Fail-Safe Mobility Management and Collision Prevention Platform for Cooperative Mobile Robots with Asynchronous Communications Rami Yared School of Information Science Japan Advanced Institute of Science and Technology (JAIST) Supervised by: Prof. Xavier Défago 1

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

Fail-Safe Mobility Management and Collision Prevention
Platform for Cooperative Mobile Robots with Asynchronous
Communications
Rami YaredSchool of Information Science
Japan Advanced Institute of Science and Technology (JAIST)
Supervised by:Prof. Xavier Défago
1
Application
Garden Cultivation by cooperative mobile robots.
2

Context
• Group of mobile robots
• Asynchronous communication (No upper bound on communication delays)
• No upper bounds on robots speeds
• No central control
3

Problem
• Prevent collisions between mobile robots.
4

Research Objective
• Mobility management platform
• Fail-safe mobile robotic system
• Prevent robots collisions.
5

Outline
• Related work and motivation
• System architecture
• System model and problem specification
• Fail-safe platform
• Collision prevention for a closed group model
• Collision prevention for a dynamic group model
• Conclusion
• Future directions
6
7
Motion planning
•Find a route from an initial position to a final position in presence of obstacles.
Related work
• Avoid collision between a robot and Fixed obstacles
• Sensing during the motion in dynamic or unknown environments
8
Minguez et al 2004. [22]Montano et al 1997. [23]
Motion planning
RT guarantees

Related work
•Upper bound on communication delays.
•Upper bound on processing speeds.
• Wireless LAN, Access point central router
9
Synchronous systemsNett et al 2003 [25]

Related work
10
Synchronous systemsNett et al 2003 [25]
Collisions between mobile robots
Violation of timeliness properties
Related work
Time elastic: Time bounds can be increased or decreased dynamically
Fail safe: exhibits correct behavior, or put the system in a fail-safe state.
11
Martins et al 2005 [21]

Related work
12
Martins et al 2005 [21]
Collisions between mobile robots
•Wireless Communications retransmission ⇒mechanisms.
•Arbitrary sized messages ⇒ unknown delays, not anticipated, ...
⇒ Time free approach is important
13
Contribution
Time free mobility management platform
Fail-Safe mobile robotic system.
• Collision prevention protocols:
• Closed group of robots.
• Dynamic group of robots.
14

Outline
• Related work and motivation
• System architecture
• System model and problem specification
• Fail-safe platform
• Collision prevention for a closed group model
• Collision prevention for a dynamic group model
• Conclusion
• Future directions
15

16
Motion planning
•Find a route from an initial position to a final position in presence of obstacles.

System architecture
17
•Fail-safe
•Time free

Outline
• Related work and motivation
• System architecture
• System model and problem specification
• Fail-safe platform
• Collision prevention for a closed group model
• Collision prevention for a dynamic group model
• Conclusion
• Future directions
18

System model
• Asynchronous communications
• Retransmission reliable channels⇒
• Positioning system with bounded errors.
19

Approach
• Distributed path reservation system.
• Primitives:
• Request
• Reserve
• Release
20

Reserve / Release
21

Specification
• Safety
A given zone can be owned by only one robot.
Zonei ∩ Zonej ≠ ⇒ (R⇒ i owns Zonei) XOR (Rj owns Zonej)
22

Specification
• Liveness
If Ri requests Zonei then eventually (Ri owns Zonei or an Exception is raised)
Ri requests Zonei (R⇒♢ i owns Zonei or Exception)
23

Specification
Raising exceptions occurs only in specified situations.
•Non triviality
Exception is raised only if a deadlock situation occurs.
24

25
Reserved Zone
•εgps : Positioning system
•εtr : translation movement
•εθ : rotation movement

Request / Released zone
26
Deadlock situation
27
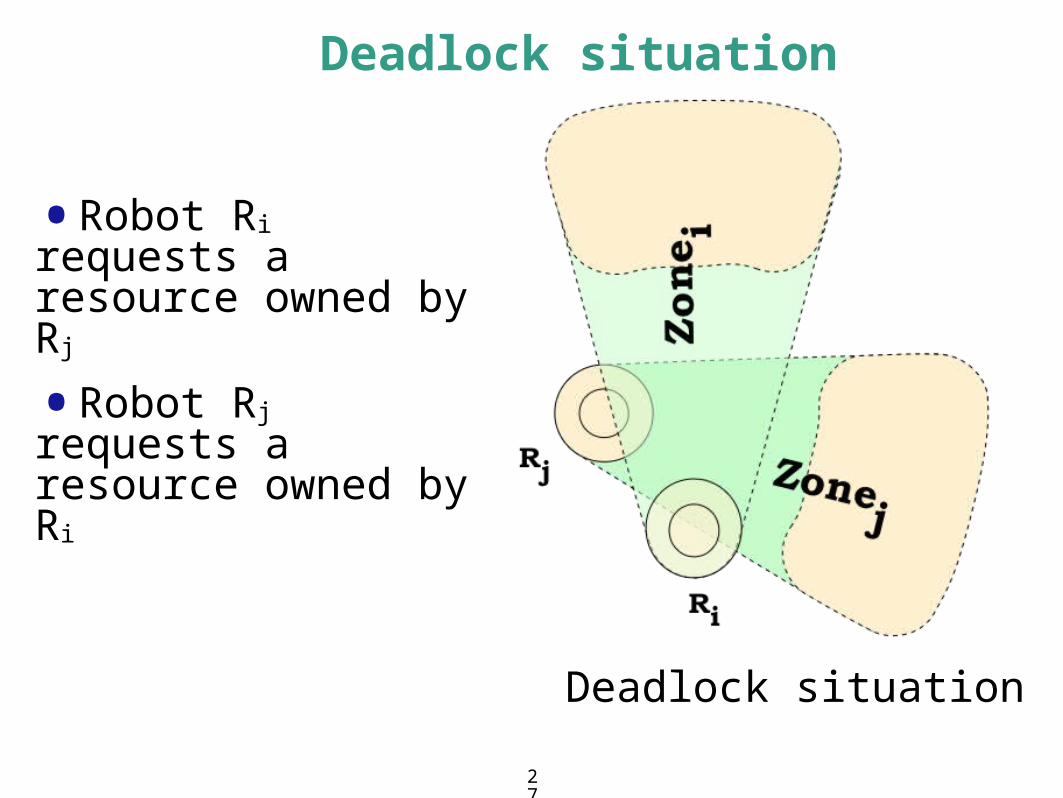
Deadlock situation
•Robot Ri requests a resource owned by Rj
•Robot Rj requests a resource owned by Ri

Starvation situation
28
Starvation situation
•If robot Rj owns Zonej then Ri is blocked (starvation)
Pathological situation
29
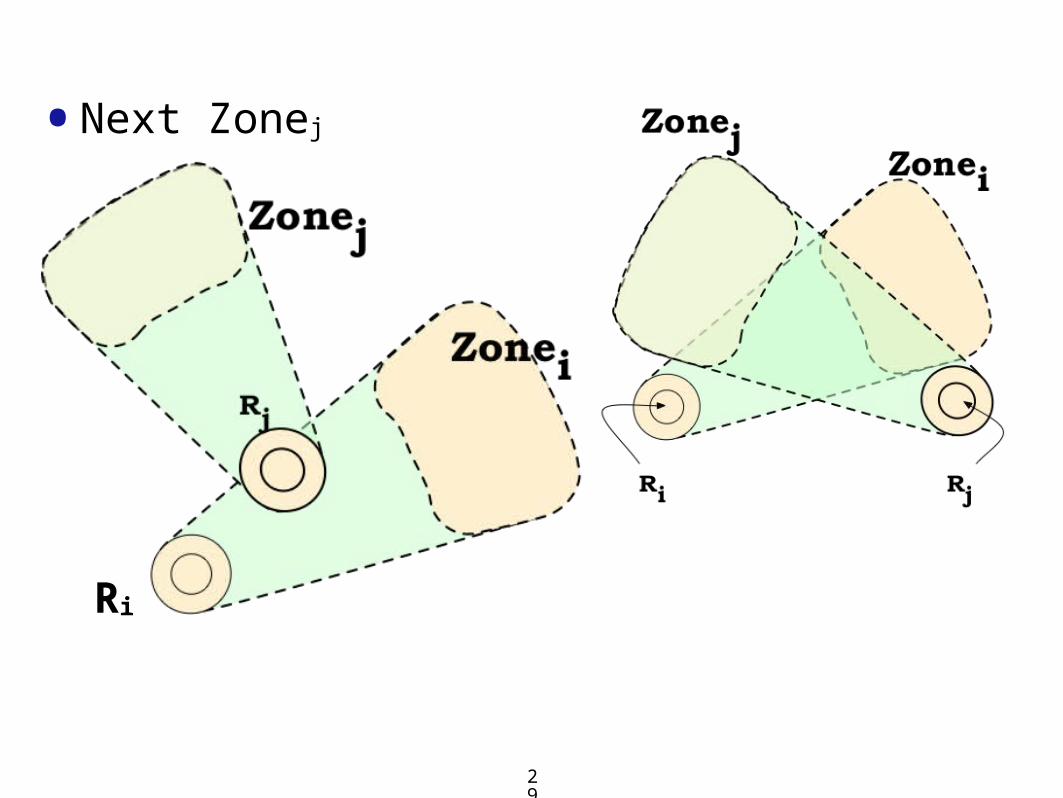
•Next Zonej
Ri

30
•Next Zonej
Deadlock situation

Outline
• Related work and motivation
• System architecture
• System model and problem specification
• Fail-safe platform
• Collision prevention for a closed group model
• Collision prevention for a dynamic group model
• Conclusion
• Future directions
31

Part 1: Collision prevention protocol for a closed group of mobile robots.
32

Closed group model
•Composition known to all robots
•Communication graph is fully connected
33

Collision prevention protocol
• Requests ordering
• wait-for relations between robots
• Consistency
• All robots agrees on the same wait-for relations.
34

Total Order Broadcast
TO-broadcastTO-broadcast TO-deliverTO-deliver
Protocol
36
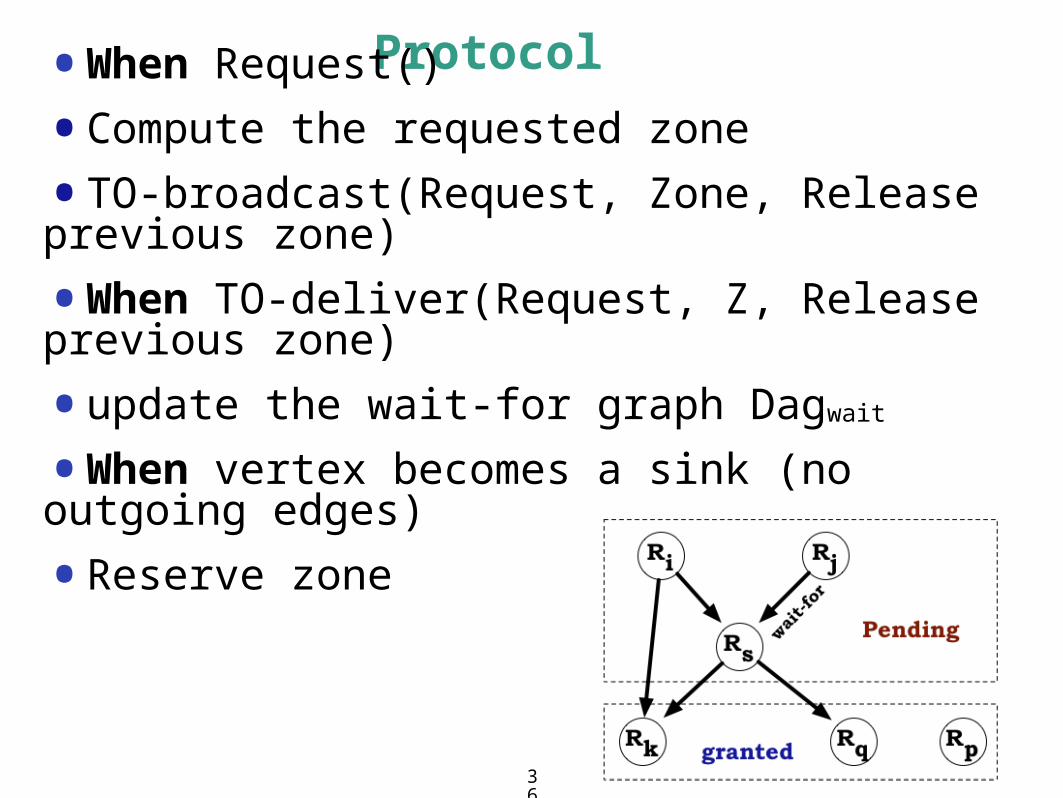
•When Request()
•Compute the requested zone
•TO-broadcast(Request, Zone, Release previous zone)
•When TO-deliver(Request, Z, Release previous zone)
•update the wait-for graph Dagwait
•When vertex becomes a sink (no outgoing edges)
•Reserve zone

Example
37

Fault-tolerant collision prevention
38
Robots fail by crash
•Communication part
•Total Order Broadcast
•Problem: If a robot has crashed
•A robot waiting for a crashed robot is blocked
•The number of blocked robots increases Snowball⇒ effect
•A robot cannot distinguish a crashed robot from a very slow one (asynchronous system)
Zoned
Zonej
Zoneb
Zonei
Zonea
Fault-tolerant collision prevention
39
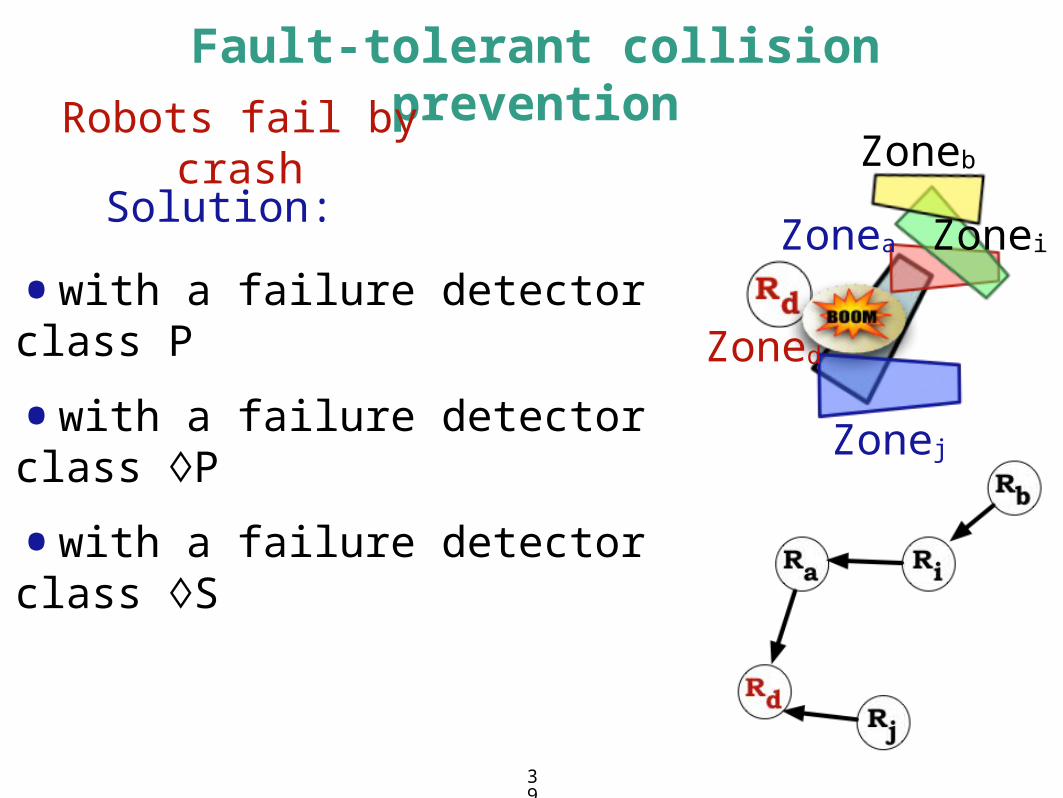
Robots fail by crash
•with a failure detector class P
•with a failure detector class P♢
•with a failure detector class S ♢
Solution:
Zoned
Zonej
Zoneb
ZoneiZonea

Fault-tolerant collision prevention
40
Robots fail by crash
•with a failure detector class P
•Perfect failure detector
•The suspected robot is considered as an inert obstacle
•A waiting robot becomes unblocked.
Solution:
Zoned
Zonej
Zoneb
ZoneiZonea

Fault-tolerant collision prevention
41
Robots fail by crash
•with a failure detector class P♢
•Eventually perfect failure detector
•Preemptive protocol
Solution:
Zoned
Zonej
Zoneb
ZoneiZonea

Fault-tolerant collision prevention
42
Preemptive protocol
•If a robot Rd is suspected then
•Zoned is “blocked”
•Requests of Ra and Rj are preempted (alternative zones)
•Other robots Ri and Rb are not blocked.
Zoned
Zonej
Zoneb
ZoneiZonea

Fault-tolerant collision prevention
43
Preemptive protocol
•If a robot Ri is suspected and has not owned Zonei then
•Request of Ri is preempted (restarts its request of Zonei)
•Robot Rb is not blocked.
Zoneb
Zonei
Fault-tolerant collision prevention
44
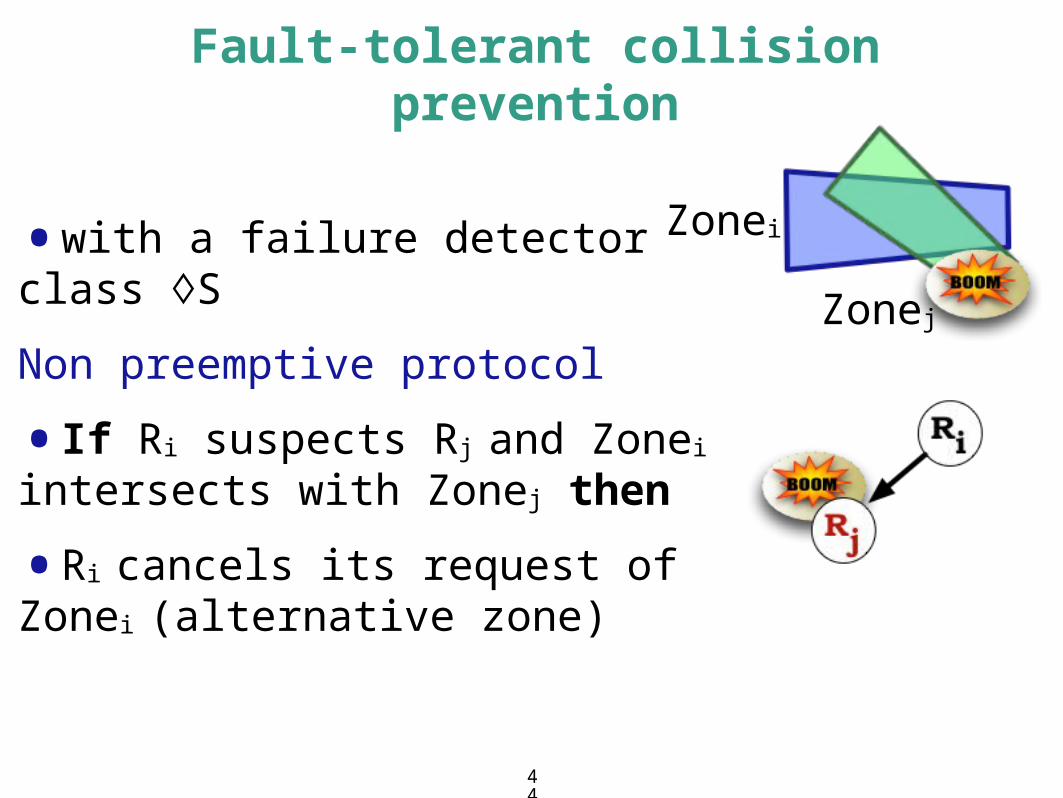
•with a failure detector class S♢
Non preemptive protocol
•If Ri suspects Rj and Zonei intersects with Zonej then
•Ri cancels its request of Zonei
(alternative zone)
Zonej
Zonei

Fault-tolerant collision prevention
45
•Failure detector class P♢
•Liveness property for the preemptive protocol, because eventually a correct robot is not suspected by any correct robot.
•Failure detector class S♢
•Liveness property for the non preemptive protocol.
•Requires more alternative zones.
Outline
• Related work and motivation
• System architecture
• System model and problem specification
• Fail-safe platform
• Collision prevention for a closed group model
• Collision prevention for a dynamic group model
• Conclusion
• Future directions
46

Part 2: Collision prevention protocol for a dynamic group of mobile robots.
47

Dynamic group model
48
•limited transmission range, No routing is required
•Communication graph is not connected

Reservation range
49
Reservation range ≤ Transmission range / 2
Dch ≤ Dtr / 2

•Input of Neighborhood Discovery: (x,y) coordinates of the caller.
•Output of Neighborhood Discovery: the set of robots that potentially conflict with the caller.
Neighborhood discovery
50

Nghi = {Ra, Rb, Rd, Re, Rj}
Gi = {Rb, Rj}
(G1)i = {Rb}
(G2)i = {Rj}
WLAfteri = {Rk}
Collision prevention protocol
51

Collision prevention protocol
52
Performance Analysis
• Robots are active executing the protocol
• reservation range (Dch)
• density of robots (s)
• Average effective speed vs reservation range
• Average effective speed vs density of robots
53

Performance Analysis
• Average communication delays Tcom
• Delay of the neighborhood discovery primitive Tnd
• Physical speed of robots Vmot
• Average effective speed V
54

Performance Analysis
55

Performance AnalysisEffective speed vs reservation
range. range
56
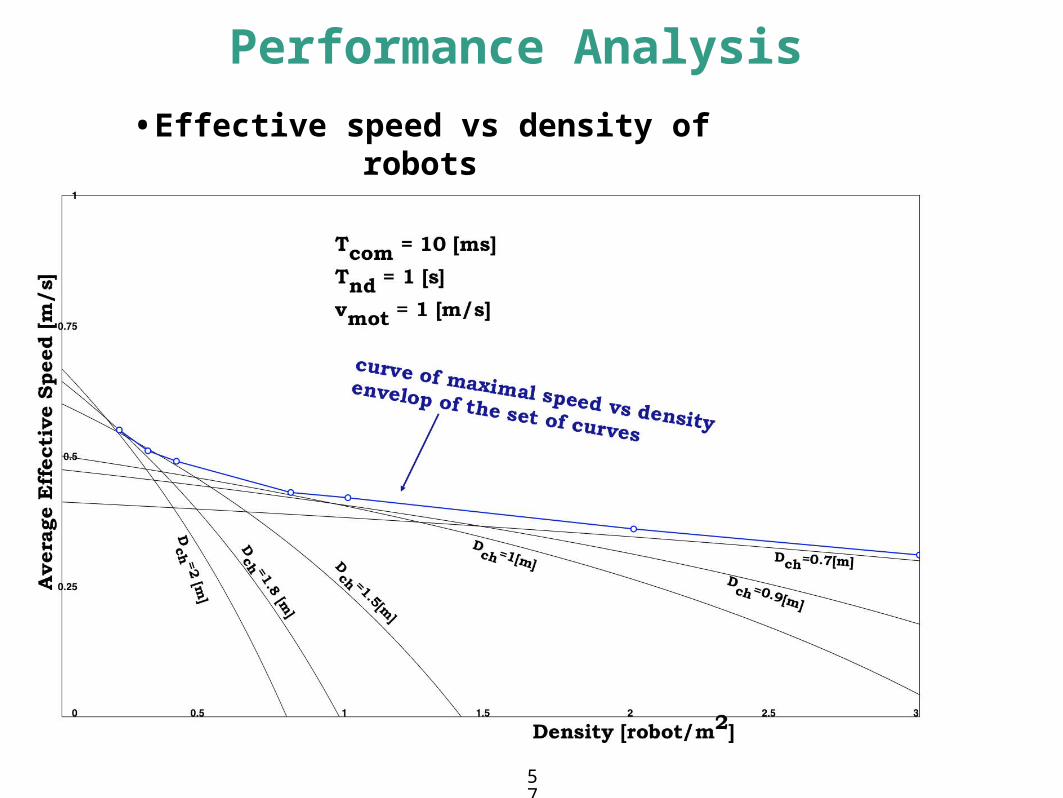
•Effective speed vs density of robots
Performance Analysis
57

Outline
• Related work and motivation
• System architecture
• System model and problem specification
• Fail-safe platform
• Collision prevention for a closed group model
• Collision prevention for a dynamic group model
• Conclusion
• Future directions
58
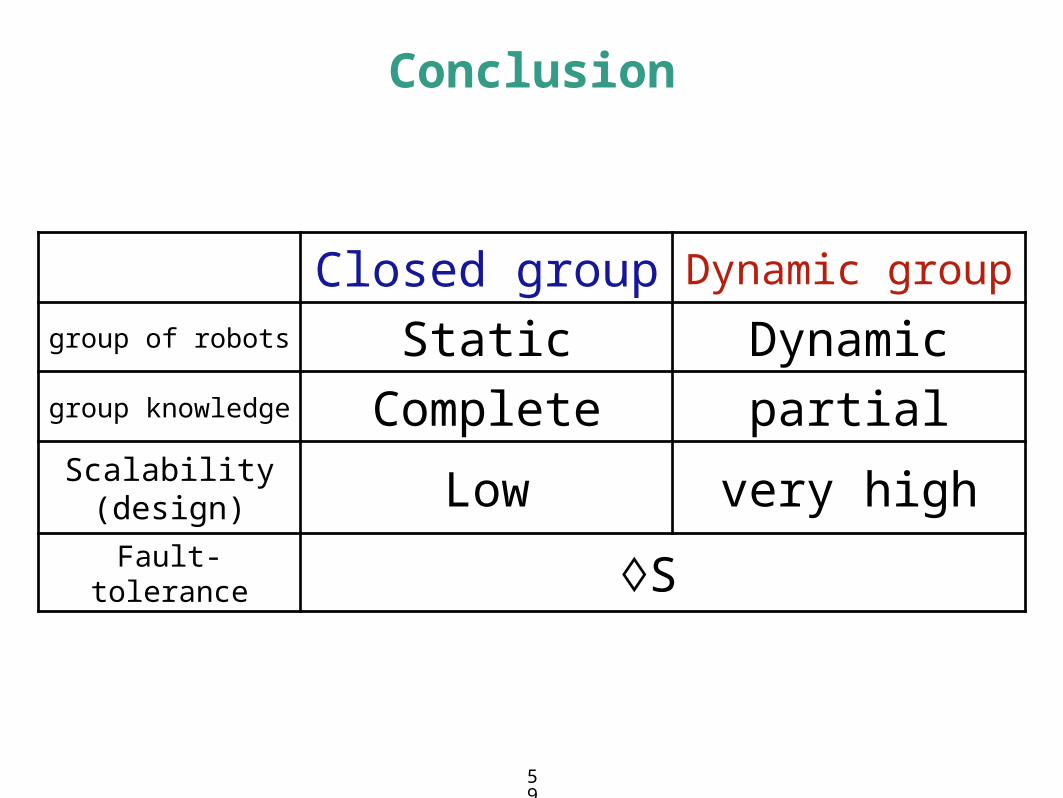
Conclusion
59
Closed group Dynamic group
group of robots Static Dynamicgroup knowledge Complete partial
Scalability (design) Low very high
Fault-tolerance ♢S

Closed group Dynamic groupmessages loss Safety violation
Imprecision positioning
systemSafety violation
Neighborhood discovery Safety violation
60
Conclusion
Vulnerability with respect to system model assumptions

Outline
• Related work and motivation
• System architecture
• System model and problem specification
• Fail-safe platform
• Collision prevention for a closed group model
• Collision prevention for a dynamic group model
• Conclusion
• Future directions
61

Future directions
62
•Simulation
•Optimizations
Thank you for your attention
63
Related Documents











