Evaluation of Dynamics Robo India www.roboindia.com

Evaluation of dynamics | Gyroscope, Accelerometer, Inertia Measuring Unit and Kalman Filter
Jul 15, 2015
Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript
Evaluation of DynamicsRobo India
www.roboindia.com

Introduction
The study of the causes of motion and changes in motion is Dynamics.
Our points of concern of Dynamics:
Acceleration.
Angular velocity.
Position and Orientation.
Required Instruments
The evaluation procedure will require following instruments/devices.
1. Accelerometer
2. Gyroscope
3. Inertial Measuring Unit
Accelerometer | Introduction
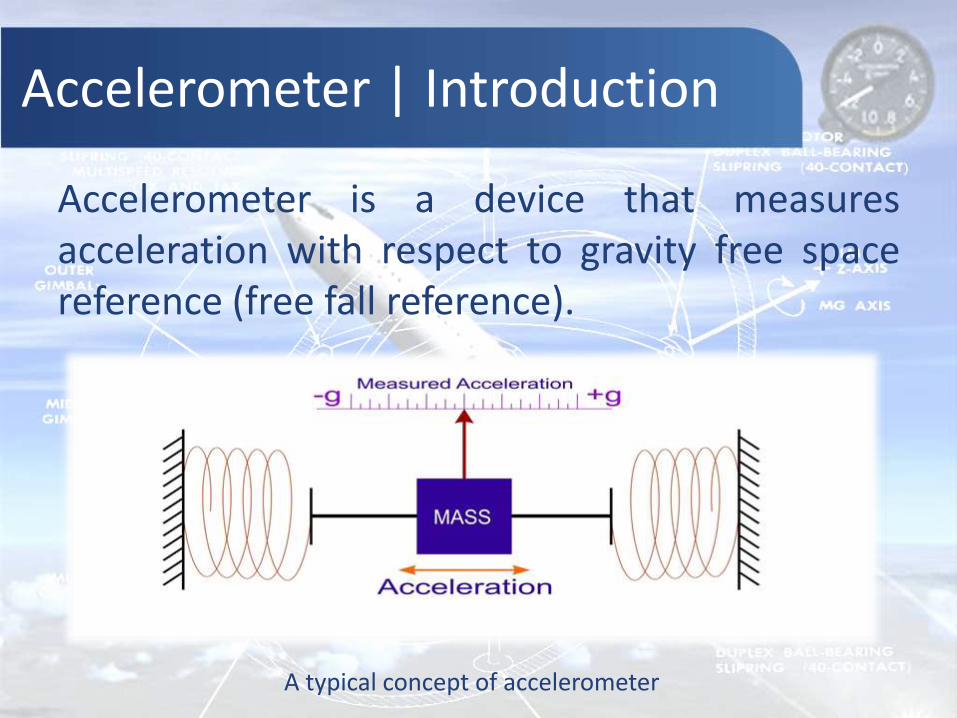
Accelerometer is a device that measuresacceleration with respect to gravity free spacereference (free fall reference).
A typical concept of accelerometer

Draw backs of typical accelerometer
• It would be more complex for multiple axis.
• Measurement would be more complex.
• Difficult to fit in applications.
• Maintenance would be high.
Micro Electro Mechanical System (MEMS) accelerometer sensors overcome all such limitations.

MEMS Accelerometer
MEMS accelerometer are very tinyelectromechanical sensors that gives output inelectronic form(i.e. voltage/current) .
Types of MEMS accelerometers:
• Capacitive
• Piezoelectric
• Piezoresistive etc.

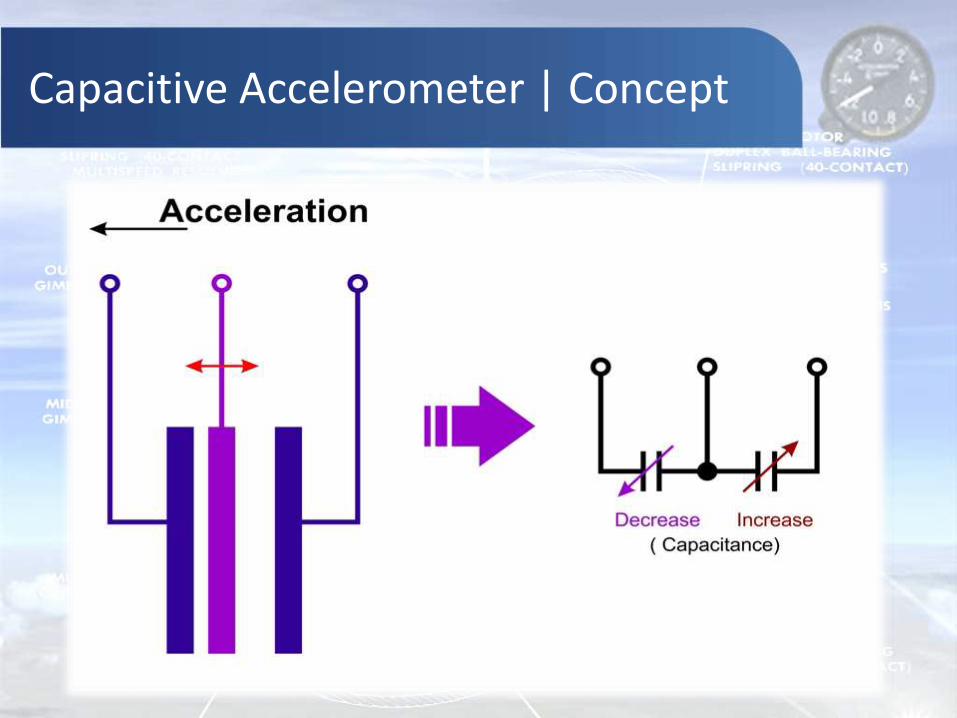
Capacitive Accelerometer
In capacitive accelerometer micro-machined siliconmaterial is used. The distance between thesematerials varies with the acceleration faced by theaccelerometer that causes to change thecapacitance which leads to change output voltage.The particular output voltage defines a particularacceleration.Out put can be:
1. Analogue
2. Digital
Useful Terminologies
• Output: accelerometer sensor gives voltage output thatindicates the acceleration faced by the sensor in terms of g(acceleration due to gravity (g) = 9.81 m/sec2).
• Sensitivity: The rate of change in output voltage with theacceleration. (Unit: mV / g)
• Ratiometricity: It means a linear relation between outputvoltage and sensitivity with respect to change in appliedsupply voltage.
• Zero g (0g): standard output voltage that represents agravity free space, means the accelerometer is facing noacceleration.
Capacitive Accelerometer | Concept
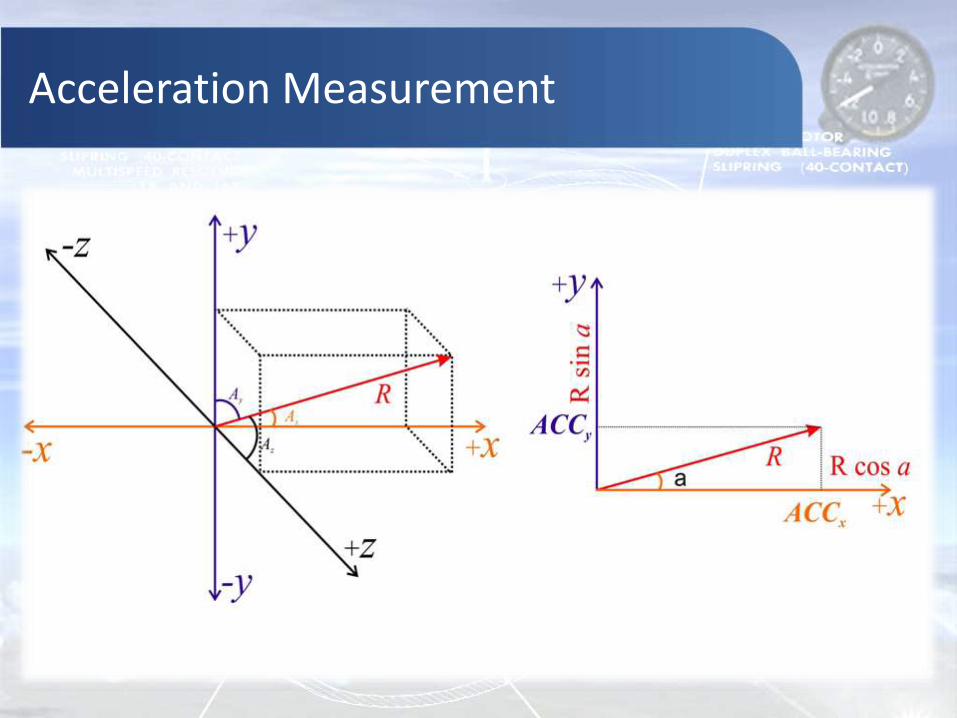
Acceleration Measurement

Measurement of angle & acceleration
R = √ ( Accx2 + Accy
2 + Accz2)
Ax = cos-1(Accx / R)
Ay = cos-1(Accy / R)
Az = cos-1(Accz / R)
Where:
Vx, Vy, Vz : Output for respective axis
ACC x, ACCy, ACCz : Acceleraton of respective axis
R : Resultant Vector
A x, Ay, Az : Angle about respective axis
Application of Accelerometers
• Engineering: to detect acceleration, engine testing, air bag operations, breaking system and various industrial applications.
• Robotics: Motion sensing, hand held devices to save battery consumption.
• 3D-Gamming: Tilt & motion sensor• Cell phones / PDA : Screen orientation, gamming sensor,
image stability• Navigation and dead reckoning: e-compass• Laptop PCs, HDD audio and video player: Free fall
detects to prevent data damaging in Hard Disk Drives (HDD).

Gyroscope
Gyroscope is a device that resists to change its position, itsposition doesn’t change with the changes occurs inexternal surroundings. This property helps extremely indetermining the angular velocity for the balancing,landing, turning and taking off of air-vehicles.
MEMS Gyroscope
Electronic(MEMS) gyroscope sensors are different fromthe traditional and mechanical gyroscopes. A very tiny IC(Plastic Land Grid Array, LGA package) does the same workand gives output in the desired manner, which makes theelectronic gyroscope very easy to use in automation.
MEMS Gyroscope works on the Coriolis force concept. Adriving mass is kept in continuous oscillating movement,the driving mass acts as sensing element and reacts to theapplied angular velocity. The whole arrangement is madeup by the integration of actuators and accelerometers ona micro-machined chip.
Measuring Gyro output
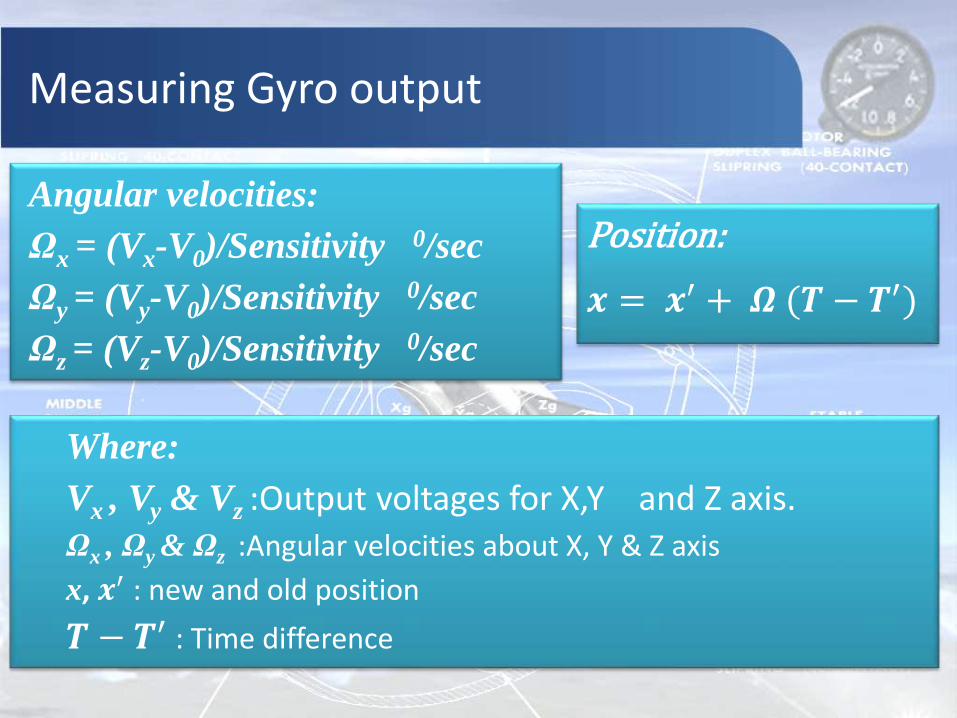
Angular velocities:
Ωx = (Vx-V0)/Sensitivity 0/sec
Ωy = (Vy-V0)/Sensitivity 0/sec
Ωz = (Vz-V0)/Sensitivity 0/sec
Where:
Vx , Vy & Vz :Output voltages for X,Y and Z axis.Ωx , Ωy & Ωz :Angular velocities about X, Y & Z axis
x, 𝒙′ : new and old position
𝑻 − 𝑻′ : Time difference
Position:
𝒙 = 𝒙′ + 𝜴 (𝑻 − 𝑻′)
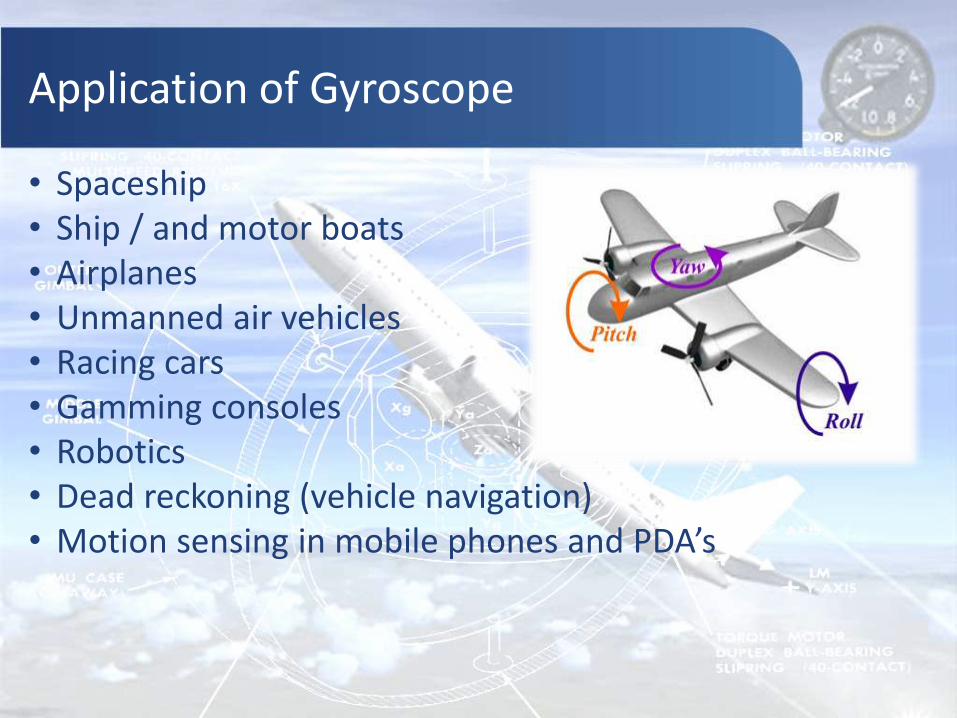
Application of Gyroscope
• Spaceship• Ship / and motor boats• Airplanes• Unmanned air vehicles• Racing cars• Gamming consoles• Robotics• Dead reckoning (vehicle navigation)• Motion sensing in mobile phones and PDA’s
Inertial Measuring Unit (IMU)
Inertial Measuring Units are the integration ofAccelerometers and Gyroscopes that measures velocity,orientation, acceleration, angular velocity andgravitational force.
• Why IMU?• Advantages of IMU• Requirement of filter
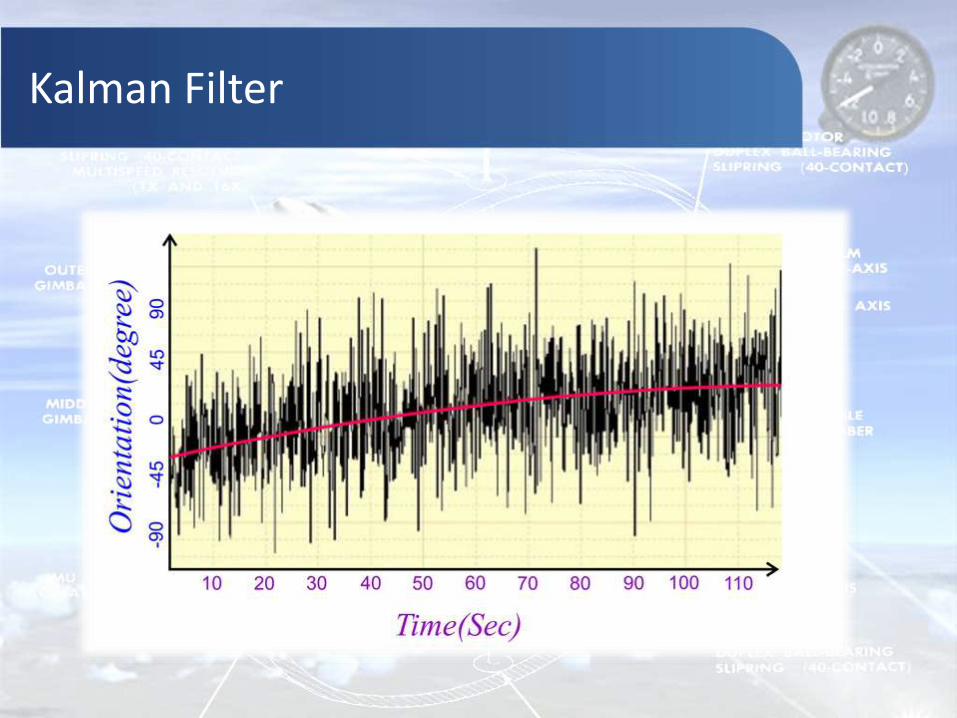
Kalman Filter
Kalman Filter was proposed by Hungarian-Americanengineer Rudolf Emil Kalman. Kalman Filter is amathematical estimation algorithm that involves a widerange of processes and applications.
The Kalman Filter has mainfunction of combining themeasurement of time seriesdata of the same variables butfrom the different sensors andto forecast the state. It predictsthe state and corrects it.
Kalman Filter
ROBO INDIA
Related Documents











