
tan=
,1.-
2.- Q q , ( ) 2cosP p k q= −
=
,
3.- Q p , pt
P q
m
+= −
1 1( , , )F F q Q t =
2 2( ,F F q
,
siendo k y m constantes.a) Encontrar si son transformaciones canónicas.b) Para aquellas que lo sean señalar si es posible encontrar funciones de tipo
, , )P t ,3 3
( , , )F F p Q t = y4 4
( , , )F F p P t == (Nota: Verificar si
es posible encontrar cada una de las cuatro funciones). En cada caso dar laexpresión de al menos una de ellas.c) Encontrar el nuevo Hamiltoninano, , que resulta de aplicar la transformación
(3) al Hamiltoniano del oscilador armónico:
K
( )2 21
2 H p q= + .
a) Comprobamos directamente los corchetes de Poisson de las variables:
1.- [ ] 101
=−=∂∂
−∂∂
∂=
q p pq
QPQ,
∂∂∂ PQP
2.- [ ] 101 2
2 =−=
∂
∂
∂
∂−
∂
∂
∂
∂= q
P
p
Q
p
P
q
QPQ cos
cos,
3.- [ ] 110 =+=∂
∂
∂
∂−
∂
∂
∂
∂=
q
P
p
Q
p
P
q
Q
),( QqPP =
)
PQ,
Luego las tres transformaciones son canónicas.
b) No siempre es posible encontrar todas las cuatro funciones generatrices para una
transformación canónica. Por ejemplo en
1. No es posible escribir debido a las ecuaciones de la transformación.
Por tanto no será posible encontrar la ,( QqF F 11 = . Las otras tres sí son
posibles y tienen la forma 2
22
1PqF = Q pF 23 −=, ,
P
pF
2
2
4 −=
),( QqF F 11 =
qk qPF ⋅+= )tan(2 )arctan()( Q pk F
2. No es posible escribir , las otras tres son posibles:
, −=3 ),( P pF F 44 =. La forma de es
muy complicada aunque es posible decir que existe (recordar que no se pide la
forma de todas las funciones posibles).
106

8/12/2019 Goldstein solucionario.pdf
http://slidepdf.com/reader/full/goldstein-solucionariopdf 160/195
3. No es posible escribir . Las posibles son),( QqF F 33 =m
t QQq
2
2
−= ,F 1
( )2
22
qPt
mF +=
m
t pPpF
2
2
4 −=,
mt QQqF
2
2
1 −=c) Para la transformación 3) podemos usar la función generatriz y
tenemos
Q p
Pm
Qt
=
−=q por lo que
( )m
QP
m
Qt Q
m
QF
22
1
2
1
2
1 22
22
221 −⎟⎟
⎠
⎞
⎜⎜
⎝
⎛ ⎟
⎠
⎞⎜⎝
⎛ −+=−+=
∂
∂q p
t H K +=
107

8/12/2019 Goldstein solucionario.pdf
http://slidepdf.com/reader/full/goldstein-solucionariopdf 161/195
TRANSFORMACIONES CANÓNICAS, CORCHETES DE POISSON YECUACIÓN DE HAMILTON-JACOBI
1. En un Hamiltoniano de dos grados de libertad independiente del tiempo nos
basta encontrar otra constante del movimiento para poder decir que elproblema está integrado. Si esta segunda constante, I( p,q), es a su vezindependiente del tiempo, debe satisfacer la condición: [ I ,H ] = 0. Supongamosuna partícula de masa unidad moviéndose en un potencial bidimensional
. Hallar: la constante más simple de la forma
, donde e y f son funciones a determinar, y una formacorrespondiente del potencial V , para poder asegurar que el problema estáintegrado. ¿Cuál es el significado físico de I ? Con lo que usted sabe demecánica, ¿ hay una forma consistente de hallar la forma general del potencialsin resolver ecuación alguna?
),( 21 qqV
)( e I qp, = 21 )()( p f p qq +
Si insertamos H e I en la condición [ I ,H ] = 0, e igualamos los coeficientes de los
términos en los momentos, encontramos:
.0 ,0 ,0 ,0212121
=+=+==q
V f
q
V e
q
e
q
f
q
f
q
e
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
De las tres primeras ecuaciones podemos obtener, por ejemplo:
12 , q f qe =−= .
La constante es entonces:1221 pq pq I −= ,
que no es otra cosa mas que el momento angular. Es razonable pensar que el potencial
es un potencial central,
)(2
2
2
1 qqV V += ,
enteramente consistente con la cuarta ecuación en derivadas parciales.
--------------------------------
2. En el caso de un sistema unidimensional con la hamiltoniana
2
2
2
1
2 q
p H −=
determínense las funciones f (q, p) y g (q, p) de manera que
( ) ( )t pq g pq f D ,, +=
sea una constante del movimiento.
La función D debe ser solución de:
72

8/12/2019 Goldstein solucionario.pdf
http://slidepdf.com/reader/full/goldstein-solucionariopdf 162/195

8/12/2019 Goldstein solucionario.pdf
http://slidepdf.com/reader/full/goldstein-solucionariopdf 163/195

8/12/2019 Goldstein solucionario.pdf
http://slidepdf.com/reader/full/goldstein-solucionariopdf 164/195
E qm pm
=+ 222
2
1
2
1ω
con un área encerrada dada por 2π E/ ω . Por lo tanto el invariante adiabático es I = E/ ω . La condición de invariancia adiabática viene dada por:
2
2
1
1
ω ω
E E =
Si escribimos la expresión anterior en términos de amplitudes de oscilación, la amplitudfinal puede expresarse como:
41
2
112
=
k
k A A
-----------------------------------
5. La transformación desde un sistema de referencia fijo a otro móvil es, siendo la distancia entre los orígenes (siendo t el tiempo).
Encuentre:)(t DqQ −= D t ( )
a) la transformación para los momentos generalizados;
b) la forma del hamiltoniano en variables , cuando su representación en
variables ( , es
),( P Q
) p q )(22 qV m p + ;
c) las ecuaciones del movimiento en variables .),( P Q
a) La función generatriz para la transformación Q )(t Dq −= , es , tal que:),(2 q P F
pq
F Q
P
F ==
∂
∂
∂
∂ 22 ;
Si , tendremos( )(2 t Dq P F −= ) P q
F p ==
∂ ∂ 2 .
b) El nuevo hamiltoniano será:
D P DQV m
P
D P qV m
p
t q P F t
t pq H t P Q K
−++
=−+
=+=
)(2
)(2
),,(),,(),,(
2
2
2∂
∂
c) Las ecuaciones del movimiento son:
75

8/12/2019 Goldstein solucionario.pdf
http://slidepdf.com/reader/full/goldstein-solucionariopdf 165/195
)( DQV Q
P
Dm
P
P
K Q
+−=
−==
∂
∂
∂
∂
Combinándolas:
Dm DQV Q
Qm −+−= )(∂
∂
-------------------------------------------
6. Supongamos que en el problema de una partícula, de masa m, en caída libre enun campo gravitatorio, queremos efectuar una transformación canónica,
, que nos permita escribir el hamiltoniano en la nuevasvariables como . Demuestre que la correspondiente función
generatriz, , viene dada por:
),(),( Q P q p →
(1 q F
mgQ K =),Q
( )( ) g mqQ g m F 2232
1 32 −−= .
Deseamos pasar de mgqm
p H +=
2
2
a mgQ K = . De la identificación de ambas
expresiones, obtenemos:
( )q
F mgqmgQm p
∂
∂ 12121)2( =−= ,
en donde es la función generatriz problema. Integrando la ecuación anterior, F 1
( ) ( )( ) 232
2
2121
1 23
1~~)2( qQ g m g m
qd qmg mgQm F q
−−=−= ∫ .
----------------------------------
7. Dada la transformación Q ),();,( pq P P pqQ == para un problema mecánicounidimensional, demostrar que la condición simplética para que ésta seacanónica se reduce a que una cierta función escalar tome un determinadovalor(¿cuál?).
Para el caso unidimensional, la condición simplética es:
∆=
−
= JMJM
p p
pq
pqT
P Q
P Q
P P
01
10
76

8/12/2019 Goldstein solucionario.pdf
http://slidepdf.com/reader/full/goldstein-solucionariopdf 166/195
siendo . Es pues necesario y suficiente que el determinante ∆ sea la
unidad.
q p pq P Q P Q −≡∆
--------------------------------
8. Dadas las siguientes transformaciones Q ),();,( pq P P pqQ == , determinarcuales son y cuales no son canónicas. Para aquéllas en las que la transformacióncontiene parámetros libres, determínense las condiciones que éstos debenverificar para que la transformación sea canónica. Razónense las respuestas encada caso.
a) iiii pQq P =−= ;
b) iiii pQq P == ;
c) jiji jiji pbQqa P =−= ;
d) jiji jiji q BQ p A P =−= ;
e) , donde es una función arbitraria de1)/(;)( −== dqdf p P q f Q f q
f) q P pQ cos;sin ==
a) canónica; b) NO; c) canónica si 1−=a b , siendo b la matriz transpuesta de b
d) canónica si 1−−= BA ; e) canónica f) no canónica
-----------------------------------
9. ¿Para qué valores de los parámetros α y β representan las ecuaciones
pq P
pqQ
β
β
α
α
sin
cos
=
=
una transformación canónica? ¿Cuál es la forma de la función generatriz ?3 F
Para un sistema unidimensional la condición simplectica se reduce a que el
determinante
p
P
q
P p
Q
q
Q
∂∂
∂∂
∂
∂
∂
∂
≡∆ sea la unidad.
En nuestro caso:
pq pq
pq pq
β β β α
β β β α α α
α α
cossin
sincos1
1
−
− −=∆ 12 −= α α β q
Deberá ser cierto que , lo que exige que112 =−α βα q
77

8/12/2019 Goldstein solucionario.pdf
http://slidepdf.com/reader/full/goldstein-solucionariopdf 167/195
2;2
1== β α
La transformación es:
pq P
pqQ
2sin
2cos
=
=
además,q
F p
p
F
∂
∂−=
∂
∂−= 33 ;q y ),(33 Q p F F =
Rescribiendo las variables P y q en función de p y Q:
pQtg P p
Qq 2;
2cos
2
==
de modo que p
F
p
Q
∂
∂
−=3
2
2cos y Q
F
p ∂Qtg
∂
−=3
2
Las dos ultimas ecuaciones se integran inmediatamente a
)(22
2
3 p ptg Q
F ϕ +−=
donde )( p =constante de modo que,salvo una constante irrelevante se verifica
finalmente que
2
),(2
3
Q pQ F −= ptg 2 .
-------------------------------------------
10. Resuelva el problema de Hamilton-Jacobi para una partícula que se mueve enun plano vertical sobre la parábola .2ax z =
)41(2
12;)(
2
1 22222 xa xmT xax z z xmT +=⇒=+=
2mgaxmgz V ==
2222 )41(2
1mgax xa xm L −+=
Solo un grado de libertad, x . Para obtener el Hamiltoniano ,
)41( 22 xa xm L
p +=∂∂
= , y:
.412
1 2
22
2
mgaxa
p
m H +
+=
78

8/12/2019 Goldstein solucionario.pdf
http://slidepdf.com/reader/full/goldstein-solucionariopdf 168/195
La ecuación de Hamilton-Jacobi se obtiene de substituir pori piq
F
∂
∂ 2 en la expresión
0),,( 2 =∂
∂+
t
F t q p H ii , de modo que:
)41(2
122 xam +
0222
2 =∂
∂++
∂
∂t
F mgax
x
F (Ecuación de Hamilton-Jacobi).
Puesto que H no depende explícitamente de t , t W F α −=2 donde const =α , y
α =+
∂
∂
+2
2
22 )41(2
1mgax
x
W
xam,
que admite una integral inmediata, ya que
)41)((2222
2
xamgaxm x
W
+−=
∂
∂α
∫ +−=⇒ x
xa xmga
dxmW 0
222 )41)(1(2α
α .
La determinación de t W F α −=2 queda pues reducida a una cuadratura.
--------------------------------
11. Dado el Hamiltoniano , encontrar la transformación canónica que
lo convierte en
22 x p H x +=
2
4 1
QQ +2 P H = utilizando las propiedades de tales
transformaciones y la relaciónQ
1= x .
Como sabemos que Q viene dada solo en función de x (normalmente llamada ),
usaremos la función generadora , para la cual
q
),(2 x P F
x
x P F
p ∂
∂
=
),(2
(1)
x P
x P F Q
1),(2 =∂
∂= (2)
Integrando (2),
)(2 q L P
F += (3)
y usando (1)
)()(2
2 QG P Qq L x
P p +−=′+−= (4)
79
8/12/2019 Goldstein solucionario.pdf
http://slidepdf.com/reader/full/goldstein-solucionariopdf 169/195

8/12/2019 Goldstein solucionario.pdf
http://slidepdf.com/reader/full/goldstein-solucionariopdf 170/195

8/12/2019 Goldstein solucionario.pdf
http://slidepdf.com/reader/full/goldstein-solucionariopdf 171/195
La ecuación, una vez hecha la separación de variables, queda como
( ) ( ) ( ) E mgz
dz
z dW
dy
ydW
dx
xdW
m=+
+
+
2
32
22
1
2
1
Si E es constante, cada uno de los sumandos diferenciales debe serlo a su vez
( ) ( )
( )
3
23
2
1
2
22
2
1 ,
1
21
2
1
α
α α
=+
=
=
mgz dz
z dW
m
dy
xdW
mdx
xdW
m
Y las soluciones
( ) ( )
( ) ( ) 23
329
8
3
222 ,121
mgz mg
z W
m x yW m x xW
−±=
±=±=
α
α α
Las constantes 321 ,, α α α definen los nuevos momentos en una transformación canónica
generada por ( )321 ,,,,, α α α z y xS =S . La otra mitad de las nuevas coordenadas
generalizadas definen las ecuaciones
( )t
mg
mgz S
t m
xS
t m
xS
−−
±=∂
∂=
−±=∂
∂=−±=
∂
∂=
23
2
33
22
22
,
12
11
α
α β
α α β
α α β
que, invertidas, dan
( ) ( )
( )232
3
222 ,
112
t g
mg z
t m
yt m
x
+−=
+±=+±=
β α
β α β α
-------------------------------------------
14. El hamiltoniano de Toda caracteriza un conjunto de partículas que se muevensobre un anillo, sometidas a fuerzas repulsivas, exponencialmente decrecientes.
En el caso de tres partículas (véase figura), este hamiltoniano viene dado por:
82

8/12/2019 Goldstein solucionario.pdf
http://slidepdf.com/reader/full/goldstein-solucionariopdf 172/195
( )[ ] ( )[ ] ( )[ ] 323
exp12
exp31
exp3
1
2
2
1−−−+−−+−−+∑
== φ φ φ φ φ φ
i i p H
Aparte del hamiltoniano, existe una integral del movimiento obvia ¿Cuál es?Genere una transformación canónica que `ponga en evidencia esta nuevaintegral en el hamiltoniano transformado. ( Nota: en la segunda parte del
problema utilice la función generatriz , definiendo como nuevo momento esa
integral de movimiento adicional ) F 2
φ1
φ 3
φ 2
p1
p 3
p2
φ
Hay una integral del movimiento obvia, que es el momento total
cte.3213
=++= p p p P (1)
ya que el hamiltoniano es invariante frente a rotaciones
0φ φ φ +
ii
Transformamos a los nuevos momentos 11 p P = , 22 p P = y dado por (1), con:3 P
( ) .321322112 φ φ φ P P P P P F −−++= .
Encontramos el nuevo hamiltoniano:
( )[ ]( ) ( )[ ] ( ) .3exp-exp-exp
2
1
221
2213
22
21
−Φ+Φ−Φ+Φ
+−−++=′ P P P P P H
′ H no depende de Φ3 : lo que demuestra la invariancia de P 3
-------------------------------------------
15. Compruebe que para tres funciones se cumple. Proceda expandiendo el lado izquierdo de la
igualdad y reorganizando términos para obtener el lado derecho. ¿De quérelación se trata?
h g f ,,
[ ][ ] [ ][ ] [[ g f h f h g h g f ,,,,,, −=+ ]]
Reconocemos aquí la identidad de Jacobi y su comprobación aparece con detalle en la
página 487 del Goldstein.
16. Sean q y p la coordenada generalizada y el momento generalizado de unsistema material de un grado de libertad; sean Q y P funciones de q y p, tales
que . Se pide determinar P de la forma más general posible, de modoque la transformación de q y p a Q y P sea canónica.
pqQ tan=
83

8/12/2019 Goldstein solucionario.pdf
http://slidepdf.com/reader/full/goldstein-solucionariopdf 173/195
Se tiene que
,tan;cos2
pq
Q
p
q
p
Q==
∂
∂
∂
∂
y una integral particular de la ecuación
1cos
tan2
=− p
q
q
P p
p
P
∂
∂
∂
∂ ,
se obtiene fácilmente haciendo P solamente función de p , por ser
p P pdp
dP senln
tan
1=⇒= .
Luego
( ) pq p P tanf senln +=
es la solución del problema.
-------------------------------------------
17.- Un sistema de una partícula tiene como lagrangiano: )(e 2
21t2 qV qm L −=
γ .
a) ¿A qué sistema corresponde?b) Una vez encontrado el hamiltoniano en variables ( )q p, , ¿cuál ha ser la
buena expresión para la función ( )t f tal que la función generatriz
transforme el hamiltoniano en una constante del
movimiento en el caso en que
( ) ( )qP t f t P q F =,,2
( )22
qmω 21q =V ?
a) La ecuación del movimiento es
qmq
V qm γ 2−
∂
∂−=
que corresponde a una partícula en un potencial V y bajo la influencia de un frenado
qm γ 2− .
b) El hamiltoniano viene dado por la expresión
( ) t t
eqV em
p H
γ γ 222
2 += −
,que se reduce, en nuestro caso, a
t t eqmem
p H γ γ ω 2222
2
2
1
2+= − .
Nos piden ahora una función generatriz de la forma ( ) ( )qP t f t P q F =,,2 para que transforme H en un nuevo hamiltoniano K que sea constante del movimiento. Nos
bastará para ello asegurar que K no depende explícitamente del tiempo. Para ello,
aplicando las ecuaciones de transformación
( ) ( )t
f qP H K qt f Q P t f p
∂
∂+=== ;;
tenemos
84

8/12/2019 Goldstein solucionario.pdf
http://slidepdf.com/reader/full/goldstein-solucionariopdf 174/195
t
f f QP e f Qme f
m
P K t t
∂
∂++= −−− 1222222
2
2
1
2
γ γ ω
Si hacemos la identificación
( ) t et f γ =
obtenemos el resultado exigido.-------------------------------------------
18.- Un conjunto de coordenadas generalizadas, se transforma en un nuevoconjunto , a través de:),( 11 P Q ),( 22 P Q
),,,(, 221111
2
11 pq pq P P qQ ==
),,,(, 221122212 pq pq P P qqQ =+= .
a) Encontrar la expresión más general de y para que la transformaciónsea canónica.
1 P 2 P
b) Mostrar la elección que reduce el hamiltoniano
( )2
212
2
1
21
2qq p
q
p p H +++
−= a .2
2
1 P P K +=
c) Resolver las ecuaciones de Hamilton en términos de las nuevas variables.
a) Buscaremos una función tal que),,(2 t P q F i
i P
F
∂Q
∂= 2 y
i
iq
F p
∂
∂= 2 , de :
2
11 qQ = y Q 212 qq += → .),,()( 212211
2
12 t qq g P qq P q F +++=Por tanto:
1
2111 2 q
g
P P q p ∂
∂
++= ;2
22q
g
P p ∂
∂
+=
con lo que
2
22q
g p P
∂
∂−= ;
∂
∂−
∂
∂+−=
∂
∂−−=
12
21
11
21
1
12
1
2
1
q
g
q
g p p
g P p
q P
b) Si suponemos que g es independiente del tiempo, H K = y si sustituimos las
expresiones anteriores de y en K tenemos que1 P 2 P
2
2
2
1211
21
2
1
2 q
g p
q
g
q
g
p p K H
∂
∂−+
∂
∂−
∂
∂+
−==
que será igual a la hamiltoniana original si
21 q
g
q
g
∂
∂=
∂
∂ y ( ) 21
2
2
2
1
2
21
2
2 qqqqqqq
g −−−=+−=
∂
∂
y esta última expresión es fácilmente integrable a
)(3
11
2
21
3
22
2
1 q f qqqqq g +−−−= y de la condición 21
2
2
2
1
21
2 qqqqq
g
q
g −−−=
∂
∂=
∂
∂
tenemos que 2
1
1
f −=
∂
∂ y por tanto
( ) 3
1
2
21
3
22
2
12211
2
12
3
1
3
1qqqqqq P qq P q F −−−−++= .
85

8/12/2019 Goldstein solucionario.pdf
http://slidepdf.com/reader/full/goldstein-solucionariopdf 175/195
c) En el nuevo Hamiltoniano no aparecen ni ni por lo que y son
constantes y1Q 2Q 1 P 2 P
1
1
1 2 P P
H Q =
∂∂
= → α += t P Q 11 2 ,
12
2 =∂∂= P H Q → β += t Q2 .
-------------------------------------------
19. Un sistema de dos grados de libertad está descrito por la hamiltoniana
)()()( 232121
2
211 q g pq g pbqq g H −++−= ,
dónde es función únicamente de la variable .)( ji q g jq
a)
Encontrar unas funciones, , y para que las funciones)( 11 q g )( 12 q g )( 23 q g
211 qq F = y2
112
q
aq p F
−=
sean constantes del movimiento.
b) ¿Existen más constantes del movimiento algebraicas independientes? Encaso de respuesta afirmativa, ¿ podría dar alguna sugerencia de constante?
c) ¿Puede construirse alguna constante más a partir de la identidad deJacobi?. (Nota: identidad de Jacobi para las funciones H , v, w es
[ ][ ] [ ][ ] [ ][ ]0,,,,,, =++ w H v H wvwv H )
d) Resolver la ecuación de Hamilton-Jacobi: 0, =∂∂
+
∂∂
t
S
q
W q H , con
( ) ( ) t P qW t P qS 1,,, α −= ¿Qué constantes del movimiento obtenemos?
a) Para que sea constante del movimiento tiene que cumplir quei F [ ] 0, =i F H , de la
definición de corchete de Poisson tenemos:
[ ] 0)()(, 123212
2
1
22
1
21
1
11
1
1
1 =+−=∂
∂
∂∂
−∂
∂
∂∂
+∂
∂
∂∂
−∂
∂
∂∂
= qq g qq g q
F
p
H
p
F
q
H
q
F
p
H
p
F
q
H F H
que tiene como solución y112 )( qq g = 223 )( qq g = (o con los signos cambiados).
Introduciendo esto en el corchete de la segunda constante:
[ ] 011
, 1111
1
1
2
2
2
113
2
2
21
21
1
12 =
−+++
∂
∂−=
−++
∂
∂+
∂
∂−= paqaq p
q
g
paq g
q
a g
g p
q
g F H
2
11 1)( aqq g =que se cumple si .
b) Con las funciones halladas el hamiltoniano tiene la forma
2211
2
2
2
1 q pq pbqaq H −++−=
que, salvo signos, es simétrica en las variables. De este modo es directo proponer una
nueva función
86

8/12/2019 Goldstein solucionario.pdf
http://slidepdf.com/reader/full/goldstein-solucionariopdf 176/195
1
223
q
bq p F
−=
que es fácil comprobar que es constante del movimiento
[ ] ( ) ( ) 0211
2, 22222
11
2
1
222
1
22
13 =−−++−=−−+
−−= bq pbq pbq
bq
q
pbq
q
pbqq F H .
También es evidente que el propio Hamiltoniano, independiente del tiempo, es otra
constante del movimiento. Podríamos pensar que ya tenemos las 4 constantes posibles
pero no son linealmente dependientes, de hecho se puede ver que
( )321 F F F H −= .
c) La aplicación de la identidad de Jacobi para generar nuevas constantes sólo produce
soluciones triviales:
[ ] 1, 21 = F F , [ ] 1, 31 = F F , [ ]2
1
32 , F
H F F −= .
d) La ecuación una vez hecha la separación de variables queda
E bqaqqq
W q
q
W =+−
∂
∂−
∂
∂ 2
2
2
12
2
21
1
1
y separando las ecuaciones por variables tenemos
1
2
11
1
1 α =−∂
∂aqq
q
W y 2
2
22
2
2 α =+∂
∂bqq
q
W −
que tiene como soluciones directas
2
1111
2
)ln( qa
qW += α y 2
2222
2
)ln( qb
q +−= α W ,
de modo que la función generadora de la transformación canónica buscada es
t t qb
qqa
qS 21
2
222
2
1112
)ln(2
)ln( α α α α −−+−+=
y podemos encontrar las soluciones explicitas para las variables canónicas:
( ) t qS
−=∂∂
= 1
1
1 lnα
β y ( ) t qS
−−=∂∂
= 2
2
2 lnα
β
t eet q 1)(1
β = y q t eet −−= 2)(2
β
y para las conjugadas:
t t eaeeeaqqq
S p 11
111
1
11
β β α
α +=+=
∂
∂= −− y t t ebeeebq
S p −−+=+−=
∂
∂= 22
222
2
22
β β α
α .
Las constantes son 2121 ,,, β β α α cuyas fórmulas en función de las variables se puede
despejar de las ecuaciones anteriores.
-------------------------------------------
20.- Sean y f f f ,, 21 funciones de las coordenadas, q , de los momentos, , y
del tiempo. Muestre que se cumplen las siguientes relaciones:k k p
a) [ ] [ ] [ g f g f g f f ,,, 2121 +=+ ]] b) [ ] [ ] [ g f f g f f g f f ,,, 122121 +=
c) [ ]
∂∂+
∂∂=
∂∂
t
g f g t
f g f t
,,,
87

8/12/2019 Goldstein solucionario.pdf
http://slidepdf.com/reader/full/goldstein-solucionariopdf 177/195
d) [ ]k
k p
f q f
∂
∂−=,
e) [ ]k
k q
f p f
∂
∂=,
-------------------------------------------
21.- Supongamos un sistema en una dimensión con coordenadas q y p.a) Demuestre que para la hamiltoniana del sistema la evolución deuna función esta dada por
),,( t pq H
),,( t pq f
[ ]t
f H f
dt
df
∂
∂+= ,
b) Encuentre las condiciones que han de cumplir las constantes a,b y c para quesea canónica la transformación
pqaQ += 2 , . (1)4cpbq P +=c) Para el sistema dado por la hamiltoniana
2242 44 p pqqq H +++= encuentre la transformación del tipo (1) tal que la nueva hamiltoniana, H’ , sea ladel oscilador armónico.d) Si tuviéramos una nueva transformación canónica sobre las coordenadas delapartado c): ( )t P Q P ,,
~ y Q( t P Q ,, )
~, ¿cómo calcularíamos la transformación desde
las variables originales a las finales, ( )t pq P ,,~
( )t pqQ ,,~
?. ¿Será canónica?. En casode conocer una transformación que simplifique la hamiltoniana H’ apunte el
procedimiento.
a) Se obtiene de la definición del corchete de Poisson y las ecuaciones del
movimiento de hamilton para el sistema. (Ver en el apartado 9-5 del Goldstein).
b) En notación matricial tiene que cumplir:
J MJM T =
y para este sistema tenemos
=
∂∂
∂∂
∂
∂
∂
∂
=34
12
pb
aq
p
P
q
P
p
Q
q
Q
M ,
−=
−
+−=
01
10
08
803
3
bcpb
bcpb MJM T
es decir, 1,0 −== bc y a sin determinar.
c) Como la transformación es independiente del tiempo la nueva hamiltoniana se
obtiene de la substitución de las nuevas variables, P q −= y en la antigua
hamiltoniana:
2aP Q p −=
22224 )24()44(' Q P aQ P aa P H H ++−++−==
en la que tomando nos lleva a2=a22' Q P H += , formalmente la del oscilador armónico.
88

8/12/2019 Goldstein solucionario.pdf
http://slidepdf.com/reader/full/goldstein-solucionariopdf 178/195

8/12/2019 Goldstein solucionario.pdf
http://slidepdf.com/reader/full/goldstein-solucionariopdf 179/195
2
3
2
2
2
q
pQ
q
p p
−=
=
,
3
2
2
4
2
2
Q
p P
Q
pq
−=
=
,
3
12
3
12
2
2
=
=
P
pQ
p
P q
y podremos calcular todas las funciones
generatrices:
2
2
24q
P F −= ,
2
2
34Q
p F −= ,
3
2
2
5
42
=
P
p F .
Estas funciones generatrices, obtenidas unas de otras a través de QP F F −= 21 ,
yqp F F −= 31 QP qp F F −+= 41 y del oportuno cambio de coordenadas (ver sección
9-1 del Goldstein) siempre generan la misma hamiltoniana.
b) No, no es única. Dado que la relación entre el cambio de coordenadas y la
función generatriz viene dado por ecuaciones del tipo:q
F p
∂
∂= 1
Q
F P
∂
∂= 1 siempre
podemos añadir una constante y/o una función dependiente del tiempo. En este último
caso las hamiltonianas serán diferentes según la función dependiente del tiempo que
consideremos.
Para el primer ejemplo de la sección anterior las transformaciones canónicas dadas por
las funciones y( ) qQt Qq F =,,1 ( ) 2
1 ,,' t qQt Qq F += , generan las mismas ecuaciones
y , pero tiene hamiltonianas diferentes.Q p = q− P =
--------------------------------------------
23.- Sean un sistema hamiltoniano )(2
1),( 22 q pq p H +=
(,0)0( t pt q
, la variable dinámica
y las condiciones iniciales pqq p g =),( 0)0 p==== . Calcule la
evolución temporal de la variable, siguiendo los siguientes procedimientos
y comente brevemente las diferencias:
),( 0 pt g
a) Integración directa de las ecuaciones de Hamilton.b) A partir del formalismo de Poisson obtenga la ecuación diferencial de
segundo orden de .),( 0 pt g
c) Encuentre una transformación canónica cualquiera tal que la nueva variablesea Q . Calcule el nuevo hamiltoniano y obtenga a partir de
las nuevas ecuaciones de Hamilton.
),( q p g = ),( 0 pt g
NOTA: las siguientes fórmulas pueden serle de utilidad:
Q
F P
q
F pt Qq F F
∂
∂−=
∂
∂== 11
11 ,),,,( P
F Q
q
F pt P q F F
∂
∂=
∂
∂== 22
22 ,),,,(
Q
F P
p
F qt Q p F F
∂
∂−=
∂
∂−== 33
33 ,),,,( P
F Q
p
F qt P p F F
∂
∂=
∂
∂−== 44
44 ,),,,(
90

8/12/2019 Goldstein solucionario.pdf
http://slidepdf.com/reader/full/goldstein-solucionariopdf 180/195
a)
H p
p p
H q
−=∂∂
−=
=∂∂
=
, y por tantoq pq −== t Bt At p
t Bt At q
sincos)(
cossin)(
−=
+=, que para las
condiciones iniciales dadas:0
0 p)0
)0 A(
(t p
Bt q====== , tenemos q t sinqt )( 0= .
t p
t t pt qt pt g 2sin2
cossin)()()(2
02
0 ===
b) [ ] 22, q pq
H
p
g
p
H
q
g H g
dt
dg g +=
∂∂
∂∂
−∂∂
∂∂
=== y
[ ] g q pqpq
H
p
g
p
H
q
g H g
dt
g d g 4)(22, =−−=
∂∂
∂∂
−∂∂
∂∂
===
)2cos()2sin()( t Bt At g += , con las condiciones iniciales 0)0( ==t g , , nos
lleva a
2
0)( pt g =
t p
t g 2sin2
)(20= .
c) Buscamos una transformación canónica desde el sistema de coordenadas p, q a otro
P , Q donde, por ejemplo, Q . Si despejamos pq g == p
Qq = , podemos considerar la
función generatriz tal que)Q,(3 p F
Q
F
P
p
Q
p
F q
∂
∂
−=
=∂
∂−=
3
3
,→ → ) )('ln Q f p P (ln3 Q f pQ F += +=
siguiendo el enunciado del problema podemos tomar el caso más simple :0)( =Q f P P Qeqe p −== ,
y el nuevo hamiltoniano será
)(2
1 222 P P eeQ H += −
Las nuevas ecuaciones del movimiento serán:
P
P P
QeQ
H P
eeQ P
H Q
2
222
−
−
=∂∂−=
+−=∂∂
=
y para la ecuación de )()( t Qt g = será
, dónde por substitución de las anteriores
ecuaciones obtenemos , es
decir la misma ecuación que en el apartado anterior.
P eQ P 22+
eQ(2 22−= −
Qe P eQQ P P 222 22 +−= −−
Q QeeQQee P P P P 4)() 2222 =+−+ −Qe P P 2 22 + −−
--------------------------------------------
24.- a.- Demuéstrese que si el hamiltoniano de un sistema puede expresarse comola función es una constante de
movimiento.
),,,,),,(( 2211 s s pq pq pq f H H …= ),( 11 pq f
91

8/12/2019 Goldstein solucionario.pdf
http://slidepdf.com/reader/full/goldstein-solucionariopdf 181/195
b.- Utilícese esto para encontrar una constante de movimiento para una partícula
en dos dimensiones bajo el potencial3
)(r
r ar V
⋅
= (siendo a
un vector constante
dado).
a) Para demostrar que 0=dt
df utilizaremos el formalismo de Poisson:
[ ] 0,111111111
=∂∂
∂∂
∂∂
−∂∂
∂∂
∂∂
=∂∂
∂∂
−∂∂
∂∂
=∂∂
∂∂
−∂∂
∂∂
== ∑= q
f
f
H
p
f
p
f
f
H
q
f
q
H
p
f
p
H
q
f
q
H
p
f
p
H
q
f H f f
ii
s
i ii
b) El hamiltoniano de una particula sometida al potencial del problema la podemos
escribir en coordenadas polares como:
32
22
22 r
r a
mr
p
m
p H r
⋅
++= θ , si elegimos el eje x
coincidiendo con el vector a podemos
escribir
mr
ma p
m
p
r
r a
mr
p
m
p H r r
2
22
32
22
2
cos2
2
cos
22
θ θ θ θ ⋅+=
⋅++= + de modo que podemos
escribir quemr
p2
,θ f
m
p p f pr H r
r
2
2
)(
2)),(,,( θ
θ θ += , con =),( θ θ p f θ θ cos22 ⋅+ p ma ,
constante del movimiento.
--------------------------------------------
25.- Sea θ ρ θ ρ ρ
θ ρ
222
2
2 sin2
1cos
2
1
2
1−−+= P P H
0=θ
, y para el instante inicial
)0( =θ P y 1== ρ ρ P . Sea θ ρ α θ ρ θ ρ sincos 2 P ),,,( 121 P P P S += una función
generatriz, siendo las nuevas coordenadas y momentos.2121 ,,, P P x x
a) Determinar los valores de α tales que el hamiltoniano de las nuevasvariables sea integrable.b) Utiliza la transformación para determinar el valor de ρ ρ ρ θ P P ,,, en el
tiempo π =t . NOTA: las siguientes fórmulas pueden serle de utilidad:
Q F P q F pt Qq F F ∂∂−=∂∂== 1111 ,),,,( P F Qq F pt P q F F ∂∂=∂∂== 2222 ,),,,(
Q F P p F qt Q p F F ∂∂−=∂∂−== 3333 ,),,,( P F Q p F qt P p F F ∂∂=∂∂−== 4444 ,),,,(
Lo primero es expresar las viejas variables en función de las nuevas
θ ρ α θ ρ
θ α θ
θ
ρ
cossin
sincos
21
21
P P P
P P P
+−=
+=,
θ αρ
θ ρ
sin
cos
2
1
=
=
x
x, de lo que obtenemos que )0( ≠α
2
2
2
1
21 x x += α
α ρ
y después de algunos cálculos tenemos que
( )2
2
21
2
2
22
122
1
α α
x x P P K −−+= , que para cualquier valor de 0≠α es separable y por
tanto integrable.
Tenemos que
92

8/12/2019 Goldstein solucionario.pdf
http://slidepdf.com/reader/full/goldstein-solucionariopdf 182/195
2
22
1 1
α
x P
P
=
=
, , que podemos integrar directamente por separado2
2
2
11
P x
P x
α =
=
B At t t x
At t P
++=
+=
2)(
)(
2
1
1
y ( )t t
t t
DeCet P
DeCet x
−
−
−=
+=
22
2
1)(
)(
α
.
Con las condiciones iniciales dadas obtenemos el valor de las constantes
0)0(,1)0(,0)0(,1)0( 2121 ==== P P x x , 0,1 ==== DC B A .
Por tanto para π =t tenemos que1
2)(
1)(
2
1
1
++=
+=
π π
π
π π
x
P
,0)(
0)(
2
2
=
=
π
π
P
x, que en las variables
originales da lugar a 12
2
++ π π
)()(,0)()( 1 ==== π π ρ π θ θ xt
0
1
=+=
θ
ρ π
P
P .
----------------------------------------------
26. Considere el hamiltoniano )sin( 2
2
2
12
2
2
2
2
1
2
1 qqq
p
q
p H +++= y la función generatriz
2
2
11
2
2
2
1
2 P q P
qqS +
+= .
a) Determinar la trasformación canónica asociada a la función S , en la región
.0, 21 >qqb) Determinar el nuevo hamiltoniano en función de .ii P Q ,
c) Dar las integrales primeras. Determinar las soluciones de la ecuación delmovimiento dadas por el nuevo hamiltonianod) Estudiar la posibilidad de obtener las soluciones a las ecuaciones delmovimiento en las variables originales a partir de la solución obtenida en c).NOTA: las siguientes fórmulas pueden serle de utilidad:
Q F P q F pt Qq F F ∂∂−=∂∂== 1111 ,),,,( P F Qq F pt P q F F ∂∂=∂∂== 2222 ,),,,(
Q F P p F qt Q p F F ∂∂−=∂∂−== 3333 ,),,,( P F Q p F qt P p F F ∂∂=∂∂−== 4444 ,),,,(
a) La función generatriz depende de las coordenadas originales ( ) y de los nuevos
momentos ( ), por tanto corresponde a y tenemos que
21 ,qq
21 , P P ),,(2 t P q F
2
12
2
2
2
11
2
qqQ
=
+=
122
21111 2
P q p
P q P q p
=
+=
Por lo que la trasformación canónica viene dada por
212
21
2 QQq
−±=
±= ( )
1212
2121
2
2
P QQ p
P P Q p
−±=
+±=, y para la región q tomaremos el signo
+.
0, 21 >q
b) Substituyendo el cambio en la expresión de H obtenemos el hamiltoniano en las
nuevas varibles
93

8/12/2019 Goldstein solucionario.pdf
http://slidepdf.com/reader/full/goldstein-solucionariopdf 183/195
( ) )2sin(2 1
2
1
2
21 Q P P P K +++=c) La variable es cíclica, por lo que se conserva y el hamiltoniano no depende
del tiempo por lo que también es constante:
2Q 2 P
E K P == ,2 α .
El resto de ecuaciones del movimiento:
)(4),2cos(2 21
1
11
1
1 P P P K QQ
Q K P +=∂∂=−=∂∂−= (1)
De este modo
( ) ( ) )2sin(22)2sin(2 1
2
11
2
1
2
1 Q P Q P P E +++=+++= α α α
si definimos α +≡ 11' P P , tenemos que
2
)2sin(2' 11
Q E P
−−±=
α y
2
)2sin(24'4 1
11
Q E P
−−±==
α Q
con lo que reducimos el problema a la integral
∫ −−
±=)(
)0( 1
11
1 ))2sin(2(8
t Q
Q Q E
dQt
α
de cuya integración obtendríamos Q )(11 t Q=
A partir de esto y teniendo en cuenta (1) y )2(4 21
2
2 P P P
K Q +=
∂∂
= tenemos el resto en
función de ella y α =2 P :
α −= )(4
1)( 11 t Qt P α t Qt QQt 4)0()()0()( 1122Q +−+=
d) Como la transformación entre variables sólo es válida si
04)0()()0()( 1122 >+−+= α t Qt QQt Q
)()0()0(2)()(2 12121
04)0(1 >−−+−=− α t Qt QQQt Qt Q , hay que tener cuidado que no
siempre será válida.Podemos mencionar que en cuanto 0≠α y Q este acotado, el movimiento
terminará cruzando alguna de las fronteras.
)(1 t
----------------------------------------------
27.- a ) Mostrar, mediante cualquiera de los métodos posibles, que latransformación
−−
=
+=a
piaq
i P
a
piaq
iQ
2
1,
2
1
donde a es una constante, es canónica.
b) Aplicar esta transformación al oscilador armónico unidimensional deHamiltoniano
( )2222
2
1qwm p
m H +=
y encontrar un valor de la constante a que simplifique el nuevo Hamiltoniano(debe tener un único término).c) Encontrar las ecuaciones de Hamilton para Q y P y mostrar que permitenrecuperar las soluciones del oscilador armónico original.
II. Solución
a) Cualquiera de las opciones permite comprobar que es una transformacióncanónica:
94

8/12/2019 Goldstein solucionario.pdf
http://slidepdf.com/reader/full/goldstein-solucionariopdf 184/195
i) Los corchetes de Poisson satisfacen las siguientes condiciones:
[ ] [ ] 0,, == P P QQ por la propia definición de los corchetes.
[ ] 1, = P Q , se comprueba del siguiente modo
[ ] 1
2222
, =−
−=
∂
∂
∂
∂−
∂
∂
∂
∂=
ai
i
i
a
ai
i
i
a
p
Q
q
P
p
P
q
Q P Q
ii) Se Escriben las variables antiguas en función de las nuevas
( ) P Qa
iq −=
2
2, ( P Q
i
a p +=
2) (1)
y, con éstas y las originales, se comprueba que
P
p
q
Q
∂∂
=∂∂
yQ
p
q
P
∂∂
−=∂∂
y P
q
p
Q
∂∂
−=∂∂
yQ
q
p
P
∂∂
=∂∂
.
Los cálculos llevan a
P
p
i
a
q
Q
∂∂
==∂∂
2 Q
p
i
a
q
P
∂∂
−=−
=∂∂
2
P
q
ai
i
p
Q
∂∂−==
∂∂
2
Q
q
ai
i
p
P
∂∂==
∂∂
2
iii) Encontrar una función generatriz.
b) Aplicando la transformación (1) al Hamiltoniano original se obtiene que
( )
+++
−= QP
a
wma P Q
a
wma
im H
2
22222
2
222 2
4
1
que se puede simplificar notablemente mediante la elección
2
222
a
wm=a o lo que es lo mismo mwiamwa ±=±= , .
Tomemos mwa ±= para obtener:
iwQP H −=
c) Las ecuaciones de Hamilton son
iwQ P
H Q −=
∂∂
= , iwP Q
H P =
∂∂
−= y las soluciones son
, , donde y son las condiciones iniciales.iwt eQQ −= 0
iwt e P P 0= 0Q 0 P
Ahora hay que llevar estas soluciones a las variables originales p y q teniendo en
cuenta que las condiciones iniciales antiguas dependen de las nuevas:
−
−=
+=
a
piaq
i P
a
piaq
iQ 0
00
0
00 2
1,
2
1
con lo que recuperamos las soluciones del oscilador armónico.
----------------------------------------------
28. Recuerde que las funciones hiperbólicas vienen definidas por
( ) ( ) ( )12
sinh x exp x exp x= − − y ( ) ( ) ( )12
x exp x exp x= +cosh − .¿Cuál de las dos
transformaciones
sinh cosh
1 ,
p p
Q P q qα α
β β
→ = =
95

8/12/2019 Goldstein solucionario.pdf
http://slidepdf.com/reader/full/goldstein-solucionariopdf 185/195
cosh sinh2 ,
p pQ P
q qα α
β β → = =
puede representar una transformación canónica, siendo α y β reales?
Transformación 1:Para un sistema unidimensional la condición simplectica se reduce a
que el determinante
p
P
q
P p
Q
q
Q
∂∂
∂∂
∂∂
∂∂
≡∆ sea la unidad.
En nuestro caso:1
1
sinh cosh
cosh sinh
q p q
q p q
α α
α α
p
p
α β β β
α β β
− − −
− − −
−∆ =
− β
2 1q α β α − −=
Deberá ser cierto que . No hay valores posibles.2 1 1q α βα − − =
Transformación 2:
En este caso:1
1
cosh sinh
sinh cosh
q p q
q p q
α α
α α
p
p
α β β β
α β β
− − −
− − −
−∆ =
− β
2 1q α β α − −= −
Deberá ser cierto que 2 1 1q α βα − −− =
o1
2α = − y 2 β =
2;2
1== β α
La transformación es:
p sinq P
pqQ
2
2cos
=
=
además,q
F p
p
F
∂∂
−=∂∂
−= 33 ;q y ),(33 Q p F F =
Reexpresando las variables P y q en función de p y Q:
pQ P p
Qq 2tg;
2cos
2
==
de modo que p
F
p
Q
∂
∂
−=
32
2cos y Q
F
p ∂
∂
−=
3
2tgQ
Las dos ultimas ecuaciones se integran inmediatamente a
)(2tg2
2
3 p pQ
F ϕ +−=
donde )( p =constante de modo que,salvo una constante irrelevante se verifica
finalmente que
2),(
2
3
Q pQ F −= p2tg .
96
8/12/2019 Goldstein solucionario.pdf
http://slidepdf.com/reader/full/goldstein-solucionariopdf 186/195
NOTAS SOBRE TEORÍA DE PERTURBACIÓN
Las ecuaciones de la mayoría de los sistemas mecánicos no pueden resolverse
exactamente, por lo que es importante desarrollar métodos que permitan obtener
soluciones aproximadas. Uno de ellos -muchas veces el único que permite soluciones
analíticas- es el de la teoría de perturbación, ampliamente utilizado en todas las ramas
de la física. La idea es resolver un sistema por medio de otro resoluble muy cercano a
él. El sistema a resolver se define entonces como una “perturbación” del segundo, lo
que permite ir aproximándonos paso a paso a la solución. El procedimiento usual define
esta perturbación como una serie -de igual modo que aproximamos una función
analítica por una serie de potencias- y el objetivo de la teoría es ir resolviendo
consistentemente cada término de la serie.
Como veremos, un cálculo perturbativo involucra pequeños parámetros. Por otra
parte, los métodos numéricos permiten en la actualidad resolver problemas con gran
precisión sin necesidad de restringirse al ámbito de pequeñas perturbaciones de un
sistema conocido. Eso hace pensar que la teoría de perturbación deja de tener sentido.
Sin embargo, no es así. Ésta sigue siendo necesaria como comprobante de los resultados
numéricos (por lo menos en el rango de parámetros pequeños) y para establecer una
buena comprensión teórica de estos mismos.
Procederemos en estas notas dividiendo la exposición en dos partes. En una
primera, se trata la teoría elemental de perturbaciones. Corresponde a la versión no
canónica de la perturbación dependiente del tiempo que se desarrolla en la sección 11-2
del Goldstein. Existe una buena razón para hacerlo así. La serie de Lindstedt -así se
denomina- es más fácil de entender que la alternativa canónica, además de poner demanifiesto en su génesis los problemas que pueden derivarse de una construcción
indebida de la serie perturbativa. Así, el alumno que lo desee, puede sustituir el estudio
de las seciones 11-2 y 11-3 del Goldstein por la sección que sigue.
La segunda parte de estas notas trata de aclarar el esquema básico de la teoría
canónica de perturbación independiente del tiempo (sección 11-4 del Goldstein). La
falta de tiempo nos obliga a detenernos en el cálculo en primer orden de perturbación en
sistemas de un solo grado de libertad. Con ello se ilustra la maquinaria básica, aunque,
97
8/12/2019 Goldstein solucionario.pdf
http://slidepdf.com/reader/full/goldstein-solucionariopdf 187/195
bien está decirlo, los problemas interesantes empiezan justamente allí donde nos
paramos. Desgraciadamente, somos esclavos de las contingencias de un cuatrimestre –
el primero- con el tiempo útil muy recortado.
Un ejemplo del particular cuidado que hay que tener en teoría de perturbaciones:
Series de potencias de Lindstedt
A modo de ilustración, escogemos el ejemplo de un oscilador integrable de un
grado de libertad cuya ecuación del movimiento es
320
20 6
1 x x x εω ω =+ (1)
obtenida expandiendo el hamiltoniano del péndulo ( φ cos2
1 2 F Gp H −= ) hasta incluir
términos de tercer orden en φ . Por comodidad rescribimos φ como x y introducimos la
notación . FG=20ω ε es un parámetro adimensional que pone de manifiesto la pequeña
magnitud del término cúbico, que pasa a ser considerado como una perturbación. Al
final del proceso se hace 1=ε . Expandimos x de forma directa
+++= 22
10 x x x x ε ε
(2)
y sustituimos la expresión (2) en la ecuación (1). Igualando términos en potencias
iguales de ε , obtenemos en orden cero
t A x 00 cos= ,
(3)
o solución del oscilador armónico, mientras que para orden uno en ε , obtenemos la
ecuación
t A x x 0332
01201 cos
6
1ω εω ω =+
(4)
La ecuación (4) puede rescribirse como
98

8/12/2019 Goldstein solucionario.pdf
http://slidepdf.com/reader/full/goldstein-solucionariopdf 188/195
)cos33(cos24
100
3201
201 t t A x x ω ω εω ω +=+
(5)
El término en t 03cos ω da como solución particular
t A
x a 0
3
,1 3cos192
ω −= (6)
El segundo, por su parte, da
( t t t A
x b 000
3
,1 cos2sin64
ω ω ω += ) (7)
Mientras que la solución (6) corresponde a una solución de buencomportamiento, la (7) tiene un término lineal en t que la hace crecer indefinidamente.
Este tipo de términos se denominan seculares, y no cabe duda de que no son algo
esperable en un sistema como el de la ecuación (1), cuyo movimiento debería estar
confinado y ser periódico. En otras palabras, el término forzante en cos t 0ω provoca
una resonancia en el oscilador armónico −lado izquierdo de la ecuación (5)− que es
totalmente indeseable desde el punto de vista físico.
El resultado anterior indica que hemos hecho algo mal en el tratamiento.
Analizándolo con detenimiento, nos damos cuenta de que hemos supuesto que la
frecuencia del oscilador cúbico era 0ω , igual a la del oscilador armónico. Esto no
parece muy adecuado, en tanto en cuanto es de esperar que el oscilador cúbico tenga
frecuencia propia (sabemos que depende de la amplitud), distinta de 0 . Es, en
consecuencia, consistente suponer la frecuencia de nuestro oscilador cúbico distinta de
0 , pero no muy alejada de esta última, de forma a que sea resultado, tal como lo es
, de una expansión en(t x ) ε :
( ) +++= 22
10 ω ε εω ω ε ω (8)
Ahora, podemos repetir todo el proceso anterior con esta nueva hipótesis y ver si
desaparecen los términos seculares. Sustituimos (2) y (8) en (1), y simplificamos la
notación definiendo la derivada ( ) xt d
dx x 1−==′ ω
ω . Obtenemos en orden cero
000 =+″
x x (9)
99

8/12/2019 Goldstein solucionario.pdf
http://slidepdf.com/reader/full/goldstein-solucionariopdf 189/195
mientras que para orden uno
06
12 3010
0
11 =−+
″+
″ x x x x
ω (10)
Sustituyamos ahora en (10) la solución de (9)
t A
t A A
x x 0
3
00
13
11 3cos24
cos2
8 ω ω
ω
ω +
+=+
″ (11)
Recordemos ahora cuál era el problema con la ecuación (5). La contribución a la
forzante en t 0cos era la responsable del término secular −resonante. Sin embargo, la
ecuación (11), a diferencia de la (5), nos permite “eliminar” esta contribución, y de
hecho la secularidad, haciendo su coeficiente idénticamente nulo. Despejando 1 ,
queda
02
161
1 ω ω A−= (12)
Ahora la solución de (11) es completamente regular y periódica −tal como era de
esperar −
t
A
t Dt C x 0
3
001 3cos192sencos ω ω ω −+= (13)
La moraleja de este ejemplo es clara: ¡cuidado con los cálculos perturbativos!
Requieren un esmero especial para no caer en resultados no físicos. En nuestro caso se
descubrió con facilidad el error. El ejemplo era de un solo grado de libertad y la
inconsistencia trivial. Sin embargo, en problemas de más de un grado de libertad las
apariencias no son tan llamativas y el control del procedimiento se hace más dificultoso.
Teoría canónica clásica de perturbación
La mayoría de los sistemas multidimensionales −o forzados− no son integrables:
no existe solución a la ecuación de Hamilton-Jacobi. Sin embargo, en sistemas que no
difieran mucho de un sistema integrable, se puede intentar obtener soluciones
expandiendo la función generatriz en potencias de un pequeño parámetro ε y tratar de
encontrar la solución de la ecuación de Hamilton-Jacobi por aproximaciones sucesivas.
100

8/12/2019 Goldstein solucionario.pdf
http://slidepdf.com/reader/full/goldstein-solucionariopdf 190/195
Existe, sin embargo, una dificultad, y es la aparición de pequeños denominadores que
impiden la convergencia de la serie. Estos pequeños denominadores están ligados a
resonancias entre grados de libertad, en el entorno de las cuales ocurre la destrucción
total de los invariantes y de la generación de movimientos caóticos. En este curso, no
vamos a hacernos eco de estas dificultades y sólo señalaremos que aún a pesar de ellas
las series son útiles ya que describen bastante bien el comportamiento en muchas zonas
del espacio de fases. Ilustraremos el método canónico para problemas de un grado de
libertad. Aunque aquí, todos los sistemas son integrables de oficio y debe existir una
solución cerrada, independientemente de la dificultad que entraña su obtención, las
series de potencias son útiles para aproximar con un cálculo sencillo la solución real, y
para obtener una transformación preparatoria a variables acción-ángulo en sistemas de
más de un grado de libertad.
Supongamos un problema de un grado de libertad escrito en la forma siguiente:
( ) ( ) ( ) ( )32
210 ,, ε θ ε θ ε O J H J H J H H +++= (14)
( ) J H 0 es un hamiltoniano cuya forma acción-ángulo −variables ( )θ , J −es conocida y
cuya solución
es:
J H
t
J J
∂∂=
+=
=
0
0
ω
β ω θ (15)
H es otro hamiltoniano que “cercano” a y cuya forma puede aproximarse por la
serie (14) −escrita hasta segundo orden. Por ahora nos ocuparemos de los aspectos
puramente formales del problema, sin preguntarnos cómo se obtiene la serie anterior.
0 H
Nuestro problema consiste en hallar una transformación a unas nuevas variables ( )θ , J
para las cuales el hamiltoniano transformado H es función sólo de la acción J . Para
ello necesitamos hallar la correspondiente función generatriz ( )θ , J S , que vamos a
suponer, al igual que el hamiltoniano problema H , susceptible de expansión en ε
( ) ( ) 31 ,, ε θ ε θ θ O J S J J S ++= (16)
( ) ( ) ( ) ( )210 ε ε O J H J H J H ++= (17)
101

8/12/2019 Goldstein solucionario.pdf
http://slidepdf.com/reader/full/goldstein-solucionariopdf 191/195
Obsérvese que la aproximación de orden cero a la función generatriz es la
transformación identidad J J = y θ θ = . A partir de (16), definimos las ecuaciones de
transformación entre los pares de variables ( )θ , J y ( θ , J
( ) ( 21 ,ε )
θ
θ ε O
J S J J +
∂
∂+= (18)
( ) ( 21 ,ε
θ ε θ θ O )
J
J S +
∂
∂+= (19)
Para hallar las viejas variables en función de las nuevas necesitamos invertir
apropiadamente (18) y (19), obteniendo:
( ( 21 , ε )θ
θ ε O J S J J +∂
∂+= (20)
( ( 21 ,ε
θ ε θ θ O )
J
J S +
∂
∂−= (21)
Obsérvese que las formas (20) y (21) proceden de (18) y (19), respectivamente.
Hay, sin embargo, un detalle importante. Contrariamente a (18) y (19), aparece en
(20) y (21) como función de las nuevas variables. Lo que hemos hecho es sustituir en
(18) y (19)
1S
θ por su aproximación de orden cero θ . Las aproximaciones de orden
superior en ε afectarán a términos de orden superior en (20) y (21). Ahora nuestro
objetivo es encontrar la forma para que haga que el hamiltoniano1S
( ) ( ) ( )( )θ θ θ ,,, J J J H J H = (22)
sea sólo función de J . Para ello vamos a trabajar el lado izquierdo de la ecuación (22).
Recordamos la forma que tiene H dada por (14) . Cogemos los dos primeros términos
de aquélla, y( ) J H 0 ( )θ ε ,1 J H , y aplicamos la transformación (20)-(21).
( ) =
+
∂
∂+=
θ ε 1
00
S J H J H
( ) ( 2100 ε
θ ε O
S
J
H J H
J J
+∂
∂
∂
∂+
=
) (23)
( ) ( ) ( )
=
+∂
∂
−
+∂
∂
+= J
J S J S J H J H
θ ε θ θ
θ ε θ
,,
,,
1111
102

8/12/2019 Goldstein solucionario.pdf
http://slidepdf.com/reader/full/goldstein-solucionariopdf 192/195
( )ε θ O J H +,1 (24)
Insertamos las expresiones (23) y (24) en el lado izquierdo de la ecuación (22)
( ) ( ) ( ) (2
1
10
0 , ε θ θ ε O J H
S
J
H
J H J H +
+∂
∂
∂
∂
+= ) (25)
que hemos de comparar, término a término, con la serie (17). El término de orden cero
no ofrece problemas
( ) J H H 00 = (26)
A su vez, para el término de primer orden
( ) ( ) ( ) ( θ θ
θ ,, 110
1 J H J S J
J H J H +
∂∂⋅
∂∂= ) (27)
El lado izquierdo de (27) depende solo de J , por lo que debemos escoger tal
que desaparezca en el lado derecho de la misma ecuación la dependencia en
1S
θ . Para
ello definimos el promedio sobre la fase de 1 H
( ) ( ) θ θ
π
π
d J H J H ∫=2
0
11 ,
2
1ˆ , (28)
función exclusivamente de J , y el resto
( ) ( ) ( ) J H J H J H 111ˆ,,
~−= θ θ , (29)
denominada usualmente parte oscilante de . Ahora podemos introducir (28) y (29) en
(27) de forma a definir
1 H
( ) ( ) J H J H 11ˆ≡ (30)
y definir como solución1S
( ) ( ( ) 0,~,
11 =+∂
∂θ
θ
θ ω J H
J S J (31)
Recordamos que ( ) ( ) J J H J ∂∂= 0ω . Si (31) tiene solución, el nuevo
hamiltoniano queda, a primer orden,
( ) ( ) ( ) ( 210 ˆ ε ε O J H J H J H ++= ) (32)
103

8/12/2019 Goldstein solucionario.pdf
http://slidepdf.com/reader/full/goldstein-solucionariopdf 193/195
Queda, consecuentemente, por resolver la ecuación (31). Lo hacemos
expandiendo y en serie de Fourier1S 1
~ H
( ) θ in
n
n J S S e11 ∑= (33)
( ) θ in
n
n J H H e~~
011 ∑
≠
= (34).
Sustituyendo en (31) vemos que, si ( ) 0≠ J ω , constante10 =S y
0,~
11 ≠= n
in
H S n
n (35)
Con esto queda completada la evaluación de la serie perturbativa hasta primer
orden de perturbación. La teoría de perturbación de Poincaré-Zeipel (que es así como se
llama) puede, en principio, evaluarse en cualquier orden de perturbación, aunque
órdenes mayores que el primero empiezan a ser muy tediosos. Existen métodos
acelerados de cálculo, así como técnicas más modernas (transformaciones de Lie), que
evitan las dificultades de la técnica de Poincaré-Zeipel. Evitan especialmente el
problema de la mezcla de variables nuevas y viejas que nos hemos encontrado en lasecuaciones (18)-(19). Sin embargo, las limitaciones de tiempo no nos van a permitir
abordar estas técnicas. Aquella persona que desee ampliar conocimientos puede ponerse
en contacto con el profesor de la asignatura para discutir este extremo.
Ejemplo
Para ilustrar el procedimiento anterior calcularemos el movimiento de libración
de un péndulo de longitud hasta primer orden. Recordemos su hamiltonianol
φ cos221 B p A H −=
con 21 ml A = y mgl B = . El problema es no-lineal y se puede resolver por cuadraturas,
dándonos un buen caso de prueba del rango de validez de nuestra aproximación.
Recordemos los dos movimientos admisibles, libración y rotación, separados por una
104

8/12/2019 Goldstein solucionario.pdf
http://slidepdf.com/reader/full/goldstein-solucionariopdf 194/195
separatriz de energía B E = , que “une” los dos puntos de equilibrio inestable π φ ±= .
Para B E < tenemos libración, mientras que la rotación aparece para B E > . La
resolución exacta del problema es bien conocida e invoca la función elíptica,
( )( )
∫=2
0 1
π
( )
ε
, (36)−
Κ 21
22 sen ξ κ
ξ κ
d
para expresar la dependencia de la frecuencia con la energía
( )[ ] libración1,2
1
0
<Κ = −
κ κ π
ω
κ ω (37)
( )
( )rotación1,
10
>
Κ
=−
κ
κ
κπ
ω
κ ω (38)
con ( ) 21
0 AB=ω
0=
como la frecuencia del movimiento linearizado alrededor del punto de
equilibrio φ , y B E += 12 2κ
B
, como medida de la relación entre la energía total
y la energía de la separatriz .
E
Es el turno ahora de la aproximación perturbativa. La estableceremos en primer
orden de perturbación y compararemos con los resultados exactos que acabamos de dar.
Expandimos en serie de Taylor el hamiltoniano del péndulo alrededor del punto
de equilibrio 0=φ
−⋅+⋅−+= 6242212
21
!6
1
!4
1φ ε φ ε φ B B B Ap H p (39)
Los dos primeros términos constituirán nuestra aproximación de orden cero.
2212
21
0 φ B Ap H p +=
Hemos intercalado en la expansión (39) potencias de un parámetro . Ésta es
una práctica habitual en teoría de perturbación y tiene como objetivo identificar
los distintos órdenes de perturbación. Al final del proceso se elimina haciendo
1=ε . Ahora podemos preparar el sistema para aplicar la teoría anterior. Para
empezar, deberemos obtener la ecuación (14) para este ejemplo. Utilizamos para
ello las variables acción-ángulo del hamiltoniano “no perturbado”, ,
correspondiente al oscilador armónico.
0 p H
105

8/12/2019 Goldstein solucionario.pdf
http://slidepdf.com/reader/full/goldstein-solucionariopdf 195/195
Recordamos que en este caso: ( ) θ sen2 21
R J q = ; ( ) θ cos2 21
JR p = , con
( )1
2 R B A= y ( ) ( ) J J AB J H p 002
1
ω == .
Quedará
2 32 4 2 6
00
1sen sen
6 90 p
A J H J AJ ω ε θ ε θ
ω = − ⋅ + ⋅ + (40)
Puede ahora aplicarse el procedimiento de perturbación hasta primer orden.
(2
2 41
1sen 3 4cos 2 cos 4
6 48 p
AJ H AJ )θ θ = − = − − − θ (41)
El procedimiento se deja como ejercicio. El nuevo hamiltoniano en primer orden
es:
1
Related Documents











