Instituto Politécnico Nacional SECCIÓN DE ESTUDIOS DE POSGRADO E I NVESTIGACIÓN ESCUELA SUPERIOR DE I NGENIERÍA MECÁNICA Y ELÉCTRICA U NIDAD ZACATENCO DISEÑO MECÁNICO DE UN EXOESQUELETO PARA R EHABILITACIÓN DE MIEMBRO SUPERIOR TESIS QUE PARA OBTENER EL GRADO DE MAESTRO EN CIENCIAS EN I NGENIERÍA MECÁNICA P R E S E N T A: Ing. Juan Francisco Ayala Lozano Asesores: Dr. Guillermo Urriolagoitia Sosa Dr. Guillermo Manuel Urriolagoitia Calderón MÉXICO, D.F. DICIEMBRE DEL 2012

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 1/232
Instituto Politécnico Nacional
SECCIÓN DE ESTUDIOS DE POSGRADO E I NVESTIGACIÓN
ESCUELA SUPERIOR DE I NGENIERÍA MECÁNICA Y ELÉCTRICA
U NIDAD ZACATENCO
DISEÑO MECÁNICO DE UN
EXOESQUELETO PARA R EHABILITACIÓN
DE MIEMBRO SUPERIOR
TESIS
QUE PARA OBTENER EL GRADO DE
MAESTRO EN CIENCIAS EN I NGENIERÍA
MECÁNICA
P R E S E N T A:
Ing. Juan Francisco Ayala Lozano
Asesores:Dr. Guillermo Urriolagoitia SosaDr. Guillermo Manuel Urriolagoitia Calderón
MÉXICO, D.F. DICIEMBRE DEL 2012

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 2/232

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 3/232

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 4/232
Juan Francisco Ayala Lozano
Resumen
Los exoesqueletos se clasifican en diversas categorías, el desarrollo del presente trabajo se basa en
los enfocados a un segmento del cuerpo (miembro superior) y en la de finalidad que se le va dar
(rehabilitación). Actualmente existen varios diseños e investigaciones en esta área, pero un número
importante de estos son para población anglosajona o de países europeos, con los cuales un número mínimo de la población mexicana coincide, esto se debe principalmente a que la población
mexicana es más baja de estatura por lo cual la longitud de las extremidades disminuye.
En el presente trabajo se realiza el diseño de un exoesqueleto para rehabilitación de miembro
superior enfocados a la población mexicana, para ello se realiza un estudio de la historia y evolución
de los exoesqueletos de rehabilitación hasta llegar a abordar los sistemas más recientes en este
aspecto.
Posteriormente se analiza la biomecánica del miembro superior con la finalidad de entender y
comprender como se realizan los movimientos desde un punto de vista mecánico y así poder realizar
una analogía para posteriormente plasmarla en un mecanismo capaz de reproducir esos
movimientos.
Una vez analizado los movimientos, se procede a realizar el diseño conceptual del dispositivo,
basado en la herramienta de diseño Blitz QFD, para ello primero se recopilan todos los parámetros que debe tener el exoesqueleto, se agrupan primero de acuerdo a la función que van a desarrollar y
luego por la prioridad que tiene cada uno de ellos, terminado eso se procede a realizar una lluvia de
ideas para cumplir cada una de las funciones que se obtienen de realizar el análisis funcional del
dispositivo, se aplican los filtros indicados en la metodología obteniendo como resultado un diseño
que cumple con las características deseadas.
Posteriormente se analiza el diseño tanto en rangos de funcionalidad como estructurales para que sea
capaz de soportar el trabajo al cual será sometido, para ello se ocupa la cinemática del manipulador
y se realizan los análisis mediante un programa de elemento finito.
Por último, se procede a realizar la manufactura del prototipo del exoesqueleto en el rango útil, es
decir, desde la sección del antebrazo hasta el movimiento de flexoextensión horizontal.
Diseño Mecánico de un Exoesqueleto para Rehabilitación de Miembro Superior i

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 5/232
Juan Francisco Ayala Lozano
Abstract
The exoskeletons can be divided into different categories, the development of this work is based on
the classification focusing on a segment of the body (upper limb) and the purpose of that is going to
give (rehabilitation). Currently there are several designs and researches in this area, but a significant
number of these are for USA population or European countries, with which a minimum number of matches Mexican population, this is due primarily that Mexican population is lower height so their
limb length decreases.
The present paper is focused in the mechanical design of an upper limb rehabilitation exoskeleton
for the Mexican population, for it, this start with a study of the history and evolution of the
exoskeletons of rehabilitation to reach newer systems addresses this aspect.
Then the biomechanics of the upper limb is analyzed in order to understand and comprehend how
the movements are performed from a mechanical point of view so we can make an analogy to then
translate it into a mechanism able to reproduce those movements.
After analyzing the movements, we proceed to perform the conceptual design of the device based on
Blitz QFD design tool, for it is first collected all parameters that the exoskeleton must have, are
grouped first according to the function that will develop and then the priority of each, that will be
done to make brainstorming to meet each of the functions that are obtained to perform the device functional analysis, the filter applies that the methodology specified and obtaining as result a design
which meets desired characteristics.
Subsequently, the design is analyzed both as structural functionality ranges to be capable of
supporting the work which will be subjected, for it use the kinematics of the manipulator and
analysis are performed by a finite element software.
Finally, we proceed to manufacture the exoskeleton prototype in the useful range, from the forearm
section to the flexion-extension horizontally section.
Diseño Mecánico de un Exoesqueleto para Rehabilitación de Miembro Superior ii

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 6/232
Juan Francisco Ayala Lozano
Agradecimientos
A Dios Por haberme permitido llegar a esta etapa de mi vida.
A mis padres Dulía y Francisco Por haberme ayudado a sobreponer de las dificultades que se me presentaron al inicio de mi
camino en la vida, por sus consejos y regaños que me han forjado trayéndome hasta este punto, y sobre todo por siempre haberme apoyado en cada decisión que he tomado.
A mis hermanos Fátima y Gabriel: Por haber ayudado en muchos momentos, por soportar mis enojos, mis desvaríos, mis
momentos de egocentrismo. Así como un agradecimiento a mis demás familiares que de alguna u otra forma me ayudaron a conseguir esta meta.
A mis amigos Por estar siempre que los necesite, por sus consejos ya fueran para la escuela o para la vida
diaria, por los momentos de alegría y también de tristeza o enojo, las desveladas, las fiestas, por todo lo que he vivido con ustedes, a los que llevo conociendo ya hace varios años, así como a los nuevos que conocí en esta etapa.
A los doctores del área de Biomecánica Gracias a sus enseñanzas, pláticas y consejos, he podido llegar a la meta de graduarme de la
Maestría ya que de alguna u otra forma han ayudado a moldear este camino que hoy concluye en lo académico, así como a los profesores de las otras áreas con los cuales tuve clases, que me han sido de gran utilidad para poder llevar a buen término esta tesis.
Al INSTITUTO POLITECNICO NACIONAL, del cual me he graduado por tercer nivel, pasando por nivel Técnico, Licenciatura y ahora Maestría, considerándome orgullosamente politécnico por convicción y no por circunstancia.
Y CONCAYT por el apoyo económico brindado para la realización de mis estudios de nivel
Maestría.
Diseño Mecánico de un Exoesqueleto para Rehabilitación de Miembro Superior iii

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 7/232
Juan Francisco Ayala Lozano
Índice General
Resumen
Abstract
ndice General
Índice de Figuras ndice de Tablas
Objetivo general
Justificación
Introducción
i
ii
iv
ix xiii
xiv
xiv
xv
Capítulo I.- Estado del Arte
I.1.- Introducción
I.2.- Exoesqueletos
I.2.1.- Antecedentes generales
I.2.2.- Clasificación
I.3.- Rehabilitación
I.3.1.- Definición
I.3.2.- Antecedentes
I.3.3.- Rehabilitación en México
I.4.- Exoesqueletos desarrollados para miembro superior I.4.1.- Exoesqueleto de 4 GDL de la Universidad de Saga
I.4.2.- CADEN-7: Exoesqueleto7 GDL
I.4.3.- Exoesqueleto de 7 GDL “Soft-Actuaded”
I.4.4.- ARMin Robot
I.4.5.- MAHI
I.4.6.- W-EXOS: Wrist Axes Offset (Desplazamiento de ejes de la muñeca)
I.4.7.- ASSIST: órtesis de soporte activo (Active Support Splint)
I.4.8.- Exoesqueleto para Movimientos de mano y dedos
I.4.9.-NEUROexos:ExoesqueletoNeurorobótico(Neurobotics exoskeleton) I.4.10.- Exoesqueleto para asistencia del movimiento del codo
I.4.11.- Interacción háptica con ambiente virtual utilizando un exoesqueleto del brazo I.4.12.- Exoesqueleto para movimientos de la mano
Diseño Mecánico de un Exoesqueleto para Rehabilitación de Miembro Superior
1
2
2
3
4
7
7
9
10
12 12
13
14
14
15
16
16
17
17
18
19
19
iv

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 8/232
Juan Francisco Ayala Lozano
I.4.13.- Exoesqueleto mecatrónicos para rehabilitación motora
I.4.14.- Exoesqueleto para la articulación del hombro
I.4.15.- IROS: Sistema Inteligente (Intelligent Rehabilitative Orthotic System) I.4.16.- RUPERT: Robot asistente para terapia de rehabilitación de extremidad superior (Robotic assisted upper extremity repetitive therapy)
I.5.- Planteamiento del problema
I.6.- Sumario
I.7.- Referencias.
Capítulo II.- Marco teórico
II.1.- Introducción
II.2.- Procedimientos de rehabilitación.
II.3.- Mecánica del manipulador II.3.1.- Grados de libertad y tipos de articulaciones.
II.3.2.- Cinemática del manipulador
II.4.-Sistemas de impulsión y actuación.
II.4.1.-Motores eléctricos
II.4.1.1- Servomotores
II.4.2.- Sensores
II.5.- Metodología de diseño
II.5.1.-Modelos descriptivos del diseño
II.5.2.-Modelos prescriptivos
II.6.-Diseño conceptual
II.7.- Diseño a detalle
II.7.1.- Cargas y ciclos de trabajo
II.7.2.- Validación por Análisis de Elemento Finito
II.8.- Procesos de manufactura
II.9.- Sumario II.10.- Referencias
Capítulo III.- Biomecánica del miembro superior
III.1.- Introducción
III.2.- Anatomía del Hombro
Diseño Mecánico de un Exoesqueleto para Rehabilitación de Miembro Superior v
19
20
21
21
22
23
23
27
28
28
29 29
30
35
35
35
36
38
39
41
41
42
42
43
44
45 46
48
49
50

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 9/232
Juan Francisco Ayala Lozano
III.2.1.- Huesos
III.2.2.- Músculos
III.3.- Anatomía del Brazo
III.3.1.- Huesos
III.3.2.- Músculos III.4.- Anatomía del Codo
III.5.- Anatomía del Antebrazo
III.5.1.- Huesos
III.5.2.- Músculos
III.6.- Biomecánica del miembro superior
III.6.1.- Biomecánica del hombro
III.6.1.1.- Flexoextensión
III.6.1.2.- Aducción
III.6.1.3.- La abducción
III.6.1.4.- Flexoextensión horizontal
III.6.1.5.- Movimiento de circunducción
III.6.1.6.- Articulaciones del hombro
III.6.2.- Biomecánica del codo
III.6.2.1.- La amplitud de los movimientos del codo
III.6.2.2.- Las limitaciones de la flexoextensión III.6.3.- Biomecánica del Antebrazo
III.7.- Cinemática del miembro superior
III.8.- Cinética del miembro superior
III.9.- Sumario
III.10.- Referencias
Capítulo IV.- Diseño Conceptual
IV.1.- Diseño conceptual del dispositivo
IV.1.1.- Parámetros de diseño
IV.1.2.- Análisis funcional
IV.1.3.- Generación de conceptos para satisfacer las necesidades
IV.1.4.- Aplicaciones de filtros
IV.1.5.- Diseño conceptual final
Diseño Mecánico de un Exoesqueleto para Rehabilitación de Miembro Superior
51
52
55
55
55 57
57
57
57
58
58
60
60
61
62
64
65
67
67
68 70
71
71
74
75
77
77
77
79
79
81
82
vi

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 10/232
Juan Francisco Ayala Lozano
IV.2.- Diseño Mecánico
IV.2.1.- Sistema del antebrazo
IV.2.1.1.- Determinación de las fuerzas involucradas en el sistema del antebrazo
IV.2.2.- Sistema del brazo
IV.2.2.1.- Determinación de las fuerzas involucradas en el sistema del brazo
IV.2.3.- Sistema del hombro
IV.2.4.-Sistema base
IV.3.-Sumario
Capitulo V.- Análisis de la estructura bajo condiciones de trabajo
V.1.- Introducción
V.2.- Espacio de trabajo V.2.1.- Flexión del antebrazo
V.2.2.- Flexo-extensión del hombro en el plano sagital
V.2.3.- Abducción del hombro en el plano coronal (frontal)
V.2.4.- Flexo-extensión horizontal del hombro respecto al eje vertical
V.2.5.- Movimientos combinados
V.3.- Análisis por elemento finito de la estructura
V.3.1.- Análisis de los ejes
V.3.2.-Analisis de la sección del antebrazo
V.3.3.- Análisis de la sección del brazo y antebrazo
V.3.4.- Análisis de la estructura para la flexo-extensión en el plano sagital
V.3.5.- Análisis de la estructura de abducción del hombro en el plano coronal (frontal) V.3.6.- Análisis de la sección superior del dispositivo
V.3.7.- Análisis de la base del dispositivo
V.4.- Análisis de resultados
V.5.- Sumario
Capítulo VI.- Manufactura
VI.1.- Introducción
VI.2.- Maquinado
VI.2.1.- Fresado
Diseño Mecánico de un Exoesqueleto para Rehabilitación de Miembro Superior
82
82
83
86
87
88
91
93
95
96
96 96
97
98
99
100
104
106
108
109
110
111
112
113
114
115
116
117
117
117
vii

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 11/232
Juan Francisco Ayala Lozano
VI.2.2.- Torneado
VI.3.-Roscado
VI.4.- Construcción del prototipo
VI.5.- Sumario
VI.6.- Referencias Conclusiones
Trabajos futuros
Anexos
Anexo A.- Servomotores
Anexo B.- Rodamientos
Anexo C.- Columna telescópica
Anexo D.- Normas para tornillería Anexo D.- Publicaciones derivadas
Planos
118
118
119
122
122 123
126
128
129
130
135
137 139
140
Diseño Mecánico de un Exoesqueleto para Rehabilitación de Miembro Superior viii

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 12/232
Juan Francisco Ayala Lozano
Índice de Figuras
Figura I.1.- Clasificación de las órtesis según su funcionamiento [I.2]. a) Pasivas. b) Activas.
Figura I.2.- Primer exoesqueleto activo creado en 1969 en el Instituto Mihailo Pupin [I.5]
Figura I.3.- Primer exoesqueleto activo de miembro superior [I.5]
Figura I.4.- Clasificación de los exosqueletos Figura I.5.- Máquina de Levacher [I.16]
Figura I.6.- Exoesqueleto de 4 GDL de la Universidad de Saga [I.18]
Figura I.7.- Usuario probando el exoesqueleto CADEN-7 compuesto por 3 configuraciones
[I.10]
Figura I.8.- Exoesqueleto impulsado por músculos neumáticos [I.19].
Figura I.9.- Demostración de cómo un terapeuta programa una rutina [I.21]
Figura I.10.- Usuario operando el nuevo rediseño del exoesqueleto [I.24]
Figura I.11.- W-EXOS se mueve en los planos X, Y y Z [I.4]
Figura I.12.- Estructura del ASSIST [I.26]
Figura I.13.- Mano de un sujeto colocado en el exosqueleto [I.27]
Figura I.14.- Vista superior del prototipo de la articulación del hombro [I.28]
Figura I.15.- Prototipo del sistema mecánico del exoesqueleto del brazo [I.29]
Figura 1.16.- Demostración del funcionamiento del Sarcos Master [I.31]
Figura I.17.- Usuaria con el dispositivo de rehabilitación motora [I.32]
Figura I.18.- Modelo 3D del mecanismo propuesto para abducción lateral y frontal [I.33] Figura I.19.- Evolución del exoesqueleto RUPERT. a) Versión I, b) Versión II y c) Versión
III.
14
15
15
16
17
17
18
18
19
20
21 22
2
3
4
8 9
13
13
Figura II.1.- Diagrama de estudio de la mecánica [II.6]
Figura II.2.- Articulaciones posible en un robot o mecanismo [II.7]
Figura II.3.- Parámetros de Denavit-Hartenberg
Figura II.4.- Encoder incremental [II.7]
Figura II.5.- Encoder absoluto [II.7]
Figura II.6.- Modelo de French [II.6]
29
30
32
37
38
40
Figura III.1.- Planos anatómicos del cuerpo humano [III.4]
Figura III.2.- Regiones miembro superior. a) Anatomía superficie. b) músculos. c) huesos
Diseño Mecánico de un Exoesqueleto para Rehabilitación de Miembro Superior
50
51
ix

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 13/232
Juan Francisco Ayala Lozano
[III.7].
Figura III.3.- Representación de los 3 GDL del hombro [III.15]
Figura III.4.- Flexo-extensión y aducción del hombro [III.15]
Figura III.5.- Movimiento de abducción del hombro [III.15]
Figura III.6.- Etapas del movimiento flexoextensión horizontal [III.15]. Figura III.7.- Movimiento de circundicción en el hombro [III.15]
Figura III.8.- La amplitud de los movimientos del codo [III.15]
Figura III.9.- Flexo-extensión del codo [III.15]
59
60
62
64 65
68
70
Figura IV.1.- Análisis funcional del dispositivo
Figura IV.2.- Segmento del antebrazo en su longitud mínima
Figura IV.3.- Segmento del antebrazo en su longitud máxima
Figura IV.4.- Representación de las reacciones en la estructura del antebrazo
Figura IV.5.- Diagrama de cuerpo libre de reacciones en la estructura del antebrazo
Figura IV.6.- Representación de las fuerzas a las que es sometida la estructura
Figura IV.7.- Diagrama de cuerpo libre del antebrazo
Figura IV.8.- Estructura del brazo en longitud mínima
Figura IV.9.- Estructura del brazo en longitud máxima
Figura IV.10.- Representación de cargas en la estructura del miembro superior
Figura IV.11.- Diagrama de cuerpo libre de la cargas en la estructura del miembro superior Figura IV.12.- Articulación para el movimiento de flexo-extensión
Figura IV.13.- Estructura que permite el movimiento de abducción frontal
Figura IV.14.- Estructura para soportar el servomotor del movimiento de abducción frontal
Figura IV.15.- Estructura de unión del exoesqueleto a la base
Figura IV.16.- Reconfiguración del dispositivo para el movimiento de flexo-extensión
Figura IV.17.- Sección de la base con sistema de ajuste de altura del hombro
Figura IV.18.- Sección de la base que permite el ajuste de ancho de espalda
Figura IV.19.- Dispositivo final. a) Configuración diestra, b) Configuración zurda.
79
83
83
84
84
85
85
86
87
88
88 89
90
90
91
91
92
92
93
Figura V.1.- rea de trabajo del antebrazo
Figura V.2.- Fase de la flexión del brazo. a) Etapa inicial, b) Etapa final
Figura V.3.- rea de trabajo en el movimiento de flexo-extensión sagital
Diseño Mecánico de un Exoesqueleto para Rehabilitación de Miembro Superior x
96
97
97

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 14/232
Juan Francisco Ayala Lozano
Figura V.4.- Etapas del movimiento. a) Fase inicial, b) Extensión máxima, c) Flexión
máxima
Figura V.5.- rea de trabajo del movimiento de abducción
Figura V.6.- Etapas del movimiento de abducción del hombro. a) ngulo inicial, b) ngulo
final Figura V.7.- rea de trabajo de la flexo-extensión en el eje vertical
Figura V.8.- Exoesqueleto realizando el movimiento de flexo-extensión. a) Posición inicial,
b) Flexión máxima, c) Extensión máxima
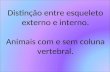
Figura V.9.- Modelo cinemático del movimiento de la flexo-extensión en torno al plano
sagital combinado con flexión en el codo
Figura V.10.- rea de trabajo del movimiento de la flexo-extensión en torno al plano sagital
combinado con flexión en el codo
Figura V.11.- Movimiento de abducción de la articulación del hombro en torno al plano
frontal junto con flexión del codo
Figura V.12.- rea de trabajo tridimensional
Figura V.13.- Modelo cinemático del movimiento de flexo-extensión en el eje vertical del
hombro y flexión del codo
Figura V.14.- rea de trabajo de flexiones combinadas del hombro y codo
Figura V.15.- Esfuerzo de von Mises resultante en el eje de flexión del antebrazo
Figura V.16.- Deformación total sufrida por el eje de flexión del antebrazo Figura V.17.- Esfuerzo de von Mises resultante en del 2do eje
Figura V.18.- Deformación total sufrida por el 2do eje
Figura V.19.- Esfuerzo de von Mises resultante en el eje de flexo-extensión horizontal
Figura V.20.- Esfuerzo de von Mises resultante en el eje de flexo-extensión horizontal
Figura V.21.- Esfuerzo de von Mises de la estructura del antebrazo
Figura V.22.- Deformación total de la estructura del antebrazo
Figura V.23.- Esfuerzo de von Mises resultante de las 2 primeras secciones
Figura V.24.- Deformación total sufrida por las 2 primeras secciones
Figura V.25.- Esfuerzo de von Mises resultante de 3 secciones de la estructura
Figura V.26.- Deformación total sufrida por 3 secciones de la estructura
Figura V.27.- Esfuerzo resultante considerando 4 secciones del dispositivo
Figura V.28.- Deformación total considerando 4 secciones del dispositivo
Diseño Mecánico de un Exoesqueleto para Rehabilitación de Miembro Superior
104
106
107 107
107
108
108
109
109
110
110
111
111
112
112
xi
103
104
102
102
101
99
100
98
99
98

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 15/232
Juan Francisco Ayala Lozano
Figura V.29.- Esfuerzo resultante de la sección superior del dispositivo
Figura V.30.- Deformación total de la sección superior del dispositivo
Figura V.31.- Esfuerzo resultante en la base del dispositivo
Figura V.32.- Deformación total sufrida por la base del dispositivo
113
113
114
114
Figura VI.1.- Sección del antebrazo. a) Subsecciones, b) Longitud mínima, c) Longitud
máxima
Figura VI.2.- Sección del brazo. a) Subsistemas, b) Longitud mínima, c) Longitud máxima
Figura VI.3.- Correas de sujeción
Figura VI.4.- Secciones de la estructura del hombro
Figura VI.5.- Estructura que contempla todos los GDL del dispositivo
Figura VI.6.- Estructura completa colocada en un soporte
119
120
120
121
121
121
Diseño Mecánico de un Exoesqueleto para Rehabilitación de Miembro Superior xii

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 16/232
Juan Francisco Ayala Lozano
Índice de Tablas
Tabla I.1.- Porcentaje de población por grupos de edad según tipo de discapacidad, año
2000 [I.15]
Tabla I.2.- Distribución porcentual de población por tipo de discapacidad según grupos de
edad en el año 2000 [I.15]
12
11
Tabla II.1.- Parámetros de Denavit-Hartenberg [II.9] 33
Tabla III.1.- Peso segmentario/relaciones de peso corporal de varios estudios [III.18]
Tabla III.2.- Medidas estándar de un percentil 50 en Latinoamérica [III.19]
Tabla III.3.- Longitudes de segmentos de la extremidad superior [III.20]
Tabla III.4.- Centros de masa/relación de longitud del segmento (en porcentaje) [III.18]
72
72
73
73
Tabla IV.1. - Clasificación de los parámetros 78
Tabla V.1.- Parámetros de Denavit-Hartenberg para el movimiento de la flexo-extensión en
torno al plano sagital combinado con flexión en el codo
Tabla V.2.- Parámetros de Denavit-Hartenberg para el movimiento abducción del hombro
en torno al plano frontal junto con flexión del codo
Tabla V.3.-Parametros de Denavit-Hartenberg del movimiento de flexo-extensión en el eje vertical del hombro y flexión del codo
101
103
104
Tabla VI.1.- Brocas para machuelos de cuerda métrica [VI.1] 118
Diseño Mecánico de un Exoesqueleto para Rehabilitación de Miembro Superior xiii

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 17/232
Juan Francisco Ayala Lozano
Objetivo general
Realizar el diseño mecánico de un sistema para lograr la rehabilitación del miembro superior,
comprendiendo las regiones desde el hombro hasta el antebrazo, que se ajuste a las dimensiones de
la población adulta mexicana, particularmente de las ciudades México D.F. y Guadalajara, Jalisco.
Para poder alcanzar este objetivo, es necesario realizar objetivos particulares que se enlistan a continuación:
Establecer un estado del arte correspondiente a las investigaciones y desarrollos tecnológicos
relacionados con sistemas de rehabilitación del miembro superior.
Conocer la anatomía del miembro superior así como la biomecánica de los movimientos que
puede realizar y los rangos de amplitud de los mismos.
Establecer los rangos de longitud de la extremidad superior en la población adulta mexicana
de las ciudades de México D.F. y Guadalajara, Jalisco; así como el resto de los datos
antropométricos necesarios.
Elegir la herramienta de diseño adecuada, para lograr realizar en una primera instancia un
diseño conceptual adecuado, para posteriormente obtener el diseño final apoyado con
análisis de elemento finito.
Justificación
El miembro superior, es una de las regiones más importantes del cuerpo humano, ya que muchas de
las actividades de la vida cotidiana son realizadas utilizando dicha región; aunque sean realizadas en
su etapa final por la mano, el resto del miembro es importante para poder ubicarla en la posición
correcta; sin embargo, al realizar las actividades se pueden presentar traumas y/o enfermedades que
dañan y limitan físicamente la capacidad de movimiento, siendo los músculos los principales
afectados por la reducción de movimiento.
Los traumas y lesiones requieren tratamientos de rehabilitación para que el miembro superior recupere movilidad, ya que de las principales causas de discapacidad se encuentran las
enfermedades cerebrovasculares (ECV) que afecta a cerca del once por ciento de la población
mexicana, derivada principalmente de la hipertensión arterial y de la diabetes Mellitus que son
enfermedades comunes en nuestra población y que va en aumento su nivel de incidencia;
aproximadamente una cuarta parte de los pacientes que logran sobrevivir a un evento de este tipo
Diseño Mecánico de un Exoesqueleto para Rehabilitación de Miembro Superior xiv

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 18/232
Juan Francisco Ayala Lozano
necesitan cuidados especiales en los siguientes tres meses y cerca de una tercera parte de los
sobrevivientes quedan con una discapacidad grave permanente, que requiere ser atendida.
Actualmente en la mayoría de los lugares de rehabilitación, las terapias son de forma manual, lo que
ocasiona fatiga en el terapeuta aunado a que las terapias no tengan una evolución constante, retrasando el tiempo de recuperación del paciente. Sin embargo, contar con un sistema automático,
que pueda realizar las terapias de forma controlada, permitirá tener un mayor control sobre las
sesiones de terapia, así como de los parámetros que debe cumplir en cada una, y con la seguridad de
que cada repetición de la rutina, será la adecuada, eliminando la incertidumbre de que el terapeuta
pueda aplicar mayor o menor fuerza así como no cumpla con el rango de movimiento indicado.
Introducción
El diseño de exoesqueletos es un tema relativamente nuevo, ya que los primeros diseños son de la
década de los 1960, siendo investigados principalmente con aplicaciones militares, aunque
rápidamente se extendió a otras áreas principalmente la médica donde en una primera instancia se
enfocó al miembro inferior con el fin de apoyar a la marcha, posteriormente se empezaron a diseñar
dispositivos para apoyar en la rehabilitación de miembro superior.
La rehabilitación física es un proceso que se debe realizar en etapas, partiendo de los movimientos
mínimos que puede realizar el paciente hasta llegar a reproducir rangos aproximados a los que se desarrollaban antes de sufrir la discapacidad; estos procesos llegan a ser largos lo que implica
también un desgaste físico en el terapeuta que realiza la rutina ya que debe realizar el esfuerzo para
mover el miembro superior del paciente, derivando en que las rutinas sean de poca duración y por lo
tanto la recuperación sea más lenta; en cambio un sistema robótico no tiene esas limitantes, el
terapeuta solo supervisara la terapia, ajustando el exoesqueleto a las dimensiones del paciente, y
estableciendo los parámetros que se debe cumplir por casa sesión y para cada usuario.
A continuación se aborda el diseño mecánico de un exoesqueleto para rehabilitación de miembro
superior, iniciando con el estado del arte de los exoesqueletos para miembro superior, siguiendo con
la teoría general, posteriormente se aborda la biomecánica del miembro superior con al finalidad de
conocer los parámetros biomecánicos que se ven involucrados en la realización de los principales
movimientos, al tener establecidos las bases teóricas se procede a desarrollar el diseño conceptual
para luego pasar a la evaluación de la estructura y por último se aborda la manufactura. Diseño Mecánico de un Exoesqueleto para Rehabilitación de Miembro Superior xv

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 19/232
Capítulo I.-
Estado del Arte
Imagen obtenida de la galería de imágenes prediseñadas de Office Word 2007 ®

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 20/232
Capítulo I
I.1.- Introducción
Juan Francisco Ayala Lozano
El ser humano realiza muchas de las actividades de la vida diaria utilizando sus miembros
superiores, que van desde las más simples tales como comer, vestirse, bañarse hasta complejas que
puede ser conducir un automóvil o manipular el control de una consola de video juego. Por ello, es
una de las partes del cuerpo que están más propensas a ser afectadas por enfermedades o traumas; para lograr su recuperación es necesaria la utilización de aparatos externos y/o de terapias de
rehabilitación física, lo que ha generado que en épocas recientes se diseñen exoesqueletos enfocados
a la rehabilitación del miembro superior.
I.2.- Exoesqueletos
La órtesis se define como un aparato usado para modificar las características funcionales o
estructurales del sistema neuronal-muscular-esquelético. Las órtesis se pueden clasificar de modo
general en 2 grupos, según su principio de funcionamiento (Figura I.1) [I.1]:
a) b)
Figura I.1.- Clasificación de las órtesis según su funcionamiento [I.2]. a) Pasivas. b) Activas.
a) Pasivas.- Aparatos cuyo diseño contempla únicamente partes mecánicas; la mayoría
de los diseños existentes no permiten el movimiento en ninguna de las articulaciones
del cuerpo.
b) Activas.- Una aplicación son los exoesqueletos, que consisten en un mecanismo
estructural externo acoplado a la persona, cuyas junturas y eslabones corresponden a
las de la parte del cuerpo humano que emula. El contacto entre el usuario y el
exoesqueleto permite transferir potencia mecánica y señales de información. A
diferencia de las órtesis pasivas, estos dispositivos son sistemas mecatrónicos que Diseño Mecánico de un Exoesqueleto para Rehabilitación de Miembro Superior 2

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 21/232
Capítulo I Juan Francisco Ayala Lozano
utilizan actuadores para proveer la fuerza y la movilidad de las articulaciones.
Generalmente son controlados por una unidad central de procesamiento a la que se
conectan sensores y actuadores.
Un exoesqueleto, se define como un sistema biomecatrónico, donde el mecanismo está adaptado a la estructura física del cuerpo humano, con un control que puede provenir de las mismas señales del
cerebro, con sensores conectados a la piel humana y con actuadores que son analógicos a las
funciones del cuerpo, todos estos elementos pueden actuar como un solo sistema integrado que
puede desarrollar variadas actividades [I.3].
I.2.1.- Antecedentes generales
Los exosqueletos fueron estudiados para propósitos de aplicaciones industriales y médicas desde la
década de 1960; adicionalmente algunos exoesqueletos fueron desarrollados con el propósito de
incrementar las capacidades humanas al inicio de la década de 1990 [I.4]. El primer exoesqueleto
activo (Figura I.2) fue diseñado en 1969, por el profesor Vukobratovic en el Instituto Mihailo Pupin,
localizado en la actual Serbia, enfocándose en el miembro inferior; impulsado neumáticamente y
con una programación cinemática mínima, para producir una marcha antropomórfica mínima[I.5].
Figura I.2.- Primer exoesqueleto activo creado en 1969 en el Instituto Mihailo Pupin [I.5]
A inicios de la década de 1970 un grupo de investigadores de la Universidad Cornell y
posteriormente de General Electric desarrollaron uno de los primeros sistemas teleoperados
maestro-esclavo, nombrados Hardiman y Handyman; el Hardiman era un exoesqueleto
Diseño Mecánico de un Exoesqueleto para Rehabilitación de Miembro Superior 3

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 22/232
Capítulo I Juan Francisco Ayala Lozano
antropomórfico colocado dentro de un robot esclavo más grande y era usado para amplificar la
fuerza humana [I.6].
En 1982, se desarrolló con éxito una órtesis activa de miembro superior para rehabilitación de casos
avanzados de distrofia y enfermedades similares (Figura I.3); era controlado por medio de un oystick [I.5].
Figura I.3.- Primer exoesqueleto activo de miembro superior [I.5]
Se considera que los pioneros son proyectos de la extinta URSS, Japón, Estados Unidos, Canadá, y
algunos países europeos como Suiza, Italia, Francia y Alemania [I.7].
I.2.2.- Clasificación
Los exoesqueletos se dividen en dos grupos según la aplicación final del exoesqueleto de acuerdo a
[I.7]:
a) Los exoesqueletos amplificadores de potencia.- Fueron los primeros en ser desarrollados,
su finalidad en aumentar la capacidad, principalmente de fuerza y carga, del miembro en el
que es aplicado.
b) Los exoesqueletos como tecnologías de asistencia para individuos con problemas de
movilidad.- Apenas en desarrollo y no existe aún un dispositivo accesible a la mayoría que
asista a los discapacitados en su vida cotidiana fuera de los centros terapéuticos. Se espera
que con el avance de la tecnología, con la miniaturización de los mecanismos y con el
Diseño Mecánico de un Exoesqueleto para Rehabilitación de Miembro Superior 4

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 23/232
Capítulo I Juan Francisco Ayala Lozano
creciente desarrollo de grupos en bioingeniería, se pueda lograr pronto este objetivo con un
producto ergonómico.
Los exoesqueletos de miembros superiores forman parte de un grupo de sistemas robóticos
denominados robots portátiles (Wearable Robots) [I.8], estos son sistemas robóticos que visten el cuerpo humano para cumplir funciones específicas; estas funciones los catalogan en los siguientes
subgrupos:
a) Robots Ortópticos.- Son sistemas cuya función es reemplazar las funciones un miembro
perdido.
b) Robots Prostéticos.- Su función es la de rehabilitar un miembro que se encuentra atrofiado,
sea por un accidente o por una deficiencia patológica.
c) Robots Extensores.- Su función es la de aumentar las habilidades del miembro al que está
unido, esta habilidad está relacionada con la fuerza.
Otros autores dividen el estudio de los exoesqueletos en dos partes, en la primera, están los sistemas
unidos a los brazos, denominados, exoesqueletos de partes superiores, y en la segunda aquellos
sistemas que están unidos a las piernas, denominados exoesqueletos de partes inferiores [I.9]. Las aplicaciones potenciales de los exoesqueletos de partes superiores están enfocadas en [I.10]:
a) Recuperaciones terapéuticas.- El paciente usa un exoesqueleto que lleva a cabo la tarea
basada en la terapia ocupacional o física de modo activo o pasivo.
b) Sistema de asistencia para labores de amplificación de la fuerza humana.- El usuario siente
las cargas reducidas a escala durante la interacción con los objetos, la mayor parte de la
carga es soportada por el exoesqueleto.
c) Dispositivo háptico para simulaciones virtuales.- El sujeto interactúa físicamente con
objetos virtuales mientras las fuerzas son generadas por retroalimentación kinestésica al
usuario a través del exoesqueleto y que pueden ser de forma, dureza, textura u otra
característica del objeto virtual. Diseño Mecánico de un Exoesqueleto para Rehabilitación de Miembro Superior 5

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 24/232
Capítulo I Juan Francisco Ayala Lozano
d) Dispositivo maestro para procesos de Teleoperación.- Se reemplaza el ambiente virtual por
un robot real, el operador usa el exoesqueleto para control el sistema robótico en el modo
de Teleoperación (maestro/esclavo), donde el exoesqueleto retroalimenta al usuario las
fuerzas generadas por la interacción del robot con el ambiente.
Los exoesqueletos se clasifican en tres categorías de acuerdo a la sección del cuerpo a la que son
aplicados [I.10]:
a) Para extremidades o miembros superiores.
b) Para extremidades o miembros inferiores.
c) Para Rehabilitación.
Los exoesqueletos activos para miembro superior pueden ser clasificados en [I.4]:
a) El segmento del miembro superior al que es aplicado (exoesqueleto para mano,
exoesqueleto para antebrazo, exoesqueleto para brazo o exoesqueleto para segmentos
combinados).
b) El número de grados de libertad (GDL).
c) El tipo de actuadores utilizados (motores eléctricos, músculos neumáticos, actuadores
hidráulicos u otro tipo).
d) Los métodos de transmisión de potencia (engranes, bandas, mecanismos de unión u otro).
e) La aplicación del robot (robots para Rehabilitación, robot de asistencia, amplificador de las
capacidades humanas, uso combinado).
La clasificación de los exoesqueletos para miembro superior basada únicamente en el diseño
mecánico se limita por los actuadores usados [I.4], por tal motivo se clasifica en 3 tipos que son: Diseño Mecánico de un Exoesqueleto para Rehabilitación de Miembro Superior6

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 25/232
Capítulo I Juan Francisco Ayala Lozano
a) Tipo A.- Actuado por motores eléctricos.
b) Tipo B.- Actuado por músculos neumáticos.
c) Tipo C- Actuado por potencia hidráulica.
También existe una clasificación de acuerdo a donde se sujeta la base del exoesqueleto [I.12]:
a) No portátiles: las estructuras exoesqueléticas que se encuentran ancladas a una base fija, tal
como el suelo, la pared o el techo. En general estas interfaces son más pesadas y complejas
que los exoesqueletos portátiles. Debido a que suelen tener la capacidad de producir fuerzas
de salida mayores. Además, la seguridad es especialmente importante en su diseño.
b) Portátiles: el soporte sobre el que se apoya todo el peso del exoesqueleto es el propio
usuario o un dispositivo móvil con el usuario, como por ejemplo una silla de ruedas. De
esta forma los exoesqueletos portátiles ejercen las fuerzas de reacción sobre el usuario en
los puntos de sujeción.
Como se observa el resultado de la investigación realizada, hay varias clasificaciones existentes, por tal motivo, en la Figura I.4 se muestra un cuadro sinóptico de esa información.
I.3.- Rehabilitación
El concepto de Rehabilitación aparece por primera vez en Estados Unidos de América hacia finales
de la primera guerra mundial para hacer frente a la reinserción profesional y al suministro de
prótesis a los mutilados por la guerra; lo que originó que se diseñaran ejercicios físicos de
Rehabilitación en los hospitales militares [I.13].
I.3.1.- Definición
La Rehabilitación es el conjunto de procedimientos dirigidos a ayudar a una persona a alcanzar el
más completo potencial físico, psicológico, social, vocacional y educacional compatible con su
deficiencia fisiológica o anatómica y limitaciones medioambientales [I.14].
Diseño Mecánico de un Exoesqueleto para Rehabilitación de Miembro Superior 7

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 26/232
Capítulo I Juan Francisco Ayala Lozano
Amplificadores de potencia.
Aplicación Final [I.7]
Robots portátiles (Wearable Robots) [I.8]
Segmentos del
Cuerpo [I.9]
Como tecnologías de asistencia para individuosconproblemasde movilidad.
Ortópticos. Prostéticos. Extensores.
Para miembro superior. Para miembro inferior.
Recuperaciones terapéuticas.
Sistema de asistencia para labores de
amplificación de la fuerza humana. Miembro Superior
[I.10] Dispositivo háptico para simulaciones virtuales.
Dispositivo maestro para procesos de
Clasificación de los
exoesqueletos
Teleoperación.
Sección del cuerpo al que son aplicadas
[I.11]
Extremidades o miembros superiores.
Extremidades o miembros inferiores.
Para Rehabilitación.
Segmento del miembro superior al que
Activos para
miembro
superior [I.4]
es aplicado. El número de grados de libertad.
El tipo de actuadores utilizados.
Los métodos de transmisión de potencia.
La aplicación del el robot.
Actuadores utilizados para el diseño mecánico
[I.4]
Lugar de sujeción de
la base [I.12]
Motores Electricos. Musculos Neumaticos. Potencia hidráulica.
Portátil.
No Portátil.
Figura I.4.- Clasificación de los exosqueletos
Diseño Mecánico de un Exoesqueleto para Rehabilitación de Miembro Superior 8

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 27/232
Capítulo I Juan Francisco Ayala Lozano
La Rehabilitación es un proceso de duración limitada y con un objetivo definido, encaminado a
permitir que una persona con deficiencia alcance un nivel físico, mental y/o social funcional óptimo,
proporcionándole así los medios de modificar su propia vida. Puede comprender medidas
encaminadas a compensar la pérdida de una función o una limitación funcional (por ejemplo, ayudas
técnicas) y otras medidas encaminadas a facilitar ajustes o reajustes sociales [I.15].
La Rehabilitación física se puede dividir principalmente en dos tipos:
Activa: El fisioterapeuta es el que origina el movimiento de la extremidad del paciente.
Pasiva: El paciente es el encargado de mover su extremidad.
I.3.2.- Antecedentes
No se tiene una fecha específica de cuando se puede establecer el inicio de la Rehabilitación ya que
desde las primeras sociedades se presentan aspectos relacionados a este tema tal como se demuestra
con un bajorrelieve hallado a la entrada de una tumba egipcia y que se considera la primera
ilustración de una persona que utiliza un bastón para ayudarse a caminar. En 1764, ya existía un
corsé similar al conocido actualmente como Milwaukee llamado máquina de Levacher (Figura I.5)
[I.16].
Figura I.5.- Máquina de Levacher [I.16]
En 1946 se crea el Departamento de Medicina Física y Rehabilitación en el New York City’s
Bellevue Medical Center. En 1905 en el Hospital General de México se fundó un Departamento que Diseño Mecánico de un Exoesqueleto para Rehabilitación de Miembro Superior9

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 28/232
Capítulo I Juan Francisco Ayala Lozano
incluía los servicios de Hidroterapia, Mecanoterapia y Electroterapia. En 1957 el Dr.Tohen
Zamudio, de México publica el libro “Medicina Física y Rehabilitación”, quizás el primero en
Latinoamérica. En la década de los 1960‟s el Instituto Mexicano de Rehabilitación, Organismo no
Gubernamental, inició el primer curso formal de especialistas en Medicina Física y Rehabilitación
con tres años de duración y las escuelas de terapia física y ocupacional. Este Instituto fue de los primero en su época, en contar con taller de prótesis y órtesis [I.16].
I.3.3.- Rehabilitación en México
La medicina de Rehabilitación en México registró un mayor impulso a partir de la necesidad de
atender a los niños afectados por las epidemias de poliomielitis. En 1951 el Hospital Infantil de
México inició la capacitación de terapistas físicos y médicos, dando lugar a los primeros trabajos de
investigación en Rehabilitación, de los que fueron pioneros los doctores Alfonso Tohen y Luis
Guillermo Ibarra. Posteriormente, en 1952 fue fundado el Centro de Rehabilitación número 5 que
se transformó en el Centro de Rehabilitación del Sistema Músculo Esquelético. Años más tarde, por
decreto presidencial fechado en abril de 1976, este Centro de Rehabilitación fue transformado en el
Instituto Nacional de Medicina de Rehabilitación [I.15].
En el año 2000, existían en México 988 asociaciones de y para personas con discapacidad, de las
cuales 871 estaban reconocidas oficialmente: 111 se registraron como instituciones de asistencia
privada, 637 como asociaciones civiles, 40 como sociedades civiles y otras 83 con otro tipo de registro [I.15].
Esta información permite un acercamiento a las necesidades de atención de este grupo de población
en cada región, entidad, municipio o localidad. En el año 2000, en el Distrito Federal se ubicaron
166 asociaciones, de y para personas con discapacidad, mientras que en Guerrero sólo se registraron
seis. A nivel nacional existen 5.5 asociaciones de este tipo por cada 10 mil personas con
discapacidad; en Baja California Sur esta tasa asciende a 29.3, mientras que en Guerrero es de 1.2
asociaciones por cada 10 mil personas con discapacidad [I.15].
El XII Censo General de Población y Vivienda 2000, consideró cinco tipos de discapacidad: motriz,
visual, mental, auditiva y del lenguaje, agrupando el resto de los tipos en una categoría denominada
otro tipo de discapacidad. De acuerdo con esta clasificación el tipo de discapacidad más frecuente
fue la motriz (45.3%), la cual agrupó las discapacidades músculo-esqueléticas y las neuromotrices. Diseño Mecánico de un Exoesqueleto para Rehabilitación de Miembro Superior10

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 29/232
Capítulo I Juan Francisco Ayala Lozano
Las primeras se refieren a la dificultad que enfrenta una persona para moverse, caminar, mantener
algunas posturas, así como las limitaciones en habilidades manipulativas como agarrar o sostener
objetos. Las neuromotrices son aquellas que dificultan la movilidad de algún segmento corporal a
consecuencia de un daño neurológico, incluyendo las secuelas de traumatismos y de algunas enfermedades como la poliomielitis, las lesiones medulares y distrofia muscular [I.15].
La presencia de los diversos tipos de discapacidad guarda una estrecha relación con la edad, esto se
puede observar en la Tabla I.1, donde se muestran los datos obtenidos en el censo realizado por el
INEGI en el año 2000 [I.15].
Tabla I.1.- Porcentaje de población por grupos de edad según tipo de discapacidad, año 2000 [I.15]
Tipo de discapacidad
Grupos de Edad
Total
Niños
Jóvenes
Adultos
Adultos mayores
Motriz
45.3
35.1
31.4
43.2
55.1
Auditiva
15.7
12
11.2
12
21
Lenguaje
4.9
10.3
10.1
4.7
1.4
Visual
26
15.1
17.3
28.7
30.5
Mental
16.1
33.9
36.4
15.7
3.7
Nota: La suma de los tipos de discapacidad puede ser mayor a cien debido a la población con más de una discapacidad; el porcentaje se calculó en relación al total de personas con
discapacidad en cada grupo de edad.
Otra forma de analizar la presencia de la discapacidad es conociendo el lugar que ocupa cada
discapacidad en los distintos grupos de edad; en la Tabla I.2 se observa que mientras las de tipo
motriz, auditiva y visual tuvieron mayor presencia entre la población de 60 años y más, entre los
niños de cero a 14 años y los jóvenes de 15 a 29 años las discapacidades con mayor frecuencia
fueron las de tipo mental y del lenguaje [I.15].
Diseño Mecánico de un Exoesqueleto para Rehabilitación de Miembro Superior 11

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 30/232
Capítulo I Juan Francisco Ayala Lozano
Tabla I.2.- Distribución porcentual de población por tipo de discapacidad según grupos de edad en el año 2000 [I.15]
Tipo de discapacidad
Grupos de Edad
Total
Niños
Jóvenes
Adultos
Adultos mayores
No especificado
Motriz
100
10.2
10.2
28.4
50.5
0.7
Auditiva
100
10
10.5
22.8
55.5
1.2
Lenguaje
100
27.8
30.3
28.6
12.2
1.1
Visual
100
7.6
9.8
33
48.7
0.9
Mental
100
27.6
33.2
29
9.4
0.8
I.4.- Exoesqueletos desarrollados para miembro superior
El uso de robots en Rehabilitación tiene dos aplicaciones fundamentales [I.17]:
a) Durante movimientos activos del paciente, permiten almacenar información de la realización
del movimiento (posición, velocidad, fuerza, entre otros), ayudando de esta forma a evaluar
la evolución de la terapia sobre el paciente.
b) También pueden provocar movimientos pasivos o resistivos de la extremidad del paciente
sujetada por el robot, sustituyendo en este caso al fisioterapeuta.
I.4.1.- Exoesqueleto de 4 GDL de la Universidad de Saga
Se trata de un exoesqueleto activo de 4 GDL con centro móvil de rotación de la articulación del
hombro, ayuda en la flexo-extensión vertical y en la flexo-extensión horizontal del hombro, en la
flexo-extensión del codo, en los movimientos de propinación-supinación del antebrazo. Se encuentra
instalado en una silla de ruedas donde personas con debilidades físicas la pueden utilizar, además de
que el usuario no carga en peso del exoesqueleto (Figura I.6). Un único mecanismo de centro de
rotación móvil fue propuesto para la articulación del hombro, dicho mecanismo anula los efectos
dañinos causados por las diferencia de posición entre el centro de rotación móvil del hombro del
exoesqueleto y el hombro humano; topes mecánicos han sido instalados para cada uno de los
movimientos para prevenir sobrepasar los rangos de movimientos de seguridad [I.18].
Diseño Mecánico de un Exoesqueleto para Rehabilitación de Miembro Superior 12

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 31/232
Capítulo I Juan Francisco Ayala Lozano
Figura I.6.- Exoesqueleto de 4 GDL de la Universidad de Saga [I.18]
I.4.2.- CADEN-7: Exoesqueleto7 GDL
La naturaleza antropomórfica del diseño de las articulaciones combinado con la insignificante
reacción de las 7 articulaciones reflectantes de fuerza se establece como la característica principal
del CADEN-7. Utiliza una abertura de fijación hombre-robot tanto para segmentos superior e
inferior del brazo, genera los movimientos de flexo-extensión, abducción-aducción y rotación
interna-externa del hombro, flexo-extensión del codo, prono-supinación del antebrazo, flexo-
extensión y desviación radio-ulnar del antebrazo (Figura I.7). La seguridad es implementada en 3 niveles: diseño mecánico, eléctrico y del programa de control [I.10].
Figura I.7.- Usuario probando el exoesqueleto CADEN-7 compuesto por 3 configuraciones [I.10]
Diseño Mecánico de un Exoesqueleto para Rehabilitación de Miembro Superior 13

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 32/232
Capítulo I
I.4.3.- Exoesqueleto de 7 GDL “Soft-Actuaded”
Juan Francisco Ayala Lozano
El exoesqueleto de 7 GDL “Soft-Actuaded” es capaz de generar movimientos de flexo-extensión,
abducción-aducción y rotación interna-externa del hombro, flexo-extensión del codo, prono-
supinación del antebrazo, flexo-extensión y desviación radio-ulnar de la muñeca. La característica
original es el uso de músculos neumáticos como un par antagonista (Figura 1.8); por lo tanto, el exoesqueleto provee la acción antagonista que es permitido por el control. Posee una masa ligera y
una excelente proporción fuerza-peso. El musculo neumático al ser un actuador de una solo
dirección de acción (contracción), 2 elementos opuestos se necesitan para la fuerza y movimiento
bidireccional [I.19].
Figura I.8.- Exoesqueleto impulsado por músculos neumáticos [I.19].
I.4.4.- ARMin Robot
Hasta el año 2011, se encuentran reportadas 3 versiones. La primera versión es un exoesqueleto
activo de 6 GDL, 4 activos y 2 pasivos a fin de permitir la flexo-extensión del codo y los
movimientos espaciales del hombro, que se ocupa para terapias de Rehabilitación en clínicas con la
finalidad de recuperar la capacidad de realizar las actividades de la vida diaria. Se encuentra fijado
a una estructura de aluminio colocado en una pared frente a una silla de ruedas donde se sienta el
paciente y es sujetado mediante bandas y correas, tiene una dinámica que permite una velocidad de
1 m/s y así como una aceleración de 10 m/s2, es ajustable en 5 parámetros que son: altura de los
hombros del paciente sentado de 90-110 cm, longitud del brazo de 27 a 42 cm, longitud del
antebrazo de 20 a 32 cm, circunferencia de la muñeca de 16 a 24 cm y circunferencia del brazo de
20 a 40 cm [I.20]. La segunda versión es de 7 GDL siendo dos de ellos acoplados; contiene sensores
que permiten medir las fuerzas de interacción entre el brazo del paciente y el exoesqueleto, Diseño Mecánico de un Exoesqueleto para Rehabilitación de Miembro Superior14

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 33/232
Capítulo I Juan Francisco Ayala Lozano
adicionalmente un sensor de fuerza/torque es colocado en la sección que soporta el antebrazo,
además para complementar las mediciones, la palanca de la mano fue instrumentada con indicadores
de esfuerzo, además de una apantalla donde el terapeuta indica la rutina a seguir (Figura I.9) [I.21].
La tercera versión cuenta con 6 GDL activos siendo 3 para el hombro, para la flexo-extensión del
codo, prono-supinación del antebrazo y para flexo-extensión de la muñeca [I.22].
Figura I.9.- Demostración de cómo un terapeuta programa una rutina [I.21]
I.4.5.- MAHI
Nombrado así por las siglas en ingles del Laboratorio de Mecatrónica e Interfaces Hápticas
(Mechatronics and Haptic Interfaces) de la Universidad RICE, es un dispositivo para Rehabilitación
en ambientes virtuales en modo activa y pasivo [I.23]. Usa manipuladores robóticos que es su
principal característica respecto a otros diseños y genera el movimiento de flexo-extensión en el
codo, prono-supinación del antebrazo, flexo-extensión de la muñeca y desviación radio-ulnar. Está formado por una articulación de revolución en el codo, una articulación de revolución para la
rotación del antebrazo y 3 articulaciones esférica-prismática-revolución en serie-paralelo para la
muñeca (Figura I.10) [I.24].
Figura I.10.- Usuario operando el nuevo rediseño del exoesqueleto [I.24]
Diseño Mecánico de un Exoesqueleto para Rehabilitación de Miembro Superior 15

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 34/232
Capítulo I Juan Francisco Ayala Lozano
I.4.6.- W-EXOS: Wrist Axes Offset (Desplazamiento de ejes de la muñeca)
Fue desarrollado para ayudar a los movimientos de prono-supinación del antebrazo, flexo-extensión
de la muñeca y desviación radio-ulnar. Considera ejes de desplazamiento en la articulación de la
muñeca; la interfaz mano-robot fue diseñada para no perturbar el movimiento de los dedos (Figura
I.11). El diseño cuenta con dos tipos de seguridad: uno instalado en el diseño mecánico y otro instalado en el programa de control; topes mecánicos son colocados en la estructura mecánica para
prevenir que cada movimiento exceda del rango permitido [I.25].
Figura I.11.- W-EXOS se mueve en los planos X, Y y Z [I.4]
I.4.7.- ASSIST: órtesis de soporte activo (Active Support Splint) Es un exoesqueleto de un grado de libertad que es impulsado por actuadores neumáticos suaves, que
fueron desarrollados bajo el nombre de órtesis de soporte activo (ASSIST por las siglas en inglés).
Fueron desarrollados dos variantes de este sistema: uno con la finalidad de aumentar el rango de
movimiento y el segundo con la finalidad de aumentar la resistencia muscular. Físicamente es una
interfaz de plástico con la palma y el brazo del usuario y 2 tipos de actuadores rotatorios suaves
puestos entre ambos lados del dispositivo como se puede apreciar en la Figura I.12. La mayor
ventaja del dispositivo es la mínima sensación que de restricción cuando el dispositivo no está
funcionando [I.26].
Diseño Mecánico de un Exoesqueleto para Rehabilitación de Miembro Superior 16

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 35/232
Capítulo I Juan Francisco Ayala Lozano
Figura I.12.- Estructura del ASSIST [I.26]
I.4.8.- Exoesqueleto para Movimientos de mano y dedos
Es un asistente para Rehabilitación del movimiento de la mano, cuenta con 18 GDL y un auto-
control para el movimiento. Que permite que la mano lastimada del usuario sea manejada por la otra
mano sana. Proporciona la fuerza adecuada de tal forma que la mano afectada pueda recuperar la
capacidad al nivel de la mano funcional, puesto que fue diseñado para soportar los movimientos de
flexo-extensión y abducción-aducción de los dedos y el pulgar independientemente así como
oponerse al pulgar (Figura I.13). Además está diseñado para poderse combinar con un movimiento
de la muñeca [I.27].
Figura I.13.- Mano de un sujeto colocado en el exosqueleto [I.27]
I.4.9.- NEUROexos: Exoesqueleto Neurorobótico (Neurobotics exoskeleton)
Un brazo robótico bioinspirado de 3 articulación y 3 uniones fue desarrollado para implementar
estrategias de control y obtener una unión hombre-brazo robótico, para ser utilizado para evaluar en
exoesqueletos activos las condiciones de seguridad. El prototipo tiene la capacidad de replicar la Diseño Mecánico de un Exoesqueleto para Rehabilitación de Miembro Superior17

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 36/232
Capítulo I Juan Francisco Ayala Lozano
cinemática del hombro humano; está profundamente acoplado al usuario humano y el diseño está
basado en un modelo humano en términos de biomecánica (Figura I.14). El hardware y el sistema
de control están basados en modelos neuro-científicos que sintetizan los conocimientos de control
motor y percepción así como de esquemas de acción [I.28].
Figura I.14.- Vista superior del prototipo de la articulación del hombro [I.28]
I.4.10.- Exoesqueleto para asistencia del movimiento del codo
El exoesqueleto es del tipo amplificador de fuerza del sistema muscular humano, con la
característica de no perder el control natural de los movimientos, es por ello que los típicos controles
de posición para las máquinas, no se pueden aplicar, pues cuando el humano proporciona el
comando de referencia de posición se pierde la naturalidad de los movimientos; por lo cual se diseña
un sistema de control de fuerza y no de posición angular del dispositivo donde el comando de fuerza lo da el operador humano (Figura I.15) [I.29].
Hombro
Codo Celda de carga
Carga
Mano
Figura I.15.- Prototipo del sistema mecánico del exoesqueleto del brazo [I.29]
Diseño Mecánico de un Exoesqueleto para Rehabilitación de Miembro Superior 18

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 37/232
Capítulo I Juan Francisco Ayala Lozano
I.4.11.- Interacción háptica con ambiente virtual utilizando un exoesqueleto del brazo
En el artículo “Haptic interaction with virtual environment using an arm type exoskeleton device” se
presenta un exoesqueleto de 7 GDL mediante el cual el usuario humano puede interactuar con un
ambiente virtual; la articulación del hombro es de tipo esférico lo que le da 3 GDL: aducción-
abducción, elevación del hombro y el giro de la parte superior del brazo. El codo tiene 2 GDL: Flexo-extensión y giro del antebrazo. La muñeca posee los 2 GDL restantes y que son flexo-
extensión y la abducción-aducción. El mecanismo de medición del movimiento del hombro y de la
muñeca es dimensional. La estructura pesa en total 2.3 Kg [I.30].
I.4.12.- Exoesqueleto para movimientos de la mano
En el artículo “Arm movement experiments with joint space force fields using an exoskeleton robot”
se describe el diseño de exoesqueleto de 7 GDL, de poco peso, minimiza la inercia debido a la
gravedad y de Coriolis de tal forma que los movimientos del brazo del usuario no son afectados. Las
perturbaciones de torque pueden ser aplicadas individualmente a cualquiera o a todos los GDL, lo
que propicio el desarrollo de un ambiente dinámico nuevo, para que los sujetos se puedan adaptar al
sistema (Figura I.16). Miden la posición y el torque en cada articulación, a una tasa de muestreo de
960Hz, y calculan la velocidad y la aceleración a partir de posición [I.31].
Figura 1.16.- Demostración del funcionamiento del Sarcos Master [I.31]
I.4.13.- Exoesqueleto mecatrónicos para rehabilitación motora
A través de un análisis biomecánico de la extremidad superior, se estableció que la estructura a
diseñar debía contar con tres grados de libertad: rotación interna-externa del húmero, flexión-
extensión del codo y pronación-supinación de la muñeca; para este prototipo se realizó un análisis
biomecánico donde se identificó cinco grados de libertad, del miembro superior; estos grados de Diseño Mecánico de un Exoesqueleto para Rehabilitación de Miembro Superior19

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 38/232
Capítulo I Juan Francisco Ayala Lozano
libertad son abducción y aducción del hombro, flexión y extensión del hombro, rotación interna y
externa del húmero, flexión y extensión del codo, pronación y supinación de la mano (Figura I.17).
Realizaron diferentes simulaciones del comportamiento mecánico del brazo con el fin de obtener los
torques máximas necesarias para mover cada articulación. Para la selección de los motores que
mueven el exoesqueleto, analizaron la resistencia que puede ejercer el paciente al movimiento y el peso propio del prototipo. Determinaron que la velocidad máxima para el giro de cada articulación
debía ser de 25º/s [I.32].
Figura I.17.- Usuaria con el dispositivo de rehabilitación motora [I.32]
I.4.14.- Exoesqueleto para la articulación del hombro
Es un exoesqueleto de 2 GDL, para aducción frontal y lateral, tiene como objetivo seguir los
movimientos humanos de la escápula y en particular el movimiento el húmero respecto a la escápula. Los resultados obtenidos de la cinemática, mostraron que durante el movimiento de
abducción lateral existente dos diferentes tipos de centro de rotación (CR), lo que se tradujo en un
diseño que permite la rotación lateral del brazo de 0 a 180° y al mismo tiempo traslada el CR a la
nueva posición para la segunda fase de la abducción (50 a 180°); esos requerimientos son logrados
mediante el mecanismo Geneva (Cruz de Malta) en conjunto con un mecanismo de 4 barras mueven
el CR del húmero cerca de 3mm hacia arriba de la fosa glenoidal como se puede observar en el
prototipo mostrado en la Figura I.18 [I.33].
Diseño Mecánico de un Exoesqueleto para Rehabilitación de Miembro Superior 20

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 39/232
Capítulo I
Soporte Humeral
Juan Francisco Ayala Lozano
Polea de tiempo
Mecanismo
Génova
Rueda
Figura I.18.- Modelo 3D del mecanismo propuesto para abducción lateral y frontal [I.33]
I.4.15.- IROS: Sistema Inteligente (Intelligent Rehabilitative Orthotic System)
Es un exoesqueleto que contiene 5 GDL, un sistema gráfico en tiempo real, un sistema de
inteligencia. Cada GDL es manejado por un motor, 3 GDL son para el brazo y 2 para el antebrazo:
orientación lateral del hombro, elevación del hombro, rotación interna-externa del húmero, flexo-
extensión del codo, prono-supinación de la muñeca. Los sensores que ocupan son medidores de
ángulo, velocidad, fuerza, torque y señales electromiografías. Maneja 4 modos de control: modo pasivo, de asistencia, de observación y de prueba [I.34].
I.4.16.- RUPERT: Robot asistente para terapia de rehabilitación de extremidad superior
(Robotic assisted upper extremity repetitive therapy)
Es un exoesqueleto de 4 GDL, impulsado por músculos neumáticos, lo que le da la característica de
ser ligero, fácil de usar, de bajo costo. Se han desarrollado 4 versiones hasta el año 2010, se puede
observar las tres primeras versiones en la Figura I.19. La primera versión incluía 4 músculos
neumáticos: elevación del hombro, extensión y supinación del codo y extensión de la muñeca
después de considerar las condiciones funcionales de los pacientes; la estructura estaba restringida
en la abducción del hombro a un solo plano (15° de forma lateral) y la máxima elevación estaba
limitada a 45° además posee una plataforma que estabiliza la escápula. La segunda versión el centro
de rotación y la longitud de cada segmento eran ajustables para acoplarse a las diferentes longitudes
y constitución de cada paciente, sin embargo esta característica genera el inconveniente de aumentar Diseño Mecánico de un Exoesqueleto para Rehabilitación de Miembro Superior21

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 40/232
Capítulo I Juan Francisco Ayala Lozano
el peso total y aumentar la demanda de energía, la articulación del hombro y del codo tienen
mecanismos que incrementan la fuerza de momento de los músculos neumáticos como incrementos
de elevación y extensión. La tercera versión fue desarrollada a partir de evaluaciones de las
versiones anteriores (I y II) en el Centro Médico Regional “Banner Good Samaritan”; una
estructura hecha de un compósito de fibra de carbón fue desarrollada para hacer más ligero el robot pero conservando su rigidez; el mecanismo permite la flexión en el hombro de 15 a 85°, la flexión
del codo de 0 a 125°, 45° en supinación a 45° en propinación, 60° en flexión a 30° extensión en la
muñeca, así como torques de 15 NM para la articulación del hombro, 15 NM para el codo, 3 NM
supinación y 15 NM para la muñeca [I.35]. La cuarta versión ya es de 5 GDL, aumentado la
rotación humeral a los GDL anteriores, además de poseer un sistema control adaptativo en lazo
cerrado para ayudar a los usuarios a realizar sus tareas tranquilamente en un ambiente 3D [I.36].
a) b) c)
Figura I.19.- Evolución del exoesqueleto RUPERT. a) Versión I, b) Versión II y c) Versión III.
I.5.- Planteamiento del problema
En la revisión realizada para la elaboración del presente capítulo, se observa que el desarrollo de
exosqueletos para Rehabilitación a nivel nacional es nulo y la difusión de los realizados no es la
correcta, ya que no se encontró referencias donde se mencionan proyectos realizados en México.
También es cierto que existen varios centros de Rehabilitación tanto gubernamentales como de la
iniciativa privada, donde la Rehabilitación física es realizada en su mayoría por fisioterapeutas
humanos que no siempre están en óptimas condiciones para proporcionar la terapia por diversos
factores, principalmente agotamiento físico, lo que ocasiona que el avance del paciente no siempre
sea el planeado. Como muestran los datos obtenidos del INEGI, la discapacidad motriz es la de
Diseño Mecánico de un Exoesqueleto para Rehabilitación de Miembro Superior 22

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 41/232
Capítulo I Juan Francisco Ayala Lozano
mayor presencia en el país, siendo aproximadamente un tercio generada por enfermedades, tal es el
que caso de la enfermedad cerebrovascular.
Por tal motivo, se propone realizar el diseño de la estructura mecánica de un exoesqueleto capaz de
reproducir los movimientos realizados por el fisioterapeuta en las terapias de rehabilitación física, cuyas longitudes de los segmentos del miembro superior se ajuste a pacientes mexicanos.
I.6.- Sumario
En el presente capítulo se muestra una visión general de los temas que componen éste trabajo. Se
inicia con la definición de los exoesqueletos, sus antecedentes generales y clasificación.
Posteriormente, se aborda el tema de la Rehabilitación, para finalmente presentar un recuento de los
exoesqueletos utilizados para la Rehabilitación de miembro superior. Dentro de la revisión de los
dispositivos realizados con la finalidad de lograr una mejor Rehabilitación del miembro o
extremidad superior de los seres humanos, mediante el diseño y desarrollo de exoesqueletos, se
puede observar que muchos prototipos y sobre todos los desarrollados en fechas más recientes
cuentan con 7 GDL para la región comprendida desde el hombro hasta la muñeca, esto mediante
asignar 3 GDL al hombro y 2 a la muñeca, sin embargo en el codo algunos asignan 1 o 2 GDL al
codo, quedando entonces que algunos no permiten movimiento originado por el antebrazo ya que lo
asignan al codo; sin embargo también se observa que el desarrollo se ha llevado en etapas para ir
añadiendo más GDL, o se ha trabajado por separado en diseños para cada parte del miembro superior y al final unirlas en un solo exoesqueleto. Además pocos artículos mencionan haber
trabajado en conjunto con especialistas en Rehabilitación para obtener el diseño final de su
exoesqueleto.
I.7.- Referencias.
1.- Tibaduiza, N., Chio, N. y Grosso, J. M., Simulación cinemática de un exoesqueleto de brazo, 2do
Congreso Internacional de Ingeniería Mecatrónica - UNAB, pp 1-8, 2009.
2.- Arce, C., rtesis de Miembros Superiores: Clasificación – Funciones – Prototipos –
Características – Indicaciones, pp 1-2, 2005.
3.- Pons, J. L., Wearable Robots: Biomechatronic Exoskeleton, Ed. John Wiley & Sons Ltd, pp 1-15,
2008.
Diseño Mecánico de un Exoesqueleto para Rehabilitación de Miembro Superior 23

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 42/232
Capítulo I Juan Francisco Ayala Lozano
4.- Gopura R. A. R. C. y Kiguchi K., Mechanical Designs of Active Upper-Limb Exoskeleton
Robots State-of-the-Art and Design Difficulties, 2009 IEEE 11th International Conference on
Rehabilitation Robotics, pp 178-187, 2009.
5.- Vukobratović, M., Humanoid Robotics – Past, Present State, Future – , SISY 2006 • 4th Serbian-
Hungarian Joint Symposium on Intelligent Systems, pp 16-19, 2006. 6.- Mosher, R. S., From Handyman to Hardiman, SAE International, Vol. 76, pp. 588 – 597, 1967.
7.- Guizzo, E. y Goldstein, H., The rise of the Body Bots, IEEE Spectrum, Vol. 42, No. 10, pp 50-
56, 2005.
8.- Veslin, E., Slama J. G., Dutra, S. M. y Lengerke O., Análisis Cinemático de un Exoesqueleto de
Partes Superiores de 7 GDL, 2do Congreso Internacional de Ingeniería Mecatrónica – UNAB, pp
1-8, 2009.
9.- Kazerooni, H., The Berkeley lower extremity exoskeleton project, Experimental Robotics IX,
Springer Tracts in Advanced Robotics, Vol. 21, pp. 291-301, 2006.
10.- Perry J. C., Rosen, J. y Burns, S., Upper limb powered exoskeleton design, IEEE/ASME
Transactions on Mechatronics, Vol. 12, No. 4, pp 408-417, 2007.
11.- Chávez-Cardona, M. A., Rodríguez-Spitia, F., Baradica-López, A., Exoesqueletos para
potenciar las capacidades humanas y apoyar la rehabilitación, Revista Ingeniería Biomédica,
Vol. 4, No. 7, pp. 63-73, 2010.
12.- Ruíz-Olaya, A. F., Sistema Robótico Multimodal para Análisis y Estudios en Biomecánica,
Movimiento Humano y Control Neuromotor, Ph D Tesis, Universidad Carlos III de Madrid, pp 29-30, 2008.
13.- Juárez-Acosta, F., Holguín- vila, E. J. y Salamanca-Sanabria, A., Aceptación o rechazo:
Perspectiva histórica sobre la discapacidad, la rehabilitación y la psicología de la rehabilitación,
Psicología y Salud, Vol. 16, No. 2, pp 187-197, 2006.
14.- Alvarado-Rocha, N.J. y Caceres-Quimbaya, F.M., Fortalecimiento de los Lazos Familiares de
las Personas en Situación de Discapacidad del Hospital Simón Bolívar hacia el Proceso de
Rehabilitación en la Clínica Fray Bartolomé de las Casas, B Sc Tesis,
Universitaria Minuto de Dios, pp 26-30 , 2010.
15.- Instituto Nacional de Estadística, Geografía e Informática, Las personas con discapacidad en
México: una visión censal, pp 1-30, 2004.
16.- Sotelano, F., Historia de la rehabilitación en Latinoamérica, American Journal of Physical
Medicine and Rehabilitation, Artículo invitado, pp 1-11, 2011.
Diseño Mecánico de un Exoesqueleto para Rehabilitación de Miembro Superior 24
Corporación

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 43/232
Capítulo I Juan Francisco Ayala Lozano
17.- Sabater, J. M., Azorín, J. M., Pérez, C., García, N., y Menchón, M., Ayuda robótica para la
rehabilitación de miembros superiores, 2do Congreso Internacional sobre Domótica, Robótica
Teleasistencia para Todos, DRT4all 2007, pp. 19-28, 2007.
18.- Kiguchi, K., Active exoskeletons for upper-limb motion assist, International Journal Humanoid
Robotics, Vol. 4, No. 3, pp. 607-624, 2007. 19.- Tsagarakis N. G. y Caldwell D. G., Development and control of a „soft-actuated‟ exoskeleton
for use in physiotherapy and training, Autonomous Robots, Vol. 15, No. 1, pp. 21-33, 2003.
20.- Nef, T., Mihelj, M., Colombo, G., y Riener R., ARMin-Robot for rehabilitation of the upper
extremities, 2006 IEEE International Conference on Robotics and Automation, pp. 3152-3157,
2006.
21.- Mihelj, M., Nef, T. y Riener, R., ARMin II – 7 DoF rehabilitation robot: mechanics and
kinematics, 2007 IEEE International Conference on Robotics and Automation, pp 4120-4125,
2007.
22.- Brokaw, E. B., Nichols, D., Holley, R. J., Murray, T. M., Nef, T., y Lum, P. S., Time
independent functional task training: a case study on the effect of inter-joint coordination driven
haptic guidance in stroke therapy, 2011 IEEE International Conference on Rehabilitation
Robotics, pp 1-6, 2011.
23.- Sledd, A. y O'Malley, M. K., Performance enhancement of a haptic arm exoskeleton, 2006 14th
Symposium on Haptic Interfaces for Virtual Environment and Teleoperator Systems, pp 375-
381, 2006. 24.- Gupta, A. y O‟Malley, M. K., Design of a haptic arm exoskeleton for training and
rehabilitation, IEEE/ASME Transactions Mechatronics, Vol. 11, No.3, pp. 280 – 289, 2006.
25.- Gopura, R.A.R.C. y Kiguchi, K., Development of a 6DoF exoskeleton robot for human upper-
limb motion assist, 4th International Conference on Information and Automation for
Sustainability, 2008. ICIAFS 2008., pp13-18, 2008.
26.- Sasaki, D., Noritsugu, T., y Takaiwa, M., Development of active support splint driven by
pneumatic soft actuator (ASSIST), IEEE International Conference on Robotics and
utomation, pp. 520-525, 2004.
27.- Kawasaki, H., Ito, S., Ishigure Y., Nishimoto, Y., Aoki, T., Mouri, T., Sakaeda, H. y Abe, M.,
Development of a hand motion assist robot for rehabilitation therapy by patient self-motion
control, IEEE 10th International Conference on Rehabilitation Robotics, pp. 234-240, 2007.
28.- Sardellitti, I., Cattin, E., Roccella, S., Vecchi, F., Carrozza, M. C., Dario, P., Artemiadis, P. K. y
Kyriakopoulos, K. J., Description, characterization and assessment of a bioinspired shoulder Diseño Mecánico de un Exoesqueleto para Rehabilitación de Miembro Superior25

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 44/232
Capítulo I Juan Francisco Ayala Lozano
oint-first link robot for neurorobotic applications, The First IEEE/RAS-EMBS International
Conference on Biomedical Robotics and Biomechatronics, pp. 112-117, 2006.
29.- Molina, J.E., González, J.P., Desarrollo de un sistema de control de un exoesqueleto para
asistencia del movimiento del codo, Scientia et Technica, Año XIV, No. 39, pp. 129-134, 2008.
30.- Chou, W., Wang, T. y Xiao, J., Haptic interaction with virtual environment using an arm type exoskeleton device, 2004 IEEE International Conference on Robotics and Automation, pp
1992-1997, 2004.
31.- Mistry M., Mohajerian P. y Schaal, S., Arm movement experiments with joint space force fields
using an exoskeleton robot, 9th International Conference on Rehabilitation Robotics, pp 408-
413, 2005.
32.- Gutiérrez, R., Niño-Suarez, P. A., Avilés-Sánchez, O. F., Vanegas, F. y Duque, J., Exoesqueleto
mecatrónico para rehabilitación motora, 8vo Congreso Iberoamericano de Ingeniería Mecánica,
pp 1-9, 2007.
33.- Papadopoulos, E. y Patsianis, G., Design of an exoskeleton mechanism for the shoulder joint,
12th IFToMM World Congress, pp 1-6, 2007.
34.- Lee, S., Agah, A., y Bekey, G., IROS: an intelligent rehabilitative orthotic system for
cerebrovascular accident, IEEE International Conference on Systems, Man and Cybernetics, pp.
815-819, 1990.
35.- Sugar T. G., He, J., Koeneman, E. J., Koeneman, J. B., Herman, R., Huang, H., Schultz, R. S.,
Herring, D. E., Wanberg, J., Balasubramanian, S., Swenson, P. y Ward, J. A, Design and control of RUPERT: a device for robotic upper extremity repetitive therapy, IEEE Transactions
on Neural Systems And Rehabilitation Engineering, Vol. 15, No. 3, pp 336-346, 2007.
36.- Chen, J. y Liao W., A leg exoskeleton utilizing a magnetorheological actuator, IEEE
International Conference on Robotics and Biomimetics, pp 824-829, 2006.
Diseño Mecánico de un Exoesqueleto para Rehabilitación de Miembro Superior 26

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 45/232
Capítulo II.-
Marco teórico
Imagen obtenida de la galería de imágenes prediseñadas de Office Word 2007 ®

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 46/232
Capítulo II
II.1.- Introducción
Juan Francisco Ayala Lozano
Uno de los aspectos primordiales de los robots de rehabilitación es que el ser humano en el ciclo
sólo es el paciente y a diferencia de lo sistemas quirúrgicos y radiológicos, tales como Da Vinci y
CyberKnife, donde un paciente está siendo “operado” por el robot, sin embargo, un médico dirige al
robot; con un robot de rehabilitación se pueden introducir criterios de seguridad adicionales por encima de los utilizados robots de aplicaciones médicas más utilizados [II.1].
II.2.- Procedimientos de rehabilitación.
Las enfermedades cerebrovasculares (ECV) constituye un problema de salud mundial con tendencia
creciente. Según datos de la Organización Mundial de la Salud (OMS), la EVC es una importante
causa de discapacidad y afectación de calidad de vida, su espectro de afectaciones es muy amplio.
Además de las limitaciones físicas, se asocia a problemas en la esfera emocional con alta frecuencia
de depresión (> 50%); y/o deterioro cognitivo de diverso grado (35%), siendo la segunda causa más
frecuente de demencia [II.2].
Las secuelas por ECV pueden ser sensitivas o motoras, siendo estas últimas sin lugar a dudas las que
mayor grado de invalidez representan; entre los pacientes mexicanos que presentan secuelas motoras
se encontró que el 81% de los hemipléjicos sufren alguna complicación, entre las más frecuentes se
encuentran depresión, hombro doloroso, epilepsia y contracturas osteoarticulares, de éstas las más
relacionadas con la lesión topográfica son la epilepsia, encontrada en pacientes con lesión en el hemisferio cerebral izquierdo y la depresión, relacionada con lesiones en el hemisferio cerebral
derecho [II.3].
La Rehabilitación del paciente adulto con Enfermedad Vascular Cerebral es un proceso limitado en
el tiempo y orientado por objetivos, dirigido a lograr un nivel funcional, físico y social óptimo para
facilitar su independencia y la reintegración al entorno familiar, social y laboral [II.4].
La enfermedad vascular cerebral puede afectar a diferentes áreas funcionales que limitan la
actividad y la participación de quien lo ha padecido [II.4].
De acuerdo a [II.2] las terapias de rehabilitación deben cumplir con los siguientes parámetros:
Diseño Mecánico de un Exoesqueleto para Rehabilitación de Miembro Superior 28

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 47/232
Capítulo II Juan Francisco Ayala Lozano
En los pacientes con secuelas de EVC la dosis óptima de ejercicio terapéutico se
tiene que valorar individualmente según las necesidades y las limitaciones.
Se recomienda una frecuencia de ejercicio de 3 a 7 días por semana, con una
duración de 20-60 min/día de ejercicio continuo o acumulado (turnos de = ≥10 min) según la condición física.
Otros especialistas indican que los ejercicios se tiene que realizas en sesiones de 3 series con 10
repeticiones por cada una.
II.3.- Mecánica del manipulador
La mecánica es la rama ocupada del estudio de los movimientos, tiempo y fuerzas, dividida en
estática y dinámica (Figura II.1), esta última referida al comportamiento de los sistemas con
respecto al tiempo [II.5].
Mecánica
Estática Dinámica
Cinética Cinemática
Figura II.1.- Diagrama de estudio de la mecánica [II.6]
II.3.1.- Grados de libertad y tipos de articulaciones.
Los grados de libertad (GDL) se refieren a los movimientos independientes que puede tener un
cuerpo, siendo 6 el número máximo considerando que se encuentra en el espacio sin ningún tipo de
restricción y contacto, siendo 3 de rotación y 3 de traslación.
Mecánicamente un robot o manipulador está formado por eslabones unidos mediante articulaciones
que permiten un movimiento relativo entre cada dos eslabones consecutivos; el movimiento de las
articulaciones puede ser de desplazamiento, de giro o una combinación de ambos, existiendo así seis
posibles tipos de articulaciones que se muestran en la Figura II.2 [II.7]
Diseño Mecánico de un Exoesqueleto para Rehabilitación de Miembro Superior 29

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 48/232
Capítulo II Juan Francisco Ayala Lozano
Esférica o rótula
(3 GDL)
Planar
(2 GDL)
Tornillo
(1 GDL)
Prismática
(1 GDL)
Rotación
(1 GDL)
Cilíndrica
(2 GDL)
Figura II.2.- Articulaciones posible en un robot o mecanismo [II.7]
Los GDL del manipulador está dado por la suma de los grados de libertad de las articulaciones que
lo componen, normalmente el número de eslabones es igual a número de GDL, aunque existen
excepciones [II.7].
II.3.2.- Cinemática del manipulador
La cinemática del robot estudia el movimiento del mismo con respecto a un sistema de referencia.
Así, la cinemática se interesa por la descripción analítica del movimiento espacial del robot como
una función del tiempo, y en particular por las relaciones entre la posición y la orientación del
extremo final del robot con los valore que toman sus coordenadas articulares [II.7].
Existen dos problemas fundamentales para resolver la cinemática del robot [II.7]:
Problema cinemático directo.- Consiste en determinar cuál es la posición y
orientación del extremo final del robot, con respecto a un sistema de coordenadas
que se toma como referencia, conocidos los valores de las articulaciones y los
parámetros geométricos de los elementos del robot.
Diseño Mecánico de un Exoesqueleto para Rehabilitación de Miembro Superior 30

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 49/232
Capítulo II Juan Francisco Ayala Lozano
Problema cinemático inverso.- Resuelve la configuración que debe adoptar el robot
para una posición y orientación del extremo conocido.
Por otra parte, la dinámica trata con la formulación de las ecuaciones de movimiento; las ecuaciones
dinámicas para un manipulador son un conjunto de expresiones matemáticas que describen su conducta y tales ecuaciones son útiles para la simulación del sistema [II.6].
Un eslabón puede ser considerado como un cuerpo rígido, el cual puede ser descrito por dos
parámetros, la longitud del eslabón y el giro del eslabón. Estos parámetros definen la localización
relativa de los ejes de articulaciones vecinas en el espacio [II.8].
Asimismo, las articulaciones pueden ser descritas también por dos parámetros, el descentramiento
del eslabón, que es la distancia de un eslabón a otro próximo, a lo largo del eje de la articulación; y
el ángulo de la articulación, que es la rotación de un eslabón con respecto al próximo, alrededor del
eje de la articulación [II.8].
A cada eslabón se le asocia un sistema de referencia solidario a él y, utilizando las transformaciones
homogéneas, es posible representar las rotaciones y traslaciones relativas entre los distintos
eslabones que componen el robot. Normalmente, la matriz de transformación homogénea que
representa la posición y orientación relativa entre los sistemas asociados a dos eslabones consecutivos del robot se suele denominar matriz
del producto de matrices i-1
i-1 Ai. Denominado 0Ak a las matrices resultantes
Ai con i desde 1 hasta k, se puede representar de forma total o parcial la
cadena cinemática que forma el robot. (II.7)
La representación de Denavit-Hartenberg de un cuerpo rígido depende entonces, de cuatro
parámetros geométricos asociados a cada elemento, estos describen completamente la relación
espacial entre sistemas de coordenadas. Estos parámetros pueden resumirse como (Figura II.3):
Longitud del eslabón ai: distancia desde el origen del sistema de coordenadas i hasta
la intersección de los ejes xi y zi−1, a lo largo del eje xi.
Giro del eslabón αi : ángulo formado entre el eje zi−1 al eje zi alrededor del eje xi.
Diseño Mecánico de un Exoesqueleto para Rehabilitación de Miembro Superior 31

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 50/232
Capítulo II Juan Francisco Ayala Lozano
Descentramiento del eslabón di: distancia desde el origen del sistema de coordenadas i
−1 hasta la intersección de los ejes x i y zi−1, a lo largo del eje zi−1.
Ángulo de la articulación θi
: ángulo de la articulación del eje xi−1
al eje xi
respecto al eje zi−1.
De esta forma, para una articulación de revolución, di, ai y αi son los parámetros de la articulación y
permanecen constantes, mientras que θi es la variable de la articulación. Para una articulación
prismática, la variable será di.
Zi-1
α1
Xi
Zi Xi-1
Yi
ai Xi
di Zi
Zi-1
Θi
Xi
Zi-1
Yi-1
Xi-1
Figura II.3.- Parámetros de Denavit-Hartenberg
Los cuatro parámetros de transformación anteriores se multiplican mediante producto de matrices
como se muestra en la Ecuación II.1.
Diseño Mecánico de un Exoesqueleto para Rehabilitación de Miembro Superior 32

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 51/232
Capítulo II
( ) ( ) ( ) ( )
Juan Francisco Ayala Lozano
II.1
Siendo la representación en matrices la Ecuación II.2.
[ ][ ][ ][ ] II.2
El producto matricial da por resultado una matriz 4x4 (Ecuación II.3) que da la orientación y
posición del eslabón siguiente respecto al anterior, llegando a obtener los parámetros del último
eslabón respecto al primero.
[ ] II.3
Donde:
C es la función trigonométrica coseno del ángulo.
S es la función trigonométrica seno del ángulo. θi, αi, di, ai, son los parámetros del eslabón i.
De este modo, basta con identificar los parámetros θi, αi, di, ai, para obtener matrices A y relacionar
así todos y cada uno de los eslabones del robot. Como se ha indicado, para que la matriz, relacione
los sistemas (Si) y (Si-1), es necesario que los sistemas se hayan escogido de acuerdo a unas
determinadas normas. Estas, junto con la definición de los 4 parámetros de Denavit-Hartenberg,
conforman el siguiente algoritmo para la resolución del problema cinemático directo [Tabla II.1]:
DH1 Tabla II.1.- Parámetros de Denavit-Hartenberg [II.9]
Numerar los eslabones comenzando con 1 (primer eslabón móvil de la cadena) y
acabando con n (último eslabón móvil). Se numerara como eslabón 0 a la base fija
del robot.
Diseño Mecánico de un Exoesqueleto para Rehabilitación de Miembro Superior 33

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 52/232
Capítulo II
DH2
Juan Francisco Ayala Lozano
Numerar cada articulación comenzando por 1 (la correspondiente al primer grado de
libertad y acabando en n).
DH3 Localizar el eje de cada articulación. Si esta es rotativa, el eje será su propio eje de
giro. Si es prismática, será el eje a lo largo del cual se produce el desplazamiento.
DH4 DH5
Para i de 0 a n-1, situar el eje Zi, sobre el eje de la articulación i+1. Situar el origen del sistema de la base (S0) en cualquier punto del eje Z0. Los ejes
0 e Y0 se situaran dé modo que formen un sistema dextrógiro con Z0.
DH6 Para i de 1 a n-1, situar el sistema (Si) (solidario al eslabón i) en la intersección del
eje Zi con la línea normal común a Zi-1 y Zi. Si ambos ejes se cortasen se situaría
(Si) en el punto de corte. Si fuesen paralelos (Si) se situaría en la articulación i+1.
DH7
DH8
DH9
Situar Xi en la línea normal común a Zi-1 y Zi.
Situar Yi de modo que forme un sistema dextrógiro con Xi y Zi.
Situar el sistema (Sn) en el extremo del robot de modo que Zn coincida con la
dirección de Zn-1 y Xn sea normal a Zn-1 y Zn.
Obtener θi como el ángulo que hay que girar en torno a Zi-1 para que Xi-1 y Xi
queden paralelos.
DH10
DH11 Obtener di como la distancia, medida a lo largo de Zi-1, que habría que desplazar
(Si-1) para que Xi y Xi-1 quedasen alineados.
DH12 Obtener ai como la distancia medida a lo largo de Xi (que ahora coincidiría con Xi-
1) que habría que desplazar el nuevo (Si-1) para que su origen coincidiese con (Si).
Obtener αi como el ángulo que habría que girar en torno a Xi (que ahora coincidiría
con Xi-1), para que el nuevo (Si-1) coincidiese totalmente con (Si).
DH13
DH14
DH15
Obtener las matrices de transformación i-1Ai.
Obtener la matriz de transformación que relaciona el sistema de la base con el del
extremo del robot T = 0Ai, 1A2... n-1An.
DH16 La matriz T define la orientación (submatriz de rotación) y posición (submatriz de
traslación) del extremo referido a la base en función de las n coordenadas articulares.
Diseño Mecánico de un Exoesqueleto para Rehabilitación de Miembro Superior 34

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 53/232
Capítulo II
II.4.-Sistemas de impulsión y actuación.
Juan Francisco Ayala Lozano
La velocidad de los movimientos humanos no es muy elevada. Por ejemplo, los movimientos
voluntarios presentan una frecuencia que difícilmente supera los 7 Hz mientras que en los
movimientos patológicos como el temblor podemos encontrar frecuencias de hasta 20 Hz. En el golf
profesional, la frecuencia del swing está entre los 3 y 4 Hz, estos movimientos se traducen en velocidades lineales entre 10 y 15 m/s [II.10].
Los sistemas de actuación más comunes se clasifican en 3 categorías: eléctrico, neumático e
hidráulico. Sin embargo existen nuevas tecnologías que están en desarrollo como: aleaciones con
memoria de forma, actuadores piezoeléctricos, fluidos electromagnetoreológicos y polímeros
electroactivos [II.11].
II.4.1.-Motores eléctricos
Los actuadores eléctricos, en específico los motores Corriente Directa (CD), son los que más se han
utilizado en el diseño y construcción por su fácil instalación, su tecnología de control es muy
conocida por lo que permite un control fino de velocidad de par y velocidad.
Los motores de CD dominan el campo de la robótica, tanto estacionaria como móvil, debido tan a
que la gran mayoría de los robots tienen varios subsistemas que son alimentados con CD; así como
la capacidad que tienen y el sencillo sistema control eléctrico-electrónico para paro, arranque e inversión de giro [II.12].
El motor eléctrico es un dispositivo electromotriz, esto quiere decir que convierte la energía eléctrica
en energía motriz. Todos los motores disponen de un eje de salida para acoplar un engranaje, polea o
mecanismo capaz de transmitir el movimiento generado por el motor. El funcionamiento de un
motor se basa en la acción de campos magnéticos opuestos que hacen girar el rotor (eje interno) en
dirección opuesta al estator (imán externo o bobina), con lo que si sujetamos por medio de soportes
o bridas la carcasa del motor el rotor con el eje de salida será lo único que gire [II.13].
II.4.1.1- Servomotores
El servomotor es un pequeño pero potente dispositivo que dispone en su interior de un pequeño
motor con un reductor de velocidad y multiplicador de fuerza, también dispone de un pequeño
circuito que gobierna el sistema. El recorrido del eje de salida es de 180º en la mayoría de ellos, pero Diseño Mecánico de un Exoesqueleto para Rehabilitación de Miembro Superior35

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 54/232
Capítulo II Juan Francisco Ayala Lozano
puede ser fácilmente modificado para tener un recorrido libre de 360º y actuar así como un motor
[II.13].
El control de posición lo efectúa el servomotor internamente mediante un potenciómetro que va
conectado mecánicamente al eje de salida y controla un PWM (modulador de anchura de pulsos) interno para así compararlo con la entrada PWM externa del servo, mediante un sistema diferencial,
y así modificar la posición del eje de salida hasta que los valores se igualen y el servo pare en la
posición indicada, en esta posición el motor del servo deja de consumir corriente y tan solo circula
una pequeña corriente hasta el circuito interno, si forzamos el servomotor (moviendo el eje de salida
con la mano) en este momento el control diferencial interno lo detecta y envía la corriente necesaria
al motor para corregir la posición [II.14]
Para controlar un servo tendremos que aplicar un pulso de duración y frecuencia específicas. Todos
los servos disponen de tres cables dos para alimentación (voltaje y neutro) y otro cable para aplicar
el tren de pulsos de control que harán que el circuito de control diferencial interno ponga el servo en
la posición indicada por la anchura del pulso [II.13].
II.4.2.- Sensores
Un sensor es un dispositivo que genera una señal de una determina forma física convertible en otra
señal de una forma física diferente. El elemento que realiza dicha conversión se suele denominar transductor. También se considera al dispositivo o elemento que convierte una variable física no
eléctrica en otra eléctrica, que en algunos de sus parámetros (Frecuencia, nivel de tensión, nivel de
corriente) contiene información correspondiente a la primera [II.15].
La tecnológica sensorial para la captación del movimiento humano más adecuada para redes de
sensores es la utilizada por los sensores inerciales. Un sensor inercial está compuesto generalmente
por un sistema de acelerómetros lineales. Existen versiones más completas en las que se incluyen
además de los acelerómetros, giroscopios y otro sensor para brindar una referencia en el plano
transversal [II.10], así como sensores de posición angular que son los enconders y resolver.
Diseño Mecánico de un Exoesqueleto para Rehabilitación de Miembro Superior 36

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 55/232
Capítulo II
Encoders
Juan Francisco Ayala Lozano
Un encoder es un sensor electro-opto-mecánico que unido a un eje proporciona información de la
posición angular. Su fin es actuar como un dispositivo de realimentación en sistemas de control
integrado, existen dos tipos de encoder, los incrementales y los absolutos [II.7]:
Encoder incremental.- Este tipo de encoder se caracteriza porque determina su
posición, contando el número de impulsos que se generan cuando un rayo de luz es
atravesado por marcas opacas en la superficie de un disco unido al eje (Figura II.4).
Fotoreceptores
Salida
digital
LED
emisor
Marca
de cero Eje de giro
Figura II.4.- Encoder incremental [II.7]
Encoder absoluto.- En el encoder absoluto, el disco contiene varias bandas dispuestas
en forma de coronas circulares concéntricas, dispuestas de tal forma que en sentido
radial el rotor queda dividido en sectores, con marcas opacas y transparentes
codificadas en código Gray.
El estator tiene un fotorreceptor por cada bit representado en el disco, el valor binario obtenido de los fotorreceptores es único para cada posición del rotor y representa su
posición absoluta. Se utiliza el código Gray en lugar de un binario clásico porque en
cada cambio de sector sólo cambia el estado de una de las bandas, evitando errores
por falta de alineación de los captadores (Figura II.5).
Diseño Mecánico de un Exoesqueleto para Rehabilitación de Miembro Superior 37

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 56/232
Capítulo II Juan Francisco Ayala Lozano
Para un encoder con n bandas en el disco, el rotor permite 2^n combinaciones, por lo
cual la resolución será 360° dividido entre los 2^n sectores; Por ejemplo para encoders
de 12 y 16 bits se obtiene una resolución angular de 0.0879° y 0.00549°
respectivamente, por lo que la resolución angular = 360°/2^n. Generalmente, los
encoders incrementales proporcionan mayor resolución a un costo más bajo que los encoders absolutos. Además, su electrónica es más simple ya que tienen menos líneas
de salida.
LED
Emisor Fotorreceptores
Lente de Lentes
cilíndricos colimación
Disco
codificado
Figura II.5.- Encoder absoluto [II.7]
Disco codificado de 8 bits
II.5.- Metodología de diseño
La ciencia como actividad pertenece a la vida social cuando es aplicada para mejorar el medio natural y artificial en el que se desenvuelve el hombre, dando origen a la invención y manufactura
de bienes materiales y culturales, que por lo general, la ciencia transforma en tecnología. Lo anterior
se simplifica en un sistema de ideas establecidas provisionalmente como conocimiento científico, y
como actividad productora de nuevas ideas llamado investigación científica, dando origen a la
metodología de diseño [II.6].
Nigel Cross define metodología de diseño como “el estudio de los principios, prácticas y
procedimientos de diseño en un sentido amplio. Su objetivo central está relacionado con el cómo
diseñar, e incluye el estudio de cómo los diseñadores trabajan y piensan; el establecimiento de
estructuras apropiadas para el proceso de diseño; el desarrollo y aplicación de nuevos métodos,
técnicas y procedimientos de diseño; y la reflexión sobre la naturaleza y extensión del conocimiento
del diseño y su aplicación a problemas de diseño” [II.16].
Diseño Mecánico de un Exoesqueleto para Rehabilitación de Miembro Superior 38

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 57/232
Capítulo II Juan Francisco Ayala Lozano
Método hace referencia a la manera cómo una persona (un ingeniero de diseño, en este caso), realiza
su tarea (diseñar); las técnicas son las herramientas que utiliza tal persona para aplicar su método; el
modelo es la forma de representar el método, con el fin de estudiarlo y comprenderlo; la
metodología es el estudio formal del método. De esta manera, mientras que las técnicas son
herramientas para el método, el modelo lo es para la metodología [II.16].
Cross [II.17] clasifica los modelos de diseño en dos grupos: descriptivos y prescriptivos. Los
modelos descriptivos muestran la secuencia de actividades que ocurren en diseño, dentro de los
cuales se puede mencionar el modelo básico y el modelo de French. Los prescriptivos, como su
nombre lo indica, prescriben un patrón de actividades de diseño, como lo intentan Archer, Pahl y
Beitz, el modelo alemán VDI 2221, el de March y el de Pugh entre otros [II.16].
Mientras que Takeda citando a Finger y Dixon adiciona dos más: cognitivos y computacionales
donde los cognitivos, explican el comportamiento del diseñador y los computacionales, expresan la
forma en que un ordenador podría desarrollar la tarea de diseño [II.16].
II.5.1.-Modelos descriptivos del diseño
El modelo lineal del proceso de diseño, aunque resulta muy básico, permite identificar las fases del
diseño que son comúnmente aceptadas por la mayoría de investigadores [II.16]:
En la primera fase se buscan conceptos o principios de solución al problema, para la
cual se analiza el problema identificado, se sintetiza una o varias posibles soluciones
y se evalúan con respecto a restricciones (especificaciones) impuestas. Algunos la
denominan fase de “síntesis” del diseño. En esta fase se generan principios de
solución, pero no se obtienen estructuras de solución lo suficientemente válidas (o
acabadas) como para materializar la respuesta al problema.
En la fase de diseño preliminar se avanza en la concretización de una solución al
problema, determinando componentes e interacciones con el suficiente grado como
para poderla evaluar objetivamente. Se obtienen formas específicas, materiales
propuestos y planos de conjunto con dimensiones generales, que representan al
producto como un conjunto organizado de piezas, componentes, enlaces y
Diseño Mecánico de un Exoesqueleto para Rehabilitación de Miembro Superior 39

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 58/232
Capítulo II Juan Francisco Ayala Lozano
acoplamientos. Se puede decir, que esta fase es más “comprendida” por los
ingenieros de diseño que la anterior, dada la formación curricular específica.
La fase de diseño de detalle corresponde a la generación de todas las especificaciones
necesarias para la producción del producto-solución. La elaboración de planos de detalle, la determinación de etapas de fabricación, la identificación de proveedores,
etc., son típicas actuaciones en esta fase, que es la mejor desarrollada a nivel
empresarial, dado su interés particular y su organización orientada a la materializar
soluciones.
Las 3 etapas anteriores pueden ser consideradas como principales aunque algunas pueden tener más
etapas, como la de French y que se muestra en la Figura II.6.
Necesidad
Análisis del
problema
Planteamiento
del problema
Diseño
conceptual Esquemas
seleccionado
s
Desarrollo
de detalles
Dibujo
finales
Figura II.6.- Modelo de French [II.6]
Diseño Mecánico de un Exoesqueleto para Rehabilitación de Miembro Superior 40

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 59/232
Capítulo II
II.5.2.-Modelos prescriptivos
Juan Francisco Ayala Lozano
Como se mencionó, los modelos prescriptivos además de describir, dan pautas para desarrollar cada
una de las fases y etapas del proceso de diseño. En esta categoría existe una gran variedad de
propuestas, siendo las más conocidas las de Archer, VDI21, March, Pugh y Pahl y Beitz [II.16]:
El modelo denominado “Total Design” propuesto por Pugh está basado en un núcleo
descriptivo del proceso, compuesto de actividades genéricas (válidas para cualquier
producto que se diseñe) tales como: análisis de mercado, diseño conceptual, diseño
de detalle, fabricación y venta. Aparte del núcleo, existirán las “especificaciones de
diseño” que son aquellas características particulares que rodean al caso concreto que
se esté abordando y que delimitan el campo de actuación del núcleo del diseño. Pero
las principales características de este modelo son: la necesaria interacción de tantas
disciplinas como sea necesario para resolver el problema, sean estas disciplinas
técnicas o no; la definición clara de las especificaciones de diseño, que serán tenidas
en cuenta durante todo el proceso y que definen la “frontera del diseño”; y el
continuo acercamiento a la solución mediante la retroalimentación que conduce a
estadios intercalados de divergencia (generación de conceptos) y convergencia
(evaluación sistemática) [II.16].
Esta aproximación gradual a la solución es denominada por Pugh como «método de convergencia controlada» y utiliza una matriz de valoración que enfrenta a las
alternativas de solución contra los criterios previamente establecidos [II.16].
Existe una metodología simplificada de QFD que se llama Blitz QFD (QFD
Relámpago), permite alinear nuestros recursos con las verdaderas necesidades del
cliente y es una herramienta muy práctica que no requiere de software ni de
herramientas específicas (como la Casa de la Calidad) para ofrecer resultados [II.6].
II.6.-Diseño conceptual
Se denomina diseño conceptual o etapa de síntesis del diseño a la etapa donde la creatividad juega
un papel determinante y, dados los objetivos de la investigación, conviene precisar algunos
elementos que ayuden a comprenderla mejor. En primer lugar es necesario decir que hay un acuerdo
general en los investigadores que el diseño conceptual es una fase crucial en el desarrollo de Diseño Mecánico de un Exoesqueleto para Rehabilitación de Miembro Superior41

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 60/232
Capítulo II Juan Francisco Ayala Lozano
productos, en particular cuando se trata de diseñar productos innovadores o cuando se quiere generar
un diseño completamente nuevo de un producto ya existente. El impacto de las decisiones tomadas
en esta fase son determinantes para el resto del proceso, hasta el punto que un pobre concepto de un
producto es prácticamente imposible de mejorar en etapas posteriores [II.16].
II.7.- Diseño a detalle
Al concluir el diseño conceptual, se procede a realizar un análisis del diseño con la finalidad de
tener las dimensiones y los materiales apropiados para que el dispositivo tenga una vida de trabajo
adecuada, y en este caso, no se tenga el riesgo de falla durante algún ciclo de trabajo.
II.7.1.- Cargas y ciclos de trabajo
Una carga estática es idealmente aquella que se aplica lentamente, sin choque y nunca se quita,
aunque también cargas que se aplican y se eliminan con lentitud, y otra vez se aplican y retiran
lentamente, es decir, si el número de aplicaciones de la carga es pequeño bajo varios ciclos de
carga, entran en esta categoría [II.18].
Al diseñar elementos mecánicos (que no sean fusibles) se debe asegurar que los esfuerzos internos
no rebasen la resistencia del material, si el que se ocupa es dúctil entonces lo que más interesa es la
resistencia por fluencia, ya que una deformación permanente seria considerada como falla; las
resistencias son casi las mismas a tensión que a compresión [II.5].
Teoría del esfuerzo cortante máximo
Se emplea para predecir la fluencia del material, y afirma que “se inicia la fluencia siempre que, en
un elemento mecánico, el esfuerzo cortante máximo se vuelve igual al esfuerzo cortante máximo en
una probeta a tensión, cuando ese espécimen empieza a ceder”[II.5].
Teoría de la energía de distorsión
También llamada teoría de la energía de cortante o teoría de von Mises-Hencky; es la más
conveniente para el caso de materiales dúctiles, se emplea para definir el principio de fluencia. Se
postuló que la fluencia no era, de ninguna manera, un fenómeno de tensión o de compresión
simples, sino más bien que estaba relacionada de algún modo con la distorsión (o deformación
angular) del elemento forzado [II.5].
Diseño Mecánico de un Exoesqueleto para Rehabilitación de Miembro Superior 42

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 61/232
Capítulo II
Esfuerzo principal máximo
Juan Francisco Ayala Lozano
La combinación de esfuerzos normales y cortantes aplicados que produce el esfuerzo normal
máximo se llama esfuerzo principal máximo [II.18].
Por lo general, un diseñador de elementos mecánicos empleara la teoría del esfuerzo cortante máximo si las dimensiones no tienen que ser muy precisas, si es necesaria una rápida estimación del
tamaño, o si se sabe que los factores de seguridad han de ser amplios. La teoría de la energía de
distorsión predice con mayor precisión la falla y, por lo tanto, se utilizaría cuando el margen de
seguridad hubiera de estar dentro de límites cercanos o cuando se investigue el origen de la falla real
de un elemento mecánico [II.5].
II.7.2.- Validación por Análisis de Elemento Finito
El método de Análisis de Elementos Finitos (FEA), es una aproximación numérica que se usa para
resolver problemas que conciernen a la ingeniería, se basa en fórmulas y cálculos que muchos
ingenieros usaban de manera tradicional, actualmente esta aproximación se lleva a cabo con la
ayuda de una computadora facilitando el trabajo de llevar a cabo este cálculo [II.19].
La discretización, es un proceso de modelación que consiste en la división de un cuerpo, de manera
equivalente, en un sistema que se conforma por cuerpos de menor tamaño a los que les nombra
“Elementos Finitos”, que son conectados entre sí por medio de puntos comunes llamados nodos, éstos a su vez pueden llegar a formar superficies y volúmenes de control completamente
independientes entre sí, y que son afectados por las condiciones de frontera que afectan al cuerpo
estudiado [II.19].
Un modelo de Elementos Finitos es una representación discreta de una parte continua, que se va a
analizar. Esto se lleva a cabo mediante la utilización de nodos, los cuales se van conectando para
formar elementos. Un nodo es la representación discreta de esa parte continua que se analizará y
donde se predice el resultado debido a las cargas aplicadas [II.19].
La malla comprende a todo el conjunto de elementos que une a los nodos, es debido a ella que se
podrán transferir las cargas a través de los elementos pero para que estas cargas se puedan transferir
de una parte a otra de manera satisfactoria se necesita que todos los nodos sean comunes donde estos
se junten. La respuesta que el análisis arroje estará ligada a los grados de libertad a los que los nodos Diseño Mecánico de un Exoesqueleto para Rehabilitación de Miembro Superior43

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 62/232
Capítulo II Juan Francisco Ayala Lozano
estarán sujetos. Después de someter al análisis la pieza modelada, a partir de las suposiciones de los
materiales y el entorno (restricciones, cargas entre otros), el diseñador se dará cuenta en términos
simples cuál es el punto más débil de la pieza, cual es el comportamiento de la misma y bajo que
condiciones de trabajo se presentará la falla [II.19].
II.8.- Procesos de manufactura
La palabra manufactura se deriva de las palabras latinas manus (manos) y factus (hacer); esta
combinación de términos significa hacer con las manos, describe el método manual que se usaba
cuando se acuño la palabra; sin embargo, gran parte de la moderna manufactura se realiza con
maquinaria computarizada y automatizada [II.20].
Muchos procesos se utilizan para producir componentes y formas, y por lo general existe más de un
método para la manufactura de una pieza a partir de un material dado. Las amplias clases de
métodos de procesamiento de materiales son [II.21]:
a.- Fundición.
b.- Formado y conformado.
c.- Maquinado.
d.- Unión.
e.- Acabado.
La selección de un proceso de manufactura adecuado, o de una secuencia de procesos en particular,
depende no solo de la forma a producirse sino también de muchos otros factores correspondientes a
las propiedades del material. El proceso de manufactura por lo general altera las propiedades de los
materiales. Los metales que se forman a temperatura ambiente se hacen más resistentes, más duros y
menos dúctiles de lo que eran antes de su procesamiento [II.21].
Dentro de la familia del maquinado destacan por su importancia el torneado, el fresado y el
taladrado, se diferencias por el movimiento relativo entre la pieza y la herramienta [II.22]. Diseño Mecánico de un Exoesqueleto para Rehabilitación de Miembro Superior 44

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 63/232
Capítulo II Juan Francisco Ayala Lozano
El más sencillo es el taladrado, donde la pieza se sujeta firmemente y es atravesada por una
herramienta de varios filos que gira (movimiento de corte) y al mismo tiempo se desplaza hacia la
pieza (movimiento de avance) produciendo una superficie de revolución interior [II.22].
En el torneado la pieza gira alrededor de su eje de revolución (movimiento de corte) y la
herramienta con un único filo arranca material por cada vuelta de la pieza, al desplazarse la
herramienta (movimiento de avance) produce un arranque de material continuo, obteniendo una
superficie de revolución interior o exterior [II.22].
En el fresado se utiliza una herramienta de filos múltiples y es la que gira (movimiento de corte) y
las piezas se desplaza (movimiento de avance), obteniendo una superficie de generatriz plana,
aunque combinando movimientos de avancen distintos ejes, se puede conseguir casi cualquier
superficie [II.22].
II.9.- Sumario
Los dispositivos de rehabilitación de tipo robótico deben cumplir con ciertos requisitos y
características que son propias del grupo al que pertenecen como lo son el tiempo que debe estar en
funcionamiento, las velocidades y aceleraciones que deben desarrollar, todo esto se utiliza con
parámetros ya establecidos como lo son los parámetros de Denavit-Hartenberg, que derivan en la cinemática del manipulador, que en este caso se adapta ya que el dispositivo a desarrollar puede
entrar en la categoría de manipuladores robóticos.
Las herramientas de diseño son varias y algunas se complementan, es decir, una única herramienta
puede darnos una idea del diseño conceptual adecuado, pero al combinarse con otra herramienta
podemos tener una visión más completa.
Aunque el presente trabajo solo se enfoca en la parte de diseño mecánico, no se pueden dejar de
considerar los sistemas de sensores, el control y el suministro de energía para los sistemas de
impulsión, ya que estos pueden aumentar significativamente el peso de la estructura pero también
afectan directamente en la geometría y movilidad del sistema; así mismo se deben tener en cuenta
los métodos de análisis estructural más adecuados así como los sistemas de manufactura
convenientes para el desarrollo del exoesqueleto. Diseño Mecánico de un Exoesqueleto para Rehabilitación de Miembro Superior 45

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 64/232
Capítulo II Juan Francisco Ayala Lozano
II.10.- Referencias
1.- Roderick, S. y Carignan, C., Designing Safety-Critical Rehabilitation Robots, University of
Maryland & Georgetown University, pp 43-64, 2007.
2.- Rehabilitación de adultos con enfermedad vascular cerebral. Evidencias y recomendaciones. Guía de práctica clínica, Secretaria de Salud Federal de México, Catálogo Maestro: DIF-331-09,
pp 18, 2009.
3.- Sánchez Almazán, N., Enfermedad cerebro vascular en México. Epidemiología y pronóstico,
Revista Ministerio de Salud, pp 3, 2008.
4.- Guía de referencia rápida. Rehabilitación de adultos con enfermedad vascular cerebral. Guía de
práctica clínica, Secretaria de Salud Federal de México, Catálogo Maestro: DIF-331-09, pp 2,
2009.
5.- Shigley, J. E. y Uicker Jr., J. J., Teoría de Máquinas y Mecanismos, Ed. McGraw-Hill, 2da
edición, pp 1-28 y 231-260, 1988.
6.- Pérez Romero, M. A., Análisis cinemático e implementación de una mano robótica servo-
articulada aplicable como prótesis, M Sc Tesis, Instituto Politécnico Nacional, pp 59-70, 2011.
7.- Barrientos, A., Peñín, L. F., Balaguer, C. y Aracil, R., Fundamentos de robótica, Ed. McGraw
Hill, 6ta edición, pág. 30-95, 1997.
8.- Merchán Cruz, E. A., Metodología para generación de trayectorias de manipuladores robóticos,
su cinemática y dinámica, M Sc Tesis, Instituto Politécnico Nacional, pp 50, 2000. 9.- Ollero, B., Robótica. Manipuladores y robots móviles, Editorial Alfaomega-Marcombo, pp 63-
75, 2001.
10.- F. Brunetti, J.C. Moreno y J.L Pons, Métrica para evaluación de redes de área personal para
captación del movimiento humano y robótico, XXVIII Jornadas de Automática, pp 1-10, 2007.
11.- Ruíz-Olaya, A. F., Sistema Robótico Multimodal para Análisis y Estudios en Biomecánica,
Movimiento Humano y Control Neuromotor, Ph D Tesis, Universidad Carlos III de Madrid, pp
78, 2008.
12.- McComb, G., The robot builder’s bonanza, Ed. McGraw Hill, 2 edición, pp 235, 2001.
13.- Ayala-Lozano, J. F., Martínez-Paredes, J. y Méndez-Romero, D., Diseño de un guante háptico
ara teleoperación de objetos con retroalimentación visual, B Sc Tesis, Instituto Politécnico
Nacional, pp 33-70, 2011.
14.- Cetinkunt, S., Mecatrónica, Ed. Patria, pp 250-260, 2007.
Diseño Mecánico de un Exoesqueleto para Rehabilitación de Miembro Superior 46

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 65/232
Capítulo II Juan Francisco Ayala Lozano
15.- Mandado Pérez, E., Marcos Acevedo, J., Fernández Silva, C. y Armesto Quiroga, J. I.,
utómatas programables y sistemas de automatización, 2da edición, Ed. Marcombo, pp 430-
435, 2009.
16.- Chaur Bernal, J., Diseño conceptual de productos asistidos por ordenador: Un estudio analítico
sobre aplicaciones y definición de la estructura básica de un nuevo programa, Tesis PhD, Universidad Politécnica de Cataluña Departamento de Proyectos de Ingeniería, pp 15-38, 2004.
17.- Cross, N., Métodos de diseño: Estrategias para el diseño de productos, Ed. Limusa Wiley, pp
29-174, 2008.
18.- Mott, R. L., Diseño de elementos de máquinas, Ed. Pearson Educación, 4ta edición, pp 135-
164, 2006.
19.- López Saucedo, J. A., Análisis de la estructura y elementos del Auto Deportivo “MXT” de
Tecnoidea SA de CV para el análisis de esfuerzo y deformación generadas por cargas estáticas,
así como su optimización mediante su simulación, empleando el Método de Elementos Finitos
en ALGOR FEA, Universidad de las Américas Puebla, pp 23-30, 2005.
20.- Groover, M. K., Fundamentos de manufactura moderna: materiales, procesos y sistemas, Ed.
Pearson Educación, pp 3-10, 1997.
21.- Kalpakjian, S. y Schmid, S. R., Manufactura Ingeniería y Tecnología, Ed. Pearson educación,
4ta edición, pp 18-25, 2002.
22.- Rodríguez Montes, J., Castro Martínez, L. y del Real Romero, J. C., Procesos industriales para
materiales metálicos, Ed. Vision net, 2da edición, pp 89-95, 2009.
Diseño Mecánico de un Exoesqueleto para Rehabilitación de Miembro Superior 47

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 66/232
Capítulo
Biomecánica
III.-
del
miembro superior

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 67/232
Capítulo III
III.1.- Introducción
Juan Francisco Ayala Lozano
La Biomecánica del movimiento humano se puede definir como la disciplina que lo describe,
analiza y cuantifica el movimiento humano, atendiendo a cómo se produce este movimiento
(cinemática) y al origen del mismo (dinámica) [III.1]. La Biomecánica asociada al miembro superior
posee una relevante implicación en el diseño e implementación de exoesqueletos robóticos. Por ejemplo, en el desarrollo de este tipo de dispositivos debe existir una compatibilidad cinemática
entre el exoesqueleto y el miembro superior humano [III.2].
Los músculos son los generadores de fuerza y movimiento del cuerpo humano, que son aplicadas a
los huesos, que le brindan soporte y estructura al cuerpo, así como restricciones y límites para los
movimientos, que pueden desarrollar principalmente las extremidades, por ello es importante
conocer la anatomía del cuerpo humano.
Las descripciones anatómicas del cuerpo humano se basa en 3 planos que se intersectan dando
origen a la posición anatómica (Figura III.1):
Planos coronales.- Orientados verticalmente, dividen el cuerpo en zonas anterior y
posterior.
Planos sagitales.- También orientados verticalmente pero perpendiculares a los planos coronales y dividen al cuerpo en zonas izquierda y derecha.
Planos transversal, horizontal o axial.- Dividen el cuerpo en zona superior e inferior.
El miembro superior, nace en la región superolateral del tórax, corresponde a una porción saliente
del cuerpo humano; es de forma cilindroide con su porción terminal aplanada de adelante hacia
atrás. Su longitud varia con la estatura del individuo, normalmente llega a la parte media del muslo [III.3].
Lo forman las regiones del hombro, brazo, codo, antebrazo, muñeca y mano; aunque las regiones
del codo y de la muñeca, por ser transicionales, revisan solo como articulaciones (Figura III.2).
Diseño Mecánico de un Exoesqueleto para Rehabilitación de Miembro Superior 49

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 68/232
Capítulo III
Superior
Juan Francisco Ayala Lozano
Plano coronal
Plano sagital
Anterior Posterior
Plano
transverso
Medial
Lateral
Inferior
Figura III.1.- Planos anatómicos del cuerpo humano [III.4]
Cada una de las extremidades superiores está constituida por 32 huesos, de los cuales 27
corresponden a las secciones que conforman la muñeca y mano [III.5].
III.2.- Anatomía del Hombro
El hombro humano es la zona de la extremidad superior que se une al tronco y permite una amplia
gama de movimientos superando incluso a la cadera [III.6]. El hombro se une al tronco
fundamentalmente mediante músculos, por lo que se puede mover respecto al del tronco; el
deslizamiento y la rotación de la escapula respecto de la pared torácica cambian la posición de la
articulación del hombro y consiguen que la mano alcance posiciones más distantes [III.4].
Diseño Mecánico de un Exoesqueleto para Rehabilitación de Miembro Superior 50

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 69/232
Capítulo III Juan Francisco Ayala Lozano
1.- Hombro
2.- Brazo
3.- Codo
2
2 2
3 3
4
5
6 6
3
4
5
4
5
6
4.- Antebrazo
5.- Muñeca
6.- Mano
1
1 1
b)a)c) Figura III.2.- Regiones miembro superior. a) Anatomía superficie. b) músculos. c) huesos [III.7].
III.2.1.- Huesos
Los huesos del hombro son la escápula, la clavícula y la parte proximal del Húmero [III.4].
Clavícula:
Es muy superficial, se le puede apreciar y palpar en toda su longitud. Constituye una referencia de primer orden para todas las regiones vecinas: cervicales, torácica, deltoidea. Su posición depende de
los músculos que se insertan en sus bordes, así como de los que se insertan en la escápula a la cual
está unida [III.8].
Escápula:
Es un hueso plano triangular, que se apoya sobre la parte superior, posterior y lateral de la caja
torácica, frente a la cual posee gran movilidad. Está compuesta por dos caras (costal, posterior), tres
bordes (medial, lateral y superior) y tres ángulos (superior, inferior y lateral). Esta cubierta casi por
completo por masas musculares [III.8].
Húmero:
Aunque es el hueso que conforma principalmente el brazo, la extremidad proximal se encuentra
unida a la clavícula y a la escápula [III.8]. Diseño Mecánico de un Exoesqueleto para Rehabilitación de Miembro Superior 51

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 70/232
Capítulo III
III.2.2.- Músculos
Juan Francisco Ayala Lozano
Encontramos dos grupos musculares: músculos del cíngulo y músculos escapulares. Los músculos
del cíngulo escapular se dividen en [III.9]:
Ventrales o pectorales: pectoral mayor, pectoral menor, subclavio y serrato anterior.
Dorsales: trapecio, latísimo del dorso, elevador de escápula, romboides mayor y menor.
En general los ventrales se originan de tórax y terminan en cíngulo escapular y los dorsales
(posteriores) se originan de columna y terminan en cíngulo, ambos mueven la articulación
esternoclavicular y algunos el hombro (pectoral mayor y latísimo del dorso). Los músculos
escapulares se originan en escápula, terminan en el húmero y mueven la articulación del hombro.
Los músculos escapulares contribuyen a formar la cavidad axilar [III.9].
Latísimo del dorso:
Es ancho, triangular y cubre la mitad inferior del dorso del tronco. Se extiende desde la región
inferior del tronco, luego a la cavidad axilar, para terminar en el húmero. Es una lámina muscular
muy extendida, delgada y triangular de base axil y vértice braquial. En la región dorsal, el latísimo
del dorso es superficial rodeado por una aponeurosis que desciende del trapecio (aponeurosis
toracolumbar). Profundamente rodea a los músculos vertebrales, serrato posterior e inferior, caja torácica y últimos fascículos del serrato anterior. Por su borde inferior forma con el margen superior
de la cresta ilíaca y el margen posterior del músculo oblicuo externo de abdomen el trígono lumbar
(Petit) [III.9].
Trapecio:
Es aplanado y triangular. Cubre la porción posterior del cuello y de la mitad superior del dorso del
tronco. Es el más superficial de la región cervicotorácica, ubicándose superolateral. Se extiende desde el occipucio (inión), las últimas vértebras torácicas y en forma triangular con vértice en la
articulación acromioclavicular. Es un músculo robusto especialmente en la región superior. Cubre a
los músculos de los canales vertebrales (erector espinal) de los que está separado por las inserciones
vertebrales del romboides y del latísimo del dorso. Hacia lateral se relaciona con la región
supraescapular, a la fosa supraespinosa y a la parte superior de la infraespinosa [III.9].
Diseño Mecánico de un Exoesqueleto para Rehabilitación de Miembro Superior 52

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 71/232
Capítulo III
Romboides mayor y menor:
Juan Francisco Ayala Lozano
Los músculos romboides están situados en la parte inferior de la nuca y en la superior de la región
dorsal, se extienden desde el raquis al borde medial de la escápula. Son aplanados y cuadriláteros,
sus fibras se dirigen oblicuas inferior y hacia lateral [III.9].
Elevador de la escapula (Angular):
Ubicado en la cara postero-lateral del cuello. Se sitúa en la parte lateral de la nuca, subyacente al
trapecio, une el ángulo superior de la escápula a la mitad superior de la columna vertebral. Es
aplanado y estrecho, se dirige oblicuo inferior y lateral hacia el ángulo escapular. Esta profundo del
trapecio interpuesto entre los músculos de la nuca posterior y los músculos escalenos. Cruza
posterior de la parte posteromedial de los primeros espacios intercostales [III.9].
Subclavio:
Profundo, corto y fusiforme. El subclavio es pequeño de poca importancia funcional pero de interés
topográfico. Se extiende desde la cara inferior de la clavícula a la primera costilla. Está oculto por la
clavícula y el pectoral mayor. El músculo subclavio contribuye a delimitar, con la primera digitación
del serrato anterior, la comunicación entre el hueco supraclavicular y la cavidad axilar, espacio
ocupado por la arteria y venas subclavias que se hacen así axilares y además los troncos del plexo
braquial [III.9].
Pectoral menor:
Profundo al pectoral mayor y de forma triangular. El pectoral menor forma parte de la pared anterior
del hueco axilar. Por su cara profunda cubre hacia profundo los espacios intercostales, las costillas y
el serrato anterior; más hacia lateral el paquete vasculonervioso de la axila. Por su borde superior
limita el triángulo clavipectoral, ocupado por la fascia del mismo nombre y por donde pasan la vena
cefálica y la arteria acromiotoracica. La fascia clavipectoral se desdobla en el borde superior del
músculo y lo contiene, se continúa hacia la piel de la base de la axila y hacia lateral estructurando
una formación triangular: el ligamento suspensorio de la axila [III.9].
Serrato Anterior (mayor):
Ancho y delgado, ubicado en la pared lateral del tórax. Es un músculo radiado que une el borde
medial de la escápula a la caja torácica. Su cara interna se apoya en la caja torácica que está
separada por el plano celuloso de deslizamiento serratorácico . Se relaciona directamente con las Diseño Mecánico de un Exoesqueleto para Rehabilitación de Miembro Superior53

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 72/232
Capítulo III Juan Francisco Ayala Lozano
costillas, intercostales externos, serrato posterosuperior y escaleno posterior. Su cara externa está
cubierta por el pectoral mayor, pectoral menor y subescapular. Las primeras digitaciones están
relacionadas con la arteria y vena axilares y con los fascículos del plexo braquial [III.9]
Pectoral mayor: Ubicado en la porción anterolateral al tórax, ancho, aplanado y superficial. Son cuatro fascículos
uno de los cuatro (el clavicular) se une fuertemente al húmero. Los otros dos son toracohumerales y
el último abdominal. Es superficial y en la mujer está cubierto en gran parte por la glándula
mamaria. La cara profunda se relaciona con el esternón, costillas, cartílagos y espacios intercostales.
Los fascículos son: Clavicular, Esternal, Costal y Abdominal, pero para fines de estudio
consideraremos cabeza clavicular y cabeza esternocostal [III.9].
Deltoides (deltoideus):
El músculo superficial bastante obvio en el hombro es el Deltoides. Este va de la cara externa de la
clavícula, acromion, borde posterior de la espina de la escápula, a la cara lateral del húmero, y se
inserta en la mitad inferior del húmero; forma la masa del hombro [III.10]. Es el principal abductor
del brazo pero debido a su pobre ventaja mecánica no puede iniciar esta acción; es asistido por el
músculo supraespinoso [III.11].
Subescapular: Grueso, triangular y profundo. Es ancho y se extiende desde la cara anterior escapular hasta la
epífisis proximal del húmero. Constituye la pared posterior axilar. Se desliza por el cuello escapular
y cruza ventralmente a la articulación del hombro separado de ella por la bolsa subescapular [III.9].
Supraespinoso:
Es delgado y redondeado cruza por encima de la articulación del húmero. Une la fosa supraespinosa
a la extremidad superior del húmero, es profundo cubierto por el arco coracoacromial, el trapecio y
deltoides [III.9].
Infraespinoso:
Cruza por posterior de la articulación del hombro. Es aplanado y triangular, une la fosa
infraespinosa de la escápula a la cara posterior de la epífisis superior del húmero. Es superficial,
Diseño Mecánico de un Exoesqueleto para Rehabilitación de Miembro Superior 54

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 73/232
Capítulo III Juan Francisco Ayala Lozano
salvo adentro en donde está cubierto por los fascículos del trapecio y lateral donde pasa inferior al
deltoides [III.9].
Teres menor:
Profundo, superior al teres mayor. Pequeño músculo que se extiende desde el borde axilar de la escápula a la tuberosidad mayor del húmero, siguiendo el margen inferior del infraespinoso [III.9].
Teres mayor:
Superficial, espeso y cruza la cara inferior de la articulación del hombro. Voluminoso, une el ángulo
inferior de la escápula al surco intertubercular. Está cubierto por el latísimo del dorso y su borde
superomedial se separa del teres menor para formar el triángulos de los teres [III.9].
III.3.- Anatomía del Brazo
Es la región de la extremidad superior situada entre el hombro y la articulación del codo [III.4].
III.3.1.- Huesos
El húmero es el único hueso que conforma esta sección del miembro superior; es un hueso largo que
presenta, para su estudio, un cuerpo y dos extremidades [III.8]:
El cuerpo da una falsa impresión de torsión sobre su eje. Irregularmente cilíndrico en su parte superior, triangular en su parte media, y es más irregular y ovalado en su parte inferior; se considera
que tiene tres caras (anterolateral, anteromedial y posterior) y tres bordes (anterior, lateral y
medial).
La extremidad superior participa en la constitución de la articulación glenohumeral y la extremidad
inferior participa en la articulación del codo.
III.3.2.- Músculos
Los músculos del brazo se ocupan de los movimientos del codo (flexión y extensión), supina el
antebrazo y colaboran en los movimientos del hombro [III.9].
Diseño Mecánico de un Exoesqueleto para Rehabilitación de Miembro Superior 55

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 74/232
Capítulo III Juan Francisco Ayala Lozano
En la región del brazo existen dos regiones separadas por los tabiques intermusculareslateral y
medial. La región anterior contiene a los músculos: coracobraquial, bícepsbraquial y braquial, y la
región posterior contiene al músculo tríceps braquial [III.9].
Coracobraquial: Está situado en la porción medial y superior del brazo. Se extiende del proceso coracoides hasta el
húmero. Está situado primeramente en el hueco de la axila formando la pared externa, luego ocupa
la región braquial corriendo a lo largo de la porción corta del bíceps. Lo atraviesa el nervio
musculocutáneo [III.9].
Biceps braquial:
Alargado, fusiforme y ubicado superficial ventral en el brazo. Consta de dos cabezas una larga o
lateral y otra corta o medial, que van desde la escápula hasta el radio. En su tercio superior se
encuentra dentro del hueco axilar, entre el deltoides y pectoral mayor poranterior, el subescapular, el
teres mayor y el latísimo del dorso por posterior. En la parte media o braquial es superficial al
braquial. El borde lateral del bíceps braquial se relaciona con el braquiorradial y deltoides; su borde
medial es recorrido por el nervio mediano y vasos humerales. En la flexión de codo penetra en un
espacio en forma de V, formado lateralmente por el supinador y extensores radiales del carpo y
medialmente por los músculos que se originan en el epicóndilo medial [III.9].
Braquial (braquial anterior):
Se sitúa dorsal al bíceps. Ocupa la parte distal del húmero inferior al bíceps, se extiende desde el
húmero a la epífisis superior de la ulna. La cara anterior se relaciona con el bíceps. La cara posterior
se relaciona con el húmero y codo. El borde medial se relaciona con el tríceps y con el pronador
teres con el cual forma un canal que aloja a los vasos humerales. El borde lateral se relaciona con
tríceps (braquioradial) con el cual forma un canal en el que se alojan el nervio radial, arteria humeral
profunda y arteria recurrente radial anterior [III.9].
Tríceps braquial:
Posterior superficial del antebrazo. Posee tres porciones, cabezas lateral y medial que se originan en
húmero y una cabeza larga originada en escápula, las tres porciones terminan en la ulna. En su
origen el tríceps está cubierto por el deltoides. En el brazo se relaciona con el húmero del que está
Diseño Mecánico de un Exoesqueleto para Rehabilitación de Miembro Superior 56

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 75/232
Capítulo III Juan Francisco Ayala Lozano
separado por el nervio radial y arteria humeral profunda. El borde medial es seguido por el nervio
ulnar [III.9]
III.4.- Anatomía del Codo
El codo, es la articulación intermedia del miembro superior, que une el brazo con el antebrazo [III.12].Funciona como punto de apoyo para el sistema de palanca del antebrazo responsable de
posicionar la mano en el espacio [III.13].
El codo, específicamente en la fosa del codo, que es una depresión de forma triangular formada por
los músculos anteriores a la articulación del codo, pasa la principal arteria que va del brazo al brazo
que es la braquial así como el principal nervio que es el mediano [III.4].
III.5.- Anatomía del Antebrazo
La parte de la extremidad superior entre la articulación del codo y la articulación de la muñeca se
conoce como antebrazo anatómico. Está compuesto por dos huesos largos, el radio (lateralmente), y
el cúbito (medialmente) [III.10]. Es capaz de efectuar movimientos de pronación y supinación, los
que modifican la orientación de los huesos del antebrazo [III.8].
III.5.1.- Huesos
Radio: Es un hueso largo, situado en la parte lateral del antebrazo [III.8]; es de menor longitud que la ulna y
se articula con ésta, con el húmero y con los huesos del carpo (escafoides y semilunar). El grosor del
radio aumenta de craneal a caudal [III.14].
Cúbito (ulna):
Es el más largo y medial del antebrazo. Epífisis distal o inferior: presenta dos eminencias, una es la
cabeza de la ulna que presenta la circunferencia articular radial que se articula con el radio y otra es
el proceso estiloides de ubicación medial y posterior. Entre ambas, en la cara inferior, hay un canal
en el que se inserta el disco articular que separa la ulna de los huesos del carpo [III.14]
III.5.2.- Músculos
Los músculos del antebrazo se dividen en dos grupos, los anteriores denominados flexores de los
dedos y pronadores del antebrazo y los posteriores denominados extensores de los dedos y Diseño Mecánico de un Exoesqueleto para Rehabilitación de Miembro Superior57

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 76/232
Capítulo III Juan Francisco Ayala Lozano
supinadores del antebrazo. Cada región se divide en compartimientos por los tabiques que forma la
fascia antebraquial. En la región anterior existe un compartimiento superficial, compartimiento
intermedio y un compartimiento profundo. Los dos primeros están formados por músculos que en
general se originan del epicóndilo medial del húmero para insertarse en carpo, metacarpo o falanges,
mientras que los músculos del compartimiento profundo en general se originan en las caras anteriores de radio, ulna y/o membrana interósea, para terminar en falanges.
La región posterior posee solamente dos compartimientos uno superficial formado por músculos que
se originan del epicóndilo lateral para terminar en carpo, metacarpo o falanges y una región
profunda formado por músculos que se originan desde la cara posterior de radio, ulna y/o membrana
interósea para insertarse en metacarpo o falanges. Los músculos del antebrazo son en su mayoría
fusiformes, generan gran movilidad y fuerza en los movimientos de la mano. Su porción muscular se
ubica en la porción superior del antebrazo y su porción tendinosa en la parte inferior. Para evitar que
al realizar los movimientos de las articulaciones radiocarpianas y carpianas los tendones se incurven
existen los retináculos que forman un túnel por donde pasan los tendones para insertarse en mano.
Existen un retináculo extensor y otro flexor [III.9].
III.6.- Biomecánica del miembro superior
Un exoesqueleto robótico que actúe como un dispositivo ortésico, idealmente debe tener la
capacidad de proporcionar un rango de movimientos o espacio de trabajo muy parecido al de una persona. Teniendo en cuenta que un exoesqueleto es una estructura antropomórfica que opera
paralelamente al miembro superior de la persona, se deben considerar diversas características
cinemáticas y dinámicas del miembro superior debido a los requerimientos biomecánicos impuestos
por el brazo humano [III.2].
III.6.1.- Biomecánica del hombro
El hombro, articulación proximal del miembro superior, es la más móvil de todas las articulaciones
del cuerpo humano. Posee tres grados de libertad (GDL), como se observa en la Figura III.3, lo que
le permite orientar el miembro superior en relación a los tres planos del espacio, merced a tres ejes
principales [III.15]:
Diseño Mecánico de un Exoesqueleto para Rehabilitación de Miembro Superior 58

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 77/232
Capítulo III Juan Francisco Ayala Lozano
3
1 2
4
Figura III.3.- Representación de los 3 GDL del hombro [III.15]
1.- Eje transversal, incluido en el plano frontal: permite los movimientos de flexo-
extensión realizados en el plano sagital (Figura III.3).
2.- Eje anteroposterior, incluido en el plano sagital: permite los movimientos de
abducción (el miembro superior se aleja del plano de simetría del cuerpo) y aducción (el
miembro superior se aproxima al plano de simetría) realizados en el plano frontal
(Figura III.3).
3.- Eje vertical, dirige los movimientos de flexión y de extensión realizados en el plano
horizontal, el brazo en abducción de 90°. Estos movimientos también se denominan
flexo-extensión horizontal (Figura III.3).
Con referencia en los 3 ejes señalados antes, se obtienen los movimientos que puede desarrollar el
hombro [III.15].
Diseño Mecánico de un Exoesqueleto para Rehabilitación de Miembro Superior 59

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 78/232
Capítulo III Juan Francisco Ayala Lozano
El eje longitudinal del húmero (4 de la Figura III.3) permite la rotación externa/interna del brazo y
del miembro superior de dos formas distintas [III.15].
III.6.1.1.- Flexoextensión
Los movimientos de flexoextensión se efectúan en el plano sagital, en torno al eje transversal (Figura III.4) [III.15]:
Extensión: movimiento de poca amplitud, 45 a 50°.
Flexión: movimiento de gran amplitud, 180°; obsérvese que la misma posición de flexión a
180° puede definirse también como una abducción de 180°, próxima a la rotación
longitudinal.
III.6.1.2.- Aducción
Los movimientos de aducción (c y d de la Figura III.4) se llevan a cabo desde la posición anatómica
(máxima aducción) en el plano frontal, pero son mecánicamente imposibles debido a la presencia
del tronco [III.15].
180°
90°
50°
a) b)
30°
c) d)
60 Figura III.4.- Flexo-extensión y aducción del hombro [III.15]
Diseño Mecánico de un Exoesqueleto para Rehabilitación de Miembro Superior

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 79/232
Capítulo III Juan Francisco Ayala Lozano
Desde la posición anatómica, la aducción no es factible si no se asocia con [III.15]:
Una extensión (c).- Aducción muy leve.
Una flexión (d).- La aducción alcanza entre 30 y 45°.
III.6.1.3.- La abducción
La abducción (Figura III.5) es el movimiento que aleja el miembro superior del tronco, se realiza en
el plano frontal, en torno al eje anteroposterior. La amplitud de la abducción alcanza los 180°; el
brazo queda vertical por arriba del tronco (Figura III.5 inciso d) [III.15].
En cuanto a las acciones musculares y el juego articular, la abducción, desde la posición anatómica
(Figura III.5 inciso a), pasa por tres fases [III.15]:
Abducción de 0° a 60° (Figura III.5 inciso b) que puede efectuarse únicamente en la
articulación glenohumeral;
Abducción de 60° a 120° (Figura III.5 inciso c ) que necesita la participación de la
articulación escapulo-torácica;
Abducción de 120° a 180° (Figura III.5 inciso d) que utiliza, además de la articulación
glenohumeral y la articulación escapulo-torácica, la inclinación del lado opuesto del tronco.
Diseño Mecánico de un Exoesqueleto para Rehabilitación de Miembro Superior 61

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 80/232
Capítulo III Juan Francisco Ayala Lozano
60°
a) b)
120° 180°
c) d)
Figura III.5.- Movimiento de abducción del hombro [III.15]
III.6.1.4.- Flexoextensión horizontal Se trata del movimiento del miembro superior (Figura III.6) en el plano horizontal, en torno al eje
vertical, o más exactamente, en torno a una sucesión de ejes verticales, ya que el movimiento se
realiza no sólo en la articulación glenohumeral sino también en la escapulotorácica [III.15].
a) Posición anatómica (Figura III.6 inciso b): el miembro superior está en abducción de 90° en
el plano frontal, lo que emplaza la acción de la siguiente musculatura [III.15]:
• Músculo deltoides (sobre todo su porción acromial);
• Músculo supraespinoso;
• Músculo trapecio: porciones superiores (acromial y clavicular) e inferior (tubercular)
• Músculo serrato anterior.
b) Flexión horizontal (Figura III.6 inciso a), movimiento que asocia la flexión y la aducción de
140° de amplitud, activa los siguientes músculos: Diseño Mecánico de un Exoesqueleto para Rehabilitación de Miembro Superior 62

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 81/232
Capítulo III Juan Francisco Ayala Lozano
• Músculo deltoides (porción anterointerna I y anteroexterna II en una proporción
variable entre ellas)
• Músculo subescapular;
• Músculos pectorales mayor y menor;
• Músculo serrato anterior.
c) Extensión horizontal (Figura III.6 inciso c), movimiento que asocia la extensión y la
aducción de menor amplitud, 30-40°, activa los siguientes músculos:
• Músculo deltoides;
• Músculo supraespinoso;
• Músculo infraespinoso;
• Músculos redondos mayor y menor;
• Músculo romboides;
• Músculo trapecio (haz espinoso que se añade a los otros dos);
• Músculo dorsal ancho (en antagonismo-sinergia con el músculo deltoides que anula el
importante componente de aducción del músculo dorsal ancho).
La amplitud total de este movimiento de flexoextensión horizontal alcanza casi los 180°. De la
posición extrema anterior a la posición extrema posterior se activan sucesivamente, como si se
tratase de la escala musical de un piano, las distintas porciones del músculo deltoides, que resulta ser el principal músculo de este movimiento [III.15].
Diseño Mecánico de un Exoesqueleto para Rehabilitación de Miembro Superior 63

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 82/232
Capítulo III Juan Francisco Ayala Lozano
140°
a)
0° b)
c) 30°
Figura III.6.- Etapas del movimiento flexoextensión horizontal [III.15].
III.6.1.5.- Movimiento de circunducción La circunducción combina los movimientos elementales en torno a tres ejes (Figura III.7). Cuando
ésta circunducción alcanza su máxima amplitud, el brazo describe en el espacio un cono irregular: el
cono de circunducción. Su cúspide se sitúa en el centro teórico del hombro, su lado es igual a la
longitud del miembro superior, pero su base, lejos de representar un cono regular, está deformada
debido al tronco. El citado cono delimita en el espacio un sector esférico de accesibilidad, en cuyo
interior la mano puede coger objetos sin desplazamiento del tronco, para llevárselos
provisionalmente a la boca [III.15].
El esquema muestra la trayectoria de las puntas de los dedos: se trata de la base del cono de
circunducción, deformada por la presencia del cuerpo [III.15].
Los tres planos ortogonales de referencia (perpendiculares entre ellos) se cruzan en un punto
localizado en el centro del hombro. Se denominan [III.15]: Diseño Mecánico de un Exoesqueleto para Rehabilitación de Miembro Superior 64

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 83/232
Capítulo III Juan Francisco Ayala Lozano
Plano sagital A, o más bien para-sagital, ya que el verdadero plano sagital pasa por el eje
longitudinal del cuerpo. Se trata del plano de la flexión-extensión;
Plano frontal B, paralelo al plano de apoyo dorsal, o coronal (denominado así por los anglosajones).
Se trata del plano de aducción-abducción;
Plano transversal C, perpendicular al eje del cuerpo. Se trata del plano de la flexo-extensión
horizontal, es decir en el plano horizontal.
Figura III.7.- Movimiento de circundicción en el hombro [III.15]
III.6.1.6.- Articulaciones del hombro
El hombro no está constituido por una sola articulación sino por cinco articulaciones que conforman
el complejo articular del hombro. Estas cinco articulaciones se clasifican en dos grupos [III.15]:
Primer grupo: dos articulaciones:
1) Articulación glenohumeral Diseño Mecánico de un Exoesqueleto para Rehabilitación de Miembro Superior 65

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 84/232
Capítulo III Juan Francisco Ayala Lozano
Verdadera articulación desde el punto de vista anatómico (contacto de dos superficies
cartilaginosas de deslizamiento); Esta articulación es la más importante del grupo.
2) Articulación subdeltoidea o segunda articulación del hombro
Desde el punto de vista estrictamente anatómico no se trata de una articulación; sin embargo si lo es desde el punto de vista fisiológico, puesto que está compuesta por dos
superficies que se deslizan entre sí. La articulación subdeltoidea está mecánicamente
unida a la articulación glenohumeral: cualquier movimiento en la articulación
glenohumeral comporta un movimiento en la articulación subdeltoidea.
Segundo grupo: tres articulaciones:
3) Articulación escapulotorácica
En este caso se trata de nuevo de una articulación fisiológica y no anatómica. Es la
articulación más importante del grupo, sin embargo, no puede actuar sin las otras dos a
las que está mecánicamente unida.
4) Articulación acromioclavicular.
Verdadera articulación, localizada en la porción externa de la clavícula.
5) Articulación esternoclavicular Verdadera articulación, localizada en la porción interna de la clavícula.
En general, el complejo articular del hombro puede esquematizarse como sigue [III.15]:
Primer grupo:
Una articulación verdadera y principal: la glenohumeral; una articulación "falsa" y una
accesoria: la subdeltoidea.
Segundo grupo:
Una articulación "falsa" y principal: la escapulotorácica; dos articulaciones verdaderas y
accesorias: la acromioclavicular y la esternoclavicular.
En cada uno de los grupos las articulaciones están mecánicamente unidas, es decir que actúan
necesariamente al mismo tiempo. En la práctica, los dos grupos también funcionan Diseño Mecánico de un Exoesqueleto para Rehabilitación de Miembro Superior66

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 85/232
Capítulo III Juan Francisco Ayala Lozano
simultáneamente, según proporciones variables en el transcurso de los movimientos. Puede
afirmarse pues que las cinco articulaciones del complejo articular del hombro funcionan
simultáneamente y en proporciones variables de un grupo a otro [III.15].
III.6.2.- Biomecánica del codo Fisiológicamente se pueden distinguir dos funciones distintas [III.15]:
La flexo-extensión, que precisa de la actuación de dos articulaciones: la articulación
húmerocubital y la articulación húmeroradial.
La pronosupinación, que afecta a la articulación radiocubital proximal.
El rango normal de flexo-extensión es de 0° a 146° con un rango funcional de 30 a 130°. El rango
normal de prona-supinación del antebrazo da una media de 71° de pronación y de 81° de supinación
[III.16].
III.6.2.1.- La amplitud de los movimientos del codo
La posición anatómica (Figura III.8 inciso a) para la medición de amplitudes se define como sigue:
el eje del antebrazo se localiza en la prolongación del eje del brazo [III.15].
La extensión es el movimiento que dirige el antebrazo hacia atrás. La posición anatómica
corresponde a la extensión completa (Figura III.8 inciso a), por definición, no existe amplitud en el
caso de la extensión del codo, excepto en algunos sujetos que poseen una gran laxitud ligamentosa,
como las mujeres y los niños, que pueden alcanzar una hiperextensión (hE) de 5 a 10° de codo (z)
(Figura III.8 inciso b). Sin embargo, la extensión relativa siempre es factible a partir de cualquier
posición de flexión de codo [III.15].
Cuando la extensión es incompleta se mide negativamente; por ejemplo, una extensión de -40°
corresponde a un déficit de extensión de 40°, quedando el codo flexionado a 40° cuando se intenta
extenderlo completamente [III.15].
En este esquema (Figura III inciso b) el déficit de extensión es -y, la flexión +x, Df representa
entonces el déficit de flexión y el recorrido útil de flexo-extensión es x-y [III.15]. Diseño Mecánico de un Exoesqueleto para Rehabilitación de Miembro Superior 67

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 86/232
Capítulo III Juan Francisco Ayala Lozano
La flexión es el movimiento que dirige el antebrazo hacia delante, de tal forma que la cara anterior
del antebrazo contacta con la cara anterior del brazo. La amplitud de la flexión activa es de 140-145°
(Figura III.8 inciso c) [III.15].
Es muy fácil de observar, sin goniómetro, gracias a la prueba del puño cerrado: la distancia entre el muñón del hombro y la muñeca corresponde a la medida de un puño ya que la muñeca no contacta
con el hombro. La amplitud de la flexión pasiva es de 160°. Puede obtenerse cuando el evaluador
empuja la muñeca hacia el hombro [III.15].
140-145°
a)
F
b)
Df
x
x-y
-y
c)
z
Figura III.8.- La amplitud de los movimientos del codo [III.15]
III.6.2.2.- Las limitaciones de la flexoextensión
La limitación de la extensión (Figura III.9 inciso a) se debe a tres factores [III.15]:
El impacto del pico olecraniano en el fondo de la fosita olecraniana. Diseño Mecánico de un Exoesqueleto para Rehabilitación de Miembro Superior
68

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 87/232
Capítulo III Juan Francisco Ayala Lozano
La puesta en tensión de la parte anterior de la cápsula articular.
La resistencia que oponen los músculos flexores (músculo bíceps braquial, músculo
braquial y músculo braquiorradial).
Si la extensión prosigue, uno de los citados frenos se rompe [III.15]:
Fractura del olécranon (1) (Figura III.9 inciso b), seguida de desgarro capsular (2); el olécranon (1)
resiste (Figura III.9 inciso c), pero la cápsula (2) y los ligamentos se rompen y se produce una
luxación posterior (3) de la articulación del codo. Los músculos en general, permanecen intactos.
Sin embargo, la arteria braquial se puede romper o, al menos, sufrir una contusión.
La limitación de la flexión es distinta según sea una flexión activa o pasiva [III.15]:
Si la flexión es activa (Figura III.9 inciso d):
El primer factor limitante es el contacto de las masas musculares (flechas blancas) del
compartimento anterior del brazo y del antebrazo, endurecidas por la contracción. Este
mecanismo explica que la flexión activa no pueda sobrepasar los 145°, hecho tanto más
acentuado cuanto más musculoso sea el individuo; los factores restantes, impacto óseo y
tensión capsular, apenas intervienen.
Si la flexión es pasiva (Figura III.9 inciso e) por la acción de una fuerza (flecha roja) que
"cierra" la articulación:
Las masas musculares sin contraer pueden aplastarse una contra otra de modo que la
flexión sobrepasa los 145°;
Es entonces cuando aparecen los otros factores limitantes: Impacto de la cabeza radial contra la fosita supracondilea y de la coronoidea contra la
fosita supratroc1ear;
Tensión de la parte posterior de la cápsula;
Tensión pasiva del músculo tríceps braquial;
Diseño Mecánico de un Exoesqueleto para Rehabilitación de Miembro Superior 69

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 88/232
Capítulo III Juan Francisco Ayala Lozano
En estas condiciones, la flexión puede alcanzar los 160° debido a que el ángulo a aumenta (Figura
III.9 inciso d).
2 3 2
1
a) b) c)
d) e)
Figura III.9.- Flexo-extensión del codo [III.15]
III.6.3.- Biomecánica del Antebrazo
Cuando se asocian los movimientos de rotación de la articulación del hombro, el codo estando
totalmente extendido, esta amplitud total alcanza [III.15]:
360° cuando el miembro superior está vertical, a lo largo del tronco.
270° cuando el miembro superior está en abducción de 90°. Diseño Mecánico de un Exoesqueleto para Rehabilitación de Miembro Superior 70

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 89/232
Capítulo III
270° en flexión de 90°.
Juan Francisco Ayala Lozano
Apenas sobrepasa los 180° cuando el miembro superior está vertical, en máxima abducción. Esto
confirma que, en abducción de 180°, la rotación axial de la articulación del hombro es casi nula.
III.7.- Cinemática del miembro superior
Con el objetivo de obtener las relaciones cinemáticas del miembro superior humano, éste se
aproxima por un modelo de cuerpos rígidos conectados por medio de articulaciones simples [III.17].
Sin embargo, diversas suposiciones deben considerarse teniendo en cuenta que el brazo humano
posee piel, músculos y huesos que se mueven dinámicamente unos en relación a los otros y además
posee articulaciones complejas con centros de rotación variables [III.2].
Una aproximación común y simple del modelo de cuerpo rígido, es considerar el miembro superior
como una cadena compuesta por tres cuerpos rígidos (brazo, antebrazo y mano), articuladas y
enlazadas por articulaciones rotacionales ideales [III.2].
III.8.- Cinética del miembro superior
El análisis cinético del miembro superior humano busca relacionar los desplazamientos,
velocidades, aceleraciones y pares. Este análisis hace referencia a la formulación matemática de las ecuaciones que definen el movimiento del miembro. El modelo dinámico del miembro superior se
puede obtener empleando leyes físicas conocidas, tales como son las descritas en la mecánica
newtoniana o lagrangiana [III.2].
Este trabajo se enfoca en la rehabilitación de la extremidad superior, por lo tanto, es necesario
conocer el peso de total así como de cada sección con la finalidad de que estos datos se utilicen en el
diseño. Sin embargo, debido a las distintas razas y grupos étnicos que conforman la población
mexicana, es difícil considerar un fenotipo estándar, por ello, basándose en estudios ya realizados
para determinar el peso de los segmentos corporales de acuerdo a como se muestra en la Tabla III.1
Para suplir el estándar de las medidas de los individuos y considerando un percentíl 50 que está dado
por las tablas antropométricas de la Organización Mundial de la Salud para personas de
Diseño Mecánico de un Exoesqueleto para Rehabilitación de Miembro Superior 71

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 90/232
Capítulo III Juan Francisco Ayala Lozano
Latinoamérica como se muestra en la Tabla III.2 [III.19] se podría considerar como el estándar a
seguir.
Tabla III.1.- Peso segmentario/relaciones de peso corporal de varios estudios [III.18] Braune Dempster Dempster (Ajustado) Clauser
Fuente %%%%
Cabeza
Tronco
Brazo
Antebrazo
Mano
Miembro superior
Antebrazo y mano
Muslo
Pierna
Pie
Miembro Inferior
Pierna y pie
Suma
7.0
46.1
3.3
2.1
0.8
6.2
2.9
10.7
4.8
1.7
17.2
6.5
100.0
7.9
48.6
2.7
1.6
0.6
4.9
2.2
9.7
4.5
1.4
15.7
6.0
100.0
8.1
49.7
2.8
1.6
0.6
5.0
2.2
9.9
4.6
1.4
16.1
6.1
100.0
7.3
50.7
2.6
1.6
0.7
4.9
2.3
10.3
4.3
1.5
16.1
5.8
100.0
Tabla III.2.- Medidas estándar de un percentil 50 en Latinoamérica [III.19] Hombre
Edad (Años)
Peso (Kg)
Talla (cm)
Circunferencia de
brazo (cm)
Circunferencia de cintura (cm)
Pliegue de Tríceps
(mm)
Pliegue de Bíceps
(mm)
34.5±11.6
69.58±16.22
168.80±7.08
28.87±3.94
Mujer
40.3±12.4
63.35±14.66
156.08±5.75
29.12±4.39
85.42±13.02 82.42±14.0
9.63±5.92 20.11±8.13
5.77±3.66 10.68±6.41
Diseño Mecánico de un Exoesqueleto para Rehabilitación de Miembro Superior 72

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 91/232
Capítulo III
Pliegue
subescapular (mm)
Pliegue suprailíaco
(mm)
Índice de masa corporal (Kg/m2)
Porcentaje de masa
corporal total
Área muscular del
brazo
16.68±8.85
Juan Francisco Ayala Lozano
23.39±8.85
19.95±9.79 23.62±9.45
24.36±4.96 25.96±5.63
21.08±6.65 34.69±6.09
51.33±11.29 35.34±8.77
Para las longitudes del miembro superior y sus regiones se tomaran los datos del percentil 5 y 90 de
los datos antropométricos obtenidos por Dr. David Sánchez Monroy y publicadas en [III.20]; dichos estudios se realizaron en la Ciudad de México y Guadalajara, Jalisco con una población de entre 18
y 68, donde se obtuvieron los datos que se muestran en la Tabla III.3; en la Tabla III.4 se muestran
los parámetros utilizados para poder calcular el centro de gravedad de las diferentes secciones del
cuerpo humano.
Tabla III.3.- Longitudes de segmentos de la extremidad superior [III.20]
Percentiles Dimensiones
5
Distancia codo – dedo medio (mm)
Distancia hombro – codo (mm)
Largo de mano (mm)
Longitud entre hombros (mm)
Altura del hombro en posición sentado (mm)
95
374.35 595.98
290.0 400.0
164.35 195.98
390
850
550
1080
Tabla III.4.- Centros de masa/relación de longitud del segmento (en porcentaje) [III.18] FuenteBraune y FischerDempsterClauser y cols.
Todo el cuerpo
Cabeza
Tronco
-
-
-
-
43.3
-
41.2
46.6
38.0
73 Diseño Mecánico de un Exoesqueleto para Rehabilitación de Miembro Superior

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 92/232
Capítulo III
Brazo
Antebrazo
Mano
Miembro superior
Antebrazo y mano Muslo
Pierna
Pie
Miembro inferior
Pierna y pie
47.0
42.1
-
-
47.2 44.0
42.0
44.4
-
52.4
43.6
43.0
49.4
-
67.7 43.3
43.3
42.9
43.3
43.7
Juan Francisco Ayala Lozano
51.3
39.0
48.0
41.3
62.6 37.2
37.1
44.9
38.2
47.5
Los datos que se obtendrán de las tablas anteriores, solo servirán para obtener rangos máximos y mínimos de longitud de las regiones de la extremidad superior, y el peso máximo que se utilizara
para considerar lo que deben mover los elementos generadores de movimiento que tendrá el
dispositivo.
III.9.- Sumario
En el capítulo se muestra la Anatomía y Biomecánica del miembro superior así como algunos
estudios y las formas de calcular la dinámica y cinemática, ya que todos estos datos serán
fundamentales en el diseño del dispositivo. El miembro superior, está compuesto por 32 huesos cada
uno, sin embargo 27 pertenecen a la muñeca y mano, y de los 5 huesos restantes, 3 comprenden la
región del hombro de los cuales comparte uno con el hombro y los restantes 2 conforman el
antebrazo. El número de músculos que lo componen son 42, donde algunos se comparten con el
tronco y el cuello.
Para la dinámica y cinemática se debe considerar además de los grados de libertad que son 4 para el
hombros 3 lineales y 1 rotacional, así 1 para el codo, sin contar el movimiento pronación supinación; las longitudes y pesos de las regiones que lo conforman, sin embargo, la existencia de
múltiples razas y grupos étnicos dentro de la población mexicana, así como el aumento en fechas
recientes del sobrepeso y obesidad hace difícil que se tenga un fenotipo estándar, del cual obtener
parámetros necesarios para diseñar exosqueletos, prótesis y órtesis, aunado a que la mayoría de los
estudios se han hecho sobre cadáveres de personas anglosajonas; con las cuales la mayoría de la
Diseño Mecánico de un Exoesqueleto para Rehabilitación de Miembro Superior 74

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 93/232
Capítulo III Juan Francisco Ayala Lozano
población mexicana no comparte muchas características, pero a fechas recientes se han empezado a
desarrollar estudios en personas en Latinoamérica tal es el caso de los datos que se muestran en la
Tabla III.2, con la cual se comparten más rasgos; así como de los estudios de ergonomía en personas
en la Ciudad de México y Guadalajara, Jalisco, que nos ofrecen datos que se pueden considerar más
cercano a un estándar para dicha región, aun así no abra cobertura al 100%.
III.10.- Referencias
1.- Winter, D. A, Biomechanics and Motor Control of Human Movements, University of Waterloo
Press, 2nd Edition, pp 1-12, 1992.
2.- Ruíz-Olaya, A. F., Sistema Robótico Multimodal para Análisis y Estudios en Biomecánica,
Movimiento Humano y Control Neuromotor, Ph D Tesis, Universidad Carlos III de Madrid, pp
60-70, 2008.
3.- Ruiz-Vargas, J., Anatomía Topográfica con Uso de Nómina Internacional, Instituto de ciencias
biomédicas de la Universidad Autónoma de Ciudad Juárez, 5ta edición, pp 43-47, 2002
4.- Drake, R. L., Vogl, W. y Mitchell, A. W. M., Anatomía para Estudiantes Gray, Ed. Elsevier, pp
608-700, 2005
5.- Almagia-Flores, A. A. y Lizana-Arce, P. J., Morfología Humana II Anatomía Humana Básica,
Pontificia Universidad Católica de Valparaíso, pp 10-14, 2008.
6.- Veegera, H.E.J. y Van der Helm, F.C.T., Shoulder function: The perfect compromise between
mobility and stability, Journal of Biomechanics, Vol. 40, pp 2119-2129, 2007. 7.- Abrahams, P. H., Marks Jr, S. C. y Hutchings, R., Gran Atlas McMinn de Anatomía Humana,
Ed. Océano, pp 117-120, 2005.
8.- Latarjet, M. y Ruiz, A., Anatomía Humana, 4ta edición, Vol. 1, Ed. Panamericana, pp 471-546,
2007.
9.- Almagia-Flores, A. A. y Lizana-Arce, P. J., Principios de Anatomía Humana Aparato Locomotor
“Descripción Muscular Apendicular - Miembro Superior”, Pontificia Universidad Católica de
Valparaíso, pp 2-30, 2011.
10.- Norton, K. y Olds, T., Antropométrica, BIOSYSTEM Servicio Educativo, pp 7-22, 1996.
11.- Ambrosiani-Fernández, J., Músculos del Miembro Superior. Guiones de consulta. Anatomía
Humana I, Departamento de anatomía y embriología humana, Universidad de Sevilla, pp1-10,
2006
12.- Viladot-Voegeli, A., Lecciones Básicas de Biomecánica del Aparato Locomotor, Ed. Springer,
pp 147-154, 2001. Diseño Mecánico de un Exoesqueleto para Rehabilitación de Miembro Superior 75

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 94/232
Capítulo III Juan Francisco Ayala Lozano
13.- Nordin, M. y Frankel, V. H., Biomecánica Básica del Sistema Musculo-Esquelético, Ed.
McGraw Hill, 3ra Edición, pp 353-360, 2004.
14.-Almagia-Flores, A. A. y Lizana-Arce, P. J., Principios de Anatomía Humana Aparato
Locomotor “Descripción sea Apendicular - Miembro Superior”, Pontificia Universidad
Católica de Valparaíso, pp 2-28, 2012. 15.- Kapandji, A. I., Fisiología Articular, Ed. Panamericana, 6ta Edición, Tomo 1, pp 2-103, 2006.
16.- Morrey, B. F., Askew, L. J., An, K. N. y Chao, E. Y., A biomechanical study of functional
elbow motion, The Journal of Bone and Joint Surgery, Vol. 63, No 6, pp 872-877, 1981.
17.- Maurel, W., 3D Modeling of the Human Upper Limb Including the Biomechanics of Joints,
Muscles and Soft Tissues, PhD Thesis, Ecole Polytechnique Federale de Lausanne, pp107-112,
1998.
18.-Le Veau, B., Biomecánica del Movimiento Humano: Williams y Lissner, Ed. Trillas, pp 227-
239, 1991.
19.- Sanabria Solano, A. L., Diseño de un Exoesqueleto de Miembro Superior, Universidad Manuela
Beltrán, Facultad de Ingeniería Biomédica, pp 20-21, 2012.
20.- Avila-Chaurand, R., Prado-León, L. R. y González-Muñoz, E. L., Dimensiones
ntropométricas, Población Latinoamérica, Ed. Universidad de Guadalajara, pp 111-123, 2001.
Diseño Mecánico de un Exoesqueleto para Rehabilitación de Miembro Superior 76

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 95/232
Capítulo IV.-
Diseño Conceptual
Imagen obtenida de la galería de imágenes prediseñadas de Office Word 2007 ®

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 96/232
Capítulo IV
IV.1.- Diseño conceptual del dispositivo
Juan Francisco Ayala Lozano
El diseño conceptual se realiza con la finalidad de tener una idea de las características generales que
debe contener el dispositivo que se está modelando, realizando los cálculos esenciales con el
objetivo de que en el diseño a detalle se analizan todos los parámetros de la estructura. Como se ha
señalado desde los objetivos del presente trabajo, éste se enfocara únicamente en el diseño de la sección mecánica de un dispositivo rehabilitador de miembro superior, la metodología que se utiliza
es Blitz QFD, que es una simplificación del QFD original.
IV.1.1.- Parámetros de diseño
Los parámetros diseño que se consideran para el diseño se dividieron en dimensionales y
funcionales:
a) Dimensionales.
Longitud de brazo varía entre 29 a 40 cm.
Longitud del antebrazo varía entre 21 a 30 cm.
La longitud entre hombros es de 39 a 55 cm.
El rango de altura del asiento para que el paciente se pueda sentar sin dificultad y
los pies queden apoyados firmemente en el piso es de entre 34 a 45 cm.
La altura del hombro en una persona sentada es de 85 a 108 cm.
b) Funcionales.
Flexo-extensión del hombro en el plano sagital en torno al eje transversal: 45 a
50° en extensión y 180° flexión.
Abducción del hombro en el plano frontal: 0 a 180°.
Flexo-extensión horizontal del hombro en torno al eje vertical: extensión 30 a 40°
y flexión 140º.
Que el dispositivo pueda realizar los 3 movimientos del hombro de manera continua.
Flexión del codo 140-145° (160° de forma pasiva).
Pronosupinación del miembro superior: supinación 90°, pronación 85º.
Diseño Mecánico de un Exoesqueleto para Rehabilitación de Miembro Superior 77

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 97/232
Capítulo IV Juan Francisco Ayala Lozano
El dispositivo se utilizara para rehabilitar a personas con un peso máximo de 90
kg de peso (utilizando los porcentajes de Clauser presentados en la Tabla III.1 ),
donde el peso de los segmentos son:
o Brazo; 2.34 kg.
o
Antebrazo; 1.44 kg. o Mano; 0.63 kg.
o Antebrazo y mano; 2.07 kg.
o Miembro superior; 4.41 kg.
Debe ser capaz de rehabilitar tanto el miembro superior derecho como el
izquierdo.
c) Manufacturabilidad e instalación.
Los materiales de construcción deben ser grado médico.
Los parámetros anteriores se clasifican en obligatorios y deseables (Tabla IV.1) con la finalidad de
conocer cuales se deben cumplir para el óptimo funcionamiento del dispositivo, y los deseables son
los que le dan un mayor valor al producto.
Tabla IV.1. - Clasificación de los parámetros
Obligatorios Longitud variable del brazo.
Deseables Que la articulación del hombro permita realizar
los 3 movimientos conjuntamente.
Longitud variable del antebrazo. Que los movimientos se realicen en el rango
completo.
Longitud variable del ancho de espalda.
Altura variable del hombro respecto al piso.
Realizar el movimiento de flexo-extensión del
hombro en el plano sagital en torno al eje transversal.
Realizar el movimiento de abducción del hombro
en el plano frontal.
Realizar el movimiento de flexión en la articulación
del codo.
Diseño Mecánico de un Exoesqueleto para Rehabilitación de Miembro Superior 78

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 98/232
Capítulo IV
Permitir la pronosupinación del miembro superior.
El dispositivo debe soportar el peso del miembro
superior de una persona de 90 Kg.
Los materiales de construcción deben ser grado
médico.
Juan Francisco Ayala Lozano
IV.1.2.- Análisis funcional
Se desarrolló el análisis funcional en etapas, partiendo de las primarias hasta llegar al nivel más bajo
de acuerdo a como se van observando las distintas funciones que debe desarrollar el dispositivo.
Para que el análisis funcional sea coherente en nivel descendiente debe satisfacer la interrogante
¿Cómo? y en nivel ascendente ¿Para qué? En la Figura IV.1 se muestra el análisis funcional del
dispositivo considerando solo las funciones que se involucran en el diseño mecánico.
Ajustar
Ubicar en posición
correcta
articulaciones
las
a las Utilizar
sistema de
barras
telescópicas
diferentes medidas de
longitud y grosor de
las extremidades del
paciente
Rehabilitar miembro
superior Generar el movimiento de las articulaciones
Proporcionar
movimiento de
rotación a las
articulaciones
Controlar posición y Utilizar
posición
angular
sensores
y
de
velocidad de los movimientos
de las articulaciones
velocidad
Figura IV.1.- Análisis funcional del dispositivo
IV.1.3.- Generación de conceptos para satisfacer las necesidades
1.- Ajustar a las diferentes medidas de longitud y grosor de las extremidades del paciente.
Esta función se desglosa en más subfunciones de acuerdo a la sección en la que se va enfocar:
Diseño Mecánico de un Exoesqueleto para Rehabilitación de Miembro Superior 79

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 99/232
Capítulo IV Juan Francisco Ayala Lozano
a) Ajustar longitud del antebrazo y brazo:
Barras telescópicas de desplazamiento manual.
Barras telescópicas de desplazamiento neumático.
Motores lineales.
b) Ajustar al grosor del antebrazo y brazo:
Correas ajustables.
c) Ajustar al ancho de hombro:
Unidad de rodamientos lineales.
Barra telescópicas de desplazamiento manual.
Carro móvil traccionado por poleas.
d) Ajustar altura del hombro:
Columna impulsada por tren de engranes.
Columna impulsada por tornillo de potencia.
Columnas telescópicas.
e) Fijar las estructuras deslizables en la posición adecuada:
Tornillería.
Abrazaderas.
Topes mecánicos.
Fin de carrera ajustable.
Perilla de 2 posiciones.
2.- Proporcionar movimiento de rotación a las articulaciones: Motor a pasos.
Servomotor.
Motor CD.
3.- Controlar posición y velocidad de los movimientos de las articulaciones:
Diseño Mecánico de un Exoesqueleto para Rehabilitación de Miembro Superior 80

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 100/232
Capítulo IV
Acelerómetros.
Encoder.
Resolver.
Potenciómetros.
Juan Francisco Ayala Lozano
IV.1.4.- Aplicaciones de filtros
Algunas herramientas de diseño indican la aplicación de 4 filtros para limitar el número de las
posibles soluciones. Dichos filtros son:
a) De factibilidad.
b) De disponibilidad tecnológica.
c) Requerimientos.
d) Matriz de decisión.
Después de aplicar el primer filtro, los conceptos que no pasaron son:
1a) Barras de desplazamiento neumático.
1c) Barras telescópicas de desplazamiento manual, carro móvil traccionado por poleas.
1d) Columna impulsada por tren de engranes.
1e) Tornillería, fin de carrera ajustable, abrazaderas.
2) Motor CD.
3) Acelerómetro, potenciómetro.
Para el segundo filtro los conceptos eliminados fueron:
1d) Columna impulsada por tornillo de potencia.
2) Motor a pasos.
En el tercer filtro no se elimina ningún concepto.
Cuando se realiza el 4to filtro, que es la matriz de decisión, quedan descartados:
1a) Motores lineales.
1e) Topes mecánicos.
3) Resolver.
Diseño Mecánico de un Exoesqueleto para Rehabilitación de Miembro Superior 81

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 101/232
Capítulo IV
IV.1.5.- Diseño conceptual final
Juan Francisco Ayala Lozano
Para ajustar la longitud del brazo y antebrazo se usaran barras telescópicas de desplazamiento
manual, en el caso para ajustar al grosor del miembro superior se utilizaran correas acolchonadas
ajustables, para ajustar la altura del mecanismo en relación al ancho del hombro se utilizará una
unidad de rodamientos lineales y para la altura una columna telescópica, la limitación a los elementos deslizables se realiza mediante perillas de 2 posiciones, el movimiento de rotación será
producido por servomotores así mismo el control de posición y velocidad será mediante sensores
tipo encoder.
IV.2.- Diseño Mecánico
Para cumplir con los parámetros de diseño establecidos, se considera dividir el dispositivo en
subsistemas que son:
1. Sistema del antebrazo.
2. Sistema del brazo.
3. Sistema del hombro.
4. Sistema base.
IV.2.1.- Sistema del antebrazo
La estructura permite ajustar la distancia a la longitud del antebrazo, así mismo realizar el movimiento de flexión en el codo que será generado por un servomotor que es sujetado a la
estructura del brazo y el servomotor moverá únicamente la estructura del antebrazo, ya que la
articulación del codo es de un solo grado de libertad (tipo revoluta).
Para poder realizar el ajuste de longitud, en el diseño existe con una barra deslizable, se ha utilizado
un sistema de riel barrenado, para detener el desplazamiento se cuenta con un perilla de 2
posiciones, una posición traba el riel evitando que este pueda desplazarse, la otra permite que la
pieza se mueva longitudinalmente sin dificultad, pasando de la posición mínima longitud (Figura
IV.2) a la posición de mayor longitud (Figura IV.3).
La forma de sujetar el antebrazo del paciente a la estructura se realiza mediante correas que
permiten ajustar a diferentes grosores de antebrazo de los distintos pacientes, ya que se ajustan en
longitud y grosor además se encuentran colocadas para siempre sujeten a la misma distancia dando Diseño Mecánico de un Exoesqueleto para Rehabilitación de Miembro Superior82

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 102/232
Capítulo IV Juan Francisco Ayala Lozano
por resultado que la articulación del codo de la estructura y del paciente queden alineadas, evitando
así que en el movimiento de flexión se pueda ocasionar una lesión al paciente.
Figura IV.2.- Segmento del antebrazo en su longitud mínima
Figura IV.3.- Segmento del antebrazo en su longitud máxima
IV.2.1.1.- Determinación de las fuerzas involucradas en el sistema del antebrazo
Dentro de la etapa de diseño conceptual se realiza un análisis estático analítico de la estructura para
conocer la carga que debe soportar la estructura por su propio peso y el del paciente, así como tener
el torque mínimo necesario para mantener en equilibrio estático la estructura, esto servirá para
realizar una selección de los servomotores ya que influirá en la geometría final de la estructura. Diseño Mecánico de un Exoesqueleto para Rehabilitación de Miembro Superior 83

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 103/232
Capítulo IV Juan Francisco Ayala Lozano
Para determinar los pesos de los segmentos de los cuerpos se ocupa el estudio de Clauser presentado
en las tablas del capítulo III donde se determinan los siguientes parámetros para una persona de 90
kg y las longitudes de segmentos de la población mexicana:
Peso del segmento antebrazo-mano: 2.07 kg (20.3067 N).
Centro de gravedad del segmento antebrazo-mano: 307.52 mm (62.6% de la longitud total
medido a partir del codo).
Para determinar las cargas que van a ser aplicadas durante las simulaciones de elemento finito (que
se realizaran en el próximo capítulo), se analiza la sección del antebrazo y mano como una viga con
doble apoyo, donde el primero corresponde a la correa cercana al codo (C C) y el segundo a la correa
de la muñeca (CM) como se muestra en la Figura IV.4 y la IV.5, los cálculos se realizan en la
Ecuación IV.1 a la IV.4.
20.3067 N
CC
0 80
CM
491.2 mm280 307.5 Figura IV.4.- Representación de las reacciones en la estructura del antebrazo
20.3067 N
CM CC
Figura IV.5.- Diagrama de cuerpo libre de reacciones en la estructura del antebrazo
Diseño Mecánico de un Exoesqueleto para Rehabilitación de Miembro Superior 84

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 104/232
Capítulo IV
∑ ( ) ( )
Juan Francisco Ayala Lozano
IV.1
IV.2
∑ ( ) ( ) IV.3
IV.4
Las cargas que se aplicarán en las correas de sujeción en el análisis estático que se realiza a la
sección del antebrazo son la correa del codo (CC) de 2.79 N y la de la muñeca (CM) de 23.098 N.
Adicionalmente se realizan el mismo procedimiento con los datos de la estructura son:
Masa de 0.844 kg (8.2796 N).
Centro de gravedad a 131.442 mm (medida a partir del eje del codo).
Para ello se realizan los diagramas de cuerpo libre (Figura IV.6 y IV.7) para después realizar las
operaciones en la Ecuación IV.5 a la IV.9.
8.2796 20.3067 N
0 131.442307.52491.25 mm Figura IV.6.- Representación de las fuerzas a las que es sometida la estructura
8.2796 MA
20.3067 N
R A
Figura IV.7.- Diagrama de cuerpo libre del antebrazo
Diseño Mecánico de un Exoesqueleto para Rehabilitación de Miembro Superior 85

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 105/232
Capítulo IV
∑ ( )( ) ( )( )
Juan Francisco Ayala Lozano
IV.5
IV.6
∑ ( ) ( ) ( ) IV.7
IV.8
Con los cálculos anteriores se tiene que el torque necesario para mantener en la sección del
antebrazo es de 7.33 N m, así como la carga que aplica esta sección a la del brazo es de 28.5863 N.
IV.2.2.- Sistema del brazo
La estructura está diseñada de forma que permite ajustar a la longitud del brazo, de manera similar a
la estructura del antebrazo, ya que también posee un riel con barrenos donde una perilla se acopla para permitir o no el desplazamiento con la diferencia de que es de mayor dimensión además esta
sección cuenta solamente con una correa de sujeción con la que se sujetara el brazo del paciente
como se aprecia en la Figura IV.8 y la IV.9; adicionalmente a esta sección se le ha acoplado el
servomotor que genera la flexo-extensión del antebrazo.
Figura IV.8.- Estructura del brazo en longitud mínima
Diseño Mecánico de un Exoesqueleto para Rehabilitación de Miembro Superior 86

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 106/232
Capítulo IV Juan Francisco Ayala Lozano
Figura IV.9.- Estructura del brazo en longitud máxima
IV.2.2.1.- Determinación de las fuerzas involucradas en el sistema del brazo
Para la sección del brazo se utilizan los correspondientes a todo el miembro superior, teniendo que:
El peso del miembro superior: 4.41 kg (43.2621 N).
El centro de gravedad del miembro superior: 368.09 mm (medido desde el hombro).
La estructura que comprende las secciones brazo y antebrazo presenta los siguientes datos:
Peso de 2.923 kg (28.6743 N).
Centro de gravedad: 353.985 mm (medido a partir del hombro).
La estructura del brazo tiene:
Un peso de: 2.079 kg (20.395 N).
Centro de gravedad: 281.942 mm (medido a partir del hombro).
Para obtener las reacciones que se generan en la articulación del hombro que se une a la sección del
brazo se realizan los diagramas de la Figura IV.10 y la IV.11, las operaciones se muestran en la
Ecuación IV.9 a la IV.12.
Diseño Mecánico de un Exoesqueleto para Rehabilitación de Miembro Superior 87

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 107/232
Capítulo IV
28.6743 43.2621 N
Juan Francisco Ayala Lozano
0 353.985 368.09
Figura IV.10.- Representación de cargas en la estructura del miembro superior
891.25 mm
28.6743 43.2621 N
MA
R A
Figura IV.11.- Diagrama de cuerpo libre de la cargas en la estructura del miembro superior
∑ ( )( ) ( )( ) IV.90
IV.10
∑ ( ) ( ) ( ) IV.11
IV.12
Los cálculos anteriores determinan que el torque necesario para mantener la sección del brazo y
antebrazo en equilibrio estático es de 26.07 N m, así como la carga que aplica esta sección a la del
brazo es de 71.9364 N. Para determinar la fuerza que debe soportar la correa de la sección del brazo,
se toma en consideración únicamente el peso del brazo de una persona, estimando que el antebrazo
ha quedado en equilibrio y por lo tanto no presentara carga sobre la sección del brazo, y al haber
únicamente una sola correa esta va a soportar todo el peso que se estima en 2.34 kg (22.9554 N).
IV.2.3.- Sistema del hombro
Permitirá realizar los movimientos de flexo extensión sagital, abducción frontal y flexo-extensión
horizontal, de forma independiente, primordialmente individuales, es decir, un solo movimiento a la
vez.
Diseño Mecánico de un Exoesqueleto para Rehabilitación de Miembro Superior 88

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 108/232
Capítulo IV Juan Francisco Ayala Lozano
Al ser 3 movimientos rotativos independientes, se considera la utilización de un servomotor para
cada uno de los movimientos, dichos servomotores están colocados de forma que se aproximen al
centro de rotación de cada giro en la articulación glenohumeral (hombro), lo que implica que la
estructura no sea estructuralmente antropomórfica sin embargo si cumpla con las funciones especificadas.
a) Movimiento de flexo extensión en el plano sagital.- Este movimiento vas estar transmitido
por un servomotor conectado mediante un eje directamente a la estructura del brazo como
se observa en la Figura IV. 12.
Figura IV.12.- Articulación para el movimiento de flexo-extensión
b) Movimiento de abducción en el plano frontal.- Se realiza mediante una estructura en forma
de L (Figura IV.13) para poder lograr que las secciones brazo y antebrazo puedan realizar
el movimiento circular que rige este movimiento; además esta sección es la que permite el
cambio de la estructura al movimiento de flexo-extensión horizontal en torno al eje vertical,
el servomotor que controlo este movimiento se coloca en una estructura cuya única
finalidad es soportarlo (Figura IV.14).
c) Movimiento flexo-extensión horizontal.- Este sistema se conforma por la estructura que
une el exoesqueleto a la base (Figura IV.15), así como las estructura que transmitirá el
movimiento a partir de que el servomotor que genera este movimiento será unido a un eje
circular transmitirá el movimiento al resto del exoesqueleto y al mismo tiempo soportara
toda la estructura como se aprecia en la Figura IV.15, sin embargo para poder realizar este Diseño Mecánico de un Exoesqueleto para Rehabilitación de Miembro Superior89

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 109/232
Capítulo IV Juan Francisco Ayala Lozano
movimiento se tiene que desenclavar al estructura del brazo y antebrazo de la estructura que
soporta al servomotor de abducción para poder desarrollar el giro libremente (Figura
IV.16), mencionado que la barra que se usa para la reconfiguración tendrá la capacidad de
unirse en la estructura únicamente cuando se va a utilizar este movimiento y retirarse
cuando no sea así, mediante ajuste por tornillo y tuerca; así como mover a 90º las 2 piezas que unen la estructura de la abducción frontal.
Figura IV.13.- Estructura que permite el movimiento de abducción frontal
Figura IV.14.- Estructura para soportar el servomotor del movimiento de abducción frontal
Diseño Mecánico de un Exoesqueleto para Rehabilitación de Miembro Superior 90

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 110/232
Capítulo IV Juan Francisco Ayala Lozano
Figura IV.15.- Estructura de unión del exoesqueleto a la base
Figura IV.16.- Reconfiguración del dispositivo para el movimiento de flexo-extensión
IV.2.4.-Sistema base
Permitirá ajustar el dispositivo a la altura del hombro, así como el ancho de la espalda hasta el
hombro, además de indicar la posición en que el paciente debe ser colocado en el dispositivo así
como si será para configuración diestra o zurda.
Para el ajuste de la altura del hombro el diseño está provisto de una columna telescópica de control
eléctrico, lo que permite que el ajuste sea automático y se coloque en la altura deseada ya que se
puede detener en cualquier punto dentro del valor de longitud variable (Figura IV.17).
Diseño Mecánico de un Exoesqueleto para Rehabilitación de Miembro Superior 91

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 111/232
Capítulo IV Juan Francisco Ayala Lozano
El ancho de espalda o distancia del hombro, se realiza a través del desplazamiento del carro móvil
(que soporta la estructura que está en contacto con el miembro superior) sobre un riel, este también
sirve para iniciar el cambio de la configuración zurda a diestra o viceversa (Figura IV.18).
Figura IV.17.- Sección de la base con sistema de ajuste de altura del hombro
Figura IV.18.- Sección de la base que permite el ajuste de ancho de espalda
La posición del paciente será dado mediante el respaldo que está provisto de un soporte para la
espalda donde se pueden unir correas que sujeten al paciente evitando que se pueda llegar a resbalar
del asiento o mueva el tronco durante la rehabilitación, ya que este último punto es algo común en
dispositivos de rehabilitación que no sujetan el paciente y puede ocasionar una lesión a nivel
columna vertebral así como disminuir los beneficios del dispositivo al realizar de manera incorrecta
la rehabilitación. Sin embargo se debe resaltar que el diseño no incluye el asiento móvil, sin
embargo, se pide que el utilizado sea variable entre los 34 y 45 cm, ya que es la altura adecuada para
que los pacientes se sientes de manera correcta ya que pueden apoyar los pies en el piso. Por último Diseño Mecánico de un Exoesqueleto para Rehabilitación de Miembro Superior92

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 112/232
Capítulo IV Juan Francisco Ayala Lozano
se presenta el diseño resultante, la Figura IV.19a muestra el dispositivo en configuración para el
miembro derecho y la Figura IV.19b ilustra la configuración para el miembro izquierdo. Se eligió la
configuración de un sola estructura de sujeción del miembro superior y que tuviera capacidad de
poderse ajustar a cualquiera de los dos miembros a una que tuviera ambos miembros, debido a que
es más económico, además una parte importante de las enfermedades y accidentes discapacitantes ocurre para uno de los hemisferios ya sea izquierdo o derecho, por lo que se estaría desperdiciando
el mecanismo del miembro superior que no se esté ocupando.
a) b)
Figura IV.19.- Dispositivo final. a) Configuración diestra, b) Configuración zurda.
IV.3.-Sumario
La etapa de diseño conceptual es de gran relevancia, ya que le proporciona al diseñador todos los
parámetros y requerimientos que se deben satisfacer el producto, así como genera una visión
adecuada de lo que debe considerar o no, sin embargo, la experiencia y conocimientos del diseñador
también son de gran relevancia ya que pueden simplificar en gran medida los problemas de diseño
que puedan surgir durante todo el proceso, aunado a lo anterior se puede apoyar en las herramientas
de diseño existentes para ir en una sola dirección y no desviarse de la meta de diseño establecida Diseño Mecánico de un Exoesqueleto para Rehabilitación de Miembro Superior93

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 113/232
Capítulo IV Juan Francisco Ayala Lozano
por los requerimientos, debido a que una vez identificados se procede a proponer todas posible
soluciones que existen por muy burdas que sean, posteriormente se reducen las posible soluciones
mediante la aplicación de filtros como son: de factibilidad, de disponibilidad tecnológica,
satisfacción de los requerimientos y matriz de decisión; al finalizar esta etapa se debe contar ya con
las principales características que debe contener, en este caso, el exoesqueleto. Se realizan análisis estáticos a la estructura con la finalidad de encontrar el torque mínimo necesario para mantener en
equilibrio la estructura del brazo y del antebrazo principalmente, ya que con este dato se procedió a
investigar los servomotores existentes en el mercado que pudieran cumplir con esos parámetros para
que junto con los datos de geometría, masa y funcionalidad seguir realizando el diseño del resto del
dispositivo.
En el próximo capítulo se evalúa el diseño al someterlo a la aplicación de fuerzas que se ven
involucradas durante la operación, como son los torques de los servomotores, y las fuerzas inducidas
por el peso del miembro superior del paciente.
Diseño Mecánico de un Exoesqueleto para Rehabilitación de Miembro Superior 94

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 114/232
Capitulo V.- Análisis de la
estructura bajo
condiciones de trabajo
Imagen obtenida de la galería de imágenes prediseñadas de Office Word 2007 ®

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 115/232
Capítulo V
V.1.- Introducción
Juan Francisco Ayala Lozano
Los mecanismos están sometidos a más fuerzas que a su propio peso y las cargas iniciales que deben
soportar ya que, como en este caso, existe al menos un torque necesario para generar el movimiento,
por lo cual es necesario analizar el comportamiento del diseño bajo estas condiciones y así poder
verificar su óptimo desempeño. De igual forma es importante conocer los puntos en el espacio abarcando los 3 planos que puede alcanzar, lo que se denomina como espacio de trabajo.
V.2.- Espacio de trabajo
La rehabilitación del miembro superior se utiliza para devolver al paciente la capacidad de realizar
los movimientos lo más próximo a rangos que tenía antes de sufrir la lesión, por ello es necesario
evaluar el espacio que el exoesqueleto puede cubrir.
V.2.1.- Flexión del antebrazo
La estructura realiza la flexoextensión en un rango de 0 a 130° (que es el rango funcional), además
de la distancia variable entre 21 a 30 cm, lo cual genera el área de trabajo que se muestra en la
Figura V.1, se muestran 10 trayectorias concéntricas ya que la longitud del antebrazo se varia de 1
cm en 1 cm además de que la articulación del codo es el punto (0,0), recordando que este
movimiento se realiza en el plano sagital. La Figura V.2 se muestra al exoesqueleto en la posición
inicial (inciso a) y final (inciso b) al realizar este movimiento, la trayectoria que describe es la que se
muestra en la gráfica.
30
25
Ejevertical(cm)
20
15
10
5
0
-20 -1001020 Eje anteroposterior (cm)
30
Figura V.1.- rea de trabajo del antebrazo
Diseño Mecánico de un Exoesqueleto para Rehabilitación de Miembro Superior 96

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 116/232
Capítulo V
a) b)
Juan Francisco Ayala Lozano
Figura V.2.- Fase de la flexión del brazo. a) Etapa inicial, b) Etapa final
V.2.2.- Flexo-extensión del hombro en el plano sagital
El rango de movimiento del dispositivo para la flexión sagital es de 180° mientras para la extensión
es de 40° (para ambos miembros, esto se puede gracias a que el servomotor es capaz de girar 360°
en ambos sentidos). La Figura V.3 muestra el área que puede cubrir un punto localizado al final de
la estructura del antebrazo, donde queda colocado la muñeca, esto sin considerar la flexión del
codo, en el punto (0,0) se coloca la articulación del hombro; la Figura V.4 muestra la estructura
describiendo la trayectoria, desde la posición inicial (inciso a), la extensión máxima (inciso b) y la
flexión máxima (inciso c). 0.8
0.6
0.4
0.2
0
-0.2
-0.4
-0.6
0.8-0.200.20.40.6 Eje anteroposterior (m)
Figura V.3.- Área de trabajo en el movimiento de flexo-extensión sagital
-0.4 -0.8
-0.6
Ejevertical(m)
Diseño Mecánico de un Exoesqueleto para Rehabilitación de Miembro Superior 97

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 117/232
Capítulo V
a) b)
Juan Francisco Ayala Lozano
c)
Figura V.4.- Etapas del movimiento. a) Fase inicial, b) Extensión máxima, c) Flexión máxima
V.2.3.- Abducción del hombro en el plano coronal (frontal)
Este movimiento está restringido, ya que la configuración está dirigida a la rehabilitación activa, por
lo que este movimiento se ocupa para dar rehabilitación en las primeras etapas, es decir, cuando la
movilidad del paciente es mínima, por lo que se limita el rango funcional, además sirve como
cambio en la estructura de la flexo-extensión sagital a la vertical, la Figura V.5 muestra su área de
trabajo; la Figura V.6 las etapas inicial (inciso a) y final del movimiento (inciso b) que describen el
movimiento representado en la gráfica..
0.6
0.4
0.2
0
-0.2
-0.4
-0.6
-0.8 0 0.1 0.2 0.3 0.4 0.5 Eje transversal (m)
0.6 0.7
Ejevertocal(m)
Figura V.5.- Área de trabajo del movimiento de abducción
Diseño Mecánico de un Exoesqueleto para Rehabilitación de Miembro Superior 98

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 118/232
Capítulo V
a) b)
Juan Francisco Ayala Lozano
Figura V.6.- Etapas del movimiento de abducción del hombro. a) ngulo inicial, b) ngulo final
V.2.4.- Flexo-extensión horizontal del hombro respecto al eje vertical
El movimiento no se puede realizar desde la posición anatómica inicial, debe haber previamente un
movimiento de abducción en el plano frontal o de flexión en el plano sagital a 90°, a partir de esa
posición se realiza el movimiento describiendo la trayectoria que se muestra en la Figura V.7, el
rango que cubre es 40° en extensión y 130° a flexión, el ángulo 0° de flexión y extensión se obtiene
al colocar el miembro superior en forma paralela al eje anatómico coronal; la Figura V.8 muestra la
vista superior del dispositivo en la configuración que adopta para desarrollar el movimiento donde el
inciso a es la posición neutra, el inciso b es la flexión máxima y el inciso c es la extensión máxima..
0.8
0.6
0.4
0.2
1 0
-0.2
-0.4 -0.6 -0.4 -0.2 0 0.8
Ejeanteroposterior (m)
0.2 0.4 0.6
Eje transversal (m)
Figura V.7.- Área de trabajo de la flexo-extensión en el eje vertical Diseño Mecánico de un Exoesqueleto para Rehabilitación de Miembro Superior 99

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 119/232
Capítulo V Juan Francisco Ayala Lozano
a)
b)
c)
Figura V.8.- Exoesqueleto realizando el movimiento de flexo-extensión. a) Posición inicial, b)
Flexión máxima, c) Extensión máxima
V.2.5.- Movimientos combinados
Los movimientos vistos anteriormente sólo consideraban un movimiento individual de cada uno de
los grado de libertad que tiene el dispositivo, ya que los que se analizaron del hombro fueron bajo la
idea de que no existía la flexión en la articulación del codo, además de considerar los movimientos
en un solo plano, sin embargo, estas configuraciones principales se pueden combinar para obtener el
volumen de trabajo, volviendo a analizar cada uno de los GDL del hombro junto con el movimiento
de flexoextensión del codo.
La Figura V.9 se muestra el modelo cinemático que se utilizó para obtener los parámetros de
Denavit-Hartenberg que su utiliza para obtener la cinemática de la flexo-extensión en torno al plano
sagital combinado con flexión en el codo, el sistema 0 es el base que se puede considerar en
cualquier parte del tronco del cuerpo humano, en este caso se decidió por ubicarlo en la misma
articulación del hombro; el sistema 1 es la articulación del hombro del tipo revoluta; el sistema 2 es Diseño Mecánico de un Exoesqueleto para Rehabilitación de Miembro Superior100
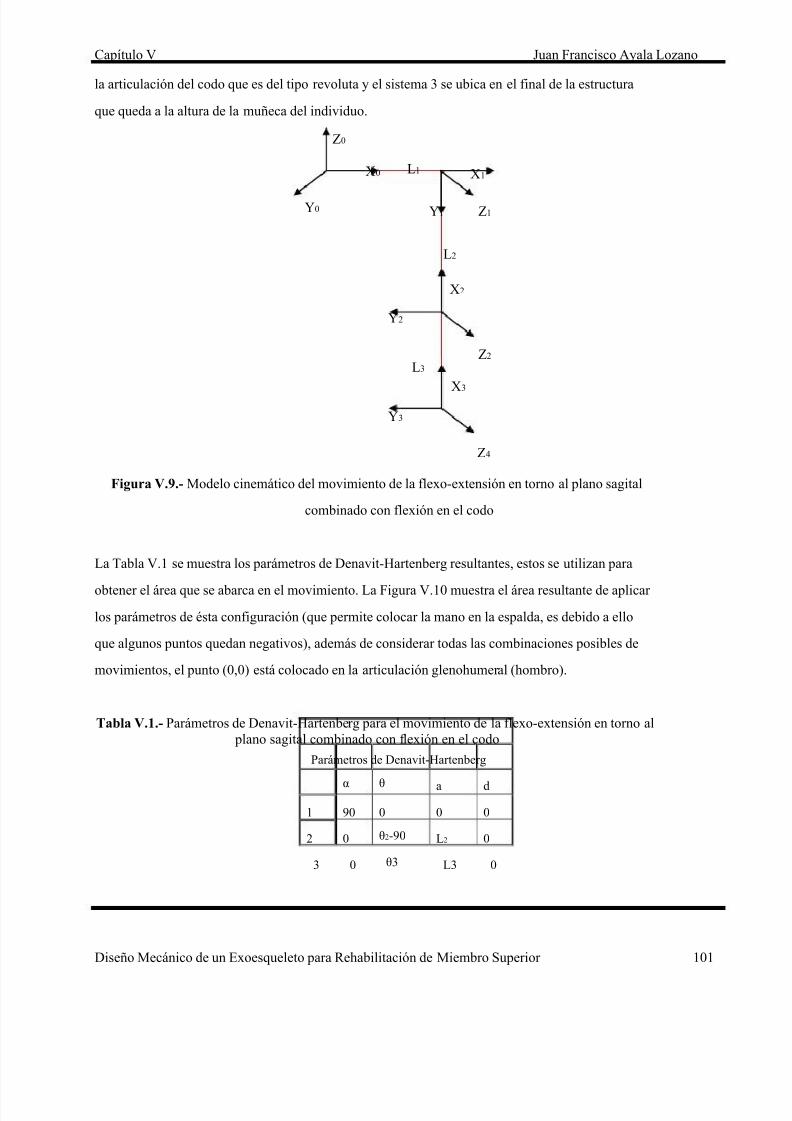
7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 120/232
Capítulo V Juan Francisco Ayala Lozano
la articulación del codo que es del tipo revoluta y el sistema 3 se ubica en el final de la estructura
que queda a la altura de la muñeca del individuo.
Z0
X0
Y0
L1
Y1
L2
X2
Y2
L3
X3
Y3
Z4
Figura V.9.- Modelo cinemático del movimiento de la flexo-extensión en torno al plano sagital
combinado con flexión en el codo
Z2
X1
Z1
La Tabla V.1 se muestra los parámetros de Denavit-Hartenberg resultantes, estos se utilizan para
obtener el área que se abarca en el movimiento. La Figura V.10 muestra el área resultante de aplicar los parámetros de ésta configuración (que permite colocar la mano en la espalda, es debido a ello
que algunos puntos quedan negativos), además de considerar todas las combinaciones posibles de
movimientos, el punto (0,0) está colocado en la articulación glenohumeral (hombro).
Tabla V.1.- Parámetros de Denavit-Hartenberg para el movimiento de la flexo-extensión en torno al plano sagital combinado con flexión en el codo
Parámetros de Denavit-Hartenberg
α 1
2
3
90
0
0
θ 0
θ2-90
θ3
a 0
L2
L3
d 0
0
0
Diseño Mecánico de un Exoesqueleto para Rehabilitación de Miembro Superior 101

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 121/232
Capítulo V
0.8
0.6
0.4
0.2
0 -0.2
-0.4
-0.6
-0.8 -0.6 -0.4 -0.200.20.4
Eje anteroposterior (m)
Eje
vertical(m)
Y0
Juan Francisco Ayala Lozano
0.6 0.8
Figura V.10.- rea de trabajo del movimiento de la flexo-extensión en torno al plano sagital
combinado con flexión en el codo
La Figura V.11 muestra el modelo cinemático que se utiliza para de abducción de la articulación del
hombro en torno al plano frontal junto con flexión del codo, como se observa los ejes Z1 y Z2 que
son los ejes del movimiento rotacional quedan perpendiculares entre sí, por lo cual el movimiento se
realiza en 2 planos; en la Tabla V.2 se muestran los parámetros obtenidos del modelo cinemático.
Z0
L1
X0 Z1
L2 X2
Z2
Y2
L3
X3
Z3 Y3
Figura V.11.- Movimiento de abducción de la articulación del hombro en torno al plano frontal
junto con flexión del codo Diseño Mecánico de un Exoesqueleto para Rehabilitación de Miembro Superior 102
X1

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 122/232
Capítulo V Juan Francisco Ayala Lozano
Tabla V.2.- Parámetros de Denavit-Hartenberg para el movimiento abducción del hombro en torno al plano frontal junto con flexión del codo
Parámetros de Denavit-Hartenberg
α
1 2
3
90 90
0
θ
0 θ2-90
θ3
a
0 L2
L3
d
0 0
0
La Figura V.12 muestra el movimiento, este se realiza en los tres planos puesto que cada uno de los
movimientos se realiza en un plano perpendicular al del otro movimiento, para tener una mejor
visualización se muestra únicamente el volumen que se genera con las máximas longitudes tanto del
brazo y antebrazo. Acot: m
0.5
0 Ejevertical
-0.5
-1.0 0
0.1 Eje 1
0.2 anteroposterior 0.3 0
0.2 0.4
0.8 0.6
Eje transversal
Figura V.12.- rea de trabajo tridimensional
La Figura V.13 muestra el modelo cinemático para la combinación de movimientos de flexo
extensión en el eje vertical de la articulación del hombro con la flexión del codo, este movimiento se realiza previo movimientos de flexión en el plano sagital o abducción en torno al plano frontal, es
por ello que el origen de los sistemas coinciden sobre una línea horizontal y todos tienen la misma
orientación. En la Tabla V.3 se muestran los parámetros obtenidos del modelo cinemático del
presente movimiento, mientras en la Figura V.14 se muestra el área de trabajo resultante de la
combinación de los movimientos.
Diseño Mecánico de un Exoesqueleto para Rehabilitación de Miembro Superior 103

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 123/232
Capítulo V
Z0
X0 L1
Z1
X1 L2
Z2
X2
Juan Francisco Ayala Lozano
Z4
L3 X3
Y1 Y2Y3Y0
Figura V.13.- Modelo cinemático del movimiento de flexo-extensión en el eje vertical del hombro y flexión del codo
Tabla V.3.-Parametros de Denavit-Hartenberg del movimiento de flexo-extensión en el eje vertical del hombro y flexión del codo
Parámetros de Denavit-Hartenberg
α
1
2
3
0
0
0
θ
0
θ2 - 90
θ3
a
0
L2
L3
d
0
0
0
0.7 0.6
0.4 Planoanteroposterior (m)
0.2
0 -0.2
-0.4
-0.6
-0.8 -0.4 -0.2 0.20.40
Plano transversal (m) 0.6 0.8
Figura V.14.- Área de trabajo de flexiones combinadas del hombro y codo
V.3.- Análisis por elemento finito de la estructura
Se realizan las simulaciones estáticas en Ansys Workbench®, para verificar que estáticamente el
diseño estructural soporta el trabajo al que será sometido, las cargas que se utilizaran son las
obtenidas en el capítulo IV.
Diseño Mecánico de un Exoesqueleto para Rehabilitación de Miembro Superior 104

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 124/232
Capítulo V Juan Francisco Ayala Lozano
Para la simulación se utilizan los siguientes datos:
a) Aluminio 6061 (material de la estructura):
Densidad= 2700 kg/m3;
Módulo de elasticidad= 69500 MPa;
Coeficiente de Poisson= 0.33;
Esfuerzo de cedencia= 240 MPa.
b) Nylon (material para los cojinetes donde se apoya el miembro):
Densidad= 1200 kg/m3;
Módulo de elasticidad= 4 GPa;
Coeficiente de Poisson= 0.4.
c) La tornillería es ISO 4014 de Acero grado A tipo 8.
Densidad= 7850 kg/m3;
Módulo de elasticidad= 200 GPa;
Coeficiente de Poisson= 0.3;
Esfuerzo de cedencia= 600 MPa.
d) Bronce SAE 62 (material de los bujes).
o Densidad= 8820 kg/m3;
o Módulo de elasticidad= 103400 MPa;
o Coeficiente de Poisson= 0.341;
o Esfuerzo de cedencia =520 MPa.
Después de definir los materiales, se realizan las simulaciones considerando que el miembro superior será colocado en el ángulo 90° de la flexión en torno al plano sagital, ya que es la posición
donde la estructura está sometida a la carga máxima debido a que se genera el mayor brazo de
palanca que se genera por la distancia desde donde son aplicadas las cargas respecto a las
articulaciones principalmente a la del hombro. La teoría de falla para materiales dúctiles, con cargas
estáticas aplicadas que se utiliza es la de Von Mises, además se analizaran las deformaciones que
Diseño Mecánico de un Exoesqueleto para Rehabilitación de Miembro Superior 105

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 125/232
Capítulo V Juan Francisco Ayala Lozano
sufre la estructura, para verificar que no sean grandes y por lo tanto no lleguen a afectar la medición
de los sensores incorporados en los servomotores.
Las primeras piezas en ser analizadas son los ejes de transmisión de movimiento, ya que se
consideran que son los elementos más críticos por su geometría y la carga que le será aplicada, posteriormente se analizaran el resto de los elementos, empezando con el segmento del antebrazo y
posteriormente se irán añadiendo uno a uno las secciones de acuerdo a como se establecieron en el
capítulo IV.
V.3.1.- Análisis de los ejes
El eje que trasmite el movimiento del servomotor a la sección del antebrazo, es el primero en
analizarse, el material de construcción es aluminio 6061 para todos los ejes, el motor seleccionado
(Harmonic Drive FHA-11C) da un torque de 11 Nm, el resultado del torque aplicado es un esfuerzo
de 7.41 MPa (Figura V.15) y la deformación es de 1.8 micras (Figura V.16) por lo que el material y
la geometría elegidos son adecuados.
Figura V.15.- Esfuerzo de von Mises resultante en el eje de flexión del antebrazo
El segundo eje de transmisión que se analiza, es el que transmite el movimiento de flexo-extensión
en el plano sagital y a la estructura del movimiento de abducción del hombro, el motor seleccionado
(Harmonic Drive FHA-14C) para estos movimientos genera un torque de 28 Nm, el resultado del
análisis demuestra que el esfuerzo es de 14.4 MPa (Figura V.17), la deformación que sufre el eje es
de 0.016 mm (Figura V.18) siendo de forma radial al eje, esto se entiende porque el torque que se
aplica en ese sentido.
Diseño Mecánico de un Exoesqueleto para Rehabilitación de Miembro Superior 106

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 126/232
Capítulo V Juan Francisco Ayala Lozano
Figura V.16.- Deformación total sufrida por el eje de flexión del antebrazo
Figura V.17.- Esfuerzo de von Mises resultante en del 2do eje
Figura V.18.- Deformación total sufrida por el 2do eje
Diseño Mecánico de un Exoesqueleto para Rehabilitación de Miembro Superior 107

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 127/232
Capítulo V Juan Francisco Ayala Lozano
El ultimo eje en ser analizado es el que une permite el movimiento de flexo-extensión horizontal,
este es importante ya que además de transmitir el torque, es el que une a la estructura móvil con la
base, el servomotor elegido para este movimiento (Harmonic Drive FHA-14C) genera 28 Nm de
torque, el resultado que se obtiene es un esfuerzo de 20.682 MPa (Figura V.19) y la deformación
que sufre la pieza es de 0.004 mm (Figura V.20), con lo que al igual que los anteriores se concluye que la geometría y el material es el adecuado.
Figura V.19.- Esfuerzo de von Mises resultante en el eje de flexo-extensión horizontal
Figura V.20.- Esfuerzo de von Mises resultante en el eje de flexo-extensión horizontal
V.3.2.-Analisis de la sección del antebrazo
La primer sección en ser analizada es la del antebrazo, estas simulaciones dan como resultado los
datos mostrados en la Figura V.21 el análisis de Von Mises indica que el esfuerzo máximo es de un
valor de 16.596 MPa, localizado en el tornillo que bloquea o permite el desplazamiento para ajustar
la longitud, valor menor al esfuerzo de cedencia de alguno de los materiales utilizados y la Figura Diseño Mecánico de un Exoesqueleto para Rehabilitación de Miembro Superior108

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 128/232
Capítulo V Juan Francisco Ayala Lozano
V.22 donde indica que la deformación es de 0.09 mm, que se presenta en la zona donde se coloca la
correa que sujeta al antebrazo en la parte de la muñeca, este dato es importante ya que dentro de la
sección no se puede tener una compensación que elimine la desviación que se genera.
Figura V.21.- Esfuerzo de von Mises de la estructura del antebrazo
Figura V.22.- Deformación total de la estructura del antebrazo
V.3.3.- Análisis de la sección del brazo y antebrazo
Después de analizar a la sección del antebrazo, se procede a añadir la sección del brazo; como
resultado se obtiene un esfuerzo de von Mises 37.841 MPa, que se localiza otra vez en el tornillo
que bloquea o permite el desplazamiento para ajustar la longitud de la estructura del antebrazo
(Figura V.23); la deformación total da como resultado es de un valor de 0.3 mm (Figura V.24)
localizado en la zona donde se encuentra las correas que sujetan la muñeca del paciente, esto se
explica porque la sección de antebrazo y mano tiene su centro de gravedad en un zona próxima a la
muñeca, y en este dispositivo no se cuenta con un soporte para la mano. Diseño Mecánico de un Exoesqueleto para Rehabilitación de Miembro Superior 109

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 129/232
Capítulo V Juan Francisco Ayala Lozano
Figura V.23.- Esfuerzo de von Mises resultante de las 2 primeras secciones
Figura V.24.- Deformación total sufrida por las 2 primeras secciones
V.3.4.- Análisis de la estructura para la flexo-extensión en el plano sagital
Para las secciones siguientes partir de la presente únicamente se utilizan las fuerzas inducidas en las
secciones estructurales del brazo y antebrazo, es decir el peso del miembro superior, así como
considerar el peso propio de la estructura.
Los resultados del análisis muestra que la deformación resultante de von Mises señalan un valor
máximo de 39.124 MPa (Figura V.25) que se presenta de nuevo en el tornillo del sistema de ajuste
de longitud del antebrazo, la deformación total máxima es de 0.5 mm (Figura V.26) siguiendo al
igual que los análisis anteriores en la zona de al correo que sujeta la muñeca.
Diseño Mecánico de un Exoesqueleto para Rehabilitación de Miembro Superior 110

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 130/232
Capítulo V Juan Francisco Ayala Lozano
Figura V.25.- Esfuerzo de von Mises resultante de 3 secciones de la estructura
Figura V.26.- Deformación total sufrida por 3 secciones de la estructura
V.3.5.- Análisis de la estructura de abducción del hombro en el plano coronal (frontal)
En esta sección se añade la estructura donde se coloca el servomotor que controla el movimiento de
la abducción, así como el eje que soportara todo el peso del sistema; ésta es importante el análisis ya
que se ve involucrada toda la estructura que se ve involucrada en el movimiento del miembro
superior; los resultado de los análisis muestran un esfuerzo de von Mises resultante de 95.242 MPa
(Figura V.27) valor que no pasa el 50% del esfuerzo de cedencia que es lo recomendable; la
deformación total indica que es de 1.43 mm (Figura V.28) se presenta en la zona del antebrazo y se
presenta en el eje vertical; el valor ya es considerable pero hay que notar que el diseño sistema no es
un elemento completo sino que está formado por eslabones y que los análisis de la sección del
antebrazo y brazo muestran valores pequeños, entonces este valor se corrige con el uso de los
servomotores y los sensores. Diseño Mecánico de un Exoesqueleto para Rehabilitación de Miembro Superior 111

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 131/232
Capítulo V Juan Francisco Ayala Lozano
Figura V.27.- Esfuerzo resultante considerando 4 secciones del dispositivo
Figura V.28.- Deformación total considerando 4 secciones del dispositivo
V.3.6.- Análisis de la sección superior del dispositivo
En éste análisis se consideran todas las piezas que intervienen en el movimiento de rehabilitación
que se le proporcionara al paciente, se toma en cuenta hasta la pieza que está en contacto con la
columna de elevación.
Los análisis realizados demuestran que la estructura superior del dispositivo está sometido a bajos
esfuerzos, como lo muestra la Figura V.29, donde el esfuerzo de von Mises es de 109.08 MPa y se
presenta en los rodamientos de la mesa deslizable, la deformación total es de 1.52 mm (Figura
V.30), pero no es preocupante ya que se presenta en la zona de la sección del antebrazo.
Diseño Mecánico de un Exoesqueleto para Rehabilitación de Miembro Superior 112

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 132/232
Capítulo V Juan Francisco Ayala Lozano
Figura V.29.- Esfuerzo resultante de la sección superior del dispositivo
Figura V.30.- Deformación total de la sección superior del dispositivo
V.3.7.- Análisis de la base del dispositivo
El último análisis que se realiza corresponde a la sección de la base, aquí se analiza que el diseño de
la estructura sea capaz de soportar todo el peso de la sección superior y de la peso del miembro
superior del paciente, parámetro que se cubre fácilmente ya que el esfuerzo al que es sometido es de
apenas 7.07 MPa (Figura V.31) y la deformación que sufre es 0.006 mm (Figura V.32) considerando
que la parte superior pesa por si sola 19.467 Kg aproximadamente sin considerar el peso del
miembro superior del paciente.
Diseño Mecánico de un Exoesqueleto para Rehabilitación de Miembro Superior 113

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 133/232
Capítulo V Juan Francisco Ayala Lozano
Figura V.31.- Esfuerzo resultante en la base del dispositivo
Figura V.32.- Deformación total sufrida por la base del dispositivo
V.4.- Análisis de resultados
Los resultados obtenidos de los análisis indican que los materiales y la geometría seleccionados
soportan las condiciones de trabajo ya que en ningún caso se pasa el 50 % del límite de cedencia de
cada uno de los materiales seleccionados, si bien es cierto que en algunos casos la deformación es
considerable, esto se presenta en los análisis donde ya se encuentra la estructura completa del
exoesqueleto que soportara al miembro superior y basándose en los estudios anteriores de las
primeras secciones (primordialmente el de la sección del antebrazo donde la deformación es muy
pequeña) estos desplazamientos se eliminan con el sistema de control y posicionamiento de los
servomotores, ya que cabe recordar que en las zonas donde se acoplan los ejes existen rodamientos
con la finalidad de eliminar rozamiento el movimiento sea más suave, pero eso mismo ocasiona que
la estructura del exoesqueleto tienda a girar por su propio peso. Diseño Mecánico de un Exoesqueleto para Rehabilitación de Miembro Superior 114

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 134/232
Capítulo V Juan Francisco Ayala Lozano
El área y volumen de trabajo que se obtuvo a partir de obtener la cinemática que presenta el
dispositivo son compatibles con los que desarrolla el miembro superior de una persona, mediante
una comparación realizada entre las trayectorias obtenidas en este capítulo y las del capítulo III.
V.5.- Sumario
En el presente capítulo se analiza en primera instancia las trayectorias que describe el exoesqueleto,
primero en movimientos individuales y posteriormente combinando uno del hombro con la
flexoextensión del codo para compararlos contra lo recopilado en el capítulo III; también se muestra
las configuración que debe adoptar el exoesqueleto para poder realizar los movimientos.
Posteriormente se analizan la estructura mediante elemento finito, en este caso se utiliza Ansys ®,
para verificar que soportara las condiciones de trabajo; el análisis se desarrolla por secciones,
inicialmente se analizan los ejes de transmisión de movimiento, una vez verificados estos, se
procede a la analizar la estructura iniciando con el antebrazo, y posteriormente se va analizando una
a una el resto de las secciones hasta llegar a la sección que permite el desplazamiento lateral de la
estructura, por separado se analiza la base.
Diseño Mecánico de un Exoesqueleto para Rehabilitación de Miembro Superior 115

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 135/232
Capítulo VI.-
Manufactura
Imagen obtenida de la galería de imágenes prediseñadas de Office Word 2007 ®

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 136/232
Capítulo VI
VI.1.- Introducción
Juan Francisco Ayala Lozano
El objetivo final del diseño mecánico es llegar a obtener el producto físicamente, éste debe ser de
acuerdo a las características plasmadas en las etapas anteriores, para ello es necesario conocer los
parámetros necesarios para el maquinado, así como el producto resultante.
VI.2.- Maquinado
En la etapa de diseño conceptual se mencionaron los materiales que se utilizarán para la
construcción, la mayor parte de la estructura se considera al aluminio 6061, las piezas que son de
este material por su geometría deben ser maquinadas en fresadora a excepción de los ejes ya que en
este tipo de maquinado se obtiene casi cualquier superficie aunque principalmente son superficies
planas; las piezas de bronce son los bujes; la carcasa del dispositivo son láminas de aluminio.
VI.2.1.- Fresado
Cuando se utiliza una máquina-herramienta para manufacturar una pieza se debe considerar varios
parámetros como son:
Profundidad de corte.- es la distancia va entrar el cortador en el material, esta longitud
depende del material de la pieza y del acabado que se pretenda obtener, se recomienda
máximo de 6 mm con un cortador de Acero a alta velocidad (HSS) para desbaste y un
máximo de 0.5 mm para acabado.
Velocidad de corte.- La velocidad con la que se mueve la pieza contra el cortador al
arrancar la viruta, para el Aluminio 6061 es de 300 m/min, y cortador HSS.
Numero de revoluciones (RPM) de la herramienta.- es la velocidad a la que debe girar el
cortador para realizar un maquinado sin problemas, y viene dado por la Ecuación VI.1
VI.1
Dónde:
v = velocidad de corte en m/min
d = diámetro de fresa en mm
n = número de revoluciones de la fresa por minuto
Diseño Mecánico de un Exoesqueleto para Rehabilitación de Miembro Superior 117

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 137/232
Capítulo VI Juan Francisco Ayala Lozano
Velocidad de avance.- Es el recorrido que realiza la mesa fresadora en un minuto; para
el Aluminio 6061 es de 0.3 mm/vuelta por cada uno de los dientes que contenga el
cortador y sea de HSS.
VI.2.2.- Torneado Los ejes son de aluminio y se obtienen bajo toreado, los parámetros son:
Profundidad de corte.- Se recomienda máximo de 2 mm con un cortador de Acero a alta
velocidad (HSS) para desbaste y un máximo de 0.5 mm para acabado.
Velocidad de corte.- Para el Aluminio 6061 es de 400 m/min, y cortador HSS.
Numero de revoluciones (RPM) de la herramienta.- es la velocidad a la que debe girar el
cortador para realizar un maquinado sin problemas, se calcula de forma similar al
realizado para la fresa (Ecuación VI.1).
Velocidad de avance.- Para el Aluminio 6061 es de 0.5 mm/vuelta para un cortador de
HSS.
VI.3.-Roscado
Las roscas internas realizadas mediante el uso de machuelos que corresponde a la cuerda deseada,
necesita de una operación anterior, que corresponde a realizar un barrenado; en el diseño se ocupa
una cuerda M5, que corresponde a una cuerda milimétrica, para ello la norma métrica internacional
francesa [VI.1] da las características que se muestran en la Tabla VI.
Tabla VI.1.- Brocas para machuelos de cuerda métrica [VI.1] Diámetro nominal
(mm)
5
6
7
8
1
1
1
1
4
5
6
7
Paso (mm) Broca (mm)
Diseño Mecánico de un Exoesqueleto para Rehabilitación de Miembro Superior 118

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 138/232
Capítulo VI
VI.4.- Construcción del prototipo
Juan Francisco Ayala Lozano
El prototipo se realiza con la finalidad de tener el diseño físicamente, en este caso se construyó la
estructura en madera y limitándose únicamente a las secciones que se ven involucradas en los
movimientos que deben ser transmitidos al miembro superior, es decir, la sección de la base no se
construyó; se construyó en secciones de acuerdo a lo visto en el capítulo IV.
La primer sección es la del antebrazo, la cual al ser una sección ajustable en longitud, se realizan
tres subsecciones, como se puede observar en la Figura VI.1 inciso a, el inciso b muestra la sección
en la longitud mínima y el inciso c lo hace de la longitud máxima; las correas se mostraran mas
adelante.
a) b)
c)
Figura VI.1.- Sección del antebrazo. a) Subsecciones, b) Longitud mínima, c) Longitud máxima
La segunda sección es la del brazo, este se construye de forma análoga a la del antebrazo, es decir,
en tres subsecciones (Figura VI.2 inciso a) para poder realizar la función telescópica, en el inciso b
se muestra la longitud mínima que puede obtener la sección mientras que en el c se presenta la
longitud máxima. Las correas sujeción que se utilizan para sujetar el miembro superior a la
estructura se unen mediante velcro, y están rellenas de un material esponjoso para mayor comodidad
Diseño Mecánico de un Exoesqueleto para Rehabilitación de Miembro Superior 119

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 139/232
Capítulo VI Juan Francisco Ayala Lozano
del paciente. Es resto de las secciones que cumplen con cada uno de los tres grados de libertad del
hombro se muestran en la Figura VI.4.
a)
)
b)
c)
Figura VI.2.- Sección del brazo. a) Subsistemas, b) Longitud mínima, c) Longitud máxima
Figura VI.3.- Correas de sujeción
Diseño Mecánico de un Exoesqueleto para Rehabilitación de Miembro Superior 120

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 140/232
Capítulo VI Juan Francisco Ayala Lozano
Figura VI.4.- Secciones de la estructura del hombro
La estructura que abarca desde el eje para el movimiento de flexoextensión en el plano horizontal
hasta el antebrazo, es decir, la estructura útil se muestra ensamblada en la figura VI.5. En la figura
VI.6 se observa la estructura del exoesqueleto colocada en una base, en la que se considera que es la
posición inicial recomendada para las terapias de rehabilitación.
Figura VI.5.- Estructura que contempla todos los GDL del dispositivo
Figura VI.6.- Estructura completa colocada en un soporte Diseño Mecánico de un Exoesqueleto para Rehabilitación de Miembro Superior 121

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 141/232
Capítulo VI Juan Francisco Ayala Lozano
VI.5.- Sumario
Los parámetros obtenidos para el maquinado de las piezas sirven para comenzar el maquinado, pero
sobre el proceso se deben aplicar cambios para regular las revoluciones de giro de la pieza en caso
del torneado o de la herramienta en el fresado, ya que puede ser que las velocidades seleccionados sean demasiado altas o caso contrario donde la velocidad sea pequeña lo que ocasionara que el
maquinado no sea uniforme; aunque también hay que verificar el filo de la herramienta de corte ya
que también es un punto importante que se debe cuidar en cualquier maquinado.
Se construyó la estructura del dispositivo abarcando desde la zona del antebrazo hasta la sección del
movimiento de flexoextensión en al plano transversal, con la finalidad de verificar que físicamente
el exoesqueleto puede cumplir con los rangos de movimiento de acuerdo a lo establecido en la etapa
de diseño ya que es el punto primordial del presente trabajo, así como ser capaz de ajustarse a
diferentes longitudes, esto principalmente en el sistema de riel barrenado que su utiliza para este fin,
y que en físico cumple satisfactoriamente con ese punto.
VI.6.- Referencias
1. Labrado Razo, C. E. y Mota Guzmán, A., Apuntes de tecnología mecánica, Centro de Estudios
Científicos y Tecnológicos “Miguel Bernard Perales”, Instituto Politécnico Nacional, pp 72,
2004.
Diseño Mecánico de un Exoesqueleto para Rehabilitación de Miembro Superior 122

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 142/232
Conclusiones
Imagen obtenida de la galería de imágenes prediseñadas de Office Word 2007 ®

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 143/232
Conclusiones Juan Francisco Ayala Lozano
Durante la realización del presente trabajo se determinó que los exoesqueletos se dividen en 2
categorías principalmente de acuerdo al segmento del cuerpo donde son utilizados, siendo así para
miembro superior o miembro inferior; otra clasificación se basa en la finalidad para la que son
utilizados dividiéndose en este caso en de rehabilitación y amplificadores de potencia; como
resultado de la combinación de las categorías anteriores surgió los exoesqueletos para rehabilitación de miembro superior, dichos dispositivos han tenido un aumento importante en su estudio y
desarrollo, ocasionado por el aumento de enfermedades discapacitantes que se han originado con el
tipo de vida actual, pero lamentablemente han sido principalmente en Europa y Estados Unidos de
América los que tomen la iniciativa; las diferencias antropométricas entre la población de estos
países y la de México son significativas, desatancando principalmente las dimensiones de las
extremidades, puesto que la de ellos son más grandes, lo que puede llegar a dañar más a los
pacientes nacionales que ocupen estos dispositivos, ya que al tener movimientos con diferentes
centros de rotación, se ocasionan desviaciones en el movimiento donde la estructura de mayor
fuerza (el dispositivo) obliga a la otra (miembro del paciente) a acoplarse a la trayectoria que él
describe.
Los exoesqueletos de miembro superior consideran principalmente las 5 secciones (excluyendo la
mano) que componen el miembro superior y que corresponden a las articulaciones del hombro,
codo y muñeca así como a los segmentos del brazo y antebrazo, asignándoles grados de libertad
(GDL) con la finalidad de poderlos reproducir y sobre todo controlar, de esta forma se tienen 3 GDL en el hombro (pero no incluyen la flexoextensión horizontal), 1 al brazo, 1 al codo y 2 a la muñeca.
El miembro superior humano se puede modelar de forma cinemática mediante el uso de teorías y
técnicas aplicadas a manipuladores robóticos, gracias a que estos últimos has sido diseñados
basándose en la estructura anatómica humana, de tal forma que así podemos obtener parámetros que
nos ayudan en la conceptualización del dispositivo.
El utilizar una herramienta de diseño es de gran utilidad ya que permiten tener una mejor visión de
los parámetros que se deben cumplir, apoyados en la clasificación que realiza, posteriormente se
realiza un análisis funcional donde se descompone en funciones más específicas, esto con la
finalidad de identificar cuáles son las posibles soluciones que pueden satisfacer adecuadamente a
cada una de la subfunciones para al final obtener la solución general; la elección o no de estos
soluciones se realiza apoyado en filtros, en caso específico del Blitz QFD se deben aplicar 4, si estos Diseño Mecánico de un Exoesqueleto para Rehabilitación de Miembro Superior124

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 144/232
Conclusiones Juan Francisco Ayala Lozano
se aplican de forma adecuada al final se tendrá un diseño conceptual adecuado que cumpla
totalmente con los requisitos establecidos, y solo se tendrá que validar ya en la etapa de diseño a
detalle.
En el diseño a detalle se evalúan las piezas más críticas de la estructura en una primera instancia con la finalidad de verificar que soportar las cargas a las que serán sometidas durante su uso, una vez
verificadas esas piezas se procede a analizar la estructura, se decidió realizar el análisis por etapas
para ir verificando el comportamiento de cada una de ellas tanto en deformación como en el
esfuerzo que presenta, para de esta forma visualizar mejor el comportamiento de cada de una de las
secciones.
La manufactura no es un proceso sencillo, ya que se ven involucrado muchos factores,
principalmente económicos y el acceso a la tecnología adecuada para poder obtener las piezas de
acuerdo a lo diseñado, por ello el diseñador debe conocer esto previamente para que la geometría
sea lo más fácil de maquinar pero que esto no impida que la estructura cumpla con los parámetros
especificados, incluido el tiempo de vida y la capacidad de soportar las cargas a las que será
sometida durante las sesione de trabajo, en este caso, durante las terapias de rehabilitación.
Se construyó la estructura para poder verificar físicamente si cada uno de las secciones que se ven
involucradas en los movimientos del hombro y codo se comportaban de acuerdo a lo establecido en el programa de dibujo utilizado y que efectivamente así sucede, principalmente el sistema de freno
que se utiliza para permitir o no la elongación de la estructura del antebrazo y brazo.
Diseño Mecánico de un Exoesqueleto para Rehabilitación de Miembro Superior 125

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 145/232
Trabajos
futuros
Imagen obtenida de la galería de imágenes prediseñadas de Office Word 2007 ®

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 146/232
Trabajos Futuros Juan Francisco Ayala Lozano
El resultado obtenido en esta tesis cumple con los objetivos establecidos para el mismo, sin
embargo, es sólo la etapa inicial por esa razón, los trabajos a futuro que se establecen son:
Diseñar la etapa de control eléctrico-electrónico.- En este trabajo se utilizaran dos tipos de
servomotores de la empresa Harmonic Driver (11C y 14C) que se eligieron por su tamaño reducido y el torque que pueden producir, además de contar con un encoder incluido que da la
posición angular de salida, por lo cual es necesario tomar esas señales y procesarlas para poder
obtener la velocidad a la que está trabajando y modificarla en caso de no ser la correcta,
además también debemos considerar el suministro eléctrico incluyendo la columna
telescópica.
Realizar la interfaz máquina-hombre para que el terapeuta pueda realizar la programación de
las rutinas de rehabilitación.- Se recomienda que realizar un programa para computador que
debe contener en primera instancia la capacidad de seleccionar si el miembro que se va a
rehabilitar es el izquierdo o el derecho, enseguida debe aparecer un historial para que el
terapeuta pueda visualizar el avance que va teniendo el paciente o poder iniciar uno nuevo en
caso de ser un nuevo paciente, posteriormente debe aparecer un contador para saber número
de repeticiones que lleva en la sesión el paciente, además de monitorear la velocidad y el
desplazamiento angular que va sucediendo.
Agregar más grados de libertad. Este mecanismo se enfoca en los 3 GDL principales del
hombro además del que presenta el codo, pero con la finalidad de generar más movimientos
para acercarse al movimiento natural que tiene el miembro superior y todas sus capacidades de
movimiento, agregar el grado de libertad de pronosupinación del miembro superior de forma
activa.
Diseño Mecánico de un Exoesqueleto para Rehabilitación de Miembro Superior 127

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 147/232
Anexos
Imagen obtenida de la galería de imágenes prediseñadas de Office Word 2007 ®

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 148/232
Anexos
Anexo A.- Servomotores
Juan Francisco Ayala Lozano
Diseño Mecánico de un Exoesqueleto para Rehabilitación de Miembro Superior 129

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 149/232
Anexos
Anexo B.- Rodamientos
Juan Francisco Ayala Lozano
Diseño Mecánico de un Exoesqueleto para Rehabilitación de Miembro Superior 130

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 150/232
Anexos Juan Francisco Ayala Lozano
Diseño Mecánico de un Exoesqueleto para Rehabilitación de Miembro Superior 131

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 151/232
Anexos Juan Francisco Ayala Lozano
Diseño Mecánico de un Exoesqueleto para Rehabilitación de Miembro Superior 132

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 152/232
Anexos Juan Francisco Ayala Lozano
Diseño Mecánico de un Exoesqueleto para Rehabilitación de Miembro Superior 133

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 153/232
Anexos Juan Francisco Ayala Lozano
Diseño Mecánico de un Exoesqueleto para Rehabilitación de Miembro Superior 134

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 154/232
Anexos
Anexo C.- Columna telescópica
Juan Francisco Ayala Lozano
Diseño Mecánico de un Exoesqueleto para Rehabilitación de Miembro Superior 135

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 155/232
Anexos Juan Francisco Ayala Lozano
Diseño Mecánico de un Exoesqueleto para Rehabilitación de Miembro Superior 136

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 156/232
Anexos
Anexo D.- Normas para tornillería
(Obtenida del catálogo de productos normalizados de WASI NORM)
Juan Francisco Ayala Lozano
Diseño Mecánico de un Exoesqueleto para Rehabilitación de Miembro Superior 137

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 157/232
Anexos Juan Francisco Ayala Lozano
Diseño Mecánico de un Exoesqueleto para Rehabilitación de Miembro Superior 138

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 158/232
Anexos
Anexo D.- Publicaciones derivadas
Juan Francisco Ayala Lozano
Diseño Mecánico de un Exoesqueleto para Rehabilitación de Miembro Superior 139

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 159/232
Planos
Imagen obtenida de la galería de imágenes prediseñadas de Office Word 2007 ®

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 160/232

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 161/232

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 162/232

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 163/232

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 164/232

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 165/232

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 166/232

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 167/232

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 168/232

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 169/232

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 170/232

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 171/232

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 172/232

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 173/232

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 174/232

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 175/232

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 176/232

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 177/232

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 178/232

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 179/232

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 180/232

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 181/232

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 182/232

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 183/232

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 184/232

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 185/232

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 186/232

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 187/232

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 188/232

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 189/232

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 190/232

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 191/232

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 192/232

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 193/232

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 194/232

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 195/232

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 196/232

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 197/232

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 198/232

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 199/232

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 200/232

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 201/232

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 202/232

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 203/232

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 204/232

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 205/232

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 206/232

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 207/232

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 208/232

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 209/232

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 210/232

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 211/232

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 212/232

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 213/232

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 214/232

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 215/232

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 216/232

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 217/232

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 218/232

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 219/232

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 220/232

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 221/232

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 222/232

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 223/232

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 224/232

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 225/232

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 226/232

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 227/232

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 228/232

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 229/232

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 230/232

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 231/232

7/27/2019 exoesqueleto 1000
http://slidepdf.com/reader/full/exoesqueleto-1000 232/232
Related Documents