Getting a Handle on GPS Accuracy

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

Getting a Handle on GPS
Accuracy

3D Pythagorean Theorm

Accuracy Depends On: • Time spent at a location (# of fixes)
• Design of the receiver & antenna
• Relative position of the satellites (DOP)
• Rover configuration settings – Datum blunder (1-100m) -- Elevation mask (DOP)
• User Equivalent Range Error (UERE) – Stand alone GPS (10-15m -- assuming no human error)
• Correction methods – Autonomous uncorrected (5-6m)
– Differential correction (<1 – 5m)
– Phase differential
• Phase processing (10-100cm)
• Wave processing (5 mm)
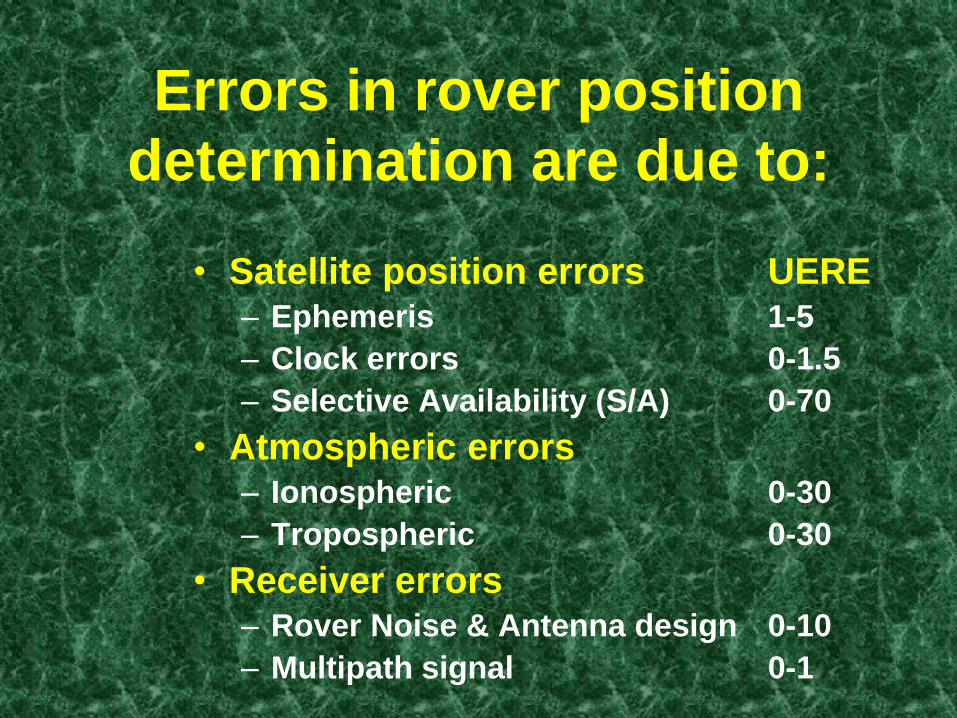
Errors in rover position
determination are due to:
• Satellite position errors UERE – Ephemeris 1-5
– Clock errors 0-1.5
– Selective Availability (S/A) 0-70
• Atmospheric errors – Ionospheric 0-30
– Tropospheric 0-30
• Receiver errors – Rover Noise & Antenna design 0-10
– Multipath signal 0-1

GPS Error Types System-Wide Errors - DGPS Correctable
S/A: fluctuates of ±50m over course of few minutes
0 20 40 60 80 100
Receiver Noise
Ephemeris
Atmospherics Selective Availability
Meters

Selective Availability
• Discourages hostile forces from using GPS
• S/A - sum of two effects on L1 signal
transmitted by the SVs – Epsilon - ephemeris “fibbing” (lie about where SVs are)
– Dither - clock variations (lie about when C/A was sent)
• S/A is Largest source of Error, but… – As of May 2, 2000 (5:05 am) S/A turned off
– Probably will never be reinstated as our system is no
longer the sole provider.
Selective Availability
The reasons for SA were safety concerns.
For example, terrorists should not be provided with the
possibility of locating important buildings with
homemade remote control weapons.
Paradoxically, during the first gulf war in 1990, S/A had
to be deactivated partially, as not enough military
receivers were available for the American troops.
10,000 civil receivers were acquired (Magellan and
Trimble instruments), making a very precise
orientation possible in a desert with no landmarks.
Non-S/A Time Errors
• Relativistic time delay
• Ionospheric distortion
• Tropospheric distortion
• Multipath
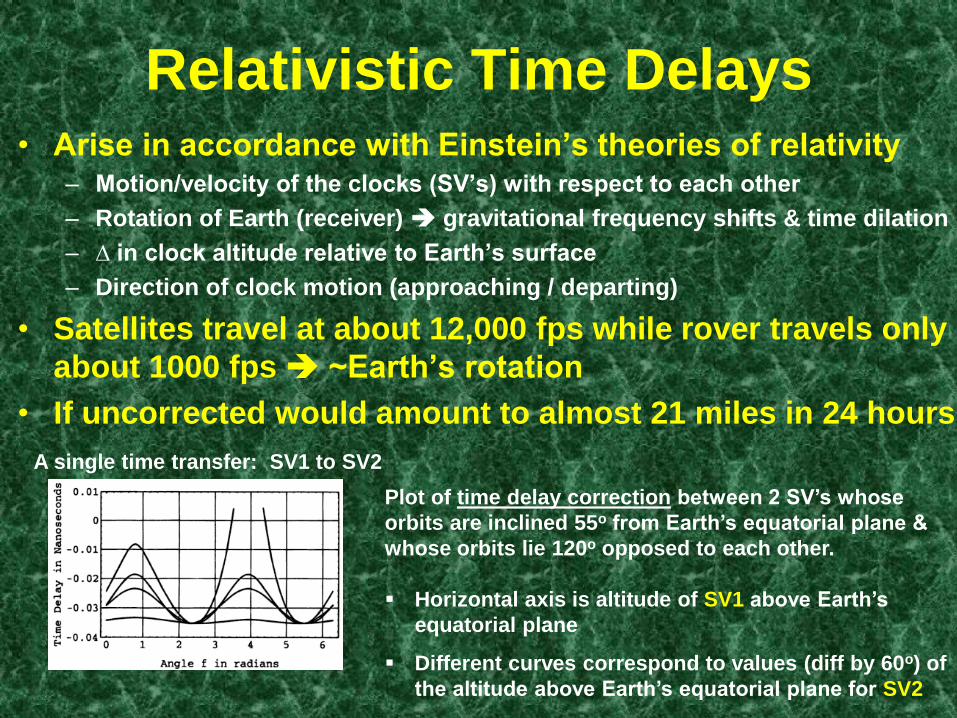
Relativistic Time Delays • Arise in accordance with Einstein’s theories of relativity
– Motion/velocity of the clocks (SV’s) with respect to each other
– Rotation of Earth (receiver) gravitational frequency shifts & time dilation
– ∆ in clock altitude relative to Earth’s surface
– Direction of clock motion (approaching / departing)
• Satellites travel at about 12,000 fps while rover travels only
about 1000 fps ~Earth’s rotation
• If uncorrected would amount to almost 21 miles in 24 hours
Plot of time delay correction between 2 SV’s whose
orbits are inclined 55o from Earth’s equatorial plane &
whose orbits lie 120o opposed to each other.
Horizontal axis is altitude of SV1 above Earth’s
equatorial plane
Different curves correspond to values (diff by 60o) of
the altitude above Earth’s equatorial plane for SV2
A single time transfer: SV1 to SV2

Atmospheric Delay
• GPS PRN Signals are delayed as they
pass through the atmosphere
Ionosphere
(-electrons, + atoms, +molecules)
50-1000 km
Troposphere
17-20 km
Phase advance – of carrier
Group delay – of PRN code (signal
modulating the carrier)
≤ 30 MHz
1200-1500 MHz

Amount delay
• Time delay due to ionosphere is
inversely proportional to the square
of the transmission frequency
• Satellites transmit on two
frequencies
– L1 frequency is 1575.42 MHz
– L2 frequency is 1227.60 MHz
Note: λ = c / f 299,792,458 / 1575,420,000 = 0.19029 m

Course Acquisition Receivers
(C/A Code)
• Receive only the L1 frequency
• Typical of civilian receivers
• Must account for atmospheric delays
by modeling the current behavior of
atmosphere.
• Will reduce ionospheric error by
approximately 50%

Precision Acquisition
Receivers
(P Code)
• Receive both L1 and L2 frequencies
• Typical of military receivers
• Because of the difference in amount
of delay between L1 and L2, can use a
simple mathematical compensation
to remove nearly all ionospheric
delay

Tropospheric Delay
• Delay is larger when satellite is near the horizon
– Signal must pass through much thicker portion of
troposphere
• Delay is larger when rover is near earth’s surface – Compared to aircraft-based less atmosphere above
• Simplest mathematical correction is a function of altitude &
elevation above horizon
– 90% due to dry atmosphere modeled well
– 10% wet atmosphere not modeled well
• Zenith values at MSL (least atmos. path)
– Delay ≈ 2.3 m of error (if not modeled)
• Oblique (near horizon…most atmos. path) at MSL
– Delay ≈ 20-30 m of error (if not modeled)

Multipath Occurs when the GPS signal is reflected
off an object before it reaches your
antenna




Accuracy of GPS Depends on 2 Things:
Accuracy of the Signals Themselves
- Ephemeris data
- SV clock bias
- Atmosphere (iono & tropo)
- Multipath
- Receiver measurements
Geometric Position of the Satellites
- SV Geometry Geometric Dilution of Precision
- Ideal GDOP = 0, but is unrealistic
- Best config 3 SVs low 120o apart & 1 SV over head



Navigational Accuracy depends on
1) Average UERE between SV & Receiver
- Line of sight vector
2) Instantaneous GDOP
- Best 4 SV’s from user’s perspective
The 1 Sigma Navigation Error is approx…
= UERE X GDOP
Overall UERE from different error sources
~ 5.5 to 6.0 meters
Average GDOP ~ 2.3 to 2.4 m
giving an average error of 15.25m
Error Budgets

DOP RATING DESCRIPTION
1 Ideal Highest possible confidence level high precision
2-3 Excellent Positions accurate enough for almost all applications
4-6 Good Allows reliable in-route navigation to user
7-8 Moderate Fix quality could be used…should wait for geometry
9-20 Fair Low confidence Should disregard positions
21-50 Poor Don’t bother….stay home & read a book
Elev. = MSL
Altitude critical






Related Documents


![Reduction of electrode position errors in clinical imaging · Reduction of electrode position errors in clinical imaging Chris McLeod, Andy Adler, Camille Gomez-Laberge [cmcleod@brookes.ac.uk]](https://static.cupdf.com/doc/110x72/5f5bfdb34b008742de728541/reduction-of-electrode-position-errors-in-clinical-reduction-of-electrode-position.jpg)








