22 Geographic Information System for the Monitoring of Maritime Traffic Cyril Ray French Naval Academy Research Institute, 29240 BREST Armées, BP600, France [email protected] Abstract: Recent advances in telecommunication and positioning systems, client-server and distributed architectures, and mobile devices offer new perspectives and challenges to maritime GIS and transportation research. However, there is still a need for data management and communication protocols, graphic and exploration interfaces that support the development of integrated maritime GIS. Such systems will be of great interest for many maritime applications oriented to the monitoring and analysis of maritime traffic and transportation. At the Naval Academy Research Institute in France, collaborative research in the fields of Geographical Information Systems (GIS) and maritime transportation is producing data models and computing architectures that favour the development of traffic monitoring and analysis for decision-aid systems. I. MARITIME ITS PLAFTOR Safety and security are constant concerns in maritime navigation, not least because of the constant increase in maritime traffic and reduction of crews on decks. This has favoured the development of automated monitoring systems such as the Automatic Identification System (AIS) and the Electronic Chart Display and Information System (ECDIS). However, officers on the watch and monitoring authorities require additional and advanced decision-aid solutions that will take advantage of these communication and cartographical systems. The development of geolocalization, information and telecommunication technology offers higher traffic data availability, but presents new challenges for the integration, analysis and delivery of maritime traffic data [1]. Hence there is a great need for integrated traffic systems that are able to cope with all these technological domains. The development of a real-time integrated maritime platform implies a reconsideration of storage, modelling, manipulation, analysis and visualization functions, since current models have not been designed to handle such dynamic phenomena. One of the most promising solutions to this problem is the integration of Geographical Information Systems (GIS) with maritime navigation systems. Our approach relies on a monitoring project, the purpose of which is to integrate heterogeneous positional data from three sources: an Automatic Identification System (AIS), public traffic data available from the Internet, and a real-time monitoring system developed for sailing races. These systems generate geolocalization frames from different types (eg AIS frames) and from different ad-hoc networks (eg VHF for AIS, WiMAX for sailing races). Coupled with external databases, this constitutes the input for an internal spatio-temporal database that manages historic and real-time data. These data include maritime trajectories, vessel characteristics and environmental data.

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript
22
Geographic Information System for the Monitoring of Maritime Traffic
Cyril Ray French Naval Academy Research Institute, 29240 BREST Armées, BP600, France
[email protected] Abstract: Recent advances in telecommunication and positioning systems, client-server and distributed architectures, and mobile devices offer new perspectives and challenges to maritime GIS and transportation research. However, there is still a need for data management and communication protocols, graphic and exploration interfaces that support the development of integrated maritime GIS. Such systems will be of great interest for
many maritime applications oriented to the monitoring and analysis of maritime traffic and transportation. At the Naval Academy Research Institute in France, collaborative research in the fields of Geographical Information Systems (GIS) and maritime transportation is producing data models and computing architectures that favour the development of traffic monitoring and analysis for decision-aid systems.
I. M ARITIME ITS PLAFTOR
Safety and security are constant concerns in maritime navigation, not least because of the constant increase in maritime traffic and reduction of crews on decks. This has favoured the development of automated monitoring systems such as the Automatic Identification System (AIS) and the Electronic Chart Display and Information System (ECDIS). However, officers on the watch and monitoring authorities require additional and advanced decision-aid solutions that will take advantage of these communication and cartographical systems.
The development of geolocalization, information and telecommunication technology offers higher traffic data availability, but presents new challenges for the integration, analysis and delivery of maritime traffic data [1]. Hence there is a great need for integrated traffic systems that are able to cope with all these technological domains. The development of a real-time integrated maritime platform implies a reconsideration of storage,
modelling, manipulation, analysis and visualization functions, since current models have not been designed to handle such dynamic phenomena.
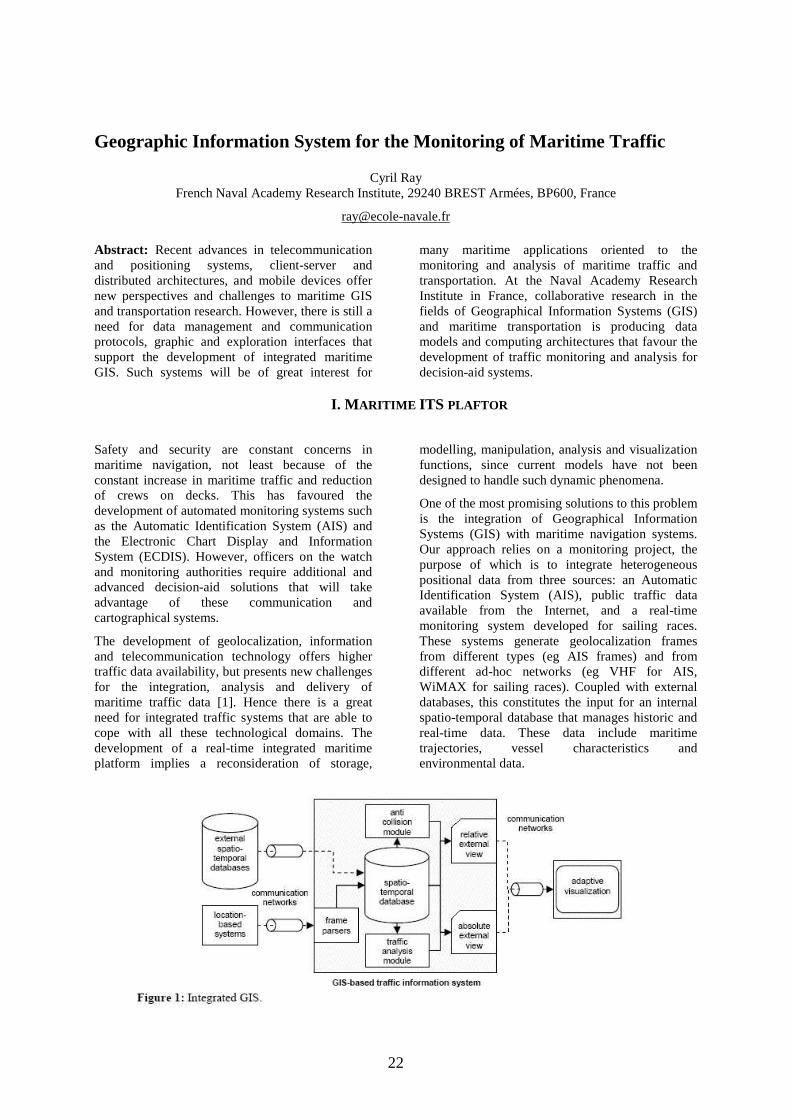
One of the most promising solutions to this problem is the integration of Geographical Information Systems (GIS) with maritime navigation systems. Our approach relies on a monitoring project, the purpose of which is to integrate heterogeneous positional data from three sources: an Automatic Identification System (AIS), public traffic data available from the Internet, and a real-time monitoring system developed for sailing races. These systems generate geolocalization frames from different types (eg AIS frames) and from different ad-hoc networks (eg VHF for AIS, WiMAX for sailing races). Coupled with external databases, this constitutes the input for an internal spatio-temporal database that manages historic and real-time data. These data include maritime trajectories, vessel characteristics and environmental data.
23
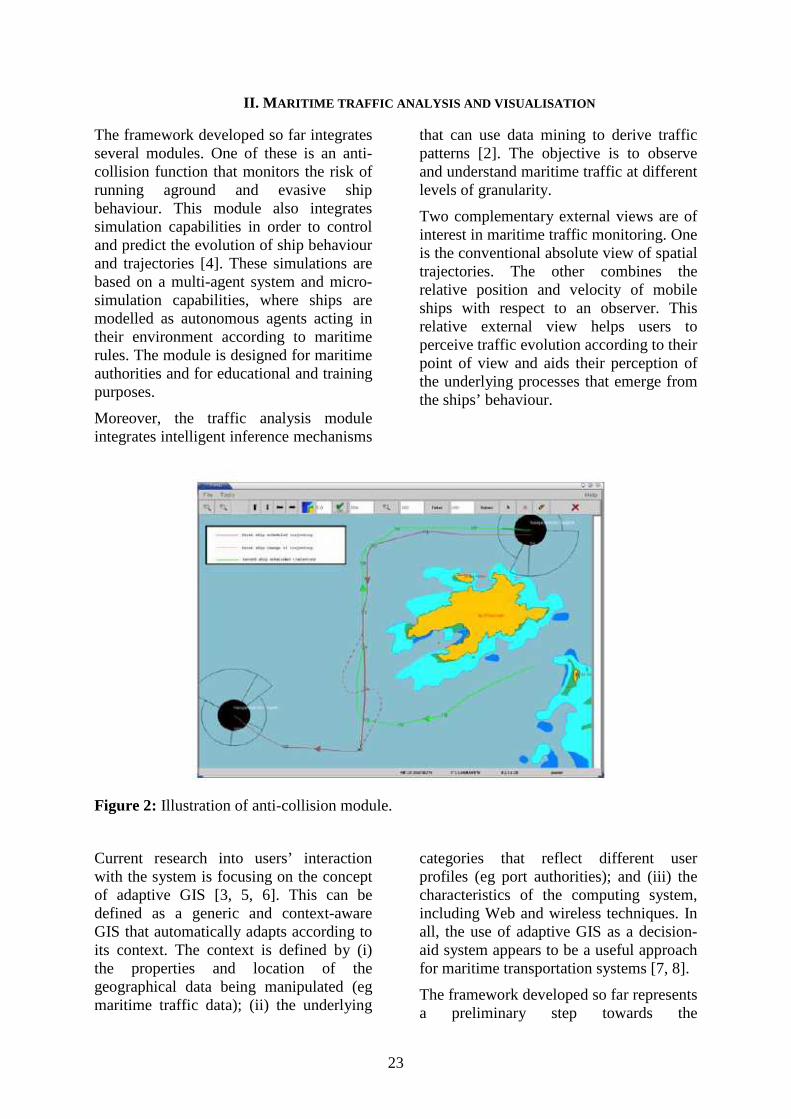
II. M ARITIME TRAFFIC ANALYSIS AND VISUALISATION The framework developed so far integrates several modules. One of these is an anti-collision function that monitors the risk of running aground and evasive ship behaviour. This module also integrates simulation capabilities in order to control and predict the evolution of ship behaviour and trajectories [4]. These simulations are based on a multi-agent system and micro-simulation capabilities, where ships are modelled as autonomous agents acting in their environment according to maritime rules. The module is designed for maritime authorities and for educational and training purposes.
Moreover, the traffic analysis module integrates intelligent inference mechanisms
that can use data mining to derive traffic patterns [2]. The objective is to observe and understand maritime traffic at different levels of granularity.
Two complementary external views are of interest in maritime traffic monitoring. One is the conventional absolute view of spatial trajectories. The other combines the relative position and velocity of mobile ships with respect to an observer. This relative external view helps users to perceive traffic evolution according to their point of view and aids their perception of the underlying processes that emerge from the ships’ behaviour.
Figure 2: Illustration of anti-collision module.
Current research into users’ interaction with the system is focusing on the concept of adaptive GIS [3, 5, 6]. This can be defined as a generic and context-aware GIS that automatically adapts according to its context. The context is defined by (i) the properties and location of the geographical data being manipulated (eg maritime traffic data); (ii) the underlying
categories that reflect different user profiles (eg port authorities); and (iii) the characteristics of the computing system, including Web and wireless techniques. In all, the use of adaptive GIS as a decision-aid system appears to be a useful approach for maritime transportation systems [7, 8].
The framework developed so far represents a preliminary step towards the

24
development of integrated GIS and maritime information systems. A number of research challenges remain. One is the development of cross-domain protocols and exchange standards for the transmission and interoperability of traffic data; another is the integration of different geographical information sources that are combined, adapted and shared in real time between different levels of users acting in the maritime environment. Conventional statistical, geographical data analysis and visualization methods should also be adapted to the specific nature of maritime traffic information. Traffic data and
applications are usually physically allocated in different geographical locations and are computationally expensive in terms of the data volumes generated. Hence, there is also a need at the implementation level for the development of a GIS-based distributed computing environment and computational and processing capabilities. Overall, the development of GIS for maritime information systems should improve the management and planning of maritime navigation, thus favouring the search for a safer sea.
REFERENCES 1. F. Barbe, F. Gélébart, T. Devogele and C. Claramunt, A knowledge-based GIS for concurrent navigation monitoring, GIS in the Environment, P. Hall (ed.), Taylor and Francis, pp. 135-146, 2001 2. S. Imfeld, Time, points and space – Towards a better analysis of wildlife data in GIS, Technical Report, University of Zurich, 2000 3. M. Petit, C. Ray and C. Claramunt, A contextual approach for the development of GIS: Application to maritime navigation, In Proceedings of the 6th International Symposium on Web and Wireless Geographical Information Systems (W2GIS 2006), J. Carswell and T. Tezuka (eds.), Springer-Verlag, LNCS 4295, 2006, to appear 4. S. Fournier, T. Devogele and C. Claramunt, A role-based multi-agent model for concurrent navigation systems, In Proceedings of the 6th AGILE Conference on Geographic Information Science, Gould, M. et al. (eds.), Presses Polytechniques et Universitaires Romandes, pp. 623-632, 2003 5. H. Hampe and V. Paelke, Adaptive maps for mobile applications, In Proceedings of Mobile Maps, Interactivity and Usability of Map-based Mobile Services, 2005 6. T. Reichenbacher, Adaptive methods for mobile cartography, In Proceedings of the 21th International Cartographic Conference, pp. 1311–1322, 2003 7. B. Tversky, Cognitive maps, cognitive collages and spatial models, Spatial Information Theory: Theorical Basis for GIS, A. Franck and I. Campari (eds). LNCS 716, Springer-Verlag, pp. 14-24, 1993 8. W. Maass, A cognitive model for the process of multimodal, incremental route descriptions, Spatial Information Theory: Theorical Basis for GIS, A. Franck and I. Campari (eds.). LNCS 716, Springer-Verlag, pp. 1-13, 1993

Département Informatique, École NavaleRay, Petit, Noyon, Devogele, Claramunt GIS for the Monitoring of Maritime Traffic
Geographic Information Systems for theMonitoring of Maritime Traffic
Cyril Ray, Mathieu Petit, Valérie Noyon, Thomas Devogele, Christophe Claramunt
Naval Academy Research Institute, France
Département Informatique, École Navale
2
Ray, Petit, Noyon, Devogele, Claramunt GIS for the Monitoring of Maritime Traffic
2Research Context
• Combined research in the fields of GIS and ITS has finally reached the point where paths should overlap and continue in better unison … but this implies respective research communities to take the challenge !
• This is particularly crucial in the domain of maritime geographical information systems
• This talk introduces some experimental results in GIS and maritime information systems where the objective is to design, develop, implement and validate decision-aided systems

Département Informatique, École Navale
3
Ray, Petit, Noyon, Devogele, Claramunt GIS for the Monitoring of Maritime Traffic
3Maritime GIS Scope
• GIS research at Naval Academy is oriented towards the modeling, simulation, visualization and understanding of complex maritime geographical systems, with a specific emphasis on transportation and traffic applications
• Research fields :– Maritime geographical intelligent transportation systems and
infrastructures
– Simulation techniques for maritime transportation systems
– Mobile and ubiquitous GIS
– Adaptive and collaborative maritime GIS
– Maritime data analysis
Département Informatique, École Navale
4
Ray, Petit, Noyon, Devogele, Claramunt GIS for the Monitoring of Maritime Traffic
4Maritime Information Systems: Motivation
• Ships and control centers have to face many safety problems due to :– Staff reduction– Traffic increase (ports, maritime routes)– Multiple and heterogeneous systems to integrate : AIS, ARPA,
multiple geographic maps, Long Range Identification System (LRIT), Global Maritime Distress and Safety System (GMDSS), synthetic aperture radar, airborne radar, satellite based sensors…

Département Informatique, École Navale
5
Ray, Petit, Noyon, Devogele, Claramunt GIS for the Monitoring of Maritime Traffic
5Maritime Data Environment
Maritime Data Processing
Radar and other sensors
Monitoring and simulationCartographic Data
Automated navigationFunctionalities and services
Alarms
GPS
Synthetic Aperture Radar Trajectory modelling
and analysis
Air Patrol
PositioningSystems
(AIS, LRIT)

Département Informatique, École Navale
6
Ray, Petit, Noyon, Devogele, Claramunt GIS for the Monitoring of Maritime Traffic
6Maritime Information Systems: Issues
• French answer to green book on European maritime policy
• From a GIS point of view, transportation research issues are: – Improved use of vector chart– Efficient real-time tracking with better services– Data integration of different sensors and coherence control– Flexible and adaptive interfaces– Decision-aid systems– Integrated, federated and distributed data infrastructures– Interoperability between information systems
“une navigation maritime sûre se passe difficilement d’une cartographie électronique vectoriséecomme le succès du programme ECDIS le montre tant qu’il est alimenté par des cartes
électroniques ENC officielles et tenues à jour, il serait bon d’inviter les instituts hydrographiques européens à poursuivre leur coopération pour la constitution d’une infrastructure géospatialemaritime dans le but de concevoir un SIG marin destiné à constituer le socle géographique de référence pour conduire une politique d’aménagement (et d’entretien) des espaces maritimes”
Département Informatique, École Navale
7
Ray, Petit, Noyon, Devogele, Claramunt GIS for the Monitoring of Maritime Traffic
7Maritime Navigation: Current Systems
• Current security systems in automated navigation such as SENIN, GECDIS or Spationav combine – Maritime geographical data
• Electronic Chart Display and Information Systems (ECDIS)
– Earth positioning systems (GPS)
– Radar sensors and scheduling of ship routes• Automatic Radar Plotting Aids (ARPA)
• Automatic Identification System (AIS)
– Some systems also includes database on traffic (e.g. traffic2000)
• Identifying new rules and promoting new standards for the improvement of safety at sea is a constant objective of the International Maritime Organisation -> guideline

Département Informatique, École Navale
8
Ray, Petit, Noyon, Devogele, Claramunt GIS for the Monitoring of Maritime Traffic
8Automatic Radar Plotting Aid (ARPA)
ARPA: equipment associated to navigation radar in order to follow tracks and avoid collision

Département Informatique, École Navale
9
Ray, Petit, Noyon, Devogele, Claramunt GIS for the Monitoring of Maritime Traffic
9Radar Track Identification
• ARPA system identify – Route or heading of observed ships– Speed– Closing Point of Approach (CPA): the nearest point that an echo
can reach according observer– Time to Closing Point of Approach (TCPA): time to reach the CPA
buoyradar location
Ship trackneed other mechanism to identify it
observer

Département Informatique, École Navale
10
Ray, Petit, Noyon, Devogele, Claramunt GIS for the Monitoring of Maritime Traffic
10Radar Limitations
• Small ships can be mistaken for sea echoes in the case of rough sea due to small echos
• Non accessible areas– Hidden by the coast– Over the limit of the radar
• No direct distinction between stable and dynamic boats
• Track monitoring difficult when ships are crossing
Département Informatique, École Navale
11
Ray, Petit, Noyon, Devogele, Claramunt GIS for the Monitoring of Maritime Traffic
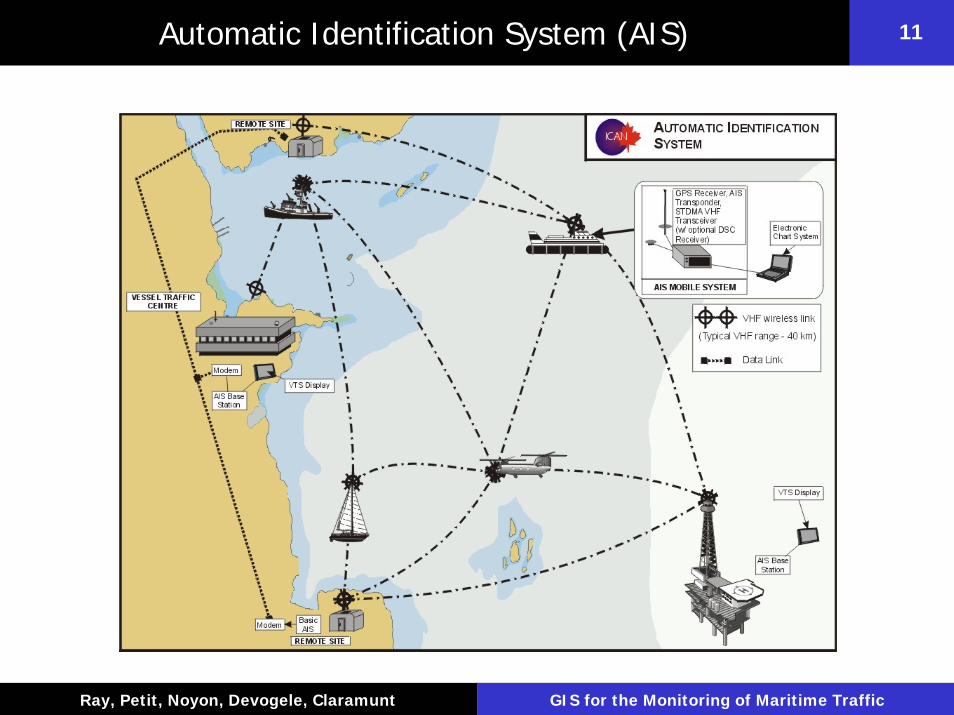
11Automatic Identification System (AIS)
Département Informatique, École Navale
12
Ray, Petit, Noyon, Devogele, Claramunt GIS for the Monitoring of Maritime Traffic
12Automatic Identification System (AIS)
• A ship fitted with AIS receives navigation data sent by surrounding ships, by its maritime VHF– Mandatory (IMO) from July 2005 for ship of more of 500 T and
300 T with passengers– It is a solution comparable to aeronautic transponders– AIS is a broadcast system
• Transmitted data include textual data such as name, length, speed and position of every AIS-connected ship in the neighbourhood
• The AIS is able to operate in autonomous and continuous mode for operations in all areas, it is not constrained by the topography as is the ARPA system
Département Informatique, École Navale
13
Ray, Petit, Noyon, Devogele, Claramunt GIS for the Monitoring of Maritime Traffic
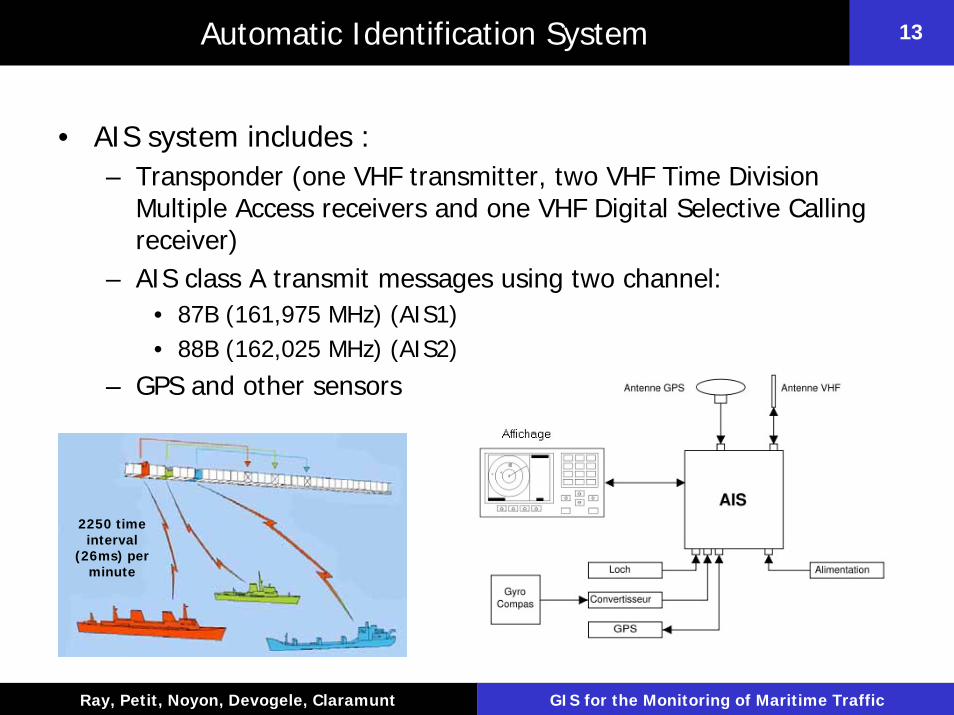
13Automatic Identification System
• AIS system includes :– Transponder (one VHF transmitter, two VHF Time Division
Multiple Access receivers and one VHF Digital Selective Calling receiver)
– AIS class A transmit messages using two channel:• 87B (161,975 MHz) (AIS1) • 88B (162,025 MHz) (AIS2)
– GPS and other sensors
2250 time interval
(26ms) per minute
Département Informatique, École Navale
14
Ray, Petit, Noyon, Devogele, Claramunt GIS for the Monitoring of Maritime Traffic
14Automatic Identification System
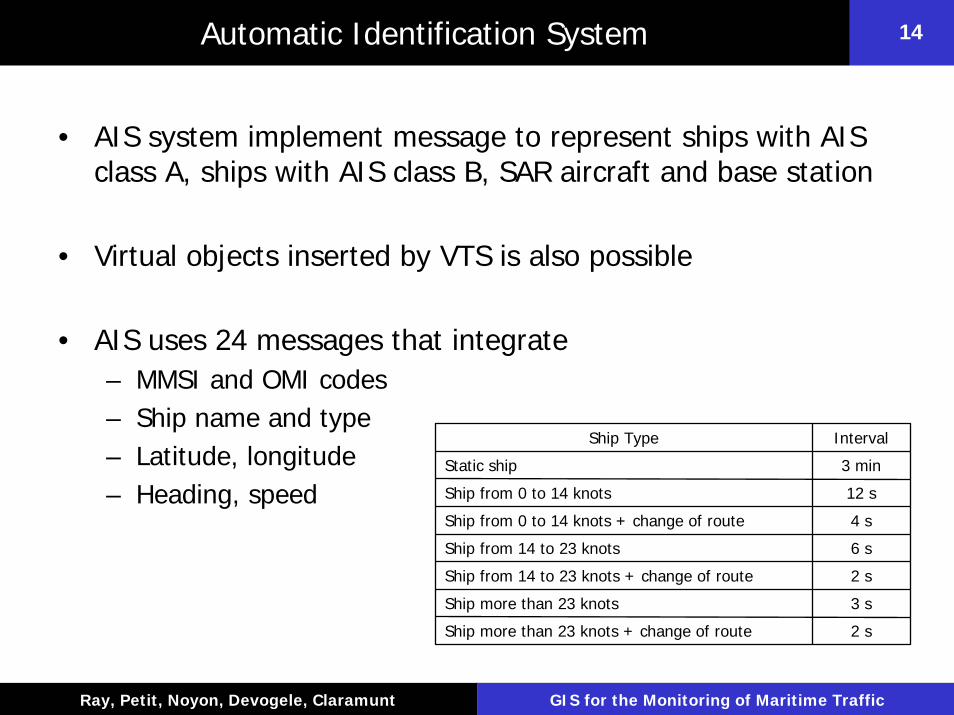
• AIS system implement message to represent ships with AIS class A, ships with AIS class B, SAR aircraft and base station
• Virtual objects inserted by VTS is also possible
• AIS uses 24 messages that integrate– MMSI and OMI codes– Ship name and type– Latitude, longitude– Heading, speed
2 sShip more than 23 knots + change of route
3 sShip more than 23 knots
2 sShip from 14 to 23 knots + change of route
6 sShip from 14 to 23 knots
4 sShip from 0 to 14 knots + change of route
12 sShip from 0 to 14 knots
3 minStatic ship
IntervalShip Type

Département Informatique, École Navale
15
Ray, Petit, Noyon, Devogele, Claramunt GIS for the Monitoring of Maritime Traffic
15AIS Contribution To The ARPA
ARPACPA 7km400TCPA 4.8 mins
• It helps the radar to distinguish the tracks– Useful nearby rocky coastals
• It identifies radar tracks– Ship name obtained via VHF
• It improves CPA and TCPA calculation– Rate of turn taken into account (ROT)
• It anticipates tracks– Routes– Destination ports
AISROT 110°and 70°CPA 115 m7.9 mins
Département Informatique, École Navale
16
Ray, Petit, Noyon, Devogele, Claramunt GIS for the Monitoring of Maritime Traffic
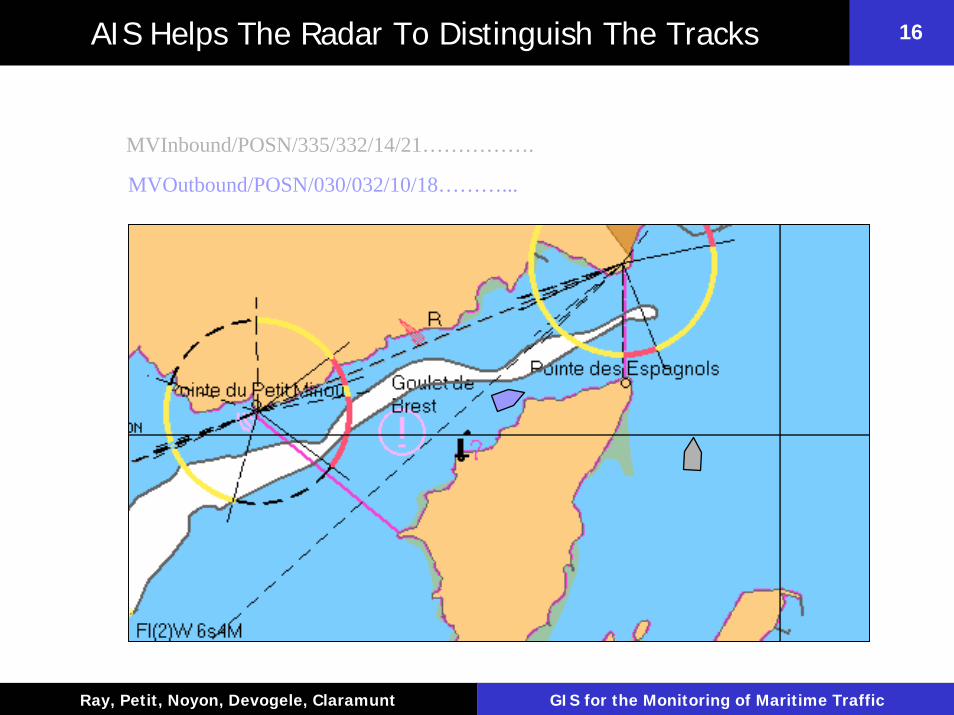
16AIS Helps The Radar To Distinguish The Tracks
MVInbound/POSN/335/332/14/21…………….
MVOutbound/POSN/030/032/10/18………...
Département Informatique, École Navale
17
Ray, Petit, Noyon, Devogele, Claramunt GIS for the Monitoring of Maritime Traffic
17Long Range Identification And Tracking (LRIT)
• The Maritime Safety Committee (MSC) of IMO adopted in May 2006 new regulations for the LRIT– The new regulation on LRIT is included in SOLAS chapter V on
Safety of Navigation – The regulation is expected to enter into force on 1 January 2008
and will apply to ships constructed on or after 31 December 2008– Data derived through LRIT will be available only to the recipients
who are entitled to receive such information– SOLAS contracting governments will receive information about
ships navigating within a distance not exceeding 1000 nautical miles off their coast
• Mandatory requirement for the following ships on international voyages: passenger ships, high-speed craft, cargo ships, (including ship of 300 gross tonnage and upwards) and mobile offshore drilling units
Département Informatique, École Navale
18
Ray, Petit, Noyon, Devogele, Claramunt GIS for the Monitoring of Maritime Traffic
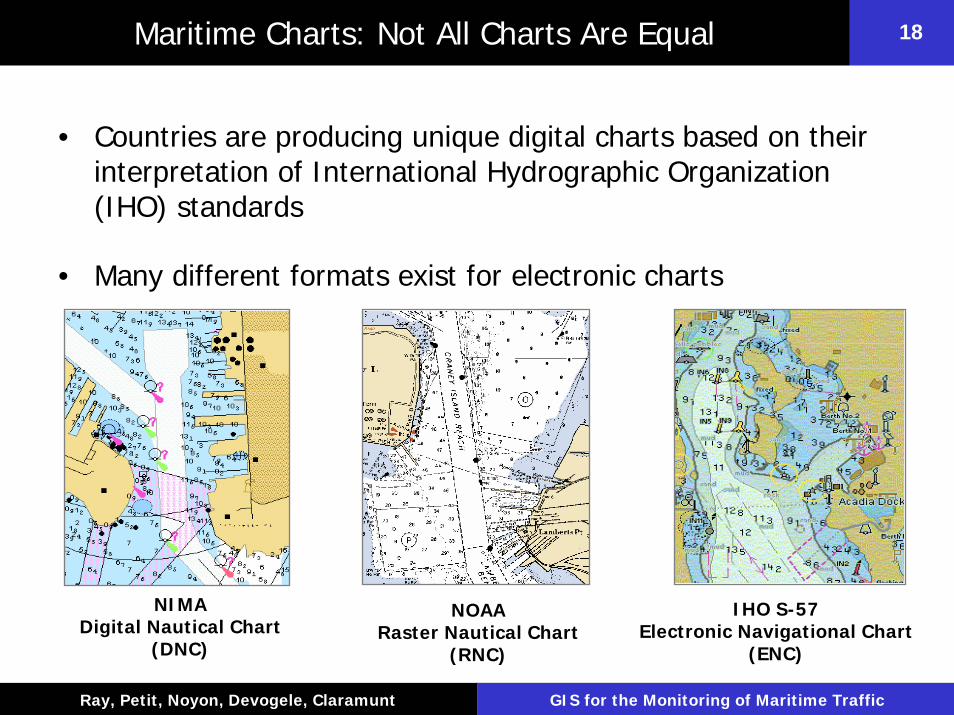
18Maritime Charts: Not All Charts Are Equal
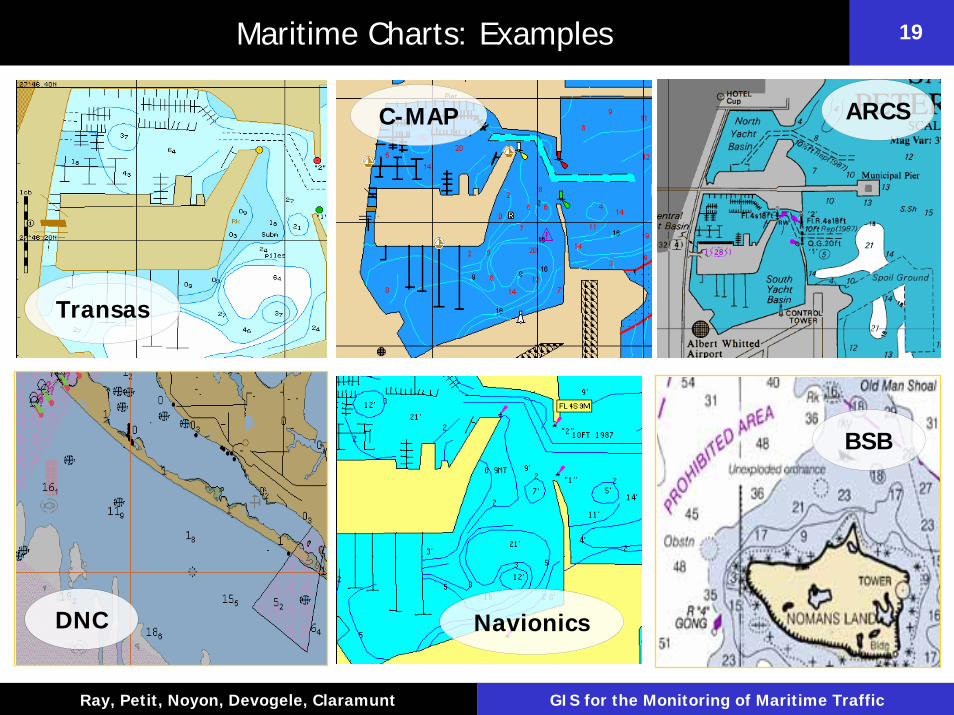
• Countries are producing unique digital charts based on their interpretation of International Hydrographic Organization (IHO) standards
• Many different formats exist for electronic charts
NIMADigital Nautical Chart
(DNC)
IHO S-57Electronic Navigational Chart
(ENC)
NOAARaster Nautical Chart
(RNC)
Département Informatique, École Navale
19
Ray, Petit, Noyon, Devogele, Claramunt GIS for the Monitoring of Maritime Traffic
19Maritime Charts: Examples
ARCSC-MAP
Transas
BSB
DNC Navionics
Département Informatique, École Navale
20
Ray, Petit, Noyon, Devogele, Claramunt GIS for the Monitoring of Maritime Traffic
20Types of Electronic Charts are: Raster and Vector
• The two major types are vector based and raster charts
• The basic difference – Raster charts are simply bitmap images created by scanning a
paper chart
– Vector charts portray charted features as points, lines, or areas with amplifying information (attributes) found in an associated database
• The Advantages of vector charts – Information on chart can be linked to specific points (objects
with meta-data)– Allows the user to display the information that is necessary for
the ship’s current mission

Département Informatique, École Navale
21
Ray, Petit, Noyon, Devogele, Claramunt GIS for the Monitoring of Maritime Traffic
21Types of Electronic Charts are: Raster and Vector
Raster Vector

Département Informatique, École Navale
22
Ray, Petit, Noyon, Devogele, Claramunt GIS for the Monitoring of Maritime Traffic
22Raster Charts
• Pixels are color coded, but do not represent features explicitly
• Looks like a paper chart • Cheap and easy to produce
(scan existing paper chart)• Runs easily on PC• World-wide availability• A set of colored pixels
representing chart information as a picture on computer screen
• Simply an array of pixels arranged in rows and columns

Département Informatique, École Navale
23
Ray, Petit, Noyon, Devogele, Claramunt GIS for the Monitoring of Maritime Traffic
23Vector Charts
• A set of accurately positioned lines (vectors), points and areas, with associated attributes (e.g. shoreline, buoy, ship) organized in a database accessed by clicking on displayed symbol
• Looks “different” from a paper chart
• Underlying database allows queries and layer selection
• Zooming reveals detail• Complex, expensive, and time-
consuming to produce• Needs more powerful computer
and expensive display
Département Informatique, École Navale
24
Ray, Petit, Noyon, Devogele, Claramunt GIS for the Monitoring of Maritime Traffic
24Electronic Chart Display & Information Systems (ECDIS)
• Combines a location-based navigation database, electronic vector charts, navigation tools, route planning and warning functionality to provide a navigation tool that can reduce the risk of human error in navigation– Geodetic System : WGS 84 – Layer–based vector format (scale and theme dependent)– S57: coding and exchange of nautical chart– S52: specify how to display ENC on ECDIS
• It is intended to replace conventional paper charts as the legalbase for safe navigation
• ECDIS is already being installed in large vessels that have fully operational installations
Département Informatique, École Navale
25
Ray, Petit, Noyon, Devogele, Claramunt GIS for the Monitoring of Maritime Traffic
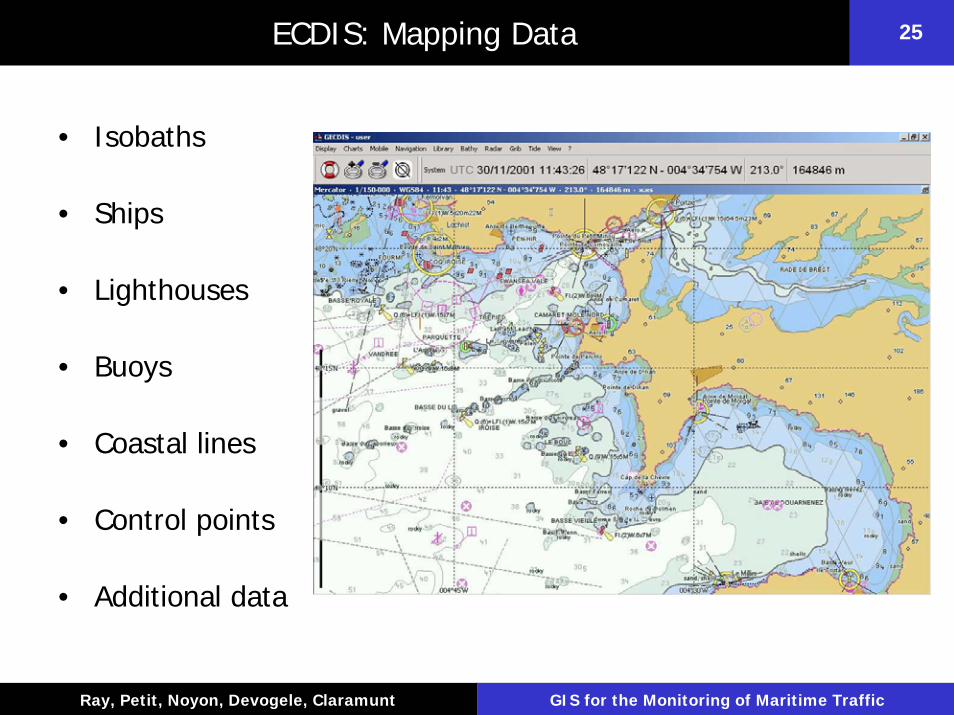
25ECDIS: Mapping Data
• Isobaths
• Ships
• Lighthouses
• Buoys
• Coastal lines
• Control points
• Additional data

Département Informatique, École Navale
26
Ray, Petit, Noyon, Devogele, Claramunt GIS for the Monitoring of Maritime Traffic
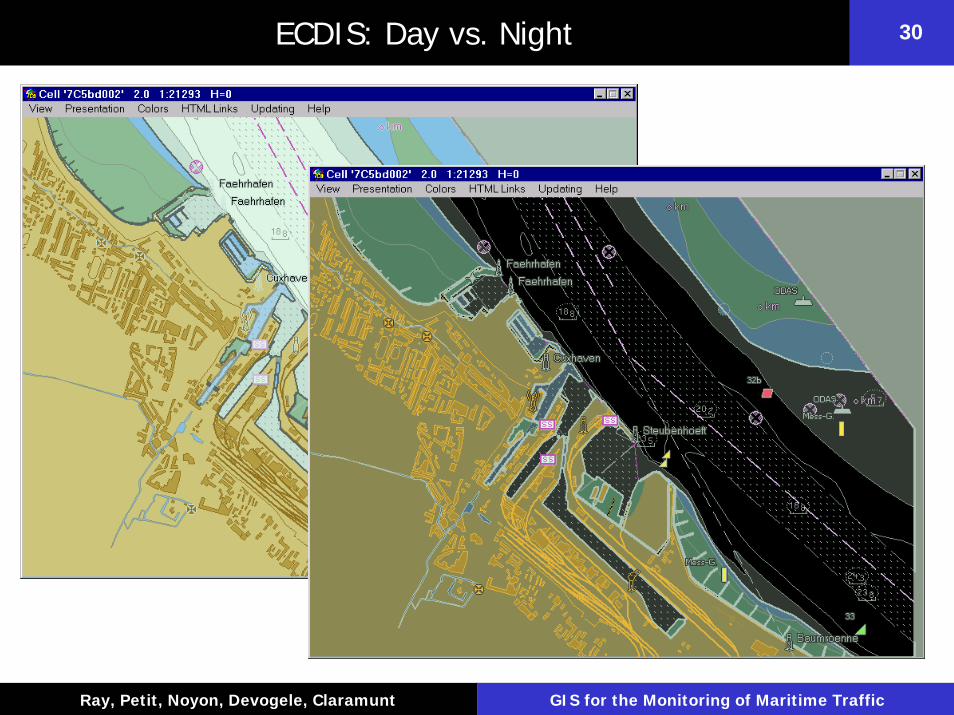
26ECDIS: Mapping Functions
• Display functions : default, standard, all
• Water depth (security) – Function of the ship draught
• Zoom– Different map scales– Object display according to the scale
• Day vs. night
• Route, time & distance and rescue functions

Département Informatique, École Navale
27
Ray, Petit, Noyon, Devogele, Claramunt GIS for the Monitoring of Maritime Traffic
27ECDIS : Water Depth
5 m10 m
15 m

Département Informatique, École Navale
28
Ray, Petit, Noyon, Devogele, Claramunt GIS for the Monitoring of Maritime Traffic
28ECDIS : Zooming

Département Informatique, École Navale
29
Ray, Petit, Noyon, Devogele, Claramunt GIS for the Monitoring of Maritime Traffic
29ECDIS : Detail Levels
Département Informatique, École Navale
30
Ray, Petit, Noyon, Devogele, Claramunt GIS for the Monitoring of Maritime Traffic
30ECDIS: Day vs. Night
Département Informatique, École Navale
31
Ray, Petit, Noyon, Devogele, Claramunt GIS for the Monitoring of Maritime Traffic
31ECDIS: Buoy Sectors Display

Département Informatique, École Navale
32
Ray, Petit, Noyon, Devogele, Claramunt GIS for the Monitoring of Maritime Traffic
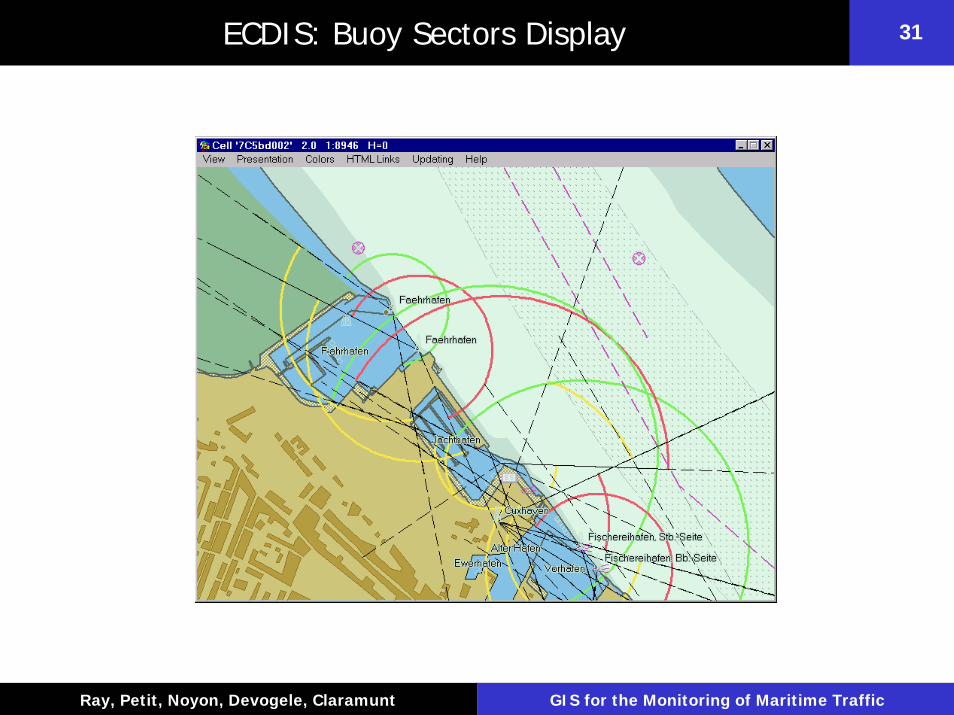
32ECDIS: Ship Display
• Cone of uncertainty– Function of speed– Function of turn radius
• Map positioning– GPS-based
• Speed vector
Département Informatique, École Navale
33
Ray, Petit, Noyon, Devogele, Claramunt GIS for the Monitoring of Maritime Traffic
33ECDIS: Advantages
• Flexible displays (contextual)
• Navigation-aid– Speed, heading, route
planning & monitoring
• Security functions– Anti-grounding, anti-
collision, rescue
• Automated mapping updates
• Sensor connections – Radar, GPS, sonar, …
• Personnalisation– Ship’s draugth, length,
turn radius– Tide height, time (day vs.
night)
• Error control
Département Informatique, École Navale
34
Ray, Petit, Noyon, Devogele, Claramunt GIS for the Monitoring of Maritime Traffic
34ECDIS: Limitations
• Data integration still not straightforward
• Legal issues: maritime data are controled by national agencies
• Visualisation and functional issues are still basic
• Heterogeneity of data integration systems
• Lack of decision-aid and simulation functions
• Personalisation still not considered
Département Informatique, École Navale
35
Ray, Petit, Noyon, Devogele, Claramunt GIS for the Monitoring of Maritime Traffic
35Maritime Navigation Limitations
• From a Tracking point of view– Sailing boats or fishing boats are not always adapted to make
use of such technology• Paradoxically, those boats are the most difficult to see, even using a
radar system• AIS class B coupled with small embedded system will bring a
solution
– Access to data ? Spationav, SafeSeaNet, LRIT, …
• From the geographic information system point of view– Lack of flexible and adaptive interfaces– Simulation systems and decision-aid systems still to develop– Needs for traffic analysis and filtering

Département Informatique, École Navale
36
Ray, Petit, Noyon, Devogele, Claramunt GIS for the Monitoring of Maritime Traffic
36Maritime Navigation: Our Research Fields
• Research Fields – Maritime Intelligent Transportation Systems (MITS)– Adaptive and collaborative maritime GIS– Simulation techniques for transportation systems (SMA, time
driven centralized simulation, discrete events distributed simulation)
– Maritime data analysis– Mobile / ubiquitous GIS
• Research activity: an integrated modular GIS that combines – Traffic data from AIS system and public database– Management of positioning data (and related info)– Simulation and traffic analysis modules – Different visualization systems
Département Informatique, École Navale
37
Ray, Petit, Noyon, Devogele, Claramunt GIS for the Monitoring of Maritime Traffic
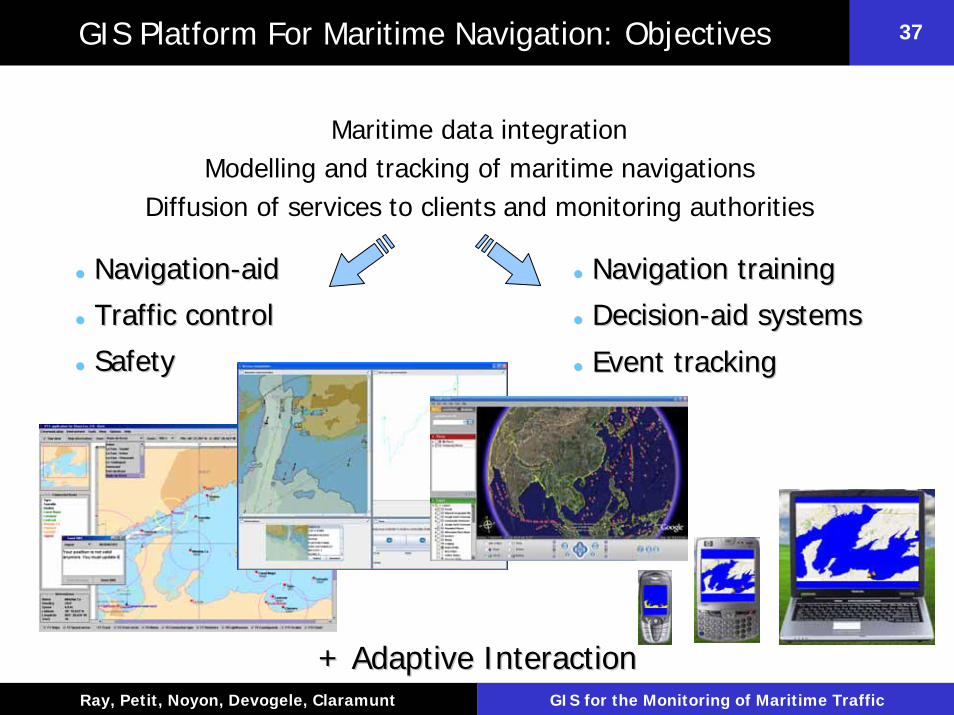
37GIS Platform For Maritime Navigation: Objectives
Maritime data integrationModelling and tracking of maritime navigations
Diffusion of services to clients and monitoring authorities
NavigationNavigation--aidaid
Traffic controlTraffic control
SafetySafety
Navigation trainingNavigation training
DecisionDecision--aid systemsaid systems
Event trackingEvent tracking
+ Adaptive Interaction+ Adaptive Interaction
Département Informatique, École Navale
38
Ray, Petit, Noyon, Devogele, Claramunt GIS for the Monitoring of Maritime Traffic
38Maritime Navigation Projects
• Several prototypes that provide real-time navigation data to VTS stations that monitor a given navigation area– The Share-Loc project for mobile clients that cannot be fitted
with AIS and concerned by the location and route of neighboring ships use a GSM/WAP platform
– Web-based GIS for AIS – Novel interfaces for a better understanding of navigation
patterns• relative view of a maritime geographical space, Retrace prototype• Adaptive, collaborative and mobile GIS (HERMAN)
– A multi-agent prototype (TRANS) that supports micro-simulation capabilities where ships are modeled as autonomous agents acting in their environment
• The Navtrack prototype for the monitoring of sailing races
Département Informatique, École Navale
39
Ray, Petit, Noyon, Devogele, Claramunt GIS for the Monitoring of Maritime Traffic
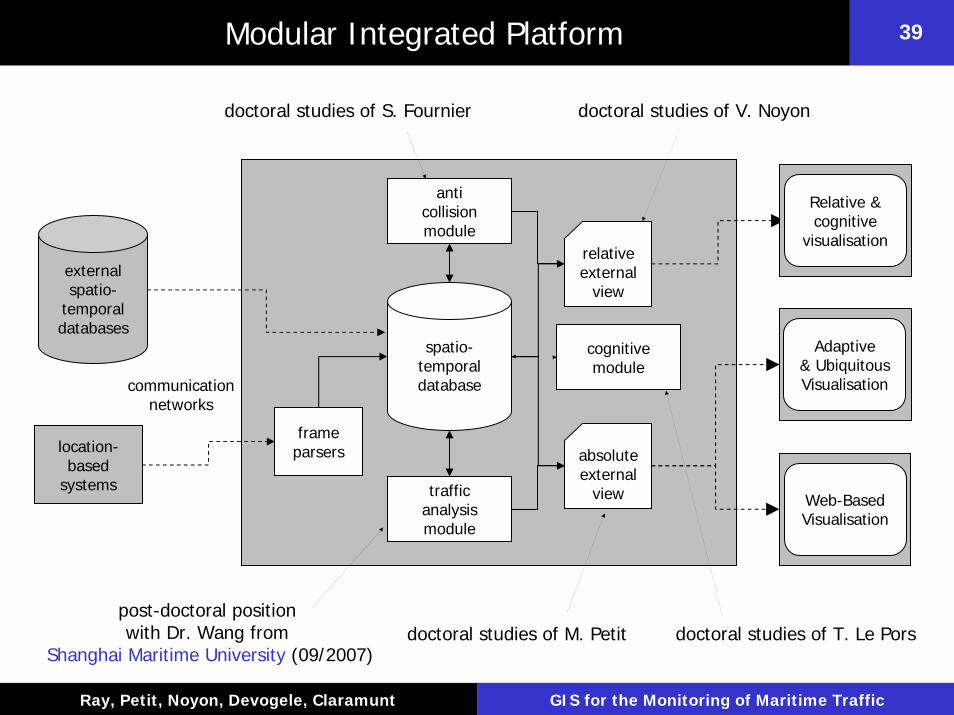
39Modular Integrated Platform
doctoral studies of S. Fournier doctoral studies of V. Noyon
frameparsers
anticollisionmodule
spatio-temporaldatabase
relative external
view
absolute external
view
Adaptive& UbiquitousVisualisationcommunication
networks
location-based
systems
external spatio-
temporaldatabases
trafficanalysismodule
Web-BasedVisualisation
Relative & cognitive
visualisation
cognitivemodule
post-doctoral positionwith Dr. Wang from
Shanghai Maritime University (09/2007)doctoral studies of M. Petit doctoral studies of T. Le Pors
Département Informatique, École Navale
40
Ray, Petit, Noyon, Devogele, Claramunt GIS for the Monitoring of Maritime Traffic
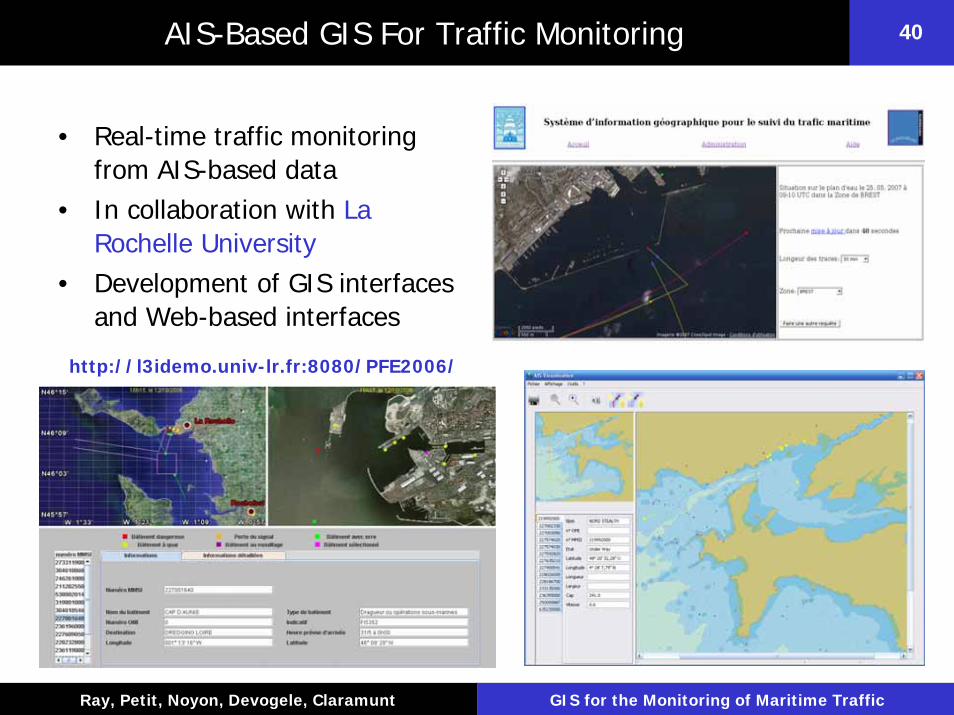
40AIS-Based GIS For Traffic Monitoring
• Real-time traffic monitoring from AIS-based data
• In collaboration with La Rochelle University
• Development of GIS interfaces and Web-based interfaces
http://l3idemo.univ-lr.fr:8080/PFE2006/

Département Informatique, École Navale
41
Ray, Petit, Noyon, Devogele, Claramunt GIS for the Monitoring of Maritime Traffic
41AIS-Based GIS For Traffic Monitoring: Architecture
AISMessages VHF
AntennaAIS
TransponderAIS Data
Web Server
AIS DataManagement
Internet
Apache/TomcatWeb
Server
Users
Permanent receivers:Technopole Brest Iroise
La Rochelle
Mobile receivers: Cardif, Wales (10/2006 – 12/2006)
Aalborg, Denmark (09/2007 – 11/2007)
2 maritime traffic platformsNaval Academy
La Rochelle University
PostGISDatabase
Internet
Département Informatique, École Navale
42
Ray, Petit, Noyon, Devogele, Claramunt GIS for the Monitoring of Maritime Traffic
42Share-Loc Project (1/2)
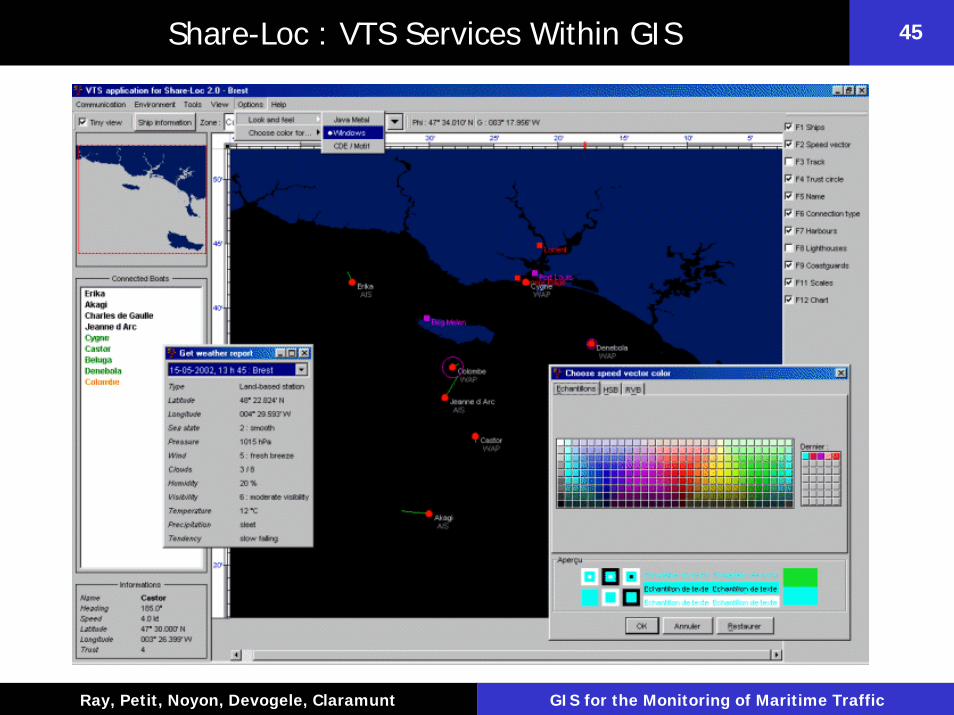
• The aim of Share-Loc is to provide real-time navigation data to end users– Useful for mobile clients that cannot be fitted with AIS and
concerned by the location and route of neighboring ships– Navigation users must be within the range of mobile network
base stations– Share-Loc systems was designed in collaboration with
Nottingham Trent University
• The Share-Loc system is a typical 3-tier application that – Includes a web server, an application server, a database server
and a gateway – Mobile Clients– VTS/WAP applications

Département Informatique, École Navale
43
Ray, Petit, Noyon, Devogele, Claramunt GIS for the Monitoring of Maritime Traffic
43Share-Loc Project (2/2)
WAP Application
Maritime authorities that monitor a given navigation area and analysis of specific
events
Servers
WML
HTML
APPLICATION
WEB
WAPGATEWAY
JAVA
DB

Département Informatique, École Navale
44
Ray, Petit, Noyon, Devogele, Claramunt GIS for the Monitoring of Maritime Traffic
44Share-Loc : VTS Services Within GIS
Département Informatique, École Navale
45
Ray, Petit, Noyon, Devogele, Claramunt GIS for the Monitoring of Maritime Traffic
45Share-Loc : VTS Services Within GIS
Département Informatique, École Navale
46
Ray, Petit, Noyon, Devogele, Claramunt GIS for the Monitoring of Maritime Traffic
46Concurrent Navigation Modelling Based On A Multi-Agent System
• TRANS (Tractable Role Agent prototype for concurrent Navigation Systems)– It extends the multi-agent model towards a deeper integration of
the role paradigm, and qualitative spatial reasoning as a support for the representation of the dynamic properties of ships
– Provides a flexible solution adapted to the multiple ship behaviours
• TRANS can be used : – As a decision support system for maritime navigation
and for monitoring authorities– For training and replays
Département Informatique, École Navale
47
Ray, Petit, Noyon, Devogele, Claramunt GIS for the Monitoring of Maritime Traffic
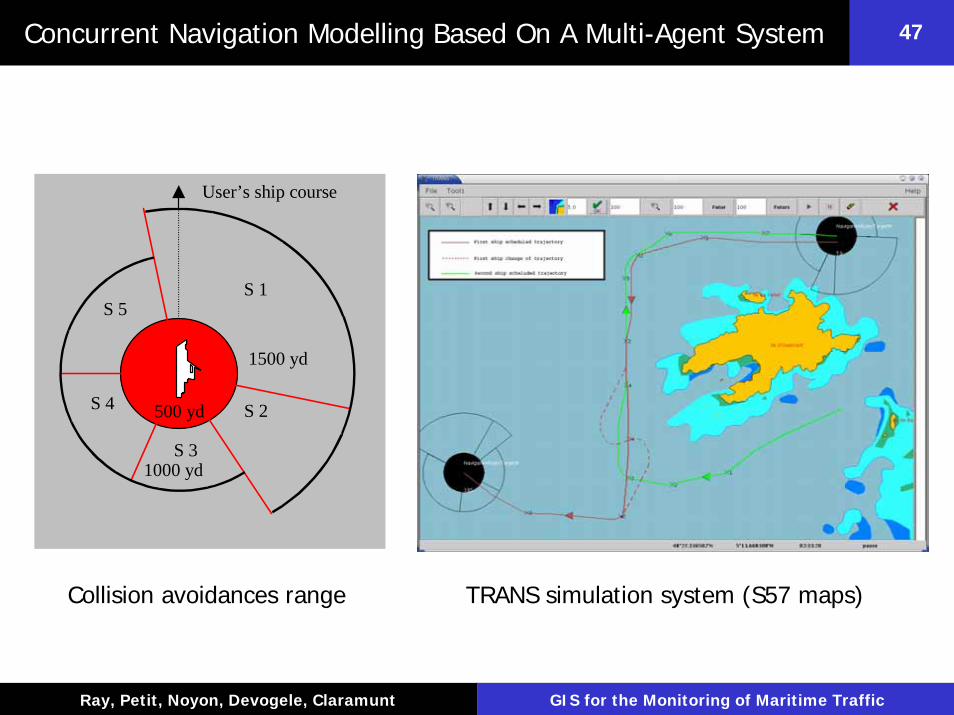
47Concurrent Navigation Modelling Based On A Multi-Agent System
S 5
S 4
S 3
S 2
S 1
500 yd
1500 yd
1000 yd
User’s ship course
Collision avoidances range TRANS simulation system (S57 maps)
Département Informatique, École Navale
48
Ray, Petit, Noyon, Devogele, Claramunt GIS for the Monitoring of Maritime Traffic
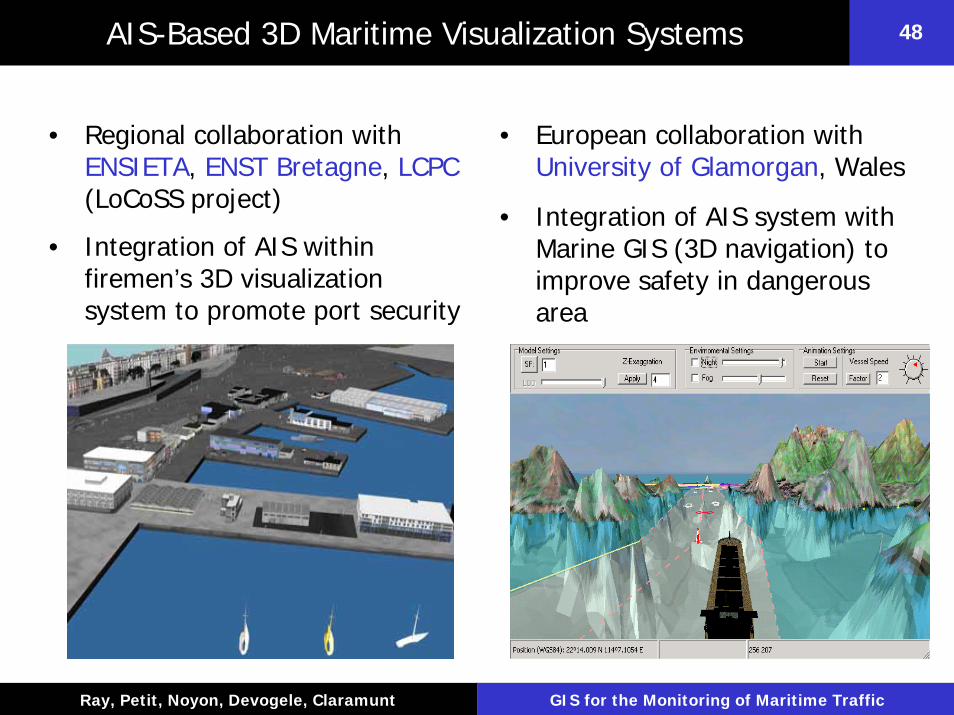
48AIS-Based 3D Maritime Visualization Systems
• Regional collaboration with ENSIETA, ENST Bretagne, LCPC(LoCoSS project)
• Integration of AIS within firemen’s 3D visualization system to promote port security
• European collaboration with University of Glamorgan, Wales
• Integration of AIS system with Marine GIS (3D navigation) to improve safety in dangerous area
Département Informatique, École Navale
49
Ray, Petit, Noyon, Devogele, Claramunt GIS for the Monitoring of Maritime Traffic
49Relative Trajectory Modelling (Retrace)
• There is still a need for additional interface and prediction mechanisms that improve the monitoring of navigation trajectories
• Users need complementary representations of displacements for a better understanding of navigation behaviors
• Relative representation :– Perception from a mobile observer where distance and difference
of speed are the main cognitive factors of interpretation– Our objective is to explore to which degree such a model
completes the conventional absolute view of a spatial trajectory
Département Informatique, École Navale
50
Ray, Petit, Noyon, Devogele, Claramunt GIS for the Monitoring of Maritime Traffic
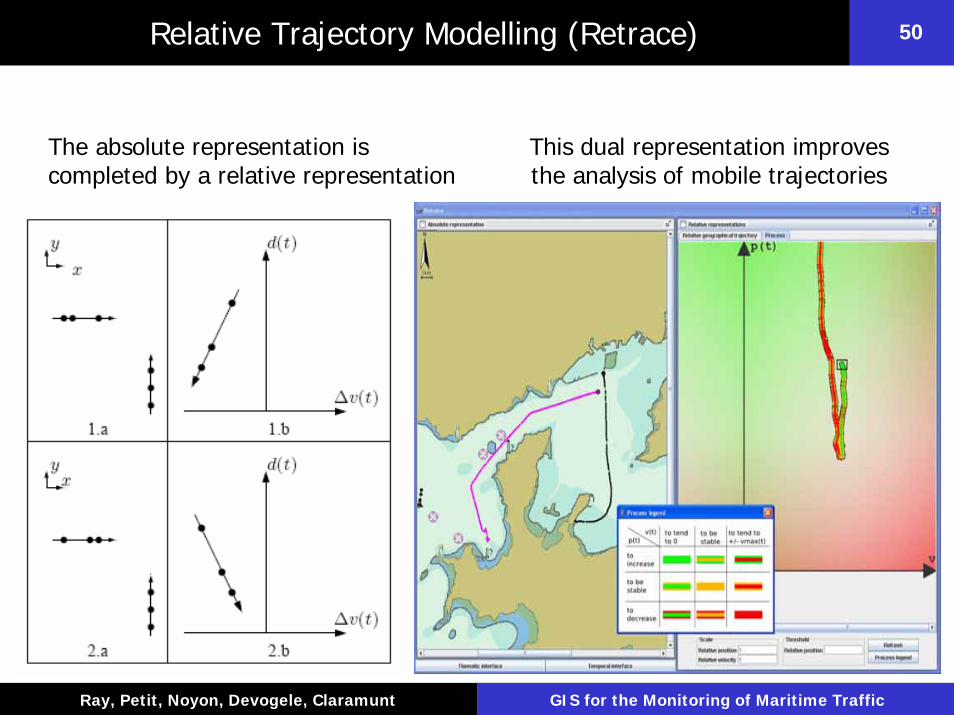
50Relative Trajectory Modelling (Retrace)
The absolute representation is completed by a relative representation
This dual representation improves the analysis of mobile trajectories

Département Informatique, École Navale
51
Ray, Petit, Noyon, Devogele, Claramunt GIS for the Monitoring of Maritime Traffic
51Adaptive Interaction Techniques for Maritime Transportation
• Research and development of an adaptive interaction model for collaborative and mobile maritime information system
• The objective is to develop a flexible system that adapts the geographic content and the interface according to the users’ needs
• Dynamic interaction methods and techniques are part of a federated maritime GIS
Geographical Context Adaptation
Client adaptation

Département Informatique, École Navale
52
Ray, Petit, Noyon, Devogele, Claramunt GIS for the Monitoring of Maritime Traffic
52Adaptive Interaction Techniques for Maritime Transportation
•Same back-end •application for different clients
•Adaptation to client pecularities

Département Informatique, École Navale
53
Ray, Petit, Noyon, Devogele, Claramunt GIS for the Monitoring of Maritime Traffic
53Adaptive Interaction Techniques for Maritime Transportation
Architecture for a context-aware and adaptive GIS
Engine for User
Context
Environmental Context Modeling

Département Informatique, École Navale
54
Ray, Petit, Noyon, Devogele, Claramunt GIS for the Monitoring of Maritime Traffic
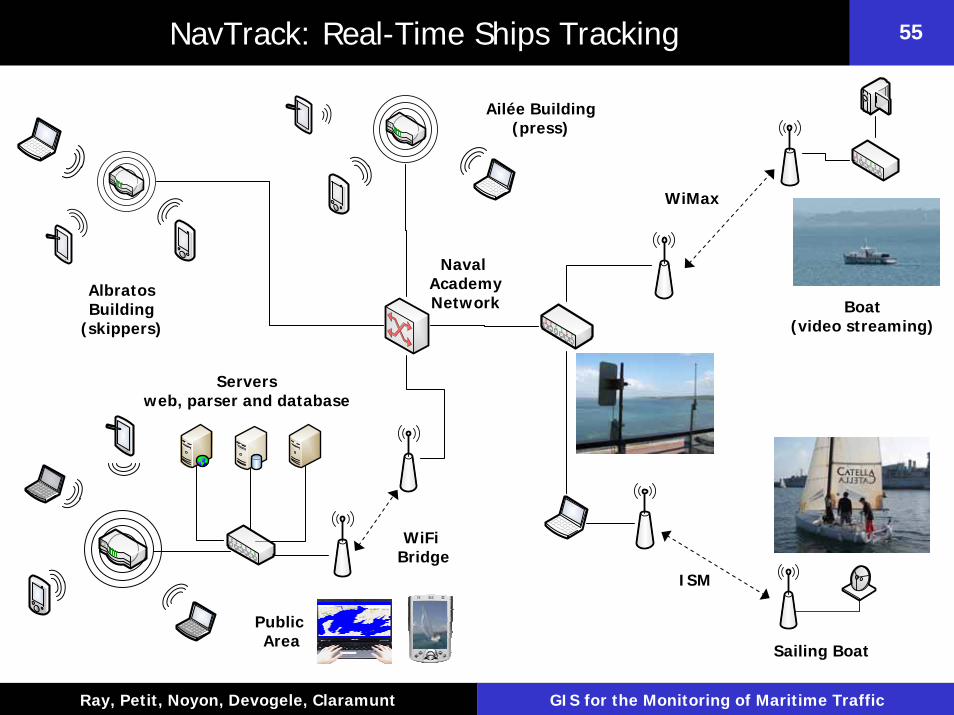
54NavTrack: Real-Time Ships Tracking
• NavTrack combines the 3 components of ITS for the real-time tracking of sailing races– Geolocalisation : GPS– Communications : ISM (800 MHz) and WiMax– Information system : web-based GIS and adaptive interfaces
In collaboration with ENST Bretagne and Technopole Brest Iroise
Département Informatique, École Navale
55
Ray, Petit, Noyon, Devogele, Claramunt GIS for the Monitoring of Maritime Traffic
55NavTrack: Real-Time Ships Tracking
Ailée Building(press)
WiMax
ISM
AlbratosBuilding
(skippers)
Sailing Boat
Public Area
Naval AcademyNetwork
Serversweb, parser and database
WiFi Bridge
Boat(video streaming)

Département Informatique, École Navale
56
Ray, Petit, Noyon, Devogele, Claramunt GIS for the Monitoring of Maritime Traffic
56NavTrack: Real-Time Ships Tracking

Département Informatique, École Navale
57
Ray, Petit, Noyon, Devogele, Claramunt GIS for the Monitoring of Maritime Traffic
57Tracking Worldwide Maritime Traffic
Worldwide traffic monitoring using public databases

Département Informatique, École Navale
58
Ray, Petit, Noyon, Devogele, Claramunt GIS for the Monitoring of Maritime Traffic
58Maritime Piracy Analysis
Département Informatique, École Navale
59
Ray, Petit, Noyon, Devogele, Claramunt GIS for the Monitoring of Maritime Traffic
59
Thank you very much for you attention !
Dr. Cyril Ray
Naval Academy Research Institute, France
Related Documents











