5000 Solutions Manual: Chapter 5 7th Edition Feedback Control of Dynamic Systems Gene F. Franklin J. David Powell Abbas Emami-Naeini . Assisted by: H.K. Aghajan H. Al-Rahmani P. Coulot P. Dankoski S. Everett R. Fuller T. Iwata V. Jones F. Safai L. Kobayashi H-T. Lee E. Thuriyasena M. Matsuoka J.K. Lee © 2015 Pearson Education, Inc., Upper Saddle River, NJ. All rights reserved. This publication is protected by Copyright and written permission should be obtained from the publisher prior to any prohibited reproduction, storage in a retrieval system, or transmission in any form or by any means, electronic, mechanical, photocopying, recording, or likewise. For information regarding permission(s), write to: Rights and Permissions Department, Pearson Education, Inc., Upper Saddle River, NJ 07458.

feedback control system 5th chapter
Nov 06, 2015
feedback control system 5th chapter details explained
Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript
-
5000
Solutions Manual: Chapter 57th Edition
Feedback Control of DynamicSystems
Gene F. Franklin
J. David Powell
Abbas Emami-Naeini .
Assisted by:H.K. AghajanH. Al-RahmaniP. CoulotP. DankoskiS. EverettR. FullerT. IwataV. JonesF. Safai
L. KobayashiH-T. Lee
E. ThuriyasenaM. MatsuokaJ.K. Lee
2015 Pearson Education, Inc., Upper Saddle River, NJ. All rights reserved. This publication is protected by Copyright and written permission should be obtained from the publisher prior to any prohibited reproduction, storage in a retrieval system, or transmission in any form or by any means, electronic, mechanical, photocopying, recording, or likewise. For information regarding permission(s), write to: Rights and Permissions Department, Pearson Education, Inc., Upper Saddle River, NJ 07458.
-
Chapter 5
The Root-Locus DesignMethod
Problems and solutions for Section 5.1
1. Set up the listed characteristic equations in the form suited to Evanssroot-locus method. Give L(s); a(s); and b(s) and the parameter K interms of the original parameters in each case. Be sure to select K so thata(s) and b(s) are monic in each case and the degree of b(s) is not greaterthan that of a(s).
(a) s+ (1=) = 0 versus parameter
(b) s2 + cs+ c+ 1 = 0 versus parameter c
(c) (s+ c)3 +A(Ts+ 1) = 0
i. versus parameter A,ii. versus parameter T ,iii. versus the parameter c, if possible. Say why you can or can not.
Can a plot of the roots be drawn versus c for given constantvalues of A and T by any means at all?
(d) 1+kp +
kIs+
kDs
s+ 1
G(s) = 0: Assume that G(s) = A
c(s)
d(s), where
c(s) and d(s) are monic polynomials with the degree of d(s) greaterthan that of c(s). (Note: The rst printing of the 7th edition
had an error in the equation above where thekIsterm above was
incorrectly stated to be kI(s):)
i. versus kpii. versus kIiii. versus kD
5001
2015 Pearson Education, Inc., Upper Saddle River, NJ. All rights reserved. This publication is protected by Copyright and written permission should be obtained from the publisher prior to any prohibited reproduction, storage in a retrieval system, or transmission in any form or by any means, electronic, mechanical, photocopying, recording, or likewise. For information regarding permission(s), write to: Rights and Permissions Department, Pearson Education, Inc., Upper Saddle River, NJ 07458.
-
5002 CHAPTER 5. THE ROOT-LOCUS DESIGN METHOD
iv. versus
Solution:
(a) K = 1= ;a = s;b = 1
(b) K = c;a = s2 + 1;b = s+ 1
(c) i. K = AT ;a = (s+ c)3;b = s+ 1=T
ii. K = AT ;a = (s+ c)3 +A;b = s
iii. The parameter c enters the equation in a nonlinear way and astandard root locus does not apply. However, using a polynomialsolver, the roots can be plotted versus c:
(d) i. K = kpA;
a = s(s+ 1=)d(s) +AkI(s+ 1=)c(s) +kDs2Ac(s);
b = s(s+ 1=)c(s)
ii. K = AkI ;
a = s(s+ 1=)d(s) +Akps(s+ 1=)c(s) +kDs2Ac(s);
b = (s+ 1=)c(s)
iii. K =AkD;
a = s(s+ 1=)d(s) +Akps(s+ 1=)c(s) +AkI(s+ 1=)c(s);b = s2c(s)
iv. K = 1= ;a = s2d(s) +Akps
2c(s) +AkIsc(s);b = sd(s) +Akpsc(s) +AkIc(s) +AkDs
2c(s)
2015 Pearson Education, Inc., Upper Saddle River, NJ. All rights reserved. This publication is protected by Copyright and written permission should be obtained from the publisher prior to any prohibited reproduction, storage in a retrieval system, or transmission in any form or by any means, electronic, mechanical, photocopying, recording, or likewise. For information regarding permission(s), write to: Rights and Permissions Department, Pearson Education, Inc., Upper Saddle River, NJ 07458.
-
5003
Problems and solutions for Section 5.2
2. Roughly sketch the root loci for the pole-zero maps as shown in Fig. 5.44without the aid of a computer. Show your estimates of the center andangles of the asymptotes, a rough evaluation of arrival and departureangles for complex poles and zeros, and the loci for positive values of theparameter K. Each pole-zero map is from a characteristic equation of theform
1 +Kb(s)
a(s)= 0;
where the roots of the numerator b(s) are shown as small circles o and theroots of the denominator a(s) are shown as 0s on the s-plane. Note thatin Fig. 5.44(c) there are two poles at the origin.
Solution:
We had to make up some numbers to do it on Matlab, so the resultspartly depend on what was dreamed up, but the idea here is just get thebasic rules right.
(a) a(s) = s2 + s; b(s) = s+ 2Breakin(s): -3.414Breakaway(s): -0.586
(b) a(s) = s2 + 0:2s+ 1; b(s) = s+ 1Angle of departure: 137:9
Breakin(s): -2.342
(c) a(s) = s2; b(s) = (s+ 1)Breakin(s): -2
(d) a(s) = s2 + s; b(s) = s2 + 5s+ 6Breakin(s): -2.366Breakaway(s): -0.634
(e) a(s) = s3 + 3s2 + 4s 8Center of asymptotes: -1Angles of asymptotes: 60; 180Angle of departure: 56:3
(f) a(s) = s5 + 3s4 + s3 5s2 0:5; b(s) = s+ 1Center of asymptotes: -0.5Angles of asymptotes: 45; 135Angle of departure:
115:8 at s = 2:01 + 1:01j 70:5 at s = 0:01 + 0:31j
Breakin(s): 0.05Breakaway(s): 0:652
2015 Pearson Education, Inc., Upper Saddle River, NJ. All rights reserved. This publication is protected by Copyright and written permission should be obtained from the publisher prior to any prohibited reproduction, storage in a retrieval system, or transmission in any form or by any means, electronic, mechanical, photocopying, recording, or likewise. For information regarding permission(s), write to: Rights and Permissions Department, Pearson Education, Inc., Upper Saddle River, NJ 07458.
-
5004 CHAPTER 5. THE ROOT-LOCUS DESIGN METHOD
-10 -5 0 5-2
-1
0
1
2
Root loci for Problem 5.2
Real Axis
Imag
inar
y Ax
is
-6 -4 -2 0 2-2
-1
0
1
2
Real Axis
Imag
inar
y Ax
is
-4 -2 0 2-2
-1
0
1
2
Real Axis
Imag
inar
y Ax
is
-4 -2 0 2-1
-0.5
0
0.5
1
Real Axis
Imag
inar
y Ax
is
-10 -5 0 5-10
-5
0
5
10
Real Axis
Imag
inar
y Ax
is
-4 -2 0 2 4-4
-2
0
2
4
Real Axis
Imag
inar
y Ax
is
2015 Pearson Education, Inc., Upper Saddle River, NJ. All rights reserved. This publication is protected by Copyright and written permission should be obtained from the publisher prior to any prohibited reproduction, storage in a retrieval system, or transmission in any form or by any means, electronic, mechanical, photocopying, recording, or likewise. For information regarding permission(s), write to: Rights and Permissions Department, Pearson Education, Inc., Upper Saddle River, NJ 07458.
-
5005
3. For the characteristic equation
1 +K
s2(s+ 1)(s+ 5)= 0;
(a) Draw the real-axis segments of the corresponding root locus.
(b) Sketch the asymptotes of the locus for K !1.(c) Sketch the locus.
(d) Verify your sketch with a Matlab plot.
Solution:
(a) The real axis segment is 1 > > 5.(b) = 6=4 = 1:5; i = 45; 135(c) The plot is shown below.
-8 -6 -4 -2 0 2 4
-6
-4
-2
0
2
4
6
Root Locus
Real Axis
Imag
inar
y A
xis
Solution for Problem 5.3
2015 Pearson Education, Inc., Upper Saddle River, NJ. All rights reserved. This publication is protected by Copyright and written permission should be obtained from the publisher prior to any prohibited reproduction, storage in a retrieval system, or transmission in any form or by any means, electronic, mechanical, photocopying, recording, or likewise. For information regarding permission(s), write to: Rights and Permissions Department, Pearson Education, Inc., Upper Saddle River, NJ 07458.
-
5006 CHAPTER 5. THE ROOT-LOCUS DESIGN METHOD
4. Real poles and zeros. Sketch the root locus with respect to K for theequation 1+KL(s) = 0 and the listed choices for L(s). Be sure to give theasymptotes and the arrival and departure angles at any complex zero orpole. After completing each hand sketch, verify your results using Matlab.Turn in your hand sketches and the Matlab results on the same scales.
(a) L(s) =2
s(s+ 1)(s+ 5)(s+ 10)
(b) L(s) =(s+ 3)
s(s+ 1)(s+ 5)(s+ 10)
(c) L(s) =(s+ 2)(s+ 4)
s(s+ 1)(s+ 5)(s+ 10)
(d) L(s) =(s+ 2)(s+ 6)
s(s+ 1)(s+ 5)(s+ 10)
Solution:All the root locus plots are displayed at the end of the solution set for thisproblem.
(a) = 4; i = 45; 135
(b) = 4:33; i = 60; 180
(c) = 5; i = 90
(d) = 4; i = 90
2015 Pearson Education, Inc., Upper Saddle River, NJ. All rights reserved. This publication is protected by Copyright and written permission should be obtained from the publisher prior to any prohibited reproduction, storage in a retrieval system, or transmission in any form or by any means, electronic, mechanical, photocopying, recording, or likewise. For information regarding permission(s), write to: Rights and Permissions Department, Pearson Education, Inc., Upper Saddle River, NJ 07458.
-
5007
-15 -10 -5 0 5-15
-10
-5
0
5
10
15
a
Real Axis
Imag
inar
y A
xis
-15 -10 -5 0 5-15
-10
-5
0
5
10
15
b
Real Axis
Imag
inar
y A
xis
-15 -10 -5 0 5-15
-10
-5
0
5
10
15
c
Real Axis
Imag
inar
y A
xis
-15 -10 -5 0 5-15
-10
-5
0
5
10
15
d
Real Axis
Imag
inar
y A
xis
Root loci for Problem 5.4
2015 Pearson Education, Inc., Upper Saddle River, NJ. All rights reserved. This publication is protected by Copyright and written permission should be obtained from the publisher prior to any prohibited reproduction, storage in a retrieval system, or transmission in any form or by any means, electronic, mechanical, photocopying, recording, or likewise. For information regarding permission(s), write to: Rights and Permissions Department, Pearson Education, Inc., Upper Saddle River, NJ 07458.
-
5008 CHAPTER 5. THE ROOT-LOCUS DESIGN METHOD
5. Complex poles and zeros. Sketch the root locus with respect to K for theequation 1+KL(s) = 0 and the listed choices for L(s). Be sure to give theasymptotes and the arrival and departure angles at any complex zero orpole. After completing each hand sketch, verify your results using Matlab.Turn in your hand sketches and the Matlab results on the same scales.
(a) L(s) =1
s2 + 3s+ 10
(b) L(s) =1
s(s2 + 3s+ 10)
(c) L(s) =(s2 + 2s+ 8)
s(s2 + 2s+ 10)
(d) L(s) =(s2 + 2s+ 12)
s(s2 + 2s+ 10)
(e) L(s) =(s2 + 1)
s(s2 + 4)
(f) L(s) =(s2 + 4)
s(s2 + 1)
Solution:All the root locus plots are displayed at the end of the solution set for thisproblem.
(a) = 1:5; i = 90; d = 90 at s = 1:5 + 2:78j
(b) = 1; i = 60; 180; d = 28:3 at s = 1:5 + 2:78j
(c) = 0; i = 180; d = 161:6 at s = 1 + 3j;
a = 200:7 at s = 1 + 2:65j
(d) = 0; i = 180; d = 18:4 at s = 1 + 3j;
a = 16:8 at s = 1 + 3:32j
(e) = 0; i = 180; d = 180 at s = 2j; a = 180 at s = j
(f) = 0; i = 180; d = 0 at s = j; a = 0 at s = 2j
2015 Pearson Education, Inc., Upper Saddle River, NJ. All rights reserved. This publication is protected by Copyright and written permission should be obtained from the publisher prior to any prohibited reproduction, storage in a retrieval system, or transmission in any form or by any means, electronic, mechanical, photocopying, recording, or likewise. For information regarding permission(s), write to: Rights and Permissions Department, Pearson Education, Inc., Upper Saddle River, NJ 07458.
-
5009
-3 -2 -1 0 1-20
-10
0
10
20
a
Real Axis
Imag
inar
y Ax
is
-20 -10 0 10-20
-10
0
10
20
b
Real Axis
Imag
inar
y Ax
is
-3 -2 -1 0 1-4
-2
0
2
4
c
Real Axis
Imag
inar
y Ax
is
-3 -2 -1 0 1-4
-2
0
2
4
d
Real Axis
Imag
inar
y Ax
is
-2 -1 0 1-4
-2
0
2
4
e
Real Axis
Imag
inar
y Ax
is
-1.5 -1 -0.5 0 0.5-4
-2
0
2
4
f
Real Axis
Imag
inar
y Ax
is
Root loci for Problem 5.5
2015 Pearson Education, Inc., Upper Saddle River, NJ. All rights reserved. This publication is protected by Copyright and written permission should be obtained from the publisher prior to any prohibited reproduction, storage in a retrieval system, or transmission in any form or by any means, electronic, mechanical, photocopying, recording, or likewise. For information regarding permission(s), write to: Rights and Permissions Department, Pearson Education, Inc., Upper Saddle River, NJ 07458.
-
5010 CHAPTER 5. THE ROOT-LOCUS DESIGN METHOD
6. Multiple poles at the origin. Sketch the root locus with respect to K forthe equation 1 + KL(s) = 0 and the listed choices for L(s). Be sure togive the asymptotes and the arrival and departure angles at any complexzero or pole. After completing each hand sketch, verify your results usingMatlab. Turn in your hand sketches and the Matlab results on the samescales.
(a) L(s) =1
s2(s+ 8)
(b) L(s) =1
s3(s+ 8)
(c) L(s) =1
s4(s+ 8)
(d) L(s) =(s+ 3)
s2(s+ 8)
(e) L(s) =(s+ 3)
s3(s+ 4)
(f) L(s) =(s+ 1)2
s3(s+ 4)
(g) L(s) =(s+ 1)2
s3(s+ 10)2
Solution:All the root locus plots are displayed at the end of the solution set for thisproblem.
(a) = 2:67; i = 60; 180
(b) = 2; i = 45; 135
(c) = 1:6; i = 36; 108; 180
(d) = 2:5; i = 90
(e) = 0:33; i = 60; 180
(f) = 3; i = 90
(g) = 6; i = 60; 180
2015 Pearson Education, Inc., Upper Saddle River, NJ. All rights reserved. This publication is protected by Copyright and written permission should be obtained from the publisher prior to any prohibited reproduction, storage in a retrieval system, or transmission in any form or by any means, electronic, mechanical, photocopying, recording, or likewise. For information regarding permission(s), write to: Rights and Permissions Department, Pearson Education, Inc., Upper Saddle River, NJ 07458.
-
5011
-15 -10 -5 0 5 10-20
-10
0
10
20
a
Real Axis
Imag
inar
y A
xis
-10 -5 0 5-10
-5
0
5
b
Real Axis
Imag
inar
y A
xis
-15 -10 -5 0 5 10
-5
0
5
10
c
Real Axis
Imag
inar
y A
xis
-10 -5 0 5-50
0
50
d
Real Axis
Imag
inar
y A
xis
-5 -4 -3 -2 -1 0 1 2-1
-0.5
0
0.5
e
Real Axis
Imag
inar
y A
xis
-5 -4 -3 -2 -1 0
-10-5
05
10
f
Real Axis
Imag
inar
y A
xis
-10 -5 0 5-10
-5
0
5
g
Real Axis
Imag
inar
y A
xis
Solution for Problem 5.6
2015 Pearson Education, Inc., Upper Saddle River, NJ. All rights reserved. This publication is protected by Copyright and written permission should be obtained from the publisher prior to any prohibited reproduction, storage in a retrieval system, or transmission in any form or by any means, electronic, mechanical, photocopying, recording, or likewise. For information regarding permission(s), write to: Rights and Permissions Department, Pearson Education, Inc., Upper Saddle River, NJ 07458.
-
5012 CHAPTER 5. THE ROOT-LOCUS DESIGN METHOD
7. Mixed real and complex poles. Sketch the root locus with respect to K forthe equation 1 + KL(s) = 0 and the listed choices for L(s). Be sure togive the asymptotes and the arrival and departure angles at any complexzero or pole. After completing each hand sketch, verify your results usingMatlab. Turn in your hand sketches and the Matlab results on the samescales.
(a) L(s) =(s+ 3)
s(s+ 10)(s2 + 2s+ 2)
(b) L(s) =(s+ 3)
s2(s+ 10)(s2 + 6s+ 25)
(c) L(s) =(s+ 3)2
s2(s+ 10)(s2 + 6s+ 25)
(d) L(s) =(s+ 3)(s2 + 4s+ 68)
s2(s+ 10)(s2 + 4s+ 85)
(e) L(s) =[(s+ 1)2 + 1]
s2(s+ 2)(s+ 3)
Solution:All the plots are attached at the end of the solution set.
(a) = 3; i = 60; 180; d = 24:8 at s = 1 + j
(b) = 3:25; i = 45; 135; d = 103:5 at s = 3 + 4j
(c) = 3:33; i = 60; 180; d = 13:5 at s = 3 + 4j
(d) = 3:5; i = 90; d = 100:2 at s = 2 + 9j;a = 99:8 at s = 2 + 8j
(e) = 1:5; i = 90; a = 71:6 at s = 1 + j
2015 Pearson Education, Inc., Upper Saddle River, NJ. All rights reserved. This publication is protected by Copyright and written permission should be obtained from the publisher prior to any prohibited reproduction, storage in a retrieval system, or transmission in any form or by any means, electronic, mechanical, photocopying, recording, or likewise. For information regarding permission(s), write to: Rights and Permissions Department, Pearson Education, Inc., Upper Saddle River, NJ 07458.
-
5013
-10 -5 0
-3
-2
-1
0
1
2
3
a
Real Axis
Imag
inar
y Axis
-15 -10 -5 0 5
-10
-8
-6
-4
-2
0
2
4
6
8
10
b
Real Axis
Imag
inar
y Axis
-15 -10 -5 0
-10
-8
-6
-4
-2
0
2
4
6
8
10
c
Real Axis
Imag
inar
y Axis
-15 -10 -5 0 5
-15
-10
-5
0
5
10
15
d
Real Axis
Imag
inar
y Axis
-3 -2 -1 0-5
-4
-3
-2
-1
0
1
2
3
4
5
e
Real Axis
Imag
inar
y Axis
Solution for Problem 5.7
2015 Pearson Education, Inc., Upper Saddle River, NJ. All rights reserved. This publication is protected by Copyright and written permission should be obtained from the publisher prior to any prohibited reproduction, storage in a retrieval system, or transmission in any form or by any means, electronic, mechanical, photocopying, recording, or likewise. For information regarding permission(s), write to: Rights and Permissions Department, Pearson Education, Inc., Upper Saddle River, NJ 07458.
-
5014 CHAPTER 5. THE ROOT-LOCUS DESIGN METHOD
8. RHP and zeros. Sketch the root locus with respect to K for the equa-tion 1 + KL(s) = 0 and the listed choices for L(s). Be sure to give theasymptotes and the arrival and departure angles at any complex zero orpole. After completing each hand sketch, verify your results using Matlab.Turn in your hand sketches and the Matlab results on the same scales.
(a) L(s) =s+ 2
s+ 10
1
s2 1 ; the model for a case of magnetic levitationwith lead compensation.
(b) L(s) =s+ 2
s(s+ 10)
1
(s2 1) ; the magnetic levitation system with inte-gral control and lead compensation.
(c) L(s) =s 1s2
(d) L(s) =s2 + 2s+ 1
s(s+ 20)2(s2 2s+ 2) : What is the largest value that canbe obtained for the damping ratio of the stable complex roots on thislocus?
(e) L(s) =(s+ 2)
s(s 1)(s+ 6)2 ;
(f) L(s) =1
(s 1)[(s+ 2)2 + 3]
Solution:
(a) = 4; i = 90
(b) = 2:67; i = 60; 180
(c) = 1; i = 180
(d) = 12; i = 60; 180; d = 92:7 at s = 1 + jThe maximum damping ratio is obtained at a point at the smallestangle o the horizontal. From the locus, the maximum damping is0:31 when K 2600.
(e) = 3; i = 60; 180
(f) = 1; i = 60; 180; d = 60:0 at s = 2 + 1:73j
2015 Pearson Education, Inc., Upper Saddle River, NJ. All rights reserved. This publication is protected by Copyright and written permission should be obtained from the publisher prior to any prohibited reproduction, storage in a retrieval system, or transmission in any form or by any means, electronic, mechanical, photocopying, recording, or likewise. For information regarding permission(s), write to: Rights and Permissions Department, Pearson Education, Inc., Upper Saddle River, NJ 07458.
-
5015
-10 -5 0-10
-5
0
5
10
Real Axis
Imag
Axi
s
plot a
-10 -5 0-10
-5
0
5
10
Real Axis
Imag
Axi
s
plot b
-1 0 1 2-1
-0.5
0
0.5
1
Real Axis
Imag
Axi
s
plot c
-5 0 5-20
-15
-10
-5
0
5
10
15
Real Axis
Imag
Axi
s
plot d
-8 -6 -4 -2 0 2-10
-5
0
5
10
Real Axis
Imag
Axi
s
plot e
-2 0 2-4
-2
0
2
4
Real Axis
Imag
Axi
s
plot f
Solution for Problem 5.8
2015 Pearson Education, Inc., Upper Saddle River, NJ. All rights reserved. This publication is protected by Copyright and written permission should be obtained from the publisher prior to any prohibited reproduction, storage in a retrieval system, or transmission in any form or by any means, electronic, mechanical, photocopying, recording, or likewise. For information regarding permission(s), write to: Rights and Permissions Department, Pearson Education, Inc., Upper Saddle River, NJ 07458.
-
5016 CHAPTER 5. THE ROOT-LOCUS DESIGN METHOD
9. Put the characteristic equation of the system shown in Fig. 5.45 in rootlocus form with respect to the parameter , and identify the correspondingL(s); a(s); and b(s): Sketch the root locus with respect to the parameter, estimate the closed-loop pole locations, and sketch the correspondingstep responses when = 0; 0:5, and 2. Use Matlab to check the accuracyof your approximate step responses.
Figure 5.45: Control system for Problem 5.9
Solution:
The characteristic equation is s2+2s+5+5s = 0 and L(s) =s
s2 + 2s+ 5:
the root locus and step responses are plotted below.
-6 -5 -4 -3 -2 -1 0 1 2-2.5
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
2.5root locus
Real Axis
Imag
inar
y Ax
is
0 5 10 15 200
0.2
0.4
0.6
0.8
1
1.2
1.4
a l p h a = 0
a l p h a = 0 . 5a l p h a = 2
Step Response
Time (sec)
Ampl
itude
2015 Pearson Education, Inc., Upper Saddle River, NJ. All rights reserved. This publication is protected by Copyright and written permission should be obtained from the publisher prior to any prohibited reproduction, storage in a retrieval system, or transmission in any form or by any means, electronic, mechanical, photocopying, recording, or likewise. For information regarding permission(s), write to: Rights and Permissions Department, Pearson Education, Inc., Upper Saddle River, NJ 07458.
-
5017
10. Use the Matlab function rltool to study the behavior of the root locus of1 +KL(s) for
L(s) =(s+ a)
s(s+ 1)(s2 + 8s+ 52)
as the parameter a is varied from 0 to 10, paying particular attention tothe region between 2:5 and 3:5. Verify that a multiple root occurs at acomplex value of s for some value of a in this range.
Solution:
For small values of ; the locus branch from 0;1 makes a circular patharound the zero and the branches from the complex roots curve o towardthe asymptotes. For large values of the branches from the complexroots break into the real axis and those from 0; 1 curve o toward theasymptotes. At about = 3:11 these loci touch corresponding to complexmultiple roots.
- 1 4 - 1 2 - 1 0 - 8 - 6 - 4 - 2 0 2 4- 1 0
- 8
- 6
- 4
- 2
0
2
4
6
8
1 0
a = 0
R e a l A x is
Imag
inar
y Axis
- 1 4 - 1 2 - 1 0 - 8 - 6 - 4 - 2 0 2 4- 1 0
- 8
- 6
- 4
- 2
0
2
4
6
8
1 0
a = 2 .5
R e a l A x is
Imag
inar
y Axis
- 1 4 - 1 2 - 1 0 - 8 - 6 - 4 - 2 0 2 4- 1 0
- 8
- 6
- 4
- 2
0
2
4
6
8
1 0
a = 3
R e a l A x is
Imag
inar
y Axis
- 1 4 - 1 2 - 1 0 - 8 - 6 - 4 - 2 0 2 4- 1 0
- 8
- 6
- 4
- 2
0
2
4
6
8
1 0
a = 3 .5
R e a l A x is
Imag
inar
y Axis
- 1 4 - 1 2 - 1 0 - 8 - 6 - 4 - 2 0 2 4- 1 0
- 8
- 6
- 4
- 2
0
2
4
6
8
1 0
a = 5
R e a l A x is
Imag
inar
y Axis
- 1 4 - 1 2 - 1 0 - 8 - 6 - 4 - 2 0 2 4- 1 0
- 8
- 6
- 4
- 2
0
2
4
6
8
1 0
a = 1 0
R e a l A x is
Imag
inar
y Axis
Solution for Problem 5.10
2015 Pearson Education, Inc., Upper Saddle River, NJ. All rights reserved. This publication is protected by Copyright and written permission should be obtained from the publisher prior to any prohibited reproduction, storage in a retrieval system, or transmission in any form or by any means, electronic, mechanical, photocopying, recording, or likewise. For information regarding permission(s), write to: Rights and Permissions Department, Pearson Education, Inc., Upper Saddle River, NJ 07458.
-
5018 CHAPTER 5. THE ROOT-LOCUS DESIGN METHOD
11. Use Rouths criterion to nd the range of the gain K for which the systemsin Fig. 5.46 are stable, and use the root locus to conrm your calculations.
Figure 5.46: Feedback systems for Problem 5.11
Solution:
(a) The system is stable for 0 K 478:234. The root locus of thesystem and the location of the roots at the crossover points are shownin the left plot.
(b) There is a pole in the right hand plane thus the system is unstablefor all values of K as shown in the right plot.
2015 Pearson Education, Inc., Upper Saddle River, NJ. All rights reserved. This publication is protected by Copyright and written permission should be obtained from the publisher prior to any prohibited reproduction, storage in a retrieval system, or transmission in any form or by any means, electronic, mechanical, photocopying, recording, or likewise. For information regarding permission(s), write to: Rights and Permissions Department, Pearson Education, Inc., Upper Saddle River, NJ 07458.
-
5019
Root Locus
Real Axis
Imag
Axi
s
-10 -5 0
-5
0
5plot a
Root Locus
Real Axis
Imag
Axi
s
-3 -2.5 -2 -1.5 -1 -0.5 0-5
0
5 plot b
Root Locus
Real Axis
Imag
Axi
s
-6 -4 -2 0-1.5
-1-0.5
00.5
11.5 plot c
Root Locus
Real Axis
Imag
Axi
s
-3 -2.5 -2 -1.5 -1 -0.5 0-4
-2
0
2
4
plot d
Solution for Problem 5.11
2015 Pearson Education, Inc., Upper Saddle River, NJ. All rights reserved. This publication is protected by Copyright and written permission should be obtained from the publisher prior to any prohibited reproduction, storage in a retrieval system, or transmission in any form or by any means, electronic, mechanical, photocopying, recording, or likewise. For information regarding permission(s), write to: Rights and Permissions Department, Pearson Education, Inc., Upper Saddle River, NJ 07458.
-
5020 CHAPTER 5. THE ROOT-LOCUS DESIGN METHOD
12. Sketch the root locus for the characteristic equation of the system forwhich
L(s) =(s+ 2)
s2(s+ 5);
and determine the value of the root-locus gain for which the complex con-jugate poles have the maximum damping ratio. What is the approximatevalue of the damping?
Solution:
Plot the system on Matlab using rlocus(sys), and use [K]= rlocnd(sys)to pick the gain for the maximum damping. We nd that the maximumdamping, = 0.275 when K 10:7.
-6 -5 -4 -3 -2 -1 0 1-15
-10
-5
0
5
10
15
0.130.190.260.38
0.52
0.8
2
4
6
8
10
12
14
2
4
6
8
10
12
14
0.040.0850.130.190.260.38
0.52
0.8
0.040.085
R oot Loc us
R eal Ax is
Imag
inar
y Axis
Root locus with 0.275 damping marked
2015 Pearson Education, Inc., Upper Saddle River, NJ. All rights reserved. This publication is protected by Copyright and written permission should be obtained from the publisher prior to any prohibited reproduction, storage in a retrieval system, or transmission in any form or by any means, electronic, mechanical, photocopying, recording, or likewise. For information regarding permission(s), write to: Rights and Permissions Department, Pearson Education, Inc., Upper Saddle River, NJ 07458.
-
5021
13. For the system in Fig. 5.47,
Figure 5.47: Feedback system for Problem 5.13
(a) Find the locus of closed-loop roots with respect to K.
(b) Is there a value of K that will cause all roots to have a damping ratiogreater than 0:5?
(c) Find the values of K that yield closed-loop poles with the dampingratio = 0:707.
(d) Use Matlab to plot the response of the resulting design to a referencestep.
Solution:
(a) The locus is plotted below
(b) There is a K which will make the dominantpoles have damping0.5 but none that will make the poles from the resonance have thatmuch damping.
(c) Using rlocnd, the gain is about 35.(d) The step response shows the basic form of a well damped response
with the vibration of the response element added.
Root Locus
Real Axis
Imag
Axis
-20 -15 -10 -5 0
-8
-6
-4
-2
0
2
4
6
8
20 17.5 15 12.5 10 7.5 5 2.5
0.99
0.965
0.92 0.84 0.74 0.6 0.42 0.22
0.99
0.965
0.92 0.84 0.74 0.6 0.42 0.22Step Response
Time (sec)
Ampl
itude
0 1 2 3 4 5 60
0.2
0.4
0.6
0.8
1
1.2
1.4
2015 Pearson Education, Inc., Upper Saddle River, NJ. All rights reserved. This publication is protected by Copyright and written permission should be obtained from the publisher prior to any prohibited reproduction, storage in a retrieval system, or transmission in any form or by any means, electronic, mechanical, photocopying, recording, or likewise. For information regarding permission(s), write to: Rights and Permissions Department, Pearson Education, Inc., Upper Saddle River, NJ 07458.
-
5022 CHAPTER 5. THE ROOT-LOCUS DESIGN METHOD
Root locus and step response for Problem 5.13
2015 Pearson Education, Inc., Upper Saddle River, NJ. All rights reserved. This publication is protected by Copyright and written permission should be obtained from the publisher prior to any prohibited reproduction, storage in a retrieval system, or transmission in any form or by any means, electronic, mechanical, photocopying, recording, or likewise. For information regarding permission(s), write to: Rights and Permissions Department, Pearson Education, Inc., Upper Saddle River, NJ 07458.
-
5023
14. For the feedback system shown in Fig. 5.48, nd the value of the gain Kthat results in dominant closed-loop poles with a damping ratio = 0:5.
Figure 5.48: Feedback system for Problem 5.14
Solution:
Use block diagram reduction to nd the characteristic equation of theclosed loop system, then divide that up into terms with and without K to
nd the root locus form, where L(s) =10s
s2 + s+ 10: Plugging into Matlab
and using rlocnd produces the required gain to be K = 0:22:The locus is
2015 Pearson Education, Inc., Upper Saddle River, NJ. All rights reserved. This publication is protected by Copyright and written permission should be obtained from the publisher prior to any prohibited reproduction, storage in a retrieval system, or transmission in any form or by any means, electronic, mechanical, photocopying, recording, or likewise. For information regarding permission(s), write to: Rights and Permissions Department, Pearson Education, Inc., Upper Saddle River, NJ 07458.
-
5024 CHAPTER 5. THE ROOT-LOCUS DESIGN METHOD
-6 -5 -4 -3 -2 -1 0 1-4
-3
-2
-1
0
1
2
3
40.140.30.440.580.720.84
0.92
0.98
0.140.30.440.580.720.84
0.92
0.98
123456
R oot Locus
R eal Axis
Imag
inar
y Ax
is
Root locus with 0.5 damping marked
2015 Pearson Education, Inc., Upper Saddle River, NJ. All rights reserved. This publication is protected by Copyright and written permission should be obtained from the publisher prior to any prohibited reproduction, storage in a retrieval system, or transmission in any form or by any means, electronic, mechanical, photocopying, recording, or likewise. For information regarding permission(s), write to: Rights and Permissions Department, Pearson Education, Inc., Upper Saddle River, NJ 07458.
-
5025
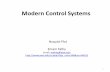
Problems and solutions for Section 5.315. A simplied model of the longitudinal motion of a certain helicopter near
hover has the transfer function
G(s) =9:8(s2 0:5s+ 6:3)
(s+ 0:66)(s2 0:24s+ 0:15) :
and the characteristic equation 1 + Dc(s)G(s) = 0. Let Dc(s) = kp atrst.
(a) Compute the departure and arrival angles at the complex poles andzeros.
(b) Sketch the root locus for this system for parameter K = 9:8kp. Useaxes -4 x 4; 3 y 3;
(c) Verify your answer using Matlab. Use the command axis([-4 4 -3 3])to get the right scales.
(d) Suggest a practical (at least as many poles as zeros) alternative com-pensation Dc(s) which will at least result in a stable system.
Solution:
(a) d = 180 25:26 90 + 266:5 + 92:6 = 63:83;a = 90 + 86:5 + 69:9 + 87:4 180 = 26:11
(b) (c)
-4 -3 -2 -1 0 1 2 3 4-3
-2
-1
0
1
2
3
Root Locus
Real Axis
Imag
inar
y A
xis
Problem 5.15(b)(c)
2015 Pearson Education, Inc., Upper Saddle River, NJ. All rights reserved. This publication is protected by Copyright and written permission should be obtained from the publisher prior to any prohibited reproduction, storage in a retrieval system, or transmission in any form or by any means, electronic, mechanical, photocopying, recording, or likewise. For information regarding permission(s), write to: Rights and Permissions Department, Pearson Education, Inc., Upper Saddle River, NJ 07458.
-
5026 CHAPTER 5. THE ROOT-LOCUS DESIGN METHOD
(d) For this problem a double lead is needed to bring the roots into theleft half-plane. The plot shows the rootlocus for control for. Let
Dc(s) =(s+ :66)(s+ :33)
(s+ 5)2:
-4 -3 -2 -1 0 1 2 3 4-3
-2
-1
0
1
2
3
Root Locus
Real Axis
Imag
inar
y A
xis
Problem 5.15(d)
2015 Pearson Education, Inc., Upper Saddle River, NJ. All rights reserved. This publication is protected by Copyright and written permission should be obtained from the publisher prior to any prohibited reproduction, storage in a retrieval system, or transmission in any form or by any means, electronic, mechanical, photocopying, recording, or likewise. For information regarding permission(s), write to: Rights and Permissions Department, Pearson Education, Inc., Upper Saddle River, NJ 07458.
-
5027
Figure 5.49: Control system for Problem 5.16
16. For the system given in Fig. 5.49,
(a) Plot the root locus of the characteristic equation as the parameterK1 is varied from 0 to 1 with = 2. Give the corresponding L(s);a(s); and b(s):
(b) Repeat part (a) with = 5. Is there anything special about thisvalue?
(c) Repeat part (a) for xed K1 = 2 with the parameter K = varyingfrom 0 to 1.
Solution:Use block diagram reduction to nd the characteristic equation of theclosed-loop system:
1 +
10K1
s(s+ 10)(s+ )
0:1
s(s+ )
K1+ 0:2s+ 1
= 0
or s(s+ )(s+ 11) + 2K1(s+ 5) = 0
The root locus for each part is attached at the end.
(a) Substituting = 2 and divide the equation above up into terms withand without K1 to nd Evans form:
1 +K12(s+ 5)
s(s+ 2)(s+ 11)= 0 ) L(s) = 2(s+ 5)
s(s+ 2)(s+ 11)
(b) Substituting = 5 and rewrite the equation in Evans form withrespect to K1:
1 +K12(s+ 5)
s(s+ 5)(s+ 11)= 0 ) L(s) = 2
s(s+ 11)
We have a pole-zero cancellation at s = 5.
2015 Pearson Education, Inc., Upper Saddle River, NJ. All rights reserved. This publication is protected by Copyright and written permission should be obtained from the publisher prior to any prohibited reproduction, storage in a retrieval system, or transmission in any form or by any means, electronic, mechanical, photocopying, recording, or likewise. For information regarding permission(s), write to: Rights and Permissions Department, Pearson Education, Inc., Upper Saddle River, NJ 07458.
-
5028 CHAPTER 5. THE ROOT-LOCUS DESIGN METHOD
(c) Substituting K1 = 2 and divide the characteristic equation up intoterms with and without to nd Evans form:
1 + s(s+ 11)
s2(s+ 11) + 4(s+ 5)= 0 ) L(s) = s(s+ 11)
s3 + 11s2 + 4s+ 20
-15 -10 -5 0 5-40
-30
-20
-10
0
10
20
30
40
plot a
Real Axis
Imag
inar
y Ax
is
-40 -30 -20 -10 0 10 20-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
plot b
Real Axis
Imag
inar
y Ax
is
-30 -25 -20 -15 -10 -5 0 5 10-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
plot c
Real Axis
Imag
inar
y Ax
is
Solution for Problem 5.16
2015 Pearson Education, Inc., Upper Saddle River, NJ. All rights reserved. This publication is protected by Copyright and written permission should be obtained from the publisher prior to any prohibited reproduction, storage in a retrieval system, or transmission in any form or by any means, electronic, mechanical, photocopying, recording, or likewise. For information regarding permission(s), write to: Rights and Permissions Department, Pearson Education, Inc., Upper Saddle River, NJ 07458.
-
5029
Figure 5.50: Control system for Problem 5.17
17. For the system shown in Fig. 5.50, determine the characteristic equationand sketch the root locus of it with respect to positive values of the pa-rameter c. Give L(s), a(s); and b(s) and be sure to show with arrows thedirection in which c increases on the locus.
Solution:
L(s) =s2 + 9
s3 + 144s=a(s)
b(s)
Root Locus
Real Ax is
Imag
Axis
-18 -16 -14 -12 -10 -8 -6 -4 -2 0
-10
-5
0
5
10
Solution for Problem 5.17
2015 Pearson Education, Inc., Upper Saddle River, NJ. All rights reserved. This publication is protected by Copyright and written permission should be obtained from the publisher prior to any prohibited reproduction, storage in a retrieval system, or transmission in any form or by any means, electronic, mechanical, photocopying, recording, or likewise. For information regarding permission(s), write to: Rights and Permissions Department, Pearson Education, Inc., Upper Saddle River, NJ 07458.
-
5030 CHAPTER 5. THE ROOT-LOCUS DESIGN METHOD
18. Suppose you are given a system with the transfer function
L(s) =(s+ z)
(s+ p)2;
where z and p are real and z > p. Show that the root locus for 1+KL(s) =0 with respect to K is a circle centered at z with radius given by
r = (z p):
Hint: Assume s + z = rej and show that L(s) is real and negative forreal under this assumption.
Solution:
Assume s+ z = (z p)ej. Then L(s) can be written as:
L =(z p)ej
((z p)ej z + p)2
=(z p)ej
(z p)2(ej 1)2
=1
(z p)(4)ej=2 ej=2
2j
2=
1
4(z p)1
(sin(=2))2
Because z > p; this function is real and negative for real and thereforethese points are on the locus.
2015 Pearson Education, Inc., Upper Saddle River, NJ. All rights reserved. This publication is protected by Copyright and written permission should be obtained from the publisher prior to any prohibited reproduction, storage in a retrieval system, or transmission in any form or by any means, electronic, mechanical, photocopying, recording, or likewise. For information regarding permission(s), write to: Rights and Permissions Department, Pearson Education, Inc., Upper Saddle River, NJ 07458.
-
5031
19. The loop transmission of a system has two poles at s = 1 and a zeroat s = 2. There is a third real-axis pole p located somewhere to theleft of the zero. Several dierent root loci are possible, depending on theexact location of the third pole. The extreme cases occur when the poleis located at innity or when it is located at s = 2. Give values for pand sketch the three distinct types of loci.
Solution:
Root Locus
Real Axis
Imag
Axi
s
-100 -80 -60 -40 -20 0
-20
-10
0
10
20 pole is at negativ e inf inity
Root Locus
Real Axis
Imag
Axi
s
-2 -1.5 -1 -0.5 0-0.5
0
0.5
pole is at s=-2
Root Locus
Real Axis
Imag
Axi
s
-3 -2.5 -2 -1.5 -1 -0.5 0-5
0
5
pole is slightly to the lef t of zero
Solution for Problem 5.19
2015 Pearson Education, Inc., Upper Saddle River, NJ. All rights reserved. This publication is protected by Copyright and written permission should be obtained from the publisher prior to any prohibited reproduction, storage in a retrieval system, or transmission in any form or by any means, electronic, mechanical, photocopying, recording, or likewise. For information regarding permission(s), write to: Rights and Permissions Department, Pearson Education, Inc., Upper Saddle River, NJ 07458.
-
5032 CHAPTER 5. THE ROOT-LOCUS DESIGN METHOD
20. For the feedback conguration of Fig. 5.51, use asymptotes, center ofasymptotes, angles of departure and arrival, and the Routh array to sketchroot loci for the characteristic equations of the listed feedback controlsystems versus the parameter K: Use Matlab to verify your results.
(a) G(s) =K
s(s+ 1 + 3j)(s+ 1 3j) ; H(s) =s+ 2
s+ 8
(b) G(s) =K
s2; H(s) =
s+ 1
s+ 3
(c) G(s) =K(s+ 5)
(s+ 1); H(s) =
s+ 7
s+ 3
(d) G(s) =K(s+ 3 + 4j)(s+ 3 4j)s(s+ 1 + 2j)(s+ 1 2j) ; H(s) = 1 + 3s
Figure 5.51: Feedback system for Problem 5.20
Solution:The root locus for each part is attached at the end.
(a)
L(s) =(s+ 2)
s(s+ 1 + 3j)(s+ 1 3j)(s+ 8)- Asymptotes: 4 1 = 3- Center of asymptotes: = 2:67- Angle of asymptotoes: = 60; 180- Angle of departure: d = 29:93 at s = 1 + 3j- Imaginary-axis crossings:
(s) = s4 + 10s3 + 26s2 + (80 +K) s+ 2K
s4 : 1 26 2Ks3 : 10 80 +Ks2 : 18 K10 2Ks : K
2100K+14400180K
s0 : 2K
Rouths test gives 0 < K < 80 for stability. Solving (s) withK = 80, the crossings are s = 4j.
2015 Pearson Education, Inc., Upper Saddle River, NJ. All rights reserved. This publication is protected by Copyright and written permission should be obtained from the publisher prior to any prohibited reproduction, storage in a retrieval system, or transmission in any form or by any means, electronic, mechanical, photocopying, recording, or likewise. For information regarding permission(s), write to: Rights and Permissions Department, Pearson Education, Inc., Upper Saddle River, NJ 07458.
-
5033
(b)
L(s) =(s+ 1)
s2(s+ 3)
- Asymptotes: 3 1 = 2- Center of asymptotes: = 1- Angle of asymptotoes: = 90- Imaginary-axis crossings:
(s) = s3 + 3s2 +Ks+K
s3 : 1 Ks2 : 3 Ks : 2K3s0 : K
Rouths test gives K > 0 for stability. Solving (s) with K = 0,the crossings are s = 0.
(c)
L(s) =(s+ 5)(s+ 7)
(s+ 1)(s+ 3)
- Asymptotes: 2 2 = 0- Breakin/Breakaway:
dL(s)
ds= 0 =) 8s3 + 64s+ 104 = 0
Therefore the breakin/breakaway points are at s = 2:27;5:73.(d)
L(s) =(1 + 3s) (s+ 3 + 4j) (s+ 3 4j)
s(s+ 1 + 2j)(s+ 1 2j)
- Asymptotes: 3 3 = 0- Angle of departure: d = 108:4 at s = 1 + 2j- Angle of arrival: a = 23:4 at s = 3 + 4j
2015 Pearson Education, Inc., Upper Saddle River, NJ. All rights reserved. This publication is protected by Copyright and written permission should be obtained from the publisher prior to any prohibited reproduction, storage in a retrieval system, or transmission in any form or by any means, electronic, mechanical, photocopying, recording, or likewise. For information regarding permission(s), write to: Rights and Permissions Department, Pearson Education, Inc., Upper Saddle River, NJ 07458.
-
5034 CHAPTER 5. THE ROOT-LOCUS DESIGN METHOD
Root Locus
Real Axis
Imag
Axi
s
-10 -5 0
-5
0
5plot a
Root Locus
Real Axis
Imag
Axi
s
-3 -2.5 -2 -1.5 -1 -0.5 0
-5
0
5plot b
Root Locus
Real Axis
Imag
Axi
s
-6 -4 -2 0
-1.5
-1
-0.5
0
0.5
1
1.5plot c
Root Locus
Real Axis
Imag
Axi
s
-3 -2.5 -2 -1.5 -1 -0.5 0-4
-2
0
2
4
plot d
Solution for Problem 5.20
2015 Pearson Education, Inc., Upper Saddle River, NJ. All rights reserved. This publication is protected by Copyright and written permission should be obtained from the publisher prior to any prohibited reproduction, storage in a retrieval system, or transmission in any form or by any means, electronic, mechanical, photocopying, recording, or likewise. For information regarding permission(s), write to: Rights and Permissions Department, Pearson Education, Inc., Upper Saddle River, NJ 07458.
-
5035
21. Consider the system in Fig. 5.52.
Figure 5.52: Feedback system for Problem 5.21
(a) Using Rouths stability criterion, determine all values of K for whichthe system is stable.
(b) Use Matlab to nd the root locus versus K. Find the values for Kat imaginary-axis crossings.
Solution:
(a)
(s) = s4 + 5s3 + 9s2 + (5 +K)s+ 3K
s4 : 1 9 3Ks3 : 5 5 +Ks2 : 8 K5 3Ks : K
240K+20040K
s0 : 3K
For the system to be stable, 0 < K < 4:49.
(b) The imaginary axis crossings are at s = 1:38j when K = 4:49.Root locus is shown below.
Root Locus
Real Axis
Imag
Axi
s
-7 -6 -5 -4 -3 -2 -1 0 1 2 3
-6
-4
-2
0
2
4
6
Root locus for Problem 5.21
2015 Pearson Education, Inc., Upper Saddle River, NJ. All rights reserved. This publication is protected by Copyright and written permission should be obtained from the publisher prior to any prohibited reproduction, storage in a retrieval system, or transmission in any form or by any means, electronic, mechanical, photocopying, recording, or likewise. For information regarding permission(s), write to: Rights and Permissions Department, Pearson Education, Inc., Upper Saddle River, NJ 07458.
-
5036 CHAPTER 5. THE ROOT-LOCUS DESIGN METHOD
Problems and solutions for Section 5.4
22. LetG(s) =
1
(s+ 2)(s+ 3)and Dc(s) = K
s+ a
s+ b:
Using root-locus techniques, nd values for the parameters a; b, and K ofthe compensation Dc(s) that will produce closed-loop poles at s = 1 jfor the system shown in Fig. 5.53.
Figure 5.53: Unity feedback system for Problems 5.22, 5.28, and 5.33
Solution:
Since the desired poles are slower than the plant, we will use PI control.The solution is to cancel the pole at -3 with the zero and set the gain toK = 2: Thus, a = 3; b = 0; and K = 2:
2015 Pearson Education, Inc., Upper Saddle River, NJ. All rights reserved. This publication is protected by Copyright and written permission should be obtained from the publisher prior to any prohibited reproduction, storage in a retrieval system, or transmission in any form or by any means, electronic, mechanical, photocopying, recording, or likewise. For information regarding permission(s), write to: Rights and Permissions Department, Pearson Education, Inc., Upper Saddle River, NJ 07458.
-
5037
23. Suppose that in Fig. 5.53,
G(s) =1
s(s2 + 2s+ 5)and Dc(s) =
K
s+ 2:
Without using Matlab, sketch the root locus with respect to K of thecharacteristic equation for the closed-loop system, paying particular at-tention to points that generate multiple roots. Find the value of K atthat point, state what the location of the multiple roots is, and how manymultiple roots there are.
Solution:The root locus for the system is attached at the end.
(s) =1
s(s+ 2)(s2 + 2s+ 5)
- Asymptotes: 4 0 = 4- Center of asymptotes: = 1- Angle of asymptotoes: = 45;135
- Angle of departure: d = 90 at s = 1 + 2j- Imaginary-axis crossings:
(s) = s4 + 4s3 + 9s2 + 10s+K
s4 : 1 9 Ks3 : 4 10s2 : 6:5 Ks : 10 8K13s0 : K
Rouths test gives 0 < K < 16:25 for stability. Solving (s) withK = 16:25, the crossings are s = 1:58j.
- Location of multiple roots:If a polynomial has repeated roots, its derivative is equal to zero atthe multiple roots. Therefore
d(s)
ds= 4s3 + 12s2 + 18s+ 10 = 0
Thus the repeated roots are at s = 1; 1 1:225j. Plugging theroots into the characteristic equation, the corresponding value of Kis K = 4; 16:25, respectively.
2015 Pearson Education, Inc., Upper Saddle River, NJ. All rights reserved. This publication is protected by Copyright and written permission should be obtained from the publisher prior to any prohibited reproduction, storage in a retrieval system, or transmission in any form or by any means, electronic, mechanical, photocopying, recording, or likewise. For information regarding permission(s), write to: Rights and Permissions Department, Pearson Education, Inc., Upper Saddle River, NJ 07458.
-
5038 CHAPTER 5. THE ROOT-LOCUS DESIGN METHOD
-4 -3 -2 -1 0 1 2-4
-3
-2
-1
0
1
2
3
4
Root Locus
Real Axis
Imag
inar
y A
xis
Root locus for Problem 5.23
2015 Pearson Education, Inc., Upper Saddle River, NJ. All rights reserved. This publication is protected by Copyright and written permission should be obtained from the publisher prior to any prohibited reproduction, storage in a retrieval system, or transmission in any form or by any means, electronic, mechanical, photocopying, recording, or likewise. For information regarding permission(s), write to: Rights and Permissions Department, Pearson Education, Inc., Upper Saddle River, NJ 07458.
-
5039
24. Suppose the unity feedback system of Fig. 5.53 has an open-loop plantgiven by G(s) = 1=s2. Design a lead compensation Dc(s) = K s+zs+p to beadded in series with the plant so that the dominant poles of the closed-loopsystem are located at s = 2 2j.
Solution:
Setting the pole of the lead to be at p = 20; the zero is at z = 1:78with a gain of K = 72: The locus is plotted below.
Root Locus
Real Axis
Imag
Axi
s
-7 -6 -5 -4 -3 -2 -1 0 1-3
-2
-1
0
1
2
3
7 6 5 4 3 2 1
0.99
0.965
0.920.84 0.74 0.6 0.42 0.22
0.99
0.965
0.920.84 0.74 0.6 0.42 0.22
Root locus for Problem 5.24
2015 Pearson Education, Inc., Upper Saddle River, NJ. All rights reserved. This publication is protected by Copyright and written permission should be obtained from the publisher prior to any prohibited reproduction, storage in a retrieval system, or transmission in any form or by any means, electronic, mechanical, photocopying, recording, or likewise. For information regarding permission(s), write to: Rights and Permissions Department, Pearson Education, Inc., Upper Saddle River, NJ 07458.
-
5040 CHAPTER 5. THE ROOT-LOCUS DESIGN METHOD
25. Assume that the unity feedback system of Fig. 5.53 has the open-loopplant
G(s) =1
s(s+ 3)(s+ 6):
Design a lag compensation to meet the following specications:
The step response settling time is to be less than 5 sec. The step response overshoot is to be less than 17%. The steady-state error to a unit ramp input must not exceed 10%.
Solution:The overshoot specication requires that damping be 0:5 and thesettling time requires that !n > 1:8: From the root locus plottedbelow, these can be met at K = 28 where the !n = 2: With thisgain, the Kv = 28=18 = 1:56: To get a Kv = 10; we need a lag gainof about 6:5: Selecting the lag zero to be at 0:1 requires the poleto be at 0:1=6:5 = 0:015: To meet the overshoot specications, it isnecessary to select a smaller K and set p = 0:01: Other choices areof course possible. The step response of this design is plotted below.
Root Locus
Real Axis
Imag
Axi
s
-10 -5 0-6
-4
-2
0
2
4
6
12 10 8 6 4 2
0.99
0.965
0.920.84 0.74 0.6 0.42 0.22
0.99
0.965
0.920.84 0.74 0.6 0.42 0.22
0 5 10 15 20 250
0.2
0.4
0.6
0.8
1
1.2
1.4
Root locus and step response for Problem 5.25
2015 Pearson Education, Inc., Upper Saddle River, NJ. All rights reserved. This publication is protected by Copyright and written permission should be obtained from the publisher prior to any prohibited reproduction, storage in a retrieval system, or transmission in any form or by any means, electronic, mechanical, photocopying, recording, or likewise. For information regarding permission(s), write to: Rights and Permissions Department, Pearson Education, Inc., Upper Saddle River, NJ 07458.
-
5041
26. A numerically controlled machine tool positioning servomechanism has anormalized and scaled transfer function given by
G(s) =1
s(s+ 1):
Performance specications of the system in the unity feedback congu-ration of Fig. 5.53 are satised if the closed-loop poles are located ats = 1 jp3.
(a) Show that this specication cannot be achieved by choosing propor-tional control alone, Dc(s) = kp.
(b) Design a lead compensator Dc(s) = K s+zs+p that will meet the speci-cation.
Solution:
(a) With proportional control, the complex poles have real part at s =0:5.
(b) To design a lead, we select the pole to be at p = 10 and nd thezero and gain to be z = 3; K = 12.
2015 Pearson Education, Inc., Upper Saddle River, NJ. All rights reserved. This publication is protected by Copyright and written permission should be obtained from the publisher prior to any prohibited reproduction, storage in a retrieval system, or transmission in any form or by any means, electronic, mechanical, photocopying, recording, or likewise. For information regarding permission(s), write to: Rights and Permissions Department, Pearson Education, Inc., Upper Saddle River, NJ 07458.
-
5042 CHAPTER 5. THE ROOT-LOCUS DESIGN METHOD
27. A servomechanism position control has the plant transfer function
G(s) =10
s(s+ 1)(s+ 10):
You are to design a series compensation transfer function Dc(s) in theunity feedback conguration to meet the following closed-loop specica-tions:
The response to a reference step input is to have no more than 16%overshoot.
The response to a reference step input is to have a rise time of nomore than 0.4 sec.
The steady-state error to a unit ramp at the reference input must beless than 0.05.
(a) Design a lead compensation that will cause the system to meet thedynamic response specications, ignoring the error requirement.
(b) What is the velocity constant Kv for your design? Does it meet theerror specication?
(c) Design a lag compensation to be used in series with the lead youhave designed to cause the system to meet the steady-state errorspecication.
(d) Give the Matlab plot of the root locus of your nal design.
(e) Give the Matlab response of your nal design to a reference step.
Solution:
(a) Setting the lead pole at p = 60 and the zero at z = 1; the dynamicspecications are met with a gain of 245. With the lead compensator,the overshoot is reduced to 3:64% and the rise time is 0:35 sec.
(b)
Kv = lims!0
sGDc = lims!0
s10
s(s+ 1)(s+ 10)
245(s+ 1)
(s+ 6)= 4:083
(c) To meet the steady-state requirement, we need a new Kv = 20; whichis an increase of a factor of 5. If we set the lag zero at z = 0:4; thepole needs to be at p = 0:08:
(d) The root locus is plotted below.
(e) The step response is plotted below.
2015 Pearson Education, Inc., Upper Saddle River, NJ. All rights reserved. This publication is protected by Copyright and written permission should be obtained from the publisher prior to any prohibited reproduction, storage in a retrieval system, or transmission in any form or by any means, electronic, mechanical, photocopying, recording, or likewise. For information regarding permission(s), write to: Rights and Permissions Department, Pearson Education, Inc., Upper Saddle River, NJ 07458.
-
5043
-10 -8 -6 -4 -2 0 2
-4
-3
-2
-1
0
1
2
3
4 0.220.420.60.740.840.92
0.965
0.99
0.220.420.60.740.840.92
0.965
0.99
246810
Lead root locus
Real Axis
Imag
inar
y A
xis
0 0.5 1 1.50
0.5
1
1.5
Lead Step response
Time (sec)
Am
plitu
de
-10 -8 -6 -4 -2 0 2
-4
-3
-2
-1
0
1
2
3
4 0.840.92
0.965
0.99
0.220.420.60.740.840.92
0.965
0.99
246810
0.220.420.60.74
Lead-lag root locus
Real Axis
Imag
inar
y A
xis
0 1 2 3 4 5 6 70
0.5
1
1.5
Lead-lag step response
Time (sec)
Am
plitu
de
Solution to Problem 5.27
2015 Pearson Education, Inc., Upper Saddle River, NJ. All rights reserved. This publication is protected by Copyright and written permission should be obtained from the publisher prior to any prohibited reproduction, storage in a retrieval system, or transmission in any form or by any means, electronic, mechanical, photocopying, recording, or likewise. For information regarding permission(s), write to: Rights and Permissions Department, Pearson Education, Inc., Upper Saddle River, NJ 07458.
-
5044 CHAPTER 5. THE ROOT-LOCUS DESIGN METHOD
28. Assume the closed-loop system of Fig. 5.53 has a feed forward transferfunction G(s) given by
G(s) =1
s(s+ 2):
Design a lag compensation so that the dominant poles of the closed-loopsystem are located at s = 1j and the steady-state error to a unit rampinput is less than 0.2.
Solution:
The poles can be put in the desired location with proportional controlalone, with a gain of kp = 2 resulting in aKv = 1: To get aKv = 5; we add
a compensation with zero at 0:1 and a pole at 0:02: Dc(s) = 2 s+ 0:1s+ 0:02
:
2015 Pearson Education, Inc., Upper Saddle River, NJ. All rights reserved. This publication is protected by Copyright and written permission should be obtained from the publisher prior to any prohibited reproduction, storage in a retrieval system, or transmission in any form or by any means, electronic, mechanical, photocopying, recording, or likewise. For information regarding permission(s), write to: Rights and Permissions Department, Pearson Education, Inc., Upper Saddle River, NJ 07458.
-
5045
29. An elementary magnetic suspension scheme is depicted in Fig. 5.54. Forsmall motions near the reference position, the voltage e on the photodetector is related to the ball displacement x(in meters) by e = 100x.The upward force (in newtons) on the ball caused by the current i (inamperes) may be approximated by f = 0:5i + 20x. The mass of the ballis 20 g, and the gravitational force is 9.8 N/kg. The power amplier is avoltage-to-current device with an output (in amperes) of i = u+ V0.
Figure 5.54: Elementary magnetic suspension
(a) Write the equations of motion for this setup.
(b) Give the value of the bias V0 that results in the ball being in equilib-rium at x = 0.
(c) What is the transfer function from u to e?
(d) Suppose the control input u is given by u = Ke. Sketch the rootlocus of the closed-loop system as a function of K.
(e) Assume that a lead compensation is available in the form UE =Dc(s) = K
s+zs+p : Give values of K; z; and p that yields improved
performance over the one proposed in part (d).
Solution:
(a) The equations of motion can be written as
mx =X
forces
= 0:5i+ 20xmg = 0:5(u+ Vo) + 20xmgSubstituting numbers, we have
0:02x = 0:5(u+ Vo) + 20x 0:196:
2015 Pearson Education, Inc., Upper Saddle River, NJ. All rights reserved. This publication is protected by Copyright and written permission should be obtained from the publisher prior to any prohibited reproduction, storage in a retrieval system, or transmission in any form or by any means, electronic, mechanical, photocopying, recording, or likewise. For information regarding permission(s), write to: Rights and Permissions Department, Pearson Education, Inc., Upper Saddle River, NJ 07458.
-
5046 CHAPTER 5. THE ROOT-LOCUS DESIGN METHOD
(b) In equilibrium at x = 0, x = 0 and u = 0. Therefore to have the biascancel gravity, 0:5Vo 0:196 = 0 or Vo = 0:392:
(c) Taking Laplace transforms of the equation and substituting e = 100x;
E
U=
2500
s2 1000
(d) The locus starts at the two poles symmetric to the imaginary axis,meet at the origin and cover the imaginary axis. The locus is plottedbelow.
-40 -30 -20 -10 0 10 20 30 40-40
-30
-20
-10
0
10
20
30
40
Root Locus
Real Axis
Imag
inar
y Ax
is
Root loci for Problem 5.29d
(e) Since the system with a proportional gain is on the stability bound-ary, any lead will improve its performance. For example, we canpick z =
p1000 to cancel one of the open-loop plant poles, and pick
p = 150 to pull the locus into the left-hand plane. K can be selectedto give a desired amount of damping, say 0:7. K = 4:75 gives adamping of 0:7. See the plot below.
2015 Pearson Education, Inc., Upper Saddle River, NJ. All rights reserved. This publication is protected by Copyright and written permission should be obtained from the publisher prior to any prohibited reproduction, storage in a retrieval system, or transmission in any form or by any means, electronic, mechanical, photocopying, recording, or likewise. For information regarding permission(s), write to: Rights and Permissions Department, Pearson Education, Inc., Upper Saddle River, NJ 07458.
-
5047
-160 -140 -120 -100 -80 -60 -40 -20 0 20 40-50
-40
-30
-20
-10
0
10
20
30
40
50
Root Locus
Real Axis
Imag
inar
y Ax
is
Root loci for Problem 5.29e
2015 Pearson Education, Inc., Upper Saddle River, NJ. All rights reserved. This publication is protected by Copyright and written permission should be obtained from the publisher prior to any prohibited reproduction, storage in a retrieval system, or transmission in any form or by any means, electronic, mechanical, photocopying, recording, or likewise. For information regarding permission(s), write to: Rights and Permissions Department, Pearson Education, Inc., Upper Saddle River, NJ 07458.
-
5048 CHAPTER 5. THE ROOT-LOCUS DESIGN METHOD
30. A certain plant with the non minimum phase transfer function
G(s) =4 2s
s2 + s+ 9;
is in a unity positive feedback system with the controller transfer functionDc(s):
(a) Use Matlab to determine a (negative) value for Dc(s) = K so thatthe closed-loop system with negative feedback has a damping ratio = 0:707.
(b) Use Matlab to plot the systems response to a reference step.
Solution:
(a) With all the negatives, the problem statement might be confusing.With the G(s) as given, Matlab needs to plot the negative locus,which is the regular positive locus for G: The locus is plotted below.The value of gain for closed loop roots at damping of 0:7 isK = 1:04
(b) The nal value of the step response plotted below is 0:887. To geta positive output we would use a positive gain in positive feedback.
Root Locus
Real Axis
Imag
Axis
-10 -8 -6 -4 -2 0 2
-4
-3
-2
-1
0
1
2
3
4
10 8 6 4 2
0.99
0.965
0.92 0.84 0.74 0.6 0.42 0.22
0.99
0.965
0.92 0.84 0.74 0.6 0.42 0.22Step Response
Time (sec)
Ampl
itude
0 1 2 3 4-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
Solutions for Problem 5.30
2015 Pearson Education, Inc., Upper Saddle River, NJ. All rights reserved. This publication is protected by Copyright and written permission should be obtained from the publisher prior to any prohibited reproduction, storage in a retrieval system, or transmission in any form or by any means, electronic, mechanical, photocopying, recording, or likewise. For information regarding permission(s), write to: Rights and Permissions Department, Pearson Education, Inc., Upper Saddle River, NJ 07458.
-
5049
31. Consider the rocket-positioning system shown in Fig. 5.55.
Figure 5.55: Block diagram for rocket-positioning control system
(a) Show that if the sensor that measures x has a unity transfer function,the lead compensator
H(s) = Ks+ 2
s+ 4
stabilizes the system.
(b) Assume that the sensor transfer function is modeled by a single polewith a 0:1 sec time constant and unity DC gain. Using the root-locusprocedure, nd a value for the gain K that will provide the maximumdamping ratio.
Solution:
(a) The root locus is plotted below and lies entirely in the left-half plane.So the system is stable for all K.
(b) At maximum damping, the gain is K = 6:25 but the damping of thecomplex poles is only 0:073: A practical design would require muchmore lead.
Root Locus
Real Axis
Imag
Axi
s
-4 -3 -2 -1 0
-10
-5
0
5
10
12
10
8
6
4
2
12
10
8
6
4
2
0.65
0.4
0.26 0.19 0.13 0.09 0.06 0.03
0.65
0.4
0.26 0.19 0.13 0.09 0.06 0.03Root Locus
Real Axis
Imag
Axi
s
-3 -2 -1 0 1-3
-2
-1
0
1
2
3
3
2.5
2
1.5
1
0.5
3
2.5
2
1.5
1
0.5
0.97
0.88
0.760.62 0.48 0.36 0.24 0.12
0.97
0.88
0.760.62 0.48 0.36 0.24 0.12
Loci for Problem 5.31
2015 Pearson Education, Inc., Upper Saddle River, NJ. All rights reserved. This publication is protected by Copyright and written permission should be obtained from the publisher prior to any prohibited reproduction, storage in a retrieval system, or transmission in any form or by any means, electronic, mechanical, photocopying, recording, or likewise. For information regarding permission(s), write to: Rights and Permissions Department, Pearson Education, Inc., Upper Saddle River, NJ 07458.
-
5050 CHAPTER 5. THE ROOT-LOCUS DESIGN METHOD
32. For the system in Fig. 5.56:
Figure 5.56: Control system for Problem 5.32
(a) Find the locus of closed-loop roots with respect to K.
(b) Find the maximum value ofK for which the system is stable. AssumeK = 2 for the remaining parts of this problem.
(c) What is the steady-state error (e = r y) for a step change in r?(d) What is the steady-state error in y for a constant disturbance w1?
(e) What is the steady-state error in y for a constant disturbance w2?
(f) If you wished to have more damping, what changes would you maketo the system?
Solution:
(a) For the locus, L(s) =100(s+ 1)
s2(s2 + 12s+ 40): The locus is plotted below.
Root Locus
Real Axis
Imag
Axi
s
-14 -12 -10 -8 -6 -4 -2 0 2-6
-4
-2
0
2
4
6
14 12 10 8 6 4 2
0.99
0.965
0.920.84 0.74 0.6 0.42 0.22
0.99
0.965
0.920.84 0.74 0.6 0.42 0.22
Locus for Problem 5.32
2015 Pearson Education, Inc., Upper Saddle River, NJ. All rights reserved. This publication is protected by Copyright and written permission should be obtained from the publisher prior to any prohibited reproduction, storage in a retrieval system, or transmission in any form or by any means, electronic, mechanical, photocopying, recording, or likewise. For information regarding permission(s), write to: Rights and Permissions Department, Pearson Education, Inc., Upper Saddle River, NJ 07458.
-
5051
(b) The maximum value of K for stability is K = 3:36:
(c) The transfer function from R to Y is
Y
R=
200
s2(s2 + 12s+ 40) + 200(s+ 1):
Therefore the steady-state error for a step change in r is
estep(1) = lims!0
s
1 Y
R
1
s
= lims!0
s2(s2 + 12s+ 40) + 200s
s2(s2 + 12s+ 40) + 200(s+ 1)= 0
(d) The transfer function from W1 to Y is:
Y
W1=
100s2
s2(s2 + 12s+ 40) + 200(s+ 1)
Therefore the steady-state error for a constant disturbance w1 is
estep(1) = lims!0
s
YW1
1
s= 0
(e) The transfer function from W2 to Y is:
Y
W2=
100
s2(s2 + 12s+ 40) + 200(s+ 1)
Therefore the steady-state error for a constant disturbance w1 is
estep(1) = lims!0
s
YW2
1
s= 0:5
(f) To get more damping in the closed-loop response, the controller needsto have a lead compensation.
2015 Pearson Education, Inc., Upper Saddle River, NJ. All rights reserved. This publication is protected by Copyright and written permission should be obtained from the publisher prior to any prohibited reproduction, storage in a retrieval system, or transmission in any form or by any means, electronic, mechanical, photocopying, recording, or likewise. For information regarding permission(s), write to: Rights and Permissions Department, Pearson Education, Inc., Upper Saddle River, NJ 07458.
-
5052 CHAPTER 5. THE ROOT-LOCUS DESIGN METHOD
33. Consider the plant transfer function
G(s) =bs+ k
s2[mMs2 + (M +m)bs+ (M +m)k]
to be put in the unity feedback loop of Fig. 5.53. This is the transferfunction relating the input force u(t) and the position y(t) of mass M inthe non-collocated sensor and actuator problem. In this problem, we willuse root-locus techniques to design a controller Dc(s) so that the closed-loop step response has a rise time of less than 0.1 sec and an overshoot ofless than 10%. You may use Matlab for any of the following questions:
(a) Approximate G(s) by assuming that m = 0, and let M = 1, k = 1,b = 0:1, and Dc(s) = K. Can K be chosen to satisfy the performancespecications? Why or why not?
(b) Repeat part (a) assuming Dc(s) = K(s+ z), and show that K and zcan be chosen to meet the specications.
(c) Repeat part (b) but with a practical controller given by the transferfunction
Dc(s) = Kp(s+ z)
s+ p;
and pick p so that the values forK and z computed in part (b) remainmore or less valid.
(d) Now suppose that the small mass m is not negligible, but is given bym = M=10. Check to see if the controller you designed in part (c)still meets the given specications. If not, adjust the controller pa-rameters so that the specications are met.
Solution:
(a) The approximate plant transfer function is G(s) = 1s2 . The locus inthis case is the imaginary axis and cannot meet the specs for any K:
(b) The specs require that > 0:6; !n > 18: Select z = 15 for a start.The locus will be a circle with radius 15: Because of the zero, theovershoot will be increased and Figure 3.29 indicates that wed bettermake the damping greater than 0.7. As a matter of fact, experimen-tation shows that we can lower the overshoot of less than 10% onlyby setting the zero at a low value and putting the poles on the realaxis. The plot shows the result when Dc = 25(s + 4): The resultingovershoot is 9:9% and the rise time is 0:06 sec.
(c) In this case, we pick p = 150; z = 4; and K = 30. Then the resultingovershoot is 9:8% and the rise time is 0:05 sec.
(d) With the resonance present, the only chance we have is to introducea notch as well as a lead. The compensation resulting in the plots
shown is Dc(s) = 12s+ 4
(:01s+ 1)
s2=9:25 + s=9:25 + 1
s2=3600 + s=30 + 1: The overshoot
is 7% and the rise time is 0:04 sec :
2015 Pearson Education, Inc., Upper Saddle River, NJ. All rights reserved. This publication is protected by Copyright and written permission should be obtained from the publisher prior to any prohibited reproduction, storage in a retrieval system, or transmission in any form or by any means, electronic, mechanical, photocopying, recording, or likewise. For information regarding permission(s), write to: Rights and Permissions Department, Pearson Education, Inc., Upper Saddle River, NJ 07458.
-
5053
-60 -50 -40 -30 -20 -10 0
-20
-10
0
10
20
Root Locus
Real Axis
Imag
inar
y A
xis
0 0.2 0.4 0.6 0.8 10
0.5
1
1.5
-60 -50 -40 -30 -20 -10 0
-20
-10
0
10
20
Root Locus
Real Axis
Imag
inar
y A
xis
0 0.2 0.4 0.6 0.8 10
0.5
1
1.5
-10 -8 -6 -4 -2 0 2
-4
-2
0
2
4
Root Locus
Real Axis
Imag
inar
y A
xis
0 0.5 1 1.5 2 2.5 3 3.50
0.5
1
1.5
Root loci and step responses for Problem 5.33
2015 Pearson Education, Inc., Upper Saddle River, NJ. All rights reserved. This publication is protected by Copyright and written permission should be obtained from the publisher prior to any prohibited reproduction, storage in a retrieval system, or transmission in any form or by any means, electronic, mechanical, photocopying, recording, or likewise. For information regarding permission(s), write to: Rights and Permissions Department, Pearson Education, Inc., Upper Saddle River, NJ 07458.
-
5054 CHAPTER 5. THE ROOT-LOCUS DESIGN METHOD
34. Consider the Type 1 system drawn in Fig. 5.57. We would like to de-sign the compensation Dc(s) to meet the following requirements: (1) Thesteady-state value of y due to a constant unit disturbance w should be lessthan 45 , and (2) the damping ratio = 0:7. Using root-locus techniques,
Figure 5.57: Control system for Problem 5.34
(a) Show that proportional control alone is not adequate.
(b) Show that proportional-derivative control will work.
(c) Find values of the gains kp and kD for Dc(s) = kp + kD s that meetthe design specications with at least a 10% margin.
Solution:
(a) To meet the error requirement, we need
ystep(1) = lims!0
sY
W
1
s= lim
s!01
s2 + s+K 0:8:
Thus K must be at least K 1:25. With this K, the damping ratiowill be
=1
2pK
) 0:45
So we cant meet both requirements with proportional control.
(b) With PD control,
ystep(1) = lims!0
sY
W
1
s= lim
s!01
s2 + (1 + kD)s+ kp 0:8:
So the error requirement can be met by setting kp 1:25. Thedamping ratio requirement can be written as
=1 + kD
2pkp
0:7
By choosing kD 1:4pkp 1, we can satisfy both specications.
2015 Pearson Education, Inc., Upper Saddle River, NJ. All rights reserved. This publication is protected by Copyright and written permission should be obtained from the publisher prior to any prohibited reproduction, storage in a retrieval system, or transmission in any form or by any means, electronic, mechanical, photocopying, recording, or likewise. For information regarding permission(s), write to: Rights and Permissions Department, Pearson Education, Inc., Upper Saddle River, NJ 07458.
-
5055
(c) Setting kp = 1:4 and kD = 0:85, we get ystep(1) = 0:714 and =0:782. The root loci and disturbance step response are plotted below.
-5 -4 -3 -2 -1 0 1-1 .5
-1
-0 .5
0
0 .5
1
1 .50 .3 50 .5 80 .7 60 .8 60 .9 20 .9 6
0 .9 84
0 .9 96
0 .3 50 .5 80 .7 60 .8 60 .9 20 .9 6
0 .9 84
0 .9 96
12345
R o ot L oc u s
R e al Ax is
Imag
inar
y Axis
0 1 2 3 4 5 6 70
0 .1
0 .2
0 .3
0 .4
0 .5
0 .6
0 .7
0 .8
Step res pons e fo r p rob lem 5 .34
Time (s e c )
Ampl
itude
Solution for Problem 5.34
2015 Pearson Education, Inc., Upper Saddle River, NJ. All rights reserved. This publication is protected by Copyright and written permission should be obtained from the publisher prior to any prohibited reproduction, storage in a retrieval system, or transmission in any form or by any means, electronic, mechanical, photocopying, recording, or likewise. For information regarding permission(s), write to: Rights and Permissions Department, Pearson Education, Inc., Upper Saddle River, NJ 07458.
-
5056 CHAPTER 5. THE ROOT-LOCUS DESIGN METHOD
35. Using a sample rate of 10 Hz, nd the Dc(z) that is the discrete equivalentto your Dc(s) from Problem 5.34 using the trapezoid rule. Evaluate thetime reponse using Simulink, and determine whether the damping ratiorequirement is met with the digital implementation. (Note: The materialto do this problem is covered in the Appendix W4.5 at www.FPE7e.comor in Chapter 8.) (Note: The rst printing of the 7th edition had anerror in the problem statement. It said to use the Dc(s) from Problem5.7 rather than the correct one, Problem 5.34)
Solution:From Problem 5.34, we have Dc(s) = 0:85s+1:4. The discrete equivalent
for Ts = 0:1 sec is given by substituting s =2
0:1 z 1z + 1
in the Dc(s):
Dd(z) = 0:85 20:1
z 1z + 1
+ 1:4 =18:4z 15:6
z + 1:
To evaluate this discrete controller, we use Simulink to compare the twoimplementations. The results of the step responses are shown below.
0 2 4 6 8 10 12 140
0.2
0.4
0.6
0.8
1
Time (sec)
Continuous designDiscrete equivalent design, T s = 0.1 sec
Solution for Problem 5.35
Note that there is slightly greater overshoot in the digital system, whichsuggests a decrease in the damping due to the digital implementation.However, the damping ratio requirement of 0:7 is still met with the digitalcontrol. It is interesting to note, however, that there is an oscillation ofthe output at 5 Hz, which is half the sample rate. This arises because theuse of the trapezoidal equivalent places a root of the compensation at z= -1, which has created an extraneous oscillatory root in the closed-loopsystem. .This is also a result of having a pure dierentiation in the D(s),
2015 Pearson Education, Inc., Upper Saddle River, NJ. All rights reserved. This publication is protected by Copyright and written permission should be obtained from the publisher prior to any prohibited reproduction, storage in a retrieval system, or transmission in any form or by any means, electronic, mechanical, photocopying, recording, or likewise. For information regarding permission(s), write to: Rights and Permissions Department, Pearson Education, Inc., Upper Saddle River, NJ 07458.
-
5057
i.e., a zero in the numerater with no pole. Using the Matched Pole-Zerodiscrete equivalent will help this situation since it does not create theoscillatory pole in the compensator. Using Matlabs C2D function forthis discrete equivalent produces
Dd2(z) = 9:219z 7:819:
which eliminates the oscillation at 5 hz.
2015 Pearson Education, Inc., Upper Saddle River, NJ. All rights reserved. This publication is protected by Copyright and written permission should be obtained from the publisher prior to any prohibited reproduction, storage in a retrieval system, or transmission in any form or by any means, electronic, mechanical, photocopying, recording, or likewise. For information regarding permission(s), write to: Rights and Permissions Department, Pearson Education, Inc., Upper Saddle River, NJ 07458.
-
5058 CHAPTER 5. THE ROOT-LOCUS DESIGN METHOD
Problems and solutions for Section 5.5
36. Consider the positioning servomechanism system shown in Fig. 5.58, where
ei = Koi; eo = Koo; Ko = 10V=rad;
(note: 1st printing of book had eo = Kpoto; which is not correct)
T = motor torque = Ktia;
km = Kt = torque constant = 0:1 N m=A;Ke = back emf constant = 0:1V secRa = armature resistance = 10;
Gear ratio = 1 : 1;
JL + Jm = total inertia = 103 kg m2;
va = KA(ei ef ):
Figure 5.58: Positioning servomechanism
(a) What is the range of the amplier gain KA for which the system isstable? Estimate the upper limit graphically using a root-locus plot.
(b) Choose a gain KA that gives roots at = 0:7. Where are all threeclosed-loop root locations for this value of KA?
Solution:
(a) Neglecting viscous friction and the eect of inductance, the transferfunction of the DC motor is
oVa
=KtRa
(JL + Jm)s2 +KtKeRa
s=
10
s2 + s
2015 Pearson Education, Inc., Upper Saddle River, NJ. All rights reserved. This publication is protected by Copyright and written permission should be obtained from the publisher prior to any prohibited reproduction, storage in a retrieval system, or transmission in any form or by any means, electronic, mechanical, photocopying, recording, or likewise. For information regarding permission(s), write to: Rights and Permissions Department, Pearson Education, Inc., Upper Saddle River, NJ 07458.
-
5059
From the root locus plotted below, the upper limit of KA for stabilityis 0:11.
-7 -6 -5 -4 -3 -2 -1 0 1-3
-2
-1
0
1
2
30.220.420.60.740.84
0.92
0.965
0.99
0.220.420.60.740.840.92
0.965
0.99
1234567
Root Locus
Real Axis
Imag
inar
y A
xis
Root locus for Problem 5.36
(b) The damping is 0:7 when K = 0:046. For the value of KA, poles areat s = 10:05; 0:475 0:482j:
2015 Pearson Education, Inc., Upper Saddle River, NJ. All rights reserved. This publication is protected by Copyright and written permission should be obtained from the publisher prior to any prohibited reproduction, storage in a retrieval system, or transmission in any form or by any means, electronic, mechanical, photocopying, recording, or likewise. For information regarding permission(s), write to: Rights and Permissions Department, Pearson Education, Inc., Upper Saddle River, NJ 07458.
-
5060 CHAPTER 5. THE ROOT-LOCUS DESIGN METHOD
37. We wish to design a velocity control for a tape-drive servomechanism. Thetransfer function from current I(s) to tape velocity (s) (in millimetersper millisecond per ampere) is
(s)
I(s)=
15(s2 + 0:9s+ 0:8)
(s+ 1)(s2 + 1:1s+ 1):
We wish to design a Type 1 feedback system so that the response to areference step satises
tr 4msec; ts 15msec; Mp 0:05
(a) Use the integral compensator kI=s to achieve Type 1 behavior, andsketch the root-locus with respect to kI . Show on the same plot theregion of acceptable pole locations corresponding to the specica-tions.
(b) Assume a proportional-integral compensator of the form kp(s+)=s,and select the best possible values of kp and you can nd. Sketchthe root-locus plot of your design, giving values for kp and , andthe velocity constant Kv your design achieves. On your plot, indicatethe closed-loop poles with a dot () and include the boundary of theregion of acceptable root locations.
Solution:
(a) The root locus with respect to kI and the step response with kI =0:036 are plotted in the rst row below.
(b) Using rltool, we can choose the location of zeroto pull the locus tothe left-hand plane. This will improve the transient response. Here,the zero was put at s = 1:7, and kp was set to 0:036. The rootlocus and the step response are plotted in the second row below.
With the PI compensator, the closed-loop poles are at s = 0:77490:7774j; 0:54510:5589j, and the closed-loop zeros are at s = 1:7;0:45 0:773j. Thus the velocity constant can be calculated fromTruxals formula.
1
Kv=
nXi=1
1pi+
mXi=1
1
zi) Kv = 0:7344
2015 Pearson Education, Inc., Upper Saddle River, NJ. All rights reserved. This publication is protected by Copyright and written permission should be obtained from the publisher prior to any prohibited reproduction, storage in a retrieval system, or transmission in any form or by any means, electronic, mechanical, photocopying, recording, or likewise. For information regarding permission(s), write to: Rights and Permissions Department, Pearson Education, Inc., Upper Saddle River, NJ 07458.
-
5061
-1.5 -1 -0.5 0 0.5-1
-0.5
0
0.5
1
R oot locus
R eal Axis
Imag
inar
y Ax
is
0 2 4 6 8 100
0.2
0.4
0.6
0.8
1
1.2
Integ ral control with kI = 0.036
T ime (sec)
Am
plitu
de
- 2 -1.5 -1 -0.5 0
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
R oot Locus
R eal Axis
Imag
inar
y Ax
is
0 2 4 6 8 100
0.2
0.4
0.6
0.8
1
PI control with kp = 0.036
T ime (sec)
Am
plitu
de
Solution for Problem 5.37
2015 Pearson Education, Inc., Upper Saddle River, NJ. All rights reserved. This publication is protected by Copyright and written permission should be obtained from the publisher prior to any prohibited reproduction, storage in a retrieval system, or transmission in any form or by any means, electronic, mechanical, photocopying, recording, or likewise. For information regarding permission(s), write to: Rights and Permissions Department, Pearson Education, Inc., Upper Saddle River, NJ 07458.
-
5062 CHAPTER 5. THE ROOT-LOCUS DESIGN METHOD
38. The normalized, scaled equations of a cart as drawn in Fig. 5.59 of massmc holding an inverted uniform pendulum of mass mp and length ` withno friction are
= vy + = v
(5.88)
where = 3mp4(mc+mp) is a mass ratio bounded by 0 < < 0:75. Time is
measured in terms of = !ot where !2o =3g(mc+mp)`(4mc+mp)
: The cart motion, y;
is
Related Documents



![[BK Control Manual] Feedback Control](https://static.cupdf.com/doc/110x72/55cf96c2550346d0338d987f/bk-control-manual-feedback-control.jpg)