FIXED-POINT IMAGE ORTHORECTIFICATION ALGORITHMS FOR REDUCED COMPUTATIONAL COST Dissertation Submitted to The School of Engineering of the UNIVERSITY OF DAYTON In Partial Fulfillment of the Requirements for The Degree of Doctor of Philosophy in Engineering By Joseph Clinton French UNIVERSITY OF DAYTON Dayton, Ohio May, 2016

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

FIXED-POINT IMAGE ORTHORECTIFICATION ALGORITHMS
FOR REDUCED COMPUTATIONAL COST
Dissertation
Submitted to
The School of Engineering of the
UNIVERSITY OF DAYTON
In Partial Fulfillment of the Requirements for
The Degree of
Doctor of Philosophy in Engineering
By
Joseph Clinton French
UNIVERSITY OF DAYTON
Dayton, Ohio
May, 2016
FIXED-POINT IMAGE ORTHORECTIFICATION ALGORITHMS FOR
REDUCED COMPUTATIONAL COST
Name: French, Joseph Clinton
APPROVED BY:
Eric J. Balster, Ph.D.Advisor Committee ChairmanAssociate ProfessorElectrical & Computer Engineering
Russell C. Hardie, Ph.D.Committee MemberProfessorElectrical and Computer Engineering
Vijayan K. Asari, Ph.D.Committee MemberProfessor & Ohio Research ScholarsChair Wide Area SurveillanceElectrical & Computer Engineering
Kenneth J. Barnard, Ph.D.Committee MemberPrincipal Electronics EngineerSensors DirectorateAir Force Research Laboratory
John G. Weber, Ph.D.Associate DeanSchool of Engineering
Eddy Rojas, Ph.D., M.A., P.E.DeanSchool of Engineering
ii
c© Copyright by
Joseph Clinton French
All rights reserved
2016

ABSTRACT
FIXED-POINT IMAGE ORTHORECTIFICATION ALGORITHMS FOR REDUCED
COMPUTATIONAL COST
Name: French, Joseph Clinton
University of Dayton
Advisor: Dr. Eric J. Balster
Imaging systems have been applied to many new applications in recent yearss. With
the advent of low-cost, low-power focal planes and more powerful, lower cost computers,
remote sensing applications have become more wide spread. Many of these applications
require some form of geolocation, especially when relative distances are desired. However,
when greater global positional accuracy is needed, orthorectification becomes necessary. Or-
thorectification is the process of projecting an image onto a Digital Elevation Map (DEM),
which removes terrain distortions and corrects the perspective distortion by changing the
viewing angle to be perpendicular to the projection plane. Orthorectification is used in
disaster tracking, landscape management, wildlife monitoring and many other applications.
However, orthorectification is a computationally expensive process due to floating point
operations and divisions in the algorithm. To reduce the computational cost of on-board
processing, two novel algorithm modifications are proposed. One modification is projec-
tion utilizing fixed-point arithmetic. Fixed point arithmetic removes the floating point
operations and reduces the processing time by operating only on integers. The second
iii
modification is replacement of the division inherent in projection with a multiplication of
the inverse. The inverse must operate iteratively. Therefore, the inverse is replaced with a
linear approximation. As a result of these modifications, the processing time of projection
is reduced by a factor of 1.3x with an average pixel position error of 0.2% of a pixel size for
128-bit integer processing and over 4x with an average pixel position error of less than 13%
of a pixel size for a 64-bit integer processing.
A secondary inverse function approximation is also developed that replaces the linear
approximation with a quadratic. The quadratic approximation produces a more accurate
approximation of the inverse, allowing for an integer multiplication calculation to be used
in place of the traditional floating point division. This method increases the throughput of
the orthorectification operation by 38% when compared to floating point processing. Addi-
tionally, this method improves the accuracy of the existing integer-based orthorectification
algorithms in terms of average pixel distance, increasing the accuracy of the algorithm by
more than 5x. The quadratic function reduces the pixel position error to 2% and is still
2.8x faster than the 128-bit floating point algorithm.
iv

For my family, Pınar and Koray.
v
ACKNOWLEDGMENTS
This research was partially funded with the help of the Air Force Research Laboratory.
I would also like to thank the University of Dayton Electrical and Computer Engineering
Department faculty for their expertise and insight. A special thanks my advisor, Dr. Eric
Balster and committee members, Dr. Russell Hardie, Dr. Vijay Asari, and Dr. Kenneth
Barnard for their guidance.
A special thanks to my current employer Lightstorm Research, as well as the University
of Dayton Research Institute for their support and encouragement.
vi
TABLE OF CONTENTS
ABSTRACT . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . iii
DEDICATION . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . v
ACKNOWLEDGMENTS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . vi
LIST OF FIGURES . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . ix
LIST OF TABLES . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . xii
I. INTRODUCTION . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
II. BACKGROUND . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
2.1 Image Projection . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
2.2 Forward Projection . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
2.2.1 Back Projection . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
2.3 Camera Model . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
2.4 Projection Plane . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
2.5 Orthorectification . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
2.6 Fixed-Point Arithmetic . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
III. REVIEW OF SELECT PAPERS . . . . . . . . . . . . . . . . . . . . . . . . . . 22
3.1 Aerial Imagery Processing . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
3.2 Orthorectification . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
3.3 Fixed-Point Processing and FPGAs . . . . . . . . . . . . . . . . . . . . . 29
IV. RESEARCH SETUP . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
4.1 Data Set . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
4.2 Equipment . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
4.3 Floating-Point Back Projection Method . . . . . . . . . . . . . . . . . . . 38
vii

4.3.1 Back Projection Method . . . . . . . . . . . . . . . . . . . . . . . 38
4.3.2 DEM Interpolation . . . . . . . . . . . . . . . . . . . . . . . . . . 42
4.3.3 Algorithm Implementation . . . . . . . . . . . . . . . . . . . . . . 44
V. FIXED-POINT PROJECTION ALGORITHM WITH LINEAR APPROXIMA-
TION [26] . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
5.1 Algorithm Description of [26] . . . . . . . . . . . . . . . . . . . . . . . . . 47
5.2 Metrics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
5.3 Results from [26] . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56
5.3.1 128-bit Algorithm with Linear Approximation Results . . . . . . . 56
5.3.2 64-bit Algorithm with Linear Approximation Results . . . . . . . 61
VI. FIXED-POINT PROJECTION ALGORITHM WITH QUADRATIC APPROX-
IMATION [27] . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
6.1 Algorithm Description of [27] . . . . . . . . . . . . . . . . . . . . . . . . . 66
6.2 Metrics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72
6.3 Results from [27] . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 74
6.3.1 128-bit Algorithm with Quadratic Approximation Training Results 74
6.3.2 64-bit Algorithm with Quadratic Approximation Training Results 75
6.3.3 Algorithm Results, Comparison, and Discussion . . . . . . . . . . 77
VII. CONCLUSION . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 82
APPENDICES. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 84
APPENDIX A: DERIVATION OF EQUATION 6.2 . . . . . . . . . . . . . . 84
APPENDIX B: CURRENT JOURNAL PUBLICATIONS . . . . . . . . . . 86
APPENDIX C: CURRENT CONFERENCE PUBLICATIONS . . . . . . . 87
BIBLIOGRAPHY . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 88
viii

LIST OF FIGURES
2.1 Projection Geometry. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
2.2 Pin-hole camera model. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
2.3 The CAHV camera model. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
2.4 East, North, Up (ENU) and Earth-Centered Earth-Fixed reference coordi-
nates with respect to the Earth. (source Wikipedia: Mike1024) . . . . . . . 16
2.5 The difference between (a) geo-location, (b) georectification, and (c) or-
thorectification . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
2.6 32-bit floating point conversion from binary to decimal . . . . . . . . . . . . 21
4.1 LAIR Data set Collection Orbit of Training Data. . . . . . . . . . . . . . . 35
4.2 Example of the individual images captured using the sensor system from the
LAIR data set. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
4.3 Combined images from Figure 4.2. . . . . . . . . . . . . . . . . . . . . . . . 36
4.4 Orthrectified image using the same images from Figure 4.2, overlayed on
Google Earth for context. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
4.5 Orientation of the Novatel IMU Orientation for the LAIR data set collection. 38
4.6 Earth coordinate variable definitions (a) top view; (b) side view. . . . . . . 40
4.7 DEM of the Dayton, Ohio area used for with the LAIR data set. . . . . . . 42
4.8 Bilinear interpolation of the DEM. . . . . . . . . . . . . . . . . . . . . . . . 43
ix
5.1 Flow diagram for the proposed projection method. . . . . . . . . . . . . . . 54
5.2 Average pixel offset surface per set of scale factors over 100 training images. 57
5.3 Average pixel offset profile highlighting peak and plateau. . . . . . . . . . . 58
5.4 Histogram for the difference image shown in Figure 5.5 (c). . . . . . . . . . 60
5.5 Sub-region of the projected image using the [68] algorithm, left (a), and
the integer algorithm, center (b), the difference between the two (contrast
enhanced), right (c). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60
5.6 Average pixel offset surface per set of scale factors over 100 training images,
limited to 64-bit integers. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62
5.7 Results of the algorithm described in [68], left (a), and the 64-bit integer
algorithm, right (b). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63
5.8 Histogram for the difference image shown in Figure 5.9 (c). . . . . . . . . . 63
5.9 Results orthorectification on a sub-image using the algorithm described in
[68], left (a), and the 64-bit integer algorithm, center (b), the difference
between the two (contrast enhanced), right (c). . . . . . . . . . . . . . . . . 64
6.1 Difference Image (C) between the truth image (A) and the 64-bit linear
approximation algorithm (B) . . . . . . . . . . . . . . . . . . . . . . . . . . 66
6.2 Difference between the linear estimate (blue) and the quadratic estimate
(green) to the inversion function . . . . . . . . . . . . . . . . . . . . . . . . 68
6.3 Percent Difference between target floating point value and the integer ap-
proximation as a function of scale factor. . . . . . . . . . . . . . . . . . . . . 70
6.4 Average pixel offset surface per set of scale factors over 100 training images. 75
6.5 Average pixel offset surface per set of scale factors over 100 training images. 76
6.6 Profile over λ3 with a fixed λ1 and different λ2 samples. . . . . . . . . . . . 77
6.7 Comparison of the average pixel projection distance from the F128 algorithm
among the different projection algorithms. . . . . . . . . . . . . . . . . . . . 79
x

6.8 Comparison of the speed increase as compared to the F128 algorithm among
the different projection algorithms. . . . . . . . . . . . . . . . . . . . . . . . 79
6.9 Full frame projection result from the F128 algorithm with highlighted selec-
tion for comparison to other algorithms. . . . . . . . . . . . . . . . . . . . . 80
6.10 Comparison of the algorithm projections from the F128 projection algorithm;
(A) F64, (B) I128LA, (C) I64LA, (D) I128QA, and (E) I64QA. . . . . . . . . . . 81
xi

LIST OF TABLES
4.1 Test bench computer specifications. . . . . . . . . . . . . . . . . . . . . . . . 37
5.1 Integer variables and scale factors. . . . . . . . . . . . . . . . . . . . . . . . 49
5.2 Projection Comparison between floating point and integer algorithm for λ1
= 28 and λ2 = 39 of the Testing Data. . . . . . . . . . . . . . . . . . . . . . 59
5.3 Projection Comparison between floating point and 64-bit integer algorithms
for λ1 = 17 and λ2 = 32 of the Testing Data. . . . . . . . . . . . . . . . . . 64
6.1 Projection algorithm comparison showing the results from the testing data
compared to the F128 algorithm. . . . . . . . . . . . . . . . . . . . . . . . . 78
xii

CHAPTER I
INTRODUCTION
Imaging systems have become a more prominent feature in many new applications as
the acquisition cost has decreased and the quality has increased. Along with the price and
quality of digital cameras, computers have become smaller and more powerful. Therefore,
more computation can now be performed in real-time with quicker response for disaster
relief, threat detection, traffic monitoring, or any number of situations. Different image
processing techniques have been developed (i.e. filtering [24], image compression [37], and
noise reduction [30]) and modified to run efficiently on low-power processing units. However,
many of these applications require orthorectification to easily identify and interpret resource
allocation.
Orthorectification is the process of projecting an image onto a Digital Elevation Map
(DEM) and changing the perspective to be perpendicular to the projection surface. Aerial
imagery is converted to more of a map-like environment with distance correctly scaled
and oriented toward the North. Orthorectification is a computationally expensive process
that can hamper image collection rates and therefore, the overall system effectiveness. In
order to combat the computationally prohibitive orthorectification we propose an efficient
fixed-point back projection algorithm.
1

Aerial imagery has been used on many remote sensing applications including managing
natural disasters [23, 47], observing ecological changes [49], tracking declines in foundation
species [21], monitoring traffic [62], monitoring natural events like glaciation [6], natural
resources [65], and monitoring wetland restoration sites [38]. Other applications include
automated UAV navigation as described in [22], or mapping archeological sites [52]. As the
proliferation of unmanned aerial vehicles (UAVs) continues, more applications will become
apparent. Each of these applications require geographical knowledge of where the images
are captured. A common Earth-based projection plane across images has the benefit of
being able to pool multiple images from multiple sensors into a common intuitive space.
To overcome the computational complexity of orthorectification, several methods have
been developed to reduce processing time. Most of these methods use a form of distributed
computing such as grid computing, cloud computing, or Graphics Processing Units (GPUs).
A distributed computing paradigm is possible because each pixel is independent of the other
pixels through the orthorectification process. In other words, the projection of one pixel
does not depend on any of the other pixels. However, distributed systems can be prohibitive
due to size, weight and power constraints.
Grid computing is a task oriented collection of computers that distribute computational
loads to increase system throughput. Grid computing has also been utilized to perform
orthorectification such as [69] which demonstrates a grid computing architecture that helps
maximize the computational throughput of an orthorectification process using Moderate
Resolution Imaging SpectroRadiometer (MODIS) satellite imagery. Another task for grid
computers is monitoring disaster areas as demonstrated by [7], which proposes a method of
a grid computing architecture for fast disaster response using orthorectification.
2

Cloud computing, a method of using several non-local computers for processing, has
been used for orthorectification in glacier [57], ocean [28], and soil monitoring [18] as well as
natural disaster damage analysis [7]. One drawback of cloud computing is the security issues
that can arise. If the image or location is sensitive, then cloud computing may not be a good
solution. Cloud computing requires the image to be offloaded to a remote computer prior
to processing. Orthorectification systems have used cloud computing [43], but it becomes
difficult for real-time operations. Another disadvantage of cloud computing is the added
overhead of breaking up of the processes and the recombination of the result.
Some of the current research with GPUs concentrate on parallel implementation, and
coding methods. The method covered by [70] describes traffic monitoring using a GPU-
based image processing system, and is able to keep up with a 3 Hz frame rate of a 3K
imaging system. GPUs are also used to orthorectify an aerial pushbroom system onto a
digital terrain model (DTM) [58], which is able to orthorectify the sensor’s pixels at over
500 lines per second; much faster than the sensor was originally collecting.
Another technique for increasing the system throughput combines the GPU and CPU to
have them work in cooperatively, or share the computational load between a CPU and GPU.
A processing architecture and data flow is detailed in [10]. The problem of implementing
image processing techniques on a GPU when the image size is not a power of 2, or is too
large to store on a GPU is covered by [11]. [11] uses an open source image processing tool
box with CUDA implementations to compare the computational costs between using the
GPU or multi-core CPU for different image sizes. [11] also mentions that the selection of
the image processing algorithms is a major factor in speed increases as well as the decreases
in double precision calculations.
3
Field programmable gate arrays (FPGAs) are low power alternatives to GPUs. FPGAs
use a series of logic gates that can be reconfigured into different computation components.
Orthorectification has been implemented on an FPGA system [40] for realtime processing.
One downside of FPGAs is floating point computation. Floating point computations are
difficult for FPGAs because of the number of gates required for the computation, and
orthorectification requires angles and decimal precision for accurate results. Therefore, the
number of floating point computation units that a FPGA can contain becomes a limiting
factor on the amount of parallel implementations.
A related method for reducing complexity is to replace floating point operations with
fixed-point arithmetic [53]. Fixed-point arithmetic has been used for increasing computa-
tional throughput for many diverse applications [29, 66]. Some of these applications are an
automatic signature verification system [25] and image compression [3].
The next section, Chapter II, gives a background of the mathematical equations re-
quired for back projection. The chapter begins with the background required for image
projection, including the mathematical basis, rotations and the collinearity equations. The
two primary types of image projection, forward and back projection are covered and com-
pared, highlighting the differences discussed in Section 2.1. The camera model, which is a
construct within which the camera can be described in mathematical terms is discussed in
Section 2.3. Two primary types of camera models are discussed, the pin-hole and CAHV.
The projection plane, which an image is projected onto is discussed in Section 2.4, as well
as how it can affect an orthorectified image. The next section, Section 2.5 explains the or-
thorectification process, the different types and accuracy measurements. The final section,
Section 2.6, describes the basis for fixed-point arithmetic.
4

Chapter III discusses a selection of papers that highlight the applications along with the
benefits and some of the challenges encountered in researching aerial imagery and efficient
code implementations. The first section, Section 3.1, covers some of the current research on
applications that require aerial image processing from remote systems. Current methods
and applications for orthorectification is discussed in Section 3.2. The final section, Section
3.3, reviews the different applications where efficient fixed-point processing and FPGA
implementations have been used and discribes the benefits and detriments inherent therein.
Chapter IV, details the experimental setup, data and fixed-point projection algorithms.
the first section, Section 4.1, describes the data set, which consists of the imagery, position
and attitude data, as well as a discussion on the preprocessing required to successfully
implement the fixed-point algorithms. Section 4.2 lists the experimental equipment used
during the image collection, algorithm programming and processing. Section 4.3 describes
the floating-point orthorectification algorithm as described in [68]. Beginning with the
basic back projection method (Section 4.3.1), the DEM interpolation (Section 4.3.2) and
the implementation of the orthorectification algorithm (Section 4.3.3).
The fixed-point orthorectification algorithm as described in [26] is covered in Chapter V.
The algorithm and equations are shown in Section 5.1. The algorithm uses two scale factors
for integer conversion and fixed-point computations to increase the system throughput.
There are two versions of the algorithm, 128-bit and 64-bit integer versions. Section 5.2
discusses the metrics used for training and comparison. The results of the testing and
training of the two different versions is shown in Section 5.3. Section 5.3.1 reviews the
results of the training and testing of the 128-bit integer version. The training and testing
of the 64-bit integer version is covered in Section 5.3.2.
5
While [26] uses a linear approximation, Chapter VI describes a quadratic approxima-
tion proposed in [27]. Section 5.1 describes the algorithm and corresponding equations.
The metrics used for scale factor optimization training and performance comparisons are
described in Section 6.2. As with Chapter V, there are training and testing components as
well as two different versions, also 128-bit and 64-bit integer, of the algorithm. The first
two subsections, Sections 6.3.1 and 6.3.2, cover the training of the algorithms to determine
the optimal scale factors. The final subsection, Section 6.3.3 discusses the comparison of
the results of the different algorithms.
The final chapter, Chapter VII, closes with a review of the results of the different ap-
proximation techniques implemented. It concludes with a brief discussion of future research
topics that may improve performance or modular implementations for commercial usage.
6
CHAPTER II
BACKGROUND
This chapter gives a brief background on a few subjects required for the understanding of
the research topic. The first section, Section 2.1, discusses image projection beginning with
the rotation matrices and then covering forward and back projection. Camera models are
modeling constructs that characterize the imaging camera and the camera’s relationship
to the real world and is covered in Section 2.3. Section 2.4 covers the different types of
Earth based projection planes. Orthorectification, described in Section 2.5, is the most
accurate type of geo-location where perspective and terrain distortions are removed. The
final section, Section 2.6, describes fixed point arithmetic and the relationship between
floating point variables and the integer representations.
2.1 Image Projection
Image projection has become more important in the last several years as the ability
to capture digital imagery has become more cost effective. Projection is the process of
transforming objects to different spaces. For instance, in ancient times a sun dial indicated
the time of day by casting a shadow of the needle in the middle of the dial onto the dial
itself to indicate the time of day. In effect, this is what projection does, an object is located
7
in a certain reference frame, projection can transform the object to a different frame usually
with some warping or distortion.
IAn image, which is in the image plane, can be modified by adding a rotation, thereby
placing the image out of the image plane, and into a different projection plane. Projection
is typically performed with a rotation matrix, as shown in Equation 2.1, where x and y are
the original coordinates, x0 and y0 are the offsets in the original coordinates, i and j are the
transformed coordinates, and i0 and j0 are the transformed coordinate offsets [41].
i− i0
j − j0
=
cos(θ) − sin(θ)
sin(θ) cos(θ)
x− x0
y − y0
(2.1)
Image projection can be a more complicated process. An image is really a 2D represen-
tation of a 3D space. An image is physically the result of a projection from a 3D world into
a 2D Focal Plane Array (FPA). During this transformation, a real-world object is projected
through a lens and then onto the focal plane. The question then becomes, is it possible to
recreate the 3D space from the imagery?
Part of the answer is that a more complex rotation matrix is required. In a 3D coordinate
system, each axis needs to have a different rotation. A set of rotation angles are used which
correspond to each axis in a 3D space, as shown in Equations 2.2, 2.3, and 2.4, where θ
is the rotation about the x-axis, φ is the rotation about the y-axis, and ω is the rotation
about the z-axis [32].
These rotations can be combined to give a similar result as Equation 2.1, only in three
dimensions, by multiplying the matrices together where the order of operation does matter.
The system transform about three axes is shown in equation 2.6. However, often during
8
the projection process, multiple transforms are required to change coordinate systems from
a real world object to the image space. These rotations are called Euler angles, a more
thorough explanation of the Euler angles and resulting rotation matrices can be found in
[50].
Rx(κ) =
1 0 0
0 cos(κ) − sin(κ)
0 sin(κ) cos(κ)
(2.2)
Ry(φ) =
cos(φ) 0 sin(φ)
0 1 0
− sin(φ) 0 cos(φ)
(2.3)
Rz(ω) =
cos(ω) − sin(ω) 0
sin(ω) cos(ω) 0
0 0 1
(2.4)
M = Rz(ω)Ry(φ)Rx(κ) =
m11 m12 m13
m21 m22 m23
m31 m32 m33
, (2.5)
Where Rz is the rotation about the z-axis, Ry is the rotation about the y-axis, and Rx
is the rotation about the x-axis.
9
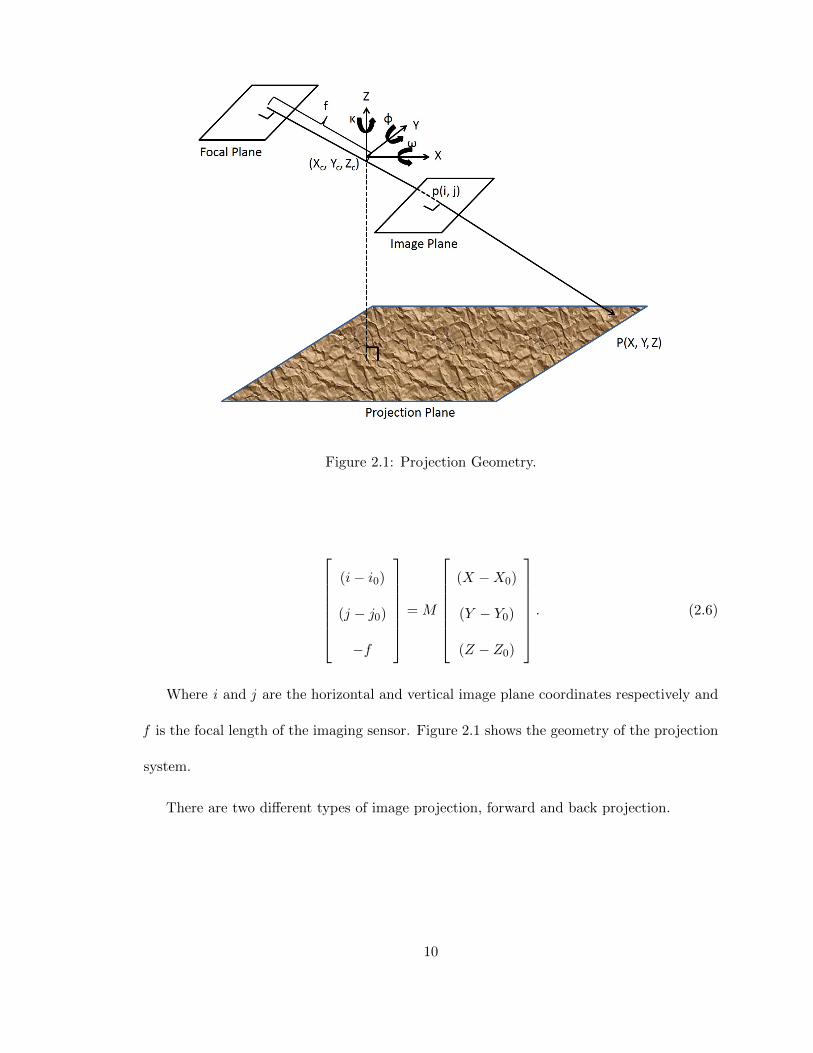
Figure 2.1: Projection Geometry.
(i− i0)
(j − j0)
−f
= M
(X −X0)
(Y − Y0)
(Z − Z0)
. (2.6)
Where i and j are the horizontal and vertical image plane coordinates respectively and
f is the focal length of the imaging sensor. Figure 2.1 shows the geometry of the projection
system.
There are two different types of image projection, forward and back projection.
10

2.2 Forward Projection
Equation 2.6 can be modified to transform image coordinates [i,j, -f ] to world coordi-
nates [X, Y, Z], as shown in Equation 2.7.
(X −X0)
(Y − Y0)
(Z − Z0)
= MT
(i− i0)
(j − j0)
(−f)
, (2.7)
Where the T operand is the transpose of the transform matrix. The collinearity equations
are a set of equations based on the assumption that the world coordinate, focal point, and
image pixel lie on the same line. The collinearity equations that are derived from the
coordinate transform shown in Equation 2.7. Equation 2.8 is for the horizontal coordinates
and 2.9 is for the vertical. The collinearity equations are widely used for orthorectification
[68].
X = X0 + (Z − Z0)m11(i− i0) +m21(j − j0) +m31(−f)
m13(i− i0) +m23(j − j0) +m33(−f)(2.8)
Y = Y0 + (Z − Z0)m12(i− i0) +m22(j − j0) +m32(−f)
m13(i− i0) +m23(j − j0) +m33(−f)(2.9)
However, with forward projection, the result isn’t a uniform grid. When an image is
forward projected, a square pixel is projected onto the projection plane into a trapezoidal
shape. The difference in shape will have to be modified to fit into a uniform DEM grid.
Another complication arises when the size of the DEM pixel is different than the native
11

projected image pixel size. When this happens, some DEM pixels that are surrounded by
projected image data, are missed and results in a distracting blank pixel in the orthorectified
image. For aerial imagery, the projected image pixel size changes throughout the projection
plane. To avoid missing or blank pixels, the largest projected pixel size would need to be
used. If the largest projected pixel size is used, then part of the image is degraded and a
loss of resolution occurs. If the smallest projected pixel size is chosen, the probability of
missed or blank projection plane pixels increases.
These missing or non-projected pixels become a distraction and can harm the appearance
and can negatively effect image processing techniques. To remove the non-projected pixels,
a secondary interpolation is required, increasing the computational requirements.
2.2.1 Back Projection
Back projection does not require the secondary interpolation step. In back projection,
the world coordinates are projected into the image plane of the camera system (Figure 2.1).
In back projection the collinearity equations can be simplified to Equation 2.10 for the
horizontal component in the image plane and Equation 2.11 for the vertical component.
i = −f m11(X −Xc) +m12(Y − Yc) +m13(Z − Zc)m31(X −Xc) +m32(Y − Yc) +m33(Z − Zc)
, (2.10)
j = −f m21(X −Xc) +m22(Y − Yc) +m23(Z − Zc)m31(X −Xc) +m32(Y − Yc) +m33(Z − Zc)
. (2.11)
Back projection has the advantage in that the interpolation ”gridding” step can be
accomplished during the projection process.
12
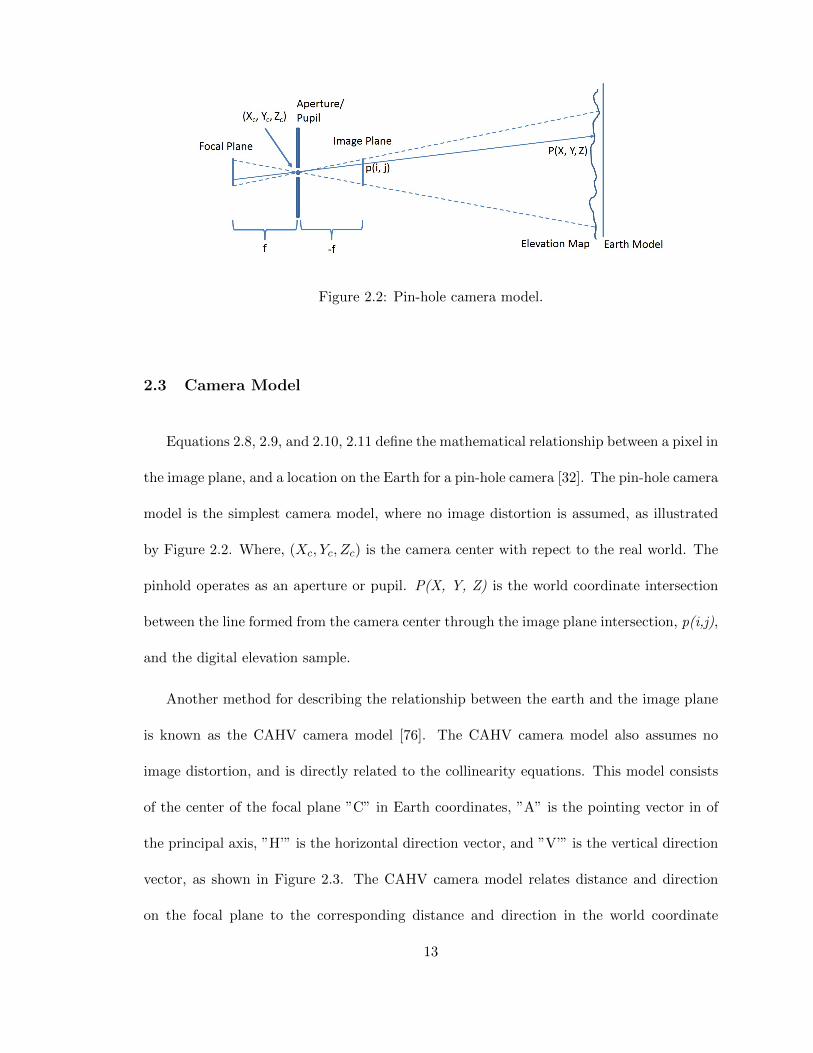
Figure 2.2: Pin-hole camera model.
2.3 Camera Model
Equations 2.8, 2.9, and 2.10, 2.11 define the mathematical relationship between a pixel in
the image plane, and a location on the Earth for a pin-hole camera [32]. The pin-hole camera
model is the simplest camera model, where no image distortion is assumed, as illustrated
by Figure 2.2. Where, (Xc, Yc, Zc) is the camera center with repect to the real world. The
pinhold operates as an aperture or pupil. P(X, Y, Z) is the world coordinate intersection
between the line formed from the camera center through the image plane intersection, p(i,j),
and the digital elevation sample.
Another method for describing the relationship between the earth and the image plane
is known as the CAHV camera model [76]. The CAHV camera model also assumes no
image distortion, and is directly related to the collinearity equations. This model consists
of the center of the focal plane ”C” in Earth coordinates, ”A” is the pointing vector in of
the principal axis, ”H’” is the horizontal direction vector, and ”V’” is the vertical direction
vector, as shown in Figure 2.3. The CAHV camera model relates distance and direction
on the focal plane to the corresponding distance and direction in the world coordinate
13

Figure 2.3: The CAHV camera model.
system. The CAHV model also creates an efficient construct for projecting between the
image coordinates and world coordinates in that all of the information required for the
projection is contained within the model.
The CAHV model is closely related to the collinearity equations only with the focal
length multiplied through the equation.
2.4 Projection Plane
With the rotation and projection applied, the next element is the projection plane. The
projection plane is where the pixels are projected onto (forward projection), as in Equations
2.8 and 2.9 where the projection plane locations are denoted by [X, Y, Z]. The projection
14
plane can also be projected from (backward projection), as in Equations 2.10 and 2.11. The
projection plane is typically a flat surface because changes in projection distance can add
distortions.
One solution is to use the Earth as the projection plane. Several different models of the
Earth ellipsoid have been developed. The most commonly used Earth model is the WGS84
ellipsoid model, which is used by the GPS satellites [71]. However, trying to project directly
onto the WGS84 geodiod is computationally intensive and often leads to systemic errors
[8]. A different reference frame is developed to both simplify the process and reduce errors.
Georectification is the process of projecting an aerial image onto an Earth based projection
plane (e.g. local tangential plane [31] or Earth-Centered, Earth Fixed (ECEF)[2]) so that
the image pixels are tied to Earth coordinates. The different Earth based coordinate systems
are shown below in Figure 2.4
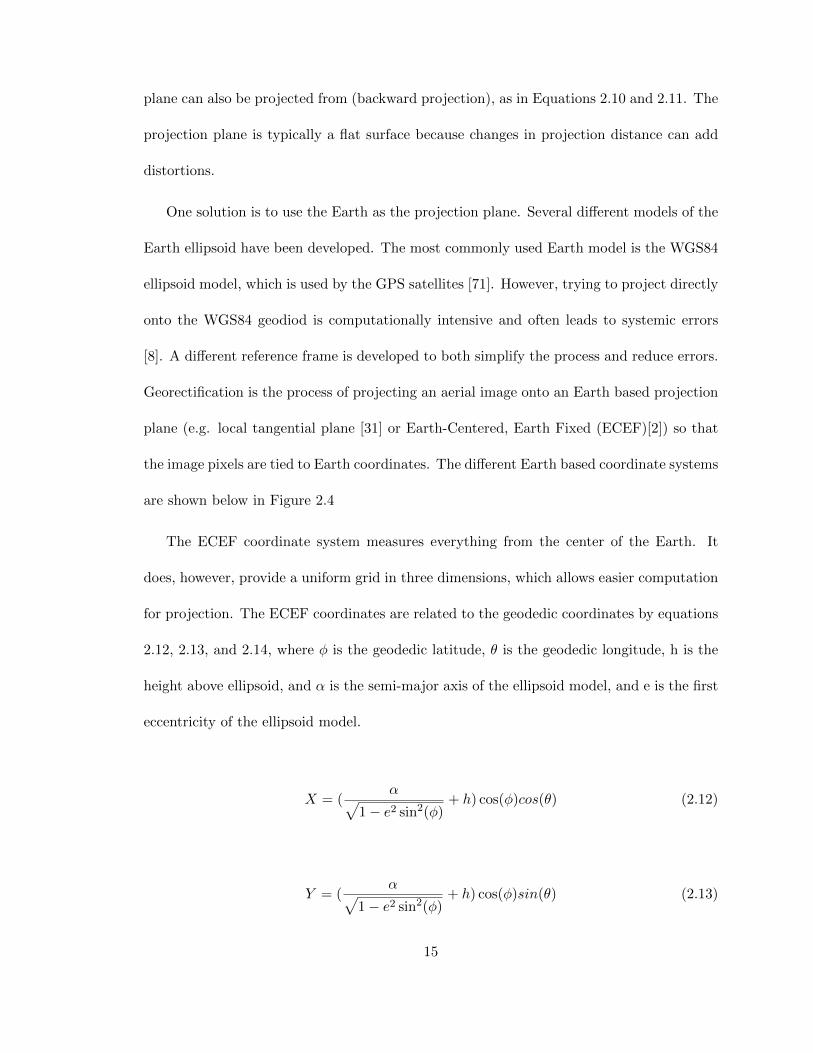
The ECEF coordinate system measures everything from the center of the Earth. It
does, however, provide a uniform grid in three dimensions, which allows easier computation
for projection. The ECEF coordinates are related to the geodedic coordinates by equations
2.12, 2.13, and 2.14, where φ is the geodedic latitude, θ is the geodedic longitude, h is the
height above ellipsoid, and α is the semi-major axis of the ellipsoid model, and e is the first
eccentricity of the ellipsoid model.
X = (α√
1− e2 sin2(φ)+ h) cos(φ)cos(θ) (2.12)
Y = (α√
1− e2 sin2(φ)+ h) cos(φ)sin(θ) (2.13)
15

Figure 2.4: East, North, Up (ENU) and Earth-Centered Earth-Fixed reference coordinateswith respect to the Earth. (source Wikipedia: Mike1024)
Z = (α√
1− e2 sin2(φ)(1− e2) + h)sin(φ) (2.14)
A derivative of the ECEF coordinate frame is the local tangent or east, north, up (ENU)
coordinate frame. One of the issues with the ECEF coordinate frame is that everything
is measured from the center of the earth, so all of the computations will work with large
values. However, since it is really only the surface that we are usually worried about,
the ENU coordinate frame references everything from a user defined center on the Earth’s
surface. This helps reduce the size of the values involved, and with the ECEF coordinate
frame, each direction is orthogonal to the other directions. The equation for converting
between ECEF and ENU is shown below in equation 2.15. The variables Xp, Yp, and Zp
16

are the ECEF coordinates of the platform. The variables Xt, Yt, and Zt are the ECEF
coordinates at the desired center of the tangent plane. Again the relationship between
geodedic, ECEF and ENU is shown below in figure 2.4
X
Y
Z
=
− sin(φ) cos(φ) 0
− sin(θ) cos(φ) − sin(φ) sin(θ) cos(φ)
cos(θ)cos(φ) cos(θ)sin(θ) sin(θ)
Xp −Xr
Yp − Yr
Zp − Zr
(2.15)
Another addition to the different ground planes is the digital elevation map (DEM).
Many techniques use a DEM during the projection process such as [50], [78], and [61].
DEMs are used to increase the accuracy of an image projection. The WGS84 ellipsoid,
for instance, is typically several meters below the actual elevation of the land. A DEM
helps to give a more accurate surface on top of the coordinate system to improve accuracy.
However, when capturing aerial imagery, the image projection vectors aren’t from a 2D
surface, the differences in elevation complicates the orthorectification process. To mitigate
this effect, an approximation of the terrain is required. There are elevation maps available
from government agencies such as the United States Geological Survey (USGS) [73] and
NASA [51]. These typically have Ground Sample Distances (GSD) of 1 to 10 square meters.
Many aerial images will have a finer GSD than those specified by the elevation map.
Therefore, an interpolation step is performed to match the expected nominal projected GSD
with the digital elevation map.
17
2.5 Orthorectification
The process described in previous sections can be combined to produce an orthorectified
image. There are different processing methods for attaching earth coordinates to image
pixels. They are geo-location, georectification, and orthorectification. The definition of
each process type is listed below.
Geo-location is simply attaching an earth coordinate to an image pixel, no other pro-
cessing needs to be performed. There are different types of geo-location such as projecting
the image footprints thereby finding the Earth coordinates of the corners of the image.
Another method is to match known features to the same features on Earth. Geo-location
does not need to perform projection, or remove perspective or terrain distortions.
Georectification adds the projection process to geo-location. With Georectification,
each image pixel gets attached to an Earth coordinate, however, the projection is on an
Earth-model surface and does not necessarily remove terrain distortions. The perspective
distortions are also removed through projection, changing the viewing angle orthogonal to
the projection plane. Georectification can be sufficient for many purposes, but as figure 2.5
shows, the accuracy may not be enough for some applications.
Orthorectification is a similar process, but instead of projection onto a flat surface, the
image is projected onto a DEM to remove the terrain distortions. It is the most accurate
Earth-based projection. It is commonly performed for mapping purposes [7, 10, 36, 42, 47,
49, 60, 62, 69]. Figure 2.5 shows the difference between the three types of Earth based image
processes.
18

Figure 2.5: The difference between (a) geo-location, (b) georectification, and (c) orthorec-tification
Many of the most accurate orthorectification algorithms rely on Ground Control Points
(GCP). GCPs are locations on the ground that are detectable in the imagery and have
known Earth coordinates. Typically the algorithms rely on several GCPs depending on the
spacing within the image. Once the GCPs have been located, corrections can be made to
the camera model or navigation data to increase the absolute accuracy of the projection.
However, in some instances, no GCPs are known. In this case the accuracy depends solely
on the camera model, position and attitude measurements of the platform.
2.6 Fixed-Point Arithmetic
Fixed-point processing is a method for increasing the speed of calculation [3, 25, 29]. In
order to convert between a floating point variable and a fixed-point variable a multiplication
by a constant is required to preserve precision as shown by Equation 2.16.
19

F =⌊2λF
⌋, (2.16)
where F is a floating point number, F is the fixed-point representation, and λ is a
scale factor. If the constant is restricted to a power of two then manipulating the resulting
integers becomes easier since scaling of the fixed-point result can be performed using bit
shifts. The scale factor determines the accuracy of the resulting integer representation. A
larger scale factor results in a higher degree of accuracy.
Fixed-point arithmetic is a more efficient computation compared to floating-point com-
putation, because of the simplification of the binary operations. A fixed-point binary word
consists only of the scaled numeric value, the significand. A floating-point binary word
consists of the significand or mantissa and exponent. Figure 2.6 shows the composition and
different stages of conversion from a binary word (top) to a decimal value (bottom).
While the floating point values can represent a wider range of values, any computation
must account for the exponent which adds more computations.
20
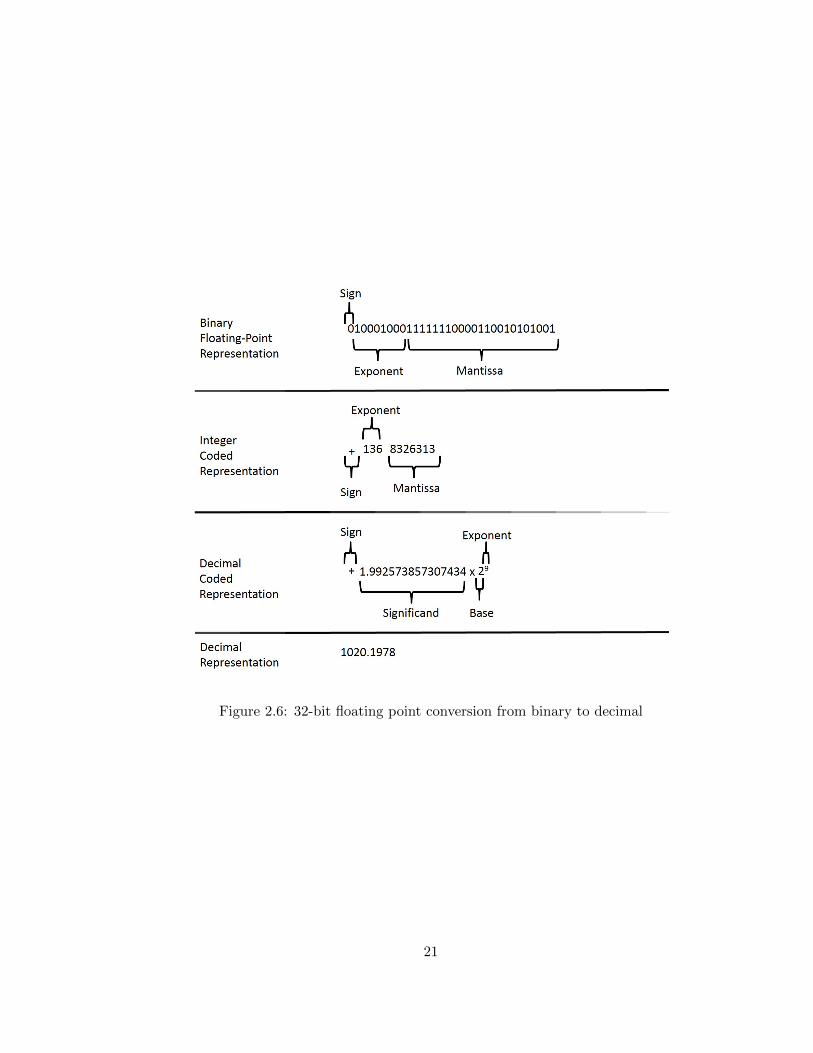
Figure 2.6: 32-bit floating point conversion from binary to decimal
21

CHAPTER III
REVIEW OF SELECT PAPERS
This chapter gives an overview on some of the recent research. The first section covers
some topics on aerial image processing, including different aerial imaging applications. The
next section deals exclusively with orthorectification and some of the applications and ben-
efits. Section 3.3 discusses some of the current topics in Fixed-point processing and FPGA
algorithms and applications.
3.1 Aerial Imagery Processing
Aerial imagery can provide a cost effective method for monitoring remote or large areas
on a more routine basis. There is, therefore, a significant amount of research conducted on
applications using aerial imagery. One application estimates the height and canopy density
of trees using data from a low cost passive sensor and a UAV [80]. The UAV is flown over a
forest. The data collected is then forward projected onto a 3D model of the forest canopy.
One issue confronted in this paper is the discontinuous nature of the canopy and processing
the imagery in a way that allows the algorithm to determine where the discontinuities are
located. The feedback loop between the 3D surface and the information from the sensor
allows the tree heights to be estimated. The accuracy of the height estimate is compared
22
for over 100 trees. Multiple flights are used with criss-crossing patterns over the forest at
different altitudes. The change in altitude also changes the projected pixel size on the 3D
model. The change in pixel size shows the degradation of the tree height estimate as the
projected pixel size increases. This research is relevant because it highlights the problems
due to the pixel size and shape and these problems are compounded by the discontinuities
in forest canopies. It also discusses the uncertainty built into the projection process when
projected pixel size varies.
Along with monitoring tree health, farming and pest/weed control also uses UAVs to
monitor health as in [35]. The application proposed in [35] uses small UAVs with a high
resolution camera to determine weed type and density. The UAV flies over a field of interest
and then uses a series of image filters which allow specific features to be extracted. The
features are then processed through a learning algorithm to differentiate between weed and
background features. This paper focuses on three weeds common to Australia. Once the
classifier has learned the weed features, the UAV can make the determination of a learned
weed type and concentration of a given weed type per area. This paper highlights the
benefit of real-time monitoring for agricultural and horticulture purposes.
In the scientific realm, remote and non-destructive testing has many benefits for fragile
or susceptible areas like the moss fields of Antarctica. The research described in [46] uses a
small rotor UAV to monitor the moss beds in Antarctica. The moss beds in Antarctica are in
a precarious situation with melting snow and glacier runoff. Monitoring the health and area
of the moss becomes an issue because going to the moss beds and taking measurements on
a regular basis can damage the moss. However, using a low-altitude UAV, a high resolution
projection plane, and statistical modelling, the moss beds are monitored remotely and in a
23
non-destructive method. The algorithm used is a Structure From Motion (SFM) algorithm
[39] to estimate the moss bed underlying structure. The accuracy of the underlying structure
and associated runoff is determined using the monte carlo simulations with 400 realizations.
The combination of the finely sampled ground plane and using statistics to estimate the
underlying structure emphasizes the multi-faceted process that is required for accurate
orthorectification. Orthorectification inherently relies on data fusion to produce an accurate
result.
Aerial imagery is also used in urban traffic monitoring as in [9], where a small low-
altitude UAV is used to detect vehicles. The complexity of the scene, including changes
in brightness, motion within the scene, and motion of the sensing platform make real-time
processing difficult. To compensate for these difficulties, a processing chain is developed
that uses an intensity boosting, that masks shaded areas for better matching, and image
resolution pyramid. The pyramid processing still allows efficient global feature extraction
and matching. The vehicles are matched using a spatio-temporal appearance related metric.
One issue that this paper covered is the effort to optimize the computation on UAV platform
and still achieve near real-time results. Many applications are moving toward a stand-alone
UAV with onboard image processing techniques. However, the complications that arise from
such an implementation, such as low-power and limited computational resources, show the
necessity of efficient and parallel programming.
Aerial imagery has also been used in the preservation [75] and identification [13, 63] of
archeological sites and artifacts. Many archeological sites are corrupted due to digs, or
vandalism, which makes post-inspection difficult or impossible. The proposed solution in
[17] uses 3D reconstruction of the archeological sites to be preserved prior to intervention or
24
destruction. The proposed system contains a UAV with a visible camera and the PhotoScan
software to determine a digital surface map of the area. High portability is a driving factor
as the system needs to be easy to carry and ship. The increased accuracy of the system
over existing site log methods, as well as the increase in public awareness make this system
a desirable alternative.
All of the applications discussed above for aerial imagery use a UAV controlled by a
user, however automated takeoff and landing can also be performed using image process-
ing on the UAV platforms. For takeoff and landing, real-time feedback becomes a more
pressing concern. A possible solution is proposed in [77] which uses an onboard monocular
camera for automatic takeoff and landing of a Micro Aerial Vehicle (MAV). For this task,
a typical landing pad is used, with a H in a circle. The system uses pictures of the circle
and perspective projection to estimate the attitude of the MAV. The algorithm determines
the position, altitude, and attitude with six degrees of freedom. Real-time automatic nav-
igation, especially from small UAVs operate in a power scarce environment where efficient
computation becomes imperative.
3.2 Orthorectification
A subset of aerial image processing is orthorectification. Orthorectification is used pri-
marily when location and distance are important for analysis. One application for real-time
monitoring is presented in [72] which proposes an orthorectification method for monitoring
active landslides. The system is implemented on a ground based system, mounted on a pil-
lar overlooking the Super-Suaze landslide in France from 2008 to 2009. A cross-correlation
25

metric is used to find the land displacements. After the displacements are found the dis-
placement fields are orthorectified using the collinearity equations onto a DEM. Some of
the drawbacks are illumination and small movements of the imaging system. Despite these
drawbacks, this system is developed to operate as an early warning system. One aspect of
the proposed system that makes orthorectification easier is that the viewing angle, distance,
and region imaged are fixed. Fixed angles and distances allow more pre-computed variables
for faster computation. However, this system finds even small movements of the platform
causes problems with accuracy. The positional measurement accuracy issue highlights the
sensitivity of the orthorectification process to measurement error.
When the platform isn’t in a fixed location and the viewing angle changes significantly
across the field of view (FOV), orthorectification becomes more difficult to process in real-
time. Moving sensor platforms also create difficulties in assessing system accuracy. One
method for determining absolute accuracy is proposed in [1], which discusses methods for
determining the absolute accuracy of the orthorectification process from two commercial
satellites, GeoEye-1 and WorldView-2. Both of these satellites are very high resolution
systems and all of the processing and comparisons are targeted to the panchromatic images.
The orthorectification algorithm for this paper uses rational functions [67] to map from
image coordinates to Earth coordinates and finds that a 3rd order polynomial in each
direction with 7 GPCs achieves the overall best result. The number of factors that influence
the assessed accuracy of the system contains, but are not limited to: sensor type, orientation
(parallel or perpendicular to orbit), number of ground control points, maximum viewing
angle with respect to nadir, and altitude accuracy. The number of variables that influence
the system accuracy, indicates the sensitivity of the orthorectification process.
26
The method of assessing accuracy presented in [1] uses Ground Control Point (GCP).
Since GCPs are used as a measure of accuracy, they are also used to update the orthorec-
tification parameters. For instance, a fully automated approach for orthorectification of a
satellite pushbroom sensor is discussed in [48]. The method uses the onboard attitude and
position measurements as well as an automated GCP detection and extraction. The GCP
extraction consists of finding geo-referenced road vectors, then building a set of GCPs based
on these roads. The collinearity equations are used to generate the initial camera model
from the position and attitude measurements. The GCPs are then used to update the
camera model for more accurate projections. The results are verified using the RapidEye
satellite collected over three different regions. The accuracy of the orthorectified images is
around 1 pixel. Using GCPs and orthorectification in a feedback loop to improve accuracy
adds another level of complexity for image processing algorithms, but are required for the
most accurate implementations. However, most of these types of feedback optimization
techniques are too slow to be considered real-time.
Different algorithms for optimizing the accuracy of the orthorectification processes have
been implemented. Particle swarm algorithms used in conjunction with GCPs is proposed
in [59] where the orthorectification of pushbroom imagery is optimized. Particle swarm
algorithms use several candidate solutions and optimize based on a set of metrics and the
other candidates movement to converge to a common minima. These algorithms use the
projected locations of GCPs to optimize the orthorectified frame. The system also uses
the parallel nature of graphics processing unit (GPU) to increase the throughput of the
system. The particle swarm algorithm is used to match features that are then fed back
into the navigation data and sensor camera model. This paper highlights the parallel
27
nature of the orthorectification process. Since orthorectification operates on each pixel
independently, each pixel can be processed in parallel. GPUs are also used because of
their parallel nature and capability to operate on floating point values. In this case, the
GPU performs orthorectification, feature extraction and matching, and optimization of the
projection. However, this application is not designed to perform in real-time. The reliance
on the optimization process and requirement of a ground station GPU for processing limit
the real-time capability. This paper does, however, show the possibilities of improving
orthorectification accuracy in a parallel implementation.
All of the applications mentioned previously either use a ground station for real-time
processing or do not operate in real-time. Performing orthorectification in real-time is re-
quired for some situations, for instance in disaster monitoring. Due to the difficulties in
real-time orthorectification, [45] discusses the time issues in imaging and processing sys-
tems required for quick response needs in generating orthorectified imagery. The primary
areas that the research covers are identification of problem areas within the image capture,
preprocessing and orthorectification processes. There were two foci of the research. The
first focus is on a generic work-flow for an efficient overall system. The second was opera-
tional work-flow to minimize the computations required for orthorectification and building
a mosaic from the result. For this particular case, most of the time saving is realized by
limiting the image overlap to achieve a more efficient system. Real-time orthorectification
requires an overall efficient imaging and processing system. The processing efficiency can be
obtained by using parallel processing on any number of computational platforms, multi-core
CPUs, GPUs, or FPGAs. It becomes difficult in real-time aerial systems to maintain the
high power consumption of CPUs and GPUs, however, FPGAs require low power.
28
3.3 Fixed-Point Processing and FPGAs
A possible first step in efficient image processing is to remove floating point calcula-
tions. As mentioned in Section 2.6, floating-point calculations require more computations
per variable than an integer computation of the same size. However, fixed point implemen-
tations can be difficult. For instance, [15] proposes a fixed-point method to approximate the
logarithmic base two (log2) function. Many hardware approximations for the log function
rely on look up tables (LUTs) [64] or piecewise polynomial approximations with uniform
segments [16]. The proposed method uses fixed-point piecewise linear approximation from
non-uniform segments. There are two ”types” of segments: coarse and fine. The fine seg-
ments are designated to the critical points of x=1 and x=0, and the coarse segments are for
everywhere else. The input to the approximated log function is limited to integer values.
One of the main contributions of this paper is the non-uniform sampling of the log func-
tion for better approximation and faster pipelining. Removing floating-point operations
in approximations of non-linear functions is a proven method for increasing computational
throughput.
Fixed-point arithmetic can also be used to increase the efficiency of select image pro-
cessing algorithms. As an example, [54] presents a method to efficiently estimate integral
histograms using fixed-point arithmetic. The method propagates an aggregate histogram
through the scan lines and updates the histogram. While this method is primarily focused
on 2D and 3D data sets, the implementation allows for any dimension data to be pro-
cessed. Both a floating point and fixed point algorithm are implemented. The fixed point
algorithm is significantly more efficient than the floating point method. The fixed point
method is used for data sets that begin with integer values, such as 8-bit imagery. The
29

floating point method is used for 3D wavefront data where the data is already in floating
point variables. This paper highlights some aspects of image processing that lends itself to
fixed point processing and the resulting increase in efficiency as compared to floating point
implementation. Fixed-point arithmetic alone increases the throughput of a system, but
the efficiency can be lost due to inefficient programming or hardware implementations.
Another possibility to increase the system throughput is to streamline the data through
the processing chain. One method of streamlining the data is with a programming language
and compiler [33, 56]. An example of a programming language and compiler that eases the
development of efficient high-speed image processing techniques for specialized hardware
implementations is proposed in [33]. Darkroom, the proposed programming language, com-
piles directly to buffer line pipelines and removes some of the complexities of local buffer
storage. Another aspect of the Darkroom compiler for optimally scheduling memory trans-
fers to and from DRAM. The compiler is formulated for operation with ASIC, FPGA or
fast CPU code. Using the compiler, the processing system is able to attain gigapixel/sec.
throughput. While moving data around in an efficient way as designed for a particular
image processing method is certainly beneficial and does increase the throughput of the
system, it can still lose some of the efficiency due to the image processing algorithm imple-
mentation and floating-point calculations. Another place loss of efficiency can arise is the
capability to be compiled on multiple hardware designs. Being able to compile on multiple
languages decreases development time, but it can negatively impact the throughput of the
system.
30
A development language that has been developed for efficient image processing is pro-
posed in [20] and named, Single Assignment C (SA-C). SA-C is a language specifically de-
signed to port image processing algorithms to an FPGA architecture. A targeted language
can typically achieve more efficient results as compared to a general language. Different
algorithms are implemented using SA-C and compared against a general purpose proces-
sor. These algorithms consist of scaler addition, edge detection, Cohen-Daubechies-Feuveau
wavelet filter [12], dilation, and probing [5]. The results are between an 8 fold increase for
scaler addition, and 800x speed increase for probing. All of the image processing algorithms
that are implemented performs faster than the corresponding CPU implementation. One
drawback is that the efficient use of pipelined memory as described in [33] is not used. An-
other drawback is that the algorithms only operate on the image processing techniques that
have an integer implementation, more sophisticated or complex algorithm will probably still
struggle using SA-C.
Many image processing algorithms are difficult to implement as integer only operations
while maintaining real-time computation. Converting floating point variables to fixed-point
values is more complex, but ultimately allows more flexibility in the development process.
For instance, [74] implements a real-time fast Fourier Transform (FFT) algorithm on an
FPGA. FFT is an algorithm that is typically implemented using floating point variables.
However, for an FPGA parallel implementation, a fixed-point version is developed. Two
types of FFT algorithms are used, the Radix-2 [14] FFT and Radix-4 discrete FFT algo-
rithms [79]. The results show the improved computational throughput of the fixed-point
implementations over the floating point versions. While the research shows the feasibility of
31

a fixed point FFT algorithm on an FPGA and the improved throughput, there is no com-
parison for results. How does the floating point implementation compare to the fixed-point
implementation?
In general, fixed-point implementations are not as accurate as floating-point implemen-
tations of image processing algorithms. As an example, [55] discusses the tradeoff between
hardware pipeline benefits of 3D ray trace renderings of objects, and software versions using
CPUs. A fixed-point ray tracing algorithm is developed and implemented in programmable
graphics hardware. There are four primary functions involved in ray tracing for 3D re-
construction: point-of-view (POV) Ray initialization, traverser, intersector, and shader.
The first function, POV Ray initialization sets up the viewing angles and initial processing
parameters. The traverser stage sets up the ray projection from the POV ”eye” and the
initial surface mesh as well as finding the where the voxels are pierced by the ray trace.
Once the ray and voxel pairs are determined, the data is passed to the intersector, which
determines if a ”hit” occurs between a ray-voxel pair and a triangle surface pixel. If a hit
occurs the ray-voxel pair is converted to a ray-triangle pair and sent to the last stage, the
shader. The shader determines the color contribution of each contributing ray trace to a
triangle. The fixed-point implementation outperforms the CPU implementation in speed.
However, the fixed-point implementation also struggles with the aspects of the process that
require a higher resolution in calculation. For instance, the ”hit” points may be shifted in
location from the floating-point implementation due to the smaller range of values that can
be represented, the shift then influences the shading of the result. While the solution offers
an efficient fixed-point algorithm for a low-power environment, it still does not operate in
real-time.
32

The combination between hardware, data pipelining, efficient programming and algo-
rithm selection offers the best results for real-time image processing on remote platforms.
The final paper reviewed [19], proposes an FPGA implementation for a real-time pipelined
optical flow algorithm for motion detection. A sensor part of the implementation is a ”vir-
tual sensor” which consists of a camera model and a 30 Hz frame rate of images to be
pipelined, as if it is coming directly from a camera. The optical flow algorithm being imple-
mented is based on a method first described in [44] and modified for hardware by [4]. The
system once implemented is able to detect motion of imagery of a moving car, however, the
results do not have the precision of the floating point implementation due to limitations of
the fixed point arithmetic. This is one of the first stand-alone real-time implementations of
an image processing algorithm. The goal is to create a system that can be implemented on
a number of remote sensing systems for traffic monitoring or search and detect applications.
33
CHAPTER IV
RESEARCH SETUP
This chapter discusses the experimental setup used in conducting this research. The
first section, Section 4.1, describes the LAIR data set which was collected by the Air Force
Research Laboratory in October of 2009. Section 4.2, covers the equipment used for data
collection, algorithm development and processing platform. The floating point orthorectifi-
cation algorithm [68] is covered in Section 4.3.
4.1 Data Set
To project an aerial image accurately, a data set must have GPS locations and camera
attitude. To increase the accuracy, it is useful to have a measured camera model such as
the LAIR data set [34] which was taken over Wright-Patterson Air Force Base in October
of 2009, see Figure 4.1.
The imaging platform used for capturing the LAIR data set contains images from six
visible band cameras, and includes GPS locations, camera velocity and attitude, as well as
the CAHV model for each image. An example of a set of images is shown in Figure 4.2.
Prior to collection, the CAHV calibration technique is performed across the entire field
of view for the camera system [76]. Using the calibration each camera image is mapped onto
34
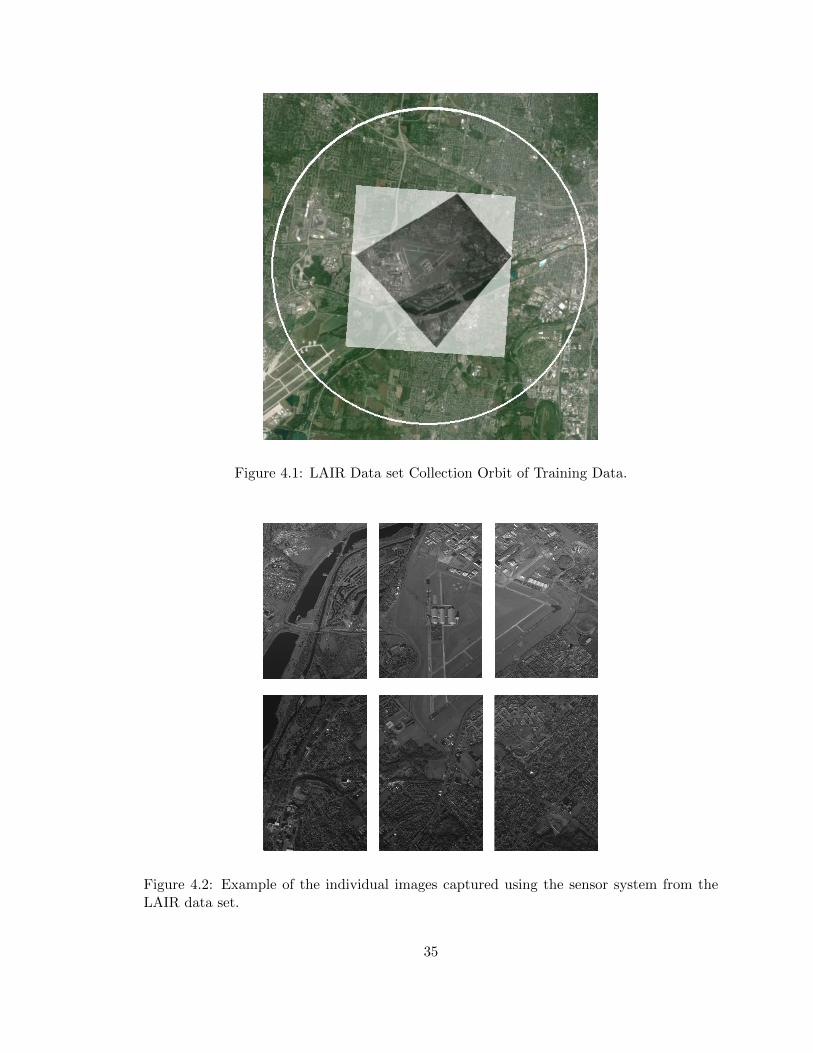
Figure 4.1: LAIR Data set Collection Orbit of Training Data.
Figure 4.2: Example of the individual images captured using the sensor system from theLAIR data set.
35
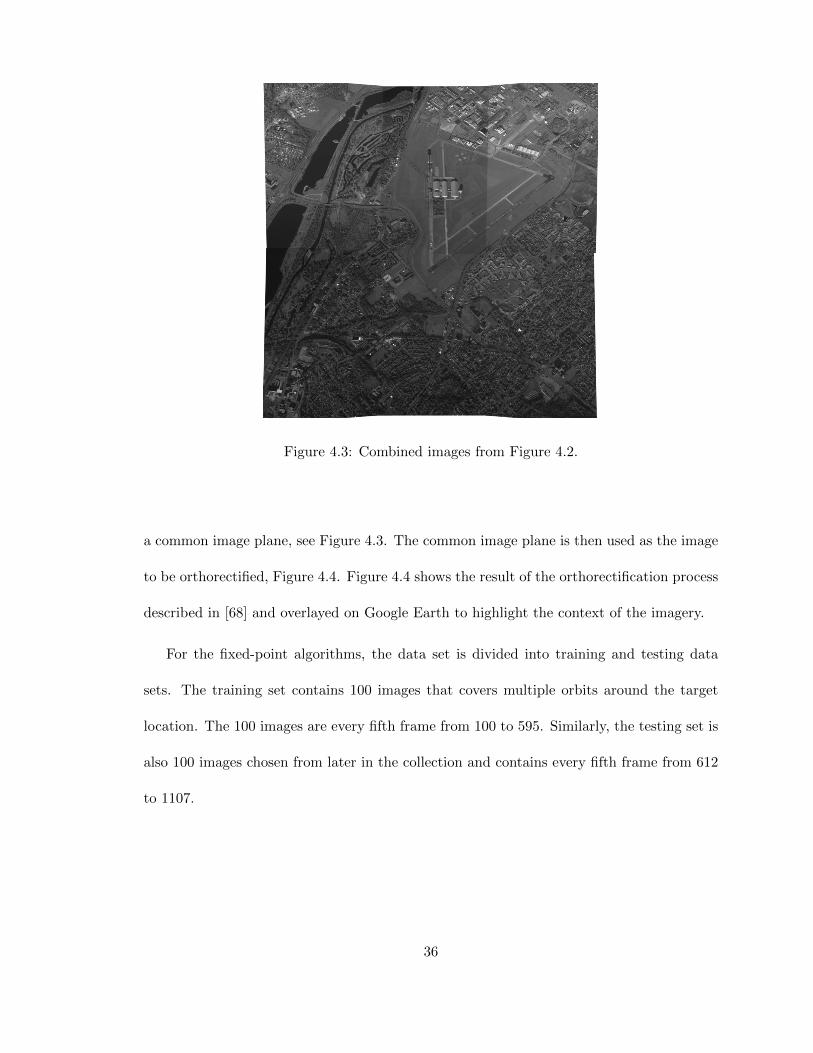
Figure 4.3: Combined images from Figure 4.2.
a common image plane, see Figure 4.3. The common image plane is then used as the image
to be orthorectified, Figure 4.4. Figure 4.4 shows the result of the orthorectification process
described in [68] and overlayed on Google Earth to highlight the context of the imagery.
For the fixed-point algorithms, the data set is divided into training and testing data
sets. The training set contains 100 images that covers multiple orbits around the target
location. The 100 images are every fifth frame from 100 to 595. Similarly, the testing set is
also 100 images chosen from later in the collection and contains every fifth frame from 612
to 1107.
36
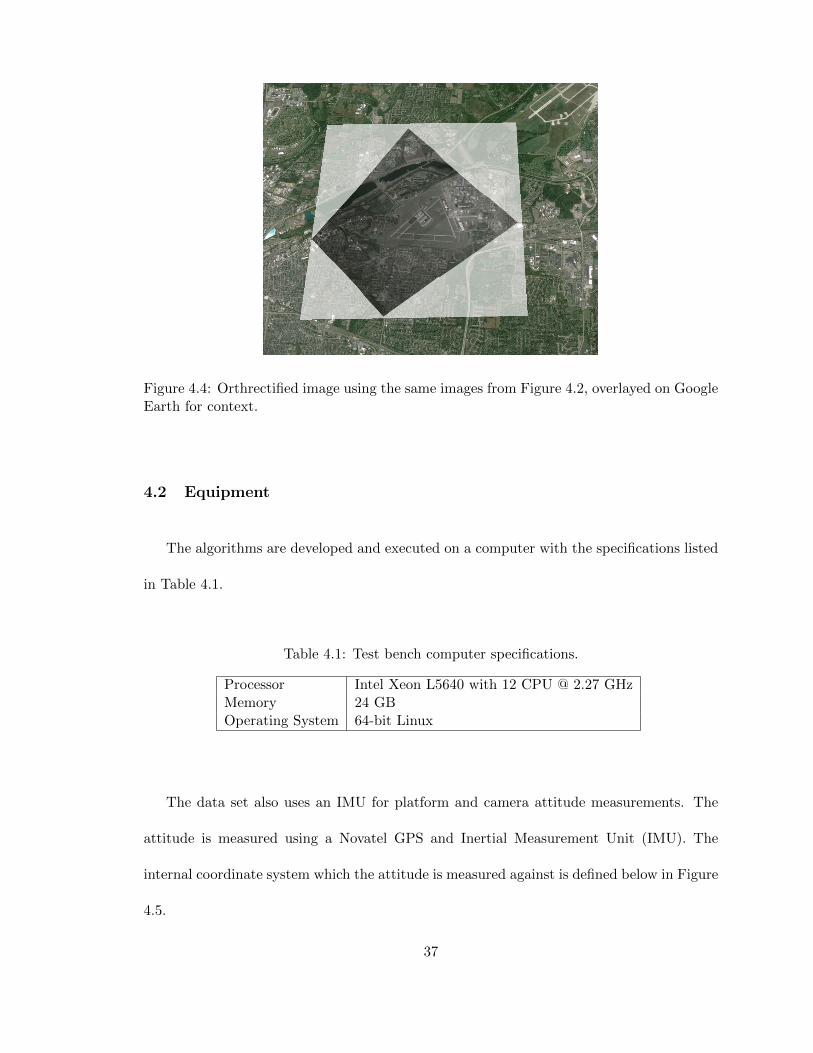
Figure 4.4: Orthrectified image using the same images from Figure 4.2, overlayed on GoogleEarth for context.
4.2 Equipment
The algorithms are developed and executed on a computer with the specifications listed
in Table 4.1.
Table 4.1: Test bench computer specifications.
Processor Intel Xeon L5640 with 12 CPU @ 2.27 GHzMemory 24 GBOperating System 64-bit Linux
The data set also uses an IMU for platform and camera attitude measurements. The
attitude is measured using a Novatel GPS and Inertial Measurement Unit (IMU). The
internal coordinate system which the attitude is measured against is defined below in Figure
4.5.
37
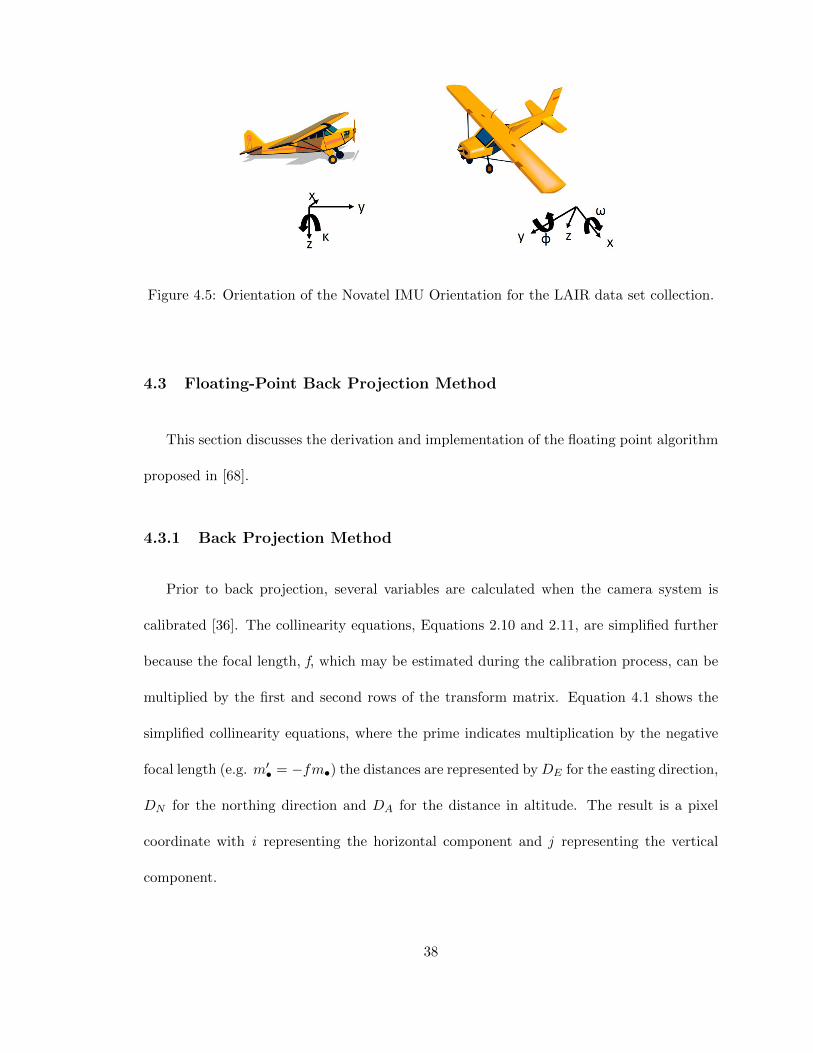
Figure 4.5: Orientation of the Novatel IMU Orientation for the LAIR data set collection.
4.3 Floating-Point Back Projection Method
This section discusses the derivation and implementation of the floating point algorithm
proposed in [68].
4.3.1 Back Projection Method
Prior to back projection, several variables are calculated when the camera system is
calibrated [36]. The collinearity equations, Equations 2.10 and 2.11, are simplified further
because the focal length, f, which may be estimated during the calibration process, can be
multiplied by the first and second rows of the transform matrix. Equation 4.1 shows the
simplified collinearity equations, where the prime indicates multiplication by the negative
focal length (e.g. m′• = −fm•) the distances are represented by DE for the easting direction,
DN for the northing direction and DA for the distance in altitude. The result is a pixel
coordinate with i representing the horizontal component and j representing the vertical
component.
38
i =m′11DE+m′12DN+m′13DAm31DE+m32DN+m33DA
j =m′21DE+m′22DN+m′23DAm31DE+m32DN+m33DA
. (4.1)
The projection plane which is projected onto the image plane can be defined as a the-
oretical flat surface, or as a Digital Elevation Map (DEM). A DEM has terrain altitudes
at associated earth coordinates and is used to obtain more accurate results over a flat pro-
jection surface. The DEM has a Ground Sample Distance (GSD) in the easting, ∆E , and
northing, ∆N , directions respectively. The DEM GSD’s are, typically, too coarse for the
size of an image pixel projection. Therefore, an interpolation factor, I, is typically used to
more densely represent the DEM, and is chosen to critically sample the image focal plane.
The interpolated GSD’s, δE for the easting direction and δN for the northing direction, are
given by
δE = ∆EI , δN = ∆N
I. (4.2)
A visual representation of the projection variables and their relationship to the DEM is
shown in Figure 2, where (X,Y,Z) is the Earth location being projected, (Xc, Yc, Zc) is the
current location of the imaging sensor, and δA is the interpolated altitude differential unit.
The DEM, Z(x, y), is natively sampled with indices x,y, corresponding to the two planar
dimensions easting and northing respectively. The interpolated indices are given by
x′ = Ix+ χ; χε[0, I)
y′ = Iy + γ; γε[0, I)
, (4.3)
39

Figure 4.6: Earth coordinate variable definitions (a) top view; (b) side view.
Where χ is the iterative variable in the easting direction, and γ is the iterative variable
in the northing direction. The DEM is interpolated using a bilinear interpolation technique
and is represented as ζ(x′, y′).
In order to use the collinearity equations for georectification, a few remaining variables
need definition. Three distance variables, DN , DE , and DA, which correspond to the
distances in the northing, easting and altitude respectively and are given by
DE [x′] = X0 + x′δE −Xc
DN [y′] = Y0 + y′δN − Yc
DA[x′, y′] = ζ[x′, y′]− Zc
. (4.4)
40

Where X0 and Y0 are the initial easting and northing values respectively for the projec-
tion plane being used. The indices x′, y′ denote the dependencies of the distances with the
corresponding DEM directions. DN is only dependent in the northing direction, and DE is
only dependent in the easting direction.
The collinearity equations require an interpolated numerator and denominator given by,
i[x′, y′] = in[x′,y′]rd[x′,y′]
j[x′, y′] = jn[x′,y′]rd[x′,y′]
. (4.5)
Back projection of an image requires an iterative process of updating all three distance
variables, DE , DN , and DA, using Equation 4.4. Solving for the numerators in Equation
4.5, in[x′, y′], jn[x′, y′], results in
in[x′, y′] = m′11DE [x′] +m′12DN [y′] +m′13DA[x′, y′]
jn[x′, y′] = m′21DE [x′] +m′22DN [y′] +m′23DA[x′, y′]
, (4.6)
and the denominator, rd[x′, y′], is given by
rd[x′, y′] = m31DE [x′] +m32DN [y′] +m33DA[x′, y′] . (4.7)
The division in Equation 4.5 produces the corresponding pixel location in the image
plane from the world coordinate. This process is repeated through all samples of the
interpolated DEM, ζ[x′, y′].
41
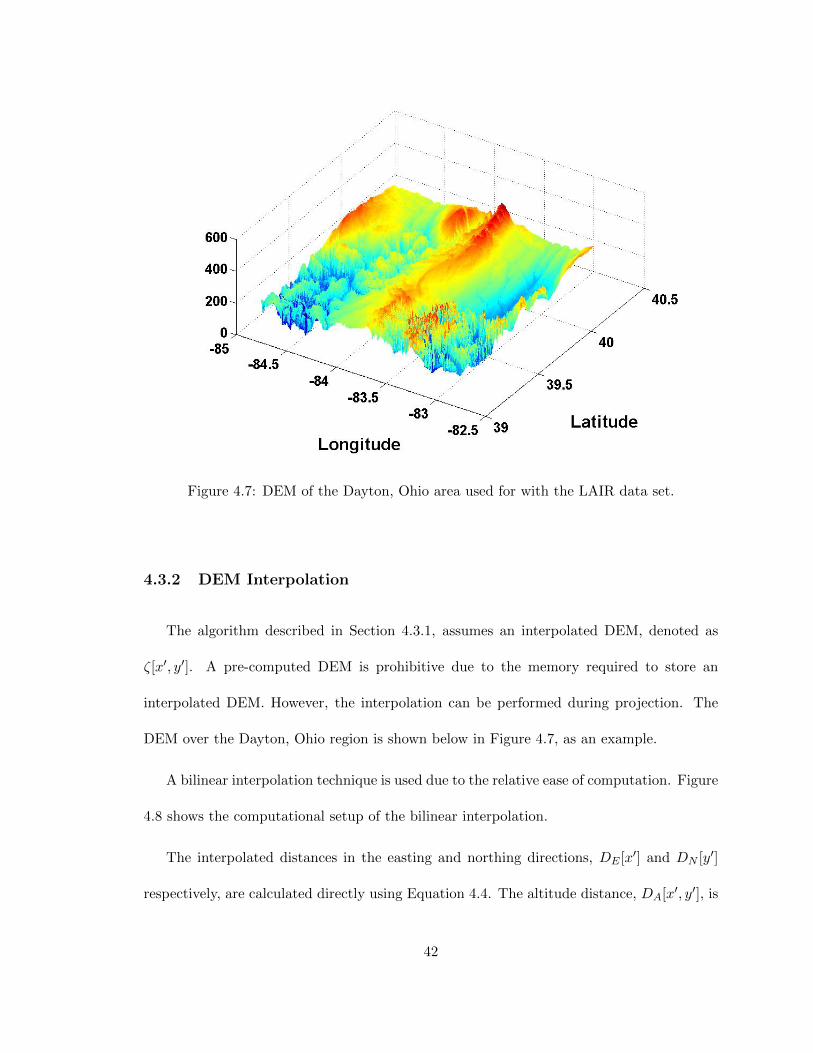
Figure 4.7: DEM of the Dayton, Ohio area used for with the LAIR data set.
4.3.2 DEM Interpolation
The algorithm described in Section 4.3.1, assumes an interpolated DEM, denoted as
ζ[x′, y′]. A pre-computed DEM is prohibitive due to the memory required to store an
interpolated DEM. However, the interpolation can be performed during projection. The
DEM over the Dayton, Ohio region is shown below in Figure 4.7, as an example.
A bilinear interpolation technique is used due to the relative ease of computation. Figure
4.8 shows the computational setup of the bilinear interpolation.
The interpolated distances in the easting and northing directions, DE [x′] and DN [y′]
respectively, are calculated directly using Equation 4.4. The altitude distance, DA[x′, y′], is
42
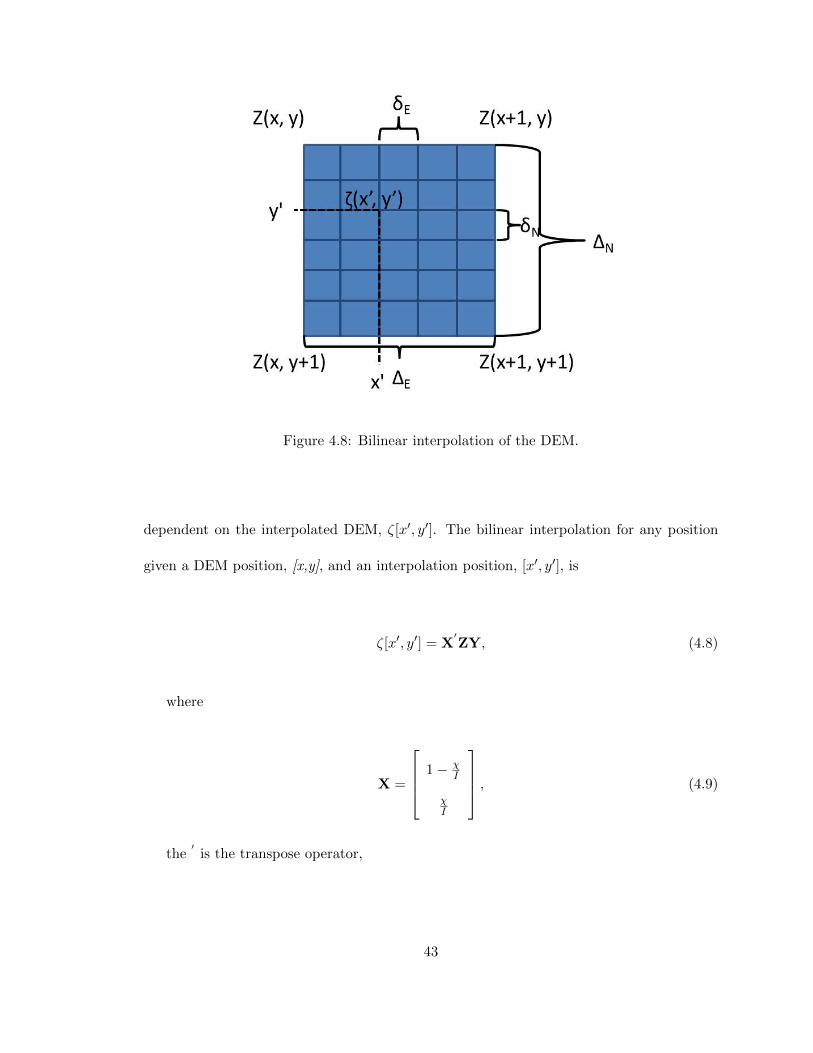
Figure 4.8: Bilinear interpolation of the DEM.
dependent on the interpolated DEM, ζ[x′, y′]. The bilinear interpolation for any position
given a DEM position, [x,y], and an interpolation position, [x′, y′], is
ζ[x′, y′] = X′ZY, (4.8)
where
X =
1− χI
χI
, (4.9)
the′
is the transpose operator,
43
Z =
Z[x, y] Z[x+ 1, y]
Z[x, y + 1] Z[x+ 1, y + 1]
, (4.10)
and
Y =
1− γI
γI
. (4.11)
With these equations, the interpolated altitude distance, DA[x′, y′], from Equation 4.4,
can be calculated within the projection algorithm without a separate DEM interpolation
step.
4.3.3 Algorithm Implementation
The implementation of the algorithm in Section 4.3.1 as described in [68] is to perform
the interpolation and projection simultaneously. If one direction is held constant during an
iteration, then the collinearity equation numerator and denominator can be incremented in
the other two directions.
The interpolated numerators, Equation 4.6, and denominator, Equation 4.7 can be
rewritten incorporating an iterative differential unit as shown in Equation 4.12.
in[x′, y′] = m′11(DE [Ix] + χδE) +m′12(DN [Iy] + γδN ) +m′13(DA[Ix, Iy] + χδAE + γδAN )
jn[x′, y′] = m′21(DE [Ix] + χδE) +m′22(DN [Iy] + γδN ) +m′23(DA[Ix, Iy] + χδAE + γδAN )
rd[x′, y′] = m31(DE [Ix] + χδE) +m32(DN [Iy] + γδN ) +m33(DA[Ix, Iy] + χδAE + γδAN )
,
(4.12)
44

Where δAE and δAN are the differential units for the altitude of the DEM in the east-
ing and northing directions respectively. If the interpolation is performed in the northing
direction and the value is held constant for the interpolation in the easting direction, the
new equations are shown in Equation 4.13, where the value for the interpolated y direction
is based on the DEM interpolation in Equation 4.11
in[x′, y′] = m′11(DE [Ix] + χδE) +m′12DN [y′] +m′13(DA[Ix, y′] + χδAE )
jn[x′, y′] = m′21(DE [Ix] + χδE) +m′22DN [y′] +m′23(DA[Ix, y′] + χδAE )
rd[x′, y′] = m31(DE [Ix] + χδE) +m32DN [y′] +m33(DA[Ix, y′] + χδAE )
, (4.13)
The differential unit for the altitude in the easting direction is found using a linear
interpolation by Equation 4.14
δAE =Z[I(x+ 1), y′]− Z[Ix, y′]
I. (4.14)
Each component of the collinearity equations is a function of χ and can be divided into
an initial value and an iterative variable. The initial values are shown in Equation 4.15.
in[Ix, y′] = (m′11DE [Ix] +m′12DN [y′] +m′13DA[Ix, y′])
jn[Ix, y′] = (m′21DE [Ix] +m′22DN [y′] +m′23DA[Ix, y′])
rd[Ix, y′] = m31DE [Ix] +m32DN [y′] +m33DA[Ix, y′]
, (4.15)
and the iterative variables are shown in Equation 4.16
45

δin = m′11δE +m′13δAE
δjn = m′21δE +m′23δAE
δrd = m31δE +m33δAE
. (4.16)
The iterative collinearity equation components becomes
in[x′, y′] = in[Ix, y′] + χδin
jn[x′, y′] = jn[Ix, y′] + χδjn
rd[x′, y′] = rd[Ix, y
′] + χδrd
. (4.17)
The floating-point algorithm psuedo-code is shown in Algorithm 1.
Algorithm 1 Floating Point Algorithm
1: Load Calibration Parameters2: m•, Z3: Xc, Yc Equation 4.44: ∆E ,∆N
5: Calculate More Parameters6: I, δE , δN Equations 4.27: for y = I(yinitial : yfinal)8: DN [Iy] - Equation 4.49: for x = I(xinitial : xfinal)
10: DE [Ix] - Equation 4.411: for γ = 1 : I12: ζ[Ix, y′] - Equation 4.913: DZ [Ix, y′] - Equation 4.414: in[Ix, y′], jn[Ix, y′], rd[Ix, y
′] - Equation 4.1515: δin , δjn , δrd - Equation 4.1616: for χ = 1 : I17: i[x′, y′], j[x′, y′] - Equation 4.518: in[x′, y′], jn[x′, y′], rd[x
′, y′] - Equation 4.17
19: end20: DN [y′] - Equation 4.4
21: end22: end23: end
46
CHAPTER V
FIXED-POINT PROJECTION ALGORITHM WITH LINEAR
APPROXIMATION [26]
This chapter covers the development, implementation, and results of algorithm proposed
in [26].
5.1 Algorithm Description of [26]
All of the components required for calculating the image plane pixel positions, Equation
4.5 are described in Section 4.3, . However, a division is required for the projection cal-
culation, which is computationally inefficient. To remove the division from the collinearity
equation, the denominator, rd[x′, y′], can be inverted beforehand.
However, the inversion is computationally inefficient when performed for every interpo-
lated pixel. To increase the throughput the inversion is computed fewer times by imple-
menting a linear approximation of the denominator. The denominator can be broken down
into an initial value and a differential value, where Ix and Iy are the interpolated positions
of known DEM values (i.e. χ = γ = 0), such as
r−1d [x′, y′] =
1
rd[Ix, Iy] + δrdE [χ] + δrdN [γ]. (5.1)
47

The differential unit can be derived by finding the partial derivative with respect to a
single direction. The resulting differential units are, in easting and northing respectively
δrdE [γ] = δE + ζ0γI + ζ2
γI2
δrdN [χ] = δN + ζ1χI + ζ2
χI2
, (5.2)
where
ζ0 = ζ[x, y + 1]− ζ[x, y]
ζ1 = ζ[x+ 1, y]− ζ[x, y]
ζ2 = ζ[x, y]− ζ[x+ 1, y]− ζ[x, y + 1] + ζ[x+ 1, y + 1]
. (5.3)
Linear iterations through the denominator, rd[x′, y′], produce a non-linear inverse. There-
fore, to increase the speed of computation, a linear approximation is used. If only one of
the directions is interpolated at a time, then only one of the directional differentials are
required. For instance, if the northing direction is held constant for every value of y’ the
equation for the approximation is
δr−1d
[Ix, y′] ≈[
1
Ird[Ix, y′] + I2δrdE [χ]
]−[
1
Ird[Ix, y′]
]. (5.4)
The result is an approximation for the denominator which is
r−1d [x′, y′] ≈ r−1
d [Ix, y′] + χδr−1d
[Ix, y′]. (5.5)
Thus, the collinearity equations become
48

i[x′, y′] ≈ in[x′, y′]r−1d [x′, y′]
j[x′, y′] ≈ jn[x′, y′]r−1d [x′, y′]
. (5.6)
Fixed-point processing is a method for increasing the speed of calculation [3, 25, 29]. In
order to convert between a floating point variable and a fixed-point variable, a multiplication
by a constant is required to preserve precision. If the constant is restricted to a power of two
then the multiplication may be applied with a single bit shift as shown in Equation 2.16.
The scale factor determines the binary accuracy of the resulting integer representation. A
larger scale factor results in a higher degree of accuracy.
In the proposed method, all of the variables used in back projection are converted into
integers by Equation 2.16. Table 5.1 consists of the integer variables and their scale factors.
Table 5.1: Integer variables and scale factors.
Variable Name Scale Factor Integer Variable Name
m′11, m′12, m′13 λ1 m′11, m′12, m′13
m′21, m′22, m′23 λ1 m′21, m′22, m′23
m31, m32, m33 λ2 m31, m32, m33
δE , δN λ1 δE , δNXc, Yc, Zc λ1 Xc, Yc, ZcX0, Y0 λ1 X0, Y0
All of the inputs are scaled by λ1 with the exception of the third row in transform matrix,
m3•. These elements contain the pointing vector with respect to the world coordinates and
require more bit-resolution.
Additionally, the DEM data points, ζ[x′, y′] are loaded and converted into integers by
49

ζ[x′, y′] =⌊2λ1ζ[x′, y′]
⌋. (5.7)
The three distances, described in Equation 4.4, are calculated as integers using the pre-
integerized constants, X0, δE and Yc with the interpolation indices (x’, y’). The resulting
equations are
DE [x′] = X0 + x′δE − Xc
DN [y′] = Y0 + y′δN − Yc
DA[x′, y′] = ζ[x′, y′]− Zc
. (5.8)
The altitude distance is only dependent on the interpolated DEM altitude, ζ[x′, y′] and
the current sensor altitude, Zc.
The components of the collinearity equations described in the previous section in Equa-
tion 4.5 are calculated as integers using
in[x′, y′] =⌊m′11DE [x′]+m′12DN [y′]+m′13DA[x′,y′]
2(2λ1−λ2)
⌋
jn[x′, y′] =⌊m′21DE [x′]+m′22DN [y′]+m′23DA[x′,y′]
2(2λ1−λ2)
⌋
rd[x′, y′] =
⌊m′31DE [x′]+m′32DN [y′]+m′33DA[x′,y′]
2λ2
⌋. (5.9)
The integer collinearity numerators can be separated into initial and iterative values as
shown in Equations 4.15 and 4.16. The numerators and numerator differential units can be
converted directly into integers as shown in Equation 5.10 for the initial values
50

in[Ix, y′] =⌊m′11DE [xI]+m′12DN [y′]+m′13DA[Ix,y′]
2(2λ1−λ2)
⌋jn[Ix, y′] =
⌊m′21DE [xI]+m′22DN [y′]+m′23DA[Ix,y′]
2(2λ1−λ2)
⌋ , (5.10)
and Equation 5.11 for the iterative variables.
δin =
⌊m′11δE+m′13δAE
2(2λ1−λ2)
⌋
δjn =
⌊m′21δE+m′23δAE
2(2λ1−λ2)
⌋ , (5.11)
The collinearity numerators and denominator have a significant impact on the overall
pixel position accuracy. Therefore, the numerators should be scaled by the larger of the
scale factors, λ2. However, for the numerators, both the m′• terms and the distances are
scaled by the smaller scale factor, λ1, shown in Table 5.1. When the distances and m terms
are multiplied, the results are scaled by 2λ1. To retain more accuracy and avoid overflow
in later operations, the results need to be scaled back to λ2. The denominator m′3• terms
are all scaled by λ2, so the result of the multiplications and additions is scaled by λ2 + λ1.
rd[x′, y′] is also inverted. Depending on how large λ2 is, the inversion can result in data
overflow. In order to have the result of the inversion scaled by λ2 and avoid the overflow,
r−1d [x′, y′] is scaled by a factor of λ1 + λ2, and then shifted back by λ1. This results in
r−1d [x′, y′] maintaining a scale factor of λ2 and avoiding the overflow that can arise from a
calculation with 2 ∗ λ2.
The approximation of the inversion, r−1d [x′, y′] from Equations 5.4 and 5.5, can be com-
puted as an integer by using the integer versions of the denominator, rd[x′, y′]. The equation
51

for the integer computations for the inversion and differential approximation is scaled by
λ2. The differential unit and inversion approximation are
δr−1d
[Ix, y′] =(r−1d [Ix+ I, y′]− r−1
d [Ix, y′])I−1
ˆr−1d [x′, y′] ≈ r−1
d [Ix, y′] + χδr−1d
[Ix, y′]
, (5.12)
where
r−1d [Ix, y′] =
⌊2λ1+λ2
rd[Ix, y′]
⌋, (5.13)
and
I−1 =
⌊2λ1
I
⌋. (5.14)
The image plane pixel positions for the proposed method can now be calculated by
i[x′, y′] =
⌊in[x′,y′]ˆr−1
d [x′,y′]
2λ2
⌋
j[x′, y′] =
⌊jn[x′,y′]ˆr−1
d [x′,y′]
2λ2
⌋ , (5.15)
and
i[x′, y′] ∼=⌊i[x′,y′]
2λ1
⌋
j[x′, y′] ∼=⌊j[x′,y′]
2λ1
⌋ . (5.16)
52

The flow diagram for the proposed projection method is shown below in Figure 5.1
The pseudo code for the fixed-point algorithm with the linear approximation is shown
below in Algorithm 2
Algorithm 2 Fixed-Point Algorithm with Linear Approximation
1: Load Calibration Parameters2: m•, Z3: Xc, Yc Equation 5.84: ∆E , ∆N
5: Calculate More Parameters6: I, δE , δN Equations 4.27: for y = I(yinitial : yfinal)
8: DN [Iy] - Equation 5.89: for x = I(xinitial : xfinal)
10: DE [Ix] - Equation 5.811: for γ = 1 : I12: ζ[x′, y′] - Equation 5.713: DA[Ix, y′] - Equation 5.814: in[Ix, y′], jn[Ix, y′] - Equation 5.1015: δin , δjn - Equation 5.11
16: ˆr−1d [Ix, y′], δr−1
d[Ix, y′] - Equation 5.12
17: for χ = 1 : I18: i[x′, y′], j[x′, y′] - Equation 5.1519: in[x′, y′], jn[x′, y′] - Equation 5.1220: r−1
d [x′, y′] - Equation 5.12
21: end22: DN [y′] - Equation 5.8
23: end24: end25: end
5.2 Metrics
For comparison, a back projection algorithm [68] is used where all of the necessary
variables are 64-bit floating point data types, along with the proposed integer based algo-
rithm. Each of the algorithms are executed on the same Linux based 16 core computer
53

Figure 5.1: Flow diagram for the proposed projection method.
54
consecutively so that the execution environments are equal. The same images are processed
including 100 images for optimization, the training set (every fifth frame from 100 to 595),
and 100 images for verification, the testing set (every fifth frame from 612 to 1107). All of
the data is from the LAIR data set collected by the Air Force Research Laboratory [34].
Table 4.1 details the specification of the computer used.
Testing of the proposed algorithm optimization involves changing the integer scale fac-
tors, λ1 and λ2, and comparing the results to [68]. The metric used for the optimization
process is average pixel offset, given by
dpix =1
M
∑x′
∑y′
dpixij [x′, y′], (5.17)
where M is the number of pixels and dpixij [x′, y′] is the Euclidean distance between the
floating point and integer pixel locations, given by
dpixij [x′, y′] =
√di[x′, y′] + dj [x′, y′]. (5.18)
d•[x′, y′] is the square of the difference in the horizontal, i, and vertical, j, directions in
the image plane. The integer image indices need to be divide by the scale factor prior to
the difference calculation as shown in
di[x′, y′] =
(i[x′, y′]−
⌊i[x′,y′]
2λ2
⌋)2
dj [x′, y′] =
(j[x′, y′]−
⌊j[x′,y′]
2λ2
⌋)2. (5.19)
Another metric used is the maximum pixel offset, given by
55

dmax = maxx′,y′
dpixij [x′, y′] (5.20)
The maximum pixel offset is recorded for each image, and is combined over the training
set by keeping the maximum pixel offset error for each set of scale factors across all of
training images. The maximum pixel offset is important because the average can show a
small difference, but if a few pixels overflow the data type then, the image will be impacted.
The maximum error indicates whether a data overflow occurred.
5.3 Results from [26]
This section presents and discusses the results from the fixed-point orthorectification
algorithm with a linear approximation methods published in [26].
5.3.1 128-bit Algorithm with Linear Approximation Results
The first set of results are for 128-bit integers, which show how accurate the proposed
method can be and limit overflow. Equation 5.17 indicates the average pixel offset from
the floating point within an image. dpix is calculated and averaged over the 100 training
images. Figure 5.2 shows the results over several values of λ1 and λ2. The range of results,
due to loss of too much resolution and data type overrun is large, therefore, a log function is
employed to highlight the small changes for the most accurate result as well as to compress
the large errors.
The range for λ1 and λ2 are from 0 to 63. Figure 5.2 shows that the errors are large
but consistent until enough information is maintained that the projection results begin to
56

Figure 5.2: Average pixel offset surface per set of scale factors over 100 training images.
approach the floating point version. The variables scaled by λ1 require less resolution to
begin convergence. There is a valley, which is the best performing sets of scale factors which
extends across the viable region along the λ2 axis. A profile plot is shown in Figure 5.3
which shows the minimum pixel offset error and plateau as λ2 varies.
There is an area of good performance with small pixel offset area around the valley. This
is beneficial as it allows flexibility to withstand large terrain variance and still maintain an
acceptable level of accuracy. However, after the floor of the results, the pixel offset error
jumps to a large value. The jump in error is due to a bit overflow from one or more of the
multiplication operations with the scale factors.
57
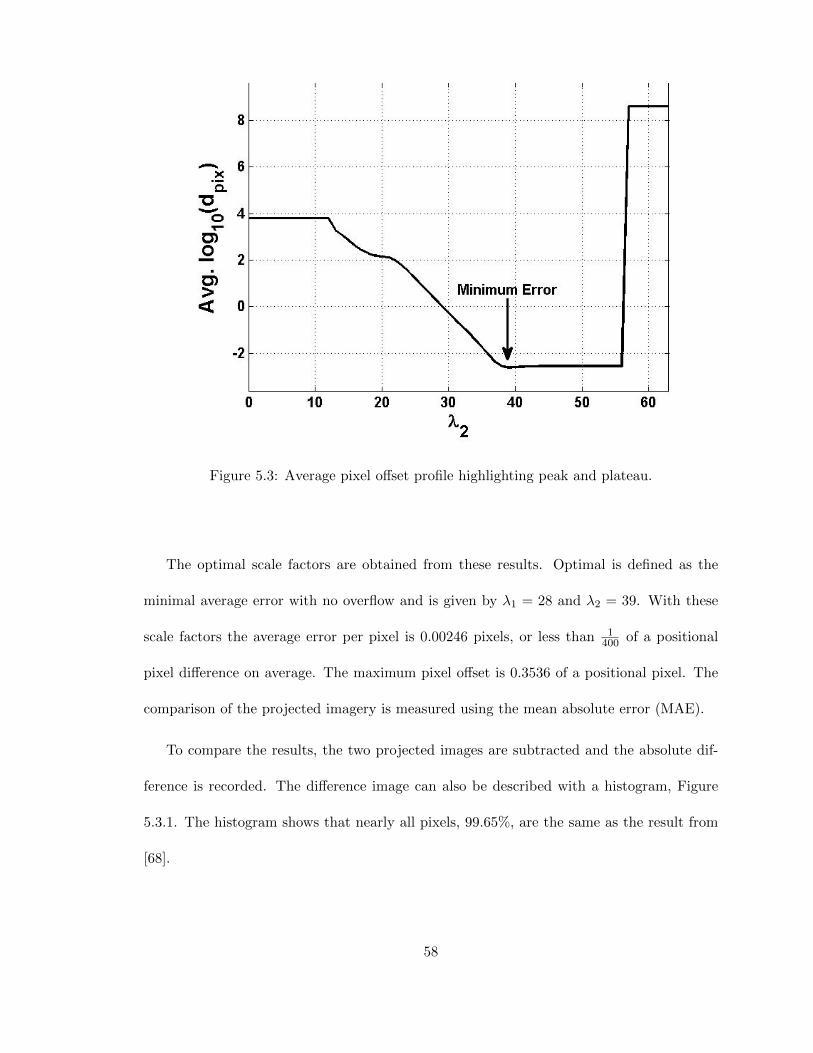
Figure 5.3: Average pixel offset profile highlighting peak and plateau.
The optimal scale factors are obtained from these results. Optimal is defined as the
minimal average error with no overflow and is given by λ1 = 28 and λ2 = 39. With these
scale factors the average error per pixel is 0.00246 pixels, or less than 1400 of a positional
pixel difference on average. The maximum pixel offset is 0.3536 of a positional pixel. The
comparison of the projected imagery is measured using the mean absolute error (MAE).
To compare the results, the two projected images are subtracted and the absolute dif-
ference is recorded. The difference image can also be described with a histogram, Figure
5.3.1. The histogram shows that nearly all pixels, 99.65%, are the same as the result from
[68].
58
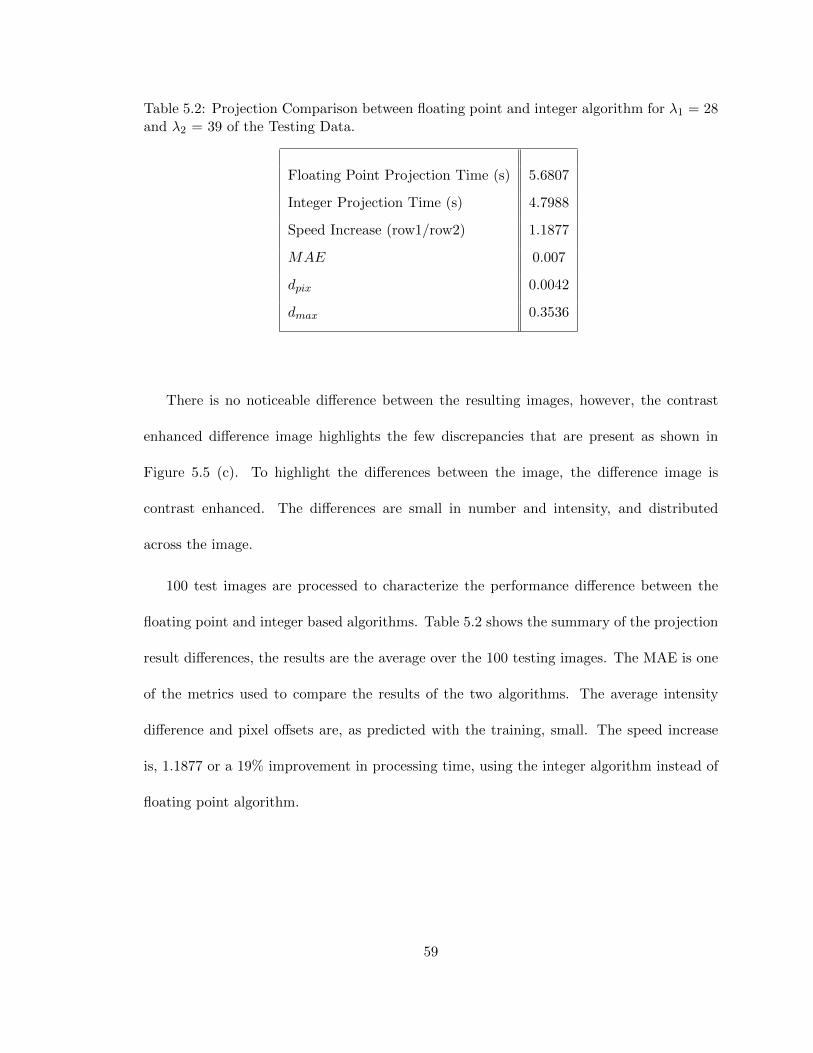
Table 5.2: Projection Comparison between floating point and integer algorithm for λ1 = 28and λ2 = 39 of the Testing Data.
Floating Point Projection Time (s) 5.6807
Integer Projection Time (s) 4.7988
Speed Increase (row1/row2) 1.1877
MAE 0.007
dpix 0.0042
dmax 0.3536
There is no noticeable difference between the resulting images, however, the contrast
enhanced difference image highlights the few discrepancies that are present as shown in
Figure 5.5 (c). To highlight the differences between the image, the difference image is
contrast enhanced. The differences are small in number and intensity, and distributed
across the image.
100 test images are processed to characterize the performance difference between the
floating point and integer based algorithms. Table 5.2 shows the summary of the projection
result differences, the results are the average over the 100 testing images. The MAE is one
of the metrics used to compare the results of the two algorithms. The average intensity
difference and pixel offsets are, as predicted with the training, small. The speed increase
is, 1.1877 or a 19% improvement in processing time, using the integer algorithm instead of
floating point algorithm.
59
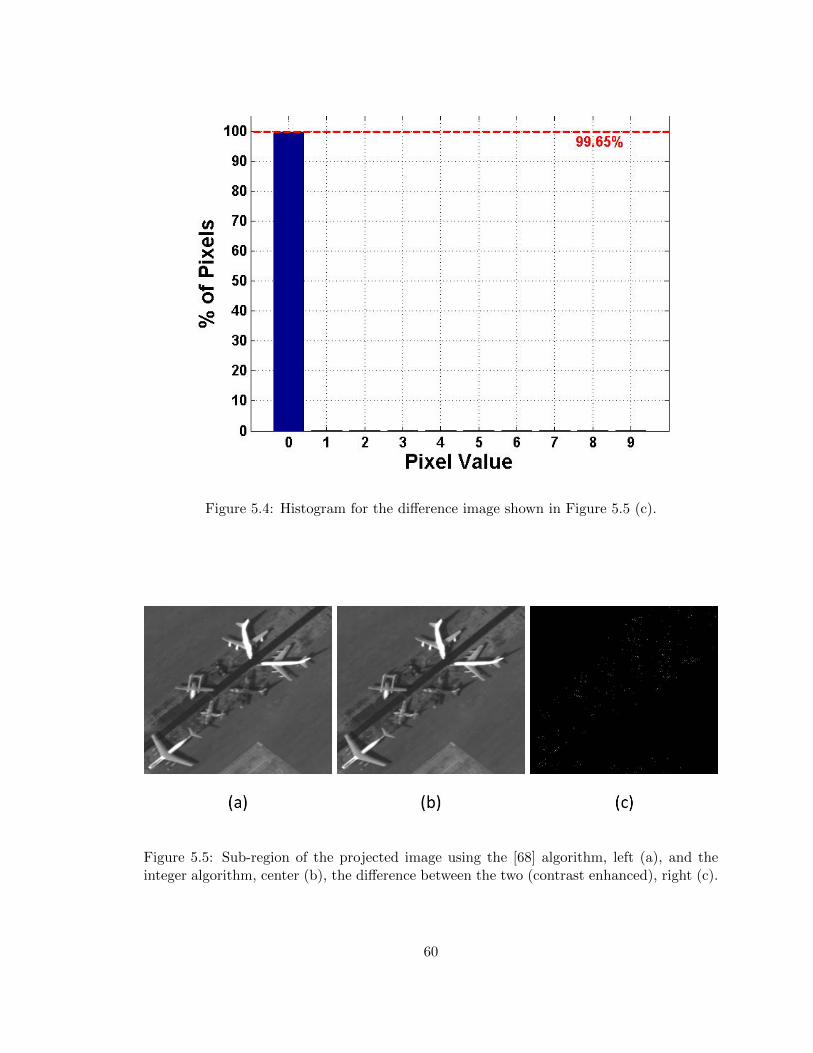
Figure 5.4: Histogram for the difference image shown in Figure 5.5 (c).
Figure 5.5: Sub-region of the projected image using the [68] algorithm, left (a), and theinteger algorithm, center (b), the difference between the two (contrast enhanced), right (c).
60

5.3.2 64-bit Algorithm with Linear Approximation Results
Since 64-bit processors are becoming more commonplace, it is helpful if the scale factors
operate within a 64-bit value to obtain maximum performance. To find the optimal scale
factors for a 64-bit integer, another test is run which limits all data-types to 64-bits. a
subset of scale factor values are optimized and the pixel offset surface is shown below in
Figure 5.6. The difference between the two surfaces shown in Figures 5.2 and 5.6 is where
data overflow occurs.
To determine the optimal scale factors with the integers limited to 64-bits, a sub-range
of the scale factor region is optimized over, namely λ1 = 12 to 20 and λ2 = 26 to 34. These
ranges are found by determining how much of a scale factor is required to maintain data,
i.e. finding where the 128-bit surface, Figure 5.2, begins to converge for each scale factor.
Then calculating the average pixel difference and checking for data overflow. Figure 5.6
shows the sub-range of scale factors over the training images, after being limited to a 64-bit
depth. The difference between Figure 5.6 and 5.2 is where the overflow occurs due the the
64-bit limit.
For the 64-bit limited algorithm, the optimal scale factors are λ1 = 17 and λ2 = 32.
The resulting average pixel offset error is 0.1464, and a maximum pixel offset of 1.0607.
Therefore, in general, nearly all pixels are under a half pixel offset, from the targeted
position. At the maximum error, a pixel is shifted by a full pixel size.
The summary for the testing data for the 64-bit limited integer algorithm is shown in
Table 5.3. As with the previous results, all of the values are averaged over the 100 testing
images. The speed increase is more than double with the optimal scale factors, and does
61

Figure 5.6: Average pixel offset surface per set of scale factors over 100 training images,limited to 64-bit integers.
not overflow in any of the images. The average intensity difference between the algorithms
is sufficiently small as to not cause noticeable artifacts.
Figure 5.3.2 shows the resulting orthorectified images from a test image for the different
algorithms. The difference image has more pixels that are different, but most of these
differences are small, as shown by the histogram of the difference image in Figure 5.8 along
with the statistics for the individual test image.
A zoomed in section of the image is shown in Figure 5.9. The difference image indicates
many pixels that are not the same, however, by inspection the two orthorectified images are
not visually different. Another artifact of the algorithm change becomes apparent in the
difference image, the graduations along the easting direction. These graduations are the
induced error from the linear approximation of the inverse function described in Section 5.1.
62
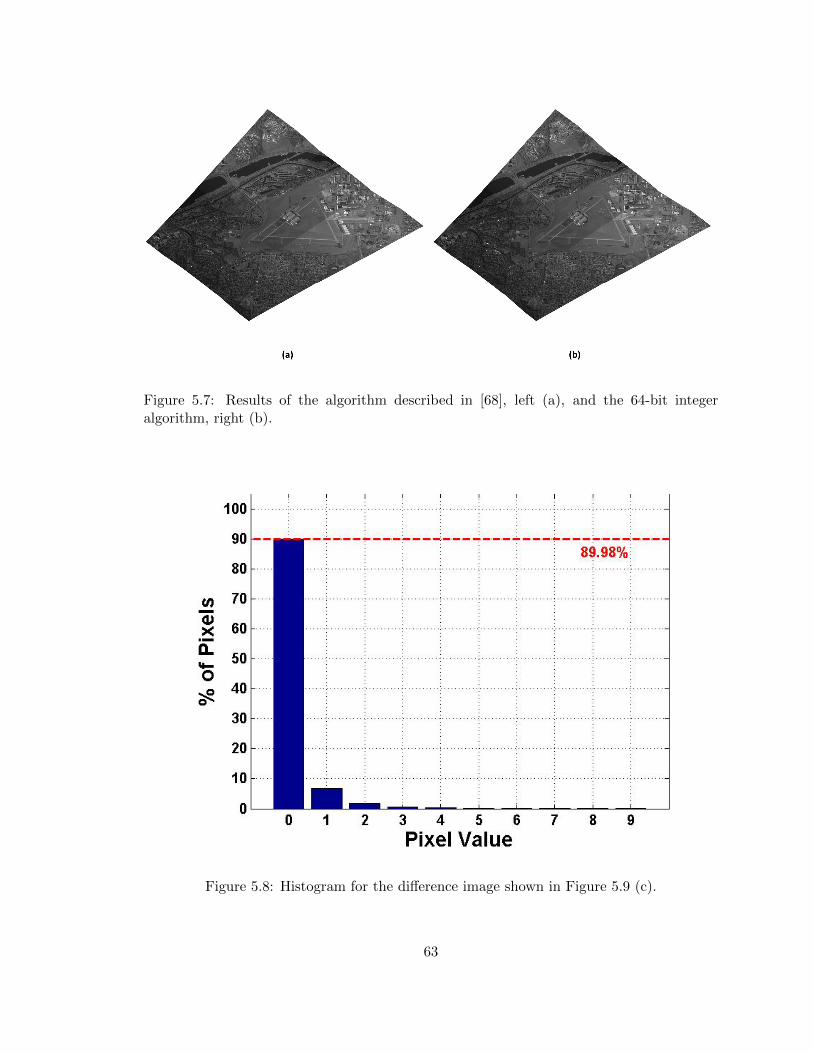
Figure 5.7: Results of the algorithm described in [68], left (a), and the 64-bit integeralgorithm, right (b).
Figure 5.8: Histogram for the difference image shown in Figure 5.9 (c).
63
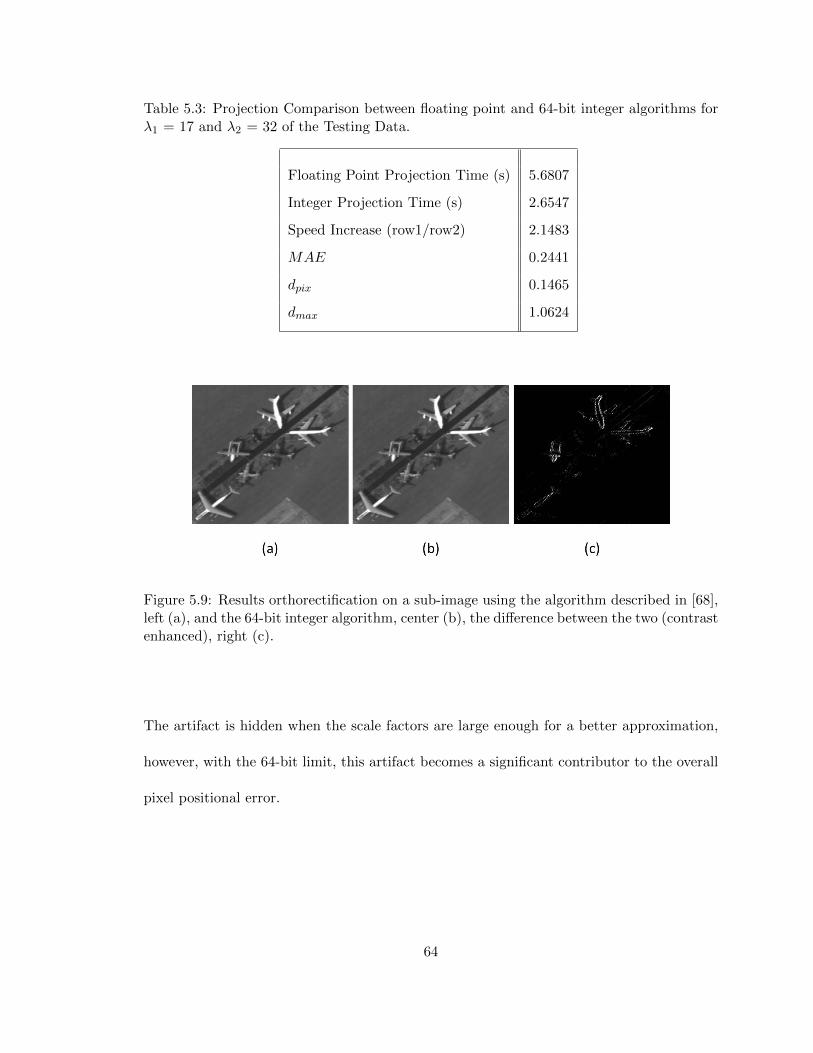
Table 5.3: Projection Comparison between floating point and 64-bit integer algorithms forλ1 = 17 and λ2 = 32 of the Testing Data.
Floating Point Projection Time (s) 5.6807
Integer Projection Time (s) 2.6547
Speed Increase (row1/row2) 2.1483
MAE 0.2441
dpix 0.1465
dmax 1.0624
Figure 5.9: Results orthorectification on a sub-image using the algorithm described in [68],left (a), and the 64-bit integer algorithm, center (b), the difference between the two (contrastenhanced), right (c).
The artifact is hidden when the scale factors are large enough for a better approximation,
however, with the 64-bit limit, this artifact becomes a significant contributor to the overall
pixel positional error.
64

CHAPTER VI
FIXED-POINT PROJECTION ALGORITHM WITH QUADRATIC
APPROXIMATION [27]
This chapter covers the quadratic approach for approximating an inverse function pro-
posed in [27]. The results of the quadratic approach are compared to the different algorithms
and versions. The first algorithm [68] has two versions. The first version is a 128-bit floating-
point algorithm denoted as F128, and used as the truth values for comparisons to the other
algorithms. There are two methods for determining a standard ”truth”, one method is to
use control points in the imagery with known absolute location and compare the projected
position to the control point’s position. Another method, given that control points aren’t
always available, the projection is dependent solely on location and attitude measurement
accuracy. The second method is used for this section, where the measurement accuracy
determines the accuracy of the projection. The control point method is useful for absolute
accuracy, but the measurement accuracy method is applicable to more platforms. The other
version of the [68] algorithm uses a 64-bit floating point data type and is denoted as F64.
The integer algorithm described in Chapter V uses a linear function to approximate
the inverse function. There are also two versions of the linear algorithm, a 128-bit integer
65

Figure 6.1: Difference Image (C) between the truth image (A) and the 64-bit linear approx-imation algorithm (B)
version, I128LA, and a 64-bit integer version I64LA. The quadratic version described below
also has the 128-bit version, I128QA and the 64-bit version I64QA.
6.1 Algorithm Description of [27]
The previous chapter, Chapter , describes a linear approximation for fixed-point image
orthorectification. However, the pixel offset, especially for the I64LA version, is significantly
higher than the F64 method. The difference image gives an indication of the likely reason;
the linear approximation of the inverse function coupled with the limited resolution of the
64-bit integer. Figure 6.1 (C) shows the difference between the result of F128 algorithm (A)
and the I64LA algorithm (B). Note the additional difference structure (vertical lines) in the
difference image.
The purpose of this paper is to develop a fixed-point orthorectification algorithm that
generates a more accurate result. The proposed modifications replace the linear approxi-
mation of the inverse function with a quadratic approximation. Using the results from [26],
66

a secondary differential unit is added to the inverse approximation. The iterative denomi-
nator takes the form of Equation 6.1, where r−1d [Ix, y′] is the approximated inverse initial
value per interpolated north direction, χ is the iterative variable in the east direction, δr−1d
is the first order differential variable, and δ(2)
r−1d
is the second order differential variable.
1
rd[Ix, y′] + χδrd≈ r−1
d [Ix, y′] + χ(δr−1d
+ χδ(2)
r−1d
). (6.1)
Solving for the two variables algebraically, the differential variables can be found by
Equation 6.2. The full derivation is shown in Appendix A.
δr−1d
[Ix, y′] =−δrd (2rd[Ix,y′]+3Iδrd )
rd[Ix,y′](2r2d[Ix,y′]+3Ird[Ix,y′]δrd+I2(δrd )2)
δ(2)
r−1d
[Ix, y′] =2(δrd )2)
rd[Ix,y′](2r2d[Ix,y′]+3Ird[Ix,y′]δrd+I2(δrd )2)
. (6.2)
To test the new approximation, the I128LA and I64LA techniques are implemented along
with the linear approximation method. Each of the approximations are subtracted from the
floating point inversion function, the results are shown in Figure 6.2. Figure 6.2 shows that
the quadratic approximation significantly improves the error over the linear approximation
by an order of magnitude and removes the maximum error at the n = I2 point.
The rest of the algorithm follows [26]. The integer version of the differential variables
for the 128-bit quadratic algorithm is shown below in Equation 6.3
ˆδr−1d
[Ix, y′] =
⌊δr−1d
[Ix,y′]
2λ2
⌋ˆδ
(2)
r−1d
[Ix, y′] =
⌊δ(2)
r−1d
[Ix,y′]
2λ2
⌋ , (6.3)
67
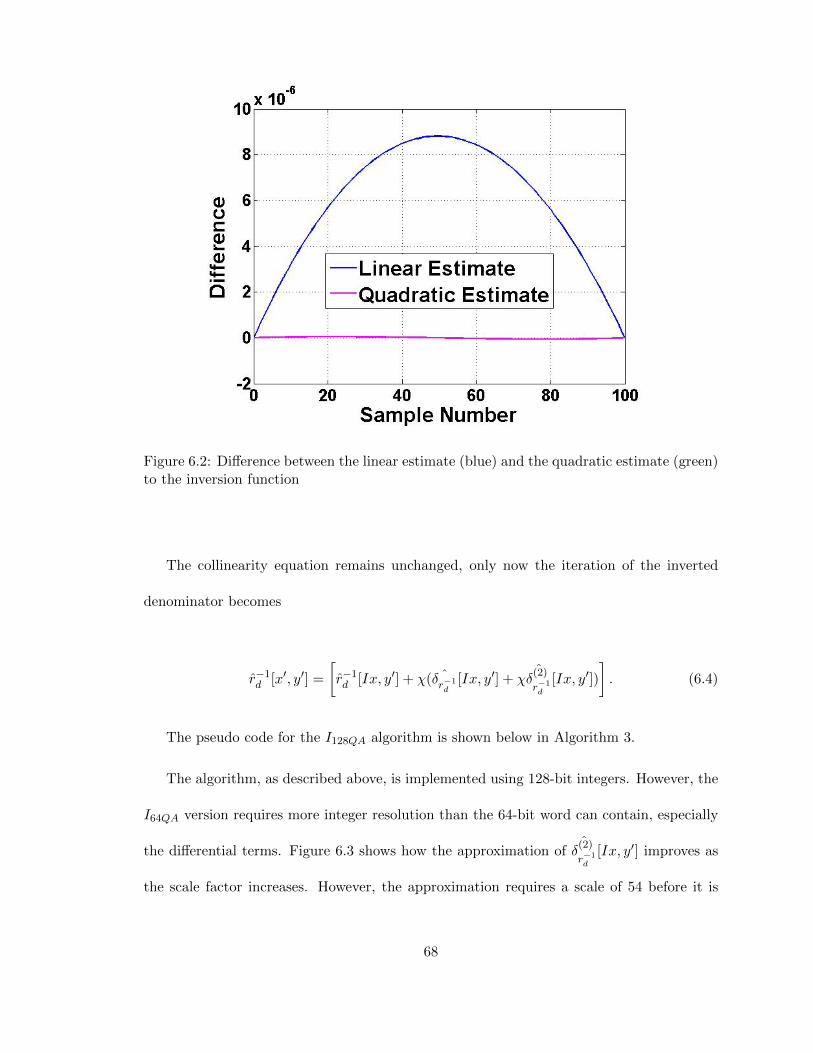
Figure 6.2: Difference between the linear estimate (blue) and the quadratic estimate (green)to the inversion function
The collinearity equation remains unchanged, only now the iteration of the inverted
denominator becomes
r−1d [x′, y′] =
[r−1d [Ix, y′] + χ( ˆδr−1
d[Ix, y′] + χ
ˆδ
(2)
r−1d
[Ix, y′])
]. (6.4)
The pseudo code for the I128QA algorithm is shown below in Algorithm 3.
The algorithm, as described above, is implemented using 128-bit integers. However, the
I64QA version requires more integer resolution than the 64-bit word can contain, especially
the differential terms. Figure 6.3 shows how the approximation ofˆδ
(2)
r−1d
[Ix, y′] improves as
the scale factor increases. However, the approximation requires a scale of 54 before it is
68

Algorithm 3 128-bit Fixed-Point Algorithm with Quadratic Approximation
1: Load Calibration Parameters2: m•, Z3: Xc, Yc Equation 5.84: ∆E , ∆N
5: Calculate More Parameters6: I, δE , δN Equations 4.27: for y = I(yinitial : yfinal)
8: DN [Iy] - Equation 5.89: for x = I(xinitial : xfinal)
10: DE [Ix] - Equation 5.811: for γ = 1 : I12: ζ[x′, y′] - Equation 5.713: DA[Ix, y′] - Equation 5.814: in[Ix, y′], jn[Ix, y′] - Equation 5.1015: δin , δjn - Equation 5.1116: ˆr−1
d [Ix, y′] - Equation 5.12
17: δr−1d
[Ix, y′],ˆδ
(2)
r−1d
[Ix, y′] - Equation 6.3
18: for χ = 1 : I19: i[x′, y′], j[x′, y′] - Equation 5.1520: in[x′, y′], jn[x′, y′] - Equation 5.1221: r−1
d [x′, y′] - Equation 6.4
22: end23: DN [y′] - Equation 5.8
24: end25: end26: end
69
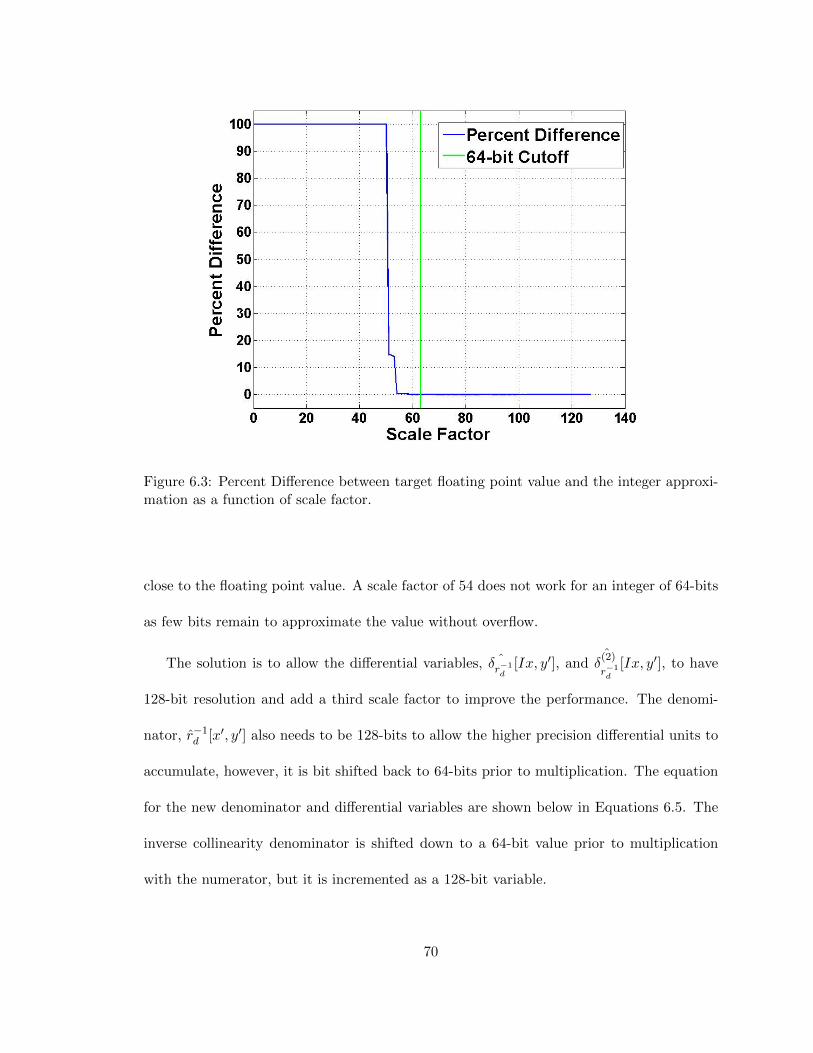
Figure 6.3: Percent Difference between target floating point value and the integer approxi-mation as a function of scale factor.
close to the floating point value. A scale factor of 54 does not work for an integer of 64-bits
as few bits remain to approximate the value without overflow.
The solution is to allow the differential variables, ˆδr−1d
[Ix, y′], andˆδ
(2)
r−1d
[Ix, y′], to have
128-bit resolution and add a third scale factor to improve the performance. The denomi-
nator, r−1d [x′, y′] also needs to be 128-bits to allow the higher precision differential units to
accumulate, however, it is bit shifted back to 64-bits prior to multiplication. The equation
for the new denominator and differential variables are shown below in Equations 6.5. The
inverse collinearity denominator is shifted down to a 64-bit value prior to multiplication
with the numerator, but it is incremented as a 128-bit variable.
70

r−1d [x′, y′] =
⌊m′31DE [x′]+m′32DN [y′]+m′33DA[x′,y′]
2λ2+λ3
⌋ˆδr−1d
[Ix, y′] =
⌊δr−1d
[Ix,y′]
2λ2+λ3
⌋ˆδ
(2)
r−1d
[Ix, y′] =
⌊δ(2)
r−1d
[Ix,y′]
2λ2+λ3
⌋ , (6.5)
The pseudo code for the I64QA version is shown below in Algorithm 4.
Algorithm 4 64-bit Fixed-Point Algorithm with Quadratic Approximation
1: Load Calibration Parameters2: m•, Z3: Xc, Yc Equation 5.84: ∆E , ∆N
5: Calculate More Parameters6: I, δE , δN Equations 4.27: for y = I(yinitial : yfinal)
8: DN [Iy] - Equation 5.89: for x = I(xinitial : xfinal)
10: DE [Ix] - Equation 5.811: for γ = 1 : I12: ζ[x′, y′] - Equation 5.713: DA[Ix, y′] - Equation 5.814: in[Ix, y′], jn[Ix, y′] - Equation 5.1015: δin , δjn - Equation 5.11
16: ˆr−1d [Ix, y′], δr−1
d[Ix, y′],
ˆδ
(2)
r−1d
[Ix, y′] - Equation 6.5
17: for χ = 1 : I18: i[x′, y′], j[x′, y′] - Equation 5.1519: in[x′, y′], jn[x′, y′] - Equation 5.1220: r−1
d [x′, y′] - Equation 6.4
21: end22: DN [y′] - Equation 5.8
23: end24: end25: end
71

6.2 Metrics
The quadratic approximated orthorectification algorithm is implemented with 128 and
64-bit data types, and compared to [68] and [26]. For comparison between the different
algorithm versions, each of the versions are developed and executed on the same Linux
based 16 core computer with specification listed below in table 4.1.
Two data sets are used one for training and the other for testing. All imagery in the
training and testing data sets are from the LAIR II data set collected by Air Force Research
Laboratory [34]. The training data set is 100 frames from the beginning of the data set to
frame 595, with every fifth frame used. The platform used for the data collection flies an
orbit around a location, by using every fifth frame the full orbit is sampled with enough
angle variation to avoid over-training to a specific a specific set of look angles and distances.
The testing data set is also 100 images, but from later in the collection (every fifth frame
from 612 to 1107).
For the floating point algorithms, no training is required because there are no scale
factors. Only the integer algorithms that have the quadratic approximation are trained to
determine the scale factors. The F128 algorithm, considered to be truth, is used to determine
the scale factors.
Once all training has been completed, the testing data set is processed using the different
algorithms. There are two steps to testing the results. The first step consists of processing
all versions and comparing the average projected pixel distances, 6.6, with respect to the
F128 algorithm.
72

dpix =1
M
∑x′
∑y′
dpix[x′, y′], (6.6)
where M is the number of projected pixels and dpix[x′, y′] is the Euclidean distance
between the F128 point pixel location and the other algorithms. The equation for the
Euclidean distance between two pixel locations is shown in Equation 6.7 where ild[x′, y′],
and jld[x′, y′] are the resulting pixel locations from the F128 algorithm using Equation 4.5
(i-horizontal, j-vertical), and j•[x′, y′], and j•[x
′, y′] are the pixel locations for one of the
other algorithms that are being tested.
dpix[x′, y′] =√
(ild[x′, y′]− i•[x′, y′])2 + ((jld[x′, y′]− j•[x′, y′])2. (6.7)
The maximum pixel offset, given by Equation 6.8, is a measure that can indicate if the
projection ever overflowed the number of allotted bits.
dmax = maxx′,y′
dpix[x′, y′]. (6.8)
The next step, consists of each stand-alone implementation where the time and orthorec-
tified imagery is produced and new metrics are used. One of the new metrics include the
mean absolute error of the projected imagery, shown in Equation 6.9, where Qld[x′, y′] is
the projected pixel intensity value from the F128 algorithm and Q•[x′, y′] is the projected
pixel value from the algorithm being tested. The absolute pixel value differences are then
summed and a mean value is calculated from all test images.
73

MAE =1
M
∑x′
∑y′
|Qld[x′, y′]−Q•[x′, y′]|. (6.9)
Computational time as well as the speed increase as shown by Equation 6.10, where the
time for projection from the F128 algorithm (Tld) is divided by the computational time of
the other projection algorithms (T•).
S =TldT•
(6.10)
The final metric is the percentage, with respect to the total number of projected pixels,
of the number of non-zero elements remaining after the difference from the F128 algorithm,
denoted as P , and shown in Equation 6.11. P is another estimate of how well the orthorec-
tification algorithm performed.
P =
1
M
∑x′
∑y′
1, |Qld[x′, y′]−Q•[x′, y′]| > 0
0, else
. (6.11)
6.3 Results from [27]
This section presents the results from the fixed-point orthorectification algorithm with
a quadratic approximation pending published in [27].
6.3.1 128-bit Algorithm with Quadratic Approximation Training Results
The 128-bit Integer algorithm with the quadratic approximation, I128QA, is trained. The
training consists of calculating the average pixel difference between the I128QA algorithm
74
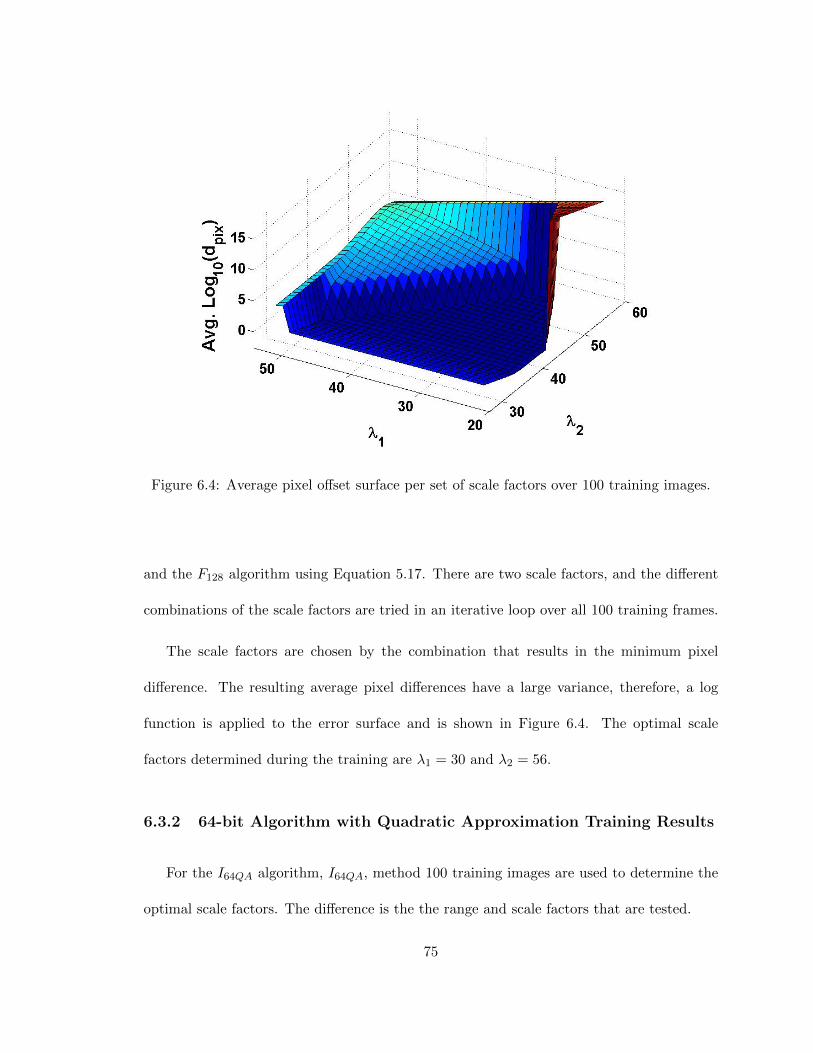
Figure 6.4: Average pixel offset surface per set of scale factors over 100 training images.
and the F128 algorithm using Equation 5.17. There are two scale factors, and the different
combinations of the scale factors are tried in an iterative loop over all 100 training frames.
The scale factors are chosen by the combination that results in the minimum pixel
difference. The resulting average pixel differences have a large variance, therefore, a log
function is applied to the error surface and is shown in Figure 6.4. The optimal scale
factors determined during the training are λ1 = 30 and λ2 = 56.
6.3.2 64-bit Algorithm with Quadratic Approximation Training Results
For the I64QA algorithm, I64QA, method 100 training images are used to determine the
optimal scale factors. The difference is the the range and scale factors that are tested.
75
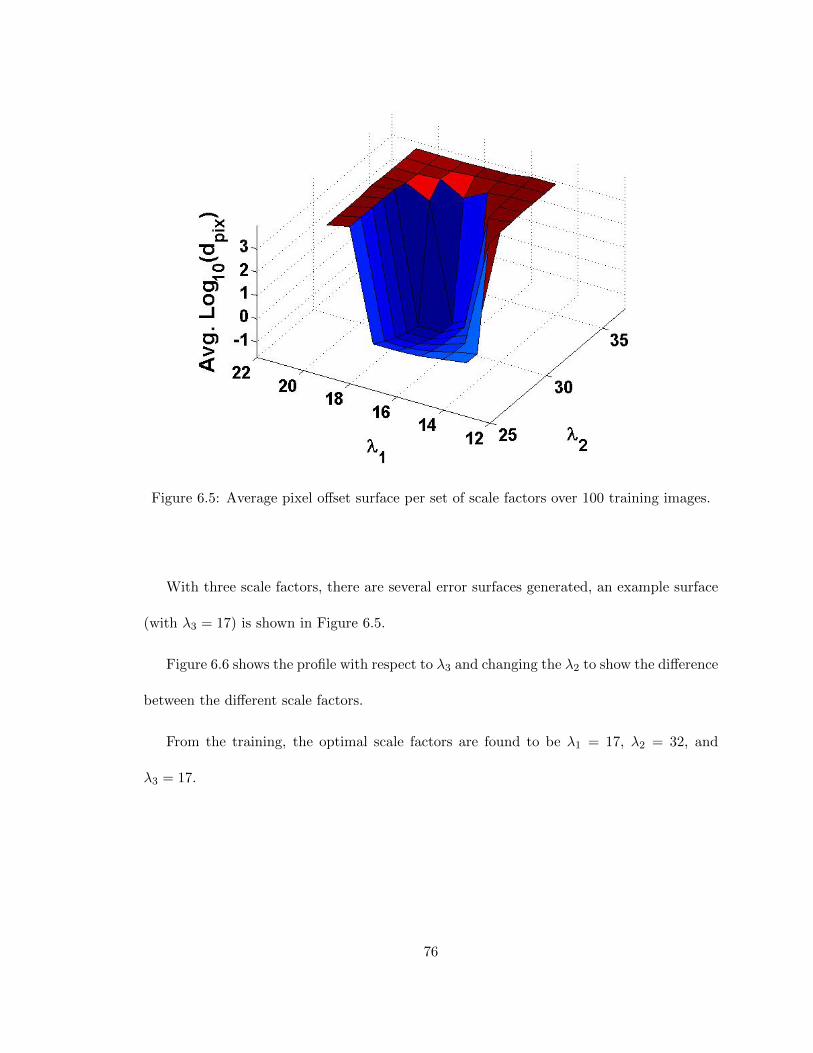
Figure 6.5: Average pixel offset surface per set of scale factors over 100 training images.
With three scale factors, there are several error surfaces generated, an example surface
(with λ3 = 17) is shown in Figure 6.5.
Figure 6.6 shows the profile with respect to λ3 and changing the λ2 to show the difference
between the different scale factors.
From the training, the optimal scale factors are found to be λ1 = 17, λ2 = 32, and
λ3 = 17.
76
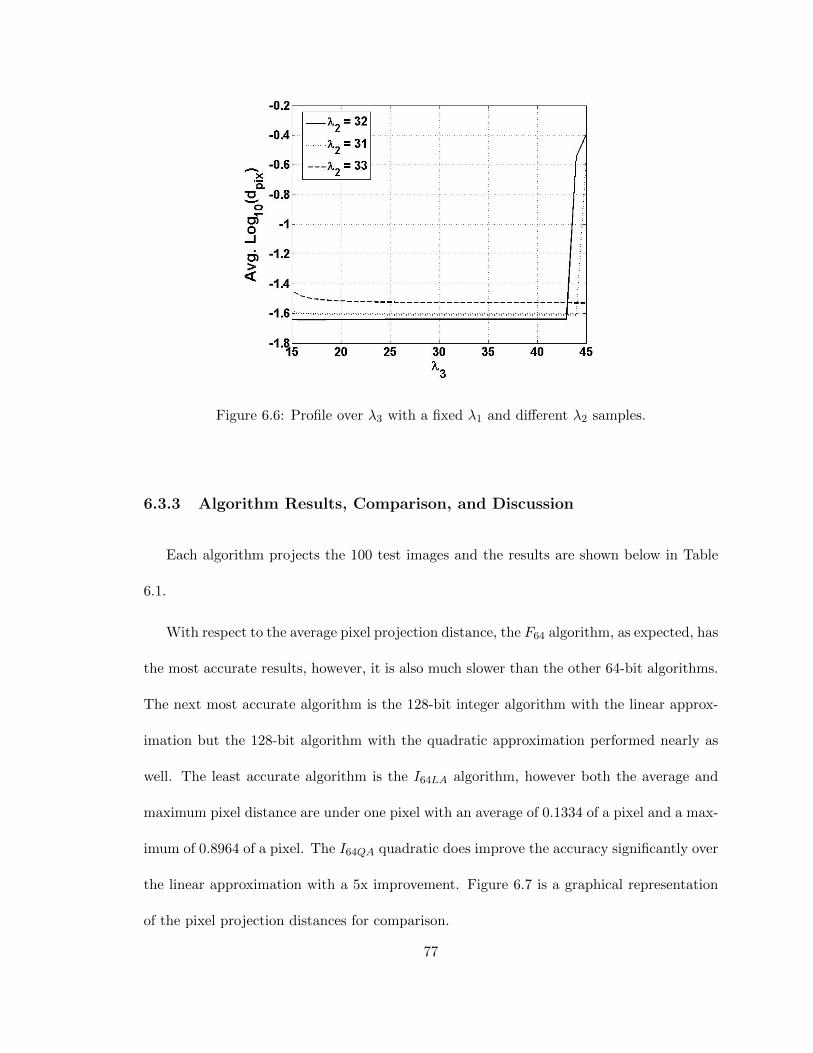
Figure 6.6: Profile over λ3 with a fixed λ1 and different λ2 samples.
6.3.3 Algorithm Results, Comparison, and Discussion
Each algorithm projects the 100 test images and the results are shown below in Table
6.1.
With respect to the average pixel projection distance, the F64 algorithm, as expected, has
the most accurate results, however, it is also much slower than the other 64-bit algorithms.
The next most accurate algorithm is the 128-bit integer algorithm with the linear approx-
imation but the 128-bit algorithm with the quadratic approximation performed nearly as
well. The least accurate algorithm is the I64LA algorithm, however both the average and
maximum pixel distance are under one pixel with an average of 0.1334 of a pixel and a max-
imum of 0.8964 of a pixel. The I64QA quadratic does improve the accuracy significantly over
the linear approximation with a 5x improvement. Figure 6.7 is a graphical representation
of the pixel projection distances for comparison.
77
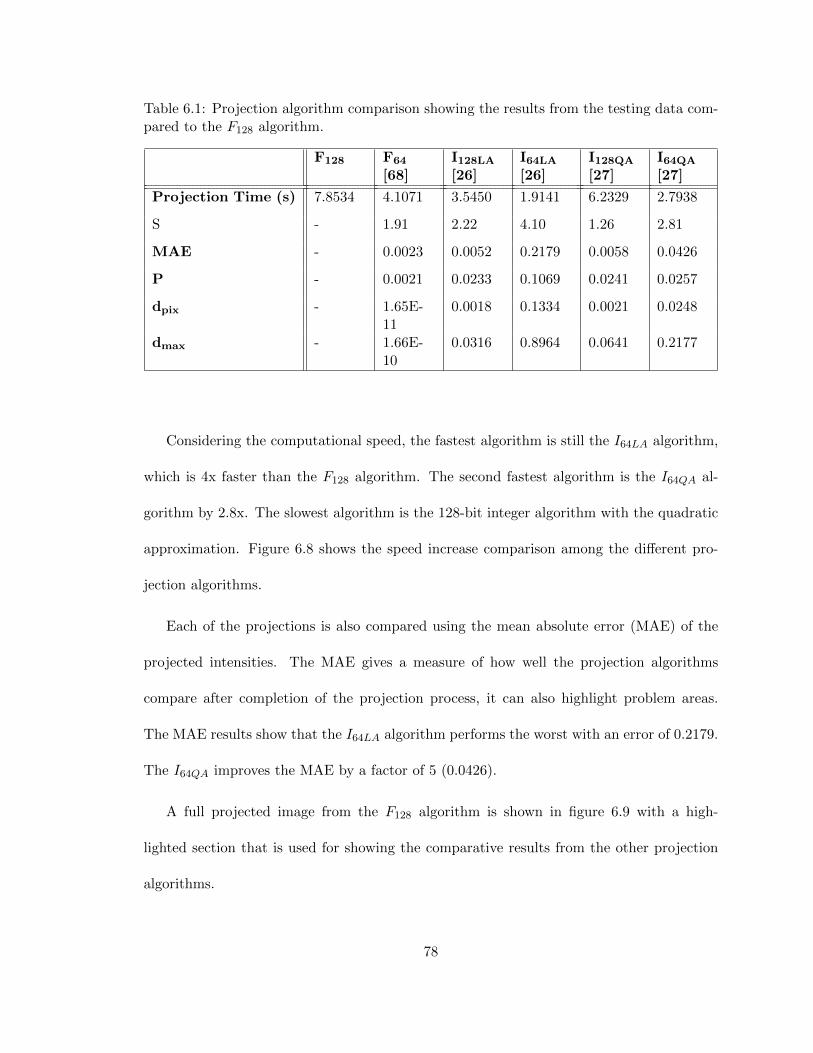
Table 6.1: Projection algorithm comparison showing the results from the testing data com-pared to the F128 algorithm.
F128 F64
[68]I128LA[26]
I64LA[26]
I128QA
[27]I64QA
[27]
Projection Time (s) 7.8534 4.1071 3.5450 1.9141 6.2329 2.7938
S - 1.91 2.22 4.10 1.26 2.81
MAE - 0.0023 0.0052 0.2179 0.0058 0.0426
P - 0.0021 0.0233 0.1069 0.0241 0.0257
dpix - 1.65E-11
0.0018 0.1334 0.0021 0.0248
dmax - 1.66E-10
0.0316 0.8964 0.0641 0.2177
Considering the computational speed, the fastest algorithm is still the I64LA algorithm,
which is 4x faster than the F128 algorithm. The second fastest algorithm is the I64QA al-
gorithm by 2.8x. The slowest algorithm is the 128-bit integer algorithm with the quadratic
approximation. Figure 6.8 shows the speed increase comparison among the different pro-
jection algorithms.
Each of the projections is also compared using the mean absolute error (MAE) of the
projected intensities. The MAE gives a measure of how well the projection algorithms
compare after completion of the projection process, it can also highlight problem areas.
The MAE results show that the I64LA algorithm performs the worst with an error of 0.2179.
The I64QA improves the MAE by a factor of 5 (0.0426).
A full projected image from the F128 algorithm is shown in figure 6.9 with a high-
lighted section that is used for showing the comparative results from the other projection
algorithms.
78
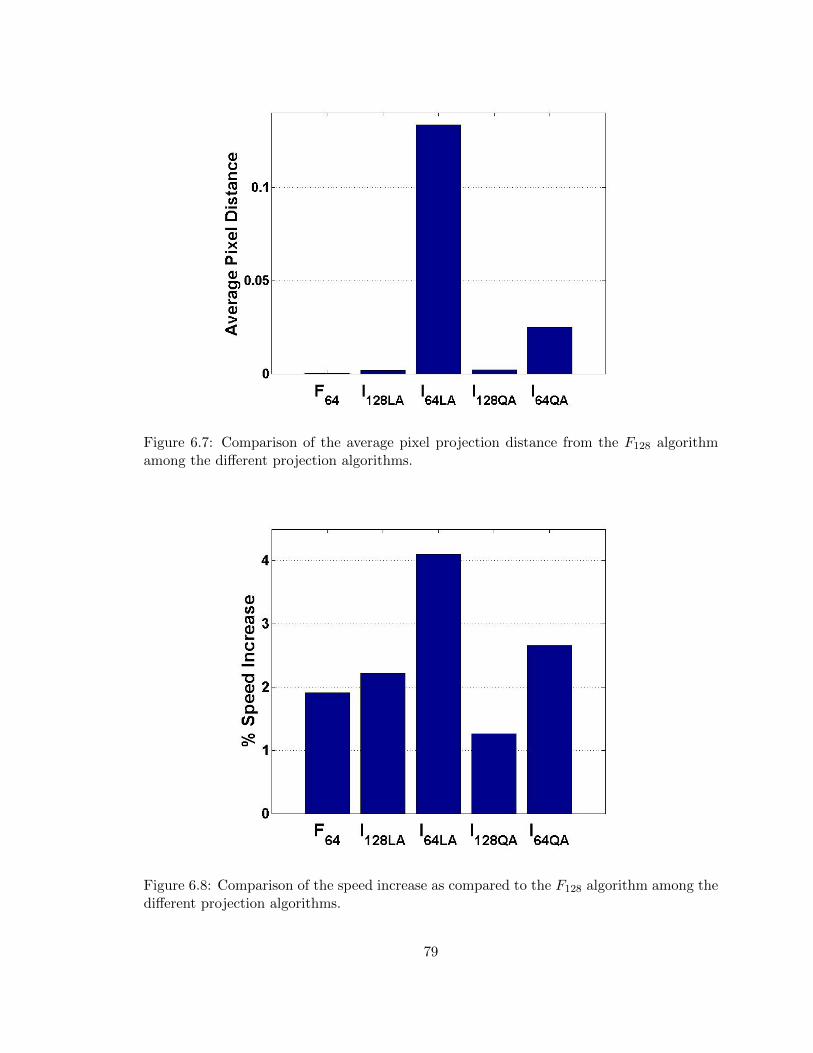
Figure 6.7: Comparison of the average pixel projection distance from the F128 algorithmamong the different projection algorithms.
Figure 6.8: Comparison of the speed increase as compared to the F128 algorithm among thedifferent projection algorithms.
79

Figure 6.9: Full frame projection result from the F128 algorithm with highlighted selectionfor comparison to other algorithms.
The selection highlighted in figure 6.9 is shown in figure 6.10 for all of the different
projection algorithms. There are two columns and each column has two images. The
left images are the projection results and the right images are the differences to the F128
algorithm.
As shown in Figure 6.10 and 6.7 the I64QA provides a better approximation of the F128
algorithm than the I64LA, as well as removing the approximation artifacts present in the
I64LA projection results. The I64QA projection methods also provides a 32% increase in
computational efficiency over the F64 method provided in [68].
80

Figure 6.10: Comparison of the algorithm projections from the F128 projection algorithm;(A) F64, (B) I128LA, (C) I64LA, (D) I128QA, and (E) I64QA.
81
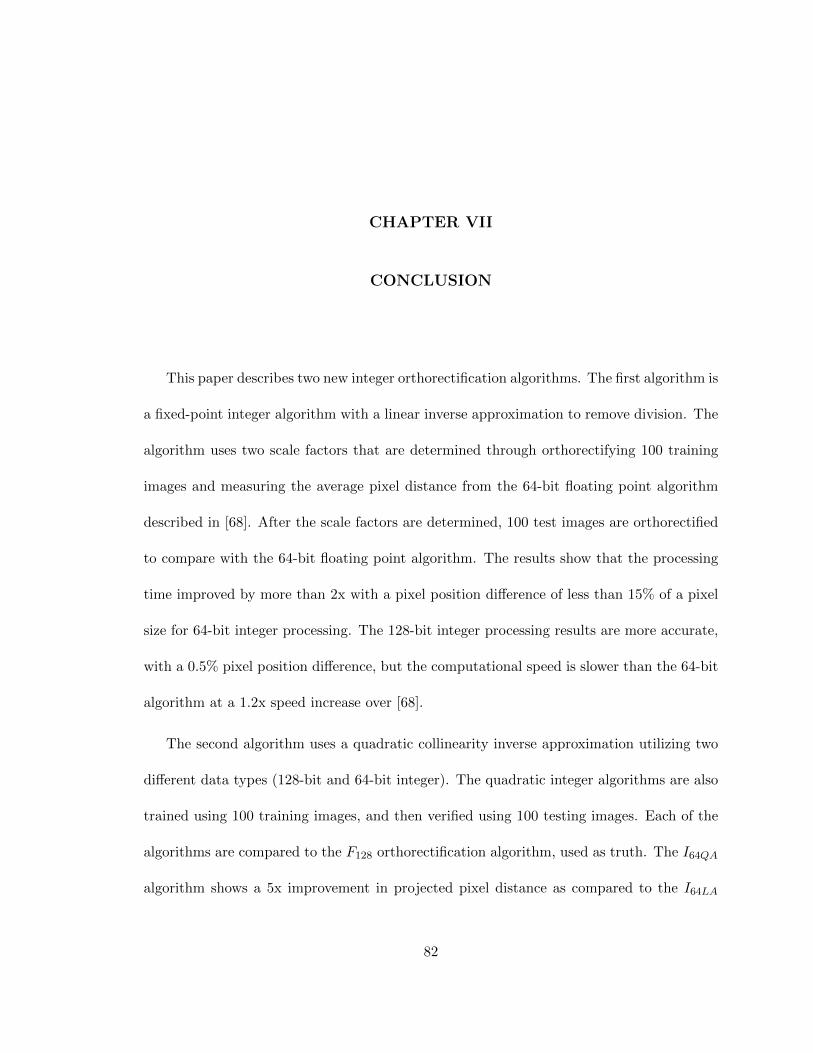
CHAPTER VII
CONCLUSION
This paper describes two new integer orthorectification algorithms. The first algorithm is
a fixed-point integer algorithm with a linear inverse approximation to remove division. The
algorithm uses two scale factors that are determined through orthorectifying 100 training
images and measuring the average pixel distance from the 64-bit floating point algorithm
described in [68]. After the scale factors are determined, 100 test images are orthorectified
to compare with the 64-bit floating point algorithm. The results show that the processing
time improved by more than 2x with a pixel position difference of less than 15% of a pixel
size for 64-bit integer processing. The 128-bit integer processing results are more accurate,
with a 0.5% pixel position difference, but the computational speed is slower than the 64-bit
algorithm at a 1.2x speed increase over [68].
The second algorithm uses a quadratic collinearity inverse approximation utilizing two
different data types (128-bit and 64-bit integer). The quadratic integer algorithms are also
trained using 100 training images, and then verified using 100 testing images. Each of the
algorithms are compared to the F128 orthorectification algorithm, used as truth. The I64QA
algorithm shows a 5x improvement in projected pixel distance as compared to the I64LA
82
algorithm. The I64QA algorithm is also nearly 3x faster than the F128 algorithm and 1.5x
faster than any of the floating point implementations.
To increase the processing speed in software, the next step could be to combine the
numerator and denominator into an iterative function. All of the researched methods solely
approximate the inverse function, the numerator is never taken into account in the approx-
imations. However, there are major advantages to including the numerator. First, it may
result in a better approximation even if the approximation is limited to a linear function.
If the linear approximation also includes the numerator it may decrease the decrease the
scale factors and allow more bit-depth to represent the value. However, a non-linear ap-
proximation would probably still give more accurate results. The second advantage is that
it will remove two multiplication steps in the inner most loop. As mentioned in Chapter
IV, the pixel location calculation (Equation 5.6) still requires the numerator multiplied by
the approximated inverted denominator. If the numerator is included in the approximation
then the pixel location would be calculated by an iterative addition.
One purpose of this research is to show the feasibility of an FPGA implementation of
the orthorectification algorithm. As mentioned earlier, FPGA is a useful tool for systems
where power consumption is a concern. The new 64-bit integer algorithm with the quadratic
approximation increases the accuracy over the linear implementation and removed the ar-
tifacts. Thereby making it a good candidate for implementation on an FPGA without
losing much accuracy in the floating point to fixed-point conversion or the inverse function
approximation.
83

APPENDIX A
DERIVATION OF EQUATION 6.2
Begin with the initial approximation.
1
rd[x′, y′] + χδrd≈ r−1
d [Ix, y′] + χ(δr−1d
[Ix, y′] + χδ(2)
r−1d
[Ix, y′]) (1.1)
The first term of the approximation is easy to find, set χ = 0. The result is
r−1d [Ix, y′] ≈ 1
rd[Ix, y′](1.2)
There are two variables, therefore two equations are required to solve each of the parts
of the equation. Set χ = I and solve for δr−1d
[Ix, y′] which results in Equation 1.3
δr−1d
[Ix, y′] ≈ 1
I
[1
rd[Ix, y′] + Iδrd− 1
rd[Ix, y′]− I2δ
(2)
r−1d
[Ix, y′]
](1.3)
The next step is to find another convenient place to find equality, the midpoint of the
approximation χ = I2 . Set χ = I
2 and solve for δ(2)
r−1d
[Ix, y′] results in Equation 1.4
δ(2)
r−1d
[Ix, y′] ≈ 4
I2
[1
rd[Ix, y′] + I2δrd
− 1
rd[Ix, y′]− I
2δr−1d
[Ix, y′]
](1.4)
84

Substitute Equation 1.3 into Equation 1.4 and simplify results in
δ(2)
r−1d
[Ix, y′] ≈ 4
I2
[1
rd[Ix, y′] + I2δrd
− 1
2rd[Ix, y′]− 1
2rd[Ix, y′] + Iδrd
](1.5)
Equation 1.5 can be simplified further into
δ(2)
r−1d
[Ix, y′] =2(δrd)
2)
rd[Ix, y′](2r2d[Ix, y
′] + 3Ird[Ix, y′]δrd + I2(δrd)2)
(1.6)
Next substitute Equation 1.6 into Equation 1.3 and simplify
δr−1d
[Ix, y′] =−δrd(2rd[Ix, y′] + 3Iδrd)
rd[Ix, y′](2r2d[Ix, y
′] + 3Ird[Ix, y′]δrd + I2(δrd)2)
(1.7)
85

APPENDIX B
CURRENT JOURNAL PUBLICATIONS
[1] Joseph C French and Eric J Balster. A fast and accurate orthorectification algorithm
of aerial imagery using integer arithmetic. Journal of Selected Topics in Applied Earth
Observations and Remote Sensing, 2013.
[2] Joseph C French and Eric J Balster. A quadratic approximation for an integer or-
thorectification algorithm. Journal of Selected Topics in Applied Earth Observations
and Remote Sensing, (Pending).
86
APPENDIX C
CURRENT CONFERENCE PUBLICATIONS
[1] Joseph French, William Turri, Joseph Fernando, and Eric Balster. Gpu accelerated ele-
vation map based registration of aerial images. In High Performance Extreme Computing
Conference (HPEC), 2013 IEEE, pages 1–6. IEEE, 2013.
[2] Joseph C French, Eric J Balster, and William F Turri. A 64-bit orthorectification
algorithm using fixed-point arithmetic. In Society of Photo-Optical Instrumentation
Engineers (SPIE) Conference Series, volume 8895, 2013.
[3] Patrick C Hytla, Joseph C French, Frank O Baxley, Kenneth J Barnard, Mark A Bick-
nell, Russell C Hardie, Eric J Balster, and Nicholas P Vicen. Dynamic range manage-
ment and image compression emphasizing dismount targets in midwave infrared per-
sistent surveillance systems. In Military Sensing Symposium 2010 PF07. SENSIAC,
2010.
[4] Patrick C Hytla, Joseph C French, Nicholas P Vicen, Russell C Hardie, Eric J Balster,
Frank O Baxley, Kenneth J Barnard, and Mark A Bicknell. Image compression empha-
sizing pixel size objects in midwave infrared persistent surveillance systems. In Aerospace
and Electronics Conference (NAECON), Proceedings of the IEEE 2010 National, pages
296–301. IEEE, 2010.
[5] Paul Sundlie, Joseph French, and Eric Balster. Integer computation of image orthorec-
tification for high speed throughput. In International Conference of Image Processing
and Computer Vision. WorldCom, July 2011.
87
BIBLIOGRAPHY
[1] Manuel A Aguilar, Marıa del Mar Saldana, and Fernando J Aguilar. Assessing geomet-
ric accuracy of the orthorectification process from geoeye-1 and worldview-2 panchro-
matic images. International Journal of Applied Earth Observation and Geoinformation,
21:427–435, 2013.
[2] E.F. Arias, P. Charlot, M. Feissel, and J.-F. Lestrade. The extragalactic reference
system of the international earth rotation service, icrs. Astronomy and Astrophysics,
(303):604–608, March 1995.
[3] Eric J. Balster, Benjamin T. Fortener, and William F. Turri. Integer computation of
lossy jpeg2000 compression. IEEE Transactions on Image Processing, 20(8):2386–2391,
August 2011.
[4] John L Barron, David J Fleet, and Steven S Beauchemin. Performance of optical flow
techniques. International journal of computer vision, 12(1):43–77, 1994.
[5] James E Bevington. Laser radar atr algorithms: Phase iii final report. Alliant Techsys-
tems, Inc, 1992.
[6] Anshuman Bhardwaj, Lydia Sam, F Javier Martın-Torres, Rajesh Kumar, et al. Uavs
as remote sensing platform in glaciology: Present applications and future prospects.
Remote Sensing of Environment, 175:196–204, 2016.
[7] Conrad Bielski, Simone Gentilini, and Marco Papparlardo. Post-disaster image pro-
cessing for damage analysis using genesi-dr, wps and grid computing. Remote Sensing,
3:1234–1250, June 2011.
[8] Samuel S. Blackman and Rober Popoli. Design and analysis of modern tracking systems,
volume 685. Artech House, Norwood, MA, 1999.
[9] Xianbin Cao, Changxia Wu, Jinhe Lan, Pingkun Yan, and Xuelong Li. Vehicle detection
and motion analysis in low-altitude airborne video under urban environment. Circuits
and Systems for Video Technology, IEEE Transactions on, 21(10):1522–1533, 2011.
88

[10] Dai Chenguang and Yang Jingyu. Research on orthorectification of remote sensing
images using gpu-cpu cooperative processing. In 2011 International Symposium on
Image and Data Fusion (ISIDF), volume 1 of 4, pages 9–11. IEEE, August 2011.
[11] Emmanuel Christophe, Julien Michel, and Jordi Inglada. Remote sensing processing:
From multicore to gpu. IEEE Journal of Selected Topics in Applied Earth Observations
and Remote Sensing, 4(3):643–652, September 2011.
[12] Albert Cohen, Ingrid Daubechies, and J-C Feauveau. Biorthogonal bases of compactly
supported wavelets. Communications on pure and applied mathematics, 45(5):485–560,
1992.
[13] Douglas C Comer and Michael J Harrower. Mapping archaeological landscapes from
space, volume 5. Springer Science & Business Media, 2013.
[14] James W Cooley and John W Tukey. An algorithm for the machine calculation of
complex fourier series. Mathematics of computation, 19(90):297–301, 1965.
[15] Davide De Caro, Marco Genovese, Ettore Napoli, Nicola Petra, and Antonio
Giuseppe Maria Strollo. Accurate fixed-point logarithmic converter. Circuits and Sys-
tems II: Express Briefs, IEEE Transactions on, 61(7):526–530, 2014.
[16] Davide De Caro, Nicola Petra, and Antonio GM Strollo. Efficient logarithmic converters
for digital signal processing applications. Circuits and Systems II: Express Briefs, IEEE
Transactions on, 58(10):667–671, 2011.
[17] Jeroen De Reu, Gertjan Plets, Geert Verhoeven, Philippe De Smedt, Machteld Bats,
Bart Cherrette, Wouter De Maeyer, Jasper Deconynck, Davy Herremans, Pieter Laloo,
et al. Towards a three-dimensional cost-effective registration of the archaeological her-
itage. Journal of Archaeological Science, 40(2):1108–1121, 2013.
[18] Stephen D DeGloria, Dylan E Beaudette, James R Irons, Zamir Libohova, Peggy E
O’Neill, Phillip R Owens, Philip J Schoeneberger, Larry T West, and Douglas A
Wysocki. Emergent imaging and geospatial technologies for soil investigations. 2014.
[19] Javier Dıaz, Eduardo Ros, Francisco Pelayo, Eva M Ortigosa, and Sonia Mota. Fpga-
based real-time optical-flow system. Circuits and Systems for Video Technology, IEEE
Transactions on, 16(2):274–279, 2006.
[20] Bruce A Draper, J Ross Beveridge, AP Willem Bohm, Charles Ross, and Monica
Chawathe. Accelerated image processing on fpgas. Image Processing, IEEE Transactions
on, 12(12):1543–1551, 2003.
[21] Aaron M Ellison, Michael S. Bank, Barton D. Clinton, Elizabeth A. Colburn,
Katherine Elliott, Chelcy R. Ford, David R. Foster, Brian D. Kloeppel, Jennifer D.
Knoepp, Gary M. Lovett, Jacqueline Mohan, David A. Orwig, Nicholas L. Rodenhouse,
William V. Sobczak, Kristina A. Stinson, Jeffrey K. Stone, Cristopher M. Swan, Jill
89
Thompson, Betsy Von Holle, and Jackson R. Webster. Loss of foundation species: Con-
sequences for the structure and dynamics of forested ecosystems. Frontiers in Ecology
and the Environment, 3(9):479–486, 2005.
[22] Jakob Engel, Jurgen Sturm, and Daniel Cremers. Scale-aware navigation of a low-
cost quadrocopter with a monocular camera. Robotics and Autonomous Systems,
62(11):1646–1656, 2014.
[23] Carlos Alphonso F Ezequiel, Matthew Cua, Nathaniel C Libatique, Gregory L Tango-
nan, Raphael Alampay, Rollyn T Labuguen, Chrisandro M Favila, Jaime Luis E Hon-
rado, Vinni Canos, Charles Devaney, et al. Uav aerial imaging applications for post-
disaster assessment, environmental management and infrastructure development. In
Unmanned Aircraft Systems (ICUAS), 2014 International Conference on, pages 274–
283. IEEE, 2014.
[24] Suhaib A Fahmy, Peter YK Cheung, and Wayne Luk. Novel fpga-based implementation
of median and weighted median filters for image processing. In Field Programmable Logic
and Applications, 2005. International Conference on, pages 142–147. IEEE, 2005.
[25] Miguel A. Ferrer, Jesus B. Alonso, and Carlos M. Travieso. Offline geometric parame-
ters for automatic signature verification using fixed point arithmetic. IEEE Transactions
on Pattern Analysis and Machine Intelligence, 27(6):993–997, June 2005.
[26] Joseph C French and Eric J Balster. A fast and accurate orthorectification algorithm of
aerial imagery using integer arithmetic. Selected Topics in Applied Earth Observations
and Remote Sensing, IEEE Journal of, 7(5):1826–1834, 2014.
[27] Joseph C French and Eric J Balster. A quadratic approximation for an integer or-
thorectification algorithm. Selected Topics in Applied Earth Observations and Remote
Sensing, IEEE Journal of, (Pending).
[28] Diego Fustes, Diego Cantorna, Carlos Dafonte, Alfonso Iglesias, and Bernardino Arcay.
Applications of cloud computing and gis for ocean monitoring through remote sensing.
In Smart Sensing Technology for Agriculture and Environmental Monitoring, pages 303–
321. Springer, 2012.
[29] Jason George, Bo Marr, Aniruddha Dasgupta, and David V. Anderson. Fixed-point
arithmetic on a budget: Comparing probabilistic and reduced-precision addition. In
Circuits and Systems (MWSCAS), 2010 53rd IEE International Midwest Symposium,
pages 1258–1261. IEEE, 2010.
[30] MC Hanumantharaju, M Ravishankar, DR Rameshbabu, and SB Satish. An efficient
vlsi architecture for adaptive rank order filter for image noise removal. International
Journal of Information and Electronics Engineering, 1(1), 2011.
[31] M. A. Hapgood. Space physics coordinate tranformations: A user guide. Planetary
Space Science, 40(5):711–717, 1992.
90
[32] Richard Hartley and Andrew Zisserman. Multiple View Geometry in Computer Vision,
volume 2. Cambridge, 2000.
[33] James Hegarty, John Brunhaver, Zachary DeVito, Jonathan Ragan-Kelley, Noy Cohen,
Steven Bell, Artem Vasilyev, Mark Horowitz, and Pat Hanrahan. Darkroom: compil-
ing high-level image processing code into hardware pipelines. ACM Trans. Graph.,
33(4):144–1, 2014.
[34] http://www.wpafb.af.mil/afrl. Lair data set. Website.
[35] Calvin Hung, Zhe Xu, and Salah Sukkarieh. Feature learning based approach for weed
classification using high resolution aerial images from a digital camera mounted on a
uav. Remote Sensing, 6(12):12037–12054, 2014.
[36] Veljko M Jovanovic, Michael M. Smyth, Jia Zong, Robert Ando, and Graham W.
Bothwell. Misr photogrammetric data reduction for geophysical retrievals. IEEE Trans-
actions on Geoscience and Remote Sensing, 36(4):1290–1301, July 1998.
[37] Med Lassaad Kaddachi, Leila Makkaoui, Adel Soudani, Vincent Lecuire, and
J Moureaux. Fpga-based image compression for low-power wireless camera sensor net-
works. In Next Generation Networks and Services (NGNS), 2011 3rd International
Conference on, pages 68–71. IEEE, 2011.
[38] Christian KNOTH, Birte KLEIN, Torsten PRINZ, and Till KLEINEBECKER. Un-
manned aerial vehicles as innovative remote sensing platforms for high-resolution in-
frared imagery to support restoration monitoring in cut-over bogs. Applied vegetation
science, 16(3):509–517, 2013.
[39] Jan J Koenderink and Andrea J Van Doorn. Affine structure from motion. JOSA A,
8(2):377–385, 1991.
[40] David Kuo and Don Gordon. Real-time orthorectification by fpga-based hardware
acceleration. In Remote Sensing, pages 78300Y–78300Y. International Society for Optics
and Photonics, 2010.
[41] David C. Lay. Linear Algebra and Its Applications, second edition. Addison-Wesley,
1998.
[42] Changno Lee and James Bethel. Georegistration of airborne hyperspectral image data.
IEEE Transactions on Geoscience and Remote Sensing, 39(7):1347–1351, July 2001.
[43] Craig A. Lee, Samuel D. Gasster, Antonio Plaza, Chein-I Chang, and Bormin Huang.
Recent developments in high performance computing for remote sensing: A review.
IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing,
4(3):508–527, September 2011.
[44] Bruce D Lucas, Takeo Kanade, et al. An iterative image registration technique with
an application to stereo vision. In IJCAI, volume 81, pages 674–679, 1981.
91
[45] G Lucas. Considering time in orthophotography production: from a general workflow
to a shortened workflow for a faster disaster response. The International Archives of
Photogrammetry, Remote Sensing and Spatial Information Sciences, 40(3):249, 2015.
[46] Arko Lucieer, Darren Turner, Diana H King, and Sharon A Robinson. Using an un-
manned aerial vehicle (uav) to capture micro-topography of antarctic moss beds. Inter-
national Journal of Applied Earth Observation and Geoinformation, 27:53–62, 2014.
[47] Luiz A. Manfre, Eliane Hirata, Janaina B. Silva, Eduardo J. Shinohara, Mariana A.
Giannotti, Ana Paula C. Larocca, and Jose A. Quintanilha. An analysis of geospatial
technologies for risk and natural disaster management. ISPRS International Journal of
Geo-Information, 1:166–185, August 2012.
[48] Ales Marsetic, Kristof Ostir, and Mojca Kosmatin Fras. Automatic orthorectification
of high-resolution optical satellite images using vector roads. Geoscience and Remote
Sensing, IEEE Transactions on, 53(11):6035–6047, 2015.
[49] Jessica L. Morgan, Sarah E. Gergel, and Nicholas C. Coops. Aerial photography: A
rapidly evolving tool for ecological management. BioScience, 60(1):47–59, January 2010.
[50] M. Mostafa and K-P Schwarz. Digital image georeferencing from a multiple camera
system by gps/ins. ISPRS Journal of Photogrammetry and Remote Sensing, 56:1–12,
2001.
[51] NASA. National aeronautics and space administration. Website.
[52] Brandon R Olson, Ryan A Placchetti, Jamie Quartermaine, and Ann E Killebrew. The
tel akko total archaeology project (akko, israel): Assessing the suitability of multi-scale
3d field recording in archaeology. Journal of Field Archaeology, 38(3):244–262, 2013.
[53] B. Parhami. Computer Arithmetic: Algorithms and Hardware Designs. Oxford Uni-
versity Press, inc, New York, NY, USA, 2nd edition, 2009.
[54] Fatih Porikli. Integral histogram: A fast way to extract histograms in cartesian spaces.
In Computer Vision and Pattern Recognition, 2005. CVPR 2005. IEEE Computer So-
ciety Conference on, volume 1, pages 829–836. IEEE, 2005.
[55] Timothy J Purcell, Ian Buck, William R Mark, and Pat Hanrahan. Ray tracing on pro-
grammable graphics hardware. In ACM Transactions on Graphics (TOG), volume 21,
pages 703–712. ACM, 2002.
[56] Jonathan Ragan-Kelley, Connelly Barnes, Andrew Adams, Sylvain Paris, Fredo Du-
rand, and Saman Amarasinghe. Halide: a language and compiler for optimizing par-
allelism, locality, and recomputation in image processing pipelines. ACM SIGPLAN
Notices, 48(6):519–530, 2013.
92
[57] Elisabeth Ranisavljevic, Florent Devin, Dominique Laffly, and Yannick Le Nir. A
dynamic and generic cloud computing model for glaciological image processing. Inter-
national Journal of Applied Earth Observation and Geoinformation, 27:109–115, 2014.
[58] Javier Reguera-Salgado and Julio Martin-Herrero. Real time orthorectification of high
resolution airborne pushbroom imagery. In Proc. SPIE 8183 - High Performance Com-
puting in Remote Sensing, volume 81830J. SPIE, October 2011.
[59] Javier Reguera-Salgado and Julio Martın-Herrero. High performance gcp-based particle
swarm optimization of orthorectification of airborne pushbroom imagery. In Geoscience
and Remote Sensing Symposium (IGARSS), 2012 IEEE International, pages 4086–4089.
IEEE, 2012.
[60] M. Rieke, T. Foerster, J. Geipel, and T. Prinz. High-precision positioning and real-
time data processing of uav systems. The International Archives of the Photogrammetry,
Remote Sensing and Spatial Information Sciences, 38:1–C22, September 2011.
[61] Branko Ristic and Nickens Okello. Sensor registration in ecef coordinates using the
mlr algorithm. Proc. 6th international Conference for Information Fusion, 2003.
[62] D. Rosenbaum, J. Leitloff, F. Kurz, O. Meynberg, and T. Reize. Real-time image
processing for road traffic data extraction from aerial images. In Technical Commission
VII Symposium, 2010.
[63] Apostolos Sarris, Nikos Papadopoulos, Athos Agapiou, Maria Cristina Salvi, Diofan-
tos G Hadjimitsis, William A Parkinson, Richard W Yerkes, Attila Gyucha, and Paul R
Duffy. Integration of geophysical surveys, ground hyperspectral measurements, aerial
and satellite imagery for archaeological prospection of prehistoric sites: the case study
of veszto-magor tell, hungary. Journal of Archaeological Science, 40(3):1454–1470, 2013.
[64] Michael J Schulte and James E Stine. Approximating elementary functions with sym-
metric bipartite tables. Computers, IEEE Transactions on, 48(8):842–847, 1999.
[65] Mozhdeh Shahbazi, Jerome Theau, and Patrick Menard. Recent applications of un-
manned aerial imagery in natural resource management. GIScience & Remote Sensing,
51(4):339–365, 2014.
[66] Paul Sundlie, Joseph French, and Eric Balster. Integer computation of image orthorec-
tification for high speed throughput. In International Conference of Image Processing
and Computer Vision. WorldCom, July 2011.
[67] C Vincent Tao and Yong Hu. A comprehensive study of the rational function model
for photogrammetric processing. Photogrammetric engineering and remote sensing,
67(12):1347–1358, 2001.
[68] MISR Science Team. Algorithm theoretical basis documents. Website.
93

[69] Y. M. Teo, S. C. Tay, and J. P. Gozali. Distributed georectification of satellite im-
ages using grid computing. In Proceedings of the International Parallel and Distributed
Processing Symposium, Nice, France, April 2003. IEEE, IEEE Computer Society Press.
[70] U. Thomas, F. Kurz, R. Mueller D. Rosenbaum, and Reinartz. Gpu-based orthorec-
tification of digital airborne camera images in real time. In ISPRS, editor, The In-
ternational Archives of the Photogrammetry, Remote Sensing and Spatial Information
Sciences, volume 37, pages 589–594, 2008.
[71] NIMA Technical Report TR8350.2. Department of defense world geodetic system 1984,
its definition and relationships with local geodetic systems. Technical report, National
Geospatial Intelligence Agency, July 1997.
[72] Julien Travelletti, Christophe Delacourt, Pascal Allemand, J-P Malet, Jean Schmit-
tbuhl, Renaud Toussaint, and Mickael Bastard. Correlation of multi-temporal ground-
based optical images for landslide monitoring: Application, potential and limitations.
ISPRS Journal of Photogrammetry and Remote Sensing, 70:39–55, 2012.
[73] USGS. United states geological survey. Website.
[74] Isa Servan Uzun, Abbes Amira, and Ahmed Bouridane. Fpga implementations of fast
fourier transforms for real-time signal and image processing. In Vision, Image and Signal
Processing, IEE Proceedings-, volume 152, pages 283–296. IET, 2005.
[75] Geert Verhoeven, Michael Doneus, Ch Briese, and Frank Vermeulen. Mapping by
matching: a computer vision-based approach to fast and accurate georeferencing of
archaeological aerial photographs. Journal of Archaeological Science, 39(7):2060–2070,
2012.
[76] Y. Yakimovsky and R. Cunningham. A system for extracting three-dimensional mea-
surements from a stereo pair of tv cameras. Computer Graphics Image Processing,
7:195–210, 1978.
[77] Shaowu Yang, Sebastian A Scherer, and Andreas Zell. An onboard monocular vision
system for autonomous takeoff, hovering and landing of a micro aerial vehicle. Journal
of Intelligent & Robotic Systems, 69(1-4):499–515, 2013.
[78] W. Yang and L. Di. An accurate and automated approach to georectification of hdf-eos
swath data. Photogrammetric Engineering and Remote Sensing, 70(4):397–404, 2004.
[79] R Yavne. An economical method for calculating the discrete fourier transform. In
Proceedings of the December 9-11, 1968, fall joint computer conference, part I, pages
115–125. ACM, 1968.
[80] Pablo J Zarco-Tejada, R Diaz-Varela, V Angileri, and P Loudjani. Tree height quan-
tification using very high resolution imagery acquired from an unmanned aerial vehicle
(uav) and automatic 3d photo-reconstruction methods. European journal of agronomy,
55:89–99, 2014.
94
Related Documents











