Event-triggered model predictive schemes for freeway traffic control Antonella Ferrara a , Simona Sacone b , Silvia Siri b a Department of Electrical, Computer and Biomedical Engineering, University of Pavia, Italy b Department of Informatics, Bioengineering, Robotics and Systems Engineering, University of Genova, Italy Abstract Objective of the paper is to define a new freeway traffic control approach based on the Model Predictive Control methodology. The control strategy adopted is ramp metering, which is able to reduce the flow entering the main- stream from the on-ramps so as to enforce traffic regularity. To determine the ramp metering actions, an innovative MPC scheme is proposed and is char- acterized by two major novel aspects. First of all, the finite horizon problem to be solved has a mixed-integer linear form, so that efficient solvers can be used to find the optimal solution. Secondly, in order to reduce the number of computations, the proposed MPC scheme is of event-triggered type, i.e. the control law is not updated at each time step but only when a given set of conditions is verified. The proposed scheme is assessed in the paper via simulation showing its effectiveness in different traffic scenarios. Keywords: Freeway traffic control, ramp metering, MPC schemes, event-triggered control 1. Introduction Freeway networks are complex systems that have been studied by re- searchers for some decades, in particular as regards the definition of appro- priate control approaches. Even though the traffic control methods present in the literature have been normally devised in order to reduce congestions, as highlighted in the overview paper by Papageorgiou (2002), this is not the only possible objective of traffic control. For instance, the increase of safety Preprint submitted to Transportation Research C January 30, 2015

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

Event-triggered model predictive schemes
for freeway traffic control
Antonella Ferraraa, Simona Saconeb, Silvia Sirib
aDepartment of Electrical, Computer and Biomedical Engineering,
University of Pavia, ItalybDepartment of Informatics, Bioengineering, Robotics and Systems Engineering,
University of Genova, Italy
Abstract
Objective of the paper is to define a new freeway traffic control approachbased on the Model Predictive Control methodology. The control strategyadopted is ramp metering, which is able to reduce the flow entering the main-stream from the on-ramps so as to enforce traffic regularity. To determine theramp metering actions, an innovative MPC scheme is proposed and is char-acterized by two major novel aspects. First of all, the finite horizon problemto be solved has a mixed-integer linear form, so that efficient solvers can beused to find the optimal solution. Secondly, in order to reduce the numberof computations, the proposed MPC scheme is of event-triggered type, i.e.the control law is not updated at each time step but only when a given setof conditions is verified. The proposed scheme is assessed in the paper viasimulation showing its effectiveness in different traffic scenarios.
Keywords: Freeway traffic control, ramp metering, MPC schemes,event-triggered control
1. Introduction
Freeway networks are complex systems that have been studied by re-searchers for some decades, in particular as regards the definition of appro-priate control approaches. Even though the traffic control methods presentin the literature have been normally devised in order to reduce congestions,as highlighted in the overview paper by Papageorgiou (2002), this is not theonly possible objective of traffic control. For instance, the increase of safety
Preprint submitted to Transportation Research C January 30, 2015
or the minimization of traffic emissions could be goals to be sought primar-ily (see the works by Lee et al. (2006), Zegeye et al. (2013), Pasquale et al.(2013)) or, at least, to be explicitly considered.
One of the most widely studied and applied control strategies for free-way traffic control is ramp metering, which adopts traffic lights at the on-ramps in order to reduce the traffic flow entering the freeway (Papageorgiouand Papamichail (2008)). The main relevant applications of ramp meter-ing date back to the Nineties, when the feedback traffic controller ALINEA(Papageorgiou et al. (1991)) was firstly introduced. From then, differentramp metering control approaches have been developed, in some cases coor-dinated with variable speed limit control. Among them we can cite for in-stance the proportional-integral version PI-ALINEA proposed by Wang et al.(2010), the non-linear Model Predictive Control (MPC) frameworks adoptingMETANET as a prediction model proposed by Bellemans et al. (2006) andHegyi et al. (2005), the optimal mainstream traffic flow controller describedin Carlson et al. (2010), the MPC scheme using the Cell Transmission Modelfor the prediction developed by Ferrara et al. (2012), or the optimal freewayramp metering approach based on the Asymmetric Cell Transmission Modelproposed by Gomes and Horowitz (2006).
The traffic control schemes based on MPC are very effective thanks tothe possibility of predicting the system behaviour, but they are in generalhighly demanding from the computational point of view. In fact, every con-trol interval, it is necessary to solve a finite horizon optimal control problem(FHOCP) which is often non-linear and in which the number of variablesinvolved can be very large. Three main issues affect the practical applicabil-ity of MPC schemes for freeway traffic control. Firstly, a non-linear optimalcontrol problem for a large scale system must be faced. Secondly, this highlycomplex problem must be solved every control interval, i.e. a high numberof times. Finally, the scheme involves the need of transmitting the systemstate measurements and the control signals to actuators every control in-terval (then, again, a high number of times). Depending on the availabletechnological infrastructure, the previous three issues can have a differentimpact on the applicability of the control scheme, that anyway turns out tobe critical from the practical point of view.
Consequently, the on-line application of MPC schemes is suitable onlyin small networks, as highlighted also by Frejo and Camacho (2012) thatpropose local techniques, with a suboptimal behaviour, but able to be im-plemented in real time. The difficulty of applying real-time MPC schemes to
2

large traffic networks is also highlighted by Ghods et al. (2012) that adopt anapproach based on game theory and distributed controllers in order to copewith the high amount of information and computational resources requiredto implement high-quality traffic control schemes in large freeways. In orderto control large freeway networks, some distributed MPC algorithms havebeen developed (see for instance Ferrara et al. (2014); Majid et al. (2014)).In other approaches, in order to reduce the complexity of the MPC schemesand hence to develop solutions to be applied on-line in large networks, thenonlinear optimization problems are properly relaxed to be linear, as donefor instance by Muralidharan and Horowitz (2012) who adopt the so-calledLink-Node Cell Transmission Model.
The idea underlying the present work is to define an innovative predictivecontrol scheme in which the computation effort is reduced with respect toclassical MPC schemes. First of all, in the proposed approach the FHOCPis conveniently formulated as a mixed-integer linear mathematical program-ming problem that can be solved optimally with efficient commercial solvers.Secondly, the proposed MPC scheme is of event-triggered nature. This meansthat a triggering condition based on measurements of the system state isverified at any time step and, only when it is satisfied, the control law isre-computed. Preliminary versions of the proposed event-triggered schemecan be found in Ferrara et al. (2012) and Ferrara et al. (2013), where howeverthe objective of the control scheme is different, since the deviations of thesystem variables from their equilibrium values are minimized quadratically(giving rise to a mixed-integer quadratic programming problem, whereas inthis paper the problem is linear). With the considered event-triggered controlscheme, the computational effort is reduced, i.e. there is a reduction in thenumber of times the FHOCP is solved. Consequently, this control scheme ischaracterized by a reduction of data transmissions over the network, sincethere is a decrease in the number of times the control law has to be commu-nicated to actuators. This data transmission reduction is not the main aimof this work but it represents an advantageous characteristic of the proposedcontrol scheme.
The concept of event-triggered strategies, in which the sampling is event-triggered rather than time-triggered, is quite new in the literature and hasbeen conceived in order to reduce the energy, computation and communi-cation effort, that is a crucial point in modern large-scale control systems.Event-triggered control laws have been studied basically for continuous-timesystems (see the work by Heemels et al. (2012) and the references therein).
3
Some approaches have been also developed for discrete-time systems (as, e.g.,in Eqtami et al. (2010), Eqtami et al. (2011)). Some works in the literaturecombine event-triggered control with MPC strategies, with the aim of reduc-ing the frequency in solving optimization problems (see for instance Li andShi (2014); Barradas Berglind et al. (2012)).
In the proposed approach the dynamic model adopted for the predic-tion is the Cell Transmission Model (CTM), a first order macroscopic modelproposed by Daganzo (1994, 1995), properly rewritten as a Mixed LogicalDynamical (MLD) system, according to the framework proposed by Bempo-rad and Morari (1999). An MLD system is a dynamic system characterizedby logic rules, on/off inputs, piecewise linear functions, discrete states, andcan be expressed with linear equalities and inequalities in which continuousand binary variables are involved. In this work the CTM has been chosenfor the prediction basically because the non-linearities present in its formu-lation are easily transformed in linear relations by adding some equalitiesand inequalities and some auxiliary variables. Nevertheless, the proposedevent-triggered MPC scheme could be also adopted with other predictionmodels, in particular with other linearized traffic models, as for instance theone introduced by Groot et al. (2011), where the second-order METANETmacroscopic traffic model is linearized, or the one by Sacone and Siri (2012)which is a piecewise version of the first-order macroscopic model.
The objective of the proposed control scheme is to penalize the situationsin which the traffic densities exceed given threshold values and the queues atthe on-ramps become positive (these two aspects will be properly weightedin the cost function of the FHOCP). Note that, the threshold values for thetraffic density can be suitably determined depending on the specific purposeof the considered application, since they could be devised in order to maxi-mize the outflow (and correspondingly to minimize the total time spent byvehicles in the freeway) or in order to pursue other objectives related, forinstance, to environmental or safety aspects.
The paper is organized as follows. In Section 2 the CTM is outlined forthe readers’ convenience. Section 3 describes the prediction model used inthe MPC scheme and reports the statement of the FHOCP. In Section 4the proposed event-triggered MPC scheme is described in detail, whereas inSection 5 an accurate simulation analysis is reported. Finally, in Section 6some conclusions are drawn.
4
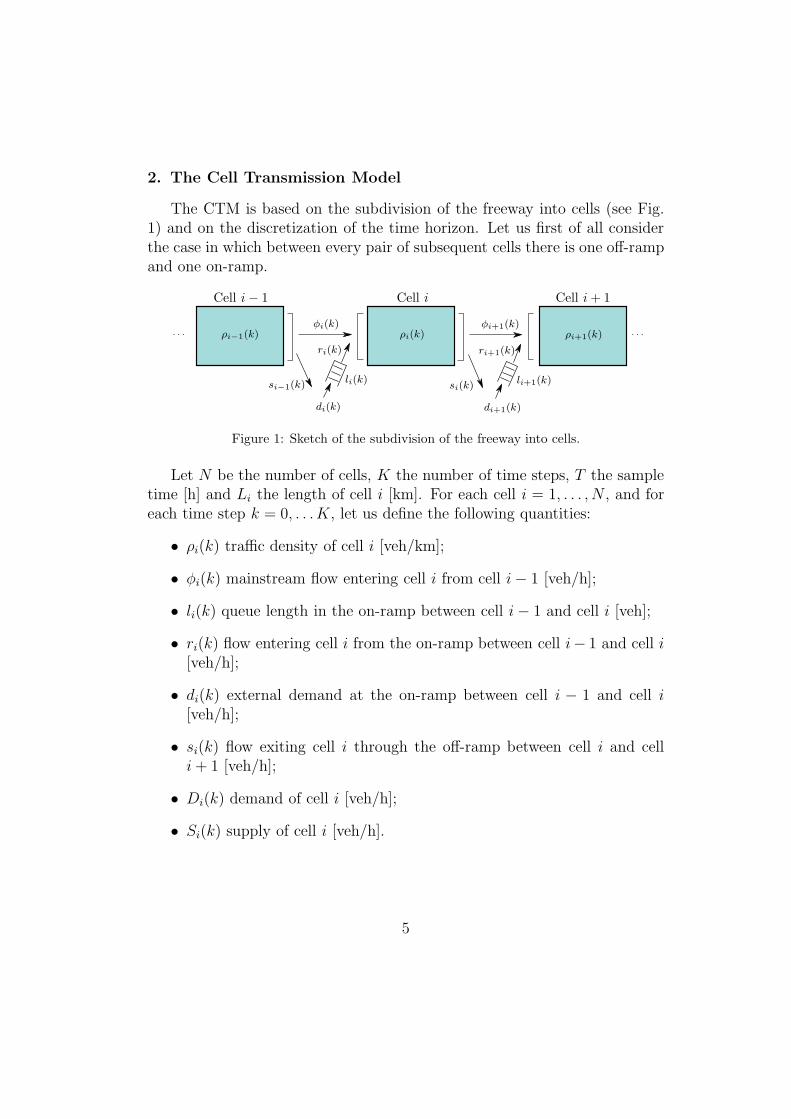
2. The Cell Transmission Model
The CTM is based on the subdivision of the freeway into cells (see Fig.1) and on the discretization of the time horizon. Let us first of all considerthe case in which between every pair of subsequent cells there is one off-rampand one on-ramp.
. . .. . .
Cell iCell i− 1 Cell i+ 1
φi(k) φi+1(k)
si−1(k) si(k)
ri(k) ri+1(k)
di(k) di+1(k)
li(k) li+1(k)
ρi−1(k) ρi(k) ρi+1(k)
Figure 1: Sketch of the subdivision of the freeway into cells.
Let N be the number of cells, K the number of time steps, T the sampletime [h] and Li the length of cell i [km]. For each cell i = 1, . . . , N , and foreach time step k = 0, . . .K, let us define the following quantities:
• ρi(k) traffic density of cell i [veh/km];
• φi(k) mainstream flow entering cell i from cell i− 1 [veh/h];
• li(k) queue length in the on-ramp between cell i− 1 and cell i [veh];
• ri(k) flow entering cell i from the on-ramp between cell i− 1 and cell i[veh/h];
• di(k) external demand at the on-ramp between cell i − 1 and cell i[veh/h];
• si(k) flow exiting cell i through the off-ramp between cell i and celli+ 1 [veh/h];
• Di(k) demand of cell i [veh/h];
• Si(k) supply of cell i [veh/h].
5

Some model parameters are: βi ∈ [0, 1) is the split ratio of cell i; vi is thefree flow speed of cell i [km/h] (the condition to guarantee the convergenceof the model is viT < Li); wi is the congestion wave speed of cell i [km/h];Fi is the capacity of cell i [veh/h]; ρi is the jam density of cell i [veh/km];pi ∈ [0, 1] is the priority of on-ramp flow with respect to mainstream flow incell i (if, as usual, the mainstream flow has a higher priority, then pi < 0.5).
The dynamic model is given by the following state equations for the trafficdensity and the queue length
ρi(k + 1) = ρi(k) +T
Li
[φi(k) + ri(k)− φi+1(k)− si(k)
]
i = 1, . . . , N, k = 0, . . . , K (1)
li(k + 1) = li(k) + T[di(k)− ri(k))
]i = 1, . . . , N, k = 0, . . . , K (2)
where the flow exiting through the off-ramp is computed as
si(k) =βi
1− βi
φi+1(k) i = 1, . . . , N, k = 0, . . . , K (3)
Referring to cell i, it is useful to define the demand (maximum flow thatcell i can send to cell i + 1) and the supply (maximum flow that cell i canreceive from cell i− 1), as follows
Di(k) = min{(1− βi)viρi(k), Fi
}i = 1, . . . , N, k = 0, . . . , K (4)
Si(k) = min{wi(ρi − ρi(k)), Fi
}i = 1, . . . , N, k = 0, . . . , K (5)
According to the merge connection model proposed by Daganzo (1995),the mainstream and on-ramp flows are obtained considering two alternativecases. The first case regards a situation in which cell i can receive all theflow that wants to enter cell i, both from the mainstream, i.e. Di−1(k), and
from the on-ramp, i.e. di(k) +li(k)T
, and it is modeled as
If Di−1(k) + di(k) +li(k)
T≤ Si(k)
then
φi(k) = Di−1(k) ri(k) = di(k) +li(k)
Ti = 1, . . . , N + 1, k = 0, . . . , K
(6)
6

The second case is the opposite situation in which cell i cannot receiveall the flow which asks to enter from the mainstream and from the on-rampand is given by
If Di−1(k) + di(k) +li(k)
T≥ Si(k)
then
φi(k) = mid
{Di−1(k), Si(k)− di(k)−
li(k)
T, (1− pi)Si(k)
}
ri(k) = mid
{di(k) +
li(k)
T, Si(k)−Di−1(k), piSi(k)
}
i = 1, . . . , N + 1, k = 0, . . . , K
(7)
where the function mid returns the middle value.To explain (7), it must be reminded that the merge model in the CTM
assumes that, in case the mainstream demand flow Di−1(k) plus the on-ramp
demand flow di(k) +li(k)T
exceeds the supply of cell i, the maximum possibleflow advances in cell i. Moreover, it is assumed that a fraction (1−pi)Si(k) ofthe supply of cell i must come from the mainstream, whereas the remainingpiSi(k) must come from the on-ramp. If one of the two demands is saturated,then the remaining flow to advance in cell i comes from the complementaryarc in the merge. Then, (7) can be split in three cases. If Di−1(k) ≥ (1 −
pi)Si(k) and di(k) +li(k)T
≥ piSi(k), the priorities assigned to the two flowsare guaranteed, resulting in φi(k) = (1 − pi)Si(k) and ri(k) = piSi(k). If
Di−1(k) ≥ (1 − pi)Si(k) but di(k) +li(k)T
≤ piSi(k), i.e. the demand fromthe on-ramp is lower than the priority flow assigned to the on-ramp, all thedemand from the on-ramp enters the cell and the flow entering from cell i−1is obtained in order to saturate the supply Si(k). In fact, in this case it is
φi(k) = Si(k)−di(k)−li(k)T
and ri(k) = di(k)+li(k)T
. Finally, if di(k)+li(k)T
≥piSi(k) but Di−1(k) ≤ (1 − pi)Si(k), i.e. the mainstream demand is lowerthan the assigned priority flow, all the mainstream flow enters the cell andthe flow entering from the on-ramp is obtained in order to saturate the supplySi(k), resulting in φi(k) = Di−1(k) and ri(k) = Si(k)−Di−1(k).
A rough way to adapt the CTM previously described to the case in whichsome cells do not present any ramps is to fix βi−1 = 0, di(k) = 0, li(k) = 0and pi = 1 in case there are not on-ramps and off-ramps between cell i−1 andcell i. In this way, (3) ensure that si−1(k) = 0, k = 0, . . . , K, whereas (6) and
7

(7) guarantee that ri(k) = 0, and φi(k) = min{Di−1(k), Si(k)}, k = 0, . . . , K,as in the standard basic CTM without merges described by Daganzo (1994).
Since the objective of this paper is to propose a ramp metering controlstrategy, it is worth describing the CTM in case the on-ramps are controlled,i.e. for each of them an optimal flow r◦i (k) has been computed and actuatedwith a proper ramp metering policy. In this case the demand from the on-ramp is no more given by di(k)+
li(k)T
but it is the minimum between r◦i (k) and
di(k)+li(k)T
. Let us denote this minimum quantity as r◦,di (k). As a matter offact, for many reasons it can happen that r◦i (k) computed by the controller
is greater than di(k) +li(k)T
. In this case, of course, the demand in the
controlled on-ramp is equal to the flow of vehicles in queue, i.e. di(k) +li(k)T
.
If instead r◦i (k) computed by the controller is lower than di(k) +li(k)T
, thenthe on-ramp demand is r◦i (k). It is not guaranteed that this volume entersthe freeway because the real entering flow ri(k) is computed according tothe merge model. Then, the CTM in case of controlled on-ramps is given by(1)-(5), and the following relationships
r◦,di (k) = min
{r◦i (k), di(k) +
li(k)
T
}i = 1, . . . , N + 1, k = 0, . . . , K (8)
If Di−1(k) + r◦,di (k) ≤ Si(k)
then
φi(k) = Di−1(k) ri(k) = r◦,di (k)
else
φi(k) = mid{Di−1(k), Si(k)− r◦,di (k), (1− pi)Si(k)
}
ri(k) = mid{r◦,di (k), Si(k)−Di−1(k), piSi(k)
}
i = 1, . . . , N + 1, k = 0, . . . , K
(9)
Note that (9) has been obtained by substituting di(k) +li(k)T
with r◦,di (k)in (6) and (7).
3. The proposed MPC scheme
As already mentioned in the Introduction, the ramp metering controlscheme we propose in this paper is an event-triggered model predictive con-trol approach in which iteratively (according to specific triggering conditions
8

described later in the paper) a FHOCP is solved. In order to be able to copewith large freeway systems and to solve the problem in times acceptable fora real-time application, the structure of the FHOCP must be computation-ally efficient. To this end, a mixed-integer linear mathematical programmingproblem has been stated by relying on a suitable reformulation of the CTMas a MLD system, for which very efficient solvers guaranteeing to find theoptimal solution are available. In this section, we introduce the standardMPC scheme, whereas the event-triggered version of the proposed approachwill be described in Section 4.
3.1. The prediction model
The prediction model to be adopted in the FHOCP is the CTM in MLDform, where some aspects of the “merge” condition are simplified. In par-ticular, the nonlinear relations present in the CTM are the min functions in(4) and (5), as well as the relations (8) and (9). In the proposed optimalcontrol problem, (4) and (5) are rewritten as linear relations by adding someauxiliary variables and some inequalities, as in the MLD framework, whereas(8) and (9) are partly relaxed, as it will be clarified in the following. Theidea of linearizing the CTM is also present in Gomes and Horowitz (2006),where instead the Asymmetric Cell Transmission Model is adopted, that is asimplified version of the CTM (the main difference between the two modelsis in the treatment of merges). In that case, the resulting alternative formu-lation is a linear problem that provides near-global solutions when certainconditions are met.
Let us start from equation (4), for which it is necessary to introduce aset of binary variables δdi (k), i = 1, . . . , N , k = 0, . . . , K, such that [δdi (k) =1] iff [(1 − βi)viρi(k) ≤ Fi]. Exploiting the transformations of propositionallogic in linear inequalities reported in Bemporad and Morari (1999), thislatter relation can be transformed as follows
(1− βi)viρi(k)− Fi ≤ Dmaxi (1− δdi (k))
(1− βi)viρi(k)− Fi ≥ ǫ+ (Dmini − ǫ)δdi (k)
(10)
i = 1, . . . , N , k = 0, . . . , K, where ǫ is a small tolerance, Dmaxi and Dmin
i arethe maximum and minimum value of function (1−βi)viρi(k)−Fi, respectively,i.e. Dmax
i = viρi and Dmini = −Fi. Now (4) can be substituted by the
following equation
Di(k) = δdi (k)[(1− βi)viρi(k)] + (1− δdi (k))Fi (11)
9

i = 1, . . . , N , k = 0, . . . , K, which is still nonlinear since it contains a multi-plication between variables. This can be overcome by introducing another setof variables zdi (k), i = 1, . . . , N , k = 0, . . . , K, such that zdi (k) = δdi (k)ρi(k).Then, (11) becomes
Di(k) = (1− βi)vizd
i (k) + (1− δdi (k))Fi (12)
i = 1, . . . , N , k = 0, . . . , K. The definition zdi (k) = δdi (k)ρi(k) can be ob-tained by the following set of inequalities
Rmini δdi (k) ≤ zdi (k) ≤ Rmax
i δdi (k)
zdi (k) ≥ ρi(k)− Rmaxi (1− δdi (k))
zdi (k) ≤ ρi(k)− Rmini (1− δdi (k))
(13)
i = 1, . . . , N , k = 0, . . . , K, in which Rmaxi and Rmin
i can be estimated asthe maximum and minimum value of function ρi(k), i.e. Rmax
i = ρi andRmin
i = 0.Analogously, it is possible to consider equation (5), for which it is neces-
sary to introduce a set of binary variables δsi (k), i = 1, . . . , N , k = 0, . . . , K,with the following meaning: [δsi (k) = 1] iff [wi(ρi−ρi(k)) ≤ Fi]. Such relationcan be transformed as follows
wi(ρi − ρi(k))− Fi ≤ Smaxi (1− δsi (k))
wi(ρi − ρi(k))− Fi ≥ ǫ+ (Smini − ǫ)δsi (k)
(14)
i = 1, . . . , N , k = 0, . . . , K, where Smaxi and Smin
i are the maximum andminimum value of function wi(ρi − ρi(k))−Fi, respectively, i.e. S
maxi = wiρi
and Smini = −Fi. Now (5) can be written as
Si(k) = δsi (k)[wi(ρi − ρi(k))] + (1− δsi (k))Fi (15)
i = 1, . . . , N , k = 0, . . . , K, which is still nonlinear; to overcome this, anotherset of variables zsi (k), i = 1, . . . , N , k = 0, . . . , K, is defined as zsi (k) =δsi (k)ρi(k). Then, (15) becomes
Si(k) = δsi (k)wiρi − wizs
i (k) + (1− δsi (k))Fi (16)
i = 1, . . . , N , k = 0, . . . , K. The relation zsi (k) = δsi (k)ρi(k) can be replacedby the following set of inequalities
Rmini δdi (k) ≤ zsi (k) ≤ Rmax
i δsi (k)
zsi (k) ≥ ρi(k)− Rmaxi (1− δsi (k))
zsi (k) ≤ ρi(k)− Rmini (1− δsi (k))
(17)
10

i = 1, . . . , N , k = 0, . . . , K.As already introduced, (8) and (9) are simplified in the prediction model
to be included in the FHOCP. In particular, the relations that we wantto consider as a set of constraints in the optimal control problem are thesimplified merge model
If Di−1(k) + ri(k) ≤ Si(k)
then
φi(k) = Di−1(k)
else
φi(k) = Si(k)− ri(k)
(18)
i = 1, . . . , N + 1, k = 0, . . . , K, and the following inequalities
ri(k) ≤ rmaxi (19)
ri(k) ≤ di(k) +li(k)
T(20)
i = 1, . . . , N + 1, k = 0, . . . , K, with rmaxi the maximum on-ramp flow.
Note that, with these relations, with respect to the complete CTM, the mainaspect that is simplified in the prediction model is the priority between themainstream demand and the on-ramp demand, represented with parameterpi.
The two relations (19) and (20) are linear, whereas (18) is not. Hence, itis necessary to introduce a set of binary variables δmi (k), i = 1, . . . , N+1, k =0, . . . , K, defined as [δmi (k) = 1] iff [Di−1(k) + ri(k) ≤ Si(k)], correspondingto the following
Di−1(k) + ri(k)− Si(k) ≤ Mmaxi (1− δmi (k))
Di−1(k) + ri(k)− Si(k) ≥ ǫ+ (Mmini − ǫ)δmi (k)
(21)
i = 1, . . . , N + 1, k = 0, . . . , K, where Mmaxi and Mmin
i are the maximumand minimum value of function Di−1(k) + ri(k) − Si(k), respectively, i.e.Mmax
i = Fi−1 + rmaxi and Mmin
i = −Fi.It is now possible to write (18) as
φi(k) = δmi (k)Di−1(k) + (1− δmi (k))[Si(k)− ri(k)] (22)
i = 1, . . . , N+1, k = 0, . . . , K, which is still nonlinear because of the productsbetween variables. Then, other three sets of variables should be defined.
11

First of all, the auxiliary variables zmd
i (k), i = 1, . . . , N + 1, k = 0, . . . , K,are defined as zmd
i (k) = δmi (k)Di−1(k) and correspond to
Mmind,i δmi (k) ≤ zmd
i (k) ≤ Mmaxd,i δmi (k)
zmd
i (k) ≥ Di−1(k)−Mmaxd,i (1− δmi (k))
zmd
i (k) ≤ Di−1(k)−Mmind,i (1− δmi (k))
(23)
i = 1, . . . , N + 1, k = 0, . . . , K, in which Mmaxd,i and Mmin
d,i can be estimatedas the maximum and minimum value of function Di−1(k), i.e. M
maxd,i = Fi−1
and Mmind,i = 0.
Then, the auxiliary variables zms
i (k), i = 1, . . . , N + 1, k = 0, . . . , K, aredefined as zms
i (k) = δmi (k)Si(k) and given by
Mmins,i δmi (k) ≤ zms
i (k) ≤ Mmaxs,i δmi (k)
zms
i (k) ≥ Si(k)−Mmaxs,i (1− δmi (k))
zms
i (k) ≤ Si(k)−Mmins,i (1− δmi (k))
(24)
i = 1, . . . , N + 1, k = 0, . . . , K, in which Mmaxs,i and Mmin
s,i can be estimatedas the maximum and minimum value of function Si(k), i.e. M
maxs,i = Fi and
Mmins,i = 0.Finally, the auxiliary variables zmr
i (k), i = 1, . . . , N +1, k = 0, . . . , K, aredefined as zmr
i (k) = δmi (k)ri(k) and correspond to
Mminr,i δmi (k) ≤ zmr
i (k) ≤ Mmaxr,i δmi (k)
zmr
i (k) ≥ ri(k)−Mmaxr,i (1− δmi (k))
zmr
i (k) ≤ ri(k)−Mminr,i (1− δmi (k))
(25)
i = 1, . . . , N + 1, k = 0, . . . , K, in which Mmaxr,i and Mmin
r,i can be estimatedas the maximum and minimum value of function ri(k), i.e. Mmax
r,i = rmaxi
and Mminr,i = 0.
Then, (22) becomes
φi(k) = zmd
i (k) + Si(k)− ri(k)− zms
i (k) + zmr
i (k) (26)
i = 1, . . . , N + 1, k = 0, . . . , K.
12

3.2. The FHOCP
The finite-horizon optimal control problem (FHOCP) to be solved at thegeneric time step k = 0, . . . , K adopts the CTM in MLD form describedin Section 3.1 as prediction model over an horizon of Kp time steps. Inorder to simplify the notation in the FHOCP statement, let us denote withI = {i ∈ Z : i = 1, . . . , N} the set of indexes of the considered cells andwith I+ = {i ∈ Z : i = 1, . . . , N + 1} the same set plus the index of the cellafter the last one. Let us introduce the set Ir gathering the indexes i ∈ Isuch that an on-ramp is present between cell i − 1 and cell i. Moreover, letus denote with Ir = I \ Ir and with I+
r = I+ \ Ir, assuming that there arenot ramps between the last cell N and cell N +1. As regards the predictionhorizon, let us denote with H
Kp
k = {h ∈ Z : h = k, . . . , k + Kp − 1}, withk = 0, . . . , K.
The objective function used in the FHOCP is defined in order to penalizethe cases in which the traffic density exceeds a given threshold value and/orthe queue lengths at the on-ramps become positive. The threshold valuesfor the traffic density are denoted as ρti, i ∈ I. This objective function isvery general, it can be used to maximize the throughput in the freeway, ascommonly done in traffic control applications, or can be adopted to avoidspecific density values, for instance for safety reasons. In the simulationanalysis reported in the paper, it is shown how different aims can be pursuedby properly setting the threshold values for the density.
To formalize this objective function, it is necessary to introduce a set ofvariables ρi(h), i ∈ I, h ∈ H
Kp
k , defined as follows:
ρi(h) =
{ρi(h)− ρti if ρi(h) ≥ ρti0 otherwise
i ∈ I, h ∈ HKp
k (27)
The objective function will be a weighted sum of these ρi(h) variablesand the variables li(h), indicating the queue lengths. In this way, all thesituations in which the traffic densities exceed the threshold values and thequeue lengths become positive are penalized.
In the following formulation, variables ri(h), li(h) and zmr
i (h), are onlydefined for i ∈ Ir, whereas βi are defined for i ∈ I (of course βi = 0 if
i+ 1 ∈ Ir).The FHOCP to be solved at time step k can be stated as follows.
Problem 1. Given the initial conditions on the density and the queue length
ρi(k) and li(k), i ∈ I, the demand of the cell before the first one D0(h),
13

h ∈ HKp
k , the supply of the cell after the last one SN+1(h), h ∈ HKp
k , the
on-ramp demands di(h), i ∈ Ir, h ∈ HKp
k , find the optimal control variables
ri(h), i ∈ Ir, h ∈ HKp
k , minimizing the cost function
J(k) =∑
h∈HKp
k+1
[∑
i∈I
γρi ρi(h) +
∑
i∈Ir
γlili(h)
](28)
where γρi , i ∈ I, and γl
i, i ∈ Ir, are appropriate positive weighting coefficients,
subject to:
ρi(h + 1) = ρi(h) +T
Li
[φi(h) + ri(h)−
φi+1(h)
1− βi
]i ∈ Ir, h ∈ H
Kp
k (29)
ρi(h + 1) = ρi(h) +T
Li
[φi(h)−
φi+1(h)
1− βi
]i ∈ Ir, h ∈ H
Kp
k (30)
li(h+ 1) = li(h) + T[di(h)− ri(h))
]i ∈ Ir, h ∈ H
Kp
k (31)
Di(h) = (1− βi)vizd
i (h) + (1− δdi (h))Fi i ∈ I, h ∈ HKp
k (32)
Si(h) = δsi (h)wiρi − wizs
i (h) + (1− δsi (h))Fi i ∈ I, h ∈ HKp
k (33)
φi(h) = zmd
i (h) + Si(h)− ri(h)− zms
i (h) + zmr
i (h) i ∈ Ir, h ∈ HKp
k (34)
φi(h) = zmd
i (h) + Si(h)− zms
i (h) i ∈ I+r , h ∈ H
Kp
k (35)
(1− βi)viρi(h)− Fi ≤ Dmaxi (1− δdi (h)) i ∈ I, h ∈ H
Kp
k (36)
(1− βi)viρi(h)− Fi ≥ ǫ+ (Dmini − ǫ)δdi (h) i ∈ I, h ∈ H
Kp
k (37)
zdi (h) ≤ Rmaxi δdi (h) i ∈ I, h ∈ H
Kp
k (38)
zdi (h) ≥ Rmini δdi (h) i ∈ I, h ∈ H
Kp
k (39)
zdi (h) ≥ ρi(h)−Rmaxi (1− δdi (h)) i ∈ I, h ∈ H
Kp
k (40)
zdi (h) ≤ ρi(h)−Rmini (1− δdi (h)) i ∈ I, h ∈ H
Kp
k (41)
wi(ρi − ρi(h))− Fi ≤ Smaxi (1− δsi (h)) i ∈ I, h ∈ H
Kp
k (42)
wi(ρi − ρi(h))− Fi ≥ ǫ+ (Smini − ǫ)δsi (h) i ∈ I, h ∈ H
Kp
k (43)
zsi (h) ≤ Rmaxi δsi (h) i ∈ I, h ∈ H
Kp
k (44)
zsi (h) ≥ Rmini δdi (h) i ∈ I, h ∈ H
Kp
k (45)
zsi (h) ≥ ρi(h)−Rmaxi (1− δsi (h)) i ∈ I, h ∈ H
Kp
k (46)
zsi (h) ≤ ρi(h)−Rmini (1− δsi (h)) i ∈ I, h ∈ H
Kp
k (47)
14
Di−1(h) + ri(h)− Si(h) ≤ Mmaxi (1− δmi (h)) i ∈ Ir, h ∈ H
Kp
k (48)
Di−1(h)− Si(h) ≤ Mmaxi (1− δmi (h)) i ∈ I+
r , h ∈ HKp
k (49)
Di−1(h) + ri(h)− Si(h) ≥ ǫ+ (Mmini − ǫ)δmi (h) i ∈ Ir, h ∈ H
Kp
k (50)
Di−1(h)− Si(h) ≥ ǫ+ (Mmini − ǫ)δmi (h) i ∈ I+
r , h ∈ HKp
k (51)
zmd
i (h) ≤ Mmaxd,i δmi (h) i ∈ I+, h ∈ H
Kp
k (52)
zmd
i (h) ≥ Mmind,i δmi (h) i ∈ I+, h ∈ H
Kp
k (53)
zmd
i (h) ≥ Di−1(h)−Mmaxd,i (1− δmi (h)) i ∈ I+, h ∈ H
Kp
k (54)
zmd
i (h) ≤ Di−1(h)−Mmind,i (1− δmi (h)) i ∈ I+, h ∈ H
Kp
k (55)
zms
i (h) ≤ Mmaxs,i δmi (h) i ∈ I+, h ∈ H
Kp
k (56)
zms
i (h) ≥ Mmins,i δmi (h) i ∈ I+, h ∈ H
Kp
k (57)
zms
i (h) ≥ Si(h)−Mmaxs,i (1− δmi (h)) i ∈ I+, h ∈ H
Kp
k (58)
zms
i (h) ≤ Si(h)−Mmins,i (1− δmi (h)) i ∈ I+, h ∈ H
Kp
k (59)
zmr
i (h) ≤ Mmaxr,i δmi (h) i ∈ Ir, h ∈ H
Kp
k (60)
zmr
i (h) ≥ Mminr,i δmi (h) i ∈ Ir, h ∈ H
Kp
k (61)
zmr
i (h) ≥ ri(h)−Mmaxr,i (1− δmi (h)) i ∈ Ir, h ∈ H
Kp
k (62)
zmr
i (h) ≤ ri(h)−Mminr,i (1− δmi (h)) i ∈ Ir, h ∈ H
Kp
k (63)
ri(h) ≤ di(h) +li(h)
Ti ∈ Ir, h ∈ H
Kp
k (64)
0 ≤ ri(h) ≤ rmaxi i ∈ Ir, h ∈ H
Kp
k (65)
ρi(h) ≥ ρi(h)− ρti i ∈ I, h ∈ HKp
k+1 (66)
ρi(h) ≥ 0 i ∈ I, h ∈ HKp
k+1 (67)
0 ≤ ρi(h) ≤ ρi i ∈ I, h ∈ HKp
k+1 (68)
0 ≤ li(h) ≤ lmaxi , i ∈ Ir, h ∈ H
Kp
k+1 (69)
δdi (h) ∈ {0, 1}, δsi (h) ∈ {0, 1} i ∈ I, h ∈ HKp
k (70)
δmi (h) ∈ {0, 1} i ∈ I+, h ∈ HKp
k (71)
�
It is worth noting that constraints (29)-(65) are the prediction modeldescribed in Section 3.1. Constraints (66), together with the positivity of
15
variables ρi(h) imposed by (67), ensure that ρi(h) are defined according to(27). Moreover, constraints (68)-(69) fix lower and upper bounds for the statevariables, denoting as lmax
i , i ∈ Ir, the upper bounds of the queue lengths.Finally, (70)-(71) indicate the binary variables. Note that, when imposingan upper bound to the queue lengths, the problem feasibility cannot alwaysbeen guaranteed, especially in a completely congested case and when thequeue is saturated. This aspect related to the problem feasibility is commonto any other freeway control scheme based on the solution of constrainedoptimization problems.
The foregoing FHOCP is a mixed-integer linear programming problemfor which existing commercial solvers are able to find the optimal solution.According to the standard MPC, at each time step k, the optimal controlsequence is obtained, i.e. the control variables r◦i (h|k), i ∈ Ir, h ∈ H
Kp
k .Only the control variables corresponding to time step h = k are applied, i.e.r◦i (k|k), i ∈ Ir, and the overall procedure is repeated at the following timestep k + 1.
4. The proposed event-triggered MPC scheme
The MPC scheme proposed in the previous section is computationallydemanding since the FHOCP problem must be solved at each time stepk = 0, . . . , K. This is typically necessary for cases in which either the predic-tion model is not completely effective or significant disturbances are present.Whenever instead the prediction of the system state is adequate and theeffect of disturbances is not so relevant, the computational effort necessaryto solve the FHOCP at each time step could be spared by using the controlaction already computed. Additionally, this reduction in the computationaleffort could also imply a reduction of the transmission effort needed to trans-fer the new control action to the system actuators. Relying on this idea, anevent-triggered control scheme is proposed in which the control law is notupdated at each time step but only when a given set of conditions is satisfied.Let us call such a set of conditions as triggering rule and the time steps inwhich the triggering rule is verified as triggering time steps.
The control strategy can be defined as follows. At k = 0, Problem 1 issolved determining the optimal control variables r◦i (h|0), i ∈ Ir, h ∈ H
Kp
0
and r◦i (0|0) is applied. At each time step k > 0, the triggering rule is verified.If it is not met, the already available control sequence is applied, i.e. r◦i (k|kc)where kc is the time step in which Problem 1 has been solved for the last
16

time (of course it must be k−kc < Kp, otherwise the control sequence foundin kc does not cover time step k). If instead at time step k the triggering ruleis met, time step k becomes a triggering time step, Problem 1 is solved, theoptimal control variables r◦i (h|k), i ∈ Ir, h ∈ H
Kp
k are derived and r◦i (k|k) isapplied. According to this logic, the values of the control variables composingthe last determined control sequence are applied to the system until the nexttriggering time step. Besides other conditions that will be described in thefollowing, the triggering rule will include also a condition verifying if thenumber of time steps after the last triggering time step is greater than Kp;as already mentioned, when the control sequence has been completely used,the following time step is a triggering time step by definition.
In order to derive the triggering rule, the basic concept is that the trig-gering rule is fulfilled when there is a significant difference between the realand the predicted behaviour of the system. Hence, in the proposed event-triggered MPC scheme it is supposed that the measurements are availableat each time step and, based on these measurements, the triggering rule isverified. In particular, let ρi(h|k) and li(h|k) denote the predicted values of
the traffic density and the queue length referred to time step h, h ∈ HKp
k ,found by solving the FHOCP at time step k. The triggering rule will bebased on the errors between the predicted and the real value of the statevariables, giving then an indication about the goodness of the prediction inthe FHOCP and consequently of the control variables found.
Moreover, another important aspect related to the traffic behaviour re-gards the state of traffic (free-flow or congested); a triggering condition willbe based on the evaluation of the difference between the current state of traf-fic in each cell and the predicted one. To do that, it is convenient to adoptagain the binary variables δmi (k), i ∈ I+, k = 0, . . . , K, that have just beendefined to be equal to 1 if Di−1(k) + ri(k) ≤ Si(k) and 0 otherwise. Suchvariables, whose values indicate the state of traffic, can be computed at anytime step relying on the system dynamics given by the CTM. Moreover, letδmi (h|k) denote the predicted values of these binary variables referred to time
step h, h ∈ HKp
k , found by solving the FHOCP at time step k.It is important to compute the set of cells for which, at time step k, there
is a relevant deviation of the real system behaviour from the predicted one.Let us denote this set as I(k). Then, the triggering rule will be also basedon the cardinality of this set, i.e. on the number of cells for which there isa relevant deviation between the real and the predicted state. At each time
17
step k, considering that kc is the previous triggering time step, this set iscreated according to the following logic
If δmi (k) 6= δmi (k|kc) ∨ |ρi(k)− ρi(k|kc)| > ǫρ ∨ |li(k)− li(k|kc)| > ǫl
then i ∈ I(k)
(72)
where ǫρ and ǫl are threshold values on the density and queue length errors,respectively.
Then, the triggering rule to be verified at a generic time step k = 1, . . . , K,(in k = 0 the triggering rule is always verified, i.e. the FHOCP is solved inany case), is
|I(k)| ≥ ǫI ∨ k − kc ≥ Kp (73)
where ǫI is a threshold on the number of cells affected by a relevant predictionerror.
5. Numerical results
In order to evaluate the effectiveness of the event-triggered MPC approachdescribed in the previous sections, we have implemented it with the C Sharp(C♯) programming language. In particular, the FHOCP has been solvedwith the MILP solver Cplex 12.5 by using the ILOG Concert library forbuilding the model with the C♯ language. The proposed event-triggeredMPC approach will be compared via simulation with the open-loop case,i.e. the case in which no control is applied. To simulate the freeway systemdynamics the CTM has been used and, to take into account the possiblemodel inaccuracy as well as the uncertainty in estimating the data, randomterms have been added to the system state variables.
In order to evaluate the effectiveness of the proposed control scheme, incomparison with the open-loop system, some performance indexes will beintroduced. First of all, the same cost function used in the FHOCP, given by(28), is computed in the open-loop case, denoted as Jol, and in the event-triggered controlled case, denoted as Jet. The first index to be adopted isthe performance improvement ∆J of the controlled case compared with theopen-loop case, i.e. ∆J = (Jol − Jet)/Jol.
Analogously, it is possible to compute the Total Time Spent (TTS),as commonly done in the literature and defined according to Papageorgiou(2002), both in the open-loop case and in the controlled case, respectively
18
denoted as TTSol and TTSet. The second performance index is the TTSreduction, computed as ∆TTS = (TTSol − TTSet)/TTSol.
Since the event-triggered mechanism has been devised in order to reducethe number of times the FHOCP is solved, another important index is thecomputation ratio, denoted with η and defined as η = 1
K
∑K
k=1 σ(k), whereσ(k) is equal to 1 if the FHOCP is solved at time step k, it is equal to 0otherwise. Note that a value of η closer to 1 means that the event-triggeredcontrol scheme is acting similarly to a standard MPC (for which η = 1 bydefinition), whereas low values of η indicate that the number of computationsis reduced. If a low value of η is combined with good performances (i.e.positive high values of ∆J and ∆TTS), it means that the proposed event-triggered control scheme is highly efficient since it is able to provide goodsystem behaviours with a reduction of the number of computations.
Finally, in order to be able to apply such control scheme on line, it isimportant that the computational time necessary to solve each FHOCP islow (much lower than the sample time). Then, the average time to solveeach FHOCP, denoted as τav, and the maximum time, denoted as τmax, willbe computed, taking into account that all the experimental tests have beenrealized with a 2.2 GHz Intel(R) Core(TM) 2 Duo computer with 2 GB RAM.
The freeway stretch considered for the simulation test has three lanesand is composed of 10 cells with 2 ramps, in particular Ir = {2, 7}. Thesimulation covers one hour, corresponding to K = 180 (the sample time hasbeen set as T = 20 [s]). The cells are homogeneous and are characterized byLi = 0.7 [km], vi = 80 [km/h], wi = 30 [km/h], Fi = 8500 [veh/h], ρi = 400[veh/km], i ∈ I. As regards the ramp parameters, the following values havebeen used: βi−1 = 0.05 and pi = 0.4, i ∈ Ir. The initial conditions havebeen set equal to 80 [veh/km] for the traffic density in all the cells and equalto 0 for all the queue lengths. As for the boundary conditions, the on-rampdemands have been set as di(k) = 2000 [veh/h], k = 0, . . . 107, di(k) = 700[veh/h], k = 108, . . . 180, i ∈ Ir; the demand from cell 0 is D0(k) = 5000[veh/h], k = 0, . . . , 180, whereas the supply in cell N + 1 has been fixed toS11(k) = 8000 [veh/h]. The additive random terms have been generated fromthe uniform distribution and range, for the density, between -5 and 5 and,for the queue lengths, between -2 and 2.
As aforementioned, the proposed controller is characterized by a generalobjective function that can be used for different purposes in a real application.In case the main aim of the traffic control scheme is to minimize the totaltime spent by the drivers, i.e. to maximize the total throughput, the best
19
choice for the density threshold values is the critical density, that in thiscase is 106 [veh/km]. Hence, the event-triggered MPC approach has beenapplied considering ρti = 106 [veh/km], i ∈ I, and equal weights in thecost function, i.e. γρ
i = γli = 1, ∀i. The upper bounds for the on-ramp
volume is rmaxi = 2500 [veh/h], i ∈ Ir, whereas the queues have been initially
considered unbounded. Moreover, the prediction horizon is Kp = 10. Thethreshold values for the event-triggered mechanism have been fixed as follows:ǫρ = 10 [veh/km], ǫl = 3 [veh] and ǫI = 3.
20 40 60 80 100 120 140 160 1801
2
3
4
5
6
7
8
9
10
Time steps
Cel
ls
0
20
40
60
80
100
120
140
160
180
200
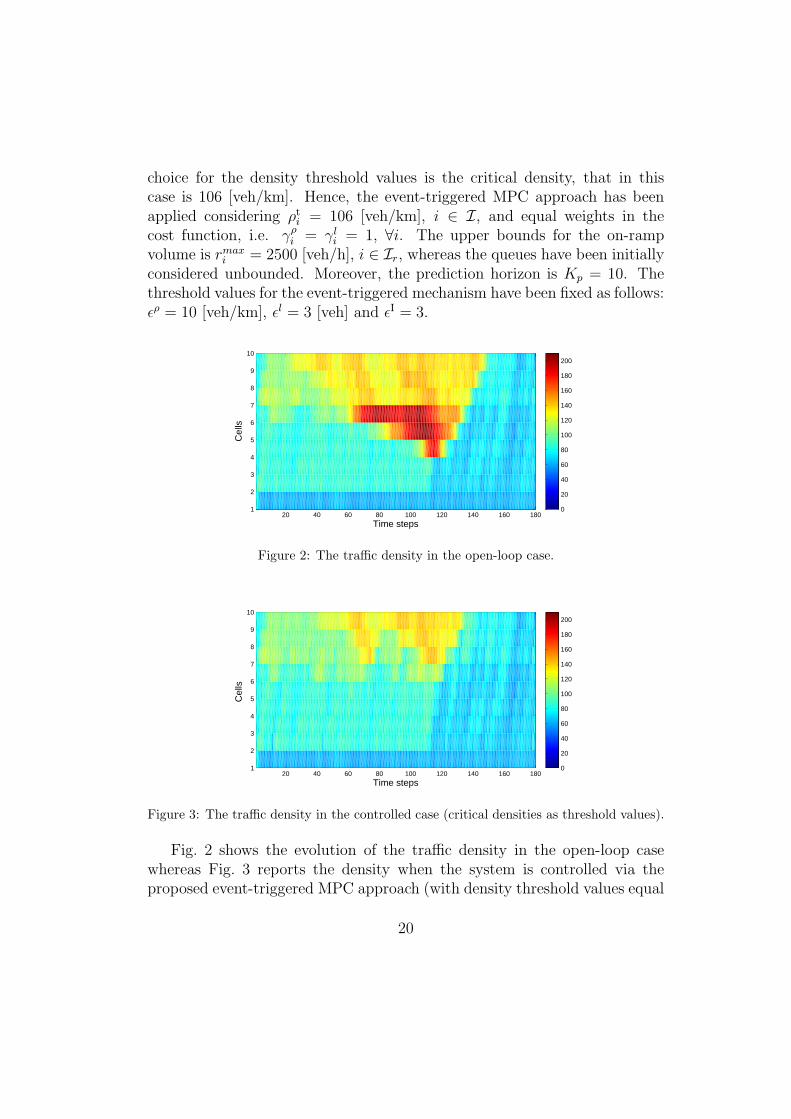
Figure 2: The traffic density in the open-loop case.
20 40 60 80 100 120 140 160 1801
2
3
4
5
6
7
8
9
10
Time steps
Cel
ls
0
20
40
60
80
100
120
140
160
180
200
Figure 3: The traffic density in the controlled case (critical densities as threshold values).
Fig. 2 shows the evolution of the traffic density in the open-loop casewhereas Fig. 3 reports the density when the system is controlled via theproposed event-triggered MPC approach (with density threshold values equal
20

to the critical values). The decrease of the density in the mainstream isobviously realized by stopping some vehicles in the on-ramps. The behaviourof the queues at the on-ramps in the controlled case is shown in Fig. 4 (inthe open-loop case the queues are almost null). Fig. 5 shows the controlledon-ramp flows.
20 40 60 80 100 120 140 160 1800
20
40
60
80
100
120
Time steps
Ramp 2Ramp 7
Figure 4: The queue lengths in the controlled case (critical densities as threshold values).
20 40 60 80 100 120 140 160 1800
500
1000
1500
2000
2500
Time steps
Ramp 2Ramp 7
Figure 5: The on-ramp flows in the controlled case (critical densities as threshold values).
Analysing the values of the performance indexes, it can be seen thatcontrolling the system strongly improves the performances. Indeed, ∆J =0.38 indicates that the event-triggered MPC is able to decrease the costfunction of 38% compared to the open-loop case, whereas ∆TTS = 0.07shows that the total time spent is reduced of 7% in comparison with the
21
open-loop case. In addition, these results are achieved with η = 0.15, sincethe FHOCP is solved 27 times (instead of 180 times, as in a standard MPCscheme). Finally, the average computational time to solve each FHOCP isτav = 0.35 [s] and the maximum time is τmax = 1.92 [s] (the FHOCP is inthis case characterized by 1300 variables and 2928 constraints). This showsthat such a scheme could be suitable for an on-line application (since thesample time is in this case equal to 20 seconds).
20 40 60 80 100 120 140 160 1801
2
3
4
5
6
7
8
9
10
Time steps
Cel
ls
0
20
40
60
80
100
120
140
160
180
200
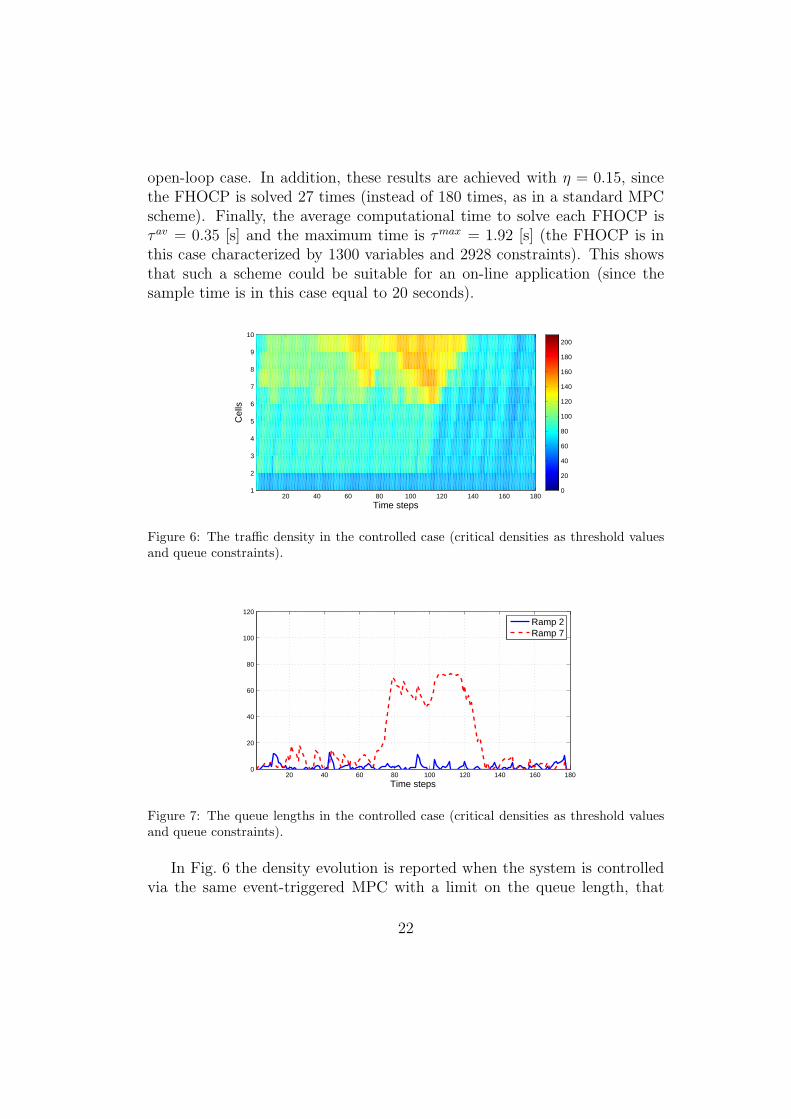
Figure 6: The traffic density in the controlled case (critical densities as threshold valuesand queue constraints).
20 40 60 80 100 120 140 160 1800
20
40
60
80
100
120
Time steps
Ramp 2Ramp 7
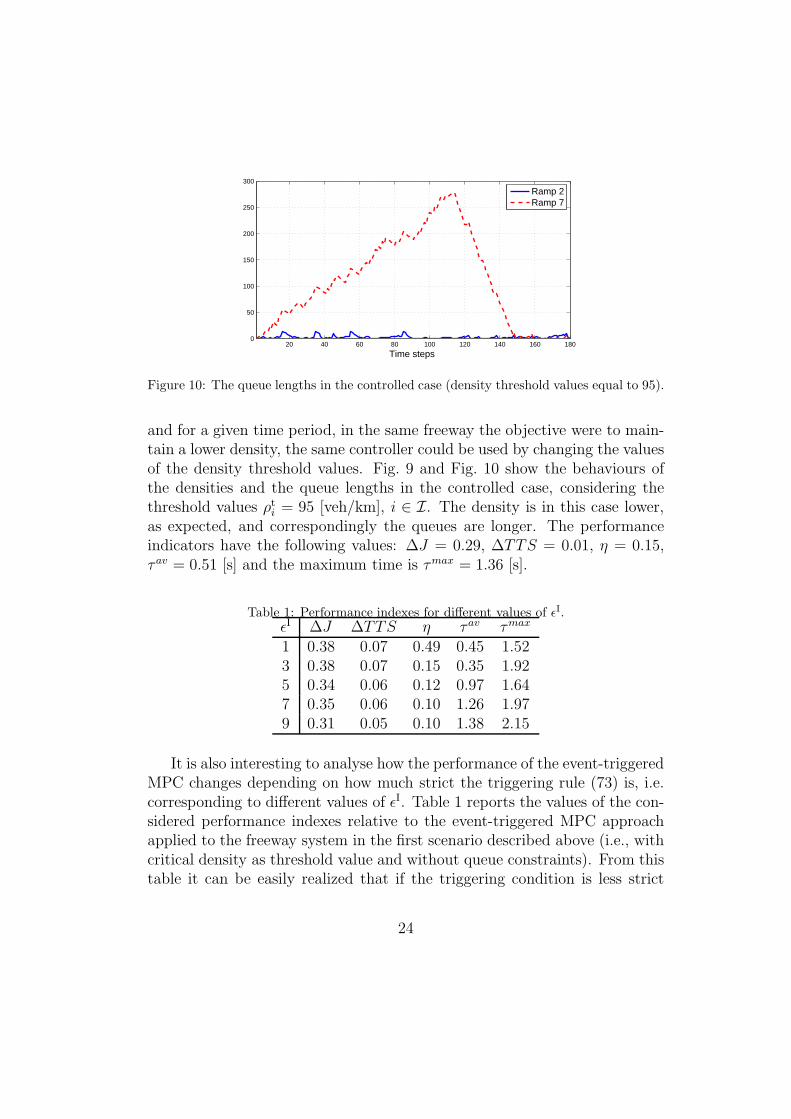
Figure 7: The queue lengths in the controlled case (critical densities as threshold valuesand queue constraints).
In Fig. 6 the density evolution is reported when the system is controlledvia the same event-triggered MPC with a limit on the queue length, that
22

20 40 60 80 100 120 140 160 1800
500
1000
1500
2000
2500
Time steps
Ramp 2Ramp 7
Figure 8: The on-ramp flows in the controlled case (critical densities as threshold valuesand queue constraints).
can be easily implemented by fixing the upper bounds for the queues. Inparticular, in this case an upper bound of lmax
i = 70 [veh], i ∈ Ir, is con-sidered. For the same case Fig. 7 and Fig. 8 show, respectively, the queuelengths in the on-ramps and the controlled on-ramp flows. The performanceof the event-triggered control scheme is quite satisfactory also in this case,characterized by ∆J = 0.38, ∆TTS = 0.07, η = 0.13, τav = 0.31 [s] andτmax = 2.15 [s].
20 40 60 80 100 120 140 160 1801
2
3
4
5
6
7
8
9
10
Time steps
Cel
ls
0
20
40
60
80
100
120
140
160
180
200
Figure 9: The traffic density in the controlled case (density threshold values equal to 95).
The results presented so far show a case in which the objective of thecontroller is to reduce the congestion in the freeway system, that is the mostcommon objective in real applications. However, if for some specific reasons
23
20 40 60 80 100 120 140 160 1800
50
100
150
200
250
300
Time steps
Ramp 2Ramp 7
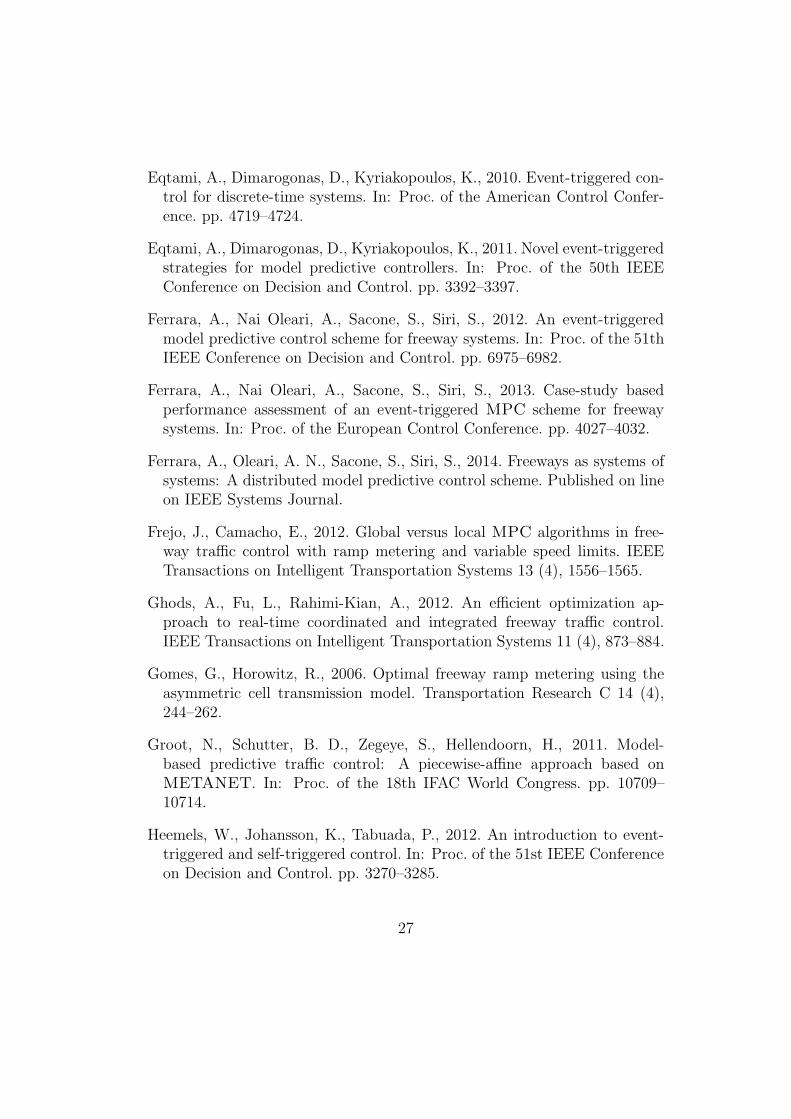
Figure 10: The queue lengths in the controlled case (density threshold values equal to 95).
and for a given time period, in the same freeway the objective were to main-tain a lower density, the same controller could be used by changing the valuesof the density threshold values. Fig. 9 and Fig. 10 show the behaviours ofthe densities and the queue lengths in the controlled case, considering thethreshold values ρti = 95 [veh/km], i ∈ I. The density is in this case lower,as expected, and correspondingly the queues are longer. The performanceindicators have the following values: ∆J = 0.29, ∆TTS = 0.01, η = 0.15,τav = 0.51 [s] and the maximum time is τmax = 1.36 [s].
Table 1: Performance indexes for different values of ǫI.ǫI ∆J ∆TTS η τav τmax
1 0.38 0.07 0.49 0.45 1.523 0.38 0.07 0.15 0.35 1.925 0.34 0.06 0.12 0.97 1.647 0.35 0.06 0.10 1.26 1.979 0.31 0.05 0.10 1.38 2.15
It is also interesting to analyse how the performance of the event-triggeredMPC changes depending on how much strict the triggering rule (73) is, i.e.corresponding to different values of ǫI. Table 1 reports the values of the con-sidered performance indexes relative to the event-triggered MPC approachapplied to the freeway system in the first scenario described above (i.e., withcritical density as threshold value and without queue constraints). From thistable it can be easily realized that if the triggering condition is less strict
24

(i.e. when ǫI increases), as expected, the index η decreases, i.e. the numberof computations of the FHOCP is strongly reduced. As regards instead theother indexes, the “difference” of the system performance compared to theopen-loop case does not change significantly, as well as the computationaltimes.
Table 2: Performance indexes for different values of Kp.
Kp ∆J ∆TTS η τav τmax Variables Constraints3 0.36 0.06 0.44 0.18 0.41 390 8776 0.36 0.07 0.26 0.33 0.93 780 17569 0.38 0.07 0.18 1.12 1.57 1170 263512 0.40 0.07 0.11 1.78 7.13 1560 351415 0.39 0.07 0.10 2.69 18.67 1950 4393
Fixing again ǫI = 3 in the first scenario (i.e., with critical density asthreshold value and without queue constraints), different results are anal-ysed in case the prediction horizon Kp varies, as reported in Table 2. In thistable, the 5 performance indexes are reported, as well as the FHOCP dimen-sions (in terms of number of variables and constraints), for different values ofKp. If Kp increases, the problem dimensions obviously increase and, conse-quently, the computation times. The last case considered, corresponding toa prediction horizon of 5 minutes, is characterized by an acceptable averagecomputation time but a high maximum time (of course, it is worth notingthat in a real application a CPU with a higher computational power wouldbe adopted and hence the computational times could be reduced). Moreover,while Kp increases, the computation ratio η decreases since the control lawcomputed at any time step regards a longer horizon and, then, it is necessaryto recompute it less frequently. As regards instead the performance indica-tors ∆J and ∆TTS, they do not show important variations. Therefore, forthe considered case, the increase of Kp does not seem to imply great improve-ments of the control scheme. This is maybe due to the boundary conditionsand the demands that are almost constant and then, in this specific case, ahigher prediction horizon is not particularly useful. However, in case of a sig-nificant time-varying demand, a longer prediction horizon could be effectiveprovided that a reliable prediction of the future demand is available.
25

6. Conclusions
In the present paper, an event-triggered MPC scheme to control freewaysystems has been proposed. First, the nonlinear Cell Transmission Modelused for prediction has been rewritten as a mixed logical dynamical system.Thanks to the linear structure of the obtained MLD model, the finite horizonoptimal control problem solved within the MPC scheme can be formulatedas a mixed-integer linear programming problem, getting the benefit of beingallowed to use more efficient solvers to provide the optimal solution. More-over, the event-triggered nature of the proposed predictive scheme enables toreduce the number of computations of the optimal control problem comparedto the standard MPC approach. In fact, in the proposed scheme, the controllaw is not updated at each time step but only when a suitably defined trigger-ing rule is verified, the triggering rule being a measure of the actual necessityof updating the control action. The efficiency of the proposed approach hasbeen analyzed and assessed in simulation.
Barradas Berglind, J., Gommans, T., Heemels, W., 2012. Self-triggeredMPC
for constrained linear systems and quadratic costs. In: Proc. of the 4thIFAC Nonlinear Model Predictive Control conference. pp. 342–348.
Bellemans, T., Schutter, B. D., Moor, B. D., 2006. Model predictive controlfor ramp metering of motorway traffic: A case study. Control EngineeringPractice 14 (7), 757–767.
Bemporad, A., Morari, M., 1999. Control of systems integrating logic, dy-namics, and constraints. Automatica 35 (3), 407–427.
Carlson, R. C., Papamichail, I., Papageorgiou, M., Messmer, A., 2010. Op-timal mainstream traffic flow control of large-scale motorway networks.Transportation Research C 18 (2), 193–212.
Daganzo, C., 1994. The cell transmission model: a dynamic representation ofhighway traffic consistent with the hydrodynamic theory. TransportationResearch B 28 (4), 269–287.
Daganzo, C., 1995. The cell transmission model, Part II: Network traffic.Transportation Research B 29 (2), 79–93.
26
Eqtami, A., Dimarogonas, D., Kyriakopoulos, K., 2010. Event-triggered con-trol for discrete-time systems. In: Proc. of the American Control Confer-ence. pp. 4719–4724.
Eqtami, A., Dimarogonas, D., Kyriakopoulos, K., 2011. Novel event-triggeredstrategies for model predictive controllers. In: Proc. of the 50th IEEEConference on Decision and Control. pp. 3392–3397.
Ferrara, A., Nai Oleari, A., Sacone, S., Siri, S., 2012. An event-triggeredmodel predictive control scheme for freeway systems. In: Proc. of the 51thIEEE Conference on Decision and Control. pp. 6975–6982.
Ferrara, A., Nai Oleari, A., Sacone, S., Siri, S., 2013. Case-study basedperformance assessment of an event-triggered MPC scheme for freewaysystems. In: Proc. of the European Control Conference. pp. 4027–4032.
Ferrara, A., Oleari, A. N., Sacone, S., Siri, S., 2014. Freeways as systems ofsystems: A distributed model predictive control scheme. Published on lineon IEEE Systems Journal.
Frejo, J., Camacho, E., 2012. Global versus local MPC algorithms in free-way traffic control with ramp metering and variable speed limits. IEEETransactions on Intelligent Transportation Systems 13 (4), 1556–1565.
Ghods, A., Fu, L., Rahimi-Kian, A., 2012. An efficient optimization ap-proach to real-time coordinated and integrated freeway traffic control.IEEE Transactions on Intelligent Transportation Systems 11 (4), 873–884.
Gomes, G., Horowitz, R., 2006. Optimal freeway ramp metering using theasymmetric cell transmission model. Transportation Research C 14 (4),244–262.
Groot, N., Schutter, B. D., Zegeye, S., Hellendoorn, H., 2011. Model-based predictive traffic control: A piecewise-affine approach based onMETANET. In: Proc. of the 18th IFAC World Congress. pp. 10709–10714.
Heemels, W., Johansson, K., Tabuada, P., 2012. An introduction to event-triggered and self-triggered control. In: Proc. of the 51st IEEE Conferenceon Decision and Control. pp. 3270–3285.
27
Hegyi, A., Schutter, B. D., Hellendoorn, H., 2005. Model predictive con-trol for optimal coordination of ramp metering and variable speed limits.Transportation Research C 13 (3), 185–209.
Lee, C., Hellinga, B., Saccomanno, F., 2006. Evaluation of variable speedlimits to improve traffic safety. Transportation Research C 14 (3), 213–228.
Li, H., Shi, Y., 2014. Event-triggered robust model predictive control ofcontinuous-time nonlinear systems. Automatica 50 (5), 1507–1513.
Majid, H., Hajiahmadi, M., Schutter, B. D., Abouaissa, H., Jolly, D., 2014.Distributed model predictive control of freeway traffic networks: A serialpartially cooperative approach. In: Proc. of the 17th IEEE InternationalConference on Intelligent Transportation Systems. pp. 1876–1881.
Muralidharan, A., Horowitz, R., 2012. Optimal control of freeway networksbased on the link node cell transmission model. In: Proc. of the AmericanControl Conference. pp. 5769–5774.
Papageorgiou, M., 2002. Freeway ramp metering: An overview. IEEE Trans-actions on Intelligent Transportation Systems 3 (4), 271–281.
Papageorgiou, M., Hadj-Salem, H., Blosseville, J.-M., 1991. ALINEA: Alocal feedback control law for on-ramp metering. Transportation ResearchRecord 1320, 58–64.
Papageorgiou, M., Papamichail, I., 2008. Overview of traffic signal operationpolicies for ramp metering. Transportation Research Record 2047, 28–36.
Pasquale, C., Sacone, S., Siri, S., 2013. Multi-class local ramp metering toreduce traffic emissions in freeway systems. In: Proc. of the IFAC Work-shop on Advances in Control and Automation Theory for TransportationApplications. To appear.
Sacone, S., Siri, S., 2012. A control scheme for freeway traffic systems basedon hybrid automata. Discrete Event Dynamic Systems: Theory and Ap-plications 22 (1), 3–25.
28
Wang, Y., Papageorgiou, M., Gaffney, J., Papamichail, I., Guo, J., 2010. Lo-cal ramp metering in the presence of random-location bottlenecks down-stream of a metered on-ramp. In: Proc. of the 13th IEEE Conference onIntelligent Transportation Systems. pp. 1462–1467.
Zegeye, S., De Schutter, B., Hellendoorn, J., Breunesse, E., Hegyi, A., 2013.Integrated macroscopic traffic flow, emission, and fuel consumption modelfor control purposes. Transportation Research C 31, 158–171.
29
Related Documents











