Anand Prakasha TU Delft 8/21/2017 Fundamental Study of Small– Signal Stability of Hybrid Power Systems

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript
Anand Prakasha
TU Delft
8/21/2017
Fundamental Study of Small–Signal Stability of Hybrid Power
Systems

Master of Science
1
Master of Science
2
Fundamental study of Small Signal Stability of
Hybrid Power Systems
MASTER THESIS BY
ANAND PRAKASHA
In partial fulfillment of the requirements for the degree of
Master of Science in
Electrical Sustainable Energy (ESE) track
Intelligent Electrical Power Grids (IEPG) group
Faculty of Electrical Engineering, Mathematics and Computer Science (EEMCS)
Supervisor: Asst. Prof. Dr. Ir. Jose Luis Rueda Torres
Thesis Committee Members:
Prof. Dr. Ir. Peter Palensky (Chairman IEPG)
Asst Prof. Dr. Ir. Jose Luis Rueda Torres (IEPG)
Prof. Dr. Ir. Nick van der Meijs (C&S group) (External)
To be defended on: 21st August 2017
The electronic version of this thesis can be found at: http://repository.tudelft.nl/.
Master of Science
3
Master of Science
4
ACKNOWLEDGEMENTS
After my initial years of Master’s study, I approached Prof. Dr. Jose Rueda Torres for a
thesis topic due to his profound knowledge in power systems stability. This led to my decision
to study the “stability of power systems” for my thesis. He not only offered me his supervision,
but also allowed me complete freedom to dive into the topic and narrow down to the most
interesting research questions in this field.
I appreciate his co-operation and the effort spent on reading my progress reports and
providing valuable feedback. He maintained professionalism, equality and allowed me to
express my ideas freely, sometimes even on social media for a quick small query. I want to
thank him for granting an opportunity to assist him in the Power system dynamics course,
where I developed skills to assist other students. Thank you again for providing such a
pleasant informal working environment.
I also want to thank Prof. Dr. Peter Palensky for accepting the role of core responsible
professor for my thesis work. In spite of his busy schedules and meetings, he spent enough
time in monitoring my work and providing valuable advice on various applications in the field.
Additionally, I was very lucky to meet Arcadio Perilla as my Ph.D. supervisor during my
thesis. The in-depth discussions about the purpose and research goals helped me to speed up
my work and clear up my doubts.
Being the last international students of our batch, only Vijay Purshothaman and I know
how it feels to be in a foreign country for years without taking a vacation to visit our home
countries. I want to thank Vijay for his time and the funny discussions that we had for a long
time. I also thank my parents and relatives for their support, patience and motivation
throughout. My special thanks to my education counselor John Stals for his financial and
optimistic support. My gratitude to all the numerous colleagues whose names cannot be
mentioned here for their support throughout my studies at TU Delft.
Anand Prakasha
TU Delft, 2017

Master of Science
5
Master of Science
6
Abstract
In the modern world, the load demands on the electrical grids are increasing at a very high
rate. Due to increasing power demands and deregulation of the electrical power, the power
systems are operated to their maximum capacities.
Many renewable sources are integrated to the conventional grids to meet the increasing
load demands. The HVDC technology has provided an efficient way to integrate different
renewable sources successfully to fulfil the electrical power requirements. The integration
involves incorporating different types of machines with different mechanisms and technologies.
At peak load operating conditions, the electro–mechanical modes of oscillations exist between
different parts of the system, which possess serious threat to the operations leading to
widespread blackouts. These modes depend on various factors like, loading conditions, weak
tie–lines, type of faults, topology of the system and generators. Among these, one of the key
factors that affect the system stability is the machine inertias. The stability of the system is a
key issue to be addressed when different sources are incorporated into a huge system.
In this thesis work, the effect of incorporating different inertia machines on the small signal
stability of the system is addressed. Two study cases are studied to examine the effect of
machine inertia on the system stability, case–1 is a HVAC system and case–2 is a HVAC–DC
system. Two methods are used to access the stability of the system, by linearized models and
by signal record based approach. The results from the linearized models are compared with the
result obtained from the information extracted from the measured signals.

Master of Science
7

Master of Science
8
Contents
ACKNOWLEDGEMENTS ........................................................................................................ 4
Abstract ............................................................................................................................. 6
1 Introduction .............................................................................................................. 16
1.1 Literature ............................................................................................................ 17
1.2 Research Questions .............................................................................................. 19
1.3 Research Approach .............................................................................................. 19
2 HVDC–VSC Converters Modeling.................................................................................. 22
2.1 HVDC configurations ............................................................................................ 22
2.2 VSC converters theoretical background .................................................................. 24
2.3 Equivalent circuits in dq0-frame ............................................................................ 27
2.4 VSC control methods ............................................................................................ 29
2.5 Point–to–point HVDC link operating principle .......................................................... 32
3 Modeling and System Implementation ......................................................................... 34
3.1 Generator modeling ............................................................................................. 34
3.2 Composite frame of generator............................................................................... 35
3.3 AVR initialization .................................................................................................. 36
3.4 Speed governor initialization ................................................................................. 36
3.5 System specifications ........................................................................................... 38
4 Linearized Modeling and Prony Analysis ....................................................................... 42
4.1 State–space model theory .................................................................................... 42
4.2 Eigenvectors of an Eigenvalue ............................................................................... 45
4.3 Sensitivity of an Eigenvalue .................................................................................. 47
4.4 Prony analysis ..................................................................................................... 48
4.5 Choice of signals .................................................................................................. 50
4.5.1 Pre–processing of the signals ......................................................................... 51
4.5.2 Choosing the Prony window ........................................................................... 51
5 Results ...................................................................................................................... 54
Master of Science
9
5.1 Tuning of AVR control system ............................................................................... 54
5.2 Tuning of the speed governor ............................................................................... 55
5.3 Two area system results ....................................................................................... 56
5.4 Modal analysis of three–area HVAC system ............................................................ 61
5.4.1 Characteristics of the modes HVAC system ...................................................... 63
5.5 Modal analysis of HVAC–DC system ....................................................................... 69
5.5.1 Characteristics of the modes HVAC–DC system ................................................ 71
5.6 Comparison between the modal behavior ............................................................... 75
5.7 Prony Analysis results ........................................................................................... 76
5.7.1 Step change in generator torques G1 and G2 ................................................... 77
5.7.2 Short circuit on the line .................................................................................. 79
5.7.3 Step change in the torque G5 and G6 ............................................................. 82
5.7.4 Line outage event (Area–1 and Area–2) in HVAC system .................................. 84
5.7.5 Inter–area mode (area–1 and area–2) in HVAC–DC system ............................... 88
5.7.6 Comparison between Prony analysis and DIgSILENT power factory ................... 92
6 Conclusions and Recommendations ............................................................................. 96
6.1 Conclusions ......................................................................................................... 96
6.2 Reflections .......................................................................................................... 97
6.3 Future recommendations ...................................................................................... 97
Appendix ........................................................................................................................ 104
Generators and controllers dynamic data ....................................................................... 104
Transmission line data.................................................................................................. 105
Transformer data ......................................................................................................... 107
VSC converter data ...................................................................................................... 107
Eigenvalues of three–area HVAC system ........................................................................ 108
Eigenvalues of three–area HVAC–DC system .................................................................. 110
MATLAB codes ............................................................................................................. 112
Interpolation of the time–domain signal ..................................................................... 112
Master of Science
10
LIST OF SYMBOLS
The used variables, symbols, and abbreviations in this thesis are defined here: SSS Small–Signal Stability
HVAC High Voltage Alternating Current
HVDC High Voltage Direct Current
VSC Voltage Source Converters
FACTS Flexible Alternating Current Transmission Devices
X0sys Initial state vector of the system
U0sys Initial input vector of the system
Xisys State vector of the system
Uisys Input vector of the system
Yisys Output vector of the system
ζ Damping ratio
σ Real part of the Eigenvalue
⍵ Imaginary part of the Eigenvalue
Φi Right Eigenvector
Ψi Left Eigenvector
Φ Right Eigen matrix
Ψ Left Eigen matrix
I Identity matrix
Va, Vb, Vc Three phase voltages
Ia, Ib, Ic Three phase currents
ut Terminal voltage of the generator (p.u.)
pt Turbine output power (p.u.)
sgnn MVA rating of the generator
cosn Power factor of the generator
xspeed Rotor speed (p.u.)
f Frequency (p.u.)
p, q Measured values of Active and Reactive power
u Measured voltage
P_ref, Q_ref Reference active and reactive power
VDC_ref Reference DC voltage

Master of Science
11
id_ref, iq_ref d, and q axis reference currents
id, iq Output d and q axis currents
Pmr, Pmi Real and Imaginary part of Pulse–width modulation index
ve Field voltage of the Synchronous generator
Master of Science
12
LIST OF FIGURES
Figure 1:1–Adopted research approach flow chart ............................................................... 20
Figure 2:1– HVDC link monopole configuration .................................................................... 22
Figure 2:2– HVDC link bipole configuration .......................................................................... 23
Figure 2:3–Two stage VSC–converter ................................................................................. 23
Figure 2:4– VSC–converter station ...................................................................................... 24
Figure 2:5– Representation of a phasor in complex plane ..................................................... 26
Figure 2:6– dq0 equivalent circuit of VSC ............................................................................ 28
Figure 2:7– VSC control strategy overall block diagram [14] ................................................. 30
Figure 2:8: Inner current controller of a VSC ....................................................................... 30
Figure 2:9– Active power controller of a VSC ....................................................................... 31
Figure 2:10– DC voltage controller of a VSC ........................................................................ 31
Figure 2:11– Reactive power controller of a VSC .................................................................. 31
Figure 2:12– AC voltage controller of a VSC ........................................................................ 32
Figure 2:13– Point–to–point HVDC link operating principle block diagram .............................. 32
Figure 3:1–DIgSILENT power factory structure (inspired by DIgSILENT) [16] ......................... 34
Figure 3:2–Compsite frame of the generator and its controls ................................................ 35
Figure 3:3–Automatic voltage regulator (AVR) block definition .............................................. 36
Figure 3:4–AVR initial conditions ........................................................................................ 36
Figure 3:5–Speed governor block definition ......................................................................... 37
Figure 3:6–Speed governor initial conditions ....................................................................... 37
Figure 3:7–Two-area reference system [12] ........................................................................ 38
Figure 3:8–Implemented three-area HVAC system ............................................................... 39
Figure 3:9–Implemented three-area HVAC–DC system ......................................................... 40
Figure 3:10–Implemented point–to–point HVDC link ............................................................ 40
Figure 4:1–State space representation block diagram [12] .................................................... 44
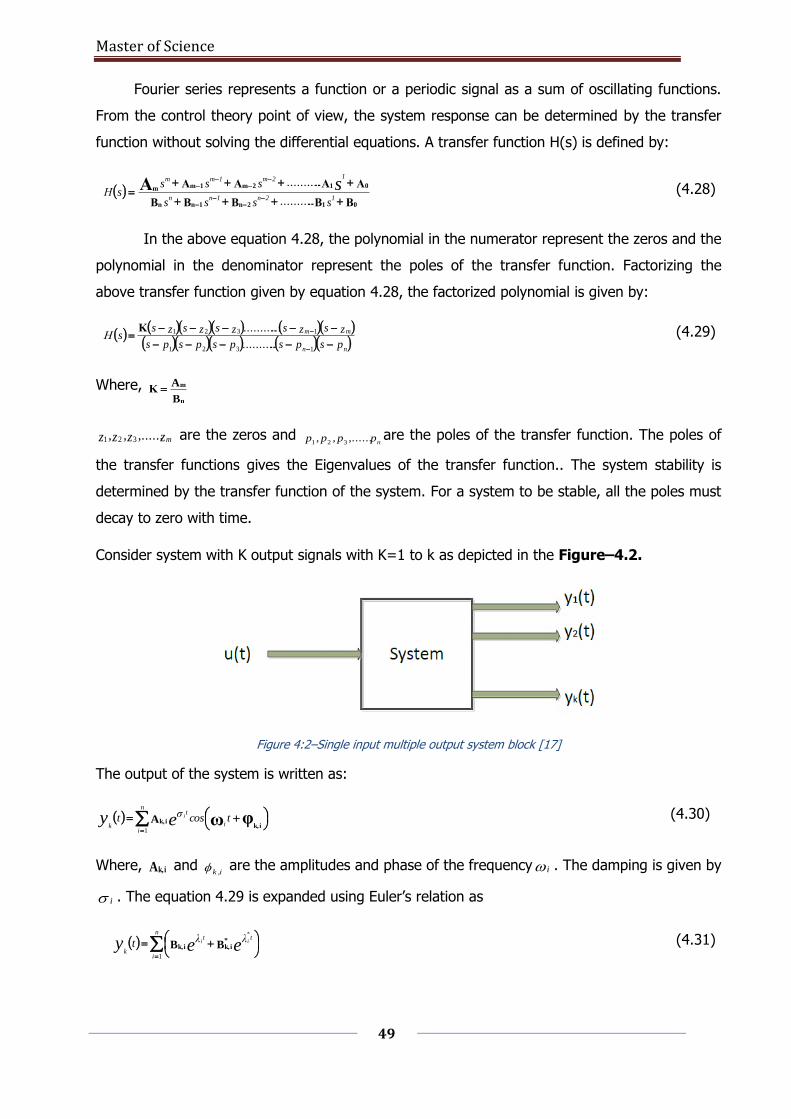
Figure 4:2–Single input multiple output system block [17] .................................................... 49
Figure 4:3–Prony analysis input screen (DSI Toolbox) [18] ................................................... 52
Figure 4:4–Prony analysis output screen DIS toolbox [18] .................................................... 53
Figure 5:1– Eigenvalues with respect to AVR gain ................................................................ 54
Figure 5:2– Eigenvalues with respect to speed governor gain ............................................... 55
Figure 5:3–Participation factors Local mode area-1 .............................................................. 57
Figure 5:4–Mode shape area-1 ........................................................................................... 58
Figure 5:5–Participation factors Local mode area-2 .............................................................. 58
Master of Science
13
Figure 5:6–Mode shape area-2 ........................................................................................... 59
Figure 5:7–Participation factor inter-area mode ................................................................... 60
Figure 5:8–Mode shape inter-area mode ............................................................................. 60
Figure 5:9–Three–area HVAC system Eigenvalue plot w.r.t machine inertia ............................ 62
Figure 5:10–Participation factors local mode area-1 HVAC system ......................................... 63
Figure 5:11–Mode shape local area-1 HVAC system ............................................................. 64
Figure 5:12– Participation factors local mode area-2 HVAC system ........................................ 64
Figure 5:13–Mode shape local area-2 HVAC system ............................................................. 65
Figure 5:14–Participation factors local mode area-3 HVAC system ......................................... 65
Figure 5:15– Mode shape local mode area-3 HVAC system ................................................... 66
Figure 5:16– Participation factors inter-area mode area-1 and area-3 HVAC–DC system .......... 66
Figure 5:17–Mode shape inter–area mode area–1 and area–3 HVAC–DC system .................... 67
Figure 5:18–Participation factors inter–area mode area–1 and area–2 HVAC–DC system ......... 68
Figure 5:19–Mode shape inter–area mode area–1 and area–2 HVAC–DC system .................... 68
Figure 5:20–Three–area HVAC–DC system Eigenvalue plot w.r.t. machine inertia ................... 70
Figure 5:21– Participation factors local mode area-1 HVAC–DC system .................................. 71
Figure 5:22–Mode shape local area-1 HVAC–DC system ....................................................... 72
Figure 5:23–Participation factors local area mode–2 HVAC–DC system .................................. 72
Figure 5:24–Mode shape area–2 HVAC–DC system .............................................................. 73
Figure 5:25–Participation factors local mode area-3 HVAC–DC system ................................... 73
Figure 5:26–Mode shape local mode area–3 HVAC–DC system .............................................. 74
Figure 5:27–Participation factors inter–area mode area–1 and area–2 HVAC–DC system ......... 74
Figure 5:28–Mode shape inter–area mode area–1 and area–2 HVAC–DC system .................... 75
Figure 5:29–Step change in the torque for G1 and G2 at 5 seconds....................................... 77
Figure 5:30–Frequency and Phase response of signal G1 ...................................................... 78
Figure 5:31–Frequency and Phase response of signal G2 ...................................................... 79
Figure 5:32–Short–circuit on Line B at 1 second in HVAC system........................................... 80
Figure 5:33–Frequency and Phase response of signal G3 ...................................................... 81
Figure 5:34–Frequency and Phase response of signal G4 ...................................................... 81
Figure 5:35–Step increase in the torque at generator G6 at 5 seconds in HVAC system ........... 82
Figure 5:36–Frequency and Phase response of signal G5 local mode area–3 HVAC system ...... 83
Figure 5:37–Frequency and Phase response of signal G6 local mode area–3 HVAC system ...... 84
Figure 5:38–Line outage of Line-C at 5 seconds ................................................................... 85
Figure 5:39–Frequency and Phase response of signal G1 inter–area mode HVAC system ......... 86
Figure 5:40–Frequency and Phase response of signal G2 inter–area mode HVAC system ......... 86
Master of Science
14
Figure 5:41–Frequency and Phase response of signal G3 inter–area mode HVAC system ......... 87
Figure 5:42–Frequency and phase response of signal G4 inter–area mode HVAC system ......... 87
Figure 5:43–Line outage of line-C at 5 seconds HVAC–DC system ......................................... 88
Figure 5:44–Frequency and Phase response of signal G1 inter–area mode HVAC–DC system ... 89
Figure 5:45–Frequency and Phase response of signal G2 inter–area mode HVAC–DC system ... 90
Figure 5:46–Frequency and Phase response of signal G3 inter–area mode HVAC–DC system ... 90
Figure 5:47–Frequency and Phase response of signal G4 inter–area mode HVAC–DC system ... 91
Figure 5:48–Comparison between linear model and Prony's method ...................................... 94
LIST OF TABLES
Table 3-1: Generator specifications ..................................................................................... 38
Table 3-2: System load specifications ................................................................................. 38
Table 3-3: Generator specifications three-area system ......................................................... 41
Table 3-4: Load demand specification three–area system ..................................................... 41
Table 3-5: Time domain case studies .................................................................................. 41
Table 5-1: Electromechanical modes two-area reference system ........................................... 56
Table 5-2: Machine inertia operating points ......................................................................... 61
Table 5-3: HVAC system electr0–mechanical modes w.r.t. machine inertia ............................. 62
Table 5-4: Participation factors and right Eigenvectors ......................................................... 67
Table 5-5: Three–area HVAC–DC system operating conditions with respect to inertias ............ 69
Table 5-6: HVAC–DC system electro–mechanical modes with respect to machine inertias ........ 70
Table 5-7: Comparison between modal behavior .................................................................. 76
Table 5-8: Time domain study cases for Prony analysis ........................................................ 76
Table 5-9: Modal characteristics of local mode area–1 .......................................................... 78
Table 5-10: Modal characteristics of local mode area–2 ........................................................ 80
Table 5-11: Characteristics of the local mode area–3 ........................................................... 83
Table 5-12: Modal characteristics of inter–area mode area–1 and area–2 HVAC system .......... 85
Table 5-13: Modal characteristics of inter–area mode area–1 and area–2 HVAC–DC system .... 88
Table 5-14: Comparison between linear model and Prony analysis without controllers ............ 92
Table 5-15: Comparison between linear model and Prony analysis with controllers ................. 93

Master of Science
15
Master of Science
16
1 Introduction
Power systems have developed from their simple direct current systems to highly complex
systems to transfer the energy from the sources to users. They generally comprise of
components like high voltage cables, transmission lines, power electronics devices, Flexible
Alternating Current Transmission System (FACTS) devices, generation systems and
transformers etc. The modern systems are highly interconnected over country borders and
even continents and operated throughout the year without any breaks. Power system is the
primary means to transmit the energy generated from various sources (thermal, wind, hydro
etc.) to industrial, commercial and residential users. The various sources used for generating
electricity, have different control mechanism and can be an AC or a DC source.
The electrical power system is mainly divided into generation, transmission and distribution
systems. These systems are predominantly operated at a constant frequency and voltage
levels. The standard frequencies and voltage levels differ from place to place like for example,
in US the standard frequency is 60 Hz and in Europe and Asian countries it is 50 Hz. The
primary use of transformers is to step–up and step–down between different transmission and
sub–transmission level voltages. The introduction of the High Voltage Direct Current (HVDC)
technologies has made it possible to have an interconnection between different standards in
fundamental frequencies.
The main purpose of introducing HVDC is to control the transmitted electrical power and
to enable bulk transmission of electrical power. Different technologies are used in the
converter station to convert from AC to DC and vise– versa. One of the technologies used is
the Line Commutated Converter (LCC) technology. LCCs are reasonable, easy to build and can
handle a large amount of power, which makes it more reliable. But, there are few
disadvantages, like when the direction of the power flow changes, the polarity has to be
changed and this creates problems. The other disadvantage is that these LCCs are difficult to
operate in a meshed grid.
Due to the limitations in the LCCs, the Voltage Source Converters (VSCs) are well suited
for modern transmission network applications. The VSCs incorporate power electronic switches
like IGBTs and GTOs that are self–commutating and change the polarity by changing the
direction of the current flow. The VSCs have black start capabilities that do not require AC filters
and a higher power quality in the AC system. This technology has led to the successful
interconnection of off–shore windfarms to the rest of the grid. As a consequence, there is a high
penetration of renewable sources of energy into the electrical generation sector.
Master of Science
17
A real time power system has both AC and DC transmission systems. These systems are
known as hybrid power systems. The operation, planning and dynamic studies of hybrid
systems require in–depth analysis involving the development of detailed models of the power
networks and simulating the dynamic phenomenon like short–circuits studies, dynamic
responses of the generators and their control mechanisms in the network. The purpose is to
achieve a high degree of reliability, safety and permissible operating points from the stability
point of view.
Since the power systems are highly inter–connected with HVAC and HVDC transmission
lines and different type of sources along with their control mechanisms, the stability of the
system is a primary concern. The three major types of stability studies are rotor angle stability,
voltage stability, frequency stability. These stability studies are carried out for a small time
ranging from few milliseconds to long term (months and years). Power system stability studies
are required to achieve a high degree of reliability, stable operating points and protects the
system from faults at peak load conditions.
To obtain more accurate models and have in–depth studies, various sophisticated software
packages, such as Matlab, PSCAD, RSCAD, EMTP and DIgSILENT Power factory have been
introduced to electrical power engineers in recent times. Power Factory in particular is an
object-oriented software package used for modeling and simulation of the electrical power
network systems. This software package is highly structured and supports both graphical and
scripting interfaces with PYTHON etc. This software package can be used for RMS/RMT
simulations, load flow calculations, sensitivity analysis and modal analysis.
This thesis work mainly focuses on the small–signal stability analysis of hybrid grids. In this
thesis work, the effect of introducing a new renewable source to the existing grid is studied, with
attention to different machine inertias from a stability point of view. The in–depth analysis of
effect of machine inertia in a HVAC dominant and a hybrid grid situation is addressed.
1.1 Literature
A reliable service of electricity, demands a power system that withstands disturbances of
various types and magnitudes. Further, the system is designed and operated such that the
probable contingencies are sustained with no loss in the loads and the most adverse possible
contingencies do not result in widespread power interruptions. Research has been done in
power system stability since the 1920s. Kundur and .co in [2] [3]studied the different modes of
oscillations that exits in a weakly interconnected power system which was the root cause to
many blackouts in the recent times (North India, July–2012, Bangladesh November–2014,
South Brazil 1999, United States and Canada 1965).
Master of Science
18
Small Signal Stability (SSS) being a critical issue in meshed power systems more of
research has gone into this aspect [4]. In the modern times, due to the introduction of the
renewable energy sources like wind, solar, hydro and nuclear power, the SSS is one of the most
critical issues that needs to be addressed in grid planning and development studies. The
authors in [5] studied the different topologies of windfarms and there interconnection with
HVDC technology. Especially with the high penetration of the renewable sources there are
number of challenges to be dealt in power grids. First the generators introduce an uncertainty
into the scheduled power dispatch, which results in the generated power.
The introduction of HVDC technology has led to different directions like modelling VSC
converters, different control strategies to control the power transmission [6] [7]. A more
general approach to control the active power is given by the authors in [8]. Thus, investigating
the SSS with respect to system integration point of view in an important topic to be addressed.
Different modes of oscillations arise in huge and complex power systems and they are
classified based on the frequency ranges and the type of oscillations generated. In the
publications [9] [10] [11] the effect the dominant modes of oscillations are identified in
standard IEEE/CIGRE grid models. These power system oscillations can be stimulated due to a
disturbance in the power system operating condition or the steady state boundaries of the
various components in the system are crossed. The oscillations can be troublesome to the
power system if they are not damped. For this purpose, various controls like power system
stabilizers, speed governors are used by the authors in [13] The modern hybrid (HVAC-HVDC)
power systems have VSC based converter terminals as the dynamic devices whose interaction,
modeling and control strategies is the hot topic in the recent years [1] [14].
Most of the studies on system planning and integration of High Voltage Direct Current
(HVDC) transmission systems focusing on the fulfillment of explicit technical requirements [11]
These limits include static (e.g. thermal) and dynamic (e.g. voltage and frequency) constraints.
From the literature studies it is inferred that various studies have been done on AC dominated
systems. The stability issues have been addressed with different control strategies. There has
been research done on different technologies like LCC and VSC. But, in the modern power
sector, due to environment concerns, there is an increasing demand towards incorporating low
inertia machines (Wind turbines, small hydro turbines). The inertia being an inherent property of
the synchronous machines the frequency levels and the dynamics immediately after small
disturbances is governed by the inertial properties of the machines. This is important in weakly
meshed grids, where low inertia machines are a predominant source. In the near foreseen
future, there shall be more HVAC grids incorporated with more and more HVDC links in the
Master of Science
19
electrical power sector. It is of high importance to address the SSS issues of a hybrid network
from the system integration point of view and the effect of incorporating low inertia machines
into the existing system. This leads us to the research questions that are addressed in this
thesis work.
1.2 Research Questions
The objective of this research work is to study the impact of machine inertia on the
damping and the frequencies of the electromechanical oscillatory modes in a HVAC system and
a hybrid (HVAC–DC) power system.
1. How does the usage of different inertia machines affect the system stability?
2. How does incorporating HVDC links into an existing weak HVAC grid affect the system
stability?
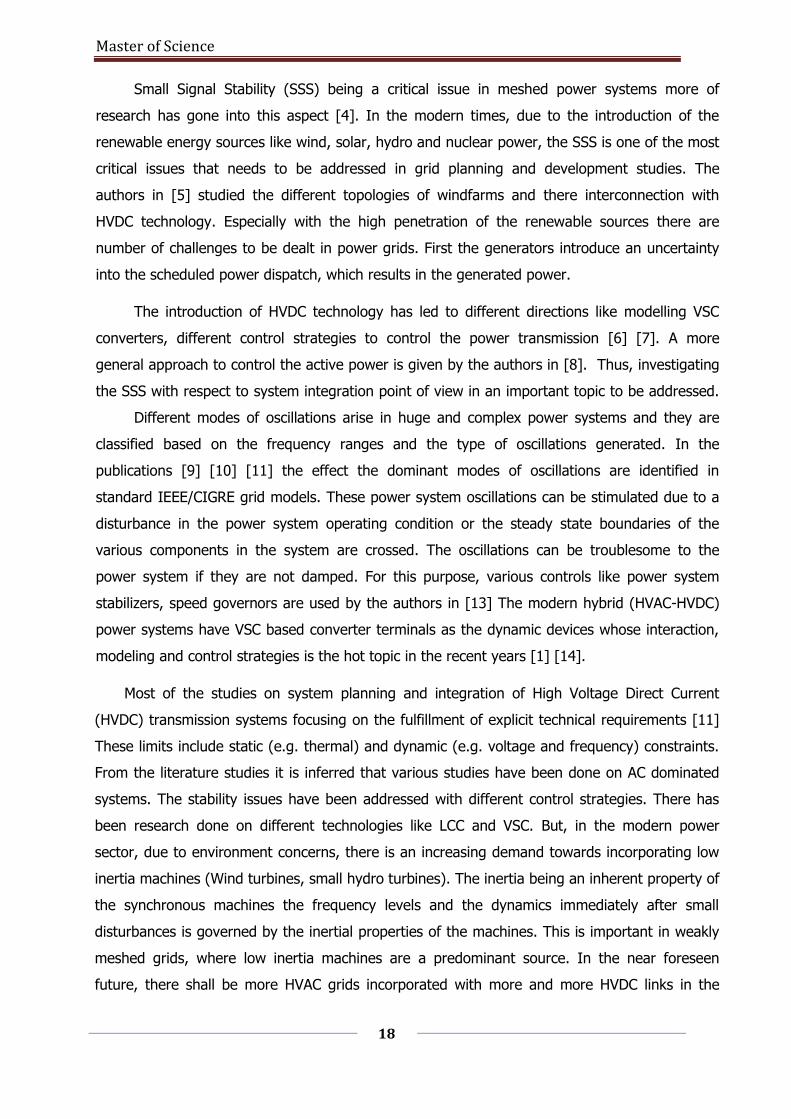
1.3 Research Approach
The overall research approach of this thesis work is presented in the Figure–1.1 below.
STEP: 1 A reference system is first developed from literature. This is a fundamental two–area
system which is weakly meshed.
STEP: 2 A new area is incorporated to the developed reference system. Two cases are defined
at this stage. In the first case, the third area is connected with an HVAC tie line. In the second
case the third area is connected with an HVDC link.
STEP: 3 The small signal stability analysis is performed by subjecting the system to small
disturbances, thereby defining different study cases through relevant time domain simulations in
DIgSILENT power factory.
STEP: 4 The SSS results obtained by power factory are validated by signal record based method
(Prony analysis).
Master of Science
20
Figure 1:1–Adopted research approach flow chart

Master of Science
21
Master of Science
22
2 HVDC–VSC Converters Modeling
The HVDC transmission technology is the most advanced technology for transmitting
electrical power over long distances. Analogous to HVAC transmission systems, this mode of
transmission uses HVDC overhead lines and undersea cables. This mode of transmission is much
more reliable and has a fast and stable control system compared to its counterpart. The major
advantage of HVDC transmission system is it allows two systems to be operated at difference
fundamental frequencies. This was first introduced on commercial bases in 1954. Until then, the
thyristors were used in the HVDC transmission systems until the modern HVDC–VSCs were
introduced to the HVDC transmission system. At present, the VSCs are the primary candidates in
HVDC transmission systems. The VSCs are FACTS devices used predominantly in HVDC
transmission. The VSC is a converter with Integrated Gate Bipolar Transistors (IGBTs) valves.
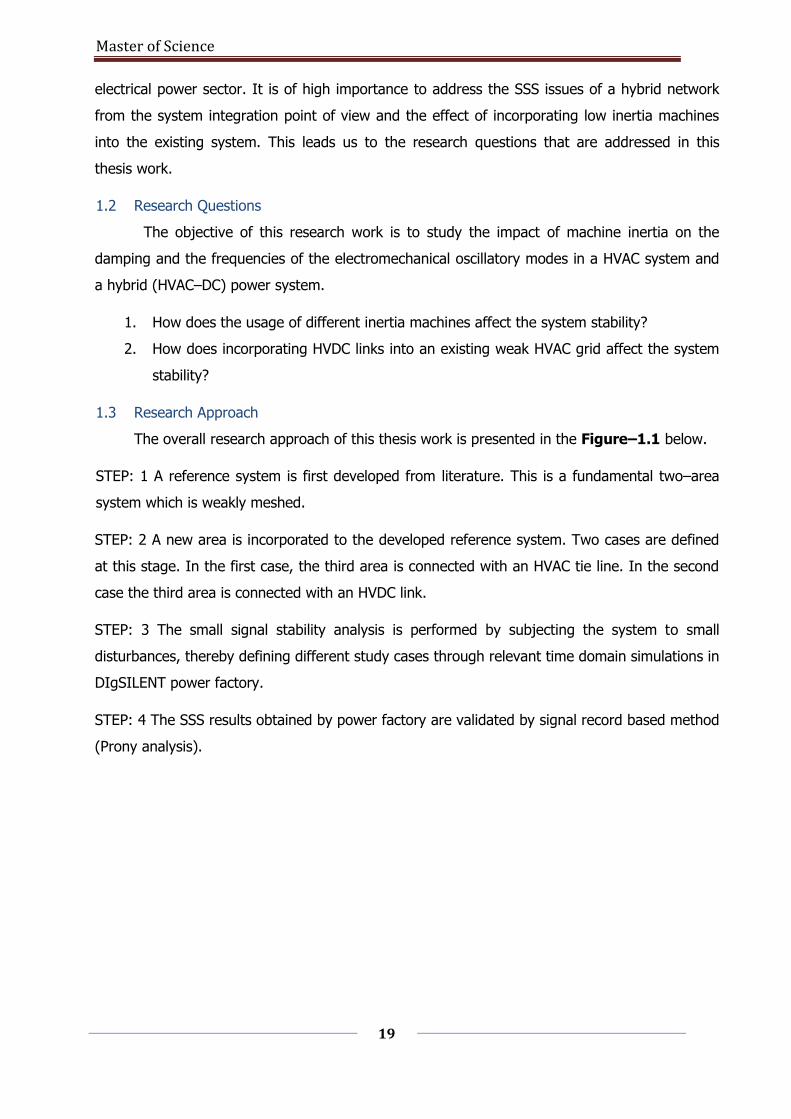
2.1 HVDC configurations
The VSCs are arranged in two configurations, namely monopole and bipole configurations.
Figure 2.1 and Figure 2.2 shows the monopole and bipolar configurations. In the monopole
link, the converters are connected with a single DC transmission line operated at positive or
negative polarity. In this configuration, the return path of the current is the ground itself. This
configuration is easy to control and has low-cost maintenance. On the other hand, the bipolar
configuration is the most common mode of HVDC transmission where two monopole
configurations is used which improves the performance of the system and is more reliable. In
this configuration, the mid–point of the system is connected to the ground and there are four
VSC stations involved. In the configuration, one of the transmission lines is maintained at
positive and negative polarity respectively. The main advantage of this configuration is the
possibility of controlling the power flow in each transmission line independently, and only one
pole can be operated when the other pole is out of service.
Figure 2:1– HVDC link monopole configuration
Master of Science
23
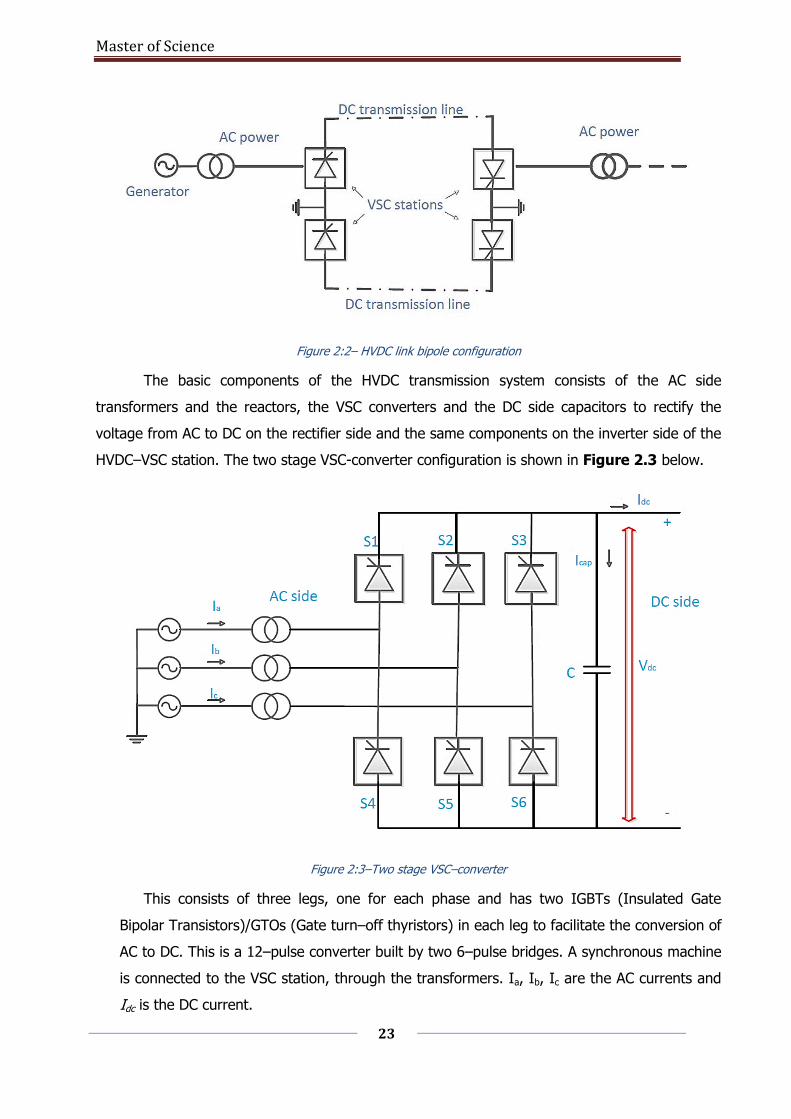
Figure 2:2– HVDC link bipole configuration
The basic components of the HVDC transmission system consists of the AC side
transformers and the reactors, the VSC converters and the DC side capacitors to rectify the
voltage from AC to DC on the rectifier side and the same components on the inverter side of the
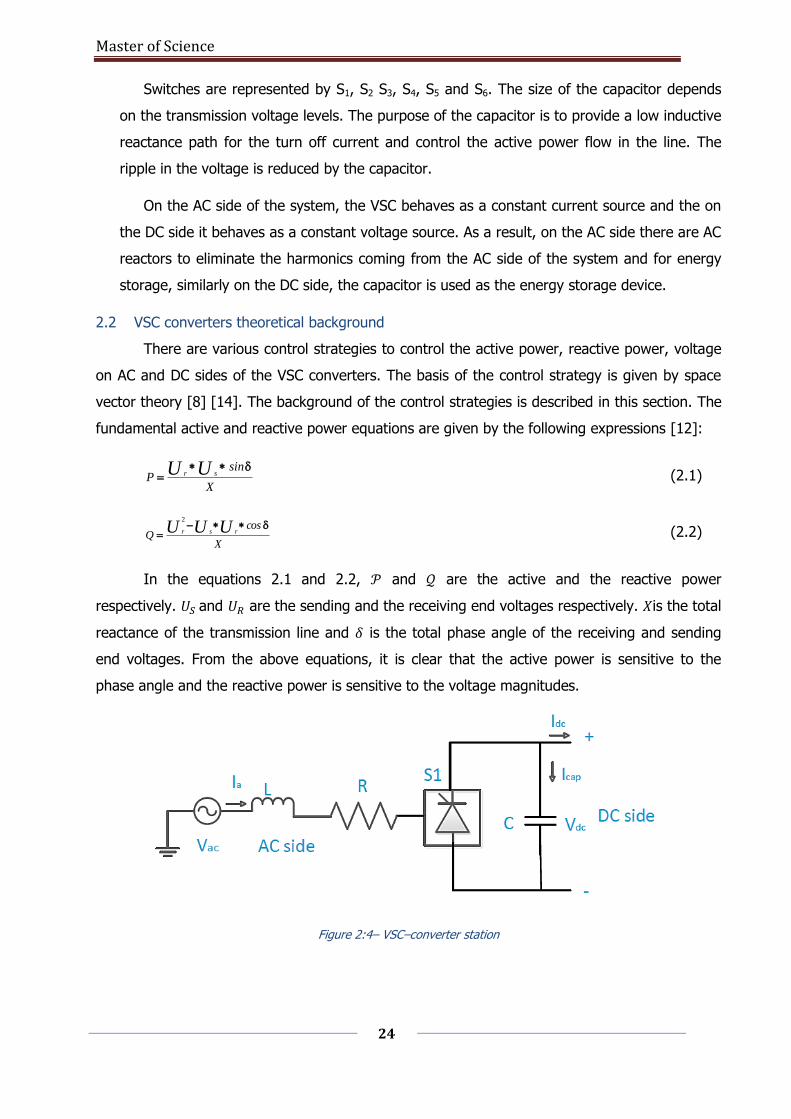
HVDC–VSC station. The two stage VSC-converter configuration is shown in Figure 2.3 below.
Figure 2:3–Two stage VSC–converter
This consists of three legs, one for each phase and has two IGBTs (Insulated Gate
Bipolar Transistors)/GTOs (Gate turn–off thyristors) in each leg to facilitate the conversion of
AC to DC. This is a 12–pulse converter built by two 6–pulse bridges. A synchronous machine
is connected to the VSC station, through the transformers. Ia, Ib, Ic are the AC currents and
Idc is the DC current.
Master of Science
24
Switches are represented by S1, S2 S3, S4, S5 and S6. The size of the capacitor depends
on the transmission voltage levels. The purpose of the capacitor is to provide a low inductive
reactance path for the turn off current and control the active power flow in the line. The
ripple in the voltage is reduced by the capacitor.
On the AC side of the system, the VSC behaves as a constant current source and the on
the DC side it behaves as a constant voltage source. As a result, on the AC side there are AC
reactors to eliminate the harmonics coming from the AC side of the system and for energy
storage, similarly on the DC side, the capacitor is used as the energy storage device.
2.2 VSC converters theoretical background
There are various control strategies to control the active power, reactive power, voltage
on AC and DC sides of the VSC converters. The basis of the control strategy is given by space
vector theory [8] [14]. The background of the control strategies is described in this section. The
fundamental active and reactive power equations are given by the following expressions [12]:
X
sinP
UU sr
(2.1)
X
cosQ
UUU rsr
2
(2.2)
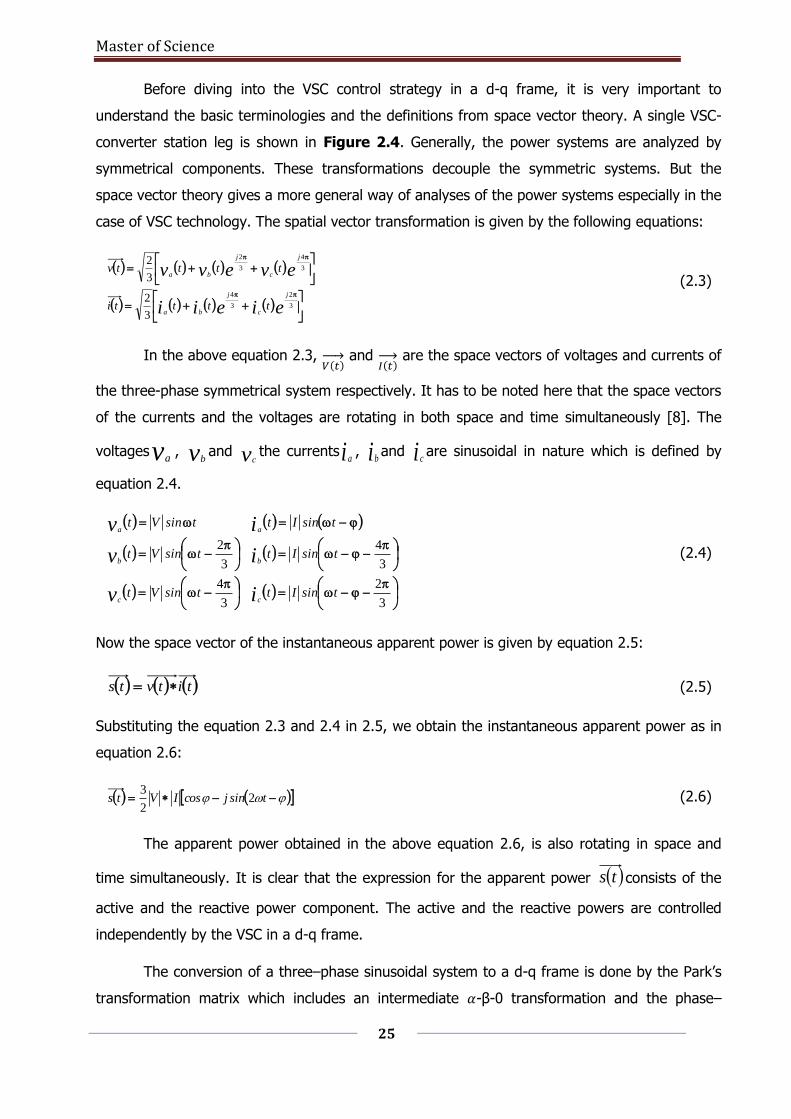
In the equations 2.1 and 2.2, 𝒫 and 𝒬 are the active and the reactive power
respectively. 𝑈𝑆 and 𝑈𝑅 are the sending and the receiving end voltages respectively. 𝑋is the total
reactance of the transmission line and 𝛿 is the total phase angle of the receiving and sending
end voltages. From the above equations, it is clear that the active power is sensitive to the
phase angle and the reactive power is sensitive to the voltage magnitudes.
Figure 2:4– VSC–converter station
Master of Science
25
Before diving into the VSC control strategy in a d-q frame, it is very important to
understand the basic terminologies and the definitions from space vector theory. A single VSC-
converter station leg is shown in Figure 2.4. Generally, the power systems are analyzed by
symmetrical components. These transformations decouple the symmetric systems. But the
space vector theory gives a more general way of analyses of the power systems especially in the
case of VSC technology. The spatial vector transformation is given by the following equations:
eieii
evevvj
c
j
ba
j
c
j
ba
tttti
ttttv
3
2
3
4
3
4
3
2
3
2
3
2
(2.3)
In the above equation 2.3, 𝑉(𝑡)→ and
𝐼(𝑡)→ are the space vectors of voltages and currents of
the three-phase symmetrical system respectively. It has to be noted here that the space vectors
of the currents and the voltages are rotating in both space and time simultaneously [8]. The
voltagesva, vb
and vcthe currentsia
, iband ic
are sinusoidal in nature which is defined by
equation 2.4.
3
4
3
2
tsinVt
tsinVt
tsinVt
v
v
v
c
b
a
3
2
3
4
tsinIt
tsinIt
tsinIt
i
i
i
c
b
a
(2.4)
Now the space vector of the instantaneous apparent power is given by equation 2.5:
titvts (2.5)
Substituting the equation 2.3 and 2.4 in 2.5, we obtain the instantaneous apparent power as in
equation 2.6:
tsinjcosIVts 22
3 (2.6)
The apparent power obtained in the above equation 2.6, is also rotating in space and
time simultaneously. It is clear that the expression for the apparent power ts consists of the
active and the reactive power component. The active and the reactive powers are controlled
independently by the VSC in a d-q frame.
The conversion of a three–phase sinusoidal system to a d-q frame is done by the Park’s
transformation matrix which includes an intermediate 𝛼-β-0 transformation and the phase–
Master of Science
26
rotation matrix transformation which results in a d–q–0 frame of control. This is depicted in
equation 2.7 below:
vvv
VVV
c
b
a
q
d
P
0
(2.7)
Where [𝑃 (θ) ] is the Park's transformation matrix which includes Clarke's transformation
and the rotation of the phasor along the axis. The Clark’s and the rotation matrix are given by
the equation 2.8 below:
2
1
2
1
2
13
2
3
2
3
2
3
2
2
1
2
1
2
12
3
2
30
2
1
2
11
3
2sinsinsin
coscoscos
P (2.8)
Using the above transformation in equation 2.8, the three phase sinusoidal quantities
can be reproduced in terms of dq0 terms. The VSC control strategy is always implemented in
dq0 frame due to numerous advantages as illustrated below. A phasor is nothing but a complex
number rotating with a certain speed in the complex plane as shown in Figure-2.5 below.
Figure 2:5– Representation of a phasor in complex plane
After the transformation in the dq0 frame, considering the space vectors of the voltage
and the current in the complex plain, we have the following equation for the apparent power in
the dq0 frame given by equations 2.9 and 2.10.
IIVV qdqdjjs
2
3 (2.9)
IVIVIVIV qddqqqddjs
2
3 (2.10)

Master of Science
27
In the above equations 2.9 and 2.10 for the apparent power in the dq0 frame, it is
observed that the terms are no more time variant, i.e. they are DC terms, which is the most
important advantage of the Park’s transformation. The consequence of this transformation can
be realized by eliminating the term 𝑉𝑞 in equations 2.9 and 2.10. This is the done because, in
the transformation process, the voltage phasor is considered to be rotating at the same speed
as that of the d–axis. In other words, the space vector of the voltage is aligned with the d-axis
which eliminates its projection on the imaginary axis or the q-axis in the complex plane. Hence
eliminating 𝑉𝑞 in the equation of apparent power 2.10 we obtain the equation 2.11:
IjV
IV
IjVIV
qd
dd
qddd
Q
P
s
2
3
2
3
2
3
(2.11)
In the above equation 2.11 as result of Park’s transformation, we can observe that the
real and the reactive powers are decoupled. The active power is a function of current I d and the
reactive power is a function of current I q. As a consequence of dq0 transformation, a decoupling
of the active and reactive power is achieved and the quantities are DC constants which are then
fed to the VSCs in the grid. In the above equations, it should be clear that the zero sequence
component or the homo-polar component is considered to be 0.
2.3 Equivalent circuits in dq0-frame
To derive the equivalent circuits in the dq0 frame of the VSC, we apply KVL to the circuit
in Figure 2.6. If E abc,V abc
, and I abcare the three-phase grid voltages, convertor input voltages
and the grid current respectively, then we have:
RVI
E abcabc
abc
abc tL
d
d (2.12)
After the Park’s transformation we obtain the quantities in the dq0 frame. This is depicted by
the equation 2.13.
VVV
III
RR
R
III
III
EEE
q
d
q
d
c
b
a
q
d
q
d
q
d
Ldt
dL
0000000
00
00
000
001
010
(2.13)
From the above equation we obtain the decoupled equations in dq0 frame as follows:
Master of Science
28
IVII
E
IVII
E
qqd
q
q
ddq
d
d
R**L*t
L
R**L*t
L
ωd
d
ωd
d
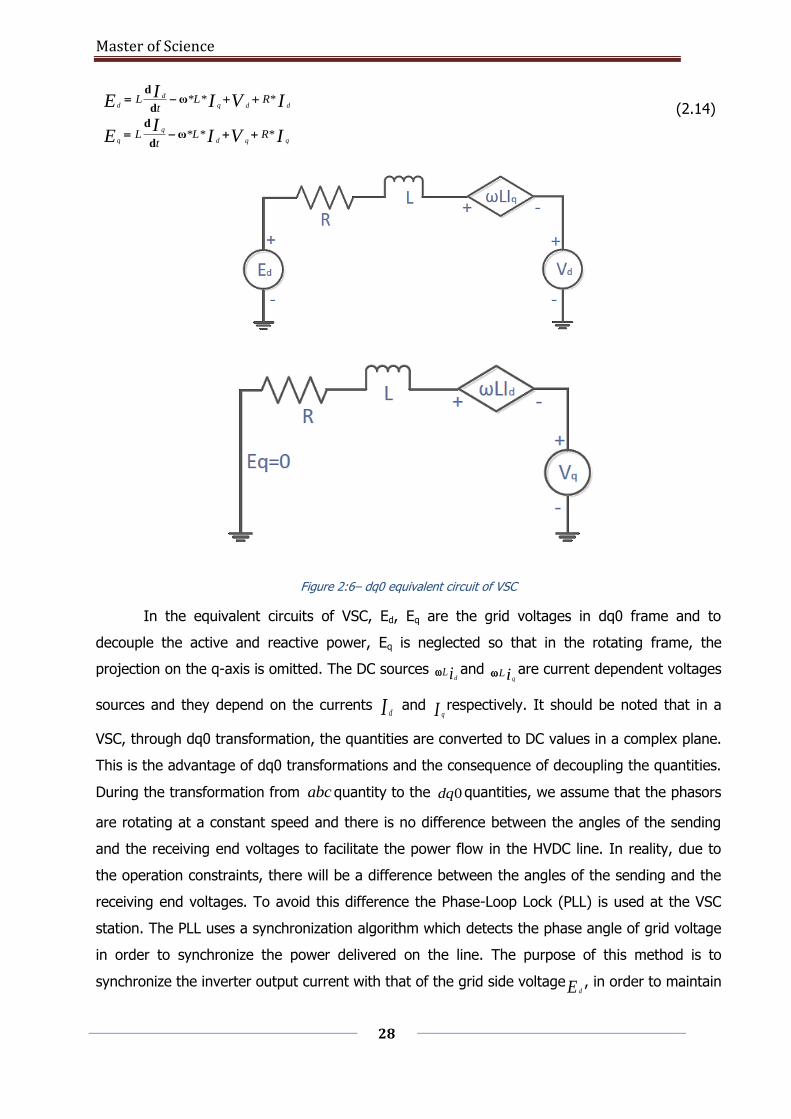
(2.14)
Figure 2:6– dq0 equivalent circuit of VSC
In the equivalent circuits of VSC, Ed, Eq are the grid voltages in dq0 frame and to
decouple the active and reactive power, Eq is neglected so that in the rotating frame, the
projection on the q-axis is omitted. The DC sources idL and iq
L are current dependent voltages
sources and they depend on the currents I d and I q
respectively. It should be noted that in a
VSC, through dq0 transformation, the quantities are converted to DC values in a complex plane.
This is the advantage of dq0 transformations and the consequence of decoupling the quantities.
During the transformation from abc quantity to the 0dq quantities, we assume that the phasors
are rotating at a constant speed and there is no difference between the angles of the sending
and the receiving end voltages to facilitate the power flow in the HVDC line. In reality, due to
the operation constraints, there will be a difference between the angles of the sending and the
receiving end voltages. To avoid this difference the Phase-Loop Lock (PLL) is used at the VSC
station. The PLL uses a synchronization algorithm which detects the phase angle of grid voltage
in order to synchronize the power delivered on the line. The purpose of this method is to
synchronize the inverter output current with that of the grid side voltagedE , in order to maintain
Master of Science
29
a unity power factor . The inputs of the PLL model are the three phase voltages V abc
measured
on the grid side and the output is the tracked phase angle . The PLL model is implemented
in synchronous dq0 reference frame by implementing Park’s transformation. The phase-locking
of the system is realized by adjusting the q-axis voltage to zero. By using the integrator of the
PI controller, the sum between the PI output and the reference frequency of the phase angle is
obtained.
2.4 VSC control methods
The main purpose of VSC is to control the active power in the HVDC line/cable and maintain
a constant voltage at the DC terminals. The VSC internal structure is shown in Figure-2.7
below. A VSC converter basically has a fast inner control loop and a slow outer control loop. The
inner control loop consists of a current controller which controls the pulse width modulation
index of the converter taking in the dq0–axis currents and the reference dq–axis currents from
the outer controllers. The outer controllers define the control modes of the converter for a
particular VSC control station [14]. A VSC station is controlled in four control modes namely:
Constant DC voltage mode
Active power control mode
Reactive power control mode
AC voltage control mode
Master of Science
30
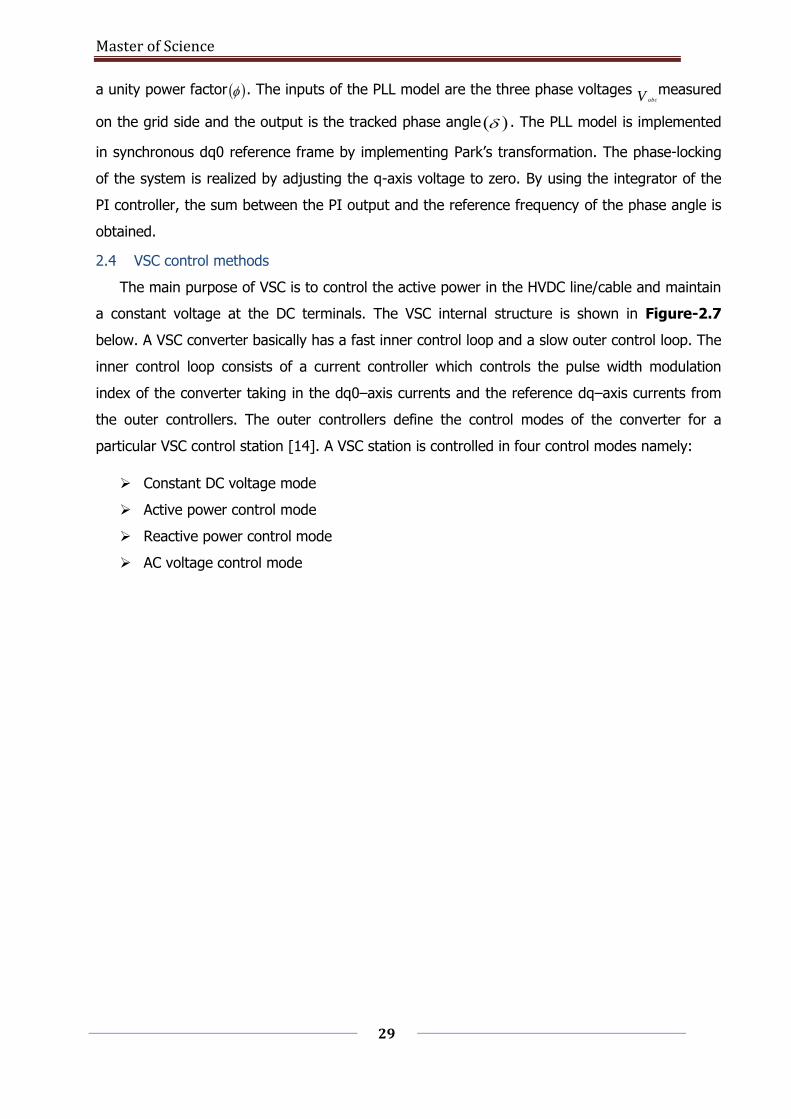
Figure 2:7– VSC control strategy overall block diagram [14]
In the above figure, the P and the VDC control modes supply the d–axis reference current
to the inner current controller and the Q and VAC control modes supply the q–axis reference
currents to the inner current controller. The control structure of the inner and the outer control
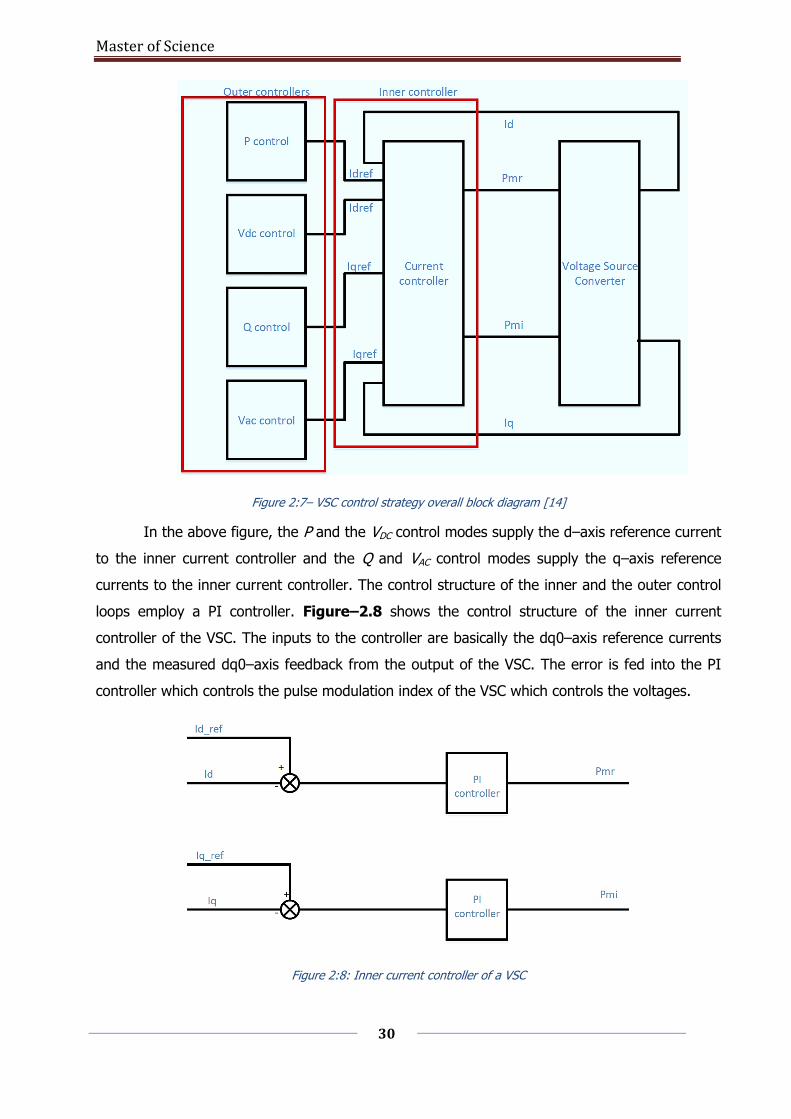
loops employ a PI controller. Figure–2.8 shows the control structure of the inner current
controller of the VSC. The inputs to the controller are basically the dq0–axis reference currents
and the measured dq0–axis feedback from the output of the VSC. The error is fed into the PI
controller which controls the pulse modulation index of the VSC which controls the voltages.
Figure 2:8: Inner current controller of a VSC
Master of Science
31
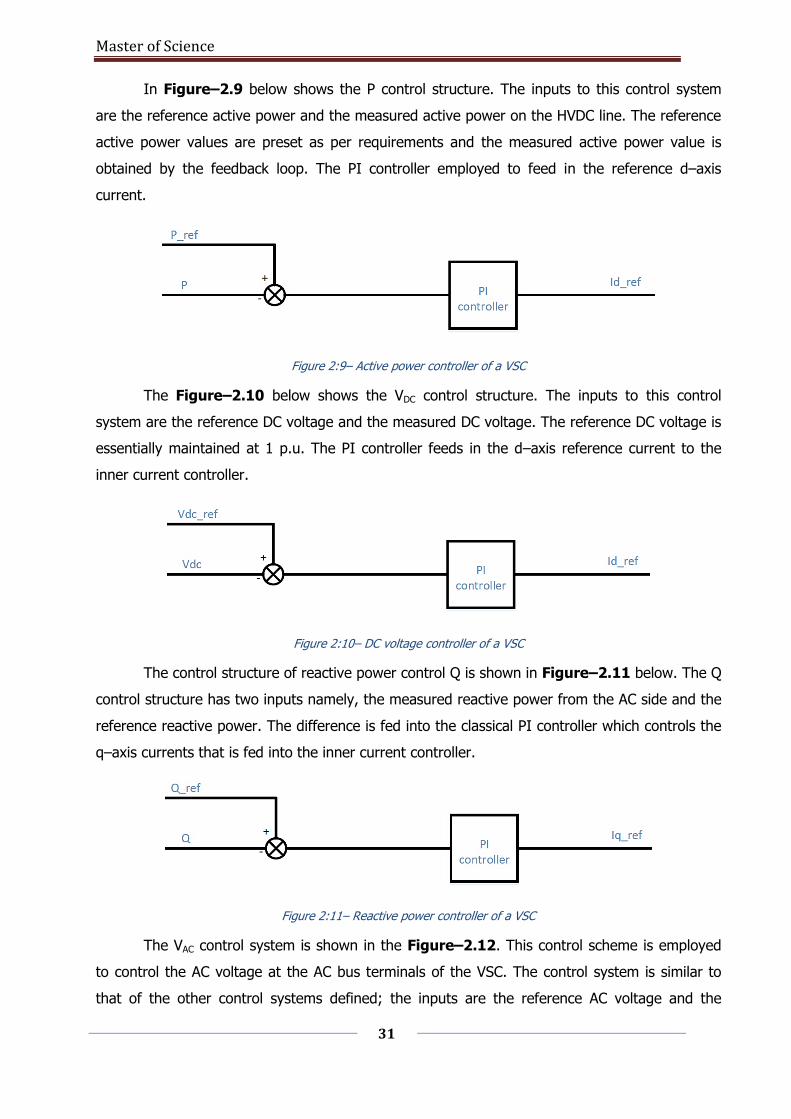
In Figure–2.9 below shows the P control structure. The inputs to this control system
are the reference active power and the measured active power on the HVDC line. The reference
active power values are preset as per requirements and the measured active power value is
obtained by the feedback loop. The PI controller employed to feed in the reference d–axis
current.
Figure 2:9– Active power controller of a VSC
The Figure–2.10 below shows the VDC control structure. The inputs to this control
system are the reference DC voltage and the measured DC voltage. The reference DC voltage is
essentially maintained at 1 p.u. The PI controller feeds in the d–axis reference current to the
inner current controller.
Figure 2:10– DC voltage controller of a VSC
The control structure of reactive power control Q is shown in Figure–2.11 below. The Q
control structure has two inputs namely, the measured reactive power from the AC side and the
reference reactive power. The difference is fed into the classical PI controller which controls the
q–axis currents that is fed into the inner current controller.
Figure 2:11– Reactive power controller of a VSC
The VAC control system is shown in the Figure–2.12. This control scheme is employed
to control the AC voltage at the AC bus terminals of the VSC. The control system is similar to
that of the other control systems defined; the inputs are the reference AC voltage and the

Master of Science
32
measured AC voltage at the terminal. The error is fed into the PI controller and the q–axis
current is fed into the inner current controller. The VSC converter data can be found in the
Table–A8 and Table–A9 in the Appendix.
Figure 2:12– AC voltage controller of a VSC
2.5 Point–to–point HVDC link operating principle
Figure 2:13– Point–to–point HVDC link operating principle block diagram
The detailed working principle of the VSC point–to–point HVDC link is explained with the
help of the Figure–2.13. In the figure, the DC equivalent circuit of the point–to–point HVDC
link is shown. In this figure 𝑉1and 𝑉2are the voltages at the VSC stations VSC–1 and VSC–2
respectively, and 𝑉𝑎and 𝑉𝑏are the terminal voltages of the DC buses on both sides of the HVDC
line. 𝐼𝐷𝐶is the DC current through the line and 𝑃𝐷𝐶 is the power flow on the HVDC transmission
line. 𝑅𝐷𝐶 is the line resistance. 𝑅𝑖𝑛is the internal resistance of the HVDC stations.
When the active power on the line 𝑃𝐷𝐶 is zero, the voltages across the line are the same.
There is no current flowing in the line. When the reference active power is set to a particular
value, the voltage 𝑉𝑎reduces and the voltage 𝑉𝑏 increases. This increases the current in the
indicated direction in the figure, as result, the active power flows in the DC line. The voltage 𝑉1
increases, the voltage 𝑉2decreases automatically to keep the voltages 𝑉𝑎 and 𝑉𝑏 constant. In the
figure the DC voltage at station VSC–2 is reduced when the active power is changed at station
VSC–1. In this case, the internal resistance is taken to be negligible hence, 𝑉1 = 𝑉𝑎and𝑉2 = 𝑉𝑏.
Master of Science
33
Master of Science
34
3 Modeling and System Implementation
3.1 Generator modeling
The previous chapter the theoretical background of VSC technology and the
implementation of the internal control structure of VSC was discussed. In this chapter the
implementation of the generator and its control systems are described in detail. The structure of
power factory to create a DSL model is shown below. This structure is used to build a DSL
model of VSC converter station within DIgSILENT power factory [16].
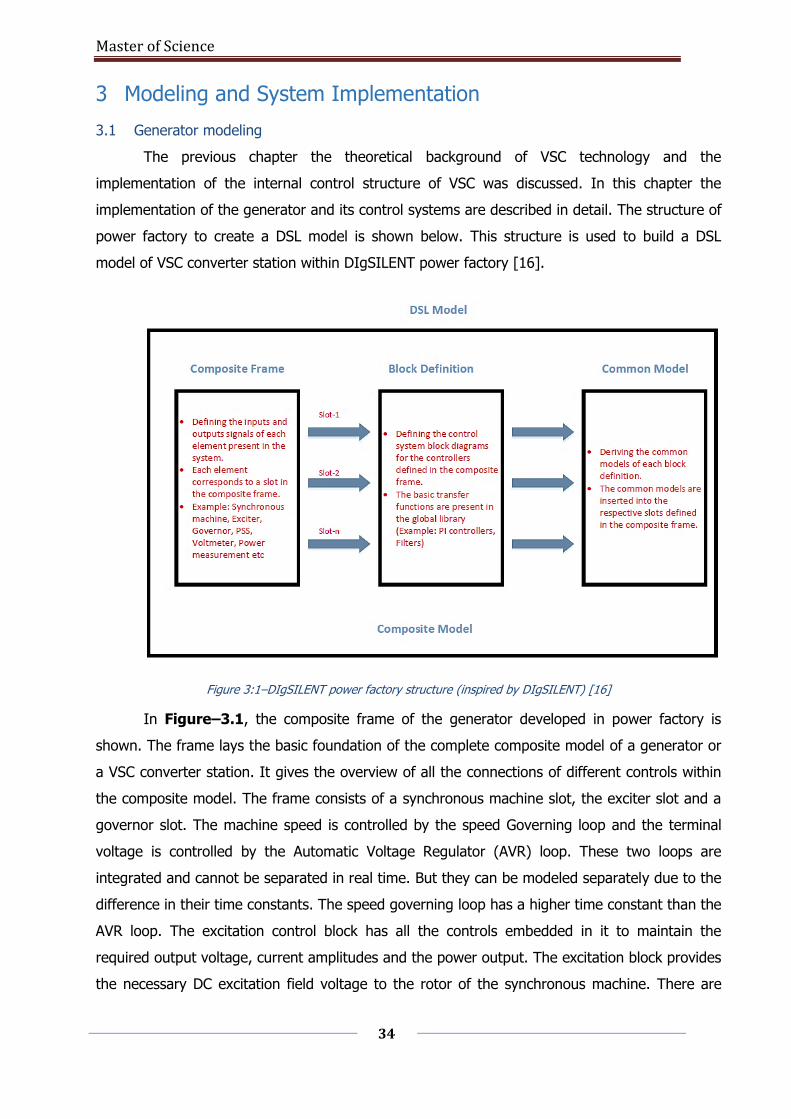
Figure 3:1–DIgSILENT power factory structure (inspired by DIgSILENT) [16]
In Figure–3.1, the composite frame of the generator developed in power factory is
shown. The frame lays the basic foundation of the complete composite model of a generator or
a VSC converter station. It gives the overview of all the connections of different controls within
the composite model. The frame consists of a synchronous machine slot, the exciter slot and a
governor slot. The machine speed is controlled by the speed Governing loop and the terminal
voltage is controlled by the Automatic Voltage Regulator (AVR) loop. These two loops are
integrated and cannot be separated in real time. But they can be modeled separately due to the
difference in their time constants. The speed governing loop has a higher time constant than the
AVR loop. The excitation control block has all the controls embedded in it to maintain the
required output voltage, current amplitudes and the power output. The excitation block provides
the necessary DC excitation field voltage to the rotor of the synchronous machine. There are
Master of Science
35
various subsystems in the excitation system block. The most important ones are described
below:
1. Exciter: This provides the required DC excitation to the rotor field windings of
the synchronous machine.
2. Regulator: This block basically controls all the signals from the speed governing
systems w.r.t. the pre–determined references and amplifies them to the required levels
and feed them into the exciter block.
3. Power System Stabilizer (PSS): This is auxiliary equipment which damps out
the oscillations in the power systems. The inputs to this block are the speed deviation
from the rotors or the power and the frequency deviation.
3.2 Composite frame of generator
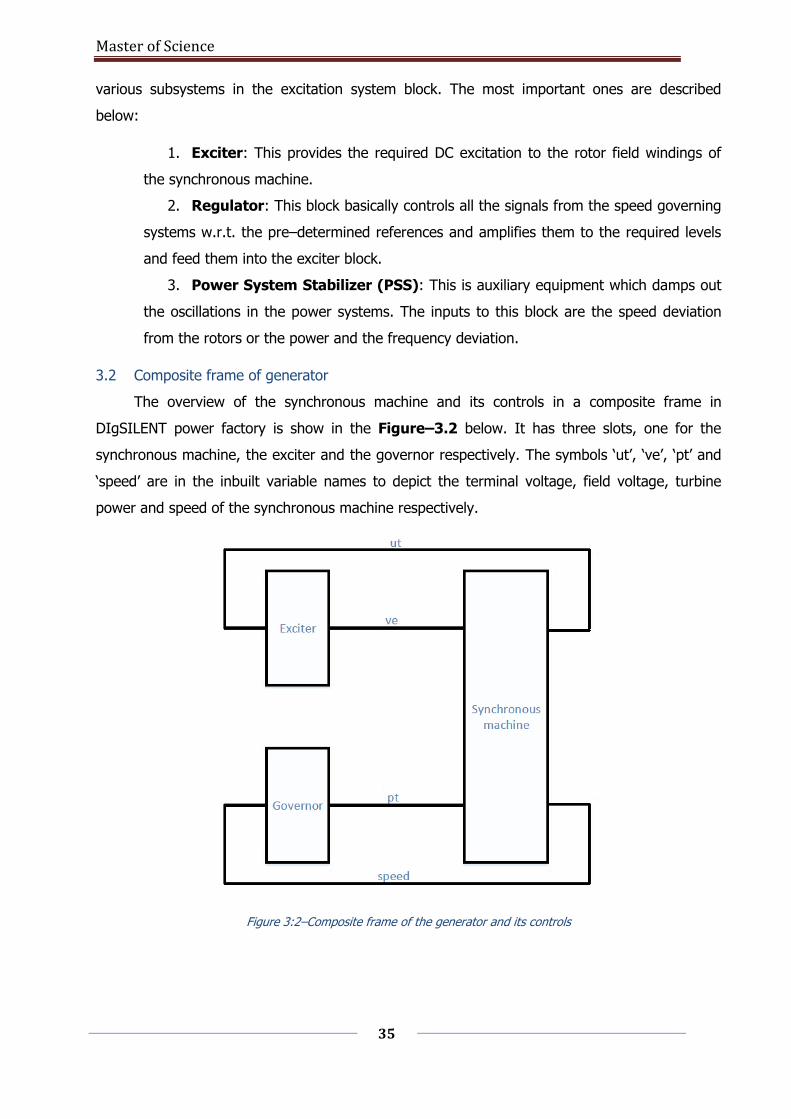
The overview of the synchronous machine and its controls in a composite frame in
DIgSILENT power factory is show in the Figure–3.2 below. It has three slots, one for the
synchronous machine, the exciter and the governor respectively. The symbols ‘ut’, ‘ve’, ‘pt’ and
‘speed’ are in the inbuilt variable names to depict the terminal voltage, field voltage, turbine
power and speed of the synchronous machine respectively.
Figure 3:2–Composite frame of the generator and its controls
Master of Science
36
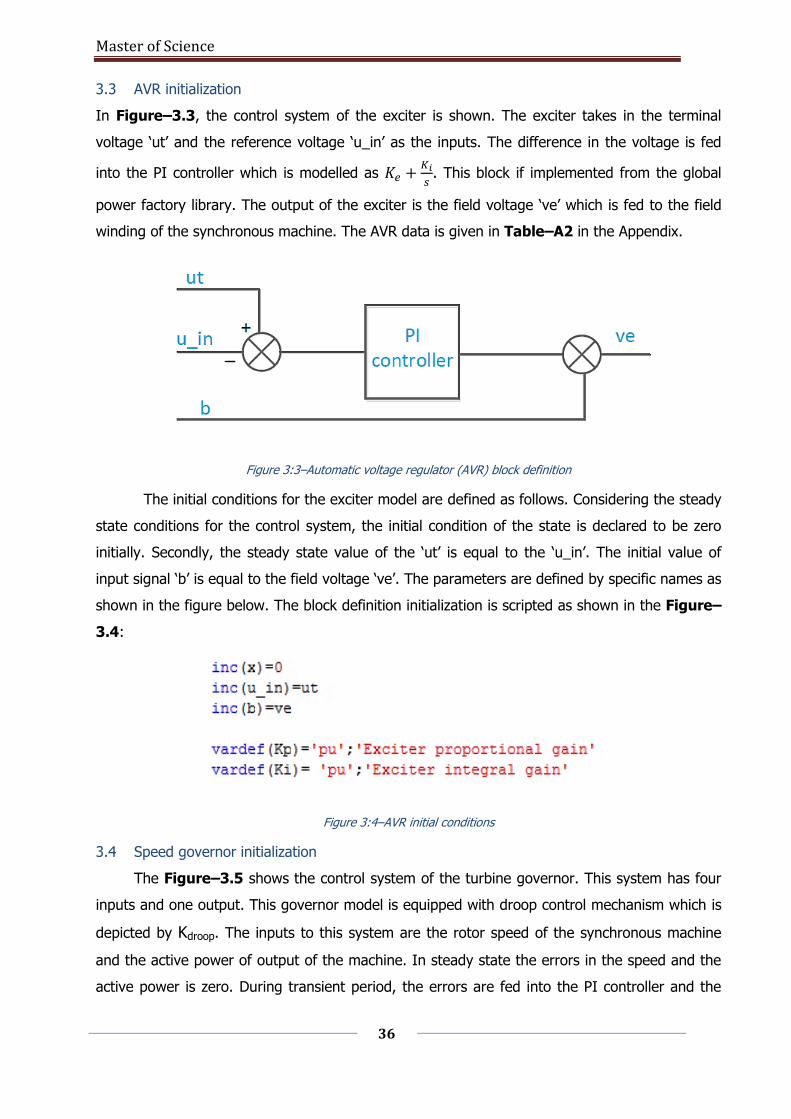
3.3 AVR initialization
In Figure–3.3, the control system of the exciter is shown. The exciter takes in the terminal
voltage ‘ut’ and the reference voltage ‘u_in’ as the inputs. The difference in the voltage is fed
into the PI controller which is modelled as 𝐾𝑒 +𝐾𝑖
𝑠. This block if implemented from the global
power factory library. The output of the exciter is the field voltage ‘ve’ which is fed to the field
winding of the synchronous machine. The AVR data is given in Table–A2 in the Appendix.
Figure 3:3–Automatic voltage regulator (AVR) block definition
The initial conditions for the exciter model are defined as follows. Considering the steady
state conditions for the control system, the initial condition of the state is declared to be zero
initially. Secondly, the steady state value of the ‘ut’ is equal to the ‘u_in’. The initial value of
input signal ‘b’ is equal to the field voltage ‘ve’. The parameters are defined by specific names as
shown in the figure below. The block definition initialization is scripted as shown in the Figure–
3.4:
Figure 3:4–AVR initial conditions
3.4 Speed governor initialization
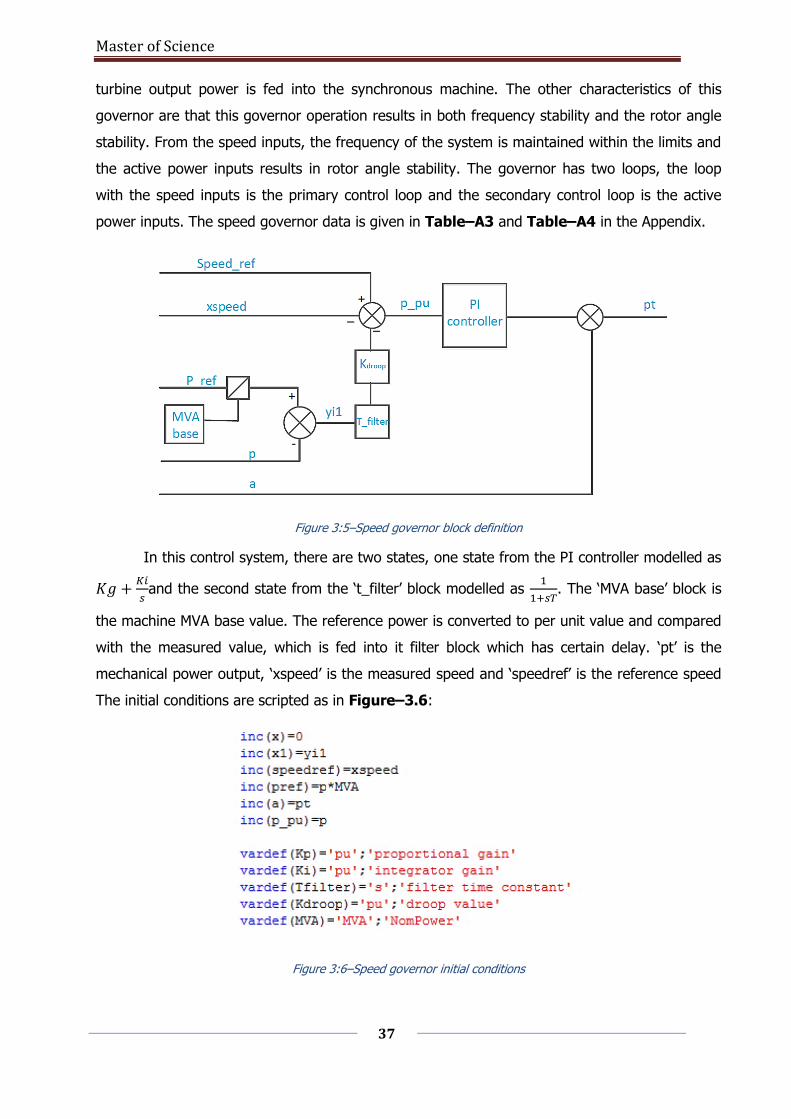
The Figure–3.5 shows the control system of the turbine governor. This system has four
inputs and one output. This governor model is equipped with droop control mechanism which is
depicted by Kdroop. The inputs to this system are the rotor speed of the synchronous machine
and the active power of output of the machine. In steady state the errors in the speed and the
active power is zero. During transient period, the errors are fed into the PI controller and the
Master of Science
37
turbine output power is fed into the synchronous machine. The other characteristics of this
governor are that this governor operation results in both frequency stability and the rotor angle
stability. From the speed inputs, the frequency of the system is maintained within the limits and
the active power inputs results in rotor angle stability. The governor has two loops, the loop
with the speed inputs is the primary control loop and the secondary control loop is the active
power inputs. The speed governor data is given in Table–A3 and Table–A4 in the Appendix.
Figure 3:5–Speed governor block definition
In this control system, there are two states, one state from the PI controller modelled as
𝐾𝑔 +𝐾𝑖
𝑠and the second state from the ‘t_filter’ block modelled as
1
1+𝑠𝑇. The ‘MVA base’ block is
the machine MVA base value. The reference power is converted to per unit value and compared
with the measured value, which is fed into it filter block which has certain delay. ‘pt’ is the
mechanical power output, ‘xspeed’ is the measured speed and ‘speedref’ is the reference speed
The initial conditions are scripted as in Figure–3.6:
Figure 3:6–Speed governor initial conditions
Master of Science
38
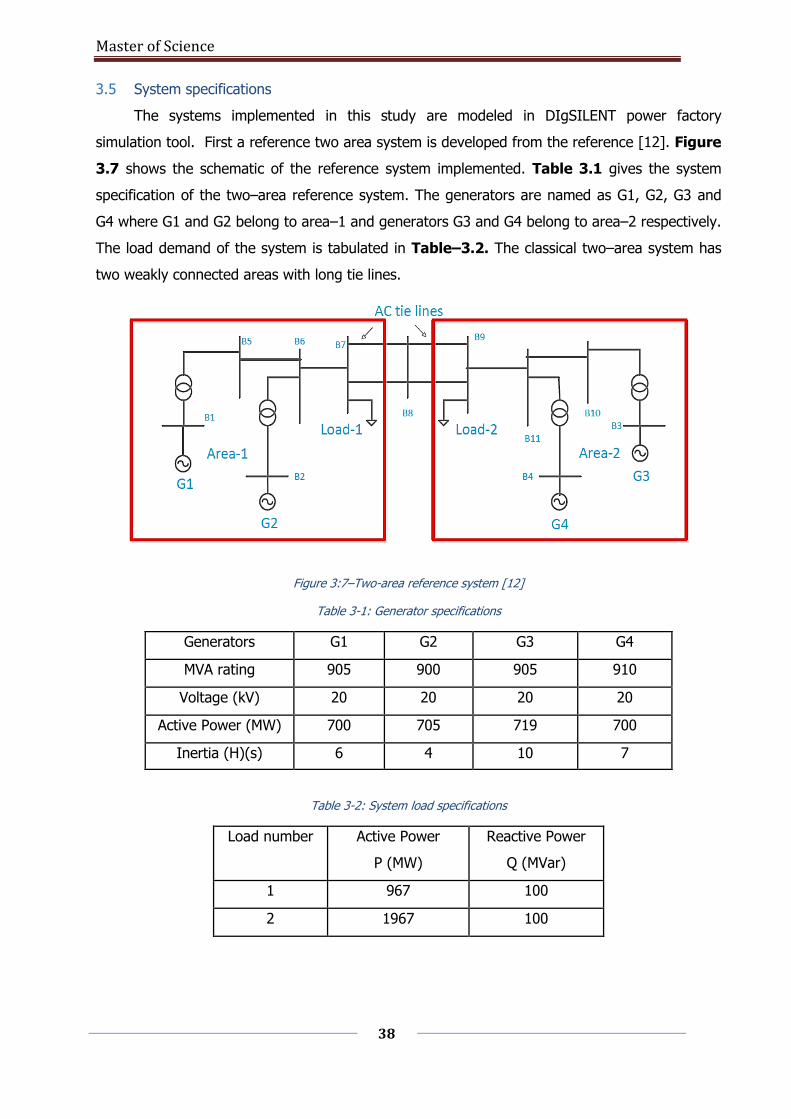
3.5 System specifications
The systems implemented in this study are modeled in DIgSILENT power factory
simulation tool. First a reference two area system is developed from the reference [12]. Figure
3.7 shows the schematic of the reference system implemented. Table 3.1 gives the system
specification of the two–area reference system. The generators are named as G1, G2, G3 and
G4 where G1 and G2 belong to area–1 and generators G3 and G4 belong to area–2 respectively.
The load demand of the system is tabulated in Table–3.2. The classical two–area system has
two weakly connected areas with long tie lines.
Figure 3:7–Two-area reference system [12]
Table 3-1: Generator specifications
Generators G1 G2 G3 G4
MVA rating 905 900 905 910
Voltage (kV) 20 20 20 20
Active Power (MW) 700 705 719 700
Inertia (H)(s) 6 4 10 7
Table 3-2: System load specifications
Load number Active Power
P (MW)
Reactive Power
Q (MVar)
1 967 100
2 1967 100
Master of Science
39
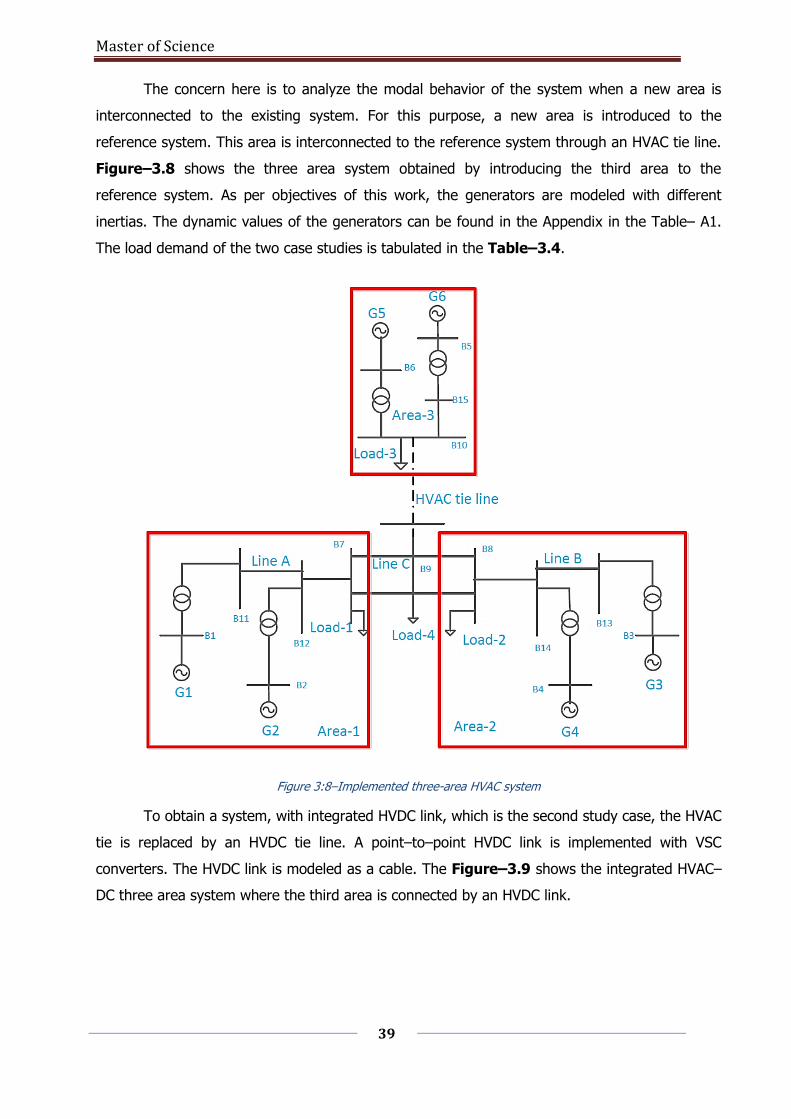
The concern here is to analyze the modal behavior of the system when a new area is
interconnected to the existing system. For this purpose, a new area is introduced to the
reference system. This area is interconnected to the reference system through an HVAC tie line.
Figure–3.8 shows the three area system obtained by introducing the third area to the
reference system. As per objectives of this work, the generators are modeled with different
inertias. The dynamic values of the generators can be found in the Appendix in the Table– A1.
The load demand of the two case studies is tabulated in the Table–3.4.
Figure 3:8–Implemented three-area HVAC system
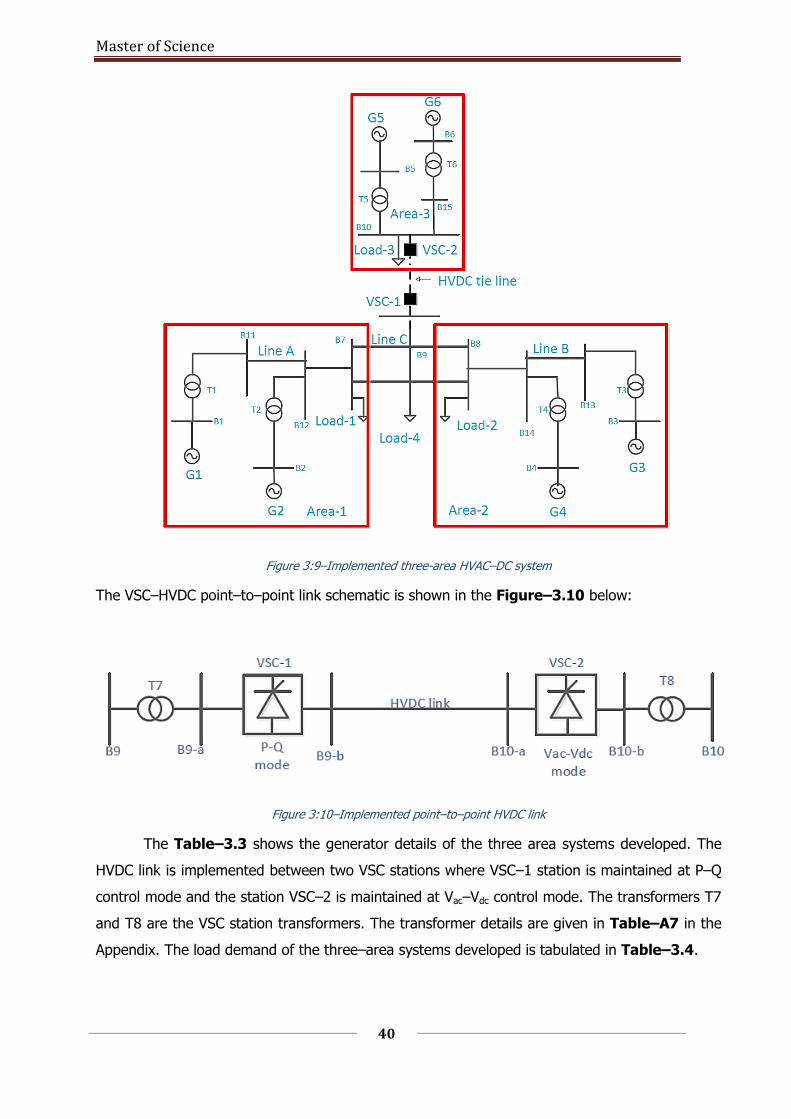
To obtain a system, with integrated HVDC link, which is the second study case, the HVAC
tie is replaced by an HVDC tie line. A point–to–point HVDC link is implemented with VSC
converters. The HVDC link is modeled as a cable. The Figure–3.9 shows the integrated HVAC–
DC three area system where the third area is connected by an HVDC link.
Master of Science
40
Figure 3:9–Implemented three-area HVAC–DC system
The VSC–HVDC point–to–point link schematic is shown in the Figure–3.10 below:
Figure 3:10–Implemented point–to–point HVDC link
The Table–3.3 shows the generator details of the three area systems developed. The
HVDC link is implemented between two VSC stations where VSC–1 station is maintained at P–Q
control mode and the station VSC–2 is maintained at Vac–Vdc control mode. The transformers T7
and T8 are the VSC station transformers. The transformer details are given in Table–A7 in the
Appendix. The load demand of the three–area systems developed is tabulated in Table–3.4.

Master of Science
41
Table 3-3: Generator specifications three-area system
Generators G1 G2 G3 G4 G5 G6
MVA rating 1000 900 1100 1010 890 850
Voltage (kV) 20 20 20 20 20 20
Active Power (MW) 700 700 719 500 1000 250
Table 3-4: Load demand specification three–area system
Load
number
Active Power
P (MW)
Reactive Power
Q (MVar)
1 900 150
2 950 150
3 1500 0
4 2200 150
The objective is to study the behavior of the electromechanical oscillations when
different inertia machines are incorporated into the system operating at peak loads. The
different time–domain case studies defined for the purpose of spectral analysis are summarized
in Table–3.5.
Table 3-5: Time domain case studies
Type of disturbance Element of the
system Type of Mode excited Type of system
Three–phase fault
event Line–B Local mode area–2
Three–area HVAC
system
Step change in
generator torques G1 and G2 Local mode area–1
Three–area HVAC
system
Step change in torque G5 Local mode area–3 Three–area HVAC
system
Line outage event Line–C Inter–area mode
area–1 and area–2
Three–area HVAC
system
Line outage event Line–C Inter–area mode
area–1 and area–2
Three–area HVAC–
DC system

Master of Science
42
4 Linearized Modeling and Prony Analysis1
4.1 State–space model theory
Power system stability is the inherent property of an electrical power system that
enables the system to stay in the state of equilibrium under normal operating conditions and
regain an acceptable state of equilibrium after being subjected to disturbance/disturbances. One
of the categories in this context is the SSS, which is defined as the ability of the power system
to maintain a synchronism when subjected to small disturbances. Eigenvalue based SSS
assessment is one of the common way to assess the SSS of the system, which is a frequency-
based approach. This assessment is done by linearizing the power system around an operating
point and analyzing the stability of the complete system by the obtained Eigenvalues.
The behavior of a power system is described as a set of ordinary nonlinear differential equations
given by the equation 4.1:
:t,:,f isysisys
uuuxxxt
xr.... . . .2,1n..... . .2,1
.
d
d (4.1)
Where, n.......,,i 321 and n is the order of the system with r inputs to the system with respect
to time t .
Let 𝑥0𝑠𝑦𝑠 and 𝑢𝑜𝑠𝑦𝑠 be the initial state vector and the input vector of the system. These
vectors correspond to an equilibrium point around which the system is linearized. The state
vector, input vector and the output vector of the system is 𝑥𝑠𝑦𝑠 ,𝑢𝑠𝑦𝑠and 𝑦𝑠𝑦𝑠respectively and are
given by the equation 4.2:
xxxxx
x
n
sys
4
3
2
1
And
uuuuu
u
n
sys
4
3
2
1
(4.2)
xxxxx
y
n
sys
4
3
2
1
And
uuuuu
u
n
sys
4
3
2
1
(4.3)
.
syssyssys
uxx,f
.0
000
(4.4)
1 This section is based on Chapter 12 from Power system stability and Control by Kundur [12]

Master of Science
43
0,000
uxy syssyssysg (4.5)
The functions f and g are the functions of the initial input state vector and the initial output
vector of the system respectively.
When the system is perturbed, the equations 4.4 and 4.5 can be written as equation 4.6.
.
.
.
syssyssyssyssyssyssys uuxxxxx ,f
000 (4.6)
The nonlinear functions are expressed in terms of Taylor’s series expansion. Neglecting the
higher order terms we get the equation 4.7:
uu
fu
u
fu
u
fu
u
f
xx
fx
x
fx
x
fx
x
fx
nsys
nsys
isys
sys
sys
isys
sys
sys
isys
sys
sys
isys
nsys
nsys
isys
sys
sys
isys
sys
sys
isys
sys
sys
isys
isys
......
.......
3
13
2
2
1
1
3
3
2
2
1
1 (4.7)
Likewise, the output equation can be defined as in equation 4.8.
uu
gu
u
gu
u
gu
u
g
xx
gx
x
gx
x
gx
x
gy
nsys
nsys
isys
sys
sys
isys
sys
sys
isys
sys
sys
isys
nsys
nsys
isys
sys
sys
isys
sys
sys
isys
sys
sys
isys
isys
......
.......
3
13
2
2
1
1
3
3
2
2
1
1 (4.8)
From the above equations, the fundamental equations of the state space representation of any
power system are given by:
U sysΧ sys
U sysΧ sys
ΔDsysΔCsysΥsysΔ
ΔΒsysΔAsysΧsysΔ
(4.9)
Where;
ΧsysΔ is defined as the state vector of size 1n
YsysΔ is defined as the output vector of size m
UsysΔ is defined as the input vector of size r
Αsys is the plant matrix which is a function of state variables 𝑥𝑠𝑦𝑠of size nn
Bsys is the input matrix which is the function of input variable 𝑢𝑠𝑦𝑠 of size rn
Csys is the output matrix which is the function of state variables 𝑦𝑠𝑦𝑠 of size nm
Master of Science
44
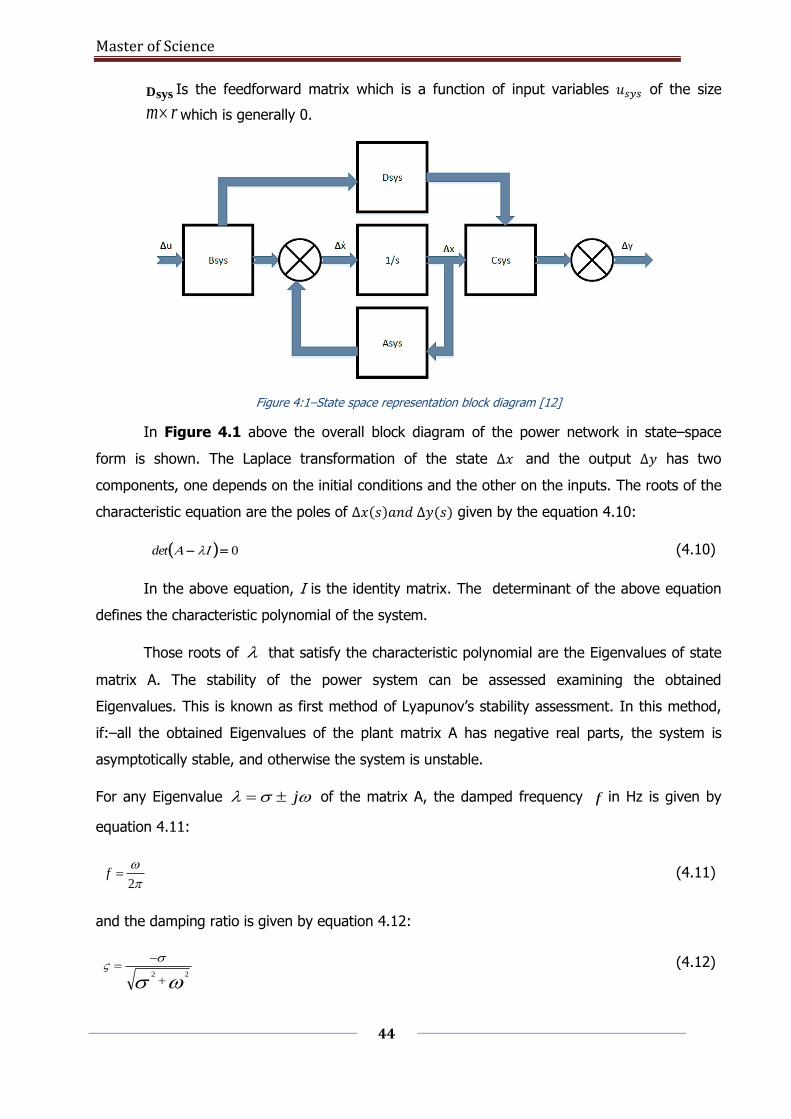
Dsys Is the feedforward matrix which is a function of input variables 𝑢𝑠𝑦𝑠 of the size
rm which is generally 0.
Figure 4:1–State space representation block diagram [12]
In Figure 4.1 above the overall block diagram of the power network in state–space
form is shown. The Laplace transformation of the state ∆𝑥 and the output ∆𝑦 has two
components, one depends on the initial conditions and the other on the inputs. The roots of the
characteristic equation are the poles of ∆𝑥(𝑠)𝑎𝑛𝑑 ∆𝑦(𝑠) given by the equation 4.10:
0 det (4.10)
In the above equation, I is the identity matrix. The determinant of the above equation
defines the characteristic polynomial of the system.
Those roots of that satisfy the characteristic polynomial are the Eigenvalues of state
matrix A. The stability of the power system can be assessed examining the obtained
Eigenvalues. This is known as first method of Lyapunov’s stability assessment. In this method,
if:–all the obtained Eigenvalues of the plant matrix A has negative real parts, the system is
asymptotically stable, and otherwise the system is unstable.
For any Eigenvalue j of the matrix A, the damped frequency f in Hz is given by
equation 4.11:
2f (4.11)
and the damping ratio is given by equation 4.12:
22
(4.12)
Master of Science
45
4.2 Eigenvectors of an Eigenvalue
A state matrix of the order nn has n Eigenvalues. The Eigenvalue of the state
matrix is a complex quantity. Each Eigenvalue has associated left and the right Eigenvector. The
right Eigenvector of an Eigenvalue is indicated by and the left Eigenvector of an Eigenvalue
is indicated by . The left and the right Eigenvectors of an Eigenvalue i is defined by
equation 4.13.
ψiλiAψi
iλiiA
(4.13)
The diagonal matrix has all the Eigenvalues on its diagonal.
The right Eigenvector is a row vector and the left Eigenvector is a column vector. These vectors
are of the form:
ni
3i
2i
1i
i
and ψψψψψι ιnι3ι2ι1 (4.14)
For n Eigenvalues there are n left and the right Eigenvectors. The Eigenvectors form the left
and the right Eigen matrices respectively.
ψTnψT
3ψT
2ψT
1
Tψ
n321φ
(4.15)
Using the characteristic polynomial obtained in the equation 4.10 and the equation 4.13, the
diagonal matrix is rewritten as in equation 4.16:
AΛ
Ιψ
ΛA
1
(4.16)
From the state matrix, it is observed that, each state variable is a linear combination of
all the other state variables. A mode is a cross coupling of different state variables, hence a new
state vector is defined to remove the cross coupling of state variables as given in equation
4.17:
zx Δ (4.17)
Master of Science
46
Pre–multiplying by the right Eigen matrix φ to the above equation and rewriting in terms of 𝒵
we get
zz iii
zz
A (4.18)
zz
(4.19)
From equation 4.9 we have:
xΔΑΔ
x (4.20)
In the above equation 4.19, it is very clear that the equations are decoupled unlike in the
equation 4.13. The difference is that the matrix A is not a diagonal matrix in equation 4.20
whereas the matrix Λ is a diagonal matrix with Eigenvalues on its diagonal.
The equation 4.18 can be visualized as a first order differential equation and its solution in time
t can be defined by equation 4.21:
ezzt
ii
it 0 (4.21)
Where the term 0zi is the initial condition of the differential equation. Thus the equation 4.16
can be written in a general manner using the original state vector ∆x as
eeee
e
z
e
tttt
t
i
tn
i
i
n
i
i
x......xxxtx
xtx
x
tx
0000
0
00
0
321
1
ΨniinΨ3ii3Ψ2ii2Ψi1 1i
Ψi
Δψi
zi
n
1i
i
(4.22)
From the equation 4.22, we can conclude that a state variable is expressed as a linear
combination of n dynamic modes. A mode can be defined as a function of the right and the left
Eigen matrix and the corresponding Eigenvalue with respect to time. From the above equation,
it is observed that the right and the left Eigen matrix are effectively complex numbers which can
be visualized as the magnitude of the mode corresponding to the Eigenvalue. Thus, for a given
mode, the product of the left and the right Eigenvectors gives an identity matrix indicating that
they are orthogonal to each other whereas, for a different mode, their product is zero.
Master of Science
47
4.3 Sensitivity of an Eigenvalue
The sensitivity of the Eigenvalues to the elements in the state matrix is of high importance.
From equation 4.13, we have
iii λA (4.23)
Consider an element from the state matrix A as Pkj . This is an element of the kth row and the
jth column of the state matrix A. To determine the sensitivity of the Eigenvalue, the equation
4.13 is differentiated with respect to the element Pkj , this results in the equation 4.13:
PPPP kj
i
kj
i
kji
kj
φφ
φi
i
iAA
(4.24)
Now by pre–multiplying the equation 4.24, by ψ i and substituting Ιψ , we obtain the
equation 4.25:
PP kj
i
kj
φi
Aψi
(4.25)
From the equation 4.25, it is concluded that the sensitivity of an Eigenvalue to a
parameter in the state matrix A is equal to the product of left Eigenvector and the right
Eigenvector. This brings to the definition of the participation matrix, which determines the state
variable, and hence the generator that is most involved in a mode. This matrix takes into
account both the right and the left Eigenvector of a mode, i.e. through which state variable the
mode is excited or easily observable (observability) and which state variable has the most
impact on this mode (controllability) of the mode. The participation matrix is a dimensionless
quantity and is defined as:
PPPPP n321 (4.26)
ψφ
ψφ
ψφ
ψφ
ψφ
p
p
p
p
p
p
inni
4i
i33i
i22i
i11i
ni
4i
3i
2i
1i
k
i4
(4.27)
The equation 4.25 gives a link between a state variable and the Eigenvalue. For
example, if an Eigenvalue corresponds to a local mode of an area, then the rotor speeds of the
generators in that area will have a high value and the other areas will be insignificant.
Master of Science
48
The stochastic nature of power system changes all the time due to changes in the values
of the voltages, currents and load flows between different areas. Large power systems will have
dominant electromechanical modes of oscillations under stressed conditions. These modes of
electro–mechanical oscillations can be broadly classified as in [12] [17]:
1. Inter-area modes of frequency 0.1 Hz to 0.8 Hz: When generators of two
different areas oscillate against each other. These modes are excited, when there is a
fault on the tie lines or transmission lines are taken out of service for maintenance
purposes.
2. Local area modes of frequency 0.7 Hz to 2 Hz: When generators within an area
oscillate against each other. These modes are excited when there are disturbances in
an area close to the generators. These have higher frequencies compared to that of
the inter–area modes.
3. Intra plants modes of frequency 1.5 Hz to 3 Hz: These modes are excited
when machines within the generating plant starts oscillating against each other. This
mainly depend on the MVA ratings of the machines and the reactance connecting
them.
These oscillatory modes are influenced by various elements in the power system like for
example HVDC, FACTS devices, AVRs and speed governors. The frequency of oscillation and the
damping factor of the inter-area modes depends upon various conditions of the power network.
For a strongly interconnected network, where the generators can handle a total load with
significant extra margin, the inter-area modal frequencies will be higher. While, in a weakly
connected network, with a smaller margin the inter–area modes will be lower.
4.4 Prony analysis2
Prony analysis is a mathematical tool used to analyze the recorded signals. This strategy
coupled with the classical Fourier analysis provides sufficient modal information from the
system’s signals. In this strategy, a linear combination of exponential terms are fit to signals
that are sampled equally with respect to time [17]. The problem of over–determined set of
linear equations and finding the roots of higher order polynomials by estimating the 𝜆’s of the
polynomials is solved by Prony analysis.
2 This section is based on the description given in DSI toolbox, user manual from PNNL laboratory. The
toolbox is available for download at https://github.com/ftuffner/DSIToolbox or https://www.naspi.org/node/490
Master of Science
49
Fourier series represents a function or a periodic signal as a sum of oscillating functions.
From the control theory point of view, the system response can be determined by the transfer
function without solving the differential equations. A transfer function H(s) is defined by:
ΒΒΒΒΒ
ΑΑΑΑ
012n1nn
012m1mmΑ
s............sss
............ssssΗ
12n1nn
12m1mm
s (4.28)
In the above equation 4.28, the polynomial in the numerator represent the zeros and the
polynomial in the denominator represent the poles of the transfer function. Factorizing the
above transfer function given by equation 4.28, the factorized polynomial is given by:
psps............pspsps
zszs.............zszszss
nn
mm
1321
1321Κ (4.29)
Where, B
AΚ
n
m
z,......z,z,z m321 are the zeros and p,......p,p,pn321are the poles of the transfer function. The poles of
the transfer functions gives the Eigenvalues of the transfer function.. The system stability is
determined by the transfer function of the system. For a system to be stable, all the poles must
decay to zero with time.
Consider system with K output signals with K=1 to k as depicted in the Figure–4.2.
Figure 4:2–Single input multiple output system block [17]
The output of the system is written as:
n
ii
t
ktcosσt ey i
1
φω ik,ik,A (4.30)
Where, A ik, and i,k are the amplitudes and phase of the frequency i . The damping is given by
i . The equation 4.29 is expanded using Euler’s relation as
n
i
tt
k eey λλt*
ii
1
BB*
ik,ik, (4.31)
Master of Science
50
Where B i,k and B*
i,k are the complex conjugate of each other and iare the poles or Eigenvalues
of the system. From the equation 4.30, B i,k are the output residues of the system and is
expressed as
B ik, = eφ
k,ij
2
A ik, (4.32)
and is a complex Eigenvalue given by:
i= ii
j (4.33)
Where i is the real part and i
is the frequency of the Eigenvalue.
If the system outputs are samples over a uniform time period for a total of Νk
samples where 1321 Nk....,,k then by Prony analysis the amplitudes, phase angles, frequencies
and the damping coefficients of the signal is determined. A signal consists of few dominant
modes along with the noise.
Prony analysis uses the Linear Prediction Method (LPM), where the future values of a
discretized signal is estimated as a linear function of the previous signals. In the second step,
the coefficients of the characteristic equation is estimated using the Least Square Estimation
method. Once the coefficients are estimated, the roots of the characteristic equation is
calculated. In this step, the noises are reduced by taking a very high modal order.
First a suitable window is opened to perform Prony. Here, it is assumed that there is
maximum energy in the modes within the Prony window. This will reorder the modes according
to their energy content in the selected window according to the error criterion which reduces
the error as the modal response is closer to the actual data.
4.5 Choice of signals
To obtain reliable results, observable signals like generator speeds, output powers should
be the first choice. The part of the signals to which Prony analysis is applied depends on the
type of the disturbance. The signal should constitute to a true ringdown/periodic/stationary
signal . For example, simulating a short circuit event or applying a positive and a negative step
in the torques to the generators in an area. This will constitute a true ringdown signal as the
system is tending to a post–fault equilibrium point.
For low frequency modes like inter–area modes, removal of the load or a tie–line is a good
choice. In response to this type of disturbance, the system will move to a new post–fault
equilibrium point. In response to the disturbances, various power equipment’s like circuit
Master of Science
51
breakers, governors or capacitor banks are switched immediately after the disturbance, these
actions are considered as additional forcing functions with respect to power system oscillations.
These switching actions alter the modal characteristics, hence the Prony analysis must be
applied to that portion of the signal where no switching action occurs or after the switching has
taken place. The dominant mode should be observable in the chosen signals for the Prony
analysis. This is done by physical inspection of the signals.
4.5.1 Pre–processing of the signals
Sometimes before applying Prony analysis, to the selected signals, the signals may have
to be pre–processed to remove any kind of trending and noises. From the definitions, Prony
analysis can be applied to only periodic signals or signals that is sampled at a constant sampling
rate. The signals that is exported from power factory may not be sampled at equal time steps.
The solvers in power factory tries to sample the variables at a given time step, but in the case of
fast transient phenomenon the time step may vary in few cases. Hence to avoid difference in
the sampling time, the basic interpolation of the signal is done before applying Prony to the
signal. The interpolation involves dividing the total simulation time by the step size and
interpolating the values. This will result in loosing few data points at the end, but does not
change the signals drastically. The interpolation codes from MATLAB can be found in the
Appendix under MATLAB codes section.
4.5.2 Choosing the Prony window
Once the signals are processed by linear interpolation, they are imported to the PNNL
Prony analysis tool. This tool conducts the Prony analysis of the imported signals and outputs
the dominant modes present in the signal. Within this tool, the Prony window timings must be
entered for the tool to perform Prony analysis. This is entered manually with numerous trials,
the most suitable window is obtained. The window should be chosen in that part of the signal
where the oscillations are is close to a linear system output. The window is shown in the
Figure–4.3 below:
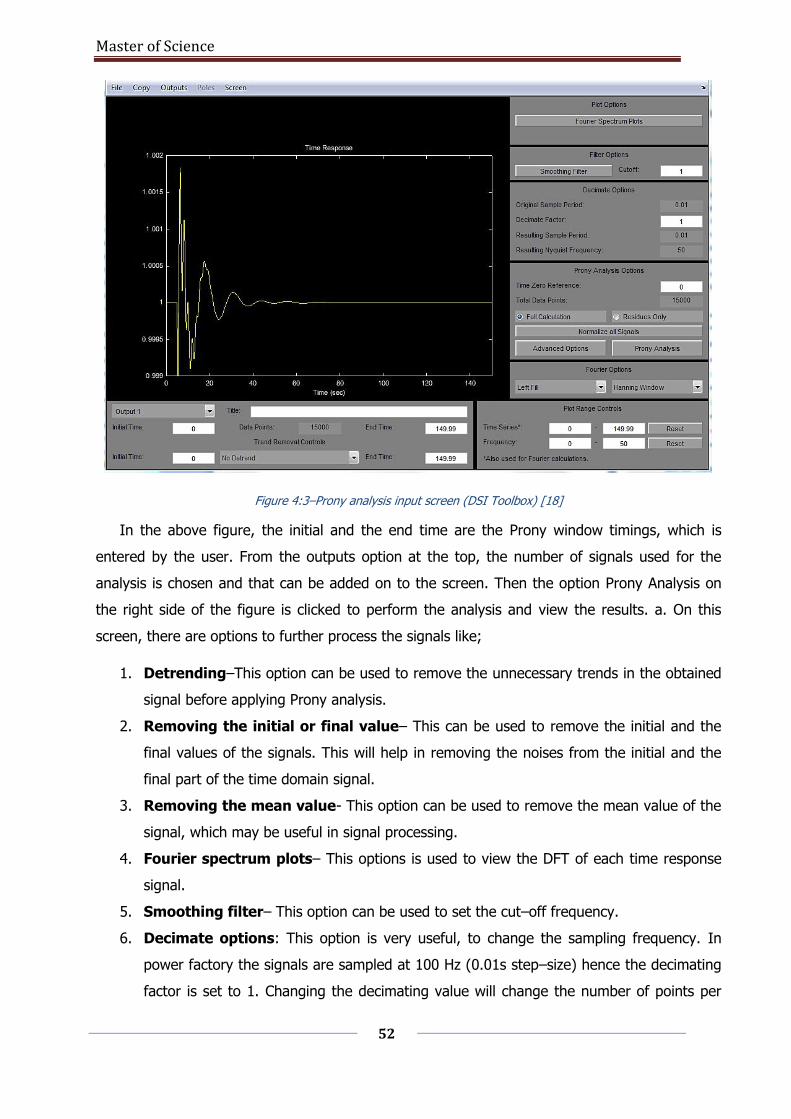
Master of Science
52
Figure 4:3–Prony analysis input screen (DSI Toolbox) [18]
In the above figure, the initial and the end time are the Prony window timings, which is
entered by the user. From the outputs option at the top, the number of signals used for the
analysis is chosen and that can be added on to the screen. Then the option Prony Analysis on
the right side of the figure is clicked to perform the analysis and view the results. a. On this
screen, there are options to further process the signals like;
1. Detrending–This option can be used to remove the unnecessary trends in the obtained
signal before applying Prony analysis.
2. Removing the initial or final value– This can be used to remove the initial and the
final values of the signals. This will help in removing the noises from the initial and the
final part of the time domain signal.
3. Removing the mean value- This option can be used to remove the mean value of the
signal, which may be useful in signal processing.
4. Fourier spectrum plots– This options is used to view the DFT of each time response
signal.
5. Smoothing filter– This option can be used to set the cut–off frequency.
6. Decimate options: This option is very useful, to change the sampling frequency. In
power factory the signals are sampled at 100 Hz (0.01s step–size) hence the decimating
factor is set to 1. Changing the decimating value will change the number of points per
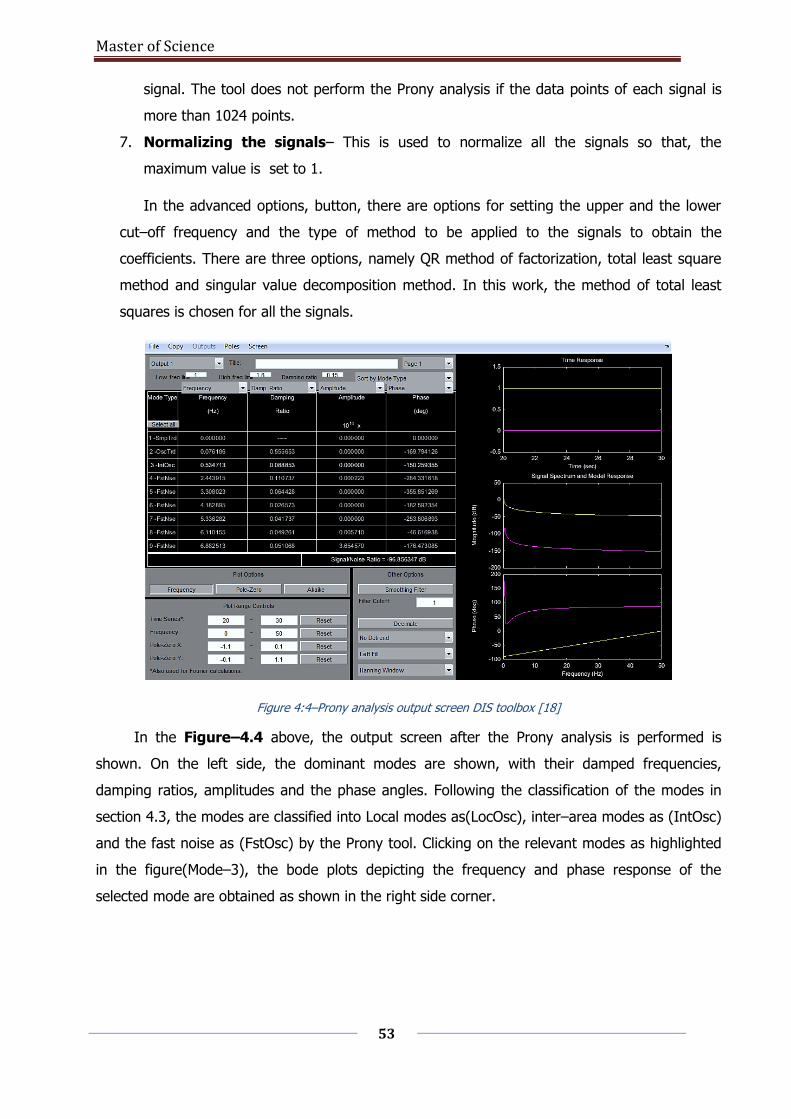
Master of Science
53
signal. The tool does not perform the Prony analysis if the data points of each signal is
more than 1024 points.
7. Normalizing the signals– This is used to normalize all the signals so that, the
maximum value is set to 1.
In the advanced options, button, there are options for setting the upper and the lower
cut–off frequency and the type of method to be applied to the signals to obtain the
coefficients. There are three options, namely QR method of factorization, total least square
method and singular value decomposition method. In this work, the method of total least
squares is chosen for all the signals.
Figure 4:4–Prony analysis output screen DIS toolbox [18]
In the Figure–4.4 above, the output screen after the Prony analysis is performed is
shown. On the left side, the dominant modes are shown, with their damped frequencies,
damping ratios, amplitudes and the phase angles. Following the classification of the modes in
section 4.3, the modes are classified into Local modes as(LocOsc), inter–area modes as (IntOsc)
and the fast noise as (FstOsc) by the Prony tool. Clicking on the relevant modes as highlighted
in the figure(Mode–3), the bode plots depicting the frequency and phase response of the
selected mode are obtained as shown in the right side corner.
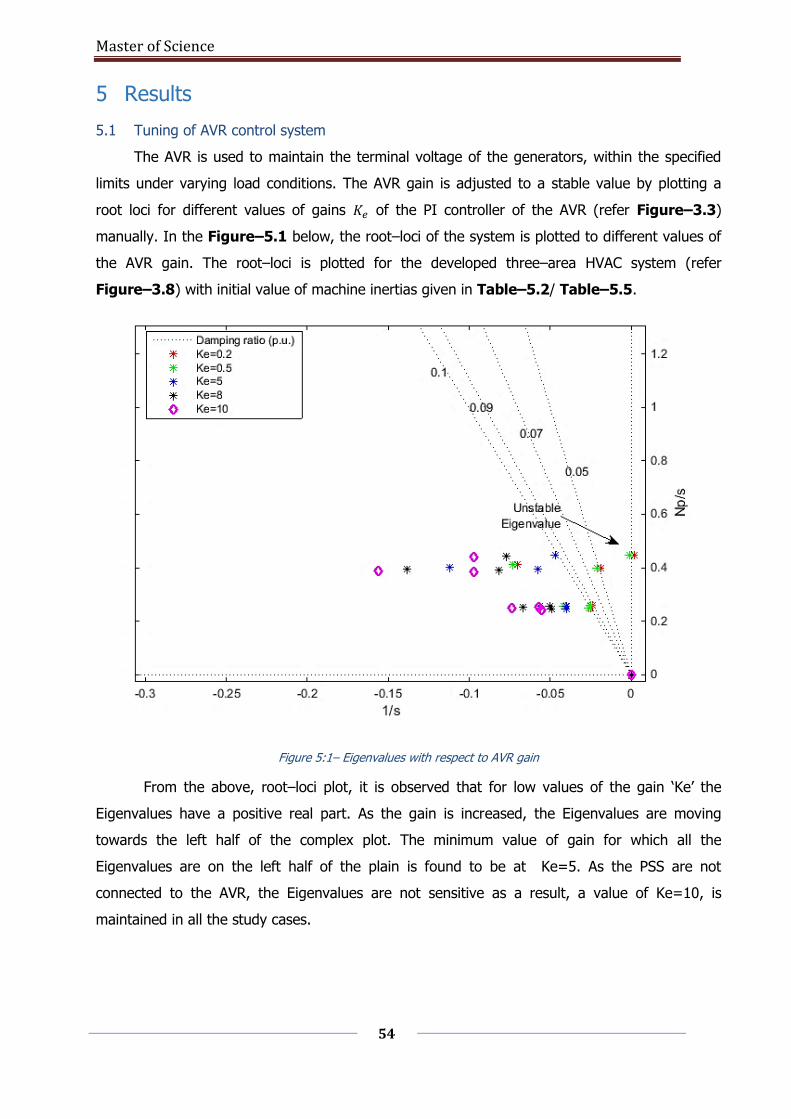
Master of Science
54
5 Results
5.1 Tuning of AVR control system
The AVR is used to maintain the terminal voltage of the generators, within the specified
limits under varying load conditions. The AVR gain is adjusted to a stable value by plotting a
root loci for different values of gains 𝐾𝑒 of the PI controller of the AVR (refer Figure–3.3)
manually. In the Figure–5.1 below, the root–loci of the system is plotted to different values of
the AVR gain. The root–loci is plotted for the developed three–area HVAC system (refer
Figure–3.8) with initial value of machine inertias given in Table–5.2/ Table–5.5.
Figure 5:1– Eigenvalues with respect to AVR gain
From the above, root–loci plot, it is observed that for low values of the gain ‘Ke’ the
Eigenvalues have a positive real part. As the gain is increased, the Eigenvalues are moving
towards the left half of the complex plot. The minimum value of gain for which all the
Eigenvalues are on the left half of the plain is found to be at Ke=5. As the PSS are not
connected to the AVR, the Eigenvalues are not sensitive as a result, a value of Ke=10, is
maintained in all the study cases.
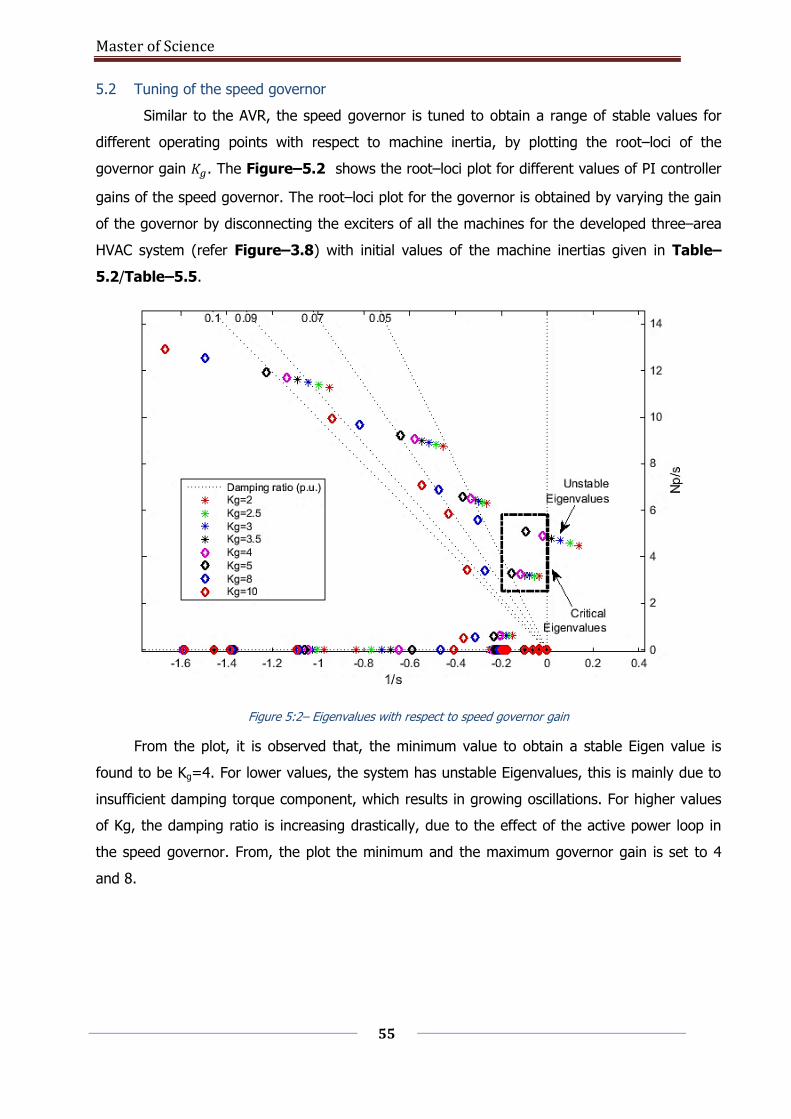
Master of Science
55
5.2 Tuning of the speed governor
Similar to the AVR, the speed governor is tuned to obtain a range of stable values for
different operating points with respect to machine inertia, by plotting the root–loci of the
governor gain 𝐾𝑔. The Figure–5.2 shows the root–loci plot for different values of PI controller
gains of the speed governor. The root–loci plot for the governor is obtained by varying the gain
of the governor by disconnecting the exciters of all the machines for the developed three–area
HVAC system (refer Figure–3.8) with initial values of the machine inertias given in Table–
5.2/Table–5.5.
Figure 5:2– Eigenvalues with respect to speed governor gain
From the plot, it is observed that, the minimum value to obtain a stable Eigen value is
found to be Kg=4. For lower values, the system has unstable Eigenvalues, this is mainly due to
insufficient damping torque component, which results in growing oscillations. For higher values
of Kg, the damping ratio is increasing drastically, due to the effect of the active power loop in
the speed governor. From, the plot the minimum and the maximum governor gain is set to 4
and 8.
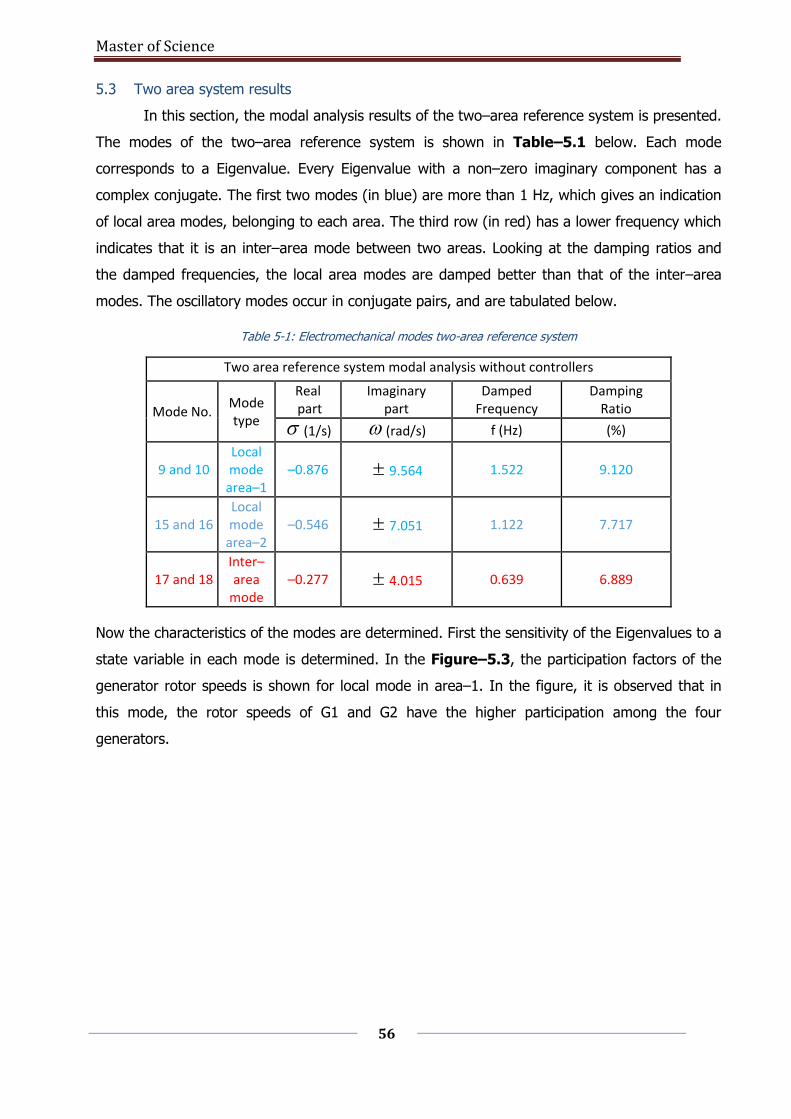
Master of Science
56
5.3 Two area system results
In this section, the modal analysis results of the two–area reference system is presented.
The modes of the two–area reference system is shown in Table–5.1 below. Each mode
corresponds to a Eigenvalue. Every Eigenvalue with a non–zero imaginary component has a
complex conjugate. The first two modes (in blue) are more than 1 Hz, which gives an indication
of local area modes, belonging to each area. The third row (in red) has a lower frequency which
indicates that it is an inter–area mode between two areas. Looking at the damping ratios and
the damped frequencies, the local area modes are damped better than that of the inter–area
modes. The oscillatory modes occur in conjugate pairs, and are tabulated below.
Table 5-1: Electromechanical modes two-area reference system
Two area reference system modal analysis without controllers
Mode No. Mode type
Real part
Imaginary part
Damped Frequency
Damping Ratio
(1/s) (rad/s) f (Hz) (%)
9 and 10 Local mode
area–1 –0.876 9.564 1.522 9.120
15 and 16 Local mode
area–2 –0.546 7.051 1.122 7.717
17 and 18 Inter–area
mode –0.277 4.015 0.639 6.889
Now the characteristics of the modes are determined. First the sensitivity of the Eigenvalues to a
state variable in each mode is determined. In the Figure–5.3, the participation factors of the
generator rotor speeds is shown for local mode in area–1. In the figure, it is observed that in
this mode, the rotor speeds of G1 and G2 have the higher participation among the four
generators.
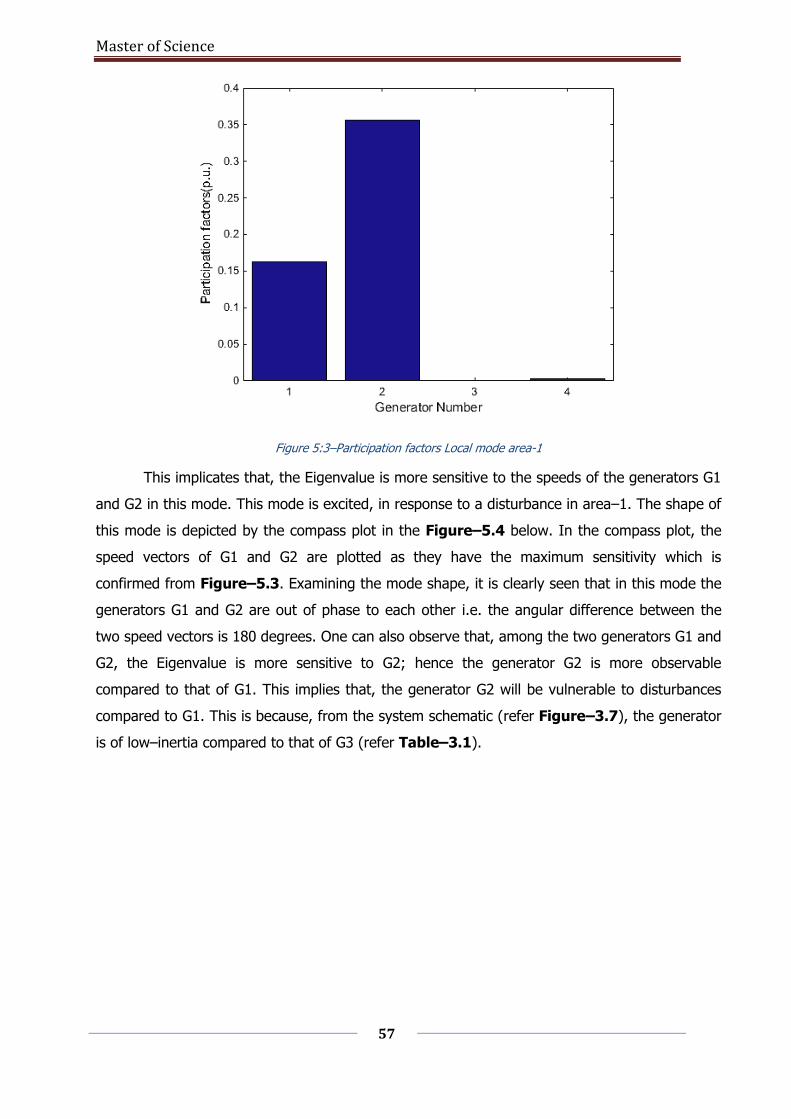
Master of Science
57
Figure 5:3–Participation factors Local mode area-1
This implicates that, the Eigenvalue is more sensitive to the speeds of the generators G1
and G2 in this mode. This mode is excited, in response to a disturbance in area–1. The shape of
this mode is depicted by the compass plot in the Figure–5.4 below. In the compass plot, the
speed vectors of G1 and G2 are plotted as they have the maximum sensitivity which is
confirmed from Figure–5.3. Examining the mode shape, it is clearly seen that in this mode the
generators G1 and G2 are out of phase to each other i.e. the angular difference between the
two speed vectors is 180 degrees. One can also observe that, among the two generators G1 and
G2, the Eigenvalue is more sensitive to G2; hence the generator G2 is more observable
compared to that of G1. This implies that, the generator G2 will be vulnerable to disturbances
compared to G1. This is because, from the system schematic (refer Figure–3.7), the generator
is of low–inertia compared to that of G3 (refer Table–3.1).
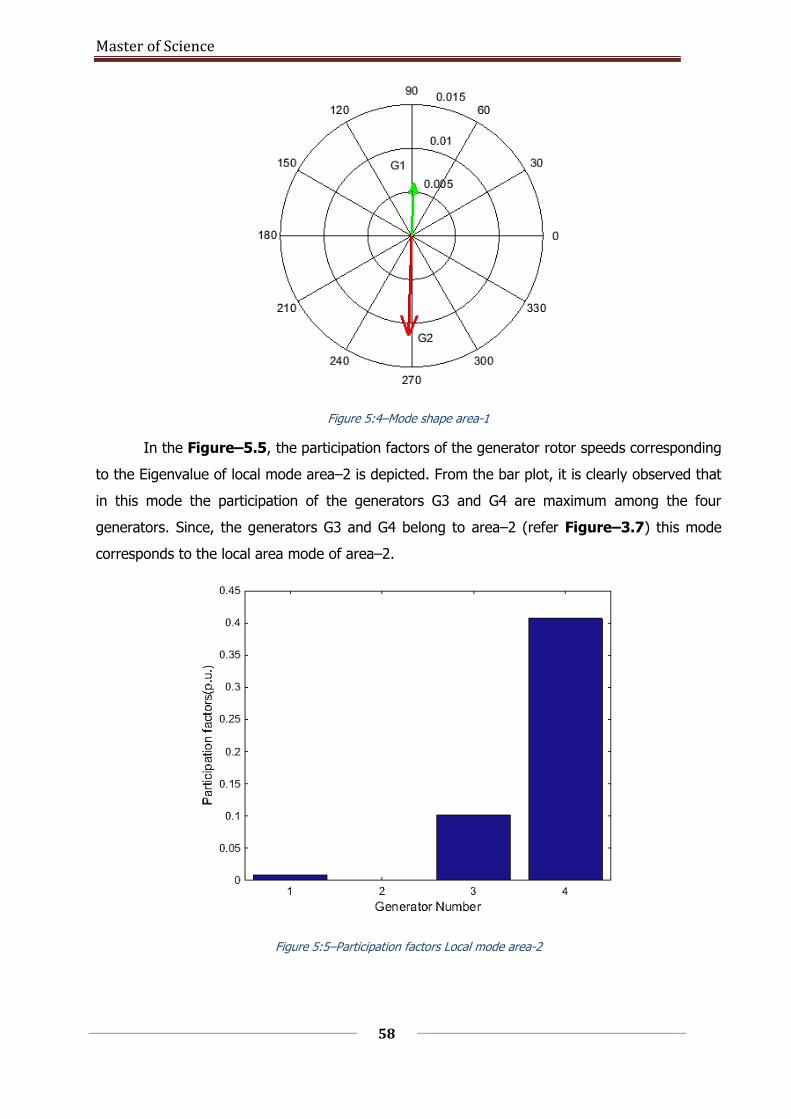
Master of Science
58
Figure 5:4–Mode shape area-1
In the Figure–5.5, the participation factors of the generator rotor speeds corresponding
to the Eigenvalue of local mode area–2 is depicted. From the bar plot, it is clearly observed that
in this mode the participation of the generators G3 and G4 are maximum among the four
generators. Since, the generators G3 and G4 belong to area–2 (refer Figure–3.7) this mode
corresponds to the local area mode of area–2.
Figure 5:5–Participation factors Local mode area-2
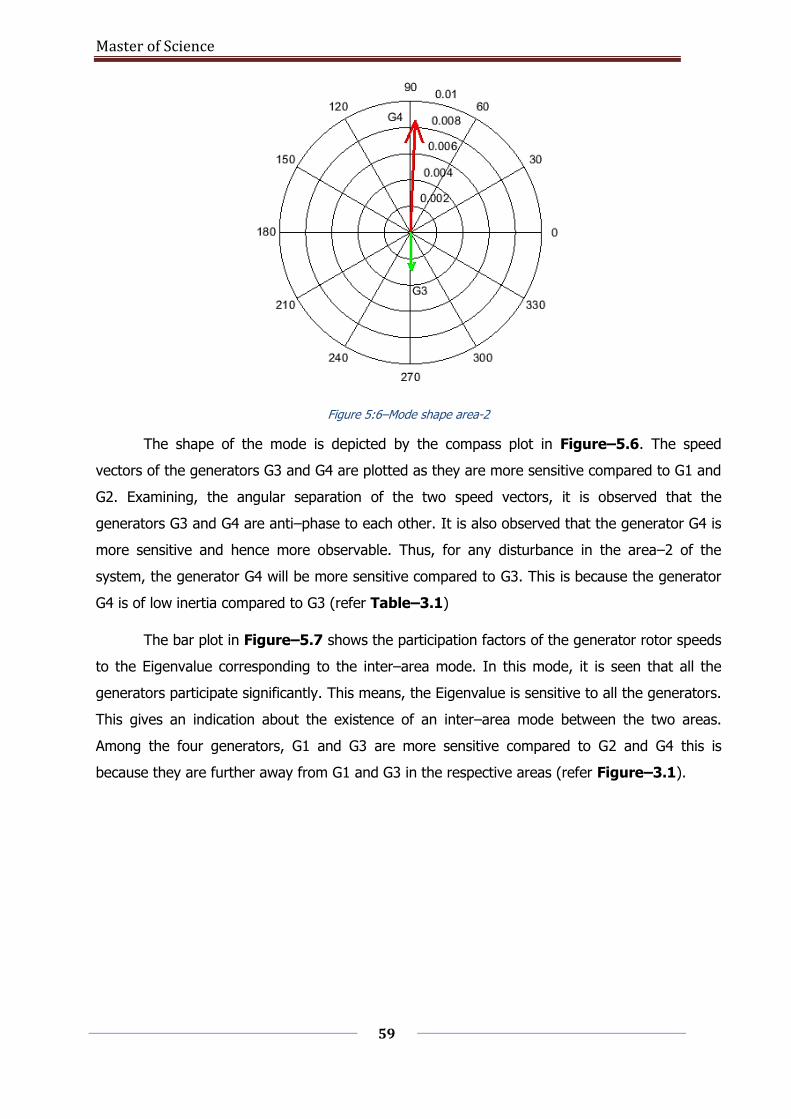
Master of Science
59
Figure 5:6–Mode shape area-2
The shape of the mode is depicted by the compass plot in Figure–5.6. The speed
vectors of the generators G3 and G4 are plotted as they are more sensitive compared to G1 and
G2. Examining, the angular separation of the two speed vectors, it is observed that the
generators G3 and G4 are anti–phase to each other. It is also observed that the generator G4 is
more sensitive and hence more observable. Thus, for any disturbance in the area–2 of the
system, the generator G4 will be more sensitive compared to G3. This is because the generator
G4 is of low inertia compared to G3 (refer Table–3.1)
The bar plot in Figure–5.7 shows the participation factors of the generator rotor speeds
to the Eigenvalue corresponding to the inter–area mode. In this mode, it is seen that all the
generators participate significantly. This means, the Eigenvalue is sensitive to all the generators.
This gives an indication about the existence of an inter–area mode between the two areas.
Among the four generators, G1 and G3 are more sensitive compared to G2 and G4 this is
because they are further away from G1 and G3 in the respective areas (refer Figure–3.1).

Master of Science
60
Figure 5:7–Participation factor inter-area mode
The mode shape is depicted by the right eigenvectors by the compass plot in Figure–
5.8. From the compass plot, it is clearly seen that the generators G1 and G2 of area–1 are in
phase with each other (angle is 0) and the generators G3 and G4 are in phase with each other
(angle is 0), but the vectors G1 and G2 together are anti–phase with the vectors G3 and G4.
This means, in this mode the generators G1 and G2 of area–1 are anti–phase to generators G3
and G4 of area–2.
Figure 5:8–Mode shape inter-area mode
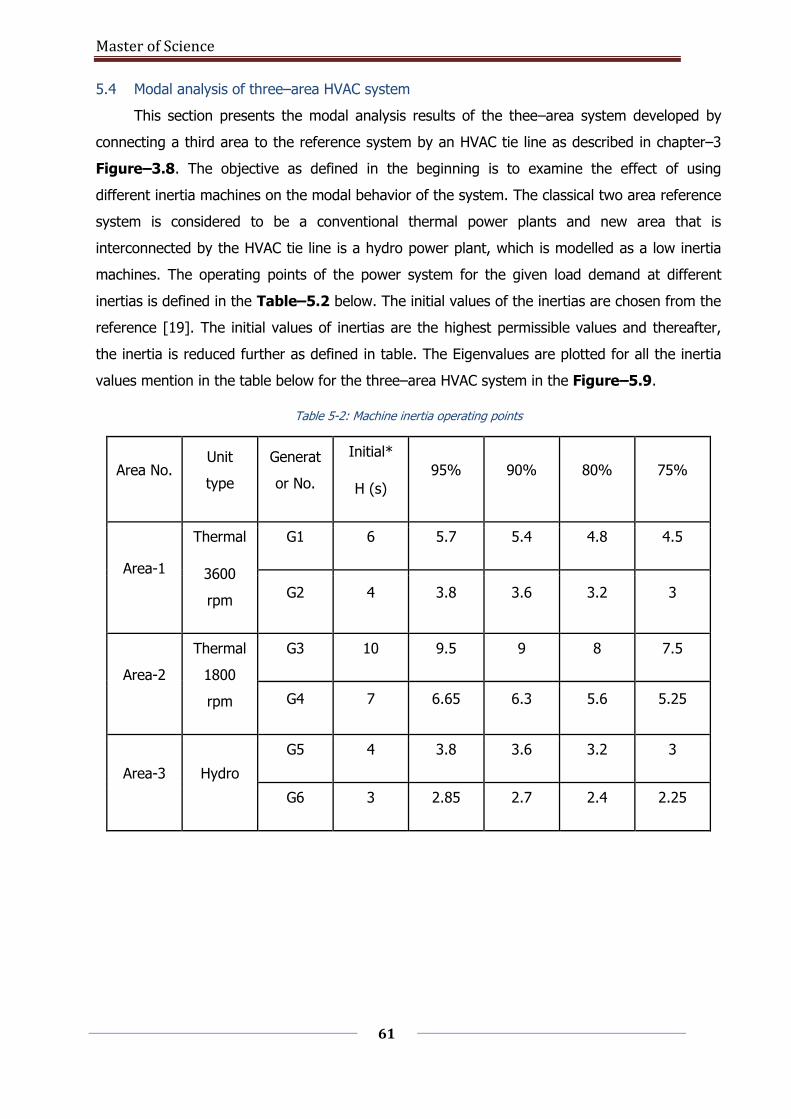
Master of Science
61
5.4 Modal analysis of three–area HVAC system
This section presents the modal analysis results of the thee–area system developed by
connecting a third area to the reference system by an HVAC tie line as described in chapter–3
Figure–3.8. The objective as defined in the beginning is to examine the effect of using
different inertia machines on the modal behavior of the system. The classical two area reference
system is considered to be a conventional thermal power plants and new area that is
interconnected by the HVAC tie line is a hydro power plant, which is modelled as a low inertia
machines. The operating points of the power system for the given load demand at different
inertias is defined in the Table–5.2 below. The initial values of the inertias are chosen from the
reference [19]. The initial values of inertias are the highest permissible values and thereafter,
the inertia is reduced further as defined in table. The Eigenvalues are plotted for all the inertia
values mention in the table below for the three–area HVAC system in the Figure–5.9.
Table 5-2: Machine inertia operating points
Area No. Unit
type
Generat
or No.
Initial*
H (s)
95% 90% 80% 75%
Area-1
Thermal
3600
rpm
G1 6 5.7 5.4 4.8 4.5
G2 4 3.8 3.6 3.2 3
Area-2
Thermal
1800
rpm
G3 10 9.5 9 8 7.5
G4 7 6.65 6.3 5.6 5.25
Area-3 Hydro
G5 4 3.8 3.6 3.2 3
G6 3 2.85 2.7 2.4 2.25
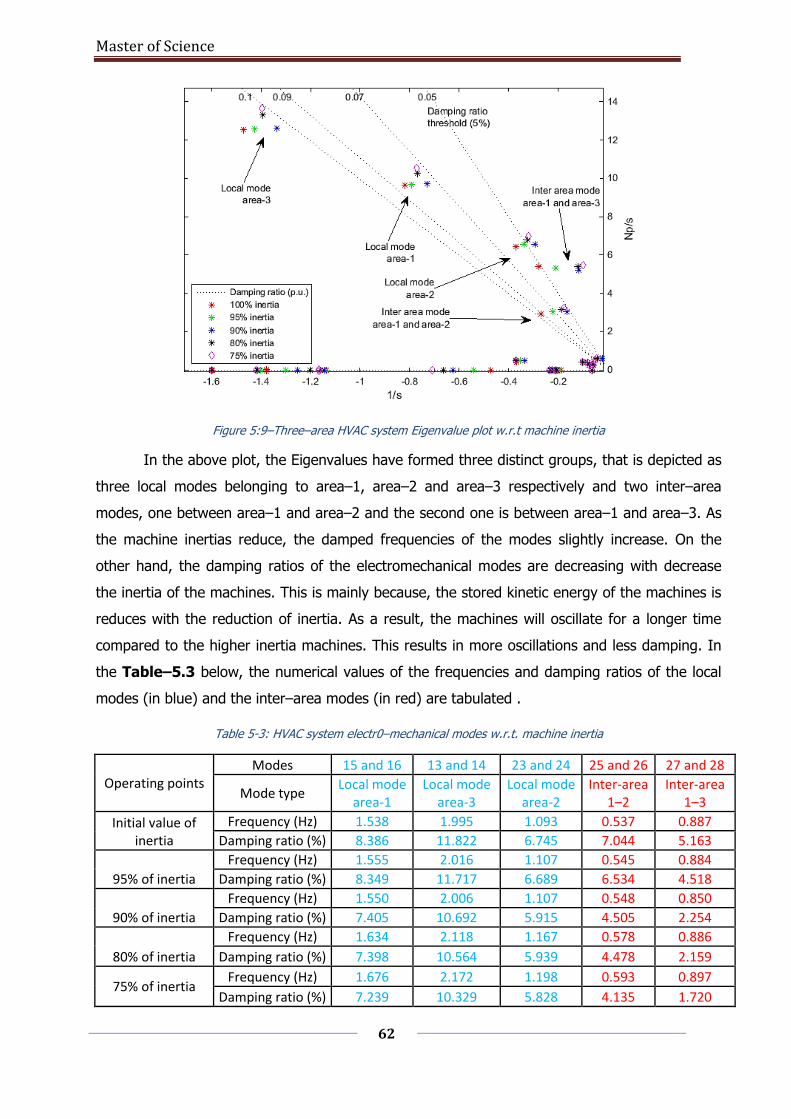
Master of Science
62
Figure 5:9–Three–area HVAC system Eigenvalue plot w.r.t machine inertia
In the above plot, the Eigenvalues have formed three distinct groups, that is depicted as
three local modes belonging to area–1, area–2 and area–3 respectively and two inter–area
modes, one between area–1 and area–2 and the second one is between area–1 and area–3. As
the machine inertias reduce, the damped frequencies of the modes slightly increase. On the
other hand, the damping ratios of the electromechanical modes are decreasing with decrease
the inertia of the machines. This is mainly because, the stored kinetic energy of the machines is
reduces with the reduction of inertia. As a result, the machines will oscillate for a longer time
compared to the higher inertia machines. This results in more oscillations and less damping. In
the Table–5.3 below, the numerical values of the frequencies and damping ratios of the local
modes (in blue) and the inter–area modes (in red) are tabulated .
Table 5-3: HVAC system electr0–mechanical modes w.r.t. machine inertia
Operating points Modes 15 and 16 13 and 14 23 and 24 25 and 26 27 and 28
Mode type Local mode
area-1 Local mode
area-3 Local mode
area-2 Inter-area
1–2 Inter-area
1–3
Initial value of inertia
Frequency (Hz) 1.538 1.995 1.093 0.537 0.887
Damping ratio (%) 8.386 11.822 6.745 7.044 5.163
95% of inertia
Frequency (Hz) 1.555 2.016 1.107 0.545 0.884
Damping ratio (%) 8.349 11.717 6.689 6.534 4.518
90% of inertia
Frequency (Hz) 1.550 2.006 1.107 0.548 0.850
Damping ratio (%) 7.405 10.692 5.915 4.505 2.254
80% of inertia
Frequency (Hz) 1.634 2.118 1.167 0.578 0.886
Damping ratio (%) 7.398 10.564 5.939 4.478 2.159
75% of inertia Frequency (Hz) 1.676 2.172 1.198 0.593 0.897
Damping ratio (%) 7.239 10.329 5.828 4.135 1.720
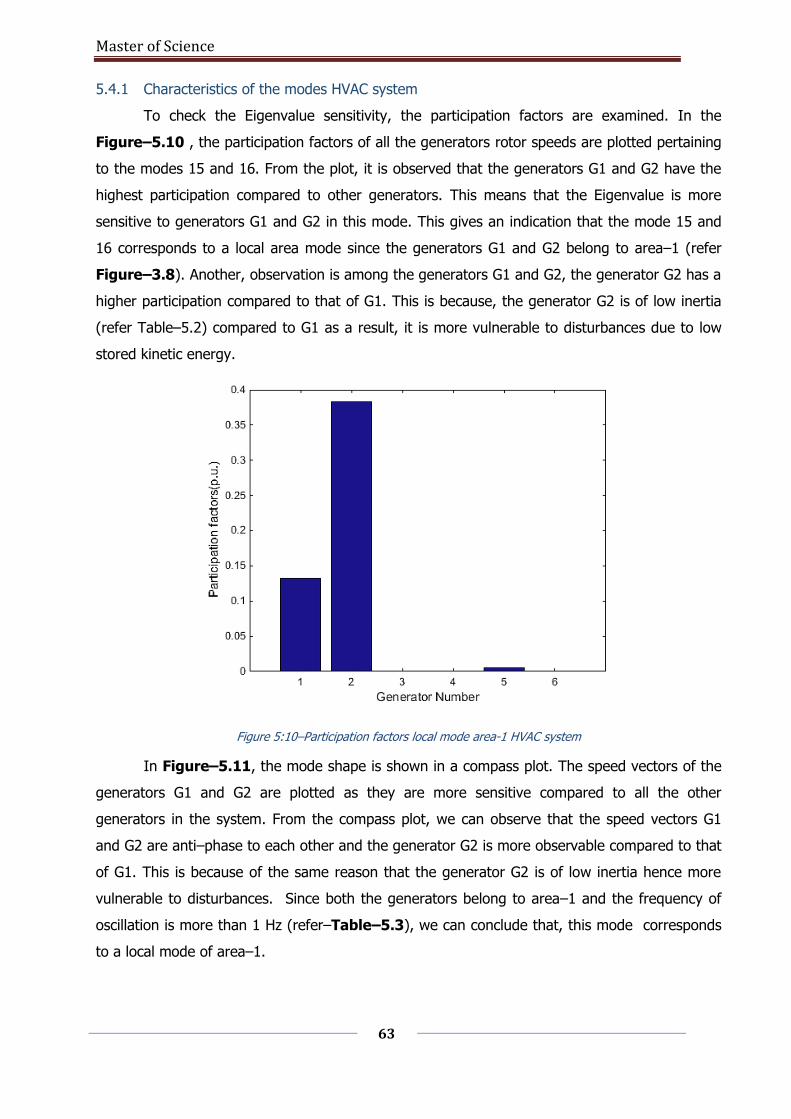
Master of Science
63
5.4.1 Characteristics of the modes HVAC system
To check the Eigenvalue sensitivity, the participation factors are examined. In the
Figure–5.10 , the participation factors of all the generators rotor speeds are plotted pertaining
to the modes 15 and 16. From the plot, it is observed that the generators G1 and G2 have the
highest participation compared to other generators. This means that the Eigenvalue is more
sensitive to generators G1 and G2 in this mode. This gives an indication that the mode 15 and
16 corresponds to a local area mode since the generators G1 and G2 belong to area–1 (refer
Figure–3.8). Another, observation is among the generators G1 and G2, the generator G2 has a
higher participation compared to that of G1. This is because, the generator G2 is of low inertia
(refer Table–5.2) compared to G1 as a result, it is more vulnerable to disturbances due to low
stored kinetic energy.
Figure 5:10–Participation factors local mode area-1 HVAC system
In Figure–5.11, the mode shape is shown in a compass plot. The speed vectors of the
generators G1 and G2 are plotted as they are more sensitive compared to all the other
generators in the system. From the compass plot, we can observe that the speed vectors G1
and G2 are anti–phase to each other and the generator G2 is more observable compared to that
of G1. This is because of the same reason that the generator G2 is of low inertia hence more
vulnerable to disturbances. Since both the generators belong to area–1 and the frequency of
oscillation is more than 1 Hz (refer–Table–5.3), we can conclude that, this mode corresponds
to a local mode of area–1.
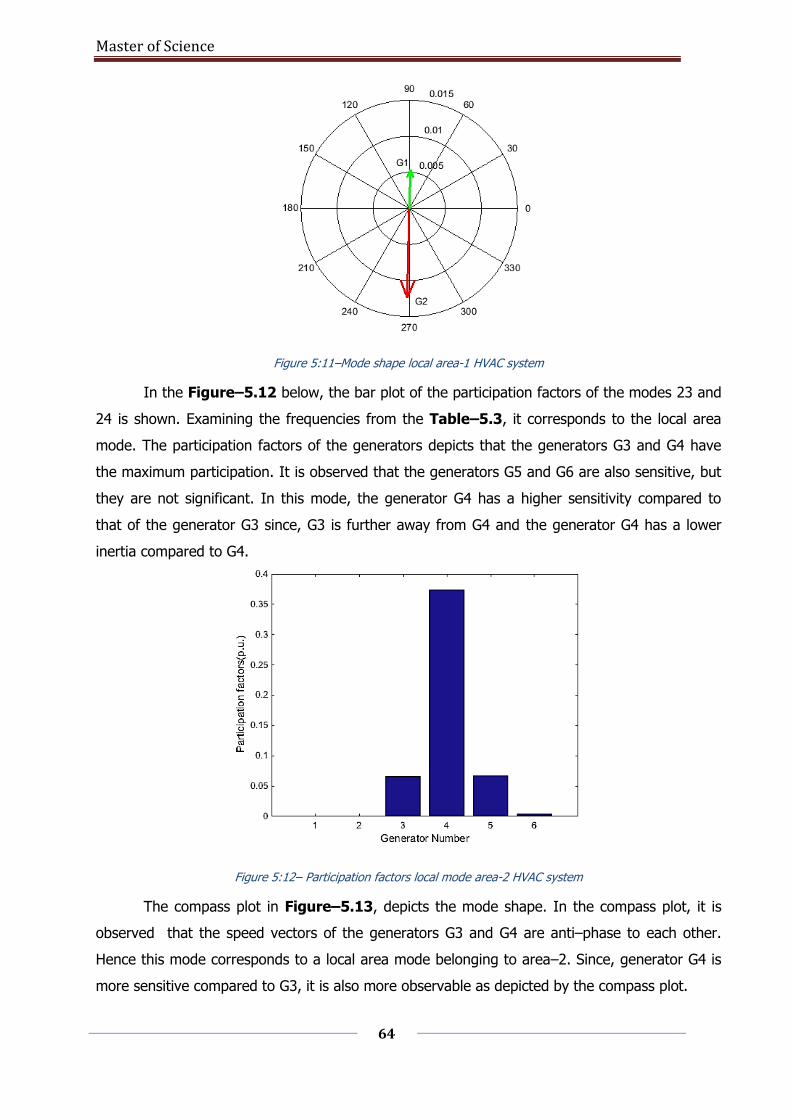
Master of Science
64
Figure 5:11–Mode shape local area-1 HVAC system
In the Figure–5.12 below, the bar plot of the participation factors of the modes 23 and
24 is shown. Examining the frequencies from the Table–5.3, it corresponds to the local area
mode. The participation factors of the generators depicts that the generators G3 and G4 have
the maximum participation. It is observed that the generators G5 and G6 are also sensitive, but
they are not significant. In this mode, the generator G4 has a higher sensitivity compared to
that of the generator G3 since, G3 is further away from G4 and the generator G4 has a lower
inertia compared to G4.
Figure 5:12– Participation factors local mode area-2 HVAC system
The compass plot in Figure–5.13, depicts the mode shape. In the compass plot, it is
observed that the speed vectors of the generators G3 and G4 are anti–phase to each other.
Hence this mode corresponds to a local area mode belonging to area–2. Since, generator G4 is
more sensitive compared to G3, it is also more observable as depicted by the compass plot.

Master of Science
65
Figure 5:13–Mode shape local area-2 HVAC system
The bar plot in Figure–5.14, depicts the sensitivity of the Eigenvalue of modes 13 and
14. From the bar plot it is clear that the generators G5 and G6 have the maximum participation
in this mode. This gives an indication that this mode is a local area mode belonging to area–3
since the generators G5 and G6 belong to area–3 (refer Figure–3.8). The generator G6 has the
higher sensitivity compared to that of G5 as the inertia of G6 is smaller than G5.
Figure 5:14–Participation factors local mode area-3 HVAC system
The mode shape is depicted by the compass plot shown in the Figure–5.15. It is
observed that the speed vectors G5 and G6 are anti–phase to each other in this mode. Since the
generator G6 has a higher participation factor, it is more observable as well.
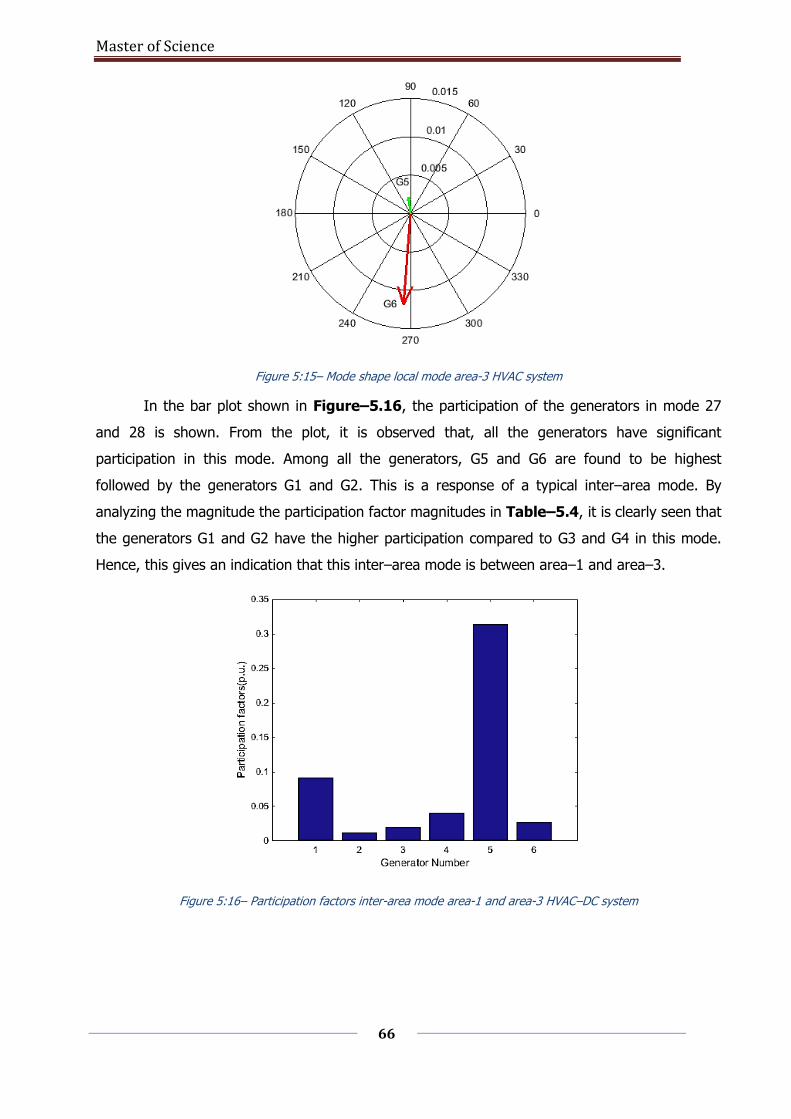
Master of Science
66
Figure 5:15– Mode shape local mode area-3 HVAC system
In the bar plot shown in Figure–5.16, the participation of the generators in mode 27
and 28 is shown. From the plot, it is observed that, all the generators have significant
participation in this mode. Among all the generators, G5 and G6 are found to be highest
followed by the generators G1 and G2. This is a response of a typical inter–area mode. By
analyzing the magnitude the participation factor magnitudes in Table–5.4, it is clearly seen that
the generators G1 and G2 have the higher participation compared to G3 and G4 in this mode.
Hence, this gives an indication that this inter–area mode is between area–1 and area–3.
Figure 5:16– Participation factors inter-area mode area-1 and area-3 HVAC–DC system
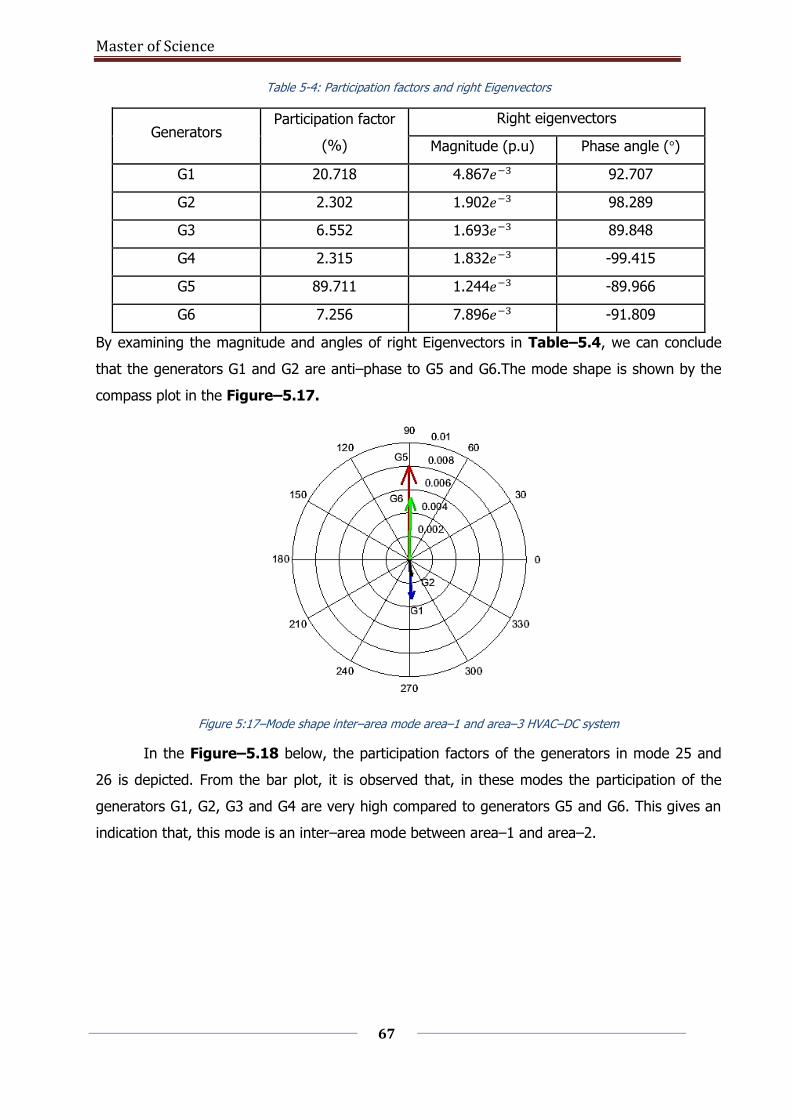
Master of Science
67
Table 5-4: Participation factors and right Eigenvectors
Generators Participation factor
(%)
Right eigenvectors
Magnitude (p.u) Phase angle (°)
G1 20.718 4.867𝑒−3 92.707
G2 2.302 1.902𝑒−3 98.289
G3 6.552 1.693𝑒−3 89.848
G4 2.315 1.832𝑒−3 -99.415
G5 89.711 1.244𝑒−3 -89.966
G6 7.256 7.896𝑒−3 -91.809
By examining the magnitude and angles of right Eigenvectors in Table–5.4, we can conclude
that the generators G1 and G2 are anti–phase to G5 and G6.The mode shape is shown by the
compass plot in the Figure–5.17.
Figure 5:17–Mode shape inter–area mode area–1 and area–3 HVAC–DC system
In the Figure–5.18 below, the participation factors of the generators in mode 25 and
26 is depicted. From the bar plot, it is observed that, in these modes the participation of the
generators G1, G2, G3 and G4 are very high compared to generators G5 and G6. This gives an
indication that, this mode is an inter–area mode between area–1 and area–2.
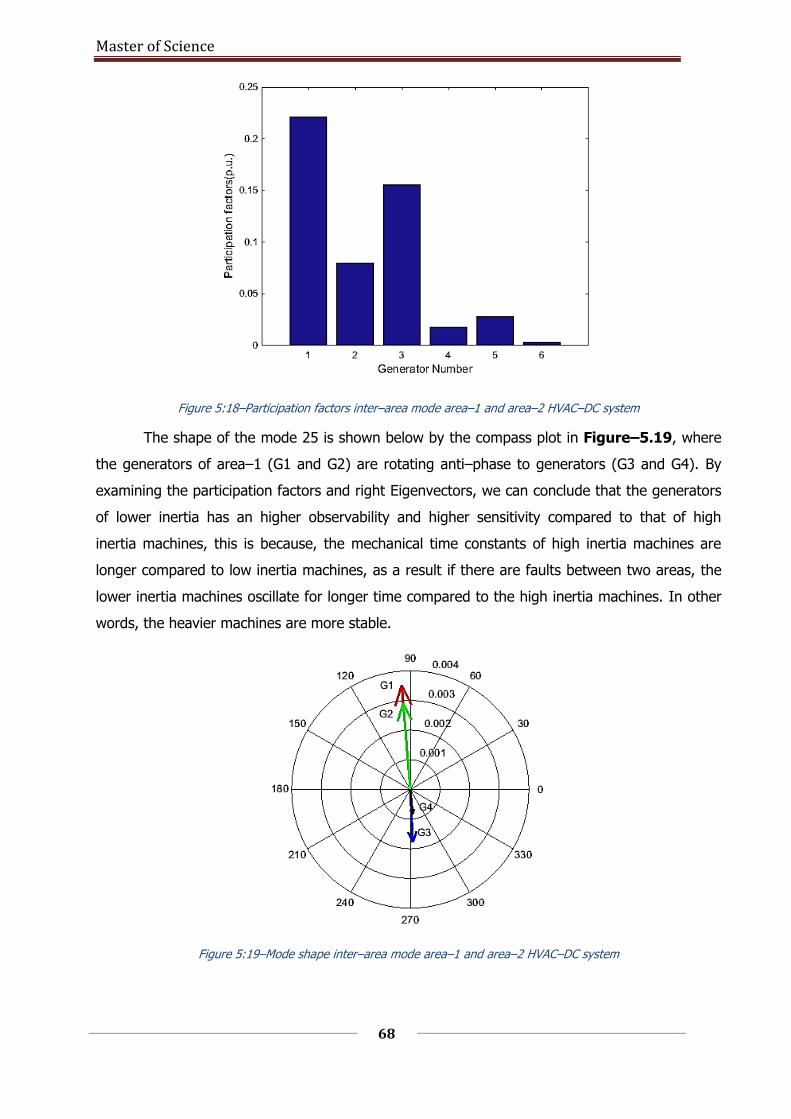
Master of Science
68
Figure 5:18–Participation factors inter–area mode area–1 and area–2 HVAC–DC system
The shape of the mode 25 is shown below by the compass plot in Figure–5.19, where
the generators of area–1 (G1 and G2) are rotating anti–phase to generators (G3 and G4). By
examining the participation factors and right Eigenvectors, we can conclude that the generators
of lower inertia has an higher observability and higher sensitivity compared to that of high
inertia machines, this is because, the mechanical time constants of high inertia machines are
longer compared to low inertia machines, as a result if there are faults between two areas, the
lower inertia machines oscillate for longer time compared to the high inertia machines. In other
words, the heavier machines are more stable.
Figure 5:19–Mode shape inter–area mode area–1 and area–2 HVAC–DC system

Master of Science
69
5.5 Modal analysis of HVAC–DC system
This section presents the modal analysis results of the HVAC–DC system, which is
developed by incorporating a point–to–point HVDC link between the third area and the existing
classical two–area system. The operating points of the power system at peak loads for different
inertias are defined in the Table–5.5 below.
Table 5-5: Three–area HVAC–DC system operating conditions with respect to inertias
Area
No.
Unit
type
Generat
or No.
Initial*
H (s)
95% 90% 80% 75%
Area-1
Thermal
3600
rpm
G1 6 5.7 5.4 4.8 4.5
G2 4 3.8 3.6 3.2 3
Area-2
Thermal
1800
rpm
G3 10 9.5 9 8 7.5
G4 7 6.65 6.3 5.6 5.25
Area-3 Hydro
G5 4 3.8 3.6 3.2 3
G6 3 2.85 2.7 2.4 2.25
The modal behavior of the system is accessed to evaluating the effect of the inertias of
the machines on the Eigen values of the electro–mechanical modes. In the Figure–5.20, the
Eigenvalue plot for different values of machine inertias is shown. From the plot, it is observed
that there is an increase in the modal frequencies and decrease in the damping ratios when the
machine inertias are decreased, similar to the HVAC system. Apart from the electromechanical
modes, the states of the PLLs are also excited but they have a significantly higher damping
ratios compared to that of the electromechanical modes in the system. The reason behind the
excitation of the electro–mechanical modes are due to the frequency error that occurs during
the transmission of the active power on the AC side to the active power on the DC link. During
this transition, the PLL states are excited along with the electro–mechanical states but they are
quickly damped. Another, important observation is there were two inter–area modes in the
HVAC system first one, between area–1 and area–2 and the second one, between area–1 and
area–3 (refer Table–5.3), whereas in the HVDC system there is only one inter–area mode.

Master of Science
70
The second inter–area mode does not exist because, the point–to–point HVDC link
decouples the system completely, and as a result there will be no inter–area mode between
systems which are interconnected by only HVDC links.
Figure 5:20–Three–area HVAC–DC system Eigenvalue plot w.r.t. machine inertia
The modal frequencies and their damping ratios of the electro–mechanical modes in the
HVAC–DC system are tabulated in the Table–5.6 below. The modes labelled in blue are more
than 1 Hz and falls into the category of local modes and the modes in red are less than 1 Hz and
the modes in red are inter–area modes.
Table 5-6: HVAC–DC system electro–mechanical modes with respect to machine inertias
Operating points Modes 16 and 17 24 and 25 14 and 15 26 and 27
Mode type
Local mode area-1
Local mode area-2
Local mode area-3
Inter-area–1 and area–2
100% inertia Frequency (Hz) 1.521 1.056 1.873 0.598
Damping ratio (%) 8.283 6.528 11.348 6.713
95% inertia Frequency (Hz) 1.539 1.094 1.889 0.624
Damping ratio (%) 7.921 6.557 10.902 6.002
90% inertia Frequency (Hz) 1.536 1.097 1.869 0.629
Damping ratio (%) 6.982 5.785 9.805 4.349
80% inertia Frequency (Hz) 1.619 1.157 1.969 0.664
Damping ratio (%) 6.981 5.802 9.692 4.326
75% inertia Frequency (Hz) 1.660 1.189 2.017 0.682
Damping ratio (%) 6.826 5.688 9.453 4.052
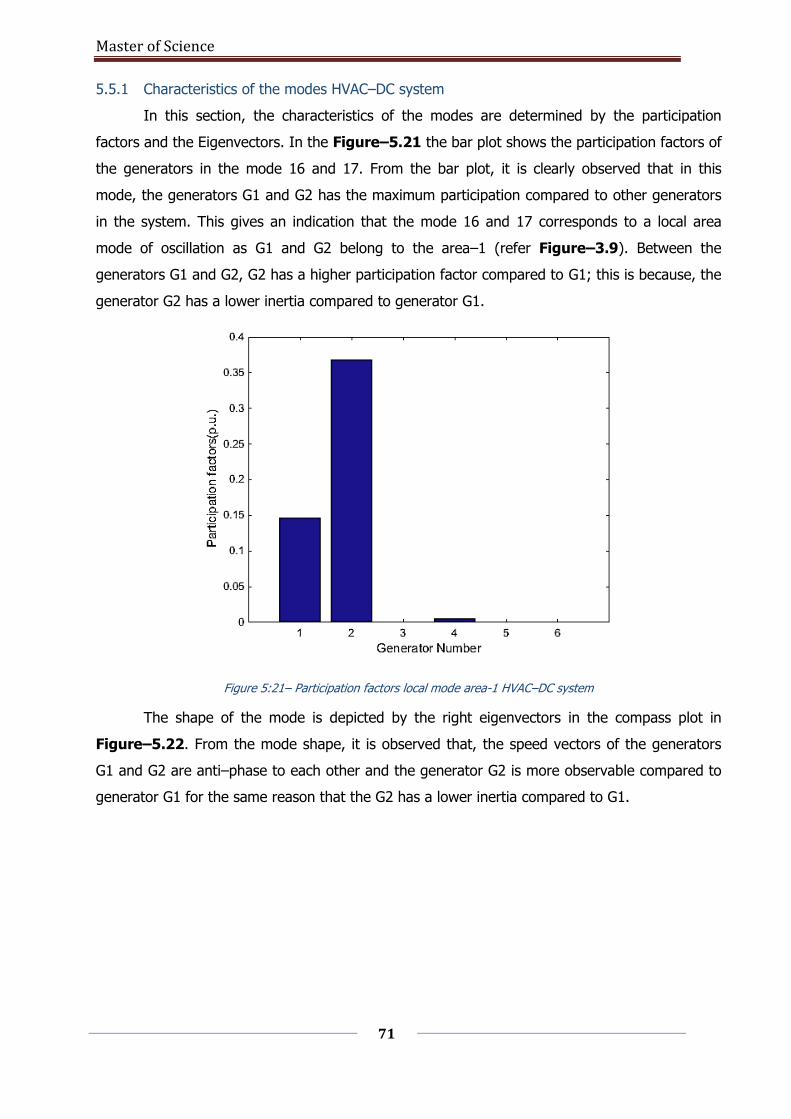
Master of Science
71
5.5.1 Characteristics of the modes HVAC–DC system
In this section, the characteristics of the modes are determined by the participation
factors and the Eigenvectors. In the Figure–5.21 the bar plot shows the participation factors of
the generators in the mode 16 and 17. From the bar plot, it is clearly observed that in this
mode, the generators G1 and G2 has the maximum participation compared to other generators
in the system. This gives an indication that the mode 16 and 17 corresponds to a local area
mode of oscillation as G1 and G2 belong to the area–1 (refer Figure–3.9). Between the
generators G1 and G2, G2 has a higher participation factor compared to G1; this is because, the
generator G2 has a lower inertia compared to generator G1.
Figure 5:21– Participation factors local mode area-1 HVAC–DC system
The shape of the mode is depicted by the right eigenvectors in the compass plot in
Figure–5.22. From the mode shape, it is observed that, the speed vectors of the generators
G1 and G2 are anti–phase to each other and the generator G2 is more observable compared to
generator G1 for the same reason that the G2 has a lower inertia compared to G1.
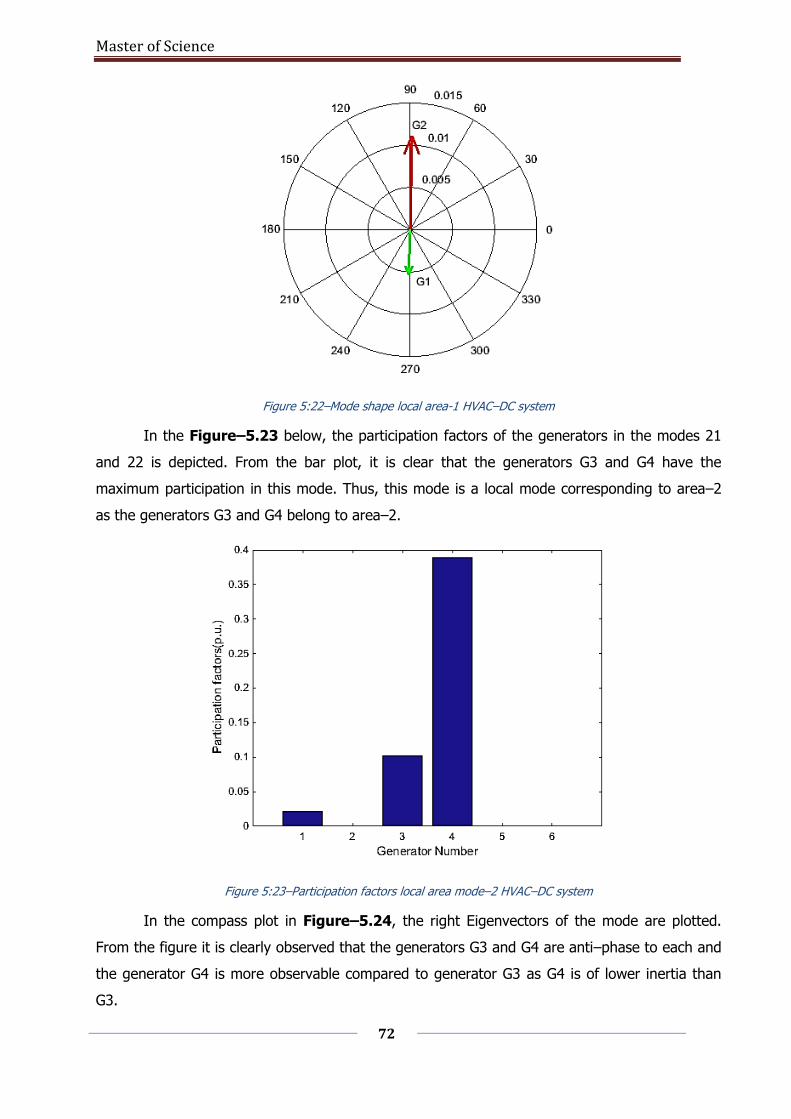
Master of Science
72
Figure 5:22–Mode shape local area-1 HVAC–DC system
In the Figure–5.23 below, the participation factors of the generators in the modes 21
and 22 is depicted. From the bar plot, it is clear that the generators G3 and G4 have the
maximum participation in this mode. Thus, this mode is a local mode corresponding to area–2
as the generators G3 and G4 belong to area–2.
Figure 5:23–Participation factors local area mode–2 HVAC–DC system
In the compass plot in Figure–5.24, the right Eigenvectors of the mode are plotted.
From the figure it is clearly observed that the generators G3 and G4 are anti–phase to each and
the generator G4 is more observable compared to generator G3 as G4 is of lower inertia than
G3.
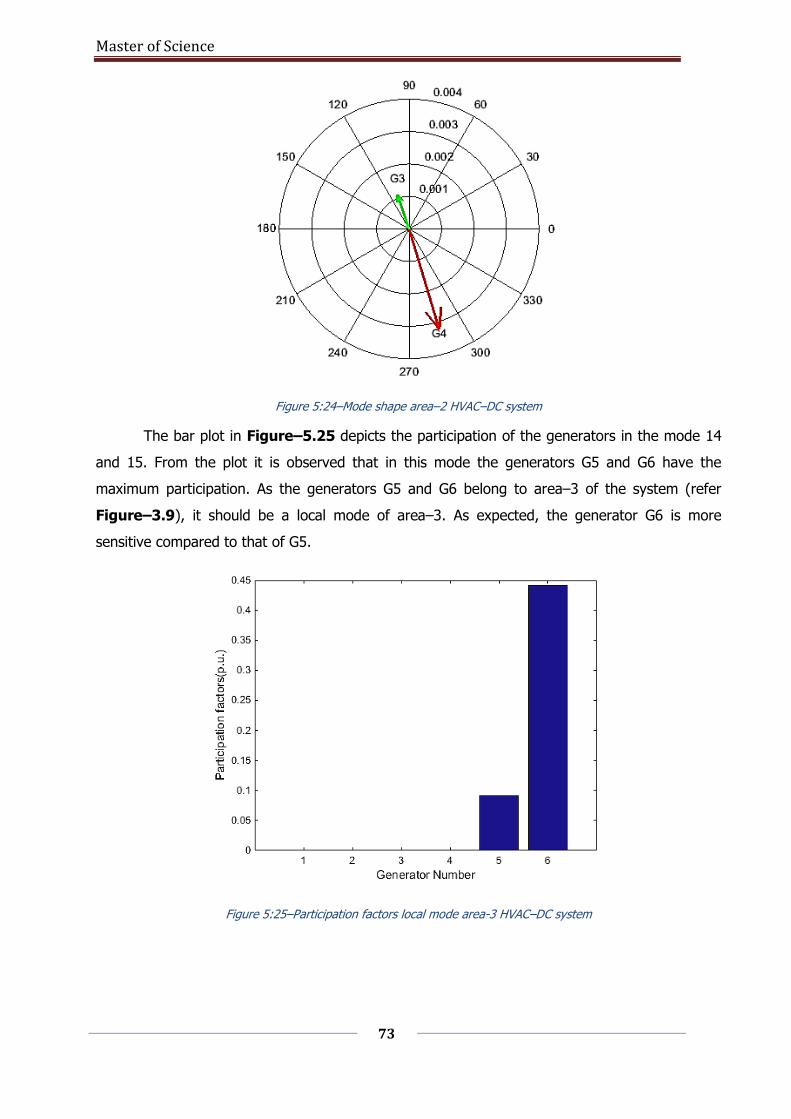
Master of Science
73
Figure 5:24–Mode shape area–2 HVAC–DC system
The bar plot in Figure–5.25 depicts the participation of the generators in the mode 14
and 15. From the plot it is observed that in this mode the generators G5 and G6 have the
maximum participation. As the generators G5 and G6 belong to area–3 of the system (refer
Figure–3.9), it should be a local mode of area–3. As expected, the generator G6 is more
sensitive compared to that of G5.
Figure 5:25–Participation factors local mode area-3 HVAC–DC system
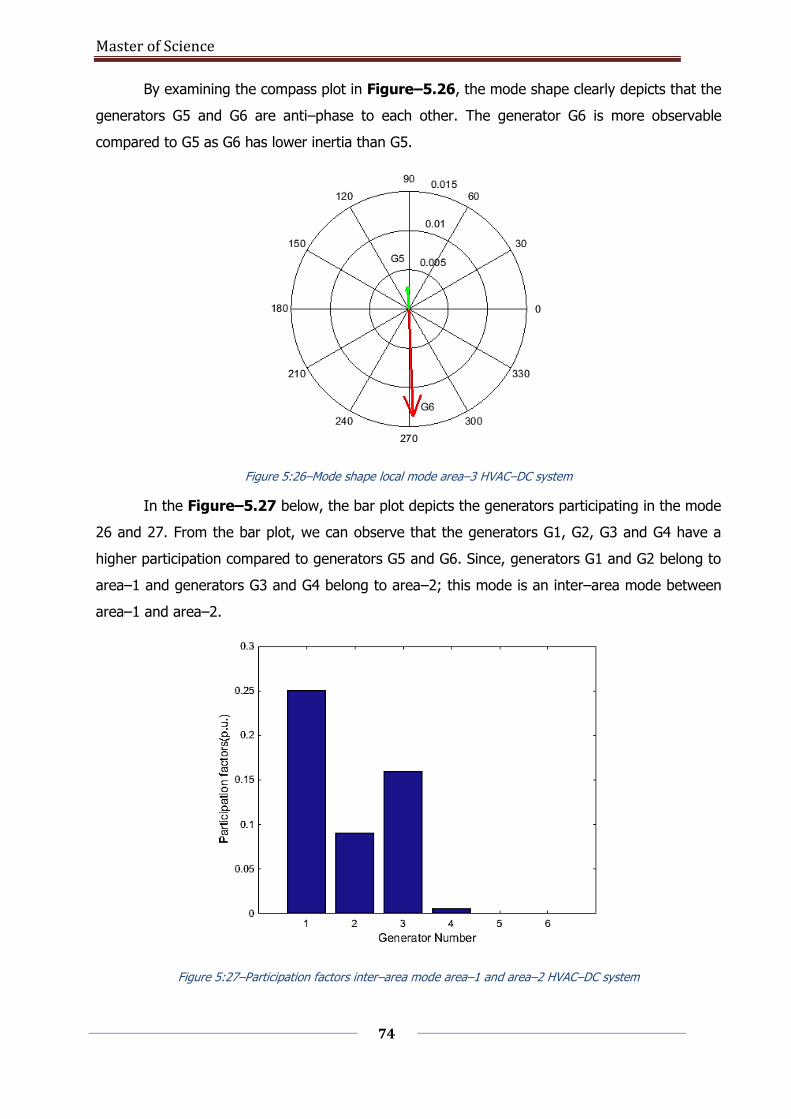
Master of Science
74
By examining the compass plot in Figure–5.26, the mode shape clearly depicts that the
generators G5 and G6 are anti–phase to each other. The generator G6 is more observable
compared to G5 as G6 has lower inertia than G5.
Figure 5:26–Mode shape local mode area–3 HVAC–DC system
In the Figure–5.27 below, the bar plot depicts the generators participating in the mode
26 and 27. From the bar plot, we can observe that the generators G1, G2, G3 and G4 have a
higher participation compared to generators G5 and G6. Since, generators G1 and G2 belong to
area–1 and generators G3 and G4 belong to area–2; this mode is an inter–area mode between
area–1 and area–2.
Figure 5:27–Participation factors inter–area mode area–1 and area–2 HVAC–DC system
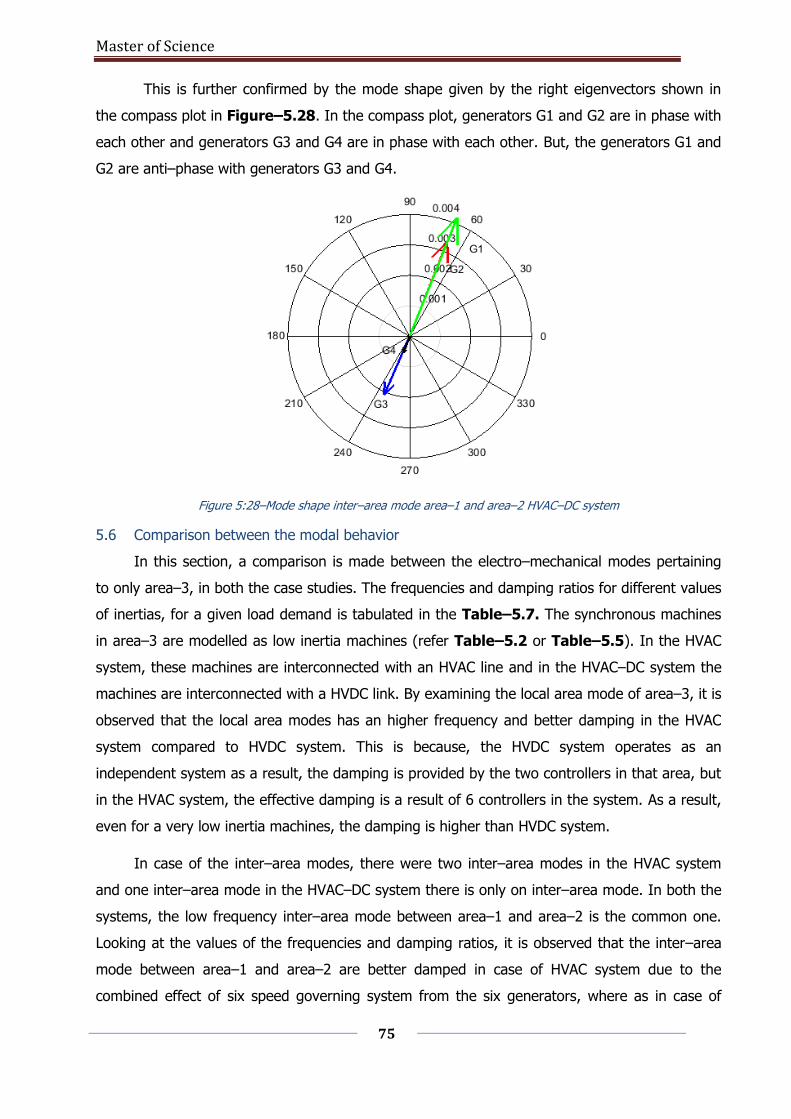
Master of Science
75
This is further confirmed by the mode shape given by the right eigenvectors shown in
the compass plot in Figure–5.28. In the compass plot, generators G1 and G2 are in phase with
each other and generators G3 and G4 are in phase with each other. But, the generators G1 and
G2 are anti–phase with generators G3 and G4.
Figure 5:28–Mode shape inter–area mode area–1 and area–2 HVAC–DC system
5.6 Comparison between the modal behavior
In this section, a comparison is made between the electro–mechanical modes pertaining
to only area–3, in both the case studies. The frequencies and damping ratios for different values
of inertias, for a given load demand is tabulated in the Table–5.7. The synchronous machines
in area–3 are modelled as low inertia machines (refer Table–5.2 or Table–5.5). In the HVAC
system, these machines are interconnected with an HVAC line and in the HVAC–DC system the
machines are interconnected with a HVDC link. By examining the local area mode of area–3, it is
observed that the local area modes has an higher frequency and better damping in the HVAC
system compared to HVDC system. This is because, the HVDC system operates as an
independent system as a result, the damping is provided by the two controllers in that area, but
in the HVAC system, the effective damping is a result of 6 controllers in the system. As a result,
even for a very low inertia machines, the damping is higher than HVDC system.
In case of the inter–area modes, there were two inter–area modes in the HVAC system
and one inter–area mode in the HVAC–DC system there is only on inter–area mode. In both the
systems, the low frequency inter–area mode between area–1 and area–2 is the common one.
Looking at the values of the frequencies and damping ratios, it is observed that the inter–area
mode between area–1 and area–2 are better damped in case of HVAC system due to the
combined effect of six speed governing system from the six generators, where as in case of
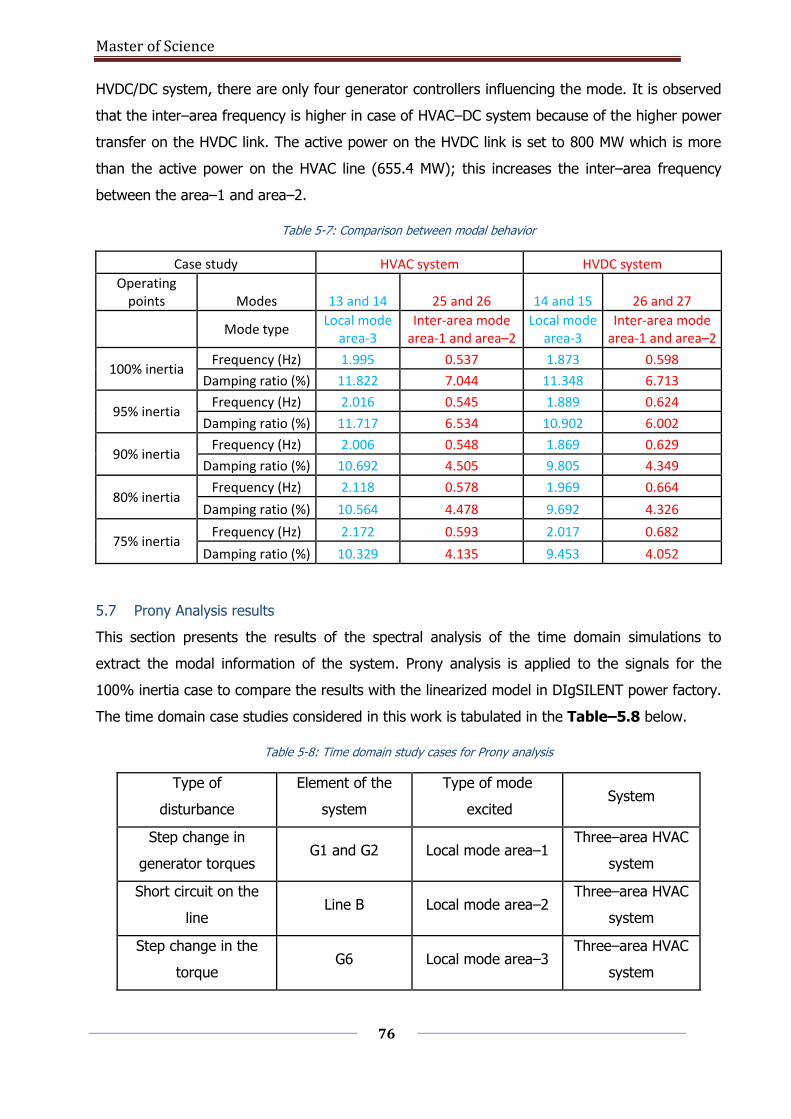
Master of Science
76
HVDC/DC system, there are only four generator controllers influencing the mode. It is observed
that the inter–area frequency is higher in case of HVAC–DC system because of the higher power
transfer on the HVDC link. The active power on the HVDC link is set to 800 MW which is more
than the active power on the HVAC line (655.4 MW); this increases the inter–area frequency
between the area–1 and area–2.
Table 5-7: Comparison between modal behavior
Case study HVAC system HVDC system
Operating points Modes 13 and 14 25 and 26 14 and 15 26 and 27
Mode type
Local mode area-3
Inter-area mode area-1 and area–2
Local mode area-3
Inter-area mode area-1 and area–2
100% inertia Frequency (Hz) 1.995 0.537 1.873 0.598
Damping ratio (%) 11.822 7.044 11.348 6.713
95% inertia Frequency (Hz) 2.016 0.545 1.889 0.624
Damping ratio (%) 11.717 6.534 10.902 6.002
90% inertia Frequency (Hz) 2.006 0.548 1.869 0.629
Damping ratio (%) 10.692 4.505 9.805 4.349
80% inertia Frequency (Hz) 2.118 0.578 1.969 0.664
Damping ratio (%) 10.564 4.478 9.692 4.326
75% inertia Frequency (Hz) 2.172 0.593 2.017 0.682
Damping ratio (%) 10.329 4.135 9.453 4.052
5.7 Prony Analysis results
This section presents the results of the spectral analysis of the time domain simulations to
extract the modal information of the system. Prony analysis is applied to the signals for the
100% inertia case to compare the results with the linearized model in DIgSILENT power factory.
The time domain case studies considered in this work is tabulated in the Table–5.8 below.
Table 5-8: Time domain study cases for Prony analysis
Type of
disturbance
Element of the
system
Type of mode
excited System
Step change in
generator torques G1 and G2 Local mode area–1
Three–area HVAC
system
Short circuit on the
line Line B Local mode area–2
Three–area HVAC
system
Step change in the
torque G6 Local mode area–3
Three–area HVAC
system
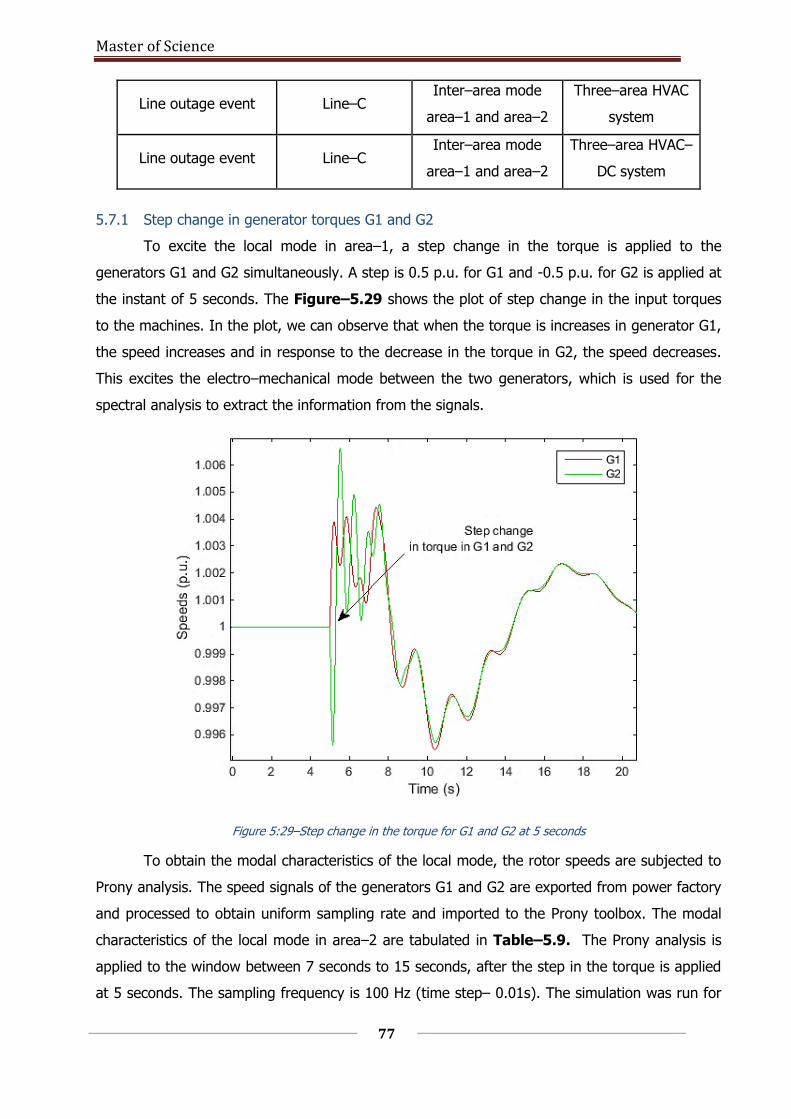
Master of Science
77
Line outage event Line–C Inter–area mode
area–1 and area–2
Three–area HVAC
system
Line outage event Line–C Inter–area mode
area–1 and area–2
Three–area HVAC–
DC system
5.7.1 Step change in generator torques G1 and G2
To excite the local mode in area–1, a step change in the torque is applied to the
generators G1 and G2 simultaneously. A step is 0.5 p.u. for G1 and -0.5 p.u. for G2 is applied at
the instant of 5 seconds. The Figure–5.29 shows the plot of step change in the input torques
to the machines. In the plot, we can observe that when the torque is increases in generator G1,
the speed increases and in response to the decrease in the torque in G2, the speed decreases.
This excites the electro–mechanical mode between the two generators, which is used for the
spectral analysis to extract the information from the signals.
Figure 5:29–Step change in the torque for G1 and G2 at 5 seconds
To obtain the modal characteristics of the local mode, the rotor speeds are subjected to
Prony analysis. The speed signals of the generators G1 and G2 are exported from power factory
and processed to obtain uniform sampling rate and imported to the Prony toolbox. The modal
characteristics of the local mode in area–2 are tabulated in Table–5.9. The Prony analysis is
applied to the window between 7 seconds to 15 seconds, after the step in the torque is applied
at 5 seconds. The sampling frequency is 100 Hz (time step– 0.01s). The simulation was run for
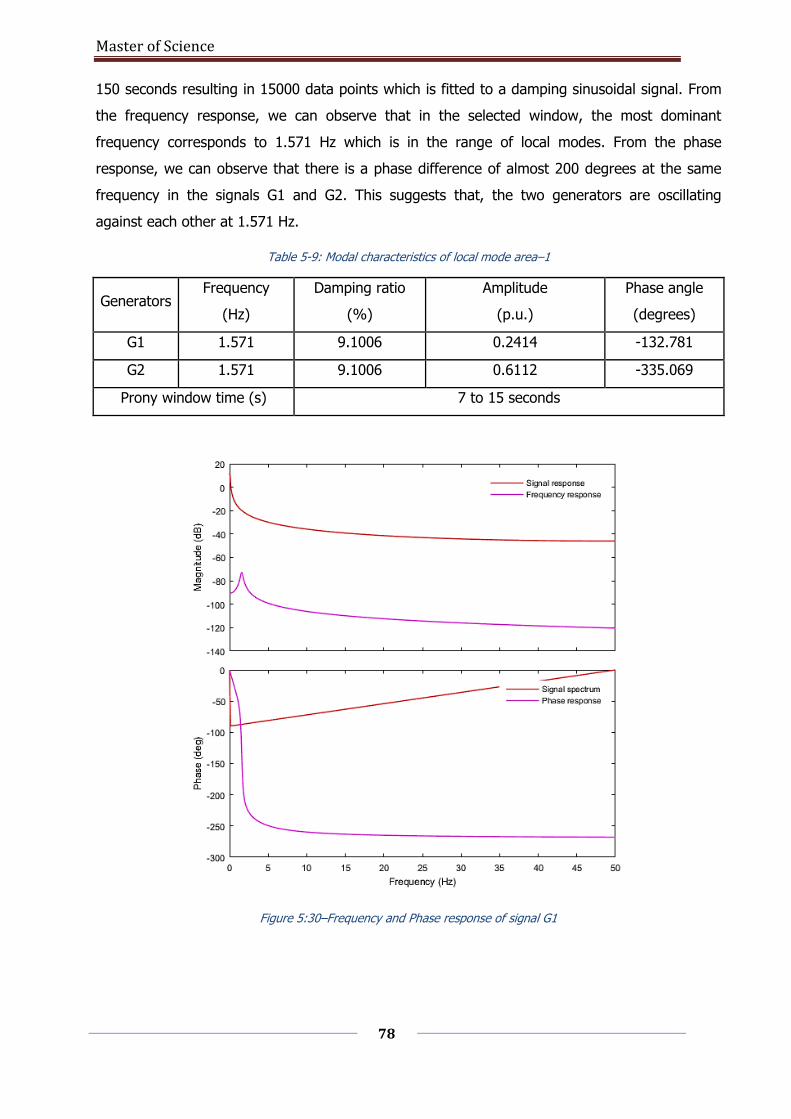
Master of Science
78
150 seconds resulting in 15000 data points which is fitted to a damping sinusoidal signal. From
the frequency response, we can observe that in the selected window, the most dominant
frequency corresponds to 1.571 Hz which is in the range of local modes. From the phase
response, we can observe that there is a phase difference of almost 200 degrees at the same
frequency in the signals G1 and G2. This suggests that, the two generators are oscillating
against each other at 1.571 Hz.
Table 5-9: Modal characteristics of local mode area–1
Generators Frequency
(Hz)
Damping ratio
(%)
Amplitude
(p.u.)
Phase angle
(degrees)
G1 1.571 9.1006 0.2414 -132.781
G2 1.571 9.1006 0.6112 -335.069
Prony window time (s) 7 to 15 seconds
Figure 5:30–Frequency and Phase response of signal G1
Master of Science
79
Figure 5:31–Frequency and Phase response of signal G2
From the frequency responses in the Figure–5.30 and Figure–5.31, it is observed
that, in the chosen window, the most dominant frequency is at 1.571 Hz. Both the generators
are oscillating at that frequency. From the phase responses it is observed that the generators
have a phase difference of almost 203 degrees. This means that, the generators are oscillating
anti–phase to each other in this mode. From the amplitudes, it is clear that the generator G2
has higher amplitude compared to that of generator G1 due to low inertia.
5.7.2 Short circuit on the line
In the Figure–5.32, a short–circuit is applied on Line B in the HVAC system at 1
seconds and it is cleared after 200ms. Since Line B is in the area–2 of the HVAC system (refer
Figure–3.8), the generators G3 and G4 starts to swing against each other exciting the local
area mode. Once, there is a short circuit, the lower inertia machine, in this case G4 swings at
higher amplitude compared to G3. This explains the vulnerability of low inertia machines
towards severe faults. To extract the modal information, the speed signals of the generators G3
and G4 are exported to the Prony toolbox from power factory. These signals are first processed
to obtain a uniform sampling frequency and imported to the Prony toolbox.
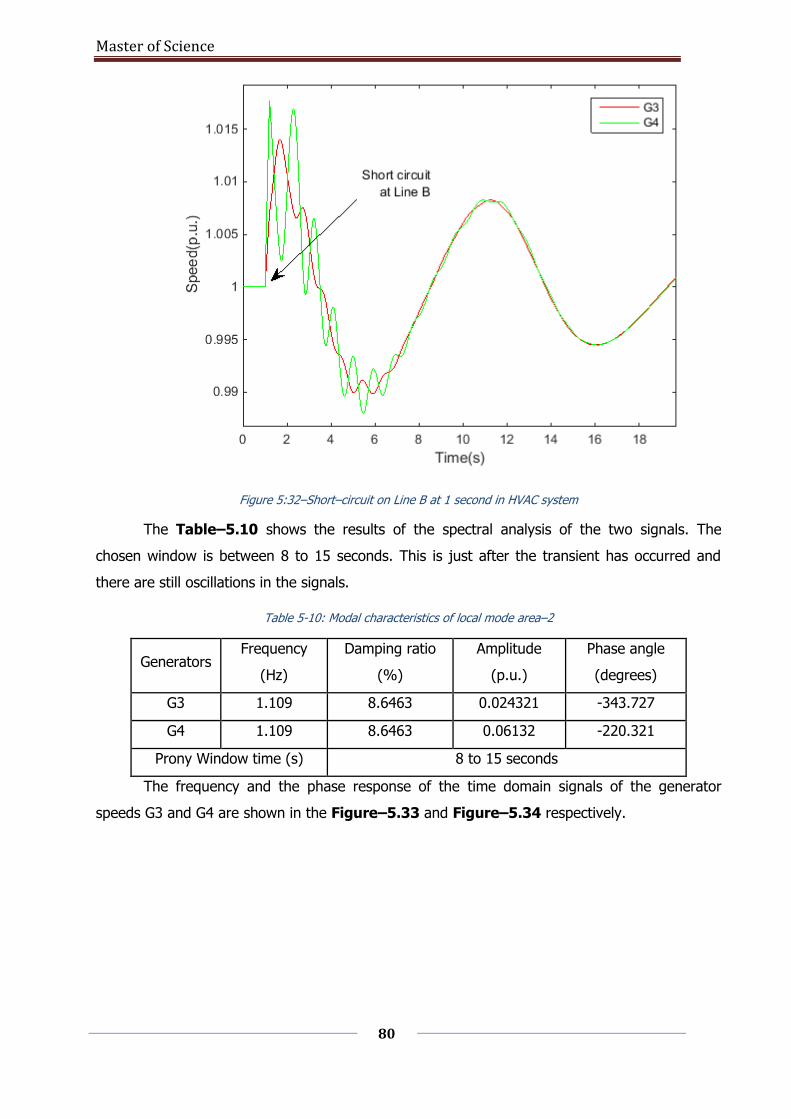
Master of Science
80
Figure 5:32–Short–circuit on Line B at 1 second in HVAC system
The Table–5.10 shows the results of the spectral analysis of the two signals. The
chosen window is between 8 to 15 seconds. This is just after the transient has occurred and
there are still oscillations in the signals.
Table 5-10: Modal characteristics of local mode area–2
Generators Frequency
(Hz)
Damping ratio
(%)
Amplitude
(p.u.)
Phase angle
(degrees)
G3 1.109 8.6463 0.024321 -343.727
G4 1.109 8.6463 0.06132 -220.321
Prony Window time (s) 8 to 15 seconds
The frequency and the phase response of the time domain signals of the generator
speeds G3 and G4 are shown in the Figure–5.33 and Figure–5.34 respectively.
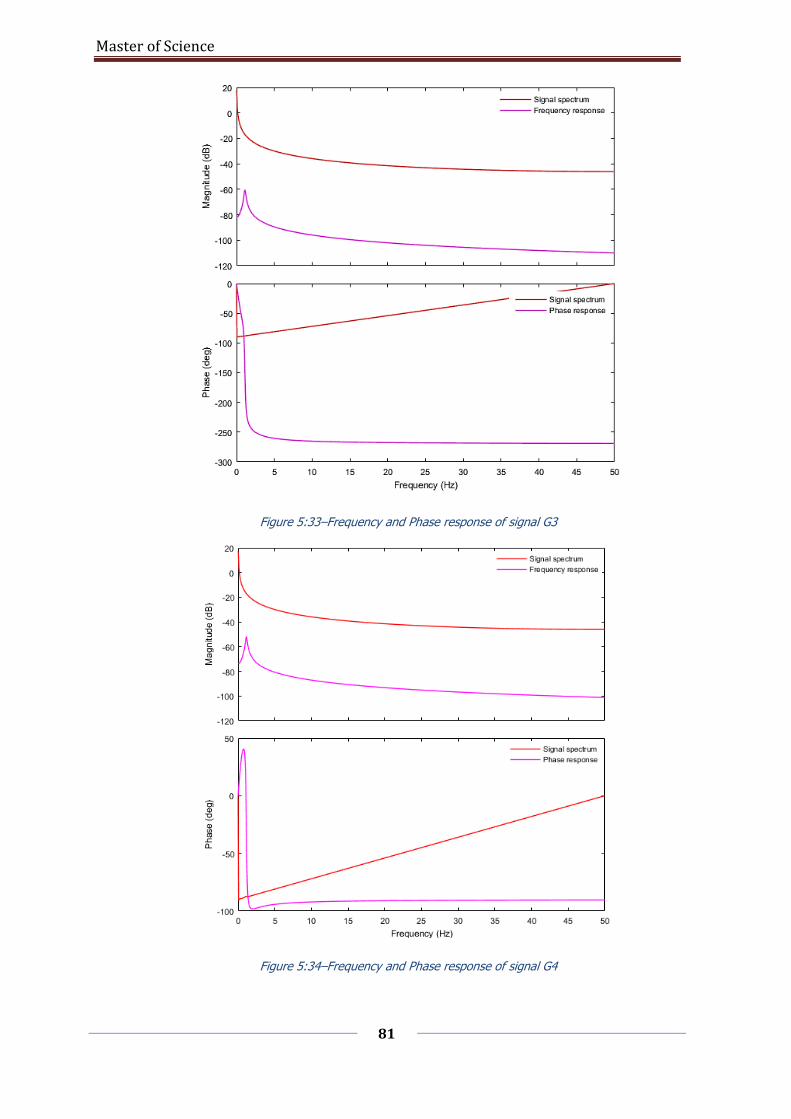
Master of Science
81
Figure 5:33–Frequency and Phase response of signal G3
Figure 5:34–Frequency and Phase response of signal G4
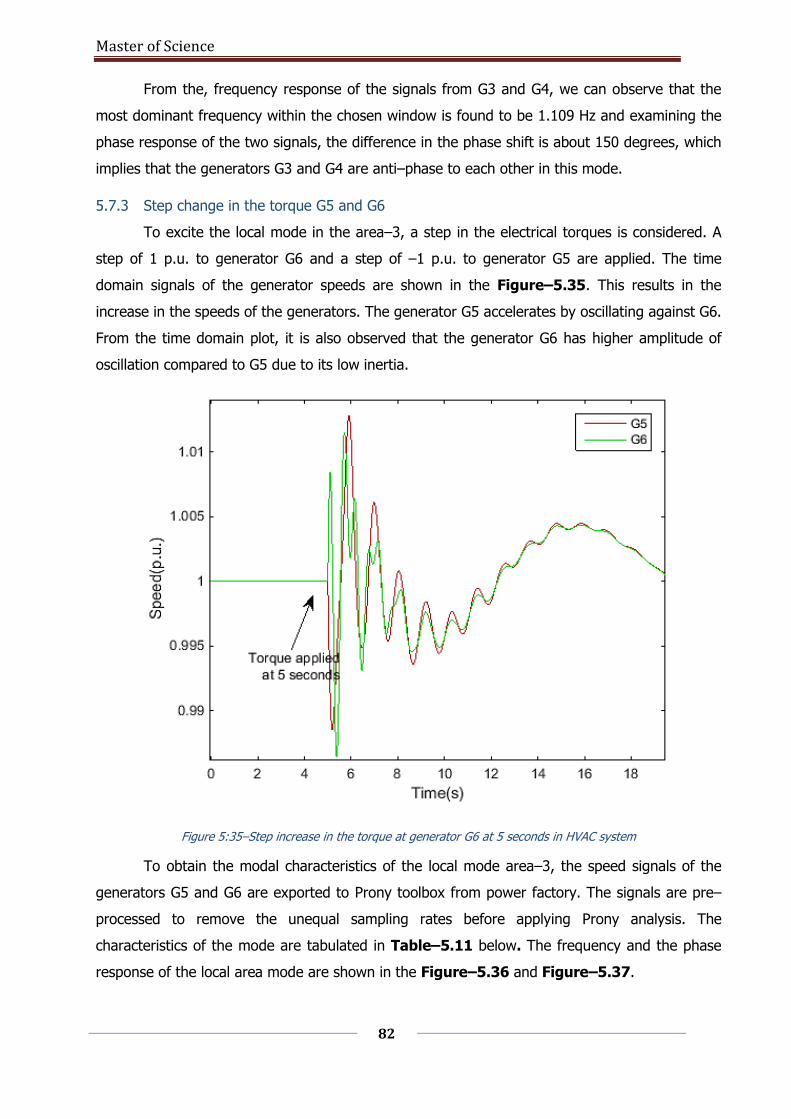
Master of Science
82
From the, frequency response of the signals from G3 and G4, we can observe that the
most dominant frequency within the chosen window is found to be 1.109 Hz and examining the
phase response of the two signals, the difference in the phase shift is about 150 degrees, which
implies that the generators G3 and G4 are anti–phase to each other in this mode.
5.7.3 Step change in the torque G5 and G6
To excite the local mode in the area–3, a step in the electrical torques is considered. A
step of 1 p.u. to generator G6 and a step of –1 p.u. to generator G5 are applied. The time
domain signals of the generator speeds are shown in the Figure–5.35. This results in the
increase in the speeds of the generators. The generator G5 accelerates by oscillating against G6.
From the time domain plot, it is also observed that the generator G6 has higher amplitude of
oscillation compared to G5 due to its low inertia.
Figure 5:35–Step increase in the torque at generator G6 at 5 seconds in HVAC system
To obtain the modal characteristics of the local mode area–3, the speed signals of the
generators G5 and G6 are exported to Prony toolbox from power factory. The signals are pre–
processed to remove the unequal sampling rates before applying Prony analysis. The
characteristics of the mode are tabulated in Table–5.11 below. The frequency and the phase
response of the local area mode are shown in the Figure–5.36 and Figure–5.37.

Master of Science
83
Table 5-11: Characteristics of the local mode area–3
Generators Frequency
(Hz)
Damping ratio
(%)
Amplitude
(p.u.)
Phase
angle
(degrees)
G5 1.763 5.389 0.01032 -204.087
G6 1.763 5.389 0.02182 -358.234
Prony window time (s) 5.5 to 8
Figure 5:36–Frequency and Phase response of signal G5 local mode area–3 HVAC system
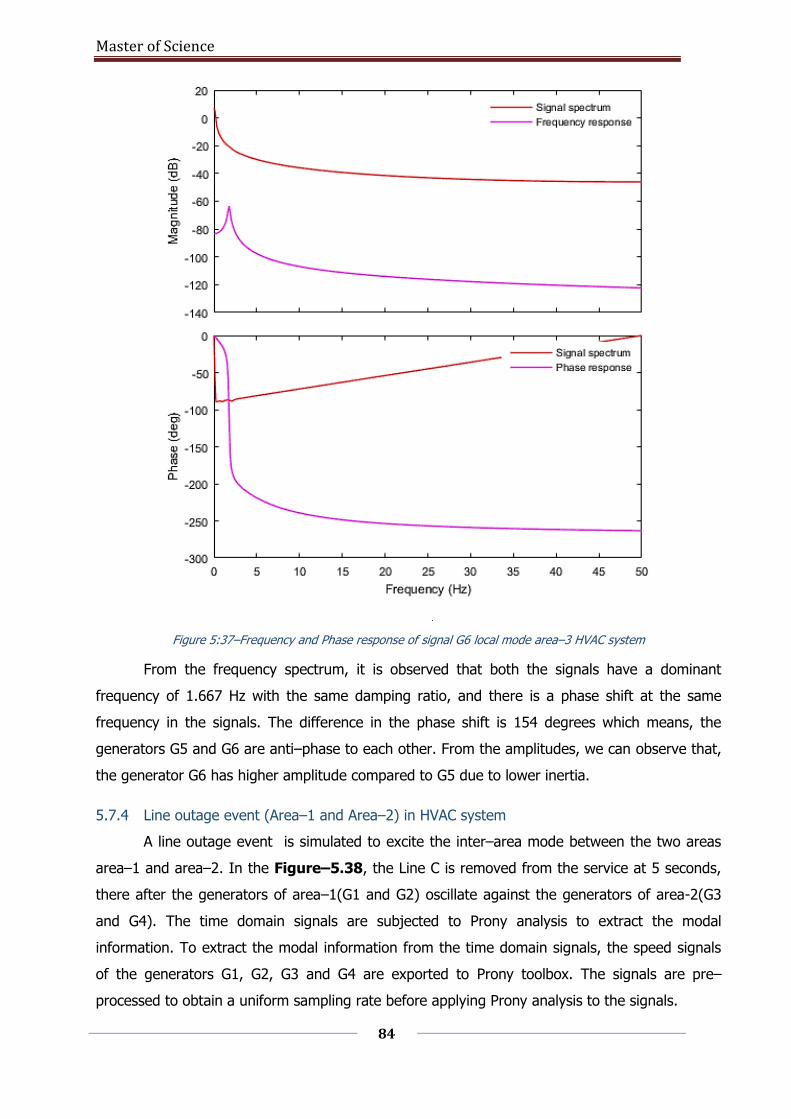
Master of Science
84
11
Figure 5:37–Frequency and Phase response of signal G6 local mode area–3 HVAC system
From the frequency spectrum, it is observed that both the signals have a dominant
frequency of 1.667 Hz with the same damping ratio, and there is a phase shift at the same
frequency in the signals. The difference in the phase shift is 154 degrees which means, the
generators G5 and G6 are anti–phase to each other. From the amplitudes, we can observe that,
the generator G6 has higher amplitude compared to G5 due to lower inertia.
5.7.4 Line outage event (Area–1 and Area–2) in HVAC system
A line outage event is simulated to excite the inter–area mode between the two areas
area–1 and area–2. In the Figure–5.38, the Line C is removed from the service at 5 seconds,
there after the generators of area–1(G1 and G2) oscillate against the generators of area-2(G3
and G4). The time domain signals are subjected to Prony analysis to extract the modal
information. To extract the modal information from the time domain signals, the speed signals
of the generators G1, G2, G3 and G4 are exported to Prony toolbox. The signals are pre–
processed to obtain a uniform sampling rate before applying Prony analysis to the signals.
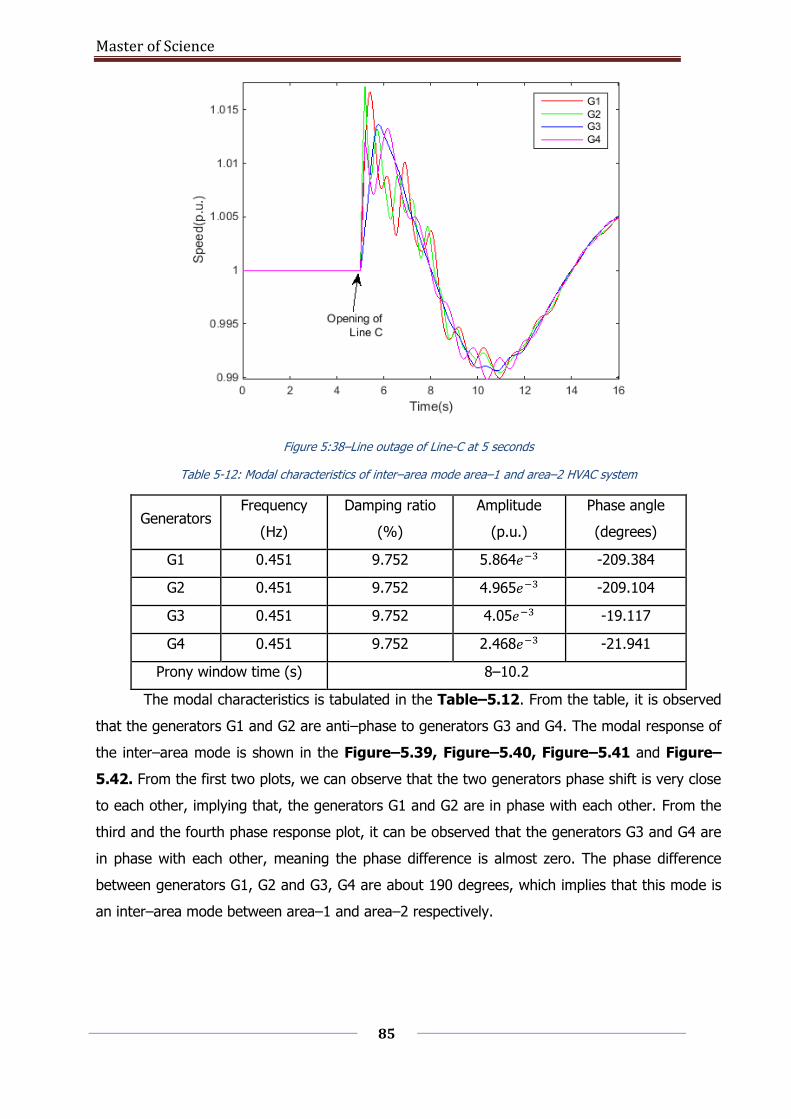
Master of Science
85
Figure 5:38–Line outage of Line-C at 5 seconds
Table 5-12: Modal characteristics of inter–area mode area–1 and area–2 HVAC system
Generators Frequency
(Hz)
Damping ratio
(%)
Amplitude
(p.u.)
Phase angle
(degrees)
G1 0.451 9.752 5.864𝑒−3 -209.384
G2 0.451 9.752 4.965𝑒−3 -209.104
G3 0.451 9.752 4.05𝑒−3 -19.117
G4 0.451 9.752 2.468𝑒−3 -21.941
Prony window time (s) 8–10.2
The modal characteristics is tabulated in the Table–5.12. From the table, it is observed
that the generators G1 and G2 are anti–phase to generators G3 and G4. The modal response of
the inter–area mode is shown in the Figure–5.39, Figure–5.40, Figure–5.41 and Figure–
5.42. From the first two plots, we can observe that the two generators phase shift is very close
to each other, implying that, the generators G1 and G2 are in phase with each other. From the
third and the fourth phase response plot, it can be observed that the generators G3 and G4 are
in phase with each other, meaning the phase difference is almost zero. The phase difference
between generators G1, G2 and G3, G4 are about 190 degrees, which implies that this mode is
an inter–area mode between area–1 and area–2 respectively.
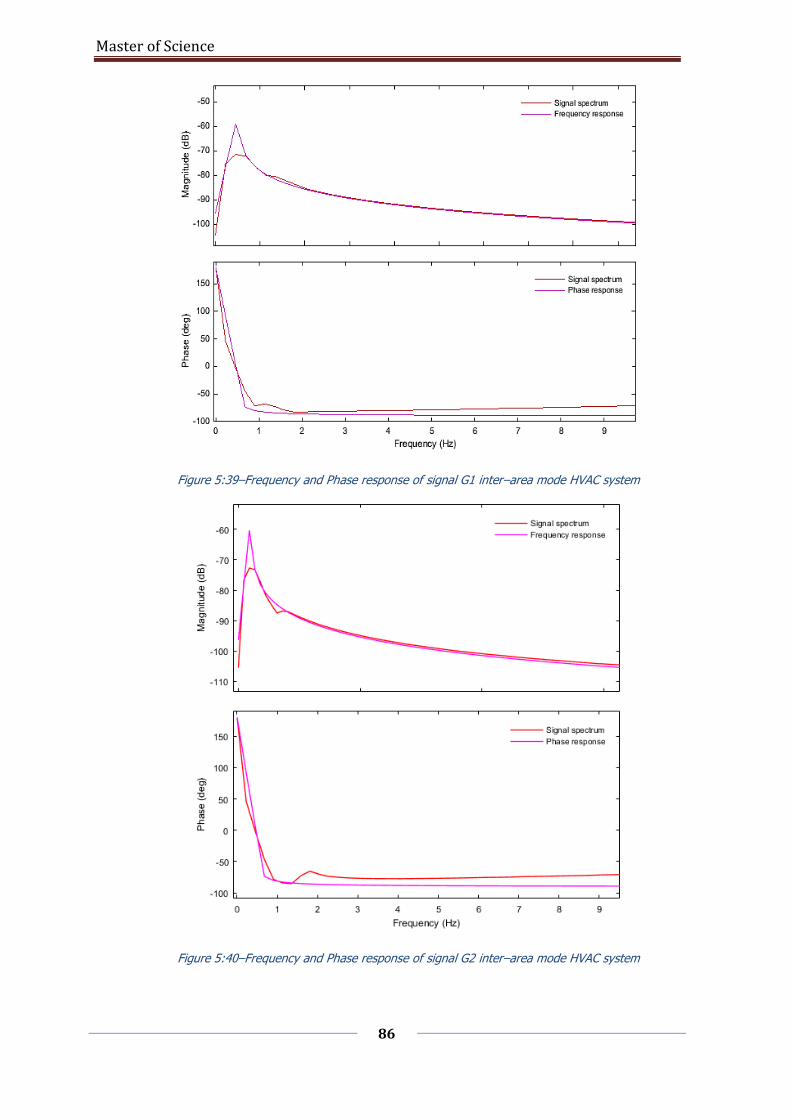
Master of Science
86
Figure 5:39–Frequency and Phase response of signal G1 inter–area mode HVAC system
Figure 5:40–Frequency and Phase response of signal G2 inter–area mode HVAC system
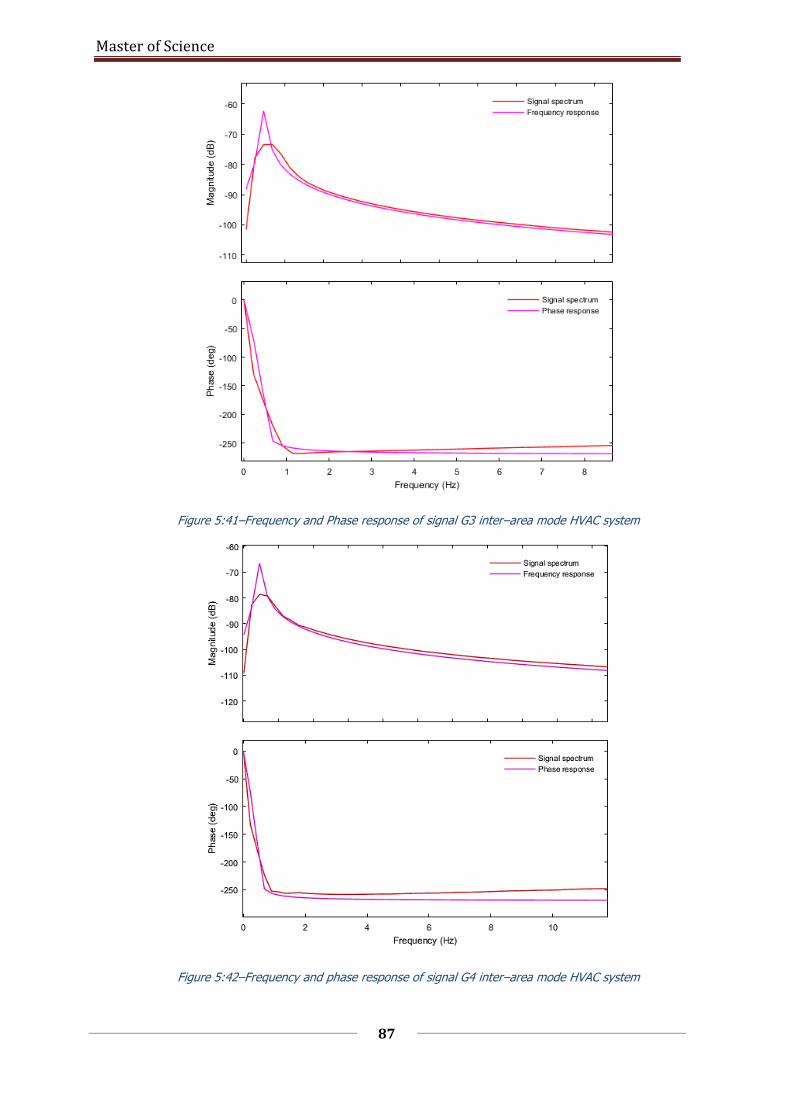
Master of Science
87
Figure 5:41–Frequency and Phase response of signal G3 inter–area mode HVAC system
Figure 5:42–Frequency and phase response of signal G4 inter–area mode HVAC system
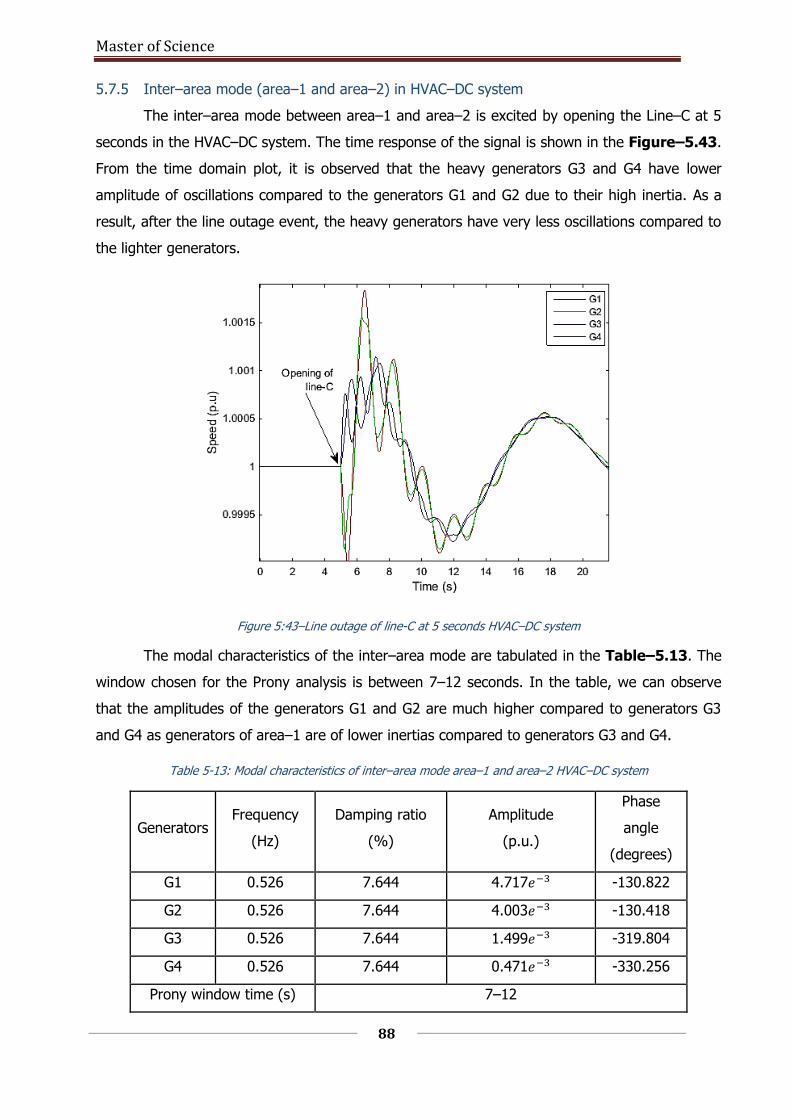
Master of Science
88
5.7.5 Inter–area mode (area–1 and area–2) in HVAC–DC system
The inter–area mode between area–1 and area–2 is excited by opening the Line–C at 5
seconds in the HVAC–DC system. The time response of the signal is shown in the Figure–5.43.
From the time domain plot, it is observed that the heavy generators G3 and G4 have lower
amplitude of oscillations compared to the generators G1 and G2 due to their high inertia. As a
result, after the line outage event, the heavy generators have very less oscillations compared to
the lighter generators.
Figure 5:43–Line outage of line-C at 5 seconds HVAC–DC system
The modal characteristics of the inter–area mode are tabulated in the Table–5.13. The
window chosen for the Prony analysis is between 7–12 seconds. In the table, we can observe
that the amplitudes of the generators G1 and G2 are much higher compared to generators G3
and G4 as generators of area–1 are of lower inertias compared to generators G3 and G4.
Table 5-13: Modal characteristics of inter–area mode area–1 and area–2 HVAC–DC system
Generators Frequency
(Hz)
Damping ratio
(%)
Amplitude
(p.u.)
Phase
angle
(degrees)
G1 0.526 7.644 4.717𝑒−3 -130.822
G2 0.526 7.644 4.003𝑒−3 -130.418
G3 0.526 7.644 1.499𝑒−3 -319.804
G4 0.526 7.644 0.471𝑒−3 -330.256
Prony window time (s) 7–12
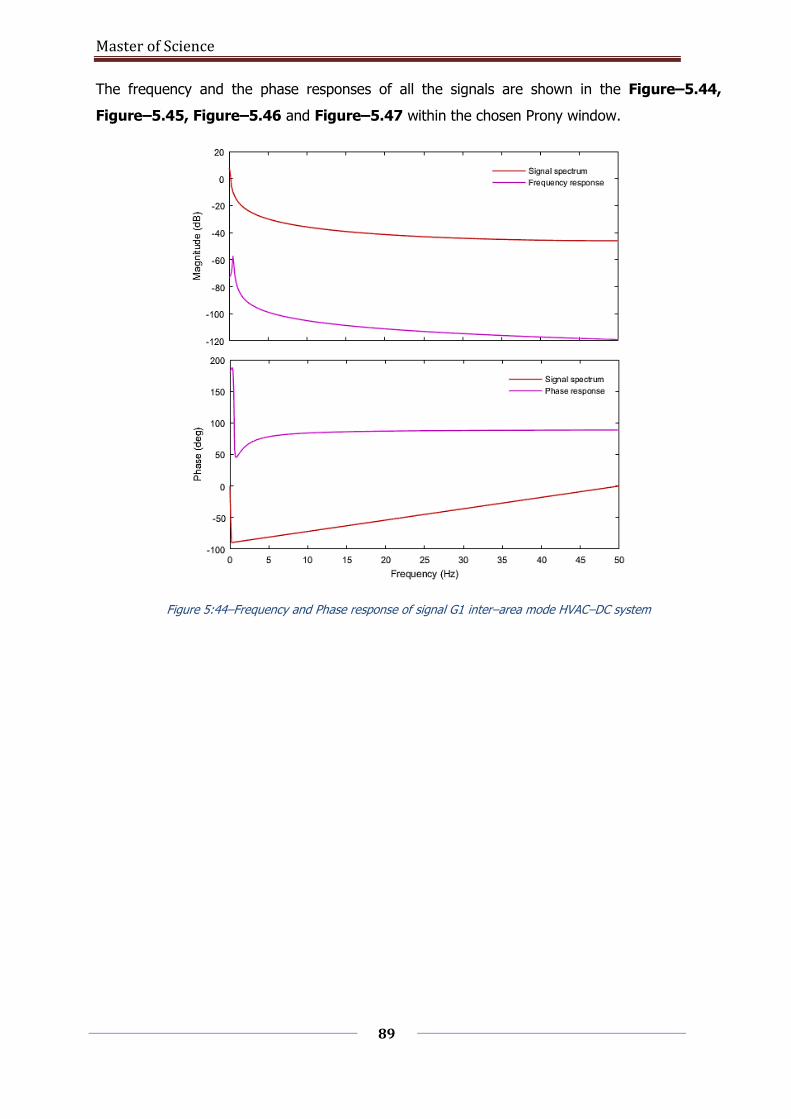
Master of Science
89
The frequency and the phase responses of all the signals are shown in the Figure–5.44,
Figure–5.45, Figure–5.46 and Figure–5.47 within the chosen Prony window.
Figure 5:44–Frequency and Phase response of signal G1 inter–area mode HVAC–DC system
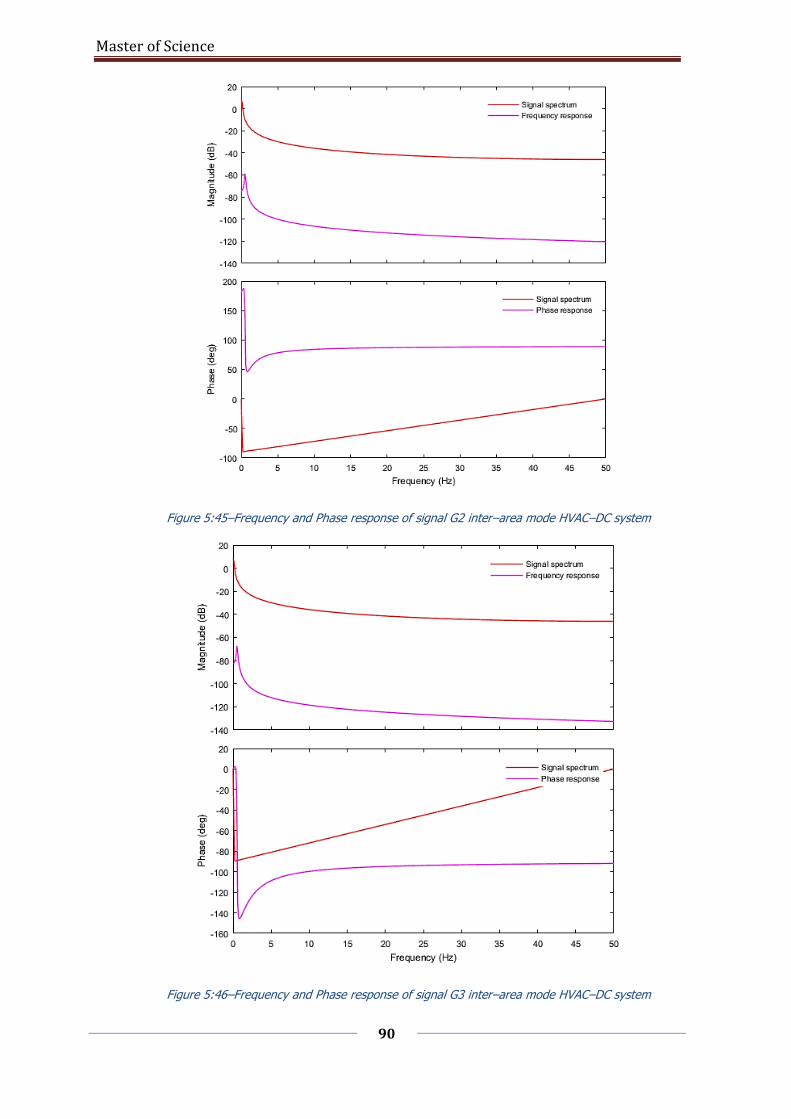
Master of Science
90
Figure 5:45–Frequency and Phase response of signal G2 inter–area mode HVAC–DC system
Figure 5:46–Frequency and Phase response of signal G3 inter–area mode HVAC–DC system
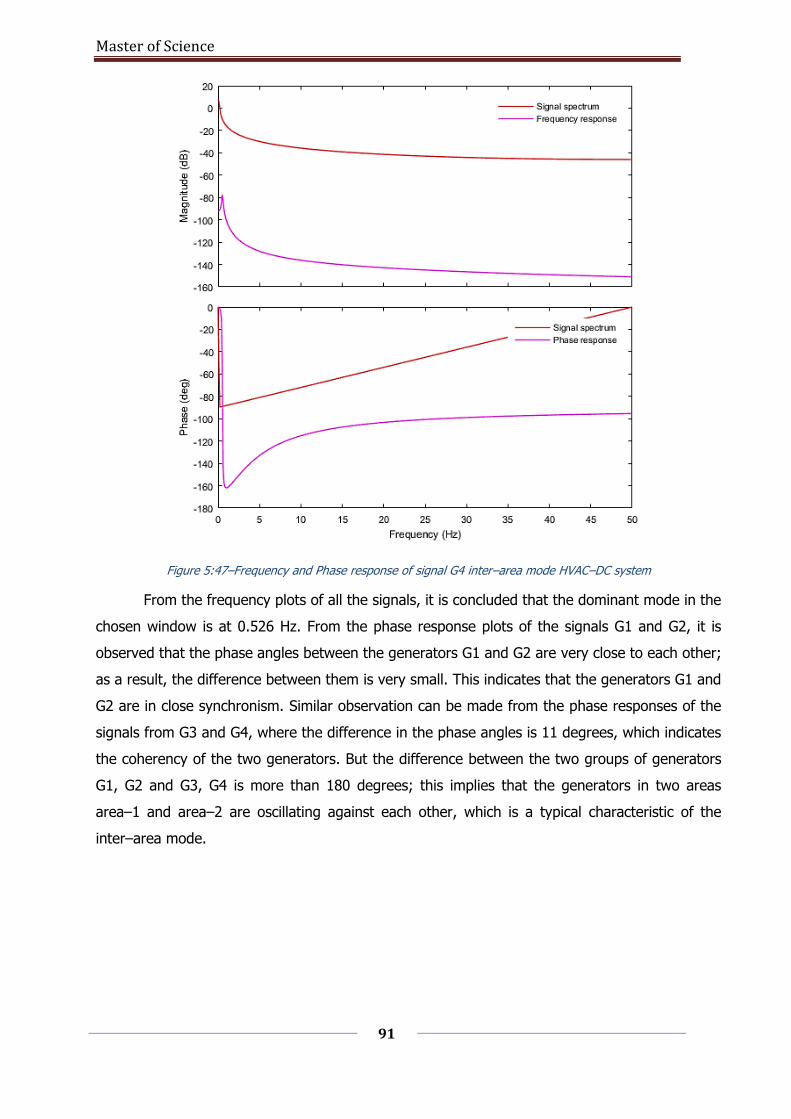
Master of Science
91
Figure 5:47–Frequency and Phase response of signal G4 inter–area mode HVAC–DC system
From the frequency plots of all the signals, it is concluded that the dominant mode in the
chosen window is at 0.526 Hz. From the phase response plots of the signals G1 and G2, it is
observed that the phase angles between the generators G1 and G2 are very close to each other;
as a result, the difference between them is very small. This indicates that the generators G1 and
G2 are in close synchronism. Similar observation can be made from the phase responses of the
signals from G3 and G4, where the difference in the phase angles is 11 degrees, which indicates
the coherency of the two generators. But the difference between the two groups of generators
G1, G2 and G3, G4 is more than 180 degrees; this implies that the generators in two areas
area–1 and area–2 are oscillating against each other, which is a typical characteristic of the
inter–area mode.
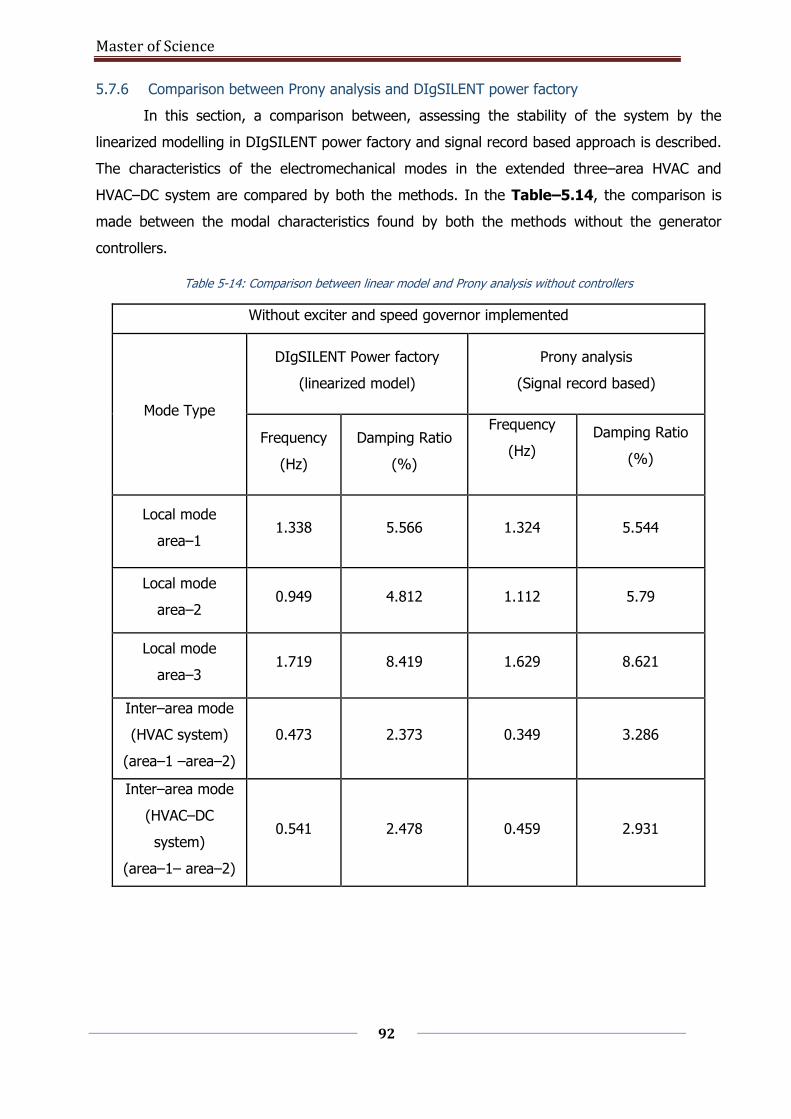
Master of Science
92
5.7.6 Comparison between Prony analysis and DIgSILENT power factory
In this section, a comparison between, assessing the stability of the system by the
linearized modelling in DIgSILENT power factory and signal record based approach is described.
The characteristics of the electromechanical modes in the extended three–area HVAC and
HVAC–DC system are compared by both the methods. In the Table–5.14, the comparison is
made between the modal characteristics found by both the methods without the generator
controllers.
Table 5-14: Comparison between linear model and Prony analysis without controllers
Without exciter and speed governor implemented
Mode Type
DIgSILENT Power factory
(linearized model)
Prony analysis
(Signal record based)
Frequency
(Hz)
Damping Ratio
(%)
Frequency
(Hz)
Damping Ratio
(%)
Local mode
area–1 1.338 5.566 1.324 5.544
Local mode
area–2 0.949 4.812 1.112 5.79
Local mode
area–3 1.719 8.419 1.629 8.621
Inter–area mode
(HVAC system)
(area–1 –area–2)
0.473 2.373 0.349 3.286
Inter–area mode
(HVAC–DC
system)
(area–1– area–2)
0.541 2.478 0.459 2.931

Master of Science
93
In Table–5.15 below, the comparison is made between the modal characteristics with
the exciter and speed governor implemented to all the generators.
Table 5-15: Comparison between linear model and Prony analysis with controllers
With Exciter and speed governor implemented
Mode Type
DIgSILENT Power factory
(linearized model)
Prony analysis
(Signal record based)
Frequency
(Hz)
Damping Ratio
(%)
Frequency
(Hz)
Damping Ratio
(%)
Local mode
area–1 1.538 8.383 1.571 9.100
Local mode
area–2 1.093 6.724 1.109 8.646
Local mode
area–3 1.995 11.806 1.763 5.389
Inter–area mode
(HVAC system)
(area–1–area–2)
0.537 7.044 0.451 9.752
Inter–area mode
(HVAC–DC
system)
(area–1–area–2)
0.598 6.713 0.526 7.644
It can be observed that the values of frequencies and damping ratios of the
electromechanical modes determined by linearized models in DIgSILENT power factory closely
matches with the signal record based approach when the controllers are not implemented. This
is mainly, because of the way the control system is implemented in the system. In the control
system definition (refer Figure–3.3 and Figure–3.5), there is an outer loop which decouples
the PI controller. As a result, during the linearization process, the effect of the controllers is not
effective. But when the signals are analyzed by Prony’s method, the effect of the controllers is
clearly evident resulting in higher values of damping ratios.
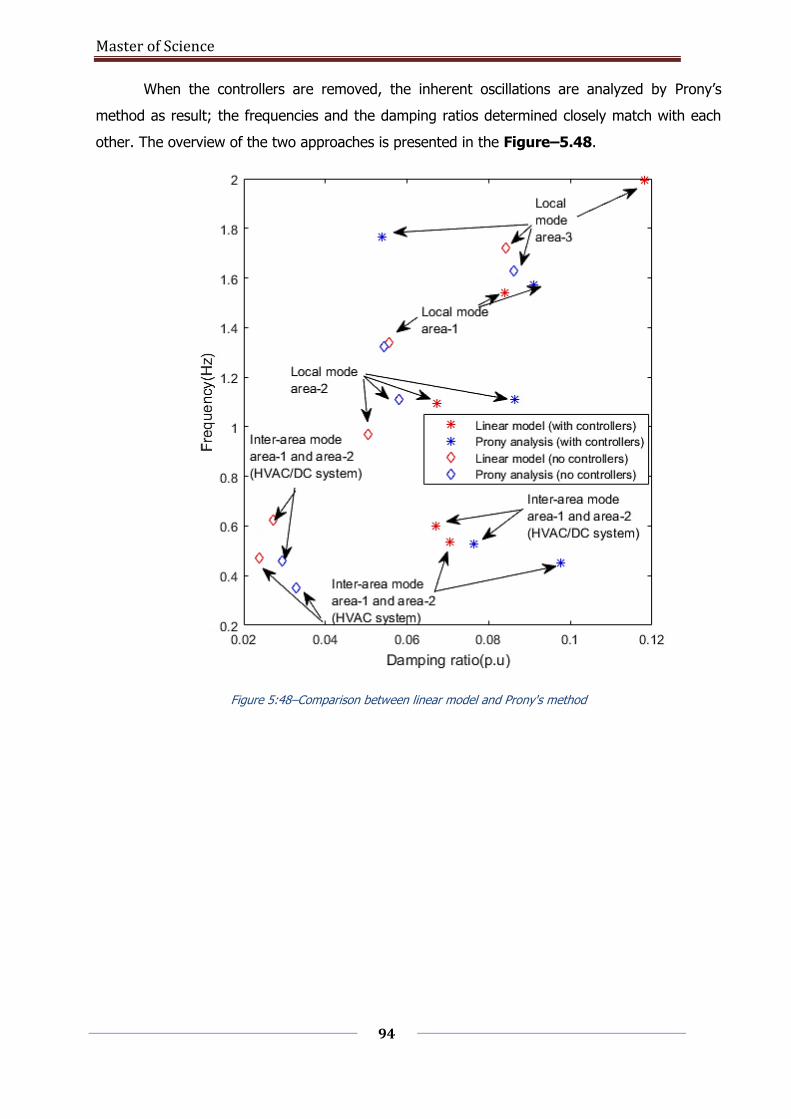
Master of Science
94
When the controllers are removed, the inherent oscillations are analyzed by Prony’s
method as result; the frequencies and the damping ratios determined closely match with each
other. The overview of the two approaches is presented in the Figure–5.48.
Figure 5:48–Comparison between linear model and Prony's method

Master of Science
95
Master of Science
96
6 Conclusions and Recommendations
In this chapter, the conclusions of this work are presented. The main objective of this thesis
work was to investigate the effect of machine inertia on the modal behavior of the system when
an HVDC link is incorporated to the existing grid. For this purpose, a classical two–area system
was implemented and thereafter, two study cases were developed. First study case was
introducing a third area with an HVAC tie line and the second study case was replacing the
HVDC tie line with a point–to point HVDC link. The modelling involved the implementation of
VSC–HVDC point–to–point link.
Different operating points were considered with respect to inertias of the synchronous
machines for a peak loaded condition to examine the sensitivity of the Eigenvalues towards
inertias. The Eigenvalue sensitivity towards the inertias of the machines was analyzed for both
the test cases developed.
Through the time–domain simulations, the modal information was extracted through
Prony analysis to validate and compare the results obtained. The Prony’s method is used in this
work is open source tool that is made available by PNNL laboratories. Hence, the modal
analysis module in DIgSILENT is validated with an independent Prony analysis tool. The error in
the determined values is because, in the Prony’s approach, a discretized time domain signal is
fitted to a curve with damped sinusoidal terms and this curve fitting is never a perfect match.
The other reason is due to manually determining the Prony window for extracting the
information about the dominant modes this would result is errors.
6.1 Conclusions
From this thesis work, the following conclusions are derived. The stability of the system is very
critical issue especially when the system is highly stressed. In such a stressed system,
monitoring the electromechanical modes is very important.
The damping of the modes depends on the dynamic elements of the system like the
speed governors and the exciters. The frequencies of the modes depend on the topology
of the network, operating conditions, loading conditions.
In both HVAC and HVAC–DC system, there are three local area modes belonging to each
area respectively. In these modes, the generators within an area swing against each
other. The low inertia machine is more sensitive hence swings with greater amplitude.
There are two inter–area modes exists when a third area is introduced with an HVAC tie–
line. One inter–area mode is between area–1 and area–2 and the other inter–area mode
is between area–1 and area-3.
Master of Science
97
In HVAC–DC system there is only one inter–area mode between area–1 and area–2 and
the second inter–area mode does not exist. This is because of the asynchronous nature
of the HVDC link.
In both the test cases, the damping of local modes is higher than that of the inter–area
modes.
Prony analysis can be very useful to determine the modal characteristics of power
systems, where the computation of the complete state matrix (A matrix) is unnecessary.
By Prony analysis an estimation of the dominant modes in the system through the
measured signals can be obtained, which is a less cumbersome process compared to
state–space modelling which involves solving complex differential equations.
6.2 Reflections
From the analysis, it is observed that, for analyzing small systems, linearized models are
very useful. The computation does not take much time due to less number of states.
For larger systems, with many states, developing the linearized models will be
cumbersome process, and during those situations the real time data from the system can be
utilized to study the system stability.
From the analysis, it can be concluded that, employing low inertia machines with an HVDC
link would be a safer option. This will make them less vulnerable to faults on the AC side of the
grid.
If the number of HVDC links is increased in a large grid, the local modes will be more
dominant ones, and it is easier to monitor them with local control mechanisms.
6.3 Future recommendations
In this thesis, two generic systems are developed from a reference system in a very well
structured simulation environment in power factory. These models are validated in both time
domain and the frequency domain.
In this thesis, a two–area reference system is extended to a three–area system by a
point–to–point HVDC link by modelling two–stage VSC converters. For large MTDC systems, with
more than one HVDC link, opting for MMC’s would be a better option to check system response
to faults and monitor the electro–mechanical modes within an area.
As the aim of the electrical power sector is to increase the penetration of the renewable
energy sources into the existing grids, the generators can be modeled as specific renewable
Master of Science
98
sources like wind turbines or hydro-power plants and the analysis for low inertia machines is to
be analyzed in detail.
A real power system is highly non–linear in nature and for the analysis purposes, it is linearized.
But, linearizing a huge system would be a difficult task, so for large systems, using advanced
technics like GMC’s (Geometric Measure of Controllability) or use of aggregated models would
give more reliable results.

Master of Science
99
Master of Science
100
Works Cited
[1] M. A. R.L. Sellick, "Comparison of HVDC Light (VSC) and HVDC Classic (LCC), Site
aspects for a MW,400kV HVDC transmission Scheme," in IET ACDC conference,
Brimingham, 2012.
[2] G. M.Klein, "A Fundamental study of inter-area oscillations in power systems," IEEE,
vol. 6, pp. 914-921, 1991.
[3] G. Rogers, Power System Oscillations, Massachusetts: Kluwer Academic Publishers,
2000.
[4] L. V. Y. Chompoobutrgool, "Identification of Power System Dominant Inter-area
oscillation paths," IEEE transactions on Power Systems, vol. 28, pp. 2798-2807,
2013.
[5] J. H. H. G. Yin.R, "Hybrid HVDC transmission topology for offshore windfarm
integration," Automation of electrical power systems, vol. 39(14), pp. 134-139, 2015.
[6] V. Mitra.P, "Dynamic Performance study of a HVDC grid using Real-Time Digital
Simulator," in RT and HIL Simulation Applications for Approaching Complexity in
Future Power and Energy Systems, Aachen, 2012.
[7] M. R. J. K. a. M. L.Shen, "The Effect of VSC HVDC Control and Operating Condition
on Dynamic Behaviour of Integrated AC/DC System," IEEE transactions on POwer
Delivery, 2015.
[8] A. B. T. P. J. A. V. M. M. I. Jose M.Aller, "Space vector applications in power
systems," IEEE, 2000.
[9] A. S. J. M. F. O. Zadeb M.K, "Small-Signal stability study of the CIGRE grid test
system with analysis of Participation factors and Parameter sensitivity of oscillatoy
modes," in 18th power systems computations conference , Wroclaw, 2014.
[10] A. S. M. F. Zadeh. M.K, "Stability analysis of interconnected AC power systems with
multi-terminal DC grids based on the CIGRE DC grid test system," in 18th Power
systems Computations Conference, Wroclaw, 2014.
Master of Science
101
[11] A. Krawita.C, "Multi-Infeed HVDC Interaction studies using Small-Signal stability
Assessment," IEEE transactions on Power Delivery, Vols. 24-2, 2009.
[12] Kundur.P, Power System Stability Dynamics and Control, New York: McGraw-Hill,
1994.
[13] V. L. Resende.F.o, "Simulataneous tuning of Power system stabilizers installed in the
VSC based MTDC networks of large offshore windfarms," in Power Systems
Computation Conference, Wroclaw, 2014.
[14] C. R. X. Ruihua.S, "VSCs based HVDC and its control strategy," in IEEE PES
Transmission and Distribution Conference and Exhibition, 2005.
[15] P. G. A. O. O.K.Giddani, "Small Signal Stability Analysis of Multi-Terminal VSC based
DC Transmission Systems," IEEE Transactions on Power System, Vols. 27-4, 2014.
[16] D. G. Germany, "User manual DIgSILENT Power factory version," [Online]. Available:
http://www.digsilent.de/.
[17] R. G. K. Klein.M, "A Fundamental study of Inter–area oscillations in power systems,"
Transactions on Power systems, vol. 3, pp. 914-921, 1991.
[18] Hauer.J.F, "Pacific Northwest National Laboratory (PNNL), US energy Department,"
PNNL, 2002. [Online]. Available: https://www.pnl.gov/.
[19] T. L. D. J. H. Theodor Borche, "Effect of rotational inertia on power system damping
and frequency transients," 2015.
[20] J. R. Torres, Power System Dynamics Lecture Slides, TU Delft EEMCS faculty, Delft,
2017.
[21] D. Zhang.P, "Emerging techniques in power system analysis," in Emerging
techniques in power system analysis, Berlin, Springer, 2010.
[22] P. J. Singh.R, "Statistical representation of distribution system loads using Gaussian
mixture model," IEEE transactions Power systems, Vols. 25-1, pp. 29-37, 2010.
[23] B. P. M. B. ,. B. Shen.L, "The effect of VSC HVDC control on AC system
electromechanical oscillations and DC system Dynamics," IEEE transactions on Pwer
Systems, 2015.

Master of Science
102
[24] R. J. Pringles R, "Optimal transmission expansion planning using mean-variance
mapping optimization," in IEEE/PES transmission and distribution, Latin America
conference and exposition, 2012.
[25] W. M. Preece.R, "The Probabilistic collocation method for power system damping and
voltage collapse studies in the presence of uncertainties," IEEE transactions Power
Systems, Vols. 28-3, pp. 2253-2262, 2013.
Master of Science
103
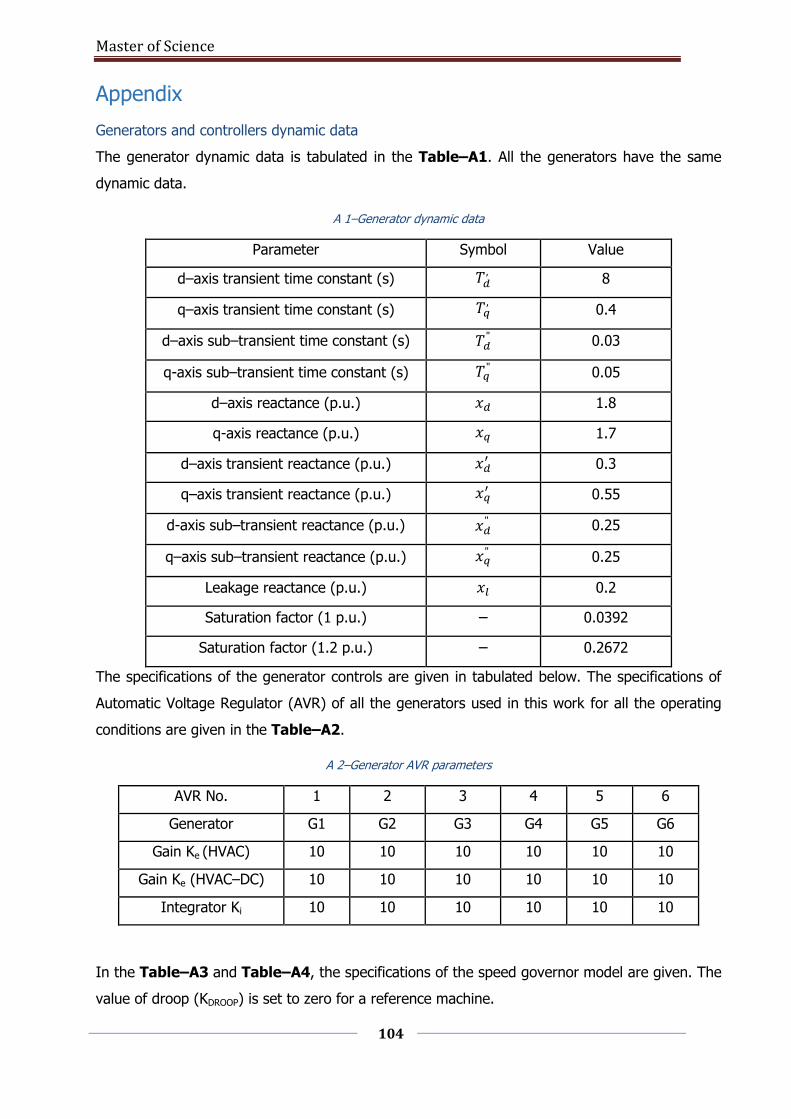
Master of Science
104
Appendix
Generators and controllers dynamic data
The generator dynamic data is tabulated in the Table–A1. All the generators have the same
dynamic data.
A 1–Generator dynamic data
Parameter Symbol Value
d–axis transient time constant (s) 𝑇𝑑, 8
q–axis transient time constant (s) 𝑇𝑞, 0.4
d–axis sub–transient time constant (s) 𝑇𝑑" 0.03
q-axis sub–transient time constant (s) 𝑇𝑞" 0.05
d–axis reactance (p.u.) 𝑥𝑑 1.8
q-axis reactance (p.u.) 𝑥𝑞 1.7
d–axis transient reactance (p.u.) 𝑥𝑑′ 0.3
q–axis transient reactance (p.u.) 𝑥𝑞′ 0.55
d-axis sub–transient reactance (p.u.) 𝑥𝑑" 0.25
q–axis sub–transient reactance (p.u.) 𝑥𝑞" 0.25
Leakage reactance (p.u.) 𝑥𝑙 0.2
Saturation factor (1 p.u.) – 0.0392
Saturation factor (1.2 p.u.) – 0.2672
The specifications of the generator controls are given in tabulated below. The specifications of
Automatic Voltage Regulator (AVR) of all the generators used in this work for all the operating
conditions are given in the Table–A2.
A 2–Generator AVR parameters
AVR No. 1 2 3 4 5 6
Generator G1 G2 G3 G4 G5 G6
Gain Ke (HVAC) 10 10 10 10 10 10
Gain Ke (HVAC–DC) 10 10 10 10 10 10
Integrator Ki 10 10 10 10 10 10
In the Table–A3 and Table–A4, the specifications of the speed governor model are given. The
value of droop (KDROOP) is set to zero for a reference machine.
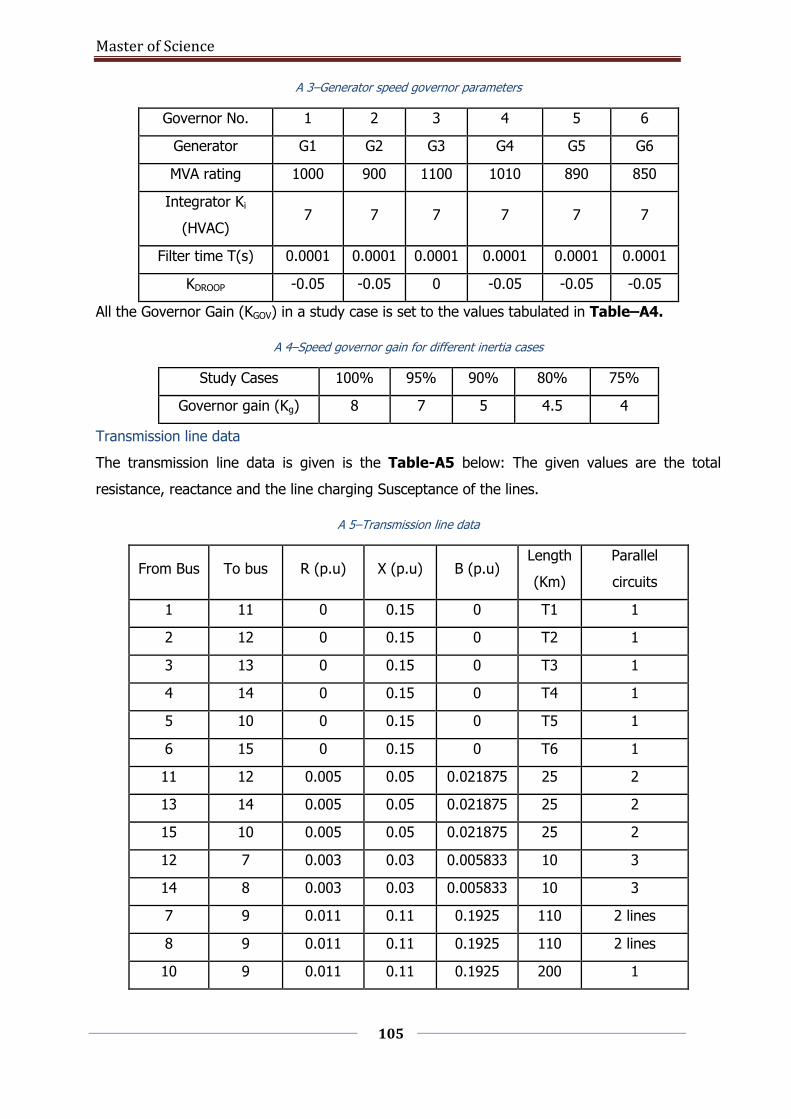
Master of Science
105
A 3–Generator speed governor parameters
Governor No. 1 2 3 4 5 6
Generator G1 G2 G3 G4 G5 G6
MVA rating 1000 900 1100 1010 890 850
Integrator Ki
(HVAC) 7 7 7 7 7 7
Filter time T(s) 0.0001 0.0001 0.0001 0.0001 0.0001 0.0001
KDROOP -0.05 -0.05 0 -0.05 -0.05 -0.05
All the Governor Gain (KGOV) in a study case is set to the values tabulated in Table–A4.
A 4–Speed governor gain for different inertia cases
Study Cases 100% 95% 90% 80% 75%
Governor gain (Kg) 8 7 5 4.5 4
Transmission line data
The transmission line data is given is the Table-A5 below: The given values are the total
resistance, reactance and the line charging Susceptance of the lines.
A 5–Transmission line data
From Bus To bus R (p.u) X (p.u) B (p.u) Length
(Km)
Parallel
circuits
1 11 0 0.15 0 T1 1
2 12 0 0.15 0 T2 1
3 13 0 0.15 0 T3 1
4 14 0 0.15 0 T4 1
5 10 0 0.15 0 T5 1
6 15 0 0.15 0 T6 1
11 12 0.005 0.05 0.021875 25 2
13 14 0.005 0.05 0.021875 25 2
15 10 0.005 0.05 0.021875 25 2
12 7 0.003 0.03 0.005833 10 3
14 8 0.003 0.03 0.005833 10 3
7 9 0.011 0.11 0.1925 110 2 lines
8 9 0.011 0.11 0.1925 110 2 lines
10 9 0.011 0.11 0.1925 200 1
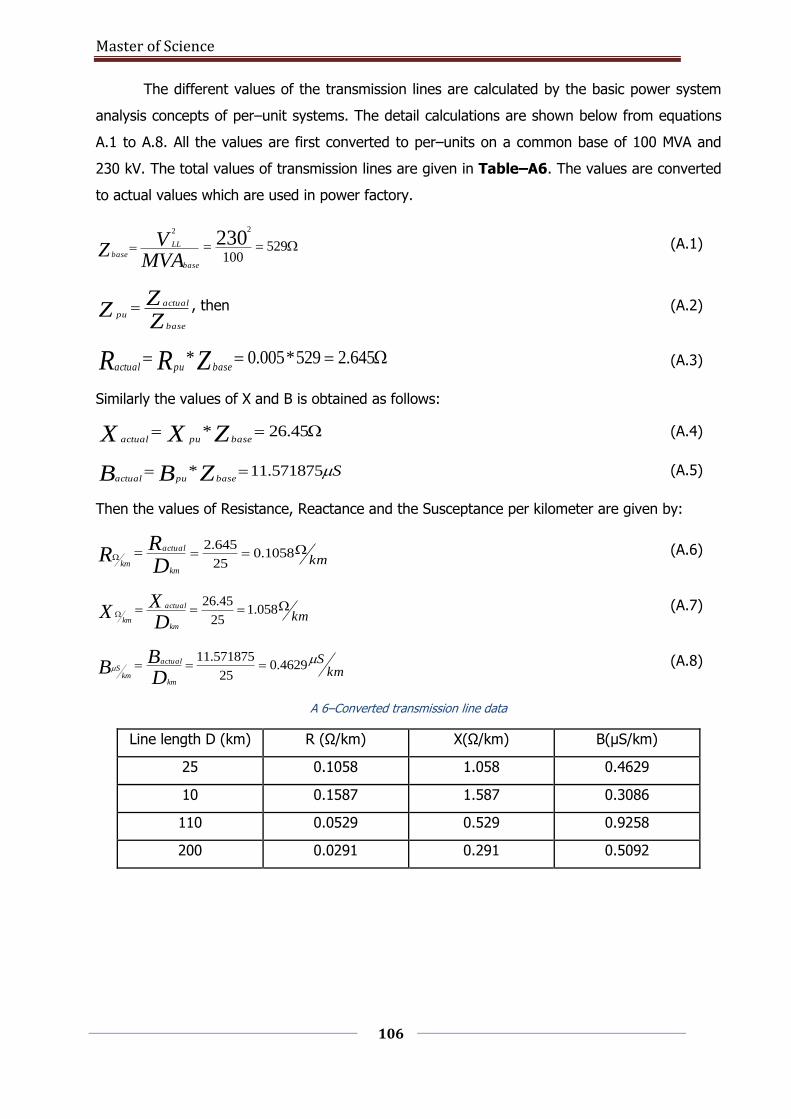
Master of Science
106
The different values of the transmission lines are calculated by the basic power system
analysis concepts of per–unit systems. The detail calculations are shown below from equations
A.1 to A.8. All the values are first converted to per–units on a common base of 100 MVA and
230 kV. The total values of transmission lines are given in Table–A6. The values are converted
to actual values which are used in power factory.
MVAV
Zbase
LL
base
2
529100
2302
(A.1)
ZZ
Zbase
actual
pu , then (A.2)
645.2529*005.0*ZRR basepuactual (A.3)
Similarly the values of X and B is obtained as follows:
45.26*ZXX basepuactual (A.4)
SZBB basepuactual571875.11* (A.5)
Then the values of Resistance, Reactance and the Susceptance per kilometer are given by:
DR
Rkm
actual
km
km 1058.0
25
645.2 (A.6)
kmDX
Xkm
actual
km
058.125
45.26 (A.7)
kmS
DB
Bkm
actual
kmS
4629.0
25
571875.11 (A.8)
A 6–Converted transmission line data
Line length D (km) R (Ω/km) X(Ω/km) B(µS/km)
25 0.1058 1.058 0.4629
10 0.1587 1.587 0.3086
110 0.0529 0.529 0.9258
200 0.0291 0.291 0.5092
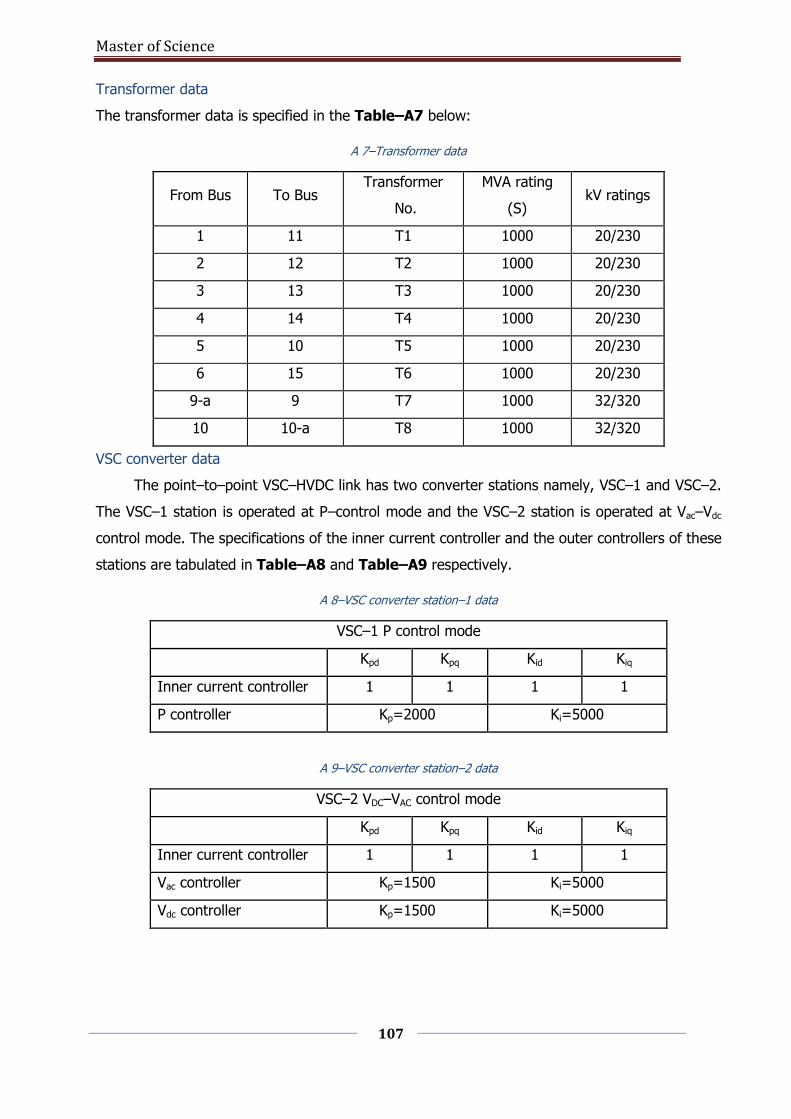
Master of Science
107
Transformer data
The transformer data is specified in the Table–A7 below:
A 7–Transformer data
From Bus To Bus Transformer
No.
MVA rating
(S) kV ratings
1 11 T1 1000 20/230
2 12 T2 1000 20/230
3 13 T3 1000 20/230
4 14 T4 1000 20/230
5 10 T5 1000 20/230
6 15 T6 1000 20/230
9-a 9 T7 1000 32/320
10 10-a T8 1000 32/320
VSC converter data
The point–to–point VSC–HVDC link has two converter stations namely, VSC–1 and VSC–2.
The VSC–1 station is operated at P–control mode and the VSC–2 station is operated at Vac–Vdc
control mode. The specifications of the inner current controller and the outer controllers of these
stations are tabulated in Table–A8 and Table–A9 respectively.
A 8–VSC converter station–1 data
VSC–1 P control mode
Kpd Kpq Kid Kiq
Inner current controller 1 1 1 1
P controller Kp=2000 Ki=5000
A 9–VSC converter station–2 data
VSC–2 VDC–VAC control mode
Kpd Kpq Kid Kiq
Inner current controller 1 1 1 1
Vac controller Kp=1500 Ki=5000
Vdc controller Kp=1500 Ki=5000
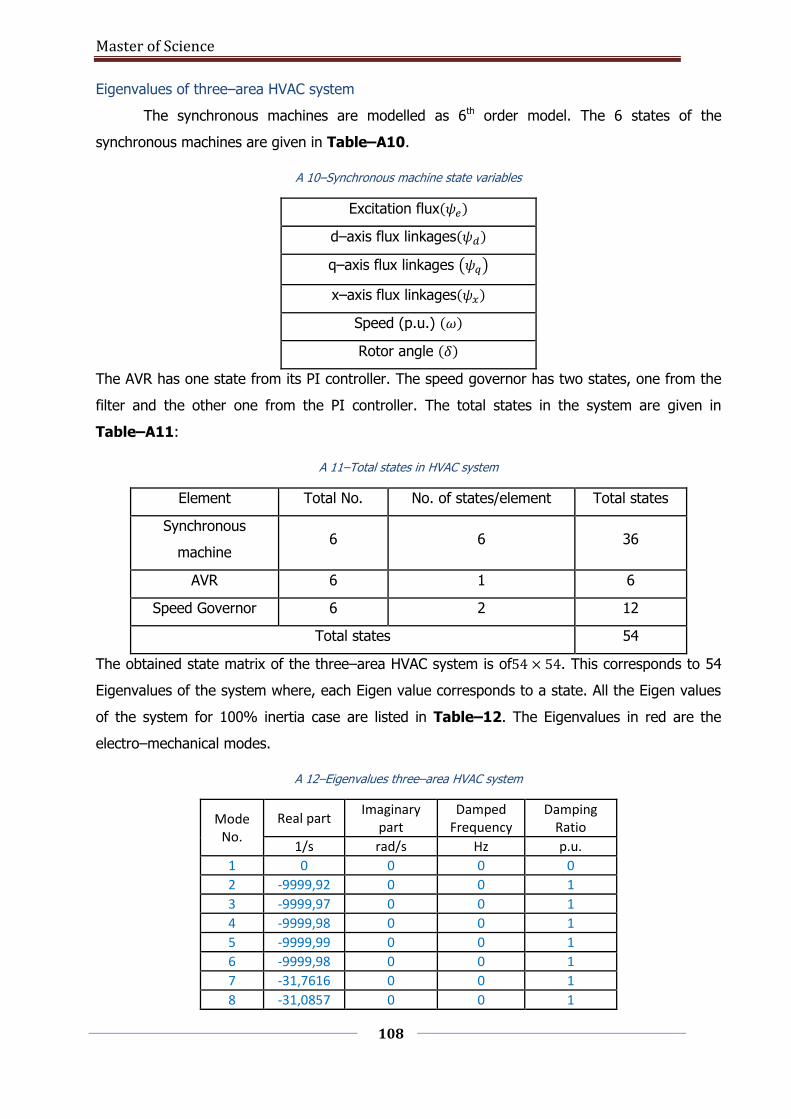
Master of Science
108
Eigenvalues of three–area HVAC system
The synchronous machines are modelled as 6th order model. The 6 states of the
synchronous machines are given in Table–A10.
A 10–Synchronous machine state variables
Excitation flux(𝜓𝑒)
d–axis flux linkages(𝜓𝑑)
q–axis flux linkages (𝜓𝑞)
x–axis flux linkages(𝜓𝑥)
Speed (p.u.) (𝜔)
Rotor angle (𝛿)
The AVR has one state from its PI controller. The speed governor has two states, one from the
filter and the other one from the PI controller. The total states in the system are given in
Table–A11:
A 11–Total states in HVAC system
Element Total No. No. of states/element Total states
Synchronous
machine 6 6 36
AVR 6 1 6
Speed Governor 6 2 12
Total states 54
The obtained state matrix of the three–area HVAC system is of54 × 54. This corresponds to 54
Eigenvalues of the system where, each Eigen value corresponds to a state. All the Eigen values
of the system for 100% inertia case are listed in Table–12. The Eigenvalues in red are the
electro–mechanical modes.
A 12–Eigenvalues three–area HVAC system
Mode No.
Real part Imaginary
part Damped
Frequency Damping
Ratio
1/s rad/s Hz p.u.
1 0 0 0 0
2 -9999,92 0 0 1
3 -9999,97 0 0 1
4 -9999,98 0 0 1
5 -9999,99 0 0 1
6 -9999,98 0 0 1
7 -31,7616 0 0 1
8 -31,0857 0 0 1
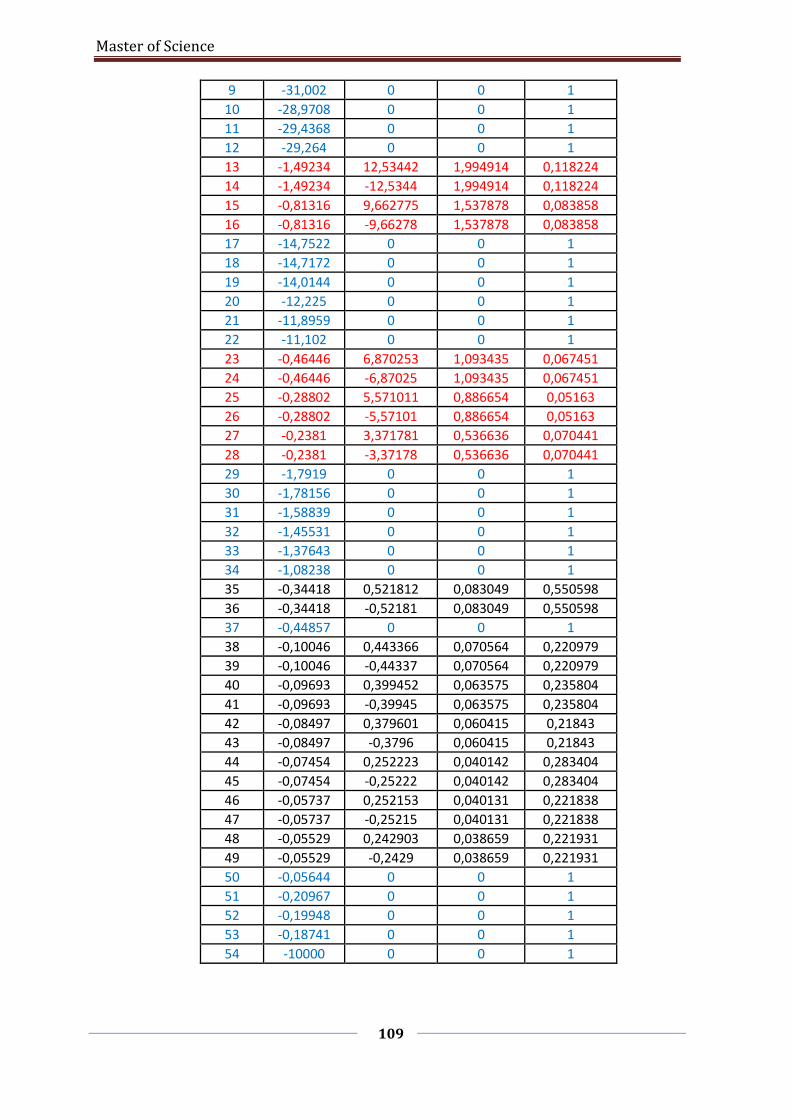
Master of Science
109
9 -31,002 0 0 1
10 -28,9708 0 0 1
11 -29,4368 0 0 1
12 -29,264 0 0 1
13 -1,49234 12,53442 1,994914 0,118224
14 -1,49234 -12,5344 1,994914 0,118224
15 -0,81316 9,662775 1,537878 0,083858
16 -0,81316 -9,66278 1,537878 0,083858
17 -14,7522 0 0 1
18 -14,7172 0 0 1
19 -14,0144 0 0 1
20 -12,225 0 0 1
21 -11,8959 0 0 1
22 -11,102 0 0 1
23 -0,46446 6,870253 1,093435 0,067451
24 -0,46446 -6,87025 1,093435 0,067451
25 -0,28802 5,571011 0,886654 0,05163
26 -0,28802 -5,57101 0,886654 0,05163
27 -0,2381 3,371781 0,536636 0,070441
28 -0,2381 -3,37178 0,536636 0,070441
29 -1,7919 0 0 1
30 -1,78156 0 0 1
31 -1,58839 0 0 1
32 -1,45531 0 0 1
33 -1,37643 0 0 1
34 -1,08238 0 0 1
35 -0,34418 0,521812 0,083049 0,550598
36 -0,34418 -0,52181 0,083049 0,550598
37 -0,44857 0 0 1
38 -0,10046 0,443366 0,070564 0,220979
39 -0,10046 -0,44337 0,070564 0,220979
40 -0,09693 0,399452 0,063575 0,235804
41 -0,09693 -0,39945 0,063575 0,235804
42 -0,08497 0,379601 0,060415 0,21843
43 -0,08497 -0,3796 0,060415 0,21843
44 -0,07454 0,252223 0,040142 0,283404
45 -0,07454 -0,25222 0,040142 0,283404
46 -0,05737 0,252153 0,040131 0,221838
47 -0,05737 -0,25215 0,040131 0,221838
48 -0,05529 0,242903 0,038659 0,221931
49 -0,05529 -0,2429 0,038659 0,221931
50 -0,05644 0 0 1
51 -0,20967 0 0 1
52 -0,19948 0 0 1
53 -0,18741 0 0 1
54 -10000 0 0 1

Master of Science
110
Eigenvalues of three–area HVAC–DC system
The obtained state matrix of the three–area HVAC–DC system is of68 × 68. This
corresponds to 68 eigenvalues of the system. The total number of states is tabulated in Table–
A13 below
A 13–Total states three–area HVAC–DC system
Element Total No. No. of states/element Total states
Synchronous
machine 6 6 36
AVR 6 1 6
Speed Governor 6 2 12
PLLs 2 2 4
VSCs 2 2 2
Inner–current
controller 2 2 4
P–control 1 1 1
Vac–control 1 1 1
Vdc–control 1 1 1
HVDC line 1 1 1
Total states 68
All the Eigen values for the 100% inertia case in HVAC–DC system is tabulated below in the
Table–A14.
A 14–Eigenvalues HVAC–DC system
Name Real part Imaginary
part Damped
Frequency Damping
Ratio
1/s rad/s Hz p.u.
1 0 0 0 0
2 -10375,3 0 0 1
3 -9999,93 0 0 1
4 -9999,98 0 0 1
5 -9999,97 0,000113 1,8E-05 1
6 -9999,97 -0,00011 1,8E-05 1
7 -9999,95 0 0 1
8 -30,7168 0 0 1
9 -30,891 0 0 1
10 -31,0049 0 0 1
11 -29,167 0 0 1
12 -28,1144 0 0 1
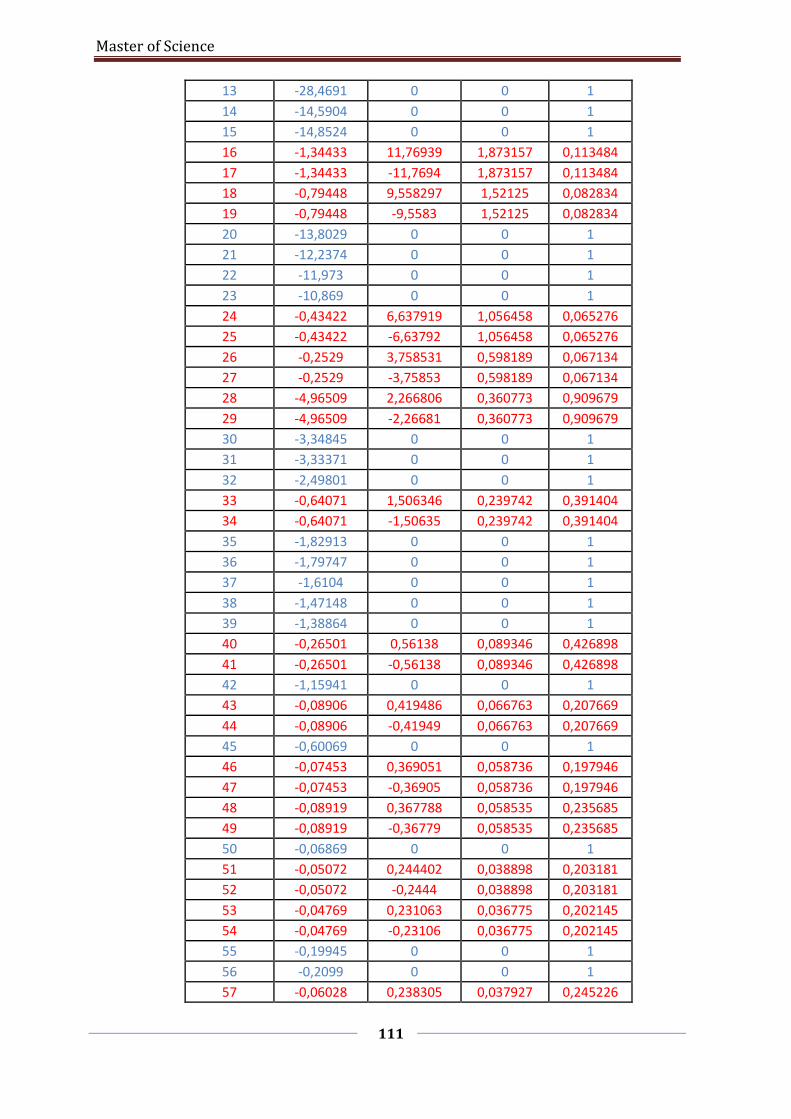
Master of Science
111
13 -28,4691 0 0 1
14 -14,5904 0 0 1
15 -14,8524 0 0 1
16 -1,34433 11,76939 1,873157 0,113484
17 -1,34433 -11,7694 1,873157 0,113484
18 -0,79448 9,558297 1,52125 0,082834
19 -0,79448 -9,5583 1,52125 0,082834
20 -13,8029 0 0 1
21 -12,2374 0 0 1
22 -11,973 0 0 1
23 -10,869 0 0 1
24 -0,43422 6,637919 1,056458 0,065276
25 -0,43422 -6,63792 1,056458 0,065276
26 -0,2529 3,758531 0,598189 0,067134
27 -0,2529 -3,75853 0,598189 0,067134
28 -4,96509 2,266806 0,360773 0,909679
29 -4,96509 -2,26681 0,360773 0,909679
30 -3,34845 0 0 1
31 -3,33371 0 0 1
32 -2,49801 0 0 1
33 -0,64071 1,506346 0,239742 0,391404
34 -0,64071 -1,50635 0,239742 0,391404
35 -1,82913 0 0 1
36 -1,79747 0 0 1
37 -1,6104 0 0 1
38 -1,47148 0 0 1
39 -1,38864 0 0 1
40 -0,26501 0,56138 0,089346 0,426898
41 -0,26501 -0,56138 0,089346 0,426898
42 -1,15941 0 0 1
43 -0,08906 0,419486 0,066763 0,207669
44 -0,08906 -0,41949 0,066763 0,207669
45 -0,60069 0 0 1
46 -0,07453 0,369051 0,058736 0,197946
47 -0,07453 -0,36905 0,058736 0,197946
48 -0,08919 0,367788 0,058535 0,235685
49 -0,08919 -0,36779 0,058535 0,235685
50 -0,06869 0 0 1
51 -0,05072 0,244402 0,038898 0,203181
52 -0,05072 -0,2444 0,038898 0,203181
53 -0,04769 0,231063 0,036775 0,202145
54 -0,04769 -0,23106 0,036775 0,202145
55 -0,19945 0 0 1
56 -0,2099 0 0 1
57 -0,06028 0,238305 0,037927 0,245226
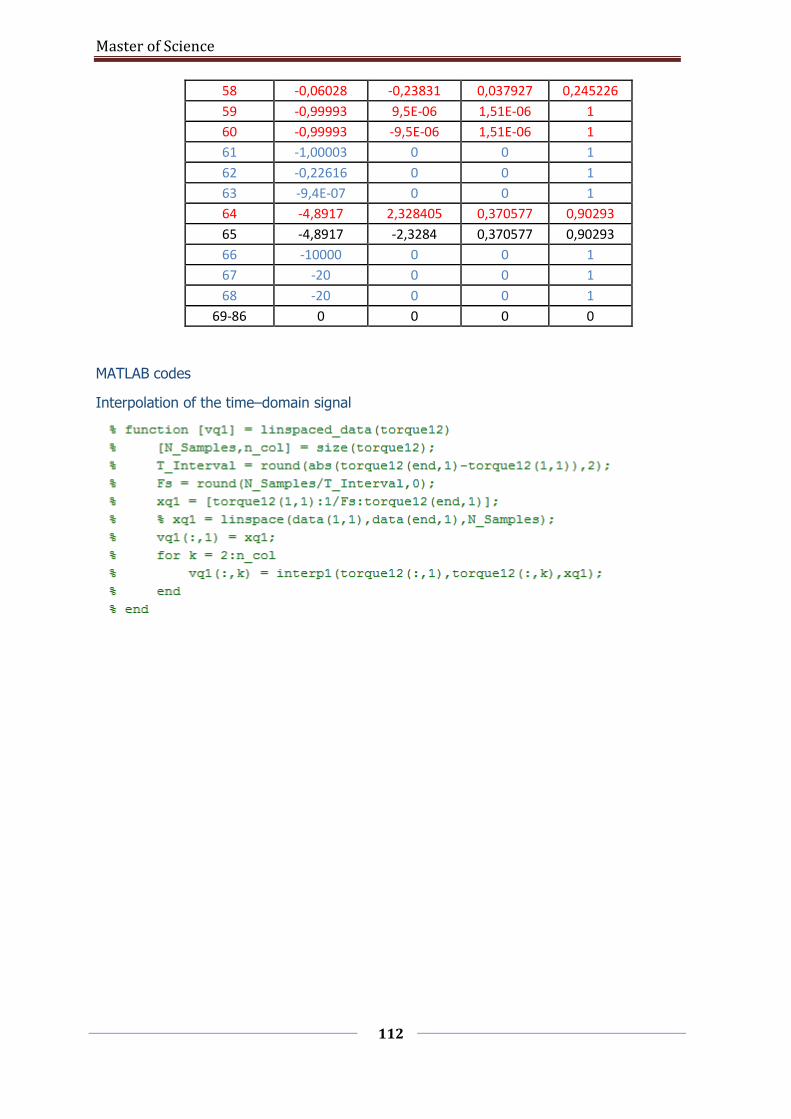
Master of Science
112
58 -0,06028 -0,23831 0,037927 0,245226
59 -0,99993 9,5E-06 1,51E-06 1
60 -0,99993 -9,5E-06 1,51E-06 1
61 -1,00003 0 0 1
62 -0,22616 0 0 1
63 -9,4E-07 0 0 1
64 -4,8917 2,328405 0,370577 0,90293
65 -4,8917 -2,3284 0,370577 0,90293
66 -10000 0 0 1
67 -20 0 0 1
68 -20 0 0 1
69-86 0 0 0 0
MATLAB codes
Interpolation of the time–domain signal
Related Documents











