DOKUZ EYLÜL UNIVERSITY GRADUATE SCHOOL OF NATURAL AND APPLIED SCIENCES GEARBOX HEALTH MONITORING AND FAULT DETECTION USING VIBRATION ANALYSIS by Hasan ÖZTÜRK November, 2006 İZMİR

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

DOKUZ EYLÜL UNIVERSITY
GRADUATE SCHOOL OF NATURAL AND APPLIED
SCIENCES
GEARBOX HEALTH MONITORING AND FAULT DETECTION USING VIBRATION ANALYSIS
by
Hasan ÖZTÜRK
November, 2006
İZMİR

GEARBOX HEALTH MONITORING AND FAULT
DETECTION USING VIBRATION ANALYSIS
A Thesis Submitted to the
Graduate School of Natural and Applied Sciences of Dokuz Eylül University
In Partial Fulfillment of the Requirements for the Degree of Doctor of
Mechanical Engineering, Machine Theory and Dynamics Program
by
Hasan ÖZTÜRK
November, 2006
İZMİR


iii
ACKNOWLEDGMENTS
First of all, I would like to thank my supervisor, Prof. Dr. Mustafa SABUNCU,
for his support and guidance throughout this research.
I am sincerely grateful to Doç.Dr. İsa YEŞİLYURT from Uşak University, who
first introduced me to condition monitoring. I thank him for his help, guidance,
criticism, very kind interest and encouragement throughout the course of this work.
I would also like to thank Prof. Dr. Hira KARAGÜLLE and Prof. Dr. Haldun
KARACA for their help with valuable suggestions and discussions.
I am also thankful to my colleagues for their moral support throughout this study.
The financial support from the Accountancy of Research Funds of Dokuz Eylül
University is greatly appreciated.
I would also like to thank Yılmaz Redüktör A.Ş., BEŞOK Mould&Plastic,
AYHAN Dişli Sanayi, AŞMAŞ A.Ş. and technicians at the department of
mechanical engineering.
I would like to thank my parents, Osman, Nazlı ÖZTÜRK and my sister Fatma
ÖZTÜRK, for their loving support throughout my education.
Finally, special thanks to my wife Yeşim YÜCEL ÖZTÜRK for all her
encouragement and patience during this study.
Hasan ÖZTÜRK

iv
GEARBOX HEALTH MONITORING AND FAULT DETECTION USING
VIBRATION ANALYSIS
ABSTRACT
Gear systems are used to transfer rotation or power transmission from one shaft to
another in desired ratios and high efficiency. These factors can be satisfactorily
achieved if there is no fault in the gears. Whenever a defect occurs in a gear system
(e.g. pitting, abrasive wear, bending fatigue cracks) the performance of the gears
deteriorate. Transmission of motion and power, therefore, cannot be transferred as
demanded. As a result, occurrence of fatal defects becomes inevitable.
The research work presented in this thesis focuses upon the early detection of
localised and distributed pitting damages, and a real-time fatigue failure in a gearbox
using vibration analysis. The gear pitting failure modes have been realistically
simulated on a few tooth surfaces in differing degrees of fault severity. The tooth
crack has been achieved due mainly to bending fatigue during the fatigue test. Real
gear vibrations have been obtained from two different test rigs utilising a two-stage
industrial helical gearbox.
Classical processing schemes in the time and frequency domains have been firstly
employed to obtain general characteristics of gear vibration. Continuous wavelet
transform has been then used to obtain a scalogram from which both mean frequency
and instantaneous energy variations are generated.
Conclusions are drawn about the effective vibration monitoring of gearboxes and
the ways of early detection.
Keywords: Gear fault, gearbox vibration, fault detection, vibration-based condition
monitoring.

v
TİTREŞİM ETÜDÜ YARDIMIYLA DİŞLİ KUTULARININ SAĞLIKLI
ÇALIŞMASININ İZLENMESİ VE ARIZALARIN TESPİTİ
ÖZ
Dişli çarkların kullanım amacı, dönme veya güç iletiminin istenilen oranda ve
yüksek bir verimlilikte bir milden diğerine aktarmaktır. Dişli çarklarda bir arıza
yoksa istenilen bu özellikler yerine getirilmektedir. Herhangi bir arıza meydana
geldiğinde (oyukçuk, aşınma, diş kırılması, gibi) dişli çarkların performansı
kötüleşmektedir. Bu nedenle hareket ve güç iletimi istenilen özelliklerde
iletilememektedir. Sonuç olarak daha büyük arızaların oluşması kaçınılmaz
olmaktadır.
Bu tezde sunulan araştırma çalışması, titreşim analiziyle dişli kutularındaki lokal
ve dağılmış oyukçuk hataları, ve gerçek zamanlı yorulma hasarlarının erken tespitine
odaklanmaktadır. Dişli oyukçuk hasar şekilleri, farklı hata şiddetlerinde bir kaç diş
yüzeyine gerçeğine yakın biçimde oluşturuldu. Diş çatlağı ise yorulma testi boyunca,
eğilme yorulması sonucu meydana gelmesi sağlandı. Dişli titreşimleri, iki kademeli
bir endüstriyel helisel dişli kutusu kullanılan iki farklı test düzeneğinden elde
edilmiştir.
İlk başta, dişli titreşimlerinin genel karakteristiklerini oluşturmak için zaman ve
frekans bölgelerindeki klasik işlemler uygulandı. Daha sonra, scalogram ve onun
ortalama frekans ile anlık enerji değişimlerini oluşturmak için sürekli dalgacık
dönüşümü kullanıldı.
Sonuçta, dişli kutuların titreşimi izleme yöntemlerinin etkinlikleri ve erken tespit
yolları yargılanmaktadır.
Anahtar sözcükler: Dişli hasarları, dişli kutusu titreşimi, hata tespiti, titreşim esaslı
durum izleme.

vi
CONTENTS
Page
THESIS EXAMINATION RESULT FORM .............................................................. ii
ACKNOWLEDGEMENTS ........................................................................................ iii
ABSTRACT................................................................................................................ iv
ÖZ ................................................................................................................................ v
CHAPTER ONE – INTRODUCTION ...................................................................... 1
1.1 Introduction ......................................................................................................... 1
1.2 Maintenance Procedures...................................................................................... 1
1.2.1 Machinery Condition Monitoring and Diagnosis ........................................ 2
1.2.2 Condition Monitoring Techniques............................................................... 4
1.3. Characteristics of Gearbox Vibration................................................................. 6
1.4 Literature Review................................................................................................ 8
1.4.1 Gear Dynamics and Failures........................................................................ 8
1.4.2 Signal Processing Techniques for Gearbox Fault Detection ....................... 9
1.4.2.1 Time Domain Analysis ...............................................................................9
1.4.2.2 Frequency Domain and Cepstrum Analyses..............................................10
1.4.2.3 Time - Frequency Domain Analysis ..........................................................12
1.5 Research Aims and Objectives............................................................................ 15
1.6 Thesis Outline...................................................................................................... 16
CHAPTER TWO - INTRODUCTION TO GEAR FAILURES ............................. 18
2.1 Introduction ......................................................................................................... 18
2.2 Gear Stresses ....................................................................................................... 19
2.3 Rolling Contact Fatigue Failure in Gears............................................................ 21
2.4 Classification of Gear Failures ............................................................................ 23
2.4.1 Gear Wear and Wear Failures...................................................................... 24
2.4.1.1 Lubrication and Gear-tooth Wear ........................................................ 25

vii
2.4.1.2 Normal wear......................................................................................... 26
2.4.1.3 Moderate and destructive wear ............................................................ 27
2.4.1.4 Scoring ................................................................................................. 28
2.4.1.5 Interference Wear................................................................................. 30
2.4.1.6 Abrasive Wear ..................................................................................... 30
2.4.1.7 Corrosive Wear .................................................................................... 31
2.4.1.8 Flaking ................................................................................................. 32
2.4.1.9 Burning ................................................................................................ 32
2.4.2 Surface-Fatigue Failures.............................................................................. 33
2.4.2.1 Pitting................................................................................................... 33
2.4.2.2 Spalling ................................................................................................ 36
2.4.3 Plastic-Flow Failures ................................................................................... 38
2.4.3.1 Rolling and Peening............................................................................. 38
2.4.3.2 Rippling................................................................................................ 38
2.4.3.3 Ridging................................................................................................. 40
2.4.4 Breakage Failures ........................................................................................ 40
2.4.4.1 Fatigue Breakage ................................................................................. 41
2.4.4.2 Location of Tooth Breakage ................................................................ 43
2.5 Statistics on Types and Causes of Gear Failure .................................................. 44
CHAPTER THREE - EXPERIMENTAL SETUP ................................................... 47
3.1 Introduction ......................................................................................................... 47
3.2 Gear Test Rig Used for Pitting Fault Detection .................................................. 47
3.2.1 Specifications of the Test Rig...................................................................... 47
3.2.2 Instrumentation for Vibration Monitoring................................................... 50
3.3 Gear Test Rig Used for the Real-Time Tooth Breakage Monitoring.................. 52
3.3.1 Specifications of the Test Rig...................................................................... 52
CHAPTER FOUR - DEFECT DETECTION TECHNIQUES................................ 60
4.1 Introduction ......................................................................................................... 60
4.2 Time Domain Analysis........................................................................................ 61
4.2.1 Time Domain Averaging ............................................................................. 61
4.2.2 Statistical Analysis ...................................................................................... 62

viii
4.3 Frequency Domain Analysis ............................................................................... 63
4.4 Extensions to Conventional Frequency Analysis................................................ 65
4.4.1 Signal Demodulation ................................................................................... 65
4.4.2 Cepstrum Analysis....................................................................................... 67
4.5 Combined Time-Frequency Domain Analysis.................................................... 69
4.5.1 Wavelet Analysis ......................................................................................... 73
4.5.1.1 The Continuous Wavelet Transform.................................................... 73
4.5.1.1.1 The Analysing Wavelet................................................................ 74
4.5.1.1.2 Time-Frequency Analysis by Wavelet Transform....................... 78
4.5.1.1.3 Properties of the Wavelet Transform ........................................... 82
4.5.1.1.4 Scalogram and its Mean Frequency ............................................ 83
4.5.1.1.5 Implementation of the Wavelet Transform .................................. 83
4.5.1.2 The Discrete Wavelet Transform......................................................... 86
4.5.1.2.1 Theory of the DWT...................................................................... 86
4.5.1.2.2 Wavelet De-Noising..................................................................... 89
CHAPTER FIVE - EARLY DETECTION AND ADVANCEMENT
MONITORING OF LOCAL PITTING FAILURE IN GEARS ............................. 92
5.1 Introduction ......................................................................................................... 92
5.2 Pitting Fault ......................................................................................................... 92
5.3. Experimental Setup and Pitting Fault Simulation .............................................. 94
5.3.1. Gear test rig ................................................................................................ 94
5.3.2. Pitting fault simulation ............................................................................... 95
5.4 Analysis of Gear Vibration.................................................................................. 96
5.4.1 Time and frequency domain analyses ......................................................... 96
5.4.2 Cepstrum analysis....................................................................................... 101
5.4.3 Scalogram and Its Mean Frequency Analyses............................................. 103
CHAPTER SIX - EARLY DETECTION AND ADVANCEMENT
MONITORING OF DISTRIBUTED PITTING FAILURE IN GEARS................ 111
6.1 Introduction ......................................................................................................... 111
6.2 Gear Test Rig....................................................................................................... 112

ix
6.3 Distributed Pitting Fault Simulation.................................................................... 112
6.4 Time and Frequency Domain Analyses .............................................................. 115
6.5 Cepstrum Analysis ............................................................................................. 118
6.6 Scalogram and Its Mean Frequency Analysis ..................................................... 120
CHAPTER SEVEN - REAL TIME MONITORING AND DETECTION OF
FATIGUE CRACK IN GEARS.................................................................................. 127
7.1 Introduction ......................................................................................................... 127
7.2 Experimental Setup ............................................................................................. 128
7.3 Time and Frequency Domain Analyses .............................................................. 130
7.4 The Application of Cepstrum Analysis ............................................................... 140
7.5 Wavelet Analysis................................................................................................. 144
7.6 Instantaneous Energy (IE) of Scalogram............................................................. 150
CHAPTER EIGHT – CONCLUSIONS..................................................................... 155
8.1 Overview of the Thesis........................................................................................ 155
8.2 General Conclusions about Vibration Based Techniques ................................... 156
8.2.1 Local Pitting Fault ....................................................................................... 156
8.2.2 Distributed Pitting Fault .............................................................................. 157
8.2.3 Tooth Crack Fault ........................................................................................ 158
8.3 Scope for Future Gearbox Condition Monitoring Research ............................... 159
REFERENCES............................................................................................................. 160
APPENDIX - NOMENCLATURE ............................................................................ 172

1
CHAPTER ONE
INTRODUCTION
1.1 Introduction
Effective maintenance of machines and equipment provides great economic
contributions to an industrial plant. The best means of medium and long term
assurance of factors such as continuity in production, preservation of investments
and effective operation of the plant, can be provided by the application of a
continuous and effective maintenance system and the prediction of probable defects
beforehand and taking the necessary measures.
A gearbox is one of the most important equipments in industrial setting, and
typical applications of gearboxes include electric utilities, automotive industry, ships
and helicopters. Gear systems are used to transfer rotary motion or power from one
shaft to another in desired ratios and high efficiency. These factors can be
satisfactorily achieved if there is no fault in the gears. Whenever a defect occurs in a
gear system (e.g. scuffing, pitting, abrasive wear, bending fatigue cracks), the
performance of the gears deteriorates. Transmission of motion and power, therefore,
cannot be transferred as demanded. As a result, occurrence of fatal defects becomes
inevitable. In entirety, gear related failures comprise 60% of faults in gearboxes, and
24% of gearbox failures are caused by ineffective maintenance action. It is for this
reason that gearbox condition monitoring is of significant importance to reduce
failures and to assure continuity of operations.
1.2 Maintenance Procedures
In industrial applications, continuity of production, preservation of invested
capital and economic operation can, in the long term, only be assured by an efficient
and continuous maintenance process, to predict damage and permit the scheduling of
repairs. Maintenance strategies can be categorized in three major groups:
1

2
• Breakdown Maintenance Strategy: In this strategy, the machine is allowed to
run until a failure occurs, and no pre-determined action is taken to prevent
failure. This type of maintenance can only be considered if the machine is
inexpensive to replace, and the failure is not significant other damages.
Breakdown maintenance is the default maintenance strategy.
• Regular Preventive Maintenance: In this strategy, the machine is stopped at
fixed time intervals to maintain the working conditions of the machine. The
maintenance time intervals can be based upon the statistical analysis of
historical maintenance information or upon manufacturer’s data.
• Condition-Based Maintenance: Machines are no longer maintained according
to damage-based policy, but rather depending on their condition. To determine,
evaluate, and predict machine condition and to accurately diagnose any fault,
information is extracted from regularly monitored parameters such as vibration,
temperature and other process parameters. This maintenance strategy should
particularly be applied whenever security of operation is a major concern or
maintenance related problems cannot be tolerated in production.
1.2.1 Machinery Condition Monitoring and Diagnosis
According to Webster’s New World Dictionary of the American Language,
monitoring, among several other meanings, means checking or regulating the
performance of a machine, a process, or a system. Diagnosis, on the other hand,
means deciding the nature and the cause of a diseased condition of a machine, a
process, or a system by examining the symptoms. In other words, monitoring is
detecting suspicious symptoms, while diagnosis is determining the cause of the
symptoms. There are several other words and phrases that have similar or slightly
different meanings, such as fault detection, fault prediction, in-process evaluation,
online inspection, identification, and estimation. Monitoring and diagnosis is an
integrated part of Computer Integrated Manufacturing (CIM) systems. To ensure
proper operation, machines and processes in CIM systems must be continuously

3
monitored and controlled. For example, in an automated machining cell, tool
condition monitoring is very important. Because broken tools or worn-out tools will
inevitably produce scratch parts. Due to the complexity of the machines and
processes, monitoring and diagnosis are usually difficult, involving the use of many
techniques from sensing to signal processing, decision-making, and cost-effective
implementation. In general, and despite the differences among machines, processes,
and systems, engineering monitoring and diagnosis follow a similar structure as
shown in Figure 1 (Leondes, 2000). As shown in the figure, the health condition of a
system (referred to as the system condition) may be considered as the input of the
system and the sensory signals as the outputs of the system, which are also affected
by noise. Through signal processing, the features of the signals (called feature
signals) are captured. Finally, based on the feature signals, the system conditions are
estimated. Clearly, signal processing is very important, without which the critical
information (the feature signals) could not be captured. Depending on the
applications, various sensory signals can be used; for example, force, pressure,
vibration (displacement and acceleration), temperature, voltage, current, acoustics,
acoustics emission, optic image, and etc. (Leondes, 2000).
Figure 1.1 A unified model for engineering monitoring and diagnosis.
A deterministic variation of a signal signifies changes in a machine or process
condition. For example, the excessive temperature increase in an electric motor
usually correlates to its either electrical problems such as a short-circuit or
mechanical problems such as broken bar or scratched bearing. Unfortunately, the

4
signals are also affected by the process working conditions and various noises. In the
above example, the variations in the process working condition may include rotating
speed and the load of the motor; and the noise disturbances may include power
supply fluctuation and sampling or circuit noise. The effects of working conditions
and noise disturbance can be minimized by means of signal processing. All of the
information contained in the signal detected is hidden in the complicated arabesques
appearing in its graphical representation. The objective of signal processing is to
capture the features signal that characterizes the system’s conditions.
1.2.2 Condition Monitoring Techniques
Although a range of methods is available to detect the existence of faults in
machinery, monitoring techniques can be grouped into six categories:
• Aural, tactile, and visual inspection: These are basic condition monitoring
techniques which may involve sensory enhancement devices (such as
microphones or stroboscopes) to aid monitoring (Rao, 1995, Yesilyurt, 1997).
• Performance monitoring: With this form of condition monitoring technique,
operational parameters affecting the performance of a machine (i.e. force,
torque, speed, etc.) are monitored to identify any deterioration. Any significant
deviation from the intended operational parameters is considered as an
indication of a malfunction in the machine (Rao, 1995, Yesilyurt, 1997).
• Thermal monitoring: This monitoring technique can be used to check the
working temperature of a process, or to identify sources of heat generation due
to any fault. Temperature can be measured by a variety of thermal sensors such
as thermometers, thermocouples, thermographic paints, and thermal cameras
(Rao, 1995, Yesilyurt, 1997).
• Wear debris monitoring: Wear occurs if two surfaces are moved against one
another with a sufficient normal force. However, presence of an adequate

5
lubrication prevents occurrence of wear when operational parameters (i.e. load
and temperature) with a clean working environment are properly established
(or controlled). If wear onsets due, for example, to excessive loading or
inadequate lubrication, material removed from contacting surfaces
contaminates lubricant and, hence, wear debris can be detected by lubricant
monitoring. Lubricant monitoring ranges from the simple use of magnetic
plugs which provide evidence of ferrous debris build-up, to the spectrometric
and ferrographic analysis of oil, where debris composition, rate of
accumulation and particle shape can pin-point a damaged component and its
mode of failure. However, this technique is not reliable for detecting faults
like fatigue cracks in a component because such failures shed few metallic
particles. (Dempsey et al, 2002; Rao, 1995, Yesilyurt, 1997)
• Acoustic Emission Monitoring: When a mechanical component is structurally
damaged, an acoustic emission is usually generated. By monitoring the residual
of the sound signal, or analyzing the changes in the residual signal spectrum,
some faults can be identified as long as the sound signal changes continuously
in amplitude. However, the limitations of acoustic monitoring are that the
signal-to-noise ratio is low, and sometimes the increase in noise level is
difficult to interpret (Baydar & Ball, 2003; Huang et al, 1998; Singh et al,
1999; Tan & Mba 2005; Toutountzakis, 2003, 2005; Wang, 2002).
• Vibration monitoring: Of all condition monitoring techniques, vibration
monitoring is most widely used for machine condition monitoring and
unquestionably it contains the most information (Randall & Tech, 1987, Rao,
1995, Yesilyurt, 1997). Machine operation involves the generation of forces
and motions that produce vibration which is often transmitted from one part of
the machine to another. If a fault occurs, monitored vibration characteristics
change. Vibration monitoring can be used to detect a variety of faults such as
bent or eccentric shaft, misaligned components, unbalanced components, faulty
bearings and gears, inappropriate clearances, and many more.

6
Unlike the other monitoring techniques, vibration monitoring is well suited
technique to detect, locate, and distinguish failures in machinery. It is for this reason
that this research work has concentrated upon the use of vibration analysis for
gearbox condition monitoring. The most establishes vibration-based techniques are
time and frequency domain analyses, cepstrum analysis and combined time-
frequency analysis.
1.3. Characteristics of Gearbox Vibration
Vibration monitored on a healthy gearbox generally exhibits predominant
frequency components at the toothmeshing frequency (i.e. the number of teeth on a
gear multiplied by its rotational frequency) and its harmonics. These predominant
components stem from gear transmission error and time-varying mesh stiffness,
which itself is mainly due to variation of the total length of contacting teeth in mesh.
The mesh stiffness is larger when the number of contacting tooth pairs in mesh is
higher, and vice versa. This mesh stiffness variation repeats itself at the fundamental
toothmeshing frequency of the gear pair. In addition, the resulting tooth deflection
causes premature contact of the subsequent meshing teeth, and this results in an
impact which again repeats itself at the toothmeshing frequency. Furthermore, tooth
deflection causes the shape of the teeth in mesh to be less than ideal, and this in turn
introduces distortion into the rotational gear motion. This distortion manifests itself
as higher harmonics of the fundamental toothmeshing frequency. (Yelle & Burns,
1981; Yesilyurt, 1997)
Under certain circumstances, gear vibration may contain amplitude and/or
frequency modulation, and this can be attributed to a number of reasons including:
pitch errors, profile errors, misalignment, eccentricity, and load variation. For
example, a distributed fault such as a single-lobe eccentricity causes amplitude
modulation of a gear vibration signal due to the periodic variation in the depth of
mesh. It also results in frequency modulation of the time signal (but to a lesser
degree) due mainly to the variation in the effective gear radius and the consequent

7
variation in angular speed of the mating gear. In such cases, modulation will be
apparent over a considerable proportion of the faulty gear's rotation.
In contrast, but nevertheless another cause of modulation, is a local defect in a
tooth (such as a tooth tip breakage or a fatigue crack) which weakens a tooth and
causes a reduction in mesh stiffness only when that faulty tooth is in mesh. The
excessive deflection of the faulty tooth results in a significant amount of premature
contact of the subsequently meshing pair of teeth. The consequential impact causes
localised variation in vibration amplitude and the effect of this can be seen across a
broad range of frequency. The amount and duration of amplitude variation depends
mainly upon the severity of the tooth defect and the contact ratio of the gear pair. If
the tooth fault severity is small and the contact ratio is high, the resulting amplitude
variation may not be seen distinctively on the vibration signal.
Amplitude and frequency modulation, either individually or in combination, will
cause the presence of sidebands within a vibration spectrum. The form of the
modulation dictates the extent and shape of the sideband pattern. Distributed
modulation tends to give rise to high amplitude sideband components which cluster
around the toothmeshing frequency and its harmonics, whereas localised modulation
tends to give rise to low level sidebands which extend across a broad range of
frequency.
Aside from deterministic components, real gearbox vibration always contains
some random noise. This mainly results from the relative sliding motion of the
contacting teeth and its amount depends upon the surface finish of the gears. Noise
gives an increase to the vibration amplitude throughout the frequency range.

8
1.4 Literature Review
Some of the pioneering research works carried out in gear dynamics, gearbox
failures and gear fault detection can be summarized as follows.
1.4.1 Gear Dynamics and Failures
The works in the dynamics of the gear transmission systems have significantly
improved our understanding of the gear vibrations. They also served as a foundation
to the development of the computer models simulating the vibration of the damaged
or worn gears.
Özgüven & Houser (1988) discussed mathematical models used in gear dynamics
and made general classification of these models. They reviewed 188 publications in
their survey. Linear and non linear mathematical models for dynamics of Spur and
Helical gears were investigated by Kahraman & Sihgh, (1991), Kahraman, (1993)
and Özgüven, (1991).
A large amount of works are reported in the literature in the area of gear dynamic
model with gear faults (Flodin & Andersson, 2000); Flodin & Andersson, 2001;
Kuang & Lin, 2001; Li & Yu, 2001; Li et al, 2002; Parey & Tandon, 2003; Yesilyurt
et al, 2003). In these studies, the effects of gear faults such as wear, and tooth crack
on gear vibration and mesh stiffness variation were studied using a variety of
mathematical models for both spur and helical gears.
A gear set may exhibit a variety of failure modes affecting either all gear tooth
surfaces such as scuffing, pitting, plastic flow, abrasive wear. (Balmforth & Watson,
1965; Boyer, 1975; Coleman, 1968; Glodez et al, 1997; Hönh & Michaelis, 2004;
Merit, 1971; Smith, 2003) or a single tooth (or a few teeth) on a gear (e.g. bending
fatigue cracks, gear rim failure) (Boyer, 1975; Das et al, 2005; Merit, 1971; Smith,
2003). Tooth surface failures are generally termed distributed gear faults and are
mainly caused by an inadequate oil-film established between the mating gear teeth.

9
In contrast, gear failures affecting one or a few gear teeth are termed localised gear
failures and are mainly caused by excessive tooth bending stress.
1.4.2 Signal Processing Techniques for Gearbox Fault Detection
The primary goal of the signal processing for machine health monitoring is to aid
the detection and classification of a fault. Various signal processing techniques have
been developed and applied for gear fault detection and diagnosis. Nevertheless,
the researchers still continuously look for better and effective techniques for these
purposes.
The signal processing methods for machine health monitoring can be classified
into time domain analysis, frequency domain analysis and joint time-frequency
domain analysis (Polyshchuk, 1999). Some of these methods are briefly discussed
here to assist for understanding of the results included in this work.
1.4.2.1 Time Domain Analysis
Time domain analysis is the most direct and easiest way of interpreting gearbox
vibration. Different statistical properties of a signal (its Root Mean Square, Peak-to-
Peak value, Crest factor, Kurtosis, and etc.) have been widely used to detect faults in
gearboxes (Andrade et al, 2001; Martin, 1992; Staszewski, 1994; Tan & Mba, 2005;
Toutountzakis, 2005; White, 1984; Yesilyurt, 1997).
Another approach used in gearbox fault detection is synchronous time domain
averaging technique (Baydar & Ball, 2000; McFadden, 1986, 1987, 1989; Yesilyurt,
1997). In this method, the gear vibration signal is synchronously detected with the
rotation of the gear. Then, the ensemble average of the gear vibration is taken over a
desired number of revolutions. The resulting signal is determined solely by the vibration
produced by the gears on the rotating shaft (Polyshchuk, 1999). In the time domain, the
signal average shows the pattern of the gear tooth meshing vibration including a
perturbation produced by the faulty gear tooth. A simple visual inspection of the gear

10
vibration average may sometimes be sufficient to detect the pronounced gear tooth faults.
Key indications of different gear faults summarised from Stewart’s work (Stewart,
1990) are as follows:
i. Once per tooth errors (i.e. tooth profile error, tooth spacing error) cause
frequency modulation of the averaged gear vibration.
ii. Misalignment causes low-frequency amplitude and frequency modulation of the
averaged gear vibration signal.
iii. Localised tooth defects tend to give localised distortion of the averaged gear
vibration.
iv. A change of the averaged signal from sinusoidal to random form is caused by
pitting or heavy wear.
1.4.2.2 Frequency Domain and Cepstrum Analyses
Spectral analysis is one of the simplest and cheapest classical gear diagnostic
techniques (Broch, 1973; Dalpiaz et al, 2000; McFadden, 1987, 1989; Randall, 1982;
Randall, 1987; Staszewski, 1994; Wang, 2002; White, 1984; Yesilyurt, 2003). If the
spectrum of a damaged gearbox is compared to its signature, which is the spectrum
representing the healthy condition of gearbox, the gear faults can be detected
(Goldman, 1999). Therefore, when a gearbox is put into service, its vibration
signature should be taken under normal operating condition as baseline for fault
detection.
A gearbox vibration spectrum may exhibit sidebands around the toothmeshing
harmonics, low frequency harmonics of shaft speed, and ghost components (Randall,
1982). Sidebands are caused by amplitude or frequency modulation of a vibration
signal due mainly to errors such as eccentricity, a bent shaft, variations in operating
load/speed, and gear tooth defects. Pronounced localised gear failures give localised
amplitude distortion of the vibration signal and their effect is seen as low level
sidebands spaced at the rotational frequency of the defected gear and extending
across a wide frequency range. In contrast, distributed faults, such as misalignment

11
and eccentricity, tend to give higher level sidebands more closely grouped around the
toothmeshing frequency and harmonics. Low frequency harmonics of the shaft speed
are caused by additive impulses (Randall, 1982), and ghost components stem from
errors induced by during machining process of the gear and appear at different
harmonic frequencies. Ghost components generally diminish with time as the initial
geometric inaccuracies wear away (Randall, 1982; Yesilyurt, 1997, 2003).
Randall (1982) states how surface wear gives an increase in the amplitude of the
toothmeshing harmonics and this is true for pronounced wear. Other researchers have
shown that the overall noise and vibration level of a pair of gears can be reduced by
introducing appropriate profile modification (Tavakoli & Houser, 1986). Early wear
damage has a similar effect to convex profile modification on a tooth surface. This
event causes reductions in overall vibration level and predominant toothmeshing
components. With increasing wear severity, the second and other higher
toothmeshing harmonics become strengthened, and a large number of sidebands
become apparent around the toothmeshing harmonics (Yesilyurt, Gu, & Ball, 2003).
The demodulation methods were developed to detect local gear defects such as fatigue
cracks, pits and spalls (Dalpiaz, Rivola, & Rubini, 2000; McFadden, 1986; Nicks &
Krishnappa, 1995; Staszewski & Tomlinson, 1992; Wan & Zhao, 1991; Wang, 2001).
After being synchronously averaged, the gear vibration signal consists of the
toothmeshing frequency and its several harmonics. The demodulation methods assume
that a gear tooth fault will produce amplitude and phase modulations of the dominant
toothmeshing frequency and its harmonics (Polyschuk, 1999). Thus, the measured
vibration signal of a faulty gear is a superposition of modulated tooth meshing harmonics.
Based on this modulation assumption of the gear vibration signal, various demodulation
methods have been developed to detect gear defects in gears.
The use of the signal demodulation technique requires firstly that the FFT of the
averaged vibration signal is taken to determine the bandpass filtering parameters.
After selecting the appropriate centre frequency and bandwidth, the inverse Fourier
transform of the filtered signal is taken and, envelope and phase functions are

12
calculated. The main difficulty with this method is the selection of the analysis
parameters and, additionally, it only considers a portion of the spectrum meaning that
some information-indicating fault features are abandoned (Wang, 2001; Yesilyurt,
1997).
Cepstrum analysis has been widely applied to gear monitoring (Badaoui et al,
2001, 2004; Dalpiaz et al, 2000; Randall, 1982, 1987; Tang et al, 1991; Wismer,
1981). Cepstrum analysis can be thought of as a frequency analysis of a frequency
analysis, and is used to extract periodic information from a logarithmic spectrum The
cepstrum is well suited for detection of sidebands in vibration spectra and for the
estimation of their evolution during gear life. In addition, since the cepstrum
estimates the average sideband spacing over a wide frequency range, it is applicable
to both detection and diagnosis of gear faults. In contrast to signal demodulation
techniques, cepstrum analysis can be used for distributed gear fault monitoring (Tang
et al, 1991), but more research is needed on the advancement monitoring of localised
and distributed gear faults to establish its effectiveness.
1.4.2.3 Time - Frequency Domain Analysis
Traditional spectral analysis techniques, based on the Fourier transform provide a
good description of stationary signals. Unfortunately these techniques have several
shortcomings. First of all, the Fourier transform is unable to accurately analyse and
present a signal that has non-periodic components like a transient signal (Shan, Bauer
& Seeliger, 1999). This is due to the fact that the Fourier transform is based on the
assumption that the signal to be transformed is periodic in nature and of infinite
length. Another deficiency of the traditional spectral analysis is its inability to
provide any information about the time dependency of the frequency contents. This
becomes a main problem when the signals to be analysed contain a great deal of non-
stationary events. In this case, it is especially beneficial to be able to acquire a
correlation between the time and frequency information of a signal.

13
In resent years, there has been an increasing interest in the research of combined
time-frequency domain analysis, which is called joint or combined time–frequency
analysis. Combined time-frequency representation gives signal energy as a function
of both time and frequency simultaneously and can be performed with either constant
or varying time-frequency resolution. A variety of time–frequency methods such as
Short Time Fourier Transform (STFT) (Cohen, 1989; Heneghan et al, 1994; Qin &
Zhong, 2004; Shan et al, 1999; Wang & McFadden, 1993; Zhan, & Jardine, 2005),
Wigner–Ville distribution (WV) (Choy et al, 1996; Claasen & Mecklenbrauker,
1980; Cohen, 1989; Janse & Kaizer, 1983); McFadden & Wang, 1992; Meng & Qu,
1991; Stander et al, 2002, Staszewski et al, 1997), Choi-Williams distribution
(CWD) (Cohen, 1989; Jones & Parks, 1992; Meltzer & Ivanov, 2003) Instantaneous
Power Spectrum distribution (IPS) (Baydar & Ball, 2000; Cohen, 1989; Hippenstiel
& De Oliveira, 1990; Yesilyurt, 1997, 2003), Smoothed Instantaneous Power
Spectrum distribution (SIPS) (Yesilyurt, 2003) and Continuous Wavelet Transform
(CWT) (Chui, 1992; Heneghan et al, 1994; Kar, & Mohanty, 2006; Loutridis, 2004;
Luo et al, 2003; Meyer, 1993; Nikolaou & Antoniadis, 2002; Ohue et al, 2004; Peng
& Chu, 2004; Qin & Zhong, 2004; Staszewski, 1994; Wang et al, 2001; Yesilyurt,
1997, 2004, 2005; Zheng et al, 2002), have been used extensively for the analysis of
vibration signals to extract useful diagnostic information.
The Wigner-Ville distribution (WV) is a good example of a fixed resolution time-
frequency method, and it has been widely used for gearbox condition monitoring.
Although the WV offers good localisation in both time and frequency, it causes
interferences to appear between the main signal components when applied to a multi-
component signal. Choi and Williams (CWD) proposed another fixed resolution
time-frequency distribution to overcome the main difficulty of the Wigner-Ville,
using an exponential kernel which enables suppression of the interferences and
which smoothes the distribution in the time and frequency directions. The
performance of the Choi-Williams distribution (CWD) depends upon the selection of
key parameters (including interference suppression coefficient, the size of the
smoothing window, and the type of analysed signal) and is insensitive in the time
localisation of events due to the shape of its kernel.

14
The IPS transform also produces interferences when it is applied to a
multicomponent signal, but here the interferences occur where the main signal
components are located, which result in clearer signal representation. In addition, the
pertinent signal components are actually strengthened by the interferences at the
expense of their fluctuation. The SIPS is shown to provide a considerable reduction
of the ringing effect of the IPS transform.
On the other hand, the STFT and CWT perform a linear decomposition of the
analysed signal, and therefore do not cause any interference. Of these methods, the
STFT employs a constant window size during the analysis and, hence, results in a
constant time–frequency resolution. However, the CWT performs a decomposition of
the analysed signal into a set of waves (or wavelets), which are derived from a single
wavelet, and wavelets at different frequencies are generated by introducing dilation
into the analysing wavelet. A large window is used for low frequency estimates with
poor time resolution, whereas the window automatically narrows at high frequencies,
improving time resolution of the transform, but the frequency resolution deteriorates
according to the uncertainty principle (Chui, 1992; Hlawatsch, & Boudreaux-Bartels,
1992). Therefore, the wavelet transform provides a good compromise between
localization and frequency resolution.
From a failure detection point of view, the analysis generally requires a
comparison of time–frequency maps representing good and faulty conditions for the
whole t–f plane, which is tedious work due to the increased dimensionality.
Moreover, revelations of fault symptoms also depend critically upon the severity of
the damage (especially in the detection of a local fault), and indications in the two-
dimensional time–frequency map may not be discernible at the early stages of fault
development. Low-order frequency moments of the energy density function (i.e.
spectrogram and scalogram) are effective tools for reducing dimensionality,
characterising dynamic behaviour of the observed signal with few parameters,
understanding of developments and propagation of transient behaviours, and
facilitating the distinction of different fault conditions (Claasen & Mecklenbrauker,

15
1980; Kareem & Kijewski, 2002; Karlsson & Gerdle, 2001; Loughlin et al, 2000;
Yesilyurt, 2004, 2005).
1.5 Research Aims and Objectives
The aim of this research presented in this thesis focuses on the early detection and
advancement monitoring of firstly localised and distributed pitting damages, and
secondly crack and tooth breakage failures in a two-stage industrial gearbox using
vibration analysis. The objectives of this study can be summarised as follows:
• To identify most common gear failure modes and to describe the reasons and
operating conditions in which gear failures naturally occur.
• To design and build a gear test facility to permit realistic simulation of
localised and distributed pitting faults in helical gears.
• To design and build a gear test facility to detect and monitor a real-time fatigue
failure in helical gears.
• To tailor and use a variety of vibration based signal processing techniques for
gearbox condition monitoring.
• To perform realistic pitting (localised and distributed) faults simulation on real
helical gears with varying fault severities, and to perform a real-time gear
fatigue test, to validate effectiveness of the condition monitoring techniques in
the detection and advancement monitoring of considered gear faults.

16
1.6 Thesis Outline
Chapter 2 details common gear failure modes and describes the reasons and
operating conditions in which gear failures occur.
Chapter 3 presents information about the two gear test rigs which were designed
to permit realistic fault simulation. In addition, instrumentation for acquisition of
vibration is also detailed.
Chapter 4 details the most commonly used vibration-based techniques in gearbox
condition monitoring. Firstly the use of the time, frequency, and quefrency domain
analyses are explained, and then combined time-frequency method (the wavelet
transform) is introduced.
Chapter 5 presents the use of vibration-based techniques for the early detection
and advancement monitoring of local pitting faults in gears. Real gear vibrations are
obtained from the first test rig utilising a two-stage industrial gearbox. Local pits are
realistically simulated on a few tooth surfaces in differing degrees of fault severity.
Classical processing schemes in the time and frequency domain are firstly employed
to obtain general characteristics of gear vibration. Continuous wavelet transform is
then used to obtain a scalogram and its mean frequency variation.
Chapter 6 presents the use of vibration-based techniques in the early detection and
advancement monitoring of distributed pitting fault. Distributed pitting was seeded in
differing degrees of severity on real gear teeth. With each fault severity, the helical
gear pair was tested on the first gear test rig and the resulting vibration data was
recorded. The application of time, frequency, cepstrum, and time-frequency method
(wavelet Transform: scalogram, its mean frequency variation, averaged mean
frequency) to each set of experimental data is presented.
Chapter 7 presents the use of the time, frequency, cepstrum and time-frequency
(Continuous wavelet transform: its scalogram and its instantaneous energy variation)

17
techniques for the detection, diagnosis and advancement of monitoring of a real tooth
fatigue crack in helical gears. The gearbox was tested on the second gear test rig until
a fatigue failure occurred and the resulting vibration data was continuously recorded
for the analyses.
Chapter 8 draws general conclusions from the research work documented in this
thesis.

18
CHAPTER TWO
INTRODUCTION TO GEAR FAILURES
2.1 Introduction
Gearboxes are widely used in industry to transmit power or rotary motion whilst
maintaining an intended torque and angular velocity ratio together with smooth
motion and high efficiency. These criteria are usually achieved unless a gear is
defected. When a fault affecting one or more gear teeth develops on a gear, the
performance of the gear system deteriorates and the desired motion transfer deviates
from the intended.
In the main, gear failures can be attributed to either deficiency of the material
from which the gear is produced, or failure of the gear lubricant. Lubricant is used to
prevent direct tooth contact, to reduce friction and vibration levels, and to remove
generated heat.
Material failures are generally caused by internal structural changes, which may
include dislocation and growth of microscopic cavities. Microscopic deterioration
can develop into macroscopic deterioration, which may lead to the fracture of the
material.
Fundamentally, material failure is induced by a stress condition the severity of
which the material cannot resist. Simplistically this can be demonstrated by
considering the tensile testing of a steel material. If a specimen is loaded up to its
elastic limit and is then relieved, the resulting strain is recovered and no permanent
deformation is observed. However, if the stress is increased beyond the yield strength
and then the load is removed, only the elastic component of the strain is recovered.
The plastic component of the strain causes permanent movement in the atomic level
of the structure. Although this plastic deformation is an indication of failure, the
material may still be in service and it is difficult to assess the severity of the defect.
For this reason, the following classifications are made to describe the severity of the
failure (Yesilyurt, 1997):
18

19
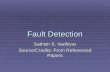
i. Damage
ii. Fracture
iii. Break
A
B
C
Failure
Damage Fracture
Strain
Break
Stress
Figure 2.1 Stress strain diagram of materials.
As depicted in Figure 2.1, damage in metals is indicated by the onset of plastic
deformation and this occurs when the applied stress exceeds the yield strength of the
material (point A on stress-strain curve). Damage is thus a kind of the failure after
which the material can still be used. Point B denotes the ultimate or tensile strength
of the material, which is the maximum stress level reached on the stress-strain
diagram. Failure up to the point B is called material damage. Having reached the
yield strength, any increase in the strain produces an unproportional stress-strain
relationship. Beyond the ultimate tensile strength, this results in a material fracture
and finally material breakage.
2.2 Gear Stresses
As shown in Figure 2.2, a photo-elastic study of a loaded gear in action
emphasizes the importance of root fillets in gear loading. The areas where the stress
patterns are close together and concentric indicate very high stress gradients. High
stress gradients are usually indicative of high stress levels. Generous round root
fillets like those shown in Figure 2.2 serve to spread out, or distribute, the high stress

20
gradients that normally are present at the base of a loaded cantilever beam. On the
other hand, sharp corners at the root fillets accentuate high stress concentrations and
may produce excessively high stress levels and premature failures.
Figure 2.2 Photoelastic study of the principal
stress regions in a loaded gear tooth. The
highest stress gradients occur where the stress
patterns are close together and concentric.
Apparent in Figure 2.2 are the two principal stress regions of a loaded gear tooth
in service. One principal stress is the surface-contact stress that results where the
force of loading is transmitted from one gear to another by intimate contact. This
loaded area moves up and down on the gear-tooth profile until the mating teeth leave
the mesh. The other principal stress is at the root fillet and gives rise to what is
commonly referred to as the tooth-bending stress. Note that deflection of the beam
produces similar stress patterns on both sides of the tooth. Under the conditions of
loading shown in Figure 2.2, the root fillet on the right is subjected to a tensile stress,
whereas the root fillet on the left is subjected to a compressive stress. Tooth bending
fatigue failure of the teeth can be expected to initiate on the side of the gear tooth that
is subjected to tensile loading.
The American Gear Manufacturers Association (AGMA) has developed standards
for determining gear tooth stresses. The equations from these standards can be
regrouped and summarized in general terms, and the basic formula for all stresses in

21
gears can be related to three indexes: a load index, a geometry index, and a rating
index. The load index is related to the gear size and measures together with the load
transmitted by the gear. The geometry index is related to the general characteristics
of the gear teeth, such as pressure angle, helix angle, tooth size, root-fillet radius,
number of teeth and contact ratio. The rating index (overall rating adjustment factor)
is related to internal misalignment of gear teeth, manufacturing inaccuracies, relative
velocity of mesh, duty or application of the gear unit, size of gear wheels, and
temperature. Thus, the rating index is a measure of the additional capacity that must
be designed into a gear drive to allow for variations in operating conditions resulting
from design, manufacture, installation and environment.
In most applications, the rating index used for the calculation of the surface
contact stress has the same value as the rating index used for the calculation of tooth
bending stress. However, for industrial drive gears, the rating index used to compute
surface contact stress often must be higher than that of tooth-bending stress. The
reason behind this is that many gear derives run at relatively slow speed and must
operate in the mixed-oil-film region accounts for the necessity of using a higher
rating index for surface-contact stress of industrial derive gears.
2.3 Rolling Contact Fatigue Failure in Gears
When two surfaces roll (or roll and slide) against one another with a sufficient
force, a surface failure will occur after a certain number of cycles of operation.
Although the mechanism of rolling contact failure is quite complicated, most authors
agree that Hertzian stresses, number of stress cycles, surface finish, material
hardness, lubrication, and temperature all influence rolling contact failure (Balmforth
& Watson, 1964/1965; Bower, 1988; Coleman, 1967/1968).
Rolling contact failure generally starts by initiation of a crack either on the rolling
surfaces or immediately beneath them. These cracks are induced by plastic
deformation of regions where the heights of asperities or other irregularities exceed
the oil-film thickness. Another reason why the cracks initiate on tooth surfaces is that

22
surface grains are only parts of a polycrystal, not wholly supported by adjoining
grains, making them more easily deformed than grains in the body of metal which
are surrounded by other grains (Yesilyurt, 1997).
Rolling fatigue cracks which initiate beneath the contacting surfaces are mainly
caused by the Hertzian shear stress, which reaches its maximum value just below the
tooth surface. The actual Hertzian shear stress may exceed the specified maximum
stress value of the gear material because of stress concentration as a result of
misalignment or excessive contact load. Beyond the specified stress limit, sub-
surface cracks may be initiated after a number of stress cycles (Bower, 1988).
Once the crack has been initiated, the propagation of surface cracks is affected by
the lubricant and the direction of the tractive force, which occurs due to the relative
motion of the contacting surfaces. The mode of propagation of surface cracks is
disputable; three crack propagation mechanisms have been proposed (Bower, 1988):
i. The crack may propagate in a shear mode due to cyclic shear stress caused by
repeated rolling contact.
ii. The lubricant may be forced into the crack by the load and surface tractive force.
The crack faces are hence forced to open, reducing friction force between the
crack faces, and resulting in an ‘opening mode’ type of stress intensity at the
crack tip.
iii. The lubricant may be trapped inside the crack and thus compressed. Fluid
trapment, such as this, is sensitive to the direction of the tractive force at the
rolling surface. If a driving traction, which opens the crack faces, is present, more
fluid is trapped in the crack. As a result, more of the crack face remains
pressurised which results in a greater opening mode stress intensity than usual.
Cracks initiated at the tooth surface penetrate into the material with an acute angle
to the rolling surfaces of around 15°-30° (Bower, 1988, Yesilyurt, 1997). If a crack
tip reaches the region, where the maximum Hertzian shear stress occurs, then its
direction of propagation changes, generally, so that it is parallel to the surface.

23
Cracks parallel to the surface can detach surface material when they intersect another
surface crack, or they can spread deep into the material causing complete fracture of
a gear tooth.
2.4 Classification of Gear Failures
A systematic analysis of gear failures begins with classification of the failure by
type. The type of failure is usually determined from the appearance of the failed gear
and from the process or mechanism of the failure. After the mechanism of a failure
has been established, it remains to determine what caused the failure. In general, an
understanding of the failure mechanism is of considerable assistance in isolating the
cause or causes of a failure.
Types of gear failures have been grouped into four general classes which are
wear, surface fatigue, plastic flow, and breakage (Boyer, 1975; Smith, 2003). Each of
these general classes has been subdivided to provide more accurate and specific
identification.
Wear is defined as gradual loss of material from contacting surfaces of teeth, and
is further classified as normal wear (polishing in), moderate wear, destructive wear,
abrasive wear, scratching (a severe form of abrasive wear), scoring, interference
wear, corrosive wear, flaking, burning, and discoloration. Obviously, normal wear
(polishing in) does not constitute failure because it only involves the loss of metal at
a rate too slow to affect performance within the expected life of the gear.
Nevertheless, normal wear is a useful classification in failure analysis which
provides a basis for comparison. Interference wear may have no serious consequence
other than noisy operation, or may be a reason for initiation of severe pitting at the
point of interference or tooth breakage during the life of gear (Boyer, 1975; Niemann
& Winter,1983; Smith, 2003).
Surface fatigue is the failure of a material occurred due to repeated surface or
subsurface stresses that exceed the endurance limit of the material, and is further

24
classified as initial pitting, destructive pitting, and spalling. Initial pitting may not
constitute failure if it is nonprogressive.
Plastic flow is a surface deformation resulting from yielding of surface metal
under heavy loads, and is further classified as rolling and peening, rippling, and
ridging. Rippling, a wavelike formation on the tooth surface at right angles to the
direction of sliding, does not constitute failure unless it is allowed to progress.
A type of plastic-flow failure that is accompanied by surface and subsurface
cracking is referred to as "case crushing", and is limited essentially to carburized
steel gears.
Breakage is defined as fracture of an entire tooth or of a substantial portion of a
tooth, and is further classified as fatigue breakage, breakage from heavy wear,
overload breakage, quenching cracks and grinding cracks. Breakage from heavy
wear, of course, is essentially a type of wear failure in which enough tooth metal is
removed by wear, and the overall strength of tooth is reduced to the level below
which fracture occurs.
It is not uncommon for a gear to fail by more than one failure mode. Failure by
two or more modes may occur simultaneously, or one may be the result of the
continued or progressive nature of the other. Classification of the different types of
wear or failure is intended to assist in distinguishing between cause and effect, in
evaluating the degree or progression of an observed condition, and in determining
suitable corrective action.
2.4.1 Gear Wear and Wear Failures
The term "wear", as applied to gears, primarily refers to, but is not restricted to,
loss of gear tooth surface metal and accompanying loss of profile (roughening) as a
result of metal to metal contact through the lubricating film. The term wear,
therefore, generally encompasses normal wear, or polishing in, moderate wear,

25
destructive wear, and scoring (also called galling) - a form of wear in which gross
damage to tooth surfaces occurs. The American Standard B6.12 extends the
classification to include abrasive wear, scratching (a severe form of abrasive wear),
interference wear, corrosive wear, flaking and burning (Boyer, 1975).
2.4.1.1 Lubrication and Gear-tooth Wear
In many moderately loaded gear sets operating at moderate speeds, a relatively
thick oil films are maintained between mating gear teeth and no metal-to-metal
contact occurs. Consequently, no wear occurs (except during starting and stopping),
and original tool marks are visible on tooth surfaces even after a long periods of
operation.
Under full-film conditions, oil viscosity is the key property that determines load
carrying ability of gear teeth as well as resistance to motion between tooth surfaces.
In practice, it is not always possible to have full-film lubrication. When the surfaces
are at rest under pressure, the thick oil film is squeezed out of the pressure area,
because motion is necessary to establish and maintain that film.
Under conditions of low speed, heavy load, extreme temperatures, relatively
rough and irregular surfaces, scanty oil supply, or use of oil too low in viscosity,
there may be only a partial film present in the loaded area. Under such conditions,
there will be some degree of metal to metal contact between the mating tooth
surfaces.
Unless a very fine tooth surface finishing process is applied, gear-tooth surfaces
are not smooth, but are wavy due to inherent characteristics of the machine tools
used to cut and finish them. When tooth surfaces come together with the presence of
insufficient lubrication, tooth contact occurs between crests of surface waves. A
number of actions then take place such as shearing of surface films, heavy rubbing
and deformation of metal, plowing of asperities on the surface of the harder material
through the softer material, which all result in detachment of wear particles and

26
creation of new asperities; and, finally, bonding of minute high areas that have been
rubbed clean. The minute bonds are broken immediately as motion continues, but
may be bonded at another location so that metal is transferred from one surface to the
other. New asperities are formed, some of which are plowed off to form wear
particles. These actions account for both wear and friction.
2.4.1.2 Normal wear
Normal wear, also called polishing in, is defined as slow loss of material from
contacting gear tooth surfaces at a rate that does not affect performance significantly
within the expected life of the gears. The loss of metal is very slow and is generally
quite uniform. Normal wear on steel gear teeth has an appearance ranging from dull
gray to burnished. A hypoid pinion exhibiting normal wear, or polishing in, is shown
in Figure 2.3. This pinion was made of carburized and hardened 8620 steel and was
removed from a truck rear end after many cycles of operation. The polishing was
attributed to high-velocity sliding (Boyer, 1975).
Figure 2.3 Hypoid pinion, made of
carburized and hardened 8620 steel,
exhibiting normal wear (polishing in)
Although normal wear does entail a very mild form of adhesive wear, it obviously
does not constitute a failure. For all practical purposes, following an initial period

27
during which wear occurs at a slow rate, normal wear ceases. In worm gears, normal
wear is desirable, because some wear must occur before proper tooth contact is
established. Spiral bevel gear sets are often run with a lapping compound to simulate
normal wear before being placed in service.
2.4.1.3 Moderate and destructive wear
Moderate wear refers to a loss of metal more rapid than normal wear. It is not
necessarily destructive and may develop on heavily loaded gear teeth. It may be self
healing, or may indicate the onset of destructive wear. Moderate wear may be
characterized by an increase in noise level, but generally does not constitute a failure.
Figure 2.4 exhibits a moderate wear damage on teeth of a helical gear made of
hardened and tempered 4340 steel.
Figure 2.4 Helical gear, made of hardened
and tempered 4340 steel, exhibiting
moderate wear.
Destructive wear usually results from loading that is excessive for the lubricant
employed. Destructive wear on a gear tooth is shown in Figure 2.5(a), and its effect
on the tooth profile of an involute gear tooth is depicted in Figure 2.5(b). This type of
wear, which is synonymous with adhesive wear, is caused by direct tooth contact,
and is not related to abrasives or corrosion. Such wear occurs over most of the gear-
tooth face except at the pitch line. In general, destructive wear, sometimes called
overload wear, occurs at low speeds and high loads. Because destructive wear

28
destroys the gear tooth profile, it may cause initiation of other types of failure like
pitting due to surface fatigue (Boyer, 1975).
Figure 2.5 (a) Destructive wear on a gear
tooth, (b) Schematic illustration of the effect of
destructive wear on the tooth profile of an
involute gear.
2.4.1.4 Scoring
The term "scoring" is essentially synonymous with, but generally is considered
preferable to, the terms scuffing or seizing. Scoring entails the rapid removal of
metal from tooth surfaces caused by the tearing out of small contacting particles that
have bonded together as a result of metal to metal contact. Scoring is a form of
adhesive wear in which the damaged surface exhibits a torn or dragged-and-furrowed
appearance with markings in the direction of sliding, in contrast to the smooth
grooves or polish of a tooth surface worn by abrasion. In scoring, the tips and roots
of the teeth are worn the most, whereas the pitch-line area generally remains in its
original condition. This is because there is rolling contact at the pitch line, with little
or no sliding action. If the alignment of the gear pair is correct and scoring is not a

29
result of isolated high spots on the tooth surfaces, the scored areas extend across the
entire width of the teeth (Boyer, 1975; Niemann & Winter,1983).
Scoring is a symptom of inadequate load-carrying capacity of the lubricant. In this
respect, scoring is similar to destructive wear. Sometimes, when particularly gears
are misaligned, the damage may cease and the surface may become smoother as the
contact area spreads and more load-carrying face is brought into contact.
Scoring sometimes is associated with an increase in oil temperature sufficient to
affect lubrication — for example, by noticeably lowering oil viscosity. The increase
in temperature may arise from an increase in operating speed or load or from heating
of the inlet oil.
(a) (b)
Figure 2.6 (a) Initial scoring on a wide-face 4340 steel helical gear, (b) Moderate scoring on
a 3310 steel spur gear with a 20° pressure angle.
Two instances of scoring are shown in Figure 2.6. Initial scoring on a wide-face
helical gear is shown in Figure 2.6(a). This gear was made from a 4340 forged steel
blank that was hardened and tempered to 300 Bhn. The gear was finished by
hobbing, and scoring was attributed to the presence of high spots on the gear teeth
following the hobbing operation. Moderate scoring on a spur gear with a 20°
pressure angle is shown in Figure 2.6(b). This gear was made of 3310 steel and was
carburized, hardened and tempered to Rockwell C 60, and finished by grinding.
Scoring appears on both the addenda and dedenda, but does not follow a fixed
pattern. However, the causes of these scorings were not reported (Boyer, 1975).

30
2.4.1.5 Interference Wear
Interference wear occurs when gear teeth mate improperly at the start or end of
contact. It is a type of localised overload wear in which the entire load is
concentrated at the point of engagement low on the profile of the driving flank with
the mating tip, or at disengagement of the driven flank and mating tip. Interference
wear may range from a light line of wear or pitting of no serious consequence other
than noisy operation to more severe damage in which the flank is gouged out and the
tip of the mate heavily rolled over, usually resulting in complete failure of the pair
(Boyer, 1975).
Interference wear is not influenced to any degree by lubrication. Although its
appearance is similar to other types of wear and scoring, it can be distinguished from
them by the location of the distressed area. Interference wear usually can be
attributed to errors in design, tooth generation or alignment.
2.4.1.6 Abrasive Wear
Abrasive wear is a tooth surface damage caused by the presence of abrasive
particles in the lubricant. The particles may be dirt or abrasive particles from the
operating environment or metal detached from tooth surfaces or bearings. Wear
debris, machining chips, and environmental contaminants are other types of
abrasives that often are found in lubricants.
The appearance of abrasive wear depends on the particle size and nature of the
abrasive contaminant. Abrasive dust, for example, forms a slurry with the lubricant
that will polish gear teeth to a mirror finish; damage to tooth contours may be
forestalled until an appreciable quantity of wear debris accumulates in the lubricant-
slurry. In contrast, larger particles like welding slag or machining chips will scratch
and gouge the surface.

31
A potentially severe form of abrasive wear is referred to as scratching. It is
characterised by short lines or marks on the contacting surfaces of gear teeth in the
direction of sliding. Scratching may be caused by burrs or projections on the tooth
surface, material embedded in the tooth surface, or hard foreign particles suspended
in the lubricant. Scratching should be differentiated from scoring, because scratching
does not result from inadequate lubrication. If the cause of scratching is removed as
early as possible, scratching damage may then be light and even progressive
destruction may be avoided (Boyer, 1975).
2.4.1.7 Corrosive Wear
Corrosive wear is a type of surface deterioration that is caused by chemical
reaction of lubricant, or of contaminants such as water or acids, with gear-tooth
surfaces. Sometimes, corrosion attacks other surfaces of a gear as well, making the
cause of damage relatively easy to distinguish. Corrosive wear on a spur-gear tooth is
shown in Figure 2.7.
Figure 2.7 Corrosive wear (patches at arrows) on a tooth of a spur gear
Corrosive wear may result in pitting of the contacting tooth surfaces; the evidence
of such pitting may be removed by wear and the contacting surfaces appear polished.
The potential sources of corrosion are numerous. Acid or water in the lubricant, are
among the most common sources. Highly active extreme-pressure (EP) additives are
also a source, especially when the gear is heavily loaded. The gear will operate
without scoring but with a uniform and low rate of corrosive wear. Overheating the
EP additives will accelerate corrosive action (Boyer, 1975).

32
Often, as a result of exposure to acids or rusting, corrosion begins before the gear
is assembled in a unit. Steel gears that retain a tenacious light oxide resulting from
heat treatment have reasonably good resistance to rusting, even though they may
have been dipped in an alkaline wash to remove quenching oils. If the light oxide is
removed by dipping in a mild phosphoric acid solution, followed by conversion
coating with manganese or iron phosphate, resistance to rusting can be further
improved. Gears that have been ground or grit blasted after heat treatment have
highly reactive surfaces and are most susceptible to rusting if stored in a humid area
without the protection of a rust-preventive coating. Gears that have been washed in
strong chemicals and inadvertently exposed to these chemicals for extended periods
may exhibit severe corrosion and should be scrapped.
2.4.1.8 Flaking
Flaking is classified as a type of wear in which material is removed from the tooth
surface in the form of small, very thin wafers or flakes; initially, it is characterized by
a dull and slightly rough appearance. Sometimes it can be detected only by the
presence of flaked material in the lubricant. Flaking may also be a type of surface
fatigue, but more often it is a type of wear associated with the action of combined
rolling and sliding. In general, flaking is limited to the softer steels and gear bronzes
(Boyer, 1975).
2.4.1.9 Burning
Burning, although not a type of wear, can result in severe wear and surface
deterioration. Burning is localized overheating to elevated temperatures caused by
excessive friction from overload, over-speed or inadequate lubrication. The
temperatures achieved are sufficient to cause discoloration and overtempering or
rehardening of hardened steels. Burning may also have an adverse effect on fatigue
properties and promote failure by surface fatigue (Boyer, 1975).

33
2.4.2 Surface-Fatigue Failures
Surface fatigue is the most common mode of gear failure and is characterized by
varying degrees of pitting, and sometimes spalling of tooth surfaces. Unlike wear
damage, which (except for abrasive and corrosive wear) is related to inadequate
lubrication, surface-fatigue failure can occur even with proper lubrication and results
primarily from repeated stressing.
2.4.2.1 Pitting
Pitting is a surface failure caused by excessive contact stresses and is indicated by
the development of smooth bottomed cavities in the contact zone of the gear teeth.
As explained in section 2.3, initiation of surface fatigue cracks (or pitting cracks)
largely depends upon the presence of plastically deformed regions on the tooth
surfaces. Once initiated, a surface crack will continue to propagate until it intersects
another surface crack, and finally results in the separation of a pitted area from the
tooth (Boyer, 1975). The resulting surface damage can be classified as follows:
Initial Pitting. High spots or asperities on tooth surfaces of new gears are stressed
highly even under normal loading, and the small areas involved may undergo fatigue
in a relatively few cycles and drop out, leaving small pits. When the high spots or
asperities are at a distance from the pitch line where both sliding and rolling occur,
they may be worn smooth during run-in before fatigue and pitting can occur. On the
other hand, if they are located at or near the pitch line, where there is rolling but little
or no sliding, initial pitting frequently occurs. This is often referred to as "pitch-line
pitting" as shown in Figure 2.8. Besides, the direction of sliding reverses at the pitch
line is also believed to be a factor in pitch-line pitting.

34
Figure 2.8 Initial pitting in a steel helical gear. Pitting
was confined to the pitch-line area and did not worsen
after many millions of stress cycles.
Initial pitting may be corrective when asperities are removed, stresses are relieved
and pitting stops. When this occurs, gear tooth surfaces are usually smoothed up with
continued operation (Boyer, 1975).
Destructive Pitting. Contact stresses in dedendum areas (that is, below the pitch
line) tooth surfaces of driving-gear are higher than those elsewhere because of the
shorter radii of tooth curvature. From the initial point of contact, surface stresses
decrease as contact moves outward because tooth radii increase. At some point, the
number of teeth in contact changes from two pairs to one pair for spur gears of usual
design and to a reduced number, whereas it is more than one pair for helical gears.
Here, surface stresses increase sharply to a maximum and again start to decrease as
contact moves outward. Whenever gears are overloaded, fatigue failure and
destructive pitting of surface metal may occur — usually in dedendum areas of
driving teeth and after long periods of operation as shown in Figure. 2.9 (Boyer,
1975). If the amount of transmitted load is large enough, however, this type of pitting
can develop in a relatively short period of operation.

35
At all times, areas of driving and driven teeth in contact with each other are
subjected to the same stresses. However, pitting normally occurs first in, and may be
restricted to, the dedendum areas of the driving-gear teeth. There are two reasons for
this: (a) the driving gear, which usually is smaller in diameter, makes more
revolutions, and its teeth, which are fewer in number, are subjected to more stress
repetitions; and (b) on the driving-gear teeth, the direction of sliding is opposite to
that of rolling between the surfaces, and the resulting stretching of the surface metal
promotes growth of fatigue cracks and, eventually, formation of pits.
(a) (b)
Figure 2.9 Destructive pitting in (a) a helical pinion and (b) a herringbone gear — both of which
were driving gears. In both gears, the destructive pitting is confined to the dedendum area, which
is usual for driving gears.
In progressive (destructive) pitting, pits continue to form and enlarge as edges
crumble or as pits break into each other. Eventually, tooth shape may be destroyed,
gears may become noisy and rough running, and if the condition progresses to a
sufficient degree, teeth may fracture.
In certain components, failure of a critical gear by tooth fracture can have serious
consequences. Such a failure in an aircraft engine — particularly during landing or
takeoff — can result in loss of life and total destruction of the aircraft. Consequently,
every precaution must strictly be taken to prevent destructive pitting of critical gears
in service.

36
Figure 2.10 shows destructive pitting which was attributed to excessive contact
stress due to non-uniform loading (Boyer, 1975).
Figure 2.10. Destructive pitting
2.4.2.2 Spalling
One type of spalling may be considered a type of destructive pitting — the
distinction between the two being primarily one of degree. In this type of spalling, a
series of small pits are joined by failure of the metal between them, and ultimately a
relatively large particle of metal spalls from the surface. Such spalling occurs only
after many cycles of operation. When spalling occurs after relatively few cycles, it is
not related to destructive pitting, but often is the result of subsurface defects,
excessive internal stress due to heat treatment, or severe eccentric overloads. This
type of spalling most commonly occurs along the top edges or ends of gear teeth, and
the resulting cavities often are larger, deeper, and more sharply defined than spalls
associated with destructive pitting (Boyer, 1975).
Only rarely are the two types of spalling encountered on the same gear. An
exception, the steel pinion of a hypoid-gear set, is shown in Figure 2.11. The large
spall visible at upper right resulted from destructive pitting that originated at and
above the pitch line. However, the spalling that occurred at the edges of the teeth
(extreme left in Figure 2.11) was the result of extreme overloading at one end of the
pinion, later determined to have been caused by dimensional error (Boyer, 1975).

37
Figure. 2.11. Two types of spalling on the steel pinion of a
hypoid-gear set: at far left, spalling due to extreme overloading
at the edges of teeth; at far right (large dark patch), spalling due
to destructive pitting.
Another instance of the type of spalling that is associated with destructive pitting
is shown on a tooth of a steel spur sun gear shaft in Figure 2.12(a). Both of the teeth
shown bear evidence of pitting; spalling occurred near the pitch line of each of these
teeth and on several other teeth in this gear. The gear shaft was subjected to 315 hr of
testing under heavy stress loading; the general appearance of the gear teeth is
indicative of good alignment, because the pattern of pitting is uniform. A micrograph
of a section through the spalled area of the tooth is shown in Figure 2.12(b) and
illustrates the progressive subsurface cracking that precedes this type of spalling.
Figure 2.12 (a) Spalling due to destructive pitting, on a tooth of a steel spur sun
gear shaft, (b) Micrograph, at 100X, of an unetched section taken through the
spalled area, showing progressive subsurface cracking.

38
2.4.3 Plastic-Flow Failures
The term "plastic flow" refers to surface deformation of gear-tooth metal as a
result of yielding under heavy loads, frequently impact loads. Although more
commonly associated with soft, ductile metals, failure by plastic flow also occurs in
through-hardened and case-hardened steels. Plastic flow is always the result of a gear
being loaded above the yield stress of the metal in the contact zone. Three major
types of plastic flow in gears are rolling and peening, rippling, and ridging.
2.4.3.1 Rolling and Peening
If transmitted gear load is significantly large, and if vibration causes high peak
loading, or if improper tooth action produces high impact loading, gear-tooth
surfaces can become rolled and peened, especially if they are made of relatively soft
material. In gears, rolling and peening are characterized by fins at the top edges or
ends of teeth (not to be confused with burrs from cutting or shaving), by badly
rounded tooth tips, or by a depression in the surface of the driving gear at the start of
single-tooth contact, with a raised ridge near the pitch line of the mating (driven)
gear. The remaining portions of teeth are usually deformed to a considerable degree
before a complete destruction occurs. Although the cause of this failure lies with
gear material or loading, or both, the use of higher-viscosity oil can help in
cushioning blows and thereby extending gear life. The feather edges at the ends and
top lands of the gear teeth shown in Figure 2.13 were resulted from rolling and
peening of a gear metal that was too soft for the intended application.
2.4.3.2 Rippling
As seen from Figure 2.14, Rippling, another type of tooth surface damage that
occurs due to plastic flow, is a wavelike pattern on the tooth surface formed in the
direction of sliding and is caused by shearing stresses (rather than compressive
stresses) at tooth surfaces. Sometimes, these stresses can be relieved by changing to a
lubricant with a lower coefficient of friction. Rippling occurs mostly on case-

39
hardened hypoid gears which produce a relatively large amount of sliding motion
compared to other types of gears. In general, it does not lead to immediate failure,
but rather is an indication of excessive loading and should serve as a warning of
possible future failure. Vibration is also known to cause rippling (Boyer, 1975).
Figure 2.13 An instance of rolling and peening in which the ends
and top lands of steel gear teeth have been deformed to feather
edges.
Figure 2.14 Rippling, a wavelike pattern on a
gear-tooth surface at right angles to the
direction of sliding.

40
2.4.3.3 Ridging
Ridging, shown in Figure 2.15, is the most severe form of plastic flow that may
occur on case-hardened steel hypoid pinions and bronze worm gears. Usually, it
appears as diagonal lines or ridges across the tooth surface, but may be characterised
by a herringbone or fishtail pattern oriented in the direction of sliding. If ridging
progresses, the surface metal is continually reworked, which results in pitting and
ultimate fatigue-type failure. In general, ridging is associated with excessive loading
or inadequate lubrication, or both (Boyer, 1975).
Figure 2.15 Ridging on a heavily loaded
hypoid gear made of case-hardened steel
2.4.4 Breakage Failures
Breakage usually refers to fracture of an entire gear tooth or a substantial portion
of a tooth. In this discussion, however, cracking (the onset of breakage) is considered
a type of breakage, because, from a practical standpoint, a cracked gear tooth is
essentially as unserviceable as a broken gear tooth.
The American Standard B6.12 classifies tooth breakage as fatigue, heavy-wear or
overload breakage. It is important to be able to distinguish breakage failures due to
tooth fatigue from breakage failures resulting from other initial causes (Boyer, 1975).

41
2.4.4.1 Fatigue Breakage
Gear teeth are loaded as cantilever beams, with loading being applied along
contacting surfaces. Gear teeth are shaped such that an applied load causes maximum
bending stress in the root area of the tooth. Thus, any tooth that breaks off at the root
has failed from bending. In some bending-fatigue failures, a crack that starts in the
root may propagate upward toward the tip of the tooth. Such a crack usually can be
traced to its origin by beach marks on the fracture surface.
Fatigue breakage is the most common type of breakage failure. The repeated
bending stress that exceeds the endurance limit of the gear material and that causes
fatigue breakage may result from a variety of factors, including poor design,
misalignment, overload, and inadvertent stress raisers such as notches or surface or
subsurface defects. Figure 2.16 shows a spur gear which was failed by fatigue
breakage of teeth.
(a)

42
(b)
(c)
Figure 2.16 A spur gear which failed by fatigue breakage of teeth.

43
2.4.4.2 Location of Tooth Breakage
In failures involving breakage of gear teeth, the location of breakage on the tooth
can be of significance in helping to determine the cause of failure or in establishing
the failure mechanism. Locations at which gear teeth commonly break are: root
fillets or roots, corners or ends, and top lands.
Figure 2.17. Broken gear teeth in which fracture originated at root fillets: (a) by sudden
shock loading, and (b) by fatigue
In gears, maximum contact loading generally occurs at midface on the teeth, and
fracture will most likely initiate in these regions. When breakage occurs at root
fillets, it is generally indicative of severe overloading. The coarseness of the root-
fillet fractures shown in Figure 2.17(a) indicates that they were caused by single
shock loads or by relatively few high-level loads. Fatigue fractures can also initiate at
root fillets, which are the portions of teeth subjected to the highest bending stress.
The relatively smooth beach marks on the fracture surfaces in Figure 2.17(b) are
characteristic of slow crack propagation. Figure 2.18 shows breakage at one end of a
gear tooth, typical of breakage resulting from misalignment.
Fatigue breakage at the top lands of gear teeth, such as that shown on the pinion
teeth in Figure 2.19, occurs on heavily loaded gears with a tooth profile that does not
allow for tooth deflection under load. The tooth top land is the first point of contact,
and therefore is most vulnerable to fracture. The solution to this problem is design
modification to relieve the gear addenda and the pinion dedenda.

44
Figure 2.18 Breakage at one end of a gear tooth, caused by misalignment
Figure 2.19 Breakage at the top lands of pinion teeth, which
occurred due to the fact that tooth profile did not allow for
deflection under load.
2.5 Statistics on Types and Causes of Gear Failure
Gear-failure statistics based on adequate sampling are of value in failure analysis
because they provide an overall view of the types and causes of gear failures and the
relative frequencies with which they occur. A leading manufacturer of steel gears has
prepared a statistical gear-failure report based on a total of 931 failures that occurred
over a period of 35 years. All failures were classified by both type and cause; results,
in percentages, and are summarized in Figure 2.20 (Boyer, 1975).

45
Types of Failure. As shown in Figure 2.20, breakage is accounted for the largest
percentage of the gear failures (61.2%), followed by surface fatigue (20.3%), wear
(13.2%), and plastic flow (5.3%). Besides, tooth breakage by fatigue (32.8%) was
more common than tooth breakage by overload (19.5%).
Causes of Failure. As shown in Figure 2.20, the majority of the gear failures
nearly 74.7% were service related. The two principal causes of failure were those
continual overloading (25.0%) and improper assembly (21.2%). Inappropriate heat
treatment was the next most common cause of failure (16.2%), followed by errors in
design (6.9%), manufacturing defects (1.4%) and material defects (0.8%).
61.2%
20.3%
13.2%
5.3%
Fatigue breakage, teeth : 32.8 Fatigue breakage, bore : 4.0 Overload breakage, teeth : 19.5Overload breakage, bore : 0.6 Chipping, teeth : 4.3
Breakage Surface Fatigue
Wear
PlasticFlow
Pitting : 7.2Spalling : 6.8 Pitting-and-spalling : 6.3
Abrasive wear : 10.3Adhesive wear : 2.9
Types of Failure, %
(a)

46
Improper assembly :21.2 Improper lubrication :11.0 Continual overloading :25.0Impact loading :13.9 Bearing failure :0.7 Foreign material :1.4 Operator error :0.3 Abusive handling :1.2
Service-related causes 74.7%
Improper design :2.8 Improper material selection :1.6 Specification of unsuitable heat treatment :2.5
Grinding burns :0.7 Tool marks or notches :0.7
Forging defects :0.1 Steel defects :0.5 Mixed steel or wrong composition :0.2
Heat treatment 16.2%
Excessive core hardness :0.5 Insufficient core hardness :2.0 Excessive case depth :1.8 Insufficient case depth :4.8 Improper hardening :5.9 Improper tempering :1.0 Distortion :0.2
Design-related causes 6.9%Manufacturing-related causes 1.4%
Material-related causes 0.8%
Causes of Failure, %
(b)
Figure 2.20 Summary of a statistical report on types and causes of 931 gear
failures over a 35-year period

47
CHAPTER THREE
EXPERIMENTAL SETUP
3.1 Introduction
This work presents the early detection and advancement monitoring of two
different gear faults (i.e. localised and distributed pits, and a real tooth breakage).
Therefore, two different gear test rigs were used to obtain relevant diagnostic
information about these gear faults. This chapter presents detailed information about
the gear test rigs which were designated both to permit realistic fault simulation, and
to monitor real-time tooth breakage in industrial gearboxes. Besides, overall
descriptions of test facilities are explained and the instrumentation for vibration data
acquisition is detailed.
3.2 Gear Test Rig Used for Pitting Fault Detection
3.2.1 Specifications of the Test Rig
A two-stage industrial helical gearbox shown in Figure 3.1 was used during the
tests for the detection and advancement monitoring of both the localised and
distributed pitting faults. It consists of an 2.2-KW AC derive motor and 2.2 KW DC
load motor. AC and DC motors were connected with belt-pulley mechanisms to get
rid of the undesired effects of AC motor, DC motor and misalignments as seen in
Figure 3.2. The motors and gearbox are mounted on a stiffened structur. Seven
rubber pads were mounted to the structure to introduce additional damping to
resulting vibrations which are transmitted from rig to ground or vice versa. The drive
pinion at the first stage had 29 teeth meshing with a 40-tooth wheel. The pinion gear
at the second stage, driven directly by 40-tooth wheel, had 13 teeth meshing with 33-
tooth wheel. The other specifications of the gears are given in Table 3.1.
As seen in Figure 3.2, the speed of the driving motor and the load at the resistor
bank are adjusted continuously to accommodate the range of speed/torque operating
47

48
conditions. Both the speed and load controller allow the gearbox to operate in a
speed range of 0 to 3000 rpm. The power resistors offer a quiet dissipation
mechanism, and consequently, do not make any additional contribution to overall
vibration.
Figure 3.1. Schematic representation of the gear test rig used for the detection of pitting faults.
(a)
Three-phase induction motor
AC Motor speed control
DC motor V-Belt drive units
Two-stage helical gearbox Resistor bank Pitted Gear
AC Derive Motor
DC Load Motor
Gearbox
Input Encoder Output Encoder

49
(b)
(c)
Figure 3.2 Photos of the gear test rig used for the detection of pitting faults.
Variable Transformer
Resistor Bank

50
Table 3.1. Specifications of the gears.
First stage Second stage
Number of teeth
Normal module (mm)
Pressure angle (°)
Profile shift (pinion/wheel)
Helix angle (°)
29/40
1.25
20
+0.325 / +0.259
30
13/33
2.5
20
+0.437 / +0.340
15
3.2.2 Instrumentation for Vibration Monitoring
The vibration signals generated by the gears are detected using two PCB 352A76
type accelerometers (which are suitable for vibration measurements within a range
of 5-16000Hz, A1 and A2) located mutually perpendicular to each other on the input
shaft bearing housings to minimize transmission path effects as shown in Figure 3.3.
A PCB 480C02 type signal conditioner was used to strengthen accelerometer
outputs. The position of the input shaft was indicated using a 5V DC ME4-S12L-PA
type inductive sensor which produces a single pulse per rotation. In addition, two
encoders (each of which has a resolution of 500/360 pulses per 1 degree rotation)
were attached to both the input and output shafts of the gearbox as shown in Figure
3.2(a) to indicate positions of the shafts in question more accurately. However, the
output of the inductive sensor is enough for the synchronous time domain averaging
of the gear vibration signal, and the encoder outputs were not considered in the
current work and will be used later for further analysis.
All the signals acquired from accelerometers, positioning sensor, and encoders
were sampled at an appropriate rate and recorded on a computer using a NI (which is
a trade mark of National Instrument) data acquisition system and LabVIEW 7.0
software. A schematic representation of the data acquisition system and
instrumentation is illustrated in Figure 3.4.

51
Figure 3.3 Locations of accelerometers and
positioning sensor.
Accelerometer(A1) Outputs
Accelerometer(A2) Outputs
Reference Signal
Input Encoder
Input Encoder
Signal Conditioner
Signal Conditioner
A/D converter
NI DAQ Card 6036E
Computer
Figure 3.4 Block diagram of data acquisition system.
Positioning Sensor
A1
A2

52
3.3 Gear Test Rig Used for the Real-Time Tooth Breakage Monitoring
3.3.1 Specifications of the Test Rig
A two-stage industrial gearbox (whose specifications are given below) was used
again for the real-time tooth breakage monitoring and a gasoline engine was used as
a driving unit. All the gears were made of steel, and were case hardened and ground.
The gears at the first stage had a helix angle of 30°, a normal module of 1mm, and
the driving pinion had 20 teeth meshing with a wheel of 38 teeth. Similarly, the gears
at the second stage had a helix angle of 15°, a normal module of 1.75mm, and the
pinion had 15 teeth meshing in a 1:2 ratio.
The gasoline engine had four cylinders and was capable of producing a maximum
power of 50kW within the speed range of approximately 700rpm to 5000rpm. The
power and rotary motion generated by the driving engine was passed through a four
stage reduction unit (i.e. a gearbox), and the output of which was used to drive the
test gearbox. A water-cooled magnetic brake (which is capable of producing of anti
torque of up to 150Nm) was connected to the output shaft of the gearbox to consume
power and, consequently, to load gears within the gearbox. In addition, an elastic
coupling and V-belt units were considered in order to provide a much smoother
power transmission over the gearbox and the other elements of the test rig. All these
explanations are depicted in both Figures 3.5 and 3.6. The other specifications of the
gears are given in Table 3.2.
Table 3.2. Specifications of the gears.
First stage Second stage
Number of teeth
Normal module (mm)
Pressure angle (°)
Profile shift (pinion/wheel)
Helix angle (°)
20/38
1
20
+0.666 / +0.345
30
15/30
1.75
20
+0.338 / +0.437
15

53
Figure 3.5. Schematic representation of the test rig used for the real-time tooth breakage monitoring.

54
(a)

55
(b)
Gasoline Engine
Gearbox
Transmission Box

56
(c)
Torque Indicator
Magnetic Brake

57
(d)
Elastic Coupling

58
(e)
V-Belt Units
V-Belt Units Bearings

59
(f)
Figure 3.6 Photos of the second test rig.
Inductive Sensor
A1
A2

60
CHAPTER FOUR
DEFECT DETECTION TECHNIQUES
4.1 Introduction
In the main, there are three types of approaches for the detection of faults in
gear systems: acoustic signal analyses, debris monitoring, and vibration analyses.
When a mechanical component is structurally damaged, an acoustic emission is
usually generated. By monitoring the residual of the sound signal, or analyzing
the changes in the residual signal spectrum, some faults can be identified as long as
the sound signal changes continuously in amplitude (Hamzaoui et al, 1998; Shibata
et al, 2000; Singh et al, 1999; Wang, 2002). However, the limitations of acoustic
monitoring are that the signal-to-noise ratio is low, and sometimes the increase in
noise level is difficult to interpret.
Whenever moving surfaces interact, minute amounts of metal are removed and
deposited in the lubricant. The presence of the metallic residues in oil can be
detected by the use of chip sensors. Failures and their severity in a mechanical
component can be estimated by examining the deposit distribution, the boundary
morphology, and the surface topography of the wear debris (Kirk et al, 1995; Peng
& Kirk, 1988; Wang, 2002). However, this technique is not reliable for detecting
faults like fatigue cracks in a component because such failures shed few metallic
particles.
Most machines produce some low-level vibration when they function properly.
However, the vibration level increases as failure occurs in a component. Vibration-
based diagnosis has been the most popular monitoring technique because of its
ease of measurement (Braun, 1986; Mitchell, 1993; Wang, 2002). When the
vibration features of a component are obtained, the component's health condition is
estimated by comparing the obtained patterns with those corresponding to the
component's normal and problematic conditions. In this study, the fault detection is
60

61
based on the use of vibration analysis, and the methods used are going to be described
in the next sections.
4.2 Time Domain Analysis
In the time domain analysis, the time history of the signal itself can be used to
determine the parameters of a vibration including peak value, signal energy, the time
duration of events, statistical properties, the shaft orbit, any modulation, and also to
obtain the time domain averaging. Of these parameters, the statistical properties and
time domain averaging are often used as a basis for gear fault detection. 4.2.1 Time Domain Averaging
Time averaging of a vibration signal is a very useful and powerful method for
reducing dimensionality of a signal eliminating random noise content, and extracting
repetitive signal features. If a fault gives a perfectly consistent effect from revolution
to revolution, then averaging is a great help. For example, a defect on a gear tooth
surface due to spalling or loss of part of a tooth is theoretically to give a signal which
is consistent over many revolutions and which can be detected and analysed
effectively if the averaging process is considered. The averaged signal can be
obtained using the formula
( )∑=
+=N
nav nTtx
Nx
1
1 (4.1)
where T is the period of time which the signal is averaged and N is the number of
samples. The averaging operation requires either an accurate knowledge of the
repetitive frequency of the vibration signal or a reference signal. The reference signal
is synchronous with the repetition frequency, but is free of noise. In the case of
gearbox vibration analysis, the repetition frequency is to be equal to the rotational
frequency of the analysed gear.

62
4.2.2 Statistical Analysis
Although a high level of vibration is an important indicator in condition
monitoring, the rate of change of vibration intensity with time is also meaningful.
Some machines may normally exhibit a high level of vibration over their entire lives.
When such a machine develops a progressive fault, the resulting vibration level will
likely increase consistently with time, but these increases may be very small. If the
rate of symptom development is small, it may not be possible to observe a clear fault
symptom from variations in a signal’s waveform (Yesilyurt, 1997).
A system is termed deterministic if its properties such as displacement,
acceleration, stress, pressure, etc. can be predicted for further instances of time.
Many real systems, such as a gearbox with a localised developing fault within it,
exhibit characteristics which cannot be estimated in time. The characteristics of such
systems, termed random or non-deterministic, cannot be accurately predicted, but
they can be estimated by statistical quantities and these quantities can be used to
predict fault progression (Dyer & Stewart, 1978; Martin, 1992). The statistical
parameters which are widely used in condition monitoring, are given below.
Root mean square value (rms) is used to indicate the power content of the signal.
The rms (Figure 4.1) is defined as follows (Broch, 1973):
( )∫∞
∞−
= dttxT
rms 21 (4.2)
where x(t) and T denote time signal analysed and its period respectively. A local
tooth defect weakens the tooth and reduces the mesh stiffness when that tooth is in
mesh. This causes an impact of subsequent meshing teeth which changes the
spikiness of the vibration signal associated with this mesh Crest-factor and Kurtosis
are used to indicate spikiness of a signal (Yesilyurt, 1997), and defined respectively
as:

63
rmsP
F pc = (4.3)
( )[ ]4
4
rms
dtxtxKr
∫∞
∞−
−= (4.4)
where Pp (Figure 4.1) and x denote peak-to-peak value (which is the difference
between the maximum and minimum values of the signal) and mean-value of the
signal, defined as follows:
)min()max( xxPp −= (4.5)
( )∫=T
dttxT
x0
1 (4.6)
Figure 4.1 Definition of the Crest Factor, Peak and RMS levels
4.3 Frequency Domain Analysis
In frequency domain analysis, the amplitude of vibration response is represented
against frequency. The Fourier transform of a time signal is used to determine
spectral composition. The vibration response of a machine is governed by factors
Crest Factor = Peak to Peak value / RMS
Peak Level RMS Level

64
which include its components, assembly, mounting, and operation. For these reasons,
the vibration characteristics of any machine are unique to that particular machine,
and provided that the excitation forces are constant, the measured vibration level will
remain unchanged. It is for this reason that vibration spectra are often referred to as
machine signatures. If the machine, however, starts to develop faults, its vibration
level and consequently the shape of the frequency spectrum will change. By
comparing the frequency spectrum of a machine in damaged condition with the
reference frequency spectrum corresponding to the same machine in good condition,
deterioration can be detected (Yesilyurt, 1997).
Aside from offering a basis for fault detection, frequency domain analysis
provides a better understanding of some key signal properties including modulations
and harmonic content. Such properties cannot readily be determined in the time
domain analysis. The Fourier transform of a signal ( )x t is expressed as follows:
( ) ( )∫∞
∞−
−= dtetxfX tfi π2 (4.7)
where f is frequency variable. The inverse Fourier transform is used to obtain
original time signal from its Fourier representation. The inverse Fourier transform is
defined as follows:
( ) ( )∫∞
∞−
= dfefXtx tfi π
π2
21 (4.8)
where ( )fX denotes the Fourier transform of the signal ( )tx .
The spectral density of a signal per unit frequency at a particular frequency f
is ( )X f2, and total signal energy in the frequency domain can be calculated by
summing up the spectral density function over all frequencies. According to

65
Parseval’s theorem, the total energy calculated in both the time and frequency
domains is equal. That is:
( ) ( )x t dt X f df2 2
−∞
∞
−∞
∞
∫ ∫= (4.9)
4.4 Extensions to Conventional Frequency Analysis
Although time or frequency domain analysis can routinely be used to reveal fault-
indicating information in the vibration signal, there are some cases in which neither
analysis enhances those features of the signal which characterize a fault.
Two methods, the Hilbert transform analysis (sometimes called signal
demodulation) (McFadden, 1986; Nicks & Krishnappa, 1995; Staszewski &
Tomlinson, 1992; Staszewski, 1994; Wan & Zhao, 1991) and the Cepstrum analysis
(Lyon, 1987; Randal, 1987; Syed et al, 1980), are widely used to reveal condition
indicating information from vibration signals. They offer another way of representing
the information in the time domain by using the frequency content of the analysed
signal.
4.4.1 Signal Demodulation
Under the ideal operating conditions (constant load and speed), vibration from a
pair of gears exhibits predominant frequency peaks at the toothmeshing harmonic
and its harmonics if all teeth are identical and equally spaced. The resulting gear
meshing vibration can then be expressed as follows:
( ) ( )∑=
+=M
mmTMm tmfXtx
1
2sin θπ (4.10)

66
where mX is the vibration amplitude of a mesh frequency harmonic, m is the mesh
frequency harmonic order ( ,...3,2,1=m ), TMf is the fundamental toothmeshing
frequency, and mθ is the phase lag of the harmonic in question.
When a gear fault occurs in a gearbox, its vibration amplitude changes and it
exhibits modulations. The modulated vibration signal, ( )ty , can be written as
follows:
( ) ( )( ) ( )( )tbtmftaXty mmTM
M
mmm +++=∑
=
θπ2sin11
(4.11)
where ( ) ( )tbta mm and denote amplitude and phase modulation functions at time t for
each meshing harmonic. The modulated vibration signal, y(t), for any meshing
harmonic m can be approximated by bandpass filtering the overall vibration signal.
The bandpass filtered signal can then be expressed as follows:
( ) ( )( ) ( )( )tbtmftaXtz mmTMmmm +++≅ θπ2sin1 (4.12)
For computational purposes, ( )tzm can be assumed to be a projection of a complex-
valued analytic signal expressed by:
( ) ( ) ( )( )tzjtztc mmm H−= (4.13)
where H denotes the Hilbert transform operator. Equation (4.13) can also be
expressed in terms of the envelope function, ( )tAm , and the instantaneous phase
function ( )tmφ :
( ) ( ) ( )tjmm
metAtc φ= (4.14)

67
The application of the signal demodulation procedure in gearbox fault detection
requires bandpass filtering around one of the meshing harmonics. Since gearbox
vibration usually exhibits more than one meshing harmonic, the selection of the
appropriate meshing harmonic and the bandwidth of the analysis can be difficult. In
addition, the signal demodulation technique is not capable of detecting small
impulses produced by local tooth defects (Staszewski & Tomlinson, 1992; Yesilyurt,
1997). For these reasons, the signal demodulation technique is not included in this
study.
4.4.2 Cepstrum Analysis
Cepstrum analysis is used for a variety of purposes including fault detection and
monitoring, removal of unwanted signal components from the vibration signal,
detection of periodic structures in the signal, and many others (Tang et al, 1991;
Yesilyurt, 1997). A summary of the theoretical background of cepstral analysis is
now presented.
Input
( )x t ( )tsOutput
( )ty
System
Figure 4.2 Input-output relationship for a
linear system.
Figure 4.2 shows a linear time-invariant system with an impulse response ( )s t ,
excited by an input ( )x t , and producing an output ( )y t . The output signal in the time
domain can be calculated by convolving the input signal with the impulse response
of the system (Randall, 1987):
( ) ( ) ( )tstxty *= (4.15)

68
where * denotes convolution. The output signal ( )y t in equation (4.15) is the overall
response of the system to the excitation, but it does not reveal any direct information
regarding the input or the system. The same relationship can be expressed in the
frequency domain by multiplying the Fourier transforms of the input and system
transfer functions:
( ) ( ) ( )fSfXfY = (4.16)
where ( )X f , ( )S f , and ( )Y f denote the Fourier transforms of the input, system, and
output respectively. The output signal in the frequency domain can be represented in
terms of its amplitude and phase at each frequency as follows:
( ) ( ) ( )[ ]ffjfj sxy eSXeY φφφ += (4.17)
where the symbol . denotes magnitude. It can be seen that the magnitude of the
output is a product of the magnitudes of the input and system functions; the phase of
the output yφ is, however, a sum of the phases of the input xφ and system sφ . If the
natural logarithm of equation (4.17) is taken, the input and system functions add their
properties to produce an output. The logarithmic transform is:
( ) ( ) ( )y x sLn Y j f Ln X Ln S j f fφ φ φ+ = + + ⎡ + ⎤⎣ ⎦ (4.18)
and the logarithmic magnitude transform is:
LnY Ln X Ln S= + (4.19)
Both the logarithmic transform and the logarithmic magnitude transform are
formed by summing the input and system parameters. Since the Fourier transform is
a linear conversion, the input and the system parameters will be added together in
their time domain representations of both these transforms. The inverse Fourier

69
transforms of these transforms are called the real (or power) cepstrum and complex
cepstrum respectively (Randall, 1987; Yesilyurt, 1997). They are defined as follows:
( ) ( ) ( )C C Cy x sτ τ τ= + (4.20)
( ) ( ) ( ) ( )C C C Cy yc x sτ τ τ τφ φ= + + (4.21)
where ( )Cy τ denotes the real cepstrum of the output signal, and ( )Cx τ and ( )Cs τ
represent the real cepstra of the input signal and the system functions respectively.
The only difference between the real and complex cepstra is that the real cepstrum
does not contain any phase information.
It can be seen from equations (4.20) and (4.21) that the effects of the input and the
system functions are added together to form the output signal in the cepstral domain,
and because of this separation property, cepstrum analysis is widely used in
condition monitoring. When, for instance, there is a localised gear fault (e.g. a tooth
breakage), a transient signal is generated only when this defected tooth is in gear
mesh. Such variation, which repeats itself with a given frequency, is seen as
rahmonics in the cepstrum (like harmonics in the spectrum) which have the same
periodicity as that fault.
Cepstrum analysis can also be used in monitoring of distributed fault
advancement in gears. Because a distributed fault affects all gear teeth, low-
quefrency rahmonics corresponding to the consecutive tooth engagements will occur
and these components may be used for distributed fault monitoring purposes.
4.5 Combined Time-Frequency Domain Analysis
Condition monitoring and fault diagnostics is useful for ensuring the safe running
of machines. Signal analysis is one of the most important methods used for condition
monitoring and fault diagnostics, whose aim is to find a simple and effective
transform to the original signals. Therefore, the important information contained in

70
the signals can be shown; and then, the dominant features of signals can be extracted
for fault diagnostics. Hitherto, many signal analysis methods have been used for fault
diagnostics, among which the FFT is one of the most widely used and well-
established methods. Unfortunately, the FFT-based methods are not suitable for non-
stationary signal analysis and are not able to reveal the inherent information of
nonstationary signals. However, various kinds of factors, such as the change of the
environment and the faults from the machine itself, often make the output signals of
the running machine contain non-stationary components. Usually, these non-
stationary signal components contain useful information about machine faults;
therefore, it is important to analyses the non-stationary signals (Peng & Chu, 2004).
Because of the disadvantages of the FFT analysis, it is necessary to find
supplementary methods for non-stationary signal analysis.
Time–frequency analysis is the most popular method for the analysis of non-
stationary signals, such as the short time Fourier transform (STFT) (Cohen, 1989;
Heneghan et al, 1994; Qin & Zhong, 2004;Wang & McFadden, 1993), the Wigner–
Ville distribution (WV) (Choy et al, 1996; Claasen & Mecklenbrauker, 1980; Cohen,
1989; McFadden & Wang 1992; Stander et al, 2002), instantaneous power spectrum
distribution (IPS) (Baydar & Ball, 2000; Cohen, 1989; Hippenstiel & De Oliveira,
1990; Yesilyurt, 1997, 2003), and the continuous wavelet transform (CWT) (Chui,
1992; Cohen, 1989; Heneghan et al, 1994; Meyer,1993; Nikolaou & Antoniadis,
2002; Ohue et al, 2004; Peng & Chu, 2004; Staszewski, 1994; Yesilyurt, 1997;
Zheng et al, 2002). All these methods perform a mapping of one-dimensional signal
x(t) to a two-dimensional function of time and frequency TFR(x : t,ω ), and are
therefore capable of providing true time–frequency representations for the signal x(t).
Time-frequency methods can exhibit local features of signals and give an account
of how energy distribution over frequencies changes from one instant to the next. Of
these methods, the WV and IPS transforms are bilinear distributions, which result in
interference terms when a multi-component signal is analysed, and this might make
the interpretation of distribution difficult. For example if a time signal which consists
of n monocomponents is analysed by a time-frequency distribution such as the

71
Wigner-Ville (Choi & Williams, 1989), it produces n(n-1)/2 interference terms
located at the midpoints of the main components. In an IPS representation, only the
existing signal components are present (although they are oscillatory) because the
interference terms coincide with them. For this reason, the IPS interferences do not
detract from the interpretation of the distribution as much do the interferences
associated with other bilinear time-frequency distributions.
It is no doubt that the WV provides good time and frequency localisations in the
time–frequency plane. However, even support areas of the signal do not overlap each
other, interference terms will appear on the time–frequency plane which will mislead
the signal analysis. In order to overcome these disadvantages, many improved
methods have been proposed, such as Choi–Willams distribution (CWD), cone-
shaped distribution (CSD), and etc. Without exception, however, elimination of one
shortcoming will always lead to the loss of other merits. For example, the reduction
of interference terms will bring the loss of time–frequency concentration.
In contrast, both the STFT and CWT perform linear decompositions of the
analysed signal, and therefore do not produce any interference, which might detract
from the interpretation of the targeted signal. However, the STFT employs a constant
window size during the analysis and, hence, results in a constant time–frequency
resolution over all time-frequency plane. On the contrary, the CWT performs a
decomposition of the analysed signal into a set of waves (or wavelets), which are
derived from a single wavelet, and wavelets at different frequencies are generated by
introducing dilation into the analysing wavelet. A large window is used for low
frequency estimates with poor time resolution, whereas the window automatically
narrows at high frequencies, improving time resolution of the transform, but the
frequency resolution deteriorates according to the uncertainty principle (Chui, 1992;
Hlawatsch & Boudreaux-Bartels, 1992). Therefore, the wavelet transform provides a
good compromise between localization and frequency resolution. In this study,
Wavelet transform was used for the detection of gear faults such as localised and
distributed pits and tooth breakage.

72
Table 4.1 gives a comparison of performances of CWT, STFT, WV, CWD, and CSD
(Peng & Chu, 2004).
Table 4.1 Comparison of the performances of the different methods
Methods Resolution Interference
term Speed
CWT
Good frequency resolution and low
time resolution for low-frequency
components; low frequency resolution
and good time resolution for high-
frequency components
No Fast
STFT Dependent on window function, good
time or frequency resolution No
Slower
than CWT
WV Good time and frequency resolution
Severe
interference
terms
Slower
than STFT
CWD Good time and frequency resolution
Less
interference
terms than WV
Very slow
CSD Good time and frequency resolution
Less
interference
terms than
CWD
Very slow

73
4.5.1 Wavelet Analysis
Wavelets are mathematical functions which are well suited to expansion of non-
stationary signals. They form the kernel of the wavelet transform, and enable a
mapping of signals from the time domain into either the time-scale or the time-
frequency domain. Their particular advantage is that a different resolution can be
obtained at different times and at different frequencies.
The use of wavelet transform was introduced at beginning of the 1980s by Morlet
et al., who used it to evaluate seismic data. Since then, various types of wavelet
transform have been developed, and many other applications have been found. The
continuous-time wavelet transform (CWT) has been widely used in data analysis
where quantum mechanics, seismic geophysics, EEG, non-destructive testing and
fatigue analysis. The most famous version of the wavelet transform is, however, the
discrete wavelet transform (DWT). This transform has excellent signal compaction
properties for many classes of real-world signals while being computationally very
efficient. Therefore, it has been applied to almost all technical fields including image
compression, de-noising, numerical integration, and pattern recognition (Mertins,
1999 ).
4.5.1.1 The Continuous Wavelet Transform
The wavelet transform performs a decomposition of ( )x t into a set of waves (or
wavelets) which are derived from a single wavelet, termed the analysing wavelet
h(t). The wavelets at different frequencies are generated by introducing dilation into
the analysing wavelet:
( ) ⎟⎠⎞
⎜⎝⎛=
ath
atha
1 (4.22)
where ( )tha denotes the dilated form of the analysing wavelet by the scale parameter
a ( )a > 0 . The dilated wavelet is normalised by a factor of a-1/2 so that it has the same

74
energy as the analysing wavelet. Since the analysing wavelet h(t) and family of the
wavelets at different scales are conventionally centred around 0, and also because
they have very fast decay (see the next section for the definition of the decay), the
wavelets are shifted in time by b (b ∈ℜ) to cover the entire time function:
( ) ⎟⎠⎞
⎜⎝⎛ −
=a
btha
th ab1
, (4.23)
where ( )th ab, represents the dilated and shifted wavelet function. The interpretation
of equation (4.23) is that the size of the wavelet functions ( )th ab, varies with dilation
(or scaling) a. When large scales are selected, the resulting ( )th ab, becomes low
frequency wavelet functions and spread out in time, and vice versa. The expansion of
the signal into wavelets given by equation (4.23) is called the continuous wavelet
transform (CWT) and is defined as follows (Bentley, 1994; Kar & Mohanty, 2006;
Meyer, 1993; Ohue et al, 2004; Oin &Zhong, 2004; Peng &Chu, 2004; Rao, &
Bopardikar, 1998; Yesilyurt, 1997, 2004, 2006; Zheng et al, 2002):
( ) dta
bthtxa
abCWTx ⎟⎠⎞
⎜⎝⎛ −
= ∫∞
∞−
1),( (4.24)
4.5.1.1.1 The Analysing Wavelet. The analysing wavelet h(t) must have certain
properties, the firstly the analysing wavelet should be oscillatory and should have a
fast decay. The oscillation is required because the wavelet transform measures the
similarity between the signal ( )x t and the wavelet at a given scale a and around the
time b.
The incorporation of fast decay gives good localisation capability. If the wavelet
( )th ab, has a very fast decay, it is well localised around the time b. The decay of the
wavelet can be described as a rapid decrease to zero as t tends to infinity (Meyer,
1993). That is:

75
( )h t dt =−∞
∞
∫ 0 (4.25)
Secondly, the wavelet transform must be invertible. This means that the original
signal ( )x t can be reconstructed from the values of ( )abCWTx , . To reconstruct ( )x t
from the ( )abCWTx , , the Fourier transform of the analysing wavelet is subjected to
the following condition (known as the admissibility condition) (Chui, 1992;
Yesilyurt, 1997):
( )C H fdffh = < ∞
−∞
∞
∫ 2 (4.26)
where ( )H f is the Fourier transform of h(t). One way to ensure that the admissibility
condition is satisfied is to set ( )H f to zero for f ≤ 0. The wavelet transform thus has
no steady-state component. If equation (4.26) is satisfied, the signal ( )x t can be
reconstructed by the following equation (Chui, 1992):
∫∫ ⎟⎠⎞
⎜⎝⎛ −
= 2*1),(1)(
adbda
abth
aabCWT
Ctx x
h
(4.27)
Mathematically, the wavelet transform offers flexibility in the selection of the
analysing wavelet. The Morlet wavelet is used in this study because it is closely
related to Fourier analysis and is therefore easier to understand. The Morlet wavelet
in the time and frequency domains is defined as follows (Chui, 1992; Yesilyurt,
1997):
( ) ( ) ( )2exp2exp 20 ttfjth −= π (4.28)
( ) ( )( )H f f f= − −2 2 20
2π πexp (4.29)

76
where f0 is the wavelet centre (or oscillation) frequency and t∈ℜ. The Morlet
wavelet itself is not admissible, but appropriate selection of the wavelet centre
frequency (e.g. Hz875.00 ≥f ) makes the Morlet wavelet admissible in practice
(Heneghan et al, 1994).
Figure 4.2 shows both the real part of a 1Hz Morlet wavelet at various scales and
the windowed basis functions of the STFT (Short-Time Fourier Transform)
transform for different frequencies. Both basis functions are centred at time t = 0 and
described within a time span of − ≤ ≤5 5t . The windowed basis functions were
generated using the Gaussian window. It can be seen that the frequency variation in
the windowed basis functions does not affect the window size in time, and the
resolution of the transform is hence constant during the analysis.
-5 0 5-1
-0.5
0
0.5
1a=1
Am
plitu
de
-5 0 5-1
-0.5
0
0.5
1a=0.5
-5 0 5-1
-0.5
0
0.5
1a=0.25
-5 0 5-1
-0.5
0
0.5
1f=1HZ
Am
plitu
de
Time (sec)-5 0 5
-1
-0.5
0
0.5
1f=2Hz
Time (sec)-5 0 5
-1
-0.5
0
0.5
1f=4Hz
Time (sec)
Figure 4.2 Real part of 1Hz Morlet wavelet at various scales and windowed basis
functions of the STFT.

77
In contrast, the bandwidth of the wavelets varies proportionally to their centre
frequencies, which are adversely affected with the dilation and results in a better
localisation than the windowed basis functions on time axis. As the scale reduces, the
wavelets become more compact in time, improving the time resolution of the
transform, but frequency resolution deteriorates according to the uncertainty
principle (Mertins, 1999; Rioul & Vetterli, 1991; Yesilyurt, 1997).
-5 0 5-1
-0.5
0
0.5
1a=1
Am
plitu
de
-5 0 5-1
-0.5
0
0.5
1a=0.5
-5 0 5-1
-0.5
0
0.5
1a=0.25
-5 0 5-1
-0.5
0
0.5
1
Am
plitu
de
Time (sec)
a=1
-5 0 5-1
-0.5
0
0.5
1
Time (sec)
a=0.5
-5 0 5-1
-0.5
0
0.5
1
Time (sec)
a=0.25
fo=1 fo=1 fo=1
fo=2 fo=2 fo=2
Figure 4.3 Comparison of the real parts of 1Hz Morlet wavelet and 2Hz Morlet at
different scales.
As seen from figures 4.3 and 4.4, when the centre frequency of Morlet wavelet
increases, the sensitive of WT at high frequencies increases.

78
0 1 2 3 4 5 6 7 8 9 100
0.1
0.2
0.3
Am
plitu
de
0 1 2 3 4 5 6 7 8 9 100
0.1
0.2
0.3
Frequency (Hz)
Am
plitu
dea=1
a=0.5
a=0.25
a=1
a=0.5
a=0.25
fo=1Hz
fo=2Hz
f=fo/a
Figure 4.4 A Comparison of frequency domain representations of 1Hz and 2Hz
Morlet wavelets at different scales.
4.5.1.1.2 Time-Frequency Analysis by Wavelet Transform. It has been explained
in the previous section that wavelets with a fast decay are well localised in both the
time and frequency, and it is for this reason that they can be used as window
functions. The centre, th, and the radius, Δht, of a window function can be calculated
using the following equations (Chui, 1992; Mertins, 1999; Yesilyurt 1997):
( )∫∞
∞−
= dtthth
th2
22
1 (4.30)

79
( ) ( )2/1
2222
1
⎭⎬⎫
⎩⎨⎧
−=Δ ∫∞
∞−
dtthtth hht (4.31)
where 2 is the norm for the space ( )L2 ℜ , and defined as follows:
w w w21 2= ⟨ ⟩, / (4.32)
When the wavelet function is shifted to position b on the time signal, the wavelet
transform of the signal x(t) will be restricted within a time window expressed as
follows (Chui, 1992):
( )hthhth aatbaatb Δ++Δ−+ , (4.33)
The wavelet is located at b ath+ and has a width of htaΔ2 . The wavelet transform
simultaneously analyses the signal within a certain frequency range. This can be
proven simply by expressing the wavelet transform given by equation (4.24) in the
frequency domain:
( ) ( ) ( ) ( ) ( )⟩⟨=⟩⟨= fHfXthtxabCWT ababXx ,,, ,,, (4.34)
where ⟨ ⟩ denotes the inner product and ( )X f and ( )fH ab, represent the Fourier
transforms of the signal and wavelet basis function respectively. The parameter
( )fH ab, can be derived by taking the Fourier transform of the wavelet basis function
given in equation (4.23):
( ) ( )afHeafH fbjab
π2,
−= (4.35)

80
where ( )H af is the Fourier transform of dilated wavelet. Substituting ( )fX and
( )fH ab, into equation (4.34) yields the ( )abCWTx , expressed in the frequency
domain:
( ) ( ) ( )∫∞
∞−
= dfeafHfXaabCWT fbjX
π2*, (4.36)
If ( )H f is also a window function in the frequency domain, then its centre, f h , and
its radius, hfΔ , can be calculated using equations (4.30) and (4.31). If ( )H af is
expressed in terms of the centre frequency of the mother wavelet, this becomes
(Chui, 1992):
( )H af a ffaa
h* = −⎛⎝⎜ ⎞
⎠⎟
⎛⎝⎜
⎞⎠⎟η (4.37)
where f ah is called the centre frequency – the frequency at which the wavelet
window is centred in the frequency domain. It can be seen with reference to equation
(4.34) that the wavelet window has a radius of ahfΔ in the frequency domain and,
therefore, the wavelet transform given by equation (4.36) gives local information of
( )X f within a frequency window limited as follows:
⎟⎟⎠
⎞⎜⎜⎝
⎛ Δ+
Δ−
aaf
aaf hfhhfh , (4.38)
Equation (4.38) states that the frequency window has a width of 2 ahfΔ and this
becomes very compact for large values of dilation. When equations (4.33) and (4.38)
are considered, the information of x(t) evaluated by the continuous wavelet transform
is bounded within a two dimensional flexible time-frequency window for each pair
of dilation and translation values. This flexible time-frequency window can be
expressed as follows:

81
( ) ⎟⎟⎠
⎞⎜⎜⎝
⎛ Δ+
Δ−×Δ++Δ−+
aaf
aaf
aatbaatb hfhhfhhthhth ,, (4.39)
It can be concluded from equation (4.39) that the ( )abCWTx , offers a time-frequency
analysis of the signal x(t) with a varying time-frequency resolution. The window
automatically narrows in the time domain (or widens in frequency domain) for small
values of a, and vice versa. Although the analysing window widths in both the time
and frequency domain narrow or stretch with dilation, the area of the time-frequency
window is always constant and is equal to hfhtΔΔ4 , as depicted in Figure 4.5.
Frequency
1/hf a
2/hf a
1 1 hb a t+2 2 hb a t+ Time
Figure 4.5 Time-frequency window of the wavelet transform.

82
4.5.1.1.3 Properties of the Wavelet Transform. The wavelet transform has a
number of desirable properties for vibration signal representation and most of them
have been extensively studied (Chui, 1992; Mertins, 1999; Yesilyurt 1997). In this
section, some important features of the continuous wavelet transform are
summarised.
Localisation in the Time and Frequency Domains: The wavelet transform given
by equation (4.24) is not local, and therefore, the wavelet transform coefficient at a
particular time and dilation depends upon the analysed signal for all time instances.
If the centre of the wavelet window is located at (b ath+ ), the transform, according to
equation (4.39), is restricted within a time span of htaΔ2 (Chui, 1992). The time
localisation of the wavelet transform thus depends upon the value of the dilation
parameter, and good time localisation enables short duration signals to be
represented.
For a particular dilation value, the corresponding wavelet window in the
frequency domain is located at f ah , with a frequency window width of ahfΔ2 . As
in time domain, the window location and the window width in frequency domain
depend upon the value of the dilation. As a result, the wavelet transform is restricted
in the frequency domain within a frequency range of ahfΔ2 around the wavelet
centre frequency of f ah . Good frequency localisation of a wavelet transform
enables low-frequency signal components to be resolved.
Linearity: In contrast to the bi-linear time-frequency distributions, the continuous
wavelet transform results in a linear decomposition of the analysed signal. Therefore
it does not cause any interference which might detract from the interpretation of the
target signal.
Conservation of Signal Energy: Signal energy is preserved by the continuous
wavelet transform. This means that the signal energy can be calculated from the
continuous wavelet transform coefficients (Rioul & Vetterli, 1991; Yesilyurt 2004,
2006):

83
( ) ( )∫ ∫ ∫∞
∞−
∞
∞−
∞
∞−
== 222 ,1
adbdaabCWT
CdttxE x
hw (4.40)
4.5.1.1.4 Scalogram and its Mean Frequency. A scalogram (which represents the
energy density function of a signal ( )x t as a function of time and frequency) is
defined as the square of the absolute value of the continuous wavelet transform
(CWT). In other words, in equation (4.40), the term ( ) 2, abCWTx can be considered
as the energy density (or scalogram) over the b-a plane. When such an energy
density function is described, its mean frequency, which represents the energy centre
of gravity at a certain time t, can be expressed as follows:
( ) ( ) ( )tMtMtf 01=Ω (4.41)
where ( )tM n denotes the frequency moments at a particular time t and n
( ,...3,2,1=n ) represents the order of frequency moment. The nth order frequency
moment of a scalogram at time t can be expressed as follows:
( ) ( )∫=NF
xn
n dfabCWTftM0
2, (4.42)
It can be seen that the 0th order moment ( )oM t gives the instantaneous signal
energy, IE, at time t.
4.5.1.1.5 Implementation of the Wavelet Transform. The wavelet transform can be
implemented either in the time domain or in the frequency domain. The time domain
calculation of the transform is achieved by direct implementation of the discrete
version of equation (4.26) (Bentley & McDonnell, 1994). Since the time domain
calculation is a convolution operation, it brings with it a higher computational load.
In contrast, a fast calculation of the wavelet transform can be achieved via simple
multiplication operations if the frequency domain expression is considered.

84
The fast calculation procedure of the wavelet transform in Matlab code is
presented in flow chart form in Figure 5.6. The calculation is based upon octave band
analysis in which each octave is equally subdivided into voices. Although the number
of octaves used in the wavelet calculation is dictated by the length of the data time
record, the selection of the number of voices depends upon the desired frequency
resolution of the transform, and the larger the number of voices the better the
frequency resolution. In the display section of the flow chart, abs and angle denote
the magnitude and the phase of the transform respectively.

85
Figure 4.6 Block diagram of the fast wavelet transform calculation.
Display
( )Amplitude = abs CWT ( )Phase = angle CWT
Wavelet transformation for band no= −0 1: for subband nv= −0 1: ( )a band subband nv= − +2 ( ) ( ) ( )( )CWT band nv subband FFT X f H af1 1+ + = −* ,: .* * end end
Calculate ( ) ( )X f H f, *
Number of octave (no)
Input Signal x(t)
Wavelet h(t) Number of voices (nv)
Start
Stop

86
4.5.1.2 The Discrete Wavelet Transform
Recently, there has been considerable interest in the use of the discrete wavelet
transform (DWT) for removing noise from signals and images. The DWT is a batch
method, which analyses a finite-length time-domain signal at different frequency
bands with different resolutions by successive decomposition into coarse
approximation and detail information (Ionescu et al, 2002). In chapter 5, the DWT
will be used for removing noise from vibration signals. A brief summary about this
method is given in the following section.
4.5.1.2.1 Theory of the DWT. In Equation (4.24), if we choose dyadic scales
2 jja = , and , 2 j
j kb k= , we obtain (Li et al, 1999; Luo et al, 2003; Ohue et al, 2004);
*, ,( ) ( ) , ,j k j kd x t t dt j k Zψ
∞
−∞
= ∈∫ (4.43)
where ,1 2( )
22
j
j k j
t ktψ ψ⎛ ⎞−
= ⎜ ⎟⎝ ⎠
(4.44)
The wavelet coefficients (or detail coefficients) ,j kd are taken as time-frequency map
of the original signal ( )x t .
In terms of the relationship between the wavelet ( )tψ and scaling functions ( )tφ ,
namely:
2ˆ ˆ( ) (2 )j
jφ ω ψ ω
∞
=−∞
= ∑ (4.45)
the discrete scaling function with corresponds to the discrete wavelet function is as
follows:

87
,1 2( )
22
j
j k j
t ktφ φ⎛ ⎞−
= ⎜ ⎟⎝ ⎠
(4.46)
it is used to discrete the signal, the sampled values are called scaling coefficients (or
approximation coefficients) ,j kc ,
*, ,( ) ( )j k j kc x t t dtφ
∞
−∞
= ∫ (4.47)
when 1j > , the scaling coefficients and the wavelet coefficients are written as
follows:
1, ,( 2 )j k j kc h i k c∞
+−∞
= −∑ (4.48)
1, ,( 2 )j k j kd g i k c∞
+−∞
= −∑ (4.49)
where the terms g and h are high-pass and low pass filters derived from the wavelet
function ( )tψ and scaling function ( )tφ , the coefficients 1,j kc + and 1,j kd + represent a
decomposition of the ( 1)j − th scaling coefficient into high and low frequency terms.
Figure 4.7 shows the implementation of the DWT where the resolution of the
time-domain signal x(n), n=1,..,N, is changed by low/high pass filtering operations
and the scale is changed by downsampling/upsampling operations (Matlab, 2002).
The parameters of DWT are the type of the wavelet filter used and the number of
decomposition levels (j=1,….,L).

88
(a)
(b)
Figure 4.7 The DWT implementation. (a) Decomposition. (b) Reconstruction.
Any discussion of wavelets begins with Haar wavelet, which is the first and
simplest in its kinds. Haar wavelet is discontinuous, and resembles a step function
(Mertins, 1999).
1 for 0 0.5( ) 1 for 0.5 1
0 otherwise
tt tψ
≤ <⎧⎪= − ≤ <⎨⎪⎩
(4.50)
the corresponding scaling function is,
1 for 0 1( )
0 otherwiset
tφ≤ <⎧
= ⎨⎩
(4.51)

89
The most well known family of orthonormal wavelets is a family of Daubechies.
Figure 4.8 shows some Daubechies wavelets, the corresponding scaling functions,
and the frequency response of the filters. It can be seen that the scaling functions and
wavelets become smoother when the filter length is increased.
Figure 4.8 Frequency response of the minimum-phase Daubechies filters and the corresponding
scaling functions and wavelet.
4.5.1.2.2 Wavelet De-Noising. Most noise removal methods actually require
knowledge of the noise content in the time series. With wavelet denoising, it is not
necessary to know which part of the signal is white noise. This is because the
wavelet transform (WT) is firstly applied to the signal and then all coefficients below
a certain size are discarded (Meyer, 1993). This technique makes use of the fact that
some of the decomposed wavelet coefficients correspond to signal averages and
others are associated with details on the original signal (Roy & Ganguli, 2005).

90
The wavelet de-noising approach is based on the observation that random errors in
a signal are present over all the coefficients while deterministic changes are captured
in a small number of relatively large coefficients. As a result, a nonlinear
thresholding (shrinking) function in the wavelet domain tends to keep a few larger
coefficients representing the underlying signal, while the noise coefficients tend to
reduce to zero.
Practically, the wavelet de-noising method consists of applying the discrete
wavelet transform to the original noisy data, thresholding the detail coefficients, then
inverse transforming the thresholded coefficients to obtain the time-domain de-
noised data. The amount of thresholding, λ, is calculated using either Stein’s
unbiased risk estimate (SURE), or Universal threshold, or Heuristic principles (Daud
& Yunus, 2004), and two thresholding methods are frequently used which are “hard”
or “soft”. In the hard thresholding, all the wavelet coefficients below a threshold
value λ are forced to zero. Mathematically, for the wavelet coefficients w, both the
hard and soft thresholding procedures are carried out as follow:
Hard-thresholding:
0w if w
wotherwise
λ⎧ >⎪= ⎨⎪⎩
(4.52)
Soft-thresholding:
ˆ0
w if ww w if w
otherwise
λ λλ λ
− >⎧⎪= + < −⎨⎪⎩
(4.53)
The technique of soft thresholding is also called wavelet shrinkage because all the
wavelet coefficients are reduced. Shrinkage of the wavelet coefficients is more
helpful in reducing the noise from the signal as compared to the hard thresholding

91
method. It is possible that some of the signal information may also be lost during the
de-noising process.
Considering a signal:
( ) ( ) ( )x k s k n k= +
where s(k) is the original signal, n(k) is the noise, the wavelet de-noising is to be
performed for a bloc of N samples, x(k), k=1,…,N, in the following processing steps:
DWTW(x)
ThresholdingT(w, )
x(k) IDWTW -1( )
s(k)w ww
Figure 5.5 Wavelet denoising processing
The w is the wavelet coefficients vector comprising the approximation coefficient jc
(at the coarser level L), and the detail coefficients jd at levels j=1,…L, w is also
wavelet coefficients vector after thresholding/shrinking of jd , j=1,…L.

92
CHAPTER FIVE
EARLY DETECTION AND ADVANCEMENT MONITORING OF LOCAL
PITTING FAILURE IN GEARS
5.1 Introduction
A local tooth defect such as a fatigue crack, a pit or chip weakens a tooth and
causes transient events when that faulty tooth is in mesh. The magnitude and
duration of these transients depend mainly upon the severity of the tooth defect and
contact ratio of the gear pair. If the tooth fault severity is small and the contact ratio
is relatively high, the resulting transient may not be seen distinctively on the
vibration signal, and time-frequency analysis can be effectively used for the
revelation of such events. This chapter presents the use of suitable vibration based
techniques (i.e. time and frequency domain analyses, cepstrum, and continuous
wavelet transform) for the detection of pitting faults in a two-stage industrial helical
gearbox. Pits are seeded on some of the input pinion gear teeth in differing degrees
of fault severity as small circular bottomed cavities and intended to replicate the fault
developing on a few teeth due to shock or load fluctuation. The resulting vibration
signal is detected by accelerometers located around the bearing housing of the input
pinion gear, and analysed using the considered techniques to reveal induced tooth
damage.
5.2 Pitting Fault
As mentioned in section 2, surface fatigue is the failure of a material due to
repeated surface or subsurface stresses that exceed the endurance limit of the
material. Hertzian contact stress, which is generally responsible for the initiation of
pits, can simply be expressed using the standard theory for the line contact of two
cylinders with a load P' per unit length. The resulting maximum contact pressure po,
and semi contact width b, can be expressed as follow (Smith, 2003):
92

93
*
oP Ep
Rπ′
= (5.1)
*2 P RbEπ′
= (5.2)
where R denotes the effective curvature and can be expressed as 1 2
1 1 1R R R= + in
which R1 and R2 represent radii of curvature of the cylinders in contact. Similarly, E*
denotes the contact modulus and can be expressed as 2 2
1 2*
1 2
1 11E E E
ν ν− −= + where E1,
E2 and ν1, ν2 are Young’s moduli and Poisson’s ratios, and suffixes 1, 2 refer to the
two bodies in contact. The resulting maximum shear stress is then max 0.3 opτ ≅
(Smith, 2003).
Maximum shear stress occurs typically about 0.5 mm below the surface and
causes the initiation of fatigue cracks which goes initially parallel to surface and then
change its direction of propagation upwards toward the surface. When they reach the
surface, a hemisphere of steel breaks out leaving the classical pit which is typically 1
mm in diameter and 0.5 mm deep. If the pitting fault (as shown Figures 5.1 (a) and
(b)) cannot be detected at its early stage of development, it may result in a complete
fracture of gear tooth as shown in Figure 5.1(c) (Yesilyurt, 1997). Therefore, the
early detection of a potential pitting failure, as well as the remaining life in the
damaged gear, is useful information for equipment users, and the examination of
operating state monitoring and fault diagnosis in gears without disassembly has
become one of the most important research areas (Glodez et al, 1997, 2004 ).

94
Figure 5.1 Typical examples of local destructive pitting faults attributed to
excessive contact stress due to fluctuating load.
5.3. Experimental Setup and Pitting Fault Simulation
5.3.1. Gear test rig
A two-stage industrial gearbox shown in Figures 3.1-3.3 was used for the tests.
All the helical gears were made of steel and were ground and induction case
hardened. The other specifications of the gears are given in Table 3.1. In addition,
the load capacity of the driving DC motor was nearly 2.2kW compared to that of
gearbox used which is nearly 8.1kW. For this reason, the face width of the pinion test
gear was reduced to 4mm from its original value of 12mm so that it could be tested at
reasonably high load. The vibration signal generated by the gearbox was detected by
accelerometers located mutually perpendicular to each other on the input shaft
bearing housing as seen in Figure 3.3. The position of the input shaft of the gearbox
was indicated by an inductive sensor which produces a pulse per test pinion gear
rotation.
(a) (b)
(c)

95
5.3.2. Pitting fault simulation
Specified gear load can be exceeded due to shock or cyclic load variation and,
consequently, some teeth on the same gear may be subjected to a higher load than the
capacity of gear. In such cases, a pitting fault may probably occur in time on the
tooth surfaces on which a higher load is experienced. All the simulated surface pits
were introduced to some of the pinion gear teeth using an electro-erosion machine as
shown in Figure 5.2, and were intended to replicate a pitting failure initiating firstly
on a single tooth, and then developing over the neighbouring tooth surfaces.
Figure 5.2 Formation of pits on gear tooth surfaces using an electro-erosion
machine
First of all, a circular pit (whose diameter and depth are approximately 0.7mm and
0.1mm respectively) was seeded onto a single tooth surface as shown in Figure
5.3(b). This gear tooth, called as centre tooth, was positioned such that it came into
mesh approximately 300° pinion rotation position. After that, in order to represent
the advancement of fault, the number of defected teeth was increased to five and
additional pits were also introduced to the neighbouring teeth as shown in Figure
5.3(c) (i.e. 5 pits on the centre tooth, 3 pits on the adjacent two teeth, and 1 pit on the
other two teeth). Moreover, the severity of fault was increased by doubling the

96
number of pits on the same gear teeth. At the final stage of the fault development, the
number of pits was redoubled on the same gear teeth during which the surface of the
centre tooth was completely covered by severe pitting marks as illustrated in Figure
5.3(e).
Figure 5.3. Seeded local pits.
5.4 Analysis of Gear Vibration
5.4.1 Time and frequency domain analyses
During the tests, the speed of test pinion was set to 2678 rpm giving a
fundamental tooth meshing frequency of 1294Hz for the first stage, and 420.7Hz for
the second stage. Both the vibration and positioning signals were sampled at 15kHz
(a) (b)
(c) (d)
(e)

97
and stored on a computer. The raw vibration data was continuously collected over
1338 pinion rotations and frequency domain approach was used to obtain the residual
vibration (whose implementation is well documented in (Futter, 1995). Since a two-
stage helical gearbox was used, the residual vibration was constructed by removing
regular meshing components corresponding to the both gear stages. In addition, in
order to eliminate the unbalance effect of each rotating component in the gearbox,
per rev sidebands located around the toothmeshing harmonics were also removed
from the residual vibration. Moreover, the resulting residual vibration was split into
267 five-pinion-rotation blocks or sample functions using reference signal, and the
ensemble average of the vibration was calculated with the start of each sample
function being determined by the reference signal. Furthermore, the averaged
residual signal was de-noised using Symlet wavelet (sym4) by applying a soft-
thresholding according to the Heuristic principle (Daud & Yunus, 2004; Ionescu et
al, 2002; Matlab, 2002; Roy & Ganguli, 2005; Ykhlef et al, 2004).
Figure 5.4 shows the averaged gear vibration accelerations and their
corresponding spectra together with de-noised residual vibration signals detected
during the advancement of pitting failure. It can be seen that the appearances of the
averaged gear vibration accelerations are more or less similar to each other and no
symptoms of fault progression can be seen until the introduction of last seeded fault.
Since a large number of averaging was considered, the resulting spectra are mainly
dominated by the toothmeshing frequency components of vibration generated by the
first gear stage. Similar to the time traces, the spectra also reveal no early indications
of progression of pitting fault. However, when the last seeded fault is introduced (e.g.
one of the gear tooth surfaces is completely covered with pitting marks), the
amplitude of vibration is remarkably increased when that tooth is in mesh giving a
peak-to-peak value of 2.98 which is nearly 8 times larger than that of the healthy
gear. This consequently gives a rise to all frequency components and a large number
of sidebands are generated across all frequencies.

98
0 1 2 3-0.2
0
0.2
0 1 2 3 -0.2
0
0.2
0 1 2 3-0.2
0
0.2
Acc
eler
atio
n (V
)
0 1 2 3-0.2
0
0.2
0 1 2 3-2
0
2
Number of Pinion Rotations
Healthy
First fault
Second fault
Third fault
Fourth fault
0 1000 2000 3000 4000 5000 6000 70000
0.04
0.08
0 1000 2000 3000 4000 5000 6000 70000
0.04
0.08
0 1000 2000 3000 4000 5000 6000 70000
0.04
0.08
Am
plitu
de
0 1000 2000 3000 4000 5000 6000 70000
0.04
0.08
0 1000 2000 3000 4000 5000 6000 70000
0.04
0.08
Frequency (Hz)
Healthy
First fault
Second fault
Third fault
Fourth fault
(a)
(b)

99
Figure 5.4. (a) and (b) Averaged gear vibrations and their
corresponding spectra, (c) de-noised residual gear vibrations
during the advancement of pitting fault.
In contrast, de-noised residual vibration performs much better than the averaged
vibration signal in the early detection of pitting failure, and exhibits the presence of
fault during the testing of the third seeded fault. At this stage, the amplitude of
residual vibration is modulated noticeably when the pitted teeth are in mesh and this
repeats itself for every rotation. This amplitude modulation consequently results in
approximately 44% increase in peak-to-peak value of the vibration compared to that
of the healthy gear, whereas the averaged gear vibration for the third seeded fault
yields approximately 7% decrease in peak-to-peak value compared to that of the
healthy gear. When the last seeded fault is considered, the resulting symptoms are
also strengthened and the amplitude of residual vibration is correspondingly
increased at the same gear positions giving a peak-to-peak value of 1.02, which is
nearly 19 times larger than that of the health gear. When summarised, analysis of the
0 1 2 3-0.1
0
0.1
0 1 2 3-0.1
0
0.1
0 1 2 3-0.1
0
0.1
Acc
eler
atio
n (V
)
0 1 2 3-0.1
0
0.1
0 1 2 3-1
0
1
Healthy
First fault
Second fault
Third fault
Fourth fault
Number of Pinion Rotations
(c)

100
de-noised residual vibration signal reveals the presence and progression of a pitting
fault in gears earlier than the classical time and frequency domain approaches.
The statistical properties of the averaged vibration signals are shown in Figure
5.5. It can be seen that, all the statistical properties (RMS, Peak to peak, Kurtosis and
Crests factor) do not exhibit a reliable trend with the fault progression until the final
stage of fault. During the testing of the last fault, however, all the parameters are
significantly increased indicating an abnormality in the gear system. When
summarised, considered statistical parameters of the averaged vibration signals are
not capable of exhibiting the presence and progression of pitting faults in gears.
Healthy 1 2 3 40
0.05
0.1
0.15
0.2
0.25
Severity of Pitting
RM
S
Healthy 1 2 3 40
0.5
1
Severity of Pitting
Pea
k to
Pea
k
Healthy 1 2 3 40
2
4
6
8
Severity of Pitting
Kur
tosi
s
Healthy 1 2 3 4
4
6
8
10
12
14
16
Severity of Pitting
Cre
st F
acto
r
Figure 5.5 Statistical parameters of the averaged helical gear vibration signals.

101
Figure 5.6 shows the statistical parameters of the de-noised residual vibration
signals. It can be seen that RMS and kurtosis both do not provide a consistent trend
reflecting the fault progression. In contrast, peak-to-peak values of the residual
vibrations result in a slowly varying increasing trend with the fault progression. Of
the parameters, the crest factor yields the best trend reflecting early detection and
progression of the pitting fault in gears.
Healthy 1 2 3 40
0.02
0.04
0.06
Severity of Pitting
Healthy 1 2 3 40
0.1
0.2
Severity of Pitting
Pea
k to
Pea
k
Healthy 1 2 3 40
2
4
6
8
Severity of Pitting
Kur
tosi
s
Healthy 1 2 3 46
7
8
9
10
Cre
st F
acto
r
Severity of Pitting
RM
S
Severity of Pitting
Figure 5.6 Statistical parameters of the de-noised residual vibration signals.
5.4.2 Cepstrum analysis
Cepstrum analysis was performed to illustrate any change in the repetitive signal
components of the helical gear vibration signals, which were averaged over five
pinion rotations, due to local pitting. The measured vibration signals from all of the
gear tests contain modulations, and consequently the resulting cepstra will exhibit

102
some high-quefrency (low-frequency) rahmonics even when there is no tooth fault
present. As a result, the resulting cepstrum representations exhibited two high
quefrency rahmonics corresponding to periodic events at the rate of pinion rotation.
If a local tooth fault is introduced, the characteristics of frequency spectrum change,
and this correspondingly reflects in the amplitudes of the high-quefrency rahmonics
which represent repetitive signals at the rotational frequency of the faulty gear.
The same averaged vibration signals, used in the time and frequency domain
analyses, were used in the cepstral analysis and Figure 5.7 shows the cepstra for the
averaged gear vibration signals during the advancement of pitting failure. It can
clearly be seen from the healthy gear that the cepstrum consists of two predominant
groups of rahmonics. There is one group located in the low quefrency region, which
represent high frequency periodic events in the gear vibration. The largest rahmonic
within this family is located exactly at 0.77msec and this corresponds to the period of
consecutive tooth engagements. The second family has its fundamental at 22.43msec
which is the period for one rotation of the pinion gear and its second rahmonic at
44.86msec.
Until the introduction of the last seeded fault, the appearances of the cepstra are
more or less similar to each other and do not exhibit any change signifying either the
presence or the progression of pitting fault. However, the cepstrum of the vibration
signal detected during the testing of the last seeded fault is quite different from the
others. Firstly, the amplitudes of the high quefrency rahmonics are significantly
increased, meaning that there is a distinct change in conditions of one per rotation
events. Secondly, most of the low quefrency rahmonics have disappeared, meaning
that there is a change in conditions of high frequency events (i.e. loss of contact).
When summarised, like time and frequency domain analyses, cepstrum analysis is
not capable of revealing early detection and progression of pitting fault in gears.

103
0 5 10 15 20 25 30 35 40 45 50 55-2
0
2
0 5 10 15 20 25 30 35 40 45 50 55-2
0
2
0 5 10 15 20 25 30 35 40 45 50 55-2
0
2
0 5 10 15 20 25 30 35 40 45 50 55-2
0
2
quefrency (msec)
Spe
ctra
l var
iatio
n (d
B)
0 5 10 15 20 25 30 35 40 45 50 55-2
0
2
Healthy
First fault
Second fault
Third fault
Fourth fault
Figure 5.7 Cepstra of the helical gear vibration accelerations.
5.4.3 Scalogram and Its Mean Frequency Analyses
For the scalogram analysis, averaged and de-noised residual vibrations were used.
During the scalogram analysis, the wavelet centre frequency 0.10 =f was selected,
and to avoid a high calculation load, the octave band based fast calculation procedure
was performed using 10 voices per octave. The resulting scalogram for each gear
vibration was presented in the form of three dimensional mesh plot, and its

104
corresponding mean frequency variation was filtered with a median filter (whose size
is 61) to reduce high frequency oscillations and noise spikes.
Figures 5.8 through 5.12 show both the scalograms and their mean frequency
variations for the gear vibrations during the advancement of pitting fault. In general,
the scalogram results in a good frequency resolution at low frequencies which
deteriorates at higher frequencies. This is due to the fact that the size of the wavelet
varies during the analysis and this, consequently, results in a varying resolution on
the time-frequency plane.
A simple comparison between the scalograms regarding to healthy and first
seeded fault reveals no clear indications of the first seeded pit. Unlike scalograms,
their mean frequency variations for the same gear vibrations are quite different from
each other and exhibit distinct and repetitive periodic variations. When the pitted
tooth comes into mesh (e.g. around 300° pinion rotation position), the mean
frequency reaches its minimum value, and this repeats itself for every pinion
rotation. Therefore, this deviation in mean frequency is quite likely an indication of
the first seeded pit.
Figure 5.10 illustrates the scalogram and its mean frequency variation for the
second seeded pits. It can be seen that there are some regions on the time-frequency
plane where the density of vibrational energy is slightly increased. This occurs when
the pitted teeth are in mesh (e.g. around 300° pinion rotation position) and repeats
itself for every pinion rotation. On the other hand, the mean frequency variation
clearly reveals the presence and progression of pitting fault severity as larger
deviations in amplitude at the same gear positions as those shown in Figure 5.9,
dictating that the mean frequency analysis is a powerful technique in the detection of
local defects in gears even the severity of fault is considerable small.
Figures 5.11 and 5.12 show scalograms and their mean frequency variations of the
gear vibrations for the third and last seeded pits. Because the number of pits is
significantly increased, the resulting fault symptoms are most pronounced and most

105
localised on the scalogram representations for the third seeded fault. The increase in
fault severity is also reflected by the mean frequency variation in Figure 5.11 as
larger deviations from its mean value when the defective teeth come into mesh.
However, any further increase in the amount of mean frequency deviation is not
observed when the last seeded fault is considered, whereas the presence of fault is
clearly revealed by the scalogram as seen in Figure 5.12. When summarised,
scalogram provides the presence and progression of pitting faults in gears when the
fault severity is pronounced, whereas early fault symptoms are clearly revealed by
the mean frequency variation of a scalogram even when the fault severity
significantly smaller.

106
Figure 5.8 Scalogram and its mean frequency variation for the healthy gear
vibration signal.
0 1 2 3800
1100
1400
1700
2000
Number of Pinion Rotations
Mea
n F
requ
ency
(Hz)

107
Figure 5.9 Scalogram and its mean frequency variation of the gear vibration for the
first seeded pit.
0 1 2 3800
1100
1400
1700
2000
Number of Pinion Rotations
Mea
n F
requ
ency
(Hz)

108
Figure 5.10 Scalogram and its mean frequency variation of the gear vibration for the
second seeded pits.
0 1 2 3800
1100
1400
1700
2000
Number of Pinion Rotations
Mea
n F
requ
ency
(Hz)

109
Figure 5.11 Scalogram and its mean frequency variation of the gear vibration for the
third seeded pits.
0 1 2 3800
1100
1400
1700
2000
Number of Pinion Rotations
Mea
n F
requ
ency
(Hz)

110
Figure 5.12 Scalogram and its mean frequency variation of the gear vibration for the
last seeded pits.
0 1 2 3800
1100
1400
1700
2000
Number of Pinion Rotations
Mea
n F
requ
ency
(Hz)

111
CHAPTER SIX
EARLY DETECTION AND ADVANCEMENT MONITORING OF
DISTRIBUTED PITTING FAILURE IN GEARS
6.1 Introduction
The simple static theory suggests that pitting on a gear teeth will be at its worst
where stresses are highest because the effective radius of curvature is smallest, when
contact is towards the root of the pinion (Smith, 2003). Pitting damage occurs
initially very near, but not exactly on the pitch line where relative sliding motion is
low. A typical pattern of such a pitting damage is sketched in Figure 6.1 for cases in
which gear teeth are subjected to a very high load transmission. Two Examples of
developed pitting damages are illustrated in Figure 6.2 (Boyer, 1975; Niemann &
Winter, 1983) which can be attributed to excessive contact stress due to heavy load
transmission and misalignment. When a pitting damage is detected in a gear system,
the reasons behind the initiation of this damage should be found and necessary
precautions should be taken. If the pitting fault cannot be detected at its early stage of
development, it may result in catastrophic failures in gear system.
This chapter presents the use of vibration-based techniques in the early detection
and advancement monitoring of distributed pitting fault. The pits were seeded on all
of the gear tooth surfaces in differing degrees of severity, and intended to replicate
the pitting damage due to misalignment. With each fault severity, the helical gears
were tested and the resulting vibration data was recorded. The application of
considered vibration-based methods (i.e. time, frequency, cepstrum, and wavelet
transform) to each set of experimental data is presented.
Figure 6.1 View of tooth flank with pitting.
111

112
Figure 6.2 Typical examples of distributed destructive pitting faults attributed to (a)
excessive contact stress, (b) excessive contact stress due to misalignment.
6.2 Gear Test Rig
Similar to the local pitting simulation, the same two-stage industrial gearbox
shown in Figures 3.1 and 3.2 was used for the tests. The load capacity of the DC
motor was nearly 2.2kW compared to that of the gearbox used, having approximately
8.1kW. For this reason, the face width of the pinion test gear was reduced to 8mm
from its original value of 12mm, so that it could be tested at reasonably high load.
The vibration signal generated by the gearbox was detected by accelerometers
located mutually perpendicular to each other on the input shaft bearing housing, as
seen in Figure 3.3. The position of the input shaft of the gearbox was indicated by an
inductive sensor, which produces a pulse per test pinion gear rotation.
6.3 Distributed Pitting Fault Simulation
Surface-contact stress (due to tooth load) cannot be uniform when the gears suffer
from the presence of angular misalignment. As a result, the load distribution and,
hence, resulting contact stress exhibit a variation along the face width of the mating
gear teeth as shown in Figure 6.3. Consequently, the pits are most likely to initiate on
the tooth surfaces where contact stresses larger than allowed are experienced.
Similar to the simulated local pitting, all the simulated pits were introduced to all
teeth of the pinion gear for the misalignment condition, using an electro-erosion
machine as shown in Figure 6.4, and were intended to replicate the distributed pitting
(a) (b)

113
failure initiating firstly at one side of the teeth surfaces, and then developing
successively in time over the whole tooth surfaces by increasing the number of pits.
Figure 6.3. Variation of tooth load along the face width due to misalignment
First of all, a circular pit (whose diameter and depth are approximately 0.7mm and
0.1mm, respectively) was seeded onto the teeth surfaces as shown in Figure 6.5(b).
After that, in order to represent the advancement of fault, the number of pits were
increased as shown in Figures 6.5 (c), (d) and (e).
Figure 6.4 Formation of pits on gear tooth surfaces using an
electro-erosion machine.

114
(a)
(b)
(c)
(d)
(e)
Figure 6.5 Seeded distributed pits

115
6.4 Time and Frequency Domain Analyses
During the tests, the speed of the test pinion was set to 2678 rpm giving a
fundamental tooth meshing frequency of 1294Hz for the first stage, and 420.7Hz for
the second stage. Both the vibration and positioning signals were sampled at 15kHz
and stored on a computer. The raw vibration data was continuously collected over
1338 pinion rotations. In addition, the resulting vibration was split into 267 five-
pinion-rotation blocks, and these were averaged together.
Figure 6.6(a) shows time signatures of the averaged vibration accelerations
detected from the gear pair with distributed pitting. As seen from the figure, there is a
modulation, which exhibits itself as repetitive fluctuations for each pinion rotation
and can be attributed to manufacturing errors. It can be seen from the figure that the
appearances of the gear vibration accelerations are similar to each other and it is
quite difficult to decide whether or not the pitting fault is present or developing.
However, an amplitude increase can be seen when the last seeded fault is introduced.
In addition, the amplitude of the vibration acceleration decreases when the second
seeded fault is introduced, which could be most likely attributed to installation errors.
Figure 6.6(b) shows the spectra of the vibration accelerations during the
advancement of the distributed pitting. Since a large number of averaging was
considered, the resulting spectra are mainly dominated by the toothmeshing
frequency components of vibration generated by the first gear stage. Similar to the
time traces, the spectra also reveal no early indications of progression of pitting fault.
However, when the third and last seeded faults are introduced, the amplitude of the
first toothmeshing frequency is remarkably increased. When summarized,
progression of distributed pitting fault cannot be clearly reflected by neither time nor
frequency domain representations, especially when the severity (or number) of pits is
small.

116
(a) (b) Figure 6.6 Time signatures of the vibration accelerations detected from the gear pair with distributed
pitting and their corresponding spectra.
The variations of statistical properties of the averaged vibration signals with the
advancement of fault severity are shown in Figure 6.7. It can be seen that the values
of all the statistical parameters (i.e. RMS, peak to peak, Kurtosis and Crests factor)
are generally increased when the fault severity is significantly large. However, none
0 1 2 3-0.25
0
0.25
0 1 2 3-0.25
0
0.25
0 1 2 3-0.25
0
0.25
0 1 2 3-0.25
0
0.25
0 1 2 3-0.25
0
0.25
Number of Pinion Rotations
Acc
eler
atio
n (V
)
Healthy
First fault
Second fault
Third fault
Fourth fault
0 1500 3000 4500 6000 75000
0.01
0.02
0.03
0 1500 3000 4500 6000 75000
0.01
0.02
0.03
0 1500 3000 4500 6000 75000
0.01
0.02
0.03
0 1500 3000 4500 6000 75000
0.01
0.02
0.03
0 1500 3000 4500 6000 75000
0.01
0.02
0.03
Frequency (Hz)
Am
plitu
de
Healthy
First fault
Second fault
Third fault
Fourth fault

117
of them produces a consistent trend which indicates early detection and development
of distributed pitting damage effecting all gear teeth due to misalignment.
Figure 6.7 Variations of statistical parameters of the vibration signals
Healthy 1 2 3 40.02
0.025
0.03
0.035
0.04
RM
S
Severity of Distributed Pitting
Healthy 1 2 3 42.75
2.8
2.85
2.9
2.95
3
3.05
3.1
3.15
Kur
tosi
s
Severity of Distributed Pitting
Healthy 1 2 3 40.15
0.2
0.25
0.3
0.35
Pea
k to
Pea
k
Severity of Distributed Pitting
Healthy 1 2 3 46
6.5
7
7.5
8
8.5
Cre
st F
acto
r
Severity of Distributed Pitting

118
6.5 Cepstrum Analysis
As mentioned in section 4.4.2, cepstrum analysis can also be used in the
monitoring of distributed fault advancement in gears. If the measured vibration
signals from all of the gear tests contain modulations, the resulting cepstra will then
exhibit some high-quefrency (low-frequency) rahmonics even when there is no local
tooth fault present. If a local tooth fault is introduced, the characteristics of frequency
spectrum change, and this is correspondingly reflected in the amplitudes of the high-
quefrency rahmonics which represent repetitive signals at the rotational frequency of
the faulty gear.
Figure 6.8 shows cepstra of the helical gear vibration signals during the
advancement of distributed pitting faults. The cepstrum of the healthy helical gear
vibration acceleration exhibits a high-quefrency rahmonic at approximately
22.44msec, which is the period for one rotation of the pinion gear, and its harmonic
at 44.88msec. The cepstrum also exhibits some rahmonics clustered in the low-
quefrency region, which represent the high frequency signal components (i.e.
reflection of toothmeshing harmonics), and hence the largest rahmonic within this
low-quefrency region is located exactly at 0.7728msec. In addition, all the cepstra
exhibit similar features during the advancement of fault severity and it is quite
difficult to decide whether the fault is developing or not.
Because a distributed fault affects all gear teeth, low-quefrency rahmonics
corresponding to the consecutive tooth engagements will then be affected and these
components may be used for distributed fault monitoring purposes. So, as seen from
the cepstra of the third and fourth seeded faults, the amplitude of the first low
quefrency rahmonic is notably increased compared to that of the healthy gear
vibration. However, the advancement of distributed pitting fault with low severities
(e.g. for the first and second seeded faults) cannot be discernable from the
corresponding cepstra.

119
0 5 10 15 20 25 30 35 40 45 50 55-1
0
1
0 5 10 15 20 25 30 35 40 45 50 55-1
0
1
0 5 10 15 20 25 30 35 40 45 50 55-1
0
1
0 5 10 15 20 25 30 35 40 45 50 55-1
0
1
0 5 10 15 20 25 30 35 40 45 50 55-1
0
1
quefrency (msec)
Spe
ctra
l var
iatio
n (d
B)
Healthy
First fault
Second fault
Third fault
Fourth fault
Figure 6.8 Cepstra of the helical gear vibration accelerations during the advancement
of pitting fault.

120
6.6 Scalogram and Its Mean Frequency Analysis
For the scalogram analysis, averaged vibrations over five pinion rotations were
used. During the scalogram analysis, the wavelet centre frequency 0 2.0f = was
selected, and to avoid a high calculation load, the octave band based fast calculation
procedure was performed using 10 voices per octave. The resulting scalogram for
each gear vibration was presented in the form of three dimensional mesh plot, and its
corresponding mean frequency variation was filtered with a median filter (whose size
is 41) to reduce high frequency oscillations and noise spikes.
Figures 6.9-6.13 show both the scalograms and their mean frequency variations
for the gear vibrations, during the advancement of distributed pitting fault. In
general, the scalogram results in a good frequency resolution at low frequencies,
which deteriorates at higher frequencies. This is due to the fact that the size of the
wavelet varies during the analysis and this, consequently, results in a varying
resolution on the time-frequency plane.
Similar to the time domain analysis of distributed pitting, the energy variation of
the healthy gear vibration also exhibits clearly repetitive fluctuations for each one
pinion rotation which can be attributed to manufacturing errors.
When the severity of distributed pitting damage is advanced (e.g. for the third and
fourth seeded faults), the amplitude of energy component located around the first
toothmeshing frequency increases, as seen in Figures 6.12 and 6.13. On the other
hand, the overall level of mean frequency of the scalogram gradually decreases with
the progression of the distributed pitting fault. Figure 6.14 shows the variation of the
average (or overall) mean frequencies with respect to the severity of distributed
pitting damage. It can be seen that the rate of mean frequency change is nearly
proportional to the severity of the distributed pitting fault and best reflects the
progression of fault. It can, hence, be concluded that the mean frequency variation
yields a consistent and more reliable trend indicating the progression of distributed

121
pitting damage compared to the time domain statistics (i.e. RMS, peak-to-peak, and
kurtosis).
0 1 2 31500
2000
2500
3000
3500
4000
Number of Pinion Rotation
Mea
n F
requ
ency
(Hz)
Figure 6.9 Scalogram and its mean frequency variation for the healthy gear vibration signal.

122
0 1 2 31500
2000
2500
3000
3500
4000
Number of Pinion Rotations
Mea
n F
requ
ency
(Hz)
Figure 6.10 Scalogram and its mean frequency variation of the gear vibration for the first
seeded pits.

123
0 1 2 31500
2000
2500
3000
3500
4000
Number of Pinion Rotations
Mea
n F
requ
ency
(Hz)
Figure 6.11 Scalogram and its mean frequency variation of the gear vibration for the second
seeded pit.

124
0 1 2 31500
2000
2500
3000
3500
4000
Number of Pinion Rotations
Mea
n F
requ
ency
(Hz)
Figure 6.12 Scalogram and its mean frequency variation of the gear vibration for the third
seeded pit.

125
0 1 2 31500
2000
2500
3000
3500
4000
Number of Pinion Rotations
Mea
n F
requ
ency
(Hz)
Figure 6.13 Scalogram and its mean frequency variation of the gear vibration for the last
seeded pit.

126
Healthy 1 2 3 42100
2300
2500
2700
2900
Severity of Distributed Pitting
Ave
rage
Mea
n F
requ
ency
(H
z)
Figure 6.14 Variations of average mean frequencies with respect to the
severity of distributed pitting

127
CHAPTER SEVEN
REAL TIME MONITORING AND DETECTION OF FATIGUE CRACK IN
GEARS
7.1 Introduction
Tooth fracture generally initiates either at the root or on the surface of a tooth as
shown in Figure 7.1. The crack commencing at the root where the resulting bending
stress is maximum propagates into gear body, well away from the working flank, and
once started it spreads rapidly so that the complete section of tooth falls out. On
helical gear it is not usual for a complete tooth to fail but perhaps one-third of the
width of the tooth may crack off (Smith, 2003).
This form of failure is very rare since it is liable to be rapid and disastrous.
Because it is so serious, normally a careful design avoids it and the flank pitting
should occur first. Tooth root cracking is usually an indication of faulty design or
faulty heat treatment. The surprising feature is that tooth breakage can occur and may
not be noticed until a routine stripdown. Moreover, noise generation is usually not
noticeable and even monitoring equipment may miss it. At the end, the major hazard
may become inevitable if the broken tooth attempts to go through the mesh and may
jam the drive.
As it can be understood, the tooth crack or breakage could be very dangerous if it
cannot be detected during its early phase of development. This chapter presents the
applications of vibration-based techniques to the resulting gear vibrations for the
detection, diagnosis and advancement of monitoring of a real tooth fatigue crack in
helical gears. The second gear test rig was used for the test and the gearbox was
allowed to run until the gears suffered badly from the complete tooth breakage. It has
been found that the instantaneous energy variation of a scalogram reveals clear fault
symptoms quite earlier than a complete tooth (or teeth) fracture occurs.
127

128
Figure 7.1 Crack positions.
7.2 Experimental Setup
In order to investigate the health monitoring of the tooth crack and breakage
failures in gear sets, a fatigue test was performed using the testing rig whose
specifications were detailed in Chapter 3. The first stage of the gearbox had a pair of
helical gears with a module of 1mm, the pinion gear had 20 teeth meshing with a 38-
tooth wheel. Similarly, the second stage consisted of a pair of helical gears with a
module of 1.75mm, whose pinion had 15 teeth meshing with a 30-tooth output
wheel. The helical angles of gears in the first and second stages were 30° and
15°degrees, respectively. Moreover, all the gears were made of 21NiCrMo2 steel and
were hobbed and, case hardened using cementation and nitritation.
In order to achieve the tooth crack and, consequently, tooth breakage within a
shorter time, the face widths of the pinion test gears were reduced to 4 mm from its
original value of 10mm as seen in Figure 7.2 so that the gear could be tested at nearly
twice of the nominal load of 17Nm. Besides, the introduced face width removals also
reduced the contact ratio of the gear pair to 1.67 from its original value of 2.61.
tip
root crack
flank crack tooth

129
Figure 7.2. Undamaged test pinion.
Before collecting the vibration data, the pinion was firstly run at 20% of a
specified full load for nearly 2 hours to lessen the amount of surface asperities. At
the end of this initial running period, the gear load was increased to twice of the
specified load (i.e. 34Nm). Under the specified testing conditions, complete tooth
breakage was experienced nearly 14 minutes after the fatigue test commenced. After
that, the gearbox was dismantled and found that the test pinion was severely
damaged as shown in Figure 7.3.
(a)

130
(b)
Figure 7.3. Resulting fatigue damage on the test gear.
7.3 Time and Frequency Domain Analyses
During the tests, the speed of the input test pinion was set to nearly1566 rpm
which yields a fundamental toothmeshing frequency of 522Hz. Both the
accelerometer and reference positioning signals were sampled at 10 kHz and
recorded on a computer. The resulting vibration data was continuously collected until
tooth breakage. Then, the data was split into 60 second blocks, each of which was
then averaged over a desired number of pinion rotations according to the nature of
the analysis.

131
Figures 7.4 and 7.5 show the gear vibration accelerations averaged over 2 pinion
rotations detected during the fatigue test. It can be seen that the amplitudes of the
time signals vary with time during the early phases of the fatigue tests. They could be
most likely attributed to the fluctuating motor speed. In addition, the appearances of
the gear vibration accelerations are more or less similar to each other and no
symptoms of fatigue crack initiation and/or development can be seen until the first 10
minutes of the test. During the time intervals of 10th and 11th minutes, the fault (i.e. a
fatigue crack) symptom is revealed in the time domain representation and the
amplitude of the vibration gives an increase around 100° gear position. When the
gears are further allowed to run in time, the amplitude of vibration is also remarkably
increased between 70° and 100° positions. During the end of the fatigue test (i.e.
after 14th minutes during which the test pinion was badly damaged due to
consequential tooth breakages), the increase in vibration amplitude is fairly evident
seen in Figure 7.5(a), and a distinct impulse around the same gear positions is
generated due to improper meshing conditions.
The variations of the statistical properties of the pure (i.e. non-averaged) and
averaged vibration signals are shown in Figure 7.6. As it can be seen that, all of the
statistical properties (RMS, peak-to-peak, kurtosis and crests factor) are increased
when the fault severity is significantly advanced (near the end of fatigue life) for
both signals. During the initiation and development phases of the fatigue failure, the
variations of the RMS, peak-to-peak, and crest factor do not really provide any
significant diagnostic information. However, Kurtosis values of the pure signal
provide an increasing trend with time which best reflects the development of fatigue
damage in gears.

132
0 0.5 1 1.5 2-0.5
0
0.5
0 0.5 1 1.5 2-0.5
0
0.5
0 0.5 1 1.5 2-0.5
0
0.5
0 0.5 1 1.5 2-0.5
0
0.5
0 0.5 1 1.5 2-0.5
0
0.5
0 0.5 1 1.5 2-0.5
0
0.5
0 0.5 1 1.5 2-0.5
0
0.5
Acc
eler
atio
n (V
)
Number of Pinion Rotation
Healthy
2-3 minutes
3-4 minutes
4-5 minutes
5-6 minutes
6-7 minutes
7-8 minutes
Figure 7.4. Averaged gear vibration signals until the first 8th minutes of the fatigue
test.

133
(a)
(b)
Figure 7.5. a) Averaged vibration signals from the 8th minutes to the end of the
fatigue test, b) A complete time history of the vibration during the fatigue test.
11 11.5 12 12.5 13 13.5 14-8
-6
-4
-2
0
2
4
6
8
Acc
eler
atio
n (V
)
Time (Minute)
0 0.5 1 1.5 2-0.5
0
0.5
0 0.5 1 1.5 2-0.5
0
0.5
0 0.5 1 1.5 2-0.5
0
0.5
0 0.5 1 1.5 2-0.5
0
0.5
0 0.5 1 1.5 2-0.5
0
0.5
0 0.5 1 1.5 2-0.5
0
0.5
0 0.5 1 1.5 2-2
0
2
Acc
eler
atio
n (V
)
Number of Pinion Rotation
9-10 minutes
10-11 minutes
11-12 minutes
12-13 minutes
13-14 minutes
14- Following minutes
8-9 minutes

134
2 4 6 8 10 12 14
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
Minutes
RM
SPure SignalAverage Signal
2 4 6 8 10 12 140
2
4
6
8
10
12
14
16
Minutes
Pea
k to
Pea
k
Pure SignalAverage Signal
2 4 6 8 10 12 14
0
0.05
0.1
0.15
0.2
0.25
0.3
RM
S
2 4 6 8 10 12 14
0
1
2
3
Pea
k to
Pea
k
(a) (b)
2 4 6 8 10 12 140
5
10
15
20
25
30
Minutes
Ku
rto
sis
Pure SignalAverage Signal
2 4 6 8 10 12 145
10
15
20
25
Minutes
Cre
st F
act
or
Pure SignalAverage Signal
2 4 6 8 10 12 142
4
6
Ku
rto
sis
2 4 6 8 10 12 142.7
2.9
3.1
3.3
2 4 6 8 10 12 14
5
7
9
11
1314
Cre
st F
acto
r
(c) (d)
Figure 7.6 Variations of the statistical parameters of the vibration signals during the fatigue test.

135
Figures 7.7 and 7.8 show the spectra of the vibration accelerations with one
minute intervals until the end of fatigue life of the test gear. Similar to the case
mentioned in section 5.4.1, the resulting spectra are mainly dominated by the
toothmeshing frequency components of vibration generated by the first gear stage
since a large number of averaging over the input pinion gear was considered. It can
be seen that the spectra of the gear vibrations are similar to each other and no
symptoms of initiation or progression of fault can be seen until the 10th minute of the
fatigue test. Beyond this time, some frequency activities become apparent in the low
frequency regions as a reflection of weakened toot/teeth due to a tooth tip breakage
or fatigue crack. When the time is advanced until the end of fatigue test, resulting
tooth breakage consequently gives a rise to all frequency components and a large
number of sidebands are generated across all frequencies (see the 14th minute of
operation).

136
0 1000 2000 3000 4000 50000
0.05
0.1
0 1000 2000 3000 4000 50000
0.05
0.1
0 1000 2000 3000 4000 50000
0.05
0.1
0 1000 2000 3000 4000 50000
0.05
0.1
0 1000 2000 3000 4000 50000
0.05
0.1
0 1000 2000 3000 4000 50000
0.05
0.1
0 1000 2000 3000 4000 50000
0.05
0.1
Frequency (Hz)
Am
plitu
de
Healthy
2-3 minutes
3-4 minutes
4-5 minutes
5-6 minutes
6-7 minutes
7-8 minutes
Figure 7.7 Frequency domain representations of the gear vibrations between 0-8
minutes.

137
0 1000 2000 3000 4000 50000
0.05
0.1
0 1000 2000 3000 4000 50000
0.05
0.1
0 1000 2000 3000 4000 50000
0.05
0.1
0 1000 2000 3000 4000 50000
0.05
0.1
0 1000 2000 3000 4000 50000
0.05
0.1
0 1000 2000 3000 4000 50000
0.05
0.1
0 1000 2000 3000 4000 50000
0.05
0.1
Frequency (Hz)
Am
plitu
de
8-9 minutes
9-10 minutes
10-11 minutes
11-12 minutes
12-13 minutes
13-14 minutes
14- Following minutes
Figure 7.8 Frequency domain representations of the gear vibrations between 8-
14 minutes.
Figures 7.9 and 7.10 show the averaged residual gear vibration accelerations
detected one-minute intervals during the fatigue test. Similar to the averaged
vibration signals, the averaged residual signals also reveal the presence of weakened
tooth/teeth at and after the 10th -11th minute interval. However, the fault symptoms in
the residual signals are more distinctive and more localised in time compared to
those in the averaged vibration signals.

138
0 0.5 1 1.5 2-0.2
0
0.2
0 0.5 1 1.5 2-0.2
0
0.2
0 0.5 1 1.5 2-0.2
0
0.2
0 0.5 1 1.5 2-0.2
0
0.2
0 0.5 1 1.5 2-0.2
0
0.2
0 0.5 1 1.5 2-0.2
0
0.2
0 0.5 1 1.5 2-0.2
0
0.2
Healthy
2-3 minutes
3-4 minutes
4-5 minutes
5-6 minutes
6-7 minutes
7-8 minutes
Acc
eler
atio
n (V
)
Number of Pinion Rotation
Figure 7.9 Averaged residual gear vibration signals between 0-8 minutes.

139
0 0.5 1 1.5 2-0.2
0
0.2
0 0.5 1 1.5 2-0.2
0
0.2
0 0.5 1 1.5 2-0.2
0
0.2
0 0.5 1 1.5 2-0.2
0
0.2
0 0.5 1 1.5 2-0.2
0
0.2
0 0.5 1 1.5 2-0.2
0
0.2
0 0.5 1 1.5 2-2
0
2
9-10 minutes
10-11 minutes
11-12 minutes
12-13 minutes
13-14 minutes
14- Following minutes
8-9 minutes
Number of Pinion Rotation
Acc
eler
atio
n (V
)
Figure 7.10 Averaged residual gear vibration signals between 8-14 minutes.

140
7.4 The Application of Cepstrum Analysis
Cepstrum analysis was applied to the vibration signals which were averaged over
five pinion rotations. The resulting representations exhibited two high quefrency
rahmonics corresponding to periodic events at the rate of pinion rotation.
Figures 7.11-14 show the cepstra for the averaged gear vibration signals detected
one-minute time intervals until the end of fatigue life of the gear. It can clearly be
seen from the cepstrum of the healthy gear’s vibration that it consists of two
predominant groups of rahmonics. There is one group located in the low quefrency
region, which represent high frequency periodic events in the gear vibration. The
largest rahmonic within this family is located exactly at 1.9msec and this corresponds
to the period of consecutive tooth engagements. The second family has its
fundamental at 38.5msec which is the period for one rotation of the pinion gear and
its second rahmonic is located at 77msec.
Until the 8th minutes of the fatigue test, the amplitudes of the high quefrency
rahmonics remain nearly unchanged. After that, the amplitude of the fundamental
high quefrency rahmonic located at 38.5msec is raised with time until the 10th minute
of the test. When the time approaches to the end of fatigue life of the gear, the
amplitudes of the high quefrency rahmonics are notably increased, whereas the low
quefrency rahmonics yield diminishing amplitudes.
In summary, the cepstrum has the ability of indicating the advancement of local
tooth defects in helical gears. As in time or frequency domain analysis, fault
detection by cepstrum analysis is based upon the comparison of cepstra for healthy
and faulty conditions. This implies that the previous knowledge of the gearbox is
required when deciding whether there is deterioration.

141
0 10 20 30 40 50 60 70 80 90-1
-0.5
0
0.5
1
0 10 20 30 40 50 60 70 80 90-1
-0.5
0
0.5
1
0 10 20 30 40 50 60 70 80 90-1
-0.5
0
0.5
1
0 10 20 30 40 50 60 70 80 90-1
-0.5
0
0.5
1
quefrency (msec)
Spe
ctra
l var
iatio
n (d
B)
Healthy
2-3 minutes
3-4 minutes
4-5 minutes
Figure 7.11 Cepstra for the gear vibrations between 0-5 minutes.

142
0 10 20 30 40 50 60 70 80 90-1
0
1
0 10 20 30 40 50 60 70 80 90-1
0
1
0 10 20 30 40 50 60 70 80 90-1
0
1
0 10 20 30 40 50 60 70 80 90-1
0
1
quefrency (msec)
Spe
ctra
l var
iatio
n (d
B)
6-7 minutes
7-8 minutes
8-9 minutes
5-6 minutes
Figure 7.12 Cepstra for the gear vibrations between 5-9 minutes.

143
0 10 20 30 40 50 60 70 80 90-1
0
1
0 10 20 30 40 50 60 70 80 90-1
0
1
0 10 20 30 40 50 60 70 80 90-1
0
1
0 10 20 30 40 50 60 70 80 90-1
0
1
quefrency (msec)
Spe
ctra
l var
iatio
n (d
B)
10-11 minutes
11-12 minutes
12-13 minutes
9-10 minutes
Figure 7.13 Cepstra for the gear vibrations between 9-13 minutes.

144
0 10 20 30 40 50 60 70 80 90-1
0
1
quefrency (msec)
Spe
ctra
l var
iatio
n (d
B)
0 10 20 30 40 50 60 70 80 90-1
0
1
quefrency (msec)
Spe
ctra
l var
iatio
n (d
B)
13-14 minutes
14- Following minutes
Figure 7.14 Cepstrafor the gear vibrations between 13 and following minutes.
7.5 Wavelet Analysis
For the wavelet analysis, the residual vibrations averaged over five pinion
rotations were used. The first 2048 samples of the averaged residual vibration signal
were considered as the input to the wavelet transform, but only the results between
columns 1 to 1930 of the wavelet transform matrix (which represents three pinion
rotations) were displayed. During the wavelet analysis, the wavelet centre frequency
of 0.10 =f was selected, and to avoid a high calculation load, the octave band based
fast calculation procedure was performed using 10 voices per octave. The resulting
wavelet for each gear vibration was presented in the form of three-dimensional mesh
plot. The wavelet transform was set to display the frequency content of the analyzed
signal up to 2500Hz, due to the fact that the frequency resolution of the transform
diminishes with increasing frequency. Moreover, to observe small changes, the
logarithm of the resulting wavelet was taken.

145
Figures 7.15-7.19 show the wavelet transform of the averaged residual vibration
acceleration during the fatigue test. It can clearly be seen from the map of the
wavelet transform for the healthy gear that the signal energy is primarily
concentrated around 500Hz and 1000Hz, and no fault symptoms can be seen from
the maps of wavelet transforms until the 5th minute. After this time, an increase in
magnitude is observed caused most likely by the weakened tooth/teeth around 300Hz
and 700 gear position which repeats itself at every pinion rotation. When the time is
further progressed, fatigue damage is also advanced which reduces the stiffness of
damaged tooth/teeth. This event consequently causes the generation of stronger
impulses which subsequently gives an increase to the amount of vibrational energy
only when damaged tooth (or teeth) comes into mesh as seen from Figures 7.17
through 7.19.
When summarized, the wavelet transform is quite sensitive to any change in gear
mesh stiffness and best reflects the progression of damage for early fault detection.

146
Figure 7.15 Maps of wavelet transforms of the gear vibrations
between 0-4 minutes
(a) Healthy
(b) 2-3 minutes
(c) 3-4 minutes

147
Figure 7.16 Maps of wavelet transforms of the gear vibrations
between 4-7 minutes
(a) 4-5 minutes
(b) 5-6 minutes
(c) 6-7 minutes

148
Figure 7.17 Maps of wavelet transforms of the gear vibrations
between 7-10 minutes
(a) 7-8 minutes
(b) 8-9 minutes
(c) 9-10 minutes

149
Figure 7.18 Maps of wavelet transforms of the gear vibrations
between 10-13 minutes
(a) 10-11 minutes
(b) 11-12 minutes
(c) 12-13 minutes

150
Figure 7.19 Maps of wavelet transforms of the gear vibrations
from 13 until the end of fatigue life of the gear
7.6 Instantaneous Energy (IE) of Scalogram
The scalogram (Energy Density Function) for each averaged residual gear
vibration was calculated using the term ( ) 2, abCWTx in equation (4.40) and then its
logarithm was taken. Its corresponding Instantaneous Energy (IE) variation was
filtered with a median filter (whose size is 61) to reduce high frequency oscillations
and noise spikes.
(a) 13-14 minutes
(b) 14-following minutes

151
Figures 7.20 through 7.22 show the instantaneous energy variations for the gear
vibrations detected during the fatigue test. Similar to the resulting wavelet maps, the
instantaneous energy variations until the end of the 4th minute also do not exhibit any
regular periodic change which can be attributable to a local fault. After that time, the
IE variation displays a distinct amplitude variation around 70° position and this
repeats itself for every pinion gear rotations. As mentioned earlier, the gear tooth is
broken around the 700 gear position, thus the instantaneous energy reaches its
minimum value at this gear position. As a result, this deviation in instantaneous
energy is quite likely an indication of crack formation.
When the fatigue test is prolonged, as seen from Figures 7.20(d) through 7.22(d),
the instantaneous energy variation clearly reveals the presence and progression of the
tooth crack as larger deviations in amplitude at the same gear positions, dictating that
the instantaneous energy analysis is a powerful technique in the detection of local
tooth/teeth defects in gears for early fault detection.
When summarised, both the wavelet transform and its instantaneous energy
provide early diagnostic information about the presence and progression of tooth
crack faults in gears. However, the IE variation reduces dimensionality of wavelet
analysis and makes easier the interpretation of results.

152
0 0.5 1 1.5 2 2.5 3320
340
360
IE
Number of Pinion Rotation
0 0.5 1 1.5 2 2.5 3320
340
360
IE
Number of Pinion Rotation
0 0.5 1 1.5 2 2.5 3320
340
360
Number of Pinion Rotation
IE
0 0.5 1 1.5 2 2.5 3320
340
360
Number of Pinion Rotation
IE
0 0.5 1 1.5 2 2.5 3320
340
360
Number of Pinion Rotation
IE
Figure 7.20 Instantaneous Energy (IE) variations of the gear vibrations
between 0-6 minutes interval.
(a) Healthy
(b) 2-3 minutes
(c) 3-4 minutes
(d) 4-5 minutes
(e) 5-6 minutes

153
0 0.5 1 1.5 2 2.5 3320
340
360
Number of Pinion Rotation
IE
0 0.5 1 1.5 2 2.5 3300
320
340
360
Number of Pinion Rotation
IE
0 0.5 1 1.5 2 2.5 3300
320
340
360
Number of Pinion Rotation
IE
0 0.5 1 1.5 2 2.5 3300
320
340
360
Number of Pinion Rotation
IE
0 0.5 1 1.5 2 2.5 3240
260
280
300
320
Number of Pinion Rotation
IE
Figure 7.21 Instantaneous Energy (IE) variations of the gear vibrations
between 6-11 minutes interval.
(a) 6-7 minutes
(b) 7-8 minutes
(c) 8-9 minutes
(d) 9-10 minutes
(e) 10-11 minutes

154
0 0.5 1 1.5 2 2.5 3240
260
280
300
320
IE
Number of Pinion Rotation
0 0.5 1 1.5 2 2.5 3240
260
280
300
320
Number of Pinion Rotation
IE
0 0.5 1 1.5 2 2.5 3240
260
280
300
320
Number of Pinion Rotation
IE
0 0.5 1 1.5 2 2.5 3160
180
200
220
240
Number of Pinion Rotation
IE
Figure 7.22 Instantaneous Energy (IE) variations of the gear vibrations
from the 11th minute to the end of fatigue life of gear.
(a) 11-12 minutes
(b) 12-13 minutes
(c) 13-14 minutes
(d) 14-following minutes

155
CHAPTER EIGHT
CONCLUSIONS
8.1 Overview of the Thesis
Gearboxes are widely utilised in industrial setting to transmit power or rotary
motion whilst maintaining intended torque and angular velocity ratio together with
smooth motion and high efficiency. Typical applications include airplanes,
automobiles, power turbines, and printing presses. In order to minimize gearbox
downtime and to avoid performance degradation, a practical and robust monitoring
system is needed to provide early warnings of malfunction or possible damage,
which may lead to sudden or even catastrophic failures. Such a monitoring system
can also be used to carry out preventive maintenance of gearbox to save time in
repairs by identifying the damaged components without the need for routine
shutdowns and manual inspections.
During normal operation, every component of a gearbox is subjected to dynamic
loads which cause a variety of responses including stress, deformation, changes in
temperature, and vibration. The characteristics of these responses, in particular those
of vibration, change when a fault occurs. A gear set may exhibit a variety of failure
modes depending upon the operating conditions as presented in Chapter 2. Each
failure mode will generally change the gearbox vibration characteristics in its own
particular way, making possible the detection and classification of the fault. It is for
this reason that vibration-based condition monitoring is widely used in gearbox fault
detection and diagnosis.
This work presents the early detection and advancement monitoring of two
different gear faults (i.e. localised and distributed pits, and a real tooth breakage).
Therefore, two different gear test rigs were used to obtain relevant diagnostic
information about these gear faults.
155

156
In gearbox condition monitoring, a variety of vibration-based techniques can be
used for the detection, location, and advancement monitoring of different types of
gear failures. In this thesis, time, frequency, quefrency domain analyses and the
continuous wavelet transform (particularly mean frequency and instantaneous energy
variations of a scalogram) have been used in order to reveal early indications of
localised and distributed pitting faults, and real-time tooth fatigue damage.
In addition, since a large number of averaging was considered in all the tests, the
resulting spectra are mainly dominated by the toothmeshing frequency components
of vibration generated by the first gear stage.
8.2 General Conclusions about Vibration Based Techniques
The research work presented in this thesis has been concentrated upon the early
detection of the pitting and tooth crack using vibration-based techniques. From the
applications of these techniques, the following findings can be drawn:
8.2.1 Local Pitting Fault
In chapter 5, the use of suitable vibration based techniques (i.e. time and
frequency domain analyses, cepstrum, and continuous wavelet transform) for the
detection and advance monitoring of pitting faults in a two-stage industrial helical
gearbox have been presented.
It has been found that analysis of the averaged gear vibration signals by the
conventional time and frequency domain techniques and cepstrum analysis do not
provide any significant diagnostic information about the presence and advancement
of pitting fault until the fault severity is considerably large. However, removal of
meshing tones together with de-noising procedure gives the presence and
development of pits earlier than classical time and frequency domain approaches.
Besides, only crest factor of the residual vibrations reflects best the progression of
pitting fault.

157
The presence of the seeded pits cannot be clearly revealed by the scalogram
during the early phase of the fault progression. When the severity (or number) of pits
is further increased, scalogram exhibits fault symptoms as an increase in energy
density when the defective teeth are in mesh. In contrast, mean frequency variation
derived from a scalogram exhibits the presence of fault even when there is only a
single pit. The resulting fault indicates itself as a localised deviation in amplitude of
mean frequency when the pitted tooth is in mesh which repeats itself for every pinion
rotation. Increasing the number of pits causes correspondingly stronger fault
symptoms and sharper fault localisation at the same gear positions.
It can therefore be concluded that the mean frequency variation provides the most
useful basis for the advancement monitoring of localised pitting gear damage.
8.2.2 Distributed Pitting Fault
Chapter 6 presents the use of considered vibration-based techniques in the early
detection and advancement monitoring of distributed pitting fault.
The distributed pitting damage cannot be easily detected in time domain when the
severity of fault is relatively small. However, an increase in overall vibration
amplitude can be seen with the introduction of the last seeded fault. Similar to the
time traces, the corresponding spectra also reveal no early indications of progression
of pitting fault for low fault severities. However, the amplitude of the fundamental
toothmeshing frequency is remarkably increased when the fault severity (e.g. for the
third and last seeded faults) is larger.
All the statistical properties (RMS, Peak to peak, Kurtosis and Crests factor) are
generally increased when the fault severity is significantly large. However, they do
not exhibit a trend, which indicates early detection and development of distributed
pitting damage effecting all the gear teeth.

158
The cepstrum of the healthy helical gear vibration exhibits two types of rahmonic
families (one is seen clustered in low-quefrency regions due to high frequency
activities, and the other is at high-quefrency regions due to one per rotation events).
The symptoms of distributed pitting damage with low severities do not appear in the
cepstra. However, the amplitudes of the low-frequency rahmonics for the last seeded
damage increase slightly compared to those of the healthy gear vibration.
Scalogram based parameter (i.e. mean frequency variation) is quite useful for the
advancement monitoring of distributed pitting damage. The level of the mean
frequency of the scalogram of the distributed pitted gear vibration is gradually
decreased when the fault severity is increased, yielding a reliable trend reflecting
fault progression.
8.2.3 Tooth Fatigue Crack
In chapter 7, vibration-based techniques have been applied to gear vibrations for
the detection, diagnosis and advancement monitoring of a real tooth fatigue crack in
helical gears.
It has been found during the fatigue test that gear fatigue failure is an insidious
type of gear damage which gives very little warning during it progression and cannot
be easily detected by the conventional time and frequency domain approaches until
the fault is significantly developed. Nevertheless, the fault symptoms are found in the
residual signals to be more distinct and more localised in time compared to those
found in the averaged vibration signals.
Of the statistical parameters considered, variation of kurtosis values for the raw
vibration data provides basis for a better understanding for fault progression.
Similarly, cepstrum analysis can also be used for the detection of local tooth defects
in gears although it does not provide early information about the presence of a
fatigue failure.

159
In contrast, both scalogram and its instantaneous energy variation of the averaged
residual vibration signal show the best indication of the development of the local
fault compared to other techniques for early detection.
8.3 Scope for Future Gearbox Condition Monitoring Research
Future research in the following areas should be conducted:
• The proposed gear fault diagnostic techniques should be applied to other
mechanical components such as bearings and shafts.
• Acoustic Emission Signal should be used by the proposed techniques for the
detection of pitting damage.
• Artificial Neural Network (ANN) method, which yields automatic fault
detection and classification procedures, should be trained for these types of
gear faults in conjunction with the proposed techniques.
• For industrial applications, comprehensive software package should be
written as a standalone program, independent of other general purpose
commercial software packages.

160
REFERENCES
Andrade, F.A., Esat, I. & Badi, M.N.M. (2001). A new approach to time-domain
vibration condition monitoring: gear tooth fatigue crack detection and
identification by the kolmogorov-smirnov test. Journal of Sound and Vibration,
240(5), 909-919.
Badaoui, M.E., Antoni, J., Gullet, F. & Daniere, J. (2001). Use of the moving
cesptrum integral to detect and localise tooth spalls in gears. Mechanical Systems
and Signal Processing, 15(5), 873-885.
Badaoui, M.E., Gullet, F. & Daniere, J. (2004). New application of the real cesptrum
to gear signal, including definition of a robuts fault indicator. Mechanical Systems
and Signal Processing, 18, 1031-1046.
Balmforth, N. & Watson, H.J. (1964/1965). A practical look at gear-tooth damage.
Proc Inst Mech Engr, 179(3D), 201–220.
Baydar, N. & Ball, A. (2000). Detection of gear deterioration under varying load
conditions by using the instantaneous power spectrum. Mechanical Systems and
Signal Processing, 14(6), 907–921.
Baydar, N. & Ball, A. (2003). Detection of gear failures via vibration and acoustic
signals using wavelet transform. Mechanical Systems and Signal Processing,
17(4), 787–804.
Bentley, P. M. & McDonnell, J. T. E. (1994). Wavelet transforms: an introduction.
Electronics & Communication Engineering Journal, August, 175-186.
Bower, A.F. (1988). The influence of crack face friction and trapped fluid on surface
initiated rolling contact fatigue cracks. Trans ASME, J Tribol, 110, 704–711.
Boyer, E.B. (Editor), (1975). Failure Analysis and Prevention, Metal Handbook.
Ohia, American Society for Metals.

161
Braun, S. (1986). Mechanical Signature Analysis, Theory and Applications.
Academic Press.
Broch, T. J. (1973). Application of the B&K Equipment to Mechanical Vibration and
Shock Measurements. Bruel & Kjaer.
Choi, H. & Williams, W. J. (1989).Improved Time-frequency Representation of
Multicomponent Signals using Exponential Kernel. IEEE Transactions on ASSP,
37(6), 862-871.
Choy, F.K., Polyshchuk V., Zakrajsek, J.J., Handschuh, R.F., &Townsend, D.P.
(1996). Analysis of the effects of surface pitting and wear on the vibration of a
gear transmission systems. Tribology International,29, 77-83.
Chui, C.K. (1992). An introduction to wavelets: wavelet analysis and its
applications, vol. I. Boston: Academic Press.
Claasen, T.A.C.M. & Mecklenbrauker, W.F.G. (1980). The Wigner distribution—a
toll for time–frequency signal analysis, Part I: continuous-time signals. Philips J
Res 35(3), 217–250.
Cohen L. (1989). Time–frequency distributions-a review. Proc IEEE, 77(7), 941–
981.
Coleman, W. (1967/1968). Bevel and hypoid gear surface durability: pitting and
scuffing. Proc Inst Mech Engrs,182(3A), 191–204.
Dalpiaz, G., Rivola, A. & Rubini, R. (2000). Effectiveness and sensitivity of
vibration processing techniques for local fault detection in gears. Mech Syst Signal
Process,14(3), 387-412.
Das, C.R., Albert, S.K., Bhaduri, A.K. & Ray, S.K. (2005). Failure analysis of a
pinion. Engineering Failure Analysis,12(2), 287-298.
Daud, M.S. & Yunus, J. (2004). Classification of mental tasks using de-noising EEG
signals. IEEE 7th International Conference on Signal Processing, 2206-2209.

162
Dempsey, P.J., Morales, W. & Afjeh, A.A. (2002). Investigation of spur gear fatigue
damage using wear debris. Lubrication Engineering, 58(11), 18-22.
Dyer, D. & Stewart, R. M. (1978). Detection of rolling element bearing damage by
statistical vibration analysis. Transactions of the ASME, Journal of Mechanical
Design, 100, 229-235.
Flodin, A. & Andersson, S. (2000). Simulation of mild wear. Wear, 241, 123-128.
Flodin, A. & Andersson, S. (2001). A simplified model for wear prediction in helical
gears. Wear, 249, 285-292.
Futter, D. N. (1995). Vibration monitoring of industrial gearboxes using time domain
averagin. Second International Conference on Gearbox Noise, Vibration, and
Diagnostics, London: ImechE Conference Transaction, 5,35–47.
Glodez, S., Abersek, B., Flasker, J., & Ren, Z. (2004). Evaluation of the service life
of gears in regard to surface pitting. Engineering Fracture Mechanics, 71(4-6),
429-438.
Glodez, S., Winter, H., Stüwe, H.P. (1997). A fracture mechanics model for the wear
of gear flanks by pitting. Wear, 208,177-183.
Goldman, S. (1999). Vibration spectrum analysis. New York: Industrial Press Inc.
Hamzaoui, N., Boisson, C., & Lesueur,C. (1998).Vibro-acoustic analysis and
identification of defects in rotating machinery, part I: Theoretical model. Journal
of Sound and Vibration, 216(4), 553-570.
Heneghan C., Khanna, S.M., & Flock, A. (1994). Investigation the nonlinear
dynamics of cellular motion in the inner ear using the short-time Fourier and
continuous wavelet transform. IEEE Trans Signal Process, 42(12), 3335–3351.
Hippenstiel, R.D. & De Oliveira, P.M. (1990). Time-varying spectral estimation
using the instantaneous power spectrum (IPS). IEEE Trans ASSP, 38(10), 1752–
1759.

163
Hlawatsch, F. & Boudreaux-Bartels, G.F. (1992). Linear and quadratic time–
frequency signal representations. IEEE SP Mag, 21–67.
Hönh, B.R. & Michaelis, K. (2004). Influence of oil temperature on gear failures.
Tribology International, 37(2), 103-109.
Huang, M., Jiang, L., Liaw, P.K., Brooks, C.R., Seeley, R. & Klarstrom, D.L. (1998).
JOM, 50(11), 1-13.
Ionescu, A.P., Jutten, C., Aminian, K., Najafi, B., & Robert, Ph. (2002). Wavelet de-
noising for highly noisy source separation. Circuit and System, ISCAS IEEE
International Symposium, (1), May, 201-214.
Janse, C.P. & Kaizer, A.J.M. (1983). Time-Frequency distributions of loudspeakers:
the application of the Wigner Distribution. J. Audio Eng. Soc., 31(4), 198-222.
Jones, D.L. & Parks T.W. (1992). A resolution comparison of several time-frequency
representations. IEEE Transaction on Signal Processing, 40(2), 413-420.
Kahraman, A. & Sihgh, R. (1991). Error associated with a reduced order linear
model of a spur gear pair. Journal of Sound and Vibration, 149(3), 495-498.
Kahraman, A. (1993). Effect of axial vibrations on the dynamics of a helical gear
pair. Journal of Vibration and Acoustics, 115, 33-39.
Kar, C. & Mohanty, A.R. (2006). Monitoring gear vibrations through motor current
signature analysis and wavelet transform. Mechanical Systems and Signal
Processing,20(1), 158–187.
Kareem, A. & Kijewski, T. (2002). Time-frequency analysis of wind effect on
structures. Journal of Wind Engineering and Industrial Aerodynamics, 90, 1435-
1452.

164
Karlsson, S. & Gerdle, B. (2001). Mean frequency and signal amplitude of the
surface EMG of the quadriceps muscles increase with increasing torque − a study
using the continuous wavelet transform. Journal of Electromyography and
Kinesiology, 11, 131-140.
Kirk, T., Panzera, D., Anamalay, R., & Xu, Z. (1995). Computer image analysis of
wear debris for machine health condition monitoring and fault diagnosis. Wear,
181-183, 717-722.
Kuang, J.H & Lin, A.D. (2001). The effect of tooth wear on the vibration spectrum
of a spur gear pair. Journal of Vibration and Acoustics, 123, 311-317.
Leondes, C.T. (2000). Computer-aided design, engineering, and manufacturing:
Systems techniques and applications, volume I: Systems techniques and
computational methods. Usa: CRC Press
Li, J. C., Hyungdae, L. & Choi, S.H. (2002). Estimating size of gear tooth root crack
using embedded modeling. Mechanical Systems and Signal Processing, 16(5),
841–852.
Li, M. & Yu, L. (2001). Analysis of the coupled lateral torsional vibration of a rotor-
bearing systems with a misaligned gear coupling. Journal of Sound and Vibration,
243(2), 283-300.
Li, X., Dong, S., & Yuan, Z. (1999). Discrete wavelet transform for tool breakage
monitoring. International Journal of Machine Tools & Manufacture, 39, 1935-
1944.
Loughlin, P., Cakrak, F. & Cohen, L. (2000). Conditional moment analysis of
transients with application to helicopter fault data. Mech Syst Signal Process,
14(4), 511-522.
Loutridis, S. (2004). A local energy density methodology for monitoring the
evolution of gear faults. NDT & E International, 37, 447-453.

165
Luo, G.Y., Osypiw, D., & Irle, M. (2003). On-line vibration analysis with fast
continuous wavelet algorithm for condition monitoring of bearing. Journal of
Vibration and Control, 9, 931-947.
Lyon R. H. (1987). Machinery noise and diagnostics. Boston: Butterwords
Publishers.
Martin, H. R. (1992). Detection of gear damage by statistical vibration analysis.
Proceedings of the Institute of Mechanical Engineers, Part-C, 395-401.
Matlab. (2002). Wavelet toolbox. Version: 6.5, The MathWorks Inc.
McFadden, P. D. (1986). Detecting fatigue cracks in gears by amplitude and phase
demodulation of the meshing vibration. Transactions of the ASME, Journal of
Vibration, Acoustics, Stress & Reliability in Design, 108, 165-170.
McFadden, P.D. & Wang, W.J. (1992). Analysis of gear vibration signatures by the
weighted Wigner–Ville distribution. Proc Inst Mech Engrs, J Mech Engng Sci,
387–93.
McFadden, P.D. (1987). Examination of a technique for the early detection of failure
in gears by signal processing of the time domain average of the meshing vibration.
Mech Syst Signal Process,1(2),173–183.
McFadden, P.D. (1989). Interpolation techniques for time domain averaging of gear
vibration. Mechanical Systems and Signal Processing, 3(1), 87-97.
Meltzer, G. & Ivanov, Y.Y. (2003). Fault detection in gear drives with non-stationary
rotational speed-part I: the time-frequency approach. Mechanical Systems and
Signal Processing, 17(5), 1033–1047.
Meng, Q. & Qu, L. (1991). Rotating machinery fault diagnosis using wigner
distribution. Mechanical Systems and Signal Processing, 5(3), 155-166.
Merit, H.E. (1971). Gear engineering. London: Pitman.

166
Mertins, A. (1999). Signal analysis wavelets, filter banks, time-frequency transform
and applications. England: John Wiley & Sons.
Meyer, Y. (1993). Wavelets: algorithms and applications. Philadelphia: Society for
Industrial and Applied Mathematics.
Mitchell, J. (1993). Machinery Analysis and Monitoring. Tulsa: Penn Well Books.
Nicks, J. E. & Krishnappa, G. (1995). Gear fault detection using modulation analysis
technique. In Proceedings of the Second International Conference on Gearbox
Noise, Vibration, and Diagnostics, Institute of Mechanical Engineers, UK, 81-89.
Niemann, G. & Winter, H. (1983). Maschinenelemente, Band III. Springer Verlag .
Nikolaou, N.G. & Antoniadis, I.A. (2002). Demodulation of vibration signals
generated by defects in rolling element bearings using complex shifted morlet
wavelet. Mechanical Systems and Signal Processing,16(4), 677–94.
Ohue, Y., Yoshida, A., & Seki, M. (2004). Application of the wavelet transform to
health monitoring and evaluation of dynamic characteristics. Proc Instn Mech
Engrs, 218, 1-12.
Özgüven, H.N. & Houser, D.R. (1988). Mathematical models used in gear
dynamics-a review. Journal of Sound and Vibration, 121(3), 383-411.
Özgüven, H.N. (1991). A non-linear mathematical models for dynamic analysis of
spur gears including shaft and bearing dynamics. Journal of Sound and Vibration,
145(2), 239-260.
Parey, A. & Tandon, N. (2003). Spur gear dynamic models including defects: a
review. The Shock and Vibration Digest, 36(6), 465-478.
Peng, Z.K. & Chu, F.L. (2004). Application of the wavelet transform in machine
condition monitoring and fault diagnostics: a review with bibliography.
Mechanical Systems and Signal Processing, 18, 199-221.

167
Peng,Z. & Kirk,T. (1998). Computer image analysis of wear particles in three-
dimensions for machine health condition monitoring. Wear, 223, 157-166.
Polyshchuk, V.V. (1999). Detection and quantification of the gear tooth damage
from the vibration and acoustic signatures. Ph.D. Thesis. The University of
Akron.
Qin, S.R. & Zhong, Y.M. (2004). Research on the unified mathematical model for
FT, STFT and WT and its application. Mechanical Systems and Signal
Processing, 18, 1335–1347.
Randall, R.B. (1982). A new method of modelling gear faults. Trans ASME, J Mech
Des,104, 259–267.
Randal, R. B. (1987). Frequency analysis. Bruel & Kjaer.
Rao, R.M. & Bopardikar, A.S. (1998). Wavelet transform: Introduction to theory and
applications. Massachusetts: Addison Wesley Longman, Inc.
Rao, S.S. (1995). Mechanical Vibrations. (3th ed.). Addison-Wesley Publishing
Company.
Rioul, O. & Vetterli, M. (1991). Wavelets and Signal Processing. IEEE SP
Magazine, October, 14-38.
Roy, N. & Ganguli, R. (2005). Helicopter rotor blade frequency evolution with
damage growth and signal processing. Journal of Sound and Vibration, 283, 821–
851.
Shan, J., Bauer, B. & Seeliger, A. (1999). The joint time-frequency analysis and its
application for vibration diagnosis of machines. COMADEM’ 99 Conference,
Sunderland, UK.
Shibata, K., Takahashi, A., & Shirai, T. (2000). Fault diagnosis of rotating machinery
through visualisation of sound signals. Mechanical Systems and Signal
Processing, 14(2), 229-241.

168
Singh, A., Houser, D., & Vijayakar, S. (1999). Detecting gear tooth breakage using
acoustic emission: A feasibility and sensor placement study. Journal of
Mechanical Design,121(4), 587-593.
Smith, J.K. (2003). Gear noise and vibration. New York: Marcel Dekker Inc.
Stander, C.J., Heyns, P.S., & Schoombie, W. (2002). Using vibration monitoring for
local fault detection on gears operating under fluctuating load conditions.
Mechanical Systems and Signal Processing, 16(6), 1005-1024.
Staszewski, W. J. & Tomlinson, G. R. (1992). Report on the application of the signal
demodulation procedure to the detection of broken and cracked teeth utilising
pyestock fzg spur gear test rig. Technical report, University of Manchester.
Staszewski, W. J. (1994). The application of time-variant analysis to gearbox fault
detection, Ph. D. Thesis. Manchester: University of Manchester.
Staszewski, W. J., Worden, K. & Tomlinson, G. R. (1997). Time-Frequency analysis
in gearbox fault detection using the wigner-ville distribution and pattern
recognition. Mechanical Systems and Signal Processing, 11(5), 673-692.
Stewart, R. M. (1990). Through-life monitoring of transmission system. In
Proceedings of the First International Conference on Gearbox Noise, Vibration,
and Diagnostics, Institute of Mechanical Engineers, UK, 135-140.
Syed, A. A., Brown, J. D., Oliver, M. J., & Hills, S. A. (1980). The cepstrum: a
viable method for the removal of ground reflections. Journal of Sound and
Vibration, 71(2), 299-313.
Tan, C.K & Mba, D. (2005). Identification of the acoustic emission source during a
comparative study on diagnosis of spur gearbox. Tribology International, 38, 469-
480.

169
Tang, H., Cha, J-Z, Wang, Y., & Zhang, C. (1991). The principle of cepstrum and its
application in quantitative fault diagnostics of gears. ASME Modal Analysis,
Modelling, Diagnostics, and Control – Analytical and Experimental, 38, 141-144.
Tavakoli, M.S. & Houser. D.R. (1986). Optimum profile modifications for the
minimization of static transmission errors of spur gears. Transactions of the
ASME, Journal of Mechanisms, Transmissions, and Automation in Design, 108,
86-95.
Toutountzakis, T. & Mba, D. (2003). Observation of acoustic emission activity
during gear defect diagnosis. NDT&E International, 36, 471-477.
Toutountzakis, T., Tan, C.K. & Mba, D. (2005) Application of acoustic emission to
seeded gear fault detection. NDT&E International, 38, 27-36.
Wan, X. & Zhao, C. (1991). The extraction of the fault signature of gearboxes using
optimum complex envelope spectrum. ASME Modal Analysis, Modelling,
Diagnostics, and Control – Analytical and Experimental, 38, 149-151.
Wang, Q.W. (2002). Rotary machinery health condition monitoring, fault diagnosis
and prognosis, Ph D. Thesis. Canada: University of Waterloo.
Wang, W. (2001). Early detection of gear tooth cracking using the resonance
demodulation technique. Mech Syst Signal Process,15(5), 887-903.
Wang, W.J. & McFadden, P.D. (1993). Early detection of gear failure by vibration
analysis-I. Calculation of time–frequency distribution. Mechanical Systems and
Signal Processing, 7(3), 193–203.
Wang, W.Q, Ismail, F. & Golnaraghi, M.F. (2001). Assessment of gear damage
monitoring techniques using vibration measurements. Mechanical Systems and
Signal Processing, 15(5), 905-922.
White, M.F. (1984). Simulation and analysis of machinery fault signals. Journal of
Sound and Vibration, 93(1), 95-116.

170
Wismer, N. J, (1981). Gearbox analysis using cepstrum analysis and comb liftering.
Application Note, Brüel & Kjaer.
Yelle, H., & Burns, D.J. (1981). Calculation of Contact Ratios for Plastic/Plastic or
Plastic/Steel Spur Gear Pairs. Transaction of the ASME, Journal of Mechanical
Design, 103, 528-542.
Yesilyurt, I, Gu, F. & Ball, A.D. (2003). Gear tooth stiffness reduction measurement
using modal analysis and its use in wear fault severity assessment of spur gears.
NDT&E International, 36, 357-372.
Yesilyurt, I. (1997). Gear fault detection and severity assessment using vibration
analysis, Ph.D. Thesis. Manchester: The University of Manchester.
Yesilyurt, I. (2003). Fault detection and location in gears by the smoothed
instantaneous power spectrum distribution. NDT&E International, 36(7), 535-
542.
Yesilyurt, I. (2004). The application of conditional moments analysis to gearbox
fault detection – A comparative study using the spectrogram and scalogram.
NDT&E International, 37(4), 309-320.
Yesilyurt, I. (2005). End mill breakage detection using mean frequency analysis of
scalogram. International Journal of Machine Tools & Manufacture, 46(3-4), 450-
458.
Ykhlef, F., Arezki, M., Guessoum, A. & Berkani, D. (2004). A wavelet denoising
method to improve detection with ultrasonic signal. IEEE International
Conference on Industrial Technology, 1422-1425.
Zhan, Y.M. & Jardine, A.K.S. (2005). Adaptive autoregressive modeling of non-
stationary vibration signals under distinct gear states. Part 2: experimental
analysis. Journal of Sound and Vibration, 3(6), 451-476.

171
Zheng, H., Li, Z., & Chen, X. (2002). Gear fault diagnosis based on continuous
wavelet transform. Mechanical Systems and Signal Processing, 16(2-3), 447–457.

172
APPENDIX
NOMENCLATURE
a dilation
( )tam amplitude modulation function
( )tAm envelope function of ( )tcm
b translation
( )tbm phase modulation function
,j kc scaling coefficients (or approximation coefficients)
( )tcm analytic signal of ( )tzm
( )τxC real cepstrum of ( )tx
( )abCWTx , continuous wavelet transform of ( )tx
,j kd wavelet coefficients (or detail coefficients)
f frequency
TMf toothmeshing frequency
0f wavelet centre frequency
cF crest factor
( )th wavelet function
( )tha dilated wavelet function
( )th ab, dilated and translated wavelet function
j 1−
rK Kurtosis
m mesh frequency harmonic index
pP peak-to peak value
rms root-mean-square value
( )ts impulse response of a linear system
( )fS Fourier transform of ( )ts

173
t time
ht centre of the wavelet function
T period
( )tx time domain signal
x mean value of time domain signal
mX vibration amplitude of mth toothmeshing harmonic
( )Y f Fourier transform of ( )y t
( )ty modulated vibration signal
( )tzm bandpass filtered signal
mθ initial phase
htΔ bandwidth of the wavelet
( )tφ scaling functions
( )tmφ instantaneous phase function of ( )tcm
( )txφ phase function of ( )tx
( )tψ wavelet functions
H Hilbert transform operator
ℜ real part of a complex number (or function) * complex conjugation
< • > inner product
. norm
abs absolute value representation in Matlab code
CSD Cone-shaped distribution
CWD Choi-Williams distribution
CWT Continuous wavelet transform
DWT Discrete wavelet transform
IPS Instantaneous Power Spectrum distribution
STFT Short time Fourier transform
WV Wigner-Ville distribution
Related Documents