EXOSKELETON BY J PRAVEEN

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript
EXOSKELETON
BYJ PRAVEEN

MOVIES EDGE OF
ROBOCOPTOMORROW
ELYSIUM
IRONMAN
MEANING Exoskeleton
derived from Greek ἔξω, éxō "outer" and σκελετός, skeletos "skeleton“.
External skeleton that supports and protects an animal's body.

INSECTS (GRASSHOPPER)
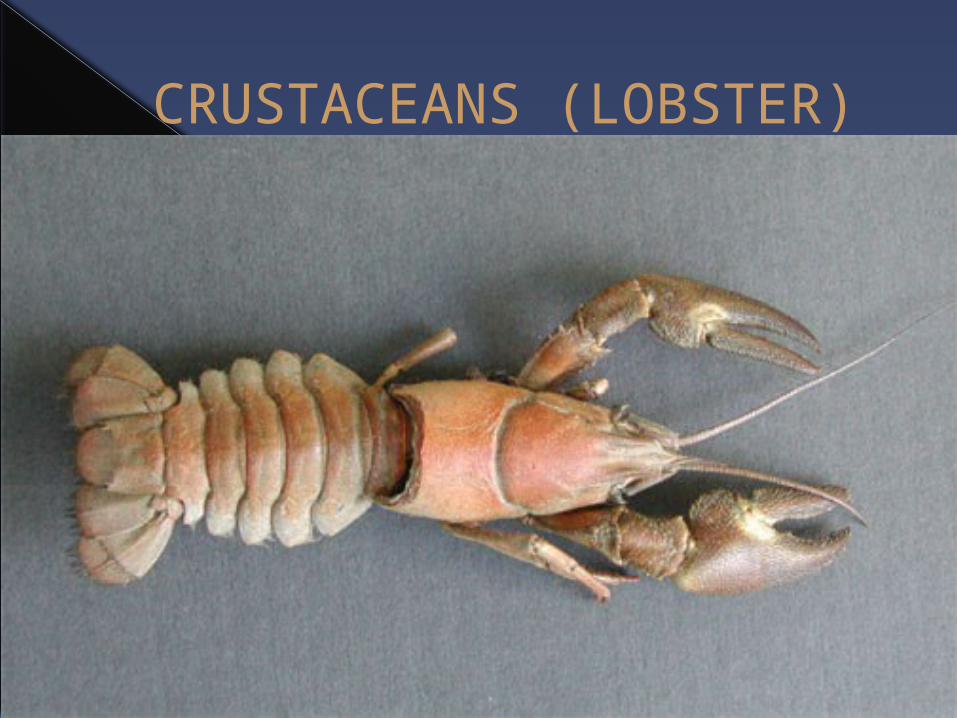
CRUSTACEANS (LOBSTER)

HISTORY Armor – Tool used
for defense Knight in shining
armor – “An idealized or chivalrous man who comes to the rescue of a woman in a difficult situation.”
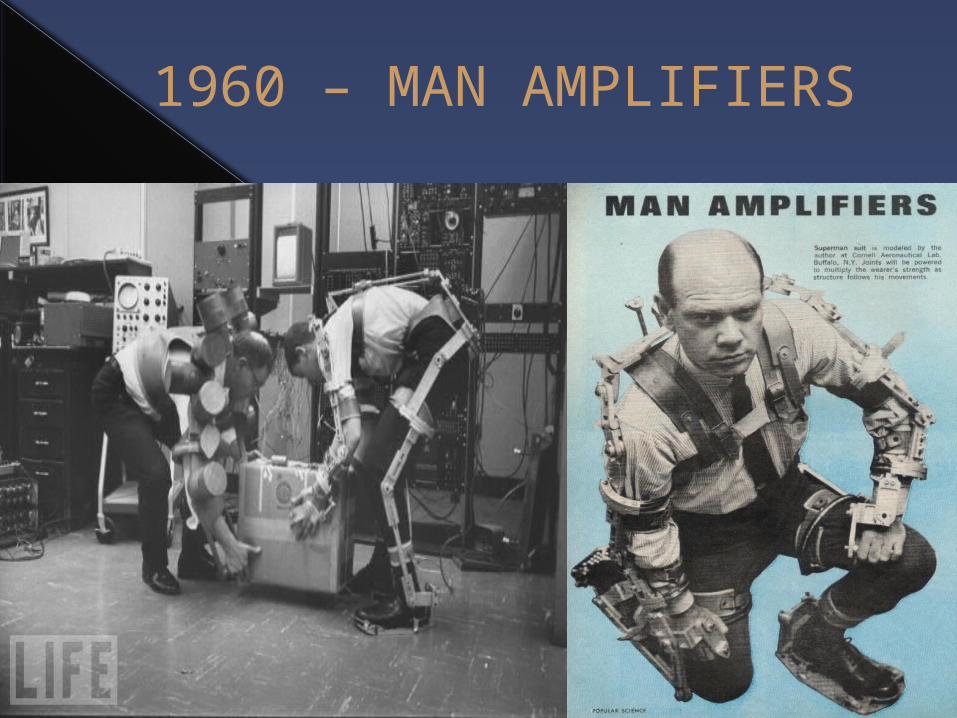
1960 – MAN AMPLIFIERS

PEDIPULATOR
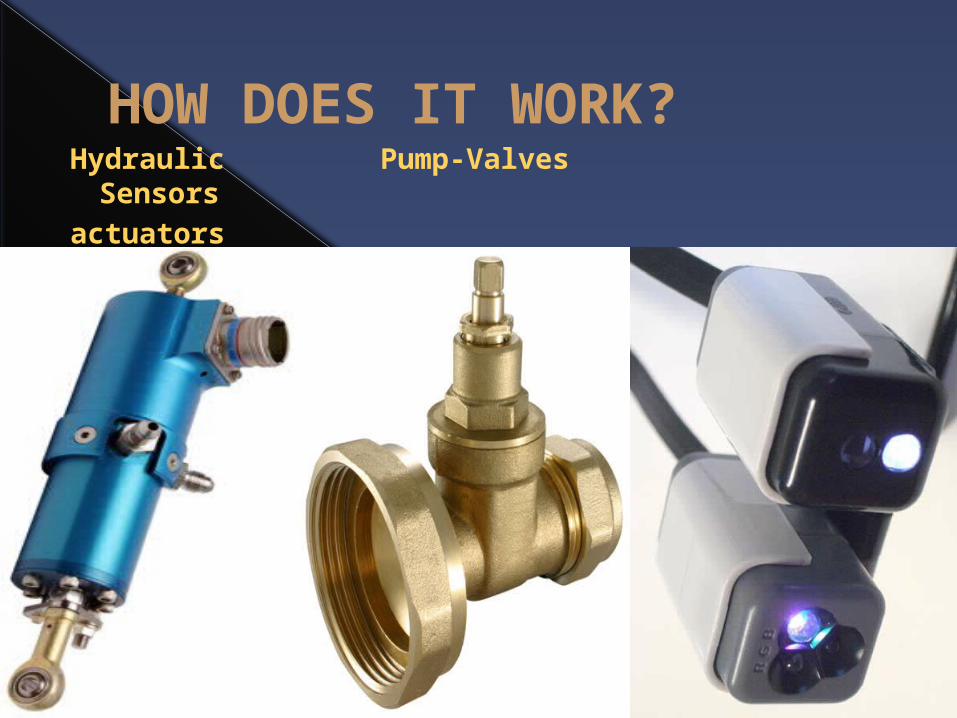
HOW DOES IT WORK?Hydraulic Pump-Valves Sensorsactuators
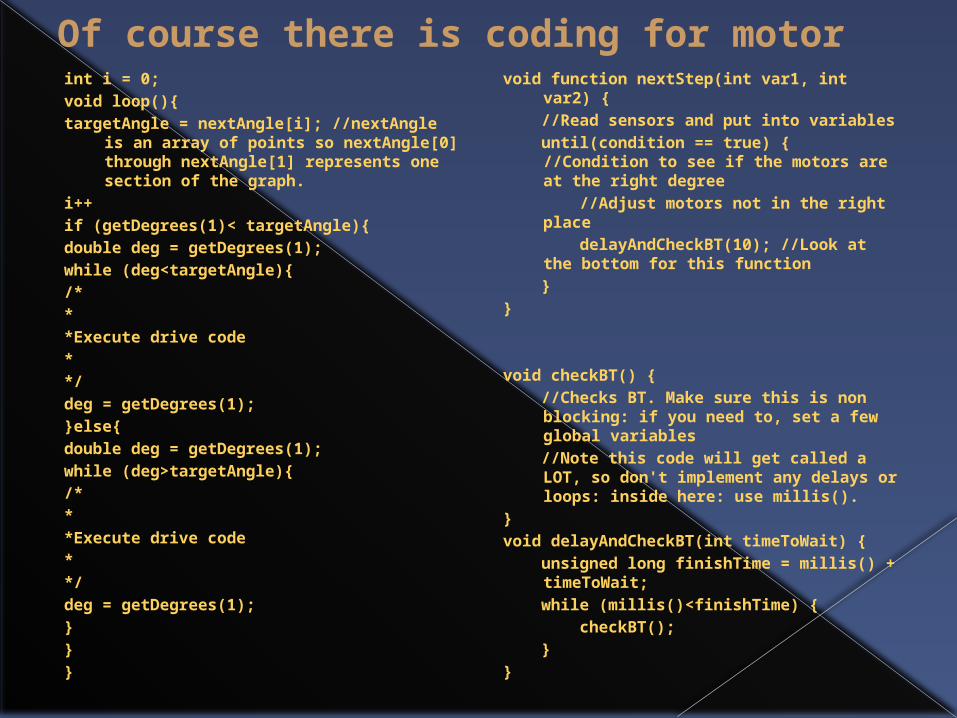
Of course there is coding for motorint i = 0;void loop(){targetAngle = nextAngle[i]; //nextAngle is
an array of points so nextAngle[0] through nextAngle[1] represents one section of the graph.
i++if (getDegrees(1)< targetAngle){double deg = getDegrees(1);while (deg<targetAngle){/***Execute drive code**/deg = getDegrees(1);}else{double deg = getDegrees(1);while (deg>targetAngle){/***Execute drive code**/deg = getDegrees(1);}}}
void function nextStep(int var1, int var2) { //Read sensors and put into variables until(condition == true) { //Condition to
see if the motors are at the right degree
//Adjust motors not in the right place delayAndCheckBT(10); //Look at the
bottom for this function }}
void checkBT() { //Checks BT. Make sure this is non
blocking: if you need to, set a few global variables
//Note this code will get called a LOT, so don't implement any delays or loops: inside here: use millis().
}void delayAndCheckBT(int timeToWait) { unsigned long finishTime = millis() +
timeToWait; while (millis()<finishTime) { checkBT(); }}
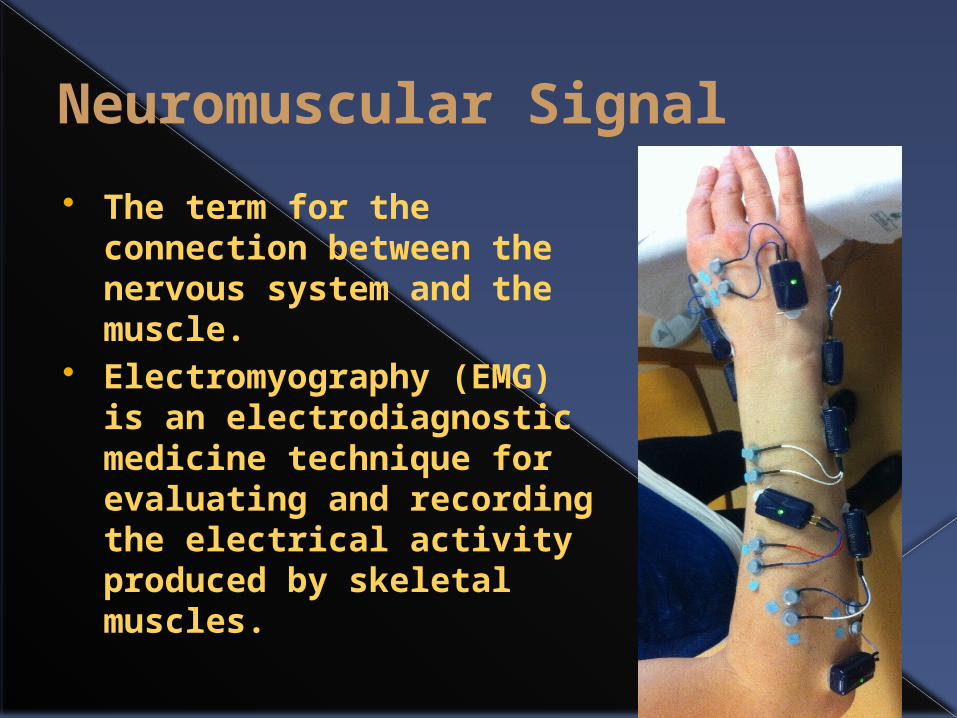
Neuromuscular Signal The term for the
connection between the nervous system and the muscle.
Electromyography (EMG) is an electrodiagnostic medicine technique for evaluating and recording the electrical activity produced by skeletal muscles.
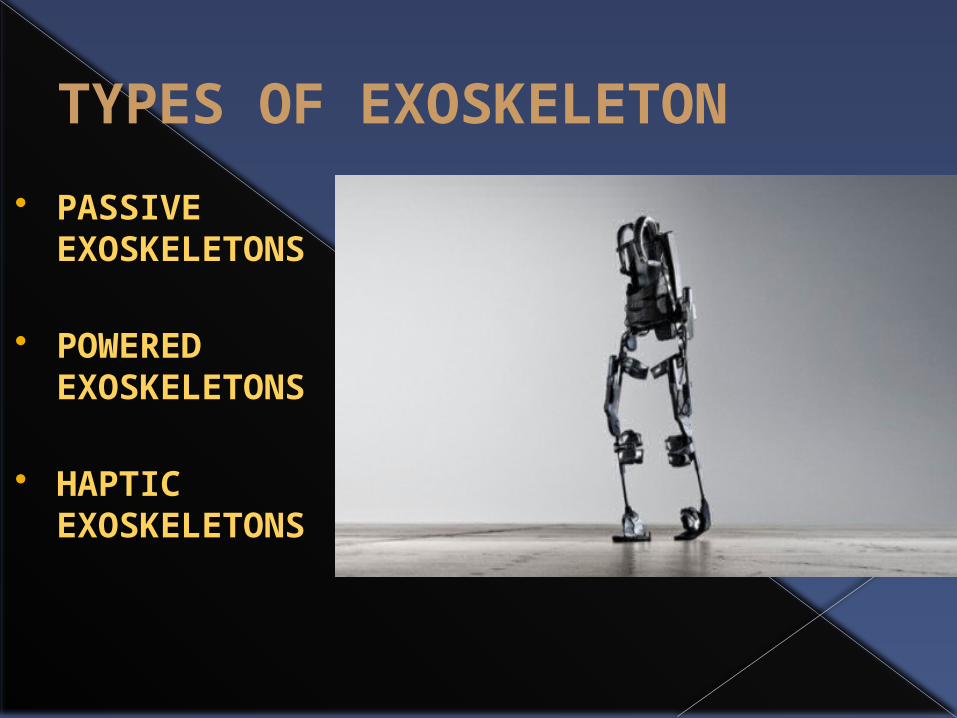
TYPES OF EXOSKELETON PASSIVE
EXOSKELETONS
POWERED EXOSKELETONS
HAPTIC EXOSKELETONS
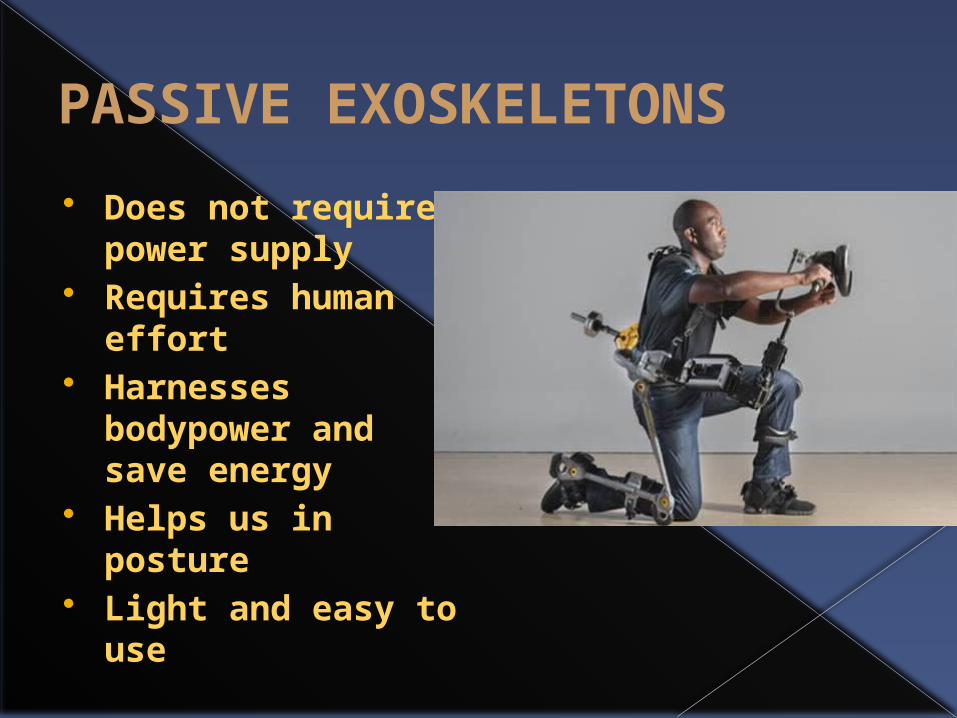
PASSIVE EXOSKELETONS Does not require
power supply Requires human
effort Harnesses
bodypower and save energy
Helps us in posture
Light and easy to use

POWERED EXOSKELETONS Requires power
supply Does not require
human effort Big and heavy Helps to do jobs
which are not humanly possible
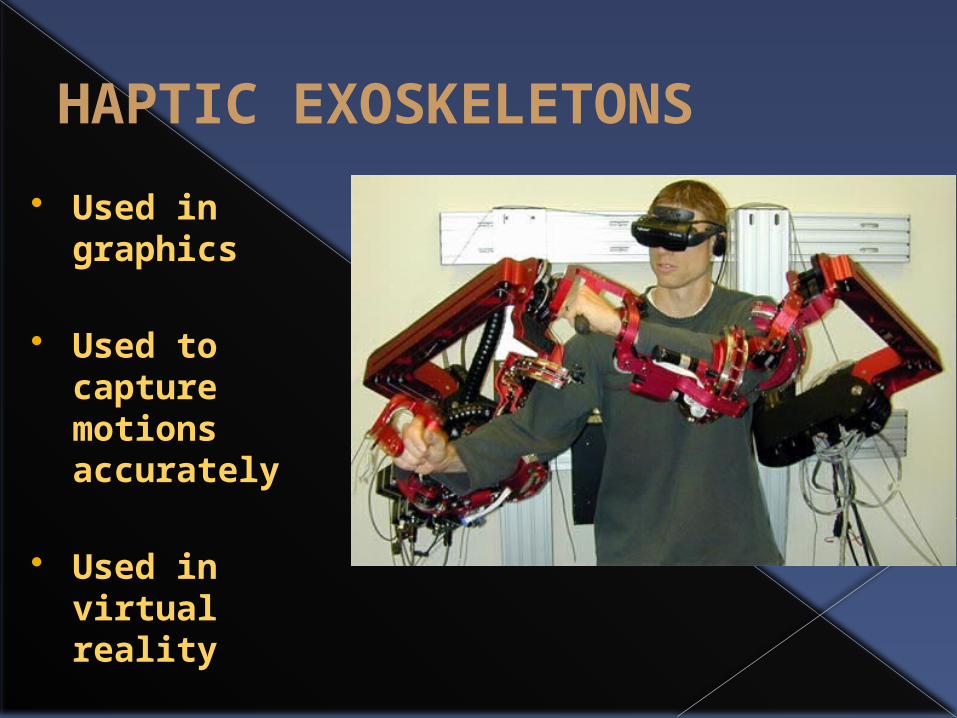
HAPTIC EXOSKELETONS Used in
graphics
Used to capture motions accurately
Used in virtual reality
CHALLENGES FACED Power supply Skeleton Actuators Joint flexibility Power control and modulation Power control and modulation Pinching and joint fouling Adaptation to user size variations
EXOSKELETONS IN USEXOS
By SARCOS Developed for US Military Weighs about 95kg Wearer can lift about 200lb of weight
for long periods of time without feeling the strain
Allows punching through three inches of wood
Lift 50lb with each arm

XOS IN ACTION


Human Universal Load Carrier(HULC)
Originally developed by Berkeley Bionics in 2008 Lockheed Martin acquired the design licence from
Berkeley in 2009 Enables soldiers to carry loads up to 200lb (91kg) Weighs 53lb (24kg) without batteries. The design is
adjustable to suit users with a height of 5'4" to 6'2“ Controlled by a micro-computer that sense the
user's requirement and adapt to the situation accordingly
Fuel cell power supply system support for 72 hours
Move at maximum speed of 11kmph long duration and at 16kmph burst speed
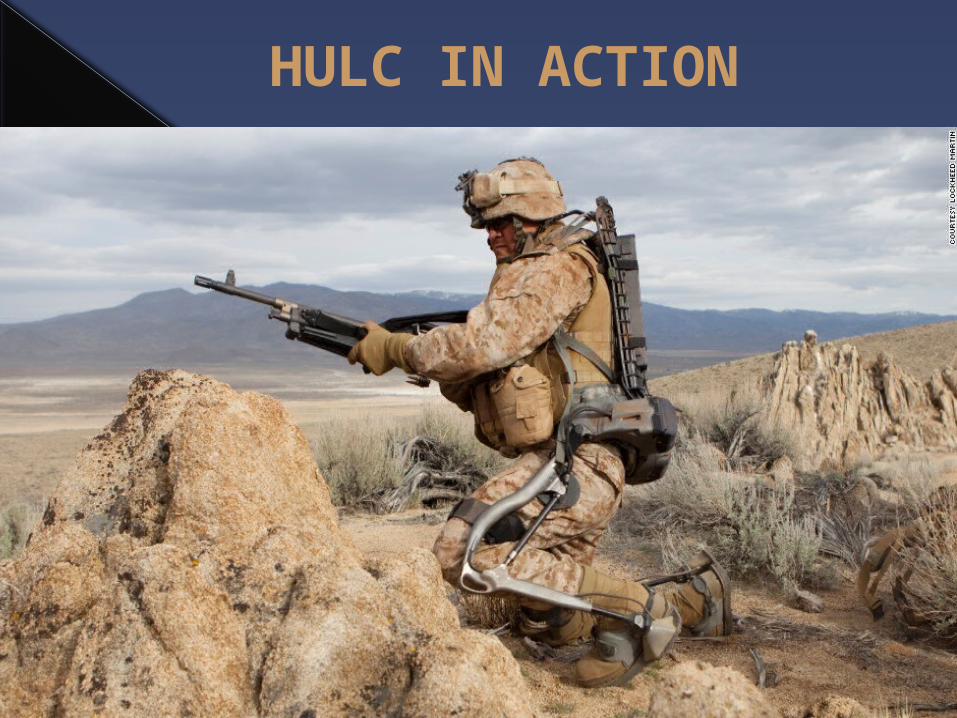
HULC IN ACTION

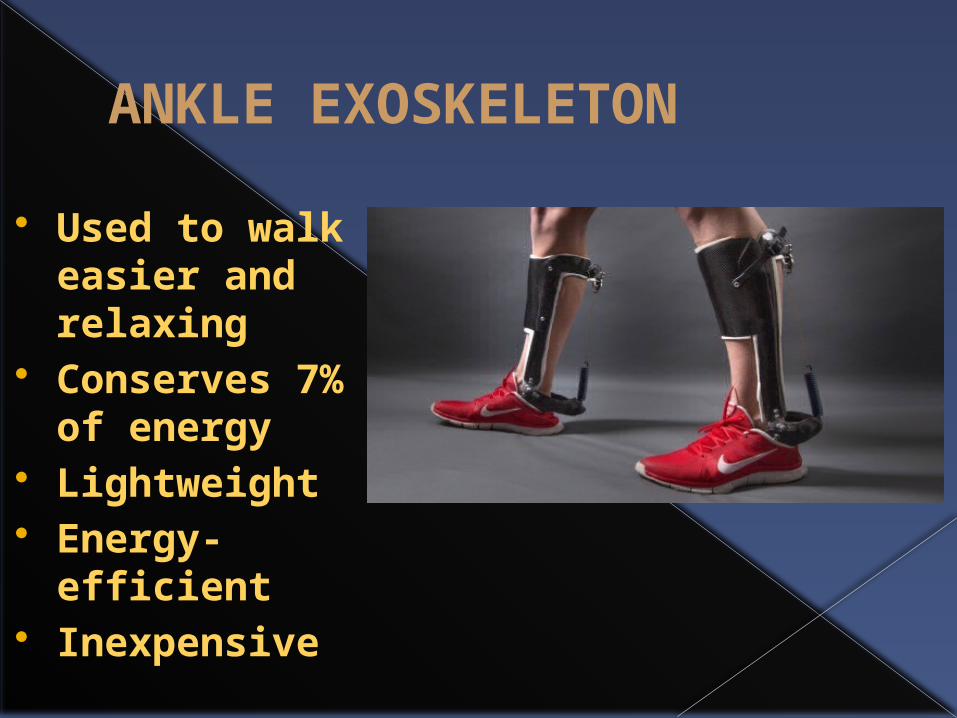
ANKLE EXOSKELETON Used to walk
easier and relaxing
Conserves 7% of energy
Lightweight Energy-
efficient Inexpensive

REWALK Helps physically
challenged and elderly people
Posture and Balance
Inexpensive Decreased Pain Reduced Fatigue Costs $150,000
(Rs.90,00,000)
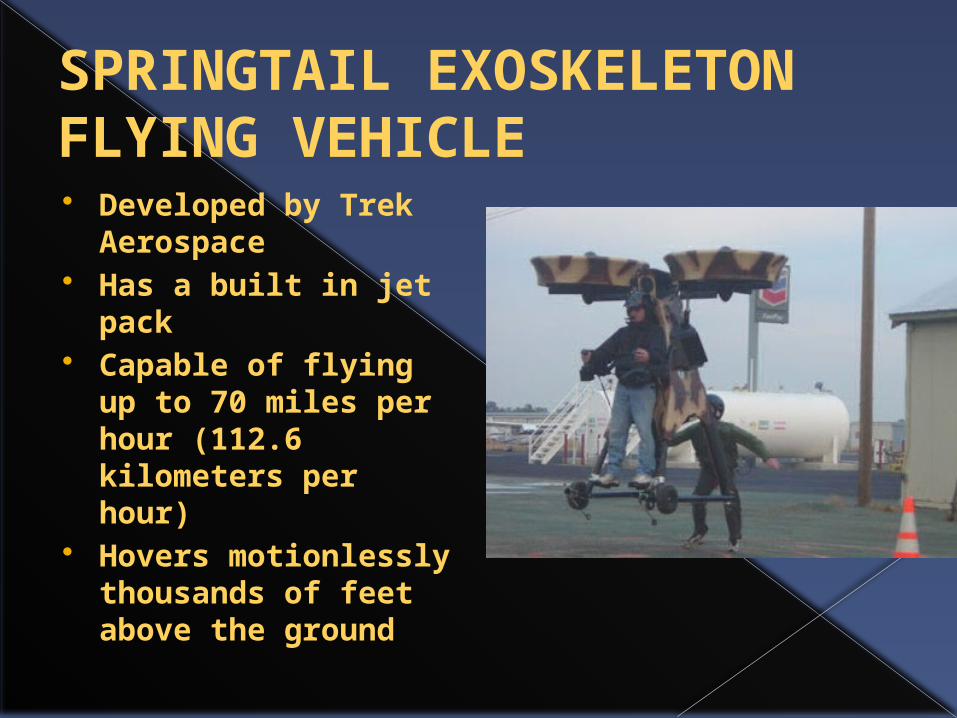
SPRINGTAIL EXOSKELETON FLYING VEHICLE Developed by Trek
Aerospace Has a built in jet
pack Capable of flying up
to 70 miles per hour (112.6 kilometers per hour)
Hovers motionlessly thousands of feet above the ground
USES

LABOURERS
PHYSICALLY CHALLENGED

MILITARY
FIREFIGHTERS

THANK YOU
Hence exoskeletons is a milestone and it is helping mankind to leap forward into the future…
A WORLD OF AUTOMATION AND ROBOTICS.
Related Documents











