Evaluation of a rough soil surface description with ASAR-ENVISAT radar data M. Zribi a, * , N. Baghdadi b , N. Holah b , O. Fafin a , C. Gue ´rin a a CETP/CNRS, 10-12 av. de l’Europe, 78140 Ve ´lizy, France b Bureau de Recherches Ge ´ologiques et Minie `res (BRGM), ARN/ATL 3 av C. Guillemin, B.P. 6009, 45060 Orle ´ans Cedex 2, France Received 21 July 2004; received in revised form 24 November 2004; accepted 28 November 2004 Abstract The input roughness parameters for electromagnetic backscattering modelling need to be accurate to estimate radar measurements correctly over bare soils, particularly in agricultural environments. This paper proposes to evaluate the roughness description in terms of several characterisations through a correlation function using a numerical backscattering model. The experimental database used in this study is based on ASAR-ENVISAT experimental campaigns in the Beauce region (France). Two presentations of the surface height correlation function are proposed in this study. The first one, referred to as the ba functionQ fits the experimental correlation functions up to the correlation length, while the second one, the b(a,b ) functionQ, fits the correlation function for scales corresponding to positive values. A relationship is proposed between the rms height of soil surface and the shape of the correlation function. Using the a function, comparisons between radar measurements for high incidence angles and simulations based on the numerical backscattering model (moment method) show a good agreement for soil surfaces with an rms height smaller than 2 cm with medium and high soil moisture. D 2004 Elsevier Inc. All rights reserved. Keywords: Radar; ENVISAT; ASAR; Roughness; Backscattering 1. Introduction Soil moisture and roughness play a key role in hydro- logical and climate studies. Considerable effort has been devoted in active microwave remote sensing to study radar backscattering response from natural surfaces (e.g. Bagh- dadi et al., 2002, 2004; Jackson et al., 1996; Ulaby et al., 1986; Zribi & Dechambre, 2002). Electromagnetic back- scattering models (Kirchoff models, the small perturbation model (Ulaby et al., 1986)) and more recently, the Integral Equation Model (IEM, Fung et al., 1992) have been developed to study this question. However, different experimental measurements have shown that they were restricted to smooth or very rough soil surfaces. These difficulties are attributed to two factors: the first one is the soil roughness description based only on two surface parameters (the rms height (s ) and the correlation length (l )) and generally an exponential correlation function for all surface types; the second one is the physical approximations introduced in these models. For example, the small perturbation model (SPM) is valid only for very smooth soils, Kirchoff approximations correspond to very rough surfaces, and for IEM, it is still difficult to identify a large validity domain for real agricultural soils in spite of the improvements developed over the past few years (Chen et al., 2000; Wu et al., 2001). The developed backscattering models generally neglect the volumetric contribution of soil. This hypothesis limits their validation to low surface moisture, where wave penetration is large (Fung, 1994). In that context, over the last few years, different studies have tried to introduce a more complete description of soil surface roughness for forward studies (Davidson et al., 2000; Li et al., 2002; Mattia & Le Toan, 1999; Mattia et al., 2003; 0034-4257/$ - see front matter D 2004 Elsevier Inc. All rights reserved. doi:10.1016/j.rse.2004.11.014 * Corresponding author. Tel.: +33 1 39 25 49 34; fax: +33 1 39 25 49 22. E-mail address: [email protected] (M. Zribi). Remote Sensing of Environment 95 (2005) 67 – 76 www.elsevier.com/locate/rse

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

www.elsevier.com/locate/rse
Remote Sensing of Environ
Evaluation of a rough soil surface description with
ASAR-ENVISAT radar data
M. Zribia,*, N. Baghdadib, N. Holahb, O. Fafina, C. Guerina
aCETP/CNRS, 10-12 av. de l’Europe, 78140 Velizy, FrancebBureau de Recherches Geologiques et Minieres (BRGM), ARN/ATL 3 av C. Guillemin, B.P. 6009, 45060 Orleans Cedex 2, France
Received 21 July 2004; received in revised form 24 November 2004; accepted 28 November 2004
Abstract
The input roughness parameters for electromagnetic backscattering modelling need to be accurate to estimate radar measurements
correctly over bare soils, particularly in agricultural environments. This paper proposes to evaluate the roughness description in terms of
several characterisations through a correlation function using a numerical backscattering model. The experimental database used in this
study is based on ASAR-ENVISAT experimental campaigns in the Beauce region (France).
Two presentations of the surface height correlation function are proposed in this study. The first one, referred to as the ba functionQ fitsthe experimental correlation functions up to the correlation length, while the second one, the b(a,b) functionQ, fits the correlation function
for scales corresponding to positive values. A relationship is proposed between the rms height of soil surface and the shape of the
correlation function. Using the a function, comparisons between radar measurements for high incidence angles and simulations based on
the numerical backscattering model (moment method) show a good agreement for soil surfaces with an rms height smaller than 2 cm with
medium and high soil moisture.
D 2004 Elsevier Inc. All rights reserved.
Keywords: Radar; ENVISAT; ASAR; Roughness; Backscattering
1. Introduction
Soil moisture and roughness play a key role in hydro-
logical and climate studies. Considerable effort has been
devoted in active microwave remote sensing to study radar
backscattering response from natural surfaces (e.g. Bagh-
dadi et al., 2002, 2004; Jackson et al., 1996; Ulaby et al.,
1986; Zribi & Dechambre, 2002). Electromagnetic back-
scattering models (Kirchoff models, the small perturbation
model (Ulaby et al., 1986)) and more recently, the Integral
Equation Model (IEM, Fung et al., 1992) have been
developed to study this question. However, different
experimental measurements have shown that they were
restricted to smooth or very rough soil surfaces. These
difficulties are attributed to two factors: the first one is the
0034-4257/$ - see front matter D 2004 Elsevier Inc. All rights reserved.
doi:10.1016/j.rse.2004.11.014
* Corresponding author. Tel.: +33 1 39 25 49 34; fax: +33 1 39 25 49
22.
E-mail address: [email protected] (M. Zribi).
soil roughness description based only on two surface
parameters (the rms height (s) and the correlation length
(l)) and generally an exponential correlation function for all
surface types; the second one is the physical approximations
introduced in these models. For example, the small
perturbation model (SPM) is valid only for very smooth
soils, Kirchoff approximations correspond to very rough
surfaces, and for IEM, it is still difficult to identify a large
validity domain for real agricultural soils in spite of the
improvements developed over the past few years (Chen et
al., 2000; Wu et al., 2001).
The developed backscattering models generally neglect
the volumetric contribution of soil. This hypothesis limits
their validation to low surface moisture, where wave
penetration is large (Fung, 1994).
In that context, over the last few years, different studies
have tried to introduce a more complete description of soil
surface roughness for forward studies (Davidson et al., 2000;
Li et al., 2002; Mattia & Le Toan, 1999; Mattia et al., 2003;
ment 95 (2005) 67–76
M. Zribi et al. / Remote Sensing of Environment 95 (2005) 67–7668
Oh & Kay, 1998; Zribi et al., 2000). The classical one, which
is based just on s and l with a fixed correlation function
neglects the importance of the shape of the correlation
function and its strong effect on backscattering. Recent
approaches generally show that a single-scale description of
the soil surface is not sufficient to describe all the scales of
soil roughness. Zribi et al. (2000) proposed a fractal brownian
model to introduce the description of soil roughness for an
interval of scales. This approach adds the fractal dimension
for scale characterisation. It links the shape of the correlation
function to the fractal dimension. Mattia and Le Toan (1999)
proposed a multi-scale gaussian description. These fractal
and multi-scale approaches do not consider stationary
profiles. Li et al. (2002) propose a generalized power-law
spectral density with a new parameterisation for a surface
considered as stationary. This results in a precise spectrum
evolution between exponential and gaussian surfaces. The
complexity of these approaches exists particularly in the
estimation of the proposed parameters from real experimental
profiles. These studies, based generally on a complex
parameterisation of surface roughness, have introduced
great improvements in the radar signal simulations for a
large domain of surface roughness. However, if we try to
analyse the inversion of radar signals, a simple description of
surface roughness is still needed because of difficulties
when complex parameterisations of heights are used.
In this paper, we investigate the characterisation of
roughness in terms of several simplified descriptions of the
correlation function using a numerical backscattering model.
Two types of correlation functions are proposed. These
descriptions are validated with ASAR-ENVISAT data for
different experimental campaigns in France. An exact
backscattering numerical model based on the moment
method (MM) is used to evaluate the discussed roughness
description.
In Section 2, we present the experimental data set, built
with both ground truth measurements (roughness and soil
moisture) and ASAR-ENVISAT data. In Section 3, we
present the surface roughness characterisation based on
different descriptions of the correlation function of surface
heights. The backscattering numerical simulation approach
based on the moment method (MM) applied with these
roughness descriptions is briefly presented. Section 4
discusses the results obtained by comparing ASAR-ENVI-
SAT measurements with MM simulations using the pro-
posed roughness description. Conclusions are gathered in
Section 5.
Fig. 1. Location of the Villamblain and Orgeval sites.
2. Data sets
2.1. Studied sites
2.1.1. Villamblain site
In this study, data acquired during seven experimental
campaigns over a study site located in the Beauce region
in the centre of France (Villamblain) were used (fig. 1).
This site is located at about 80 km west of Paris (latitude
48810VN and longitude 01848VE). It is characterised by
large agricultural fields, mainly bare soil fields with
homogenous soil composed of about 60% loam, 30%
clay and 10% sand. For each one, radar measurements
were made with the ASAR-ENVISAT radar. Simultane-
ously to radar measurements, ground measurements were
acquired over a large number of bare soil test fields. A
SPOT image (September 2003) was used to assess field
boundaries.
2.1.2. The Orgeval site
The Orgeval watershed (Fig. 1) is located east of Paris
(France). An experimental campaign was conducted
during the SIRC/XSAR mission (Zribi et al., 1997). The
soil texture is relatively constant over the whole basin:
clay 17%, silt 78%, sand 5%. Ground measurements
(roughness and moisture) were carried out over 5 fields.
As a result of a very rainy winter, during the 5-day SAR
surveys (12–17 April 1994), the soil moisture content
remained high and constant over the watershed (about
0.35 cm3/cm3). The Orgeval data will be used in this
study only for roughness description analysis.
2.2. Ground truth measurements
2.2.1. Soil moisture measurements
Measurements of the soil moisture were made within the
top 5 cm using a gravimetric method with 10 samples per
field. Soil density measurements were made for each test
field. A mean volumetric moisture (Mv) is estimated for
each test field.
1 Km
Fig. 2. A segment of an ASAR ENVISAT image acquired in 23/09/2003 in
HH polarisation and at an incidence angle of 408.
M. Zribi et al. / Remote Sensing of Environment 95 (2005) 67–76 69
2.2.2. Soil roughness measurements
Roughness measurements were made using a pin
profiler (with a total length of 2 m and a resolution of 1
cm). In order to guarantee a sufficient precision in
roughness computations, about 10 profiles were taken for
each field. A surface height profile is considered as
ergodic and stationary. Then, for each profile, we compute
the correlation function (Ogilvy, 1991) and derive the two
statistical parameters, the rms height (s) and the correlation
length (l).
Oh and Kay (1998) proposed a sampling length not
greater than 0.2 times the correlation length in order to
obtain a precision of F5% for s and l. For our case, most
of the test fields fulfil this condition (generally lN5 cm).
However, the pin profiler resolution (1 cm) neglects very
small structures and may therefore introduce a lack of
precision in the shape of the correlation function near
origin.
2.3. Satellite data
After ESA, ERS1 and 2 SARs, ESA launched
ENVISAT with the ASAR radar in March 2002. Compared
to ERS/SAR, this instrument extends the range of
Table 1
Main characteristics of the images used in this study
Date Incidence angle Sensor/mode
09 February 03 37.58 ASAR/IS5
23 September 03 408 ASAR/IS6
09 October 03 438 ASAR/IS7
02 December 03 408 ASAR/IS6
06 mai 2004 44.48 ASAR/IS7
04 September 03 – SPOT4
measurements due to its various operating modes (Rosich,
2002). In particular, it strongly improves on the measure-
ments repeat with approximately 5 days between two
successive images at different incidence angles (only 35
days for ERS/SAR). In our study, we chose to use the
narrow mode corresponding to high resolution data (12.5
m�12.5 m by pixel). For 5 dates, acquisitions were made
with different high incidence angles (37.58, 408, 438 and
44.58) in HH polarisation. Fig. 2 illustrates the ASAR-
ENVISAT image of the site on 23/09/2003. Details of
satellite images are presented in Table 1.
3. Simulation of rough surfaces
3.1. Roughness description
As noted in the Introduction, the description of surface
roughness remains one of the most important difficulties to
be overcome for inverting radar measurements and the
deriving parameters such as soil surface moisture. In this
study, it is proposed to discuss the shape of the correlation
function. Different types of correlation functions have been
proposed in order to obtain an appropriate fit with the
experimental correlation functions (Fung, 1994; Oh et al.,
1994; Zribi et al., 2000). Zribi et al. (2000) linked the
shape of the correlation function at small scales to the
fractal dimension of soil surface. Oh et al. (1994) proposed
a correlation function with two parameters (other than s
and l) in order to obtain a good fit with the experimental
functions for scales larger than the correlation length.
These different studies were generally based on a small
number of test fields and also on an analytical back-
scattering model for radar simulations. In this study, we
propose to test our approach on more than 50 test fields
and different experimental campaigns.
Two analytical correlation functions are suggested here
to fit the experimental functions:
The first one is: q(x)=s2 exp�((x/l)a)
The use of this function aims at fitting the experimental
correlation function correctly up to the correlation length
scale. For each experimental correlation function, the mean
square approach is used to compute coefficient a.The second function is: q(x)=s2 exp�
�(x/l)[a+b(x/l)]
�
This function introduces a varying power for the
correlation function. As observed in different experimental
Polarisation Pixel spacing Orbit mode
HH 12.5 m by 12.5 m Descending
HH 12.5 m by 12.5 m Descending
HH 12.5 m by 12.5 m Descending
HH 12.5 m by 12.5 m Descending
HH 12.5 m by 12.5 m Descending
– 20 m by 20 m –
0
0,1
0,2
0,3
0,4
0,5
0,6
0,7
0,8
0,9
1
0 5 10 15 20
Nor
mal
ized
cor
rela
tion
experimental correlation function
Gaussian function
alpha function
a, b, function
exponential function
0
0,1
0,2
0,3
0,4
0,5
0,6
0,7
0,8
0,9
1
0 5 10 15 20
Displacement (cm)
Displacement (cm)
Nom
aliz
ed c
orre
latio
n
experimental correlation function
Gaussian function
alpha function
a, b, function
exponential function
(a)
(b)
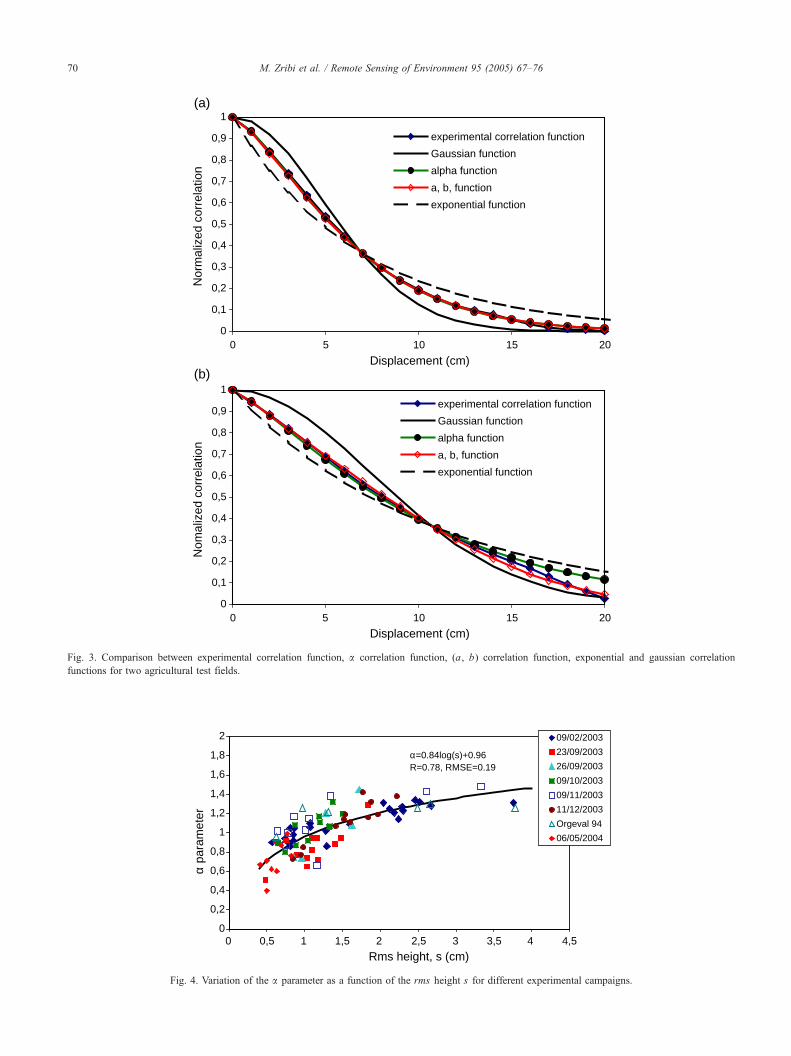
Fig. 3. Comparison between experimental correlation function, a correlation function, (a, b) correlation function, exponential and gaussian correlation
functions for two agricultural test fields.
0
0,2
0,4
0,6
0,8
1
1,2
1,4
1,6
1,8
2
0 1 2 3 40,5 1,5 2,5 3,5 4,5
Rms height, s (cm)
α pa
ram
eter
09/02/2003
23/09/2003
26/09/2003
09/10/2003
09/11/2003
11/12/2003
Orgeval 94
06/05/2004
α=0.84log(s)+0.96 R=0.78, RMSE=0.19
Fig. 4. Variation of the a parameter as a function of the rms height s for different experimental campaigns.
M. Zribi et al. / Remote Sensing of Environment 95 (2005) 67–7670
M. Zribi et al. / Remote Sensing of Environment 95 (2005) 67–76 71
profiles, the shape of the correlation function is not usually
stable with a constant power, particularly beyond the
correlation length scale. Coefficients a and b are computed
by a mean square approach for positive correlation function
values. When b is close to zero, this means that the
correlation function could be simply fitted by a function
with a constant power. On the other hand, when b is large,
the shape of the function beyond the correlation length scale
corresponds more to a gaussian correlation function. This
case is largely present in real agricultural surfaces, as will be
illustrated below.
As an example, Fig. 3 shows a comparison of two
experimental correlation functions and the two proposed
correlation functions, where the gaussian and exponential
0
0,2
0,4
0,6
0,8
1
1,2
1,4
1,6
1,8
2
0 0,2 0,4 0,6 0,8
a par
α pa
ram
eter
(a)
(b)
-0,2
0
0,2
0,4
0,6
0,8
1
0 0,5 1 1,5
Rms he
b pa
ram
eter
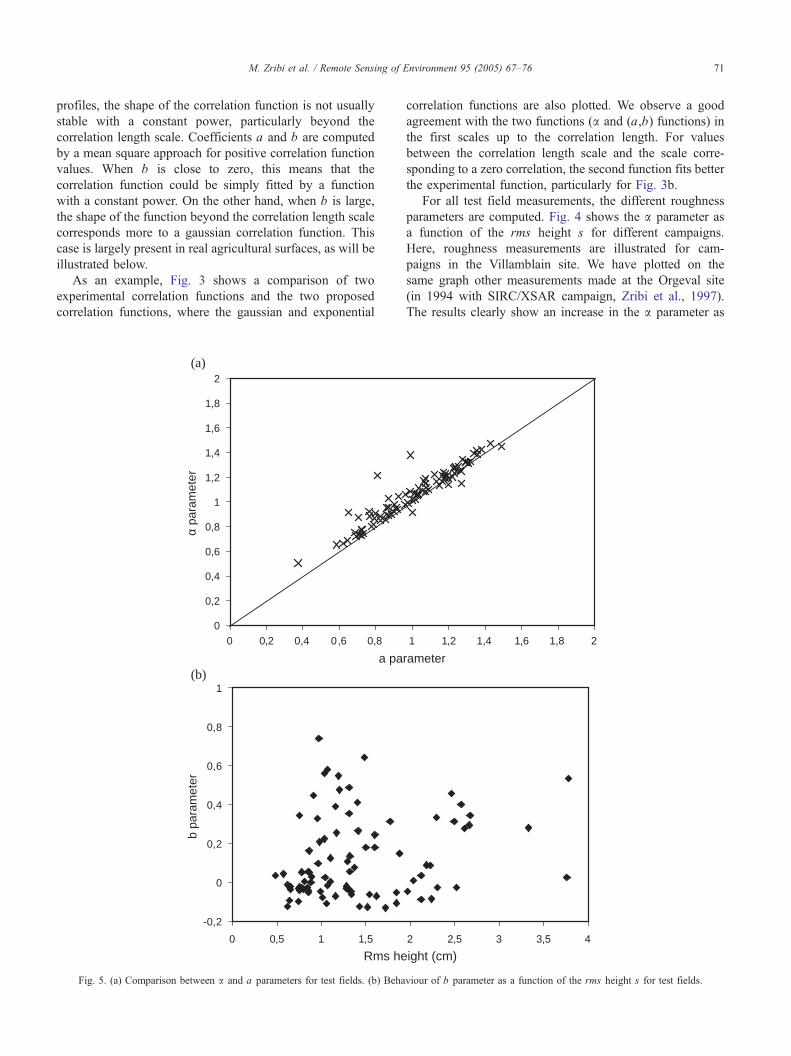
Fig. 5. (a) Comparison between a and a parameters for test fields. (b) Beha
correlation functions are also plotted. We observe a good
agreement with the two functions (a and (a,b) functions) in
the first scales up to the correlation length. For values
between the correlation length scale and the scale corre-
sponding to a zero correlation, the second function fits better
the experimental function, particularly for Fig. 3b.
For all test field measurements, the different roughness
parameters are computed. Fig. 4 shows the a parameter as
a function of the rms height s for different campaigns.
Here, roughness measurements are illustrated for cam-
paigns in the Villamblain site. We have plotted on the
same graph other measurements made at the Orgeval site
(in 1994 with SIRC/XSAR campaign, Zribi et al., 1997).
The results clearly show an increase in the a parameter as
1 1,2 1,4 1,6 1,8 2
ameter
2 2,5 3 3,5 4
ight (cm)
viour of b parameter as a function of the rms height s for test fields.

M. Zribi et al. / Remote Sensing of Environment 95 (2005) 67–7672
a function of the rms height before an approximate settling
at high roughness values. This could be explained by the
fact that for small roughness values we have generally
more small clods and therefore a larger power at high
frequencies, and therefore a smaller a. High rms height
corresponds generally to ploughed soils with principally
large clods and then a limited power at high frequencies.
The second important observation deals with the
behaviour of a for the different campaigns. The a values
have a general tendency to increase with the oldness of the
agricultural tillage and soil moisture, except for rough
surfaces (sN1.5 cm). This behaviour is due particularly to
the effect of rain on the degradation of small clods (high-
frequency structures) and then the increase in a. For
surfaces with large rms height, the limited high-frequency
power explains the absence of tendency for a.In fact, the smallest values are generally retrieved
approximately for the dates 23/09/2003 and 26/09/2003.
These dates correspond to new agricultural tillage and
small or medium values of soil moisture (mean Mv equals
to 7 and 18%). For 09/10/2003 and 03/11/2003 measure-
ments, with rainfall after the end of September measure-
ments, soil has been degraded which induced an increase
in the a parameter. The date 11/12/2003 corresponds to
new tillage made at the beginning of December but
followed by large rainfall (mean Mv of about 30%).
During the Orgeval campaign, the highest a values are
observed. The measurements were made in April 1994
after a long period without agricultural tillage and strong
rainfall (mean soil moisture of about 35%). The date of 06/
05/2004 corresponds to the case of very smooth soil
surfaces with small a parameters.
To conclude on these results, it may be observed that
the a parameter might be one of the tools for quantifying
the evolution of soil surface structure and degradation, an
important parameter for agronomic and erosion studies
(Boiffin & Monnier, 1985; Le Bissonnais et al., 1989).
An empirical logarithmic relationship is proposed to link
the rms height to the a parameter with a high correlation
-20
0
20
40
60
80
100
120
0 200 400Distanc
Hei
ght (
mm
)
Fig. 6. Generation of three surfaces with s=0,7 cm
coefficient (R=0.78) and a root mean square error equal to
0.19. It is written as:
a ¼ 0:84log sð Þ þ 0:96 ð1Þ
This relationship could be considered as a tool for
eliminating one parameter (the shape of the correlation
function) in the inversion of radar measurements.
The a and b parameters of the second proposed function
are also computed over the whole set of measured soil
profiles. As observed in Fig. 5a, a and a are generally close,
particularly for surfaces with very small b values. On the
other hand, the second parameter b is not very stable. This is
illustrated in Fig. 5b, where b is plotted as function of the
rms height. We do not observe any significant correlation
between the rms height and the b parameter.
3.2. Simulation of soil surfaces
In order to study the backscattering behaviour of soil
surfaces and to estimate the difference between the two
proposed functions, we chose to use a numerical model
based on the moment method. This numerical approach
needs a generation of soil surface as input to roughness
description.
For the simulation of surface, we used the approach
described by Fung and Chen (1985), as follows:
The surface heights are written as:
h kð Þ ¼Xi¼M
i¼�M
W ið ÞX iþ kð Þ ð2Þ
where X(i) is a gaussian random variable N(0,1) and W( j) is
the weighting function given by W ið Þ ¼ F�1tffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiF C ið Þ½ �
pb,
where C(i) is the correlation function and F[] denotes the
Fourier transform operator.
For the proposed functions, there is no obvious analytical
Fourier transformation of the correlation functions. There-
fore, Fast Fourier Transformation (FFT) is used to compute
the corresponding values numerically.
600 800 1000e (mm)
s=7mm, l=60 mm
α =1.6
α =1.3
α =1
, l=6 cm and (a) a=1, (b) a=1.3, (c) a=1.6.
-12
-10
-8
-6
-4
-2
0
2
-12 -10 -8 -6 -4 -2 0 2
Simulations (α function)
Sim
ulat
ions
((a
, b)
func
tion)
incidence=26˚incidence=42˚
RMSE=0.18dB (26˚)
RMSE=0.36dB (42˚)
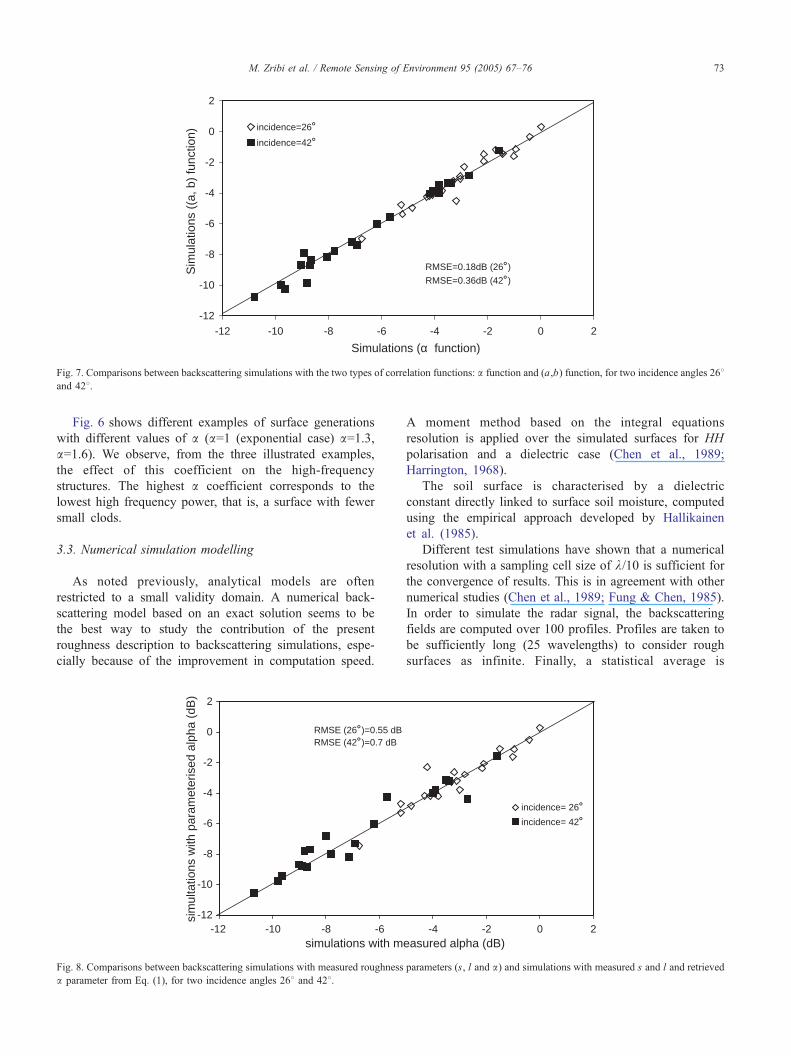
Fig. 7. Comparisons between backscattering simulations with the two types of correlation functions: a function and (a,b) function, for two incidence angles 268and 428.
M. Zribi et al. / Remote Sensing of Environment 95 (2005) 67–76 73
Fig. 6 shows different examples of surface generations
with different values of a (a=1 (exponential case) a=1.3,a=1.6). We observe, from the three illustrated examples,
the effect of this coefficient on the high-frequency
structures. The highest a coefficient corresponds to the
lowest high frequency power, that is, a surface with fewer
small clods.
3.3. Numerical simulation modelling
As noted previously, analytical models are often
restricted to a small validity domain. A numerical back-
scattering model based on an exact solution seems to be
the best way to study the contribution of the present
roughness description to backscattering simulations, espe-
cially because of the improvement in computation speed.
-12
-10
-8
-6
-4
-2
0
2
-12 -10 -8 -6simulations with m
sim
ulta
tions
with
par
amet
eris
ed a
lpha
(dB
)
RMSE (26˚)=0.55 dBRMSE (42˚)=0.7 dB
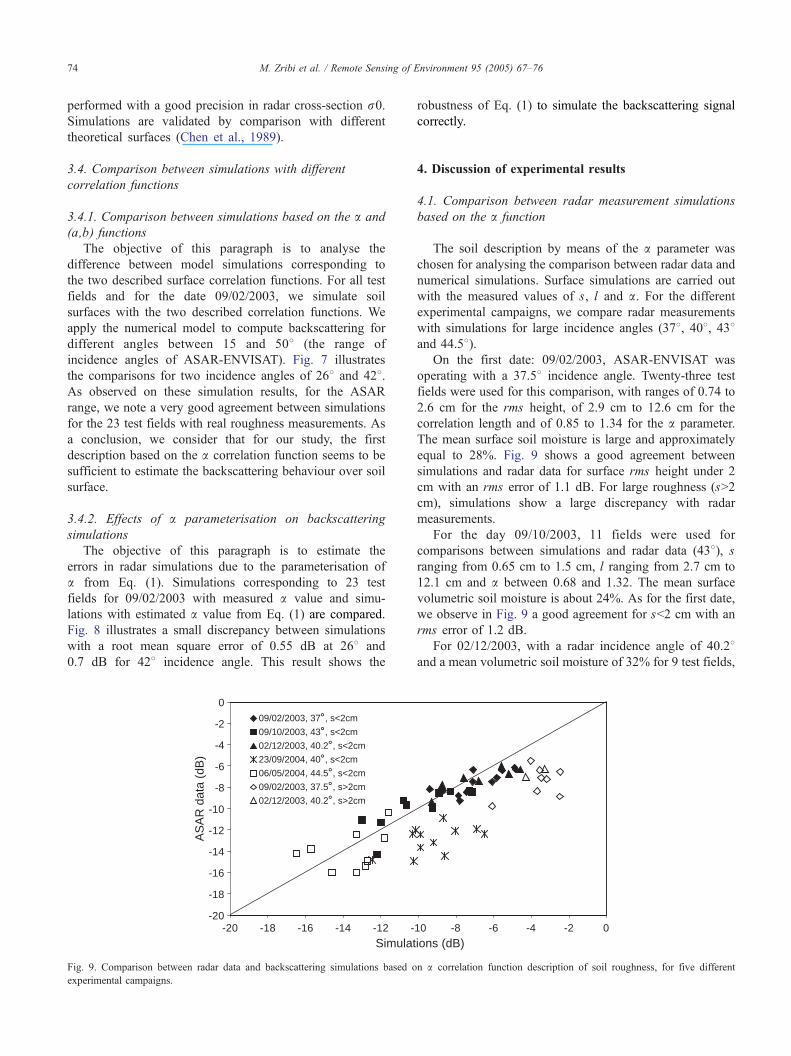
Fig. 8. Comparisons between backscattering simulations with measured roughness
a parameter from Eq. (1), for two incidence angles 268 and 428.
A moment method based on the integral equations
resolution is applied over the simulated surfaces for HH
polarisation and a dielectric case (Chen et al., 1989;
Harrington, 1968).
The soil surface is characterised by a dielectric
constant directly linked to surface soil moisture, computed
using the empirical approach developed by Hallikainen
et al. (1985).
Different test simulations have shown that a numerical
resolution with a sampling cell size of k/10 is sufficient for
the convergence of results. This is in agreement with other
numerical studies (Chen et al., 1989; Fung & Chen, 1985).
In order to simulate the radar signal, the backscattering
fields are computed over 100 profiles. Profiles are taken to
be sufficiently long (25 wavelengths) to consider rough
surfaces as infinite. Finally, a statistical average is
-4 -2 0 2easured alpha (dB)
incidence= 26˚incidence= 42˚
parameters (s, l and a) and simulations with measured s and l and retrieved
M. Zribi et al. / Remote Sensing of Environment 95 (2005) 67–7674
performed with a good precision in radar cross-section r0.Simulations are validated by comparison with different
theoretical surfaces (Chen et al., 1989).
3.4. Comparison between simulations with different
correlation functions
3.4.1. Comparison between simulations based on the a and
(a,b) functions
The objective of this paragraph is to analyse the
difference between model simulations corresponding to
the two described surface correlation functions. For all test
fields and for the date 09/02/2003, we simulate soil
surfaces with the two described correlation functions. We
apply the numerical model to compute backscattering for
different angles between 15 and 508 (the range of
incidence angles of ASAR-ENVISAT). Fig. 7 illustrates
the comparisons for two incidence angles of 268 and 428.As observed on these simulation results, for the ASAR
range, we note a very good agreement between simulations
for the 23 test fields with real roughness measurements. As
a conclusion, we consider that for our study, the first
description based on the a correlation function seems to be
sufficient to estimate the backscattering behaviour over soil
surface.
3.4.2. Effects of a parameterisation on backscattering
simulations
The objective of this paragraph is to estimate the
errors in radar simulations due to the parameterisation of
a from Eq. (1). Simulations corresponding to 23 test
fields for 09/02/2003 with measured a value and simu-
lations with estimated a value from Eq. (1) are compared.
Fig. 8 illustrates a small discrepancy between simulations
with a root mean square error of 0.55 dB at 268 and
0.7 dB for 428 incidence angle. This result shows the
-20
-18
-16
-14
-12
-10
-8
-6
-4
-2
0
-20 -18 -16 -14 -12 -
Simulat
AS
AR
dat
a (d
B)
09/02/2003, 37˚, s<2cm
09/10/2003, 43˚, s<2cm
02/12/2003, 40.2˚, s<2cm
23/09/2004, 40˚, s<2cm
06/05/2004, 44.5˚, s<2cm
09/02/2003, 37.5˚, s>2cm
02/12/2003, 40.2˚, s>2cm
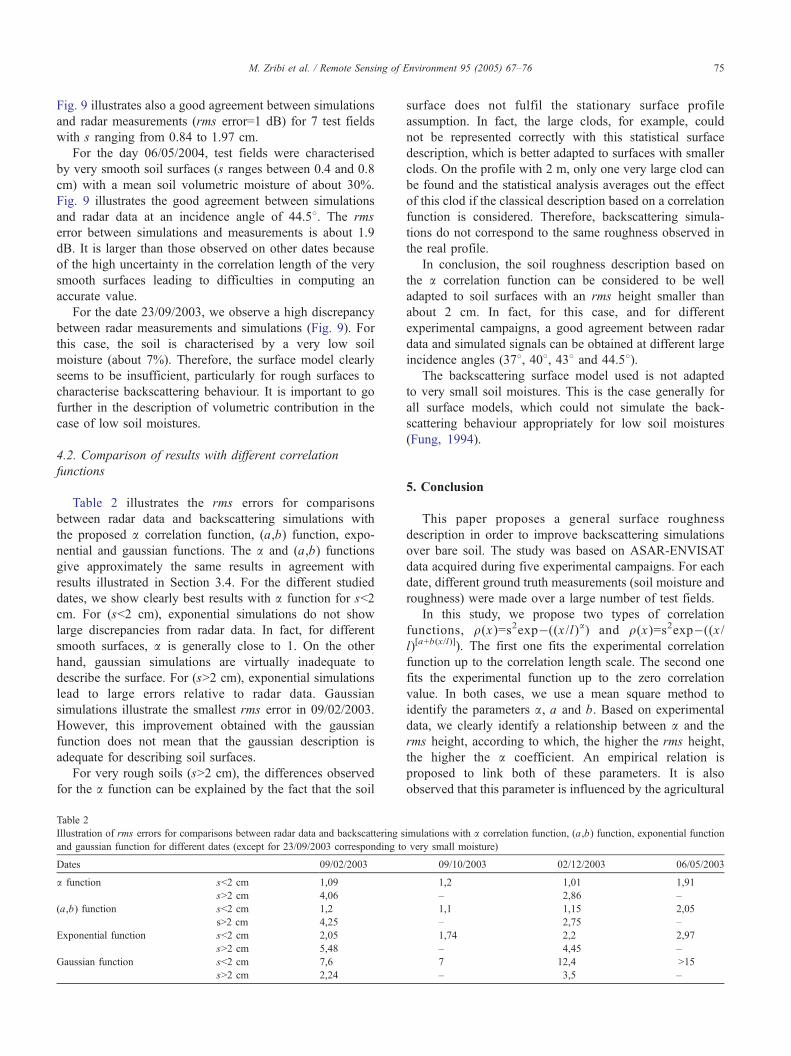
Fig. 9. Comparison between radar data and backscattering simulations based o
experimental campaigns.
robustness of Eq. (1) to simulate the backscattering signal
correctly.
4. Discussion of experimental results
4.1. Comparison between radar measurement simulations
based on the a function
The soil description by means of the a parameter was
chosen for analysing the comparison between radar data and
numerical simulations. Surface simulations are carried out
with the measured values of s, l and a. For the different
experimental campaigns, we compare radar measurements
with simulations for large incidence angles (378, 408, 438and 44.58).
On the first date: 09/02/2003, ASAR-ENVISAT was
operating with a 37.58 incidence angle. Twenty-three test
fields were used for this comparison, with ranges of 0.74 to
2.6 cm for the rms height, of 2.9 cm to 12.6 cm for the
correlation length and of 0.85 to 1.34 for the a parameter.
The mean surface soil moisture is large and approximately
equal to 28%. Fig. 9 shows a good agreement between
simulations and radar data for surface rms height under 2
cm with an rms error of 1.1 dB. For large roughness (sN2
cm), simulations show a large discrepancy with radar
measurements.
For the day 09/10/2003, 11 fields were used for
comparisons between simulations and radar data (438), sranging from 0.65 cm to 1.5 cm, l ranging from 2.7 cm to
12.1 cm and a between 0.68 and 1.32. The mean surface
volumetric soil moisture is about 24%. As for the first date,
we observe in Fig. 9 a good agreement for sb2 cm with an
rms error of 1.2 dB.
For 02/12/2003, with a radar incidence angle of 40.28and a mean volumetric soil moisture of 32% for 9 test fields,
10 -8 -6 -4 -2 0
ions (dB)
n a correlation function description of soil roughness, for five different
M. Zribi et al. / Remote Sensing of Environment 95 (2005) 67–76 75
Fig. 9 illustrates also a good agreement between simulations
and radar measurements (rms error=1 dB) for 7 test fields
with s ranging from 0.84 to 1.97 cm.
For the day 06/05/2004, test fields were characterised
by very smooth soil surfaces (s ranges between 0.4 and 0.8
cm) with a mean soil volumetric moisture of about 30%.
Fig. 9 illustrates the good agreement between simulations
and radar data at an incidence angle of 44.58. The rms
error between simulations and measurements is about 1.9
dB. It is larger than those observed on other dates because
of the high uncertainty in the correlation length of the very
smooth surfaces leading to difficulties in computing an
accurate value.
For the date 23/09/2003, we observe a high discrepancy
between radar measurements and simulations (Fig. 9). For
this case, the soil is characterised by a very low soil
moisture (about 7%). Therefore, the surface model clearly
seems to be insufficient, particularly for rough surfaces to
characterise backscattering behaviour. It is important to go
further in the description of volumetric contribution in the
case of low soil moistures.
4.2. Comparison of results with different correlation
functions
Table 2 illustrates the rms errors for comparisons
between radar data and backscattering simulations with
the proposed a correlation function, (a,b) function, expo-
nential and gaussian functions. The a and (a,b) functions
give approximately the same results in agreement with
results illustrated in Section 3.4. For the different studied
dates, we show clearly best results with a function for sb2
cm. For (sb2 cm), exponential simulations do not show
large discrepancies from radar data. In fact, for different
smooth surfaces, a is generally close to 1. On the other
hand, gaussian simulations are virtually inadequate to
describe the surface. For (sN2 cm), exponential simulations
lead to large errors relative to radar data. Gaussian
simulations illustrate the smallest rms error in 09/02/2003.
However, this improvement obtained with the gaussian
function does not mean that the gaussian description is
adequate for describing soil surfaces.
For very rough soils (sN2 cm), the differences observed
for the a function can be explained by the fact that the soil
Table 2
Illustration of rms errors for comparisons between radar data and backscattering s
and gaussian function for different dates (except for 23/09/2003 corresponding to
Dates 09/02/2003
a function sb2 cm 1,09
sN2 cm 4,06
(a,b) function sb2 cm 1,2
sN2 cm 4,25
Exponential function sb2 cm 2,05
sN2 cm 5,48
Gaussian function sb2 cm 7,6
sN2 cm 2,24
surface does not fulfil the stationary surface profile
assumption. In fact, the large clods, for example, could
not be represented correctly with this statistical surface
description, which is better adapted to surfaces with smaller
clods. On the profile with 2 m, only one very large clod can
be found and the statistical analysis averages out the effect
of this clod if the classical description based on a correlation
function is considered. Therefore, backscattering simula-
tions do not correspond to the same roughness observed in
the real profile.
In conclusion, the soil roughness description based on
the a correlation function can be considered to be well
adapted to soil surfaces with an rms height smaller than
about 2 cm. In fact, for this case, and for different
experimental campaigns, a good agreement between radar
data and simulated signals can be obtained at different large
incidence angles (378, 408, 438 and 44.58).The backscattering surface model used is not adapted
to very small soil moistures. This is the case generally for
all surface models, which could not simulate the back-
scattering behaviour appropriately for low soil moistures
(Fung, 1994).
5. Conclusion
This paper proposes a general surface roughness
description in order to improve backscattering simulations
over bare soil. The study was based on ASAR-ENVISAT
data acquired during five experimental campaigns. For each
date, different ground truth measurements (soil moisture and
roughness) were made over a large number of test fields.
In this study, we propose two types of correlation
functions, q(x )=s2exp�((x /l)a) and q(x )=s2exp�((x /
l)[a+b(x/l)]). The first one fits the experimental correlation
function up to the correlation length scale. The second one
fits the experimental function up to the zero correlation
value. In both cases, we use a mean square method to
identify the parameters a, a and b. Based on experimental
data, we clearly identify a relationship between a and the
rms height, according to which, the higher the rms height,
the higher the a coefficient. An empirical relation is
proposed to link both of these parameters. It is also
observed that this parameter is influenced by the agricultural
imulations with a correlation function, (a,b) function, exponential function
very small moisture)
09/10/2003 02/12/2003 06/05/2003
1,2 1,01 1,91
– 2,86 –
1,1 1,15 2,05
– 2,75 –
1,74 2,2 2,97
– 4,45 –
7 12,4 N15
– 3,5 –

M. Zribi et al. / Remote Sensing of Environment 95 (2005) 67–7676
soil tillage evolution and rainfall. It will be important to link
it in more detail with soil structure, an important input
parameter for erosion and agronomical studies.
The numerical model based on the moment method is
used to assess the contribution of these functions. It is
shown that for the range of incidence angles of ASAR-
ENVISAT (158, 478), there is very little difference between
both cases and therefore, the function with a fixed power
seems to be sufficient.
The comparison between radar measurements and
simulations shows that for high and medium soil moistures,
a good agreement exists between data and model simu-
lations for soil rms heights below 2 cm. For higher rms
heights, a discrepancy exists with simulations. This is
probably due to the complexity of the soil surface and the
fact that the approach assuming a stationary profile and
based on a correlation function is not appropriate.
In the next studies, it will be important to further describe
very rough surfaces with other methodologies, particularly
to better take into account the distribution of clod sizes.
The proposed approach describing the isotropic structure
of soil surface is applied to large incidence angles in C band.
For other conditions of frequency or incidence angle, this
description could become part of a more complete descrip-
tion (for example, adding information from larger scales
such as rows).
Acknowledgements
This work was financed by two programs PNTS
(French Program of Remote Sensing) and PNRH (French
Program of Hydrological, project RIDES). The authors
would like to thank the European Space Agency (ESA) for
providing us with the ASAR images free of charge through
the project n8351 ENVISAT/ASAR. The SPOT images
were obtained through the CNES’ ISIS program (Centre
National d’Etudes Spatiales). The authors would also like
to thank Monique Dechambre, Isabella Zin, Catherine
Ottle, Steven Hosford, Odile Duval and Olivier Cerdan
and the whole team for their logistic support in terrain
campaigns.
References
Baghdadi, N., Gaultier, S., & King, C. (2002). Retrieving surface roughness
and soil moisture from SAR data using neural network. Canadian
Journal of Remote Sensing, 28(5), 701–711.
Baghdadi, N., Gherboudj, I., Zribi, M., Sahebi, M., Bonn, F., & King,
C. (2004). Semi-empirical calibration of the IEM backscattering
model using radar images and moisture and roughness field
measurements. International Journal of Remote Sensing, 25(18),
3593–3623.
Boiffin, J., & Monnier, G. (1985). Infiltration rate as influenced by soil
surface crusting caused by rainfall. In F. Callebaut, D. Gabriels, & M.
De Boodt (Eds.), Assessment of soil surface sealing and crusting,
Proceeding of Symposium helt in Gent, Belguim (pp. 210–217).
Chen, K. -S., Wu, T. D., Tsay, M. K., & Fung, A. K. (2000). A note on the
multiple scattering in an IEM model. IEEE Transactions on Geoscience
and Remote Sensing, 38(1), 249–256.
Chen, M. F., Chen, K. S., & Fung, A. K. (1989). A study of the validity of
the Integral Equation Model by moment method simulation-cylindrical
case. Remote Sensing of Environment, 29, 217–228.
Davidson, M. W. J., Le Toan, T., Mattia, F., Satalino, G., Manninen, T., &
Borgeaud, M. (2000). On the characterisation of agricultural soil
roughness for radar remote sensing studies. IEEE Transactions on
Geoscience and Remote Sensing, 38, 630–640.
Fung, A., & Chen, M.F. (1985). Numerical simulation of scattering from
simple and composite random surfaces. Journal of the Optical Society
America. A, 2(12), 2274–2283.
Fung, A. K. (1994). Microwave scattering and emission models and their
applications. Artech House.
Fung, A. K., Li, Z., & Chen, K. S. (1992). Backscattering from a randomly
rough dielectric surface. IEEE Transactions on Geoscience and Remote
Sensing, 30(2), 356–369.
Hallikainen, M. T., Ulaby, F. T., Dobson, M. C., El-Rayes, M. A., & Wu, L.
K. (1985). Microwave dielectric behaviour of wet soil: Part I. Empirical
models and experimental observations. IEEE Transactions on Geo-
science and Remote Sensing, 23(1), 25–46.
Harrington, R. F. (1968). Field computation by moment method. Series on
electromagnetic waves. IEEE PRESS.
Jackson, T. -J., Schmugge, J., & Engman, E. -T. (1996). Remote sensing
applications to hydrology: Soil moisture. Hydrological Sciences, 41(4),
517–530.
Le Bissonnais, Y., Bruand, A., & Jamagne, M. (1989). Laboratory
experimental study of soil crusting: Relation between aggregates
breakdown and crust structure. Catena, 16, 377–392.
Li, Q., Shi, J.C., & Chen, K.-S. (2002). A generalized power law spectrum
and its applications to the backscattering of soil surfaces based on the
integral equation model. IEEE Transactions on Geoscience and Remote
Sensing, 40(2), 271–281.
Mattia, F., Davidson, W. J., Le Toan, T., D’Haese, M. F., Verhost, N. E. C.,
Gatti, A. M., et al. (2003). A comparison between soil roughness
statistics used in surface scattering models derived from mechanical and
laser profilers. IEEE Transactions on Geoscience and Remote Sensing,
41(7), 1659–1671.
Mattia, F., & Le Toan, T. (1999). Backscattering properties of multi-scale
rough surfaces. Journal of Electromagnetic Waves and Applications, 13,
491–526.
Ogilvy, O. (1991). Theory of wave scattering from random rough surfaces.
Adam Hilder.
Oh, Y., & Kay, Y. C. (1998). Condition for precise measurement of soil
surface roughness. IEEE Transactions on Geoscience and Remote
Sensing, 36(2), 691–695.
Oh, Y., Sarabandi, K., & Ulaby, F. T. (1994). An inversion algorithm to
retrieve soil moisture and surface roughness from polarimetric radar
observations. Proc of IGARSS’94, Firenze, Italy.
Rosich, (2002). ASAR validation review, ESRIN, Frescatti, 11–12
December, 2002.
Ulaby, F. T., Moore, R. K., & Fung, A. K. (1986). Microwave remote
sensing active and passive. Artech House.
Wu, T. D., Chen, K. S., Shi, J., & Fung, A. K. (2001). A transition model
for the reflection coefficient in surface scattering. IEEE Transactions on
Geoscience and Remote Sensing, 39(9), 2040–2050.
Zribi, M., & Ciarletti, V. (2000). Validation of a rough surface model based
on fractional brownian geometry with SIRC and ERASME radar data
over Orgeval site. Remote Sensing of Environment, 73, 65–72.
Zribi, M., & Dechambre, M. (2002). An new empirical model to retrieve
soil moisture and roughness from radar data. Remote Sensing of
Environment, 84(1), 42–52.
Zribi, M., Taconet, O., Le Hegarat-Mascle, S., Vidal-Madjar, D., Emblanch,
C., Loumagne, C., et al. (1997). Backscattering behavior and simulation
comparison over bare soils using SIRC/XSAR and ERASME 1994 data
over Orgeval. Remote Sensing of Environment, 59, 256–266.
Related Documents











