■ EtherCAT Brochure 한글판

EtherCAT Brochure à Ö x · EtherCAT Technology Group 3 I¢ õ&UIFS$"5 K > I¢&UIFS$"5 7 ¸ I ´ ³ I Ð è P I D } Z Ý ÿ Ñ * & @ ¿ D ¿ Õ 8 ¯ ° ; Ñ ×)551 '51
May 05, 2018
Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

■EtherCAT Brochure 한 판

2
3 왜 Ether CAT인가?
사용자 및 개발자들의 인사말
ETG 멤버 회사 둘러보기
ETG 멤버 목록
EtherCAT Technology Group (ETG)
EtherCAT 기술소개 및 개요
구현의 측면
어플리케이션 사례제품 사례
연락처
4
6
8
10
12
20
2223
24
EtherCAT Technology Group
ⓒ EtherCAT Technology Group. We reserve the right to make technical changes.

3EtherCAT Technology Group왜 EtherCAT인가?
EtherCAT은 산업용 이더넷- 표준 이더넷 프레임 사용- 이더넷의 모든 기술 지원- 실시간성의 품질을 떨어뜨리지 않는 HTTP,FTP, TCP/IP 지원
- 수직적 통합의 단순화
가장 빠른 EtherCAT- 뛰어난 동기화 특성과 함께 사용할 수 있는가장 빠른 시스템
- 토폴로지에 거의 의존하지 않는 성능- 기초가 되는 서브시스템이 더 이상 필요 없음- 현재와 미래의 요구사항을 만족시킴
사용하기 쉬운 EtherCAT- 주소의 수동설정이 없음- 스위치 환경설정이 없음- 자동 환경설정 기능- 정확한 로컬라이제이션 진단
EtherCAT의 유연한 토폴로지- 모든 토폴로지가 지원됨 : 라인, 트리, 스타,링 토폴로지.
- 노드, 스위치 또는 허브의 종속접속 문제가 없음- 세그먼트마다 65535개까지의 노드가 있음- Redundancy, Hot Connect, Hot Swap옵션
이더넷상에서 EtherCAT의 안전성- 하나의 네트워크를 사용하는 Safety 어플리케이션 및 표준자동화
- 국제안전표준 IEC 61508에 따라 개발한 프로토콜
- Safety I/O 및 Safety 구동에 적합함.- Gateway 및 필드버스 시스템을 경유하여경로설정 가능
EtherCAT의 개방- 완전히 공개된 개방기술- 세계 최대의 이더넷 관련조직인 ETG의 지원을받음
- EtherCAT은 IEC 사양 : IEC/PAS 62407- 잘 정립된 디바이스 프로파일을 지원
EtherCAT의 미래보장- ETG를 통해 널리 지원됨- 여러 회사로부터 제공되는 컨트롤러 칩- 국제적 표준화- 시대에 뒤떨어진 기술을 사용하지 않음
다방면에 걸친 EtherCAT의 응용성- 마스터와 슬레이브, 슬레이브 간 및 마스터 간통신 지원
- 프로세스 데이터와 파라미터 데이터를 위한주기적/ 비주기적 서비스
- 중앙집중 또는 분산 제어구조에 적합- 기계 제어, 로봇공학, 내장형 시스템, 빌딩자동화, 운송 시스템 등등 …
비용 대비 효율적인 EtherCAT- 필드버스의 가격수준 대비 훨씬 낮음- 특별한 마스터 카드가 필요하지 않음- 온 보드 MAC 또는 저가 표준 NIC 사용- 낮은 인터페이스 비용으로 고도로 통합된 슬레이브 컨트롤러
- 기반구조(인프라) 구성요소가 필요 없음
이미 검증된 EtherCAT- 2003년 이래 어플리케이션 시리즈로 계속해서발달해 옴
- 이미 수천개의 노드를 출하- 다양한 컨트롤러와 운 체제상에서 구현됨- 제품 선택 범위가 넒음
ⓒ EtherCAT Technology Group. All rights reserved.

4 EtherCAT Technology Group
ⓒ EtherCAT Technology Group. All rights reserved.
■ Dieter Hess, 3S Smart Software Solutions GmbH의Managing Director
“3S는 EtherCAT을 최초의 실시간 이더넷 프로토콜로써 구현하기로 결정했습니다. EtherCAT은 이더넷의 최대 성능을 이용하기 때문입니다. 소프트웨어 제조업체인 우리 회사로서는 마스터구현이 특별한 플러그 인 카드 없이 가능하다는 점에 특히 매력을 느낍니다. 소프트웨어는 보편적으로 사용할 수 있는 표준이더넷 컨트롤러에 기반을 둘 수 있습니다. 시스템의 공개성과ETG에 대한 Beckhoff의 적극적인 지원이 더 중요한 요인이라할 수 있습니다.”
■ Clement Peter, Schuler AG의 제어 및 Drive시스템 코디네이터, ETG Board Member
“EtherCAT을 사용하면 현재 Schuler 그룹에서 사용하고 있는 모든 어플리케이션에서 고속드라이브제어 및 유압제어를 구현 할 수 있습니다. 또 다른핵심적인 요인은 EtherCAT의 성능 때문에 우리는속도 면에서 더 이상 문제를 일으키지 않고 앞으로
복잡한 제어 임무를 해결할 수 있는 충분한 잠재능력을 가지게 되었다는 것입니다. 기술의 기능적인 측면과는 별도로, 부품 선택에 대한 광범위한 옵션의 제공은 자동화 디바이스를 사용하는 사용자에게 매우 의미가 깊습니다. ETG가 설립된 이후 얼마 되지도 않아 수많은 멤버 회사들이 이미 EtherCAT 제품을 개발판매하고 더 앞선 제품을 준비하고 있다는 사실은 이 신생 기술이 성공할 분명한 증거가 됩니다. 사용자의 선택을 결정하는 주요 요소는 계속 간단해 질것이고 구성설정 및 진단에 관하여 이더넷 시스템은 효과적으로 취급 될 것입니다.”
■ Kim Hartman, TenAsys Corp의VP Sales & Marketing,
“EtherCAT 표준은 비용을 낮추면서도 필드버스 어플리케이션에 기반한실시간 이더넷의 성능을 개선시킬 중요하고도 강력한 기술이 될 잠재성을가지고 있습니다. 윈도우용 iRMX 및
INtime이라는 실시간 운 체제를 25년 동안 공급한 업체로서TenAsys사는 EtherCAT 텔레그램에서 사용하는 특히 고도로최적화한 구조를 잘 알고 있습니다. EtherCAT 테크놀로지 그룹은 파트너와 고객의 의미 깊고도 실질적인 기반을 구축하는 상호협력을 통하여 가치를 지속적으로 높이고 있습니다. 우리 회사는ETG 및 Beckhoff사와 관계를 맺게 된 것을 매우 기쁘게 생각하며 OEM 어플리케이션을 위하여 견고하고 높은 성능의 실시간EtherCAT 마스터를 공급하기 위해 노력하고 있습니다.”
■ Dr. Peter Heidrich, Baumuler GmbH의R&D 매니저, ETG Board Member
“바우뮬러사는 특히 가격 대비 성능 비와 가용성 면에 있어서 EtherCAT에 중요한 이점이 있어서EtherCAT을 사용하기로 결정하 습니다. 이 결정은ETG의 실행 위원회와 우리의 적극적 협력을 통해이루어졌습니다. 우리는 EtherCAT에 관한 결정이
올바른 것이었음을 확신하고 있습니다. EtherCAT의 슬레이브 컨트롤러를 사용할 수 있게 되면서 바우뮬러사는 2004년 8월에 b maxx 4400 시스템의 연결생산에 착수하 습니다. ETG는 EtherCAT 기술대학의 기능으로써 이제까지EtherCAT 기반의 시스템을 매우 빠르게 개발하고 실현할 수 있다는 것을 증명해오고 있습니다.”
■ Gunter Redeker, IMA의 전기설계 담당 매니저
“IMA는 가구산업 분야에 최첨단 기계를 생산하는 회사로 알려져있습니다. 우리는 수년 동안 PC를 기반으로 한 제어를 사용해왔습니다. 왜냐하면 이 기술은 동적이고 정확한 모션 어플리케이션에 뛰어난 성능을 제공하기 때문입니다. EtherCAT은 우리 어플리케이션에 걸맞은 통신 시스템입니다. 우리는 일반 필드버스대신에 EtherCAT을 사용하는 것이 지능형 마스터 카드를 사용하지 않더라도 제어시스템의 CPU 부하를 상당히 줄인다는 것을발견하 습니다. 따라서 우리는 비용을 절감하면서도 뛰어난 성능을 얻게 되었습니다.”

5EtherCAT Technology Group
ⓒ EtherCAT Technology Group. All rights reserved.
■ Hans Beckhoff, Beckhoff사 사장
“EtherCAT은 특히 PC를 기반으로 한 고속 제어에 적합합니다. 마스터는 플러그 인 카드가 필요 없고 매우 단순한 인터페이스를 사용하여기존의 이더넷 컨트롤러상에 구현할 수 있습니다. 따라서 EtherCAT은 소형 및 중형 컨트롤러에도 또한 적합합니다. 왜냐하면 이것은 분산제어를 위한 새로운 어플리케이션 역을 열어 놓았기 때문입니다.따라서 EtherCAT은 Beckhoff 시스템 구조에 있어서 통신의 중추라고 할 수 있습니다. 우리 회사는 이 기술이 세계적인 성공을 거둔 것에 대하여 매우 기쁘게 생각합니다.”
■ Martin Roastan, Beckhoff사 제품 매니저, EtherCAT 테크놀로지그룹 회장
“EtherCAT 테크놀로지 그룹이 이제는 세계 최대의 산업용 이더넷 기관이 되었다는 점을 기쁘게 생각합니다. ETG의 빠른 성장은 EtherCAT기술에 대한 엄청난 관심을 뜻합니다. 제조업체와 사용자는 EtherCAT이 제공하는 장점을 인정하고 있습니다: 미래보장 성능, 유연한 네트워크 토폴로지, 단순한 환경설정 및 낮은 비용입니다. 때론 멤버의 수가 많음이 기술 기관의 성공에 대한 중요한 판단기준이 되기도 하지만, 결정적인 판단기준은 되지 못합니다. 제품의 개발 및 어플리케이션에 기술이얼마나 많이 채택되었는가 하는 것이 좀 더 중요한 판단기준입니다.EtherCAT은 이 점에 있어서도 매우 성공적입니다.”
■ Ludger Borgmann, PhilipsMedical System사의 시스템 설계자
“우리는 EtherCAT이 비용을 절감하면서새로운 혁신을 가능하게 만드는 다음 단계의 올바른 기술이라고 믿습니다. 이더넷은 이 요구사항을 만족시키기에는 부적절합니다. EtherCAT의 성능이라면 단일
케이블(네트워크) 상에서 케이블의 비용을 상당히 줄일 유연한 토폴로지를 제공하는 동시에 Hard Real Time, Safety 및 필요한 제어 기능을 구현할 수 있을 것입니다. 성능뿐 아니라 국제 표준화와 전세계적인 채택 또한 EtherCAT의 중요한 사양입니다. 우리는 차세대 제품을 개발하면서 기존의 서브시스템과 구성요소를 모두 바꿀수 없었기때문에, CANopen 디바이스 프로파일, Gateway와 컨버터를 사용하여 차세대 제품을 EtherCAT으로 간단히 전환할 수 있었습니다.”
■ Chris Choi, Husky Injection MoldingSystem의 제어담당 이사
“선두에 서서 고객을 계속 리드하는 것은 쉽지 않습니다. 이 능력을 유지하는 방법 중의하나는 우리의 컨트롤러를 지속적으로 재개발하는 것입니다. 우리는 차세대 제어 방안을찾는 과정에서 EtherCAT이 최선의 가격을
갖는 필드버스 기술이라고 하는 점을 알아냈습니다. PCI 인터페이스 카드가 필요없다는 것은 필드버스 비용과 PC의 비용이 낮아짐을 의미하며, 궁극적으로는 시스템 비용이 낮아짐을 의미합니다. EtherCAT의 고유한 어드레스 맵핑 기술은 실시간 산업용 이더넷의 잠재성을 최대로 만들었습니다. 우리는 다른 경쟁기술이 기술적으로나 경제적으로EtherCAT보다 우월하지 않다고 여전히 확신합니다.”
■ Holger Zeltwanger, CAN inAutomation협회 관리이사
“CANopen과 EtherCAT은 최적의 방법으로 서로를 보완하는 두 개의 통신 시스템입니다. harmonized applicationlayer를 사용함으로써 Gateway를 통한단순 통합이 지원되는데 많은 CANopen
디바이스 프로파일을 사용하는 EtherCAT에 의하여 이 통합이 쉬워지게 됩니다.”
■ Dmitry Dzilno, Applied Materials사. 제어그룹 매니저
“우리는 EtherCAT을 평가해 왔으며 이 통신기술이 여러 개의 PCI 슬롯을 사용하는 대신 단 하나의 이더넷 포트를 사용하는 고속 I/O 디바이스뿐 아니라 필드버스 스캐너 카드, 디지털 모션 증폭기의 연결을 가능하게 한다는 점에서 특히 흥미롭다는 점을 발견했습니다. EtherCAT을도입한다면, 기존에 제대로 설치된 모든 필드버스 시스템을 바로 포기할필요는 없지만 모션제어 어플리케이션을 필요로 할 때 EtherCAT은 쉽고도 유연한 방법으로 변화의 수단을 제공합니다.”

6 EtherCAT Technology Group
ⓒ EtherCAT Technology Group. All rights reserved.
EtherCAT 테크놀로지 그룹은 세계 최대의 산업용 이더넷 기관입니다. 2003년 11월에 발족하여 가장 빠르게성장하는 필드버스 기관이 되었습니다. 2006년 4월 현재25개국의 300개가 넘는 회사들이 회원으로 가입되어 있으며, 대한민국에서는 12개 회사가 가입되어 있습니다.
(대한민국, 이스라엘, 미국, 우크라이나, 터키, 대만, 스위스,스웨덴, 네덜란드, 싱가포르, 스페인, 리히텐슈타인, 이탈리아,인도, 국, 핀란드, 프랑스, 독일, 덴마크, 중국, 일본, 벨기에,호주, 오스트리아, 캐나다)

7EtherCAT Technology Group
ⓒ EtherCAT Technology Group. All rights reserved.

8 EtherCAT Technology Group
ⓒ EtherCAT Technology Group. All rights reserved.
3S-Smart Software Solutions GmbH,
Germany
3S-Systems GmbH, Germany
ABB Power Technologies AB, Sweden
ABB Stotz-Kontakt GmbH, Germany
ABM automation building messaging
GmbH, Austria
acontis technologies GmbH, Germany
ACS-Tech8o Ltd., Israel
Advantech Co. Ltd., Taiwan
AeroLas GmbH, Germany
ALSTOM Power Conversion, Germany
Altera GmbH, Germany
AMK GmbH & Co.KG, Germany
Anca PTY Ltd., Australia
Andrive Antriebstechnik GmbH,
Germany
Applied Materials Inc., USA
Aradex AG, Germany
Arlington Laboratory Corp., USA
as electronics GmbH, Germany
ASIRobicon S.p.A., Italy
ASM Technology Singapore Pte.Ltd.,
Singapore
Automata GmbH & Co.KG, Germany
AutomationX GmbH, Austria
Aweta G&P, Netherlands
AXIOM GB Ltd., Great Britain
Baldor UK Ltd., Great Britain
Balluff GmbH, Germany
BAS efficiency, Netherlands
Baumuller Nurnberg GmbH, Germany
BE Semiconductor Industries N.V.,
Netherlands
Beck IPC GmbH, Germany
Beckhoff Automation GmbH, Germany
Berghof Automationstechnik GmbH,
Germany
Berner Fachhochschule Fur Technik und
Informatik, Switzerland
Bhend Automation AG, Switzerland
Billhofer Maschinenfabrik GmbH &
Co.KG, Germany
Binar AB, Sweden
b-plus GmbH, Germany
Brosis Engineering GmbH, Germany
Bruderer Maschinenfabrik AG, Switzerland
Bruker Daltonik GmbH, Germany
Caesar Datensysteme GmbH, Germany
CEGELEC, BelgiumChr. Mayr GmbH & Co.KG, GermanyCimetrics Inc., USACleveland Motion Controls, USAContinental AG, GermanyControl Techniques, UKDanaher Motion GmbH, GermanyDanaher Motion Stockholm AB, SwedenDelta Tau Data Systems Inc., USADeutschmann Automation GmbH &Co.KG, GermanyDeWind GmbH, GermanyDieffenbacher GmbH & Co.KG, GermanyDigitronic Automationsanlagen GmbH,GermanyDeutsches Zentrum fur Luft-u.Raumfahrte.V., GermanyDynaservo Inc., CanadaEagle Precision Technologies Inc., CanadaEasyMatics Ltd., UKElectroglas Inc., USAElectronic Control Systems, ItalyEleks Software Ltd., UkraineElmar Vogel Software & Automation,AustriaElrest Automationssysteme GmbH,GermanyEltromat GmbH, GermanyEpis Microcomputer GmbH, GermanyESR Pollmeier GmbH, GermanyETAS GmbH, GermanyFachhochschule Munchen, GermanyFachhochschule Solothurn, SwitzerlandFagor Automation s.coop., SpainFERAG AG, SwitzerlandFerrocontrol Steuerungssysteme GmbH &Co.KG, GermanyFH GieBen - Friedberg, GermanyFH Ingolstadt, GermanyFinn-Power Oy, FinlandFisher Technical Services Inc., USAFlanders’ MECHATRONICS TechnologyCentre, BelgiumFocke & Co., GermanyFraba Posital GmbH, GermanyFritz Kubler GmbH, GermanyFronius International GmbH, AustriaFuji Electric FA Components & SystemsCo., Ltd., JapanGAS - Gesellschaft fur Antriebs- u.
Steuerungstechnik mbH, Germany
Hahn-Meitner-Institut Berlin GmbH,
Germany
Hans Turck GmbH & Co.KG, Germany
Harting Electric GmbH & Co.KG, Germany
Heesemann GmbH & Co.KG, Germany
HEINZ SIEGFRIED AG, Switzerland
Hengstler GmbH, Germany
Hilscher GmbH, Germany
HMS Industrial Networks AB, Sweden
Hochschule Aalen, Germany
Hubner Elektromaschinen GmbH, Germany
Husky Injection Molding Systems Ltd.,
Canada
Iba AG, Germany
IBS Prufsysteme, Germany
ICP DAS Co. Ltd., Taiwan
IDAM-INA-Drives & Mechatronics GmbH &
Co.KG, Germany
IMA Automation GmbH, Germany
Imperial Tobacco Limited, Germany
IMS Messsysteme GmbH, Germany
Indumat GmbH & Co.KG, Germany
Industrial Dynamics Company, USA
Industriele Automatisierung Kremer BV,
Netherlands
Infranor Electronics SAS, France
Ingenieurgemeinschaft IgH, Germany
ITT Flygt AB, Sweden
IVECO Motorenforschung AG, Switzerland
IVO GmbH & Co.KG, Germany
Janz Automationssysteme AG, Germany
Jetter AG, Germany
Justek Inc., Korea
K.Mecs Co.Ltd., Japan
Kayser Threde GmbH, Germany
KEB Antriebstechnik, Germany
KEBA AG, Austria
KineticaRT Ltd., UK
Kithara Software GmbH, Germany
KK-electronic a/s, Denmark
Komax AG, Switzerland
Konig Prozessautomatisierung GmbH,
Germany
Kuhnke GmbH, Germany
Kuka Controls GmbH, Germany
KW-Software GmbH, Germany
Leister Process Technologies, Switzerland
Lemoine, France
‥
‥
‥
‥
‥
‥
‥
‥
‥
‥
‥
‥
9
ⓒ EtherCAT Technology Group. All rights reserved.
EtherCATE Technology Group
Lenord, Bauer & Co. GmbH, Germany
LG Industrial Systems, Korea
Lust Antriebstechnik GmbH, Germany
Lust Drivetronics GmbH, Germany
LVD Company n.v., Belgium
Ma.Vi. SRL, Italy
Manar Sistem (Meysar) Ltd., Tureky
Manfred Fohrenbach Servodrives,
Germany
MDH-Systems GmbH, Germany
MESCO Engineering GmbH, Germany
MESSUNG SYSTEMS, India
Metronix Messgerate und Elektronik
GmbH, Germany
Mettler & Fuchs AG, Switzerland
Micronet Co., Japan
Micronor AG, Switzerland
Miille Applied Research Co.Inc, USA
MKS Instruments INC., USA
Moeller GmbH, Germany
Moog GmbH, Germany
Motion Control Systems INC., USA
Moxa Networking Co.,Ltd., Taiwan
MTS Sensor Technologie GmbH,
Germany
Muller Weingarten AG, Germany
Multiscan Technologies S.L., Spain
National Instruments, USA
Netstal-Maschinen AG, Switzerland
NOKIAN CAPACITORS Ltd., Finland
NTI AG / LinMot, Switzerland
Optel Vision, Canada
PANTEC Engineering AG, Liechtenstein
Paul Maschinenfabrik GmbH & Co.KG,
Germany
Pfeiffer Vacuum, Germany
Philips Medical Systems DMC GmbH,
Germany
Phoenix Innovation GmbH, Switzerland
Power Automation GmbH, Germany
ProCom GmbH, Germany
Profimatics GmbH, Germany
PROMESS Montage- u. Prufsysteme
GmbH, Germany
ProSign GmbH, Germany
Pruftechnik NDT GmbH, Germany
Rafi GmbH & Co.KG, Germany
Reinhold Seiz Ingenieurburo GmbH,
Germany
Reis GmbH & Co. Maschinenfabrik,
Germany
Renk Test System GmbH, Germany
RIGATRON sagl, Switzerland
Robert Bosch GmbH, Germany
Robox S.p.A., Italy
Roders GmbH, Germany
Rohwedder AG, Germany
Roland Electronic GmbH, Germany
RS elektronik GmbH, Germany
Saia-Burgess Controls AG, Switzerland
Samsoft ApS, Denmark
Samsung Electronics Co.,Ltd., Korea
Sanyo Denki Co.,Ltd., Japan
SCA Schucker GmbH & Co.KG, Germany
Schaefer Elektronik GmbH, Germany
Schaeper Automation GmbH, Germany
Schmidhauser AG, Switzerland
Schmitt-Walter Automation Consult
GmbH, Germnay
Schuler Automation GmbH & Co.KG,
Germany
Seidel Elektronik GmbH NfG.KG, Austria
SELEMA SRL, Italy
Serad SA, France
Servo Dynamics, USA
SEW-EURODRIVE GmbH & Co.KG,
Germany
Siemens-OTN, Belgium
Sigmatek GmbH & Co.KG, Austria
SMC European Tech Centre, Great
Britain
SND Smart Network Devices GmbH,
Germany
Softing AG, Germany
Soft-O-Matic, Netherlands
Speciaal Machinefabriek Ketels v.o.f.,
Netherlands
Steinhoff Automation & Fieldbus-
Systems, Germany
STMicroelectronics GmbH, Germany
Stober Antriebstechnik GmbH & Co.KG,
Germany
SYBERA e.K., Germany
SYSTEMATIX Inc., USA
TAS Engineering AG, Switzerland
Technische FH Berlin, Germany
TECHNOSOFT S.A., Switzerland
TenAsys Corp., USA
Test-Fuchs Ing. Fritz Fuchs Ges.m.b.H.,
Austria
ThyssenKrupp Presta AG, Liechtenstein
Tigris Elektronik GmbH, Germany
TR-Electronic GmbH, Germany
Trio Motion Technology Ltd., Great Britain
TR-Systemtechnik GmbH, Germany
Turbotek Co.,Ltd., Korea
TWK-Elektronik GmbH, Germany
Unidor Industrieelektronik GmbH, Germany
Universitat Salzburg, Austria
UNJO AB, Sweden
Vamco International Inc., USA
VAT AG, Switzerland
WATT DRIVE Antriebstechnik GmbH,
Austria
Weidmuller Interface GmbH & Co.KG,
Germany
Weidmuller Schweiz AG, Switzerland
WIEDEG Elektronik GmbH, Germany
WIKA Alexander Wiegand GmbH & Co.KG,
Germany
Wipotec GmbH, Germany
Wittenstein Motion Control GmbH,
Germany
Woodhead, Canada
WST Systemtechnik GmbH, Germany
WTCM-CRIF, Belgium
Xilinx Inc., USA
YELLOWSTONE SOFT, Germany
Zhejiang Supcon Technology Co.,Ltd.,
China
‥
‥
‥
‥
‥
‥
‥
‥
‥
‥
‥
‥

10 EtherCAT Technology Group
ⓒ EtherCAT Technology Group. All rights reserved.
“모든 사람이 EtherCAT을 사용하고 구현할 수 있어야 한다.”EtherCAT 테크놀로지 그룹은 이러한 철학을 지향하고 있습니다. ETG(EtherCAT 테크놀로지 그룹)는 서로다른 산업 분야에 있는 앤드 유저 및 기계장비 제조업체와, EtherCAT 기술을 지원하고 촉진할 목적으로 컨트롤러를 공급하고 있는 업체를 위한 포럼입니다. EtherCAT이 광범위한 산업부문에서 사용되고 있다고 하는 것은EtherCAT이 수많은 어플리케이션에 항상 최적으로 준비되고 있다고 하는 것을 말해주고 있습니다. 그들로부터 돌아오는 양질의 피드백을 서로 공유함으로써, 시스템 파트너들은 모든 필요한 디바이스들에 대한 하드웨어와 소프트웨어적 구성요소의 통합에 대한 진보된 정보를 얻게 될것입니다.ETG 기술 위원회는 기술을 재검토하기 위하여 종종 모
임을 갖습니다. 기술 대책위원회는 디바이스 프로파일의 통합, 안전, 배선, 표준화 또는 테스트 및 인증을 감독합니다.ETG는 교육과정 및 세미나 등을 통하여 이 기술에 대
한 상세한 정보를 제공하고 있습니다. InternationalElectrotechnical Commission (IEC)의 경 이사회에서는 2004년 8월, 디지털 통신을 위한 IEC 위원회와EtherCAT 테크놀로지 그룹간의 연락소(Liaison)를 허가하 습니다: 이제 ETG는 IEC의 공식 표준화 협력기관이되었습니다.
회원의 이익■ 회원사는 사양의 초안, 사양, 백서, 툴, 평가용 시제품
및 최초의 일괄제품에 대한 우선 접근권을 가지며, 따라서 EtherCAT 기술을 평가, 사용하거나 구현하는데있어서 선두주자가 되게 됩니다.
■ 회원사는 실무그룹에 참가할 수 있으며 EtherCAT 기술 사양에 대한 장래의 개선에 향을 미칠 수 있게 됩니다.
■ ETG는 IEC 및 ISO와 같은 국제 표준화 위원회에서회원사의 이익을 대표하게 됩니다.
11EtherCAT Technology Group
ⓒ EtherCAT Technology Group. All rights reserved.
■ ETG의 회원사는 EtherCAT 웹사이트의 회원사 전용사이트에 들어갈 수 있습니다. 이 사이트는 아직 개발중인 사양, 개발자 공개토론회 및 이 기술에 관한 최신정보를 제공합니다.
■ ETG는 EtherCAT에 관한 기술적 질문들에 대답하고,마케팅에 관한 도움을 제공하며, 제품 지도서를 간행하고 인쇄물과 기사를 제작합니다. 또한 웹사이트를 통하여 EtherCAT을 마케팅하며 전시회의 EtherCAT 공동부스에 참여할 수 있습니다.
국제 표준화IEC 회원사 96%의 찬성투표를 얻어 EtherCAT은 2005년 2월에 공식 IEC 사양이 되었습니다: IEC/PAS62407. 이 매우 의미 깊은 표준화 단계를 거쳐서EtherCAT은 다른 국제표준화로 한걸음 다가가고 있습니다. 예를 들어 현재 EtherCAT은 IEC 61784-2 표준에가입되고 있는 중인데 (측정 및 제어를 위한 디지털 데이터 통신- 파트 2: 실시간 어플리케이션에서 ISO/IEC
8802-3을 기반으로 하는 통신 네트워크를 위한 추가 프로파일) 이것은 ETG의 전문가들이 관련되어 개발하고 있는 중입니다. EtherCAT 기술은 또한 국제 필드버스 표준, IEC 61158 및 IEC 61800-7의 (가변 속도 전기 파워 드라이브 시스템을 위한 프로파일 및 인터페이스)의다음 버전에 포함될 것입니다. 국제 표준화 협회(ISO)는EtherCAT을 ISO 15745 표준 안에 포함시키고 있습니다.

12 EtherCAT Technology Group
ⓒ EtherCAT Technology Group. All rights reserved.
이 장에서는 EtherCAT 및 EtherCAT을 기반으로 하는 필드버스 시스템에 대해 깊이 있게 소개할 것입니다.EtherCAT은 필드버스의 성능에 대한 새로운 표준을 제시하 습니다. EtherCAT은 그 취급방법이 간단하고 필드버스와 비슷하면서도 토폴로지에 대한 유연성과 환경설정이 매우 단순합니다. 더 나아가 EtherCAT을 구현하는 데는 큰 돈이 들지 않으므로 (컴퓨터의 이더넷 포트를 그대로 사용할 수 있음) 비용 때문에 필드버스 네트워크를 선택할 수 없었던 어플리케이션에서도 이제는 EtherCAT을 필드버스로 적용하는 것이 가능하게 되었습니다.
■ 기술소개필드버스는 자동화 기술의 통합 구성요소가 되었습니다.그 동안 필드버스 기술은 테스트와 검증을 거쳤고 이제는널리 정착되었습니다. PC기반의 제어 시스템을 광범위한스케일로 어플리케이션 할 수 있게 만든 것이 바로 필드버스 기술입니다. 컨트롤러 CPU - 특히 산업용 컴퓨터의CPU - 의 성능이 빠르게 성장하는 동안, 전통적인 필드버스 시스템은 제어 시스템이 도달 할 수 있는 성능에 한계를 가져오는 소위“병목현상”을 나타내는 경향이 있습니다. 병목현상을 일으키는 또 다른 요소는 실제 제어 임무,필드버스 시스템 및 I/O 시스템 내에 있는 로컬 확장버스,주변기기 안에 있는 로컬 펌웨어 사이클 등을 간단한 예로들 수 있는, 여러 개의 종속 시스템(보통 주기적인)으로 구성된 수직계층적 제어구조입니다. 응답시간은 보통 컨트롤러의 사이클 타임보다 3~5배 더 길어 이것은 불만족스러운 솔루션입니다(그림 1 참조).필드버스 시스템 상위의 레벨, 즉 네트워킹 컨트롤러(레
벨2, 3 또는 그 이상)의 경우에 이더넷은 이미 최신 기술의 위치를 지켜 왔습니다. 드라이브, 또는 I/O 레벨(레벨1)에서 이더넷을 어플리케이션 하는 것이 비교적 새롭다고
할 수 있는데 이것은 필드버스 시스템이 지배하던 역입니다. 이런 어플리케이션의 주요 요건은 높은 실시간 성능, 소량의 데이터에 적합할 것, 그리고 물론 가격 대비효율성이 높을 것 등입니다. EtherCAT은 이러한 요건을충족시키며 동시에 전체 제어 시스템의 수직 계층적 구조의 맨 하부 단인 I/O 레벨에서 인터넷 기술을 가능케 만듭니다.
■ 이더넷과 실시간 성능이더넷에 실시간 성능을 부여한 솔루션들이 여러가지 있습니다. 예를 들어, CSMA/CD 디바이스 액세스 절차는더 상위 레벨의 프로토콜 계층을 경유하여 작동불능(disable) 상태가 되며, 시분할 또는 폴링에 의하여 대체됩니다. 패킷을 정 제어 방법으로 분산시키는 특별한 스위치를 사용하는 또 다른 방법도 있습니다. 이 솔루션은연결된 이더넷 노드로 데이터 패킷을 다소 빠르고 정확하게 전송할 수 있는 반면, 출력 또는 드라이브 컨트롤러에재지시(redirection)를 내리는데 필요한 시간과 입력된 데이터를 읽는데 걸리는 시간은 구현방법에 따라 매우 달라지게 됩니다.
■그림 1 : 전형적인 필드버스에서의 응답시간

Data 2HDR 2Data 1HDR 1Ethernet HDR Data nHDR n
Ethernet Telegram 1…n Ethernet Telegram 2 Ethernet Telegram n
CRC
Logi
cal P
roce
ss im
age:
up
to 4
GB
13EtherCAT Technology Group
ⓒ EtherCAT Technology Group. All rights reserved.
만일 각 디바이스에 대하여 개별적인 이더넷 프레임을사용한다면, 원칙상 사용할 수 있는 데이터의 속도는 매우느려지게 됩니다. 가장 짧은 이더넷 프레임은 패킷간 간격(IPG)를 포함하여 84바이트의 길이를 갖고 있습니다.예를 들어 만일 드라이브가 주기적으로 4바이트의 실제값과 상태정보를 내보내고 그에 따라 4바이트의 명령값과제어워드 정보를 100% 버스 부하에서 받는다면, 즉 드라이브의 응답시간이 무한히 짧다면 단지 4/84=4.8%만의가용 데이터 속도를 얻을 수 있게 됩니다. 10㎲의 평균 응답시간에서 데이터 속도는 1.9%까지 떨어집니다. 이 속도한계는 이더넷 프레임 안에서 어느 프로토콜을 사용하는가에 관계없이 이더넷 프레임을 각 디바이스(각 디바이스로부터의 하나의 프레임을 상상하십시오.)로 전송하는 모든 실시간 이더넷 솔루션의 경우에도 적용됩니다.
■ EtherCAT의 동작원리EtherCAT 기술은 다른 이더넷 솔루션의 본질적 한계를극복하 습니다. EtherCAT에서는 더 이상 이더넷 패킷을받지 않으며 모든 디바이스에서 데이터를 해석, 처리하고복사합니다. EtherCAT 슬레이브 디바이스는 프레임이 노드를 통과하는 동안 그곳에 전달된 데이터를 읽습니다. 이와 유사하게 텔레그램이 통과하는 동안 입력한 데이터가삽입됩니다. (그림2 참조) 프레임은 겨우 몇 ns 동안만 지연됩니다.이더넷 프레임이 수신방향과 발신방향 모두에서 많은 디
바이스의 데이터를 포함하기 때문에 사용 가능한 데이터속도는 90% 이상으로 증가합니다. 100BaseTX의 full-
duplex특성을 충분히 활용하여 100Mb/s보다 큰 효과적인 데이터 속도를 얻을 수 있습니다.(그림 3 참조)IEEE 802.3에 따라 이더넷 프로토콜은 개별 디바이스
에 이르기까지 손상되지 않고 그대로 있습니다; 서브 버스가 필요하지 않습니다. 터미널 블록과 같은 모듈화 디바이스의 요건을 만족시키기 위해서 커플링 디바이스 내의 물리계층은 twisted pair 또는 광 파이버에서LVDS(Alternative 이더넷 Physical Layer[4,5]에서 표준화됨)로 바꿔질 수 있습니다. 따라서 모듈화 디바이스는비용 대비 매우 효과적으로 확장될 수 있습니다. 백플레인물리계층 LVDS에서 100BaseTX의 물리계층으로의 연속전환은 언제라도 가능하며 이것은 이더넷의 경우 흔한 일입니다.
■ 프로토콜EtherCAT 프로토콜은 프로세스 데이터에 관하여 최적화되며, 특별한 이더타입(Ethertype)의 도움을 받아 이더넷안에서 직접 전송됩니다. 이것은 여러 개의 EtherCAT 텔레그램으로 구성될 수 있으며, 각 텔레그램은 크기가 약 4기가 바이트까지 될 수 있는 로지컬 프로세스 이미지의 특별한 메모리 역에 제공됩니다. 데이터 시퀀스는 네트워크 내의 이더넷터미널의 물리적 순서와는 관계가 없습니다: 주소할당은 어떠한 순서로든 가능합니다. 브로드케스트, 멀티케스트 및 슬레이브 간의 통신이 가능합니다. 최대 성능이 요구될 때와 컨트롤러와 동일한 서브넷 안에서EtherCAT 컴포넌트를 운 할 경우에 direct 이더넷 프레임 전송을 사용합니다.
■그림 2 : 텔레그램에 프로세스 데이터의 삽입 ■그림 3 : 대역폭 활용의 비교

14 EtherCAT Technology Group
ⓒ EtherCAT Technology Group. All rights reserved.
그러나, EtherCAT 어플리케이션은 하나의 서브넷에 제한되지 않습니다: EtherCAT UDP는 EtherCAT 프로토콜을 UDP/IP 데이터그램 안으로 일괄 처리합니다. (그림4 참조). 이로써 어떠한 이더넷 프로토콜 스택을 사용한제어도 EtherCAT 시스템으로 보내는 것이 가능해집니다.라우터를 거쳐 다른 서브넷으로 가는 통신도 가능합니다.이러한 여러 경우에서, 시스템 성능은 실시간 제어 특성및 이더넷 프로토콜의 구현에 따라 변합니다. EtherCAT네트워크 자체의 응답시간은 전혀 제한을 받지 않습니다:오직 최초의 스테이션 안에서 UDP 데이터그램을 해독해야 하기 때문입니다.EtherCAT은 마스터/슬레이브 원칙에 따른 데이터 교환
외에도 마스터간 또는 슬레이브간의 통신에도 매우 적합합니다. 어드레싱에 제약이 없는 프로세스 데이터의 네트워크 변수 및 파라미터화, 진단, 프로그래밍 및 원격제어를 위한 다양한 서비스는 광범위한 요구사항을 커버합니다. 마스터/슬레이브와 마스터/마스터 통신의 데이터 인터페이스는 동일합니다. 슬레이브에서 슬레이브로의 통신의경우 두 개의 메커니즘을 사용할 수 있습니다. 업스트림디바이스는 동일한 사이클 내에서 다운스트림 디바이스와교신할 수 있으며 따라서 매우 빠릅니다. 이 방법은 토폴로지에 의존하기 때문에 특히 기계 설계시에 주어진 슬레이브간 통신에 적합합니다. (예를 들면 인쇄 또는 포장기어플리케이션) 자유로이 설정할 수 있는 슬레이브간 통신의 경우 두 번째 메커니즘을 적용합니다: 데이터는 마스터에 의하여 릴레이 됩니다. 여기서 두 개의 사이클이 필요하지만, EtherCAT의 특출한 성능 때문에 이것은 다른 이
더넷 솔루션 보다 여전히 빠릅니다.EtherCAT은 IEEE 802.3 [3]에 따른 표준 프레임만을
사용합니다 - 프레임은 짧게 줄여지지 않습니다. 따라서EtherCAT 프레임은 이더넷 MAC으로부터 전송할 수 있으며 표준 툴을 사용할 수 있습니다. (예. 모니터)
■ 토폴로지라인 토폴로지, 트리 토폴로지 또는 스타 토폴로지 :EtherCAT은 어떠한 토폴로지도 지원할 수 있습니다(그림5 참조). 따라서 캐스캐이드 방식 스위치나 허브의 개수에대한 수적 제약 없이 버스 또는 어떤 토폴로지 구조의 이더넷에도 사용할 수 있게 되었습니다.특히 line, branches, stubs의 조합을 시스템 배선에
사용하면 특히 유용합니다: 각 디바이스들은 각각 필요한인터페이스들을 가지고 있습니다. (예. I/O 모듈들): 추가스위치는 필요없습니다. 물론 고전적인 스위치 기반의 인터넷 스타 토폴로지도 사용할 수 있습니다. 배선의 유연성은 서로 다른 케이블 선택을 통해 극대화됩니다. 유연하고저렴한 표준 이더넷 패치 케이블은 100BaseTX 모드에서신호를 전송합니다. 플라스틱 광 파이버(POF)는 특별한어플리케이션의 시스템에서 사용될 것입니다. 이더넷 배선의 완벽한 선택은 - 서로 다른 광 파이버 및 동축 케이블과 같은 - 스위치 또는 미디어 컨버터와 조합하여 사용할수 있습니다. 고속 이더넷(100Base TX, 내장형 네트워크서버)으로 두 디바이스간의 케이블 길이는 100m까지 가능하게 되었습니다.
■그림 4 : IEEE 802.3에 따른 EtherCAT의 표준 프레임 ■그림 5 : 토폴로지에 대한 유연성 : 라인 트리 및 스타
15EtherCAT Technology Group
ⓒ EtherCAT Technology Group. All rights reserved.
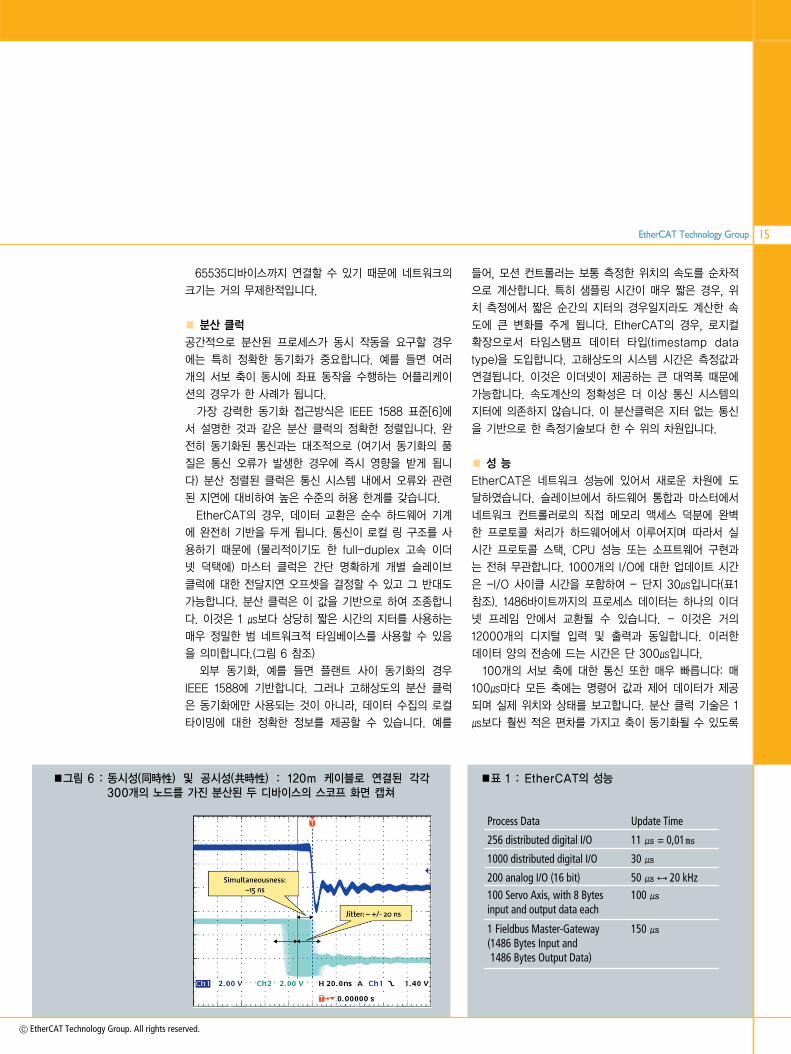
Process Data Update Time
256 distributed digital I/O 11 ㎲ = 0,01㎳1000 distributed digital I/O 30 ㎲200 analog I/O (16 bit) 50 ㎲ ↔ 20 kHz100 Servo Axis, with 8 Bytes 100 ㎲input and output data each
1 Fieldbus Master-Gateway 150 ㎲(1486 Bytes Input and1486 Bytes Output Data)
65535디바이스까지 연결할 수 있기 때문에 네트워크의크기는 거의 무제한적입니다.
■ 분산 클럭공간적으로 분산된 프로세스가 동시 작동을 요구할 경우에는 특히 정확한 동기화가 중요합니다. 예를 들면 여러개의 서보 축이 동시에 좌표 동작을 수행하는 어플리케이션의 경우가 한 사례가 됩니다.가장 강력한 동기화 접근방식은 IEEE 1588 표준[6]에
서 설명한 것과 같은 분산 클럭의 정확한 정렬입니다. 완전히 동기화된 통신과는 대조적으로 (여기서 동기화의 품질은 통신 오류가 발생한 경우에 즉시 향을 받게 됩니다) 분산 정렬된 클럭은 통신 시스템 내에서 오류와 관련된 지연에 대비하여 높은 수준의 허용 한계를 갖습니다.EtherCAT의 경우, 데이터 교환은 순수 하드웨어 기계
에 완전히 기반을 두게 됩니다. 통신이 로컬 링 구조를 사용하기 때문에 (물리적이기도 한 full-duplex 고속 이더넷 덕택에) 마스터 클럭은 간단 명확하게 개별 슬레이브클럭에 대한 전달지연 오프셋을 결정할 수 있고 그 반대도가능합니다. 분산 클럭은 이 값을 기반으로 하여 조종합니다. 이것은 1 ㎲보다 상당히 짧은 시간의 지터를 사용하는매우 정 한 범 네트워크적 타임베이스를 사용할 수 있음을 의미합니다.(그림 6 참조)
외부 동기화, 예를 들면 플랜트 사이 동기화의 경우IEEE 1588에 기반합니다. 그러나 고해상도의 분산 클럭은 동기화에만 사용되는 것이 아니라, 데이터 수집의 로컬타이밍에 대한 정확한 정보를 제공할 수 있습니다. 예를
들어, 모션 컨트롤러는 보통 측정한 위치의 속도를 순차적으로 계산합니다. 특히 샘플링 시간이 매우 짧은 경우, 위치 측정에서 짧은 순간의 지터의 경우일지라도 계산한 속도에 큰 변화를 주게 됩니다. EtherCAT의 경우, 로지컬확장으로서 타임스탬프 데이터 타입(timestamp datatype)을 도입합니다. 고해상도의 시스템 시간은 측정값과연결됩니다. 이것은 이더넷이 제공하는 큰 대역폭 때문에가능합니다. 속도계산의 정확성은 더 이상 통신 시스템의지터에 의존하지 않습니다. 이 분산클럭은 지터 없는 통신을 기반으로 한 측정기술보다 한 수 위의 차원입니다.
■ 성 능EtherCAT은 네트워크 성능에 있어서 새로운 차원에 도달하 습니다. 슬레이브에서 하드웨어 통합과 마스터에서네트워크 컨트롤러로의 직접 메모리 액세스 덕분에 완벽한 프로토콜 처리가 하드웨어에서 이루어지며 따라서 실시간 프로토콜 스택, CPU 성능 또는 소프트웨어 구현과는 전혀 무관합니다. 1000개의 I/O에 대한 업데이트 시간은 -I/O 사이클 시간을 포함하여 - 단지 30㎲입니다(표1참조). 1486바이트까지의 프로세스 데이터는 하나의 이더넷 프레임 안에서 교환될 수 있습니다. - 이것은 거의12000개의 디지털 입력 및 출력과 동일합니다. 이러한데이터 양의 전송에 드는 시간은 단 300㎲입니다.100개의 서보 축에 대한 통신 또한 매우 빠릅니다: 매
100㎲마다 모든 축에는 명령어 값과 제어 데이터가 제공되며 실제 위치와 상태를 보고합니다. 분산 클럭 기술은 1㎲보다 훨씬 적은 편차를 가지고 축이 동기화될 수 있도록
■그림 6 : 동시성(同時性) 및 공시성(共時性) : 120m 케이블로 연결된 각각300개의 노드를 가진 분산된 두 디바이스의 스코프 화면 캡쳐
■표 1 : EtherCAT의 성능

16 EtherCAT Technology Group
ⓒ EtherCAT Technology Group. All rights reserved.
합니다. 이러한 속도에서 조차 TCP/IP, 파라미터 다운로드 또는 진단 데이터 업로드와 같은 비동기 통신을 위한충분한 대역폭이 존재하고도 남습니다.EtherCAT 기술의 매우 높은 성능은 전통적인 필드버스
시스템에서는 실현될 수 없는 제어 개념을 가능케 합니다.EtherCAT을 사용하면, 현대의 산업용 PC의 월등한 계산성능과 조화되는 통신 기술을 사용할 수 있습니다. 버스시스템은 더 이상 제어 개념의 병목점이 아닙니다. 분산I/O는 로컬 I/O 인터페이스를 사용하여 가능한 것보다 더빠르게 기록됩니다. EtherCAT 기술은 스케일이 있으며100Mbaud에 제한되지 않고 Giga 비트 이더넷까지 확장이 가능합니다.
■ 진 단필드버스 시스템에 대한 경험상 준공시간 및 시운전 기간이 진단 성능에 따라 크게 좌우된다는 것을 알고 있습니다. 신속하고 정확하게 감지된 오류, 정확하게 찾아낸 오류만이 신속하게 교정될 수 있습니다. 따라서 EtherCAT을 개발하는 동안 우수한 진단 특성에 대하여 특별한 주의를 기울 습니다. 시운전을 하는 동안 노드의 실제 구성은(예. 드라이브 또는 I/O 터미널) 특정 구성을 사용하여 일관성 있게 검사되어야 합니다. 토폴로지 또한 구성과 맞아야 합니다. 맨 하부단 개별 터미널에까지 토폴로지에 대한인식기능이 있기 때문에 이 검증은 시스템을 시작할 동안에만 일어나는 것이 아니며, 네트워크에 대한 자동 읽기가또한 가능합니다. (구성 업로드)
전송중의 비트 오류는 CRC(Cyclic Redundancy
Checks) 체크썸(파일 자체의 무결성을 확인하기 위해 파일의 내용으로부터 수학적으로 계산된 숫자로 표시. 중요한 시스템 파일이 바뀌었거나 깨졌는지 등의 확인 여부 같은 보안 목적으로 체크썸을 참고함)의 비교를 통하여 주로감지됩니다: 32 비트 CRC 다항식은 4의 최소 해밍거리(같은 단어길이를 가진 두개의 2진수에 대응하는 각 자리를 비교했을 때 서로 다른 자릿수의 개수)를 갖습니다. 파손된 전선의 탐색과 위치 찾기와는 별도로, EtherCAT 시스템의 프로토콜, 물리계층 및 토폴로지는 각 전송구획의개별 품질 모니터링을 가능케 합니다. 관련 오류 카운터에대한 자동평가는 핵심적인 네트워크 섹션의 정확한 위치찾기를 가능케 합니다. EMI(전자파) 향과 같은 점진적이거나 변화하는 오류의 출처, 결함이 있는 커넥터, 또는 케이블 손상은 네트워크의 자가치유 능력을 무리하게 사용하지 않을지라도 감지되며 위치를 추적할 수 있습니다.
■ 높은 가용성높은 시스템 가용성에 대한 점증하는 요구에 따라 네트워크를 가동 중단시킬 필요없이 디바이스를 교체할 수 있는케이블 redundancy 기능을 제공하게 되었습니다. 케이블 redundancy 기능을 추가하는 것은 비용이 매우 저렴합니다: 라인 토폴로지를 링으로 바꿔주는 케이블 하나와표준 이더넷 포트(특별한 카드나 인터페이스 없는) 하나가유일하게 하드웨어로 추가됩니다.
■그림 7 : 분산 배치된 필드버스 인터페이스

17EtherCAT Technology Group
ⓒ EtherCAT Technology Group. All rights reserved.
디바이스나 케이블이 고장 난 경우의 switchover는 단 한사이클만 발생합니다. 따라서 빡빡한 모션제어 어플리케이션 일지라도 문제없이 케이블 오류를 견뎌낼 수 있습니다.EtherCAT은 또한 hot standby 기능을 갖춘 redundant마스터를 지원합니다. EtherCAT 슬레이브 컨트롤러가 즉시 자동으로 프레임을 반환하므로 만일 인터럽트가 발생한다면 디바이스의 오류로 인해 전체 네트워크를 중지시킬필요가 없게 됩니다. 예를 들어, Dragchain 어플리케이션은 케이블 파손에 대비하기 위하여 특별히 stubs로써 환경구성을 할 수 있습니다.
■ 안전 Safety전통적으로 Safety 기능은 하드웨어를 경유하거나 또는전용 Safety 버스 시스템을 경유하여 자동화 네트워크와는 별도로 구현됩니다. EtherCAT을 경유한 Safety 디바이스는 동일한 네트워크 상에서 Safety 관련 통신 및 제어 통신을 가능케 합니다. Safety 프로토콜은 더 낮은 계층에 향을 주지 않는 EtherCAT의 어플리케이션 계층을 기반으로 합니다. 이것은 IEC 61508에 따라 승인되며Safety Integranted Level (SIL)4의 요건을 만족시킵니다. 데이터의 길이는 가변적이어서 프로토콜을 SafetyI/O 데이터와 Safety 드라이브 기술에 똑같이 적합하게만들게 됩니다. 다른 EtherCAT 데이터와 같이 Safety데이터는 Safety 라우터나 Gateway 없이 경로를 설정할수 있습니다. EtherCAT을 통한 Safety 디바이스를 특징으로 하는 최초로 충분히 입증된 상용 제품이 이미 출시중입니다.
■ PCI를 대신하는 EtherCATPC 구성요소의 소형화 추세가 증가하면서 산업용 PC의물리적인 크기는 점점 필요한 슬롯의 개수에 의하여 결정되게 되었습니다. 고속 이더넷의 대역폭은 EtherCAT 통신 하드웨어의 프로세스 데이터 대역폭과 함께 새로운 방향을 가능케 하 습니다: 전통적으로 IPC (산업용 컴퓨터)의 슬롯에 장착되는 카드 타입의 인터페이스는 지능형EtherCAT 인터페이스 터미널로 바뀌어가고 있습니다(그림 7 참조). 분산된 I/O 포트와는 별도로 드라이브와 제어유닛, 필드버스 마스터와 같은 복잡한 시스템, 고속 시리얼인터페이스, Gateway 및 기타 통신 인터페이스를 어드레싱 시킬 수 있습니다.프로토콜 변경에 대한 제한 없이 더 많은 이더넷 디바이
스 조차도 분산된 스위치 포트 디바이스를 경유하여 접속시킬 수 있습니다. 중앙 IPC는 더 소형화되고 있으며 따라서 좀더 가격 대비 효율적이 되고 있습니다. 주변기기와의완벽한 통신을 위하여 하나의 이더넷 인터페이스면 충분합니다(그림 8 참조).
■ 디바이스 프로파일디바이스 프로파일은 어플리케이션 파라미터와 디바이스class-specific state machine을 포함하는 디바이스의기능적 동작을 설명합니다. 많은 디바이스의 경우 (예를 들어 I/O 디바이스나 드라이브 또는 밸브) 필드버스에서 이미 신뢰할만한 디바이스 프로파일을 제공합니다. 사용자는이러한 프로파일과 관련 파라미터 및 툴에 친숙합니다. 따라서 어떠한 EtherCAT 특유의 디바이스 프로파일은 개발
■그림 8 : 컨트롤러의 크기를 작게 만드는 EtherCAT
18 EtherCAT Technology Group
ⓒ EtherCAT Technology Group. All rights reserved.
한 적이 없습니다. 대신 기존 디바이스 프로파일을 위한단순한 인터페이스를 제공하고 있습니다.이것은 기존의 필드버스에서 EtherCAT으로 옮겨가는
과정에서 사용자와 디바이스 제조업체에 많은 도움을 주고있습니다.
■ EtherCAT으로 CANopen을 사용하는 기술(CoE)CANopen 디바이스와 어플리케이션 프로파일은 예를 들어 I/O 부품, 드라이브, 엔코더, 비례밸브 및 유압 컨트롤러로부터 플라스틱 또는 직물 기계류를 위한 어플리케이션프로파일에 이르기까지 광범위한 디바이스들과 어플리케이션에 사용할 수 있습니다. EtherCAT은 CANopen [7]EN 50325-4 메커니즘과 동일한 통신 메커니즘을 제공할수 있습니다: 오브젝트딕셔너리(OD 객체사전),PDO(process data object) 및 SOD(service dataobject) - 네트워크 관리까지도 가능합니다. 따라서EtherCAT은 CANopen을 장착한 디바이스에 대해서는최소의 노력으로 구현할 수 있습니다. CANopen 펌웨어의 대부분은 재사용이 가능합니다. 오브젝트는 EtherCAT에서 제공하는 더 큰 대역폭을 떠맡기 위하여 선택적으로확장할 수 있습니다.
■ EtherCAT으로 IEC 61491에 따른 서보 드라이브 프로파일을 사용하는 기술(SoE)
SERCOS 인터페이스는 특히 모션 제어 어플리케이션을위한 고성능 실시간 통신 인터페이스로서 전세계적인 인정과 명성을 얻고 있습니다. 서보 드라이브와 통신기술을 위
한 SERCOS 프로파일은 IEC 61491 표준[8]에서 다루고있습니다. 이 서보 드라이브 프로파일은 EtherCAT에 매우 쉽게 맵 시킬 수 있습니다. 서비스 채널과 모든 파라미터로의 접근 및 드라이브에 내재하는 기능들은 EtherCAT메일박스(그림 9 참조)를 기반으로 합니다. 여기서 또한 중점을 둔 것은 기존의 프로토콜(IDN의 값, 특성, 이름, 단위등에 대한 액세스)과의 호환성과 데이터 길이 한계에 관한확장성입니다. AT 및 MDT 데이터의 형태를 갖는SERCOS의 프로세스 데이터는 EtherCAT 슬레이브 컨트롤러 메커니즘을 사용하여 전송합니다. 매핑은 SERCOS매핑과 유사합니다. EtherCAT 슬레이브 state machine은 SERCOS 프로토콜 phases에 쉽게 매핑 시킬 수 있습니다. EtherCAT은 이 프로파일을 위한 발전된 실시간 이더넷 기술을 제공하는데 이것은 특히 CNC 어플리케이션에 널리 퍼져 있습니다. 디바이스 프로파일의 장점은EtherCAT에서 제공하는 장점과 결합됩니다. 분산 클럭은정확한 범 네트워크적 동기화를 보장합니다. 명령어 위치,속도 또는 토오크를 선택적으로 전송할 수 있습니다. 구현방법에 따라서 드라이브를 위한 동일한 설정 툴을 지속적으로 사용하는 것도 가능합니다.
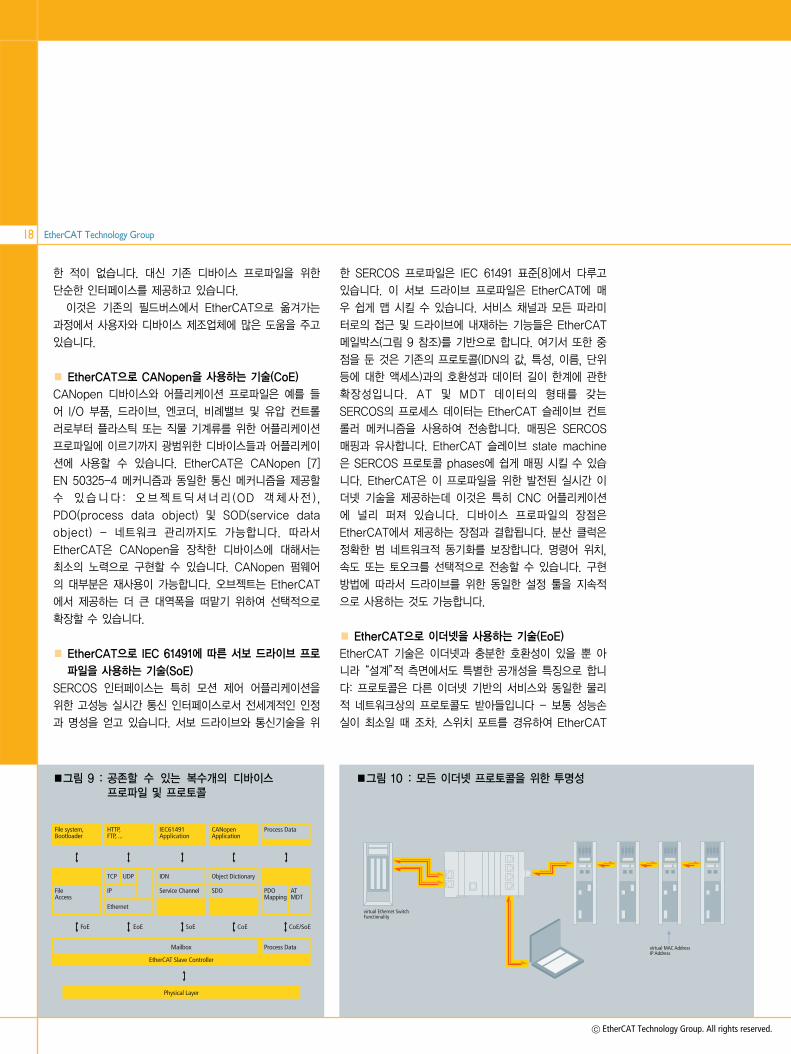
■ EtherCAT으로 이더넷을 사용하는 기술(EoE)EtherCAT 기술은 이더넷과 충분한 호환성이 있을 뿐 아니라“설계”적 측면에서도 특별한 공개성을 특징으로 합니다: 프로토콜은 다른 이더넷 기반의 서비스와 동일한 물리적 네트워크상의 프로토콜도 받아들입니다 - 보통 성능손실이 최소일 때 조차. 스위치 포트를 경유하여 EtherCAT
■그림 9 : 공존할 수 있는 복수개의 디바이스프로파일 및 프로토콜
■그림 10 : 모든 이더넷 프로토콜을 위한 투명성
19EtherCAT Technology Group
ⓒ EtherCAT Technology Group. All rights reserved.
세그먼트 안에 접속할 수 있는 이더넷 디바이스 유형에는제한이 없습니다.이더넷 프레임은 EtherCAT 프로토콜을경유하며, 이것은 인터넷 프로토콜의 표준 접근방식입니다.(예. VPN, PPPoE(DSL 등). EtherCAT 네트워크는 이더넷 디바이스에 대하여 완전히 투명하며 실시간 특성은손상되지 않습니다 (그림 10 참조).EtherCAT 디바이스는 다른 이더넷 프로토콜의 특징을
추가적으로 가질 수 있으며 따라서 표준 이더넷 디바이스처럼 동작할 수 있습니다. 마스터는 주소 정보에 따라서개별 디바이스로 프레임의 방향을 재설정하는 layer 2 스위치처럼 작동합니다. 따라서 통합 웹 서버, 이메일, FTP전송 등 모든 인터넷 기술은 EtherCAT 환경에서도 사용할 수 있습니다.
■ EtherCAT으로 파일 액세스를 하는 기술 (FoE)TFTP와 유사한 매우 단순한 이 프로토콜은 디바이스 내의어떠한 데이터 구조에 대해서도 접근을 가능하게 합니다.따라서 TCP/IP를 지원하는지 여부에 상관없이 디바이스에대해 표준화된 펌웨어 업로드가 가능합니다.
■ 인프라 구축 비용EtherCAT에는 허브나 스위치가 필요하지 않기 때문에 파워서플라이, 설치 등을 포함하는 디바이스들에 관련된 비용을 절약할 수 있습니다. 만일 환경조건이 이를 허용한다면 표준 이더넷 케이블과 표준 저가 커넥터를 사용할 수있습니다. 보호를 필요로 하는 환경일 경우에는 IEC 표준에 따라 실링한 커넥터를 사용합니다.
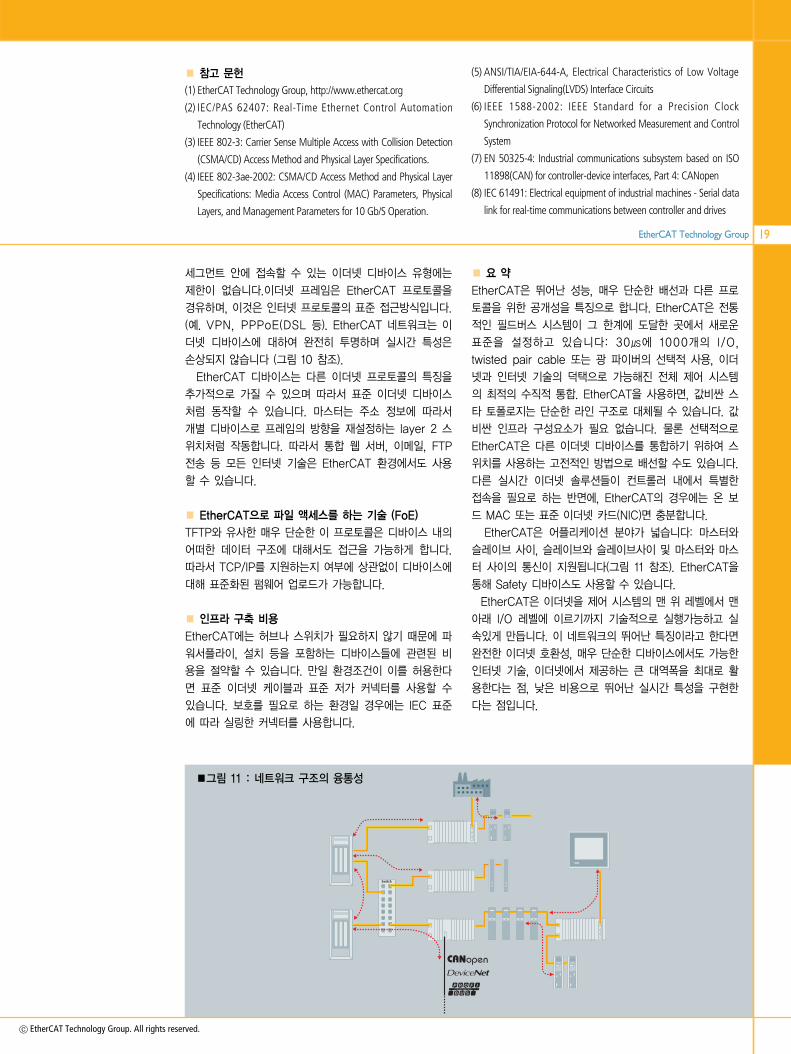
■ 요 약EtherCAT은 뛰어난 성능, 매우 단순한 배선과 다른 프로토콜을 위한 공개성을 특징으로 합니다. EtherCAT은 전통적인 필드버스 시스템이 그 한계에 도달한 곳에서 새로운표준을 설정하고 있습니다: 30㎲에 1000개의 I/O,twisted pair cable 또는 광 파이버의 선택적 사용, 이더넷과 인터넷 기술의 덕택으로 가능해진 전체 제어 시스템의 최적의 수직적 통합. EtherCAT을 사용하면, 값비싼 스타 토폴로지는 단순한 라인 구조로 대체될 수 있습니다. 값비싼 인프라 구성요소가 필요 없습니다. 물론 선택적으로EtherCAT은 다른 이더넷 디바이스를 통합하기 위하여 스위치를 사용하는 고전적인 방법으로 배선할 수도 있습니다.다른 실시간 이더넷 솔루션들이 컨트롤러 내에서 특별한접속을 필요로 하는 반면에, EtherCAT의 경우에는 온 보드 MAC 또는 표준 이더넷 카드(NIC)면 충분합니다.EtherCAT은 어플리케이션 분야가 넓습니다: 마스터와
슬레이브 사이, 슬레이브와 슬레이브사이 및 마스터와 마스터 사이의 통신이 지원됩니다(그림 11 참조). EtherCAT을통해 Safety 디바이스도 사용할 수 있습니다.EtherCAT은 이더넷을 제어 시스템의 맨 위 레벨에서 맨
아래 I/O 레벨에 이르기까지 기술적으로 실행가능하고 실속있게 만듭니다. 이 네트워크의 뛰어난 특징이라고 한다면완전한 이더넷 호환성, 매우 단순한 디바이스에서도 가능한인터넷 기술, 이더넷에서 제공하는 큰 대역폭을 최대로 활용한다는 점, 낮은 비용으로 뛰어난 실시간 특성을 구현한다는 점입니다.
■ 참고 문헌(1) EtherCAT Technology Group, http://www.ethercat.org
(2) IEC/PAS 62407: Real-Time Ethernet Control Automation
Technology (EtherCAT)
(3) IEEE 802-3: Carrier Sense Multiple Access with Collision Detection
(CSMA/CD) Access Method and Physical Layer Specifications.
(4) IEEE 802-3ae-2002: CSMA/CD Access Method and Physical Layer
Specifications: Media Access Control (MAC) Parameters, Physical
Layers, and Management Parameters for 10 Gb/S Operation.
(5) ANSI/TIA/EIA-644-A, Electrical Characteristics of Low Voltage
Differential Signaling(LVDS) Interface Circuits
(6) IEEE 1588-2002: IEEE Standard for a Precision Clock
Synchronization Protocol for Networked Measurement and Control
System
(7) EN 50325-4: Industrial communications subsystem based on ISO
11898(CAN) for controller-device interfaces, Part 4: CANopen
(8) IEC 61491: Electrical equipment of industrial machines - Serial data
link for real-time communications between controller and drives
■그림 11 : 네트워크 구조의 융통성

20 EtherCAT Technology Group
ⓒ EtherCAT Technology Group. All rights reserved.
EtherCAT 기술은 I/O 터미널, 센서 및 내장형 컨트롤러와 같은 저가의 디바이스를 염두에 두고 개발하 습니다.EtherCAT은 IEEE 802.3에 따른 표준 이더넷 프레임만을 사용합니다. 이 프레임들은 마스터 디바이스에 의해 보내지며, 슬레이브 디바이스는 운용 중에 데이터를 추출 또는 삽입합니다. EtherCAT의 마스터 디바이스에는 표준이더넷 MAC 또는 NIC를 사용합니다. 그리고 슬레이브디바이스에는 EtherCAT 전용 슬레이브 컨트롤러가 사용되는데, 이것이 슬레이브 디바이스 안에서 프로세스 데이터를 처리하고 로컬 프로세싱 능력이나 소프트웨어의 품질에 관계없이 슬레이브 디바이스가 최대로 실시간 성능을 발휘하게 해줍니다.
■ 마스터EtherCAT은 단 하나의 이더넷 프레임을 사용하여 최대1486 바이트의 분산처리 데이터를 통신합니다. 그러므로각 네트워크 사이클 안에서 마스터 디바이스가 각 노드 프레임을 처리, 전송 및 수신해야 하는 다른 솔루션과 달리EtherCAT 시스템은 모든 노드와의 전체적인 통신에 사이클당 한 개 또는 두 개의 프레임만을 필요로 합니다. 따라서 EtherCAT 마스터는 전용 통신 프로세서가 필요하지 않으며 이것은 호스트 CPU에 어떤 부하도 거의 가하지 않는다는 뜻입니다. 따라서 EtherCAT은 패시브NIC(네트워크 카드)나 온 보드 이더넷 MAC만을 사용함
으로써 특별하고 값비싼 액티브 플러그 인 카드 없이도 구현할 수 있습니다. EtherCAT 마스터의 구현은 특히 소형과 중형 제어 시스템 및 명확하게 정의된 어플리케이션의경우 매우 쉽습니다.싱 프로세스 이미지를 갖는 PLC의 경우를 예로 들면,
만일 그 이미지가 1486 바이트를 초과하지 않는다면,PLC 사이클 타임에서 하나의 이더넷 프레임을 주기적으로 내보내는 것이면 충분합니다. 실행시간에 헤더는 변경되지 않으므로, 필요한 것은 프로세스 이미지에 추가되어야 하는 상수 헤더와 이더넷 컨트롤러에 전송해야 하는 결과가 전부입니다. 프로세스 이미지는 이미 분류가 되었고이더넷의 매핑이 마스터 안에서 발생하지 않았기 때문에(슬레이브에서 일어남) 슬레이브에서는 패싱 프레임 안의개별 지점에서 주변기기가 자신의 데이터를 삽입합니다.이것은 호스트 CPU의 부하를 덜어줍니다. 호스트 CPU상의 소프트웨어에서 완전히 구현된 EtherCAT 마스터는액티브 플러그-인 카드를 사용하여 구현하는 훨씬 느린필드버스 시스템보다 더 적은 프로세싱 파워를 사용한다는 것이 밝혀졌습니다. - 액티브 카드의 DPRAM을 서비스하는 것조차도 호스트에 더 많은 부하를 주게 됩니다.시스템 구성 도구는 - 여러 제조업체의 제품을 사용할 수있는 - 표준 XML 형식으로 해당 부팅 시퀀스를 포함한네트워크 및 디바이스 파라미터를 제공합니다.
■ 마스터 - 하나의 프로세스 이미지로 구현 ■ 마스터샘플 코드의 구조

21EtherCAT Technology Group
ⓒ EtherCAT Technology Group. All rights reserved.
■ 마스터 구현 서비스마스터 코드와 구현 서비스 및 지원은 다양한 벤더로부터입수할 수 있으며, 다양한 하드웨어 플랫폼 및 운 체제들이 있습니다. 빠르게 늘어나는 정보제공에 관한 사항은EtherCAT 웹사이트 http://www.ethercat.org에서 찾아볼 수 있습니다. 공개소스 RTOS와 함께 공개소스 구현에관한 정보도 있습니다.
■ 마스터 샘플 코드EtherCAT 마스터를 구현하는 또 다른 방법은 일정 금액을 지불하고 사용할 수 있는 샘플코드를 이용하는 것입니다. 소프트웨어는 소스코드로 제공되며, EtherCAT으로 이더넷을 사용하는(EoE) 기술을 포함한 EtherCAT 마스터기능을 포함하고 있습니다. 모든 개발자들이 해야 할 일은개발 대상 하드웨어와 사용한 RTOS에 대하여 윈도우 환경하에서 개발된 코드를 적합 시키는 것인데 이미 많은 수의 시스템에서 성공적으로 수행되었습니다.
■ 슬레이브여러 제조업체에서 EtherCAT 슬레이브 컨트롤러를 제공하고 있습니다. 슬레이브 컨트롤러의 기능은 FPGA 상에서도 매우 저렴하게 구현할 수 있습니다. FPGA에서는 이진 코드를 라이센스(buy-out license)로 살 수 있습니다. 슬레이브 컨트롤러는 전형적으로 내부 DPRAM으로 특
징지어지며 이 어플리케이션 메모리에 액세스하기 위한 광범위한 인터페이스를 제공합니다.● 시리얼 SPI(주변 디바이스용 시리얼 인터페이스)는 아
날로그 I/O 모듈, 센서, 엔코더 또는 단순한 드라이브등 특히 처리할 데이터가 소량인 디바이스를 위해 고안한 것입니다. 이 인터페이스는 Microchip PIC,DSPic, 인텔 80C51 등 전형적으로 8비트 마이크로 컨트롤러가 사용됩니다.
● 병렬 8/16 비트 마이크로 컨트롤러 인터페이스는DPRAM 인터페이스를 사용하는 필드버스 컨토롤러를위한 전통적인 인터페이스에 해당합니다. 이것은 특히더 큰 데이터 볼륨을 가지고 있는 좀 더 복잡한 디바이스의 경우에 적합합니다. 이 인터페이스를 사용하는 전형적인 마이크로 컨트롤러의 예를 들면 Infineon80C16x, 인텔 80x86, Hitachi SH1, St10, ARM 또는T1 TMS320 시리즈가 있습니다.
● 32비트 병렬 I/O 인터페이스는 32개의 디지털 I/O까지접속하기에 적합합니다. 그러나 단순한 센서나 32 데이터 비트를 사용하여 운 되는 액츄에이터의 경우에는그와 같은 디바이스에 호스트 CPU가 전혀 필요하지않습니다.
■ 슬레이브 평가 키트슬레이브 평가 키트는 이러한 모든 인터페이스에 쉽게 접근할 수 있도록 해줍니다. EtherCAT을 사용하면 강력한통신 프로세서가 불필요하기 때문에 슬레이브 평가 키트는호스트 CPU로 선택적으로 사용할 수 있는 8비트의 마이크로 컨트롤러를 포함합니다. 이 키트에는 - 프로토콜 스택과 동등한 - 슬레이브 호스트 소프트웨어가 소스 코드와참조용 마스터 소프트웨어 패키지 형태로 따라옵니다.
■ 슬레이브 평가 키트
■ 슬레이브 하드웨어 : 호스트 CPU와 FPGA ■ 슬레이브 하드웨어 : 직접 I/O와 FPGA

22 EtherCAT Technology Group
ⓒ EtherCAT Technology Group. All rights reserved.

23EtherCAT Technology Group
ⓒ EtherCAT Technology Group. All rights reserved.
가장 최근의 제품을 보시려면www.ethercat.org를 방문하십시오.

24 EtherCAT Technology Group
■ 연락처
EtherCAT Technology GroupOstendstrabe 19690482 NurembergGermanyPhone : +49(0) 911 540 5620Fax : +49(0) 911 540 [email protected]
www.ethercat.org
■ 한국내연락처
(주)트라이텍서울 금천구 가산동 448대륭테크노타운 3차 717호전화 : (02) 2107-3242팩스 : (02) [email protected]
www.tritek.co.kr
Related Documents











