Freeway Segment Traffic State Estimation Heterogeneous Data Sources and Uncertainty Quantification: A Stochastic Three-Detector Approach 1 Wen Deng Xuesong Zhou University of Utah Prepared for INFORMS 2011

Freeway Segment Traffic State Estimation Heterogeneous Data Sources and Uncertainty Quantification: A Stochastic Three-Detector Approach 1 Wen Deng Xuesong.
Dec 21, 2015
Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

1
Freeway Segment Traffic State Estimation
Heterogeneous Data Sources and Uncertainty Quantification:
A Stochastic Three-Detector Approach
Wen DengXuesong Zhou
University of Utah
Prepared for INFORMS 2011

2
Needs for Traffic State Estimation
Sensor Data Traffic State Estimation Traffic Flow/Control Optimization

3
Motivating Questions• How to estimate freeway segment traffic
states from heterogeneous measurements?– Point mean speed– Bluetooth travel time records– Semi-continuous GPS data
Automatic Vehicle Identification Automatic Vehicle LocationLoop Detector Video Image Processing
Point Point-to-pointSemi-continuous path trajectory
Continuous path trajectory

4
Motivating Questions
• How much information is sufficient?– How to locate point sensors on a traffic segment?– How to locate Bluetooth reader locations?– How much AVI/GPS market penetration rate is
sufficient?

5
Existing Method 1: Kalman Filtering
• Eulerian sensing framework– Muñoz et al., 2003; Sun et al., 2003; Sumalee et
al., 2011– Linear measurement equations to incorporate
flow and speed data from point detectors
• Extended Kalman filter framework– second-order traffic flow model– Wang and Papageorgiou (2005)

6
Existing Method 2: Cell Transmission Model
0 10 20 30 40 50 60 70 80 90 100 110 120 1300
200400600800
100012001400160018002000
Density (vhc/ml/lane)
Flo
w v
olu
e (v
hc/
hou
r/la
ne)
Cell inflow inequalityqi,j(t) = Min { vfree ki,j(t) , qmax i,j(t) , w (kjam - ki,j(t)) Δ x }
Switching-mode model (SMM)set of piecewise linear equations
qi,j(t) = [vfree ki,j(t) ] + [vfree ki,j(t) ]

7
Existing Method 3: Lagrangian sensing
• Nanthawichit et al., 2003; Work et al., 2010; Herrera and Bayen, 2010
• Establish linear measurement equations • Utilize semi-continuous samples from moving
observers or probes
8
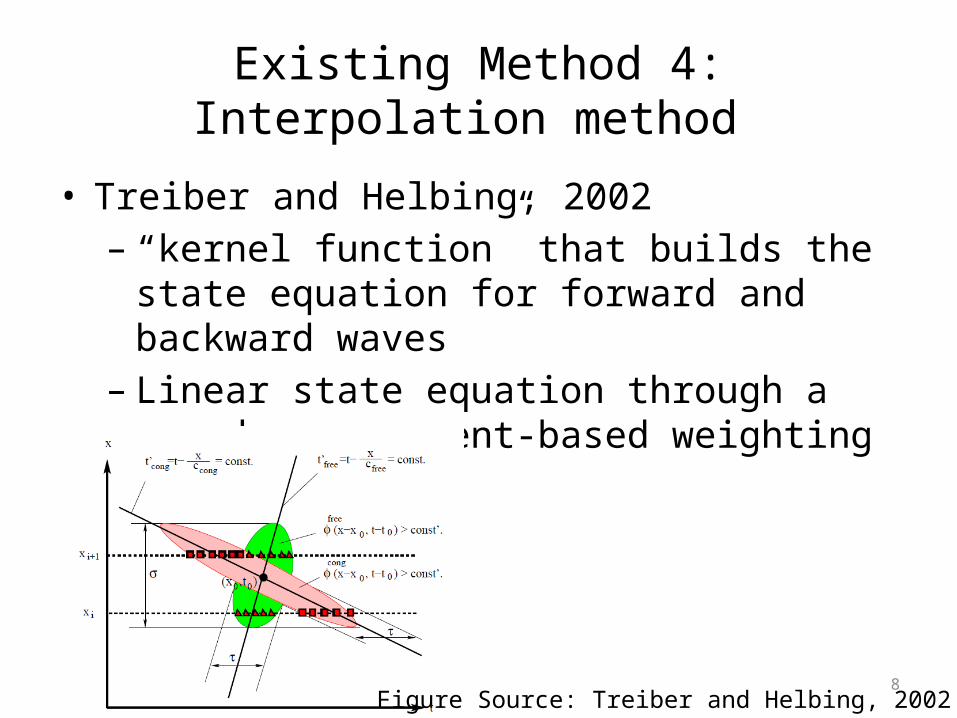
Existing Method 4: Interpolation method
• Treiber and Helbing, 2002– “kernel function” that builds the state equation for
forward and backward waves– Linear state equation through a speed
measurement-based weighting scheme
Figure Source: Treiber and Helbing, 2002

9
Challenge No.1
• 1. Unified measurement equations to incorporate– Point, point-to-point and semi-continuous data

10
Our New Perspective• Dr. Newell’s three-detector model provides a
unified framework• N(t,x)=Min {Nupstream(t-BWTT)+Kjam*distance, Ndownstream(t-FFTT)}
Time axis
( )( )
b
length bBWTT b
w
( )( )
f
length aFFTT a
v
Time t-1
Spac
e axi
s
Link b
Link a
A(b,t-1)
D(b,t-BWTT(b)-1)

11
1: From Point Sensor Data to Boundary N-curves
• Cell density and flow are all functions of cumulative flow counts

12
2: From Bluetooth Travel Time to Boundary N-curves
• Downstream and upstream N-Curves between two time stamps are connected

13
3: From to GPS Trajectory Data to Boundary N-curves
• Under FIFO conditions, GPS probe vehicle keeps the same N-Curve number (say m)
m
m
mm
m

14
4: From Boundary N-curves to Everything inside S
pac
e ax
is
Cumulative flow count n(t,x) space
Time
t0 t3
t t+ΔT
x+ΔX
xN(x,t) N(x,t+ΔT)
N(x+ΔX,t) N(x+ΔX,t+ΔT)
length xD t
w
length x XD t
w
f
xA t
v
f
x XA t
v

15
Challenge No. 2
• All sensors have errors error propagation
Surveillance Type Data Quality
Point Detectors High accuracy and relatively low reliability
AutomaticVehicle Identification
Accuracy depends on market penetration level of tagged vehicles
Mobile GPS location sensors Accuracy depends on market penetration level of probe vehicles
Trajectory data from video image processing
Accuracy depends on machine vision algorithms
16
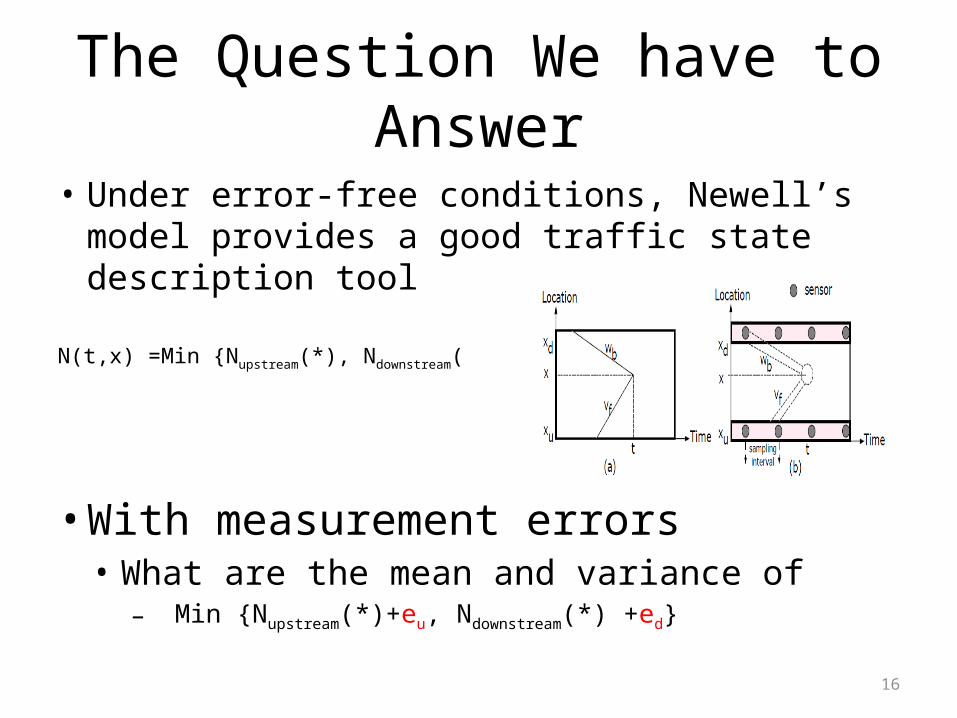
The Question We have to Answer
• Under error-free conditions, Newell’s model provides a good traffic state description tool
N(t,x) =Min {Nupstream(*), Ndownstream(*)}
• With measurement errors• What are the mean and variance of
– Min {Nupstream(*)+eu, Ndownstream(*) +ed}

17
Quick Review: Probit Model and Clark’s Approximation
• Probit model (discrete choice model for min of two alternatives’ random utilities )– U = min (U1+e1, U2+e2)– Route choice application
• Clark’s approximation
minimization of two random variables can be approximated by a third random
variables

18
Proposed Stochastic 3-Detector Model

19
Discussion 1: Consistency CheckingWhen Uncertainties of boundary values are 0, the stochastic 3-detector model reduces to deterministic 3-detertor model

20
Discussion 2: Weights under Different Traffic Conditions

21
Discussion 3: Quantify Uncertainty of Inside-Traffic-State Estimates
• Variance or trace of estimates determine the value of information
1 1T
2 2
3 3
E(e e )
Trace(ee )= E(e e )
E(e e )

22
Stochastic Boundary
A priori Estimation Variance-Covariance Matrix
A priori Cumulative Vehicle Count Vector Estimation
N
P
1
2A posterior estimation of
Variance-Covariance Matrix
A posterior estimation ofCumulative Vehicle Count Vector
N
P
4
5
Linear Measurement Equations
Y HN R 3
Cell Based Flow and DensityEstimation
Cell Based Flow and DensityUncertainty Quantification
12
13
AVI Measurements
Travel Times
Additional Point Sensor
Measurements
Vehicle Counts
Occupancy
GPS Measurements
Vehicle Number
Speed
7. Heterogeneous Data Sources
Stochastic Three Detector Model
Newell’s Simplified Kinematic Wave TheoryMinimization Equation
Probit Model and Clark’s ApproximationSolution to a Minimization Equation
8
9 Boundary N Mapping Matrix H
Measurement Error Variance Covariance
R
Point Sensor Sampling Time Interval
AVI Market Penetration Rate
GPS Market Penetration Rate
10
11
6. Parameters

23
Numerical Example

24
Input: Queue Spillback

25
Ground truth Arrive-departure Curves

26
Estimated Density Profile

27
Estimated Uncertainty profileBefore
After

28
Impact of Additional Sensors

29
Possible (Un-captured) Modeling Errors
• Upper plot: original NGSIM vehicle trajectory data• Lower plot: reconstructed vehicle trajectory based on flow count measurements
1. Stochastic free-flow speed, 2. Stochastic backward wave speed;3. Heterogeneous driving behavior

30
Conclusions
• Proposed stochastic 3-detertor Model– Estimate freeway segment traffic states from
heterogeneous measurements– Quantify the degree of estimation uncertainty and
value of information, under different sensor deployment plans
Related Documents