Fire Fighting Robot Fire Fighting Robot Design Design The V-Team The V-Team James Barnes – ME, ’04 James Barnes – ME, ’04 Robert Kelbley – CpE, ’04 Robert Kelbley – CpE, ’04 Christopher Pfeifer – CpE, ’04 Christopher Pfeifer – CpE, ’04 Todd Stewart – CpE, ‘04 Todd Stewart – CpE, ‘04 Advisors Advisors Dr. John-David Yoder Dr. John-David Yoder Dr. Srinivasa Vemuru Dr. Srinivasa Vemuru

Fire Fighting Robot Design The V-Team James Barnes – ME, ’04 Robert Kelbley – CpE, ’04 Christopher Pfeifer – CpE, ’04 Todd Stewart – CpE, ‘04 Advisors.
Dec 17, 2015
Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript
Fire Fighting Robot DesignFire Fighting Robot Design
The V-TeamThe V-TeamJames Barnes – ME, ’04James Barnes – ME, ’04
Robert Kelbley – CpE, ’04Robert Kelbley – CpE, ’04Christopher Pfeifer – CpE, ’04Christopher Pfeifer – CpE, ’04
Todd Stewart – CpE, ‘04Todd Stewart – CpE, ‘04
AdvisorsAdvisorsDr. John-David YoderDr. John-David YoderDr. Srinivasa VemuruDr. Srinivasa Vemuru

OverviewOverview
Problem StatementProblem Statement
ComponentsComponentsMicrocontrollerMicrocontroller
SensorsSensors
Vehicle DesignVehicle Design
Motors and GearingMotors and Gearing
ResultsResults
ConclusionsConclusions
Problem StatementProblem Statement
ObjectivesObjectivesDesign a robotic device to seek a candle flame within Design a robotic device to seek a candle flame within mock house and extinguish.mock house and extinguish.Robot will be taken to Trinity College to compete in Robot will be taken to Trinity College to compete in Firefighting Robot ContestFirefighting Robot Contest
BenefitsBenefitsFurthering robotics knowledge of group members and Furthering robotics knowledge of group members and society.society.Small scale version could lead to improvements or a new Small scale version could lead to improvements or a new design for a large scale firefighting robot.design for a large scale firefighting robot.Allowing team to use engineering skills and teamwork to Allowing team to use engineering skills and teamwork to solve multidisciplinary taskssolve multidisciplinary tasks

Mock HouseMock House

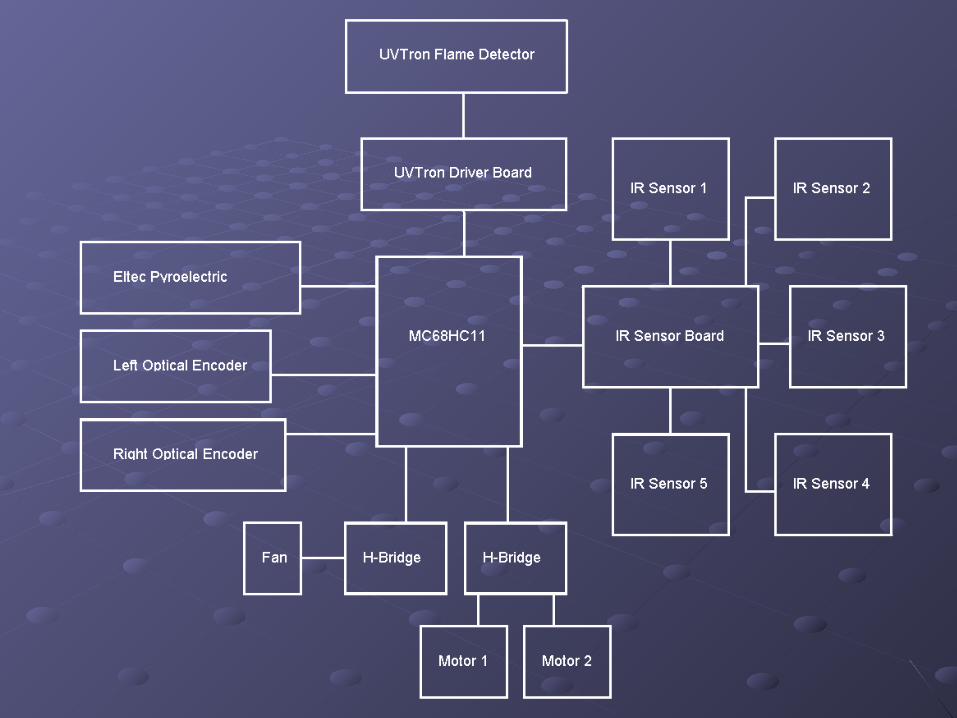
MicrocontrollerMicrocontroller
The microcontroller is the most important The microcontroller is the most important part of the design – acts as brain for robotpart of the design – acts as brain for robot
Interfaces all sensors and motorsInterfaces all sensors and motors
Contains all code for robot operationContains all code for robot operation

MC68HC11MC68HC11
AdvantagesAdvantagesHC11 and ModCon controller obtained – no expenseHC11 and ModCon controller obtained – no expense
Familiar usageFamiliar usage
Can be programmed in CCan be programmed in C
32 KB of RAM available in extended mode32 KB of RAM available in extended mode
DisadvantagesDisadvantagesNon user friendly hardware interfacingNon user friendly hardware interfacing

The SensorsThe Sensors
Sensors were needed to detect vicinity of Sensors were needed to detect vicinity of candle flame, exact location of candle candle flame, exact location of candle flame, and robot’s proximity to maze wallsflame, and robot’s proximity to maze walls
Several sensors chosenSeveral sensors chosenHamamatsu UVTron Flame detectorHamamatsu UVTron Flame detector
Eltec Pyroelectric SensorEltec Pyroelectric Sensor
Sharp GP2D02 IR SensorsSharp GP2D02 IR Sensors
Optical EncoderOptical Encoder

Hamamatsu UVTronHamamatsu UVTron
Chosen due to close connection to Fire Fighting Chosen due to close connection to Fire Fighting Robot ContestRobot Contest
Detects vicinity of candle flame, Detects vicinity of candle flame, NOTNOT exact location exact location
Detects presence of flame by sensing emitted UV Detects presence of flame by sensing emitted UV lightlight
Emits +5 V signal after UV source is sensedEmits +5 V signal after UV source is sensed
Eltec Pyroelectric SensorEltec Pyroelectric Sensor
Activated after UVTron sensors detect Activated after UVTron sensors detect flame in vicinityflame in vicinity
Used to guide robot to exact flame locationUsed to guide robot to exact flame location
Eltec emits constant +2.5 V analog signal Eltec emits constant +2.5 V analog signal when flame centeredwhen flame centered
Signal voltage rises or falls depending on Signal voltage rises or falls depending on objects movement through sensor’s field objects movement through sensor’s field of visionof vision

Sharp GP2D02 SensorsSharp GP2D02 Sensors
Infrared range detectorInfrared range detector Generate IR light pulsesGenerate IR light pulses Determine distance objects are from robotDetermine distance objects are from robot
Range of 10 to 80 cmRange of 10 to 80 cm
Use 2-wire serial interfaceUse 2-wire serial interface
8-bit range value8-bit range value
Only takes reading when requestedOnly takes reading when requested

Range Sensor ArrangementRange Sensor Arrangement
Robot can detect obstacles in frontRobot can detect obstacles in front
Ensure robot stays in center of hallwayEnsure robot stays in center of hallway
Recognize doorways to enter roomsRecognize doorways to enter rooms

Vehicle DesignVehicle Design
The robot needed to:The robot needed to: move with adequate speedmove with adequate speed maneuver through the roomsmaneuver through the rooms avoid hitting the wallsavoid hitting the walls extinguish the candleextinguish the candle be upgraded easilybe upgraded easily

Round baseRound base This helps prevent the robot from jamming in This helps prevent the robot from jamming in
cornerscorners
Turning the robot is accomplished with a Turning the robot is accomplished with a differential steering systemdifferential steering system
Power is provided by 9.6 V rechargeable Power is provided by 9.6 V rechargeable NiCd batteriesNiCd batteries
Fan is used to extinguish fireFan is used to extinguish fire
Design SpecificationsDesign Specifications

Chosen motors: Permanent Chosen motors: Permanent magnet DCmagnet DC AvailableAvailable Cost effectiveCost effective Adequate powerAdequate power
Chosen gearing: Worm gearChosen gearing: Worm gear AvailableAvailable Cost effectiveCost effective Adequate gear reductionAdequate gear reduction Braking actionBraking action
Selected Motors and GearingSelected Motors and Gearing

Motors and GearingMotors and Gearing
Permanent magnet DC motorsPermanent magnet DC motors .05 Nm max torque with 1 amp max current draw.05 Nm max torque with 1 amp max current draw Maximum input voltage of 24v with maximum rotational Maximum input voltage of 24v with maximum rotational
speed of 3400 rpmspeed of 3400 rpm Rotational speed of 1400 rpm with 9.6V batteryRotational speed of 1400 rpm with 9.6V battery
20:1 gear reduction with worm gear20:1 gear reduction with worm gear Obtained from a previous project with the motorsObtained from a previous project with the motors Rotational speed from motors reduced to 70 rpmRotational speed from motors reduced to 70 rpm
4 inch diameter wheels4 inch diameter wheels velocity of 14.7 in/sec with 9.6V batteryvelocity of 14.7 in/sec with 9.6V battery

Fall QuarterFall Quarter

Winter QuarterWinter Quarter

Completed RobotCompleted Robot

Contest ResultsContest Results
Successfully completed qualifying trial to compete in main competitionSuccessfully completed qualifying trial to compete in main competition
Failed during first two runs of competition from damages incurred in travelFailed during first two runs of competition from damages incurred in travel
Successfully extinguished candle on last trial run in just under one minuteSuccessfully extinguished candle on last trial run in just under one minute

ConclusionConclusion
Successfully navigates maze and Successfully navigates maze and extinguishes candleextinguishes candle
Uses combination of Dead Reckoning and Uses combination of Dead Reckoning and Landmark Recognition for navigationLandmark Recognition for navigation
Uses sensors to pinpoint exact location of Uses sensors to pinpoint exact location of candle and fan to blow out flamecandle and fan to blow out flame

Contest References:Contest References:1. 1. http://www.trincoll.edu/events/robot/Rules/default.asphttp://www.trincoll.edu/events/robot/Rules/default.asp2. 2. http://www.trincoll.edu/events/robot/Results04/default.asphttp://www.trincoll.edu/events/robot/Results04/default.asp
Robotics References:Robotics References:3. 3. http://members.verizon.net/~vze2b2zf/robotpage.htmlhttp://members.verizon.net/~vze2b2zf/robotpage.html4. 4. http://abrobotics.tripod.com/Snuffy/snuffy.htmhttp://abrobotics.tripod.com/Snuffy/snuffy.htm
Part References:Part References:5. 5. http://bd.thrijswijk.nl/thrsim11/68hc11/about2.htmhttp://bd.thrijswijk.nl/thrsim11/68hc11/about2.htm. . 6. 6. http://abrobotics.tripod.com/Snuffy/uvtron.htmhttp://abrobotics.tripod.com/Snuffy/uvtron.htm7. 7. http://www.acroname.comhttp://www.acroname.com
Book References:Book References:
8. 8. Software and Hardware EngineeringSoftware and Hardware Engineering, Fredrick M. Cady, , Fredrick M. Cady, Copyright 1997, Oxford University Press, Inc. Copyright 1997, Oxford University Press, Inc.
The V-Team would to thank Dr. Vemuru, Dr. Yoder, Brad Hummel and Dr. Hurtig for their help and guidance throughout the project and the ECE Department and College of Engineering for providing funding for the robot and trip to Hartford.
Related Documents