Computers and Mathematics with Applications 60 (2010) 2476–2487 Contents lists available at ScienceDirect Computers and Mathematics with Applications journal homepage: www.elsevier.com/locate/camwa Exponential synchronization of weighted general delay coupled and non-delay coupled dynamical networks Xiangjun Wu a,b,∗ , Hongtao Lu a a Department of Computer Science and Engineering, Shanghai Jiao Tong University, Shanghai 200240, PR China b Institute of Complex Intelligent Network System, Henan University, Kaifeng 475004, PR China article info Article history: Received 31 October 2009 Received in revised form 17 August 2010 Accepted 19 August 2010 Keywords: Exponential synchronization Delay coupled and non-delay coupled network Weighted complex dynamical network Chen system abstract Time delays commonly exist in the real world. In the present work, we investigate the exponential synchronization of weighted general delay coupled and non-delay coupled complex dynamical networks with different topological structures. Based on the Lyapunov stability theory, the suitable controllers are designed to make the controlled dynamical network exponentially synchronize an isolated node with any pre-specified exponential convergence rate, and proved theoretically. The synchronization scheme is applicable to the undirected networks as well as the directed ones. The derived controllers are simple and can be readily used in practical applications. Furthermore, the coupling matrix is not necessary to be irreducible and the network node dynamics need not satisfy the very strong and conservative uniform Lipschitz condition. Numerical simulations further validate the effectiveness and feasibility of our synchronization method. © 2010 Elsevier Ltd. All rights reserved. 1. Introduction Since the pioneering work of Watts and Strogatz [1], more and more researchers, from a variety of disciplines including physics, sociology, biology, mathematics, engineering science and so on, pay significant attention to complex networks [2–6]. A complex network refers to a large set of nodes connected by links that has certain non-trivial topological features which are not found in simple networks [3]. Such non-trivial features involve a hierarchical structure, a degree distribution with a heavy-tail, a high clustering coefficient, a community structure at different scales, and assortativity or disassortativity among vertices [5]. Complex networks are shown to exist in various fields of the real world, for instance, transportation networks, phone call networks, social networks, the Internet, the World Wide Web, electrical power grids and the genetic networks etc., [1–4,6]. Recently, synchronization of complex dynamical networks, which is a significant and interesting phenomenon among various complex dynamical behaviors, has been studied extensively. Early studies of synchronization in complex networks mainly focus on regular networks such as global coupling networks or star coupling networks or the nearest neighbor coupling networks [7–9]. Unfortunately, these regular networks cannot represent well the realistic networks. Since Watts and Strogatz [1] introduced the small-world model to describe the more realistic networks, large networks of coupled dynamical systems that exhibit collective phenomena have attracted many great interests in variety of fields, ranging from physics to engineering and biology [10–21]. Wang and Chen [10,11] studied local synchronization of the small-world and scale-free networks by the transverse stability to the synchronization manifold. In [12], Li et al. introduced a linear state feedback controller to synchronize a complex network to a desired orbit. Wu [14] investigated the synchronization of ∗ Corresponding author at: Department of Computer Science and Engineering, Shanghai Jiao Tong University, Shanghai 200240, PR China. Tel.: +86 21 15800632702. E-mail address: [email protected] (X. Wu). 0898-1221/$ – see front matter © 2010 Elsevier Ltd. All rights reserved. doi:10.1016/j.camwa.2010.08.054

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript
Computers and Mathematics with Applications 60 (2010) 2476–2487
Contents lists available at ScienceDirect
Computers and Mathematics with Applications
journal homepage: www.elsevier.com/locate/camwa
Exponential synchronization of weighted general delay coupled andnon-delay coupled dynamical networksXiangjun Wu a,b,∗, Hongtao Lu a
a Department of Computer Science and Engineering, Shanghai Jiao Tong University, Shanghai 200240, PR Chinab Institute of Complex Intelligent Network System, Henan University, Kaifeng 475004, PR China
a r t i c l e i n f o
Article history:Received 31 October 2009Received in revised form 17 August 2010Accepted 19 August 2010
Keywords:Exponential synchronizationDelay coupled and non-delay couplednetwork
Weighted complex dynamical networkChen system
a b s t r a c t
Time delays commonly exist in the real world. In the present work, we investigate theexponential synchronization of weighted general delay coupled and non-delay coupledcomplex dynamical networks with different topological structures. Based on the Lyapunovstability theory, the suitable controllers are designed to make the controlled dynamicalnetwork exponentially synchronize an isolated node with any pre-specified exponentialconvergence rate, and proved theoretically. The synchronization scheme is applicable tothe undirected networks as well as the directed ones. The derived controllers are simpleand can be readily used in practical applications. Furthermore, the coupling matrix is notnecessary to be irreducible and the network node dynamics need not satisfy the very strongand conservative uniform Lipschitz condition. Numerical simulations further validate theeffectiveness and feasibility of our synchronization method.
© 2010 Elsevier Ltd. All rights reserved.
1. Introduction
Since the pioneering work of Watts and Strogatz [1], more and more researchers, from a variety of disciplines includingphysics, sociology, biology,mathematics, engineering science and so on, pay significant attention to complexnetworks [2–6].A complex network refers to a large set of nodes connected by links that has certain non-trivial topological features whichare not found in simple networks [3]. Such non-trivial features involve a hierarchical structure, a degree distribution witha heavy-tail, a high clustering coefficient, a community structure at different scales, and assortativity or disassortativityamong vertices [5]. Complex networks are shown to exist in various fields of the real world, for instance, transportationnetworks, phone call networks, social networks, the Internet, the World Wide Web, electrical power grids and the geneticnetworks etc., [1–4,6].
Recently, synchronization of complex dynamical networks, which is a significant and interesting phenomenon amongvarious complex dynamical behaviors, has been studied extensively. Early studies of synchronization in complex networksmainly focus on regular networks such as global coupling networks or star coupling networks or the nearest neighborcoupling networks [7–9]. Unfortunately, these regular networks cannot represent well the realistic networks. Since Wattsand Strogatz [1] introduced the small-world model to describe the more realistic networks, large networks of coupleddynamical systems that exhibit collective phenomena have attracted many great interests in variety of fields, ranging fromphysics to engineering and biology [10–21]. Wang and Chen [10,11] studied local synchronization of the small-world andscale-free networks by the transverse stability to the synchronization manifold. In [12], Li et al. introduced a linear statefeedback controller to synchronize a complex network to a desired orbit. Wu [14] investigated the synchronization of
∗ Corresponding author at: Department of Computer Science and Engineering, Shanghai Jiao Tong University, Shanghai 200240, PR China. Tel.: +86 2115800632702.
E-mail address:[email protected] (X. Wu).
0898-1221/$ – see front matter© 2010 Elsevier Ltd. All rights reserved.doi:10.1016/j.camwa.2010.08.054
X. Wu, H. Lu / Computers and Mathematics with Applications 60 (2010) 2476–2487 2477
random directed networks. In [15], Yu et al. gave a general criterion where the network sizes can be extended to be muchlarger compared to the very small ones studied in [16]. Unlucky, it is still very difficult to ensure global synchronization invery large-scale networks for the computational complexity. Adaptive synchronization in nonlinearly coupled dynamicalnetworks was studied in [17]. By using the invariance principle of differential equations, some simple linear feedbackcontrollers with dynamical updated strengths were constructed to make the dynamical network synchronized with anisolate node. Arenas et al. [18] reported the advances in the comprehension of synchronization phenomenon whenoscillating elements are constrained to interact in a complex network topology and several applications of synchronizationin complex networks to different disciplines. In [19], pinning synchronization of a class of complex dynamical networkswas investigated. A general criterion for guaranteeing network synchronization is derived. More recently, Song et al. [20]investigated the synchronization problem of a complex network with nonidentical nodes, and presented two effectivecontrol schemes to synchronize the network onto any smooth goal dynamics.
It is well known that time delay inevitably exists in natural and man-made networks [13,22,23]. The delay increasesthe dimensionality, and hence the complexity, of the systems. Some time delays are so trivial that can be ignored,while some others cannot be ignored, especially in long-distance communication and traffic congestions. To simulatemore realistic networks, time delay should be taken into account. The dynamics and synchronization of networks ofcoupled oscillators with delayed coupling have recently been studied by many researchers [13,15,16,22,24–27]. Most ofthe research on synchronization of dynamical network has been performed under some implicit assumptions that thereexists the information communication of nodes via the edges only at time t [28] or at time t − τ [29]. However, inmany circumstances, this simplification does not match satisfactorily the peculiarities of real networks: there exists theinformation communication of nodes both at time t and at time t − τ . To our best knowledge, synchronization of both delaycoupled and non-delay coupled complex dynamical networks has almost been ignored in the literature and few resultshave been reported. Even when [30,31] investigating this kind of network with delay and non-delay coupling, the nodedynamics are assumed to satisfy a very strong and conservative uniform Lipschitz condition. On the other hand, the couplingtopology is assumed to be undirected and unweighted in many works. However, this simplification does not match thefeatures of real-world networks due to the actual circumstances in far too many cases. For example, the World Wide Web,metabolic and citation networks are all directed graphs, and some food webs and neural networks are weighted [32]. Insome cases, the networks may not be synchronized when a controller is not added into the infrastructure of individualnodes. Synchronization of complex networks is believed to be a rather significant topic in both theoretical research andpractical applications.
In our work, we present a weighted general complex dynamical network model with delayed and non-delayed coupling,which may represent both the undirected and directed dynamical networks. Global exponential synchronization of suchgeneral complex dynamical networks is studied in detail. Based on the Lyapunov stability theory, the suitable controllersare designed to guarantee the weighted general complex dynamical network with delayed and non-delayed coupling toreach the desired orbit. The controllers are simple and convenient for future practical engineering design. Furthermore,the node dynamics in the complex dynamical network need not satisfy the very strong and conservative uniform Lipschitzcondition and the coupling matrix is not assumed to be irreducible. This method holds for almost all complex networksincluding random, regular, small-world, and scale-free networks. Finally, numerical simulations are performed to validatethe effectiveness of the proposed scheme.
The rest of this paper is organized as follows. In Section 2, a more weighted general delay coupled and non-delay coupledcomplex dynamical network model is introduced, and some necessary preliminaries are also given. In Section 3, based onthe Lyapunov stability theory, the controllers are designed to achieve exponential synchronization of the delay coupled andnon-delay coupled complex dynamical network in two cases: the undirected and directed topological structure. In Section 4,numerical simulations are given to verify the theoretical results and the effectiveness of the designed controllers. Finally,some concluding remarks are given in Section 5.
Throughout this paper, we denote ‖x‖ as the 2-norm of the vector x, and ‖A‖ as the 2-norm of the matrix A induced bythe vector 2-norm. AT (or xT) means the transpose of the matrix A (or vector x). |a| represents the absolute value of the realnumber a ∈ R.
2. The complex dynamical network model and preliminaries
Consider a general delay coupled and non-delay coupled complex dynamical network consisting of N nonlinearly anddiffusively coupled identical nodes, and each node is an n-dimensional dynamical oscillator. The dynamical network modelcan be described as follows:
xi(t) = f (xi(t))+
N−j=1,j=i
aijg(xj(t))+
N−j=1,j=i
bijg(xj(t − τ)), i = 1, 2, . . . ,N, (1)
where xi = (xi1, xi2, . . . , xin)T ∈ Rn is the state variables of ith node; f , g ∈ Rn are smooth nonlinear vector fields; τ ≥ 0is the constant time delay; A = (aij)N×N and B = (bij)N×N are constant coupling configuration matrices with zero-sumrowswhich link the coupled variables, and represent the coupling strength and the underlying topological structure of non-delayed configuration and delayed one at time t , respectively. A and B are defined as follows: if there exists a connection

2478 X. Wu, H. Lu / Computers and Mathematics with Applications 60 (2010) 2476–2487
from node j to node i (i = j), then aij > 0 and bij > 0; otherwise, aij = 0 and bij = 0 (i = j); the diagonal elements ofmatrices A and B are defined by
aii = −
N−j=1,j=i
aij, bii = −
N−j=1,j=i
bij, i = 1, 2, . . . ,N. (2)
Network (1) is a general complex network model in which there exist both non-delayed coupling and delayed coupling.It means that each node communicates with other nodes the information at time t as well as at time t − τ . In effect,such phenomenon exists commonly in our real world, for instance, in the stock market, decision-making of single trader isinfluenced by that of others at time t as well as at time t − τ . The network model (1) also covers the weighted and directednetwork model introduced in [32]. When A and B are symmetric, the network is weighted and undirected; when A and Bare asymmetric, the network is weighted and directed. On the other hand, if g(xj(t)) = Γ xj(t) with Γ = (γij)n×n being aninner-coupling matrix of the network, then the network model is translated into the one of linearly and diffusively networkwith delayed and non-delayed coupling:
xi(t) = f (xi(t))+
N−j=1,j=i
aijΓ xj(t)+
N−j=1,j=i
bijΓ xj(t − τ), i = 1, 2, . . . ,N. (3)
Moreover, when A = 0 or B = 0, the network model (1) can be rewritten by
xi(t) = f (xi(t))+
N−j=1,j=i
bijg(xj(t − τ)), i = 1, 2, . . . ,N, (4)
or
xi(t) = f (xi(t))+
N−j=1,j=i
aijg(xj(t)), i = 1, 2, . . . ,N, (5)
which has been investigated extensively in [1,10–12,14] or [29,31,32]. Here, the coupling matrices A and B are not assumedto be irreducible. In addition, different from the existing work in [30,31], the node dynamics in the network (1) need notsatisfy the very strong and conservative uniform Lipschitz condition.
Suppose C = C([−τ , 0], Rn) be the Banach space of continuous functions mapping the interval [−τ , 0] into Rn with thenorm ‖ϕ‖ = sup−τ≤η≤0 ‖ϕ(η)‖. For the functional differential equation (1), its initial conditions are given by xi(t) = ϕi(t) ∈
C([−τ , 0], Rn). We always assume that the network model (1) has a unique solution with respect to the initial conditions.Let s(t) be a solution of the isolated node of the network which is assumed to exist and be unique, satisfying
s(t) = f (s(t)), (6)
where s(t)may be an equilibrium point, a non-trivial periodic orbit, or even a chaotic orbit. Here, we consider the isolatednode as the reference state. Our aim is to design the suitable controllers for each node such that the solutions of the networkmodel (1) globally exponentially synchronize with the solution of (6), in the sense that
limt→∞
‖xi(t)− s(t)‖ = 0, i = 1, 2, . . . ,N. (7)
Before stating the main results of this paper, some preliminaries need to be given for convenient analysis.
Definition 1. Suppose xi(t; t0;ϕ) ∈ RnN (1 ≤ i ≤ N) be a solution of the dynamical network (1), where ϕ =
(ϕT1, ϕ
T2, . . . , ϕ
TN)
T, ϕi = ϕi(η) ∈ C([−τ , 0], Rn) are initial conditions of node i. f : Rn× R+
→ Rn and g : Rn×∆ → Rn are
continuously differentiable on∆ ⊆ Rn. If there exist two positive constants L, λ and a nonempty subsetΦ ⊆ ∆with ϕi ∈ Φ
such that xi(t; t0;ϕ) ∈ ∆×∆× · · · ×∆ for all t ≥ t0 and
limt→∞
‖xi(t; t0;ϕ)− S(t; t0; s0)‖ ≤ Le−λt sup−τ≤η≤0
‖ϕ(η)− S0‖ (8)
where S(t; t0; s0) = (s(t; t0; s0)T, s(t; t0; s0)T, . . . , s(t; t0; s0)T)T ∈ RnN , S0 = (sT0, sT0, . . . , s
T0)
T, s(t; t0; s0) is a solution of thesystem (6) with the initial condition s0 ∈ ∆. Thus, the dynamical network (1) is said to achieve exponential synchronizationwith the exponential convergence rate λ, andΦ × Φ × · · · × Φ is called the region of synchrony of the network (1).
Assumption 1. There exist two positive constants k1 and k2, such that
‖f (xi)− f (s)‖ ≤ k1‖ei‖, (9a)‖g(xi)− g(s)‖ ≤ k2‖ei‖, (9b)
hold for i = 1, 2, . . . ,N .
Assumption 2. Similar to Assumption 1, if Γ ∈ Rn×n and ei ∈ Rn, the equation ‖Γ ei‖ ≤ ‖Γ ‖·‖ei‖ holds for i = 1, 2, . . . ,N .
X. Wu, H. Lu / Computers and Mathematics with Applications 60 (2010) 2476–2487 2479
3. Exponential synchronization of the complex dynamical network
In this section, we focus on investigating the exponential synchronization of the delay coupled and non-delay coupleddynamical network with two different topological structures, i.e. undirected and directed. The controlled network can bedescribed by
xi(t) = f (xi(t))+
N−j=1,j=i
aijg(xj(t))+
N−j=1,j=i
bijg(xj(t − τ))+ ui, (10)
where ui ∈ Rn (i = 1, 2, . . . ,N) are the controllers of node i.Here, we aim at determining the controllers which is required for system (10) to synchronize with system (6). For this
purpose, let us define the error vector as ei(t) = xi(t) − s(t). Subtracting system (10) from system (6) yields the followingerror dynamical system
ei(t) = f (xi(t))− f (s(t))+
N−j=1,j=i
aijφ(ej(t))+
N−j=1,j=i
bijφ(ej(t − τ))+ ui, (11)
where φ(ei(t)) = g(xi(t))− g(s(t)) and φ(ei(t − τ)) = g(xi(t − τ))− g(s(t − τ)), i = 1, 2, . . . ,N .
3.1. Exponential synchronization of the undirected network
In this subsection, we will study exponential synchronization of the complex network which has undirected graphtopology structure. In this case, the matrices A and B are symmetric, then we have
aii = −
N−j=1,j=i
aij = −
N−j=1,j=i
aji, (12a)
bii = −
N−j=1,j=i
bij = −
N−j=1,j=i
bji. (12b)
Theorem 1. Consider the weighted general delay coupled and non-delay coupled complex dynamical network (10) withundirected topological structure. Under Assumption 1, if the time delay τ ∈ [0, δ](δ > 0), then the complex dynamicalnetwork (10) can achieve global exponential synchronization using the following controllers:
ui =
[−k1 − λ+
12k22e
2λδ(aii + bii)+12k22aii +
12(aii + bii)
](xi − s), i = 1, 2, . . . ,N, (13)
where k1 and k2 are defined in Assumption 1, λ is the exponential convergence rate, aii and bii are defined as Eqs. (12a) and (12b).Proof. We choose the Lyapunov function candidate as
V (t) = e−2λδN−i=1
eTi ei − W (t), (14)
where
W (t) =
N−i=1
(aii + bii)∫ t
t−τe2λ(ψ−t)φ(ei(ψ))Tφ(ei(ψ))dψ.
The time derivative ofW (t) is
W (t) = −2λW +
N−i=1
(aii + bii)φ(ei(t))Tφ(ei(t))− e−2λτN−i=1
(aii + bii)φ(ei(t − τ))Tφ(ei(t − τ)). (15)
We get the time derivative of V (t) along the trajectory of system (11) as
V (t) = 2e−2λδN−i=1
eTi ei − W
= 2e−2λδN−i=1
eTi
f (xi(t))− f (s(t))+
N−j=1,j=i
aijφ(ej(t))+
N−j=1,j=i
bijφ(ej(t − τ))+ ui
+ 2λW −
N−i=1
(aii + bii)φ(ei(t))Tφ(ei(t))+ e−2λτN−i=1
(aii + bii)φ(ei(t − τ))Tφ(ei(t − τ)). (16)

2480 X. Wu, H. Lu / Computers and Mathematics with Applications 60 (2010) 2476–2487
Substituting the controllers (13) into Eq. (16), and from Eq. (9a) in Assumption 1, we can obtain
V (t) ≤ −2λe−2λδN−i=1
‖ei(t)‖2+
N−i=1
(aii + bii)k22‖ei(t)‖2+ e−2λδ
N−i=1
aiik22‖ei(t)‖2+ e−2λδ
N−i=1
(aii + bii)‖ei(t)‖2
+ 2e−2λδN−i=1
N−j=1,j=i
aijei(t)Tφ(ej(t))+ 2e−2λδN−i=1
N−j=1,j=i
bijei(t)Tφ(ej(t − τ))
+ 2λW −
N−i=1
(aii + bii)‖φ(ei(t))‖2+ e−2λτ
N−i=1
(aii + bii)‖φ(ei(t − τ))‖2
= 2λW − 2λe−2λδN−i=1
‖ei(t)‖2+
N−i=1
(aii + bii)[k22‖ei(t)‖2− ‖φ(ei(t))‖2
] + e−2λδN−i=1
aiik22‖ei(t)‖2
+ e−2λδN−i=1
(aii + bii)‖ei(t)‖2+ 2e−2λδ
N−i=1
N−j=1,j=i
aijei(t)Tφ(ej(t))+ 2e−2λδ
×
N−i=1
N−j=1,j=i
bijei(t)Tφ(ej(t − τ))+ e−2λτN−i=1
(aii + bii)‖φ(ei(t − τ))‖2.
From Eq. (9b) in Assumption 1, we can get ‖φ(ei(t))‖ = ‖g(xi)− g(s)‖ ≤ k2‖ei‖. Since aii < 0 and bii < 0, the followinginequality
N−i=1
(aii + bii)k22‖ei(t)‖2
≤
N−i=1
(aii + bii)‖φ(ei(t))‖2, (17)
holds. From time delay τ ∈ [0, δ] defined in Theorem 1, there exists e−2λδ≤ e−2λτ . For aii < 0 and bii < 0, we get
e−2λτN−i=1
(aii + bii)‖φ(ei(t − τ))‖2≤ e−2λδ
N−i=1
(aii + bii)‖φ(ei(t − τ))‖2. (18)
According to Eqs. (17) and (18), the time derivative of V (t) can be rewritten as
V (t) ≤ 2λW − 2λe−2λδN−i=1
‖ei(t)‖2+ e−2λδ
N−i=1
aii‖φ(ei(t))‖2+ e−2λδ
N−i=1
aii‖ei(t)‖2+ e−2λδ
N−i=1
bii‖ei(t)‖2
+ 2e−2λδN−i=1
N−j=1,j=i
aijei(t)Tφ(ej(t))+ 2e−2λδN−i=1
N−j=1,j=i
bijei(t)Tφ(ej(t − τ))+ e−2λδN−i=1
bii‖φ(ei(t − τ))‖2
= 2λW − 2λe−2λδN−i=1
‖ei(t)‖2− e−2λδ
N−i=1
N−j=1,j .=i
aij‖ei(t)‖2− e−2λδ
N−i=1
N−j=1,j .=i
bij‖ei(t)‖2
+ 2e−2λδN−i=1
N−j=1,j=i
aijei(t)Tφ(ej(t))+ 2e−2λδN−i=1
N−j=1,j=i
bijei(t)Tφ(ej(t − τ))
−e−2λδN−i=1
N−j=1,j=i
aij‖φ(ei(t))‖2− e−2λδ
N−i=1
N−j=1,j=i
bij‖φ(ei(t − τ))‖2.
The dynamical network is undirected which implies that A and B are symmetric, namely, aij = aji and bij = bji. Thus, thefollowing equations:
N−i=1
N−j=1,j=i
aij‖φ(ei(t))‖2=
N−i=1
N−j=1,j=i
aij‖φ(ej(t))‖2 and
N−i=1
N−j=1,j=i
bij‖φ(ei(t − τ))‖2=
N−i=1
N−j=1,j=i
bij‖φ(ej(t − τ))‖2,

X. Wu, H. Lu / Computers and Mathematics with Applications 60 (2010) 2476–2487 2481
hold. Then we get
V (t) ≤ 2λW − 2λe−2λδN−i=1
‖ei(t)‖2− e−2λδ
N−i=1
N−j=1,j .=i
aij‖ei(t)‖2− e−2λδ
N−i=1
N−j=1,j .=i
bij‖ei(t)‖2
+ 2e−2λδN−i=1
N−j=1,j=i
aijei(t)Tφ(ej(t))+ 2e−2λδN−i=1
N−j=1,j=i
bijei(t)Tφ(ej(t − τ))
− e−2λδN−i=1
N−j=1,j=i
aij‖φ(ej(t))‖2− e−2λδ
N−i=1
N−j=1,j=i
bij‖φ(ej(t − τ))‖2
= 2λW − 2λe−2λδN−i=1
‖ei(t)‖2− e−2λδ
N−i=1
N−j=1,j .=i
aij‖ei(t)− φ(ej(t))‖2
− e−2λδN−i=1
N−j=1,j=i
bij‖ei(t)− φ(ej(t − τ))‖2.
It is easy to see that
e−2λδN−i=1
N−j=1,j .=i
aij‖ei(t)− φ(ej(t))‖2≥ 0 and e−2λδ
N−i=1
N−j=1,j=i
bij‖ei(t)− φ(ej(t − τ))‖2≥ 0.
Therefore, we can obtain the following inequality
V (t) ≤ 2λW − 2λe−2λδN−i=1
‖ei(t)‖2− e−2λδ
N−i=1
N−j=1,j .=i
aij‖ei(t)− φ(ej(t))‖2
− e−2λδN−i=1
N−j=1,j=i
bij‖ei(t)− φ(ej(t − τ))‖2
≤ 2λW − 2λe−2λδN−i=1
‖ei(t)‖2= −2λV (t). (19)
Taking integration on both sides of Eq. (19), we can get
V (t) = e−2λ(t−t0)V (t0). (20)
Obviously, from Eq. (14), W (t) ≤ 0. Thus, we can get
e−2λδ‖e(t)‖2
≤ V (t) ≤ m‖e0‖2, (21)
where e(t) = (e1, e2, . . . , eN)T,m = e−2λδ+max(|a11 + b11|, |a22 + b22|, . . . , |aNN + bNN |) and ‖e0‖ = min−τ≤η≤0{‖e(t0 +
η)‖}. From Eqs. (20) and (21), we can obtain
‖e(t)‖ ≤
α
e−2λδe−λ(t−t0)‖e0‖ = Le−λt ,
where L =
α
e−2λδ eλt0‖e0‖is a constant. It implies that the error dynamical system (11) is globally exponentially stable
at the equilibrium set ei = 0 (i = 1, 2, . . . ,N) with the exponential convergence rate λ. Therefore, global exponentialsynchronization of the delay coupled and non-delay coupled undirected dynamical network model (10) and system (6) isachieved. This completes the proof. �
If g(xi(t)) = Γ xi(t) and g(xi(t − τ)) = Γ xi(t − τ), the dynamical network model (1) is translated into system (3). Bythe same way, we can obtain the following lemma:
Lemma 1. If Assumption 1 holds and the time delay τ ∈ [0, δ](δ > 0), the delay coupled and non-delay coupled complexdynamical network (3) with undirected topological structure can achieve exponential synchronization applying the followingcontrollers:
ui =
[−k1 − λ+
12e2λδ‖Γ ‖
2(aii + bii)+12‖Γ ‖
2aii +12(aii + bii)
](xi − s) , i = 1, 2, . . . ,N (22)

2482 X. Wu, H. Lu / Computers and Mathematics with Applications 60 (2010) 2476–2487
where k1 is defined in Assumption 1, λ is the exponential convergence rate, ‖Γ ‖ denotes the 2-norm of the matrix Γ , aii and biiare defined as Eqs. (12a) and (12b).
3.2. Exponential synchronization of the directed network
In this subsection, we will study exponential synchronization of the delay coupled and non-delay coupled dynamicalnetwork (1) with directed topological structure. It implies that the matrices A and B are asymmetric, we define the columnsum of the matrix as follows:
αi = −
N−j=1,j=i
aji, (23a)
βi = −
N−j=1,j=i
bji, (23b)
for i = 1, 2, . . . ,N .
Theorem 2. Consider the weighted general delay coupled and non-delay coupled complex dynamical network (10)with directedtopological structure. Suppose that Assumption 1 holds and the time delay is τ ∈ [0, δ](δ > 0), then the complex dynamicalnetwork (10) can achieve global exponential synchronization using the following controllers:
ui =
[−k1 − λ+
12k22e
2λδ(αi + βi)+12k22αi +
12(aii + bii)
](xi − s), (24)
where k1 and k2 are defined in Assumption 1, λ is the exponential convergence rate, αi and βi are column sums as defined inEqs. (23a) and (23b), aii and bii are defined as Eqs. (12a) and (12b).
Proof. Choose the Lyapunov function candidate as follows:
V (t) = e−2λδN−i=1
eTi ei − W (t), (25)
where
W (t) =
N−i=1
(αi + βi)
∫ t
t−τe2λ(ψ−t)φ(ei(ψ))Tφ(ei(ψ))dψ.
The time derivative ofW (t) is described by
W (t) = −2λW +
N−i=1
(αi + βi)φ(ei(t))Tφ(ei(t))− e−2λτN−i=1
(αi + βi)φ(ei(t − τ))Tφ(ei(t − τ)). (26)
Taking the time derivative of V (t) along system (11) leads to
V (t) = 2e−2λδN−i=1
eTi
f (xi(t))− f (s(t))+
N−j=1,j=i
aijφ(ej(t))+
N−j=1,j=i
bijφ(ej(t − τ))+ ui
+ 2λW −
N−i=1
(αi + βi)φ(ei(t))Tφ(ei(t))+ e−2λτN−i=1
(αi + βi)φ(ei(t − τ))Tφ(ei(t − τ))
≤ 2λW − 2λe−2λδN−i=1
‖ei(t)‖2+
N−i=1
(αi + βi)k22‖ei(t)‖
2− ‖φ(ei(t))‖2
+ e−2λδN−i=1
αik22‖ei(t)‖2
+ e−2λδN−i=1
(aii + bii)‖ei(t)‖2+ 2e−2λδ
N−i=1
N−j=1,j=i
aijei(t)Tφ(ej(t))+ 2e−2λδN−i=1
N−j=1,j=i
bijei(t)T
×φ(ej(t − τ))+ e−2λτN−i=1
(αi + βi)‖φ(ei(t − τ))‖2.
From Eq. (9b) in Assumption 1, we can get ‖φ(ei(t))‖ = ‖g(xi)− g(s)‖ ≤ k2‖ei‖. There exists the following inequality
N−i=1
(αi + βi)k22‖ei(t)‖2
≤
N−i=1
(αi + βi)‖φ(ei(t))‖2, (27)

X. Wu, H. Lu / Computers and Mathematics with Applications 60 (2010) 2476–2487 2483
for αi < 0 and βi < 0. For any τ ∈ [0, δ], we have e−2λδ≤ e−2λτ . Thus, we can obtain
e−2λτN−i=1
(αi + βi)‖φ(ei(t − τ))‖2≤ e−2λδ
N−i=1
(αi + βi)‖φ(ei(t − τ))‖2≤ e−2λδ
N−i=1
βi‖φ(ei(t − τ))‖2, (28)
for αi < 0 and βi < 0. Further, according to the definitions of αi and βi, we have
N−i=1
N−j=1,j=i
γji‖φ(ei(t))‖2=
N−i=1
N−j=1,j=i
γij‖φ(ej(t))‖2, (29)
N−i=1
N−j=1,j=i
γji‖φ(ei(t − τ))‖2=
N−i=1
N−j=1,j=i
γij‖φ(ej(t − τ))‖2, (30)
where γij = aij or γij = bij or γij = aij + bij; γji = aji or γji = bji or γji = aji + bji. Using the previous results, we can get
V (t) ≤ 2λW − 2λe−2λδN−i=1
‖ei(t)‖2+ e−2λδ
N−i=1
αik22‖ei(t)‖2
+ e−2λδN−i=1
(aii + bii)‖ei(t)‖2+ 2e−2λδ
N−i=1
N−j=1,j=i
aijei(t)Tφ(ej(t))
+ 2e−2λδN−i=1
N−j=1,j=i
bijei(t)Tφ(ej(t − τ))+ e−2λτN−i=1
βi‖φ(ei(t − τ))‖2
≤ 2λW − 2λe−2λδN−i=1
‖ei(t)‖2− e−2λδ
N−i=1
N−j=1,j .=i
aij‖ei(t)‖2− e−2λδ
N−i=1
N−j=1,j .=i
bij‖ei(t)‖2
+ 2e−2λδN−i=1
N−j=1,j=i
aijei(t)Tφ(ej(t))+ 2e−2λδN−i=1
N−j=1,j=i
bijei(t)Tφ(ej(t − τ))
− e−2λδN−i=1
N−j=1,j=i
aij‖φ(ej(t))‖2− e−2λδ
N−i=1
N−j=1,j=i
bij‖φ(ej(t − τ))‖2
= 2λW − 2λe−2λδN−i=1
‖ei(t)‖2− e−2λδ
N−i=1
N−j=1,j .=i
aij‖ei(t)− φ(ej(t))‖2
− e−2λδN−i=1
N−j=1,j=i
bij‖ei(t)− φ(ej(t − τ))‖2
≤ 2λW − 2λe−2λδN−i=1
‖ei(t)‖2= −2λV (t).
Similar to the proof of Theorem 1, the following result can be obtained:
‖e(t)‖ ≤
c
e−2λδe−λ(t−t0)‖e0‖ = Le−λt ,
where e(t) = (e1, e2, . . . , eN)T, c = e−2λδ+max(|α1 +β1|, |α2 +β2|, . . . , |αN +βN |), ‖e0‖ = min−τ≤η≤0{‖e(t0 +η)‖} and
L =
α
e−2λδ eλt0‖e0‖. It indicates that the error dynamical system (11) is globally exponentially stable at the equilibrium
set ei = 0(i = 1, 2, . . . ,N) with the exponential convergence rate λ. Therefore, global exponential synchronization of thedelay coupled and non-delayed coupled directed dynamical network model (10) is achieved. This completes the proof. �
If g(xi(t)) = Γ xi(t) and g(xi(t − τ)) = Γ xi(t − τ), the dynamical network model (1) can be written as system (3).Applying the analysis method similar to that of Theorem 2, we can get the following lemma:
Lemma 2. Under Assumption 1 and the time delay τ ∈ [0, δ](δ > 0), the delay coupled and non-delay coupled complexdynamical network (3) with directed topological structure can achieve exponential synchronization applying the followingcontrollers:
ui =
[−k1 − λ+
12e2λδ‖Γ ‖
2(αi + βi)+12‖Γ ‖
2αi +12(aii + bii)
](xi − s) , i = 1, 2, . . . ,N (31)

2484 X. Wu, H. Lu / Computers and Mathematics with Applications 60 (2010) 2476–2487
Fig. 1. The attractor of the Chen system.
where k1 is defined in Assumption 1, λ is the exponential convergence rate, ‖Γ ‖ denotes the 2-norm of the matrix Γ , αi and βiare column sums as defined in Eqs. (23a) and (23b), aii and bii are defined as Eqs. (12a) and (12b).
Remark 1. In our work, we introduce a more general model than that given in the existing literature. In this model, thereexists non-delayed coupling aswell as delayed coupling,which is suitable to investigate and simulatemore realistic complexnetworks, such as the regular networks, the small-world networks, the scale-free networks, etc.
Remark 2. In our work, the node dynamics are not assumed to satisfy the very strong and conservative uniform Lipschitzcondition. The coupling matrices A and B can be symmetric as well as asymmetric and not necessarily irreducible. Thetheorems and lemmas obtained are applicable to a great many complex dynamical networks.
Remark 3. In practice, it is often quite difficult to get the entire information on the coupling matrices A and B. In ourwork, only partial information of the matrices A and B is used to design the controllers. In the undirected networks, onlythe diagonal elements are employed to construct the controllers. In the directed networks, the diagonal elements and thenegative column sum of off-diagonal elements are required to design the controllers for achieving synchronization of thedirected networks. Therefore, the proposed synchronization method is easy to implement in reality.
4. Numerical simulations
In the foregoing section, the theorems and lemmas essentially provide the criteria for global exponential asymptoticsynchronization. In this section, we use two representative examples to illustrate how these theorems and lemmas can beapplied to achieve synchronization in the delay coupled and non-delay coupled complex dynamical networks with differenttopological structure. In the following simulations, we consider a general complex dynamical network consisting of N = 6identical nodes. The node dynamical system in the network is the Chen system [33] as described bys1 = a(s2 − s1)
s2 = (c − a)s1 − s1s3 + cs2s3 = s1s2 − bs3,
(32)
which is chaotic when a = 35, b = 3 and c = 28 as displayed in Fig. 1. The controlled dynamical network is described byxi1xi2xi3
=
35(xi2 − xi1)−7xi1 − xi1xi3 + 28xi2xi1xi2 − 3xi3
+
N−j=1,j=i
aijg(xj(t))+
N−j=1,j=i
bijg(xj(t − τ))+ ui. (33)
In the following simulations, the initial values of the state vector s(t) are chosen arbitrarily as (s10, s20, s30) = (3, 4, 5), andthe initial conditions of the state vector x are (x110, x120, x130) = (2, 5, 1), (x210, x220, x230) = (1, 3, 2), (x310, x320, x330) =
(3, 3, 2), (x410, x420, x430) = (4, 2, 1), (x510, x520, x530) = (5, 5, 0), (x610, x620, x630) = (2, 3, 4). It is clear that Assumption 1is satisfied which follows that the solution of the Chen system (32) is bounded.
4.1. Synchronization of the undirected network
In this case, we consider the delay coupled and non-delay coupled complex dynamical network with undirectedtopological structure. Further, there exist g(xi(t)) = Γ xi(t) and g(xi(t − τ)) = Γ xi(t − τ)where
X. Wu, H. Lu / Computers and Mathematics with Applications 60 (2010) 2476–2487 2485
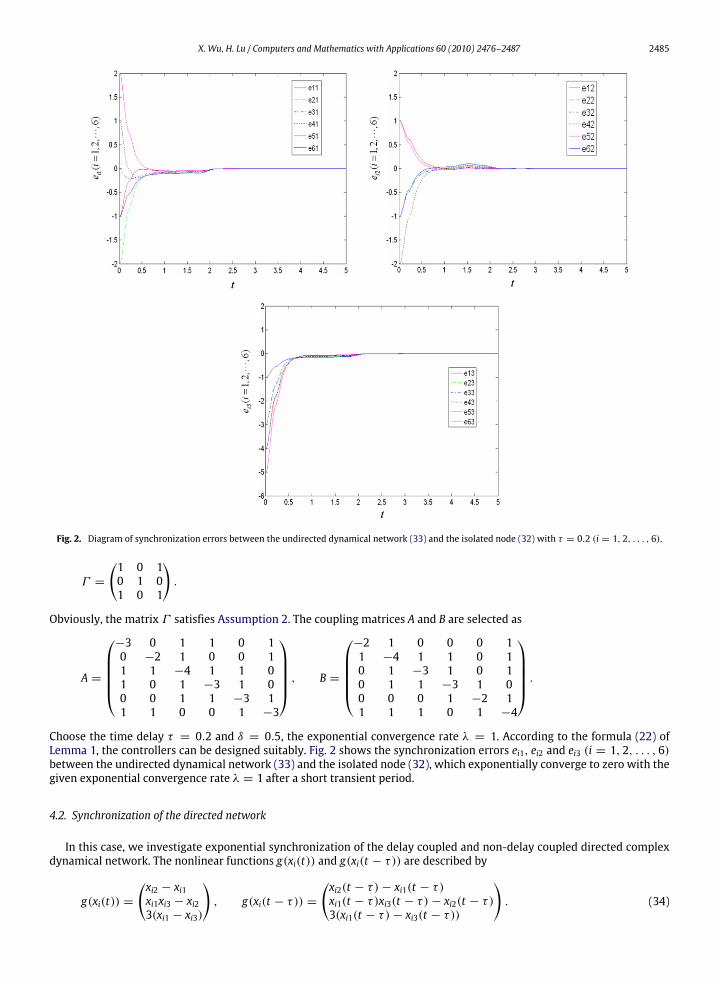
Fig. 2. Diagram of synchronization errors between the undirected dynamical network (33) and the isolated node (32) with τ = 0.2 (i = 1, 2, . . . , 6).
Γ =
1 0 10 1 01 0 1
.
Obviously, the matrix Γ satisfies Assumption 2. The coupling matrices A and B are selected as
A =
−3 0 1 1 0 10 −2 1 0 0 11 1 −4 1 1 01 0 1 −3 1 00 0 1 1 −3 11 1 0 0 1 −3
, B =
−2 1 0 0 0 11 −4 1 1 0 10 1 −3 1 0 10 1 1 −3 1 00 0 0 1 −2 11 1 1 0 1 −4
.Choose the time delay τ = 0.2 and δ = 0.5, the exponential convergence rate λ = 1. According to the formula (22) ofLemma 1, the controllers can be designed suitably. Fig. 2 shows the synchronization errors ei1, ei2 and ei3 (i = 1, 2, . . . , 6)between the undirected dynamical network (33) and the isolated node (32), which exponentially converge to zero with thegiven exponential convergence rate λ = 1 after a short transient period.
4.2. Synchronization of the directed network
In this case, we investigate exponential synchronization of the delay coupled and non-delay coupled directed complexdynamical network. The nonlinear functions g(xi(t)) and g(xi(t − τ)) are described by
g(xi(t)) =
xi2 − xi1xi1xi3 − xi23(xi1 − xi3)
, g(xi(t − τ)) =
xi2(t − τ)− xi1(t − τ)xi1(t − τ)xi3(t − τ)− xi2(t − τ)3(xi1(t − τ)− xi3(t − τ))
. (34)
2486 X. Wu, H. Lu / Computers and Mathematics with Applications 60 (2010) 2476–2487
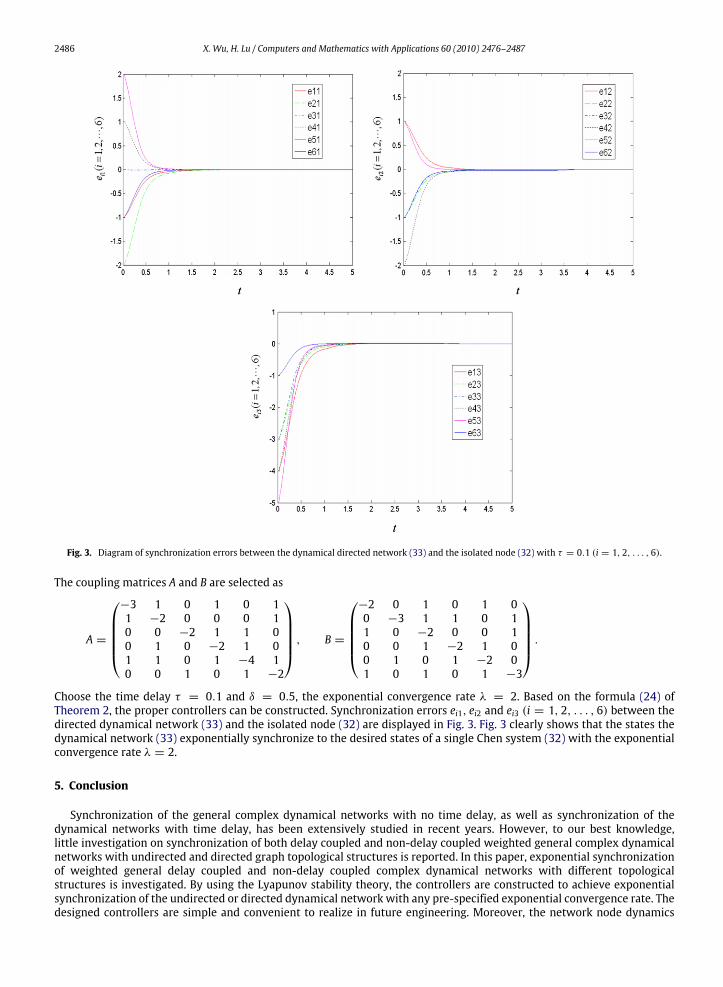
Fig. 3. Diagram of synchronization errors between the dynamical directed network (33) and the isolated node (32) with τ = 0.1 (i = 1, 2, . . . , 6).
The coupling matrices A and B are selected as
A =
−3 1 0 1 0 11 −2 0 0 0 10 0 −2 1 1 00 1 0 −2 1 01 1 0 1 −4 10 0 1 0 1 −2
, B =
−2 0 1 0 1 00 −3 1 1 0 11 0 −2 0 0 10 0 1 −2 1 00 1 0 1 −2 01 0 1 0 1 −3
.Choose the time delay τ = 0.1 and δ = 0.5, the exponential convergence rate λ = 2. Based on the formula (24) ofTheorem 2, the proper controllers can be constructed. Synchronization errors ei1, ei2 and ei3 (i = 1, 2, . . . , 6) between thedirected dynamical network (33) and the isolated node (32) are displayed in Fig. 3. Fig. 3 clearly shows that the states thedynamical network (33) exponentially synchronize to the desired states of a single Chen system (32) with the exponentialconvergence rate λ = 2.
5. Conclusion
Synchronization of the general complex dynamical networks with no time delay, as well as synchronization of thedynamical networks with time delay, has been extensively studied in recent years. However, to our best knowledge,little investigation on synchronization of both delay coupled and non-delay coupled weighted general complex dynamicalnetworks with undirected and directed graph topological structures is reported. In this paper, exponential synchronizationof weighted general delay coupled and non-delay coupled complex dynamical networks with different topologicalstructures is investigated. By using the Lyapunov stability theory, the controllers are constructed to achieve exponentialsynchronization of the undirected or directed dynamical network with any pre-specified exponential convergence rate. Thedesigned controllers are simple and convenient to realize in future engineering. Moreover, the network node dynamics
X. Wu, H. Lu / Computers and Mathematics with Applications 60 (2010) 2476–2487 2487
need not satisfy the very strong and conservative uniform Lipschitz condition and the coupling matrix is not necessary tobe irreducible. Finally, numerical simulations are provided to demonstrate the feasibility and the effectiveness of the globalexponential synchronization conditions obtained.
Acknowledgements
The research is supported by the National Natural Science Foundation of China (Grant No. 60873133), National HighTechnology Research and Development Program of China (Grant No. 2007AA01Z478). The authors thank the referees andthe editor for their valuable comments and suggestions on improvement of this paper.
References
[1] D.J. Watts, S.H. Strogatz, Collective dynamics of small-world networks, Nature 393 (6684) (1998) 409–410.[2] A.L. Barabási, R. Albert, Emergence of scaling in random networks, Science 286 (5439) (1999) 509–512.[3] S.H. Strogatz, Exploring complex networks, Nature 410 (6825) (2001) 268–276.[4] R. Albert, A.L. Barabási, Statistical mechanics of complex networks, Reviews of Modern Physics 74 (1) (2002) 47–97.[5] J. Lü, X.H. Yu, G. Chen, D.Z. Cheng, Characterizing the synchronizability of small-world dynamical networks, IEEE Transactions on Circuits and Systems
I 51 (4) (2004) 787–796.[6] S. Boccaleti, V. Latora, Y. Moreno, M. Chavez, D.U. Hwang, Complex networks: structure and dynamics, Physics Reports 424 (4–5) (2006) 175–308.[7] K. Kaneko, Theory and Applications of Coupled Map Lattices, Wiley, New York, 1993.[8] A.L. Gelover-Santiago, R. Lima, G.Matinez-Mekler, Synchronization and cluster periodic solutions in globally coupledmaps, Physica A 283 (1–2) (2000)
131–135.[9] Y.Q. Gu, C. Shao, X.C. Fu, Complete synchronization and stability of star-shaped complex networks, Chaos, Solitons & Fractals 28 (2) (2006) 480–488.
[10] X.F. Wang, G. Chen, Synchronization in small-world dynamical networks, International Journal of Bifurcation and Chaos 12 (1) (2002) 187–192.[11] X.F. Wang, G. Chen, Synchronization in scale-free dynamical networks: robustness and fragility, IEEE Transactions on Circuits and Systems I 49 (1)
(2002) 54–62.[12] X. Li, X.Wang, G. Chen, Pinning a complex dynamical network to its equilibrium, IEEE Transactions on Circuits and Systems I 51 (3) (2004) 2074–2087.[13] J. Lü, G. Chen, A time-varying complex dynamical networkmodels and its controlled synchronization criteria, IEEE Transactions on Automatic Control
50 (6) (2005) 841–846.[14] C.W. Wu, Synchronization and convergence of linear dynamics in random directed networks, IEEE Transactions on Automatic Control 51 (7) (2006)
1207–1210.[15] W. Yu, J. Cao, J. Lü, Global synchronization of linearly hybrid coupled networks with time-varying delay, SIAM Journal on Applied Dynamical Systems
7 (1) (2008) 108–133.[16] J. Cao, P. Li, W. Wang, Global synchronization in arrays of delayed neural networks with constant and delayed coupling, Physics Letters A 353 (4)
(2006) 318–325.[17] G. He, J. Yang, Adaptive synchronization in nonlinearly coupled dynamical networks, Chaos, Solitons & Fractals 38 (5) (2008) 1254–1259.[18] A. Arenas, A. Diaz-Guilera, J. Kurths, Y. Moreno, C. Zhou, Synchronization in complex networks, Physics Reports 469 (1) (2008) 93–153.[19] W. Yu, G. Chen, J. Lü, On pinning synchronization of complex dynamical networks, Automatica 45 (2) (2009) 429–435.[20] Q. Song, J. Cao, F. Liu, Synchronization of complex dynamical networks with nonidentical nodes, Physics Letters A 374 (4) (2010) 544–551.[21] X. Wu, W. Zheng, J. Zhou, Generalized outer synchronization between complex dynamical networks, Chaos 19 (1) (2009) 013109.[22] M. Dhamala, V.K. Jirsa, M. Ding, Enhancement of neural synchrony by time delay, Physical Review Letters 92 (7) (2004) 074104.[23] M. Thomas, M. Morari, Delay Effects on Stability: A Robust Control Approach, in: Lecture Notes in Control and Information Science, vol. 269, Springer,
Berlin, Heidelberg, New York, 2001.[24] X. Xu, Z. Chen, G. Si, X. Hu, P. Luo, A novel definition of generalized synchronization on networks and a numerical simulation example, Computers &
Mathematics with Applications 56 (11) (2008) 2789–2794.[25] Z.X. Liu, Z.Q. Chen, Z.Z. Yuan, Pinning control of weighted general complex dynamical networks with time delay, Physica A 375 (1) (2007) 345–354.[26] S. Wen, S. Chen, W. Guo, Adaptive global synchronization of a general complex dynamical network with non-delayed and delayed coupling, Physics
Letters A 372 (42) (2008) 6340–6346.[27] L.Wang, H.P. Dai, H. Dong, Y.H. Shen, Y.X. Sun, Adaptive synchronization ofweighted complex dynamical networkswith coupling time-varying delays,
Physics Letters A 372 (20) (2008) 3632–3639.[28] C.W. Wu, Synchronization in networks of nonlinear dynamical systems coupled via a directed graph, Nonlinearity 18 (3) (2005) 1057–1064.[29] P. Li, Z. Yi, Synchronization analysis of delayed complex networks with time-varying couplings, Physica A 387 (14) (2008) 3729–3737.[30] X. Lou, B. Cui, Synchronization of neural networks based on parameter identification and via output or state coupling, Journal of Computational and
Applied Mathematics 222 (2) (2008) 440–457.[31] J. Lu, J. Cao, Adaptive synchronization of uncertain dynamical networks with delayed coupling, Nonlinear Dynamics 53 (1–2) (2008) 107–115.[32] L.Y. Xiang, Z.X. Liu, Z.Q. Chen, F. Chen, Z.Z. Yuan, Pinning control of complex dynamical networks with general topology, Physica A 379 (1) (2007)
298–306.[33] G. Chen, T. Ueta, Yet another chaotic attractor, International Journal of Bifurcation and Chaos 9 (7) (1999) 1465–1466.
Related Documents











