Arpan G Srikanta Bhatta B S Guided By Prof.P Meena

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript
8/2/2019 Final Rev1
http://slidepdf.com/reader/full/final-rev1 1/18
Arpan G
Srikanta Bhatta B S
Guided By Prof.P Meena

8/2/2019 Final Rev1
http://slidepdf.com/reader/full/final-rev1 2/18
ACTIVE NOISE CANCELLATION
It uses the phenomenon of wave interference.Two waves with same amplitude and frequency butphase-reversed travelling in the same direction willneutralize each other.The resulting sound is ideally null, as sound energy istransformed into heat.
8/2/2019 Final Rev1
http://slidepdf.com/reader/full/final-rev1 3/18
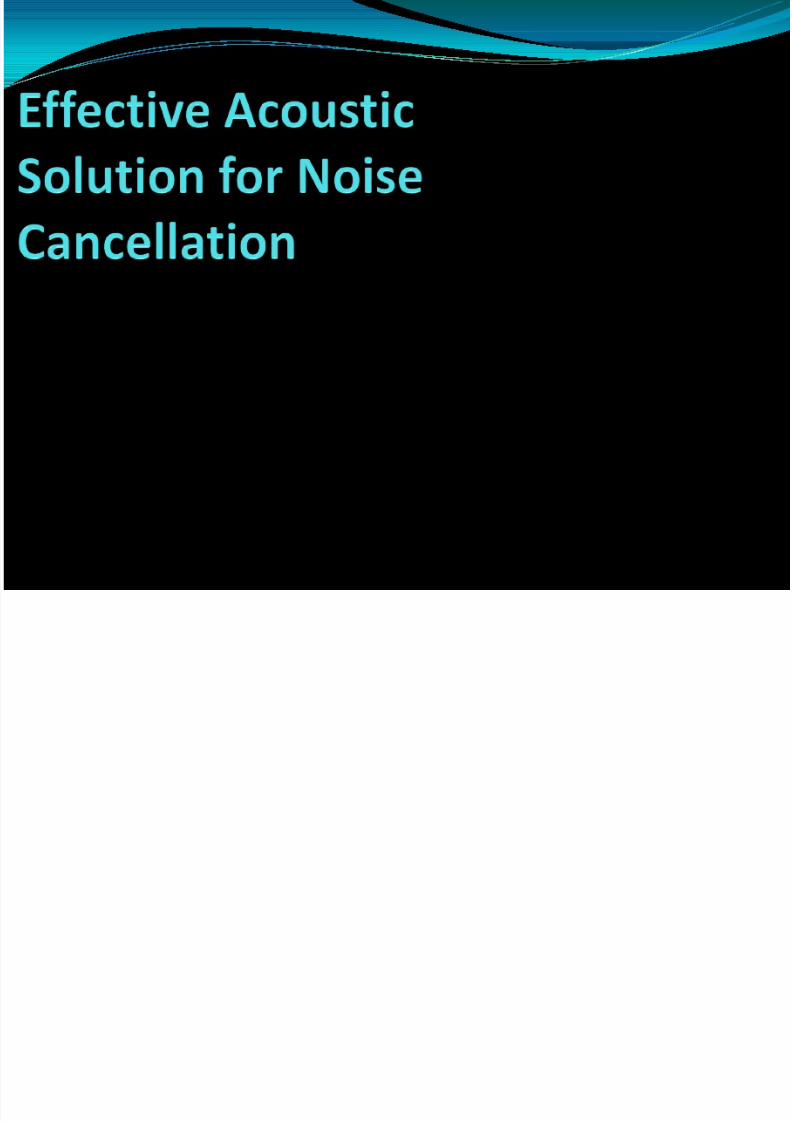
Basic ANC System
The components of ANC system are
• Noise source
• Reference MIC
• Control speaker
• Error MIC
ANC controller whichis an adaptive LMSfilter.
8/2/2019 Final Rev1
http://slidepdf.com/reader/full/final-rev1 4/18
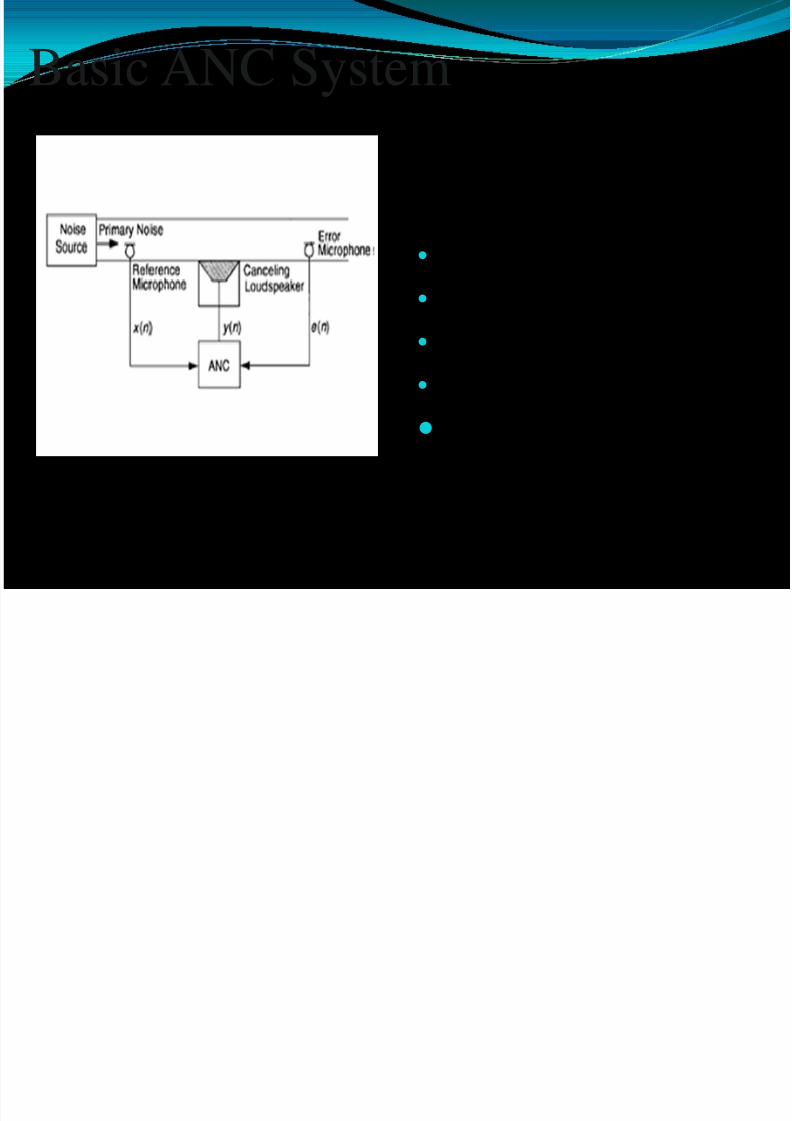
Noise Cancellation Using LMS
algorithm Lms adaptive filter
y(n)= xT(n)w(n)
Update weights: w(n+1)= w(n) + me(n)x(n)m: step size
e(n)= d(n)-y(n)
x(n) : refrence signal
y(n): filter output
d(n): desired output
e(n):error signal
Convergence depends on step size
8/2/2019 Final Rev1
http://slidepdf.com/reader/full/final-rev1 5/18
SIMULATION
8/2/2019 Final Rev1
http://slidepdf.com/reader/full/final-rev1 6/18
COMPOMENTS NOISE SOURCE
DESIRED RESPONSE
LMS FILTER
ERROR SIGNAL
SUBTRACT
DELAY
8/2/2019 Final Rev1
http://slidepdf.com/reader/full/final-rev1 7/18
FIRLMS
Arguments
h[nh] Coefficient Array
x[nh] Input Array
b Error from previous FIR
nh Number of coefficients
return long return value

8/2/2019 Final Rev1
http://slidepdf.com/reader/full/final-rev1 8/18
ALGORITHMlong firlms2(short h[ ],short x[ ], short b, int nh){int i;
long r = 0;for (i = 0; i < nh; i++){
h[i] += (x[i] * b) >> 16;r += x[i + 1] * h[i];
}return r;}
8/2/2019 Final Rev1
http://slidepdf.com/reader/full/final-rev1 9/18
SUBTRACT The Subtract block performs the function of destructive
interference that happens in the real world.
DELAY The Unit Delay block delays its input by the specifiedsample period. This block is equivalent to the z-1 discrete-time operator. The block accepts one input and generatesone output, which can be either both scalar or both vector.
If the input is a vector, all elements of the vector aredelayed by the same sample period.
8/2/2019 Final Rev1
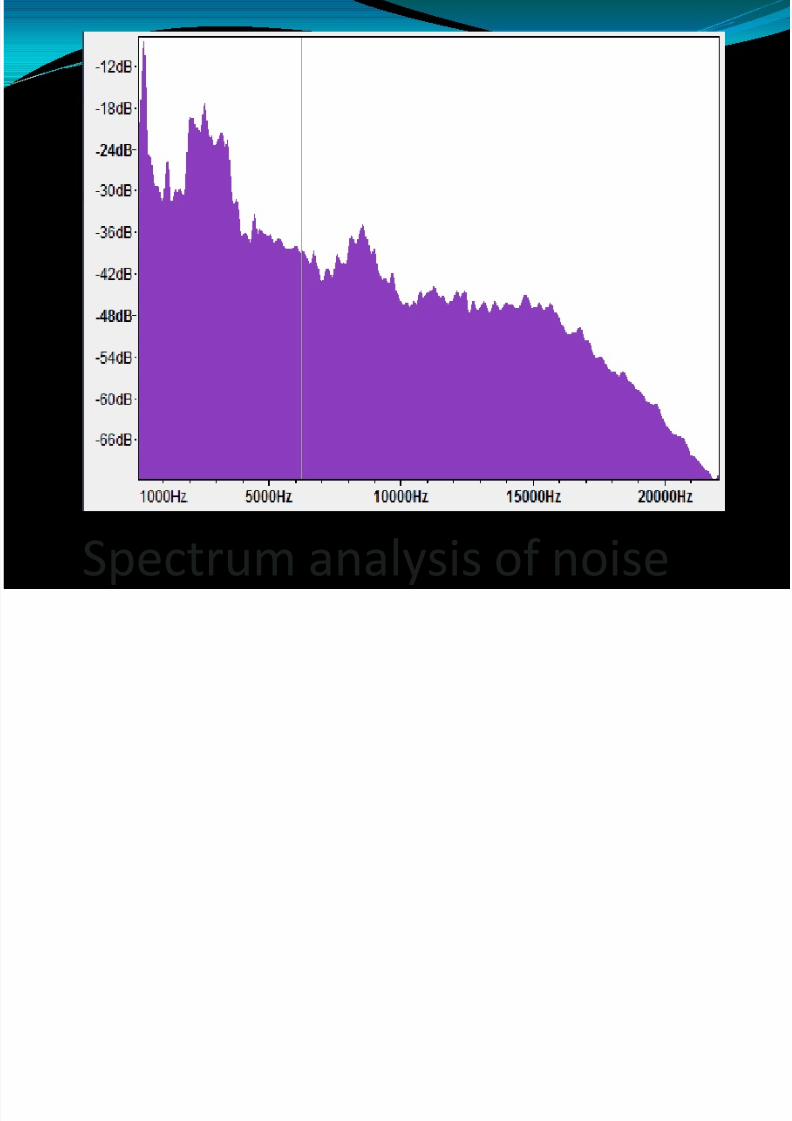
http://slidepdf.com/reader/full/final-rev1 10/18Spectrum analysis of noise

8/2/2019 Final Rev1
http://slidepdf.com/reader/full/final-rev1 11/18Spectrum analysis of the output
8/2/2019 Final Rev1
http://slidepdf.com/reader/full/final-rev1 12/18
Hardware implementation Hardware used: Texas Instruments TMS320C6713
DSK and AD6M daughter card.
Daughter card needed due to the drawbacks of DSK
DSK kit has only 1 ADC.
Features of TMS320C6713 225 MHz CPU
16 MB sync RAM and 512 Kb Flash
Standard expansion for Daughter Cards
JTAG emulation
Single +5v supply
8/2/2019 Final Rev1
http://slidepdf.com/reader/full/final-rev1 13/18
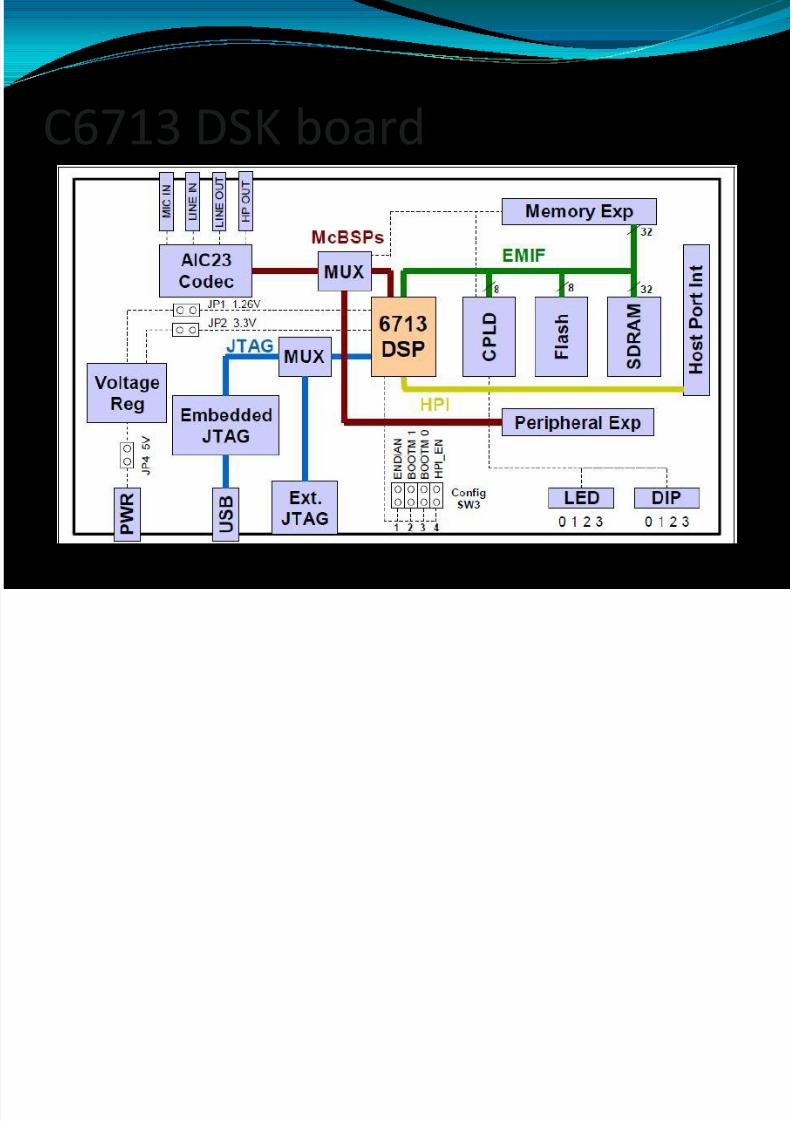
C6713 DSK board

8/2/2019 Final Rev1
http://slidepdf.com/reader/full/final-rev1 14/18
AD6M Daughter Card
8/2/2019 Final Rev1
http://slidepdf.com/reader/full/final-rev1 15/18
TESTING & WORKING Initially Model implemented in SIMULINK
The model is automatically downloaded onto the DSK
CCS generates C code, emulates onto the Hardware. Many disadvantages with this method.
Feasibility is reduced.
Customizations are not possible.
Simulink generates errors
The daughter card can’t be accessed.
8/2/2019 Final Rev1
http://slidepdf.com/reader/full/final-rev1 16/18
Solution
We write our own C code The model is emulated directly
Progress Studying in detail the aspects of Hardware
Programming
Implemented some basic codes for testing purposes
Implemented the static model of our project i.e.,, nonreal time model but outputs are not according to ourexpectations.
Further things to be done Implementation of real time model
Design of ducts, enclosures and microphoneplacements.
8/2/2019 Final Rev1
http://slidepdf.com/reader/full/final-rev1 17/18
8/2/2019 Final Rev1
http://slidepdf.com/reader/full/final-rev1 18/18
THANK YOU
Related Documents