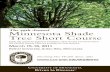
AIAA Short Course: Flight Vehicle System Identification in Time Domain, Aug. 2006 Maneuvers/1 Dr. Ravindra Jategaonkar Maneuvers for Flight Vehicle System Identification Parameter Adjustments Model Response Response Error Actual Response Input M aneuver Model Validation Complementary Flight Data Identification Phase Validation Phase Optimized Input Flight Vehicle Identification Criteria Estimation Algorithm / Optimization Mathematical Model / Simulation Data Collection & Compatibility easurements M ethods M odels M A Priori Values, lower/upper bounds Model Structure - +

FVSysID ShortCourse 2 Maneuvers
Feb 03, 2016
fly vehicle identification
Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

AIAA Short Course: Flight Vehicle System Identification in Time Domain, Aug. 2006 Maneuvers/1Dr. Ravindra Jategaonkar
Maneuvers for Flight Vehicle System Identification
ParameterAdjustments
Model Response
ResponseError
ActualResponseInput
Maneuver
ModelValidation
ComplementaryFlight Data
Identification Phase
Validation Phase
OptimizedInput
Flight Vehicle
IdentificationCriteria
EstimationAlgorithm /Optimization
MathematicalModel /
Simulation
Data Collection& Compatibility
easurementsM
ethodsM
odelsM
A Priori Values,lower/upperbounds
Model Structure
-+

AIAA Short Course: Flight Vehicle System Identification in Time Domain, Aug. 2006 Maneuvers/2Dr. Ravindra Jategaonkar
This page is left intentionally blank.

AIAA Short Course: Flight Vehicle System Identification in Time Domain, Aug. 2006 Maneuvers/3Dr. Ravindra Jategaonkar
Fundamentals of Data Gathering
The process of performing experiments and recording system inputs and outputs
“If it is not in the data, it cannot be modeled”
Basics:
1) Define the scope of flight testing
2) Define the suitable sequence of flight maneuvers to be performed at each test point
3) Choose an adequate form of the inputs to excite the aircraft
motion in some optimum sense “Optimal Input Design”

AIAA Short Course: Flight Vehicle System Identification in Time Domain, Aug. 2006 Maneuvers/4Dr. Ravindra Jategaonkar
1) Flight Testing for performance evaluation
2) Flight Testing for system identification
- FT for aircraft certification – first category
- FT for aerodynamic database development – 2nd category
- A large number required in each category- Some are common to both; some are characteristically different
- Proof-of-Match maneuvers - Required to demonstrate fidelity of aerodynamic databases- JAA / FAA - About 100 – 120 test cases (ATG: Acceptance Test Guide).
Classification

AIAA Short Course: Flight Vehicle System Identification in Time Domain, Aug. 2006 Maneuvers/5Dr. Ravindra Jategaonkar
1) Acceleration - deceleration
2) Pushover – Pullup (Roller coater)- Primarily to determine lift and drag characteristic
3) Windup turn- To determine the gradient of ‘Stick force per g’ (design criterion)
4) Climb / sawtooth climb,- To determine the best climb rate
5) Bank-to-bank roll- To determine the maximum roll capability
6) Steady sideslip, - To determine the gradient of the rudder deflection
7) Landing and takeoffs
Flight Testing for Performance Evaluation

AIAA Short Course: Flight Vehicle System Identification in Time Domain, Aug. 2006 Maneuvers/6Dr. Ravindra Jategaonkar
• Short period maneuver
• Phugoid maneuver
• Pushover-pullup (Roller coaster)
• Level turn
• Thrust variation
• Bank-to-bank roll
• Dutch roll maneuver
• Steady heading steady sideslip
+ windup turn,
+ acceleration-deceleration,
+ flybys, landings
Flight Testing for System Identification

AIAA Short Course: Flight Vehicle System Identification in Time Domain, Aug. 2006 Maneuvers/7Dr. Ravindra Jategaonkar
Two Approaches:
a) Based on the estimation error criterion
b) Based on spectral behavior of the model
Approach a): Rigorous, involved, and theoretical
Approach b): Engineering approach, easy to practice
Guiding Principle:... the optimum input in a given case is that which best excites thefrequency range of interest, and hence the harmonic control of theinput should be examined before the test ...(Milliken, 1951)
Optimal Input Design

AIAA Short Course: Flight Vehicle System Identification in Time Domain, Aug. 2006 Maneuvers/8Dr. Ravindra Jategaonkar
Optimal Input design (2)
Excitation level (input amplitude):- Sufficient excitation to result in individual
components greater than the measurement accuracy +-σ
- Resulting response negligible (within measurement accuracy), but the individual components large enough
- Large amplitudes may result in nonlinear response behavior.
Dynamic motion:- Excite different natural frequencies (modes of motion)- Preferably one control input at a time
(While moving the stick, many pilots are trained to maintainAoA through throttle variation)
Independent control inputs:- Manual or computerized inputs

AIAA Short Course: Flight Vehicle System Identification in Time Domain, Aug. 2006 Maneuvers/9Dr. Ravindra Jategaonkar
Input Design by Estimation Error AnalysisStatistical properties of the parameter estimates:
bias and covariance matrix of the estimates.
The maximum likelihood (ML) estimation is based on maximization of p(z|θ), the conditional density function of the measurements z for a given parameter vector θ.
Fisher Information matrix: ,
Indicator of information content
The ML estimation: Bias free and efficient in a statistical sense
Inverse of F provides a good approximation to error covariance matrix P
⎪⎭
⎪⎬⎫
⎪⎩
⎪⎨⎧
Θ∂Θ∂Θ∂
−=ji
ijzLE )|(2
F ))|(ln()|( Θ=Θ zpzL

AIAA Short Course: Flight Vehicle System Identification in Time Domain, Aug. 2006 Maneuvers/10Dr. Ravindra Jategaonkar
Input Design by Estimation Error Analysis (2)Estimation error covariance matrix:
Thus, the parameter error covariance matrix, P, depends upon:
1) response sensitivity.
2) number of data points N, (depends on the length of the record),
3) weighting matrix R, (depends on the measurement noise)
Response y and response gradient obtained from a-priori model
At this stage the parameters Θ are known and kept fixed.
Information content in F mainly determined by response gradients.
( ) ( )1
1
11−
=
−−
⎪⎭
⎪⎬⎫
⎪⎩
⎪⎨⎧
⎥⎦
⎤⎢⎣
⎡Θ∂
∂⎥⎦
⎤⎢⎣
⎡Θ∂
∂≈≈ ∑
N
k
kT
k tyR
tyP F
Θ∂∂ /y

AIAA Short Course: Flight Vehicle System Identification in Time Domain, Aug. 2006 Maneuvers/11Dr. Ravindra Jategaonkar
Input Design by Estimation Error Analysis (3)Proper tuning of input shape will result in optimal excitation of the
modes of a system defined by the a-priori model
leads to maximization of information matrix
In other words, minimizes the error covariance matrix P.
such inputs lead to parameter estimates having loweststatistical errors
Different measures, all based on Fisher information matrix:
1)
Which is same as maximizing determinant of F :D-optimal: overall measure,
reduces redundancyleads to better identifiability of individual parameters
{ } )()det(min)(
tuP opttu
⇒

AIAA Short Course: Flight Vehicle System Identification in Time Domain, Aug. 2006 Maneuvers/12Dr. Ravindra Jategaonkar
Input Design by Estimation Error Analysis (4)
The other criteria are the sum or product of the diagonal elements of the matrix P:
2)
3)
They minimize the standard deviations(square root of the diagonal elements of P).
Criterion 2) is called A-optimal: A for averageIt is not scale invariant
Define input space to be searched, and perform optimization.
{ } )()(min)(
tuPtr opttu
⇒
)(min)(
tuP opti
iitu
⇒⎭⎬⎫
⎩⎨⎧∏

AIAA Short Course: Flight Vehicle System Identification in Time Domain, Aug. 2006 Maneuvers/13Dr. Ravindra Jategaonkar
� � � �� � � � � �
�
�
� � �
���
� � � � � � � � � �
� � � � �� � � �
�
�
�
� � �
���
� � � � � � � � �
� � � �� � � � � �
�
�
� � �
�
�
�
� � �
���
� � � � � � � � � �
� � � � �� � � �
�
�
�
� � �
�
�
�
� � �
���
� � � � � � � � �
Input Design by Estimation Error Analysis (5)
- Combine integer multiples of basic freuqnecy- Summation of sine functions
Not suitable to be flown manually.
Needs on board computer implementation

AIAA Short Course: Flight Vehicle System Identification in Time Domain, Aug. 2006 Maneuvers/14Dr. Ravindra Jategaonkar
Two step procedure:
- determine the range of frequencies needed for accurate estimation
- design multistep input to cover these frequencies
Range of frequencies:
- Synthesize contributions due to each parameter
- make use of Bode diagram to determine the frequencies which must be included in the input signal
Example:
ee
e
e
qu
u
qu
MZX
q
u
MMMUZUZ
gXXX
q
u
δ
θ
α
θ
α
δ
δ
δ
α
α
α
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
+
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡ −
=
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
00100001// 00
&&
&
&
Design of Multistep Input Signals (1)

AIAA Short Course: Flight Vehicle System Identification in Time Domain, Aug. 2006 Maneuvers/15Dr. Ravindra Jategaonkar
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
=
010002.04-3.49-0010.867-0.0022-
9.80665-09.430.0091-
A T0] 5.09- 0.11- [0 ==B
Now, for each equation, the frequency response magnitudesof the various terms in that equation are plotted as a functionof the input signal frequency.
Consider, pitching moment equation:compute the frequency response magnitudes for each of the terms
uM αM qM eM δ as well as for the total pitch acceleration q&
with respect to the elevator input eδ
Design of Multistep Input Signals (2)

AIAA Short Course: Flight Vehicle System Identification in Time Domain, Aug. 2006 Maneuvers/16Dr. Ravindra Jategaonkar
In other words, it amounts to computing the magnitudes:
)(~)(~
,)(~
)(~,
)(~)(~
,)(~
)(~,
)(~)(~
ωδ
ωδ
ωδ
ω
ωδωα
ωδω
ωδω δα
e
ee
e
q
ee
u
e
MqMMuMq&
where ~ denotes the Fourier transform.
The individual components for and are computed
from the output equations:
q& α q eδ
eT DquCy δθα += ][
by defining the observation matrices C and D as:
]004.249.30[ −−=qC & ]09.5[−=qD &1) For :
2) For α:
q&
]0049.30[ −=αC ]0[=αD
3) For q:
4) For :eδ]004.200[ −=qC ]0[=qD
]0000[=eCδ ]09.5[−=eDδ
Design of Multistep Input Signals (3)

AIAA Short Course: Flight Vehicle System Identification in Time Domain, Aug. 2006 Maneuvers/17Dr. Ravindra Jategaonkar
Mqq/δe
Mαα/δe
Mδe
q/δe.
Optimum frequency ranges for determination of
MδeMα, MqMα
Mag
nitu
de
Frequency0.01 0.1 1 10 100
40
20
0
-20
-40
-60
-80rad/s
db
Bode magnitude plot of the pitching moment equation terms:
At any given frequency, a large magnitude of any particular term compared to the other contributions suggests a dominant influence of that derivative, which indicates good information content necessary for estimation of the parameter.
Conversely, the derivative cannot be accurately estimated, if the contribution is small.
Rule of thumb: a derivative is considered identifiable when its termhas a magnitude of at least 10% of the largest term’s magnitude
Design of Multistep Input Signals (4)

AIAA Short Course: Flight Vehicle System Identification in Time Domain, Aug. 2006 Maneuvers/18Dr. Ravindra Jategaonkar
0.01 0.1 1 10 100rad/s
Mδe
Mq
Short periodPhugoid
XαZα, Zδe
Mα, Mq, Mδe
Xu, XαZu, Zα
Frequency
Mα
Xu
Xα
Zα
Zδe
Zu
Regions of Identifiability
Design of Multistep Input Signals (5)

AIAA Short Course: Flight Vehicle System Identification in Time Domain, Aug. 2006 Maneuvers/19Dr. Ravindra Jategaonkar
Design of Multistep Input Signals (6)
The two regions surround the natural frequencies ofPhugoid and Short period motion
Logical conclusion: System excited at its natural modes exhibit dominant dynamic motion.
Basis for designing multistep input:1) Optimum range of frequencies covers a range below and above the natural frequencies
2) Eigen-frequencies based on a-priori model are subjected to uncertainties
3) Eigen frequency changes with flight condition.
Bandwidth of 1:10 desirable.

AIAA Short Course: Flight Vehicle System Identification in Time Domain, Aug. 2006 Maneuvers/20Dr. Ravindra Jategaonkar
V1 V2 V3
V4 V5
V6
V7
Design of Multistep Input Signals (7)
Multistep input signal of arbitrary shape can be synthesized by a suitable combination of pulse inputs
⎥⎥⎦
⎤
⎢⎢⎣
⎡Ω+
Ω
Ω−Δ=Ε ∑ ∑ ∑
=
−
=+
−
=
N
i
N
jji
jN
iii VVjVt
1
1
1 1
22
2 cos2cos12)(ω
The power (or energy) spectrum:
tΔ=Ω ω tNT Δ=
tΔ
tΔ
iV
duration of each pulse
amplitudes
normalized frequency Total duration

AIAA Short Course: Flight Vehicle System Identification in Time Domain, Aug. 2006 Maneuvers/21Dr. Ravindra Jategaonkar
0 4 8 12frequency
rad/s
Ener
gy
0
0.1
0.2
0.3
t
u
Δt
Δt=1.2 s
Δt=0.8 sΔt=0.4 s
Design of Multistep Input Signals (8)
Energy spectrum of pulse inputs:

AIAA Short Course: Flight Vehicle System Identification in Time Domain, Aug. 2006 Maneuvers/22Dr. Ravindra Jategaonkar
Design of Multistep Input Signals (9)
Energy spectrum of doublet inputs:
Ener
gy
0.2
0.4
0.6
0.8
1.0
0
1.2
0 4 8 12frequency
rad/s
t
u
Δt
Δt=1.2 s
Δt=0.6 s
Δt=0.8 s
0 2 4 50
0.2
0.4
0.6
0.8
1.0
Normalized frequency, ωΔtE/Δ
t2
t
u
Δt
1 3
(ωΔt)mid
Δt= 1.2 s 0.8 s 0.6 s
ω1 ω2
1 : 3
noscillatioofperiodtnn
DBLT ⋅≈≈≈Δ7.2
17.223.2ωπ
ω

AIAA Short Course: Flight Vehicle System Identification in Time Domain, Aug. 2006 Maneuvers/23Dr. Ravindra Jategaonkar
Design of Multistep Input Signals (10)
Energy spectrum of 3211, doublet and pulse inputs
noscillatioofperiodtnn
⋅≈≈≈Δ41
26.1
3211 ωπ
ω
noscillatioofperiodtn
⋅≈≈Δ311.2
3211 ω
ω2ω1
Normalized frequency, ωΔt0 1 32 4 5
Ener
gy sp
ectru
mStep
Doublet
3211 Signal
Modified3211 Signal
t
-1.1
0 3 5 7
1.
-1.1.
-1.1.
-1.1.
-1.
1.1
-1.2
0.8
Δt
(ωΔt)mid
(ωΔt)2/3
Bandwidth
1 : 101 : 3

AIAA Short Course: Flight Vehicle System Identification in Time Domain, Aug. 2006 Maneuvers/24Dr. Ravindra Jategaonkar
Design of Multistep Input Signals (11)
Multistep inputs: - Time step for 3211 input is somewhat smaller than that for
the doublet- 3211 provides good excitation of short period mode
- 1123 input has same spectrum 3211 input
- Phugoid is excited by long duration pulse
- Dutch roll is lightly damped; Doublet input provides adequate excitation

AIAA Short Course: Flight Vehicle System Identification in Time Domain, Aug. 2006 Maneuvers/25Dr. Ravindra Jategaonkar
Multistep inputs: - Onboard generated computer inputs
- Step changes within single ΔtMay lead to excitation of structural modesLarge accelerations (at off CG locations, e.g. cockpit)
- Pilot applied inputs- Simple counting procedure (21,22,22; 21,22; 21; 21)- Audio/optical cueing (series of beeps, track displayed signal)- Extremely sharp changes are automatically filtered out
Exact time step and shape is not that critical, Use rule of thumbfor Δt
Practical Aspects of Input Signals (1)
10150 kts200230
260
0 30
Speed period Doublet(kts) (s) 2Δt (s)150 4.7 3.6200 3.7 3.9230 3.3 3.9260 2.8 3.1
2010time
s-6
6deg
0
0
deg/s
-10
r
δr

AIAA Short Course: Flight Vehicle System Identification in Time Domain, Aug. 2006 Maneuvers/26Dr. Ravindra Jategaonkar
Elev
ato
r Small Input
3 2 1 1 3 2 1 1
Ban
k A
ng
le
20 s 20 s
Elev
ato
r
Elevator Pulse for PhugoidExcitation10s 1 Oscillation Period
Aile
ron
/Sp
oile
r
Aileron/SpoilerBank to Bankmaneuver
Ailerons only
30° Bank Angle10° Bank Angle
Level Turn with60° Bank and
Elevator Doublets
3-2-1-1 ElevatorMultistep Input
Rudder Doubletfor Dutch RollExcitation
Δ t 1s
Ru
dd
er
Small Input
1 1 1 1
Thru
st
10s 10s
20% ThrustVariation
Δ t 1s
Ru
dd
er
15 s
Rudder pulsesFor steady sideslips
Elev
ato
r Elevator pulland push forRoller-coaster
Practical Aspects of Input Signals (2)
Typical manual inputs

AIAA Short Course: Flight Vehicle System Identification in Time Domain, Aug. 2006 Maneuvers/27Dr. Ravindra Jategaonkar
Elevator 3-2-1-1
Short Period
Elevator pulse
Phugoid
Bank angle
Level Turn Maneuver
Aileron/Spoiler
Bank to BankManeuver
Rudder Doublet
Dutch Roll
Thrust Doublet
FL 300
FL 260
FL 160
FL 80
FL 20
100 150 200 250 300 True Airspeed (Kts)
0.2 0.3 0.4 0.5 Mach No.
Alt
itu
de
80 K
CAS
100
KCAS
120
KCAS
160 K
CAS
195 K
CAS
277 KCAS
230 K
CAS
140 K
CAS
Practical Aspects of Flight Testing
Typical flight test program for system identification

AIAA Short Course: Flight Vehicle System Identification in Time Domain, Aug. 2006 Maneuvers/28Dr. Ravindra Jategaonkar
Practical Aspects of Flight Testing (2)
Important Aspects:
Flight testing is costly; optimize the test procedure and maneuver sequence
Define the specific goals of flight testing- System identification
- dynamic maneuvers: small, medium and large amplitude- linear or nonlinear model identification- global model or point-models at selected trim conditions- configuration changes- flight (trim) conditions: angle of attack, sideslip angle, Mach, altitude, ...- special effects- repetition of dynamic maneuvers- influence of atmospheric conditions
- Model verification
On-site preliminary verification of recorded data to insure adequacy for off-line analysis

AIAA Short Course: Flight Vehicle System Identification in Time Domain, Aug. 2006 Maneuvers/29Dr. Ravindra Jategaonkar
p
r
φ
δr
δaL
δaR
deg/s
deg/s
deg
deg
deg
20
0
-2020
0
-2015
-10
0
0
0
15
-10
1.5
-1.00 80time sec
Aerodynamic database:- Lateral-directional motion Identified from bank-to-bankand Dutch roll maneuvers.
- Multi run analysis
Example:- validation of Dutch roll- Rudder doublets- three maneuvers with differentinput amplitudes
- Beta variations up to +- 10°
Observation:The model response matches with flight measurement of p, r, β. Match for bank angle does not show any particular discrepancies.
Dynamic maneuvers
Practical Aspects of Flight Testing (3)

AIAA Short Course: Flight Vehicle System Identification in Time Domain, Aug. 2006 Maneuvers/30Dr. Ravindra Jategaonkar
Combined motion:in yaw (due to directional stability) and roll (due to dihedral effect)
Beta-Sweep:- slowly scan β from 0° to βmax to 0° to βmax to 0°
- 30 to 50 seconds
Steady state sideslip:- 0° to +4°, hold for ~15 sec;
increase to 8°, hold for 15 sec- repeat for –ve sideslip angles
In both cases try to keep wings level.
Observation:Some discernible discrepancies in the match for Bank angle.
sideslip maneuvers
p
r
φ
δr
δaL
δaR
deg
5
0
-5
10
0
-1010
-10
0
0
0
10
-10
4
-425 50 75 100
time
sec
Practical Aspects of Flight Testing (4)

AIAA Short Course: Flight Vehicle System Identification in Time Domain, Aug. 2006 Maneuvers/31Dr. Ravindra Jategaonkar
p
r
φ
δr
δaL
δaR
deg/s
deg/s
deg
deg
deg
5
0
-5
10
0
-1010
-10
0
0
0
10
-10
4
-425 50 75 100
time
sec
Flat Yaw Maneuver?- Banked turn: classical, looks elegant
- Yaw-only turn, bank 0°
sideslip maneuvers
Asymmetric configuration:Beta sweeps and steady sideslip maneuvers provide additional information – directional stability, lateral-directional control, coupling effects.
Database update:-Nonlinearity in aileron effectiveness for small deflections.
-Pitching moment nonlinear function of sideslip angle.
Practical Aspects of Flight Testing (5)

AIAA Short Course: Flight Vehicle System Identification in Time Domain, Aug. 2006 Maneuvers/32Dr. Ravindra Jategaonkar
Downwash Lag Effects - Pitch Damping DerivativesSpecial Flight Test Techniques
ATTAS VFW-614
Bank Angle
-12
12deg/s
-75
75deg
φ
0 20 40 stime
qα-dot
Large bank angle maneuver with elevator input
-12
12deg/s
q
0 20 40stime
Pitch rateα-dot
α-dot
conventional elevator input maneuver
Modeling: Two Complementary Approaches
Two point aerodynamic model
- wing and tail are modeled separately
- physically more realistic
- automatically accounts for q and α-dot effects- nonlinear model with time delay
- necessarily requires NL estimation program
Conventional approach - Taylor series
- simplification based on linearization- linear parameter estimation program adequate- generally total pitch damping C mmq+C α
)sinsincoscos(cosVgqLCVm
qS αθ+αφθ++−=α&
independent component of α−dotthrough gravity term
- Cmqand Cmαseparation require special tests
Practical Aspects of Flight Testing (6)

AIAA Short Course: Flight Vehicle System Identification in Time Domain, Aug. 2006 Maneuvers/33Dr. Ravindra Jategaonkar
Correlated Inputs (1)
X-31A: Pilot Input and Separate Surface Excitation α σδTEδcan
deg
deg
deg
deg
20
35
0
2
-15
-4520
-20
time s200 10 15 255
PID command
pitch command
angle of attack
canard
sym. trailing edge flaps
TV deflection in pitch
2.5
-2.5
deg20
-20
deg
pilot inputpitch doublet
canard 3211
elevator 3211
separate surface excitation (SSE)

AIAA Short Course: Flight Vehicle System Identification in Time Domain, Aug. 2006 Maneuvers/34Dr. Ravindra Jategaonkar
20 40 60 80Angle of Attack, deg
0.6
0.4
0.2
0
-0.220 40 60 80
Angle of Attack, deg
Pilot Input Separate Surface Excitation
Single maneuverData partitioningWindtunnel predicted
EstimatedWindtunnel
Cmδcan
X-31A: Canard Effectiveness
α σδTEδcan
Correlated Inputs (2)

AIAA Short Course: Flight Vehicle System Identification in Time Domain, Aug. 2006 Maneuvers/35Dr. Ravindra Jategaonkar
Flight Test Instrumentation and Measurement (1)A typical set of measurements for aerodynamic model extraction
1) Control surface deflections -- essential, input to the aero model
2) Linear accelerations -- three axes; provide very good information
3) Angular rates -- three axes; provide very good information
4) Attitude angles -- primarily useful in the data compatibility check
Also, for Aero-model ID using output error method
5) Air data -- very useful in the parameter estimation
6) Static pressure,
7) Engine parameters
8) Pilot forces and inceptor positions (Hinge-moment database)
9) Angular accelerations -- Recommended
10) Signal-to-noise ratio -- 10:1- noise around system frequencies critical

AIAA Short Course: Flight Vehicle System Identification in Time Domain, Aug. 2006 Maneuvers/36Dr. Ravindra Jategaonkar
θ2.5
-2.5
0θ
35
-35
0
q-do
t
9
-9
0q
0 2 4 6 8 10times
qq&
θS θ
θ(f)
0
0.12
0.08
0.04
0
12
8
4
0
1.2
8
4S qq(
f)
0 0.4 0.8 1.2 1.6 2Hz
q q&
S qq(
f)
frequency
degdeg/sdeg/s2
Flight Test Instrumentation and Measurement (2)
Three levels of signals: acceleration, rate, attitude angle

AIAA Short Course: Flight Vehicle System Identification in Time Domain, Aug. 2006 Maneuvers/37Dr. Ravindra Jategaonkar
Current Trends
Current Trends Computerized Control Inputs
NASA LaRC Input Signal
DLR Improved 3211 Input Signal
Manual Multi step Inputs
Computerized Control Inputs
Design techniques robust toinaccurate a priori model
Optimal Input Design byDynamic Programming- nonlinear models- actuator dynamics- feedback control
Separate Surface Excitation- unstable aircraft
1050
-5
Time
0.8 1.1
-1.1-1.2
1.
-1.
0Δt 3Δt 5Δt 7Δt
Hypersonic flight vehicles- multi axis orthogonal phaseoptimized sweeps

AIAA Short Course: Flight Vehicle System Identification in Time Domain, Aug. 2006 Maneuvers/38Dr. Ravindra Jategaonkar
References (1)Jategaonkar, R. V., Flight Vehicle System Identification: A Time Domain Methodology, Volume 216, AIAA Progress in Astronauticsand Aeronautics Series; Published by AIAA Reston, VA, Aug. 2006, ISBN: 1-56347-836-6http://www.aiaa.org/content.cfm?pageid=360&id=1447
Gates, R. J., Bowers, A. H., and Howard, R. M., “A Comparison of Flight Input Techniques for Parameter Estimation of Highly Augmented Aircraft”, AIAA Atmospheric Flight Mechanics, Conference, San Diego,CA, Aug. 11-13, 1996, Paper No. AIAA 96-3363.
Gupta, N. K. and Hall W. E. Jr., “Input Design for Identification of Aircraft Stability and Control Derivatives”,NASA CR-2493, Feb. 1975.
Hamel, P. G. and Jategaonkar, R. V., “Evolution of Flight Vehicle System Identification”, Journal of Aircraft, Vol. 33, No. 1, Jan.-Feb. 1996, pp. 9-28.
Koehler, R. and Wilhelm, K., “Auslegung von Eingangssignalen für die Kennwertermittlung”, DFVLR-IB 154-77/40, Dec. 1977.
Morelli, E. A. and Klein, V., “Optimal Input Design for Aircraft Parameter Estimation using Dynamic Programming”, AIAA Atmospheric Flight Mechanics Conference, Portland, OR, Aug. 20-22, 1990, Paper No. AIAA 90-2801.
Morelli, E. A., “Flight Test Validation of Optimal Input Design and Comparison to Conventional Inputs”, AIAA Atmospheric Flight Mechanics Conference, New Orleans, LA, Aug. 11-13, 1997, Paper No. AIAA 97-3711.
Mulder, J. A., Sridhar, J. K., and Breeman, J. H., “Identification of Dynamic Systems: Applications to Aircraft. Part 2: Nonlinear Analysis and Manoeuvre Design”, AGRAD AG-300, Vol. 3, Pt. 2, May 1994.
Plaetschke, E. and Schulz, G., “Practical Input Signal Design”, AGARD LS-104, Nov. 1979, Paper No. 3.

AIAA Short Course: Flight Vehicle System Identification in Time Domain, Aug. 2006 Maneuvers/39Dr. Ravindra Jategaonkar
Stepner, D. E. and Mehra, R. K., “Maximum Likelihood Identification and Optimal Input Design forIdentifying Aircraft Stability and Control Derivatives”, NASA CR- 2200, March 1973.
Stepner, D. E. and Mehra, R. K., “Maximum Likelihood Identification and Optimal Input Design forIdentifying Aircraft Stability and Control Derivatives”, NASA CR- 2200, March 1973.
Weiss, S., Friehmelt, H., Plaetschke, E., and Rohlf, D., “X-31A System Identification using Single Surface Excitation at High Angles of Attack”, Journal of Aircraft, Vol. 33, No. 3, May-June 1996, pp. 485-490.
References (2)

AIAA Short Course: Flight Vehicle System Identification in Time Domain, Aug. 2006 Maneuvers/40Dr. Ravindra Jategaonkar
This page is left intentionally blank.
Related Documents