K¨ ayt¨ ann¨ on geodesia 9908 9907 9910 9969 9966 9967 9965 9968 9911 9914 8485 9984 9910 9988 9987 9986 9955 9956 9957 9958 9954 9953 9952 9951 9950 9902 9905 9906 9909 takymetrijono- IV. luokan mittaus Jyväskylä III. luokan verkko II. luokan verkko 516 521 506 131 133 1337 525 522 113 5 525 1337 9920 9919 9918 9917 9916 9914 9915 9912 9909 9907 9910 9913 506 9906 9903 9908 9904 9905 9904 9905 9909 9964 9986 9959 9960 9961 9962 9906 5 9911 9916 9917 9919 9920 9982 9983 9974 9973 9972 9980 9981 9918 9978 9977 9992 9991 9979 9976 9975 9970 9971 521 9901 9902 9963 113 IV. luokka GPS IV. luokka GPS IV. luokka GPS IV. luokan takymetrijono- mittaus Säynätsalo Martin Vermeer 10. helmikuuta 2009

Geode Sia
Oct 30, 2014
Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

Kaytannon geodesia
9908
9907
991099699966
99679965
9968
9911
9914
84859984
9910 9988 9987
9986
9955 9956
9957
9958
9954
9953
9952
9951
9950
9902
9905 9906
9909
takymetrijono−IV. luokan
mittausJyväskylä
III. luokanverkko
II. luokan verkko
516
521
506
131
133
1337
525
522
113
5
525
1337
9920
9919
9918
99179916
99149915
9912
9909
9907
9910
9913
506
9906
9903
9908
9904
9905
9904
9905
9909
9964
9986
99599960
9961
9962
9906
5
9911
99169917
9919
9920
9982
9983
9974
99739972
9980
9981
9918
9978
9977
9992
9991
9979
9976
9975
9970
9971
521
9901
9902
9963
113
IV. luokka GPS
IV. luokka GPS
IV. luokka GPS
IV. luokantakymetrijono−mittausSäynätsalo
Martin Vermeer
10. helmikuuta 2009


3
Kaytannon geodesia -opintojaksontavoite
Kaytannon geodesia -kurssi aikoo antaa valmiudet suunnitella, mitata ja laskea geodeettisiaverkkoja, kuten taso- korkeus- ja avaruusrunkoverkkoja. Seuraavia aiheita kasitellaan:
Epasaannollisen fysikaalisen Maan tai Maan pinnan kuvaus geometrisesti sovitullatavalla deformoituneena tasoksi (karttaprojektio).
Fysikaalisen maanpinnan korkeuserojen maaritys sovitun nolla- eli vertaustason(geoidin) suhteen.
Tavallisimpien geodeettisten havaintosuureiden, kuten avaruusjana-etaisyyden (vi-noetaisyyden) ja atsimuti- ja zeniittikulmien, seka GPS-mittausten, havaintoyhtaloidenformulointi ja linearisointi.
Kahden koordinaatiston valisen Helmert-muunnoksen parametrien estimointi pien-imman neliosumman menetelman avulla, kun pistekentta on annettuna kahdessajarjestelmassa. Samalla tutkitaan virheiden kasautumista. Vapaan asemapisteenmenetelma perustuu tahan.
Geodeettisten laitteiden kalibrointi ja geodeettisten jarjestelmien menetelmatestaus.
Geodesiassa ensisijainen koordinaatti- eli vertausjarjestelma on kolmiulotteinen. Huomatta-va on kuitenkin, etta moneen kayttotarkoitukseen tarvitaan nimenomaan alempiulotteisiakoordinaattijarjestelmia:
Kaksiulotteisessa tasojarjestelmassa (2D) eli karttaprojektiojarjestelmassa kuvataanmaaston kartoissa esitettavat yksityiskohdat.
Erillisessa yksiulotteisessa korkeusjarjestelmassa (1D) kuvataan maanpinnan kor-keussuhteet. Kartoilla niita esitetaan joko pistekorkeuksina tai korkeuskayrina tai -varjostuksina/vareina.
Tassa yhteydessa puhutaan (2D+1D)-jarjestelmasta, joka siis eroaa todellisesta kol-miulotteisesta 3D-jarjestelmasta, jossa (esim. GPS:n avulla) kaikki kolme koordinaat-tia maaritetaan samanaikaisesti ja samanarvoisina ilman paikallisen luotiviivan suunnanerikoisasemaa.
(2D+1D)-jarjestelman kaytossa on kyse myos intuitiosta. Ihmiset tietavat hyvinkin, et-ta maapallo on kaareva, haluavat kuitenkin pitaa kiinni yksinkertaiseen mielikuvaan“kenkalaatikko-maasta”, missa “korkeus” on yksinkertaisesti etaisyys kenkalaatikon pohjal-ta, ja karttaprojektio tapahtuu “suoraan alaspain”, myos laatikon pohjaan. Geodeetin onkuitenkin tunnettava totuutta karttaprojektioiden mittakaavavirheesta ja ortometrisessa ko-rkeuksissa “vaarinpain” virtaavasta vedesta!

4
Kansikuva: Jyvaskylan kaupungin runkoverkon uudelleenmittauksen 1999 geometria (Maa-6.227 Geodesian maastoharjoitukset)

Sisalto 5
Sisalto
1 Linearisointi ja virheiden kasautuminen 91.1 Linearisointi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
1.1.1 Skalaaritapaus . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91.1.2 Vektoritapaus . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 101.1.3 Havaintoyhtaloiden linearisointi . . . . . . . . . . . . . . . . . . . . . . . . . . 12
1.2 Varianssien kasautumislaki . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 131.3 Geodeettinen paatehtava . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 141.4 Datumit . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 171.5 Yksiulotteiset datuminmuunnokset . . . . . . . . . . . . . . . . . . . . . . . . . . . 171.6 Kaksiulotteiset datuminmuunnokset . . . . . . . . . . . . . . . . . . . . . . . . . . 191.7 Kompleksinen esitystapa . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 191.8 Kolmiulotteinen datuminmuunnos (1) . . . . . . . . . . . . . . . . . . . . . . . . . 211.9 Kolmulotteinen datummuunnos (2) . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
2 Koordinaattijarjestelmat 252.1 Yleista . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 252.2 Suorakulmaiset geosentriset koordinaatit . . . . . . . . . . . . . . . . . . . . . . . . 252.3 Vertausellipsoidi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 272.4 WGS84-vertausjarjestelma . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 272.5 Toposentrinen koordinaattijarjestelma . . . . . . . . . . . . . . . . . . . . . . . . . 282.6 Geodeettinen datum . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 302.7 Geodeettisten datumien valinen muunnos . . . . . . . . . . . . . . . . . . . . . . . 322.8 Suorakulmainen kayraviivainen koordinaattijarjestelma . . . . . . . . . . . . . . . . 35
2.8.1 Geodeettiset (“ellipsoidiset”) koordinaatit: . . . . . . . . . . . . . . . . . . . . 352.8.2 Tahtitieteelliset koordinaatit: . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
2.9 Karttaprojektiot . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 352.9.1 Mercator-projektio . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 362.9.2 Mittakaavavaaristyma . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 372.9.3 Gauß-Kruger . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 382.9.4 UTM (Universal Transverse Mercator)-projektio . . . . . . . . . . . . . . . . 38
3 Vaakakulmien asematasoitus 393.1 Yleista . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 393.2 Asematasoituksen havaintoyhtalot . . . . . . . . . . . . . . . . . . . . . . . . . . . 393.3 Kulmamuunnos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 403.4 Takaisinsijoitus, orientaatiotuntematomat . . . . . . . . . . . . . . . . . . . . . . . 423.5 Jaannosvirheet ja vapausasteet . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 423.6 Asematasoituksen laskentataulukko . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
4 Keskistykset ja projektiot 474.1 Keskistys . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 474.2 Pieni keskistys . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
4.2.1 Vaakakeskistys . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 474.2.2 Korkeuskeskistys . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
4.3 Suuri keskistys . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48

6 Sisalto
4.4 GPS-keskistys . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
4.5 Suuntakorjaus paikallisesta horisontista vertausellipsoidiin . . . . . . . . . . . . . . 50
4.6 Ellipsoidisten normaalien erisuuntaisuus . . . . . . . . . . . . . . . . . . . . . . . . 51
4.7 Pituuskorjaus . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
4.8 Suuntakorjaus vertausellipsoidista karttatasoon . . . . . . . . . . . . . . . . . . . . 54
4.9 Karttaprojektion mittakaavavirhe . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
5 Korkeuden mittaus ja kasittely 57
5.1 Pystykulma . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
5.2 Trigonometrinen korkeudenmittaus . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
5.2.1 Korkean kohteen maaritys . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
5.2.2 Trigonometrinen vaaitus . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
5.2.3 Refraktion ja Maan kaarevuuden vaikutus . . . . . . . . . . . . . . . . . . . . 60
5.2.4 Vastakkaiset yht’aikaiset mittaukset . . . . . . . . . . . . . . . . . . . . . . . 62
5.3 xyH -jonomittaus . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
5.3.1 Kuvaus . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
5.3.2 Mittatanko . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
5.4 Vaaituksen satunnaiset virheet . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 66
5.5 Vaaituksen systemaattiset virheet . . . . . . . . . . . . . . . . . . . . . . . . . . . . 66
5.6 Vaaitusrefraktio . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67
5.7 Vaaituksen kojevirheet . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 69
5.8 Vaaituksen karkeat virheet . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 70
5.9 Yksittaisen vaaitusjonon laskeminen . . . . . . . . . . . . . . . . . . . . . . . . . . 73
6 Jonoverkon laskennasta 77
6.1 Suljettu monikulmiojono . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 77
6.2 Alku- ja loppuliitossuunnan laskeminen . . . . . . . . . . . . . . . . . . . . . . . . . 78
6.3 Suuntien tasoitus . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 78
6.4 Koordinaattien tasoitus . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 79
6.5 Laskentakaavio . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81
6.5.1 Huomautuksia . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81
6.6 Avoin monikulmiojono . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 82
6.6.1 Lahtosuunta . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 82
6.6.2 Jonon laskenta . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 83
7 Ehtoyhtaloiden tasoitus 85
7.1 Teoria . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 85
7.2 Esimerkki: kolmioehto . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 86
7.3 Monikulmiojonotasoitus ehtoyhtalotasoituksena . . . . . . . . . . . . . . . . . . . . 86
7.3.1 Ilman painotusta . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 86
7.3.2 Painotuksen kera . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 87
7.4 Monikulmiojonon havaintoyhtalot . . . . . . . . . . . . . . . . . . . . . . . . . . . . 88
7.4.1 Pistevali . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 88
7.4.2 Koko monikulmiojono . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 89
7.5 Yksittaisen jonon laskennasta . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 92
7.5.1 Painokertoimien valinnasta . . . . . . . . . . . . . . . . . . . . . . . . . . . . 93
7.5.2 “Realistiset” painoluvut . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 93
7.5.3 Relatiivinen pistekeskivirhe, loppupistekeskivirhe, loppusulkuvirhe . . . . . . 94
7.5.4 Kriteerikeskivirhe ja kriteerivarianssi . . . . . . . . . . . . . . . . . . . . . . . 95
7.5.5 Karkeiden virheiden loytaminen . . . . . . . . . . . . . . . . . . . . . . . . . 95
7.5.6 Sulkuvirheen testaus . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 96
7.5.7 Tasoitetun pisteen keskivirhe . . . . . . . . . . . . . . . . . . . . . . . . . . . 97

Sisalto 7
8 Pienimman neliosumman tasoitus 998.1 Teoreettinen tausta . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 99
8.1.1 Pienimman neliosumman ratkaisu . . . . . . . . . . . . . . . . . . . . . . . . 998.1.2 Harhattomuus . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1008.1.3 Ortogonaalisuusominaisuus . . . . . . . . . . . . . . . . . . . . . . . . . . . . 101
8.2 Vinoetaisyys avaruudessa . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1028.3 Atsimutimittaus . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 103
8.4 Zeniittikulmamittaus . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1048.5 Kaytannon esimerkki . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 105
9 Tasoituslasku ja GPS 1079.1 Havaintogeometria, havainto-yhtalot . . . . . . . . . . . . . . . . . . . . . . . . . . 107
9.2 Tuntemattomien varianssimatriisi ja varianssit . . . . . . . . . . . . . . . . . . . . . 1089.3 Esimerkki: atsimutisymmetrinen geometria . . . . . . . . . . . . . . . . . . . . . . . 1109.4 Erotushavaintojen havaintoyhtalot . . . . . . . . . . . . . . . . . . . . . . . . . . . 1129.5 Vektorimittaukset . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 114
10 Tasoituslaskun variantit ja yhdistelmat 11710.1 Pakkoehtojen kaytto ratkaisun kiinnittamiseksi . . . . . . . . . . . . . . . . . . . . 11710.2 Ehto- ja havaintoyhtaloiden valinen yhteys . . . . . . . . . . . . . . . . . . . . . . . 118
10.2.1 Testaussuureen laskenta . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 120
10.2.2 Ortogonaalisuus . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12010.3 Vaaitus ehtoyhtaloiden esimerkkina . . . . . . . . . . . . . . . . . . . . . . . . . . . 120
11 Tasoituslaskun sovellusesimerkit 12311.1 Vaaitusverkko . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 123
11.2 Tasokolmio . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12511.3 Helmert-muunnosparametrien estimointi . . . . . . . . . . . . . . . . . . . . . . . . 131
12 Monikulmiojonojen verkon yhteistasoitus 13312.1 Solmupisteverkkotasoitus . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 133
12.2 Jonojen sulkuvirheet pseudo-havaintoina . . . . . . . . . . . . . . . . . . . . . . . . 13312.3 Painotusvaihtoehtoja . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13612.4 Verkkotasoituskorjausten takaisinsyotto . . . . . . . . . . . . . . . . . . . . . . . . 137
13 Vapaa asemapiste 139
13.1 Tausta . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13913.2 Laskuesimerkki . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13913.3 Helmert-muunnos kahdesta tunnetusta pisteesta . . . . . . . . . . . . . . . . . . . 14013.4 Helmert-parametrien virheiden kasautuminen . . . . . . . . . . . . . . . . . . . . . 141
14 GPS-mittaus 14514.1 Yleista . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14514.2 Rekognosointi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14514.3 Vektoreiden mittaus . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 145
14.4 Vektoreiden maara . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14614.5 Verkon geometria . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14714.6 Mittausten kesto ja aikataulu . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14714.7 Ratatiedot . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14814.8 Antennit ja pystytys . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 148
15 Geodeettiset mittaukset ja laskennat 15115.1 Runkkoverkkojen hierarkia . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 151
15.1.1 Valtakunnalliset runkoverkot . . . . . . . . . . . . . . . . . . . . . . . . . . . 151
8 Sisalto
15.1.2 Alemman luokan runkoverkot . . . . . . . . . . . . . . . . . . . . . . . . . . . 15115.1.3 Tarkkuusluokitus . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 152
15.2 Mittauspisteiden lopullinen tarkkuus . . . . . . . . . . . . . . . . . . . . . . . . . . 15215.2.1 Suhteellinen (sisainen) ja absoluuttinen (ulkoinen) virhe . . . . . . . . . . . . 153
15.3 Perinteisia ja satelliittimittauksia . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15415.3.1 kkj -jarjestelman maaritys . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15415.3.2 Korkeusjarjestelmat ja geoidin rooli . . . . . . . . . . . . . . . . . . . . . . . 15615.3.3 Muunnokset eri jarjestelmien valilla . . . . . . . . . . . . . . . . . . . . . . . 156
16 Maastomittaus kaytannossa 16116.1 Geodesian laboratorion maastomittaukset . . . . . . . . . . . . . . . . . . . . . . . 16116.2 Maastomittauksessa kaytetyt tekniikat . . . . . . . . . . . . . . . . . . . . . . . . . 161
16.2.1 Staattinen GPS-mittaus . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16216.2.2 Digitaalinen tarkkavaaitus . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16216.2.3 Trigonometrinen vaaitus: “tarkka trigo” . . . . . . . . . . . . . . . . . . . . . 16316.2.4 Monikulmiojonomittaus . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 163
16.3 Case: Jyvaskylan maastomittaus . . . . . . . . . . . . . . . . . . . . . . . . . . . . 164
17 Ohjeet ja standardit 16517.1 Yleista . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16517.2 Kaavoitusmittausohjeet . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 166
17.2.1 Mittausluokat . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16617.2.2 Kiintopisteet . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16617.2.3 Koordinaatti- ja korkeusjarjestelmat . . . . . . . . . . . . . . . . . . . . . . . 167
17.3 Kaavan pohjakartta . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16717.4 Maaseudun mittaukset . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 167
17.4.1 Mittausluokat . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16717.5 Epavirallisia ohjeita . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16817.6 Myohempia ohjeita ja suosituksia . . . . . . . . . . . . . . . . . . . . . . . . . . . . 168
17.6.1 Ilmakuvaussuositus . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16917.6.2 Tarkka fotogrammetrinen kartoitus . . . . . . . . . . . . . . . . . . . . . . . 169
17.7 Numeerisen kartoituksen maastomittausohjeet . . . . . . . . . . . . . . . . . . . . . 17017.7.1 Runkomittaukset . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 170
17.8 Numeeristen kartoitustehtavien hankintamenettely . . . . . . . . . . . . . . . . . . 17117.9 Rakennusstandardit . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17217.10 Kansainvaliset standardit . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 172
18 Kalibrointi 17518.1 Teodoliitin akselivirheet . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17518.2 Vaakakehan kalibrointi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17518.3 Pystykehan kalibrointi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17618.4 Elektroninen etaisyydenmittaus . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17618.5 Vaisala-kalibrointi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17718.6 Vaaituslattojen kalibrointi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17718.7 Jarjestelmakalibrointi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17818.8 Metrologia kansainvalisesti ja Suomessa . . . . . . . . . . . . . . . . . . . . . . . . 178
9
Luku 1
Linearisointi ja virheiden kasautuminen
1.1 Linearisointi
Geodesiassa, kuten monessa muussakin tieteissa, on olemassa monet tilanteet, joissa kahdensuuren valinen yhteys on epalineaarinen. Esimerkkeina voidaan mainita havaintosuureidenja tuntemattomien valinen yhteys, tai kahden eri koordinaattijarjestelman koordinaattienvalinen yhteys.
Kuitenkin monet teoriat, kuten esim. pienimman neliosumman (PNS) menetelma, perustuvatlineaarisiin kaavoihin, jotka ovat ykisinkertaisempia kasitella. Myos virheiden (varianssien)kasautumislaki patee vain lineaarisille riippuvuussuhteille suureiden valilla.
Kaytannossa kuitenkin yhteys, esim. pistekoordinaatin ja pisteeseen mitatun suunnan valil-la, on melkein lineaarinen molempien epavarmuusvalin sisalla. Onhan mittaustarkkuudetgeodesiassa varsin suuria, ja pisteen sijainnin epavarmuus voi olla senttimetrin luokkaa, mis-sa pisteiden valinen etaisyys on monta metreja. Sellaisissa tapauksissa voidaan tutkia yhteys,alkuperaisten suureiden sijasta, pienten erotussuureiden valilla, joka on lahestulkoon lineaari-nen. Taman nayttamiseksi kaytetaan Taylor-sarjakehitelma.
1.1.1 Skalaaritapaus
Yleensa jos on kaksi suurta, jonka valinen on funktionaalinen yhteys:
y = f (x) ,
voidaan linearisoida valitsemalla likiarvo x0 ja kehittamalla funktio sarjakehitelmaan
(Taylor-sarjaan) likiarvon lahistolla. Saadaan:
y = f (x0) +df
dx
∣∣∣∣x=x0
(x− x0) + . . .
eliy − y0 ≈ a (x− x0) , (1.1)
jossa y0 ≡ f (x0) ja a =df
dx
∣∣∣∣x=x0
. Tata voidaan kirjoittaa muotoon
∆y = a∆x
mita usein lyhennetaan seuraavan muotoon
y = ax,
kun vain muistetaan etta x, y ovat “linearisoidut (siis: x0, y0 suhteen lasketut erotus-)arvot”.

10 Luku 1. Linearisointi ja virheiden kasautuminen
y
x
x0
y0
y = f(x)
y = y0 + a (x− x0)vali
Linearisointi-
Kuva 1.1: Yksiulotteinen kuvaus ja linearisointi
1.1.2 Vektoritapaus
Jos on kaksi vektorisuurta, x =[x1 x2 · · · xn
]T ∈ Rn ja y =[y1 y2 · · · ym
]T ∈Rm, jonka valilla on funktionaalinen yhteys
y = F (x) = F (x1, x2, . . . , xn) ,
eli
y1
y2
...ym
=
F1 (x)
F2 (x)...
Fm (x)
=
F1 (x1, x2, . . . , xn)
F2 (x1, x2, . . . , xn)...
Fm (x1, x2, . . . , xn)
,
tilanne mutkistuu. Tassakin tapauksessa voidaan valita likiarvovektori x0 =[x
(0)1 x
(0)2 · · · x(0)
n
]T, ja vastaava likiarvovektori y0 ≡ F (x0) , jonka jalkeen taas
y = y0 +∂F (x1, x2, . . . , xn)
∂x1
∣∣∣∣x=x0
(x1 − x
(0)1
)+∂F (x1, x2, . . . , xn)
∂x2
∣∣∣∣x=x0
(x2 − x
(0)2
)+ · · ·
· · · + ∂F (x1, x2, . . . , xn)
∂xn
∣∣∣∣x=x0
(xn − x(0)
n
),
eli
yi = y(0)i +
∂Fi (x1, x2, . . . , xn)
∂x1
∣∣∣∣x=x0
(x1 − x
(0)1
)+∂Fi (x1, x2, . . . , xn)
∂x1
∣∣∣∣x=x0
(x2 − x
(0)2
)+ · · ·
· · ·+ ∂Fi (x1, x2, . . . , xn)
∂xn
∣∣∣∣x=x0
(xn − x(0)
n
)+ . . . , i = 1, . . . , m.
Tassa kaavassa on m eri rivia, ja jokaisella rivilla on n eri (lineaarista) termia. Tamayhtaloryhman yhteenvedoksi kirjoitetaan seuraava matriisiyhtalo:
y = y0 + A (x − x0) + . . . ,

1.1. Linearisointi 11
x1
y2x2
y1
F : R2 → R2
Kuva 1.2: Kaksiulotteinen kuvaus
jossa matriisi A on
A =
∂F1
∂x1
∂F1
∂x2· · · ∂F1
∂xn
∂F2
∂x1
∂F2
∂x2
· · · ∂F2
∂xn...
.... . .
...∂Fm
∂x1
∂Fm
∂x2
· · · ∂Fm
∂xn
.
Tama matriisi on kahden abstraktisen vektoriavaruuden Rn ja Rm valisen vektorikuvauksenF : Rn → Rm ns. Jakobin1 matriisi. Matriisi kuvaa paikallisesti, siis pisteen x = x0
lahistolla, milla tavalla pienet “hairiot” x-vektorissa kulkevat y-vektoriin:
∆y ≡ y − y0 ≈ A (x − x0) = A∆x,
jos maaritetaan ∆x = x − x0 ja ∆y = y − y0. Siis erotussuureiden ∆x,∆y valilla kuvaus onpaikallisesti lineaarinen. Tama on ns. linearisointi.
Yleisessa tapauksessa m 6= n. Erikoisessa tapauksessa, etta m = n, voidaan ajatella, ettakuvauksella F olisi kaanteiskuvaus G = F−1, jolla
x = G (y) .
Paikallisesti, likipisteen x0 ymparistossa, voidaan tasta sanoa: Jos matriisi A on singulaari-
nen, ts. sen determinantti det (A) = 0, merkitsee tama, etta kuvauksella F ei ole olemassapaikallisesti (siis pisteessa x0, ja mahdollisesti ei myoskaan sen sopivan pienella lahialueel-la) kaanteista kuvausta. Tama merkitsee taas, etta voi olla useita (itse asiassa aarettomanuseita) eri arvoa x joilla on kaikki sama kuva y = F (x). Toisaalta jos detA 6= 0, sellainenkaanteiskuvaus on (sopivan pienikokoisella likipisteen x0 lahistolla) olemassa.
Tulkinta
detA kuvaa, miten tilavuudet kuvautuvat F -kuvauksen alla: esim. jos n = m = 2, se kuvaa,miten pikkunelion pinta-ala Rn-avaruudessa kuvautuu parallellogrammin pinta-alaan Rm-avaruuteen, eli niiden kahden pinta-alan suhde. Jos n = m = 3, se kuvaa vastaavasti suhde
1Carl Gustav Jacob Jacobi, 1804-51, juutalaissaksalainen matemaatikko, Konigsbergin yliopisto 1827-42.

12 Luku 1. Linearisointi ja virheiden kasautuminen
Rn-avaruuden kuution ja sen Rm-avaruuden parallellepipeedin tilavuuksien valilla. Jos suhdeon nolla, niin ilmeisesti nelio “litistyy” viivapatkaksi ja kuutio taso-parallellogrammiksi, jakuvaus on ilmeisen singulaarinen.
1.1.3 Havaintoyhtaloiden linearisointi
Kasitellaan esimerkkina funktionaalinen yhteys tuntemattomien x ja havaintosuureidenℓ valilla, joka on todellisessa havaintogeometriassa harvoin lineaarinen. Joudutaan lin-
earisoimaan: olkoon ei-lineaariset havaintoyhtalot
ℓ+ v = F (x) , (1.2)
missa F (·) on moniulotteinen, yleensa ei-lineaarinen “havaintofunktio”.
Mallit linearisoidaan kehittamalla ne taas Taylor-sarjaan karkeasti arvioitujen ratkaisukoor-dinaattien (“likiarvojen”) ymparilla, ja kayttamalla sarjasta vain ensimmaisen asteen termit.Mikali kaytetyt likikoordinaatit eivat ole riittavan hyvia, joudutaan laskemaan ratkaisu it-
eratiivisesti.
Valitaan likiarvot x0 ja yhteensopivasti ℓ0 joille siis patee:
ℓ0 = F (x0) (1.3)
eli (huomaa, etta tuntemattomien maara on m ja havaintosuureiden maara n):
ℓ(0)i = Fi
(x
(0)1 , x
(0)2 , . . . x
(0)m−1, x
(0)m
), i = 1 . . . n.
Tama vahennetaan kaavasta (1.2) ja tehdaan sarjakehitelma:
(ℓi − ℓ
(0)i
)+ vi = Fi (x1, x2, . . . xm) − Fi
(x
(0)1 , x
(0)2 , . . . x(0)
m
)≈
m∑
j=1
∂Fi
∂xj
∣∣∣∣xj=x
(0)j
(xj − x
(0)j
).
Kutsutaan
Aij =∂Fi
∂xj
∣∣∣∣xj=x
(0)j
, i = 1 . . . n, j = 1 . . .m, (1.4)
ns. second order design matrixin2 alkiot. Itse matriisi on silloin
A =
∂F1
∂x1
∂F2
∂x2
· · · ∂F2
∂xm
∂F2
∂x1
∂F2
∂x2· · · ∂F2
∂xm...
.... . .
...∂Fn
∂x1
∂Fn
∂x2· · · ∂Fn
∂xm
∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣x1=x
(0)1 ,x2=x
(0)2 ,...xm=x
(0)m
2Suom. (toisen kertaluvun) rakennematriisi.

1.2. Varianssien kasautumislaki 13
Tassa n on havaintojen, m tuntemattomien maara. Jos kutsutaan
(ℓ− F (x0)) ≡ ∆ℓ
(x − x0) ≡ ∆x
(“korvaavat” eli “linearisoidut” havaintosuureet ja tuntemattomat), saadaan linearisoiduiksihavainto-yhtaloiksi:
∆ℓ + v = A∆x. (1.5)
Tasta laskettava pienimman neliosumman ratkaisu minimoi residuaalien neliollinen summavTQ−1
ℓℓ v, mista syysta sita kutsutaan pienimman neliosumman menetelmaksi. Matriisi Qℓℓ,lyhyesti Q, on havaintojen tarkkuutta ja mahdollista keskinaista tilastollista riippuvuutta(korrelaatiota) kuvaava havaintovektorin varianssimatriisi, ks. luku 1.2.
Kaavassa (1.5) jatetaan usein myos ∆ pois yksinkertaisuuden vuoksi. ∆-suureet ovat tyyp-illisesti paljon pienempia kuin “kokonaiset” suureet. Siksi numeriikka onnistuu hyvin vaikkaA-matriisin elementit eivat olisi eksakteja.
Kuitenkin kaava (1.3) on aina laskettava eksaktisti.
1.2 Varianssien kasautumislaki
Jos stokastinen suure y on stokastisen suureen x lineaarinen funktio, ts.
y = Lx,
voidaan kirjoittaa myosσy = Lσx,
missa σx, σy ovat suureiden x ja y keskivirheet. Samalla voidaan kirjoittaa
Ey
= E Lx = LE x
(“odotusarvojen kasautumislaki”), missa E · on odotusarvo-operaattori, lineaarinen oper-aattori.
Jos maaritetaan varianssi seuraavasti:
Var x = σ2x ≡ E
(x− E x)2 ,
seuraa, ettaσ2
y = L2σ2x.
Tama on varianssien kasautumislaki yksinkertaiselle stokastiselle suureelle.
Mikali stokastisella suureella x =[x1 x2 · · · xn
]Tja y =
[y1 y2 · · · ym
]Ton useita
komponentteja (abstrakti “vektorisuure”), patee
y = Lx, (1.6)
Ey
= LE xja
Var(y)
= LVar (x)LT , (1.7)

14 Luku 1. Linearisointi ja virheiden kasautuminen
missa nyt L ja varianssit ovat matriiseja.
L =
L11 L12 · · · L1n
L21 · · · · · · ...... · · · · · · ...
Lm1 · · · · · · Lmn
,
m× n-kokoinen matriisi;
Var(x) =
σ2x1
σx1x2 · · · σx1xn
σx2x1 σ2x2
. . ....
.... . .
. . ....
σxnx1 · · · · · · σ2xn
,
n× n-kokoinen, nelionmuotoinen matriisi; ja
Var(y)
=
σ2y1
σy1y2 · · · σy1ym
σy2y1 σ2y2
. . ....
.... . .
. . ....
σymy1 · · · · · · σ2ym
,
m×m-kokoinen neliomatriisi. Tassa varianssit:
σ2xi
= Var (xi) = E(xi − E xi)2 ,
ja kovarianssit :
σxixj= Cov
(xi, xj
)= E
(xi − E xi)
(xj − E
xj
),
ja samoin y:n komponenteille.
Kaava (1.7) kutsutaan yleiseksi varianssien kasautumislaiksi. Kaavan (1.6) ilmaisema lin-
eaarisuusominaisuus saadaan tarvittaessa aikaan linearisoimalla, josta puhuttiin aikaisem-min.
1.3 Geodeettinen paatehtava
Varianssien kasautumislain sovelluksena tarkastetaan geodeettinen paatehtava, missasuunta- ja etaisyysmittauksen tunnetut epatarkkuudet kulkevat eli kasautuvat tuntemat-toman pisteen koordinaattien epatarkkuuksiksi.
Geodeettinen paatehtava: annettuna mittaussuureet s, A seka lahtopisteen P koordinaatitxP , yP , maarita tuntemattoman pisteen koordinaatit
x = xP + s · cosA,
y = yP + s · sinA.

1.3. Geodeettinen paatehtava 15
Ongelma ratkaistaan seuraavalla tavalla. Otetaan likiarvot s0, s = s0 + ∆s ja A0, A =A0 + ∆A ja kirjoitetaan Taylor-sarjakehitelma:
x = xP +s0 cosA0+∆s cosA0+s0∂ cosA
∂A∆A =
x0
︷ ︸︸ ︷xP + s0 cosA0
+
∆x︷ ︸︸ ︷[
cosA0 −s0 sinA0
] [ ∆s∆A
]
ja samalla tavalla
y = y0 +
∆y︷ ︸︸ ︷[
sinA0 s0 cosA0
] [ ∆s∆A
] .
Nyt meilla on (jattamalla, mutta muistamalla, 0-indeksit):
y ≡[
∆x∆y
], x ≡
[∆s∆A
], ja L =
[cosA −s sinAsinA s cosA
]; seka Var (x) =
[σ2
s 0
0 σ2A
]
ja ylla olevat kaavat voidaan nyt kirjoittaa:
y = Lx.
Varianssimatriisin
Var(y)
=
[σ2
x σxy
σxy σ2y
]= LVar (x)LT =
=
[cosA −s sinAsinA s cosA
][σ2
s 0
0 σ2A
] [cosA sinA
−s sinA s cosA
]=
=
[σ2
s cos2A+ σ2As
2 sin2A cosA sinA(σ2
s − s2σ2A
)
cosA sinA(σ2
s − s2σ2A
)σ2
s sin2 A+ σ2As
2 cos2A
],
jossa alkiot laskettiin varianssien kasautumislain (1.7) avulla3.
Sijoittamalla viela
cosA =x− xP
s, sinA =
y − yP
ssaadaan vaihtoehtoinen muoto:
σ2x = Var (∆x) =
(x− xP
s
)2
σ2s + (y − yP )2 σ2
A,
σ2y = Var (∆y) =
(y − yP
s
)2
σ2s + (x− xP )2 σ2
A,
σxy = Cov (∆x,∆y) =
[(σs
s
)2
− σ2A
](x− xP ) (y − yP ) , (1.8)
3Jos ilmaistaan suunnan A varianssi gooneissa, voidaan sijoittaa kaikkiin alla oleviiin kaavoihin
σ2
A =
(σA [g]
ρ
)2
,
jossa ρ on radiaanin suuruus kaytetyssa asteyksikossa, tassa tapauksessa ρ =63.661977236758. Samoinkun kaytetaan kaarisekunteja: silloin
σ2
A =
(σA [′′]
ρ
)2
,
jossa nyt ρ = 57.295779513× 60 × 60 = 206264.806247.

16 Luku 1. Linearisointi ja virheiden kasautuminen
s
P
Q
sσA
σs
σx
σy
N
A
Kuva 1.3: Virhe-ellipsin geometria
jossa x− xP = s cosA, y − yP = s sinA.
Nain havaintotyon keskivirheet σs, σA muunnetaan koordinaattikeskivirheiksi σx, σy. Kutennakyy, vaikuttavat tarkkuuteen vaikuttavat seka havaintojen tarkkuus σs, σA etta geometriaA, s.
Virhe-ellipsi on tilastomatemaattinen varmuusalue kaksiulotteisen pisteen ratkaisulle. Tatakaytetaan eri testeissa.
Pisteen tarkkuuden mitaksi on olemassa sopivampi suure joka ei riipu koordinaattiakseleidensuunnasta. Sellainen mitta saadaan seuraavasti: virhe-ellipsi on oikeastaan varianssimatriisin
kuvaaja: jos pisteen P koordinaattien, tai kahden pisteiden P,Q, koordinaattierojen, x, yvarianssimatriisi kirjoitetaan
V = Var
[xy
]=
[Var (x) Cov (x, y)
Cov (x, y) Var (y)
].
Taman matriisin invariantit ovat sen ominaisarvoja ja -vektoreita: Kaavan (V − λI)x = 0ratkaisuja (λi,xi). Jos kaannetaan koordinaatiston akselit nain, etta ne ovat samansuuntaisiaellipsin paaakseleiden kanssa, saadaan
V =
[s2σ2
A 0
0 σ2s
]
ja on selva, etta λ1 = s2σ2A ja λ2 = σ2
s . Yleisemmin ratkaistaan determinanttiyhtalo∥∥∥∥V11 − λ V12
V21 V22 − λ
∥∥∥∥ = 0 ,
mista ns. karakteristinen polynomi : (V11 − λ) (V22 − λ) − V 212 = 0, siis λ2 − (V11 + V22)λ +(
V11V22 − V 212
)= 0, mista4
λ1 + λ2 = V11 + V22 = Var (x) + Var (y) = σ2x + σ2
y (1.9)
4Ominaisarvot ovat
λ1,2 =1
2
[V11 + V22 ±
√(V11 + V22)
2 − 4 (V11V22 − V 2
12)
]=
=1
2
[V11 + V22 ±
√(V11 − V22)
2+ 4V 2
12
]=
=1
2(V11 + V22) ±
√[1
2(V11 − V22)
]2+ V 2
12,

1.4. Datumit 17
jaλ1λ2 = V11V22 − V 2
12 = det (V ) = σ2xσ
2y − σ2
xy (1.10)
(missa σ2xy lasketaan kaavan (1.8) mukaan). Suureet (1.9, 1.10) ovat invariantit (siis: aina
sama, koordinaattiakseleiden orientoinnista riippumatta) ja etenkin suure (1.9), jota kutsu-taan pisteen P pistevarianssiksi σ2
P , on sopiva pistetarkkuuden mitta:
σ2P = σ2
x + σ2y .
Pistekeskivirhe σP on taman pistevarianssin neliojuuri.
1.4 Datumit
Datum-kasite voidaan matemaattisesti kasitella tapana kiinnittaa verkkoratkaisussa tiettyjenpisteiden koordinaatit oletettuun likiarvoihinsa. Kiinnitettavien pisteiden valinta on mieli-valtainen, siis datumin maarittely on mielivaltainen. Esim. syy, miksi Suomessa kaytetaanN60-korkeusdatum jonka lahtopiste on Helsingissa, on taysin poliittinen. Lahtopiste olisivoinut olla Turussakin.
1.5 Yksiulotteiset datuminmuunnokset
Yksiulotteinen datuminmuunnos on yksinkertainen translaatio eli arvojen siirto vakiomaa-ralla. Esim. korkeusjarjestelma jossa tietty piste on maaritetty lahtopisteeksi eli datumpis-teeksi, jonka arvo on 0, voidaan muunta toiseksi siirtamalla kaikki arvot nain, etta uudendatumpisteen arvoksi saadaan 0.
ja ellipsin pitka ja lyhyt akselit puolikkaat ovat√
λ1,√
λ2.Myos akseleiden suunnat voidaan maarittaa: tutki koordinaattien lineaariyhdistelma
z (θ) = x sin θ + y cos θ,
joka on suuntakulman θ funktio.Varianssien kasautumislain avulla saadaan
Var (z (θ)) = V11 sin2 θ + V22 cos2 θ + 2 sin θ cos θV12;
ellipsin akselit ovat taman θ-funktion stationaariset arvot,
d
dθVar (z) = 0.
Differentioimalla2 sin θ cos θ (V11 − V22) + 2
(cos2 θ − sin2 θ
)V12 = 0
elisin 2θ (V11 − V22) + 2 cos 2θ · V12 = 0
ja
θ =1
2arctan
(− 2V12
V11 − V22
)+ k · 100 gon =
= arctan
− V12
V12 +
√[1
2(V11 − V22)
]2+ V 2
12
+ k · 100 gon,
kayttamalla arctangentin puolikulmakaava.

18 Luku 1. Linearisointi ja virheiden kasautuminen
Olkoon pistejoukon korkeusarvot tietyssa datumissa Hi, ja tietyssa toisessa datumissa H ′i.
Olkoon lisaksi kaytettavassa joukolle korkeuksien likiarvot H0i . Kuten myohemmin tullaan
nakemaan, onko likiarvojen olemassaolosta hyotya kun formuloidaan lineaariset havaintoy-htalot.
Ensimmaisen datumin lahtopiste olkoon A ja toisen datumin lahtopiste B. Silloin
HA = H0A,
H ′B = H0
B.
Jos maaritetaan
∆Hi ≡ Hi −H0i ,
∆H ′i ≡ H ′
i −H0i ,
seuraa, etta∆HA = ∆H ′
B = 0.
Nyt johdetaan datuminmuunnoskaava! Oletetaan yksinkertaisuuden vuoksi sen olevan muo-toa
H ′ = H + a,
missa a on vakio. Kaavan “delta-muoto” on
∆H ′ = ∆H + a
eli∆H ′
i = ∆Hi + a.
Pisteille A ja B saadaan
∆H ′A = ∆HA + a
∆H ′B = ∆HB + a
ja koska ∆HA = ∆H ′B = 0, saadaan
a = ∆H ′A = −∆HB.
Tasta yleinen muunnoskaava pisteille i:
∆H ′i = ∆Hi − ∆HB,
∆Hi = ∆H ′i − ∆H ′
A,
ts. seka eteenpain (A-datumista B-datumiin) etta taaksepain muunnoskaava.
Matriisikielella: [∆H ′
i
∆H ′A
]=
[1 −10 −1
] [∆Hi
∆HB
]
ja [∆Hi
∆HB
]=
[1 −10 −1
] [∆H ′
i
∆H ′A
].
(nahdaan helposti, etta [1 −10 −1
]·[
1 −10 −1
]=
[1 00 1
],
eli matriisi on oma kaanteismatriisinsa. Tama matriisi kutsutaan S-muunnosmatriisiksi.)
Translaatiovakio on tavoitedatumin lahtopisteen korkeuspoikkeama likiarvosta,
laskettuna lahtodatumissa.

1.6. Kaksiulotteiset datuminmuunnokset 19
1.6 Kaksiulotteiset datuminmuunnokset
Kaksiulotteinen datuminmuunnos on useimmiten yhdenmuotois- eli Helmert5-muunnos,kaavana
[x′
y′
]=
[c −dd c
] [xy
]+
[ab
],
(“neliparametrinen Helmert”) jossa a, b, c, d ovat muunnoksen parametrit: translaatio (siirto)a, b ja rotaatio/skaalaus c, d.
Selkeampi kirjoitustapa:
[x′
y′
]= (1 +m)
[cos t − sin tsin t cos t
] [xy
]+
[ab
],
missa c = (1 +m) cos t ja d = (1 +m) sin t.
Usein m ja t ovat pienia, jolloin voidaan kirjoittaa likimaarin:
[x′
y′
]= (1 +m)
[1 −tt 1
] [xy
]+
[ab
]
eli [x′ − x
y′ − y
]=
[m −tt m
][x0
y0
]+
[ab
], (1.11)
missa x0, y0 ∼ x, y ovat likiarvoja; uudelleen jarjestaminen antaa
[x′ − x
y′ − y
]=
[x0 −y0 1 0
y0 x0 0 1
]
mtab
, (1.12)
Helmert-muunnoksen parametrien havaintoyhtalo.
Kaikkien tuntemattomien maarittaminen edellyttaa tietysti riittava maara “havaintoja” elipistekoordinaattieroja vasemmalla puolella. Kahden pisteen koordinaatit on minimi.
1.7 Kompleksinen esitystapa
Lahdetaan Helmert-kaavasta (1.11) ja kirjoitetaan sen kompleksilukujen avulla6:
z′ − z = µz0 + α,
5Friedrich Robert Helmert, 1843-1917 kuuluisa Saksalainen geodeetti.6Vastaavasti Helmert-muunnoksen parametrien havaintoyhtaloksi (kaava 1.12) saadaan
z′ − z =[
z0 1] [
µ
α
].
Huomaa, etta kompleksilukujen a + bi ja 2× 2 matriisien
[a b
−b a
]valilla on olemassa isomorfismi, eli
ne kayttaytyvat samalla tavalla.

20 Luku 1. Linearisointi ja virheiden kasautuminen
missa z′ ≡ x′ + iy′, z ≡ x+ iy, µ ≡ m+ it, z0 ≡ x0 + iy0 jaα ≡ a + ib.
Maarittamalla taas delta-suureet
∆z ≡ z − z0,
∆z′ ≡ z′ − z0,
saadaan∆z′ = α + ∆z + z0µ.
Vaaditaan nyt tavoitedatumin kahden lahtopisteen A,B koordinaattipoikkeamat nollaksi :
∆z′A = ∆z′B = 0.
Eli
α + ∆zA + z0Aµ = 0
α+ ∆zB + z0Bµ = 0
Vahennyslaskun avulla:∆zA − ∆zB +
(z0A − z0
B
)µ = 0
eli :
µ = −∆zA − ∆zB
z0A − z0
B
.
Seuraavaksi ratkaistaan α takaisinsijoituksen avulla:
α = −∆zA + z0A
∆zA − ∆zB
z0A − z0
B
.
Parametrit α, µ ovat nyt ratkaistuina ja voimme kirjoittaa yleinen muunnoskaava pisteille i:
∆z′i = ∆zi − ∆zA + z0A
∆zA − ∆zB
z0A − z0
B
− z0i
∆zA − ∆zB
z0A − z0
B
=
= ∆zi − ∆zA −(z0i − z0
A
) ∆zA − ∆zB
z0A − z0
B
=
= ∆zi −(
z0i − z0
A
z0A − z0
B
− 1
)∆zA +
(z0i − z0
A
z0A − z0
B
)∆zB =
= ∆zi −(
z0i − z0
B
z0A − z0
B
)∆zA −
(z0i − z0
A
z0B − z0
A
)∆zB. (1.13)
Kaava (1.13) kutsutaan S-muunnokseksi .
Se kuvaa “pienta” yhdenmuotoisuus- eli Helmert-muunnosta milla paastaan eraan koordi-naattijarjestelman tietysta “realisaatiosta” (eli lahtopisteiden vallinnasta) toiseen. Kaavassa(1.13) korjaustermit jotka sisaltavat ∆zA, ∆zB ovat pienia, yhta pienia kuin nama delta-suureet itse.
Oletetaan viela, etta lahtokoordinaattijarjestelman lahtopisteet olivat C ja D, eli etta ∆zC =∆zD = 0; silloin voimme kirjoittaa kaava (1.13) seuraavaan matriisimuotoon:
∆z′i∆z′C∆z′D
=
1 −(
z0i − z0
B
z0A − z0
B
)−(
z0i − z0
A
z0B − z0
A
)
0 −(
z0C − z0
B
z0A − z0
B
)−(
z0C − z0
A
z0B − z0
A
)
0 −(
z0D − z0
B
z0A − z0
B
)−(
z0D − z0
A
z0B − z0
A
)
∆zi
∆zA
∆zB
1.8. Kolmiulotteinen datuminmuunnos (1) 21
z0i
∆zA
∆z′i
∆zi
∆z′C
C
D
B
A
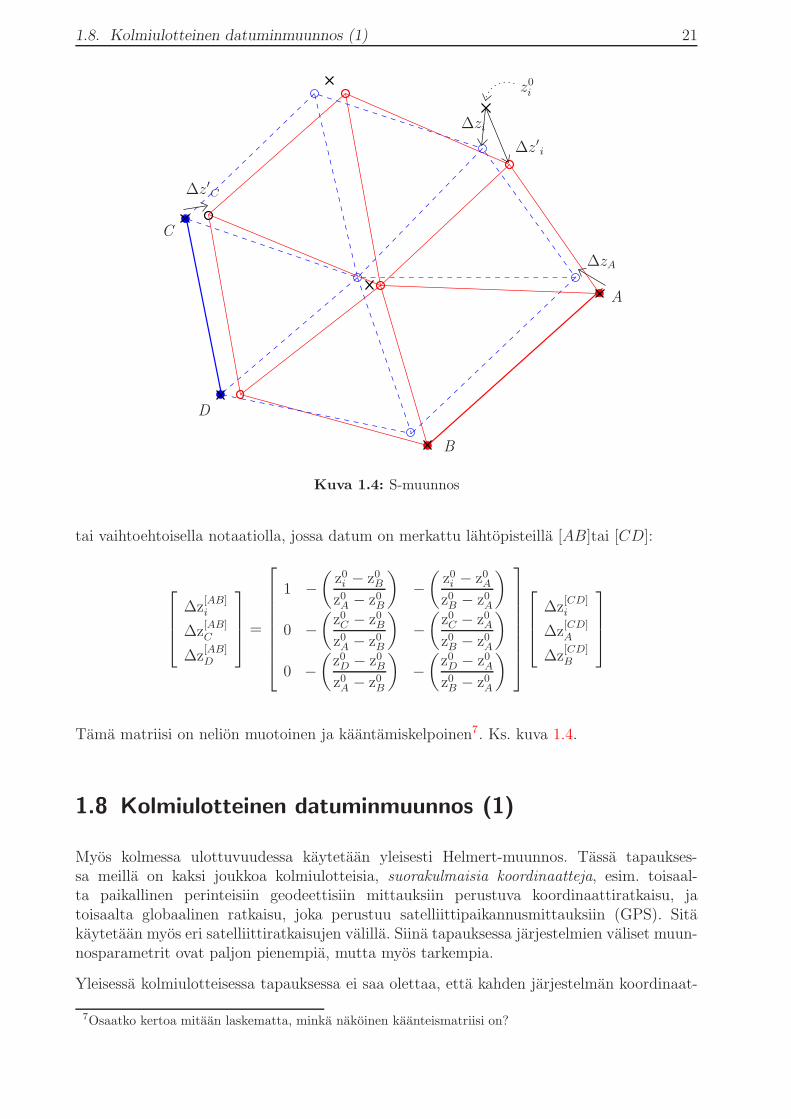
Kuva 1.4: S-muunnos
tai vaihtoehtoisella notaatiolla, jossa datum on merkattu lahtopisteilla [AB]tai [CD]:
∆z[AB]i
∆z[AB]C
∆z[AB]D
=
1 −(
z0i − z0
B
z0A − z0
B
)−(
z0i − z0
A
z0B − z0
A
)
0 −(
z0C − z0
B
z0A − z0
B
)−(
z0C − z0
A
z0B − z0
A
)
0 −(
z0D − z0
B
z0A − z0
B
)−(
z0D − z0
A
z0B − z0
A
)
∆z[CD]i
∆z[CD]A
∆z[CD]B
Tama matriisi on nelion muotoinen ja kaantamiskelpoinen7. Ks. kuva 1.4.
1.8 Kolmiulotteinen datuminmuunnos (1)
Myos kolmessa ulottuvuudessa kaytetaan yleisesti Helmert-muunnos. Tassa tapaukses-sa meilla on kaksi joukkoa kolmiulotteisia, suorakulmaisia koordinaatteja, esim. toisaal-ta paikallinen perinteisiin geodeettisiin mittauksiin perustuva koordinaattiratkaisu, jatoisaalta globaalinen ratkaisu, joka perustuu satelliittipaikannusmittauksiin (GPS). Sitakaytetaan myos eri satelliittiratkaisujen valilla. Siina tapauksessa jarjestelmien valiset muun-nosparametrit ovat paljon pienempia, mutta myos tarkempia.
Yleisessa kolmiulotteisessa tapauksessa ei saa olettaa, etta kahden jarjestelman koordinaat-
7Osaatko kertoa mitaan laskematta, minka nakoinen kaanteismatriisi on?

22 Luku 1. Linearisointi ja virheiden kasautuminen
tiakselit ovat samansuuntaisia. Parametrien maara on silloin seitseman:X ′
Y ′
Z ′
= (1 +m)
1 ez −ey
−ez 1 ex
ey −ex 1
XYZ
+
txtytz
. (1.14)
Tassa muunnosparametrit ovat m, ex, ey, ez, tx, ty, tz8. Tassa m on mittakaavapoikkeama
(K = 1 + m on muunnoksen mittakaava),[tx ty tz
]Ton origon siirtyma- eli translaa-
tiovektori, ja ex, ey, ez ovat kiertokulmat, joita oletetaan olevan pienia9. Usein m:n yksikkonakaytetaan ppm (parts per million) ja ex, ey, ez ilmaistaan kaarisekunteina. Kaikissa lasku-toimituksissa on kuitenkin kaytettava radiaaneja.
Kaavaa voidaan kirjoittaa symbolisesti
X′ = (1 +m)RX + t, (1.15)
jossa X′ =[X ′ Y ′ Z ′
]T, X =
[X Y Z
]T, t =
[tx ty tz
]Tja rotaatiomatriisi on
R =
1 ez −ey
−ez 1 ex
ey −ex 1
.
Joskus m jatetaan pois; erityisesti satelliittimittauksessa jotka perustuvat konventionaaliseenvalon nopeuteen,
c = 299 792 458 ms−1;
koska myos satelliittimittaukset tapahtuvat ilmakehan lapi, ei voi kuitenkaan aina olettaa,etta alueelliset mittaukset ja naihin perustuvat verkkoratkaisut olisivat aina mittakaavoiltaanoikeita.
Valitettavasti kolmessa ulottuvuudessa ei ole olemassa kompleksilukujen vastine. On yritettykayttaa Hamiltonin keksimat kvaterniot10, mutta tulokset eivat olleet yhta tyydyttavia kuintasokoordinaateissa kompleksiluvukuja kayttaessa.
1.9 Kolmulotteinen datummuunnos (2)
Ylla kuvattua datummuunnosta (1.14) kutsutaan usein Bursa-Wolf esitystavaksi. Tassamuunnoskaavassa rotaatio R (ja skaalaus 1+m) tapahtuu Maan massakeskipisteen suhteen,jonka jalkeen suoritetaan translaatio t.
8Kiertokulmien ex, ey, ez oikeaan suuntaan on kiinnittava huomiota. Jopa ammattikirjallisuudessa esiintyyvirheita!
9Elleivat ne olisi pienia, sisaltaisi rotaatiomatriisi monimutkaisia trigonometrisia ilmaisuja itse e-kulmiensijasta.
10Kvaterniot ovat lukuja Q = a + ix + jy + kz, joiden laskusaannot ovat:
ij = k, jk = i, ki = j,
ji = −k, kj = −i, ik = −j,
i2 = j2 = k2 = −1.
Ne ovat jollain tavalla samanlaisia kuin kompleksiluvut, muttei niin katevia. Keksija oli Sir William R.Hamilton (1805-1865) Dublinista (http://www.maths.tcd.ie/pub/HistMath/People/Hamilton/).
Ks. myos http://www.gsu.edu/~oprdeb/qtrn/index.html.

1.9. Kolmulotteinen datummuunnos (2) 23
Usein paremmin kayttaytyva muunnoskaava on Molodenskii-Badekas, jossa rotaatio jaskaalaus tapahtuu koko pistekentan painopisteen, X, suhteen. Tassa tapauksessa translaatiokuvaa taman painopisteen siirtymista:
X′ = X + (1 +m)R(X − X
)+ t.
Tassa tapauksessa R jam ovat identtisia Bursa-Wolfin vastaavien kanssa; kuitenkin t 6= t.Voimme johtaa
X′ = (1 +m)RX + X − (1 +m)RX + t,
josta vertailemalla kaavan (1.15) kanssa saa seuraava yhteys kahden translaatiovektorin valil-la:
t = X − (1 +m)RX + t
eli
t = t −
m ez −ey
−ez m ex
ey −ex m
X,
taas olettamalla, etta m, ex, ey, ez ovat pienia11.
Molodenskii-Badekas -esitystavan etuna on, etta pistekentan kohdalla translaatio jarotaatio ovat melkein riippumattomia toisistaan. Tama tulee esille, kun ratkaistaan tun-temattomat parametrit pistekentan annetuista koordinaateista kummassa datumissa: sillointranslaatio- ja rotaatioparametrien valiset korrelaatiot haviavat.
Haittana toisaalta on, etta tama “optimaalisuus” toimii vain pistekentan alueella, se ei oleglobaalisesti voimassa.
11Huomaa, etta jos X = 0, silloin t = t, eli B-W on sama kuin M-B jossa pistekentan painopiste on Maanmassakeskipisteessa, X, Y, Z-jarjestelman origossa.

24 Luku 1. Linearisointi ja virheiden kasautuminen
25
Luku 2
Koordinaattijarjestelmat
2.1 Yleista
Tutkiessa koko maapallon tai sen suuren osan geometria on kayttettava kolmiulotteisia koor-dinaattijarjestelmia. Naista johdetaan sitten maanmittauksen kayton tarpeen mukaan kaksi-ja yksiulotteisia koordinaattijarjestelmia. Korkeuksien referenssipintana kaytetaan geoidia;
kaksiulotteiset koordinaatit lasketaan vertausellipsoidilla kayttamalla projektiomenetelmaa.
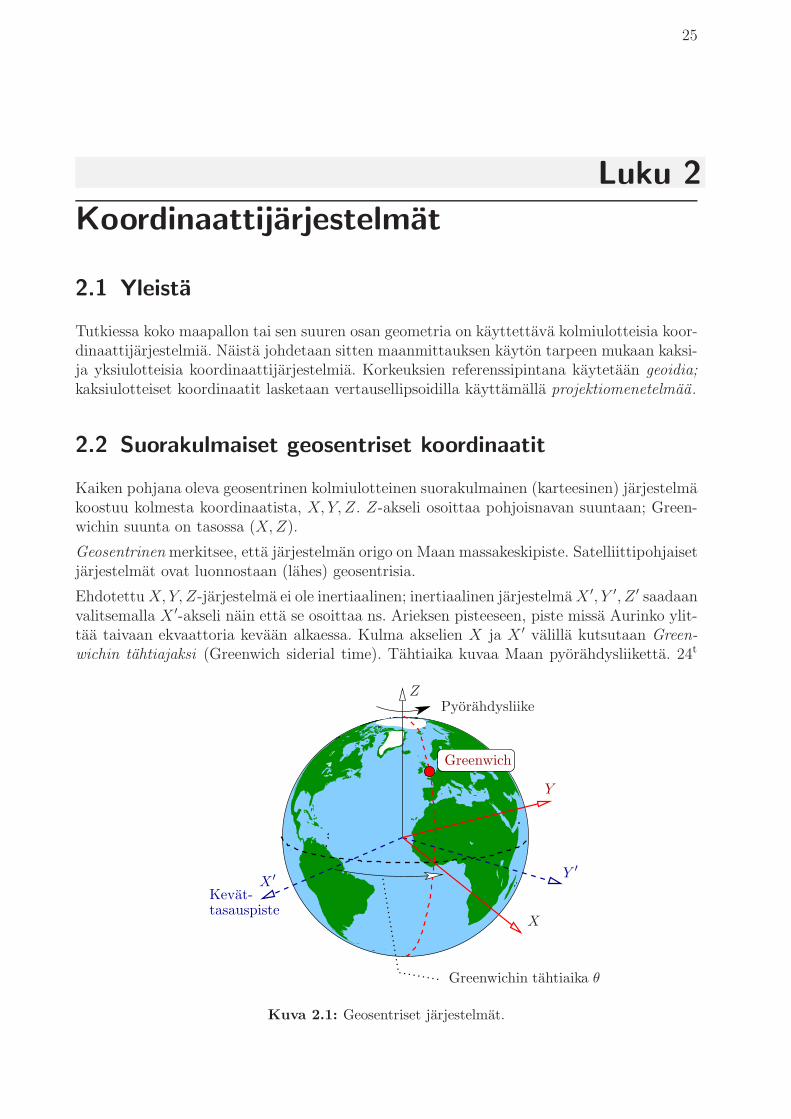
2.2 Suorakulmaiset geosentriset koordinaatit
Kaiken pohjana oleva geosentrinen kolmiulotteinen suorakulmainen (karteesinen) jarjestelmakoostuu kolmesta koordinaatista, X, Y, Z. Z-akseli osoittaa pohjoisnavan suuntaan; Green-wichin suunta on tasossa (X,Z).
Geosentrinen merkitsee, etta jarjestelman origo on Maan massakeskipiste. Satelliittipohjaisetjarjestelmat ovat luonnostaan (lahes) geosentrisia.
EhdotettuX, Y, Z-jarjestelma ei ole inertiaalinen; inertiaalinen jarjestelmaX ′, Y ′, Z ′ saadaanvalitsemalla X ′-akseli nain etta se osoittaa ns. Arieksen pisteeseen, piste missa Aurinko ylit-taa taivaan ekvaattoria kevaan alkaessa. Kulma akselien X ja X ′ valilla kutsutaan Green-
wichin tahtiajaksi (Greenwich siderial time). Tahtiaika kuvaa Maan pyorahdysliiketta. 24t
Y
Kevat-tasauspiste
Y ′
X
PyorahdysliikeZ
X ′
Greenwichin tahtiaika θ
Greenwich
Kuva 2.1: Geosentriset jarjestelmat.
26 Luku 2. Koordinaattijarjestelmat
seisausKesä−Talvi−
seisaus
Auringonnäennäinenpolku
Taivaan pohjoisnapa
Kevättasauspiste ("Aries")
KaamosSuvi
Syksy
Kevät
Taivaan ekvaattori
Ekliptika (eläinrata)
Hic sunt dracones
Maan todellinen rata
Syystasaus
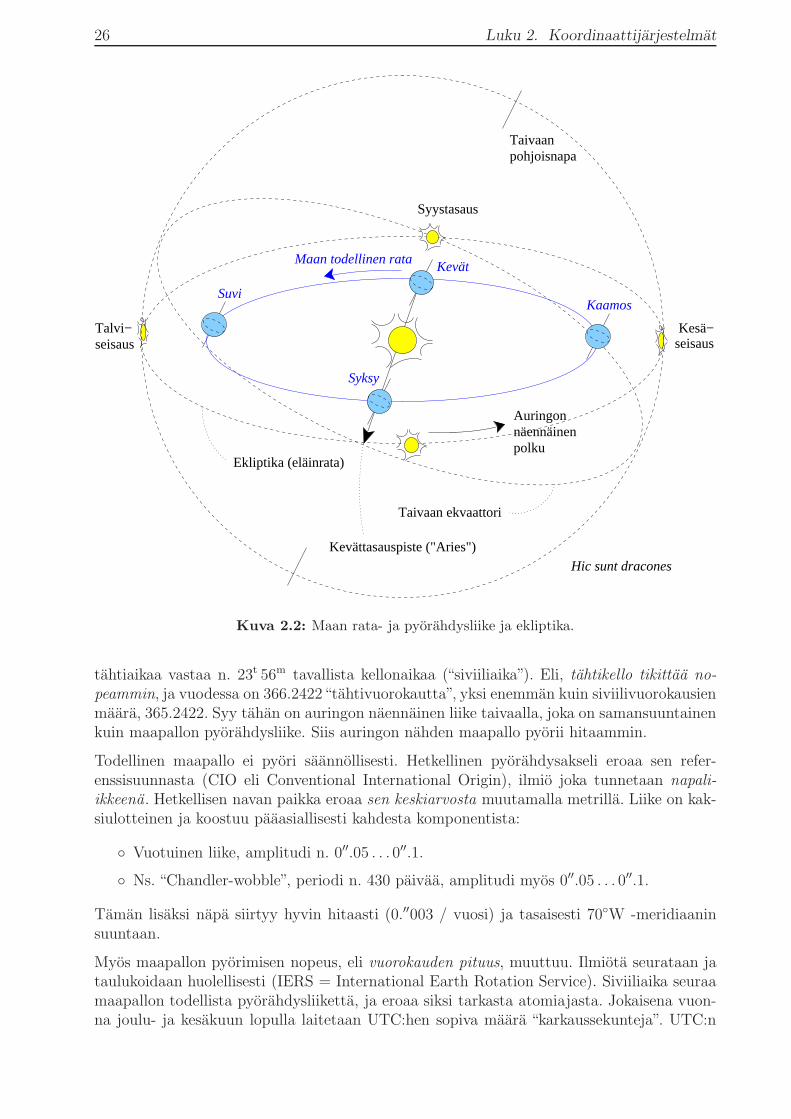
Kuva 2.2: Maan rata- ja pyorahdysliike ja ekliptika.
tahtiaikaa vastaa n. 23t 56m tavallista kellonaikaa (“siviiliaika”). Eli, tahtikello tikittaa no-
peammin, ja vuodessa on 366.2422“tahtivuorokautta”, yksi enemman kuin siviilivuorokausienmaara, 365.2422. Syy tahan on auringon naennainen liike taivaalla, joka on samansuuntainenkuin maapallon pyorahdysliike. Siis auringon nahden maapallo pyorii hitaammin.
Todellinen maapallo ei pyori saannollisesti. Hetkellinen pyorahdysakseli eroaa sen refer-enssisuunnasta (CIO eli Conventional International Origin), ilmio joka tunnetaan napali-
ikkeena. Hetkellisen navan paikka eroaa sen keskiarvosta muutamalla metrilla. Liike on kak-siulotteinen ja koostuu paaasiallisesti kahdesta komponentista:
Vuotuinen liike, amplitudi n. 0′′.05 . . . 0′′.1.
Ns. “Chandler-wobble”, periodi n. 430 paivaa, amplitudi myos 0′′.05 . . . 0′′.1.
Taman lisaksi napa siirtyy hyvin hitaasti (0.′′003 / vuosi) ja tasaisesti 70W -meridiaaninsuuntaan.
Myos maapallon pyorimisen nopeus, eli vuorokauden pituus, muuttuu. Ilmiota seurataan jataulukoidaan huolellisesti (IERS = International Earth Rotation Service). Siviiliaika seuraamaapallon todellista pyorahdysliiketta, ja eroaa siksi tarkasta atomiajasta. Jokaisena vuon-na joulu- ja kesakuun lopulla laitetaan UTC:hen sopiva maara “karkaussekunteja”. UTC:n
2.3. Vertausellipsoidi 27
ero atomiajasta on siis sekuntien kokonaismaara; UTC seuraa sekunnin sisalla Maapallontodellista liiketta.
2.3 Vertausellipsoidi
Pitkaakselin puolikas (ekvatoriaalisade) a,
Lyhytakselin puolikas (napasade) b,
Litistyneisyyssuhde f =a− b
a.
Suomessa on ollut pitkaan kaytossa vertausellipsoidina Kansainvalinen ellipsoidi 1924 (ns.Hayford-ellipsoidi), jonka parametrit ovat
a = 6378388 m
f = 1/297.0
(b = 6356911.946128 m)
WGS84- ja monen muun modernin satelliittijarjestelman pohjana (mm. EUREF89) onGRS80 (Geodetic Reference System 1980) joka antaa seuraavat ellipsoidiparametrit:
a = 6378137 m
f = 1/298.257222101
2.4 WGS84-vertausjarjestelma
Tama vertausjarjestelma on sidottu GPS-konstellaatioon eli tassa jarjestelmassa satelliittienradat (“broadcast ephemeris”) kuvataan. WGS84 on luonut ja yllapitaa Yhdysvaltain sotilas-viranomaiset. GPS’n avulla saadut paikkakoordinaatit ovat siis periaatteessa aina WGS84-koordinaatteja.
WGS84-vertausjarjestelman (suorakulmaisen, kolmiulotteisen) koordinaatiston origo on,kuten aina satellittipohjaisilla systeemeilla, Maan massakeskipisteessa. Z-akseli osoittaaMaan keskimaaraisen pyorahdysakselin (CIO:n) suuntaan, X-akseli Greenwichin meridi-aanin suuntaan. WGS84-jarjestelmaan kuuluu myos painovoimakentan malli. Parametreistamainittakoon dynaaminen litistyneisyys ja kokonaismassa (mukaanlukien ilmakeha):
C2,0 = −484.16685 · 10−6,
GM = 3986005 · 108 m3s−2,
seka oletettu Maan pyorahdysnopeus on ω = 7292115 · 10−11rad s−1. Nama arvot ovat hyvinlahella GRS80:n vastaavia arvoja.
Geodeettisessa tyossa kaytetaan tavallisesti WGS84:aa parempaa vertausjarjestelma, es-im. Euroopan alueella EUREF89. Tama jarjestelma on luotu vastaavanlaisella tavalla kuinWGS84: samat GPS-satelliitit jotka on kaytetty WGS84-jarjestelman luomiseksi on myos
28 Luku 2. Koordinaattijarjestelmat
Luoti−viiva
Geoidi−profiili
Φ,ΛTähtitieteellisetkoordinaatit
xz
y
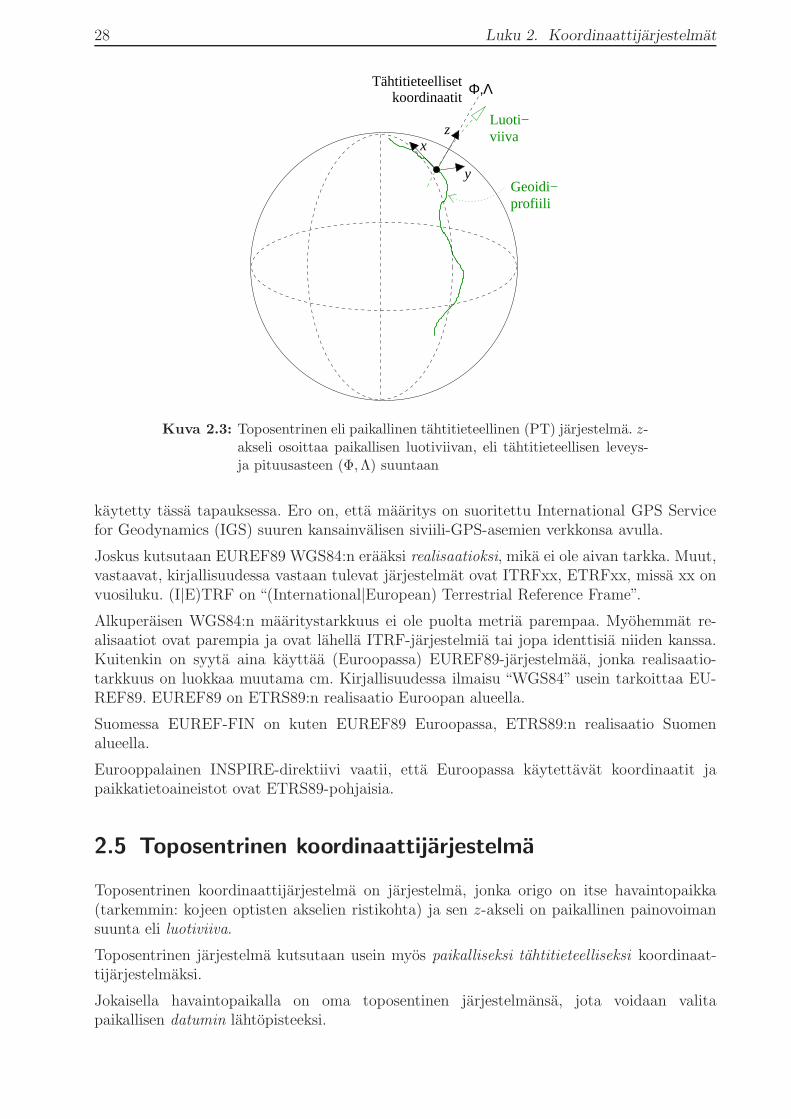
Kuva 2.3: Toposentrinen eli paikallinen tahtitieteellinen (PT) jarjestelma. z-akseli osoittaa paikallisen luotiviivan, eli tahtitieteellisen leveys-ja pituusasteen (Φ,Λ) suuntaan
kaytetty tassa tapauksessa. Ero on, etta maaritys on suoritettu International GPS Servicefor Geodynamics (IGS) suuren kansainvalisen siviili-GPS-asemien verkkonsa avulla.
Joskus kutsutaan EUREF89 WGS84:n eraaksi realisaatioksi, mika ei ole aivan tarkka. Muut,vastaavat, kirjallisuudessa vastaan tulevat jarjestelmat ovat ITRFxx, ETRFxx, missa xx onvuosiluku. (I|E)TRF on “(International|European) Terrestrial Reference Frame”.
Alkuperaisen WGS84:n maaritystarkkuus ei ole puolta metria parempaa. Myohemmat re-alisaatiot ovat parempia ja ovat lahella ITRF-jarjestelmia tai jopa identtisia niiden kanssa.Kuitenkin on syyta aina kayttaa (Euroopassa) EUREF89-jarjestelmaa, jonka realisaatio-tarkkuus on luokkaa muutama cm. Kirjallisuudessa ilmaisu “WGS84” usein tarkoittaa EU-REF89. EUREF89 on ETRS89:n realisaatio Euroopan alueella.
Suomessa EUREF-FIN on kuten EUREF89 Euroopassa, ETRS89:n realisaatio Suomenalueella.
Eurooppalainen INSPIRE-direktiivi vaatii, etta Euroopassa kaytettavat koordinaatit japaikkatietoaineistot ovat ETRS89-pohjaisia.
2.5 Toposentrinen koordinaattijarjestelma
Toposentrinen koordinaattijarjestelma on jarjestelma, jonka origo on itse havaintopaikka(tarkemmin: kojeen optisten akselien ristikohta) ja sen z-akseli on paikallinen painovoimansuunta eli luotiviiva.
Toposentrinen jarjestelma kutsutaan usein myos paikalliseksi tahtitieteelliseksi koordinaat-tijarjestelmaksi.
Jokaisella havaintopaikalla on oma toposentinen jarjestelmansa, jota voidaan valitapaikallisen datumin lahtopisteeksi.

2.5. Toposentrinen koordinaattijarjestelma 29
Maaritellaan maastohavainnot:
atsimuti AP : Toposentrisessa jarjestelmassa mitattu myotapaivainen suunta toiseenpisteeseen P jarjestelman XT -akselista (pohjoisesta).
Pystykulma zP : Paikallisesta vertikaalista ZT eli zeniitista mitattu kulma toiseen pis-teeseen: Zeniittikulma z.
Vaihtoehtoisesti korkeuskulma (elevaatio) η = 100 gon − z.
Etaisyys sP : Origon O ja toisen pisteen P valinen suora avaruusjana.
Pisteen P toposentriset suorakulmaiset koordinaatit, ts. pisteiden O ja P valiset koor-dinaattierot, ovat:
xP
yP
zP
T
=
∆xOP
∆yOP
∆zOP
= sP
cosAP sin zP
sinAP sin zP
cos zP
T
.
Koska luotiviivojen suunnat vaihtelevat paikasta toiseen hieman epasaannollisella tavalla1, ei
ole mahdollista yhdistella liian suuren alueen eri pisteiden toposentriset jarjestelmat yhdeksisuorakulmaiseksi koordinaattijarjestelmaksi,ainakaan yksinkertaisella tavalla.
Pienella alueella, esim. tontin sisalla, se on kuitenkin kayttokelpoinen; toposentrisia koordi-naattijarjestelmia voidaan yhdistaa yksinkertaisella translaatiolla (siirrolla):
x
(2)P
y(2)P
z(2)P
=
∆xO2P
∆yO2P
∆zO2P
=
∆xO1P
∆yO1P
∆zO1P
+
∆xO2O1
∆yO2O1
∆zO2O1
=
∆xO2O1
∆yO2O1
∆zO2O1
+
x
(1)P
y(1)P
z(1)P
.
Tassa O1 ja O2 ovat (1)- ja (2)-jarjestelmien origot maastossa. Vektori[∆xO2O1 ∆yO2O1 ∆zO2O1
]Ton itse asiassa (yksinkertainen) datum-muunnos kah-
den toposentrisen jarjestelman valilla.
Jos alue, eli etaisyys O1O2 on liian suuri, yksinkertainen translaatio ei riita vain tarvitaanmyos rotaatiota, koska (1)- ja (2)- jarjestelmien akselit eivat ole samansuuntaisia. Kuinkasuuri on “liian suuri” riippuu tarkkuusvaatimuksista. Maan kaarevuussade on R = 6000 kmja maan pinnan poikkeama tasopinnasta on δ = d2/2R, jossa d on matka. Saadaan seuraavatarviot yhteydesta sallitun virheen δ ja alueen koon d valilla:
1 cm: d ∼ 350 m
1 mm: d ∼ 110 m
0.1 mm: d ∼ 11 m
Toposentrinen eli PT-jarjestelma ei sovi siis esim. kunnan alueella kaytettavaksi jarjestelmak-si.
1Toisin kuin luotiviiva, vertausellipsoidin normaali muuttuu hyvin saannollisesti paikasta toiseen. Siksimyos tahan normaalin sidottua toposentrista jarjestelmaa (“paikallinen geodeettinen, PG”) ei voida lail-lisesti ulottaa kovin suuriin alueisiin.

30 Luku 2. Koordinaattijarjestelmat
Φ,Λϕ,λ Luotiviivapoikkeama
Ellipsoidin normaali
Luotiviiva
Geodeettinen mittausverkko
Φ,Λ
ϕ,λ
Datum−piste
Tähtitieteelliset koordinaatit
Geodeettiset koordinaatit
Vertausellipsoidi
Geoidi (keskimerenpinta)
Kuva 2.4: Geodeettiset ja tahtitieteelliset koordinaatit
2.6 Geodeettinen datum
Arkielamassa harvoin ajatellaan mita oletuksia on tehtava, etta olisi mahdollista suorit-taa maanmittaus jossain vertausjarjestelmassa. Tuntuu selvalta, etta mittaukset ja lasken-nat kohdistetaan johonkin tasoon, “vaakatasoon”. Tama intuitiivinen ajatus voidaan kutsua“kenkalaatikko-erheeksi”; ajatellaan, etta Maa on jattimaisen suorakulmaisen kenkalaatikonsisalla ja keskimerenpinta sen pohja...
Kuitenkin tama vertaustasoksi valittu vaakataso ei ole yksiselitteinen. Luotiviiva – jonkakohtaan vaakataso on kohtisuora – on paikallinen ilmio ja jo sadan metrin paassa se onerilainen, koska luotiviivat seuraavat Maan kaarevuutta. Taman lisaksi luitiviivojen suuntaaei voida kuvata yksinkertaisen kaavan avulla; se seuraa Maan painovoimakenttaa, joka onMaan sisaisen massajakauman epasaannollisyydesta johtuen itse epasaannollinen.
Mita voidaan tehda, on konstruoida vertausellipsoidi joka on paikallisesti mahdollisimmanhyvin sopiva Maan muotoon, eli ellipsoidinen normaali on mahdollisimman samansuuntainenkuin paikallinen luotiviiva. Toisin sanottuna, etta luotiviivapoikkeamat ovat mahdollisimmanpienia.
Laajassa kaytossa on kaksi tapaa tehda tata.
1. Klassinen geodeettinen datum sisaltaa, vertausellipsoidin muotoparametrien (a, f)lisaksi, myos
lahtopisteen P luotiviivapoikkeamien komponentit ξP , ηP (ks. kuva 2.4) ja
lahtopisteen P geoidikorkeus vertausellipsoidista NP .
Siis yhteensa 5 (viisi) parametria on kiinittettava valittuihin lahtoarvoihin. Silla tavallakiinnitetaan laskennallisen vertausellipsoidin sijainti avaruudessa.
Sellaisen geodeettisen datumin esimerkkina voidaan mainita ED50 (European Datum1950), joka kayttaa Munchenin (Baijeri) Frauenkirche lahtopisteena.
2.6. Geodeettinen datum 31
Pohjois−Ameriikandatum(NAD)
Pohjois−Atlantti(ei mitt.) Eurooppa
Pohjois−Ameriikka
Euroopandatum(ED50, ED87)
+
++
EDNADMassakeskipiste
Geoidi
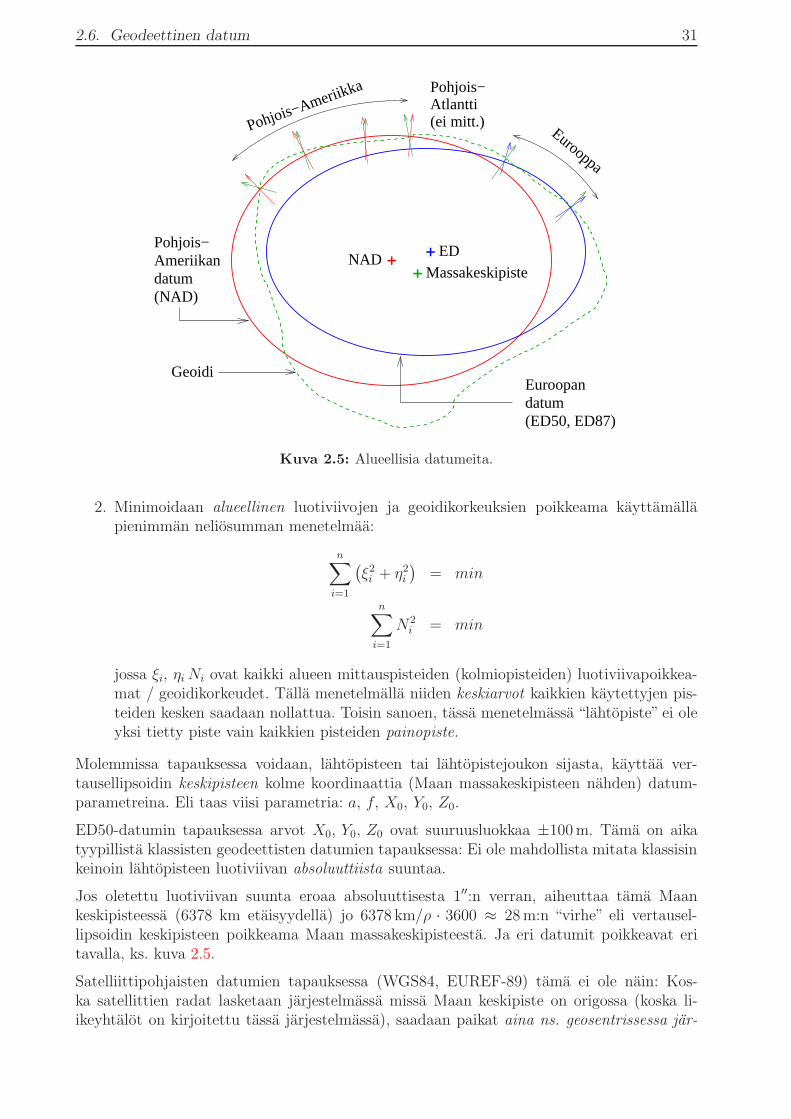
Kuva 2.5: Alueellisia datumeita.
2. Minimoidaan alueellinen luotiviivojen ja geoidikorkeuksien poikkeama kayttamallapienimman neliosumman menetelmaa:
n∑
i=1
(ξ2i + η2
i
)= min
n∑
i=1
N2i = min
jossa ξi, ηiNi ovat kaikki alueen mittauspisteiden (kolmiopisteiden) luotiviivapoikkea-mat / geoidikorkeudet. Talla menetelmalla niiden keskiarvot kaikkien kaytettyjen pis-teiden kesken saadaan nollattua. Toisin sanoen, tassa menetelmassa “lahtopiste” ei oleyksi tietty piste vain kaikkien pisteiden painopiste.
Molemmissa tapauksessa voidaan, lahtopisteen tai lahtopistejoukon sijasta, kayttaa ver-tausellipsoidin keskipisteen kolme koordinaattia (Maan massakeskipisteen nahden) datum-parametreina. Eli taas viisi parametria: a, f, X0, Y0, Z0.
ED50-datumin tapauksessa arvot X0, Y0, Z0 ovat suuruusluokkaa ±100 m. Tama on aikatyypillista klassisten geodeettisten datumien tapauksessa: Ei ole mahdollista mitata klassisinkeinoin lahtopisteen luotiviivan absoluuttiista suuntaa.
Jos oletettu luotiviivan suunta eroaa absoluuttisesta 1′′:n verran, aiheuttaa tama Maankeskipisteessa (6378 km etaisyydella) jo 6378 km/ρ · 3600 ≈ 28 m:n “virhe” eli vertausel-lipsoidin keskipisteen poikkeama Maan massakeskipisteesta. Ja eri datumit poikkeavat eritavalla, ks. kuva 2.5.
Satelliittipohjaisten datumien tapauksessa (WGS84, EUREF-89) tama ei ole nain: Kos-ka satellittien radat lasketaan jarjestelmassa missa Maan keskipiste on origossa (koska li-ikeyhtalot on kirjoitettu tassa jarjestelmassa), saadaan paikat aina ns. geosentrissessa jar-

32 Luku 2. Koordinaattijarjestelmat
jestelmassa. Vain itse mittausten epavarmuudet voivat edelleen aiheuttaa pienia poikkeamiageosentrisyydesta, ±muutama cm.
2.7 Geodeettisten datumien valinen muunnos
Geodeettinen datum maarittaa joko yhden pisteen, tai pistejoukon, ellipsoidisen normaalin
suunta ϕ, λ ja pisteen korkeus h ellipsoidista, tai vertausellipsoidin origon paikka X0, Y0, Z0
maan massakeskipisteeseen nahden.
Suorakulmaiset koordinaatit voidaan kirjoittaa nain, pallo-approksimaatiossa!:
XYZ
= (R + h)
cosϕ cosλcosϕ sinλ
sinϕ
+
X0
Y0
Z0
.
Saman pisteen tarkasti geosentriset koordinaatit (X, Y, Z)T kirjoitettuna eri datumin koor-dinaateiksi (eli eri vertausellipsoidin suhteen) pitaisi olla samat :
X(1)
Y (1)
Z(1)
=
(R + h(1)
)
cosϕ(1) cosλ(1)
cosϕ(1) sinλ(1)
sinϕ(1)
+
X
(1)0
Y(1)0
Z(1)0
ja X(2)
Y (2)
Z(2)
=
(R + h(2)
)
cosϕ(2) cosλ(2)
cosϕ(2) sinλ(2)
sinϕ(2)
+
X
(2)0
Y(2)0
Z(2)0
.
Tassa merkinnat (1) ja (2) tarkoittavat kahden eri datumin suhteen laskettuja geodeettisiakoordinaatteja X, Y, Z tai ϕ, λ, h tai datumien origon paikat geosentrisessa jarjestelmassa.
Maaritetaan erotukset seuraavasti:
∆X∆Y∆Z
=
X(2)
Y (2)
Z(2)
−
X(1)
Y (1)
Z(1)
= 0,
∆X0
∆Y0
∆Z0
=
X
(2)0
Y(2)0
Z(2)0
−
X
(1)0
Y(1)0
Z(1)0
,
∆h ≡ h(2) − h(1),
∆ϕ ≡ ϕ(2) − ϕ(1),
∆λ ≡ λ(2) − λ(1),
niin saadaan vahentamalla (huom. delta-notaatio):

2.7. Geodeettisten datumien valinen muunnos 33
∆X∆Y∆Z
=
(R + h(2)
)
cosϕ(2) cos λ(2)
cosϕ(2) sinλ(2)
sinϕ(2)
−
(R + h(1)
)
cosϕ(1) cos λ(1)
cosϕ(1) sinλ(1)
sinϕ(1)
+
∆X0
∆Y0
∆Z0
=
= ∆
(R + h)
cosϕ cosλcosϕ sinλ
sinϕ
+
∆X0
∆Y0
∆Z0
= 0.
Laskemalla osittaisderivaatat (olettaen, etta kaikki ∆-suureet ovat pienia, niin etta saa lin-
earisoida):
∂
∂h
(R + h)
cosϕ cosλcosϕ sinλ
sinϕ
=
cosϕ cosλcosϕ sinλ
sinϕ
,
ja samoin myos ϕ:n ja λ:n suhteen:
∆X∆Y∆Z
=
[∂
∂h
∂
∂ϕ
∂
∂λ
](R + h)
cosϕ cosλcosϕ sinλ
sinϕ
∆h∆ϕ∆λ
+
∆X0
∆Y0
∆Z0
=
=
cosϕ cosλ − (R + h) sinϕ cosλ − (R + h) cosϕ sinλ
cosϕ sinλ − (R + h) sinϕ sinλ + (R + h) cosϕ cosλ
sinϕ + (R + h) cosϕ 0
∆h∆ϕ∆λ
+
∆X0
∆Y0
∆Z0
= 0.
Olemme tassa asettaneet
∆X∆Y∆Z
≡
X(2)
Y (2)
Z(2)
−
X(1)
Y (1)
Z(1)
= 0,
koska nama ovat, datumista riippumatta, samat, tarkasti geosentriset, suorakulmaiset koor-dinaatit.
Koska h << R:
∆X0
∆Y0
∆Z0
=
− cosϕ cosλ +R sinϕ cosλ +R cosϕ sinλ− cosϕ sinλ +R sinϕ sinλ −R cosϕ cosλ
− sinϕ −R cosϕ 0
∆h∆ϕ∆λ
=
=
− cosϕ cosλ +R sinϕ cosλ +R cosϕ sinλ− cosϕ sinλ +R sinϕ sinλ −R cosϕ cosλ
− sinϕ −R cosϕ 0
∆N−∆ξ
− ∆η
cosϕ
.
Tama kaava antaa yhteys vertausellipsoidin epageosentrisyyden ja sen maarittaman datu-min (pisteessa (ϕ, λ) valilla. Se on samalla myos kaava, milla kahden geodeettisen datu-min valiset erot ∆h,∆ϕ,∆λ lahtopisteessa voidaan muuttaa origon koordinaattisiirtymiksi∆X0,∆Y0,∆Z0. Eli kaava, milla muunnosparametrit voidaan muuntaa toposentrisesta muo-dosta geosentriseen muotoon.

34 Luku 2. Koordinaattijarjestelmat
ϕ ,λ1 1 ϕ ,λ22
.
.
.
Geoidi
Ellipsoidi 1Ellipsoidi 2
Luotiviiva
Datum−muunnos
Φ,Λξ
Ellipsoidin normaali
21ξ1
21N
N2
H
h1
h2
Kuva 2.6: Datum-muunnoksen (vertausellipsoidin siirron) vaikutus geodeet-tisiin leveys- ja pituusasteisiin ϕ, λ, luotiviivapoikkeamiin ξ, η,geoidikorkeuksiin N ja pisteiden ellipsoidikorkeuksiin h.
Olemme esittanyt toposentrinen siirtymavektori myos muotoon
[∆N −∆ξ − ∆η
cosϕ
]T
,
jossa esiintyvat geoidin korkeus N ja luotiviivapoikkeamat ξ, η, kaikki kolme datum-pisteessa.Ks. kuva 2.6. Huomaa, etta2
N = h−H
ξ = Φ − ϕ
η = (Λ − λ) cosϕ
missa
N geoidin korkeus vertausellipsoidista (“geoidikorkeus”),
h pisteen korkeus ellipsoidista (“ellipsoidinen korkeus”),
H pisteen korkeus geoidista (“ortometrinen korkeus”),
ξ, η luotiviivapoikkeamat eli suuntaerotukset tahtitieteellisen vertikaalin (“luotiviivan”) javertausellipsoidin valilla – ξ etela-pohjoissuunnassa ja η lansi-itasuunnassa,
Φ,Λ tahtitieteelliset leveys- ja pituusaste (luotiviivan suunta),
ϕ,λ geodeettiset leveys- ja pituusaste (ellipsoidin normaalin suunta).
Koska suureet H,Φ,Λ ovat fysikaalisia suureita – seka paikallisen luotiviivan suunta tahti-taivaan nahden etta pisteen korkeus geoidista eli “merenpinnasta” eivat riipu valitusta ver-tausellipsoidista – seuraa
∆N = ∆h
∆ξ = −∆ϕ
∆η = −∆λ cosϕ
2Lisakerroin cosϕ η-kaavassa johtuu meridiaanikonvergenssista. Korkeimmilla leveysasteilla tietty pitu-usasteen muutos ∆λ vastaa yha pienempaan matkaan maan pinnalla, ja nain yha pienempaan vertikaalinsuunnan muutokseen.
2.8. Suorakulmainen kayraviivainen koordinaattijarjestelma 35
josta vaihtoehtoinen muoto seuraa.
Ylla olevan kaavan kaanteiskaava on (MathematicaTM!):
∆N−∆ξ
− ∆η
cosϕ
=
∆h∆ϕ∆λ
=
1
R
−R cosϕ cosλ −R cosϕ sinλ −R sinϕ+ sinϕ cosλ + sinϕ sinλ − cosϕ
+sinλ
cosϕ−cos λ
cosϕ0
∆X0
∆Y0
∆Z0
.
Nama kaavat yksinkertaistuvat jonkin verran, jos kirjoitetaan toposentrinen siirtyma muo-
toon[
∆N −R∆ξ −R∆η]T
, koska silloin matriisit ovat puhtaita rotaatiomatriiseja:
∆NR∆ξR∆η
=
∆hR∆ϕ
R cosϕ∆λ
=
− cosϕ cosλ − cosϕ sinλ − sinϕ− sinϕ cosλ − sinϕ sinλ + cosϕ
− sinλ + cosλ 0
∆X0
∆Y0
∆Z0
.
2.8 Suorakulmainen kayraviivainen koordinaattijarjestelma
2.8.1 Geodeettiset (“ellipsoidiset”) koordinaatit:
ϕ tai B geodeettinen leveys
λ tai L geodeettinen pituus
h korkeus vertausellipsoidista (“ellipsoidinen korkeus”)
Geodeettiset koordinaatit saadaan aina geodeettisen verkon tasoituksen laskutuloksena.Verkko voi olla perinteinen kolmioverkko – jonka tapauksessa se on tavallisesti valtakun-nallinen tai korkeintaan mannerlaajuinen – tai GPS-verkko, joka voi olla globaalinenkin.
2.8.2 Tahtitieteelliset koordinaatit3:
Φ tahtitieteellinen leveys
Λ tahtitieteellinen pituus
H tai H∗ ortometrinen tai normaali korkeus (geoidista tai kvasigeoidista)
Tahtitieteelliset koordinaatit saadaan tahtitieteellisen paikanmaarityksen (Φ,Λ) tai vaaituk-sen (H,H∗ tuloksena. Se kuvaa kyseisen paikan painovoimakentan paikallisia ominaisuuksia:luotiviivan suunta tahtitaivaan nahden, tai paikan painovoimapotentiaaliero keskimerenpin-nan potentiaalin kanssa.
2.9 Karttaprojektiot
Suomessa kaytetaan valtakunnallisen kkj -jarjesteman projektiona Gauß-Kruger projektio-ta, joka on poikittainen lierioprojektio. Monessa muissa maissa kaytetaan UTM (UniversalTransverse Mercator) -projektiota, joka eroaa Gauß-Krugerista vain skaalauksessa.
3Joskus naita kutsutaan myos maantieteellisiksi koordinaateiksi. Yleisemmin kuitenkin maantieteellisillakoordinaateilla tarkoitetaan yleisia leveys- ja pituusastetyyppisia koordinaatteja, seka geodeettisia ettatahtitieteellisia.
36 Luku 2. Koordinaattijarjestelmat
dt
ds
y
x
λ
ds
dt
ϕ
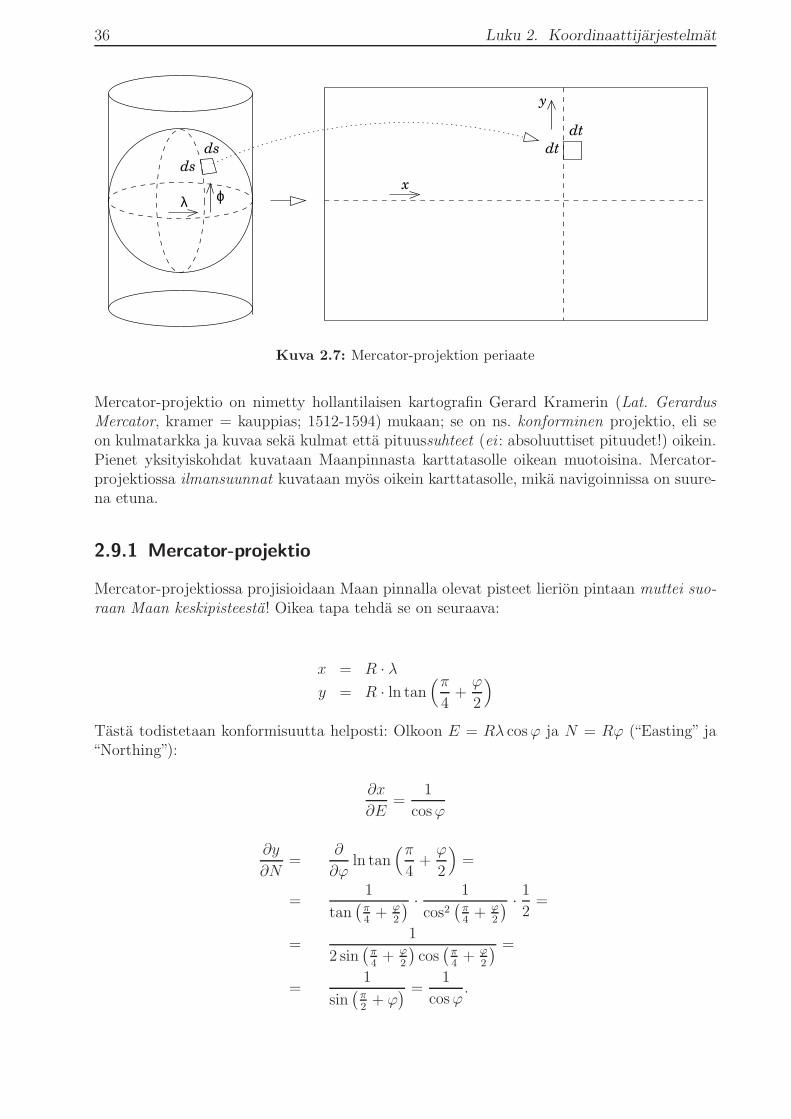
Kuva 2.7: Mercator-projektion periaate
Mercator-projektio on nimetty hollantilaisen kartografin Gerard Kramerin (Lat. Gerardus
Mercator, kramer = kauppias; 1512-1594) mukaan; se on ns. konforminen projektio, eli seon kulmatarkka ja kuvaa seka kulmat etta pituussuhteet (ei : absoluuttiset pituudet!) oikein.Pienet yksityiskohdat kuvataan Maanpinnasta karttatasolle oikean muotoisina. Mercator-projektiossa ilmansuunnat kuvataan myos oikein karttatasolle, mika navigoinnissa on suure-na etuna.
2.9.1 Mercator-projektio
Mercator-projektiossa projisioidaan Maan pinnalla olevat pisteet lierion pintaan muttei suo-
raan Maan keskipisteesta! Oikea tapa tehda se on seuraava:
x = R · λy = R · ln tan
(π4
+ϕ
2
)
Tasta todistetaan konformisuutta helposti: Olkoon E = Rλ cosϕ ja N = Rϕ (“Easting” ja“Northing”):
∂x
∂E=
1
cosϕ
∂y
∂N=
∂
∂ϕln tan
(π4
+ϕ
2
)=
=1
tan(
π4
+ ϕ2
) · 1
cos2(
π4
+ ϕ2
) · 1
2=
=1
2 sin(
π4
+ ϕ2
)cos(
π4
+ ϕ2
) =
=1
sin(
π2
+ ϕ) =
1
cosϕ.
2.9. Karttaprojektiot 37
60oW 45oW 30oW 15oW 0o 15oE 30oE 45oE 60oE 75oE 90oE
0o
15oN
30oN
45oN
60oN
75oN
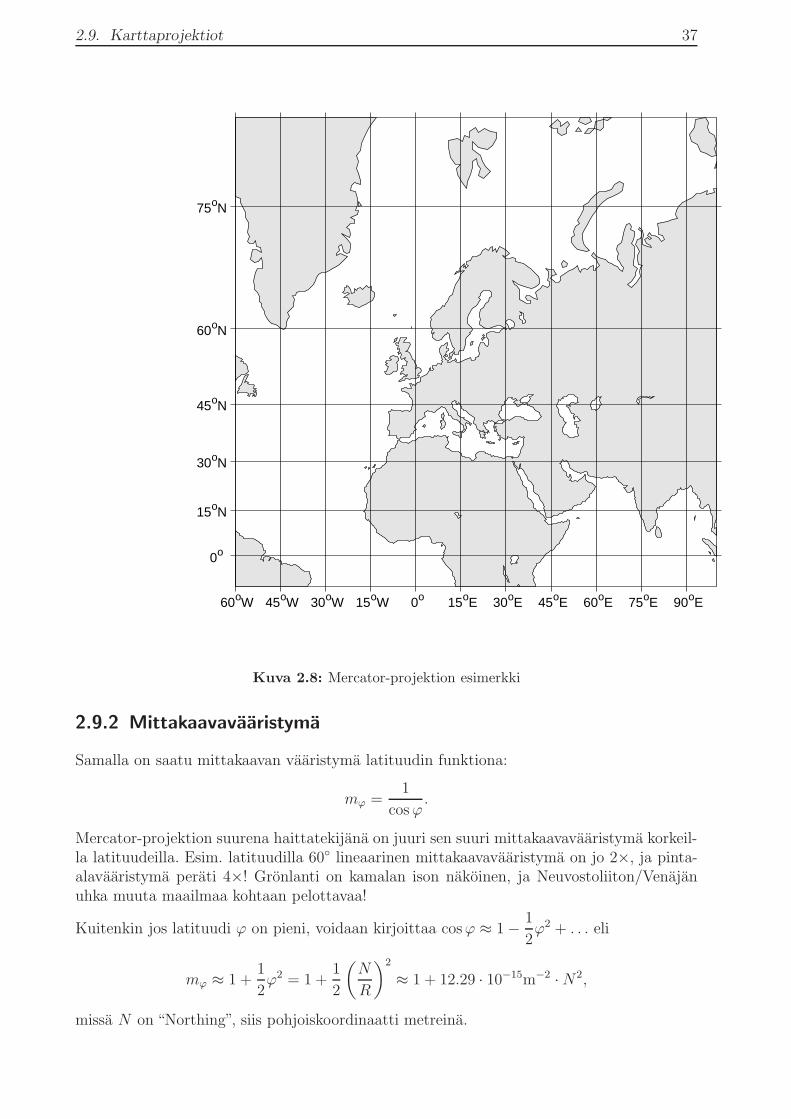
Kuva 2.8: Mercator-projektion esimerkki
2.9.2 Mittakaavavaaristyma
Samalla on saatu mittakaavan vaaristyma latituudin funktiona:
mϕ =1
cosϕ.
Mercator-projektion suurena haittatekijana on juuri sen suuri mittakaavavaaristyma korkeil-la latituudeilla. Esim. latituudilla 60 lineaarinen mittakaavavaaristyma on jo 2×, ja pinta-alavaaristyma perati 4×! Gronlanti on kamalan ison nakoinen, ja Neuvostoliiton/Venajanuhka muuta maailmaa kohtaan pelottavaa!
Kuitenkin jos latituudi ϕ on pieni, voidaan kirjoittaa cosϕ ≈ 1 − 1
2ϕ2 + . . . eli
mϕ ≈ 1 +1
2ϕ2 = 1 +
1
2
(N
R
)2
≈ 1 + 12.29 · 10−15m−2 ·N2,
missa N on “Northing”, siis pohjoiskoordinaatti metreina.

38 Luku 2. Koordinaattijarjestelmat
2.9.3 Gauß-Kruger
Gauß-Kruger projektio on ns. poikittainen Mercator-projektio: Projektion kannalta “paivan-tasaaja” on projektion keskimeridiaani, ja pisteen “latituudi” on sen kulmaetaisyyskeskimeridiaanista. Siksi voidaan kirjoittaa yo. kaava uudelleen:
m ≈ 1 + 12.29 · 10−15m−2 · (E − E0)2 , (2.1)
missa E on“Easting”– etaisyys metreina itasuuntaan – ja E0 on“false easting”Suomen kkj:n
tapauksessa 500000 m.
Tama kaava antaa Gauß-Kruger projektiolle projektiokaistan (±1.5) reunoilla paivantasaa-jalla (E − E0 = 166666 m) virhe m− 1 = 0.000341, eli yli 300 ppm mittakaavavirhe.
Onneksi Suomen leveysasteella kulmaetaisyys 1.5 vastaa vain metrietaisyyteen 83333 m,joten m = 1.000085.
Uudessa Suomen karttakoordinaattijarjestelmassa ((Anon., 2003)) kaytetaan myos Gauss-Kruger projektiota, mutta
1. Geosentrisen GRS80-ellipsoidin suhteen (perustuu EUREF-FIN koordinaatteihin), ja
2. Kaistanleveys on vain 1.
2.9.4 UTM (Universal Transverse Mercator)-projektio
UTM-projektion tapauksessa
1. kaytetaan esiskaalaus 0.9996 keskimeridiaanilla (toisin sanoen, projektiossa kaytet-ty lierio ei koske vaan leikkaa Maan pintaa). Nain ollen jo keskimeridiaanilla mit-takaavavirhe on 400 ppm, mutta vahenee sitten meridiaanista pois kulkiessa, ennenkuin taas alkaa kasvaa.
2. Kaistaleveys ei ole 3 vaan 6.
Suomessa ollaan ottamassa UTM-koordinaatit kayttoon tavalla, jolla koko Suomen alue onyhden kaistan sisalla, keskimeridiaani 27. Kaistan nimi on TM35 (UTM-kaistojen numeroin-ti alkaa paivamaararajalta: kaista 1 on 180W−172W, ja siis kaista 31 on 0−6E ja kaista35, 24E − 30E.) Koska maksimietaisyys keskimeridiaanista on −420 km, saataisiin mak-simivaaristymaksi m − 1 = 0.001768 eli lahes 2000 ppm. Moneen kayttoon (rakennustyo)niin suuri vaaristyma ei ole hyvaksyttava, josta syysta on otettu kayttoon yhden vyohykkeenUTM:n lisaksi myos Gauß-Kruger-projektio, kuten ylla kuvattu.
Vaikka koko Suomi siis projisoidaan, ja jaetaan karttalehtiin, keskimeridiaanin 27E mukaan,on kuitenkin jokaiselle kartoille karttakoordinaattiruudukko sen kartan “laillisen” kuudenasteen kaistan keskimeridiaanin mukaisesti piiretty. Kaistan rajojen karttalehdilla nakyy jopamolemmat ruudukot ja niiden valinen “sauma”!
Kartalla on siis olemassa kolmenlaiset pohjoiset: karttapohjoinen, ruudukkopohjonen jaoikea, maantieteellinen pohjoinen (ja viela magneettinen pohjoinenkin). . .

39
Luku 3
Vaakakulmien asematasoitus
3.1 Yleista
Asematasoitus eli teodoliitilla tehtyjen useiden havaintosarjojen yhdistaminen yhdeksi op-timaaliseksi ratkaisuksi on tasoitustehtava, vaikkakin lahes triviaalinen sellainen. Tassa an-netaan esimerkki, missa on havaittu nelja mittaussarjaa kolmeen tahtyyssuuntaan. Jokaisensarjan kaksi kojeasemaa on jo yhdistetty.
Tassa esimerkissa on sarjoja s = 4, tahtayksia r = 3, siis havaintoja n = rs = 12. Tun-temattomien tahtaysten maara sarjakeskiarvossa on r − 1 = 2. Jokaisessa sarjassa on yksiorientointituntamaton1. Siis ylimaaraisia havaintoja (redundanssi, vapausasteiden maara)on
rs− (r − 1 + s) = (r − 1) (s− 1) .
Havaintoyhtalo on
tij + vij = Aj − Ωi,
missa i = 1 . . . 4 on sarjan numero, j = 1 . . . 3 suunnan numero, Ωi sarjan vaakakehan ori-entointituntematon, Aj tahyksen suuntatuntematon (mitatun sivun atsimuti), ja tij (raaka)suuntahavainto. Taman lisaksi on kiinnitettava yksi suunta tai suuntien lineaariyhdistelma,jotta koko ongelma olisi ratkaistavissa (suhteellisista kulmahavainnoista ei voi ratkaista ab-soluttisia suuntia). Eli vaaditaan lisaksi vaikkapa2:
A1 = 0. (3.1)
3.2 Asematasoituksen havaintoyhtalot
Kirjoitetaan asematasoituksen havaintoyhtalot tuttuun muotoon:
ℓ+ v = Ax,
1Tilanne on hieman sama kuin GPS-mittauksessa. Siellakin jokaisen vastannottimen kaikki havain-not sisaltavat kellovirhetuntematomman ∆T , ja siksi havaintosuure kutsutaan pseudoetaisyys- eikaetaisyyshavainnoksi. Samoin voitaisiin tassa puhua “pseudosuuntahavainnoista”. Tallaiset ei-kiinnostavatlisatuntemattomat kutsutaan nuisance parametereiksi.
2Taysin mielivaltainen. Yhta hyvin A2 = 0, A3 = 0, tai vaikkapa A1 + A2 + A3 = 0 joka olisi ainakin“demokraattinen”.

40 Luku 3. Vaakakulmien asematasoitus
eli kirjoitettuna auki, olettaen kolme suuntaa ja nelja sarjaa, ja jattaen yksinkertaisuudenvuoksi “stokastiset alleviivaukset” pois:
t11t12t13t21t22t23t31t32t33t41t42t43
+
v11
v12
v13
v21
v22
v23
v31
v32
v33
v41
v42
v43
=
1 −11 −1
1 −11 −1
1 −11 −1
1 −11 −1
1 −11 −1
1 −11 −1
·
A1
A2
A3
Ω1
Ω2
Ω3
Ω4
(3.2)
Tassa esimerkkitapauksessa havainnot ovat
ℓ =[t11 t12 t13 t21 t22 t23 t31 t32 t33 t41 t42 t43
]T
ja tuntemattomat x =[A1 A2 A3 Ω1 Ω2 Ω3 Ω4
]T.
Rakennematriisi A on:
A =
1 −11 −1
1 −11 −1
1 −11 −1
1 −11 −1
1 −11 −1
1 −11 −1
.
3.3 Kulmamuunnos
Ylla oleva havaintoyhtaloryhma ei ole yksisellitteisesti ratkaistavissa. Tama nakyy siita, et-ta jos seka kaikille tuntemattomille Aj-arvoille, etta kaikille Ωi-arvoille, lisataan suure ∆.Havaintoyhtaloryhman vasen puoli eli ℓ+ v ei muutu.
Siksi suoritetaan seuraava toimenpide (kulmamuunnos):
Vahennetaan jokaisesta havainnosta tij paitsi joka sarjan ensimmaisesta, sarjan
ensimmainen havainto ti1.
Taman jalkeen meilla on uudet havaintosuureet tij − ti1, i = 1 . . . s, j = 2 . . . r; yhteensas (r − 1) havaintoa, esimerkkitapauksessa 4 · (3 − 1) = 8 havaintoa.

3.3. Kulmamuunnos 41
Havaintoyhtalot ovat nyt
t12 − t11t13 − t11t22 − t21t23 − t21t32 − t31t33 − t31t42 − t41t43 − t41
+
v′12v′13v′22v′23v′32v′33v′42v′43
=
−1 1−1 1−1 1−1 1−1 1−1 1−1 1−1 1
·
A1
A2
A3
.
Nyt maaritellaan myos tuntemattomat uudelleen (siis, ne eivat ole enaa absoluuttisia tamanjalkeen):
Tj ≡ Aj −A1.
Silloin yo. havaintoyhtalot saavat muodon3
t′12t′13t′22t′23t′32t′33t′42t′43
+
v′12v′13v′22v′23v′32v′33v′42v′43
=
11
11
11
11
·[T2
T3
],
missa t′ij ≡ tij − ti1.
Nyt nakyy heti, etta saman sarjan eri suuntien havainnot t′ij , t′ik, j 6= k, ovat toisistaan
riippumattomia. Siksi on sallittua ottaa kaikkien sarjojen tiettya suuntaa koskevat havainnoterikseen omaksi havaintoyhtaloryhmaksi:
t′1j
t′2j
t′3j
t′4j
+
v′1j
v′2j
v′3j
v′4j
= Tj , j = 2 . . . r.
Tata yhtaloryhma taas on keskiarvon laskemisen tasoitustehtav a: meilla on yksi tuntematonTj josta on olemassa 4 (sarjojen maara s) kappaletta samanarvoista, ei-korreloitua havaintoa.Ratkaisu on sama:
Tj =1
s
s∑
i=1
t′ij
eli tasoitettu kulmamuunnos on sarjojen kulmamuunnosten keskiarvo.
Tassa voidaan mielivaltaisesti asettaa T1 ≡ 0. T -arvot ovat tasoitetut, mutta relatiivisetsuunnat, eivatka absoluuttiset atsimutit.
3Tata voidaan verifioida kirjoittamalla t′j auki ja kertomalla uuden A-matriisin kanssa, jolloin saat takaisinylla oleva vanha A-matriisi.

42 Luku 3. Vaakakulmien asematasoitus
3.4 Takaisinsijoitus, orientaatiotuntematomat
Sijoittamalla tama takaisin alkuperaisiin havaintyhtaloihin 3.2, saadaan:
t11 − T1
t12 − T2
t13 − T3
t21 − T1
t22 − T2
t23 − T3
t31 − T1
t32 − T2
t33 − T3
t41 − T1
t42 − T2
t43 − T3
+
v11
v12
v13
v21
v22
v23
v31
v32
v33
v41
v42
v43
=
−1−1−1
−1−1−1
−1−1−1
−1−1−1
·
Ω1
Ω2
Ω3
Ω4
.
Tassa taas nakyy, etta eri sarjojen havaintoyhtalot ovat toisistaan riippumattomia. Eli niitavoi kasitella erikseen:
ti1 − T1
ti2 − T2
ti3 − T3
+
vi1
vi2
vi3
= −Ωi, i = 1 . . . s.
Tama on taas keskiarvon laskemisen tasoitustehtava. Saadaan ratkaisuksi:
Ωi = −1
r
r∑
j=1
(tij − Tj
).
3.5 Jaannosvirheet ja vapausasteet
Nyt, kun tuntemattomat Tj ja Ωi on laskettu, tarkemmin estimoitu pienimman neliosum-man menetelman avulla, voidaan myos laskea jaannosvirheet eli residuaalit. Alkuperaisistahavaintoyhtaloista 3.2 saadaan:
v11
v12
v13
v21
v22
v23
v31
v32
v33
v41
v42
v43
=
1 −11 −1
1 −11 −1
1 −11 −1
1 −11 −1
1 −11 −1
1 −11 −1
·
T1
T2
T3
Ω1
Ω2
Ω3
Ω4
−
t11t12t13t21t22t23t31t32t33t41t42t43

3.6. Asematasoituksen laskentataulukko 43
eli yleisessa tapauksessa
vij = Tj − Ωi − tij .
Olkoon suuntahavaintojen tij keskivirhe σ (ja sama kaikille) ja olkoon suuntahavainnot kor-reloimattomia. Siina tapauksessa havaintojen varianssimatriisi on
Qℓℓ = Var ℓ = σ2Is×r,
jossa Is×r on (s× r) × (s× r)-kokoinen yksikkomatriisi.
Tassa tapauksessa suure (“siirtosuure”, Baarda)
E = vTQ−1ℓℓ v =
1
σ2
s∑
i=1
r∑
j=1
v2ij =
1
σ2
∑
i,j
v2ij .
on jakautunut ns. χ2b-jakauman mukaan, jonka odotusarvo on b, vapausasteiden eli ylimaarais-
ten havaintojen maara.
Aikaisemmin nahtiin, etta b = (r − 1) (s− 1), kulmamuunnosten (riippumattomien su-untamittausten) maara kerrottuna ylimaaraisten sarjojen maaralla. Siis E on jakautunutχ2
(r−1)(s−1) mukaan ja sen odotusarvo on (r − 1) (s− 1). Eli:
E
1
σ2
∑
i,j
v2ij
= (r − 1) (s− 1) ⇒ σ2 = E
∑i,j v
2ij
(r − 1) (s− 1)
,
ja naemme, etta
σ2 ≡∑s
i=1
∑rj=1 v
2ij
(r − 1) (s− 1)
on yhden havainnon varianssin σ2 harhaton estimaattori :
Eσ2
= σ2.
3.6 Asematasoituksen laskentataulukko
Kaytannossa katsoen asematasoituksen suorittamiseksi on tehtava seuraavat askeleet:
1. Kiinnitetaan mielivaltaisuus suuntien maarittelyssa, esim. kiinnittamalla ensimmainensuunta nollaan, T1 = 0; Tata kutsutaan kulmamuunnokseksi. Se tehdaan vahentamallaensimmainen havaittu suuntaluku saman sarjan muista suuntaluvuista.
2. Lasketaan sarjojen yli suuntahavaintojen sarjakeskiarvot1
s
s∑
j=1
tij jokaiselle suunnalle
i;
3. Lasketaan havaintojen residuaalit sarjakeskiarvojen suhteen
v′ij = tij −1
s
s∑
j=1
tij ;

44 Luku 3. Vaakakulmien asematasoitus
Kulmamuunnos (gon) v′(cc) v (cc)1. sarja 0.00 00 0 -3.7
68.84 30 +4 +0.3209.18 80 +7 +3.3
Sarjan summa, keskiarvo: +11 +3.72. sarja 0.00 00 0 -1.3
68.84 25 -1 -2.3209.18 78 +5 +3.7
Sarjan summa, keskiarvo: +4 +1.33. sarja 0.00 00 0 +2.7
68.84 24 -2 +0.7209.18 68 -5 -2.3
Sarjan summa, keskiarvo: -7 -2.74. sarja 0.00 00 0 +3.7
68.84 22 -4 -0.3209.18 66 -7 -3.3
Sarjan summa, keskiarvo: -11 -3.7
Sarjakeskiarvo 0.00 0068.84 26
209.18 73
Taulukko 3.1: Asematasoituksen laskentataulukko
4. Lasketaan “ensimmaisten residuaalien” v′ij summat jokaisen sarjan kaikkien suuntienyli:
1
r
r∑
i=1
v′ij =1
r
r∑
i=1
(tij −
1
s
s∑
j=1
tij
);
5. Lasketaan lopulliset residuaalit vij = v′ij−1
r
r∑
i=1
v′ij , mika vastaa juuri residuaalit, jos
annettaisiin jokaiselle sarjalle oman orientointituntemattoman Ωj suuntien tuntemat-tomien Ai lisaksi, kuten alkuperaisessa havaintoyhtaloryhmassa 3.2.
Lopputulos on yksinkertaisesti esitetty laskentataulukko (taulukko 3.1), joka pitaa sisallaannama operaatiot ja joka pitaisi olla ilman selitystakin selva.
Kaavan tayttamisen jalkeen (jarjestyksessa sarjakeskiarvo, v′, sarjakohtainen summa, v) yh-den tahtayksen (eli painoyksikon) keskivirhe lasketaan ensin laskemalla residuaalien nelio-summa kaikkien sarjojen ja tahtayssuuntien residuaalien yli:
vTv =
s∑
i=1
r∑
j=1
v2ij = [vv]

3.6. Asematasoituksen laskentataulukko 45
(viimeinen kirjoitustapa on Gaußin keksima joka joskus viela kaytetaan). Sitten lasketaan(eli estimoidaan4)
σ =√σ2 =
√vTv
rs− (r + s) + 1=
√vT v
(r − 1) (s− 1)= 3.7cc .
Tassa:
rs havaintojen maara (r suuntaa s sarjassa)
r+ s tuntemattomien maara (r suuntatuntematonta ti, s orientaatiotuntematonta Ωj)
Luku +1 edustaa ongelman defekti eli ratkaisuavaruuden ulottuvuus: se ylla mainittuseikka, etta suureen ∆ lisaaminen seka ti:hin etta Ωj :hen ei vaikuta havaintoihin millaanhavaittavalla tavalla, ja siis, etta ratkaisu ei ole yksiselitteinen ilman yhta lisaehtoa5,esim. t1 = 0.
Suuretta rs− (r + s) + 1 = (r − 1) (s− 1) kutsutaan vapausasteiden maaraksi.
Taman jalkeen sarjakeskiarvon keskivirheen estimaatio on σs =σ√s
= 1.8cc.
4Huomaa, etta E
σ2
= σ2,mutta kuitenkin E σ 6= σ! Syy tahan on, etta E-operattoria ja nelioju-
urta ei saa vaihtaa keskenaan: yleisesti E √x 6=√
E x . Todistus vastaesimerkilla: jos x toden-nakoisyysjakauma on p (1) = 0.5, p (4) = 0.5, ja muulloin p (x) = 0, me saadaan E √x = 1.5 mutta√
E x =√
2.5 ≈ 1.58. Siis σ ei ole harhaton vaikka σ2 on.5Tata lisaehtoa voidaan myos ymmartaa “pseudo-havainnoksi”: silloin havaintojen maara on rs + 1.

46 Luku 3. Vaakakulmien asematasoitus

47
Luku 4
Keskistykset ja projektiot
4.1 Keskistys
Usein ei ole mahdollista laittaa havaintokojetta tai tahysta varsinaiseen kohteeseen. Silloinkaytetaan epakeskinen koje- tai tahyspaikka ja tehdaan laskennallinen korjaus, ns. keskistys.
On tarkeata huomauttaa, etta ilman keskistyshavaintoja epakeskisesti suoritetut varsinaisethavainnot ovat arvottomia.
Huomaa myos, etta kun seka mittauskoje etta tahys ovat mitattavan pisteen ylapuolella, onpystysuunnassa aina kyse keskistyksesta. “Pystykeskistysalkiot” eli kojeen ja tahyksen – taiGPS-antennin – korkeudet on syyta mitata niin kauan kuin kolmijalka on viela pystyssa. . .
4.2 Pieni keskistys
4.2.1 Vaakakeskistys
Jos koje pystytetaan pisteeseen H eika K, tehdaan suuntahavainnossa virhe ε.
Vaakageometrian keskistysalkiot e, ν mitataan havaintopaikalla:
e etaisyys vaakatasossa H :n ja K:n valilla
ν vaakakulma ∠KHT
Nyt voidaan laskea (ks. kuva) sinisaantoa kayttaen:sin ε
sin ν=e
seli sin ε =
e
s· sin ν, jossa
s etaisyys vaakatasossa K:n ja T :n valilla.
Jos ε on riittavan pieni, saadaan ε ≈ eρ/s·sin ν, missa ρ on tuttu radiaanin suuruus ilmaistunakaytetyssa kulmayksikossa, 63.661977 jos kaytetaan gooneja.
Jos mittauksesta on saatu s′, saadaan s kaavan s/sin ν = s′/sinα avulla, missa α = 200 g−ν−ε.Jos, kuten on tavallista, mittaukset on suoritettu avaruudessa, pitaa laskea vaakaetaisyydetavaruusjanoista. Tata varten esitetaan seuraavat suureet:
∆HK kojepaikassa olevan tahyksen korkeus merkista
∆HT tahyksen korkeus merkista
zHK mitattu zeniittikulma H :ssa olevasta kojeesta pisteen K tahykseen
zHT mitattu zeniittikulma H :ssa olevasta kojeesta pisteen T tahykseen

48 Luku 4. Keskistykset ja projektiot
K
ν
εα
e
ε”Oikea” suunta
Tahys (keskisesti)
H
s’
Havaittu suunta
T
s
Kuva 4.1: Keskistys vaakatasossa
Nyt lasketaan vaakaetaisyydet seuraavaksi:
e = e sin zHK ;
s′ = s′ sin zHT .
Mikali zeniittikulmat ovat lahella 100g, ei ole niiden tarkka mittaus kriittinen.
4.2.2 Korkeuskeskistys
Myos korkeuskeskistys voidaan suorittaa: tarkoitus on laskea merkkien valinen korkeuseroHT −HK kaytettavissa olevista mittauksista. Seuraavasti:
HT −HK = (HT −HH) − (HK −HH) =
= (s′ cos zHT − ∆HT + ∆HH) − (e cos zHK − ∆HK + ∆HH) =
= s′ cos zHT − e cos zHK − ∆HT + ∆HK ,
josta ∆HH , kojeen korkeus H :n merkista, on sopivasti pudonnut pois.
Mikali ei koje vaan tahys on epakeskinen, saadaan korjauskaava vastaavalla tavalla. Silloinkeskistysalkiot e, v ja zHT mitataan tahyksen paikalla.
4.3 Suuri keskistys
Jos ylla kuvattu suora menettelytapa ei ole mahdollinen, voidaan rakentaa paikallinen apu-
verkko keskistysalkioiden maarittamiseksi. Apuverkon pisteiden maara riippuu tilanteesta(paikalliset nakoesteet) ja voi olla 2-4. Apuverkon kaytto on kateva jos saman pisteen kojeenja tahyksen paikat eivat ole samoja, ja valttamatonta jos tahyksen paikkaan ei saa laitetuk-si teodoliittia havaitsijoineen esim. sen kevytrakenteisyyden vuoksi. Esimerkkitapaus nakyykuvassa 4.2.
Tassa tapauksessa kaytetaan kahta apupistetta A,B ja mitataan kulmat ∠THA,∠THB,∠HAK ja ∠HBK seka etaisyydet e′ ja e′′. Silloin lasketaan etaisyys e ja keskistyskul-ma ν = ∠THK, joita ei voitu mitata suoraan. Sen jalkeen menettely on sama kuin pienessakeskistyksessa.
4.4 GPS-keskistys
GPS-mittausten yhteydessa on usein myos suoritettava keskistys, jos mittaus varsinaisessapisteessa ei ole mahdollista.

4.4. GPS-keskistys 49
H
K T
A
s’
s
e"
e e’B
Kuva 4.2: Epasuora keskistys
GPS:n tapauksessa tarvitaan absoluuttiset eli orientoidut keskistyselementit: olkoon mitat-tuna kolmiulotteiset keskistysalkiot e, ν ja zHK epakeskisella pisteella H , ja suuntakulma(atsimuti) AHT tahykseen pain, niin voidaan laskea suuntakulma
AHK = AHT − ν.
Redukoitu zeniittikulma zredHK , siis zeniittikulma “pultista pulttiin”, saadaan seuraavasti1:
ered cos zredHK = e cos zHK − ∆HK + ∆HH . (4.1)
Samalla myos e redukoidaan “pultista pulttiin” -etaisyydeksi seuraavan kaavan avulla:
ered sin zredHK = e sin zHK , (4.2)
taytyy tehda jos jana HK ei ole vaakatasossa. Ilmeisesti kaavat 4.1 ja 4.2 on ratkaistavayhdessa, iterativisesti.
Meilla on nyt seuraavat absoluuttiset (napa-) keskistysalkiot kolmessa ulottuvuudessa:AHK , e
red ja zredHK .
Absoluuttisia keskistyselementteja annetaan usein “North, East, Up” -jarjestelmassa:
∆NHK = ered cosAHK sin zredHK
∆EHK = ered sinAHK sin zredHK
∆UHK = ered cos zredHK
Tassa on siis koordinaattierot muodossa “keskipiste minus epakeskinen piste”. Usein ne an-netaan myos muodossa “epakeskinen piste minus keskipiste”. Aina on kirjallisuuslahteesta
selvitettava, kumpi muoto on valittu.
GPS-mittausten yhteydessa annetaan usein keskitysalkiot geosentrisesti : ∆X,∆Y,∆Z. Kon-vertointi NEU-systeemiin on suoranaista. Kirjoitetaan
∆N∆E∆U
=
R∆ϕR cosϕ∆λ
∆h
,
ja (pallon geometria) XYZ
= (R + h)
cosϕ cosλcosϕ sinλ
sinϕ
⇒
1Huomaa, etta GPS-mittaukset tehdaan aina “pultista” silla tavalla, etta antennin korkeus pultista on ainaosa haivaintotiedostoa, ja se otetaan automaattisesti huomioon. Siksi “reduktio pulttiin” on tarpeen.

50 Luku 4. Keskistykset ja projektiot
Ellipsoidinen normaaliLuotiviiva
Kuva 4.3: Paikallisen luotiviivan poikkeama ellipsoidista normaalista
⇒
∆X∆Y∆Z
=
−R sinϕ cosλ −R cosϕ sinλ cosϕ cosλ−R sinϕ sinλ +R cosϕ cosλ cosϕ sinλ
R cosϕ 0 sinϕ
∆ϕ∆λ∆h
=
=
− sinϕ cosλ − sin λ cosϕ cosλ− sinϕ sinλ + cosλ cosϕ sinλ
cosϕ 0 sinϕ
∆N∆E∆U
.
Kaanteista muunnosta:
∆N∆E∆U
=
− sinϕ cosλ − sinϕ sinλ cosϕ− sin λ + cosλ 0
cosϕ cosλ cosϕ sinλ sinϕ
∆X∆Y∆Z
on helppoa verifioida2.
4.5 Suuntakorjaus paikallisesta horisontista
vertausellipsoidiin
Mitatut suunnat ovat paikalliseen horisonttiin projisoidut suunnat eli paikallisen horisontti-tason ja jokaisen suunnan normaalitason valisten leikkausviivojen suunnat.
Mikali jatetaan huomioimatta paikalliset luotiviivapoikkeamat (eli oletetaan etta paikallinenhorisonttitaso on sama kuin paikallinen vertausellipsoidin tangenttipinta), voidaan sanoa,etta tahtayssuunnat ovat suuntahavaintojen normaalitasojen ja ellipsoidipinnan leikkausvi-ivoja, ts. kayria viivoja ellipsoidilla. Tama olettama ei ole kuitenkaan oikein. Paikallinenhorisontti on kohtisuora paikalliseen painovoimaan nahden jonka suunta eroaa jonkin verranvertausellipsoidin normaalin suunnasta. Ilmio kutusutaan luotiviivapoikkeamaksi (kuva 4.3).
Luotiviivapoikkeamat ovat ξ pohjois-ita-suunnassa ja η ita-lansi-suunnassa. Kaavat:
ξ = Φ − ϕ
η = (Λ − λ) cos Φ
missa (Φ,Λ) ovat tahtitieteellisesti maaritettyja leveys- ja pituusasteita. Koordinaatit (ϕ, λ)taas ovat maantieteellisia leveys- ja pituusateita, jotka ovat laskennallisia koordinaatteja
2Itse asiassa syy, miksi tama on niin helppo on, etta kyseessa on ortogonaalinen rotaatiomatriisi, jolle pateeR−1 = RT.

4.6. Ellipsoidisten normaalien erisuuntaisuus 51
kuten loytyvat kartoilta, laskettu tietyn vertausellipsoidin suhteen3.
Olkoon paikalliseen horisonttiin nahden mitattu atsimuti (absoluuttinen suunta) A, ja samantahtayksen atsimuti vertausellipsoidilla a.
Silloin voidaan sanoa, etta
A− a = η tanΦ + (ξ sinA− η cosA) cot z =
= (Λ − λ) sin Φ + ((Φ − φ) sinA− (Λ − λ) cosA cos Φ) cot z (4.3)
missa z on zeniittikulma ja A atsimuti. Kaava 4.3 on ns. Laplace-yhtalo. Mikali suuntaon vaakatasossa on cot z = 0 ja yllaoleva korjaus on mittauspaikkakohtainen vakio, koskasuuntakulman A riippuvuus haviaa.
Alla oleva kuva selittaa mista molemmat termit on peraisin:
ensimmainen termi η tan Φ johtuu taivaannavan suunnan eri projektioista paikalliseenhorisonttiin kuin vertausellipsoidin tangenttitasoon. Se riippuu taivaannavan korkeud-esta eli leveysasteesta Φ.
Toinen termi (ξ sinA− η cosA) cot z johtuu tahyksen suunnan eri projektioistapaikalliseen horisonttiin kuin ellipsoidin tangenttitasoon. Se taas riippuu samalla taval-la tahyksen zeniittikulmasta z ja haviaa jos z = 90.
4.6 Ellipsoidisten normaalien erisuuntaisuus
Sen jalkeen kun suunnat on redukoitu paikallisesta horisonttitasosta vertausellipsoidin tan-genttitasoon, kaikki ei ole viela kunnossa.
Kuvassa 4.5 tama on selostettu: Pisteen B tahtayssuunta pisteessa A saadaan projisoimal-la piste B pisteen A tangenttitasoon, ja pisteen A tahtayssuunta B:hen taas saadaan pro-jisoimalla piste B pisteen A tangenttitasoon.
Molemmat suunnat eroavat “geodeettisen viivan” eli lyhyin mahdollisen matkan viivan su-unnasta ellipsoidin pinnalla. Puhutaan normaalitasoista4: pisteen B atsimuti pisteessa A onkulma A:n meridiaanitason ja sen pisteen A normaalitason valilla, joka sisaltaa myos pisteenB. Toisaalta, pisteen A atsimuti pisteesta B mitattuna on kulma B:n meridiaanitason ja senB:n normaalitason valilla, joka sisaltaa myos A.
Nama normaalitasot eivat yleensa ole samoja, ellipsoidin litistyneisyyden johdosta. Vain jospisteet A ja B ovat samalla meridiaanilla (ts. niiden pituusaste on sama) tai molemmatovat esim. paivantasaajalla, ovat normaalitasot identtisia ja geodeettinen viiva on “suora”(torsioton) kayra, normaalitason leikkausviiva itse ellipsoidipinnan kanssa.
Geodeettisen viivan ja normaalitason atsimutien valilla on olemassa pienenpieni ero.(Cooper, 1987) antaa kaavan
δA [′′] = 2.8 · 10−6ℓ2 sin 2A cosϕA
3Tama merkitsee siis, etta luotiviivapoikkeamat riippuvat valitusta vertausellipsoidista; Paikallisen ver-tausellipsoidin eli datumin valinta tehdaan usein nain, etta luotiviivapoikkeamien neliollinen summa min-imoituisi. Eli, etta ellipsoidi sopisi mahdolllisimman yhteen hyvin paikallisen painovoimakentan tasopin-nan eli geoidin kanssa.
4En. normal section, ks. (Cooper, 1987) luku 2.4.

52 Luku 4. Keskistykset ja projektiot
Havaitsija
PohjantähtiviivaLuoti−Ellipsoidin
normaali
ZeniittiHic sunt leones
Φ
Horisontti
Ellipsoidin tangenttitaso
Tähys
a
A
viivaLuoti−
Zeniitti Hic sunt leones
HorisonttiTähys
Pohjantähti
Ellipsoidinnormaali
Aa
Ellipsoidin tangenttitaso
Havaitsija
z
Kuva 4.4: Laplace-ilmio: luotiviivapoikkeaman vaikutus atsimutin suuntaan
jonka mukaan jopa sadan kilometrin kaarella ero on vain luokkaa 0.03′′.
Myos jos havaitut suunnat ti eivat ole absoluuttisia, on ne redukoitavia paikallisesta ho-risontista ellipsoidiin kayttamalla kaava 4.3, koska aniharvoin kaikki zeniittikulmat zi ovattarkasti 100 gon. Kolmioverkkoa tasoitetaan ellipsoidilla; tahtitieteelliset pohjoissuunta-havainnot (“Laplace-pisteet”) A redukoidaan myos ellipsoidiin kaavan 4.3 avulla, ja arvoja akaytetaan silloin ehtoina koko verkon orientoimiseksi ja (mikali on useita Laplace-pisteita)vahvistamiseksi.

4.7. Pituuskorjaus 53
B
A
A:n tangenttitaso
A:n normaalitaso
B:n normaalitaso
B:n tangenttitaso
Geodeettinen viivaN
N
A
B
Kuva 4.5: Luotiviivat eivat ole samassa normaalitasossa
4.7 Pituuskorjaus
Tarkasti ottaen sahkomagneettisesti mitattu etaisyys ei ole suoran janan vain avaruuskayranpituus. Tasta johtuvat korjaukset on annettu kirjassa (Blachut et al., 1979, s. 113); es-imerkiksi korjaus mitatusta suoraan janaan on
C = D − (2k − k2)D3
24R2.
Korjaus on tarkea vain pitkilla matkoilla, kymmenia kilometreja. Myos ns. toinen refrak-tiokorjaus (ks. geodesian peruskurssin luentomoniste) kuuluu tahan ryhmaan.
Aluksi valitaan sopiva vertaustaso, yleensa “keskimerenpinta” eli se pinta, johon paikallinenkorkeusjarjestelma on sidottu.
Suoraa janaa redukoidaan “merenpinnan kaareksi” seuraavalla tavalla. Ensin merenpinnanjanaksi kaavalla:
Cs =
√C2 − (H2 −H1)
2
(1 +H1/R) (1 +H2/R),
missa H1 ja H2 ovat paatepisteiden korkeudet merenpinnalta ja R on paikallisesti oikeavertausellipsoidin kaarevuussade. Sitten
Ss = Cs +C3
s
24R2
antaa kaaren pituus janan pituudesta.
Reduktio vertausellipsoidiin suoritetaan seuraavasti:
S = Ss +(ξ cosA+ η sinA
)(H2 −H1) −
NSs
R,
missa ξ = (Φ − φ) ja η = (Λ − λ) cosφ ovat keskimaaraiset luotiviivan poikkeamat sivuapitkin ja N on keskimaarainen geoidin korkeus. Nain saadut vertausellipsoidille projisoitujakaaren pituuksia voidaan kayttaa suoraan verkkotasoituksessa jos reduktio suoritetaan maan-tieteellisissa koordinaateissa ellipsoidin paalla.
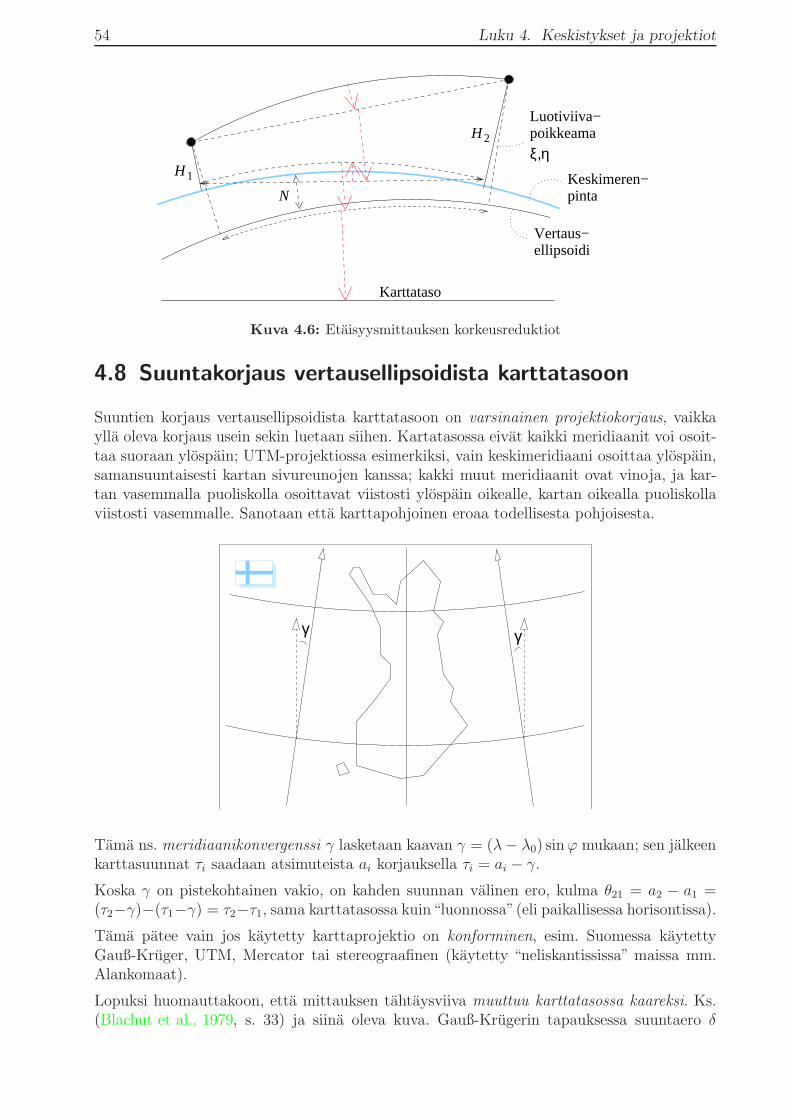
54 Luku 4. Keskistykset ja projektiot
N
Karttataso
Luotiviiva−poikkeamaξ,η
Keskimeren−pinta
Vertaus−ellipsoidi
H
H
1
2
Kuva 4.6: Etaisyysmittauksen korkeusreduktiot
4.8 Suuntakorjaus vertausellipsoidista karttatasoon
Suuntien korjaus vertausellipsoidista karttatasoon on varsinainen projektiokorjaus, vaikkaylla oleva korjaus usein sekin luetaan siihen. Kartatasossa eivat kaikki meridiaanit voi osoit-taa suoraan ylospain; UTM-projektiossa esimerkiksi, vain keskimeridiaani osoittaa ylospain,samansuuntaisesti kartan sivureunojen kanssa; kakki muut meridiaanit ovat vinoja, ja kar-tan vasemmalla puoliskolla osoittavat viistosti ylospain oikealle, kartan oikealla puoliskollaviistosti vasemmalle. Sanotaan etta karttapohjoinen eroaa todellisesta pohjoisesta.
γγ
Tama ns. meridiaanikonvergenssi γ lasketaan kaavan γ = (λ− λ0) sinϕ mukaan; sen jalkeenkarttasuunnat τi saadaan atsimuteista ai korjauksella τi = ai − γ.
Koska γ on pistekohtainen vakio, on kahden suunnan valinen ero, kulma θ21 = a2 − a1 =(τ2−γ)−(τ1−γ) = τ2−τ1, sama karttatasossa kuin“luonnossa”(eli paikallisessa horisontissa).
Tama patee vain jos kaytetty karttaprojektio on konforminen, esim. Suomessa kaytettyGauß-Kruger, UTM, Mercator tai stereograafinen (kaytetty “neliskantississa” maissa mm.Alankomaat).
Lopuksi huomauttakoon, etta mittauksen tahtaysviiva muuttuu karttatasossa kaareksi. Ks.(Blachut et al., 1979, s. 33) ja siina oleva kuva. Gauß-Krugerin tapauksessa suuntaero δ

4.9. Karttaprojektion mittakaavavirhe 55
tahtaysviivan ja karttasuoran valilla on
δ12 = ρ(x2 − x1) (2y1 + y2)
6R2,
missa y on laskettu keskimeridiaanista. ρ on200
π, radiaanin pituus gooneina. Vastaavasti
δ21 = ρ(x1 − x2) (2y2 + y1)
6R2.
Huomaa epasymmetria y-koordinaateissa.
4.9 Karttaprojektion mittakaavavirhe
Mikali halutaan redukoida ellipsoidinen kaaren pituus S pituudeksi karttatasossa, voidaankayttaa seuraava kaavaa:
s = mS
missa m on kaytetyn projektion keskimaarainen mittakaavakorjaus sivua (kaarta) pitkin.Ylla on johdettu kaava 2.1 Gauß-Kruger-projektiolle:
m ≈ 1 + 12.29 · 10−15m−2 · y2,
missa y = E − E0 on metrinen etaisyys keskimeridiaanista. Hyva likimaarainen kaava senkeskiarvolle voidaan johtaa seuraavasti:
y2 = (y2 − y1)−1
∫ y2
y1
(y2)dy = (y2 − y1)
(1
3y3
2 −1
3y3
1
)=
1
3
(y2
1 + y1y2 + y22
).
Tasta saadaanm = 1 + 4.1 · 10−15m−2
(y2
1 + y1y2 + y22
),
missa y1 ja y2 ovat sivun paatepisteiden y-arvot eli etaisyydet keskimeridiaanista.
Vastaavanlaiset kaavat loytyvat muille projektioille, mm. UTM.
Harjoitus. Stereograafisen projektion kaava on (projektion keskipiste on “pohjoisnapa” φ =90):
x = 2R sin
(π
4− φ
2
)cosλ,
y = 2R sin
(π
4− φ
2
)sinλ.
1. Johda Kaavan 2.1 vastaava mittakaavavirheen likikaava stereograafiselle projek-tiolle.
2. Johda vastaava reduktiokaava ellipsoidisen kaaren (x1, y1)−(x2, y2) projisoimiseksikarttatasoon.

56 Luku 4. Keskistykset ja projektiot
57
Luku 5
Korkeuden mittaus ja kasittely
5.1 Pystykulma
Pystykulmien havaitseminen korkeuden mittauksessa:
Pystykulmat havaitaan kahdessa kojeasennossa I ja II, kohde kerrallaan, absoluuttisenamittauksena, referenssina luotiviiva. Mittaamalla kahdessa asennossa voidaan eliminoi-da kojeen pystykehan indeksivirhe y, ks. kuva. Indeksivirhe on se, etta pystykehastaluettu arvo ei ole tarkasti 100g (kojeasento I) tai 300g (kojeasento II), vaikka tahys olisisamassa korkeudessa kuin koje.
Olkoon tahyksen “oikea” zeniittikulma z. Ensimmaisessa kojeasennossa mitataan arvoz1 = z+y; toisessa arvo z2 = 400 gon−z+y. Yhdistamalla saadaan lasketuksi erikseen
seka“oikea”arvo z =1
2(400 gon + z1 − z2), etta indeksivirhe y =
1
2(z1 + z2 − 400 gon).
Koska indeksivirhe kompensaattorikojeissa muuttuu – lineaarisesti, jaksollisesti taimonimutkaisemmalla tavalla, mutta ainakin hitaasti – , on mittaukset suoritettavamahdollisimman lyhyella aikavalilla. Silloin, jos y1 6= y2, saadaan kayttamalla“sokeasti”yo. kaava:
zlask =1
2(400 gon + z1 − z2) = z +
1
2(y1 − y2) ,
eli tehty virhe on
zlask − z =1
2(y1 − y2) .
Vaihtoehtona voidaan kayttaa suhteellinen pystykulman mittausta tunnetun pisteensuhteen. Talla tavoin voidaan eliminoida myos joitakin muita kojevirheita.
5.2 Trigonometrinen korkeudenmittaus
Trigonometrinen korkeudenmittaus kaytetaan lyhyilla etaisyyksilla1 (s < 250 m). Tassatapauksessa ei oteta mukaan maan kaarevuutta eika refraktion vaikutusta.
Kuvassa suureilla on seuraavat merkitykset:
z pystykulma (paikallisen luotiviivan suhteen)
D vinoetaisyys
1Perinteisesti trigonometrinen korkeudenmaaritys on tehty myos vuoristoisessa maastossa, mm. Lapissa,jolloin mittausetaisyydet olivat kymmenia kilometreja.
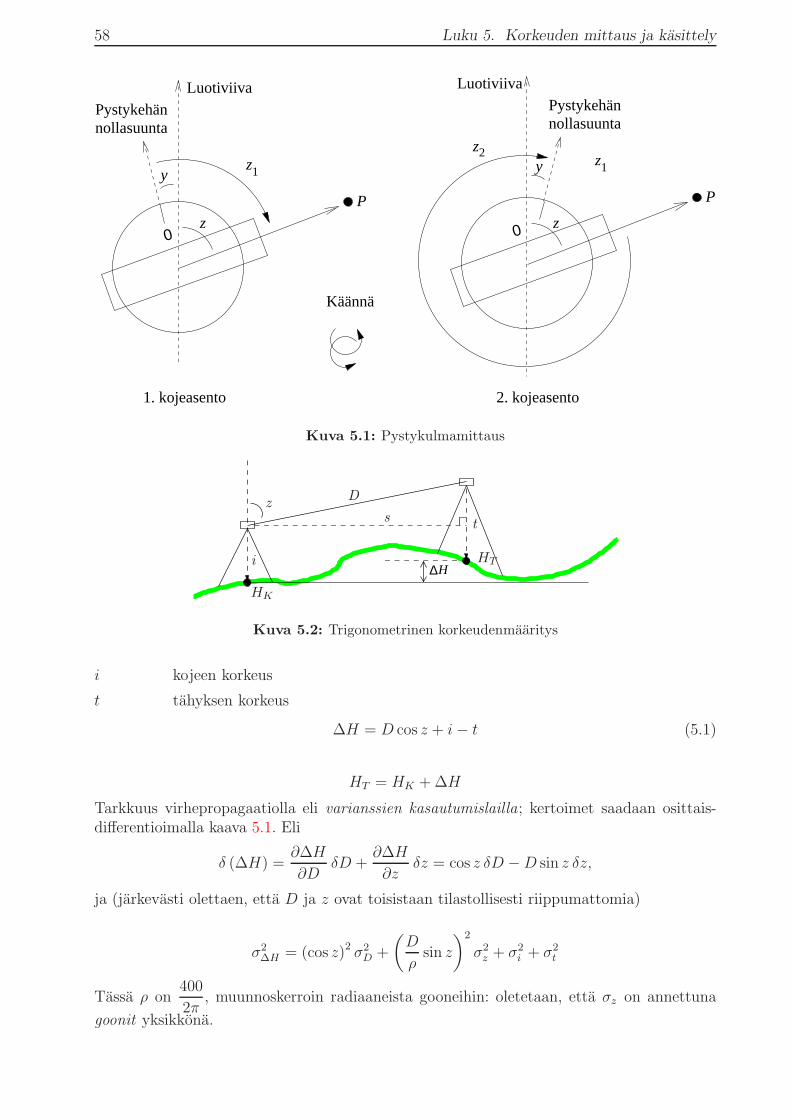
58 Luku 5. Korkeuden mittaus ja kasittely
Pystykehännollasuunta
z2
Pystykehännollasuunta
Käännä
P
1z
0 z
y
2. kojeasento1. kojeasento
P
1z
z
y
0
Luotiviiva Luotiviiva
Kuva 5.1: Pystykulmamittaus
∆H
Dz
t
i
s
HK
HT
Kuva 5.2: Trigonometrinen korkeudenmaaritys
i kojeen korkeus
t tahyksen korkeus
∆H = D cos z + i− t (5.1)
HT = HK + ∆H
Tarkkuus virhepropagaatiolla eli varianssien kasautumislailla; kertoimet saadaan osittais-differentioimalla kaava 5.1. Eli
δ (∆H) =∂∆H
∂DδD +
∂∆H
∂zδz = cos z δD −D sin z δz,
ja (jarkevasti olettaen, etta D ja z ovat toisistaan tilastollisesti riippumattomia)
σ2∆H = (cos z)2 σ2
D +
(D
ρsin z
)2
σ2z + σ2
i + σ2t
Tassa ρ on400
2π, muunnoskerroin radiaaneista gooneihin: oletetaan, etta σz on annettuna
goonit yksikkona.
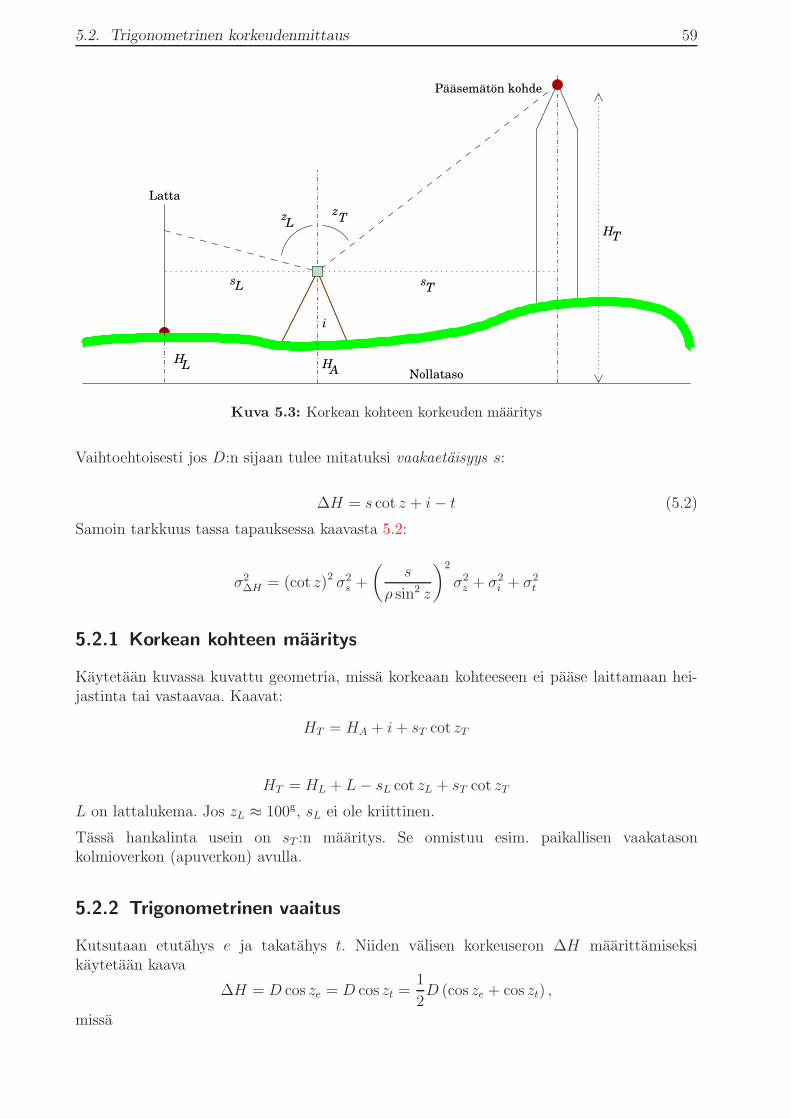
5.2. Trigonometrinen korkeudenmittaus 59
HT
z
H H
i
Latta
NollatasoL
L Tz
A
Ls sT
Pääsemätön kohde
Kuva 5.3: Korkean kohteen korkeuden maaritys
Vaihtoehtoisesti jos D:n sijaan tulee mitatuksi vaakaetaisyys s:
∆H = s cot z + i− t (5.2)
Samoin tarkkuus tassa tapauksessa kaavasta 5.2:
σ2∆H = (cot z)2 σ2
s +
(s
ρ sin2 z
)2
σ2z + σ2
i + σ2t
5.2.1 Korkean kohteen maaritys
Kaytetaan kuvassa kuvattu geometria, missa korkeaan kohteeseen ei paase laittamaan hei-jastinta tai vastaavaa. Kaavat:
HT = HA + i+ sT cot zT
HT = HL + L− sL cot zL + sT cot zT
L on lattalukema. Jos zL ≈ 100g, sL ei ole kriittinen.
Tassa hankalinta usein on sT :n maaritys. Se onnistuu esim. paikallisen vaakatasonkolmioverkon (apuverkon) avulla.
5.2.2 Trigonometrinen vaaitus
Kutsutaan etutahys e ja takatahys t. Niiden valisen korkeuseron ∆H maarittamiseksikaytetaan kaava
∆H = D cos ze = D cos zt =1
2D (cos ze + cos zt) ,
missa

60 Luku 5. Korkeuden mittaus ja kasittely
∆z
z
H
zt ezt
e D
Kuva 5.4: Trigonometrinen vaaitus
D mitattu vinoetaisyys
ze, zt mitatut zeniittikulmat
Pistevalin korkeuseron varianssi:
σ2∆H =
(1
2(cos ze + cos zt) · σD
)2
+
(1
2Dσz
ρ(sin ze + sin zt)
)2
Oletus: σz = σze= σzt
.
Jonomittauksessa mitataan useita pistevaleja; koko jonon korkeuseron varianssi on silloin
σ2∆H = σ2
∆H1+ σ2
∆H2+ . . .+ σ2
∆Hn=
n∑
i=1
σ2∆Hi
.
Tassa n on kojeasemavalien lukumaara; kojeasemien maara on n + 1.
Tassa ei ole viela esitetty, miten kojeen korkeus saadaan siirretyksi maassa olevaan kiintopis-teeseen; siihen on olemassa erilaisia vaihtoehtoja.
5.2.3 Refraktion ja Maan kaarevuuden vaikutus
Tutkitaan refraktion ja Maan kaarevuuden vaikutus korkeudenmittauksessa samalla teoreet-tisella lahestymistavalla: kyse on kahden erikaarevan tason tai sateen valisen etaisyydenkasvusta vaakaetaisyyden mukaan.
Maanpinnan tangenttitaso (horizonttitaso, kohtisuora luottiviiva kohtaan) A:ssa leikkaa B:n
paikallinen normaali (luotiviiva) pisteessa C. Kulma ∠DAC =γ
2. Kaarietaisyys Maan pin-
nalla:
s = γR,
jossa γ oltava radiaaneissa. Approksimaatio s ≈ s0,missa s kaarietaisyys AD, s0 janaetaisyysAD.
sinγ
2=
s0
2R≈ s
2R.

5.2. Trigonometrinen korkeudenmittaus 61
O
Z
γ
C
0s
B
D
A
RR
s
Kuva 5.5: Maan kaarevuuden vaikutus
Tasta kolmion sinikaavan kautta (∠ACO = 100 g − γ):
CD
s=
sin γ2
sin (100 g − γ)
CDkaar =s sin γ
2
cos γ≈ s sin
γ
2=
s2
2R, (5.3)
(oletus γ pieni, siis cos γ ≈ 1) mika kuvaa maan kaarevuuden vaikutusta korkeuseromit-taukseen. Tassa olemme valinneet kirjoitustapaa CD ≡ CDkaar, painottakseen etta tama onmaan kaarevuuteen liittyva ilmio.
Esimerkkilaskenta:
s, m 100 200 500 1000 5000 7906 10000CD, mm 0.8 3.2 20 79 1960 4900 7839
Kysymys: paikallinen painovoima on 9.8 m s−2.
1. Paljonko vapaasti putoava esine putoaa yhden sekunnin aikana?
2. Jos esine lentaa vaakasuuntaan nopeudella 7906 m s−1, paljonko silloin Maan pinta“putoaa” esineen alta Maan kaarevuuden seurauksena?
3. Mita olemme juuri keksineet?
Refraktiota kuvataan usein samanlaisella tavalla kuin Maan kaarevuutta: Kaytetaan refrak-
tiokerrointa k, joka kuvaa valonsateen kaarevuussateen r ja Maapallon kaarevuussateen Rkeskinaista suhdetta: k = R/r.

62 Luku 5. Korkeuden mittaus ja kasittely
Jos jatetaan mahdolliset ilman taitekertoimen n vaihtelut vaakasuunnassa huomioimatta,voidaan valonsateen kaarevuus kirjoittaa n:n pystygradientin funktiona:
k = −Rdndh
sin β,
missadn
dhon taitekertoimen pystygradientti ja β valonsateen ja paikallisen vertikaalin valinen
kulma, yleensa lahella 100 gon.dn
dhliittyy tiivisti saaolosuhteisiin ja voidaan laskea ilman
lampogradientistadt
dh: kirkkaana paivana ilman lampogradientti on lahella adiabaattista
gradienttia, kirkkaana yona toisaalta se voi aamupaivaan mennessa olla vahvasti positiivinen(inversiosaa).
Refraktion vaikutuksen kaava on samanlainen (mutta vastakkaisella etumerkilla) kuin Maankaarevuuden vaikutuksen kaava 5.3: se on
CDrefr = − s2
2r= −k s
2
2R,
josta saadaan kokonaisvaikutus (Maan kaarevuus ja refraktio):
CDtot = CDkaar + CDrefr = (1 − k)s2
2R.
Nahdaan, etta, mikali k = 1 (fysikaalisesti eparealistista), nettoefekti haviaa.
Kaytannossa maaston muodot monimutkaistavat refraktion kasittelya trigonometrisessa ko-rkeudenmaarituksessa, vaikka mittaukset suoritettaisiinkin ns. pintakerroksen ulkopuolellaesim. puutornien avulla.
5.2.4 Vastakkaiset yht’aikaiset mittaukset
Vastakkaiset yht’aikaiset mittaukset eliminoivat refraktion ja Maan kaarevuuden vaikutuksensuurin osa jopa pitkilla mittausvaleilla. Menetelma on perinteisesti kaytetty kolmiomittauk-sen yhteydessa; kuitenkin sita kaytetaan myos trigonometrisessa vaaituksessa, jolloin matkatovat luokkaa muutama sata metria eivatka kymmenia kilometreja.
Syy tahan nakyy kuvasta 5.6. Korkeusero H2 −H1 lasketaan sinisaannon avulla seuraavasti:
H2 +R
sinα=
H1 +R
sin β=
s
sin γ⇒
H2 −H1
sinα=
H1 +R
sin β− H1 +R
sinα⇒
H2 −H1 =(H1 +R)
sin β(sinα− sin β) =
=s
sin γ(sinα− sin β) ,
missa γ = 200 g − α− β, siis:
sin γ = sin (α+ β) = sin
(2 · 1
2(α + β)
)=
= 2 sin
(1
2(α+ β)
)cos
(1
2(α + β)
).

5.3. xyH-jonomittaus 63
s
αH1
β
H2
α + β
2 α − β
2
Kuva 5.6: Vastakkaiset, yht’aikaiset mittaukset
Nyt jos kirjoitetaan
α = µ+ δ
β = µ− δ
sinα− sin β = sin (µ+ δ) − sin (µ− δ) =
= (sinµ cos δ + cosµ sin δ) − (sinµ cos δ − cosµ sin δ) =
= 2 cosµ sin δ = 2 cos
(1
2(α + β)
)sin
(1
2(α− β)
).
Sijoittaminen tuottaa
H2 −H1 = ssin(
12(α− β)
)
sin(
12(α + β)
) . (5.4)
Tata kaavaa voidaan myos helposti tulkita ja ymmartaa geometrisesti, ks. kuva 5.6.
Jos kulmaetaisyys γ on alle 1 = 111 km, voidaan kirjoittaa tarkkuudella 0.02%:
sin
(1
2(α + β)
)= cos
1
2γ ≈ 1.
Jos taas voi olettaa, etta refraktion seurauksena mittaussateen polku on ympyrankaari, jaetta siis mitatuille kulmille αm ja βm patee:
αm − α ≈ βm − β,
seuraa, etta kaavasta (5.4) saadaan erittain hyva likimaarainen kaava:
H2 −H1 ≈ s sin
(1
2(αm − βm)
).
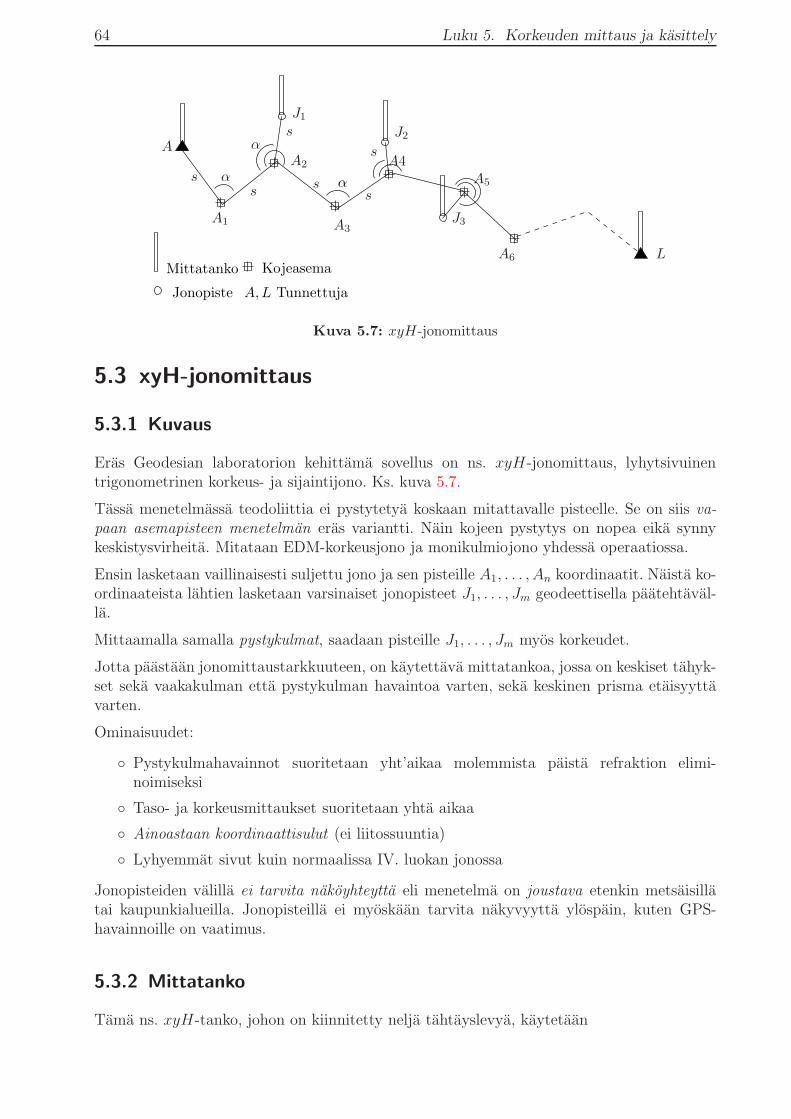
64 Luku 5. Korkeuden mittaus ja kasittely
ss
A1
A2
A5
A3
A4A
L
J3
J2
α
α
α
J1
s
KojeasemaMittatanko
Jonopiste A,L Tunnettuja
A6
s
s
s
Kuva 5.7: xyH-jonomittaus
5.3 xyH-jonomittaus
5.3.1 Kuvaus
Eras Geodesian laboratorion kehittama sovellus on ns. xyH-jonomittaus, lyhytsivuinentrigonometrinen korkeus- ja sijaintijono. Ks. kuva 5.7.
Tassa menetelmassa teodoliittia ei pystytetya koskaan mitattavalle pisteelle. Se on siis va-
paan asemapisteen menetelman eras variantti. Nain kojeen pystytys on nopea eika synnykeskistysvirheita. Mitataan EDM-korkeusjono ja monikulmiojono yhdessa operaatiossa.
Ensin lasketaan vaillinaisesti suljettu jono ja sen pisteille A1, . . . , An koordinaatit. Naista ko-ordinaateista lahtien lasketaan varsinaiset jonopisteet J1, . . . , Jm geodeettisella paatehtaval-la.
Mittaamalla samalla pystykulmat, saadaan pisteille J1, . . . , Jm myos korkeudet.
Jotta paastaan jonomittaustarkkuuteen, on kaytettava mittatankoa, jossa on keskiset tahyk-set seka vaakakulman etta pystykulman havaintoa varten, seka keskinen prisma etaisyyttavarten.
Ominaisuudet:
Pystykulmahavainnot suoritetaan yht’aikaa molemmista paista refraktion elimi-noimiseksi
Taso- ja korkeusmittaukset suoritetaan yhta aikaa
Ainoastaan koordinaattisulut (ei liitossuuntia)
Lyhyemmat sivut kuin normaalissa IV. luokan jonossa
Jonopisteiden valilla ei tarvita nakoyhteytta eli menetelma on joustava etenkin metsaisillatai kaupunkialueilla. Jonopisteilla ei myoskaan tarvita nakyvyytta ylospain, kuten GPS-havainnoille on vaatimus.
5.3.2 Mittatanko
Tama ns. xyH-tanko, johon on kiinnitetty nelja tahtayslevya, kaytetaan

5.3. xyH-jonomittaus 65
z4
z1
1.0 m
1.3 m
1.9 m
2.2 m
1.0 m
1.3 m
1.9 m
2.2 m
d
h
Kuva 5.8: xyH-tanko ja sen kaytto. Kuvaus Mikko Takalo((Takalo, 1995))
1. takymetrisen korkeusjonon siirtamiseksi tunnettuun pulttiin, ja
2. kolmiulotteisen jonomittauksen yhteydessa (xyH-jono) kuten edellisessa osassa kuvat-tu.
Tanko on tehty hiilikuidusta ja sen lampo- ja kosteuslaajeneminen on olematon. Ks. kuva5.8.
Idea on, etta pystykulmamittauksilla z1 . . . z4 voidaan maarittaa tuntemattomat h ja d.Tahan riittaisi jo kaksi mittausta, mikali tanko on tarkasti pystysuunnassa asennettu. Neljantahyksen kaytto antaa redundanssia. Havaintoyhtalot johdetaan seuraavasti:
d cos zi = ℓi − h,
jossa ℓ1 = 1.0 m, ℓ2 = 1.3 m, ℓ3 = 1.9 m ja ℓ4 = 2.2 m.
Linearisointi antaa (oletetaan ℓi tarkoiksi, eli ℓi = ℓ(0)i ja ∆ℓi = ℓi − ℓ
(0)i = 0):
∆d cos zi − d sin zi∆zi = ∆h
eli
∆zi =∆h− ∆d cos zi
−d sin zi
=
[− 1
d sin zi
cot zi
d
] [∆h∆d
].
Tama on jo havaintoyhtaloryhma, jossa
ℓ =
∆z1∆z2∆z3∆z4
, x =
[∆h∆d
]jaA =
−1/d sin z1 cot z1/d
−1/d sin z2 cot z2/d
−1/d sin z3 cot z3/d
−1/d sin z4 cot z4/d
.
66 Luku 5. Korkeuden mittaus ja kasittely
Ylimaaraisyys (nelja havaintoa, kaksi tuntematonta) auttaa huomaamaan karkeita virheita.Tarkka mittaus edellyttaa, etta h on ℓi-arvojen valilla, eli ei mitata jyrkasti alas- tai ylospain.
5.4 Vaaituksen satunnaiset virheet
Kohdistus
⊲ Vareily, huojunta; ehkaisykeino mittaamien pilvisina paivina, tai kuumina paivinaaamulla ja illalla
⊲ Kuplan vaeltaminen
⊲ Lattojen vajoaminen, lika latan pohjalevyssa
⊲ Pohjalevyn kuluminen johtuu epatasaisuuteen
⊲ Eripitkat tahtaykset
Ilmakeha eli refraktio
Kaytannossa tarkka korjaus ei ole oikein mahdollista, siksi valitaan yhtapitkat tahtayk-
set. Ja makisessa maastossa se ei edes auta, ks. kuva 5.9.
5.5 Vaaituksen systemaattiset virheet
Ilmakeha:
Refraktio
Tahtays aina vahintaan 50 cm maan pinnan ylapuolella. Saan oltava sopiva, mieluitenpilvinen. Lampotilan gradientit (etenkin pystygradientti) mahdollisimman pienia.
Lampotilan vaikutus kojeisiin
Kojeen annettava lammeta tai viileta ilman lampotilaan noin minuutin verran jokaiselleCelsiusasteen lampoerolle. Koje ja latat on suojeltava suoralta paisteelta kuljetettaessaja mitattaessa, laatikot, paivanvarjot, ei kosketella kojeita. Tarkimmissa mittauksessakaytetaan invarnauhan lampolaajenemiskorjausta.
Latat:
Jaotusten virheet. Saannollinen tarkastus, saannollinen kalibrointi.
Nykyisin on mahdollista kalibroida latat automaattisesti, jolloin kaikki viivat tulevatkalibroiduiksi.
Latat vinossa. Tasaimet, tasainten saannollinen tarkastus.
Kojeet:
Kojeen vajoaminen mittauksen aikana tai jalustat painuvat kasaan. Asfaltti kuumanapaivana vaarallinen!
Kompensaattorin virheet itsetasaavissa kojeissa (automaattikojeissa).
Geomagneettinen vaikutus lienee korjattua valmistajien toimesta. Vain kaiken tarkim-missa kojeissa.
Arviointivirheet latta luettaessa, jos ei optista mikrometria.
Parallaksi. Hyva fokusointi tarkea; silmalasit voi ottaa pois ellei sylinterilasit.
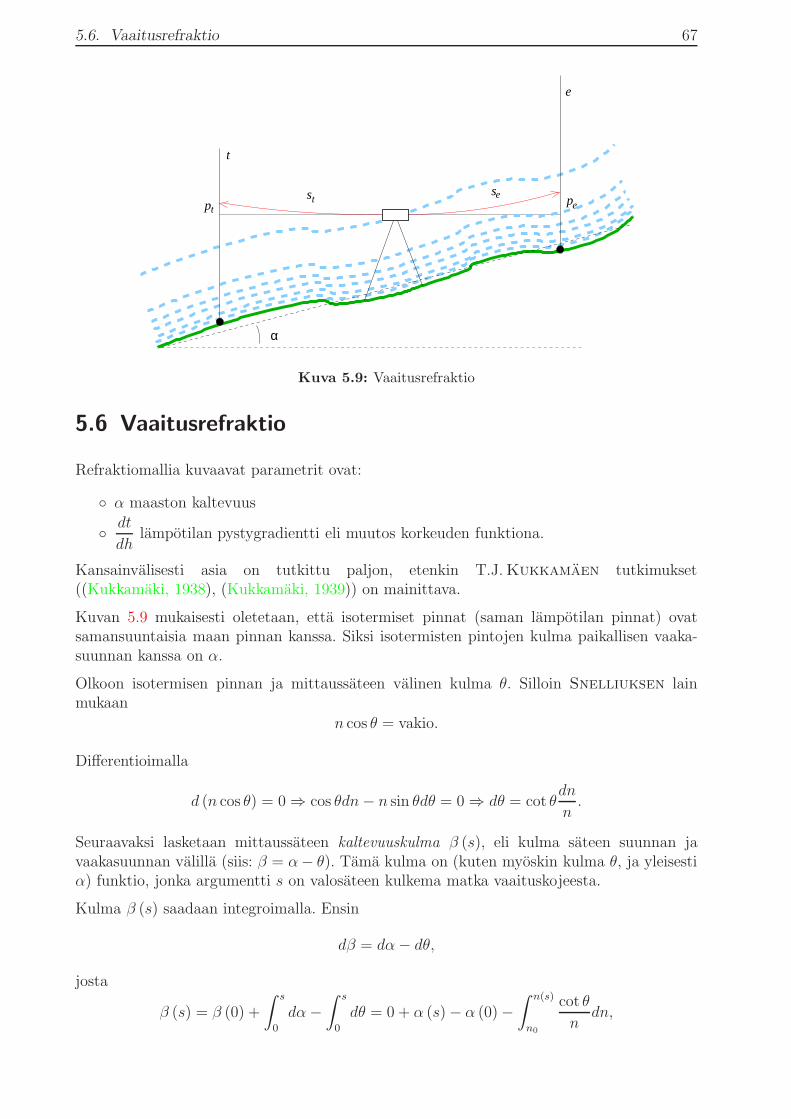
5.6. Vaaitusrefraktio 67
α
s sp p
t
et
t
e
e
Kuva 5.9: Vaaitusrefraktio
5.6 Vaaitusrefraktio
Refraktiomallia kuvaavat parametrit ovat:
α maaston kaltevuus
dt
dhlampotilan pystygradientti eli muutos korkeuden funktiona.
Kansainvalisesti asia on tutkittu paljon, etenkin T.J. Kukkamaen tutkimukset((Kukkamaki, 1938), (Kukkamaki, 1939)) on mainittava.
Kuvan 5.9 mukaisesti oletetaan, etta isotermiset pinnat (saman lampotilan pinnat) ovatsamansuuntaisia maan pinnan kanssa. Siksi isotermisten pintojen kulma paikallisen vaaka-suunnan kanssa on α.
Olkoon isotermisen pinnan ja mittaussateen valinen kulma θ. Silloin Snelliuksen lainmukaan
n cos θ = vakio.
Differentioimalla
d (n cos θ) = 0 ⇒ cos θdn− n sin θdθ = 0 ⇒ dθ = cot θdn
n.
Seuraavaksi lasketaan mittaussateen kaltevuuskulma β (s), eli kulma sateen suunnan javaakasuunnan valilla (siis: β = α− θ). Tama kulma on (kuten myoskin kulma θ, ja yleisestiα) funktio, jonka argumentti s on valosateen kulkema matka vaaituskojeesta.
Kulma β (s) saadaan integroimalla. Ensin
dβ = dα− dθ,
josta
β (s) = β (0) +
∫ s
0
dα−∫ s
0
dθ = 0 + α (s) − α (0) −∫ n(s)
n0
cot θ
ndn,

68 Luku 5. Korkeuden mittaus ja kasittely
jossa n0 on taitekerroin vaaituskojeen kohdalla, ja n taitekerroin etaisyydella s vaaitusko-jeesta. Huomaa, etta β (0) = 0 eli sade lahtee vaatuskojeesta vaakasuuntaan.
Kun oletettiin, etta α on vakio, sama kuin maan pinnan kaltevuus, seuraa α (s) = α (0) ja
β (s) = −∫ n(s)
n0
cot θ
ndn.
Yleensa saa olettaa, etta koko matkalla kulma β on hyvin lahella nollaa (eli, etta vaaitusre-fraktio on pieni efekti). Silloin θ = α−β ≈ α ja voidaan siirtaa cot θ integraalin ulkopuolellecotα:na:
β (s) ≈ cotα
∫ n(s)
n0
1
ndn = cotα ln
n (s)
n0≈ cotα
n0(n (s) − n0) ,
koska ilmassa n ≈ 1 ja nain ollen ln n(s)/n0 = lnn (s) − lnn0 ≈ n (s) − n0.
Tasta saadaan korkeuspoikkeama latalla pℓ integroimalla kulma β toinenkin kerta matkan syli:
dp = sin βds ≈ βds,
jossa p (s) on pystyetaisyys mittaussateen ja kojeen suoran vaaka-akselin valilla. Saadaan
pℓ =
∫ pl
0
dp =
∫ s0
0
βds =cotα
n0
∫ s0
0
(n (s) − n0) ds,
jossa s0 on koko matka kojeesta vaaituslattaan.
Taas integrointimuuttujan vaihto: h (s) on pystyetaisyys maan pinnasta:
dh = tan βds− tanαds,
jossa maaston ja isotermisten pintojen kaltevuutta kuvaava α-termi on hallitseva ja β ≈ 0:
ds ≈ − cotαdh.
Silloin
pℓ = −cot2 α
n0
∫ hl
h(0)
(n (h) − n0) dh,
jossa hℓ on lattalukema ja h (0) kojeen korkeus. Kirjoitetaan viela
n (h) − n0 =
∫ h
h(0)
dn
dh′dh′,
ja saadaan
pℓ = −cot2 α
n0
∫ hl
h(0)
(∫ h
h(0)
dn
dh′dh′)dh =
= −κcot2 α
n0
∫ hl
h(0)
(∫ h
h(0)
dt
dh′dh′)dh,
jossa kerroin κ voidaan johtaa nakyvan valon refraktiivisuuskaavasta (Rueger, 1990, s. 55):
N = 106 (n− 1) = N0273.15 K
T
p
1013.25 hPa− 11.27KhPa−1
Te ,
5.7. Vaaituksen kojevirheet 69
josta, yksinkertaistaen etta pintakerroksessa taitekerroin riippuu korkeudesta vain lampotilaneika ilmanpaineen kautta:
n ≈ −10−6N0273.15
293.252K−1 (t− 20C) + O
((t− 20C)2) ,
siis t ≈ 20C, p = 1013.25 hPa ja e = 0 ymparilla lampotilan ja taitekertoimen valinenyhteys on
dn = κdt,
jossa
κ = −10−6N0273.15
293.252K−1 ≈ 0.96 · 10−6K−1.
valkoisen valon (λ = 0.577µm, N0 = 303) tapauksessa.
Sovelletaan erikseen etu- ja taakse-lattoihin, laitetaan n0 ≈ 1 ja merkinnat hi ≡ h (0) kojeenkorkeudelle ja he ja ht etu- ja takalatan lukemille:
pt = −κ cot2 α
∫ ht
hi
∫ h
hi
dt
dh′dh′dh,
pe = −κ cot2 α
∫ he
hi
∫ h
hi
dt
dh′dh′dh.
Integraalit ovat ilkean nakoisia, mutta kun valitaan sopiva analyyttinen ilmaisu integrandilledt
dh′, integraatio onnistuu ((Kukkamaki, 1938, s. 23)). Jos on kaytettavissa valmis ilmaisu
lampotilafunktiolle t (h), voidaan sisaisesta integraalista luopua:
pt = −κ cot2 α
∫ ht
hi
(t (h) − t (hi)) dh,
pe = −κ cot2 α
∫ he
hi
(t (h) − t (hi)) dh.
Suurin vaikeus on integrandin, ilman lampotilan pystygradientindt
dh, tai vaihtoehtoisesti
koko funktion t (h), maarittaminen. Tarkkaa mittausta on yritetty, mutta vaikea, mallinta(pilvisyyden, maaperan ominaisuuksien, auringon korkeuden jne. jne. funktiona) on jonkinverran tuottanut tuloksia.
5.7 Vaaituksen kojevirheet
Ensin on varmistettava, etta tahtays- ja tasainakselit ovat yhdensuuntaisia. Tama tarkis-tus on helppo, ks. geodesian peruskurssin luentomoniste. Jos valitaan etu- ja takaetaisyydetsuunnilleen yhtapitkiksi, kumoutuu mahdollinen jaannosvirhe.

70 Luku 5. Korkeuden mittaus ja kasittely
Lattojen virheet
1. Jaotusvirheet
a) mittakaavavirhe; korjataan korkeuseroihin, ei lukemiin (ne ovat “lattametreissa”)
b) jakoviivojen satunnaiset virheet. Perinteisesti niita ei korjattu (oletettiin kayttay-tyvan satunnaisesti), nykyisin on olemassa automaattinen lattakalibrointi missakaikki viivat mitataan
c) nollapistevirhe
jaotus alkaa eri kohdasta latan alapaan nahden eri latoissa
Laake: valise parillinen maara kojeasemia ja siirra aina takalatta uuteen pis-teeseen, silloin nollapistevirhe eliminoituu!
2. lattatasaimen virhe
Ei kumoudu vain menee latan mittakaavaan: lukemat aina liian suuria.
Tasain tarkistettava saannollisin valein pitkan luotinarun avulla.
Pienet tasausvirheet harmittomia: esim. 0.1 gon ≈ 0.0015 rad (1.5 mm kallistus metria
kohtaan, nakyy selvasti luotinarun avulla) aiheuttaa kaavan cosα = 1− 1
2α2 mukainen,
relatiivinen virhe:
0.5 · 0.00152 = 0.000001 = 1 ppm.
Toisin sanoen, 1 mm per km korkeusero.
Jo yhden goonin tasausvirhe antaisi 100 ppm:n, eli 10 cm per km, korkeuseron virheen,mika ei ole enaa hyvaksyttavissa.
5.8 Vaaituksen karkeat virheet
Vaaitus ei sinallaan kontrolloi havaintoja: Sulkuvirhe voi sisaltaa karkean virheen eika sevalttamatta nay. Siksi on tarkoissa ja tuotannollisesti tarkeissa mittauksissa (siis: aina!)tehtava sidos kahteen toisistaan riippumattomaan lahtopisteeseen.
Lisaksi tarkoissa mittauksissa voidaan vaaitus suorittaa kahta rinnakkaista mittausta kayt-tamalla; kaksiasteikkoiset latat. Asteikot voivat olla latan samalla puolella tai latan eri puo-lilla (kaantolatta).
Asteikot alkaavat eri pisteista (suuri ero suositeltava!); asteikkojen erotus lisaksi saa ollakokonaisluku, jotta asteikkojen pyoristysvirheet olisivat tilastollisesti riippumattomia.
Kutsutaan takalattaan mittausta t1, t′1 ja etulattaan mittausta e1, e
′1. Silloin oikea mittaus-
menetelma systemaattisten virheiden minimoimiseksi on t1, e1, e′1, t
′1.
Kahden asteikon lisaksi voidaan kayttaa (ja joskus kaytetaankin, jos pelataan varman paalla)
kaksi latta,
tai
kaksi kojetta.

5.8. Vaaituksen karkeat virheet 71
62
63
64
65
01
02
03
04
Kuva 5.10: Kaksoisasteikko
Kaikissa tapauksissa saadaan kaksi korkeuseroa:
∆H = t1 − e1
∆H ′ = t′1 − e′1
Yleisemmin, jos on mitattu n:lla kojeasemalla i = 1, . . . , n pisteesta A pisteeseen B:
∆Hi = ti − ei; ∆hAB =n∑
i=1
ti −n∑
i=1
ei
Valin varianssi:σ2
∆Hi= σ2
ti+ σ2
ei
Linjan varianssi:
σ2∆HAB
= 2n∑
i=1
σ2i = 2nσ2
0,
jossa σ20 on yhden eteen- tai taakse- mittauksen varianssi.

72 Luku 5. Korkeuden mittaus ja kasittely
t
t’
t
3
1
1
2
ee’
t’ e
tt’
e’2
3
22
11
Kuva 5.11: Kahden latan kaytto
tt’
ee’
t’t
e’
e
1
1
2
2
11
2
2
Kuva 5.12: Kahden kojeen kaytto
Vaaituksen laadun mitaksi kaytetaan usein ns. kilometrikeskivirhetta
σ20 =
w2
∑s
Yhdesta w-arvosta ei saada luotettavia likiarvoa. Monesta linjasta saadaan luotettavampitulos:
σ20 =
1
n
n∑
i=1
w2i
si, (5.5)
missa i = 1, . . . , n on vaaituslinjojen laskuri. Jos on kyse kaksinkertaisen vaaituksen tulok-sesta, voidaan laskea niiden erotuksista
d = ∆H − ∆H ′
ja
σ20 =
1
2n
n∑
i=1
d2i
si
,
missa nyt i = 1, . . . n laskee mitatut korkeuserot (valit), usein suuri luku.
Kahden mittauksen keskiarvon keskivirheen estimaatti σ0,2 saadaan seuraavasti:
σ20,2 =
σ20
2.
Havaittu seikka, josta on oltava tietoinen, on etta mita suurempi havaintoaineisto yritetaan
sovittaa yhteen, sita suuremmaksi arvio σ20 muodostuu. Myos tasoverkkotasoituksessa verkos-
ta saatu arvo on useimmiten huomattavasti suurempi kuin mita asematasoitukset ovat an-taneet.

5.9. Yksittaisen vaaitusjonon laskeminen 73
Samalla vaaitusverkoissa: valien edestakaisesta mittauksesta saaty σ20 on aina pienempi kuin
mita linjoista saa, ja se on taas pienempi kuin vaaitusverkkotasoituksesta saatu arvio.
Tama on vain looginen seuraus siita, etta laajempi aineisto on aina saatu suuremmaltaalueelta ja pitemmalta mittausajalta, jolla on voinut tapahtua enemman tarkuutta huonon-tavia seikkoja: puutteellisesti mallinnettuja geofysikaalisia tai ilmatieteellisia ilmioita, lait-teiden ominaisuuksien muuttuminen, jne. jne.
5.9 Yksittaisen vaaitusjonon laskeminen
Lahdetaan kilometrikeskivirheen hypoteesista, eli oletus, etta jos vaaituslinjan pituus on s,sen paatepisteiden korkeuseron ∆h varianssi on
σ2∆h = σ2
0 s, (5.6)
missa σ0 on kilometrikeskivirhe. Talla jarkevaksi osoitetulla olettamuksella voidaan kayttaapistevalin pituus vaaitusjonon tasoituksen painona.
Pistevali s, km dH , m13-1 0.4 0.5341-2 0.6 2.6342-3 1.0 3.0753-16 0.2 0.517Σ 2.2 6.760
Tunnetaan H13 = 78.278 m, H16 = 85.002 m; ero H16 − H13 = 6.724 m. Sulkuvirhe w =+0.036 m.
Tasoitettu korkeus:
Hk =alkukorkeus
︷︸︸︷HT
+
korkeuserot︷ ︸︸ ︷
k∑
i=1
dHi
−tasoituskorjaus︷ ︸︸ ︷∑k
i=1 pi∑ni=1 pi
w,
missa HT lahtopisteen (13) korkeus. Painoluvuiksi otetaan linjan pituus, pk = sk. Esi-merkissa:
p1 = 0.4
p1 + p2 = 0.4 + 0.6 = 1.0
p1 + p2 + p3 = 0.4 + 0.6 + 1.0 = 2.0
p1 + p2 + p3 + p4 = 0.4 + 0.6 + 1.0 + 0.2 = 2.2
Syy miksi pk = sk:
Myohemmin luvussa 10.3 naytetaan, etta ehtotasoituksena vaaitussilmukan tasoitukses-sa tilastollisesti “oikeat” (optimaaliset) painot ovat vaaitusvalien mittausvarianssit σ2
∆Hi.

74 Luku 5. Korkeuden mittaus ja kasittely
Vaaituksessa patee kilometrivirhe-olettamus (kaava 5.6). Tama merkitsee, etta vaaitusvalinvarianssi on suoraan verrannollinen sen pituuteen. Tama taas merkitsee, etta voidaan kayt-taa vaaitusvalien pituudet tasoituksen painoina.
Miksi kilometrivirhe-olettamus patee? Yksi havainto vaaitusjonon tasoituksessa on pult-tivalin korkeusero. Tama ero on useiden taakse-eteen -lukemien erostusten summa:
∑(ht − he) = ∆H.
Yhden tallaisen erotuksen keskivirhe on aina sama (sama menetelma, sama koje, suunnilleensama mittausetaisyys, . . . : σi. Korkeuseron ∆H keskivirhe saadaan summan keskivirheena
σ∆H =√∑
σ2i ,
eli
σ2∆H =
n∑
i=1
σ2i = nσ2
i .
Summattavien erotuksien eli kojeasemien lukumaara pulttivalilla on suoraan verrannollinenvaaittuun matkaan eli varianssi σ2
∆H on myos suoraan verrannollinen vaaittuun matkaan s:
σ2∆H = σ2
0s. (5.7)
Numeroesimerkki:
Tassa numeroesimerkissa kaytetaan luvussa 10.3 johdetut tasoitetun korkeuseronvarianssin kaavat.
σ20 = 385.6 mm2/km (kaava 5.5).
σ2∆H1
= σ20 · 0.4
(1 − 0.4
2.2
)= 125.6 mm2 σ∆H1 = 11.2 mm eli 28 ppm
σ2∆H2
= σ20 · 0.6
(1 − 0.6
2.2
)= 168.3 mm2 σ∆H2 = 13.0 mm eli 22 ppm
σ2∆H3
= σ20 · 1.0
(1 − 1.0
2.2
)= 210.3 mm2 σ∆H3 = 14.5 mm eli 15 ppm
σ2∆H4
= σ20 · 0.2
(1 − 0.2
2.2
)= 78.1 mm2 σ∆H4 = 8.4 mm eli 42 ppm
Tasoitetut korkeudet (huom: 0.0164 onw
Σs=
0.036
2.2):
H1 = 78.278 + 0.534 − 0.4 · 0.0164 = 78.806
H2 = 78.278 + (0.534 + 2.634) − 1.0 · 0.0164 = 81.430
H3 = 78.278 + (0.534 + 2.634 + 3.075) − 2.0 · 0.0164 = 84.488
Tarkistus: pisteelle 16 pitaa saada annettu korkeus takaisin:
H16 = 78.278 + (0.534 + 2.634 + 3.075 + 0.517) −−2.2 · 0.0164 = 85.002

5.9. Yksittaisen vaaitusjonon laskeminen 75
Tasoitettujen korkeuksien keskivirheet (varianssit). Kaytetaan mittausvalien varianssit pain-oina:
σ2Hk
=
k∑
i=1
σ2∆Hi
(1 −
∑ki=1 σ
2∆Hi∑n
i=1 σ2∆Hi
)
Korkeuksien varianssit kayttamalla valien pituudet painoina, kaavan (5.7) mukaan:
σ2Hk
=
k∑
i=1
σ20si
(1 − σ2
0
∑ki=1 si
σ20
∑ni=1 si
)=
=
k∑
i=1
σ20si
(1 −
∑ki=1 si∑ni=1 si
).
σ0 kilometrikeskivirhe tai sen arvio eli estimaatti.
σ0:n arvio voidaan saada esim. sulkuvirheesta. Jos on kaytettavissa vain yksi sulkuvirhe(vaaituslinja), arvio tulee olemaan karkea. Jos sulkuvirhe on w, on suure
ω ≡ w
σo
√s
jakautunut normaalisti (ts. Gaußin kellokayran mukaisesti) odotusarvolla E ω = 0 jakeskivirheella 1 (standardi-normaali jakauma, N 0; 1). Kirjallisuudesta ((Cooper, 1987))loytyvien taulukoiden mukaan on todennakoisyys, etta |ω| > 1.96, eli
|w| > 1.96σ0
√s,
vain 5%. Jos nain on kuitenkin asian laita, voidaan tehda johtopaatos, etta 95% toden-nakoisyydella, joko
1. σ0 on arvioitu liian pieneksi; tai
2. mittauksessa on karkea virhe.
Kuten ylla jo selostettu, jos on kaytettavissa useita sulkuvirheita (esim. useasta linjastaja/tai edestakaisesta vaaituksesta) voidaan estimoida kilometrikeskivirhe seuraavasti:
σ20 =
1
n
n∑
i=1
w2i
si,
missa n on sulkuvirheiden maara.

76 Luku 5. Korkeuden mittaus ja kasittely
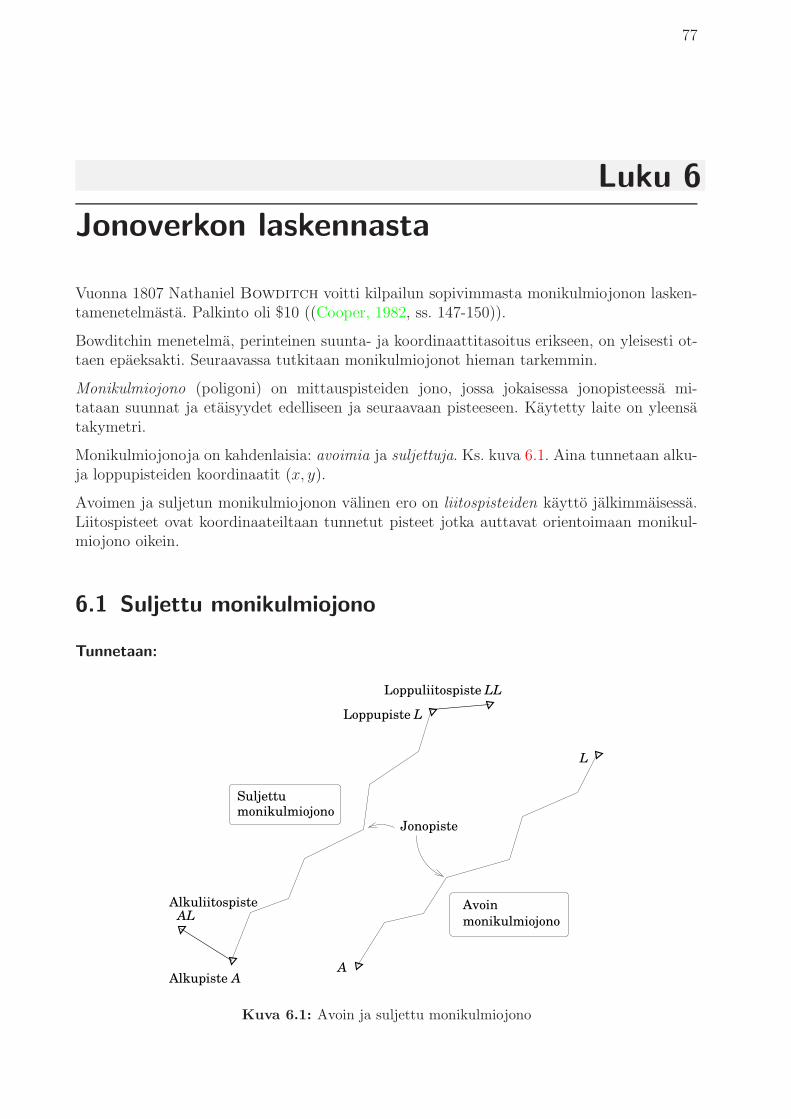
77
Luku 6
Jonoverkon laskennasta
Vuonna 1807 Nathaniel Bowditch voitti kilpailun sopivimmasta monikulmiojonon lasken-tamenetelmasta. Palkinto oli $10 ((Cooper, 1982, ss. 147-150)).
Bowditchin menetelma, perinteinen suunta- ja koordinaattitasoitus erikseen, on yleisesti ot-taen epaeksakti. Seuraavassa tutkitaan monikulmiojonot hieman tarkemmin.
Monikulmiojono (poligoni) on mittauspisteiden jono, jossa jokaisessa jonopisteessa mi-tataan suunnat ja etaisyydet edelliseen ja seuraavaan pisteeseen. Kaytetty laite on yleensatakymetri.
Monikulmiojonoja on kahdenlaisia: avoimia ja suljettuja. Ks. kuva 6.1. Aina tunnetaan alku-ja loppupisteiden koordinaatit (x, y).
Avoimen ja suljetun monikulmiojonon valinen ero on liitospisteiden kaytto jalkimmaisessa.Liitospisteet ovat koordinaateiltaan tunnetut pisteet jotka auttavat orientoimaan monikul-miojono oikein.
6.1 Suljettu monikulmiojono
Tunnetaan:
Suljettumonikulmiojono
Avoin
monikulmiojono
L
A
LLoppupiste
ALAlkuliitospiste
Alkupiste A
LLLoppuliitospiste
Jonopiste
Kuva 6.1: Avoin ja suljettu monikulmiojono
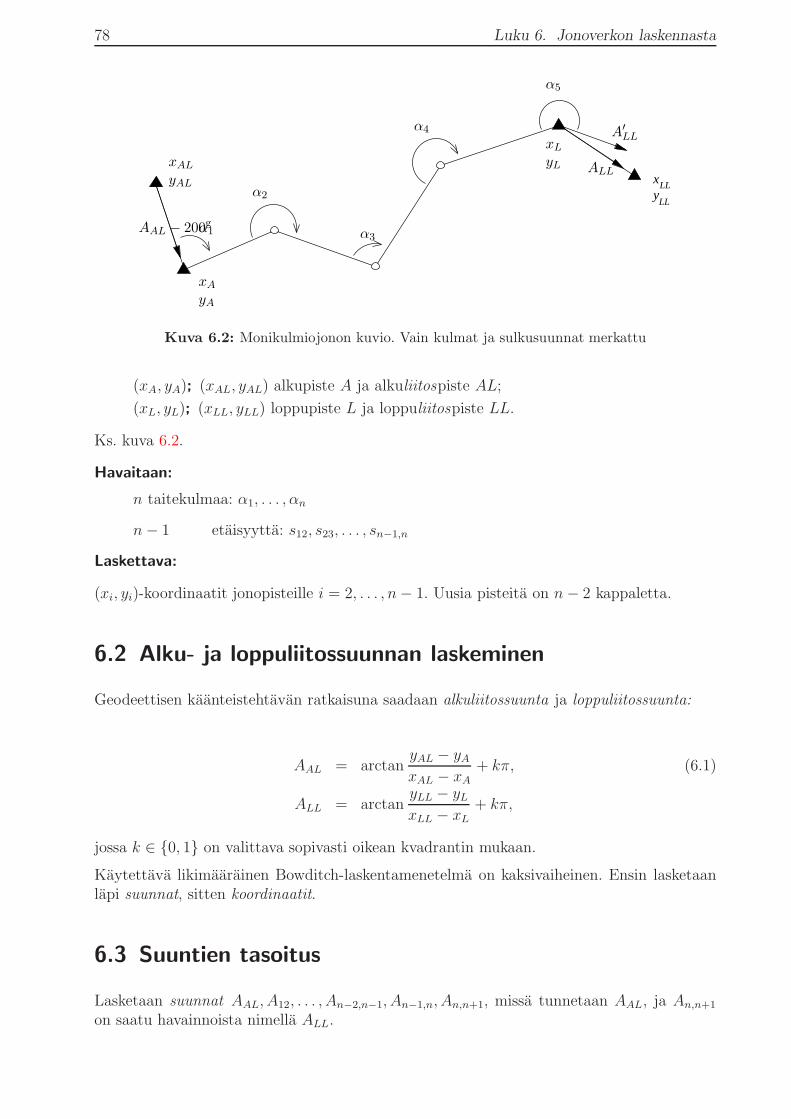
78 Luku 6. Jonoverkon laskennasta
xy
LL
LL
xAL
yAL
α1
α2
α3
α4
α5
xL
yL
A′LL
xA
yA
ALL
AAL − 200g
Kuva 6.2: Monikulmiojonon kuvio. Vain kulmat ja sulkusuunnat merkattu
(xA, yA); (xAL, yAL) alkupiste A ja alkuliitospiste AL;
(xL, yL); (xLL, yLL) loppupiste L ja loppuliitospiste LL.
Ks. kuva 6.2.
Havaitaan:
n taitekulmaa: α1, . . . , αn
n− 1 etaisyytta: s12, s23, . . . , sn−1,n
Laskettava:
(xi, yi)-koordinaatit jonopisteille i = 2, . . . , n− 1. Uusia pisteita on n− 2 kappaletta.
6.2 Alku- ja loppuliitossuunnan laskeminen
Geodeettisen kaanteistehtavan ratkaisuna saadaan alkuliitossuunta ja loppuliitossuunta:
AAL = arctanyAL − yA
xAL − xA+ kπ, (6.1)
ALL = arctanyLL − yL
xLL − xL+ kπ,
jossa k ∈ 0, 1 on valittava sopivasti oikean kvadrantin mukaan.
Kaytettava likimaarainen Bowditch-laskentamenetelma on kaksivaiheinen. Ensin lasketaanlapi suunnat, sitten koordinaatit.
6.3 Suuntien tasoitus
Lasketaan suunnat AAL, A12, . . . , An−2,n−1, An−1,n, An,n+1, missa tunnetaan AAL, ja An,n+1
on saatu havainnoista nimella ALL.

6.4. Koordinaattien tasoitus 79
Seuraavasti1:
A12 = AAL + α1
A23 = A12 − 200 gon + α2
· · · · · · · · ·Ai,i+1 = Ai−1,i − 200 gon + αi (6.2)
· · · · · · · · ·An−1,n = An−2,n−1 − 200 gon + αn−1
A′LL = An−1,n − 200 gon + αn
Lopuksi saadaan siis arvo A′LL, joka, jos kaikki kulmahavainnot αi olisivat virheettomia, olisi
identisesti sama kuin kaavalla (6.1) koordinaatteista laskettu ALL. Todellisuudessa nain eikuitenkaan ole, vaan suuntasulkuvirhe on:
wt = A′LL − ALL.
Tama sulkuvirhe poistetaan, eli tasoitetaan, jakamalla se tasan kaikille taitekulmille elijokaiseen taitekulmaan tehdaan korjaus:
∆αi = −wt
n,
jonka jalkeen suoritetaan kulmien lasku uudelleen, tuloksena tasoitetut suunnat :
A12 = AAL + (α1 + ∆α)
A23 = A12 − 200 gon + (α2 + ∆α)
· · · · · · · · ·Ai,i+1 = Ai−1,i − 200 gon + (αi + ∆α)
· · · · · · · · ·An−1,n = An−2,n−1 − 200 gon + (αn−1 + ∆α)
A′LL = An−1,n − 200 gon + (αn + ∆α)
6.4 Koordinaattien tasoitus
Nain tasoitetuilla suunnilla lasketaan pisteille 2, . . . , n− 1 koordinaatit geodeettisella paate-htavalla):
Piste 2:
∆x12 = s12 cos A12
∆y12 = s12 sin A12
jonka avulla
x2 = x1 + ∆x12
y2 = y1 + ∆y12
1Huomaa, etta ensimmaisen taitekulman α1 yhteydessa ei vahenneta 200 gon! Ja jos haluat pitaa suun-takulmat Ai katevasti valilla [0, 400 gon), on joskus lisattava tai vahennettava 400 gon.

80 Luku 6. Jonoverkon laskennasta
Yleinen piste i: (ja myos loppupiste i → n)
∆xi−1,i = si−1,i cos Ai−1,i
∆yi−1,i = si−1,i sin Ai−1,i
jonka avulla
xi = xi−1 + ∆xi−1,i
yi = yi−1 + ∆yi−1,i
Yleisesti: (muista, etta xA = x1 ja yA = y1)
xk = xA +
k∑
i=2
si−1,i cos Ai−1,i ,
yk = yA +
k∑
i=2
si−1,i sin Ai−1,i .
Sijoittamalla k → n saadaan loppupisteen kaavat ja koordinaatit xn, yn.
Mikali havainnot olisivat virheettomia, olisi xn = xL ja yn = yL, mutta nain ei ole asianlaita. Saadaan koordinaattisulkuvirheet :
wx = xn − xL ,
wy = yn − yL .
Sulkuvirheet tasoitetaan antamalla jokaiselle pistevalille painokerroin qi−1,i, ja naiden pain-okertoimien suhteessa jaetaan wx ja wy pistevaleille.
Pieni painokerroin ⇔ suuri paino, suuri painokerroin ⇔ pieni paino!
Lasketaan painoyksikkojen summaa vastaava standardikorjaus erikseen x- ja y-koordinaateille:
dx = − wx∑ni=2 qi−1,i
,
dy = − wy∑ni=2 qi−1,i
.
Tasoitetuiksi koordinaateiksi saadaan
xi = xi−1+ si−1,i cos Ai−1,i + qi−1,idx ,
yi = yi−1+ si−1,i sin Ai−1,i + qi−1,idy ;
tai alkupisteesta A laskien:
xk = xA +
k∑
i=2
(si−1,i cos Ai−1,i + qi−1,idx
),
yk = yA +
k∑
i=2
(si−1,i sin Ai−1,i + qi−1,idy
).

6.5. Laskentakaavio 81
6.5 Laskentakaavio
Koko laskenta voidaan suorittaa alla olevan laskentakaavion avulla, jota voidaan helpostiautomatisoida. Annettuna tAL = 145.3750 gon ja tLL = 72.3818 gon, seka alkupisteen A jaloppupisteen L koordinaatit. n = 5. Kaytetty painotus: tasainen.
i αi Ai,i+1 ∆A Ai,i+1
A 345.3750
1 212.2345 157.6095 +7 157.6102
2 151.4565 109.0660 +15 109.0675
3 221.9823 131.0483 +22 131.0505
4 175.9831 107.0314 +29 107.0343
5 165.3467 72.3781 +37 72.3818
L 72.3818
Sulkuvirhe wt -0.0037 ↑
i Ai,i+1 si,i+1 s cos A s sin A xi yi ∆xi ∆yi xi yi
1 157.6102 502.345 -395.038 +310.315 1000.235 256.256
2 109.0675 487.241 -69.164 +482.307 605.197 566.571 +9 -36 .206 .535
3 131.0505 445.981 -209.001 +393.977 536.033 1048.878 +18 -73 .051 .805
4 107.0343 512.125 -56.472 +509.002 327.032 1442.855 +26 -109 .058 .746
5 72.3818 270.560 1951.857 +35 -146 .595 .711
L 270.595 1951.711
Sulkuvirheet wx, wy -0.035 +0.146 ↑ ↑
Lahto- ja loppupisteiden annetut arvot alleviivattuina, havainnot mustia, lasketut punaisia,sulkuvirheet ja tasoituksen korjaukset sinisia. Tama kaavio kelpaa kaytannon tyohonpaikallisessa runkomittauksessa.
6.5.1 Huomautuksia
Ylla kuvattu tasoitusmenetelma on likimaarainen eli suboptimaalinen. Oikeaoppisessapienimman neliosumman tasoitusmenetelmassa lasketaan kulma- ja koordinaattikor-jaukset samanaikaisesti, koska ne korreloivat keskenaan. Tulokset ovat silloin hiemanerilaisia.
Kuitenkin, jos monikulmiojono on suhteellisen suora (eli sivut suunnilleen samansu-untaisia), on suboptimaalisuus pieni ja oikeaoppinen tasoitus aiheuttaisi vain pieniamuutoksia lopullisiin koordinaatteihin. Toisaalta ei ole toivottavaa etta sivut olisivataivan samansuuntaisia; se hankaloittaisi mahdollisten karkeiden virheiden etsintaa.
Jonolasku tapahtuu tasolaskuna. Kuitenkin havainnot on tehty kolmiulotteisesti,“avaruudessa”. Tama edellyttaa, etta koje ja tahys ovat tarkasti ja oikein keskistet-
tyja ja koje tasattu, ja etta kaikki relevantit reduktiot (kallistus- nollataso-, ks. luku??) on suoritettu. Vain siina tapauksessa voidaan sanoa, etta
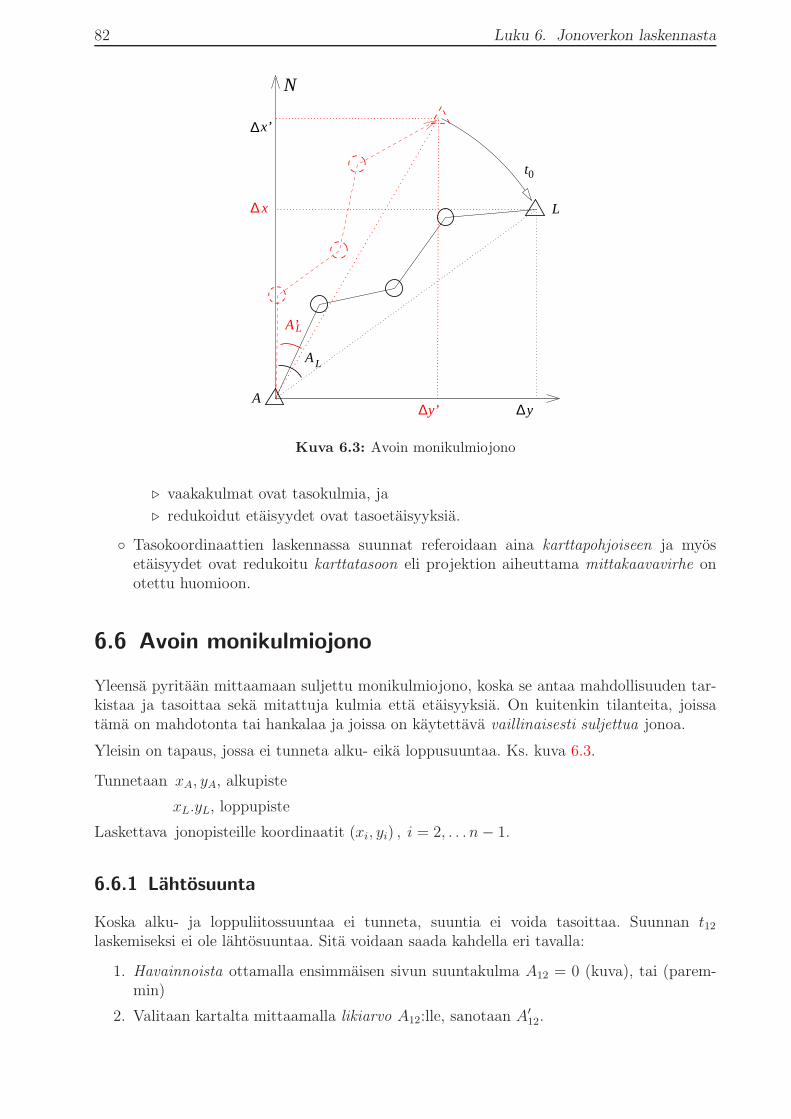
82 Luku 6. Jonoverkon laskennasta
t0
N
L
A∆
∆x’
x∆
y∆y’
A’
AL
L
Kuva 6.3: Avoin monikulmiojono
⊲ vaakakulmat ovat tasokulmia, ja
⊲ redukoidut etaisyydet ovat tasoetaisyyksia.
Tasokoordinaattien laskennassa suunnat referoidaan aina karttapohjoiseen ja myosetaisyydet ovat redukoitu karttatasoon eli projektion aiheuttama mittakaavavirhe onotettu huomioon.
6.6 Avoin monikulmiojono
Yleensa pyritaan mittaamaan suljettu monikulmiojono, koska se antaa mahdollisuuden tar-kistaa ja tasoittaa seka mitattuja kulmia etta etaisyyksia. On kuitenkin tilanteita, joissatama on mahdotonta tai hankalaa ja joissa on kaytettava vaillinaisesti suljettua jonoa.
Yleisin on tapaus, jossa ei tunneta alku- eika loppusuuntaa. Ks. kuva 6.3.
Tunnetaan xA, yA, alkupiste
xL.yL, loppupiste
Laskettava jonopisteille koordinaatit (xi, yi) , i = 2, . . . n− 1.
6.6.1 Lahtosuunta
Koska alku- ja loppuliitossuuntaa ei tunneta, suuntia ei voida tasoittaa. Suunnan t12laskemiseksi ei ole lahtosuuntaa. Sita voidaan saada kahdella eri tavalla:
1. Havainnoista ottamalla ensimmaisen sivun suuntakulma A12 = 0 (kuva), tai (parem-min)
2. Valitaan kartalta mittaamalla likiarvo A12:lle, sanotaan A′12.

6.6. Avoin monikulmiojono 83
6.6.2 Jonon laskenta
Suoritetaan suuntien lasku tuttuun tapaan:
A12 = A′12
A23 = A12 − 200 gon + α2
· · · · · · · · ·Ai,i+1 = Ai−1,i − 200 gon + αi
· · · · · · · · ·An−1,n = An−2,n−1 − 200 gon + αn−1
Nama suunnat ovat “lopullisia”. Laskemme niille koordinaatit geodeettisella paatehtavalla:
x′2 = xA + s12 cosA12 ,
y′2 = yA + s12 sinA12 ,
ja niin edelleen:
x′i = x′i−1 + si−1,i cosAi−1,i ,
y′i = y′i−1 + si−1,i sinAi−1,i .
Lopuksi:
x′n = x′n−1 + sn−1,n cosAn−1,n ,
y′n = y′n−1 + sn−1,n sinAn−1,n .
Tama tasoitus on suoritettu oikealla tavalla, mutta vaarin orientoidussa koordinaatistossa.
Sulkuvirheet ∆x′ = x′n − xL ja ∆y′ = y′n − yL eivat kerro mittausvirheista vaan oletetun su-unnan A′
12 likimaaraisyydesta. Tasta syysta sulkuvirheita ei saa poistaa tasoittamalla kutentaysin suljetussa jonossa.
Koko jono on kiertynyt kulman t0 verran, ja sen pitaa kiertaa takaisin Helmert- eli yhden-muotoisuusmuunnoksella.
Koska alkupiste A on molempien koordinaatistojen valinen kiertopiste, voimme yksinkertais-esti laskea niiden valisen mittakaavakertoimen K ja kiertokulman t0, eli
K =
√∆x2 + ∆y2
√(∆x′)2 + (∆y′)2
,
t0 = arctan∆y
∆x− arctan
∆y′
∆x′
– tai puolikulmakaavalla:
t0 = 2
arctan
∆y
∆x+√
∆x2 + ∆y2− arctan
∆y′
∆x′ +√
(∆x′)2 + (∆y′)2
missa
∆x = xL − xA ,
∆y = yL − yA ,
∆x′ = x′n − xA ,
∆y′ = y′n − yA .

84 Luku 6. Jonoverkon laskennasta
Konstruoidaan taas muunnosmatriisi:
c = K cos t0 ,
s = K sin t0 ,
jonka avulla jonopisteiden i = 1, . . . , n koordinaateiksi saadaan:
xi = xA + c∆x′i − s∆y′i ,
yi = yA + s∆x′i + c∆y′i .
Matriisimuodossa: [xi
yi
]=
[xA
yA
]+
[c −ss c
] [∆x′i∆y′i
],
missa
∆x′i = x′i − xA ,
∆y′i = y′i − yA .
Huomaa, etta matriisissa
M =
[c −ss c
]= K
[cos t0 − sin t0sin t0 cos t0
]
suuntakorjaus t0 korjaa ainoastaan alkusuunta-olettamuksen, kun taas mittakaavakorjaus Ksisaltaa myos mittausepatarkkuuden aiheuttaman sulkuvirheen korjauksen2: vaikka lahtosu-unta t12 olisikin taysin oikein arvattu, kuitenkaan eivat x′n, y
′n valttamatta osuisi tarkkaan
pisteeseen xL, yL. Kuitenkin sivusuunnassa (kohtisuoraan jonoa vastaan) jaa havaintovirhetasoittamatta, tai tarkemmin sanottuna, se “absorboituu” t0:aan.
Hyva lopputarkastus on:
xL?= xA + c∆x′n − s∆y′n ,
yL?= yA + s∆x′n + c∆y′n .
Taman lisaksi on tarkistettava, onko K realistinen, eli lahella 1. Vaihtoehtoisesti voidaanlaskea yksi koordinaattisulkuvirhe asettamalla K = 1, ja testata se tunnetun etaisyysmit-tauksen tarkkuutta vastaan.
2. . . eli se on alkeellinen tasoitus.

85
Luku 7
Ehtoyhtaloiden tasoitus
7.1 Teoria
Tasoituslaskussa tavataan usein tilanne, jossa tuttujen havaintoyhtaloiden muodostaminenei ole tarkoituksenmukaista, vaan on helpompaa vaihtoehtoisesti muodostaa ehtoyhtaloita.Silloin kirjoitetaan:
y1 = b11ℓ1 + b12ℓ2 + · · ·+ b1nℓn + b10;
y2 = b21ℓ1 + b22ℓ2 + · · ·+ b2nℓn + b20; (7.1)
· · · · · · · · ·yk = bk1ℓ1 + bk2ℓ2 + · · · + bknℓn + bk0.
. . .missa suureet yi kutsutaan nollasuureiksi. Havainnoista lasketut yi-arvot kutsutaan sulku-
virheeksi. Mittausvirheiden vuoksi ne eivat ole nolla vaan jakautuvat nollan molemminpuolin.
Tassa on k ehtoyhtaloa n havaintosuureiden valilla. Ehdot kertovat, etta ihanteellisesti, an-nettujen havaintojen ℓ1, ℓ2, . . . , ℓn lineaariyhdistelmat olisivat nolla, kuten esimerkisi vaai-tussilmukan yhteenlasketut korkeuseromittaukset.
Havaintosuureet ℓj ovat samalla myos tuntemattomat ℓj, eli suureet joiden arvot halutaanestimoida mahdollisimman tarkasti. Tasoitustehtavana on tassa tapauksessa korjata havain-tosuureet ℓj nain, etta ehdot tayttavat ja sulkuvirheet haviavat.
Matriisimuotoon:
y = Bℓ+ b. (7.2)
Jos oletetaan, etta kaikilla havainnoilla ℓi on sama keskivirhe σ ja etta ne eivat korreloikeskenaan, voidaan kirjoittaa, etta
ℓ = ℓ−BT(BBT
)−1y. (7.3)
Nollasuureiden vektorin y alkioiden lukumaara, ehtojen maara, on aina pienempi kuinhavaintojen eli havaintovektorin ℓ alkioiden maara:
ℓ ∈ Rn,
y ∈ Rk,
missa k < n. B on k × n-kokoinen matriisi, siina on k rivia ja n saraketta. BT taas onn× k-kokoinen ja BBT on k × k-kokoinen.

86 Luku 7. Ehtoyhtaloiden tasoitus
7.2 Esimerkki: kolmioehto
Klassinen esimerkki ehtotasoituksesta on kolmion kolmen kulman ehdon
α1 + α2 + α3 = 200 gon
kayttaminen mittattujen kulmien α1α2, α3 tasoittamiseksi.
Kirjoitetaan tama ehtoyhtalona:
y =[
1 1 1]α1
α2
α3
− 200 gon,
missa ℓ =[α1 α2 α3
]Tja B =
[1 1 1
]. Suure y on ongelman nollasuure.
Lasketaan matriisi BBT ja vektori BT(BBT
)−1y :
BBT =[
1 1 1]
111
= 3;
(BBT
)−1=
1
3.
Siis
BT(BBT
)−1y =
111
1
3y
ja
ℓ =
α1
α2
α3
= ℓ− BT
(BBT
)−1y =
α1 − 1/3 y
α2 − 1/3 y
α3 − 1/3 y
,
tulos yhteensopiva aikaisempien tulosten kanssa, jos muistetaan, etta y = ∆ on sulkuvirhe.Sulkuvirhe tasoitetaan pois havaituista kulmista, jokainen kulma saa kolmasosan korjaukses-ta. Huomaa, etta ehtotasoitus on tassa tapauksessa paljon elegantimpi ja yksinkertaisempi
kuin havaintoyhtaloista.
7.3 Monikulmiojonotasoitus ehtoyhtalotasoituksena
7.3.1 Ilman painotusta
Suljetun monikulmiojonon suuntatasoitus (kaava (6.2)) voidaan kirjoittaa seuraavasti:
y ≡ A′n − ALL =
n∑
i=1
αi + β,
missaβ ≡ AAL −ALL − (n− 1) · 200 gon, (7.4)
mika on ehtoyhtalon esimerkki — y on nollasuure (Ey
= 0) nimelta sulkuvirhe. Jos
havainnoiksi valitaan kulmat ℓ ≡[α1 α2 · · · αn
]T, seuraa, etta matriisi B ja vektori b
(kaava 7.2) ovat muodoltaan
B =
n kpl︷ ︸︸ ︷[1 1 · · · 1
]ja b = β

7.3. Monikulmiojonotasoitus ehtoyhtalotasoituksena 87
ja jos oletamme etta havainnot eivat korreloi keskenaan, saadaan
BBT = n
ja
ℓ ≡
α1
...
αi
...
αn
=
α1
...αi
...αn
−
11...11
· 1
n· y ,
eli
αi = αi −y
n= αi −
A′n − ALL
n,
eli suuntasulkuvirhe wt = A′n−ALL (joka saadaan laskemalla lapi monikulmiojonon suunnat
ja vertaamalla loppusuunta A′n koordinaateista saadun loppusuunnan ALL kanssa) jaetaan
“kristillisesti” kaikkien jonon kulmapisteiden yli.
Suure β on vakio. Se voidaan laskea suoraan pisteiden A,AL, L, LL koordinaattien (sekamonikulmiojonon pistemaaran) perusteella.
7.3.2 Painotuksen kera
MIkali havaintosuureet eivat ole kaikki yhta tarkkoja, on kaytettava painotusta. Olkoonhavaintovektorin varianssimatriisi (diagonaalimatriisi)
Var (ℓ) =
q1 0 · · · 00 q2 · · · 0...
.... . .
...0 0 · · · qn
≡ Q.
Ehtoyhtalotasoituskaava muuttuu seuraavaksi:
ℓ = ℓ−QBT(BQBT
)−1y, (7.5)
missa
BQBT =n∑
i=1
qi
ja
QBT =
q1q2...qn
,
lopputuloksena
ℓ ≡
α1
...αi
...
αn
=
α1
...αi
...αn
−
q1q2...
qn−1
qn
· 1∑n
i=1 qi· y,
juuri mita saatiin jo luvussa 6.4.

88 Luku 7. Ehtoyhtaloiden tasoitus
Havaintojen varianssit toimivat ehtotasoituksessa painokertoimina.
Lisaksi:
1. Havainnoille tehtava tasoituskorjaus on verrannollinen painokertoimeen;
2. Tasoituskorjausten summa on sama kuin sulkuvirhe y painvastaisella etumerkilla: tasoi-tus poistaa sulkuvirheen.
Jos kaikki varianssit ovat samoja, qi = q, i = 1, . . . , n; Q = qI, tapaus 7.5 palautuu yksinker-taisempaan tapaukseen 7.3.
7.4 Monikulmiojonon havaintoyhtalot
7.4.1 Pistevali
Olkoon kaksi pistetta P jaQ, jonka valinen etaisyys on sPQ ja jonka valinen suunta (atsimuti)APQ. Olkoon lisaksi tasokoordinaattierot pisteiden valilla xPQ ≡ xQ − xP ja yPQ ≡ yQ − yP .Tata tilannetta analysoitiin jo luvussa 1.3 geodeettisena paatehtavana.
Voimme kirjoittaa pari (sPQ, APQ) toisen parin (xPQ, yPQ) funktiona:
sPQ =√x2
PQ + y2PQ,
APQ = arctan
(yPQ
xPQ
)+ kπ;
tai toisiinpain:
xPQ = sPQ cosAPQ,
yPQ = sPQ sinAPQ.
Linearisoidaan ensimmainen kaavapari (ketjusaanto):
∆sPQ =1
2
(x2
PQ + y2PQ
)−1/2 · (2xPQ∆xPQ + 2yPQ∆yPQ) =
=xPQ
sPQ∆xPQ +
yPQ
sPQ∆yPQ;
∆APQ =1
1 +(
yPQ
xPQ
)2 ·(−yPQ
x2PQ
∆xPQ +1
xPQ∆yPQ
)=
=x2
PQ
s2PQ
· 1
x2PQ
(−yPQ∆xPQ + xPQ∆yPQ) =
=1
s2PQ
(−yPQ∆xPQ + xPQ∆yPQ) .
Matriisikaavana (ja jatetaan P ja Q pois):
[∆s∆A
]=
x
s
y
s
− y
s2
x
s2
[
∆x∆y
]. (7.6)

7.4. Monikulmiojonon havaintoyhtalot 89
Linearisoidaan vastaavasti toinen kaavapari:
∆xPQ = cosAPQ∆sPQ − sPQ sinAPQ∆APQ,
∆yPQ = sinAPQ∆sPQ + sPQ cosAPQ∆APQ,
eli taas matriisiyhtalona:[
∆x∆y
]=
x
s−y
y
sx
[
∆s∆A
]. (7.7)
Voimme tarkistaa, etta kaavojen 7.6 ja 7.7 kerroinmatriisit ovat toistensa kaanteismatriiseja:
x
s
y
s
− y
s2
x
s2
·
x
s−y
y
sx
=
[1 00 1
],
kuten pitaakin olla kun niiden kuvaamat operaatiot ovat toistensa kaanteisoperaatioita.
Todellisessa monikulmiojonon mittaustilanteissa kuitenkaan ei ole mitattuna atsimuti A vaanrelatiivinen suuntakulma t. Silloin yo. havaintoyhtalo muuttuu seuraavaksi:
tPQ = arctan
(yPQ
xPQ
)+ kπ − ΩP ,
jossa ΩP on teodoliitin vaakakehan orientaatiotuntematon pisteessa P . Ks. seuraava luku.
7.4.2 Koko monikulmiojono
Tassa tutkitaan monikulmiojonon havaintoyhtalot tarkemmin pienimman neliosummanmenetelman kannalta.
Kirjoitetaan jonon yhden valin havaintoyhtalot. Tassa t on (teodoliitilla mitattu) suunta-arvo, A absoluuttinen suunta-arvo (atsimuti) ja Ω on tietyn teodoliittiaseman vaakakehannollasuunta, ns. “nuisance parameter” joka laskennassa on otettava mukaan vaikkei kiinnos-taisi:
ti,i+1 = Ai,i+1 − Ωi = arctanyi,i+1
xi,i+1+ kπ − Ωi
ti+1,i = Ai,i+1 − π − Ωi+1 = arctanyi,i+1
xi,i+1+ (k − 1)π − Ωi+1
si,i+1 =√x2
i,i+1 + y2i,i+1
si+1,i =√x2
i,i+1 + y2i,i+1
(k on joko 0 tai 1, riippuen pisteiden i ja i+ 1 keskinaisesta sijainnista.) Tasta yhteenlaske-malla ja vahentamalla:
ti,i+1 ≡ ti+1,i − ti,i+1 + π = Ωi+1 − Ωi
ti,i+1 ≡1
2(ti,i+1 + ti+1,i) +
(k +
1
2
)π = arctan
yi,i+1
xi,i+1− 1
2(Ωi + Ωi+1)
si,i+1 =1
2(si,i+1 + si+1,i) =
√x2
i,i+1 + y2i,i+1

90 Luku 7. Ehtoyhtaloiden tasoitus
Ensimmainen kaava on jo lineaarinen. Toisen ja kolmannen linearisointi tuottaa:
∆ti,i+1 = cosA0i,i+1
∆yi+1
s0i,i+1
− sinA0i,i+1
∆xi+1
s0i,i+1
−
− cosA0i,i+1
∆yi
s0i,i+1
+ sinA0i,i+1
∆xi
s0i,i+1
+
− 1
2∆Ωi+1 −
1
2∆Ωi;
∆si,i+1 = sinA0i,i+1∆yi+1 + cosA0
i,i+1∆xi+1 −− sinA0
i,i+1∆yi − cosA0i,i+1∆xi.
Tassa A on (absoluuttinen) suuntakulma1, t = A− Ω, Ω teodoliitin orientaatiotuntematon.
Matriisikaavana (“havaintoyhtalot”) – jatetaan indeksit i, i + 1 ja likiarvomerkinta 0 poismatriisista:
[∆ti,i+1
∆si,i+1
]=
+
cosA
s−sinA
s−cosA
s+
sinA
s−1
2−1
2+ sinA + cosA − sinA − cos t 0 0
∆yi+1
∆xi+1
∆yi
∆xi
∆Ωi+1
∆Ωi
kerrotaan
1. rivi 1 kertoimella s sinA ja rivi 2 kertoimella cosA ja vahennetaan rivit toisistaan, ja
2. rivi 1 kertoimilla s cosA ja rivi 2 kertoimella sinA ja ynnataan:
[∆t · s sinA− ∆s cosA
∆t · s cosA+ ∆s sinA
]=
0 −1 0 +1 −1
2s sinA −1
2s sinA
+1 0 −1 0 −1
2s cosA −1
2s cosA
∆yi+1
∆xi+1
∆yi
∆xi
∆Ωi+1
∆Ωi
Tutkitaan tata kaavaa tarkemmin. Vasemmalla puolella nakyy “delta-suureena” jonon pistei-den valiset koordinaattierot
∆xi,i+1 = ∆xi+1 − ∆xi ≡ ∆t · s sinA− ∆s cosA,
∆yi,i+1 = ∆yi+1 − ∆yi ≡ ∆t · s cosA+ ∆s sinA,
(joissa ∆t, ∆s on saatu sivun kahdesta paatepisteesta tehtyjen havaintojen keskiarvoina).Tahan palataan kohta.
Tahan lisataan viela
∆ti,i+1 ≡ ∆ti+1,i − ∆ti,i+1 = ∆Ωi+1 − ∆Ωi,
1Huomaa notaatio. Kaytannossa kaytetaan huolimattomasti A ja t sekaisin; tassa luvussa A on absoluut-tisuunta eli atsimuti kun t on (relatiivinen) suuntamittaus.

7.4. Monikulmiojonon havaintoyhtalot 91
lopputuloksena
∆t · s sinA− ∆s cosA
∆t · s cosA+ ∆s sinA
∆t
=
0 −1 0 +1 −1
2s sinA −1
2s sinA
+1 0 −1 0 −1
2s cosA −1
2s cosA
0 0 0 0 1 −1
∆yi+1
∆xi+1
∆yi
∆xi
∆Ωi+1
∆Ωi
.
Tama kaava patee nyt pisteiden i ja i + 1 valilla. Jos on n pistetta (n − 1 valia), voidaansummata yo. kaavan kolme rivia yksitellen kaikkien valien (1, 2) , . . . (n− 1, n) yli:
∆x1n ≡ ∆xn − ∆x1 =n−1∑
i=1
(∆xi+1 − ∆xi) =
= −n−1∑
i=1
(∆ti,i+1s
0i,i+1 sinA0
i,i+1 − ∆si,i+1 cosA0i,i+1
)− 1
2
n−1∑
i=1
s0i,i+1 sinA0
i,i+1 (∆Ωi+1 + ∆Ωi) ,
∆y1n ≡ ∆yn − ∆y1 =
n−1∑
i=1
(∆yi+1 − ∆yi) =
= −n−1∑
i=1
(∆ti,i+1s
0i,i+1 cosA0
i,i+1 + ∆si,i+1 sinA0i,i+1
)− 1
2
n−1∑
i=1
s0i,i+1 cosA0
i,i+1 (∆Ωi+1 + ∆Ωi) ,
∆Ω1n ≡ ∆Ωn − ∆Ω1 =n−1∑
i=1
(∆Ωi+1 − ∆Ωi) =n−1∑
i=1
∆ti,i+1 =n−1∑
i=1
(∆ti+1,i − ∆ti,i+1) .
Naista kaavoista nakyy jo usein kaytetty suljetun monikulmiojonon Bowditchin “klubi-askin kannen tasoitusmenetelma”: (1) laske suunnat lapi ja tasoita alku- ja loppusulkusuun-nan avulla; (2) laske koordinaatit uudelleen; (3) tasoita koordinaatit niiden sulkuvirheiden∆x1n,∆y1n avulla.
Approksimaatio jota tehdaan tassa likimaaraisessa menetelmassa on, etta oletetaan, ettasuuntatasoitetuilla orientaatiotuntemattomilla ∆Ωi, i = 1, . . . n, termit
n−1∑
i=1
s0i,i+1 sinA0
i,i+1 (∆Ωi+1 + ∆Ωi) ,
n−1∑
i=1
s0i,i+1 cosA0
i,i+1 (∆Ωi+1 + ∆Ωi)
voidaan jattaa huomioimatta.
Muodollisesti oikea kasittelytapa tietysti laskea “korvaavien tuntemattomien” vektorin[∆x1n ∆y1n ∆Ω1n
]Tkoko varianssimatriisi ja huomaa, etta se ei ole diagonaalimatri-
isi. Sen jalkeen pienimman neliosumman ratkaisua voidaan laskea joko
1. lisaamalla yo. yhtaloryhmaan sulku- ja sulkusuuntapisteista saatuja ehtoyhtaloita; tai
2. kayttamalla yo. yhtaloryhma monikulmiojonojen solmupisteverkon tasoituksen havain-toyhtaloitten osaryhmana.

92 Luku 7. Ehtoyhtaloiden tasoitus
Havaintoyhtalot:
∆ti,i+1 · s0i,i+1 sinA0
i,i+1 − ∆si,i+1 cosA0i,i+1
∆ti,i+1 · s0i,i+1 cosA0
i,i+1 + ∆si,i+1 sinA0i,i+1
∆ti,i+1
=
=
−1 01
2s0
i,i+1 sinA0i,i+1 +1 0
1
2s0
i,i+1 sinA0i,i+1
0 +11
2s0
i,i+1 cosA0i,i+1 0 −1
1
2s0
i,i+1 cosA0i,i+1
0 0 1 0 0 −1
∆xi+1
∆yi+1
∆Ωi+1
∆xi
∆yi
∆Ωi
, i = 1, . . . , n− 1.
Tassa korvaavat havaintosuureet vasemmalla puolella ovat laskettavissa varianssimatriisei-neen.
Jos nyt kirjoitetaan tuntemattomien vektoriksi
x =[
xi xe
]T,
jossa
xi =[
∆x2 ∆y2 ∆Ω2 · · · ∆xi ∆yi ∆Ωi · · · ∆xn−1 ∆yn−1 ∆Ωn−1
]T,
xe =[
∆x1 ∆y1 ∆Ω1 ∆xn ∆yn ∆Ωn
]T.
Toisin sanoen, monikulmiojonon “sisainen” tuntemattomien vektori xi ja “ulkoinen” xe.
Nyt ylla oleva havaintoyhtaloryhma voidaan kirjoittaa muotoon (lisattyna jaannosvirheidenvektori v)
ℓ+ v =[Ai Ae
] [ xi
xe
].
Mikali on useita monikulmiojonoja joiden “ulkoiset” tuntemattomat ovat yhteisia mutta“sisaisia” eivat, saadaan ryhma jonka muoto on
ℓ1ℓ2...ℓn
=
Ai11 Ae
1
Ai22 Ae
2
. . ....
Ainn Ae
n
=
x1
x2
...xn
xe
.
Taman muotoiseen ryhmaan loytyy tehokkaita ratkaisumenetelmia, seka monikulmiojonokerrallaan, etta koko verkko yhdessa.
7.5 Yksittaisen jonon laskennasta
Jono lasketaan lapi kuten aikaisemmin on kuvattu. Tassa tutkitaan lahemmin painotus,virheiden kasautuminen ja tilastillinen testaus.

7.5. Yksittaisen jonon laskennasta 93
7.5.1 Painokertoimien valinnasta
Painokertoimien qi−1,i valinta voidaan tehda usealla eri tavalla. Ylla esitetty laskumenetelmaon itse asiassa pienimman neliosumman tasoitus, joka on optimaalinen vain jos se ottaahuomioon havaintojen tosiasialliset mittaustarkkuudet eli satunnaisvirheiden suuruuden.Nain ollen kaytossa on kaski erilaista painotusmenetelmaa:
1. Painotus pistevalien etaisyyksien mukaan:
n∑
i=2
qi−1,i =
n∑
i=2
si−1,i.
Silloin koordinaattisulkuvirheet wx ja wy tasoitetaan etaisyyksien suhteessa, ja pitkiapistevaleja korjataan suhteessa enemman (eli ne saavat vahemman painoa) kuin lyhyitavaleja.
2. Tasainen painotus:
n∑
i=2
qi−1,i = n− 1 ⇒ qi−1,i = q =1
n− 1
Talloin kaikki pistevalit, seka lyhyet etta pitkat, saavat saman suuruiset korjaukset,−wx/n−1 x-koordinaattierolle ja −wy/n−1 y-koordinaattierolle.
Intuitiivisesti on selvaa, etta painotus etaisyyksien mukaan on oikeampi siina tapaukses-sa, etta kaytetyn etaisyysmittarin mittauksen tilastollinen epavarmuus kasvaa etaisyydenmukaan, eli mittausepatarkkuus on sita suurempi, miten pitempi matka on. Tasainen pain-otus on oikeellisempi niissa tapauksessa, missa etaisyyksien mittausvirhe ei riipu (merkit-tavasti) mitatusta pituudesta.
Nykyiset mittauslaitteet ovat niin tarkkoja etta – ainakin paikallisessa monikulmiojonomit-tauksissa – tasainen painotus on oikeampi.
7.5.2 “Realistiset” painoluvut
Voidaan valita painoluvut myos “realististen” varianssien perusteella, kayttamalla parhaatolemassa olevat arvot etaisyys- ja suuntahavaintojen keskivirheesta.
Pistevalin varianssi saadaan varianssien kasautumislain perusteella (josta enempaa myohem-min):
σ2xj−1,j
= (cosAj−1,j σs)2 +
(sj−1,j sinAj−1,j
σA [g]
ρ
)2
(7.8)
σ2yj−1,j
= (sinAj−1,j σs)2 +
(sj−1,j cosAj−1,j
σA [g]
ρ
)2
(7.9)
σs etaisyyshavaintojen keskivirhe
σA [g] suuntahavaintojen keskivirhe gooneissa
xj−1,j ≡ xj − xj−1, yj−1,j ≡ yj − yj−1.
Koska nyt x:lle ja y:lle on omat painoluvut, lasketaan

94 Luku 7. Ehtoyhtaloiden tasoitus
∑pxj
=n−1∑
j=1
σ2xj−1,j
,∑
pyj=
n−1∑
j=1
σ2yj−1,j
dx = − wx∑σ2
xj−1,j
, dy = − wy∑σ2
yj−1,j
xk = xk−1 + sk cosAk + σ2xk−1,k
wx∑n−1j=1 σ
2xj−1,j
yk = yk−1 + sk sinAk + σ2yk−1,k
wy∑n−1j=1 σ
2yj−1,j
Tasoitus tapahtuu todellisten havaintoepatarkkuuksien suhteessa.
Pistevalin epatarkkuus johtuu seka suunta- etta etaisyyshavainnon epatarkkuudesta.
7.5.3 Relatiivinen pistekeskivirhe, loppupistekeskivirhe, loppusulkuvirhe
Maaritetaan viela relatiivinen pistekeskivirhe
σrelPj−1,Pj
≡√σ2
xj−1,j+ σ2
yj−1,j,
jolloin saadaan kaavojen 7.8, 7.9 avulla
σrelPj−1,Pj
=
√(cosAj−1,j σs)
2 +
(sj−1,j sinAj−1,j
σA [g]
ρ
)2
+ (sinAj−1,j σs)2 +
(sj−1,j cosAj−1,j
σA [g]
ρ
)2
=
√σ2
s + s2
(σA [g]
ρ
)2
,
koska sin2Aj−1,j + cos2Aj−1,j = 1.
Talla kaavalla voi laskea jonomittauksen loppupisteen pistekeskivirhetta summaamalla:
σPn=
√√√√n∑
i=1
(σrel
Pi−1,i
)2
=
√√√√n∑
i=1
[σ2
s + s2i−1,i
(σA [g]
ρ
)2],
Olkoon jonon loppupisteen pistesulkuvirhe eli loppusulkuvirhe ennen tasoitusta:
wP =√w2
x + w2y.
Tilastollinen testaus tapahtuu vertaamalla σPnja wP .

7.5. Yksittaisen jonon laskennasta 95
σ
σ x
y
L
Pcσ
0.7
Kuva 7.1: Kriteerivirhe-ellipsit
7.5.4 Kriteerikeskivirhe ja kriteerivarianssi
Kaytannossa geodeettisissa mittauksissa annetaan jonkinlainen kriteeri siita, kuinka tarkastimonikulmiojonon mittaus pitaisi olla riippuen
1. Mittauksen tyypista (perusrunkopistemittaus, kayttopistemittaus, . . . )
2. Mitatun monikulmiojonon pituudesta L.
Usein annettu kriteeri on esimerkiksi, etta ei-tasoitetun jonon loppupisteen pistekeskivirheon oltava alle µ ppm (parts per million). Tama merkitsee, etta loppupisteen a priori pis-tekeskivirhe on jaatava alle µ · 10−6L, eli
σPn< µ · 10−6L.
Jos nain on – eli, monikulmiojono tayttaa tata ehtoa – voidaan korvata todellinen pistevar-ianssimatriisi,
Var (rn) =
[σ2
xnσxnyn
σxnynσ2
yn
],
kriteerivarianssimatriisilla,
Var (rcn) =
[1 00 1
]· µ · 10−6L ≡
[(σc
x)2 0
0(σc
y
)2
].
Huomaa, etta tasta kriteerimatriisista kovarianssitermit σxy ovat havinneet tyystin, ja σcx =
σcy. Kriteerivarianssimatriisin kuvaaja eli kriteerivirhe-ellipsi on itse asiassa ympyra joka
sisaltaa a priori pistevirhe-ellipsin kokonaan. Ympyran sade kerrottuna√
2:lla on
σcp =
√(σc
x)2 +
(σc
y
)2,
kriteeripistekeskivirheeksi kutsuttu suure. Ks. kuva.
7.5.5 Karkeiden virheiden loytaminen
Suljetun monikulmiojonon tapauksessa yhden karkean virheen loytaminen on suhteellisen
helppoa: Lasketaan molemmista paista taaksepain geodesian paatehtavaa kayttaen. Virhe
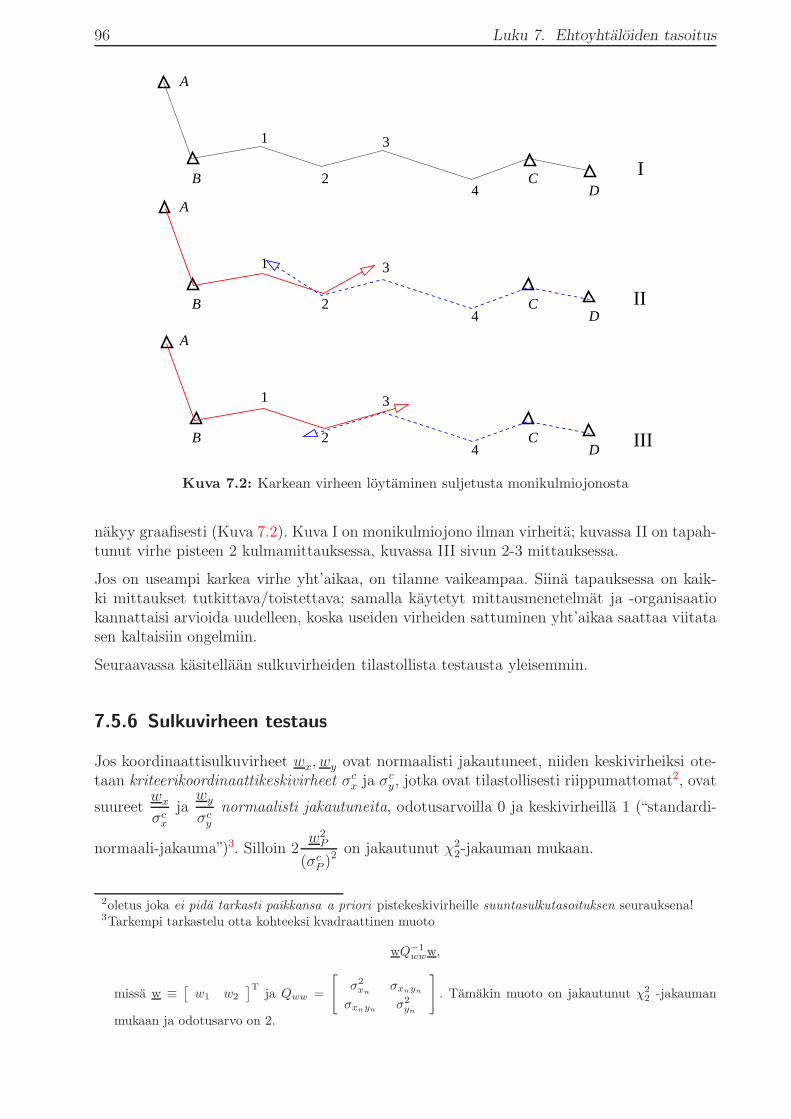
96 Luku 7. Ehtoyhtaloiden tasoitus
A
B CD
1
2
3
4
A
B CD
1
2
3
4
A
B CD
1
2
3
4I
II
III
Kuva 7.2: Karkean virheen loytaminen suljetusta monikulmiojonosta
nakyy graafisesti (Kuva 7.2). Kuva I on monikulmiojono ilman virheita; kuvassa II on tapah-tunut virhe pisteen 2 kulmamittauksessa, kuvassa III sivun 2-3 mittauksessa.
Jos on useampi karkea virhe yht’aikaa, on tilanne vaikeampaa. Siina tapauksessa on kaik-ki mittaukset tutkittava/toistettava; samalla kaytetyt mittausmenetelmat ja -organisaatiokannattaisi arvioida uudelleen, koska useiden virheiden sattuminen yht’aikaa saattaa viitatasen kaltaisiin ongelmiin.
Seuraavassa kasitellaan sulkuvirheiden tilastollista testausta yleisemmin.
7.5.6 Sulkuvirheen testaus
Jos koordinaattisulkuvirheet wx, wy ovat normaalisti jakautuneet, niiden keskivirheiksi ote-taan kriteerikoordinaattikeskivirheet σc
x ja σcy, jotka ovat tilastollisesti riippumattomat2, ovat
suureetwx
σcx
jawy
σcy
normaalisti jakautuneita, odotusarvoilla 0 ja keskivirheilla 1 (“standardi-
normaali-jakauma”)3. Silloin 2w2
P
(σcP )2 on jakautunut χ2
2-jakauman mukaan.
2oletus joka ei pida tarkasti paikkansa a priori pistekeskivirheille suuntasulkutasoituksen seurauksena!3Tarkempi tarkastelu otta kohteeksi kvadraattinen muoto
wQ−1
www,
missa w ≡[
w1 w2
]Tja Qww =
[σ2
xn
σxnyn
σxnynσ2
yn
]. Tamakin muoto on jakautunut χ2
2-jakauman
mukaan ja odotusarvo on 2.

7.5. Yksittaisen jonon laskennasta 97
χ2n-hylkaysrajat 90% 95% 99%
n = 1 2.71 3.84 6.63n = 2 4.61 5.99 9.21n = 3 6.25 7.81 11.34n = 4 7.78 9.49 13.28
Tama merkitsee, etta
1. w2p:n odotusarvo on
(σc
p
)2.
2. todennakoisyys, etta sattumalta 2w2
P
(σcP )2 > 5.99, voidaan lukea χ2
2-taulukosta: tulos on
5%. Eli 95%:n merkitsevyystason testauskriteeri on:
w2P ≤ 3.00 (σc
P )2 ⇒ |wP | ≤ 1.73 σcP .
Esimerkiksi:
Runkomittauksessa meilla on viidennen luokan jono, missa ohjeen((Anon., 1991), luku 1.11 p. 3) mukaan sallittu suhteellinen pistekeskivirhe
(kahden pisteen valisen vektorin pistekeskivirhe, eli toisen pisteen keskivihetoisesta pisteesta laskettuna) on µ = 50 ppm. Tassa L on kahden pisteen valinenetaisyys.
Siis:σc
P = µ · 10−6L = 5 · 10−5L,
missa L on jonon pituus.
Jonon pistesulkuvirhe wP testataan nyt 95% merkitsevyystasolla nain:
|wP | ≤ 1.73 · 5 · 10−5L ⇒ hyvaksyminen
|wP | > 1.73 · 5 · 10−5L ⇒ hylkays.
Testaus kertoo jotain siita, kuinka hyvin mittaus on onnistunut saavuttamaan mittauslu-okkansa edellyttama tarkkuus. Voisi ajatella etta jos testi hyvaksytaan, niin mittaaja mittaa
1. mittaaja mittaa oikeilla kojeilla ja menetelmilla, ja
2. tasapitkia pistevaleja, ja
3. mittauksissa ei ole (suuria) karkeita virheita.
7.5.7 Tasoitetun pisteen keskivirhe
Nama kaavat johdetaan teoreettisesti osassa 10.3.
1. Absoluuttinen pistekoordinaattivarianssi, a posteriori :
σ2cxk
=
(k∑
i=1
σ2xi−1,i
)(1 −
∑ki=1 σ
2xi−1,i∑n
i=1 σ2xi−1,i
)

98 Luku 7. Ehtoyhtaloiden tasoitus
Kuva 7.3: Monikulmiojonon virhekuviot
σ2cyk
=
(k∑
i=1
σ2yi−1,i
)(1 −
∑ki=1 σ
2yi−1,j∑n
i=1 σ2yi−1,i
)
k = 1 . . . n− 1
Alla olevassa kuvassa on annettu absoluuttiset ja relatiiviset virhe-ellipsit ennen (jatku-va viiva) ja jalkeen (katkoviiva) jonon tasoitusta. Oletettu on, etta virhe-ellipsit ovat
ympyroita. Huomaa, etta, jos kaikki valivarianssit ovat samoja ((σrel
x
)2,(σrel
y
)2), patee
σ2cxk
=(σrel
x
)2 · k(
1 − k
n
),
σ2cyk
=(σrel
y
)2 · k(
1 − k
n
).
2. Suhteellinen eli pistekoordinaattierojen varianssi, a posteriori :
σ2xj−1,j
= σ2xj−1,j
1 −
σ2xj−1,j
∑ni=1
(σ2
xi−1,i
)
σ2yj−1,j
= σ2yj−1,j
1 −
σ2yj−1,j
∑n−1i=1
(σ2
yi−1,i
)
Jos kaikki valivarianssit on samoja, saadaan
σ2xj−1,j
= σ2xj−1,j
·(
1 − 1
n
),
σ2yj−1,j
= σ2yj−1,j
·(
1 − 1
n
).
Pistekeskivirheesta suhteessa sivun pituuteen (“ppm-virhe”) saadaan estimaatio:
µ = 106 · σP
L,
missa keskivirhe-arvio saadaan tuttuun tapaan
σPi−1,Pi=√σ2
xi−1,i+ σ2
yi−1,i.
µ, a posteriori suhteellinen pistekeskivirhe kahden pisteen valein, verrataan taas ohjeisiin.Se on “normaalikokoinen” luku, esim. 50 jos tarkkuusvaatimus on 50 ppm.
99
Luku 8
Pienimman neliosumman tasoitus
Ks. (Cooper, 1987).
8.1 Teoreettinen tausta
Maanmittaustyossa, teknisessa maanmittausessa ja runkoverkkomittauksessa yleensa meitakiinnostavat tuntemattomat ovat pisteiden koordinaatit. Koordinaatit annetaan tavallisestikolmiulotteisina suorakulmaisina (karteesisina) koordinaatteina. Menettelytapa on seuraava:Mittaukset suoritetaan ja korjataan tunnettuja fysikaalisia efekteja varten, kuten ilmake-han ja kojeen aiheuttamat virheet; taman jalkeen mittaukset voidaan katsoa geometristensuureiden mittauksina vektoriavaruudessa.
Funktionaalimalli joka yhdistaa mitattu suure ja tuntemattomat, estimoitavissa olevatparametrit muodostetaan sitten tassa abstraktissa avaruudessa.
Joskus havaintojen korjaus ilmakehaa, kojetta tai muun virhelahdetta varten ei ole mahdol-lista koska tarvittavaa informaatiota ei ole saatavissa. Tassa tapauksessa voidaan laajentaa
funktionaalimalli sisaltamaan lisatuntemattomia joiden arvot estimoidaan yhdessaa koordi-naattien kanssa. Sellaiset lisaparametrit voivat olla kellovirhe, refraktiokerroin, tai fotogram-metriassa kameran tai linssin parametrit. GPS-mittausten tapauksessa lisatuntemattomatvoivat olla vastaanottimen kellokorjaus, satellittirataelementtien korjaukset tai troposfaari-parametrit, mm.
Pienimman neliosumman menetelman kaavat ovat kaikki lineaarisia. Jos todellisessa mit-taustilanteessa funktionaaliset yhteydet tuntemattomien x ja havaintosuureiden ℓ valillaeivat ole lineaarisia, joudutaan linearisoimaan.
8.1.1 Pienimman neliosumman ratkaisu
Havaintoyhtalot kirjoitetaan seuraavaan muotoon:
Ax = ℓ+ v,
missa x on tuntemattomien vektori (tarkemmin: sen pienimman neliosumman estimaattori), ℓhavaintojen vektori ja v residuaalien (havaintojen korjausten) vektori. Huomaa, etta korjatut
havainnot ℓ ≡ ℓ + v ovat tarkasti yhteensopivia linearisoidun funktionaalimallin kanssa.Minimoitava suure on
E = vTQ−1v = (Ax − ℓ)TQ−1(Ax − ℓ) =
= xTATQ−1Ax − xTATQ−1ℓ− ℓTQ−1Ax + ℓTQ−1ℓ ,

100 Luku 8. Pienimman neliosumman tasoitus
ja differentioimalla saadaan minimi:
∂E∂xi
=(xTATQ−1Aei + eT
i ATQ−1Ax
)−(eiA
TQ−1ℓ + ℓTQ−1Aei
)+ 0, i = 1, . . . , m
mika on oltava nolla kaikille i-arvoille, siis kaikille yksikkovektoreille ei =[0 0 · · · 1 · · · 0 0
]T(ykkonen paikassa i1). Tama onnistuu asettamalla
(ATQ−1A
)x = ATQ−1ℓ . (8.1)
Kaavaa 8.1 kutsutaan normaaliyhtaloiksi. Niista ratkaistaan x, jonka jalkeen saadaan kor-jatut havaintosuureet seuraavasti:
ℓ+ v = Ax , (8.2)
ja residuaalit v = Ax − ℓ.
8.1.2 Harhattomuus
Haluamme osoittaa, etta ylla johdettu pienimman neliosumman ratkaisusta x laskettava“tasoitettu havaintosuureiden vektori” ℓ = Ax on harhaton, siis, etta sen odotusarvo on samakuin havaintovektorin ℓ odotusarvo.
Todistuksen antamiseksi meilla pitaa olla malli havaintoprosessista. Tama malli voisi vaikka-pa olla
ℓ = Ax + n,
jossa n on ns. havaintovirhe (ei: jaannosvirhe!), jonka odotusarvo on E n = 0 ja jonkavarianssimatriisi on Q = Qℓℓ, eli havaintovektorin ℓ varianssimatriisi. Vektori x taas onei-stokastinen ja sisaltaa tuntemattomien oikeat arvot2, siis ne arvot, jotka saataisiin, josvoitaisiin mitata aarettoman tarkasti.
Vektori n kutsutaan joskus myos havaintojen kohinaksi.
Nyt:
E ℓ = Ax + E n = Ax.
Kuitenkin myos, kaavasta (8.2),
E ℓ + E v = AE x ,
ja ratkaisukaavasta (8.1) saadaan
E x =(ATQ−1A
)−1ATQ · E ℓ =
=(ATQ−1A
)−1ATQAx = x.
Siis yhdistamalla edelliseen:
E ℓ + E v = Ax
1Huomaa, etta Aei = ai, A-matriisin i:s sarakevektori.2Tama on ns. tyohypoteesi. “Oikeat arvot” eivat valttamatta edes pida olla olemassa. Niiden olemassaolon
kysymys on tavallaan metafyysinen: suhiseeko tuuli puussa kun kukaan ei ole kuuntelemassa? Kuitenkinpaaasia on, etta oikeasti olemassa olevat havainnot ℓ kayttaytyvat annetun kaavan mukaisesti.

8.1. Teoreettinen tausta 101
ja vahentamalla sita edeltavasta:
E v = 0.
Siis: jaannosvirheiden odotusarvot haviavat. Jaannosvirheet ovat “kohinaa”. Silloin myos,koska ℓ = ℓ+ v, seuraa, etta
Eℓ
= E ℓ + 0 = E ℓ .
Siis: ℓ on ℓ:n harhaton estimaattori, ja x on x:n harhaton estimaattori.
8.1.3 Ortogonaalisuusominaisuus
Varianssien kasautumislain avulla saamme suoraan normaaliyhtalon (8.1) ratkaisusta x:nvarianssimatriisiksi:
Qbxbx =(ATQ−1A
)−1AQ−1 ·Q ·Q−1AT
(ATQ−1A
)−1=(ATQ−1A
)−1.
Tasta ℓ = Ax:n varianssimatriisi:
Qbℓbℓ = AQbxbxAT = A
(ATQ−1A
)−1AT .
Lasketaan seuraavasti suureiden x ja v valinen kovarianssi:
Cov (x, v) = Qbxv = Cov (x, Ax − ℓ) = Var (x)AT − Cov (x, ℓ) =
= QbxbxAT −
(ATQ−1A
)−1ATQ−1Var (ℓ) =
=(ATQ−1A
)−1AT −
(ATQ−1A
)−1ATQ−1Q
= 0.
Sanotaan, etta tuntemattomien pienimman neliosumman estimaattorit x ja jaannosvirheetv ovat keskenaan ortogonaalisia:
x ⊥ v.
Tietysti tama merkitsee, etta jokaisen tasoitetun tuntemattoman xj ja jokaisen jaan-nosvirheen vi valilla, j = 1 . . .m, i = 1 . . . n, kovarianssi on nolla. Samoin tietysti myos
jokaisen tasoitetun havainnon ℓ = Ax ja jokaisen jaannosvirheen valilla.
Tasta seuraa viela seuraava tulos:
Var (ℓ) = Var(ℓ− v
)= Var
(ℓ)
+ Var (v) − 2 · Cov(ℓ, v)
=
= Var(ℓ)
+ Var (v) ,
koska kovarianssi on nolla. Siis (“Pythagoras”, ajattele Qℓℓ = ‖ℓ‖2 jne.):
Q = Qℓℓ = Qbℓbℓ +Qvv.

102 Luku 8. Pienimman neliosumman tasoitus
8.2 Vinoetaisyys avaruudessa
Olkoon kojeen ja tahyksen koordinaatit (x1, y1, z1) ja (x2, y2, z2). Silloin funktionaalimalli(kaava 1.2) on
s =
√(x2 − x1)
2 + (y2 − y1)2 + (z2 − z1)
2. (8.3)
Ensin oletetaan, etta piste(x1 y1 z1
)Ton tunnettu. Silloin tuntemattomien vektori koos-
tuu vain toisen pisteen koordinaateista, x =(x2 y2 z2
)T. Havaintovektorilla on vain yksi
alkio, ℓ = (s) ja rakennematriisi A (kaava 1.4) on:
A = Ai =∂s
∂xi=
[∂s
∂x2
∂s
∂y2
∂s
∂z2
].
Alkiot lasketaan differentioimalla 8.3:
∂s
∂x2=x2 − x1
s
ja niin edelleen. Lopputulos on
A =
[x2 − x1
s
y2 − y1
s
z2 − z1s
].
Huomaa, etta matriisin A alkiot ovat yksikkovektorin alkioita! Kayttamalla suuntakulma(atsimuti) A ja zeniittikulma ζ voimme kirjoittaa
A =[
cosA12 sin ζ12 sinA12 sin ζ12 cos ζ12]
tai jopa symbolisemminA =
[eT
12
]
jossa e12 on pisteen 1 ja 2 valinen suuntavektori, jolle patee
‖e12‖ = 1.
Yleisempi tapaus, missa molemmat pisteet ovat tuntemattomia, kasitellaan seuraavaksi. Tun-
temattomien vektoriksi muodostetaan x =(x1 y1 z1 x2 y2 z2
)T, ja havaintovektori
on taas ℓ = (s). Rakennematriisi A (kaava 1.4) on:
Ai =∂s
∂xi=
[∂s
∂x1
∂s
∂y1
∂s
∂z1
∂s
∂x2
∂s
∂y2
∂s
∂z2
].
Edellisen perusteellla on lopputulos
A =
[−x2 − x1
s−y2 − y1
s−z2 − z1
s
x2 − x1
s
y2 − y1
s
z2 − z1s
]=
=[
eT21 eT
12
]=[−eT
12 eT12
].
Linearisoitu havaintoyhtalo on siis:
[∆s + v] =[−eT
12 eT12
] [ ∆r1
∆r2
],
missa

8.3. Atsimutimittaus 103
e12 =
[x2 − x1
s
y2 − y1
s
z2 − z1s
]T
∆ri =[
∆xi ∆yi ∆zi
]T, i = 1, 2
∆x1 = x1 − x01
∆s ≡ s− s0, jne.
Tassa indeksi 0 merkitsee likiarvoja.
Likiarvoille patee funktionaalimalli tarkasti:
s0 = f (x0) =
√(x0
2 − x01)
2+ (y0
2 − y01)
2+ (z0
2 − z01)
2.
8.3 Atsimutimittaus
Jos atsimuti3 α mitataan pisteiden 1 ja 2 valilla:
α = arctan
(y2 − y1
x2 − x1
)+ kπ,
silloin x =(x1 y1 x2 y2
)T.
Rakennematriisi saadaan taas ketjusaannon avulla, esim. (lyhentamalla x12 = x2 − x1 jne.):
∂ arctan(
y12
x12
)
∂x1
=∂ arctan
(y12
x12
)
∂(
y12
x12
)∂(
y12
x12
)
∂x12
∂x12
∂x1
=
=1
1 +(
x12
y12
)2 ·(−y12
x212
)· (−1) =
=y12
x212 + y2
12
=y12
s2⊥
= −sinA21
s⊥.
Koko matriisi:
Ai =∂A
∂xi=
=
[−sinA21
s⊥+
cosA21
s⊥− sinA12
s⊥+
cosA12
s⊥
]=
=
[+y2 − y1
s2⊥
− x2 − x1
s2⊥
− y2 − y1
s2⊥
+x2 − x1
s2⊥
],
jossa s⊥ =
√(x2 − x1)
2 + (y2 − y1)2, kojeen ja tahyksen valinen vaakatasoon projisoitu
etaisyys.
Tasta linearisoitu havaintoyhtalo:
∆α + v =
[+y2 − y1
s2⊥
−x2 − x1
s2⊥
−y2 − y1
s2⊥
+x2 − x1
s2⊥
]
∆x1
∆y1
∆x2
∆y2
.
3Kaytetaan α eika A sekaannuksen valttamiseksi rakennematriisin A kanssa.

104 Luku 8. Pienimman neliosumman tasoitus
x
y
x
y y
x
α
(∂α / ∂ ) ∆
(∂α / ∂ ) ∆
1
2
y∆
∆ x
Kuva 8.1: Atsimutimittauksen geometria ja rakennematriisi
8.4 Zeniittikulmamittaus
Jos mitataan pisteiden 1 ja 2 valinen zeniittikulma4:
ζ = arccosz2 − z1s
= arctan
(π
2− z2 − z1
s⊥
),
missa s⊥ = ρ =√(
(x2 − x1)2 + (y2 − y1)
2).
Nyt x =(x1 y1 z1 x2 y2 z2
)Tja
Ai =∂ζ
∂xi=
=
[∂ζ
∂ρ· ∂ρ∂x1
∂ζ
∂ρ· ∂ρ∂y1
cos ζ21s
∂ζ
∂ρ· ∂ρ∂x2
∂ζ
∂A· ∂A∂y2
cos ζ12s
]=
=
[cos ζ21ρ
(− cosA21)cos ζ21ρ
sinA21s⊥s2
cos ζ12ρ
(− cosA12)cos ζ12ρ
sinA12 − s⊥s2
]
=
[−(x2 − x1)
s2 tan ζ12+
(y2 − y1)
s2 tan ζ12
s⊥s2
+(x2 − x1)
s2 tan ζ12− (y2 − y1)
s2 tan ζ12− s⊥s2
].
Tassa osittaisderivaatta∂ζ
∂ρon laskettu lieriokoordinaateissa (ρ, A, z). Silloin ζ = ζ (ρ, z).
Itse asiassa ρ on sama kuin s⊥.
Nyt havaintoyhtalo on
δζ + v =
[−(x2 − x1)
s2 tan ζ+
(y2 − y1)
s2 tan ζ
s⊥s2
+(x2 − x1)
s2 tan ζ−(y2 − y1)
s2 tan ζ−s⊥s2
]
∆x1
∆y1
∆z1∆x2
∆y2
∆z2
.
4Kaytetaan symboli ζ ettei tule sekaannusta z-koordinaatin kanssa.
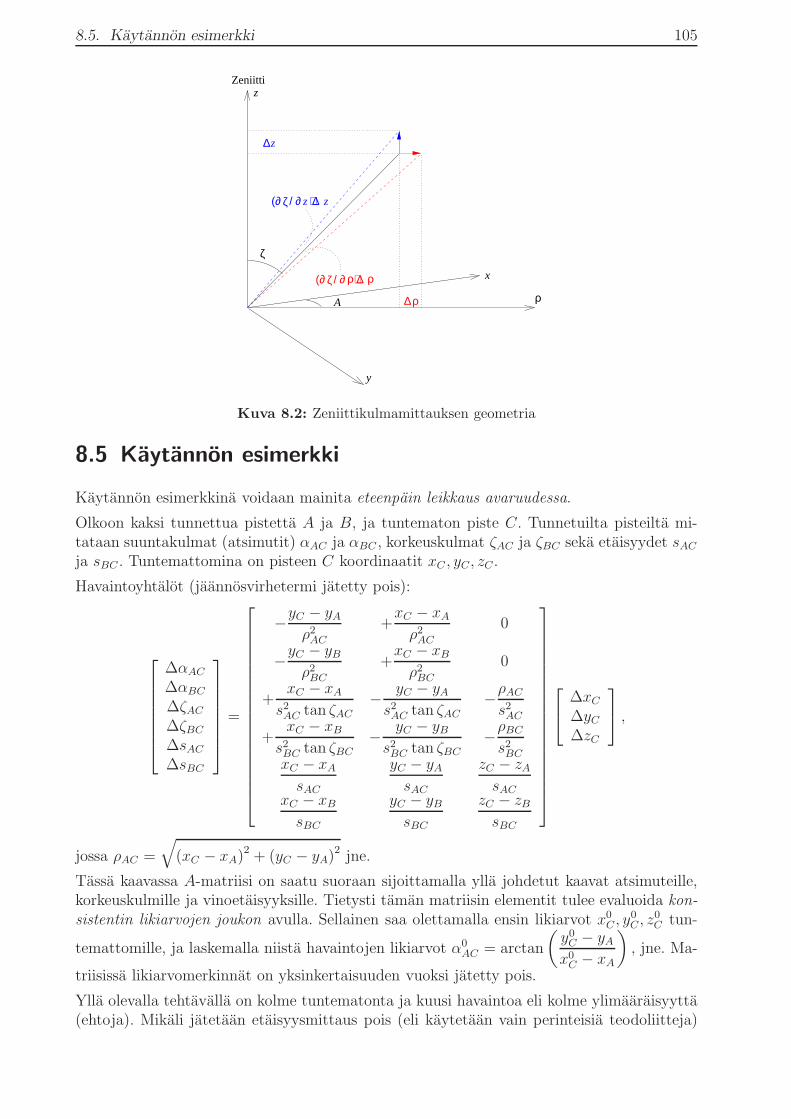
8.5. Kaytannon esimerkki 105
z
ρ
∆z
ρ∆
z
ρ ρ
z
ζ
ζ
ζ
A
x
y
(∂ / ∂ ) ∆
(∂ / ∂ ) ∆
Zeniitti
Kuva 8.2: Zeniittikulmamittauksen geometria
8.5 Kaytannon esimerkki
Kaytannon esimerkkina voidaan mainita eteenpain leikkaus avaruudessa.
Olkoon kaksi tunnettua pistetta A ja B, ja tuntematon piste C. Tunnetuilta pisteilta mi-tataan suuntakulmat (atsimutit) αAC ja αBC , korkeuskulmat ζAC ja ζBC seka etaisyydet sAC
ja sBC . Tuntemattomina on pisteen C koordinaatit xC , yC, zC .
Havaintoyhtalot (jaannosvirhetermi jatetty pois):
∆αAC
∆αBC
∆ζAC
∆ζBC
∆sAC
∆sBC
=
−yC − yA
ρ2AC
+xC − xA
ρ2AC
0
−yC − yB
ρ2BC
+xC − xB
ρ2BC
0
+xC − xA
s2AC tan ζAC
− yC − yA
s2AC tan ζAC
−ρAC
s2AC
+xC − xB
s2BC tan ζBC
− yC − yB
s2BC tan ζBC
−ρBC
s2BC
xC − xA
sAC
yC − yA
sAC
zC − zA
sACxC − xB
sBC
yC − yB
sBC
zC − zB
sBC
∆xC
∆yC
∆zC
,
jossa ρAC =
√(xC − xA)2 + (yC − yA)2 jne.
Tassa kaavassa A-matriisi on saatu suoraan sijoittamalla ylla johdetut kaavat atsimuteille,korkeuskulmille ja vinoetaisyyksille. Tietysti taman matriisin elementit tulee evaluoida kon-
sistentin likiarvojen joukon avulla. Sellainen saa olettamalla ensin likiarvot x0C , y
0C , z
0C tun-
temattomille, ja laskemalla niista havaintojen likiarvot α0AC = arctan
(y0
C − yA
x0C − xA
), jne. Ma-
triisissa likiarvomerkinnat on yksinkertaisuuden vuoksi jatetty pois.
Ylla olevalla tehtavalla on kolme tuntematonta ja kuusi havaintoa eli kolme ylimaaraisyytta(ehtoja). Mikali jatetaan etaisyysmittaus pois (eli kaytetaan vain perinteisia teodoliitteja)

106 Luku 8. Pienimman neliosumman tasoitus
on havaintojen maara nelja ja on vain yksi ylimaaraisyys eli ehto: se, etta A:lta ja B:ltalahtevat suuntaviivat pitaisi leikata eivatka menna vain ristiin.
107
Luku 9
Tasoituslasku ja GPS
9.1 Havaintogeometria, havainto-yhtalot
GPS:n tuottamat havaintosuureet ovat pseudoetaisyyksia:
p = ρ+ c (∆t− ∆T ) + dion + dtrop.
Yksinkertaisuuden vuoksi jatetaan ilmakehan vaikutus pois ja oletetaan myos etta satellitti-rata – ja radasta ja kellonajasta laskettu satelliitin hetkellinen paikka avaruudessa – ja satel-liitin kellovirhe ∆t ovat tunnettuja. Tassa ρ on geometrinen etaisyys satelliitti - vastaanotinja ∆T on vastaanottimen kellovirhe.
Kirjoitetaan
ρ =
√(x−X)2 + (y − Y )2 + (z − Z)2,
missa[x y z
]Ton tunnettu satelliitin paikka avaruudessa, laskettu ratatiedoista eli efe-
meriideista. Nyt
p =
√(x−X)2 + (y − Y )2 + (z − Z)2 + c (∆t− ∆T ) ,
missa on nelja tuntematonta, X, Y, Z ja ∆T .
Nama neljan tuntemattoman ratkaisemiseksi riittaa havainnot neljalle satelliitille. Mikalikaytettavien satelliittien maara on suurempi, saadaan redundanssi ja tasoitustehtava.
Linearisointi on suoranaista: valitse likiarvot X0, Y0, Z0 ja ∆T0 = 0. Silloin “yhteensopiva”havaintosuureen likiarvo on:
p0 =
√(x−X0)
2 + (y − Y0)2 + (z − Z0)
2 + c∆t
ja pienet erotussuureet (Taylor-kehitelman ensimmaiset termit):
∆p ≡ p− p0 ≈∂ρ
∂X∆X +
∂ρ
∂Y∆Y +
∂ρ
∂Z∆Z − c∆T, (9.1)
missa osittaisderivaatat lasketaan seuraavasti ketjusaannon avulla:
∂ρ
∂X=
1
2ρ· ∂ (x−X)2
∂X= −x−X
ρ,
ja vastaavasti∂ρ
∂Y= −y − Y
ρ,∂ρ
∂Z= −z − Z
ρ.

108 Luku 9. Tasoituslasku ja GPS
Vaihtoehtoisesti kaytetaan toposentrisia (taivaanpallon) pallokoordinaatteja:
∂ρ
∂X= cosA cos η,
∂ρ
∂Y= sinA cos η,
∂ρ
∂Z= sin η,
missa A on atsimuti (suuntakulma) ja η on korkeuskulma horizontin ylapuolella.
Huomaa myos, etta e ≡[∂ρ
∂X
∂ρ
∂Y
∂ρ
∂Z
]on yksikkovektori, ts. sen pituus on ‖−→e ‖ = 1.
Talla tavoin voimme kirjoittaa linearisoitu havaintoyhtalo seuraavasti:
∆p+ v =[
e −c] [ ∆R
∆T
], (9.2)
missa v on jaannosvirhe.
Jos kirjoitetaan havaintoyhtalot symboliseen muotoon ℓ+ v = Ax, on rakennematriisi :
A =[
e −c]
=[
cosA cos η sinA cos η sin η −c].
Esimerkkimatriisissa on vain yksi rivi. Yleisemmin rivien maara vastaa havaintojen maaraa:
A =
cosA1 cos η1 sinA1 cos η1 sin η1 −ccosA2 cos η2 sinA2 cos η2 sin η2 −c
......
......
cosAi cos ηi sinAi cos ηi sin ηi −c...
......
...cosAn cos ηn sinAn cos ηn sin ηn −c
. (9.3)
9.2 Tuntemattomien varianssimatriisi ja varianssit
Tuntemattomien x painomatriisi on normaalimatriisi :
N =[ATA
]=
=
∑cos2A cos2 η
∑cosA sinA cos2 η
∑cosA cos η sin η −c
∑cosA cos η
∑cosA sinA cos2 η
∑sin2A cos2 η
∑sinA cos η sin η −c
∑sinA cos η
∑cosA cos η sin η
∑sinA cos η sin η
∑sin2 η −c
∑sin η
−c∑
cosA cos η −c∑
sinA cos η −c∑
sin η nc2
.
Huomaa, etta taman matriisin jokainen alkio paikassa (i, j) saadaan kertomalla A-matriisinsarake i ja sarake j keskenaan (“skalaaritulo”): jos kirjoitetaan
A =[
a1 a2 a3 a4
],

9.2. Tuntemattomien varianssimatriisi ja varianssit 109
jossa
a1 ≡[
cosA1 cos η1 cosA2 cos η2 · · · cosAn cos ηn
]T,
a2 ≡[
sinA1 cos η1 sinA2 cos η2 · · · sinAn cos ηn
]T,
jne., saadaan
N =
a1 · a1 a1 · a2 a1 · a3 a1 · a4
a2 · a1 a2 · a2 a2 · a3 a2 · a4
a3 · a1 a3 · a2 a3 · a3 a3 · a4
a4 · a1 a4 · a2 a4 · a3 a4 · a4
,
jossa a · b on kahden vektorin skalaari- eli pistetulon∑
k=1
akbk.
Tassa summaus∑
tapahtuu kaikkien satelliittien i = 1, . . . , n yli, ja i-indeksi A- ja η-
arvoille on jatetty merkitsematta.
Tasta saa tuntemattomien a posteriori -varianssit kaanteismatriisin Qxx = N−1 alkioina:
qxx ≡ Var(∆X
)= (Qxx)11 ,
qyy ≡ Var(∆Y
)= (Qxx)22 ,
qzz ≡ Var(∆Z)
= (Qxx)33 ,
qtt ≡ Var(∆T)
= (Qxx)44 .
Nain laskettujen q-arvojen perusteella DOP1-suureet on maaritelty seuraavasti:
GDOP =√qxx + qyy + qzz
PDOP =√qxx + qyy + qzz
HDOP =√qxx + qyy
VDOP =√qzz
TDOP =√qtt
Muista kuitenkin, etta nain laskettu Q-matriisi2 ja sen alkiot perustuvat fiktioon, etta yhdensatelliitin pseudoetaisyyshavainnon tarkkuus olisi σ0 =
√q0 = 1.
Siina tapauksessa, etta yhden satelliitin pseudoetaisyyden todelliseksi tarkkuudeksi ontiedossa: σ0, saadaan:
PDOP =
√σ2
x + σ2y + σ2
z
σ0=σ
(3D)P
σ0
HDOP =
√σ2
x + σ2y
σ0=σ
(2D)P
σ0
VDOP =
√σ2
z
σ0
1Dilution of Precision2Nain laskettu “varianssimatriisi” – missa havaintojen todellinen tarkkuus on korvattu konventionaalisella
arvolla 1 – kutsutaan usein painokerroinmatriisiksi.

110 Luku 9. Tasoituslasku ja GPS
missa σx, σy.σz ovat X, Y ja Z -koordinaattien todelliset (realistiset) keskivirheet: σ2x =
qxxσ20 , σ
2y = qyyσ
20, σ
2z = qzzσ
20.
Ylla olevissa kaavoissa on kaytetty myos σ2P = σ2
x +σ2y
[+σ2
z
], joko kaksi- tai kolmiulotteinen
pistevarianssi, pistekeskivirheen nelio.
9.3 Esimerkki: atsimutisymmetrinen geometria
Olettakaame nyt yksinkertaistetun analyysin vuoksi, etta
satelliitit on tasaisesti jaettu ympari taivasta eli atsimutiarvojen A mukaan, erik-seen jokaiselle korkeuskulmalle η.
Silloin ylla olevassa matriisissa
1. kaikki ei-paalavistajan arvot haviavat, koska niissa on joko sinA tai cosA, tai jopa
sinA cosA. Ainoastaan∑
sin η ei havia.
2. Paalavistajaelementit
n∑
i=1
cos2Ai cos2 ηi =1
2
n∑
i=1
cos2 ηi,
n∑
i=1
sin2Ai cos2 ηi =1
2
n∑
i=1
cos2 ηi,
koska seka sin2A:n etta cos2A:n keskiarvo ympyran ympasi on1
2.
Siksi[ATA
]:sta tulee melkein diagonaalinen matriisi joka on suhteellisen helppoa kaantaa3:
[ATA
]=
1
2
n∑
i=1
cos2 ηi 0 0 0
01
2
n∑
i=1
cos2 ηi 0 0
0 0
n∑
i=1
sin2 ηi −cn∑
i=1
sin ηi
0 0 −cn∑
i=1
sin ηi nc2
.
Muunnetaan nyt havaintoyhtalo (9.1) ja rakennematriisi (9.3) seuraavalla tavalla:
ℓ+ v = Ax = AIx = A[ΛΛ−1
]x = [AΛ]
[Λ−1x
]= Ax,
missa
x =
∆X∆Y∆Z
∆T
= Λ−1x =
∆X∆Y∆Z
∆T −∑
sin η
nc∆Z
(9.4)
3Tulemme kuitenkin parjaamaan ilman matriisinkaannosta.

9.3. Esimerkki: atsimutisymmetrinen geometria 111
ja
A = AΛ =
cosA1 cos η1 sinA1 cos η1 sin η1 − 1
n
∑sin η −c
cosA2 cos η2 sinA2 cos η2 sin η2 − 1
n
∑sin η −c
......
......
cosAi cos ηi sinAi cos ηi sin ηi − 1
n
∑sin η −c
......
......
cosAn cos ηn sinAn cos ηn sin ηn − 1
n
∑sin η −c
,
koska4
Λ =
1 0 0 00 1 0 00 0 1 0
0 0 +
∑sin η
nc1
, Λ−1 =
1 0 0 00 1 0 00 0 1 0
0 0 −∑
sin η
nc1
Nyt saadaan
N =[AT A
]=
1
2
n∑
i=1
cos2 ηi 0 0 0
01
2
n∑
i=1
cos2 ηi 0 0
0 0
n∑
i=1
(sin ηi − 1
n
n∑
j=1
sin ηj
)2
0
0 0 0 nc2
,
Kirjoitetaan nyt x-vektorin virhe-ellipsoidin, eli vastaavasti matriisin N−1 kuvaaja-ellipsoidin, kaava:
xTATAx = 1,
missa x kuten kaavassa (9.4). Tulos on
n11∆X2 + n22∆Y
2 + n33∆Z2 + n44∆T
2=
∆X2
qxx+
∆Y 2
qyy+
∆Z2
qzz+
∆T2
qtt= 1,
mista nakyy heti maaritelman mukaiset, varianssimatriisin Qxx =[ATA
]−1alkiot:
qxx =2∑
cos2 η,
qyy =2∑
cos2 η,
mista lasketaan
HDOP =√qxx + qyy =
√4∑
cos2 η=
2√∑cos2 η
.
4Tarkista, etta ΛΛ−1 = Λ−1Λ = I !

112 Luku 9. Tasoituslasku ja GPS
Samalla, hieman uudelleen jarjestamisen jalkeen,
qzz =1∑
sin2 η − 1n
(∑
sin η)2 ,
ja VDOP on sen neliojuuri5.
9.4 Erotushavaintojen havaintoyhtalot
Voimme lahtea yksinkertaisten GPS-pseudoetaisyyshavaintojen haviantoyhtalosta (kaava9.2, c on valon nopeus):
∆p+ v =[
e −c] [ ∆R
∆T
].
Kirjoitetaan satelliitien indeksi ylaindeksina ja maa-asemien indeksi alaindeksina:
∆p1j + v1
j
...
∆pij + vi
j
∆pi′
j + vi′
j
...∆pn
j + vnj
=
e1j −c...
...
eij −c
ei′
j −c...
...en
j −c
[∆Rj
∆Tj
].
Tassa on kirjoitettu vain kahdet sarakkeet, havaintoasemalle numero j. Kaytannossa tuleeolemaan kaksi saraketta jokaiselle maa-asemalle j.
Muodostetaan nyt satellittien valiset erotukset6 vahentamalla yhtaloryhman ensimmainenrivi kaikista muista joilla on sama maa-asema j:
∇12pj + ∇12vj
...
∇1ipj + ∇1ivj
∇1i′pj + ∇1i′vj
...
∇1npj + ∇1nvj
=
∇12ej
...
∇1iej
∇1i′ej
...
∇1nej
[∆Rj] . (9.5)
Huomaa, miten ongelmasta on poistunut kellotuntematon ∆T . Koska se on sama satellii-tista riippumatta, se haviaa kun vahennetaan saman vastaanottimen kahden eri satelliitinhavainnot toisistaan.
Ylla annettujen kaavojen matriisimuodot ovat:
p =[
e −c] [ R
∆T
]
5Huomaa, etta jos η on vakio, niin nimittaja haviaa! Eli, korkeuden maaritys GPS:lla edellyttaa, etta onsatelliitteja eri korkeuksilla taivaassa.
6Notaatio “∇” ei ole mitaan tekemista vektorianalyysin ∇-operaattorin kanssa! Se on valittu vain, koskamerkin muoto kuvaa geometrisesti kahden satelliitin ja yhden maa-aseman idea.

9.4. Erotushavaintojen havaintoyhtalot 113
e→2j
"Taivaan−pallo"
W
ES
N
η A
Sat
e→2
2 2
1
Havaitsijaj
e j
j
e→3j
13e→j
→412
e→j
14ej
Tetraedri→
Kuva 9.1: GPS-pseudoetaisyyshavaintojen ja erotushavaintojen geometria
ja
∇p = ∇eR,
missa matriisi
[∇]j =
−1 1 0 · · · 0−1 0 1 · · · 0...
......
. . ....
−1 0 0 · · · 1
koostuu “blokeista” jokaiselle havainto-asemalla j. Huomaa, etta matriisi on suorakulmaineneika nelion muotoinen. Sarakkeita on riveja yksi enempaa. Se kuvaa se, etta erotushavaintojaon aina yksi (per maa-asema) vahemman kuin alkuperaisia.
Tasta voimme laskea myos erotushavaintojen varianssimatriisi. Jos alkuperaisten havainto-jen p varianssimatriisi on Q, saadaan ∇p:n varianssimatriisi kaavalla
Q∇∇ = ∇Q∇T .
Jos Q on yksikkomatriisin muotoinen, siis Q = σ20I, saadaan kaunis tulos:
Q∇∇ = σ20
2 1 · · · 1 11 2 · · · 1 1...
.... . .
......
1 1 · · · 2 11 1 · · · 1 2
= σ20 (I + J) ,
kayttamalla notaatio: I on yksikkomatriisi, J on “ykkosten matriisi”, siis sellainen, jonkakaikki elementit ovat ykkosia.

114 Luku 9. Tasoituslasku ja GPS
9.5 Vektorimittaukset
Mikali mitataan GPS:n avulla vektoreita eika absoluuttisia koordinaattiratkaisuja, ovathavaintoyhtalot edelleen ylla kuvatun muotoisia, edellyttaen etta vektorin toinen paa pi-
detaan kiinni. Silloin tuntemattomat ∆Rj =[
∆Xj ∆Yj ∆Zj
]Tovat taman vektorin
kolme komponenttia. Mikaan muu ei muutu.
Mikali halutaan estimoida todella absoluuttiset pistekoordinaatit geosentrisessa jar-jestelmassa kayttamatta jo tiedossa olevia lahtopisteita, on sekin mahdollista yo. kaavojenavulla. Emme tata tapausta tassa kasittele. Se kuuluu globaalisen tarkkuusgeodesian piiriin.
Mikali mitataan verkkoja jotka koostuvat useista vektoreista, mutkistuvat kuviot. Olkoonalkuperaisten mittausten havaintoyhtaloryhma
∆p11 + v1
1
...∆pn
1 + vn1
...
...
∆p1m + v1
m
...∆pn
m + vnm
=
e11 · · · 0 −c · · · 0...
......
......
...en
1 · · · 0 −c · · · 0...
......
......
......
......
......
...
0 · · · e1m 0 · · · −c
......
......
......
0 · · · enm 0 · · · −c
∆R1
...∆Rm
∆T1
...∆Tm
.
Tassa n on satelliittien, m maa-asemien maara.
Samalla tavalla kuin aikaisemmin konstruoidaan kaksoiserotusten havaintoyhtalot, jolloin∆T ’:t taas haviavat:
∆12∇12p+ ∆12∇12v...
∆12∇1np+ ∆12∇1nv......
∆1m∇12p+ ∆1m∇12v...
∆1m∇1np+ ∆1m∇1nv
=
−∇12e1 ∇12e2 · · · 0...
......
−∇1ne1 ∇1ne2 · · · 0...
......
......
...
−∇12e1 0 · · · ∇12em
......
...
−∇1ne1 0 · · · ∇1nem
∆R1
...∆Rm
.
(Tasta nakyy heti, jos ∆Ri = 0, i = 2, 3, . . . , m, etta saadaan takaisin yksinkertaisten ero-tusten havaintoyhtaloryhma 9.5.)

9.5. Vektorimittaukset 115
Tassa tapauksessa “nabla-matriisi” on
[∆∇] =
1 −1 · · · 0 −1 1 · · · 0 · · 0 0 · · · 0...
.... . .
......
.... . .
... · · ......
. . ....
1 0 · · · −1 −1 0 · · · 1 · · 0 0 · · · 0
· · · · · · · · · . . . · · · · ·· · · · · · · · · · . . . · · · ·1 −1 · · · 0 · · 0 0 · · · 0 −1 1 · · · 0...
.... . .
... · · ......
. . ....
......
. . ....
1 0 · · · −1 · · 0 0 · · · 0 −1 0 · · · 1
.
Jos taas Q on yksikkomatriisin muotoinen σ20I, saadaan kaksoiserotusten ∆∇p varianssima-
triisi seuraavasti:Q∆∇,∆∇ = [∆∇]Q [∆∇]T = σ2
0 [∆∇] [∆∇]T ,
jonka muoto on monimutkainen.
Paapointti tassa on, etta erotushavainnot ovat korreloituja keskenaan. Kahden satelliitinvalilla lasketut yksinkertaiset erotukset korreloituvat yhteisen vertaussatelliitin (ylla: satelli-itti 1) kautta. Kaksinkertaiset havainnot taas korreloituvat yhteisen maa-aseman kautta jossellainen on. Taman seurauksena samasta pisteesta lahtevat vektorit korreloituvat.
Kuitenkin monet kaytannon GPS-laskentaohjelmistot (kuten Ashtechin WinPrism) toimivatkaksivaiheperiaatteella:
1. Lasketaan yksittaiset vektorit, jokainen kahden verkon pisteen valilla
2. Tasoitetaan vektoreista muodostettu verkko.
Yleensa kakkosvaiheessa oletetaan, etta vektorit ovat toisistaan tilastollisesti riippumatto-mia. Tiedamme nyt, etta ne eivat sita ole. Vektorien tarkkuudeksi oletataan yleensa niidenpituuden kanssa verrannollinen funktio.
Likimaarainen menetelma toimii useimmiten hyvin, vaikkei optimaalisesti. Esim. Bernese-ohjelmisto tarjoaa mahdollisuuden ottaa erotushavaintojen todelliset korrelaatiot huomioon.Tulos ei valttamatta aina parane. Tama on vaikea ala.
Paljon suurempi approksimaatio, jota tehdaan monessa GPS-laskentaohjelmassa (myosBernesessa), on, etta perakkaiset GPS-havainnot ovat tilastollisesti riippumattomia toisis-taan. Tiedamme, etta sekaan ei pida paikkansa. Taman oletuksen seurauksena GPS-ohjelmantuottamat, muodolliset pistekeskivirheet voivat olla jopa 10-20 kertaa liian optimistisia. Lu-
otettava tapa selvittaa tulosten todellista tarkkuutta on tutkia vektorien verkkotasoituksestasaatua painoyksikon keskivirhetta.

116 Luku 9. Tasoituslasku ja GPS

117
Luku 10
Tasoituslaskun variantit ja yhdistelmat
10.1 Pakkoehtojen kaytto ratkaisun kiinnittamiseksi
Jos kaytetaan ylla olevia havaintoyhtaloita verkon pisteiden koordinaattien ratkaisemisek-si, huomataan pian, etta se ei valttamatta onnistu. Ylla olevat mittaukset sitovat pisteidensuhteelliset sijainnit, muttei koko verkon absoluuttista paikkaa. Siksi kaytetaan aina pakkoe-
htoja (en. constraints). Esim. monikulmiojonon mittauksessa on joko yksi tai molemmatpaatepisteet koordinaateiltaan annettuja. Jos on kyse kahden pisteen verkosta joiden valillaon mitattu etaisyys, atsimuti ja korkeuskulma, voivat pakkoehdot olla esimerkiksi:
x1 = 0
y1 = 0
z1 = 0
mika luo paikallisen koordinaattijarjestelman (datumin) jossa pisteen 2 koordinaatit(x2, y2, z2) ratkaistaan.
Pakkoehtojen maara riippuu
1. Onko kyse 1- 2- tai 3-ulotteista verkosta,
2. Onko kiinnitettava vain sijainnin vain myos orientoinnin ja mahdollisesti mittakaavan.
1D 2D 3D
Sijainti 1/0 2 3
Orientointi - 1 3/0
Mittakaava 1/0 1 1/0
Yhteensa 2/1/0 4 7/6/3
Kuten huomaat, on pakkoehtojen maara sama kuin ko. avaruudessa kaytettavan Helmert-muunnoksen parametrien maara. Tama ei ole sattuma.
Korkeusverkoissa ei yleensa kayteta mittakaavatuntematonta, koska vaaituslatat oletetaankunnollisesti kalibroiduiksi. Lisaksi korkeuksien arvovali on vain korkeintaan muutama km,kun tasoverkkojen koko voi olla tuhansia kilometreja.
Toinen yksiulotteinen verkko on painovoimamittausverkko. Kun kaytetaan absoluutti-gravimetri, ei tarvita referenssipistetta. Kun kaytetaan relatiivinen gravimetri (yleensa jousi-gravimetri) on lahtopisteen kaytto tarpeellinen ja mittaus antaa vain eri pisteiden valisiapainovoimaeroja, aivan kuten vaaitus antaa vain pisteiden valisia korkeuseroja.

118 Luku 10. Tasoituslaskun variantit ja yhdistelmat
Kolmiulotteisissa verkoissa ei valttamatta tarvita orientointia eika mittakaava, jos on kyseGPS-miitauksesta pienen alueen sisalla. Silloin yksi datum-piste riittaa, ja datum-muunnoson yksinkertainen translaatio avaruudessa. Suurille GPS-tarkkuusverkoille kuitenkin set-semanparametrinen Helmert-muunnos rotaatiokulmineen mittakaavoineen on valttamaton-ta.
10.2 Ehto- ja havaintoyhtaloiden valinen yhteys
Havaintovektori ℓ =[ℓ1 ℓ2 · · · ℓn
]Ton n-ulotteisen lineaarisen vektoriavaruuden ele-
mentti. Koska tasoitetuille havainnoille
ℓ = Ax,
missa tuntemattomien vektorin x estimaattori x =[x1 x2 · · · xm
]Ton m-ulotteinen,
voidaan operaatio ℓ→ ℓ kuvata projektioksi m-ulotteiseen aliavaruuteen.
Jos pateeBℓ = 0
samalle ℓ:lle (ehtoyhtaloryhma), voidaan paatella, etta
BAx = 0.
Ja koska tama pitaa paikkansa x:n arvosta riippumatta, seuraa
BA = 0.
Toisin sanoen, jos kirjoitetaan
B =
b1
b2
...bk
, A =
[a1 a2 a3 · · · am
],
seuraa, etta〈bi · aj〉 = 0, i = 1 . . . k, j = 1 . . .m.
Taas toisin sanoen:
B:n rivivektorit ja A:n sarakevektorit ovat ortogonaalisia keskenaan.
. . . ja koska vektorit aj virittavat n-ulotteisen vektoriavaruuden m-ulotteista aliavaruutta, onbi-vektoreiden maksimimaara k = n−m:
Tuntemattomien maara m plus ehtojen maara k on yhta suuri kuin havaintojen
maara n.
Kirjoitetaany = Bℓ
ja
Qyy = BQℓℓBT ,
Qℓy = QℓℓBT.

10.2. Ehto- ja havaintoyhtaloiden valinen yhteys 119
Etsitaan optimaalinen ratkaisu joka on yleista muotoa:
ℓ = ℓ− Cy = (I − CB) ℓ.
Koska Ey
= 0, on Eℓ
= E ℓ, voidaan sanoa, etta etsimme optimaalinen harhaton
estimaattori.
Estimaattorin ℓ varianssi on
Qbℓbℓ = (I − CB)Qℓℓ (I − CB)T .
Taman minimointi edellyttaa
dQbℓbℓ
dC= −BQℓℓ (I − CB)T − (I − CB)QℓℓB
T = 0,
mika toteutuu, mikali
− (I − CB)QℓℓBT = 0
eli
QℓℓBT − CBQℓℓB
T = 0 ⇒ C = QℓℓBT(BQℓℓB
T)−1
.
Taman jalkeen pienimman neliosumman ratkaisu voidaan kirjoittaa
ℓ = ℓ− Cy =
= ℓ−QℓℓBT(BQℓℓB
T)−1
y =
= ℓ−QℓyQ−1yy y ⇒
⇒ ℓ− ℓ = QℓyQ−1yy y. (10.1)
Suureet v ≡ ℓ− ℓ tunnetaan tassakin jaannosvirheina eli residuaaleina.
Nain n-ulotteinen “havaintoavaruus” jakautuu kahteen toisensa nahden“ortogonaaliseen”ali-avaruuteen: Toisaalta m-avaruus missa tasoitetut tuntemattomat x ja tasoitetut havainnotℓ; toisaalta n −m-avaruus missa “nollasuureet” (siis: Suureet jotka ehtoyhtaloiden mukaan
pitaa olla nolla) y ja residuaalit v = ℓ− ℓ.
Yleisesti voimme todeta:
Tietty pienimman neliosumman tasoitusongelma voidaan kirjoittaa joko havain-toyhtalotasoituksena tai ehtoyhtalotasoituksena. Esitystavat ovat samanarvoisiaja niita voi muuntaa toisilleen. Esimerkiksi, jos A-matriisi on annettu, voidaan or-togonaalisuusehtojen kautta B-matriisin laskea ja toisiinpain. Matriisin tulkinta
on sitten jo toinen kysymys.
Kaytannon tasoitusongelmissa tarjoutuu usein joki havaintoyhtalo- tai yhtoy-htalomenetelma luonollisempana: jos on helposti identifioitavia sulkuvirheita, onehtotasoitus luultavasti paras.

120 Luku 10. Tasoituslaskun variantit ja yhdistelmat
10.2.1 Testaussuureen laskenta
Lasketaan testaussuure E :
E = vTPv = vTQ−1ℓℓ v =
=(yTQ−1
yy Qyℓ
)Q−1
ℓℓ
(QℓyQ
−1yy y)
=
= yTQ−1yy BQℓℓQ
−1ℓℓ QℓℓB
TQ−1yy y =
= yTQ−1yy
(BQℓℓB
T)Q−1
yy y =
= yTQ−1yy QyyQ
−1yy y = yTQ−1
yy y.
Siis: testaussuuretta voidaan laskea yhta hyvin nollasuureista (esim. sulkuvirheista ja niidenvarianssimatriisista) kuin jaannosvirheista.
10.2.2 Ortogonaalisuus
Voimme taas laskea tasoitettujen havaintojen ℓ ja nyt nollasuureiden y valista kovarianssia:
Cov(ℓ, y)
= Cov(ℓ, y)− Cov
(QℓyQ
−1yy y,y
)=
= Qℓy −(QℓyQ
−1yy
)Qyy =
= Qℓy −Qℓy = 0.
Eli:ℓ ⊥ y.
Samoin tietysti myos
Cov(ℓ, v)
= Cov(ℓ, y)Q−1
yy Qyℓ = 0,
vrt. luku 8.1.3.
Nain ollen tasoitus on taas “ortogonalisointi” eli projektio havaintoavaruudessa.
10.3 Vaaitus ehtoyhtaloiden esimerkkina
Aikaisemmin on naytetty, miten vaaitussilmukan tasoituksessa voidaan kayttaa vaaituslinjanpituus painona silmukkaa tasoitettaessa. Tassa tutkitaan asia hieman teoreettisemmin.
Olkoon havainnot pulttivalit ∆Hi, i = 1, . . . n. Ehtoyhtalo on, etta silmukka sulkeutuu:
n∑
i=1
∆Hi = 0.
Kirjoitetaan muotoonBℓ = 0,
missa
ℓ =
∆H1
∆H2
...
...∆Hn

10.3. Vaaitus ehtoyhtaloiden esimerkkina 121
jaB =
[1 1 1 · · · 1
].
Jos “nollasuure” eli sulkuvirhey = Bℓ,
on sen varianssi
Qyy = BQℓℓBT =
n∑
i=1
σ2∆Hi
ja estimaattori (kaava 10.1):
ℓ = ℓ−QℓℓBTQ−1
yy y
josta
∆H1
∆H2
∆H3
...
∆Hn
=
∆H1
∆H2
∆H3
...∆Hn
−
σ2∆H1
0 0 0 0
0 σ2∆H2
0 0 0
0 0 σ2∆H3
0 0
0 0 0. . . 0
0 0 0 0 σ2∆Hn
111...1
w∑ni=1 σ
2∆Hi
=
=
∆H1
∆H2
∆H3
...∆Hn
−
σ2∆H1
σ2∆H2
σ2∆H3
...
σ2∆Hn
w∑ni=1 σ
2∆Hi
,
missa w on silmukan sulkuvirhe.
Tasta tuloksesta voidaan heti vetaa johtopaatos, etta vaaitussilmukan tasoituksessa (jakaikissa vastaavissa ehtotasoituksissa) sulkuvirhe jaetaan havaintovaleihin suhteessa niiden
havaintojen variansseihin. Mikali, kuten on vaaituksen tapauksessa asian laita, vaaitusvalinvarianssi on suoraan verrannollinen vaaituun etaisyyteen (“kilometrivirhe-olettamus”, kaava5.6), silloin on oikeutettu kayttaa valien pituudet suoraan painoina.
Lasketaan nyt samalla tasoitetun havaintovektorin ℓ varianssi:
Qbℓbℓ = Qℓℓ − 2QℓyQ−1yyQyℓ +QℓyQ
−1yyQyyQ
−1yyQyℓ =
= Qℓℓ −QℓyQ−1yyQyℓ.
Laskenta antaa:
Qbℓbℓ =
σ2∆H1
0 0 0
0 σ2∆H2
0 0
0 0. . . 0
0 0 0 σ2∆Hn
−
− 1∑ni=1 σ
2∆Hi
σ2∆H1
σ2∆H1
σ2∆H1
σ2∆H2
· · · ...
σ2∆H2
σ2∆H1
σ2∆H2
σ2∆H2
· · · ......
.... . .
...... · · · · · · σ2
∆Hnσ2
∆Hn
,

122 Luku 10. Tasoituslaskun variantit ja yhdistelmat
ja yhden valin varianssi tasoituksen jalkeen (a posteriori):
σ2d∆Hi
= σ2∆Hi
(1 − σ2
∆Hi∑ni=1 σ
2∆Hi
).
Tama voidaan yleistaa helposti havaitsemalla, etta Hk = H0 +
k∑
i=1
∆Hi (siis, pisteen ab-
soluuttinen korkeus on vain sen suhteellinen korkeus lahtopisteeseen nahden) ja siis, etta
σ2Hk
=
k∑
i=1
σ2∆Hi
. Mista saadaan suoraan absoluuttisiksi pistekorkeuksien a posteriori vari-
ansseiksi:
σ2cHk
=k∑
i=1
σ2∆Hi
(1 −
∑ki=1 σ
2∆Hi∑n
i=1 σ2∆Hi
).
Tahan voi halutessa sijoittaa σ2∆Hi
→ si.
Vastaavat kaavat patevat myos muissa ehtotasoituksissa, mm. monikulmiojonojen suunta-ja koordinaattitasoituksissa. Naissa tapauksissa kuitenkaan“kilometrivirhe-olettama”ei valt-tamatta pade.
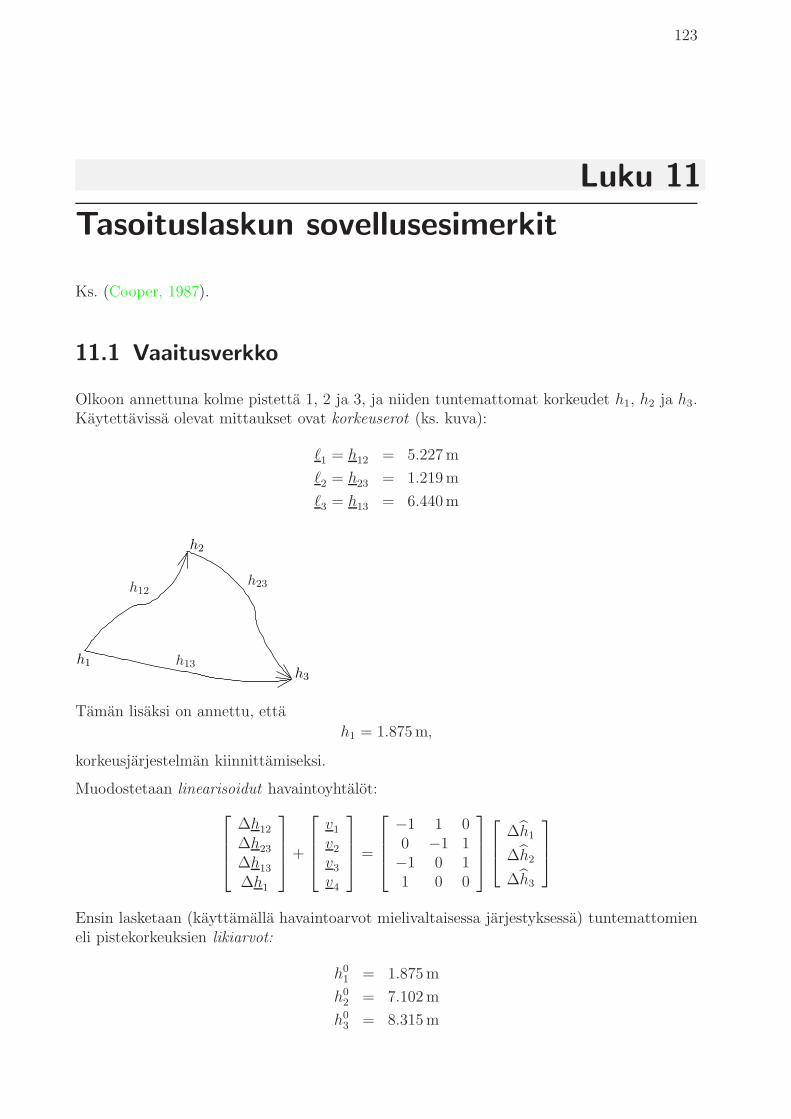
123
Luku 11
Tasoituslaskun sovellusesimerkit
Ks. (Cooper, 1987).
11.1 Vaaitusverkko
Olkoon annettuna kolme pistetta 1, 2 ja 3, ja niiden tuntemattomat korkeudet h1, h2 ja h3.Kaytettavissa olevat mittaukset ovat korkeuserot (ks. kuva):
ℓ1 = h12 = 5.227 m
ℓ2 = h23 = 1.219 m
ℓ3 = h13 = 6.440 m
h12h23
h13
h2
h1h3
Taman lisaksi on annettu, etta
h1 = 1.875 m,
korkeusjarjestelman kiinnittamiseksi.
Muodostetaan linearisoidut havaintoyhtalot:
∆h12
∆h23
∆h13
∆h1
+
v1
v2
v3
v4
=
−1 1 00 −1 1−1 0 11 0 0
∆h1
∆h2
∆h3
Ensin lasketaan (kayttamalla havaintoarvot mielivaltaisessa jarjestyksessa) tuntemattomieneli pistekorkeuksien likiarvot:
h01 = 1.875 m
h02 = 7.102 m
h03 = 8.315 m

124 Luku 11. Tasoituslaskun sovellusesimerkit
ja naista havaintosuureiden likiarvot:
h012 = h0
2 − h01 = 5.227 m ⇒ ∆h12 = h12 − h0
12 = 0,
h023 = h0
3 − h02 = 1.213 m ⇒ ∆h23 = h23 − h0
23 = 0.006 m,
h013 = h0
3 − h01 = 6.440 m ⇒ ∆h13 = h13 − h0
13 = 0,
h01 = 1.875 m ⇒ ∆h1 = h1 − h0
1 = 0.
Siis linearisoitu havaintovektori on
∆ℓ =
00.006 m
00
.
Sitten lasketaan normaaliyhtalot; rakennematriisi on
A =
−1 1 00 −1 1−1 0 11 0 0
ja oletetaan etta Q = I4, 4 × 4 yksikkomatriisi1. Silloin
ATQ−1A = ATA =
3 −1 −1−1 2 −1−1 −1 2
ja
ATQ−1∆ℓ = AT ∆ℓ =
0−0.006 m+0.006 m
.
Nyt normaaliyhtalot ovat
3 −1 −1−1 2 −1−1 −1 2
∆h1
∆h2
∆h3
=
0−0.006 m+0.006 m
mista ratkaisu
∆h1 = 0 m ⇒ h1 = h01 + ∆h1 = 1.875 m
∆h2 = −0.002 m ⇒ h2 = h02 + ∆h2 = 7.100 m .
∆h3 = +0.002 m ⇒ h3 = h03 + ∆h3 = 8.317 m
Tasoitetut havainnot:
∆h12 = −0.002 m ⇒ h12 = 5.227 m − 0.002 m = 5.225 m.
∆h23 = +0.004 m ⇒ h23 = 1.213 m + 0.004 m = 1.217 m.
∆h13 = +0.002 m ⇒ h13 = 6.440 m + 0.002 m = 6.442 m.
∆h1 = 0 m ⇒ h1 = h01 = 1.875 m.
1Ei kovin realistista. Realistisempaa olisi muoto
1 0 0 00 1 0 00 0 1 00 0 0 q
, olettaen etta matkat 1-2, 1-3 ja 2-3 ovat
yhtapitkia. Ja jos piste 1 on kiintea lahtopiste, q = 0.

11.2. Tasokolmio 125
Nakyy, etta tasoitettujen havaintojen kohdalla patee:
h12 + h23 − h13 = 0
eli sulkuvirhe on tasoitettu pois.
Korjaukset/residuaalit:
v1 = h12 − h12 = −0.002 m.
v2 = h23 − h23 = −0.002 m.
v3 = h13 − h13 = +0.002 m.
v4 = h1 − h1 = 0 m.
Mista painoykisikon keskivirhe:
E4 − 3
=
√vTQ−1v
1=√
vTv = 0.001 m√
12 ≈ ±0.004 m.
Luku 1 = 4 − 3 on vapausasteiden maara, kun on 4 havaintoa ja 3 tuntematonta.
11.2 Tasokolmio
Oleta, etta kolmiossa ABC on mitattu kolme etaisyytta a = BC, b = AC, c = AB, ja kolmekulmaa ∠A,∠B,∠C.
a
B
C
b
A
x
α
β
γc
y
Tuntemattomat voivat olla pisteiden A,B,C koordinaatit. Havaintoyhtalot ovat:

126 Luku 11. Tasoituslaskun sovellusesimerkit
a =
√(xB − xC)2 + (yB − yC)2
b =
√(xA − xC)2 + (yA − yC)2
c =
√(xA − xB)2 + (yA − yB)2
α = arctanyC − yA
xC − xA− arctan
yB − yA
xB − xA(11.1)
β = arctanyA − yB
xA − xB− arctan
yC − yB
xC − xB
γ = arctanyB − yC
xB − xC− arctan
yA − yC
xA − xC
Nama yhtalot ovat kaikkea muuta kuin lineaarisia tuntemattomissa koordinaatteissaxA, . . . , yC. Suoritetaan linearisointi, mika edellyttaa osittaisderivaattojen laskeminen ko-ordinaattien likiarvojen lahistolla:
∂a
∂xA= 0;
∂a
∂xB=xB − xC
a;
∂a
∂xC= −xB − xC
a;
ja vastaavasti muut osittaisderivaatat.
Nyt A-matriisi tulee olemaan (silla ymmarryksella, etta kaikki laskut suoritetaan koordi-naattien likiarvoilla xA ≡ x0
A jne):
A1 =
∂a
∂xA
∂a
∂yA
∂a
∂xB
∂a
∂yB
∂a
∂xC
∂a
∂yC
∂b
∂xA
∂b
∂yA
∂b
∂xB
∂b
∂yB
∂b
∂xC
∂b
∂yC
∂c
∂xA
∂c
∂yA
∂c
∂xB
∂c
∂yB
∂c
∂xC
∂c
∂yC
=
=
0 0xCB
a
yCB
a−xCB
a−yCB
axCA
b
yCA
b0 0 −xCA
b−yCA
bxBA
c
yBA
c−xBA
c−yBA
c0 0
.
jossa on kaytetty notaatio xCB ≡ xB − xC jne.
Samalla tavalla kulmille.
Koska funktion arctan t derivaatta on
d
dtarctan t =
1
1 + t2,
seuraa, etta
d
dxarctan
y
x=
1
1 + (y/x)2· ddx
(yx
)=
=x2
x2 + y2· − y
x2=
= − y
x2 + y2

11.2. Tasokolmio 127
ja vastaavasti
d
dyarctan
y
x=
x2
x2 + y2· 1
x=
=x
x2 + y2,
saadaan
∂α
∂xA
= −(−yAC
b2+yAB
c2
)= +
yAC
b2− yAB
c2,
∂α
∂yA
= −(xAC
b2− xAB
c2
)= −xAC
b2+xAB
c2,
∂α
∂xB= −yAB
c2,
∂α
∂yB= +
xAB
c2,
jne. jne. Matriisi A on:
A2 =
−yCA
b2− yAB
c2xCA
b2+xAB
c2−yAB
c2+xAB
c2−yCA
b2+xCA
b2
−yAB
c2+xAB
c2−yAB
a2− yBC
c2xAB
c2+xBC
a2−yBC
a2+xBC
a2
−yCA
b2+xCA
b2−yBC
a2+xBC
a2−yBC
a2− yCA
b2xBC
a2+xCA
b2
.
Yhdistamalla matriisit saadaan
A =
[A1
A2
],
6 × 6 matriisi joka on singulaarinen. Tama johtuu siita, etta haviantoaineisto on ilmeisenkyvyton antaa koko kolmion absoluuttinen sijainti seka orientointi.
Ratkaisut:
1. Annetaan kahden pisteen koordinaatit.
2. Annetaan yhden pisteen koordinaatit ja yhden sivun absoluuttisuunta.
Vaihtoehdon 1. hankaluutena on, etta se kiinnittaa liikaa: Tarvitaan yksi lisatuntematon,
skaalafaktori m, ja matriisissa A yksi lisasarake A4 =[a b c 0 0 0
]T. Koordinaatti-
tiedon rakennematriisi on taas hyvin yksinkertainen: Jos on annettu pisteiden A ja B koor-dinaatit, on matriisi
A5 =
1 0 0 0 0 00 1 0 0 0 00 0 1 0 0 00 0 0 1 0 0
Vaihtoehto 2 sisaltaa annettu suunta:
tAB = arctanyB − yA
xB − xA

128 Luku 11. Tasoituslaskun sovellusesimerkit
ja taman “havainnon” linearisoitu havaintoyhtalo (A-matriisi) on
A3 =[
+yAB
c2−xAB
c2−yAB
c2+xAB
c20 0
],
ja kaikkien pakkoehtojen rakennematriisi on
A5 =
A3
1 0 0 0 0 00 1 0 0 0 0
.
Nyt yhdistetty rakennematriisi on (A4:n sisaltava sarake vain jos kaytetaan mittakaavatun-tematon):
A =
[A1
A2
]A4
A5 0
.
Pienimman neliosumman ratkaisun laskeminen vaatii myos, etta taman funktiomallin lisaksimeilla on virhemalli. Tassa tapauksessa voidaan olettaa, etta
1. Mitatuilla etaisyyksilla on varianssi σ2s .
2. Mitatuilla kulmilla on varianssi σ2α.
3. Annetuille pakkoehdoille p on varianssi σ2p
4. Mittaukset ja pakkoehdot eivat korreloi keskenaan.
Nailla olettamuksilla voidaan kirjoittaa:
Qℓℓ =
σ2
sI 0 0
0 σ2αI 0
0 0 σ2p
.
Nain ollen saadaan normaalimatriisiksi:
N = ATQ−1ℓℓ A =
[AT
1 AT2 AT
5
]σ−2
s I 0 0
0 σ−2α I 0
0 0 σ−2p
A1
A2
A5
=
= σ−2s AT
1A1 + σ−2α AT
2A2 + σ−2p AT
5A5.
Myos normaaliyhtaloiden “oikea puoli” saadaan helposti:
b = ATQ−1ℓℓ ℓ =
[AT
1 AT2 AT
5
]σ−2
s I 0 0
0 σ−2α I 0
0 0 σ−2p
ℓ1ℓ2ℓ5
=
= σ−2s AT
1
∆a∆b∆c
+ σ−2
α AT2
∆α∆β∆γ

11.2. Tasokolmio 129
mista ratkaisua saadaan2. Huomaa, etta havaintosuureet ovat ∆a jne. eli pienet erotukset
likiarvoista! Likiarvot lasketaan likikoordinaateista (x0A, . . . , y
0C) kayttamalla ei-linearisoidut
kaavat (11.1). Ratkaisu saadaan normaaliyhtalosta
N x = b,
missa x =[
∆xA ∆yA ∆xB ∆yB ∆xC ∆yC
]T. Sen jalkeen xA = x0
A + ∆xA jne.
Tama ongelma on jo niin mittava, etta laskeminen ilman tietokonetta, vaikkakin mahdollista,on tyolasta. Ohjelmointi esim. MatLabilla on jo toinen asia.
Laskuesimerkki
Olkoon pisteiden likimaaraiset koordinaatit:
A: 0,0
B: 100,0
C: 100,100
Olkoon mittausarvot seuraavat:
Atsimuti tAB = 0.0000 gon
Etaisyydet a = 100.035 m, b = 141.428 m, c = 99.987 m.
Kulmat α = 49.985 gon, β = 100.015 gon, γ = 50.005 gon.
Kuten huomaat, on likimaarainen geometria tassa kouluesimerkissa erikoisen yksinkertainen.Tama tekee matriisin A konstruointi yksinkertaisemmaksi:
A =
A1
A2
A3
1 0 0 0 0 00 1 0 0 0 0
.
Tassa
A1 =
0 0xCB
a
yCB
a−xCB
a−yCB
axCA
b
yCA
b0 0 −xCA
b−yCA
bxBA
c
yBA
c−xBA
c−ψBA
c0 0
=
=
0 0 0 −1 0 +1−0.7 −0.7 0 0 +0.7 +0.7−1 0 +1 0 0 0
ja
A2 =
−yCA
b2− yAB
c2xCA
b2+xAB
c2−yAB
c2+xAB
c2−yCA
b2+xCA
b2
−yAB
c2+xAB
c2−yAB
a2− yBC
c2xAB
c2+xBC
a2−yBC
a2+xBC
a2
−yCA
b2+xCA
b2−yBC
a2+xBC
a2−yBC
a2− yCA
b2xBC
a2+xCA
b2
=
2Huomaa, etta ℓ5 = δp = p − p0 = 0, jossa p on pakkoehto. Pakkoehdon likiarvoksi otetaan aina itse senannettu arvo, jolloin linearisoidut pakkoehdot ovat nolla.
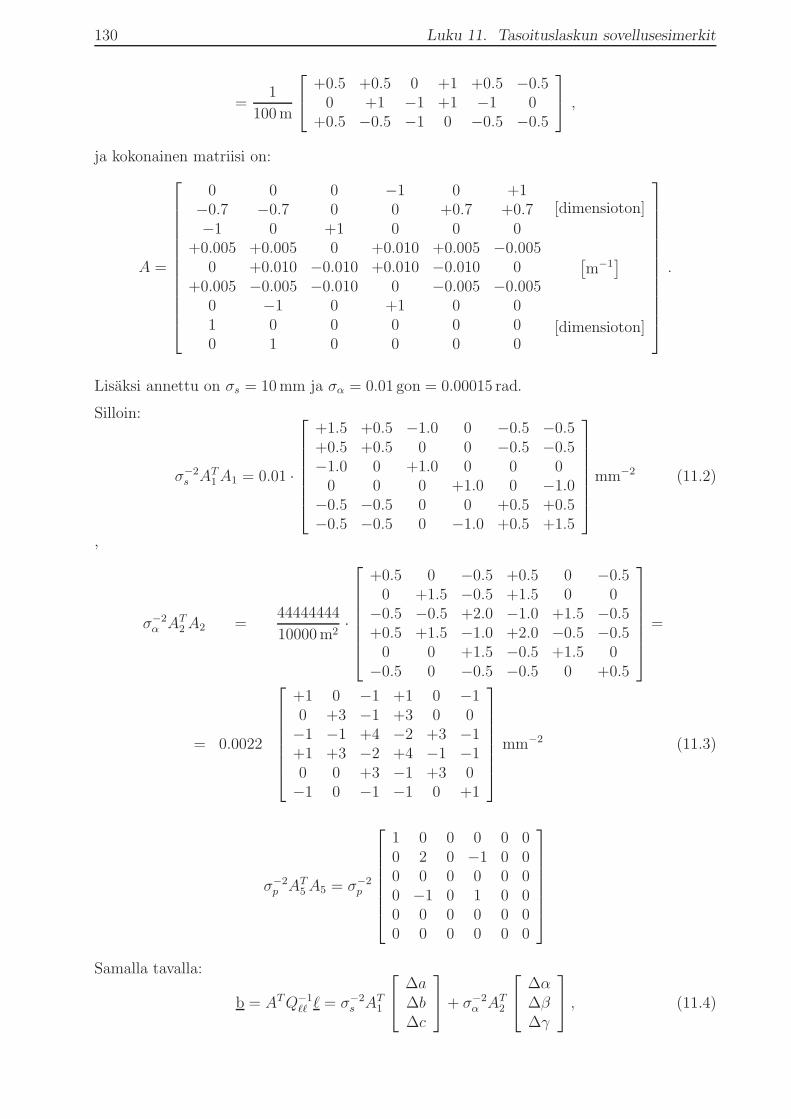
130 Luku 11. Tasoituslaskun sovellusesimerkit
=1
100 m
+0.5 +0.5 0 +1 +0.5 −0.50 +1 −1 +1 −1 0
+0.5 −0.5 −1 0 −0.5 −0.5
,
ja kokonainen matriisi on:
A =
0 0 0 −1 0 +1−0.7 −0.7 0 0 +0.7 +0.7−1 0 +1 0 0 0
+0.005 +0.005 0 +0.010 +0.005 −0.0050 +0.010 −0.010 +0.010 −0.010 0
+0.005 −0.005 −0.010 0 −0.005 −0.0050 −1 0 +1 0 01 0 0 0 0 00 1 0 0 0 0
[dimensioton]
[m−1
]
[dimensioton]
.
Lisaksi annettu on σs = 10 mm ja σα = 0.01 gon = 0.00015 rad.
Silloin:
σ−2s AT
1A1 = 0.01 ·
+1.5 +0.5 −1.0 0 −0.5 −0.5+0.5 +0.5 0 0 −0.5 −0.5−1.0 0 +1.0 0 0 0
0 0 0 +1.0 0 −1.0−0.5 −0.5 0 0 +0.5 +0.5−0.5 −0.5 0 −1.0 +0.5 +1.5
mm−2 (11.2)
,
σ−2α AT
2A2 =44444444
10000 m2·
+0.5 0 −0.5 +0.5 0 −0.50 +1.5 −0.5 +1.5 0 0
−0.5 −0.5 +2.0 −1.0 +1.5 −0.5+0.5 +1.5 −1.0 +2.0 −0.5 −0.5
0 0 +1.5 −0.5 +1.5 0−0.5 0 −0.5 −0.5 0 +0.5
=
= 0.0022
+1 0 −1 +1 0 −10 +3 −1 +3 0 0−1 −1 +4 −2 +3 −1+1 +3 −2 +4 −1 −10 0 +3 −1 +3 0−1 0 −1 −1 0 +1
mm−2 (11.3)
σ−2p AT
5A5 = σ−2p
1 0 0 0 0 00 2 0 −1 0 00 0 0 0 0 00 −1 0 1 0 00 0 0 0 0 00 0 0 0 0 0
Samalla tavalla:
b = ATQ−1ℓℓ ℓ = σ−2
s AT1
∆a∆b∆c
+ σ−2
α AT2
∆α∆β∆γ
, (11.4)

11.3. Helmert-muunnosparametrien estimointi 131
missa
∆a∆b∆c
=
+35.0 mm+6.6 mm−13 mm
(11.5)
∆α∆β∆γ
=
−0.015 gon+0.015 gon+0.005 gon
. (11.6)
Kaavoista (11.2, 11.3, 11.4, 11.5 ja 11.6) muodostetaan normaaliyhtalot N x = b ja lasketaanratkaisu. Matlab antaa
x =
∆xA
∆yA
∆xB
∆yB
∆xC
∆yC
=
0.0000−0.0000−0.0117−0.0000−0.0178
0.0318
m ⇒
xA
yA
xB
yB
xC
yC
=
0.00000.0000
99.98830.0000
99.9822100.0318
m.
11.3 Helmert-muunnosparametrien estimointi
Kaytannossa tulee usein vastaan tehtava, etta on estimoitava Helmert-muunnosta maaravatparametrit, kun pistekentan koordinaatit on annettu kahdessa koordinaattijarjestelmassa.
Esimerkiksi on muunnoskaava kahden kolmiulotteisen koordinaattijarjestelman valilla(Ollikainen, 1993):
x(2)
y(2)
z(2)
= (1 +m)R
x(1)
y(1)
z(1)
+
txtytz
, (11.7)
missa 1 + m on mittakaavakerroin (m yleensa pieni), R on pyorahdysmatriisi ja tx, ty, tzjarjestelmien valinen siirtovektori.
Koska pyorahdyskulmat ovat yleensa pienia, voidaan kirjoittaa:
R =
1 ez −ey
−ez 1 ex
ey −ex 1
,
missa ex, ey, ez ovat pienia kiertokulmia akseleiden x, y, z ympari.
Kaava (11.7) voidaan kirjoittaa uudelleen ja linearisoida seuraavasti:
x(2) − x(1)
y(2) − y(1)
z(2) − z(1)
=
m ez −ey
−ez m ex
ey −ex m
x0
y0
z0
+
txtytz
,

132 Luku 11. Tasoituslaskun sovellusesimerkit
eli
x
(2)i − x
(1)i
y(2)i − y
(1)i
z(2)i − z
(1)i
=
x0
i 0 −zi,0 +y0i 1 0 0
y0i +z0
i 0 −x0i 0 1 0
z0i −y0
i +x0i 0 0 0 1
mex
ey
ez
txtytz
. (11.8)
Tassa on yleisyyden vuoksi lisatty piste-indeksi i, i = 1, . . . , n. Pisteiden maara on silloin n,“havaintojen” (annettujen koordinaattierotusten) maara on 3n.
133
Luku 12
Monikulmiojonojen verkon yhteistasoitus
12.1 Solmupisteverkkotasoitus
Jonohavainnoista lasketaan“korvaavat tuntemattomat”, ns. fiktiiviset havainnot seka kulma-etta etaisyyshavaintojen osalta.
havaintoyhtalotasoituksella tasoitetaan suunnat ja saadaan solmupisteiden (paatepis-teiden) valiset orientointituntemattomien ja koordinaattien erotukset, seka kaikki ni-iden keskivirheet — tarkemmin, kokonainen varianssimatriisi ;
Yksittaisten jonojen sovittaminen verkkoratkaisun antamiin orientointeihin ja koordi-naatteihin; ehtoyhtalotasoitus.
Virheiden kasautuminen koko verkosta takaisin yksittaisten jonojen pisteiden keskivir-heisiin.
Tassa luvussa laajempi selostus.
12.2 Jonojen sulkuvirheet pseudo-havaintoina
Julkaisussa (Lankinen et al., 1992) on kuvattu seikkaperaisesti miten yksittainen monikul-miojono tasoitetaan, mikali on annettu seka alku- etta loppusuunta, tai jos niita ei ole an-nettu. Myos eri painotusstrategiat kasitellaan. Kaiken mielenkiintoisinta on kuitenkin, mitenuseasta monikulmiojonosta koostuva verkko voidaan tasoittaa, koska tama on kaytannon es-imerkki Helmert-Wolf blocking -strategian kaytosta.
Tilanne voi olla vaikkapa kuvan 12.1 mukainen. Kaikki nelja jonoa lahtevat ja/tai paat-tavat solmupisteisiin A, B. Solmupisteissa on annettu tuntemattomat orientaatiot ΩA ja ΩB,ts. teodoliitin vaakakehan nollakohdan absoluuttinen suunta (atsimuti). Lisaksi on annettupaatepisteiden C, D koordinaatit — koordinaattiratkaisun kiinnittamiseksi — seka yksi ori-entaatiotuntematon ΩD, koska muuten suuntatasoitus ei olisi yksiselitteisesti ratkaistavissa.
Tama verkko tasoitetaan niin, etta ensin konstruoidaan pseudo- eli fiktiivisia havaintoja (ks.ylla) jotka riippuvat vain yhteisista tuntemattomista, jollaisiksi maaritellaan pisteiden A jaB koordinaatit ja pisteiden A,B,C orientaatiotuntemattomat.
Seitseman tuntematonta: xA, yA, xB, yB,ΩA,ΩB,ΩC .
Voidaan kirjoittaa jonon I seuraava havaintoyhtalo1:
fI =
NI∑
j=1
(tIj,j−1 − tIj,j+1
)− (NI − 1) · 200 gon = ΩB − ΩA,
1Kirjoitustapa eroaa (Lankinen et al., 1992):ssa kaytetysta, koska haluamme tuoda esiin orientaatiotun-temattomien rooli. Huomaa myos etta se on havaintoyhtalo eika ehtoyhtalo.

134 Luku 12. Monikulmiojonojen verkon yhteistasoitus
A
B B
C D C
D
A
AB
I
II
III
IV
Ω
Ω
Ω
Ω
D
C
Kuva 12.1: Jonoverkko.
mika on muotoa ℓ = Ax, missa ℓ = fI , A =[−1 +1
]ja x =
[ΩA ΩB
]T. Tassa NI on
jonon I pisteiden maara paatepisteita mukaanlukien, tIj,j+1 on jonon I pisteen j suuntahavain-
to eteenpain ja tIj,j−1 saman jonon ja pisteen suuntahavainto taaksepain. (Lahtopisteessa eikuitenkaan ole taaksepain-suunta eika sulkupisteessa eteenpain-suunta.)
Kaavassa globaalisia tuntemattomia ovat ΩA,ΩB ja ΩC . Kuvassa annetun geometrian A-matriisi tulee olemaan sellainen, etta on yksi sarake jokaista orientaatiotuntematonta ko-htaan, ja lahtopisteelle arvo -1 ja sulkupisteelle +1. Matriisin rivien maara on sama kuinjonojen maara sarakkeiden maara vastaa tuntemattomien omegoiden maaraan.
Saadaan:
A =
−1 1 0−1 1 00 1 0−1 0 1
Tasoituksessa kaytettava painotus on:
P = diag
[1
νI
1
νII
1
νIII
1
νIV
], (12.1)
missa νi on jonon i taitekulmien lukumaara. Eli esimerkkitapauksessa:
P = diag
[1
5
1
3
1
2
1
2
].
Taman jalkeen standarditasoitus ΩA, ΩB, ΩC ratkaisemiseksi.
Toisessa vaiheessa tasoitetaan koordinaatit. Konstruoidaan taas “pseudo-havaintoja”, nytkoordinaattieroja:
f Ix =
nI∑
j=1
sIj−1,j cosαI
j−1,j = xB − xA,
f Iy =
nI∑
j=1
sIj−1,j sinαI
j−1,j = yB − yA,

12.2. Jonojen sulkuvirheet pseudo-havaintoina 135
molemmat taas havaintoyhtaloita muotoa ℓ = Ax. Tassa sIj−1,j on jonon I sivun j − 1 → j
pituus, ja αIj−1,j sen (absoluuttinen) suunta2.
Tuntemattomat ovat nyt koordinaatit xA, xB, yA, yB ja rakennematriisin A rakenne on —erikseen x- ja y-koordinaateille:
A =
−1 1−1 10 1−1 0
Ylla olevat ehtoyhtalot antavat rivin[−1 1
]matriisiin. Jonot III ja IV sen sijaan antavat
rivit muotoa[−1 0
]ja[
0 1], koska paatepisteiden koordinaateista yksi pari on jo
tunnettu.
Yhteinen koordinaattirakennematriisi on nyt
A =
−1 1−1 10 1−1 0
−1 1−1 10 1−1 0
,
jossa vastaava havaintovektori on[f I
x f IIx f III
x f IVx f I
y f IIy f III
y f IVy
]Tja tuntem-
attomien vektori[xA xB yA yB
]T.
Koordinaattitasoituksessa voidaan valita painomatriisi seuraavaksi sivujen lukumaaran pe-rusteella:
P = diag
[1
nI
1
nII
1
nIII
1
nIV
], (12.2)
missa ni on jonon i sivujen maara. Esimerkkitapauksessa:
P = diag
[1
6
1
4
1
3
1
3
],
2...eli summa tIj−1,j +Ωj−1, jossa tIj−1,jon sivun j − 1 → j eteenpain-suunta ja Ωj−1 sen orientointituntem-aton.

136 Luku 12. Monikulmiojonojen verkon yhteistasoitus
ts. koko painomatriisi on
P =
1
61
41
31
31
61
41
31
3
seka x- etta y-koordinaatteille.
Monet muut painotusvaihtoehdot ovat olemassa:
1. Sivujen yhteispituus
2. Puoliempiirisesti koordinaattierojen keskivirheista.
Ks. (Lankinen et al., 1992).
Onko tama nyt Helmert-Wolf blocking? Se on sen hyvin yksinkertainen erikoistapaus: Verkko-tasoitus missa lasketaan pisteiden A,B koordinaatit ja orientointituntemattomat vastaa“ylimman tason”tasoitukseen, kun taas yksittaisten jonojen tasoitus (kayttamalla jo globaal-isti tasoitetut koordinaatit ja orientoinnit) vastaa paikallistason (“kansalliseen”) tasoitukseen.
Tama laskenta on jo niin yksinkertainen etta sen voi suorittaa taskulaskimella. Koko verkonsuora tasoitus muodostamalla ja ratkaisemalla kaikki havaintoyhtalot kerrallaan ei silla taval-la onnistuisi!
12.3 Painotusvaihtoehtoja
Ylla kuvatussa verkkotasoituksessa valitaan yleensa suuntien tasoituksessa painotus taitekul-mien maaran mukaan (kaava 12.1) ja koordinaattien tasoituksessa painotus sivujen maaranmukaan (kaava 12.2). Nama eivat kuitenkaan ole ainoat mahdollisuudet. Ne ovat realistisia,mikali
1. seka suuntien etta etaisyyksien havaintotarkkuudet ovat riippumattomia mittaussivunpituudesta, ja
2. Suuntamittauksen tarkkuus (muunnettuna paikan tarkkuudeksi keskimaaraisella sivunpituudella) vastaa etaisyysmittauksen tarkkuuteen.
Erityisesti toinen olettamus ei yleisesti pida paikkansa.

12.4. Verkkotasoituskorjausten takaisinsyotto 137
Mikali etaisyysmittauksen tarkkuus on verrannollinen etaisyyteen, on parempi koordinaat-titasoituksen painotustapa seuraava:
P = diag
[1∑nI
j=1 sIj−1,j
1∑nII
j=1 sIIj−1,j
1∑nIII
j=1 sIIIj−1,j
1∑nIV
j=1 sIVj−1,j
],
eli painotus jokaisen jonon i kokonaispituuden
ni∑
j=1
sij−1,j mukaan. Kaava on helposti
yleistavissa mielivaltaisen jonojen maaran tapaukseen.
Toinen kaytetty vaihtoehto ottaa huomioon suuntien ja etaisyyksien valisten mittaus-tarkkuuksien erilaisuutta. Tassa tapauksessa kaytetaan x- ja y-koordinaateille erilaiset pain-
otukset. Seuraavasti:
Px = diag
[1∑nI
j=1 σ2xI
j−1,j
1∑nII
j=1 σ2xII
j−1,j
1∑nIII
j=1 σ2∆xIII,j
1∑nIV
j=1 σ2∆xIV,j
]
ja
Py = diag
[1∑nI
j=1 σ2yI
j−1,j
1∑nII
j=1 σ2yII
j−1,j
1∑nIII
j=1 σ2yIII
j−1,j
1∑nIV
j=1 σ2yIV
j−1,j
],
jossa
σ2xI
j−1,j=(cosAI
j−1,j · σs
)2+
(sI
j−1,j sinAIj−1,j ·
σAIj−1,j
[g]
ρ
)2
,
σ2yI
j−1,j=(sinAI
j−1,j · σs
)2+
(sI
j−1,j cosAIj−1,j ·
σAIj−1,j
[g]
ρ
)2
.
Tassa σs on etaisyyshavainnon keskivirhe, tassa oletettu vakioksi. (ρ on jo aikaisemminmainittu muunnosluku radiaaneista gooniin.)
Koska tassa kaytettava suuntahavannon keskivirhe on suuntatasoituksen jalkeinen
keskivirhe, kaytetaan I-jonon (j − 1, j)-sivun suuntahavainnon keskivirheelle kaava σAIj−1,j
=
σ0
√j
(1 − j
νI
), missa νI on jonon I taitekulmien lukumaara ja j = 1, . . . , νI jonon taitekul-
mien indeksi.
Kaava on puoli-empiirinen mutta riittaa tahan tarkoitukseen. Ks. (Lankinen et al., 1992).
12.4 Verkkotasoituskorjausten takaisinsyotto
Monikulmiojonojen verkkon tasoituksesta saadut jaannosvirheet (residuaalit, eli erotuksetalkuperainen minus tasoitettu), ovat samalla korjaukset jotka ovat jaettavia jokaisen jononsisalla taitekulmien ja pistekoordinaattien kesken. Menetelma on seuraava.
Olkoon jonolle I saatu paatepisteiden orientointikulmien erotuksen residuaaliksi
wtI= f
I− fI = f
I−(ΩB − ΩA
),

138 Luku 12. Monikulmiojonojen verkon yhteistasoitus
silloin taitekulmien α korjaukset ovat jonoittain
dαI=wtI
νI,
missaαI
j = tIj,j+1 − tIj,j−1
on taitekulma eli eteen- ja taakse-suuntahavaintojen valinen ero, dαIjsen tasoituskorjaus (joka
ei riipu taitekulman numerosta j) ja νI on jonon I taitekulmien maara. Eli suuntakorkausjakautuu tasaisesti kaikkien taitekulmien kesken, kuten on voitu odottaa.
Talla tavoin saaduilla korjatuilla suuntakulmilla ja havaituilla etaisyyksilla lasketaan seu-raavasti pistevalien koordinaattierot xj−1,j ja yj−1,j. Kaavat ovat:
xj−1,j = sj−1,j cosAj−1,j,
yj−1,j = sj−1,j sinAj−1,j.
Samalla tavalla kuin ylla on kaytettavissa sulkuvirheet, tassa jonolle i = I:
wIx = f I
x− f I
x =
nI∑
j=1
xIj−1,j − (xB − xA)
wIy = f I
y− f I
y =
nI∑
j=1
yI
j−1,j− (yB − yA)
Naita sulkuvirheita jaellaan suureiden xj−1,j, yj−1,j yli oletettujen painotuksen mukaisesti:
dxIj−1,j = −w
Ix
nI
, dyIj−1,j = −
wIy
nI
kun painot valitaan verrannollisiksi sivujen lukumaaraan, tai
dxIj−1,j = −
sIj−1,jw
Ix∑nI
j=1 sIj−1,j
, dyIj−1,j = −
sIj−1,,jw
Iy∑nI
j=1 sIj−1,j
kun painot valitaan verrannollisiksi jonojen kokonaispituuksiin, tai
dxIj−1,j = −
sIj−1,jσ
2xI
j−1,j∑nI
j=1 σ2xI
j−1,j
, dyIj−1,j = −
sIj−1,jσ
2yI
j−1,j∑nI
j=1 σ2yI
j−1,j
mikali painot valitaan verrannollisiksi laskettuihin koordinaattierotusvariansseihin.
Naista kaavoista voidaan johtaa myos (mutkikkaita) kaavoja jonopisteiden pistekoordinaat-tien variansseille; ks. (Lankinen et al., 1992) ja taman kirjoituksen luvun 10.3 kaavat. Niidenhyoty on nykyisin hieman kyseenalainen, koska yleinen pienimman neliosumman verkkotasoi-tusmenetelma tuottaa nykyisin automaattisesti ja muodollisesti oikealla tavalla myos piste-koordinaattien varianssit – ja kovarianssit.
139
Luku 13
Vapaa asemapiste
13.1 Tausta
Perinteisesti on kartoitusmittauksessa oletettu, etta asemapiste tunnetaan. Myos sateittai-nen kartoitusmittaus suoritettiin silla tavalla, etta valittu asemapiste oli tunnettu piste, jamittauspisteet mitattiin tasta pisteesta lahtien.
Nykyaikaisessa takymetrissa on sen verran tietojenkasittelyvoima, etta tama ei ole enaa valt-tamatonta. Silla ehdolla, etta mittauksessa otetaan mukaan riittava maara pisteita, joidenkoordinaatit tavoitetussa koordinaattijarjestelmassa ovat jo tiedossa, voidaan jo kentalla saa-da kaikki mitattujen kartoituskohteiden koordinaatit valmiiksi tahan jarjestelmaan.
Menetelman nimi on vapaan asemapisteen menetelma.
Nykyaikainen takymetria mahdollistaa suurien pisteblokkien samanaikaisen mittaamisen.Mittausten tehokas suorittaminen edellyttaa, etta asemapisteet voidaan valita vapaasti, kar-toitettavien pisteiden ehdoilla. Vaatimus, etta asemapiste olisi jo tunnettu piste, olisi liianrajoittava ja aiheuttaisi ylimaaraista tyota (esim. kojeen ylimaaraisia siirtoja annetun pis-tekentan mittaamiseksi).
13.2 Laskuesimerkki
1. Tunnetuille jonopisteille 1 ja 2 on olemassa koordinaatit koordinaatistossa x, y: x1, y1
ja x2, y2, ja mittauksesta saadaan pisteiden kojekoordinaatit u1, v1 ja u2, v2
2. Oletetaan, etta on suurehko maara kohdepisteita i = 1, . . . , n. Pisteille on maaritettavakoordinaatit xi, yi mitatuista kojekoordinaateista ui, vi.
3. Suoritetaan koordinaatistomuunnos eli Helmert- tai yhdenmuotoisuusmuunnos. Tamaon lineaarinen, tasossa neljan parametrin muunnos.
4. Kertoimet kahden tunnetun pisteen tapauksessa saadaan alla kuvatulla menetelmalla.
5. muunnetaan kohdepisteiden mitatut kojekoordinaatit ui, vi koordinaatit xi, yi -koordinaateiksi
Vapaan asemapisteen menetelma mahdollistaa kohdepisteiden mittaamisen ennen kuinjonopisteita on mitattu. Muunnos kojekoordinaateista tavoitekoordinaatteisiin suoritetaansilloin jalkeenpain.
Yleensa kaytetaan kolme tai useampi tunnettua pistetta; silloin muunnosparametrit on las-kettava tasoituslaskulla. Etuina ovat
1. suurempi tarkkuus,

140 Luku 13. Vapaa asemapiste
2. mahdollisten karkeiden virheiden loytaminen, ja
3. mahdollisen x, y -koordinaatiston paikallisen vaaristyman huomaaminen.
13.3 Helmert-muunnos kahdesta tunnetusta pisteesta
x = a+ cu− dv
y = b+ du+ cv
eli [xy
]=
[ab
]+
[c −dd c
] [uv
]
tai selkeammin: [xy
]=
[ab
]+K
[cos θ − sin θsin θ cos θ
] [uv
]. (13.1)
Pythagoras antaa mittakaavan:
sxy =
√(x2 − x1)
2 + (y2 − y1)2
ja
suv =
√(u2 − u1)
2 + (v2 − v1)2,
ja tasta
K =sxy
suv.
Samall tavalla saadaan orientaatio1:
θ = arccosx2 − x1
sxy− arccos
u2 − u1
suv
tai2
θ = arctany2 − y1
x2 − x1− arctan
v2 − v1
u2 − u1.
Taman jalkeen siirtovektorin(a b
)Tlaskeminen on suoranaista.
Intermezzo. Kompleksilukujen kaytto. Helmert-muunnosta (kaava 13.1) saadaan helposti komplek-silukuversio:
z = α + βw,
missa z ≡ x + iy, w ≡ u + iv, α ≡ a + ib ja
β ≡ K (cos θ + i sin θ) = Keiθ.
Mikali K on lahella 1 (kuten lahes aina), voi kirjoittaa K = 1 + m ≈ em ja seuraa:
β = em+iθ = eµ,
1Mika kaytannon vika on tassa kaavassa? Tarkasta tapaus x2 − x1 ≈ sxy! Ratkaisu?2Enta jos x2 ≈ x1? Ratkaisu: Kayta θ = − arctan
x2 − x1
y2 − y1
+ arctanu2 − u1
v2 − v1
!

13.4. Helmert-parametrien virheiden kasautuminen 141
missa taas µ ≡ m + iθ! Nain
z = α + weµ,
ja, jos seka m etta θ ovat pienia,
z ≈ α + w (1 + µ) ,
eli kaytannossa β ≈ 1 + µ.
13.4 Helmert-parametrien virheiden kasautuminen
Mikali on enemman kuin kaksi tukipistetta, on mahdollista analysoida miten virheet kasautu-vat tukipisteiden koordinaateista Helmert-parametreihin ja niiden kauttaa tuntemattomienpisteiden (muunnettuihin) koordinaatteihin. Ks. esim. (Kahmen and Faig, 1988, ss. 253-255).
Lahdetaan Helmert-muunnoskaavasta kirjoitettuna havaintoyhtalona3:
[xi − ui
yi − vi
]=
[+ui,0 −vi,0 1 0+vi,0 +ui,0 0 1
]
mθab
, (13.2)
missa arvot ui,0 etc. ovat riittavan hyvia likiarvoja. Tietysti tukipisteiden annetut koordinaat-tiarvotarvot ovat riittavan hyvia. m = d− 1, θ = c ovat mittakaavakorjaus ja pyorahdyskul-ma, jotka usein ovat pienia (useimmat, myos paikalliset, koordinaattijarjestelmat ovat suun-nilleen oikean mittaisia ja orientoituvat pohjoiseen).
Ylla olevissa havaintoyhtaloissa on 2n rivia, missa n on tukipisteiden maara; i = 1, . . . , n.Rakennematriisi A on muotoa
A =
[+ui −vi 1 0+vi +ui 0 1
].
Jos oletetaan, etta kaikki tukipisteet ovat yhta tarkkoja, voidaan laskea normaalimatriisi N
seuraavasti (∑
merkitsee summaus kaikkien tukipisteiden yli):
N = ATA =
∑(u2 + v2
)0
∑u
∑v
0∑(
u2 + v2)
−∑
v∑
u∑
u −∑
v n 0∑
v∑
u 0 n
Taman merkitys on, etta tuntemattomien[m θ a b
]Tvarianssimatriisi on juuri N−1.
3Kompleksina:
zi − wi =[
wi,0 1] [ µ
α
].

142 Luku 13. Vapaa asemapiste
Mikali nyt∑
u =∑
v = 0, t.s. u, v ovat painopistekoordinaatit, saadaan
N =
∑(u2 + v2
)0 0 0
0∑(
u2 + v2)
0 0
0 0 n 00 0 0 n
ja parametrien varianssit ovat:
σ2m = σ2
θ =σ2
0∑(u2 + v2)
,
σ2a = σ2
b =σ2
0
n.
Ja parametrit eivat tilastollisesti korreloi.
Nyt on varianssien kasautumislain avulla suoranaista johtaa, mika on Helmert-parametrienvirheiden vaikutus muunnetun pisteen koordinaattivirheeseen. Saadaan
Qℓℓ =
[σ2
x σxy
σxy σ2y
]= AN−1AT = σ2
0
u2 + v2
∑tp (u2 + v2)
+1
n0
0u2 + v2
∑tp (u2 + v2)
+1
n
.
Mista seuraa suoraan
σ2pi
= 2σ2xi
= 2σ2yi
= 2σ20
(u2
i + v2i∑
tp (u2 + v2)+
1
n
).
Nama ovat kaytannon kaavat Helmert-muunnoskaavan kautta saatujen pisteiden pis-tekeskivirheille. Esiintyvat koordinaatit u, v ovat painopistekoordinaatteja ts. origo on tukip-istekentan painopiste. Pistekoordinaattien kovarianssi on
σxy = 0,
ts. pisteiden x- ja y-koordinaatit eivat korreloi ja pisteiden virhe-ellipsien akselit ovat x-ja y-akselein suuntaisia. Tarkemmin, virhe-ellipsit ovat ympyroita. Ja niiden koko riippuuainoastaan etaisyydesta origosta eli annettujen pisteiden painopisteesta.
Kuvassa 13.1 on kuvattu graafisesti taman virheen kayttaytymista. Lienee intuitiivises-ti selva, etta annetut pisteet on peitettava koko alue missa naihin perustuvaa Helmert-muunnosta aiotaan kayttaa. Ja miten enemman pisteita, sita tarkempi tulos. Minimipis-temaara on kaytannon kokemuksen mukaan oltava vahintaan kaksi kertaa matemaatistaminimia, eli nelja pistetta = 8 koordinaattiero, joista lasketaan 4 muunnosparametria. San-otaan, etta redundanssi on 2×.
Tassa laskennassa ei ole viela otettu huomioon muut virhelahteet kuten itse lahtopisteen jamuunnettavan pisteen piste- ja mittauskeskivirheita. Yksi sellainen on pisteen identifioinnin
keskivirhe: piste ei ole maastossa valttamatta merkitty kovin tarkasti. Esim. pultti voi ollakulunut.

13.4. Helmert-parametrien virheiden kasautuminen 143
Kuva 13.1: Miten annettujen pisteiden virheet (kolmiot) kasautuvatHelmert-muunnoksen kautta uusiin (muunnettuihin) pisteisiin(neliot).

144 Luku 13. Vapaa asemapiste
145
Luku 14
GPS-mittaus
14.1 Yleista
Geodeettiset mittaukset tehdaan yhdistettyina pseudoetaisyys- ja vaihe-eromittauksina.Kaytetaan vahintaan kahta vastaanotinta jotka toimivat yhtaaikaa, eli mittaus on relatii-
vinen ja perustuu havaintopaikkojen valisten erotusten kasittelyyn.
Saavutettava tarkkuus on (muutaman kilometrin vektoreille) 1. . . 5 ppm staattisella mit-tauksella; myohemmin kasiteltavalla kinemaattisella tekniikalla saavutetaan 10. . . 20 mm +1. . . 2 ppm. Tama on hyvin riippuvainen olosuhteista ja mittausjakson pituudesta. Runk-omittaukseen pitaa kayttaa vain staattinen mittausmenetelma.
14.2 Rekognosointi
Ennen mittausta on suoritettava rekognosointi, jonka ansoista itse mittaustilanteessa pisteetloytyvat vaivattomasti: tarkistettu, selkea pistekortti piirroksineen seka lahestymiskarttoi-neen ja -ohjeineen on oltava jokaiselle pisteelle.
GPS-konstellaation nykytila on niin hyva, etta yleisesti ei tarvitse ottaa sita huomioon GPS-mittauksia suunnitteltaessa. Mittauksia voidaan suorittaa 24 tuntia vuorokaudessa ja luot-taa siihen, etta hyva ratkaisu voidaan laskea. On kuitenkin erikoistilanteita missa tama eipida paikkansa. Satelliittien nakyvyys havaintopaikalta voi olla niin huono etta on tarkoinsuunniteltava koska riittava maara satelliitteja on havaittavissa.
Havaintopaikkaa valitessa on otettava huomioon nakyvys ylospain: Jokaisesta havain-topaikasta tehdaan horisonttipiirros missa kaikki esteet nakyvat. Havainnot tehdaan vaintietyyn korkeuskulmaan saakka, ns. cut-off angle. Arvo on ollut perinteisesti 20 tai 15,mutta nykyisin geodeettisia tarkkuusmittauksia tehdaan jopa 5:een saakka. Ilmakehamallienparantunut laatu on mahdollistanut tata. Nain matala raja-arvo ei sovellu kuitenkaan ruti-inimittauksille eika RTK-mittauksille.
14.3 Vektoreiden mittaus
Havaintoja tehdaan useimmiten vektoreiden mittauksena. Vektori on kahden havaintopaikanvalinen kolmiulotteinen, koordinaattieroista koostuva objekti eli mittaustulos. Vektorityhdistetaan verkoksi sopivalla pienimman neliosumman menetelmalla, jolloin testataan myosniiden oikeellisuutta.

146 Luku 14. GPS-mittaus
Jokainen edellisessa kohdassa muodostettu vektori mitataan (vahintaan) kahdessa sessiossa.Eli jokaiselle pisteparille jonka valiin on muodostettu vektori, pitaa olla kaksi mittausjaksoaeli sessiota, joissa ne ovat yht’aikaisesti miehitettyja. Tama helpottaa mittausten laadun –seka tarkkuuden etta luotettavuuden – varmistaminen jo kenttatyon aikana.
14.4 Vektoreiden maara
Numeerisen kartoituksen maastomittausohjeiden ((Anon., 1991)) luvussa 1.391 (s. 16)kasitellaan, miten arvioidaan tarvittava maara mittausjaksoja ja laskennassa tarvittavamaara riippumattomia vektoreita. Julkaisussa kaytetaan seuraavat symbolit:
R Yhtaaikaa mittaavien vastaanottimien — siis: kaytettavissa olevien vastaanot-timien — maara
M Mitattavien pisteiden kokonaislukumaara; tukipisteet ja maaritettavat pisteetyhteenlaskettuna
N Haluttu mittausten ylimaaraisyyskerroin (redundanssiaste, vapausastekerroin).
Ylimaaraisyskerroin N riippuu kaytettavissa olevien vastaanotinten maarasta R ja valitaanalla olevan taulukon mukaisesti:
Vastaanottimien maara R ylimaaraisyyskerroin N , vahintaan2 23 1.44 1.2
5 tai useampia (1)
Taman takana on filosofia, etta jos on useampia vastaanottimia kaytettavissa yhtaaikaa,saadaan redundanssia verkkogeometrian kautta. Jos on vain kaksi vastaanotinta, ei saadaverkkoa vain yksi ainoa vektori kerrallaan.
Mittausjaksojen (sessioiden) vahimmaismaara S ja mitattaville riippumattomien vektoreidenvahimmaismaara B voidaan tasta laskea:
S = (1 + p)MN
R+ kM,
missa p on varmuuskerroin mittausten epaonnistumisriskin ja k alueen koon (siirtymisriskin)takia:
p = 0.1, . . . , 0.2. p = 0.1 vastaa onnistumisprosenttiin 90%, p = 0.2 vastaa 80-prosenttiseen onnistumiseen.
k = 0.1, . . . , 0.2. Sataa kilometria pienemmille alueille valitaan k = 0.1, muuten k =0.2.
Arvioitu vektoreiden kokonaismaara V (vektori AB on identtinen vektorin BA kanssa, ja
vektori AA ei olekaan; siksi vektoreiden maara yhdessa sessiossa on v =1
2(R − 1)R):
V = R (R− 1)S
2
Riippumattomia vektoreita (pistevaleja) B:
B = (R− 1)S.
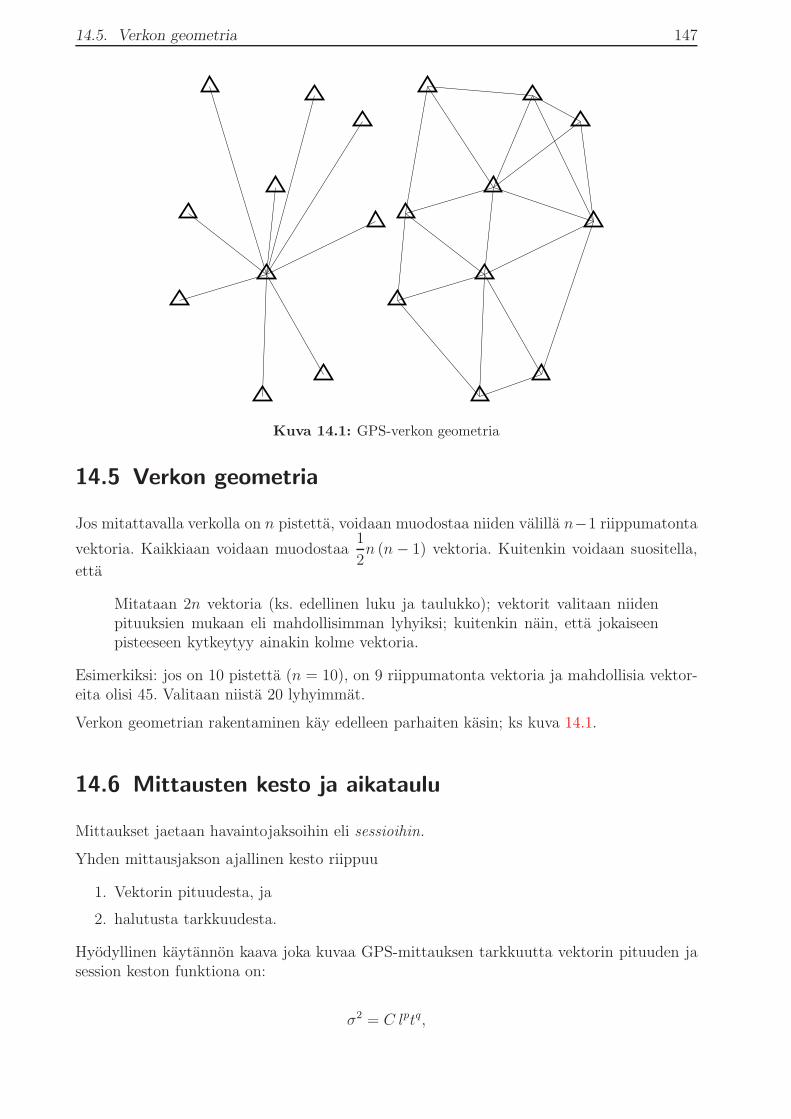
14.5. Verkon geometria 147
Kuva 14.1: GPS-verkon geometria
14.5 Verkon geometria
Jos mitattavalla verkolla on n pistetta, voidaan muodostaa niiden valilla n−1 riippumatonta
vektoria. Kaikkiaan voidaan muodostaa1
2n (n− 1) vektoria. Kuitenkin voidaan suositella,
etta
Mitataan 2n vektoria (ks. edellinen luku ja taulukko); vektorit valitaan niidenpituuksien mukaan eli mahdollisimman lyhyiksi; kuitenkin nain, etta jokaiseenpisteeseen kytkeytyy ainakin kolme vektoria.
Esimerkiksi: jos on 10 pistetta (n = 10), on 9 riippumatonta vektoria ja mahdollisia vektor-eita olisi 45. Valitaan niista 20 lyhyimmat.
Verkon geometrian rakentaminen kay edelleen parhaiten kasin; ks kuva 14.1.
14.6 Mittausten kesto ja aikataulu
Mittaukset jaetaan havaintojaksoihin eli sessioihin.
Yhden mittausjakson ajallinen kesto riippuu
1. Vektorin pituudesta, ja
2. halutusta tarkkuudesta.
Hyodyllinen kaytannon kaava joka kuvaa GPS-mittauksen tarkkuutta vektorin pituuden jasession keston funktiona on:
σ2 = C lptq,

148 Luku 14. GPS-mittaus
missa σ on vektorin komponenttien (koordinaattierojen) keskivirhe, l on vektorin pituus, tmittauksen kesto, ja C sopiva vakio, joka riippuu mm. Auringon aktivisuudesta, mittaus-paikan leveysasteesta, mittauslaitteiden ominaisuuksista jne. jne. Eksponentteja p ja q onjonkin verran tutkittu empiirisesti; “Bernese rule-of-thumb” esim. sanoo, etta p = +1, elivirhe on verrannollinen etaisyyden neliojuureen. Myos q = −1 tuntuu jarkevalta: Tarkkuusparanee kerattyjen havaintojen maaran neliojuuren mukaan.
Kaytannossa:
1. Jos verkon vektoripituudet ovat luokkaa 1-10 km, kuten on asian laita monessa kun-nallisessa runkoverkoissa, jarkeva mittausaika olisi 1h − 2h. Jos vektorin toinen piste –tai molemmat – on peitteinen, voidaan tuplata sen vektorin mittaussession pituutta.Nain voidaan saavuttaa sentrimetriluokan paikannustarkkuutta.
2. Jos vektorit ovat 10-50 km pitkia, erityisesti jos ne ovat sidosmittauksia ulkoisiinEUREF-vertauspisteisiin, sessioiden pituudeksi valitaan 6h − 12h. Varmuuden vuok-si kahden session mittaus on suositeltava.
Kun sessioiden pituudet on saatu selville, voidaan laatia mittausaikataulu, jossa otetaanhuomioon myos matkustus paamajasta pisteisiin – nehan ovat rekognosoinnin ansiostatarkoin ennakoitavissa – ja tyoaikasaannokset. Myos kustannuslaskelma on silloin jo mah-dollista tehda.
Kuitenkin:
Muista varata ylimaaraista aikaa odottamattomiin tilanteisiin! Niita kun tapah-tuu aina: vastaanotin voi joutua epakuntoon! Sopiva varaus on 10-50%, riippuenkaytettavien vastaanotinten maarasta.
14.7 Ratatiedot
1-5 km kokoisissa verkoissa broadcast-ratatietojen kaytto pitaisi olla riittava; kuitenkin useintarkkojen ratatietojen kaytto parantaa tulokset. 5-50 km pitkat vektorit pitaa ehdottomastiprosessoida kayttaen precise ephemeris.
14.8 Antennit ja pystytys
Yleista:
1. Kampanjassa kaytetaan aina samantyyppiset antennit; nain sahkoisen keskipisteen vai-htelut eliminoituvat ongelmasta.
2. Kun on kyse pitkien matkojen mittauksesta ja mittauksesta EUREF-pisteeseen, kan-nattaa kayttaa ns. choke ring -antenni, jonka maaheijastuksia torjuvat ominaisuudet(“multipath”) ovat hyvia.
3. Kolmijalkojen, erityisesti optisen luodin, kunta tarkastetaan ennen mittausta ja senjalkeen.
Kentalla:
1. Antenni pystytetaan pisteen ylapuolella kolmijalan ja pakkokeskistyslevyn avulla.Keskistetaan ja tasataan huolella, ja suunnataan antenni (magneettiseen) pohjoiseenkompassin avulla.

14.8. Antennit ja pystytys 149
2. Mitataan huolellisesti antennin korkeus pisteen ylapuolella. Yleensa mittaus suorite-taan merkin keskipisteesta antennin reunaan, kolmeen eri reunan paikkaan. Kolmestaarvosta otetaan keskiarvo. Arvot ei saa poiketa toisistaan millimetria enempaa, muutentarkistettava keskistys ja tasaus.
3. Antennin korkeusmittaus mittauksen alussa ja lopussa, pitkissa mittausissa myos(varovasti!) mittauksen aikana.

150 Luku 14. GPS-mittaus
151
Luku 15
Geodeettiset mittaukset ja laskennat
15.1 Runkkoverkkojen hierarkia
15.1.1 Valtakunnalliset runkoverkot
Valtakunnallisella I. luokan kolmiomittauksella on seuraava tarkoitus:
1. Kaytannon tarkitus on luoda maahan yhtenainen, kaikkiin kayttotarkoituksiin riit-tavan tarkka tasokiintopisteverkko muiden kolmiomittausten seka kartoitustoiden po-hjaksi.
1. luokan kolmiomittaus saatiin paatokseen 1980-luvuilla; sen avulla luotu kartoitusjar-jestelma (koordinaatisto) oli nimeltaan kkj. GPS-aikakaudella sen sisainen tarkkuus eienaa rita kaikkien tarkimpiin mittaus- ja kartoitustoihin, mista syysta on kaynnis-sa yhteiskunnallinen keskustelu uuteen jarjestelmaan, EUREF-FIN:iin siirtymiseksi.GL:n mittausten tuloksena on olemassa jo n. 450 pisteen valtakunnallinen kiintopis-teisto uudessa jarjestelmassa; kuitenkin siihen siirtyminen tulee olemaan vaikea ja kallisoperaatio.
2. Tieteellinen tarkoitus oli
a) maarittaa luotiviivanpoikkeamat geodeettisesti laskettujen ja tahtitieteellisestimaaritettyjen leveys- ja pituusasteiden valilla; ja niista laskea geoidin ja vertausel-lipsoidin valiset erot (geoidi-undulaatiot).
GPS toteuttaa nykyisin tama paamaara paremmin maarittamalla suoraan kolmiu-lotteiset (X, Y, Z)-koordinaatit ja niista geoidin korkeus vertausellipsoidin nahden.Historiallisen jatkuvuuden kannalta paatettiin viisaasti kayttaa Suomen EUREF-tihennysverkkoa (EUREF-FIN) olemassa olevien I. luokan kolmioverkon pisteitauudelleen GPS-mittauksissa. Mittaukset suoritettiin 1996-1997 ja naissa mitattiinn. 100 pistetta.
b) seurata mahdolliset vaaka- ja pystyliikkeet Suomen maankuoressa. Vasta GPS:nylivertainen tarkkuus on tehnyt tata paamaaraa realistiseksi ja se on ollut ole-massa vasta 1990 luvuista lahtien.
Geodeettinen laitos mittasi I. luokan kolmioverkko etela- ja keskisuomessa ketjuverkkona,jonka reiat Maanmittauslaitos sulki omilla kolmiomittauksilla. Pohjois-Suomessa GL:n mit-taama kolmioverkko oli taydellinen, vaikkakin koostui suuremmista kolmioista.
15.1.2 Alemman luokan runkoverkot
Olemassa olevat alemman luokan runkoverkot ja -pisteet ovat seuraavia:
152 Luku 15. Geodeettiset mittaukset ja laskennat
IIa ja IIIb luokka: Maanmittauslaitoksen mittaamat kolmioverkon tihennykset
III luokan pisteet muodostavat kunnallinen ylin luokka. Kolmioverkko
IV luokka: monikulmiojonoilla tihennysta
V lk ja VI lk: kayttojonoja
Kaupunkien runkoverkkojen uusintamittauksissa lahdetaan yleensa III luokan lahtopisteista.Paikallisesti tama riittaa, monesti III luokan verkko jakaa alueen lahes kaupunginosan kasit-taviin alueisiin. Kuitenkin, jos tarkoitus on myos sitoa paikallista runkoa EUREF-FIN jar-jestelmaan, on otettava mukaan myos EUREF-FIN n. 450 pisteen verkoston pisteita. Niidenetaisyydet ovat usein 10-50 km mittausalueelta; mittausaineiston kasittely on oltava huolelli-nen. Redundanssi on syyta sisallyttaa mittaussuunnitelmaan, eli kaytetaan vahintaan kolmeEUREF-pistetta, mieluiten mittausalueen eri puolelta.
15.1.3 Tarkkuusluokitus
Verkkohierarkiasta hieman erillaan oleva kasite on tarkkuusluokitus.
Eritellaan seuraavat kasitteet:
Tarkkuusluokitus (class)
Hierarkia eli jarjestysluokitus (order)
Eri luokkien verkkojen pisteet omaavat eri tarkkuuksia. Tarkkuuksien sijasta voidaan puhuamyos toleranssista: nyrkkisaanto on, etta jos pisteen pistekeskivirhe on σP , on toleranssi, elipisteen sijainnin vaihteluvali jonka sisalla se todennakoisimmin on, n. 2.5 kertaa σP .
Tarkkuusluokituksella on seuraavat kaytannon aspektit:
1. Toiminnallinen
maa on kallista: sijainti ja pinta-ala on tunnettava tarkasti. Pieni virhe voi aiheuttaasuuret rahalliset seuraamukset etenkin kaupunkialueilla. Tarkkuusluokitus ottaa tamahuomioon.
2. Paikkatietojen yhteiskaytto
Tasta syysta luokitus on standardoitu mm. uusien kaavoitusmittausohjeitten ja tilus-mittausohjeitten muodossa.
Pisteen koordinaattien lisaksi on aina ilmoitettava sijainnin epavarmuus (esim. pis-tekeskivirhe) ja kaytetty koordinaattijarjestelma.
15.2 Mittauspisteiden lopullinen tarkkuus
Mittausprojektissa saatetaan olla kiinnostuneita kahdesta eri asiasta:
1. Tekninen mittaus: keskinainen tarkkuus projektin sisalla
2. Yhteiskaytto: tarkkuus johonkin yhteiseen referenssiin nahden.

15.2. Mittauspisteiden lopullinen tarkkuus 153
III
IV
V
IIIIV
IVIV
III
V
Kartoituspiste
Kuva 15.1: Absoluuttisen pistevirheen kasautuminen jonoverkon tapaukses-sa
15.2.1 Suhteellinen (sisainen) ja absoluuttinen (ulkoinen) virhe
Suhteellinen eli pisteiden valinen pistekeskivirhe σrelP lasketaan pistevalikohtaisesti.
III III
III
IV
IV IV
IV
V
V
Laskentamenetelmat on kasitelty aikaisemmin, luvussa 7.5.6. Relatiivinen pistekeskivirheilmoitetaan ppm:na (Parts Per Million). Kaytetty raja-arvo µ riippuu jonon mittausluokassa;ks. taulukko 17.3.
Pisteiden absoluuttinen virhe kasautuu lahtopisteista (eli yleensa III. luokan kiintopisteista)lahtien. Mikali mittaus suoritetaan jonomittausten hierarkiana, olisi kaava
σ2P = σ2
lp +∑
σ2IV +
∑σ2
V + σ2kart + σ2
id,

154 Luku 15. Geodeettiset mittaukset ja laskennat
jossa σkart on (esim. sateittaisen) kartoitusmittauksen virheosuus ja σid pisteen maastossa
identifioinnin virheosuus. σlp on lahtopisteen tarkkuus.∑
σ2IV ja
∑σ2
V taas ovat IV. tai
V. luokan jonojen kautta kasautuneet virheosuudet.
GPS-mittausten tapauksessa virheanalyysi on paljon vaikeampaa eika laheskaan yhtalapinakyvaa. Ks. luku 14. Yleisena ohjeena voidaan sanoa, etta saa luottaa vain redundanssin
perusteella laskettuihin a posteriori tarkkuusarvioihin. Suosituilla GPS-kasittelyohjelmillaniita saa seuraavalla tavalla:
1. GPS-verkkolaskenta 3D-vektorien verkkona. Ensin lasketaan vektorit, sitten vekto-rien muodostama 3D-verkko tasoitetaan. Tasoitus tuottaa painoyksinkon keskivirheja verkon pisteiden pistevirheita kolmessa ulottuvuudessa. Pistekeskivirheet ±5 cmovat saavutettavissa ja mittauksiin ja kasittelyyn ei saa tyytya, ennen kuin tama onsaavutettu.
2. Kytkenta kaukaisiin vertauspisteisiin on tehtava vahintaan kolmen EUREF-pisteenavulla. Pisteet voivat olla 1. luokan kolmiopisteita – niita on vain n. 100, eli siinatapauksessa vektorin pituus tulee olemaan suuri – tai EUREF-tihennyspisteita, joidentarkkuus voi olla hieman heikompaa. EUREF-kytkenta ±5 cm:n tarkkuustasolla, elivastaavasti ±1 ppm, on taysin mahdollista ja taivoitettavaa.
15.3 Perinteisia ja satelliittimittauksia
Tavallista on, etta joudutaan mittaamaan alueella, jossa on ennestaan olemassa pis-tekentta, jonka koordinaatit tunnetaan perinteisessa valtakunnallisessa jarjestelmassa ja/taipaikallisessa tai paikkakuntakohtaisessa jarjestelmassa. Kuitenkin mittaukset suoritetaanGPS-menetelmalla ja mittausten tuloksena saadaan pisteille ETRS-89 (eli sen realisaationEUREF-89 tai EUREF-FIN) geosentrisia koordinaatteja.
Tassa tapauksessa syntyvat seuraavat kysymykset.
15.3.1 kkj-jarjestelman maaritys
Suomessa on Gauß-Kruger projektio sovellettu nain, etta
1. Kolmiulotteiset ED50-koordinaatitX, Y, Z ovat projisioitu Kansainvaliselle ellipsoidille(Hayford).
2. Nain saadut kaksiulotteiset karttakoordinaatit (x, y) on Helmert-muunnettu tavalla,joka minimoi erotukset jo olemassa olevien Helsingin jarjestelman (x, y) kanssa, Parm(1970). Sopiva muunnos loytyy myos julkaisusta (Ollikainen, 1993):
[xy
]
kkj
=
[−61.5805
95.6691
]+
[1.0000007515 −0.00000439330.0000043933 1.0000007515
]·[xy
]
ED50
.
3. Projektiokaistojen valiseksi etaisyydeksi on valittu ∆λ = 3. Nain ollen saadaanSuomen alueelle nelja (4) kaistaa. Keskimeridiaanit ovat 21, 24, 27, 30. Mielival-taisen pisteen maksimietaisyys keskimeridiaanista on 1.5 ≈ 80 km meidan latituudeil-la.
4. y-koordinaattiin lisataan 500000 m, jotta saadaan jokaisessa kaistassa aina vain posi-tiiviset y-arvot.

15.3. Perinteisia ja satelliittimittauksia 155
ϕ, λ, h
Ellipsoidiset koordinaatit:ED50
GPS−järjestelmä: WGS84 (X, Y, Z)
X, Y, Z
Alueellinen, astrogeodeettinenED50−järjestelmä:
ED50: Karttakoordinaatit
x, y H = h − N
Ortometrinen korkeusN60−korkeusjärjestelmä:
3D−muunnos (muunnospisteet ja niiden korkeudet)
Geoidin korkeus NGeoidimalli(Gauss−Krueger)
Karttaprojektio
x, yKartastokoordinaattijärjestelmä (kkj)
Muunnos (2D) paikalliseen järjestelmään
Kuva 15.2: kkj -koordinaattien tuottaminen GPS-mittauksin
kkj:n yhtenaiskoordinaatisto
Tassa jarjestelmassa, joka kaytetaan pienimittakaavaisilla kartoilla ja jota kayttaa Puolus-tusvoimat, on vain yksi keskimeridiaani, 27. Nain ollen kaistan leveys on perati −420 . . .+250 km.
Helsingin jarjestelma
Nimetty myos “vanha valtion jarjestelma” (vvj ). Tama on lahes sama kuin kkj. On vielayllattavan monella paikalla kaytossa (muttei Helsingissa!). Tassa systeemissa ilmoitetaanpituuskaistan keskimeridiaanin pituusaste eika kaistan numero.
Paikalliset jarjestelmat
Yleensa ne ovat kuntien omia jarjestelmia. Jonkinlainen yhteys kkj:hen tai vvj:hen on yleensaolemassa.
Muunnoskaavat on yleensa olemassa ja dokumentoitu. Kuitenkin siihen ei saisi sokeasti lu-ottaa: koelaskenta tunnettujen pisteiden avulla kannattaa aina suorittaa.
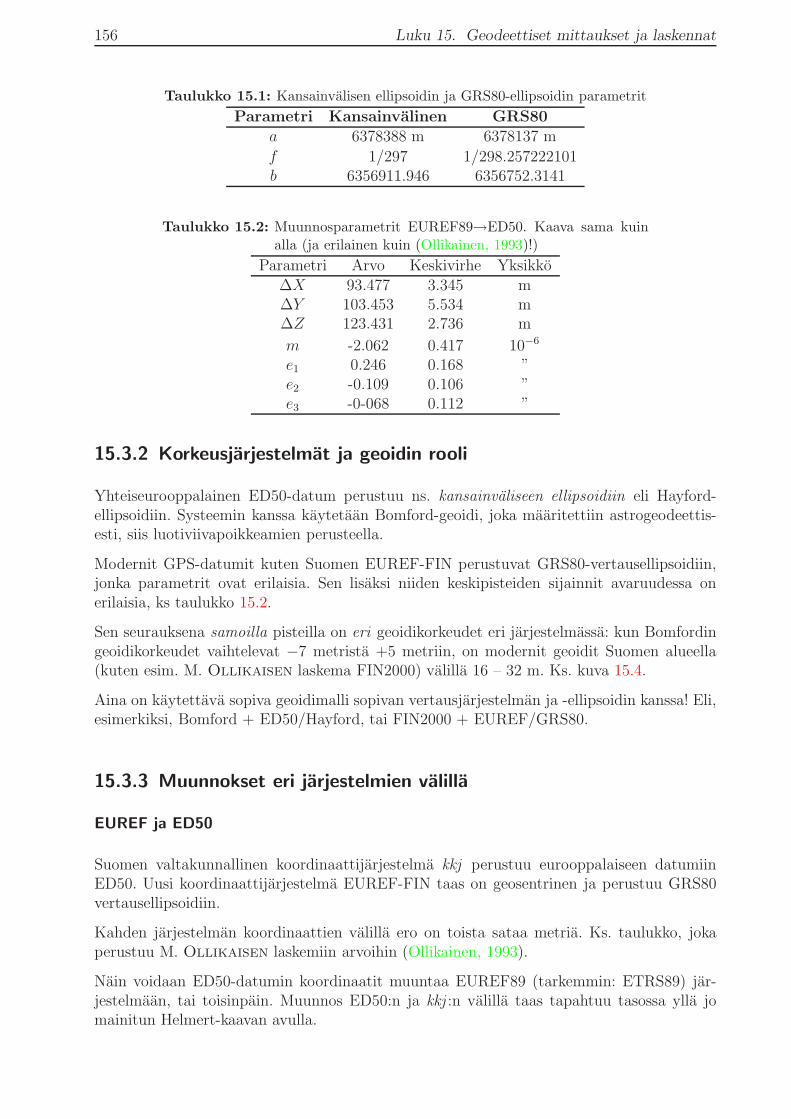
156 Luku 15. Geodeettiset mittaukset ja laskennat
Taulukko 15.1: Kansainvalisen ellipsoidin ja GRS80-ellipsoidin parametrit
Parametri Kansainvalinen GRS80
a 6378388 m 6378137 m
f 1/297 1/298.257222101b 6356911.946 6356752.3141
Taulukko 15.2: Muunnosparametrit EUREF89→ED50. Kaava sama kuinalla (ja erilainen kuin (Ollikainen, 1993)!)
Parametri Arvo Keskivirhe Yksikko∆X 93.477 3.345 m∆Y 103.453 5.534 m∆Z 123.431 2.736 m
m -2.062 0.417 10−6
e1 0.246 0.168 ”e2 -0.109 0.106 ”e3 -0-068 0.112 ”
15.3.2 Korkeusjarjestelmat ja geoidin rooli
Yhteiseurooppalainen ED50-datum perustuu ns. kansainvaliseen ellipsoidiin eli Hayford-ellipsoidiin. Systeemin kanssa kaytetaan Bomford-geoidi, joka maaritettiin astrogeodeettis-esti, siis luotiviivapoikkeamien perusteella.
Modernit GPS-datumit kuten Suomen EUREF-FIN perustuvat GRS80-vertausellipsoidiin,jonka parametrit ovat erilaisia. Sen lisaksi niiden keskipisteiden sijainnit avaruudessa onerilaisia, ks taulukko 15.2.
Sen seurauksena samoilla pisteilla on eri geoidikorkeudet eri jarjestelmassa: kun Bomfordingeoidikorkeudet vaihtelevat −7 metrista +5 metriin, on modernit geoidit Suomen alueella(kuten esim. M. Ollikaisen laskema FIN2000) valilla 16 – 32 m. Ks. kuva 15.4.
Aina on kaytettava sopiva geoidimalli sopivan vertausjarjestelman ja -ellipsoidin kanssa! Eli,esimerkiksi, Bomford + ED50/Hayford, tai FIN2000 + EUREF/GRS80.
15.3.3 Muunnokset eri jarjestelmien valilla
EUREF ja ED50
Suomen valtakunnallinen koordinaattijarjestelma kkj perustuu eurooppalaiseen datumiinED50. Uusi koordinaattijarjestelma EUREF-FIN taas on geosentrinen ja perustuu GRS80vertausellipsoidiin.
Kahden jarjestelman koordinaattien valilla ero on toista sataa metria. Ks. taulukko, jokaperustuu M. Ollikaisen laskemiin arvoihin (Ollikainen, 1993).
Nain voidaan ED50-datumin koordinaatit muuntaa EUREF89 (tarkemmin: ETRS89) jar-jestelmaan, tai toisinpain. Muunnos ED50:n ja kkj :n valilla taas tapahtuu tasossa ylla jomainitun Helmert-kaavan avulla.
15.3. Perinteisia ja satelliittimittauksia 157
Muunnoskaavojen johtaminen
Kaytannossa nama muunnoskaavat sopivat kaytettaviksi valtakunnallisesti; pienella alueellakuitenkin kannattaa aina laskea tarkat muunnosparametrit jotka sopivat kaytettaviksi siinaalueessa. Menetelmiksi tarjoutuu:
1. Paikallinen Helmert-muunnos
2. Paikallinen affiininen muunnos
3. “Patkittainen” ratkaisu, jos paikallinen terrestrinen jarjestelma on pahasti defor-moitunut tai koostuu useasta eri tavalla kayttaytyvasta osasta (kuntaliitos)
Helmert-parametrien estimointi kay helposti pienimman neliosumman menetelman avulla:
1. Annetut kkj- koordinaatit muunnetaan ensin ED50-jarjestelman (x, y)-karttaprojektiokoordinaateiksi, sen jalkeen karttaprojektiokaavan kautta (Gauss-Kruger) (ϕ, λ)ED50 maantieteellisiksi koordinaateiksi. Ellipsoidiset korkeudet laske-taan erikseen hED50 = HN60 +NBomford avulla. Sen jalkeen Hayford-ellipsoidin kaavalla
lasketaan (ϕ, λ, h)ED50 → (X, Y, Z)vanhaED50 .
2. Mitatut GPS-koordinaatit EUREF-FIN jarjestelmassa muunnetaan(X, Y, Z)EUREF−FIN → (X, Y.Z)uusi
ED50, jonka jalkeen ne ovat vertailukelpoisia.
3. Taman jalkeen maaritetaan kolmiulotteisia Helmert-parametreja kahden koordinaatti-joukon (X, Y, Z)vanha
ED50 ja (X, Y, Z)uusiED50 valilla.
Molempien koordinaattien muuntaminen ED50-jarjestelmaan on vain yksi menetelma eikavalttamatta paras; parametrien estimointia voidaan suorittaa myos EUREF-FIN jar-jestelmasta. Se edellyttaa taulukon ... kaanteismuunnoksen ED50 → EUREF89 kayttoa.
Eri ITRF ja ETRF jarjestelmat
Nykyisin IERS (International Earth Rotation Service) laskee saannollisin valein uusia geosen-trisia vertausjarjestelmia nimeltaan ITRFxx, jossa xx on vuosiluku. Laskennassa kaytetaanerityyppiset havainnot (GPS, satelliittilaser, VLBI, . . . ) monelta vuodelta ennen nimel-lisvuotta.
Kasiteellisella tasolla erotetaan toisitaan reference system ja reference frame. Reference
system (koordinaattijarjestelma) on teoreettisesti maaritetty jarjestelma, jonka realisaatio
maastossa, mitattujen pisteiden kautta, kutsutaan reference frame:ksi (koordinaatisto).
Esimerkiksi: ETRS89 (European Terrestrial Reference System 1989) on koordinaattijar-
jestelma, jonka eraat realisaatiot ovat ETRF89 (European Terrestrial Reference Frame 1989,perustuu yhteiseurooppalaiseen mittauskampanjaan 1980-luvun lopulla, toinen nimi EU-REF89) ja EUREF-FIN (Suomen valtakunnallisen tyon tuloksena), seka monien muidenmaiden kansalliset realisaatiot.
Maailmanlaajuisesti ovat olemassa vastaavat ITRS (International TRS) ja ITRF (Interna-tional TRF) kasitteet. Esim. ITRS89, ITRF97, ITRF2000.
Kahden [I/E]TRF -ratkaisun valilla on olemassa muunnoskaava, joka on kolmiulotteinenyhdenmuotoismuunnos. Sen paramatrit ovat kuitenkin ajasta riippuvaisia. Muunnos on
XYZ
(B)
=
XYZ
(A)
+
∆X∆Y∆Z
+
m −e3 e2e3 m −e1−e2 e1 m
·
XYZ
(A)
,
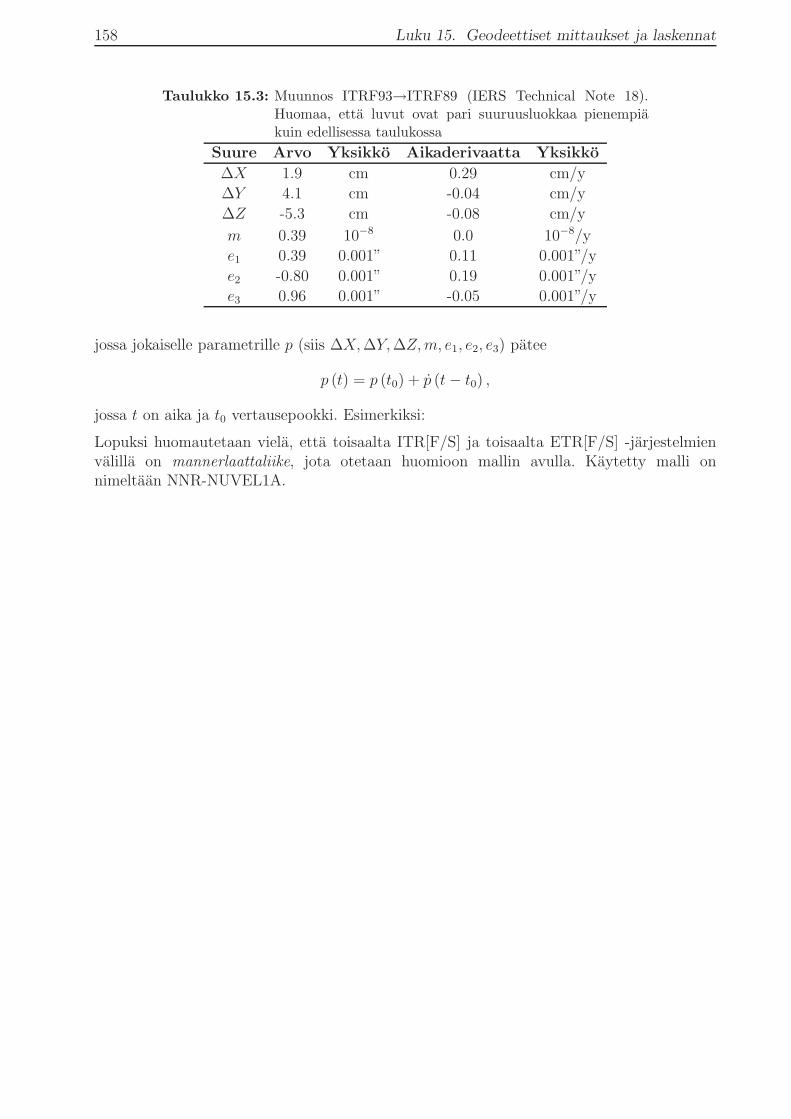
158 Luku 15. Geodeettiset mittaukset ja laskennat
Taulukko 15.3: Muunnos ITRF93→ITRF89 (IERS Technical Note 18).Huomaa, etta luvut ovat pari suuruusluokkaa pienempiakuin edellisessa taulukossa
Suure Arvo Yksikko Aikaderivaatta Yksikko
∆X 1.9 cm 0.29 cm/y
∆Y 4.1 cm -0.04 cm/y
∆Z -5.3 cm -0.08 cm/y
m 0.39 10−8 0.0 10−8/y
e1 0.39 0.001” 0.11 0.001”/y
e2 -0.80 0.001” 0.19 0.001”/y
e3 0.96 0.001” -0.05 0.001”/y
jossa jokaiselle parametrille p (siis ∆X,∆Y,∆Z,m, e1, e2, e3) patee
p (t) = p (t0) + p (t− t0) ,
jossa t on aika ja t0 vertausepookki. Esimerkiksi:
Lopuksi huomautetaan viela, etta toisaalta ITR[F/S] ja toisaalta ETR[F/S] -jarjestelmienvalilla on mannerlaattaliike, jota otetaan huomioon mallin avulla. Kaytetty malli onnimeltaan NNR-NUVEL1A.

15.3. Perinteisia ja satelliittimittauksia 159
Satelliitit
Maan massakeskipisteO
Z
Y
X
∆X
∆Y
∆Z
3D-avaruuskoordinaatisto
verkkoratkaisu
h = H + N
NBomford
NGRS80Geoidi
Maasto
Bomford
GRS80
H
P
Vertaus-ellipsoidi:
Ortometrinen korkeus H
h
Y
λ
P
ϕ
h
Topografia
Geodeettinen jarjestelma λ, ϕ, h
x
y
Karttaprojektio
X
Geodeettisesta GPS-mittauksesta 2D + 1D -koordinaatteihin
Vastaanottimet
∆X
∆Y∆Z
Paikallinen GPS-
Z
Kartastokoordinaattijarjestelma
x, y
λ, ϕ
Kuva 15.3: Geodeettisesta GPS-mittauksesta taso- ja korkeuskoordinaattei-hin

160 Luku 15. Geodeettiset mittaukset ja laskennat
++
Hayford
GRS80
Geoidi
Kuva 15.4: Kahden datum-ellipsoidin sijainti avaruudessa ja geoidin pintaSuomessa
Vaakakulmat Pystykulmat Etäisyyshavainnot
AsematasoitusRedukointikorkeuseroiksi
Korkeudet
Redukointivertausellipsoidille
Projektiokorjaus
Tunnetut pisteet(GPS, III lk. pisteet)
Tasokoordinaatit(tasopisteiden korkeudet)
Verkkotasoitus
Tunnetut korkeudet
Kuva 15.5: Mittauksista koordinaatteihin
161
Luku 16
Maastomittaus kaytannossa
16.1 Geodesian laboratorion maastomittaukset
Geodesian laboratorio jarjestaa joka toinen vuosi maastomittaus, yleensa suomalaisenkaupungin alueella, jonka runkoverkko mitataan uudelleen kayttamalla nykyaikaisetmenetelmat, mm. staattinen GPS.
Runkomittauksen tavoitteet ovat yleensa kaupungin kannalta:
Runkoverkon pisteiden tarkka uudelleenmittaus ja kytkeminen valtakunnalliseenEUREF-jarjestelmaan GPS-menetelmalla; verkon tarkkuuden ja sisaisen vaaristamat-tomyyden varmistamiseksi GPS-teknologian edellyttamalla tarkkuustasolla, n. 1-2 cm.
Vanhan koordinaattijarjestelman, yleensa kaupungin oma ja/tai kkj, ja uuden EUREF-FIN jarjestelman valisen muunnoksen selvittaminen. Tama edellyttaa riittava maarapisteita, joihin on saatavissa seka GPS:lla mitatut kolmiulotteiset koordinaatit ettaperinteiset taso- ja korkeuskoordinaatit, eli kkj (tai vastaava) ja N60 (tai vastaava).
Usein kaivataan myos neuvoja, miten kaupungin siirtyminen uuteen EUREF-FIN jar-jestelmaan, ja vanhojen ja uusien mittausten ja paikkatietojen yhteiskaytto, voidaanparhaiten suorittaa.
Mittauksen opetukselliset tavoitteet ovat:
Kaytannon tutustuminen erilaisiin nykyaikaisiin geodeettisiin mittausmenetelmiin,mm. staattinen GPS-paikannus, digitaalinen tarkkavaaitus, trigonometrinen vaaitus,monikulmiojonomittaus takymetrilla ja pituusperusviivan tarkka mittaus, mikali sell-ainen on olemassa kaupungin alueella; seka kaikkien menetelmien laskentatoimiin tu-tustuminen.
Kokonaisvaltaisen tuotantoprojektin lapivieminen tiimityona.
Kahden viikon kenttamittauksen sosiaalista eli yhteisollista puolta ei tulealiarvioimaan.
16.2 Maastomittauksessa kaytetyt tekniikat
Kaupungin alueella tulee ensin identifioida olemassa olevat pisteet, jotka soveltuvat runk-omittaukseen. Yleensa ne ovat jo kaytossa olevat pisteet, jotka ovat III luokan pisteita (hata-tapauksessa IV) seka taso- etta korkeusverkossa. Nain ollen mitattavan verkon luokka on IV.
Muista, etta perinteisissa verkoissa tasosijainti ja korkeus kasitellaan erikseen, toisin kuinGPS-tekniikassa. Muunnoskaavojen johtaminen, yleensa seitseman parametrin Helmert-muunnoksen muodossa, kuitenkin edellyttaa, etta myos perinteiset koordinaatit ovat

162 Luku 16. Maastomittaus kaytannossa
kolmiulotteisia: on oltava samojen pisteiden seka kkj :n tai vastaavan jarjestelman x, y -tasokoordinaatit etta (vaikkapa) N60-korkeuskoordinaatit H . Kuitenkin aidosti kolmiulot-teisten koordinaattien laskeminen vertausellipsoidilla edellyttaa ellipsoidisten korkeuksienh = H +N kayttoa, eli myos pisteiden geoidikorkeudet on laskettava geoidimallin avulla.
Vaatimus kaikkien kolmen koordinaatin olemassaolista samoissa pisteissa johtaa vaaitustoi-den tarpeeseen, koska perinteisten taso- ja korkeusverkkojen kiintopisteet eivat yleensa olesamoja.
16.2.1 Staattinen GPS-mittaus
Pisteiden maara vaihtelee, mutta on liikkunut n. 20 pisteen tienoilla. Mittaukseen kaytetaan6-8 geodeettista vastaanotinta, Laboratorion omien Ashtech Z12 -laitteiden lisaksi Geodeet-tiselta laitokselta lainatut kojeet. Mikali mahdollista kaytetaan geodeettisessa tarkkuusmit-tauksessa ns. Choke ring -antenneja monitieheijastusten vaikutuksen minimoimiseksi.1
Mittausverkkoa ja mittauksen edistymista suunnitellaan etukateen. Liikutaan kompakteissa,kuuden pisteen ryhmissa, joiden valilla oltava vahvat kytkennot. Jokaisella pisteella mitataanvahintaan kaksi sessiota. Mikali pisteiden valiset etaisyydet ovat alle 10 km, riittaa sessionpituus 1,5-2 t; pidemmat vektorit vaativat enemman aikaa.
Kaupungin ymparilta identifioidaan vahintaan kolme EUREF-pistetta, joita Geodeettinenlaitos on mitannut 1996-1999 aikoina. Vektorit kaupungin pisteiden ja EUREF-pisteidenvalilla ovat yleensa kymmenia kilometria pitkia ja niita mitataan vahintaan kahden 6 tunninsessiossa.
Kaytannon neuvot:
Kaytettavat optiset luodit tarkastetaan toimistossa ennen ja jalkeen mittausta. Lin-jeerausvirhe johtaa keskistysvirheeseen!
Antenni pystytetaan keskisesti pisteelle. Keskistys tarkistetaan ennen ja jalkeen GPS-mittausta, tarvittaessa myos mittausten aikana.
Horisontti oltava 10 korkeuskulmaan asti vapaata. Tee tarvittaessa horizonttipiirros.
Havaitsija mittaa antennin korkeuden, ennen ja jalkeen GPS-mittausta, tarvittaessamyos mittausten aikana.
Nykyisin ei enaa tehda saahavaintoja, koska on havaittu, etta niista ei ole apua tarkku-uden kannalta.
Matkapuhelinyhteys mittauksen johdolle ja viereisten pisteiden mittaajille: sessionkesto on pisteiden yhteinen mittausaika!
16.2.2 Digitaalinen tarkkavaaitus
Nykyisin runkomittauksissa kaytetaan digitaalivaaituskoje ja viivakoodilattoja. Niidentarkkuus on nykyisin riittava tahan ja aikaisemmat systemaattisten virheiden ongelmat (mm.Maan magneettikentta) on ratkaistu.
“Hyppymenetelma”: Taakse Eteen Eteen Taakse
1Samalla helpottuu myos havaintojen kasittelya yhdessa Suomen pysyvan GPS-verkon FinnRefin asemiendatan kanssa, mikali sellainen on lahella.

16.2. Maastomittauksessa kaytetyt tekniikat 163
Samat etaisyydet eteen ja taakse
Kojeen ja lattojen varjostus suoralta Auringonvalolta. Myos varjot voivat aiheuttaaongelmia
Metsaisessa maastossa on raivattava kunnolla, koska koje kayttaa latan kokonaistaaluetta eika vain yhta viivaa.
Digitaalisen vaaituskojeen tarkistukseen (kollimaatioakselin vaakasuunnan tarkastamiseen)kaytetaan kenttatestausmenetelma ennen mittausten aloittamista.
16.2.3 Trigonometrinen vaaitus: “tarkka trigo”
Tama Geodesian laboratorion (Takalo, Santala, Salminen) kehittama menetelma on kayt-tokelpoinen silloin, kun
1. Korkeuserot ovat suuria lyhyella matkalla
2. Maapera tekee perinteinen vaaitus hankalaksi tai mahdottomaksi: soinen maasto taivedenylitys.
Tarkassa trigossa kaytetaan kaksi takymetria, joilla mitataan samanaikaisesti vastakkaisi-in suuntiin pystykulmat toisen takymetrin paalle laitettuun tahykseen. Myos etaisyy-det mitataan samalla ajanketkella, mutta vaan yhteen suuntaan. Mittausdata kaukaises-ta takymetrista siirtyy radiomodeemitse toiseen asemaan, kenttamikroon tallennettavaksi,kuten toisen takimetrin ja saaaseman datakin.
Kaytannon mittauksissa vaaitus suoritetaan digitaali- ja trigonometrisen vaaituksen yhdis-telmana.
16.2.4 Monikulmiojonomittaus
Taman osuuden tavoitteena on tutustua modernin takymetrin kayttoon runko- ja kartoitus-mittauksen tuontantoymparistossa.
Mitataan:
4 vaakakulmasarjaa
5 erillista etaisyysmittausta
2 pystykulmasarjaa
kojeen korkeus mitataan huolellisesti. Epakeskisen etaisyysmittauslaitteen tapauksessamitataan molemmat korkeudet erikseen.
tahyksen korkeus (prisma) mitataan huolellisesti
Saahavainnot mieluimmin molemmissa paissa etaisyysmittauksen aikana.
Vaihtoehtoisesti suoritetaan tarkka perusviivamittaus, jos sellainen on kaupungin alueel-la tarjolla ja sita kaytetaan pituudenmittauskojeiden kalibrointiin. Kaytettava laite tassatapauksessa on Mekometer (ME5000 tai ME2000) ja mittausmenetelma, saahavaintojamukaan lukien, erittain huolellinen.

164 Luku 16. Maastomittaus kaytannossa
16.3 Case: Jyvaskylan maastomittaus
Vuonna 1999 mitattiin Jyvaskylassa kaupungin runkomittaus uudelleen kayttamalla GPS,takymetrit (monikulmiojonot) ja tarkka trigonometrinen korkeudenmaaritys. Tyo on doku-mentoitu tyoselostuksessa ((Geodesian ja kartografian laboratorio, 1999)).
Mittauksen tarkoitus oli saada Jyvaskylan oman jarjestelman mukaiset tasokoordinaatit(2D), seka kkj :n mukaiset kartastokoordinaatit. Taman lisaksi laskettiin geosentrisetEUREF-FIN koordinaatit (3D) ja niista myos projisoidut tasokoordinaatit Gauß-Kruger-projektion ja GRS80-vertausellipsoidin mukaisesti.
Nain ollen koordinaatit laskettiin kolmessa eri koordinaattijarjestelmassa.
Mittaukset suoritettiin Geodesian ja kartografian laboratorion kenttaharjoituksen puitteissa17 – 28 toukokuuta 1999. Laskennat suoritettiin kesalla 1999.
Piste 1337 kaytettiin paikallisena lahtopisteena. Sen EUREF-koordinaatit laskettiin kayt-tamalla lahtopisteena 131 Puolakka, missa Geodeettisen laitoksen mittauksista oli saatuEUREF-FIN-koordinaatit:
’ ”
leveys 61 55 36.32944pituus 25 32 1.04996ellipsoidinen korkeus 211.485 m
Ks. kansikuva.

165
Luku 17
Ohjeet ja standardit
17.1 Yleista
Geodeettisen mittaustyon laadun ja tehokkuuden varmistamiseksi on olemassa monenlaisetstandardit ja ohjeet.
Ohjeita on seka virallisia etta epavirallisia. Virallisiin ohjeisiin luetaan:
Kaavoitusmittausohjeet (1983, 2003)
Kaavan pohjakartta (1997)
Maanmittauslaitoksen “Maaraykset. . . ” (1996) (“Tilusmittausohjeet”)
Epavirallisia ohjeita ovat mm.
Numeerisen kartoituksen maastomittausohjeet (Anon., 1991)
Muut mittauksia koskevat ohjeet
Epaviralliset ohjeet eivat kaytannon mittaustyon kannalta ole ilman merkitysta; niitakaytetaan referenssina ja ns. de-facto standardina maanmittauskonsultti- ja projektityossa.
Geodeettista mittaustyota ohjaavien standardien ja ohjeitten lisaksi on myos ole-massa standardit ja ohjeet koskien Suomessa kayttavia karttaprojektio ja ko-ordinaattijarjestelma. Voidaan mainita esim. Julkisen Hallinnon Suosituksia(http://www.intermin.fi/intermin/hankkeet/juhta/home.nsf/pages/JHS-Suositukset),kuten.
JHS153 “ETRS89-jarjestelman mukaiset koordinaatit Suomessa”
JHS154 “ETRS89-jarjestelmaan liittyvat karttaprojektiot, tasokoordinaatistot ja kart-
talehtijako”
JHS 163“Suomen korkeusjarjestelma N2000”(http://www.jhs-suositukset.fi/suomi/jhs163)
Taulukko 17.1: Uusien (v. 2003) kaavoitusmittausohjeitten sisallys
1. Johdanto
2. Runkoverkot ja niiden mittaus
3. Ilmakuvaus
4. Kartoitusmittaukset
5. Kaavan pohjakartan laadinta
6. Mittauksen dokumentointi ja lopputuotteet
Viite- ja lahdeluettelo
Liitteet

166 Luku 17. Ohjeet ja standardit
17.2 Kaavoitusmittausohjeet
Tama vuoden 1983 Maanmittaushallituksen julkaisu (Anon., 1983) on annettu kaavoitusmit-tausasetuksen (493/82) 13§:n ja 14§:n 2 mom:n pohjalta, joka on taas annettu lain nojalla.Myos rakennusasetuksessa on pohjakarttoja koskevia maarayksia.
Kaytetty menetelma on:
Asetuksessa puitteet, ja
ohjeissa tekniset vaatimukset.
Ohjeet koskevat kaavoitusmittauksa eli asema-, rakennus- ja rantakaava-alueilla tehtaviamittauksia ja kartoituksia.
Koska nama ohjeet olivat pahasti vanhentuneita, kaynnistettiin vuonna 2000 uusityoryhma kaavoitusmittausohjeiden nykyaikaistamiseksi. Ryhman johtajana toimiReino Ruotsalainen Maanmittauslaitokselta ja sihteerina Matti Rantanen To-pografikunnasta. Tyo on edistynyt hyvin: tulos (Anon., 2003) loytyy myos osoitteeltahttp://www.finlex.fi/pdf/normit/13750-Kaavoitusmittausohjeet_2003.pdf. Setuli voimaan 1.3.2003. Verkkoversio pidetaan jatkuvasta ajantasalla. Sen sisallysluetteloesitetaan taulukossa 17.1.
Muutama otos uusista kaavoitusmittausohjeista:
17.2.1 Mittausluokat
Mittausluokka 1: taajama-alue, maa erittain arvokasta, rakennusoikeudet suuria jayhdyskuntarakenne kaupunkimaista. Karttojen mittakaava 1:500 tai 1:1000
Mittausluokka 2: taajama-alue, maa arvokasta, rakentaminen pientalovaltaista mutta suh-teellisen intensiivista. Mittakaava 1:1000 tai 1:2000
Mittausluokka 3: muut alueet, joille laaditaan yleiskaavaa yksityiskohtaisempi kaava.Rakennusoikeus vahainen. Mittakaava yleensa 1:2000, erityistapauksessa 1:5000
Numeerisella kartalla ei ole varsinainen mittakaava. Kuitenkin mittakaava on perinteinentapa kuvata sen sisaltaman tiedon tarkkuutta.
17.2.2 Kiintopisteet
Kiintopisteet ovat taso- korkeus- tai yhdistetyt taso- ja korkeuskiintopisteet.
Tasokiintopisteet jaetaan taas perusrunkoverkon pisteisiin ja kayttokiintopisteisiin.
Perusrunkopisteet ovat 1-2 km etaisyydella toisistaan. Perusrunkoverkon lahtopisteiksikaytetaan valtakunnallisia I-III luokan tasokiintopisteita tai EUREF-FIN tihennyspisteita.Havaintomenetelmaksi suositellaan (staattista) GPS-mittausta, vaikka jonomittauskin onmahdollista.
Kaavoitusmittausohjeissa annnetaan seikkaperaiset ohjeet miten eri tyyppiset pisteet raken-netaan ja saadaan riittavan yksikasitteisiksi, liikkumattomiksi ja kestaviksi.
Kayttokiintopisteiden tiheyden ja sijainnin maarittaa kartoituksen ja maastoon merkit-semisen seka rakentamisen kaytannon tarpeet.
Kiintopisteesta on laadittava pistekortti.
17.3. Kaavan pohjakartta 167
17.2.3 Koordinaatti- ja korkeusjarjestelmat
Kaytettava on valtakunnallista tai kunnan kaytossa olevaa paikallista koordinaatti- tai ko-rkeusjarjestelmaa. Valtakunnallisia jarjestelmia ovat kkj (kartastokoordinaattijarjestelma) jaETRS89 (sen realisaationa EUREF-FIN). Kaavan pohjakartan karttaprojektioiksi suositel-laan konformiset UTM- tai Gauß-Kruger projektiot.
Poikkeusjarjestelyt ovat tarvittaessa sallittuja, mm. ns. Helsingin jarjestelman (vanhan val-tion jarjestelman, vvj ) tai paikallisen jarjestelman kaytto.
Ohjeet tasorunkomittausten liittamiseksi kaytettavaan koordinaattijarjestelmaan kiin-topisteiden avulla
Vastaavat ohjeet korkeusjarjestelmaa varten.
17.3 Kaavan pohjakartta
Vuonna 1997 julkaistiin Kaavan pohjakartta ((Anon., 1997)), joka korvaa Kaavoitusmittaus-ohjeiden kuvausohjeen. Vanhaa kuvausohjetta voi kuitenkin noudattaa taydennyskartoituk-sissa ja muutoinkin kaytettaessa perinteista mittaus- ja kartoitustekniikkaa.
Uudet kaavoitusmittausohjeet korvaavat tatakin vanhaa ohjetta.
17.4 Maaseudun mittaukset
Maaseudun mittauksia ohjaa Maanmittauslaitoksen kiertokirje nimelta “Maaraykset mit-
tausten tarkkuudesta, rajamerkeista ja karttamerkeista kiinteistotoimituksessa”, paivamaara4.12.1996. Siihen viitataan usein kayttamalla vanhemmat nimitykset “tilusmittausohjeet” ja“toimituskarttaohjeet” (henkilok. tied. A. Vitikainen).
Ohje on synkronoitu Kaavoitusmittausohjeiden kanssa ja on tarkoitettu lahinna haja-asutusalueilla mittausten ja kartoitusten ohjeistamiseksi.
Ohjeen sisallysluettelo on annettu taulukossa 17.5 sivulla 173.
17.4.1 Mittausluokat
Tilusmittausohjeissa kaytetty mittausluokitus vastaa kaavoitusmittausohjeissa annettuun.
Mittausluokat 1 ja 2: Kuten Kaavoitusmittausohjeissa, tiluskartta 1:500, 1:1000 tai 1:2000.
Mittausluokka 3: Taajama- ja haja-asutusalueet, joilla maan arvo suurempi kuin tavallinenmaa- ja metsatalousmaan arvo, tiluskartta mittakaavassa 1:2000 tai 1:5000.
Mittausluokka 4: Haja-asutusalueet, maa arvoltaan tavallista maa- ja metsatalousmaata,tiluskartta, mittakaava 1:5000 tai 1:10000.
Mittausluokka 5: Maan arvo alhainen, tiluskartta 1:10 000 tai 1:20 000.

168 Luku 17. Ohjeet ja standardit
17.5 Epavirallisia ohjeita
Kaavoitusmittausohjeet ja Tilusmittausohjeet eivat koske
valtakunnallisia mittauksia ja kartoituksia, ja
ovat liian valjat numeeristen aineistojen keruuta varten.
Valtakunnalliset mittaukset ja kartoitukset perustuvat siis pelkastaan naita toita tekevienvirastojen ja laitosten sisaisiin ohjeisiin. Ne voivat kuitenkin perustua myos kansainvalisiinsuosituksiin tai menetelmiin.
Tarkkoja kartoituksia ja numeerista aineistojen keruuta varten solmitaan sopimuksia tilaajaneli kunnan ja mittaajan eli konsultin valilla. Naissa on noudatettu tiukempia ohjeita kuinKaavoitusmittausohjeissa.
Tielaitoksella (TVH) on olemassa omat ohjeet numeerisen korkeusmallin mittaamiseksi.
Rakennustyomaamittauksia varten on olemassa kansainvaliset ISO-standardit, joita ei olevirallisesti noudatettu Suomessa. Nyt on ryhdytty hyvaksymaan ISO-standardeja SFS-standardeiksi, jolloin niita tullaan kayttamaan kaytannon mittauksissa.
Epatyydyttavan tilanteen ja monien ohjeiden vuoksi ryhdyttiin vuonna 1989 tekemaanyhteisia ohjeita tarkkoja mittauksia varten. Naita soveltaisivat keskinaisella sopimuksellakunnat, konsultit, Tie- ja vesihallitus (nyk. Tielaitos) ja Maanmittaushallitus (nyk. Maan-mittauslaitos). Ohjeet saavat nain standardin luonteen.
Taman jalkeen merkittavat kayttoon tulleet epaviralliset, standardinomaiset ohjeet luet-teloidaan alla.
17.6 Myohempia ohjeita ja suosituksia
90-luvun aikana ohjeistus- ja standardointityo on tuottanut useita hyodyllisia dokumentteja.
Suositukset Suomessa tehtavalle mittaus- ja kartoituskuvauk-selle, 1995. Fotogrammetrian ja Kaukokartoituksen Seura,http://foto.hut.fi/seura/julkaisut/erillisjulkaisu1_1995/teksti.html.
Ohjeet tarkan fotogrammetrisen kartoitusmittauksen suorittamistavarten, 1993. Fotogrammetrian ja Kaukokartoituksen Seura,http://foto.hut.fi/seura/julkaisut/erillisjulkaisu1_1993/teksti.html.
Numeerisen kartoituksen maastomittausohjeet, 1991. TKK:n Geodesian laboratorionjulkaisema, (Anon., 1991).
GPS:n kayttomoodit, 1994. TKK:n Geodesian laboratorion julkaisema,(Koivula, 1994).
Numeerisen maastotiedon keruun mittausohjeet, 1990. Maanmittauslaitoksen sisainenjulkaisu.
Maastotietojen luokittelu. Kuntaliitto, http://www.kuntaliitto.fi/mtl2/.
Tata sovelletaan tietojen luokitteluun ja koodaukseen numeerisia maastotietoja kerat-taessa ja siirattaessa jarjestelmasta toiseen.
Numeeristen kartoitustehtavien hankintamenettely ((Nuora et al., 1992)).

17.6. Myohempia ohjeita ja suosituksia 169
Kirja Rakennusmittaus ((Martikainen and Santala, 1990)).
Ohjeiden tarkoitus: Asiat joista on sovittava mittausta tilattaessa.
Ohjeistot on tehty tyoryhmissa siten, etta niilla on ollut kaytettavissa toistensa aineistoa jasamoja henkiloita on ollut useissa tyoryhmissa.
17.6.1 Ilmakuvaussuositus
Suositukset Suomessa tehtavalle mittaus- ja kartoitusilmakuvaukselle, Fotogrammetrian jaKaukokartoituksen Seura 1995.
Sisalto:
1. Ilmakuvauksen tilaaminen
2. Kuvauskalusto
3. Ilmakuvauksen suorittaminen
Lentokorkeus ja -suunta
Lento-olosuhteet
Kuvaustoleranssit
Kuvausten uusiminen ja taydentaminen
4. Ilmakuvausfilmin prosessointi ja kuvien laatuvaatimukset
5. Kuvatuotteet
6. Kuvauksen dokumentointi
7. Kuvauksen laadunvalvonta ja laaturaportti
17.6.2 Tarkka fotogrammetrinen kartoitus
Ohjeet tarkan fotogrammetrisen kartoitusmittauksen suorittamista varten, Fotogrammetrianja Kaukokartoituksen Seura, 1993.
Sisalto:
1. Lopputuloksen tarkkuus
tarkastaminen
tulkintaepavarmuus
2. Geodeettinen runkoverkko ja signalointi
3. Ilmakuvauksen suorittaminen
4. Pistetihennys
Lahtopisteiston kattavuus
Tihennyspisteet
Kuvakoordinaattien mittaus
Muunnokset ja korjaukset
Blokkitasoitus
Tasoituksen ulkopuolisten pisteiden kasittely
5. Stereomittausten suorittaminen

170 Luku 17. Ohjeet ja standardit
Taulukko 17.2: Numeerisen kartoituksen maastomittausohjeitten sisallys(osin)
1. Runkomittaukset 2. Kartoitusmittaukset
1 Tarkkuusluokat 1 Tarkkuusvaatimukset
2 Pisteiden merkitseminen ja 2 Yksityiskohtien kartoitus
dokumentointi 3. Kartoitusten tarkastusmittaus
3 GPS-mittaus [osittain 1 Tasokoordinaattien
vanhentunut – MV] tarkastusmittaus
4 Kolmiomittaus 2 Korkeuden tarkastusmittaukset
5 Jonomittaus 3 Tarkastusmittausten
1 4. luokan jonomittaus testimenettely
2 5. luokan jonomittaus 4 Opastavia tietoja
3 Samanaikainen taso- ja 4. Kojeiden ja menetelmien
korkeusjono kalibrointi
4 Opastavia tietoja 1 Elektro-optisten
6 Korkeudenmittaus etaisyysmittarien kalibrointi
1 Modifioitu eli kevennetty 2 Teodoliittien kalibrointi
tarkkavaaitus 3 Vaaituskojeiden kalibrointi
2 Jonovaaitus 4 Lattojen kalibrointi
3 Opastavia tietoja 5 Jarjestelmakalibrointi
4 Trigonometrinen 6 GPS-laitteiston kalibrointi
korkeuden mittaus 7 Opastavia tietoja
5 Tarkka trigonometrinen 5. Kasitteita
korkeudenmittaus
17.7 Numeerisen kartoituksen maastomittausohjeet
TKK:n Maanmittausosaston Geodesian laboratorion julkaisu, (Anon., 1991). Tassasisallysluettelo (taulukko 17.2):
Seuraavassa kasitellaan taman julkaisun joitakin mielenkiintoisia osia.
17.7.1 Runkomittaukset
Runkomittausten tarkkuuden kuvaamiseksi kaytetaan tarkkuusluokat: mittauksethyvaksytaan tiettyyn luokkaan, jos ne tayttavat luokan tarkkuusvaatimukset. Luokatnumeroidaan 1-5; luokka 1 on tarkin (esim. Suomen 1. luokan kolmioverkko joka kattaakoko Suomen), luokka 5 kuvaa hyvin paikallisia mittauksia. Periaatteena on, etta tietynluokan mittausten kiintopisteiksi kelpaavat ainostaan ylemman luokan (ts. pienemman
luokkanumeron) verkon pisteet.
Geometrinen suhteellinen tasotarkkuus maaritellaan pistetarkkuuden (pistekeskivirheen) pe-rusteella. Kun puhutaan suhteellisesta tarkkuudesta, tarkastellaan vain kahden pisteen (Aja B) koordinaattierojen tarkkuutta.
Pistevalin AB suhteellinen pistekeskivirhe on mP =√m2
∆x +m2∆y (kuva), missa m∆x ja
m∆y ovat pisteparin AB koordinaattierojen ∆x = xB − xA, ∆y = yB − yA tarkkuudet elikeskivirheet.
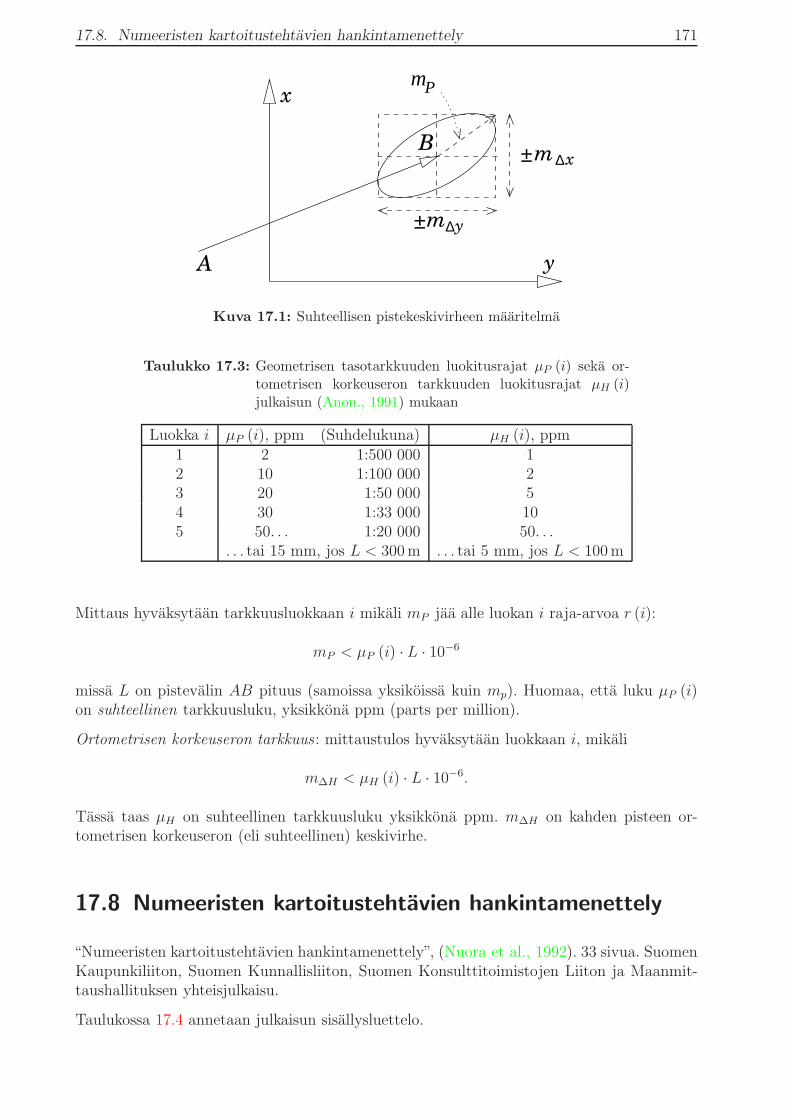
17.8. Numeeristen kartoitustehtavien hankintamenettely 171
∆y
∆x
mP
A
±m
±m
x
y
B
Kuva 17.1: Suhteellisen pistekeskivirheen maaritelma
Taulukko 17.3: Geometrisen tasotarkkuuden luokitusrajat µP (i) seka or-tometrisen korkeuseron tarkkuuden luokitusrajat µH (i)julkaisun (Anon., 1991) mukaan
Luokka i µP (i), ppm (Suhdelukuna) µH (i), ppm1 2 1:500 000 12 10 1:100 000 23 20 1:50 000 54 30 1:33 000 105 50. . . 1:20 000 50. . .
. . . tai 15 mm, jos L < 300 m . . . tai 5 mm, jos L < 100 m
Mittaus hyvaksytaan tarkkuusluokkaan i mikali mP jaa alle luokan i raja-arvoa r (i):
mP < µP (i) · L · 10−6
missa L on pistevalin AB pituus (samoissa yksikoissa kuin mp). Huomaa, etta luku µP (i)on suhteellinen tarkkuusluku, yksikkona ppm (parts per million).
Ortometrisen korkeuseron tarkkuus: mittaustulos hyvaksytaan luokkaan i, mikali
m∆H < µH (i) · L · 10−6.
Tassa taas µH on suhteellinen tarkkuusluku yksikkona ppm. m∆H on kahden pisteen or-tometrisen korkeuseron (eli suhteellinen) keskivirhe.
17.8 Numeeristen kartoitustehtavien hankintamenettely
“Numeeristen kartoitustehtavien hankintamenettely”, (Nuora et al., 1992). 33 sivua. SuomenKaupunkiliiton, Suomen Kunnallisliiton, Suomen Konsulttitoimistojen Liiton ja Maanmit-taushallituksen yhteisjulkaisu.
Taulukossa 17.4 annetaan julkaisun sisallysluettelo.

172 Luku 17. Ohjeet ja standardit
Taulukko 17.4: Numeeristen kartoitustehtavien hankintamenettely; sisallys
Esipuhe 4. Lopputuotteiden maarittely
Numeeristen kartoitustehtavien A Numeerinen maastotieto
hankintamenettely B Numeerinen pisterekisteriaineisto
Numeerisen kartoituksen tyoohjelma C Graafiset tulosteet
Tyoohjelman sisalto D Muu aineisto
1. Tyotehtavan yleismaarittely 5. Tyonjako tilaajan ja konsultin valilla
2. Lahtotilanne 6. Aikataulut
3. Yksityiskohtainen maarittely Numeerisen kartoituksen
1 Tyosuunnitelma tarkastaminen
2 Rekisterikartta 1. Yleista
3 Runkomittaukset 2. Geodeettiset runkomittaukset
4 Signalointi 3. Signalointi
5 Ilmakuvaus 4. Ilmakuvaus
6 Fotogrammetrinen pistetihennys 5. Fotogrammetrinen pistetihennys
7 Stereodigitointi 6. Numeerisen kartan tietosisalto
8 Taydennysmittaukset 7. Numeerisen kartan sijaintitarkkuus
9 Numeerisen aineiston viimeistel 8. Numeerisen aineiston tarkastaminen
10 Graafinen tulostus Liitteet:
11 Numeerisen aineiston siirto 1. Konsulttipalvelujen hankinta
tilaajalle 2. Tyoohjelmaesimerkki
12 Muut vaatimukset 3. Kirjallisuusluettelo alan julkaisuista
17.9 Rakennusstandardit
Rakennusalalla on kaytossa monet ISO-standardit kaannettyina suomeksi (Suomen Stan-dardoimisliito SFS ry, http://www.sfs.fi), jolloin puhutaan SFS-ISO standardeista. Listaniista loytyy kirjasta Rakennusmittaus (Martikainen and Santala, 1990).
17.10 Kansainvaliset standardit
Geodesiassa tarkeat kansainvaliset standardit luo ISO (International Standardization Or-ganization, http://www.iso.ch/iso/en/ISOOnline.frontpage) ja CEN (European Com-mittee for Standardization, http://www.cenorm.be/aboutcen/aboutcen.htm).
Geotietojarjestelmien alalla tarkea tekija on Open GIS Consortium(http://www.opengis.org/).
Suomi osallistuu kansainvaliseen standardointityohon mm. paikkatietojen standardoin-
tirenkaan (http://www.nls.fi/ptk/stand/) kautta.

17.10. Kansainvaliset standardit 173
Taulukko 17.5: ”Tilusmittausohjeitten” sisallys
1. Yleista 5. Karttamerkit ja kuvaustekniikka
1.1 Mittausluokat 5.1 Tekstit ja viivanleveys
1.2 Mittakaavat 5.2 Rajat
1.3 Kartan tarkkuusvaatimukset 5.3 Rajamerkit
2. Mittausten tarkkuusvaatimukset 5.4 Paalut
2.1 Yleista 5.5 Tiluskuviot
2.2 Kartan runkomittaus ja 5.6 Maa- ja vesialueiden
koordinaattijarjestelma kuvaaminen rajakartalla
2.3 Rajamerkkien, rajapisteiden ja 5.7 Rakennukset ja
paalujen keskinainen sijainnin pysyvat rekennelmat
maaritys ja rajojen mittaus 5.8 Muut kuvattavat kohteet
2.4 Yksityiskohtien kartoitus 5.9 Paallekkaiset rajat
2.5 Pyykkien ja rajapisteiden sijain- 5.10 Kaavamerkinnat
nin maaritys kiinteistorekisteri- 5.11 Tietokoneavusteisesti
kartan ajantasallapitoa varten laadittavan toimituskartan
2.6 Mittausvalineiden tarkistus poikkeavat karttamerkit
2.7 Mittaukseen osallistuvat henkilot 5.12 Tekstit ja lisamerkinnat
3. Rajamerkit ja paalut ja 6. Alanlasku
niiden kaytto 6.1 Tarkkuusvaatimukset
3.1 Rajamerkit 6.2 Pinta-alojen merkitseminen
3.2 Pyykkien kayttaminen toimitusasiakirjaan
3.3 Rajaviittojen kayttaminen
3.4 Pyykkiin tehtavat merkinnat
3.5 Pyykin sijoittaminen
3.6 Paalun kayttaminen Liitteet
3.7 Tarpeettoman rajamerkin 1) Toimituskartassa kaytettavat
poistaminen karttamerkinnat
4. Toimituskartan laatiminen 2) Maanmittauslaitoksen toimi-
4.1 Karttapohja tusten maankayttolajit ja
4.2 Kartan koko ja marginaalit niiden alaluokitus, kaytettavat
4.3 Kartan valmistaminen lyhenteet ja atk-koodit
asemoimalla seka metsamaan veroluokat
4.4 Kartta eri elementteina 3) Malli kartan
4.5 Toimituskartan korvaaminen otsikkokirjoituksesta
arkistokelpoisella kopiolla 4) Rekisteriyksikkoselitelmien
4.6 Arkistokelpoisuus mallit

174 Luku 17. Ohjeet ja standardit

175
Luku 18
Kalibrointi
Erilaisten geodeettisten kojeiden kalibrointi on kojeilla suoritettujen mittausten laadun-valvonnan yksi valine. Taman lisaksi on tietenkin monet muut valineet olemassa: Hyvatmittausmenetelmat ja hyva mittaus- rekisterointi- ja arkistointikaytanto, havaintojen kasit-tely ja tilastollinen testaus, jne. jne.
Eri laitteiden kalibroinnissa erotetaan toisistaan maarityskalibrointi ja seurantakalibrointi.Kalibroinnissa maaritettavat vakiot riippuvat laitetyypista.
Laitekalibroinnin lisaksi puhutaan jarjestelmakalibroinnista. Jarjestelmakalibroinnissa kali-broidaan ei vain laitteisto, vain kaytettavat ohjelmistot, mittausmenetelma, ja mittaustasuorittava henkilosto kokonaisuutena.
GPS-laitteiston “kalibroinnista” puhutaan myos, mutta on ongelmallinen kasite, koska GPS-mittauksen tulos riippuu niin monesta vaihtelevasta tekijasta, kuten satelliittikonstellaatio,satelliittigeometria, mittauksen kesto, ilmakeha, verkkogeometria, laskentatapa jne. jne.. . .siksi GPS-laitteiston kalibrointia on katsottava luonteeltaan jarjestelmatestaukseksi.
TKK:n Geodesian laboratoriolla on kalibrointipalvelu, joka voi kalibroida monenlaisia lait-teistoja, kuten sahkooptisten etaisyysmittarien, teodoliittien, takymetrien, vaaituskojeidenja -lattojen seka GPS-laitteistojen kalibrointiin. Tama toiminta on kaupallistettu.
18.1 Teodoliitin akselivirheet
Mittaukset tehdaan kahdessa kojeasennossa. Talla tavoin saadaan akselivirheet maaritetyk-si: kollimaatiovirhe, tappikaltevuus. Tappikaltevuutta maaritetaan sen jalkeen kun kollimaa-tiovirhe on eliminoitu (mittaamalla kahdessa kojeasemassa) kayttamalla korkea tahtayspiste.
18.2 Vaakakehan kalibrointi
Teodoliitin vaakakehan kalibrointi on suhteellisen helppoa, koska vaakakehaa voidaan kaan-ta koho ympyran (400 gon) lapi. Siksi mitataan annettu goniometrikulma (esim. 60 gon)useita kertoja, ja joka kerta kaannetaan vaakakeha niin, etta se kulkee koko 400 gon lapivakioaskelein.
Mittaukset toistetaan jokaiselle vaakakehaasennolle molemmissa kojeasennossa. Nainsaadaan vaakakehan epakeskisyys maaritetyksi.
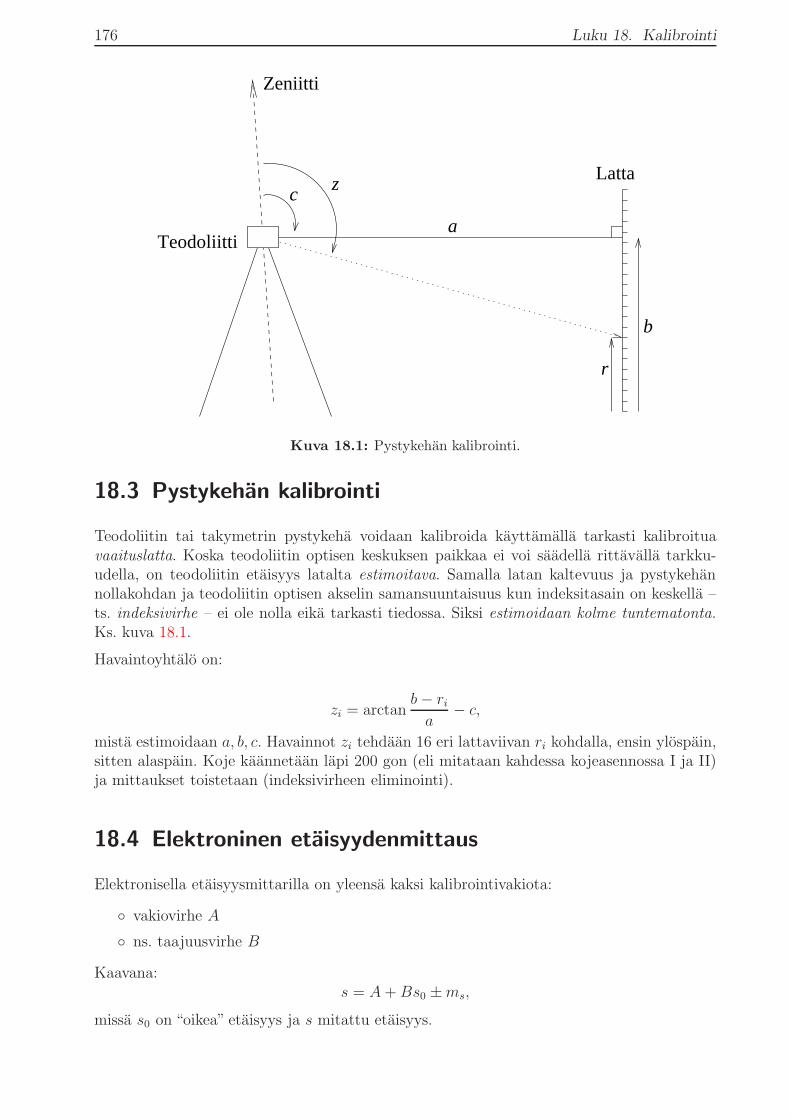
176 Luku 18. Kalibrointi
Zeniitti
a
Latta
r
b
Teodoliitti
cz
Kuva 18.1: Pystykehan kalibrointi.
18.3 Pystykehan kalibrointi
Teodoliitin tai takymetrin pystykeha voidaan kalibroida kayttamalla tarkasti kalibroituavaaituslatta. Koska teodoliitin optisen keskuksen paikkaa ei voi saadella rittavalla tarkku-udella, on teodoliitin etaisyys latalta estimoitava. Samalla latan kaltevuus ja pystykehannollakohdan ja teodoliitin optisen akselin samansuuntaisuus kun indeksitasain on keskella –ts. indeksivirhe – ei ole nolla eika tarkasti tiedossa. Siksi estimoidaan kolme tuntematonta.
Ks. kuva 18.1.
Havaintoyhtalo on:
zi = arctanb− ri
a− c,
mista estimoidaan a, b, c. Havainnot zi tehdaan 16 eri lattaviivan ri kohdalla, ensin ylospain,sitten alaspain. Koje kaannetaan lapi 200 gon (eli mitataan kahdessa kojeasennossa I ja II)ja mittaukset toistetaan (indeksivirheen eliminointi).
18.4 Elektroninen etaisyydenmittaus
Elektronisella etaisyysmittarilla on yleensa kaksi kalibrointivakiota:
vakiovirhe A
ns. taajuusvirhe B
Kaavana:s = A+Bs0 ±ms,
missa s0 on “oikea” etaisyys ja s mitattu etaisyys.

18.5. Vaisala-kalibrointi 177
Taman lisaksi halutaan maarittaa mittauksen satunnaisvirhe m, joka voi olla mitattavanetaisyyden funktiona ms. Yleisesti:
ms = a+ bs,
missa a ja b ovat laitteen (ja mittaustilanteen) vakioita.
Todellisessa mittauksessa laitteen mittausvirhe ei tietenkaan ole ainoa satunnainenvirhelahde. Ilmakehan vaikutus on useimmiten jopa suurempi, vaikka meteorologinen ko-rjaus tehdaankin.
18.5 Vaisala-kalibrointi
Tama on optinen ns. valkoisen valon interferometria. Perusidea on, etta
1. lahdetaan tunnetusta metrista joka on toteutettu jossakin stabiilissa aineessa, kvart-
sissa.
2. “kerrotaan” tata metria vertaamalla optiset polut peilien 1 ja 2, ja 1 ja 3 valilla. Tassaetaisyys 1-3 on etaisyyden 1-2 kokonainen monikko.
3. Valon polku 1-2“taitetaan”heijastuksien avulla, niin etta kokonaispolku 1-2-1-....-1-2-1on yhta pitka kuin polku 1-3. Silloin interferenssiviivat tulevat nakyviin.
Kvartsimetri laitetaan peiliparin valiin ja jaava, hyvin pieni ilmarako mitataan Newton-interferenssirenkaiden avulla. Kvartsimitta poistetaan, ja kolmas peili laitetaan 6 metrinetaisyyteen. Peileissa on reikia, jotka mahdollistavat valon polun taittoa. Lasisen apulevynavulla korjataan pieni jaannosero kahden polun pituuksien valilla, ja levyn asento mitataan.
Menettely toistetaan: Metrista saadaan 6 m, kuudesta metrista 24 m, ja niin edelleen. 24m→ 72m, 72m → 216 m, 216m → 432 m, 432 m → 864 m. Viimeiset vaiheet ovat hyvinvaikeita ilmakehan rauhattomuuden johdosta.
Mittausprosessi on vaativa ja nain on mittauksen jalkeinen laskentaprosessikin. Yhden pe-rusviivan mittaaminen voi vaatia parikin kuukautta. Yleensa mitataan syksylla kun ilmakehaon rauhallisinta.
Saavutettava tarkkuus ±0.02 mm 864 m:n matkalla. Tarkuutta rajoittavana tekijana: peilienpaikkojen siirtaminen maanalaisiin (pysyviin) merkkeihin. Interferometria itse on paljontarkempi!
18.6 Vaaituslattojen kalibrointi
Viivan paikka mitataan laser-interferometrin avulla. Latta siirretaan niin, etta seuraava viivatulee mikroskoopin alle, ja siirtomatka mitataan laserilla.
Nykyisin mittaukset ovat pitkalle automatisoituja ja jokainen lattaviiva mitataan. Kentallakalibrointitulokset hyodynnetaan kenttatietokoneen avulla.
178 Luku 18. Kalibrointi
18.7 Jarjestelmakalibrointi
Kaytetty takymetrien kalibroinnissa. Maarataan kolmiulotteinen mittaustarkkuuslaboratorio- tai kenttakoetilanteessa. Myos jotkut GPS-tutkimukset voidaan luokitellatahan.
On hieman kyseenalianen, voidaanko naissa tapauksissa puhua lainkaan “kalibroinnista”,koska metrologiassa sana on varattu tietyn suuruuden mittauksen oikeellisuuden varmis-tamiselle. Se on kuitenkin jo aika yleisessa kaytossa.
18.8 Metrologia kansainvalisesti ja Suomessa
Bureau International des Poids et Mesures (BIPM), Comite International des Poids etMesures (CIPM). Tama on kansainvalinen metrologian jarjestelma. BIPM:n paamaja onPariisissa.
Koko metrologian paamaara on suureiden jaljitettavyys. On oltava jaljitettavyysketju kan-sainvalisesta standardin maaritelmasta loppukayttajan mittausyksikkoon. Vain silla tavallavoidaan olla varmoja, etta kaikkialla todella kaytetaan (tietylla tarkkuustasolla) sama yk-sikko.
MIKES, Mittatekniikan Keskus, on Suomen virallinen metrologian taho.
Geodeettisesti relevantit suureet ovat “geodeettinen pituus” (yli 1 m) ja “vapaan putoamisenkiihtyvyys” (painovoima). Molemmille Geodeettinen laitos toimi Suomessa akkreditoitunamittanormaalilaboratoriona.
TKK:n Geodesian laboratorion rooli on taman verran epavirallisempaa: Suoritetaan laite-ja jarjestelmakalibrointeja ja kirjoitetaan kalibroititodistuksia. Toimeksiantajat ovat suuriltaosin teollisuudelta, missa TKK:n kalibrointitoiminta nauttii arvostusta. Kalibroitavat laitteetovat teodoliitteja, etaisyysmittareita ja takymetreja.

KIRJALLISUUTTA 179
Kirjallisuutta
Anon. (1983). Kaavoitusmittausohjeet. julkaisu 49, Maanmittaushallitus. 166
Anon. (1991). Numeerisen kartoituksen maastomittausohjeet. Geodesian laboratorian julka-isu 20/1991, Teknillinen korkeakoulu, Maanmittaustekniikan laitos, Geodesian labora-torio, Otaniemi. 97, 146, 165, 168, 170, 171
Anon. (1997). Kaavan pohjakartta. julkaisu 85, Maanmittaushallitus, Helsinki. 167
Anon. (2003). ETRS89 -jarjestelmaan liittyvat karttaprojektiot, tasokoordinaatistot ja kart-talehtijako. website, Maanmittauslaitos. URL:http://www.intermin.fi/intermin/hankkeet/juhta/home.nsf/
pages/2A84782CF8BE2527C2256D580047282A/$file/JHS154.pdf. 38
Anon. (2003). Kaavoitusmittausohjeet 2003. julkaisu 94, Maanmittauslaitos. 166
Blachut, T. J., Chrzanowski, A., and Saastamoinen, J. H. (1979). Urban Surveying and
Mapping. Springer Verlag, New York - Heidelberg - Berlin. 53, 54
Cooper, M. A. R. (1982). Modern Theodolites and Levels. Granada Publishing Ltd, London,second edition. 77
Cooper, M. A. R. (1987). Control surveys in civil engineering. Collins, Department of CivilEngineering, The City University, London. 51, 75, 99, 123
Geodesian ja kartografian laboratorio (1999). Raportti jyvaskylan kaupungin runkomit-tauksesta vuonna 1999. osa 1: Tyoselostus. Technical report, Teknillinen korkeakoulu,Maanmittausosasto, Otaniemi. 164
Kahmen, H. and Faig, W. (1988). Surveying. Walter de Gruyter, Berlin - New York. 141
Koivula, H. (1994). GPS:n kayttomoodit. Geodesian laboratorian julkaisu 24/1994, Teknilli-nen korkeakoulu, Maanmittaustekniikan laitos, Geodesian laboratorio, Otaniemi. 168
Kukkamaki, T. (1938). Uber die nivellitische Refraktion. Technical Report 25, FinnishGeodetic Institute, Helsinki. 67, 69
Kukkamaki, T. (1939). Formeln und Tafeln zur Berechnung der nivellitischen Refraktion.Technical Report 27, Finnish Geodetic Institute, Helsinki. 67
Lankinen, U., Martikainen, M., and Santala, J. (1992). Maastomittauksen laskentakaavoja.Technical Report 21, Teknillinen korkeakoulu, Maanmittaustekniikan laitos, Geodesianja kartografian laboratorio, Otaniemi. 133, 136, 137, 138
Martikainen, M. and Santala, J. (1990). Rakennusmittaus. Rakennuskirja Oy. 169, 172
Nuora, A., Linkola, T., Musto, M., Frosen, T., Pirhonen, V., Pohjola, H., Remes, E., Saari,M. P. J., Makela, J., and Pirvola, J. (1992). Numeeristen kartoitustehtavien hankin-
tamenettely. Suomen Kaupunkiliitto, Suomen Kunnallisliitto, Suomen Konsulttitoimis-tojen Liitto, Maanmittaushallitus. 33 pp. ISBN 951-759-833-5. 168, 171
Ollikainen, M. (1993). GPS-koordinaattien muuntaminen Kartastokoordinaateiksi.Tiedote 8, Geodeettinen laitos, Helsinki. 131, 154, 156

180 KIRJALLISUUTTA
Rueger, J. M. (1990). Electronic Distance Measurement. Springer-Verlag, Berlin Heidelberg,kolmas, uusittu edition. 68
Takalo, M. (1995). Computer supported Finnish EDM height traversing. Part I: technicaldescription. Surveying Science in Finland, 13(2):56–99. 65
Hakemisto 181
Hakemisto
atsimuutti, 29
Chandler-wobble, 26CIO, katso Conventional International Ori-
ginConventional International Origin, 26, 27
datum, 28
elevaatio, katso korkeuskulmaellipsoidi
Hayford, 27kansainvalinen, 27
ephemerisbroadcast, 27
Frauenkirche Munchen, 30
geoidi, 3geosentrinen, 25Gronlanti, 37
Helmert-muunnos, 19
karkaussekunti, 26karttaprojektio, 3korkeuskulma, 29
litistyneisyyssuhde, 27luotiviivapoikkeamat, 30
massakeskipisteMaan, 25
Mercator-projektio, 37
napaliike, 26
painovoimakentta, 27pistekeskivirhe, 170pistetarkkuus, 170projektio
Gauß-Kruger, 35Mercator, 36
projektiomenetelma, 25
rekursiivinen, katso rekursiivisuusrekursiivisuus, katso rekursiivinen
S-muunnos, 20siviiliaika, 26
tahtiaika, 26tasotarkkuus
suhteellinen, 170Taylor-sarja, 9, 12
UTC, 26
Related Documents











