Федеральное государственное автономное образовательное учреждение высшего образования «Российский университет транспорта» РУТ (МИИТ) На правах рукописи Пугачев Александр Анатольевич ЭНЕРГОЭФФЕКТИВНЫЕ ЭЛЕКТРОПРИВОДЫ С АСИНХРОННЫМИ ДВИГАТЕЛЯМИ ДЛЯ МАГИСТРАЛЬНЫХ ЛОКОМОТИВОВ 05.09.03 – Электротехнические комплексы и системы Диссертация на соискание ученой степени доктора технических наук Научный консультант: Доктор технических наук, профессор Иньков Юрий Моисеевич Москва – 2019

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

Федеральное государственное автономное
образовательное учреждение высшего образования
«Российский университет транспорта»
РУТ (МИИТ)
На правах рукописи
Пугачев Александр Анатольевич
ЭНЕРГОЭФФЕКТИВНЫЕ ЭЛЕКТРОПРИВОДЫ С АСИНХРОННЫМИ
ДВИГАТЕЛЯМИ ДЛЯ МАГИСТРАЛЬНЫХ ЛОКОМОТИВОВ
05.09.03 – Электротехнические комплексы и системы
Диссертация на соискание ученой степени
доктора технических наук
Научный консультант:
Доктор технических наук, профессор
Иньков Юрий Моисеевич
Москва – 2019
2
ОГЛАВЛЕНИЕ
стр.
ВВЕДЕНИЕ 5
1 АНАЛИЗ СТРУКТУР И ТЕХНИЧЕСКИХ ХАРАКТЕРИСТИК
ЭЛЕКТРОПРИВОДОВ ТЯГОВОГО ПОДВИЖНОГО СОСТАВА С
АСИНХРОННЫМИ ДВИГАТЕЛЯМИ
15
1.1 Постановка задачи 15
1.2 Регулируемый электропривод с асинхронным электродвигате-
лем вспомогательных механизмов тепловозов
17
1.3 Влияние температуры обмоток асинхронного двигателя на его
режимы работы
31
1.4 Анализ существующих способов измерения температуры враща-
ющихся частей электрических машин
Выводы по разделу 1
38
54
2. СИНТЕЗ СИСТЕМ СКАЛЯРНОГО УПРАВЛЕНИЯ
ЭЛЕКТРОПРИВОДОВ С АСИНХРОННЫМИ ДВИГАТЕЛЯМИ
55
2.1. Результаты анализа систем управления электроприводов с асин-
хронными двигателями
55
2.2 Анализ математических моделей, описывающих преобразование
энергии в асинхронных двигателях
64
2.3 Синтез системы скалярного управления с минимизацией
потерь мощности
76
2.4 Сравнительная характеристика систем скалярного управления 86
Выводы по разделу 2 92
3 СИНТЕЗ СИСТЕМ ВЕКТОРНОГО УПРАВЛЕНИЯ И ПРЯМОГО
УПРАВЛЕНИЯ МОМЕНТОМ ЭЛЕКТРОПРИВОДА
94
3.1 Сравнительная оценка применения в электроприводах двух- и
трехуровневых автономных инверторов напряжения
94
3.1.1 Общие сведения 94
3
3.1.2 Реализация системы прямого управления моментом 98
3.1.3 Отработка нештатных и аварийных ситуаций 106
3.1.4 Потери мощности в силовых ключах автономного инвер-
тора напряжения
112
3.2 Синтез системы векторного управления с минимизацией потерь
мощности
116
Выводы по разделу 3 126
4 РАЗРАБОТКА МЕТОДОВ И СРЕДСТВ ОПРЕДЕЛЕНИЯ
ТЕМПЕРАТУРЫ ТЯГОВЫХ АСИНХРОННЫХ ДВИГАТЕЛЕЙ
129
4.1 Постановка задачи разработки. Существующие методы решения
задачи
129
4.2 Разработка эквивалентной тепловой схемы замещения двигателя 133
4.3 Метод определения тепловых сопротивлений на лабораторной
установке
140
4.4 Разработка метода определения температуры на базе идентифи-
катора сопротивления ротора
148
4.5 Разработка метода определения температуры за счет введения
дополнительных составляющих напряжения статора
152
Выводы по разделу 4 168
5. РЕГУЛИРОВАНИЕ ТЕМПЕРАТУРЫ ОБМОТОК ТЯГОВЫХ
АСИНХРОННЫХ ДВИГАТЕЛЕЙ И СИЛОВЫХ ПОЛУПРО-
ВОДНИКОВЫХ ПРИБОРОВ ТЯГОВЫХ ПРЕОБРАЗОВАТЕЛЕЙ
ЧАСТОТЫ
171
5.1 Общие сведения 171
5.2 Автоматическая система регулирования температуры тягового
асинхронного двигателя
173
5.2.1 Система охлаждения тяговых двигателей как объект регу-
лирования температуры
173
5.2.2 Вентилятор охлаждения как регулирующее устройство 179
4
5.2.3 Результаты применения электропривода в автоматической
системе регулирования температуры тягового двигателя
179
5.3 Автоматическая система регулирования температуры силовых
полупроводниковых приборов
182
5.3.1 Система охлаждения силовых полупроводниковых прибо-
ров как объект регулирования температуры
182
5.3.2 Результаты применения электропривода в автоматической
системе регулирования температуры силовых полупроводнико-
вых приборов
191
5.3 Синтез системы контроля температуры силовых полупроводни-
ковых приборов для системы векторного управления электропри-
вода
194
Выводы по разделу 5 197
6 ЭКОНОМИЧЕСКАЯ ЭФФЕКТИВНОСТЬ ПРИМЕНЕНИЯ
ПРЕДЛАГАЕМЫХ РЕШЕНИЙ
199
ЗАКЛЮЧЕНИЕ 205
СПИСОК ЛИТЕРАТУРЫ 209
ПРИЛОЖЕНИЕ 1. Описание изобретения к патенту RU 2541491
ПРИЛОЖЕНИЕ 2. Акты о внедрении результатов диссертации
240
248

5
ВВЕДЕНИЕ
Актуальность темы исследования.
Создание энергоэффективных электротехнических комплексов и систем яв-
ляется одним из приоритетных направлений развития экономики России в бли-
жайшем будущем и на дальнейшую перспективу. Железнодорожный транспорт –
крупнейший потребитель топливно-энергетических ресурсов. На фактор потреб-
ления энергии в значительной степени оказывает технический уровень и состоя-
ние электрических передач автономных локомотивов и тяговых электроприводов
электроподвижного состава.
Стратегией научно-технического развития ОАО «РЖД» на период до 2020
года и перспективу до 2025 года поставлена задача минимизации доли топливно-
энергетической составляющей в себестоимости транспортно-логистических
услуг. Одним из основных средств решения этой задачи является проектирование
и строительство локомотивов с асинхронными тяговыми двигателями, которые
обладают рядом известных преимуществ по сравнению с традиционными тяго-
выми двигателями постоянного или пульсирующего тока и позволяют улучшить
показатели надежности, повысить их экономичность и тяговые качества. Допол-
нительным резервом повышения энергетической эффективности является умень-
шение энергозатрат на работу вспомогательных агрегатов и систем локомотивов
(систем охлаждения силовых энергетических установок и тягового электрообору-
дования).
Реализация этих целей на тяговом подвижном составе требует решения це-
лого ряда научно-технических задач по выбору рациональной структуры электро-
приводов, уменьшению потерь мощности в тяговом и вспомогательном электро-
приводах, организации точного определения (измерения) локальной и средней
температуры обмоток двигателей и силовых полупроводниковых приборов и её
плавного регулирования и др.
Вышеизложенное обеспечивает актуальность выбранной темы диссертации
и проведенных теоретических исследований.

6
Степень разработанности темы исследования.
В своей работе автор опирался на труды ученых в области теории электро-
приводов переменного тока и преобразовательной техники – В.И. Аносова, А.С.
Анучина, В.Я. Беспалова, И.Я. Браславского, А.Т. Буркова, А.М. Вейнгера, А.Б.
Виноградова, А.М. Зюзева, Н.Ф. Ильинского, Ю.М. Инькова, В.И. Ключева, А.Е.
Козярука, М.П. Костенко, И.П. Копылова, В.А. Кучумова, В.Н. Мещерякова, В.А.
Мищенко, О.А. Некрасова, В.В. Панкратова, В.В. Рудакова, Г.Б. Онищенко, А.С.
Сандлера, А.С. Сарбатова, О.В. Слежановского, С.А. Харитонова, Р.Т. Шрейнера,
В.А. Шубенко, F. Blaschke, M. Depenbrock, J. Holtz, W. Leonard, T.A. Lipo, D.W.
Novotny, R. Schönfeld, I. Takahahi и других ученых.
Автор учитывал результаты исследований электрических передач автоном-
ных локомотивов и тяговых электроприводов электроподвижного состава и авто-
матизации управления тяговыми агрегатами, которые изложены в трудах В.И. Ан-
дерса, Х.-П. Бауэра, С.В. Власьевского, А.В. Грищенко, А.М. Евстафьева, А.А. За-
рифьяна, Д.Л. Киржнера, П.Г. Колпахчьяна, А.С. Космодамианского, Е.Е. Кос-
сова, В.А. Кучумова, В.В. Литовченко, Е.Ю. Логиновой, Н.М. Лукова, П.Ю. Пет-
рова, Н.А. Ротанова, А.Н. Савоськина, Л.Н. Сорина, А.Д. Степанова, В.В. Стреко-
пытова, Б.Н. Тихменева, В.Д. Тулупова, Г.А. Федяевой, В.П. Феоктистова и дру-
гих ученых.
Цель диссертационного исследования – совершенствование режимов ра-
боты электроприводов с асинхронными двигателями, применяемых на тяговом по-
движном составе, посредством регулирования температуры обмоток тяговых дви-
гателей.
Задачи исследования, поставленные и решенные в работе для достижения
указанной цели:
– проведение сравнительного анализа характеристик тяговых электропри-
водов и электроприводов вспомогательных агрегатов, применяемых на тяговом
подвижном составе;
– синтез системы управления электропривода вспомогательных агрегатов с
асинхронным двигателем, осуществляющей минимизацию потерь мощности в
7
асинхронном двигателе;
– синтез системы векторного управления тягового электропривода с асин-
хронными двигателями, осуществляющей минимизацию потерь мощности в асин-
хронном двигателе;
– разработка упрощенной эквивалентной тепловой схемы замещения для
определения температуры обмотки и магнитопровода статора асинхронного дви-
гателя;
– разработка бесконтактных методов определения средних значений темпе-
ратуры обмоток статора и ротора в процессе работы электропривода;
– разработка автоматических систем регулирования температуры для маги-
стральных локомотивов с применением в качестве исполнительно-регулирую-
щего устройства энергоэффективного электропривода вентилятора охлаждения.
Объект исследования – тяговые и вспомогательные электроприводы с
асинхронными двигателями, применяемые на магистральных локомотивах.
Предмет исследования – энергетические характеристики электроприводов
с асинхронными двигателями, методы и средства определения температуры теп-
лонагруженных элементов электроприводов и обеспечения требуемого теплового
состояния электроприводов на магистральных локомотивах.
Научная новизна заключается в следующем:
– разработана система скалярного управления электропривода с асинхрон-
ным двигателем, осуществляющая минимизацию тока статора в установившихся
режимах работы;
– разработан алгоритм формирования задания на токи статора асинхрон-
ного двигателя при использовании системы векторного управления, обеспечива-
ющий минимум потерь мощности;
– разработан метод определения сопротивления и температуры обмоток ста-
тора и ротора, основанный на периодическом добавлении к напряжению статора
напряжения высокой частоты и/или постоянной составляющей напряжения и
предложен вариант модификации контуров тока для применения синтезированной
методики в электроприводе с системой векторного управления;

8
– разработан метод идентификации активного сопротивления и темпера-
туры обмотки ротора асинхронного двигателя по сигналам от датчиков тока и
напряжения статора и датчика частоты вращения вала ротора;
– разработаны автоматические системы регулирования температуры тяго-
вых двигателей и преобразователей частоты с применением электропривода вен-
тилятора охлаждения как исполнительно-регулирующего устройства.
Теоретическая и практическая значимость работы.
– разработана система скалярного управления электропривода с асинхрон-
ным двигателем, обеспечивающая уменьшение потерь мощности в установив-
шемся режиме работы;
– разработана упрощенная эквивалентная тепловая схема замещения ста-
тора асинхронного двигателя и метод определения в лабораторных условиях зна-
чений ее тепловых сопротивлений;
– разработаны методы определения сопротивления и температуры обмоток
статора и ротора с помощью датчиков тока и напряжения и периодическим добав-
лением к напряжению статора напряжения высокой частоты и/или постоянной со-
ставляющей напряжения;
– разработаны алгоритм формирования задания на токи статора асинхрон-
ного двигателя при использовании системы векторного управления, обеспечива-
ющий минимум потерь мощности и система управления, осуществляющая мини-
мизацию потерь и контроль температуры силовых полупроводниковых приборов
тягового преобразователя частоты;
– разработаны автоматические системы регулирования температуры тяго-
вых двигателей, тяговых преобразователей частоты и энергетической установки
автономного локомотива с применением электропривода вентилятора охлаждения
как исполнительно-регулирующего устройства, обеспечивающие расширение
диапазона изменения частоты вращения вала вентилятора, а, следовательно, сни-
жение диапазона изменения регулируемой температуры.
9
Методология и методы исследования.
Для решения сформулированных задач использованы современные методы
научного исследования, основанные на теоретической электротехнике, теории
электромеханического преобразования энергии, теории автоматического управле-
ния. Теоретические исследования проведены с использованием аналитических и
численных методов решения алгебраических и дифференциальных уравнений и
систем, применялось моделирование на базе компьютерных имитационных моде-
лей. Экспериментальные исследования проведены на разработанных с участием
автора лабораторных установках.
Положения, выносимые на защиту:
– структура и принцип работы энергосберегающей системы скалярного
управления электропривода с асинхронным двигателем;
– алгоритм формирования задания на токи статора асинхронного двигателя
при использовании системы векторного управления, обеспечивающий минимум
потерь мощности;
– упрощенная эквивалентная тепловая схема замещения статора асинхрон-
ного двигателя и метод определения значений ее тепловых сопротивлений при по-
мощи лабораторной установки
– метод идентификации активного сопротивления и температуры обмотки
ротора асинхронного двигателя по сигналам от датчиков тока и напряжения ста-
тора и датчика частоты вращения вала ротора;
– метод определения сопротивления и температуры обмоток статора и ро-
тора, основанный на периодическом добавлении к напряжению статора напряже-
ния высокой частоты и/или постоянной составляющей напряжения и модифика-
ция контуров тока для применения синтезированной методики в электроприводе
с системой векторного управления;
– автоматические системы регулирования температуры тяговых двигателей
и преобразователей частоты с применением энергоэффективного электропривода
вентилятора охлаждения как исполнительно-регулирующего устройства.
10
Достоверность полученных результатов обеспечивается обоснованно-
стью используемых теоретических зависимостей и принятых допущений при ана-
лизе электромагнитных и электромеханических процессов, применением извест-
ных математических методов; подтверждается качественным и количественным
согласованием результатов теоретических исследований с экспериментальными
данными.
Апробация результатов.
Результаты работы обсуждались и получили одобрение на VI – VIII Между-
народных (XVII – XIX Всероссийских) конференциях по автоматизированному
электроприводу, Тула, 2010 г., Иваново, 2012 г., Саранск, 2014 г.; XI научно-прак-
тической конференции «Безопасность движения поездов», Москва, 2010 г.; пят-
надцатой международной научно-технической конференции «Электроприводы
переменного тока», Екатеринбург, 2012 г.; Международной научно-практической
конференции «Электрические аппараты и электротехнические комплексы и си-
стемы», Ульяновск, 2012 г.; IV Международной научно-технической конференции
«Проблемы электротехники, электроэнергетики и электротехнологии», Тольятти,
2012 г.; I – VI Международных научно-технических конференциях «Локомотивы
ХХI век», Санкт-Петербург, 2013 – 2018 гг.; XI международной научно-практиче-
ской интернет-конференции «Энерго- и ресурсосбережение XXI век», Орел, 2013
г., 2017 г.; международной научно-практической конференции «Эксплуатацион-
ная надежность подвижного состава», Омск, 2013 г.; I Международной научной
конференции молодых ученых «Электротехника. Энергетика. Машиностроение»,
Новосибирск, 2014 г.; Шестой Всероссийской научно-практической конференции
«Автоматизированный электропривод и промышленная электроника», Новокуз-
нецк, 2014 г.; Всероссийской научно-практической конференции «Автоматизиро-
ванный электропривод и автоматика», Липецк, 2014 г.; VIII международной (XIX
Всероссийской) конференции по автоматизированному электроприводу, Саранск,
2014 г.; VII Международной научной конференции молодых ученых «Электротех-
ника. Электротехнология. Энергетика», Новосибирск, 2015 г.; II Международной
11
(V Всероссийской) научно-технической конференции «Электропривод, электро-
технологии и электрооборудование предприятий», Уфа, 2015 г.; VIII, X, XI, XII
Международных конференции «Системы безопасности на транспорте», Белград,
2015 г., Будва, 2017 г., Любляна, 2018 г., 2019 г.; IX и X Международных научно-
технических конференциях «Современные проблемы машиностроения»
(MEACS), Томск, 2015 г., 2016 г.; Международных научно-технических конферен-
циях «Пром-Инжиниринг» (ICIEAM), Челябинск, 2016 г., Санкт-Петербург, 2017
г., Сочи, 2019 г.; XI Международной IEEE научно-технической конференции «Ди-
намика систем, механизмов и машин» (Dynamics of Systems, Mechanisms and
Machines (Dynamics), Омск, 2016 г.; Международной научно-технической конфе-
ренции «Инновации и перспективы развития горного машиностроения и электро-
механики», Санкт-Петербург, 2017 г.; международной научно-практической кон-
ференции «Перспективы развития локомотиво-, вагоностроения», Ростов-на-
Дону, 2018 г.; Международной конференции «Электротехника, электротехноло-
гии, электрические материалы и компоненты», Алушта, 2018г. По материалам
диссертационной работы результаты докладывались и получили одобрение на
научных семинарах кафедр «Электропоезда и локомотивы» и «Тяговый подвиж-
ной состав» ФГАОУ ВО «Российский университет транспорта» в 2019 г.
Реализация и внедрение результатов работы. Результаты исследований
использовались при выполнении научного проекта РФФИ № 14-08-31274 (2014 –
2015 гг.) и НИР по заданию Министерства образования и науки № 8.1729.2017/ПЧ
(2017 – 2019 гг.). Результаты работы внедрены и используются в ФГБОУ ВО
«Брянский государственный технический университет» на кафедрах «Промыш-
ленная электроника и электротехника» и «Электронные, радиоэлектронные и
электротехнические системы» и при подготовке студентов по направлениям бака-
лавриата 13.03.02 и магистратуры 13.04.02 – Электроэнергетика и электротехника.
Результаты работы приняты в обособленном подразделении ООО «ТМХ Инжини-
ринг» в г. Брянске КБ «Локомотивы» в процессы проектирования и разработки
тягового и вспомогательного электроприводов линейки тепловозов 2ТЭ30А для
12
тяжеловесного движения. Результаты работы использованы в ООО «Центр техни-
ческого развития СТМ» при проектировании тепловозов нового поколения
2ТЭ35А с асинхронными тяговыми двигателями. Результаты работы использо-
ваны в АО «Навлинский завод «Промсвязь» при производстве транспортных
средств.
Публикации.
Основное содержание работы отражено в 97 публикациях, из них 30 статей
в изданиях, рекомендуемых ВАК, 18 статей в изданиях, включенных в междуна-
родные базы цитирования (Web of Science, Scopus), 3 монографии, 3 патента на
изобретение и 4 патента на полезную модель.
Структура и объем диссертации. Диссертация состоит из введения, шести
разделов, заключения с основными результатами и выводами, списка литературы
из 259 наименований, двух приложений и содержит 239 страниц основного текста,
81 рисунок и 22 таблицы.
Содержание диссертации соответствует заявленной цели и поставленным
задачам.
В первом разделе проведен обзор электроприводов вентиляторов охлажде-
ния, применяемых на тяговом подвижном составе и выполнен анализ существую-
щих способов измерения температуры вращающихся частей электрических ма-
шин, который показал, что несмотря на относительно большое количество работ
в области исследования теплового состояния асинхронного двигателя, это направ-
ление не утратило свое актуальности.
Второй раздел посвящен синтезу системы скалярного управления электро-
привода с асинхронным двигателем, обеспечивающий работу электропривода с
уменьшением потерь мощности за счет минимизации тока статора. Выбрана кор-
ректная математическая модель, отражающая электромагнитные и электромеха-
нические процессы преобразования энергии в асинхронном двиагтеле. Проведена
сравнительная оценка энергетической эффективности электропривода с разрабо-
танной системой управления и с постоянством абсолютного скольжения.
13
Третий раздел посвящен анализу систем управления тягового электропри-
вода и синтезу системы управления, обеспечивающей уменьшение потерь мощно-
сти с учетом действующих ограничений при работе тягового электропривода.
Проведена сравнительная характеристика применения двух- и трехуровневого ав-
тономного инвертора напряжения в составе тягового преобразователя частоты в
отношении реализации системы прямого управления моментом, отработки не-
штатных и аварийных ситуаций, выполнен расчет потерь мощности для двух ти-
пов автономных инверторов.
Четвертый раздел посвящен разработке бездатчиковых методов определе-
ния локальных и средних значений температуры обмоток тяговых асинхронных
двигателей. Разработаны метод определения тепловых сопротивлений на лабора-
торной установке и метод определения температуры на базе идентификатора со-
противления ротора. Разработан метод определения температуры при помощи пе-
риодического добавления к напряжению статора напряжения высокой частоты
и/или постоянной составляющей напряжения и предложен вариант модификации
контуров тока для применения синтезированной методики в электроприводе с си-
стемой векторного управления.
Пятый раздел посвящен регулированию температуры обмоток тяговых
асинхронных двигателей и силовых полупроводниковых приборов тяговых пре-
образователей частоты. Разработаны автоматические системы регулирования тем-
пературы, пригодные для использования на магистральных локомотивах, содер-
жащие электропривод с преобразователем частоты и асинхронным двигателем со
скалярной системой управления в качестве регулирующего устройства. Разрабо-
тана система управления, осуществляющая уменьшение потерь мощности в сило-
вых полупроводниковых приборах автономного инвертора напряжения тягового
преобразователя частоты и контроль их температуры тягового электропривода,
предназначенная для использования в составе системы управления тягового элек-
тропривода.
В шестом разделе проведена оценка экономической эффективности приме-
нения электропривода вентилятора охлаждения с минимизацией потерь мощности

14
в составе автоматической системы регулирования температуры энергетической
установки по методике, разработанной во ВНИТИ.
В приложениях приведены описание изобретения к патенту RU 2541491 и
акты о внедрении результатов диссертации.
15
1 АНАЛИЗ СТРУКТУР И ТЕХНИЧЕСКИХ ХАРАКТЕРИСТИК
ЭЛЕКТРОПРИВОДОВ ТЯГОВОГО ПОДВИЖНОГО СОСТАВА
С АСИНХРОННЫМИ ДВИГАТЕЛЯМИ
1.1 Постановка задачи
Железнодорожный транспорт является динамично развивающимся видом
транспорта в России и за рубежом, он обеспечивает с каждым годом все более
возрастающие объемы грузовых и пассажирских перевозок. Уровень техниче-
ского оснащения тягового подвижного состава напрямую влияет на безопасность
железнодорожных перевозок и экономику этой отрасли.
Учитывая современные тенденции в развитии микропроцессорной техники,
силовой электроники и электрических машин, при проектировании современного
тягового подвижного состава целесообразно ориентироваться на использование
электроприводов с асинхронными двигателями, которые имеют ряд преимуществ
перед электроприводами с двигателями постоянного тока в связи с отсутствием
щеточно-коллекторного узла, что приводит к повышению их надежности и эффек-
тивности. Вместе с этим, отсутствие отдельных каналов для управления потоком
и моментом приводит к усложнению алгоритмов управления и технических
средств их реализации.
Стремление максимально полно использовать перегрузочные способности
двигателей и вместе с этим избежать перегрева элементов силового канала, после-
дующих механических повреждений их конструкций, продлить срок службы тре-
бует предусматривать непрерывный контроль температуры теплонагруженных
элементов во время эксплуатации электропривода. Для этих целей используются
системы охлаждения и автоматические системы регулирования температуры тя-
говых двигателей и преобразователей, однако единого подхода в вопросах постро-
ения схем и принципов работы этих систем до сих пор не существует, поэтому
проблема охлаждения тягового электропривода не утратила своей актуальности.

16
Локомотивы эксплуатируются в широком диапазоне изменения темпера-
туры окружающей среды, для тяговых электроприводов локомотивов характерно
изменение частоты вращения и момента сопротивления в большом диапазоне в
зависимости от профиля пути, веса состава и т.д.; эти два фактора приводят к
сложности анализа теплового состояния элементов силового канала электропри-
вода. Несмотря на жесткие требования к массогабаритным показателям, тяговые
электроприводы должны обеспечивать быстродействие регулирования момента,
обладать минимально возможными потерями мощности, иметь высокие показа-
тели надежности, быть нечувствительными к изменению параметров во всех ре-
жимах работы.
Повышенная температура силовых полупроводниковых приборов тяговых
преобразователей частоты может повлечь за собой механические повреждения из-
за неравномерного теплового расширения сопряженных узлов. Превышения тем-
пературы обмоток двигателя над допустимой температурой класса изоляции мо-
гут приводить к повреждениям изоляции и обмоток. Колебания температуры
напрямую влияют на показатели качества управления применяемой системы
управления электропривода.
Анализ исследований [2, 3, 17, 30, 34, 57, 58, 61, 66, 75, 103, 115, 118, 123,
125, 129, 132, 187, 198, 204, 228], посвященных синтезу высокодинамичных и
энергоэффективных электроприводов показал, что при применении систем век-
торного управления и систем прямого управления моментом необходимо учиты-
вать среднее значение температуры обмоток статора и ротора, т.к. это значение
напрямую влияет на величину активных сопротивлений соответствующих обмо-
ток. Это обусловлено тем, что в указанных системах управления электроприводов
значение активного сопротивления обмоток используется при вычислении обрат-
ных связей по потокосцеплениям и моменту. При погрешности определения ак-
тивного сопротивления обмотки статора более 5% показатели качества переход-
ных процессов в системе прямого управления моментом резко ухудшаются. Боль-
шие величины погрешности приводят к значительному уменьшению запасов
устойчивости.
17
КПД электроприводов определяется прежде всего КПД двигателей, потери
мощности которых зависят не только от момента сопротивления, оказывающего
непосредственное влияние на значения токов статора и ротора, но также от пара-
метров схемы замещения двигателя, частоты вращения ротора, параметров источ-
ника электроэнергии, мощности двигателя, режимов работы, условий эксплуата-
ции и др.
Повышение температуры обмоток двигателя приводит к соответствующему
росту сопротивления обмоток, что влечет за собой увеличение потерь мощности
и уменьшение КПД, происходит еще более интенсивный нагрев, что при прежнем
уровне теплоотдачи (отсутствии регулирования подачи охлаждающего воздуха)
приводит к дальнейшему увеличению температуры.
В работе [126] были проведены исследования изменения КПД асинхронных
двигателей при применении системы скалярного управления с компенсацией па-
дения напряжения в активных сопротивлениях обмотки статора (IR-компенсация),
в результате которых установлено, что при снижении частоты вращения ротора
происходит значительное снижение КПД двигателей. Например, для двигателя
АНЭ225L4УХЛ2 были получены следующие результаты: при частоте тока ста-
тора, равной 50 Гц, КПД двигателя равняется 88 %, при частоте – 25 Гц КПД рав-
няется 53 %.
Таким образом, задачи синтеза и исследования энергоэффективных систем
управления электропривода, в полной мере учитывающих значения температуры
обмоток двигателей, являются актуальными для тягового подвижного состава.
1.2 Регулируемый электропривод с асинхронным электродвигателем вспо-
могательных механизмов тепловозов
Анализ приводов вентиляторов охлаждения, применяемых на тяговом по-
движном составе [11, 39 – 41, 96, 109, 110, 112, 114, 122, 126, 130, 133, 153, 168,
172, 173, 174, 177], показал, что электропривод вентиляторов имеет ряд преиму-
ществ перед другими вариантами приводов, что и определило его наибольшее
18
применение в современном локомотивостроении. При выборе между электропри-
водами переменного или постоянного тока предпочтение отдается электроприво-
дам переменного тока, т.к. они дешевле и надежнее [10, 55, 63].
В настоящее время имеется достаточно большое количество научных разра-
боток и практических решений в области электроприводов переменного тока [15,
19, 20, 64, 124, 130, 171, 172, 196, 200, 201], обзор которых позволяет выделить
следующие типы электроприводов, пригодных для применения в системах охла-
ждения на локомотивах:
а) электроприводы с фазовым управлением асинхронным двигателем (в том
числе с применением двигателей с массивным ротором, двухслойным ротором
или двухпакетным ротором);
б) электроприводы с преобразователем частоты и скалярной системой
управления асинхронным двигателем.
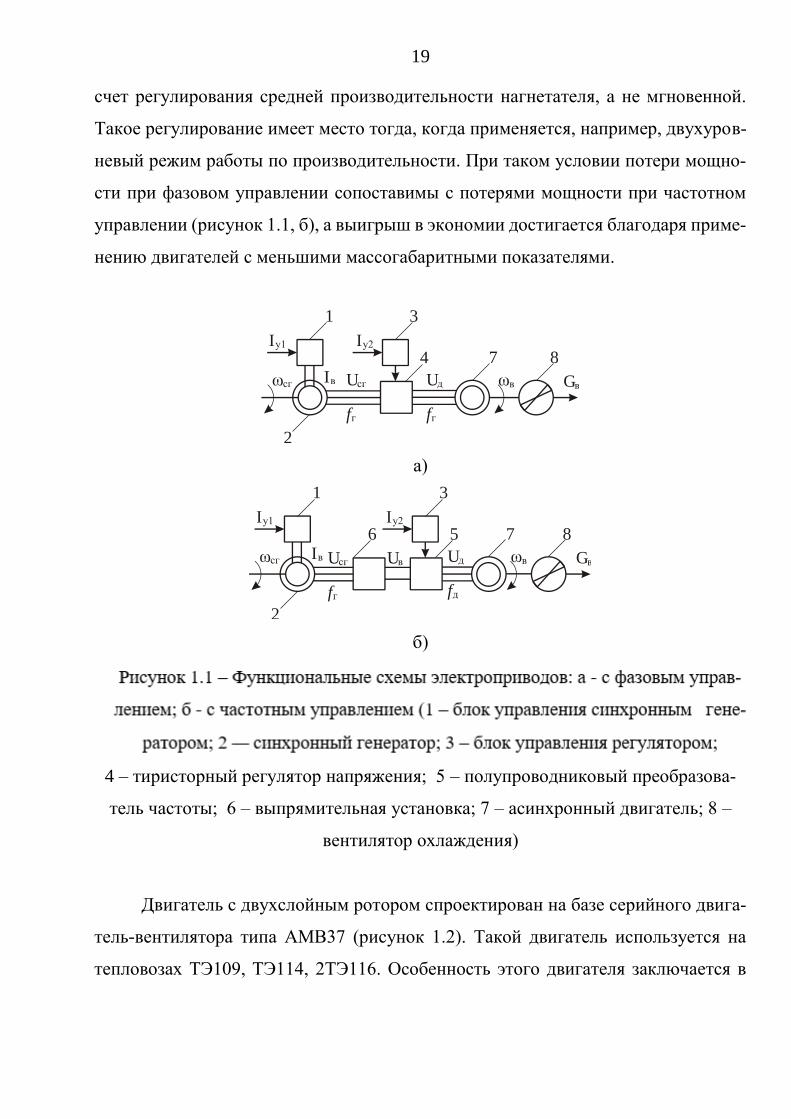
Применение электроприводов с фазовым управлением (рисунок 1.1, а) целе-
сообразно на локомотивах, содержащих источник энергии переменного тока, т.к.
такой вид тиристорные регуляторы напряжения, используемые в таких электро-
приводах, осуществляют однократное преобразование электроэнергии, изменяя
действующее значение напряжения, не меняя его частоты. Основным недостатком
этих электроприводов является то, что при фазовом управлении происходит
уменьшение критического момента пропорционально квадрату изменения напря-
жения, в то время как частота вращения холостого хода и критическое скольжение
остаются неизменными, следовательно, диапазон регулирования частоты враще-
ния ограничен величиной критического скольжения. При вентиляторной нагрузке
при определенных условиях статической устойчивости возможно увеличение диа-
пазона, но это достигается за счет значительного увеличения тока статора, что
приводит к повышению мощности потерь и соответствующему перегреву обмоток
статора и ротора.
В результате исследований, выполненных в [14, 15, 174], установлено, что
технико-экономический эффект за счет использования тиристорных регуляторов
напряжения в электроприводах нагнетателей (вентиляторы, насосы) возможен за
19
счет регулирования средней производительности нагнетателя, а не мгновенной.
Такое регулирование имеет место тогда, когда применяется, например, двухуров-
невый режим работы по производительности. При таком условии потери мощно-
сти при фазовом управлении сопоставимы с потерями мощности при частотном
управлении (рисунок 1.1, б), а выигрыш в экономии достигается благодаря приме-
нению двигателей с меньшими массогабаритными показателями.
а)
б)
4 – тиристорный регулятор напряжения; 5 – полупроводниковый преобразова-
тель частоты; 6 – выпрямительная установка; 7 – асинхронный двигатель; 8 –
вентилятор охлаждения)
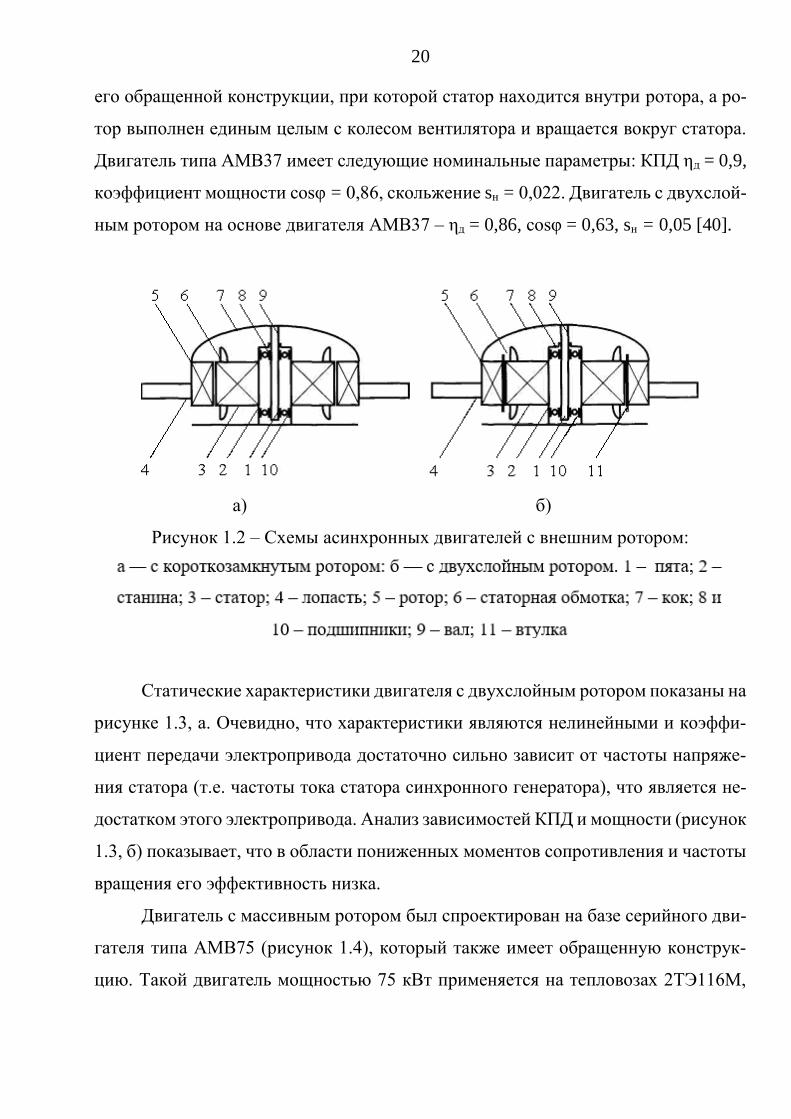
Двигатель с двухслойным ротором спроектирован на базе серийного двига-
тель-вентилятора типа АМВ37 (рисунок 1.2). Такой двигатель используется на
тепловозах ТЭ109, ТЭ114, 2ТЭ116. Особенность этого двигателя заключается в
Iу1 Iу2
Iв Uсг
fг
Uд
fг
ωв Gвωсг
1
2
4 7
3
8
Iу1 Iу2
Iв Uсг
fг
Uд
fд
ωв Gвωсг
1
2
5 7
3
8
Uв
6
20
его обращенной конструкции, при которой статор находится внутри ротора, а ро-
тор выполнен единым целым с колесом вентилятора и вращается вокруг статора.
Двигатель типа АМВ37 имеет следующие номинальные параметры: КПД ηд = 0,9,
коэффициент мощности cosφ = 0,86, скольжение sн = 0,022. Двигатель с двухслой-
ным ротором на основе двигателя АМВ37 – ηд = 0,86, cosφ = 0,63, sн = 0,05 [40].
а) б)
Рисунок 1.2 – Схемы асинхронных двигателей с внешним ротором:
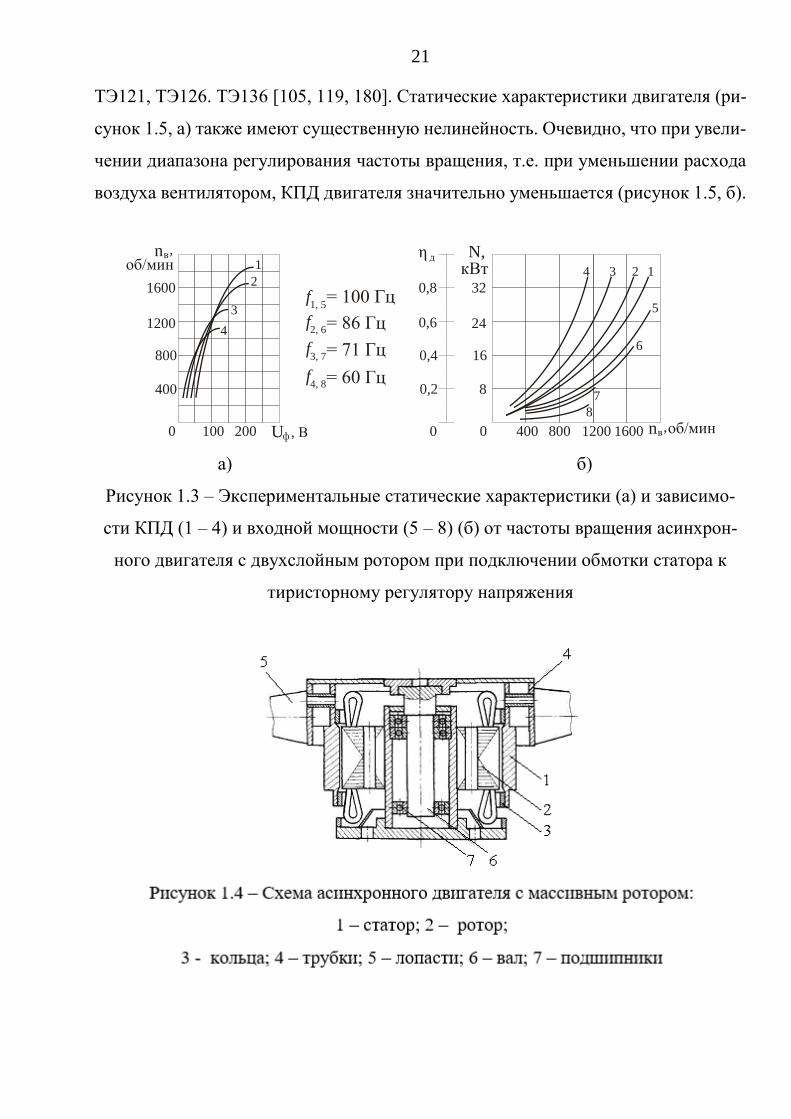
Статические характеристики двигателя с двухслойным ротором показаны на
рисунке 1.3, а. Очевидно, что характеристики являются нелинейными и коэффи-
циент передачи электропривода достаточно сильно зависит от частоты напряже-
ния статора (т.е. частоты тока статора синхронного генератора), что является не-
достатком этого электропривода. Анализ зависимостей КПД и мощности (рисунок
1.3, б) показывает, что в области пониженных моментов сопротивления и частоты
вращения его эффективность низка.
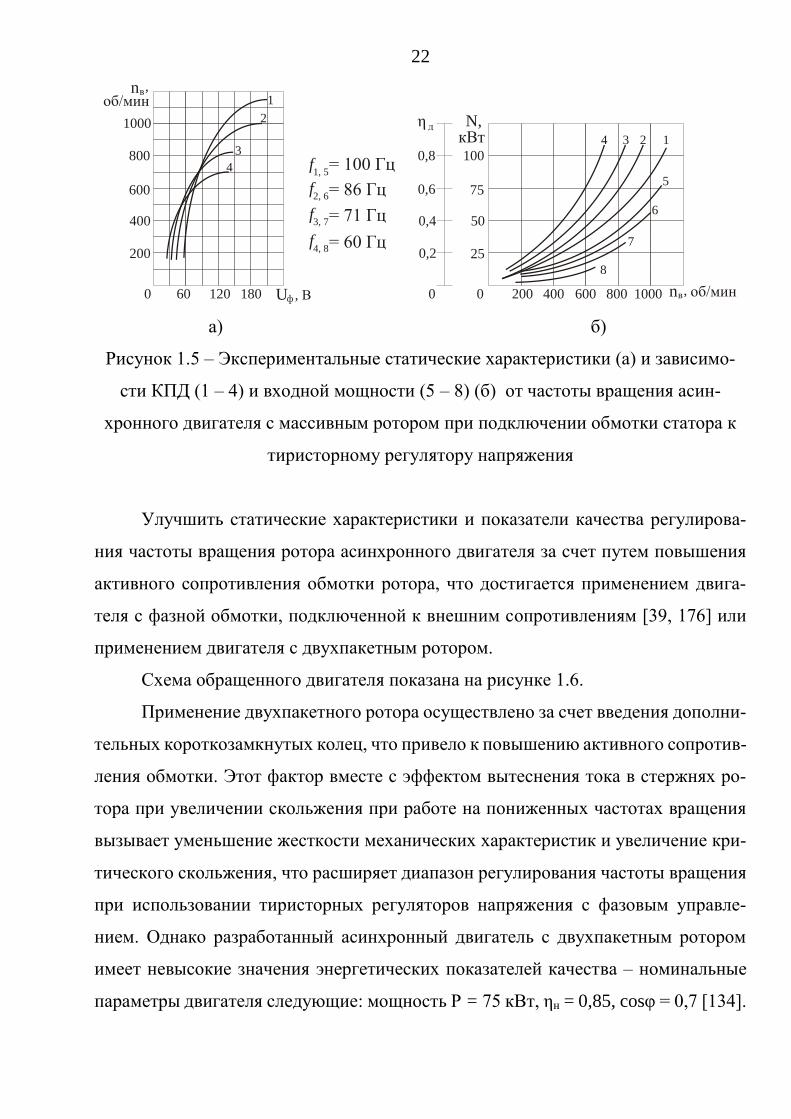
Двигатель с массивным ротором был спроектирован на базе серийного дви-
гателя типа АМВ75 (рисунок 1.4), который также имеет обращенную конструк-
цию. Такой двигатель мощностью 75 кВт применяется на тепловозах 2ТЭ116М,
21
ТЭ121, ТЭ126. ТЭ136 [105, 119, 180]. Статические характеристики двигателя (ри-
сунок 1.5, а) также имеют существенную нелинейность. Очевидно, что при увели-
чении диапазона регулирования частоты вращения, т.е. при уменьшении расхода
воздуха вентилятором, КПД двигателя значительно уменьшается (рисунок 1.5, б).
а) б)
Рисунок 1.3 – Экспериментальные статические характеристики (а) и зависимо-
сти КПД (1 – 4) и входной мощности (5 – 8) (б) от частоты вращения асинхрон-
ного двигателя с двухслойным ротором при подключении обмотки статора к
тиристорному регулятору напряжения
400
800
1200
1600
100 2000
2
1
3
4
nв,об/мин
Uф , В
f 1, 5
= 100 Гц
f 2, 6= 86 Гц
f 3, 7= 71 Гц
f 4, 8= 60 Гц
8
16
24
32
400 8000 nв,об/мин1200 1600
N,кВт
0,2
0,4
0,6
0,8
0
η д1234
5
6
7
8
22
а) б)
Рисунок 1.5 – Экспериментальные статические характеристики (а) и зависимо-
сти КПД (1 – 4) и входной мощности (5 – 8) (б) от частоты вращения асин-
хронного двигателя с массивным ротором при подключении обмотки статора к
тиристорному регулятору напряжения
Улучшить статические характеристики и показатели качества регулирова-
ния частоты вращения ротора асинхронного двигателя за счет путем повышения
активного сопротивления обмотки ротора, что достигается применением двига-
теля с фазной обмотки, подключенной к внешним сопротивлениям [39, 176] или
применением двигателя с двухпакетным ротором.
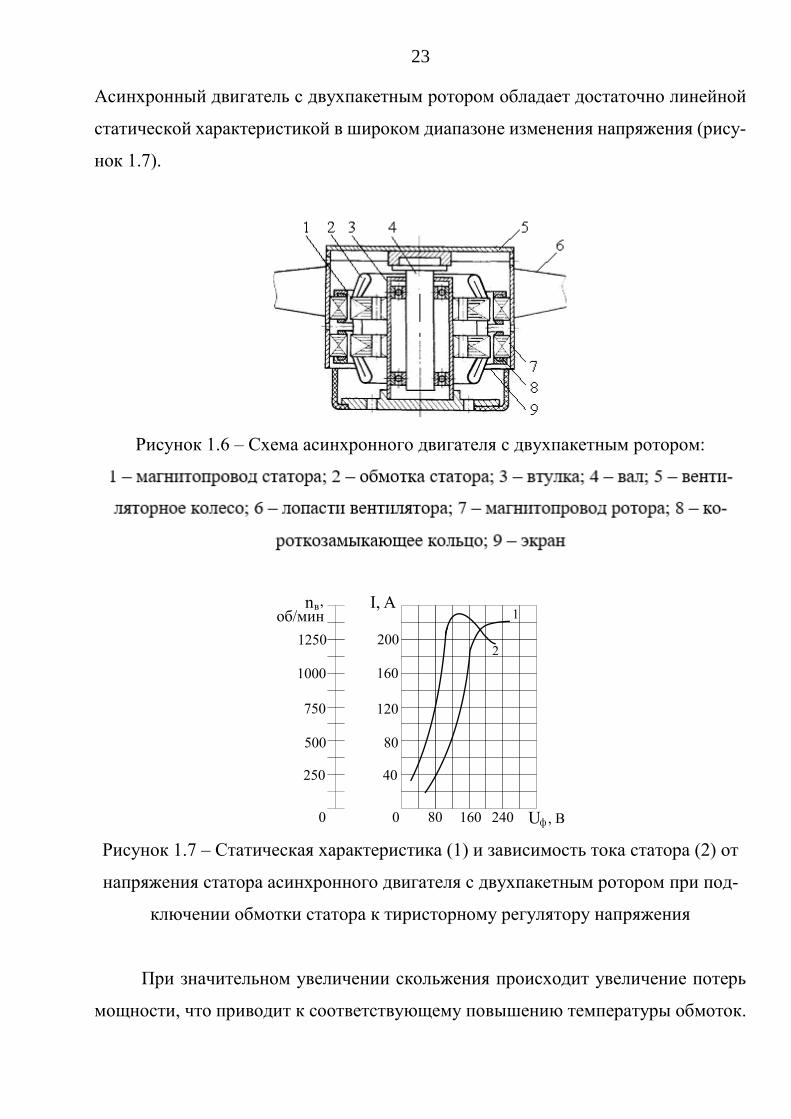
Схема обращенного двигателя показана на рисунке 1.6.
Применение двухпакетного ротора осуществлено за счет введения дополни-
тельных короткозамкнутых колец, что привело к повышению активного сопротив-
ления обмотки. Этот фактор вместе с эффектом вытеснения тока в стержнях ро-
тора при увеличении скольжения при работе на пониженных частотах вращения
вызывает уменьшение жесткости механических характеристик и увеличение кри-
тического скольжения, что расширяет диапазон регулирования частоты вращения
при использовании тиристорных регуляторов напряжения с фазовым управле-
нием. Однако разработанный асинхронный двигатель с двухпакетным ротором
имеет невысокие значения энергетических показателей качества – номинальные
параметры двигателя следующие: мощность Р = 75 кВт, ηн = 0,85, cosφ = 0,7 [134].
1 02 18060
2
1
3
4
Uф , В
f 1, 5
= 100 Гц
f 2, 6= 86 Гц
f 3, 7= 71 Гц
f 4, 8= 60 Гц
25
50
75
100
200 4000 nв, об/мин600 800
N,кВт
0,2
0,4
0,6
0,8
0
η д1234
5
6
7
8
200
400
600
800
0
1 000
nв,об/мин
1000
23
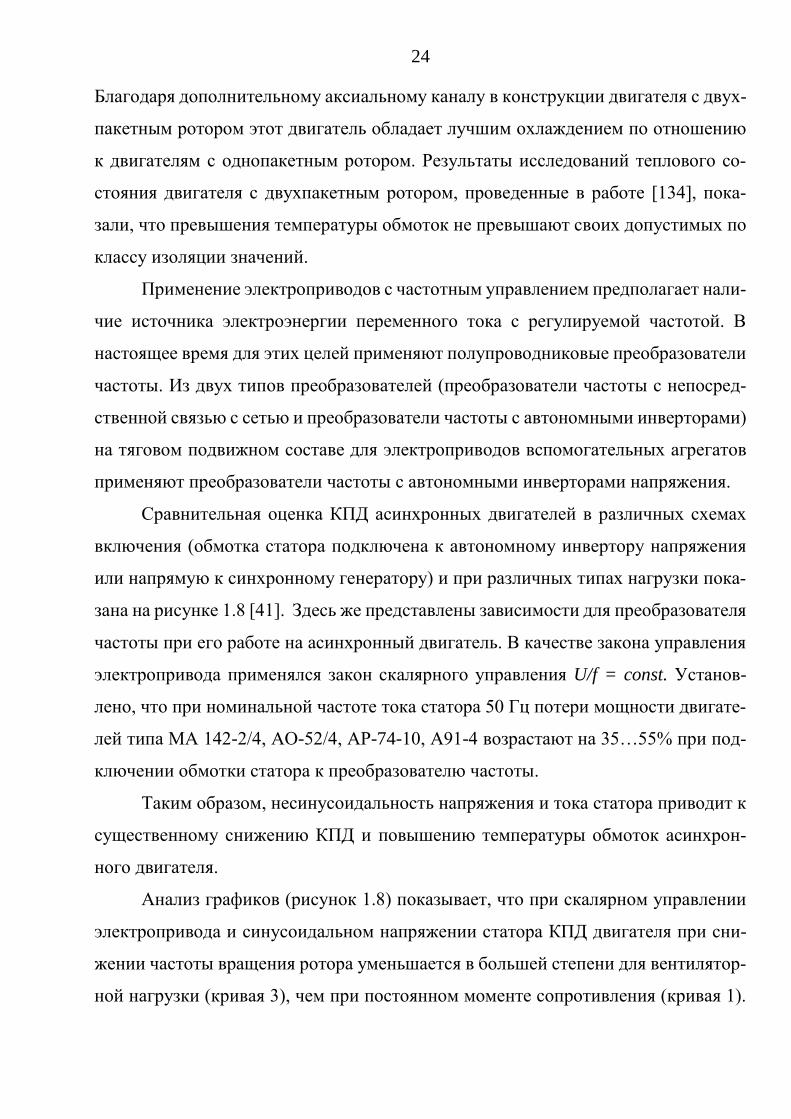
Асинхронный двигатель с двухпакетным ротором обладает достаточно линейной
статической характеристикой в широком диапазоне изменения напряжения (рису-
нок 1.7).
Рисунок 1.6 – Схема асинхронного двигателя с двухпакетным ротором:
Рисунок 1.7 – Статическая характеристика (1) и зависимость тока статора (2) от
напряжения статора асинхронного двигателя с двухпакетным ротором при под-
ключении обмотки статора к тиристорному регулятору напряжения
При значительном увеличении скольжения происходит увеличение потерь
мощности, что приводит к соответствующему повышению температуры обмоток.
24
Благодаря дополнительному аксиальному каналу в конструкции двигателя с двух-
пакетным ротором этот двигатель обладает лучшим охлаждением по отношению
к двигателям с однопакетным ротором. Результаты исследований теплового со-
стояния двигателя с двухпакетным ротором, проведенные в работе [134], пока-
зали, что превышения температуры обмоток не превышают своих допустимых по
классу изоляции значений.
Применение электроприводов с частотным управлением предполагает нали-
чие источника электроэнергии переменного тока с регулируемой частотой. В
настоящее время для этих целей применяют полупроводниковые преобразователи
частоты. Из двух типов преобразователей (преобразователи частоты с непосред-
ственной связью с сетью и преобразователи частоты с автономными инверторами)
на тяговом подвижном составе для электроприводов вспомогательных агрегатов
применяют преобразователи частоты с автономными инверторами напряжения.
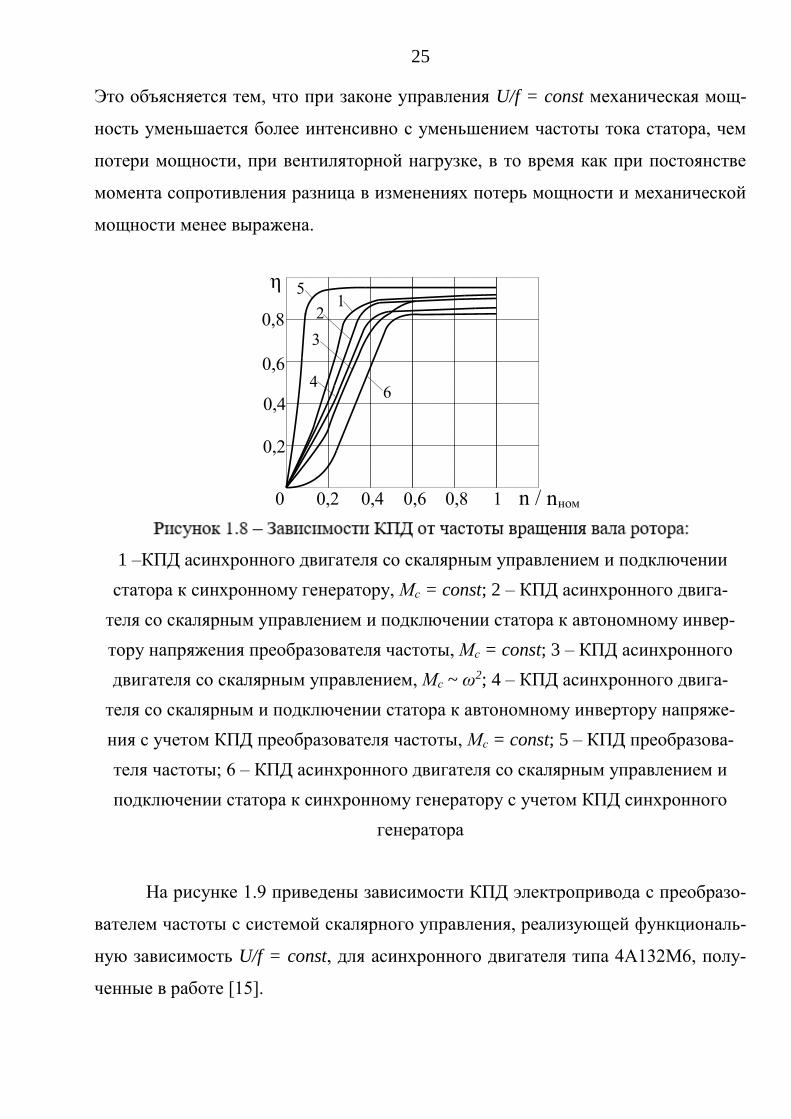
Сравнительная оценка КПД асинхронных двигателей в различных схемах
включения (обмотка статора подключена к автономному инвертору напряжения
или напрямую к синхронному генератору) и при различных типах нагрузки пока-
зана на рисунке 1.8 [41]. Здесь же представлены зависимости для преобразователя
частоты при его работе на асинхронный двигатель. В качестве закона управления
электропривода применялся закон скалярного управления U/f = const. Установ-
лено, что при номинальной частоте тока статора 50 Гц потери мощности двигате-
лей типа МА 142-2/4, АО-52/4, АР-74-10, А91-4 возрастают на 35…55% при под-
ключении обмотки статора к преобразователю частоты.
Таким образом, несинусоидальность напряжения и тока статора приводит к
существенному снижению КПД и повышению температуры обмоток асинхрон-
ного двигателя.
Анализ графиков (рисунок 1.8) показывает, что при скалярном управлении
электропривода и синусоидальном напряжении статора КПД двигателя при сни-
жении частоты вращения ротора уменьшается в большей степени для вентилятор-
ной нагрузки (кривая 3), чем при постоянном моменте сопротивления (кривая 1).
25
Это объясняется тем, что при законе управления U/f = const механическая мощ-
ность уменьшается более интенсивно с уменьшением частоты тока статора, чем
потери мощности, при вентиляторной нагрузке, в то время как при постоянстве
момента сопротивления разница в изменениях потерь мощности и механической
мощности менее выражена.
1 –КПД асинхронного двигателя со скалярным управлением и подключении
статора к синхронному генератору, Мс = const; 2 – КПД асинхронного двига-
теля со скалярным управлением и подключении статора к автономному инвер-
тору напряжения преобразователя частоты, Мс = const; 3 – КПД асинхронного
двигателя со скалярным управлением, Мс ~ ω2; 4 – КПД асинхронного двига-
теля со скалярным и подключении статора к автономному инвертору напряже-
ния с учетом КПД преобразователя частоты, Мс = const; 5 – КПД преобразова-
теля частоты; 6 – КПД асинхронного двигателя со скалярным управлением и
подключении статора к синхронному генератору с учетом КПД синхронного
генератора
На рисунке 1.9 приведены зависимости КПД электропривода с преобразо-
вателем частоты с системой скалярного управления, реализующей функциональ-
ную зависимость U/f = const, для асинхронного двигателя типа 4А132М6, полу-
ченные в работе [15].

26
КПД электропривода при реализуемой зависимости между частотой тока и
напряжением обмотки статора зависит также и от момента сопротивления. С
уменьшением частоты вращения рабочая точка с максимальным КПД смещается
в зону пониженных моментов сопротивления, в первом приближении уменьшение
момента, которому соответствует максимум КПД можно считать пропорциональ-
ным уменьшению частоты.
В работах [15, 126] показано, что КПД электроприводов с преобразовате-
лями частоты почти полностью определяется КПД асинхронных двигателей, т.к.
потери мощности в электроприводе преимущественно состоят из потерь в двига-
теле.
Рисунок 1.9 – Зависимости КПД от момента сопротивления электропривода с
асинхронным двигателем и преобразователем частоты преобразователь ча-
стоты – асинхронный двигатель при законе управления U/f = const
Переход к регулируемому электроприводу посредством применения преоб-
разователя частоты в силовом канале сопряжен с усложнением схемы электропри-
вода, что неизбежно влечет к возможности возникновения различных аварийных
и нештатных ситуаций. Анализ исследований [106, 191, 192], посвященных этой
проблеме, показал, что наиболее опасным и часто возникающим является одно-
временное включение силовых ключей одной фазы автономного инвертора. Это
приводит к межфазному короткому замыканию обмотки статора асинхронного

27
двигателя, в результате чего создается ударный электромагнитный момент. Нали-
чие в преобразователях частоты различных аппаратных и программных защит не
позволяет гарантированно исключить такое явление.
Осциллограмма ударного момента на валу асинхронного двигателя ЭД900
при одновременном включении силовых ключей одной фазы при частоте враще-
ния ротора 54 рад/с, полученная в работе [192], показана на рисунке 1.10.
Рисунок 1.10 – Осциллограмма момента асинхронного
двигателя при одновременном включении силовых ключей одной фазы
(М – момент на валу двигателя, М* = М/ Мном)
В работе [192] установлено, что максимальная величина ударного момента
зависит от напряжения статора в момент времени, предшествующий короткому
замыканию силовых ключей, и может составлять 4…10 значений номинального
момента. Время действия ударного момента составляет несколько периодов
напряжения статора.
Очевидно, что при таких значениях ударного момента короткие замыкания
силовых ключей автономного инвертора приводят к повреждениям не только в
электрической части силового канала, но также и в механической части электро-
привода.
Разберем вкратце технические характеристики преобразователя частоты, ис-
пользуемого на тепловозе 2ТЭ25А с электропередачей переменного тока и пред-
назначенного для системы электропитания электроприводов вспомогательных аг-
регатов
28
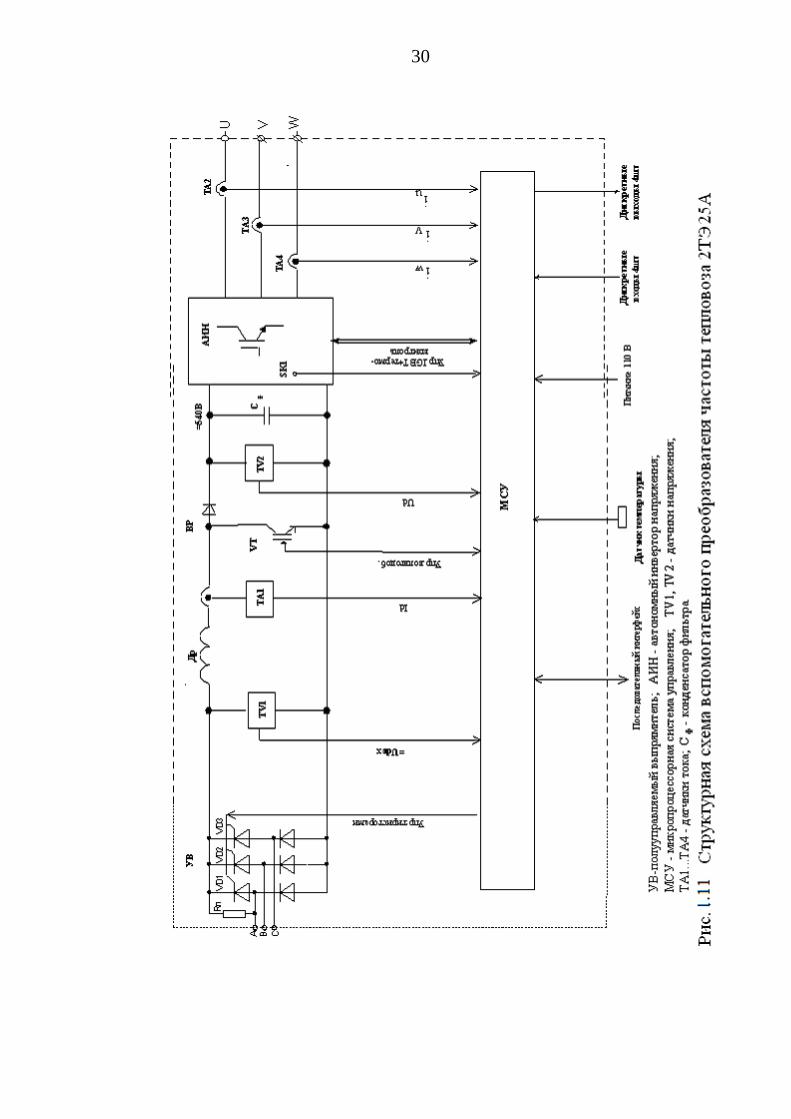
Преобразователь частоты для собственных нужд выполнен по схеме «вы-
прямитель – звено постоянного тока – автономный инвертор напряжения» и пред-
назначен для подключения к асинхронным двигателям вентиляторов холодиль-
ника дизеля и охлаждения тяговых двигателей. Асинхронный двигатель вентиля-
тора охлаждения тяговых преобразователей частоты подключен напрямую к об-
мотке статор асинхронного генератора.
Преобразователь частоты состоит из силовой части с драйверами, контрол-
лера и блока питания.
Для управления преобразователем частоты применяется последовательный
канал связи, по которому происходит передача данных от микропроцессорной си-
стемы управления тепловоза. Основными функциональными возможностями пре-
образователя являются:
- плавный пуск и изменение частоты вращения ротора в диапазоне 3…100
Гц;
- реализация закона скалярного управления U/f по шести предустановлен-
ным точкам;
- аппаратная защита от токов короткого замыкания, замыканий на землю,
повышенного и пониженного значений напряжения в звене постоянного тока, теп-
ловая защита радиатора охлаждения транзисторов.
На тепловозе 2ТЭ25А два преобразователя частоты установлены для двига-
телей вентиляторов охлаждающего устройства (холодильник) дизеля, один – для
двигателя вентилятора охлаждения тягового агрегата, еще один – для двигателя
вентилятора, охлаждающего тяговые двигатели. Структурная схема преобразова-
теля частоты показана на рисунке 1.11. Технические характеристики преобразова-
теля частоты показаны в таблице 1.1.
Применение автономного инвертора напряжения позволяет осуществлять
плавное регулирование скорости вращения вентиляторов в широком диапазоне и
получать наибольшую экономию электроэнергии. В то же время такой преобразо-
ватель имеет ряд недостатков: высокую мощность; двукратное преобразование
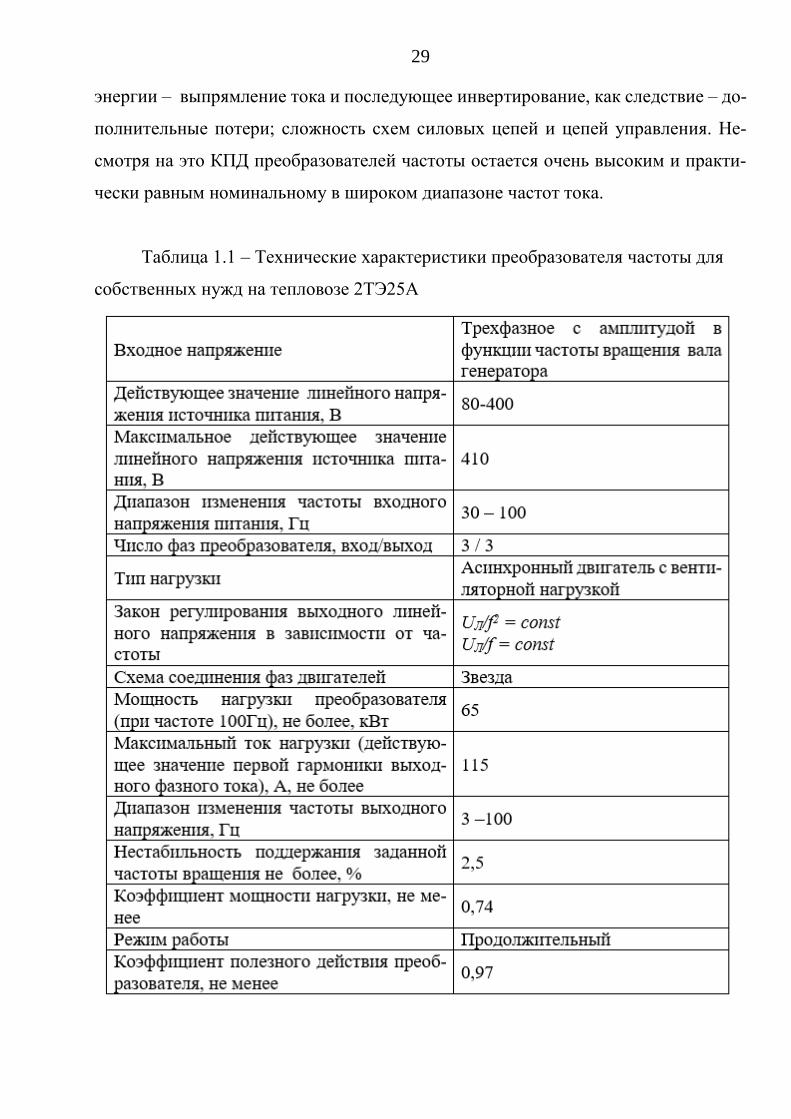
29
энергии – выпрямление тока и последующее инвертирование, как следствие – до-
полнительные потери; сложность схем силовых цепей и цепей управления. Не-
смотря на это КПД преобразователей частоты остается очень высоким и практи-
чески равным номинальному в широком диапазоне частот тока.
Таблица 1.1 – Технические характеристики преобразователя частоты для
собственных нужд на тепловозе 2ТЭ25А
30
31
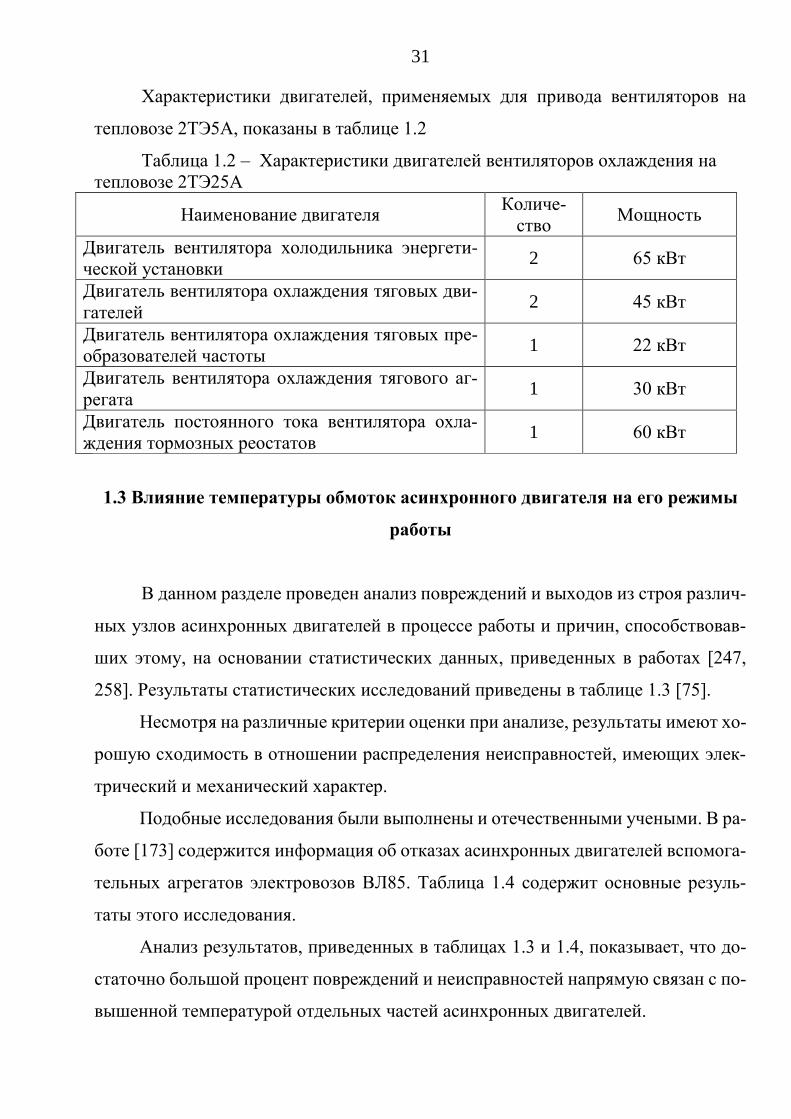
Характеристики двигателей, применяемых для привода вентиляторов на
тепловозе 2ТЭ5А, показаны в таблице 1.2
Таблица 1.2 – Характеристики двигателей вентиляторов охлаждения на
тепловозе 2ТЭ25А
Наименование двигателя Количе-
ство Мощность
Двигатель вентилятора холодильника энергети-
ческой установки 2 65 кВт
Двигатель вентилятора охлаждения тяговых дви-
гателей 2 45 кВт
Двигатель вентилятора охлаждения тяговых пре-
образователей частоты 1 22 кВт
Двигатель вентилятора охлаждения тягового аг-
регата 1 30 кВт
Двигатель постоянного тока вентилятора охла-
ждения тормозных реостатов 1 60 кВт
1.3 Влияние температуры обмоток асинхронного двигателя на его режимы
работы
В данном разделе проведен анализ повреждений и выходов из строя различ-
ных узлов асинхронных двигателей в процессе работы и причин, способствовав-
ших этому, на основании статистических данных, приведенных в работах [247,
258]. Результаты статистических исследований приведены в таблице 1.3 [75].
Несмотря на различные критерии оценки при анализе, результаты имеют хо-
рошую сходимость в отношении распределения неисправностей, имеющих элек-
трический и механический характер.
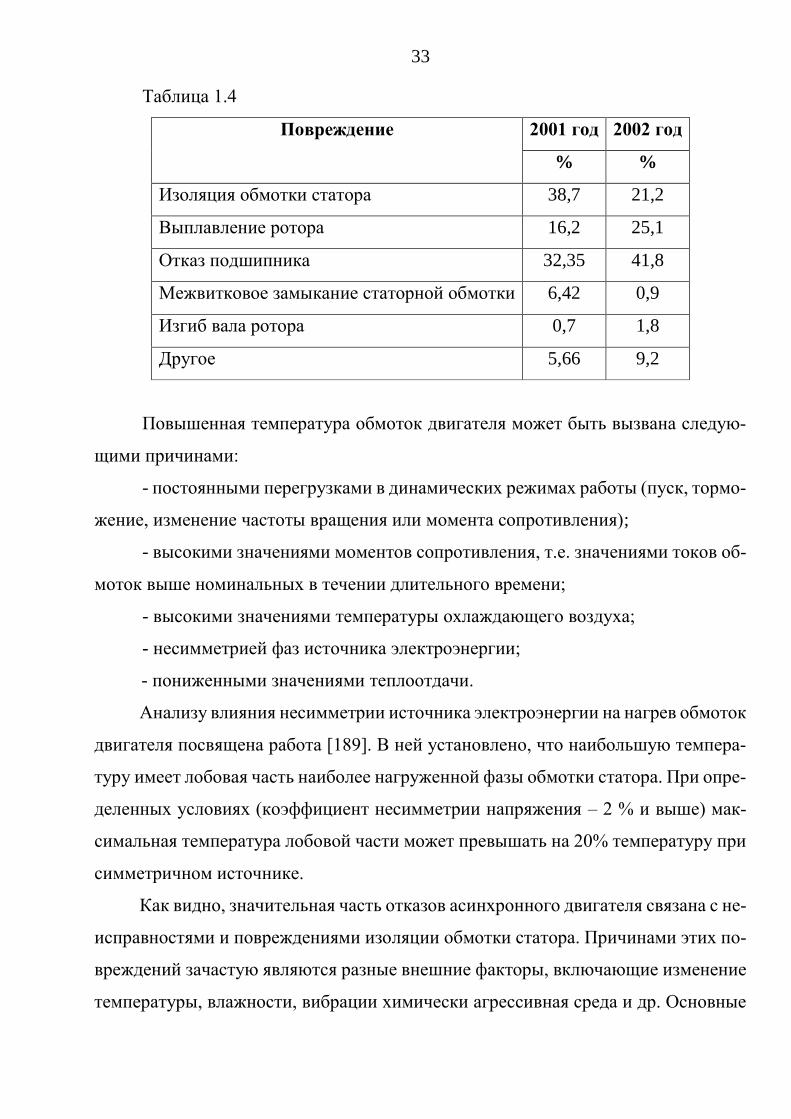
Подобные исследования были выполнены и отечественными учеными. В ра-
боте [173] содержится информация об отказах асинхронных двигателей вспомога-
тельных агрегатов электровозов ВЛ85. Таблица 1.4 содержит основные резуль-
таты этого исследования.
Анализ результатов, приведенных в таблицах 1.3 и 1.4, показывает, что до-
статочно большой процент повреждений и неисправностей напрямую связан с по-
вышенной температурой отдельных частей асинхронных двигателей.

32
Таблица 1.3
Причины поврежде-
ния
% Поврежденный узел % В среднем
Постоянные перегрузки 4,2 Корпусная изоляция ста-
тора
23 Повреждения,
вызванные
электриче-
скими
причинами
33,3 %
Старение изоляции 26,4 Межвитковая изоляция 4
Стяжка проводов 3
Сердечник статора 1
Стержни «беличьей»
клетки
5
Итого 30,6 Итого 36
Повышенная вибрация 15,5 Подшипник скольжения 29
Ухудшенная смазка 15,2 Вал ротора 2 Повреждения,
вызванные
механиче-
скими
причинами
31,35 %
Сердечник ротора 1
Итого 30,7 Итого 32
Высокая температура
окружающей среды 3 Подшипниковые гнезда 6
Повреждения,
вызванные
условиями
эксплуатации
и другими
причинами
35,35 %
Изменения влажности 5,8 Утечка масла (смазки) 3
Несимметрия напряже-
ния
2,1 Станина 1
Химически опасная
среда
4,2 Ребра охлаждения 1
Ухудшенное охлажде-
ние
3,9
Другие причины 19,7 Другие узлы 21
Итого 38,7 Итого 32
33
Таблица 1.4
Повреждение 2001 год 2002 год
% %
Изоляция обмотки статора 38,7 21,2
Выплавление ротора 16,2 25,1
Отказ подшипника 32,35 41,8
Межвитковое замыкание статорной обмотки 6,42 0,9
Изгиб вала ротора 0,7 1,8
Другое 5,66 9,2
Повышенная температура обмоток двигателя может быть вызвана следую-
щими причинами:
- постоянными перегрузками в динамических режимах работы (пуск, тормо-
жение, изменение частоты вращения или момента сопротивления);
- высокими значениями моментов сопротивления, т.е. значениями токов об-
моток выше номинальных в течении длительного времени;
- высокими значениями температуры охлаждающего воздуха;
- несимметрией фаз источника электроэнергии;
- пониженными значениями теплоотдачи.
Анализу влияния несимметрии источника электроэнергии на нагрев обмоток
двигателя посвящена работа [189]. В ней установлено, что наибольшую темпера-
туру имеет лобовая часть наиболее нагруженной фазы обмотки статора. При опре-
деленных условиях (коэффициент несимметрии напряжения – 2 % и выше) мак-
симальная температура лобовой части может превышать на 20% температуру при
симметричном источнике.
Как видно, значительная часть отказов асинхронного двигателя связана с не-
исправностями и повреждениями изоляции обмотки статора. Причинами этих по-
вреждений зачастую являются разные внешние факторы, включающие изменение
температуры, влажности, вибрации химически агрессивная среда и др. Основные
34
методы предупреждения развития неисправностей связаны с попытками устране-
ния этих негативных факторов, например, осушка изоляции, применение автома-
тических систем регулирования температур и т.д.
В настоящее время при производстве электрических машин стремятся созда-
вать такие конструкции, которые обладают более высокими энергетическими по-
казателями качества, обеспечивают большие значения мощности при тех же са-
мых габаритах и массе [31]. Применение новых неорганических материалов в ка-
честве средств изоляции с одной стороны способствует повышению диэлектриче-
ских качеств изоляции обмотки, с другой стороны эти материалы более чувстви-
тельны к повышению их температуры.
Помимо возможных неисправностей различных узлов в конструкции асин-
хронного двигателя изменения температуры асинхронного двигателя также при-
водят к изменению его характеристик и параметров. Эти явления напрямую вли-
яют на качество работы системы управления электропривода при условии, что
настройки и регуляторы системы рассчитаны для неизменного значения темпера-
туры. Далее приводятся результаты аналитического исследования на основании
Т-образной схемы замещения асинхронного двигателя влияния температуры его
обмоток статора и ротора на характеристики в установившемся режиме работы.
Уравнение механической характеристики асинхронного двигателя:
22
21
23
k'
0
'2ф
xs/RRs
RUM
, (1.1)
где М – момент двиагтеля; фU – фазное напряжение обмотки статора; 'R,R 21
– сопротивления статора и приведенное сопротивление ротора соответственно;
'k xxx 21 – индуктивное сопротивление короткого замыкания, 'x,x 21 – индук-
тивное сопротивление статора и приведенное индуктивное сопротивление ротора
соответственно; 0 – частота вращения ротора при идеальном холостом ходе;
00 /)(s – относительное скольжение, – частота вращения вала ротора.
Критический момент:

35
)xRR(
UM
k0
2ф
k22
112
3
. (1.2)
Критическое скольжение:
221
2
k
'
kxR
Rs
. (1.3)
Абсолютное скольжение:
0ном0абс /)(s , (1.4)
где 0ном – частота вращения ротора при идеальном холостом ходе при но-
минальной частоте тока статора.
Жесткость линейного участка механической характеристики асинхронного
двигателя:
k
k
s
М
0
2
. (1.5)
Зависимость сопротивления обмоток от температуры:
)(12020
RR , (1.6)
где 20R – сопротивление обмотки при температуре 2020 °С, θ – текущая
температура обмотки, – температурный коэффициент сопротивления (для меди
004330, ).
Зависимости основных рабочих характеристик и параметров асинхронного
двигателя от температуры его обмоток показаны на примере тепловозного элек-
тродвигателя ЭД-900 [66, 141].
Параметры двигателя ЭД-900: Uф = 362 В; РH = 380 кВт; 2р = 6; f1H = 24 Гц;
1x = 0,114 Ом; 'x2 = 0,119 Ом; 1R = 0,0347 Ом; 'R2 = 0,0304 Ом, где, 2р – число
полюсов обмотки статора, f1H – номинальная частота тока статора.
При расчете использовалась система скалярного управления с пропорцио-
нальным законом U/f = const с IR-компенсацией при температуре θ = 150°С, т.е.
закон постоянства потокосцепления статора обеспечивается только при этой тем-
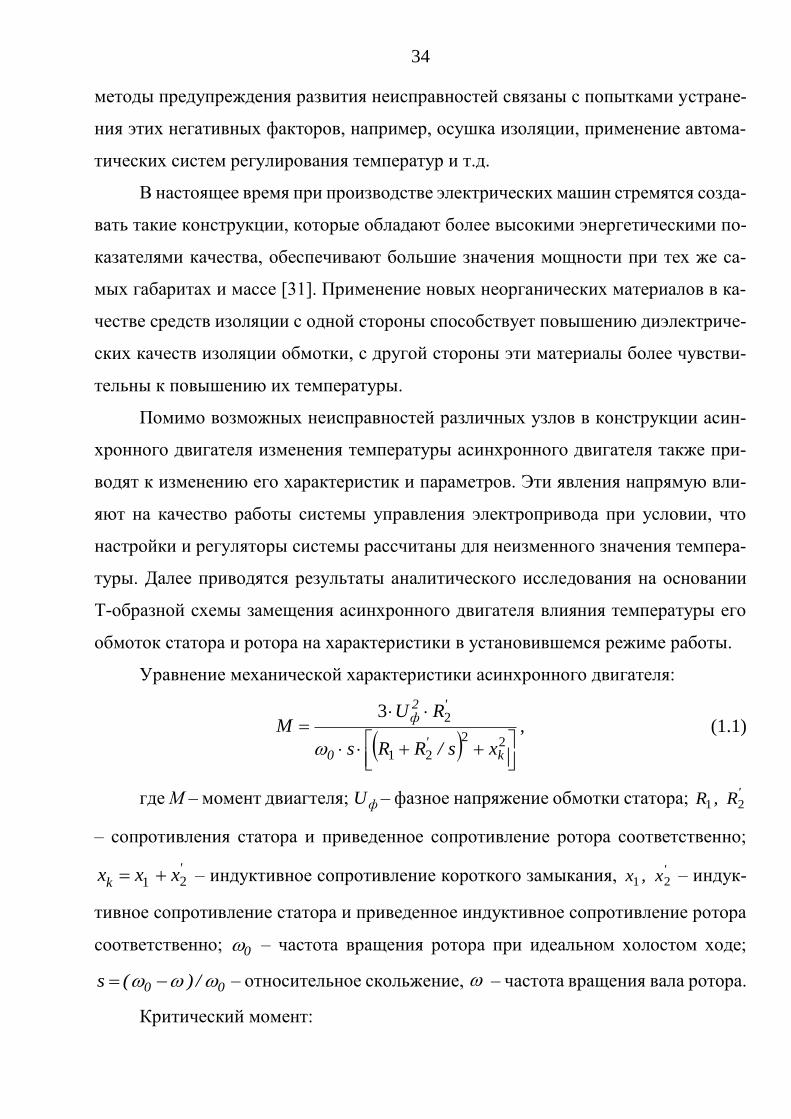
36
пературе. При частоте тока статора выше номинальной напряжение статора под-
держивалось на уровне номинального значения. Результаты расчета приведены на
рисунке 1.12.
а)
б)
в) г)

37
Проведенный анализ результатов расчета (рисунок 1.12) говорит о том, что
одновременно с повышением температуры обмоток двигателя происходит соот-
ветствующее увеличение критического скольжения и понижение максимального
момента, результатом чего становится уменьшение жесткости механической ха-
рактеристики двигателя.
Данное влияние температуры на характеристики асинхронного двигателя
связано с тем, что возрастание температуры обмоток приводит к соответствую-
щему увеличению активных сопротивлений этих обмоток, что и вызывает умень-
шение критического скольжения, т.к. явно и сильно выраженная зависимость ин-
дуктивного сопротивления обмоток от температуры отсутствует. Наибольшее
влияние температура оказывает на критическое скольжение при высоких значе-
ниях частоты тока статора (при частоте 42 Гц значение критического скольжения
достигает 42%), в то время как при низких частотах тока статора влияние темпе-
ратуры выражено слабо (при частоте 2,4 Гц значение критического скольжения
составляет 13%), т.к. величина индуктивного сопротивления, входящего в выра-
жение (1.3) становится мало по отношению к активным сопротивлениям.
Возрастание температуры приводит к снижению величины критического
момента, причем с уменьшением частоты тока статора это снижение увеличива-
ется (критический момент уменьшается на 55 % при частоте тока статора 2,4 Гц,
при частоте 24 Гц момент уменьшается на 10,5%). При частотах выше номиналь-
ного значения отношение активного и индуктивного сопротивления таково, что
изменение критического момента из-за изменения температуры обмоток выра-
жено слабо.
Такой характер зависимости критических скольжения и момента от темпе-
ратуры приводит к снижению значения жесткости механических характеристик
асинхронного двигателя, с уменьшением частоты тока статора этот эффект увели-
чивается (при частоте f1 = 48 Гц значение жесткости уменьшается на 5%, при f1 =
2,4 Гц – на 71%).

38
Изменение жесткости механической характеристики тягового двигателя
оказывает непосредственное влияние на качество работы тягового электропри-
вода [54, 199], особенно в случае с работой тяговых двигателей в пределах одной
тележки при питании от общего преобразователя частоты. В случае, если жестко-
сти механических характеристик таких двигателей неодинаковы, это вызовет не-
равномерное распределение моментов сопротивления на их валах, вследствие
чего двигатель с большей жесткостью будет перегружен больше, чем двигатель с
меньшей жесткостью. Кроме этого, колесная пара двигателя с большей жестко-
стью обладает склонностью к возникновению буксования. Вместе с этим, при оди-
наковых жестких характеристиках происходит более быстрый сброс нагрузки, что
приводит к выравниванию сил тяги на колесных парах при меньшей избыточной
скорости скольжения. Таким образом, одним из важных вопросов при синтезе си-
стем управления тяговых электроприводов является поддержание одинаковых и
регулируемых значений жесткостей механических характеристик тяговых двига-
телей, для осуществления чего необходимо учитывать температурное состояние
обмоток двигателя.
1.4 Анализ существующих способов измерения температуры вращающихся
частей электрических машин
Поддержание теплового состояния тяговых двигателей на локомотивах осу-
ществляется системами охлаждения или автоматическими системами регулирова-
ния температуры. Организацию работы автоматической системы регулирования
температуры, работающей по отклонению, необходимо реализовывать с помощью
обратной связи по регулируемому параметру (температуре лимитирующего по
нагреву узла двигателя).
В настоящее время как в России, так и за рубежом существует достаточно
большое количество работ, посвященных теоретическим и экспериментальным
исследованиям в области теплового состояния электромашин. Основоположни-
ками этого направления в нашей стране можно считать ученых А.Е. Алексеева,

39
В.А. Винокурова, А.Б. Иоффе, М.П. Костенко, М.Д. Находкина, О.А. Некрасова,
И.М. Постникова и другие. Проведением экспериментальных исследований в этой
области занимались коллективы и научные школы ВНИИЖТ, ВНИТИ, ВЭлНИИ,
МГУПС (МИИТ), НЭВЗ, «Электротяжмаш» и другие.
Результаты выполненных исследований теплового состояния электромашин
по своим назначениям можно сгруппировать в три основные категории:
- определение установившихся локальных и средних значений темпера-
туры различных узлов (прежде всего, обмоток) тяговых двигателей в процессе ра-
боты и их сопоставление с предельными по классу изоляции значениями;
- определение распределения установившейся температуры по всему объ-
ему тягового двигателей, т.е. применение алгоритмов численного моделирования
исследования тепловых полей;
- определение параметров (коэффициенты передачи и постоянные вре-
мени, время запаздывания, запасы устойчивости и др.) и характеристик (статиче-
ские, динамические, временные, частотные) тяговых двигателей как объекта регу-
лирования температуры; определение локальных и средних значений темпера-
туры различных узлов в переходных режимах работы.
Достижение этих целей возможно при проведении как экспериментальных,
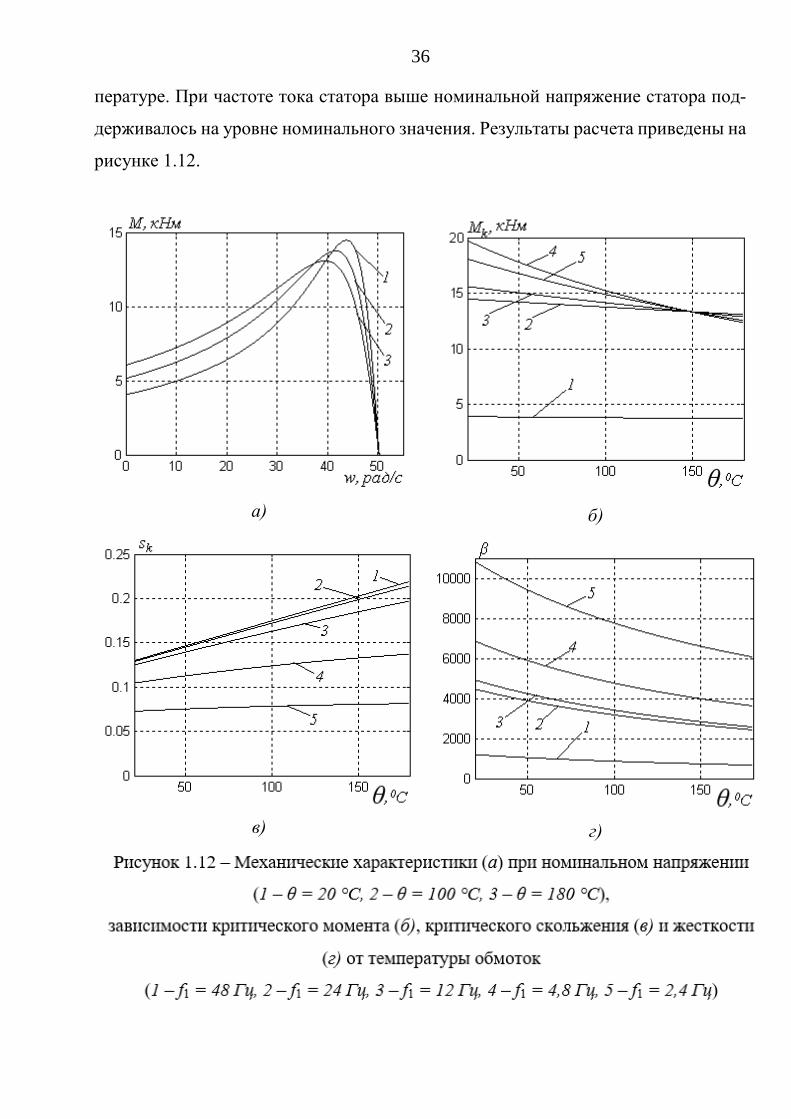
так и теоретических исследований (рисунок 1.13) [96].
Экспериментальные исследования в части методов измерения нагреваю-
щихся элементов электрических машин регламентированы ГОСТ 25000-81, со-
гласно которому применяют методы термометра, сопротивления, заложенных и
встраиваемых датчиков температуры.
Первый метод – метод термометра – позволяет выполнять измерение ло-
кальных температур посредством термопар или термометров, присоединяемым к
доступным частям поверхностей различных элементов электромашины (обмотки,
сердечники, корпуса, коллекторы (при наличии) и т.д.).
40
Рисунок 1.13 – Способы измерения температуры вращающихся частей электри-
ческих машин
Метод сопротивления позволяет на основании закона Ома определять сред-
нее интегральное значение температуры обмоток путем измерения напряжения и
тока с помощью соответствующих датчиков и с последующим определением со-
противления этой обмотки и ее температуры из зависимости (1.6). Недостатками
данного метода являются его применимость только для цепей постоянного тока и
уменьшение точности определения сопротивления и температуры при уменьше-
нии активного сопротивления обмотки.
Метод заложенных датчиков температуры позволяет выполнять измерение
локальных температур посредством термопар или термометров, смонтированных
41
при производстве электромашины в таких узлах, которые недоступны при эксплу-
атации машины (например, на дно паза, между листами стали сердечника) и в ко-
торых предполагаются наибольшие значения перегрева. Данный метод приме-
няют для измерения температуры не только обмоток, но также сердечника, под-
шипников и т.д.
Метод встраиваемых датчиков также применяют для измерения локальных
температур, но на стадии испытания уже собранной электромашины. В качестве
измерительных средств используются термометры сопротивления, термопары и
другие приборы.
Основная проблема при измерении температуры вращающихся частей – это
организация передачи информации с измерительных устройств к информацион-
ной системе, которая может быть выполнена контактным или бесконтактным спо-
собом. При контактном способе информация передается посредством коммутаци-
онной эдс, индуцируемой в зоне скользящего контакта. На точность передачи вли-
яет контактное сопротивление, зависящее от условий окружающей среды, частоты
вращения и ряда других факторов, поэтому при контактном способе на первое ме-
сто выходит задача обеспечения минимальной погрешности. Для решения этой
задачи применяют, например, ртутные или иные жидкометаллические контакты.
В настоящее время для передачи информации с вращающегося источника приме-
няют бесконтактные способы на основе радиотелеметрической, оптической, ем-
костной и других видов беспроводной связи.
Далее приведем результаты анализа некоторых исследований тепловых про-
цессов в асинхронных двигателях [139].
В работе [202] проводилось экспериментальное исследование распределе-
ния температуры в обмотках и сердечниках электродвигателей с радиальной си-
стемой вентиляции, которое показывает, что при такой системе вентиляции
наблюдается значительная неравномерность нагрева в радиальном и осевом
направлениях. Экспериментальные исследования были выполнены на асинхрон-
ных двигателях мощностью 95, 630 и 800 кВт.
42
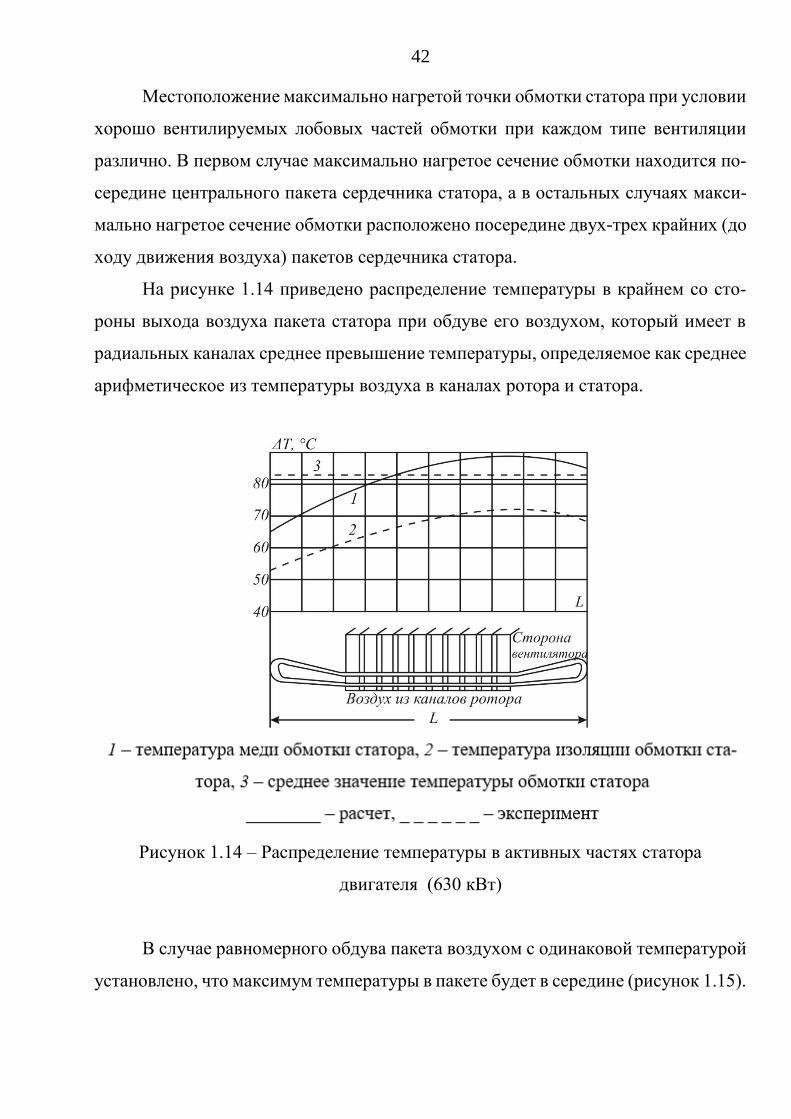
Местоположение максимально нагретой точки обмотки статора при условии
хорошо вентилируемых лобовых частей обмотки при каждом типе вентиляции
различно. В первом случае максимально нагретое сечение обмотки находится по-
середине центрального пакета сердечника статора, а в остальных случаях макси-
мально нагретое сечение обмотки расположено посередине двух-трех крайних (до
ходу движения воздуха) пакетов сердечника статора.
На рисунке 1.14 приведено распределение температуры в крайнем со сто-
роны выхода воздуха пакета статора при обдуве его воздухом, который имеет в
радиальных каналах среднее превышение температуры, определяемое как среднее
арифметическое из температуры воздуха в каналах ротора и статора.
Рисунок 1.14 – Распределение температуры в активных частях статора
двигателя (630 кВт)
В случае равномерного обдува пакета воздухом с одинаковой температурой
установлено, что максимум температуры в пакете будет в середине (рисунок 1.15).
43
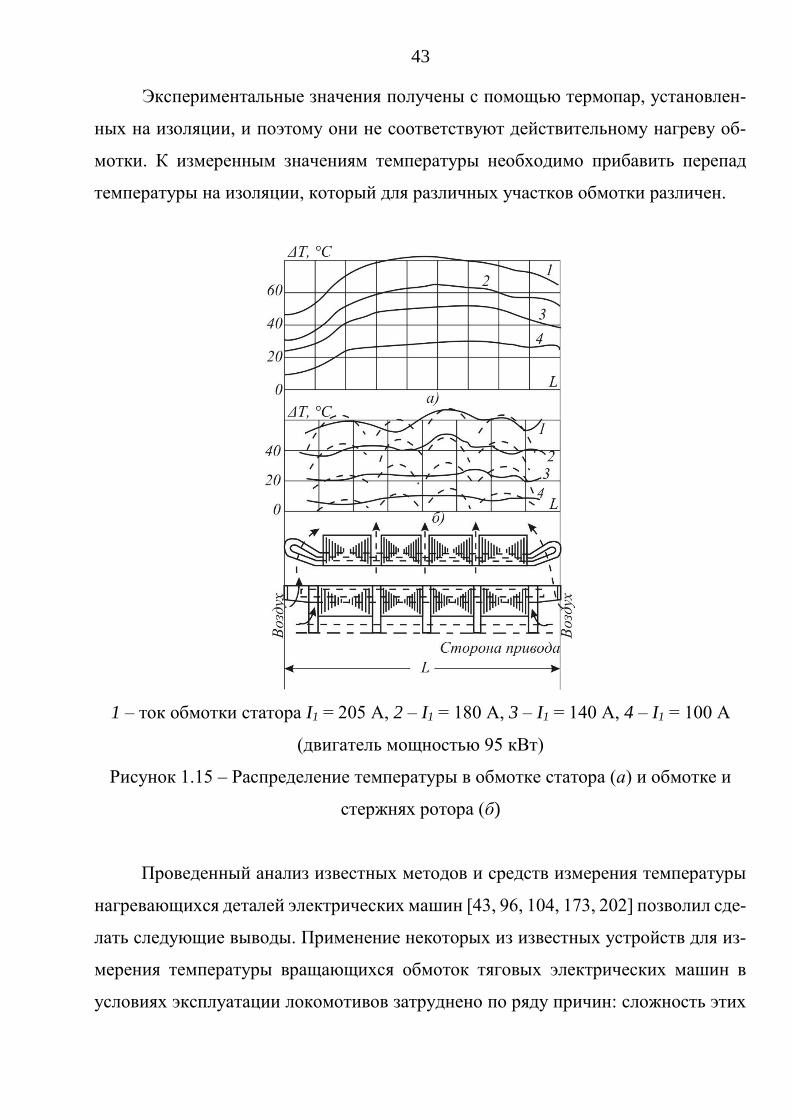
Экспериментальные значения получены с помощью термопар, установлен-
ных на изоляции, и поэтому они не соответствуют действительному нагреву об-
мотки. К измеренным значениям температуры необходимо прибавить перепад
температуры на изоляции, который для различных участков обмотки различен.
1 – ток обмотки статора I1 = 205 А, 2 – I1 = 180 А, 3 – I1 = 140 А, 4 – I1 = 100 А
(двигатель мощностью 95 кВт)
Рисунок 1.15 – Распределение температуры в обмотке статора (а) и обмотке и
стержнях ротора (б)
Проведенный анализ известных методов и средств измерения температуры
нагревающихся деталей электрических машин [43, 96, 104, 173, 202] позволил сде-
лать следующие выводы. Применение некоторых из известных устройств для из-
мерения температуры вращающихся обмоток тяговых электрических машин в
условиях эксплуатации локомотивов затруднено по ряду причин: сложность этих

44
устройств; необходимость вмешательства в конструкцию электрических машин;
ограниченные возможности в реализации основных требований, предъявляемых к
этим измерительным устройствам, как функциональным элементам системы регу-
лирования, и др.
Перспективу имеет направление разработки устройств для непосредствен-
ных измерений нагревающихся неподвижных элементов электрических машин, в
том числе в сочетании с расчетными методами. Разрабатываемые измерительные
устройства должны удовлетворять следующим требованиям: универсальность
(пригодность их для измерения температуры элементов электрических машин раз-
личных типов), простота, возможность применения серийных элементов.
Кроме того, к измерительному устройству, как функциональному элементу
системы регулирования, предъявляются следующие требования: простота
настройки и регулирования (в том числе изменение коэффициента передачи); воз-
можность введения дополнительных сигналов по основным возмущающим воз-
действиям; возможность формирования статических характеристик требуемого
вида и др.
Существующие методы теоретических исследований тепловых процессов,
происходящих в электрических машинах, базируются либо на использовании диф-
ференциальных уравнений теплопроводности для активных частей электрических
машин (метод температурного поля), либо на методе эквивалентных тепловых
схем.
Метод температурного поля является более строгим. Активные части ма-
шины – обмотки и магнитные сердечники – являются источниками потерь и рас-
сматриваются как тела с внутренними распределенными источниками тепла, ко-
торые контактируют между собой, с другими деталями конструкции машины, с
внешней охлаждающей средой или промежуточными охладителями при гранич-
ных условиях различного рода. В общем случае в установившемся состоянии рас-
пределение температуры определяется уравнением вида:
02
2
2
2
2
2
k
k
zk
k
yk
k
xkq
zyx
,

45
где xk , yk , zk - коэффициенты теплопроводности в направлениях x, y и z;
kq - количество теплоты, выделяющегося в единице объема за единицу времени.
Однако граничные условия для этого уравнения сложны и взаимосвязаны.
Решения получаются громоздкими и часто неприемлемыми для инженерной прак-
тики. Поэтому в практических расчетах принимают ряд допущений, позволяющих
существенно упростить решение задачи. Одним из самых существенных упроще-
ний при решении задачи нагрева электрической машины является отказ от рас-
смотрения поля температур внутри отдельных его частей. Переход к средним тем-
пературам позволяет систему с распределенными потерями заменить системой тел
с сосредоточенными источниками. Связи между узлами устанавливаются на ос-
нове анализа возможных путей тепловых потоков. Эти связи представляют собой
тепловые сопротивления. Таким образом, в этом методе аналогично электриче-
ской цепи составляется тепловая цепь из тепловых сопротивлений, в которых име-
ется тепловой поток, и из источников тепла. Дифференциальные уравнения не-
установившихся процессов нагревания электрической машины могут быть пред-
ставлены в виде:
k
n
i
ikkik
kk qd
dс
1
)(
,
где kс - удельная теплоемкость, k - плотность тела.
Эта система может быть представлена эквивалентной тепловой схемой, в ко-
торой реальную картину распределения потерь и тепловых потоков заменяют
условной, представляющей собой взаимный нагрев системы однородных тел.
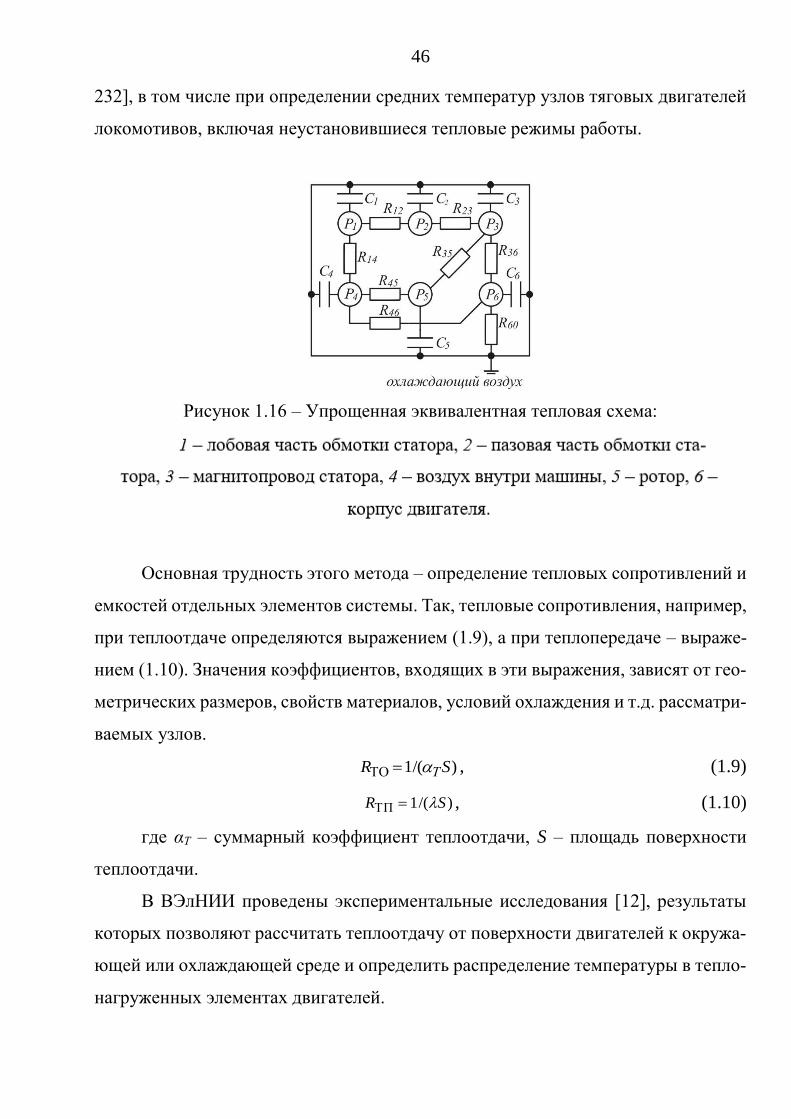
Для примера на рисунке 1.16 приведена эквивалентная тепловая схема асин-
хронного двигателя, синтезированная в работе [9]. Как видно из рисунка 1.8 мо-
дель содержит 8 тепловых сопротивлений.
Универсальность и относительная простота метода эквивалентных тепло-
вых схем послужила причиной его широкого использования в научных и инже-
нерных исследованиях [4, 11, 107, 108, 120, 127, 128, 184, 186, 190, 215, 226, 229,
46
232], в том числе при определении средних температур узлов тяговых двигателей
локомотивов, включая неустановившиеся тепловые режимы работы.
Рисунок 1.16 – Упрощенная эквивалентная тепловая схема:
Основная трудность этого метода – определение тепловых сопротивлений и
емкостей отдельных элементов системы. Так, тепловые сопротивления, например,
при теплоотдаче определяются выражением (1.9), а при теплопередаче – выраже-
нием (1.10). Значения коэффициентов, входящих в эти выражения, зависят от гео-
метрических размеров, свойств материалов, условий охлаждения и т.д. рассматри-
ваемых узлов.
)/(1ТО SR Т , (1.9)
)/(1ТП SR , (1.10)
где αТ – суммарный коэффициент теплоотдачи, S – площадь поверхности
теплоотдачи.
В ВЭлНИИ проведены экспериментальные исследования [12], результаты
которых позволяют рассчитать теплоотдачу от поверхности двигателей к окружа-
ющей или охлаждающей среде и определить распределение температуры в тепло-
нагруженных элементах двигателей.
47
Из выражения (1.8) можно перейти к уравнению для установившегося зна-
чения превышения температуры узла двигателя:
n
i
ii
устB
kP
В
Р
1
, (1.11)
где ΔР – потери мощности в активном узле; ΔРi – потери мощности в i-том
рассматриваемом активном узле двигателя; ki –коэффициент подогрева рассмат-
риваемого узла; B – суммарная теплопередача от узла к окружающей или охла-
ждающей среде.
В работах [107, 186] синтезирована тепловая модель асинхронного двига-
теля, в которой при расчете потерь мощности учтены температуры меди обмоток
и стали магнитопроводов. Охлаждающий воздух внутри двигателя имеет неоди-
наковую температуру по его длине, значение температуры увеличивается от узла
к узлу по направлению потока воздуха. Установлено, что для обеспечения погреш-
ности определения температуры различных узлов двигателя менее 3 % в широком
диапазоне изменения частот вращения и моментов сопротивления ее эквивалент-
ная тепловая схема должна содержать 21 узел, а математическая модель состоит
из 21 дифференциального уравнения. Это 21 уравнения необходимо дополнить 17
уравнениями, которые описывают изменение температуры охлаждающего воз-
духа по длине асинхронного двигателя и учитывают конвективные связи узлов
двигателя с охлаждающим воздухом. В результате полная математическая модель
тепловых процессов состоит из 38 дифференциальных уравнений, учитывающих
теплообмен между активными и пассивными узлами машины, охлаждающим воз-
духом внутри двигателя и окружающей средой.
В работе [186] установлено, что обмотка статора испытывает больший пере-
грев, чем обмотка ротора во всем диапазоне скорости движения электровоза; эта
разность становится тем больше, чем больше скорость движения электровоза –
разница в максимальных температурах обмоток статора и ротора при скорости
10км/ч равняется 23,5 °С, в то время как при скорости 80 км/ч – 63,7 °С. Также в
работе установлено, что наибольший перегрев испытывает пазовая часть обмотки

48
статора. Это объясняется авторами тем, что у обмотки статора наилучшая тепло-
отдача в лобовых частях.
В работе [226] предложена тепловая модель, первоначально рассчитанная на
использование в конструкторских целях при проектировании новых машин. Эта
модель предоставляет очень подробные результаты расчета температуры в раз-
личных точках и тепловых потоках. Она состоит из 104 узлов и 170 тепловых со-
противлений. Данная модель разработана для полностью закрытых обдуваемых
вентилятором асинхронных машин с короткозамкнутым ротором. Благодаря кон-
структивной симметрии машина поделена на элементы, сконцентрированные во-
круг вала. Каждый элемент поделен в осевом направлении на узлы, что делает воз-
можным исследовать распределение температуры в осевом направлении.
В результате исследований установлено, что максимальную температуру
имеют стержни короткозамкнутого ротора (для двигателя мощностью 4 кВт пре-
вышение температуры стержней ротора над температурой обмотки статора со-
ставляет 18 °С; для двигателя мощностью 15 кВт – 44 °С). Результаты получены
для режима работы, близкого к номинальному.
В работе [232] синтезирована эквивалентная тепловая схема двигателя, со-
стоящая из 37 тепловых сопротивлений, позволяющая определять температуру в
10 узлах асинхронного двигателя, 4 из которых являются активными с точки зре-
ния потерь. С точки зрения результатов в отношении выявления узла с наиболь-
шей температурой работа [232] достаточно близко совпадает с работой [226].
В работе [184] проведено исследование распределения температур для дви-
гателя АИР100S4, которое показало, что максимальный перегрев испытывают ло-
бовые части обмотки статора, следующей по теплонагруженности идет пазовая
часть обмотки статора.
Аналогичные выводы были сделаны в работах [211, 229]: температура пазо-
вой части обмотки статора, как правило на 5-10 °С ниже, чем в лобовой часто со
стороны, противоположной подаче охлаждающего воздуха. Теоретически это объ-

49
ясняется тем, что в радиальном направлении тепло посредством высокой тепло-
проводности через сталь сердечника статора и после через корпус достаточно ин-
тенсивно отводится в окружающую среду.
Кроме исследований установившихся распределений температуры значи-
тельный интерес представляют определения температурно-временных зависимо-
стей отдельных элементов асинхронных машин при различных нагрузках.
В качестве примера на рисунке 1.17 показаны кривые изменения темпера-
туры отдельных элементов двигателя AИP100S4 при разгоне до номинального ре-
жима.
Рисунок 1.17 – Осциллограммы тепловых переходных процессов
1 – воздух, 2 – корпус, 3 – ротор, 4 – сталь статора, 5 – пазовые части об-
моток, 6 – лобовые части обмоток
Как видно из рисунка 1.17, постоянные времени нагрева для различных ча-
стей двигателя разные. Чем больше момент сопротивления, тем больше потери
мощности и тем больше разница температур сопряженных узлов двигателя, след-
ствием чего является необходимость контроля максимальных значений локальных
температур.
В работе [211] показано, что в реальном переходном процессе тепловая по-
стоянная времени T ≠ const, причем темп изменения постоянной времени при при-
ближении текущего превышения температуры θ к установившемуся значению θуст

50
уменьшается. Авторы работы [211] объясняют это тем, что переходный процесс
нагрева и охлаждения удовлетворительнее описывается суммой экспонент, чем
одной экспонентой.
В работе [9] предложено введение двух постоянных времени, одна из кото-
рых (большая) относится к стали магнитопровода, а другая (меньшая) – к меди
обмоток двигателя. Данный подход позволяет построит упрощенную тепловую
модель асинхронного двигателя, которая при условии равенства температуры об-
моток температуре окружающей среды в начале переходного процесса описыва-
ется следующим выражением:
)1()1()1()( minmax /
н
/
н
2
ном
уст
TtTti еKеKI
It
, (1.12)
где Ii и Iном – текущее и номинальное значения тока в обмотке соответ-
ственно; КН – коэффициент, учитывающий соотношения температур меди обмо-
ток и стали магнитопровода.
Уравнение (1.12) записано, исходя из условия пропорциональности темпе-
ратуры меди обмотки статора квадрату тока статора. Данное условие выполняется
только при анализе распределения температур между обмоткой и магнитопрово-
дом статора двигателя, т.е. квадрату тока статора пропорционально превышение
температуры меди обмотки над сталью статора, в то время как превышение тем-
пературы обмотки статора над температурой окружающей среды складывается из
превышения температуры обмотки над температурой магнитопровода статора и
превышения температуры магнитопровода над температурой окружающей среды.
Последнее зависит количества теплоты, передаваемого магнитопроводу от об-
мотки, и от потерь мощности в стали, которые являются функцией магнитной ин-
дукции, т.е. напряжения статора и частоты тока статора. Таким образом, эмпири-
ческий коэффициент Кн, входящий в выражение (1.12) является функцией не-
скольких переменных, что уменьшает точность предлагаемого подхода.
Аналогично в работе [9] получена математическая модель тепловых процес-
сов при охлаждении асинхронного двигателя.

51
В работе [248] предложен другой подход к описанию переходных процессов
нагрева асинхронных двигателей и определения его параметров. Переходный про-
цесс нагрева и охлаждения описывается экспонентой с одной постоянной вре-
мени, значение которой зависит от текущей температуры обмотки статора θj:
)1(0 j
ТТ . (1.13)
Уравнение переходного процесса:
)
)1(exp(1
0 j
j
устjT
, (1.14)
где β – температурный коэффициент сопротивления, 0С-1; T0 –значение по-
стоянной времени в начале переходного процесса, мин.
В работе [184] было проведено сопоставление данных, полученных при ма-
тематическом и физическом моделировании, анализ которых показал, что раз-
ность температур, полученных расчетным путем на основе модели, учитывающей
пять активных элементов, и измеренных с помощью датчиков, в установившемся
режиме не более 1,5 °С, что составляет 1,7 % действительного значения. Для теп-
ловой модели двигателя, состоящей из одного узла, ошибка определения темпера-
туры по отношению к ее действительному значению составляет 9,5 °С (более 10
%). Для определения степени детализации тепловой модели на основе предложен-
ного метода было проведено моделирование тепловых процессов для моделей с
различным количеством элементов. При увеличении количества элементов (коли-
чества уравнений системы) увеличивается точность вычислений, но вместе с этим
растёт время решения системы. Установлено, что оптимальное соотношение точ-
ности к времени вычисления обеспечивается при использовании модели, содержа-
щей 5 элементов. Эта цифра определяется количеством активных элементов асин-
хронного двигателя, параметры теплообмена которых постоянны по всему их объ-
ёму, что позволяет считать их (с приемлемыми для релейной зашиты допущени-
ями) однородными телами.
В работе [226] для экспериментальной оценки теплового состояния различ-
ных узлов машин 4 и 15 кВт были использованы 24 и 47 термопар соответственно.

52
Показано, что наибольшее рассогласование между теоретическими и эксперимен-
тальными данными достигает 6,5 %.
Разработанная тепловая модель в работе [215] состоит из 11 узлов и 15 теп-
ловых сопротивлений. В этой модели статор поделен на сталь статора, пазовую
часть обмотки статора и лобовую часть обмотки. Принято, что тепловой поток от
обмотки ротора проходит через воздушный зазор непосредственно в обмотку ста-
тора, с пренебрежимо малым значением, передаваемым зубцам статора. Ротор ма-
шины поделен на сталь ротора, обмотку ротора и короткозамкнутые кольца.
Эксперимент проводился на установке, содержащей асинхронную машину
мощностью 7,5 кВт (номинальная частота вращения ротора 1400 об/мин, номи-
нальный ток 19,2 А). Измерения температуры проводились для трех случаев: хо-
лостой ход, номинальная нагрузка и короткое замыкание (заторможенный ротор).
В режиме заторможенного ротора замеры температуры осуществлялись по 20 и 12
медь-константановым термопарам, установленным соответственно в статоре и ро-
торе. В остальных режимах работы измерения температуры на роторе не проводи-
лось.
Проведенные исследования показали, что разработанная математическая
модель тепловых процессов в асинхронном двигателе способна с приемлемой точ-
ностью описывать тепловое состояние машины в трех рассмотренных режимах
работы. Для режима холостого хода погрешность вычисления температуры не
превышает 5 °С, под номинальной нагрузкой погрешность составляет порядка 9
°С, в режиме короткого замыкания – 10 °С.
Тепловая схема, состоящая из 20 узлов и описанная в работе [16] упрощена
в работе [56] так, что на половину длина машины состоит из семи тел и описыва-
ется системой семи дифференциальных уравнений. В работе был проведен стати-
стический анализ нагрева асинхронных двигателей.
Сравнение опытной дисперсии с расчетной по критерию Фишера показало,
что различие между ними для уровня доверительной вероятности 0,95 весьма су-
щественно. Это можно объяснить либо наличием погрешности расчета, которую
вносят принятые допущения, либо превышением заложенных технологических

53
параметров при изготовлении двигателей, в частности заменой отдельных матери-
алов, качеством пропиточных лаков и пропитки обмоток и т.д. Допустимые пре-
делы превышения температуры обмотки статора двигателей, полученные на осно-
вании опытных данных составляют 18,3 %. В эти пределы не попадают опытные
значения превышений температуры обмотки статора 12 двигателей ВАО основ-
ного исполнения из 328, что составляет 3,7 %. Максимальные превышения темпе-
ратуры обмотки статора составили – 20… + 25 %.
Обобщая проведенный анализ, необходимо отметить, что несмотря на отно-
сительно большое количество работ в области исследования теплового состояния
асинхронного двигателя, это направление не утратило свое актуальности и свое-
временности в силу ряда причин.
Установившееся и неустановившееся тепловое состояние асинхронного
двигателя напрямую зависит от конструктивных особенностей, геометрических
размеров, а также применяемого способа охлаждения. Точность математических
расчетов определяется корректностью используемых размеров, характеристик ма-
териалов, потерь и др. Поэтому итоги расчетов тепловых моделей для разных дви-
гателей будут давать различные результаты, причем не только в количественном,
но и в качественном отношениях. Следовательно, подтверждение адекватности
разработанной математической модели тепловых процессов в электрической ма-
шине на основании данных, полученных в других работах, будет являться некор-
ректным и недостоверным.
Таким образом, для прогнозирования или регулирования теплового состоя-
ния асинхронного двигателя в период его эксплуатации необходима разработка
уточненной, предназначенной для конкретного типа электродвигателя, математи-
ческой модели или наблюдателя температуры. Проверка адекватности математи-
ческой модели должна осуществляться данными, полученными во время экспери-
ментальных испытаний на исследуемом двигателе, либо его физической модели.
54
Выводы по разделу 1
1. Анализ работы вспомогательных электроприводов показал, что при вен-
тиляторной нагрузке электропривода, что имеет место при его работе в составе
системы охлаждения тягового электрооборудования и электродвигателей на по-
движном составе, целесообразнее, учитывая стоимостные показатели современ-
ных преобразователей частоты, применять частотно-регулируемые электропри-
воды с алгоритмами скалярного управления.
2. Анализ повреждений и выходов из строя различных узлов асинхронных
двигателей в процессе работы и причин, способствовавших этому, на основании
статистических данных, показал, что значительная часть отказов асинхронного
двигателя связана с неисправностями и повреждениями изоляции обмотки ста-
тора. Причинами этих повреждений являются разные внешние факторы, включа-
ющие изменение температуры, влажности, вибрации химически агрессивная
среда и др. Помимо возможных неисправностей различных узлов в конструкции
асинхронного двигателя изменения температуры асинхронного двигателя также
приводят к изменению его характеристик и параметров. Эти явления напрямую
влияют на качество работы системы управления электропривода при условии, что
настройки и регуляторы системы рассчитаны для неизменного значения темпера-
туры.
3. Анализ методов и средств измерения температуры обмоток асинхронных
двигателей показал, что измерения локальных значений температуры неподвиж-
ный частей двигателя не представляют трудностей при технической реализации, в
то время как измерения температуры вращающихся частей (прежде всего, об-
мотки ротора) сопряжено с определенными трудностями и не имеет единого об-
щепринятого решения. Аналогичная ситуация наблюдается с определением сред-
них значений температуры обмоток двигателя, информация о которых необхо-
дима для корректной работы системы управления тягового электропривода.

55
2 СИНТЕЗ СИСТЕМ СКАЛЯРНОГО УПРАВЛЕНИЯ
ЭЛЕКТРОПРИВОДОВ С АСИНХРОННЫМИ ДВИГАТЕЛЯМИ
2.1 Результаты анализа систем управления электроприводов
с асинхронными двигателями
Выбор и расчет конкретного типа системы управления и преобразователя
электроэнергии зависит, в первую очередь, от возлагаемых на электропривод ос-
новных требований.
Для тягового электропривода такими требованиями являются
- высокий момент при пуске и подъеме на уклон, а также высокая мощность,
реализуемая при движении с высокой скоростью;
- широкий диапазон регулирования частоты вращения, включая зону работы
с постоянством момента и зону работы с постоянством мощности;
- высокое быстродействие электропривода;
- высокая энергоэффективность во всем диапазоне регулирования частоты
вращения и момента в тяговом и тормозном режимах;
- высокая надежность и робастность при различных условиях работы;
- приемлемые массо-габаритные показатели;
- умеренная стоимость.
Электроприводам вспомогательных агрегатов, применяемых на тяговом по-
движном составе, присущи следующие особенности режимов работы:
- уменьшение момента сопротивления и механической мощности при уве-
личении диапазона регулирования частоты вращения;
- продолжительное время работы с постоянным моментом сопротивления;
- направление вращения неизменно, нет режимов реверса;
- отсутствие в рабочих режимах значительных перегрузок;
- относительно неглубокое регулирование частоты вращения;
К электроприводам вспомогательных агрегатов не предъявляются жесткие
требования к обеспечению показателей качества в динамических режимах работы;
56
главное требование – обеспечение плавного пуска для предотвращения динамиче-
ских нагрузок в электрической и механической частях электропривода.
Аналогично тяговому электроприводу к вспомогательному электроприводу
также предъявляются требования поддержания высокой энергоэффективности во
всем диапазоне регулирования, надежности и умеренной стоимости.
Обзор современного состояния проблемы разработки регулируемых элек-
троприводов для тягового подвижного состава, проведенный в первом разделе,
показал, что для построения автоматических систем плавного регулирования тех-
нологических параметров наиболее перспективными являются электроприводы с
асинхронными двигателями и преобразователями частоты. Несмотря на это, в
силу разных причин, достаточно длительное время такие электроприводы не по-
лучали широкого применения на тяговом подвижном составе, что послужило ос-
нованием для разработки альтернативных вариантов регулируемого электропри-
вода.
В работах [86, 128] предложен электропривод вентилятора, содержащий
асинхронный электродвигатель с поворотным статором. Такой электропривод не
содержит полупроводниковых преобразователей в силовом канале, регулирование
частоты вращения вниз от номинальной осуществляется поворотом статора. К
бесспорным его достоинствам следует отнести простоту и высокую надежность в
эксплуатации. На основе анализа информации, содержащейся в источниках [13,
62, 153, 163, 172, 197, 201, 243], на рисунке 2.1 приведены кривые КПД для раз-
личных видов электроприводов в стационарных режимах работы, в таблице 2.1
приведены некоторые показатели качества для этих электроприводов.
В целом, можно принять, что КПД асинхронного двигателя в номинальном
режиме работы находится в диапазоне от 75% для машин мощности до 0,75 кВт
до значений, превышающих 95 % для машин мощности 100 кВт и больше. В это
же время во всем указанном диапазоне установленных мощностей КПД полупро-
водниковых преобразователей частоты превышает 95 % в широком диапазоне ча-
стот вращения и моментов сопротивления. Очевидно, что при оптимизации элек-
троприводов допустимо не учитывать потери мощность в преобразователях.

57
Рисунок 2.1 – КПД электроприводов
На рисунке 2.1 приняты следующие обозначения: η – КПД электропривода,
n – частота вращения ротора асинхронного двигателя.
Рассмотрим вкратце особенности работы электроприводов, реализующих
различные алгоритмы скалярного и векторного управлений.
Системы скалярного управления обеспечивают формирование статических
механических характеристик без обратных связей по электрическим, магнитным
и механическим (реже) переменным асинхронного двигателя. При отсутствии об-
ратной связи по частоте вращения ротора ошибка по частоте вращения будет воз-
растать с увеличением момента сопротивления в соответствии со значением жест-
кости механической характеристики для выбранного соотношения напряжения и
частоты тока статора. Очевидные преимущества такой системы управления – про-
стота и надежность, а также отсутствие влияния изменения параметров асинхрон-
ного двигателя на устойчивость работы электропривода в разомкнутой системе.

58
Основные недостатки – невозможность управления моментом в переходных про-
цессах, большие колебания момента, низкая энергоэффективность [100, 210].
Для получения требуемого момента М у асинхронных двигателей во всех
режимах работы, включая динамические, необходимо обеспечить управление не
только амплитудой, но и фазой вектора тока статора, т.е. оперировать векторными
величинами. Этим и обусловлено введение для такого способа управления тер-
мина «векторное» в отличие от рассмотренного выше скалярного управления, ос-
нованного на изменении частоты и амплитуды питающего двигатель напряжения.
Разделение тока статора на составляющие может осуществляться различными
способами.
Одним из таких способов является разделение пространственного вектора
тока на составляющие по положению в пространстве вектора магнитного потока
ротора (рисунок 2.2, а). Одна из этих составляющих, являющаяся проекцией век-
тора тока на направление вектора магнитного потока, является намагничивающим
током (пропорциональна напряжению задания u1x), аналогичным току возбужде-
ния двигателя постоянного тока. Другая ортогональная составляющая вектора
тока статора является составляющей (пропорциональна напряжению задания u1y),
образующей момент двигателя, аналогичной току якоря двигателя постоянного
тока. Следовательно, для синтеза системы векторного управления, кроме токов i1
в обмотках статора, необходимо измерять положение пространственного вектора
магнитного потока ротора ψ2 в двигателе АД и частоту вращения ротора f (для этой
цели служит датчик частоты вращения ДЧВ).
В середине 80-х годов прошлого столетия было предложено использование
системы прямого управления моментом (DTC). Принцип работы этой системы ос-
нован на поддержании постоянных значений электромагнитного момента М и по-
тока статора ψ1 (в пределах петли гистерезиса), которое осуществляется выбором
одного из шести ненулевых или двух нулевых векторов напряжения двухуровне-
вого инвертора (рисунок 2.2, б). Для формирования большего количества опти-
мальных векторов напряжения в последние годы начали применять трехуровне-
вые инверторы.

59
В работе [214] показано, что, основываясь на измерении мгновенных значе-
ний тока и напряжения обмотки статора, возможно получить требуемые значения
момента и потока за определенный промежуток времени. Вычисленный при этом
вектор напряжения генерируется при помощи алгоритмов пространственно-век-
торной модуляции (рисунок 2.2, в). Другим вариантом улучшения работы системы
прямого управления моментом может являться вариант, предложенный в работе
[221]. В установившемся режиме работы система прямого управления моментом
последовательно коммутирует нулевые и ненулевые векторы напряжений. Нену-
левой вектор, как правило, выбирается для увеличения значения момента. Достиг-
нув верхней границы петли гистерезиса, к обмотке статора прикладывается нуле-
вой вектор напряжения и момент начинает уменьшаться. Вычислив минимальное
время для переключения между векторами напряжения, можно добиться умень-
шения колебаний момента (рисунок 2.1, г).
а)
б)
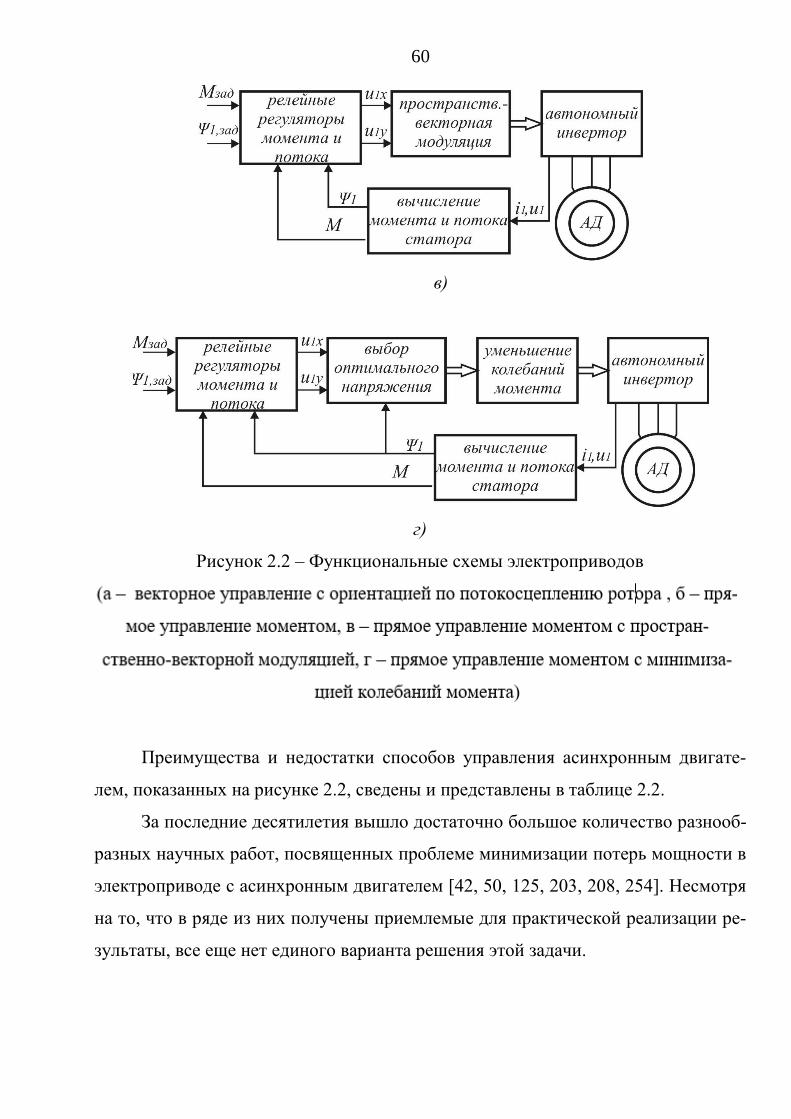
60
Преимущества и недостатки способов управления асинхронным двигате-
лем, показанных на рисунке 2.2, сведены и представлены в таблице 2.2.
За последние десятилетия вышло достаточно большое количество разнооб-
разных научных работ, посвященных проблеме минимизации потерь мощности в
электроприводе с асинхронным двигателем [42, 50, 125, 203, 208, 254]. Несмотря
на то, что в ряде из них получены приемлемые для практической реализации ре-
зультаты, все еще нет единого варианта решения этой задачи.
в)
г)
Рисунок 2.2 – Функциональные схемы электроприводов

61
Таблица 2.2 – Сравнительная оценка систем управления электроприводов
Си-
стема Преимущества Недостатки
Рису-
нок
2.1, а
- относительно простая высокодина-
мичная схема;
- хорошо апробированная методика,
используемая довольно продолжитель-
ное время
- относительно низкое быстро-
действие контуров из-за приме-
нения ПИ- регуляторов;
- изменение параметров схемы
замещения способно вызвать
значительные ошибки поддержа-
ния момента и потокосцепления
Рису-
нок
2.1, б
Рису-
нок
2.1, в
Рису-
нок
2.1, г

62
В связи с вышеизложенным можно выделить три наиболее популярных и
широко распространенных принципа организации систем управления асинхрон-
ного двигателя в электроприводе с полупроводниковым преобразователем ча-
стоты, направленных на повышение его энергоэффективности за счет уменьшения
потерь мощности или тока статора.
Исторически первым из них является подход [208], основанный на поддер-
жании постоянной одной из переменных асинхронной машины Gопт (рисунок
2.3, а). Эта переменная измеряется или вычисляется, ее значение используется для
организации обратной связи в контуре ее регулирования. Наиболее часто исполь-
зуемые переменные при таком варианте построения системы управления – это ча-
стота скольжения, коэффициент мощности, ток обмотки статора и др. Выбор той
или иной переменной зависит от наличия необходимой измерительной базы, быст-
родействия и разрядности средств вычисления и т.д. Данный подход наиболее
прост, однако он дает приемлемые результаты в очень узком диапазоне рабочих
режимов. Также данный подход очень чувствителен к изменениям параметров
схемы замещения асинхронной машины, которые зависят, в первую очередь, от
температуры обмоток и ярма, насыщения магнитной системы, частоты тока ро-
тора.
Наибольшее применение описываемый способ нашел при реализации ска-
лярных систем управления, поддерживающих заданное значение абсолютного
скольжения или тока статора.
Второй метод основан на использовании модели потерь мощности электро-
привода в целом или асинхронной машины в частности (аналитический метод).
Функциональная схема системы, построенной таким образом, приведена на рису-
нок 2.3, б. Данный метод является наиболее быстродействующим, т.к. параметры
и настройки оптимального управления высчитываются напрямую из модели по-
терь [254]. Кроме того, что само вычисление необходимых параметров – ком-
плексная и трудоемкая задача, главной проблемой такого решения является влия-
ние изменения параметров схемы замещения на работу электропривода.
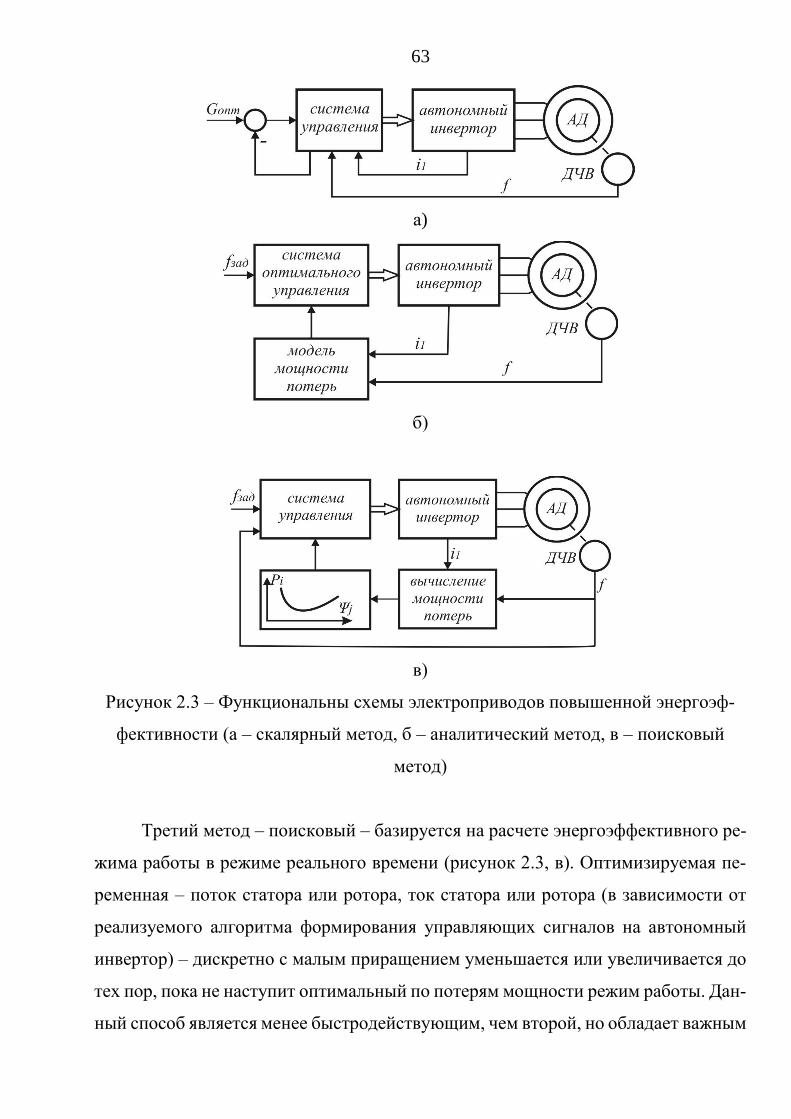
63
а)
б)
в)
Рисунок 2.3 – Функциональны схемы электроприводов повышенной энергоэф-
фективности (а – скалярный метод, б – аналитический метод, в – поисковый
метод)
Третий метод – поисковый – базируется на расчете энергоэффективного ре-
жима работы в режиме реального времени (рисунок 2.3, в). Оптимизируемая пе-
ременная – поток статора или ротора, ток статора или ротора (в зависимости от
реализуемого алгоритма формирования управляющих сигналов на автономный
инвертор) – дискретно с малым приращением уменьшается или увеличивается до
тех пор, пока не наступит оптимальный по потерям мощности режим работы. Дан-
ный способ является менее быстродействующим, чем второй, но обладает важным
64
преимуществом по отношению ко всем остальным – его работа не зависит от из-
менения параметров асинхронного двигателя [203].
Данные методы уменьшения потерь мощности рассчитаны на статические
режимы работы. В динамических процессах для тягового электропривода в
первую очередь ставится задача по реализации силы тяги, предотвращению бок-
сования и проскальзывания в условиях действующих ограничений по максималь-
ным мощности, скорости и моменту, поэтому в этих режимах настройки, оптими-
зирующие потребление энергии, отключаются. В противном случае необходимо
применение принципов динамического программирования, что существенно
усложняет систему управления. В электроприводах вспомогательных механизмов,
где переходные режимы могут быть известны заранее, возможно применение мо-
дифицированных скалярного и аналитического методов с учетом действующих
ограничений. Следует отметить, что если момент сопротивления и частота враще-
ния близки к своим номинальным значениям, то магнитный поток также близок к
номинальному значению вне зависимости от того, какой метод или алгоритм
управления используется. Наибольший выигрыш приведенные выше методы
энергоэффективного управления асинхронным двигателем дают при работе на по-
ниженных частотах вращения и/или с пониженными моментами сопротивления за
счет регулирования в необходимых пределах магнитного потока или соответству-
ющего тока.
2.2 Анализ математических моделей, описывающих преобразование энергии
в асинхронных двигателях
Для исследования энергоэффективности и работоспособности предложен-
ных далее систем управления электроприводов необходима корректная математи-
ческая модель асинхронного двигателя.
Классические математические модели [55, 58, 62], описывающие переход-
ные режимы работы и базирующиеся на уравнениях Парка-Горева, не принимают
65
во внимание ни потери в стали магнитопровода, ни насыщение по главному маг-
нитному пути, ни эффект вытеснения тока. При отсутствии жестких требований к
регулированию какого-либо энергетического показателя качества данные упроще-
ния не являются критичными. Иначе необходимо использование математических
моделей, учитывающих все эти явления и эффекты, что приводит к усложнению
дифференциальных уравнений, появлению алгебраических зависимостей и изме-
няет типы и параметры синтезированных регуляторов системы управления [8,18,
204, 210].
В последнее время синтезированы разнообразные методики и алгоритмы,
позволяющие учитывать нелинейный характер зависимостей различных парамет-
ров асинхронных двигателей от частоты токов статора и ротора, величины тока
намагничивания.
С учетом развития методов численного моделирования остановим свое вни-
мание на применении дифференциальных уравнений для описания переходных
процессов с учетом указанных ранее уточнений.
В работе [121], например, учет потерь в стали магнитопровода статора осу-
ществляется посредством включения в схему замещения асинхронного двигателя
дополнительного сопротивления Rμ, эквивалентного потерям мощности в стали,
которое подключается последовательно со взаимоиндуктивностью (рисунок 2.4).
В работе [204] предложен учет потерь мощности не только в стали статора, но
также и в стали ротора, что достигается за счет включения сопротивлений Rсs и Rсr
последовательно сопротивлениям соответствующих обмоток (рисунок 2.5).
На рисунках 2.4 и 2.5 и далее приняты следующие обозначения. Rs, Rr –
сопротивления обмотки статора и ротора, соответственно; Lσs, Lσr, Lμ – индуктив-
ности рассеяния обмотки статора, ротора и взаимоиндуктивность соответственно;
ψs, ψr, ψμ, – потокосцепления обмотки статора, ротора и взаимоиндукции соответ-
ственно; ω, ωk – частота вращения магнитного поля и координатных осей соответ-
ственно; us, is, ir, iμ, ic – напряжение и токи в соответствующих ветвях схемы.
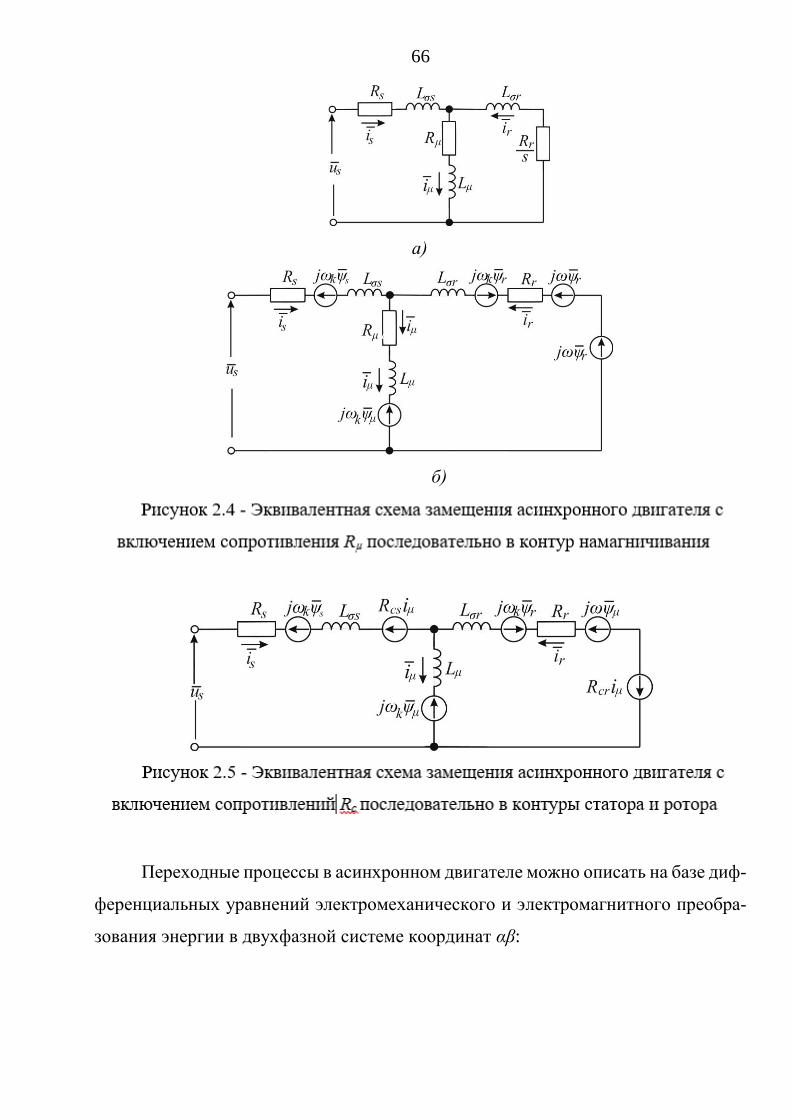
66
а)
б)
Переходные процессы в асинхронном двигателе можно описать на базе диф-
ференциальных уравнений электромеханического и электромагнитного преобра-
зования энергии в двухфазной системе координат αβ:
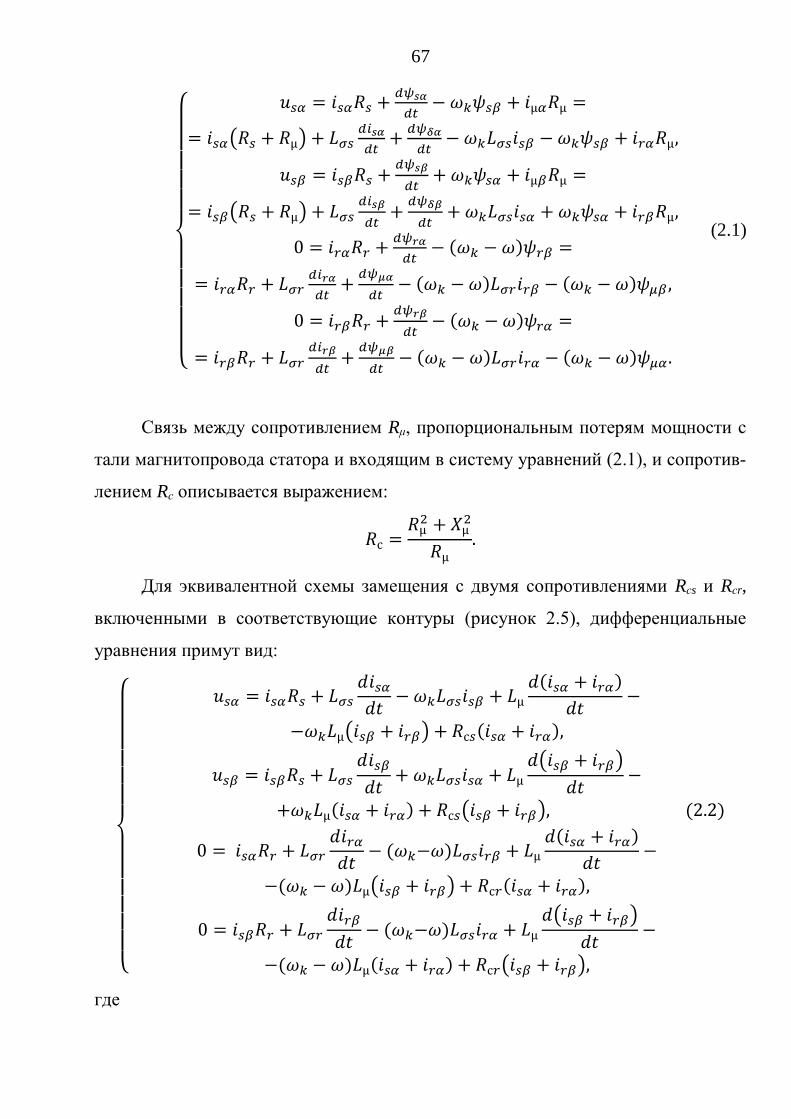
67
{
𝑢𝑠𝛼 = 𝑖𝑠𝛼𝑅𝑠 +
𝑑𝜓𝑠𝛼
𝑑𝑡−𝜔𝑘𝜓𝑠𝛽 + 𝑖µ𝛼𝑅µ =
= 𝑖𝑠𝛼(𝑅𝑠 + 𝑅µ) + 𝐿𝜎𝑠𝑑𝑖𝑠𝛼
𝑑𝑡+𝑑𝜓𝛿𝛼
𝑑𝑡−𝜔𝑘𝐿𝜎𝑠𝑖𝑠𝛽 −𝜔𝑘𝜓𝑠𝛽 + 𝑖𝑟𝛼𝑅µ,
𝑢𝑠𝛽 = 𝑖𝑠𝛽𝑅𝑠 +𝑑𝜓𝑠𝛽
𝑑𝑡+𝜔𝑘𝜓𝑠𝛼 + 𝑖µ𝛽𝑅µ =
= 𝑖𝑠𝛽(𝑅𝑠 + 𝑅µ) + 𝐿𝜎𝑠𝑑𝑖𝑠𝛽
𝑑𝑡+𝑑𝜓𝛿𝛽
𝑑𝑡+𝜔𝑘𝐿𝜎𝑠𝑖𝑠𝛼 +𝜔𝑘𝜓𝑠𝛼 + 𝑖𝑟𝛽𝑅µ,
0 = 𝑖𝑟𝛼𝑅𝑟 +𝑑𝜓𝑟𝛼
𝑑𝑡− (𝜔𝑘 −𝜔)𝜓𝑟𝛽 =
= 𝑖𝑟𝛼𝑅𝑟 + 𝐿𝜎𝑟𝑑𝑖𝑟𝛼
𝑑𝑡+𝑑𝜓𝜇𝛼
𝑑𝑡− (𝜔𝑘 −𝜔)𝐿𝜎𝑟𝑖𝑟𝛽 − (𝜔𝑘 −𝜔)𝜓𝜇𝛽 ,
0 = 𝑖𝑟𝛽𝑅𝑟 +𝑑𝜓𝑟𝛽
𝑑𝑡− (𝜔𝑘 −𝜔)𝜓𝑟𝛼 =
= 𝑖𝑟𝛽𝑅𝑟 + 𝐿𝜎𝑟𝑑𝑖𝑟𝛽
𝑑𝑡+𝑑𝜓𝜇𝛽
𝑑𝑡− (𝜔𝑘 − 𝜔)𝐿𝜎𝑟𝑖𝑟𝛼 − (𝜔𝑘 −𝜔)𝜓𝜇𝛼 .
(2.1)
Связь между сопротивлением Rμ, пропорциональным потерям мощности с
тали магнитопровода статора и входящим в систему уравнений (2.1), и сопротив-
лением Rс описывается выражением:
𝑅с =𝑅µ2 + 𝑋µ
2
𝑅µ.
Для эквивалентной схемы замещения с двумя сопротивлениями Rсs и Rсr,
включенными в соответствующие контуры (рисунок 2.5), дифференциальные
уравнения примут вид:
{
𝑢𝑠𝛼 = 𝑖𝑠𝛼𝑅𝑠 + 𝐿𝜎𝑠
𝑑𝑖𝑠𝛼𝑑𝑡
− 𝜔𝑘𝐿𝜎𝑠𝑖𝑠𝛽 + 𝐿µ𝑑(𝑖𝑠𝛼 + 𝑖𝑟𝛼)
𝑑𝑡−
−𝜔𝑘𝐿µ(𝑖𝑠𝛽 + 𝑖𝑟𝛽) + 𝑅с𝑠(𝑖𝑠𝛼 + 𝑖𝑟𝛼),
𝑢𝑠𝛽 = 𝑖𝑠𝛽𝑅𝑠 + 𝐿𝜎𝑠𝑑𝑖𝑠𝛽
𝑑𝑡+ 𝜔𝑘𝐿𝜎𝑠𝑖𝑠𝛼 + 𝐿µ
𝑑(𝑖𝑠𝛽 + 𝑖𝑟𝛽)
𝑑𝑡−
+𝜔𝑘𝐿µ(𝑖𝑠𝛼 + 𝑖𝑟𝛼) + 𝑅с𝑠(𝑖𝑠𝛽 + 𝑖𝑟𝛽), (2.2)
0 = 𝑖𝑠𝛼𝑅𝑟 + 𝐿𝜎𝑟𝑑𝑖𝑟𝛼𝑑𝑡
− (𝜔𝑘−𝜔)𝐿𝜎𝑠𝑖𝑟𝛽 + 𝐿µ𝑑(𝑖𝑠𝛼 + 𝑖𝑟𝛼)
𝑑𝑡−
−(𝜔𝑘 −𝜔)𝐿µ(𝑖𝑠𝛽 + 𝑖𝑟𝛽) + 𝑅с𝑟(𝑖𝑠𝛼 + 𝑖𝑟𝛼),
0 = 𝑖𝑠𝛽𝑅𝑟 + 𝐿𝜎𝑟𝑑𝑖𝑟𝛽
𝑑𝑡− (𝜔𝑘−𝜔)𝐿𝜎𝑠𝑖𝑟𝛼 + 𝐿µ
𝑑(𝑖𝑠𝛽 + 𝑖𝑟𝛽)
𝑑𝑡−
−(𝜔𝑘 −𝜔)𝐿µ(𝑖𝑠𝛼 + 𝑖𝑟𝛼) + 𝑅с𝑟(𝑖𝑠𝛽 + 𝑖𝑟𝛽),
где
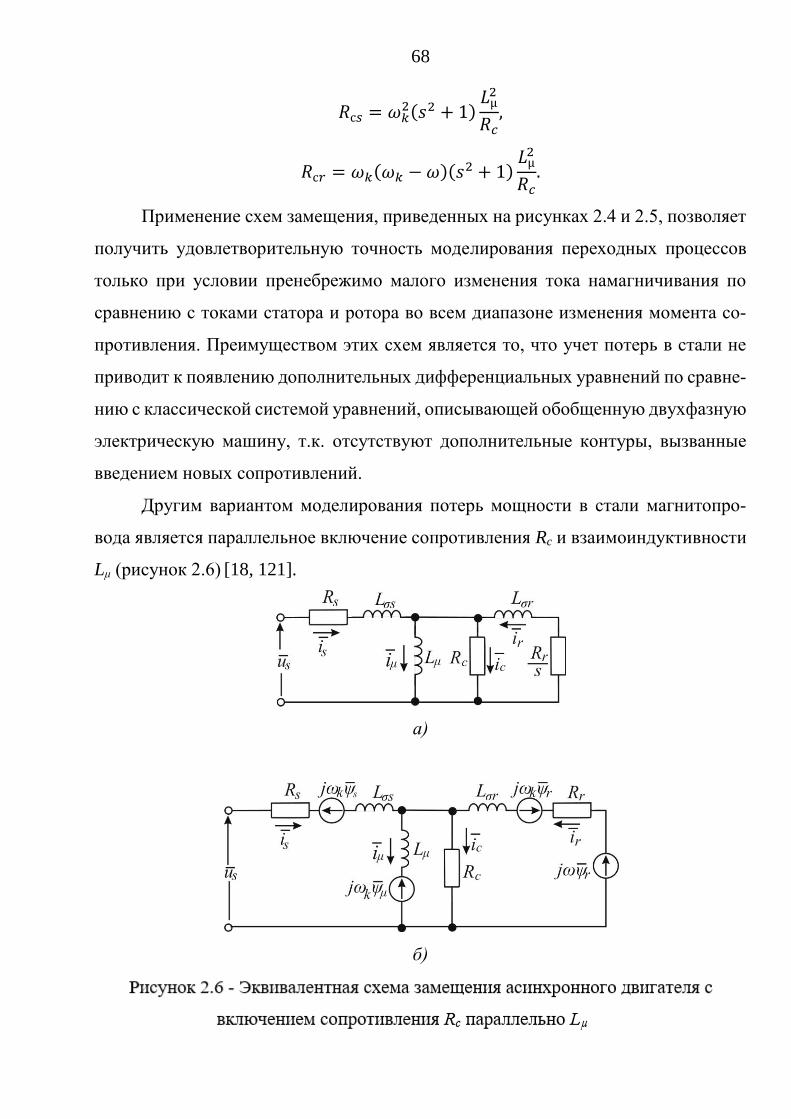
68
𝑅с𝑠 = 𝜔𝑘2(𝑠2 + 1)
𝐿µ2
𝑅𝑐,
𝑅с𝑟 = 𝜔𝑘(𝜔𝑘 −𝜔)(𝑠2 + 1)
𝐿µ2
𝑅𝑐.
Применение схем замещения, приведенных на рисунках 2.4 и 2.5, позволяет
получить удовлетворительную точность моделирования переходных процессов
только при условии пренебрежимо малого изменения тока намагничивания по
сравнению с токами статора и ротора во всем диапазоне изменения момента со-
противления. Преимуществом этих схем является то, что учет потерь в стали не
приводит к появлению дополнительных дифференциальных уравнений по сравне-
нию с классической системой уравнений, описывающей обобщенную двухфазную
электрическую машину, т.к. отсутствуют дополнительные контуры, вызванные
введением новых сопротивлений.
Другим вариантом моделирования потерь мощности в стали магнитопро-
вода является параллельное включение сопротивления Rc и взаимоиндуктивности
Lμ (рисунок 2.6) [18, 121].
а)
б)

69
В данном случае распределение потерь мощности в обмотках статора и ро-
тора и сердечнике статора получается более близким к реальному распределению
потерь, точность моделирования переходных процессов при изменении момента
сопротивления и частоты вращения более высокая.
В работах [18, 121] также показано, что для повышения точности моделиро-
вания целесообразно введение в схему дополнительной индуктивности, учитыва-
ющей влияние вихревых токов на динамику асинхронного двигателя.
В отличие от систем уравнений (2.1) и (2.2) при математическом описании
схемы (рисунок 2.6, б) появляются дополнительные уравнения, обусловленные
введением новой ветви в схеме замещения, содержащей сопротивление Rс. Запи-
шем уравнение в векторной форме:
)(____
____
____
sk
s
ssssj
dt
d
dt
idLiRu , (2.3)
))((0____
______
rkr
rrr jdt
d
dt
idLiR , (2.4)
dt
djiR kcc
__
____
, (2.5)
________
rsc iiii . (2.6)
Выражение для развиваемого двигателем момента:
uvrvrvurur
r
n iLiLL
pM
)()(2
3 . (2.7)
Уравнение, описывающее механическое движение ротора:
dt
dJMM c
. (2.8)
Подстрочные индексы u и v указывают на проекции соответствующих пара-
метров на ортогональные оси, вращающиеся с произвольной частотой ωk, J обо-
значает момент инерции ротора и связанных с ним вращающихся масс.
70
Эмпирическое уравнение, описывающее насыщение по главному магнит-
ному пути [82]:
413.1214.0278.187.0261.0037.0002,0*
2
*
3
*
4
*
5
*
6
**
IIIIIIL , (2.9)
где подстрочный индекс * обозначает относительное значение тока намагничива-
ния.
Система уравнений, описывающая зависимость потерь мощности в стали
статора от частоты тока статора [82]:
50Г0Г,/378683,1261
,50,0534.0646.53135.882
ss
sss
c
ff
ГцfffR (2.10)
Для качественного и количественного уточнения переходных процессов в
уравнения математической модели (2.3 – 2.10) также добавим выражения, учиты-
вающие влияние эффекта вытеснения тока в обмотке ротора на значения актив-
ного и индуктивного сопротивлений:
лп rrRrRRKR ,
лп rrХrХХKХ , (2.11)
где пr
R ,пr
Х илr
R , лr
Х – сопротивления пазовой части и короткозамкнутых колец
обмотки ротора, соответственно; R
K и Х
K - коэффициенты, учитывающие влия-
ние эффекта вытеснения тока в стержне обмотки ротора на значения активного и
индуктивного сопротивлений:
2cos2
2sin2
ch
shKR ,
2cos2
2sin2
2
3
ch
shKX ,
где ïb
bfsh
10102 13 – приведенная высота стержня, h, ρ, b, bп – пара-
метры геометрических размеров и свойств материала стержня.
Зависимости рассчитанных по выражениям (2.9 – 2.11) относительных зна-
чений параметров от частоты тока статора и величины тока намагничивания пока-
заны на рисунке 2.7.

71
а) б) в)
В результате анализа результатов расчетов, проведенных на математических
моделях, описывающих процессы в Т-образных схемах замещения (рисунок 2.4 –
2.6), а также ряда других исследований установлено, что качественно электромаг-
нитные процессы в асинхронных двигателях удовлетворительно описываются с
помощью схем (рисунки 2.5 и 2.6), что сопровождается большим временем рас-
чета. Количественные показатели, прежде всего в переходных режимах работы,
более близки к истинным значениям при использовании эквивалентной схемы за-
мещения (рисунок 2.6) при изменении в широком диапазоне как механических па-
раметров электропривода (частота вращения и момент сопротивления), так и па-
раметров схемы замещения (сопротивления и индуктивности).
Таким образом, для дальнейших исследований принимается приведенная на
рисунке 2.6 эквивалентная схема замещения асинхронного двигателя с параллель-
ным включением сопротивления, пропорционального потерям в стали статора, и
взаимоиндуктивности.
Для расчета энергетических показателей электропривода приведем уравне-
ния для расчета мощности и потерь мощности.
Механическая мощность на валу двигателя:
MPмех . (2.12)
72
Активная мощность, потребляемая из сети:
)(2
3svsvsususa uiuiP . (2.13)
Реактивная мощность:
)(2
3svsususvsp uiuiP . (2.14)
Баланс мощности асинхронного двигателя:
crмsммехsaPPPPP . (2.15)
Общие потери мощности:
)(2
3)(
2
3)(
2
3 222222cvccucrvrrursvssus iRiRiRiRiRiRP , (2.16)
где первое слагаемое – потери мощности в обмотке статора, второе слагаемое –
потери мощности в обмотке ротора, третье слагаемое – потери мощности в стали
статора.
Энергия, потребляемая из сети:
T
ssdtPW
0
, (2.17)
где Т — время цикла работы электропривода.
Энергия потерь:
T
мехsdtPPW
0
)( . (2.18)
КПД асинхронного двигателя за время работы:
T
s
T
мех
s
мех
dtP
dtP
W
W
0
0 (2.19)
Рассмотрим для примера пуск асинхронного двигателя типа ДМТF 012-06
(таблица 2.3), при различных способах управления [94]:
- прямой пуск асинхронного двигателя;
- скалярное управление с применением IR-компенсации;
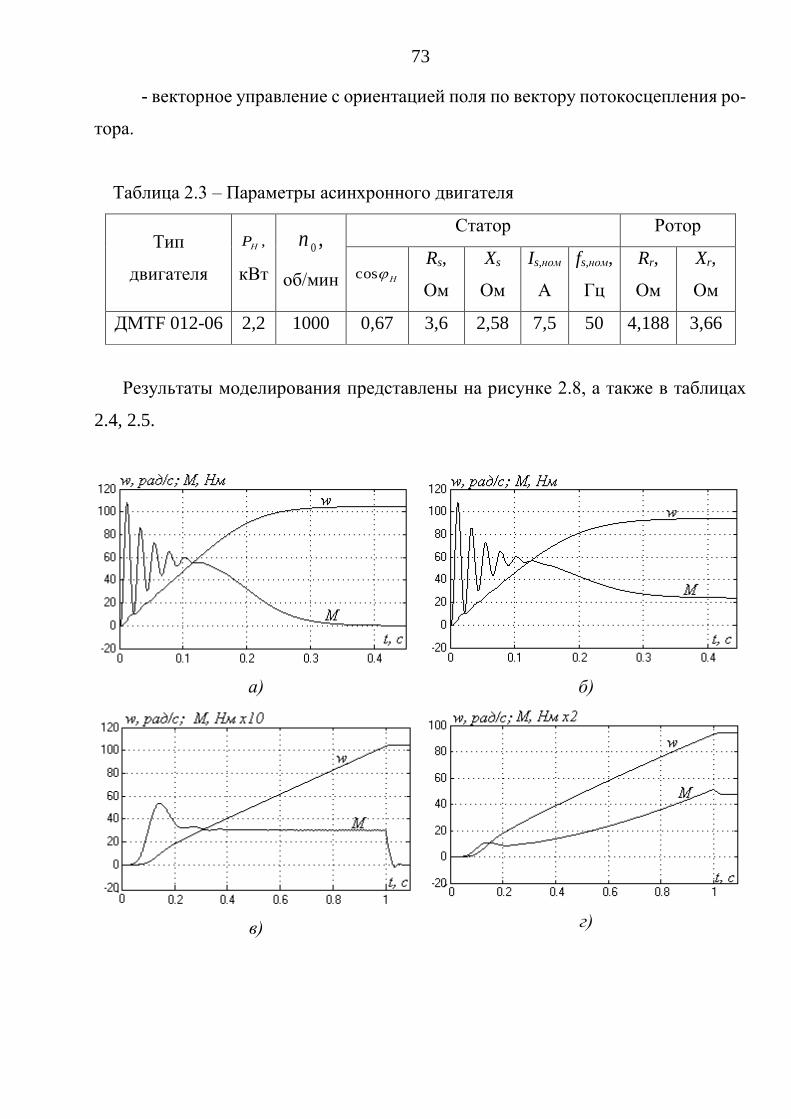
73
- векторное управление с ориентацией поля по вектору потокосцепления ро-
тора.
Таблица 2.3 – Параметры асинхронного двигателя
Тип
двигателя
,НP
кВт
,0
n
об/мин
Статор Ротор
Нcos Rs,
Ом
Xs
Ом
Is,ном
А
fs,ном,
Гц
Rr,
Ом
Xr,
Ом
ДМТF 012-06 2,2 1000 0,67 3,6 2,58 7,5 50 4,188 3,66
Результаты моделирования представлены на рисунке 2.8, а также в таблицах
2.4, 2.5.
а)
б)
в)
г)
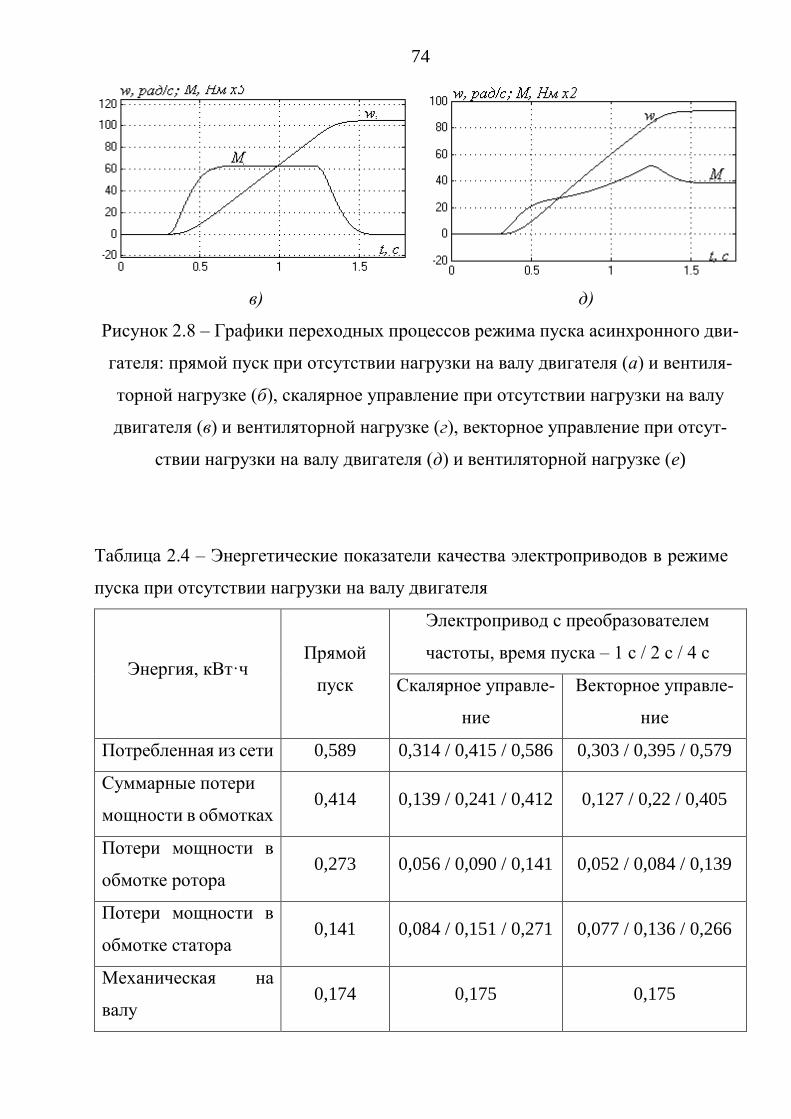
74
в)
д)
Рисунок 2.8 – Графики переходных процессов режима пуска асинхронного дви-
гателя: прямой пуск при отсутствии нагрузки на валу двигателя (а) и вентиля-
торной нагрузке (б), скалярное управление при отсутствии нагрузки на валу
двигателя (в) и вентиляторной нагрузке (г), векторное управление при отсут-
ствии нагрузки на валу двигателя (д) и вентиляторной нагрузке (е)
Таблица 2.4 – Энергетические показатели качества электроприводов в режиме
пуска при отсутствии нагрузки на валу двигателя
Энергия, кВт·ч Прямой
пуск
Электропривод с преобразователем
частоты, время пуска – 1 с / 2 с / 4 с
Скалярное управле-
ние
Векторное управле-
ние
Потребленная из сети 0,589 0,314 / 0,415 / 0,586 0,303 / 0,395 / 0,579
Суммарные потери
мощности в обмотках 0,414 0,139 / 0,241 / 0,412 0,127 / 0,22 / 0,405
Потери мощности в
обмотке ротора 0,273 0,056 / 0,090 / 0,141 0,052 / 0,084 / 0,139
Потери мощности в
обмотке статора 0,141 0,084 / 0,151 / 0,271 0,077 / 0,136 / 0,266
Механическая на
валу 0,174 0,175 0,175
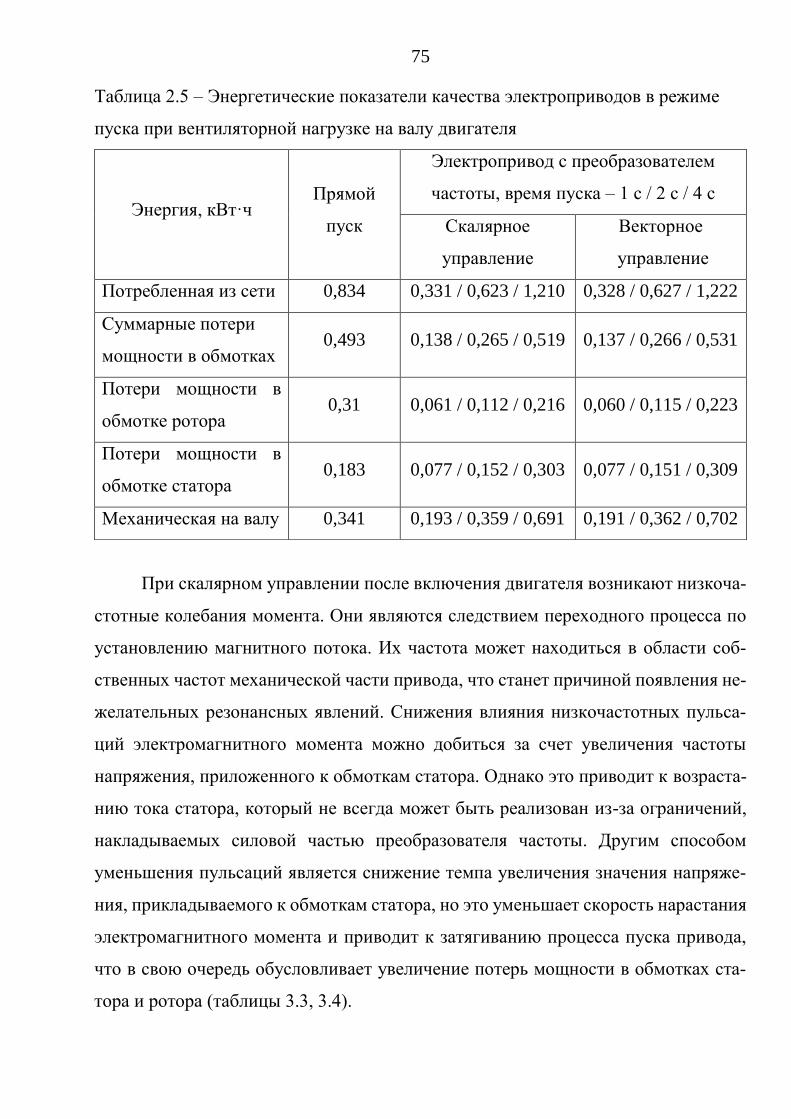
75
Таблица 2.5 – Энергетические показатели качества электроприводов в режиме
пуска при вентиляторной нагрузке на валу двигателя
Энергия, кВт·ч Прямой
пуск
Электропривод с преобразователем
частоты, время пуска – 1 с / 2 с / 4 с
Скалярное
управление
Векторное
управление
Потребленная из сети 0,834 0,331 / 0,623 / 1,210 0,328 / 0,627 / 1,222
Суммарные потери
мощности в обмотках 0,493 0,138 / 0,265 / 0,519 0,137 / 0,266 / 0,531
Потери мощности в
обмотке ротора 0,31 0,061 / 0,112 / 0,216 0,060 / 0,115 / 0,223
Потери мощности в
обмотке статора 0,183 0,077 / 0,152 / 0,303 0,077 / 0,151 / 0,309
Механическая на валу 0,341 0,193 / 0,359 / 0,691 0,191 / 0,362 / 0,702
При скалярном управлении после включения двигателя возникают низкоча-
стотные колебания момента. Они являются следствием переходного процесса по
установлению магнитного потока. Их частота может находиться в области соб-
ственных частот механической части привода, что станет причиной появления не-
желательных резонансных явлений. Снижения влияния низкочастотных пульса-
ций электромагнитного момента можно добиться за счет увеличения частоты
напряжения, приложенного к обмоткам статора. Однако это приводит к возраста-
нию тока статора, который не всегда может быть реализован из-за ограничений,
накладываемых силовой частью преобразователя частоты. Другим способом
уменьшения пульсаций является снижение темпа увеличения значения напряже-
ния, прикладываемого к обмоткам статора, но это уменьшает скорость нарастания
электромагнитного момента и приводит к затягиванию процесса пуска привода,
что в свою очередь обусловливает увеличение потерь мощности в обмотках ста-
тора и ротора (таблицы 3.3, 3.4).
76
Как видно из рисунка 3.2, таблиц 3.3 и 3.4 при вентиляторной нагрузке элек-
тропривода, что имеет место при его работе в составе системы охлаждения тяго-
вого электрооборудования и электродвигателей на подвижном составе, целесооб-
разнее, учитывая стоимостные показатели современных преобразователей ча-
стоты, применять частотно-регулируемые электроприводы с алгоритмами скаляр-
ного управления, обеспечивающими оптимальные режимы работы асинхронного
двигателя в соответствии с законом М.П. Костенко.
2.3 Синтез системы скалярного управления с минимизацией
потерь мощности
Скалярное управление асинхронным двигателем, как было показано ранее в
разделе 2.1, не предполагает в общем случае использование информации о его те-
кущем состоянии, т.е. не требует наличия датчиков электрических и механических
переменных. При таком управлении с разомкнутым контуром частота вращения
ротора двигателя регулируется изменением частоты выходного напряжения пре-
образователя таким образом, что реальная частота вращения ротора будет опреде-
ляться моментом нагрузки и частотой выходного напряжения преобразователя.
Величина выходного напряжения зависит от частоты в соответствии с соотноше-
нием, определяемым выбранным законом регулирования. Для того, что бы в про-
цессе регулирования сохранялась перегрузочная способность двигателя, а, следо-
вательно, и его коэффициент мощности и статическая устойчивость, необходимо
применить частотный закон управления М.П. Костенко:
ННН M
M
f
f
U
U . (2.20)
Текущее значение момента двигателя М в установившихся режимах равно
моменту сопротивления рабочей машины МС. При вентиляторной нагрузке (МС =
к2), закон частотного управления приобретает вид:
U/f2 = const. (2.21)

77
Для получения требуемого момента у асинхронных двигателей необходимо
обеспечить управление не только амплитудой, но и фазой вектора тока статора,
т.е. оперировать с векторными величинами. Этим и обусловлено введение для та-
кого способа управления термина «векторное» в отличие от рассмотренного выше
скалярного управления, основанного на изменении частоты и амплитуды напря-
жения на двигателе. Разделение тока статора на составляющие может осуществ-
ляться различными способами. Одним из таких способов является разделение про-
странственного вектора тока на составляющие по положению в пространстве век-
тора магнитного потока. Одна из этих составляющих, являющаяся проекцией век-
тора тока на направление вектора магнитного потока, является намагничивающим
током, аналогичным току возбуждения двигателя постоянного тока. Другая орто-
гональная составляющая вектора тока статора является составляющей, образую-
щей момент двигателя, аналогичной току якоря двигателя постоянного тока. Оче-
видно, что для построения системы векторного управления кроме токов в обмот-
ках статора необходимо измерять положение пространственного вектора магнит-
ного потока в асинхронном двигателе.
При синтезе системы скалярного управления с минимизацией потерь мощ-
ности автором были проанализированы разработки и решения, отраженные в ра-
ботах [5, 45, 59, 116]. Основные результаты анализа и предложения опубликованы
в работах [49, 82, 145, 146, 161, 164, 166, 236, 238].
Для синтеза системы управления приведем математические формулы для
некоторых энергетических величин.
Выражение для потерь мощности (2.16) можно переписать так:
crrssccrrss RUIRIRIRIRIRP /333333 222222 . (2.22)
После преобразований получим:
cr
r
c
r
r
s
RR
L
Rs
R
R
RsMP
22
20 1
. (2.23)

78
Очевидно, что потери мощности в асинхронном двигателе является функ-
цией скольжения. Из последнего выражения несложно найти оптимальное сколь-
жение, соответствующее минимальному значению потерь мощности:
22
0)(
rrsc
r
опт
LRRR
Rs
. (2.24)
При реализации скалярного управления по кривой Us/ω0 слежение за экстре-
мумом мощности потерь целесообразно осуществлять посредством изменения ам-
плитуды напряжения, приложенного к обмотке статора:
21 ss UU , (2.25)
где γ1 – управляющий сигнал, γ2 – тестовый сигнал треугольной формы.
Критический момент асинхронного двигателя:
220
2
0
2
)(/
/3
rsrs
rsk
LLsRR
sRUM
. (2.26)
Отсюда 2~ sk UM .
Электромагнитный момент, развиваемый двигателем, можно записать, при-
менив уточненную формулу Клосса:
22~
/
2
/2//
)/1(2s
kk
k
rskkk
rskk Us
s
ss
M
RRsssss
RRsMM
, (2.27)
отсюда 22
1~
2~
ss
k
UU
Mss .
Согласно выражениям (2.22), (2.23) построена зависимость на рисунке 2.9.
Задав в качестве тестового сигнала γ2(t) напряжение треугольной формы с
амплитудой ΔUs max = Δγ2 max и периодом Т, мы получим, что положение текущей
точки на графике зависимости потерь мощности от напряжения и/или скольжения
(1, 2 или 3 на рисунке 2.9), соответствующее минимальному значению потерь
мощности, определяется фиксацией изменения потерь мощности, вызванного из-
менением напряжения треугольной формы (+ΔUs max = +Δγ2 max) в течение первого
полупериода (Т/2).
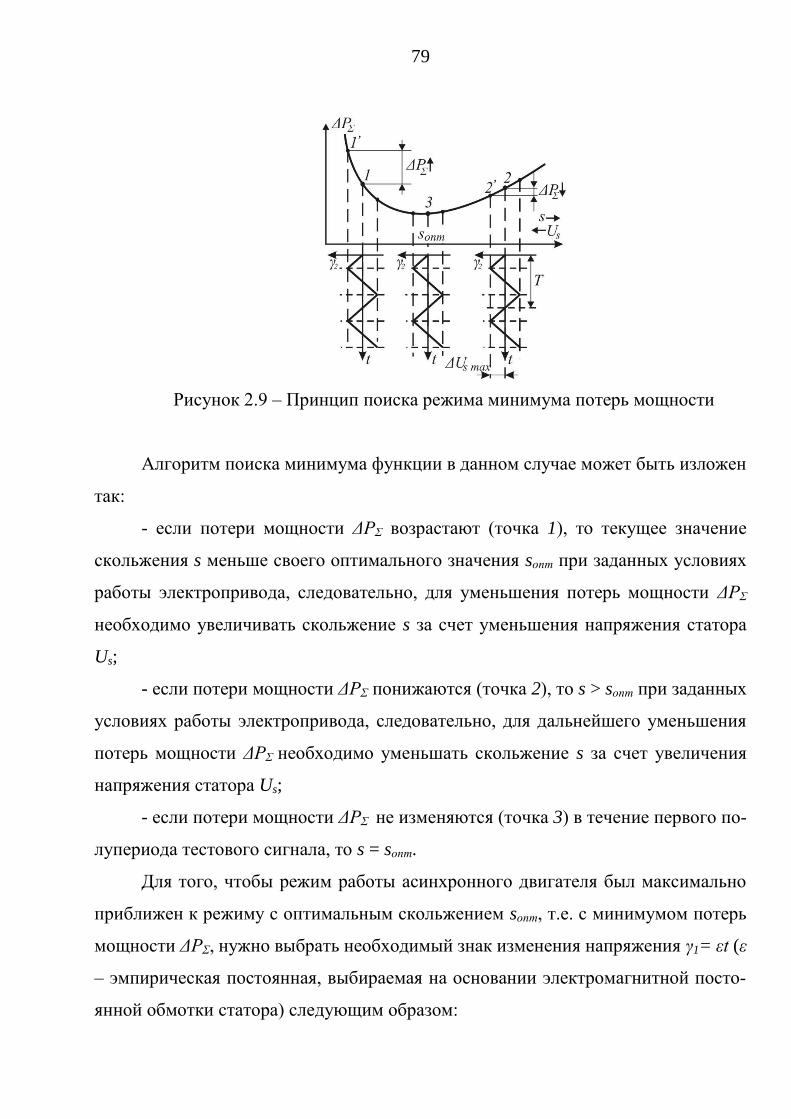
79
Рисунок 2.9 – Принцип поиска режима минимума потерь мощности
Алгоритм поиска минимума функции в данном случае может быть изложен
так:
- если потери мощности ΔРΣ возрастают (точка 1), то текущее значение
скольжения s меньше своего оптимального значения sопт при заданных условиях
работы электропривода, следовательно, для уменьшения потерь мощности ΔРΣ
необходимо увеличивать скольжение s за счет уменьшения напряжения статора
Us;
- если потери мощности ΔРΣ понижаются (точка 2), то s > sопт при заданных
условиях работы электропривода, следовательно, для дальнейшего уменьшения
потерь мощности ΔРΣ необходимо уменьшать скольжение s за счет увеличения
напряжения статора Us;
- если потери мощности ΔРΣ не изменяются (точка 3) в течение первого по-
лупериода тестового сигнала, то s = sопт.
Для того, чтобы режим работы асинхронного двигателя был максимально
приближен к режиму с оптимальным скольжением sопт, т.е. с минимумом потерь
мощности ΔРΣ, нужно выбрать необходимый знак изменения напряжения γ1= εt (ε
– эмпирическая постоянная, выбираемая на основании электромагнитной посто-
янной обмотки статора) следующим образом:
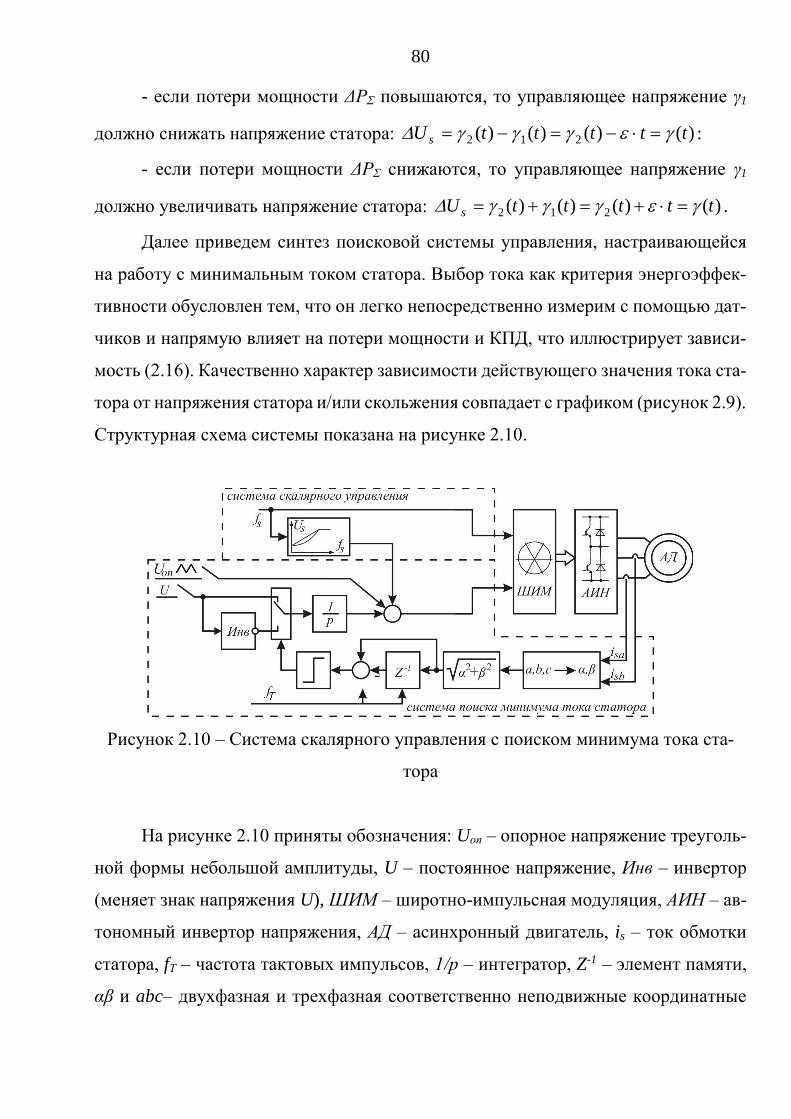
80
- если потери мощности ΔРΣ повышаются, то управляющее напряжение γ1
должно снижать напряжение статора: )()()()( 212 tttttU s :
- если потери мощности ΔРΣ снижаются, то управляющее напряжение γ1
должно увеличивать напряжение статора: )()()()( 212 tttttU s .
Далее приведем синтез поисковой системы управления, настраивающейся
на работу с минимальным током статора. Выбор тока как критерия энергоэффек-
тивности обусловлен тем, что он легко непосредственно измерим с помощью дат-
чиков и напрямую влияет на потери мощности и КПД, что иллюстрирует зависи-
мость (2.16). Качественно характер зависимости действующего значения тока ста-
тора от напряжения статора и/или скольжения совпадает с графиком (рисунок 2.9).
Структурная схема системы показана на рисунке 2.10.
Рисунок 2.10 – Система скалярного управления с поиском минимума тока ста-
тора
На рисунке 2.10 приняты обозначения: Uоп – опорное напряжение треуголь-
ной формы небольшой амплитуды, U – постоянное напряжение, Инв – инвертор
(меняет знак напряжения U), ШИМ – широтно-импульсная модуляция, АИН – ав-
тономный инвертор напряжения, АД – асинхронный двигатель, is – ток обмотки
статора, fТ – частота тактовых импульсов, 1/р – интегратор, Z-1 – элемент памяти,
αβ и abc– двухфазная и трехфазная соответственно неподвижные координатные
81
системы. Для удобства система управления поделена на две части: система клас-
сического скалярного управления и система поиска минимума тока статора.При
пуске электропривода плавно устанавливается заданное постоянное значение ча-
стоты вращения асинхронного двигателя системой скалярного управления. Задан-
ное постоянное значение частоты вращения поступает на функциональный преоб-
разователь Us = f (fs), реализующий эмпирическую зависимость между напряже-
нием и частотой тока статора. С выхода преобразователя заданное значение напря-
жения Us поступает на сумматор. При пуске сигналы постоянного U и треуголь-
ного опорных напряжений Uоп на сумматор не подаются (соответствующие ключи
разомкнуты). Таким образом, на входные выводы блока широтно-импульсной мо-
дуляции поступают сигналы заданного постоянного значения частоты вращения
ротора и заданного значения напряжения. На основе этих двух сигналов блок ши-
ротно-импульсной модуляции формирует управляющие сигналы автономного ин-
вертора напряжения. Асинхронный двигатель, находясь в режиме пуска, начинает
разгоняться.
При достижении установившееся значения частоты вращения ключи, ком-
мутирующие напряжения U и Uоп, переходят в замкнутое состояние, тем самым
подключая к работе систему поиска минимума тока статора.
Принцип работы в энергосберегающем режиме следующий. Опорное тре-
угольное напряжение Uоп (небольшой амплитуды по отношению к амплитуде
напряжения статора Us) с периодом 2ТВ, синхронизированное тактовыми импуль-
сами fT (рисунок 2.11) прикладывается к сумматору. В результате в обмотке ста-
тора асинхронного двигателя формируется небольшое изменение тока статора, ин-
формация о котором с датчиков тока поступает на координатный преобразователь
a, b, c → α, β. После преобразования в двухфазную систему координат происходит
вычисление модуля полного вектора тока статора. Элемент памяти Z-1 фиксирует
значение модуля вектора тока статора в начале каждого периода следования опор-
ного треугольного напряжения и через время ТВ выдает этот сигнал на соответ-
ствующий сумматор. Фиксация значения модуля вектора тока статора происходит
82
по фронту тактовых импульсов fT, подача этого значения на выход элемента па-
мяти Z-1 происходит по спаду тактовых импульсов fT (рисунок 2.11). по спаду так-
товых сигналов fT сумматор вычитает из текущего предыдущее значение модуля
вектора тока статора. Релейный регулятор на выходе сумматора определят знак
сигнала, поступающего с сумматора таким образом, что если текущее значение
модуля вектора тока статора больше его предыдущего значения (т.е. знак положи-
тельный), то блок переключения (рисунок 2.10) переводится в верхнее положение,
подключая источник постоянного опорного напряжения U к интегратору, если те-
кущее значение модуля вектора тока статора меньше его предыдущего значения
(т.е. знак отрицательный), то блок переключения переводится в нижнее положе-
ние, подключая напряжение, инверсное опорному напряжению U. При верхнем
положении ключа блока переключения к интегратору 1/р подключено постоянное
напряжение, в результате чего на выходе интегратора формируется линейно
нарастающее напряжение. При нижнем положении блока переключения к инте-
гратору подключено отрицательное постоянное напряжение, в результате чего на
выходе интегратора формируется линейно уменьшающееся напряжение. Таким
образом, если опорное треугольное напряжение за первый полупериод следования
импульсов 0...ТВ вызывает увеличение модуля вектора тока статора, то для его
уменьшения происходит увеличение напряжения статора (как показано на ри-
сунке 2.11 за первый полупериод 0...ТВ происходит линейное уменьшение напря-
жения. Если это уменьшение вызывает увеличение тока, то для уменьшения тока
необходимо увеличить напряжение). Если опорное треугольное напряжение за
первый полупериод следования импульсов 0... ТВ вызывает уменьшение действу-
ющего тока статора, то для его дальнейшего уменьшения происходит уменьшение
напряжения статора (как показано на рисунке 2.11 за первый полупериод 0...ТВ
происходит линейное уменьшение напряжения. Если это уменьшение вызывает
уменьшение тока, то для уменьшения тока необходимо уменьшение напряжение).
Данный процесс продолжается до тех пор, пока не будет найден минимум модуля
вектора значения тока статора, в результате чего полное напряжение статора UsΣ

83
достигнет своего оптимального значения и его отклонение в любую из сторон при-
ведет к возрастанию тока. Следствием этого является то, что значение модуля век-
тора тока статора за время ТВ меняется менее установленного значения и происхо-
дит смена знака сигнала с выхода сумматора текущего и предыдущего значений
модуля вектора тока статора. На основании этой смены знаков постоянное напря-
жение U и треугольное напряжение Uоп отключаются от системы управления. На
вход интегратора 1/р поступает нулевой сигнал, на выходе интегратора хранится
предыдущее значение, обеспечивающее минимум модуля вектора тока статора,
которое продолжает поступать на соответствующий сумматор.
Рисунок 2.11 – Осциллограммы тактовых импульсов fT и опорного напряжения
Uоп
В случае изменения нагрузки, которое приводит к существенному измене-
нию тока статора, значение модуля вектора тока статора за время ТВ меняется бо-
лее установленного значения, в результате чего ключи, коммутирующие напряже-
ния U и Uоп, переходят в замкнутое состояние и процесс повторяется.
Таким образом, предложенная система управления обеспечивает работу с
минимальным значением тока статора асинхронного двигателя во всем диапазоне
изменения нагрузок.
Для проверки работоспособности такой системы был использован пакет
Matlab Simulink. Для адекватной проверки применена корректная математическая

84
модель асинхронного двигателя, учитывающая все возможные потери мощности,
а также нелинейности, вызванные особенностями работы в различных режимах
(выражения (2.3) – (2.11)).
При моделировании применялся вентиляторный момент сопротивления. На
рисунке 2.12 а, в, д, ж, и приведены результаты моделирования электропривода с
асинхронным двигателем и управлением по закону Us/fs2 = const. На рисунке 2.12,
б, г, е, з, к приведены результаты моделирования электропривода с асинхронным
двигателем и системой поиска минимума тока статора.
Параметры асинхронного двигателя следующие: Uном = 220 В; Iном = 27 А;
Рном = 11 кВт; 2рn = 4; nном = 1460 об/мин; Mном = 72 Нм; fном = 50 Гц; Xσs = 0,73 Ом;
Rs = 0,34 Ом; Xμ,ном = 31 Ом; Xμ,хх = 43,8 Ом; Rc = 504 Ом; Xσr,пуск = 0,73 Ом; Xσr,ном =
1,68 Ом; Rr,пуск = 0,41 Ом, Rr,ном = 0,29 Ом.
Нагрузка при пуске составляет М = 72 Нм, в момент времени t = 70 с нагрузка
ступенчато изменяется до М = 20 Нм, в момент времени t = 110 с нагрузка ступен-
чато изменятся до М = 110 Нм. Частота тока статора fs = 15 Гц.
Анализ работы электропривода с управлением по закону Us/fs2 = const пока-
зывает, что при нагрузке М = 72 Нм (М = Мном) ток статора Is = 27,3 А, потери
мощности ΔР = 1356 Вт, КПД = 0,7354, амплитуда напряжения статора Us = 97 В;
при нагрузке М = 20 Нм (М = 0.28Мном) ток статора Is = 8,08 А, потери мощности
ΔР = 106 Вт, КПД = 0,8987, амплитуда напряжения статора Us = 97 В; при нагрузке
М = 110 Нм (М = 1.53Мном) ток статора Is = 44,59 А, потери мощности ΔР = 3675
Вт, КПД = 0,585, амплитуда напряжения статора Us = 97 В.
Анализ работы электропривода с системой управления, настраивающейся
на минимум тока статора, показывает, что при нагрузке М = 72 Нм (М = Мном) ток
статора Is = 21,9 А, потери мощности ΔР = 814,7 Вт, КПД = 0,8222, амплитуда
напряжения статора Us = 116 В; при нагрузке М = 20 Нм (М = 0.28Мном) ток статора
Is = 7,98 А, потери мощности ΔР = 102,4 Вт, КПД = 0,9011, амплитуда напряжения
статора Us = 91 В; при нагрузке М = 110 Нм (М = 1.53Мном) ток статора Is = 29,2 А,
потери мощности ΔР = 1463 Вт, КПД = 0,7798, амплитуда напряжения статора Us
= 124,5 В.

85
а)
в)
д)
ж)
и)
б)
г)
е)
з)
к)
Рисунок 2.12 – Результаты моделирования электроприводов со скалярной системой
управления (а, в, д, ж, и) и системой поиска минимума тока статора (б, г, е, з, к)
86
Таким образом, моделирование подтвердило работоспособность разрабо-
танной системы управления и оптимизацию энергетических характеристик элек-
тропривода. Так, при моменте сопротивления, не равном номинальному, величина
КПД за счет применения системы минимизации тока статора может быть увели-
чена на 20%, а потери мощности – снижены на 50%. Частота вращения ротора по-
сле отключения системы экстремального управления возвращается к своему зна-
чению до включения системы. Колебания частоты вращения во время работы си-
стемы незначительны и не превышают 0,5% от заданного значения. Очевидно, что
система поиска минимума тока статора работоспособна во всем диапазоне изме-
нения нагрузок, но при частотах вращения ротора ниже номинальной, так как при
больших частотах увеличение напряжения неэффективно по причине насыщения
магнитной цепи и может быть опасно из-за возможного пробоя изоляции. Приме-
нение предложенной системы управления обеспечивает поддержание минимума
тока статора, в то время как частота вращения ротора незначительно меняется
вследствие изменения напряжения. В тех случаях, когда это становится критич-
ным для нагрузочного механизма, систему скалярного управления целесообразно
дополнить датчиком и регулятором частоты вращения ротора.
Новизна синтезированной в данном подразделе системы управления под-
тверждена патентом на полезную модель № 167775 [165].
2.4 Сравнительная характеристика систем скалярного управления
В данном разделе проведено сравнение разработанной в предыдущем раз-
деле системы скалярного управления с поиском минимума тока статора и системы
скалярного управления при постоянстве абсолютного скольжения (рисунок 2.13)
при подключении обмотки статора асинхронного двигателя к двухуровневому ав-
тономному инвертору напряжения с учетом теплового состояния обмоток статора
и ротора.
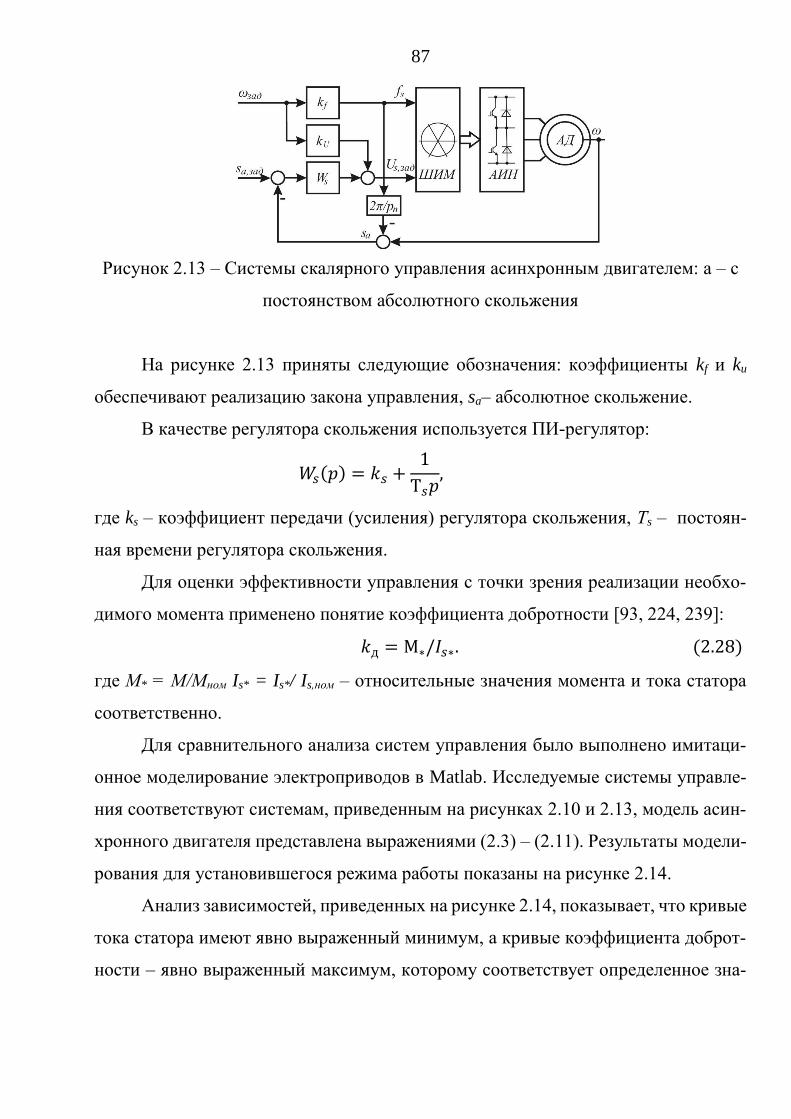
87
Рисунок 2.13 – Системы скалярного управления асинхронным двигателем: а – с
постоянством абсолютного скольжения
На рисунке 2.13 приняты следующие обозначения: коэффициенты kf и ku
обеспечивают реализацию закона управления, sa– абсолютное скольжение.
В качестве регулятора скольжения используется ПИ-регулятор:
𝑊𝑠(𝑝) = 𝑘𝑠 +1
Т𝑠𝑝,
где ks – коэффициент передачи (усиления) регулятора скольжения, Тs – постоян-
ная времени регулятора скольжения.
Для оценки эффективности управления с точки зрения реализации необхо-
димого момента применено понятие коэффициента добротности [93, 224, 239]:
𝑘д = М∗/𝐼𝑠∗. (2.28)
где М* = М/Мном Is* = Is*/ Is,ном – относительные значения момента и тока статора
соответственно.
Для сравнительного анализа систем управления было выполнено имитаци-
онное моделирование электроприводов в Matlab. Исследуемые системы управле-
ния соответствуют системам, приведенным на рисунках 2.10 и 2.13, модель асин-
хронного двигателя представлена выражениями (2.3) – (2.11). Результаты модели-
рования для установившегося режима работы показаны на рисунке 2.14.
Анализ зависимостей, приведенных на рисунке 2.14, показывает, что кривые
тока статора имеют явно выраженный минимум, а кривые коэффициента доброт-
ности – явно выраженный максимум, которому соответствует определенное зна-
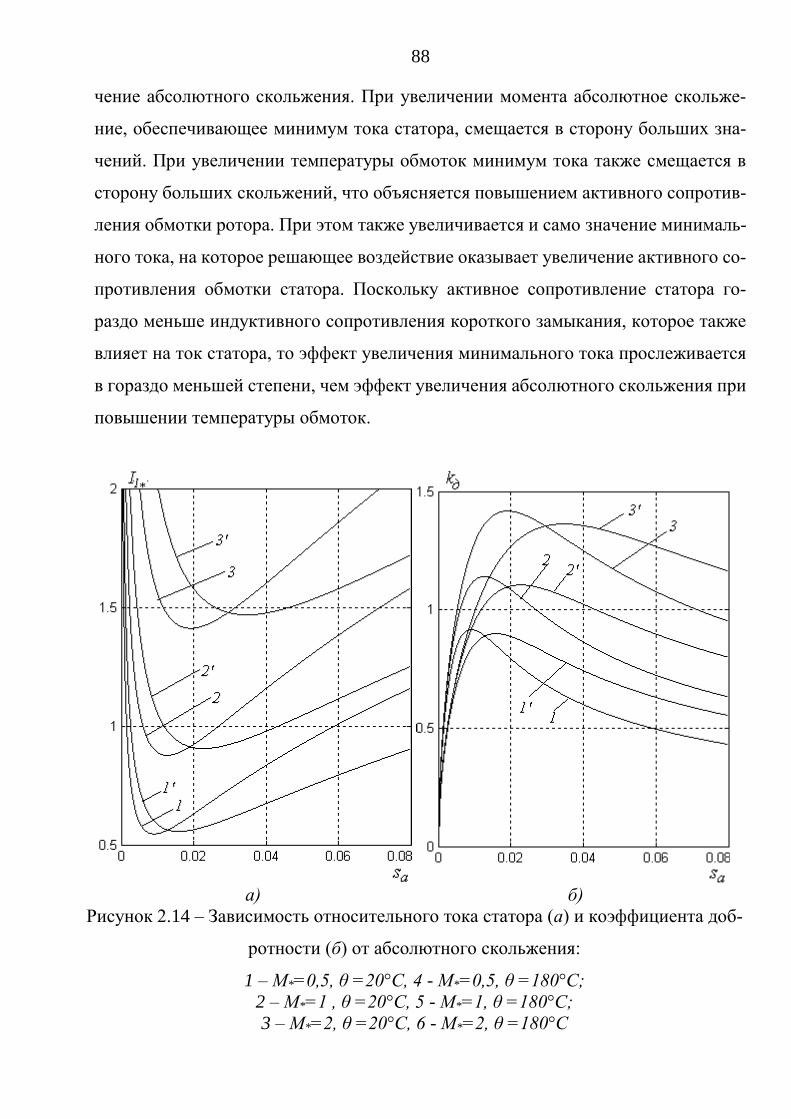
88
чение абсолютного скольжения. При увеличении момента абсолютное скольже-
ние, обеспечивающее минимум тока статора, смещается в сторону больших зна-
чений. При увеличении температуры обмоток минимум тока также смещается в
сторону больших скольжений, что объясняется повышением активного сопротив-
ления обмотки ротора. При этом также увеличивается и само значение минималь-
ного тока, на которое решающее воздействие оказывает увеличение активного со-
противления обмотки статора. Поскольку активное сопротивление статора го-
раздо меньше индуктивного сопротивления короткого замыкания, которое также
влияет на ток статора, то эффект увеличения минимального тока прослеживается
в гораздо меньшей степени, чем эффект увеличения абсолютного скольжения при
повышении температуры обмоток.
а) б)
Рисунок 2.14 – Зависимость относительного тока статора (а) и коэффициента доб-
ротности (б) от абсолютного скольжения:
3 – М*=2, θ =20°С, 6 - М*=2, θ =180°С
1 – М*=0,5, θ =20°С, 4 - М*=0,5, θ =180°С;
2 – М*=1 , θ =20°С, 5 - М*=1, θ =180°С;
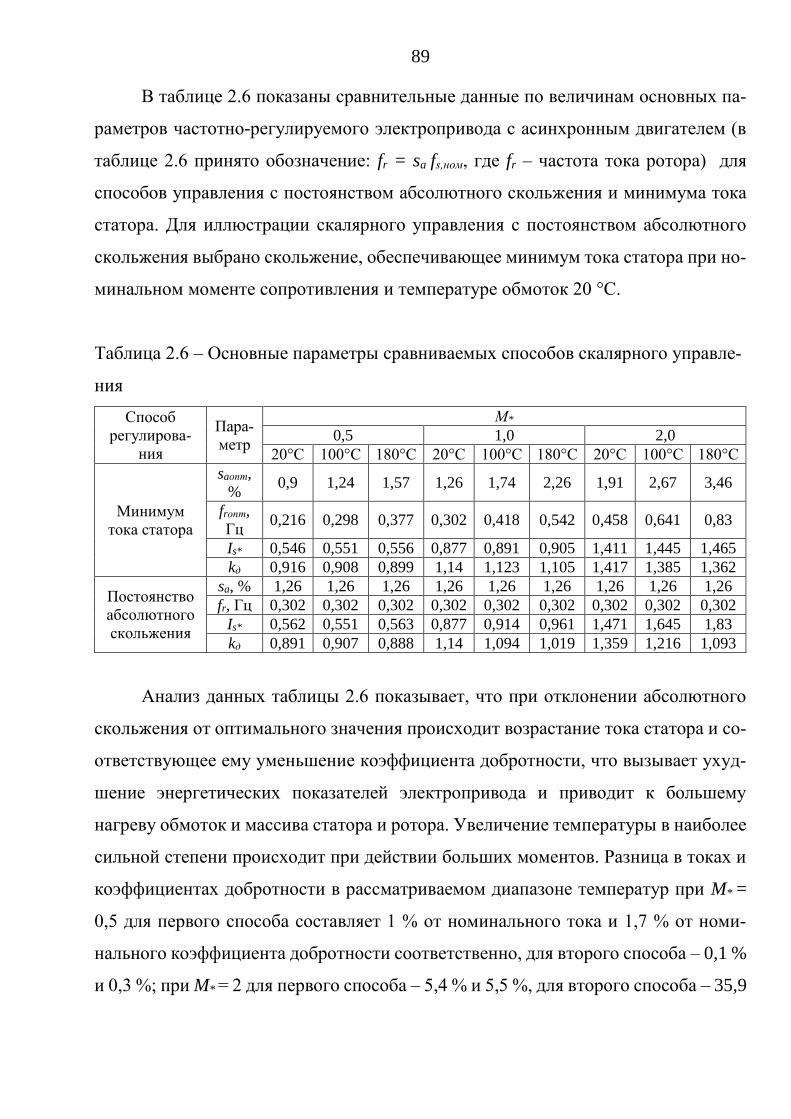
89
В таблице 2.6 показаны сравнительные данные по величинам основных па-
раметров частотно-регулируемого электропривода с асинхронным двигателем (в
таблице 2.6 принято обозначение: fr = sa fs,ном, где fr – частота тока ротора) для
способов управления с постоянством абсолютного скольжения и минимума тока
статора. Для иллюстрации скалярного управления с постоянством абсолютного
скольжения выбрано скольжение, обеспечивающее минимум тока статора при но-
минальном моменте сопротивления и температуре обмоток 20 °С.
Таблица 2.6 – Основные параметры сравниваемых способов скалярного управле-
ния
Способ
регулирова-
ния
Пара-
метр
М*
0,5 1,0 2,0
20°С 100°С 180°С 20°С 100°С 180°С 20°С 100°С 180°С
Минимум
тока статора
saопт,
% 0,9 1,24 1,57 1,26 1,74 2,26 1,91 2,67 3,46
frопт,
Гц 0,216 0,298 0,377 0,302 0,418 0,542 0,458 0,641 0,83
Is* 0,546 0,551 0,556 0,877 0,891 0,905 1,411 1,445 1,465
kд 0,916 0,908 0,899 1,14 1,123 1,105 1,417 1,385 1,362
Постоянство
абсолютного
скольжения
sa, % 1,26 1,26 1,26 1,26 1,26 1,26 1,26 1,26 1,26
fr, Гц 0,302 0,302 0,302 0,302 0,302 0,302 0,302 0,302 0,302
Is* 0,562 0,551 0,563 0,877 0,914 0,961 1,471 1,645 1,83
kд 0,891 0,907 0,888 1,14 1,094 1,019 1,359 1,216 1,093
Анализ данных таблицы 2.6 показывает, что при отклонении абсолютного
скольжения от оптимального значения происходит возрастание тока статора и со-
ответствующее ему уменьшение коэффициента добротности, что вызывает ухуд-
шение энергетических показателей электропривода и приводит к большему
нагреву обмоток и массива статора и ротора. Увеличение температуры в наиболее
сильной степени происходит при действии больших моментов. Разница в токах и
коэффициентах добротности в рассматриваемом диапазоне температур при M* =
0,5 для первого способа составляет 1 % от номинального тока и 1,7 % от номи-
нального коэффициента добротности соответственно, для второго способа – 0,1 %
и 0,3 %; при M* = 2 для первого способа – 5,4 % и 5,5 %, для второго способа – 35,9
90
% и 26,6 %. Это говорит о том, что способ управления при постоянстве абсолют-
ного скольжения гораздо менее восприимчив к изменению температуры при низ-
ких моментах, чем управление по минимуму тока статора. Разница в оптимальных
значениях абсолютных скольжений при M* = 0,5 составляет 0,67 %, при M* = 2 –
1,55 %. Таким образом, увеличение температуры обмоток приводит к резкому сни-
жению эффективности управления при постоянстве абсолютного скольжения по
сравнению с поддержанием минимального значения тока статора.
Подобные исследования были проведены и для пониженных частот тока
статора. При пониженных частотах сохраняется тенденция увеличения минималь-
ного тока и оптимального значения скольжения при увеличении температуры или
момента. Причем чем ниже частота тока статора, тем в наибольшей степени про-
является влияние температуры обмоток двигателя. Сами минимальные значения
тока несколько превышают значения тока при номинальной частоте напряжения
питания точно так же, как и оптимальные значения абсолютного скольжения с по-
нижением частоты увеличиваются при тех же самых значениях температуры и мо-
мента. Это приводит к еще более значительному снижению эффективности регу-
лирования с постоянством абсолютного скольжения в зоне больших моментов.
С точки зрения реализации подобных систем управления асинхронными
двигателями имеет практический смысл определение значения напряжения, при-
кладываемого к обмотке статора. Очевидно, что для регулирования частоты тока
ротора или абсолютного скольжения при заданной частоте тока статора необхо-
димо изменять величину этого напряжения. Для анализа влияния выбранного спо-
соба управления, а также температуры обмоток двигателя на напряжение статора
были рассчитаны и построены зависимости относительного напряжения от отно-
сительного момента для различных частот тока статора (рисунок 2.15).
Напряжение, прикладываемое к статору при номинальном моменте и номи-
нальной частоте тока статора, в обоих случаях превышает свое номинальное зна-
чение на 5...15 %. Для способа регулирования при постоянстве абсолютного сколь-
жения влияние температуры на значения напряжения в большей степени проявля-
ется в зоне больших моментов, в то время как при управлении по минимуму тока
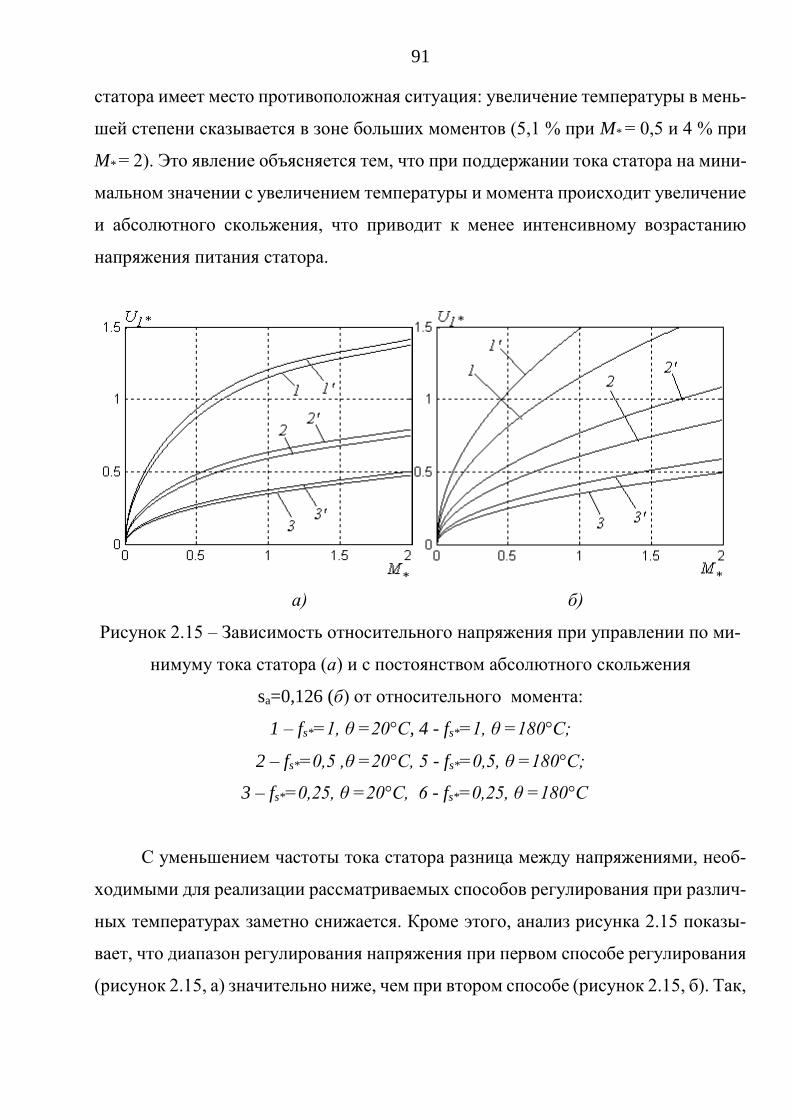
91
статора имеет место противоположная ситуация: увеличение температуры в мень-
шей степени сказывается в зоне больших моментов (5,1 % при M* = 0,5 и 4 % при
M* = 2). Это явление объясняется тем, что при поддержании тока статора на мини-
мальном значении с увеличением температуры и момента происходит увеличение
и абсолютного скольжения, что приводит к менее интенсивному возрастанию
напряжения питания статора.
а) б)
3 – fs*=0,25, θ =20°С, 6 - fs*=0,25, θ =180°С
С уменьшением частоты тока статора разница между напряжениями, необ-
ходимыми для реализации рассматриваемых способов регулирования при различ-
ных температурах заметно снижается. Кроме этого, анализ рисунка 2.15 показы-
вает, что диапазон регулирования напряжения при первом способе регулирования
(рисунок 2.15, а) значительно ниже, чем при втором способе (рисунок 2.15, б). Так,
Рисунок 2.15 – Зависимость относительного напряжения при управлении по ми-
нимуму тока статора (а) и с постоянством абсолютного скольжения
sa=0,126 (б) от относительного момента:
1 – fs*=1, θ =20°С, 4 - fs*=1, θ =180°С;
2 – fs*=0,5 ,θ =20°С, 5 - fs*=0,5, θ =180°С;

92
разница напряжений в долях от номинального при M* = 1 на рассматриваемом диа-
пазоне температур составляет от 3,1 % при fs* = 0,25 до 4,9 % при fs* = 1 для первого
способа и от 4,9 % до 43,6 % соответственно для второго. Очевидно, что подержа-
ние напряжения на уровне Us* = 1,49 затруднительно по условиям пробоя изоля-
ции, поэтому для технической реализации этого способа необходимо либо под-
держивать постоянным большее значение абсолютного скольжения, что ведет к
худшим показателям при малых значениях момента, либо прибегать к одновре-
менному регулированию частоты тока статора, что ведет к значительному услож-
нению системы скалярного управления.
В заключении следует отметить очевидное преимущество систем скаляр-
ного управления, работающих по принципу минимума тока статора, которые под-
держивают требуемое значение момента с меньшими значениями тока статора,
напряжения статора, а, следовательно, и с меньшим значением магнитного потока,
что приводит к увеличению коэффициента добротности и снижению электромаг-
нитных нагрузок. Вместе с этим, проведенный анализ показал необходимость
учета влияния температуры обмоток на значения напряжения статора и параметры
системы управления в связи с влиянием на величины минимума тока статора и,
особенно, оптимального абсолютного скольжения, обеспечивающего экстремаль-
ное управление по минимуму тока статора.
Выводы по разделу 2
1. В результате анализа исследований, посвященных моделированию про-
цессов преобразования энергии в асинхронных двигателях, установлено, что ма-
тематическая модель асинхронного двигателя, описывающая Т-образную эквива-
лентную схему замещения, которая содержит сопротивление, пропорциональное
потерям в стали статора и включенное параллельно взаимоиндуктивности, явля-
ется оптимальной с точки зрения соотношения времени расчета и точности ре-
зультата.

93
2. Анализ работы вспомогательных электроприводов показал, что при вен-
тиляторной нагрузке электропривода, что имеет место при его работе в составе
системы охлаждения тягового электрооборудования и электродвигателей на по-
движном составе, целесообразнее, учитывая стоимостные показатели современ-
ных преобразователей частоты, применять частотно-регулируемые электропри-
воды с алгоритмами скалярного управления, обеспечивающими оптимальные ре-
жимы работы асинхронного двигателя в соответствии с законом М.П. Костенко.
3. Синтезирована система скалярного управления электропривода с асин-
хронным двигателем, осуществляющая минимизацию тока статора, а, следова-
тельно, и потери мощности в установившихся режимах работы. При моменте со-
противления, не равном номинальному, величина КПД за счет применения си-
стемы минимизации тока статора может быть увеличена на 20%, а потери мощно-
сти – снижены на 50%.
4. В результате сравнительного анализа электроприводов с системами ска-
лярного управления установлено, что системы, обеспечивающие поддержание ми-
нимального значения тока статора, реализуют необходимую величину момента с
меньшими значениями тока статора по сравнению с системами, работающими с
постоянством абсолютного скольжения во всем диапазоне моментов сопротивле-
ния и частот вращения. Одновременно с этим установлено, что необходимо учи-
тывать изменения температуры обмоток и ее влияние на значение напряжения ста-
тора в обеих рассматриваемых системах и параметры этих систем управления в
связи с ее ярко выраженным влиянием на значения не только минимума тока ста-
тора, но и скольжения, обеспечивающего это минимальное значение и реализацию
всего экстремального управление.

94
3 СИНТЕЗ СИСТЕМ ВЕКТОРНОГО УПРАВЛЕНИЯ И ПРЯМОГО
УПРАВЛЕНИЯ МОМЕНТОМ ЭЛЕКТРОПРИВОДА
3.1 Сравнительная оценка применения в электроприводах двух- и трехуров-
невых автономных инверторов напряжения
3.1.1 Общие сведения
В настоящее время в тяговых электроприводах с асинхронными двигате-
лями для регулирования частоты вращения чаще всего используются полупровод-
никовые преобразователи частоты, подключаемые к обмотке статора. Выбор мощ-
ности и топологии преобразователя частоты в значительной степени определяет
массогабаритные, надежностные, энергетические и экономические показатели ка-
чества всего электропривода, а также специфику синтеза его системы управления.
От выбора конструкции преобразователя зависят его ремонтопригодность, тип и
особенности построения его системы охлаждения.
Структурно применяемые преобразователи состоят из выпрямителя, звена
постоянного тока (конденсаторов или дросселей) и автономного инвертора напря-
жения или тока. Динамика развития локомотивостроения такова, что в последнее
время большая часть тяговых электроприводов используют автономные инвер-
торы напряжения, обладающие лучшими массогабаратными показателями по
сравнению с инверторами тока.
Наибольшее распространение при реализации тяговых электроприводов по-
лучили двухуровневые автономные инверторы напряжения (рисунок 3.1), форми-
рующие восемь векторов напряжения на выходе (рисунок 3.2).
Основные условия переключения силовых полупроводников VT1 – VT6 можно
записать так: конденсатор C в цепи постоянного тока не должен быть в результате
переключения замкнут накоротко; при переключении должно выполняться «сосед-
нее кодирование». Каждое плечо имеет два состояния. Функции переключения могут
быть описаны следующим образом:
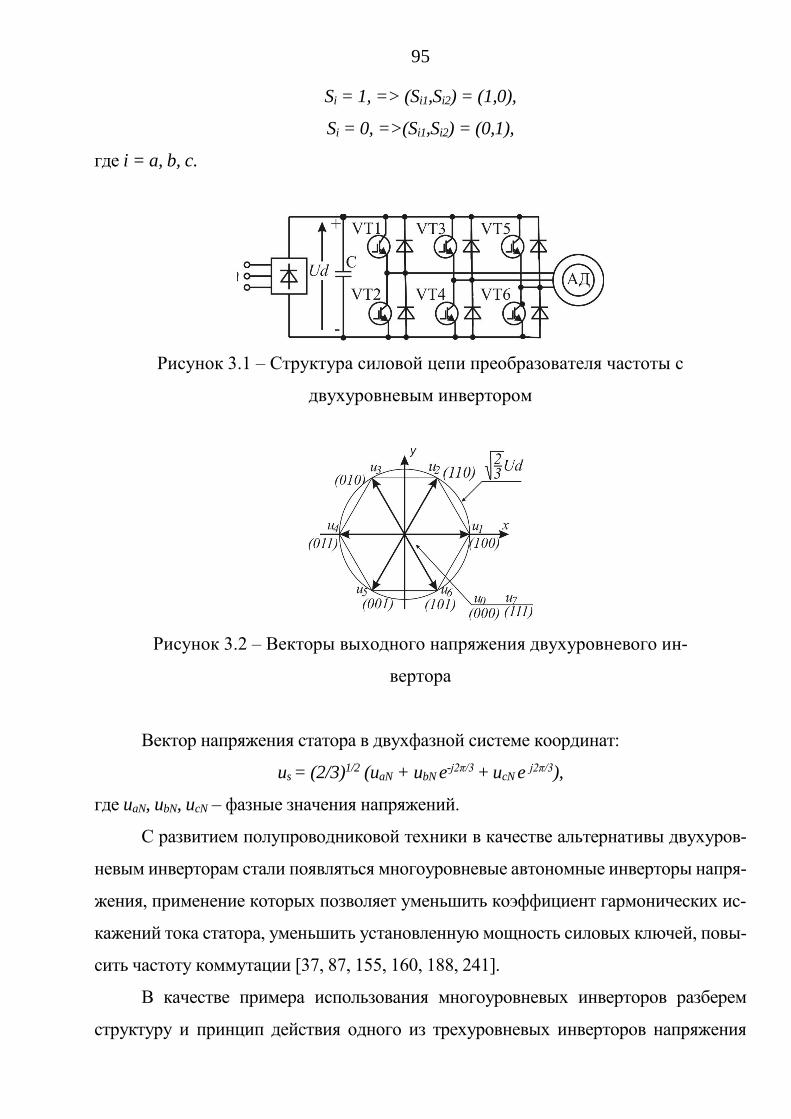
95
Si = 1, => (Si1,Si2) = (1,0),
Si = 0, =>(Si1,Si2) = (0,1),
где i = a, b, c.
Рисунок 3.1 – Структура силовой цепи преобразователя частоты с
двухуровневым инвертором
Рисунок 3.2 – Векторы выходного напряжения двухуровневого ин-
вертора
Вектор напряжения статора в двухфазной системе координат:
us = (2/3)1/2 (uaN + ubN e-j2π/3 + ucN e j2π/3),
где uaN, ubN, ucN – фазные значения напряжений.
С развитием полупроводниковой техники в качестве альтернативы двухуров-
невым инверторам стали появляться многоуровневые автономные инверторы напря-
жения, применение которых позволяет уменьшить коэффициент гармонических ис-
кажений тока статора, уменьшить установленную мощность силовых ключей, повы-
сить частоту коммутации [37, 87, 155, 160, 188, 241].
В качестве примера использования многоуровневых инверторов разберем
структуру и принцип действия одного из трехуровневых инверторов напряжения

96
(структура схематично показана на рисунке 3.3). Такой инвертор получает питание
от источника со средней точкой. Роль делителя напряжения обычно выполняют элек-
тролитические конденсаторы С1 и С2. Инвертор состоит из двенадцати силовых
транзисторов VT1 – VT12 (в одном плече инвертора содержится четыре последова-
тельно включенных транзистора), к каждому из которых встречно-параллельно под-
ключен обратный диод, обеспечивающий двухстороннее протекание тока. Схема до-
полняется шестью фиксирующими диодами VD5 – VD6 (по два на фазу), позволяю-
щие подключать фазы асинхронного двигателя АД к средней точке. Каждое плечо
имеет три состояния. Функции переключения могут быть описаны следующим обра-
зом:
Si = -1 = n, =>(Si1,Si2,Si3,Si4) = (0,0,1,1),
Si = 0 = o, =>(Si1,Si2,Si3,Si4) = (0,1,1,0),
Si = 1 = p, =>(Si1,Si2,Si3,Si4) = (1,1,0,0).
Рисунок 3.3 – Структура трехуровневого автономного инвертора
напряжения
Трехуровневый инвертор формирует двадцать семь векторов напряжения, в то
время как двухуровневый инвертор имеет только восемь векторов напряжения. При

97
использовании конденсаторов С1 и С2 с одинаковыми значениями номиналов про-
исходит наложение отдельных векторов друг на друга, что приводит к уменьшению
эффективных векторов напряжения до девятнадцати (рисунок 3.4).
Рисунок 3.4 – Векторы выходного напряжения трехуровневого инвертора
Величина напряжения зависит от комбинации включенных ключей, в резуль-
тате чего можно выделить четыре группы векторов напряжения. Напряжение с
наибольшей амплитудой образуется посредством подключения двух фаз инвертора
к положительно заряженной обкладке конденсатора р, а третьей – к отрицательно
заряженной n (функции переключения для двух фаз Si = 1, для третьей – Si = -1) или
наоборот. Напряжение со средним значением амплитуды образуется при подключе-
нии одной фазы инвертора к средней точке о, а две другие подключаются к положи-
тельно р и отрицательно n заряженным обкладкам соответственно (все фазы инвер-
тора имеет различные функции переключения, например, (1-10), (0-11) и т.д.). Напря-
жение с малой амплитудой образуется посредством подключения двух фаз к одной
точке источника питания (p, o или n), а третьей – к соседней точке (функции пере-
ключения (100) или (0-1-1) и т.д.), – каждый вектор такого напряжения может быть
образован двумя различными функциями переключения. Четвертая группа векторов
напряжения – это нулевые векторы (напряжение с нулевой амплитудой) – образуется
98
посредством подключения всех фаз инвертора к одинаково заряженной обкладке
конденсатора (функции переключения – (-1-1-1), (000) или (111)).
Далее в этом разделе рассмотрены особенности работы различных топологий
автономных инверторов напряжения с использованием имитационного моделирова-
ния системы прямого управления моментом асинхронного двигателя и реакции элек-
тропривода на возникновение нештатных и аварийных ситуаций в преобразователе
частоты.
3.1.2. Реализация системы прямого управления моментом
Система прямого управления моментом (рисунок 3.5) впервые была приме-
нена в середине 80-х годов прошлого столетия [223, 252]. В отличие от систем век-
торного и скалярного управления система прямого управления моментом основана
на релейном принципе работы (так называемая система с разрывным управлением)
– используются двух- и трехпозиционные реле момента и потокосцепления статора
с гистерезисом, формирующие то или иное дискретное значение напряжений управ-
лений ΔМ и Δψ в зависимости от знака и значения ошибки регулирования момента и
потокосцепления (М – Мз) и (ψз – ψs) соответственно. Заданием на выбор выходного
вектора являются значения сектора потокосцепления. Основная трудность такого
управления заключается в прецизионном определении переменных регулирования –
момента и потокосцепления. На рисунке 3.5 предложен один из возможных вариан-
тов решения этой задачи. На основе информации, полученной от датчиков тока и
напряжения обмотки статора, выполняется преобразование в двухфазную неподвиж-
ную систему координат (A, В, С → α, β), после чего рассчитываются проекции пото-
косцепления статора ψs на взаимноперпендикулярные оси:
𝜓𝑠𝛼 = ∫(𝑈𝑠𝛼 − 𝐼𝑠𝛼 𝑅𝑠)dt,
𝜓𝑠𝛽 = ∫(𝑈𝑠𝛽 − 𝐼𝑠𝛽 𝑅𝑠)dt,
где Rs – сопротивление обмотки статора.

99
Рисунок 3.5 – Блок-схема системы прямого управления моментом асинхрон-
ного двигателя
Очевидно, что из-за применения операции интегрирования при расчете пото-
косцепления статора реализация системы прямого управления моментом чувстви-
тельна к точности определения значения сопротивления статора, и при погрешности
определения этого сопротивления более чем на 1 %, показатели качества регулиро-
вания резко ухудшаются. При большем увеличении ошибки система может потерять
устойчивость [58], поэтому при оценке сопротивления статора необходимо приме-
нять температурную коррекцию.
Электромагнитный момент находится из выражения:
М =3
2р𝑛(𝐼𝑠𝛽𝜓𝑠𝛼 − 𝐼𝑠𝛼𝜓𝑠𝛽), (3.1)
где рn – число пар полюсов.
Относительно системы векторного управления достоинствами системы пря-
мого управления моментом являются:
– отсутствие координатных преобразователей для двухфазных систем коорди-
нат;
– высокое быстродействие контуров регулирования потокосцепления и мо-
мента, обусловленное наличием релейных регуляторов;
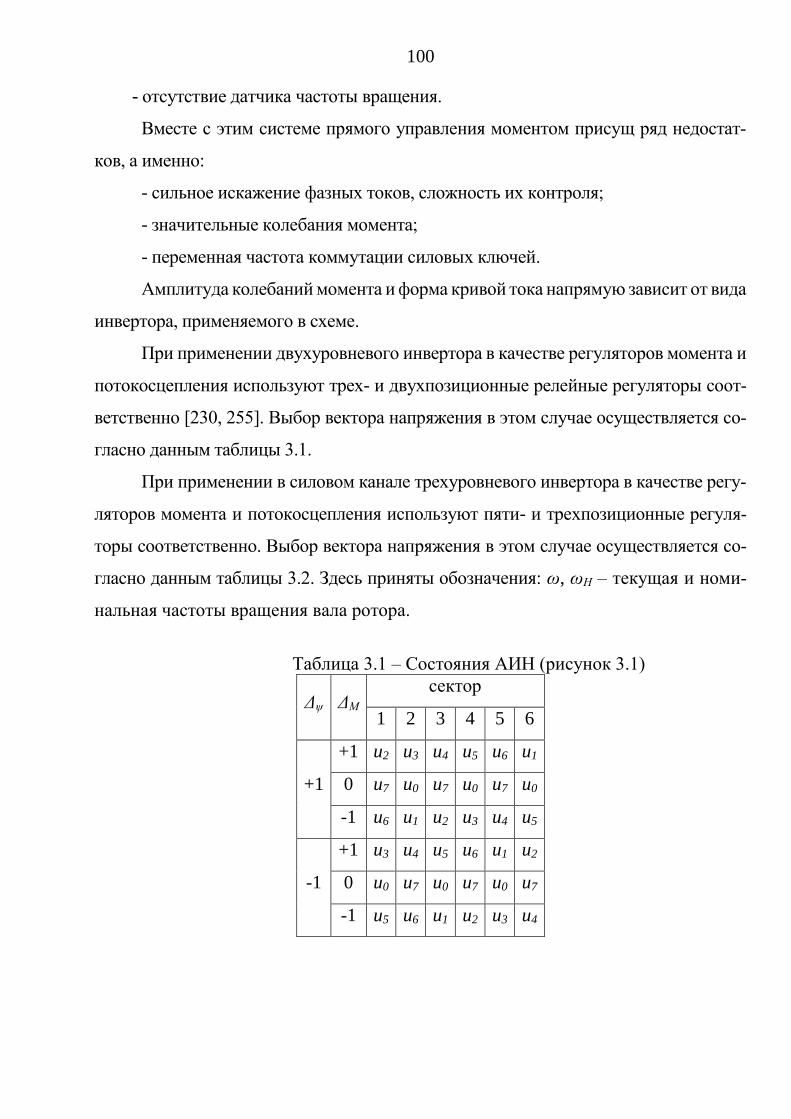
100
- отсутствие датчика частоты вращения.
Вместе с этим системе прямого управления моментом присущ ряд недостат-
ков, а именно:
- сильное искажение фазных токов, сложность их контроля;
- значительные колебания момента;
- переменная частота коммутации силовых ключей.
Амплитуда колебаний момента и форма кривой тока напрямую зависит от вида
инвертора, применяемого в схеме.
При применении двухуровневого инвертора в качестве регуляторов момента и
потокосцепления используют трех- и двухпозиционные релейные регуляторы соот-
ветственно [230, 255]. Выбор вектора напряжения в этом случае осуществляется со-
гласно данным таблицы 3.1.
При применении в силовом канале трехуровневого инвертора в качестве регу-
ляторов момента и потокосцепления используют пяти- и трехпозиционные регуля-
торы соответственно. Выбор вектора напряжения в этом случае осуществляется со-
гласно данным таблицы 3.2. Здесь приняты обозначения: ω, ωН – текущая и номи-
нальная частоты вращения вала ротора.
Таблица 3.1 – Состояния АИН (рисунок 3.1)
Δψ ΔМ сектор
1 2 3 4 5 6
+1
+1 u2 u3 u4 u5 u6 u1
0 u7 u0 u7 u0 u7 u0
-1 u6 u1 u2 u3 u4 u5
-1
+1 u3 u4 u5 u6 u1 u2
0 u0 u7 u0 u7 u0 u7
-1 u5 u6 u1 u2 u3 u4
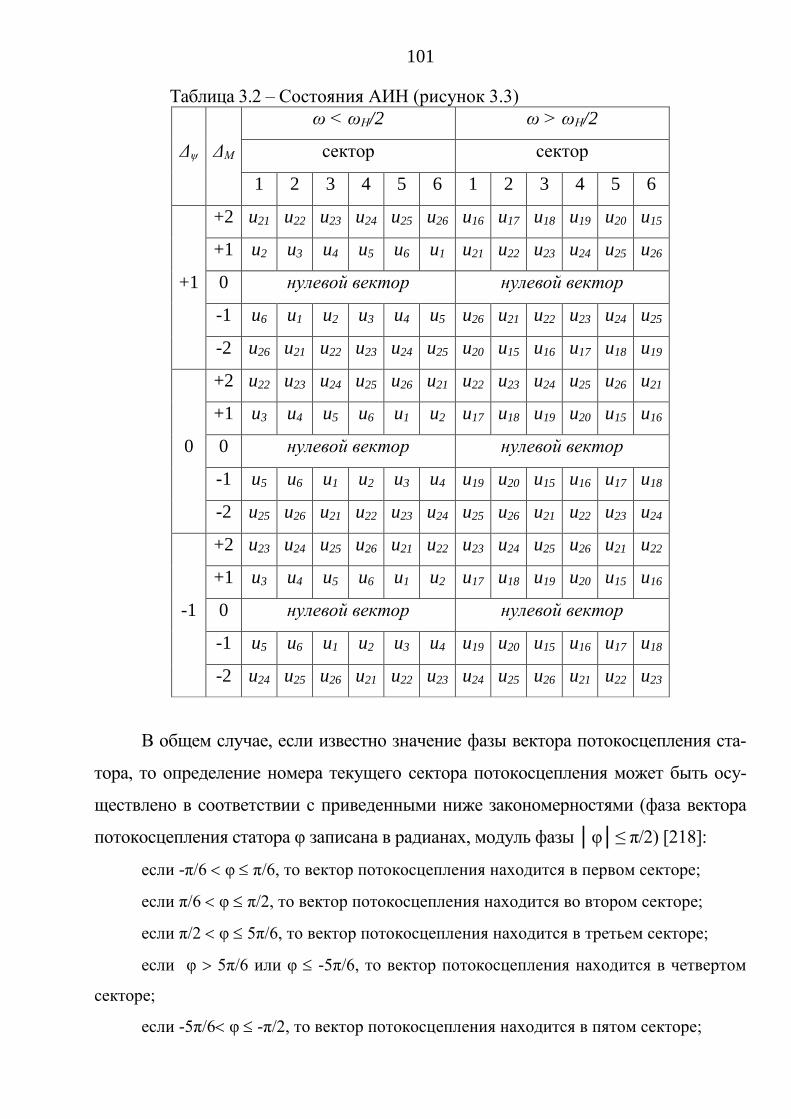
101
Таблица 3.2 – Состояния АИН (рисунок 3.3)
Δψ ΔМ
ω < ωН/2 ω > ωН/2
сектор сектор
1 2 3 4 5 6 1 2 3 4 5 6
+1
+2 u21 u22 u23 u24 u25 u26 u16 u17 u18 u19 u20 u15
+1 u2 u3 u4 u5 u6 u1 u21 u22 u23 u24 u25 u26
0 нулевой вектор нулевой вектор
-1 u6 u1 u2 u3 u4 u5 u26 u21 u22 u23 u24 u25
-2 u26 u21 u22 u23 u24 u25 u20 u15 u16 u17 u18 u19
0
+2 u22 u23 u24 u25 u26 u21 u22 u23 u24 u25 u26 u21
+1 u3 u4 u5 u6 u1 u2 u17 u18 u19 u20 u15 u16
0 нулевой вектор нулевой вектор
-1 u5 u6 u1 u2 u3 u4 u19 u20 u15 u16 u17 u18
-2 u25 u26 u21 u22 u23 u24 u25 u26 u21 u22 u23 u24
-1
+2 u23 u24 u25 u26 u21 u22 u23 u24 u25 u26 u21 u22
+1 u3 u4 u5 u6 u1 u2 u17 u18 u19 u20 u15 u16
0 нулевой вектор нулевой вектор
-1 u5 u6 u1 u2 u3 u4 u19 u20 u15 u16 u17 u18
-2 u24 u25 u26 u21 u22 u23 u24 u25 u26 u21 u22 u23
В общем случае, если известно значение фазы вектора потокосцепления ста-
тора, то определение номера текущего сектора потокосцепления может быть осу-
ществлено в соответствии с приведенными ниже закономерностями (фаза вектора
потокосцепления статора φ записана в радианах, модуль фазы │φ│≤ π/2) [218]:
если -π/6 φ π/6, то вектор потокосцепления находится в первом секторе;
если π/6 φ π/2, то вектор потокосцепления находится во втором секторе;
если π/2 φ 5π/6, то вектор потокосцепления находится в третьем секторе;
если φ 5π/6 или φ -5π/6, то вектор потокосцепления находится в четвертом
секторе;
если -5π/6 φ -π/2, то вектор потокосцепления находится в пятом секторе;
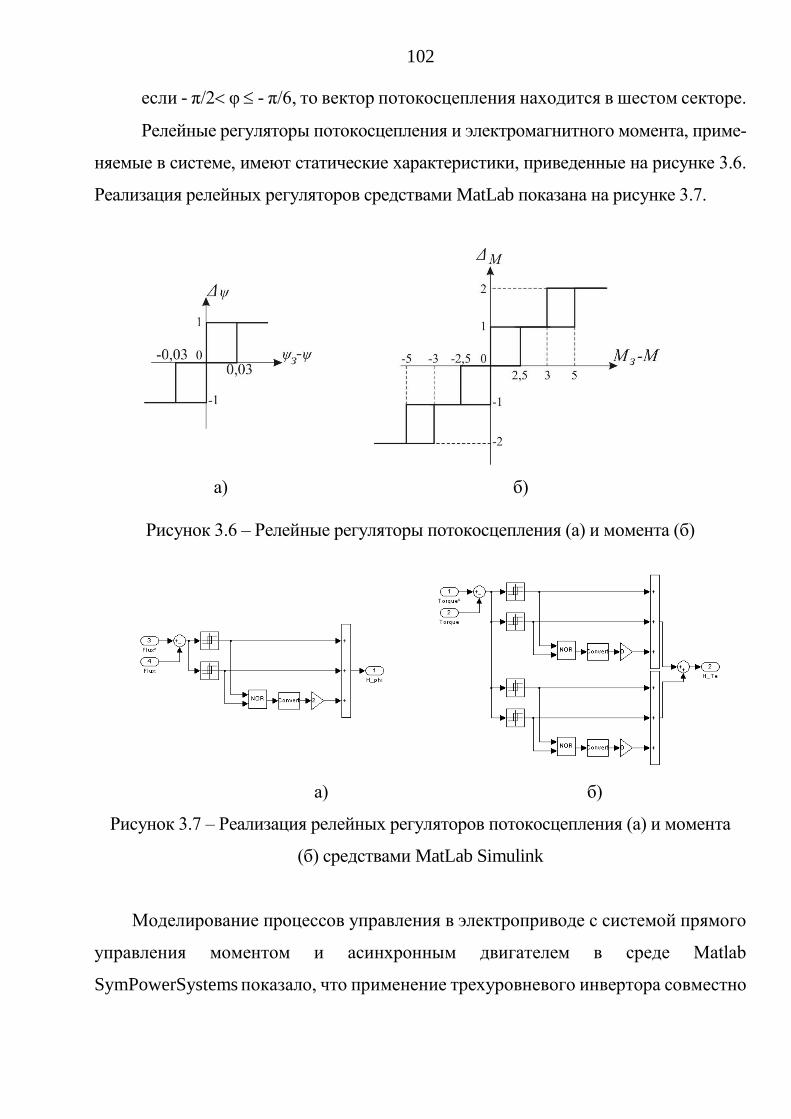
102
если - π/2 φ - π/6, то вектор потокосцепления находится в шестом секторе.
Релейные регуляторы потокосцепления и электромагнитного момента, приме-
няемые в системе, имеют статические характеристики, приведенные на рисунке 3.6.
Реализация релейных регуляторов средствами MatLab показана на рисунке 3.7.
а) б)
Рисунок 3.6 – Релейные регуляторы потокосцепления (а) и момента (б)
а) б)
Рисунок 3.7 – Реализация релейных регуляторов потокосцепления (а) и момента
(б) средствами MatLab Simulink
Моделирование процессов управления в электроприводе с системой прямого
управления моментом и асинхронным двигателем в среде Matlab
SymPowerSystems показало, что применение трехуровневого инвертора совместно
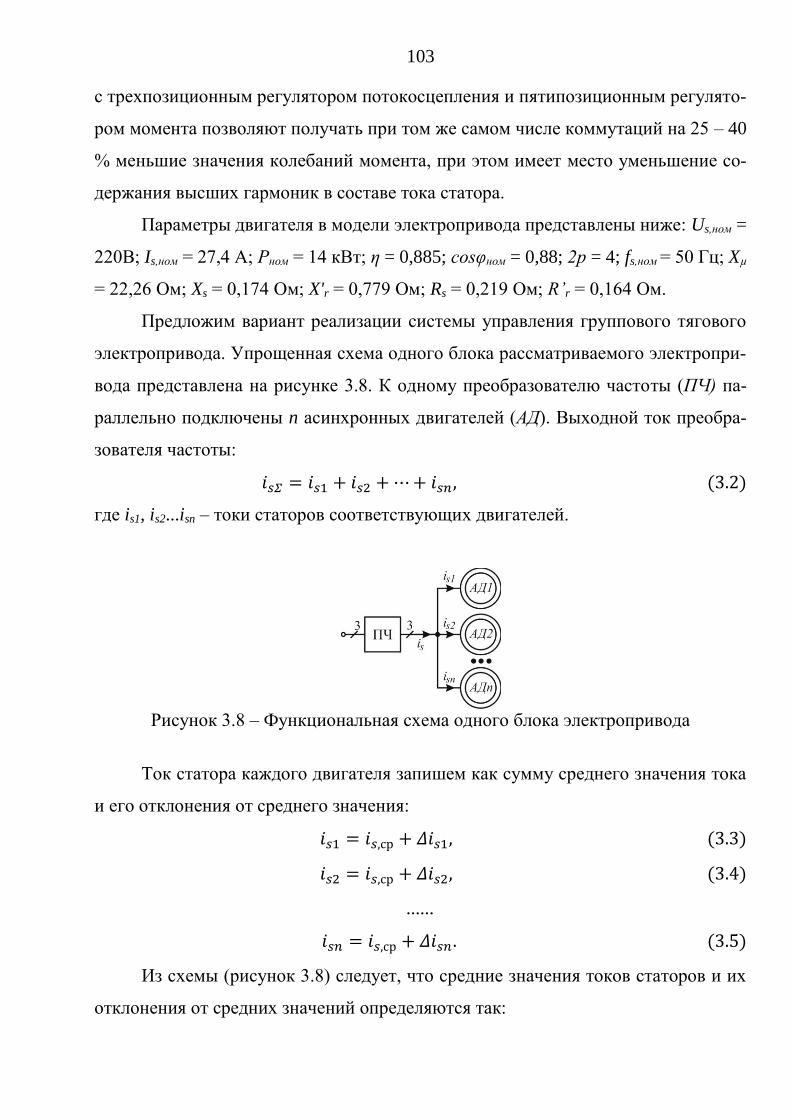
103
с трехпозиционным регулятором потокосцепления и пятипозиционным регулято-
ром момента позволяют получать при том же самом числе коммутаций на 25 – 40
% меньшие значения колебаний момента, при этом имеет место уменьшение со-
держания высших гармоник в составе тока статора.
Параметры двигателя в модели электропривода представлены ниже: Us,ном =
220В; Is,ном = 27,4 А; Рном = 14 кВт; η = 0,885; cosφном = 0,88; 2р = 4; fs,ном = 50 Гц; Xµ
= 22,26 Ом; Xs = 0,174 Ом; X'r = 0,779 Ом; Rs = 0,219 Ом; R’r = 0,164 Ом.
Предложим вариант реализации системы управления группового тягового
электропривода. Упрощенная схема одного блока рассматриваемого электропри-
вода представлена на рисунке 3.8. К одному преобразователю частоты (ПЧ) па-
раллельно подключены n асинхронных двигателей (АД). Выходной ток преобра-
зователя частоты:
𝑖𝑠𝛴 = 𝑖𝑠1 + 𝑖𝑠2 +⋯+ 𝑖𝑠𝑛, (3.2)
где is1, is2...isn – токи статоров соответствующих двигателей.
Рисунок 3.8 – Функциональная схема одного блока электропривода
Ток статора каждого двигателя запишем как сумму среднего значения тока
и его отклонения от среднего значения:
𝑖𝑠1 = 𝑖𝑠,ср + 𝛥𝑖𝑠1, (3.3)
𝑖𝑠2 = 𝑖𝑠,ср + 𝛥𝑖𝑠2, (3.4)
......
𝑖𝑠𝑛 = 𝑖𝑠,ср + 𝛥𝑖𝑠𝑛. (3.5)
Из схемы (рисунок 3.8) следует, что средние значения токов статоров и их
отклонения от средних значений определяются так:

104
𝑖𝑠,ср =(𝑖𝑠1 + 𝑖𝑠2 +⋯+ 𝑖𝑠𝑛)
𝑛, (3.6)
𝛥𝑖𝑠1 =2(−𝛥𝑖𝑠12 − 𝛥𝑖𝑠13 −⋯− 𝛥𝑖𝑠1𝑛)
𝑛, (3.7)
𝛥𝑖𝑠2 =2(𝛥𝑖𝑠12 − 𝛥𝑖𝑠23 −⋯− 𝛥𝑖𝑠2𝑛)
𝑛, (3.8)
......
𝛥𝑖𝑠𝑛 =2(𝛥𝑖𝑠1𝑛 + 𝛥𝑖𝑠2𝑛 +⋯+ 𝛥𝑖𝑠(𝑛−1)𝑛)
𝑛, (3.9)
где
{
𝛥𝑖𝑠12 =
𝑖𝑠2 − 𝑖𝑠12
, 𝛥𝑖𝑠13 =𝑖𝑠3 − 𝑖𝑠1
2. . . 𝛥𝑖𝑠𝑖𝑗 =
𝑖𝑠𝑗 − 𝑖𝑠𝑖2
,… . .
𝛥𝑖𝑠(𝑛−1)𝑛 =𝑖𝑠𝑛 − 𝑖𝑠(𝑛−1)
2, 𝑖, 𝑗 = 1…𝑛, 𝑖 < 𝑗.
(3.10)
При работе от одного инвертора среднее значение напряжений us,cp, потокос-
цеплений ψs,cp и моментов Мср и их отклонения Δus1, Δus2... Δψsn, Δψs1, Δψs2... Δψsn
и ΔМ1, ΔМ2... ΔМn определяются по аналогичным выражениям (3.3 – 3.10) для со-
ответствующих токов. Выражение для суммарного момента МΣ электропривода
аналогично выражению (3.2) для суммарного тока.
Выполнение такого подхода к исследованию процессов преобразования
энергии и управления в электроприводе с совместным управлением нескольких
двигателей обеспечивает возможность сделать заключение о степени перегрузки
или недогрузки каждого двигателя в зависимости от соотношения токов статоров.
Данная возможность особенно критична для тяговых электроприводов, где откло-
нение момента от заданного значения зачастую оказывается сопряженным со сры-
вом сцепления, переходом в режим боксования.
В связи со сложностью технической реализации в тяговом электроприводе
датчиков потокосцепления и момента целесообразно иметь их зависимости напря-
мую от измеряемых переменных. Для упрощения математического описания при-
мем, что к одному инвертору подключены два асинхронных двигателя. Из уравне-
ния (2.24) в неподвижной системе координат αβ (ωk = 0):

105
𝜓𝑠𝛼,ср = ∫(𝑢𝑠𝛼 −𝑅𝑠𝑖𝑠𝛼)𝑑𝑡 = ∫ [𝑢𝑠𝛼 − 𝑅𝑠,ср𝑖𝑠𝛼,ср −1
2(𝛥𝑅𝑠1𝛥𝑖𝑠1𝛼 + 𝛥𝑅𝑠2𝛥𝑖𝑠2𝛼)] 𝑑𝑡, (3.11)
𝜓𝑠𝛽,ср = ∫(𝑢𝑠𝛽 −𝑅𝑠𝑖𝑠𝛽)𝑑𝑡 = ∫ [𝑢𝑠𝛽 − 𝑅𝑠,ср𝑖𝑠𝛽,ср −1
2(𝛥𝑅𝑠1𝛥𝑖𝑠1𝛽 + 𝛥𝑅𝑠2𝛥𝑖𝑠2𝛽)] 𝑑𝑡, (3.12)
Среднее значение момента двух двигателей:
Мср =3
2р [𝑖𝑠𝛽,ср𝜓𝑠𝛼,ср − 𝑖𝑠𝛼,ср𝜓𝑠𝛽,ср +
1
2(𝛥𝑖𝑠𝛽1𝛥𝜓𝑠𝛼1 +
+𝛥𝑖𝑠𝛽2𝛥𝜓𝑠𝛼2) + 1
2(𝛥𝑖𝑠𝛼1𝛥𝜓𝑠𝛽1 + 𝛥𝑖𝑠𝛼2𝛥𝜓𝑠𝛽2)]. (3.13)
Предлагаемая система управления показана на рисунке 3.9. Определение пере-
менных каждого двигателя осуществляется на основании математической модели
асинхронного двигателя (2.24 – 2.29), определение средних значений переменных
осуществляется на основании выражений (3.11 – 3.13).
Рисунок 3.9 – Структура системы прямого управления моментом
В системе предусмотрена возможность организации контуров регулирования либо
по электрическим и механическим параметрам первого или второго асинхронного дви-
гателя, либо по средним значениям электрических и механических параметров. Для тя-
гового электропривода с совместным управлением двумя двигателями одной тележки в
режиме тяги целесообразно применение переменных первого по ходу движения тележки
двигателя и использование в системе управления сигнала большей частоты вращения
двигателей тележки в режиме тяги и меньшей – в режиме электрического торможения.
106
Это снижает вероятность боксования в режиме тяги и юза в режиме торможения.
3.1.3 Отработка нештатных и аварийных ситуаций
В процессе работы системы «преобразователь электроэнергии – асинхронный
двигатель» могут возникнуть следующие аварийные или нестационарные режимы
преобразователя частоты [67, 68, 76, 89, 140, 220, 222, 227, 253]:
- обрыв фазы источника переменного напряжения;
- короткое замыкание диода выпрямителя;
- короткое замыкание конденсатора звена постоянного тока;
- отсутствие управляющих импульсов на затворе транзистора (обрыв цепи кол-
лектор - эмиттер) автономного инвертора напряжения;
- короткое замыкание силового ключа автономного инвертора напряжения;
- одновременное короткое замыкание силовых ключей в одном плече (опроки-
дывание) автономного инвертора напряжения.
В процессе работы различные повреждения также могут возникать в асинхрон-
ной машине. Их первоочередными причинами являются избыточное напряжение
или большие токи, однако эти негативные факторы практически полностью устраня-
ются за счет применения автономного инвертора, имеющего функции защиты от по-
ниженного и повышенного напряжений, максимально-токовую и другие виды за-
щит. Проблема повреждения стержней ротора главным образом связана с токовыми
перегрузками во время прямого пуска – данная проблема практически полностью ре-
шается плавным пуском, также реализуемым в современных преобразователях. По
указанным причинам неисправности, возникающие в процессе работы асинхронной
машины, в этой работе не рассматриваются. Также следует учесть, что вероятность
одновременного возникновения в инверторе двух и более неисправностей крайне
низка, поэтому подобное явление также не рассматривается. Как показывают иссле-
дования по тематике анализируемой задачи, наиболее часто встречаемые неисправ-
ности преобразователя связаны с коротким замыканием силовых ключей или исчез-
новением с них управляющих импульсов (около 40 % от общего количества выходов

107
из строя). На данном аспекте и будет сфокусировано внимание в текущем разделе
работы.
Проанализируем процессы, протекающие в двухуровневом инверторе напря-
жения (рисунок 3.1).
В рабочем режиме все транзисторы инвертора управляются по цепи затвора
специальным блоком, выполняющим функции усилителя сигналов управления, –
драйвером. В случае неисправной работы драйвера возможен пропуск управляющих
импульсов, что эквивалентно обрыву цепи коллектор- эмиттер. Если данная нештат-
ная ситуация возникает, например, с транзистором VT1, то соответствующая фаза
машины окажется подключенной к положительной шине питания через шунтирую-
щий транзистор VT1 диод. Следовательно, напряжение этой фазы статора машины
будет определяться полярностью тока и состоянием транзистора VT2. Данный режим
вызывает появление постоянной составляющей тока, которая в случае полной сим-
метрии фаз будет одинаково проявляться в двух оставшихся фазах.
На рисунке 3.10 приведены графики переходных процессов основных пере-
менных электропривода, полученные в среде Matlab SymPowerSystems. В качестве
алгоритма управления силовыми ключами принята синусоидальная широтно-им-
пульсная модуляция (принципы ее реализации в Matlab изложены в работе [29]).
Закон управления асинхронным двигателем – пропорциональный без Ir-
компенсации.
Развиваемый асинхронной машиной электромагнитный момент будет яв-
ляться функцией переменной и постоянной составляющей тока, причем постоянная
составляющая будет создавать тормозной момент. Результирующий момент, тем не
менее, сохраняет свое первоначальное направление, что можно объяснить незначи-
тельной величиной частоты скольжения относительно частоты вращения вала ро-
тора.
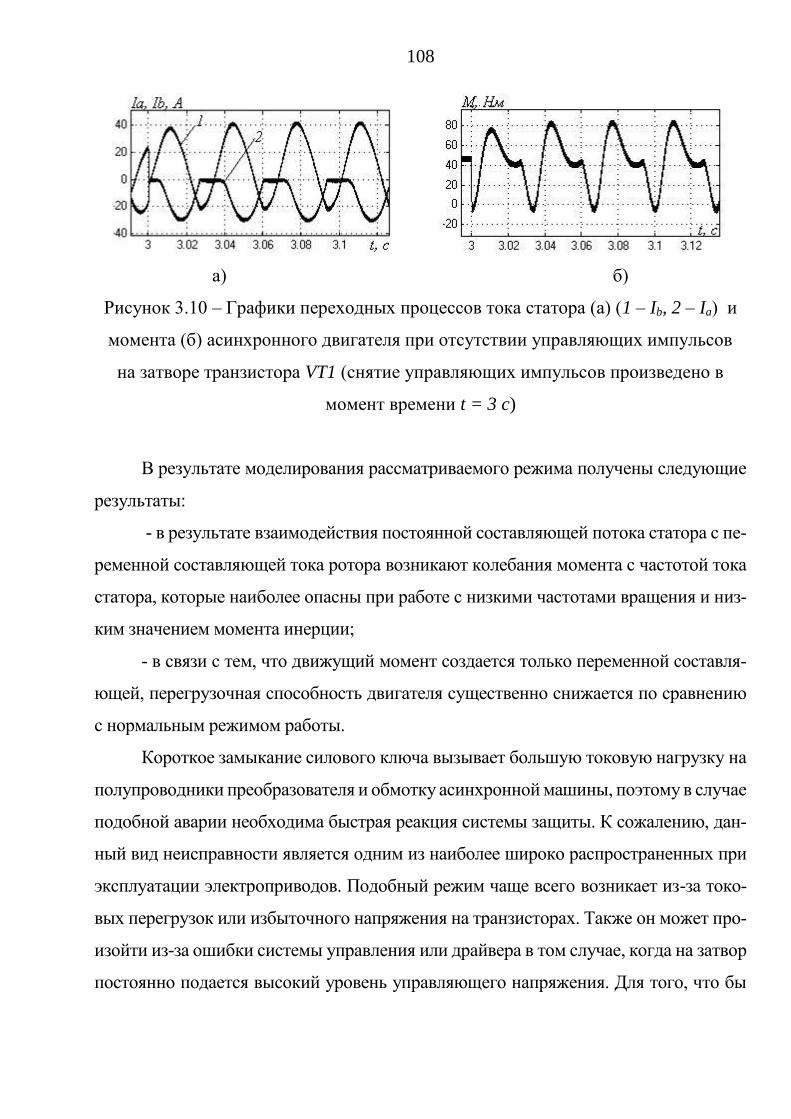
108
а) б)
Рисунок 3.10 – Графики переходных процессов тока статора (а) (1 – Ib, 2 – Ia) и
момента (б) асинхронного двигателя при отсутствии управляющих импульсов
на затворе транзистора VT1 (снятие управляющих импульсов произведено в
момент времени t = 3 c)
В результате моделирования рассматриваемого режима получены следующие
результаты:
- в результате взаимодействия постоянной составляющей потока статора с пе-
ременной составляющей тока ротора возникают колебания момента с частотой тока
статора, которые наиболее опасны при работе с низкими частотами вращения и низ-
ким значением момента инерции;
- в связи с тем, что движущий момент создается только переменной составля-
ющей, перегрузочная способность двигателя существенно снижается по сравнению
с нормальным режимом работы.
Короткое замыкание силового ключа вызывает большую токовую нагрузку на
полупроводники преобразователя и обмотку асинхронной машины, поэтому в случае
подобной аварии необходима быстрая реакция системы защиты. К сожалению, дан-
ный вид неисправности является одним из наиболее широко распространенных при
эксплуатации электроприводов. Подобный режим чаще всего возникает из-за токо-
вых перегрузок или избыточного напряжения на транзисторах. Также он может про-
изойти из-за ошибки системы управления или драйвера в том случае, когда на затвор
постоянно подается высокий уровень управляющего напряжения. Для того, что бы

109
избежать опрокидывания инвертора (одновременного замыкания транзисторов од-
ной фазы), что приведет к неизбежному короткому замыканию конденсатора звена
постоянного тока, необходимо немедленно закрыть второй транзистор этой же фазы.
Автором проанализировано два случая реакции электропривода на короткое
замыкание силового ключа. Первый случай – это снятие управляющих импульсов с
затвора транзистора той же фазы, где имело место короткое замыкание силового
ключа, функционирование всех других транзисторов при этом ведется в нормальном
штатном режиме. Второй случай – это одновременное снятие управляющих импуль-
сов со всех работающих транзисторов (подобный алгоритм отработки коротких за-
мыканий широко распространен в системах защиты преобразователей частоты). Гра-
фики переходных процессов для двух случаев представлены на рисунке 3.11.
Анализ графиков показывает, что в первом случае значения токов короткого
замыкания достигают уровней, гораздо превышающих номинальные значения и по-
тому опасных для полупроводниковых приборов и обмотки статора; частота враще-
ния резко снижается в связи с действием тормозного момента, образованного посто-
янной составляющей тока статора. Во втором случае значения токов в фазах ограни-
чиваются сразу после первого максимума (пиковое значение тока может достигать
5I1H), что предотвращает цепную реакцию по выходу из строя исправных полупро-
водниковых приборов инвертора.
Проведенные исследования данного режима также позволили сделать вывод о
том, что короткое замыкание транзистора при работе во второй зоне (с ослабленным
магнитным потоком) имеет гораздо меньшие негативные последствия:
- электромагнитный момент имеет меньшую амплитуду колебаний (до двух раз
по отношению к колебаниям момента в первой зоне в зависимости от рабочей точки,
где произошла авария);
- снижена продолжительность во времени переходного процесса.

110
а)
б)
в)
Рисунок 3.11 – Графики переходных процессов частоты вращения
ротора (а) и тока статора (б, в) асинхронного двигателя при коротком
замыкании силового ключа VT1 (короткое замыкание осуществлено в
момент времени t = 3 c,защитное отключение – t = 3,003 c )
(1 – управляющие импульсы сняты с транзистора VT2, 2 –
управляющие импульсы сняты со всех нормально функционирующих
транзисторов)

111
При моделировании во второй зоне на вал машины был подан пониженный
момент сопротивления.
Рассмотрим отработку аналогичных ситуаций при использовании трехуровне-
вого инвертора (рисунок 3.3).
В случае исчезновения управляющих импульсов с одного из транзисторов в
токе статора появится постоянная составляющая, уменьшающая значение момента.
Физика процессов, протекающих в электроприводе, с точки зрения асинхронной ма-
шины, совпадает с отработкой аналогичной неисправности в двухуровневом инвер-
торе. Количественные значения максимальных моментов и токов в данном режиме
при выбранной нагрузке и законе управления существенных изменений по отноше-
нию к значениям, приведенным на графиках рисунка 3.11, не претерпевают.
При коротком замыкании, например, транзистора VT1 (осциллограммы приве-
дены на рисунке 3.12) происходит разряд емкости С1, выпрямленное напряжение Ud
окажется полностью приложенным к конденсатору С2. В связи со смещением и по-
явлением постоянной составляющей ток статора претерпевает сильные искажения, и
как показало моделирование, отношение второй гармоники тока по отношению к
первой может достигать 20 %.
Процесс разряда конденсатора С1 произойдет не сразу при замыкании транзи-
стора VT1, а только тогда, когда образуется контур разряда. Данный контур возни-
кает при переходе инвертора в состояние, при котором замкнуты ключи VT2 и VT3.
Очевидно, что ток в этом режиме определяется не полным напряжением шины
питания, а напряжением, приложенным к конденсатору С1, что значительно умень-
шает его пиковое значение (по сравнению с коротким замыканием силового ключа
двухуровневого инвертора максимальное значение тока снижено примерно в 2 раза).
Ударное значение электромагнитного момента в случае короткого замыкания
в трехуровневом инверторе гораздо меньше, чем в двухуровневом (кратность момен-
тов: в двухуровневом инверторе – 4,7, в трехуровневом – 1,8).

112
а) б)
Рисунок 3.12 – Графики переходных процессов тока статора (а) (1 – Ia, 2 – Iс) и
момента (б) асинхронного двигателя п при коротком замыкании силового
ключа VT1 (короткое замыкание осуществлено в момент времени t = 3 c)
При коротком замыкании транзистора VT2 произойдет разряд конденсатора С2
при образовании соответствующего контура, одновременно с этим конденсатор C1
зарядится до напряжения шины питания Ud. Значения токов в обмотке статора и мо-
мента на валу машины не существенно меняются по отношению к своим значениям
при коротком замыкании ключа VT1.
3.1.4 Потери мощности в силовых ключах автономного инвертора напряжения
При выборе типа и мощности полупроводниковых ключей для различных
конфигураций инверторов напряжения необходимо учитывать, что максимальное
напряжение, прикладываемое к переходу коллектор-эмиттер транзистора в инвер-
торе по схеме (рисунок 3.3) в два раза меньше, чем в схеме (рисунок 3.1) из-за
увеличенного в 2 раза количества ключей. Рассмотрим применение в качестве эле-
ментной базы двухуровневого инвертора модуля SK60GB128 (максимальное
напряжение Umaz = 1200 В) и модуля SK30MLI066 (Umaz = 600 В) – для трехуровне-
вого [89].
При определении потерь мощности в автономном инверторе напряжения це-
лесообразно ввести допущения: ток нагрузки (обмотки статора) является синусо-
113
идальным, «мертвое время» переключения транзисторов не учитывается. Суммар-
ные потери мощности в силовых ключах автономного инвертора напряжения
складываются из потерь мощности в статическом и динамическом режимах, кото-
рые вызывают нагрев полупроводника. Потери мощности в статическом режиме
обусловлены в основном падением напряжения на pn-переходе при протекании
прямого тока и зависят от тока двигателя как нагрузки инвертора, температуры
кристалла полупроводника, способа и коэффициента модуляции, коэффициента
мощности двигателя. Потери мощности в динамическом режиме обусловлены
процессами включения и выключения полупроводниковых ключей и зависят от
тока нагрузки, напряжения на входных зажимах инвертора, температуры кри-
сталла полупроводника, частоты коммутации, а также энергии коммутационных
потерь.
Таким образом, выражение для потерь мощности в автономном инверторе
напряжения представим так:
∆РАИН = 3∆Рст + 3∆Рдин, (3.14)
где ∆Рст и ∆Рдин – потери мощности в одной стойке инвертора в статическом и
динамическом режимах работы соответственно.
В трехуровневом инверторе потери в статическом режиме ∆Рст включают в
себя потери в силовых транзисторах, фиксирующих и обратных диодах.
Потери мощности в статическом режиме определяются зависимостью [15,
251]:
∆Рст = 𝑈пр𝐼ср + 𝐼эф2 𝑅диф, (3.15)
где 𝑈пр – граничное падение напряжения при прямом токе, 𝐼ср и 𝐼эф – среднее и
эффективное значения прямого тока через ключ, 𝑅диф. – дифференциальное сопро-
тивление ключа при прямом токе.
Ток через транзисторы VT1 и VT4:
𝐼ср =𝜇𝐼𝑚𝑎𝑥
4𝜋(𝑠𝑖𝑛|𝜑| + (𝜋 − |𝜑|)𝑐𝑜𝑠𝜑), (3.16)
𝐼эф2 =
𝜇𝐼𝑚𝑎𝑥2
4𝜋(1 +
4
3𝑐𝑜𝑠𝜑 +
1
3cos2𝜑), (3.17)

114
где φ – угол между током и напряжением статора, µ – коэффициент модуляции (µ
= 0…1).
Ток через транзисторы VT2 и VT3:
𝐼ср =𝐼𝑚𝑎𝑥
𝜋−𝜇𝐼𝑚𝑎𝑥
4𝜋(𝑠𝑖𝑛|𝜑| − |𝜑|𝑐𝑜𝑠𝜑), (3.18)
𝐼эф2 =
𝐼𝑚𝑎𝑥2
4−𝜇𝐼𝑚𝑎𝑥
2
4𝜋(1 −
4
3𝑐𝑜𝑠𝜑 +
1
3cos2𝜑). (3.19)
Ток через диоды VD1 – VD4:
𝐼ср =𝜇𝐼𝑚𝑎𝑥
4𝜋(𝑠𝑖𝑛|𝜑| − |𝜑|𝑐𝑜𝑠𝜑), (3.20)
𝐼эф2 =
𝜇𝐼𝑚𝑎𝑥2
6𝜋(1 − cos2𝜑)2. (3.21)
Ток через фиксирующие диоды VD5 и VD6:
𝐼ср =𝐼𝑚𝑎𝑥
𝜋−𝜇𝐼𝑚𝑎𝑥
4𝜋(𝑐𝑜𝑠𝜑 +
2
𝜋𝑠𝑖𝑛|𝜑| −
2𝜑
𝜋𝑐𝑜𝑠𝜑), (3.22)
𝐼эф2 =
𝐼𝑚𝑎𝑥2
4−𝜇𝐼𝑚𝑎𝑥
2
2𝜋(1 +
1
3cos (2𝜑)). (3.23)
Потери мощности транзисторов VT1 и VT4 в динамическом режиме:
∆Рдин =√2𝑓𝑘
𝜋(𝐸вкл + 𝐸выкл) (
1+cos𝜑
2𝜋)0,4
, (3.24)
где fk – частота коммутации транзисторов, Евкл и Евыкл – энергия потерь транзистора
в динамическом режиме при замыкании и размыкании цепи коллектор-эммитер со-
ответственно.
Потери мощности транзисторов VT2 и VT3 в динамическом режиме:
∆Рдин =√2𝑓𝑘
𝜋(𝐸вкл + 𝐸выкл) (
1−cos (𝜑)
2𝜋)0,4
. (3.25)
Потери мощности в транзисторах двухуровневого инвертора в статическом
режиме могут быть вычислены так:
∆Рст,𝑉𝑇 =1
2(𝑈пр
𝜋𝐼𝑚𝑎𝑥 +
𝑅диф.
4𝐼𝑚𝑎𝑥2 ) + 𝜇𝑐𝑜𝑠𝜑 (
𝑈пр
8𝐼𝑚𝑎𝑥 +
𝑅диф.
3𝜋𝐼𝑚𝑎𝑥2 ). (3.26)
Потери мощности в диодах в статическом режиме:
∆Рст,,𝑉𝐷 =1
2(𝑈пр,д
𝜋𝐼𝑚𝑎𝑥 +
𝑅диф.,д
4𝐼𝑚𝑎𝑥2 ) − 𝜇𝑐𝑜𝑠𝜑 (
𝑈пр,д
8𝐼𝑚𝑎𝑥 +
𝑅диф.,д
3𝜋𝐼𝑚𝑎𝑥2 ), (3.27)
где 𝑈пр,д и 𝑅диф.,д – граничное падение напряжения и дифференциальное сопротив-
ление при прямом токе диода соответственно.
115
Потери мощности в транзисторах двухуровневого инвертора в динамиче-
ском режиме:
∆Рдин =𝑓𝑘
𝜋(𝐸вкл + 𝐸выкл). (3.28)
Необходимые для расчетов по формулам (3.14) – (3.28) параметры полупро-
водниковых ключей представлены ниже [249, 250].
Модуль SK60GB128: Uпр = 1,0 В, Rдиф.=18 мОм, Евкл+Евыкл =10,4 мДж (для
тока I=45 А) (транзисторы); Uпр,д = 1,0 В, Rдиф.,д = 18 мОм (обратные диоды) [250].
Модуль SK30MLI066: Uпр = 1,65 В, Rдиф.=22 мОм, Евкл+Евыкл =3,6 мДж (для
тока I=45 А) (транзисторы); Uпр,д = 0,9 В, Rдиф.,д =20 мОм (обратные и фиксирую-
щие диоды) [249].
Результаты расчетов потерь мощности при частоте коммутации fk =20 кГц и
коэффициенте модуляции µ = 1 сведены в таблице 3.3.
Таблица 3.3 – Потерь мощности в двух- и трехуровневом инверторах
Вид потерь Схема (рисунок 3.1) Схема (рисунок 3.3)
Потери в транзисторах на 1 фазу 188 Вт 118 Вт
Потери в диодах на 1 фазу 10,9 Вт 24 Вт
Полные потери на 1 (3) фазу 199 (597) ВТ 142 (426) Вт
Потери мощности в обратных диодах VD1 – VD4 трехуровневого инвертора
в статическом режиме оказываются незначительны (на порядок меньше потерь в
фиксирующих диодах VD5, VD6), т.к. токи через силовые транзисторы замыка-
ются преимущественно через фиксирующие диоды, которые работают под полной
нагрузкой. Потери мощности транзисторов VT2 и VT3 в динамическом режиме
оказываются значительно меньше потерь мощности в транзисторах VT1 и VT4.
Кроме этого, анализ результатов, приведенных в таблице 3.3 показывает, что
потери в трехуровневом инверторе могут быть до 40% ниже, чем в двухуровневом
инверторе, работающем на аналогичную нагрузку. Данное явление объясняется бо-
116
лее высокими значениями прямого падения напряжения и потерь мощности в тран-
зисторах двухуровневого инвертора в динамических режимах и меньшим числом
переключений транзисторов трехуровневого инвертора при той же самой несущей
частоте.
3.2 Синтез системы векторного управления
с минимизацией потерь мощности
Современные перспективные локомотивы с электропередачей переменного
или постоянно-переменного тока содержат тяговый электропривод, который, как
правило, имеет два варианта систем управления асинхронным двигателем – это
система скалярного управления и система векторного управления (или система
прямого управления моментом). Внедрение систем векторного управления в
структуру тягового электропривода значительно расширяет возможности по регу-
лированию не только частоты вращения асинхронного двигателя, но и его мо-
мента в установившихся режимах и переходных процессах; позволяет применять
различные эффективные алгоритмы энергосберегающего управления при наличие
большого количества действующих во время работы ограничений, связанных с
конечной мощностью источника электропитания электропривода, максималь-
ными значениями векторов токов и напряжений, и их отдельных составляющих
[213, 233].
Далее проведем разработку системы векторного управления тягового элек-
тропривода, реализующей его тяговые качества, необходимые по условиям ра-
боты, и уменьшение потерь мощности.
Для разработки этой системы рассмотрим более подробную математиче-
скую модель по отношению к использованной ранее (выражения (2.3) – (2.11)),
описывающей эквивалентную схему замещения, учитывающую потери мощности
в стали как статора, так и ротора (рисунок 3.13) [69, 158, 162].
Физически часть потерь мощности в стали возникает из-за действия вихре-
вых токов (токов Фуко), эквивалентирующих потери в стальных массивах при их

117
размещении в переменном магнитном поле; другая часть потерь обусловлена
наличием гистерезиса:
𝑃вт = 𝑘вт𝜔02Ф2; 𝑃г = 𝑘г𝜔0Ф
2, (3.29)
где Pвт – потери мощности, вызванные действием вихревых токов; Pг – потери
мощности на гистерезис; kвт, kг – коэффициенты пропорциональности; Ф – маг-
нитный поток в воздушном зазоре.
Из выражения (3.29) очевидно, что и потери, вызванные вихревыми токами,
и потери на гистерезис увеличиваются с ростом частоты тока статора, при этом
потери, вызванные вихревыми токами, растут в большей степени, т.к. являются
функцией квадрата частоты. Следовательно, при повышении частоты тока
наибольшее значение играет точность определения коэффициента kвт.
Разделение потерь мощности в стали на потери в статоре и роторе можно
записать так:
𝑃ст,𝑠 = (𝑘вт𝜔02 + 𝑘г𝜔0)Ф
2 ≌ 𝜔02Ф2𝑘вт = 𝜔0
2Ф2/𝑅𝑐 ; (3.30)
𝑃ст,𝑟 = (𝑘вт𝑠2𝜔0
2 + 𝑘г𝑠𝜔0)Ф2 ≌ 𝑠2𝜔0
2Ф2𝑘вт = 𝜔02Ф2(𝑠2/𝑅𝑐) , (3.31)
где Rс = 1/ kвт – сопротивление, эквивалентное потерям в стали.
При таком разделении учет потерь мощности в стали ротора осуществляется
посредством того же сопротивления Rс, которое принимает в расчет потери в стали
статора, но с учетом поправочного коэффициента, обратно пропорционального
квадрату скольжения. Данный подход обеспечивает значение сопротивления, учи-
тывающего суммарные потери мощности в стали, равного Rс/(s2+1), как и пока-
зано на схеме замещения, изображенной на рисунке 3.13.
Учитывая достаточно высокое значение сопротивления Rс по сравнению с
индуктивным сопротивлением ω0Lμ, примем допущение о следующем соотноше-
нии токов 𝑖µ̅ и 𝑖�̅�:
|𝑖µ̅| ≫ |𝑖�̅�|. (3.32)
Тогда на основании схемы замещения (рисунок 3.13) и выражения (3.32) по-
лучим:
𝑖µ̅ ≌ 𝑖�̅� + 𝑖�̅� . (3.33)
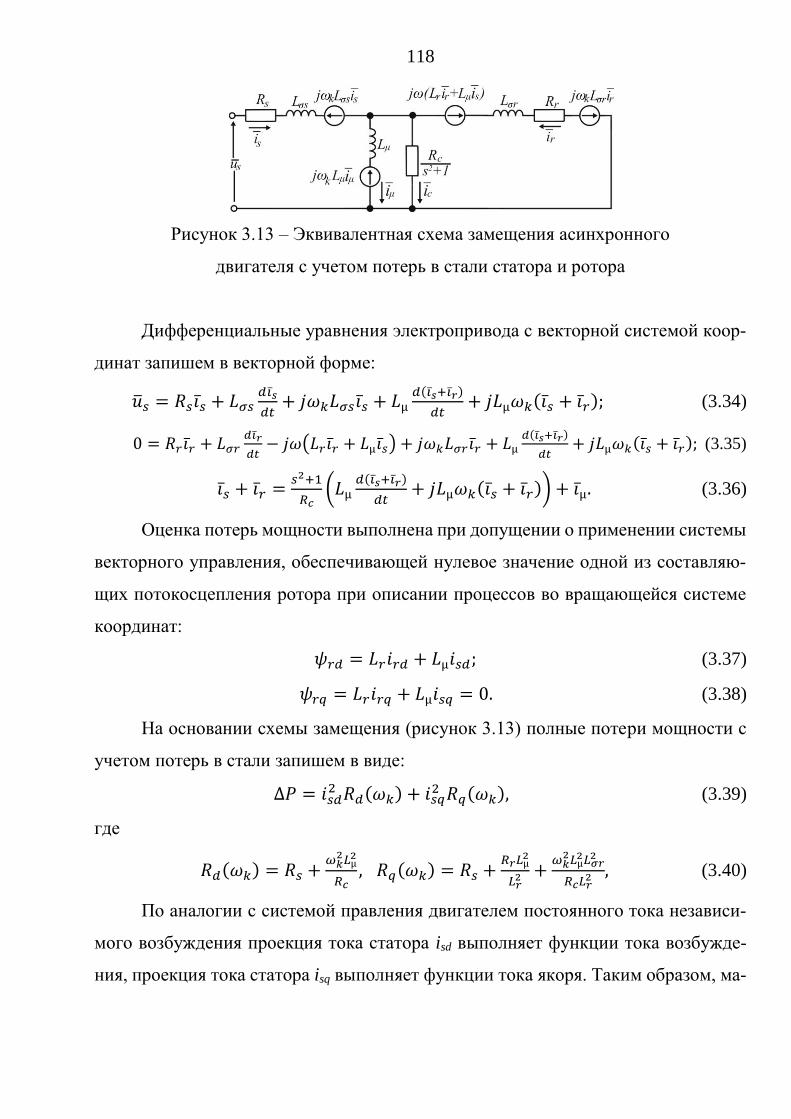
118
Рисунок 3.13 – Эквивалентная схема замещения асинхронного
двигателя с учетом потерь в стали статора и ротора
Дифференциальные уравнения электропривода с векторной системой коор-
динат запишем в векторной форме:
�̅�𝑠 = 𝑅𝑠𝑖�̅� + 𝐿𝜎𝑠𝑑𝑖�̅�
𝑑𝑡+ 𝑗𝜔𝑘𝐿𝜎𝑠𝑖�̅� + 𝐿µ
𝑑(𝑖�̅�+𝑖�̅�)
𝑑𝑡+ 𝑗𝐿µ𝜔𝑘(𝑖�̅� + 𝑖�̅�); (3.34)
0 = 𝑅𝑟𝑖�̅� + 𝐿𝜎𝑟𝑑𝑖̅𝑟
𝑑𝑡− 𝑗𝜔(𝐿𝑟𝑖�̅� + 𝐿µ𝑖�̅�) + 𝑗𝜔𝑘𝐿𝜎𝑟𝑖�̅� + 𝐿µ
𝑑(𝑖�̅�+𝑖�̅�)
𝑑𝑡+ 𝑗𝐿µ𝜔𝑘(𝑖�̅� + 𝑖�̅�); (3.35)
𝑖�̅� + 𝑖�̅� =𝑠2+1
𝑅𝑐(𝐿µ
𝑑(𝑖�̅�+𝑖�̅�)
𝑑𝑡+ 𝑗𝐿µ𝜔𝑘(𝑖�̅� + 𝑖�̅�)) + 𝑖µ̅. (3.36)
Оценка потерь мощности выполнена при допущении о применении системы
векторного управления, обеспечивающей нулевое значение одной из составляю-
щих потокосцепления ротора при описании процессов во вращающейся системе
координат:
𝜓𝑟𝑑 = 𝐿𝑟𝑖𝑟𝑑 + 𝐿µ𝑖𝑠𝑑; (3.37)
𝜓𝑟𝑞 = 𝐿𝑟𝑖𝑟𝑞 + 𝐿µ𝑖𝑠𝑞 = 0. (3.38)
На основании схемы замещения (рисунок 3.13) полные потери мощности с
учетом потерь в стали запишем в виде:
∆𝑃 = 𝑖𝑠𝑑2 𝑅𝑑(𝜔𝑘) + 𝑖𝑠𝑞
2 𝑅𝑞(𝜔𝑘), (3.39)
где
𝑅𝑑(𝜔𝑘) = 𝑅𝑠 +𝜔𝑘2𝐿µ2
𝑅𝑐, 𝑅𝑞(𝜔𝑘) = 𝑅𝑠 +
𝑅𝑟𝐿µ2
𝐿𝑟2 +
𝜔𝑘2𝐿µ2𝐿𝜎𝑟2
𝑅𝑐𝐿𝑟2 , (3.40)
По аналогии с системой правления двигателем постоянного тока независи-
мого возбуждения проекция тока статора isd выполняет функции тока возбужде-
ния, проекция тока статора isq выполняет функции тока якоря. Таким образом, ма-
119
тематически проекция тока isd вызывает потери мощности в стали. Анализ уравне-
ния (3.40) также позволяет заключить, что с увеличением частоты тока статора (и,
следовательно, частоты вращения ωk) сопротивление Rd повышается более интен-
сивно, чем Rq, т.к. справедливо соотношение Lσr << Lμ. Это подтверждает физиче-
ский вывод о том, что повышение частоты тока вызывает повышение потерь в
стали магнитопроводов. Соответственно, ток isq вызывает потери мощности в
меди обмоток.
Выбор оптимального соотношения между токами isd и isq и есть задача син-
теза энергооптимального векторного управления.
Момент асинхронного двигателя в установившемся режиме записывается в
функции двух токов:
М =3
2
𝑝𝑛𝐿µ
𝐿𝑟𝜓𝑟𝑑𝑖𝑠𝑞 = 𝐾𝑀𝑖𝑠𝑑𝑖𝑠𝑞 , (3.41)
где
𝐾𝑀 =3
2
𝑝𝑛𝐿µ2
𝐿𝑟. (3.42)
Выбор заданий на оптимальные значения токов статора isd и isq осуществим,
приняв во внимание наличие ограничений по напряжению и току статора. Полагая
ток isq функцией момента сопротивления, синтезируем выражения для задания на
ток isd.
Приняв допущение о незначительной величине напряжения isRs в выраже-
нии (3.34), что актуально для тяговых двигателей средней и большой мощности,
запишем неравенство, отражающее ограничение по максимальному напряжение:
(𝜔𝑘𝐿𝑠𝑖𝑠𝑑)2 + (𝜔𝑘𝜎𝐿𝑠𝑖𝑠𝑞)
2≤ 𝑈𝑚𝑎𝑥
2 ; (3.43)
где
𝜎 = 1 −𝐿µ2
𝐿𝑠𝐿𝑟; (3.44)
𝑈𝑚𝑎𝑥 =𝑈𝐷𝐶
√3; (3.45)

120
UDC – напряжение звена постоянного тока (входное напряжение автономного ин-
вертора).
Максимальное значение тока статора запишем через проекции на ортого-
нальные оси:
𝑖𝑠𝑑2 + 𝑖𝑠𝑞
2 ≤ 𝐼𝑚𝑎𝑥2 . (3.46)
При анализе системы векторного управления необходимо учесть, что ток isd,
отвечающий за создание магнитного потока, ограничен условно номинальным
значением Iном, при достижении и превышении которого зависимость магнитного
потока от тока становится нелинейной вследствие насыщения:
𝑖𝑠𝑑 ≤ 𝐼ном. (3.47)
Цель системы управления – уменьшение потерь мощности асинхронного
двигателя с обеспечением необходимого момента при наличии текущих ограни-
чений по максимальным значениям тока и напряжения статора. Согласно уравне-
нию (3.41) данную цель можно осуществить путем поддержания определенного
уровня потокосцепления. Математически для достижения этой цели необходимо
одного из методов теории динамического программирования, например, теоремы
Куна-Таккера [6, 181].
Рисунок 3.14 – Зависимость максимального момента от частоты вращения
ротора
График зависимости максимального момента от частоты вращения ротора,
учитывающий ограничения (3.43), (3.46), (3.47) при реализации системы вектор-
ного управления приведен на рисунке 3.14. График имеет три зоны – зона I, где
действует ограничение по максимальному моменту, вызванное ограничением по
121
проекции тока статора isd или одновременным ограничением по проекции тока ста-
тора isd и максимальному току статора Imax; зона II, где действует ограничение по
максимальному потоку, обусловленное ограничением по полному току статора
Imax или одновременным ограничением по полному току статора Imax и напряже-
нию; зона III , где действует ограничение по максимально допустимой частоте вра-
щения ротора, вызванное ограничением по максимальному напряжению статора.
При работе электропривода в любой из зон без ограничений соотношение
между проекциями тока статора опишется равенством:
𝑖𝑠𝑑,зад = |𝑖𝑠𝑞|√𝑅𝑞(𝜔𝑘)
𝑅𝑑(𝜔𝑘). (3.48)
При работе электропривода в зонe I или II при действии ограничения по току
isd неравенство для сигнала задания тривиально:
𝑖𝑠𝑑,зад ≤ 𝑖𝑠𝑑,ном. (3.49)
При работе электропривода в зонe III при действии ограничения по макси-
мальному напряжению Umax для задания на ток справедливо следующее выраже-
ние:
𝑖𝑠𝑑,зад =√𝑈𝑚𝑎𝑥
2 +(𝑈𝑚𝑎𝑥4 −4𝜔𝑘
4𝜎2𝐿𝑠4𝑀2/𝐾𝑀
2 )1/2
√2𝜔𝑘𝐿𝑠. (3.50)
При работе электропривода в зонe I или II при действии ограничения по мак-
симальному значению полного тока Imax для задания на ток справедливо выраже-
ние:
𝑖𝑠𝑑,зад =КМ𝐼𝑚𝑎𝑥
2 −√(КМ𝐼𝑚𝑎𝑥2 )
2−4𝑀2
2М. (3.51)
Связь между потокосцеплением ротора ψrd и проекцией тока статора isd :
𝜓𝑟𝑑,зад = 𝐿µ𝑖𝑠𝑑,зад. (3.52)
В связи с тем, что чрезмерное уменьшение магнитного потока приводит к
соответствующему понижению перегрузочной способности, а при небольших
нагрузках может вызвать значительное увеличение частоты вращения, целесооб-
разно ограничить минимальное значение ψrd, т.е. если 𝜓𝑟𝑑 < 𝜓𝑟𝑑,𝑚𝑖𝑛, то 𝜓𝑟𝑑,зад =
𝜓𝑟𝑑,зад.𝑚𝑖𝑛
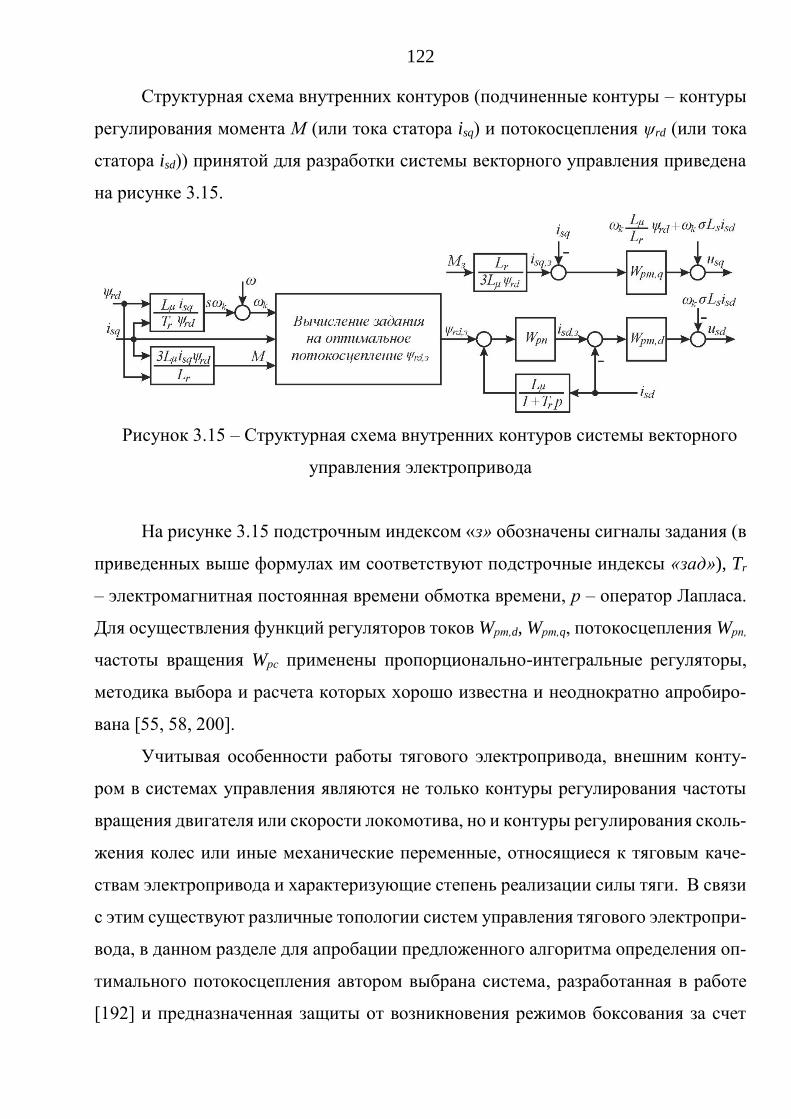
122
Структурная схема внутренних контуров (подчиненные контуры – контуры
регулирования момента М (или тока статора isq) и потокосцепления ψrd (или тока
статора isd)) принятой для разработки системы векторного управления приведена
на рисунке 3.15.
Рисунок 3.15 – Структурная схема внутренних контуров системы векторного
управления электропривода
На рисунке 3.15 подстрочным индексом «з» обозначены сигналы задания (в
приведенных выше формулах им соответствуют подстрочные индексы «зад»), Tr
– электромагнитная постоянная времени обмотка времени, р – оператор Лапласа.
Для осуществления функций регуляторов токов Wрт,d, Wрт,q, потокосцепления Wрп,
частоты вращения Wрс применены пропорционально-интегральные регуляторы,
методика выбора и расчета которых хорошо известна и неоднократно апробиро-
вана [55, 58, 200].
Учитывая особенности работы тягового электропривода, внешним конту-
ром в системах управления являются не только контуры регулирования частоты
вращения двигателя или скорости локомотива, но и контуры регулирования сколь-
жения колес или иные механические переменные, относящиеся к тяговым каче-
ствам электропривода и характеризующие степень реализации силы тяги. В связи
с этим существуют различные топологии систем управления тягового электропри-
вода, в данном разделе для апробации предложенного алгоритма определения оп-
тимального потокосцепления автором выбрана система, разработанная в работе
[192] и предназначенная защиты от возникновения режимов боксования за счет
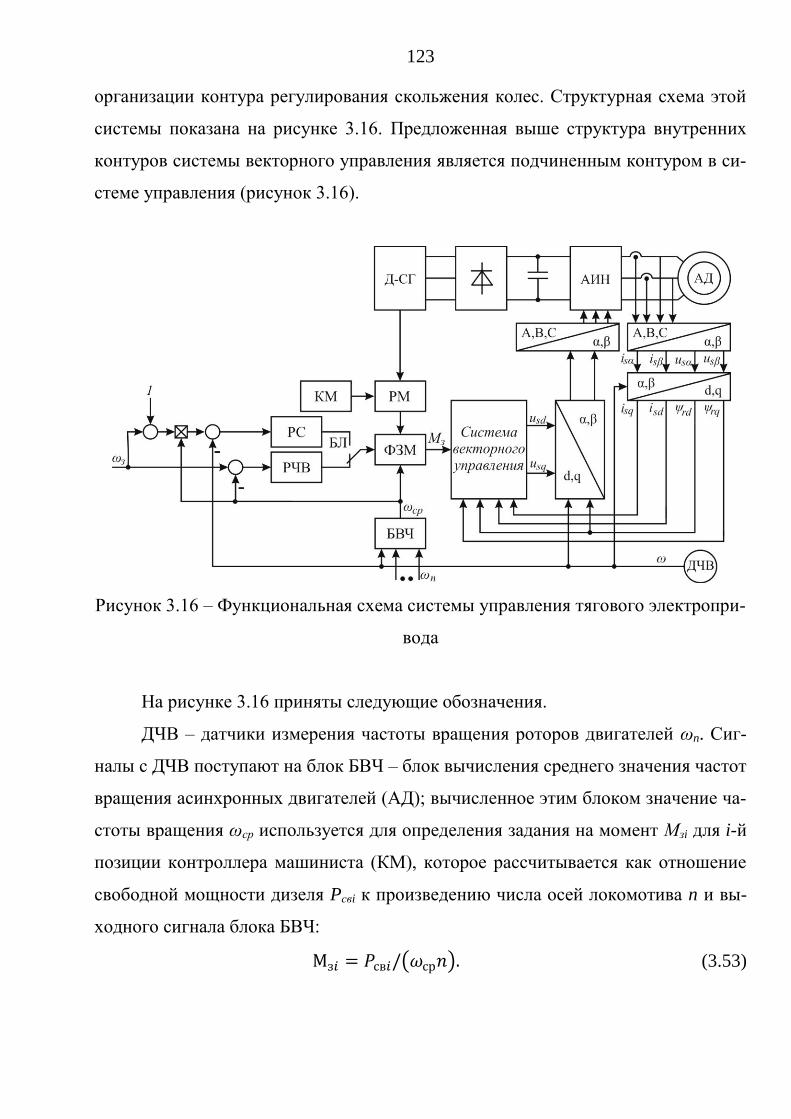
123
организации контура регулирования скольжения колес. Структурная схема этой
системы показана на рисунке 3.16. Предложенная выше структура внутренних
контуров системы векторного управления является подчиненным контуром в си-
стеме управления (рисунок 3.16).
Рисунок 3.16 – Функциональная схема системы управления тягового электропри-
вода
На рисунке 3.16 приняты следующие обозначения.
ДЧВ – датчики измерения частоты вращения роторов двигателей ωn. Сиг-
налы с ДЧВ поступают на блок БВЧ – блок вычисления среднего значения частот
вращения асинхронных двигателей (АД); вычисленное этим блоком значение ча-
стоты вращения ωср используется для определения задания на момент Мзi для i-й
позиции контроллера машиниста (КМ), которое рассчитывается как отношение
свободной мощности дизеля Pсвi к произведению числа осей локомотива n и вы-
ходного сигнала блока БВЧ:
Мз𝑖 = 𝑃св𝑖/(𝜔ср𝑛). (3.53)
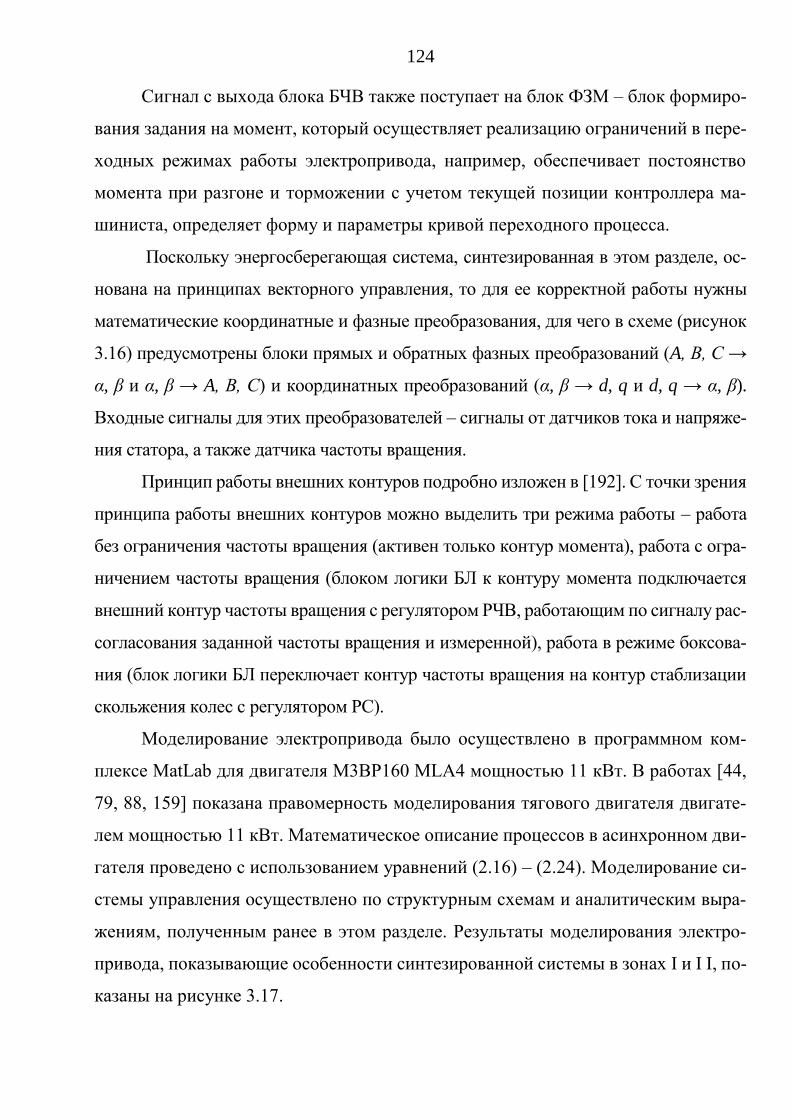
124
Сигнал с выхода блока БЧВ также поступает на блок ФЗМ – блок формиро-
вания задания на момент, который осуществляет реализацию ограничений в пере-
ходных режимах работы электропривода, например, обеспечивает постоянство
момента при разгоне и торможении с учетом текущей позиции контроллера ма-
шиниста, определяет форму и параметры кривой переходного процесса.
Поскольку энергосберегающая система, синтезированная в этом разделе, ос-
нована на принципах векторного управления, то для ее корректной работы нужны
математические координатные и фазные преобразования, для чего в схеме (рисунок
3.16) предусмотрены блоки прямых и обратных фазных преобразований (A, В, С →
α, β и α, β → A, В, С) и координатных преобразований (α, β → d, q и d, q → α, β).
Входные сигналы для этих преобразователей – сигналы от датчиков тока и напряже-
ния статора, а также датчика частоты вращения.
Принцип работы внешних контуров подробно изложен в [192]. С точки зрения
принципа работы внешних контуров можно выделить три режима работы – работа
без ограничения частоты вращения (активен только контур момента), работа с огра-
ничением частоты вращения (блоком логики БЛ к контуру момента подключается
внешний контур частоты вращения с регулятором РЧВ, работающим по сигналу рас-
согласования заданной частоты вращения и измеренной), работа в режиме боксова-
ния (блок логики БЛ переключает контур частоты вращения на контур стаблизации
скольжения колес с регулятором РС).
Моделирование электропривода было осуществлено в программном ком-
плексе MatLab для двигателя M3BP160 MLA4 мощностью 11 кВт. В работах [44,
79, 88, 159] показана правомерность моделирования тягового двигателя двигате-
лем мощностью 11 кВт. Математическое описание процессов в асинхронном дви-
гателя проведено с использованием уравнений (2.16) – (2.24). Моделирование си-
стемы управления осуществлено по структурным схемам и аналитическим выра-
жениям, полученным ранее в этом разделе. Результаты моделирования электро-
привода, показывающие особенности синтезированной системы в зонах I и I I, по-
казаны на рисунке 3.17.
125
Принимая во внимание необходимость формирования момента тягового
двигателя в переходных режимах пуска и торможения с учетом требований по за-
щите от боксования и юза [24, 60, 157, 240], результаты проверки эффективности
применения разработанной системы управления целесообразно привести в уста-
новившемся режиме работы.
а) б) в)
г) д) е)
Рисунок 3.17 – Результаты моделирования электропривода: зависимости потерь
мощности ΔР (для момента сопротивления Мс = 30 Нм (а) и Мс = 60 Нм (г)), тока
статора is (для Мс = 30 Нм (б) и Мс = 60 Нм (д)) и потокосцепления ротора ψr от
частоты вращения ωk (для Мс = 30 Нм (в) и Мс = 60 Нм (е));
1 – зависимости, полученные для стандартной системы векторного управления;
2 – зависимости, полученные для системы управления, синтезированной автором
Анализ результатов моделирования, приведенных на рисунке 3.17 (а, г), го-
ворит о том, что использование синтезированного алгоритма выбора заданий на
ток статора isd и, соответственно, потокосцепление ψrd влечет за собой уменьшение
потерь мощности. Максимальное снижение потерь мощности имеет место при ча-
стотах вращения, близких к номинальному значению, независимо от величины

126
момента сопротивления. Отметим, что эта частота вращения (ωгр = ωk = ω0,ном =
157 рад/с) является граничной для двух первых зон работы электропривода (зона
I и II). Особенностью стандартных систем управления электропривода является
то, что они поддерживают постоянство потока при работе в первой зоне (во второй
зоне с увеличением частоты вращения поток уменьшается в связи с ограничением
по максимальной мощности). Соответственно, предлагаемая система обеспечи-
вает наибольшее энергосбережение при работе в первой зоне (т.е. при ω < ω0,ном),
что и проиллюстрировано на графиках (рисунок 3.17). При значительном превы-
шении частоты вращения своего номинального значения корректная работа лю-
бой системы управления асинхронным двигателем обеспечивается за счет сниже-
ния потока, поэтому эффект энергосбережения резко уменьшается. Оценивая вли-
яние момента сопротивления на величину энергосбережения, можно сделать за-
ключение о том, что наибольший эффект проявляется при больших отклонениях
нагрузки от своего номинального значения (при моменте 30 Нм разница в потерях
мощности равняется 272 Вт, при моменте 60 Нм уменьшение потерь достигает 110
Вт).
Сравнительная оценка соотношения токов при работе синтезированной и
стандартной систем управления показывает, что в предлагаемой системе происхо-
дит существенное уменьшение проекции тока isd, но повышение isq по отношению
к стандартной системе управления, что, тем не менее, за счет выбора их оптималь-
ного с точки зрения энергоэффективности отношения приводит к уменьшению
суммарных потерь мощности в асинхронном двигателе.
Выводы по разделу 3
1. Проведенный анализ использования в электроприводах двух- и трехуров-
невых автономных инверторов напряжения показал, что несмотря на наличие не-
которых недостатков трехуровневых инверторов – сложная структура звена посто-
янного тока, необходимость точной балансировки напряжений, более дорогая сто-
127
имость (обусловлена большим количеством полупроводниковых элементов и кон-
денсаторов, хотя сами полупроводники и конденсаторы в силу меньших номина-
лов стоят несколько дешевле, чем для двухуровневого инвертора) – они обладают
рядом бесспорных преимуществ:
- применение трехуровневого инвертора совместно с трехпозиционным ре-
гулятором потокосцепления и пятипозиционным регулятором момента в системе
прямого управления моментом позволяют получать при том же самом числе ком-
мутаций на 25 – 40 % меньшие значения колебаний момента, происходит умень-
шение содержания высших гармоник в составе тока статора;
- короткое замыкание силового полупроводникового прибора в трехуровне-
вом инверторе оказывает менее негативное влияние на обмотку статора и полу-
проводниковые приборы самого инвертора, а также элементы механической части
электропривода, чем короткое замыкание в двухуровневом инверторе (по сравне-
нию с двухуровневым инвертором значение тока снижено примерно в 2 раза, мак-
симальное значение момента снижено примерно в 2,5 раза);
- потери мощности в силовых полупроводниковых приборах трехуровне-
вого инвертора в статическом и динамическом режимах оказываются ниже (по-
рядка 40 %), чем в двухуровневом;
2. Разработан алгоритм формирования задания на токи статора и потокос-
цепление ротора асинхронного двигателя при использовании системы векторного
управления, обеспечивающий минимум потерь мощности. В качестве лимитиру-
ющих факторов применены ограничения по току и напряжению статора двига-
теля, мощности дизель-генераторной установки. Синтезирована система управле-
ния тягового электропривода с асинхронным двигателем, обеспечивающая непо-
средственное регулирование скольжения колес, с подчиненной системой миними-
зации мощности потерь энергии. Установлено, что применение разработанной си-
стемы управления приводит к уменьшению мощности потерь. Наибольший абсо-
лютный эффект при любых моментах сопротивления достигается в окрестности
номинальной частоты вращения магнитного поля статора ω0,ном, причем при при-

128
ближении частоты ω к частоте ω0,ном со стороны меньших значений эффект от при-
менения разработанной системы возрастает в значительно большей степени, чем
при приближении ω к ω0,ном со стороны больших значений.

129
4 РАЗРАБОТКА МЕТОДОВ И СРЕДСТВ ОПРЕДЕЛЕНИЯ
ТЕМПЕРАТУРЫ ТЯГОВЫХ АСИНХРОННЫХ ДВИГАТЕЛЕЙ
4.1 Постановка задачи разработки.
Существующие методы решения задачи
Как показали результаты анализа, проведенного в подразделе 1.4, темпера-
тура обмоток асинхронного двигателя влияет на режимы работы электропривода,
в частности, изменяет статические механические характеристики, нарушает
настройки систем векторного управления и прямого управления моментом. Осо-
бенно критично это для тяговых электроприводов, в которых кроме жестких тре-
бований по энергетическим и массогабаритным показателям должно быть обеспе-
чено заданное тяговое усилие для реализации требуемого качества переходного
процесса.
Превышение температуры обмоток выше допустимых значений приводит к
ускоренному старению изоляции. Для уменьшения температуры обмоток и тепло-
нагруженных элементов тяговых двигателей их оборудуют системами воздушного
охлаждения. В ряде работ [70, 78, 96, 108, 175] отмечается, что в условиях эксплу-
атации превышение температуры обмоток над температурой окружающей среды
редко превышает допустимые пределы. Снижение расхода воздуха для тяговых
двигателей, не нуждающихся в расчетном (номинальном) значении охлаждения,
позволяет существенно уменьшить потребление электроэнергии двигателями вен-
тиляторов системы охлаждения. С учетом современного уровня развития техники
наиболее экономичным способом уменьшения расхода воздуха является оборудо-
вание вентилятора регулируемым электроприводом с преобразователем частоты,
работа которого организована в замкнутой автоматической системе регулирова-
ния с обратной связью по температуре.
Таким образом, информация о значении температуры обмоток двигателя в
равной степени важна и необходима для поддержания расчетных показателей ка-
чества тягового электропривода, тепловой защиты обмотки статора и стержней

130
короткозамкнутого ротора и повышения энергоэффективности работы вспомога-
тельных электроприводов вентиляторов охлаждения и всей системы регулирова-
ния температуры двигателя в целом.
Анализ методов и средств измерения и определения температуры нагреваю-
щихся элементов асинхронных двигателей, проведенный в подразделе 1.4, показал
что наибольшую точность определения температуры имеют контактные датчики
и устройства, установленные непосредственно на доступных частях обмотки ста-
тора. Их широкое применение в реальных рабочих режимах тягового подвижного
состава сдерживается рядом факторов, включающих необходимость изменения
комплектации и конструкции тягового двигателя, трудности обеспечения повы-
шенной помехозащищенности как при измерении температуры, так и при пере-
даче сигнала в систему управления и др. Кроме этого, контактные датчики изме-
ряют температуру только в месте их установки, в то время как распределение тем-
пературы по массиву двигателя, включая обмотки, носит неравномерный характер
[80, 154, 156, 245]. Если во время тестовых испытаний были выявлены участки
наибольшего нагрева, установлены закономерности распределения температуры в
обмотках и связь температуры наиболее нагретого участка с температурой, изме-
ряемой в месте установки датчика, то установка датчика температуры способна
решить задачи тепловой защиты и организации обратной связи для автоматиче-
ской системы регулирования температуры. Однако для реализации систем вектор-
ного управления и прямого управления моментом, которые имеют перспективы
широкого применения на современных локомотивах, необходима информация о
среднем значении температуры, так как именно среднее значение температуры
оказывает влияние на значение сопротивления как обмотки статора, так и стерж-
ней ротора. Точность значения сопротивлений играет ключевую роль при реали-
зации указанных систем управления электропривода, так как используется при
расчете регуляторов практически всех контуров. В работе [5] показано, что по-
грешность определения сопротивления обмотки статора более, чем на 10%, при-
водит к потере устойчивости системы прямого управления моментом.
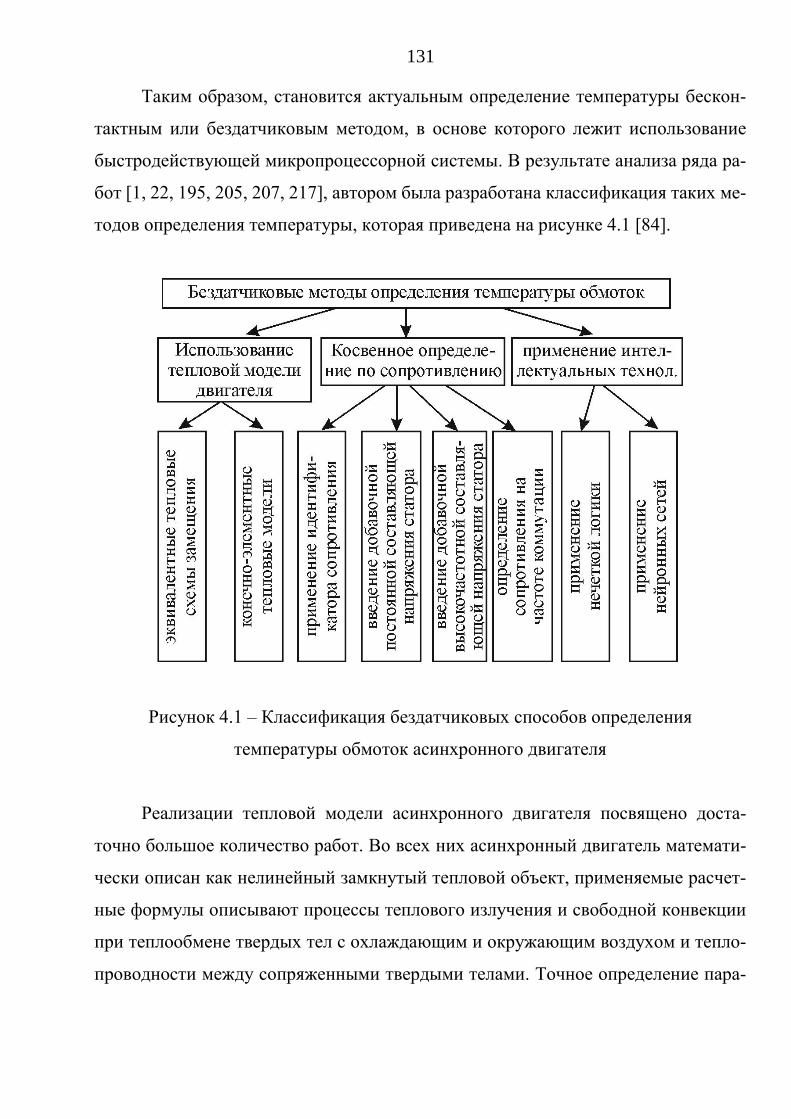
131
Таким образом, становится актуальным определение температуры бескон-
тактным или бездатчиковым методом, в основе которого лежит использование
быстродействующей микропроцессорной системы. В результате анализа ряда ра-
бот [1, 22, 195, 205, 207, 217], автором была разработана классификация таких ме-
тодов определения температуры, которая приведена на рисунке 4.1 [84].
Рисунок 4.1 – Классификация бездатчиковых способов определения
температуры обмоток асинхронного двигателя
Реализации тепловой модели асинхронного двигателя посвящено доста-
точно большое количество работ. Во всех них асинхронный двигатель математи-
чески описан как нелинейный замкнутый тепловой объект, применяемые расчет-
ные формулы описывают процессы теплового излучения и свободной конвекции
при теплообмене твердых тел с охлаждающим и окружающим воздухом и тепло-
проводности между сопряженными твердыми телами. Точное определение пара-

132
метров тепловой схемы затруднительно, так как требует слишком большого коли-
чества данных, для получения которых необходимы как теоретические, так и экс-
периментальные исследования конкретного двигателя. Кроме этого, некоторые
параметры меняются непосредственно во время работы в зависимости от скорости
и температуры охлаждающего воздуха, влажности и т.д. Точность модели напря-
мую зависит от степени детализации асинхронного двигателя как теплового объ-
екта.
Второе направление исследований – это косвенное определение темпера-
туры посредством измерения активного сопротивления обмотки статора. Мето-
дики определения или измерения активного сопротивления нечувствительны к из-
менению условий внешней среды, следовательно, свободны от недостатков, воз-
никающих при использовании тепловых моделей. Выделяют два основных под-
хода к определению активного сопротивления обмотки статора непосредственно
во время работы электропривода [206]: микропроцессорная реализация математи-
ческой модели на основе электрической схемы замещения асинхронного двига-
теля и введение дополнительных составляющих с различной частотой в кривой
напряжения статора.
Недостатком первого подхода является то, что удовлетворительную точ-
ность он обеспечивает только в режиме низких частот тока статора, при котором
падение напряжения на активном сопротивлении статора оказывается сопостави-
мым с ЭДС, наводимой обмоткой статора. При повышении частоты ЭДС значи-
тельно повышается, что приводит к увеличению погрешности определения сопро-
тивления. Определение сопротивления введением дополнительной составляющей
в кривую напряжения, прикладываемого к обмотке статора, пригодно для приме-
нения как на низких, так и на высоких частотах вращения. Однако введение до-
полнительного напряжения приводит к искажению формы тока статора, а, следо-
вательно, и появлению колебаний момента.
Интеллектуальные технологии для решения задачи по определению темпе-
ратуры обмоток стали применяться относительно недавно [219]. Преимуще-
ственно, их реализация не нарушает структуры системы управления и не влияет

133
на форму момента. Основной проблемой этого направления является обеспечение
устойчивости и заданной точности в широком диапазоне изменения частоты вра-
щения и момента.
4.2 Разработка эквивалентной тепловой схемы замещения двигателя
Для исследования распределения температур в массиве асинхронного дви-
гателя в установившихся режимах в данном разделе синтезирована нелинейная
математическая модель, описывающая распределение потенциалов в эквивалент-
ной тепловой схеме замещения, состоящей из тридцати девяти тепловых сопро-
тивлений.
Условия охлаждения на поверхности твердых тел – функциональных эле-
ментов асинхронного двигателя – определяются на основании соответствующих
критериальных уравнений.
Предлагаемая нелинейная модель позволяет рассчитать значения локальных
температур в 10 элементарных узлах двигателя (рисунок 4.2), включая и темпера-
туры теплоносителя на входном участке охлаждающего воздуха. Тепловые про-
цессы в ней, аналогично другим работам по этой теме, для каждого узла опреде-
ляются уравнениями теплового баланса, теплопередачи к охлаждающему воздуху
и теплопроводности к соседним узлам.
Для математического описания процессов передачи теплоты в асинхронном
двигателе приняты следующие допущения [25, 152]:
- основные конструктивные узлы асинхронной машины представляют собой
ту или иную модификацию цилиндрической формы;
- тепловые потоки в радиальном и осевом направлении независимы друг от
друга;
- тепловые потоки в радиальном и осевом направлениях определяют некое
среднее значение температуры цилиндрического элемента;
- отсутствуют круговые тепловые потоки;
- равномерность распределения тепловыделений.
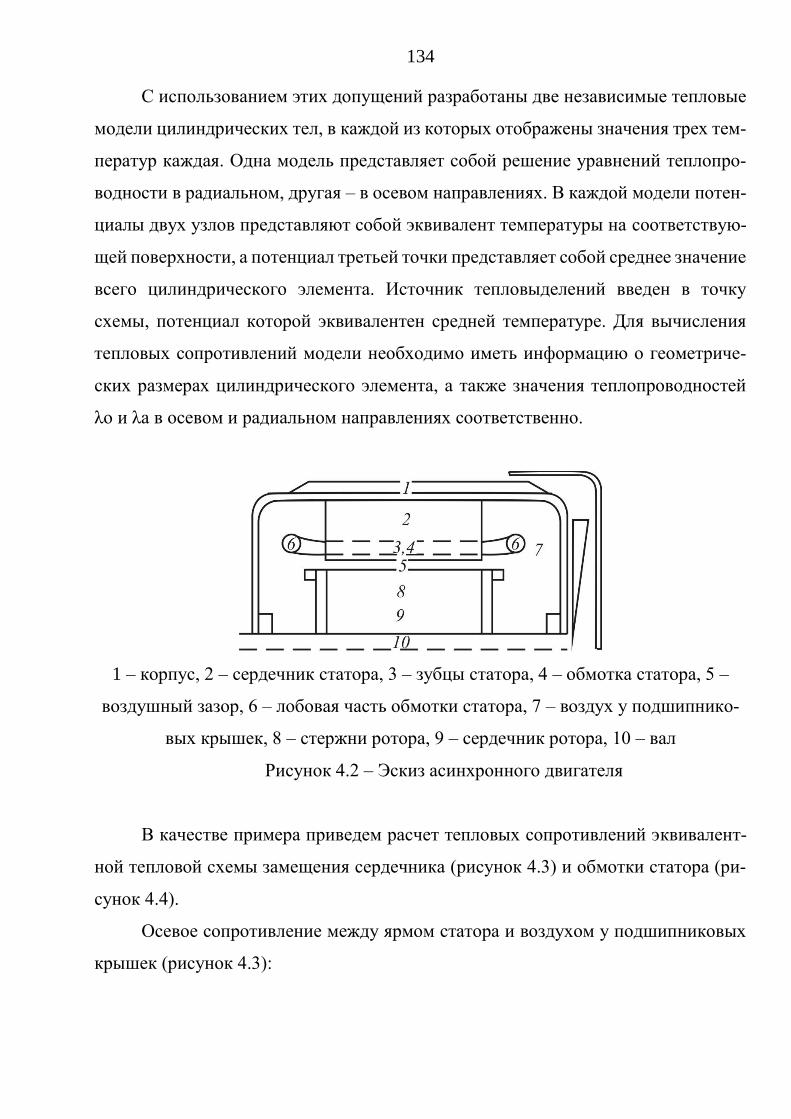
134
С использованием этих допущений разработаны две независимые тепловые
модели цилиндрических тел, в каждой из которых отображены значения трех тем-
ператур каждая. Одна модель представляет собой решение уравнений теплопро-
водности в радиальном, другая – в осевом направлениях. В каждой модели потен-
циалы двух узлов представляют собой эквивалент температуры на соответствую-
щей поверхности, а потенциал третьей точки представляет собой среднее значение
всего цилиндрического элемента. Источник тепловыделений введен в точку
схемы, потенциал которой эквивалентен средней температуре. Для вычисления
тепловых сопротивлений модели необходимо иметь информацию о геометриче-
ских размерах цилиндрического элемента, а также значения теплопроводностей
λо и λа в осевом и радиальном направлениях соответственно.
1 – корпус, 2 – сердечник статора, 3 – зубцы статора, 4 – обмотка статора, 5 –
воздушный зазор, 6 – лобовая часть обмотки статора, 7 – воздух у подшипнико-
вых крышек, 8 – стержни ротора, 9 – сердечник ротора, 10 – вал
Рисунок 4.2 – Эскиз асинхронного двигателя
В качестве примера приведем расчет тепловых сопротивлений эквивалент-
ной тепловой схемы замещения сердечника (рисунок 4.3) и обмотки статора (ри-
сунок 4.4).
Осевое сопротивление между ярмом статора и воздухом у подшипниковых
крышек (рисунок 4.3):
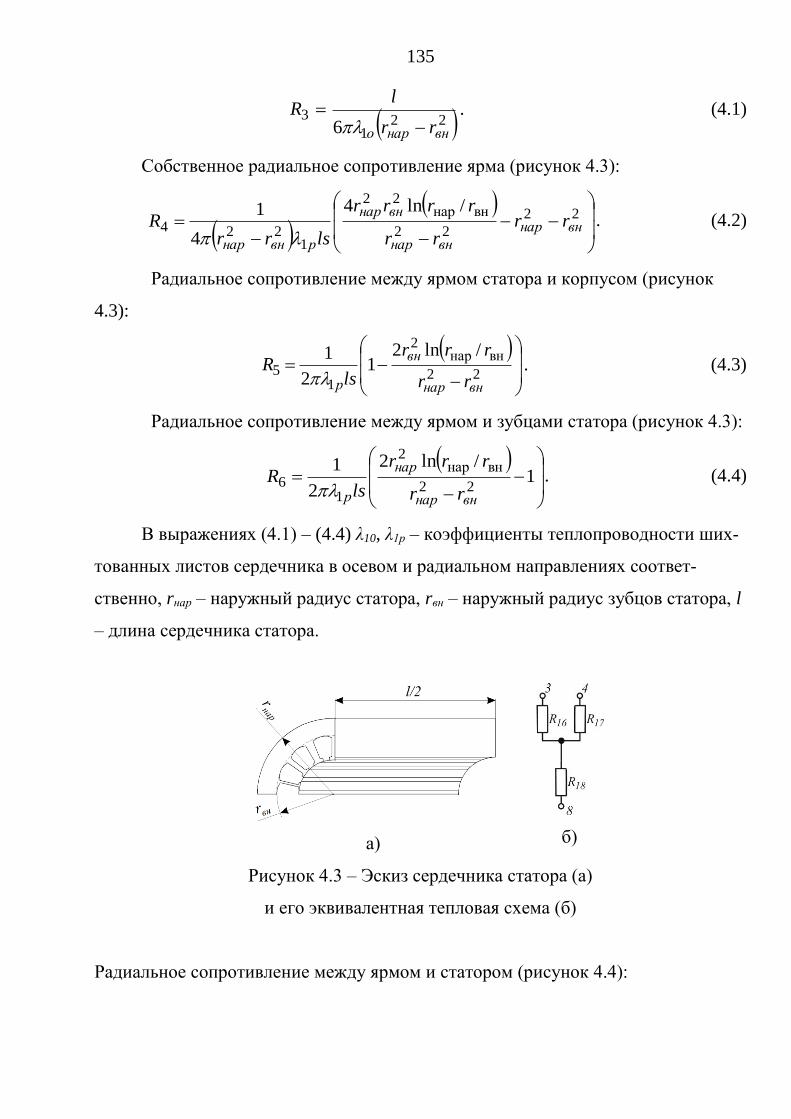
135
221
36 вннаро rr
lR
. (4.1)
Собственное радиальное сопротивление ярма (рисунок 4.3):
22
22
вннар22
1224
/ln4
4
1вннар
вннар
вннар
рвннар
rrrr
rrrr
lsrrR
. (4.2)
Радиальное сопротивление между ярмом статора и корпусом (рисунок
4.3):
22
вннар2
15
/ln21
2
1
вннар
вн
р rr
rrr
lsR
. (4.3)
Радиальное сопротивление между ярмом и зубцами статора (рисунок 4.3):
1
/ln2
2
122
вннар2
16
вннар
нар
р rr
rrr
lsR
. (4.4)
В выражениях (4.1) – (4.4) λ10, λ1р – коэффициенты теплопроводности ших-
тованных листов сердечника в осевом и радиальном направлениях соответ-
ственно, rнар – наружный радиус статора, rвн – наружный радиус зубцов статора, l
– длина сердечника статора.
а)
б)
Рисунок 4.3 – Эскиз сердечника статора (а)
и его эквивалентная тепловая схема (б)
Радиальное сопротивление между ярмом и статором (рисунок 4.4):
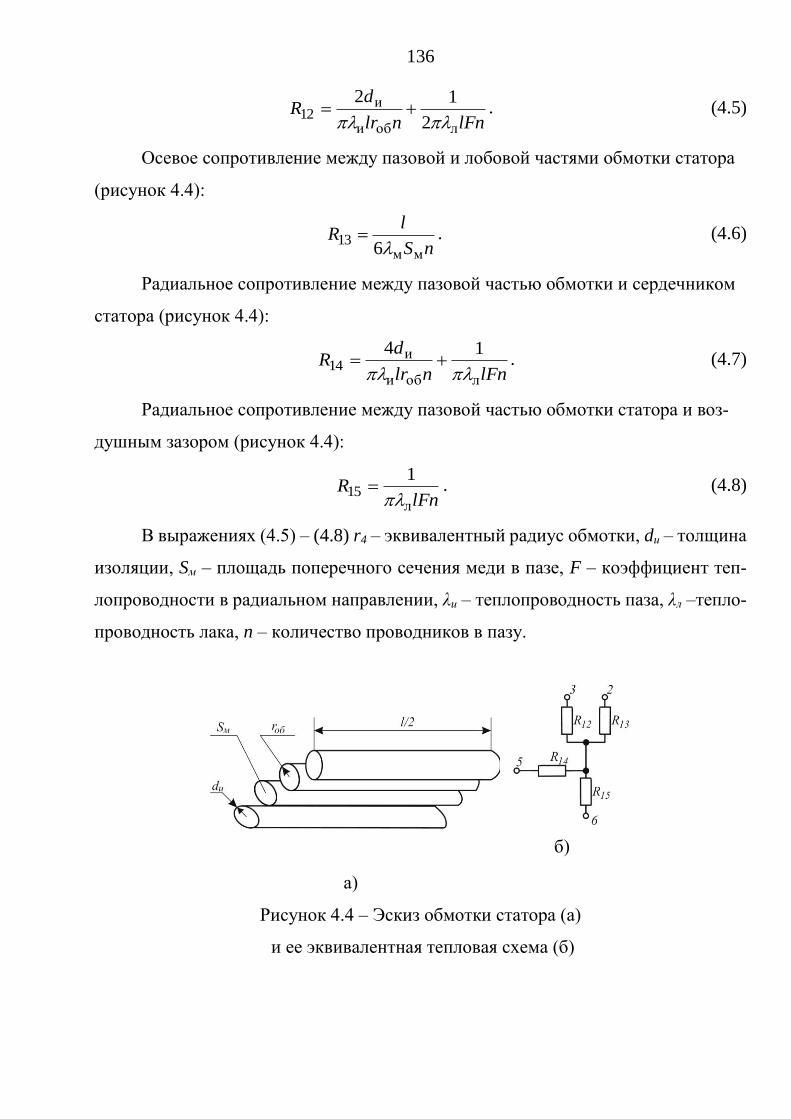
136
lFnnlr
dR
лоби
и12
2
12
. (4.5)
Осевое сопротивление между пазовой и лобовой частями обмотки статора
(рисунок 4.4):
nS
lR
мм13
6 . (4.6)
Радиальное сопротивление между пазовой частью обмотки и сердечником
статора (рисунок 4.4):
lFnnlr
dR
лоби
и14
14
. (4.7)
Радиальное сопротивление между пазовой частью обмотки статора и воз-
душным зазором (рисунок 4.4):
lFnR
л15
1
. (4.8)
В выражениях (4.5) – (4.8) r4 – эквивалентный радиус обмотки, dи – толщина
изоляции, Sм – площадь поперечного сечения меди в пазе, F – коэффициент теп-
лопроводности в радиальном направлении, λи – теплопроводность паза, λл –тепло-
проводность лака, n – количество проводников в пазу.
а)
б)
Рисунок 4.4 – Эскиз обмотки статора (а)
и ее эквивалентная тепловая схема (б)
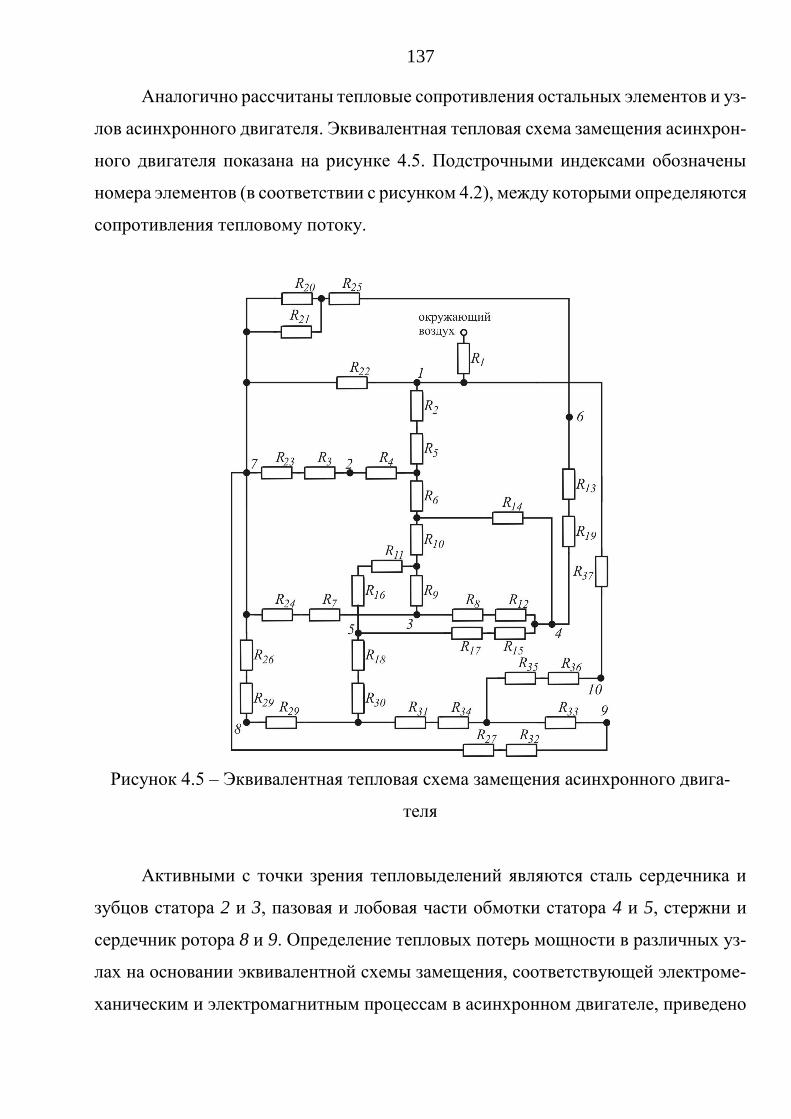
137
Аналогично рассчитаны тепловые сопротивления остальных элементов и уз-
лов асинхронного двигателя. Эквивалентная тепловая схема замещения асинхрон-
ного двигателя показана на рисунке 4.5. Подстрочными индексами обозначены
номера элементов (в соответствии с рисунком 4.2), между которыми определяются
сопротивления тепловому потоку.
Рисунок 4.5 – Эквивалентная тепловая схема замещения асинхронного двига-
теля
Активными с точки зрения тепловыделений являются сталь сердечника и
зубцов статора 2 и 3, пазовая и лобовая части обмотки статора 4 и 5, стержни и
сердечник ротора 8 и 9. Определение тепловых потерь мощности в различных уз-
лах на основании эквивалентной схемы замещения, соответствующей электроме-
ханическим и электромагнитным процессам в асинхронном двигателе, приведено

138
на основании результатов работ [82, 147, 148]. При определении потерь мощности
учтены явления насыщения по главному магнитному пути, эффект вытеснения
тока ротора, а также нелинейная зависимость потерь в стали от частоты тока ста-
тора.
В общем случае упрощенная эквивалентная тепловая схема может быть опи-
сана следующей системой дифференциальных уравнений:
),(...)(
),(...)(
),(...)(
1)1(11
22122122
2
11211211
1
nnnnnnnn
n
nn
nn
aaPdt
dC
aaPdt
dC
aaPdt
dC
(4.9)
где Сi – тепловая емкость i-го узла тепловой схемы, θi – превышение темпе-
ратуры i-го узла над температурой окружающей среды, ∆Рi –потери мощность в i-
м узле, aij – теплопроводность между i-м и j-м узлами схемы.
Корпус двигателя является как теплоотводом с большой тепловой емкостью.
Поэтому, несмотря на то, что значительные части как статора, так и ротора, со-
стоят из стального массива одинаковой длины, тепловая емкость обмотки статора
часто больше, чем тепловая емкость ротора благодаря наличию корпуса. Кроме
того, лобовая часть обмотки статора обеспечивает более высокое значение тепло-
вой емкости. В установившемся режиме работы изменение температуры во вре-
мени dθi/dt =0. Это приводит к упрощению уравнений (4.9), которые после не-
сложных преобразований примут вид:
,...
,...
,...
2211
22221212
12121111
nnnnnn
nn
nn
PRPRPR
PRPRPR
PRPRPR
(4.10)
где Rij – тепловое сопротивление между i-м и j-м узлами, Rij = ∆ij/∆, ∆ –
определитель матрицы |aij|, ∆ij – коэффициенты матрицы |aij|-1.
В качестве исследуемого двигателя выбран двигатель АО-63-4 мощностью
14 кВт. Выбор данного двигателя обусловлен тем, что им снабжена комплексная
физическая модель тягового электропривода с асинхронными двигателями [120].

139
В работе [120] показана адекватность физического моделирования тягового дви-
гателя двигателем мощностью 14 кВт.
Результаты расчета потерь мощности приведены в таблице 4.1. Расчет мощ-
ности проведен для закона управления us/fs = const. В качестве исследуемых режи-
мов работы выбраны режимы, наиболее тяжелые с точки зрения тепловой
нагрузки, т.е. соответствующие большим моментам сопротивления.
Таблица 4.1
№ fs* us* ω* М* Vов* ∆Р2,
Вт
∆Р3,
Вт
∆Р4,
Вт
∆Р6,
Вт
∆Р8,
Вт
∆Р9,
Вт
1 1 1 0,9 1 1 90.1 150.4 310.8 305.1 460.1 21.9
2 1 1 0,86 1,5 1 87.5 149.7 485.1 473.9 721.8 35.8
3 0,5 0,5 0,43 1 0,45 50,4 106,7 322,7 323,8 483,9 17,9
4 0,25 0,25 0,24 1 0,2 39,75 72,2 323,6 336,3 512,7 9,9
В таблице 4.1 приняты обозначения: ω* = ω/ω0ном, М* = М/Мном – относитель-
ные значения частоты вращения вала ротора и момента, Vов* = Vов/Vов,ном– относи-
тельная скорость охлаждающего воздуха,; ω0ном – частота вращения магнитного
поля статора при fs* = 1. Значения частоты fs* выбраны согласно значениям частоты
тока дизель-генераторной установки маневрового тепловоза на различных пози-
циях контроллера машиниста, значения Vов* выбраны согласно расходу воздуха,
охлаждающего тяговые двигатели маневрового тепловоза, на различных позициях
контроллера машиниста.
Результаты расчета перегрева узлов двигателя АО-63-4 приведены в таблице
4.4.
Рассчитанные значения перегрева (таблица 4.2) показали высокую сходи-
мость с результатами экспериментальных исследований (датчики температуры,
установленные в двигателе, позволяют измерять температуру корпуса 1, сердеч-
ника статора 2, лобовой части обмотки статора 6, сердечника ротора 9), что гово-
рит о корректности проведенного расчета [25,156].
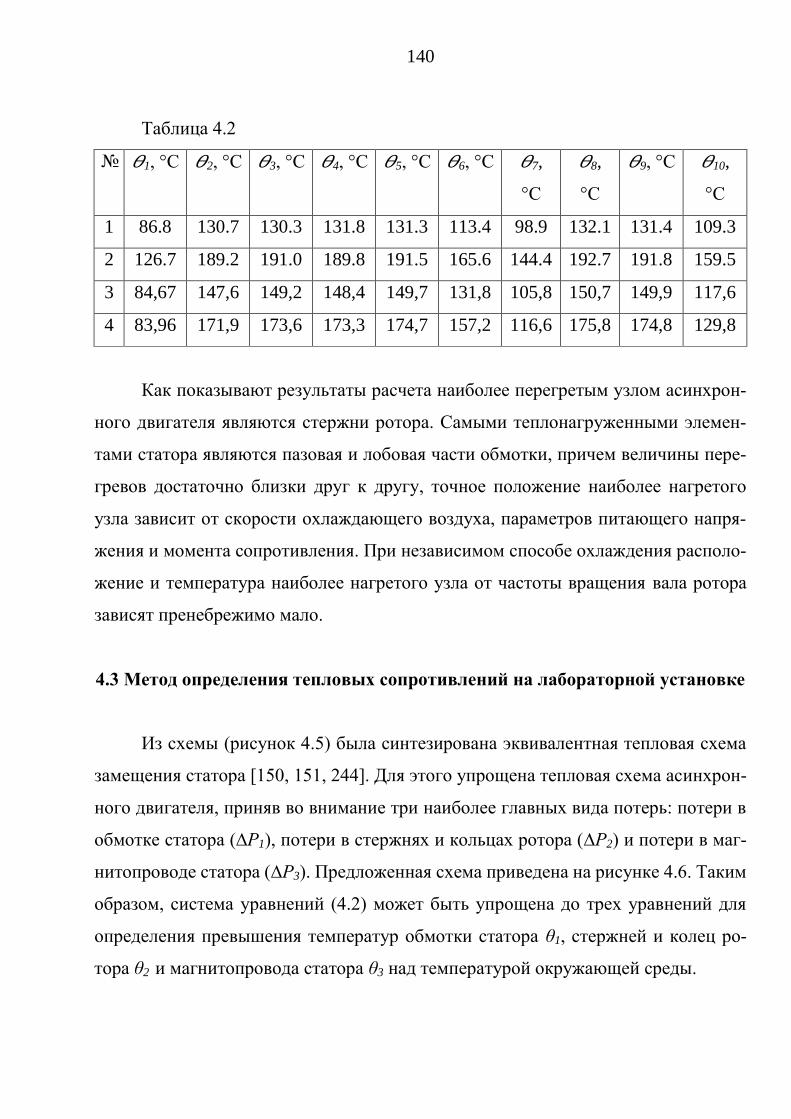
140
Таблица 4.2
№ 𝛳1, °С 𝛳2, °С 𝛳3, °С 𝛳4, °С 𝛳5, °С 𝛳6, °С 𝛳7,
°С
𝛳8,
°С
𝛳9, °С 𝛳10,
°С
1 86.8 130.7 130.3 131.8 131.3 113.4 98.9 132.1 131.4 109.3
2 126.7 189.2 191.0 189.8 191.5 165.6 144.4 192.7 191.8 159.5
3 84,67 147,6 149,2 148,4 149,7 131,8 105,8 150,7 149,9 117,6
4 83,96 171,9 173,6 173,3 174,7 157,2 116,6 175,8 174,8 129,8
Как показывают результаты расчета наиболее перегретым узлом асинхрон-
ного двигателя являются стержни ротора. Самыми теплонагруженными элемен-
тами статора являются пазовая и лобовая части обмотки, причем величины пере-
гревов достаточно близки друг к другу, точное положение наиболее нагретого
узла зависит от скорости охлаждающего воздуха, параметров питающего напря-
жения и момента сопротивления. При независимом способе охлаждения располо-
жение и температура наиболее нагретого узла от частоты вращения вала ротора
зависят пренебрежимо мало.
4.3 Метод определения тепловых сопротивлений на лабораторной установке
Из схемы (рисунок 4.5) была синтезирована эквивалентная тепловая схема
замещения статора [150, 151, 244]. Для этого упрощена тепловая схема асинхрон-
ного двигателя, приняв во внимание три наиболее главных вида потерь: потери в
обмотке статора (∆Р1), потери в стержнях и кольцах ротора (∆Р2) и потери в маг-
нитопроводе статора (∆Р3). Предложенная схема приведена на рисунке 4.6. Таким
образом, система уравнений (4.2) может быть упрощена до трех уравнений для
определения превышения температур обмотки статора θ1, стержней и колец ро-
тора θ2 и магнитопровода статора θ3 над температурой окружающей среды.
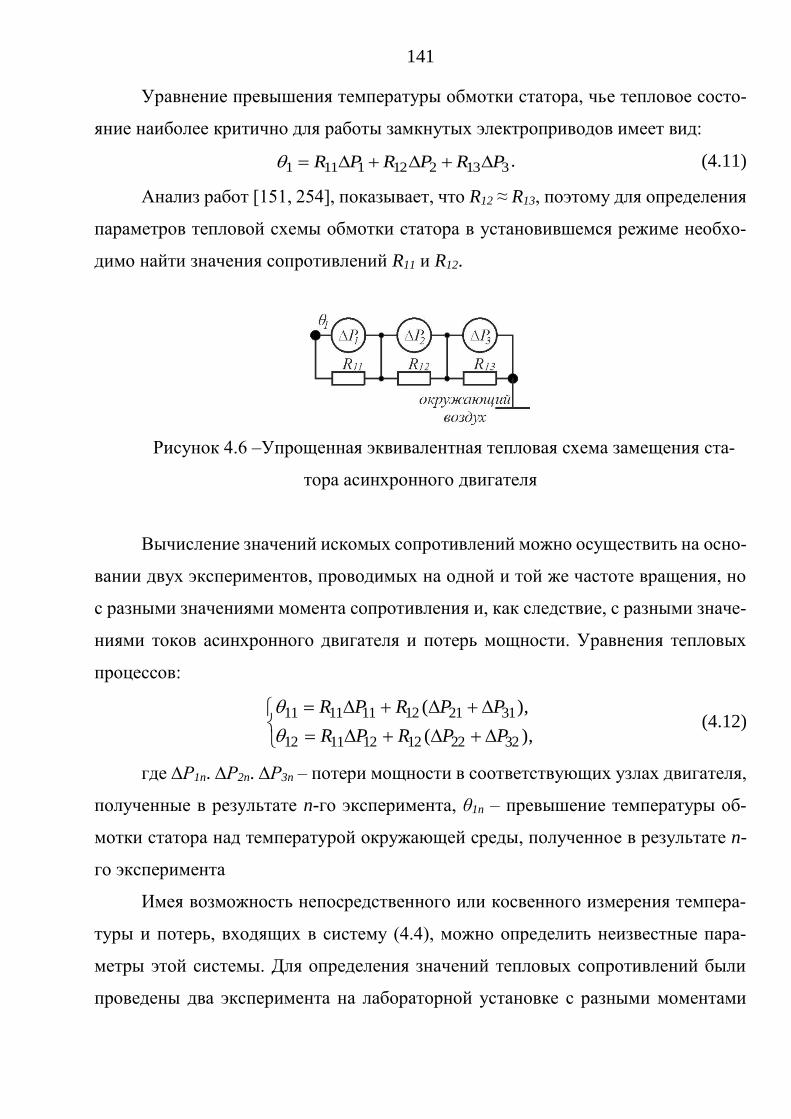
141
Уравнение превышения температуры обмотки статора, чье тепловое состо-
яние наиболее критично для работы замкнутых электроприводов имеет вид:
3132121111 PRPRPR . (4.11)
Анализ работ [151, 254], показывает, что R12 ≈ R13, поэтому для определения
параметров тепловой схемы обмотки статора в установившемся режиме необхо-
димо найти значения сопротивлений R11 и R12.
Рисунок 4.6 –Упрощенная эквивалентная тепловая схема замещения ста-
тора асинхронного двигателя
Вычисление значений искомых сопротивлений можно осуществить на осно-
вании двух экспериментов, проводимых на одной и той же частоте вращения, но
с разными значениями момента сопротивления и, как следствие, с разными значе-
ниями токов асинхронного двигателя и потерь мощности. Уравнения тепловых
процессов:
),(
),(
322212121112
312112111111
PPRPR
PPRPR
(4.12)
где ∆Р1n. ∆Р2n. ∆Р3n – потери мощности в соответствующих узлах двигателя,
полученные в результате n-го эксперимента, θ1n – превышение температуры об-
мотки статора над температурой окружающей среды, полученное в результате n-
го эксперимента
Имея возможность непосредственного или косвенного измерения темпера-
туры и потерь, входящих в систему (4.4), можно определить неизвестные пара-
метры этой системы. Для определения значений тепловых сопротивлений были
проведены два эксперимента на лабораторной установке с разными моментами

142
сопротивления при одной и той же частоте тока статора. Эксперименты были по-
вторены при различных частотах тока статора и, как следствие, различных часто-
тах вращения вала ротора. В лабораторной установке разработана физическая мо-
дель тягового и вспомогательного электроприводов (рисунки 4.7, 4.8), которая со-
стоит из следующих трех функциональных систем – информационная система
(включает в себя датчики электрических, механических и тепловых переменных
электропривода), силовая система (включает в себя физические модели тяговых
двигателей, преобразователи частоты, механическую часть электропривода) и си-
стема обработки информации (включает в себя многофункциональную плату ана-
лого-цифрового преобразования, персональный компьютер).
Рисунок 4.7 – Функциональная схема физической модели тягового и
вспомогательного электроприводов

143
Рисунок 4.8 – Общий вид физической модели тягового электропривода
Силовая система состоит из асинхронного двигателя АД1 (двигатель
4А112МВ6У3 мощностью 4 кВт), приводящего во вращение центробежный вен-
тилятор охлаждения ЦБ (асинхронный двигатель АД1 и центробежный вентиля-
тор ЦБ образуют исполнительно-регулирующее устройство системы охлаждения
обмоток двигателей АД2 и АД3); асинхронных двигателей АД2 (двигатель M3BP
160 MLA 4 производства фирмы АВВ мощностью 11 кВт) и АД3 (двигатель АО-
63-4 мощностью 14 кВт) – физические модели асинхронных тяговых электродви-
гателей локомотива; модели механической части привода.
Для управления асинхронными двигателями применяются полупроводнико-
вые преобразователи частоты ПЧ1 – ПЧ3 производства фирмы АВВ: преобразова-
тели типа ACS550 и ACS850 мощностью 11 кВт каждый, реализующие функции
скалярного, векторного управления, а также прямого управления моментом; пре-
144
образователь частоты типа ACSM1 мощностью 4 кВт, реализующий функции ска-
лярного управления и прямого управления моментом. Для организации обмена
информацией между преобразователями частоты и ЭВМ используется интерфейс
RS-485, управление преобразователями осуществляется при помощи программ
DriveStudio и DriveWindow Light.
Модель механической части электропривода включает в себя колесные пары
КП (с установленным на ней зубчатым колесом ЗК) для двигателя АД2 и колеса
Кс для двигателя АД3; два жестко соединенных катка К, которые применены для
моделирования контакта колесной пары с рельсами; маховика М, необходимого
для моделирования веса состава; тормозного (нагрузочного) устройства, необхо-
димого для реализации момента (силы) сопротивления вращению. Механическое
сочленение между колесной парой и зубчатым колесом выполнено как жестко, так
с возможностью получения упругих колебаний за счет применения резиновых
втулок как демпфирующих звеньев. Тормозной момент сопротивления регулиру-
ется с помощью силы нажатия колесной пары (колеса) на каток посредством ис-
пользования винтовых пружин ВП. Колесная пара КП и колесо Кс имеют сменные
бандажи, что обеспечивает возможность моделирования совместной работы тяго-
вого привода с колесными парами, имеющими различную величину диаметра ко-
лес. Применение колес с разными величинами диаметров может позволить приве-
сти к возникновению фрикционных крутильных автоколебаний. Изменяя точку
передачи крутильного момента вдоль оси колесной пары, можно добиться того,
чтобы в крутильных колебаниях (автоколебаниях) участвовал ротор асинхронного
двигателя.
Тормозное (нагрузочное) устройство состоит из фрикционного тормоза ФТ
и электрической машины постоянного тока независимого возбуждения МПТ, тор-
мозной момент которой можно регулировать при помощи реостатов в цепи об-
мотки якоря и изменения напряжения обмотки возбуждения. В режимах низких и
средних частот вращения ротора дополнительно используется нагрузочная элек-
трическая машина. При околонулевых частотах вращения тормозной момент со-
здается фрикционным тормозом. Изменение момента сопротивления вращению
145
маховика приводит к изменению режима работы привода, возможностей появле-
ния срыва сцепления колес с катком, имитирующим рельс, возникновению боксо-
вания и, как следствие, автоколебательным процессам. Задаваясь различными мо-
ментами сопротивления и начальными частотами вращения тягового электродви-
гателя, можно определять области боксования и режимов автоколебаний на раз-
личных подъемах железнодорожного пути.
Измеряемыми электрическими и механическими параметрами в установке
являются: токи фаз статоров асинхронных двигателей; частотыа вращения валов
их роторов; моменты, развиваемые двигателями АД2 и АД3.
При измерении тока необходимо учитывать, что полученные данные будут
использоваться для расчета температуры различных частей асинхронной машины
на математической модели тепловых процессов. Электромагнитная постоянная
времени обмотки статора гораздо меньше электромеханической постоянной вре-
мени и, тем более, постоянной времени нагрева. К датчикам тока предъявляются
требования высокой полосы пропускания, низкой ошибки измерения, линейности
статической характеристики, малой температурной зависимости.
Измерение токов осуществлено датчиками тока серии ACS712, предназна-
ченными для применения в цепях постоянного и переменного тока (частота пере-
менного тока – не более 50 кГц), основанные на эффекте Холла и содержащие
гальваническую развязку; максимальная погрешность измерения не превышает
1,5 % при температуре 25°С. Для измерения фазных токов обмоток асинхронных
двигателей АД2 и АД3 применены датчики, рассчитанные на номинальный ток 30
А ACS712ELCTR-30A-T.
Для измерения частоты вращения роторов асинхронных двигателей приме-
нены инкрементальные энкодеры, обеспечивающие разрешение 1000 импульсов
на оборот. Энкодер ДЧ1 смонтирован на валу ролика, прижатого к катку, т.е. по-
казания этого датчика имитируют линейную скорость подвижного состава. Энко-
дер ДЧ2 смонтирован на колесе, сопряженном с катком и приводящем его в дви-
жение, т.е. показания этого датчика имитируют частоту вращения ведущего ко-
леса.

146
Исследование температур по массиву двигателя АД3 осуществляется с по-
мощью хромель-копелевых термопар, которые прикреплены на статоре (в трех се-
чениях – на изоляции лобовых частей обмотки с двух сторон, со стороны привода
и со стороны подачи охлаждающего воздуха (рисунок 4.9), и в стали магнитопро-
вода на расстоянии 45 мм от его поверхности, – в каждом сечении смонтированы
три датчика температуры равноудаленно друг от друга), на роторе (в двух сече-
ниях – в массиве ротора со стороны короткозамкнутых колец на расстоянии 40 мм
от поверхности – в каждом сечении смонтированы два датчика температуры рав-
ноудаленно друг от друга) и на корпусе. Для передачи сигнала с датчиков, враща-
ющихся на роторе, применен скользящий контакт.
Сбор информации со всех датчиков и передача ее на ЭВМ осуществляется
многофункциональной платой ЛА-2SB [21].
Рисунок 4.9 –Лобовая часть обмотки
статора
Рисунок 4.10 – Лобовая часть обмотки
ротора (короткозамкнутое кольцо)
Новизна разработанной установки подтверждена патентами на изобретение
№ 2550105 и полезную модель № 156446, 148359 [27, 28, 95].
В систему уравнений (4.12) подставлялись средние значения температур, из-
меренных с помощью термопар, расположенных на обмотке статора, что позволит
использовать предлагаемую методику и эквивалентную схему замещения для

147
определения средней температуры обмотки статора. Для определения максималь-
ной температуры необходимо подставлять максимальную измеренную темпера-
туру.
Выражение для определения потерь в обмотке статора при ее питании от
источника переменного тока:
,3 2111 sRIP (4.13)
где I1 – ток статора, Rs – сопротивление одной фазы обмотки статора, изме-
ренное при установившемся превышении температуры θ1. Для определения Rs в
данной работе использовались опыты постоянного тока при различных темпера-
турах обмотки.
Из баланса мощностей асинхронного двигателя выведем выражение для
суммы потерь в роторе и магнитопроводе статора:
,1132 мехPPPPP (4.14)
где Р1 – мощность электроэнергии, потребляемой обмоткой статора, Рмех –
механическая мощность на валу ротора асинхронного двигателя (валу якоря дви-
гателя постоянного тока):
,20
20 )()( adddddмех RIIIIUP (4.15)
где Ud, Id – напряжение и ток обмотки якоря двигателя постоянного тока, Id0
– ток холостого хода, Ra – сопротивление обмотки якоря.
Основные результаты экспериментальных исследований сведены в таблицу
4.3.
Анализ результатов исследований показывает зависимость тепловых сопро-
тивлений от частоты вращения вала ротора, что отражает основную физическую
сущность процессов, протекающих в асинхронном двигателе во время его работы.
Очевидно, что уменьшение частоты вращения вала асинхронных двигателей с са-
мовентиляцией, что эквивалентно снижению расхода охлаждающего воздуха,
приводит к повышению температуры узлов и элементов двигателя при той же са-
мой нагрузке. Это обусловливает увеличение значений тепловых сопротивлений.
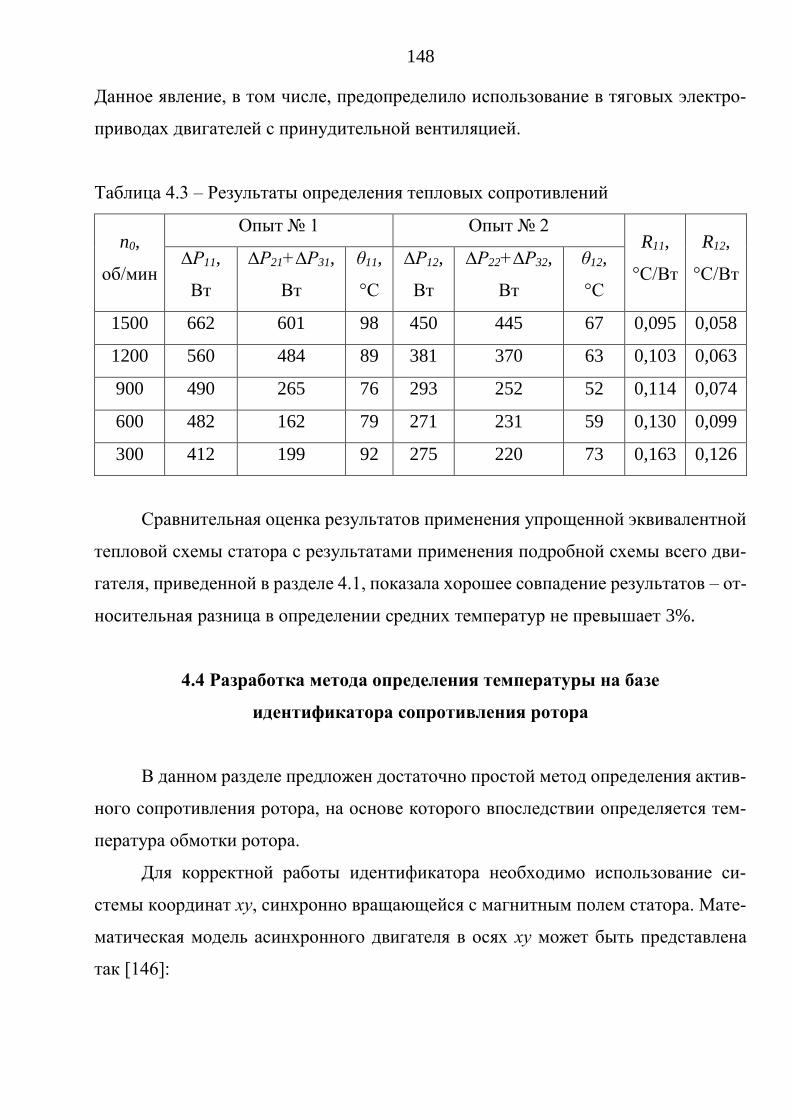
148
Данное явление, в том числе, предопределило использование в тяговых электро-
приводах двигателей с принудительной вентиляцией.
Таблица 4.3 – Результаты определения тепловых сопротивлений
n0,
об/мин
Опыт № 1 Опыт № 2 R11,
°С/Вт
R12,
°С/Вт ∆Р11,
Вт
∆Р21+∆Р31,
Вт
θ11,
°С
∆Р12,
Вт
∆Р22+∆Р32,
Вт
θ12,
°С
1500 662 601 98 450 445 67 0,095 0,058
1200 560 484 89 381 370 63 0,103 0,063
900 490 265 76 293 252 52 0,114 0,074
600 482 162 79 271 231 59 0,130 0,099
300 412 199 92 275 220 73 0,163 0,126
Сравнительная оценка результатов применения упрощенной эквивалентной
тепловой схемы статора с результатами применения подробной схемы всего дви-
гателя, приведенной в разделе 4.1, показала хорошее совпадение результатов – от-
носительная разница в определении средних температур не превышает 3%.
4.4 Разработка метода определения температуры на базе
идентификатора сопротивления ротора
В данном разделе предложен достаточно простой метод определения актив-
ного сопротивления ротора, на основе которого впоследствии определяется тем-
пература обмотки ротора.
Для корректной работы идентификатора необходимо использование си-
стемы координат ху, синхронно вращающейся с магнитным полем статора. Мате-
матическая модель асинхронного двигателя в осях ху может быть представлена
так [146]:

149
[
𝑢𝑠𝑥𝑢𝑠𝑦00
] =
[ 𝑅𝑠 + 𝑝𝐿𝑠 − 𝜔0𝐿µ 𝑝𝐿µ − 𝜔0𝐿µ
𝜔0𝐿𝑠 𝑅𝑠 + 𝑝𝐿𝑠 𝜔0𝐿µ 𝑝𝐿µ
𝑝𝐿µ − 𝜔𝑠𝐿µ 𝑅𝑟 + 𝑝𝐿𝑟 − 𝜔𝑠𝐿𝑟 𝜔𝑠𝐿µ 𝑝𝐿µ 𝜔𝑠𝐿𝑟 𝑅𝑟 + 𝑝𝐿𝑟 ]
[
𝑖𝑠𝑥𝑖𝑠𝑦𝑖𝑟𝑥𝑖𝑟𝑥
]. (4.16)
Очевидно, что необходимость применения координатных осей ху ограничи-
вает область внедрения данного метода системами векторного управления, т.к. и
системы скалярного управления и системы прямого управления моментом в клас-
сическом варианте построения не нуждаются в использовании вращающейся си-
стемы координат.
Выражение (4.16) может быть упрощено за счет того, что координатные оси
будут сориентированы таким образом, что проекция тока статора на ось у ока-
жется равной нулю (isу=0), тогда весь ток статора проецируется на ось х: isx=Is. В
этом случае для установившегося режима работы из выражения (2,16) после мате-
матических преобразований получим:
[
𝑢𝑠𝑥𝑢𝑠𝑦00
] =
[ 𝑅𝑠 0 − 𝜔0𝐿µ
𝜔0𝐿𝑠 𝜔0𝐿µ 0
0 𝑅𝑟 − 𝜔0𝐿𝑟𝜔𝑠𝐿µ 𝜔𝑠𝐿𝑟 𝑅𝑟 ]
[
𝐼𝑠𝑖𝑠𝑥𝑖𝑠𝑦
]. (4.17)
Из уравнения (4.17) определяем активное сопротивление ротора:
𝑅𝑟 = √−𝜔𝑠2𝐿𝑟 (
𝜔0𝐿µ2
𝑢𝑠𝑥/𝐼𝑠 − 𝜔0𝐿𝑠+ 𝐿𝑟). (4.18)
Выразим переменные асинхронного двигателя в неподвижных осях α𝛽. В
этом случае можно записать выражения для активной и реактивной мощностей по
цепи статора:
[𝑢𝑠𝑥𝑢𝑠𝑦
] =1
𝐼𝑠[1 00 − 1
] [𝑃𝑄], (4.19)
где Р – активная мощность энергии, потребляемой по цепи статора:
𝑃 = 𝑢𝑠𝛼𝑖𝑠𝛼 + 𝑢𝑠𝛽𝑖𝑠𝛽 , (4.20)
Q – реактивная мощность энергии, потребляемой по цепи статора:
𝑄 = 𝑢𝑠𝛼𝑖𝑠𝛽 − 𝑢𝑠𝛽𝑖𝑠𝛼 . (4.21)

150
После математических преобразований с учетом (4.21) получим:
𝑅𝑟 = √−𝜔𝑠2𝐿𝑟 (
𝜔0𝐿µ2
𝑄/𝐼𝑠2 +𝜔0𝐿𝑠
− 𝐿𝑟). (4.22)
Зависимость между температурой и активным сопротивлением обмотки вы-
ражается известной зависимостью:
𝑅 = 𝑅20(1 + 𝛼∆𝜃), (4.23)
где R20 – сопротивление обмотки при температуре θ = 20 ºС, θ – текущая темпера-
тура обмотки, α – температурный коэффициент сопротивления (для меди α =
0,00433), ∆ θ – разница между текущей температурой θ и 20 ºС.
Таким образом, процесс идентификации сопротивления и температуры об-
мотки ротора асинхронного двигателя может быть сведен к следующему алго-
ритму:
1. получение информации о фазных токах и напряжениях статора и частоте
вращения вала ротора;
2. преобразование токов и напряжений из трехфазной системы АВС в двух-
фазную α𝛽;
3. вычисление реактивной мощности Q по выражению (4.21);
4. определение активного сопротивления ротора Rr по выражению (4.22);
5. определение температуры обмотки ротора Т по выражению (4.23).
К недостатку предложенного метода идентификации следует отнести то, что
для его реализации требуется информация о частоте скольжения, для чего необхо-
дим прецизионный датчик частоты вращения вала ротора. В отношении тяговых
электроприводов этот недостаток нивелируется за счет того, что в них точное из-
мерение частоты вращения также необходимо для реализации требуемых тяговых
усилий. К преимуществам предложенного метода относятся высокое быстродей-
ствие и простота определения сопротивления и температуры обмотки ротора.
Кроме электрических и механических переменных исходными условиями для
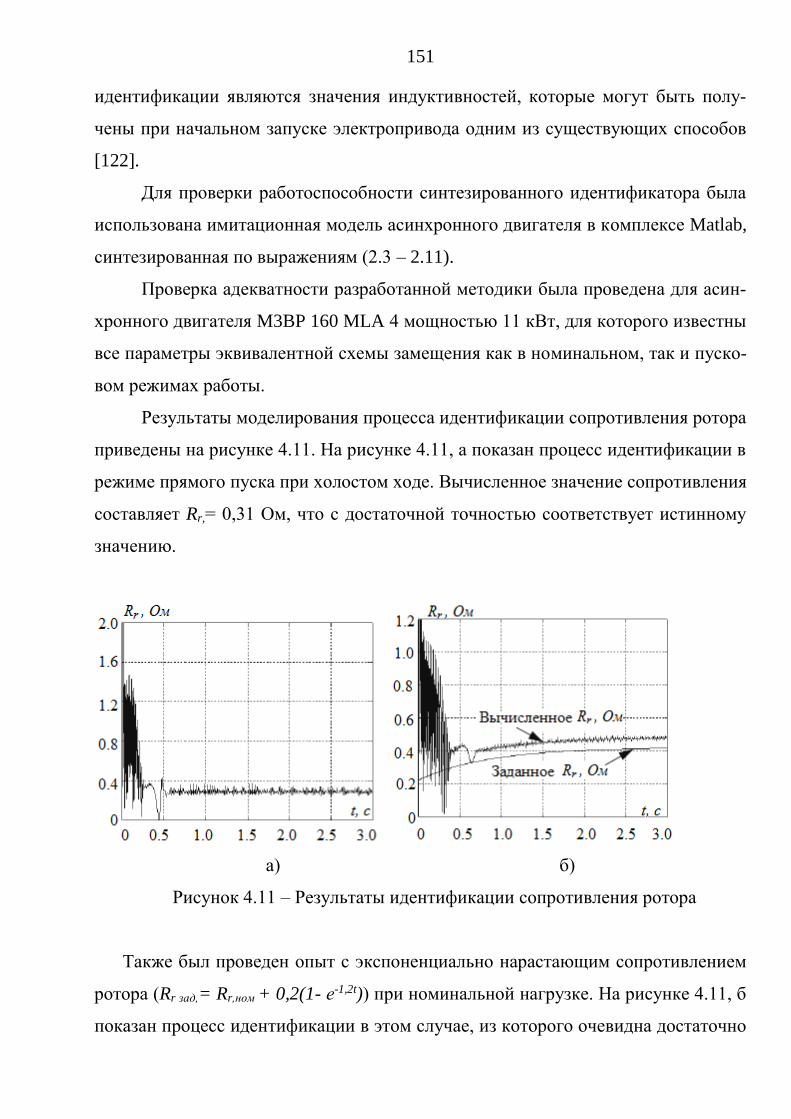
151
идентификации являются значения индуктивностей, которые могут быть полу-
чены при начальном запуске электропривода одним из существующих способов
[122].
Для проверки работоспособности синтезированного идентификатора была
использована имитационная модель асинхронного двигателя в комплексе Matlab,
синтезированная по выражениям (2.3 – 2.11).
Проверка адекватности разработанной методики была проведена для асин-
хронного двигателя M3BP 160 MLA 4 мощностью 11 кВт, для которого известны
все параметры эквивалентной схемы замещения как в номинальном, так и пуско-
вом режимах работы.
Результаты моделирования процесса идентификации сопротивления ротора
приведены на рисунке 4.11. На рисунке 4.11, а показан процесс идентификации в
режиме прямого пуска при холостом ходе. Вычисленное значение сопротивления
составляет Rr,= 0,31 Ом, что с достаточной точностью соответствует истинному
значению.
а) б)
Рисунок 4.11 – Результаты идентификации сопротивления ротора
Также был проведен опыт с экспоненциально нарастающим сопротивлением
ротора (Rr зад,= Rr,ном + 0,2(1- е-1,2t)) при номинальной нагрузке. На рисунке 4.11, б
показан процесс идентификации в этом случае, из которого очевидна достаточно

152
высокая сходимость результатов, погрешность определения сопротивления не
превышает 9%. Качественная картина определения температуры также соответ-
ствует ожидаемым результатам – увеличение активного сопротивления ротора Rr
ведет к повышению температуры обмотки ротора.
4.5 Разработка метода определения температуры за счет введения дополни-
тельных составляющих напряжения статора
Определение сопротивления обмотки статора введением дополнительных
составляющих напряжения пригодно для применения как на низких, так и на вы-
соких частотах. Реакция двигателя на подобные воздействия отслеживаема (выде-
ление дополнительных составляющих из общего состава напряжения и тока до-
статочно просто реализуется различными методами, например, преобразованием
Фурье) и одинакова во всех режимах работы. Наиболее просто введение дополни-
тельных составляющих можно осуществить при прямом подключении асинхрон-
ного двигателя к источнику электроэнергии, когда это происходит путем включе-
ния в одну из фаз управляемого полупроводникового ключа. При наличии тири-
сторного тягового преобразователя введение постоянной составляющей может
быть реализовано углом регулирования тиристоров. Аналогичного эффекта
можно добиться и при транзисторных преобразователях с широтно-импульсным
управлением за счет изменения формы и значения управляющих напряжений. От-
метим, что введение постоянной составляющей напряжения позволит определить
значение сопротивления обмотки статора; применение высокочастотной состав-
ляющей позволяет при определенных допущениях определить еще температуру
обмотки ротора.
Используемая зависимость между сопротивлением и температурой хорошо
известна – выражение (4.23).
Рассмотрим вначале методику определения параметров при введении посто-
янной составляющей напряжения [46, 74, 83].
153
В общем случае при питании тягового двигателя от автономного инвертора
напряжения введение постоянной составляющей целесообразно осуществлять по
напряжению всех трех фаз (usa, usb, usc):
𝑢𝑠𝑎см = 𝑈𝑑𝑐 , 𝑢𝑠𝑏
см = −1
2𝑈𝑑𝑐 , 𝑢𝑠𝑐
см = −1
2𝑈𝑑𝑐 , (4.24)
где Udc – величина постоянной составляющей напряжения, прикладываемого к об-
мотке статора.
Постоянная составляющая Udc распределяется по всем фазам в соответствии
с выражением (4.24) и вызывает появление постоянной составляющей Idc в составе
тока. Соотношение между этими составляющими и определяет активное сопро-
тивление обмотки статора:
𝑅𝑠 =𝑈𝑑𝑐𝐼𝑑𝑐
. (4.25)
Зависимость температуры от сопротивления, найденного из уравнения
(4.23):
𝜃 =1
𝛼(𝑅𝑠𝑅𝑠,20
− 1) + 20 ͦС, (4.26)
где α – температурный коэффициент сопротивления, Rs,20 – сопротивление об-
мотки при температуре 20 ͦС.
Выражение (4.26) определяет среднюю температуру обмотки статора, что,
учитывая характер распределения температур по всему активному объему асин-
хронного двигателя, позволяет использовать ее для тепловой защиты и регулиро-
вания теплового состояния, а также коррекции настроек регуляторов системы век-
торного управления тяговым двигателем.
Для уменьшения влияния Idc на показатели качества электропривода
(прежде всего, колебания момента) необходимо обеспечить минимально возмож-
ное значение Idc. Это может быть достигнуто малым значением Udc, при котором
для поддержания точности определения Rs должны быть учтены значения мерт-
вого времени и падения напряжения на силовых ключах инвертора.
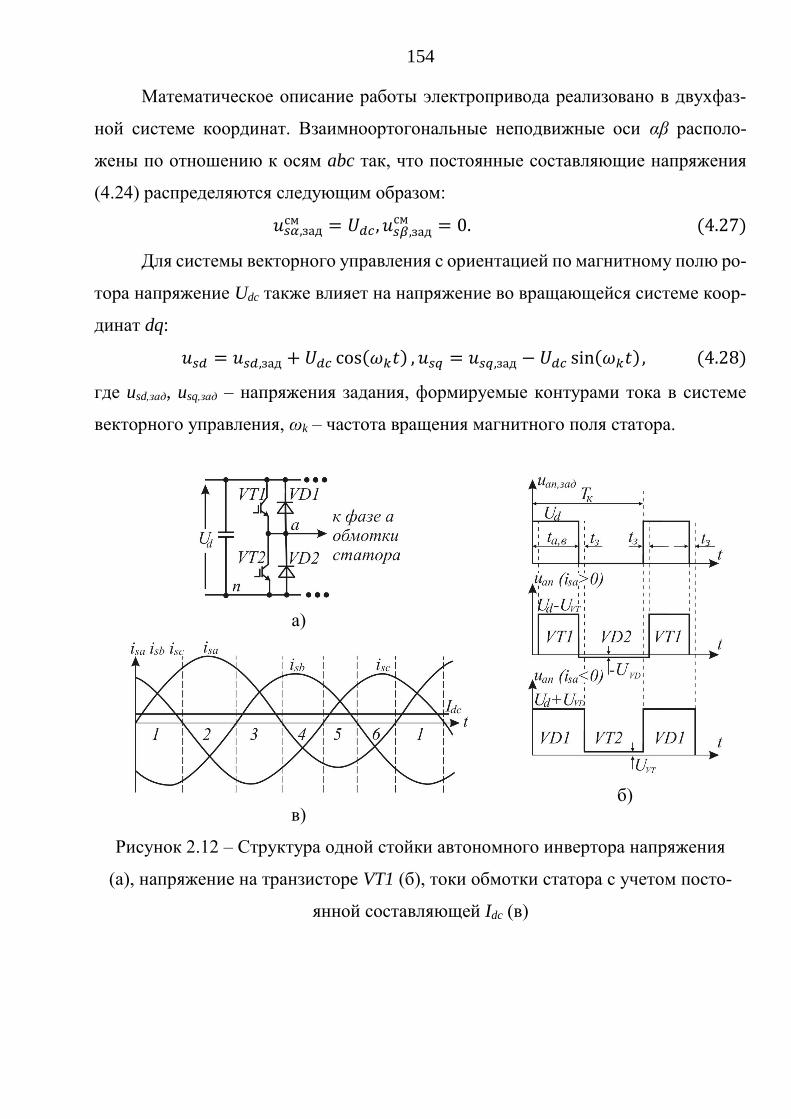
154
Математическое описание работы электропривода реализовано в двухфаз-
ной системе координат. Взаимноортогональные неподвижные оси αβ располо-
жены по отношению к осям abc так, что постоянные составляющие напряжения
(4.24) распределяются следующим образом:
𝑢𝑠𝛼,задсм = 𝑈𝑑𝑐 , 𝑢𝑠𝛽,зад
см = 0. (4.27)
Для системы векторного управления с ориентацией по магнитному полю ро-
тора напряжение Udc также влияет на напряжение во вращающейся системе коор-
динат dq:
𝑢𝑠𝑑 = 𝑢𝑠𝑑,зад + 𝑈𝑑𝑐 cos(𝜔𝑘𝑡) , 𝑢𝑠𝑞 = 𝑢𝑠𝑞,зад − 𝑈𝑑𝑐 sin(𝜔𝑘𝑡), (4.28)
где usd,зад, usq,зад – напряжения задания, формируемые контурами тока в системе
векторного управления, ωk – частота вращения магнитного поля статора.
а)
в)
б)
Рисунок 2.12 – Структура одной стойки автономного инвертора напряжения
(а), напряжение на транзисторе VT1 (б), токи обмотки статора с учетом посто-
янной составляющей Idc (в)

155
Ожидаемое напряжение uаn,зад между фазой а трехфазной обмотки статора
асинхронного двигателя, подключенной по схеме «звезда», и узлом n двухуровне-
вого автономного инвертора напряжения (на рисунке 4.12, а изображено подклю-
чение одной фазы инвертора), показанное на рисунке 4.12, б, для идеальных сило-
вых ключей математически может быть описано так:
𝑢𝑎𝑛,зад =𝑡𝑎,в
𝑇к𝑈𝑑, (4.29)
где ta,в – время подключения фазы а обмотки статора к положительному потенци-
алу звена постоянного тока, Тк – период коммутации силовых ключей, Ud – напря-
жение звена постоянного тока.
Аналогично уравнению (4.29) записываются выражения для напряжений по
оставшимся фазам b и с с временным смещением на 120 ͦэл.
Принимая во внимание наличие мертвого времени tз и падения напряжения
на pn переходах реальных силовых ключах UVT и UVD напряжение (4.29) запишется
следующим образом:
𝑢𝑎𝑛 =𝑡𝑎,в+𝑡з𝑇к
(𝑈𝑑 + 𝑈𝑑𝑐 − 𝑈𝑉𝑇)+𝑈𝑉𝑇 при 𝑖𝑠𝑎 < 0, (4.30)
𝑢𝑎𝑛 =𝑡𝑎,в−𝑡з𝑇к
(𝑈𝑑 + 𝑈𝑑𝑐 − 𝑈𝑉𝑇)+𝑈𝑉𝐷 при 𝑖𝑠𝑎 > 0. (4.31)
Разница между реальным и заданным значениями напряжения составит
𝛥𝑢𝑎𝑛 = 𝑢𝑎𝑛,зад − 𝑢𝑎𝑛. (4.32)
Как видно из выражений (4.30) и (4.31) величина ошибки (4.32) зависит от
знака тока соответствующей фазы. Введение постоянной составляющей оставляет
неизменными все шесть секторов, через которые проходит вектор полного тока
обмотки статора (рисунке 4.12, в).
Введение постоянной составляющей тока Idc посредством напряжения Udc
изменяет длительность подключения фаз к положительному потенциалу звена по-
стоянного тока tj,в:
𝑡𝑗,в = 𝑡𝑗,вм + 𝛥𝑡𝑗
см, 𝑗 = 𝑎, 𝑏, 𝑐, (4.33)
156
где 𝑡𝑗,вм – длительность подключения, определяемая алгоритмами управления си-
нусоидальной или пространственно-векторной широтно-импульсной модуляции,
обеспечивающей необходимые значения амплитуды, частоты и фазы напряжений
usa, usb и usc; 𝛥𝑡𝑗см – изменение длительности подключения, вызванное введением
постоянной составляющей. Аналогично распределению напряжений (4.24) 𝛥𝑡𝑗см
можно вычислить, исходя из соотношений:
𝛥𝑡𝑎см =
𝑈𝑑𝑐𝑈𝑑
𝑇к,𝛥𝑡𝑏см = 𝛥𝑡𝑐
см = −𝛥𝑡𝑎
см
2. (4.34)
Для реализации минимально возможного значения Udc необходимо учиты-
вать ошибку (4.32), из-за которой будет существовать несоответствие между за-
данными значениями напряжений (2.37) и их действительными значениями:
𝛥𝑢𝑠𝛼см = 𝑢𝑠𝛼,зад
см − 𝑢𝑠𝛼см , 𝛥𝑢𝑠𝛽
см = 𝑢𝑠𝛽,задсм − 𝑢𝑠𝛽
см . (4.35)
Очевидно, что значения напряжений (4.35) будут отличаться в зависимости
от текущего сектора тока статора. Кроме этого, время нахождения вектора тока в
каждом из секторов будет отличаться от стандартного Тк/6 из-за введения Idc.
Знаки и величины напряжений 𝛥𝑢𝑠𝛼см и 𝛥𝑢𝑠𝛽
см для каждого временного интервала и
длительности этих секторов вычислены на основании общей теории управления
асинхронными двигателями [123] и выражений (4.29) – (4.34) и приведены в таб-
лице 4.4.
В таблице 4.4 принято обозначение: 𝐼𝑠,зад = √𝑖𝑠𝑑,зад2 + 𝑖𝑠𝑞,зад
2 – заданное зна-
чение тока обмотки статора.
Среднее значение напряжений за период питающего напряжения:
𝛥𝑢𝑠𝛼,срсм =
1
𝑇к∑𝑢𝑠𝛼𝑛
см 𝛥𝑇𝑛,
6
𝑛=1
𝛥𝑢𝑠𝛽,срсм =
1
𝑇к∑𝑢𝑠𝛽𝑛
см 𝛥𝑇𝑛
6
𝑛=1
. (4.36)

157
Таблица 4.4
№ 𝛥𝑢𝑠𝛼см 𝛥𝑢𝑠𝛽
см isa isb isc Расчетные формулы
1
+
+ + - +
𝛥𝑢𝑠𝛼1см = (
1
3+𝛥𝑡𝛼
см
𝑇к) (𝑈𝑉𝑇 − 𝑈𝑉𝐷) +
2𝑡з3𝑇к
(𝑈𝑑 − 𝑈𝑉𝑇 − 𝑈𝑉𝐷)
𝛥𝑢𝑠𝛽1см = −
1
√3(𝑈𝑉𝑇 − 𝑈𝑉𝐷) −
2𝑡з
√3𝑇к(𝑈𝑑 − 𝑈𝑉𝑇 − 𝑈𝑉𝐷)
𝑇1 =𝑇к6+𝑇к2𝜋[𝑎𝑟𝑐𝑠𝑖𝑛 (
𝐼𝑑𝑐𝐼𝑠,зад
) − 𝑎𝑟𝑐𝑠𝑖𝑛 (𝐼𝑑𝑐2𝐼𝑠,зад
)]
2 0 + - -
𝛥𝑢𝑠𝛼2см = (
2
3+𝛥𝑡𝛼
см
𝑇к) (𝑈𝑉𝑇 − 𝑈𝑉𝐷) +
4𝑡з3𝑇к
(𝑈𝑑 − 𝑈𝑉𝑇 − 𝑈𝑉𝐷)
𝛥𝑢𝑠𝛽2см = 0
𝑇2 =𝑇к6+𝑇к𝜋𝑎𝑟𝑐𝑠𝑖𝑛 (
𝐼𝑑𝑐2𝐼𝑠,зад
)
3 - + + -
𝛥𝑢𝑠𝛼1см = (
1
3+𝛥𝑡𝛼
см
𝑇к) (𝑈𝑉𝑇 − 𝑈𝑉𝐷) +
2𝑡з3𝑇к
(𝑈𝑑 − 𝑈𝑉𝑇 − 𝑈𝑉𝐷)
𝛥𝑢𝑠𝛽3см =
1
√3(𝑈𝑉𝑇 − 𝑈𝑉𝐷) +
2𝑡з
√3𝑇к(𝑈𝑑 − 𝑈𝑉𝑇 − 𝑈𝑉𝐷)
𝑇3 =𝑇к6+𝑇к2𝜋[𝑎𝑟𝑐𝑠𝑖𝑛 (
𝐼𝑑𝑐𝐼𝑠,зад
) − 𝑎𝑟𝑐𝑠𝑖𝑛 (𝐼𝑑𝑐2𝐼𝑠,зад
)]
4
-
+ - + -
𝛥𝑢𝑠𝛼4см = (
𝛥𝑡𝛼см
𝑇к−1
3) (𝑈𝑉𝑇 − 𝑈𝑉𝐷) −
2𝑡з3𝑇к
(𝑈𝑑 − 𝑈𝑉𝑇 − 𝑈𝑉𝐷)
𝛥𝑢𝑠𝛽4см = −
1
√3(𝑈𝑉𝑇 − 𝑈𝑉𝐷) −
2𝑡з
√3𝑇к(𝑈𝑑 − 𝑈𝑉𝑇 − 𝑈𝑉𝐷)
𝑇4 =𝑇к6−𝑇к2𝜋[𝑎𝑟𝑐𝑠𝑖𝑛 (
𝐼𝑑𝑐𝐼𝑠,зад
) − 𝑎𝑟𝑐𝑠𝑖𝑛 (𝐼𝑑𝑐2𝐼𝑠,зад
)]
5 0 - + +
𝛥𝑢𝑠𝛼5см = (
𝛥𝑡𝛼см
𝑇к−2
3) (𝑈𝑉𝑇 − 𝑈𝑉𝐷) −
4𝑡з3𝑇к
(𝑈𝑑 − 𝑈𝑉𝑇 − 𝑈𝑉𝐷)
𝛥𝑢𝑠𝛽5см = 0
𝑇5 =𝑇к6−𝑇к𝜋𝑎𝑟𝑐𝑠𝑖𝑛 (
𝐼𝑑𝑐2𝐼𝑠,зад
)
6 - - - +
𝛥𝑢𝑠𝛼6см = (
𝛥𝑡𝛼см
𝑇к−1
3) (𝑈𝑉𝑇 − 𝑈𝑉𝐷) −
2𝑡з3𝑇к
(𝑈𝑑 − 𝑈𝑉𝑇 − 𝑈𝑉𝐷)
𝛥𝑢𝑠𝛽6см =
1
√3(𝑈𝑉𝑇 − 𝑈𝑉𝐷) +
2𝑡з
√3𝑇к(𝑈𝑑 − 𝑈𝑉𝑇 − 𝑈𝑉𝐷)
𝑇6 =𝑇к6−𝑇к2𝜋[𝑎𝑟𝑐𝑠𝑖𝑛 (
𝐼𝑑𝑐𝐼𝑠,зад
) − 𝑎𝑟𝑐𝑠𝑖𝑛 (𝐼𝑑𝑐2𝐼𝑠,зад
)]

158
Смена знаков 𝛥𝑢𝑠𝛼см и 𝛥𝑢𝑠𝛽
см при вращении вектора полного тока статора и
справедливость соотношений Idc/Is,зад→min, arcsin(Idc/Is,зад)≈Idc/Is,зад позволяют пре-
образовать выражение (4.36) к виду:
𝛥𝑢𝑠𝛼,срсм =
𝛥𝑡𝑎см
𝑇к(𝑈𝑉𝑇 − 𝑈𝑉𝐷) +
𝐼𝑑𝑐6𝜋𝐼𝑠,зад
[𝑈𝑉𝐷 − 𝑈𝑉𝑇 + 10𝑡з𝑇к(𝑈𝑑 − 𝑈𝑉𝑇 − 𝑈𝑉𝐷)] , (4.37)
𝛥𝑢𝑠𝛽,срсм = 0. (4.38)
Расчет напряжения по формуле (4.37) не представляет трудностей – все вхо-
дящие в него величины являются либо данными, известными по характеристикам
транзисторов и диодов, либо данными, являющимися результатом предваритель-
ных расчетов и работы системы управления.
Очевидно, что смещение действительного напряжения usα от заданного зна-
чения usα,зад тем меньше, чем меньше время задержки tз силовых ключей и значе-
ние введенной постоянной составляющей тока Idc.
Учитывая таким образом ошибку по напряжению, согласно выражениям
(4.24), (4.27), (4.28) и (4.36), получим корректное значение полной постоянной со-
ставляющей напряжения Udc.
Для реализации системы векторного управления с рассмотренным методом
определения сопротивления и температуры необходимо выполнить следующие
требования: величина тока Idc должна быть полностью управляема, ток Idc не дол-
жен оказывать влияние не регулирование вектора полного тока статора и на ра-
боту контуров регулирования момента и потокосцепления, величина тока Idc и
длительность его ведения должны быть минимальны.
Для выполнения двух первых требований необходима организация контура
регулирования постоянной составляющей тока (рисунок 4.13), который поддер-
живает заданное среднее значение Idc, полученное за период напряжения, и кор-
ректирует значение Udc согласно выражению (4.28). Одновременно с этим среднее
значение Idc за период напряжение вычитается из полного тока статора, подавае-
мого на регуляторы токов isd и isq, что исключает влияние введения постоянной

159
составляющей на работу подчиненных контуров тока и, следовательно, всей си-
стемы векторного управления в целом.
На рисунке 4.13 приняты следующие обозначения. Wрт,d, Wрт,q Wрт,dc – пере-
даточные функции регуляторов токов isd, isq и Idc соответственно; ωr– частота вра-
щения вала ротора; θк – угловое положение магнитного поля статора, θk = ωkt; θ,
t1, t2, η – переменные управления пространственно-векторной модуляции (ПВМ).
Рисунок 4.13 – Структурная схема введения Idc в системе векторного управления
Возможность выполнения третьего требования зависит от быстродействия
и погрешности микропроцессорного устройства и датчика тока и в общем случае
его техническая реализация проблем не представляет.
Выполнена оценка влияния постоянной составляющей тока статора на реа-
лизуемый тяговым двигателем момент в системе векторного управления. Не вда-
ваясь в подробности математических преобразований, приведем конечное выра-
жение для момента двигателя:
𝑀 =3𝑝𝑛𝐿𝜇
2
2𝐿𝑟(𝑖𝑠𝑑𝑖𝑠𝑞 − 𝐼𝑑𝑐𝑖𝑠𝑑 sin(𝜔𝑘𝑡) −
√2
2𝜔𝑘𝑇𝑟𝐼𝑑𝑐2 ), (4.39)
где Tr – электромагнитная постоянная времени обмотки ротора, Tr=Lr/Rr; Rr –со-
противление обмотки ротора, приведенное к обмотке статора
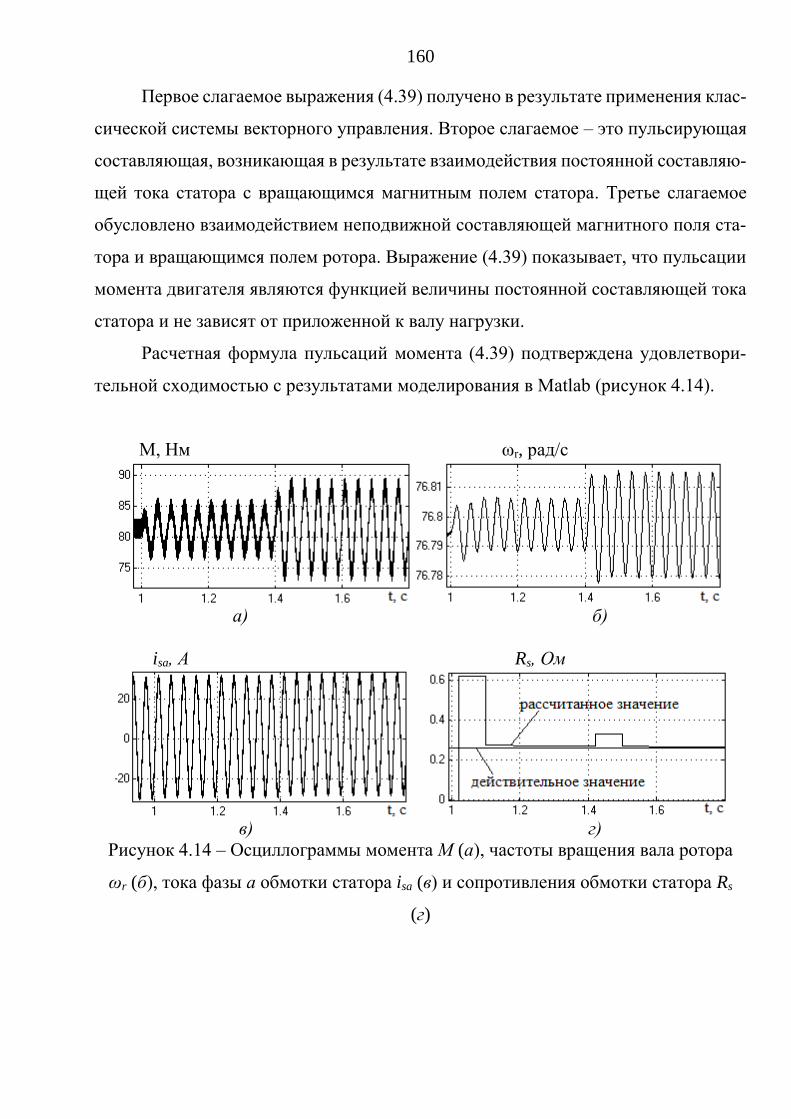
160
Первое слагаемое выражения (4.39) получено в результате применения клас-
сической системы векторного управления. Второе слагаемое – это пульсирующая
составляющая, возникающая в результате взаимодействия постоянной составляю-
щей тока статора с вращающимся магнитным полем статора. Третье слагаемое
обусловлено взаимодействием неподвижной составляющей магнитного поля ста-
тора и вращающимся полем ротора. Выражение (4.39) показывает, что пульсации
момента двигателя являются функцией величины постоянной составляющей тока
статора и не зависят от приложенной к валу нагрузки.
Расчетная формула пульсаций момента (4.39) подтверждена удовлетвори-
тельной сходимостью с результатами моделирования в Matlab (рисунок 4.14).
М, Нм ωr, рад/с
а) б)
isa, А Rs, Ом
в) г)
Рисунок 4.14 – Осциллограммы момента М (а), частоты вращения вала ротора
ωr (б), тока фазы а обмотки статора isa (в) и сопротивления обмотки статора Rs
(г)
161
Был проверен режим работы двигателя мощностью 14 кВт с номинальным
током статора 27 А в диапазоне частот вращения (20...150%)ωr,ном и моментов со-
противления (0...200%)Mном, где ωr,ном, Mном – номинальные значения частоты вра-
щения и момента сопротивления соответственно. При моделировании было про-
изведено введение тока Idc=1,2А при t=1c и тока Idc=2,5А при t=1,4c. Для опреде-
ления постоянной составляющей тока использовалось преобразование Фурье.
Время корректного определения – два периода питающего напряжения.
Установлено, что в результате введения Idc=2,5А амплитуда пульсаций мо-
мента составляет 11% от номинального значения. Колебания частоты вращения
незначительные и не превышают 1 рад/с. Погрешность определения сопротивле-
ния обмотки статора по отношению к его действительному значению составляет
менее 1,2% во всем диапазоне момента сопротивления, частоты вращения и тем-
пературы обмоток. Учитывая время определения сопротивления и температуры и
высокую инерционность двигателя как объекта регулирования температуры, це-
лесообразно осуществлять кратковременное (пять-шесть периодов питающего
напряжения) введение Idc через достаточно длительные промежутки времени за
счет чего будет достигнуто минимальное воздействие на механические и шумовые
характеристики.
Далее исследуем возможность по определению сопротивления и темпера-
туры обмоток посредством добавления к напряжению статора высокочастотной
составляющей напряжения [47, 242], что позволит дополнительно определить со-
противление и температуру обмотки ротора.
Возможность определения сопротивления добавлением высокочастотной
составляющей напряжения следует из принципа работы асинхронного двигателя,
описанного методами теории электропривода. При низкой частоте тока статора fs
индуктивное сопротивление намагничивающего контура 2πfsLμ достаточно мало и
большую часть тока статора is составляет на ток намагничивания iμ. Увеличение
частоты тока статора ведет к перераспределению токов и при высоких значениях
fs практически весь ток статора протекает через обмотку ротора, т.е. ir ≈ is.

162
Электромеханические процессы, обусловленные добавлением к напряже-
нию статора высокочастотной составляющей напряжения, математически можно
записать выражением электрического равновесия на основе эквивалентной схемы
замещения (рисунок 2.6, б):
𝑢𝑠,вч ≈ [(𝑅𝑠+𝑅𝑟) + 𝑗𝜔вч(𝐿𝜎𝑠+𝐿𝜎𝑟)]𝑖𝑠,вч = (𝑅эк + 𝑗𝜔вч𝐿𝜎,эк)𝑖𝑠,вч = 𝑍эк𝑖𝑠,вч, (4.40)
где us,вч – добавленное напряжение высокой частоты; is,вч – ток, обусловленный
напряжением us,вч; ωвч – значение частоты введенного напряжения;
𝑅эк = 𝑅𝑠+𝑅𝑟 , 𝐿𝜎,эк = 𝐿𝜎𝑠+𝐿𝜎𝑟 , 𝑍эк = 𝑅эк + 𝑗𝜔𝑠,вч𝐿𝜎,эк.
Из выражения (4.40) очевидно, что:
𝑅эк = 𝑅𝑒 [𝑢𝑠,вч𝑖𝑠,вч
] =𝑈𝑚,вч𝐼𝑚,вч
cosφвч , (4.41)
𝑋𝜎,эк = 𝜔𝑠,вч𝐿𝜎,эк = 𝐼𝑚 [𝑢𝑠,вч𝑖𝑠,вч
] =𝑈𝑚,вч𝐼𝑚,вч
sinφвч , (4.42)
где Um,вч, Im,вч – амплитуды составляющих напряжения и тока на частоте ωвч, φвч –
фазовый сдвиг между током is,вч и напряжением us,вч на частоте ωвч.
Результаты моделирования показаны на рисунке 4.15. На рисунке 4.15 ε обо-
значает ошибку измерения сопротивления обмотки ротора: ε = (Rr,опр– Rr,ист)/ Rr,ист
∙100%, где Rr,опр и Rr,ист – определенное и истинное значения сопротивления об-
мотки ротора.
Анализ графиков (рисунок 4.15) показывает, что наибольшая погрешность
определения сопротивления Rэк не превышает 7% при наиболее неблагоприятных
условиях. Минимальная ошибка определения сопротивления для выбранного дви-
гателя имеет место в диапазон частот fвч = 150...200 Гц. Следует отметить моно-
тонный характер изменения φвч для всех воздействующих факторов, изменение
момента сопротивления Мс на значение φвч влияния не оказывает. С ростом fвч ско-
рость изменения φвч уменьшается и при fвч > 500 Гц изменение температуры обмо-
ток θ приводит к минимальным изменениям φвч, что накладывает жесткие требо-
вания к информационно-измерительной системе. Погрешность определения со-
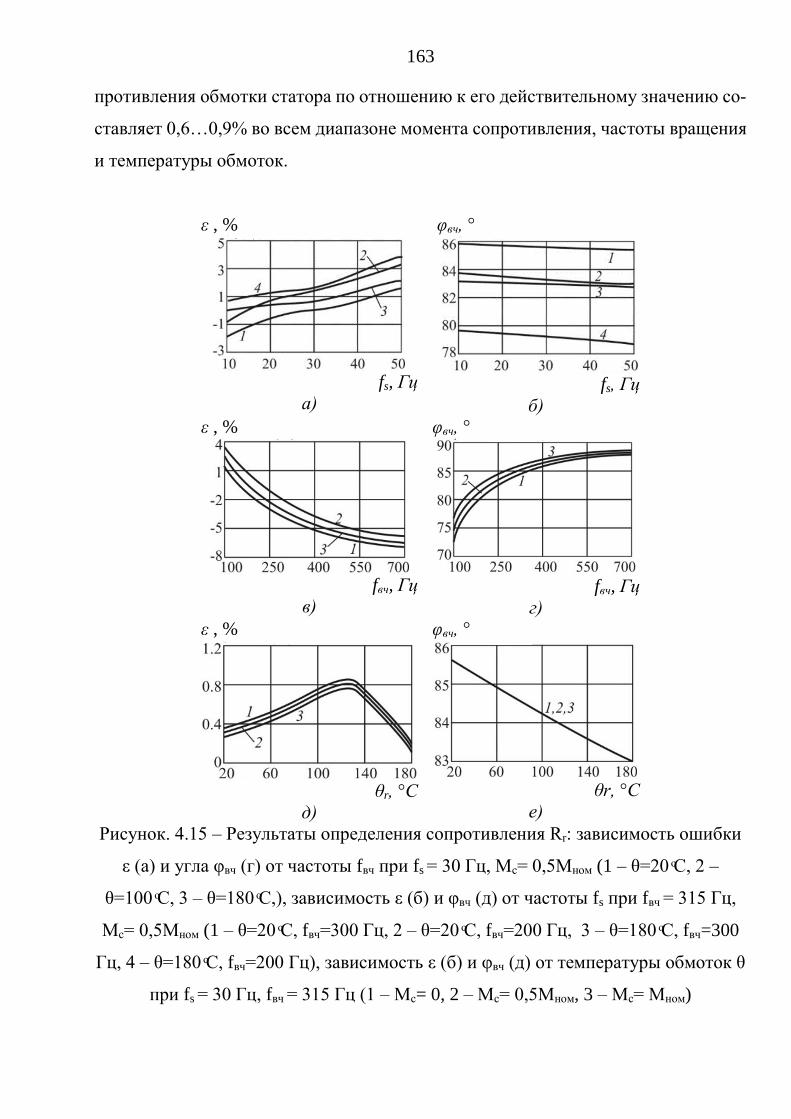
163
противления обмотки статора по отношению к его действительному значению со-
ставляет 0,6…0,9% во всем диапазоне момента сопротивления, частоты вращения
и температуры обмоток.
ε , %
fs, Гц
а)
φвч, °
fs, Гц
б)
ε , %
fвч, Гц
в)
φвч, °
fвч, Гц
г)
ε , %
θr, °С
д)
φвч, °
θr, °С
е)
Рисунок. 4.15 – Результаты определения сопротивления Rr: зависимость ошибки
ε (а) и угла φвч (г) от частоты fвч при fs = 30 Гц, Мс= 0,5Мном (1 – θ=20 ͦС, 2 –
θ=100 ͦС, 3 – θ=180 ͦС,), зависимость ε (б) и φвч (д) от частоты fs при fвч = 315 Гц,
Мс= 0,5Мном (1 – θ=20 ͦС, fвч=300 Гц, 2 – θ=20 ͦС, fвч=200 Гц, 3 – θ=180 ͦС, fвч=300
Гц, 4 – θ=180 ͦС, fвч=200 Гц), зависимость ε (б) и φвч (д) от температуры обмоток θ
при fs = 30 Гц, fвч = 315 Гц (1 – Мс= 0, 2 – Мс= 0,5Мном, 3 – Мс= Мном)
164
В настоящее время формирование требуемого напряжения статора осу-
ществляется полупроводниковыми преобразователями частоты при помощи алго-
ритмов широтно-импульсной модуляции. Все современные электроприводы,
включая тяговые, снабжаются высокоточными и быстродействующими датчи-
ками тока и высокоразрядными АЦП, преобразующими сигнал с датчика тока в
цифровой вид для их последующей обработки в микропроцессорной системе
управления. Датчики напряжения обмотки статора имеются не во всех электро-
приводах, поэтому при отсутствии датчика напряжения из-за неидеальности ха-
рактеристик силовых ключей инверторов напряжения при использовании расчет-
ных формул необходимо учитывать падение напряжения на pn переходах силовых
ключей и время задержки их срабатывания.
Выбор корректной частоты дополнительного сигнала – это ключевой вопрос
при реализации предложенного метода в электроприводах с широтно-импульсной
модуляцией. Ток статора асинхронного двигателя имеет достаточно широкий
спектр высщих гармоник, обусловленный различными причинами. Ниже приве-
ден краткий перечень частот, осуществляющих наибольший вклад в спектральный
состав тока статора [65, 219]:
– частота тока статора fs, причина – напряжение питания;
– частоты временных гармоник nfs (n =1, 2, 3...), причина – автономный ин-
вертор, формирующий напряжение питания по алгоритмам соответствующей мо-
дуляции;
– частоты kNrfr (Nr – число стержней беличьей клетки ротора, k =1, 2, 3...),
причина – неидеальность формы стержней;
– частоты nfs ± fr, причина – неидеальность воздушного зазора, колебания
момента и частоты вращения.
Из всех приведенных частот наибольшие амплитуды тока приходятся на ча-
стоты nfs, причем для нечетных n [219].
Было выполнено имитационное моделирование добавления к напряжению
статора высокочастотной составляющей при применении автономного инвертора
165
напряжения с алгоритмами векторной и скалярной широтно-импульсной модуля-
ции на частоте 10 кГц. При совпадении частот fвч и nfs (n = 2, 3, 4...) погрешность
определения Rэк достигала 95% при n = 3 и снижалась до 24% при n = 9, что ука-
зывает на необходимость исключения значений nfs из диапазона рекомендуемых
частот. Еще один задача, требующая решения при практической реализации до-
бавления высокочастотного напряжения – это определение значения его ампли-
туды. Очевидно, что повышение значения us,вч приводит к соответствующему по-
вышению значения is,вч, что увеличивает точность определения сопротивления.
Вместе с этим, более высокое значение добавленного напряжения приводит к
большим колебаниям момента, что ухудшает как механические, так и шумовые
характеристики двигателя. В данном исследовании результаты моделирования по-
казали, что при значении us,вч = 12 В в диапазоне fвч = 150...250 Гц при fвч ≠ nfs,
погрешность определения Rэк превышает ошибку ε, полученную при синусоидаль-
ном источнике питания не более, чем на 2%. Максимальная погрешность опреде-
ления Rэк составила 7,5%.
Учитывая время определения сопротивления и температуры и высокую
инерционность двигателя как объекта регулирования температуры, целесообразно
осуществлять кратковременное (приблизительно 3…4 периода питающего напря-
жения для каждой составляющей) введение Udc и us,вч через достаточно длитель-
ные промежутки времени (5…10% от тепловой постоянной времени асинхронного
двигателя) за счет чего будет достигнуто минимальное воздействие на механиче-
ские и шумовые характеристики. Также следует отметить, что наиболее просто
реализация предложенного метода определения сопротивления и температуры об-
моток может быть осуществлена в системах скалярного управления асинхронным
двигателем, где отсутствуют контуры регулирования тока. При применении дан-
ного подхода в системах векторного управления необходимо компенсировать до-
полнительные составляющие тока статора для поддержания заданной точности
регулирования основных контуров электропривода.
Результаты моделирования, приведенные на рисунке 4.16, показывают вли-
яние вводимого сигнала на электромеханические координаты электропривода.
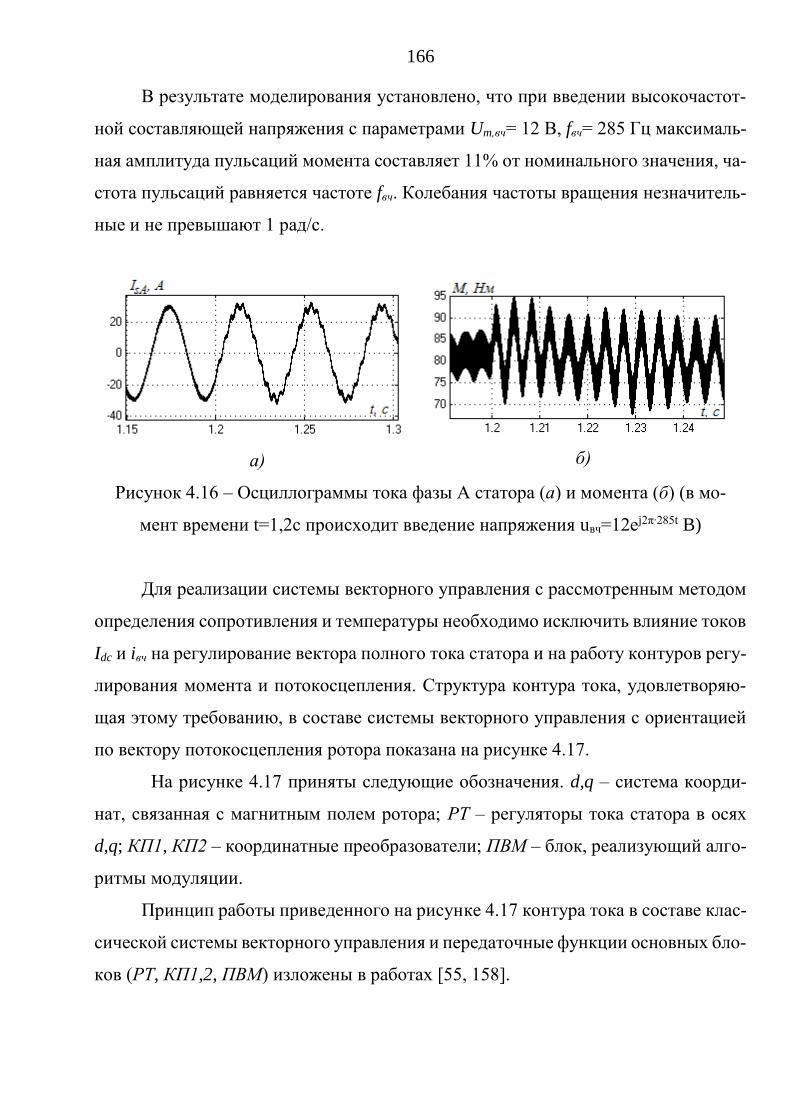
166
В результате моделирования установлено, что при введении высокочастот-
ной составляющей напряжения с параметрами Um,вч= 12 В, fвч= 285 Гц максималь-
ная амплитуда пульсаций момента составляет 11% от номинального значения, ча-
стота пульсаций равняется частоте fвч. Колебания частоты вращения незначитель-
ные и не превышают 1 рад/с.
а)
б)
Рисунок 4.16 – Осциллограммы тока фазы А статора (а) и момента (б) (в мо-
мент времени t=1,2с происходит введение напряжения uвч=12еj2π∙285t B)
Для реализации системы векторного управления с рассмотренным методом
определения сопротивления и температуры необходимо исключить влияние токов
Idc и iвч на регулирование вектора полного тока статора и на работу контуров регу-
лирования момента и потокосцепления. Структура контура тока, удовлетворяю-
щая этому требованию, в составе системы векторного управления с ориентацией
по вектору потокосцепления ротора показана на рисунке 4.17.
На рисунке 4.17 приняты следующие обозначения. d,q – система коорди-
нат, связанная с магнитным полем ротора; РТ – регуляторы тока статора в осях
d,q; КП1, КП2 – координатные преобразователи; ПВМ – блок, реализующий алго-
ритмы модуляции.
Принцип работы приведенного на рисунке 4.17 контура тока в составе клас-
сической системы векторного управления и передаточные функции основных бло-
ков (РТ, КП1,2, ПВМ) изложены в работах [55, 158].
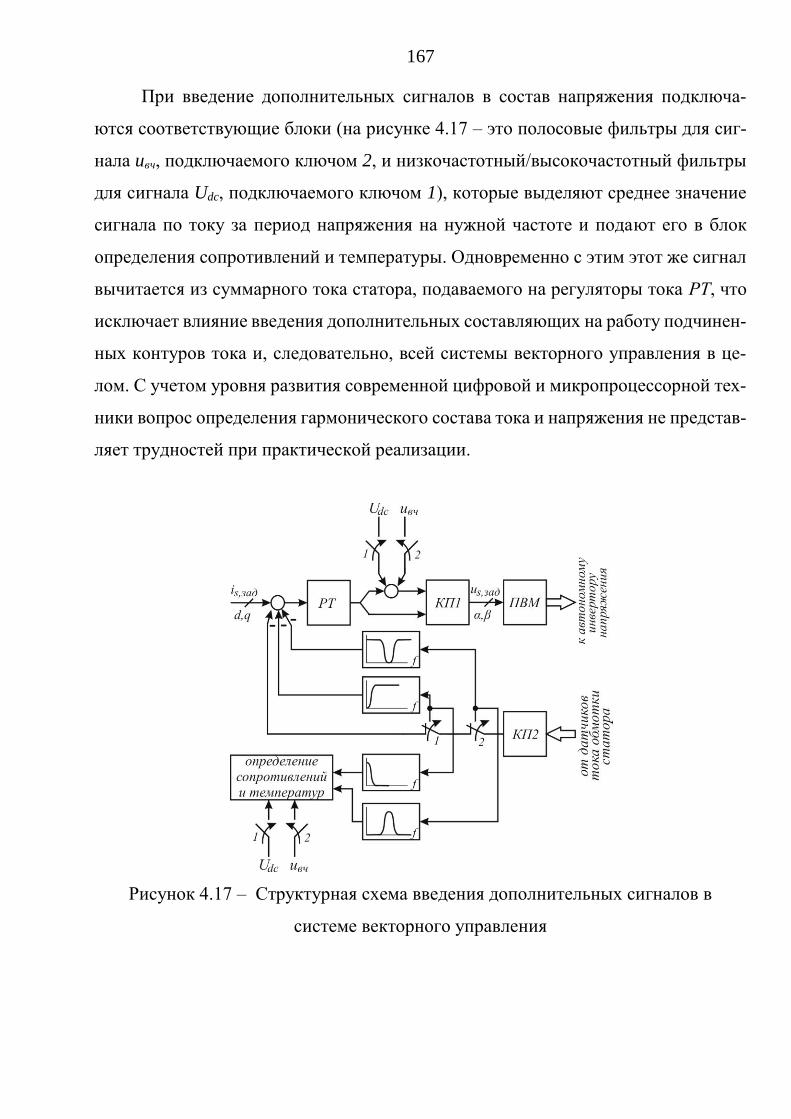
167
При введение дополнительных сигналов в состав напряжения подключа-
ются соответствующие блоки (на рисунке 4.17 – это полосовые фильтры для сиг-
нала uвч, подключаемого ключом 2, и низкочастотный/высокочастотный фильтры
для сигнала Udc, подключаемого ключом 1), которые выделяют среднее значение
сигнала по току за период напряжения на нужной частоте и подают его в блок
определения сопротивлений и температуры. Одновременно с этим этот же сигнал
вычитается из суммарного тока статора, подаваемого на регуляторы тока РТ, что
исключает влияние введения дополнительных составляющих на работу подчинен-
ных контуров тока и, следовательно, всей системы векторного управления в це-
лом. С учетом уровня развития современной цифровой и микропроцессорной тех-
ники вопрос определения гармонического состава тока и напряжения не представ-
ляет трудностей при практической реализации.
Рисунок 4.17 – Структурная схема введения дополнительных сигналов в
системе векторного управления

168
Таким образом, предложенная методика определения активного сопротив-
ления и температуры обмоток статора и ротора посредством введения дополни-
тельных составляющих напряжения не требует наличия никаких дополнительных
датчиков, кроме стандартно принятых датчиков тока и напряжения обмотки ста-
тора. В случае отсутствия датчика напряжения необходимо при расчете спектра
напряжения учитывать основные характеристики силовых ключей инвертора
напряжения, приводимые в технической документации. Работоспособность пред-
ложенного метода подтверждена результатами моделирования.
Выводы по разделу 4
1. Синтезирована эквивалентная тепловая схема замещения асинхронного
двигателя, состоящая из 10 узлов. Приведен метод расчета тепловых сопротивле-
ний отдельных узлов на основании конструктивных особенностей и геометриче-
ских размеров асинхронного двигателя. Результаты моделирования тепловых про-
цессов для двигателя мощностью 14 кВт, являющегося физической моделью тяго-
вого двигателя, при различных нагрузках и параметрах питающего напряжения
показали, что наиболее перегретым узлом асинхронного двигателя являются
стержни ротора. Самыми теплонагруженными элементами статора являются пазо-
вая и лобовая части обмотки, причем величины перегревов достаточно близки
друг к другу. Сравнительная оценка результатов применения эквивалентной теп-
ловой схемы и физической модели асинхронного двигателя показала хорошую
сходимость – относительная разница в определении температур не превышает
6%.
2. Предложена упрощенная тепловая схема замещения для определения тем-
пературы обмотки и магнитопровода статора. Синтезированы уравнения тепло-
вого равновесия. Разработана методика определения значений тепловых сопро-
тивлений статора при помощи лабораторной установки, которая учитывает осо-
бенности охлаждения конкретного типа двигателей и избавляет от необходимости
169
рассмотрения асинхронного двигателя как аэродинамической системы. Апроба-
ция методики проведена для короткозамкнутого асинхронного двигателя мощно-
стью 14 кВт, температура в различных узлах которого измеряется с помощью хро-
мель-копелевых термопар. Результаты экспериментальных исследований позво-
лили установить влияние частоты вращения ротора двигателя и объема охлажда-
ющего воздуха на значения тепловых сопротивлений. Сравнительная оценка ре-
зультатов применения упрощенной эквивалентной тепловой схемы статора с ре-
зультатами применения более детальной схемы всего двигателя, показала хорошее
совпадение результатов – относительная разница в определении средних темпера-
тур не превышает 3%.
3. Разработан метод идентификации активного сопротивления обмотки ро-
тора асинхронного двигателя по сигналам с датчиков тока и напряжения статора
и датчика частоты вращения вала ротора. На основании алгебраических уравне-
ний, описывающих электромеханическое преобразование энергии во вращаю-
щихся взаимно ортогональных осях, синтезирован алгоритм определения сопро-
тивления и температуры обмотки ротора. Результаты имитационного моделирова-
ния предложенного метода в программном комплексе MatLab Simulink для асин-
хронного двигателя мощностью 11 кВт показали высокую сходимость, макси-
мальное расхождение не превысило 9%.
4. Предложен метод определения сопротивления и температуры обмоток
статора и ротора периодическим добавлением к напряжению статора напряжения
высокой частоты и/или постоянной составляющей напряжения, выполнена оценка
его точности. Добавление постоянной составляющей напряжения позволяет опре-
делять сопротивление и температуру обмотки статора; добавление напряжения
высокой частоты позволяет определять сопротивление и температуру обмоток
статора и ротора при их одинаковом нагреве. В случае неодинакового нагрева об-
моток статора и ротора необходимо совместное добавление постоянной и высоко-
частотной составляющих напряжения. Показано влияние неидеальности характе-
ристик силовых ключей инвертора напряжения. Результаты моделирования пока-
зали, что ошибка определения сопротивления обмотки статора составляет 1%, в

170
то время как ошибка определения сопротивления ротора может достигать 6% при
добавлении переменной составляющей напряжения с частотой 150…250 Гц.
Предложен вариант модификации контуров тока для применения синтезирован-
ной методики в электроприводе с системой векторного управления.
171
5 РЕГУЛИРОВАНИЕ ТЕМПЕРАТУРЫ ОБМОТОК ТЯГОВЫХ АСИН-
ХРОННЫХ ДВИГАТЕЛЕЙ И СИЛОВЫХ ПОЛУПРОВОДНИКОВЫХ
ПРИБОРОВ ТЯГОВЫХ ПРЕОБРАЗОВАТЕЛЕЙ ЧАСТОТЫ
5.1 Общие сведения
Как показали результаты исследования в предыдущих разделах, учет тепло-
вого состояния обмоток тягового двигателя в алгоритме работы системы его
управления позволяет достичь улучшения качества управления, в том числе по-
средством уменьшения потерь мощности и, как следствие, пониженных значений
температуры обмоток. При работе с неполной нагрузкой, кроме этого, появляется
возможность снижения потерь мощности в электроприводе вентилятора охлажде-
ния за счет плавного перехода на пониженные частоты вращения посредством
применения предложенной во втором разделе энергосберегающей системы управ-
ления.
Аналогичные рассуждения применимы для тяговых преобразователей ча-
стоты, где наибольшие тепловые перегрузки испытывают силовые полупроводни-
ковые приборы автономного инвертора напряжения, значения которых зависят от
тока статора тягового двигателя, меняющегося в функции нагрузки на валу.
Косвенный контроль и регулирование температуры двигателя и полупро-
водникового преобразователя можно осуществлять за счет применения многокон-
турного регулирования координат тягового электропривода, т.к. наибольшее вли-
яние на возрастание температуры обмоток двигателя оказывают их токи; на воз-
растание температуры полупроводниковых приборов тягового преобразователя
частоты влияет ток статора (выходной ток автономного инвертора), частота ком-
мутации силовых ключей. Все эти переменные величины являются параметрами
или координатами системы управления электропривода, следовательно, введя до-
полнительные внутренние контуры их непосредственного регулирования или

172
введя косвенный критерий их оценки можно, за счет усложнения системы управ-
ления, регулировать значения этих переменных в определенных пределах, регули-
руя тем самым и температуру теплонагруженных элементов электропривода.
Другим, традиционным и более предпочтительным, вариантом является
контроль и регулирование температуры двигателя и полупроводникового преоб-
разователя с помощью систем охлаждения или автоматических систем регулиро-
вания температуры, которые при наличии обратной связи и плавно регулируемого
привода вентилятора как исполнительно-регулирующего устройства обеспечи-
вают уменьшение колебаний температуры при изменении нагрузки и токов двига-
теля.
Функциональная схема автоматической системы регулирования темпера-
туры, пригодная для использования на локомотивах, показана на рисунке 5.1. На
рисунке 5.1 и далее приняты обозначения: λ – возмущающее воздействие; µ - ре-
гулирующее воздействие; х – регулируемая величина; ∆θ – приращение темпера-
туры объекта регулирования температуры; ∆Gвз – приращение подачи охлаждаю-
щего воздуха вентилятором.
Рисунок 5.1 – Функциональная схема автоматической системы регулирования
температуры
Далее в данном разделе приведены результаты разработки вариантов по-
строения автоматических систем регулирования температуры тяговых асинхрон-
ных двигателей и полупроводниковых преобразователей частоты с использова-
нием электропривода с синтезированной ранее энергосберегающей системой ска-
лярного управления, на которые получены патенты на изобретение (патент на
изобретение № 2695152, опубликовано 22.07.2019, бюл. № 2) [138] и полезную

173
модель (патент на полезную модель № 177910, опубликовано 15.03.2018, бюл. №
8) [137]. Также разработана подсистема контроля температуры силовых полупро-
водниковых приборов для системы векторного управления электропривода.
Помимо регулирования температуры тягового электрооборудования на ав-
тономных локомотивах также необходимо регулирование температуры энергети-
ческой установки [23, 52, 113]. Для этих целей автором также предложено приме-
нение электропривода с энергосберегающей системой скалярного управления для
регулирования температуры энергетической установки автономного локомотива,
новизна этого способа подтверждена патентом на изобретение № 2541491, опуб-
ликовано 20.02.2015, бюл. № 5 [92], приведенного в приложении 1.
5.2 Автоматическая система регулирования температуры тягового асин-
хронного двигателя
5.2.1 Система охлаждения тяговых двигателей как объект регулирования
температуры
В настоящее время распространение на магистральных локомотивах полу-
чили системы воздушного охлаждения тяговых двигателей.
Применительно к системам воздушного охлаждения тяговых двигателей как
объекта регулирования температуры возмущающими воздействиями λ являются
потери мощности, вызывающие нагрев асинхронного двигателя, и температура
охлаждающего воздуха. Физически основные потери мощности включают в себя
потери мощности в меди, зависящие от токов обмоток статора и ротора, опреде-
ляемых в функции момента сопротивления, параметров эквивалентной схемы за-
мещения асинхронного двигателя и кривой намагничивания магнитопровода; по-
тери мощности в стали, зависящие от значений напряжения статора и частоты тока
статора, определяемых в функции системы управления; механические потери в
подшипниках, зависящих от частоты вращения ротора. Приняв механические по-
тери постоянными, с помощью математических преобразований и эквивалентных

174
схем замещения (рисунок 2.6 или рисунок 3.13) можно свести потери в меди об-
моток и стали магнитопровода преимущественно в функции соответствующих то-
ков (выражение (2.16) – для электроприводов с системой скалярного управления,
выражение (3.39) – для электроприводов с системой векторного управления). Та-
ким образом, возмущающее воздействие потерь мощности заменяем на воздей-
ствие токов, которые измеримы непосредственно в процессе работы.
Исследованию асинхронного двигателя как объекта регулирования темпера-
туры посвящены работы [11, 12, 16, 72, 90, 117, 136, 139, 149, 172, 186, 225, 235].
Для определения статических и динамических характеристик объекта регу-
лирования температуры использовалась лабораторная установка, описанная в раз-
деле 4.3 и работах [77, 79, 99, 101].
Скорость охлаждающего воздуха измерялась с помощью термоанемометра
AZ Instrument 8908. С учетом площади поперечного сечения воздуховода был осу-
ществлен переход от скорости воздуха к его подаче и построена зависимость по-
дачи охлаждающего воздуха от частоты вращения вала вентилятора, измеряемой
непосредственно.
Для устранения погрешности, связанной с колебаниями температуры окру-
жающего воздуха, эксперименты по определению параметров в установившихся
режимах работы были проведены несколько раз, после чего статические пара-
метры и характеристики были получены как среднее арифметическое значение со-
ответствующих переменных.
Методику исследований динамических параметров и характеристик объекта
регулирования температуры можно описать так [96]:
- переходные характеристики объекта регулирования температуры опреде-
ляются при ступенчатом изменении только одного регулирующего или возмуща-
ющего воздействий (остальные воздействия остаются неизменными);
- значение ступенчатого изменения одного из воздействий не превышает
15% от максимально возможного значения;
- ступенчатого изменения одного из воздействий осуществляется установив-
шемся режиме работы, при достижении нового установившегося режима работы

175
осуществляется ступенчатое изменение того же воздействия с тем же значением
противоположного знака; динамические параметры и характеристики рассчиты-
ваются как среднее арифметическое соответствующих переменных.
Исследования, проведенные на лабораторной установке (см. раздел 4.3) по-
казали, что наибольший перегрев испытывает лобовая часть обмотки статора со
стороны, противоположной подаче воздуха. В связи с этим лимитирующим по
нагреву элементом асинхронного двигателя в данной установке принята лобовая
часть обмотки статора и в данном разделе диссертации обсуждаются результаты,
относящиеся к лобовой части.
Результаты исследований установившихся режимов работы приведены на
рисунках 5.2 и 5.3. Результаты исследований переходных процессов приведены на
рисунке 5.4 (данные, полученные с датчиков температур содержат высокочастот-
ные помехи, которые при обработке были удалены с помощью фильтра нижних
частот). Температура окружающего воздуха в период проведения исследований
составляла 18…25 ºС. Из результатов следует, что система охлаждения асинхрон-
ного двигателя как объект регулирования температуры нелинейна, причем коэф-
фициент передачи kμ уменьшается с увеличением подачи охлаждающего воздуха
Gвз и увеличивается с увеличением тока статора Is.
1 – Is* = 0.9, 2 – Is* = 0.87, 3 – Is* = 0.5, Is* = Is / Is,ном
Рисунок 5.2– Зависимости коэффициента передачи системы охлаждения асин-
хронного двигателя kμ от подачи охлаждающего воздуха Gвз
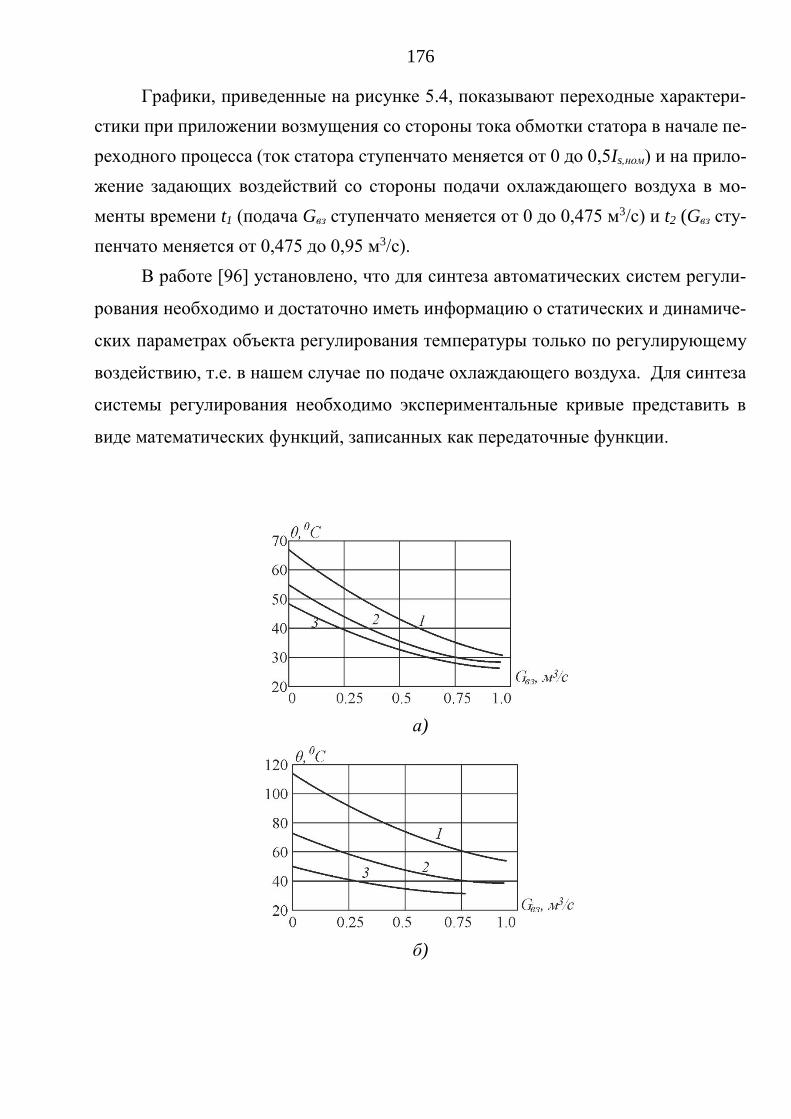
176
Графики, приведенные на рисунке 5.4, показывают переходные характери-
стики при приложении возмущения со стороны тока обмотки статора в начале пе-
реходного процесса (ток статора ступенчато меняется от 0 до 0,5Is,ном) и на прило-
жение задающих воздействий со стороны подачи охлаждающего воздуха в мо-
менты времени t1 (подача Gвз ступенчато меняется от 0 до 0,475 м3/с) и t2 (Gвз сту-
пенчато меняется от 0,475 до 0,95 м3/с).
В работе [96] установлено, что для синтеза автоматических систем регули-
рования необходимо и достаточно иметь информацию о статических и динамиче-
ских параметрах объекта регулирования температуры только по регулирующему
воздействию, т.е. в нашем случае по подаче охлаждающего воздуха. Для синтеза
системы регулирования необходимо экспериментальные кривые представить в
виде математических функций, записанных как передаточные функции.
а)
б)

177
в)
1 – Is* = 0.9, 2 – Is* = 0.7, 3 – Is* = 0.5, Is* = Is / Is,ном
Рисунок 5.3 – Статические характеристики системы охлаждения асинхрон-
ного двигателя для среднего сечения массива статора (а), лобовой части обмотки
статора (б) и короткозамкнутого кольца ротора (в) со стороны, противоположной
подаче воздуха при частоте тока статора 10 Гц и законе управления Us / fs = const
а)
б)

178
в)
Рисунок 5.4 – Графики тепловых переходных процессов для лобовой части
обмотки статора со стороны подачи охлаждающего воздуха (а) и с противопо-
ложной стороны (б), массива статора в среднем сечении (в)
На основании результатов проведенных исследований было принято реше-
ние использовать для аппроксимации тепловых переходных процессов в меди об-
моток передаточную функцию вида:
𝑊(𝑝) =𝑘µ
𝑇𝜇𝑝 + 1, (5.1)
где kµ определяется согласно рисунку 5.2, Тμ – постоянная времени теплового пе-
реходного процесса.
Для определения постоянной времени были применены методы Ольден-
берга и Сарториуса, интерполяционный метод Ормана [7, 96, 235, 237]. Значения
параметров передаточной функции (5.1) для лобовой части обмотки статора со
стороны, противоположной подаче воздуха, для некоторых значений исходных
условий сведены в таблице 5.1.
Таблица 5.1 – Параметры передаточной функции (5.1)
Исходные условия Tμ, c kµ, ºС/м3
/с
Gвз = 0,91 м3/с, Is* = 1, us* = 1, fs* =1 958 42
Gвз = 0,91 м3/с, Is* = 0.5, us* = 1, fs* =1 821 12
Gвз = 0,51 м3/с, Is* = 1 us* = 1, fs* =1 969 130
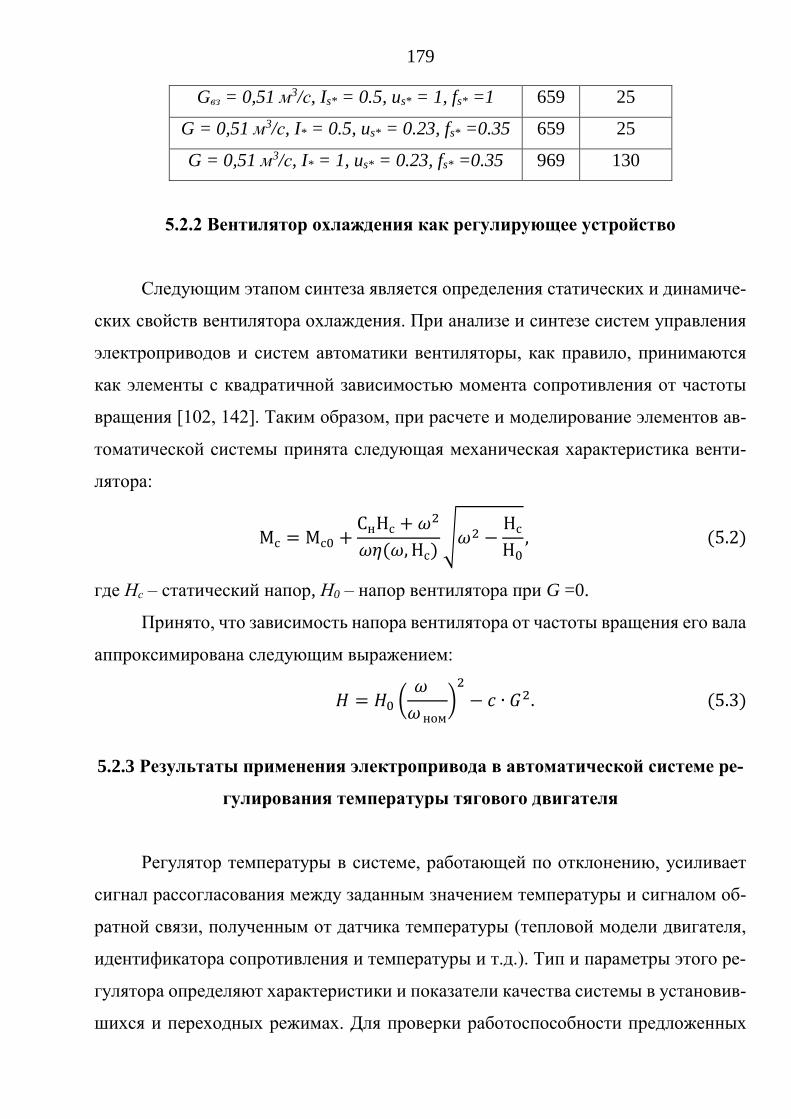
179
Gвз = 0,51 м3/с, Is* = 0.5, us* = 1, fs* =1 659 25
G = 0,51 м3/с, I* = 0.5, us* = 0.23, fs* =0.35 659 25
G = 0,51 м3/с, I* = 1, us* = 0.23, fs* =0.35 969 130
5.2.2 Вентилятор охлаждения как регулирующее устройство
Следующим этапом синтеза является определения статических и динамиче-
ских свойств вентилятора охлаждения. При анализе и синтезе систем управления
электроприводов и систем автоматики вентиляторы, как правило, принимаются
как элементы с квадратичной зависимостью момента сопротивления от частоты
вращения [102, 142]. Таким образом, при расчете и моделирование элементов ав-
томатической системы принята следующая механическая характеристика венти-
лятора:
Мс = Мс0 +СнНс +𝜔
2
𝜔𝜂(𝜔,Нс)√𝜔2 −
НсН0, (5.2)
где Нс – статический напор, Н0 – напор вентилятора при G =0.
Принято, что зависимость напора вентилятора от частоты вращения его вала
аппроксимирована следующим выражением:
𝐻 = 𝐻0 (𝜔
𝜔 ном)2
− 𝑐 ∙ 𝐺2. (5.3)
5.2.3 Результаты применения электропривода в автоматической системе ре-
гулирования температуры тягового двигателя
Регулятор температуры в системе, работающей по отклонению, усиливает
сигнал рассогласования между заданным значением температуры и сигналом об-
ратной связи, полученным от датчика температуры (тепловой модели двигателя,
идентификатора сопротивления и температуры и т.д.). Тип и параметры этого ре-
гулятора определяют характеристики и показатели качества системы в установив-
шихся и переходных режимах. Для проверки работоспособности предложенных

180
решений используем наиболее распространенные регуляторы температуры двух
типов (пропорциональный и пропорционально-интегральный) со следующими пе-
редаточными функциями:
𝑊рт(𝑝) = 𝑘𝑝𝑚, (5.4)
𝑊рт(𝑝) = 𝑘рт +1
𝜏𝑝𝑚𝑝, (5.5)
где kрт – коэффициент усиления (передачи) пропорциональной составляющей ре-
гулятора температуры, τрт – постоянная времени интегральной составляющей ре-
гулятора температуры.
Функциональная схема синтезированной системы показана на рисунке 5.5.
Результаты моделирования переходных процессов показаны на рисунке 5.6.
При выполнении имитационного моделирования синтезированной системы
тяговый двигатель как объект регулирования температуры представлен переда-
точной функцией (5.1), вентилятор охлаждения описан выражениями (5.2) и (5.3),
асинхронный двигатель – выражениями (2.3) – (2.11), система скалярного управ-
ления реализована согласно принципу ее действия (рисунки 2.10 и 2.11).
Рисунок 5.5 – Функциональная схема автоматической системы регулирования
температуры асинхронного двигателя
а)
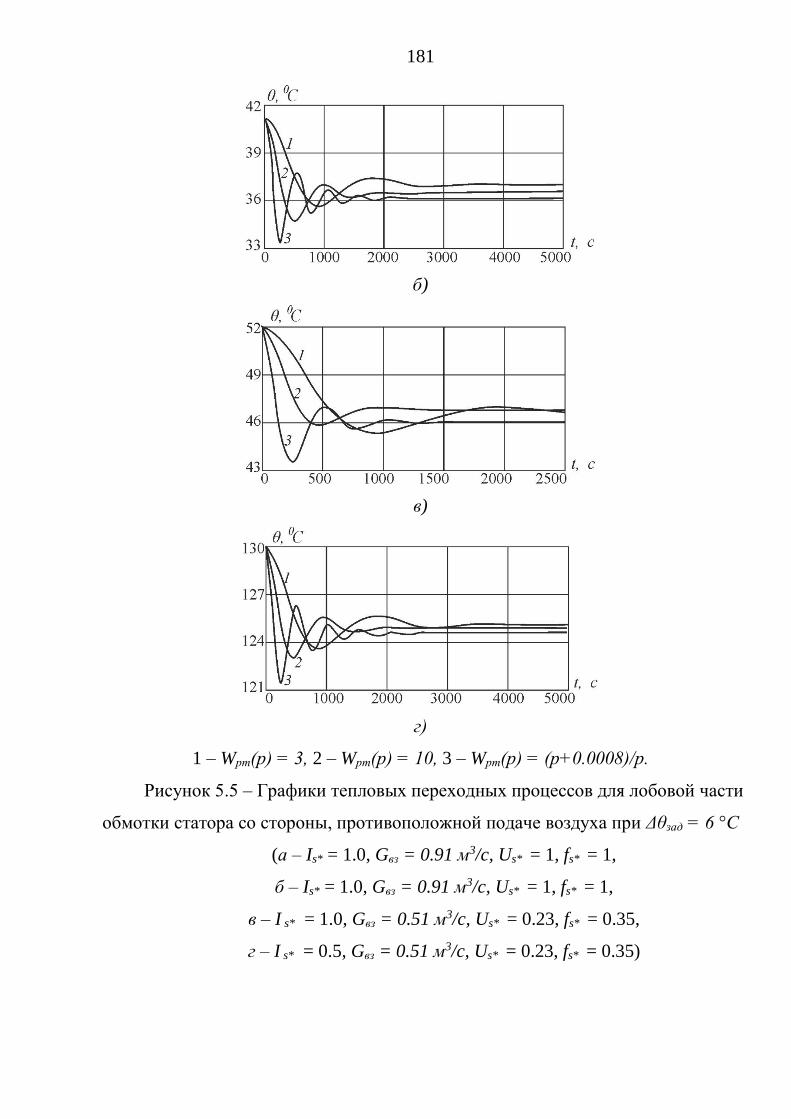
181
б)
в)
г)
1 – Wрт(р) = 3, 2 – Wрт(р) = 10, 3 – Wрт(р) = (р+0.0008)/р.
Рисунок 5.5 – Графики тепловых переходных процессов для лобовой части
обмотки статора со стороны, противоположной подаче воздуха при Δθзад = 6 °С
(а – Is* = 1.0, Gвз = 0.91 м3/c, Us* = 1, fs* = 1,
б – Is* = 1.0, Gвз = 0.91 м3/c, Us* = 1, fs* = 1,
в – I s* = 1.0, Gвз = 0.51 м3/c, Us* = 0.23, fs* = 0.35,
г – I s* = 0.5, Gвз = 0.51 м3/c, Us* = 0.23, fs* = 0.35)

182
Результаты моделирования «в малом» показывают адекватность работы си-
стемы. Введение интегральной составляющей в регулятор повышает порядок
астатизма системы и обеспечивает нулевую ошибку регулирования в установив-
шемся режиме работы. При отработке больших значений изменения температуры
система входит в ограничение по частоте вращения ротора двигателя (вала венти-
лятора) и охлаждение тягового двигателя осуществляется максимально возмож-
ной для данного исполнительно-регулирующего устройства подачей воздуха.
5.3 Автоматическая система регулирования температуры силовых полупро-
водниковых приборов
5.3.1 Система охлаждения силовых полупроводниковых приборов как объ-
ект регулирования температуры
В данном подразделе под силовыми полупроводниковыми приборами будем
понимать транзисторы и диоды автономного инвертора напряжения, входящего в
состав тягового преобразователя частоты. Особенности топологии и характери-
стики отдельных видов автономных инверторов были проанализированы в раз-
деле 3.1.
В отличие от систем охлаждения тяговых двигателей, где альтернативы воз-
душному охлаждению на отечественных локомотивах пока не предвидится (эта
ситуация характерна не только для транспорта, но и для промышленности в целом,
где жидкостное охлаждение также не получило широкого использования – суще-
ствуют технические решения по использованию жидкостного охлаждения некото-
рых высоковольтных двигателей переменного тока, прежде всего зарубежного
производства), в отношении охлаждения полупроводниковых приборов наблюда-
ется большее разнообразие. Анализ методов охлаждения силовых полупроводни-
ков тяговых преобразователей, проведенный в работе [81], позволил сделать сле-
дующую классификацию (рисунок 5.6).

183
Рисунок 1.1 – Классификация методов охлаждения силовых полупроводников
На магистральных локомотивах применение получили системы воздушного
охлаждения (принудительное воздушное) и системы жидкостного охлаждения.
Системы жидкостного охлаждения, несмотря на ряд очевидных преимуществ (вы-
сокая эффективность теплообмена между корпусом полупроводникового прибора
и теплоохладителем), не получили до сих пор широкого распространения на по-
движном составе из-за опасностей протечек, наличия дополнительных гидравли-
ческих элементов (насосы, клапаны, вентили и др.). Система жидкостного (воз-
душно-жидкостного) охлаждения применена на электровозе ЭП10. Отметим, что
повышение теплоотдачи теплообменника осуществляется с помощью установлен-
ных вентиляторов с двигателями мощностью 11 кВт.
В данном подразделе проработаем возможность применения системы воз-
душного охлаждения силовых полупроводников аналогично системе охлаждения
тяговых асинхронных двигателей.
Применительно к системе охлаждения силовых полупроводниковых прибо-
ров как объекту регулирования температуры возмущающими воздействиями λ яв-
ляются потери мощности, вызывающие нагрев полупроводников, и температура
охлаждающего воздуха. Как показали проведенные в разделе 3.1 диссертации ис-
следования, потери мощности в полупроводниках можно поделить на потери в

184
статическом режиме, определяемые в основном током через соответствующие по-
лупроводники, и потери в динамическом режиме, определяемые в основном ча-
стотой коммутации соответствующих полупроводников.
Исследованию полупроводников автономного инвертора напряжения как
объекта регулирования температуры посвящены работы [32, 53, 71, 85, 111, 135,
170, 177, 178, 185, 234, 246, 256].
Анализ существующих методов измерения температуры силовых полупро-
водниковых приборов позволил составить следующую классификацию (таблица
5.2).
Далее для определения статических и динамических характеристик объекта
регулирования температуры воспользуемся математическим аппаратом описания
тепловых процессов на базе эквивалентной тепловой схемы замещения [48]. Эк-
вивалентная тепловая схема одного полупроводникового прибора приведена на
рисунке 5.7, а.
а)
б)
кр – кристалл полупроводника, к – корпус полупроводникового прибора,
то – теплоохладитель, о – охлаждающая среда
Рисунок 5.7 – Упрощенные эквивалентные тепловые схемы полупроводниковых
приборов

185
На рисунке 5.7 приняты обозначения: Rx-y – тепловое сопротивление между
сопряженными узлами х и у, Tх-у – постоянная времени теплового переходного про-
цесса.
Таблица 5.2 – Классификация методов измерения (определения) температуры си-
ловых полупроводниковых приборов
Потери мощности ΔPΣ в эквивалентной схеме представлены источником
тока, температура соответствует потенциалу определенной точки в схеме (превы-
шение температуры соответствует напряжению). Таким образом, уравнение теп-
лового баланса для схемы (рисунок 5.6, а) запишем так:

186
𝜃кр = 𝜃о + 𝛥Р𝛴 [𝑅кр−к (1 − 𝑒−
𝑡𝑇кр−к) + 𝑅к−то (1 − 𝑒
−𝑡
𝑇к−то) + 𝑅то−о (1 − 𝑒−
𝑡𝑇то−о)]. (5.6)
Потери мощности ΔPΣ определяются согласно выражениям, приведенным в
подразделе 3.1 в зависимости от схемы, в которой применяется полупроводник.
Отметим, что в настоящее время в автономных инверторах напряжения при-
меняются полупроводниковые ключи, обладающие двусторонней проводимо-
стью, в связи с чем схему (рисунок 5.7, а) целесообразно привести к схеме (рису-
нок 5.7, б), которая описывает размещение в одном корпусе параллельно соеди-
ненных транзистора VT и диода VD. В этом случае уравнения теплового баланса
для кристалла каждого полупроводника будут такими:
𝜃кр,𝑉𝑇 = 𝜃о + 𝛥Р𝛴,𝑉𝑇 [𝑅кр−к,𝑉𝑇 (1 − 𝑒−
𝑡𝑇кр−к,𝑉𝑇)] + +
+ (𝛥Р𝛴,𝑉𝑇 + 𝛥Р𝛴,𝑉𝐷) [𝑅к−то (1 − 𝑒−
𝑡𝑇к−то) + 𝑅то−о (1 − 𝑒
−𝑡
𝑇то−о)]. (5.7)
𝜃кр,𝑉𝐷 = 𝜃о + 𝛥Р𝛴,𝑉𝐷 [𝑅кр−к,𝑉𝐷 (1 − 𝑒−
𝑡𝑇кр−к,𝑉𝐷)] + +
+ (𝛥Р𝛴,𝑉𝑇 + 𝛥Р𝛴,𝑉𝐷) [𝑅к−то (1 − 𝑒−
𝑡𝑇к−то) + 𝑅то−о (1 − 𝑒
−𝑡
𝑇то−о)]. (5.8)
Потери мощности в транзисторах и диодах двухуровневого инвертора могут
быть вычислены по формулам (3.26) – (3.28), в транзисторах и диодах трехуров-
невого инвертора – по формулам (3.15), (2.24), (3.25).
Для уточнения величины граничного падения напряжения перехода коллек-
тор-эмиттер Uпр при прямом токе можно применить следующую зависимость
этого напряжения от тока i и температуры кристалла θкр [89, 91, 144, 148]:
𝑈пр(𝑖, 𝜃) = 1,21 + 9,93 ∙ 10−3𝑖 − 1,88 ∙ 10−3𝜃кр − 2,54 ∙ 10−5𝑖2 + 3.22 ∙ 10−5𝑖𝜃кр. (5.9)
На основании выражения (5.6) запишем передаточную функцию по потерям
мощности как возмущающему воздействию:
𝑊𝛥Р𝛴(𝑝) =
𝛥𝜃кр(𝑝)
𝛥Р𝛴(𝑝)=∑𝑍𝑥−𝑦 (𝑝) =
𝑅кр−к
𝑇кр−к𝑝 + 1+
𝑅к−то𝑇к−то𝑝 + 1
+𝑅то−ос
𝑇то−ос𝑝 + 1. (5.10)
После математических преобразований передаточную функцию (5.10) запи-
шем в виде:
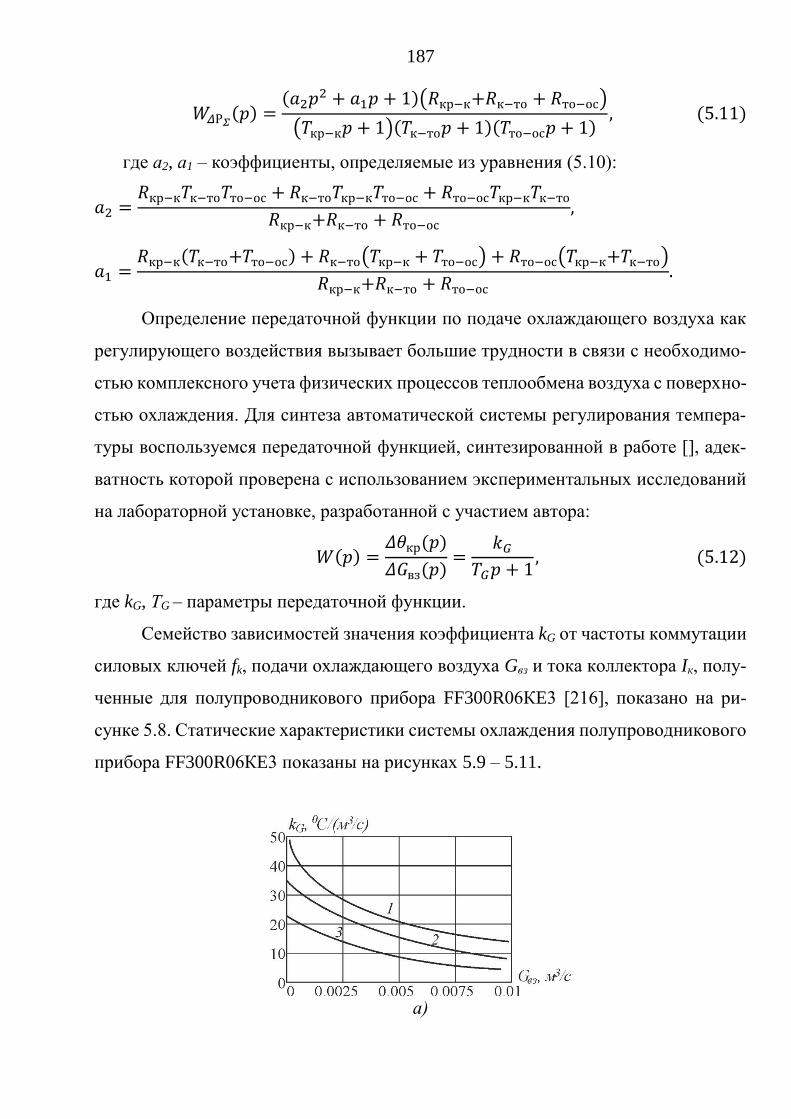
187
𝑊𝛥Р𝛴(𝑝) =(𝑎2𝑝
2 + 𝑎1𝑝 + 1)(𝑅кр−к+𝑅к−то + 𝑅то−ос)
(𝑇кр−к𝑝 + 1)(𝑇к−то𝑝 + 1)(𝑇то−ос𝑝 + 1), (5.11)
где а2, а1 – коэффициенты, определяемые из уравнения (5.10):
𝑎2 =𝑅кр−к𝑇к−то𝑇то−ос + 𝑅к−то𝑇кр−к𝑇то−ос + 𝑅то−ос𝑇кр−к𝑇к−то
𝑅кр−к+𝑅к−то + 𝑅то−ос,
𝑎1 =𝑅кр−к(𝑇к−то+𝑇то−ос) + 𝑅к−то(𝑇кр−к + 𝑇то−ос) + 𝑅то−ос(𝑇кр−к+𝑇к−то)
𝑅кр−к+𝑅к−то + 𝑅то−ос.
Определение передаточной функции по подаче охлаждающего воздуха как
регулирующего воздействия вызывает большие трудности в связи с необходимо-
стью комплексного учета физических процессов теплообмена воздуха с поверхно-
стью охлаждения. Для синтеза автоматической системы регулирования темпера-
туры воспользуемся передаточной функцией, синтезированной в работе [], адек-
ватность которой проверена с использованием экспериментальных исследований
на лабораторной установке, разработанной с участием автора:
𝑊(𝑝) =𝛥𝜃кр(𝑝)
𝛥𝐺вз(𝑝)=
𝑘𝐺𝑇𝐺𝑝 + 1
, (5.12)
где kG, ТG – параметры передаточной функции.
Семейство зависимостей значения коэффициента kG от частоты коммутации
силовых ключей fk, подачи охлаждающего воздуха Gвз и тока коллектора Iк, полу-
ченные для полупроводникового прибора FF300R06КE3 [216], показано на ри-
сунке 5.8. Статические характеристики системы охлаждения полупроводникового
прибора FF300R06КE3 показаны на рисунках 5.9 – 5.11.
а)

188
б)
Рисунок 5.8 – Зависимости коэффициента передачи системы охлаждения полу-
проводникового прибора kG от подачи охлаждающего воздуха Gвз
(а – fk = 4 кГц, 1 – Iк* = 0.9, 2 – Iк* = 0.7, 3 – Iк* = 0.5, Iк* = Iк / Iк,ном;
б – Iк* = 0.9, 1 – fk = 4 кГц, 2 – fk = 2 кГц, 3 – fk = 1 кГц)
Рисунок 5.8 – Зависимость температуры корпуса полупроводникового прибора
от тока коллектора Iк при частоте коммутации fk = 4 кГц
(1,2 – подача охлаждающего воздуха Gвз = 0,
3,4 – подача охлаждающего воздуха Gвз = 10-2 м3/с)
Рисунок 5.9 – Зависимость температуры корпуса полупроводникового прибора
от подачи охлаждающего воздуха Gвз при частоте коммутации fk = 4 кГц
(1,2 – ток коллектора Iк = 110 А, 3,4– ток коллектора Iк = 60 А)
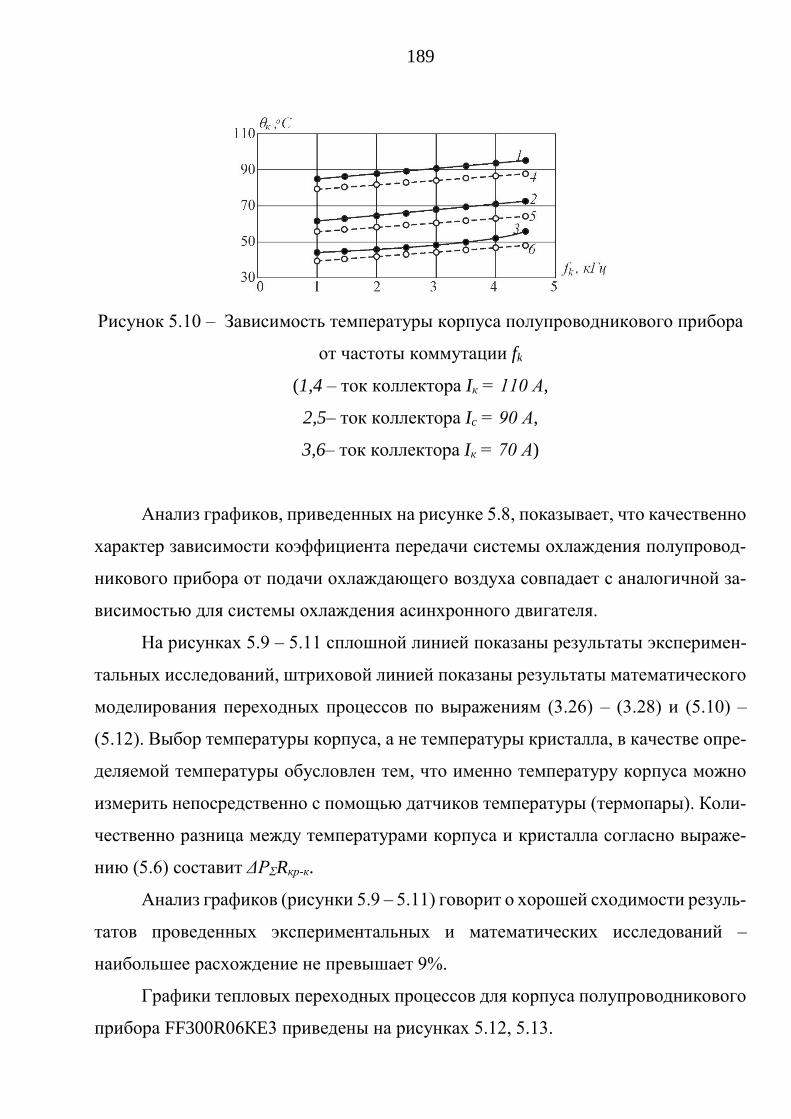
189
Рисунок 5.10 – Зависимость температуры корпуса полупроводникового прибора
от частоты коммутации fk
(1,4 – ток коллектора Iк = 110 А,
2,5– ток коллектора Ic = 90 А,
3,6– ток коллектора Iк = 70 А)
Анализ графиков, приведенных на рисунке 5.8, показывает, что качественно
характер зависимости коэффициента передачи системы охлаждения полупровод-
никового прибора от подачи охлаждающего воздуха совпадает с аналогичной за-
висимостью для системы охлаждения асинхронного двигателя.
На рисунках 5.9 – 5.11 сплошной линией показаны результаты эксперимен-
тальных исследований, штриховой линией показаны результаты математического
моделирования переходных процессов по выражениям (3.26) – (3.28) и (5.10) –
(5.12). Выбор температуры корпуса, а не температуры кристалла, в качестве опре-
деляемой температуры обусловлен тем, что именно температуру корпуса можно
измерить непосредственно с помощью датчиков температуры (термопары). Коли-
чественно разница между температурами корпуса и кристалла согласно выраже-
нию (5.6) составит ΔРΣRкр-к.
Анализ графиков (рисунки 5.9 – 5.11) говорит о хорошей сходимости резуль-
татов проведенных экспериментальных и математических исследований –
наибольшее расхождение не превышает 9%.
Графики тепловых переходных процессов для корпуса полупроводникового
прибора FF300R06КE3 приведены на рисунках 5.12, 5.13.

190
а) б)
Рисунок 5.12 – Графики тепловых переходных процессов для корпуса полупро-
водникового прибора (частота коммутации fk = 4 кГц, начальное значение тока
коллектора Iк = 0.35Iк.ном, конечное значение – Iк = 0.3Iк.ном) (a – результаты экспе-
риментальных исследований, б – результаты математического моделирования)
а) б)
Рисунок 5.13 – Графики тепловых переходных процессов для корпуса полупро-
водникового прибора (ток коллектора Iк = 0.35Iк.ном, частота коммутации fk = 4
кГц, начальное значение подачи охлаждающего воздуха Gвз = 0, конечное значе-
ние – Gвз = 0.01 м3/с) (a – результаты экспериментальных исследований, б – ре-
зультаты математического моделирования)
Графики тепловых переходных процессов, полученные в результате экспе-
риментальных исследований (рисунки 5.12, а и 5.13, а), не содержат высокочастот-
ной составляющей, обусловленной коммутацией силовых ключей и вызывающей
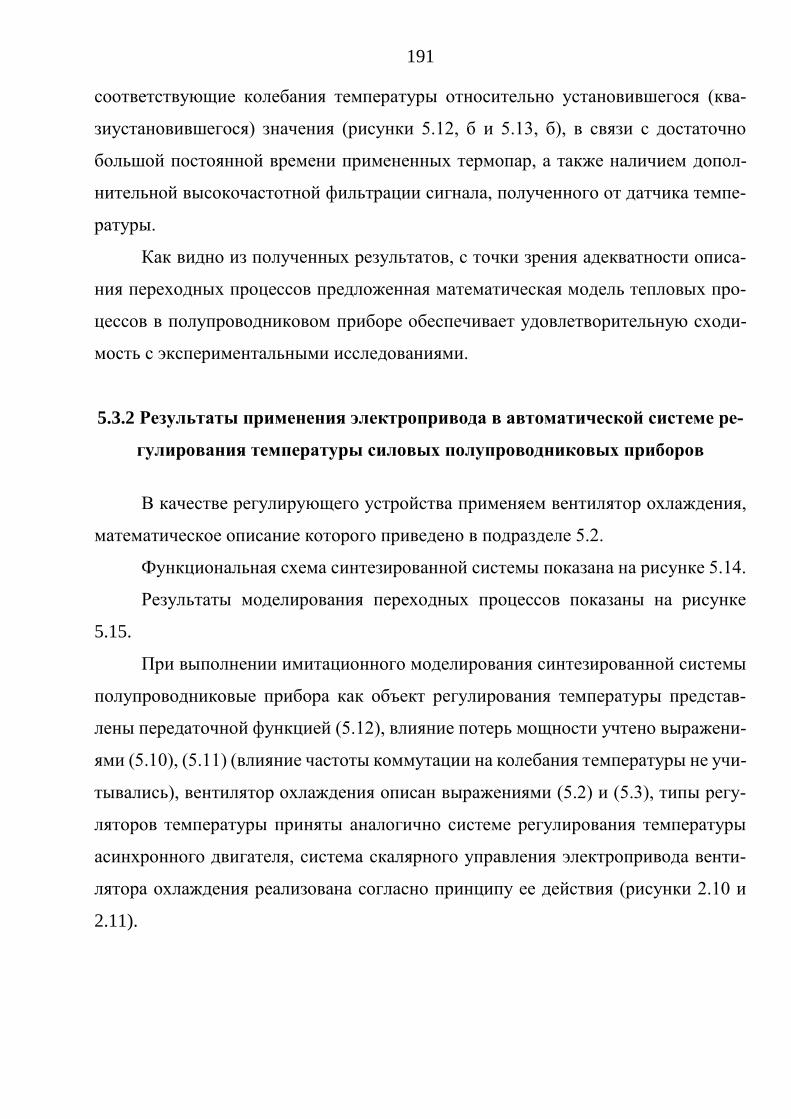
191
соответствующие колебания температуры относительно установившегося (ква-
зиустановившегося) значения (рисунки 5.12, б и 5.13, б), в связи с достаточно
большой постоянной времени примененных термопар, а также наличием допол-
нительной высокочастотной фильтрации сигнала, полученного от датчика темпе-
ратуры.
Как видно из полученных результатов, с точки зрения адекватности описа-
ния переходных процессов предложенная математическая модель тепловых про-
цессов в полупроводниковом приборе обеспечивает удовлетворительную сходи-
мость с экспериментальными исследованиями.
5.3.2 Результаты применения электропривода в автоматической системе ре-
гулирования температуры силовых полупроводниковых приборов
В качестве регулирующего устройства применяем вентилятор охлаждения,
математическое описание которого приведено в подразделе 5.2.
Функциональная схема синтезированной системы показана на рисунке 5.14.
Результаты моделирования переходных процессов показаны на рисунке
5.15.
При выполнении имитационного моделирования синтезированной системы
полупроводниковые прибора как объект регулирования температуры представ-
лены передаточной функцией (5.12), влияние потерь мощности учтено выражени-
ями (5.10), (5.11) (влияние частоты коммутации на колебания температуры не учи-
тывались), вентилятор охлаждения описан выражениями (5.2) и (5.3), типы регу-
ляторов температуры приняты аналогично системе регулирования температуры
асинхронного двигателя, система скалярного управления электропривода венти-
лятора охлаждения реализована согласно принципу ее действия (рисунки 2.10 и
2.11).

192
Рисунок 5.14 – Функциональная схема автоматической системы регулирования
температуры силового полупроводникового прибора
а)
б)
193
в)
1 – Wрт(р) = 20, 2 – Wрт(р) = (р+0,005)/0,04р, 3 – Wрт(р) = (р+0,015)/0,075р
Рисунок 5.15 – Графики тепловых переходных процессов для кристалла по-
лупроводникового прибора при Δθкр,зад = 5 °С
(а – потери мощности ΔPΣ = 0,8 ΔPΣ ном, подача воздуха Gвз = 0,064 м3/с;
б – потери мощности ΔPΣ = 0,6 ΔPΣ ном, подача воздуха Gвз = 0,084 м3/с;
в – потери мощности ΔPΣ = 0,4 ΔPΣ ном, подача воздуха Gвз = 0,104 м3/с)
Результаты моделирования разработанной системы «в малом» говорят об
адекватности работы системы с точки зрения полученных переходных процессов
и ошибки в установившемся режиме работы. Поведение системы при отработке
больших значений изменения температуры аналогично системе регулирования
температуры тяговых двигателей.
Следует отметить тот факт, что даже при отсутствии плавного регулирова-
ния температуры, применение электропривода с преобразователем частоты и
энергосберегающей системой скалярного управления дает положительный ре-
зультат по экономии электроэнергии (дизельного топлива) при использовании
ступенчатого регулирования подачи охлаждающего воздуха, т.к. в этом случае
при работе на пониженных частотах вращения с пониженным моментом сопро-
тивления происходит поиск оптимального значения напряжения статора при за-
данной частоте тока статора, что обеспечивает минимизацию потерь мощности в
асинхронном двигателе вентилятора охлаждения.
194
Дальнейшую перспективу в этой области имеют разработки систем с введе-
нием дополнительного регулирующего воздействия по частоте коммутации fk, что
обеспечит повышение диапазона регулирования температуры одновременно с вы-
соким быстродействием контура регулирования. Исследованиям в данном направ-
лении посвящены ряд работ [26, 97, 98, 177, 178, 179, 209, 212, 231].
В следующем подразделе проанализируем возможность регулирования тем-
пературы силовых полупроводниковых приборов автономного инвертора напря-
жения посредством изменения их частоты коммутации при работе системы управ-
ления тягового электропривода.
5.3 Синтез системы контроля температуры силовых полупроводниковых
приборов для системы векторного управления электропривода
Приведенные ранее в этом и предыдущем разделах результаты позволяют
сделать вывод о возможности косвенного контроля температуры теплонагружен-
ных элементов тягового электропривода посредством управления величиной по-
терь мощности, вызывающих нагрев, т.е. по сути управлением значением токов
для двигателя и токов и частоты коммутации для преобразователя частоты. Точ-
ность данного подхода зависит от целого ряда внешних факторов, прежде всего, –
это условия охлаждения, т.к. контролируя значения токов, частоты коммутации и
потерь мощности, можно отслеживать процессы нагрева, но не охлаждения, по-
этому расширения области применения этого подхода необходима информация о
значении регулирующих (регулирующего) воздействия системы охлаждения, т.е.
для систем воздушного охлаждения речь идет о подаче охлаждающего воздуха.
Кроме этого, регулирование токов двигателя в тяговом электроприводе осуществ-
ляется в первую очередь для реализации заданного момента, обеспечивающего
требуемые режимы тяги и торможения и формирование желаемых переходных
процессов [5, 33, 36, 38, 51, 131, 167, 169, 182, 183]. Таким образом, применение
разработанной системы управления целесообразно в установившихся режимах ра-
боты.

195
Запишем значения токов транзисторов iVT и диодов iVD (рисунок 3.1), завися-
щих от направления тока s(ia)=±1 (для прямого и обратного тока для соответству-
ющего полупроводника), в виде функций переключения для фазы А:
|𝑖𝑉𝑇1𝑖𝑉𝑇2
| =1
2𝑖𝑎 |1 + 𝑆𝑎1 − 𝑆𝑎
|, (5.13)
|𝑖𝑉𝐷1𝑖𝑉𝐷2
| =1
2𝑖𝑎 |1 − 𝑆𝑎1 + 𝑆𝑎
|. (5.14)
Потери в статическом режиме работы за период коммутации транзисторов
зависят от коэффициента модуляции µ. Соотношение между временем проводи-
мости транзистора Тпр и периодом коммутации Тk можно записать так:
𝑇пр
𝑇𝑘=1 + 𝑘µ
2, (5.15)
где k=1 – для полупроводниковых ключей VT1 и VD1, k=-1 – для VT2 и VD2.
Тогда с учетом (5.15) потери в статическом режиме работы за период ком-
мутации можно записать так:
∆Рст,𝑉𝑇 = 𝑈пр(𝑖, 𝜃)𝑖𝑇пр
𝑇𝑘, (5.16)
∆Рст,𝑉𝐷 = 𝑈пр(𝑖, 𝜃)𝑖𝑇пр
𝑇𝑘. (5.17)
Потери в транзисторе в динамическом режиме:
∆Рдин,𝑉𝑇 = (Евкл(𝑖) + Евыкл(𝑖))𝑈𝑑𝑐
𝑈𝑑𝑐,ном
1
𝑇𝑘. (5.18)
Потери диодов в динамическом режиме работы, обусловленные восстанов-
лением обратного сопротивления:
∆Рвосс,𝑉𝐷 = Евосс(𝑖)𝑈𝑑𝑐
𝑈𝑑𝑐,ном
1
𝑇𝑘, (5.19)
Цель системы управления с контролем температуры силовых полупровод-
никовых приборов – защита наиболее уязвимых в тепловом отношении элементов
или узлов электропривода от перегрева. Это достигается за счет контроля темпе-
ратур теплонагруженных элементов (в нашем случае – полупроводников автоном-
ного инвертора напряжения) в реальном времени и ограничения лимитирующих

196
по нагреву воздействий. Для полупроводников инвертора напряжения – это ча-
стота коммутации fk и ток нагрузки I.
Когда температура кристалла силового ключа θкр приближается к предельно
допустимому значению θкр,доп, первая реакция системы – уменьшение частоты
коммутации силовых ключей fk,зад = 1/ Тk,зад. В схеме для этого применен трехпо-
зиционный релейный регулятор с гистерезисом.
Величина максимально допустимого тока определяется таким образом,
чтобы обеспечить максимально допустимую скорость нарастания температуры
dθ/dt за время, определяемое постоянной времени регулирования Трег:
|𝐼|кр = |𝐼| + (𝑑𝜃
𝑑𝑡 з−𝑑𝜃
𝑑𝑡)𝑇
𝑇рег, (5.20)
𝑑𝜃
𝑑𝑡 з=𝜃доп − 𝜃
𝜏, (5.21)
где θдоп – предельно допустимая температуры теплонагруженного элемента, τ –
постоянная времени нагрева этого элемента.
Применив описанный алгоритм работы ко всем теплонагруженным элемен-
там, получим максимальное ограничение тока, удовлетворяющее требованиям
наиболее критично нагретого элемента.
Структура системы управления тепловым состоянием полупроводников ин-
вертора показана на рисунке 5.16.
Входными сигналами для системы управления тепловым состоянием полу-
проводников инвертора являются температуры кристаллов полупроводников, ко-
торые могут быть получены на основе эквивалентной схемы замещения (рисунок
5.7, б) по выражениям (5.7) и (5.8), и ток нагрузки I, т.е. ток статора тягового дви-
гателя Is. Выходные сигналы (задание на частоту коммутации fk и величина мак-
симального тока Imax) поступают в систему формирования выходного напряжения
автономного инвертора напряжения, реализующей алгоритмы скалярной или век-
торной широтно-импульсной модуляции, и в систему векторного управления, в
которой максимальное значение тока учитывается в выражении (3.46).

197
Рисунок 5.16 – Структура системы управления тепловым состоянием сило-
вых полупроводниковых приборов
Очевидно, что величина максимального тока является одной из функций мо-
мента, развиваемого на валу двигателя, следовательно, формирование этой вели-
чины в функции теплового состояния полупроводников может вступать в проти-
воречие с внешними контурами системы управления тягового электропривода, по-
этому при интеграции разработанной подсистемы в тяговый электропривод целе-
сообразно ограничиться регулированием частоты коммутации fk.
Выводы по разделу 5
1. Разработаны автоматические системы регулирования температуры тяго-
вого асинхронного двигателя и силовых полупроводниковых приборов автоном-
ного инвертора напряжения тягового преобразователя частоты, содержащие элек-
тропривод вентилятора охлаждения с асинхронным двигателем и энергосберега-
ющей системой скалярного управления, обеспечивающие расширение диапазона
изменения частоты вращения вала вентилятора, а, следовательно, снижение диа-
пазона изменения регулируемой температуры.
2. Разработана система управления, осуществляющая уменьшение потерь
мощности в силовых полупроводниковых приборах автономного инвертора
напряжения тягового преобразователя частоты и контроль их температуры, пред-

198
назначенная для использования в составе системы управления тягового электро-
привода. Входными сигналами системы являются температуры кристаллов сило-
вых полупроводниковых приборов и ток статора тягового двигателя. Выходными
сигналами системы являются задание на частоту коммутации fk силовых полупро-
водниковых приборов и задание на величину максимального тока Is,max.
199
6 ЭКОНОМИЧЕСКАЯ ЭФФЕКТИВНОСТЬ ПРИМЕНЕНИЯ
ПРЕДЛАГАЕМЫХ РЕШЕНИЙ
Основной экономический эффект от применения предлагаемых решений в
разделах 2 и 3 связан с уменьшением потерь мощности при работе тягового и вспо-
могательного электроприводов; решения, предложенные в 4 разделе обеспечи-
вают повышение точности определения температуры обмоток тягового двигателя,
что служит основной для разработки автоматических систем плавного регулиро-
вания температуры в 5 разделе, применение которых, помимо уменьшения диапа-
зона изменения и колебания температуры объектов регулирования температуры,
позволяет переходить на пониженные частоты вращения вентилятора охлажде-
ния, а вместе с этим и в зону частичных нагрузок его электропривода, что обеспе-
чивает эффективность использования энергосберегающей системы скалярного
управления асинхронного двигателя.
Оценка экономической эффективности предложенных решений зависит,
прежде всего, от режима работы тягового электропривода, наибольший эффект от
применения синтезированной в подразделе 3.2 системы управления достигается
при работе на частотах вращения, меньших номинальной и близких к ней по зна-
чению. Наибольший эффект от применения синтезированной в подразделе 2.3 си-
стемы скалярного управления в составе автоматической системы регулирования
температуры тяговых двигателя и преобразователя частоты мощности достигается
при неполной загрузке тяговых двигателей, когда температура обмоток ниже пре-
дельно допустимого значения и необходим переход на пониженную частоту вра-
щения, где поиск оптимального с точки зрения потерь мощности соотношения
напряжения статора и частоты тока статора обеспечивает повышение КПД элек-
тропривода. Аналогичные рассуждения применимы и к системе регулирования
температуры энергетической установки автономного локомотива, где наибольшая
эффективность вспомогательного электропривода проявляется в диапазоне непол-
ных нагрузок установки.
200
В качестве примера экономической эффективности предлагаемых решений
проведем экономическую оценку эффективности применения электропривода
вентилятора охлаждения с минимизацией потерь мощности в составе автоматиче-
ской системы регулирования температуры энергетической установки по мето-
дике, разработанной во ВНИТИ и апробированной в работах [11, 41, 153, 172, 194].
Методика основана на использовании значения среднеэксплуатационной мощно-
сти электропривода вентилятора охлаждения.
Исходными данными для ее использования являются требуемые обороты
вентилятора в зависимости от диапазона температуры окружающего воздуха, ра-
бочего диапазона мощности энергоустановки, КПД электропривода вентилятора
охлаждения (рассчитан на основе имитационного моделирования [193]).
Вычисление среднеэксплуатационной мощности выполняется дискретно,
принимая во внимание диапазон распределения температур окружающего (наруж-
ного) воздуха и диапазона мощности энергоустановки. Результаты расчета средне-
эксплуатационной мощности приведены в таблице 6.1. Диапазон температур
окружающего воздуха приведен в таблице 6.2, диапазон мощности энергетиче-
ской установки – в таблице 6.3.
При расчете учитывается продолжительность работы энергетической уста-
новки в диапазоне 0,3 – 1 от номинальной мощности. Суммарная продолжитель-
ность работы взята за единицу.
Выражение для среднеэксплуатационной мощности, потребляемой электро-
приводом вентилятора охлаждения и приведенной к валу энергетической уста-
новки, запишем в виде:
jijiприв
Pj
Pj
i
iэс PP
д
д
max
min
max
min
.. , (6.1)
где jiпривP – средняя мощность, потребляемая электроприводом от энергоуста-
новки при его работе в i-м диапазоне температуры окружающего воздуха и в j-м
диапазоне мощности энергоустановки;
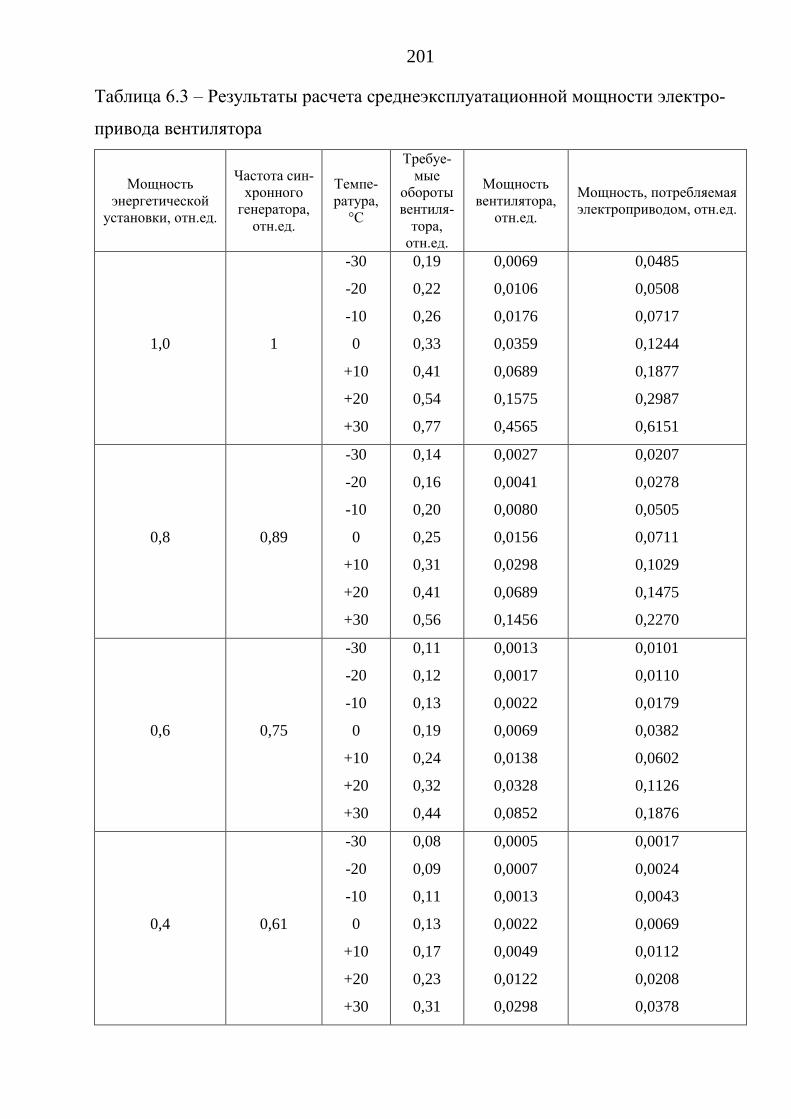
201
Таблица 6.3 – Результаты расчета среднеэксплуатационной мощности электро-
привода вентилятора
Мощность
энергетической
установки, отн.ед.
Частота син-
хронного
генератора,
отн.ед.
Темпе-
ратура,
°С
Требуе-
мые
обороты
вентиля-
тора,
отн.ед.
Мощность
вентилятора,
отн.ед.
Мощность, потребляемая
электроприводом, отн.ед.
1,0 1
-30
-20
-10
0
+10
+20
+30
0,19
0,22
0,26
0,33
0,41
0,54
0,77
0,0069
0,0106
0,0176
0,0359
0,0689
0,1575
0,4565
0,0485
0,0508
0,0717
0,1244
0,1877
0,2987
0,6151
0,8 0,89
-30
-20
-10
0
+10
+20
+30
0,14
0,16
0,20
0,25
0,31
0,41
0,56
0,0027
0,0041
0,0080
0,0156
0,0298
0,0689
0,1456
0,0207
0,0278
0,0505
0,0711
0,1029
0,1475
0,2270
0,6 0,75
-30
-20
-10
0
+10
+20
+30
0,11
0,12
0,13
0,19
0,24
0,32
0,44
0,0013
0,0017
0,0022
0,0069
0,0138
0,0328
0,0852
0,0101
0,0110
0,0179
0,0382
0,0602
0,1126
0,1876
0,4 0,61
-30
-20
-10
0
+10
+20
+30
0,08
0,09
0,11
0,13
0,17
0,23
0,31
0,0005
0,0007
0,0013
0,0022
0,0049
0,0122
0,0298
0,0017
0,0024
0,0043
0,0069
0,0112
0,0208
0,0378

202
Таблица 6.2 – Распределение температуры окружающего воздуха по диапа-
зонам
Диапазон
температур, °С
Распределение
температур
-35 – -25
-25 – -15
-15 – -5
-5 – +5
+5 – +15
+15 – +25
+25 – +35
0,03
0,10
0,19
0,23
0,23
0,21
0,01
Таблица 6.3 – Распределение мощности энергетической установки по диа-
пазонам
Диапазон
мощности, отн.ед.
Распределение
мощности
0,3 – 0,4
0,4 – 0,5
0,5 – 0,6
0,6 – 0,7
0,7 – 0,8
0,8 – 0,9
0,9 – 1
0,05
0,05
0,07
0,19
0,30
0,23
0,11
τi – отношение продолжительности работы автономного локомотива в i-м
диапазоне температуры окружающего воздуха к суммарной продолжительности
работы автономного локомотива;

203
τj – отношение продолжительности работы автономного локомотива в j-м
диапазоне мощности энергоустановки к суммарной продолжительности работы
автономного локомотива;
minдmaxд P,P – максимальная и минимальная мощности энергоустановки;
minmax , – максимальная и минимальная температуры окружающего воз-
духа.
В результате расчета установлено, что среднеэксплуатационная мощность
электропривода вентилятора составляет 5,6 % от номинальной мощности электро-
привода.
В работе [153] показано, что среднеэксплуатационная мощность при релей-
ном регулировании, затрачиваемая на электропривод вентиляторов, при питании
от синхронного генератора составляет 29,8 кВт. Номинальная полная мощность
двух мотор-вентиляторов составляет 108 кВт. Расчет проводился для охлаждаю-
щего устройства энергетической установки автономного локомотива мощностью
2200 кВт.
При использовании электропривода с разработанной системой скалярного
управления для охлаждения энергетической установки аналогичной мощности с
применением в качестве приводных двух двигателей мощностью 55 кВт каждый
затраты мощности на электропривод составят 6,2 кВт.
Таким образом, использование электропривода с преобразователем частоты
и асинхронным двигателем с энергосберегающей системой скалярного управле-
ния по сравнению с релейной системой может дать экономию по потерям средне-
эксплуатационной мощности на уровне 23,6 кВт.
Экономия потребления электроэнергии за год работы (принятое время ра-
боты автономного локомотива – 3000 часов в год) составит 70 800 кВт·ч. При сред-
нем удельном расходе дизельного топлива 0,24 кг / кВт·ч экономия дизельного
топлива в случае применения электропривода с энергосберегающей системой ска-

204
лярного управления составит 16 т 992 кг в год на систему охлаждения энергетиче-
ской установки автономного локомотива мощностью 2200 кВт по сравнению с ре-
лейной системой регулирования.

205
ЗАКЛЮЧЕНИЕ
В диссертации изложены новые научно обоснованные технические реше-
ния, направленные на обеспечение высокой энергоэффективности электроприво-
дов на магистральных локомотивах, внедрение которых носит значительный
вклад в развитие страны.
Получены новые научные результаты, сформулированные в следующих по-
ложениях:
1. При вентиляторной нагрузке вспомогательных электроприводов локомо-
тивов, учитывая стоимостные показатели современных преобразователей ча-
стоты, целесообразнее применять частотно-регулируемые электроприводы с ал-
горитмами скалярного управления.
2. Синтезирована система скалярного управления электропривода с асин-
хронным двигателем, осуществляющая минимизацию тока статора, а, следова-
тельно, и потери мощности в установившихся режимах работы. При моменте со-
противления, не равном номинальному, величина КПД за счет применения си-
стемы минимизации тока статора может быть увеличена на 20%, а потерь мощно-
сти – снижены на 50%.
3. Сравнительный анализ электроприводов показал очевидное преимуще-
ство систем скалярного управления, работающих по принципу минимума тока
статора, которые поддерживают требуемое значение момента с меньшими значе-
ниями тока статора, напряжения статора, а, следовательно, и с меньшим значе-
нием магнитного потока, что приводит к увеличению коэффициента добротности
и снижению электромагнитных нагрузок. Вместе с этим, проведенный анализ по-
казал необходимость учета влияния температуры обмоток на значения напряже-
ния статора и параметры системы управления в связи с влиянием на величины ми-
нимума тока статора и, особенно, оптимального абсолютного скольжения, обес-
печивающего экстремальное управление по минимуму тока статора.
4. Разработан алгоритм формирования задания на токи статора и потокос-
цепление ротора асинхронного двигателя при использовании системы векторного
206
управления, обеспечивающий минимум потерь мощности. В качестве лимитиру-
ющих факторов применены ограничения по току и напряжению статора двига-
теля, мощности дизель-генераторной установки. Синтезирована система управле-
ния тягового электропривода с асинхронным двигателем, обеспечивающая непо-
средственное регулирование скольжения колес, с подчиненной системой миними-
зации потерь мощности. Установлено, что применение разработанной системы
управления приводит к уменьшению потерь мощности. Наибольший абсолютный
эффект при любых моментах сопротивления достигается в окрестности номиналь-
ной частоты вращения магнитного поля статора ω0,ном, причем при приближении
частоты ω к частоте ω0,ном со стороны меньших значений эффект от применения
разработанной системы возрастает в значительно большей степени, чем при при-
ближении ω к ω0,ном со стороны больших значений.
5. Предложена упрощенная тепловая схема замещения для определения тем-
пературы обмотки и магнитопровода статора. Синтезированы уравнения тепло-
вого равновесия. Разработана методика определения значений тепловых сопро-
тивлений статора при помощи лабораторной установки, которая учитывает осо-
бенности охлаждения конкретного типа двигателей и избавляет от необходимости
рассмотрения асинхронного двигателя как аэродинамической системы. Резуль-
таты экспериментальных исследований позволили установить влияние частоты
вращения ротора двигателя и объема охлаждающего воздуха на значения тепло-
вых сопротивлений.
6. Разработан метод идентификации активного сопротивления обмотки ро-
тора асинхронного двигателя по сигналам с датчиков тока и напряжения статора
и датчика частоты вращения вала ротора. На основании алгебраических уравне-
ний, описывающих электромеханическое преобразование энергии во вращаю-
щихся взаимно перпендикулярных осях, синтезирован алгоритм определения со-
противления и температуры обмотки ротораРезультаты имитационного модели-
рования предложенного метода в программном комплексе MatLab Simulink для
асинхронного двигателя мощностью 11 кВт показали высокую сходимость, мак-
симальное расхождение не превысило 9%.
207
7. Предложен метод определения сопротивления и температуры обмоток
статора и ротора периодическим добавлением к напряжению статора напряжения
высокой частоты и/или постоянной составляющей напряжения, выполнена оценка
его точности. Добавление постоянной составляющей напряжения позволяет опре-
делять сопротивление и температуру обмотки статора; добавление напряжения
высокой частоты позволяет определять сопротивление и температуру обмоток
статора и ротора при их одинаковом нагреве. В случае неодинакового нагрева об-
моток статора и ротора необходимо совместное добавление постоянной и высоко-
частотной составляющих напряжения. Показано влияние неидеальности характе-
ристик силовых ключей инвертора напряжения. Результаты моделирования пока-
зали, что ошибка определения сопротивления обмотки статора составляет 1%, в
то время как ошибка определения сопротивления ротора может достигать 6% при
добавлении переменной составляющей напряжения с частотой 150…250 Гц.
8. Разработаны автоматические системы регулирования температуры тяго-
вых двигателей, тяговых преобразователей частоты и энергетической установки
автономного локомотива с применением электропривода вентилятора охлаждения
как исполнительно-регулирующего устройства, обеспечивающие расширение
диапазона изменения частоты вращения вала вентилятора, а, следовательно, сни-
жение диапазона изменения регулируемой температуры.
9. Разработана система управления, осуществляющая уменьшение потерь
мощности в силовых полупроводниковых приборах автономного инвертора
напряжения тягового преобразователя частоты и контроль их температуры, пред-
назначенная для использования в составе системы управления тягового электро-
привода. Входными сигналами системы являются температуры кристаллов сило-
вых полупроводниковых приборов и ток статора тягового двигателя. Выходными
сигналами системы являются задание на частоту коммутации силовых полупро-
водниковых приборов и задание на величину максимального тока.
10. Оценка экономической эффективности применения электропривода вен-
тилятора охлаждения с преобразователем частоты и асинхронным двигателем с
энергоэффективной системой скалярного управления в составе автоматической

208
системы регулирования температуры энергетической установки, проведенная по
методике, разработанной во ВНИТИ, показала, что экономия топлива может со-
ставить 16 т 992 кг в год на систему охлаждения энергетической установки авто-
номного локомотива мощностью 2200 кВт по сравнению с релейной системой ре-
гулирования.

209
СПИСОК ЛИТЕРАТУРЫ
1. Андреев, М.А. Параметрическая идентификация асинхронного электро-
привода в режиме реального времени/ М.А. Андреев // автореферат дисс. … канд.
техн. наук. – Санкт-Петербург, 2010. – 18 с.
2. Аносов, В.И. Методы и средства повышения эффективности систем тя-
гового электропривода автономных транспортных средств / В.И. Аносов // авторе-
ферат дисс. … докт. техн. наук. – Новосибирск, 2008. – 35 с.
3. Анучин, А.С. Разработка цифровых систем эффективного управления
комплектов тягового электрооборудования гибридных электрических транспорт-
ных средств / А.С. Анучин // автореферат дисс. … докт. техн. наук. – Москва, 2018.
– 40 с.
4. Анучин, А.С. Двухмассовая тепловая модель асинхронного двигателя /
А. С. Анучин, К. Г. Федорова // Электротехника. – 2014. – № 2. – С. 21 – 25.
5. Бабков, Ю.В. Способ управления асинхронным тяговым двигателем /
Ю.В. Бабков, Ю.И. Клименко, Н.А. Кузнецов, К.С. Перфильев, И.В. Романов, П.Л.
Чудаков // патент RU 2451389, опубликовано 20.05.2012, бюл. №14.
6. Базара, М. Нелинейное программирование. Теория и алгоритмы: моногра-
фия / М. Базара, К. Шетти. – М.: Мир, 1982. – 584 с.
7. Балакирев В.С., Дудников Е.Г., Цирлин А.М. Экспериментальное опре-
деление динамических характеристик промышленных объектов управления. – М.:
Энергия, 1967. – 232 с.
8. Беспалов, В.Я. Математическая модель асинхронного двигателя в обоб-
щенной ортогональной системе координат / В.Я. Беспалов, Ю.А. Мощинский,
А.П. Петров // Электричество. – 2002. - № 8. – С. 33 – 38.
9. Беспалов, В.Я. Упрощенная математическая модель нестационарного
нагрева и охлаждения обмотки статора асинхронного двигателя / В.Я. Беспалов,
Ю.А. Мощинский, В.И. Цуканов // Электричество. – 2003. - № 4 – С. 20 – 26.
10. Беспалов, В.Я. Электрические машины: учебник / В.Я, Беспалов, Н.Ф,
Котеленец. – Москва: Академия, 2013. – 320 с.
210
11. Бондаренко, Д.А. Автоматическая система управления температурой
тягового асинхронного двигателя тепловоза / Д.А. Бондаренко // диссер. …
канд.техн.наук. – Москва, 2017. – 203 с.
12. Борисенко, А.И. Охлаждение электрических промышленных машин /
А.И. Борисенко, О.Н. Костиков, А.И. Яковлев. – М.: Энергоатомиздат, 1983. – 296
с.
13. Браславский, И.Я. Математические модели для определения энергопо-
требления различными типами асинхронных электроприводов и примеры их ис-
пользования / И.Я. Браславский, Ю.В. Плотников // Электротехника. – 2005. - №
9. – С. 14 – 16.
14. Браславский, И.Я. О возможностях энергосбережения при использо-
вании регулируемых асинхронных электроприводов / И.Я. Браславский // Элек-
тротехника – 1998г. - № 8 – С. 2 – 6
15. Браславский, И.Я. Энергосберегающий асинхронный электропривод /
И.Я. Браславский, З.Н. Ишматов, В.Н. Поляков. – М.: Академия, 2004. – 256 с.
16. Бурковский, А.Н. Нагрев и охлаждение электродвигателей взрывоне-
проницаемого исполнения / А.Н. Бурковский, Е.Б. Ковалев, В.К. Коробов. – М.;
Энергия, 1970.
17. Виноградов, А.Б. Развитие теории и практическая реализация векторных
электроприводов переменного тока с микропроцессорным управлением / А.Б. Вино-
градов // автореферат дисс. … докт. техн. наук. – Иваново, 2011. – 38 с.
18. Виноградов, А.Б. Учет потерь в стали, насыщения и поверхностного
эффекта при моделировании динамических процессов в частотно-регулируемом
асинхронном электроприводе / А.Б. Виноградов // Электротехника. – 2005. – №5.
– С. 57 – 61.
19. Власьевский, С.В. Анализ тяговых характеристик грузовых электрово-
зов с асинхронным и коллекторным электроприводом / С.В. Власьевский, В.Г.
Скорик, Л.В. Бузмакова, В.А. Ковалев // Транспорт азиатско-тихоокеанского реги-
она. – 2018. – № 1 (14). – С. 22 – 26.

211
20. Власьевский, С.В. Сравнение энергетической эффективности тягового
электропривода электровозов переменного тока на основе коллекторных и асинхрон-
ных двигателей / С.В. Власьевский, В.А. Кучумов, В.Г. Щербаков // Электротехника.
– 2017. – № 9. – С. 72 – 78.
21. Внешнее устройство аналогово-цифрового преобразования для IBM
PC/AT – совместимых компьютеров ЛА-2USB. Руководство по эксплуатации. Ре-
жим доступа: https://rudshel.nt-t.ru/images/manuals/LA-2USB-12_14_Y.pdf
22. Вольвич, А.Г. Способ бесконтактного определения температуры об-
мотки короткозамкнутого ротора частотно-регулируемого асинхронного двига-
теля / А.Г. Вольвич, Ю.А. Орлов, ИЛ. Таргонский, В.Г. Щербаков // патент RU
2386114, опубл. 10.04.2010, бюл. №10.
23. Воробьев, В.И. Автоматический комбинированный регулятор темпе-
ратуры энергетической установки / В.И. Воробьев, А.А. Пугачев, Д.А. Бондаренко
// Совершенствование энергетических машин: сб. науч. тр. – Брянск.: БГТУ, 2013.
– С. 207 – 215.
24. Воробьев, В.И. Исследование динамических процессов в тяговом при-
воде локомотива с асинхронным двигателем в режимах пуска, разгона и движения
с низкими скоростями / В.И. Воробьев // дисс… канд. техн. наук. – Брянск.. 1981.
– 183 с.
25. Воробьев, В.И. Математическая модель установившихся тепловых
процессов в асинхронном двигателе / В.И. Воробьев, А.А. Пугачев, Д.А. Бонда-
ренко // Фундаментальные и прикладные проблемы техники и технологии. – 2015.
– № 5 – 2 (313). – С. 221 – 226.
26. Воробьев, В.И. Регулирование температуры силовых полупроводни-
ковых приборов преобразователя / В.И. Воробьев, Н.Н. Стрекалов, А.А. Пугачев
// Вестник Брянского государственного технического университета. – 2017. – № 1
(54). – С. 200 – 206.
212
27. Воробьев, В.И. Стенд для моделирования динамических процессов в
тяговом приводе локомотивов с электропередачей / В.И. Воробьев, А.С. Космода-
мианский, Д.А. Антипин, О.В. Измеров, А.А. Пугачев, Д.А. Бондаренко // патент
на полезную модель № 156446, опубликовано 10.11.2015, бюл. № 31.
28. Воробьев, В.И. Стенд для моделирования динамических процессов в
тяговом приводе локомотивов с электропередачей / В.И. Воробьев, Д.В. Воробьев,
В.Г. Новиков, А.А. Пугачев, С.Г. Волохов, А.Н. Чвала, А.С. Космодамианский,
А.В. Самотканов // патент на изобретение № 2550105, опубликовано 10.05.2015,
бюл. № 13.
29. Герман-Галкин, С.Г. Matlab & Simulink. Проектирование мехатронных
систем на ПК / С.Г. Герман-Галкин. – СПб.: Корона-Век, 2008. – 368 с.
30. Горбик, В.С. Структура и алгоритмы управления регулируемым асин-
хронным электроприводом с обеспечением максимального быстродействия по кон-
туру тока (момента) для горных машин / В.С. Горбик // дисс. … канд. техн. наук. –
Санкт-Петербург, 2014. – 114 с.
31. Грачев, П.Ю. Энергоэффективные асинхронные машины с нетрадици-
онным электромагнитным ядром / П.Ю. Грачев, В.Я. Беспалов, А.С. Табачинский,
Е.В. Стрижакова // Электротехника. – 2018. – № 2. – С. 7 – 12.
32. Грищенко, А.В. Повышение эффективности охлаждения силовых по-
лупроводниковых приборов / А.В. Грищенко [и др.] // Электротехника. – 2016. –
№ 5. – С. 32 – 36.
33. Динамические процессы при совместном регулировании асинхронных
тяговых двигателей тележки тепловоза / Г.А. Федяева [и др.] // Вестн. Брянского гос-
ударственного технического университета. – 2014. – № 4. – С. 129−132.
34. Дорохина, Е.С. Мониторинг теплового состояния асинхронных тяговых
электродвигателей / Е.С. Дорохина // дисс. … канд. техн. наук. – Томск, 2015. – 155
с.
35. Евстафьев, А.М. Повышение энергетической эффективности электриче-
ского подвижного состава / А.М. Евстафьев // автореферат дисс. … докт. техн. наук.
– Санкт-Петербург, 2018. – 34 с.

213
36. Елисеев, И.А. Повышение энергоэффективности процесса управления
электровозом посредством оперативного уточнения силы тяги и электрического тор-
можения / И.А. Елисеев // автореферат дисс. … канд. техн. наук. – Москва, 2013. – 26
с.
37. Жуликов, В.Н. Критерии сравнительной оценки преобразователей
электрической энергии подвижного состава / В.Н. Жуликов, Ю.М. Иньков, А.В.
Орехов //Электровозостроение Сб. науч. тр. ОАО «Всерос. н.-и. и проектно-кон-
структ. ин-т электровозостроения» (ОАО «ВЭлНИИ»). – 1997. – т. 37. – С. 84 – 88
38. Зарифьян, А.А. Повышение энергетической эффективности пассажир-
ских электровозов с асинхронным тяговым приводом при питании от сети постоян-
ного тока / А.А. Зарифьян // автореферат дисс. … канд. техн. наук. – Ростов-на-Дону,
2016. – 24 с.
39. Захарчук, А.С. Асинхронный мотор-вентилятор для систем охлажде-
ния тепловозных дизелей / А.С. Захарчук [и др.] – Ворошиловград, ВМИ.Деп. рук.
№ 1142, 1980. ЦНИИТЭИ МПС. – 14 с.
40. Захарчук, А.С. Исследование и разработка асинхронного мотор-вен-
тилятора с двухслойным ротором для тепловоза / А.С. Захарчук // автореф. дисс…
канд. техн. наук. – М. 1977. – 22 с.
41. Захарчук, А.С. Сравнительный анализ фазового и частотного способов
регулирования асинхронных мотор-вентиляторов холодильной камеры тепловоза
с различной конструкцией роторов / А.С. Захарчук // Производство и конструиро-
вание транспортных машин. Вып. 10. – Харьков, 1978. – С. 33 – 38.
42. Измеров, О.В. Кибернетические аспекты методов синтеза электроме-
ханических систем: монография / О.В. Измеров, С.Н. Злобин, В.И. Воробьев, А.С.
Космодамианский, О.В. Дорофеев, М.И. Борзенков, А.А. Пугачев, Н.Н. Стрекалов.
– Орел: Госуниверситет-УНПК, 2015. – 233 с.
43. Измеров, О.В. Техническая инновационика. Проблемы инженерного
анализа технических систем: монография / О.В. Измеров, С.Ю. Радченко, В.П, Ти-
хомиров, М.И. Борзенков, А.С. Космодамианский, О.В. Дорофеев, В.И, Воробьев,
С.Н. Злобин, А.А. Пугачев. – Орел: Госуниверситет-УНПК, 2014. – 261 с.

214
44. Измеров, О.В. Физический эксперимент и моделирование в машино-
строении: монография / О.В. Измеров, А.С. Космодамианский, М.И. Борзенков,
В.И. Воробьев, В.П. Тихомиров, О.В. Дорофеев, А.А. Пугачев, С.Н. Злобин, В.Г.
Новиков. –Орел: ОрелГТУ, 2010. – 452 с.
45. Изосимов, Д.Б. Способ оптимального частотного управления асин-
хронным двигателем / Д.Б. Изосимов, Л.Н. Макаров // патент RU 2402865, опуб-
ликовано 27.10.2010, бюл. №30.
46. Иньков, Ю.М. Определение сопротивления и температуры обмоток
асинхронного двигателя / Ю.М. Иньков, А.С. Космодамианский, А.А. Пугачев //
Труды XVII Международной конференции «Электротехника, электротехнологии,
электрические материалы и компоненты» – М.: Знак, 2018. – С. 116 – 119.
47. Иньков, Ю.М. Моделирование бездатчикового определения сопротив-
ления и температуры обмоток статора и ротора асинхронного двигателя / Ю.М,
Иньков, А.С. Космодамианский, А.А. Пугачев // Электротехника. – 2018 – № 9. –
С. 13 – 18.
48. Иньков, Ю.М. Моделирование теплового состояния автономных ин-
верторов напряжения / Ю.М, Иньков, А.С. Космодамианский, Л.М. Клячко, А.А.
Пугачев // Электротехника. – 2019 – № 9. – С. 8 – 12.
49. Иньков, Ю.М. Оптимизация энергетических характеристик электро-
привода вспомогательных механизмов тягового подвижного состава / Ю.М. Инь-
ков, А.А. Пугачев // Электроника и электрооборудование транспорта, № 6 – 2016.
– С. 43 – 47.
50. Иньков, Ю.М. Потери мощности в асинхронных тяговых двигателях
перспективного электроподвижного состава / Ю.М. Иньков, Т.Н. Фадейкин, Я.А.
Бредихина // Электротехника. – 2014. – № 8. – C. 44 – 47.
51. Иньков, Ю.М. Формирование задания на потокосцепление ротора в
системе векторного управления асинхронным двигателем / Ю.М/ Иньков, А.С.
Космодамианский, А.А. Пугачев // Электроника и электрооборудование транс-
порта. – 2018 – № 6. – С. 40 – 42.
215
52. Кашников, Г.Ф. Разработка микропроцессорной системы регулирова-
ния температуры дизеля тепловоза с гидродинамическим приводом вентилятора /
Г.Ф. Кашников // дисс. … канд. техн. наук. М., 1991. – 185 с.
53. Киселев, И. Г. Расчеты нагрева и охлаждения полупроводниковых
преобразовательных установок железнодорожного транспорта / И.Г. Киселев, А.Б.
Буянов. – С-Пб, ПГУПС-ЛИИЖТ, 2001. – 80 с.
54. Клименко, Ю.В. Исследование электропривода с изменяемой жестко-
стью тяговой характеристики / Ю.В. Клименко // дисс. … канд. техн. наук. – Ко-
ломна, 2004. – 149 с.
55. Ключев, В.И. Теория электропривода / В.И. Ключев – М.: Энергоато-
миздат, 2001. – 704 с.
56. Ковалев, Е.Б. Статистический анализ и расчет нагрева асинхронных
электродвигателей / Е.Б. Ковалев, Ю.В. Расков, Б.С. Голянд //Электричество. –
1975. – № 11. – С. 38 – 40.
57. Ковалев, Р.В. Совершенствование системы управления тяговым элек-
троприводом грузового локомотива / Р.В. Ковалев, С.Ю. Матюшков, А.А. Пуга-
чев, Г.В. Роговцев, Г.А. Федяева// Известия Тульского государственного универ-
ситета. Технические науки. – 2010. – № 3-2. – С. 109 – 114.
58. Козярук, А.Е. Современное и перспективное алгоритмическое обеспече-
ние частотно-регулируемых электроприводов / А.Е. Козярук, В.В. Рудаков; под ред.
А.Г. Народицкого. – СПб.: С.-Петерб. электротехн. компания, 2004. – 128 с.
59. Козярук, А.Е. Энергосберегающая система управления асинхронным
электроприводом / Козярук А.Е., Васильев Б.Ю., Емельянов А.П. // патент России
№ 2498496, 2013
60. Колпахчьян, П.Г. Методология комплексного моделирования и способы
управления асинхронным тяговым приводом магистральных электровозов / П.Г.
Колпахчьян // автореферат дисс. … докт. техн. наук. – Новочеркасск, 2006. – 36 с.
61. Конохов, Д.В. Энергоэффективное прямое управление моментом асин-
хронных тяговых электродвигателей / Д.В, Конохов // автореферат дисс. … канд.
техн. наук. – Москва, 2018. – 24 с.
216
62. Копылов, И.П. Математическое моделирование электрических ма-
шин: учеб. для вузов / И.П. Копылов – М.: Высш.шк., 2001 – 327 с.
63. Копылов, И.П. Электрические машины – М.: Высш. шк., 2000.
64. Копылов, С.И. Использование тиристорных регуляторов напряжения
для бесконтактного изменения коэффициента трансформации / С.И. Копылов,
М.В. Попова, Д.И. Грибов, М.В. Бухалкин // Инновации в сельском хозяйстве. –
2017. – № 2 (23). – С. 34 – 40.
65. Коробейников, А.Б. Анализ существующих методов диагностирова-
ния электродвигателей и перспективы их развития / А.Б. Коробейников, А.С. Сар-
варов // Электротехнические системы и комплексы. – 2015. – № 1 (26). – С. 4 – 9.
66. Космодамианский, А.С. Влияние температуры тягового асинхронного
двигателя на его режимы работы / А.С. Космодамианский, В.И. Воробьев, А.А.
Пугачев // Электротехника. – 2011. – № 8. – C. 50 – 54.
67. Космодамианский, А.С. Отработка аварийных ситуаций в преобразо-
вателях частоты с автономными инверторами напряжения / А.С. Космодамиан-
ский, В.И. Воробьев, А.А. Пугачев // Локомотивы. Транспортно – технологические
комплексы. XXI век: материалы V Международной научно- технической конферен-
ции, посвященной 180-летию железных дорог России, Санкт-Петербург, 14–16 но-
ября 2017 г. – СПб.: ФГБОУ ВО ПГУПС, 2017. – С. 178 – 183.
68. Космодамианский, А.С. Применение тяговых электроприводов с
двух- и трехуровневыми автономными инверторами напряжения / А.С. Космода-
мианский, В.И. Воробьев, А.А. Пугачев // Наука и техника транспорта, 2013. - №1.
– С.74 – 83.
69. Космодамианский, А.С. Система двухзонного векторного управления
асинхронным тяговым двигателем с минимизацией мощности потерь / А.С. Космо-
дамианский, В.И. Воробьев, А.А. Пугачев // Современные проблемы совершенство-
вания работы железнодорожного транспорта; межвузовский сборник научных тру-
дов. – М.: МГУПС, 2018. – С. 221 – 229.
70. Космодамианский, А.С. Система управления асинхронного двигателя
по минимуму тока статора / А.С. Космодамианский, Н.Н. Стрекалов, В.И. Воробьев,

217
А.А. Пугачев // Локомотивы. Электрический транспорт. XXI век т.2: материалы VI
Международной научно- технической конференции, Санкт-Петербург, 13–15 ноября
2018 г. – СПб.: ФГБОУ ВО ПГУПС, 2017. – С. 130 – 135.
71. Космодамианский, А.С. Сравнительная характеристика двух- и трех-
уровневых инверторов напряжения по тепловому состоянию / А.С. Космодамиан-
ский, Н.Н. Стрекалов, А.А. Пугачев // Локомотивы. Транспортно – технологические
комплексы. XXI век: материалы V Международной научно- технической конферен-
ции, посвященной 180-летию железных дорог России, Санкт-Петербург, 14–16 но-
ября 2017 г. – СПб.: ФГБОУ ВО ПГУПС, 2017. – С. 178 – 183.
72. Космодамианский, А.С. Автоматическая система регулирования темпе-
ратуры тяговых электрических машин локомотивов/ А.С. Космодамианский, В.И.
Воробьев, А.А. Пугачев, А.Д. Хохлов // Известия ОрелГТУ. Фундаментальные и при-
кладные проблемы техники и технологии. – 2010. – №3 – С. 106 – 111.
73. Космодамианский, А.С. Анализ и систематизация систем электропри-
вода тягового подвижного состава / А.С. Космодамианский, В.И. Воробьев, А.А.
Пугачев, С.Г. Волохов // Мир транспорта и технологических машин, 2013. – №
2(41) – С. 46 – 53
74. Космодамианский, А.С. Бездатчиковое определение температуры об-
мотки статора тягового асинхронного двигателя / А.С. Космодамианский, В.И. Во-
робьев, А.А. Пугачев // Технологическое обеспечение ремонта и повышение динами-
ческих качеств железнодорожного подвижного состава: Материалы третьей всерос-
сийской научно-технической конференции с международным участием в трех ча-
стях. Часть 1 / Омский гос. ун-т путей сообщения. Омск, 2015. – С. 28 – 33.
75. Космодамианский, А.С. Влияние теплового состояния тягового асин-
хронного двигателя на характер его отказов и механических характеристик / А.С.
Космодамианский, В.И. Воробьев, А.А. Пугачев, А.Д. Хохлов // Наука и техника
транспорта. – 2011. – № 3. – С. 56 – 61
76. Космодамианский, А.С. Динамические нагрузки в тяговом приводе ло-
комотива при коротком замыкании тягового асинхронного двигателя / А.С, Космо-

218
дамианский, В.И. Воробьев, А.А. Пугачев // Повышение эффективности использова-
ния и совершенствования системы технического обслуживания и ремонта локомоти-
вов: Межвуз. темат. сб. науч. тр. – Омский гос. ун-т путей сообщения, Омск, 2014. –
С. 10 – 14.
77. Космодамианский, А.С. Исследование тепловых режимов тягового
асинхронного двигателя на комплексной физической модели А.С. Космодамиан-
ский, В.И. Воробьев, А.А. Пугачев // Вестник транспорта Поволжья. – 2016. – № 4
(58). – С. 53 – 57.
78. Космодамианский, А.С. Исследования электропривода вентилятора с
асинхронным двигателем специальной конструкции, как исполнительно-регули-
рующего устройства системы регулирования температуры/ Космодамианский
А.С., Воробьев В.И., Пугачев А.А., Хохлов А.Д. // Вестник транспорта Поволжья.
– 2010. – № 2. – С. 25 – 30.
79. Космодамианский, А.С. Комплексная физическая модель тягового
электропривода с асинхронными двигателями / А.С. Космодамианский, В.И. Во-
робьев, А.А. Пугачев, А.В. Самотканов, Д.А. Бондаренко // Наука и техника транс-
порта. – 2014. - № 3. – С. 31 – 38
80. Космодамианский, А.С. Концепция развития энергосберегающих
электромеханических систем: монография / А.С. Космодамианский, М.И. Борзен-
ков, В.И. Воробьев, С.Ю. Радченко, О.В. Измеров, О.В. Дорофеев, А.А. Пугачев,
С.Н. Злобин, А.В. Самотканов. – Орел: Госуниверситет-УНПК, 2014. – 244 с.
81. Космодамианский, А.С. Методы охлаждения силовых полупроводников
тяговых преобразователей / А.С. Космодамианский, Н.Н. Стрекалов, А.А. Пугачев //
Эксплуатационная надежность локомотивного парка и повышение эффективности
тяги поездов: материалы третьей всероссийской научно-технической конференции с
международным участием. – Омск: ОмГУПС, 2016. – С. 214 – 219.
82. Космодамианский, А.С. Моделирование электропривода с асинхронным
двигателем в режиме минимума мощности потерь / А.С. Космодамианский, В.И. Во-
робьев, А.А. Пугачев // Электротехника. – 2012. – № 12. – C. 26 – 31.
219
83. Космодамианский, А.С. Определение сопротивления и температуры
обмотки статора асинхронного двигателя по постоянной составляющей тока / А.С.
Космодамианский, В.И. Воробьев, А.А. Пугачев, // Наука и техника транспорта. –
2016. – № 3. – С. 31 – 38.
84. Космодамианский, А.С. Определение температуры обмоток тягового
асинхронного двигателя введением дополнительных составляющих напряжения /
А.С. Космодамианский, В.И. Воробьев, А.А. Пугачев // Электроника и электро-
оборудование транспорта. – 2016. – № 2. –С. 33 – 38.
85. Космодамианский, А.С. Определение установившейся температуры
полупроводников автономного инвертора напряжения / А.С. Космодамианский,
Н.Н. Стрекалов, А.А. Пугачев // Электроника и электрооборудование транспорта.
– 2016. – № 6. – С. 8 – 12.
86. Космодамианский, А.С. Особенности математической модели элек-
тропривода с двумя асинхронными двигателями, один из которых содержит пово-
ротный статор / А.С. Космодамианский, В.И. Воробьев, А.А. Пугачев // Известия
ОрелГТУ. Фундаментальные и прикладные проблемы техники и технологии. –
2010. – №1 – С. 8 – 13.
87. Космодамианский, А.С. Повышение надежности тяговых и вспомога-
тельных электроприводов локомотивов / А.С. Космодамианский, В.И. Воробьев,
А.А. Пугачев, А.С. Самотканов // Планово-предупредительный вид ремонта тягового
подвижного состава с учетом его технического состояния: коллективная монография
по материалам международной научно-практической конференции «Эксплуатаци-
онная надежность подвижного состава» (18 октября 2013 г). – Омск: НИИТКД, 2013.
– С. 105 – 111.
88. Космодамианский, А.С. Применение метода анализа размерностей к
исследованию электромеханических характеристик тяговых асинхронных двигате-
лей / А.С. Космодамианский, В.И. Воробьев, А.А. Пугачев // Фундаментальные и
прикладные проблемы техники и технологии. – 2012. – № 3 – 2 – С. 3 – 11.

220
89. Космодамианский, А.С. Применение тяговых электроприводов с двух-
и трехуровневыми автономными инверторами напряжения / А.С. Космодамиан-
ский, В.И. Воробьев, А.А. Пугачев // Наука и техника транспорта. – 2013. – №1. –
С.74 – 83.
90. Космодамианский, А.С. Синтез автоматической системы регулирования
температуры тягового асинхронного двигателя / А.С. Космодамианский, А.А. Пуга-
чев, Д.А. Бондаренко //Локомотивы ХХI век: материалы III Международной научно-
технической конференции. – СПб.: ФГБОУ ВПО ПГУПС, 2015. – С. 81 – 86.
91. Космодамианский, А.С. Система управления тягового электропривода
с контролем температуры теплонагруженных элементов / А.С. Космодамианский,
Л.М. Клячко, В.И. Воробьев, А.А. Пугачев // Электротехника. - 2014. - № 8. - C.
38 – 43
92. Космодамианский, А.С. Способ регулирования температуры энерге-
тической установки транспортного средства и устройство для его реализации /
А.С. Космодамианский, А.В. Самотканов, В.И. Воробьев, А.А. Пугачев // патент
на изобретение № 2541491, опубликовано 20.02.2015, бюл. № 5.
93. Космодамианский, А.С. Сравнительная оценка различных способов
скалярного управления тяговым асинхронным двигателем с учетом температуры
обмоток / А.С. Космодамианский, В.И. Воробьев, А.А. Пугачев // Фундаменталь-
ные и прикладные проблемы техники и технологии. – 2011. – №6 – С. 129 – 135.
94. Космодамианский, А.С. Сравнительная оценка электроприводов вспо-
могательных агрегатов подвижного состава / А.С. Космодамианский, В.И. Воро-
бьев, А.А. Пугачев, А.Д. Хохлов // Электроника и электрооборудование транс-
порта. – 2011. – № 1 –С. 31 – 34.
95. Космодамианский, А.С. Стенд для моделирования динамических про-
цессов в тяговом приводе локомотивов с электропередачей / А.С. Космодамианский,
В.И. Воробьев, А.В. Самотканов, А.А. Пугачев, Д.В. Воробьев, Д.А. Бондаренко //
патент на полезную модель 148359, опубл. 10.11.2014
96. Космодамианский, А.С. Теоретические основы и разработка систем
регулирования температуры тяговых электрических машин локомотивов: дисс. ...

221
доктора технических наук / А.С. Космодамианский // дисс… докт. техн. наук. –
Москва, 2002. – 306 с.
97. Космодамианский, А.С. Уменьшение колебаний температуры сило-
вых полупроводниковых приборов тягового преобразователя / А.С. Космодамиан-
ский, Н.Н. Стрекалов, А.А. Пугачев // Наука и техника транспорта. – 2017. - № 1.
– С. 8 – 13.
98. Космодамианский, А.С. Управление частотой коммутации для регу-
лирования температуры тяговых полупроводниковых приборов / А.С. Космода-
мианский, Н.Н. Стрекалов, А.А. Пугачев // Электроника и электрооборудование
транспорта. – 2017. – № 6 – С. 7 – 11.
99. Космодамианский, А.С. Физическое моделирование тягового и вспо-
могательного электроприводов локомотива с асинхронными двигателями / А.С.
Космодамианский, В.И. Воробьев, А.А. Пугачев // Электроника и электрообору-
дование транспорта. – 2013. – № 5 –– С. 37 – 40.
100. Космодамианский, А.С. Характеристики тягового электропривода со
скалярным управлением асинхронным двигателем / А.С. Космодамианский, А.С. Са-
мотканов, В.И. Воробьев, А.А. Пугачев // Локомотивы. ХХI век: сборник материалов
международной научно-технической конференции. – С.-Петербург: ПГУПС, 2013. –
С. 53 – 57.
101. Космодамианский, А.С. Экспериментальная установка для исследова-
ния и регулирования процессов нагрева и охлаждения асинхронного двигателя / А.С.
Космодамианский, В.И. Воробьев, А.А. Пугачев // Вестник Всероссийского научно-
исследовательского и проектно-конструкторского института электровозостроения.
Новочеркасск, 2011. № 2 (62). – С. 65 – 76.
102. Кривицкий, С.О. Динамика частотно-регулируемых электроприводов
с автономными инверторами / С.О. Кривицкий, И.И. Эпштейн – М.: Энергия, 1970.
– 152 с.

222
103. Крюков, О.В. Энергоэффективные электроприводы газоперекачиваю-
щих агрегатов газопроводов на базе интеллектуальных систем управления и монито-
ринга / О.В. Крюков // автореферат дисс. … докт. техн. наук. – Нижний Новгород,
2015. – 40 с.
104. Кузьмич, В.Д. Математическое моделирование температурного поля
обмоток тягового электродвигателя тепловоза / В.Д. Кузьмич, Е.Ю. Логинова //
Вестник ВНИИЖТ. – 1999. - № 2 – С. 39 –
105. Куцевалов, В.М. Применение асинхронных двигателей с двухслой-
ными роторами на судах / В.М. Куцевалов, В.С. Могильников, А.М. Олейников –
Киев: Знание, 1978. – 74 с.
106. Литовченко, В.В. Моделирование аварийных режимов в инверторе
напряжения асинхронного тягового привода локомотива / В.В. Литовченко, Г.А.
Федяева // Вестник МИИТ: Научно-технический журнал. - Выпуск 13.- М.: МИИТ,
2005.- С. 25 – 29.
107. Логинова, Е.Ю. Исследование неравномерности нагрева обмоток
асинхронного тягового электродвигателя / Е.Ю. Логинова, Ф.В. Тихонов // Транс-
порт: наука, техника, управление. – 2007. – № 2 – С. 39 – 42.
108. Логинова, Е.Ю. Совершенствование методов анализа теплового состо-
яния тяговых электродвигателей тепловозов и характеристик их систем охлажде-
ния / Е.Ю. Логинова // автореферат дисс. … докт. техн. наук. – Москва, 2000. – 48 с.
109. Луков, Н. М. Автоматическое регулирование температуры двигателей.
– М.: Машиностроение, 1995. – 271 с.
110. Луков, Н.М. Автоматизация систем охлаждения тепловозов: учебное
пособие / Н.М. Луков – М.: изд. ВЗИИТ, 1974. – 56 с.
111. Луков, Н.М. Автоматическая система регулирования температуры тя-
говой полупроводниковой преобразовательной установки тягового транспортного
средства / патент RU 2284049// Луков Н.М., Ромашкова О.М., Космодамианский
А.С,, Алейников И.А., Стрекалов Н.Н., опубл. 20.09.2006, бюл. № 26.
112. Луков, Н.М. Автоматические системы управления и регулирования
тепловозов: учебное пособие / Н.М. Луков – М.: изд. МИИТ, 1983 – 144 с.
223
113. Луков, Н.М. Регулятор температуры энергетической установки транс-
портного средства / патент RU 2241837 // Н.М. Луков, А.С. Космодамианский,
И.А. Алейников. – опуб. 10.12.2004
114. Луков, Н.М. Электроприводы вентиляторов для регуляторов темпера-
туры энергетических установок подвижного состава / Н.М. Луков, А.С. Космода-
мианский, Ю.В. Попов // НТТ – Наука и техника транспорта, № 1 – 2005. – С. 44 –
55
115. Мамедов, З.А.О. Повышение эффективности работы подвижного со-
става с асинхронными тяговыми электроприводами в переходных режимах / З.А.О.
Мамедов // автореферат дисс. … канд. техн. наук. – Ростов-на-Дону, 2010. – 19 с.
116. Мещеряков, В.Н. Электропривод переменного тока / В.Н. Мещеряков,
Т.В. Синюкова, О.В. Мещерякова // патент России № 2512873, 2013.
117. Михальчук, Н.Л. Адаптивная система управления температурным ре-
жимом изоляции электрооборудования электровозов / Н.Л. Михальчук // автореф.
дисс. … канд. техн. наук. – Иркутск, 2010. – 20 с.
118. Мищенко, В.А. Теория, способы и системы векторного и оптимального
векторного управления электроприводами переменного тока / В.А. Мищенко // ав-
тореферат дисс. … докт. техн. наук. – Москва, 2010. – 40 с.
119. Могильников, В.С. Асинхронные электродвигатели с массивными и
двухслойными роторами / В.С. Могильников – ВМФ. Севастополь, 1967.– 94 с.
120. Моисеев, В.О. Исследование четырехмассовой термодинамической
математической модели асинхронного двигателя / В.О. Моисеев, Е.Я. Омель-
ченко, О.А. Тележкин // ФГБОУ ВПО «Магнитогорский государственный техни-
ческий университет им. Г. И. Носова. – 2009. №2. – С. 31 – 35.
121. Мощинский, Ю.А. Обобщенная математическая модель частотно-регу-
лируемого асинхронного двигателя с учетом потерь в стали / Ю.А. Мощинский, Аунг
Вин Тут // Электричество. – 2007. - № 11. – С. 60 – 66.
122. Мустафин, М.А. Энергосберегающие системы электропривода цен-
тробежных насосных агрегатов / М.А. Мустафин // автореф. дисс… докт. техн.
наук. – Алматы: КНТУ, 2007. – 43 с.
224
123. Нгуен Куанг Тхиеу. Развитие теории и методы повышения энергоэф-
фективности однодвигательных тяговых электроприводов автотранспортных
средств / Нгуен Куанг Тхиеу // автореф. дисс… докт. техн. наук. – Москва, 2012. –
40 с.
124. Онищенко, Г.Б. Асинхронные вентильные каскады и двигатели двой-
ного питания / Г.Б. Онищенко, И.Л. Локтева – М.: Энергия, 1979 – 200 с.
125. Оптимизация тягового асинхронного электропривода с учетом потерь и
насыщения стали / А.Б. Виноградов [и др.] // Электроприводы переменного тока:
труды международной пятнадцатой научно-технической конференции. – Екатерин-
бург, 2012. – С. 285 – 288.
126. Орленко, А.И. Энергосбережение в цепях вспомогательных машин
электровозов переменного тока на основе ступенчатого управления производи-
тельностью вентиляторов / А.И. Орленко // дисс… канд. техн. наук. – Иркутск.
2004. – 196 с.
127. Осташевский, Н.А. Математическая модель теплового состояния ча-
стотно-управляемого асинхронного двигателя в нестационарных режимах / Н.А.
Осташевский, В.П. Шайда, А.Н. Петренко // Электротехника и электромеханика.
– 2011. – № 5. – С. 39 – 42.
128. Оценка нагрева тяговых двигателей электровозов переменного тока в
условиях эксплуатации / И.В. Скогорев [и др.] // Повышение эффективности и ка-
чества работы электроподвижного состава: тр. Ростов-на-Лону ин-та ж.-д. трансп.
(РИИЖТ). – Ростов-на-Дону, 1984. – Вып. 176. – С. 71 – 78.
129. Панкратов, В.В. Методы синтеза автоматического управления элек-
троприводами переменного тока, малочувствительных к изменениям параметров
/ В.В. Панкратов // дисс… докт. техн. наук. – Новосибирск, 1997. – 479 с.
130. Паршин, А.Н. Регулируемый электропривод на базе тиристорного
преобразователя с непосредственной связью для систем собственных нужд элек-
тровозов переменного тока / А.Н. Паршин // дисс… канд. техн. наук. – М. 2006. –
179 с.

225
131. Петрушин, А.Д. Алгоритм оптимального управления пуском асинхрон-
ного тягового привода локомотива / А.Д. Петрушин, З.А Мамедов // Известия Петер-
бургского государственного университета путей сообщения. – 2007, №2(11). – С. 127
– 136.
132. Поляков, В.Н. Энергоэффективные режимы регулируемых электро-
приводов (концепция, задачи оптимизации, математические модели иалгоритмы
управления) / В.Н. Поляков // автореферат дисс. … докт. техн. наук. – Екатеринбург,
2009. – 41 с.
133. Попов, Ю.В. Совершенствование исполнительно-регулирующих
устройств локомотивных систем регулирования температуры, содержащих осевые
вентиляторы // Ю.В. Попов // дисс… канд. техн. наук. – Москва. 2007. – 142 с.
134. Прокопенко, С.А. Асинхронные мотор-вентиляторы с двухпакетной
конструкцией ротора для мощных магистральных тепловозов / С.А. Прокопенко
// Системы и узлы перспективных тепловозов: Сб. науч. тр.: под ред. Ю.А. Кули-
кова – Киев: УМК ВО, 1990. – 212 с. – С. 114 – 118.
135. Пугачев А.А. Математическая модель для исследования теплового со-
стояния силовых ключей тягового автономного инвертора напряжения / А.А. Пуга-
чев, Н.Н. Стрекалов// материалы I Международной научно-практической конферен-
ции «Локомотивы. Газомоторное топливо (Проблемы. Решения. Перспективы)». –
Самара: СамГУПС, 2016. – С. 104 – 107.
136. Пугачев А.А. Обзор методов измерения и определения температуры об-
моток тягового асинхронного двигателя /А.А. Пугачев //Локомотивы ХХI век: мате-
риалы IV Международной научно-технической конференции. – СПб.: ФГБОУ ВПО
ПГУПС, 2016. – С. 61 – 65.
137. Пугачев, А.А. Автоматическая система регулирования температуры
тяговой полупроводниковой преобразовательной установки тягового транспорт-
ного средства / А.А. Пугачев, В.И. Воробьев, А.С. Космодамианский, Н.Н. Стре-
калов // патент на полезную модель № 177910, приоритет полезной модели
06.06.2017

226
138. Пугачев, А.А. Автоматическая система регулирования температуры
тяговой полупроводниковой преобразовательной установки тягового транспорт-
ного средства / А.А. Пугачев, В.И. Воробьев, А.С. Космодамианский, Н.Н. Стре-
калов // патент на изобретение № 2695152, приоритет изобретения 13.04.2017
139. Пугачев, А.А. Влияние методов и результатов определения темпера-
туры теплонагруженных узлов асинхронного тягового двигателя железнодорож-
ного транспорта / А.А. Пугачев // Мир транспорта и технологических машин, № 3.
– 2012. – С. 39 – 49.
140. Пугачев, А.А. Анализ переходных процессов в системе «преобразова-
тель частоты – асинхронный двигатель» при неисправностях преобразователя / А.А.
Пугачев, В.И. Воробьев // Труды VII Международной (XVIII Всероссийской) конфе-
ренции по автоматизированному электроприводу. – Иваново, 2012. – С. 91 – 96.
141. Пугачев, А.А. Влияние температуры обмоток тягового двигателя на па-
раметры системы скалярного управления / А.А. Пугачев // Современные проблемы
совершенствования работы железнодорожного транспорта: межвузовский сборник
научных трудов – М.: Московский государственный университет путей сообщения,
2014. – С. 59 – 65.
142. Пугачев, А.А. Динамические свойства электропривода вентилятора
охлаждения энергетической установки / А.А. Пугачев, А.С. Космодамианский, А.Д.
Хохлов // Совершенствование энергетических машин: сб. науч. тр. – Брянск: БГТУ,
2013. – С. 165 – 171.
143. Пугачев, А.А. Идентификация сопротивления и температуры обмотки
ротора асинхронного двигателя / А.А. Пугачев // Автоматизированный электропри-
вод и промышленная электроника: Труды Шестой Всероссийской научно-практиче-
ской конференции. – Новокузнецк: изд-во СибГИУ, 2014. – С. 192 – 198.
144. Пугачев, А.А. Математическая модель для исследования электромеха-
нических процессов в электроприводе с асинхронным двигателем / А.А. Пугачев //
Электротехника. Энергетика. Машиностроение: сб. тр. I Междунар. науч. конф.
молодых ученых. – Новосибирск: Изд-во НГТУ, 2014. - Ч. 2. – С. 186 – 190.

227
145. Пугачев, А.А. Минимизация мощности потерь в электроприводе со
скалярной системой управления асинхронным двигателем / А. А. Пугачев // Вест-
ник Череповецкого государственного университета. – 2015. – № 3 (64). – С. 32 –
37.
146. Пугачев, А.А. Минимизация мощности потерь электропривода с асин-
хронным двигателем / А.А. Пугачев, А.С. Космодамианский, Д.А. Бондаренко //
Энерго- и ресурсосбережение XXI век.: материалы XI международной научно-прак-
тической интернет-конференции, 01 марта – 30 июня 2013 г., г. Орёл. – Орёл: Гос-
университет-УНПК, 2013. – С. 89 – 92.
147. Пугачев, А.А. Моделирование тягового электропривода локомотива с
опорно-осевым подвешиванием двигателя / А.А. Пугачев // Электротехника. Элек-
тротехнология. Энергетика: сборник научных трудов VII Международной научной
конференции молодых ученых. – Новосибирск: Изд-во НГТУ, 2015, ч. 1. – С. 130 –
133.
148. Пугачев, А.А. Моделирование энергетических процессов в электро-
приводах с асинхронным двигателем на базе эквивалентной схемы замещения /
А.А. Пугачев, В.И. Воробьев, А.С. Космодамианский // Проблемы электротех-
ники, электроэнергетики и электротехнологии: IV Международная научно-техни-
ческая конференция: сборник трудов. – Тольятти, ч. 1, 2012. – С. 208 – 213.
149. Пугачев, А.А. Определение параметров передаточной функции асин-
хронного двигателя как объекта регулирования температуры / А.А. Пугачев //Элек-
тротехника. Энергетика. Машиностроение: в 3 ч.: сборник научных трудов I Между-
народной научной конференции молодых ученых. – Новосибирск: Изд-во НГТУ,
2014, ч. 2. – С 183 – 186.
150. Пугачев, А.А. Определение параметров схемы замещения асинхрон-
ной машины на лабораторной установке / А.А. Пугачев, В.И. Воробьев, А.С. Кос-
модамианский // Электрические аппараты и электротехнические комплексы и си-
стемы: Международная научно-практическая конференция. – Ульяновск: УлГТУ,
Т. 2., 2012. – С. 204 – 206.
228
151. Пугачев, А.А. Определение тепловых сопротивлений обмотки статора
асинхронного двигателя / А.А. Пугачев // Мир транспорта и технологических ма-
шин, 2016. - № 2(53) – С. 62 – 67.
152. Пугачев, А.А. Расчет сопротивлений эквивалентной тепловой схемы за-
мещения асинхронного двигателя / А.А. Пугачев, Д.А. Бондаренко // Совершенство-
вание энергетических машин: сб. науч. тр. – Брянск: БГТУ, 2015. – С. 205 – 218.
153. Пугачев, А.А. Регулируемый электропривод вспомогательных агрега-
тов подвижного состава с асинхронным двигателем, имеющим поворотный статор /
А.А. Пугачев // дисс… канд. техн. наук. – Москва. 2009. – 153 с.
154. Пугачев, А.А. Результаты расчета тепловых процессов в асинхронном
двигателе / А.А. Пугачев, Д.А Бондаренко // Электропривод, электротехнологии и
электрооборудование предприятий: сборник научных трудов II Международной (V
Всероссийской) научно-технической конференции – Уфа: Издательство УГНТУ,
2015. – С. 220 – 223.
155. Пугачев, А.А. Результаты сравнительного анализа электроприводов с
двух- и трехуровневыми инверторами напряжения / А.А. Пугачев // Автоматизиро-
ванный электропривод и автоматика [Текст]: сборник докладов Всероссийской
научно-практической конференции. 1-4 июля 2014 г.– Липецк: Изд-во Липецкого
государственного технического университета, 2014. – С. 5 – 6.
156. Пугачев, А.А. Результаты экспериментальных исследований
тепловых процессов в асинхронном двигателе / А.А. Пугачев, Д.А. Бондаренко //
Вестник Брянского государственного технического университета. – 2015. – № 3 (47).
– С. 77−82.
157. Пугачев, А.А. Синтез энергоэффективной системы векторного управле-
ния для тягового электропривода / А.А. Пугачев // Локомотивы ХХI век: материалы
III Международной научно-технической конференции. – СПб.: ФГБОУ ВПО
ПГУПС, 2015. – С. 96 – 100.
229
158. Пугачев, А.А. Система управления тяговым асинхронным двигателем с
минимизацией мощности потерь / А. А. Пугачев, В. И. Воробьев, А. С. Космодамиан-
ский // Вестник Брянского государственного технического университета. – 2015. –
№ 2 (46). – С. 55−61.
159. Пугачев, А.А. Системный подход к исследованию характеристик тяго-
вого и вспомогательного электроприводов локомотива с асинхронными двигателями
/ А.А. Пугачев, А.С. Космодамианский, В.И. Воробьев // Электроприводы перемен-
ного тока: тр. XV Междунар. науч. - техн. конф. – Екатеринбург, 2012. – С. 281 –
284.
160. Пугачев, А.А. Сравнительная оценка преобразователей частоты электро-
приводов тягового подвижного состава / А.С. Космодамианский, В.И. Воробьев,
А.А. Пугачев // Современные проблемы совершенствования работы железнодорож-
ного транспорта: межвузовский сборник научных трудов – М.: Московский государ-
ственный университет путей сообщения, 2014. – С. 48 – 51.
161. Пугачев, А.А. Сравнительная оценка энергоэффективности электропри-
водов с асинхронными двигателями / А.А. Пугачев // Энерго- и ресурсосбережение –
XXI век.: материалы XIII международной научно-практической интернет-конферен-
ции. – Орел: Госуниверситет-УНПК, 2015. – С. 159 – 162.
162. Пугачев, А.А. Формирование оптимального задания на момент тягового
асинхронного двигателя / А.А. Пугачев // Локомотивы ХХI век: материалы II Меж-
дународной научно-технической конференции. – СПб.: Петербургский государ-
ственный университет путей сообщения Императора Александра I, 2014. – С. 51 – 54.
163. Пугачев, А.А. Энергетические показатели качества электропривода
вспомогательных систем тягового подвижного состава / А.А. Пугачев, В.И. Воро-
бьев, Г.С. Михальченко, А.С. Космодамианский, А.В. Самотканов // Мир транс-
порта и технологических машин. – 2015. - № 1(48) – С. 58 – 66
164. Пугачев, А.А. Энергоэффективная система скалярного управления элек-
тропривода с асинхронным двигателем / А.А. Пугачев // Энерго- и ресурсосбереже-
ние – XXI век: материалы XVI международной научно-практической интернет-кон-
ференции. – Орел: Госуниверситет-УНПК, 2018. – С. 148 – 151.

230
165. Пугачев, А.А. Энергоэффективная система управления асинхронным
электроприводом / А.А. Пугачев, В.И. Воробьев // патент на полезную модель №
167775, опубликовано 10.01.2017, бюл. № 1.
166. Пугачев, А.А. Энергоэффективность электроприводов со скалярным
управлением асинхронных двигателей / А.А. Пугачев // Актуальные проблемы науки
и техники: материалы VIII Международной научно-практической конф. молодых
учёных. – Уфа: Издательство УГНТУ, т. 2, 2015. – С. 39 – 42.
167. Пудовиков, О.Е. Автоматическое управление скоростью грузового по-
езда с электровозом, допускающим плавное управление силами тяги и торможения /
О.Е. Пудовиков // автореферат дисс… докт. техн. наук. – Москва. 2011. – 48 с.
168. Савоськин, А.Н. Автоматизация электроподвижного состава /
А.Н. Савоськин. – М.:Транспорт, 1990. – 311 с.
169. Савоськин, А.Н. Автоматизированные системы управления электро-
подвижным составом: учебник: в 3 ч. Ч. 1: Теория автоматического управления /
под ред. Л.А. Баранова, А.Н. Савоськина – изд-во УМЦ ЖДТ (Маршрут), 2014. –
400 с.
170. Сагитов, П. Математическое моделирование системы воздушного
охлаждения силового шкафа управления с частотным преобразователем / П. Саги-
тов [и др.] // Силовая электроника. – 2012. – № 5 – С. 76 – 78.
171. Самотканов, А.В. Передаточная функция вспомогательного электропри-
вода тепловоза / А.В. Самотканов, В.И. Воробьев, А.А. Пугачев // Труды VIII Меж-
дународной (XIX Всероссийской) конференции по автоматизированному электро-
приводу АЭП-2014: в 2 т. – Саранск: Изд-во Мордов. ун-та, 2014., Т. 2. – С. 220 – 223.
172. Самотканов, А.В. Электропривод вентилятора охлаждения локомо-
тивных автоматических систем регулирования температуры / А.В. Самотканов //
дисс… канд. техн. наук. – Москва. 2015. – 156 с.
173. Смирнов, В.П. Непрерывный контроль температуры предельно нагру-
женного оборудования электровоза / В.П. Смирнов // дисс… докт. техн. наук. –
Иркутск, 2005. – 355 с.

231
174. Снегирев, Д.А. Асинхронный электродвигатель для частотно-регули-
руемого электропривода турбомеханизмов / Д.А. Снегирев // дисс… канд. техн.
наук. – Воронеж, 2006. – 142 с.
175. Солдатенко, Д.А. Разработка методов выбора параметров тяговых при-
водов тепловозов по уровню энергетической эффективности / Д.А. Солдатенко //
автореферат дисс. … канд. техн. наук. – Москва, 2008. – 24 с.
176. Соломин, В.А. Пусковые параметры асинхронных двигателей с меха-
нически регулируемым сопротивлением обмотки ротора / В.А. Соломин, К.А.
Шухмин, В.П, Янов //Электровозостроение Сб. науч. тр. ОАО «Всерос. н.-и. и про-
ектно-конструкт. ин-т электровозостроения» (ОАО «ВЭлНИИ»). – 1997. – т. 37. –
С. 55 – 63
177. Стрекалов, Н.Н. Автоматическая система регулирования температуры
силовых полупроводниковых приборов тяговых преобразователей локомотивов /
Н.Н Стрекалов // дисс. … канд.техн.наук. – Москва, 2019. – 134 с.
178. Стрекалов, Н.Н. Автоматическое регулирование температуры полупро-
водниковых приборов тягового преобразователя частоты / Н.Н. Стрекалов, А.А. Пу-
гачев // Труды Ростовского государственного университета путей сообщения.
Научно-технический журнал. – 2018 – № 4 (45) – С. 94 – 97.
179. Стрекалов, Н.Н. Стабилизация температурного режима силовых полу-
проводниковых приборов / Н.Н. Стрекалов // Локомотивы ХХI век: материалы IV
Международной научно-технической конференции. – СПб.: ФГБОУ ВПО
ПГУПС, 2016. – С. 65 – 69.
180. Стрельников, А.Н. Асинхронные электродвигатели с массивными ро-
торами для судовых электроприводов / А.Н. Стрельников, Е.Л. Лисицкий // Судо-
строение, 1970. – № 3.
181. Сухов, Я. И. Оптимизация по условиям Куна – Таккера / Я. И. Сухов, И.
А. Гарькина // Молодой ученый. – 2014. – №7. – С. 182 – 185.
182. Тарасов, А.Н. Управление асинхронными тяговыми электродвигателями
тележки локомотива в предельных по сцеплению режимах работы / А.Н. Тарасов //
автореферат дисс. … канд. техн. наук. – Москва, 2018. – 20 с.
232
183. Телегин, М.В. Адаптивная система комбинированного автоматического
управления током тяговых двигателей электроподвижного состава // М.В. Телегин //
дисс. … канд. техн. наук. – Москва, 2013. – 267 с.
184. Тепловая модель асинхронного двигателя для цепей релейной защиты
/ А.В. Булычёв [и др.] // Электротехника. – 2011. - № 3. – С. 26 – 30.
185. Тимофеев, А.А. Охлаждающие устройства полупроводниковых пре-
образователей на основе модулей IGBT для вспомогательного электропривода
электровозов: дисс. ... канд.техн.наук: 05.22.07 / А.А. Тимофеев. – Санкт-Петер-
бург, 2005. – 20 с.
186. Тихонов, Ф.В. Разработка методов выбора параметров асинхронного
тягового двигателя с учетом теплового состояния обмоток / Ф.В. Тихонов // дисс.
… канд. техн. наук. – Москва, 2008. – 135 с.
187. Управление тяговым асинхронным электроприводом гибридных авто-
мобилей по минимуму потерь и максимуму перегрузочной способности / Е.М. Ов-
сянников [и др.] // Приоритеты развития отечественного автотракторостроения и
подготовки инженерных и научных кадров: сб. тр. 65- й Междунар. науч.-техн. конф.
ААИ. – М.: МАМИ, 2009. – C. 120 – 129.
188. Фадейкин, Т.Н. Исследование тяговых электроприводов с асинхрон-
ными двигателями для подвижного состава железных дорог с целью повышения их
энергетической эффективности / Т.Н. Фадейкин // дисс. … канд. техн. наук. – Москва,
2016. – 110 с.
189. Федоров, М.М. Особенности теплового состояния асинхронных дви-
гателей при несимметричном питающем напряжении / М.М. Федоров, О.Г. Пин-
чук // Вестник Кременчугского государственного политехнического универси-
тета. – Кременчуг, 2004. – Вып. 2 (25). – С. 122 – 125.
190. Федорова, К.Г. Применение двухмассовой тепловой модели для органи-
зации защиты в частотно-регулируемом асинхронном электроприводе / К.Г. Федо-
рова // дисс. … канд. техн. наук. – Москва, 2018. – 147 с.

233
191. Федяева, Г.А. Влияние характеристик асинхронного двигателя на
ударные динамические нагрузки в тяговом приводе / Г.А. Федяева, В.П. Феокти-
стов // Соискатель. Приложение к журналу «Мир транспорта». – 2005. – № 2. – С.
118 – 125.
192. Федяева, Г.А. Прогнозирование динамических процессов при нестацио-
нарных и аварийных режимах тяговых электроприводов с асинхронными двигате-
лями/ Г.А. Федяева / автореферат дисс. … докт. техн. наук. – Москва, 2009. –40 с.
193. Хвостов, В.А. Применение MatLab для исследования электроприводов
с асинхронными двигателями / В.А. Хвостов, А.А. Пугачев// Известия Тульского
государственного университета. Технические науки. – 2010. – № 3-4. – С. 241 –
247.
194. Храменков, С.А. Исследование электрических систем плавного регу-
лирования частоты вращения мотор-вентиляторов для новых тепловозов / С.А.
Храменков, В.М, Алексеев, В.С. Строков // ВНИТИ. Труды института. Вып. 45. –
1977. – С. 38 – 50
195. Худорожко, М.В. Повышение эффективности использования электро-
воза с микропроцессорной системой управления за счет оперативного уточнения
тепловых параметров тягового электродвигателя и сопротивления движению поезда
/ М.В, Худорожко // автореферат дисс. … канд. техн. наук. – Москва, 2009. – 25 с.
196. Цветков, П.Е. Разработка и исследование систем асинхронного элек-
тропривода с частотно-токовым управлением для насосных механизмов / П.Е.
Цветков // автореферат дисс. … канд. техн. наук. – Липецк, 2014. – 18 с.
197. Цыкунов, Ю.Ю. Повышение экономичности вспомогательных электро-
приводов с асинхронными двигателями на локомотивах / Ю.Ю. Цыкунов // дисс. …
канд. техн. наук. – Москва, 2004. – 203 с.
198. Чащин, В.В. Повышение эффективности работы асинхронного тяго-
вого электродвигателя с учетом его теплового состояния / В.В. Чащин // дисс. …
канд. техн. наук. – Москва, 2004. – 179 с.

234
199. Шиляков, А.П. Влияние жесткости характеристик тяговых двигателей
локомотивов на потери энергии в зоне колеса с рельсом / А.П. Шиляков // дисс. …
канд. техн. наук. – Омск, 2009. – 181 с.
200. Шрейнер, Р.Т. Математическое моделирование электроприводов пе-
ременного тока с полупроводниковыми преобразователями частоты / Р.Т. Шрей-
нер – Екатеринбург: УРО РАН, 2000. – 654 с.
201. Шубенко, В.А. Тиристорный асинхронный электропривод с фазовым
управлением / В.А. Шубенко, И.Я. Браславский – М.: Энергия, 1972. – 200 с.
202. Яковлев, А.И. Распределение температур в асинхронных электродви-
гателях с радиальной системой вентиляции / А.И. Яковлев // Электричество. –
1969. - № 9. – С. 65 – 69.
203. Adaptive Fuzzy Controller for Efficiency Optimization of Induction Motors /
D.A. Sousa [et al] // IEEE Transaction on Industrial Electronics, Vol. 54, No.4, pp. 2157-
2164, 2007.
204. Aissa, K. Vector control using series iron loss model of induction motors and
power loss minimization / K. Aissa, K.D. Eddine // World academy of science, engineering,
and technology, 52, 2009. – P. 142 – 1
205. Avenas, Y. Temperature Measurement of Power Semiconductor Devices by
Thermo-Sensitive Electrical Parameters – A Review / Y. Avenas, L. Dupont, Z. Khatir
// IEEE Transactions on Power Elec- tronics, Institute of Electrical and Electronics En-
gineers, 2012, 27 (6), pp 3081-3092.
206. Beguenane, R. Induction motor thermal monitoring by means of rotor re-
sistance identification / R. Beguenane, M. Benbouzid / IEEE Trans. Energy Conver.,
1999, – vol. 14, no. 3, pp. 566–570.
207. Belassel, M.T. High-frequency parameters and voltage surges in various
windings of induction motors supplied from PWM converters / M.T. Belassel, V.Y.
Bespalov // Russian Electrical Engineering. – 2006. – Volume 77, issue 3 – p. 54 – 65.
208. Benbouzid, M.E.H. An efficiency-optimization controller for induction motor
drives / M.E.H. Benbouzid, N.S. Nait Said // IEEE Power Engineering Review, Vol. 18,
Issue 5, pp. 63 –64, 1998.
235
209. Blasko, V. On Line Thermal model and Thermal Management Strategy of
a Three Phase Voltage Source Inverter / V. Blasko [et al.] // Industry Applications Con-
ference. - 1999. – P. 1423 – 1431.
210. Böcker, J. State of the art of induction motor control / J. Böcker, S. Matha-
pati // Proceedings of 2007 International Conference on Electric Machines & Drives,
ISBN 1-4244-0743-5, Antalya, Turkey, May 2007. – P. 1459 –1464
211. Champenois, G. Electrical and thermal performance predictions in inverter-
fed squirrel-cage induction motor drives / G. Champenois, D. Roye, and D. S. Zhu //
Electr. Mach. Power Syst., vol. 22, no. 3, pp. 355-369, May/June 1994.
212. Chung, D.W. Minimum-loss PWM strategy for 3-phase PWM rectifier / D.W.
Chung, S.K.Sul // PESC, 1997, vol. 136, pp.1020 – 1027.
213. Del Pizzo, A. Optimum torque/current control of dual-PMSM single -VSI
drive / A. Del Pizzo, D. Iannuzzi, I. Spina // Electronics, vol. 14, No. 1, June 2010. – pp. 61
– 66.
214. Direct torque control of induction machines using space vector modulation
/ T.G. Habetler [et al.]//IEEE Trans. Industry Applications. Vol. 28, No. 5, Sept/Oct
1992.
215. Dynamic and thermal modeling of induction machine with non-linear effect
/ Ogbonnaya Inya Okoro // Kassel university press GmbH, Kassel, 2002. – P. 140.
216. FF300R06KE3. Technical information. Режим доступа: http://www.in-
fineon.com
217. Guidi, G. A novel stator resistance estimation method for speed-sensorless
induction motor drives / G. Guidi, H. Umida // IEEE Trans. Ind. Appl., 2000. – vol. 36,
no. 6, pp. 1619–1627, Nov./Dec.
218. In’kov, Yu.M. Simulation of electric drive with direct torque control of
induction motor / Yu.M. In’kov, A.S. Kosmodamianskii, A.A. Pugachev, E.V. Sachkova
// Journal of Information Technology and Applications. – 2018. – Vol. 8, No. 1, – pp. 5
– 13.
236
219. Induction machine diagnosis using stator current advanced signal pro-
cessing / E. Elbouchikhi [et al.] // Advanced Signal Processing. International Journal on
Energy Conversion, 2015, 3 (3), pp.76-87.
220. Kalas, A.E. IGBT open gate drive fault diagnosis of a voltage fed three phase
PWM inverter drive system / A.E. Kalas // Proceedings of the 14th International Middle
East power systems conference (MEPCON’ 10), Cairo, Egypt, 2010. – P. 696 – 701.
221. Kang, J-K. New direct torque control of induction motor for minimum torque
ripple and constant switching frequency / J-K. Kang and S-K. Sul // IEEE Trans. Industry
Applications, Vol. 35, No. 5, Sept/Oct 1999
222. Kastha, D. Investigation on fault modes of voltage-fed inverter system for in-
duction motor drive / D. Kastha, B.K. Rose // IEEE transactions on industry applications,
vol. 30. No. 4, 1994. – P. 1028 – 1038.
223. Kosmodamianskii, A.S. Direct torque control of induction motors fed by a
single frequency converter / A.S. Kosmodamianskii, V.I. Vorobiev, A.A. Pugachev //
Russian Electrical Engineering. – 2015. – Vol. 86, No. 9, pp. 527 – 533.
224. Kosmodamianskii, A.S. Scalar control systems for a traction induction mo-
tor / A.S. Kosmodamianskii, V.I. Vorobiev, A.A. Pugachev // Russian Electrical Engi-
neering. – 2016. – Vol. 87, No. 9, pp. 518 – 524.
225. Kosmodamianskiy, A.S. Automatic temperature regulation system of loco-
motive traction induction motors with power losses minimization / A.S. Kosmoda-
mianskiy, V.I. Vorobiev, A.A. Pugachev // Journal of Information Technology and Ap-
plications. – 2015. – Vol. 5, No. 1, – pp. 13 – 24.
226. Kylander, G. Thermal modeling of small cage induction motors / G. Ky-
lander // Technical report № 265, submitted to the School of Electrical and Computer
Engineering Chalmers University of Technology in partial fulfilment of the require-
ments for the degree of Doctor of Philosophy, Goteborg, 1995. – P. 113
227. Lezana, P. Survey on fault operation on multilevel inverters / P. Lezana, J.
Poy, T.A. Meynard, J. Rodriguez, S. Ceballos, F. Richardean // IEEE transactions on indus-
trial electronics, vol 57, No. 7, 2010. – P. 2207 – 2218.
237
228. Lim, S. Loss-minimising control scheme for induction motors / S. Lim, K.
Nam // IEE Proc.-Electr. Power Appl. - 2004 - Vol. 151. № 4. – P. 386 – 397.
229. Mellor, P.H. Lumped parameter thermal model for electrical machines of
TEFC design / P. H. Mellor, D. Roberts, and D. R. Turner // IEE Proc. - Electr. Power
Appl., 1991. –vol. 138, pp. 205-218.
230. Mesaif, I. A study of DTC – power electronic cascade fed by photovoltaic
cell-three-level NPC inverter / I. Mesaif, EI-M. Berkouk, N. Saadia // Smart grid and re-
newable energy, 2010. – 1. – pp. 109 – 118.
231. Murdock, D.A. Active thermal control of power electronics module / Mur-
dock D.A., Ramos Torres J.E., Connors J.J., Lorenz R.D. // IEEE Transactions on In-
dustry Applications, VOL. 42, NO. 2, MARCH/APRIL 2006. – pp. 552 – 558.
232. Popova, L. Combined electromagnetic and thermal design platform for to-
tally enclosed induction machines / L. Popova. – Lappeenranta: Lappeenranta university
of technology, 2010. – p. 76.
233. Predictive control technique of single inverter dual motor AC-brushless drives
/ M.S.D. Acampa [et al.] // Proceedings of the 2008 International Conference on Electrical
Machines, 2008.
234. Pugachev, A. Comparative assessment of thermal processes in frequency
converters / A. Pugachev, A. Kosmodamianskiy, N. Strekalov // Proceedings of 2017
International Conference on Industrial Engineering, Applications and Manufacturing
(ICIEAM), Saint Petersburg. – 2017.
235. Pugachev, A. Definition of the transfer function of asynchronous motor as
an object of temperature control / A. Pugachev, G. Fedyaeva // Applied Mechanics and
Materials. – 2015. – Vol. 698. – pp. 124 – 130
236. Pugachev, A. Efficiency increasing of induction motor scalar control sys-
tems / A. Pugachev // Proceedings of 2017 International Conference on Industrial Engi-
neering, Applications and Manufacturing (ICIEAM), Saint Petersburg. – 2017.
237. Pugachev, A. Experimental investigation of thermal processes in induction
motor by physical modelling / A. Pugachev, A. Kosmodamianskiy // Proceedings of
238
2015 International Conference on Mechanical Engineering, Automation and Control
Systems (MEACS 2015), Tomsk. – 2015.
238. Pugachev, A. Induction motor scalar control system with power losses min-
imization / A. Pugachev, A. Kosmodamianskiy // Proceedings of 2019 International
Conference on Industrial Engineering, Applications and Manufacturing, ICIEAM 2019.
239. Pugachev, A. Induction motor temperature influence on scalar control sys-
tems efficiency / A. Pugachev // Proceedings of 2016 International Conference on In-
dustrial Engineering, Applications and Manufacturing (ICIEAM), Chelyabinsk – 2016.
240. Pugachev, A. Induction motor traction drive with slipping protection / A.
Pugachev // Applied Mechanics and Materials. – 2015. – Vol. 792. – pp. 101 – 106
241. Pugachev, A. Investigation of the dynamics of electric drive in fault modes
of two- and three-level inverters / A. Pugachev // Proceedings of Dynamics of Systems,
Mechanisms and Machines (Dynamics), 2016, Omsk.
242. Pugachev, A. Simulation of induction motor temperature determination by
additional voltage injections / A. Pugachev // Proceedings of 2016 International Confer-
ence on Industrial Engineering, Applications and Manufacturing (ICIEAM), Chelya-
binsk – 2016.
243. Pugachev, A. Two induction motors electric drive with rotatory stator / A.
Pugachev, A. Kosmodamianskiy // Journal of Electrical Engineering. – 2016. – Volume
16, issue 4, pp. 54 – 60.
244. Pugachev, A.A. A simplified equivalent thermal circuit for the substitution
of a stator in an induction motor / A.A. Pugachev, A.S. Kosmodamianskii, Yu.M. In’kov
// Russian Electrical Engineering. – 2017. – Vol. 88, No. 9, pp. 600 – 604.
245. Pugachev, A.А. Investigation of induction motor temperature distribution
in traction applications / A.A. Pugachev, A.S. Kosmodamianskiy // IOP Conf. Series:
Earth and Environmental Science 87 (2017)
246. Pugachev, A.А. Temperature control of power semiconductor devices in
traction applications / A.A. Pugachev, N.N. Strekalov // IOP Conf. Series: Materials
Science and Engineering 177 (2017)

239
247. Report Of Large Motor Reliability Survey Of Industrial And Commercial
Installations, Part I / Motor Reliability Working Group // IEEE Trans. Ind. Appl., vol.
IA-21, no. 4, pp. 853-864, July/Aug. 1985.
248. Schulze, R. Ermittlung der mathematischen Abhangigkeiten bei der
Erwarmung von Dahnmotoren. Sektion Fahrzeugtechnik / R. Schulze // Hochschule fur
Verkehrswesen Friedrich List», Dresden 30 (1983) H. 3, s. 581 – 585.
249. SK30MLI066 datasheet. Режим доступа: http://www.semikron.com/prod-
ucts/ data/cur/assets/SK_30_MLI_066_24914400.pdf
250. SK60GB128 datasheet. Режим доступа: http://www.semikron.com/products/
data/cur/assets/SK_60_GB_128_24910740.pdf
251. Staudt, I. 3L NPC & TNPC Topology / I. Staudt // Semikron. Application note
AN11001, 2012. – P. 12.
252. Takahashi, I. A new quick response and high efficiency control strategy for an
induction motor / I. Takahashi, T. Noguchi // IEEE transactions on industry applications,
No. 5, 1986. – P. 820 – 827
253. Thorsen, O.V. A survey of the reliability with an analysis of faults on variable
frequency drives with in industry / O.V. Thorsen, M. Dalva // EPE’95, Spain. – 1995. – P.
1033 – 1038.
254. Vukosavic, S.N. Robust DSP-based efficiency optimization of variable speed
induction motor drive / S.N. Vukosavic, E Levi // IEEE Transaction of Ind. Electronics,
2003. – Vol.50, No.3, pp. 560-570.
255. Wan, H. A single inverter multi-motor system based on direct torque control /
H. Wan, Y. Pan // U.P.D. Sci. Bull. Series C, vol. 76, Iss. 2, 2014. – pp. 207 – 218.
256. Xi, C. Losses and Thermal Calculation of IGBT and FWD in PWM Inverter
for Electric Engineering Maintenance Rolling Stock / C. Xi, H. Shenghua, L. Bingzhang,
X. Yangxiao // 2016 19th International Conference on Electrical Machines and Systems
(ICEMS)
257. Zhang, A. Active stator winding thermal protection for AC motors / P.
Zhang, B. Lu, T.G. Habetler // 2009 IEEE IAS pulp & paper industry conference in
Birmingham, p. 11 – 19.
240
ПРИЛОЖЕНИЕ 1. Описание изобретения к патенту RU 2541491
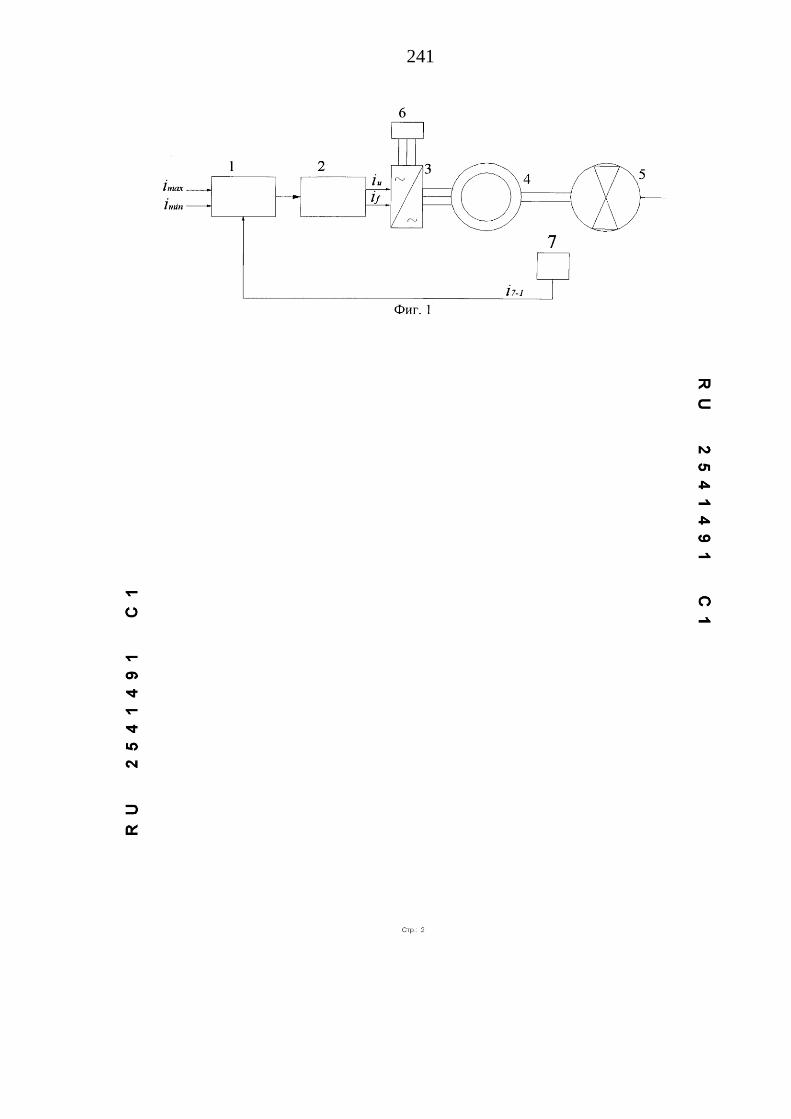
241

242
243

244
245
246
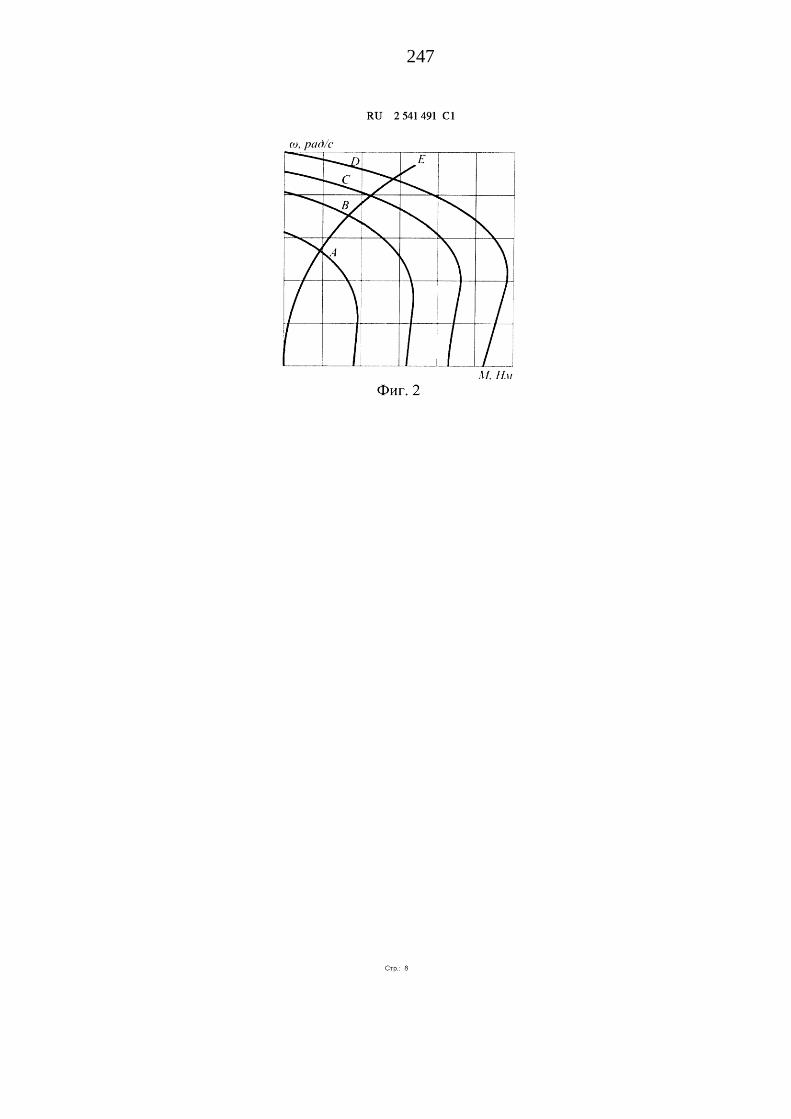
247

248
ПРИЛОЖЕНИЕ 2. Акты о внедрении результатов диссертации
249
250
251
Related Documents











