SYSTEM DYNAMICS SYSTEM DYNAMICS (KJM 497) (KJM 497) System Dynamics – KJM 497 Fakulti Kejuruteraan Mekanikal State-Space Representation of Two DOF System

Exercise State Space Representation (TDOF)
Dec 05, 2015
Control Engineering
Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

SYSTEM DYNAMICSSYSTEM DYNAMICS(KJM 497)(KJM 497)
System Dynamics – KJM 497Fakulti Kejuruteraan Mekanikal
State-Space Representationof Two DOF System

OBJECTIVESOBJECTIVES• TO DETERMINE THE STATE SPACE
REPRESENTATIOIN OF A MDOF MECHANICAL SYSTEM.
• TO UNDERSTAND THE STEPS INVOLVE IN OBTAINING THE STATE SPACE REPRESENTATION.
System Dynamics – KJM 497Fakulti Kejuruteraan Mekanikal

State-Space Equations:STATE SPACE REPRESENTATION:STATE SPACE REPRESENTATION:
System Dynamics – KJM 497Fakulti Kejuruteraan Mekanikal
BuAxx +=&
DuCxy +=
where,
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
=
nx
xx
x 2
1
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
=
nnnn
n
n
aaa
aaaaaa
A
21
22221
11211
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
=
nrnn
r
r
bbb
bbbbbb
B
21
22221
11211
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
=
ru
uu
u 2
1
State EquationOutput Equation
STATE SPACE REPRESENTATION:STATE SPACE REPRESENTATION:
System Dynamics – KJM 497Fakulti Kejuruteraan Mekanikal
where,
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
=
my
yy
y 2
1
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
=
mnmm
n
n
ccc
cccccc
C
21
22221
11211
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
=
mrmm
r
r
ddd
dddddd
D
21
22221
11211
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
=
ru
uu
u 2
1

EXAMPLE:EXAMPLE:
System Dynamics – KJM 497Fakulti Kejuruteraan Mekanikal
Consider a two DOF system as shown in figure below. Obtain the Consider a two DOF system as shown in figure below. Obtain the state space representation.state space representation.
m2
x2
k2
c2
m1
x1
f(t)
k1
c1

Solution:Solution:
System Dynamics – KJM 497Fakulti Kejuruteraan Mekanikal
1. Draw the Free Body Diagram (FBD).1. Draw the Free Body Diagram (FBD).
m2
x2
k2
c2
m1
x1
f(t)
k1
c1
m2m1
x2x1
f(t)( )211 xxc && −
( )211 xxk − 22xk
22xc &

System Dynamics – KJM 497Fakulti Kejuruteraan Mekanikal
2.Apply Newton2.Apply Newton’’s Second Law.s Second Law.
m2m1
x2x1
f(t)( )211 xxc && −
( )211 xxk − 22 xk
22 xc &
Mass 1, mMass 1, m1:1: xxmaF =+→ ∑
1211211 )()()( xmxxkxxctf &&&& =−−−−
)(2111211111 tfxkxkxcxcxm =−+−+ &&&& ( )1Mass 2, mMass 2, m2:2: 222222211211 )()( xmxkxcxxkxxc &&&&& =−−−+−
( )2022222111211122 =++−++− xkxcxkxkxcxcxm &&&&&
( ) 0)( 221112211122 =−−+++− xkkxkxccxcxm &&&&

System Dynamics – KJM 497Fakulti Kejuruteraan Mekanikal
2.Define State Variables.2.Define State Variables.
)(2111211111 tfxkxkxcxcxm =−+−+ &&&& ( )1( )2( ) 0)( 221112211122 =−−+++− xkkxkxccxcxm &&&&
[ ]tfxkxkxcxcm
x (121112111
11 ++−+−= &&&&
( )[ ]22111221112
2 )(1 xkkxkxccxcm
x −+−+−= &&&&
24
23
12
11
xxxxxxxx
&
&
====

System Dynamics – KJM 497Fakulti Kejuruteraan Mekanikal
3.Define State Equation (from state variables).3.Define State Equation (from state variables).
24
23
12
11
xxxxxxxx
&
&
====
24
43
12
21
xxxxxxxx
&&&
&
&&&
&
====
[ ]tfxkxkxcxcm
x (121112111
11 ++−+−= &&&&
( )[ ]22111221112
2 )(1 xkkxkxccxcm
x −+−+−= &&&&
Need to be substitute Need to be substitute using state variablesusing state variables
System Dynamics – KJM 497Fakulti Kejuruteraan Mekanikal
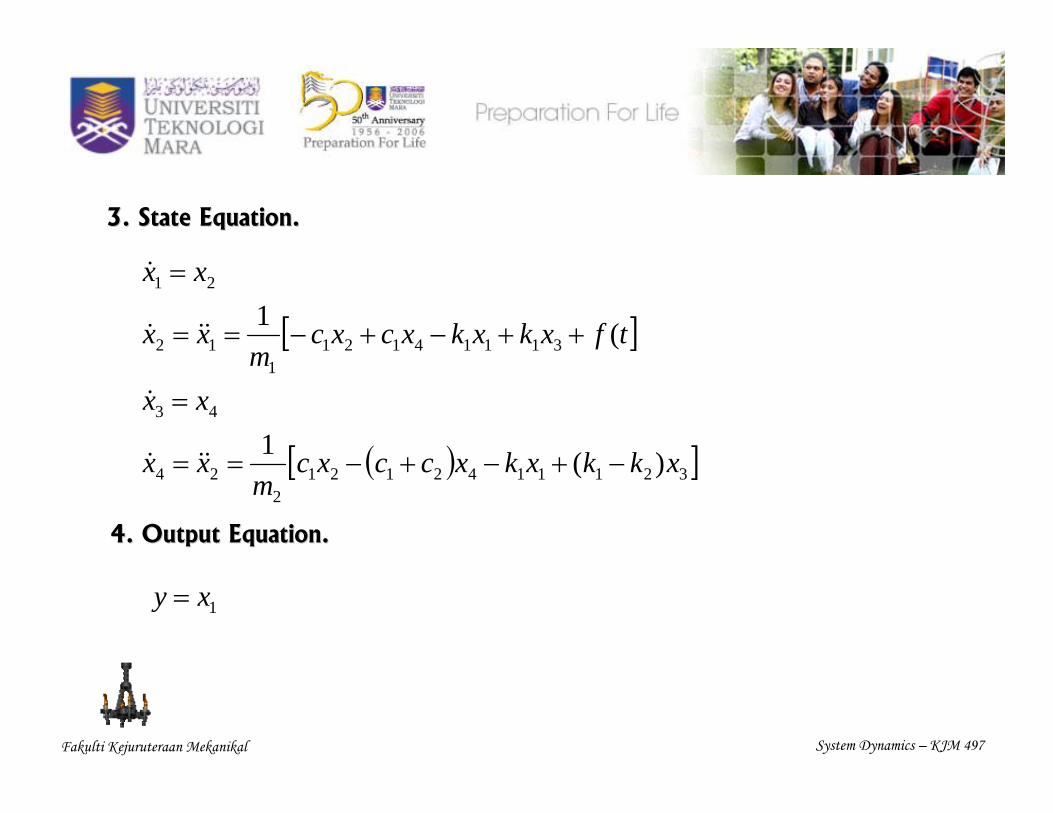
3. State Equation.3. State Equation.
[ ]
( )[ ]32111421212
24
43
311141211
12
21
)(1
(1
xkkxkxccxcm
xx
xx
tfxkxkxcxcm
xx
xx
−+−+−==
=
++−+−==
=
&&&
&
&&&
&
4. Output Equation.4. Output Equation.
1xy =

System Dynamics – KJM 497Fakulti Kejuruteraan Mekanikal
3. State3. State--Space Equation in Matrix Form.Space Equation in Matrix Form.
( ) ( )⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢
⎣
⎡
+
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢
⎣
⎡
+−−
−−
=
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
00
)(0
1000
0010
1
4
3
2
1
2
21
2
21
2
1
2
1
1
1
1
1
1
1
1
1
4
3
2
1
mtf
xxxx
mcc
mkk
mc
mk
mc
mk
mc
mk
xxxx
&
&
&
&
[ ]⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
=
4
3
2
1
0001
xxxx
y

CONCLUSION:CONCLUSION:
• Know how to determine the state space representation of MDOF system.
System Dynamics – KJM 497Fakulti Kejuruteraan Mekanikal

EXAMPLE:EXAMPLE:
System Dynamics – KJM 497Fakulti Kejuruteraan Mekanikal
Consider massConsider mass--springspring--damper system as shown in figure below. The damper system as shown in figure below. The displacement x of the mass is the output of the system and the displacement x of the mass is the output of the system and the external force external force f(tf(t) is the input to the system. Derive the mathematical ) is the input to the system. Derive the mathematical model of the system.model of the system.
m
x1f(t)
k1
c1030
x2
c2
k2

System Dynamics – KJM 497Fakulti Kejuruteraan Mekanikal
m
x1 x2
30cos)(tf
( )211 xxk −
( )211 xxc && −22xc &
22xk

System Dynamics – KJM 497Fakulti Kejuruteraan Mekanikal
m
x1 x2
30cos)(tf
( )211 xxk −
( )211 xxc && −
−22xc &
22xk
−30cos)(tf ( )−− 211 xxc && ( )211 xxk − 1xm &&=
( )−− 211 xxk( )+− 211 xxc &&
22xc &
022 =xk
( )1
( )2

System Dynamics – KJM 497Fakulti Kejuruteraan Mekanikal
−22xc &
−30cos)(tf ( )−− 211 xxc && ( )211 xxk − 1xm &&=
( )−− 211 xxk( )+− 211 xxc && 022 =xk
( )1
( )2
24
23
12
11
xxxxxxxx
&
&
====
2.Define State Variables.2.Define State Variables.
24
43
12
21
xxxxxxxx
&&&
&
&&&
&
====

System Dynamics – KJM 497Fakulti Kejuruteraan Mekanikal
Related Documents




![STATEWIDE MEDICAL AND HEALTH EXERCISE SWMHE EXERCISE DEBRIEF [Exercise Name/Exercise Date] SWMHE EXERCISE DEBRIEF.](https://static.cupdf.com/doc/110x72/56649d755503460f94a56498/statewide-medical-and-health-exercise-swmhe-exercise-debrief-exercise-nameexercise.jpg)






