Genetic Optimization of Fuzzy Logic Control for Coupled Dynamic Systems Andrew Janson, * Nicklas Stockton, † and Kelly Cohen, ‡ College of Enginering and Applied Science, University of Cincinnati, Cincinnati, Ohio This research project, in the field of control systems, was funded by the National Science Foundation through the Research Experience for Under- graduate (REU) students. The objective of this project was to combine the robustness of fuzzy logic control with the adaptability of genetic algorithms to produce a self-optimizing oscillation damping control mechanism. Once an initial fuzzy inference system (FIS) is developed by an expert for a given dynamic system, the genetic algorithm will be able to optimize the FIS for a range of similar systems with varying parameters. In order to evaluate the control mechanisms developed during this project, a simulation of a two- cart spring-mass system was developed in MATLAB. The performance of the controllers was determined by how quickly it could approach a wall and how close it was able to settle the car system to the wall without crashing. The membership functions of the FIS were reduced to an array of real- valued parameters in order to be used in a genetic algorithm. Once the genetic representation of the FIS was defined, the selection, reproduction, and mutation methods were developed to complete the genetic algorithm. The best solution developed by the genetic algorithm was evaluated against the hand-tuned solution developed in a previous phase of the project. In order to simulate varying parameters between similar dynamic systems, the mass of the car system in the simulation was varied from 3 kg to 20 kg. For each weight change the genetic algorithm was allowed to re-optimize the parameters of the FIS. The performance of the genetic algorithm, with re- spect to the theoretical best, varied up to 3%, while the unmodified FIS * Senior, Department of Electrical Engineering and Computing Systems † Sophomore, Department of Aerospace and Engineering Mechanics ‡ Associate Professor, Department of Aerospace and Engineering Mechanics 1 of 18 Downloaded by Kelly Cohen on January 9, 2015 | http://arc.aiaa.org | DOI: 10.2514/6.2015-0890 AIAA Infotech @ Aerospace 5-9 January 2015, Kissimmee, Florida AIAA 2015-0890 Copyright © 2015 by the American Institute of Aeronautics and Astronautics, Inc. All rights reserved. AIAA SciTech

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

Genetic Optimization of Fuzzy Logic Control
for Coupled Dynamic Systems
Andrew Janson,∗ Nicklas Stockton,† and Kelly Cohen,‡
College of Enginering and Applied Science, University of Cincinnati, Cincinnati, Ohio
This research project, in the field of control systems, was funded by the
National Science Foundation through the Research Experience for Under-
graduate (REU) students. The objective of this project was to combine the
robustness of fuzzy logic control with the adaptability of genetic algorithms
to produce a self-optimizing oscillation damping control mechanism. Once
an initial fuzzy inference system (FIS) is developed by an expert for a given
dynamic system, the genetic algorithm will be able to optimize the FIS for a
range of similar systems with varying parameters. In order to evaluate the
control mechanisms developed during this project, a simulation of a two-
cart spring-mass system was developed in MATLAB. The performance of
the controllers was determined by how quickly it could approach a wall and
how close it was able to settle the car system to the wall without crashing.
The membership functions of the FIS were reduced to an array of real-
valued parameters in order to be used in a genetic algorithm. Once the
genetic representation of the FIS was defined, the selection, reproduction,
and mutation methods were developed to complete the genetic algorithm.
The best solution developed by the genetic algorithm was evaluated against
the hand-tuned solution developed in a previous phase of the project. In
order to simulate varying parameters between similar dynamic systems, the
mass of the car system in the simulation was varied from 3 kg to 20 kg. For
each weight change the genetic algorithm was allowed to re-optimize the
parameters of the FIS. The performance of the genetic algorithm, with re-
spect to the theoretical best, varied up to 3 %, while the unmodified FIS
∗Senior, Department of Electrical Engineering and Computing Systems†Sophomore, Department of Aerospace and Engineering Mechanics‡Associate Professor, Department of Aerospace and Engineering Mechanics
1 of 18
Dow
nloa
ded
by K
elly
Coh
en o
n Ja
nuar
y 9,
201
5 | h
ttp://
arc.
aiaa
.org
| D
OI:
10.
2514
/6.2
015-
0890
AIAA Infotech @ Aerospace
5-9 January 2015, Kissimmee, Florida
AIAA 2015-0890
Copyright © 2015 by the American Institute of Aeronautics and Astronautics, Inc. All rights reserved.
AIAA SciTech

varied up to 300 %. These results show that genetic algorithms are neces-
sary to allow fuzzy control mechanisms to adapt to different systems with
little external input from a general user.
Nomenclature
Ci Genetic parent
F Control force, N
I Genetic selection interval
K Spring Constant, N/m
L Simulation length, m
M Total system mass, kg
d Genetic interval buffer distance
m Cart mass, kg
t Time, s
xji Parameter of genetic individual
x(t) Cart position, m
x(t) Cart velocity, m/s
x(t) Cart acceleration, m/s2
y System state vector
Subscripts
0 Denotes initial condition
1 Denotes property of trailing cart
2 Denotes property of leading cart
f Denotes condition at settling time
Symbols
α Genetic parameter modifier
∆(t, x) Genetic mutation function
λ Random constant
τ Coin flip value
I. Introduction
Fuzzy logic systems are used as control systems which are capable of handling the vague-
ness of the real world. Fuzzy logic can model and control nuances overlooked by the
binary logic of conventional computers.1 In fuzzy logic, the truth of any statement becomes
2 of 18
Dow
nloa
ded
by K
elly
Coh
en o
n Ja
nuar
y 9,
201
5 | h
ttp://
arc.
aiaa
.org
| D
OI:
10.
2514
/6.2
015-
0890

a matter of degree. Take for example, determining the timespan of the weekend.2 Binary
logic allows only a yes/no answer to the question: “Is this day part of the weekend?” How-
ever, human reasoning does not consider the “weekendness” of a day to immediately rise to
a value of one from zero at exactly 12am Saturday. We usually view most of Friday as a
part of the weekend, determined by when we decide to quit working. Fuzzy logic allows us
to specify that most of Friday is considered the weekend as well by assigning it a value of
less than one but greater than zero. This distinction gives the fuzzy logic system much more
robustness compared to binary logic as it can map a larger range of inputs.
Many structural dynamics problems may be represented by a coupled set of second-
order dynamic systems.3 Coupled rigid-body and flexible body dynamics are sensitive to
movement vibrations, which add instability to the structures. The best solution is to use
active control to augment structural dynamics. The objective for this research project is
to develop an effective non-linear active structural control methodology to provide stability
in large flexible structures. Such structures include robotic manufacturing arms that must
perform tasks in a quick and accurate manner. This project also takes into consideration
managing stability with minimum cost. Stability in these structures is obtained by damping
oscillations that occur during rapid movement of the structure.
Optimization of the non-linear fuzzy logic controller is best accomplished using genetic
algorithms. Fuzzy logic controllers are defined by a large set of parameters which greatly
increase the search space to find optimum values for the controller. Genetic algorithms
mimic natural evolution through Darwinian selection.4 Individuals who are best suited to
the environment survive and produce the next generation. Over a large number of generations
individuals become stronger as the weaker individuals are filtered out. Starting with a large
number of diverse solutions allows for larger portions of the search space to be investigated
and to then converge on areas that provide the best solutions. The automation of the
optimization process generalizes the fuzzy logic controller so that it may be easily applied
to different systems with varying requirements and parameters.
A. Goals and Objectives
The primary goal of this research is to develop an optimized, non-linear active structure
control methodology for coupled flexible-rigid body structures. The following objectives
have been identified to achieve this goal:
• Understand how fuzzy systems exert active control on coupled dynamic systems.
• Study several different proposed control solutions.5,6, 7, 8
• Develop a fuzzy control system from identified characteristics.
3 of 18
Dow
nloa
ded
by K
elly
Coh
en o
n Ja
nuar
y 9,
201
5 | h
ttp://
arc.
aiaa
.org
| D
OI:
10.
2514
/6.2
015-
0890

• Learn and apply optimization techniques to the newly developed control system.
B. Approach
We undertook the following research tasks to achieve the previously stated objectives:
1. Developed a simulation of a spring to provide a testing environment for the damping
controllers.
2. Analyzed several proposed solutions to determine the best characteristics and rule base
for the fuzzy controller.
3. Developed and hand-tuned a fuzzy logic damping controller to outperform all other
controllers in the simulation
4. Implemented a genetic algorithm to further optimize the fuzzy logic damping controller.
II. Coupled Spring-Mass Simulation Model
A simulated environment is necessary to test the efficacy of the proposed fuzzy inference
systems (FIS). The simulation consists of two cars connected by a spring; this system
is expected to traverse a given distance as quickly as possible without exceeding a certain
bound represented by a wall. The system is propelled by a force on the leading car which
represents the actuating output of the controller. At each time instant, the controller must
determine how much force to exert on the carts, and in which direction, to get as close as
possible to the wall in minimum time. The constants for the model are the weight of each
car, the spring constant, and the distance which must be traversed to the wall. A diagram
of the simulation is shown in figure 1 on the following page.
m1 = 1 kg, m2 = 2 kg, K = 250N
m, L = 100 m
The modeled system contains displacement and velocity sensors on each cart; therefore,
the four inputs to the FIS are the distances traveled and the velocities of both carts. These
inputs represent the state vector of the system. The output of the controller is the force,
F (t), applied to cart 2, limited to ±1 N. At each time step of the simulation, the FIS uses
the four inputs to determine the force which must be exerted according to a fuzzy rule base.
4 of 18
Dow
nloa
ded
by K
elly
Coh
en o
n Ja
nuar
y 9,
201
5 | h
ttp://
arc.
aiaa
.org
| D
OI:
10.
2514
/6.2
015-
0890

Figure 1. Diagram of two rigid bodies connected by a spring traversing distance L in minimumtime.
Input : ~y(t) =
x1(t)
x2(t)
x1(t)
x2(t)
Output : |F (t)| ≤ 1 N
At time t = 0, both carts are at rest at position x = 0. The maximum allowed runtime of
the simulation is 500 s. The system requirement for the final condition is that neither cart
exceeds 100 m and should be at rest with negligible oscillation.
~y0 =
0 m
0 m
0 m/s
0 m/s
, ~y(500) =
< 100 m
< 100 m
0 m/s
0 m/s
The acceleration of cart 1 is determined by the displacement between the two carts, the
spring constant, and the mass of the cart. The acceleration of cart 2 is also a function of
these parameters as well as the control force. The equations of motion for the system are
represented by simple second-order differential equations.
Cart1 : x1 =K
m1
(x2 − x1) (1)
Cart2 : x2 =K
m2
(x1 − x2) +F
m2
(2)
5 of 18
Dow
nloa
ded
by K
elly
Coh
en o
n Ja
nuar
y 9,
201
5 | h
ttp://
arc.
aiaa
.org
| D
OI:
10.
2514
/6.2
015-
0890

A. Data Evaluation
The efficiency of a FIS’s control of the system is based upon the amount of time it expends
traversing the distance to the wall and how close the carts are to the wall when they settle.
Any breach of the wall results in immediate system failure. A cost function, J , is defined
by the settling time tf , the time taken to settle within 1 m of the wall and the steady state
error, the distance between the leading carts and the wall. The control system that produces
the lowest J value will be proven to be the most fit solution for the simulation.
tf = |L− x(tf )| ≤ 1 m (3)
J =tf
100+ 2[L− x2(500)] (4)
where the constants 100 and 2 are scaling factors. In order to provide a frame of reference
for the performance of any control system, the theoretical limits of the simulation were
calculated to provide a lower bound for the value of Eq. (4). Assuming a single rigid body
assembly with no dynamic coupling, the model is greatly simplified to a single equation
where the acceleration of the body is a function of only the control force.
x =F
M(5)
where M is the total mass of the system. The total mass of the system is 3 kg, whereas the
maximum input force is limited to 1 N, rendering Eq. (5)
x =1 N
3 m=
1
3
m
s2
as the maximum acceleration. Given this acceleration and the distance to be traversed to
the wall, the minimum time to complete the trip can be calculated. There are, however, two
scenarios to consider.
1. Applying maximum force over the entire distance and instantaneously stopping the
carts at (but not touching) the wall provides an absolute, if unfeasible, optimum sim-
ulation completed in minimum time. Given an initial velocity of zero and a constant
accelerating force of 1 N, the traversal time is calculated. Note that once the carts have
breached 99 m, the system may come to rest and be considered settled.
x(t) = x0t+1
2xt2, x0 = 0
6 of 18
Dow
nloa
ded
by K
elly
Coh
en o
n Ja
nuar
y 9,
201
5 | h
ttp://
arc.
aiaa
.org
| D
OI:
10.
2514
/6.2
015-
0890

x(t) =1
2xt2
Letting x(t) = 99 m
t =
√2x(t)
x=
√2 · 99 m13
m/s2= 24.37 s
2. Applying maximum force over half of the distance and then applying maximum neg-
ative force in the second half to slow the velocities of the carts to zero at the wall
position.
First half:
t =
√2x(t)
x=
√2 · 50 m13
m/s2= 17.23 s
Traversing the second half and stopping at the wall takes the same amount of time,
therefore the total time expended in reaching 100 m is 34.46 s; however, we are inter-
ested in the time taken to breach the 99 m mark. The time taken to travel the last
meter is 2.45 s, so the best possible time to reach the 99 m position is :
t = 32.19 s
As this is a much more realistic scenario, this is the limit used as the benchmark in
this research. Using this time to evaluate Eq. (4)
J =32.19
100+ 2[100− 100] = 0.3219
results in the minimum possible cost. The addition of harmonic oscillation and non-
linear dynamics ensures that this limit will not be reached, but merely provides a
standard against which a controller may be measured.
III. Fuzzy Inference System
A fuzzy inference system (FIS) is a control system built on the basic principles of fuzzy
logic1.9 It can take an arbitrary number analog inputs and map them to a set of logical
variables ranging from 0 to 1. This mapping is performed by membership functions, which
determine the degree of membership each input has to a function. Each input typically has
multiple membership functions. Based on the value of the input, it will have a different value
for each membership function. Each of these membership functions are evaluated according
to a linguistic rule base of IF-THEN statements which determines the analog output variable.
By using the set of rules and the memberships functions, the FIS is able to determine an
7 of 18
Dow
nloa
ded
by K
elly
Coh
en o
n Ja
nuar
y 9,
201
5 | h
ttp://
arc.
aiaa
.org
| D
OI:
10.
2514
/6.2
015-
0890

appropriate analog output given a set of analog inputs.
The FIS built during this project uses two measured inputs: the position and velocity of
cart 2. The output of the FIS is the force exerted on cart 2 at a given point in the simulation.
A. Membership Functions and Rule Base
1. Position
The first input variable, position, is composed of three membership functions to which it
can map. The position of the car, from 0 m to 100 m, is described in human-understandable
language as far away, close to, or very close to the wall. If the simulation has just begun
and the cart is as far away from the wall as it can be, the “Far” membership function will
map to 1 and the “Close” and “VeryClose” functions will evaluate to 0. Conversely, at the
end of the traverse, as the car approaches the wall, “VeryClose” will map to 1 and “Far” to
0. “Close” may evaluate to some value in between. The membership functions are shown
in figure 2(a) on the next page. As the system predominately behaves as a rigid body on
a large scale, the membership functions mirror the ideal simulation of a rigid body for the
majority of the carts’ travel. Each function is represented by a vector of values expressing
the points at which the function switches from 0 to 1 or 1 to 0. For the FIS used in this
research, trapezoidal- and triangular-shaped membership functions are utilized. Trapezoids
are represented by a four-element vector as they start at 0, rise to 1, remain at 1, and
finally fall to 0. Likewise, triangular functions are expressed as three-element vectors. The
parameters of the position membership functions shown in figure 2(a) on the following page
are:
Far : Trapezoid
0 m
0 m
49.8 m
50.1 m
, Close : Trapezoid
49.8 m
50.1 m
9909 m
100 m
,
VeryClose : Triangle
99.9 m
100 m
100.1 m
2. Velocity
The second input variable, velocity, is composed of three membership functions. The velocity
of the cart, within a range from −6 m/s to 6 m/s, can either be classified as “Negative”,
“Zero”, or “Positive”. When the simulation starts, the carts are at rest and the degree of
membership to “Zero” velocity will be 1 whereas “Negative” and “Positive” will be 0. For
8 of 18
Dow
nloa
ded
by K
elly
Coh
en o
n Ja
nuar
y 9,
201
5 | h
ttp://
arc.
aiaa
.org
| D
OI:
10.
2514
/6.2
015-
0890
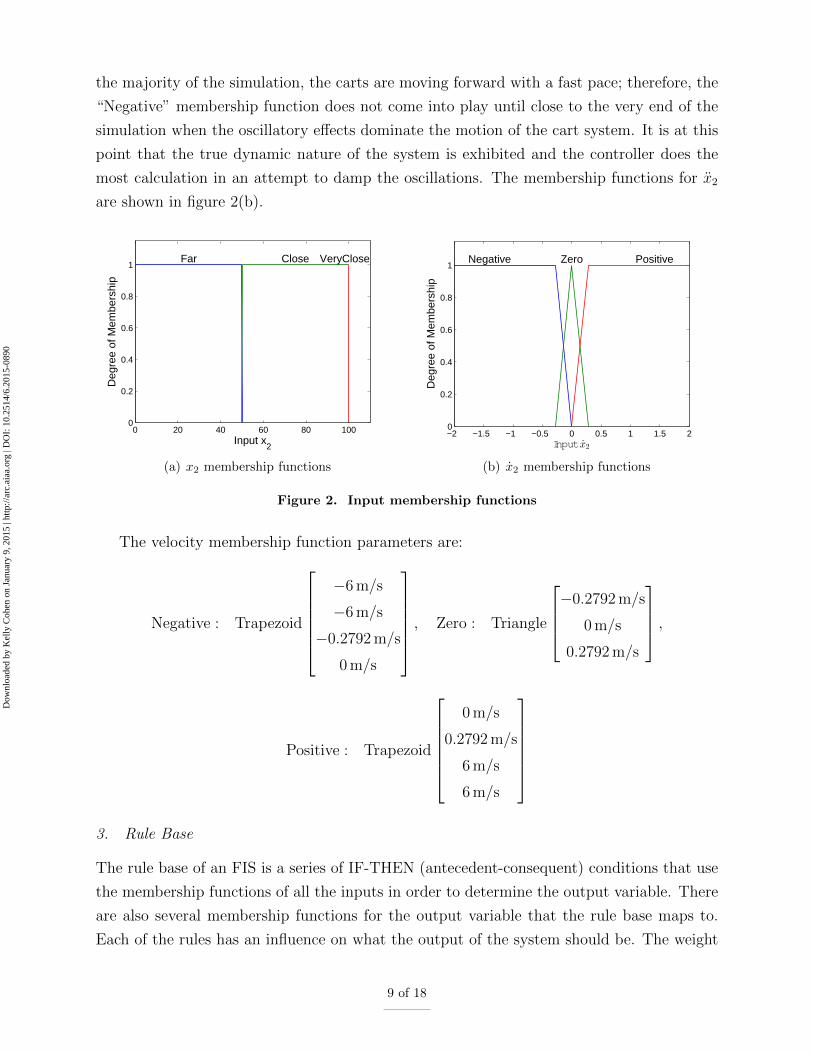
the majority of the simulation, the carts are moving forward with a fast pace; therefore, the
“Negative” membership function does not come into play until close to the very end of the
simulation when the oscillatory effects dominate the motion of the cart system. It is at this
point that the true dynamic nature of the system is exhibited and the controller does the
most calculation in an attempt to damp the oscillations. The membership functions for x2
are shown in figure 2(b).
0 20 40 60 80 1000
0.2
0.4
0.6
0.8
1
Deg
ree
of M
embe
rshi
p
Input x2
Far Close VeryClose
(a) x2 membership functions
−2 −1.5 −1 −0.5 0 0.5 1 1.5 20
0.2
0.4
0.6
0.8
1
Deg
ree
of M
embe
rshi
pInputx2
Negative Zero Positive
(b) x2 membership functions
Figure 2. Input membership functions
The velocity membership function parameters are:
Negative : Trapezoid
−6 m/s
−6 m/s
−0.2792 m/s
0 m/s
, Zero : Triangle
−0.2792 m/s
0 m/s
0.2792 m/s
,
Positive : Trapezoid
0 m/s
0.2792 m/s
6 m/s
6 m/s
3. Rule Base
The rule base of an FIS is a series of IF-THEN (antecedent-consequent) conditions that use
the membership functions of all the inputs in order to determine the output variable. There
are also several membership functions for the output variable that the rule base maps to.
Each of the rules has an influence on what the output of the system should be. The weight
9 of 18
Dow
nloa
ded
by K
elly
Coh
en o
n Ja
nuar
y 9,
201
5 | h
ttp://
arc.
aiaa
.org
| D
OI:
10.
2514
/6.2
015-
0890

of these influences again varies from 0 to 1 and the final output value is determined by
calculating the centroid of all of the rules. For instance, one rule dictates that if the car is
far away then the output force should be positive and large so that the car will move towards
the wall. Another rule will say that when the car is close to the wall the output force should
be negative in order to slow the car down. All of these rules have influence over all input
ranges determined by how the input variables map to the given membership functions in
that specific rule.
The antecedent of each statement contains memberships of both input variables and the
consequent maps to the output membership functions. The rules for this FIS were developed
based upon intuitive decision making. The rules developed for our FIS are shown in Table 1.
Table 1. Rule Base of the Fuzzy Inference System
Velocity Measurement
Negative Zero Positive
PositionMeasurement
Far Positive
Close Positive Zero Negative
VeryClose Positive Zero Negative
Control Force
4. Control Force
−2 −1.5 −1 −0.5 0 0.5 1 1.5 20
0.2
0.4
0.6
0.8
1
Deg
ree
of M
embe
rshi
p
Output Force
Negative Zero Positive
Figure 3. Control force
membership functions.
The output variable, force, is also composed of three mem-
bership functions. The output force is bounded from −1 N to
1 N thus the membership functions allow for the output to be
“Negative”, “Zero”, or “Positive”. As the centroid of the area
beneath each function is used to evaluate the control force,
the upper and lower bounds are centered over 1 and -1 respec-
tively. These functions represent the “defuzzification” stage of
the FIS and these outputs are determined by evaluating each
rule in the rule base (see § 3 on the previous page) in parallel.2
The controller emulates bang-bang control for the majority of
the simulation lifetime, sharply transitioning from full acceleration to full deceleration. As
the cart system nears the wall, the oscillation damping rules will dictate the force to apply
10 of 18
Dow
nloa
ded
by K
elly
Coh
en o
n Ja
nuar
y 9,
201
5 | h
ttp://
arc.
aiaa
.org
| D
OI:
10.
2514
/6.2
015-
0890

on the system. Typically, the output force will be directed opposite to the velocity of cart 2.
The membership functions for the control force are shown in figure 3 on the preceding page.
Negative : Triangle
−2 N
−1 N
0 N
, Zero : Triangle
−1 N
0 N
1 N
, Positive : Triangle
0 N
1 N
2 N
B. Simulation Performance
0 10 20 30 40 50
−1
−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
1
Time (s)
Con
trol
ler
For
ce (
N)
Figure 4. System control
force over time.
The efficiency of this FIS was determined by using it as the
control mechanism in the simulation. The goal was to approach
the realistic theoretical limits calculated above and reach this
goal with minimum force. Table 2 shows the settling time, final
position of cart 2 and the calculated J value for the controller’s
performance. Figure 4 shows the controller’s output force over
time for each step of the simulation. The controller’s output
force is much lower than previously tested fuzzy solutions as
well as an optimal linear controller.
It is clear that the controller expends less energy than a
traditional bang-bang type controller would in the oscillation damping process. It can be
seen that the FIS responds quickly to control needs and applies the needed force with low-
latency.
Much work was done to hand-tune this controller to perform optimally, thus the work
was undertaken to develop a genetic algorithm to produce similar results autonomously.
Automating the tuning process ultimately produces a controller which is nearly as good as
the hand-tuned controller, but requires little to no effort from the programmer.
Table 2. Results from implemented FIS.
tf x2(500) J
32.303 s 99.999 821 m 0.32328
IV. Genetic Algorithm
The performance of the FIS depends directly on the value of each parameter of the
membership functions. These values were hand-tuned by a time-consuming process of
trial and error. To quicken this process, a genetic algorithm was utilized to autonomously
tune the membership functions and approach an optimal solution.
11 of 18
Dow
nloa
ded
by K
elly
Coh
en o
n Ja
nuar
y 9,
201
5 | h
ttp://
arc.
aiaa
.org
| D
OI:
10.
2514
/6.2
015-
0890

A genetic algorithm is a computational mechanism which imitates evolutionary behavior
to achieve optimality. It consists of a population of individuals which undergoes a process
similar to natural selection, reproduction, and mutation over the course of a number of
generations.4 Selection is attained by evaluating the fitness of each individual according
to a fitness function. For the purposes of this research, each individual represents a FIS
and the fitness function is simply the cost function used earlier. The individual which most
effectively minimizes the cost function is considered most fit for the control environment.
In order to manipulate the FIS structure in an algorithmic manner, it is necessary to
represent it as a genetic individual. Since the values of the parameters of the membership
functions of the FIS have significant impact on the control performance, it was decided to
manipulate only these parameters with the algorithm; however, of the thirty-one parameters
which comprise this FIS model, many are trivial to the overall performance. It is desirable
to reduce the number of parameters to facilitate the optimization process.
A. Parameter Reduction
To simplify the genetic tuning of the parameters, the symmetry of the system was exploited.
The parameters were reduced from thirty-one to seven. The position membership functions
were simplified to only three parameters by defining a center point (center) between far and
close functions, a distance from the center point at which the far and close functions will be
valued at 0 and 1 respectively (iTrap1), and half of the base of the triangular membership
function which decides when the car is very close to the wall (iTriBase1). The velocity mem-
bership function parameters were reduced to two parameters by defining the one parameter
for the distance from 0 that each of the membership functions reaches 1 for the negative and
positive functions (iTrap2) and another to define half of the base of the zero velocity triangu-
lar membership function (iTriBase2). The output force membership functions were reduced
similarly by allowing the negative and positive membership functions become trapezoidal
(oTrap and oTriBase).
• Position Membership Function Parameter
Far : Trapezoid
0
0
(center − iT rap1)
(center + iT rap1)
, Close : Trapezoid
(center − iT rap1(center + iT rap1)
99.9
100
,
12 of 18
Dow
nloa
ded
by K
elly
Coh
en o
n Ja
nuar
y 9,
201
5 | h
ttp://
arc.
aiaa
.org
| D
OI:
10.
2514
/6.2
015-
0890

VeryClose : Triangle
(100− iT riBase1)
100
(100 + iT riBase1)
• Velocity Membership Function Parameters
Negative : Trapezoid
−6
−6
(0)− iT rap2)
0
, Zero : Triangle
(0− iT riBase2)
0
(0 + iT riBase2)
,
Positive : Trapezoid
0
(0 + iT rap2)
6
6
• Control Force Membership Function Parameters
Negative : Trapezoid
−2
(−1− oTrap)(−1 + oTrap)
0
, Zero : Triangle
(0− oTriBase)
0
(1 + oTriBase)
,
Positive : Trapezoid
0
(1− oTrap)(1 + oTrap)
2
These Parameter reductions allow an individual to be defined by a single vector of seven
variables.
13 of 18
Dow
nloa
ded
by K
elly
Coh
en o
n Ja
nuar
y 9,
201
5 | h
ttp://
arc.
aiaa
.org
| D
OI:
10.
2514
/6.2
015-
0890

• Individual Definition
iT rap1
center
iTriBase1
iT rap2
iT riBase2
oTrap
oTriBase
B. Population Initialization
An initial population is generated by assigning random values to each of the individual
parameters within given ranges. iTrap1, iTriBase1, and oTriBase are allowed to vary between
0.05 and 1. iTrap2 and iTriBase2 are allowed to vary between 0.05 and 2. Center values
fall between 45 and 55, and oTrap between 0.05 and 0.95. Twenty individuals comprise a
population. Each individual is evaluated for fitness and brought up for selection to produce
a new generation.
C. Parent Selection and Reproduction
A new generation consists of three individuals which remain unchanged from the previous
generation, called elite children, ten individuals which are created from recombination of
two parents, five individuals which are created from mutating recombined children, and two
individuals randomly defined from the previously defined ranges.
Parents are selected by selecting the three best fit individuals to both become parents
and elite children. Seven more parents are selected by randomly choosing three individuals
from the remaining population, selecting the most fit, and returning the other two. This
tournament style of selection is repeated until all parents are selected.
Reproduction occurs by blended crossover process with an α modification (BLX-α), by
selecting a new parameter x′i from the range [xmin − Iα, xmax + Iα], where
xmin = min(x1i , x2i ) and xmax = max(x1i , x
1i )
Parents are defined as
C1 = (x11, x12, · · · , x17) and C2 = (x21, x
22, · · · , x27)
14 of 18
Dow
nloa
ded
by K
elly
Coh
en o
n Ja
nuar
y 9,
201
5 | h
ttp://
arc.
aiaa
.org
| D
OI:
10.
2514
/6.2
015-
0890

I =xmax − xmin
bi − aiα = min(d1, d2)
d1 = xmin − ai and d2 = bi − xmax
The interval [ai, bi] is the parameter-specific range. This mechanism allows the algorithm
to create a child from two parents which is a blend of both parents, while still expanding
the search space. As a population generally converges on a solution, so too do the children
of the population.
D. Mutation
Five of the recombined children are selected by random sampling and then two randomly
sampled parameters are selected from each of these child for mutation. Mutation is defined
to be nonuniform such that the mutation has a smaller effect in later generations as follows:
x′i =
ai + ∆(t, xi − ai), if τ = 0
bi −∆(t, bi − xi), if τ = 1
where τ represents a coin flip such that P (τ = 1) = P (τ = 0) = 0.5
∆(t, x) = x(1− λ(1− t
tmax
)b)
where t is the current generation, and tmax is the maximum number of generations. The
variable λ is a random value from the interval [0, 1]. The function ∆ computes a value in the
range [0, x] such that the probability of returning a zero increases as the algorithm advances.
The value of b determines the impact of the time on the probability distribution of ∆. The
value of b is set to 1.5 for algorithm for this research.
Two additional children are added to the population by random selection from the ranges
in order to ensure that the search space is sufficiently large.
V. Results
Running the algorithm for 50 generations yields a FIS which performs as well as the
hand-tuned FIS from B on page 11. This result converges out of the evolution process
quickly as can be seen in figure 5(a) on the following page. Though the algorithm finds
a near optimal solution quickly, it continues to search similar solutions, selecting the best
15 of 18
Dow
nloa
ded
by K
elly
Coh
en o
n Ja
nuar
y 9,
201
5 | h
ttp://
arc.
aiaa
.org
| D
OI:
10.
2514
/6.2
015-
0890

individuals each time to produce progressively better fit children each generation. Figure 5(b)
shows the average fitness of generation. It is clear from this plot that the algorithm produces
many unfit children in its search for optimality. This satisfies the need of a good algorithm
to expand the search area to eliminate premature convergence.
The results of the performance of the most fit individual produced by the genetic algo-
rithm are shown in Table 3.
Table 3. Final Results from algorithm-generated FIS
tf x2(500) J
32.308 s 99.999 999 m 0.32311
0 10 20 30 40 50
0.35
0.4
0.45
0.5
0.55
0.6
0.65
0.7
Generation
Mos
t Fit
Indi
vidu
al
(a) Best fit individual by generation.
0 10 20 30 40 500
50
100
150
200
250
300
350
Generation
Ave
rage
Fitn
ess
of P
opul
atio
n
(b) Individual fitness average by generation.
A. Genetic Adaptability
These results demonstrate the ability of the genetic algorithm to tune a FIS to near-optimal
performance. All tuning and development heretofore was done with an unchanging system
setup of known masses connected by a known spring. Although a robust controller,3 intro-
ducing changes to the masses of each car significantly alters the performance of the FIS as
it was carefully tuned to only a certain envelope; however, utilizing the genetic algorithm
to generate an optimum FIS for each new system setup is an efficient method of developing
good active controllers. This is demonstrated by changing the masses m1 and m2 to 2 kg
and 4 kg respectively. They are again changed to 4 kg and 8 kg, and finally 4 kg and 16 kg.
The algorithm was deployed for each case to optimize a controller for that envelope. After
fifty generations of evolution, the genetically optimized FIS performed within 3% of the the-
oretical rigid body limit in all four cases. These results are displayed in Table 4 on the next
page.
16 of 18
Dow
nloa
ded
by K
elly
Coh
en o
n Ja
nuar
y 9,
201
5 | h
ttp://
arc.
aiaa
.org
| D
OI:
10.
2514
/6.2
015-
0890

Table 4. Genetic algorithm FIS performance compared the hand-tuned FIS and rigid bodylimit.
Mass 1 (kg), Mass 2 (kg)
1 kg, 2 kg 2 kg, 4 kg 4 kg, 8 kg 4 kg, 16 kg
Theoretical Limit 0.3191 0.4553 0.6438 0.8312
GA FIS 0.3231 0.4562 0.6579 0.8434
Hand-tuned FIS 0.3230 0.6125 5.3072 3.3240
GA Error 1.3% 0.2% 2.2% 1.5%
Hand-tuned Error 1.2% 34.5% 724.4% 299.9%
It is easily seen in these results that the use of the genetic algorithm is advantageous
in the autonomous development of near optimal FIS controllers. Given a generic control
architecture, the genetic algorithm is able to tune a FIS rapidly and accurately for a varied
set of circumstances.
VI. Conclusions
Fuzzy logic provides a robust framework for control. It has been demonstrated that
proper fuzzy control is efficient and computationally inexpensive. The inherent vague-
ness of set membership and linguistic operation of fuzzy logic allows the controller to mimic
expert human control. This superior control, however, comes with a steep cost in FIS devel-
opment. Hand-tuning a FIS is time-consuming and tedious.
The use of the genetic algorithm facilitates FIS development. Once a FIS has been
developed for a general type of control situation, it is relatively simple to define the FIS as
a genetic element and automate the tuning through the evolutionary process. These results
imply that if a general fuzzy controller is developed for a family of control situations, then
a genetic algorithm can be implemented to tune each FIS to its specific task. The tuning,
therefore, can be accomplished by someone with no expertise in the control of the situation.
As the computation is quick, efficient control could be widely distributed due also to the
low-cost of development.
References
1Kosko, B., Fuzzy Thinking, The New Sciencs of Fuzzy Logic, Hyperion, NY, 1994.
2The MathWorks Inc, Natick, Massachusetts, United States, MATLAB and Fuzzy Logic Toolbox Release
2012b, 2012.
3Cohen, K., Weller, T., and Ben-Asher, J., “Control of Linear Second-Order Systems by Fuzzy Logic-
Based Algorithm,” Journal of Guidance, Control, and Dynamics, Vol. 24, No. 3, 2001, pp. 494–501.
17 of 18
Dow
nloa
ded
by K
elly
Coh
en o
n Ja
nuar
y 9,
201
5 | h
ttp://
arc.
aiaa
.org
| D
OI:
10.
2514
/6.2
015-
0890

4Cordon, O., Herrera, F., Hoffmann, F., and Magdalena, L., Genetic Fuzzy Systems, Evolutionary Tuning
and Learning of Fuzzy Knowledge Bases, World Scientific Publishing Co., MA, 2001.
5Walker, A., “untitled,” Class project.
6Stimetz, A., “untitled,” Class project.
7Mitchell, S., “untitled,” Class project.
8Vick, T., “untitled,” Class project.
9Kosko, B. and Isaka, S., “Fuzzy Logic,” Scientific American, , No. 269, 1993, pp. 76–81.
18 of 18
Dow
nloa
ded
by K
elly
Coh
en o
n Ja
nuar
y 9,
201
5 | h
ttp://
arc.
aiaa
.org
| D
OI:
10.
2514
/6.2
015-
0890
Related Documents










