弾性接触モデルによる弾性表面波モータの摩擦駆動解析 黒澤実 † ・重松隆史 ‡ †‡ 東京工業大学総合理工学研究科 〒 226-8502 横浜市緑区長津田町 4259 E-mail: †[email protected], ‡[email protected] あらまし ステータを伝搬するレイリー波とスライダ突起の弾性摩擦接触をモデル化することにより,弾性表面波モー タの動作シミュレーションを行い実験結果と比較検討した。シミュレーションの結果は,スライダ突起の個数や突起直径の変 化によりモータ特性が変化した実験結果を良く再現しており,モデルの有効性が示された。さらに,突起配列の影響を考慮す るために,各突起列毎での波動パワーの減衰を繰り入れた近似的な計算手法を開発した。突起配列による効果を取り込むことで, 実験より得られた推力特性変化の様子をより正確に表すことを試みた。 キーワード アクチュエータ,リニアモータ,摩擦駆動,圧電アクチュエータ,超音波モータ Friction Drive Simulation of Surface Acoustic Wave Motor Minoru Kuribayashi Kurosawa † and Takashi Shigematsu ‡ †‡Tokyo Institute of Technology, 4259 Nagatsuta, Midori, Yokohama 226-8502, Japan E-mail: †[email protected], ‡[email protected] Abstract Friction drive mechanism has been successfully simulated using elastic fiction contact modeling of projection fabricated slider and traveling wave stator. Motor characteristics such as speed and thrust varied by changing the slider projection amount and the diameter by the simulation similar to experimental results. In addition, calculation algorithm to take into account the matrix arrangement of slider projections has been developed for the precise simulation modeling. Keyword Actuator, Linear motor, Friction drive, Piezo actuator, Ultrasonic motor 1.はじめに 電子機器の小型化や装置・機器の軽量化,製造装置の高度 化・高速化などに伴って,高性能なマイクロリニアモータが 必要とされるようになってきた。我々は先進的なリニアモー タとして,高速・高分解能・高速応答を実現する弾性表面波 モータの研究を進めている。 初期の弾性表面波モータ研究 [1],[2] は動作を実証する目 的であったが,MEMS(Micro Electro Mecanical Systems) プロセスを用いてスライダが作成され [3],[4],著しく特性 が向上した [5],[6]。従来の超音波モータと比較すると,格 段に生産性・再現性に優れた高度なデバイスとなることが 期待される。また,超音波モータの分類上,「進行波型」の 「リニアモータ」だけが実用化されていないが,効率的な駆 動方法も提案され [7],制御方法に関する検討も進んでいる [8],[9]。また,デザイン自由度が高いモータ [10] である。 これまで,ナノメータの弾性変形を伴って行われている摩 擦力の伝達に関するモデル化を検討 [11],[12] してきた。摩 擦駆動について検討した結果[13]-[17]をもとに,シミュレー ションを行った結果についても報告を行っている [18]。こ こでは,さらに精密なモデル化の試みを含めて報告する。 2.原理と実例 弾性表面波モータは,レイリー波の進行波を用いた超音波 リニアモータである。短冊状の圧電基板両端部に IDT を配 置することで,もっとも簡単な構成のリニアモータを作るこ とができる。図1に示すように,伝搬波路上にスライダを置 くと,波動伝搬方向と逆向きにスライダが移動する。スライ ダの移動方向と速度は,波頭での圧電基板表面粒子の運動方 向と速度により決まるので,波動の伝搬方向と波の振幅によ り動きを制御することができる。図1の構成では,駆動する IDT を切り替えることでスライダ移動方向が決まり,駆動電 圧の大小により速度が増減する。 例えば,ステータ材料として 128 度 Y 板ニオブ酸リチウ ムを用いて,レイリー波の駆動周波数を約 10MHz とする 図1 弾性表面波モータの構成例 preload SAW device (Stator transducer) Electrode (IDT) Slider Rayleigh wave RF power ‡ 現在 理化学研究所 ‡ currently RIKEN 47

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

弾性接触モデルによる弾性表面波モータの摩擦駆動解析
黒澤実†・重松隆史‡
†‡東京工業大学総合理工学研究科 〒 226-8502 横浜市緑区長津田町 4259
E-mail: †[email protected], ‡[email protected]
あらまし ステータを伝搬するレイリー波とスライダ突起の弾性摩擦接触をモデル化することにより,弾性表面波モー
タの動作シミュレーションを行い実験結果と比較検討した。シミュレーションの結果は,スライダ突起の個数や突起直径の変
化によりモータ特性が変化した実験結果を良く再現しており,モデルの有効性が示された。さらに,突起配列の影響を考慮す
るために,各突起列毎での波動パワーの減衰を繰り入れた近似的な計算手法を開発した。突起配列による効果を取り込むことで,
実験より得られた推力特性変化の様子をより正確に表すことを試みた。
キーワード アクチュエータ,リニアモータ,摩擦駆動,圧電アクチュエータ,超音波モータ
Friction Drive Simulation of Surface Acoustic Wave MotorMinoru Kuribayashi Kurosawa† and Takashi Shigematsu‡
†‡Tokyo Institute of Technology, 4259 Nagatsuta, Midori, Yokohama 226-8502, JapanE-mail: †[email protected], ‡[email protected]
Abstract Frictiondrivemechanismhasbeensuccessfullysimulatedusingelasticfictioncontactmodelingofprojectionfabricated slider and traveling wave stator. Motor characteristics such as speed and thrust varied by changing the slider projection amount and the diameter by the simulation similar to experimental results. In addition, calculation algorithm to take into account the matrix arrangement of slider projections has been developed for the precise simulation modeling.Keyword Actuator, Linear motor, Friction drive, Piezo actuator, Ultrasonic motor
1.はじめに
電子機器の小型化や装置・機器の軽量化,製造装置の高度
化・高速化などに伴って,高性能なマイクロリニアモータが
必要とされるようになってきた。我々は先進的なリニアモー
タとして,高速・高分解能・高速応答を実現する弾性表面波
モータの研究を進めている。
初期の弾性表面波モータ研究 [1],[2] は動作を実証する目
的であったが,MEMS(Micro Electro Mecanical Systems)
プロセスを用いてスライダが作成され [3],[4],著しく特性
が向上した [5],[6]。従来の超音波モータと比較すると,格
段に生産性・再現性に優れた高度なデバイスとなることが
期待される。また,超音波モータの分類上,「進行波型」の
「リニアモータ」だけが実用化されていないが,効率的な駆
動方法も提案され [7],制御方法に関する検討も進んでいる
[8],[9]。また,デザイン自由度が高いモータ [10] である。
これまで,ナノメータの弾性変形を伴って行われている摩
擦力の伝達に関するモデル化を検討 [11],[12] してきた。摩
擦駆動について検討した結果[13]-[17]をもとに,シミュレー
ションを行った結果についても報告を行っている [18]。こ
こでは,さらに精密なモデル化の試みを含めて報告する。
2.原理と実例
弾性表面波モータは,レイリー波の進行波を用いた超音波
リニアモータである。短冊状の圧電基板両端部に IDT を配
置することで,もっとも簡単な構成のリニアモータを作るこ
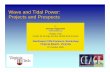
とができる。図1に示すように,伝搬波路上にスライダを置
くと,波動伝搬方向と逆向きにスライダが移動する。スライ
ダの移動方向と速度は,波頭での圧電基板表面粒子の運動方
向と速度により決まるので,波動の伝搬方向と波の振幅によ
り動きを制御することができる。図1の構成では,駆動する
IDT を切り替えることでスライダ移動方向が決まり,駆動電
圧の大小により速度が増減する。
例えば,ステータ材料として 128 度 Y 板ニオブ酸リチウ
ムを用いて,レイリー波の駆動周波数を約 10MHz とする
図1 弾性表面波モータの構成例
preload
SAW device(Stator transducer)
Electrode(IDT)
Slider
Rayleigh wave
RF power
‡現在 理化学研究所‡currently RIKEN
47
teruko
タイプライターテキスト
teruko
タイプライターテキスト
社団法人 電子情報通信学会 THE INSTITUTE OF ELECTRONICS, INFORMATION AND COMMUNICATION ENGINEERS
teruko
タイプライターテキスト
信学技報 IEICE Technical Report US2008-40 (2008-09)

��������������
������
������
と,基板寸法は幅 14mm, 長さ 60mm, 厚さ 1mm 程度と
なる。IDT 電極幅・間隔とも 100µm として 20 対の電極と
すると,駆動電圧 125V0-p で,モータとしての移動速度は
1m/s 以上を得ることができた [4]。しかし高周波であるた
め,その時の基板垂直方向の振動振幅は 20nm 程度しかな
い。このような微小な振動変位に対して効率よく駆動力を取
り出すために,これまでの研究においては微細加工により,
スライダ摩擦駆動面に多数の突起を設け,図2の電子顕微鏡
像に示すような摩擦駆動面形状とした。ポンチ絵で示すと,
波動とスライダ表面の接触の様子は図3のようになる。波長
が 400µm であるのに対して,振幅は 20nm 程度であるから,
実際よりも振幅を千倍程度拡大して描いていることに注意さ
れたい。
スライダとして 4mm 角のシリコンを用い,突起直径
1µm,突起間隔 5µm として予圧を 30N 程度とすると,前
述の基板で駆動電圧 125V0-p のとき,モータとしての無負
荷速度は 1m/s,0速度推力約 7N, 無負荷速度 1m/s 程度
の性能が得られている [7]。予圧を 60N とすると,無負荷速
度は 0.7m/s 程に低下するが,0速度推力は 13N に達した。
スライダ幅を倍の 8mm とすることができるので,25N 以
上の非常に大きな推力を得ることが可能である。また,バー
スト波による駆動を用いると微小なステップ移動も可能で,
1nm 以下のステップ駆動を実現している [6]。
3.摩擦駆動部の力学モデル
弾性表面波モータの電気入力端子から機械出力端子までの
完全なモデルを構築するために,コンタクトメカニクスの考
え方を用いたモデル化を進めている [10]。駆動力源となる
波動とスライダ表面の接触の様子は図3に示したような弾性
的な接触状態となっていると考えられる。まずは簡単のた
め,一つの突起に対してどのような力学モデルとなるか考察
した。
静止の状態では,スライダがステータ表面に垂直方向に予
圧を与えた状態で接触していることから,図4に示した垂直
方向の力に対して kpn と ksn の弾性が作用する。モータ動作
時には垂直方向とともに水平方向の表面粒子の運動 ( 図4右
下に示したような粒子の楕円軌跡を描く振動 ) が作用するこ
とから , スライダとステータの kpt と kst の弾性が作用するこ
とになり,場合によっては滑りが発生する。また振動がある
場合には,垂直方向の変位によりスライダ接触面とステータ
表面は,接触 / 非接触を周期的に繰り返すこととなる。
弾性接触の理論を用いて,図4に示した各弾性要素につい
て求めると [10],スライダ側については,
kpn = 4GSi a(ln(3-4νSi)/(1-2νSi)) (1)
kpt = GSi a /(1/8+(1-2νSi)/(8πκ)) (2)
となる。ここで,GSi および νSi はスライダ材料の剛性率お
よびポアソン比である。シリコンを用いているのでこれらの
値は 68.0 GPa および 0.218 である。a は突起半径である。
また ,κ=ln(3-4νSi)/π である。ステータ側に関しては,
ksn = 4GLN a/(1- νLN) (3)
kst = 8GLN a/(2- νLN) (4)
と求められる。GLN および νLN はステータ材料の剛性率お
よびポアソン比である。基板に用いている LN の値より,そ
れぞれ 93.7 MPa および 0.05 である。これらの式は,突起
一つに関してであるが,実際のスライダには,多数の突起が
形成されている。弾性接触解析を用いた超音波モータの動作
図2 弾性表面波モータ用シリコンスライダ摩擦駆動面に形成された多数の突起の例;電子顕微鏡像
図3 弾性表面波と突起付きスライダ駆動面の接触状態模式図:進行波の場合
図4 スライダ突起とステイタ駆動部付近のモデル図
Stator
Slider Projection
PQ
ksn
kst
Stator Motionah
av
kpn
kpt
48

-2 -1 0 1 2 3 4 5 -2
-1.5
-1
-0.5
0
0.5
1
1.5
2
ω t [rad]
Forc
e [N
]
滑り
固着
滑り
滑り固着
解析はこれまでにほとんど例が無く,有限要素法解析を用い
たやや厳密性に欠ける解析の試みがある程度である。弾性表
面波モータの場合には,振動振幅がナノメートルのオーダと
なることから,摩擦駆動面での弾性変形が動作特性に重大な
影響を与えることが予想される。そこで今回は,弾性接触解
析モデルの有効性を示すことを最初の課題として,上述の弾
性モデルを動作解析計算に取り込んだ。
4.シミュレーションと実験結果
4.1 計算の概要と駆動波形
まず第一次近似として , スライダ表面にある多数の突起が
独立に駆動力を受けるとして解析を行った。したがって,突
起間に働くと考えられる相互の干渉,すなわち,隣接した突
起間における予圧方向の変形および駆動力方向の変位の影響
などは考慮していない。また,実際には突起が波動の進行方
向に分布しているために,波動が後方の突起に行くに従い減
衰を受けることになるが,この影響も考慮していない。計算
手順としては,与えられた予圧を突起の個数で割り,突起一
つ当たりの予圧と駆動力を算出し,突起個数倍としてスライ
ダに働くの摩擦駆動力を算出している。
計算手順の概要としては,まず,与えられた予圧値と振動
振幅から,突起がステータ表面に接触している範囲と予圧分
布を求める。イメージとしては,図3に示したように,突起
は波頭で大きな弾性変形を受け,波の底辺りでは離れた状態
となるか,あるいは予圧が大きければ接触は保ちながらも低
予圧の状態となっている。予圧分布が分かれば,各位相にお
ける突起の推力方向の振る舞いを算出できる。このとき,摩
擦係数と予圧値およびステータとスライダの弾性変形の具合
から,境界面がスリップするかスティックするかを判別しな
がら順次計算を進めて行く。
以上の手順により接触と摩擦駆動および滑りを考慮してス
テータ側での振動を駆動力源として時間応答解析をすると,
図 5 のような駆動力波形が求められる。この波形は,振動周
期一周期分についてであるから,波形の時間平均を取ること
で,アクチュエータとしての速度および推力が求められ,駆
動特性などをシミュレーションできる [12]。計算の結果か
らは,図5に示すような突起に働く駆動力やすべり速度など
が得られるので,波動の減衰の程度や摩擦駆動への変換効率,
および摩耗に関する考察に必要となる剪断力なども求められ
る。今回の計算では深い考察を行っていないが,今後は効率
や摩耗に関する研究に進めていくことが可能である。以前に
同様なシミュレーションを行っているが [12],突起部分の
モデル化が全く異なっているので,今回は,以前のシミュレー
ション結果とは異なる結果が得られている。
4.2 突起寄与率
現段階では突起間の干渉を考慮していないので,実験結
果から推察して突起の寄与率を推定して用いた。用いた実
験データは,4mm 角のスライダ表面に直径 20µm の突起を
80µm 間隔で総計 6400 個配置したものである。ステータは
前述の基板で駆動電圧 125V0-p とした場合で,基板垂直方
向の振動変位が 21nm, 基板水平方向の振動速度が 1.1m/s
である。ステータとスライダ間の摩擦係数は 0.14 としてい
る。この値は,フリクションテスタによる測定値の範囲にあ
る。
突起の寄与率を 0.4 から 0.8 の範囲で変化させたときのシ
ミュレーション結果と実測値の関係を図6および7に示す。
ここで,突起寄与率が 0.6 ということは,一列に 80 個ある
突起の内,60% すなわち 48 個の突起が動作に寄与していて,
残りの突起は予圧が働いていないということを示している。
全体としては 36% の突起が機能していることになる。実験
においては,4mm 角のスライダに均一に予圧が掛かってい
ないために動作に関与していない突起が存在していることが
考えられる。また,スライダが波動の進行方向に分布してい
ることを考慮していないことを補正していることになってい
るかもしれない。
シミュレーションと実験結果を比較すると,この例では,
突起の寄与率を 0.6 とすることで,図6に示した予圧変化に
対する0速度推力が実験値とよく一致することが分かる。図
7に示した予圧変化に対する無負荷速度の変化の具合も寄与
率 0.6 程度で比較的よい一致を示しているようである。そこ
で,今回の計算では,突起寄与率を 0.6 としてシミュレーショ
ンを行った。しかし,あとの計算結果を参照すると分かるが,
突起の密度などにより,寄与率は実効的に異なってきている
ように考えられる。
4.3 突起密度の影響
突起直径を 20µm としたまま,突起間隔を変えて,突起
総数を 1089 個から 10000 個とした5種類のスライダを用
いた場合の実験値とシミュレーション結果を比較した。0速
度推力と無負荷速度の特性を図8および9に示す。
まず0速度推力について見ると,突起総数が多くなるにし
たがい,予圧を大きくしたことにより,より大きな推力を得
図5 摩擦駆動波形の例
49

られるという実験によって得られている弾性表面波モータの
特徴的な性質がよくシミュレーションできている。現象の解
釈としては,突起一つ当たりの予圧が大きくなるに従い推力
が増加するが,予圧の増加によりやがて,「底当たり」を起
こすようになり,かえって推力が低下してしまうことを示し
ている。よって,突起総数が多い方が全体としての予圧値を
大きくできるために,より大きな推力を得ることができるよ
うになっている。
突起総数が異なることで実験値とシミュレーション結果の
相違状況を見ると,突起数 6400 の結果は図6と同じである
ので,よく一致しているが,突起が少ない場合は実験結果が
高めに,突起が多い場合は実験結果が低めに出ている傾向が
見られる。この相違傾向は,突起が波動の進行方向に分布し
ていることを考慮してシミュレーションを行うことで,より
一致した結果が得られることを示していると考えられる。
図9に示した無負荷速度に関しては,特に低予圧時の速度
に関する実験結果がばらついているようで,あまりより一
致は得られていない。突起総数が多い方が高予圧に対する速
度低下が少ないという実験結果の傾向は,シミュレーション
と一致していることは事実であるが,定量的な一致までには
至っていない。精度の高い実験値とシミュレーションの改良
が必要であるように考えられる。
4.4 突起直径の影響
前節と同様のステータ条件で,これまでの動作解析 [12]
では説明できなかった,突起直径の違いによる動作特性の相
違について検討した。スライダ表面の突起直径/突起間隔を
20µm/40µm, 30µm/60µm および 50µm/100µm とした 3
つのスライダで特性を比較した。実験結果およびシミュレー
ション結果を図 10 および 11 に示す。これらのグラフも,
予圧を変えたときの0速度推力と無負荷速度の変化を示して
図8 突起密度を変えた場合の予圧変化に対する推力特性;実験値のプロットとシミュレーション,突起直径 20µm, 突起中心間間隔 40µm から 120µm
図9 突起密度を変えた場合の予圧変化に対する速度特性;実験値のプロットとシミュレーション,突起直径 20µm, 突起中心間間隔 40µm から 120µm
0
2
4
6
8
10
12
0 20 40 60 80 100 120 140
Thrust
0s [N]
Preload [N]
n=10000
6400
4356
2500
1089
0
0.2
0.4
0.6
0.8
1
1.2
0 20 40 60 80 100 120 140
Speed
0f [m/s]
Preload [N]
n=10000
6400435625001089
図6 突起寄与率を変えた場合の予圧変化に対する推力特性;実験値のプロットとシミュレーション,突起直径20µm, 突起中心間間隔 50µm, 突起個数 6400 個
図7 突起寄与率を変えた場合の予圧変化に対する速度特性;実験値のプロットとシミュレーション,突起直径20µm, 突起中心間間隔 50µm, 突起個数 6400 個
0
0.2
0.4
0.6
0.8
1
1.2
0 20 40 60 80 100 120 140
Speed
0f [m/s]
Pre-load [N]
x 0.8x 0.7
x 0.6
x 0.5x 0.4
0
2
4
6
8
10
12
0 20 40 60 80 100 120 140
Thrust
0s [N]
Pre-load [N]
x 0.8
x 0.7
x 0.6
x 0.5
x 0.4
50

いる。3 つのスライダは突起直径が違うだけで,接触面積は
いずれも 3mm2 となっているにも関わらず特性に差が現れ
ている。
式 (1)-(4) に示した剛性と突起直径の関係をみると,剛性
が突起径にに比例していることから,突起径が例えば 2.5 倍
になると突起数は 1/2.52 となっているので,突起直径が 2.5
倍になることで接触剛性が 1/2.5 に低下していることを示
している。したがって,接触部分が柔らかくなることで特性
劣下の生ずることが示されており,実験結果と一致する傾向
が得られている。よって,摩擦駆動面の弾性率がモータの特
性に大きく影響していることが実験とシミュレーションによ
り明確となってきた。
5.突起配列の影響
突起が波の進行方向に対して格子状に配列している影響を
考慮するため,前章までに述べたシミュレーション方法に改
良を加えた。これまでの方法では,波面に対して突起は横一
列に配列されているとして計算を行っていた。しかし,実際
には例えば 10,000 個の突起の場合は 100x100 の配列となっ
ている。したがって,波面に対して一列目の突起は減衰の無
い波が来るが,2列目以降の突起列では摩擦駆動によって次
第に減衰した波動が駆動を行うこととなる。
厳密な計算手順を考えようとすると,かなり煩雑なことに
なりそうである。そこで,突起間隔が表面波の波長よりも長
いとして,以下の手順で計算を行った。
step 1: 第1列目の突起の接触角と速度を与え,こららの値 から予圧,推力,消費パワー,伝搬パワーを算出
step 2: 伝搬パワーから波動の振幅を求め ,step 1 での予圧 に一致するよう接触角を求める。スライダ速度から 推力,消費パワー,伝搬パワーを算出
step 3: 2と同様にして推力,消費パワー,伝搬パワーを 最後の列まで算出
step 4: 各列毎の予圧,推力,消費パワーの総和を求める
0
2
4
6
8
10
12
0 20 40 60 80 100 120 140
Thrust
0s [N]
Pre-load [N]
ø20 µm
ø30 µm
ø50 µm
0
0.2
0.4
0.6
0.8
1
1.2
0 20 40 60 80 100 120 140
Speed
0f [m/s]
Pre-load [N]
ø20 µm
ø30 µm
ø50 µm
図 10 突起径が異なる場合の予圧変化に対する推力特性;実験値のプロットとシミュレーション,突起接触面積はいずれも 3mm2
図 11 突起径が異なる場合の予圧変化に対する速度特性;実験値のプロットとシミュレーション,突起接触面積はいずれも 3mm2
0
0.2
0.4
0.6
0.8
1
1.2
1.4
0 20 40 60 80 100 120 140
Speed
0f [m/s]
Preload [N]
n=1000064004356
25001089
0
2
4
6
8
10
0 20 40 60 80 100 120 140
Thrust
0s [N]
Preload [N]
n=10000
6400
4356
2500
1089
図 12 突起密度を変えた場合の予圧変化に対する推力特性;突起列毎のパワー消散を考慮したシミュレーション,突起直径 20µm, 突起中心間間隔 40µm から 120µm
図 13 突起密度を変えた場合の予圧変化に対する速度特性;突起列毎のパワー消散を考慮したシミュレーション,突起直径 20µm, 突起中心間間隔 40µm から 120µm
51

以上の方法により,前章で述べたのとほぼ同一の条件でシ
ミュレーションを行った。結果を図 12 〜 14 に示す。
結果を見比べると,低い予圧の領域では違いは見られない
が,予圧を高くしていった場合に推力の低下が大きくなるよ
うである。例えば図8で予圧 100 N の場合に推力が 10 N を
超えているが,同様の条件で突起列毎のパワーの減衰を考慮
した図 12 では 10 N 以下の推力となった。
6.おわりに
SAW モータの摩擦駆動解析の方法として,駆動面の弾性
接触解析に基づく手法を述べた。弾性接触解析に基づく方法
をとることにより,スライダ突起直径や突起個数といった表
面形状の違いによるモータ特性の差異が,実験結果と一致す
るような解析結果が初めて得られた。今回の解析手法は現実
のSAWモータの動作解析方法として非常に優れており,な
お改良が必要であるが,今後の研究開発に大いに役立つと期
待される。
謝辞
本研究は科研費特定領域研究(438),JST 産学共同シー
ズイノベーション化事業(顕在化ステージ)の補助を受けた。
参考文献
[1] M. Kurosawa, M. Takahashi, and T. Higuchi, "Ultrasonic linear motor using surface acoustic wave," IEEE Trans. on UFFC, vol. 43(5), pp. 901-906, 1996.
[2] M. K. Kurosawa, M. Takahashi and T. Higuchi, "Elastic Contact Conditions to Optimize Friction Drive of Surface Acoustic Wave Motor," IEEE Trans. on UFFC, vol. 45, no. 5, pp. 1229-1237, 1998.
[3] K. Asai, M. K. Kurosawa and T. Higuchi, "Evaluation of the driving performance of a surface acoustic wave linear motor," Proceedings of the IEEE Ultrasonics Symp., pp. 675-679, 2000.
[4] M. K. Kurosawa, H. Itoh, K. Asai, M. Takasaki, and T. Higuchi, "Optimization of slider contact face geometry for surface acoustic wave motor," Proc. of IEEE MEMS Conference, pp. 252-255, 2001.
[5] T. Shigematsu, M. K. Kurosawa and K. Asai, "Nanometer stepping drive of surface acoustic wave motor," IEEE Trans. on UFFC, vol. 50, no. 4, pp. 376-385, 2003.
[6] Y. Nakamura, M. K. Kurosawa, T. Shigematsu and K. Asai, "Effects of ceramic thinfilmcoatingon friction surfaces forsurface acoustic wave linear motor," Proceedings of the IEEE Ultrasonics Symposium, pp. 1766-1769, 2003.
[7] K. Asai and M. K. Kurosawa, "Surface acoustic wave motor using an energy circulation driving method," Proceedings of the IEEE Ultrasonics Symposium, pp. 525-529, 2001.
[8] T. Suzuki, M. K. Kurosawa and K. Asai, "Control of a surface acoustic wave motor using PID controller," Proceedings of LDIA 2005, pp. 326-329.
[9] M. Okano, and M. K. Kurosawa, "Study on modeling of surface acoustic wave motor," Proceedins of the IEEE Int. Symp. on Industrial Electronics 2007, pp. 1508-1513.
[10] T. Iseki, T. Shigematsu, M. Okumura, T. Sugawara and M. K. Kurosawa,"Two-dimensionallyself-holdingdeflectionmirrorusing surface acoustic wave motor," Optical Review, vol. 13, no. 4, pp. 195-200, 2006.
[11] 浅井勝彦,黒澤実,”摩擦駆動モデルを用いた弾性表面波モータの駆動性能評価,” 電子情報通信学会誌 A, vol. J86-A, no. 12, pp.1442-1452, 2003.
[12] T. Shigematsu and M. K. Kurosawa, "Friction drive modeling of SAW otor using classical theori of contact mechanics," Proceedings of Actuator 2006, pp. 444-448.
[13] T. Shigematsu and M. K. Kurosawa, “Friction Drive of an SAW motor Part I: Measurements,” IEEE Trans. Ultrasonics, Ferroelectrics, and Frequency Control, vol. 57, no. 9, pp. 2005-2015, Sept. 2008.
[14] T. Shigematsu and M. K. Kurosawa, “Friction Drive of an SAW motor Part II: Analyses,” IEEE Trans. Ultrasonics, Ferroelectrics, and Frequency Control, vol. 57, no. 9, pp. 2016-2024, Sept. 2008.
[15] T. Shigematsu and M. K. Kurosawa, “Friction Drive of an SAW motor Part III: Modeling,” IEEE Trans. Ultrasonics, Ferroelectrics, and Frequency Control, , vol. 57, no. 10, Sept. 2008 (in printing).
[16] T. Shigematsu and M. K. Kurosawa, “Friction Drive of an SAW motor Part IV: Physics of Contact,” IEEE Trans. Ultrasonics, Ferroelectrics, and Frequency Control, vol. 57, no. 10, Sept. 2008 (in printing).
[17] T. Shigematsu and M. K. Kurosawa, “Friction Drive of an SAW motor Part V: Design Criteria,” IEEE Trans. Ultrasonics, Ferroelectrics, and Frequency Control, vol. 57, no. 10, Sept. 2008 (in printing).
[18] M. K. Kurosawa and T. Shigematsu, “Friction Drive Simulation of Surface Acoustic Wave Motor Characteristics Based on Contact Mechanics,” Jpn. J. Appl. Phys., vol. 47, no. 5, pp. 4287-4291, 2008.
0
2
4
6
8
10
0 20 40 60 80 100 120 140
Thrust
0s [N]
Preload [N]
ø20 µm
ø30 µm
ø50 µm
0
0.2
0.4
0.6
0.8
1
1.2
1.4
0 20 40 60 80 100 120 140
Speed
0t [m/s]
Preload [N]
ø20 µm
ø30 µmø50 µm
図 14 突起径が異なる場合の予圧変化に対する推力特性;突起列毎のパワー消散を考慮したシミュレーション,突起接触面積はいずれも 3mm2
図 15 突起径が異なる場合の予圧変化に対する速度特性;突起列毎のパワー消散を考慮したシミュレーション,突起接触面積はいずれも 3mm2
52
Related Documents