217 Field Condition and the Robotic Urban Landscapes AKSHAY GOYAL Architectural Association, UK # [email protected] ABSTRACT: e paper explores the concept of the ‘field condition’ in recent urban discourse and its implication with respect to emerging technologies in the domains of robotics and AI. e author argues that the notion of ‘field condition’ as one of ‘loosely bound aggregates characterized by porosity and local interconnectivity defined not by overarching geometrical schemas but by intricate local connections’ 1 , has inherent limitations in its contemporary manifestation. e paper then discusses the discourse of the field theory in architecture & urbanism in context with recent developments in swarm robotics, modular self reconfiguring robotic systems and distributed intelligence. Recent design proposals that explore the idea of the city informed by such technologies are also analyzed. e author then argues for a ‘Robotic Urban Landscape’ that builds on the notion of the field as a possibility in the near future. In such a theoretical construct the city consists of a field of ‘nomadic’ mobile technological artifacts that respond to a complex set of parameters and act as a collective whole. e ‘robotic field condition’ in this respect has both physical and virtual dimensions, is both machinic and biological, and has fuzzy binary condition, effectively dematerializing its identity as part of the larger whole. Such fields of mini robots, which collectively are able to perform complex task systems, get intrinsically linked to the city fabric and result in a new urban ecology. e impact on the urban condition as a result of these ‘robotic fields’ of loosely bound mobile artificial constructs that respond in the mathematical matrix of urban ecology and socio economic parameters, is also discussed. Lastly the author suggests a provocative likelihood of a ‘singularity’ moment in light of these developments and the need to relook at contemporary architectural discourse KEYWORDS: Field theory, robotics, artificial intelligence, robotic ecology, emerging technology, emergent urbanism

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript
Rethinking Traditions and Envisioning the Future in Architecture Through the Use of Digital Technologies 217
Field Condition and the Robotic Urban Landscapes
AKSHAY GOYALArchitectural Association, UK # [email protected]
ABSTRACT: The paper explores the concept of the ‘field condition’ in recent urban discourse and its implication with respect to emerging technologies in the domains of robotics and AI. The author argues that the notion of ‘field condition’ as one of ‘loosely bound aggregates characterized by porosity and local interconnectivity defined not by overarching geometrical schemas but by intricate local connections’1, has inherent limitations in its contemporary manifestation. The paper then discusses the discourse of the field theory in architecture & urbanism in context with recent developments in swarm robotics, modular self reconfiguring robotic systems and distributed intelligence. Recent design proposals that explore the idea of the city informed by such technologies are also analyzed. The author then argues for a ‘Robotic Urban Landscape’ that builds on the notion of the field as a possibility in the near future. In such a theoretical construct the city consists of a field of ‘nomadic’ mobile technological artifacts that respond to a complex set of parameters and act as a collective whole. The ‘robotic field condition’ in this respect has both physical and virtual dimensions, is both machinic and biological, and has fuzzy binary condition, effectively dematerializing its identity as part of the larger whole. Such fields of mini robots, which collectively are able to perform complex task systems, get intrinsically linked to the city fabric and result in a new urban ecology. The impact on the urban condition as a result of these ‘robotic fields’ of loosely bound mobile artificial constructs that respond in the mathematical matrix of urban ecology and socio economic parameters, is also discussed. Lastly the author suggests a provocative likelihood of a ‘singularity’ moment in light of these developments and the need to relook at contemporary architectural discourse
KEYWORDS: Field theory, robotics, artificial intelligence, robotic ecology, emerging technology, emergent urbanism
FUTURE TRADITIONS 1ST eCAADe Regional International Workshop 218
Introduction:
“The role of the architect here ... is not so much to design a building or city as to catalyze them: to act that they may evolve.” – Gordon Pask, 19952
Robotics and Artificial Intelligence (AI) have been of interest in architecture ever since cybernetics and systems theory became an influencing factor during the 1960-70’s. This interest quickly progressed to the digital & computational methodologies, which now is firmly established in both theory and praxis. The first decade of the new millennium has seen a revival of interest in Robotics and AI. A number of design research groups spread around the world have been exploring the possibilities both as a technological pursuit as well as speculative visions of the future. The paper explores this thematic area in detail and puts forward the idea of the field condition in the city consisting of robotic urban landscapes.
The paper is structured in four parts. The first part describes the field condition & traces its origins in the architectural discourse. Starting with the works of the ‘paper architects’ of the 1960’s, field condition has been established as an approach to address the complexities of the context of the city3. Yet the materialization of the shift from the idea of an object to that of the field is inconsistent and is discussed in the paper. In the second part the scope of Robotics and AI in architecture is established. Current research both by scientists and designers in this field is discussed with the perspective of how such machinic constructs could possibly be integrated in the city of the future. In the third part the concept of the robotic urban landscapes is proposed. The integration of these machinic constructs in the urban fabric offers a significantly different interpretation of the field condition. The paper then discusses the possibilities and impact of such an approach on the specific conditions in the city. In the last part the author suggests a provocative likelihood of ‘architectural singularity’4 in the near future. This moment caused by incorporation of a field of the robotic landscapes in the urban ecology, would alter the physicality and connections of the built environment. This could possibly result in a paradigm shift in the field of architecture, fundamentally changing the way it is conceived, produced and perceived.
IMAGE 1: Sol LeWitt, Incomplete Open Cubes, 1974; Collection SFMOMA, Accessions Committee Fund; © The LeWitt Estate/Artists Rights Society (ARS), New York
From Object to the Field Condition
“The field describes a space of propagation, of effects. It contains no matter or material points, rather functions, vectors and speeds. It describes local relations of difference within the fields of celerity, transmission or of careering points, in a word, what Minkowski called the ‘world’. “ - Sanford Kwinter, 19865
Rethinking Traditions and Envisioning the Future in Architecture Through the Use of Digital Technologies 219
The idea of field condition emerged from the physical sciences and impacted a variety of scientific and cultural disciplines including architecture. In physical sciences the concept of the field emerged as an irreducible element of physical description just like matter6. The general idea of the ‘field’ was directly opposed to the traditional conception of the ‘object’. Such an approach was exemplified in works like the ‘statistical’ music of Xenakis , the ‘drip paintings’ of Jackson Pollock or the conceptual art of Sol Lewitt.7
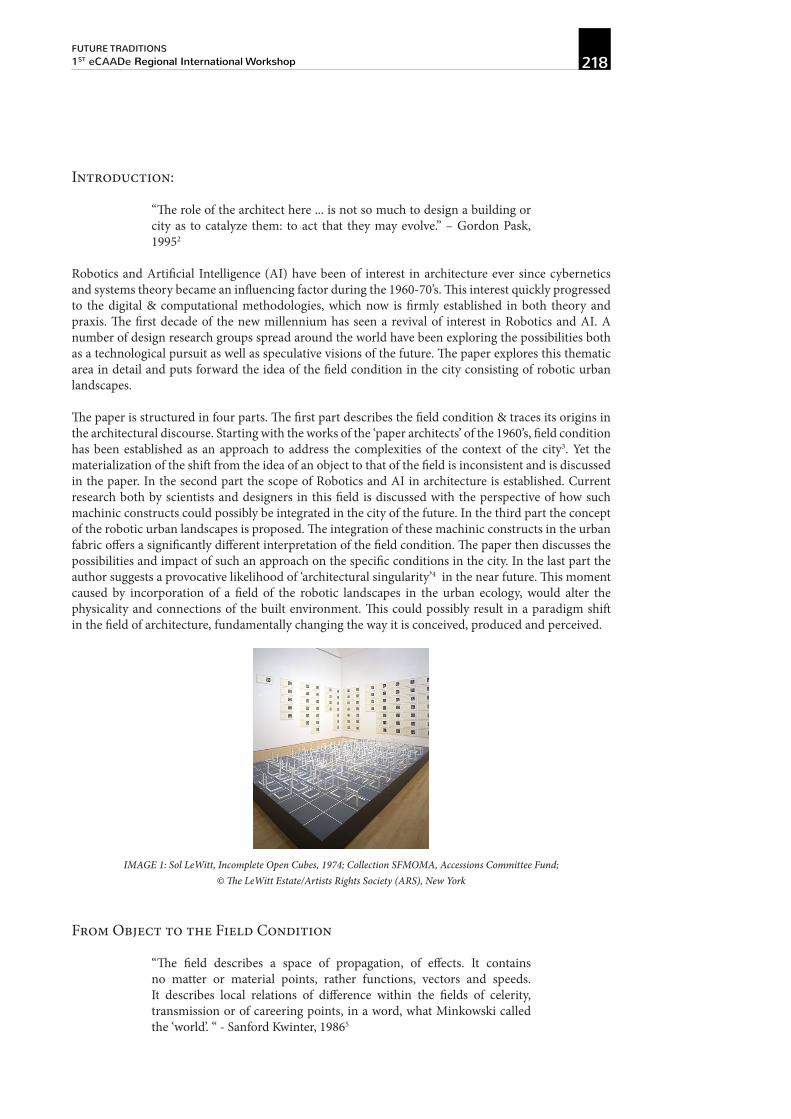
IMAGE 2: Archizoom, No Stop City, in Domus, no. 496, March 3, 1971, pp. 49-54
In architecture, the discourse began during the paper architecture period of the 1960’s & 1970’s.8
Groups like Archizoom, Archigram & Superstudio proposed utopian visions in which the city was mobile and had dissolved boundaries. Archizoom’s ‘No stop City’ project proposed an endless city that integrated architecture with consumer goods. It consisted of repetitive elements, multiple centers, was open and unbroken, and was organized much like a ‘limitless’ factory or supermarket9. In the 1980’s and the 1990’s architects of the likes of Lebbeus Woods, Daniel Libeskind, Stan Allen and Zaha Hadid conceptualized spaces grounded in the ideas of flexibility, continuity & openness; emphasizing the shift from the notion of ‘object’ to that of the ‘field’. Stan Allen’s defines this ‘field condition’ as one of ‘loosely bound aggregates characterized by porosity and local interconnectivity...bottom-up phenomena, defined not by overarching geometrical schemas but by intricate local connections10.’ The field condition theoretically was key to addressing the complexities of the “logistics of context” by ‘giving up control’11. Allen’s description of the idea of the field was significant to emergence of the discourse on ‘landscape urbanism’ where the traditional relationship of the figure with the ground was dissolved12. Lately field condition has also been extended to incorporate the concepts of ‘digital fields’ & ‘flows’. In architectural discourse the conception of the city has now significantly shifted “from the chaotic and fragmented image of the postmodern city to that of a loose and continuous field of interactive forces”13.
IMAGE 3: Zaha Hadid, The Peak — Night, Hong Kong, 1990; Collection SFMOMA, Agnes E. Meyer and Elise S. Haas Fund and Accessions Committee Fund purchase; © Zaha Hadid
Field Condition and the Robotic Urban Landscapes
FUTURE TRADITIONS 1ST eCAADe Regional International Workshop 220
IMAGE 4: Lebbeus Woods and Dwayne Oyler, Terrain (earthquake architecture), 1999; © Lebbeus Woods and Dwayne Oyler
Yet, the ‘field condition’ has always been representational, a metaphoric concept, since dematerialization of corporal boundaries is problematic in a finite physical system. Dissolution of the boundaries between the object (figure), the subject (user) and the space between (ground) is plagued by pragmatic constraints to materialize such a condition. The figure is usually static and intractable, the interconnections perfunctory & dormant as opposed to the pursuit of ‘loosely bound aggregates’ with fluid ‘local connections’. The act of production of the object ultimately leads to a ‘freeze frame’ condition, with only a static essence of the original construct that is left behind. How could then architecture address the objective of flexible local relations, open arrangements, and irregularity while maintaining its coherence? 14
Rise of the machines
The field of robotics has captured the popular imagination ever since the early 1900’s. A robot is typically understood as a mechanical or virtual artificial agent, usually an electro-mechanical machine that is guided by a computer program or electronic circuitry.15 Usually depicted in popular culture as a humanoid the form and use of a robot has evolved considerably since the early days.16 Robots today can be autonomous, semi-autonomous or remotely controlled and are being used extensively for industrial, military & domestic purposes. Research efforts have been concentrated on advancing the body ( locomotion, manipulation, actuation) and the mind (intelligent response, learning, tactile sensing, navigation) of these machines. It has reached a point now where increasingly complex tasks like the mimicking human emotions is also possible.17
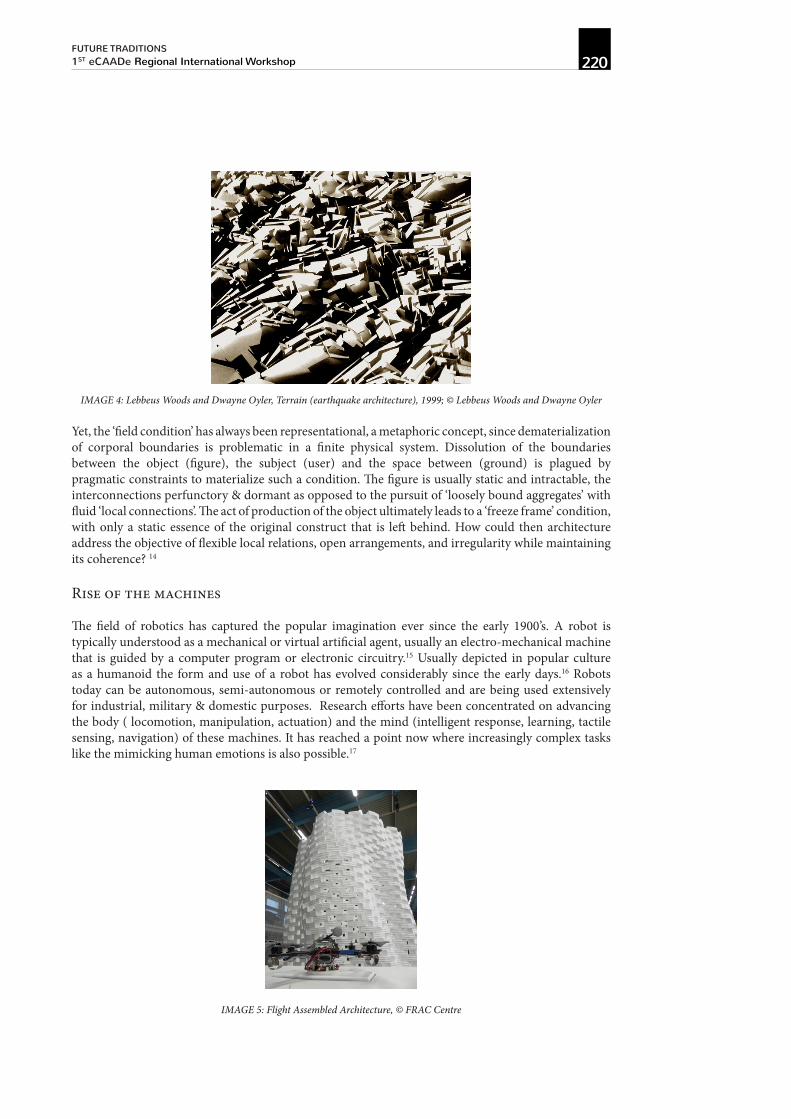
IMAGE 5: Flight Assembled Architecture, © FRAC Centre

Rethinking Traditions and Envisioning the Future in Architecture Through the Use of Digital Technologies 221
Design of buildings and environments that demonstrate robotic capabilities like participation & responsiveness has been a long standing pursuit within the architectural community. Dr W Grey Walter’s development of the Machina Speculatrix (a machine that watches) consisting of robotic agents that demonstrated self organizing patterns was instrumental in opening up the general field. Influenced by ideas of ‘cybernetics’ the likes of Nicholas Negroponte at the MIT Architecture Machine Group, Cedric price, Gordon Pask and John Fraser had by the 1990’s already created a background of the possible implications of incorporating active intelligence in the built environment18 . Negroponte anticipated the prospect of such an “Architectural Robotics” in his vision of “a man-made environment that responds to and is ‘meaningful’ for him or her”19 . From the Spatio-dynamic Tower (Nicolas Schoffer, 1954) to the recent Hyposurface (Decoi, 2002) there has been an attempt to create whole environments that are dynamic and responsive20. Wired editor Kevin Kelly has since imagined a “world of mutating buildings” and “rooms stuffed with co-evolutionary furniture”21. William J. Mitchell, former Dean of MIT’s School of Architecture and Planning, sees homes “as robots for living in”.22 Most of such efforts have led to a range of workable prototypes composed of mechanical components but is yet to be integrated into the mainstream architectural praxis. Since the early 2000’s the advancement of both software and hardware capabilities has led to a surge of interest in the architectural possibilities of robotics and AI. Dedicated architectural robotics labs have been set up at institutions like the MIT, GSD, ETH, UPenn and SciArc
IMAGE 6: Taipei Pop Music Centre , © Reiser+Umemoto
Robots as we know as of today have already started making a foray into the built environment, from the i-robot’s ‘Roomba’23 which vacuums your home to the ‘DustBot’24 which would collect door to door garbage. A futuristic robot themed park or ‘robotic city’ in South Korea is under construction and will be completed by the year 201425. Yet the popular interpretation in architecture is often limited to either robotic components (Hyposurface by dECOi26; Actuated Tensigrity Prototype by ORAMBRA27), as urban scale macrobots (Martha Schwartz’s proposal for landscape robot at the tall towers, Dubai28; Reiser+Umemoto’s proposal for media robot at Taipei pop music centre29), or as ‘robotic fabrication’ and printing devices (Flight assembled architecture at the FRAC by Fabio Gramazio, Matthias Kohler & Raffaello D’Andrea30; the ‘Stone Spray Robotic Printer’ by Anna Kulik, Inder Shergill and Petr Novikov31). Groups like the ORAMBRA (Tristan D’Estree Sterk), R+Sie , SJET (Skylar Tibbs), Future Cities lab (Jason Kelly Johnson and Nataly Gattegno), Robotecture/Foxlin (Michael Fox), Spatial robots/ Variate Labs (Miles Kemp) & Terreform One (Maria Aiolova & Mitchell Joachim,), have over the last decade specifically incorporated robots and robotic environments in their work. But of importance to the essay is the emerging research in the domains of modular self-reconfiguring robotic systems, swarm robotics, & distributed intelligence. These approaches are discussed with their probable architectural use and case studies.
Field Conditionand the Robotic Urban LandscapesField Condition and the Robotic Urban Landscapes

FUTURE TRADITIONS 1ST eCAADe Regional International Workshop 222
IMAGE 7: T-1000 from Terminator 2
IMAGE 8: MTRAN II , © MTRAN
Modular self-reconfiguring robotic systems (MSRRS) are autonomous kinematic machines with variable morphology. Beyond conventional actuation, sensing and control typically found in fixed-morphology robots, self-reconfiguring robots are also able to deliberately change their own shape by rearranging the connectivity of their parts, in order to adapt or perform tasks. These robots are composed of a single type of identical, several different identical module types, or similarly shaped modules, which vary in size. This concept has been a popular fictional device, depicted in the ‘Transformers’ anime series or the ‘T-1000’ of the Hollywood movie – Terminator-II, who could morph their form when required. Projects like the M-TRAN series were one of the initial prototypes of the approach.32
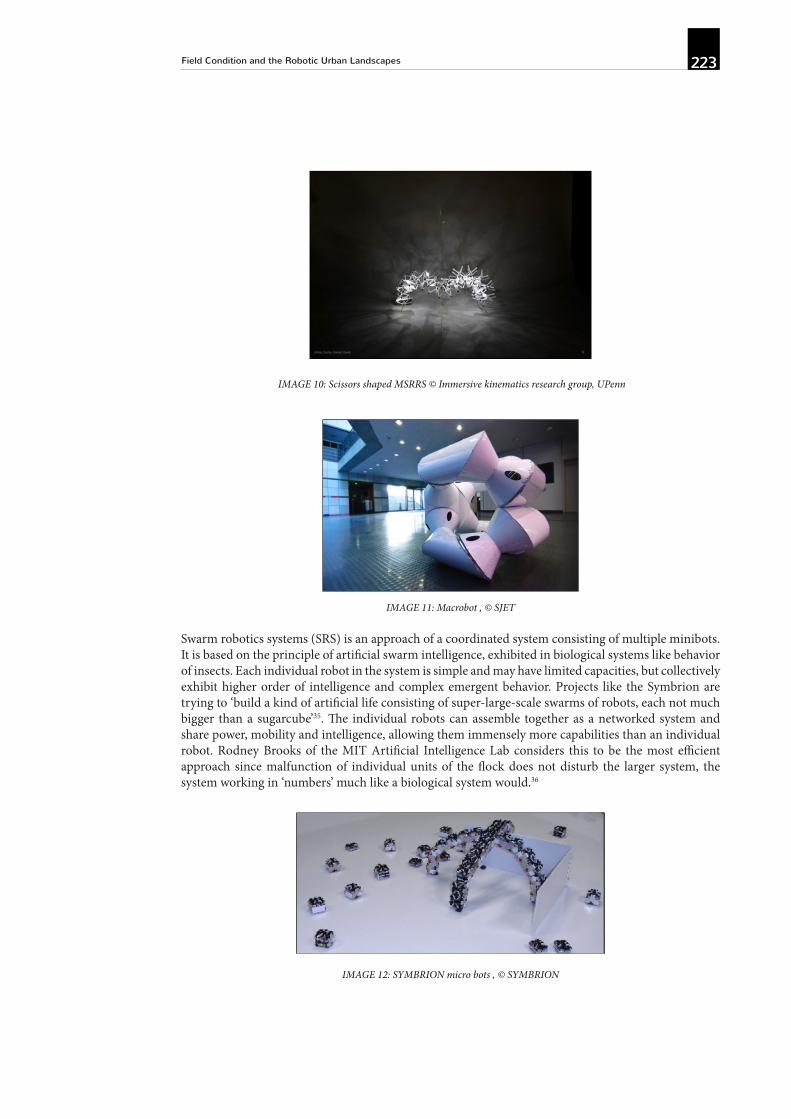
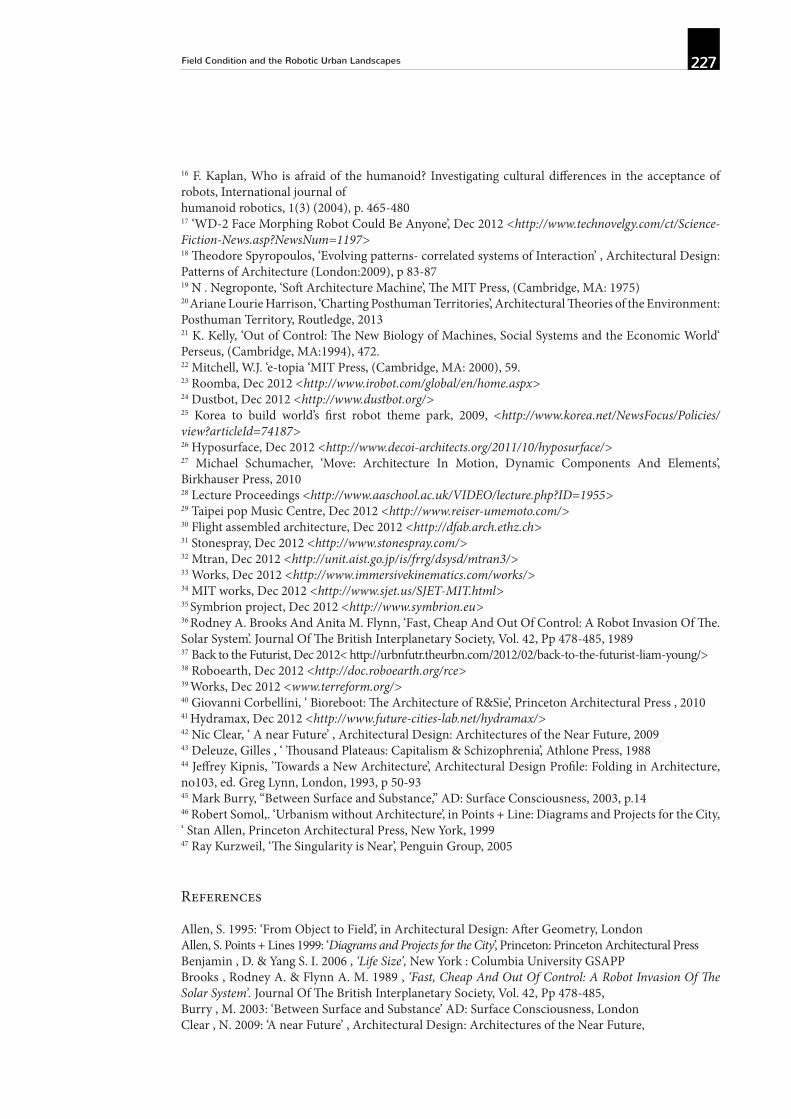
Potentially, MSRRS could radically change the way architects conceive of space. A robotic system consisting of modular mini bots could manifest as the ‘boundary matter’ in architecture - making walls, partitions, transforming to create permanent or temporary openings and user-required furniture. Simon Kim & Mark Yim led Immersive Kinematics Research Group at UPenn have worked on a number of prototypes with the MSRRS approach. The ‘Caterpillar’ project consists of room sized modules that can propel with a synchronized flow. This snake like system can fold into compact clusters or transform into mobile dwellings with flexible space usage33. SJET’s work on the ‘Macrobot’ & the ‘Decibot’ at the MIT illustrates how chain based modules could potentially be components of such a system.34 Both the projects used programmable bots that underwent electromechanical folding to result in variable three-dimensional configurations.
IMAGE 9: Caterpillar project , © Immersive kinematics research group, UPenn
Rethinking Traditions and Envisioning the Future in Architecture Through the Use of Digital Technologies 223
IMAGE 10: Scissors shaped MSRRS © Immersive kinematics research group, UPenn
IMAGE 11: Macrobot , © SJET
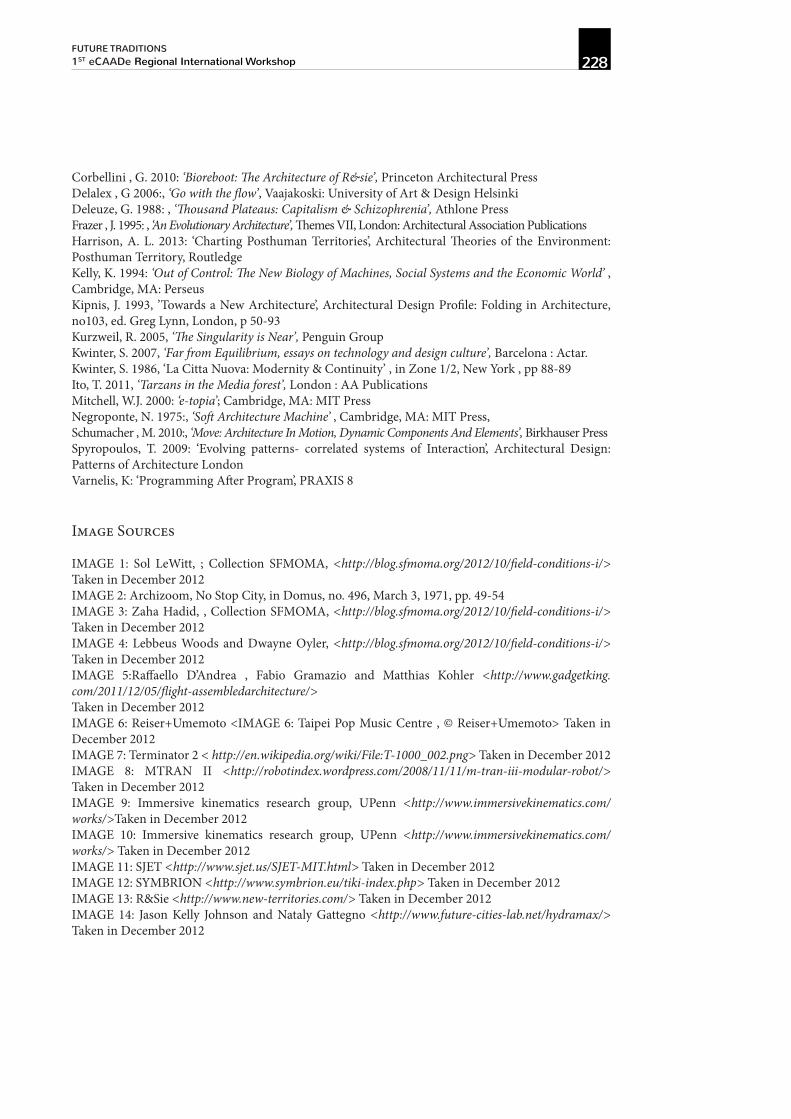
Swarm robotics systems (SRS) is an approach of a coordinated system consisting of multiple minibots. It is based on the principle of artificial swarm intelligence, exhibited in biological systems like behavior of insects. Each individual robot in the system is simple and may have limited capacities, but collectively exhibit higher order of intelligence and complex emergent behavior. Projects like the Symbrion are trying to ‘build a kind of artificial life consisting of super-large-scale swarms of robots, each not much bigger than a sugarcube’35. The individual robots can assemble together as a networked system and share power, mobility and intelligence, allowing them immensely more capabilities than an individual robot. Rodney Brooks of the MIT Artificial Intelligence Lab considers this to be the most efficient approach since malfunction of individual units of the flock does not disturb the larger system, the system working in ‘numbers’ much like a biological system would.36
IMAGE 12: SYMBRION micro bots , © SYMBRION
Field Conditionand the Robotic Urban LandscapesField Condition and the Robotic Urban Landscapes

FUTURE TRADITIONS 1ST eCAADe Regional International Workshop 224
Liam Young in the ‘Electronic Countermeasures’ project has demonstrated the possibilities of using SRS in the city. It consists of a flock of flying drones with inbuilt broadcasting capabilities. These drones fly over the city, nomadically drifting into formation to create ad hoc infrastructures or ‘pirate networks’. They swarm into formation, broadcasting their pirate network, and then disperse, escaping detection, only to reform elsewhere.37
Distributed intelligence in multi-robotic agent system would complement the SRS approach. This approach allows the swarm of robotic agents, connected over Wi-fi networks to distribute the problem solving and share their learning. Already projects like the ‘Roboearth Cloud Engine38’ is making the computation power of the ‘cloud’ available to individual bots. Such an approach would significantly reduce costs of building the hardware for computation in each individual. The cloud system allows these robotic agents to share their experience and learning’s of interaction with their environment, building up intelligence of the overall system.
Robots have also been imagined to perform ecological functions in the city of tomorrow. Terreform One in their proposal ‘Rapid Re(f)use’ have proposed automated 3d printing robots that are modified to process the trash of the city. These robots employ the techniques used in industrial waste compaction to create interlocking waste cubes for easy assembly. These cubes become a resource and are then used for different purposes based on their material constituents39. R&Sie/ New Territories on the other hand use robotic machines as a conceptual narrative device in their projects. For them robots signify ‘non human’ roles and ‘affects’ in their projects. In the project ‘he shot me down’ they have camouflaged robotic machines that carry biomass running between the DMZ at the N-S Korea border. In their proposal for FRAC centre, robotic arms running on aggregation scripts are used to introduce randomization and uncertainty in the assembly of recycled glass bottles to create a labyrinth.40
IMAGE 13: Robotic Arm in the FRAC Centre Proposal, © R&Sie
California based architects Jason Kelly Johnson and Nataly Gattegno have an integrated approach of ‘Robotic ecologies’ to deal with the role of urban robots. They envision a ‘synthetic world in which distinctions between buildings, robots and biology cease to exist’. In their proposal ‘Hydramax’ for San Francisco’s urban waterfront they have pictured a ‘soft system’, composed of a natural systems combining with a massive urban scale robotic structure that ‘harvests rainwater and fog, while modulating air flow, solar exposure and intelligent building systems’. Building skins respond and change shape, texture and color throughout the day and the year. The prototype model composed of a six feet long arduino controlled interactive system, with pulsating LED lights and ‘shape-memory alloy’ motor based ‘fog feathers’. Their future city Lab has also proposed a number of dynamic and interactive robotic building components that respond to environmental conditions.41

Rethinking Traditions and Envisioning the Future in Architecture Through the Use of Digital Technologies 225
IMAGE 14: Hydramax , © Jason Kelly Johnson and Nataly Gattegno
The cross breeding of the technologies and approaches discussed above, leads to the idea of ‘robotic urban landscapes’ which is discussed in the next section.
Robotic Urban Landscapes
“In many ways the near future could be very much like the past, with one obvious exception- it will be completely different.”- Nic Clear, 2009 42
A logical progression of the discussion leads to the proposition that these technologies embedded in the urban fabric of the future would lead to a significant shift in the way we think about the city. In these ‘Robotic Urban Landscapes’, boundaries between people, buildings, infrastructure and landscape would seamlessly dissolve, linked together by digital networks. The urbanscape would become part of the extended machinic continuum. This machinic urban ecology could behave as an artificial simulation of the ‘non human’ natural simulacra. Artificially intelligent environments would co evolve & symbiotically function with the earlier built habitat, eventually merging with the environment leading to a unique artificial ecological condition. Instead of a worldview in which the person as a ‘subject’ in the city flows around static objects, it would become a proactive assemblage of systems that respond around the subject analogous to the idea of ‘body without organs’.43 This could radically transform the way people live, move, work and play. Urban ecology, which has historically revolved around passive built objects, could finally be as dynamic and emergent as natural ecological systems.
A speculative case scenario for such an urban condition would require a three dimensional field condition consisting of numerous micro-bots and a limited number of large robotic constructs placed at ad-hoc locations across the city. Groups of such modular robots would constitute a larger intelligent system, which would be layered with other such systems to result in a global system capable of performing extremely intelligent and complex tasks. Layering of such robotic agent based systems would be a key to the overall performance & efficiency, with each layer behaving like a group of organs that comprise a biological system inside an organism. Distributed intelligence would entail that this works as a multi agent system with ‘observers’ and ‘responders’, who collectively learn, adapt and self organize based on their interaction within the group and with their environment. The machinic systems would sense, interpret and respond through a continuous feedback mechanism resulting in a digital ‘collective consciousness’ of the system. Being globally aware the system would efficiently concentrate resources where required, allowing the reduction of the overall energy demands. Its impact would be from the micro to the macro, from a responsive, spatially recombinant building component to a citywide nomadic infrastructure consisting of a swarm of microbots that manages our waste. This case scenario could definitely be critiqued on various grounds, and it remains a challenge on how the disciple would address them.
‘Robotic Urban Landscapes’, as a field condition would essentially be in ‘continuous heterogeneity’.44 As liquefied, fluid organizations, with no particular scale or hierarchy they would effectively address the urban complexities. The virtual connections and micro relations between its mobile constituents would dissolve and morph the boundaries resulting in a tribe like organizational order. Without a
Field Conditionand the Robotic Urban LandscapesField Condition and the Robotic Urban Landscapes

FUTURE TRADITIONS 1ST eCAADe Regional International Workshop 226
predetermined overall structure or distribution and local interconnections that are simultaneously physical and virtual, the robotic landscapes would have an implicit notion of the field. The physical connection with the invisible ‘virtual’ network at once dematerializes the ‘bound’ identity of these machinic entities; materially concrete yet different in both the real-time physical manifestation as well as the digital existence - a condition similar to the Deleuzian ‘perplication’.45
It goes without saying that at such a point the nature of architecture would radically change. Would it lead to a progressive disappearance of architecture in the cities as suggested by Somol46? Will the objective of architecture then necessitate design of these systems instead? Would this lead to a point of a Kurzweil-ian47 ‘architectural singularity’ beyond which the direction that architecture takes cannot be suitably predicted? The response to these questions would require a critical reflection of what the architectural community envisions its role to be in the future. It is beyond doubt that the social, economic and environmental concerns will always be critical. What is to be seen is how fast the profession of architecture could adapt and evolve to such scenarios and reposition its role as a catalyst to progress the urban condition, from designers of objects to design who mediate the ‘system for objects’.
Conclusion
The paper suggests that recent developments in the domains of robotics and AI could result in a unique architectural condition in the city of the future. The ‘Robotic Urban Landscapes’ informed by an artificial ecology created by a swarms of modular reconfigurable robots, changes the way in which ‘field condition’ is interpreted in the architectural discourse. Such a system could radically alter the way people live, work and play. Whether this will be the moment of architectural ‘singularity’ is debatable, but nonetheless ‘robotic ecology’ could result in a paradigm shift in architectural discipline. The architectural ‘field’ needs to evolve and inform the technological and philosophical pursuits that lead to the possibility of such a machinic ‘field condition’ in the urban fabric of the near future.
Endnotes
1 Stan Allen, ‘From Object to Field’, Architectural Design: After Geometry (London:1995)2 Gordon Pask, ‘Foreword’, in John Frazer, ‘An Evolutionary Architecture’, Themes VII, Architectural Association Publications,(London: 1995) p63 Stan Allen, ‘From Object to Field’, Architectural Design: After Geometry (London: 1995), p304 Derived from the idea of ‘technological singularity’ proposed by Ray Kurzweil, ‘The Singularity is Near’, Penguin Group, 20055 Sanford Kwinter, ‘La Citta Nuova: Modernity & Continuity’ , in Zone 1/2, (New York , 1986), p 88-896 Sanford Kwinter, ‘La Citta Nuova: Modernity & Continuity’ , in Zone 1/2, (New York , 1986), p 88-897 Stan Allen, ‘Field Constructions: Points + Lines: Diagrams and Projects for the City’, Princeton Architectural Press, 1999, p 92-1038 Field Conditions, Joseph Becker, Dec 2012 < http://blog.sfmoma.org/2012/10/field-conditions-i/>9 K Varnelis, ‘Programming After Program’, PRAXIS 8. p 8310 Stan Allen, ‘From Object to Field’, Architectural Design: After Geometry (London:1995)11 Stan Allen, ‘From Object to Field’, Architectural Design: After Geometry (London:1995)12 ‘No Room for the Weak: Form, Process and the Existential Territory of Landscape Urbanism’ , Dec 2012 < http://terraincritical.wordpress.com/>13 Gilles Delalex,, ‘Go with the flow’, University of Art & Design Helsinki, (Vaajakoski:2006), pg 4814 Stan Allen, ‘Field Constructions: Points + Lines: Diagrams and Projects for the City’, Princeton Architectural Press, 1999, p 90 15 ‘What is a Robot’ , Dec 2012 < http://www.robotstoreuk.com/ROBOT%20PAGES/Robot%20definition-1.htm>
Rethinking Traditions and Envisioning the Future in Architecture Through the Use of Digital Technologies 227
16 F. Kaplan, Who is afraid of the humanoid? Investigating cultural differences in the acceptance of robots, International journal ofhumanoid robotics, 1(3) (2004), p. 465-48017 ‘WD-2 Face Morphing Robot Could Be Anyone’, Dec 2012 <http://www.technovelgy.com/ct/Science-Fiction-News.asp?NewsNum=1197>18 Theodore Spyropoulos, ‘Evolving patterns- correlated systems of Interaction’ , Architectural Design: Patterns of Architecture (London:2009), p 83-8719 N . Negroponte, ‘Soft Architecture Machine’, The MIT Press, (Cambridge, MA: 1975)20 Ariane Lourie Harrison, ‘Charting Posthuman Territories’, Architectural Theories of the Environment: Posthuman Territory, Routledge, 201321 K. Kelly, ‘Out of Control: The New Biology of Machines, Social Systems and the Economic World‘ Perseus, (Cambridge, MA:1994), 472.22 Mitchell, W.J. ‘e-topia ‘MIT Press, (Cambridge, MA: 2000), 59.23 Roomba, Dec 2012 <http://www.irobot.com/global/en/home.aspx>24 Dustbot, Dec 2012 <http://www.dustbot.org/>25 Korea to build world’s first robot theme park, 2009, <http://www.korea.net/NewsFocus/Policies/view?articleId=74187>26 Hyposurface, Dec 2012 <http://www.decoi-architects.org/2011/10/hyposurface/>27 Michael Schumacher, ‘Move: Architecture In Motion, Dynamic Components And Elements’, Birkhauser Press, 201028 Lecture Proceedings <http://www.aaschool.ac.uk/VIDEO/lecture.php?ID=1955>29 Taipei pop Music Centre, Dec 2012 <http://www.reiser-umemoto.com/>30 Flight assembled architecture, Dec 2012 <http://dfab.arch.ethz.ch>31 Stonespray, Dec 2012 <http://www.stonespray.com/>32 Mtran, Dec 2012 <http://unit.aist.go.jp/is/frrg/dsysd/mtran3/>33 Works, Dec 2012 <http://www.immersivekinematics.com/works/>34 MIT works, Dec 2012 <http://www.sjet.us/SJET-MIT.html>35 Symbrion project, Dec 2012 <http://www.symbrion.eu>36 Rodney A. Brooks And Anita M. Flynn, ‘Fast, Cheap And Out Of Control: A Robot Invasion Of The. Solar System’. Journal Of The British Interplanetary Society, Vol. 42, Pp 478-485, 198937 Back to the Futurist, Dec 2012< http://urbnfutr.theurbn.com/2012/02/back-to-the-futurist-liam-young/>38 Roboearth, Dec 2012 <http://doc.roboearth.org/rce>39 Works, Dec 2012 <www.terreform.org/>40 Giovanni Corbellini, ‘ Bioreboot: The Architecture of R&Sie’, Princeton Architectural Press , 201041 Hydramax, Dec 2012 <http://www.future-cities-lab.net/hydramax/>42 Nic Clear, ‘ A near Future’ , Architectural Design: Architectures of the Near Future, 200943 Deleuze, Gilles , ‘ Thousand Plateaus: Capitalism & Schizophrenia’, Athlone Press, 198844 Jeffrey Kipnis, ’Towards a New Architecture’, Architectural Design Profile: Folding in Architecture, no103, ed. Greg Lynn, London, 1993, p 50-9345 Mark Burry, “Between Surface and Substance,” AD: Surface Consciousness, 2003, p.1446 Robert Somol,. ‘Urbanism without Architecture’, in Points + Line: Diagrams and Projects for the City, ‘ Stan Allen, Princeton Architectural Press, New York, 199947 Ray Kurzweil, ‘The Singularity is Near’, Penguin Group, 2005
References
Allen, S. 1995: ‘From Object to Field’, in Architectural Design: After Geometry, LondonAllen, S. Points + Lines 1999: ‘Diagrams and Projects for the City’, Princeton: Princeton Architectural PressBenjamin , D. & Yang S. I. 2006 , ‘Life Size’, New York : Columbia University GSAPPBrooks , Rodney A. & Flynn A. M. 1989 , ‘Fast, Cheap And Out Of Control: A Robot Invasion Of The Solar System’. Journal Of The British Interplanetary Society, Vol. 42, Pp 478-485,Burry , M. 2003: ‘Between Surface and Substance’ AD: Surface Consciousness, LondonClear , N. 2009: ‘A near Future’ , Architectural Design: Architectures of the Near Future,
Field Conditionand the Robotic Urban LandscapesField Condition and the Robotic Urban Landscapes
FUTURE TRADITIONS 1ST eCAADe Regional International Workshop 228
Corbellini , G. 2010: ‘Bioreboot: The Architecture of R&sie’, Princeton Architectural PressDelalex , G 2006:, ‘Go with the flow’, Vaajakoski: University of Art & Design HelsinkiDeleuze, G. 1988: , ‘Thousand Plateaus: Capitalism & Schizophrenia’, Athlone PressFrazer , J. 1995: , ‘An Evolutionary Architecture’, Themes VII, London: Architectural Association PublicationsHarrison, A. L. 2013: ‘Charting Posthuman Territories’, Architectural Theories of the Environment: Posthuman Territory, RoutledgeKelly, K. 1994: ‘Out of Control: The New Biology of Machines, Social Systems and the Economic World’ , Cambridge, MA: PerseusKipnis, J. 1993, ’Towards a New Architecture’, Architectural Design Profile: Folding in Architecture, no103, ed. Greg Lynn, London, p 50-93Kurzweil, R. 2005, ‘The Singularity is Near’, Penguin GroupKwinter, S. 2007, ‘Far from Equilibrium, essays on technology and design culture’, Barcelona : Actar.Kwinter, S. 1986, ‘La Citta Nuova: Modernity & Continuity’ , in Zone 1/2, New York , pp 88-89Ito, T. 2011, ‘Tarzans in the Media forest’, London : AA PublicationsMitchell, W.J. 2000: ‘e-topia’; Cambridge, MA: MIT PressNegroponte, N. 1975:, ‘Soft Architecture Machine’ , Cambridge, MA: MIT Press,Schumacher , M. 2010:, ‘Move: Architecture In Motion, Dynamic Components And Elements’, Birkhauser PressSpyropoulos, T. 2009: ‘Evolving patterns- correlated systems of Interaction’, Architectural Design: Patterns of Architecture LondonVarnelis, K: ‘Programming After Program’, PRAXIS 8
Image Sources
IMAGE 1: Sol LeWitt, ; Collection SFMOMA, <http://blog.sfmoma.org/2012/10/field-conditions-i/> Taken in December 2012IMAGE 2: Archizoom, No Stop City, in Domus, no. 496, March 3, 1971, pp. 49-54IMAGE 3: Zaha Hadid, , Collection SFMOMA, <http://blog.sfmoma.org/2012/10/field-conditions-i/> Taken in December 2012IMAGE 4: Lebbeus Woods and Dwayne Oyler, <http://blog.sfmoma.org/2012/10/field-conditions-i/> Taken in December 2012IMAGE 5:Raffaello D’Andrea , Fabio Gramazio and Matthias Kohler <http://www.gadgetking.com/2011/12/05/flight-assembledarchitecture/>Taken in December 2012IMAGE 6: Reiser+Umemoto <IMAGE 6: Taipei Pop Music Centre , © Reiser+Umemoto> Taken in December 2012IMAGE 7: Terminator 2 < http://en.wikipedia.org/wiki/File:T-1000_002.png> Taken in December 2012IMAGE 8: MTRAN II <http://robotindex.wordpress.com/2008/11/11/m-tran-iii-modular-robot/> Taken in December 2012IMAGE 9: Immersive kinematics research group, UPenn <http://www.immersivekinematics.com/works/>Taken in December 2012IMAGE 10: Immersive kinematics research group, UPenn <http://www.immersivekinematics.com/works/> Taken in December 2012IMAGE 11: SJET <http://www.sjet.us/SJET-MIT.html> Taken in December 2012IMAGE 12: SYMBRION <http://www.symbrion.eu/tiki-index.php> Taken in December 2012IMAGE 13: R&Sie <http://www.new-territories.com/> Taken in December 2012IMAGE 14: Jason Kelly Johnson and Nataly Gattegno <http://www.future-cities-lab.net/hydramax/> Taken in December 2012
Related Documents











