DEPARTAMENTO DE ARQUITECTURA Y CONSTRUCCIONES NAVALES. ESCUELA TÉCNICA SUPERIOR DE INGENIEROS NAVALES UNIVERSIDAD POLITECNICA DE MADRID TESIS DOCTORAL ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER Autor: D. José Luís Aguilar Vázquez. Ingeniero Naval por la Universidad Politécnica de Madrid Director de Tesis: D. Luis Pérez Rojas, Doctor Ingeniero Naval por la Universidad Politécnica de Madrid. Catedrático de Teoría del Buque. E.T.S.I.N. Abril – 2012

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript
DEPARTAMENTO DE ARQUITECTURA Y CONSTRUCCIONES NAVALES.
ESCUELA TÉCNICA SUPERIOR DE INGENIEROS NAVALES
UNIVERSIDAD POLITECNICA DE MADRID
TESIS DOCTORAL
ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT
CARRIER
Autor: D. José Luís Aguilar Vázquez.
Ingeniero Naval por la Universidad Politécnica de Madrid
Director de Tesis: D. Luis Pérez Rojas,
Doctor Ingeniero Naval por la Universidad Politécnica de Madrid.
Catedrático de Teoría del Buque. E.T.S.I.N.
Abril – 2012

iii
Tribunal nombrado por el Magfco. y Excmo. Sr. Rector de la Universidad Politécnica
de Madrid, el día______ de________________________ de 201_ .
Presidente: D. _______________________________________________________ Vocal: D. _______________________________________________________ Vocal: D. _______________________________________________________ Vocal: D. _______________________________________________________ Secretario: D. _______________________________________________________ Suplente: D. _______________________________________________________ Realizado el acto de defensa y lectura de la Tesis el día_____ de________________ de
201__ .
en ___________________________________________
Calificación: __________________________________ EL PRESIDENTE LOS VOCALES EL VOCAL SECRETARIO

iv
AGRADECIMIENTOS
A mi Director de Tesis, Profesor D. Luis Pérez Rojas, que con inteligencia y enorme paciencia ha
conseguido que esta Tesis se pudiera leer y llegara a buen puerto.
A mi amigo y compañero Antonio Barrios Gallego, cuya mente clara y ordenada, me ha
mostrado en más de una ocasión el camino a seguir.
A mis padres que me dieron la vida y a mi mujer y mis hijos que me enseñaron y ayudaron a
vivirla.
Y finalmente y en primer lugar a Quien hizo la mar con Infinita Sabiduría.
Muchas Gracias

Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
INDICE iii
ÍNDICE Capítulo Página
PÁGINA DE PORTADA.
i
ÍNDICE. iii
LISTA DE SÍMBOLOS. v
1 RESUMEN / ABSTRAC. 1
2 INTRODUCCIÓN Y PLANTEAMIENTO DEL PROBLEMA. 3
2.1. INTRODUCCIÓN. 3
2.2. ORIGEN DEL PROBLEMA. 4
2.3. PLANTEAMIENTO DEL PROBLEMA. 6
2.4 OBJETIVOS. 7
2.5. TRABAJOS. 8
2.6. BIBLIOGRAFÍA Y REFERENCIAS. 12
2.7 HERRAMIENTAS Y MÉTODO. 12
3 EVOLUCIÓN DE LOS BUQUES HLC. 13
3.1 PASADO Y PRESENTE DEL BUQUE HEAVY LIFT CA-
RRIER.
13
3.2 CARACTERÍSTICAS DE LOS HLC EN EL PERIODO
2001-2004.
17
3.3 EVOLUCIÓN DE LOS CRITERIOS OPERATIVOS DE
TRANSPORTE.
26
3.4 PRINCIPALES CARACTERÍSTICAS DE LOS BUQUES AÑOS
2005 – 2011.
27
4 GENERACIÓN DE CARENAS. 29
4.1 BUQUE DE PARTIDA: CARENA 42. 30
4.2 MODELIZACIÓN. 31
4.3. CURVAS HIDROSTÁTICAS. 32
4.4. FRANCOBORDO. 41
4.5 CARENA 63. 70
4.6. CARENA 72. 82
4.7 CARENA 84. 90
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
INDICE iv
5 COMPARTIMENTACIÓN Y CONDICIONES DE CARGA. 98
5.1 DETERMINACIÓN DEL PESO EN ROSCA. 99
5.2 CRITERIOS DE COMPARTIMENTACIÓN. 114
5.3. CONDICIONES DE CARGA ESTÁNDAR. - RESISTENCIA
LONGITUDINAL.
139
6 ESTABILIDAD A PLENA CARGA DISEÑO. 164
6.1 ENTIDADES REGULADORAS. 165
6.2 DETERMINACIÓN DE KG MÁX. 177
6.3 DETERMINACIÓN EN CONDICIÓN ESTABLE DEL KG
MAX. CARGA EN FUNCIÓN DEL PESO DE LA CARGA.
189
6.4. DIAGRAMAS DE ESTABILIDAD. 217
6.5. ESTUDIO DE LA ESTABILIDAD DURANTE LA EMERSIÓN
E INMERSIÓN.
239
6.6. CORRECCIÓN DE LA ESTABILIDAD EXCESIVA. 253
7 ESTUDIOS FUTUROS A REALIZAR.
275
7.1. ESTUDIO DINÁMICO DE LOS BUQUES. 276
7-2. ESTUDIOS DE CORRECCIÓN ESTABILIDAD EXCESIVA. 278
8 APORTACIONES Y CONCLUSIÓN FINAL. 295
8.1. CARENAS SISTEMÁTICAS. 295
8.2. CRITERIOS DE ESTABILIDAD. 296
8.3. ÁBACOS DE ESTABILIDAD LÍMITE. 296
8.4. ESTUDIOS FUTUROS A REALIZAR. 297
8.5. CONCLUSIÓN FINAL. 299
9 BIBLIOGRAFIA Y REFERENCIAS. 301
9.1 BIBLIOGRAFÍA. 301
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
Lista de Simbolos
vii
Lista de Símbolos
Símbolo Significado BG Distancia vertical entre el CG del buque y el centro de carena BM Radio metacéntrico trasversal BML Radio metacéntrico longitudinal CONS Consumos DWT Peso muerto GM0 / GMt Altura metacéntrica transversal inicial GZ Brazo del par adrizante transversal Ixx Momento de inercia del área de flotación respecto al eje KB Cota del centro de carena sobre el plano base. KG Cota del CG a la línea base KGBW Altura del CG del lastre KGCARGA MAX KG máximo de la carga KGCONS Altura del CG del peso de consumos KGC Altura del CG de la carga KGlimite ó máximo Maximo KG aceptable s/IMO en función de la carga KGLWT Altura del CG del peso en rosca KM Altura del metacentro trasversal sobre la quilla LWT Peso en rosca (Lightship) T Periodo TE Periodo de encuentro WBW Peso del lastre WC Peso de la carga γ Aceleración ó peso específico ∆Diseño Desplazamiento de escantillonado o de diseño θ Escora (instantánea) ω ZG
ZC
Velocidad angular Altura del C.G. de la carga referida a la Cbta. del Buque. Altura del C.G. de la carga referida a la línea base del buque.

viii
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
1. RESUMEN 1
CAPÍTULO 1.- RESUMEN / ABSTRACT
1.1. RESUMEN
Se plantea la posible demanda en un futuro del transporte de grandes platafor-
mas petrolíferas semisumergibles de más de 70.000 t de peso, para perforaciones a más
de 10.000 pies de profundidad.
Estudia la estabilidad de buques Heavy Lift Carrier con mangas atípicas, capaces
de transportar estas cargas, y en algunos casos sobresaliendo por sus amuras.
Para esto se:
1. Estudia y genera posibles carenas, su compartimentación y lastre
para la inmersión o emersión de la cubierta de intemperie, a más de 10 m de pro-
fundidad para tomar o dejar la carga, optimizando el proceso.
2. Analiza la estabilidad del buque tanto en inmersión/emersión y
navegación, con máximas cargas y con altos centros de gravedad, y establece
ábacos de estabilidad límite en función de los parámetros del buque.
3. Plantea la corrección de estabilidad excesiva del buque en condi-
ciones de navegación para evitar las excesivas aceleraciones.
Los resultados obtenidos aportan ábacos que permiten, en función de los pará-
metros carga a transportar (Zg max) - Peso Carga), elegir el buque más adecuado, ca-
paz de efectuar la inmersión, emersión, y navegación, y plantea acciones futuras de in-
vestigación.
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
1. RESUMEN 2
1.2. ABSTRACT
This work raises the potential demand in the future, to transport large semi-
submersible oil rigs over 70,000 tonnes of weight for drilling to 10,000 feet deep. Study
vessel stability Heavy Lift Carrier with atypical breadths capable of carrying these bur-
dens, and in some cases standing out for their bows.
1. Examines possible hulls, their partitioning and ballast for immer-
sion or emersion of the weather deck, more than 10 m deep to take –loading
(lifting) - or leave (off- loading).
2. Analyzes the stability of the vessel both immersion / emersion
and navigation, with maximum loads with high centers of gravity and stability
limit states abacus according to the parameters of the ship.
3. Correction raises the stability of the ship over navigation to pre-
vent excessive accelerations.
The results allow, in terms of cargo transport parameters (Zg max) - Weight
Load), choosing the most suitable vessel capable of carrying out the immersion, emer-
sion, and navigation, and suggests future research activities.
Tesis Doctoral:“ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
2. INTRODUCCIÓN 3
CAPÍTULO 2.- INTRODUCCIÓN Y PLANTEAMIENTO DEL PROBL EMA
2.1. INTRODUCCIÓN.
En vías de agotamiento de los campos petrolíferos a profundidades inferiores a
1000 pies se ha comenzado a perforar en campos petrolíferos del Golfo de México, a
más de 10.000 pies, y se prevé que en un futuro, conforme se vayan agotando estas re-
servas petrolíferas, es posible que se continúen perforando a cotas superiores, lo que
hace prever plataformas semisumergibles cada vez mayores y más sofisticadas.
La demanda de transporte de estas grandes plataformas petrolíferas semisumer-
gibles de más de 60.000 t. de peso, así como otros grandes artefactos propios del campo
energético (plataformas de producción, etcétera), nos lleva a estudiar la estabilidad sufi-
ciente de estos HLC para afrontar el transporte de las mismas en condiciones de seguri-
dad.
Los buques tradicionalmente llamados Lift Carrier han sido buques utilizados
para el transporte de yates, pequeñas embarcaciones de recreo y de algunos artefactos de
dimensiones reducidas o al menos limitadas a los medios de izada o deslizamiento dis-
ponibles en los muelles de embarque. Al aumentar las dimensiones y el peso muerto de
los buques LC aumentó también el peso de la carga a transportar, así como la altura del
C.G. de la misma. Sin embargo ya no era posible con los nuevos HLC posicionar la
carga en cubierta y el trincaje de la misma con los medios convencionales tanto de izada
como de trincaje.
El estudio de los procesos de carga y descarga de estos buques llevó a los inge-
nieros a estudiar la maniobra en la que el buque opera semisumergido para situarse por
debajo de la quilla del flotador a transportar y posicionando la cubierta de carga en ca-
lados de más de 10 metros de profundidad. Esta característica operativa abrió durante la
guerra del Golfo nuevos segmentos de mercado como ha sido el trasporte de buques de
guerra con graves averías y pesos de hasta 7.000 toneladas de desplazamiento, y su
transporte hasta bases situadas a miles de millas, como el transporte del USS COLE
desde el Golfo de Aden hasta Pescagoula Miss. USA.
Tesis Doctoral:“ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
2. INTRODUCCIÓN 4
Desde principio de este siglo, el mercado de los buques Heavy Lift Carrier ha
seguido evolucionado impulsado por la demanda para el transporte de artefactos offsho-
re utilizados en el campo energético, tales como plataformas petrolíferas semisumergi-
bles, de producción y de perforación de mayores dimensiones, con destino a los campos
petrolíferos, entre otros, del Mar del Norte, Golfo de México, Brasil y Nigeria, y a asti-
lleros para su reparación y modificación, entrando en este mercado nuevos operadores
que han transformado grandes petroleros en lift carrier. Así mismo han surgido otros
tipos de transporte tales como el transporte de buques de guerra (P.D. dragaminas), a
zonas de operaciones navales, reportándolos a la terminación de sus operaciones a las
bases de origen.
La explotación de los dos primeros buques de peso muerto en el entorno de las
50.000 TM puso de manifiesto posibilidades de transporte hasta ahora impensables pero
también han puesto en evidencia limitaciones notables que la actual demanda de buques
intenta subsanar. El objetivo es establecer criterios básicos que ayuden a resolver en
fase de proyecto los posibles problemas de estabilidad.
La información sobre los buques que en la actualidad están operando en la prin-
cipal compañía especializada en este tipo de fletes y la posible demanda de artefactos
offshore por los operadores de las explotaciones energéticas permiten vislumbrar las
posibles características del buque que puede dar respuesta a este mercado.
2.2. ORIGEN DEL PROBLEMA.
Tres acontecimientos ilustran el origen de esta tesis doctoral:
1. Una compañía armadora aumenta la manga de un buque al poco tiempo de su
puesta en servicio.
Uno de los primeros grandes HLC ha sido el buque BLUE MARLIN que tras un
breve periodo de explotación, es retirado por el armador y procede aumentar su manga
en 21 metros, pasando su peso muerto de 57.021 tm a 78.000 tm.
Tesis Doctoral:“ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
2. INTRODUCCIÓN 5
Así mismo en el mismo periodo de tiempo, una compañía de bandera china en
buques LC, contrata la construcción de dos buques: el buque Tai An Kou y su gemelo el
buque Kang Sheng Kou. Inmediatamente después de su puesta en servicio el Tai An
Kou es retirado del servicio, llevado a un astillero y se le aumenta la manga de 32,2 m
hasta 36 m, al objeto de aumentar la estabilidad y el peso muerto. El buque Kang Sheng
Kou durante el año 2008 será también retirado del servicio para modificar la manga al
igual que su gemelo.
2. Seguridad en el proceso de lastrado y deslastrado.
El hundimiento en Angola de un buque HLC (Mighty Servant 3) en la fase de
descarga de una plataforma semisumergible fue examinado por The Dutch Maritime
Court, autoridad independiente que estudia los desastres marítimos, recomendando al-
gunas medidas para evitar la repetición del accidente mencionado. Reconociendo que el
buque cumplía con las leyes y normativa vigentes pone en tela de juicio el proceso de
lastrado y deslastrado.
3. Estiba de la carga.
Un principio de seguridad del transporte marítimo viene puesto en entredicho: la
huella de la carga no está contenida en la cubierta sino que sobresale por fuera de los
costados, por ambas bandas. Como consecuencia estos buques con determinadas esti-
vas de la carga, sobresaliendo por las amuras más de 20 metros y con escoras superiores
a 10 grados, harían inviable la navegación.
Finalmente, una larga conversación con un marino que había realizado un largo
viaje transportando una carga comprometida en un HLC, y mi experiencia en la prueba
de buques, originó mi curiosidad para estudiar el comportamiento de los buques UHLC,
plantear la corrección de estabilidad excesiva de estos buques en condiciones de nave-
gación y plantear posibles investigaciones futuras en relación con el análisis dinámico
de estos buques.
Tesis Doctoral:“ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
2. INTRODUCCIÓN 6
2.3. PLANTEAMIENTO DEL PROBLEMA.
En un buque el peso muerto es un parámetro que nos define la capacidad del
transporte. En un HLC, la carga no solamente viene determinada por su peso, sino tam-
bién por su C. G. y por la geometría de la misma (forma). Esto condicionará el plan-
teamiento del problema. Generalizar la carga (peso y C.G.) nos llevará a renunciar a la
“forma” de la misma, y en definitiva a determinar en muchos casos la acción del viento
sobre la misma. Como contrapartida la determinación de la estabilidad vendrá a com-
pensar el problema anteriormente formulado. La acción de las estructuras cerradas en
cubierta, vinculadas al buque, mejorarán en muchos casos la estabilidad del mismo.
En un HLC se presentan entre otras, las siguientes peculiaridades:
a) La necesidad de un GM0 inicial suficiente para afrontar adecuadamente el
proceso de inmersión / emersión y el transporte seguro de la carga, lleva a estudiar la
disposición y tamaño de los tanques de lastre del buque.
b) Las cargas a transportar en cubierta pueden tener grandes alturas con lo que
su centro de gravedad tendrá una posición elevada lo que hace prever GZ muy peque-
ños o negativos para pequeñas escoras.
c) Por otra parte durante el proceso de inmersión de HLC para tomar la carga se
producirá una interacción entre ambos (unidad a transportar y HLC) en la que influirá
de manera decisiva tanto el peso de dicha unidad como su empuje hidrostático mientras
está siendo elevada. La situación más crítica es aquella en la que la cubierta de cierre
del HLC está ligeramente bajo la superficie del agua y la carga gravita totalmente sobre
ella, sin que su peso esté parcialmente “aliviado” por dicho empuje.
La necesidad de una cubierta sin interferencias laterales que entorpezcan la re-
cepción de la carga (cuya anchura supera a veces la manga del HLC) debe compaginar-
se con las exigencias de flotabilidad, estabilidad y control del asiento durante los proce-
sos de inmersión y emersión de este tipo de buque. Esto se resuelve disponiendo unas
torres a popa que alojen los tanques de trimado y que proporcionan el área e inercia de
Tesis Doctoral:“ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
2. INTRODUCCIÓN 7
flotación y el margen de empuje necesario mientras la cubierta de carga se encuentra
sumergida o con muy poco francobordo.
d) La navegación de estos buques debe cumplir los criterios de estabilidad, de
acuerdo con las resoluciones de IMO MSC 85/26 Add. 1 ANNEX 2 y SOLAS Ch.II-1.y
Sociedad de Clasificación “DNV Rules for classification of ships” Part 5 Ch 7 Sec. 21”
Semisumergible Heavy transport vessels y “Damage Stability of Cargo Ships” Part. 5
Ch. 2 Sec. 8.
e) Necesidad de valorar la magnitud de la manga a en relación con la estabili-
dad transversal del HLC.
Si para unos valores dados del peso y KG de la carga se aumenta la manga del
HLC manteniendo su eslora y calado operativo el volumen de carena aumenta según la
dimensión de la manga y el radio metacéntrico I/V aumentará según el cuadrado de la
manga por lo que aumentará el GM. Será conveniente estudiar los movimientos del bu-
que, y en concreto su periodo, afectados por el GM0.
2.4. OBJETIVOS
• Cuantificar la capacidad de trasporte de un HLC cualquiera que sea la
carga y su CG.
• Optimizar el lastrado del buque que nos permita modificar el CG del
sistema carga – buque.
• Estudiar la normativa de estabilidad durante todas las fases de explo-
tación del buque y ver las condiciones más adecuadas.
• La presente tesis doctoral plantea posibles estudios futuros en rela-
ción con el análisis dinámico de estos buques de ahí su importancia y relevancia.
Tesis Doctoral:“ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
2. INTRODUCCIÓN 8
2.5. TRABAJOS
La elección de los trabajos para estudiar la estabilidad de este tipo de buques lle-
vaba en primer lugar a crear unas carenas sistemáticas, que por una parte recogiese la
experiencia que hasta la fecha se tenía en este tipo de buques, tanto por los aciertos co-
mo por los defectos constatados, y por otra, estudiar las vías de optimización de los
mismos para que los resultados obtenidos fueran fiables. A pesar de las dificultades en-
contradas en los inicios, este proyecto de investigación se plantea de la siguiente mane-
ra:
1) Trata de estudiar la influencia de la manga en las características principa-
les de posibles buques HLC aumentando sistemáticamente la manga. Para esto se han
creado cuatro carenas con mangas crecientes permaneciendo fijos el resto de los pará-
metros.
2) Estudiar una compartimentación utilizando tanques pequeños, sin super-
ficies libres, situados en tres niveles y otros en cubierta a popa, que podrían mejorar la
estabilidad en las fases de inmersión /emersión y de navegación. Se considera la necesi-
dad de equipos de lastre fiables con equipos redundantes.
3) Los ábacos obtenidos de acuerdo con la normativa IMO y la capacidad
límite de transporte ponen de manifiesto, como era de esperar, que para mayores pesos
con un mayor ZGC de los mismos, cumpliendo los criterios IMO de estabilidad, necesi-
tamos buques de manga cada vez mayores. Partiendo de estos conceptos bastaría consi-
derar las dimensiones de las plataformas Offshore semisumergibles y otros artefactos en
función de su peso, posición de su centro de gravedad y dimensiones para plantearnos
las posibles características del buque capaz de realizar el transporte.
4) Para llevar a cabo la maniobra de inmersión o emersión (para recoger o
abandonar la carga) será necesario un GM0 inicial suficiente para afrontar adecuada-
mente estas maniobras.
En la maniobra de inmersión el buque debe poder sumergirse por encima de la
cubierta de cierre hasta 10 m. aprox. y el área de flotación resultante queda reducida a
Tesis Doctoral:“ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
2. INTRODUCCIÓN 9
la superficie de flotación del castillo de proa, y los tanques de trimado del buque sobre
la cubierta en la zona de popa y al área de flotación de la carga sobre cubierta. Si el ca-
lado del buque es tal que la cubierta intemperie del buque está a nivel del agua, el área
de flotación de la carga es nula y la superficie de flotación se reducirá únicamente a la
del buque, una superficie de flotación relativamente pequeña en general, lo que llevará
consigo un momento de inercia del área de flotación pequeña y volúmenes de despla-
zamiento grandes, por lo tanto el radio metacéntrico, transversal y longitudinal tendrán
valores pequeños afectando a la estabilidad del buque adrizado pudiendo alcanzar valo-
res de GZ incluso negativos para grandes desplazamientos y pequeñas escoras.
5) Para la navegación el buque debe cumplir los criterios de estabilidad
mencionados en el parágrafo 2.3. subparágrafo d).
6) Por otra parte, presenta una situación especial en relación con la escora:
hasta ahora los pocos buques construidos de los que tenemos noticia tenían una manga
entorno a los 42 metros uno y 62 metros el otro para posicionar la carga, con un franco-
bordo de verano en torno a los 3 metros. El ángulo de escora de inmersión de la cubierta
es del orden de 9º de escora. El GZ máximo, que no debe alcanzarse con un ángulo
inferior a 25ºde escora, limita las condiciones de carga, encontrando serias dificultades
para alcanzar las condiciones IMO, es decir 0,055 m. Rad en escoras de 0º a 30º. La
consideración de estos buques como “Offshore Supply Vessels” nos permite utilizar
una normativa más permisiva, es decir GZ máximo para ángulos no inferiores a 15º,
pero hay que tener en cuenta las condiciones de aplicación de este reglamento. Este te-
ma será tratado ampliamente en el Capítulo 6.
7) Valorar la influencia de las dimensiones de la manga del buque para la
estabilidad del buque de acuerdo con la normativa IMO. Antes de afrontar esta tesis
doctoral se han tenido en cuenta algunas consideraciones. Si se aumenta la manga del
HLC, permaneciendo invariables todas las demás dimensiones y los coeficientes de
forma, se puede afirmar:
a) El Volumen de Carena (V) aumentará proporcionalmente a la manga B.
Tesis Doctoral:“ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
2. INTRODUCCIÓN 10
b) El Momento de Inercia trasversal de la flotación (It) (es decir el momento de
inercia del área de la flotación respecto al plano de crujía) aumentará proporcionalmente
al cubo de la manga.
c) El Radio Metacéntrico transversal (BM), que se calcula como el cociente en-
tre It y V, habrá aumentado, por tanto, proporcionalmente al cuadrado de la manga.
d) La cota KB del centro de carena se habrá mantenido prácticamente invaria-
ble si se han mantenido los coeficientes de afinamiento de la carena por lo que el Meta-
centro Transversal inicial habrá subido una distancia igual al incremento de BM.
Si en este proceso (variación de la manga del HLC) se considera que la carga a
transportar (peso y KG) fuese la misma, para que se mantenga el calado habría que em-
barcar en el casco del HLC una cantidad de lastre igual a la diferencia entre los aumen-
tos de su desplazamiento y de su Peso en Rosca causados por el aumento de manga, lo
que sería un contrasentido, de aquí que la presente tesis doctoral haya sido orientada a
asignar cargas adecuadas a cada tipo de carena.
Por otro lado, si al aumentar la manga del HLC, manteniendo la eslora, el calado
y los coeficientes de la carena, se acepta que su Peso Muerto (capacidad de carga) au-
mentaría, habría que considerar el efecto de este incremento en el KG del conjunto: se-
guramente subiría, lo que restaría ventaja al incremento de KM.
Si por el contrario al aumentar la manga del HLC se pretendiese mantener su ca-
pacidad de carga, su desplazamiento sólo tendría que incrementarse en una cantidad
sensiblemente igual al incremento de Peso en Rosca, lo que sin duda conduciría a un
KM todavía más alto. (La inercia It puede seguir considerándose proporcional al cubo
de la manga B). Por otra parte, con esta nueva hipótesis se tendrían unas formas más
finas, lo que implicaría que el centro de carena B se elevase.
8) Prever el comportamiento de un buque de estas características en su fase
de proyecto es de por sí una necesidad hoy día en cuanto permite tomar decisiones a
tiempo. Los datos que aporta la estabilidad del buque son conditio sine qua non para la
Tesis Doctoral:“ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
2. INTRODUCCIÓN 11
viabilidad del flete pero también la necesidad de evaluar la operatividad es necesaria y
sería conveniente conocer el comportamiento del buque en la mar para el mayor número
posible de velocidades y rumbos relativos “buque - oleaje”. Lo habitual es obtener los
R.A.O. (operadores de amplitud de respuesta) o las funciones de transferencia en un
Canal de Pruebas.
9) Actualmente está muy extendido estudiar el comportamiento del buque
en la mar de acuerdo con los planteamientos realizados en el dominio de la frecuencia, y
basados en la “strip teoría” (teoría de rebanadas) tomando como guía los estudios reali-
zados por Nils Salvensen. La validez de la teoría de las rebanadas se basa en suponer
que el buque navega a velocidades moderadas en ausencia de sustentación dinámica y
que la forma de sus cuadernas varía gradualmente a lo largo de la eslora, cuya magni-
tud predomina sobre la de la manga o el calado. En el caso de nuestros buques la fiabili-
dad del método podría ser suficiente en cuanto que la velocidad es relativamente peque-
ña y no presentan cambios bruscos en las formas de carena. Sin embargo, no podemos
afirmar lo mismo en cuanto la magnitud de la eslora “predomina” sobre la manga, en
cuanto la manga alcanza valores atípicos y presenta unas formas llenas y un coeficiente
de bloque de 0,83 alejándonos de formas finas. El único camino fiable sería el estudio
en el canal de pruebas, que se hallaría fuera de esta tesis doctoral y encontraría su espa-
cio en futuras investigaciones que validen nuestra teoría.
Sin embargo, sabemos que para buques con un valor de GMo elevado el periodo
de oscilación es pequeño (frecuencia del movimiento de escora alto) y el buque nave-
gando en una mar con oleaje tendrá un comportamiento “duro”, lo que nos hace prever
el comportamiento de estos buques con mangas crecientes para mares de fuerzas 5, y 6.
A pesar de todas estas dificultades no se ha querido renunciar a sugerir acciones
y estudios futuros a realizar en relación con el análisis dinámico de los buques HLC
para evaluar algunos parámetros de comportamiento que dota de mayor valor la presen-
te tesis doctoral.
Tesis Doctoral:“ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
2. INTRODUCCIÓN 12
2.6. BIBLIOGRAFÍA Y REFERENCIAS
La bibliografía específica relativa al estudio planteado en esta tesis doctoral es
escasa y casi inexistente salvo algunos artículos y normativas que han constituido las
referencias orientativas para realizar las investigaciones.
2.7. HERRAMIENTAS Y MÉTODO
Las herramientas matemáticas e informáticas utilizadas en la tesis doctoral han
sido:
a) Ecuaciones generales de equilibrio del sólido rígido.
Nos han permitido establecer las relaciones entre los parámetros básicos que de-
finen la estabilidad. Así, por ejemplo, hemos relacionado la carga (peso y su centro de
gravedad de la misma) con el centro de gravedad del buque o con el momento de inercia
de la sección de la carga.
b) Cálculo numérico iterativo.
Utilizando el software informático MAXSURF e HYDROMAX Versión 9.5
hemos calculado todos los elementos que intervienen en los cálculos de estabilidad:
• Carenas rectas y curvas hidrostáticas
• KG máximos según diferentes criterios de estabilidad
• Curvas de estabilidad
• Condiciones de equilibrio
• Valores de los brazos KN
• Calibración de tanques
c) Generación paramétrica de la carena.
La generación de la carena se ha hecho utilizando el sistema informático FO-
RAN a partir de las formas de proa de un petrolero y de la popa de un buque militar.
Hemos realizado las transformaciones afines para obtener las dimensiones principales
(L, B, T), la transformación cuadrática para obtener el coeficiente de bloque de diseño y
el centro de carena deseado. A partir de aquí hemos utilizado las superficies IGE gene-
radas y las hemos adaptado al MAXSURF.
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
3. EVOLUCIÓN DE LOS BUQUES UHLC
13
CAPÍTULO 3.- EVOLUCIÓN DE LOS BUQUES UHLC.
3.1. PASADO Y PRESENTE DEL BUQUE HEAVY LIFT CARRIER.- CONDICIO-NES OPERATIVAS.
Los buques tradicionalmente llamados Lift Carrier han sido buques utilizados
para el transporte de yates, pequeñas embarcaciones de recreo y de algunos artefactos de
dimensiones reducidas o al menos limitadas a los medios de izada o deslizamiento dis-
ponibles en los muelles de embarque.
Los buques tipo “LASH” (Lighter Aboard Ship) son transportes de barcazas de
dimensiones concretas que funcionan como un dique flotante: se sumerge el buque has-
ta recibir las barcazas y se eleva durante el transporte. Su relación con los nuevos Heavy
Lift Carrier es puramente descriptiva en cuanto ambos utilizan el proceso de inmersión
para tomar la carga.
Al aumentar el peso muerto, las dimensiones y el peso de la posible carga alcan-
za valores altos y mientras que en un Lift Carrier tradicional la posición y amarre de la
carga sobre cubierta se podía hacer con medios de izada de superficie o medios desli-
zantes, y el amarre a la cubierta con medios relativamente sencillos, al aumentar esta
posible carga a varias decenas de miles de toneladas, el planteamiento cambia radical-
mente.
Como se ha visto, los Heavy Lift Carriers se caracterizan por su capacidad de
cargar y descargar la carga que transportan por lo que deberemos asegurar la estabilidad
en todos los procesos de carga y descarga en que tengan lugar dichas operaciones. El
tratamiento de la estabilidad en estas condiciones de carga transitorias no deberían ser
las mismas que en condiciones de navegación normales y los requerimientos de clase no
son rebajados por la brevedad del tiempo en el que el buque se encuentra en ellas. En
estas condiciones de carga se suelen aplicar los criterios de las Sociedades de Clasifica-
ción para la clasificación de artefactos de Offshore. Estas operaciones de carga y des-
carga son minuciosas y en general comprometidas.
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
3. EVOLUCIÓN DE LOS BUQUES UHLC
14
La explotación de los dos primeros buques de peso muerto en torno a las 50.000
TM, el Blue Marlin y el Black Marlin, ha puesto de manifiesto posibilidades de trans-
porte hasta ahora impensables, aunque también ha puesto en evidencia limitaciones no-
tables que la actual demanda de buques intenta subsanar. A partir de ellos sabemos que
se están desarrollando en la actualidad importantes investigaciones en algunos de los
principales canales de prueba europeos, de aquí nuestro interés en definir criterios bási-
cos que ayuden a resolver en fase de proyecto estos problemas.
La información que poseemos de los buques que en la actualidad están operando
en la principal compañía especializada en este tipo de fletes, y la demanda de artefactos
offshore por los operadores de las explotaciones energéticas nos permiten vislumbrar las
posibles características del buque tipo que puede dar respuesta a este mercado.
La demanda de transporte de este tipo de buques se ha ido incrementando más
allá de cualquier previsión y el armador del buque BLUE MARLIN lo retira de opera-
ciones apenas con tres años de explotación y procede a modificar su manga en 22 me-
tros, pasando su peso muerto de 57.021 t a 76.061 t. ¿Qué razones le han llevado a to-
mar dicha medida?
A principios del año 2000 un técnico de esta compañía entró en contacto con los
astilleros DSME (Daewoo) en Corea del Sur que estaban construyendo la plataforma
semisumergible “THUNDER HORSE” (la mayor construida por este astillero) y co-
mienzan a estudiar el posible transporte de este artefacto desde el astillero de construc-
ción a la base de operaciones situada a 16.000 millas del astillero. Las dimensiones de
esta plataforma son superiores a todas las transportadas anteriormente por esta compa-
ñía y por cualquier otra.
La compañía armadora apuesta por los transportes de estas características y des-
pués de dos años de explotación del BLUE MARLIN conoce suficientemente sus limi-
taciones de estabilidad y solicita asistencias técnicas y pruebas de transporte a Marine
Research Institute Netherlands (MARIN) en Wageningen (Holanda). Se llevan a cabo
los estudios de transporte en relación con una posible modificación de buque “BLUE
MARLIN”. El 19 Junio de ese mismo año se firma el contrato de transporte con DSME
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
3. EVOLUCIÓN DE LOS BUQUES UHLC
15
y el 19 de septiembre se firma el contrato de transformación del buque “BLUE MAR-
LIN” con los astilleros Hyundai’s Mipo en Ulsan (Corea del Sur).
La demanda del mercado de fletes que se abre en un futuro inmediato le da la ra-
zón a la compañía armadora: las limitaciones operativas de estos buques no podían ha-
cer frente al flete que el mercado empezaba a demandar y las características técnicas de
estos buques vienen desbordadas por la realidad de los hechos.
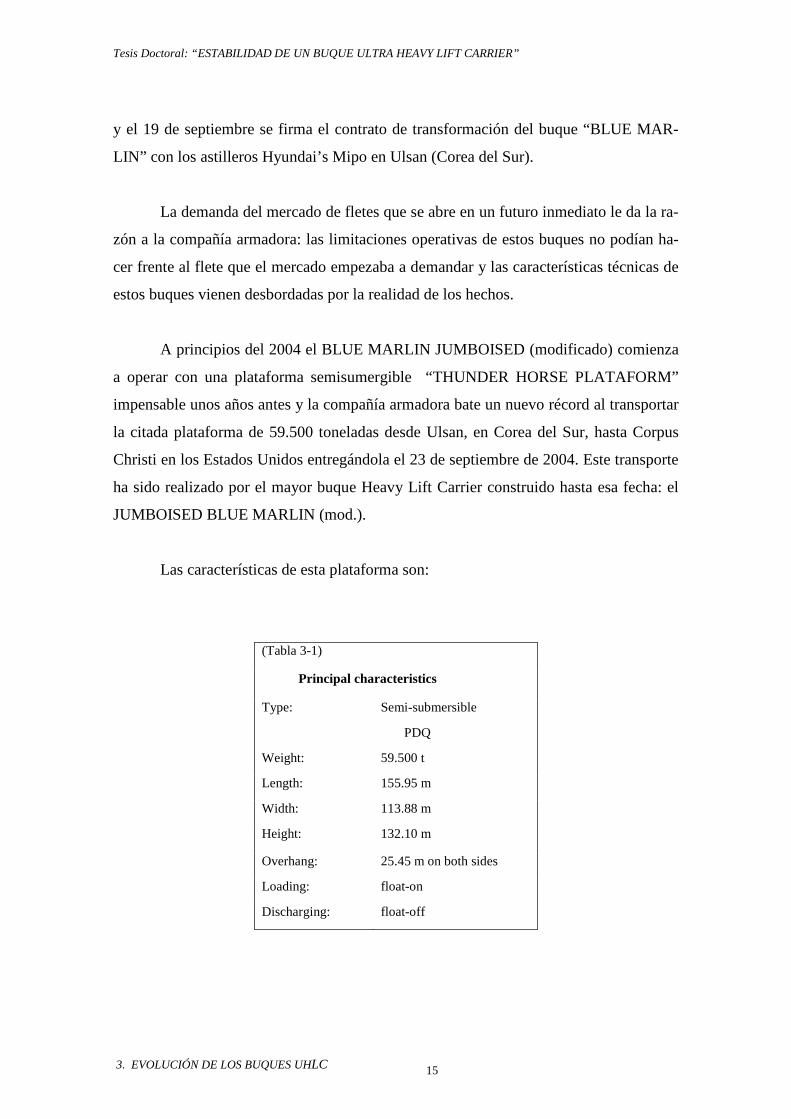
A principios del 2004 el BLUE MARLIN JUMBOISED (modificado) comienza
a operar con una plataforma semisumergible “THUNDER HORSE PLATAFORM”
impensable unos años antes y la compañía armadora bate un nuevo récord al transportar
la citada plataforma de 59.500 toneladas desde Ulsan, en Corea del Sur, hasta Corpus
Christi en los Estados Unidos entregándola el 23 de septiembre de 2004. Este transporte
ha sido realizado por el mayor buque Heavy Lift Carrier construido hasta esa fecha: el
JUMBOISED BLUE MARLIN (mod.).
Las características de esta plataforma son:
(Tabla 3-1)
Principal characteristics
Type: Semi-submersible
PDQ
Weight: 59.500 t
Length: 155.95 m
Width: 113.88 m
Height: 132.10 m
Overhang: 25.45 m on both sides
Loading: float-on
Discharging: float-off

Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
3. EVOLUCIÓN DE LOS BUQUES UHLC
16
La navegación se efectuó entre el 23 de Julio y el 23 de Septiembre de 2004 si-
guiendo la ruta por el Cabo de Buena Esperanza y a una velocidad de navegación de 11
nudos. El Blue Marlin llegó al astillero de Kiewit en Corpus Christi donde esta plata-
forma terminaría su montaje.
El “Chief Executive Officier” de la compañía Dockwise Shipping of the Nether-
lands publica en Diciembre del 2004 un comunicado a sus clientes y empleados:
“No one can blame us for continuing to glow and gloat about the success
of the Blue Marlin voyage with the Thunder Horse platform. A voyage of
16.000 nautical miles, from Okpo in Korea to Ingleside in Texas. Only 60
days in the life of this magnificent piece of engineering, but 60 very essen-
tial days for our client Daewoo. It takes an oil company with a daring vi-
sion, in this case British Petroleum, to set something like this in motion and
to create something that is seemingly inconceivable to transport. It takes a
yard like Daewoo Shipbuilding & Marine Engineering (DSME), with its
professional skills, to take on such a challenge.(…)
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
3. EVOLUCIÓN DE LOS BUQUES UHLC
17
3.2 CARACTERÍSTICAS DE LOS HLC EN EL PERIODO 2001 - 2005.
Durante los cinco primeros años de su puesta en funcionamiento este tipo de buque
ha ido evolucionando en función de la demanda del mercado. Podemos observar que las
dimensiones fueron aumentando y cambiando en función del transporte aunque no
siempre de la forma más conveniente. A partir del 2005 se incrementa el número de
buques con la entrada de nuevos armadores en el transporte de los heavy lift carriers.
Los buques más significativos en función de sus características son:
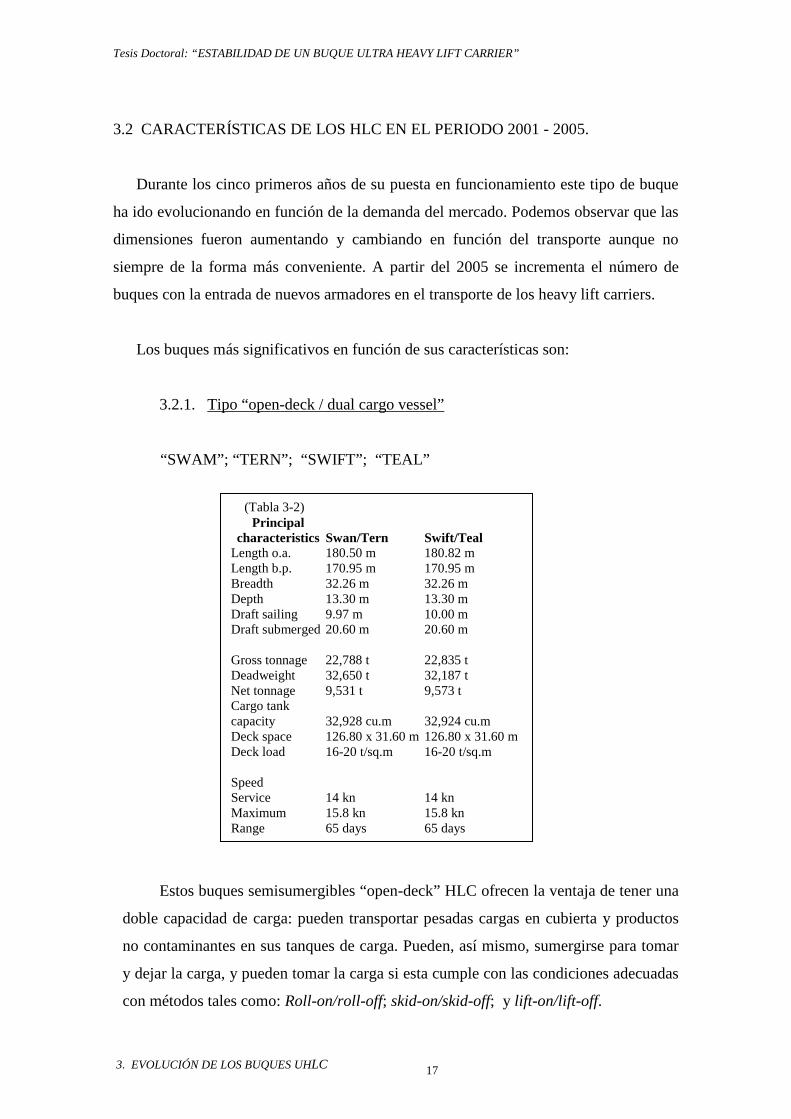
3.2.1. Tipo “open-deck / dual cargo vessel”
“SWAM”; “TERN”; “SWIFT”; “TEAL”
Estos buques semisumergibles “open-deck” HLC ofrecen la ventaja de tener una
doble capacidad de carga: pueden transportar pesadas cargas en cubierta y productos
no contaminantes en sus tanques de carga. Pueden, así mismo, sumergirse para tomar
y dejar la carga, y pueden tomar la carga si esta cumple con las condiciones adecuadas
con métodos tales como: Roll-on/roll-off; skid-on/skid-off; y lift-on/lift-off.
(Tabla 3-2) Principal
characteristics Swan/Tern Swift/Teal Length o.a. 180.50 m 180.82 m Length b.p. 170.95 m 170.95 m Breadth 32.26 m 32.26 m Depth 13.30 m 13.30 m Draft sailing 9.97 m 10.00 m Draft submerged 20.60 m 20.60 m Gross tonnage 22,788 t 22,835 t Deadweight 32,650 t 32,187 t Net tonnage 9,531 t 9,573 t Cargo tank capacity 32,928 cu.m 32,924 cu.m Deck space 126.80 x 31.60 m 126.80 x 31.60 m Deck load 16-20 t/sq.m 16-20 t/sq.m Speed Service 14 kn 14 kn Maximum 15.8 kn 15.8 kn Range 65 days 65 days
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
3. EVOLUCIÓN DE LOS BUQUES UHLC
18
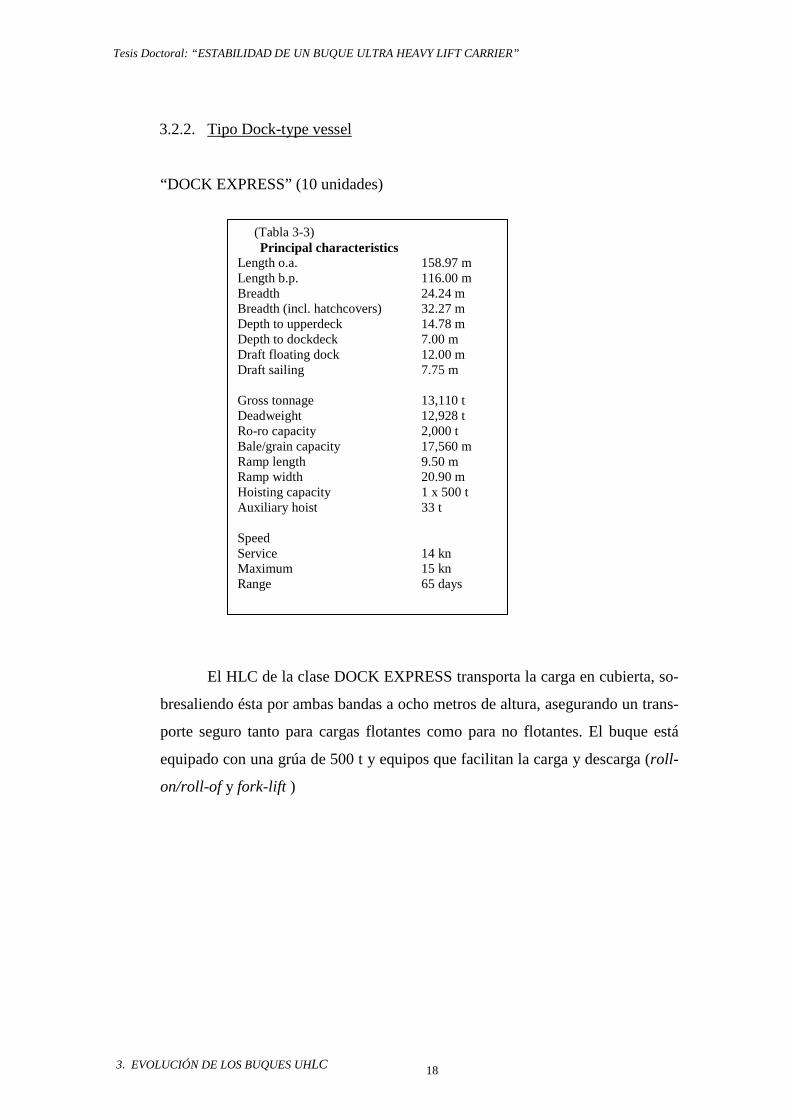
3.2.2. Tipo Dock-type vessel
“DOCK EXPRESS” (10 unidades)
El HLC de la clase DOCK EXPRESS transporta la carga en cubierta, so-
bresaliendo ésta por ambas bandas a ocho metros de altura, asegurando un trans-
porte seguro tanto para cargas flotantes como para no flotantes. El buque está
equipado con una grúa de 500 t y equipos que facilitan la carga y descarga (roll-
on/roll-of y fork-lift )
(Tabla 3-3) Principal characteristics
Length o.a. 158.97 m Length b.p. 116.00 m Breadth 24.24 m Breadth (incl. hatchcovers) 32.27 m Depth to upperdeck 14.78 m Depth to dockdeck 7.00 m Draft floating dock 12.00 m Draft sailing 7.75 m Gross tonnage 13,110 t Deadweight 12,928 t Ro-ro capacity 2,000 t Bale/grain capacity 17,560 m Ramp length 9.50 m Ramp width 20.90 m Hoisting capacity 1 x 500 t Auxiliary hoist 33 t Speed Service 14 kn Maximum 15 kn Range 65 days
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
3. EVOLUCIÓN DE LOS BUQUES UHLC
19
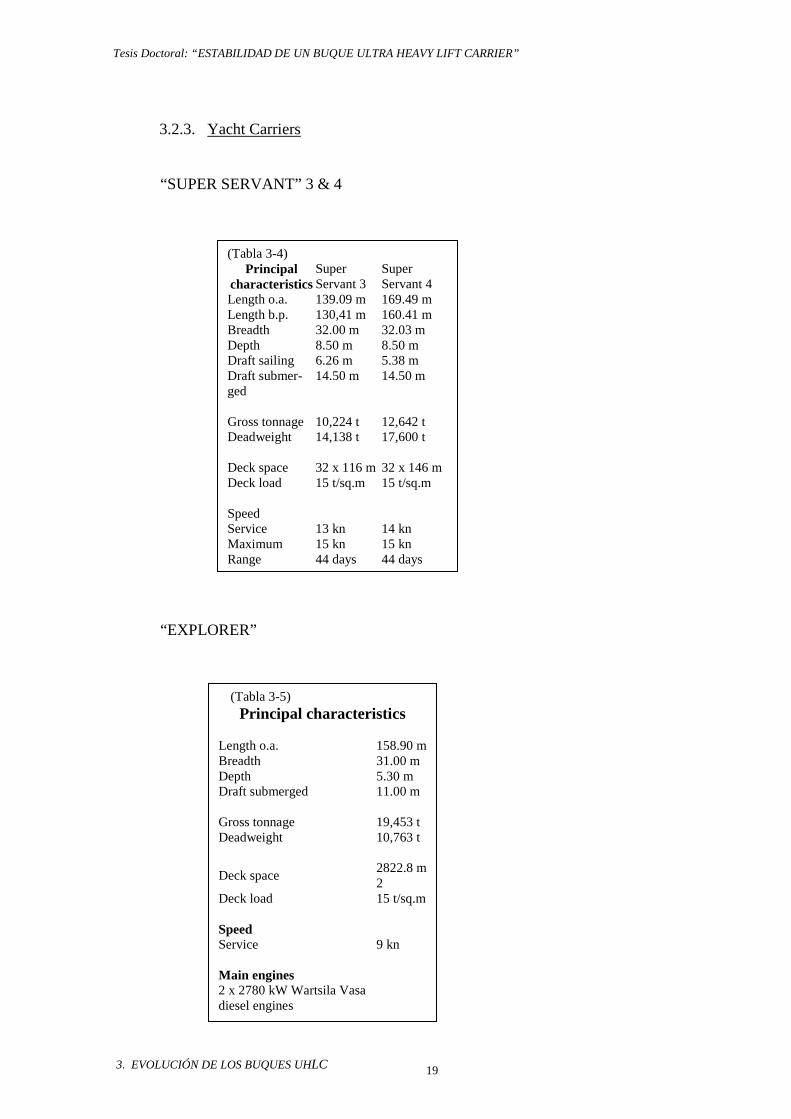
3.2.3. Yacht Carriers
“SUPER SERVANT” 3 & 4
“EXPLORER”
(Tabla 3-4) Principal
characteristics Super Servant 3
Super Servant 4
Length o.a. 139.09 m 169.49 m Length b.p. 130,41 m 160.41 m Breadth 32.00 m 32.03 m Depth 8.50 m 8.50 m Draft sailing 6.26 m 5.38 m Draft submer-ged
14.50 m 14.50 m
Gross tonnage 10,224 t 12,642 t Deadweight 14,138 t 17,600 t Deck space 32 x 116 m 32 x 146 m Deck load 15 t/sq.m 15 t/sq.m Speed Service 13 kn 14 kn Maximum 15 kn 15 kn Range 44 days 44 days
(Tabla 3-5) Principal characteristics
Length o.a. 158.90 m Breadth 31.00 m Depth 5.30 m Draft submerged 11.00 m Gross tonnage 19,453 t Deadweight 10,763 t
Deck space 2822.8 m 2
Deck load 15 t/sq.m Speed Service 9 kn Main engines 2 x 2780 kW Wartsila Vasa diesel engines
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
3. EVOLUCIÓN DE LOS BUQUES UHLC
20
Dos buques de la clase “SUPER SERVANTS” han sido transformados para el
transporte de yates, generalmente de lujo, por todo el mundo. La modificación introdu-
cida en el buque “SUPER SERVANT 3” y el “SUPER SERVANT 4” ha permitido el
transporte de yates de grandes dimensiones. Durante el transporte los yates son estiba-
dos en cubierta y protegidos de la mar por elevadas amuras en ambas bandas.
3.2.4. Tipo Open-deck vessel
“TRANSSHELF”; “MIGHTY SERVAN 3”; “MIGHTY SERVAN 1”; “BLACK
MARLIN”; “BLUE MARLIN” (Jumboised)
Los buques semisumergibles HLC poseen una cubierta corrida sin obstáculos
que permite la posición de plataformas de forma segura así como una variada cantidad
de cargas. La carga y descarga se lleva a cabo utilizando técnicas tales como float-
on/float-off, roll-on/roll-off, skid-on/skid-off, lift-on/lift-off, o bien por medio de combi-
naciones de las mismas.
En el año 2002 el buque “Tai An Kou” y su gemelo el buque “Kang Sheng Kou”
(más pequeños que el “Blue Marlin”) entran en el mercado de fletes. Inmediatamente
después de su puesta en servicio, el “Tai An Kou” es retirado del servicio y se le aumen-
ta la manga de 32,2 m hasta 36 m al objeto de aumentar la estabilidad y el peso muerto.
El buque “Kang Sheng Kou” durante el año 2008 es retirado del servicio para modificar
la manga al igual que su gemelo.
Finalmente, debemos destacar varios aspectos: las transformaciones de buques
petroleros en “heavy lift carrier”; la creación de nuevas empresas que surgen a partir del
año 2000 y que entrarán en el mercado de fletes especializándose en el transporte de
equipos de perforación de prospecciones petrolíferas; y el crecimiento significativo a
partir del año 2005 del número de armadores.
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
3. EVOLUCIÓN DE LOS BUQUES UHLC
21
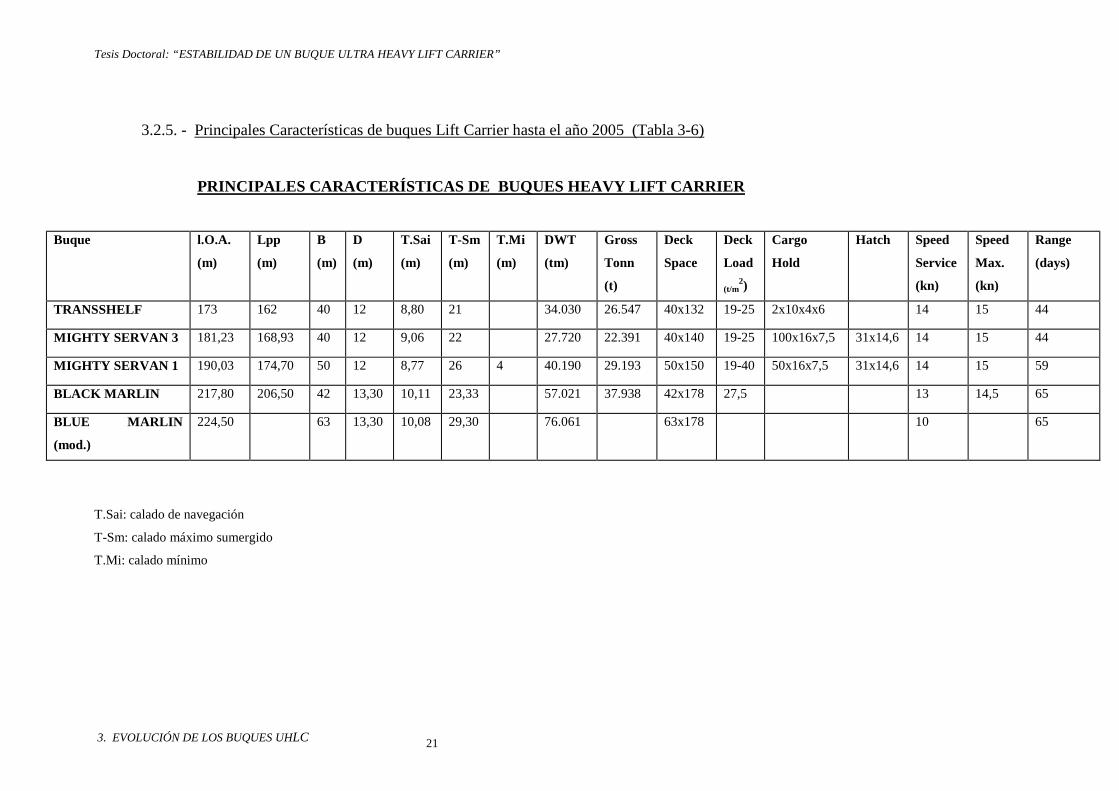
3.2.5. - Principales Características de buques Lift Carrier hasta el año 2005 (Tabla 3-6)
PRINCIPALES CARACTERÍSTICAS DE BUQUES HEAVY LIFT C ARRIER
Buque l.O.A.
(m)
Lpp
(m)
B
(m)
D
(m)
T.Sai
(m)
T-Sm
(m)
T.Mi
(m)
DWT
(tm)
Gross
Tonn
(t)
Deck
Space
Deck
Load
(t/m2)
Cargo
Hold
Hatch Speed
Service
(kn)
Speed
Max.
(kn)
Range
(days)
TRANSSHELF 173 162 40 12 8,80 21 34.030 26.547 40x132 19-25 2x10x4x6 14 15 44
MIGHTY SERVAN 3 181,23 168,93 40 12 9,06 22 27.720 22.391 40x140 19-25 100x16x7,5 31x14,6 14 15 44
MIGHTY SERVAN 1 190,03 174,70 50 12 8,77 26 4 40.190 29.193 50x150 19-40 50x16x7,5 31x14,6 14 15 59
BLACK MARLIN 217,80 206,50 42 13,30 10,11 23,33 57.021 37.938 42x178 27,5 13 14,5 65
BLUE MARLIN
(mod.)
224,50 63 13,30 10,08 29,30 76.061 63x178 10 65
T.Sai: calado de navegación
T-Sm: calado máximo sumergido
T.Mi: calado mínimo
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
3. EVOLUCIÓN DE LOS BUQUES UHLC
22
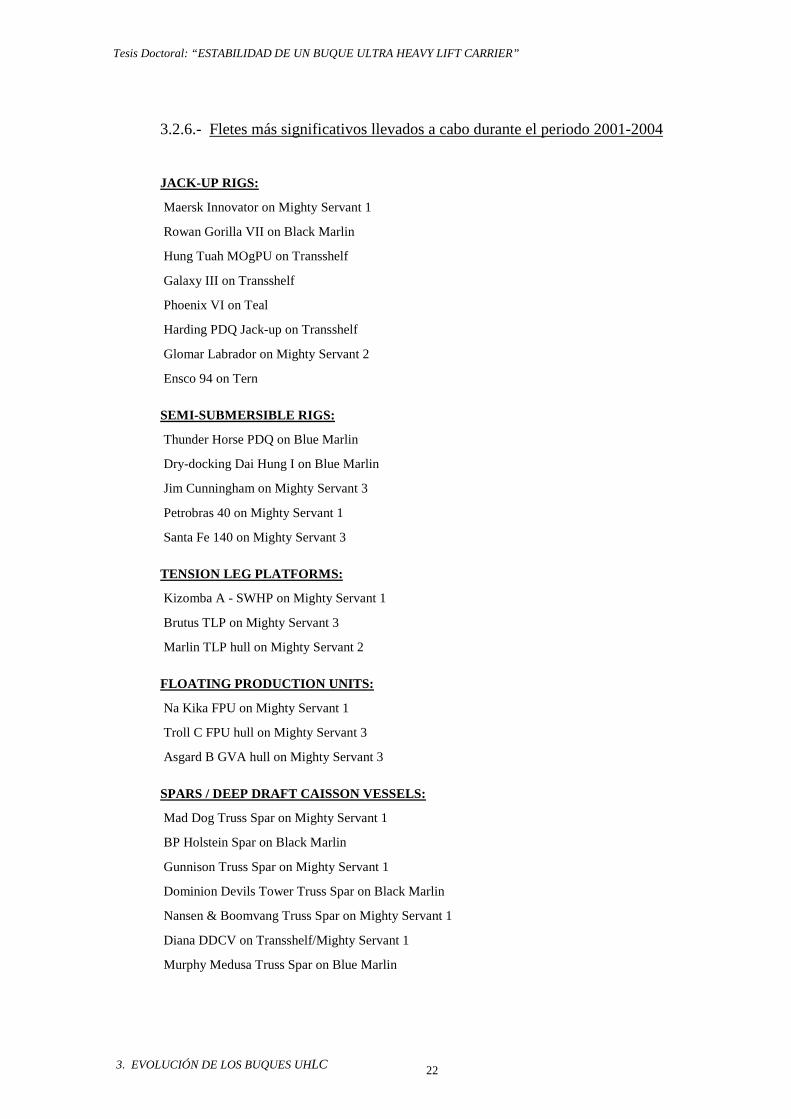
3.2.6.- Fletes más significativos llevados a cabo durante el periodo 2001-2004
JACK-UP RIGS:
Maersk Innovator on Mighty Servant 1
Rowan Gorilla VII on Black Marlin
Hung Tuah MOgPU on Transshelf
Galaxy III on Transshelf
Phoenix VI on Teal
Harding PDQ Jack-up on Transshelf
Glomar Labrador on Mighty Servant 2
Ensco 94 on Tern
SEMI-SUBMERSIBLE RIGS:
Thunder Horse PDQ on Blue Marlin
Dry-docking Dai Hung I on Blue Marlin
Jim Cunningham on Mighty Servant 3
Petrobras 40 on Mighty Servant 1
Santa Fe 140 on Mighty Servant 3
TENSION LEG PLATFORMS:
Kizomba A - SWHP on Mighty Servant 1
Brutus TLP on Mighty Servant 3
Marlin TLP hull on Mighty Servant 2
FLOATING PRODUCTION UNITS:
Na Kika FPU on Mighty Servant 1
Troll C FPU hull on Mighty Servant 3
Asgard B GVA hull on Mighty Servant 3
SPARS / DEEP DRAFT CAISSON VESSELS:
Mad Dog Truss Spar on Mighty Servant 1
BP Holstein Spar on Black Marlin
Gunnison Truss Spar on Mighty Servant 1
Dominion Devils Tower Truss Spar on Black Marlin
Nansen & Boomvang Truss Spar on Mighty Servant 1
Diana DDCV on Transshelf/Mighty Servant 1
Murphy Medusa Truss Spar on Blue Marlin
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
3. EVOLUCIÓN DE LOS BUQUES UHLC
23
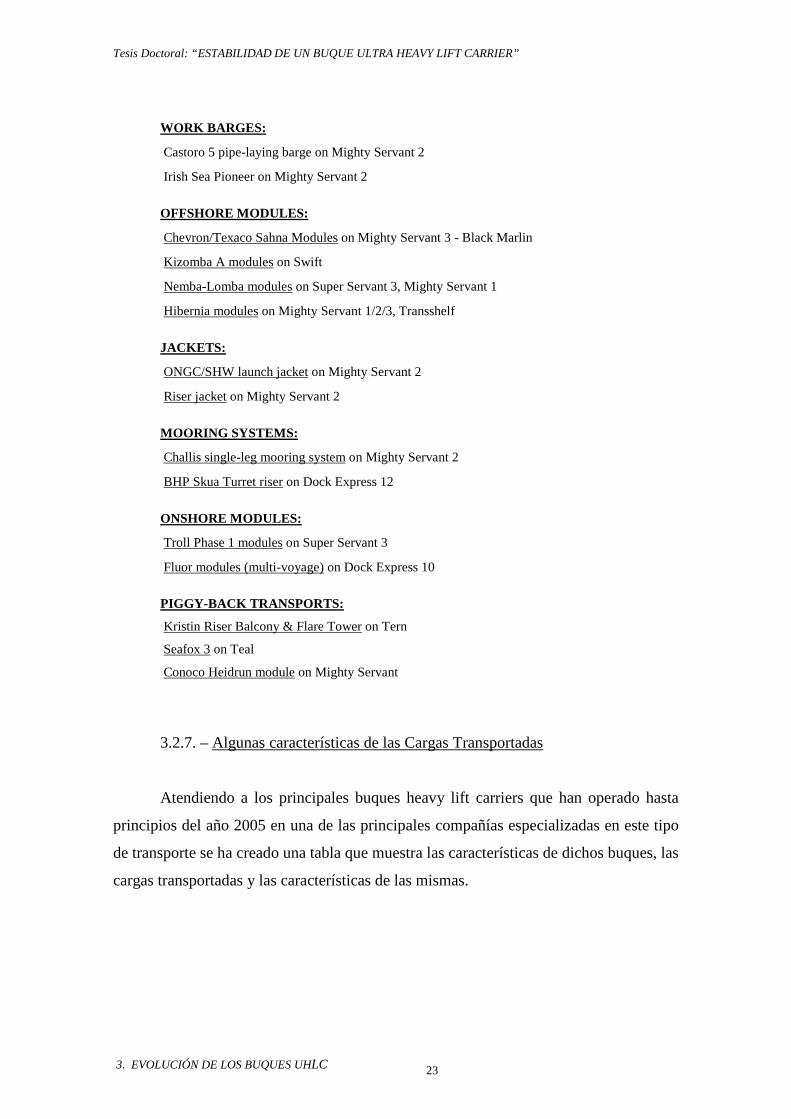
WORK BARGES:
Castoro 5 pipe-laying barge on Mighty Servant 2
Irish Sea Pioneer on Mighty Servant 2
OFFSHORE MODULES:
Chevron/Texaco Sahna Modules on Mighty Servant 3 - Black Marlin
Kizomba A modules on Swift
Nemba-Lomba modules on Super Servant 3, Mighty Servant 1
Hibernia modules on Mighty Servant 1/2/3, Transshelf
JACKETS:
ONGC/SHW launch jacket on Mighty Servant 2
Riser jacket on Mighty Servant 2
MOORING SYSTEMS:
Challis single-leg mooring system on Mighty Servant 2
BHP Skua Turret riser on Dock Express 12
ONSHORE MODULES:
Troll Phase 1 modules on Super Servant 3
Fluor modules (multi-voyage) on Dock Express 10
PIGGY-BACK TRANSPORTS:
Kristin Riser Balcony & Flare Tower on Tern
Seafox 3 on Teal
Conoco Heidrun module on Mighty Servant
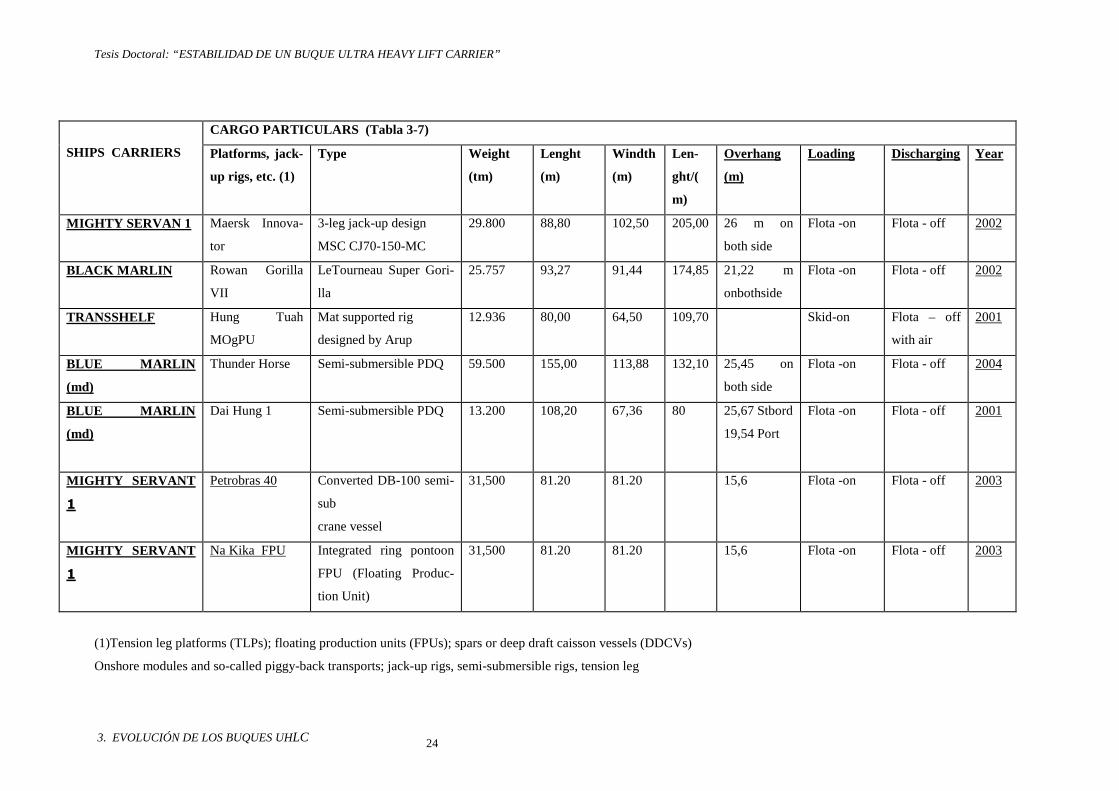
3.2.7. – Algunas características de las Cargas Transportadas
Atendiendo a los principales buques heavy lift carriers que han operado hasta
principios del año 2005 en una de las principales compañías especializadas en este tipo
de transporte se ha creado una tabla que muestra las características de dichos buques, las
cargas transportadas y las características de las mismas.
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
3. EVOLUCIÓN DE LOS BUQUES UHLC
24
SHIPS CARRIERS
CARGO PARTICULARS (Tabla 3-7)
Platforms, jack-
up rigs, etc. (1)
Type Weight
(tm)
Lenght
(m)
Windth
(m)
Len-
ght/(
m)
Overhang
(m)
Loading Discharging Year
MIGHTY SERVAN 1 Maersk Innova-
tor
3-leg jack-up design
MSC CJ70-150-MC
29.800 88,80 102,50 205,00 26 m on
both side
Flota -on Flota - off 2002
BLACK MARLIN Rowan Gorilla
VII
LeTourneau Super Gori-
lla
25.757 93,27 91,44 174,85 21,22 m
onbothside
Flota -on Flota - off 2002
TRANSSHELF Hung Tuah
MOgPU
Mat supported rig
designed by Arup
12.936 80,00 64,50 109,70 Skid-on Flota – off
with air
2001
BLUE MARLIN
(md)
Thunder Horse Semi-submersible PDQ 59.500 155,00 113,88 132,10 25,45 on
both side
Flota -on Flota - off 2004
BLUE MARLIN
(md)
Dai Hung 1 Semi-submersible PDQ 13.200 108,20 67,36 80 25,67 Stbord
19,54 Port
Flota -on Flota - off 2001
MIGHTY SERVANT
1
Petrobras 40 Converted DB-100 semi-
sub
crane vessel
31,500 81.20 81.20 15,6 Flota -on Flota - off 2003
MIGHTY SERVANT
1
Na Kika FPU
Integrated ring pontoon
FPU (Floating Produc-
tion Unit)
31,500 81.20 81.20 15,6 Flota -on Flota - off 2003
(1)Tension leg platforms (TLPs); floating production units (FPUs); spars or deep draft caisson vessels (DDCVs)
Onshore modules and so-called piggy-back transports; jack-up rigs, semi-submersible rigs, tension leg
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
3. EVOLUCIÓN DE LOS BUQUES UHLC
25
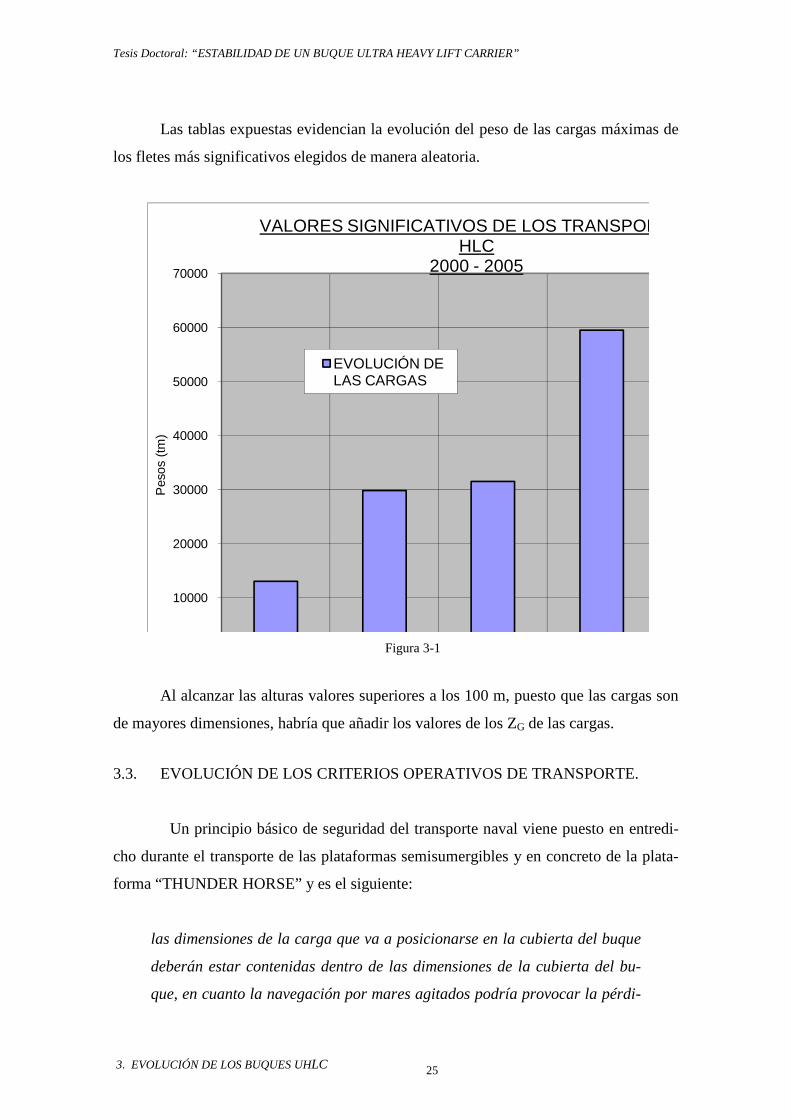
Las tablas expuestas evidencian la evolución del peso de las cargas máximas de
los fletes más significativos elegidos de manera aleatoria.
10000
20000
30000
40000
50000
60000
70000
Pes
os (
tm)
VALORES SIGNIFICATIVOS DE LOS TRANSPORTES HLC
2000 - 2005
EVOLUCIÓN DE LAS CARGAS
Figura 3-1
Al alcanzar las alturas valores superiores a los 100 m, puesto que las cargas son
de mayores dimensiones, habría que añadir los valores de los ZG de las cargas.
3.3. EVOLUCIÓN DE LOS CRITERIOS OPERATIVOS DE TRANSPORTE.
Un principio básico de seguridad del transporte naval viene puesto en entredi-
cho durante el transporte de las plataformas semisumergibles y en concreto de la plata-
forma “THUNDER HORSE” y es el siguiente:
las dimensiones de la carga que va a posicionarse en la cubierta del buque
deberán estar contenidas dentro de las dimensiones de la cubierta del bu-
que, en cuanto la navegación por mares agitados podría provocar la pérdi-
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
3. EVOLUCIÓN DE LOS BUQUES UHLC
26
da de la misma. Así mismo la carga deberá estar suficientemente amarrada
para evitar desplazamientos o movimientos de la misma durante la navega-
ción que pudieran perjudicar tanto a la estabilidad del buque como a la de
la misma carga.
El armador opta por posicionar la carga sobresaliendo por ambas bandas 25,45 m
y a cambio realiza el transporte buscando los meses de navegación que ofrecen las me-
jores condiciones meteorológicas.
Esta nueva característica viene a complicar más aún el problema y a plantearnos
nuevos condicionantes de futuro.
Partiendo de estos conceptos, bastaría considerar las dimensiones de las platafor-
mas Offshore semisumergibles y otros artefactos en función de su peso, posición de su
centro de gravedad y dimensiones para plantearnos las posibles características del buque
para realizar el transporte.
3.4. PRINCIPALES CARACTERÍSTICAS DE BUQUES LIFT CARRIER EN EL
PERIODO 2005 - 2011
A partir del año 2005 el transporte de cargas no ha cambiado sustancialmente,
aunque sí ha crecido el número de empresas armadoras que se han incorporado al mer-
cado de fletes con buques tanques (petroleros) modificados aunque adecuados para el
transporte de plataformas y cargas en cubierta.
El mercado en este periodo evoluciona con nuevas transformaciones que se in-
corporan al mercado de “lift carrier” aunque no así el mercado de nuevas construcciones
que permanece con pocas novedades. Entre estas transformaciones podemos señalar, a
principios del año 2008, dos buques “Ancora” (ex “Soga Ancora”) y el “Hawk” (ex
“Front Transporter”) con una manga de 44,5 m y un peso muerto de 54.000 t.
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
3. EVOLUCIÓN DE LOS BUQUES UHLC
27
Entre los años 2007 y 2009, 6 buques petroleros “Suezmax” (ex “Frontline”) son
retirados del servicio para ser modificados y trasformados en “lift carrier”.
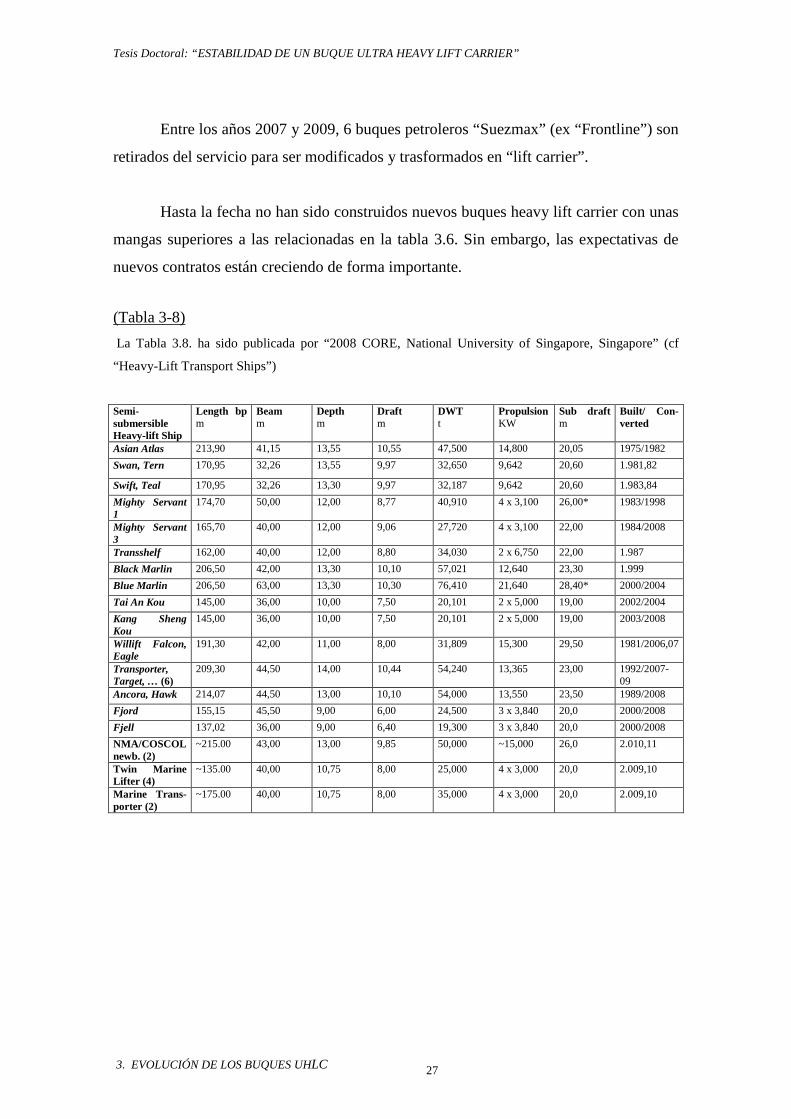
Hasta la fecha no han sido construidos nuevos buques heavy lift carrier con unas
mangas superiores a las relacionadas en la tabla 3.6. Sin embargo, las expectativas de
nuevos contratos están creciendo de forma importante.
(Tabla 3-8)
La Tabla 3.8. ha sido publicada por “2008 CORE, National University of Singapore, Singapore” (cf
“Heavy-Lift Transport Ships”)
Semi-submersible Heavy-lift Ship
Length bp m
Beam m
Depth m
Draft m
DWT t
Propulsion KW
Sub draft m
Built/ Con-verted
Asian Atlas 213,90 41,15 13,55 10,55 47,500 14,800 20,05 1975/1982
Swan, Tern 170,95 32,26 13,55 9,97 32,650 9,642 20,60 1.981,82
Swift, Teal 170,95 32,26 13,30 9,97 32,187 9,642 20,60 1.983,84
Mighty Servant 1
174,70 50,00 12,00 8,77 40,910 4 x 3,100 26,00* 1983/1998
Mighty Servant 3
165,70 40,00 12,00 9,06 27,720 4 x 3,100 22,00 1984/2008
Transshelf 162,00 40,00 12,00 8,80 34,030 2 x 6,750 22,00 1.987
Black Marlin 206,50 42,00 13,30 10,10 57,021 12,640 23,30 1.999
Blue Marlin 206,50 63,00 13,30 10,30 76,410 21,640 28,40* 2000/2004
Tai An Kou 145,00 36,00 10,00 7,50 20,101 2 x 5,000 19,00 2002/2004
Kang Sheng Kou
145,00 36,00 10,00 7,50 20,101 2 x 5,000 19,00 2003/2008
Willift Falcon, Eagle
191,30 42,00 11,00 8,00 31,809 15,300 29,50 1981/2006,07
Transporter, Target, … (6)
209,30 44,50 14,00 10,44 54,240 13,365 23,00 1992/2007-09
Ancora, Hawk 214,07 44,50 13,00 10,10 54,000 13,550 23,50 1989/2008
Fjord 155,15 45,50 9,00 6,00 24,500 3 x 3,840 20,0 2000/2008
Fjell 137,02 36,00 9,00 6,40 19,300 3 x 3,840 20,0 2000/2008
NMA/COSCOL newb. (2)
~215.00 43,00 13,00 9,85 50,000 ~15,000 26,0 2.010,11
Twin Marine Lifter (4)
~135.00 40,00 10,75 8,00 25,000 4 x 3,000 20,0 2.009,10
Marine Trans-porter (2)
~175.00 40,00 10,75 8,00 35,000 4 x 3,000 20,0 2.009,10

Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
3. EVOLUCIÓN DE LOS BUQUES UHLC
28
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
4. GENERACIÓN Y DERIVACIÓN DE CARENAS 29
CAPÍTULO 4- GENERACIÓN Y DERIVACIÓN DE CARENAS.
En este capítulo se tratan los resultados obtenidos, -obviando el largo proceso
experimental-, para generar unas carenas sistemáticas de la misma eslora, el mismo coe-
ficiente de bloque y con una variación de la manga en función de las necesidades de
estabilidad exigidas para el transporte de determinados pesos con C.G. similares a los
requerimientos del posible mercado de fletes. Se sabe que para muy grandes valores de
la manga es necesario un puntal adecuado que cumpla la normativa IMO. Dado que el
objetivo no era el proyecto de un buque sino estudiar las propiedades de estabilidad con
unas carenas sistemáticas se abandonó la propuesta de aumentar en cada carena el pun-
tal a la vez que la manga para de este modo obtener el buque más idóneo.
Partiendo de los parámetros de un buque operativo se ha creado la carena 42 y a
partir de ésta se han generado las carenas 63, 72 y 84.
Y, para finalizar, calculamos el francobordo de verano de cada carena y deter-
minamos el desplazamiento de cada una de ellas para el correspondiente francobordo.
4.1 BUQUE DE PARTIDA: CARENA 42
Para ilustrar las características de este tipo de buques y de acuerdo con lo tratado
en el Capítulo 1 se ha buscado información de aquellos que operan en la actualidad. La
información que tenemos de ellos es una página encontrada en la revista Offshore Ship-
ping Online básicamente divulgativa pero suficiente para poder afrontar el comienzo de
esta investigación.
Se ha intentado generar una carena con formas diferentes pero con los principa-
les parámetros lo más parecidos posibles a la carena del buque operativo, partiendo de
los parámetros básicos del mismo. Se han definido las cubiertas y la compartimentación
de acuerdo a las disposiciones generales a las que se ha tenido acceso en el mencionado
artículo.
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
4. GENERACIÓN Y DERIVACIÓN DE CARENAS 30
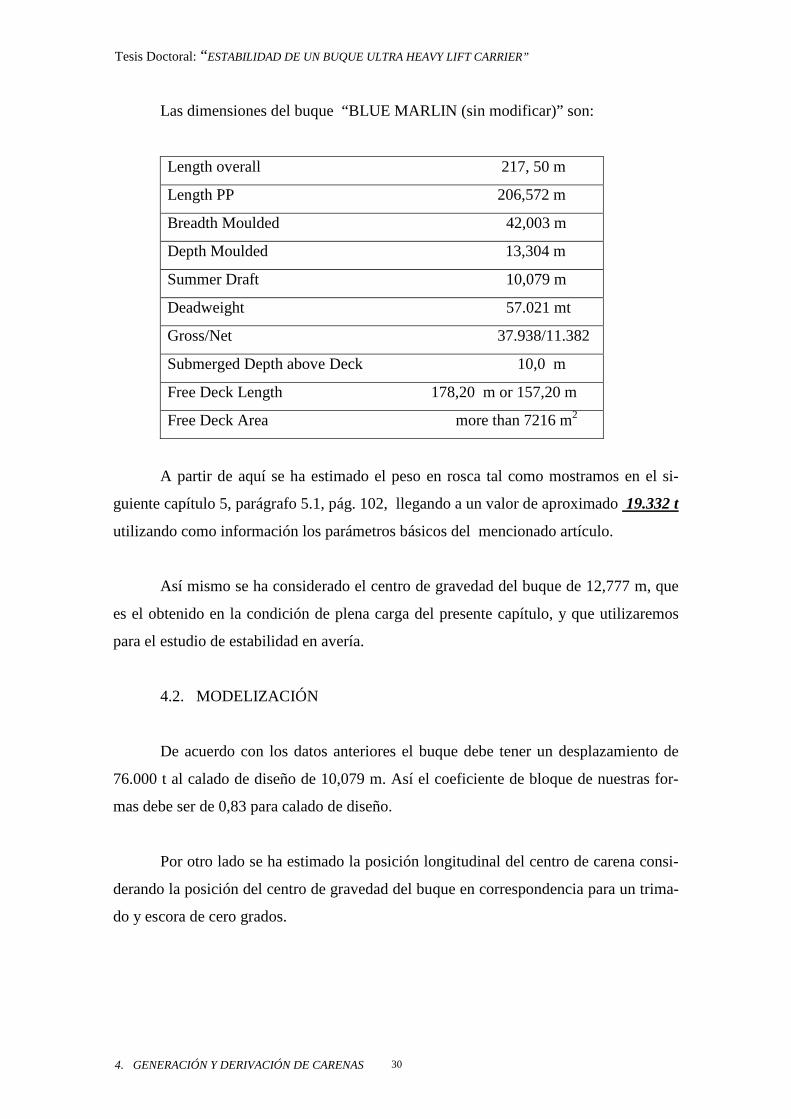
Las dimensiones del buque “BLUE MARLIN (sin modificar)” son:
Length overall 217, 50 m
Length PP 206,572 m
Breadth Moulded 42,003 m
Depth Moulded 13,304 m
Summer Draft 10,079 m
Deadweight 57.021 mt
Gross/Net 37.938/11.382
Submerged Depth above Deck 10,0 m
Free Deck Length 178,20 m or 157,20 m
Free Deck Area more than 7216 m2
A partir de aquí se ha estimado el peso en rosca tal como mostramos en el si-
guiente capítulo 5, parágrafo 5.1, pág. 102, llegando a un valor de aproximado 19.332 t
utilizando como información los parámetros básicos del mencionado artículo.
Así mismo se ha considerado el centro de gravedad del buque de 12,777 m, que
es el obtenido en la condición de plena carga del presente capítulo, y que utilizaremos
para el estudio de estabilidad en avería.
4.2. MODELIZACIÓN
De acuerdo con los datos anteriores el buque debe tener un desplazamiento de
76.000 t al calado de diseño de 10,079 m. Así el coeficiente de bloque de nuestras for-
mas debe ser de 0,83 para calado de diseño.
Por otro lado se ha estimado la posición longitudinal del centro de carena consi-
derando la posición del centro de gravedad del buque en correspondencia para un trima-
do y escora de cero grados.
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
4. GENERACIÓN Y DERIVACIÓN DE CARENAS 31
La generación de la carena se ha hecho a partir de las formas de un petrolero,
realizando las transformaciones siguientes para adaptarse a los parámetros arriba descri-
tos:
• Transformaciones afines para obtener las dimensiones principales (L, B, T).
• Transformación cuadrática para obtener el coeficiente de bloque de diseño y
el centro de carena deseado.
• Rediseño de la obra muerta para adaptarla a las alturas de las cubiertas
principal y castillo.
• Alisado de formas.
• Diseño y dibujo de las torres de trimado de popa.
De este modo se han obtenido unos coeficientes de diseño muy similares a los
del buque de partida.
Se ha utilizado el software informático MAXSURF e HYDROMAX Versión
9.5 Integrated Naval Architecture & Ship Construction Software de Formation Design
Sytems de la Universidad de Cádiz.
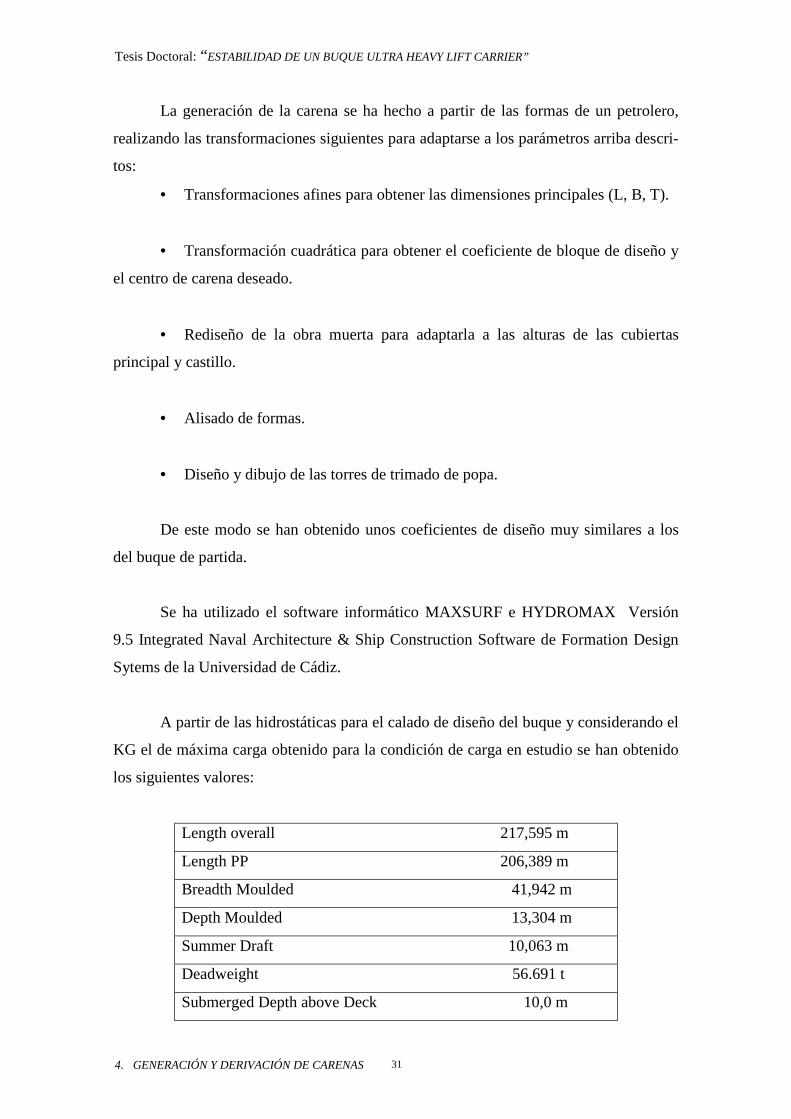
A partir de las hidrostáticas para el calado de diseño del buque y considerando el
KG el de máxima carga obtenido para la condición de carga en estudio se han obtenido
los siguientes valores:
Length overall 217,595 m
Length PP 206,389 m
Breadth Moulded 41,942 m
Depth Moulded 13,304 m
Summer Draft 10,063 m
Deadweight 56.691 t
Submerged Depth above Deck 10,0 m
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
4. GENERACIÓN Y DERIVACIÓN DE CARENAS 32
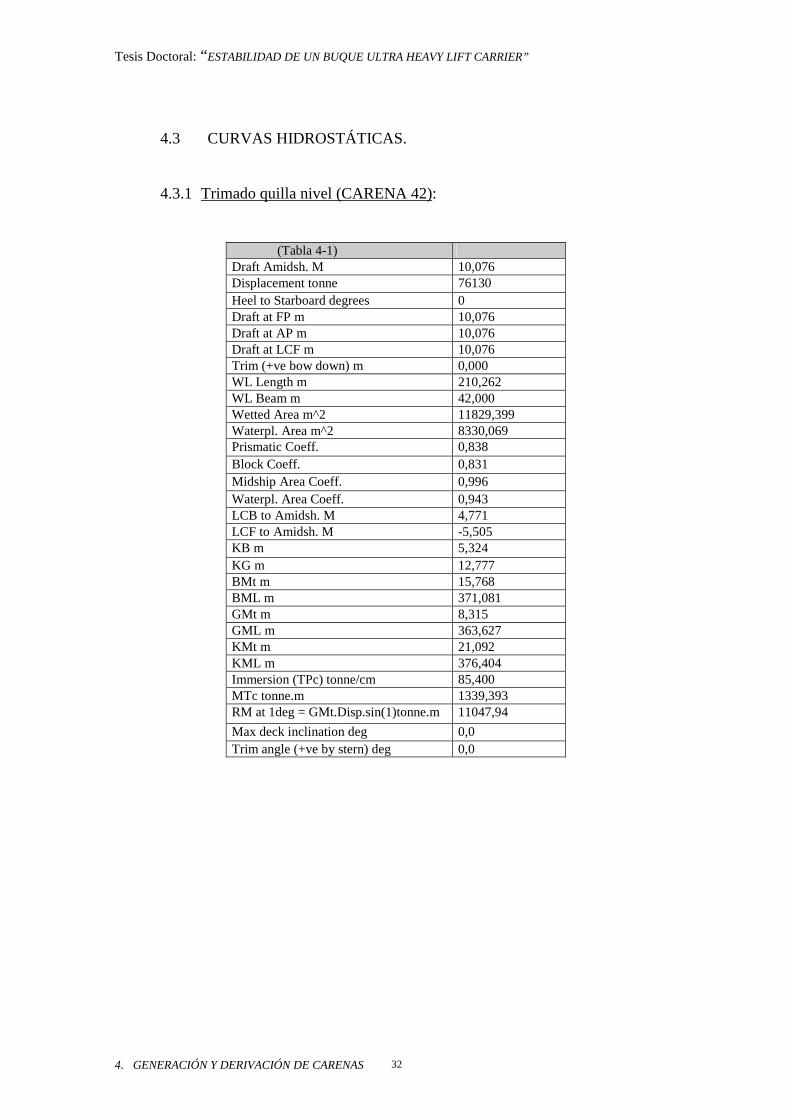
4.3 CURVAS HIDROSTÁTICAS.
4.3.1 Trimado quilla nivel (CARENA 42):
(Tabla 4-1) Draft Amidsh. M 10,076 Displacement tonne 76130 Heel to Starboard degrees 0 Draft at FP m 10,076 Draft at AP m 10,076 Draft at LCF m 10,076 Trim (+ve bow down) m 0,000 WL Length m 210,262 WL Beam m 42,000 Wetted Area m^2 11829,399 Waterpl. Area m^2 8330,069 Prismatic Coeff. 0,838 Block Coeff. 0,831 Midship Area Coeff. 0,996 Waterpl. Area Coeff. 0,943 LCB to Amidsh. M 4,771 LCF to Amidsh. M -5,505 KB m 5,324 KG m 12,777 BMt m 15,768 BML m 371,081 GMt m 8,315 GML m 363,627 KMt m 21,092 KML m 376,404 Immersion (TPc) tonne/cm 85,400 MTc tonne.m 1339,393 RM at 1deg = GMt.Disp.sin(1)tonne.m 11047,94
Max deck inclination deg 0,0 Trim angle (+ve by stern) deg 0,0
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
4. GENERACIÓN Y DERIVACIÓN DE CARENAS 33
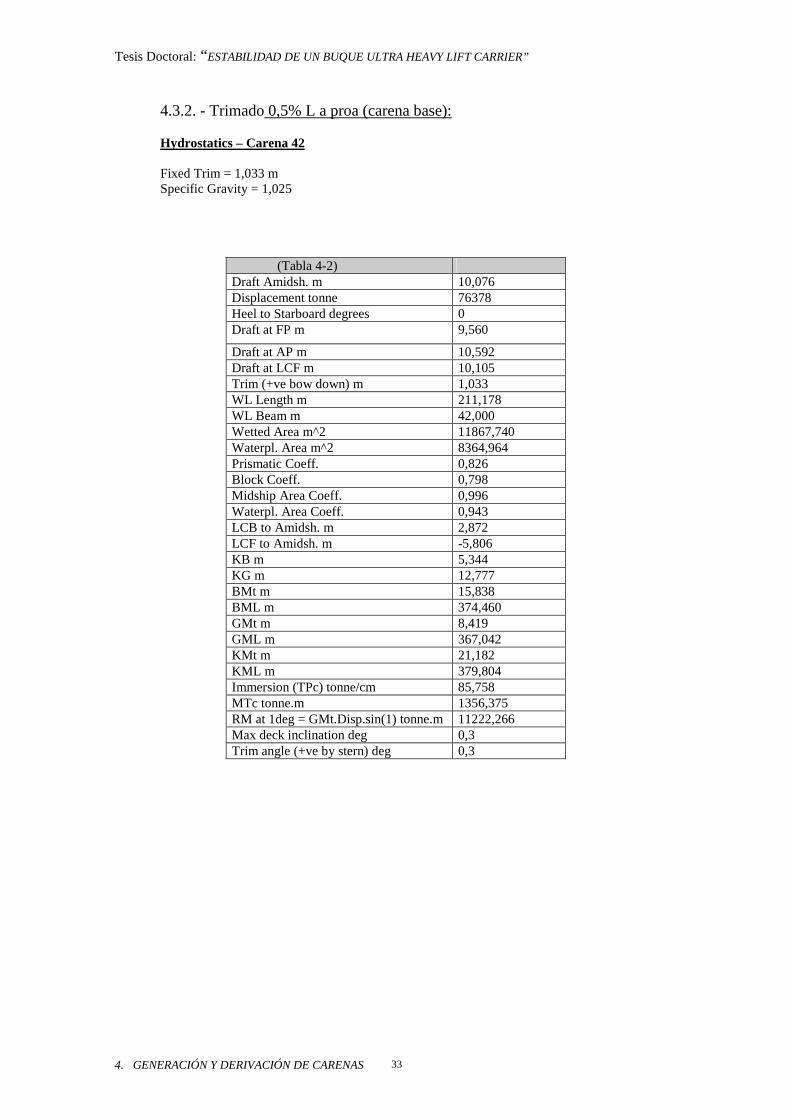
4.3.2. - Trimado 0,5% L a proa (carena base): Hydrostatics – Carena 42 Fixed Trim = 1,033 m Specific Gravity = 1,025
(Tabla 4-2) Draft Amidsh. m 10,076 Displacement tonne 76378 Heel to Starboard degrees 0 Draft at FP m 9,560
Draft at AP m 10,592 Draft at LCF m 10,105 Trim (+ve bow down) m 1,033 WL Length m 211,178 WL Beam m 42,000 Wetted Area m^2 11867,740 Waterpl. Area m^2 8364,964 Prismatic Coeff. 0,826 Block Coeff. 0,798 Midship Area Coeff. 0,996 Waterpl. Area Coeff. 0,943 LCB to Amidsh. m 2,872 LCF to Amidsh. m -5,806 KB m 5,344 KG m 12,777 BMt m 15,838 BML m 374,460 GMt m 8,419 GML m 367,042 KMt m 21,182 KML m 379,804 Immersion (TPc) tonne/cm 85,758 MTc tonne.m 1356,375 RM at 1deg = GMt.Disp.sin(1) tonne.m 11222,266 Max deck inclination deg 0,3 Trim angle (+ve by stern) deg 0,3
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
4. GENERACIÓN Y DERIVACIÓN DE CARENAS 34
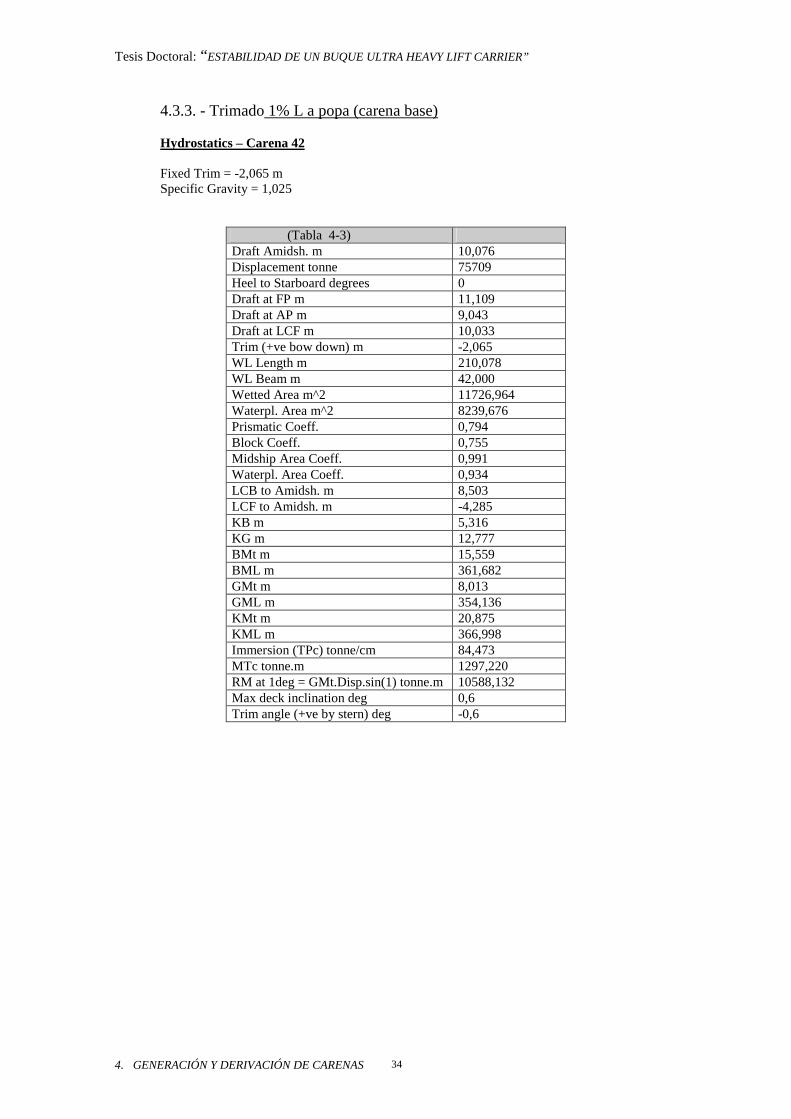
4.3.3. - Trimado 1% L a popa (carena base) Hydrostatics – Carena 42 Fixed Trim = -2,065 m Specific Gravity = 1,025
(Tabla 4-3) Draft Amidsh. m 10,076 Displacement tonne 75709 Heel to Starboard degrees 0 Draft at FP m 11,109 Draft at AP m 9,043 Draft at LCF m 10,033 Trim (+ve bow down) m -2,065 WL Length m 210,078 WL Beam m 42,000 Wetted Area m^2 11726,964 Waterpl. Area m^2 8239,676 Prismatic Coeff. 0,794 Block Coeff. 0,755 Midship Area Coeff. 0,991 Waterpl. Area Coeff. 0,934 LCB to Amidsh. m 8,503 LCF to Amidsh. m -4,285 KB m 5,316 KG m 12,777 BMt m 15,559 BML m 361,682 GMt m 8,013 GML m 354,136 KMt m 20,875 KML m 366,998 Immersion (TPc) tonne/cm 84,473 MTc tonne.m 1297,220 RM at 1deg = GMt.Disp.sin(1) tonne.m 10588,132 Max deck inclination deg 0,6 Trim angle (+ve by stern) deg -0,6
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
4. GENERACIÓN Y DERIVACIÓN DE CARENAS 35
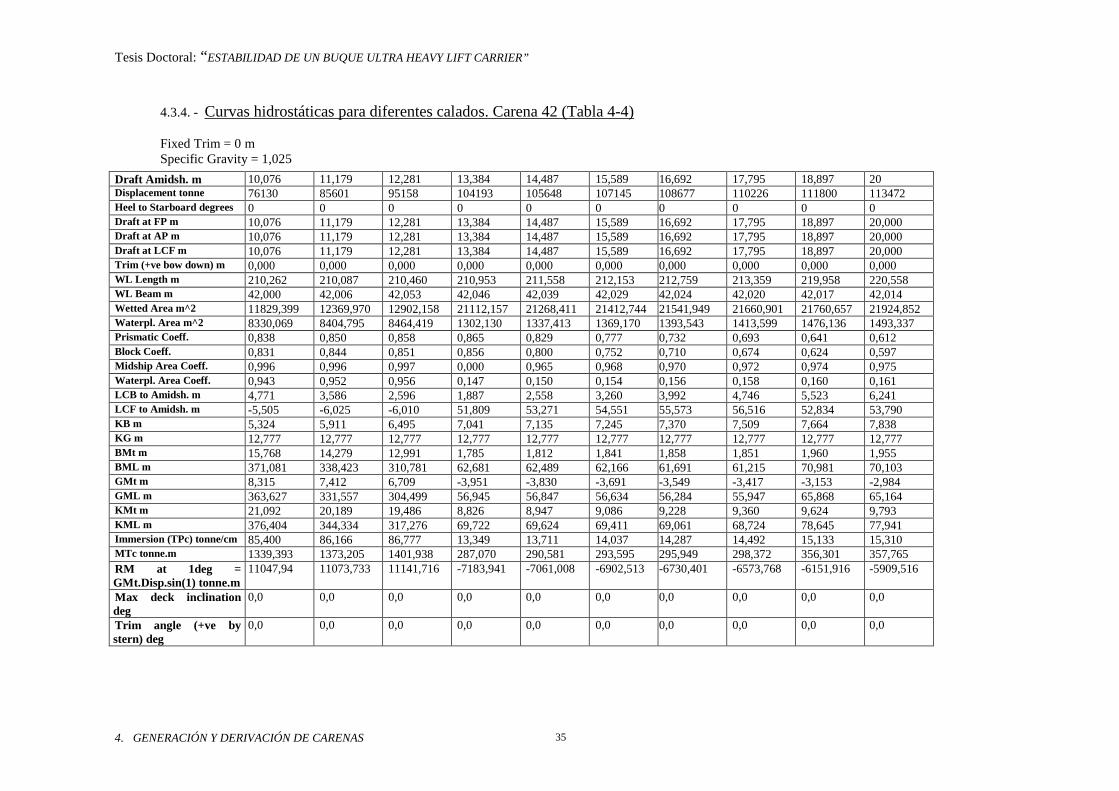
4.3.4. - Curvas hidrostáticas para diferentes calados. Carena 42 (Tabla 4-4) Fixed Trim = 0 m Specific Gravity = 1,025
Draft Amidsh. m 10,076 11,179 12,281 13,384 14,487 15,589 16,692 17,795 18,897 20 Displacement tonne 76130 85601 95158 104193 105648 107145 108677 110226 111800 113472 Heel to Starboard degrees 0 0 0 0 0 0 0 0 0 0 Draft at FP m 10,076 11,179 12,281 13,384 14,487 15,589 16,692 17,795 18,897 20,000 Draft at AP m 10,076 11,179 12,281 13,384 14,487 15,589 16,692 17,795 18,897 20,000 Draft at LCF m 10,076 11,179 12,281 13,384 14,487 15,589 16,692 17,795 18,897 20,000 Trim (+ve bow down) m 0,000 0,000 0,000 0,000 0,000 0,000 0,000 0,000 0,000 0,000 WL Length m 210,262 210,087 210,460 210,953 211,558 212,153 212,759 213,359 219,958 220,558 WL Beam m 42,000 42,006 42,053 42,046 42,039 42,029 42,024 42,020 42,017 42,014 Wetted Area m^2 11829,399 12369,970 12902,158 21112,157 21268,411 21412,744 21541,949 21660,901 21760,657 21924,852 Waterpl. Area m^2 8330,069 8404,795 8464,419 1302,130 1337,413 1369,170 1393,543 1413,599 1476,136 1493,337 Prismatic Coeff. 0,838 0,850 0,858 0,865 0,829 0,777 0,732 0,693 0,641 0,612 Block Coeff. 0,831 0,844 0,851 0,856 0,800 0,752 0,710 0,674 0,624 0,597 Midship Area Coeff. 0,996 0,996 0,997 0,000 0,965 0,968 0,970 0,972 0,974 0,975 Waterpl. Area Coeff. 0,943 0,952 0,956 0,147 0,150 0,154 0,156 0,158 0,160 0,161 LCB to Amidsh. m 4,771 3,586 2,596 1,887 2,558 3,260 3,992 4,746 5,523 6,241 LCF to Amidsh. m -5,505 -6,025 -6,010 51,809 53,271 54,551 55,573 56,516 52,834 53,790 KB m 5,324 5,911 6,495 7,041 7,135 7,245 7,370 7,509 7,664 7,838 KG m 12,777 12,777 12,777 12,777 12,777 12,777 12,777 12,777 12,777 12,777 BMt m 15,768 14,279 12,991 1,785 1,812 1,841 1,858 1,851 1,960 1,955 BML m 371,081 338,423 310,781 62,681 62,489 62,166 61,691 61,215 70,981 70,103 GMt m 8,315 7,412 6,709 -3,951 -3,830 -3,691 -3,549 -3,417 -3,153 -2,984 GML m 363,627 331,557 304,499 56,945 56,847 56,634 56,284 55,947 65,868 65,164 KMt m 21,092 20,189 19,486 8,826 8,947 9,086 9,228 9,360 9,624 9,793 KML m 376,404 344,334 317,276 69,722 69,624 69,411 69,061 68,724 78,645 77,941 Immersion (TPc) tonne/cm 85,400 86,166 86,777 13,349 13,711 14,037 14,287 14,492 15,133 15,310 MTc tonne.m 1339,393 1373,205 1401,938 287,070 290,581 293,595 295,949 298,372 356,301 357,765 RM at 1deg = GMt.Disp.sin(1) tonne.m
11047,94 11073,733 11141,716 -7183,941 -7061,008 -6902,513 -6730,401 -6573,768 -6151,916 -5909,516
Max deck inclination deg
0,0 0,0 0,0 0,0 0,0 0,0 0,0 0,0 0,0 0,0
Trim angle (+ve by stern) deg
0,0 0,0 0,0 0,0 0,0 0,0 0,0 0,0 0,0 0,0
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
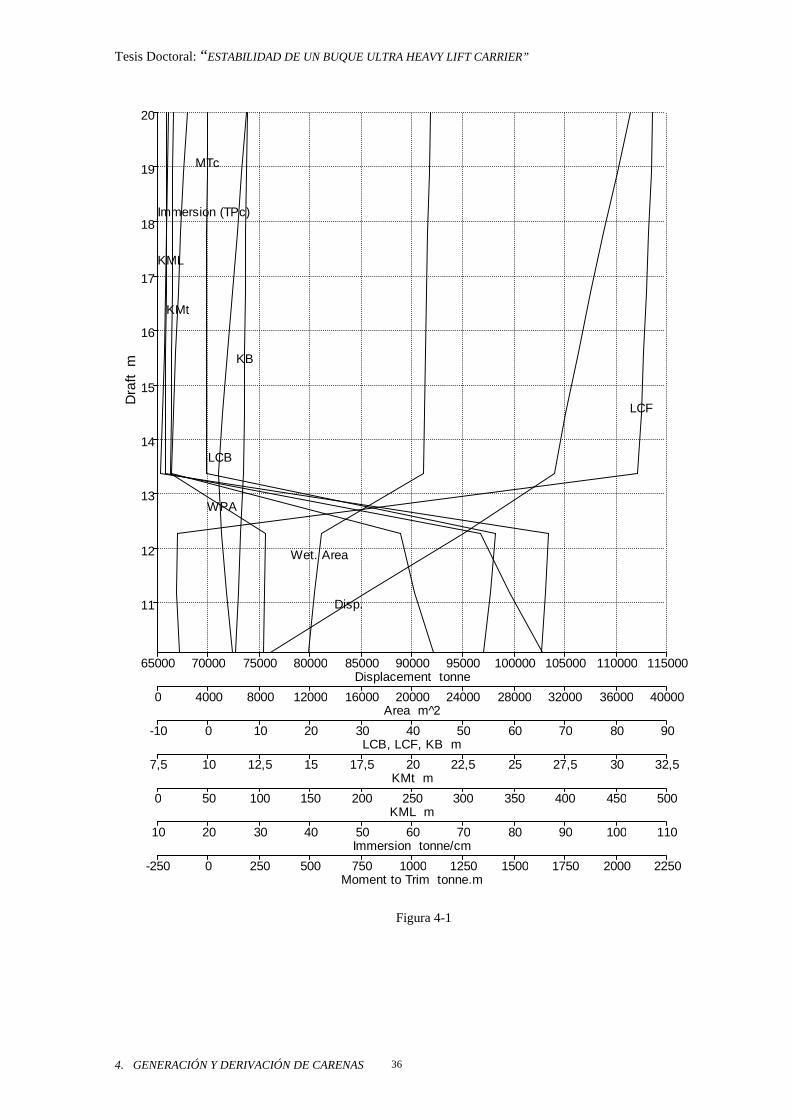
4. GENERACIÓN Y DERIVACIÓN DE CARENAS 36
11
12
13
14
15
16
17
18
19
20
65000 70000 75000 80000 85000 90000 95000 100000 105000 110000 115000
0 4000 8000 12000 16000 20000 24000 28000 32000 36000 40000
-10 0 10 20 30 40 50 60 70 80 90
7,5 10 12,5 15 17,5 20 22,5 25 27,5 30 32,5
0 50 100 150 200 250 300 350 400 450 500
10 20 30 40 50 60 70 80 90 100 110
-250 0 250 500 750 1000 1250 1500 1750 2000 2250
Disp.
Wet. Area
WPA
LCB
LCF
KB
KMt
KML
Immersion (TPc)
MTc
Displacement tonne
Dra
ft m
Area m^2
LCB, LCF, KB m
KMt m
KML m
Immersion tonne/cm
Moment to Trim tonne.m
Figura 4-1
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
4. GENERACIÓN Y DERIVACIÓN DE CARENAS 37
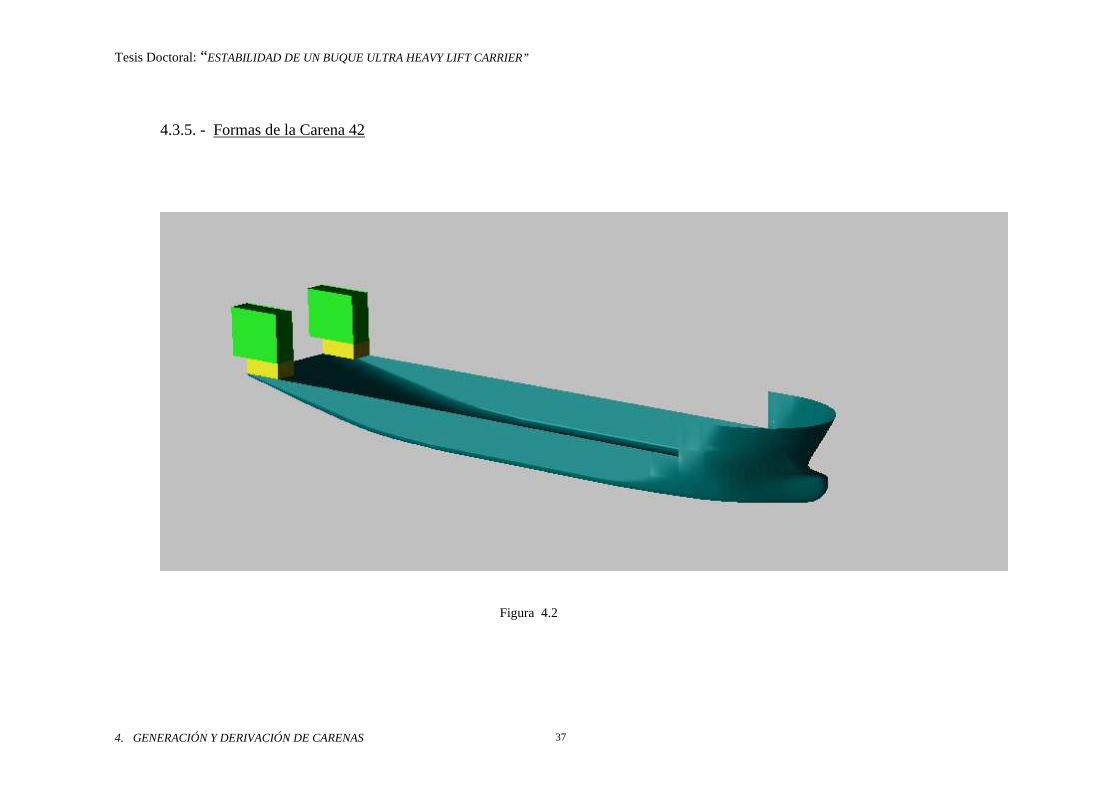
4.3.5. - Formas de la Carena 42
Figura 4.2
Tesis Doctoral: “ESTABILIDAD Y COMPORTAMIENTO DE UN BUQUE UHLC”
4. GENERACIÓN Y DERIVACIÓN DE CARENAS 38
4.3.6. - Elección de las Torres de Flotación de Popa.Carena 42 La necesidad de sustentación y trimado del buque durante la maniobra de inmer-
sión o emersión, así como aumentar la reserva de flotabilidad, hace necesario tanques de
lastre a popa. Con este fin se ha situado a popa del buque dos torres de flotación, las
cuales forman parte de la carena del buque, con tanques de lastre para conseguir el tri-
mado, y además incrementar el área de flotación durante la fase de inmersión. (Ver Cri-
terios de Compartimentación, capítulo 5, páginas 115-117).
Ambas torres Br y Er son fijas y están divididas en dos partes: la parte posterior
se utiliza como salida de la tubería de exhaustación, haciendo la función de chimenea, y
la parte a proa se compone de dos tanques de lastre superpuestos, de dimensiones ade-
cuadas, tales que se puedan llenar si es necesario hasta el 98% de su volumen, evitando
dejar superficies libres. Así mismo, se han colocado estas torres lo más a popa posible a
fin de obtener el brazo de palanca mayor para el trimado, forzando la colocación a popa
de dichos tanques y dejando despejada la cubierta para la carga.
Tesis Doctoral: “ESTABILIDAD Y COMPORTAMIENTO DE UN BUQUE UHLC”
4. GENERACIÓN Y DERIVACIÓN DE CARENAS 39
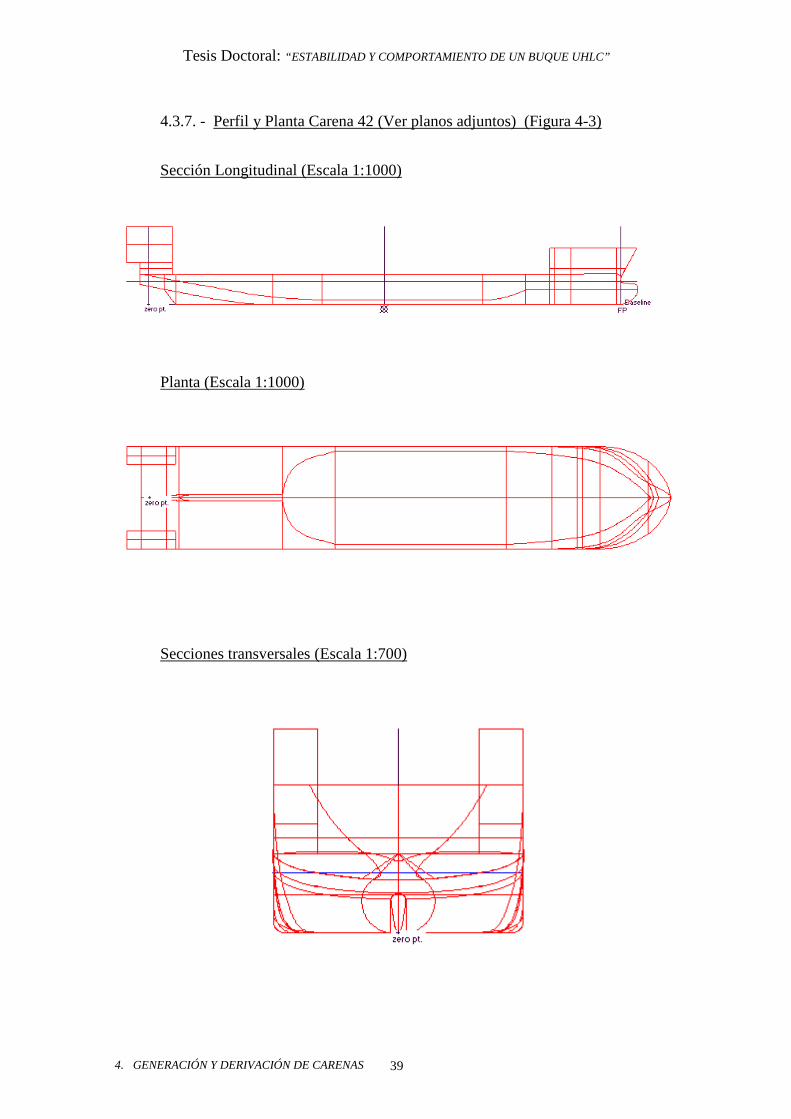
4.3.7. - Perfil y Planta Carena 42 (Ver planos adjuntos) (Figura 4-3) Sección Longitudinal (Escala 1:1000)
Planta (Escala 1:1000)
Secciones transversales (Escala 1:700)
Tesis Doctoral: “ESTABILIDAD Y COMPORTAMIENTO DE UN BUQUE UHLC”
4. GENERACIÓN Y DERIVACIÓN DE CARENAS 40
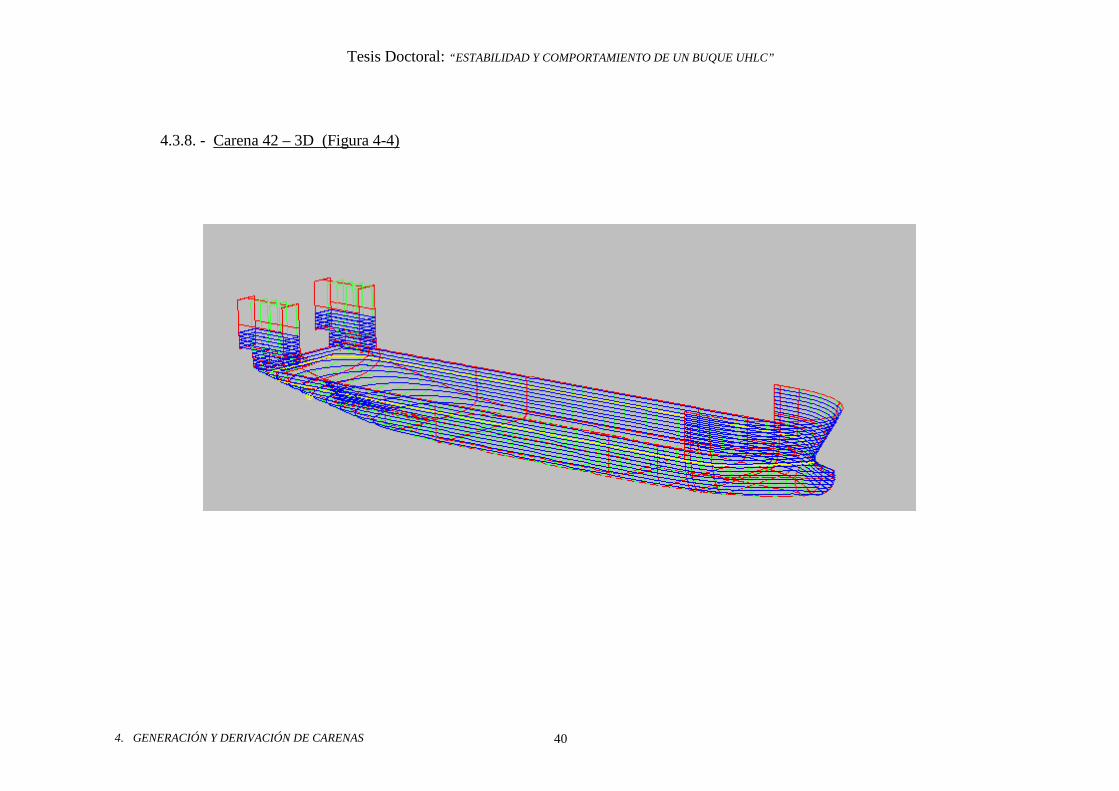
4.3.8. - Carena 42 – 3D (Figura 4-4)

Tesis Doctoral: “ESTABILIDAD Y COMPORTAMIENTO DE UN BUQUE UHLC”
4. GENERACIÓN Y DERIVACIÓN DE CARENAS 41
4.4. FRANCOBORDO 4.4.1. Francobordo: Generalidades
El casco de un buque incluye en su parte superior una o varias cubiertas. Una de
ellas es la que se considera “cierre estanco efectivo" y recibe el nombre de “Cubierta de
Francobordo”.
Se denomina francobordo, en una banda y en una sección transversal determina-
da, a la distancia entre la flotación y el canto alto de la cubierta de francobordo.
Durante el diseño del buque establecemos la llamada “Línea de máxima carga”,
adoptada en Londres el 5 de abril de 1966 y que se corresponde con el “francobordo
mínimo permitido” en la sección Maestra, cuando el buque se encuentra adrizado y va a
navegar en un área perfectamente delimitada que se llama “Zona de Verano”.
El francobordo desde tiempos ancestrales se consideró necesario para que el bu-
que tuviese una reserva de estabilidad que le permitiera capear temporales o accidentes
marítimos. Fue en 1930 cuando se emitió el primer Convenio Internacional sobre Líneas
de Máxima Carga y más tarde en 1966 el actualmente en vigor: 1966 LOAD LINES
CONVENTION.
Cuanto mayor es el calado de un buque mayores son las solicitaciones sobre su
estructura. Cuando se diseña ésta, hay que fijar lo que se conoce como “calado de es-
cantillonado”, Ts, que se indica en el plano de la cuaderna maestra, y en el que se basa
en gran medida la elección de los escantillones del casco y su aprobación por la corres-
pondiente Sociedad de Clasificación. La marca del “calado de verano” que apruebe la
Autoridad asignataria de la Línea de Máxima Carga nunca estará por encima de la flota-
ción correspondiente al calado de escantillonado.
Aplicando las reglas que recoge el capítulo 3 del Anexo 1 al 1966 LLC se llega a
un valor que recibe el nombre de “francobordo geométrico”, fg, pero si éste fuera menor
que el correspondiente al calado de escantillonado, se aplicará un incremento (“penali-
Tesis Doctoral: “ESTABILIDAD Y COMPORTAMIENTO DE UN BUQUE UHLC”
4. GENERACIÓN Y DERIVACIÓN DE CARENAS 42
zación por escantillones”) tal que finalmente el calado de verano coincida con el de es-
cantillonado.
El puntal de francobordo, Df, se encuentra añadiendo el espesor de la plancha
de trancanil al puntal de trazado de la cubierta de francobordo. En principio, el calado
de verano sería la diferencia entre Df y el calado geométrico fg. Pero si dicha diferencia
superase el valor del francobordo de escantillonado Ts, incrementaría el francobordo en
la corrección Df-fg-Ts, que recibe el nombre de “corrección por escantillones”, de ma-
nera que el calado de verano resultante sería:
Tv = Df – (fg + Df – fg –Ts) = Ts (4-1)
En definitiva: Tv = min. (Ts; Df-fg). (4-2)
Aunque el francobordo no determina directamente la estabilidad transversal de
un buque, cuanto mayor es la distancia desde la flotación al borde de la cubierta, mayor
ángulo de balance puede soportar sin que dicho borde se sumerja. (Esta inmersión con-
llevaría una sensible reducción de la inercia en la flotación y, en consecuencia, del par
adrizante.)
Por otra parte, en 1966 LLC se requiere que para todos los buques a los que se
vaya a asignar un francobordo reducido se realicen cálculos de inundación (flotabilidad
y estabilidad después de avería (damage stability)) que demuestren su capacidad para
soportar ciertas averías que inunden determinados compartimentos.
En el caso de buques diseñados para transportar pesadas unidades offshore sobre
su cubierta si éstas están firmemente sujetas por pernos o soldadura es razonable plan-
tear que la carena de la carga actúa de manera conjunta con la del buque. En tal caso,
aun cuando el centro de gravedad del conjunto quede sensiblemente elevado respecto al
plano base del buque, puede considerarse el beneficio de la reserva de flotabilidad y de
estabilidad de formas que aporta la parte estanca de la carga transportada. El cálculo de
la reserva de flotabilidad del conjunto podría realizarse considerando la carga como una
superestructura estanca y los cálculos de estabilidad requeridos podrían hacerse conside-
rando en cada caso las características específicas de la carga a transportar. Estos cálcu-
Tesis Doctoral: “ESTABILIDAD Y COMPORTAMIENTO DE UN BUQUE UHLC”
4. GENERACIÓN Y DERIVACIÓN DE CARENAS 43
los de estabilidad (tanto intacta como después de averías) se pueden llevar a cabo me-
diante programas de Arquitectura Naval (FORAM, NAPA, MAXSURF, entre otros),
que trataremos en el capítulo 6.
4.4.2. Francobordo (Carena 42) Pretendemos comprobar que el buque obtenido partiendo de la carena 42 y la
compartimentación diseñada (Capítulo 5) posee un francobordo de verano muy próximo
al del buque de partida. A tal fin se ha considerado el escantillón correspondiente de la
plancha de cubierta.
A efectos del cálculo de la línea de máxima carga se ha considerado el buque
como un B-100 de acuerdo con la Convención internacional sobre la “Línea de máxima
carga”, adoptada en Londres el 5 de abril de 1966, y ratificada en España el 18 de junio
del mismo año.
A este respecto el reglamento citado establece en el Capítulo 3 (Francobordos,
Regla 27, parágrafo 9:“… La reducción del francobordo tabular, concedida en virtud del
parágrafo 8 de esta regla - reducción B-60) que se podrá aumentar hasta el valor total de
la diferencia entre valores de la tabla “A” y de la tabla “B” de la regla 28 de este regla-
mento, a condición de que el buque satisfaga las condiciones de la regla 26 1), 2), 3), 5),
6) como si fuera un buque de tipo “A” y además cumpla con lo previsto en la regla 27,
párrafo 7, de los subparágrafos a) a d) inclusive, excepto la referencia que se hace en el
d) sobre la inundación de un solo compartimiento cualquiera averiado, que deberá con-
siderarse como referencia a la inundación de dos compartimientos cualesquiera adya-
centes en dirección longitudinal, siendo ninguno de ellos el espacio de maquinaria .
(…)”
Por lo tanto, será necesario una vez calculado el francobordo comprobar las con-
diciones de estabilidad en avería tomando como referencia la inundación de dos com-
partimentos cualesquiera adyacentes en la dirección longitudinal, no siendo ninguno de
ellos el espacio de máquinas.
Tesis Doctoral: “ESTABILIDAD Y COMPORTAMIENTO DE UN BUQUE UHLC”
4. GENERACIÓN Y DERIVACIÓN DE CARENAS 44
4.4.3. Determinación del Francobordo.
En este caso se ha considerado el escantillón de cubierta (28) para comparar los
resultados de carena generada con los de la carena de un buque operativo.
Puntal de trazado: D = 13.300 mm
Puntal de francobordo: D + 28 = 13.328 mm
Eslora total: L.O.A – 217 m;
Eslora entre perpendiculares: L.B.P. 206 m
Eslora de flotación correspondiente al 85% del puntal mínimo de trazado:
0,96 x 214 = 205,44;
Eslora al eje de la mecha del timón: 206 m
Eslora de francobordo: 206 m
Considerando:
• Buque Tipo “B” = 3.363 mm
• Buque Tipo “A” = 2.669 mm
Diferencia entre ambos: 694 mm
Un buque tipo “B” de más de 100 m de eslora puede tener un francobordo redu-
cido si cumple algunos requerimientos adicionales, permitiéndose una reducción del
francobordo tabular del 100%, como máximo, de la diferencia entre el francobordo ta-
bular tipo A y tipo B, que equivale por lo tanto a un buque tipo “A”.
FBTB-100 = 3.363 – 1(3.363 – 2.669) = 3.363 – 694 = 2.669 mm
Aplicando los criterios del Convenio de 1.966, tendremos:
1. Corrección por eslora menor de 100 m: no procede en este caso. C1 = 0
2. Corrección por coeficiente de bloque:
85.625
0.8524206 x 41,94 x 11,32 x 1,025
CB = =

Tesis Doctoral: “ESTABILIDAD Y COMPORTAMIENTO DE UN BUQUE UHLC”
4. GENERACIÓN Y DERIVACIÓN DE CARENAS 45
2
0,8524 0,68C 1,1268
1,36
+= =
3. Corrección por puntal: 13,36 < L/15 (no procede) C3 = 0
L/15=14; 13,36 < 14
4. Corrección por superestructura:
La longitud de nuestra superestructura o puente es de 36,900 m de aquí que la
relación E/L = 0,1791
Para E/L = 0,1 corresponde: 5%
Para E/L = 0,2 corresponde: 10%
Por interpolación lineal obtenemos: 8,955%
C4 = (1.070*8,955)/100 = 95,818 mm
5. Corrección por arrufo: C5
El parágrafo de 12 de la regla 39 expone:
“Cuando la altura real de una toldilla o un castillo en la ordenada extrema es su-
perior a la normal, se utilizará la siguiente fórmula:
' 14, 250 2,6 36. . 0,6956
3 3 206
y Ls
L
−= = =
siendo:
s = suplemento de arrufo a deducir del defecto o añadir al exceso del arrufo;
y = diferencia entre las alturas real y normal de la superestructura en la ordenada
extrema de la línea de arrufo;
L’ = longitud media de la parte cerrada de la toldilla o castillo hasta un máximo
de 0,5 L
L = eslora del buque, según se define en la regla 3,1) del Anexo del Reglamento.
La fórmula arriba indicada da una curva parabólica, tangente a la curva de arrufo
real en la cubierta de francobordo y que corta a la ordenada extrema en un punto situado

Tesis Doctoral: “ESTABILIDAD Y COMPORTAMIENTO DE UN BUQUE UHLC”
4. GENERACIÓN Y DERIVACIÓN DE CARENAS 46
por debajo de la cubierta de la superestructura a una distancia de esta cubierta igual a la
altura normal de una superestructura.
6. Corrección por variaciones respecto a la curva de arrufo normal.
La corrección por arrufo deberá ser el defecto o el exceso de arrufo multiplicado
por
S0, 75
2.L−
siendo
S la longitud de la superestructura cerrada.
7. Altura mínima de proa
La altura de proa definida como distancia vertical en la perpendicular de proa,
entre la flotación correspondiente al francobordo de verano asignado y el asiento de
proyecto y el canto alto en el costado de la cubierta expuesta, no será inferior a los valo-
res dados por las siguientes fórmulas:
Para eslora inferior a 250 m: (Cumple)
Diferencia entre suma de productos sCorrección = x (0,75- )
16 2.L
(Tabla 4-5)
Posición Ordenada
normal
reglamenta-
ria
Factor Producto Sumas
parciales
Orde-
nada
real del
buque
Fac-
tor
Producto Sumas
parcia-
les
Pp 1.999,93 1 1.999,93 sPp=
5.333,11
1 0 sPp.=
600
1/6 E de Pp 888,85 3 2.666,55 3 0
1/3 E de Pp 222,21 3 666,63 3 0
Sección media 0 1 0 sPr.=
10.666,22
1 0
1/3 E de Pr 444,42 3 1.333,26 3 1927 sPr.=
7.237
1/6 E de Pr 1.777,70 3 5.333,10 3 23.709
Pr 3.399,86 1 3.399,86 1 32.782
Totales Sumas parciales reglamentarias = 15.999 Totales Sumas parciales reales = 7.418
Tesis Doctoral: “ESTABILIDAD Y COMPORTAMIENTO DE UN BUQUE UHLC”
4. GENERACIÓN Y DERIVACIÓN DE CARENAS 47
5
Totales Sumas parciales reglamentarias = 15.999
Totales Sumas parciales reales = 7.418
15.999 - 7.418 36C .(0,75 - ) 536 x 0,6604 = 353,974 mm
16 412= =
Considerando FB = (FBTB-100 +C1) x C2 +C3 – C4 + C5,
el francobordo total será:
FB = (FBTB-100 + C1)*C2 + C3 – C4 +C5
FB = 2669*1,1268 +0 – 95,818 +353,974 =
= 3.007,42 +0-95,818+353,974 =3.265 mm
Tipo de francobordo4: B – 100
El calado correspondiente al francobordo de verano será
13.328 -3.265 = 10.063 mm
El desplazamiento para el calado de francobordo de verano obtenido a partir de
las curvas hidrostáticas nos da un desplazamiento de 76.071 t.
4.4.4. - Estudio de la Estabilidad en Avería de la Carena 42(según Convenio In-
ternacional sobre Líneas de Máxima Carga, 1966).
Este estudio deberá considerarse únicamente como un supuesto para validar el
francobordo de la carena 42. Al ser la carena 42 la carena de partida que servirá de base
para las otras tres carenas, es decir las 63, 72, y 84, generadas con idéntico criterio de
compartimentación pero mayor número de tanques debido a la mayor manga se ha con-
siderado conveniente que una vez calculado su francobordo, y solamente para este su-
puesto, hacer el cálculo de la estabilidad en avería.
Se ha visto en el parágrafo 4.4.2. (pág. 43) que la reducción del francobordo ta-
bular, concedida en virtud del parágrafo 8) de esta regla - reducción B-60) – se podrá
Tesis Doctoral: “ESTABILIDAD Y COMPORTAMIENTO DE UN BUQUE UHLC”
4. GENERACIÓN Y DERIVACIÓN DE CARENAS 48
aumentar hasta el valor total de la diferencia entre valores de la tabla “A” y de la tabla
“B” de la regla 28 de este reglamento, cumpliendo con las condiciones anteriormente
descritas en el citado apartado.
El reglamento continúa en la regla 27:
“… Como indicación para la Administración, al aplicar los subparágrafos d) y
e) de este párrafo 7 de la regla 27, los límites dados en los subparágrafos 3 a)5, b)6, c)7
podrán considerarse satisfactorios.
Los cálculos correspondientes se basaran sobre las hipótesis principales siguien-
tes:
• La extensión vertical de la avería es igual al puntal del buque.
• La penetración de la avería no es superior a B/5.
• No se ha averiado ningún mamparo trasversal principal.
• La altura del centro de gravedad sobre la base se calculará considerando
una carga homogénea de las bodegas y un 50% de la capacidad de proyecto de líquidos
y provisiones de consumo.
Partiendo de este reglamento procederemos a determinar el francobordo de ve-
rano y a continuación comprobaremos las condiciones de estabilidad después de avería,
en los términos expresados anteriormente.
La condición de carga que se ha elegido corresponde al término “Carga” al final
de la tabla “Condiciones de Carga de la Carena 42” del presente Capítulo y se adapta a
las condiciones operativas de este buque, es decir, cargas con un C.G. alto, por lo tanto
se ha procurado que el C.G. del buque sea lo más bajo posible para lo cual se ha lastrado
los tanques del D. F. Como consecuencia, el GM0 que obtendremos será alto lo cual es
fácilmente corregible en cada caso particular, lastrando los “upper tank” situados debajo
de la cubierta principal,o los tanques “médium” y en definitiva haciendo el buque “top
heavy”. El C.G. del buque con su carga viene determinado en la tabla 4.8, “Equilibrium
Analisis” (pág. 51), cuyo valor es KG = 12,095 m.
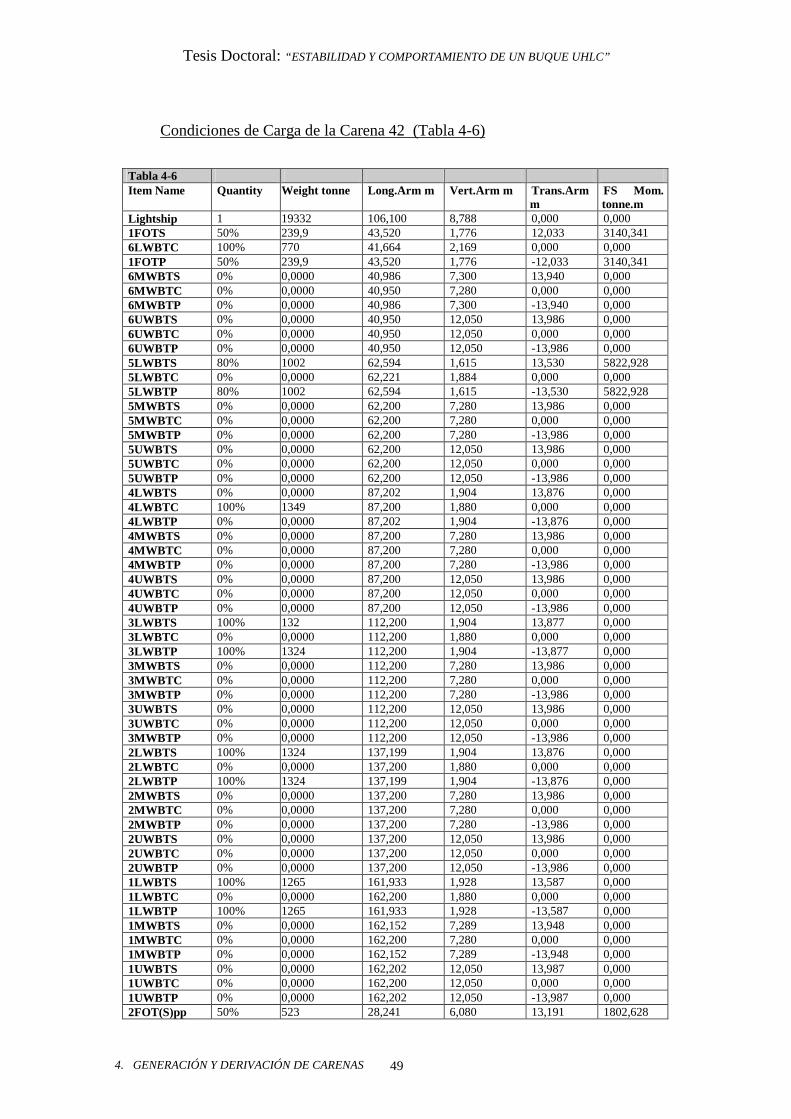
Tesis Doctoral: “ESTABILIDAD Y COMPORTAMIENTO DE UN BUQUE UHLC”
4. GENERACIÓN Y DERIVACIÓN DE CARENAS 49
Condiciones de Carga de la Carena 42 (Tabla 4-6)
Tabla 4-6 Item Name Quantity Weight tonne Long.Arm m Vert.Arm m Trans.Arm
m FS Mom. tonne.m
Lightship 1 19332 106,100 8,788 0,000 0,000 1FOTS 50% 239,9 43,520 1,776 12,033 3140,341 6LWBTC 100% 770 41,664 2,169 0,000 0,000 1FOTP 50% 239,9 43,520 1,776 -12,033 3140,341 6MWBTS 0% 0,0000 40,986 7,300 13,940 0,000 6MWBTC 0% 0,0000 40,950 7,280 0,000 0,000 6MWBTP 0% 0,0000 40,986 7,300 -13,940 0,000 6UWBTS 0% 0,0000 40,950 12,050 13,986 0,000 6UWBTC 0% 0,0000 40,950 12,050 0,000 0,000 6UWBTP 0% 0,0000 40,950 12,050 -13,986 0,000 5LWBTS 80% 1002 62,594 1,615 13,530 5822,928 5LWBTC 0% 0,0000 62,221 1,884 0,000 0,000 5LWBTP 80% 1002 62,594 1,615 -13,530 5822,928 5MWBTS 0% 0,0000 62,200 7,280 13,986 0,000 5MWBTC 0% 0,0000 62,200 7,280 0,000 0,000 5MWBTP 0% 0,0000 62,200 7,280 -13,986 0,000 5UWBTS 0% 0,0000 62,200 12,050 13,986 0,000 5UWBTC 0% 0,0000 62,200 12,050 0,000 0,000 5UWBTP 0% 0,0000 62,200 12,050 -13,986 0,000 4LWBTS 0% 0,0000 87,202 1,904 13,876 0,000 4LWBTC 100% 1349 87,200 1,880 0,000 0,000 4LWBTP 0% 0,0000 87,202 1,904 -13,876 0,000 4MWBTS 0% 0,0000 87,200 7,280 13,986 0,000 4MWBTC 0% 0,0000 87,200 7,280 0,000 0,000 4MWBTP 0% 0,0000 87,200 7,280 -13,986 0,000 4UWBTS 0% 0,0000 87,200 12,050 13,986 0,000 4UWBTC 0% 0,0000 87,200 12,050 0,000 0,000 4UWBTP 0% 0,0000 87,200 12,050 -13,986 0,000 3LWBTS 100% 132 112,200 1,904 13,877 0,000 3LWBTC 0% 0,0000 112,200 1,880 0,000 0,000 3LWBTP 100% 1324 112,200 1,904 -13,877 0,000 3MWBTS 0% 0,0000 112,200 7,280 13,986 0,000 3MWBTC 0% 0,0000 112,200 7,280 0,000 0,000 3MWBTP 0% 0,0000 112,200 7,280 -13,986 0,000 3UWBTS 0% 0,0000 112,200 12,050 13,986 0,000 3UWBTC 0% 0,0000 112,200 12,050 0,000 0,000 3MWBTP 0% 0,0000 112,200 12,050 -13,986 0,000 2LWBTS 100% 1324 137,199 1,904 13,876 0,000 2LWBTC 0% 0,0000 137,200 1,880 0,000 0,000 2LWBTP 100% 1324 137,199 1,904 -13,876 0,000 2MWBTS 0% 0,0000 137,200 7,280 13,986 0,000 2MWBTC 0% 0,0000 137,200 7,280 0,000 0,000 2MWBTP 0% 0,0000 137,200 7,280 -13,986 0,000 2UWBTS 0% 0,0000 137,200 12,050 13,986 0,000 2UWBTC 0% 0,0000 137,200 12,050 0,000 0,000 2UWBTP 0% 0,0000 137,200 12,050 -13,986 0,000 1LWBTS 100% 1265 161,933 1,928 13,587 0,000 1LWBTC 0% 0,0000 162,200 1,880 0,000 0,000 1LWBTP 100% 1265 161,933 1,928 -13,587 0,000 1MWBTS 0% 0,0000 162,152 7,289 13,948 0,000 1MWBTC 0% 0,0000 162,200 7,280 0,000 0,000 1MWBTP 0% 0,0000 162,152 7,289 -13,948 0,000 1UWBTS 0% 0,0000 162,202 12,050 13,987 0,000 1UWBTC 0% 0,0000 162,200 12,050 0,000 0,000 1UWBTP 0% 0,0000 162,202 12,050 -13,987 0,000 2FOT(S)pp 50% 523 28,241 6,080 13,191 1802,628
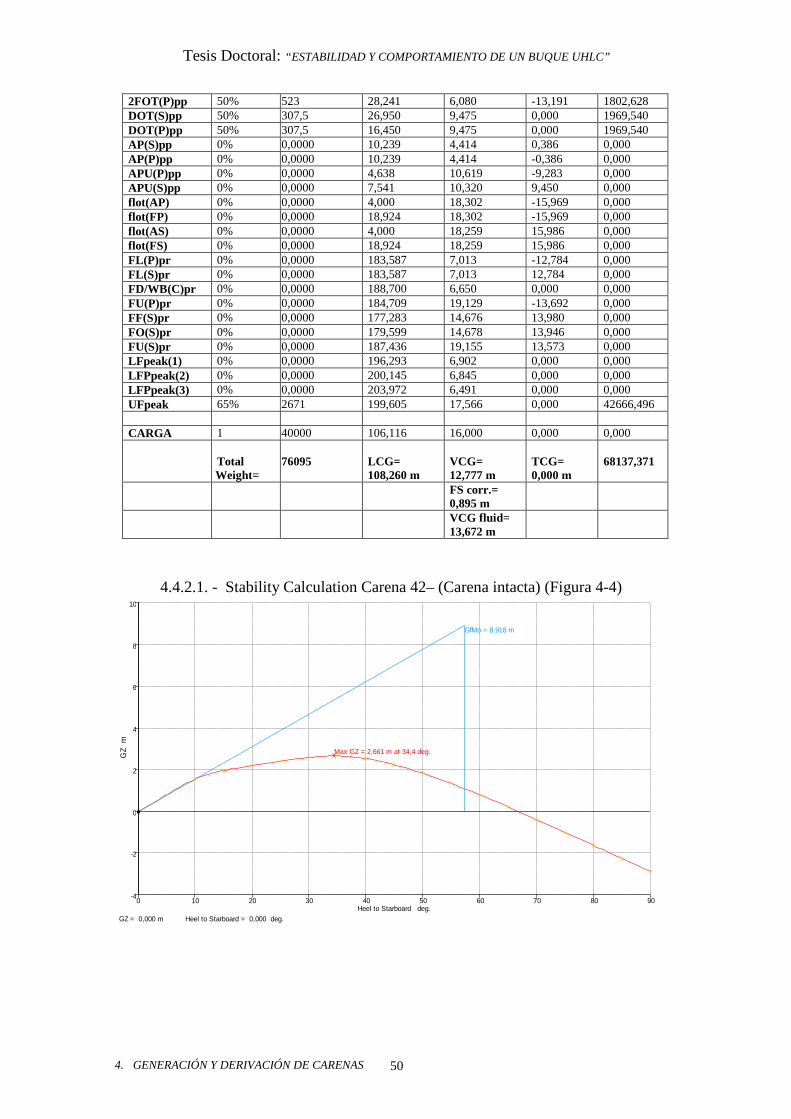
Tesis Doctoral: “ESTABILIDAD Y COMPORTAMIENTO DE UN BUQUE UHLC”
4. GENERACIÓN Y DERIVACIÓN DE CARENAS 50
4.4.2.1. - Stability Calculation Carena 42– (Carena intacta) (Figura 4-4)
-4
-2
0
2
4
6
8
10
0 10 20 30 40 50 60 70 80 90
Max GZ = 2,661 m at 34,4 deg.
GfMo = 8,918 m
GZ = Heel to Starboard = 0,000 m 0,000 deg.Heel to Starboard deg.
GZ
m
2FOT(P)pp 50% 523 28,241 6,080 -13,191 1802,628 DOT(S)pp 50% 307,5 26,950 9,475 0,000 1969,540 DOT(P)pp 50% 307,5 16,450 9,475 0,000 1969,540 AP(S)pp 0% 0,0000 10,239 4,414 0,386 0,000 AP(P)pp 0% 0,0000 10,239 4,414 -0,386 0,000 APU(P)pp 0% 0,0000 4,638 10,619 -9,283 0,000 APU(S)pp 0% 0,0000 7,541 10,320 9,450 0,000 flot(AP) 0% 0,0000 4,000 18,302 -15,969 0,000 flot(FP) 0% 0,0000 18,924 18,302 -15,969 0,000 flot(AS) 0% 0,0000 4,000 18,259 15,986 0,000 flot(FS) 0% 0,0000 18,924 18,259 15,986 0,000 FL(P)pr 0% 0,0000 183,587 7,013 -12,784 0,000 FL(S)pr 0% 0,0000 183,587 7,013 12,784 0,000 FD/WB(C)pr 0% 0,0000 188,700 6,650 0,000 0,000 FU(P)pr 0% 0,0000 184,709 19,129 -13,692 0,000 FF(S)pr 0% 0,0000 177,283 14,676 13,980 0,000 FO(S)pr 0% 0,0000 179,599 14,678 13,946 0,000 FU(S)pr 0% 0,0000 187,436 19,155 13,573 0,000 LFpeak(1) 0% 0,0000 196,293 6,902 0,000 0,000 LFPpeak(2) 0% 0,0000 200,145 6,845 0,000 0,000 LFPpeak(3) 0% 0,0000 203,972 6,491 0,000 0,000 UFpeak 65% 2671 199,605 17,566 0,000 42666,496 CARGA 1 40000 106,116 16,000 0,000 0,000
Total Weight=
76095
LCG= 108,260 m
VCG= 12,777 m
TCG= 0,000 m
68137,371
FS corr.= 0,895 m
VCG fluid= 13,672 m
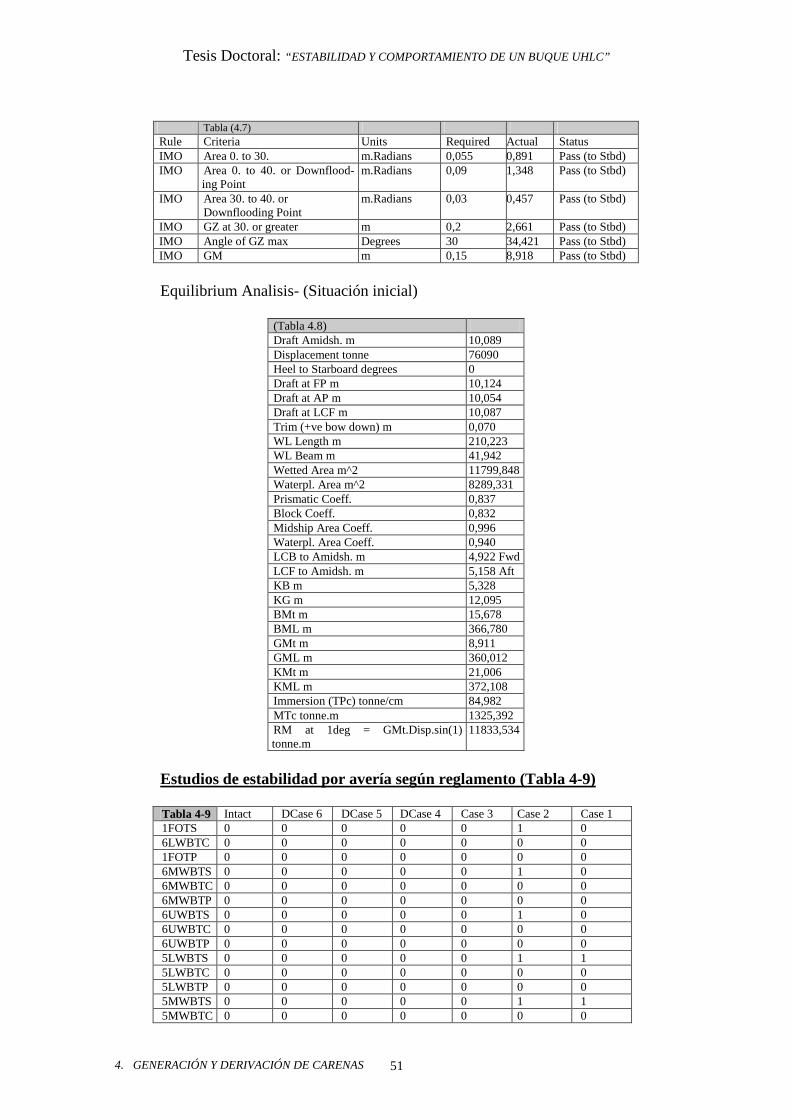
Tesis Doctoral: “ESTABILIDAD Y COMPORTAMIENTO DE UN BUQUE UHLC”
4. GENERACIÓN Y DERIVACIÓN DE CARENAS 51
Tabla (4.7) Rule Criteria Units Required Actual Status IMO Area 0. to 30. m.Radians 0,055 0,891 Pass (to Stbd) IMO Area 0. to 40. or Downflood-
ing Point m.Radians 0,09 1,348 Pass (to Stbd)
IMO Area 30. to 40. or Downflooding Point
m.Radians 0,03 0,457 Pass (to Stbd)
IMO GZ at 30. or greater m 0,2 2,661 Pass (to Stbd) IMO Angle of GZ max Degrees 30 34,421 Pass (to Stbd) IMO GM m 0,15 8,918 Pass (to Stbd)
Equilibrium Analisis- (Situación inicial)
(Tabla 4.8) Draft Amidsh. m 10,089 Displacement tonne 76090 Heel to Starboard degrees 0 Draft at FP m 10,124 Draft at AP m 10,054 Draft at LCF m 10,087 Trim (+ve bow down) m 0,070 WL Length m 210,223 WL Beam m 41,942 Wetted Area m^2 11799,848 Waterpl. Area m^2 8289,331 Prismatic Coeff. 0,837 Block Coeff. 0,832 Midship Area Coeff. 0,996 Waterpl. Area Coeff. 0,940 LCB to Amidsh. m 4,922 Fwd LCF to Amidsh. m 5,158 Aft KB m 5,328 KG m 12,095 BMt m 15,678 BML m 366,780 GMt m 8,911 GML m 360,012 KMt m 21,006 KML m 372,108 Immersion (TPc) tonne/cm 84,982 MTc tonne.m 1325,392 RM at 1deg = GMt.Disp.sin(1) tonne.m
11833,534
Estudios de estabilidad por avería según reglamento (Tabla 4-9) Tabla 4-9 Intact DCase 6 DCase 5 DCase 4 Case 3 Case 2 Case 1 1FOTS 0 0 0 0 0 1 0 6LWBTC 0 0 0 0 0 0 0 1FOTP 0 0 0 0 0 0 0 6MWBTS 0 0 0 0 0 1 0 6MWBTC 0 0 0 0 0 0 0 6MWBTP 0 0 0 0 0 0 0 6UWBTS 0 0 0 0 0 1 0 6UWBTC 0 0 0 0 0 0 0 6UWBTP 0 0 0 0 0 0 0 5LWBTS 0 0 0 0 0 1 1 5LWBTC 0 0 0 0 0 0 0 5LWBTP 0 0 0 0 0 0 0 5MWBTS 0 0 0 0 0 1 1 5MWBTC 0 0 0 0 0 0 0
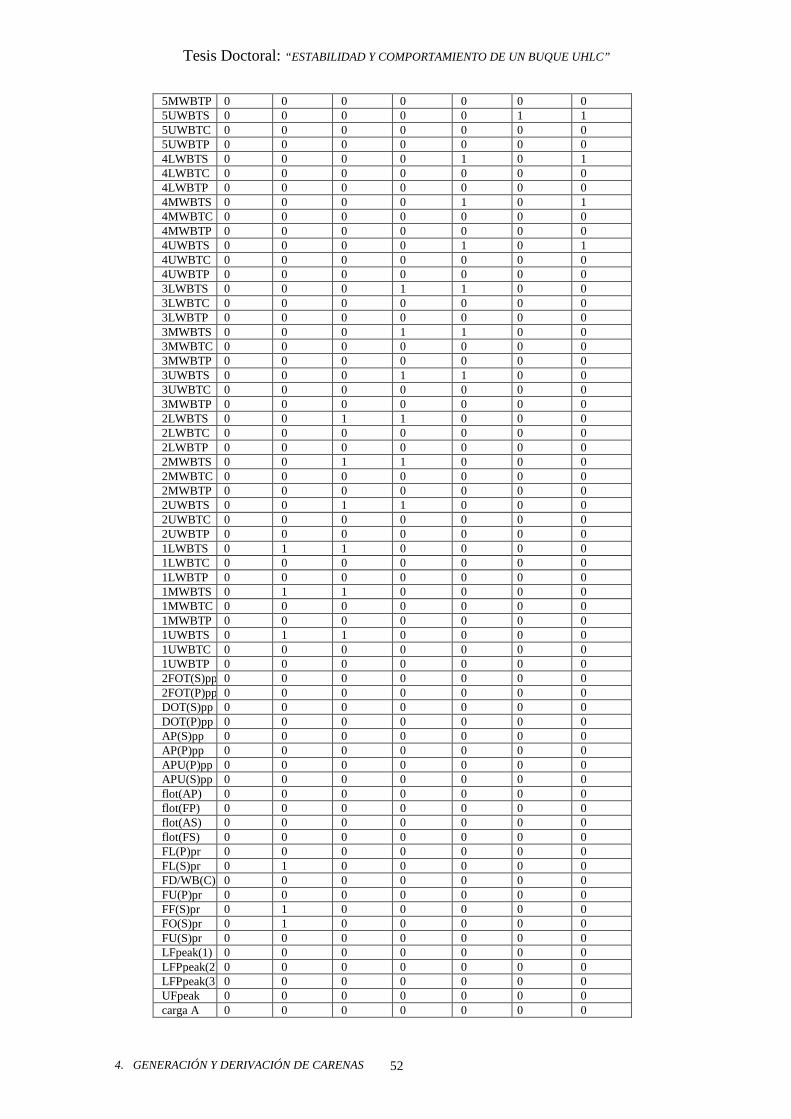
Tesis Doctoral: “ESTABILIDAD Y COMPORTAMIENTO DE UN BUQUE UHLC”
4. GENERACIÓN Y DERIVACIÓN DE CARENAS 52
5MWBTP 0 0 0 0 0 0 0 5UWBTS 0 0 0 0 0 1 1 5UWBTC 0 0 0 0 0 0 0 5UWBTP 0 0 0 0 0 0 0 4LWBTS 0 0 0 0 1 0 1 4LWBTC 0 0 0 0 0 0 0 4LWBTP 0 0 0 0 0 0 0 4MWBTS 0 0 0 0 1 0 1 4MWBTC 0 0 0 0 0 0 0 4MWBTP 0 0 0 0 0 0 0 4UWBTS 0 0 0 0 1 0 1 4UWBTC 0 0 0 0 0 0 0 4UWBTP 0 0 0 0 0 0 0 3LWBTS 0 0 0 1 1 0 0 3LWBTC 0 0 0 0 0 0 0 3LWBTP 0 0 0 0 0 0 0 3MWBTS 0 0 0 1 1 0 0 3MWBTC 0 0 0 0 0 0 0 3MWBTP 0 0 0 0 0 0 0 3UWBTS 0 0 0 1 1 0 0 3UWBTC 0 0 0 0 0 0 0 3MWBTP 0 0 0 0 0 0 0 2LWBTS 0 0 1 1 0 0 0 2LWBTC 0 0 0 0 0 0 0 2LWBTP 0 0 0 0 0 0 0 2MWBTS 0 0 1 1 0 0 0 2MWBTC 0 0 0 0 0 0 0 2MWBTP 0 0 0 0 0 0 0 2UWBTS 0 0 1 1 0 0 0 2UWBTC 0 0 0 0 0 0 0 2UWBTP 0 0 0 0 0 0 0 1LWBTS 0 1 1 0 0 0 0 1LWBTC 0 0 0 0 0 0 0 1LWBTP 0 0 0 0 0 0 0 1MWBTS 0 1 1 0 0 0 0 1MWBTC 0 0 0 0 0 0 0 1MWBTP 0 0 0 0 0 0 0 1UWBTS 0 1 1 0 0 0 0 1UWBTC 0 0 0 0 0 0 0 1UWBTP 0 0 0 0 0 0 0 2FOT(S)pp 0 0 0 0 0 0 0 2FOT(P)pp 0 0 0 0 0 0 0 DOT(S)pp 0 0 0 0 0 0 0 DOT(P)pp 0 0 0 0 0 0 0 AP(S)pp 0 0 0 0 0 0 0 AP(P)pp 0 0 0 0 0 0 0 APU(P)pp 0 0 0 0 0 0 0 APU(S)pp 0 0 0 0 0 0 0 flot(AP) 0 0 0 0 0 0 0 flot(FP) 0 0 0 0 0 0 0 flot(AS) 0 0 0 0 0 0 0 flot(FS) 0 0 0 0 0 0 0 FL(P)pr 0 0 0 0 0 0 0 FL(S)pr 0 1 0 0 0 0 0 FD/WB(C)pr0 0 0 0 0 0 0 FU(P)pr 0 0 0 0 0 0 0 FF(S)pr 0 1 0 0 0 0 0 FO(S)pr 0 1 0 0 0 0 0 FU(S)pr 0 0 0 0 0 0 0 LFpeak(1) 0 0 0 0 0 0 0 LFPpeak(2)0 0 0 0 0 0 0 LFPpeak(3)0 0 0 0 0 0 0 UFpeak 0 0 0 0 0 0 0 carga A 0 0 0 0 0 0 0
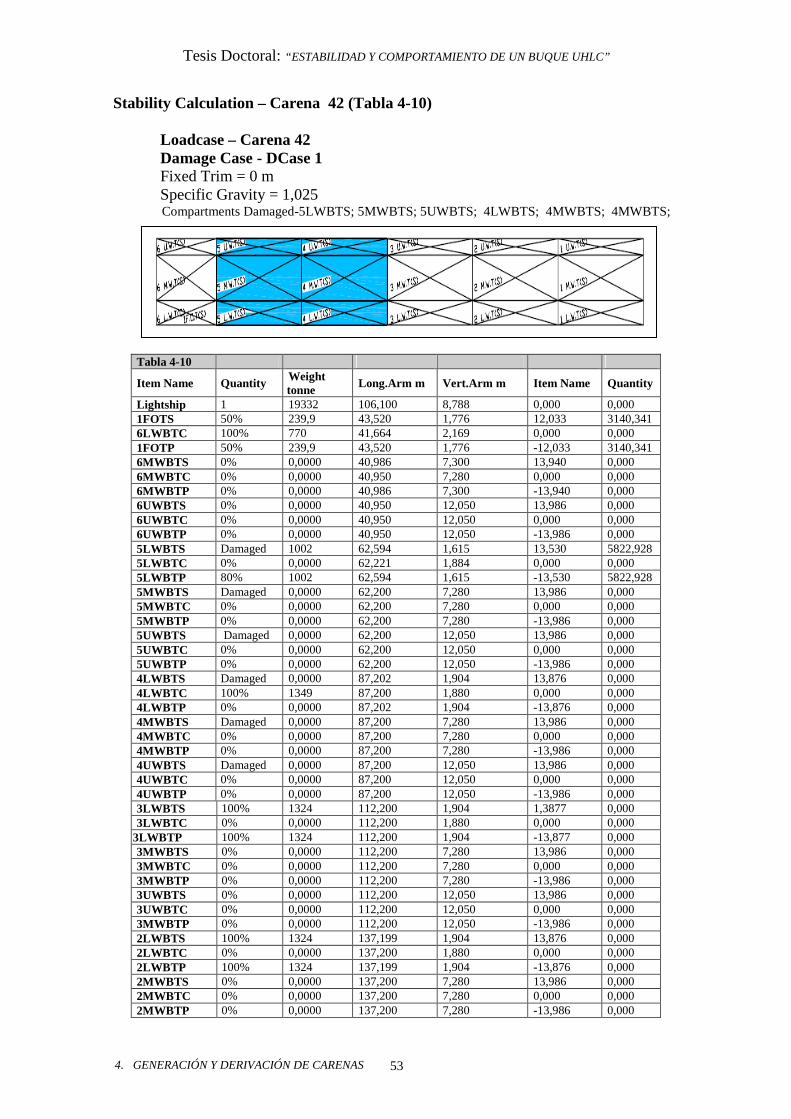
Tesis Doctoral: “ESTABILIDAD Y COMPORTAMIENTO DE UN BUQUE UHLC”
4. GENERACIÓN Y DERIVACIÓN DE CARENAS 53
Stability Calculation – Carena 42 (Tabla 4-10) Loadcase – Carena 42 Damage Case - DCase 1 Fixed Trim = 0 m Specific Gravity = 1,025 Compartments Damaged-5LWBTS; 5MWBTS; 5UWBTS; 4LWBTS; 4MWBTS; 4MWBTS;
Tabla 4-10
Item Name Quantity Weight tonne Long.Arm m Vert.Arm m Item Name Quantity
Lightship 1 19332 106,100 8,788 0,000 0,000 1FOTS 50% 239,9 43,520 1,776 12,033 3140,341 6LWBTC 100% 770 41,664 2,169 0,000 0,000 1FOTP 50% 239,9 43,520 1,776 -12,033 3140,341 6MWBTS 0% 0,0000 40,986 7,300 13,940 0,000 6MWBTC 0% 0,0000 40,950 7,280 0,000 0,000 6MWBTP 0% 0,0000 40,986 7,300 -13,940 0,000 6UWBTS 0% 0,0000 40,950 12,050 13,986 0,000 6UWBTC 0% 0,0000 40,950 12,050 0,000 0,000 6UWBTP 0% 0,0000 40,950 12,050 -13,986 0,000 5LWBTS Damaged 1002 62,594 1,615 13,530 5822,928 5LWBTC 0% 0,0000 62,221 1,884 0,000 0,000 5LWBTP 80% 1002 62,594 1,615 -13,530 5822,928 5MWBTS Damaged 0,0000 62,200 7,280 13,986 0,000 5MWBTC 0% 0,0000 62,200 7,280 0,000 0,000 5MWBTP 0% 0,0000 62,200 7,280 -13,986 0,000 5UWBTS Damaged 0,0000 62,200 12,050 13,986 0,000 5UWBTC 0% 0,0000 62,200 12,050 0,000 0,000 5UWBTP 0% 0,0000 62,200 12,050 -13,986 0,000 4LWBTS Damaged 0,0000 87,202 1,904 13,876 0,000 4LWBTC 100% 1349 87,200 1,880 0,000 0,000 4LWBTP 0% 0,0000 87,202 1,904 -13,876 0,000 4MWBTS Damaged 0,0000 87,200 7,280 13,986 0,000 4MWBTC 0% 0,0000 87,200 7,280 0,000 0,000 4MWBTP 0% 0,0000 87,200 7,280 -13,986 0,000 4UWBTS Damaged 0,0000 87,200 12,050 13,986 0,000 4UWBTC 0% 0,0000 87,200 12,050 0,000 0,000 4UWBTP 0% 0,0000 87,200 12,050 -13,986 0,000 3LWBTS 100% 1324 112,200 1,904 1,3877 0,000 3LWBTC 0% 0,0000 112,200 1,880 0,000 0,000
3LWBTP 100% 1324 112,200 1,904 -13,877 0,000 3MWBTS 0% 0,0000 112,200 7,280 13,986 0,000 3MWBTC 0% 0,0000 112,200 7,280 0,000 0,000 3MWBTP 0% 0,0000 112,200 7,280 -13,986 0,000 3UWBTS 0% 0,0000 112,200 12,050 13,986 0,000 3UWBTC 0% 0,0000 112,200 12,050 0,000 0,000 3MWBTP 0% 0,0000 112,200 12,050 -13,986 0,000 2LWBTS 100% 1324 137,199 1,904 13,876 0,000 2LWBTC 0% 0,0000 137,200 1,880 0,000 0,000 2LWBTP 100% 1324 137,199 1,904 -13,876 0,000 2MWBTS 0% 0,0000 137,200 7,280 13,986 0,000 2MWBTC 0% 0,0000 137,200 7,280 0,000 0,000 2MWBTP 0% 0,0000 137,200 7,280 -13,986 0,000
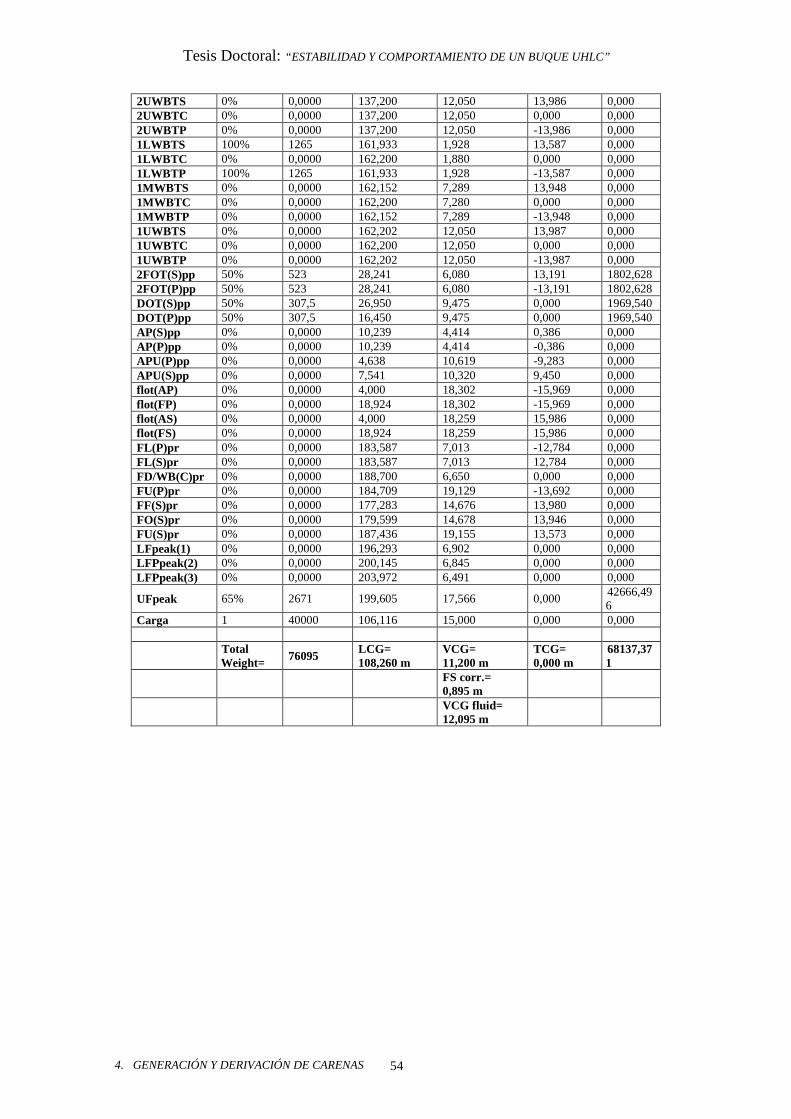
Tesis Doctoral: “ESTABILIDAD Y COMPORTAMIENTO DE UN BUQUE UHLC”
4. GENERACIÓN Y DERIVACIÓN DE CARENAS 54
2UWBTS 0% 0,0000 137,200 12,050 13,986 0,000 2UWBTC 0% 0,0000 137,200 12,050 0,000 0,000 2UWBTP 0% 0,0000 137,200 12,050 -13,986 0,000 1LWBTS 100% 1265 161,933 1,928 13,587 0,000 1LWBTC 0% 0,0000 162,200 1,880 0,000 0,000 1LWBTP 100% 1265 161,933 1,928 -13,587 0,000 1MWBTS 0% 0,0000 162,152 7,289 13,948 0,000 1MWBTC 0% 0,0000 162,200 7,280 0,000 0,000 1MWBTP 0% 0,0000 162,152 7,289 -13,948 0,000 1UWBTS 0% 0,0000 162,202 12,050 13,987 0,000 1UWBTC 0% 0,0000 162,200 12,050 0,000 0,000 1UWBTP 0% 0,0000 162,202 12,050 -13,987 0,000 2FOT(S)pp 50% 523 28,241 6,080 13,191 1802,628 2FOT(P)pp 50% 523 28,241 6,080 -13,191 1802,628 DOT(S)pp 50% 307,5 26,950 9,475 0,000 1969,540 DOT(P)pp 50% 307,5 16,450 9,475 0,000 1969,540 AP(S)pp 0% 0,0000 10,239 4,414 0,386 0,000 AP(P)pp 0% 0,0000 10,239 4,414 -0,386 0,000 APU(P)pp 0% 0,0000 4,638 10,619 -9,283 0,000 APU(S)pp 0% 0,0000 7,541 10,320 9,450 0,000 flot(AP) 0% 0,0000 4,000 18,302 -15,969 0,000 flot(FP) 0% 0,0000 18,924 18,302 -15,969 0,000 flot(AS) 0% 0,0000 4,000 18,259 15,986 0,000 flot(FS) 0% 0,0000 18,924 18,259 15,986 0,000 FL(P)pr 0% 0,0000 183,587 7,013 -12,784 0,000 FL(S)pr 0% 0,0000 183,587 7,013 12,784 0,000 FD/WB(C)pr 0% 0,0000 188,700 6,650 0,000 0,000 FU(P)pr 0% 0,0000 184,709 19,129 -13,692 0,000 FF(S)pr 0% 0,0000 177,283 14,676 13,980 0,000 FO(S)pr 0% 0,0000 179,599 14,678 13,946 0,000 FU(S)pr 0% 0,0000 187,436 19,155 13,573 0,000 LFpeak(1) 0% 0,0000 196,293 6,902 0,000 0,000 LFPpeak(2) 0% 0,0000 200,145 6,845 0,000 0,000 LFPpeak(3) 0% 0,0000 203,972 6,491 0,000 0,000
UFpeak 65% 2671 199,605 17,566 0,000 42666,496
Carga 1 40000 106,116 15,000 0,000 0,000
Total Weight= 76095
LCG= 108,260 m
VCG= 11,200 m
TCG= 0,000 m
68137,371
FS corr.= 0,895 m
VCG fluid= 12,095 m
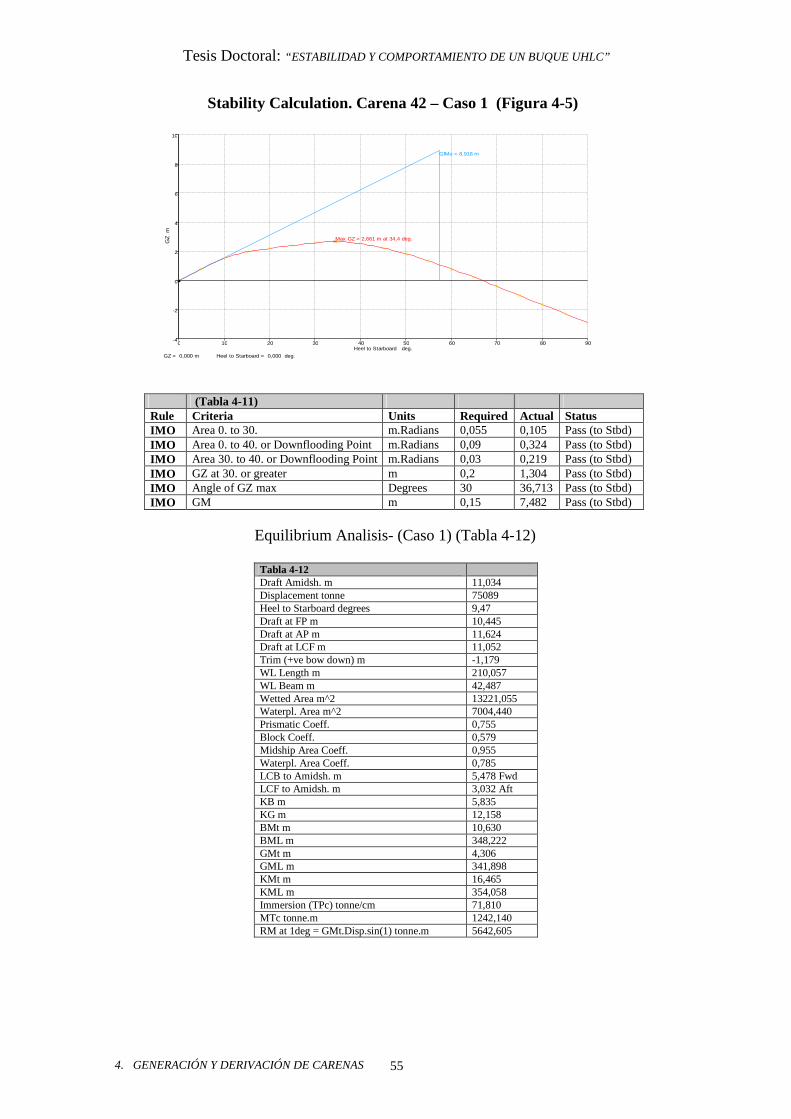
Tesis Doctoral: “ESTABILIDAD Y COMPORTAMIENTO DE UN BUQUE UHLC”
4. GENERACIÓN Y DERIVACIÓN DE CARENAS 55
Stability Calculation. Carena 42 – Caso 1 (Figura 4-5)
-4
-2
0
2
4
6
8
10
0 10 20 30 40 50 60 70 80 90
Max GZ = 2,661 m at 34,4 deg.
GfMo = 8,918 m
GZ = Heel to Starboard = 0,000 m 0,000 deg.
Heel to Starboard deg.
GZ
m
Equilibrium Analisis- (Caso 1) (Tabla 4-12)
Tabla 4-12 Draft Amidsh. m 11,034 Displacement tonne 75089 Heel to Starboard degrees 9,47 Draft at FP m 10,445 Draft at AP m 11,624 Draft at LCF m 11,052 Trim (+ve bow down) m -1,179 WL Length m 210,057 WL Beam m 42,487 Wetted Area m^2 13221,055 Waterpl. Area m^2 7004,440 Prismatic Coeff. 0,755 Block Coeff. 0,579 Midship Area Coeff. 0,955 Waterpl. Area Coeff. 0,785 LCB to Amidsh. m 5,478 Fwd LCF to Amidsh. m 3,032 Aft KB m 5,835 KG m 12,158 BMt m 10,630 BML m 348,222 GMt m 4,306 GML m 341,898 KMt m 16,465 KML m 354,058 Immersion (TPc) tonne/cm 71,810 MTc tonne.m 1242,140 RM at 1deg = GMt.Disp.sin(1) tonne.m 5642,605
(Tabla 4-11) Rule Criteria Units Required Actual Status IMO Area 0. to 30. m.Radians 0,055 0,105 Pass (to Stbd) IMO Area 0. to 40. or Downflooding Point m.Radians 0,09 0,324 Pass (to Stbd) IMO Area 30. to 40. or Downflooding Point m.Radians 0,03 0,219 Pass (to Stbd) IMO GZ at 30. or greater m 0,2 1,304 Pass (to Stbd) IMO Angle of GZ max Degrees 30 36,713 Pass (to Stbd) IMO GM m 0,15 7,482 Pass (to Stbd)
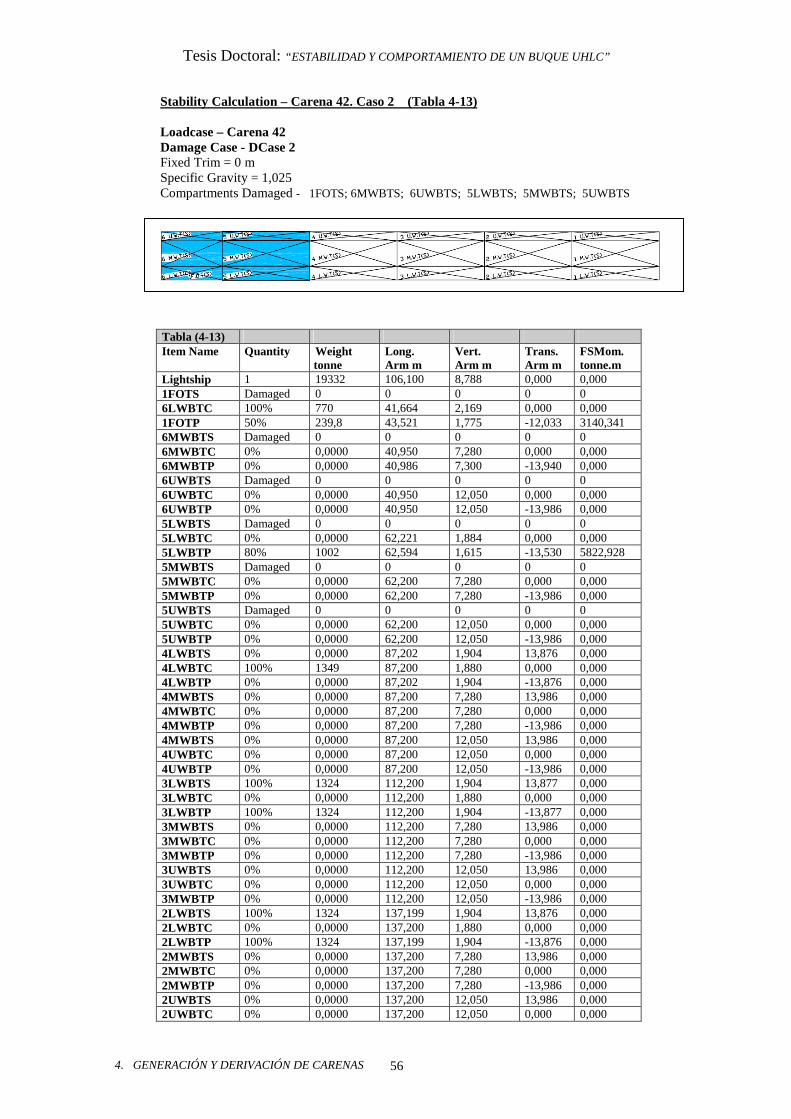
Tesis Doctoral: “ESTABILIDAD Y COMPORTAMIENTO DE UN BUQUE UHLC”
4. GENERACIÓN Y DERIVACIÓN DE CARENAS 56
Stability Calculation – Carena 42. Caso 2 (Tabla 4-13) Loadcase – Carena 42 Damage Case - DCase 2 Fixed Trim = 0 m Specific Gravity = 1,025 Compartments Damaged - 1FOTS; 6MWBTS; 6UWBTS; 5LWBTS; 5MWBTS; 5UWBTS
Tabla (4-13) Item Name Quantity Weight
tonne Long. Arm m
Vert. Arm m
Trans. Arm m
FSMom. tonne.m
Lightship 1 19332 106,100 8,788 0,000 0,000 1FOTS Damaged 0 0 0 0 0 6LWBTC 100% 770 41,664 2,169 0,000 0,000 1FOTP 50% 239,8 43,521 1,775 -12,033 3140,341 6MWBTS Damaged 0 0 0 0 0 6MWBTC 0% 0,0000 40,950 7,280 0,000 0,000 6MWBTP 0% 0,0000 40,986 7,300 -13,940 0,000 6UWBTS Damaged 0 0 0 0 0 6UWBTC 0% 0,0000 40,950 12,050 0,000 0,000 6UWBTP 0% 0,0000 40,950 12,050 -13,986 0,000 5LWBTS Damaged 0 0 0 0 0 5LWBTC 0% 0,0000 62,221 1,884 0,000 0,000 5LWBTP 80% 1002 62,594 1,615 -13,530 5822,928 5MWBTS Damaged 0 0 0 0 0 5MWBTC 0% 0,0000 62,200 7,280 0,000 0,000 5MWBTP 0% 0,0000 62,200 7,280 -13,986 0,000 5UWBTS Damaged 0 0 0 0 0 5UWBTC 0% 0,0000 62,200 12,050 0,000 0,000 5UWBTP 0% 0,0000 62,200 12,050 -13,986 0,000 4LWBTS 0% 0,0000 87,202 1,904 13,876 0,000 4LWBTC 100% 1349 87,200 1,880 0,000 0,000 4LWBTP 0% 0,0000 87,202 1,904 -13,876 0,000 4MWBTS 0% 0,0000 87,200 7,280 13,986 0,000 4MWBTC 0% 0,0000 87,200 7,280 0,000 0,000 4MWBTP 0% 0,0000 87,200 7,280 -13,986 0,000 4MWBTS 0% 0,0000 87,200 12,050 13,986 0,000 4UWBTC 0% 0,0000 87,200 12,050 0,000 0,000 4UWBTP 0% 0,0000 87,200 12,050 -13,986 0,000 3LWBTS 100% 1324 112,200 1,904 13,877 0,000 3LWBTC 0% 0,0000 112,200 1,880 0,000 0,000 3LWBTP 100% 1324 112,200 1,904 -13,877 0,000 3MWBTS 0% 0,0000 112,200 7,280 13,986 0,000 3MWBTC 0% 0,0000 112,200 7,280 0,000 0,000 3MWBTP 0% 0,0000 112,200 7,280 -13,986 0,000 3UWBTS 0% 0,0000 112,200 12,050 13,986 0,000 3UWBTC 0% 0,0000 112,200 12,050 0,000 0,000 3MWBTP 0% 0,0000 112,200 12,050 -13,986 0,000 2LWBTS 100% 1324 137,199 1,904 13,876 0,000 2LWBTC 0% 0,0000 137,200 1,880 0,000 0,000 2LWBTP 100% 1324 137,199 1,904 -13,876 0,000 2MWBTS 0% 0,0000 137,200 7,280 13,986 0,000 2MWBTC 0% 0,0000 137,200 7,280 0,000 0,000 2MWBTP 0% 0,0000 137,200 7,280 -13,986 0,000 2UWBTS 0% 0,0000 137,200 12,050 13,986 0,000 2UWBTC 0% 0,0000 137,200 12,050 0,000 0,000
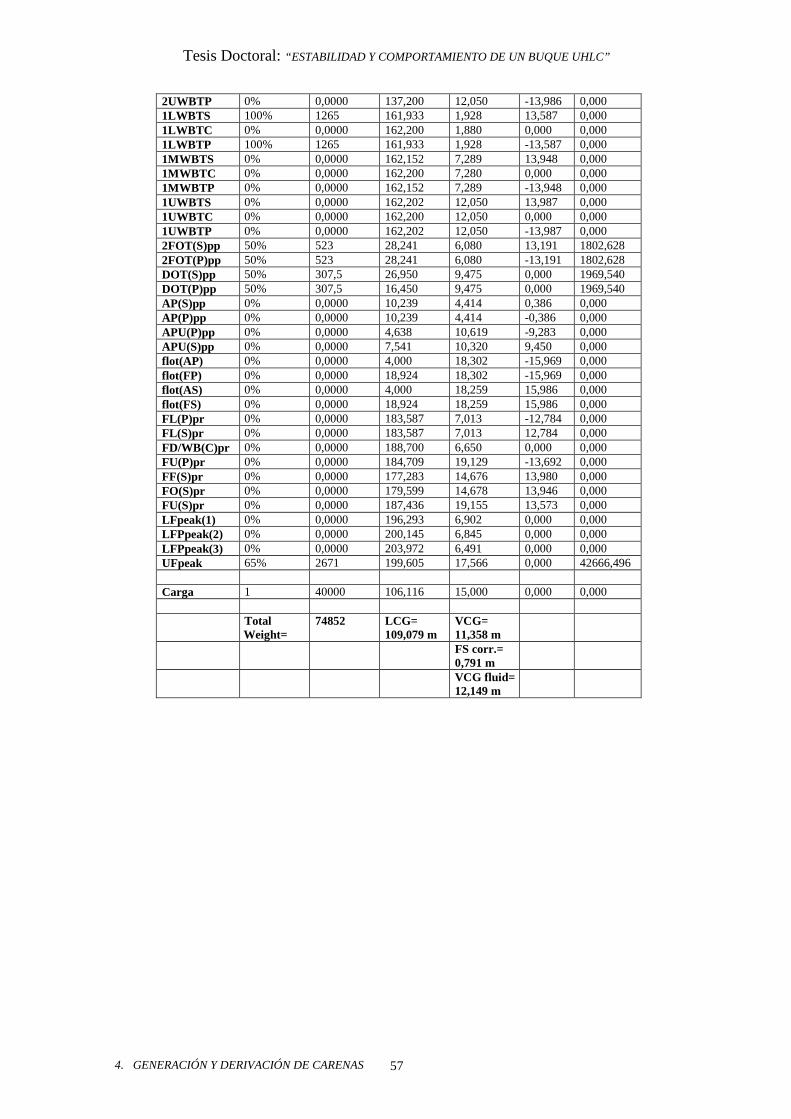
Tesis Doctoral: “ESTABILIDAD Y COMPORTAMIENTO DE UN BUQUE UHLC”
4. GENERACIÓN Y DERIVACIÓN DE CARENAS 57
2UWBTP 0% 0,0000 137,200 12,050 -13,986 0,000 1LWBTS 100% 1265 161,933 1,928 13,587 0,000 1LWBTC 0% 0,0000 162,200 1,880 0,000 0,000 1LWBTP 100% 1265 161,933 1,928 -13,587 0,000 1MWBTS 0% 0,0000 162,152 7,289 13,948 0,000 1MWBTC 0% 0,0000 162,200 7,280 0,000 0,000 1MWBTP 0% 0,0000 162,152 7,289 -13,948 0,000 1UWBTS 0% 0,0000 162,202 12,050 13,987 0,000 1UWBTC 0% 0,0000 162,200 12,050 0,000 0,000 1UWBTP 0% 0,0000 162,202 12,050 -13,987 0,000 2FOT(S)pp 50% 523 28,241 6,080 13,191 1802,628 2FOT(P)pp 50% 523 28,241 6,080 -13,191 1802,628 DOT(S)pp 50% 307,5 26,950 9,475 0,000 1969,540 DOT(P)pp 50% 307,5 16,450 9,475 0,000 1969,540 AP(S)pp 0% 0,0000 10,239 4,414 0,386 0,000 AP(P)pp 0% 0,0000 10,239 4,414 -0,386 0,000 APU(P)pp 0% 0,0000 4,638 10,619 -9,283 0,000 APU(S)pp 0% 0,0000 7,541 10,320 9,450 0,000 flot(AP) 0% 0,0000 4,000 18,302 -15,969 0,000 flot(FP) 0% 0,0000 18,924 18,302 -15,969 0,000 flot(AS) 0% 0,0000 4,000 18,259 15,986 0,000 flot(FS) 0% 0,0000 18,924 18,259 15,986 0,000 FL(P)pr 0% 0,0000 183,587 7,013 -12,784 0,000 FL(S)pr 0% 0,0000 183,587 7,013 12,784 0,000 FD/WB(C)pr 0% 0,0000 188,700 6,650 0,000 0,000 FU(P)pr 0% 0,0000 184,709 19,129 -13,692 0,000 FF(S)pr 0% 0,0000 177,283 14,676 13,980 0,000 FO(S)pr 0% 0,0000 179,599 14,678 13,946 0,000 FU(S)pr 0% 0,0000 187,436 19,155 13,573 0,000 LFpeak(1) 0% 0,0000 196,293 6,902 0,000 0,000 LFPpeak(2) 0% 0,0000 200,145 6,845 0,000 0,000 LFPpeak(3) 0% 0,0000 203,972 6,491 0,000 0,000 UFpeak 65% 2671 199,605 17,566 0,000 42666,496 Carga 1 40000 106,116 15,000 0,000 0,000 Total
Weight= 74852 LCG=
109,079 m VCG= 11,358 m
FS corr.= 0,791 m
VCG fluid= 12,149 m
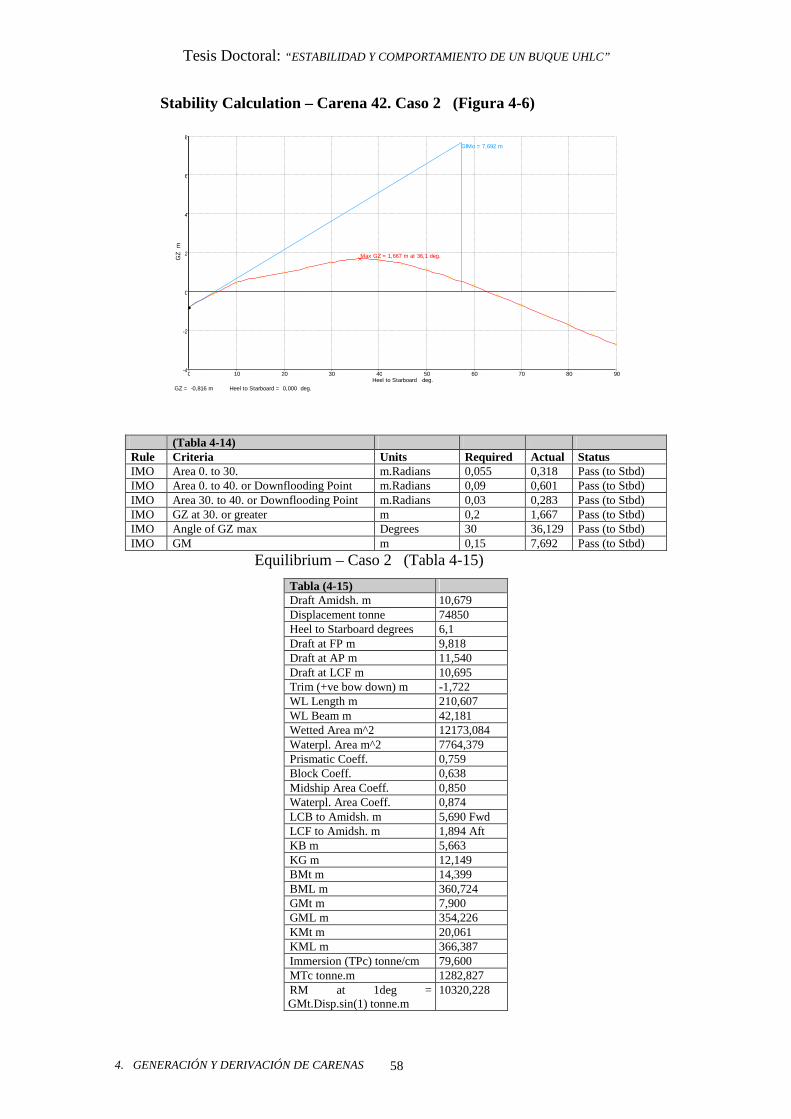
Tesis Doctoral: “ESTABILIDAD Y COMPORTAMIENTO DE UN BUQUE UHLC”
4. GENERACIÓN Y DERIVACIÓN DE CARENAS 58
Stability Calculation – Carena 42. Caso 2 (Figura 4-6)
Equilibrium – Caso 2 (Tabla 4-15)
(Tabla 4-14) Rule Criteria Units Required Actual Status IMO Area 0. to 30. m.Radians 0,055 0,318 Pass (to Stbd) IMO Area 0. to 40. or Downflooding Point m.Radians 0,09 0,601 Pass (to Stbd) IMO Area 30. to 40. or Downflooding Point m.Radians 0,03 0,283 Pass (to Stbd) IMO GZ at 30. or greater m 0,2 1,667 Pass (to Stbd) IMO Angle of GZ max Degrees 30 36,129 Pass (to Stbd) IMO GM m 0,15 7,692 Pass (to Stbd)
Tabla (4-15) Draft Amidsh. m 10,679 Displacement tonne 74850 Heel to Starboard degrees 6,1 Draft at FP m 9,818 Draft at AP m 11,540 Draft at LCF m 10,695 Trim (+ve bow down) m -1,722 WL Length m 210,607 WL Beam m 42,181 Wetted Area m^2 12173,084 Waterpl. Area m^2 7764,379 Prismatic Coeff. 0,759 Block Coeff. 0,638 Midship Area Coeff. 0,850 Waterpl. Area Coeff. 0,874 LCB to Amidsh. m 5,690 Fwd LCF to Amidsh. m 1,894 Aft KB m 5,663 KG m 12,149 BMt m 14,399 BML m 360,724 GMt m 7,900 GML m 354,226 KMt m 20,061 KML m 366,387 Immersion (TPc) tonne/cm 79,600 MTc tonne.m 1282,827 RM at 1deg = GMt.Disp.sin(1) tonne.m
10320,228
-4
-2
0
2
4
6
8
0 10 20 30 40 50 60 70 80 90
Max GZ = 1,667 m at 36,1 deg.
GfMo = 7,692 m
GZ = Heel to Starboard = -0,816 m 0,000 deg.
Heel to Starboard deg.
GZ
m
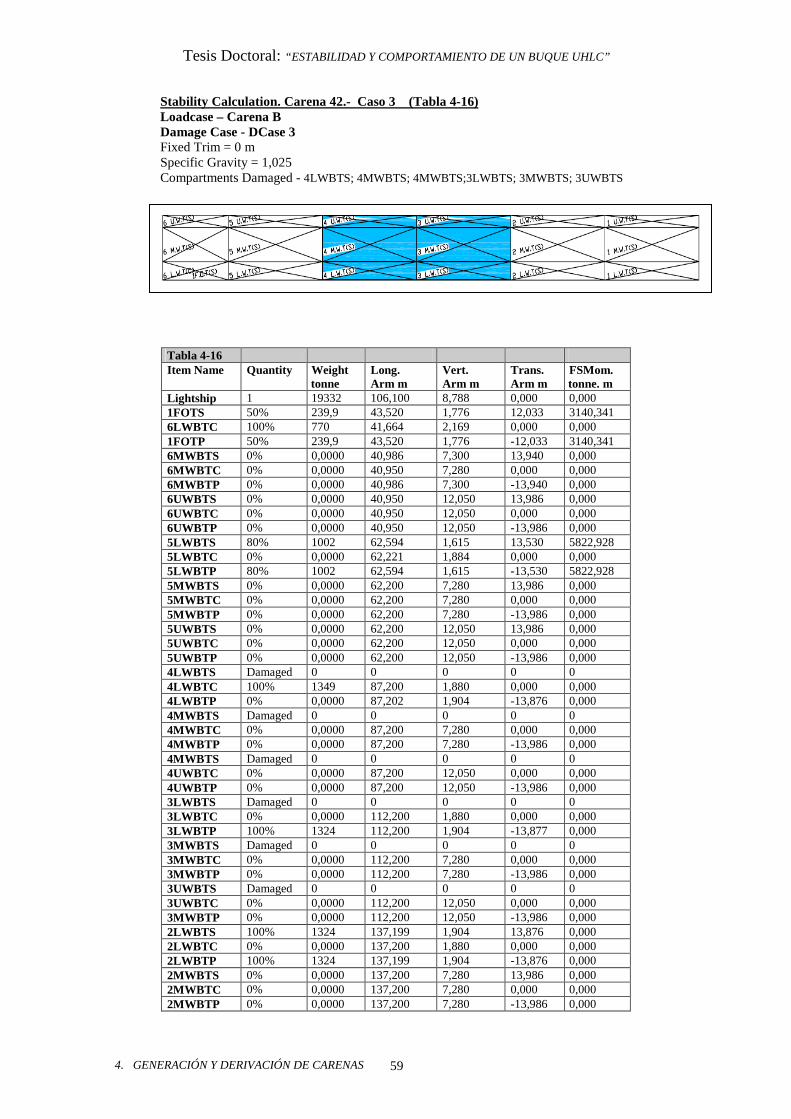
Tesis Doctoral: “ESTABILIDAD Y COMPORTAMIENTO DE UN BUQUE UHLC”
4. GENERACIÓN Y DERIVACIÓN DE CARENAS 59
Stability Calculation. Carena 42.- Caso 3 (Tabla 4-16) Loadcase – Carena B Damage Case - DCase 3 Fixed Trim = 0 m Specific Gravity = 1,025 Compartments Damaged - 4LWBTS; 4MWBTS; 4MWBTS;3LWBTS; 3MWBTS; 3UWBTS
Tabla 4-16 Item Name Quantity Weight
tonne Long. Arm m
Vert. Arm m
Trans. Arm m
FSMom. tonne. m
Lightship 1 19332 106,100 8,788 0,000 0,000 1FOTS 50% 239,9 43,520 1,776 12,033 3140,341 6LWBTC 100% 770 41,664 2,169 0,000 0,000 1FOTP 50% 239,9 43,520 1,776 -12,033 3140,341 6MWBTS 0% 0,0000 40,986 7,300 13,940 0,000 6MWBTC 0% 0,0000 40,950 7,280 0,000 0,000 6MWBTP 0% 0,0000 40,986 7,300 -13,940 0,000 6UWBTS 0% 0,0000 40,950 12,050 13,986 0,000 6UWBTC 0% 0,0000 40,950 12,050 0,000 0,000 6UWBTP 0% 0,0000 40,950 12,050 -13,986 0,000 5LWBTS 80% 1002 62,594 1,615 13,530 5822,928 5LWBTC 0% 0,0000 62,221 1,884 0,000 0,000 5LWBTP 80% 1002 62,594 1,615 -13,530 5822,928 5MWBTS 0% 0,0000 62,200 7,280 13,986 0,000 5MWBTC 0% 0,0000 62,200 7,280 0,000 0,000 5MWBTP 0% 0,0000 62,200 7,280 -13,986 0,000 5UWBTS 0% 0,0000 62,200 12,050 13,986 0,000 5UWBTC 0% 0,0000 62,200 12,050 0,000 0,000 5UWBTP 0% 0,0000 62,200 12,050 -13,986 0,000 4LWBTS Damaged 0 0 0 0 0 4LWBTC 100% 1349 87,200 1,880 0,000 0,000 4LWBTP 0% 0,0000 87,202 1,904 -13,876 0,000 4MWBTS Damaged 0 0 0 0 0 4MWBTC 0% 0,0000 87,200 7,280 0,000 0,000 4MWBTP 0% 0,0000 87,200 7,280 -13,986 0,000 4MWBTS Damaged 0 0 0 0 0 4UWBTC 0% 0,0000 87,200 12,050 0,000 0,000 4UWBTP 0% 0,0000 87,200 12,050 -13,986 0,000 3LWBTS Damaged 0 0 0 0 0 3LWBTC 0% 0,0000 112,200 1,880 0,000 0,000 3LWBTP 100% 1324 112,200 1,904 -13,877 0,000 3MWBTS Damaged 0 0 0 0 0 3MWBTC 0% 0,0000 112,200 7,280 0,000 0,000 3MWBTP 0% 0,0000 112,200 7,280 -13,986 0,000 3UWBTS Damaged 0 0 0 0 0 3UWBTC 0% 0,0000 112,200 12,050 0,000 0,000 3MWBTP 0% 0,0000 112,200 12,050 -13,986 0,000 2LWBTS 100% 1324 137,199 1,904 13,876 0,000 2LWBTC 0% 0,0000 137,200 1,880 0,000 0,000 2LWBTP 100% 1324 137,199 1,904 -13,876 0,000 2MWBTS 0% 0,0000 137,200 7,280 13,986 0,000 2MWBTC 0% 0,0000 137,200 7,280 0,000 0,000 2MWBTP 0% 0,0000 137,200 7,280 -13,986 0,000
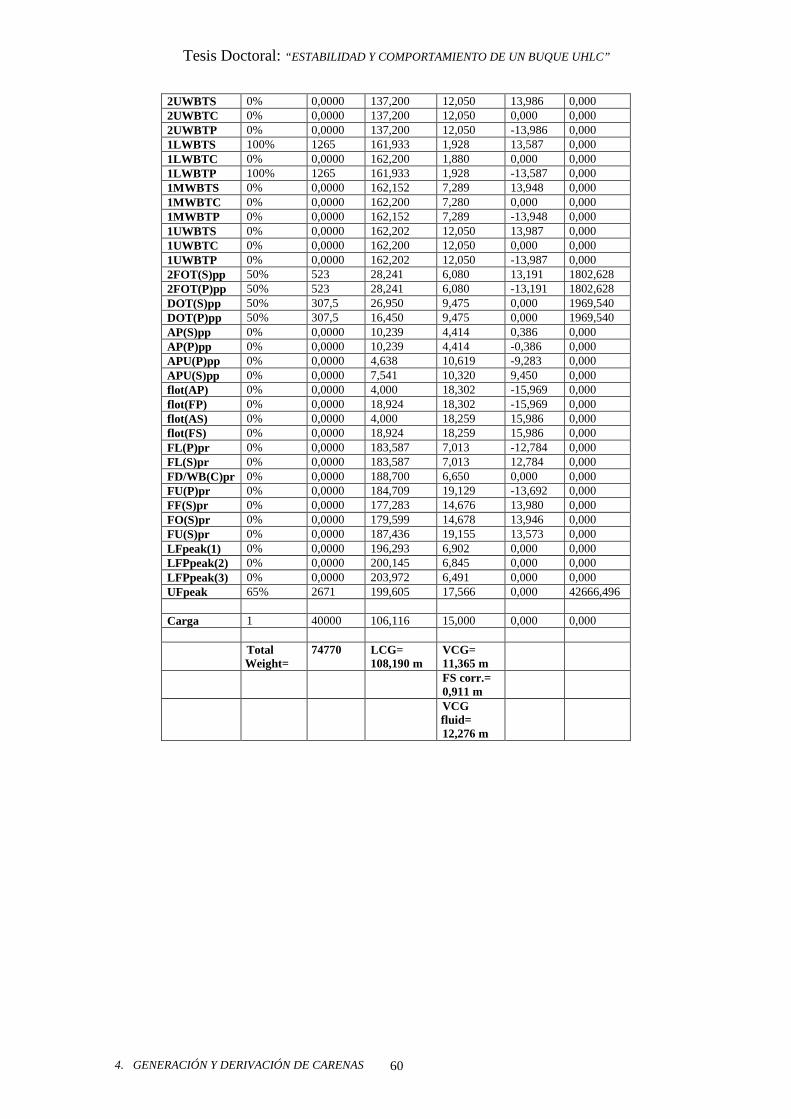
Tesis Doctoral: “ESTABILIDAD Y COMPORTAMIENTO DE UN BUQUE UHLC”
4. GENERACIÓN Y DERIVACIÓN DE CARENAS 60
2UWBTS 0% 0,0000 137,200 12,050 13,986 0,000 2UWBTC 0% 0,0000 137,200 12,050 0,000 0,000 2UWBTP 0% 0,0000 137,200 12,050 -13,986 0,000 1LWBTS 100% 1265 161,933 1,928 13,587 0,000 1LWBTC 0% 0,0000 162,200 1,880 0,000 0,000 1LWBTP 100% 1265 161,933 1,928 -13,587 0,000 1MWBTS 0% 0,0000 162,152 7,289 13,948 0,000 1MWBTC 0% 0,0000 162,200 7,280 0,000 0,000 1MWBTP 0% 0,0000 162,152 7,289 -13,948 0,000 1UWBTS 0% 0,0000 162,202 12,050 13,987 0,000 1UWBTC 0% 0,0000 162,200 12,050 0,000 0,000 1UWBTP 0% 0,0000 162,202 12,050 -13,987 0,000 2FOT(S)pp 50% 523 28,241 6,080 13,191 1802,628 2FOT(P)pp 50% 523 28,241 6,080 -13,191 1802,628 DOT(S)pp 50% 307,5 26,950 9,475 0,000 1969,540 DOT(P)pp 50% 307,5 16,450 9,475 0,000 1969,540 AP(S)pp 0% 0,0000 10,239 4,414 0,386 0,000 AP(P)pp 0% 0,0000 10,239 4,414 -0,386 0,000 APU(P)pp 0% 0,0000 4,638 10,619 -9,283 0,000 APU(S)pp 0% 0,0000 7,541 10,320 9,450 0,000 flot(AP) 0% 0,0000 4,000 18,302 -15,969 0,000 flot(FP) 0% 0,0000 18,924 18,302 -15,969 0,000 flot(AS) 0% 0,0000 4,000 18,259 15,986 0,000 flot(FS) 0% 0,0000 18,924 18,259 15,986 0,000 FL(P)pr 0% 0,0000 183,587 7,013 -12,784 0,000 FL(S)pr 0% 0,0000 183,587 7,013 12,784 0,000 FD/WB(C)pr 0% 0,0000 188,700 6,650 0,000 0,000 FU(P)pr 0% 0,0000 184,709 19,129 -13,692 0,000 FF(S)pr 0% 0,0000 177,283 14,676 13,980 0,000 FO(S)pr 0% 0,0000 179,599 14,678 13,946 0,000 FU(S)pr 0% 0,0000 187,436 19,155 13,573 0,000 LFpeak(1) 0% 0,0000 196,293 6,902 0,000 0,000 LFPpeak(2) 0% 0,0000 200,145 6,845 0,000 0,000 LFPpeak(3) 0% 0,0000 203,972 6,491 0,000 0,000 UFpeak 65% 2671 199,605 17,566 0,000 42666,496 Carga 1 40000 106,116 15,000 0,000 0,000 Total
Weight= 74770 LCG=
108,190 m VCG= 11,365 m
FS corr.= 0,911 m
VCG fluid= 12,276 m
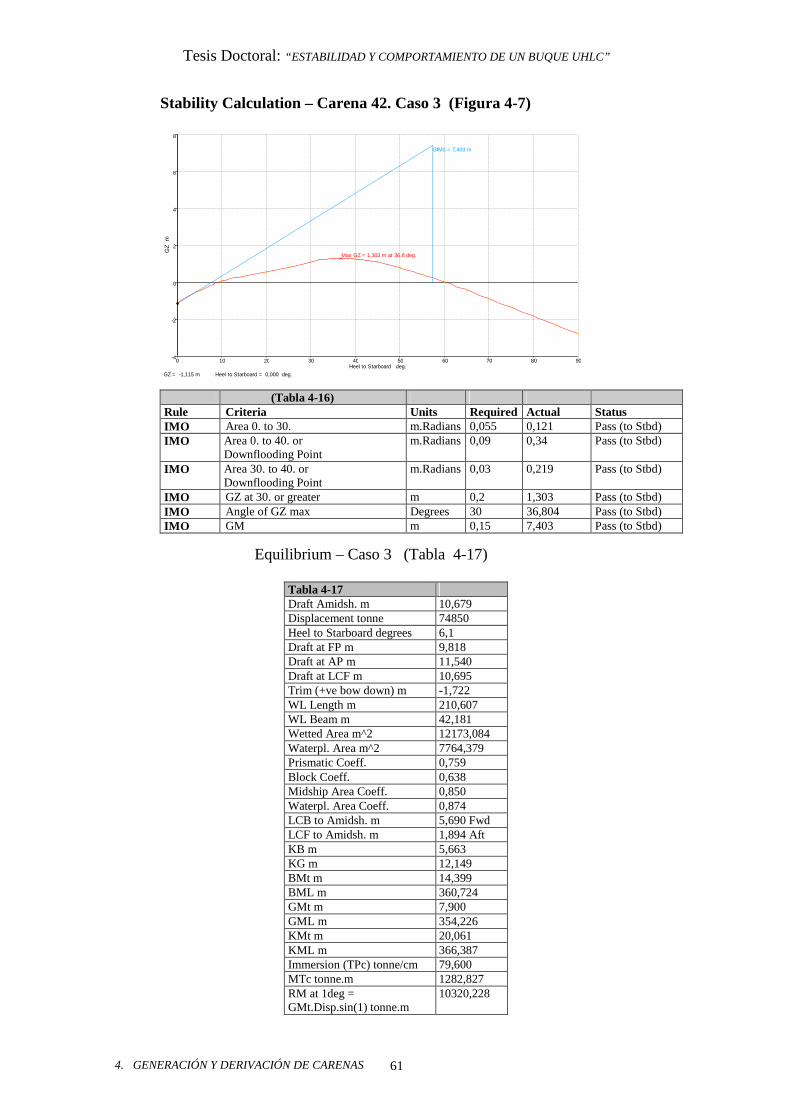
Tesis Doctoral: “ESTABILIDAD Y COMPORTAMIENTO DE UN BUQUE UHLC”
4. GENERACIÓN Y DERIVACIÓN DE CARENAS 61
Stability Calculation – Carena 42. Caso 3 (Figura 4-7)
-4
-2
0
2
4
6
8
0 10 20 30 40 50 60 70 80 90
Max GZ = 1,303 m at 36,8 deg.
GfMo = 7,403 m
GZ = Heel to Starboard = -1,115 m 0,000 deg.
Heel to Starboard deg.
GZ
m
Equilibrium – Caso 3 (Tabla 4-17)
Tabla 4-17 Draft Amidsh. m 10,679 Displacement tonne 74850 Heel to Starboard degrees 6,1 Draft at FP m 9,818 Draft at AP m 11,540 Draft at LCF m 10,695 Trim (+ve bow down) m -1,722 WL Length m 210,607 WL Beam m 42,181 Wetted Area m^2 12173,084 Waterpl. Area m^2 7764,379 Prismatic Coeff. 0,759 Block Coeff. 0,638 Midship Area Coeff. 0,850 Waterpl. Area Coeff. 0,874 LCB to Amidsh. m 5,690 Fwd LCF to Amidsh. m 1,894 Aft KB m 5,663 KG m 12,149 BMt m 14,399 BML m 360,724 GMt m 7,900 GML m 354,226 KMt m 20,061 KML m 366,387 Immersion (TPc) tonne/cm 79,600 MTc tonne.m 1282,827 RM at 1deg = GMt.Disp.sin(1) tonne.m
10320,228
(Tabla 4-16) Rule Criteria Units Required Actual Status IMO Area 0. to 30. m.Radians 0,055 0,121 Pass (to Stbd) IMO Area 0. to 40. or
Downflooding Point m.Radians 0,09 0,34 Pass (to Stbd)
IMO Area 30. to 40. or Downflooding Point
m.Radians 0,03 0,219 Pass (to Stbd)
IMO GZ at 30. or greater m 0,2 1,303 Pass (to Stbd) IMO Angle of GZ max Degrees 30 36,804 Pass (to Stbd) IMO GM m 0,15 7,403 Pass (to Stbd)
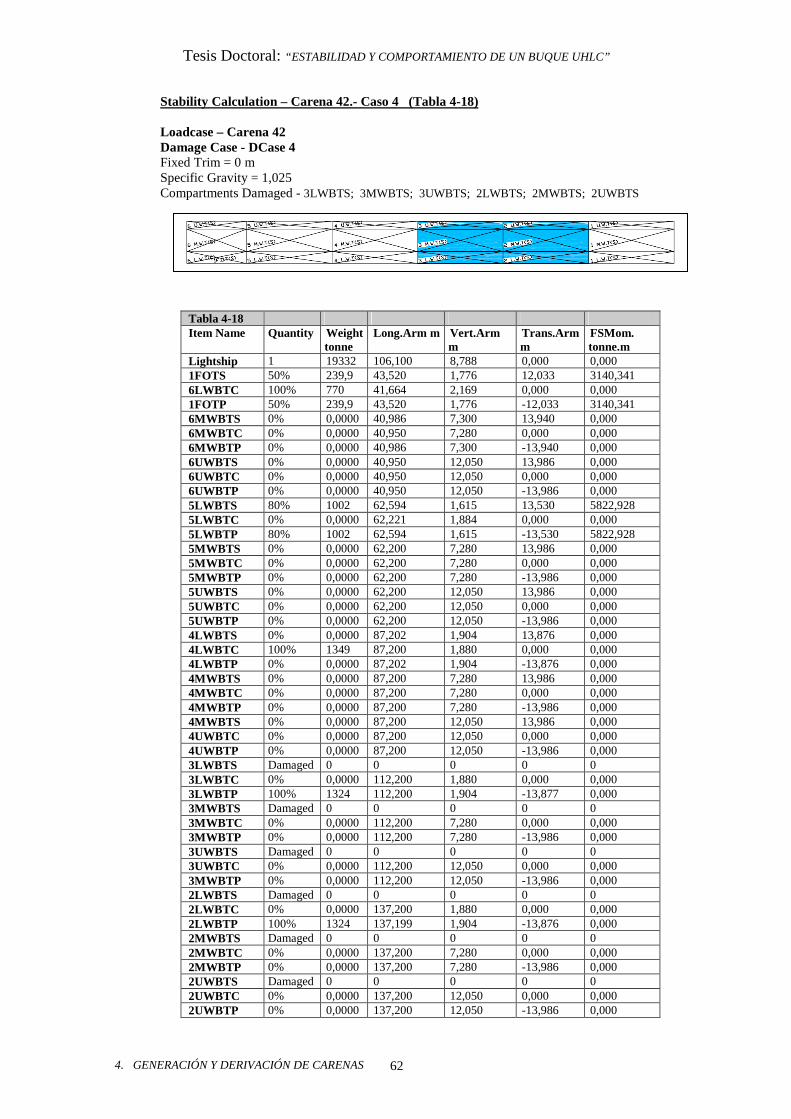
Tesis Doctoral: “ESTABILIDAD Y COMPORTAMIENTO DE UN BUQUE UHLC”
4. GENERACIÓN Y DERIVACIÓN DE CARENAS 62
Stability Calculation – Carena 42.- Caso 4 (Tabla 4-18) Loadcase – Carena 42 Damage Case - DCase 4 Fixed Trim = 0 m Specific Gravity = 1,025 Compartments Damaged - 3LWBTS; 3MWBTS; 3UWBTS; 2LWBTS; 2MWBTS; 2UWBTS
Tabla 4-18 Item Name Quantity Weight
tonne Long.Arm m Vert.Arm
m Trans.Arm m
FSMom. tonne.m
Lightship 1 19332 106,100 8,788 0,000 0,000 1FOTS 50% 239,9 43,520 1,776 12,033 3140,341 6LWBTC 100% 770 41,664 2,169 0,000 0,000 1FOTP 50% 239,9 43,520 1,776 -12,033 3140,341 6MWBTS 0% 0,0000 40,986 7,300 13,940 0,000 6MWBTC 0% 0,0000 40,950 7,280 0,000 0,000 6MWBTP 0% 0,0000 40,986 7,300 -13,940 0,000 6UWBTS 0% 0,0000 40,950 12,050 13,986 0,000 6UWBTC 0% 0,0000 40,950 12,050 0,000 0,000 6UWBTP 0% 0,0000 40,950 12,050 -13,986 0,000 5LWBTS 80% 1002 62,594 1,615 13,530 5822,928 5LWBTC 0% 0,0000 62,221 1,884 0,000 0,000 5LWBTP 80% 1002 62,594 1,615 -13,530 5822,928 5MWBTS 0% 0,0000 62,200 7,280 13,986 0,000 5MWBTC 0% 0,0000 62,200 7,280 0,000 0,000 5MWBTP 0% 0,0000 62,200 7,280 -13,986 0,000 5UWBTS 0% 0,0000 62,200 12,050 13,986 0,000 5UWBTC 0% 0,0000 62,200 12,050 0,000 0,000 5UWBTP 0% 0,0000 62,200 12,050 -13,986 0,000 4LWBTS 0% 0,0000 87,202 1,904 13,876 0,000 4LWBTC 100% 1349 87,200 1,880 0,000 0,000 4LWBTP 0% 0,0000 87,202 1,904 -13,876 0,000 4MWBTS 0% 0,0000 87,200 7,280 13,986 0,000 4MWBTC 0% 0,0000 87,200 7,280 0,000 0,000 4MWBTP 0% 0,0000 87,200 7,280 -13,986 0,000 4MWBTS 0% 0,0000 87,200 12,050 13,986 0,000 4UWBTC 0% 0,0000 87,200 12,050 0,000 0,000 4UWBTP 0% 0,0000 87,200 12,050 -13,986 0,000 3LWBTS Damaged 0 0 0 0 0 3LWBTC 0% 0,0000 112,200 1,880 0,000 0,000 3LWBTP 100% 1324 112,200 1,904 -13,877 0,000 3MWBTS Damaged 0 0 0 0 0 3MWBTC 0% 0,0000 112,200 7,280 0,000 0,000 3MWBTP 0% 0,0000 112,200 7,280 -13,986 0,000 3UWBTS Damaged 0 0 0 0 0 3UWBTC 0% 0,0000 112,200 12,050 0,000 0,000 3MWBTP 0% 0,0000 112,200 12,050 -13,986 0,000 2LWBTS Damaged 0 0 0 0 0 2LWBTC 0% 0,0000 137,200 1,880 0,000 0,000 2LWBTP 100% 1324 137,199 1,904 -13,876 0,000 2MWBTS Damaged 0 0 0 0 0 2MWBTC 0% 0,0000 137,200 7,280 0,000 0,000 2MWBTP 0% 0,0000 137,200 7,280 -13,986 0,000 2UWBTS Damaged 0 0 0 0 0 2UWBTC 0% 0,0000 137,200 12,050 0,000 0,000 2UWBTP 0% 0,0000 137,200 12,050 -13,986 0,000
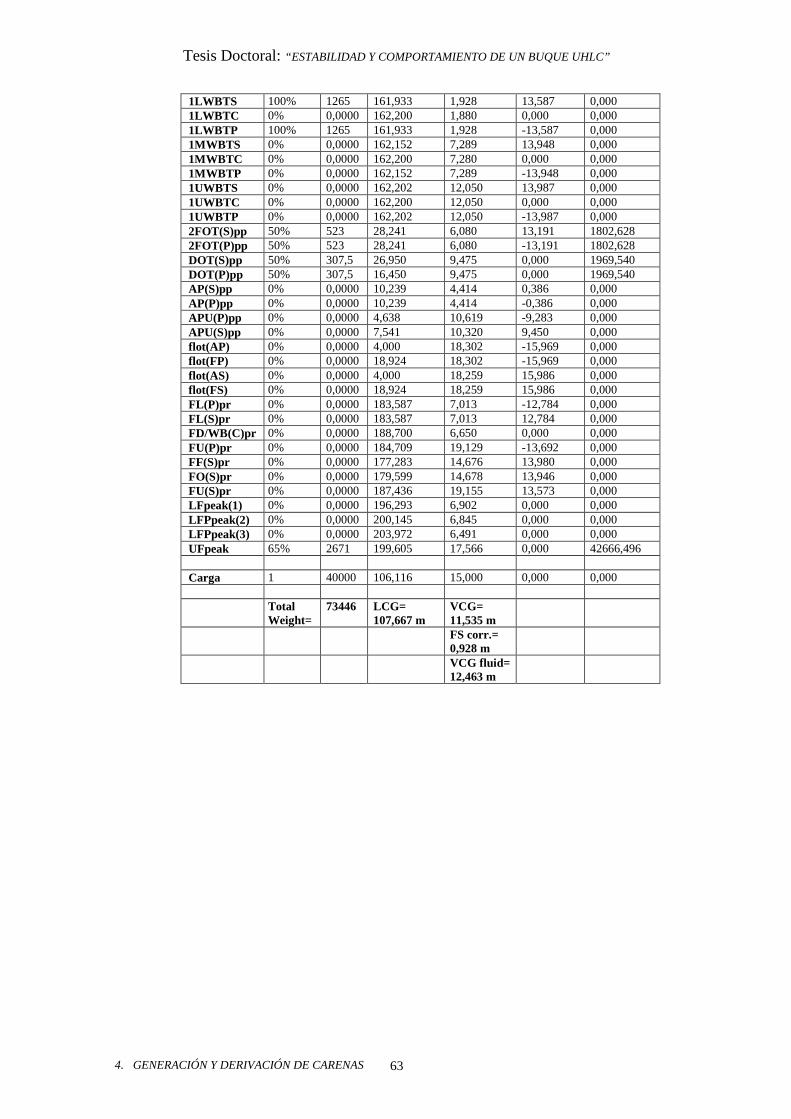
Tesis Doctoral: “ESTABILIDAD Y COMPORTAMIENTO DE UN BUQUE UHLC”
4. GENERACIÓN Y DERIVACIÓN DE CARENAS 63
1LWBTS 100% 1265 161,933 1,928 13,587 0,000 1LWBTC 0% 0,0000 162,200 1,880 0,000 0,000 1LWBTP 100% 1265 161,933 1,928 -13,587 0,000 1MWBTS 0% 0,0000 162,152 7,289 13,948 0,000 1MWBTC 0% 0,0000 162,200 7,280 0,000 0,000 1MWBTP 0% 0,0000 162,152 7,289 -13,948 0,000 1UWBTS 0% 0,0000 162,202 12,050 13,987 0,000 1UWBTC 0% 0,0000 162,200 12,050 0,000 0,000 1UWBTP 0% 0,0000 162,202 12,050 -13,987 0,000 2FOT(S)pp 50% 523 28,241 6,080 13,191 1802,628 2FOT(P)pp 50% 523 28,241 6,080 -13,191 1802,628 DOT(S)pp 50% 307,5 26,950 9,475 0,000 1969,540 DOT(P)pp 50% 307,5 16,450 9,475 0,000 1969,540 AP(S)pp 0% 0,0000 10,239 4,414 0,386 0,000 AP(P)pp 0% 0,0000 10,239 4,414 -0,386 0,000 APU(P)pp 0% 0,0000 4,638 10,619 -9,283 0,000 APU(S)pp 0% 0,0000 7,541 10,320 9,450 0,000 flot(AP) 0% 0,0000 4,000 18,302 -15,969 0,000 flot(FP) 0% 0,0000 18,924 18,302 -15,969 0,000 flot(AS) 0% 0,0000 4,000 18,259 15,986 0,000 flot(FS) 0% 0,0000 18,924 18,259 15,986 0,000 FL(P)pr 0% 0,0000 183,587 7,013 -12,784 0,000 FL(S)pr 0% 0,0000 183,587 7,013 12,784 0,000 FD/WB(C)pr 0% 0,0000 188,700 6,650 0,000 0,000 FU(P)pr 0% 0,0000 184,709 19,129 -13,692 0,000 FF(S)pr 0% 0,0000 177,283 14,676 13,980 0,000 FO(S)pr 0% 0,0000 179,599 14,678 13,946 0,000 FU(S)pr 0% 0,0000 187,436 19,155 13,573 0,000 LFpeak(1) 0% 0,0000 196,293 6,902 0,000 0,000 LFPpeak(2) 0% 0,0000 200,145 6,845 0,000 0,000 LFPpeak(3) 0% 0,0000 203,972 6,491 0,000 0,000 UFpeak 65% 2671 199,605 17,566 0,000 42666,496 Carga 1 40000 106,116 15,000 0,000 0,000 Total
Weight= 73446 LCG=
107,667 m VCG= 11,535 m
FS corr.= 0,928 m
VCG fluid= 12,463 m
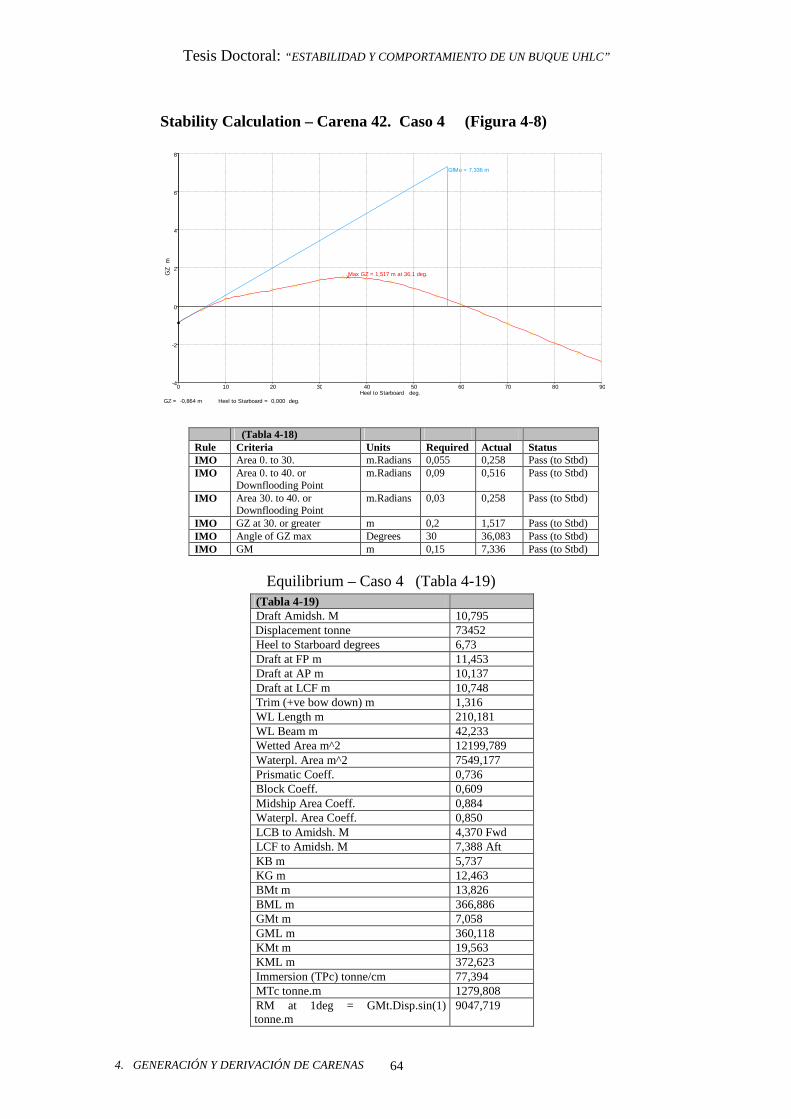
Tesis Doctoral: “ESTABILIDAD Y COMPORTAMIENTO DE UN BUQUE UHLC”
4. GENERACIÓN Y DERIVACIÓN DE CARENAS 64
Stability Calculation – Carena 42. Caso 4 (Figura 4-8)
-4
-2
0
2
4
6
8
0 10 20 30 40 50 60 70 80 90
Max GZ = 1,517 m at 36,1 deg.
GfMo = 7,336 m
GZ = Heel to Starboard = -0,864 m 0,000 deg.
Heel to Starboard deg.
GZ
m
Equilibrium – Caso 4 (Tabla 4-19)
(Tabla 4-18) Rule Criteria Units Required Actual Status IMO Area 0. to 30. m.Radians 0,055 0,258 Pass (to Stbd) IMO Area 0. to 40. or
Downflooding Point m.Radians 0,09 0,516 Pass (to Stbd)
IMO Area 30. to 40. or Downflooding Point
m.Radians 0,03 0,258 Pass (to Stbd)
IMO GZ at 30. or greater m 0,2 1,517 Pass (to Stbd) IMO Angle of GZ max Degrees 30 36,083 Pass (to Stbd) IMO GM m 0,15 7,336 Pass (to Stbd)
(Tabla 4-19) Draft Amidsh. M 10,795 Displacement tonne 73452 Heel to Starboard degrees 6,73 Draft at FP m 11,453 Draft at AP m 10,137 Draft at LCF m 10,748 Trim (+ve bow down) m 1,316 WL Length m 210,181 WL Beam m 42,233 Wetted Area m^2 12199,789 Waterpl. Area m^2 7549,177 Prismatic Coeff. 0,736 Block Coeff. 0,609 Midship Area Coeff. 0,884 Waterpl. Area Coeff. 0,850 LCB to Amidsh. M 4,370 Fwd LCF to Amidsh. M 7,388 Aft KB m 5,737 KG m 12,463 BMt m 13,826 BML m 366,886 GMt m 7,058 GML m 360,118 KMt m 19,563 KML m 372,623 Immersion (TPc) tonne/cm 77,394 MTc tonne.m 1279,808 RM at 1deg = GMt.Disp.sin(1) tonne.m
9047,719

Tesis Doctoral:“ESTABILIDAD Y COMPORTAMIENTO DE UN BUQUE UHLC”
4. GENERACIÓN Y DERIVACIÓN DE CARENAS 65
Stability Calculation – Carena 42.- Caso 5 (Tabla 4-20) Loadcase – Carena 42 Damage Case - DCase 5 Fixed Trim = 0 m Specific Gravity = 1,025 Compartments Damaged -2LWBTS; 2MWBTS; 2UWBTS; 1LWBTS; 1MWBTS;1UWBTS
(Tabla4-20) Item Name Quantity Weight
tonne Long.Arm m
Vert.Arm m
Trans.Arm m
FSMom. tonne. m
Lightship 1 19332 106,100 8,788 0,000 0,000 1FOTS 50% 239,8 43,521 1,775 12,033 3140,341 6LWBTC 100% 770 41,664 2,169 0,000 0,000 1FOTP 50% 239,8 43,521 1,775 -12,033 3140,341 6MWBTS 0% 0,0000 40,986 7,300 13,940 0,000 6MWBTC 0% 0,0000 40,950 7,280 0,000 0,000 6MWBTP 0% 0,0000 40,986 7,300 -13,940 0,000 6UWBTS 0% 0,0000 40,950 12,050 13,986 0,000 6UWBTC 0% 0,0000 40,950 12,050 0,000 0,000 6UWBTP 0% 0,0000 40,950 12,050 -13,986 0,000 5LWBTS 80% 1002 62,594 1,615 13,530 5822,928 5LWBTC 0% 0,0000 62,221 1,884 0,000 0,000 5LWBTP 80% 1002 62,594 1,615 -13,530 5822,928 5MWBTS 0% 0,0000 62,200 7,280 13,986 0,000 5MWBTC 0% 0,0000 62,200 7,280 0,000 0,000 5MWBTP 0% 0,0000 62,200 7,280 -13,986 0,000 5UWBTS 0% 0,0000 62,200 12,050 13,986 0,000 5UWBTC 0% 0,0000 62,200 12,050 0,000 0,000 5UWBTP 0% 0,0000 62,200 12,050 -13,986 0,000 4LWBTS 0% 0,0000 87,202 1,904 13,876 0,000 4LWBTC 100% 1349 87,200 1,880 0,000 0,000 4LWBTP 0% 0,0000 87,202 1,904 -13,876 0,000 4MWBTS 0% 0,0000 87,200 7,280 13,986 0,000 4MWBTC 0% 0,0000 87,200 7,280 0,000 0,000 4MWBTP 0% 0,0000 87,200 7,280 -13,986 0,000 4MWBTS 0% 0,0000 87,200 12,050 13,986 0,000 4UWBTC 0% 0,0000 87,200 12,050 0,000 0,000 4UWBTP 0% 0,0000 87,200 12,050 -13,986 0,000 3LWBTS 100% 1324 112,200 1,904 13,877 0,000 3LWBTC 0% 0,0000 112,200 1,880 0,000 0,000 3LWBTP 100% 1324 112,200 1,904 -13,877 0,000 3MWBTS 0% 0,0000 112,200 7,280 13,986 0,000 3MWBTC 0% 0,0000 112,200 7,280 0,000 0,000 3MWBTP 0% 0,0000 112,200 7,280 -13,986 0,000 3UWBTS 0% 0,0000 112,200 12,050 13,986 0,000 3UWBTC 0% 0,0000 112,200 12,050 0,000 0,000 3MWBTP 0% 0,0000 112,200 12,050 -13,986 0,000 2LWBTS Damaged 0 0 0 0 0 2LWBTC 0% 0,0000 137,200 1,880 0,000 0,000 2LWBTP 100% 1324 137,199 1,904 -13,876 0,000 2MWBTS Damaged 0 0 0 0 0 2MWBTC 0% 0,0000 137,200 7,280 0,000 0,000 2MWBTP 0% 0,0000 137,200 7,280 -13,986 0,000 2UWBTS Damaged 0 0 0 0 0 2UWBTC 0% 0,0000 137,200 12,050 0,000 0,000 2UWBTP 0% 0,0000 137,200 12,050 -13,986 0,000
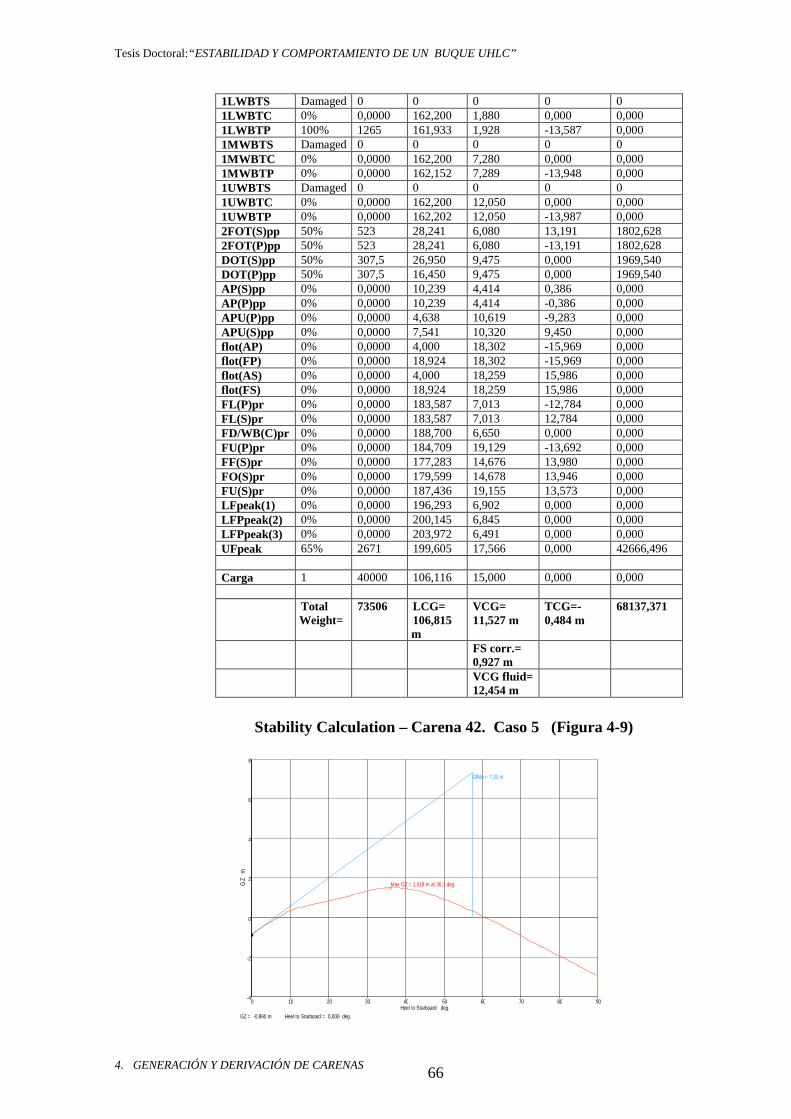
Tesis Doctoral:“ESTABILIDAD Y COMPORTAMIENTO DE UN BUQUE UHLC”
4. GENERACIÓN Y DERIVACIÓN DE CARENAS 66
Stability Calculation – Carena 42. Caso 5 (Figura 4-9)
-4
-2
0
2
4
6
8
0 10 20 30 40 50 60 70 80 90
Max GZ = 1,519 m at 36,1 deg.
GfMo = 7,33 m
GZ = Heel to Starboard = -0,860 m 0,000 deg.
Heel to Starboard deg.
GZ
m
1LWBTS Damaged 0 0 0 0 0 1LWBTC 0% 0,0000 162,200 1,880 0,000 0,000 1LWBTP 100% 1265 161,933 1,928 -13,587 0,000 1MWBTS Damaged 0 0 0 0 0 1MWBTC 0% 0,0000 162,200 7,280 0,000 0,000 1MWBTP 0% 0,0000 162,152 7,289 -13,948 0,000 1UWBTS Damaged 0 0 0 0 0 1UWBTC 0% 0,0000 162,200 12,050 0,000 0,000 1UWBTP 0% 0,0000 162,202 12,050 -13,987 0,000 2FOT(S)pp 50% 523 28,241 6,080 13,191 1802,628 2FOT(P)pp 50% 523 28,241 6,080 -13,191 1802,628 DOT(S)pp 50% 307,5 26,950 9,475 0,000 1969,540 DOT(P)pp 50% 307,5 16,450 9,475 0,000 1969,540 AP(S)pp 0% 0,0000 10,239 4,414 0,386 0,000 AP(P)pp 0% 0,0000 10,239 4,414 -0,386 0,000 APU(P)pp 0% 0,0000 4,638 10,619 -9,283 0,000 APU(S)pp 0% 0,0000 7,541 10,320 9,450 0,000 flot(AP) 0% 0,0000 4,000 18,302 -15,969 0,000 flot(FP) 0% 0,0000 18,924 18,302 -15,969 0,000 flot(AS) 0% 0,0000 4,000 18,259 15,986 0,000 flot(FS) 0% 0,0000 18,924 18,259 15,986 0,000 FL(P)pr 0% 0,0000 183,587 7,013 -12,784 0,000 FL(S)pr 0% 0,0000 183,587 7,013 12,784 0,000 FD/WB(C)pr 0% 0,0000 188,700 6,650 0,000 0,000 FU(P)pr 0% 0,0000 184,709 19,129 -13,692 0,000 FF(S)pr 0% 0,0000 177,283 14,676 13,980 0,000 FO(S)pr 0% 0,0000 179,599 14,678 13,946 0,000 FU(S)pr 0% 0,0000 187,436 19,155 13,573 0,000 LFpeak(1) 0% 0,0000 196,293 6,902 0,000 0,000 LFPpeak(2) 0% 0,0000 200,145 6,845 0,000 0,000 LFPpeak(3) 0% 0,0000 203,972 6,491 0,000 0,000 UFpeak 65% 2671 199,605 17,566 0,000 42666,496 Carga 1 40000 106,116 15,000 0,000 0,000 Total
Weight= 73506 LCG=
106,815 m
VCG= 11,527 m
TCG=- 0,484 m
68137,371
FS corr.= 0,927 m
VCG fluid= 12,454 m
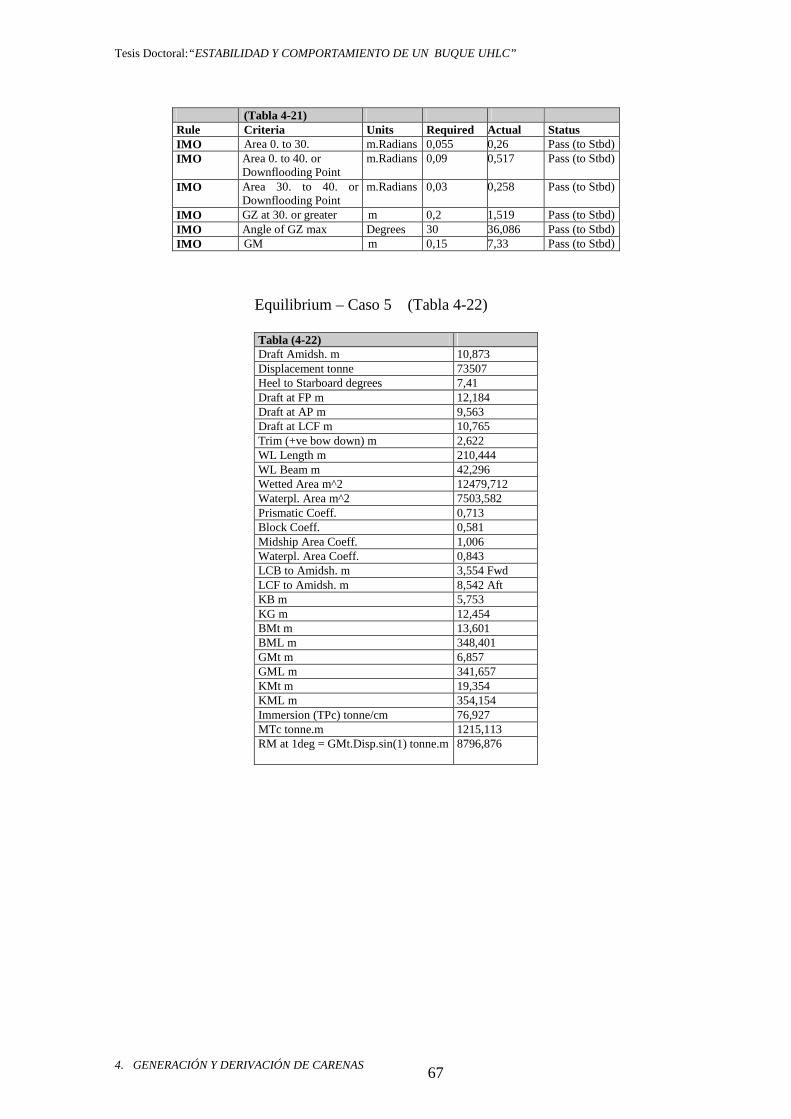
Tesis Doctoral:“ESTABILIDAD Y COMPORTAMIENTO DE UN BUQUE UHLC”
4. GENERACIÓN Y DERIVACIÓN DE CARENAS 67
Equilibrium – Caso 5 (Tabla 4-22)
Tabla (4-22) Draft Amidsh. m 10,873 Displacement tonne 73507 Heel to Starboard degrees 7,41 Draft at FP m 12,184 Draft at AP m 9,563 Draft at LCF m 10,765 Trim (+ve bow down) m 2,622 WL Length m 210,444 WL Beam m 42,296 Wetted Area m^2 12479,712 Waterpl. Area m^2 7503,582 Prismatic Coeff. 0,713 Block Coeff. 0,581 Midship Area Coeff. 1,006 Waterpl. Area Coeff. 0,843 LCB to Amidsh. m 3,554 Fwd LCF to Amidsh. m 8,542 Aft KB m 5,753 KG m 12,454 BMt m 13,601 BML m 348,401 GMt m 6,857 GML m 341,657 KMt m 19,354 KML m 354,154 Immersion (TPc) tonne/cm 76,927 MTc tonne.m 1215,113 RM at 1deg = GMt.Disp.sin(1) tonne.m 8796,876
(Tabla 4-21) Rule Criteria Units Required Actual Status IMO Area 0. to 30. m.Radians 0,055 0,26 Pass (to Stbd) IMO Area 0. to 40. or
Downflooding Point m.Radians 0,09 0,517 Pass (to Stbd)
IMO Area 30. to 40. or Downflooding Point
m.Radians 0,03 0,258 Pass (to Stbd)
IMO GZ at 30. or greater m 0,2 1,519 Pass (to Stbd) IMO Angle of GZ max Degrees 30 36,086 Pass (to Stbd) IMO GM m 0,15 7,33 Pass (to Stbd)
Tesis Doctoral:“ESTABILIDAD Y COMPORTAMIENTO DE UN BUQUE UHLC”
4. GENERACIÓN Y DERIVACIÓN DE CARENAS 68
4.5. CARENA 63 La información acerca de la transformación llevada a cabo en el BLUE MAR-
LIN ha sido escasa pero suficiente para llevar adelante esta tesis doctoral.
Las dimensiones del “BLUE MARLIN (trasformado)” son:
Length overall 223,50 m
Length PP 206,5 m
Breadth Moulded 63,00 m
Depth Moulded 13,304 m
Summer Draft 10,23 m8
Deadweight 76.071 mt
Max. sailing draft 10,30 m
Water above Deck submerged (max.) 28, 40 m
Free Deck Length 178, 20 m
Free Deck Area (178,2 x 63) more than 11.227 m2
4.5.1. Modelización
Para generar nuestra CARENA 63 se ha tomado como buque de partida la CA-
RENA 42 y se ha aumentando la manga en 21 m.
Se ha generado una carena por medio de transformaciones paramétricas, perma-
neciendo constantes otros parámetros tales como el coeficiente de bloque o la eslora.
Por otro lado, se ha estimado la posición longitudinal del centro de carena consi-
derando la posición del C.G. del buque en correspondencia para un trimado y escora de
cero grados.
Al igual que la carena 42 se ha generado la carena a partir de las formas de un
petrolero realizando las mismas transformaciones para adaptarse a los parámetros arriba
descritos:
• Transformaciones afines para obtener las dimensiones principales (L, B,
T);
• Transformación cuadrática para obtener el coeficiente de bloque de
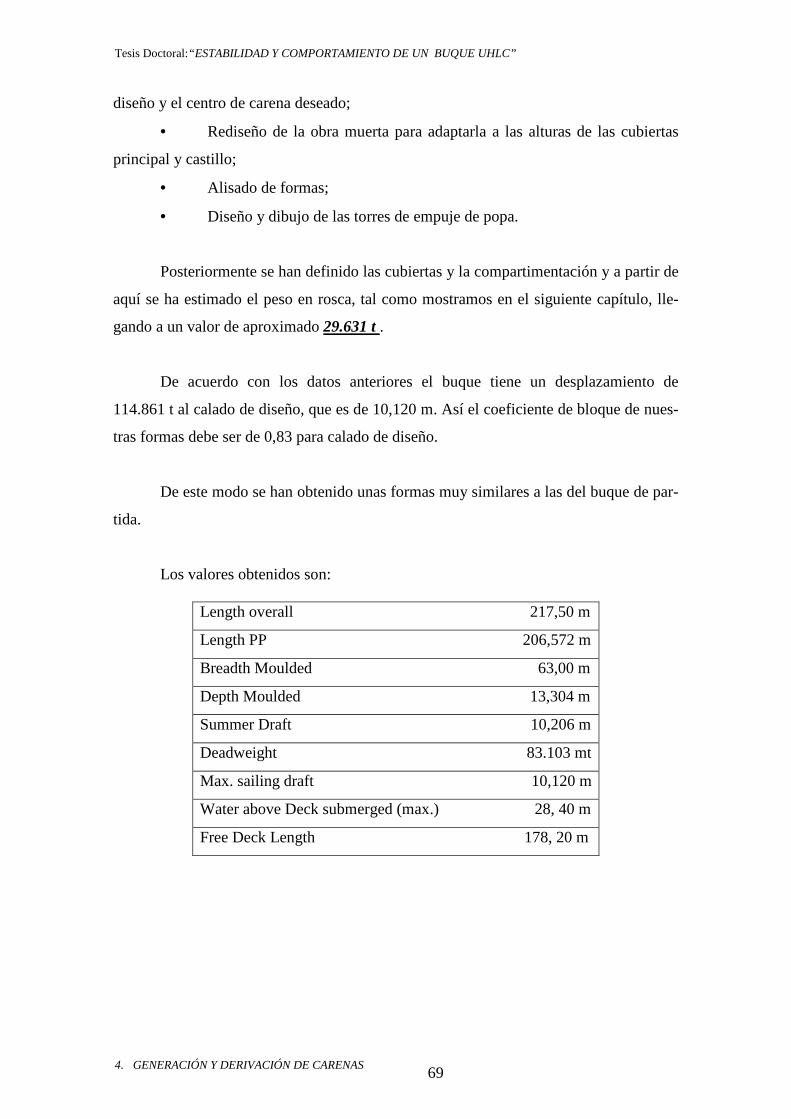
Tesis Doctoral:“ESTABILIDAD Y COMPORTAMIENTO DE UN BUQUE UHLC”
4. GENERACIÓN Y DERIVACIÓN DE CARENAS 69
diseño y el centro de carena deseado;
• Rediseño de la obra muerta para adaptarla a las alturas de las cubiertas
principal y castillo;
• Alisado de formas;
• Diseño y dibujo de las torres de empuje de popa.
Posteriormente se han definido las cubiertas y la compartimentación y a partir de
aquí se ha estimado el peso en rosca, tal como mostramos en el siguiente capítulo, lle-
gando a un valor de aproximado 29.631 t .
De acuerdo con los datos anteriores el buque tiene un desplazamiento de
114.861 t al calado de diseño, que es de 10,120 m. Así el coeficiente de bloque de nues-
tras formas debe ser de 0,83 para calado de diseño.
De este modo se han obtenido unas formas muy similares a las del buque de par-
tida.
Los valores obtenidos son:
Length overall 217,50 m
Length PP 206,572 m
Breadth Moulded 63,00 m
Depth Moulded 13,304 m
Summer Draft 10,206 m
Deadweight 83.103 mt
Max. sailing draft 10,120 m
Water above Deck submerged (max.) 28, 40 m
Free Deck Length 178, 20 m
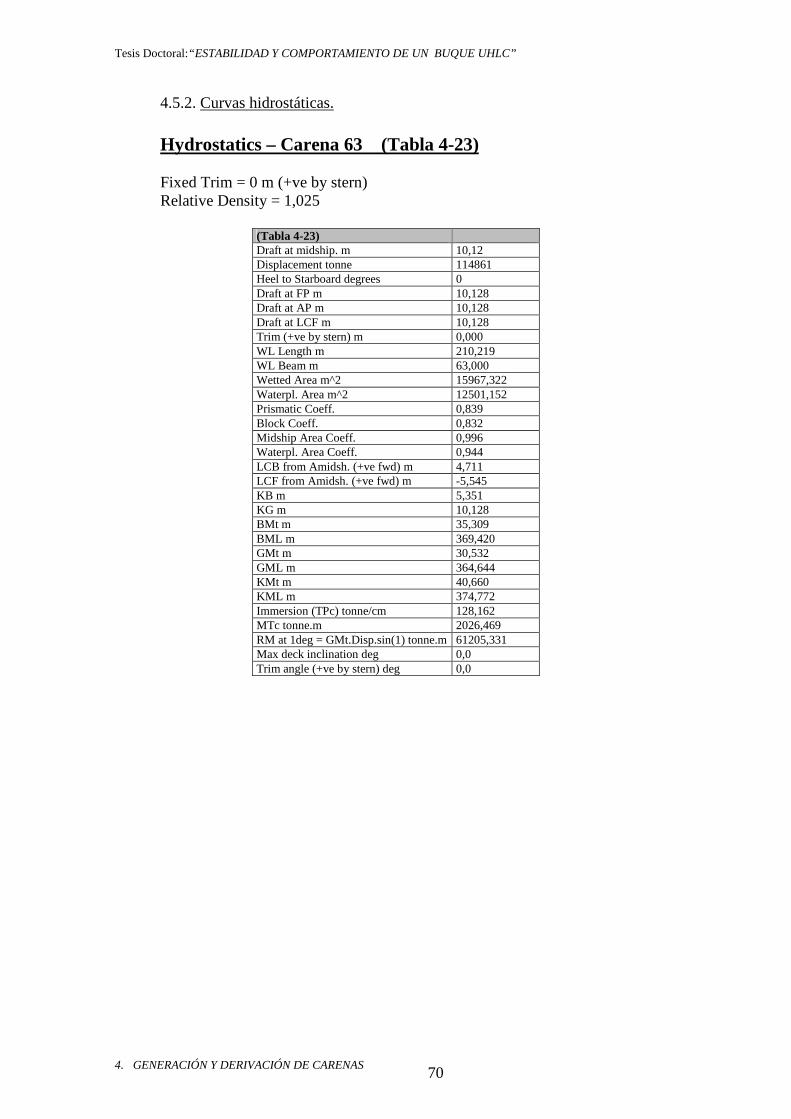
Tesis Doctoral:“ESTABILIDAD Y COMPORTAMIENTO DE UN BUQUE UHLC”
4. GENERACIÓN Y DERIVACIÓN DE CARENAS 70
4.5.2. Curvas hidrostáticas. Hydrostatics – Carena 63 (Tabla 4-23) Fixed Trim = 0 m (+ve by stern) Relative Density = 1,025
(Tabla 4-23) Draft at midship. m 10,12 Displacement tonne 114861 Heel to Starboard degrees 0 Draft at FP m 10,128 Draft at AP m 10,128 Draft at LCF m 10,128 Trim (+ve by stern) m 0,000 WL Length m 210,219 WL Beam m 63,000 Wetted Area m^2 15967,322 Waterpl. Area m^2 12501,152 Prismatic Coeff. 0,839 Block Coeff. 0,832 Midship Area Coeff. 0,996 Waterpl. Area Coeff. 0,944 LCB from Amidsh. (+ve fwd) m 4,711 LCF from Amidsh. (+ve fwd) m -5,545 KB m 5,351 KG m 10,128 BMt m 35,309 BML m 369,420 GMt m 30,532 GML m 364,644 KMt m 40,660 KML m 374,772 Immersion (TPc) tonne/cm 128,162 MTc tonne.m 2026,469 RM at 1deg = GMt.Disp.sin(1) tonne.m 61205,331 Max deck inclination deg 0,0 Trim angle (+ve by stern) deg 0,0
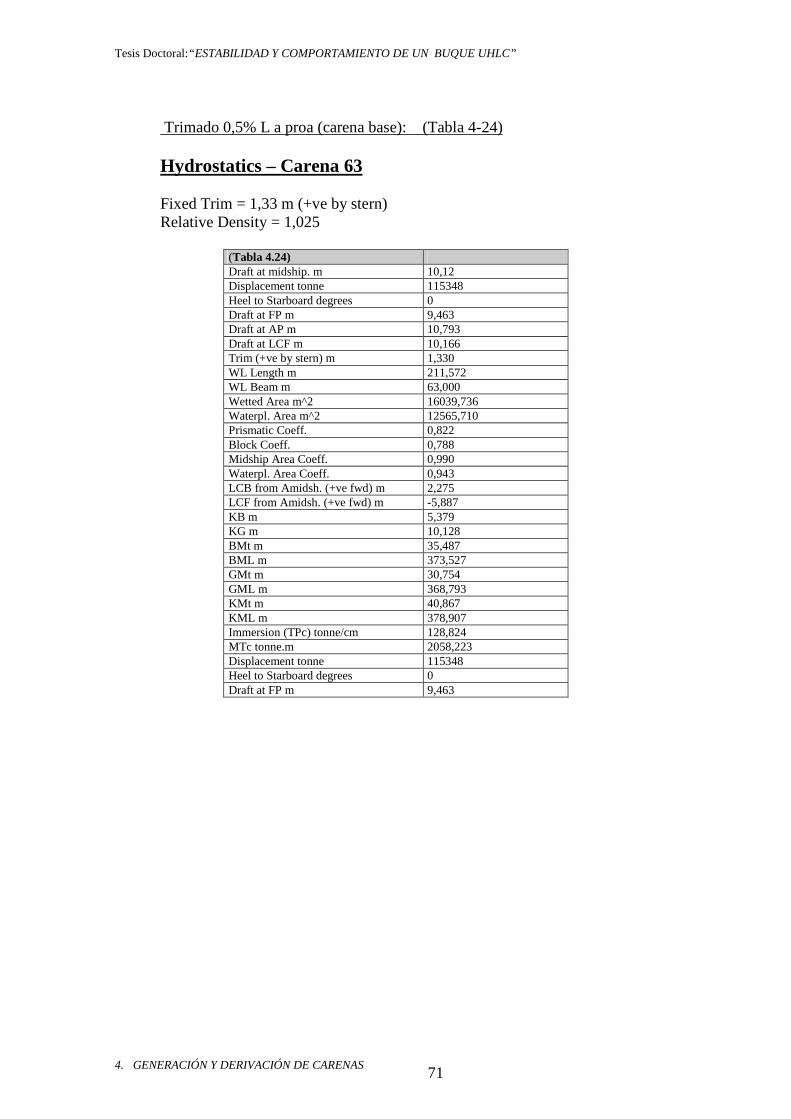
Tesis Doctoral:“ESTABILIDAD Y COMPORTAMIENTO DE UN BUQUE UHLC”
4. GENERACIÓN Y DERIVACIÓN DE CARENAS 71
Trimado 0,5% L a proa (carena base): (Tabla 4-24) Hydrostatics – Carena 63 Fixed Trim = 1,33 m (+ve by stern) Relative Density = 1,025
(Tabla 4.24) Draft at midship. m 10,12 Displacement tonne 115348 Heel to Starboard degrees 0 Draft at FP m 9,463 Draft at AP m 10,793 Draft at LCF m 10,166 Trim (+ve by stern) m 1,330 WL Length m 211,572 WL Beam m 63,000 Wetted Area m^2 16039,736 Waterpl. Area m^2 12565,710 Prismatic Coeff. 0,822 Block Coeff. 0,788 Midship Area Coeff. 0,990 Waterpl. Area Coeff. 0,943 LCB from Amidsh. (+ve fwd) m 2,275 LCF from Amidsh. (+ve fwd) m -5,887 KB m 5,379 KG m 10,128 BMt m 35,487 BML m 373,527 GMt m 30,754 GML m 368,793 KMt m 40,867 KML m 378,907 Immersion (TPc) tonne/cm 128,824 MTc tonne.m 2058,223 Displacement tonne 115348 Heel to Starboard degrees 0 Draft at FP m 9,463
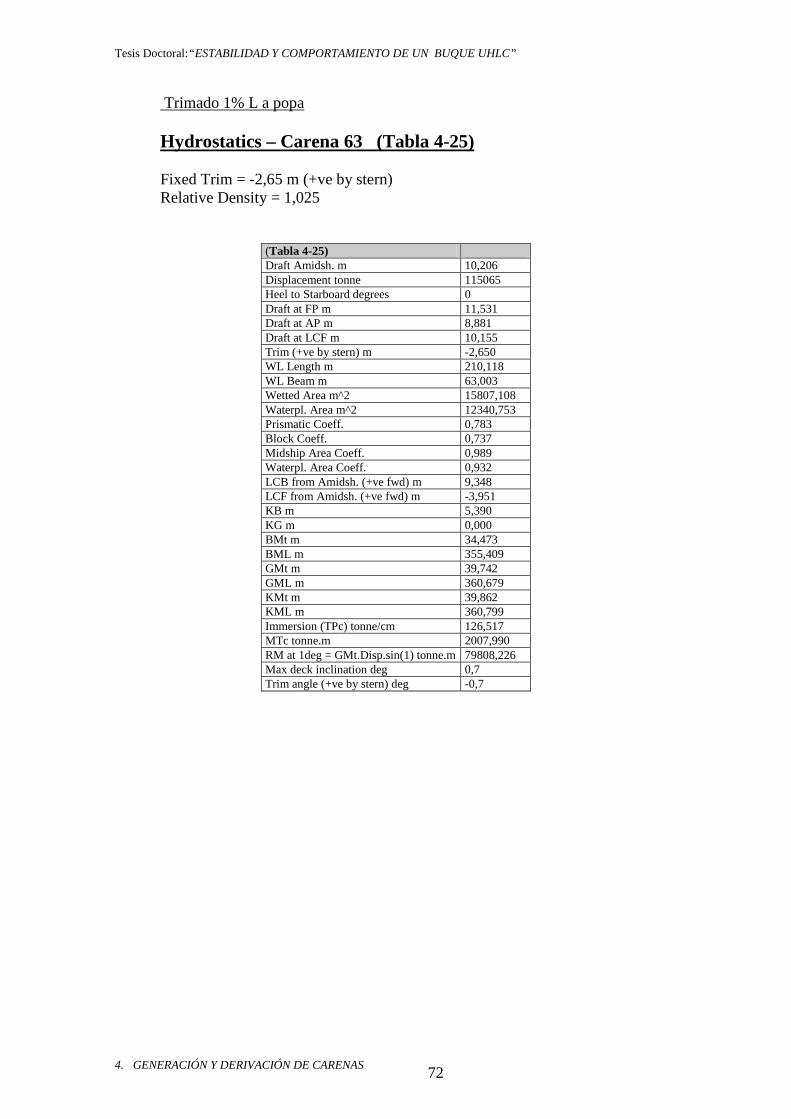
Tesis Doctoral:“ESTABILIDAD Y COMPORTAMIENTO DE UN BUQUE UHLC”
4. GENERACIÓN Y DERIVACIÓN DE CARENAS 72
Trimado 1% L a popa Hydrostatics – Carena 63 (Tabla 4-25) Fixed Trim = -2,65 m (+ve by stern) Relative Density = 1,025
(Tabla 4-25) Draft Amidsh. m 10,206 Displacement tonne 115065 Heel to Starboard degrees 0 Draft at FP m 11,531 Draft at AP m 8,881 Draft at LCF m 10,155 Trim (+ve by stern) m -2,650 WL Length m 210,118 WL Beam m 63,003 Wetted Area m^2 15807,108 Waterpl. Area m^2 12340,753 Prismatic Coeff. 0,783 Block Coeff. 0,737 Midship Area Coeff. 0,989 Waterpl. Area Coeff. 0,932 LCB from Amidsh. (+ve fwd) m 9,348 LCF from Amidsh. (+ve fwd) m -3,951 KB m 5,390 KG m 0,000 BMt m 34,473 BML m 355,409 GMt m 39,742 GML m 360,679 KMt m 39,862 KML m 360,799 Immersion (TPc) tonne/cm 126,517 MTc tonne.m 2007,990 RM at 1deg = GMt.Disp.sin(1) tonne.m 79808,226 Max deck inclination deg 0,7 Trim angle (+ve by stern) deg -0,7
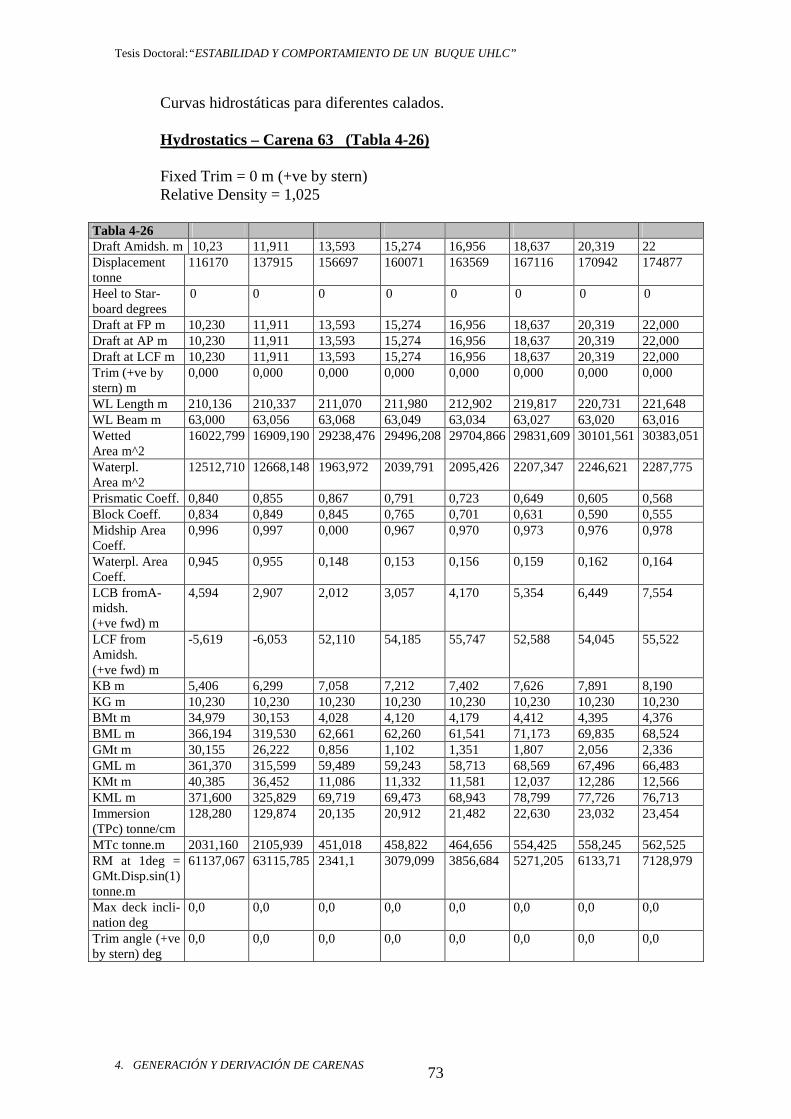
Tesis Doctoral:“ESTABILIDAD Y COMPORTAMIENTO DE UN BUQUE UHLC”
4. GENERACIÓN Y DERIVACIÓN DE CARENAS 73
Curvas hidrostáticas para diferentes calados. Hydrostatics – Carena 63 (Tabla 4-26) Fixed Trim = 0 m (+ve by stern) Relative Density = 1,025
Tabla 4-26 Draft Amidsh. m 10,23 11,911 13,593 15,274 16,956 18,637 20,319 22 Displacement tonne
116170 137915 156697 160071 163569 167116 170942 174877
Heel to Star-board degrees
0 0 0 0 0 0 0 0
Draft at FP m 10,230 11,911 13,593 15,274 16,956 18,637 20,319 22,000 Draft at AP m 10,230 11,911 13,593 15,274 16,956 18,637 20,319 22,000 Draft at LCF m 10,230 11,911 13,593 15,274 16,956 18,637 20,319 22,000 Trim (+ve by stern) m
0,000 0,000 0,000 0,000 0,000 0,000 0,000 0,000
WL Length m 210,136 210,337 211,070 211,980 212,902 219,817 220,731 221,648 WL Beam m 63,000 63,056 63,068 63,049 63,034 63,027 63,020 63,016 Wetted Area m^2
16022,799 16909,190 29238,476 29496,208 29704,866 29831,609 30101,561 30383,051
Waterpl. Area m^2
12512,710 12668,148 1963,972 2039,791 2095,426 2207,347 2246,621 2287,775
Prismatic Coeff. 0,840 0,855 0,867 0,791 0,723 0,649 0,605 0,568 Block Coeff. 0,834 0,849 0,845 0,765 0,701 0,631 0,590 0,555 Midship Area Coeff.
0,996 0,997 0,000 0,967 0,970 0,973 0,976 0,978
Waterpl. Area Coeff.
0,945 0,955 0,148 0,153 0,156 0,159 0,162 0,164
LCB fromA-midsh. (+ve fwd) m
4,594 2,907 2,012 3,057 4,170 5,354 6,449 7,554
LCF from Amidsh. (+ve fwd) m
-5,619 -6,053 52,110 54,185 55,747 52,588 54,045 55,522
KB m 5,406 6,299 7,058 7,212 7,402 7,626 7,891 8,190 KG m 10,230 10,230 10,230 10,230 10,230 10,230 10,230 10,230 BMt m 34,979 30,153 4,028 4,120 4,179 4,412 4,395 4,376 BML m 366,194 319,530 62,661 62,260 61,541 71,173 69,835 68,524 GMt m 30,155 26,222 0,856 1,102 1,351 1,807 2,056 2,336 GML m 361,370 315,599 59,489 59,243 58,713 68,569 67,496 66,483 KMt m 40,385 36,452 11,086 11,332 11,581 12,037 12,286 12,566 KML m 371,600 325,829 69,719 69,473 68,943 78,799 77,726 76,713 Immersion (TPc) tonne/cm
128,280 129,874 20,135 20,912 21,482 22,630 23,032 23,454
MTc tonne.m 2031,160 2105,939 451,018 458,822 464,656 554,425 558,245 562,525 RM at 1deg = GMt.Disp.sin(1) tonne.m
61137,067 63115,785 2341,1 3079,099 3856,684 5271,205 6133,71 7128,979
Max deck incli-nation deg
0,0 0,0 0,0 0,0 0,0 0,0 0,0 0,0
Trim angle (+ve by stern) deg
0,0 0,0 0,0 0,0 0,0 0,0 0,0 0,0
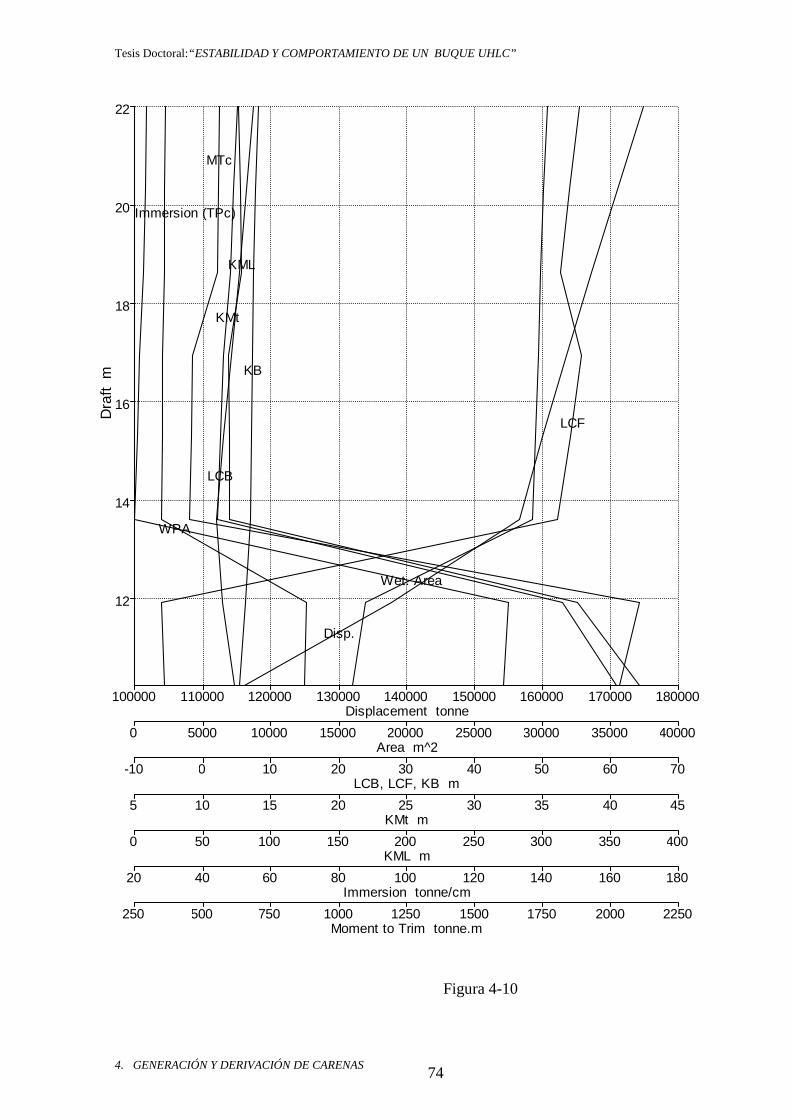
Tesis Doctoral:“ESTABILIDAD Y COMPORTAMIENTO DE UN BUQUE UHLC”
4. GENERACIÓN Y DERIVACIÓN DE CARENAS 74
Figura 4-10
12
14
16
18
20
22
100000 110000 120000 130000 140000 150000 160000 170000 180000
0 5000 10000 15000 20000 25000 30000 35000 40000
-10 0 10 20 30 40 50 60 70
5 10 15 20 25 30 35 40 45
0 50 100 150 200 250 300 350 400
20 40 60 80 100 120 140 160 180
250 500 750 1000 1250 1500 1750 2000 2250
Disp.
Wet. Area
WPA
LCB
LCF
KB
KMt
KML
Immersion (TPc)
MTc
Displacement tonne
Dra
ft m
Area m^2
LCB, LCF, KB m
KMt m
KML m
Immersion tonne/cm
Moment to Trim tonne.m
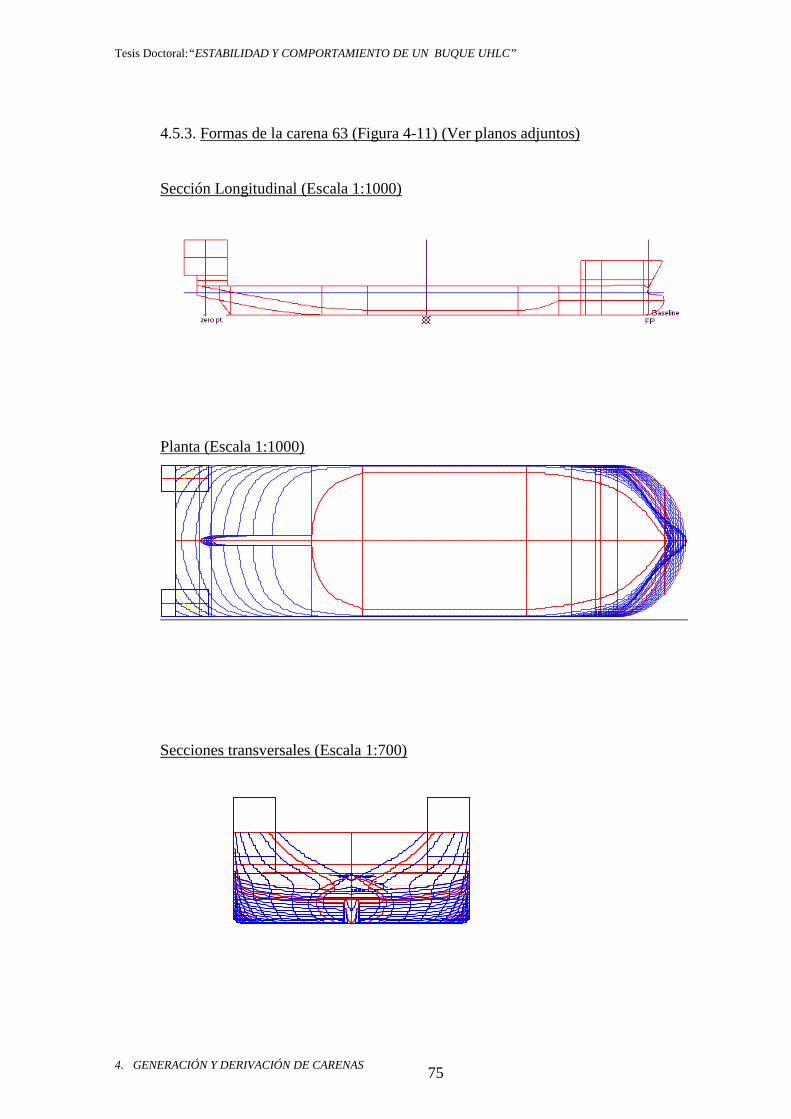
Tesis Doctoral:“ESTABILIDAD Y COMPORTAMIENTO DE UN BUQUE UHLC”
4. GENERACIÓN Y DERIVACIÓN DE CARENAS 75
4.5.3. Formas de la carena 63 (Figura 4-11) (Ver planos adjuntos) Sección Longitudinal (Escala 1:1000)
Planta (Escala 1:1000)
Secciones transversales (Escala 1:700)
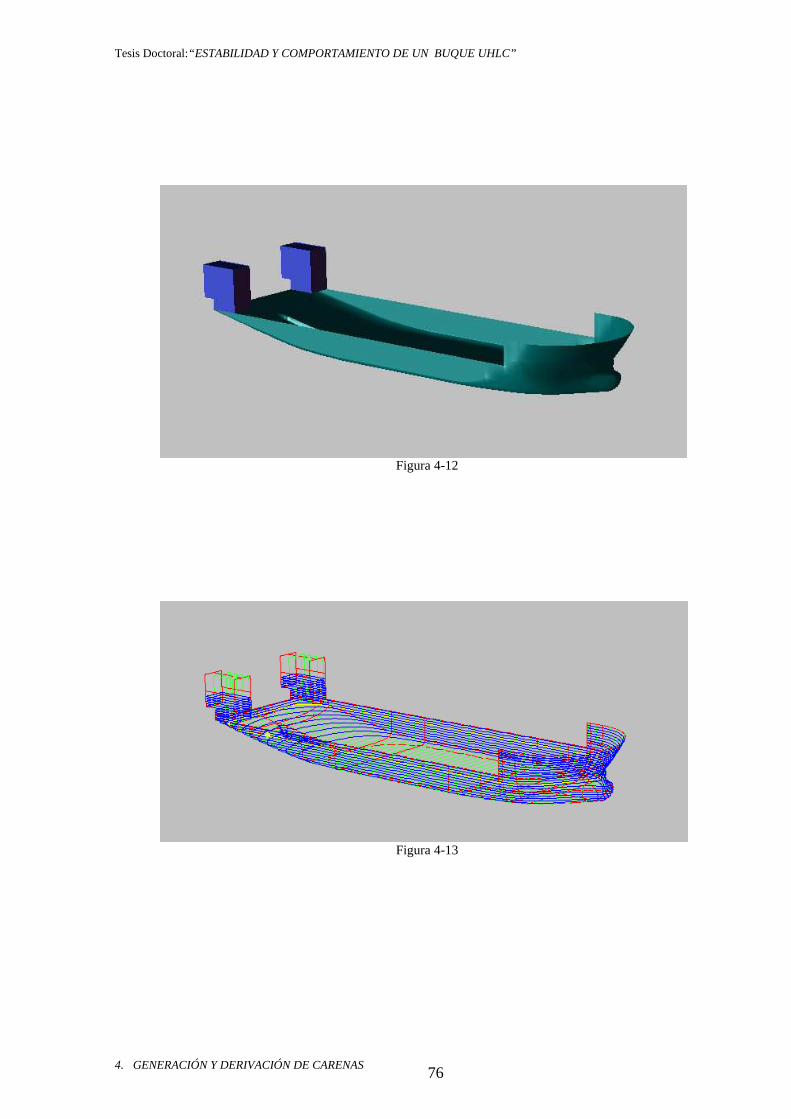
Tesis Doctoral:“ESTABILIDAD Y COMPORTAMIENTO DE UN BUQUE UHLC”
4. GENERACIÓN Y DERIVACIÓN DE CARENAS 76
Figura 4-12
Figura 4-13
Tesis Doctoral:“ESTABILIDAD Y COMPORTAMIENTO DE UN BUQUE UHLC”
4. GENERACIÓN Y DERIVACIÓN DE CARENAS 77
4.5.4 Francobordo (Carena 63)
El valor del francobordo que obtendremos será muy similar al obtenido para la
carena 42 ya que nuestra carena 63 se ha derivado de la anterior manteniendo la eslora y
el coeficiente de bloque de la carena 42. Sin embargo, a efectos operativos será conve-
niente aumentar la altura del castillo de proa, lo que llevará consigo una muy ligera va-
riación en el valor del francobordo.
Puntal de trazado: D = 13.300 mm
Puntal de francobordo: D + 28 = 13.328 mm
Eslora total: L.O.A – 224,5 Eslora entre perpendiculares: L.B.P. 206 m
Eslora de flotación correspondiente al 85% del puntal mínimo de trazado:
0,96 x 214 = 205,44;
Eslora al eje de la mecha del timón: 206 m
Eslora de francobordo: 206 m
Considerando
• Buque Tipo B = 3.363 mm
• Buque Tipo A = 2.669 mm
Diferencia entre ambos: 694 mm
Un buque tipo B de más de 100 m de eslora puede tener un francobordo reduci-
do, si cumple algunos requerimientos adicionales, permitiéndose una reducción del
francobordo tabular del 100%, como máximo, de la diferencia entre el francobordo ta-
bular tipo A y tipo B, que equivale por lo tanto a un buque tipo “A”.
FBTB-100 = 3.363 – 1(3.363 – 2.669) = 3.363 – 694 = 2.669 mm
Aplicando los criterios del Convenio de 1.966 tendremos:
1. Corrección por eslora menor de 100 m: no procede en este caso. C1 = 0
2. Corrección por coeficiente de bloque:

Tesis Doctoral:“ESTABILIDAD Y COMPORTAMIENTO DE UN BUQUE UHLC”
4. GENERACIÓN Y DERIVACIÓN DE CARENAS 78
130.233
0.8649206 x 63 x 11,32 x 1,025
CB = =
2
0,8649 0,68C 1,1359
1,36
+= =
3. Corrección por puntal: 13,36 < L/15 (no procede) C3 = 0
L/15=14; 13,36 < 14
4. Corrección por superestructura:
La longitud de nuestra superestructura o puente es de 36,900 m de aquí que la
relación E/L = 0,1791
Para E/L = 0,1 corresponde: 5%
Para E/L = 0,2 corresponde: 10%
Por interpolación lineal obtenemos:
8,955%
C4 = (1.070*8,955)/100 = 95,818 mm
5. Corrección por arrufo: C5
El parágrafo de 12 de la regla 39 dice:
“Cuando la altura real de una toldilla o un castillo en la ordenada extrema es su-
perior a la normal se utilizará la siguiente fórmula:
' 16, 250 2, 6 40. . 0,8835
3 3 206
y Ls
L
−= = =
siendo:
s = suplemento de arrufo a deducir del defecto o añadir al exceso del arrufo;
y = diferencia entre las alturas real y normal de la superestructura en la ordenada
extrema de la línea de arrufo;
L’ = longitud media de la parte cerrada de la toldilla o castillo hasta un máximo
de 0,5 L;
L = eslora del buque, según se define en la regla 3, 1) del Anexo del Reglamen-
to.
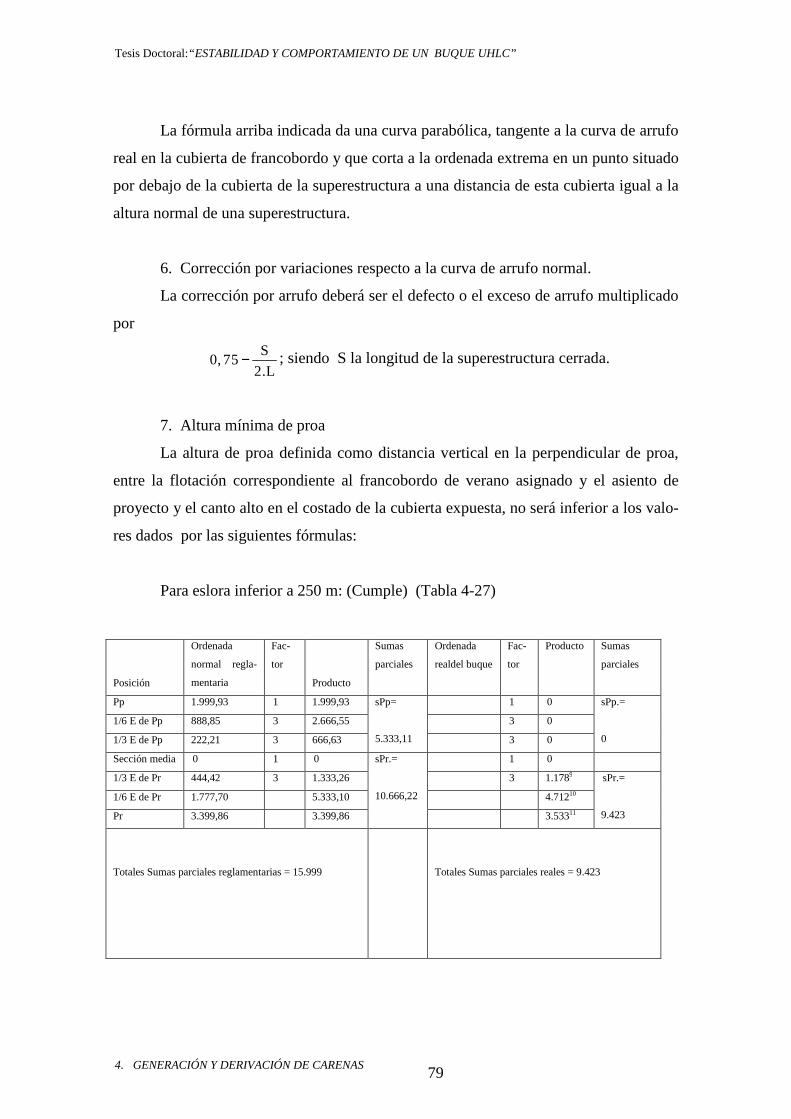
Tesis Doctoral:“ESTABILIDAD Y COMPORTAMIENTO DE UN BUQUE UHLC”
4. GENERACIÓN Y DERIVACIÓN DE CARENAS 79
La fórmula arriba indicada da una curva parabólica, tangente a la curva de arrufo
real en la cubierta de francobordo y que corta a la ordenada extrema en un punto situado
por debajo de la cubierta de la superestructura a una distancia de esta cubierta igual a la
altura normal de una superestructura.
6. Corrección por variaciones respecto a la curva de arrufo normal.
La corrección por arrufo deberá ser el defecto o el exceso de arrufo multiplicado
por
S0, 75
2.L− ; siendo S la longitud de la superestructura cerrada.
7. Altura mínima de proa
La altura de proa definida como distancia vertical en la perpendicular de proa,
entre la flotación correspondiente al francobordo de verano asignado y el asiento de
proyecto y el canto alto en el costado de la cubierta expuesta, no será inferior a los valo-
res dados por las siguientes fórmulas:
Para eslora inferior a 250 m: (Cumple) (Tabla 4-27)
Posición
Ordenada
normal regla-
mentaria
Fac-
tor
Producto
Sumas
parciales
Ordenada
realdel buque
Fac-
tor
Producto Sumas
parciales
Pp 1.999,93 1 1.999,93 sPp=
5.333,11
1 0 sPp.=
0
1/6 E de Pp 888,85 3 2.666,55 3 0
1/3 E de Pp 222,21 3 666,63 3 0
Sección media 0 1 0 sPr.=
10.666,22
1 0
1/3 E de Pr 444,42 3 1.333,26 3 1.1789 sPr.=
9.423
1/6 E de Pr 1.777,70 5.333,10 4.71210
Pr 3.399,86 3.399,86 3.53311
Totales Sumas parciales reglamentarias = 15.999
Totales Sumas parciales reales = 9.423
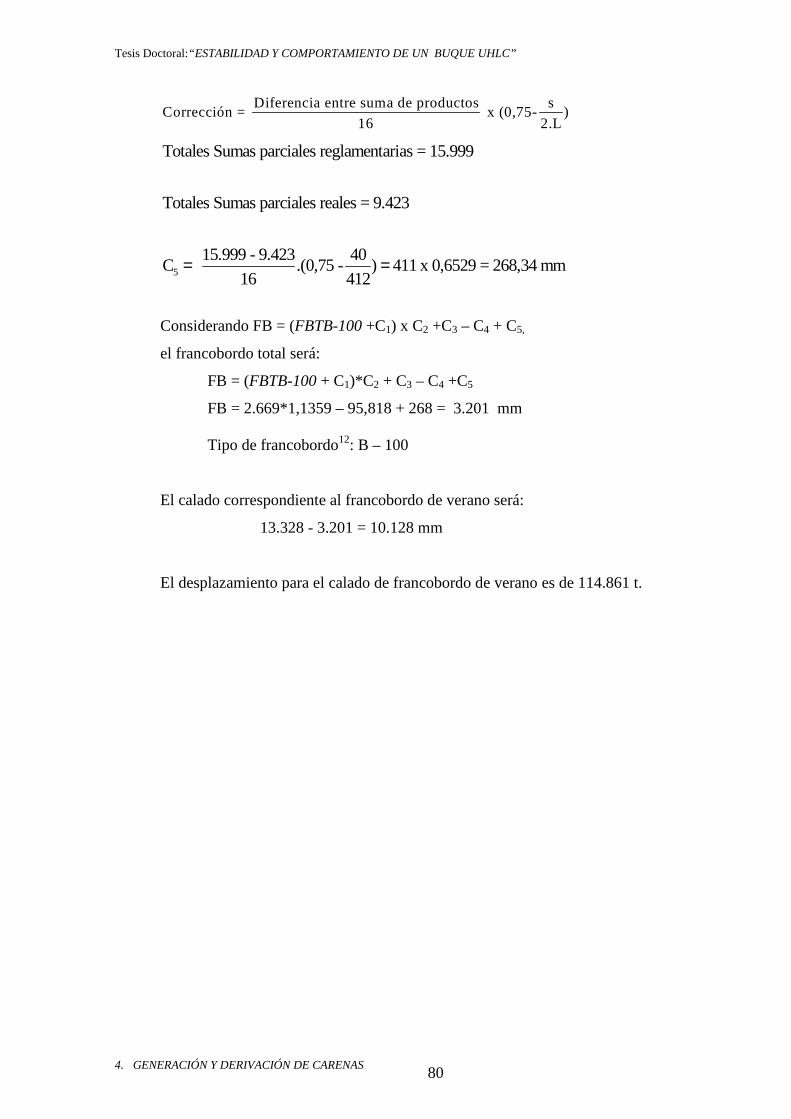
Tesis Doctoral:“ESTABILIDAD Y COMPORTAMIENTO DE UN BUQUE UHLC”
4. GENERACIÓN Y DERIVACIÓN DE CARENAS 80
Diferencia entre suma de productos sCorrección = x (0,75- )
16 2.L
5
Totales Sumas parciales reglamentarias = 15.999
Totales Sumas parciales reales = 9.423
15.999 - 9.423 40C .(0,75 - ) 411 x 0,6529 = 268,34 mm
16 412
= =
Considerando FB = (FBTB-100 +C1) x C2 +C3 – C4 + C5,
el francobordo total será:
FB = (FBTB-100 + C1)*C2 + C3 – C4 +C5
FB = 2.669*1,1359 – 95,818 + 268 = 3.201 mm
Tipo de francobordo12: B – 100
El calado correspondiente al francobordo de verano será:
13.328 - 3.201 = 10.128 mm
El desplazamiento para el calado de francobordo de verano es de 114.861 t.
Tesis Doctoral:“ESTABILIDAD Y COMPORTAMIENTO DE UN BUQUE UHLC”
4. GENERACIÓN Y DERIVACIÓN DE CARENAS 81
4.6 CARENA 72 Se ha tomado como buque de partida la modificación llevada a cabo en el buque
CARENA 63 aumentando la manga en 9 m.
Se ha generado una carena por medio de transformaciones paramétricas, perma-
neciendo constantes otros parámetros tales como el coeficiente de bloque, la eslora.
Posteriormente se han definido las cubiertas y la compartimentación.
A partir de aquí se ha estimado el peso en rosca, tal como mostramos en el si-
guiente capítulo, llegando a un valor de aproximado 35.084 t.
Una de las aportaciones más valiosas de esta investigación es que esta carena
propuesta no tiene parangón en la realidad.
4.6.1. Modelización
De acuerdo con los datos anteriores, el buque debe tener un desplazamiento de
131.211 t al calado de diseño, que es de 10,124 m, de tal forma que el coeficiente de
bloque de nuestras formas debe ser de 0,83 para calado de diseño.
Por otro lado se ha estimado la posición longitudinal del centro de carena a tra-
vés del óptimo hidrodinámico.
La generación de la carena se ha hecho igual a las carenas 42 y 63 a partir de las
formas de un petrolero, realizando las transformaciones vistas para las carenas 42 y 63.
Las dimensiones del buque obtenido son:
Length overall 223,50 m
Length PP 206,5 m
Breadth Moulded 72,00 m
Depth Moulded 13,304 m
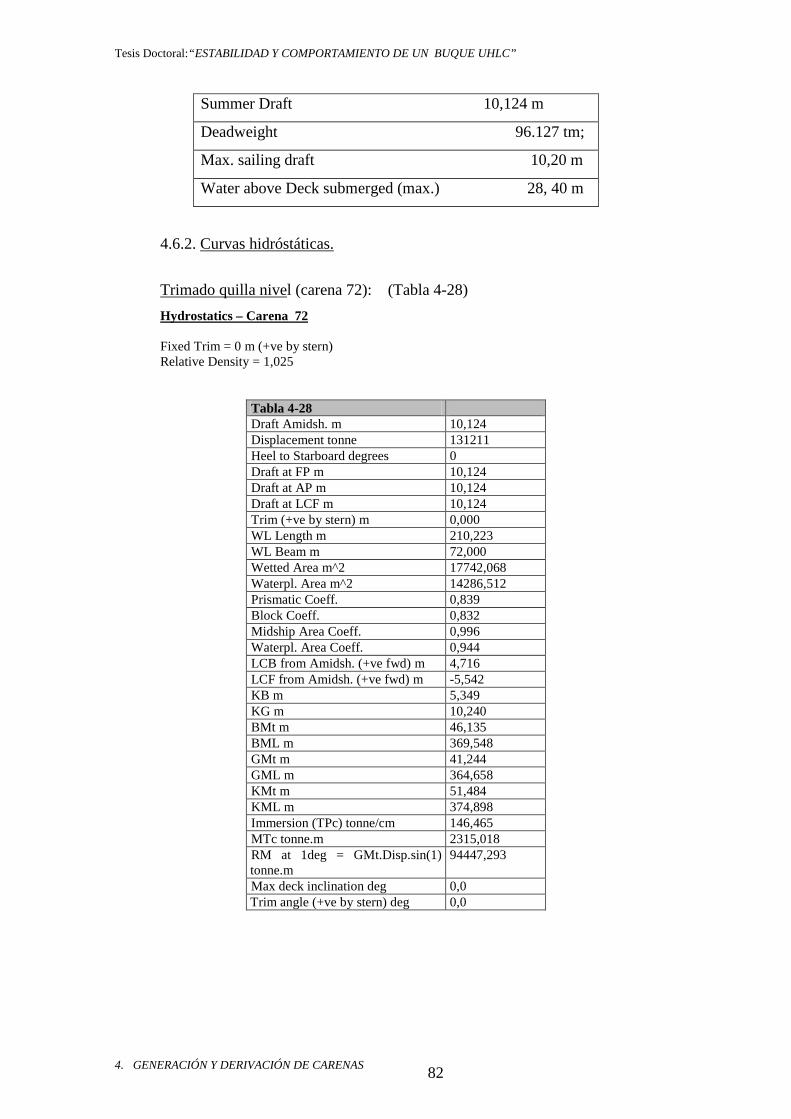
Tesis Doctoral:“ESTABILIDAD Y COMPORTAMIENTO DE UN BUQUE UHLC”
4. GENERACIÓN Y DERIVACIÓN DE CARENAS 82
Summer Draft 10,124 m
Deadweight 96.127 tm;
Max. sailing draft 10,20 m
Water above Deck submerged (max.) 28, 40 m
4.6.2. Curvas hidróstáticas.
Trimado quilla nivel (carena 72): (Tabla 4-28)
Hydrostatics – Carena 72 Fixed Trim = 0 m (+ve by stern) Relative Density = 1,025
Tabla 4-28 Draft Amidsh. m 10,124 Displacement tonne 131211 Heel to Starboard degrees 0 Draft at FP m 10,124 Draft at AP m 10,124 Draft at LCF m 10,124 Trim (+ve by stern) m 0,000 WL Length m 210,223 WL Beam m 72,000 Wetted Area m^2 17742,068 Waterpl. Area m^2 14286,512 Prismatic Coeff. 0,839 Block Coeff. 0,832 Midship Area Coeff. 0,996 Waterpl. Area Coeff. 0,944 LCB from Amidsh. (+ve fwd) m 4,716 LCF from Amidsh. (+ve fwd) m -5,542 KB m 5,349 KG m 10,240 BMt m 46,135 BML m 369,548 GMt m 41,244 GML m 364,658 KMt m 51,484 KML m 374,898 Immersion (TPc) tonne/cm 146,465 MTc tonne.m 2315,018 RM at 1deg = GMt.Disp.sin(1) tonne.m
94447,293
Max deck inclination deg 0,0 Trim angle (+ve by stern) deg 0,0
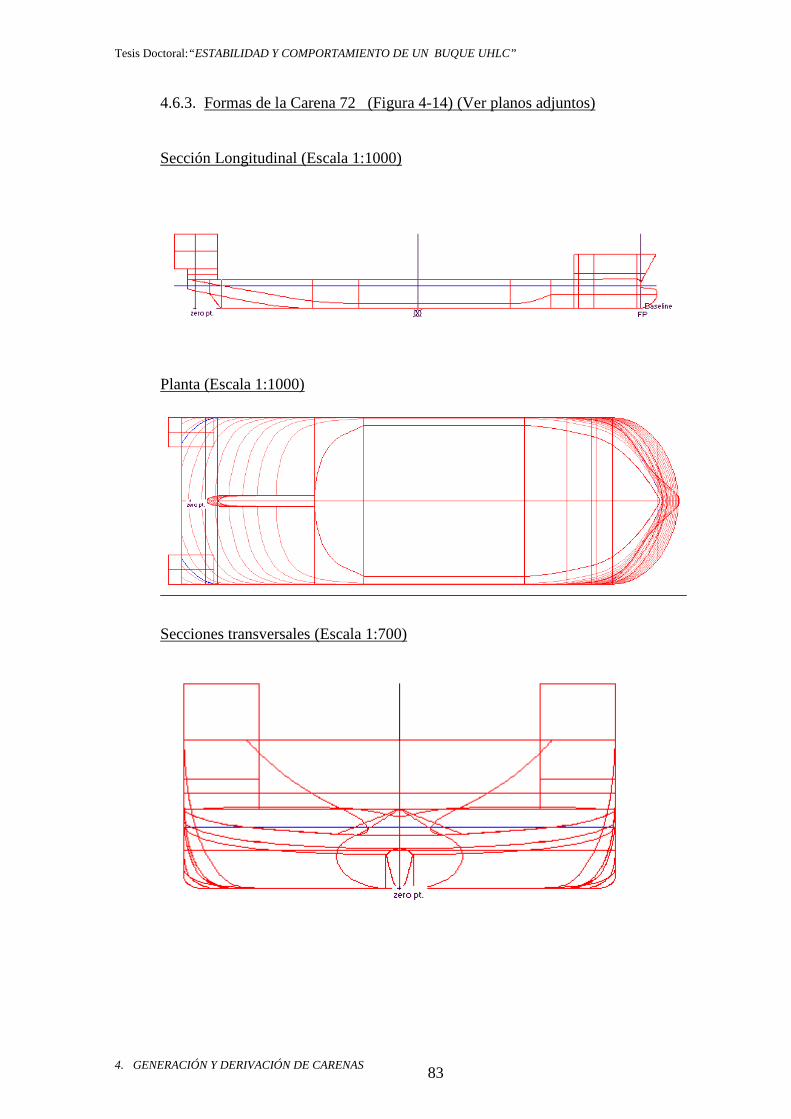
Tesis Doctoral:“ESTABILIDAD Y COMPORTAMIENTO DE UN BUQUE UHLC”
4. GENERACIÓN Y DERIVACIÓN DE CARENAS 83
4.6.3. Formas de la Carena 72 (Figura 4-14) (Ver planos adjuntos) Sección Longitudinal (Escala 1:1000)
Planta (Escala 1:1000)
Secciones transversales (Escala 1:700)
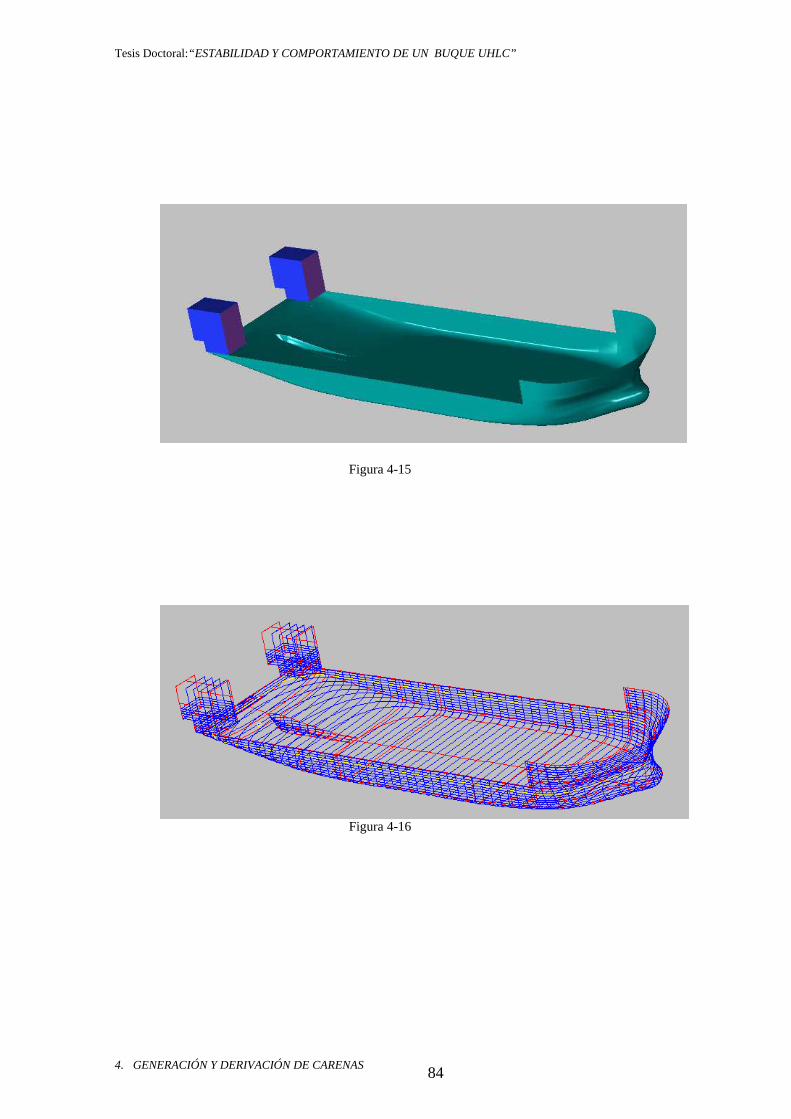
Tesis Doctoral:“ESTABILIDAD Y COMPORTAMIENTO DE UN BUQUE UHLC”
4. GENERACIÓN Y DERIVACIÓN DE CARENAS 84
Figura 4-15
Figura 4-16
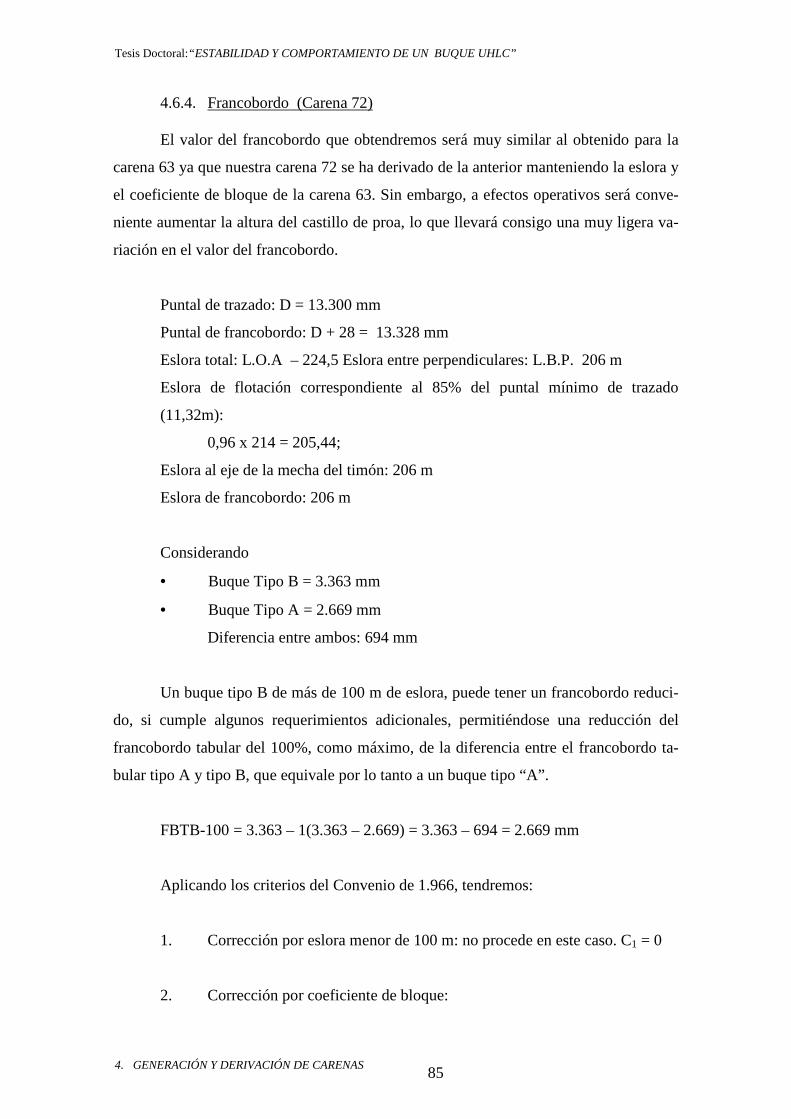
Tesis Doctoral:“ESTABILIDAD Y COMPORTAMIENTO DE UN BUQUE UHLC”
4. GENERACIÓN Y DERIVACIÓN DE CARENAS 85
4.6.4. Francobordo (Carena 72) El valor del francobordo que obtendremos será muy similar al obtenido para la
carena 63 ya que nuestra carena 72 se ha derivado de la anterior manteniendo la eslora y
el coeficiente de bloque de la carena 63. Sin embargo, a efectos operativos será conve-
niente aumentar la altura del castillo de proa, lo que llevará consigo una muy ligera va-
riación en el valor del francobordo.
Puntal de trazado: D = 13.300 mm
Puntal de francobordo: D + 28 = 13.328 mm
Eslora total: L.O.A – 224,5 Eslora entre perpendiculares: L.B.P. 206 m
Eslora de flotación correspondiente al 85% del puntal mínimo de trazado
(11,32m):
0,96 x 214 = 205,44;
Eslora al eje de la mecha del timón: 206 m
Eslora de francobordo: 206 m
Considerando
• Buque Tipo B = 3.363 mm
• Buque Tipo A = 2.669 mm
Diferencia entre ambos: 694 mm
Un buque tipo B de más de 100 m de eslora, puede tener un francobordo reduci-
do, si cumple algunos requerimientos adicionales, permitiéndose una reducción del
francobordo tabular del 100%, como máximo, de la diferencia entre el francobordo ta-
bular tipo A y tipo B, que equivale por lo tanto a un buque tipo “A”.
FBTB-100 = 3.363 – 1(3.363 – 2.669) = 3.363 – 694 = 2.669 mm
Aplicando los criterios del Convenio de 1.966, tendremos:
1. Corrección por eslora menor de 100 m: no procede en este caso. C1 = 0
2. Corrección por coeficiente de bloque:

Tesis Doctoral:“ESTABILIDAD Y COMPORTAMIENTO DE UN BUQUE UHLC”
4. GENERACIÓN Y DERIVACIÓN DE CARENAS 86
148.837
0.8649206 x 72 x 11,32 x 1,025
CB = =
2
0,8649 0,68C 1,1360
1,36
+= =
3. Corrección por puntal: 13,36 < L/15 (no procede) C3 = 0
L/15=14; 13,36 < 14
4. Corrección por superestructura:
La longitud de nuestra superestructura o puente es de 36,900 m de aquí que la
relación E/L = 0,1757
Para E/L = 1 corresponde: 5%
Para E/L = 2 corresponde: 10%
Por interpolación lineal obtenemos:
8,955%
C4 = (1.070*8,74)/100 = 95,818 mm
5. Corrección por arrufo: C5
El parágrafo de 12 de la regla 39, expone:
“Cuando la altura real de una toldilla o un castillo en la ordenada extrema es su-
perior a la normal, se utilizará la siguiente fórmula:
' 16, 250 2, 6 40. . 0,8835
3 3 206
y Ls
L
−= = =
siendo:
s = suplemento de arrufo a deducir del defecto o añadir al exceso del arrufo;
y = diferencia entre las alturas real y normal de la superestructura en la ordenada
extrema de la línea de arrufo;
L’ = longitud media de la parte cerrada de la toldilla o castillo hasta un máximo
de 0,5 L;
L = eslora del buque, según se define en la regla 3, 1) del Anexo del Reglamen-
to.

Tesis Doctoral:“ESTABILIDAD Y COMPORTAMIENTO DE UN BUQUE UHLC”
4. GENERACIÓN Y DERIVACIÓN DE CARENAS 87
La fórmula arriba indicada da una curva parabólica, tangente a la curva de arrufo
real en la cubierta de francobordo y que corta a la ordenada extrema en un punto situado
por debajo de la cubierta de la superestructura a una distancia de esta cubierta igual a la
altura normal de una superestructura.
6. Corrección por variaciones respecto a la curva de arrufo normal.
La corrección por arrufo deberá ser el defecto o el exceso de arrufo multiplicado
por
S0, 75
2.L− ; siendo S la longitud de la superestructura cerrada.
7. Altura mínima de proa
La altura de proa definida como distancia vertical en la perpendicular de proa,
entre la flotación correspondiente al francobordo de verano asignado y el asiento de
proyecto y el canto alto en el costado de la cubierta expuesta, no será inferior a los valo-
res dados por las siguientes fórmulas:
Para eslora inferior a 250 m: (Cumple) (Tabla 4-29)
Diferencia entre suma de productos sCorrección = x (0,75- )
16 2.L
Posición Ordenada
normal regla-
mentaria
Factor Producto Sumas
parciales
Ordenada
real del
buque
Factor Producto Sumas-
parciales
Pp 1.999,93 1 1.999,93 sPp=
5.333,11
1 0 sPp.=
600
1/6 E de Pp 888,85 3 2.666,55 3 0
1/3 E de Pp 222,21 3 666,63 3 0
Sección media 0 1 0 sPr.=
10.666,22
1 0
1/3 E de Pr 444,42 3 1.333,26 3 1.17713 sPr.=
11.335
1/6 E de Pr 1.777,70 3 5.333,10 3 4.71114
Pr 3.399,86 3.399,86 1 3.53315
Totales Sumas parciales reglamentarias = 15.999
Totales Sumas parciales reales = 9.421
Tesis Doctoral:“ESTABILIDAD Y COMPORTAMIENTO DE UN BUQUE UHLC”
4. GENERACIÓN Y DERIVACIÓN DE CARENAS 88
5
Totales Sumas parciales reglamentarias = 15.999
Totales Sumas parciales reales = 9.421
15.999 - 9.421 40C .(0,75 - ) 411 x 0,6529 = 268,34 mm
16 412
= =
Considerando FB = (FBTB-100 +C1) x C2 +C3 – C4 + C5,
el francobordo total será:
FB = (FBTB-100 + C1)*C2 + C3 – C4 +C5
FB = 2.669*1,1360 – 95,818 + 268 = 3.204 mm
Tipo de francobordo16: B – 100
El calado correspondiente al francobordo de verano será
13.328 – 3.204 = 10.124 mm
El desplazamiento para el calado de francobordo de verano es de 131.211 t.
Tesis Doctoral:“ESTABILIDAD Y COMPORTAMIENTO DE UN BUQUE UHLC”
4. GENERACIÓN Y DERIVACIÓN DE CARENAS 89
4.7 CARENA 84
Se ha tomado como buque de partida la modificación llevada a cabo en el buque
CARENA 72 aumentando la manga en 9 m.
Se ha generado una carena por medio de transformaciones paramétricas, perma-
neciendo constantes otros parámetros tales como el coeficiente de bloque o la eslora.
Posteriormente se han definido las cubiertas y la compartimentación.
A partir de aquí se ha estimado el peso en rosca, tal como mostramos en el si-
guiente capítulo, llegando a un valor de aproximado 43.585 t.
Una de las aportaciones más valiosas de esta investigación es que esta carena
propuesta no tiene parangón en la realidad.
4.7.1. Modelización
De acuerdo con los datos anteriores el buque debe tener un desplazamiento de
153.892 t al calado de diseño, que es de 10,448 m. Así el coeficiente de bloque de nues-
tras formas debe ser de 0,834 para calado de diseño.
Por otro lado, se ha estimado la posición longitudinal del centro de carena consi-
derando la posición del centro de gravedad del buque en correspondencia para un trima-
do y escora de cero grados.
• La generación de la carena se ha hecho igual a las carenas 42, 63 y 72.
Las dimensiones del buque obtenido son:
Length overall 223,50 m
Length PP 210.136 m
Breadth Moulded 84,00 m
Depth Moulded 13,304 m
Summer Draft 10,125 m
Deadweight 109.360 tm
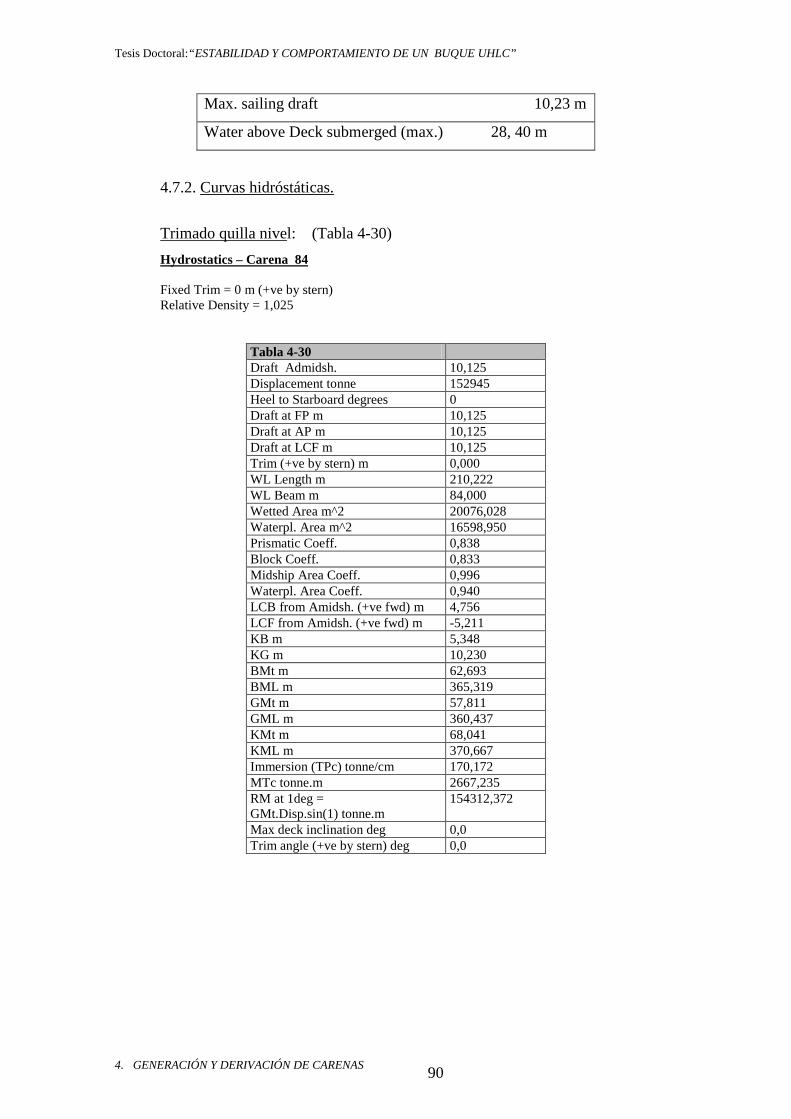
Tesis Doctoral:“ESTABILIDAD Y COMPORTAMIENTO DE UN BUQUE UHLC”
4. GENERACIÓN Y DERIVACIÓN DE CARENAS 90
Max. sailing draft 10,23 m
Water above Deck submerged (max.) 28, 40 m
4.7.2. Curvas hidróstáticas.
Trimado quilla nivel: (Tabla 4-30)
Hydrostatics – Carena 84 Fixed Trim = 0 m (+ve by stern) Relative Density = 1,025
Tabla 4-30 Draft Admidsh. 10,125 Displacement tonne 152945 Heel to Starboard degrees 0 Draft at FP m 10,125 Draft at AP m 10,125 Draft at LCF m 10,125 Trim (+ve by stern) m 0,000 WL Length m 210,222 WL Beam m 84,000 Wetted Area m^2 20076,028 Waterpl. Area m^2 16598,950 Prismatic Coeff. 0,838 Block Coeff. 0,833 Midship Area Coeff. 0,996 Waterpl. Area Coeff. 0,940 LCB from Amidsh. (+ve fwd) m 4,756 LCF from Amidsh. (+ve fwd) m -5,211 KB m 5,348 KG m 10,230 BMt m 62,693 BML m 365,319 GMt m 57,811 GML m 360,437 KMt m 68,041 KML m 370,667 Immersion (TPc) tonne/cm 170,172 MTc tonne.m 2667,235 RM at 1deg = GMt.Disp.sin(1) tonne.m
154312,372
Max deck inclination deg 0,0 Trim angle (+ve by stern) deg 0,0
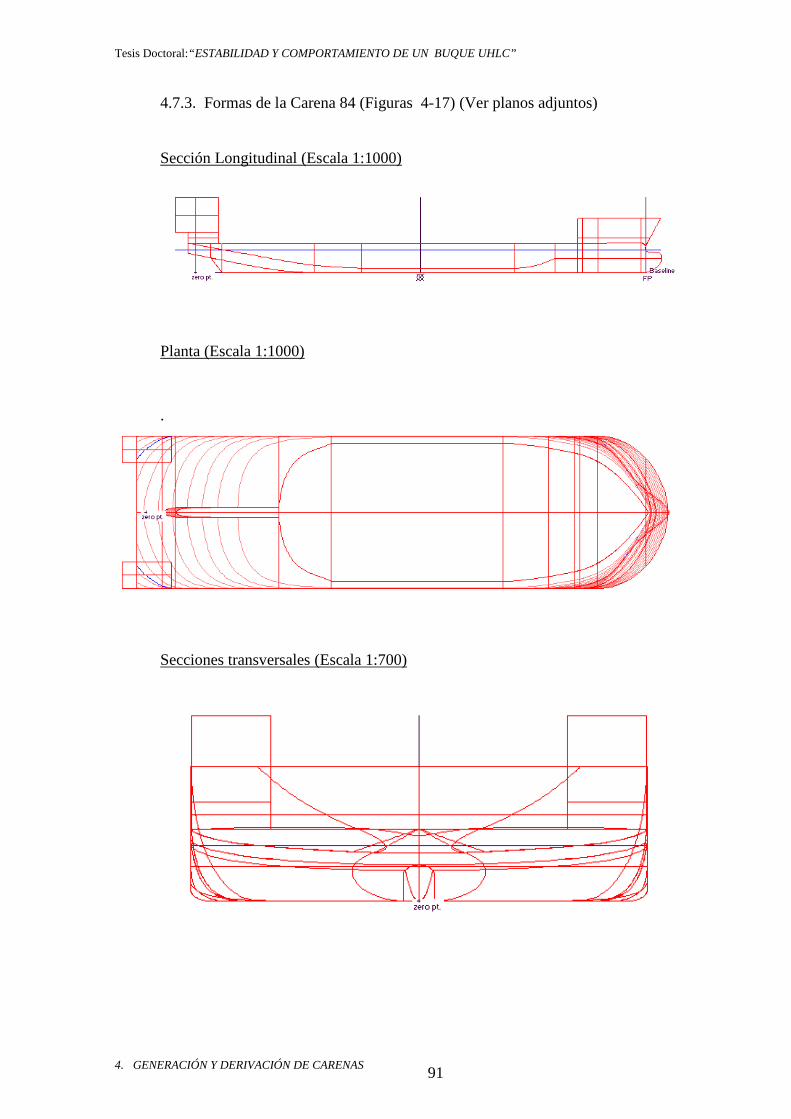
Tesis Doctoral:“ESTABILIDAD Y COMPORTAMIENTO DE UN BUQUE UHLC”
4. GENERACIÓN Y DERIVACIÓN DE CARENAS 91
4.7.3. Formas de la Carena 84 (Figuras 4-17) (Ver planos adjuntos) Sección Longitudinal (Escala 1:1000)
Planta (Escala 1:1000)
.
Secciones transversales (Escala 1:700)
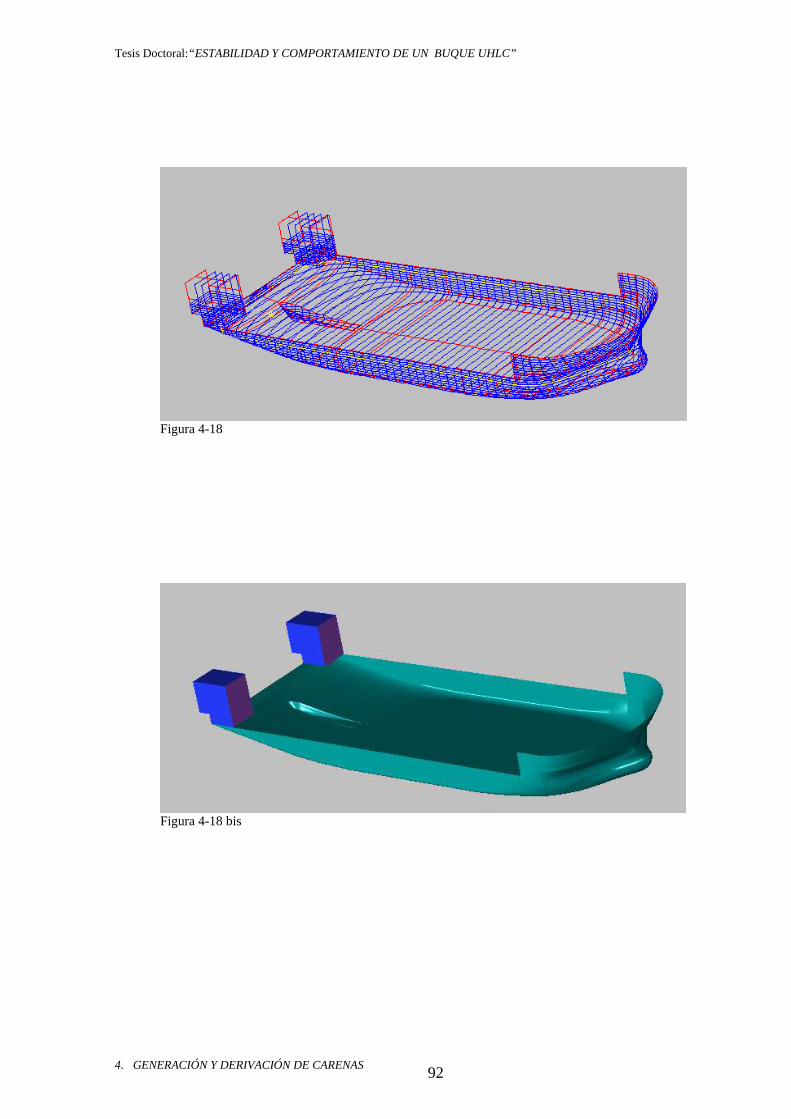
Tesis Doctoral:“ESTABILIDAD Y COMPORTAMIENTO DE UN BUQUE UHLC”
4. GENERACIÓN Y DERIVACIÓN DE CARENAS 92
Figura 4-18
Figura 4-18 bis
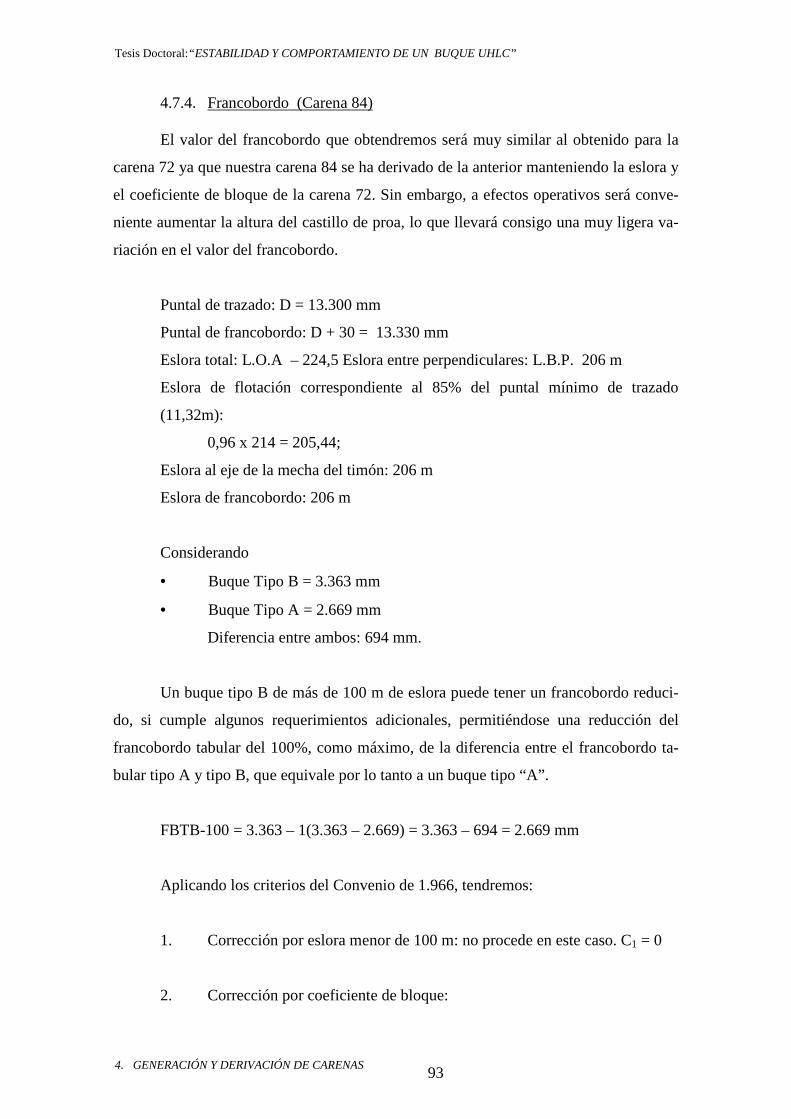
Tesis Doctoral:“ESTABILIDAD Y COMPORTAMIENTO DE UN BUQUE UHLC”
4. GENERACIÓN Y DERIVACIÓN DE CARENAS 93
4.7.4. Francobordo (Carena 84) El valor del francobordo que obtendremos será muy similar al obtenido para la
carena 72 ya que nuestra carena 84 se ha derivado de la anterior manteniendo la eslora y
el coeficiente de bloque de la carena 72. Sin embargo, a efectos operativos será conve-
niente aumentar la altura del castillo de proa, lo que llevará consigo una muy ligera va-
riación en el valor del francobordo.
Puntal de trazado: D = 13.300 mm
Puntal de francobordo: D + 30 = 13.330 mm
Eslora total: L.O.A – 224,5 Eslora entre perpendiculares: L.B.P. 206 m
Eslora de flotación correspondiente al 85% del puntal mínimo de trazado
(11,32m):
0,96 x 214 = 205,44;
Eslora al eje de la mecha del timón: 206 m
Eslora de francobordo: 206 m
Considerando
• Buque Tipo B = 3.363 mm
• Buque Tipo A = 2.669 mm
Diferencia entre ambos: 694 mm.
Un buque tipo B de más de 100 m de eslora puede tener un francobordo reduci-
do, si cumple algunos requerimientos adicionales, permitiéndose una reducción del
francobordo tabular del 100%, como máximo, de la diferencia entre el francobordo ta-
bular tipo A y tipo B, que equivale por lo tanto a un buque tipo “A”.
FBTB-100 = 3.363 – 1(3.363 – 2.669) = 3.363 – 694 = 2.669 mm
Aplicando los criterios del Convenio de 1.966, tendremos:
1. Corrección por eslora menor de 100 m: no procede en este caso. C1 = 0
2. Corrección por coeficiente de bloque:

Tesis Doctoral:“ESTABILIDAD Y COMPORTAMIENTO DE UN BUQUE UHLC”
4. GENERACIÓN Y DERIVACIÓN DE CARENAS 94
173.058
0,8716206*83*11,33*1,025
CB = =
2
0,8716 0,68C 1,1409
1,36
+= =
3. Corrección por puntal: 13,36 < L/15 (no procede) C3 = 0
L/15=14; 13,36 < 14
4. Corrección por superestructura:
La longitud de nuestra superestructura o puente es de 36,900 m de aquí que la
relación E/L = 0,1757
Para E/L = 1 corresponde: 5%
Para E/L = 2 corresponde: 10%
Por interpolación lineal obtenemos:
8,955%
C4 = (1.070*8,74)/100 = 95,818 mm
5. Corrección por arrufo: C5
El parágrafo 12 de la regla 39 expone:
“Cuando la altura real de una toldilla o un castillo en la ordenada extrema es su-
perior a la normal, se utilizará la siguiente fórmula:
' 16, 250 2, 6 40. . 0,8835
3 3 206
y Ls
L
−= = =
siendo:
s = suplemento de arrufo a deducir del defecto o añadir al exceso del arrufo;
y = diferencia entre las alturas real y normal de la superestructura en la ordenada
extrema de la línea de arrufo;
L’ = longitud media de la parte cerrada de la toldilla o castillo hasta un máximo
de 0,5 L;
L = eslora del buque, según se define en la regla 3, 1) del Anexo del Reglamen-
to.

Tesis Doctoral:“ESTABILIDAD Y COMPORTAMIENTO DE UN BUQUE UHLC”
4. GENERACIÓN Y DERIVACIÓN DE CARENAS 95
La fórmula arriba indicada da una curva parabólica tangente a la curva de arrufo
real en la cubierta de francobordo y que corta a la ordenada extrema en un punto situado
por debajo de la cubierta de la superestructura a una distancia de esta cubierta igual a la
altura normal de una superestructura.
5. Corrección por variaciones respecto a la curva de arrufo normal.
La corrección por arrufo deberá ser el defecto o el exceso de arrufo multiplicado
por
S0, 75
2.L− ; siendo S la longitud de la superestructura cerrada.
6. Altura mínima de proa
La altura de proa definida como distancia vertical en la perpendicular de proa,
entre la flotación correspondiente al francobordo de verano asignado y el asiento de
proyecto y el canto alto en el costado de la cubierta expuesta, no será inferior a los valo-
res dados por las siguientes fórmulas:
Para eslora inferior a 250 m: (Cumple) (Tabla 4-31)
Posición Ordenada
normal
reglamentaria
Factor Producto Sumas
parciales
Ordenada
real del
buque
Factor Producto Sumas
parciales
Pp 1.999,93 1 1.999,93 sPp=
5.333,11
1 0 sPp.=
600
1/6 E de Pp 888,85 3 2.666,55 3 0
1/3 E de Pp 222,21 3 666,63 3 0
Sección media 0 1 0 sPr.=
10.666,22
1 0
1/3 E de Pr 444,42 3 1.333,26 3 1.17717 sPr.=
11.335
1/6 E de Pr 1.777,70 3 5.333,10 3 4.71118
Pr 3.399,86 1 3.399,86 3.53319
Totales Sumas parciales reglamentarias = 15.999
Totales Sumas parciales reales = 9.421
Diferencia entre suma de productos sCorrección = x (0,75- )
16 2.L
Tesis Doctoral:“ESTABILIDAD Y COMPORTAMIENTO DE UN BUQUE UHLC”
4. GENERACIÓN Y DERIVACIÓN DE CARENAS 96
5
Totales Sumas parciales reglamentarias = 15.999
Totales Sumas parciales reales = 9.421
15.999 - 9.421 40C .(0,75 - ) 411 x 0,6529 = 268,34 mm
16 412
= =
Considerando FB = (FBTB-100 +C1) x C2 +C3 – C4 + C5, el francobordo total se-
rá:
FB = (FBTB-100 + C1)*C2 + C3 – C4 +C5
FB = 2.669*1,1360 – 95,818 + 268 = 3.204 mm
Tipo de francobordo20: B – 100
El calado correspondiente al francobordo de verano será
13.330 - 3.204 = 10.125 mm
El desplazamiento para el calado de francobordo de verano es de 152.945 t.
1 1.333,26 * 0,6956 = 927 2 5.333,10 * 0,6956 = 3.709 3 3.999,86 * 0,6956 = 2.782 4 Cuando la reducción del francobordo tabular es el 100% de la diferencia entre los tipos A y B, llegando a tener el mismo valor que el francobordo A. 5 La flotación final después de la inundación quedará por debajo del borde inferior de cualquier abertura a través de la cual pudiera producirse una inundación progresiva. 6 La máxima escora producida por inundación asimétrica será del orden de 15º. 7 La altura metacéntrica después de la inundación será positiva. 8 Ver cálculo del francobordo. 9 1.333,26 * 0,8835 = 1.178 10 5.333,10 * 0,8835= 4.712 11 3.999,86 *0,8835 = 3.533 12 Cuando la reducción del francobordo tabular es el 100% de la diferencia entre los tipos A y B, llegando a tener el mismo valor que el francobordo A. 13 1.333,26 * 0,8835 = 1.177,92 14 5.333,10 * 0,8835= 4711,76 15 3.999,86 *0,8835 = 3.533,8 16 Cuando la reducción del francobordo tabular es el 100% de la diferencia entre los tipos A y B, llegando a tener el mismo valor que el francobordo A. 17 1.333,26 * 0,8835 = 1.177,92 18 5.333,10 * 0,8835= 4711,76 19 3.999,86 *0,8835 = 3.533,8 20 Cuando la reducción del francobordo tabular es el 100% de la diferencia entre los tipos A y B, llegando a tener el mismo valor que el francobordo A.
Tesis Doctoral:“ESTABILIDAD Y COMPORTAMIENTO DE UN BUQUE UHLC”
4. GENERACIÓN Y DERIVACIÓN DE CARENAS 97
APENDICE CAPITULO 4. COMENTARIO ACERCA DEL VALOR DEL KGmax DE LA C/42 PARA EL ∆ EN CONDICION DE ESTABILIDAD DESPUES DE AVERIA. Para el estudio de estabilidad en avería de este buque se ha elegido una carga 40.000 tm y ZG.de 16 m. (condición límite). El caso de avería 1 (siendo el mas crítico de los cinco estudiados) presenta las siguientes características:
1. Ni en el Convenio Internacional sobre líneas de carga de Londres 1966, ni el protocolo de 1988, ni la enmiendas del 2003 al Protocolo del 1988, recogen una normativa específica para este tipo de buques.
2. Aplicando la normativa del Convenio citado, considerando al buque como B-100, el buque después de avería cumple las condiciones de estabilidad pero toma una escora a Er 9,47º y un aumento de calado por encima de la línea de franco-bordo aumentando el trimado en 1,179 m a popa. Lo que para un buque normal es asumible en hipotéticas condiciones de avería, para un HLC con la carga de 40.000 t y ZG. de16 m de la misma, sobresaliendo por ambos costados, es difí-cilmente asumible. El Convenio Inter. Sobre líneas de Carga 1966, en la regla 27 paragrafo 9) dice: “…después de avería deberá permanecer a flote en una condi-ción satisfactoria de equilibrio”.
3. ¿Sería posible el abandono de la carga en estas condiciones, para un caso límite como este?
4. No hay normativa internacional de “estabilidad después de avería” durante las maniobras transitorias de inmersión / emersión. (DNV Julio 2011)
5. Dadas las características de este buque, (más parecido a un petrolero que a un bulkcarrier), debería ser tipificado como un buque tip A y la estabilidad en avería debería ser estudiada para solo una subdivisión o compartimento en avería.
6. El KG max para el buque en avería Caso 1, es aprox. 12,25 m. La elección de este KGmax, penalizaría la capacidad del transporte de este buque en relación con la reglamentación IMO (Resolución A. 649 XII (Offshore Supply Vessel) sin aportar las condiciones de seguridad previstas en el convenio.
Insistimos lo enunciado en la pag´ 178 “La utilización de un criterio u otro de estabi-lidad para el cálculo del KGmax no influye en el método operativo de nuestra tesis. Por el contrario, la elección de uno u otro modificará solamente la capacidad de trans-porte de los buques. “
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
5. COMPARTIMENTACIÓN Y CONDICIONES DE CARGA
98
CAPÍTULO 5.- COMPARTIMENTACIÓN Y CONDICIONES DE CAR GA.
En este capítulo tratamos de optimizar la compartimentación del buque al objeto
de mejorar la estabilidad, modificando la posición del C.G. con el menor movimiento de
lastre. Para esto se han dimensionado tanques de lastre pequeños en varias alturas, lo
que nos permitirá evitar las superficies libres y por lo tanto las consiguientes correcció-
nes de estabilidad, y así mismo utilizar el mínimo lastre posible en la posición adecua-
da, lo que implicará un aumento del peso muerto disponible.
Así mismo tratamos de mejorar la seguridad en los procesos de carga y de aban-
dono de la carga aumentando el área de flotación del buque y las condiciones de trima-
do por medio de dos tanques situados a Br y Er, respectivamente, en la cubierta de carga
a popa del buque (buoyancy casing).
Finalmente, damos una idea orientativa de resistencia longitudinal de cada care-
na para condiciones de carga estándar.
5.1 DETERMINACIÓN DEL SUPUESTO INICIAL PESO EN ROSCA.
Aunque el peso en rosca definitivo y la posición de su C.G. se determinarán en
la práctica después de las pruebas de estabilidad a la terminación del buque, en esta tesis
se utilizará un peso en rosca supuesto que servirá para los cálculos que se van a llevar a
cabo. No podemos obviar que los datos que se quieren obtener son aquellos necesarios y
suficientes para el estudio de estabilidad de un heavy lift carrier en una fase preliminar.
La importancia de la determinación tanto del peso en rosca como de su centro de
gravedad, y la falta de buques de referencia, nos lleva a tratar este importante parágrafo
con criterios especiales. Se establece la división de los elementos componentes del bu-
que, de acuerdo con la clasificación por conceptos tradicional, en la bibliografia del
buque mercante:
• Elementos de la estructura.
• Elementos del equipo y de la habilitación.
• Conceptos de la maquinaria.
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
5. COMPARTIMENTACIÓN Y CONDICIONES DE CARGA
99
Se utilizarán como guía de cálculo del peso en rosca en esta etapa de investiga-
ción métodos basados en las características específicas del tipo de buque, tal como se
establece en (Bibliografia Ref. 9) y datos basados en la experiencia, de la Oficina Téc-
nica de AESA – Puerto Real.
5.1.1. Carena 42
5.1.1.1. Estructura de acero.-
Como se ha dicho en el capítulo 2, parágrafo 2.5., pág. 8, 2) la ne-
cesidad de una compartimentación versátil que nos permita posicionar el
centro de gravedad de la forma más adecuada en función de la carga, nos
lleva a una adecuada distribución de tanques (ver parágrafo 5.2., pág. 114
y siguientes), es decir, dividir longitudinalmente la zona maestra con dos
mamparos longitudinales que, junto con una división de los tanques en
tres alturas y seis divisiones transversales nos da: 3 x 3 x 6 = 54 tanques
de lastre en la zona maestra.
Para establecer el posible peso de acero del buque 42 se ha calcu-
lado el peso de acero de un moderno buque petrolero, con doble fondo y
con incorporación de acero HT en las zonas más tesionadas. Dada la poca
información publicada sobre estos buques, se ha utilizado como método
de cálculo el propuesto en el “Proyecto Básico del Buque Mercante” (Bi-
bliografia, Ref 9)
El porcentaje de acero HT respecto al peso total del acero según
los datos publicados tienen un valor medio expresado por la siguiente
fórmula:
PHT = 50 + 0,124 WPM / 1000 – 2,02 x 106 / WPM; (5-1);
PHT = el valor medio del porcentaje de acero AH; WPM = peso muerto
El peso total del acero de estos buques, incluyendo superestructu-
ras y casetas, con extensión estándar de acero HT y CB normal, se puede
estimar por la siguiente fórmula:
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
5. COMPARTIMENTACIÓN Y CONDICIONES DE CARGA
100
WST = 0,0658 LPP1, 7 x B0,102 x D0,886 ; (5-2).
WST = peso de acero laminado (casco + superestructura).
Sin embargo, un buque HLC es diferente a un petrolero con doble
fondo y doble casco en cuanto que el número de tanques es mucho menor
y por lo tanto el peso de la cantidad de acero será también menor. Así
mismo, la fórmula a aplicar ha sido determinada por regresión lineal en-
tre petroleros con D.F y doble casco, con peso muerto entre 45.000 y
300.000 toneladas. Las desviaciones máximas de los pesos de los buques
analizados al aplicar esta fórmula varían entre – 4% y + 18%. Los buques
con peso muerto comprendido entre 100.000 y 200.000 tienen un mam-
paro longitudinal, y los mayores, dos mamparos longitudinales.
Dado que los mamparos transversales, longitudinales y horizonta-
les, así como también el forro, fondo y D.F. aportan básicamente una
gran parte del peso del casco de acero (se considera aparte las superes-
tructuras), se evaluará la diferencia de estos elementos del buque C42 y
el petrolero considerado, valorando proporcionalmente las diferencias
existentes. Partiendo del peso del petrolero obtenido debe compensarse
sus limitaciones al objeto de aproximar su peso en acero al del buque en
estudio.
0.0658 x 206.51.7 x 420.012 x 13.300.886 = 5872.20
1. Aceptando un valor de incremento del 10% asumido por el autor
dado por la incertidumbre entre extremos de la muestra (45.000 a
300.000 t oscila entre – 4% y + 18%), obtendríamos 6.460,3 t.
a. Dado que el buque tiene dos mamparos longitudinales
más, dos transversales más, y un mamparo horizontal más, y subdivi-
diendo buques en elementos longitudinales y transversales (2 forros lon-
gitudinales + 2 mamparos longitudinales + 1 fondo + 1 D.F. + 1 mampa-
ro horizontal + 1 cubierta + 6 mamparos transversales + 2 mamparos
transversales de cierre proa popa), la relación entre ambos será 16/11
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
5. COMPARTIMENTACIÓN Y CONDICIONES DE CARGA
101
mayor en el buque, es decir, 2.936 toneladas, obteniendo un total de
9.396 tm.
b. El aumento del castillo de proa desde la cuaderna 103 a la
156 en 10 m de altura para permitir la inmersión con dos mamparos lon-
gitudinales y dividir este espacio en dos tanques Br y Er y un tanque de
combustible: 1.500 t.
c. Reforzado de la cubierta principal para incrementar el mó-
dulo de resistencia y soportar presiones específicas de hasta 27,5 t/m2:
250 t.
d. Subdivisión de los piques de proa y popa con 2 mamparos
longitudinales y horizontales: 80 t.
e. Flotadores Br y Er (alargados) 750 toneladas cada uno:
1.500 t.
f. Superestructura: 750 t.
Peso total: 9.396 + 1500 + 250 + 1.500 +750 = 13.396 t
El peso de la estructura es de 13.396 toneladas de acero.
5.1.1.2. Equipos y Habilitación.
Tanto el equipo como la habilitación de este buque tienen
un estándar alto en relación con el de un buque mercante conven-
cional.
WOA = Ke x LPP x B = 0,45 x 206 x 42 = 3.893 tm ; Ke = 0,45;
(5-3); WOA = Peso del equipo y habilitación.
Corrección por estándar 10%: 369 tm
Peso total Equipos y habilitación: 4.262 tm
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
5. COMPARTIMENTACIÓN Y CONDICIONES DE CARGA
102
5.1.1.3. Maquinaria.
Dividimos en:
• Motor propulsor y equipo
WME = 5 + 4(MCO/N) 0,925 = 5 + 4(17.160/120,3)0,925 =
397,11 tm
siendo:
MCO: Potencia máxima continua: 17.160 BHP
Nº de revoluciones: 120,3
• Resto de maquinaria propulsora
WRP = Km x MCO0,7 = 580 tm
KM = 0,63
Incremento equipo de maniobra con hélice a proa: 200 tm
Total: 780 tm
• Otros elementos en cámara de máquinas
WQR = 0,03 x VMQ = 52,57 tm
VMQ=Volumen cámara de máquinas= 1.752 m3
Incremento equipo e instalación de distribución de las-
trado: 400 tm
Total: 452,57 tm
• Línea de ejes fuera de cámara de máquinas.
WQF= 92–0,0076 x MCO+2,8 x 10-7 x MCO2 = 44,03 tm
Peso total Maquinaria 1.673,71 tm
RESUMEN
• Elementos de la estructura ……………………. 13.276 tm
• Elementos del equipo y de la habilitación…….. 4.262 tm
• Conceptos de la maquinaria ……………….. 1.673 tm
_____________
19.332 tm
Peso en rosca del buque: 19.332 t
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
5. COMPARTIMENTACIÓN Y CONDICIONES DE CARGA
103
5.1.1.4. Determinación de la posición del centro de gravedad Carena 42
Dada la poca información publicada sobre estos buques se ha
utilizado como método de cálculo el propuesto en (Bibliografia
Ref. 9) y dada la mayor cantidad de acero bajaremos ligeramente
el C.G. en cuanto a los espesores del fondo y D.F. aumentan lige-
ramente respecto a los del buque tipo.
• C.G. de la estructura de acero (sin torres de flotación y superes-
tructura):
Ordenada:
KGWST = (48 + 0,15 (0,85 – CBD ) LPP2 / D) DA / D ;
siendo:
DA = Puntal en m corregido por arrufo
Si existe bulbo = - 0,45 D
CBD – Coef. Bloque = 0,83 (Calado de francobordo de verano)
C.G. = 0,4872 x 13,30 = 6,48 m (aprox.)
Si se considera una diferencia del 4 % obtendremos:
6,48 – (0.04 x 6,48) = 6,48 – 0,259 = 6,21 m
Abcisa:
½ (206,5 + 3,38 ) = ½ ( 209,88) = 104,94 m
• C.G. Equipos y Habilitación
A partir de la posición de los espacios del plano de disposición
general se ha considerado la ordenada: 7,5 m
Abcisa: 131 m
• Superestructura
Considerando la posición a proa de la superestructura
KGWOA = D + 1,25 + 0,01 (Lpp – 125) = 15,36 m
Se ha aumentado 7,5 m teniendo en cuenta los tanques de lastre
del castillo de proa, obteniendo 23 m aprox.
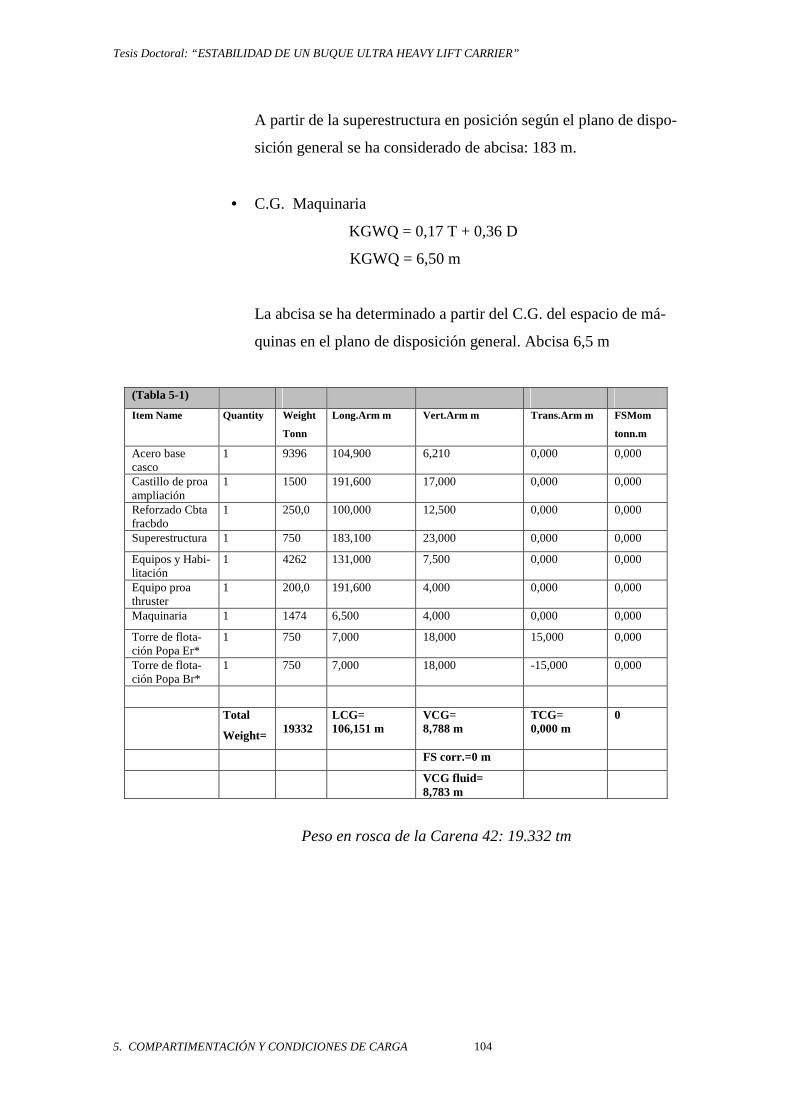
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
5. COMPARTIMENTACIÓN Y CONDICIONES DE CARGA
104
A partir de la superestructura en posición según el plano de dispo-
sición general se ha considerado de abcisa: 183 m.
• C.G. Maquinaria
KGWQ = 0,17 T + 0,36 D
KGWQ = 6,50 m
La abcisa se ha determinado a partir del C.G. del espacio de má-
quinas en el plano de disposición general. Abcisa 6,5 m
(Tabla 5-1)
Item Name Quantity Weight
Tonn
Long.Arm m Vert.Arm m Trans.Arm m FSMom
tonn.m
Acero base casco
1 9396 104,900 6,210 0,000 0,000
Castillo de proa ampliación
1 1500 191,600 17,000 0,000 0,000
Reforzado Cbta fracbdo
1 250,0 100,000 12,500 0,000 0,000
Superestructura 1 750 183,100 23,000 0,000 0,000
Equipos y Habi-litación
1 4262 131,000 7,500 0,000 0,000
Equipo proa thruster
1 200,0 191,600 4,000 0,000 0,000
Maquinaria 1 1474 6,500 4,000 0,000 0,000
Torre de flota-ción Popa Er*
1 750 7,000 18,000 15,000 0,000
Torre de flota-ción Popa Br*
1 750 7,000 18,000 -15,000 0,000
Total
Weight=
19332
LCG= 106,151 m
VCG= 8,788 m
TCG= 0,000 m
0
FS corr.=0 m
VCG fluid= 8,783 m
Peso en rosca de la Carena 42: 19.332 tm
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
5. COMPARTIMENTACIÓN Y CONDICIONES DE CARGA
105
5.1.2 Carena 63
El método operativo seguido es igual al de la Carena 42 y por tan-
to para la Carena 63 sólo se transcribirán los datos obtenidos. Tomando
como punto de partida los valores calculados para la Carena 42 se au-
mentarán por los correspondientes a la transformación.
5.1.2.1. Estructura de Acero
Se partirá de los datos determinados en la Carena 42 y conociendo el
nuevo DWT se determinará aproximadamente el peso en rosca.
El peso de la estructura de acero determinado para la carena 42 ha si-
do de 13.396 toneladas de acero. El peso del acero incorporado al buque
en la carena 63 ha sido aproximadamente de 8.750 t distribuido de la
forma siguiente:
Nuevos tanques…………………….. ………7.000 t
Nuevo reforzado transversal de tanques…… 1.000 t
Nuevo reforzado de la Cbta de francobordo… 500 t
Mayor peso del castillo de proa……………… 250 t
El peso del acero es 22.146 t
5.1.2.2. Equipos y habilitación
Se considera que la habilitación y equipos no sufre variación res-
pecto a los valores determinados para la carena ampliando únicamente el
equipo de lastre y tubería en 1.474 t.
Peso total Equipos y habilitación: 4.262 + 500 = 4.762 t
5.1.2.3. Maquinaria: Nuevos Equipos añadidos.
Se parte de los datos obtenidos para la carena 42 del peso total de
la maquinaria y el equipo de Thruster y que ha sido de 1.873,71 t.
Se incorpora aquella maquinaria de la que tenemos información o
bien que se ha determinado para mantener las condiciones dinámicas del
buque. En este caso se ha considerado la información de la modificación
del buque BLUE MARLIN publicada por su armador.
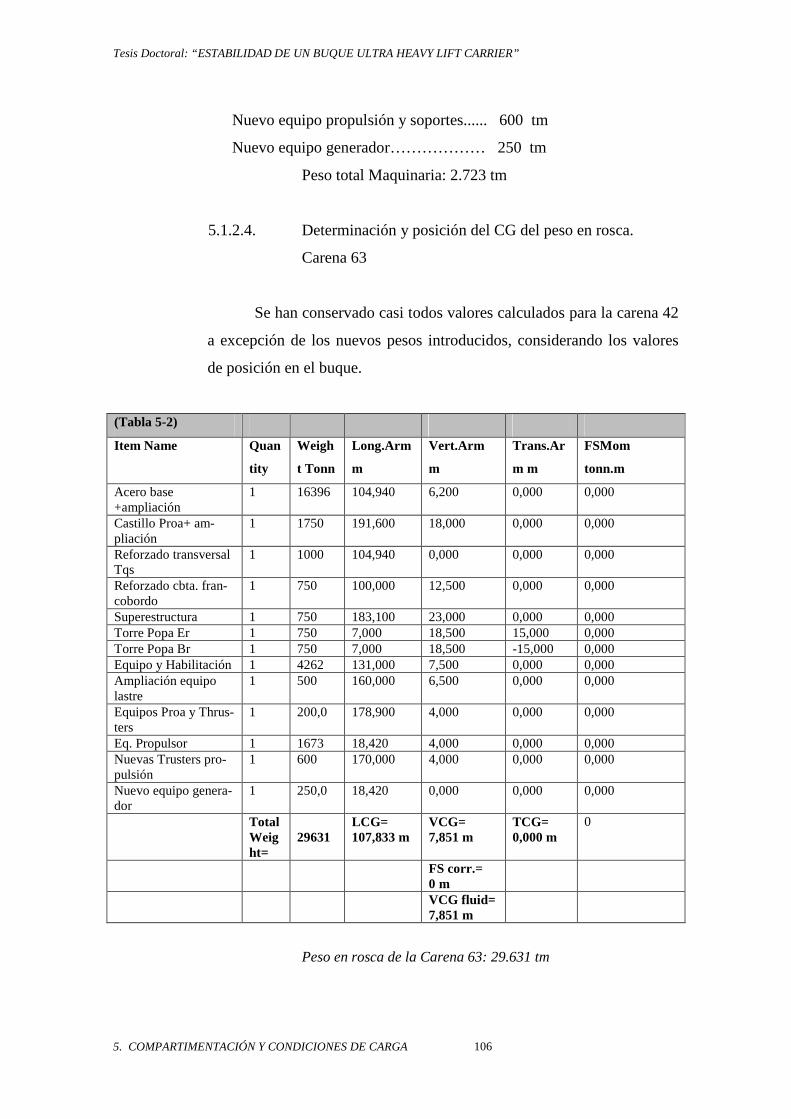
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
5. COMPARTIMENTACIÓN Y CONDICIONES DE CARGA
106
Nuevo equipo propulsión y soportes...... 600 tm
Nuevo equipo generador……………… 250 tm
Peso total Maquinaria: 2.723 tm
5.1.2.4. Determinación y posición del CG del peso en rosca.
Carena 63
Se han conservado casi todos valores calculados para la carena 42
a excepción de los nuevos pesos introducidos, considerando los valores
de posición en el buque.
(Tabla 5-2)
Item Name Quan
tity
Weigh
t Tonn
Long.Arm
m
Vert.Arm
m
Trans.Ar
m m
FSMom
tonn.m
Acero base +ampliación
1 16396 104,940 6,200 0,000 0,000
Castillo Proa+ am-pliación
1 1750 191,600 18,000 0,000 0,000
Reforzado transversal Tqs
1 1000 104,940 0,000 0,000 0,000
Reforzado cbta. fran-cobordo
1 750 100,000 12,500 0,000 0,000
Superestructura 1 750 183,100 23,000 0,000 0,000 Torre Popa Er 1 750 7,000 18,500 15,000 0,000 Torre Popa Br 1 750 7,000 18,500 -15,000 0,000 Equipo y Habilitación 1 4262 131,000 7,500 0,000 0,000 Ampliación equipo lastre
1 500 160,000 6,500 0,000 0,000
Equipos Proa y Thrus-ters
1 200,0 178,900 4,000 0,000 0,000
Eq. Propulsor 1 1673 18,420 4,000 0,000 0,000 Nuevas Trusters pro-pulsión
1 600 170,000 4,000 0,000 0,000
Nuevo equipo genera-dor
1 250,0 18,420 0,000 0,000 0,000
Total Weight=
29631
LCG= 107,833 m
VCG= 7,851 m
TCG= 0,000 m
0
FS corr.= 0 m
VCG fluid= 7,851 m
Peso en rosca de la Carena 63: 29.631 tm
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
5. COMPARTIMENTACIÓN Y CONDICIONES DE CARGA
107
5.1.3. Carena 72
Al igual a lo visto anteriormente nos limitaremos a transcribir los
datos obtenidos correspondientes a los valores añadidos. Se han conside-
rado que las fórmulas aplicadas anteriormente fundamentadas en el cono-
cimiento de la potencia necesaria, implican en general condiciones hi-
drodinámicas y carenas cuya relación L/B sean válidas con la nuestra en
estudio.
5.1.3.1. Estructura de Acero
Partiendo de los datos determinados en la Carena 63 se
añadirán los valores incrementales determinando aproximada-
mente el peso en rosca.
El peso del acero de la carena 63 fue de 22.146 t a partir
de los valores asignados a este buque.
El peso del acero incorporado al buque ha sido aproximada-
mente de 3.800 t, distribuido de la forma siguiente:
Mayor volumen de tanques…………………….. 3.000 t
Nuevo reforzado de la Cbta de francobordo…… 500 t
Mayor peso del castillo de proa……………….. 300 t
Peso total de Acero 25.946 t
5.1.3.2. Equipos y habilitación
Se considera, al igual que en la carena 63, que la habilita-
ción no sufre variación y que los valores determinados para la ca-
rena 42 nos sirven para el cálculo.
El equipo de lastre y tubería: 1.474 t
Peso total Equipos y habilitación: 4.262 + 500= 4.762 t
5.1.3.3. Maquinaria
Partiendo del valor de la maquinaria determinada para la carena 63.
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
5. COMPARTIMENTACIÓN Y CONDICIONES DE CARGA
108
• Motor propulsor y equipo
Consideraremos un motor diésel de dos tiempos:
WME = 5 + 4(MCO/N)0,925 = 5 + 4(21.809/112)0,925 = 529 t
siendo:
MCO: Potencia máxima continua: 21.809 BHP
Nº de revoluciones: 112
• Resto de maquinaria propulsora
WRP = Km x MCO0,7 = 686 t
KM = 0,63
Incremento equipo de maniobra con hélice a proa: 400 t
Total: 1.086 t
• Otros elementos en cámara de máquinas
WQR = 0,03 x VMQ = 52,57 t
VMQ= Volumen cámara de máquinas= 1.752 m3
Incremento equipo e instalación de distribución de lastra-
do: 400 t
Total: 452,57 t
• Línea de ejes fuera de cámara de máquinas.
WQF= 92–0,0076 x MCO+2,8 x 10-7 x MCO2= 59,42 t
Peso total Maquinaria 2.126 t
RESUMEN
• Elementos de la estructura ……………………. 25.946 t
• Elementos del equipo y de la habilitación…….. 4.762 t
• Conceptos de la maquinaria propulsora………. 2.126 t
• Equipos Proa /Popa Thruster……………………. 200 t
• Nuevo equipo generador………………………… 250 t
_____________
33.284
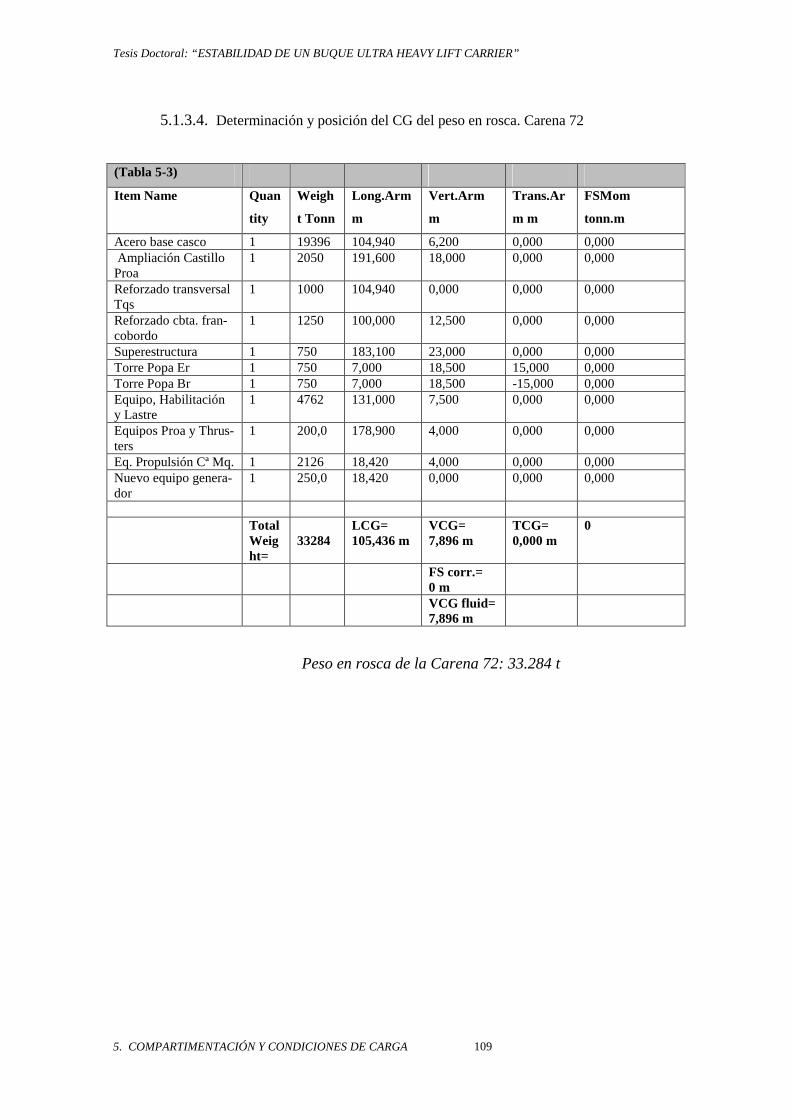
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
5. COMPARTIMENTACIÓN Y CONDICIONES DE CARGA
109
5.1.3.4. Determinación y posición del CG del peso en rosca. Carena 72
(Tabla 5-3)
Item Name Quan
tity
Weigh
t Tonn
Long.Arm
m
Vert.Arm
m
Trans.Ar
m m
FSMom
tonn.m
Acero base casco 1 19396 104,940 6,200 0,000 0,000 Ampliación Castillo Proa
1 2050 191,600 18,000 0,000 0,000
Reforzado transversal Tqs
1 1000 104,940 0,000 0,000 0,000
Reforzado cbta. fran-cobordo
1 1250 100,000 12,500 0,000 0,000
Superestructura 1 750 183,100 23,000 0,000 0,000 Torre Popa Er 1 750 7,000 18,500 15,000 0,000 Torre Popa Br 1 750 7,000 18,500 -15,000 0,000 Equipo, Habilitación y Lastre
1 4762 131,000 7,500 0,000 0,000
Equipos Proa y Thrus-ters
1 200,0 178,900 4,000 0,000 0,000
Eq. Propulsión Cª Mq. 1 2126 18,420 4,000 0,000 0,000 Nuevo equipo genera-dor
1 250,0 18,420 0,000 0,000 0,000
Total
Weight=
33284
LCG= 105,436 m
VCG= 7,896 m
TCG= 0,000 m
0
FS corr.= 0 m
VCG fluid= 7,896 m
Peso en rosca de la Carena 72: 33.284 t
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
5. COMPARTIMENTACIÓN Y CONDICIONES DE CARGA
110
5.1.4. Carena 84
Aunque el método seguido para determinar el peso en rosca es
igual al presentado para las carenas anteriores, la extrapolación en el caso
de los equipos y maquinaria se ha tratado con particular cuidado en cuan-
to a la dimensión de la manga y las condiciones hidrodinámicas que
cambian sustancialmente y por tanto se ha considerado que las fórmulas
aplicadas anteriormente fundamentadas en el conocimiento de la potencia
necesaria, implican en general condiciones hidrodinámicas de carenas
cuya relación L/B se alejan de la nuestra en estudio.
Para el acero ha sido utilizada una base de datos de oficina técnica
que nos lleva a valores de peso altos.
Se ha partido de la carena 72 y se ha analizado el aumento de ace-
ro en la carena 84. En los casos anteriores se tenía alguna información
(básicamente, informe de suministradores) que ha permitido aproximarse
con seguridad, mientras que en este caso se parte de hipótesis y de datos
de oficinas técnicas, extrapolando los mismos con cautela. No obstante,
pequeñas variaciones en el peso en rosca no influirán excesivamente en
los cálculos de estabilidad.
5.1.4.1. Estructura de Acero
Partiremos de los datos determinados en la Carena 72 y
conociendo el nuevo DWT determinaremos aproximadamente el
peso en rosca.
El peso del acero de la Carena 72 es de 25.946 tm y se ha
incorporado al buque en relación con la carena 72 aproximada-
mente 10.214 tm, distribuidas de la forma siguiente:
Acero base casco ……………. 8.873 t
Ampliación Castillo Proa…………500 t
Reforzado transversal Tqs………...541 t
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
5. COMPARTIMENTACIÓN Y CONDICIONES DE CARGA
111
Superestructura……………………300 t
_____________
Total…………………… 10.214 tm
Lo que supone un peso total de acero de 32.360 t
5.1.4.2. Equipos y Habilitación
Se considera al igual que en la carena 63 que la habilita-
ción no sufre variación y que los valores determinados para la ca-
rena 42 nos sirven para el cálculo. Sin embargo, aumenta en 500 t
el equipo de lastre.
Peso total Equipos y habilitación: 4.762 + 500 = 5.262 tm
5.1.4.3. Maquinaria
Determinar la potencia necesaria para la velocidad operativa
de un buque de estas características no es objeto del presente estudio.
Los valores de peso asignados al propulsor principal y su equipo cu-
bren una amplia gama de potencias según sean motores de dos tiem-
pos sobrealimentados o motores semirápidos con reductoras.
• Motor propulsor y equipo
Consideraremos un motor diésel de dos tiempos:
WME = 5 + 4(MCO/N)0,925 = 5 + 4(28.000/112)0,925 =
666 t
siendo:
MCO: Potencia máxima continua: 28.000 BHP
Nº de revoluciones: 112
• Resto de maquinaria propulsora
WRP = Km x MCO0,7 = 686 t
KM = 0,63
Incremento equipo de maniobra con hélice a proa: 400 t.
Total: 1.086 t
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
5. COMPARTIMENTACIÓN Y CONDICIONES DE CARGA
112
• Otros elementos en cámara de máquinas
WQR = 0,03 x VMQ = 52,57 t
VMQ = Volumen cámara de máquinas = 1.752 m3
• Equipo de instalación de distribución de lastrado
Total: 3.702,57 t
• Línea de ejes fuera de cámara de máquinas.
WQF=92 –0,0076 x MCO + 2,8 x 10-7 x MCO2= 59,42 t
Peso total Maquinaria 5.513,4 t
RESUMEN
• Elementos de la estructura ……………………. 32.360 t
• Elementos de habilitación y equipos………… 5.262 t
• Conceptos de la maquinaria propulsora……….. 5.513 t
• Equipos Proa /Popa Thruster……………………. 200 t
• Equipo Generador……………………………….. 250 t
_____________
43.585 t
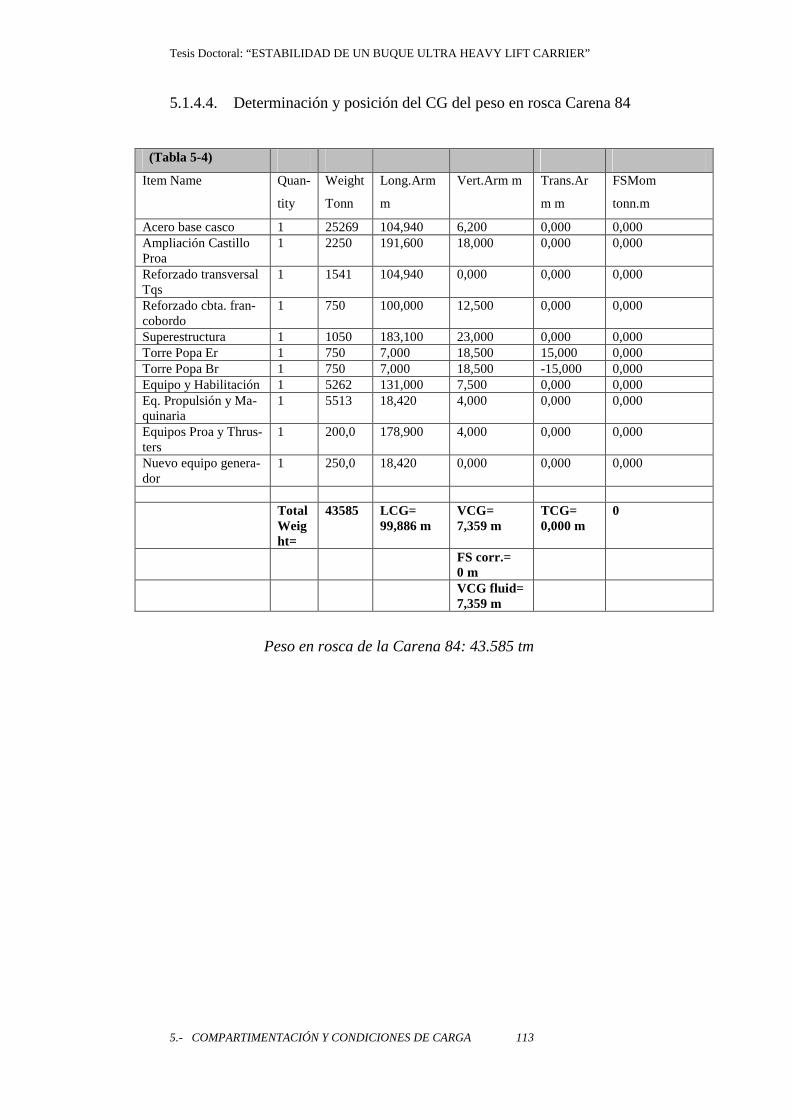
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
5.- COMPARTIMENTACIÓN Y CONDICIONES DE CARGA 113
5.1.4.4. Determinación y posición del CG del peso en rosca Carena 84
(Tabla 5-4)
Item Name Quan-
tity
Weight
Tonn
Long.Arm
m
Vert.Arm m Trans.Ar
m m
FSMom
tonn.m
Acero base casco 1 25269 104,940 6,200 0,000 0,000 Ampliación Castillo Proa
1 2250 191,600 18,000 0,000 0,000
Reforzado transversal Tqs
1 1541 104,940 0,000 0,000 0,000
Reforzado cbta. fran-cobordo
1 750 100,000 12,500 0,000 0,000
Superestructura 1 1050 183,100 23,000 0,000 0,000 Torre Popa Er 1 750 7,000 18,500 15,000 0,000 Torre Popa Br 1 750 7,000 18,500 -15,000 0,000 Equipo y Habilitación 1 5262 131,000 7,500 0,000 0,000 Eq. Propulsión y Ma-quinaria
1 5513 18,420 4,000 0,000 0,000
Equipos Proa y Thrus-ters
1 200,0 178,900 4,000 0,000 0,000
Nuevo equipo genera-dor
1 250,0 18,420 0,000 0,000 0,000
Total
Weight=
43585 LCG= 99,886 m
VCG= 7,359 m
TCG= 0,000 m
0
FS corr.= 0 m
VCG fluid= 7,359 m
Peso en rosca de la Carena 84: 43.585 tm
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
5.- COMPARTIMENTACIÓN Y CONDICIONES DE CARGA 114
5.2 CRITERIOS DE COMPARTIMENTACIÓN
La distribución de los tanques de lastre se ha mantenido al igual que la
Carena 42 a tres alturas diferentes para los tres buques. Sin embargo, a partir de
la carena 42, al ser los buques de mayor manga, se ha añadido por ambas ban-
das una nueva fila de tanques. Esto ha permitido a la hora de lastrar estos bu-
ques posicionar de la mejor forma el lastre necesario, tanto en posición como
en cantidad, permitiendo subir o bajar el centro de gravedad en determinadas
condiciones y, en definitiva, mejorar la estabilidad y contrarrestar los esfuerzos
de flexión debidos a la carga.
Se han diseñado los tanques de lastre en todas las carenas lo suficien-
temente pequeños para llenarlos por encima del 98%, evitando los efectos de
las superficies libres que afectarían negativamente a la estabilidad del buque.
Se han adoptado los criterios de seguridad de “doble fondo” y “doble
cubierta”, es decir, tanques por encima del fondo y por debajo de la cubierta de
cierre.
Una manga de valor alto implica estabilidad alta y, en definitiva, altos
pares adrizantes. Sin embargo, éstos deberían ser lo suficiente bajos para evitar
aceleraciones bruscas de escora que puedan afectar a la carga con C.G. bajo, es
decir, con un GM alto. Tanto para cargas muy pesadas como para cargas lige-
ras es importante controlar el centro de gravedad en este tipo de buques y sobre
todo con mala mar. Trataremos esto en el Capítulo 6.
Para el transporte de pequeños pesos y con mares de fuerza elevada es
importante reducir las aceleraciones de escora, para lo cual el lastre de los tan-
ques altos disminuye el GM0 haciendo el buque menos “duro”. De la misma
forma cuando toma cargas pesadas con centro de gravedad alto es posible me-
jorar la estabilidad del buque lastrando el doble fondo y en definitiva bajando
el centro de gravedad del buque.
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
5.- COMPARTIMENTACIÓN Y CONDICIONES DE CARGA 115
Con una distribución de lastre tal como la enunciada se requiere un
equipo de lastre potente y sobre todo fiable, al objeto de lastrar y deslastrar
rápidamente y de forma segura ya que pueden darse determinadas situaciones
en donde el tiempo sea limitado y decisivo. Por estos motivos, se deberá elegir
con rigor técnico el equipo de lastre a utilizar para los buques HLC. Esto se ha
tenido en cuenta para determinar el peso en rosca, (sistemas básicos redundan-
tes).
Durante la maniobra de inmersión y debido a la disposición de los 31
tanques de doble fondo se pueden inundar por acción de la gravedad lo que
mejora el tiempo de lastrado. Estas características se han conservado en las
cuatro carenas que estamos tratando.
Durante las maniobras de inmersión y emersión la popa del buque que-
da completamente sumergida lo que hace necesario crear un área de flotación
en la popa que permita crear el empuje de flotación necesario para trimar el
buque (ver fórmula (6-22) página 244).
Por otra parte, para que el buque pueda sumergirse con un trimado ade-
cuado hasta un calado aproximado de 20 m es necesario añadir unos tanques de
lastre situados en la popa del buque. La necesidad de una cubierta sin interfe-
rencias laterales que entorpezcan la recepción de la carga (cuya dimensión po-
dría superar a veces la manga del HLC) debe compaginarse con las exigencias
de flotabilidad, estabilidad y control del asiento durante los procesos de inmer-
sión y emersión de este tipo de buque. Esto se ha procurado resolver dispo-
niendo unas torres de lastre a popa – que llamaremos “torres de flotación”
(buoyancy casing)-, que alojen los tanques de lastre para el trimado del buque y
que proporcionen el área de flotación e inercia y el margen de empuje necesa-
rio mientras la cubierta de carga se encuentra sumergida. Dichas torres de tri-
mado se han dispuesto en los extremos de la popa del buque, a babor y estribor
de la misma, situadas simétricamente respecto a la crujía del buque, y con idén-
tica área de sección (véanse los planos adjuntos de compartimentación).
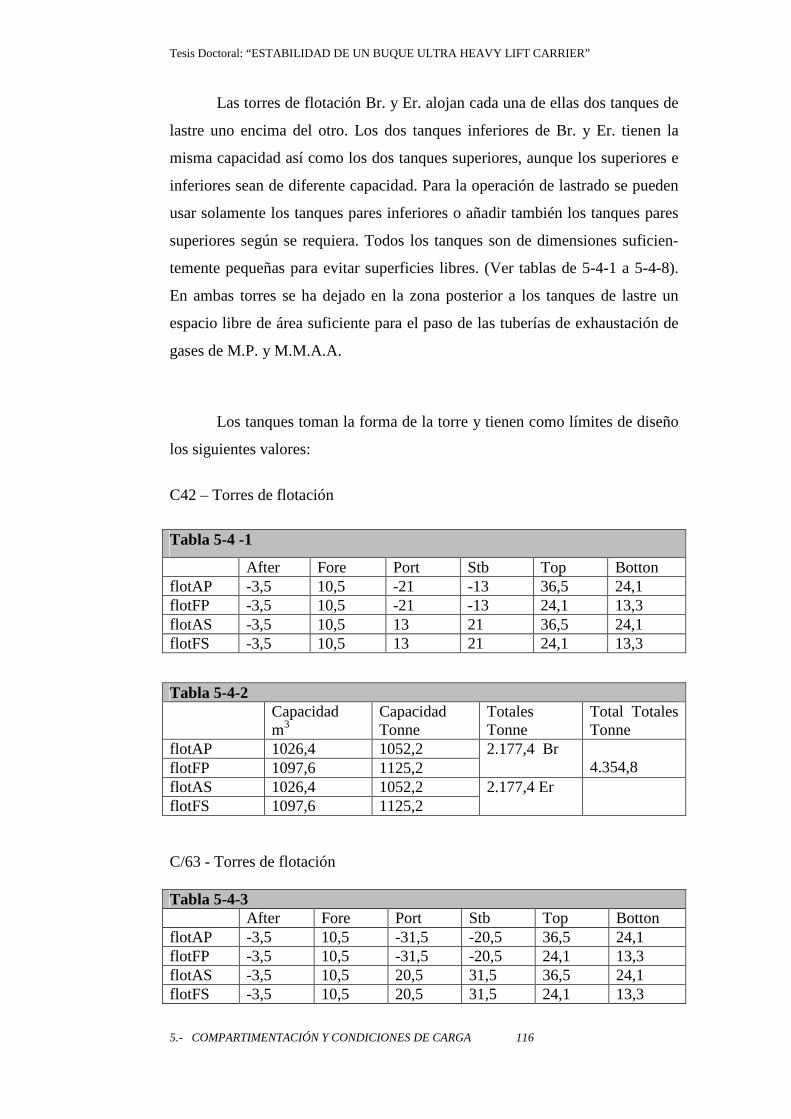
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
5.- COMPARTIMENTACIÓN Y CONDICIONES DE CARGA 116
Las torres de flotación Br. y Er. alojan cada una de ellas dos tanques de
lastre uno encima del otro. Los dos tanques inferiores de Br. y Er. tienen la
misma capacidad así como los dos tanques superiores, aunque los superiores e
inferiores sean de diferente capacidad. Para la operación de lastrado se pueden
usar solamente los tanques pares inferiores o añadir también los tanques pares
superiores según se requiera. Todos los tanques son de dimensiones suficien-
temente pequeñas para evitar superficies libres. (Ver tablas de 5-4-1 a 5-4-8).
En ambas torres se ha dejado en la zona posterior a los tanques de lastre un
espacio libre de área suficiente para el paso de las tuberías de exhaustación de
gases de M.P. y M.M.A.A.
Los tanques toman la forma de la torre y tienen como límites de diseño
los siguientes valores:
C42 – Torres de flotación
C/63 - Torres de flotación Tabla 5-4-3 After Fore Port Stb Top Botton flotAP -3,5 10,5 -31,5 -20,5 36,5 24,1 flotFP -3,5 10,5 -31,5 -20,5 24,1 13,3 flotAS -3,5 10,5 20,5 31,5 36,5 24,1 flotFS -3,5 10,5 20,5 31,5 24,1 13,3
Tabla 5-4 -1
After Fore Port Stb Top Botton flotAP -3,5 10,5 -21 -13 36,5 24,1 flotFP -3,5 10,5 -21 -13 24,1 13,3 flotAS -3,5 10,5 13 21 36,5 24,1 flotFS -3,5 10,5 13 21 24,1 13,3
Tabla 5-4-2 Capacidad
m3 Capacidad Tonne
Totales Tonne
Total Totales Tonne
flotAP 1026,4 1052,2 2.177,4 Br 4.354,8 flotFP 1097,6 1125,2
flotAS 1026,4 1052,2 2.177,4 Er flotFS 1097,6 1125,2
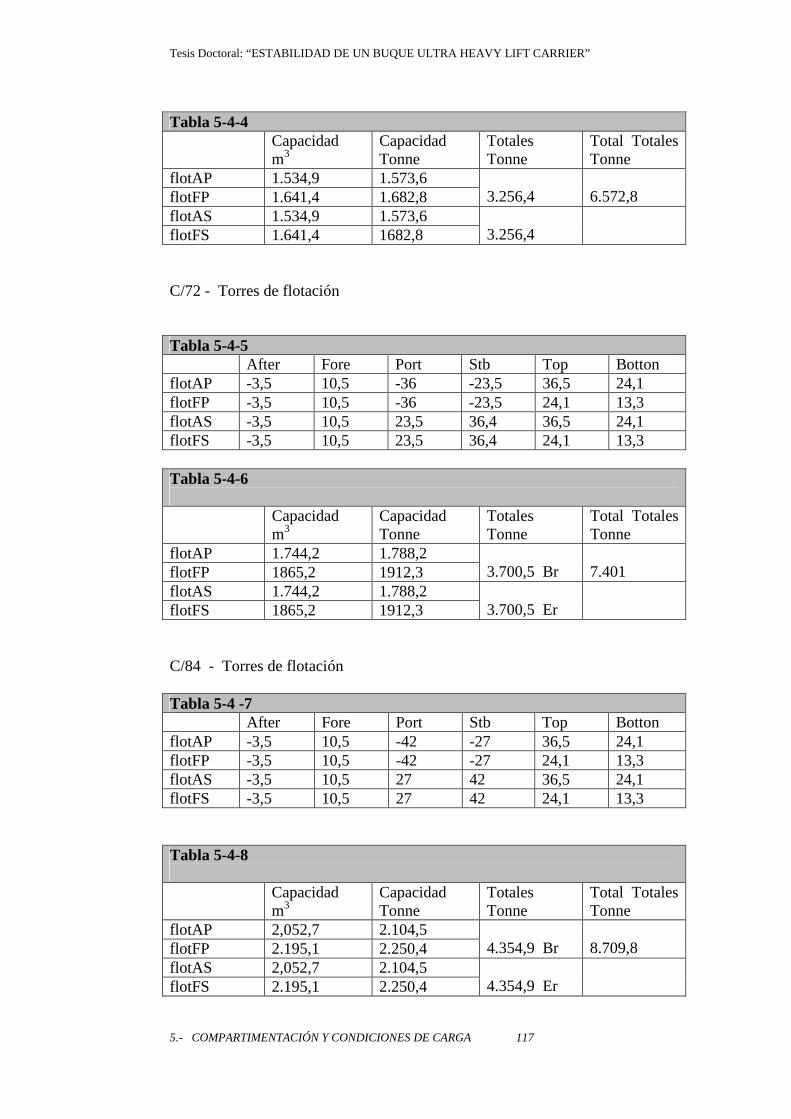
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
5.- COMPARTIMENTACIÓN Y CONDICIONES DE CARGA 117
Tabla 5-4-4 Capacidad
m3 Capacidad Tonne
Totales Tonne
Total Totales Tonne
flotAP 1.534,9 1.573,6 3.256,4
6.572,8 flotFP 1.641,4 1.682,8
flotAS 1.534,9 1.573,6 3.256,4
flotFS 1.641,4 1682,8 C/72 - Torres de flotación
Tabla 5-4-5 After Fore Port Stb Top Botton flotAP -3,5 10,5 -36 -23,5 36,5 24,1 flotFP -3,5 10,5 -36 -23,5 24,1 13,3 flotAS -3,5 10,5 23,5 36,4 36,5 24,1 flotFS -3,5 10,5 23,5 36,4 24,1 13,3 Tabla 5-4-6 Capacidad
m3 Capacidad Tonne
Totales Tonne
Total Totales Tonne
flotAP 1.744,2 1.788,2 3.700,5 Br
7.401 flotFP 1865,2 1912,3
flotAS 1.744,2 1.788,2 3.700,5 Er
flotFS 1865,2 1912,3 C/84 - Torres de flotación Tabla 5-4 -7 After Fore Port Stb Top Botton flotAP -3,5 10,5 -42 -27 36,5 24,1 flotFP -3,5 10,5 -42 -27 24,1 13,3 flotAS -3,5 10,5 27 42 36,5 24,1 flotFS -3,5 10,5 27 42 24,1 13,3 Tabla 5-4-8 Capacidad
m3 Capacidad Tonne
Totales Tonne
Total Totales Tonne
flotAP 2,052,7 2.104,5 4.354,9 Br
8.709,8 flotFP 2.195,1 2.250,4
flotAS 2,052,7 2.104,5 4.354,9 Er
flotFS 2.195,1 2.250,4
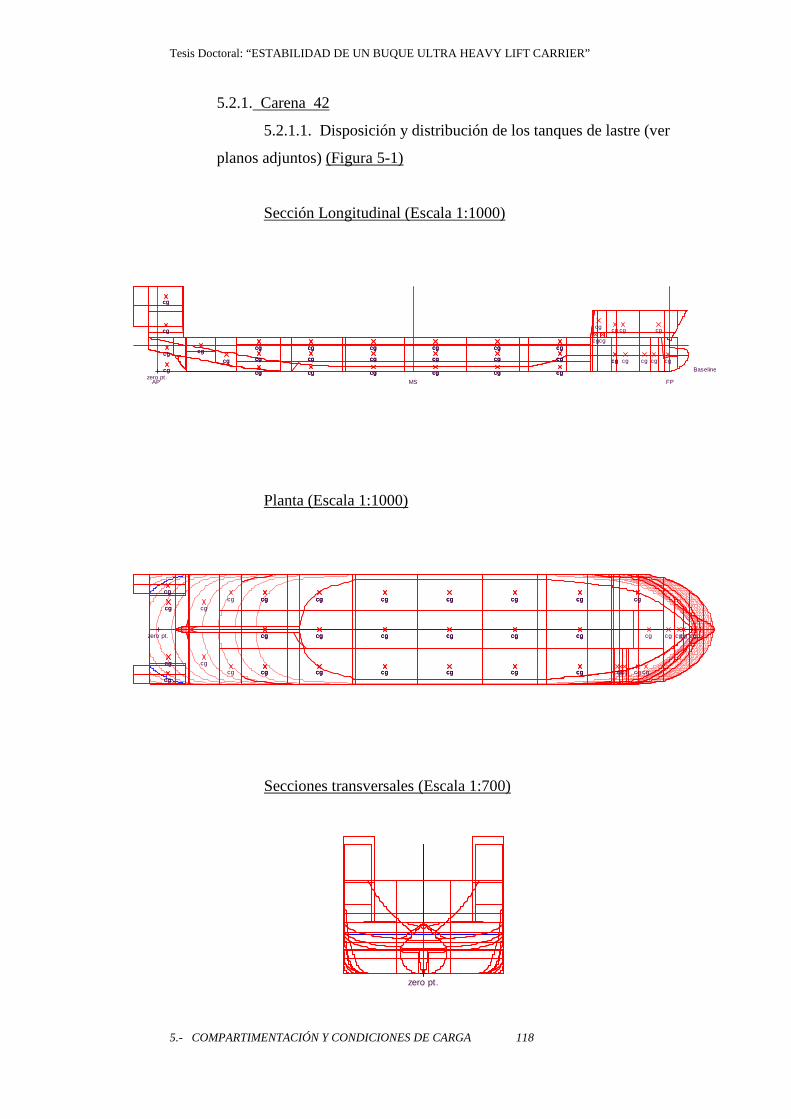
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
5.- COMPARTIMENTACIÓN Y CONDICIONES DE CARGA 118
5.2.1. Carena 42
5.2.1.1. Disposición y distribución de los tanques de lastre (ver
planos adjuntos) (Figura 5-1)
Sección Longitudinal (Escala 1:1000)
Planta (Escala 1:1000)
Secciones transversales (Escala 1:700)
zero pt.
MSAP FP
Baselinecgcgcg
cgcgcg
cgcgcg
cgcgcg
cgcgcg
cgcgcg
cgcgcg
cgcgcg
cgcgcg
cgcgcg
cgcgcg
cgcgcg
cgcgcg
cgcgcg
cgcgcg
cgcgcg
cgcgcg
cgcgcg
cgcg
cgcg
cgcg
cgcg
cg
cg
cg
cg
cgcg cg
cg
cgcg
cgcg
cg cg cg
cg
zero pt.
cg
cg
cg
cg
cg
cg
cg
cg
cg
cg
cg
cg
cg
cg
cg
cg
cg
cg
cg
cg
cg
cg
cg
cg
cg
cg
cg
cg
cg
cg
cg
cg
cg
cg
cg
cg
cg
cg
cg
cg
cg
cg
cg
cg
cg
cg
cg
cg
cg
cg
cg
cg
cg
cg
cg
cg
cg
cg
cg
cgcg
cg
cgcg
cgcg
cg
cg
cg
cg
cgcg cgcg
cg cg cgcgzero pt.
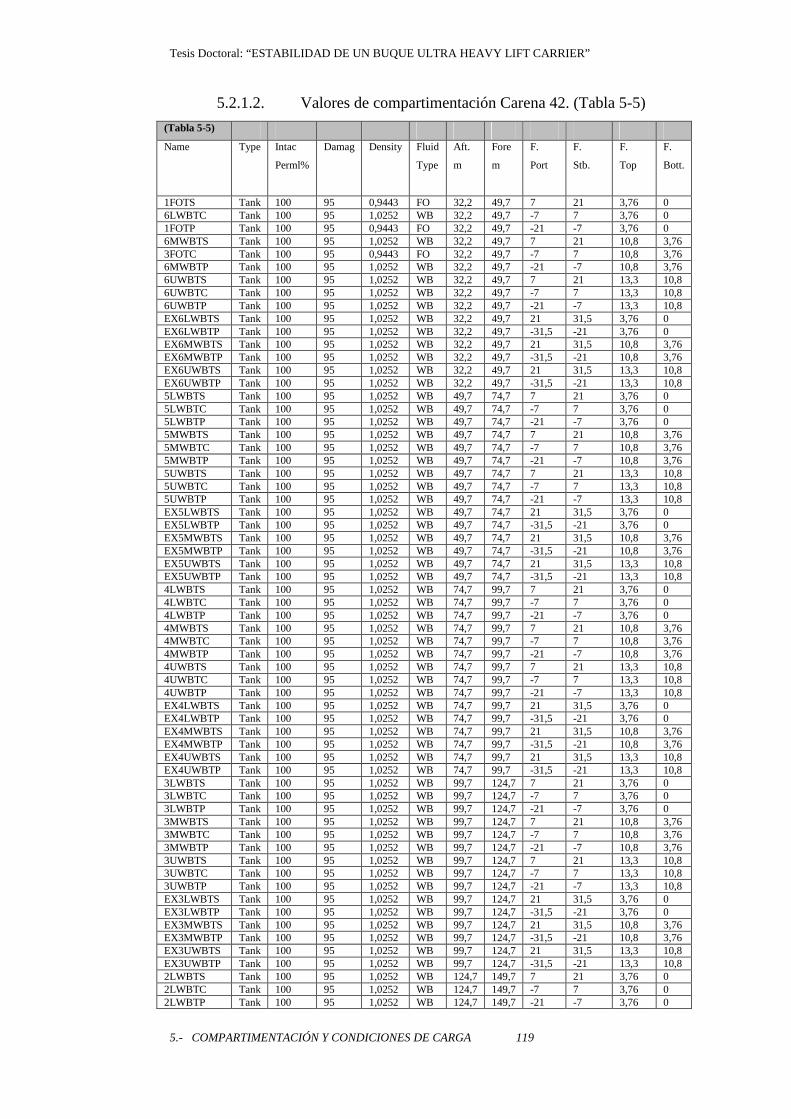
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
5.- COMPARTIMENTACIÓN Y CONDICIONES DE CARGA 119
5.2.1.2. Valores de compartimentación Carena 42. (Tabla 5-5)
(Tabla 5-5)
Name Type Intac
Perml%
Damag Density Fluid
Type
Aft.
m
Fore
m
F.
Port
F.
Stb.
F.
Top
F.
Bott.
1FOTS Tank 100 95 0,9443 FO 32,2 49,7 7 21 3,76 0 6LWBTC Tank 100 95 1,0252 WB 32,2 49,7 -7 7 3,76 0 1FOTP Tank 100 95 0,9443 FO 32,2 49,7 -21 -7 3,76 0 6MWBTS Tank 100 95 1,0252 WB 32,2 49,7 7 21 10,8 3,76 3FOTC Tank 100 95 0,9443 FO 32,2 49,7 -7 7 10,8 3,76 6MWBTP Tank 100 95 1,0252 WB 32,2 49,7 -21 -7 10,8 3,76 6UWBTS Tank 100 95 1,0252 WB 32,2 49,7 7 21 13,3 10,8 6UWBTC Tank 100 95 1,0252 WB 32,2 49,7 -7 7 13,3 10,8 6UWBTP Tank 100 95 1,0252 WB 32,2 49,7 -21 -7 13,3 10,8 EX6LWBTS Tank 100 95 1,0252 WB 32,2 49,7 21 31,5 3,76 0 EX6LWBTP Tank 100 95 1,0252 WB 32,2 49,7 -31,5 -21 3,76 0 EX6MWBTS Tank 100 95 1,0252 WB 32,2 49,7 21 31,5 10,8 3,76 EX6MWBTP Tank 100 95 1,0252 WB 32,2 49,7 -31,5 -21 10,8 3,76 EX6UWBTS Tank 100 95 1,0252 WB 32,2 49,7 21 31,5 13,3 10,8 EX6UWBTP Tank 100 95 1,0252 WB 32,2 49,7 -31,5 -21 13,3 10,8 5LWBTS Tank 100 95 1,0252 WB 49,7 74,7 7 21 3,76 0 5LWBTC Tank 100 95 1,0252 WB 49,7 74,7 -7 7 3,76 0 5LWBTP Tank 100 95 1,0252 WB 49,7 74,7 -21 -7 3,76 0 5MWBTS Tank 100 95 1,0252 WB 49,7 74,7 7 21 10,8 3,76 5MWBTC Tank 100 95 1,0252 WB 49,7 74,7 -7 7 10,8 3,76 5MWBTP Tank 100 95 1,0252 WB 49,7 74,7 -21 -7 10,8 3,76 5UWBTS Tank 100 95 1,0252 WB 49,7 74,7 7 21 13,3 10,8 5UWBTC Tank 100 95 1,0252 WB 49,7 74,7 -7 7 13,3 10,8 5UWBTP Tank 100 95 1,0252 WB 49,7 74,7 -21 -7 13,3 10,8 EX5LWBTS Tank 100 95 1,0252 WB 49,7 74,7 21 31,5 3,76 0 EX5LWBTP Tank 100 95 1,0252 WB 49,7 74,7 -31,5 -21 3,76 0 EX5MWBTS Tank 100 95 1,0252 WB 49,7 74,7 21 31,5 10,8 3,76 EX5MWBTP Tank 100 95 1,0252 WB 49,7 74,7 -31,5 -21 10,8 3,76 EX5UWBTS Tank 100 95 1,0252 WB 49,7 74,7 21 31,5 13,3 10,8 EX5UWBTP Tank 100 95 1,0252 WB 49,7 74,7 -31,5 -21 13,3 10,8 4LWBTS Tank 100 95 1,0252 WB 74,7 99,7 7 21 3,76 0 4LWBTC Tank 100 95 1,0252 WB 74,7 99,7 -7 7 3,76 0 4LWBTP Tank 100 95 1,0252 WB 74,7 99,7 -21 -7 3,76 0 4MWBTS Tank 100 95 1,0252 WB 74,7 99,7 7 21 10,8 3,76 4MWBTC Tank 100 95 1,0252 WB 74,7 99,7 -7 7 10,8 3,76 4MWBTP Tank 100 95 1,0252 WB 74,7 99,7 -21 -7 10,8 3,76 4UWBTS Tank 100 95 1,0252 WB 74,7 99,7 7 21 13,3 10,8 4UWBTC Tank 100 95 1,0252 WB 74,7 99,7 -7 7 13,3 10,8 4UWBTP Tank 100 95 1,0252 WB 74,7 99,7 -21 -7 13,3 10,8 EX4LWBTS Tank 100 95 1,0252 WB 74,7 99,7 21 31,5 3,76 0 EX4LWBTP Tank 100 95 1,0252 WB 74,7 99,7 -31,5 -21 3,76 0 EX4MWBTS Tank 100 95 1,0252 WB 74,7 99,7 21 31,5 10,8 3,76 EX4MWBTP Tank 100 95 1,0252 WB 74,7 99,7 -31,5 -21 10,8 3,76 EX4UWBTS Tank 100 95 1,0252 WB 74,7 99,7 21 31,5 13,3 10,8 EX4UWBTP Tank 100 95 1,0252 WB 74,7 99,7 -31,5 -21 13,3 10,8 3LWBTS Tank 100 95 1,0252 WB 99,7 124,7 7 21 3,76 0 3LWBTC Tank 100 95 1,0252 WB 99,7 124,7 -7 7 3,76 0 3LWBTP Tank 100 95 1,0252 WB 99,7 124,7 -21 -7 3,76 0 3MWBTS Tank 100 95 1,0252 WB 99,7 124,7 7 21 10,8 3,76 3MWBTC Tank 100 95 1,0252 WB 99,7 124,7 -7 7 10,8 3,76 3MWBTP Tank 100 95 1,0252 WB 99,7 124,7 -21 -7 10,8 3,76 3UWBTS Tank 100 95 1,0252 WB 99,7 124,7 7 21 13,3 10,8 3UWBTC Tank 100 95 1,0252 WB 99,7 124,7 -7 7 13,3 10,8 3UWBTP Tank 100 95 1,0252 WB 99,7 124,7 -21 -7 13,3 10,8 EX3LWBTS Tank 100 95 1,0252 WB 99,7 124,7 21 31,5 3,76 0 EX3LWBTP Tank 100 95 1,0252 WB 99,7 124,7 -31,5 -21 3,76 0 EX3MWBTS Tank 100 95 1,0252 WB 99,7 124,7 21 31,5 10,8 3,76 EX3MWBTP Tank 100 95 1,0252 WB 99,7 124,7 -31,5 -21 10,8 3,76 EX3UWBTS Tank 100 95 1,0252 WB 99,7 124,7 21 31,5 13,3 10,8 EX3UWBTP Tank 100 95 1,0252 WB 99,7 124,7 -31,5 -21 13,3 10,8 2LWBTS Tank 100 95 1,0252 WB 124,7 149,7 7 21 3,76 0 2LWBTC Tank 100 95 1,0252 WB 124,7 149,7 -7 7 3,76 0 2LWBTP Tank 100 95 1,0252 WB 124,7 149,7 -21 -7 3,76 0
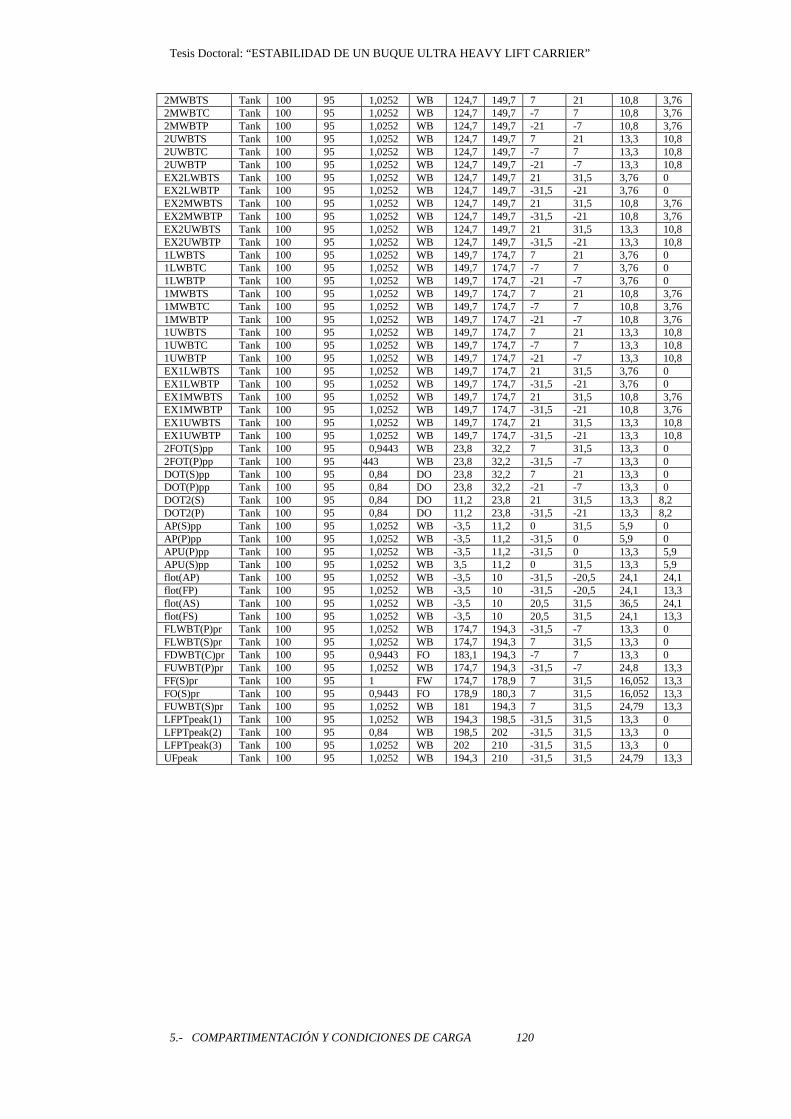
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
5.- COMPARTIMENTACIÓN Y CONDICIONES DE CARGA 120
2MWBTS Tank 100 95 1,0252 WB 124,7 149,7 7 21 10,8 3,76 2MWBTC Tank 100 95 1,0252 WB 124,7 149,7 -7 7 10,8 3,76 2MWBTP Tank 100 95 1,0252 WB 124,7 149,7 -21 -7 10,8 3,76 2UWBTS Tank 100 95 1,0252 WB 124,7 149,7 7 21 13,3 10,8 2UWBTC Tank 100 95 1,0252 WB 124,7 149,7 -7 7 13,3 10,8 2UWBTP Tank 100 95 1,0252 WB 124,7 149,7 -21 -7 13,3 10,8 EX2LWBTS Tank 100 95 1,0252 WB 124,7 149,7 21 31,5 3,76 0 EX2LWBTP Tank 100 95 1,0252 WB 124,7 149,7 -31,5 -21 3,76 0 EX2MWBTS Tank 100 95 1,0252 WB 124,7 149,7 21 31,5 10,8 3,76 EX2MWBTP Tank 100 95 1,0252 WB 124,7 149,7 -31,5 -21 10,8 3,76 EX2UWBTS Tank 100 95 1,0252 WB 124,7 149,7 21 31,5 13,3 10,8 EX2UWBTP Tank 100 95 1,0252 WB 124,7 149,7 -31,5 -21 13,3 10,8 1LWBTS Tank 100 95 1,0252 WB 149,7 174,7 7 21 3,76 0 1LWBTC Tank 100 95 1,0252 WB 149,7 174,7 -7 7 3,76 0 1LWBTP Tank 100 95 1,0252 WB 149,7 174,7 -21 -7 3,76 0 1MWBTS Tank 100 95 1,0252 WB 149,7 174,7 7 21 10,8 3,76 1MWBTC Tank 100 95 1,0252 WB 149,7 174,7 -7 7 10,8 3,76 1MWBTP Tank 100 95 1,0252 WB 149,7 174,7 -21 -7 10,8 3,76 1UWBTS Tank 100 95 1,0252 WB 149,7 174,7 7 21 13,3 10,8 1UWBTC Tank 100 95 1,0252 WB 149,7 174,7 -7 7 13,3 10,8 1UWBTP Tank 100 95 1,0252 WB 149,7 174,7 -21 -7 13,3 10,8 EX1LWBTS Tank 100 95 1,0252 WB 149,7 174,7 21 31,5 3,76 0 EX1LWBTP Tank 100 95 1,0252 WB 149,7 174,7 -31,5 -21 3,76 0 EX1MWBTS Tank 100 95 1,0252 WB 149,7 174,7 21 31,5 10,8 3,76 EX1MWBTP Tank 100 95 1,0252 WB 149,7 174,7 -31,5 -21 10,8 3,76 EX1UWBTS Tank 100 95 1,0252 WB 149,7 174,7 21 31,5 13,3 10,8 EX1UWBTP Tank 100 95 1,0252 WB 149,7 174,7 -31,5 -21 13,3 10,8 2FOT(S)pp Tank 100 95 0,9443 WB 23,8 32,2 7 31,5 13,3 0 2FOT(P)pp Tank 100 95 0,9443 WB 23,8 32,2 -31,5 -7 13,3 0 DOT(S)pp Tank 100 95 0,84 DO 23,8 32,2 7 21 13,3 0 DOT(P)pp Tank 100 95 0,84 DO 23,8 32,2 -21 -7 13,3 0 DOT2(S) Tank 100 95 0,84 DO 11,2 23,8 21 31,5 13,3 8,2 DOT2(P) Tank 100 95 0,84 DO 11,2 23,8 -31,5 -21 13,3 8,2 AP(S)pp Tank 100 95 1,0252 WB -3,5 11,2 0 31,5 5,9 0 AP(P)pp Tank 100 95 1,0252 WB -3,5 11,2 -31,5 0 5,9 0 APU(P)pp Tank 100 95 1,0252 WB -3,5 11,2 -31,5 0 13,3 5,9 APU(S)pp Tank 100 95 1,0252 WB 3,5 11,2 0 31,5 13,3 5,9 flot(AP) Tank 100 95 1,0252 WB -3,5 10 -31,5 -20,5 24,1 24,1 flot(FP) Tank 100 95 1,0252 WB -3,5 10 -31,5 -20,5 24,1 13,3 flot(AS) Tank 100 95 1,0252 WB -3,5 10 20,5 31,5 36,5 24,1 flot(FS) Tank 100 95 1,0252 WB -3,5 10 20,5 31,5 24,1 13,3 FLWBT(P)pr Tank 100 95 1,0252 WB 174,7 194,3 -31,5 -7 13,3 0 FLWBT(S)pr Tank 100 95 1,0252 WB 174,7 194,3 7 31,5 13,3 0 FDWBT(C)pr Tank 100 95 0,9443 FO 183,1 194,3 -7 7 13,3 0 FUWBT(P)pr Tank 100 95 1,0252 WB 174,7 194,3 -31,5 -7 24,8 13,3 FF(S)pr Tank 100 95 1 FW 174,7 178,9 7 31,5 16,052 13,3 FO(S)pr Tank 100 95 0,9443 FO 178,9 180,3 7 31,5 16,052 13,3 FUWBT(S)pr Tank 100 95 1,0252 WB 181 194,3 7 31,5 24,79 13,3 LFPTpeak(1) Tank 100 95 1,0252 WB 194,3 198,5 -31,5 31,5 13,3 0 LFPTpeak(2) Tank 100 95 0,84 WB 198,5 202 -31,5 31,5 13,3 0 LFPTpeak(3) Tank 100 95 1,0252 WB 202 210 -31,5 31,5 13,3 0 UFpeak Tank 100 95 1,0252 WB 194,3 210 -31,5 31,5 24,79 13,3
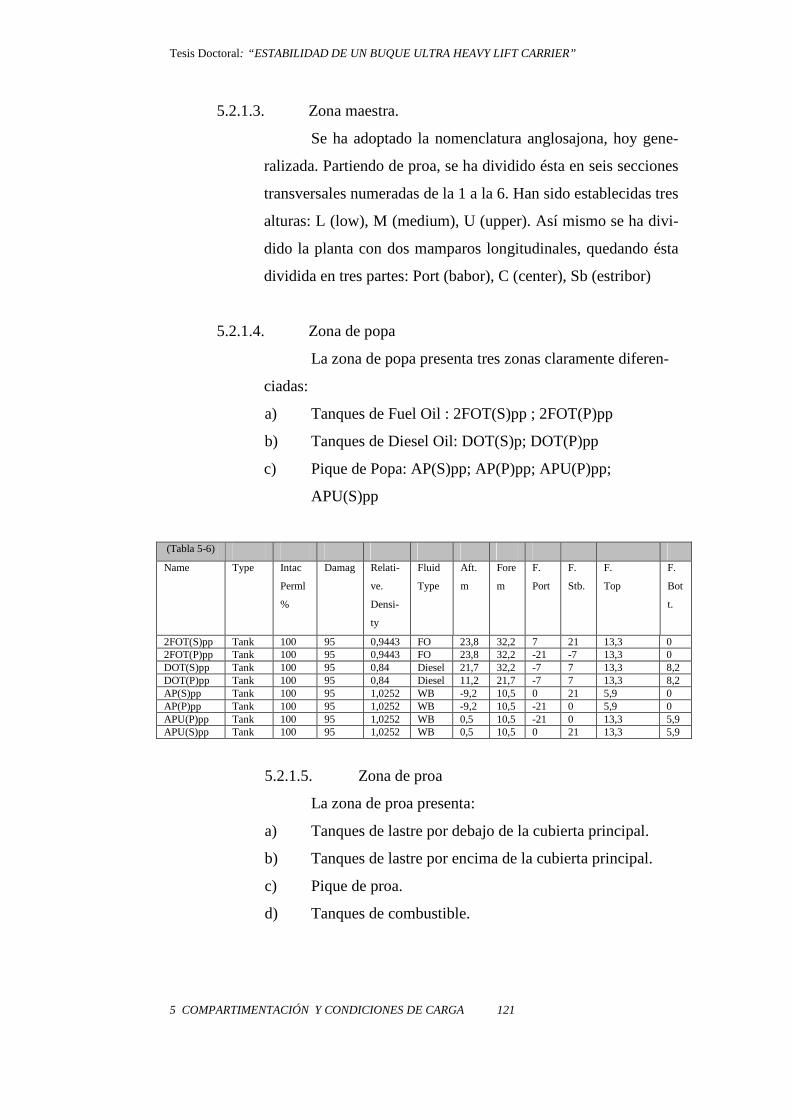
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
5 COMPARTIMENTACIÓN Y CONDICIONES DE CARGA 121
5.2.1.3. Zona maestra.
Se ha adoptado la nomenclatura anglosajona, hoy gene-
ralizada. Partiendo de proa, se ha dividido ésta en seis secciones
transversales numeradas de la 1 a la 6. Han sido establecidas tres
alturas: L (low), M (medium), U (upper). Así mismo se ha divi-
dido la planta con dos mamparos longitudinales, quedando ésta
dividida en tres partes: Port (babor), C (center), Sb (estribor)
5.2.1.4. Zona de popa
La zona de popa presenta tres zonas claramente diferen-
ciadas:
a) Tanques de Fuel Oil : 2FOT(S)pp ; 2FOT(P)pp
b) Tanques de Diesel Oil: DOT(S)p; DOT(P)pp
c) Pique de Popa: AP(S)pp; AP(P)pp; APU(P)pp;
APU(S)pp
(Tabla 5-6)
Name Type Intac
Perml
%
Damag Relati-
ve.
Densi-
ty
Fluid
Type
Aft.
m
Fore
m
F.
Port
F.
Stb.
F.
Top
F.
Bot
t.
2FOT(S)pp Tank 100 95 0,9443 FO 23,8 32,2 7 21 13,3 0 2FOT(P)pp Tank 100 95 0,9443 FO 23,8 32,2 -21 -7 13,3 0 DOT(S)pp Tank 100 95 0,84 Diesel 21,7 32,2 -7 7 13,3 8,2 DOT(P)pp Tank 100 95 0,84 Diesel 11,2 21,7 -7 7 13,3 8,2 AP(S)pp Tank 100 95 1,0252 WB -9,2 10,5 0 21 5,9 0 AP(P)pp Tank 100 95 1,0252 WB -9,2 10,5 -21 0 5,9 0 APU(P)pp Tank 100 95 1,0252 WB 0,5 10,5 -21 0 13,3 5,9 APU(S)pp Tank 100 95 1,0252 WB 0,5 10,5 0 21 13,3 5,9
5.2.1.5. Zona de proa
La zona de proa presenta:
a) Tanques de lastre por debajo de la cubierta principal.
b) Tanques de lastre por encima de la cubierta principal.
c) Pique de proa.
d) Tanques de combustible.
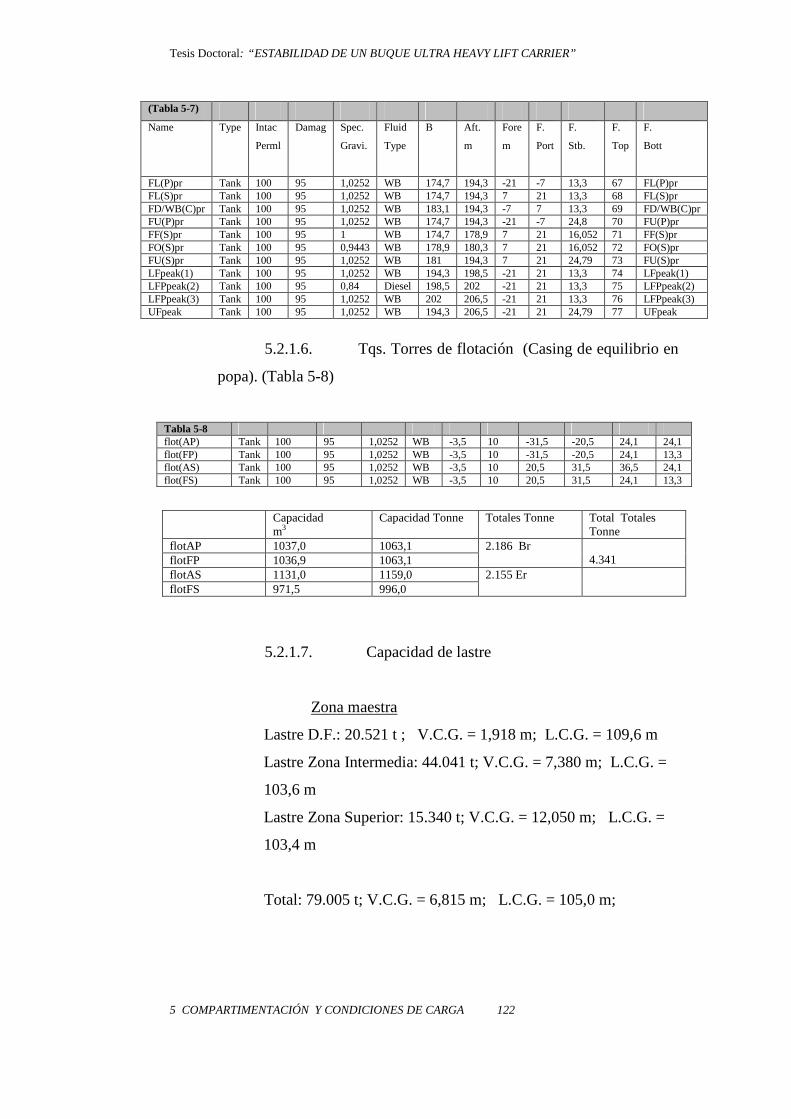
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
5 COMPARTIMENTACIÓN Y CONDICIONES DE CARGA 122
(Tabla 5-7)
Name Type Intac
Perml
Damag Spec.
Gravi.
Fluid
Type
B Aft.
m
Fore
m
F.
Port
F.
Stb.
F.
Top
F.
Bott
FL(P)pr Tank 100 95 1,0252 WB 174,7 194,3 -21 -7 13,3 67 FL(P)pr FL(S)pr Tank 100 95 1,0252 WB 174,7 194,3 7 21 13,3 68 FL(S)pr FD/WB(C)pr Tank 100 95 1,0252 WB 183,1 194,3 -7 7 13,3 69 FD/WB(C)pr FU(P)pr Tank 100 95 1,0252 WB 174,7 194,3 -21 -7 24,8 70 FU(P)pr FF(S)pr Tank 100 95 1 WB 174,7 178,9 7 21 16,052 71 FF(S)pr FO(S)pr Tank 100 95 0,9443 WB 178,9 180,3 7 21 16,052 72 FO(S)pr FU(S)pr Tank 100 95 1,0252 WB 181 194,3 7 21 24,79 73 FU(S)pr LFpeak(1) Tank 100 95 1,0252 WB 194,3 198,5 -21 21 13,3 74 LFpeak(1) LFPpeak(2) Tank 100 95 0,84 Diesel 198,5 202 -21 21 13,3 75 LFPpeak(2) LFPpeak(3) Tank 100 95 1,0252 WB 202 206,5 -21 21 13,3 76 LFPpeak(3) UFpeak Tank 100 95 1,0252 WB 194,3 206,5 -21 21 24,79 77 UFpeak
5.2.1.6. Tqs. Torres de flotación (Casing de equilibrio en
popa). (Tabla 5-8)
Tabla 5-8 flot(AP) Tank 100 95 1,0252 WB -3,5 10 -31,5 -20,5 24,1 24,1 flot(FP) Tank 100 95 1,0252 WB -3,5 10 -31,5 -20,5 24,1 13,3 flot(AS) Tank 100 95 1,0252 WB -3,5 10 20,5 31,5 36,5 24,1 flot(FS) Tank 100 95 1,0252 WB -3,5 10 20,5 31,5 24,1 13,3
Capacidad m3
Capacidad Tonne Totales Tonne Total Totales Tonne
flotAP 1037,0 1063,1 2.186 Br 4.341 flotFP 1036,9 1063,1
flotAS 1131,0 1159,0 2.155 Er flotFS 971,5 996,0
5.2.1.7. Capacidad de lastre
Zona maestra
Lastre D.F.: 20.521 t ; V.C.G. = 1,918 m; L.C.G. = 109,6 m
Lastre Zona Intermedia: 44.041 t; V.C.G. = 7,380 m; L.C.G. =
103,6 m
Lastre Zona Superior: 15.340 t; V.C.G. = 12,050 m; L.C.G. =
103,4 m
Total: 79.005 t; V.C.G. = 6,815 m; L.C.G. = 105,0 m;
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
5 COMPARTIMENTACIÓN Y CONDICIONES DE CARGA 123
Popa y pique de popa
Lastre Torres de flotación: 4.354,8 t; V.C.G. = 23,850 m;
L.C.G. = 3,902 m;
Lastre pique popa: 2.293 t ; V.C.G. = 10.481 m ; L.C.G. =
5,857 m;
Total: 6.690 ; V.C.G. = 19,268 m ; L.C.G. = 4,572 m;
Proa y pique de proa
Lastre tanques de proa: 13.206 t; V.C.G. = 11,604 m; L.C.G. =
185,2 m;
Lastre piques proa: 6.771 t; V.C.G.=14,508 m; L.C.G.=199,4 m;
Total: 19.977 t; V.C.G. = 12,588 m; L.C.G. = 190,0 m
Total del buque
Lastre del Buque: 106.920 t; V.C.G.= 8,514 m; L.C.G.= 110,5 m
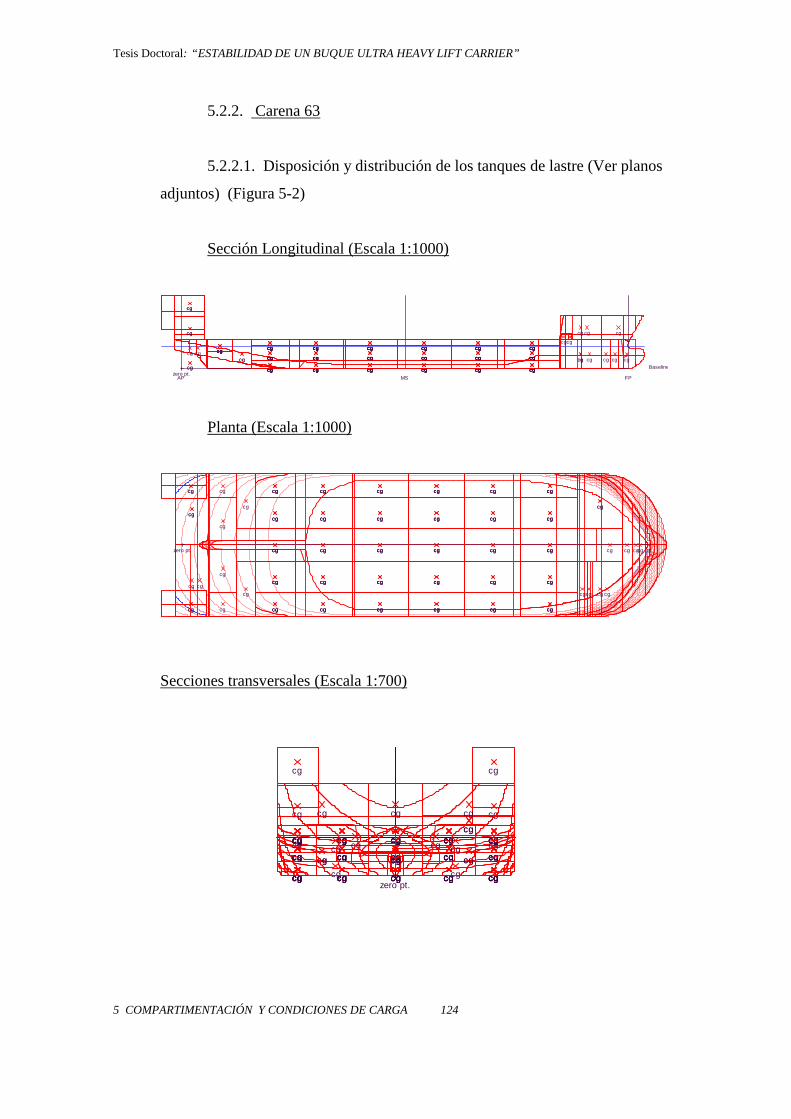
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
5 COMPARTIMENTACIÓN Y CONDICIONES DE CARGA 124
5.2.2. Carena 63
5.2.2.1. Disposición y distribución de los tanques de lastre (Ver planos
adjuntos) (Figura 5-2)
Sección Longitudinal (Escala 1:1000)
MSAP FP
Baselinecgcgcg
cgcgcg
cgcgcg
cgcg
cgcg
cgcg
cgcgcg
cgcgcg
cgcgcg
cgcg
cgcg
cgcg
cgcgcg
cgcgcg
cgcgcg
cgcg
cgcg
cgcg
cgcgcg
cgcgcg
cgcgcg
cgcg
cgcg
cgcg
cgcgcg
cgcgcg
cgcgcg
cgcg
cgcg
cgcg
cgcgcg
cgcgcg
cgcgcg
cgcg
cgcg
cgcg
cgcg
cgcgcgcg
cgcg
cg cg
cg
cg
cg
cg
cgcg cg
cg
cgcg
cg
cg cg cg
cg
zero pt.
Planta (Escala 1:1000)
cg
cg
cg
cg
cg
cg
cg
cg
cg
cg
cg
cg
cg
cg
cg
cg
cg
cg
cg
cg
cg
cg
cg
cg
cg
cg
cg
cg
cg
cg
cg
cg
cg
cg
cg
cg
cg
cg
cg
cg
cg
cg
cg
cg
cg
cg
cg
cg
cg
cg
cg
cg
cg
cg
cg
cg
cg
cg
cg
cg
cg
cg
cg
cg
cg
cg
cg
cg
cg
cg
cg
cg
cg
cg
cg
cg
cg
cg
cg
cg
cg
cg
cg
cg
cg
cg
cg
cg
cg
cg
cg
cg
cg
cg
cg
cg
cg
cgcg
cg
cgcg
cgcg
cg
cg
cg
cg
cgcg cg
cg cg cgcgzero pt.
Secciones transversales (Escala 1:700)
cgcgcg
cgcgcg
cgcgcg
cgcg
cgcg
cgcg
cgcgcg
cgcgcg
cgcgcg
cgcg
cgcg
cgcg
cgcgcg
cgcgcg
cgcgcg
cgcg
cgcg
cgcg
cgcgcg
cgcgcg
cgcgcg
cgcg
cgcg
cgcg
cgcgcg
cgcgcg
cgcgcg
cgcg
cgcg
cgcg
cgcgcg
cgcgcg
cgcgcg
cgcg
cgcg
cgcg
cgcg
cgcg cgcg
cgcg
cg cg
cg
cg
cg
cg
cg cgcg
cg
cgcg
cg
cgcgcg
cg
zero pt.
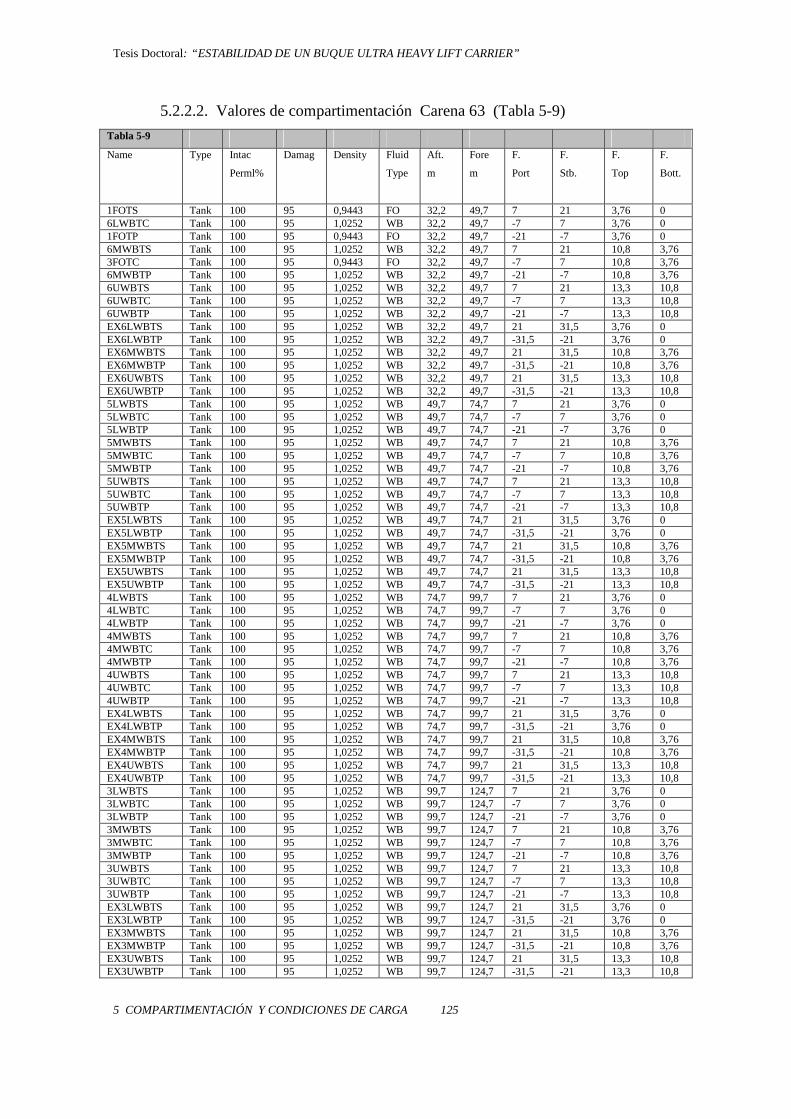
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
5 COMPARTIMENTACIÓN Y CONDICIONES DE CARGA 125
5.2.2.2. Valores de compartimentación Carena 63 (Tabla 5-9)
Tabla 5-9
Name Type Intac
Perml%
Damag Density Fluid
Type
Aft.
m
Fore
m
F.
Port
F.
Stb.
F.
Top
F.
Bott.
1FOTS Tank 100 95 0,9443 FO 32,2 49,7 7 21 3,76 0 6LWBTC Tank 100 95 1,0252 WB 32,2 49,7 -7 7 3,76 0 1FOTP Tank 100 95 0,9443 FO 32,2 49,7 -21 -7 3,76 0 6MWBTS Tank 100 95 1,0252 WB 32,2 49,7 7 21 10,8 3,76 3FOTC Tank 100 95 0,9443 FO 32,2 49,7 -7 7 10,8 3,76 6MWBTP Tank 100 95 1,0252 WB 32,2 49,7 -21 -7 10,8 3,76 6UWBTS Tank 100 95 1,0252 WB 32,2 49,7 7 21 13,3 10,8 6UWBTC Tank 100 95 1,0252 WB 32,2 49,7 -7 7 13,3 10,8 6UWBTP Tank 100 95 1,0252 WB 32,2 49,7 -21 -7 13,3 10,8 EX6LWBTS Tank 100 95 1,0252 WB 32,2 49,7 21 31,5 3,76 0 EX6LWBTP Tank 100 95 1,0252 WB 32,2 49,7 -31,5 -21 3,76 0 EX6MWBTS Tank 100 95 1,0252 WB 32,2 49,7 21 31,5 10,8 3,76 EX6MWBTP Tank 100 95 1,0252 WB 32,2 49,7 -31,5 -21 10,8 3,76 EX6UWBTS Tank 100 95 1,0252 WB 32,2 49,7 21 31,5 13,3 10,8 EX6UWBTP Tank 100 95 1,0252 WB 32,2 49,7 -31,5 -21 13,3 10,8 5LWBTS Tank 100 95 1,0252 WB 49,7 74,7 7 21 3,76 0 5LWBTC Tank 100 95 1,0252 WB 49,7 74,7 -7 7 3,76 0 5LWBTP Tank 100 95 1,0252 WB 49,7 74,7 -21 -7 3,76 0 5MWBTS Tank 100 95 1,0252 WB 49,7 74,7 7 21 10,8 3,76 5MWBTC Tank 100 95 1,0252 WB 49,7 74,7 -7 7 10,8 3,76 5MWBTP Tank 100 95 1,0252 WB 49,7 74,7 -21 -7 10,8 3,76 5UWBTS Tank 100 95 1,0252 WB 49,7 74,7 7 21 13,3 10,8 5UWBTC Tank 100 95 1,0252 WB 49,7 74,7 -7 7 13,3 10,8 5UWBTP Tank 100 95 1,0252 WB 49,7 74,7 -21 -7 13,3 10,8 EX5LWBTS Tank 100 95 1,0252 WB 49,7 74,7 21 31,5 3,76 0 EX5LWBTP Tank 100 95 1,0252 WB 49,7 74,7 -31,5 -21 3,76 0 EX5MWBTS Tank 100 95 1,0252 WB 49,7 74,7 21 31,5 10,8 3,76 EX5MWBTP Tank 100 95 1,0252 WB 49,7 74,7 -31,5 -21 10,8 3,76 EX5UWBTS Tank 100 95 1,0252 WB 49,7 74,7 21 31,5 13,3 10,8 EX5UWBTP Tank 100 95 1,0252 WB 49,7 74,7 -31,5 -21 13,3 10,8 4LWBTS Tank 100 95 1,0252 WB 74,7 99,7 7 21 3,76 0 4LWBTC Tank 100 95 1,0252 WB 74,7 99,7 -7 7 3,76 0 4LWBTP Tank 100 95 1,0252 WB 74,7 99,7 -21 -7 3,76 0 4MWBTS Tank 100 95 1,0252 WB 74,7 99,7 7 21 10,8 3,76 4MWBTC Tank 100 95 1,0252 WB 74,7 99,7 -7 7 10,8 3,76 4MWBTP Tank 100 95 1,0252 WB 74,7 99,7 -21 -7 10,8 3,76 4UWBTS Tank 100 95 1,0252 WB 74,7 99,7 7 21 13,3 10,8 4UWBTC Tank 100 95 1,0252 WB 74,7 99,7 -7 7 13,3 10,8 4UWBTP Tank 100 95 1,0252 WB 74,7 99,7 -21 -7 13,3 10,8 EX4LWBTS Tank 100 95 1,0252 WB 74,7 99,7 21 31,5 3,76 0 EX4LWBTP Tank 100 95 1,0252 WB 74,7 99,7 -31,5 -21 3,76 0 EX4MWBTS Tank 100 95 1,0252 WB 74,7 99,7 21 31,5 10,8 3,76 EX4MWBTP Tank 100 95 1,0252 WB 74,7 99,7 -31,5 -21 10,8 3,76 EX4UWBTS Tank 100 95 1,0252 WB 74,7 99,7 21 31,5 13,3 10,8 EX4UWBTP Tank 100 95 1,0252 WB 74,7 99,7 -31,5 -21 13,3 10,8 3LWBTS Tank 100 95 1,0252 WB 99,7 124,7 7 21 3,76 0 3LWBTC Tank 100 95 1,0252 WB 99,7 124,7 -7 7 3,76 0 3LWBTP Tank 100 95 1,0252 WB 99,7 124,7 -21 -7 3,76 0 3MWBTS Tank 100 95 1,0252 WB 99,7 124,7 7 21 10,8 3,76 3MWBTC Tank 100 95 1,0252 WB 99,7 124,7 -7 7 10,8 3,76 3MWBTP Tank 100 95 1,0252 WB 99,7 124,7 -21 -7 10,8 3,76 3UWBTS Tank 100 95 1,0252 WB 99,7 124,7 7 21 13,3 10,8 3UWBTC Tank 100 95 1,0252 WB 99,7 124,7 -7 7 13,3 10,8 3UWBTP Tank 100 95 1,0252 WB 99,7 124,7 -21 -7 13,3 10,8 EX3LWBTS Tank 100 95 1,0252 WB 99,7 124,7 21 31,5 3,76 0 EX3LWBTP Tank 100 95 1,0252 WB 99,7 124,7 -31,5 -21 3,76 0 EX3MWBTS Tank 100 95 1,0252 WB 99,7 124,7 21 31,5 10,8 3,76 EX3MWBTP Tank 100 95 1,0252 WB 99,7 124,7 -31,5 -21 10,8 3,76 EX3UWBTS Tank 100 95 1,0252 WB 99,7 124,7 21 31,5 13,3 10,8 EX3UWBTP Tank 100 95 1,0252 WB 99,7 124,7 -31,5 -21 13,3 10,8
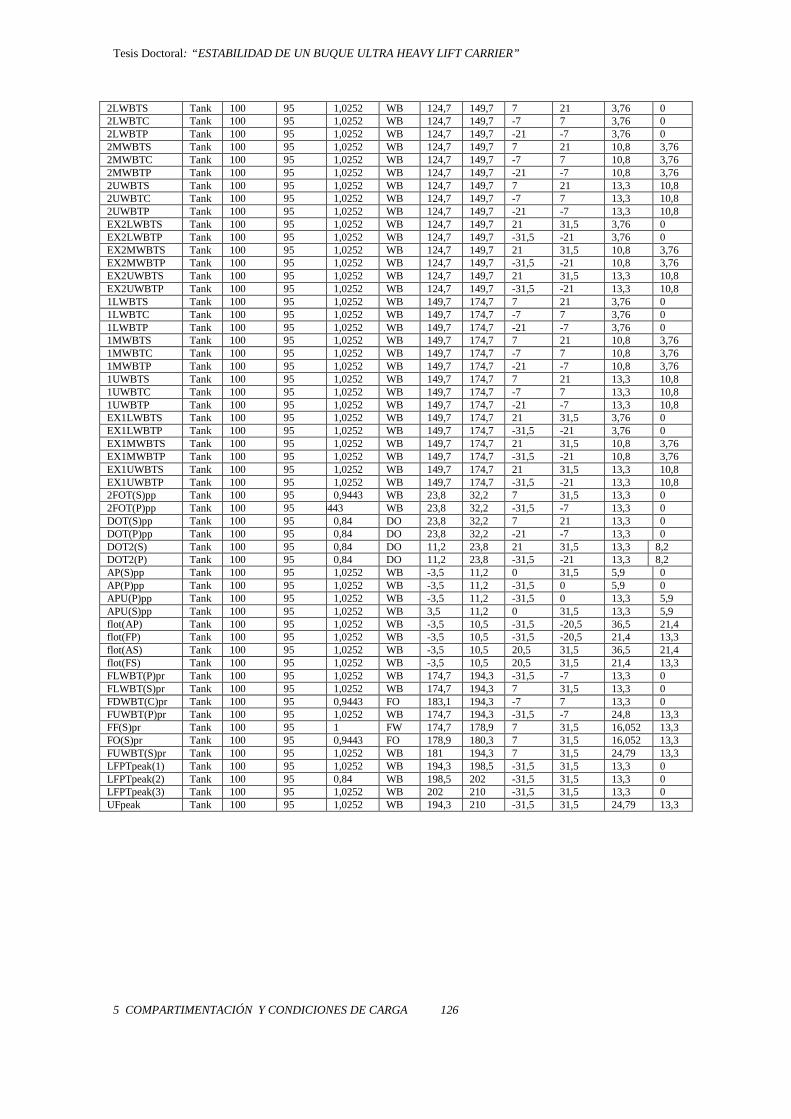
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
5 COMPARTIMENTACIÓN Y CONDICIONES DE CARGA 126
2LWBTS Tank 100 95 1,0252 WB 124,7 149,7 7 21 3,76 0 2LWBTC Tank 100 95 1,0252 WB 124,7 149,7 -7 7 3,76 0 2LWBTP Tank 100 95 1,0252 WB 124,7 149,7 -21 -7 3,76 0 2MWBTS Tank 100 95 1,0252 WB 124,7 149,7 7 21 10,8 3,76 2MWBTC Tank 100 95 1,0252 WB 124,7 149,7 -7 7 10,8 3,76 2MWBTP Tank 100 95 1,0252 WB 124,7 149,7 -21 -7 10,8 3,76 2UWBTS Tank 100 95 1,0252 WB 124,7 149,7 7 21 13,3 10,8 2UWBTC Tank 100 95 1,0252 WB 124,7 149,7 -7 7 13,3 10,8 2UWBTP Tank 100 95 1,0252 WB 124,7 149,7 -21 -7 13,3 10,8 EX2LWBTS Tank 100 95 1,0252 WB 124,7 149,7 21 31,5 3,76 0 EX2LWBTP Tank 100 95 1,0252 WB 124,7 149,7 -31,5 -21 3,76 0 EX2MWBTS Tank 100 95 1,0252 WB 124,7 149,7 21 31,5 10,8 3,76 EX2MWBTP Tank 100 95 1,0252 WB 124,7 149,7 -31,5 -21 10,8 3,76 EX2UWBTS Tank 100 95 1,0252 WB 124,7 149,7 21 31,5 13,3 10,8 EX2UWBTP Tank 100 95 1,0252 WB 124,7 149,7 -31,5 -21 13,3 10,8 1LWBTS Tank 100 95 1,0252 WB 149,7 174,7 7 21 3,76 0 1LWBTC Tank 100 95 1,0252 WB 149,7 174,7 -7 7 3,76 0 1LWBTP Tank 100 95 1,0252 WB 149,7 174,7 -21 -7 3,76 0 1MWBTS Tank 100 95 1,0252 WB 149,7 174,7 7 21 10,8 3,76 1MWBTC Tank 100 95 1,0252 WB 149,7 174,7 -7 7 10,8 3,76 1MWBTP Tank 100 95 1,0252 WB 149,7 174,7 -21 -7 10,8 3,76 1UWBTS Tank 100 95 1,0252 WB 149,7 174,7 7 21 13,3 10,8 1UWBTC Tank 100 95 1,0252 WB 149,7 174,7 -7 7 13,3 10,8 1UWBTP Tank 100 95 1,0252 WB 149,7 174,7 -21 -7 13,3 10,8 EX1LWBTS Tank 100 95 1,0252 WB 149,7 174,7 21 31,5 3,76 0 EX1LWBTP Tank 100 95 1,0252 WB 149,7 174,7 -31,5 -21 3,76 0 EX1MWBTS Tank 100 95 1,0252 WB 149,7 174,7 21 31,5 10,8 3,76 EX1MWBTP Tank 100 95 1,0252 WB 149,7 174,7 -31,5 -21 10,8 3,76 EX1UWBTS Tank 100 95 1,0252 WB 149,7 174,7 21 31,5 13,3 10,8 EX1UWBTP Tank 100 95 1,0252 WB 149,7 174,7 -31,5 -21 13,3 10,8 2FOT(S)pp Tank 100 95 0,9443 WB 23,8 32,2 7 31,5 13,3 0 2FOT(P)pp Tank 100 95 0,9443 WB 23,8 32,2 -31,5 -7 13,3 0 DOT(S)pp Tank 100 95 0,84 DO 23,8 32,2 7 21 13,3 0 DOT(P)pp Tank 100 95 0,84 DO 23,8 32,2 -21 -7 13,3 0 DOT2(S) Tank 100 95 0,84 DO 11,2 23,8 21 31,5 13,3 8,2 DOT2(P) Tank 100 95 0,84 DO 11,2 23,8 -31,5 -21 13,3 8,2 AP(S)pp Tank 100 95 1,0252 WB -3,5 11,2 0 31,5 5,9 0 AP(P)pp Tank 100 95 1,0252 WB -3,5 11,2 -31,5 0 5,9 0 APU(P)pp Tank 100 95 1,0252 WB -3,5 11,2 -31,5 0 13,3 5,9 APU(S)pp Tank 100 95 1,0252 WB 3,5 11,2 0 31,5 13,3 5,9 flot(AP) Tank 100 95 1,0252 WB -3,5 10,5 -31,5 -20,5 36,5 21,4 flot(FP) Tank 100 95 1,0252 WB -3,5 10,5 -31,5 -20,5 21,4 13,3 flot(AS) Tank 100 95 1,0252 WB -3,5 10,5 20,5 31,5 36,5 21,4 flot(FS) Tank 100 95 1,0252 WB -3,5 10,5 20,5 31,5 21,4 13,3 FLWBT(P)pr Tank 100 95 1,0252 WB 174,7 194,3 -31,5 -7 13,3 0 FLWBT(S)pr Tank 100 95 1,0252 WB 174,7 194,3 7 31,5 13,3 0 FDWBT(C)pr Tank 100 95 0,9443 FO 183,1 194,3 -7 7 13,3 0 FUWBT(P)pr Tank 100 95 1,0252 WB 174,7 194,3 -31,5 -7 24,8 13,3 FF(S)pr Tank 100 95 1 FW 174,7 178,9 7 31,5 16,052 13,3 FO(S)pr Tank 100 95 0,9443 FO 178,9 180,3 7 31,5 16,052 13,3 FUWBT(S)pr Tank 100 95 1,0252 WB 181 194,3 7 31,5 24,79 13,3 LFPTpeak(1) Tank 100 95 1,0252 WB 194,3 198,5 -31,5 31,5 13,3 0 LFPTpeak(2) Tank 100 95 0,84 WB 198,5 202 -31,5 31,5 13,3 0 LFPTpeak(3) Tank 100 95 1,0252 WB 202 210 -31,5 31,5 13,3 0 UFpeak Tank 100 95 1,0252 WB 194,3 210 -31,5 31,5 24,79 13,3
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
5 COMPARTIMENTACIÓN Y CONDICIONES DE CARGA 127
5.2.2.3 Zona maestra
Utilizamos la misma nomenclatura que en la carena 42.
Para los nuevos tanques añadidos en la zona maestra, a Br y Er de
los tanques de la carena 42, se ha antepuesto la sigla “EX” y a
continuación la misma nomenclatura de posición expuesta ante-
riormente. Se han establecido tres alturas: L (low), M (medium),
U (upper) y se ha dividido la planta por dos mamparos longitudi-
nales quedando ésta dividida en tres partes: Port (babor), C (cen-
ter), Sb (estribor).
5.2.2.4. Zonas de proa y popa y tanques de equilibrio.
Se ha utilizado la misma nomenclatura expuesta para la
carena 42. Los valores de estos tanques han sido indicados en el
parágrafo 3.2.2.2. (Valores de compartimentación).
Conviene poner de manifiesto dos nuevos tanques de dié-
sel: DOT2(S) y DOT2(P) situados por encima del ECR a Br y Er
del mismo.
5.2.2.5. Capacidad de lastre
Zona maestra
Lastre D.F.: 30.991 t ; V.C.G.=1,928 m; L.C.G.= 109,1 m
Lastre Zona Intermedia: 60.920 t; V.C.G. = 7,132 m; L.C.G. =
106,6 m
Lastre Zona Superior: 23.009 t; V.C.G. = 12,050 m; L.C.G. =
103,4 m
Total: 116.948 t; V.C.G. = 6,802 m; L.C.G. = 105,9 m;
Popa y pique de popa
Lastre Torres de flotación: 6.572,8 t; V.C.G. = 24,589 m; L.C.G.
= 3,086 m;
Lastre pique popa: 2.841 t ; V.C.G.= 10.259 m ; L.C.G. = 5,683
m;
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
5 COMPARTIMENTACIÓN Y CONDICIONES DE CARGA 128
Total: 10.803 t; V.C.G.= 20,821 m; L.C.G = 3,769 m;
Proa y pique de proa
Lastre tanques de proa: 14.809 t; V.C.G. = 11,140 m; L.C.G. =
185,5 m;
Lastre piques proa: 9.740 t; V.C.G. = 14,055 m; L.C.G. = 199,4
m;
Total: 24.280 t; V.C.G. = 12,277 m; L.C.G. = 191,0 m
Total del buque
Lastre del Buque: 151.641 t; V.C.G. = 8,672 m; L.C.G. = 112,2 m
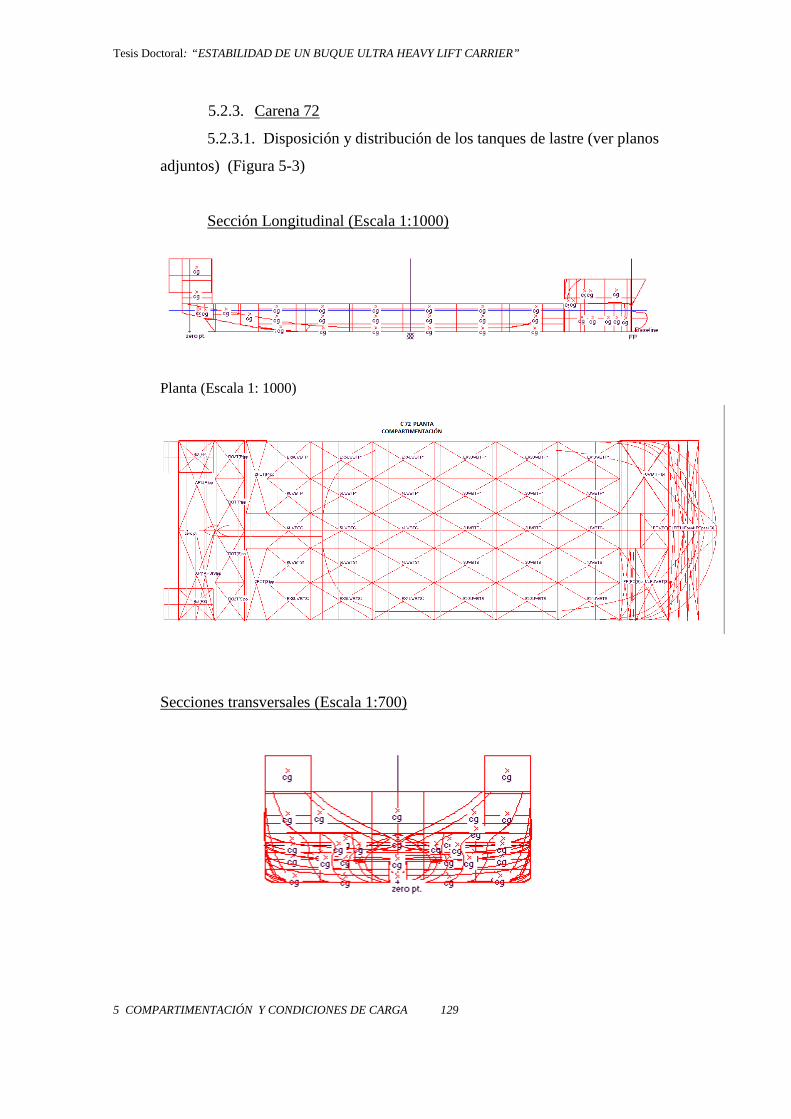
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
5 COMPARTIMENTACIÓN Y CONDICIONES DE CARGA 129
5.2.3. Carena 72
5.2.3.1. Disposición y distribución de los tanques de lastre (ver planos
adjuntos) (Figura 5-3)
Sección Longitudinal (Escala 1:1000)
Planta (Escala 1: 1000)
Secciones transversales (Escala 1:700)
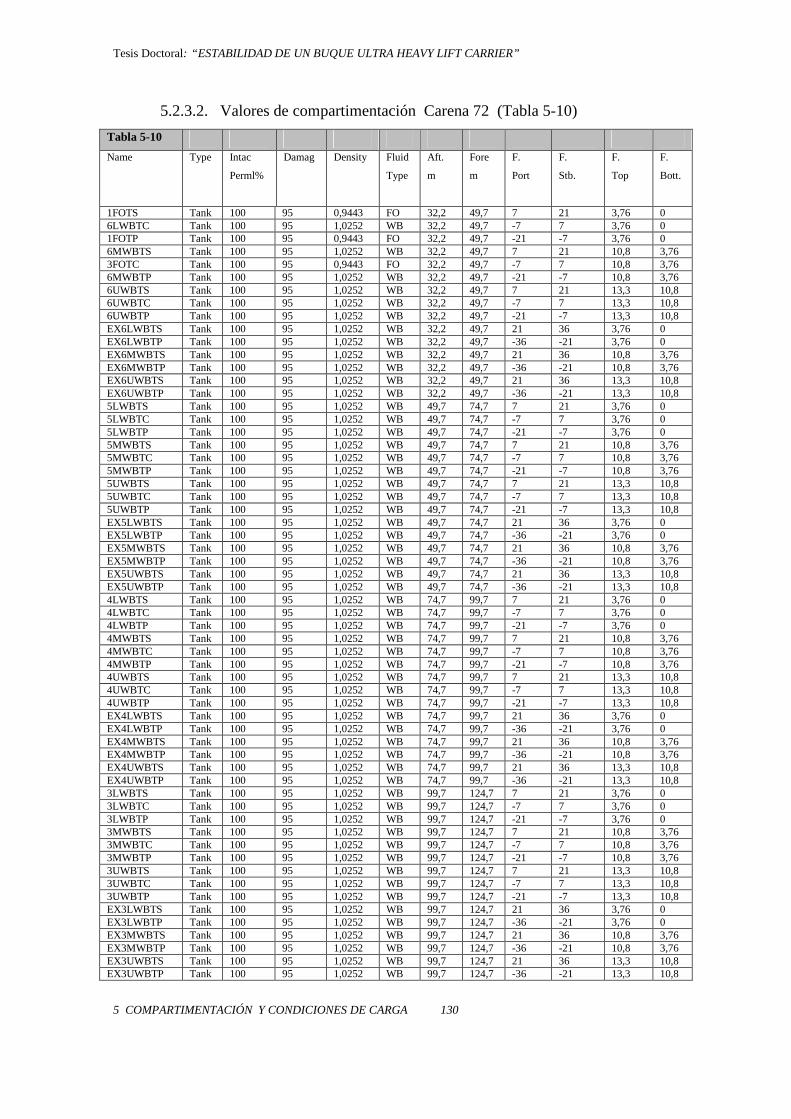
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
5 COMPARTIMENTACIÓN Y CONDICIONES DE CARGA 130
5.2.3.2. Valores de compartimentación Carena 72 (Tabla 5-10)
Tabla 5-10
Name Type Intac
Perml%
Damag Density Fluid
Type
Aft.
m
Fore
m
F.
Port
F.
Stb.
F.
Top
F.
Bott.
1FOTS Tank 100 95 0,9443 FO 32,2 49,7 7 21 3,76 0 6LWBTC Tank 100 95 1,0252 WB 32,2 49,7 -7 7 3,76 0 1FOTP Tank 100 95 0,9443 FO 32,2 49,7 -21 -7 3,76 0 6MWBTS Tank 100 95 1,0252 WB 32,2 49,7 7 21 10,8 3,76 3FOTC Tank 100 95 0,9443 FO 32,2 49,7 -7 7 10,8 3,76 6MWBTP Tank 100 95 1,0252 WB 32,2 49,7 -21 -7 10,8 3,76 6UWBTS Tank 100 95 1,0252 WB 32,2 49,7 7 21 13,3 10,8 6UWBTC Tank 100 95 1,0252 WB 32,2 49,7 -7 7 13,3 10,8 6UWBTP Tank 100 95 1,0252 WB 32,2 49,7 -21 -7 13,3 10,8 EX6LWBTS Tank 100 95 1,0252 WB 32,2 49,7 21 36 3,76 0 EX6LWBTP Tank 100 95 1,0252 WB 32,2 49,7 -36 -21 3,76 0 EX6MWBTS Tank 100 95 1,0252 WB 32,2 49,7 21 36 10,8 3,76 EX6MWBTP Tank 100 95 1,0252 WB 32,2 49,7 -36 -21 10,8 3,76 EX6UWBTS Tank 100 95 1,0252 WB 32,2 49,7 21 36 13,3 10,8 EX6UWBTP Tank 100 95 1,0252 WB 32,2 49,7 -36 -21 13,3 10,8 5LWBTS Tank 100 95 1,0252 WB 49,7 74,7 7 21 3,76 0 5LWBTC Tank 100 95 1,0252 WB 49,7 74,7 -7 7 3,76 0 5LWBTP Tank 100 95 1,0252 WB 49,7 74,7 -21 -7 3,76 0 5MWBTS Tank 100 95 1,0252 WB 49,7 74,7 7 21 10,8 3,76 5MWBTC Tank 100 95 1,0252 WB 49,7 74,7 -7 7 10,8 3,76 5MWBTP Tank 100 95 1,0252 WB 49,7 74,7 -21 -7 10,8 3,76 5UWBTS Tank 100 95 1,0252 WB 49,7 74,7 7 21 13,3 10,8 5UWBTC Tank 100 95 1,0252 WB 49,7 74,7 -7 7 13,3 10,8 5UWBTP Tank 100 95 1,0252 WB 49,7 74,7 -21 -7 13,3 10,8 EX5LWBTS Tank 100 95 1,0252 WB 49,7 74,7 21 36 3,76 0 EX5LWBTP Tank 100 95 1,0252 WB 49,7 74,7 -36 -21 3,76 0 EX5MWBTS Tank 100 95 1,0252 WB 49,7 74,7 21 36 10,8 3,76 EX5MWBTP Tank 100 95 1,0252 WB 49,7 74,7 -36 -21 10,8 3,76 EX5UWBTS Tank 100 95 1,0252 WB 49,7 74,7 21 36 13,3 10,8 EX5UWBTP Tank 100 95 1,0252 WB 49,7 74,7 -36 -21 13,3 10,8 4LWBTS Tank 100 95 1,0252 WB 74,7 99,7 7 21 3,76 0 4LWBTC Tank 100 95 1,0252 WB 74,7 99,7 -7 7 3,76 0 4LWBTP Tank 100 95 1,0252 WB 74,7 99,7 -21 -7 3,76 0 4MWBTS Tank 100 95 1,0252 WB 74,7 99,7 7 21 10,8 3,76 4MWBTC Tank 100 95 1,0252 WB 74,7 99,7 -7 7 10,8 3,76 4MWBTP Tank 100 95 1,0252 WB 74,7 99,7 -21 -7 10,8 3,76 4UWBTS Tank 100 95 1,0252 WB 74,7 99,7 7 21 13,3 10,8 4UWBTC Tank 100 95 1,0252 WB 74,7 99,7 -7 7 13,3 10,8 4UWBTP Tank 100 95 1,0252 WB 74,7 99,7 -21 -7 13,3 10,8 EX4LWBTS Tank 100 95 1,0252 WB 74,7 99,7 21 36 3,76 0 EX4LWBTP Tank 100 95 1,0252 WB 74,7 99,7 -36 -21 3,76 0 EX4MWBTS Tank 100 95 1,0252 WB 74,7 99,7 21 36 10,8 3,76 EX4MWBTP Tank 100 95 1,0252 WB 74,7 99,7 -36 -21 10,8 3,76 EX4UWBTS Tank 100 95 1,0252 WB 74,7 99,7 21 36 13,3 10,8 EX4UWBTP Tank 100 95 1,0252 WB 74,7 99,7 -36 -21 13,3 10,8 3LWBTS Tank 100 95 1,0252 WB 99,7 124,7 7 21 3,76 0 3LWBTC Tank 100 95 1,0252 WB 99,7 124,7 -7 7 3,76 0 3LWBTP Tank 100 95 1,0252 WB 99,7 124,7 -21 -7 3,76 0 3MWBTS Tank 100 95 1,0252 WB 99,7 124,7 7 21 10,8 3,76 3MWBTC Tank 100 95 1,0252 WB 99,7 124,7 -7 7 10,8 3,76 3MWBTP Tank 100 95 1,0252 WB 99,7 124,7 -21 -7 10,8 3,76 3UWBTS Tank 100 95 1,0252 WB 99,7 124,7 7 21 13,3 10,8 3UWBTC Tank 100 95 1,0252 WB 99,7 124,7 -7 7 13,3 10,8 3UWBTP Tank 100 95 1,0252 WB 99,7 124,7 -21 -7 13,3 10,8 EX3LWBTS Tank 100 95 1,0252 WB 99,7 124,7 21 36 3,76 0 EX3LWBTP Tank 100 95 1,0252 WB 99,7 124,7 -36 -21 3,76 0 EX3MWBTS Tank 100 95 1,0252 WB 99,7 124,7 21 36 10,8 3,76 EX3MWBTP Tank 100 95 1,0252 WB 99,7 124,7 -36 -21 10,8 3,76 EX3UWBTS Tank 100 95 1,0252 WB 99,7 124,7 21 36 13,3 10,8 EX3UWBTP Tank 100 95 1,0252 WB 99,7 124,7 -36 -21 13,3 10,8
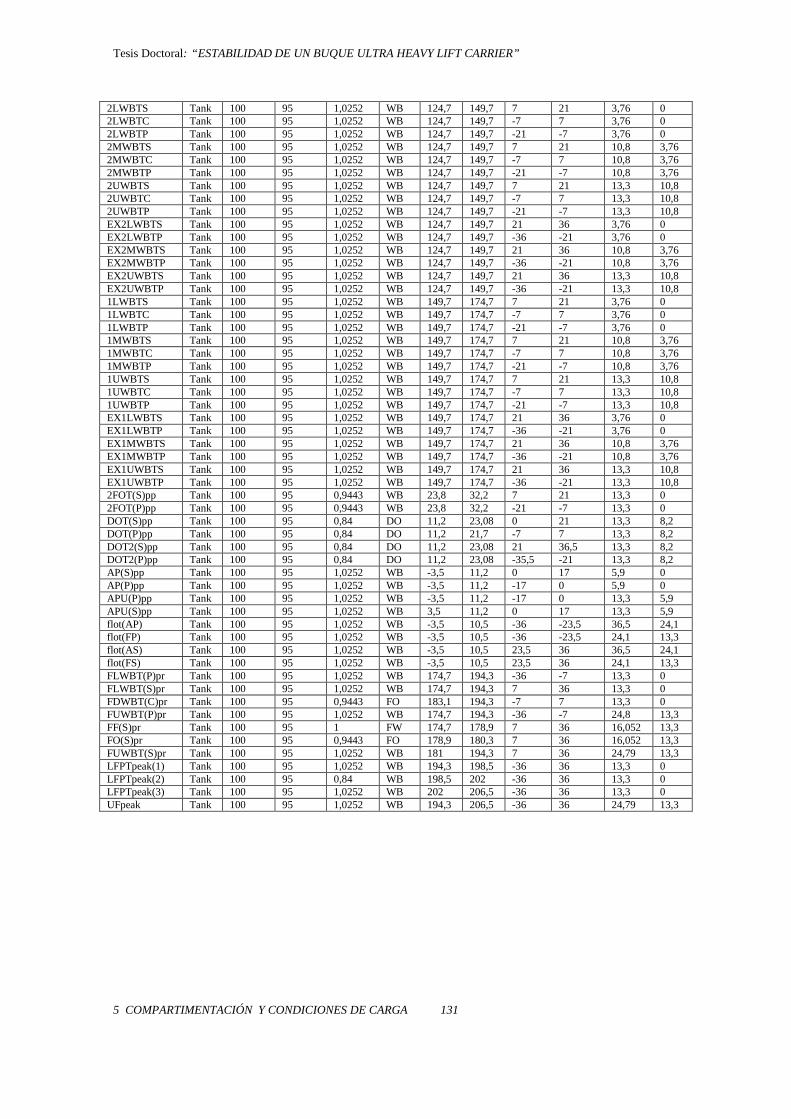
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
5 COMPARTIMENTACIÓN Y CONDICIONES DE CARGA 131
2LWBTS Tank 100 95 1,0252 WB 124,7 149,7 7 21 3,76 0 2LWBTC Tank 100 95 1,0252 WB 124,7 149,7 -7 7 3,76 0 2LWBTP Tank 100 95 1,0252 WB 124,7 149,7 -21 -7 3,76 0 2MWBTS Tank 100 95 1,0252 WB 124,7 149,7 7 21 10,8 3,76 2MWBTC Tank 100 95 1,0252 WB 124,7 149,7 -7 7 10,8 3,76 2MWBTP Tank 100 95 1,0252 WB 124,7 149,7 -21 -7 10,8 3,76 2UWBTS Tank 100 95 1,0252 WB 124,7 149,7 7 21 13,3 10,8 2UWBTC Tank 100 95 1,0252 WB 124,7 149,7 -7 7 13,3 10,8 2UWBTP Tank 100 95 1,0252 WB 124,7 149,7 -21 -7 13,3 10,8 EX2LWBTS Tank 100 95 1,0252 WB 124,7 149,7 21 36 3,76 0 EX2LWBTP Tank 100 95 1,0252 WB 124,7 149,7 -36 -21 3,76 0 EX2MWBTS Tank 100 95 1,0252 WB 124,7 149,7 21 36 10,8 3,76 EX2MWBTP Tank 100 95 1,0252 WB 124,7 149,7 -36 -21 10,8 3,76 EX2UWBTS Tank 100 95 1,0252 WB 124,7 149,7 21 36 13,3 10,8 EX2UWBTP Tank 100 95 1,0252 WB 124,7 149,7 -36 -21 13,3 10,8 1LWBTS Tank 100 95 1,0252 WB 149,7 174,7 7 21 3,76 0 1LWBTC Tank 100 95 1,0252 WB 149,7 174,7 -7 7 3,76 0 1LWBTP Tank 100 95 1,0252 WB 149,7 174,7 -21 -7 3,76 0 1MWBTS Tank 100 95 1,0252 WB 149,7 174,7 7 21 10,8 3,76 1MWBTC Tank 100 95 1,0252 WB 149,7 174,7 -7 7 10,8 3,76 1MWBTP Tank 100 95 1,0252 WB 149,7 174,7 -21 -7 10,8 3,76 1UWBTS Tank 100 95 1,0252 WB 149,7 174,7 7 21 13,3 10,8 1UWBTC Tank 100 95 1,0252 WB 149,7 174,7 -7 7 13,3 10,8 1UWBTP Tank 100 95 1,0252 WB 149,7 174,7 -21 -7 13,3 10,8 EX1LWBTS Tank 100 95 1,0252 WB 149,7 174,7 21 36 3,76 0 EX1LWBTP Tank 100 95 1,0252 WB 149,7 174,7 -36 -21 3,76 0 EX1MWBTS Tank 100 95 1,0252 WB 149,7 174,7 21 36 10,8 3,76 EX1MWBTP Tank 100 95 1,0252 WB 149,7 174,7 -36 -21 10,8 3,76 EX1UWBTS Tank 100 95 1,0252 WB 149,7 174,7 21 36 13,3 10,8 EX1UWBTP Tank 100 95 1,0252 WB 149,7 174,7 -36 -21 13,3 10,8 2FOT(S)pp Tank 100 95 0,9443 WB 23,8 32,2 7 21 13,3 0 2FOT(P)pp Tank 100 95 0,9443 WB 23,8 32,2 -21 -7 13,3 0 DOT(S)pp Tank 100 95 0,84 DO 11,2 23,08 0 21 13,3 8,2 DOT(P)pp Tank 100 95 0,84 DO 11,2 21,7 -7 7 13,3 8,2 DOT2(S)pp Tank 100 95 0,84 DO 11,2 23,08 21 36,5 13,3 8,2 DOT2(P)pp Tank 100 95 0,84 DO 11,2 23,08 -35,5 -21 13,3 8,2 AP(S)pp Tank 100 95 1,0252 WB -3,5 11,2 0 17 5,9 0 AP(P)pp Tank 100 95 1,0252 WB -3,5 11,2 -17 0 5,9 0 APU(P)pp Tank 100 95 1,0252 WB -3,5 11,2 -17 0 13,3 5,9 APU(S)pp Tank 100 95 1,0252 WB 3,5 11,2 0 17 13,3 5,9 flot(AP) Tank 100 95 1,0252 WB -3,5 10,5 -36 -23,5 36,5 24,1 flot(FP) Tank 100 95 1,0252 WB -3,5 10,5 -36 -23,5 24,1 13,3 flot(AS) Tank 100 95 1,0252 WB -3,5 10,5 23,5 36 36,5 24,1 flot(FS) Tank 100 95 1,0252 WB -3,5 10,5 23,5 36 24,1 13,3 FLWBT(P)pr Tank 100 95 1,0252 WB 174,7 194,3 -36 -7 13,3 0 FLWBT(S)pr Tank 100 95 1,0252 WB 174,7 194,3 7 36 13,3 0 FDWBT(C)pr Tank 100 95 0,9443 FO 183,1 194,3 -7 7 13,3 0 FUWBT(P)pr Tank 100 95 1,0252 WB 174,7 194,3 -36 -7 24,8 13,3 FF(S)pr Tank 100 95 1 FW 174,7 178,9 7 36 16,052 13,3 FO(S)pr Tank 100 95 0,9443 FO 178,9 180,3 7 36 16,052 13,3 FUWBT(S)pr Tank 100 95 1,0252 WB 181 194,3 7 36 24,79 13,3 LFPTpeak(1) Tank 100 95 1,0252 WB 194,3 198,5 -36 36 13,3 0 LFPTpeak(2) Tank 100 95 0,84 WB 198,5 202 -36 36 13,3 0 LFPTpeak(3) Tank 100 95 1,0252 WB 202 206,5 -36 36 13,3 0 UFpeak Tank 100 95 1,0252 WB 194,3 206,5 -36 36 24,79 13,3
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
5 COMPARTIMENTACIÓN Y CONDICIONES DE CARGA 132
5.2.3.3 Zonas maestra, proa y popa y tanques de equilibrio Carena 72
Utilizamos la misma nomenclatura que en las carenas an-
teriores y los valores de referencia los podemos encontrar en el
parágrafo 5.2.3.2. (Valores de compartimentación)
5.2.3.4. Capacidad de Lastre Carena 72
Zona maestra
Lastre D.F.: 35.579 t; V.C.G = 1,931 m; L.C.G. = 108,8 m
Lastre Zona Intermedia: 72.293 t; V.C.G. = 7,411 m; L.C.G. =
103,0 m
Lastre Zona Superior: 26.296 t; V.C.G. = 12,050 m; L.C.G. =
103,4 m
Total: 134.168 t; V.C.G. = 6,797 m; L.C.G. = 105,7 m;
Popa y pique de popa
Lastre Torres de flotación: 7.401 t; V.C.G. = 24,579 m; L.C.G. =
2.983 m;
Lastre pique popa: 2.383 t; V.C.G. = 10.162 m ; L.C.G. = 5,683
m;
Total: 11.826 t ; V.C.G. = 21,674 m ; L.C.G. = 3,523 m;
Proa y pique de proa
Lastre tanques de proa: 20.300 t; V.C.G. = 11.119 m; L.C.G. =
184 m;
Lastre piques proa: 10.163 t; V.C.G = 13,748 m; L.C.G =199,7 m
Total: 30.463 t; V.C.G. = 11,330 m; L.C.G. = 189,7 m
Total del buque
Lastre del Buque: 149,989 t; V.C.G = 8,672 m; L.C.G.=112,2 m;
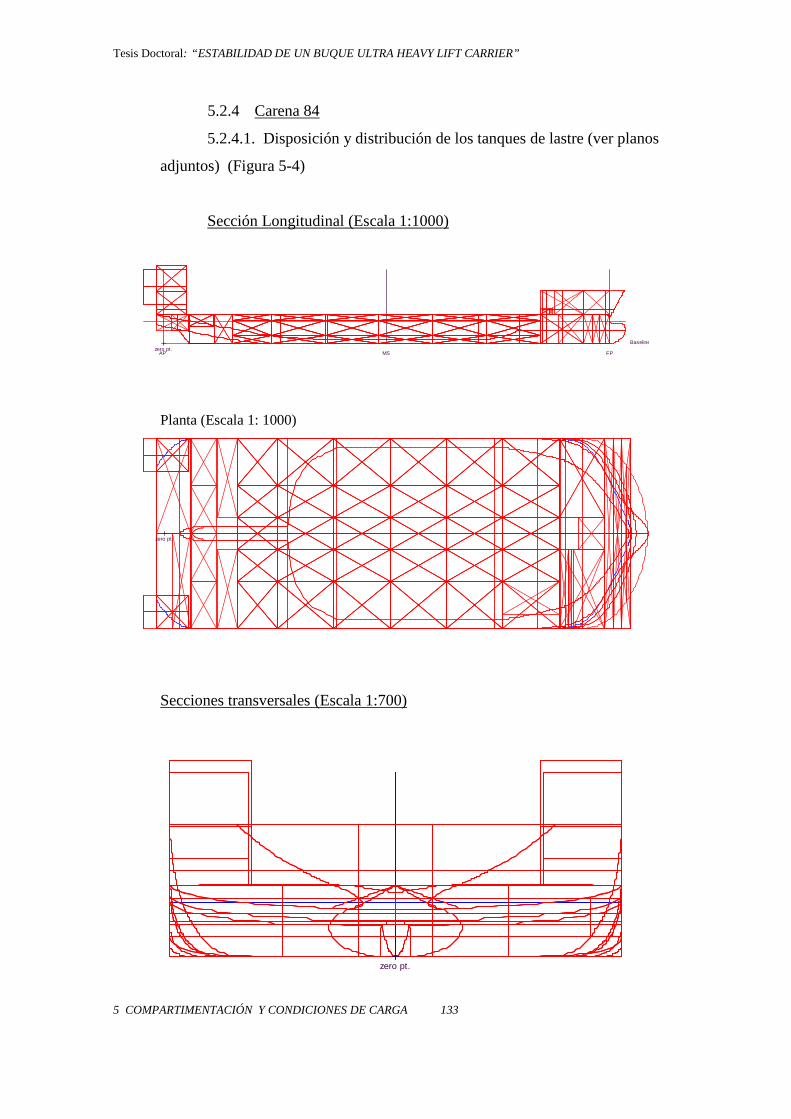
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
5 COMPARTIMENTACIÓN Y CONDICIONES DE CARGA 133
5.2.4 Carena 84
5.2.4.1. Disposición y distribución de los tanques de lastre (ver planos
adjuntos) (Figura 5-4)
Sección Longitudinal (Escala 1:1000)
Planta (Escala 1: 1000)
Secciones transversales (Escala 1:700)
zero pt.
zero pt.
MSAP FP
Baselinezero pt.
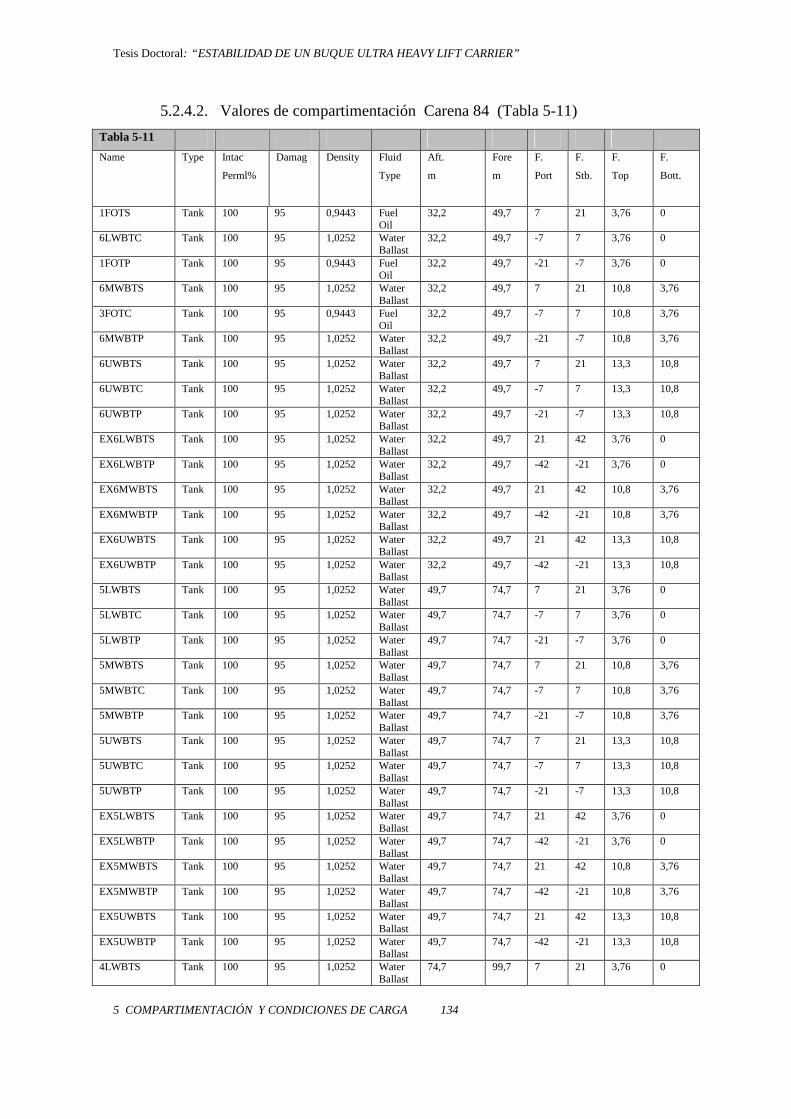
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
5 COMPARTIMENTACIÓN Y CONDICIONES DE CARGA 134
5.2.4.2. Valores de compartimentación Carena 84 (Tabla 5-11)
Tabla 5-11
Name Type Intac
Perml%
Damag Density Fluid
Type
Aft.
m
Fore
m
F.
Port
F.
Stb.
F.
Top
F.
Bott.
1FOTS Tank 100 95 0,9443 Fuel Oil
32,2 49,7 7 21 3,76 0
6LWBTC Tank 100 95 1,0252 Water Ballast
32,2 49,7 -7 7 3,76 0
1FOTP Tank 100 95 0,9443 Fuel Oil
32,2 49,7 -21 -7 3,76 0
6MWBTS Tank 100 95 1,0252 Water Ballast
32,2 49,7 7 21 10,8 3,76
3FOTC Tank 100 95 0,9443 Fuel Oil
32,2 49,7 -7 7 10,8 3,76
6MWBTP Tank 100 95 1,0252 Water Ballast
32,2 49,7 -21 -7 10,8 3,76
6UWBTS Tank 100 95 1,0252 Water Ballast
32,2 49,7 7 21 13,3 10,8
6UWBTC Tank 100 95 1,0252 Water Ballast
32,2 49,7 -7 7 13,3 10,8
6UWBTP Tank 100 95 1,0252 Water Ballast
32,2 49,7 -21 -7 13,3 10,8
EX6LWBTS Tank 100 95 1,0252 Water Ballast
32,2 49,7 21 42 3,76 0
EX6LWBTP Tank 100 95 1,0252 Water Ballast
32,2 49,7 -42 -21 3,76 0
EX6MWBTS Tank 100 95 1,0252 Water Ballast
32,2 49,7 21 42 10,8 3,76
EX6MWBTP Tank 100 95 1,0252 Water Ballast
32,2 49,7 -42 -21 10,8 3,76
EX6UWBTS Tank 100 95 1,0252 Water Ballast
32,2 49,7 21 42 13,3 10,8
EX6UWBTP Tank 100 95 1,0252 Water Ballast
32,2 49,7 -42 -21 13,3 10,8
5LWBTS Tank 100 95 1,0252 Water Ballast
49,7 74,7 7 21 3,76 0
5LWBTC Tank 100 95 1,0252 Water Ballast
49,7 74,7 -7 7 3,76 0
5LWBTP Tank 100 95 1,0252 Water Ballast
49,7 74,7 -21 -7 3,76 0
5MWBTS Tank 100 95 1,0252 Water Ballast
49,7 74,7 7 21 10,8 3,76
5MWBTC Tank 100 95 1,0252 Water Ballast
49,7 74,7 -7 7 10,8 3,76
5MWBTP Tank 100 95 1,0252 Water Ballast
49,7 74,7 -21 -7 10,8 3,76
5UWBTS Tank 100 95 1,0252 Water Ballast
49,7 74,7 7 21 13,3 10,8
5UWBTC Tank 100 95 1,0252 Water Ballast
49,7 74,7 -7 7 13,3 10,8
5UWBTP Tank 100 95 1,0252 Water Ballast
49,7 74,7 -21 -7 13,3 10,8
EX5LWBTS Tank 100 95 1,0252 Water Ballast
49,7 74,7 21 42 3,76 0
EX5LWBTP Tank 100 95 1,0252 Water Ballast
49,7 74,7 -42 -21 3,76 0
EX5MWBTS Tank 100 95 1,0252 Water Ballast
49,7 74,7 21 42 10,8 3,76
EX5MWBTP Tank 100 95 1,0252 Water Ballast
49,7 74,7 -42 -21 10,8 3,76
EX5UWBTS Tank 100 95 1,0252 Water Ballast
49,7 74,7 21 42 13,3 10,8
EX5UWBTP Tank 100 95 1,0252 Water Ballast
49,7 74,7 -42 -21 13,3 10,8
4LWBTS Tank 100 95 1,0252 Water Ballast
74,7 99,7 7 21 3,76 0
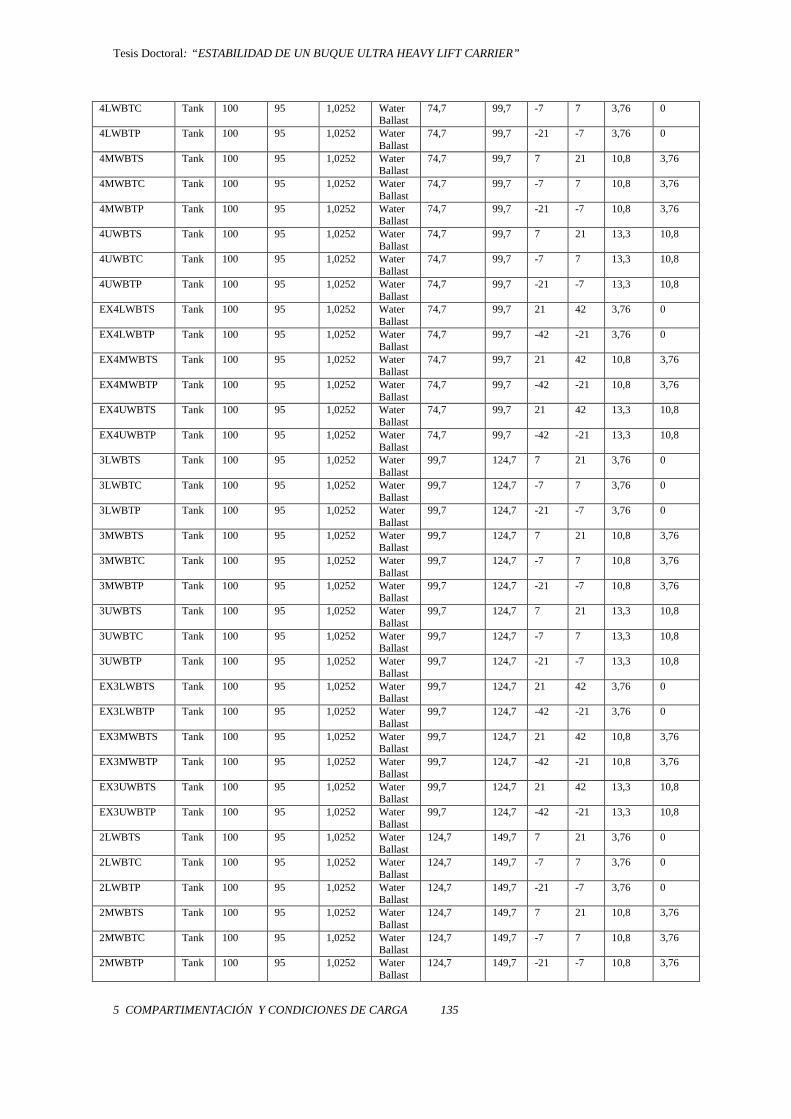
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
5 COMPARTIMENTACIÓN Y CONDICIONES DE CARGA 135
4LWBTC Tank 100 95 1,0252 Water Ballast
74,7 99,7 -7 7 3,76 0
4LWBTP Tank 100 95 1,0252 Water Ballast
74,7 99,7 -21 -7 3,76 0
4MWBTS Tank 100 95 1,0252 Water Ballast
74,7 99,7 7 21 10,8 3,76
4MWBTC Tank 100 95 1,0252 Water Ballast
74,7 99,7 -7 7 10,8 3,76
4MWBTP Tank 100 95 1,0252 Water Ballast
74,7 99,7 -21 -7 10,8 3,76
4UWBTS Tank 100 95 1,0252 Water Ballast
74,7 99,7 7 21 13,3 10,8
4UWBTC Tank 100 95 1,0252 Water Ballast
74,7 99,7 -7 7 13,3 10,8
4UWBTP Tank 100 95 1,0252 Water Ballast
74,7 99,7 -21 -7 13,3 10,8
EX4LWBTS Tank 100 95 1,0252 Water Ballast
74,7 99,7 21 42 3,76 0
EX4LWBTP Tank 100 95 1,0252 Water Ballast
74,7 99,7 -42 -21 3,76 0
EX4MWBTS Tank 100 95 1,0252 Water Ballast
74,7 99,7 21 42 10,8 3,76
EX4MWBTP Tank 100 95 1,0252 Water Ballast
74,7 99,7 -42 -21 10,8 3,76
EX4UWBTS Tank 100 95 1,0252 Water Ballast
74,7 99,7 21 42 13,3 10,8
EX4UWBTP Tank 100 95 1,0252 Water Ballast
74,7 99,7 -42 -21 13,3 10,8
3LWBTS Tank 100 95 1,0252 Water Ballast
99,7 124,7 7 21 3,76 0
3LWBTC Tank 100 95 1,0252 Water Ballast
99,7 124,7 -7 7 3,76 0
3LWBTP Tank 100 95 1,0252 Water Ballast
99,7 124,7 -21 -7 3,76 0
3MWBTS Tank 100 95 1,0252 Water Ballast
99,7 124,7 7 21 10,8 3,76
3MWBTC Tank 100 95 1,0252 Water Ballast
99,7 124,7 -7 7 10,8 3,76
3MWBTP Tank 100 95 1,0252 Water Ballast
99,7 124,7 -21 -7 10,8 3,76
3UWBTS Tank 100 95 1,0252 Water Ballast
99,7 124,7 7 21 13,3 10,8
3UWBTC Tank 100 95 1,0252 Water Ballast
99,7 124,7 -7 7 13,3 10,8
3UWBTP Tank 100 95 1,0252 Water Ballast
99,7 124,7 -21 -7 13,3 10,8
EX3LWBTS Tank 100 95 1,0252 Water Ballast
99,7 124,7 21 42 3,76 0
EX3LWBTP Tank 100 95 1,0252 Water Ballast
99,7 124,7 -42 -21 3,76 0
EX3MWBTS Tank 100 95 1,0252 Water Ballast
99,7 124,7 21 42 10,8 3,76
EX3MWBTP Tank 100 95 1,0252 Water Ballast
99,7 124,7 -42 -21 10,8 3,76
EX3UWBTS Tank 100 95 1,0252 Water Ballast
99,7 124,7 21 42 13,3 10,8
EX3UWBTP Tank 100 95 1,0252 Water Ballast
99,7 124,7 -42 -21 13,3 10,8
2LWBTS Tank 100 95 1,0252 Water Ballast
124,7 149,7 7 21 3,76 0
2LWBTC Tank 100 95 1,0252 Water Ballast
124,7 149,7 -7 7 3,76 0
2LWBTP Tank 100 95 1,0252 Water Ballast
124,7 149,7 -21 -7 3,76 0
2MWBTS Tank 100 95 1,0252 Water Ballast
124,7 149,7 7 21 10,8 3,76
2MWBTC Tank 100 95 1,0252 Water Ballast
124,7 149,7 -7 7 10,8 3,76
2MWBTP Tank 100 95 1,0252 Water Ballast
124,7 149,7 -21 -7 10,8 3,76
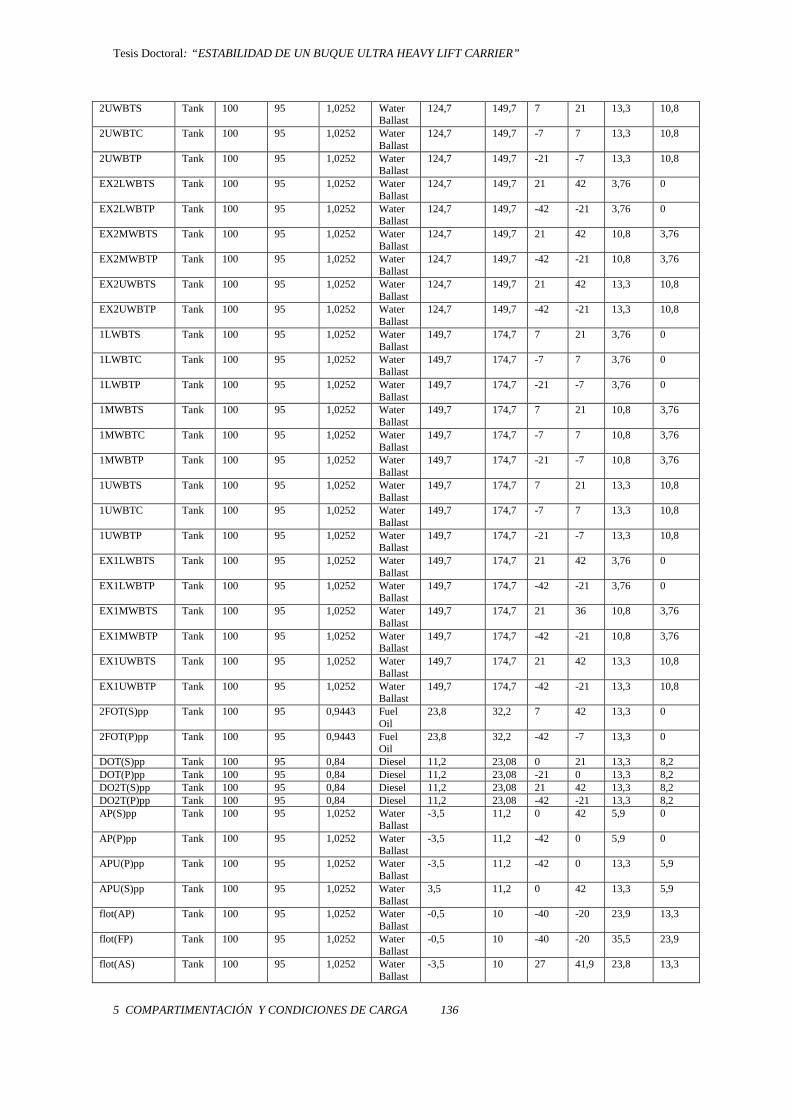
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
5 COMPARTIMENTACIÓN Y CONDICIONES DE CARGA 136
2UWBTS Tank 100 95 1,0252 Water Ballast
124,7 149,7 7 21 13,3 10,8
2UWBTC Tank 100 95 1,0252 Water Ballast
124,7 149,7 -7 7 13,3 10,8
2UWBTP Tank 100 95 1,0252 Water Ballast
124,7 149,7 -21 -7 13,3 10,8
EX2LWBTS Tank 100 95 1,0252 Water Ballast
124,7 149,7 21 42 3,76 0
EX2LWBTP Tank 100 95 1,0252 Water Ballast
124,7 149,7 -42 -21 3,76 0
EX2MWBTS Tank 100 95 1,0252 Water Ballast
124,7 149,7 21 42 10,8 3,76
EX2MWBTP Tank 100 95 1,0252 Water Ballast
124,7 149,7 -42 -21 10,8 3,76
EX2UWBTS Tank 100 95 1,0252 Water Ballast
124,7 149,7 21 42 13,3 10,8
EX2UWBTP Tank 100 95 1,0252 Water Ballast
124,7 149,7 -42 -21 13,3 10,8
1LWBTS Tank 100 95 1,0252 Water Ballast
149,7 174,7 7 21 3,76 0
1LWBTC Tank 100 95 1,0252 Water Ballast
149,7 174,7 -7 7 3,76 0
1LWBTP Tank 100 95 1,0252 Water Ballast
149,7 174,7 -21 -7 3,76 0
1MWBTS Tank 100 95 1,0252 Water Ballast
149,7 174,7 7 21 10,8 3,76
1MWBTC Tank 100 95 1,0252 Water Ballast
149,7 174,7 -7 7 10,8 3,76
1MWBTP Tank 100 95 1,0252 Water Ballast
149,7 174,7 -21 -7 10,8 3,76
1UWBTS Tank 100 95 1,0252 Water Ballast
149,7 174,7 7 21 13,3 10,8
1UWBTC Tank 100 95 1,0252 Water Ballast
149,7 174,7 -7 7 13,3 10,8
1UWBTP Tank 100 95 1,0252 Water Ballast
149,7 174,7 -21 -7 13,3 10,8
EX1LWBTS Tank 100 95 1,0252 Water Ballast
149,7 174,7 21 42 3,76 0
EX1LWBTP Tank 100 95 1,0252 Water Ballast
149,7 174,7 -42 -21 3,76 0
EX1MWBTS Tank 100 95 1,0252 Water Ballast
149,7 174,7 21 36 10,8 3,76
EX1MWBTP Tank 100 95 1,0252 Water Ballast
149,7 174,7 -42 -21 10,8 3,76
EX1UWBTS Tank 100 95 1,0252 Water Ballast
149,7 174,7 21 42 13,3 10,8
EX1UWBTP Tank 100 95 1,0252 Water Ballast
149,7 174,7 -42 -21 13,3 10,8
2FOT(S)pp Tank 100 95 0,9443 Fuel Oil
23,8 32,2 7 42 13,3 0
2FOT(P)pp Tank 100 95 0,9443 Fuel Oil
23,8 32,2 -42 -7 13,3 0
DOT(S)pp Tank 100 95 0,84 Diesel 11,2 23,08 0 21 13,3 8,2 DOT(P)pp Tank 100 95 0,84 Diesel 11,2 23,08 -21 0 13,3 8,2 DO2T(S)pp Tank 100 95 0,84 Diesel 11,2 23,08 21 42 13,3 8,2 DO2T(P)pp Tank 100 95 0,84 Diesel 11,2 23,08 -42 -21 13,3 8,2 AP(S)pp Tank 100 95 1,0252 Water
Ballast -3,5 11,2 0 42 5,9 0
AP(P)pp Tank 100 95 1,0252 Water Ballast
-3,5 11,2 -42 0 5,9 0
APU(P)pp Tank 100 95 1,0252 Water Ballast
-3,5 11,2 -42 0 13,3 5,9
APU(S)pp Tank 100 95 1,0252 Water Ballast
3,5 11,2 0 42 13,3 5,9
flot(AP) Tank 100 95 1,0252 Water Ballast
-0,5 10 -40 -20 23,9 13,3
flot(FP) Tank 100 95 1,0252 Water Ballast
-0,5 10 -40 -20 35,5 23,9
flot(AS) Tank 100 95 1,0252 Water Ballast
-3,5 10 27 41,9 23,8 13,3
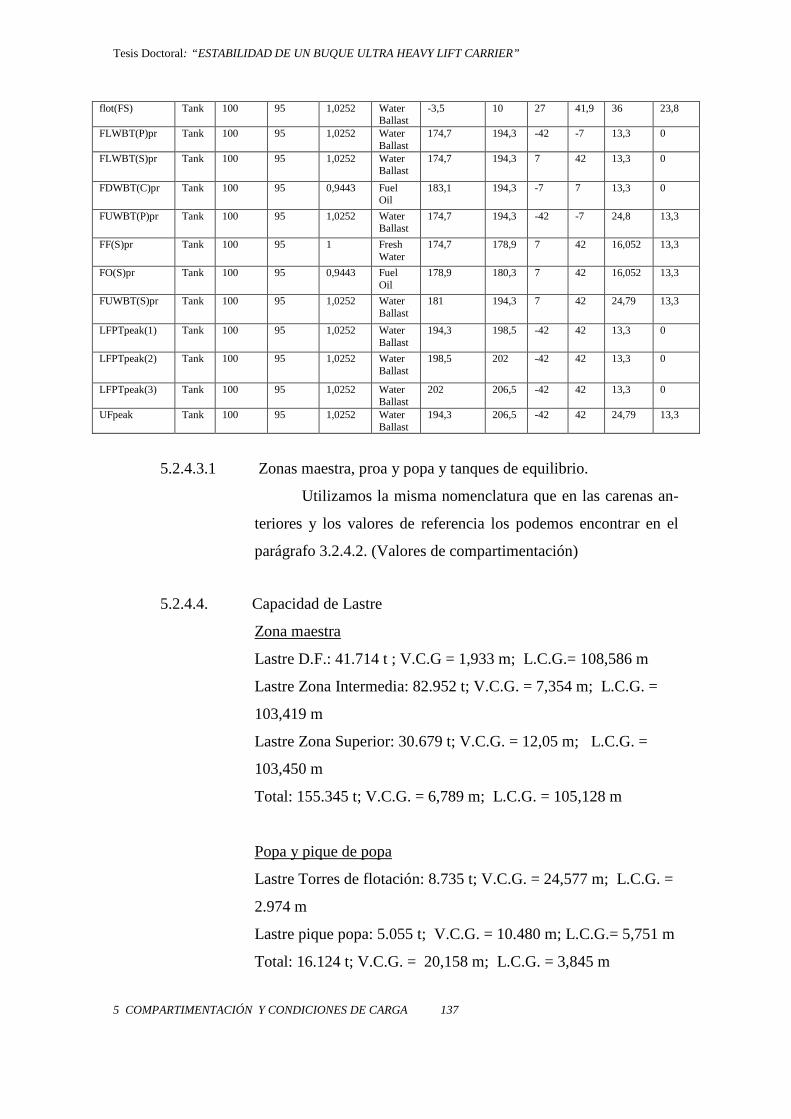
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
5 COMPARTIMENTACIÓN Y CONDICIONES DE CARGA 137
flot(FS) Tank 100 95 1,0252 Water Ballast
-3,5 10 27 41,9 36 23,8
FLWBT(P)pr Tank 100 95 1,0252 Water Ballast
174,7 194,3 -42 -7 13,3 0
FLWBT(S)pr Tank 100 95 1,0252 Water Ballast
174,7 194,3 7 42 13,3 0
FDWBT(C)pr Tank 100 95 0,9443 Fuel Oil
183,1 194,3 -7 7 13,3 0
FUWBT(P)pr Tank 100 95 1,0252 Water Ballast
174,7 194,3 -42 -7 24,8 13,3
FF(S)pr Tank 100 95 1 Fresh Water
174,7 178,9 7 42 16,052 13,3
FO(S)pr Tank 100 95 0,9443 Fuel Oil
178,9 180,3 7 42 16,052 13,3
FUWBT(S)pr Tank 100 95 1,0252 Water Ballast
181 194,3 7 42 24,79 13,3
LFPTpeak(1) Tank 100 95 1,0252 Water Ballast
194,3 198,5 -42 42 13,3 0
LFPTpeak(2) Tank 100 95 1,0252 Water Ballast
198,5 202 -42 42 13,3 0
LFPTpeak(3) Tank 100 95 1,0252 Water Ballast
202 206,5 -42 42 13,3 0
UFpeak Tank 100 95 1,0252 Water Ballast
194,3 206,5 -42 42 24,79 13,3
5.2.4.3.1 Zonas maestra, proa y popa y tanques de equilibrio.
Utilizamos la misma nomenclatura que en las carenas an-
teriores y los valores de referencia los podemos encontrar en el
parágrafo 3.2.4.2. (Valores de compartimentación)
5.2.4.4. Capacidad de Lastre
Zona maestra
Lastre D.F.: 41.714 t ; V.C.G = 1,933 m; L.C.G.= 108,586 m
Lastre Zona Intermedia: 82.952 t; V.C.G. = 7,354 m; L.C.G. =
103,419 m
Lastre Zona Superior: 30.679 t; V.C.G. = 12,05 m; L.C.G. =
103,450 m
Total: 155.345 t; V.C.G. = 6,789 m; L.C.G. = 105,128 m
Popa y pique de popa
Lastre Torres de flotación: 8.735 t; V.C.G. = 24,577 m; L.C.G. =
2.974 m
Lastre pique popa: 5.055 t; V.C.G. = 10.480 m; L.C.G.= 5,751 m
Total: 16.124 t; V.C.G. = 20,158 m; L.C.G. = 3,845 m
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
5 COMPARTIMENTACIÓN Y CONDICIONES DE CARGA 138
Proa y pique de proa
Lastre tanques de proa: 28.573 t; V.C.G. = 12,389 m; L.C.G. =
184,653 m
Lastre piques proa: 13.873 t; V.C.G. = 14,345 m; L.C.G. =
199,485 m
Total: 42.410 t; V.C.G. = 13,027 m; L.C.G. = 189,492 m
Total del buque
Lastre del Buque: 200.989 t; V.C.G. = 8,182 m; L.C.G. =
120,255 m
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
5 COMPARTIMENTACIÓN Y CONDICIONES DE CARGA 139
5.3 CONDICIONES DE CARGA ESTÁNDAR- RESISTENCIA LONGITUDINAL
Se ha considerado como carga estándar la máxima carga de diseño con un C.G.
acorde con las mayores plataformas de perforación y explotación actualmente en el
mercado o bien aquéllas previsibles en un futuro.
Un dato a tener en cuenta en la evaluación de este tipo de buque es un breve aná-
lisis de la resistencia longitudinal resultante al objeto de valorar los esfuerzos a los que
va a estar sometido y en definitiva la necesaria resistencia estructural que nos permita
ver sus posibilidades de adecuación a la demanda del mercado.
Se ha establecido como condición de carga para cada una de las carenas las con-
diciones referidas en la Tabla 6-16 del Capítulo 6, parágrafo 6.4, página 218, donde la
magnitud del peso y el C.G. de la carga corresponden a las posibles mayores platafor-
mas de transporte acorde con el citado diagrama.
A partir de aquí se ha establecido la condición de carga estándar determinando
el centro de gravedad del buque y la resistencia longitudinal del mismo, datos que utili-
zaremos para nuestras conclusiones.
Las Sociedades de Clasificación exigen para cada una de las situaciones de carga
determinar la distribución de los momentos flectores y esfuerzos cortantes, que se esta-
blecen en la resistencia longitudinal, y que dichas distribuciones satisfagan unos deter-
minados requisitos, que están prácticamente unificados. En definitiva, será necesario
demostrar en la fase de proyecto que las solicitaciones debidas a las olas pueden ser
menores que las reglamentarias, bien analizando el espectro de las olas para determinar
los correspondientes esfuerzos del buque o por otro procedimiento pertinente y adecua-
do.
Sin embargo, las Sociedades de Clasificación exigen consideraciones específicas
de esfuerzos debidos a la resistencia longitudinal en aquellos buques en que alguno de
los siguientes parámetros se aparte de las reglas:
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
5 COMPARTIMENTACIÓN Y CONDICIONES DE CARGA 140
L > 400 m; L/B = 5; B/D = 2,5; CB = 0,6;
Los buques de esta tesis estarán en estas condiciones de excepción a partir de un
determinado peso muerto y, por tanto, el análisis de su resistencia longitudinal no debe
ser obviado.
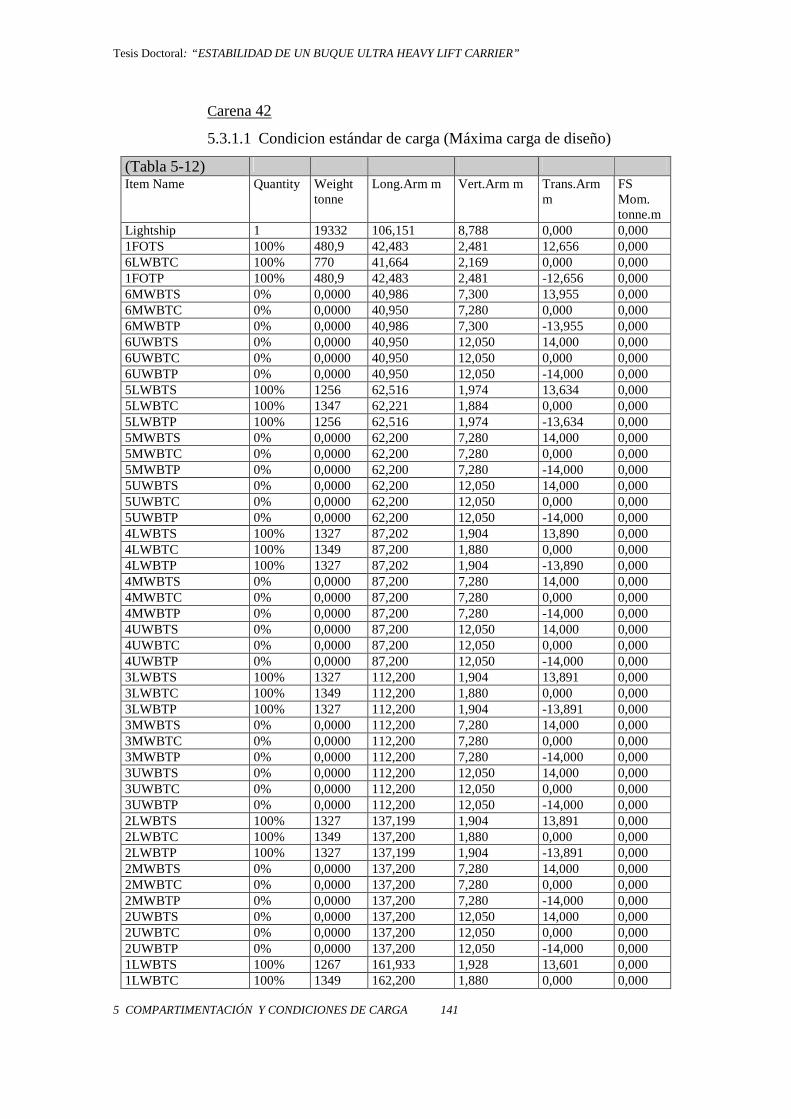
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
5 COMPARTIMENTACIÓN Y CONDICIONES DE CARGA 141
Carena 42
5.3.1.1 Condicion estándar de carga (Máxima carga de diseño)
(Tabla 5-12)
Item Name Quantity Weight tonne
Long.Arm m Vert.Arm m Trans.Arm m
FS Mom. tonne.m
Lightship 1 19332 106,151 8,788 0,000 0,000 1FOTS 100% 480,9 42,483 2,481 12,656 0,000 6LWBTC 100% 770 41,664 2,169 0,000 0,000 1FOTP 100% 480,9 42,483 2,481 -12,656 0,000 6MWBTS 0% 0,0000 40,986 7,300 13,955 0,000 6MWBTC 0% 0,0000 40,950 7,280 0,000 0,000 6MWBTP 0% 0,0000 40,986 7,300 -13,955 0,000 6UWBTS 0% 0,0000 40,950 12,050 14,000 0,000 6UWBTC 0% 0,0000 40,950 12,050 0,000 0,000 6UWBTP 0% 0,0000 40,950 12,050 -14,000 0,000 5LWBTS 100% 1256 62,516 1,974 13,634 0,000 5LWBTC 100% 1347 62,221 1,884 0,000 0,000 5LWBTP 100% 1256 62,516 1,974 -13,634 0,000 5MWBTS 0% 0,0000 62,200 7,280 14,000 0,000 5MWBTC 0% 0,0000 62,200 7,280 0,000 0,000 5MWBTP 0% 0,0000 62,200 7,280 -14,000 0,000 5UWBTS 0% 0,0000 62,200 12,050 14,000 0,000 5UWBTC 0% 0,0000 62,200 12,050 0,000 0,000 5UWBTP 0% 0,0000 62,200 12,050 -14,000 0,000 4LWBTS 100% 1327 87,202 1,904 13,890 0,000 4LWBTC 100% 1349 87,200 1,880 0,000 0,000 4LWBTP 100% 1327 87,202 1,904 -13,890 0,000 4MWBTS 0% 0,0000 87,200 7,280 14,000 0,000 4MWBTC 0% 0,0000 87,200 7,280 0,000 0,000 4MWBTP 0% 0,0000 87,200 7,280 -14,000 0,000 4UWBTS 0% 0,0000 87,200 12,050 14,000 0,000 4UWBTC 0% 0,0000 87,200 12,050 0,000 0,000 4UWBTP 0% 0,0000 87,200 12,050 -14,000 0,000 3LWBTS 100% 1327 112,200 1,904 13,891 0,000 3LWBTC 100% 1349 112,200 1,880 0,000 0,000 3LWBTP 100% 1327 112,200 1,904 -13,891 0,000 3MWBTS 0% 0,0000 112,200 7,280 14,000 0,000 3MWBTC 0% 0,0000 112,200 7,280 0,000 0,000 3MWBTP 0% 0,0000 112,200 7,280 -14,000 0,000 3UWBTS 0% 0,0000 112,200 12,050 14,000 0,000 3UWBTC 0% 0,0000 112,200 12,050 0,000 0,000 3UWBTP 0% 0,0000 112,200 12,050 -14,000 0,000 2LWBTS 100% 1327 137,199 1,904 13,891 0,000 2LWBTC 100% 1349 137,200 1,880 0,000 0,000 2LWBTP 100% 1327 137,199 1,904 -13,891 0,000 2MWBTS 0% 0,0000 137,200 7,280 14,000 0,000 2MWBTC 0% 0,0000 137,200 7,280 0,000 0,000 2MWBTP 0% 0,0000 137,200 7,280 -14,000 0,000 2UWBTS 0% 0,0000 137,200 12,050 14,000 0,000 2UWBTC 0% 0,0000 137,200 12,050 0,000 0,000 2UWBTP 0% 0,0000 137,200 12,050 -14,000 0,000 1LWBTS 100% 1267 161,933 1,928 13,601 0,000 1LWBTC 100% 1349 162,200 1,880 0,000 0,000
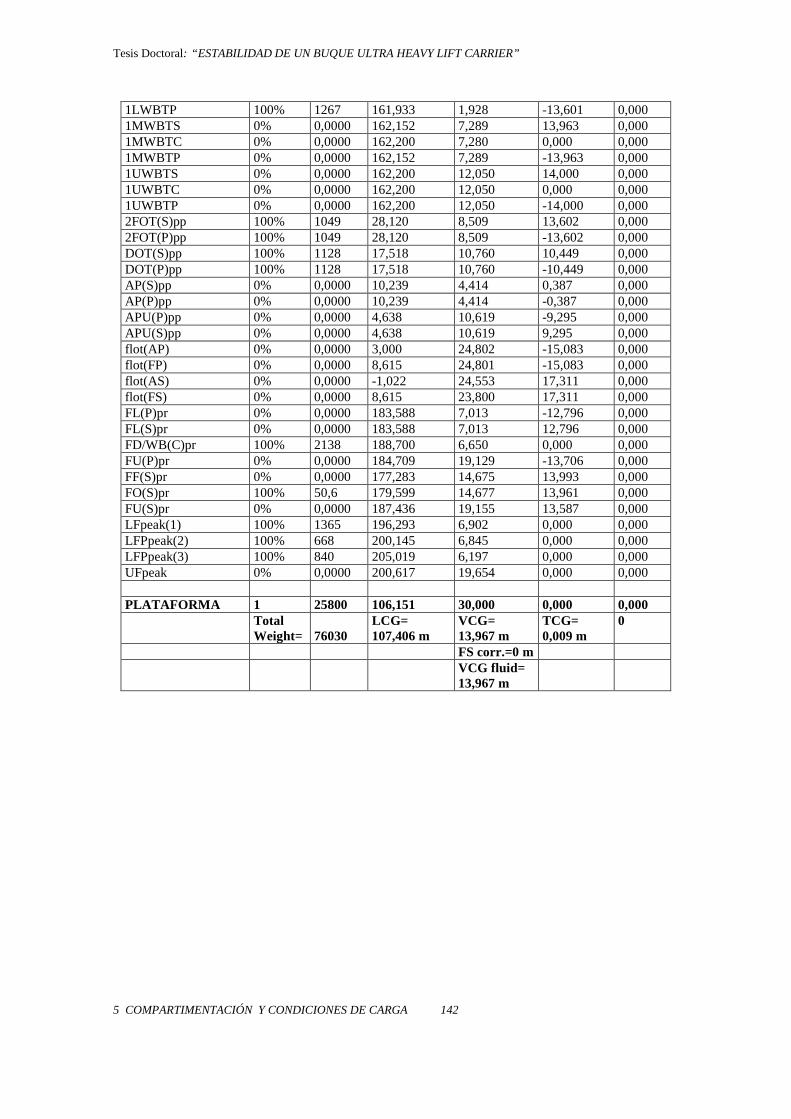
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
5 COMPARTIMENTACIÓN Y CONDICIONES DE CARGA 142
1LWBTP 100% 1267 161,933 1,928 -13,601 0,000 1MWBTS 0% 0,0000 162,152 7,289 13,963 0,000 1MWBTC 0% 0,0000 162,200 7,280 0,000 0,000 1MWBTP 0% 0,0000 162,152 7,289 -13,963 0,000 1UWBTS 0% 0,0000 162,200 12,050 14,000 0,000 1UWBTC 0% 0,0000 162,200 12,050 0,000 0,000 1UWBTP 0% 0,0000 162,200 12,050 -14,000 0,000 2FOT(S)pp 100% 1049 28,120 8,509 13,602 0,000 2FOT(P)pp 100% 1049 28,120 8,509 -13,602 0,000 DOT(S)pp 100% 1128 17,518 10,760 10,449 0,000 DOT(P)pp 100% 1128 17,518 10,760 -10,449 0,000 AP(S)pp 0% 0,0000 10,239 4,414 0,387 0,000 AP(P)pp 0% 0,0000 10,239 4,414 -0,387 0,000 APU(P)pp 0% 0,0000 4,638 10,619 -9,295 0,000 APU(S)pp 0% 0,0000 4,638 10,619 9,295 0,000 flot(AP) 0% 0,0000 3,000 24,802 -15,083 0,000 flot(FP) 0% 0,0000 8,615 24,801 -15,083 0,000 flot(AS) 0% 0,0000 -1,022 24,553 17,311 0,000 flot(FS) 0% 0,0000 8,615 23,800 17,311 0,000 FL(P)pr 0% 0,0000 183,588 7,013 -12,796 0,000 FL(S)pr 0% 0,0000 183,588 7,013 12,796 0,000 FD/WB(C)pr 100% 2138 188,700 6,650 0,000 0,000 FU(P)pr 0% 0,0000 184,709 19,129 -13,706 0,000 FF(S)pr 0% 0,0000 177,283 14,675 13,993 0,000 FO(S)pr 100% 50,6 179,599 14,677 13,961 0,000 FU(S)pr 0% 0,0000 187,436 19,155 13,587 0,000 LFpeak(1) 100% 1365 196,293 6,902 0,000 0,000 LFPpeak(2) 100% 668 200,145 6,845 0,000 0,000 LFPpeak(3) 100% 840 205,019 6,197 0,000 0,000 UFpeak 0% 0,0000 200,617 19,654 0,000 0,000 PLATAFORMA 1 25800 106,151 30,000 0,000 0,000 Total
Weight= 76030
LCG= 107,406 m
VCG= 13,967 m
TCG= 0,009 m
0
FS corr.=0 m VCG fluid=
13,967 m
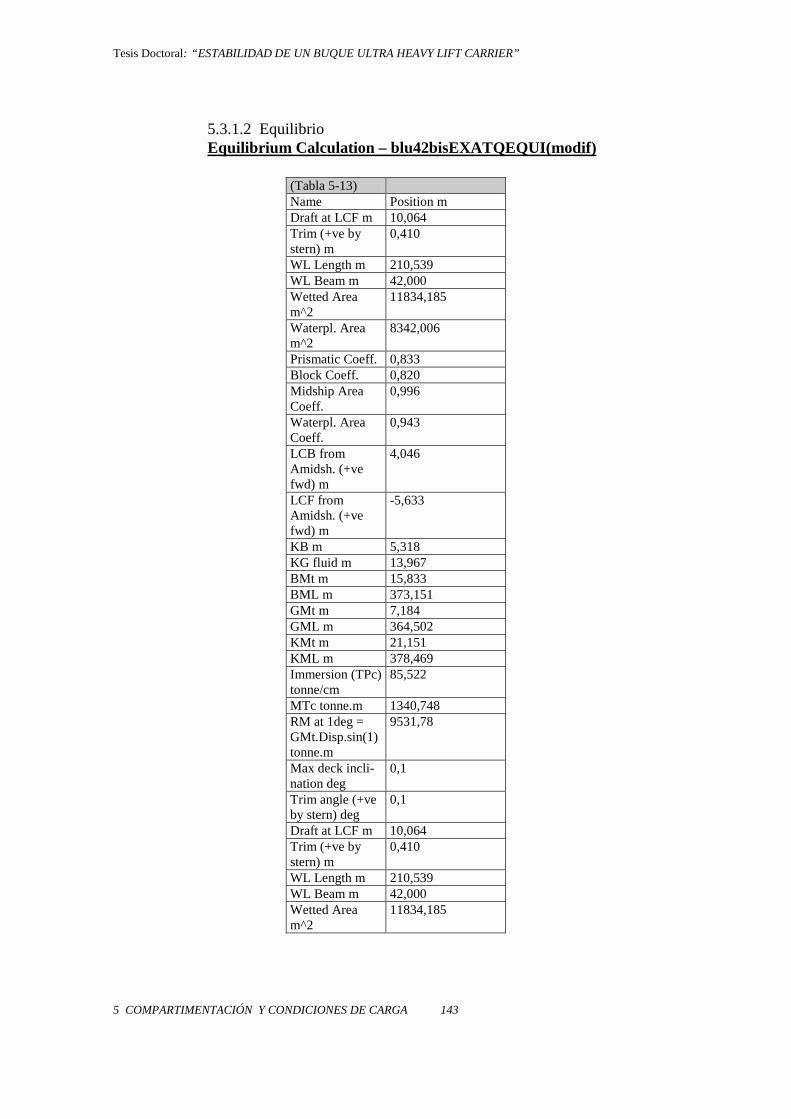
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
5 COMPARTIMENTACIÓN Y CONDICIONES DE CARGA 143
5.3.1.2 Equilibrio Equilibrium Calculation – blu42bisEXATQEQUI(modif)
(Tabla 5-13) Name Position m Draft at LCF m 10,064 Trim (+ve by stern) m
0,410
WL Length m 210,539 WL Beam m 42,000 Wetted Area m^2
11834,185
Waterpl. Area m^2
8342,006
Prismatic Coeff. 0,833 Block Coeff. 0,820 Midship Area Coeff.
0,996
Waterpl. Area Coeff.
0,943
LCB from Amidsh. (+ve fwd) m
4,046
LCF from Amidsh. (+ve fwd) m
-5,633
KB m 5,318 KG fluid m 13,967 BMt m 15,833 BML m 373,151 GMt m 7,184 GML m 364,502 KMt m 21,151 KML m 378,469 Immersion (TPc) tonne/cm
85,522
MTc tonne.m 1340,748 RM at 1deg = GMt.Disp.sin(1) tonne.m
9531,78
Max deck incli-nation deg
0,1
Trim angle (+ve by stern) deg
0,1
Draft at LCF m 10,064 Trim (+ve by stern) m
0,410
WL Length m 210,539 WL Beam m 42,000 Wetted Area m^2
11834,185
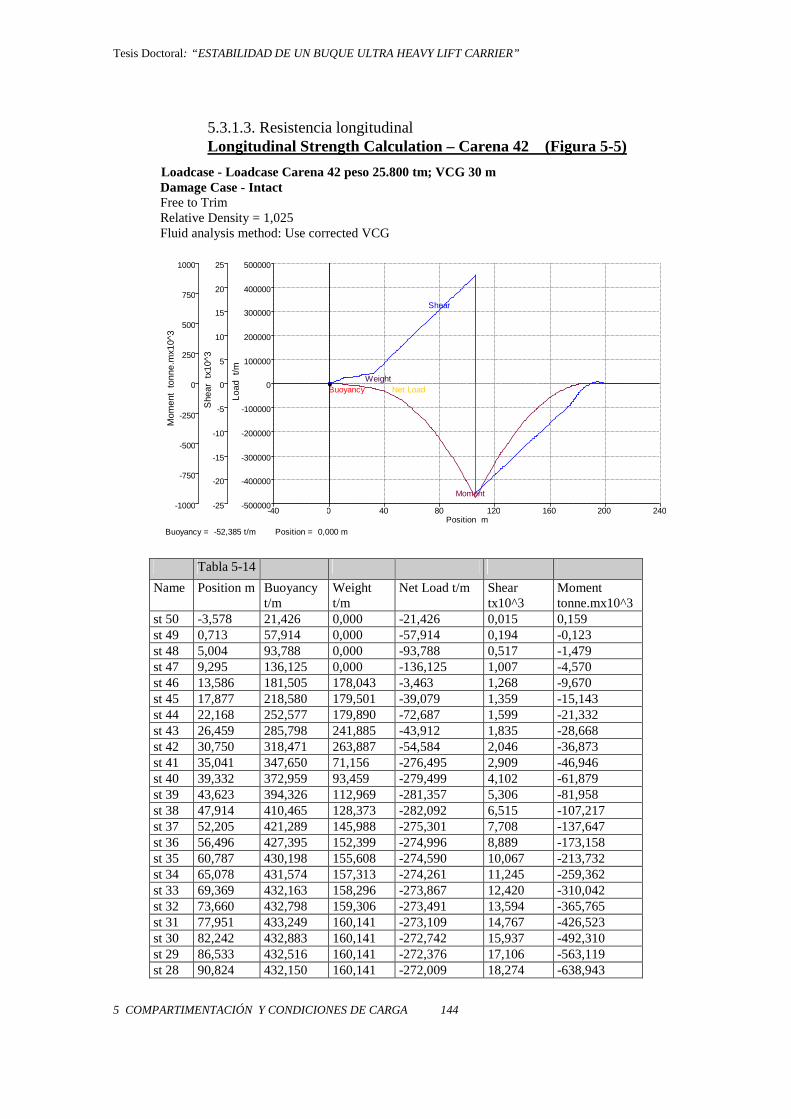
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
5 COMPARTIMENTACIÓN Y CONDICIONES DE CARGA 144
5.3.1.3. Resistencia longitudinal Longitudinal Strength Calculation – Carena 42 (Figura 5-5)
Loadcase - Loadcase Carena 42 peso 25.800 tm; VCG 30 m Damage Case - Intact Free to Trim Relative Density = 1,025 Fluid analysis method: Use corrected VCG
-500000
-400000
-300000
-200000
-100000
0
100000
200000
300000
400000
500000
-40 0 40 80 120 160 200 240-25
-20
-15
-10
-5
0
5
10
15
20
25
-1000
-750
-500
-250
0
250
500
750
1000
BuoyancyWeight
Net Load
Shear
Moment
Buoyancy = Position = -52,385 t/m 0,000 m
Position m
Load
t/m
She
ar t
x10^
3
Mom
ent
tonn
e.m
x10^
3
Tabla 5-14
Name Position m Buoyancy t/m
Weight t/m
Net Load t/m Shear tx10^3
Moment tonne.mx10^3
st 50 -3,578 21,426 0,000 -21,426 0,015 0,159 st 49 0,713 57,914 0,000 -57,914 0,194 -0,123 st 48 5,004 93,788 0,000 -93,788 0,517 -1,479 st 47 9,295 136,125 0,000 -136,125 1,007 -4,570 st 46 13,586 181,505 178,043 -3,463 1,268 -9,670 st 45 17,877 218,580 179,501 -39,079 1,359 -15,143 st 44 22,168 252,577 179,890 -72,687 1,599 -21,332 st 43 26,459 285,798 241,885 -43,912 1,835 -28,668 st 42 30,750 318,471 263,887 -54,584 2,046 -36,873 st 41 35,041 347,650 71,156 -276,495 2,909 -46,946 st 40 39,332 372,959 93,459 -279,499 4,102 -61,879 st 39 43,623 394,326 112,969 -281,357 5,306 -81,958 st 38 47,914 410,465 128,373 -282,092 6,515 -107,217 st 37 52,205 421,289 145,988 -275,301 7,708 -137,647 st 36 56,496 427,395 152,399 -274,996 8,889 -173,158 st 35 60,787 430,198 155,608 -274,590 10,067 -213,732 st 34 65,078 431,574 157,313 -274,261 11,245 -259,362 st 33 69,369 432,163 158,296 -273,867 12,420 -310,042 st 32 73,660 432,798 159,306 -273,491 13,594 -365,765 st 31 77,951 433,249 160,141 -273,109 14,767 -426,523 st 30 82,242 432,883 160,141 -272,742 15,937 -492,310 st 29 86,533 432,516 160,141 -272,376 17,106 -563,119 st 28 90,824 432,150 160,141 -272,009 18,274 -638,943
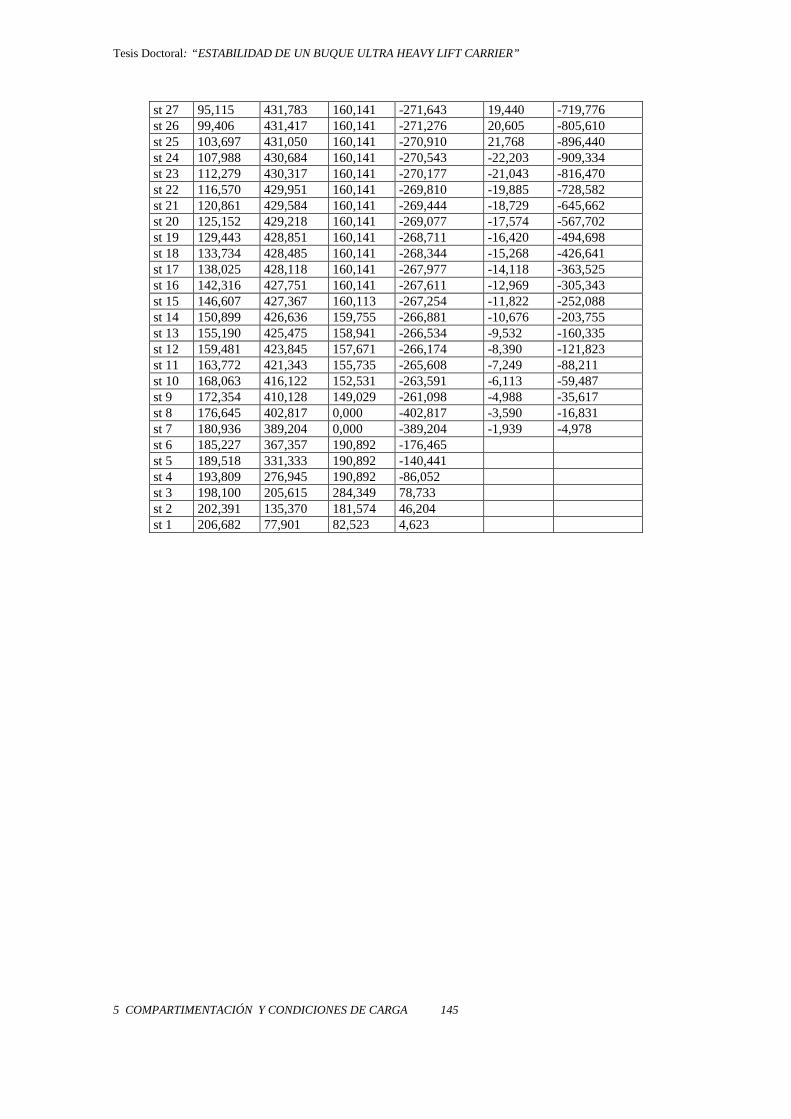
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
5 COMPARTIMENTACIÓN Y CONDICIONES DE CARGA 145
st 27 95,115 431,783 160,141 -271,643 19,440 -719,776 st 26 99,406 431,417 160,141 -271,276 20,605 -805,610 st 25 103,697 431,050 160,141 -270,910 21,768 -896,440 st 24 107,988 430,684 160,141 -270,543 -22,203 -909,334 st 23 112,279 430,317 160,141 -270,177 -21,043 -816,470 st 22 116,570 429,951 160,141 -269,810 -19,885 -728,582 st 21 120,861 429,584 160,141 -269,444 -18,729 -645,662 st 20 125,152 429,218 160,141 -269,077 -17,574 -567,702 st 19 129,443 428,851 160,141 -268,711 -16,420 -494,698 st 18 133,734 428,485 160,141 -268,344 -15,268 -426,641 st 17 138,025 428,118 160,141 -267,977 -14,118 -363,525 st 16 142,316 427,751 160,141 -267,611 -12,969 -305,343 st 15 146,607 427,367 160,113 -267,254 -11,822 -252,088 st 14 150,899 426,636 159,755 -266,881 -10,676 -203,755 st 13 155,190 425,475 158,941 -266,534 -9,532 -160,335 st 12 159,481 423,845 157,671 -266,174 -8,390 -121,823 st 11 163,772 421,343 155,735 -265,608 -7,249 -88,211 st 10 168,063 416,122 152,531 -263,591 -6,113 -59,487 st 9 172,354 410,128 149,029 -261,098 -4,988 -35,617 st 8 176,645 402,817 0,000 -402,817 -3,590 -16,831 st 7 180,936 389,204 0,000 -389,204 -1,939 -4,978 st 6 185,227 367,357 190,892 -176,465 st 5 189,518 331,333 190,892 -140,441 st 4 193,809 276,945 190,892 -86,052 st 3 198,100 205,615 284,349 78,733 st 2 202,391 135,370 181,574 46,204 st 1 206,682 77,901 82,523 4,623
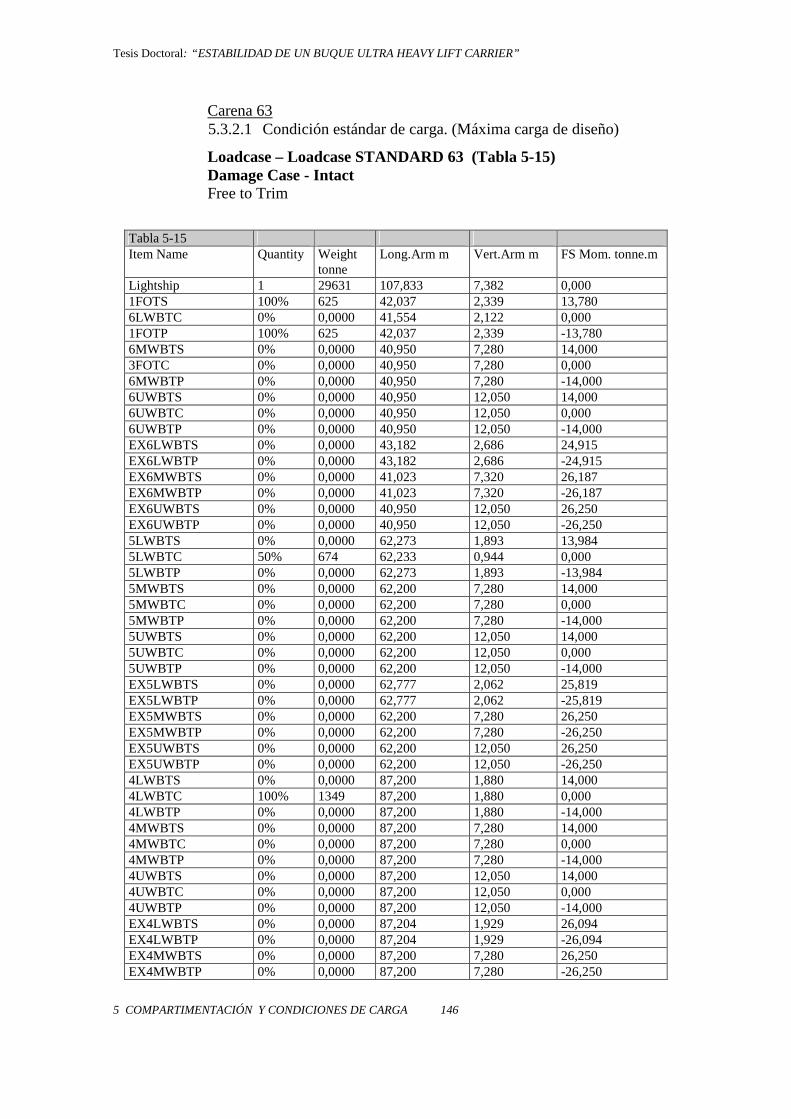
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
5 COMPARTIMENTACIÓN Y CONDICIONES DE CARGA 146
Carena 63 5.3.2.1 Condición estándar de carga. (Máxima carga de diseño)
Loadcase – Loadcase STANDARD 63 (Tabla 5-15) Damage Case - Intact Free to Trim
Tabla 5-15 Item Name Quantity Weight
tonne Long.Arm m Vert.Arm m FS Mom. tonne.m
Lightship 1 29631 107,833 7,382 0,000 1FOTS 100% 625 42,037 2,339 13,780 6LWBTC 0% 0,0000 41,554 2,122 0,000 1FOTP 100% 625 42,037 2,339 -13,780 6MWBTS 0% 0,0000 40,950 7,280 14,000 3FOTC 0% 0,0000 40,950 7,280 0,000 6MWBTP 0% 0,0000 40,950 7,280 -14,000 6UWBTS 0% 0,0000 40,950 12,050 14,000 6UWBTC 0% 0,0000 40,950 12,050 0,000 6UWBTP 0% 0,0000 40,950 12,050 -14,000 EX6LWBTS 0% 0,0000 43,182 2,686 24,915 EX6LWBTP 0% 0,0000 43,182 2,686 -24,915 EX6MWBTS 0% 0,0000 41,023 7,320 26,187 EX6MWBTP 0% 0,0000 41,023 7,320 -26,187 EX6UWBTS 0% 0,0000 40,950 12,050 26,250 EX6UWBTP 0% 0,0000 40,950 12,050 -26,250 5LWBTS 0% 0,0000 62,273 1,893 13,984 5LWBTC 50% 674 62,233 0,944 0,000 5LWBTP 0% 0,0000 62,273 1,893 -13,984 5MWBTS 0% 0,0000 62,200 7,280 14,000 5MWBTC 0% 0,0000 62,200 7,280 0,000 5MWBTP 0% 0,0000 62,200 7,280 -14,000 5UWBTS 0% 0,0000 62,200 12,050 14,000 5UWBTC 0% 0,0000 62,200 12,050 0,000 5UWBTP 0% 0,0000 62,200 12,050 -14,000 EX5LWBTS 0% 0,0000 62,777 2,062 25,819 EX5LWBTP 0% 0,0000 62,777 2,062 -25,819 EX5MWBTS 0% 0,0000 62,200 7,280 26,250 EX5MWBTP 0% 0,0000 62,200 7,280 -26,250 EX5UWBTS 0% 0,0000 62,200 12,050 26,250 EX5UWBTP 0% 0,0000 62,200 12,050 -26,250 4LWBTS 0% 0,0000 87,200 1,880 14,000 4LWBTC 100% 1349 87,200 1,880 0,000 4LWBTP 0% 0,0000 87,200 1,880 -14,000 4MWBTS 0% 0,0000 87,200 7,280 14,000 4MWBTC 0% 0,0000 87,200 7,280 0,000 4MWBTP 0% 0,0000 87,200 7,280 -14,000 4UWBTS 0% 0,0000 87,200 12,050 14,000 4UWBTC 0% 0,0000 87,200 12,050 0,000 4UWBTP 0% 0,0000 87,200 12,050 -14,000 EX4LWBTS 0% 0,0000 87,204 1,929 26,094 EX4LWBTP 0% 0,0000 87,204 1,929 -26,094 EX4MWBTS 0% 0,0000 87,200 7,280 26,250 EX4MWBTP 0% 0,0000 87,200 7,280 -26,250
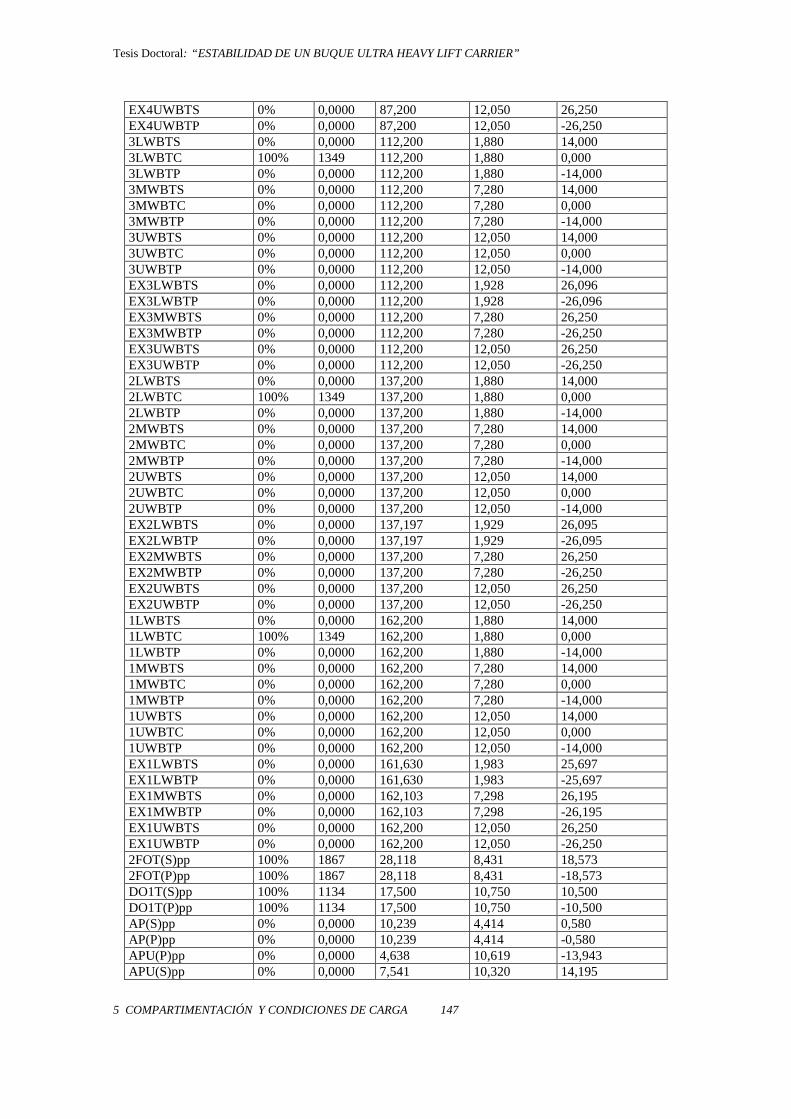
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
5 COMPARTIMENTACIÓN Y CONDICIONES DE CARGA 147
EX4UWBTS 0% 0,0000 87,200 12,050 26,250 EX4UWBTP 0% 0,0000 87,200 12,050 -26,250 3LWBTS 0% 0,0000 112,200 1,880 14,000 3LWBTC 100% 1349 112,200 1,880 0,000 3LWBTP 0% 0,0000 112,200 1,880 -14,000 3MWBTS 0% 0,0000 112,200 7,280 14,000 3MWBTC 0% 0,0000 112,200 7,280 0,000 3MWBTP 0% 0,0000 112,200 7,280 -14,000 3UWBTS 0% 0,0000 112,200 12,050 14,000 3UWBTC 0% 0,0000 112,200 12,050 0,000 3UWBTP 0% 0,0000 112,200 12,050 -14,000 EX3LWBTS 0% 0,0000 112,200 1,928 26,096 EX3LWBTP 0% 0,0000 112,200 1,928 -26,096 EX3MWBTS 0% 0,0000 112,200 7,280 26,250 EX3MWBTP 0% 0,0000 112,200 7,280 -26,250 EX3UWBTS 0% 0,0000 112,200 12,050 26,250 EX3UWBTP 0% 0,0000 112,200 12,050 -26,250 2LWBTS 0% 0,0000 137,200 1,880 14,000 2LWBTC 100% 1349 137,200 1,880 0,000 2LWBTP 0% 0,0000 137,200 1,880 -14,000 2MWBTS 0% 0,0000 137,200 7,280 14,000 2MWBTC 0% 0,0000 137,200 7,280 0,000 2MWBTP 0% 0,0000 137,200 7,280 -14,000 2UWBTS 0% 0,0000 137,200 12,050 14,000 2UWBTC 0% 0,0000 137,200 12,050 0,000 2UWBTP 0% 0,0000 137,200 12,050 -14,000 EX2LWBTS 0% 0,0000 137,197 1,929 26,095 EX2LWBTP 0% 0,0000 137,197 1,929 -26,095 EX2MWBTS 0% 0,0000 137,200 7,280 26,250 EX2MWBTP 0% 0,0000 137,200 7,280 -26,250 EX2UWBTS 0% 0,0000 137,200 12,050 26,250 EX2UWBTP 0% 0,0000 137,200 12,050 -26,250 1LWBTS 0% 0,0000 162,200 1,880 14,000 1LWBTC 100% 1349 162,200 1,880 0,000 1LWBTP 0% 0,0000 162,200 1,880 -14,000 1MWBTS 0% 0,0000 162,200 7,280 14,000 1MWBTC 0% 0,0000 162,200 7,280 0,000 1MWBTP 0% 0,0000 162,200 7,280 -14,000 1UWBTS 0% 0,0000 162,200 12,050 14,000 1UWBTC 0% 0,0000 162,200 12,050 0,000 1UWBTP 0% 0,0000 162,200 12,050 -14,000 EX1LWBTS 0% 0,0000 161,630 1,983 25,697 EX1LWBTP 0% 0,0000 161,630 1,983 -25,697 EX1MWBTS 0% 0,0000 162,103 7,298 26,195 EX1MWBTP 0% 0,0000 162,103 7,298 -26,195 EX1UWBTS 0% 0,0000 162,200 12,050 26,250 EX1UWBTP 0% 0,0000 162,200 12,050 -26,250 2FOT(S)pp 100% 1867 28,118 8,431 18,573 2FOT(P)pp 100% 1867 28,118 8,431 -18,573 DO1T(S)pp 100% 1134 17,500 10,750 10,500 DO1T(P)pp 100% 1134 17,500 10,750 -10,500 AP(S)pp 0% 0,0000 10,239 4,414 0,580 AP(P)pp 0% 0,0000 10,239 4,414 -0,580 APU(P)pp 0% 0,0000 4,638 10,619 -13,943 APU(S)pp 0% 0,0000 7,541 10,320 14,195
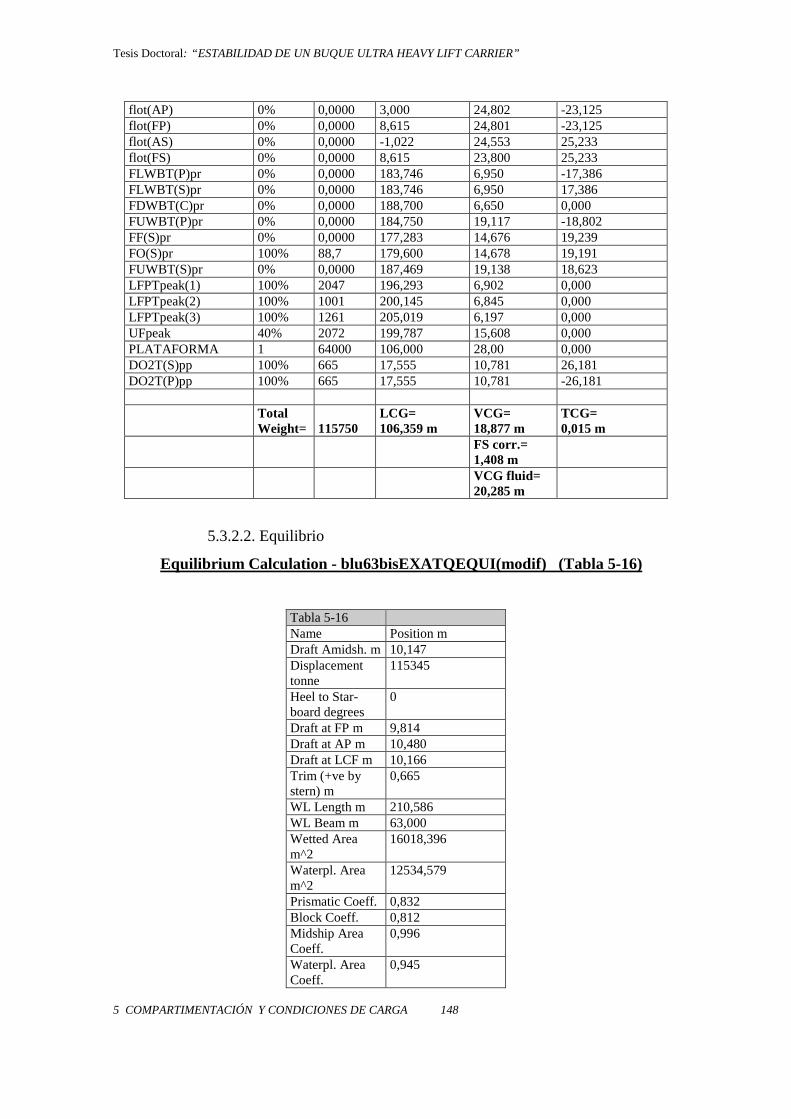
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
5 COMPARTIMENTACIÓN Y CONDICIONES DE CARGA 148
flot(AP) 0% 0,0000 3,000 24,802 -23,125 flot(FP) 0% 0,0000 8,615 24,801 -23,125 flot(AS) 0% 0,0000 -1,022 24,553 25,233 flot(FS) 0% 0,0000 8,615 23,800 25,233 FLWBT(P)pr 0% 0,0000 183,746 6,950 -17,386 FLWBT(S)pr 0% 0,0000 183,746 6,950 17,386 FDWBT(C)pr 0% 0,0000 188,700 6,650 0,000 FUWBT(P)pr 0% 0,0000 184,750 19,117 -18,802 FF(S)pr 0% 0,0000 177,283 14,676 19,239 FO(S)pr 100% 88,7 179,600 14,678 19,191 FUWBT(S)pr 0% 0,0000 187,469 19,138 18,623 LFPTpeak(1) 100% 2047 196,293 6,902 0,000 LFPTpeak(2) 100% 1001 200,145 6,845 0,000 LFPTpeak(3) 100% 1261 205,019 6,197 0,000 UFpeak 40% 2072 199,787 15,608 0,000 PLATAFORMA 1 64000 106,000 28,00 0,000 DO2T(S)pp 100% 665 17,555 10,781 26,181 DO2T(P)pp 100% 665 17,555 10,781 -26,181 Total
Weight= 115750
LCG= 106,359 m
VCG= 18,877 m
TCG= 0,015 m
FS corr.= 1,408 m
VCG fluid= 20,285 m
5.3.2.2. Equilibrio
Equilibrium Calculation - blu63bisEXATQEQUI(modif) (Tabla 5-16)
Tabla 5-16 Name Position m Draft Amidsh. m 10,147 Displacement tonne
115345
Heel to Star-board degrees
0
Draft at FP m 9,814 Draft at AP m 10,480 Draft at LCF m 10,166 Trim (+ve by stern) m
0,665
WL Length m 210,586 WL Beam m 63,000 Wetted Area m^2
16018,396
Waterpl. Area m^2
12534,579
Prismatic Coeff. 0,832 Block Coeff. 0,812 Midship Area Coeff.
0,996
Waterpl. Area Coeff.
0,945
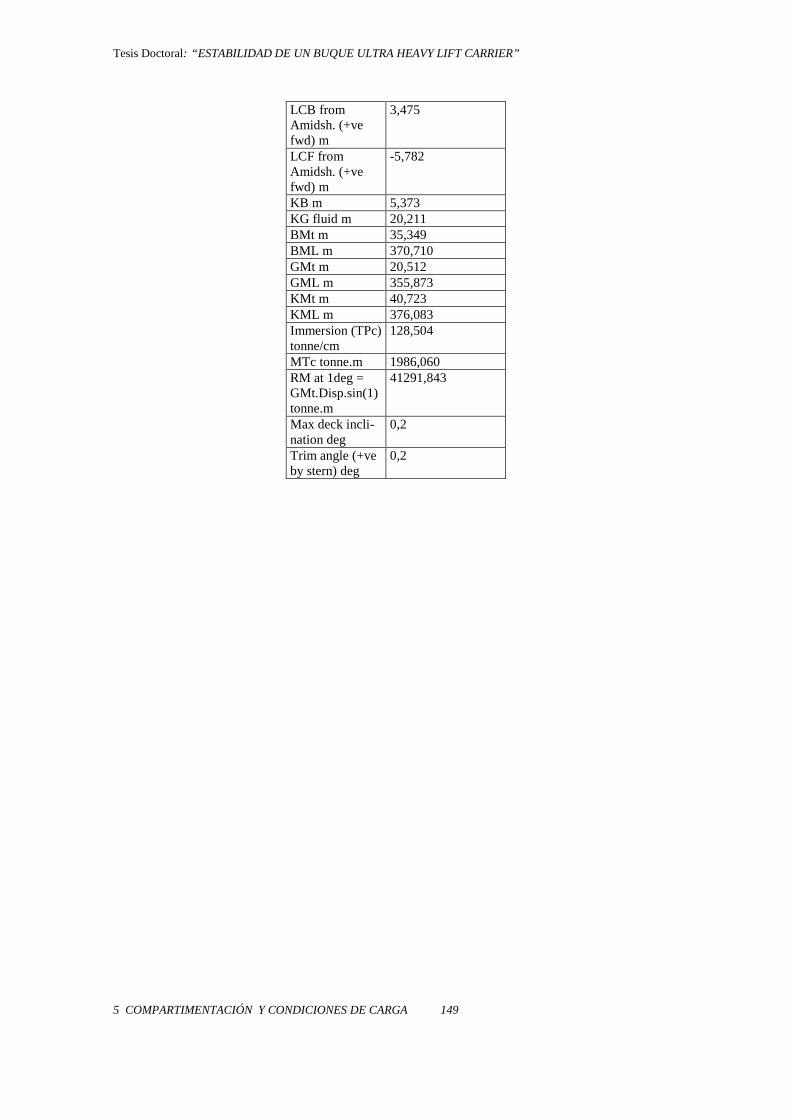
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
5 COMPARTIMENTACIÓN Y CONDICIONES DE CARGA 149
LCB from Amidsh. (+ve fwd) m
3,475
LCF from Amidsh. (+ve fwd) m
-5,782
KB m 5,373 KG fluid m 20,211 BMt m 35,349 BML m 370,710 GMt m 20,512 GML m 355,873 KMt m 40,723 KML m 376,083 Immersion (TPc) tonne/cm
128,504
MTc tonne.m 1986,060 RM at 1deg = GMt.Disp.sin(1) tonne.m
41291,843
Max deck incli-nation deg
0,2
Trim angle (+ve by stern) deg
0,2
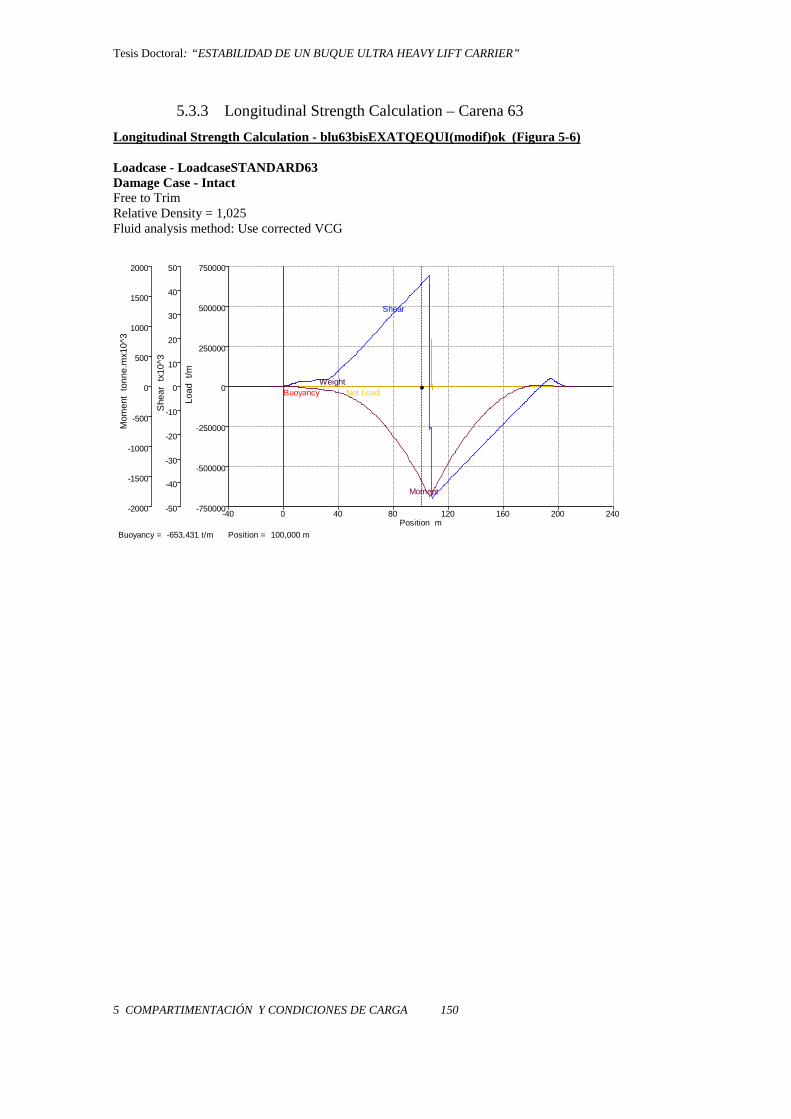
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
5 COMPARTIMENTACIÓN Y CONDICIONES DE CARGA 150
5.3.3 Longitudinal Strength Calculation – Carena 63
Longitudinal Strength Calculation - blu63bisEXATQEQUI(modif)ok (Figura 5-6) Loadcase - LoadcaseSTANDARD63 Damage Case - Intact Free to Trim Relative Density = 1,025 Fluid analysis method: Use corrected VCG
-750000
-500000
-250000
0
250000
500000
750000
-40 0 40 80 120 160 200 240-50
-40
-30
-20
-10
0
10
20
30
40
50
-2000
-1500
-1000
-500
0
500
1000
1500
2000
BuoyancyWeight
Net Load
Shear
Moment
Buoyancy = Position = -653,431 t/m 100,000 m
Position m
Load
t/m
She
ar t
x10^
3
Mom
ent
tonn
e.m
x10^
3
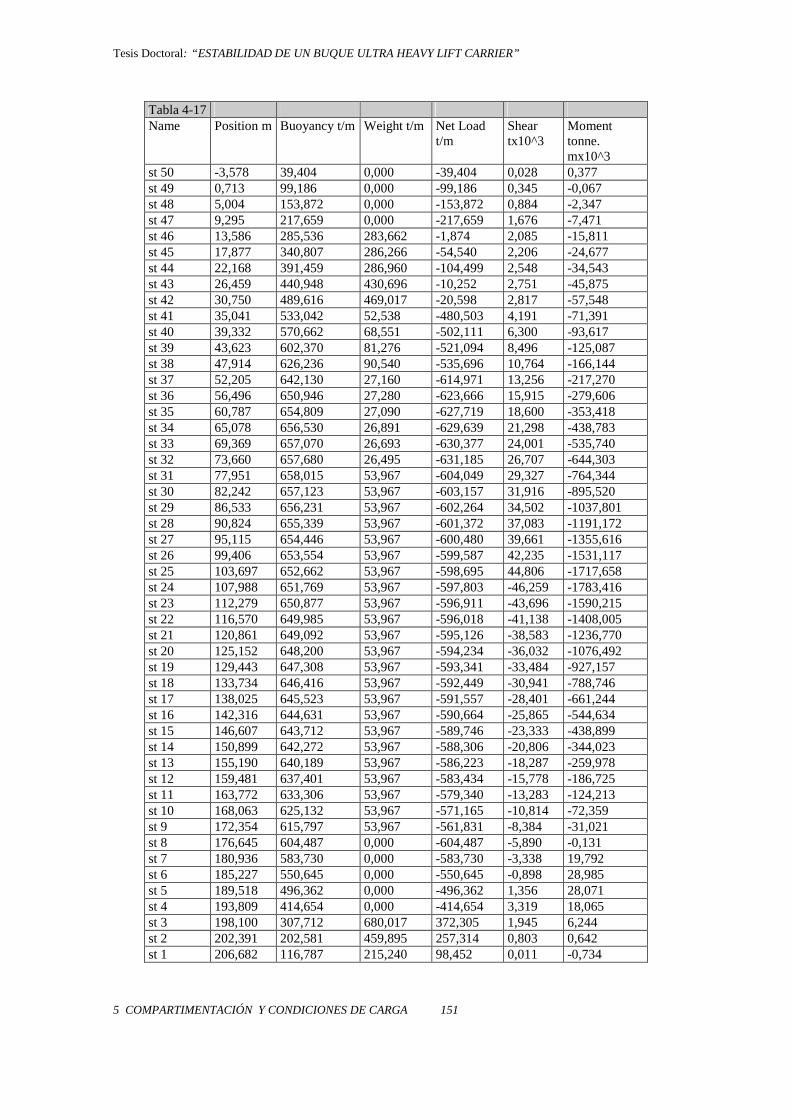
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
5 COMPARTIMENTACIÓN Y CONDICIONES DE CARGA 151
Tabla 4-17 Name Position m Buoyancy t/m Weight t/m Net Load
t/m Shear tx10^3
Moment tonne. mx10^3
st 50 -3,578 39,404 0,000 -39,404 0,028 0,377 st 49 0,713 99,186 0,000 -99,186 0,345 -0,067 st 48 5,004 153,872 0,000 -153,872 0,884 -2,347 st 47 9,295 217,659 0,000 -217,659 1,676 -7,471 st 46 13,586 285,536 283,662 -1,874 2,085 -15,811 st 45 17,877 340,807 286,266 -54,540 2,206 -24,677 st 44 22,168 391,459 286,960 -104,499 2,548 -34,543 st 43 26,459 440,948 430,696 -10,252 2,751 -45,875 st 42 30,750 489,616 469,017 -20,598 2,817 -57,548 st 41 35,041 533,042 52,538 -480,503 4,191 -71,391 st 40 39,332 570,662 68,551 -502,111 6,300 -93,617 st 39 43,623 602,370 81,276 -521,094 8,496 -125,087 st 38 47,914 626,236 90,540 -535,696 10,764 -166,144 st 37 52,205 642,130 27,160 -614,971 13,256 -217,270 st 36 56,496 650,946 27,280 -623,666 15,915 -279,606 st 35 60,787 654,809 27,090 -627,719 18,600 -353,418 st 34 65,078 656,530 26,891 -629,639 21,298 -438,783 st 33 69,369 657,070 26,693 -630,377 24,001 -535,740 st 32 73,660 657,680 26,495 -631,185 26,707 -644,303 st 31 77,951 658,015 53,967 -604,049 29,327 -764,344 st 30 82,242 657,123 53,967 -603,157 31,916 -895,520 st 29 86,533 656,231 53,967 -602,264 34,502 -1037,801 st 28 90,824 655,339 53,967 -601,372 37,083 -1191,172 st 27 95,115 654,446 53,967 -600,480 39,661 -1355,616 st 26 99,406 653,554 53,967 -599,587 42,235 -1531,117 st 25 103,697 652,662 53,967 -598,695 44,806 -1717,658 st 24 107,988 651,769 53,967 -597,803 -46,259 -1783,416 st 23 112,279 650,877 53,967 -596,911 -43,696 -1590,215 st 22 116,570 649,985 53,967 -596,018 -41,138 -1408,005 st 21 120,861 649,092 53,967 -595,126 -38,583 -1236,770 st 20 125,152 648,200 53,967 -594,234 -36,032 -1076,492 st 19 129,443 647,308 53,967 -593,341 -33,484 -927,157 st 18 133,734 646,416 53,967 -592,449 -30,941 -788,746 st 17 138,025 645,523 53,967 -591,557 -28,401 -661,244 st 16 142,316 644,631 53,967 -590,664 -25,865 -544,634 st 15 146,607 643,712 53,967 -589,746 -23,333 -438,899 st 14 150,899 642,272 53,967 -588,306 -20,806 -344,023 st 13 155,190 640,189 53,967 -586,223 -18,287 -259,978 st 12 159,481 637,401 53,967 -583,434 -15,778 -186,725 st 11 163,772 633,306 53,967 -579,340 -13,283 -124,213 st 10 168,063 625,132 53,967 -571,165 -10,814 -72,359 st 9 172,354 615,797 53,967 -561,831 -8,384 -31,021 st 8 176,645 604,487 0,000 -604,487 -5,890 -0,131 st 7 180,936 583,730 0,000 -583,730 -3,338 19,792 st 6 185,227 550,645 0,000 -550,645 -0,898 28,985 st 5 189,518 496,362 0,000 -496,362 1,356 28,071 st 4 193,809 414,654 0,000 -414,654 3,319 18,065 st 3 198,100 307,712 680,017 372,305 1,945 6,244 st 2 202,391 202,581 459,895 257,314 0,803 0,642 st 1 206,682 116,787 215,240 98,452 0,011 -0,734
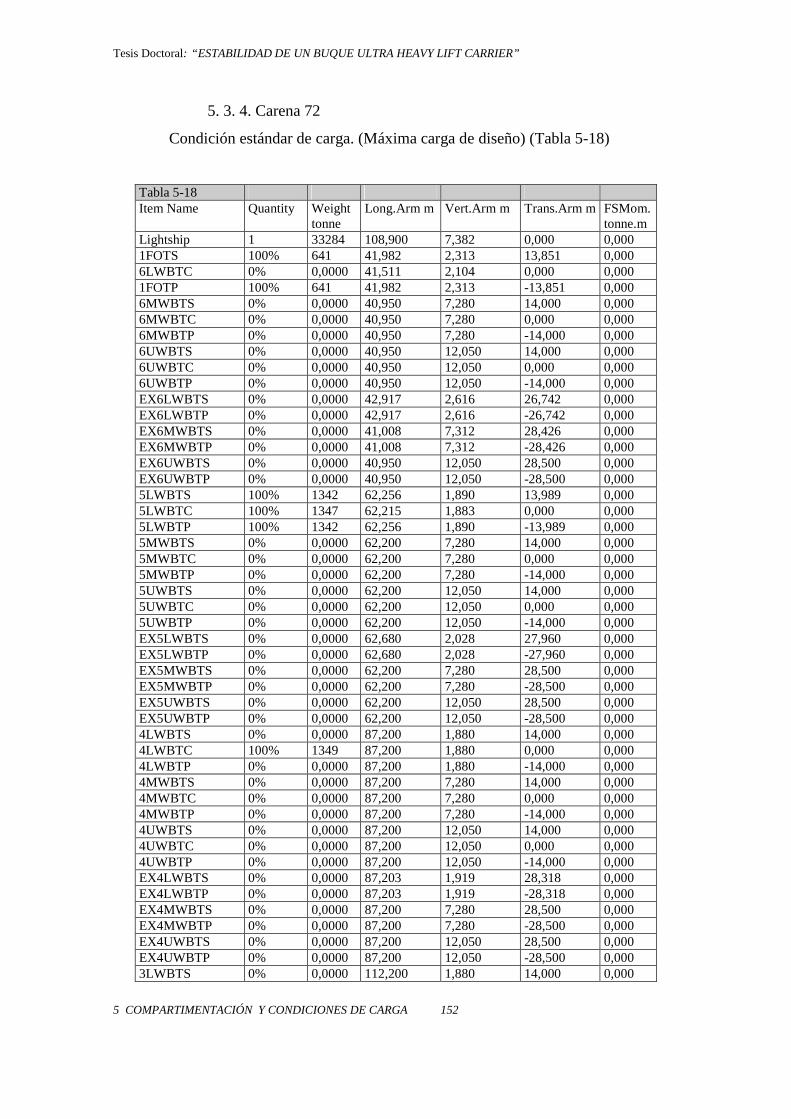
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
5 COMPARTIMENTACIÓN Y CONDICIONES DE CARGA 152
5. 3. 4. Carena 72
Condición estándar de carga. (Máxima carga de diseño) (Tabla 5-18)
Tabla 5-18 Item Name Quantity Weight
tonne Long.Arm m Vert.Arm m Trans.Arm m FSMom.
tonne.m Lightship 1 33284 108,900 7,382 0,000 0,000 1FOTS 100% 641 41,982 2,313 13,851 0,000 6LWBTC 0% 0,0000 41,511 2,104 0,000 0,000 1FOTP 100% 641 41,982 2,313 -13,851 0,000 6MWBTS 0% 0,0000 40,950 7,280 14,000 0,000 6MWBTC 0% 0,0000 40,950 7,280 0,000 0,000 6MWBTP 0% 0,0000 40,950 7,280 -14,000 0,000 6UWBTS 0% 0,0000 40,950 12,050 14,000 0,000 6UWBTC 0% 0,0000 40,950 12,050 0,000 0,000 6UWBTP 0% 0,0000 40,950 12,050 -14,000 0,000 EX6LWBTS 0% 0,0000 42,917 2,616 26,742 0,000 EX6LWBTP 0% 0,0000 42,917 2,616 -26,742 0,000 EX6MWBTS 0% 0,0000 41,008 7,312 28,426 0,000 EX6MWBTP 0% 0,0000 41,008 7,312 -28,426 0,000 EX6UWBTS 0% 0,0000 40,950 12,050 28,500 0,000 EX6UWBTP 0% 0,0000 40,950 12,050 -28,500 0,000 5LWBTS 100% 1342 62,256 1,890 13,989 0,000 5LWBTC 100% 1347 62,215 1,883 0,000 0,000 5LWBTP 100% 1342 62,256 1,890 -13,989 0,000 5MWBTS 0% 0,0000 62,200 7,280 14,000 0,000 5MWBTC 0% 0,0000 62,200 7,280 0,000 0,000 5MWBTP 0% 0,0000 62,200 7,280 -14,000 0,000 5UWBTS 0% 0,0000 62,200 12,050 14,000 0,000 5UWBTC 0% 0,0000 62,200 12,050 0,000 0,000 5UWBTP 0% 0,0000 62,200 12,050 -14,000 0,000 EX5LWBTS 0% 0,0000 62,680 2,028 27,960 0,000 EX5LWBTP 0% 0,0000 62,680 2,028 -27,960 0,000 EX5MWBTS 0% 0,0000 62,200 7,280 28,500 0,000 EX5MWBTP 0% 0,0000 62,200 7,280 -28,500 0,000 EX5UWBTS 0% 0,0000 62,200 12,050 28,500 0,000 EX5UWBTP 0% 0,0000 62,200 12,050 -28,500 0,000 4LWBTS 0% 0,0000 87,200 1,880 14,000 0,000 4LWBTC 100% 1349 87,200 1,880 0,000 0,000 4LWBTP 0% 0,0000 87,200 1,880 -14,000 0,000 4MWBTS 0% 0,0000 87,200 7,280 14,000 0,000 4MWBTC 0% 0,0000 87,200 7,280 0,000 0,000 4MWBTP 0% 0,0000 87,200 7,280 -14,000 0,000 4UWBTS 0% 0,0000 87,200 12,050 14,000 0,000 4UWBTC 0% 0,0000 87,200 12,050 0,000 0,000 4UWBTP 0% 0,0000 87,200 12,050 -14,000 0,000 EX4LWBTS 0% 0,0000 87,203 1,919 28,318 0,000 EX4LWBTP 0% 0,0000 87,203 1,919 -28,318 0,000 EX4MWBTS 0% 0,0000 87,200 7,280 28,500 0,000 EX4MWBTP 0% 0,0000 87,200 7,280 -28,500 0,000 EX4UWBTS 0% 0,0000 87,200 12,050 28,500 0,000 EX4UWBTP 0% 0,0000 87,200 12,050 -28,500 0,000 3LWBTS 0% 0,0000 112,200 1,880 14,000 0,000
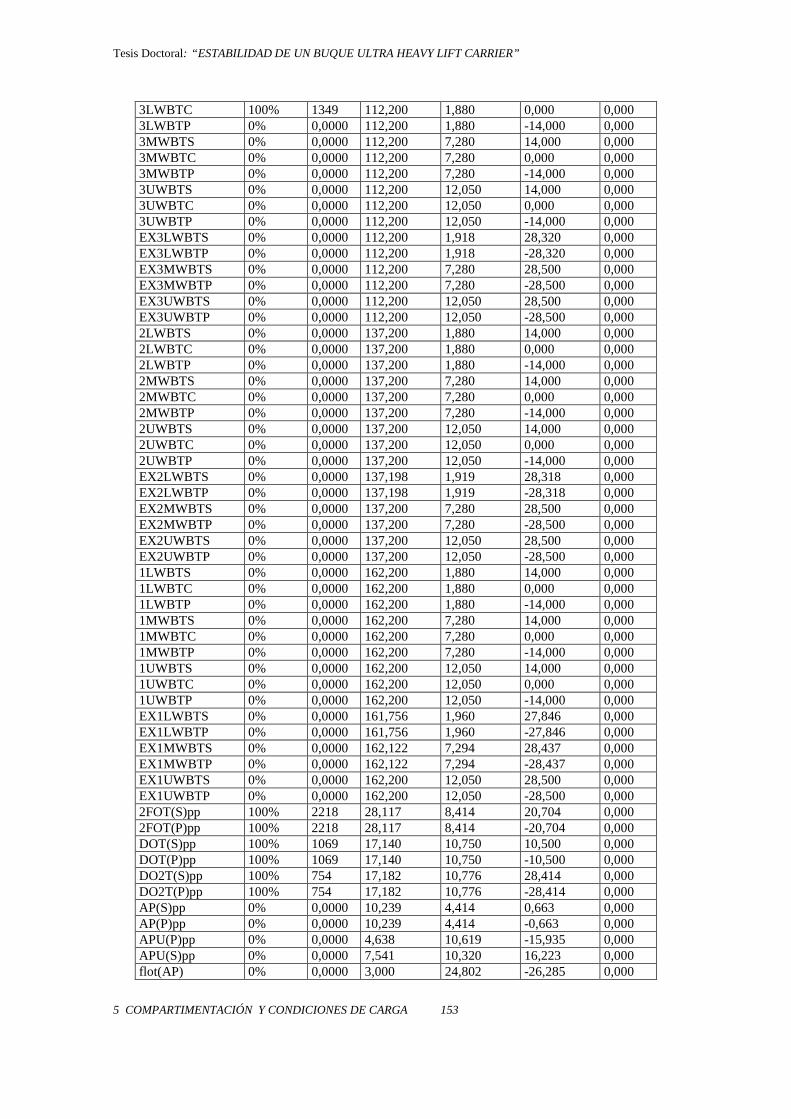
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
5 COMPARTIMENTACIÓN Y CONDICIONES DE CARGA 153
3LWBTC 100% 1349 112,200 1,880 0,000 0,000 3LWBTP 0% 0,0000 112,200 1,880 -14,000 0,000 3MWBTS 0% 0,0000 112,200 7,280 14,000 0,000 3MWBTC 0% 0,0000 112,200 7,280 0,000 0,000 3MWBTP 0% 0,0000 112,200 7,280 -14,000 0,000 3UWBTS 0% 0,0000 112,200 12,050 14,000 0,000 3UWBTC 0% 0,0000 112,200 12,050 0,000 0,000 3UWBTP 0% 0,0000 112,200 12,050 -14,000 0,000 EX3LWBTS 0% 0,0000 112,200 1,918 28,320 0,000 EX3LWBTP 0% 0,0000 112,200 1,918 -28,320 0,000 EX3MWBTS 0% 0,0000 112,200 7,280 28,500 0,000 EX3MWBTP 0% 0,0000 112,200 7,280 -28,500 0,000 EX3UWBTS 0% 0,0000 112,200 12,050 28,500 0,000 EX3UWBTP 0% 0,0000 112,200 12,050 -28,500 0,000 2LWBTS 0% 0,0000 137,200 1,880 14,000 0,000 2LWBTC 0% 0,0000 137,200 1,880 0,000 0,000 2LWBTP 0% 0,0000 137,200 1,880 -14,000 0,000 2MWBTS 0% 0,0000 137,200 7,280 14,000 0,000 2MWBTC 0% 0,0000 137,200 7,280 0,000 0,000 2MWBTP 0% 0,0000 137,200 7,280 -14,000 0,000 2UWBTS 0% 0,0000 137,200 12,050 14,000 0,000 2UWBTC 0% 0,0000 137,200 12,050 0,000 0,000 2UWBTP 0% 0,0000 137,200 12,050 -14,000 0,000 EX2LWBTS 0% 0,0000 137,198 1,919 28,318 0,000 EX2LWBTP 0% 0,0000 137,198 1,919 -28,318 0,000 EX2MWBTS 0% 0,0000 137,200 7,280 28,500 0,000 EX2MWBTP 0% 0,0000 137,200 7,280 -28,500 0,000 EX2UWBTS 0% 0,0000 137,200 12,050 28,500 0,000 EX2UWBTP 0% 0,0000 137,200 12,050 -28,500 0,000 1LWBTS 0% 0,0000 162,200 1,880 14,000 0,000 1LWBTC 0% 0,0000 162,200 1,880 0,000 0,000 1LWBTP 0% 0,0000 162,200 1,880 -14,000 0,000 1MWBTS 0% 0,0000 162,200 7,280 14,000 0,000 1MWBTC 0% 0,0000 162,200 7,280 0,000 0,000 1MWBTP 0% 0,0000 162,200 7,280 -14,000 0,000 1UWBTS 0% 0,0000 162,200 12,050 14,000 0,000 1UWBTC 0% 0,0000 162,200 12,050 0,000 0,000 1UWBTP 0% 0,0000 162,200 12,050 -14,000 0,000 EX1LWBTS 0% 0,0000 161,756 1,960 27,846 0,000 EX1LWBTP 0% 0,0000 161,756 1,960 -27,846 0,000 EX1MWBTS 0% 0,0000 162,122 7,294 28,437 0,000 EX1MWBTP 0% 0,0000 162,122 7,294 -28,437 0,000 EX1UWBTS 0% 0,0000 162,200 12,050 28,500 0,000 EX1UWBTP 0% 0,0000 162,200 12,050 -28,500 0,000 2FOT(S)pp 100% 2218 28,117 8,414 20,704 0,000 2FOT(P)pp 100% 2218 28,117 8,414 -20,704 0,000 DOT(S)pp 100% 1069 17,140 10,750 10,500 0,000 DOT(P)pp 100% 1069 17,140 10,750 -10,500 0,000 DO2T(S)pp 100% 754 17,182 10,776 28,414 0,000 DO2T(P)pp 100% 754 17,182 10,776 -28,414 0,000 AP(S)pp 0% 0,0000 10,239 4,414 0,663 0,000 AP(P)pp 0% 0,0000 10,239 4,414 -0,663 0,000 APU(P)pp 0% 0,0000 4,638 10,619 -15,935 0,000 APU(S)pp 0% 0,0000 7,541 10,320 16,223 0,000 flot(AP) 0% 0,0000 3,000 24,802 -26,285 0,000
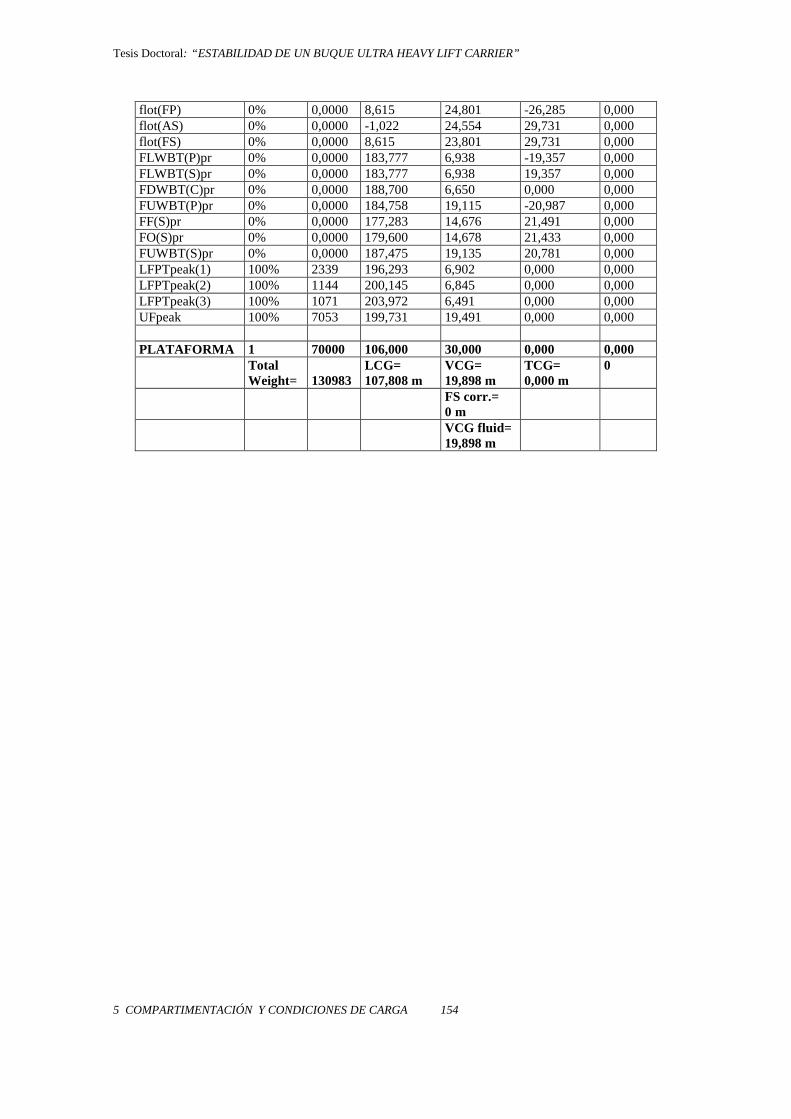
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
5 COMPARTIMENTACIÓN Y CONDICIONES DE CARGA 154
flot(FP) 0% 0,0000 8,615 24,801 -26,285 0,000 flot(AS) 0% 0,0000 -1,022 24,554 29,731 0,000 flot(FS) 0% 0,0000 8,615 23,801 29,731 0,000 FLWBT(P)pr 0% 0,0000 183,777 6,938 -19,357 0,000 FLWBT(S)pr 0% 0,0000 183,777 6,938 19,357 0,000 FDWBT(C)pr 0% 0,0000 188,700 6,650 0,000 0,000 FUWBT(P)pr 0% 0,0000 184,758 19,115 -20,987 0,000 FF(S)pr 0% 0,0000 177,283 14,676 21,491 0,000 FO(S)pr 0% 0,0000 179,600 14,678 21,433 0,000 FUWBT(S)pr 0% 0,0000 187,475 19,135 20,781 0,000 LFPTpeak(1) 100% 2339 196,293 6,902 0,000 0,000 LFPTpeak(2) 100% 1144 200,145 6,845 0,000 0,000 LFPTpeak(3) 100% 1071 203,972 6,491 0,000 0,000 UFpeak 100% 7053 199,731 19,491 0,000 0,000 PLATAFORMA 1 70000 106,000 30,000 0,000 0,000 Total
Weight= 130983
LCG= 107,808 m
VCG= 19,898 m
TCG= 0,000 m
0
FS corr.= 0 m
VCG fluid= 19,898 m
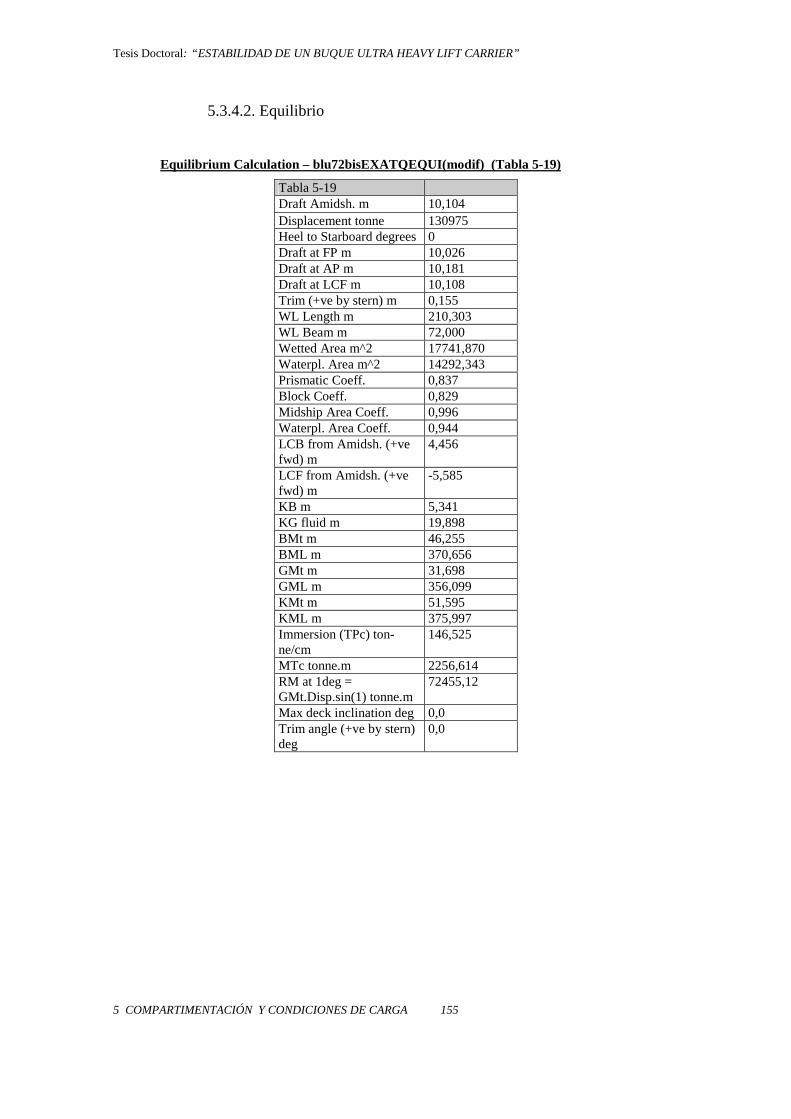
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
5 COMPARTIMENTACIÓN Y CONDICIONES DE CARGA 155
5.3.4.2. Equilibrio
Equilibrium Calculation – blu72bisEXATQEQUI(modif) (Tabla 5-19)
Tabla 5-19 Draft Amidsh. m 10,104 Displacement tonne 130975 Heel to Starboard degrees 0 Draft at FP m 10,026 Draft at AP m 10,181 Draft at LCF m 10,108 Trim (+ve by stern) m 0,155 WL Length m 210,303 WL Beam m 72,000 Wetted Area m^2 17741,870 Waterpl. Area m^2 14292,343 Prismatic Coeff. 0,837 Block Coeff. 0,829 Midship Area Coeff. 0,996 Waterpl. Area Coeff. 0,944 LCB from Amidsh. (+ve fwd) m
4,456
LCF from Amidsh. (+ve fwd) m
-5,585
KB m 5,341 KG fluid m 19,898 BMt m 46,255 BML m 370,656 GMt m 31,698 GML m 356,099 KMt m 51,595 KML m 375,997 Immersion (TPc) ton-ne/cm
146,525
MTc tonne.m 2256,614 RM at 1deg = GMt.Disp.sin(1) tonne.m
72455,12
Max deck inclination deg 0,0 Trim angle (+ve by stern) deg
0,0
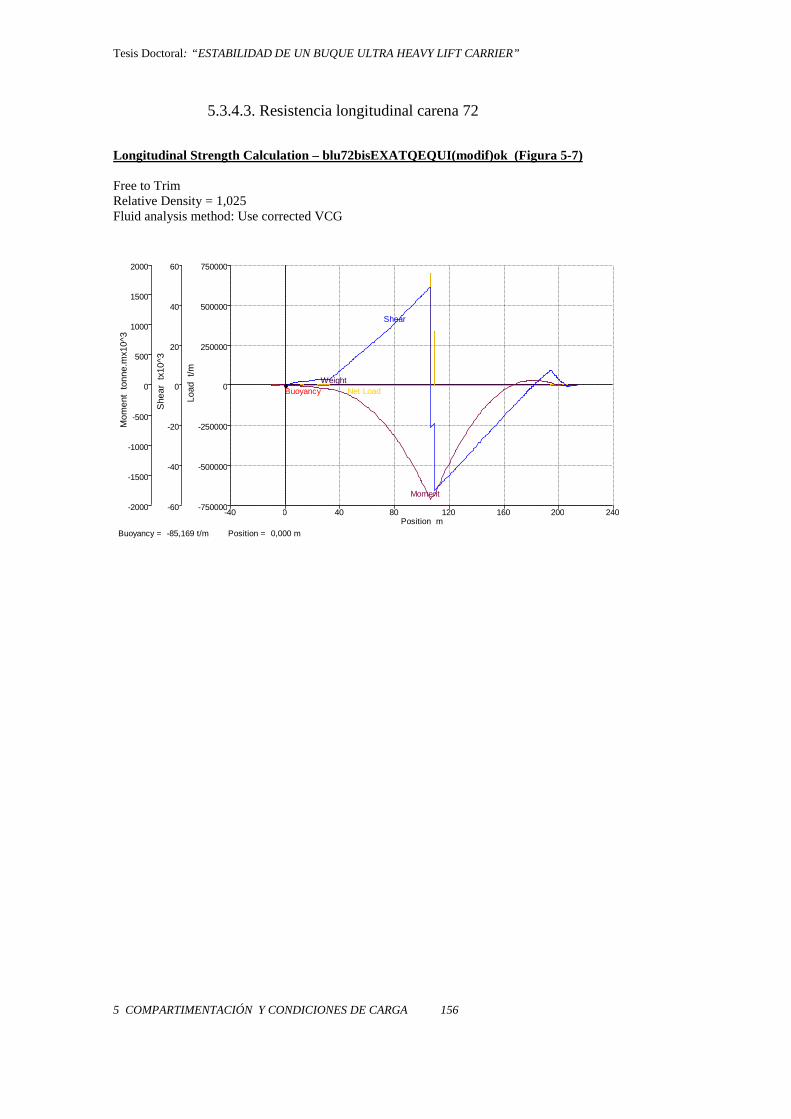
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
5 COMPARTIMENTACIÓN Y CONDICIONES DE CARGA 156
5.3.4.3. Resistencia longitudinal carena 72
Longitudinal Strength Calculation – blu72bisEXATQEQUI(modif)ok (Figura 5-7) Free to Trim Relative Density = 1,025 Fluid analysis method: Use corrected VCG
-750000
-500000
-250000
0
250000
500000
750000
-40 0 40 80 120 160 200 240-60
-40
-20
0
20
40
60
-2000
-1500
-1000
-500
0
500
1000
1500
2000
BuoyancyWeight
Net Load
Shear
Moment
Buoyancy = Position = -85,169 t/m 0,000 m
Position m
Load
t/m
She
ar t
x10^
3
Mom
ent
tonn
e.m
x10^
3
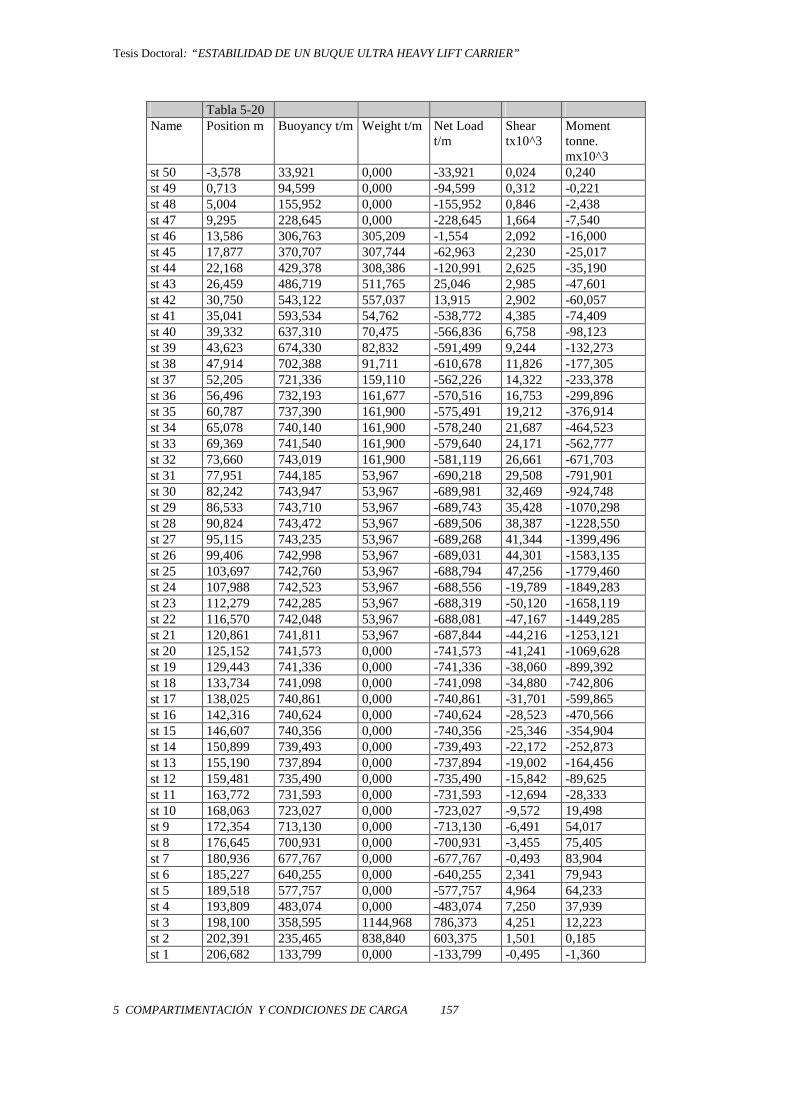
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
5 COMPARTIMENTACIÓN Y CONDICIONES DE CARGA 157
Tabla 5-20 Name Position m Buoyancy t/m Weight t/m Net Load
t/m Shear tx10^3
Moment tonne. mx10^3
st 50 -3,578 33,921 0,000 -33,921 0,024 0,240 st 49 0,713 94,599 0,000 -94,599 0,312 -0,221 st 48 5,004 155,952 0,000 -155,952 0,846 -2,438 st 47 9,295 228,645 0,000 -228,645 1,664 -7,540 st 46 13,586 306,763 305,209 -1,554 2,092 -16,000 st 45 17,877 370,707 307,744 -62,963 2,230 -25,017 st 44 22,168 429,378 308,386 -120,991 2,625 -35,190 st 43 26,459 486,719 511,765 25,046 2,985 -47,601 st 42 30,750 543,122 557,037 13,915 2,902 -60,057 st 41 35,041 593,534 54,762 -538,772 4,385 -74,409 st 40 39,332 637,310 70,475 -566,836 6,758 -98,123 st 39 43,623 674,330 82,832 -591,499 9,244 -132,273 st 38 47,914 702,388 91,711 -610,678 11,826 -177,305 st 37 52,205 721,336 159,110 -562,226 14,322 -233,378 st 36 56,496 732,193 161,677 -570,516 16,753 -299,896 st 35 60,787 737,390 161,900 -575,491 19,212 -376,914 st 34 65,078 740,140 161,900 -578,240 21,687 -464,523 st 33 69,369 741,540 161,900 -579,640 24,171 -562,777 st 32 73,660 743,019 161,900 -581,119 26,661 -671,703 st 31 77,951 744,185 53,967 -690,218 29,508 -791,901 st 30 82,242 743,947 53,967 -689,981 32,469 -924,748 st 29 86,533 743,710 53,967 -689,743 35,428 -1070,298 st 28 90,824 743,472 53,967 -689,506 38,387 -1228,550 st 27 95,115 743,235 53,967 -689,268 41,344 -1399,496 st 26 99,406 742,998 53,967 -689,031 44,301 -1583,135 st 25 103,697 742,760 53,967 -688,794 47,256 -1779,460 st 24 107,988 742,523 53,967 -688,556 -19,789 -1849,283 st 23 112,279 742,285 53,967 -688,319 -50,120 -1658,119 st 22 116,570 742,048 53,967 -688,081 -47,167 -1449,285 st 21 120,861 741,811 53,967 -687,844 -44,216 -1253,121 st 20 125,152 741,573 0,000 -741,573 -41,241 -1069,628 st 19 129,443 741,336 0,000 -741,336 -38,060 -899,392 st 18 133,734 741,098 0,000 -741,098 -34,880 -742,806 st 17 138,025 740,861 0,000 -740,861 -31,701 -599,865 st 16 142,316 740,624 0,000 -740,624 -28,523 -470,566 st 15 146,607 740,356 0,000 -740,356 -25,346 -354,904 st 14 150,899 739,493 0,000 -739,493 -22,172 -252,873 st 13 155,190 737,894 0,000 -737,894 -19,002 -164,456 st 12 159,481 735,490 0,000 -735,490 -15,842 -89,625 st 11 163,772 731,593 0,000 -731,593 -12,694 -28,333 st 10 168,063 723,027 0,000 -723,027 -9,572 19,498 st 9 172,354 713,130 0,000 -713,130 -6,491 54,017 st 8 176,645 700,931 0,000 -700,931 -3,455 75,405 st 7 180,936 677,767 0,000 -677,767 -0,493 83,904 st 6 185,227 640,255 0,000 -640,255 2,341 79,943 st 5 189,518 577,757 0,000 -577,757 4,964 64,233 st 4 193,809 483,074 0,000 -483,074 7,250 37,939 st 3 198,100 358,595 1144,968 786,373 4,251 12,223 st 2 202,391 235,465 838,840 603,375 1,501 0,185 st 1 206,682 133,799 0,000 -133,799 -0,495 -1,360
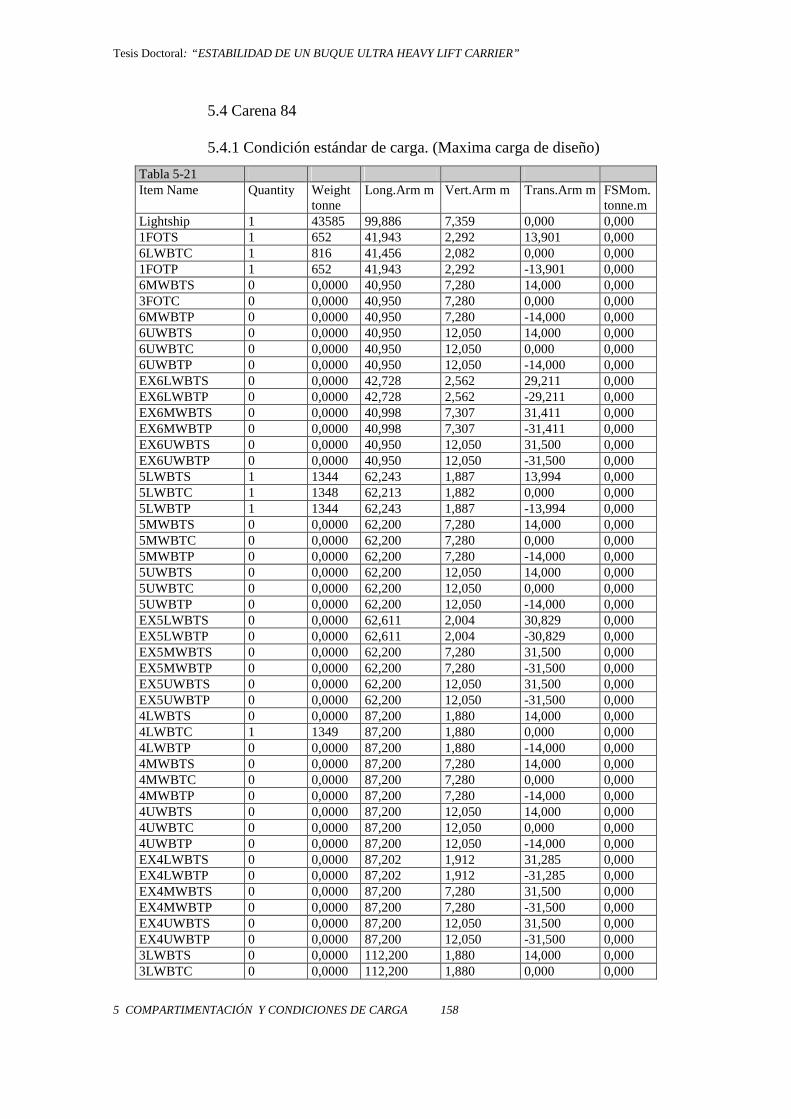
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
5 COMPARTIMENTACIÓN Y CONDICIONES DE CARGA 158
5.4 Carena 84
5.4.1 Condición estándar de carga. (Maxima carga de diseño)
Tabla 5-21 Item Name Quantity Weight
tonne Long.Arm m Vert.Arm m Trans.Arm m FSMom.
tonne.m Lightship 1 43585 99,886 7,359 0,000 0,000 1FOTS 1 652 41,943 2,292 13,901 0,000 6LWBTC 1 816 41,456 2,082 0,000 0,000 1FOTP 1 652 41,943 2,292 -13,901 0,000 6MWBTS 0 0,0000 40,950 7,280 14,000 0,000 3FOTC 0 0,0000 40,950 7,280 0,000 0,000 6MWBTP 0 0,0000 40,950 7,280 -14,000 0,000 6UWBTS 0 0,0000 40,950 12,050 14,000 0,000 6UWBTC 0 0,0000 40,950 12,050 0,000 0,000 6UWBTP 0 0,0000 40,950 12,050 -14,000 0,000 EX6LWBTS 0 0,0000 42,728 2,562 29,211 0,000 EX6LWBTP 0 0,0000 42,728 2,562 -29,211 0,000 EX6MWBTS 0 0,0000 40,998 7,307 31,411 0,000 EX6MWBTP 0 0,0000 40,998 7,307 -31,411 0,000 EX6UWBTS 0 0,0000 40,950 12,050 31,500 0,000 EX6UWBTP 0 0,0000 40,950 12,050 -31,500 0,000 5LWBTS 1 1344 62,243 1,887 13,994 0,000 5LWBTC 1 1348 62,213 1,882 0,000 0,000 5LWBTP 1 1344 62,243 1,887 -13,994 0,000 5MWBTS 0 0,0000 62,200 7,280 14,000 0,000 5MWBTC 0 0,0000 62,200 7,280 0,000 0,000 5MWBTP 0 0,0000 62,200 7,280 -14,000 0,000 5UWBTS 0 0,0000 62,200 12,050 14,000 0,000 5UWBTC 0 0,0000 62,200 12,050 0,000 0,000 5UWBTP 0 0,0000 62,200 12,050 -14,000 0,000 EX5LWBTS 0 0,0000 62,611 2,004 30,829 0,000 EX5LWBTP 0 0,0000 62,611 2,004 -30,829 0,000 EX5MWBTS 0 0,0000 62,200 7,280 31,500 0,000 EX5MWBTP 0 0,0000 62,200 7,280 -31,500 0,000 EX5UWBTS 0 0,0000 62,200 12,050 31,500 0,000 EX5UWBTP 0 0,0000 62,200 12,050 -31,500 0,000 4LWBTS 0 0,0000 87,200 1,880 14,000 0,000 4LWBTC 1 1349 87,200 1,880 0,000 0,000 4LWBTP 0 0,0000 87,200 1,880 -14,000 0,000 4MWBTS 0 0,0000 87,200 7,280 14,000 0,000 4MWBTC 0 0,0000 87,200 7,280 0,000 0,000 4MWBTP 0 0,0000 87,200 7,280 -14,000 0,000 4UWBTS 0 0,0000 87,200 12,050 14,000 0,000 4UWBTC 0 0,0000 87,200 12,050 0,000 0,000 4UWBTP 0 0,0000 87,200 12,050 -14,000 0,000 EX4LWBTS 0 0,0000 87,202 1,912 31,285 0,000 EX4LWBTP 0 0,0000 87,202 1,912 -31,285 0,000 EX4MWBTS 0 0,0000 87,200 7,280 31,500 0,000 EX4MWBTP 0 0,0000 87,200 7,280 -31,500 0,000 EX4UWBTS 0 0,0000 87,200 12,050 31,500 0,000 EX4UWBTP 0 0,0000 87,200 12,050 -31,500 0,000 3LWBTS 0 0,0000 112,200 1,880 14,000 0,000 3LWBTC 0 0,0000 112,200 1,880 0,000 0,000
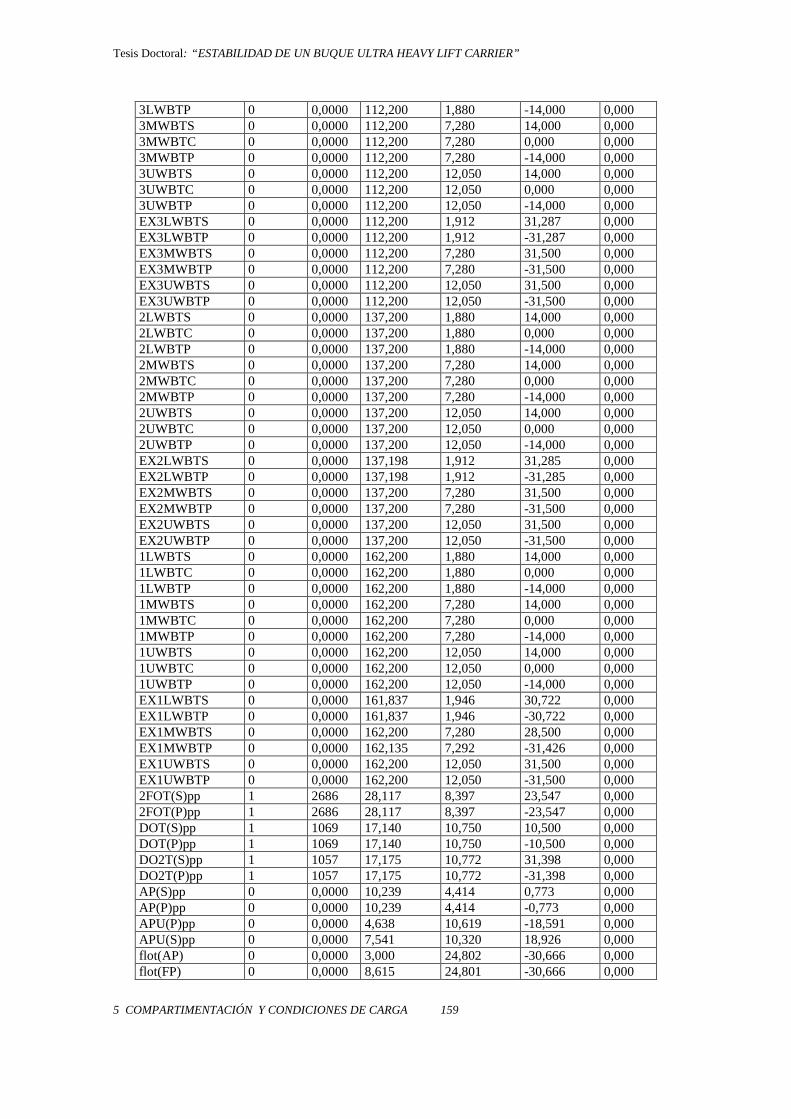
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
5 COMPARTIMENTACIÓN Y CONDICIONES DE CARGA 159
3LWBTP 0 0,0000 112,200 1,880 -14,000 0,000 3MWBTS 0 0,0000 112,200 7,280 14,000 0,000 3MWBTC 0 0,0000 112,200 7,280 0,000 0,000 3MWBTP 0 0,0000 112,200 7,280 -14,000 0,000 3UWBTS 0 0,0000 112,200 12,050 14,000 0,000 3UWBTC 0 0,0000 112,200 12,050 0,000 0,000 3UWBTP 0 0,0000 112,200 12,050 -14,000 0,000 EX3LWBTS 0 0,0000 112,200 1,912 31,287 0,000 EX3LWBTP 0 0,0000 112,200 1,912 -31,287 0,000 EX3MWBTS 0 0,0000 112,200 7,280 31,500 0,000 EX3MWBTP 0 0,0000 112,200 7,280 -31,500 0,000 EX3UWBTS 0 0,0000 112,200 12,050 31,500 0,000 EX3UWBTP 0 0,0000 112,200 12,050 -31,500 0,000 2LWBTS 0 0,0000 137,200 1,880 14,000 0,000 2LWBTC 0 0,0000 137,200 1,880 0,000 0,000 2LWBTP 0 0,0000 137,200 1,880 -14,000 0,000 2MWBTS 0 0,0000 137,200 7,280 14,000 0,000 2MWBTC 0 0,0000 137,200 7,280 0,000 0,000 2MWBTP 0 0,0000 137,200 7,280 -14,000 0,000 2UWBTS 0 0,0000 137,200 12,050 14,000 0,000 2UWBTC 0 0,0000 137,200 12,050 0,000 0,000 2UWBTP 0 0,0000 137,200 12,050 -14,000 0,000 EX2LWBTS 0 0,0000 137,198 1,912 31,285 0,000 EX2LWBTP 0 0,0000 137,198 1,912 -31,285 0,000 EX2MWBTS 0 0,0000 137,200 7,280 31,500 0,000 EX2MWBTP 0 0,0000 137,200 7,280 -31,500 0,000 EX2UWBTS 0 0,0000 137,200 12,050 31,500 0,000 EX2UWBTP 0 0,0000 137,200 12,050 -31,500 0,000 1LWBTS 0 0,0000 162,200 1,880 14,000 0,000 1LWBTC 0 0,0000 162,200 1,880 0,000 0,000 1LWBTP 0 0,0000 162,200 1,880 -14,000 0,000 1MWBTS 0 0,0000 162,200 7,280 14,000 0,000 1MWBTC 0 0,0000 162,200 7,280 0,000 0,000 1MWBTP 0 0,0000 162,200 7,280 -14,000 0,000 1UWBTS 0 0,0000 162,200 12,050 14,000 0,000 1UWBTC 0 0,0000 162,200 12,050 0,000 0,000 1UWBTP 0 0,0000 162,200 12,050 -14,000 0,000 EX1LWBTS 0 0,0000 161,837 1,946 30,722 0,000 EX1LWBTP 0 0,0000 161,837 1,946 -30,722 0,000 EX1MWBTS 0 0,0000 162,200 7,280 28,500 0,000 EX1MWBTP 0 0,0000 162,135 7,292 -31,426 0,000 EX1UWBTS 0 0,0000 162,200 12,050 31,500 0,000 EX1UWBTP 0 0,0000 162,200 12,050 -31,500 0,000 2FOT(S)pp 1 2686 28,117 8,397 23,547 0,000 2FOT(P)pp 1 2686 28,117 8,397 -23,547 0,000 DOT(S)pp 1 1069 17,140 10,750 10,500 0,000 DOT(P)pp 1 1069 17,140 10,750 -10,500 0,000 DO2T(S)pp 1 1057 17,175 10,772 31,398 0,000 DO2T(P)pp 1 1057 17,175 10,772 -31,398 0,000 AP(S)pp 0 0,0000 10,239 4,414 0,773 0,000 AP(P)pp 0 0,0000 10,239 4,414 -0,773 0,000 APU(P)pp 0 0,0000 4,638 10,619 -18,591 0,000 APU(S)pp 0 0,0000 7,541 10,320 18,926 0,000 flot(AP) 0 0,0000 3,000 24,802 -30,666 0,000 flot(FP) 0 0,0000 8,615 24,801 -30,666 0,000
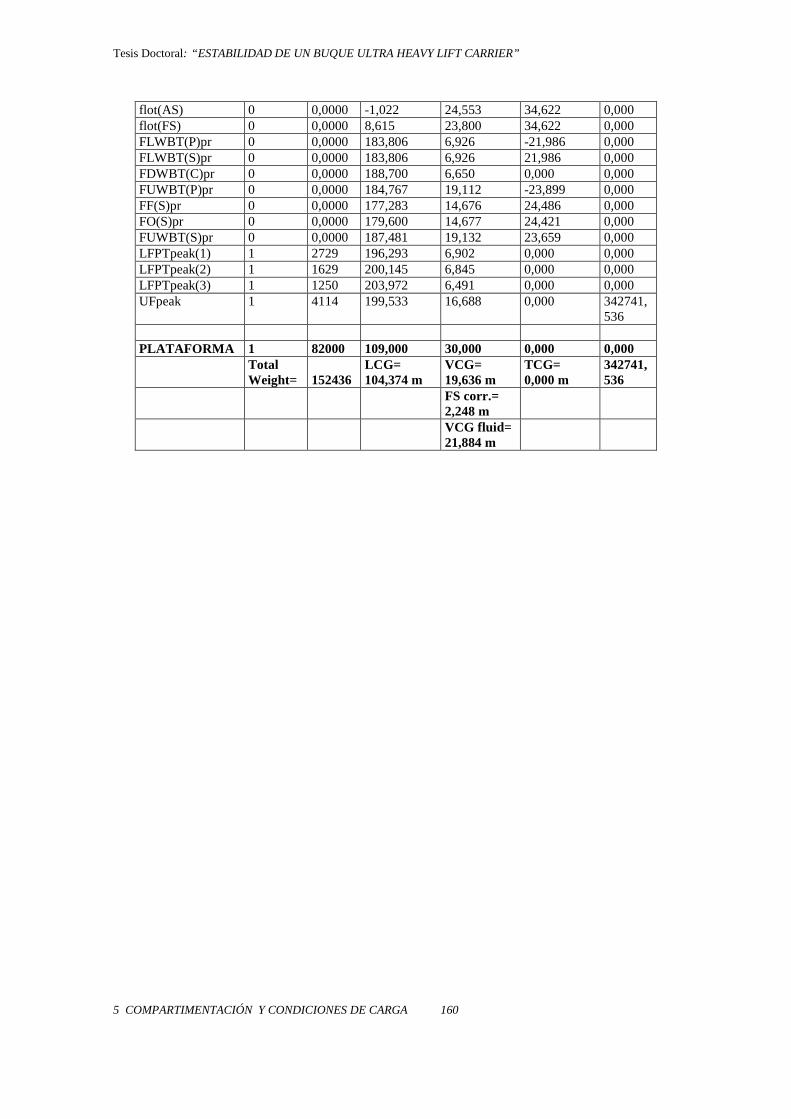
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
5 COMPARTIMENTACIÓN Y CONDICIONES DE CARGA 160
flot(AS) 0 0,0000 -1,022 24,553 34,622 0,000 flot(FS) 0 0,0000 8,615 23,800 34,622 0,000 FLWBT(P)pr 0 0,0000 183,806 6,926 -21,986 0,000 FLWBT(S)pr 0 0,0000 183,806 6,926 21,986 0,000 FDWBT(C)pr 0 0,0000 188,700 6,650 0,000 0,000 FUWBT(P)pr 0 0,0000 184,767 19,112 -23,899 0,000 FF(S)pr 0 0,0000 177,283 14,676 24,486 0,000 FO(S)pr 0 0,0000 179,600 14,677 24,421 0,000 FUWBT(S)pr 0 0,0000 187,481 19,132 23,659 0,000 LFPTpeak(1) 1 2729 196,293 6,902 0,000 0,000 LFPTpeak(2) 1 1629 200,145 6,845 0,000 0,000 LFPTpeak(3) 1 1250 203,972 6,491 0,000 0,000 UFpeak 1 4114 199,533 16,688 0,000 342741,
536 PLATAFORMA 1 82000 109,000 30,000 0,000 0,000 Total
Weight= 152436
LCG= 104,374 m
VCG= 19,636 m
TCG= 0,000 m
342741,536
FS corr.= 2,248 m
VCG fluid= 21,884 m
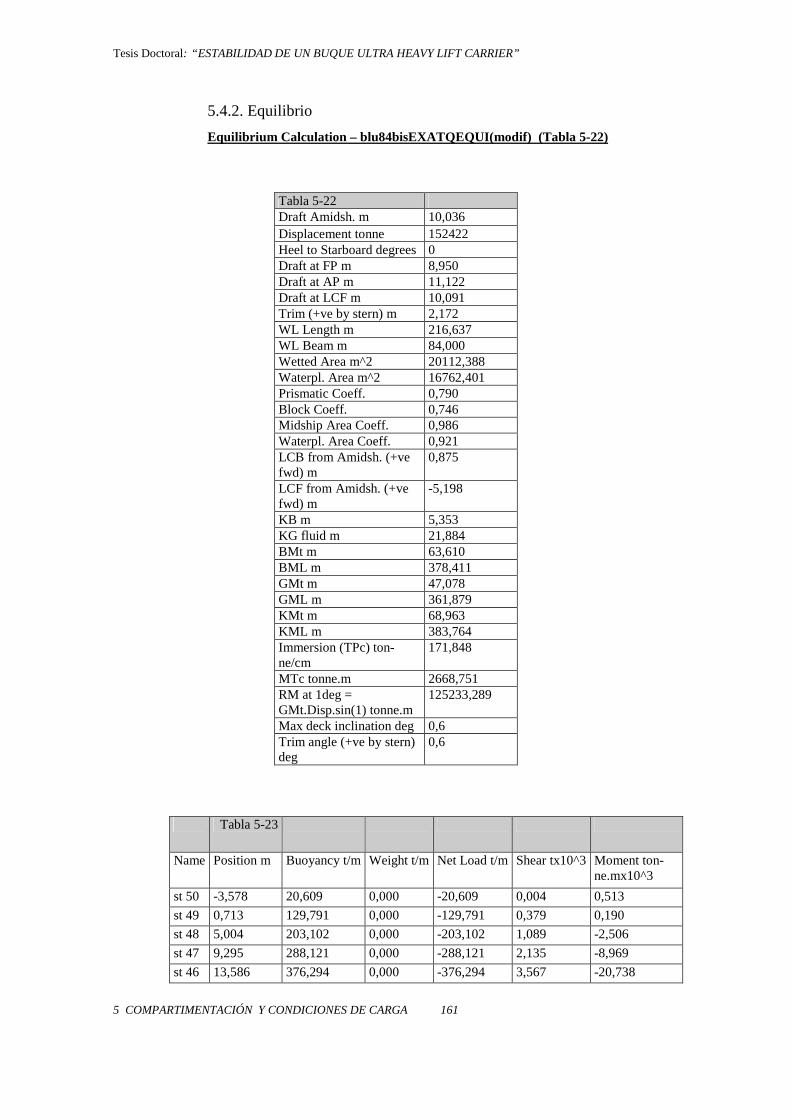
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
5 COMPARTIMENTACIÓN Y CONDICIONES DE CARGA 161
5.4.2. Equilibrio
Equilibrium Calculation – blu84bisEXATQEQUI(modif) (Tabla 5-22)
Tabla 5-22 Draft Amidsh. m 10,036 Displacement tonne 152422 Heel to Starboard degrees 0 Draft at FP m 8,950 Draft at AP m 11,122 Draft at LCF m 10,091 Trim (+ve by stern) m 2,172 WL Length m 216,637 WL Beam m 84,000 Wetted Area m^2 20112,388 Waterpl. Area m^2 16762,401 Prismatic Coeff. 0,790 Block Coeff. 0,746 Midship Area Coeff. 0,986 Waterpl. Area Coeff. 0,921 LCB from Amidsh. (+ve fwd) m
0,875
LCF from Amidsh. (+ve fwd) m
-5,198
KB m 5,353 KG fluid m 21,884 BMt m 63,610 BML m 378,411 GMt m 47,078 GML m 361,879 KMt m 68,963 KML m 383,764 Immersion (TPc) ton-ne/cm
171,848
MTc tonne.m 2668,751 RM at 1deg = GMt.Disp.sin(1) tonne.m
125233,289
Max deck inclination deg 0,6 Trim angle (+ve by stern) deg
0,6
Tabla 5-23
Name Position m Buoyancy t/m Weight t/m Net Load t/m Shear tx10^3 Moment ton-ne.mx10^3
st 50 -3,578 20,609 0,000 -20,609 0,004 0,513
st 49 0,713 129,791 0,000 -129,791 0,379 0,190
st 48 5,004 203,102 0,000 -203,102 1,089 -2,506
st 47 9,295 288,121 0,000 -288,121 2,135 -8,969
st 46 13,586 376,294 0,000 -376,294 3,567 -20,738
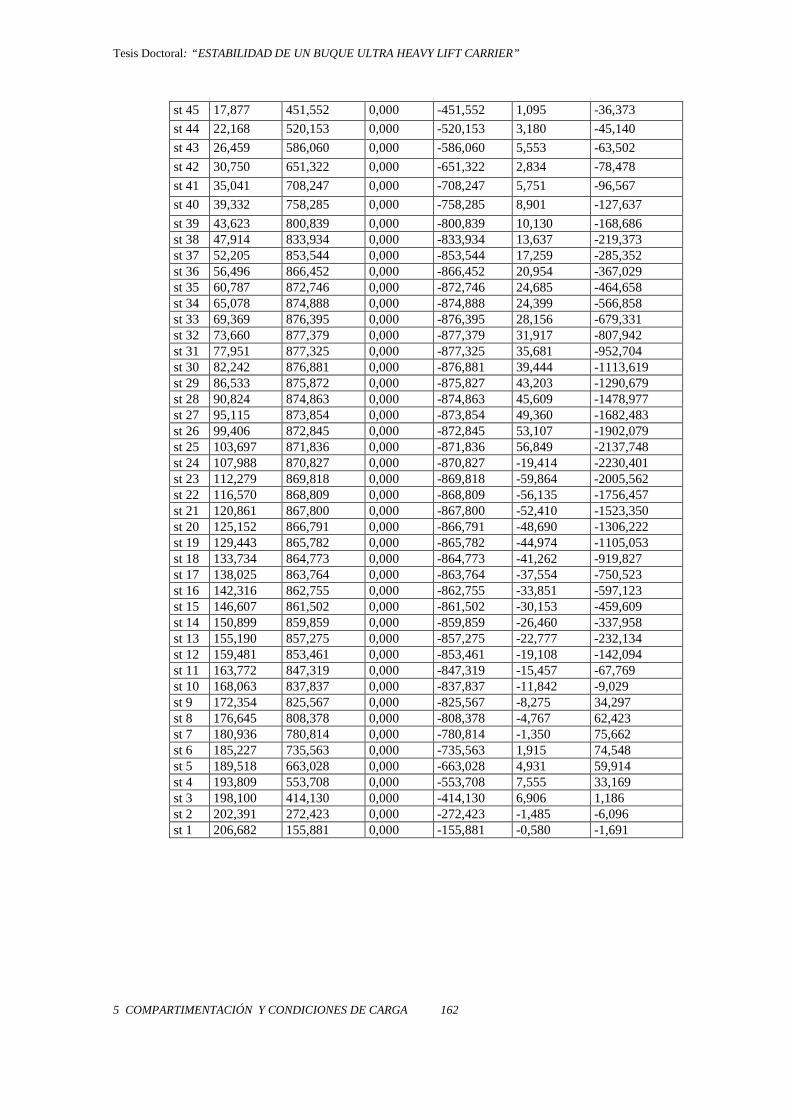
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
5 COMPARTIMENTACIÓN Y CONDICIONES DE CARGA 162
st 45 17,877 451,552 0,000 -451,552 1,095 -36,373
st 44 22,168 520,153 0,000 -520,153 3,180 -45,140
st 43 26,459 586,060 0,000 -586,060 5,553 -63,502
st 42 30,750 651,322 0,000 -651,322 2,834 -78,478
st 41 35,041 708,247 0,000 -708,247 5,751 -96,567
st 40 39,332 758,285 0,000 -758,285 8,901 -127,637
st 39 43,623 800,839 0,000 -800,839 10,130 -168,686 st 38 47,914 833,934 0,000 -833,934 13,637 -219,373 st 37 52,205 853,544 0,000 -853,544 17,259 -285,352 st 36 56,496 866,452 0,000 -866,452 20,954 -367,029 st 35 60,787 872,746 0,000 -872,746 24,685 -464,658 st 34 65,078 874,888 0,000 -874,888 24,399 -566,858 st 33 69,369 876,395 0,000 -876,395 28,156 -679,331 st 32 73,660 877,379 0,000 -877,379 31,917 -807,942 st 31 77,951 877,325 0,000 -877,325 35,681 -952,704 st 30 82,242 876,881 0,000 -876,881 39,444 -1113,619 st 29 86,533 875,872 0,000 -875,827 43,203 -1290,679 st 28 90,824 874,863 0,000 -874,863 45,609 -1478,977 st 27 95,115 873,854 0,000 -873,854 49,360 -1682,483 st 26 99,406 872,845 0,000 -872,845 53,107 -1902,079 st 25 103,697 871,836 0,000 -871,836 56,849 -2137,748 st 24 107,988 870,827 0,000 -870,827 -19,414 -2230,401 st 23 112,279 869,818 0,000 -869,818 -59,864 -2005,562 st 22 116,570 868,809 0,000 -868,809 -56,135 -1756,457 st 21 120,861 867,800 0,000 -867,800 -52,410 -1523,350 st 20 125,152 866,791 0,000 -866,791 -48,690 -1306,222 st 19 129,443 865,782 0,000 -865,782 -44,974 -1105,053 st 18 133,734 864,773 0,000 -864,773 -41,262 -919,827 st 17 138,025 863,764 0,000 -863,764 -37,554 -750,523 st 16 142,316 862,755 0,000 -862,755 -33,851 -597,123 st 15 146,607 861,502 0,000 -861,502 -30,153 -459,609 st 14 150,899 859,859 0,000 -859,859 -26,460 -337,958 st 13 155,190 857,275 0,000 -857,275 -22,777 -232,134 st 12 159,481 853,461 0,000 -853,461 -19,108 -142,094 st 11 163,772 847,319 0,000 -847,319 -15,457 -67,769 st 10 168,063 837,837 0,000 -837,837 -11,842 -9,029 st 9 172,354 825,567 0,000 -825,567 -8,275 34,297 st 8 176,645 808,378 0,000 -808,378 -4,767 62,423 st 7 180,936 780,814 0,000 -780,814 -1,350 75,662 st 6 185,227 735,563 0,000 -735,563 1,915 74,548 st 5 189,518 663,028 0,000 -663,028 4,931 59,914 st 4 193,809 553,708 0,000 -553,708 7,555 33,169 st 3 198,100 414,130 0,000 -414,130 6,906 1,186 st 2 202,391 272,423 0,000 -272,423 -1,485 -6,096 st 1 206,682 155,881 0,000 -155,881 -0,580 -1,691
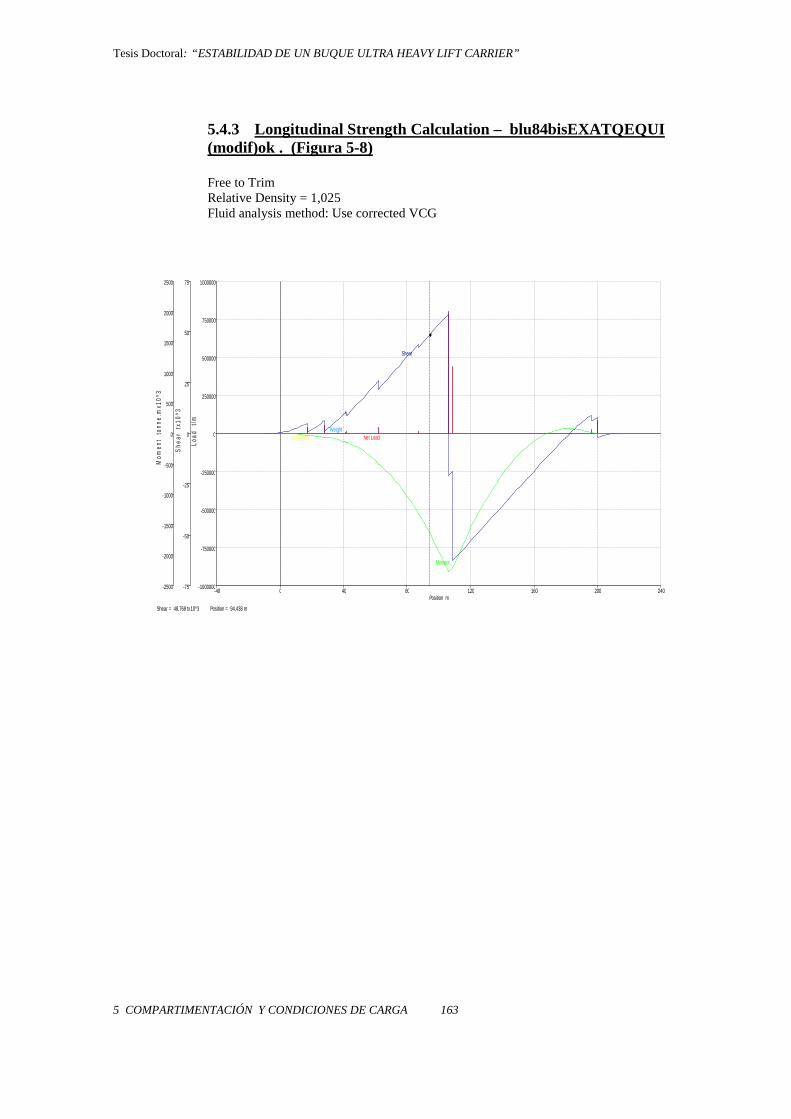
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
5 COMPARTIMENTACIÓN Y CONDICIONES DE CARGA 163
5.4.3 Longitudinal Strength Calculation – blu84bisEXATQEQUI (modif)ok . (Figura 5-8)
Free to Trim Relative Density = 1,025 Fluid analysis method: Use corrected VCG
-1000000
-750000
-500000
-250000
0
250000
500000
750000
1000000
-40 0 40 80 120 160 200 240-75
-50
-25
0
25
50
75
-2500
-2000
-1500
-1000
-500
0
500
1000
1500
2000
2500
BuoyancyWeight
Net Load
Shear
Moment
Shear = Position = 48,768 tx10^3 94,438 m
Position m
Load
t/
m
She
ar
tx10
^3
Mom
ent
ton
ne.m
x10^
3
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
6. ESTABILIDAD ESTÁTICA: PLENA CARGA DISEÑO
164
CAPITULO 6.- ESTABILIDAD A PLENA CARGA DE DISEÑO.
Se ha querido formular muy brevemente los fundamentos y criterios básicos de
estabilidad que vamos a utilizar. Nos proponemos estudiar, además, las limitaciones de
la estabilidad estática del buque en la condición de plena carga de diseño utilizado como
parámetro el KG MAX del buque en los siguientes casos:
1. Estudiar la influencia del binomio carena-carga por medio de la de-
terminación del KG MAX del buque para un rango de desplazamientos. Se ha
considerado principalmente dos desplazamientos:
a) el desplazamiento correspondiente al francobordo de verano para
cada una de las carenas en estudio.
b) el desplazamiento correspondiente al calado de la maniobra de
carga y descarga para cada una de las carenas en estudio.
2. Estudiar la influencia del ZG la carga y el peso de la misma, analizando
los criterios de estabilidad atendiendo a la reglamentación IMO, y establecer
gráficos que definan las áreas de estabilidad en función del binomio Carga -
ZG.
3. Evaluación previa de la estabilidad durante la emersión e inmersión para
una carga genérica de la que sólo conocemos su peso y su centro de gravedad,
sin tener en cuenta la interacción de la parte de la carga cerrada con la carena.
Queremos poner de manifiesto la problemática que surge al aplicar normativas
de estabilidad que fueron adoptadas para ser aplicadas a la navegación del buque, al ser
éstas aplicadas también al proceso de carga y descarga. Estas características serán trata-
das en el presente capítulo.
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
6. ESTABILIDAD ESTÁTICA: PLENA CARGA DISEÑO
165
6.1. ENTIDADES REGULADORAS. CRITERIOS Y NORMATIVAS APLICABLES
En la presente tesis doctoral, de acuerdo con la legislación aprobada por la Admi-
nistración del Estado, se han adoptado como criterios de estabilidad para este estudio las
siguientes resoluciones y reglamentos:
1. IMO Resolución .A. 749(18) (aprobada el 4 de noviembre de 1.993) “Código de
Estabilidad Sin Averías Para Todos los Tipos de Buques Regidos por los Ins-
trumentos de la OMI”. Después de varías enmiendas, ha sido modificado por las
Resoluciones MSC 75/69 y MSC 85/26 Add. 1 ANNEX 2 (4 diciembre de
2008), recogiéndose en la Resolución MSC 267 (85) (4 de diciembre de 2008).
2. IMO (Resolución A. 649 XII (aprobada el 19 de noviembre de 1.981) “Direc-
trices para el Proyecto y la Construcción de Buques de Suministro Mar Aden-
tro”. Posteriormente ha sido modificada por la Resolución MSC 267 (85) (4 de
diciembre 2008).
3. SOLAS Ch.II-1. Varias modificaciones han sido recogidas a partir del regla-
mento adoptado en 1.974 y entrado en vigor en 1.981 hasta la última edición del
2.011.
4. DET NORSKE VERITAS “Rules for classification of ships” Part 3 Ch 4 de Ju-
lio de 2.009 y “Stability and Watertight integrity” y “Damage Stability of Cargo
Ships” Part. 5 Ch. 2 Sec. 8. de Julio de 2.009.
6.1.1. Criterios generales de estabilidad aplicables a todos los buques.
6.1.1.1 Criterios generales de estabilidad sin avería para todos los buques.
6.1.1.1.1 Ámbito de aplicación
Se recomienda los siguientes criterios para buques de pasaje y buques de carga.
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
6. ESTABILIDAD ESTÁTICA: PLENA CARGA DISEÑO
166
6.1.1.1.2 Criterios generales recomendados
6.1.1.1.2.1 El área situada bajo la curva de brazos adrizantes (curva GZ) no será
inferior a 0,055 metros-radianes hasta un ángulo de escora θ = 30º ni inferior a
0,09 metros-radianes hasta θ = 40º o hasta un ángulo de inundación θf1 si éste es
menor de 40º. Además, la curva situada bajo la curva de brazos adrizantes (curva de
brazos adrizantes GZ) entre los ángulos de escora de 30º y 40º o entre los ángulos
de 30º y θf si éste es menor de 40º no será inferior a 0,03 metros-radianes.
6.1.1.1.2.2 El brazo adrizante (GZ) será de 0,20 como mínimo para un ángulo de
escora igual o superior a 30º.
6.1.1.1.2.3 El brazo adrizante máximo corresponderá a un ángulo de escora prefe-
riblemente superior a 30º pero no inferior a 25º.
6.1.1.1.2.4 La altura metacéntrica transversal inicial (GM0) no será inferior a 0,15
m.
6.1.1.1.2.5 Además, tratándose de buques de pasaje, el ángulo de escora producido
por la aglomeración de pasajeros en una banda, tal como se define en este regla-
mento, no excederá de 10º.
6.1.1.1.2.6 Además, tratándose de buques de pasaje, el ángulo de escora debido a
una maniobra de giro no excederá de 10º si se calcula utilizando la fórmula si-
guiente:
200,02
2R
V dM KG
L = −
MR = momento escorante, en m . t
V0 = velocidad de servicio m/s
L = eslora en la flotación del buque en m
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
6. ESTABILIDAD ESTÁTICA: PLENA CARGA DISEÑO
167
∆ = desplazamiento en toneladas
d = desplazamiento en toneladas
KG = altura del centro de gravedad sobre la quilla, en m
6.1.1.1.2.7 En los buques dotados de dispositivos antibalance, la Administración
comprobará que cuando éstos estén en funcionamiento se cumplen los criterios
de estabilidad anteriores.
6.1.1.1.2.8 Hay una serie de fenómenos, tales como la acción del viento de tra-
vés en buques con mucha superficie expuesta, la acumulación de hielo en la obra
muerta, el agua embarcada en cubierta, las características de balance, la mar de
popa, entre otros, que influyen de manera desfavorable en la estabilidad, por lo
que se aconseja a la Administración que los tenga en cuenta siempre que lo juz-
gue necesario.
6.1.1.1.2.9 Se tomarán medidas para disponer de un margen seguro de estabili-
dad en todas las etapas del viaje, teniendo en cuenta la adición de pesos, tales
como los debidos a la absorción de agua y al engelamiento (los pormenores rela-
tivos a la acumulación de hielo producida por el engelamiento figuran en el capí-
tulo 5), y la pérdida de peso, tal como la debida al consumo de combustible y
provisiones.
6.1.1.1.2.10 En el caso de buques que transporten contaminantes oleosos a gra-
nel, la Administración se cerciorará de que durante todas las operaciones de car-
ga y de lastrado se satisfacen los criterios indicados en 3.1.2 de la normativa ofi-
cial.
6.1.1.2 Criterio de viento y balance intensos (criterio meteorológico)
6.1.1.2.1 Ámbito de aplicación
Este criterio complementa el criterio de estabilidad que figura en la sec-
ción 3.1. Los criterios más rigurosos de la sección 3.1 y el criterio meteorológico
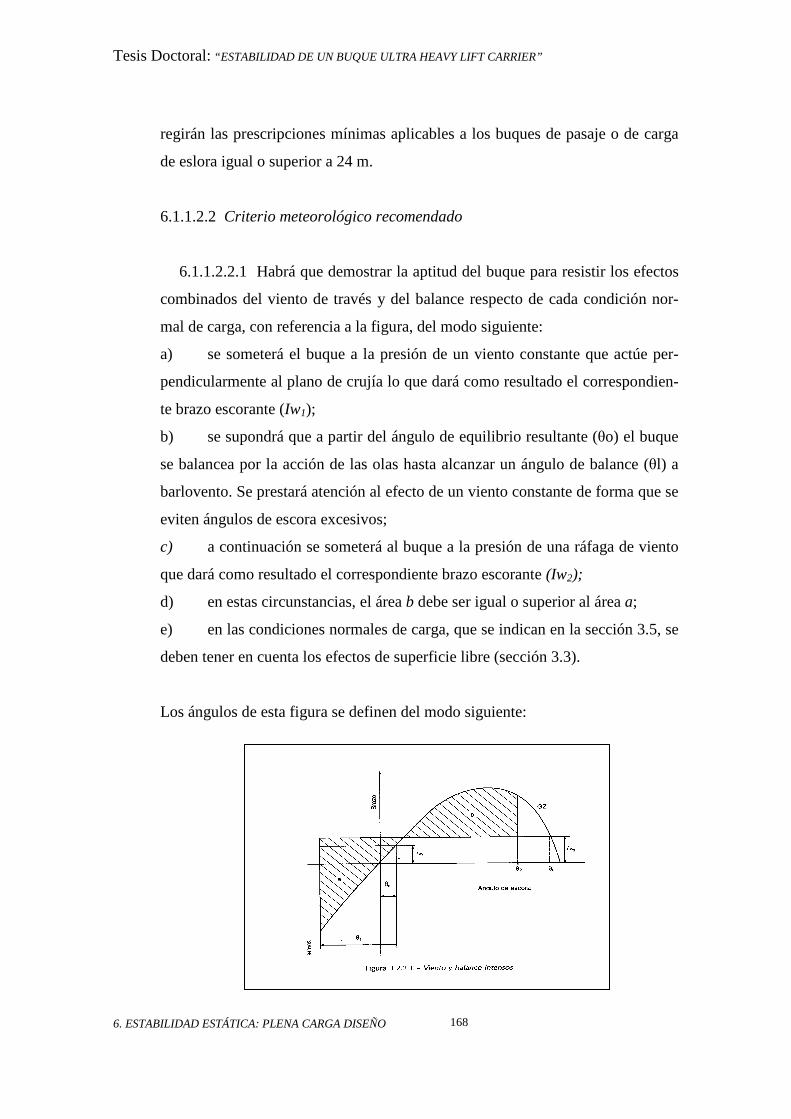
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
6. ESTABILIDAD ESTÁTICA: PLENA CARGA DISEÑO
168
regirán las prescripciones mínimas aplicables a los buques de pasaje o de carga
de eslora igual o superior a 24 m.
6.1.1.2.2 Criterio meteorológico recomendado
6.1.1.2.2.1 Habrá que demostrar la aptitud del buque para resistir los efectos
combinados del viento de través y del balance respecto de cada condición nor-
mal de carga, con referencia a la figura, del modo siguiente:
a) se someterá el buque a la presión de un viento constante que actúe per-
pendicularmente al plano de crujía lo que dará como resultado el correspondien-
te brazo escorante (Iw1);
b) se supondrá que a partir del ángulo de equilibrio resultante (θo) el buque
se balancea por la acción de las olas hasta alcanzar un ángulo de balance (θl) a
barlovento. Se prestará atención al efecto de un viento constante de forma que se
eviten ángulos de escora excesivos;
c) a continuación se someterá al buque a la presión de una ráfaga de viento
que dará como resultado el correspondiente brazo escorante (Iw2);
d) en estas circunstancias, el área b debe ser igual o superior al área a;
e) en las condiciones normales de carga, que se indican en la sección 3.5, se
deben tener en cuenta los efectos de superficie libre (sección 3.3).
Los ángulos de esta figura se definen del modo siguiente:
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
6. ESTABILIDAD ESTÁTICA: PLENA CARGA DISEÑO
169
0θ = ángulo de escora provocado por un viento constante (3.2.2.1.2)
1θ = ángulo de balance a barlovento debido a la acción de las olas (3.2.2.3)
2θ = ángulo al que se produce inundación descendente ( fθ ) o 50º, o cθ
tomando de estos valores el menor, de donde:
fθ = ángulo de escora al que se sumergen las aberturas del casco, superestructu-
ras o casetas que no puedan cerrarse de modo estanco a la intemperie. Al aplicar
este criterio no hará falta considerar abiertas las pequeñas aberturas por las que
no pueda producirse inundación progresiva
cθ = ángulo de la segunda intersección entre la curva de brazos escorantes IW2 y
la de brazos GZ.
(Para el cálculo de los brazos escorantes, consultar IMO Resolución A. 749 (18),
página 280, parágrafo 3.2.2.2 versión oficial (Véase Bibliografía, Ref. 14)
6.1.2. Buques suministro mar adentro (supply vessel)
Según la definición dada en la Resolución A749 (19), (Véase Bibliografía, Ref. 14)
capítulo 1 sección “Definiciones”, los buques de suministro mar adentro son los buques
dedicados principalmente a llevar pertrechos, materiales y equipos a las instalaciones
mar adentro. Están proyectados con el puente y superestructuras, que serán alojamien-
tos, en la parte proel del buque y con una cubierta de carga, expuesta a la intemperie, en
la parte popel para la manipulación de la carga en la mar.
Para su ámbito de aplicación, definiciones y principios que rigen los viajes próxi-
mos a la costa consultar la bibliografía, Ref. 14. El ámbito de aplicación de esta regla
establece que se aplicará a buques de < 100 m de eslora. Ver, así mismo, la interpreta-
ción de la sociedad de clasificación, parágrafo 6.5.1., página 240-241, donde se equipara
la IMO A 749, Ch 3,1 con Ch 4,5 “Offshore suply Vessel”, para los buques HLC.
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
6. ESTABILIDAD ESTÁTICA: PLENA CARGA DISEÑO
170
6.1.2.1 Criterios de estabilidad
6.1.2.1.1 Los criterios de estabilidad que figuran en la 6.1.1.1.2 (“Criterios gene-
rales recomendados” del presente capítulo) se aplicarán a todos los buques de su-
ministro mar adentro, con la salvedad de aquellos cuyas características les impi-
dan cumplir con lo dispuesto en la 6.1.1.1.2. Cuando las características de un bu-
que hagan impracticable la observancia de lo dispuesto en este subparágrafo se
recomienda aplicar los siguientes criterios equivalentes:
.1 El área situada bajo la curva de brazos adrizantes (curva GZ) no será
inferior a 0,070 metros-radianes hasta un ángulo de 15º si el brazo adri-
zante máximo (GZ) se da a un ángulo igual o inferior de 15º, o bien de
0,055 metros-radianes hasta un ángulo de 30º si el brazo adrizante máxi-
mo (GZ) se da a un ángulo igual o superior a 30º.
.2 Cuando el brazo adrizante máximo (GZ) se da a un ángulo compren-
dido entre 15º y 30º, el área correspondiente situada bajo la curva de bra-
zos adrizantes será la siguiente:
0,055 + 0,001 (30º - θmax ) metros-radianes.2 El área situada bajo la
curva de brazos adrizantes (GZ) entre los ángulos de escora de 30º y 40º
o entre 30º y θf, si éste es de menos de 40º, no será inferior a 0,003 me-
tros-radianes. Siendo θf el ángulo de la escora expresado en grados al que
se sumergen las aberturas del casco, de la superestructura o de las case-
tas, que no se puedan cerrar de modo que queden estancas a la intempe-
rie. Al aplicarse este criterio no se considerarán abiertas las pequeñas
aberturas por las que no puedan producirse inundación progresiva
.3 El brazo adrizante máximo (GZ) será de 0,20 m como mínimo para un
ángulo de escora igual o superior a 30º.
.4 El brazo adrizante máximo (GZ) se dará a un ángulo de escora no in-
ferior a 15º.
.5 La altura metacéntrica transversal inicial (GM0) no será inferior a 0,15
m.
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
6. ESTABILIDAD ESTÁTICA: PLENA CARGA DISEÑO
171
Deberá tenerse presente que los criterios de estabilidad mencionados en
6.1.2.1.1 y 6.1.2.1.2 son valores mínimos, y no se atienden los valores máximos
recomendados. Es aconsejable evitar valores excesivos ya que éstos podrían ori-
ginar aceleraciones posiblemente perjudiciales para el buque, la dotación, el
equipo y el transporte de la carga en condiciones de seguridad.
La altura metacéntrica inicial y las curvas de estabilidad se corregirán en
cuanto al efecto de las superficies libres de los líquidos de los tanques en todas
las condiciones de carga, de conformidad con las hipótesis de la presente norma.
6.1.2.2 Condiciones de carga
Las condiciones típicas de carga son las siguientes:
6.1.2.2.1 Buque en la condición de salida a plena carga, distribuida ésta bajo cu-
bierta y con una cubertada de posición y peso especificados y la totalidad de pro-
visiones y combustible, según corresponda a la condición de servicio más desfa-
vorable en que se satisfagan todos los criterios de estabilidad pertinentes.
6.1.2.2.2 Buque en la condición de llegada a plena carga, tal como se indica en 1,
pero con sólo el 10% de provisiones y combustible.
6.1.2.2.3 Buque en la condición de salida en lastre y sin carga, pero con la totali-
dad de provisiones y combustible.
6.1.2.2.4 Buque en la condición de llegada en lastre y sin carga, con sólo el 10%
de provisiones y combustible.
6.1.2.2.5 Buque en las peores condiciones operacionales previstas.
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
6. ESTABILIDAD ESTÁTICA: PLENA CARGA DISEÑO
172
6.1.2.3 Supuestos para el cálculo en las condiciones de carga
Al calcular las condiciones de carga se supondrá lo siguiente:
6.1.2.3.1 Si el buque tiene tanques de carga se modificarán las condiciones de
plena carga indicadas en 6.1.2.2.1 y 6.1.2.2.2 suponiendo en primer lugar que
los tanques de carga están llenos y a continuación que están vacíos.
6.1.2.3.2 Si en alguna condición de carga es preciso lastrar el buque con agua,
se calcularán diagramas adicionales teniendo en cuenta el agua de lastre, cuya
cantidad y disposición se indicará en la información sobre estabilidad.
6.1.2.3.3 Siempre que se transporten cubertadas habrá que suponer un peso de
estiba que se ajuste a la realidad, y éste se hará constar en la información sobre
estabilidad junto con la altura de la carga y su centro de gravedad.
6.1.2.3.4 Cuando se transporten tuberías en cubierta, se supondrá que dentro de
ellas y en sus inmediaciones se acumula agua en cantidad equivalente a un de-
terminado porcentaje del volumen neto de la cubertada de tuberías. Se conside-
rará que el volumen neto es igual al volumen interior de las tuberías más el vo-
lumen que media entre ellas. Dicho porcentaje será de 30° si el francobordo en
los medios es igual o inferior a 0,015 L y de 10° si dicho francobordo es igualo
superior a 0,030 L. Para valores intermedios del francobordo, el porcentaje co-
rrespondiente podrá obtenerse por interpolación lineal. Al determinar la cantidad
de agua acumulada, la Administración podrá tener en cuenta el arrufo positivo o
negativo a popa, el asiento real y la zona de operaciones.
6.1.2.3.5 Si un buque opera en zonas donde es probable la acumulación de hie-
lo, se aplicará un margen por engelamiento de conformidad con lo dispuesto en
el capítulo 5.
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
6. ESTABILIDAD ESTÁTICA: PLENA CARGA DISEÑO
173
6.1.3. Estabilidad estática después de avería (IMO) - Damage Stability Requirements
(Resolución A 649 XII – “Directrices para el proyecto y la construcción de buques de
suministro mar adentro”. Véase Bibliografía, Ref. 11)
6.1.3.1 Compartimentado y Estabilidad Después de Avería
6.1.3.1.1 Generalidades
Considerando como condiciones iniciales previas a la inundación las condi-
ciones normalizadas de carga a que se hace referencia en la Resolución A
649 XII, parágrafos 2.9 y 2.10 relativos a “Condiciones de Carga” e “Hipóte-
sis para el cálculo de las condiciones de carga” y las hipótesis de avería da-
das en el parágrafo 3.2 “Hipótesis de avería”; el buque se ajustará a los cri-
terios relativos a la estabilidad después de avería indicados en la Resolución
A 649 XII, parágrafos 3.3 relativos a “Criterios relativos a la estabilidad
después de avería”. (Véase Bibliografía, Ref. 11)
6.1.3.1.2 Hipótesis de avería
6.1.3.1.2.1. Se supone que la avería ocurre en cualquier punto de la eslora
del buque entre mamparos transversales del buque.
6.1.3.1.2.2 Se supondrá que la extensión vertical de la avería comienza en
la parte inferior de la cubierta de carga, o en la continuación de ésta, en todo
el puntal del buque.
6.1.3.1.2.3 Se supondrá que la extensión transversal de la avería es de 760
mm., medida hacia el interior del buque desde el costado, perpendicularmen-
te al eje longitudinal, al nivel de la flotación en carga de verano.
6.1.3.1.2.4 Un mamparo transversal estanco que se extienda desde el costa-
do del buque hacia el interior en una distancia igual o superior a 760 mm al
nivel de la flotación en carga de verano y que se una a mamparos longitudi-
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
6. ESTABILIDAD ESTÁTICA: PLENA CARGA DISEÑO
174
nales estancos, podrá considerarse como mamparo transversal estanco a los
efectos de cálculo de averías.
6.1.3.1.2.5. Si en la extensión supuesta de la avería hay tuberías, conductos
o túneles, se adoptarán las medidas necesarias para impedir que por ellos
pueda llegar la inundación progresiva a compartimentos distintos de los que
en los cálculos correspondientes a cada caso de avería se haya supuesto que
son inundables.
6.1.3.1.2.6. Si una avería de dimensiones menores que las indicadas en 3.2.2
y/o 3.2.3 (epígrafes del texto original de la IMO correspondientes a la Res.
A.469 (XII) aprobada el 19 de noviembre de 1.981 punto 10 b) del orden del
día) origina condiciones peores, tales dimensiones se tomarán como hipóte-
sis.
6.1.3.1.2.7. Cuando un mamparo transversal estanco quede comprendido
dentro de la extensión transversal de la supuesta avería y presente una bayo-
neta de más de 3,05 m en la zona de un doble fondo o de un tanque lateral, el
doble fondo o los tanques laterales adyacentes a la parte del mamparo trans-
versal estanco que presenta la bayoneta se considerarán como inundados si-
multáneamente.
6.1.3.1.3 Criterios relativos a la estanqueidad después de averías.
6.1.3.1.3.1. Considerados el incremento de carena, la escora y el asiento, la
flotación final deberá situarse por debajo del borde inferior de toda abertura
por la que pueda producirse inundación progresiva. Entre esas aberturas se
cuentan los conductos de aire y la que pueden cerrarse con puertas estancas a
la intemperie o tapas de escotilla; pueden no figurar entre ellas las aberturas
que se cierran con tapas de registro estancas y portillos sin brazola estancos,
pequeñas tapas de escotilla estancas de tanques de carga que mantienen la
firme integridad de la cubierta, puertas de corredera estancas telemandadas y
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
6. ESTABILIDAD ESTÁTICA: PLENA CARGA DISEÑO
175
portillos de tipo fijo.
6.1.3.1.3.2. En la fase final de inundación el ángulo de escora debido a la
inundación asimétrica no deberá exceder de 15º. Este ángulo podrá llegar a
ser de 17º si no se produce inmersión de la cubierta.
6.1.3.1.3.3. Se examinará la estabilidad que haya en la fase final de inunda-
ción y se considerará que es suficiente si una curva de brazos adrizantes tiene
como mínimo una amplitud de 20º más allá de la posición de equilibrio, con
un brazo adrizante residual máximo de por lo menos 100 mm dentro de esa
amplitud. Las aberturas no protegidas no deberán quedar sumergidas a un
ángulo de escora que esté dentro del margen mínimo prescrito para la estabi-
lidad residual, a menos que el espacio de que se trate haya quedado incluido
como inundable en los cálculos relativos a la estabilidad después de avería.
Dentro de este margen podrá permitirse la inmersión de cualquiera de las
aberturas indicadas en 6.1.3.1.3.1. y de cualesquiera otras que puedan cerrar-
se de manera estanca a la intemperie.
6.1.3.1.3.4. La Administración se cerciorará de que la estabilidad es sufi-
ciente durante las fases intermedias de inundación.
6.1.3.1.4 Hipótesis para el cálculo de la estabilidad después de avería.
6.1.3.1.4.1. El cumplimiento de lo dispuesto en 4.1.3.1.3 se confirmará
mediante cálculos en los que se tengan en cuenta las características de
proyecto del buque, la disposición, la configuración y la permeabilidad
de los compartimentos averiados y la distribución, pesos específicos y
efectos de las superficies libres de los líquidos.
6.1.3.1.4.2 La permeabilidad de los espacios que se supongan averiados
será la siguiente:
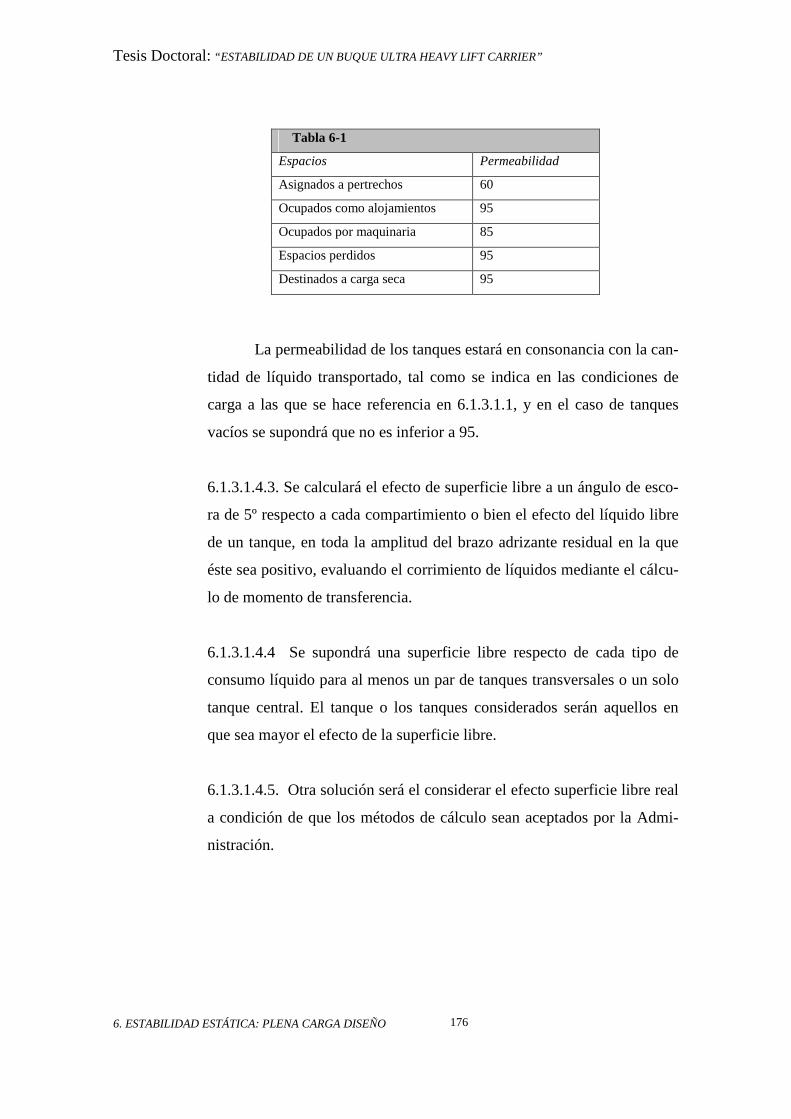
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
6. ESTABILIDAD ESTÁTICA: PLENA CARGA DISEÑO
176
La permeabilidad de los tanques estará en consonancia con la can-
tidad de líquido transportado, tal como se indica en las condiciones de
carga a las que se hace referencia en 6.1.3.1.1, y en el caso de tanques
vacíos se supondrá que no es inferior a 95.
6.1.3.1.4.3. Se calculará el efecto de superficie libre a un ángulo de esco-
ra de 5º respecto a cada compartimiento o bien el efecto del líquido libre
de un tanque, en toda la amplitud del brazo adrizante residual en la que
éste sea positivo, evaluando el corrimiento de líquidos mediante el cálcu-
lo de momento de transferencia.
6.1.3.1.4.4 Se supondrá una superficie libre respecto de cada tipo de
consumo líquido para al menos un par de tanques transversales o un solo
tanque central. El tanque o los tanques considerados serán aquellos en
que sea mayor el efecto de la superficie libre.
6.1.3.1.4.5. Otra solución será el considerar el efecto superficie libre real
a condición de que los métodos de cálculo sean aceptados por la Admi-
nistración.
Tabla 6-1
Espacios Permeabilidad
Asignados a pertrechos 60
Ocupados como alojamientos 95
Ocupados por maquinaria 85
Espacios perdidos 95
Destinados a carga seca 95
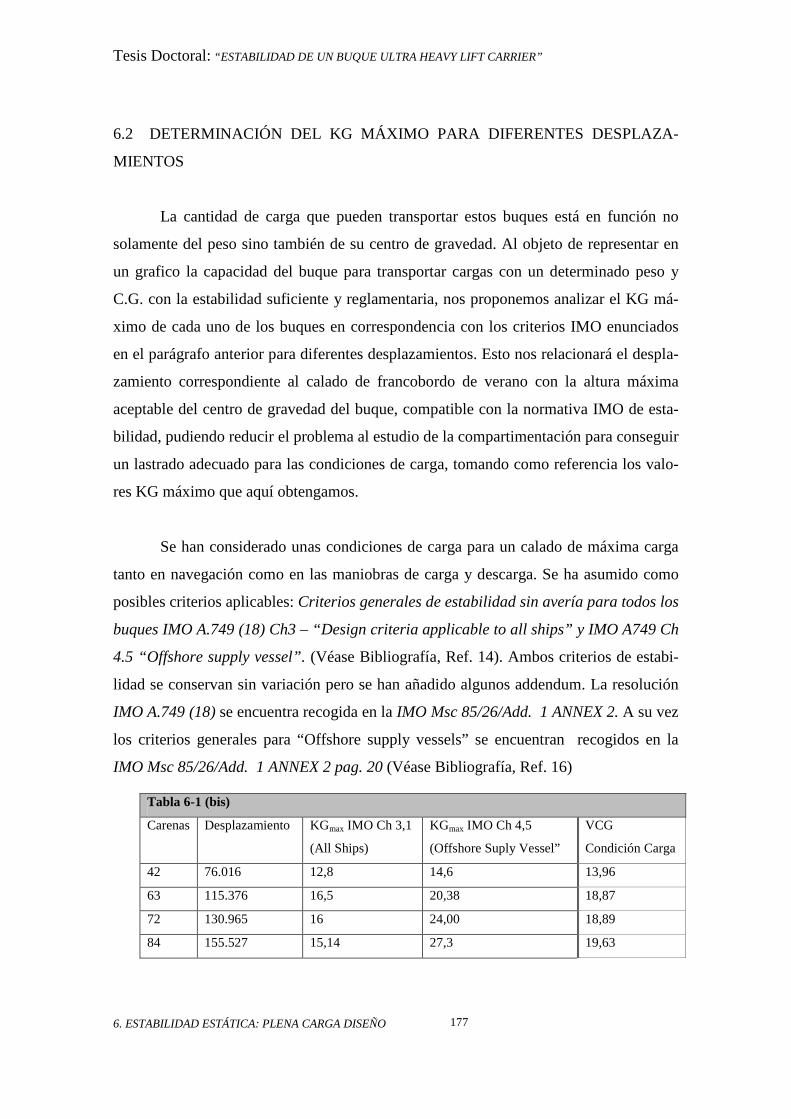
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
6. ESTABILIDAD ESTÁTICA: PLENA CARGA DISEÑO
177
6.2 DETERMINACIÓN DEL KG MÁXIMO PARA DIFERENTES DESPLAZA-
MIENTOS
La cantidad de carga que pueden transportar estos buques está en función no
solamente del peso sino también de su centro de gravedad. Al objeto de representar en
un grafico la capacidad del buque para transportar cargas con un determinado peso y
C.G. con la estabilidad suficiente y reglamentaria, nos proponemos analizar el KG má-
ximo de cada uno de los buques en correspondencia con los criterios IMO enunciados
en el parágrafo anterior para diferentes desplazamientos. Esto nos relacionará el despla-
zamiento correspondiente al calado de francobordo de verano con la altura máxima
aceptable del centro de gravedad del buque, compatible con la normativa IMO de esta-
bilidad, pudiendo reducir el problema al estudio de la compartimentación para conseguir
un lastrado adecuado para las condiciones de carga, tomando como referencia los valo-
res KG máximo que aquí obtengamos.
Se han considerado unas condiciones de carga para un calado de máxima carga
tanto en navegación como en las maniobras de carga y descarga. Se ha asumido como
posibles criterios aplicables: Criterios generales de estabilidad sin avería para todos los
buques IMO A.749 (18) Ch3 – “Design criteria applicable to all ships” y IMO A749 Ch
4.5 “Offshore supply vessel”. (Véase Bibliografía, Ref. 14). Ambos criterios de estabi-
lidad se conservan sin variación pero se han añadido algunos addendum. La resolución
IMO A.749 (18) se encuentra recogida en la IMO Msc 85/26/Add. 1 ANNEX 2. A su vez
los criterios generales para “Offshore supply vessels” se encuentran recogidos en la
IMO Msc 85/26/Add. 1 ANNEX 2 pag. 20 (Véase Bibliografía, Ref. 16)
Tabla 6-1 (bis)
Carenas Desplazamiento KGmax IMO Ch 3,1
(All Ships)
KGmax IMO Ch 4,5
(Offshore Suply Vessel”
VCG
Condición Carga
42 76.016 12,8 14,6 13,96
63 115.376 16,5 20,38 18,87
72 130.965 16 24,00 18,89
84 155.527 15,14 27,3 19,63
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
6. ESTABILIDAD ESTÁTICA: PLENA CARGA DISEÑO
178
La utilización de un criterio u otro de estabilidad no influye en el método opera-
tivo. Por el contrario, la elección de uno u otro modificará la capacidad de transporte de
los buques. Los buques HLC se consideran por la Sociedad de Clasificación como “Bu-
ques suministro mar adentro” (Offshore supply vessel), estableciendo algunas condicio-
nes compensatorias (Ver parágrafo 6.5.1., páginas 240-241).
Consideramos que en condiciones de navegación el GM0 no debería ser obstácu-
lo atendiendo a las curvas hidrostáticas que se han obtenido.
IMO Stability criteria (valores mínimos), para todos los buques:
• Area 0º to 30º ………………………… 0,055 m.rad
• Area 0º to 40º or Down Flooding points 0,09 m.rad
• Area 30º to 40º or Down Flooding points 0,03 m.rad
• GZ at 30º o greater ……………………… 0,2 m
• Angle of GZ max. ………………………. 30º 1
• GZ at 0º heel ………………………… 0,15 m
Así mismo en el parágrafo 6.1.2.1.1. de este capítulo para los buques suministro
mar adentro se enuncian los siguientes criterios:
.1 El área situada bajo la curva de brazos adrizantes (curva GZ) no será
inferior a 0,070 metros-radianes hasta un ángulo de 15º si el brazo adri-
zante máximo (GZ) se da a un ángulo igual o inferior de 15º, o de 0,055
metros-radianes hasta un ángulo de 30º si el brazo adrizante máximo
(GZ) se da a un ángulo igual o superior a 30º.
Cuando el brazo adrizante máximo (GZ) se da a un ángulo com-
prendido entre 15º y 30º, el área correspondiente situada bajo la curva de
brazos adrizantes será la siguiente:
0,055 + 0,001 (30º - θmax ) metros-radianes
El valor suficiente es 25º pero la IMO aconseja utilizar 30º. Sin em-
bargo, cuando sea necesario se utilizará 25º.
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
6. ESTABILIDAD ESTÁTICA: PLENA CARGA DISEÑO
179
.2 El área situada bajo la curva de brazos adrizantes (GZ) entre los án-
gulos de escora de 30º y 40º o entre 30º y θf, si éste es de menos de 40º,
no será inferior a 0,003 metros-radianes.
.3 El brazo adrizante máximo (GZ) será de 0,20 m como mínimo para
un ángulo de escora igual o superior a 30º.
.4 El brazo adrizante máximo (GZ) se dará a un ángulo de escora no in-
ferior a 15º.
.5 La altura metacéntrica transversal inicial (GM0) no será inferior a 0,15
m
Se ha aplicado en cada carena los dos criterios, siendo más restrictivo el
criterio IMO (A.749 (18) Ch 3. (Véase Bibliografía, Ref. 14)
Finalmente adoptaremos para los procesos de carga y descarga única-
mente el criterio IMO 4.5 Offshore supply vessel, obteniendo KG superiores al
criterio IMO (A.749 (18) Ch 3. (Véase Bibliografía, Ref. 14)
La IMO, en la aplicación de los criterios de estabilidad para buques offshore
supply vessels, establece que la eslora máxima de aplicación no será superior a
100 m. Sin embargo, la Sociedad de Clasificación y las Administraciones de
bandera han aplicado este criterio para buques semisumergibles como buques
offshore supply vessels de más de 100 m de eslora. (Véase DNV Rules for ships,
July 2011 Pt.5 Ch.7 Sec. 21 – Page 100, Bibliografía, Ref.13)
Las condiciones de carga–peso y C.G. para la determinación de las curvas de
estabilidad deberán ser coherentes con la posición del centro de gravedad máxi-
mo que aquí se determine. La influencia de las posibles variables que intervienen
en el cálculo de las curvas de estabilidad será fácilmente determinada a partir de
las curvas que a continuación vamos a mostrar.
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
6. ESTABILIDAD ESTÁTICA: PLENA CARGA DISEÑO
180
Estudiaremos las cuatro carenas enunciadas. Nos fijaremos principalmente
en aquellos criterios que limitan el KG obtenido. El desplazamiento máximo, de
acuerdo con el francobordo de verano, será el desplazamiento que corresponda
en las curvas hidrostáticas a cada una de las carenas correspondientes a estos ca-
lados.
Se ha calculado la curva KG en primer lugar, fijando un asiento fijo nulo (fix
trim =0). Se obtiene una curva más favorable que en la realidad. Algunas veces
las reglamentaciones exigen que se calcule “free trim”, es decir, se da un P, Xg,,
Zg, y se deja que el programa encuentre el equilibrio aunque suponga variar algo
el trimado inicial. Fijando un intervalo de escora de 0 a 40º, los resultados obte-
nidos a continuación confirman lo previsto. El GZ en el primer caso es más fa-
vorable que en el segundo caso. A los efectos del método, utilizaremos el primer
caso para estudiar la estabilidad de cada una de nuestras carenas en la condición
de diseño, en cuanto los grados de escora establecidos no son previsibles en este
tipo de buques.
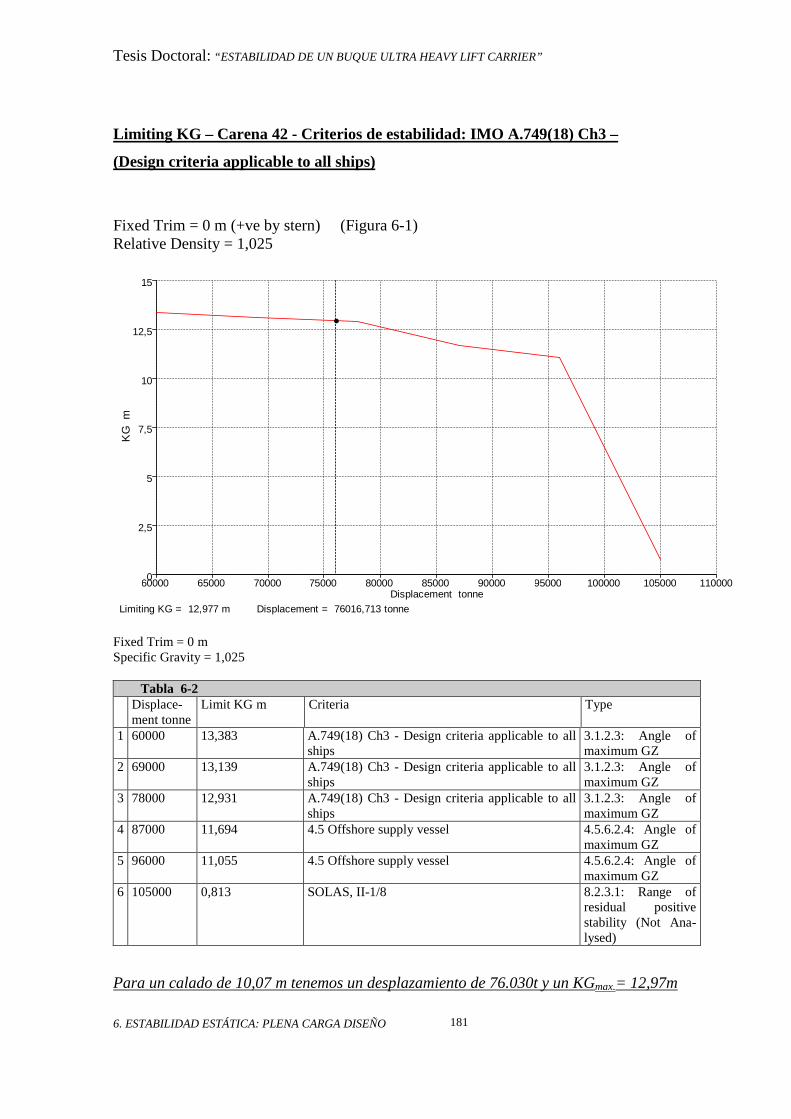
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
6. ESTABILIDAD ESTÁTICA: PLENA CARGA DISEÑO
181
Limiting KG – Carena 42 - Criterios de estabilidad: IMO A.749(18) Ch3 –
(Design criteria applicable to all ships)
Fixed Trim = 0 m (+ve by stern) (Figura 6-1) Relative Density = 1,025
0
2,5
5
7,5
10
12,5
15
60000 65000 70000 75000 80000 85000 90000 95000 100000 105000 110000
Limiting KG = Displacement = 12,977 m 76016,713 tonne
Displacement tonne
KG
m
Fixed Trim = 0 m Specific Gravity = 1,025 Tabla 6-2 Displace-
ment tonne Limit KG m Criteria Type
1 60000 13,383 A.749(18) Ch3 - Design criteria applicable to all ships
3.1.2.3: Angle of maximum GZ
2 69000 13,139 A.749(18) Ch3 - Design criteria applicable to all ships
3.1.2.3: Angle of maximum GZ
3 78000 12,931 A.749(18) Ch3 - Design criteria applicable to all ships
3.1.2.3: Angle of maximum GZ
4 87000 11,694 4.5 Offshore supply vessel 4.5.6.2.4: Angle of maximum GZ
5 96000 11,055 4.5 Offshore supply vessel 4.5.6.2.4: Angle of maximum GZ
6 105000 0,813 SOLAS, II-1/8 8.2.3.1: Range of residual positive stability (Not Ana-lysed)
Para un calado de 10,07 m tenemos un desplazamiento de 76.030t y un KGmax.= 12,97m
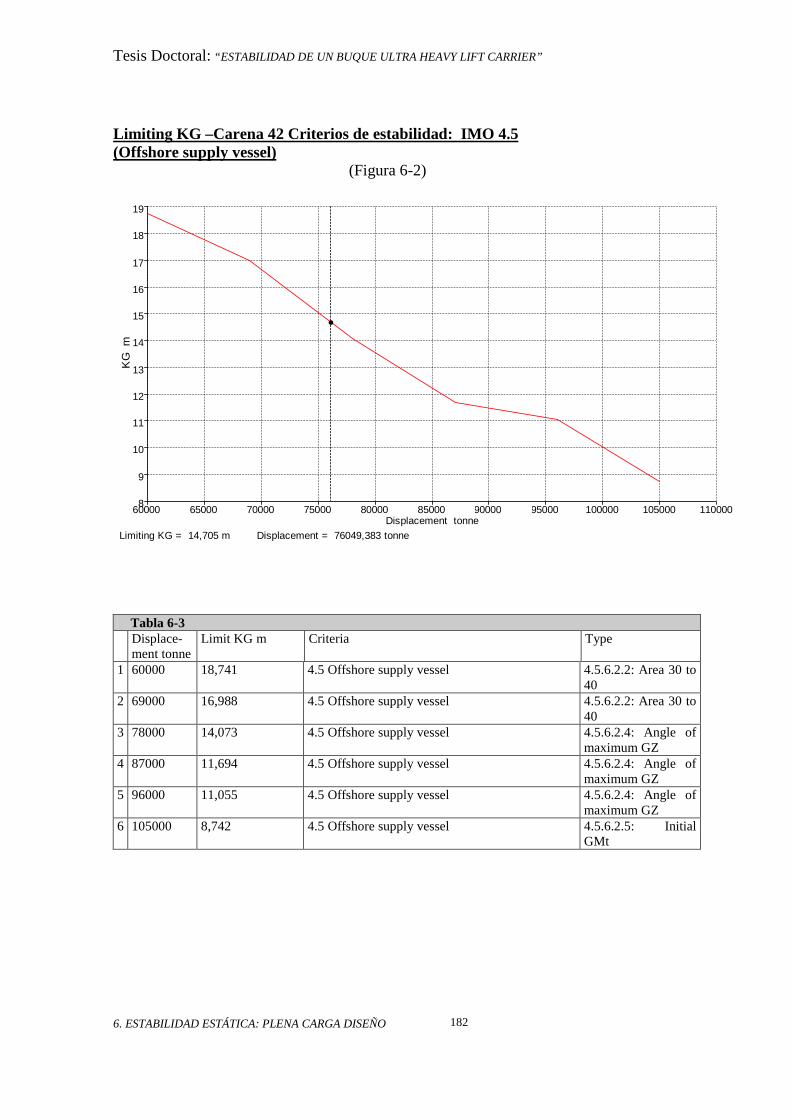
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
6. ESTABILIDAD ESTÁTICA: PLENA CARGA DISEÑO
182
Limiting KG –Carena 42 Criterios de estabilidad: IMO 4.5 (Offshore supply vessel) (Figura 6-2)
8
9
10
11
12
13
14
15
16
17
18
19
60000 65000 70000 75000 80000 85000 90000 95000 100000 105000 110000
Limiting KG = Displacement = 14,705 m 76049,383 tonne
Displacement tonne
KG
m
Tabla 6-3 Displace-
ment tonne Limit KG m Criteria Type
1 60000 18,741 4.5 Offshore supply vessel 4.5.6.2.2: Area 30 to 40
2 69000 16,988 4.5 Offshore supply vessel 4.5.6.2.2: Area 30 to 40
3 78000 14,073 4.5 Offshore supply vessel 4.5.6.2.4: Angle of maximum GZ
4 87000 11,694 4.5 Offshore supply vessel 4.5.6.2.4: Angle of maximum GZ
5 96000 11,055 4.5 Offshore supply vessel 4.5.6.2.4: Angle of maximum GZ
6 105000 8,742 4.5 Offshore supply vessel 4.5.6.2.5: Initial GMt
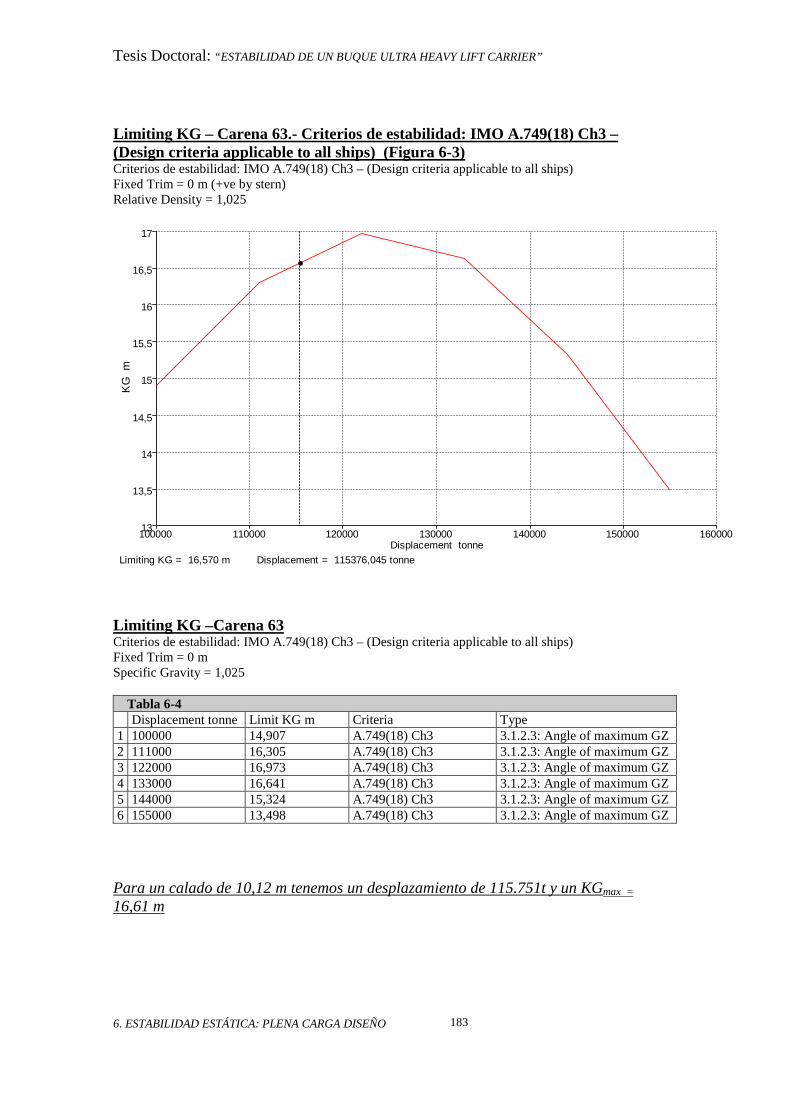
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
6. ESTABILIDAD ESTÁTICA: PLENA CARGA DISEÑO
183
Limiting KG – Carena 63.- Criterios de estabilidad: IMO A.749(18) Ch3 – (Design criteria applicable to all ships) (Figura 6-3) Criterios de estabilidad: IMO A.749(18) Ch3 – (Design criteria applicable to all ships) Fixed Trim = 0 m (+ve by stern) Relative Density = 1,025
13
13,5
14
14,5
15
15,5
16
16,5
17
100000 110000 120000 130000 140000 150000 160000
Limiting KG = Displacement = 16,570 m 115376,045 tonne
Displacement tonne
KG
m
Limiting KG –Carena 63 Criterios de estabilidad: IMO A.749(18) Ch3 – (Design criteria applicable to all ships) Fixed Trim = 0 m Specific Gravity = 1,025 Tabla 6-4 Displacement tonne Limit KG m Criteria Type 1 100000 14,907 A.749(18) Ch3 3.1.2.3: Angle of maximum GZ 2 111000 16,305 A.749(18) Ch3 3.1.2.3: Angle of maximum GZ 3 122000 16,973 A.749(18) Ch3 3.1.2.3: Angle of maximum GZ 4 133000 16,641 A.749(18) Ch3 3.1.2.3: Angle of maximum GZ 5 144000 15,324 A.749(18) Ch3 3.1.2.3: Angle of maximum GZ 6 155000 13,498 A.749(18) Ch3 3.1.2.3: Angle of maximum GZ Para un calado de 10,12 m tenemos un desplazamiento de 115.751t y un KGmax = 16,61 m
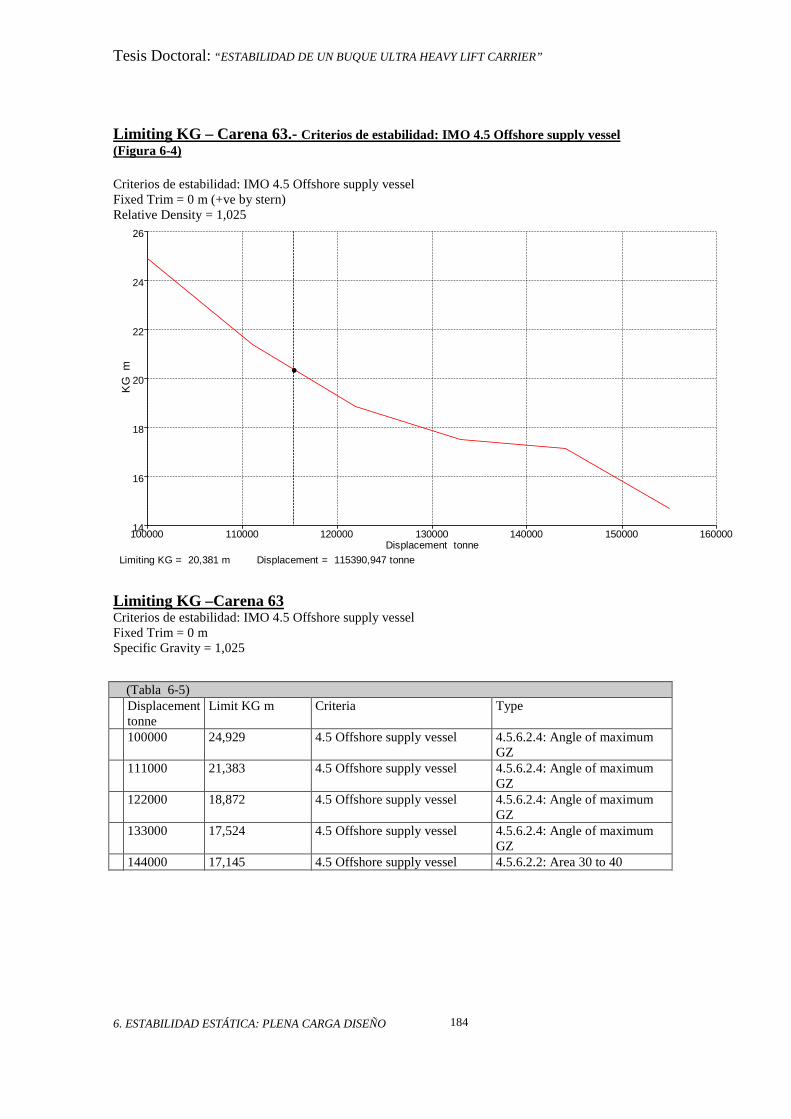
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
6. ESTABILIDAD ESTÁTICA: PLENA CARGA DISEÑO
184
Limiting KG – Carena 63.- Criterios de estabilidad: IMO 4.5 Offshore supply vessel (Figura 6-4) Criterios de estabilidad: IMO 4.5 Offshore supply vessel Fixed Trim = 0 m (+ve by stern) Relative Density = 1,025
14
16
18
20
22
24
26
100000 110000 120000 130000 140000 150000 160000
Limiting KG = Displacement = 20,381 m 115390,947 tonne
Displacement tonne
KG
m
Limiting KG –Carena 63 Criterios de estabilidad: IMO 4.5 Offshore supply vessel Fixed Trim = 0 m Specific Gravity = 1,025
(Tabla 6-5) Displacement
tonne Limit KG m Criteria Type
100000 24,929 4.5 Offshore supply vessel 4.5.6.2.4: Angle of maximum GZ
111000 21,383 4.5 Offshore supply vessel 4.5.6.2.4: Angle of maximum GZ
122000 18,872 4.5 Offshore supply vessel 4.5.6.2.4: Angle of maximum GZ
133000 17,524 4.5 Offshore supply vessel 4.5.6.2.4: Angle of maximum GZ
144000 17,145 4.5 Offshore supply vessel 4.5.6.2.2: Area 30 to 40 6 155000 14,689 4.5 Offshore supply vessel 4.5.6.2.2: Area 30 to 40
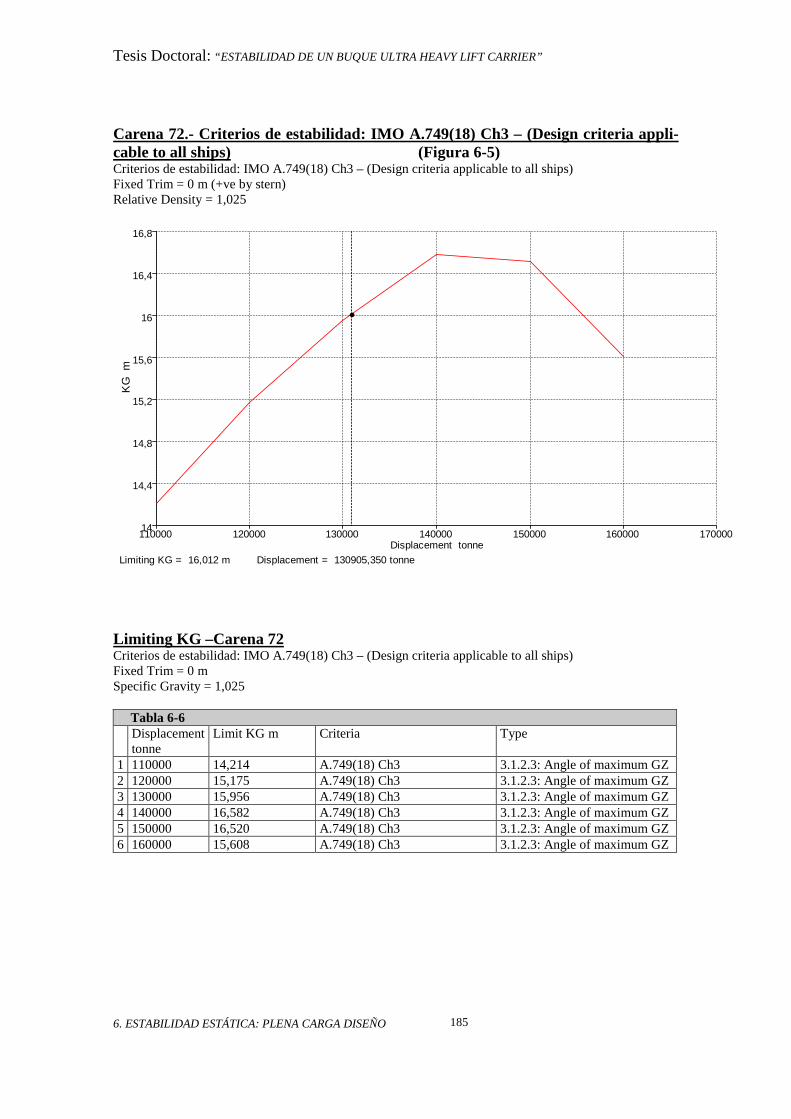
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
6. ESTABILIDAD ESTÁTICA: PLENA CARGA DISEÑO
185
Carena 72.- Criterios de estabilidad: IMO A.749(18) Ch3 – (Design criteria appli-cable to all ships) (Figura 6-5) Criterios de estabilidad: IMO A.749(18) Ch3 – (Design criteria applicable to all ships) Fixed Trim = 0 m (+ve by stern) Relative Density = 1,025
14
14,4
14,8
15,2
15,6
16
16,4
16,8
110000 120000 130000 140000 150000 160000 170000
Limiting KG = Displacement = 16,012 m 130905,350 tonne
Displacement tonne
KG
m
Limiting KG –Carena 72 Criterios de estabilidad: IMO A.749(18) Ch3 – (Design criteria applicable to all ships) Fixed Trim = 0 m Specific Gravity = 1,025 Tabla 6-6 Displacement
tonne Limit KG m Criteria Type
1 110000 14,214 A.749(18) Ch3 3.1.2.3: Angle of maximum GZ 2 120000 15,175 A.749(18) Ch3 3.1.2.3: Angle of maximum GZ 3 130000 15,956 A.749(18) Ch3 3.1.2.3: Angle of maximum GZ 4 140000 16,582 A.749(18) Ch3 3.1.2.3: Angle of maximum GZ 5 150000 16,520 A.749(18) Ch3 3.1.2.3: Angle of maximum GZ 6 160000 15,608 A.749(18) Ch3 3.1.2.3: Angle of maximum GZ
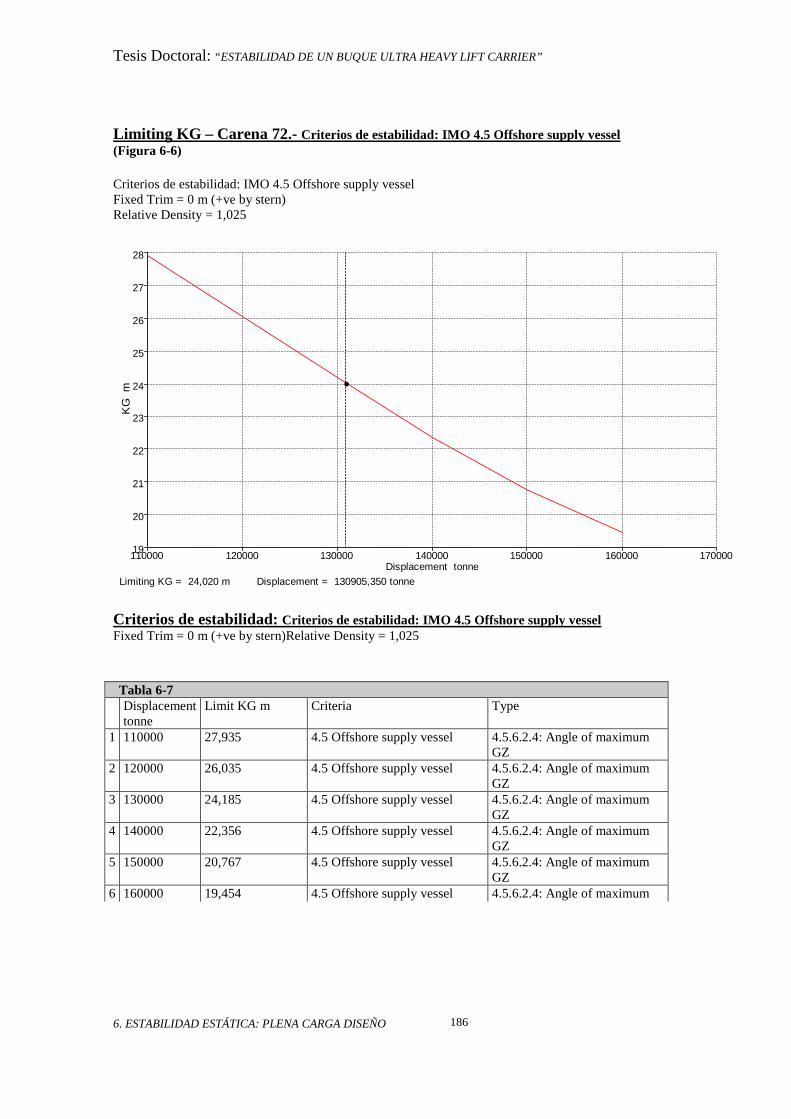
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
6. ESTABILIDAD ESTÁTICA: PLENA CARGA DISEÑO
186
Limiting KG – Carena 72.- Criterios de estabilidad: IMO 4.5 Offshore supply vessel (Figura 6-6) Criterios de estabilidad: IMO 4.5 Offshore supply vessel Fixed Trim = 0 m (+ve by stern) Relative Density = 1,025
19
20
21
22
23
24
25
26
27
28
110000 120000 130000 140000 150000 160000 170000
Limiting KG = Displacement = 24,020 m 130905,350 tonne
Displacement tonne
KG
m
Criterios de estabilidad: Criterios de estabilidad: IMO 4.5 Offshore supply vessel Fixed Trim = 0 m (+ve by stern)Relative Density = 1,025
Tabla 6-7 Displacement
tonne Limit KG m Criteria Type
1 110000 27,935 4.5 Offshore supply vessel 4.5.6.2.4: Angle of maximum GZ
2 120000 26,035 4.5 Offshore supply vessel 4.5.6.2.4: Angle of maximum GZ
3 130000 24,185 4.5 Offshore supply vessel 4.5.6.2.4: Angle of maximum GZ
4 140000 22,356 4.5 Offshore supply vessel 4.5.6.2.4: Angle of maximum GZ
5 150000 20,767 4.5 Offshore supply vessel 4.5.6.2.4: Angle of maximum GZ
6 160000 19,454 4.5 Offshore supply vessel 4.5.6.2.4: Angle of maximum GZ
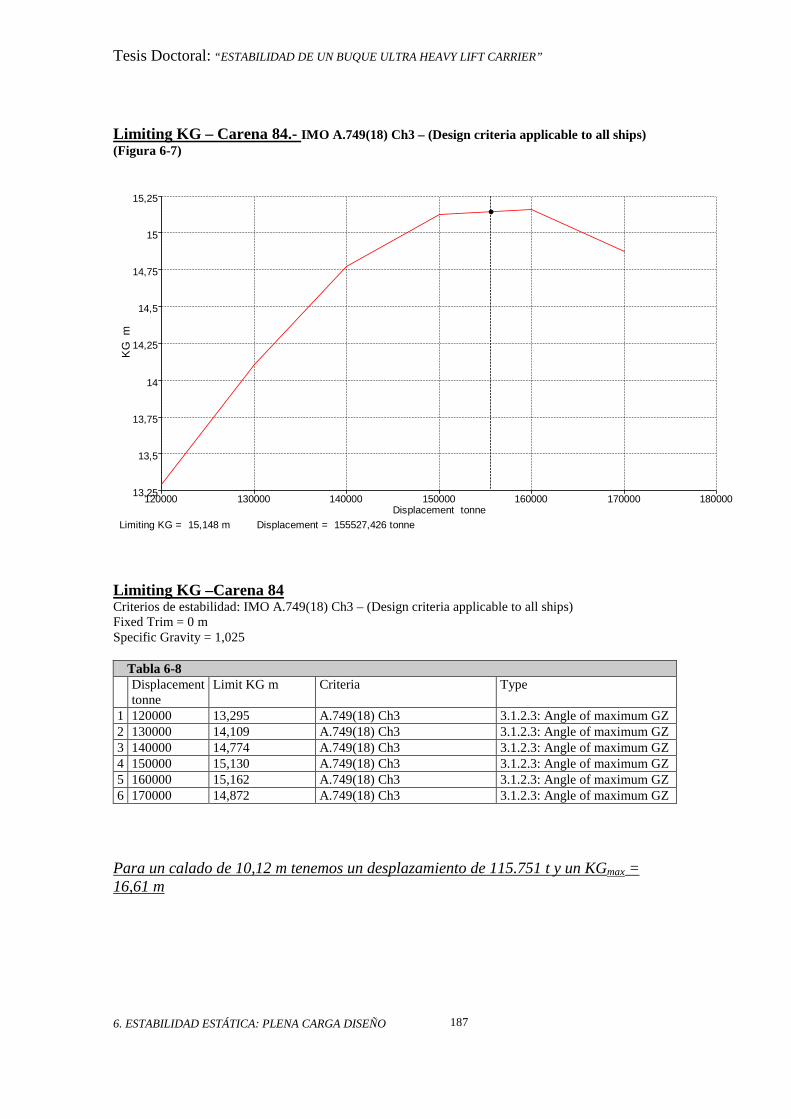
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
6. ESTABILIDAD ESTÁTICA: PLENA CARGA DISEÑO
187
Limiting KG – Carena 84.- IMO A.749(18) Ch3 – (Design criteria applicable to all ships) (Figura 6-7)
13,25
13,5
13,75
14
14,25
14,5
14,75
15
15,25
120000 130000 140000 150000 160000 170000 180000
Limiting KG = Displacement = 15,148 m 155527,426 tonne
Displacement tonne
KG
m
Limiting KG –Carena 84 Criterios de estabilidad: IMO A.749(18) Ch3 – (Design criteria applicable to all ships) Fixed Trim = 0 m Specific Gravity = 1,025 Tabla 6-8 Displacement
tonne Limit KG m Criteria Type
1 120000 13,295 A.749(18) Ch3 3.1.2.3: Angle of maximum GZ 2 130000 14,109 A.749(18) Ch3 3.1.2.3: Angle of maximum GZ 3 140000 14,774 A.749(18) Ch3 3.1.2.3: Angle of maximum GZ 4 150000 15,130 A.749(18) Ch3 3.1.2.3: Angle of maximum GZ 5 160000 15,162 A.749(18) Ch3 3.1.2.3: Angle of maximum GZ 6 170000 14,872 A.749(18) Ch3 3.1.2.3: Angle of maximum GZ Para un calado de 10,12 m tenemos un desplazamiento de 115.751 t y un KGmax = 16,61 m
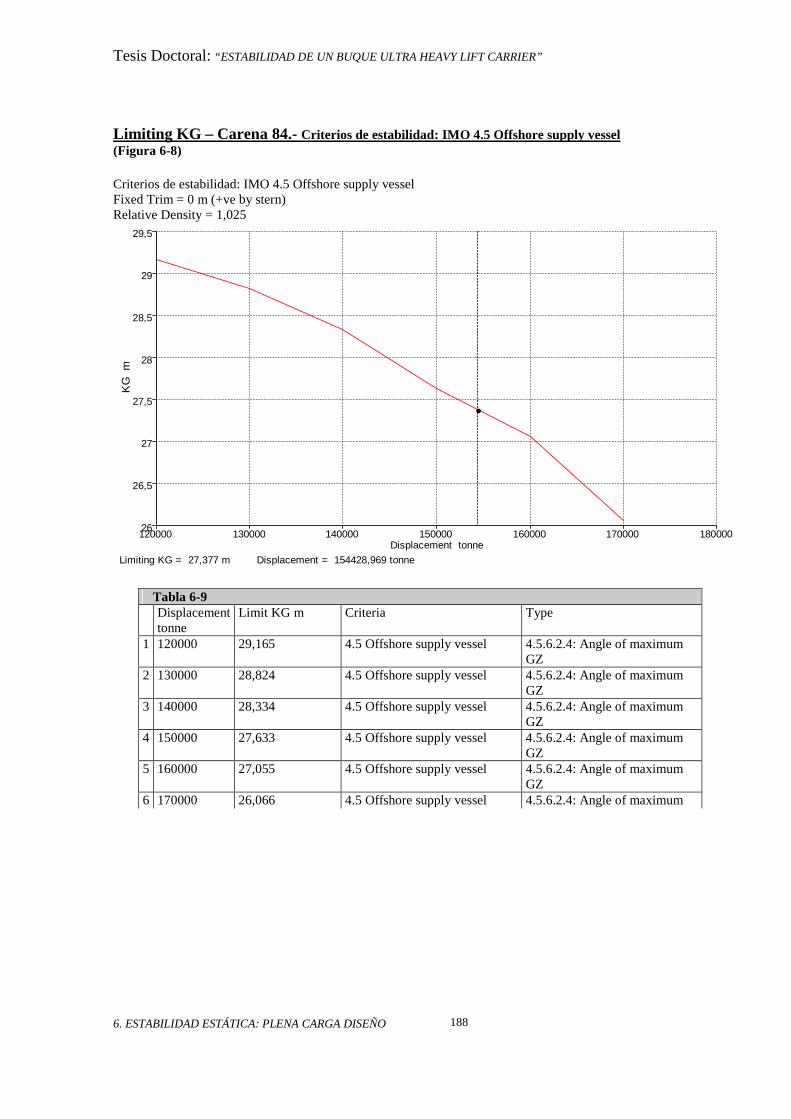
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
6. ESTABILIDAD ESTÁTICA: PLENA CARGA DISEÑO
188
Limiting KG – Carena 84.- Criterios de estabilidad: IMO 4.5 Offshore supply vessel (Figura 6-8) Criterios de estabilidad: IMO 4.5 Offshore supply vessel Fixed Trim = 0 m (+ve by stern) Relative Density = 1,025
26
26,5
27
27,5
28
28,5
29
29,5
120000 130000 140000 150000 160000 170000 180000
Limiting KG = Displacement = 27,377 m 154428,969 tonne
Displacement tonne
KG
m
Tabla 6-9 Displacement
tonne Limit KG m Criteria Type
1 120000 29,165 4.5 Offshore supply vessel 4.5.6.2.4: Angle of maximum GZ
2 130000 28,824 4.5 Offshore supply vessel 4.5.6.2.4: Angle of maximum GZ
3 140000 28,334 4.5 Offshore supply vessel 4.5.6.2.4: Angle of maximum GZ
4 150000 27,633 4.5 Offshore supply vessel 4.5.6.2.4: Angle of maximum GZ
5 160000 27,055 4.5 Offshore supply vessel 4.5.6.2.4: Angle of maximum GZ
6 170000 26,066 4.5 Offshore supply vessel 4.5.6.2.4: Angle of maximum GZ
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
6. ESTABILIDAD ESTÁTICA: PLENA CARGA DISEÑO
189
6.3. ESTUDIO DE ESTABILIDAD CON CARENA INTACTA: DETERMINACIÓN DEL KG MÁXIMO DE LA CARGA (KGCARGA MAX.) EN FUNCIÓN DEL PESO DE LA MISMA (CW).
Nos proponemos ahora representar la influencia de la carga y de su ZG en la de-
terminación de las condiciones de estabilidad del buque de acuerdo con los criterios
IMO expuestos. Los gráficos que obtendremos nos servirán, de forma aproximada, para
valorar las condiciones de estabilidad de cualquier carga con cualquier centro de grave-
dad.
Conviene hacer algunas observaciones, que, si bien conocidas, no son menos
importantes:
a) Determinación de la relación carga / lastre
• PESO MUERTO: DWT
Utilizando los datos del buque 42 se ha considerado el desplazamiento de
diseño ∆ = 76.023 t para un calado de 10,063 m, lo que teniendo en cuenta
el peso en rosca calculado en el capítulo 3 nos da un peso muerto de:
DWT = 76.023 – 19.332 = 56.691 t.
El peso muerto comprende la carga, el combustible, el agua, el aceite en
tanques y los víveres de tripulación, por lo tanto, al objeto de relacionar cla-
ramente la carga y el lastre (de máxima importancia para esta tesis) sería
conveniente determinar exactamente cuál es valor de los componentes res-
tantes, que forman parte del peso muerto.
• CONSUMOS
Combustible M.P.: Si la autonomía del buque, según contrato, es de 22.000
millas, y la potencia necesaria para una velocidad de 15 nudos, es aproxi-
madamente de 17.600 BHP, el combustible estimado sería:
17.160 (BHP) x 0,120 Kg (BHP/hora) = 2.059 Kg / hora
22.000 millas / 15 nudos = 1.466 horas;
2.059 Kg / hora x 1.533 horas = 3.019 t
Auxiliares: Considerando las operaciones de lastrado y deslastrado, las ho-
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
6. ESTABILIDAD ESTÁTICA: PLENA CARGA DISEÑO
190
ras de navegación, etc., no es excesivo considerar una carga de 1.230 t
Aceites en tanques: 400 t
Agua: 56 tripulantes x 150 litros /día x 70 = 579 t ~ 700 t
Agua técnica: 70 t
Víveres para 54 tripulantes: 400 t
Pertrechos de la tripulación: 56 tripulantes x 120 kg / tripulante ~ 10 t
Incremento 6% por mayor estándar.
TOTAL = 6.378 T
Consideraremos, pues, las partidas correspondientes a la carga y lastre, la dife-
rencia entre DWT – (combustible, agua, aceite en tanques, víveres tripulación) =
56.691 – 6.378 ~ 50.000 t
Es decir, que disponemos de 50.000 t de carga neta:
• lo que metamos de lastre, lo detraemos a la carga de transporte
• en todo momento las condiciones operativas de estabilidad deberán de estar
de acuerdo con los criterios IMO.
b) Deberemos conocer las capacidades tanto de los tanques de lastre como los
de combustible así como sus KGs correspondientes.
Los tanques destinados a FO serán:
1FOTS………….. 479,8 t
1FOTS…………. 479,8 t
2FOT(S)....……. 1047 t
2FOT (P)………. 1047 t
TOTAL F.O. 3.054 t
Los tanques destinados a D.O. serán:
DOT (P) ………….615 t
DOT (S)…………. 615 t
TOTAL D.O. 1.230 t
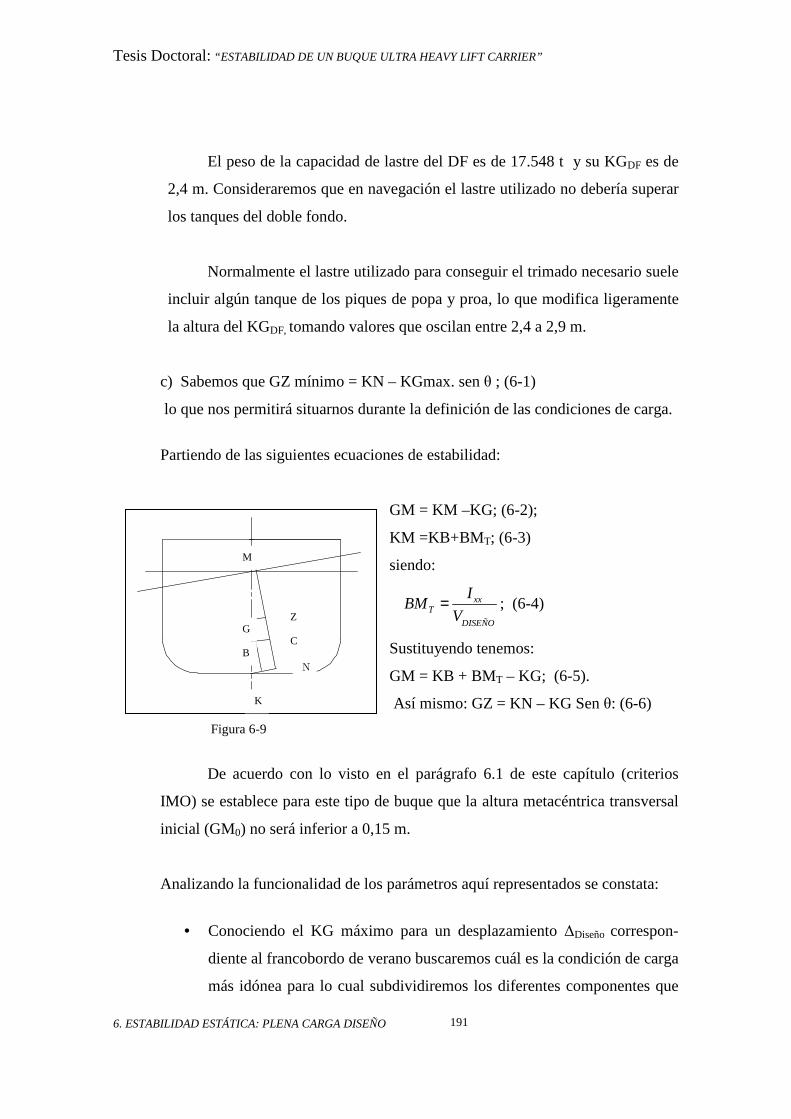
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
6. ESTABILIDAD ESTÁTICA: PLENA CARGA DISEÑO
191
El peso de la capacidad de lastre del DF es de 17.548 t y su KGDF es de
2,4 m. Consideraremos que en navegación el lastre utilizado no debería superar
los tanques del doble fondo.
Normalmente el lastre utilizado para conseguir el trimado necesario suele
incluir algún tanque de los piques de popa y proa, lo que modifica ligeramente
la altura del KGDF, tomando valores que oscilan entre 2,4 a 2,9 m.
c) Sabemos que GZ mínimo = KN – KGmax. sen θ ; (6-1)
lo que nos permitirá situarnos durante la definición de las condiciones de carga.
Partiendo de las siguientes ecuaciones de estabilidad:
GM = KM –KG; (6-2);
KM =KB+BM T; (6-3)
siendo:
xxT
DISEÑO
IBM
V= ; (6-4)
Sustituyendo tenemos:
GM = KB + BMT – KG; (6-5).
Así mismo: GZ = KN – KG Sen θ: (6-6)
Figura 6-9
De acuerdo con lo visto en el parágrafo 6.1 de este capítulo (criterios
IMO) se establece para este tipo de buque que la altura metacéntrica transversal
inicial (GM0) no será inferior a 0,15 m.
Analizando la funcionalidad de los parámetros aquí representados se constata:
• Conociendo el KG máximo para un desplazamiento ∆Diseño correspon-
diente al francobordo de verano buscaremos cuál es la condición de carga
más idónea para lo cual subdividiremos los diferentes componentes que
K
B
G
M
Z
C
N
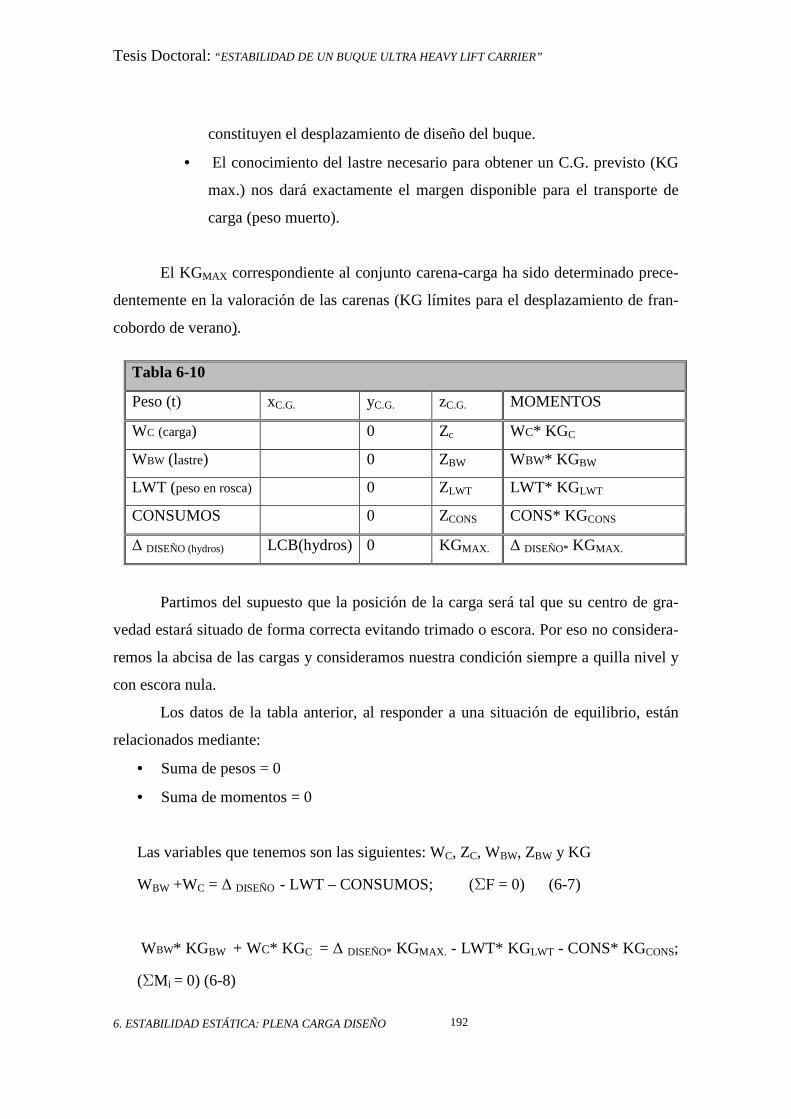
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
6. ESTABILIDAD ESTÁTICA: PLENA CARGA DISEÑO
192
constituyen el desplazamiento de diseño del buque.
• El conocimiento del lastre necesario para obtener un C.G. previsto (KG
max.) nos dará exactamente el margen disponible para el transporte de
carga (peso muerto).
El KGMAX correspondiente al conjunto carena-carga ha sido determinado prece-
dentemente en la valoración de las carenas (KG límites para el desplazamiento de fran-
cobordo de verano).
Partimos del supuesto que la posición de la carga será tal que su centro de gra-
vedad estará situado de forma correcta evitando trimado o escora. Por eso no considera-
remos la abcisa de las cargas y consideramos nuestra condición siempre a quilla nivel y
con escora nula.
Los datos de la tabla anterior, al responder a una situación de equilibrio, están
relacionados mediante:
• Suma de pesos = 0
• Suma de momentos = 0
Las variables que tenemos son las siguientes: WC, ZC, WBW, ZBW y KG
WBW +WC = ∆ DISEÑO - LWT – CONSUMOS; (ΣF = 0) (6-7)
WBW* KGBW + WC* KGC = ∆ DISEÑO* KGMAX. - LWT* KGLWT - CONS* KGCONS;
(ΣM i = 0) (6-8)
Tabla 6-10
Peso (t) xC.G. yC.G. zC.G. MOMENTOS
WC (carga) 0 Zc WC* KGC
WBW (lastre) 0 ZBW WBW* KGBW
LWT (peso en rosca) 0 ZLWT LWT* KG LWT
CONSUMOS 0 ZCONS CONS* KGCONS
∆ DISEÑO (hydros) LCB(hydros) 0 KGMAX. ∆ DISEÑO* KGMAX.
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
6. ESTABILIDAD ESTÁTICA: PLENA CARGA DISEÑO
193
Las variables que tenemos son las siguientes: WC, ZCGC, WBW, ZBW y KG.
WC = Peso de la carga
ZC =KGCW = Altura del C.G. de la carga
WBW = Peso del lastre
ZBW= KGBW = Altura del C.G. del lastre
KG = Distancia del C.G. de la línea base (Valores del buque)
El WBW y el KGBW se pueden considerar relacionados si se considera una se-
cuencia de lastre /deslastre para trimar el buque para la navegación con carga ya que
sólo utilizará algunos tanques del D.F., lo que resultaría WBW = f (ZBW). De esta ma-
nera, tenemos 5 variables y 3 ecuaciones que las relacionan, es decir, se podría obtener
una ecuación del tipo WC = f (ZC, KG)
Por otro lado, si lo que queremos es ver la capacidad de carga máxima que pue-
de llevar nuestro buque en condiciones estables, el KG será el KG máximo correspon-
diente a nuestra carena frente a un cierto criterio que se aplique. Sin embargo, nuestro
KG máximo depende de la carena considerada (forma de la carga) y del criterio de esta-
bilidad aplicado. Por ello dispondremos de una curva del tipo WC=f (ZCG CW) para cada
criterio y para cada tipo de carga a transportar.
6.3.1. Aplicación del método propuesto al buque 42
Determinamos previamente los valores necesarios para llevar a cabo estos cálculos:
DWT = 56.091t
WBWMAX = 20.521 t (DF)
∆ DISEÑO = 76.023 t
KGMAX =14,705 m calado de francobordo de 10,06 m;Criterio IMO “Supply Vessel”
LWT = 19.332 t
KGLWT = 7,851m
CONS = 10.115 t
KGCONS; = 2m
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
6. ESTABILIDAD ESTÁTICA: PLENA CARGA DISEÑO
194
Plantearemos las siguientes ecuaciones para la CARENA 42:
(ΣF = 0); WBW +WC = ∆ DISEÑO - LWT – CONSUMOS; (6-7)
(ΣM i = 0); WBW* KGBW + WC* KGC = ∆ DISEÑO* KGMAX. - LWT* KGLWT -
CONS* KGCONS; (6-8)
Consideramos que en este caso el lastre del DF aporta lastre suficiente para la
navegación en condiciones máximas de carga. Si fuera necesario utilizar otros tan-
ques, además de los del DF, el problema se reduciría a determinar el KGBW corres-
pondiente. El C.G. del lastre considerado supone una pequeña simplificación en
cuanto no se tiene en cuenta posibles alturas del lastre en los piques, necesario para
el trimado. Se ha valorado el C.G. real del lastre en diversas condiciones de carga,
encontrando una variación del VCG de la carga inferior al 2%.
Condiciones: WBW < WBW MAX = 17.000 T (DF); KGBW = 2,8 m;
Sustituyendo en la (6-7):
WBW +WC = 76.023 – 19.332 – 6.378 = 50.313 t; despejando: WBW = 50.313 – WC;
(6-9)
Sustituyendo en la ecuación de momentos (6-8):
(50.313 – WC)*2,8 + WC* KGC = 76.071*14,705 – 19.332 * 8,78 -6378 * 2
=1.118.243 -169.734 – 12.756 = 935.753; (6-10)
WC*KGC–2,8*WC=794.877;
794.877 2,8*
C
WcKG
Wc
+= (6-11)
El C.G. lo podemos representar bien referido a la línea base del buque KGWC o
bien referido a la cubierta intemperie del buque ZG. Los operadores eligen normal-
mente esta última forma.
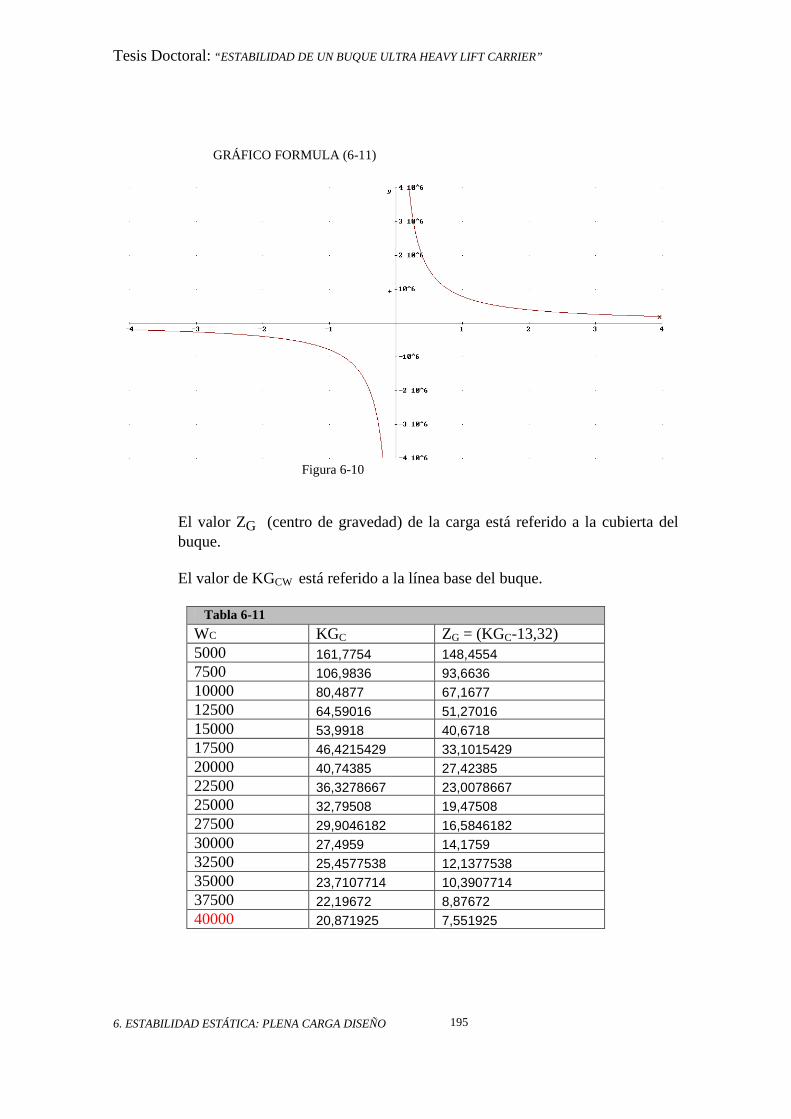
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
6. ESTABILIDAD ESTÁTICA: PLENA CARGA DISEÑO
195
GRÁFICO FORMULA (6-11)
Figura 6-10
El valor ZG (centro de gravedad) de la carga está referido a la cubierta del buque.
El valor de KGCW está referido a la línea base del buque. Tabla 6-11
WC KGC ZG = (KGC-13,32) 5000 161,7754 148,4554 7500 106,9836 93,6636 10000 80,4877 67,1677 12500 64,59016 51,27016 15000 53,9918 40,6718 17500 46,4215429 33,1015429 20000 40,74385 27,42385 22500 36,3278667 23,0078667 25000 32,79508 19,47508 27500 29,9046182 16,5846182 30000 27,4959 14,1759 32500 25,4577538 12,1377538 35000 23,7107714 10,3907714 37500 22,19672 8,87672 40000 20,871925 7,551925
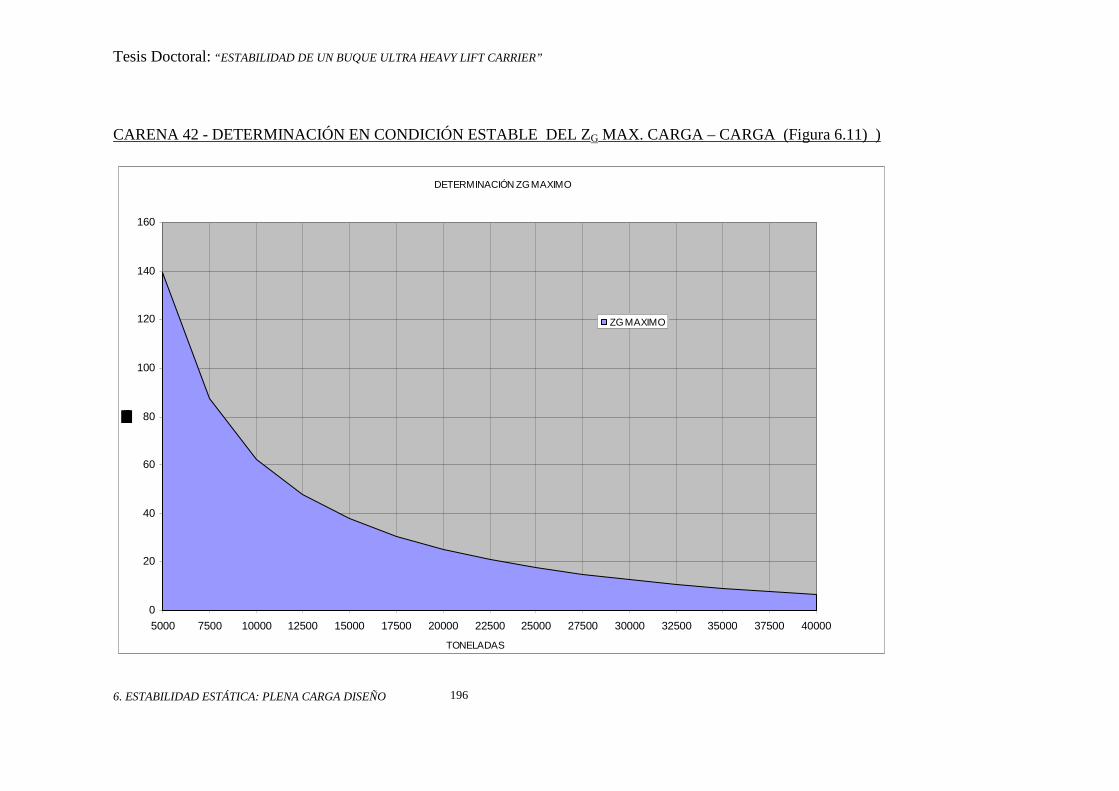
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
6. ESTABILIDAD ESTÁTICA: PLENA CARGA DISEÑO
196
CARENA 42 - DETERMINACIÓN EN CONDICIÓN ESTABLE DEL ZG MAX. CARGA – CARGA (Figura 6.11) )
DETERMINACIÓN ZG MAXIMO
0
20
40
60
80
100
120
140
160
5000 7500 10000 12500 15000 17500 20000 22500 25000 27500 30000 32500 35000 37500 40000
TONELADAS
ZG MAXIMO
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
6. ESTABILIDAD ESTÁTICA: PLENA CARGA DISEÑO
197
6.3.2. Buque 63
Se ha considerado el desplazamiento de diseño ∆ = 115.750 t para un calado
de 10,12 m, lo que teniendo en cuenta el peso en rosca calculado en el capítulo 3
nos da un peso muerto de:
DWT = 115.750 – 29.631 = 86.119 t
El peso muerto comprende la carga, el combustible, el agua, el aceite en tan-
ques y los víveres de tripulación, por lo tanto, al objeto de relacionar claramente la
carga y el lastre (de máxima importancia para la tesis), sería conveniente determi-
nar exactamente cuál es el valor de los componentes restantes, que forman parte del
peso muerto.
• CONSUMOS
Combustible M.P.: Si la autonomía del buque, según contrato, es de 25.000 mi-
llas, y la potencia necesaria para una velocidad de 15 nudos es aproximadamente de
17.600 BHP1, el combustible estimado sería:
17.160 (BHP) x 0,120 Kg (BHP/hora) = 2.059 Kg / hora
22.000 millas / 15 nudos = 1.466 horas;
2.059 Kg / hora x 1.533 horas = 3.019 t
Nuevas hélices azimutales de propulsión eléctrica:
12.069 HP x 0,200 Kg (caballo/hora) = 2.423 Kg/hora
2.423 x1.533 = 3.714 t
Total F.O. 6.733 t
Auxiliares: Considerando las operaciones de lastrado y deslastrado, las horas
de navegación, etcétera, no es excesivo considerar una carga de 1.230 t
Aceites en tanques: 400 t
Agua: 56 tripulantes x 150 litros /día x 70 = 579 t ~ 700 t
Agua técnica: 70 t
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
6. ESTABILIDAD ESTÁTICA: PLENA CARGA DISEÑO
198
Víveres para 56 tripulantes: 400 t
Pertrechos de la tripulación: 56 tripulantes x 120 kg / tripulante ~ 10 t
Incremento 6% por mayor estándar
TOTAL = 10.115 t
Consideraremos como las partidas correspondiente a la carga y lastre, la dife-
rencia entre DWT – (combustible, agua, aceite en tanques, víveres tripulación) =
86.119 – 10.115 t ~ 76.000 t
Es decir, que disponemos de 76.000 t de carga neta:
• lo que metamos de lastre lo detraemos a la carga de transporte
• en todo momento las condiciones operativas de estabilidad deberán de estar
de acuerdo con los criterios IMO. Consideraremos los criterios IMO para
Buque de suministro mar adentro.
b) Deberemos conocer las capacidades tanto de los tanques de lastre como los
de combustible, así como sus KGs correspondientes.
Los tanques destinados a FO serán:
1FOTS………….. 625 t
1FOTP…………. 625 t
2FOT(S)....……. 1.143 t
2FOT (P)………. 1.143 t
3FOTC ………… 1.629 t
FDWBT(C)pr …. 1.969 t
TOTAL F.O. 7.134 t
Los tanques destinados a D.O. serán:
DOT (P) ………….615 t
DOT (S)…………. 615 t
TOTAL D.O. 1.230 t

Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
6. ESTABILIDAD ESTÁTICA: PLENA CARGA DISEÑO
199
El peso del lastre destinado a DF es: 17.548 t y su KGDF es: 2,8 m
Consideraremos que en navegación no debería superar los tanques del doble
fondo.
Plantearemos las siguientes ecuaciones para la CARENA 63:
(ΣF = 0); WBW +WC = ∆ DISEÑO - LWT – CONSUMOS; (6-7)
(ΣM i = 0); WBW* KGBW + WC* KGC = ∆ DISEÑO* KGMAX. - LWT* KGLWT -
CONS* KGCONS; (6-8)
Determinaremos previamente los valores necesarios para llevar a cabo estos
cálculos al igual que se ha hecho con la carena 42.
DWT = 86.119 t
WBWMAX = 40.207 t (DF)
∆ DISEÑO = 115.750 t
KGMAX = 20,38 m para un calado de francobordo de 10,1 m; Criterio IMO
“Supply Vessel”
LWT = 29.631 t
KGLWT = 7,851m
CONS = 10.115 t
KGCONS = 2 m
Consideramos que en el caso el lastre del DF aporta lastre suficiente para la
navegación en condiciones máximas de carga. Si fuera necesario utilizar otros tan-
ques, además de los del DF, el problema se reduciría a determinar el KGBW corres-
pondiente. El C.G. del lastre considerado supone una pequeña simplificación en
cuanto no se tiene en cuenta posibles alturas del lastre en los piques, necesario para
el trimado. Se ha valorado el C.G. real del lastre en diversas condiciones de carga,
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
6. ESTABILIDAD ESTÁTICA: PLENA CARGA DISEÑO
200
encontrando una variación del VCG de la carga inferior al 2%
Condiciones: WBW < WBW MAX = 40.207 t (DF); KGBW =2,8 m;
Sustituyendo en la (6-7):
WBW +WC = 115.750 – 29.631 – 10.115 = 76.004 t; (6-12)
despejando:
WBW = 76.004 – WC;
Sustituyendo en la ecuación de momentos (6-8):
(76.004– WC)*2.8 + WC* KGC = 115.750*20,38 – 29.631 * 7,851 -10.115 * 2
=2.358.985 -232.632 – 20.230 = 2.106.123; (6-13)
WC* KGC– 2,8 * WC = 1.893.312;
1.893312 2,8*
C
WcKG
Wc
+= (6-14)
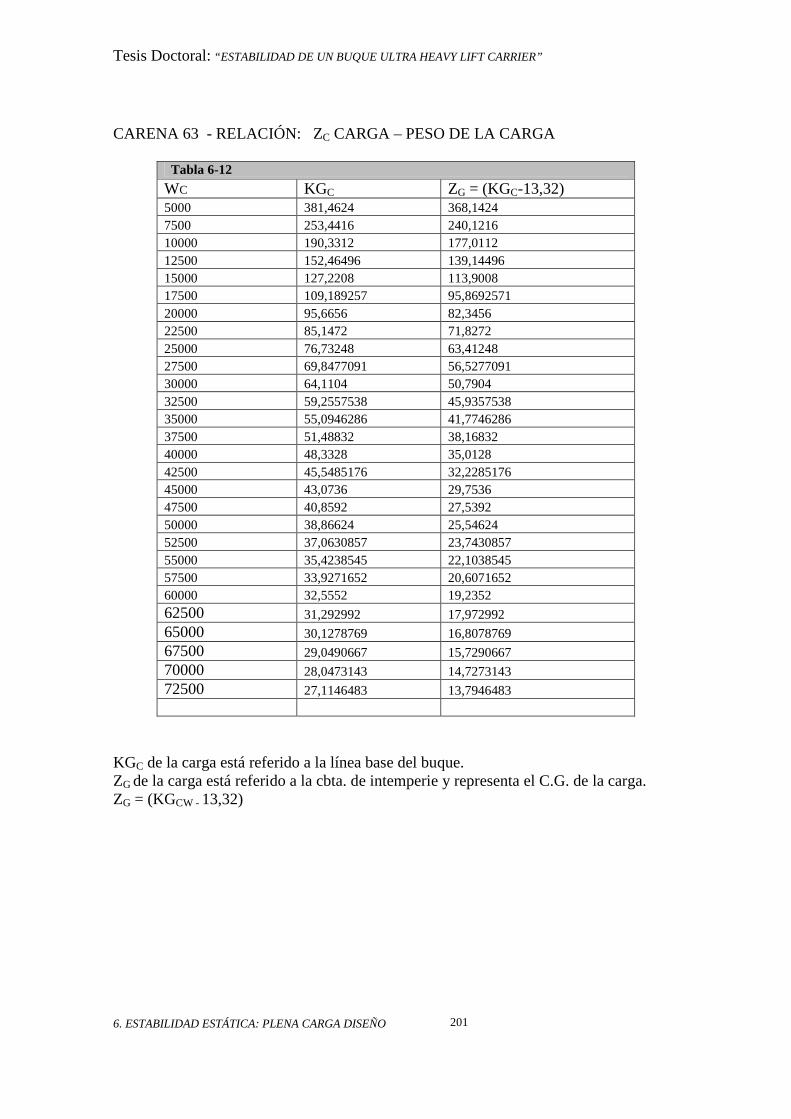
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
6. ESTABILIDAD ESTÁTICA: PLENA CARGA DISEÑO
201
CARENA 63 - RELACIÓN: ZC CARGA – PESO DE LA CARGA
Tabla 6-12
WC KGC ZG = (KGC-13,32) 5000 381,4624 368,1424 7500 253,4416 240,1216 10000 190,3312 177,0112 12500 152,46496 139,14496 15000 127,2208 113,9008 17500 109,189257 95,8692571 20000 95,6656 82,3456 22500 85,1472 71,8272 25000 76,73248 63,41248 27500 69,8477091 56,5277091 30000 64,1104 50,7904 32500 59,2557538 45,9357538 35000 55,0946286 41,7746286 37500 51,48832 38,16832 40000 48,3328 35,0128 42500 45,5485176 32,2285176 45000 43,0736 29,7536 47500 40,8592 27,5392 50000 38,86624 25,54624 52500 37,0630857 23,7430857 55000 35,4238545 22,1038545 57500 33,9271652 20,6071652 60000 32,5552 19,2352 62500 31,292992 17,972992 65000 30,1278769 16,8078769 67500 29,0490667 15,7290667 70000 28,0473143 14,7273143 72500 27,1146483 13,7946483
KGC de la carga está referido a la línea base del buque. ZG de la carga está referido a la cbta. de intemperie y representa el C.G. de la carga. ZG = (KGCW - 13,32)
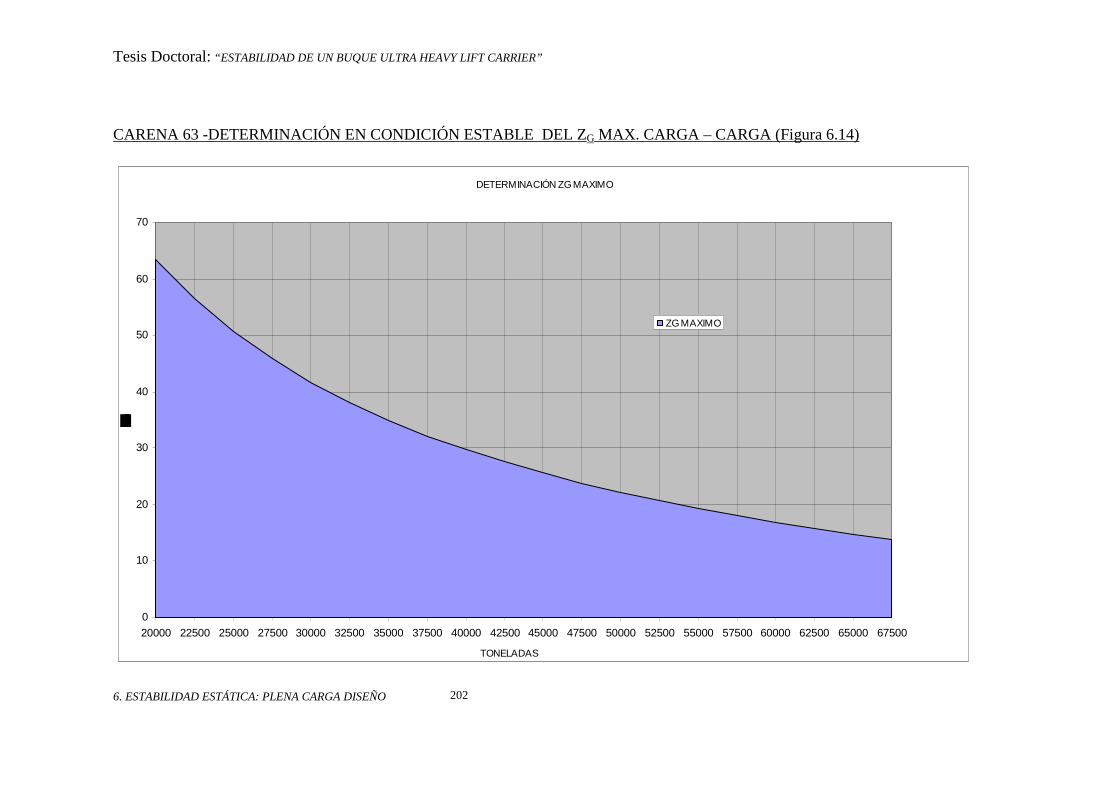
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
6. ESTABILIDAD ESTÁTICA: PLENA CARGA DISEÑO
202
CARENA 63 -DETERMINACIÓN EN CONDICIÓN ESTABLE DEL ZG MAX. CARGA – CARGA (Figura 6.14)
DETERMINACIÓN ZG MAXIMO
0
10
20
30
40
50
60
70
20000 22500 25000 27500 30000 32500 35000 37500 40000 42500 45000 47500 50000 52500 55000 57500 60000 62500 65000 67500
TONELADAS
ZG MAXIMO
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
6. ESTABILIDAD ESTÁTICA: PLENA CARGA DISEÑO
203
6.3.3. Buque 72
Se ha considerado el desplazamiento de diseño ∆ = 131.211 t para un calado de
10,124 m, lo que teniendo en cuenta el peso en rosca calculado en el capítulo 4 nos
da un peso muerto de:
DWT = 131.211 – 33.284 = 97.927 t
El peso muerto comprende la carga, el combustible, el agua, el aceite en tanques
y los víveres de tripulación, por lo tanto, al objeto de relacionar claramente la carga
y el lastre (de máxima importancia para la tesis), sería conveniente determinar exac-
tamente el valor de los componentes restantes que forman parte del peso muerto.
• CONSUMOS
Combustible M.P.: Si la autonomía del buque, según contrato, es de 25.000 mi-
llas, y la potencia necesaria para una velocidad de 15 nudos, es aproximadamente de
17.600 BHP, el combustible estimado sería:
21.809 (BHP) x 0,120 kgr (caballo/hora) = 2.617 kgr / hora
22.000 millas / 15 nudos = 1.466 horas;
2.617 gr / hora x 1.533 horas = 4.012 t
Auxiliares: Considerando las operaciones de lastrado y deslastrado, las horas de
navegación, etcétera, no es excesivo considerar una carga de 1.000 t
Aceites en tanques: 700 t
Agua: 56 tripulantes x 150 litros /día x 70 = 579 t ~ 700 t
Agua técnica: 70 t
Víveres para 56 tripulantes: 400 t
Pertrechos de la tripulación: 56 tripulantes x 120 kg / tripulante ~ 10 t
Incremento 6% por mayor estándar.
TOTAL = 7395 t
Consideraremos pues como las partidas correspondiente a la carga y lastre, la di-
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
6. ESTABILIDAD ESTÁTICA: PLENA CARGA DISEÑO
204
ferencia entre DWT – (combustible, agua, aceite en tanques, víveres tripulación) =
97.927 – 7.395 ~ 90.000 t
Es decir, que disponemos de 90.000 t de carga neta:
• lo que metamos de lastre lo detraemos a la carga de transporte
• en todo momento las condiciones operativas de estabilidad deberán de estar
de acuerdo con los criterios IMO.
b) Deberemos conocer las capacidades tanto de los tanques de lastre como los
de combustible, así como sus KGs correspondientes.
Los tanques destinados a FO serán:
1FOTS………….. 479,8 t
1FOTS…………. 479,8 t
2FOT(S)....……. 1047 t
2FOT (P)………. 1047 t
3FOT (C) ……… 1.629 t
FDWBT(C)pr …. 1.969 t
TOTAL F.O. 7.134 t
Los tanques destinados a D.O. serán:
DOT (P) ………….615 t
DOT (S)…………. 615 t
TOTAL D.O. 1.230 t
El peso del lastre destinado a DF es: 35.579 t y su KGDF es: 1,931 m
Consideraremos que en navegación no debería superar los tanques del doble
fondo.
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
6. ESTABILIDAD ESTÁTICA: PLENA CARGA DISEÑO
205
Plantearemos las siguientes ecuaciones para la CARENA 72:
(ΣF = 0); WBW +WC = ∆ DISEÑO - LWT – CONSUMOS; (6-7)
(ΣM i = 0); WBW* KGBW + WC* KGC = ∆ DISEÑO* KGMAX. - LWT* KGLWT -
CONS* KGCONS; (6-8)
Determinaremos previamente los valores necesarios para llevar a cabo estos
cálculos al igual que se ha hecho con la carena 42.
DWT = 98.709 t
WBWMAX = 33.284 t (DF)
∆ DISEÑO = 130.983 t
KGMAX = 24,02 m para un calado de francobordo de 10,190 m. ( IMO
“Supply Vessel”)
LWT = 33.284 t
KGLWT = 7,896 m
CONS = 10.115 t
KGCONS = 2 m
Consideramos que en este caso el lastre del DF aporta lastre suficiente para la
navegación en condiciones máximas de carga. Si fuera necesario utilizar otros tan-
ques, además de los del DF, el problema se reduciría a determinar el KGBW corres-
pondiente. El C.G. del lastre considerado supone una pequeña simplificación en
cuanto no se tiene en cuenta posibles alturas del lastre en los piques, necesario para
el trimado. Se ha valorado el C.G. real del lastre en diversas condiciones de carga,
encontrando una variación del VCG de la carga inferior al 2%.
Condiciones: WBW < WBW MAX = 35.579 t (DF); KGBW = 2,8 m;
Sustituyendo en la (6-7):
WBW +WC = 130.983 – 35.084 – 10.115 = 85.784 t; (6-15)
despejando: WBW = 85.784 – WC;
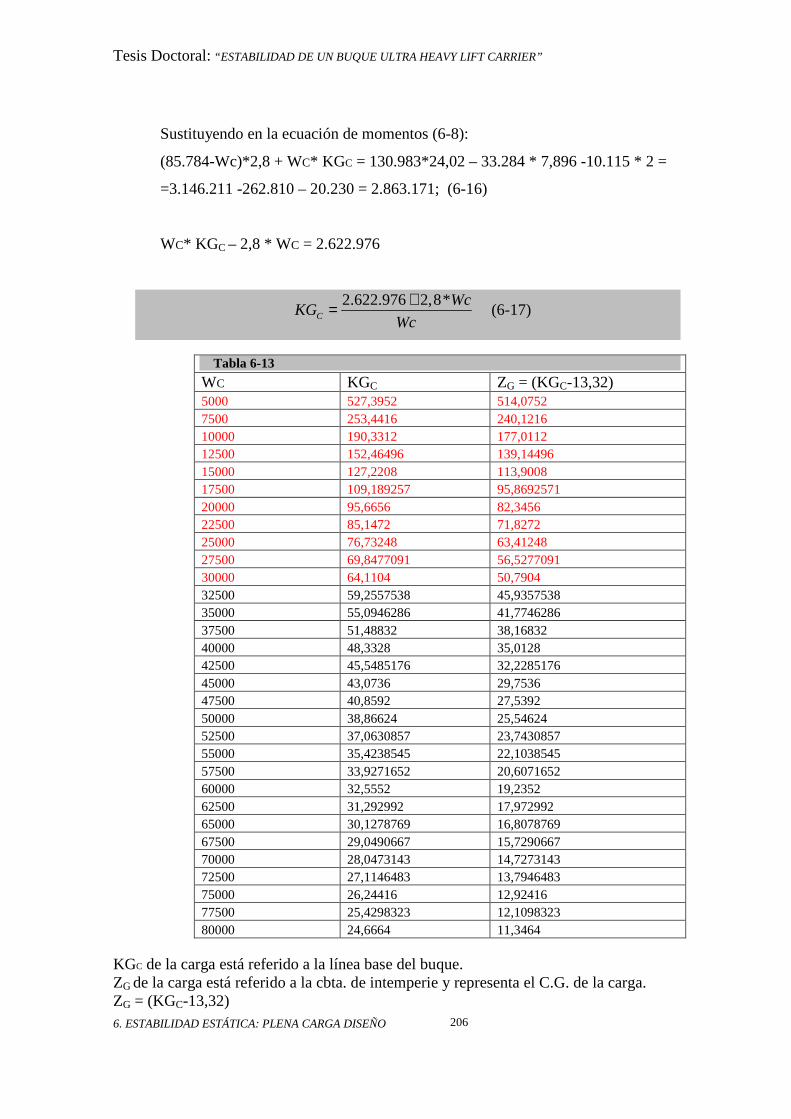
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
6. ESTABILIDAD ESTÁTICA: PLENA CARGA DISEÑO
206
Sustituyendo en la ecuación de momentos (6-8):
(85.784-Wc)*2,8 + WC* KGC = 130.983*24,02 – 33.284 * 7,896 -10.115 * 2 =
=3.146.211 -262.810 – 20.230 = 2.863.171; (6-16)
WC* KGC – 2,8 * WC = 2.622.976
2.622.976 2,8*
C
WcKG
Wc
+= (6-17)
KGC de la carga está referido a la línea base del buque. ZG de la carga está referido a la cbta. de intemperie y representa el C.G. de la carga. ZG = (KGC-13,32)
Tabla 6-13
WC KGC ZG = (KGC-13,32) 5000 527,3952 514,0752 7500 253,4416 240,1216 10000 190,3312 177,0112 12500 152,46496 139,14496 15000 127,2208 113,9008 17500 109,189257 95,8692571 20000 95,6656 82,3456 22500 85,1472 71,8272 25000 76,73248 63,41248 27500 69,8477091 56,5277091 30000 64,1104 50,7904 32500 59,2557538 45,9357538 35000 55,0946286 41,7746286 37500 51,48832 38,16832 40000 48,3328 35,0128 42500 45,5485176 32,2285176 45000 43,0736 29,7536 47500 40,8592 27,5392 50000 38,86624 25,54624 52500 37,0630857 23,7430857 55000 35,4238545 22,1038545 57500 33,9271652 20,6071652 60000 32,5552 19,2352 62500 31,292992 17,972992 65000 30,1278769 16,8078769 67500 29,0490667 15,7290667 70000 28,0473143 14,7273143 72500 27,1146483 13,7946483 75000 26,24416 12,92416 77500 25,4298323 12,1098323 80000 24,6664 11,3464
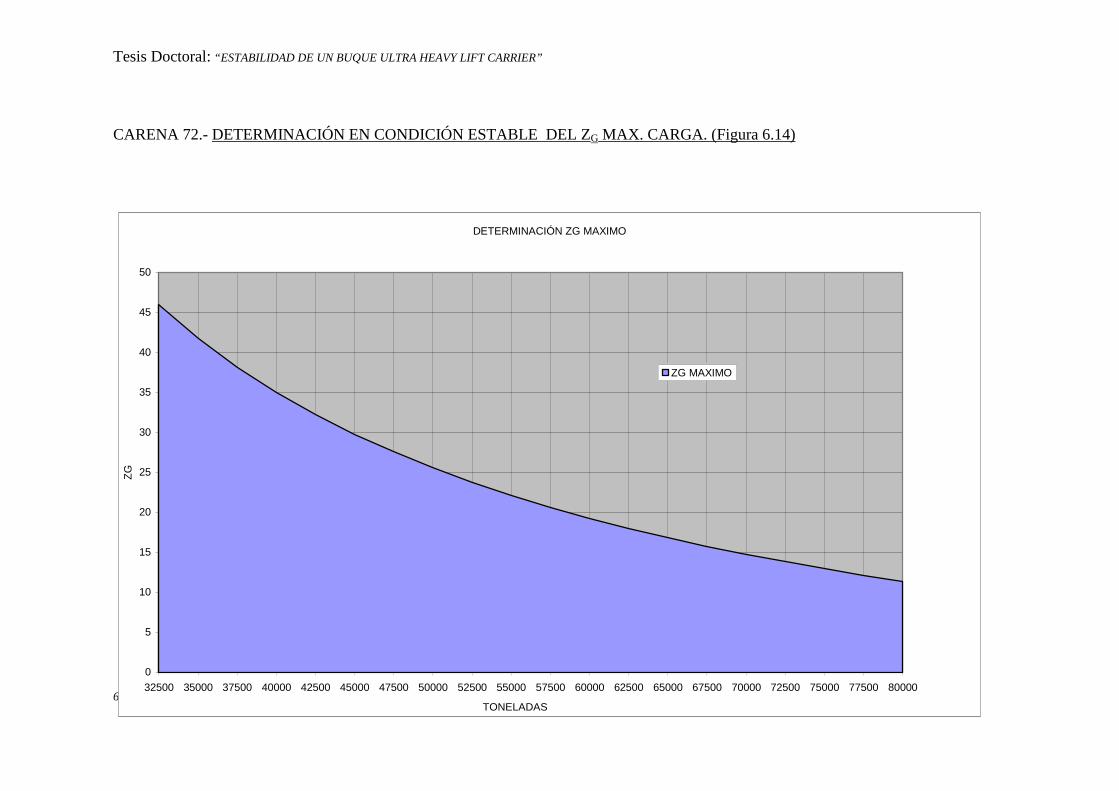
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
6. ESTABILIDAD ESTÁTICA: PLENA CARGA DISEÑO
207
CARENA 72.- DETERMINACIÓN EN CONDICIÓN ESTABLE DEL ZG MAX. CARGA. (Figura 6.14)
DETERMINACIÓN ZG MAXIMO
0
5
10
15
20
25
30
35
40
45
50
32500 35000 37500 40000 42500 45000 47500 50000 52500 55000 57500 60000 62500 65000 67500 70000 72500 75000 77500 80000
TONELADAS
ZG
ZG MAXIMO
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
6. ESTABILIDAD ESTÁTICA: PLENA CARGA DISEÑO
208
6.3.4. Buque 84
Plantearemos las siguientes ecuaciones para la CARENA 84:
WBW +WC = ∆ DISEÑO - LWT – CONSUMOS; (ΣF = 0) (6-7)
WBW* KGBW + WC* KGC = ∆ DISEÑO* KGMAX. - LWT* KGLWT - CONS* KGCONS;
(ΣM i = 0) (6-8)
Se ha considerado el desplazamiento de diseño ∆ = 155.427 t para un ca-
lado de 10,2 m, lo que teniendo en cuenta el peso en rosca calculado en el capí-
tulo 3 nos da un peso muerto de:
DWT = 155.427 - 43575 = 111.852 t;
El peso muerto comprende: la carga, el combustible, el agua, el aceite en
tanques y los víveres de tripulación, por lo tanto, al objeto de relacionar clara-
mente la carga y el lastre (de máxima importancia para la tesis), sería convenien-
te determinar exactamente cuál es valor de los componentes restantes, que for-
man parte del peso muerto.
• CONSUMOS
Combustible M.P.: Si la autonomía del buque, según contrato, es de 25.000
millas, y la potencia necesaria para una velocidad de 15 nudos, es aproxi-
madamente de 17.600 BHP, el combustible estimado sería:
30.000 (BHP) x 0,120 kgr (caballo/hora) = 3600 Kgr / hora
22.000 millas / 15 nudos = 1.466 horas;
3.600 Kgr / hora x 1.466 horas = 5.277 t
Auxiliares: Considerando, las operaciones de lastrado, y deslastrado, horas
de navegación, etcétera, no es excesivo considerar una carga de 2.500 t.
Aceites en tanques: 700 t
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
6. ESTABILIDAD ESTÁTICA: PLENA CARGA DISEÑO
209
Agua: 56 tripulantes x 150 litros /día x 70 = 579 t ~ 700 t
Agua técnica: 70 t
Víveres para 56 tripulantes: 400 t
Pertrechos de la tripulación: 56 tripulantes x 120 kg / tripulante ~ 10 t
Incremento 6% por mayor estándar.
TOTAL ~ 12.000 t
Consideraremos pues como las partidas correspondiente a la carga y las-
tre, la diferencia entre DWT – (combustible, agua, aceite en tanques, víveres tri-
pulación) = 111.852-12.000 ~ 100.000 t
Es decir, que disponemos de 100.000 t de carga neta:
• lo que metamos de lastre, lo detraemos a la carga de transporte
• en todo momento las condiciones operativas de estabilidad deberán de estar
de acuerdo con los criterios IMO.
b) Deberemos conocer las capacidades tanto de los tanques de lastre como los
de combustible, así como sus KGs correspondientes.
Los tanques destinados a FO serán:
1FOTS………….. 479,8 t
1FOTS…………. 479,8 t
2FOT(S)....……. 1047 t
2FOT (P)………. 1047 t
3FOT (C) ……… 1.629 t
FDWBT(C)pr …. 1.969 t
TOTAL F.O. 7.134 t
Los tanques destinados a D.O. serán:
DOT (P) ………….615 t
DOT (S)…………. 615 t
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
6. ESTABILIDAD ESTÁTICA: PLENA CARGA DISEÑO
210
TOTAL D.O. 1.230 t
El peso del lastre destinado a DF es: 35.579 t y su KGDF es: 1,931 m
Consideraremos que en navegación no debería superar los tanques del
doble fondo.
Plantearemos las siguientes ecuaciones para la CARENA 84:
(ΣF = 0); WBW +WC = ∆ DISEÑO - LWT – CONSUMOS; (6-7)
(ΣM i = 0); WBW* KGBW + WC* KGC = ∆ DISEÑO* KGMAX. - LWT* KGLWT - -
CONS* KGCONS; (6-8)
Determinaremos previamente los valores necesarios para llevar a cabo
estos cálculos al igual que se ha hecho con la carena 42.
DWT = 111.852 t
BWMAX = 41.714 t (DF)
∆ DISEÑO = 156.779 t para un calado de francobordo de 10,20 m
KGMAX = 27,1,020 m para un calado de francobordo de 10,20 m
LWT = 43.575 t
KGLWT = 7,359 m
CONS = 12.000 t
KGCONS = 2 m
Consideramos que en este caso el lastre del DF aporta lastre suficiente
para la navegación en condiciones máximas de carga. Si fuera necesario utilizar
otros tanques, además de los del DF, el problema se reduciría a determinar el
KGBW correspondiente. El C.G. del lastre considerado supone una pequeña sim-
plificación en cuanto no se tiene en cuenta posibles alturas del lastre en los pi-

Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
6. ESTABILIDAD ESTÁTICA: PLENA CARGA DISEÑO
211
ques, necesario para el trimado. Se ha valorado el C.G. real del lastre en diversas
condiciones de carga, encontrando una variación del VCG de la carga inferior al
2%.
Condiciones: BW < BW MAX = 43.575 t (DF); KGBW = 2,8 m;
Sustituyendo en la (6-7):
WBW +WC = 156.779 – 43.575 – 12.000 = 101.204 t; (6-18)
despejando: WBW = 101.204 – WC;
Sustituyendo en la ecuación de momentos (6-8):
(101.204-WC)*2,8 + WC* KGC = 156.779*27.01 – 43.575 * 7,359 -12.000 * 2 =
4234600 -320668 – 24.000 = 3.889.932; (6-19)
WC* KGC – 2,8 * WC = 3.606.561;
3.606.561 2,8*
C
WcKG
Wc
+= (6-20)
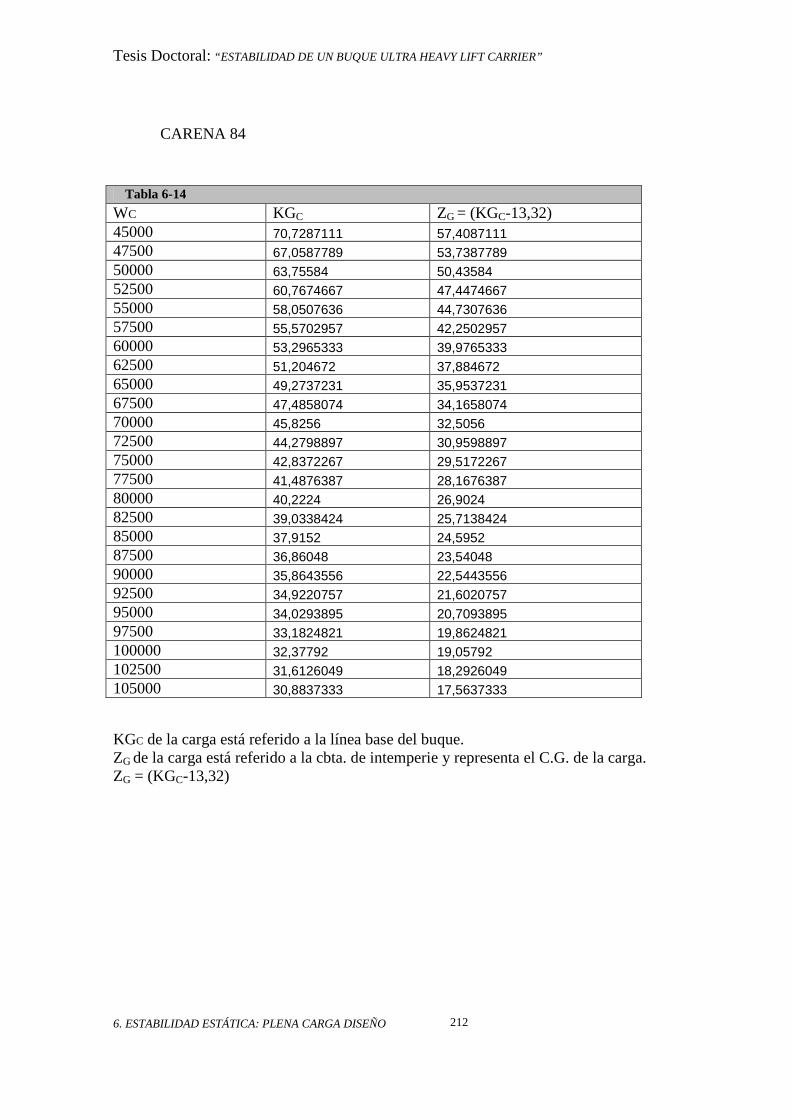
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
6. ESTABILIDAD ESTÁTICA: PLENA CARGA DISEÑO
212
CARENA 84
KGC de la carga está referido a la línea base del buque. ZG de la carga está referido a la cbta. de intemperie y representa el C.G. de la carga. ZG = (KGC-13,32)
Tabla 6-14
WC KGC ZG = (KGC-13,32) 45000 70,7287111 57,4087111 47500 67,0587789 53,7387789 50000 63,75584 50,43584 52500 60,7674667 47,4474667 55000 58,0507636 44,7307636 57500 55,5702957 42,2502957 60000 53,2965333 39,9765333 62500 51,204672 37,884672 65000 49,2737231 35,9537231 67500 47,4858074 34,1658074 70000 45,8256 32,5056 72500 44,2798897 30,9598897 75000 42,8372267 29,5172267 77500 41,4876387 28,1676387 80000 40,2224 26,9024 82500 39,0338424 25,7138424 85000 37,9152 24,5952 87500 36,86048 23,54048 90000 35,8643556 22,5443556 92500 34,9220757 21,6020757 95000 34,0293895 20,7093895 97500 33,1824821 19,8624821 100000 32,37792 19,05792 102500 31,6126049 18,2926049 105000 30,8837333 17,5637333
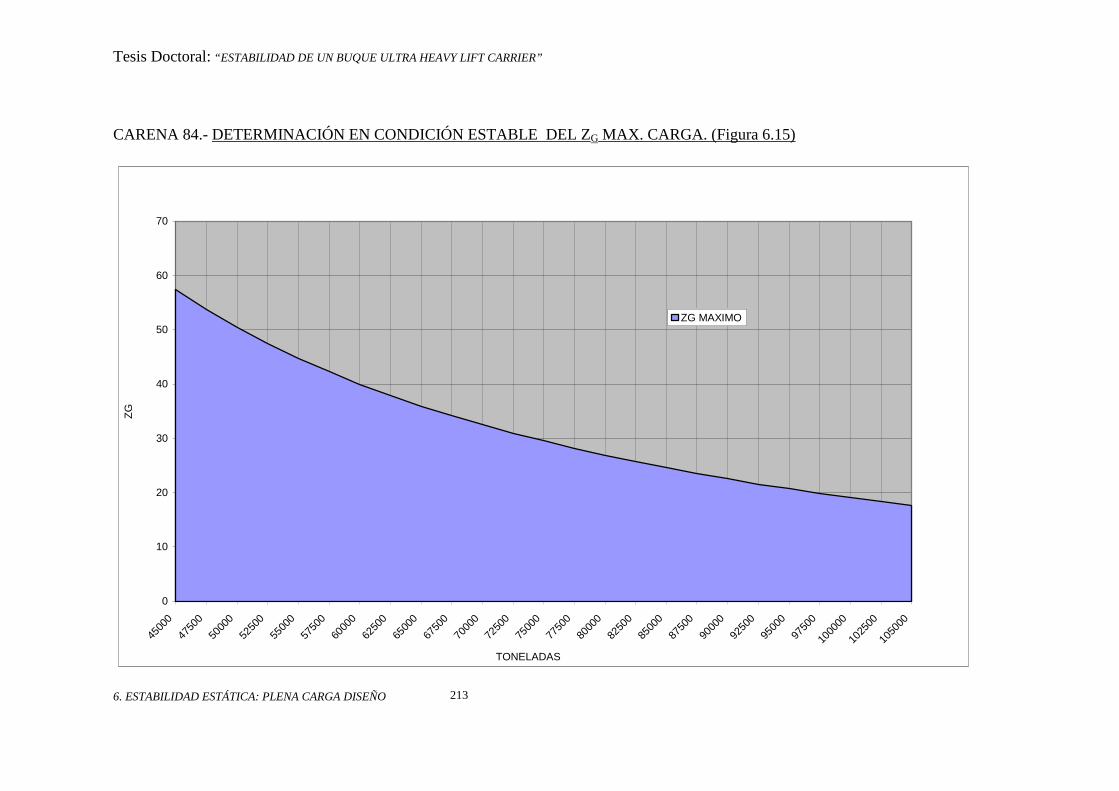
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
6. ESTABILIDAD ESTÁTICA: PLENA CARGA DISEÑO
213
CARENA 84.- DETERMINACIÓN EN CONDICIÓN ESTABLE DEL ZG MAX. CARGA. (Figura 6.15)
0
10
20
30
40
50
60
70
4500
047
500
5000
052
500
5500
057
500
6000
062
500
6500
067
500
7000
072
500
7500
077
500
8000
082
500
8500
087
500
9000
092
500
9500
097
500
1000
0010
2500
1050
00
TONELADAS
ZG
ZG MAXIMO
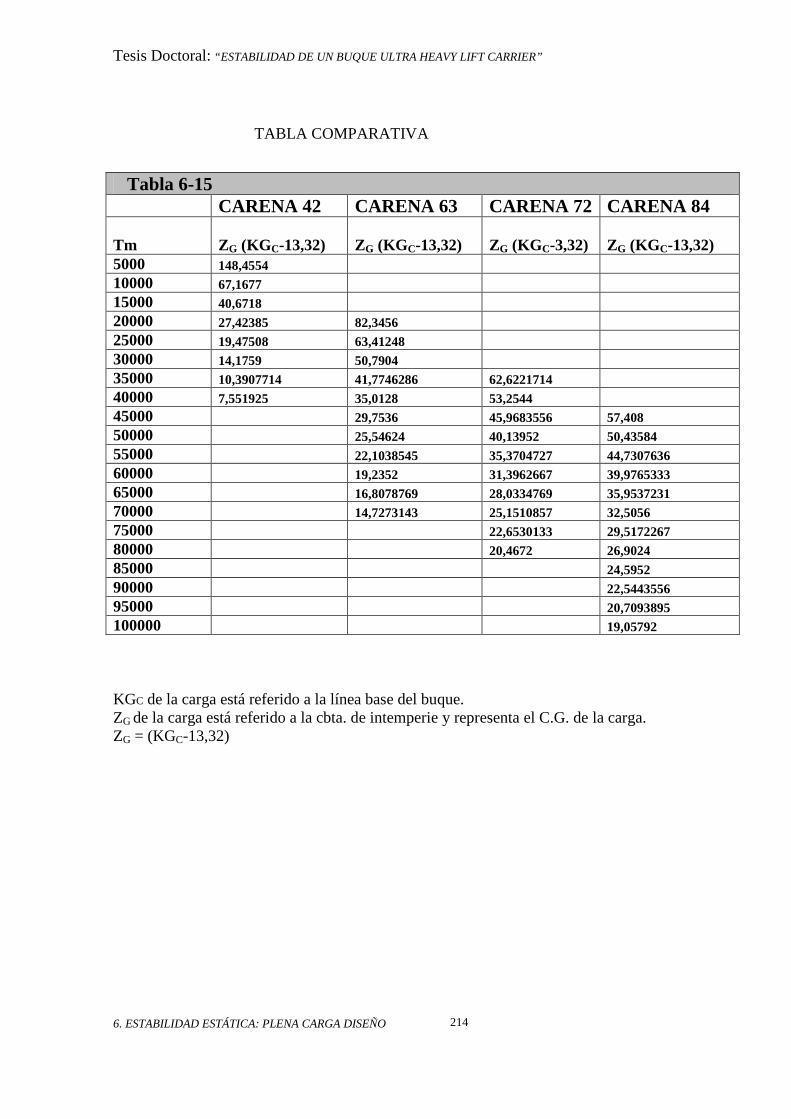
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
6. ESTABILIDAD ESTÁTICA: PLENA CARGA DISEÑO
214
TABLA COMPARATIVA
KGC de la carga está referido a la línea base del buque. ZG de la carga está referido a la cbta. de intemperie y representa el C.G. de la carga. ZG = (KGC-13,32)
Tabla 6-15 CARENA 42 CARENA 63 CARENA 72 CARENA 84 Tm ZG (KGC-13,32) ZG (KGC-13,32) ZG (KGC-3,32) ZG (KGC-13,32) 5000 148,4554 10000 67,1677 15000 40,6718 20000 27,42385 82,3456 25000 19,47508 63,41248 30000 14,1759 50,7904 35000 10,3907714 41,7746286 62,6221714 40000 7,551925 35,0128 53,2544 45000 29,7536 45,9683556 57,408 50000 25,54624 40,13952 50,43584 55000 22,1038545 35,3704727 44,7307636 60000 19,2352 31,3962667 39,9765333 65000 16,8078769 28,0334769 35,9537231 70000 14,7273143 25,1510857 32,5056 75000 22,6530133 29,5172267 80000 20,4672 26,9024 85000 24,5952 90000 22,5443556 95000 20,7093895 100000 19,05792
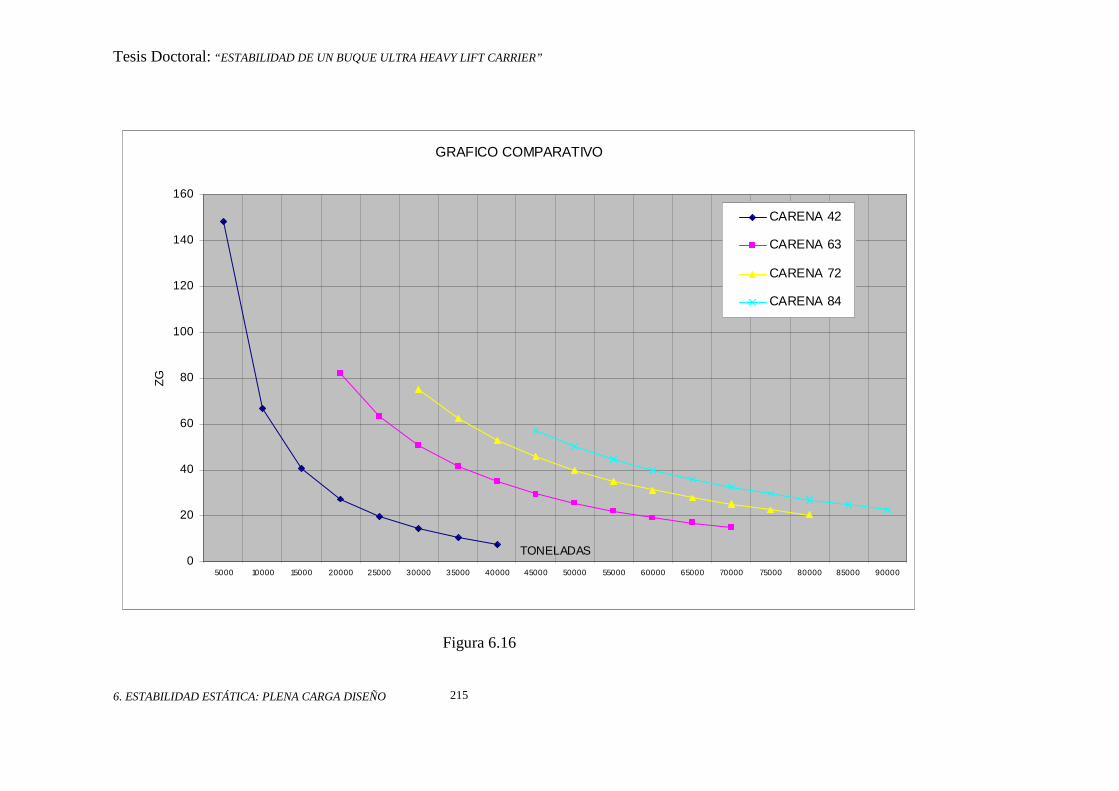
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
6. ESTABILIDAD ESTÁTICA: PLENA CARGA DISEÑO
215
GRAFICO COMPARATIVO
0
20
40
60
80
100
120
140
160
5000 10000 15000 20000 25000 30000 35000 40000 45000 50000 55000 60000 65000 70000 75000 80000 85000 90000
TONELADAS
ZG
CARENA 42
CARENA 63
CARENA 72
CARENA 84
Figura 6.16

Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
6. ESTABILIDAD ESTÁTICA: PLENA CARGA DISEÑO 216
En el eje de abscisas, tal como nos muestra la figura 6-16, podemos observar que
para un mismo peso de la carga el centro de gravedad posible de esta, es mayor confor-
me aumenta la manga del buque. En la fase de anteproyecto del buque, y para una de-
terminada carena en estudio, siguiendo la metodología de esta tesis, es posible trabajar
con estas ramas de pseudohipérbolas, determinando las alturas máximas permisibles de
los centros de gravedad de una determinada carga.

Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
6. ESTABILIDAD ESTÁTICA: PLENA CARGA DISEÑO 217
6.4. DIAGRAMAS DE ESTABILIDAD- (Calado de máxima carga de diseño)
Siguiendo las áreas de estabilidad, vistas precedentemente en los ábacos del pa-
rágrafo anterior, procedamos al cálculo de estabilidad en condiciones de carga estándar,
que nos servirá de comprobación.
Consideraremos como condiciones de carga estándar aquellas cargas quasi lími-
tes que vienen requeridas para el transporte de las mayores plataformas que demanda el
mercado de fletes.
Al objeto de afirmar los resultados anteriormente obtenidos analizaremos los
diagramas de estabilidad correspondientes a estas condiciones de carga relativas a las
posibilidades de cada carena.
Las condiciones de carga que se han planteado nos muestran valores del peso de
plataformas con centro de gravedad similares al de algunas plataformas que podrían ser
transportadas siempre en condiciones extremas.
Se debe tener presente que los valores KGmax utilizados han sido calculados con
el criterio IMO A479 Ch 4,5 “Offshore Suply Vessel” y los ábacos determinados debe-
rán ser coherentes con este criterio.
Nos proponemos definir el peso y VCG de cuatro plataformas de acuerdo con
los gráficos que se han visto en el parágrafo anterior, teniendo presente que el VCG de
las plataformas está referido a la línea base del buque. Bastará añadir al valor ZG del
ábaco, el valor del puntal, es decir 13,30 m.. El grado de precisión aumenta conforme
aumenta la manga. Para las dos primeras carenas, 42 y 63, se ha trabajado con condicio-
nes de carga con un VCG inferior en un 6% a lo previsto de acuerdo con el ábaco co-
rrespondiente. En las dos siguientes carenas, 72 y 84, se ha hecho con un VCG superior
en un 6% a lo previsto en sus correspondientes ábacos.
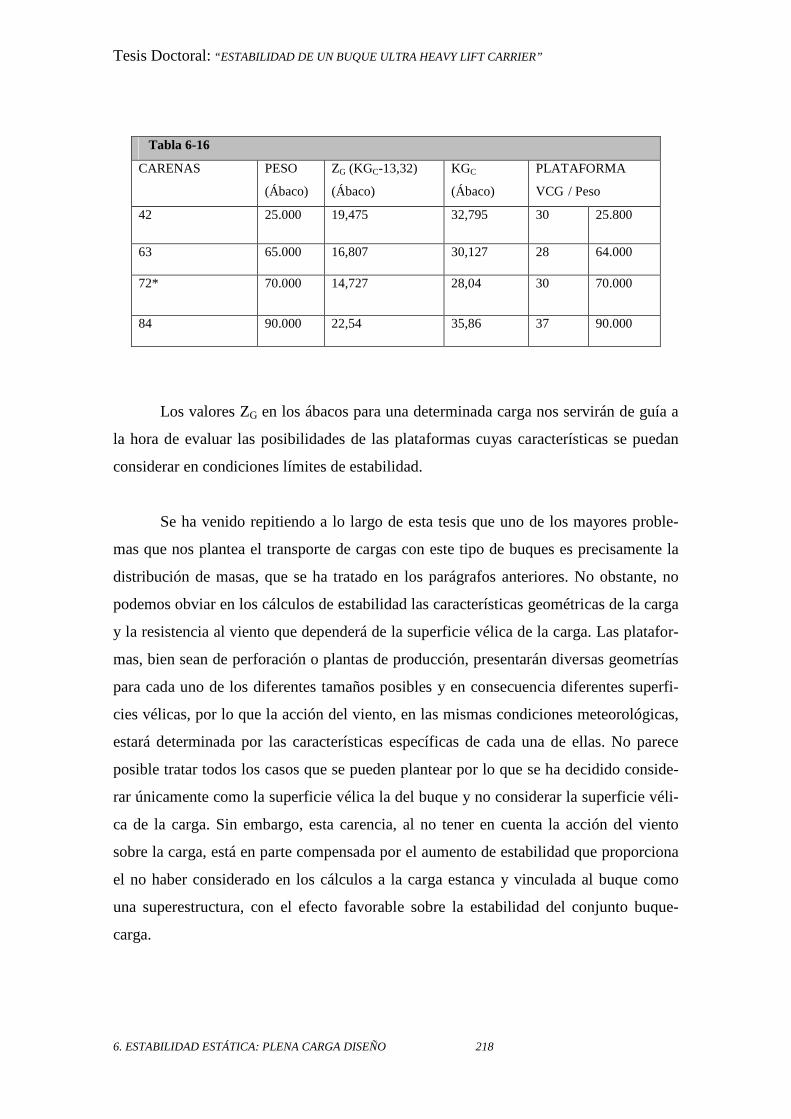
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
6. ESTABILIDAD ESTÁTICA: PLENA CARGA DISEÑO 218
Los valores ZG en los ábacos para una determinada carga nos servirán de guía a
la hora de evaluar las posibilidades de las plataformas cuyas características se puedan
considerar en condiciones límites de estabilidad.
Se ha venido repitiendo a lo largo de esta tesis que uno de los mayores proble-
mas que nos plantea el transporte de cargas con este tipo de buques es precisamente la
distribución de masas, que se ha tratado en los parágrafos anteriores. No obstante, no
podemos obviar en los cálculos de estabilidad las características geométricas de la carga
y la resistencia al viento que dependerá de la superficie vélica de la carga. Las platafor-
mas, bien sean de perforación o plantas de producción, presentarán diversas geometrías
para cada uno de los diferentes tamaños posibles y en consecuencia diferentes superfi-
cies vélicas, por lo que la acción del viento, en las mismas condiciones meteorológicas,
estará determinada por las características específicas de cada una de ellas. No parece
posible tratar todos los casos que se pueden plantear por lo que se ha decidido conside-
rar únicamente como la superficie vélica la del buque y no considerar la superficie véli-
ca de la carga. Sin embargo, esta carencia, al no tener en cuenta la acción del viento
sobre la carga, está en parte compensada por el aumento de estabilidad que proporciona
el no haber considerado en los cálculos a la carga estanca y vinculada al buque como
una superestructura, con el efecto favorable sobre la estabilidad del conjunto buque-
carga.
Tabla 6-16
CARENAS PESO
(Ábaco)
ZG (KGC-13,32)
(Ábaco)
KGC
(Ábaco)
PLATAFORMA
VCG / Peso
42 25.000 19,475 32,795 30 25.800
63 65.000 16,807
30,127
28 64.000
72* 70.000 14,727 28,04 30 70.000
84 90.000
22,54
35,86
37 90.000
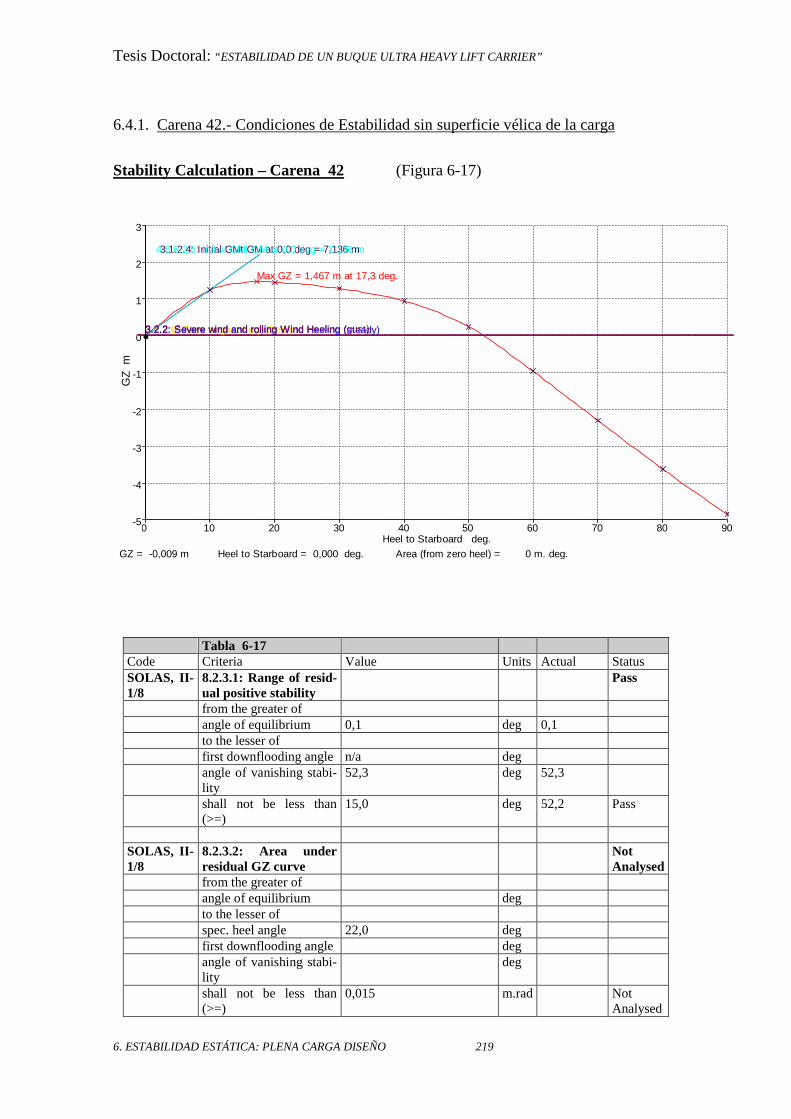
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
6. ESTABILIDAD ESTÁTICA: PLENA CARGA DISEÑO 219
6.4.1. Carena 42.- Condiciones de Estabilidad sin superficie vélica de la carga
Stability Calculation – Carena 42 (Figura 6-17)
-5
-4
-3
-2
-1
0
1
2
3
0 10 20 30 40 50 60 70 80 90
Max GZ = 1,467 m at 17,3 deg.
3.1.2.4: Initial GMt GM at 0,0 deg = 7,136 m
3.1.2.6: Turn: angle of equilibrium3.2.2: Severe wind and rolling Wind Heeling (steady)3.2.2: Severe wind and rolling Wind Heeling (gust)
4.5.6.2.5: Initial GMt GM at 0,0 deg = 7,136 m
GZ = Heel to Starboard = -0,009 m 0,000 deg. Area (from zero heel) = 0 m. deg.
Heel to Starboard deg.
GZ
m
Tabla 6-17 Code Criteria Value Units Actual Status SOLAS, II-1/8
8.2.3.1: Range of resid-ual positive stability
Pass
from the greater of angle of equilibrium 0,1 deg 0,1 to the lesser of first downflooding angle n/a deg angle of vanishing stabi-
lity 52,3 deg 52,3
shall not be less than (>=)
15,0 deg 52,2 Pass
SOLAS, II-1/8
8.2.3.2: Area under residual GZ curve
Not Analysed
from the greater of angle of equilibrium deg to the lesser of spec. heel angle 22,0 deg first downflooding angle deg angle of vanishing stabi-
lity deg
shall not be less than (>=)
0,015 m.rad Not Analysed
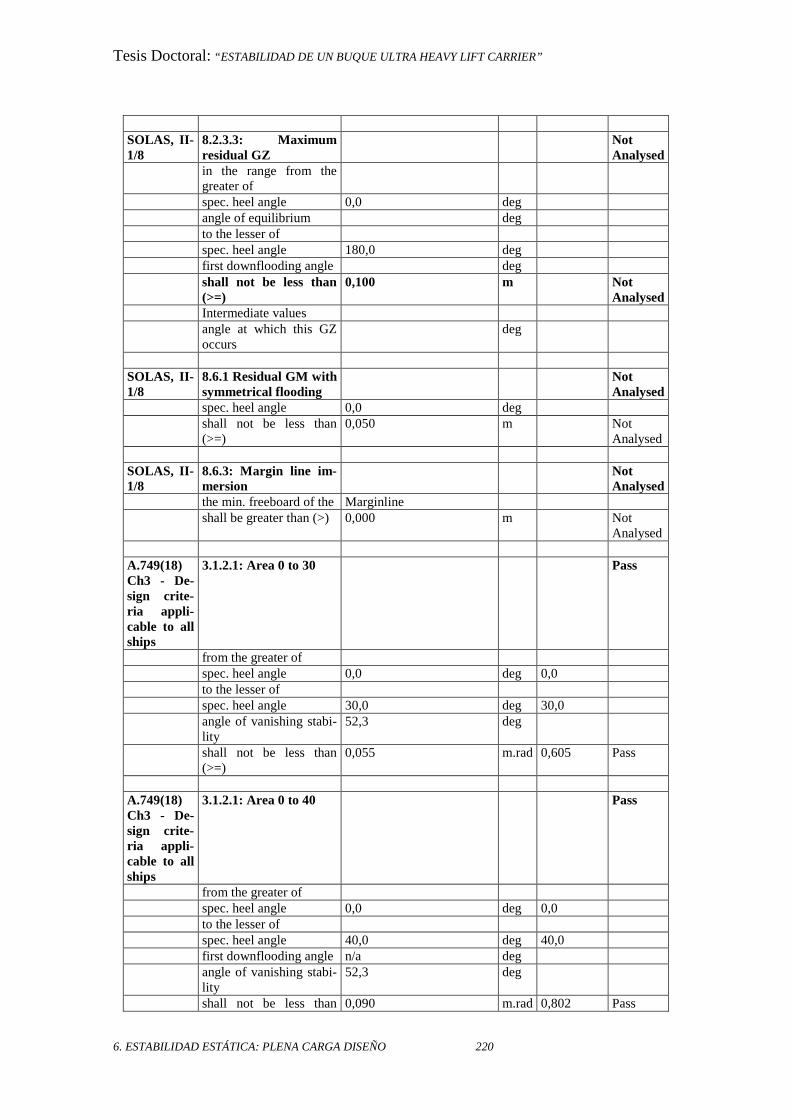
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
6. ESTABILIDAD ESTÁTICA: PLENA CARGA DISEÑO 220
SOLAS, II-1/8
8.2.3.3: Maximum residual GZ
Not Analysed
in the range from the greater of
spec. heel angle 0,0 deg angle of equilibrium deg to the lesser of spec. heel angle 180,0 deg first downflooding angle deg shall not be less than
(>=) 0,100 m Not
Analysed Intermediate values angle at which this GZ
occurs deg
SOLAS, II-1/8
8.6.1 Residual GM with symmetrical flooding
Not Analysed
spec. heel angle 0,0 deg shall not be less than
(>=) 0,050 m Not
Analysed SOLAS, II-1/8
8.6.3: Margin line im-mersion
Not Analysed
the min. freeboard of the Marginline shall be greater than (>) 0,000 m Not
Analysed A.749(18) Ch3 - De-sign crite-ria appli-cable to all ships
3.1.2.1: Area 0 to 30 Pass
from the greater of spec. heel angle 0,0 deg 0,0 to the lesser of spec. heel angle 30,0 deg 30,0 angle of vanishing stabi-
lity 52,3 deg
shall not be less than (>=)
0,055 m.rad 0,605 Pass
A.749(18) Ch3 - De-sign crite-ria appli-cable to all ships
3.1.2.1: Area 0 to 40 Pass
from the greater of spec. heel angle 0,0 deg 0,0 to the lesser of spec. heel angle 40,0 deg 40,0 first downflooding angle n/a deg angle of vanishing stabi-
lity 52,3 deg
shall not be less than 0,090 m.rad 0,802 Pass
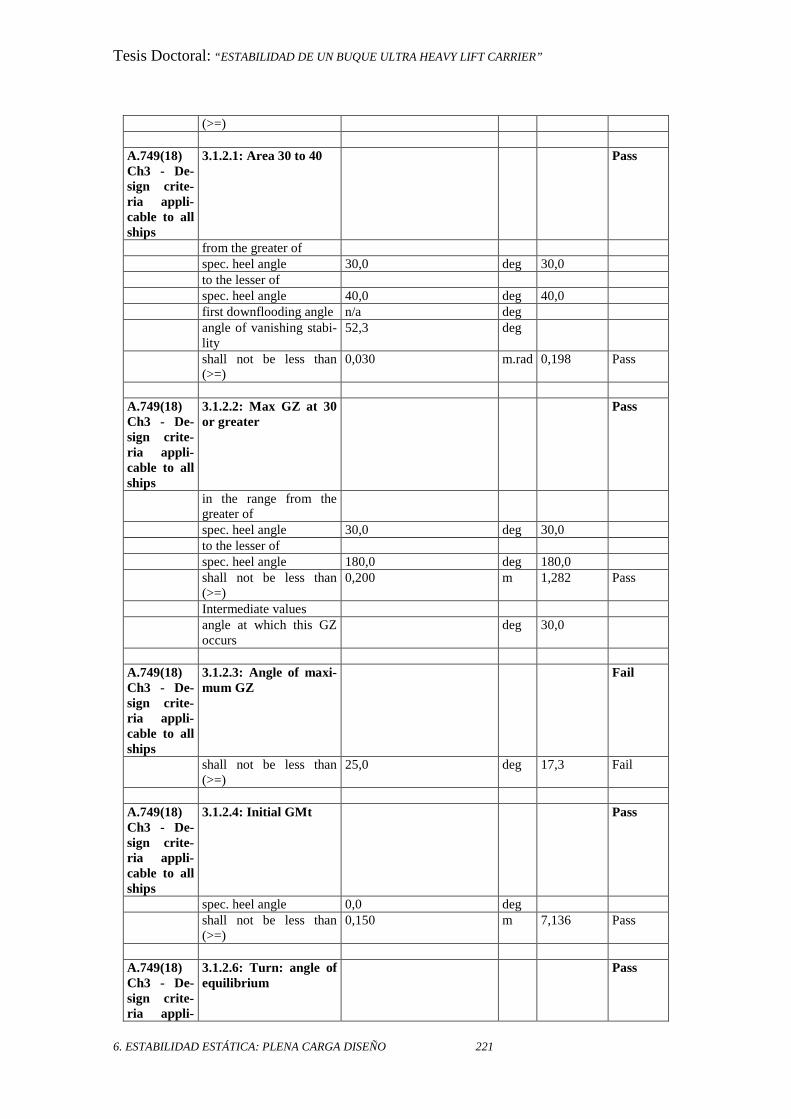
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
6. ESTABILIDAD ESTÁTICA: PLENA CARGA DISEÑO 221
(>=) A.749(18) Ch3 - De-sign crite-ria appli-cable to all ships
3.1.2.1: Area 30 to 40 Pass
from the greater of spec. heel angle 30,0 deg 30,0 to the lesser of spec. heel angle 40,0 deg 40,0 first downflooding angle n/a deg angle of vanishing stabi-
lity 52,3 deg
shall not be less than (>=)
0,030 m.rad 0,198 Pass
A.749(18) Ch3 - De-sign crite-ria appli-cable to all ships
3.1.2.2: Max GZ at 30 or greater
Pass
in the range from the greater of
spec. heel angle 30,0 deg 30,0 to the lesser of spec. heel angle 180,0 deg 180,0 shall not be less than
(>=) 0,200 m 1,282 Pass
Intermediate values angle at which this GZ
occurs deg 30,0
A.749(18) Ch3 - De-sign crite-ria appli-cable to all ships
3.1.2.3: Angle of maxi-mum GZ
Fail
shall not be less than (>=)
25,0 deg 17,3 Fail
A.749(18) Ch3 - De-sign crite-ria appli-cable to all ships
3.1.2.4: Initial GMt Pass
spec. heel angle 0,0 deg shall not be less than
(>=) 0,150 m 7,136 Pass
A.749(18) Ch3 - De-sign crite-ria appli-
3.1.2.6: Turn: angle of equilibrium
Pass
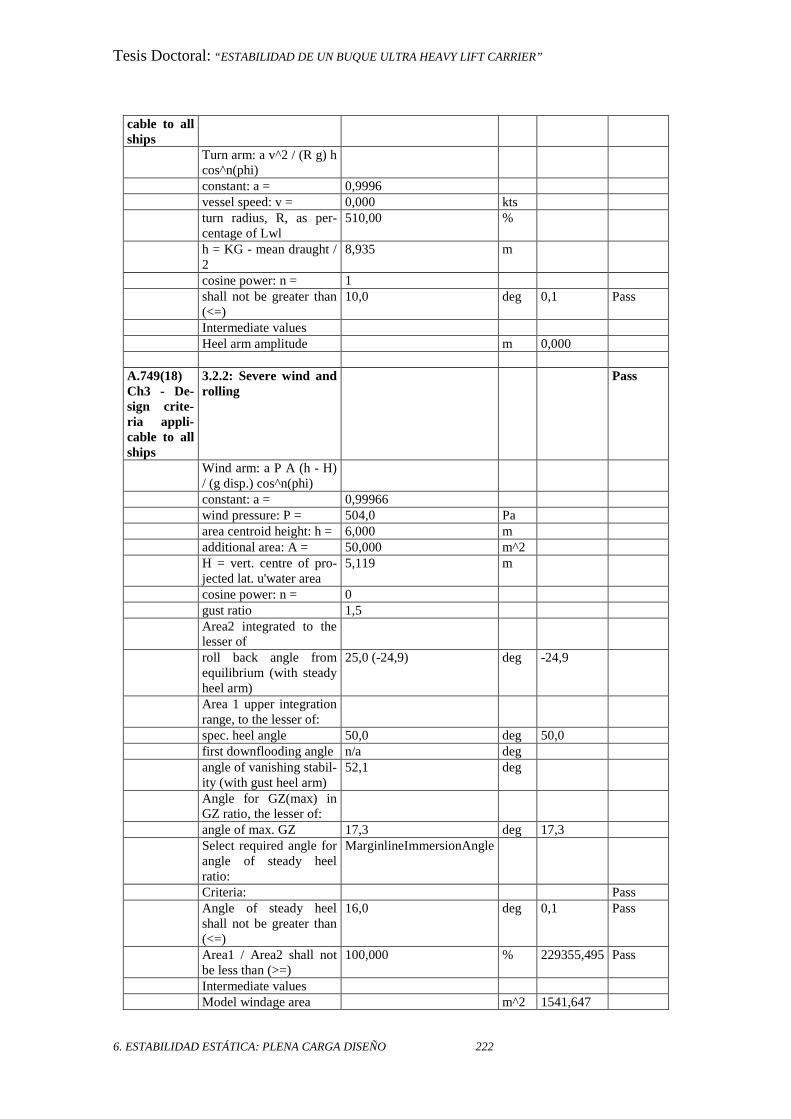
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
6. ESTABILIDAD ESTÁTICA: PLENA CARGA DISEÑO 222
cable to all ships Turn arm: a v^2 / (R g) h
cos^n(phi)
constant: a = 0,9996 vessel speed: v = 0,000 kts turn radius, R, as per-
centage of Lwl 510,00 %
h = KG - mean draught / 2
8,935 m
cosine power: n = 1 shall not be greater than
(<=) 10,0 deg 0,1 Pass
Intermediate values Heel arm amplitude m 0,000 A.749(18) Ch3 - De-sign crite-ria appli-cable to all ships
3.2.2: Severe wind and rolling
Pass
Wind arm: a P A (h - H) / (g disp.) cos^n(phi)
constant: a = 0,99966 wind pressure: P = 504,0 Pa area centroid height: h = 6,000 m additional area: A = 50,000 m^2 H = vert. centre of pro-
jected lat. u'water area 5,119 m
cosine power: n = 0 gust ratio 1,5 Area2 integrated to the
lesser of
roll back angle from equilibrium (with steady heel arm)
25,0 (-24,9) deg -24,9
Area 1 upper integration range, to the lesser of:
spec. heel angle 50,0 deg 50,0 first downflooding angle n/a deg angle of vanishing stabil-
ity (with gust heel arm) 52,1 deg
Angle for GZ(max) in GZ ratio, the lesser of:
angle of max. GZ 17,3 deg 17,3 Select required angle for
angle of steady heel ratio:
MarginlineImmersionAngle
Criteria: Pass Angle of steady heel
shall not be greater than (<=)
16,0 deg 0,1 Pass
Area1 / Area2 shall not be less than (>=)
100,000 % 229355,495 Pass
Intermediate values Model windage area m^2 1541,647
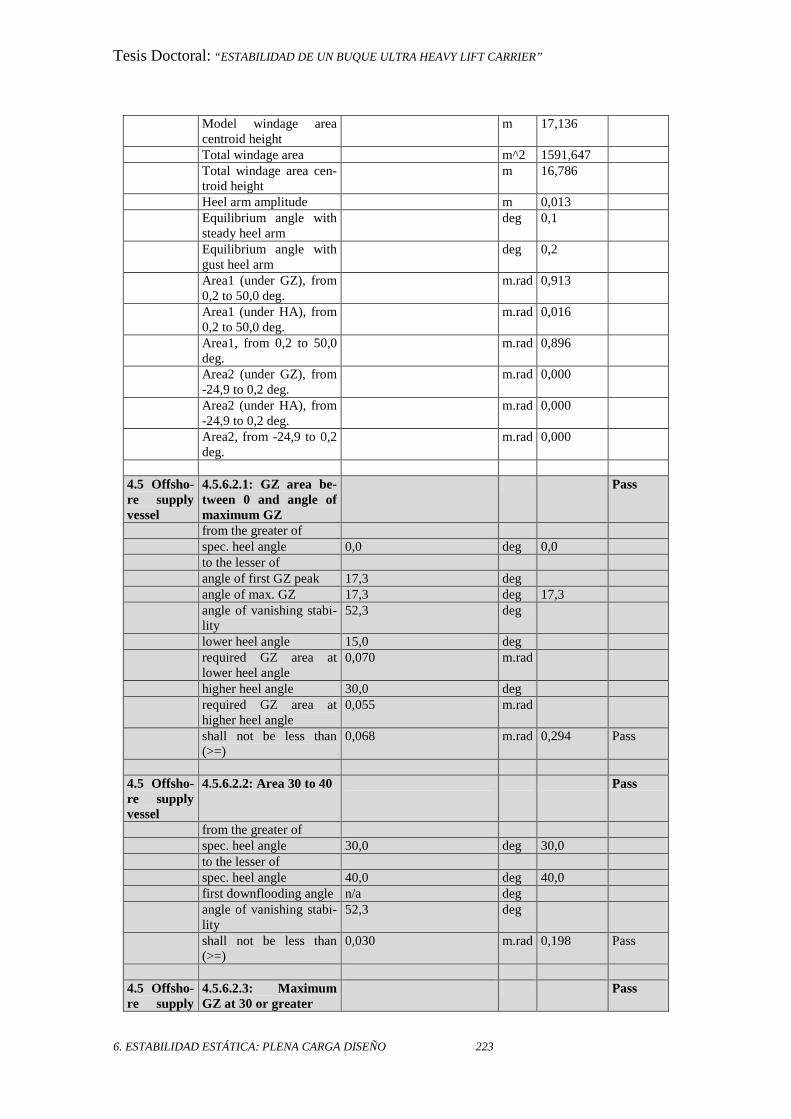
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
6. ESTABILIDAD ESTÁTICA: PLENA CARGA DISEÑO 223
Model windage area centroid height
m 17,136
Total windage area m^2 1591,647 Total windage area cen-
troid height m 16,786
Heel arm amplitude m 0,013 Equilibrium angle with
steady heel arm deg 0,1
Equilibrium angle with gust heel arm
deg 0,2
Area1 (under GZ), from 0,2 to 50,0 deg.
m.rad 0,913
Area1 (under HA), from 0,2 to 50,0 deg.
m.rad 0,016
Area1, from 0,2 to 50,0 deg.
m.rad 0,896
Area2 (under GZ), from -24,9 to 0,2 deg.
m.rad 0,000
Area2 (under HA), from -24,9 to 0,2 deg.
m.rad 0,000
Area2, from -24,9 to 0,2 deg.
m.rad 0,000
4.5 Offsho-re supply vessel
4.5.6.2.1: GZ area be-tween 0 and angle of maximum GZ
Pass
from the greater of spec. heel angle 0,0 deg 0,0 to the lesser of angle of first GZ peak 17,3 deg angle of max. GZ 17,3 deg 17,3 angle of vanishing stabi-
lity 52,3 deg
lower heel angle 15,0 deg required GZ area at
lower heel angle 0,070 m.rad
higher heel angle 30,0 deg required GZ area at
higher heel angle 0,055 m.rad
shall not be less than (>=)
0,068 m.rad 0,294 Pass
4.5 Offsho-re supply vessel
4.5.6.2.2: Area 30 to 40 Pass
from the greater of spec. heel angle 30,0 deg 30,0 to the lesser of spec. heel angle 40,0 deg 40,0 first downflooding angle n/a deg angle of vanishing stabi-
lity 52,3 deg
shall not be less than (>=)
0,030 m.rad 0,198 Pass
4.5 Offsho-re supply
4.5.6.2.3: Maximum GZ at 30 or greater
Pass
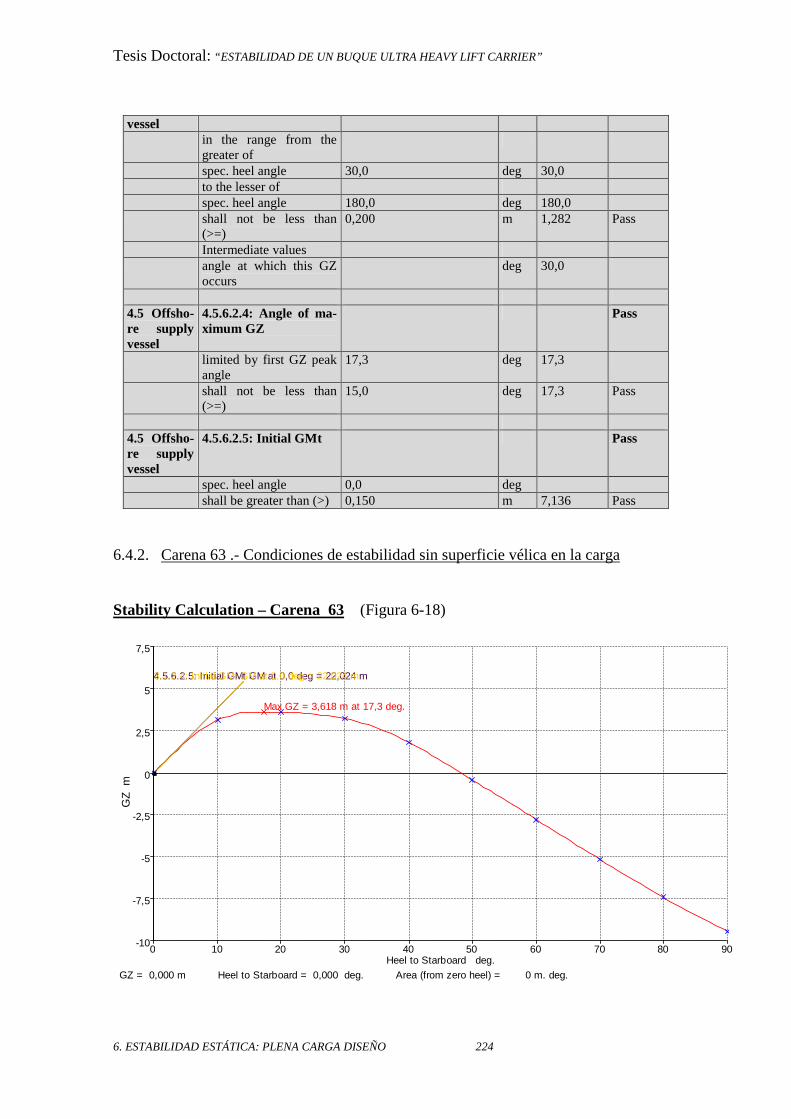
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
6. ESTABILIDAD ESTÁTICA: PLENA CARGA DISEÑO 224
vessel in the range from the
greater of
spec. heel angle 30,0 deg 30,0 to the lesser of spec. heel angle 180,0 deg 180,0 shall not be less than
(>=) 0,200 m 1,282 Pass
Intermediate values angle at which this GZ
occurs deg 30,0
4.5 Offsho-re supply vessel
4.5.6.2.4: Angle of ma-ximum GZ
Pass
limited by first GZ peak angle
17,3 deg 17,3
shall not be less than (>=)
15,0 deg 17,3 Pass
4.5 Offsho-re supply vessel
4.5.6.2.5: Initial GMt Pass
spec. heel angle 0,0 deg shall be greater than (>) 0,150 m 7,136 Pass
6.4.2. Carena 63 .- Condiciones de estabilidad sin superficie vélica en la carga Stability Calculation – Carena 63 (Figura 6-18)
-10
-7,5
-5
-2,5
0
2,5
5
7,5
0 10 20 30 40 50 60 70 80 90
Max GZ = 3,618 m at 17,3 deg.
4.5.6.2.5: Initial GMt GM at 0,0 deg = 22,024 m3.1.2.4: Initial GMt GM at 0,0 deg = 22,024 m
GZ = Heel to Starboard = 0,000 m 0,000 deg. Area (from zero heel) = 0 m. deg.
Heel to Starboard deg.
GZ
m
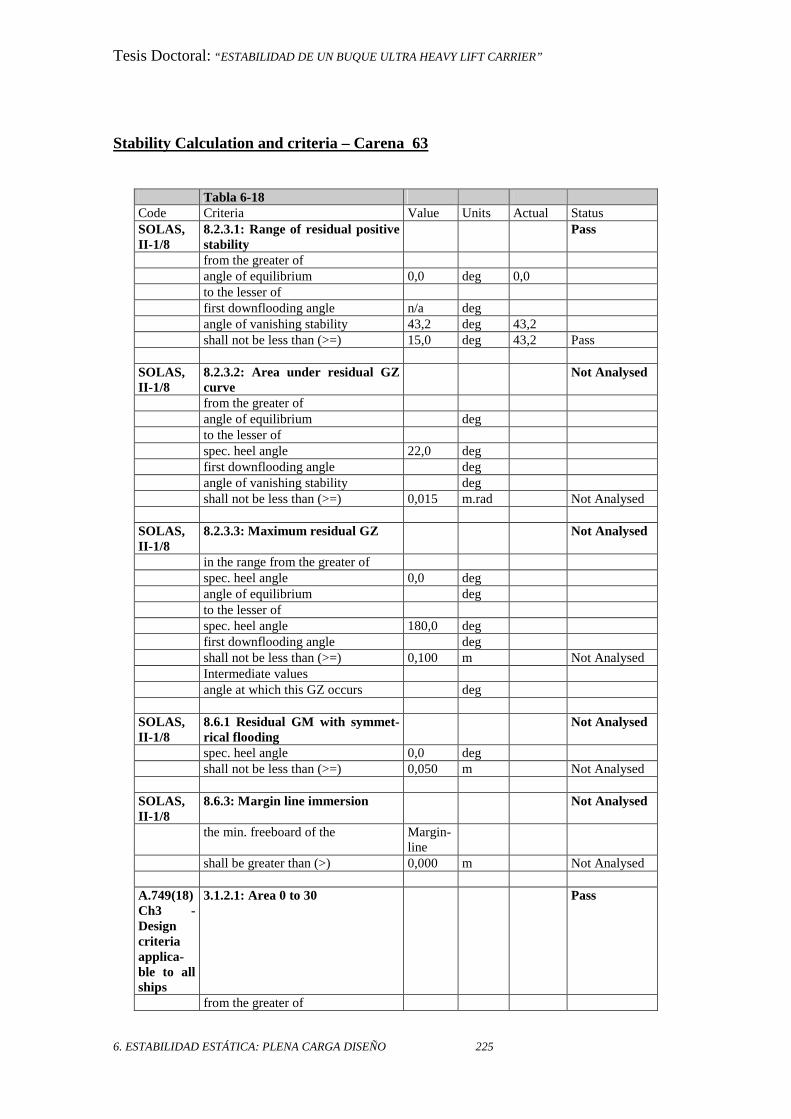
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
6. ESTABILIDAD ESTÁTICA: PLENA CARGA DISEÑO 225
Stability Calculation and criteria – Carena 63
Tabla 6-18 Code Criteria Value Units Actual Status SOLAS, II-1/8
8.2.3.1: Range of residual positive stability
Pass
from the greater of angle of equilibrium 0,0 deg 0,0 to the lesser of first downflooding angle n/a deg angle of vanishing stability 43,2 deg 43,2 shall not be less than (>=) 15,0 deg 43,2 Pass SOLAS, II-1/8
8.2.3.2: Area under residual GZ curve
Not Analysed
from the greater of angle of equilibrium deg to the lesser of spec. heel angle 22,0 deg first downflooding angle deg angle of vanishing stability deg shall not be less than (>=) 0,015 m.rad Not Analysed SOLAS, II-1/8
8.2.3.3: Maximum residual GZ Not Analysed
in the range from the greater of spec. heel angle 0,0 deg angle of equilibrium deg to the lesser of spec. heel angle 180,0 deg first downflooding angle deg shall not be less than (>=) 0,100 m Not Analysed Intermediate values angle at which this GZ occurs deg SOLAS, II-1/8
8.6.1 Residual GM with symmet-rical flooding
Not Analysed
spec. heel angle 0,0 deg shall not be less than (>=) 0,050 m Not Analysed SOLAS, II-1/8
8.6.3: Margin line immersion Not Analysed
the min. freeboard of the Margin-line
shall be greater than (>) 0,000 m Not Analysed A.749(18) Ch3 - Design criteria applica-ble to all ships
3.1.2.1: Area 0 to 30 Pass
from the greater of
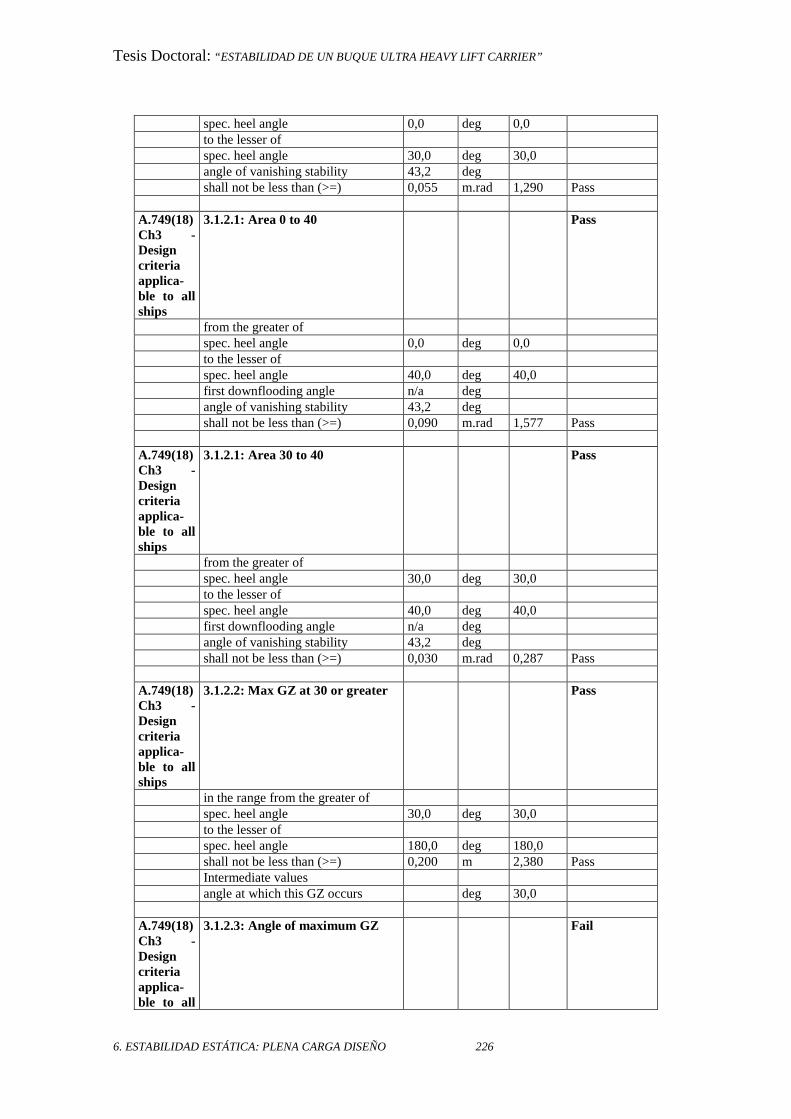
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
6. ESTABILIDAD ESTÁTICA: PLENA CARGA DISEÑO 226
spec. heel angle 0,0 deg 0,0 to the lesser of spec. heel angle 30,0 deg 30,0 angle of vanishing stability 43,2 deg shall not be less than (>=) 0,055 m.rad 1,290 Pass A.749(18) Ch3 - Design criteria applica-ble to all ships
3.1.2.1: Area 0 to 40 Pass
from the greater of spec. heel angle 0,0 deg 0,0 to the lesser of spec. heel angle 40,0 deg 40,0 first downflooding angle n/a deg angle of vanishing stability 43,2 deg shall not be less than (>=) 0,090 m.rad 1,577 Pass A.749(18) Ch3 - Design criteria applica-ble to all ships
3.1.2.1: Area 30 to 40 Pass
from the greater of spec. heel angle 30,0 deg 30,0 to the lesser of spec. heel angle 40,0 deg 40,0 first downflooding angle n/a deg angle of vanishing stability 43,2 deg shall not be less than (>=) 0,030 m.rad 0,287 Pass A.749(18) Ch3 - Design criteria applica-ble to all ships
3.1.2.2: Max GZ at 30 or greater Pass
in the range from the greater of spec. heel angle 30,0 deg 30,0 to the lesser of spec. heel angle 180,0 deg 180,0 shall not be less than (>=) 0,200 m 2,380 Pass Intermediate values angle at which this GZ occurs deg 30,0 A.749(18) Ch3 - Design criteria applica-ble to all
3.1.2.3: Angle of maximum GZ Fail
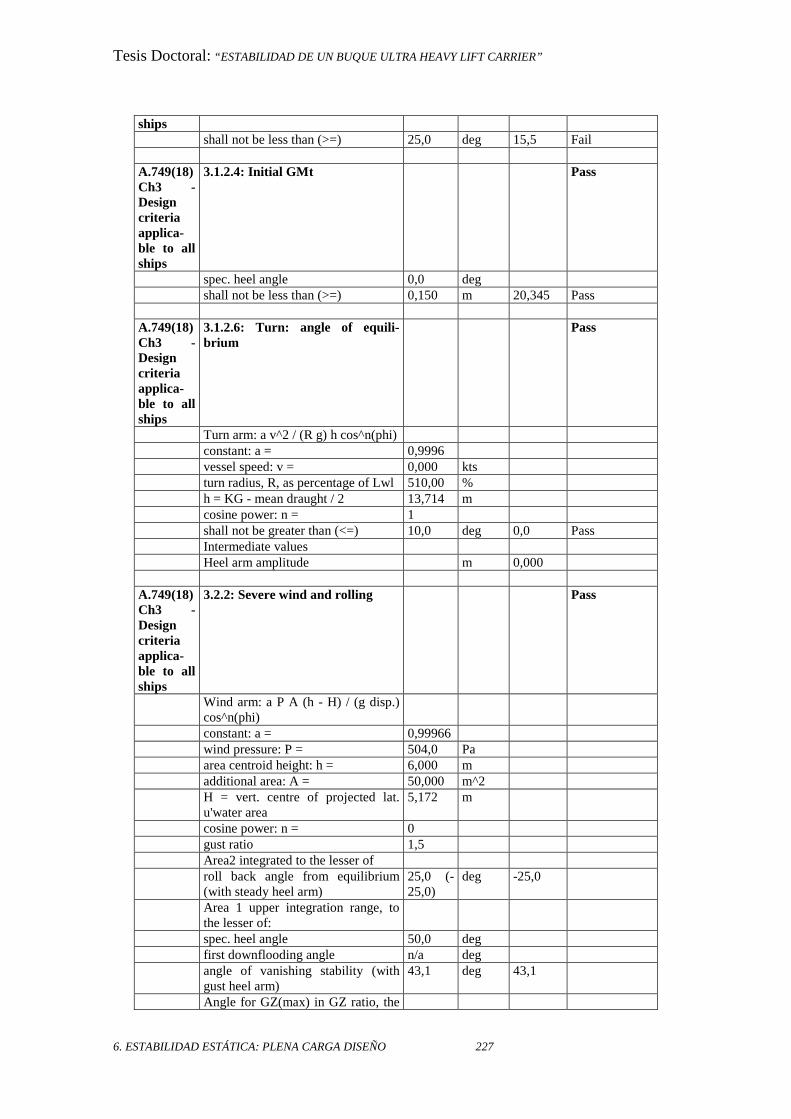
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
6. ESTABILIDAD ESTÁTICA: PLENA CARGA DISEÑO 227
ships shall not be less than (>=) 25,0 deg 15,5 Fail A.749(18) Ch3 - Design criteria applica-ble to all ships
3.1.2.4: Initial GMt Pass
spec. heel angle 0,0 deg shall not be less than (>=) 0,150 m 20,345 Pass A.749(18) Ch3 - Design criteria applica-ble to all ships
3.1.2.6: Turn: angle of equili-brium
Pass
Turn arm: a v^2 / (R g) h cos^n(phi) constant: a = 0,9996 vessel speed: v = 0,000 kts turn radius, R, as percentage of Lwl 510,00 % h = KG - mean draught / 2 13,714 m cosine power: n = 1 shall not be greater than (<=) 10,0 deg 0,0 Pass Intermediate values Heel arm amplitude m 0,000 A.749(18) Ch3 - Design criteria applica-ble to all ships
3.2.2: Severe wind and rolling Pass
Wind arm: a P A (h - H) / (g disp.) cos^n(phi)
constant: a = 0,99966 wind pressure: P = 504,0 Pa area centroid height: h = 6,000 m additional area: A = 50,000 m^2 H = vert. centre of projected lat.
u'water area 5,172 m
cosine power: n = 0 gust ratio 1,5 Area2 integrated to the lesser of roll back angle from equilibrium
(with steady heel arm) 25,0 (-25,0)
deg -25,0
Area 1 upper integration range, to the lesser of:
spec. heel angle 50,0 deg first downflooding angle n/a deg angle of vanishing stability (with
gust heel arm) 43,1 deg 43,1
Angle for GZ(max) in GZ ratio, the
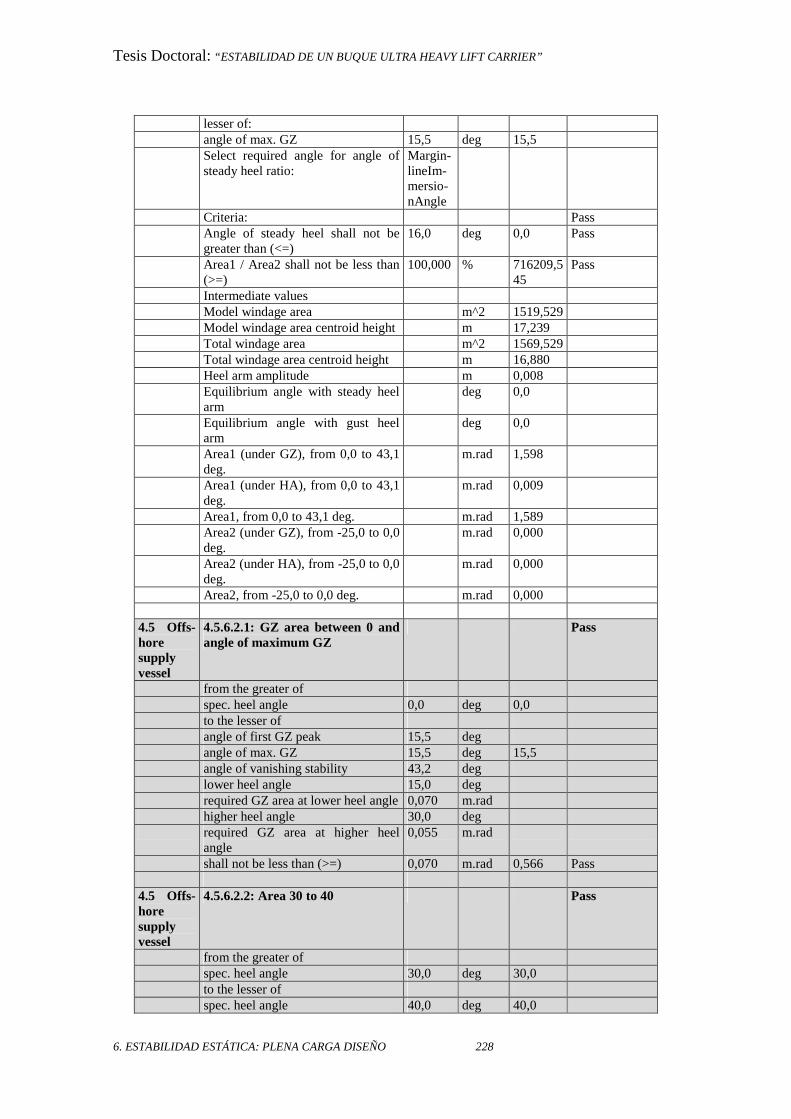
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
6. ESTABILIDAD ESTÁTICA: PLENA CARGA DISEÑO 228
lesser of: angle of max. GZ 15,5 deg 15,5 Select required angle for angle of
steady heel ratio: Margin-lineIm-mersio-nAngle
Criteria: Pass Angle of steady heel shall not be
greater than (<=) 16,0 deg 0,0 Pass
Area1 / Area2 shall not be less than (>=)
100,000 % 716209,545
Pass
Intermediate values Model windage area m^2 1519,529 Model windage area centroid height m 17,239 Total windage area m^2 1569,529 Total windage area centroid height m 16,880 Heel arm amplitude m 0,008 Equilibrium angle with steady heel
arm deg 0,0
Equilibrium angle with gust heel arm
deg 0,0
Area1 (under GZ), from 0,0 to 43,1 deg.
m.rad 1,598
Area1 (under HA), from 0,0 to 43,1 deg.
m.rad 0,009
Area1, from 0,0 to 43,1 deg. m.rad 1,589 Area2 (under GZ), from -25,0 to 0,0
deg. m.rad 0,000
Area2 (under HA), from -25,0 to 0,0 deg.
m.rad 0,000
Area2, from -25,0 to 0,0 deg. m.rad 0,000 4.5 Offs-hore supply vessel
4.5.6.2.1: GZ area between 0 and angle of maximum GZ
Pass
from the greater of spec. heel angle 0,0 deg 0,0 to the lesser of angle of first GZ peak 15,5 deg angle of max. GZ 15,5 deg 15,5 angle of vanishing stability 43,2 deg lower heel angle 15,0 deg required GZ area at lower heel angle 0,070 m.rad higher heel angle 30,0 deg required GZ area at higher heel
angle 0,055 m.rad
shall not be less than (>=) 0,070 m.rad 0,566 Pass 4.5 Offs-hore supply vessel
4.5.6.2.2: Area 30 to 40 Pass
from the greater of spec. heel angle 30,0 deg 30,0 to the lesser of spec. heel angle 40,0 deg 40,0
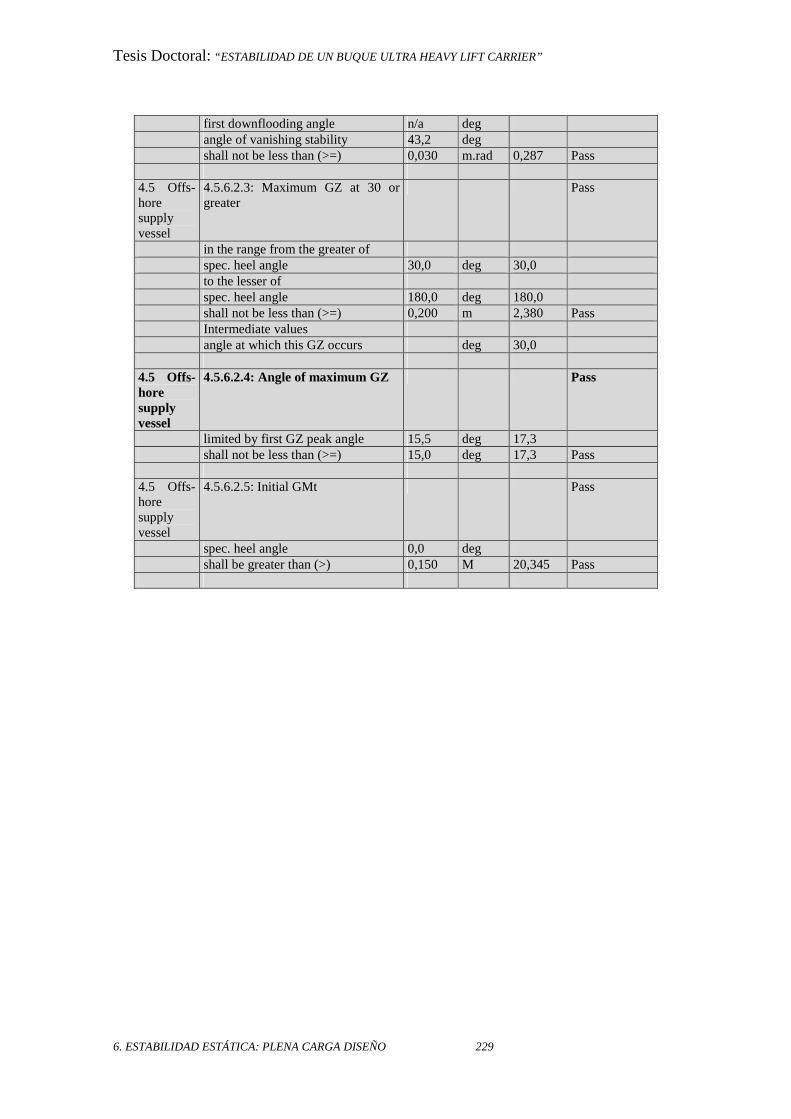
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
6. ESTABILIDAD ESTÁTICA: PLENA CARGA DISEÑO 229
first downflooding angle n/a deg angle of vanishing stability 43,2 deg shall not be less than (>=) 0,030 m.rad 0,287 Pass 4.5 Offs-hore supply vessel
4.5.6.2.3: Maximum GZ at 30 or greater
Pass
in the range from the greater of spec. heel angle 30,0 deg 30,0 to the lesser of spec. heel angle 180,0 deg 180,0 shall not be less than (>=) 0,200 m 2,380 Pass Intermediate values angle at which this GZ occurs deg 30,0 4.5 Offs-hore supply vessel
4.5.6.2.4: Angle of maximum GZ Pass
limited by first GZ peak angle 15,5 deg 17,3 shall not be less than (>=) 15,0 deg 17,3 Pass 4.5 Offs-hore supply vessel
4.5.6.2.5: Initial GMt Pass
spec. heel angle 0,0 deg shall be greater than (>) 0,150 M 20,345 Pass
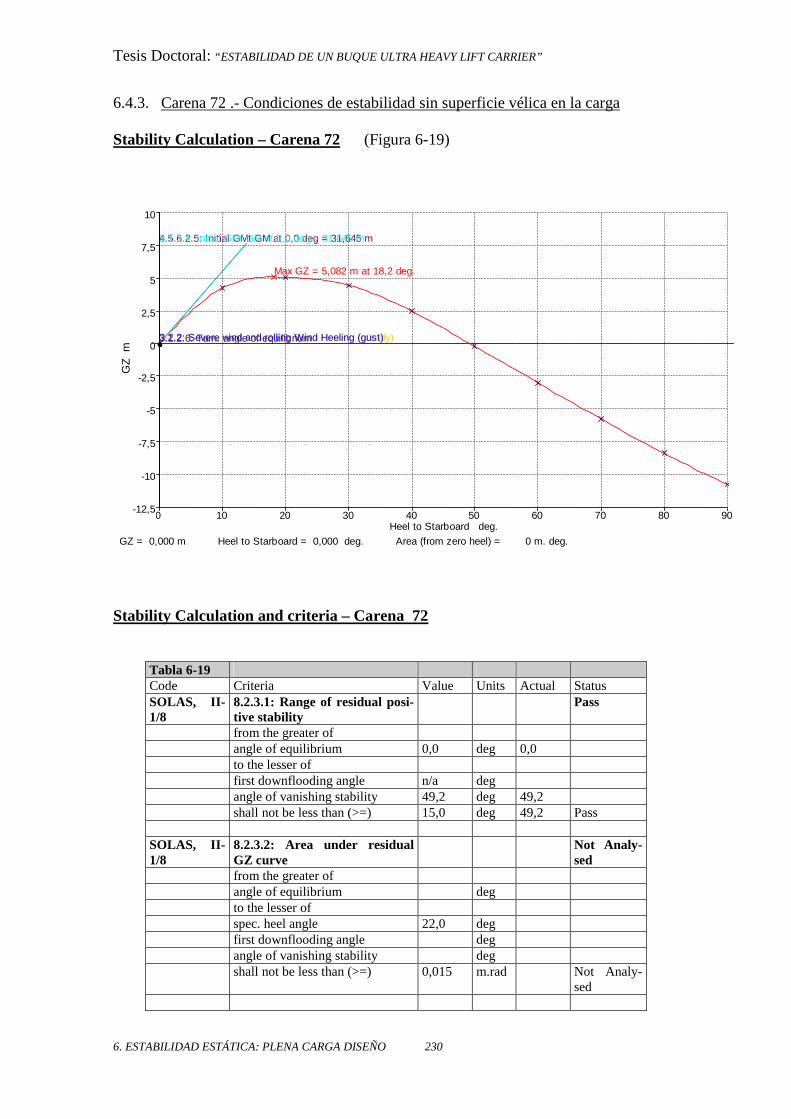
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
6. ESTABILIDAD ESTÁTICA: PLENA CARGA DISEÑO 230
6.4.3. Carena 72 .- Condiciones de estabilidad sin superficie vélica en la carga Stability Calculation – Carena 72 (Figura 6-19)
-12,5
-10
-7,5
-5
-2,5
0
2,5
5
7,5
10
0 10 20 30 40 50 60 70 80 90
Max GZ = 5,082 m at 18,2 deg.
3.1.2.6: Turn: angle of equilibrium3.2.2: Severe wind and rolling Wind Heeling (steady)3.2.2: Severe wind and rolling Wind Heeling (gust)
4.5.6.2.5: Initial GMt GM at 0,0 deg = 31,645 m3.1.2.4: Initial GMt GM at 0,0 deg = 31,645 m
GZ = Heel to Starboard = 0,000 m 0,000 deg. Area (from zero heel) = 0 m. deg.
Heel to Starboard deg.
GZ
m
Stability Calculation and criteria – Carena 72
Tabla 6-19 Code Criteria Value Units Actual Status SOLAS, II-1/8
8.2.3.1: Range of residual posi-tive stability
Pass
from the greater of angle of equilibrium 0,0 deg 0,0 to the lesser of first downflooding angle n/a deg angle of vanishing stability 49,2 deg 49,2 shall not be less than (>=) 15,0 deg 49,2 Pass SOLAS, II-1/8
8.2.3.2: Area under residual GZ curve
Not Analy-sed
from the greater of angle of equilibrium deg to the lesser of spec. heel angle 22,0 deg first downflooding angle deg angle of vanishing stability deg shall not be less than (>=) 0,015 m.rad Not Analy-
sed
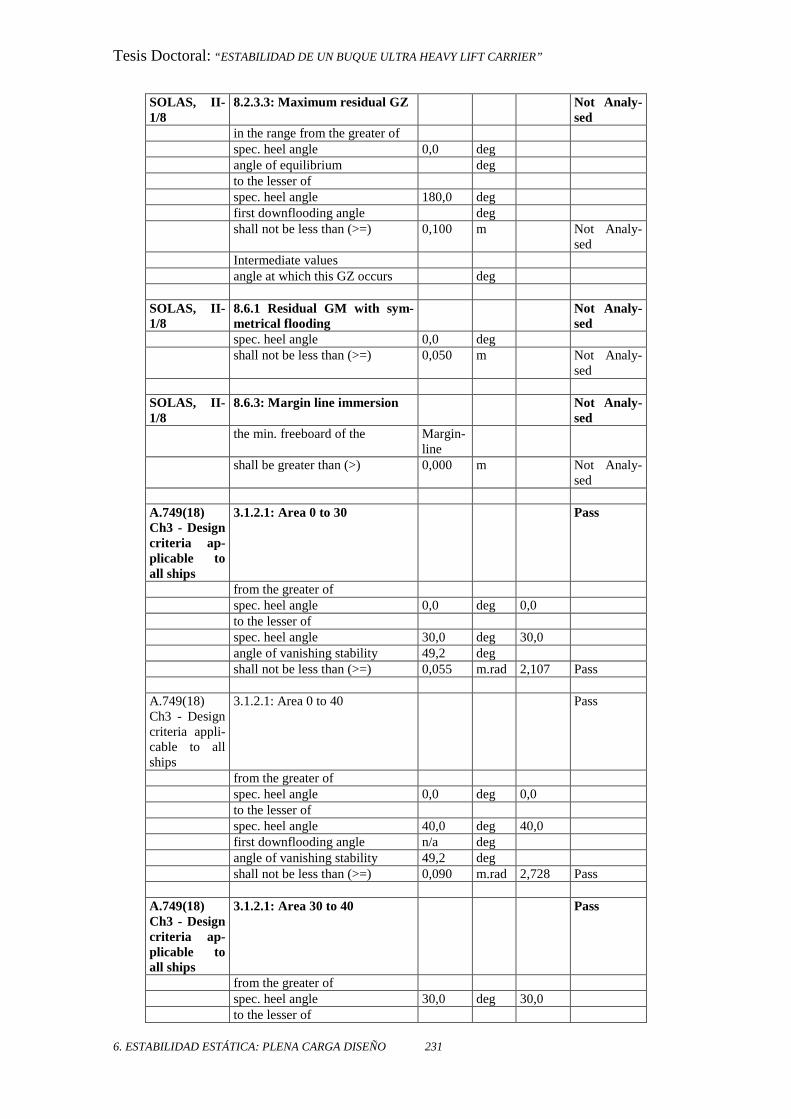
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
6. ESTABILIDAD ESTÁTICA: PLENA CARGA DISEÑO 231
SOLAS, II-1/8
8.2.3.3: Maximum residual GZ Not Analy-sed
in the range from the greater of spec. heel angle 0,0 deg angle of equilibrium deg to the lesser of spec. heel angle 180,0 deg first downflooding angle deg shall not be less than (>=) 0,100 m Not Analy-
sed Intermediate values angle at which this GZ occurs deg SOLAS, II-1/8
8.6.1 Residual GM with sym-metrical flooding
Not Analy-sed
spec. heel angle 0,0 deg shall not be less than (>=) 0,050 m Not Analy-
sed SOLAS, II-1/8
8.6.3: Margin line immersion Not Analy-sed
the min. freeboard of the Margin-line
shall be greater than (>) 0,000 m Not Analy-sed
A.749(18) Ch3 - Design criteria ap-plicable to all ships
3.1.2.1: Area 0 to 30 Pass
from the greater of spec. heel angle 0,0 deg 0,0 to the lesser of spec. heel angle 30,0 deg 30,0 angle of vanishing stability 49,2 deg shall not be less than (>=) 0,055 m.rad 2,107 Pass A.749(18) Ch3 - Design criteria appli-cable to all ships
3.1.2.1: Area 0 to 40 Pass
from the greater of spec. heel angle 0,0 deg 0,0 to the lesser of spec. heel angle 40,0 deg 40,0 first downflooding angle n/a deg angle of vanishing stability 49,2 deg shall not be less than (>=) 0,090 m.rad 2,728 Pass A.749(18) Ch3 - Design criteria ap-plicable to all ships
3.1.2.1: Area 30 to 40 Pass
from the greater of spec. heel angle 30,0 deg 30,0 to the lesser of
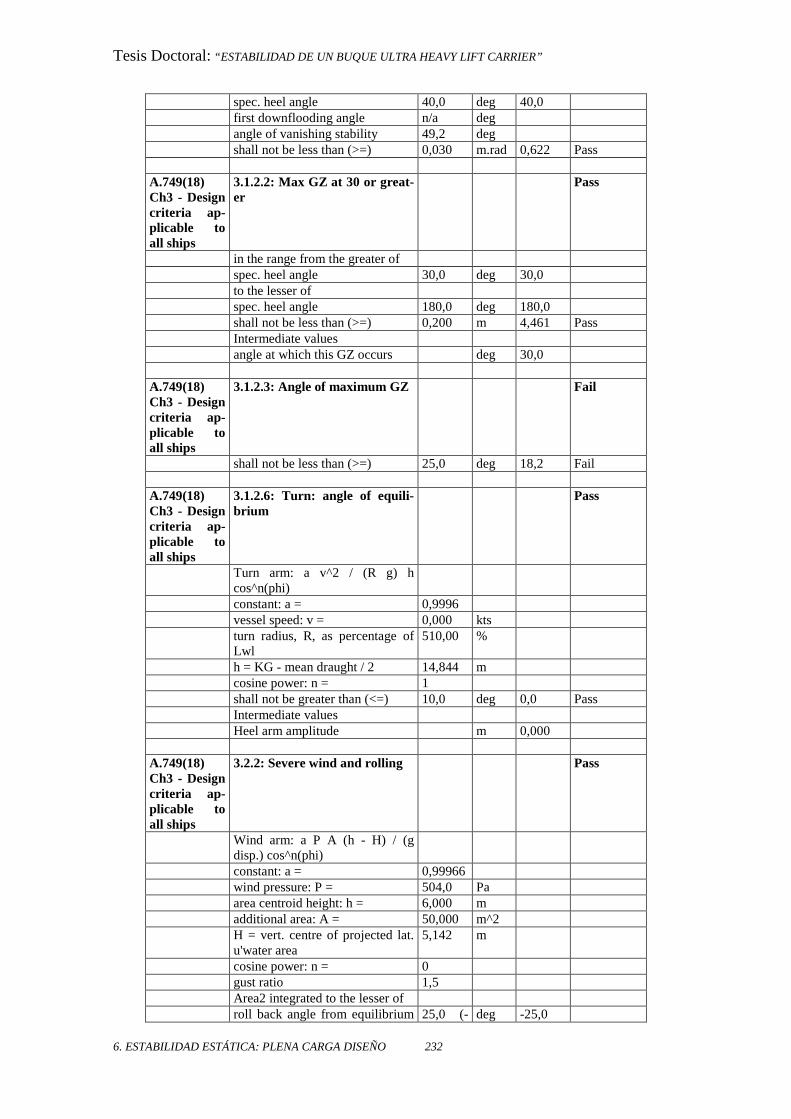
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
6. ESTABILIDAD ESTÁTICA: PLENA CARGA DISEÑO 232
spec. heel angle 40,0 deg 40,0 first downflooding angle n/a deg angle of vanishing stability 49,2 deg shall not be less than (>=) 0,030 m.rad 0,622 Pass A.749(18) Ch3 - Design criteria ap-plicable to all ships
3.1.2.2: Max GZ at 30 or great-er
Pass
in the range from the greater of spec. heel angle 30,0 deg 30,0 to the lesser of spec. heel angle 180,0 deg 180,0 shall not be less than (>=) 0,200 m 4,461 Pass Intermediate values angle at which this GZ occurs deg 30,0 A.749(18) Ch3 - Design criteria ap-plicable to all ships
3.1.2.3: Angle of maximum GZ Fail
shall not be less than (>=) 25,0 deg 18,2 Fail A.749(18) Ch3 - Design criteria ap-plicable to all ships
3.1.2.6: Turn: angle of equili-brium
Pass
Turn arm: a v^2 / (R g) h cos^n(phi)
constant: a = 0,9996 vessel speed: v = 0,000 kts turn radius, R, as percentage of
Lwl 510,00 %
h = KG - mean draught / 2 14,844 m cosine power: n = 1 shall not be greater than (<=) 10,0 deg 0,0 Pass Intermediate values Heel arm amplitude m 0,000 A.749(18) Ch3 - Design criteria ap-plicable to all ships
3.2.2: Severe wind and rolling Pass
Wind arm: a P A (h - H) / (g disp.) cos^n(phi)
constant: a = 0,99966 wind pressure: P = 504,0 Pa area centroid height: h = 6,000 m additional area: A = 50,000 m^2 H = vert. centre of projected lat.
u'water area 5,142 m
cosine power: n = 0 gust ratio 1,5 Area2 integrated to the lesser of roll back angle from equilibrium 25,0 (- deg -25,0
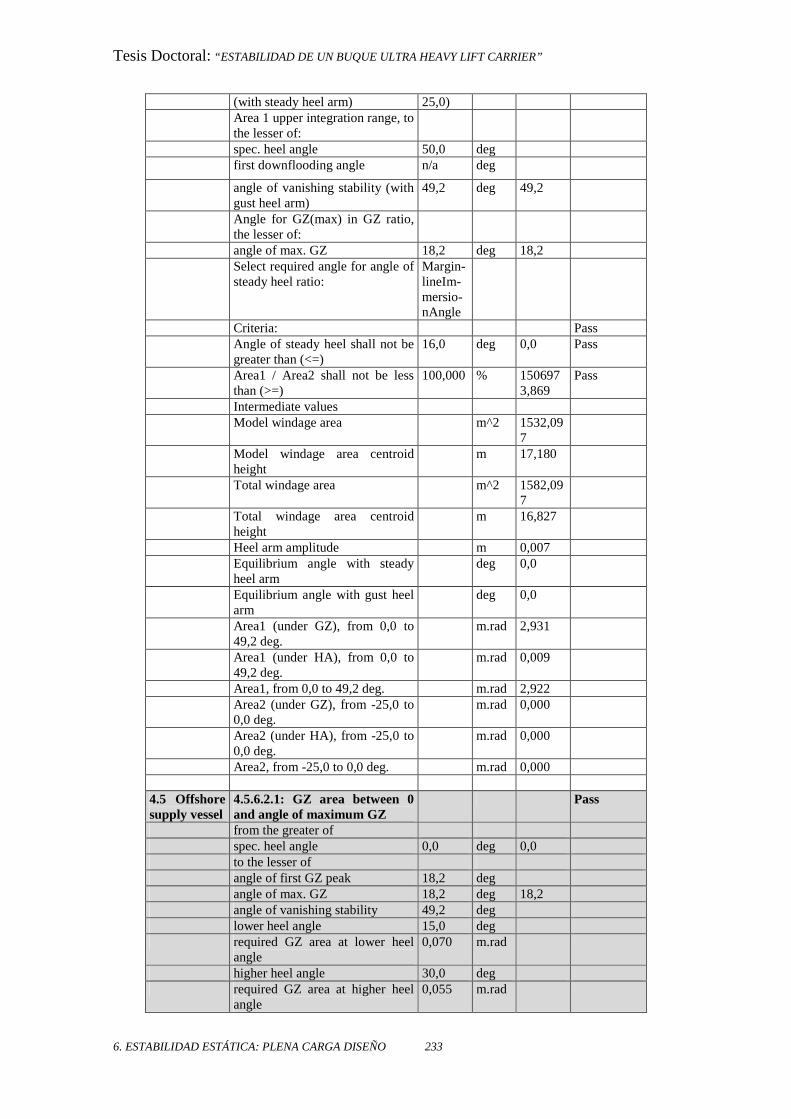
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
6. ESTABILIDAD ESTÁTICA: PLENA CARGA DISEÑO 233
(with steady heel arm) 25,0) Area 1 upper integration range, to
the lesser of:
spec. heel angle 50,0 deg first downflooding angle n/a deg
angle of vanishing stability (with gust heel arm)
49,2 deg 49,2
Angle for GZ(max) in GZ ratio, the lesser of:
angle of max. GZ 18,2 deg 18,2 Select required angle for angle of
steady heel ratio: Margin-lineIm-mersio-nAngle
Criteria: Pass Angle of steady heel shall not be
greater than (<=) 16,0 deg 0,0 Pass
Area1 / Area2 shall not be less than (>=)
100,000 % 1506973,869
Pass
Intermediate values Model windage area m^2 1532,09
7
Model windage area centroid height
m 17,180
Total windage area m^2 1582,097
Total windage area centroid height
m 16,827
Heel arm amplitude m 0,007 Equilibrium angle with steady
heel arm deg 0,0
Equilibrium angle with gust heel arm
deg 0,0
Area1 (under GZ), from 0,0 to 49,2 deg.
m.rad 2,931
Area1 (under HA), from 0,0 to 49,2 deg.
m.rad 0,009
Area1, from 0,0 to 49,2 deg. m.rad 2,922 Area2 (under GZ), from -25,0 to
0,0 deg. m.rad 0,000
Area2 (under HA), from -25,0 to 0,0 deg.
m.rad 0,000
Area2, from -25,0 to 0,0 deg. m.rad 0,000 4.5 Offshore supply vessel
4.5.6.2.1: GZ area between 0 and angle of maximum GZ
Pass
from the greater of spec. heel angle 0,0 deg 0,0 to the lesser of angle of first GZ peak 18,2 deg angle of max. GZ 18,2 deg 18,2 angle of vanishing stability 49,2 deg lower heel angle 15,0 deg required GZ area at lower heel
angle 0,070 m.rad
higher heel angle 30,0 deg required GZ area at higher heel
angle 0,055 m.rad
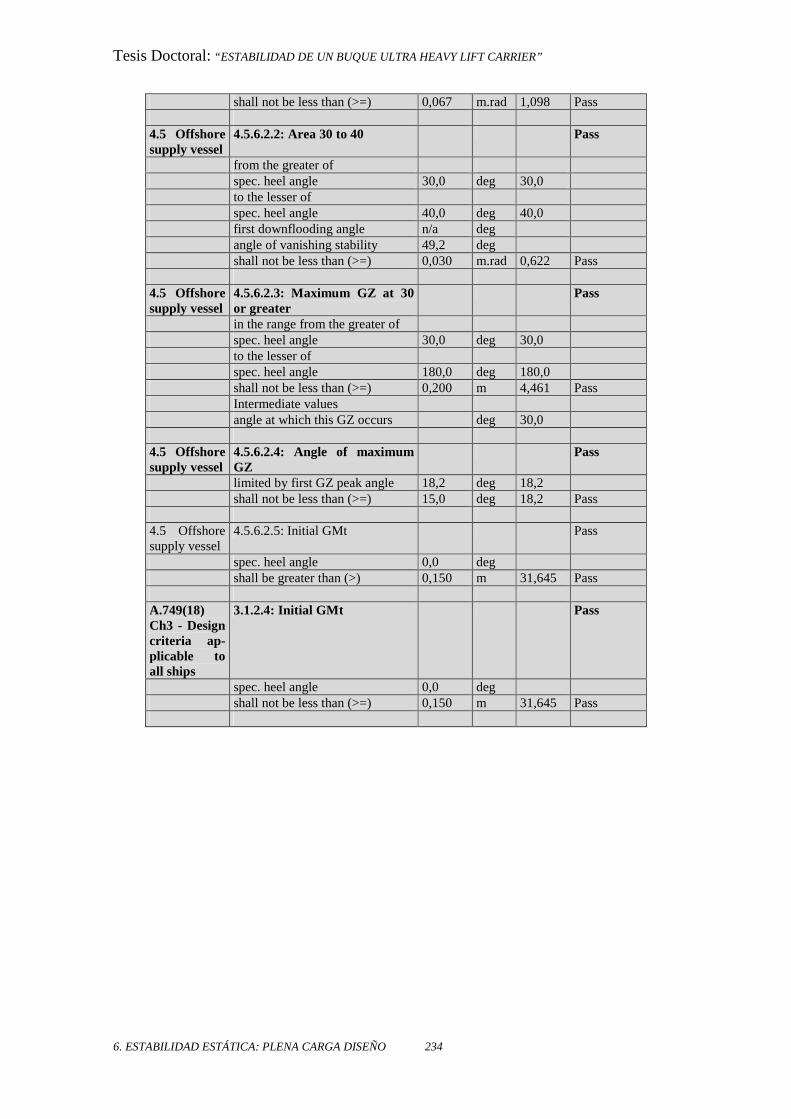
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
6. ESTABILIDAD ESTÁTICA: PLENA CARGA DISEÑO 234
shall not be less than (>=) 0,067 m.rad 1,098 Pass 4.5 Offshore supply vessel
4.5.6.2.2: Area 30 to 40 Pass
from the greater of spec. heel angle 30,0 deg 30,0 to the lesser of spec. heel angle 40,0 deg 40,0 first downflooding angle n/a deg angle of vanishing stability 49,2 deg shall not be less than (>=) 0,030 m.rad 0,622 Pass 4.5 Offshore supply vessel
4.5.6.2.3: Maximum GZ at 30 or greater
Pass
in the range from the greater of spec. heel angle 30,0 deg 30,0 to the lesser of spec. heel angle 180,0 deg 180,0 shall not be less than (>=) 0,200 m 4,461 Pass Intermediate values angle at which this GZ occurs deg 30,0 4.5 Offshore supply vessel
4.5.6.2.4: Angle of maximum GZ
Pass
limited by first GZ peak angle 18,2 deg 18,2 shall not be less than (>=) 15,0 deg 18,2 Pass 4.5 Offshore supply vessel
4.5.6.2.5: Initial GMt Pass
spec. heel angle 0,0 deg shall be greater than (>) 0,150 m 31,645 Pass A.749(18) Ch3 - Design criteria ap-plicable to all ships
3.1.2.4: Initial GMt Pass
spec. heel angle 0,0 deg shall not be less than (>=) 0,150 m 31,645 Pass
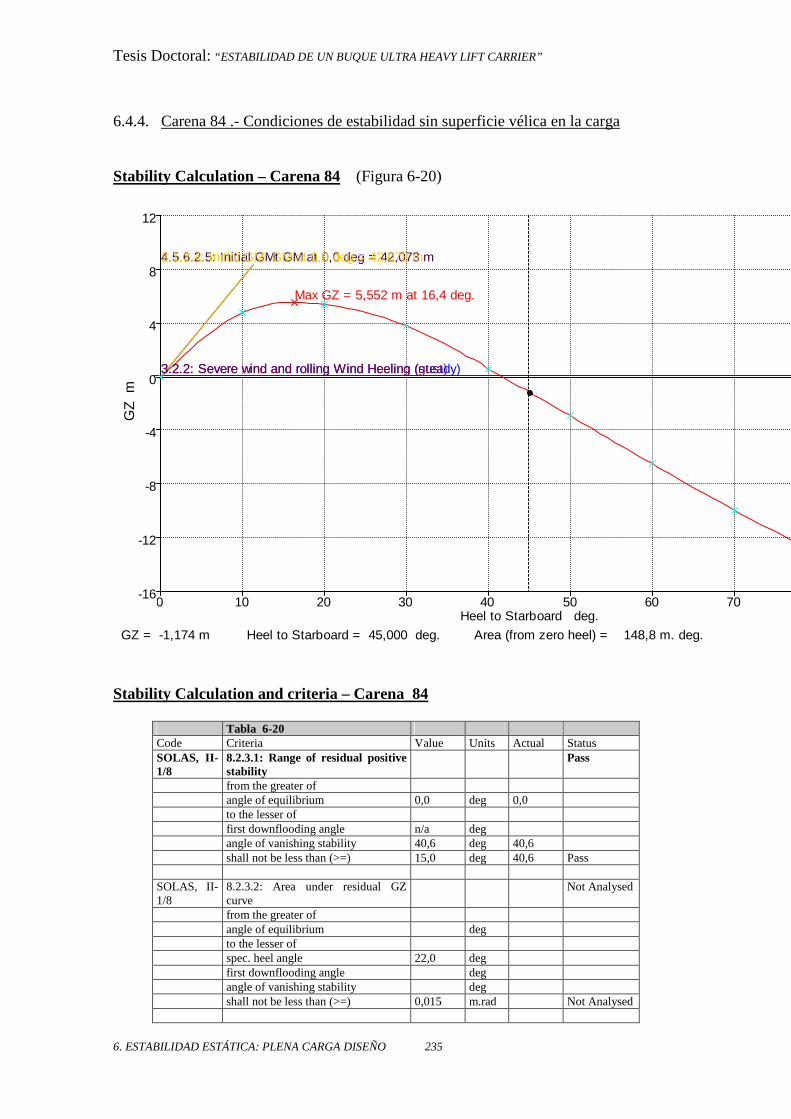
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
6. ESTABILIDAD ESTÁTICA: PLENA CARGA DISEÑO 235
6.4.4. Carena 84 .- Condiciones de estabilidad sin superficie vélica en la carga Stability Calculation – Carena 84 (Figura 6-20)
-16
-12
-8
-4
0
4
8
12
0 10 20 30 40 50 60 70
Max GZ = 5,552 m at 16,4 deg.
4.5.6.2.5: Initial GMt GM at 0,0 deg = 42,073 m3.1.2.4: Initial GMt GM at 0,0 deg = 42,073 m
3.2.2: Severe wind and rolling Wind Heeling (steady)3.2.2: Severe wind and rolling Wind Heeling (gust)
GZ = Heel to Starboard = -1,174 m 45,000 deg. Area (from zero heel) = 148,8 m. deg.
Heel to Starboard deg.
GZ
m
Stability Calculation and criteria – Carena 84
Tabla 6-20 Code Criteria Value Units Actual Status SOLAS, II-1/8
8.2.3.1: Range of residual positive stability
Pass
from the greater of angle of equilibrium 0,0 deg 0,0 to the lesser of first downflooding angle n/a deg angle of vanishing stability 40,6 deg 40,6 shall not be less than (>=) 15,0 deg 40,6 Pass SOLAS, II-1/8
8.2.3.2: Area under residual GZ curve
Not Analysed
from the greater of angle of equilibrium deg to the lesser of spec. heel angle 22,0 deg first downflooding angle deg angle of vanishing stability deg shall not be less than (>=) 0,015 m.rad Not Analysed
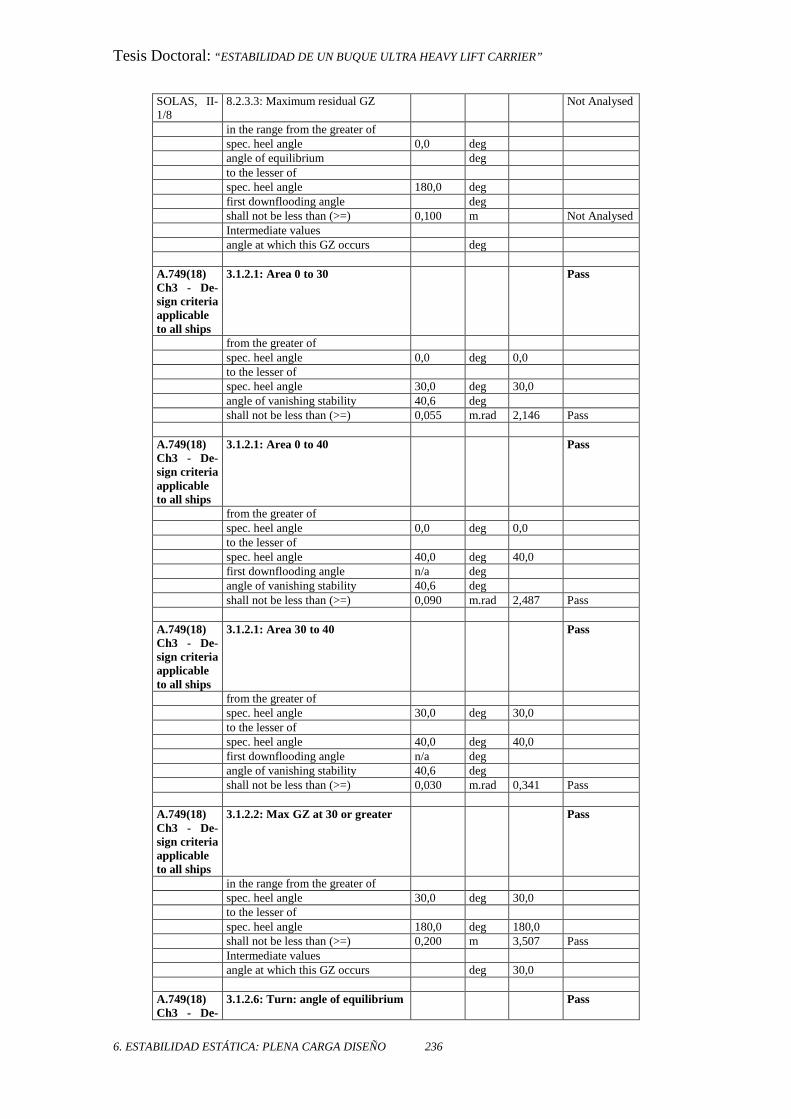
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
6. ESTABILIDAD ESTÁTICA: PLENA CARGA DISEÑO 236
SOLAS, II-1/8
8.2.3.3: Maximum residual GZ Not Analysed
in the range from the greater of spec. heel angle 0,0 deg angle of equilibrium deg to the lesser of spec. heel angle 180,0 deg first downflooding angle deg shall not be less than (>=) 0,100 m Not Analysed Intermediate values angle at which this GZ occurs deg A.749(18) Ch3 - De-sign criteria applicable to all ships
3.1.2.1: Area 0 to 30 Pass
from the greater of spec. heel angle 0,0 deg 0,0 to the lesser of spec. heel angle 30,0 deg 30,0 angle of vanishing stability 40,6 deg shall not be less than (>=) 0,055 m.rad 2,146 Pass A.749(18) Ch3 - De-sign criteria applicable to all ships
3.1.2.1: Area 0 to 40 Pass
from the greater of spec. heel angle 0,0 deg 0,0 to the lesser of spec. heel angle 40,0 deg 40,0 first downflooding angle n/a deg angle of vanishing stability 40,6 deg shall not be less than (>=) 0,090 m.rad 2,487 Pass A.749(18) Ch3 - De-sign criteria applicable to all ships
3.1.2.1: Area 30 to 40 Pass
from the greater of spec. heel angle 30,0 deg 30,0 to the lesser of spec. heel angle 40,0 deg 40,0 first downflooding angle n/a deg angle of vanishing stability 40,6 deg shall not be less than (>=) 0,030 m.rad 0,341 Pass A.749(18) Ch3 - De-sign criteria applicable to all ships
3.1.2.2: Max GZ at 30 or greater Pass
in the range from the greater of spec. heel angle 30,0 deg 30,0 to the lesser of spec. heel angle 180,0 deg 180,0 shall not be less than (>=) 0,200 m 3,507 Pass Intermediate values angle at which this GZ occurs deg 30,0 A.749(18) Ch3 - De-
3.1.2.6: Turn: angle of equilibrium Pass
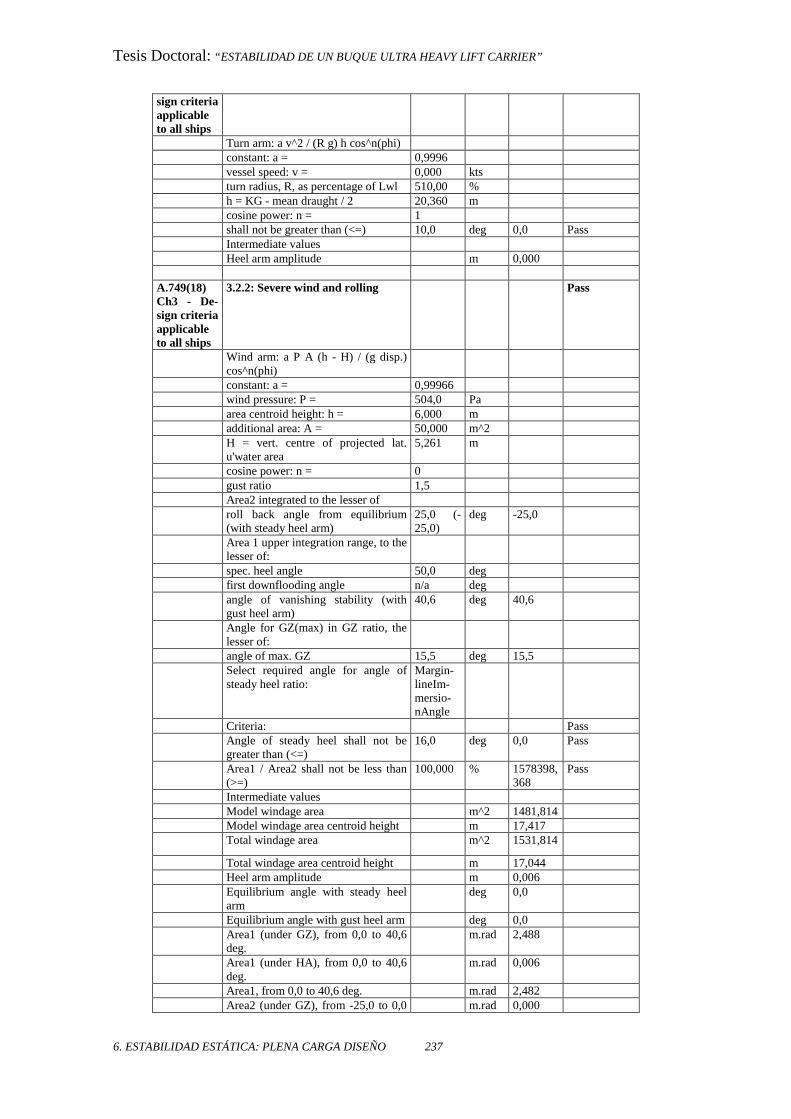
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
6. ESTABILIDAD ESTÁTICA: PLENA CARGA DISEÑO 237
sign criteria applicable to all ships Turn arm: a v^2 / (R g) h cos^n(phi) constant: a = 0,9996 vessel speed: v = 0,000 kts turn radius, R, as percentage of Lwl 510,00 % h = KG - mean draught / 2 20,360 m cosine power: n = 1 shall not be greater than (<=) 10,0 deg 0,0 Pass Intermediate values Heel arm amplitude m 0,000 A.749(18) Ch3 - De-sign criteria applicable to all ships
3.2.2: Severe wind and rolling Pass
Wind arm: a P A (h - H) / (g disp.) cos^n(phi)
constant: a = 0,99966 wind pressure: P = 504,0 Pa area centroid height: h = 6,000 m additional area: A = 50,000 m^2 H = vert. centre of projected lat.
u'water area 5,261 m
cosine power: n = 0 gust ratio 1,5 Area2 integrated to the lesser of roll back angle from equilibrium
(with steady heel arm) 25,0 (-25,0)
deg -25,0
Area 1 upper integration range, to the lesser of:
spec. heel angle 50,0 deg first downflooding angle n/a deg angle of vanishing stability (with
gust heel arm) 40,6 deg 40,6
Angle for GZ(max) in GZ ratio, the lesser of:
angle of max. GZ 15,5 deg 15,5 Select required angle for angle of
steady heel ratio: Margin-lineIm-mersio-nAngle
Criteria: Pass Angle of steady heel shall not be
greater than (<=) 16,0 deg 0,0 Pass
Area1 / Area2 shall not be less than (>=)
100,000 % 1578398,368
Pass
Intermediate values Model windage area m^2 1481,814 Model windage area centroid height m 17,417 Total windage area m^2 1531,814
Total windage area centroid height m 17,044 Heel arm amplitude m 0,006 Equilibrium angle with steady heel
arm deg 0,0
Equilibrium angle with gust heel arm deg 0,0 Area1 (under GZ), from 0,0 to 40,6
deg. m.rad 2,488
Area1 (under HA), from 0,0 to 40,6 deg.
m.rad 0,006
Area1, from 0,0 to 40,6 deg. m.rad 2,482 Area2 (under GZ), from -25,0 to 0,0 m.rad 0,000
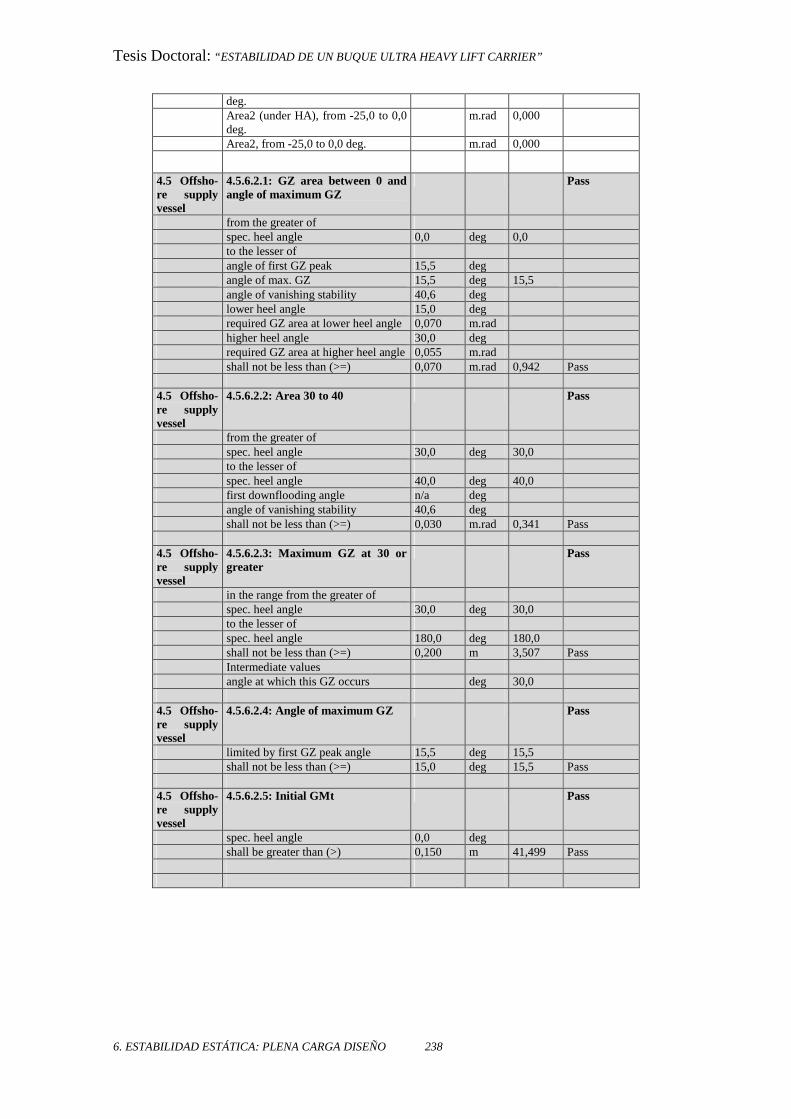
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
6. ESTABILIDAD ESTÁTICA: PLENA CARGA DISEÑO 238
deg. Area2 (under HA), from -25,0 to 0,0
deg. m.rad 0,000
Area2, from -25,0 to 0,0 deg. m.rad 0,000
4.5 Offsho-re supply vessel
4.5.6.2.1: GZ area between 0 and angle of maximum GZ
Pass
from the greater of spec. heel angle 0,0 deg 0,0 to the lesser of angle of first GZ peak 15,5 deg angle of max. GZ 15,5 deg 15,5 angle of vanishing stability 40,6 deg lower heel angle 15,0 deg required GZ area at lower heel angle 0,070 m.rad higher heel angle 30,0 deg required GZ area at higher heel angle 0,055 m.rad shall not be less than (>=) 0,070 m.rad 0,942 Pass 4.5 Offsho-re supply vessel
4.5.6.2.2: Area 30 to 40 Pass
from the greater of spec. heel angle 30,0 deg 30,0 to the lesser of spec. heel angle 40,0 deg 40,0 first downflooding angle n/a deg angle of vanishing stability 40,6 deg shall not be less than (>=) 0,030 m.rad 0,341 Pass 4.5 Offsho-re supply vessel
4.5.6.2.3: Maximum GZ at 30 or greater
Pass
in the range from the greater of spec. heel angle 30,0 deg 30,0 to the lesser of spec. heel angle 180,0 deg 180,0 shall not be less than (>=) 0,200 m 3,507 Pass Intermediate values angle at which this GZ occurs deg 30,0 4.5 Offsho-re supply vessel
4.5.6.2.4: Angle of maximum GZ Pass
limited by first GZ peak angle 15,5 deg 15,5 shall not be less than (>=) 15,0 deg 15,5 Pass 4.5 Offsho-re supply vessel
4.5.6.2.5: Initial GMt Pass
spec. heel angle 0,0 deg shall be greater than (>) 0,150 m 41,499 Pass
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
6. ESTABILIDAD ESTÁTICA: PLENA CARGA DISEÑO 239
6.5. ESTABILIDAD DURANTE LA EMERSIÓN E INMERSIÓN.
6.5.1. Criterios de estabilidad para calados mayores de 13,36 m
Es necesario que el buque HLC no solamente navegue en condiciones de
estabilidad adecuadas al calado reglamentario de máxima carga sino que sea ca-
paz de recoger y liberarse de la carga, por lo que habrá que tener presente que las
condiciones de inmersión y emersión podrían limitar la capacidad final de trans-
porte en el caso de no cumplir con los criterios de estabilidad preceptivos en es-
tas dos maniobras.
Se pueden dividir estas dos maniobras en dos fases diferenciadas:
a) Fase durante la cual el buque se sumerge en lastre por debajo de la quilla del
artefacto para proceder a su carga sobre la cubierta intemperie y emerger poste-
riormente con el mismo hasta la flotación de verano (Proceso de carga)
b) Fase durante la cual el buque se sumerge a plena carga con el artefacto sobre
la cubierta intemperie hasta un calado en el que este artefacto flote establemente
y se independice entonces de la carga. (Proceso de descarga)
Los valores operativos de inmersión serán función del flotador transpor-
tado (< ó = a 10 metros de calado), y por lo tanto deberán estar como máximo en
torno a los 23 m de calado del buque, lo que supone que la cubierta de cierre o
de francobordo estará como máximo aproximadamente a 10 m por debajo de la
superficie del agua.
Los valores de las cargas a estudiar serán aquellos con los que se han
llevado a cabo las condiciones de estabilidad para las cuatro carenas aquí ex-
puestas. En estos cálculos no se ha tenido en cuenta considerar la carga como
una superestructura estanca, tanto en la maniobra de tomar la carga como en la
de soltarla, la carga deberá estar únicamente soportada por la fuerza de roza-
miento. Las curvas hidrostáticas para cada carena y para un calado máximo de
23 m. aproximadamente darán el desplazamiento y el KBt correspondiente lo
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
6. ESTABILIDAD ESTÁTICA: PLENA CARGA DISEÑO 240
que permitirá configurar condiciones de carga coherentes con estos valores, ob-
teniendo así un KG adecuado para la estabilidad del buque.
La primera cuestión que plantean los procesos de carga / descarga son los
criterios de estabilidad a tener en cuenta ya que parece razonable no aplicar los
criterios IMO que están pensados para un buque en normales condiciones de na-
vegación y no para ser aplicadas durante los espacios de tiempo que se emplean
en estas maniobras y donde siempre es posible elegir tanto las condiciones me-
teorológicas como el lugar de la mar más conveniente y contar con el apoyo de
los remolcadores que se consideren necesarios. Sin embargo, a título de conoci-
miento, veremos cuáles son los resultados aplicando la reglamentación siguiente:
1. Aplicar las condiciones generales de IMO (A.749 (18) Ch3,1 – “Design
criteria applicable to all ships”) de estabilidad durante los procesos de
carga y descarga para un buque cualquiera con la consiguiente penaliza-
ción de la carga a trasportar. Aplicar las condiciones IMO (A749 Ch 4.5
“Offshore supply vessel”) durante la maniobra de carga y descarga.
2. Criterios de la Sociedad de Clasificación consultada.
Adjuntamos la respuesta de la Sociedad de Clasificación acerca de un cri-
terio de estabilidad en las maniobras enunciadas, en cuanto los criterios IMO no
parecen estar definidos claramente para su aplicación en las dos maniobras
enunciadas:
1º texto
QUOTE
“Intact stability during loading /off loading:
The stability during the loading (lifting) and off-loading sequence should
be investigated in details (reasonable small steps/intervals) to ensure ad-
equate stability. Correct free surface effect must be applied all the times.
We recommend a minimum GM of 0,3 to be complied with (we do not
have any specific requirements for this in (..) Rules, but a GM of 0,3 is
used for temporary conditions for mobile offshore units, and this opera-
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
6. ESTABILIDAD ESTÁTICA: PLENA CARGA DISEÑO 241
tion have some element in common with that). In addition the range and
height of GZ-curves should not be worse than those presented form the
submerged condition.
UNQUOTE
2º texto:
QUOTE:
“ From (…), Stability, Load Line & Tonnage
Please Reply to: (…)
Subject: (…) HEAVY LIFT SUBMERSIBLE DECK CARGO CARRIER –
STABILITY CRITERIA, INTACT AND DAMAGED
Reference is made to your email dated (…) with attached enquiry from
(…) of de same data.
Damage stability: If an actual B-60 or B-100 freeboard is assigned and
the ship has to meet ICLL, Reg 27, it will not be required to meet SOLAS
Ch II-1, Part B-1.
Intact stability: The alternative criteria of Ch 4.5 in the IMO Intact sta-
bility code (Res. A.749). However these criteria are generally considered
to be equivalent to those of 3.1, see also DNV rules Pt.3 Ch 3, Sec. 9
D101 and D102. The application should however for the sake or order be
clarified with the flag authority.
Temporary conditions: We agree that the most onerous condition nor-
mally would be the condition when the main hull is just submerged. We
would not recommend a GM in this condition less than 0,30 m, in order
to have an adequate safety margin. In addition it should be investigated
that the range and height of the GZ curve in this condition is satisfacto-
ry.”
UNQUOTE
Estos criterios han sido recogidos en las Reglas de la Sociedad de Clasifica-
ción hace poco tiempo. (Véase, DNV Rules for ships, Ref. 13, pág. 100)
En este sentido la Sociedad de Clasificación opina, en la correspondencia
expuesta, que aun siendo en condiciones especiales, es necesario adoptar un
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
6. ESTABILIDAD ESTÁTICA: PLENA CARGA DISEÑO 242
GM0 no inferior a 0,30 m considerando esto como un adecuado margen de segu-
ridad. Añade que se deberán investigar si los rangos y alturas de la curva GZ son
satisfactorios en estas condiciones, es decir, para un GM0 de 0,30 m.
Consideramos que si la IMO establece unos criterios de estabilidad gene-
rales mínimos para todos los buques en condiciones normales de navegación, las
condiciones temporales de carga y descarga están fuera de estos criterios.
La condición de GM0 igual o no inferior a 0,30 m no es particularmente
restrictiva, como veremos a continuación.
IMO Stability criteria IMO A.749 (18) Ch 3, 1 – “Design criteria applicable to
all ships” (Véase Bibliografía, Ref. 14)
3.1.2.1: Area 0 to 30 ………………………… 0,055 m.rad
3.1.2.1: Area 0 to 40 or Down Flooding points …… 0,09 m.rad
3.1.2.1: Area 30 to 40 or Down Flooding points ….. 0,03 m.rad
3.1.2.2: Max GZ at 30 or greater…………………… 0,2 m
3.1.2.4: Initial GMt ………………………………... 0,150 m
3.1.2.3: Angle of maximum GZ ………………….... 25º
IMO Stability criteria 4.5 “Offshore supply vessel” (Bibliografía, Ref. 14)
4.5.6.2.1: GZ area between 0 and angle of maximum GZ …0,070 m
4.5.6.2.3: Maximum GZ at 30 or greater ……………….. 0,200 m
4.5.6.2.4: Angle of maximum GZ ……………………... 15º
4.5.6.2.5: Initial GMt …………………………………… 0,150 m
Classification Society Stability Criteria:
Ch 4.5 in the IMO Intact stability code Res. A.749 “Offshore supply ves-
sel” (Véase Bibliografía, Ref. 14)
Initial GMt ……………………………………….. 0,300m
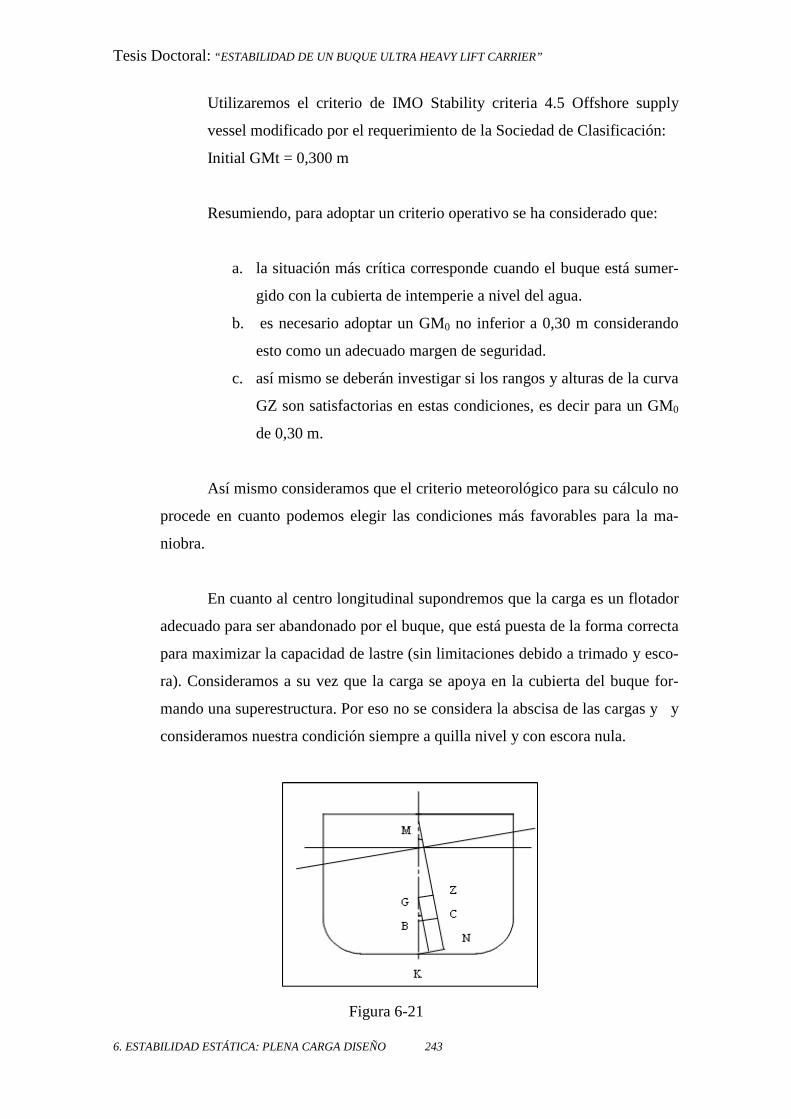
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
6. ESTABILIDAD ESTÁTICA: PLENA CARGA DISEÑO 243
Utilizaremos el criterio de IMO Stability criteria 4.5 Offshore supply
vessel modificado por el requerimiento de la Sociedad de Clasificación:
Initial GMt = 0,300 m
Resumiendo, para adoptar un criterio operativo se ha considerado que:
a. la situación más crítica corresponde cuando el buque está sumer-
gido con la cubierta de intemperie a nivel del agua.
b. es necesario adoptar un GM0 no inferior a 0,30 m considerando
esto como un adecuado margen de seguridad.
c. así mismo se deberán investigar si los rangos y alturas de la curva
GZ son satisfactorias en estas condiciones, es decir para un GM0
de 0,30 m.
Así mismo consideramos que el criterio meteorológico para su cálculo no
procede en cuanto podemos elegir las condiciones más favorables para la ma-
niobra.
En cuanto al centro longitudinal supondremos que la carga es un flotador
adecuado para ser abandonado por el buque, que está puesta de la forma correcta
para maximizar la capacidad de lastre (sin limitaciones debido a trimado y esco-
ra). Consideramos a su vez que la carga se apoya en la cubierta del buque for-
mando una superestructura. Por eso no se considera la abscisa de las cargas y y
consideramos nuestra condición siempre a quilla nivel y con escora nula.
Figura 6-21
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
6. ESTABILIDAD ESTÁTICA: PLENA CARGA DISEÑO 244
Con el mismo razonamiento anterior visto en el estudio de la estabilidad
de diseño obtenemos una relación de la forma WC = f (ZC, KG). Sin embargo, el
criterio que se aplica es el GM> 0,3 m, de esta manera lo que obtendremos será:
KGmax = KB +BM -0,3 m; (6-21)
donde KB es fijo (hydrost,) y BM se puede descomponer en BMbuque debido a la
carena de nuestro buque, torres de flotación y castillo de proa, y BMcarga debido
a la carga sobre cubierta (vinculada al buque), que es la inercia de la huella que
deja la carga sobre la cubierta entre el volumen que desplaza nuestro buque, esto
es:
KGmax. > KB (hydrost) +BM (hydrost) + Icarga(carga) /V(carga) – 0,3 ; (6-22)
Al considerar esto, estamos suponiendo que la carga no descansa sobre
picaderos sino que se apoya directamente sobre la cubierta y que se comporta
como si estuviera siempre unida al buque incluso en la secuencia de carga. De
esta forma tendremos una familia de curvas del tipo WC=f(ZC), una curva para
cada inercia que se considere en exceso debido a la carga o a tanques de empuje
que se podrían usar a tal efecto.
BM = BMBUQUE HIDRO. + BM CARGA; (6-23)
El área de flotación disminuye en este punto de la flotación de la cubierta
de intemperie a solamente la del castillo de proa, los casings de popa y el área de
flotación de la carga, si es una superestructura cerrada y unida al buque.
Para determinar aportación de la carga a la estabilidad del buque, considerando
Ix carga como parámetro a valorar, se puede establecer los valores del KG para
cada calado, y obtener una ecuación lineal.
X CARGA max x arg argI KG * *c a x c aV k V= − (Ecuación lineal) (6-25)
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
6. ESTABILIDAD ESTÁTICA: PLENA CARGA DISEÑO 245
6.5.2. Criterios de estabilidad para calado crítico aproximadamente de 13,41 m.
Durante la navegación la carga se encuentra sólidamente trincada al buque. Sin
embargo, durante la maniobra de inmersión para el abandono de la carga ésta ha sido
liberada de los cartabones de sujeción y se han posicionado lateralmente unos topes en
L para evitar movimientos laterales con pequeñas escoras.
En este último caso, el buque comienza la inmersión con la carga en cubierta y
para el calado de 13,41 m el buque soporta la totalidad del peso de la carga, y las áreas
de flotación serán las del buque (área de flotación del castillo de proa y los tanques de
flotación de popa). Ésta es la situación más crítica. A partir de este calado la carga co-
menzará a sumergirse hasta el momento que la carga comience a flotar por sus propios
medios. Durante este último proceso el peso de la carga vendrá “aliviado” por el empuje
de la parte de la carga sumergida.
Consideramos que la carga se encuentra simplemente apoyada sobre la cubierta
de intemperie y el área sumergida de la misma es de pocos centímetros (no viene alivia-
da por el empuje de flotación). En la medida que la escora del buque sea inferior al án-
gulo del coeficiente estático de rozamiento, la carga no deslizará. En caso contrario des-
lizaría y podría provocar la escora y el hundimiento del buque.
Partiremos de la relación ya vista anteriormente (6-22) pág. 244 y la aplicaremos
al calado crítico 13,41 m, aunque dicho cálculo se puede generalizar para cualquier otro
calado:
KGlim. = KB (hydrost) +BM (hydrost) + Icarga(carga) /V(carga) – 0,3 ; (6-26)
siendo BM el radio metacéntrico transversal de carena, GM altura metacéntrica trans-
versal de carena, será según Classification Society Stability Criteria igual a 0,300 m.
Si el área de flotación de la carga es nula, Icarga será cero, por lo tanto BMcarga = 0
KGmax. < KB (hydrost) +BM (hydrost) – 0,3 ; (6-27)
siendo:
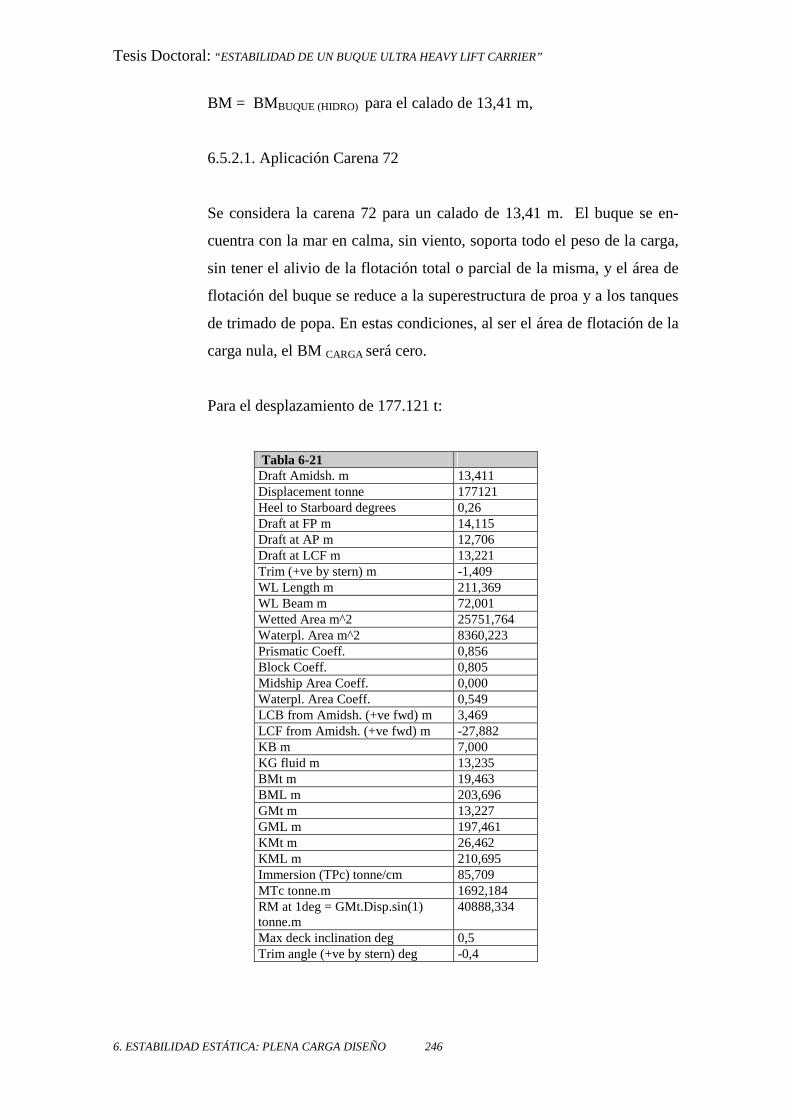
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
6. ESTABILIDAD ESTÁTICA: PLENA CARGA DISEÑO 246
BM = BMBUQUE (HIDRO) para el calado de 13,41 m,
6.5.2.1. Aplicación Carena 72
Se considera la carena 72 para un calado de 13,41 m. El buque se en-
cuentra con la mar en calma, sin viento, soporta todo el peso de la carga,
sin tener el alivio de la flotación total o parcial de la misma, y el área de
flotación del buque se reduce a la superestructura de proa y a los tanques
de trimado de popa. En estas condiciones, al ser el área de flotación de la
carga nula, el BM CARGA será cero.
Para el desplazamiento de 177.121 t:
Tabla 6-21 Draft Amidsh. m 13,411 Displacement tonne 177121 Heel to Starboard degrees 0,26 Draft at FP m 14,115 Draft at AP m 12,706 Draft at LCF m 13,221 Trim (+ve by stern) m -1,409 WL Length m 211,369 WL Beam m 72,001 Wetted Area m^2 25751,764 Waterpl. Area m^2 8360,223 Prismatic Coeff. 0,856 Block Coeff. 0,805 Midship Area Coeff. 0,000 Waterpl. Area Coeff. 0,549 LCB from Amidsh. (+ve fwd) m 3,469 LCF from Amidsh. (+ve fwd) m -27,882 KB m 7,000 KG fluid m 13,235 BMt m 19,463 BML m 203,696 GMt m 13,227 GML m 197,461 KMt m 26,462 KML m 210,695 Immersion (TPc) tonne/cm 85,709 MTc tonne.m 1692,184 RM at 1deg = GMt.Disp.sin(1) tonne.m
40888,334
Max deck inclination deg 0,5 Trim angle (+ve by stern) deg -0,4
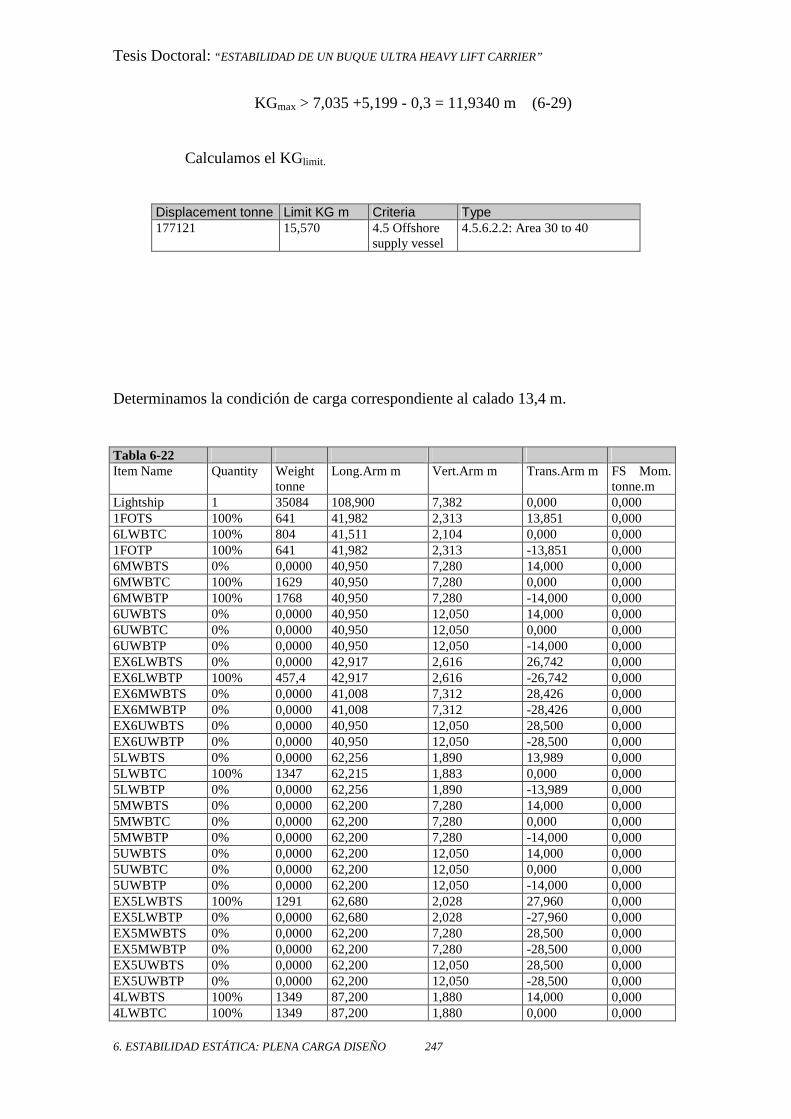
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
6. ESTABILIDAD ESTÁTICA: PLENA CARGA DISEÑO 247
KGmax > 7,035 +5,199 - 0,3 = 11,9340 m (6-29)
Calculamos el KGlimit.
Displacement tonne Limit KG m Criteria Type 177121 15,570 4.5 Offshore
supply vessel 4.5.6.2.2: Area 30 to 40
Determinamos la condición de carga correspondiente al calado 13,4 m.
Tabla 6-22 Item Name Quantity Weight
tonne Long.Arm m Vert.Arm m Trans.Arm m FS Mom.
tonne.m Lightship 1 35084 108,900 7,382 0,000 0,000 1FOTS 100% 641 41,982 2,313 13,851 0,000 6LWBTC 100% 804 41,511 2,104 0,000 0,000 1FOTP 100% 641 41,982 2,313 -13,851 0,000 6MWBTS 0% 0,0000 40,950 7,280 14,000 0,000 6MWBTC 100% 1629 40,950 7,280 0,000 0,000 6MWBTP 100% 1768 40,950 7,280 -14,000 0,000 6UWBTS 0% 0,0000 40,950 12,050 14,000 0,000 6UWBTC 0% 0,0000 40,950 12,050 0,000 0,000 6UWBTP 0% 0,0000 40,950 12,050 -14,000 0,000 EX6LWBTS 0% 0,0000 42,917 2,616 26,742 0,000 EX6LWBTP 100% 457,4 42,917 2,616 -26,742 0,000 EX6MWBTS 0% 0,0000 41,008 7,312 28,426 0,000 EX6MWBTP 0% 0,0000 41,008 7,312 -28,426 0,000 EX6UWBTS 0% 0,0000 40,950 12,050 28,500 0,000 EX6UWBTP 0% 0,0000 40,950 12,050 -28,500 0,000 5LWBTS 0% 0,0000 62,256 1,890 13,989 0,000 5LWBTC 100% 1347 62,215 1,883 0,000 0,000 5LWBTP 0% 0,0000 62,256 1,890 -13,989 0,000 5MWBTS 0% 0,0000 62,200 7,280 14,000 0,000 5MWBTC 0% 0,0000 62,200 7,280 0,000 0,000 5MWBTP 0% 0,0000 62,200 7,280 -14,000 0,000 5UWBTS 0% 0,0000 62,200 12,050 14,000 0,000 5UWBTC 0% 0,0000 62,200 12,050 0,000 0,000 5UWBTP 0% 0,0000 62,200 12,050 -14,000 0,000 EX5LWBTS 100% 1291 62,680 2,028 27,960 0,000 EX5LWBTP 0% 0,0000 62,680 2,028 -27,960 0,000 EX5MWBTS 0% 0,0000 62,200 7,280 28,500 0,000 EX5MWBTP 0% 0,0000 62,200 7,280 -28,500 0,000 EX5UWBTS 0% 0,0000 62,200 12,050 28,500 0,000 EX5UWBTP 0% 0,0000 62,200 12,050 -28,500 0,000 4LWBTS 100% 1349 87,200 1,880 14,000 0,000 4LWBTC 100% 1349 87,200 1,880 0,000 0,000
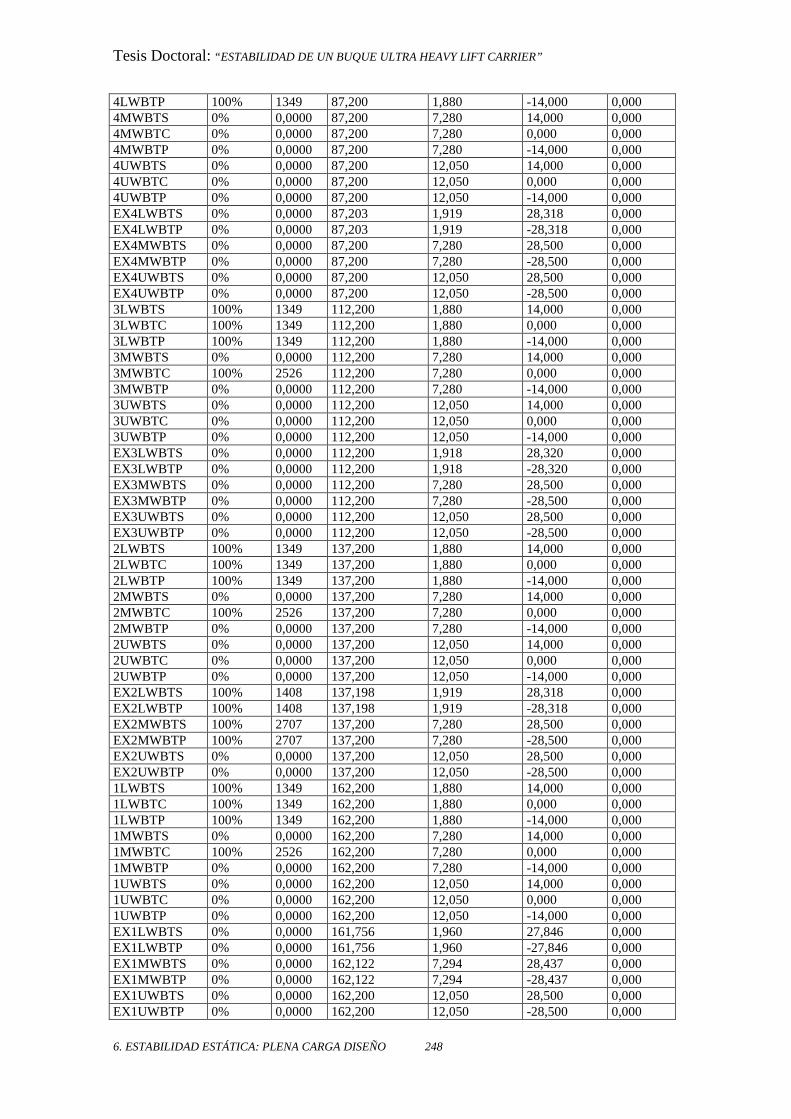
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
6. ESTABILIDAD ESTÁTICA: PLENA CARGA DISEÑO 248
4LWBTP 100% 1349 87,200 1,880 -14,000 0,000 4MWBTS 0% 0,0000 87,200 7,280 14,000 0,000 4MWBTC 0% 0,0000 87,200 7,280 0,000 0,000 4MWBTP 0% 0,0000 87,200 7,280 -14,000 0,000 4UWBTS 0% 0,0000 87,200 12,050 14,000 0,000 4UWBTC 0% 0,0000 87,200 12,050 0,000 0,000 4UWBTP 0% 0,0000 87,200 12,050 -14,000 0,000 EX4LWBTS 0% 0,0000 87,203 1,919 28,318 0,000 EX4LWBTP 0% 0,0000 87,203 1,919 -28,318 0,000 EX4MWBTS 0% 0,0000 87,200 7,280 28,500 0,000 EX4MWBTP 0% 0,0000 87,200 7,280 -28,500 0,000 EX4UWBTS 0% 0,0000 87,200 12,050 28,500 0,000 EX4UWBTP 0% 0,0000 87,200 12,050 -28,500 0,000 3LWBTS 100% 1349 112,200 1,880 14,000 0,000 3LWBTC 100% 1349 112,200 1,880 0,000 0,000 3LWBTP 100% 1349 112,200 1,880 -14,000 0,000 3MWBTS 0% 0,0000 112,200 7,280 14,000 0,000 3MWBTC 100% 2526 112,200 7,280 0,000 0,000 3MWBTP 0% 0,0000 112,200 7,280 -14,000 0,000 3UWBTS 0% 0,0000 112,200 12,050 14,000 0,000 3UWBTC 0% 0,0000 112,200 12,050 0,000 0,000 3UWBTP 0% 0,0000 112,200 12,050 -14,000 0,000 EX3LWBTS 0% 0,0000 112,200 1,918 28,320 0,000 EX3LWBTP 0% 0,0000 112,200 1,918 -28,320 0,000 EX3MWBTS 0% 0,0000 112,200 7,280 28,500 0,000 EX3MWBTP 0% 0,0000 112,200 7,280 -28,500 0,000 EX3UWBTS 0% 0,0000 112,200 12,050 28,500 0,000 EX3UWBTP 0% 0,0000 112,200 12,050 -28,500 0,000 2LWBTS 100% 1349 137,200 1,880 14,000 0,000 2LWBTC 100% 1349 137,200 1,880 0,000 0,000 2LWBTP 100% 1349 137,200 1,880 -14,000 0,000 2MWBTS 0% 0,0000 137,200 7,280 14,000 0,000 2MWBTC 100% 2526 137,200 7,280 0,000 0,000 2MWBTP 0% 0,0000 137,200 7,280 -14,000 0,000 2UWBTS 0% 0,0000 137,200 12,050 14,000 0,000 2UWBTC 0% 0,0000 137,200 12,050 0,000 0,000 2UWBTP 0% 0,0000 137,200 12,050 -14,000 0,000 EX2LWBTS 100% 1408 137,198 1,919 28,318 0,000 EX2LWBTP 100% 1408 137,198 1,919 -28,318 0,000 EX2MWBTS 100% 2707 137,200 7,280 28,500 0,000 EX2MWBTP 100% 2707 137,200 7,280 -28,500 0,000 EX2UWBTS 0% 0,0000 137,200 12,050 28,500 0,000 EX2UWBTP 0% 0,0000 137,200 12,050 -28,500 0,000 1LWBTS 100% 1349 162,200 1,880 14,000 0,000 1LWBTC 100% 1349 162,200 1,880 0,000 0,000 1LWBTP 100% 1349 162,200 1,880 -14,000 0,000 1MWBTS 0% 0,0000 162,200 7,280 14,000 0,000 1MWBTC 100% 2526 162,200 7,280 0,000 0,000 1MWBTP 0% 0,0000 162,200 7,280 -14,000 0,000 1UWBTS 0% 0,0000 162,200 12,050 14,000 0,000 1UWBTC 0% 0,0000 162,200 12,050 0,000 0,000 1UWBTP 0% 0,0000 162,200 12,050 -14,000 0,000 EX1LWBTS 0% 0,0000 161,756 1,960 27,846 0,000 EX1LWBTP 0% 0,0000 161,756 1,960 -27,846 0,000 EX1MWBTS 0% 0,0000 162,122 7,294 28,437 0,000 EX1MWBTP 0% 0,0000 162,122 7,294 -28,437 0,000 EX1UWBTS 0% 0,0000 162,200 12,050 28,500 0,000 EX1UWBTP 0% 0,0000 162,200 12,050 -28,500 0,000
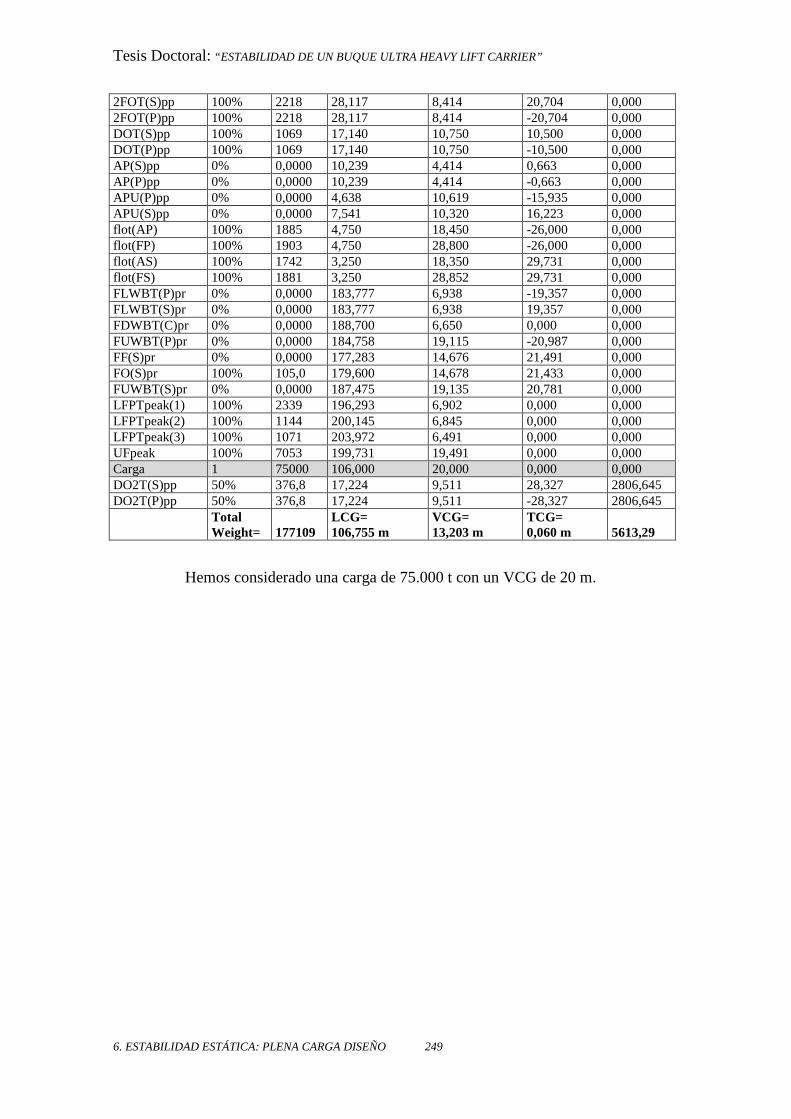
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
6. ESTABILIDAD ESTÁTICA: PLENA CARGA DISEÑO 249
Hemos considerado una carga de 75.000 t con un VCG de 20 m.
2FOT(S)pp 100% 2218 28,117 8,414 20,704 0,000 2FOT(P)pp 100% 2218 28,117 8,414 -20,704 0,000 DOT(S)pp 100% 1069 17,140 10,750 10,500 0,000 DOT(P)pp 100% 1069 17,140 10,750 -10,500 0,000 AP(S)pp 0% 0,0000 10,239 4,414 0,663 0,000 AP(P)pp 0% 0,0000 10,239 4,414 -0,663 0,000 APU(P)pp 0% 0,0000 4,638 10,619 -15,935 0,000 APU(S)pp 0% 0,0000 7,541 10,320 16,223 0,000 flot(AP) 100% 1885 4,750 18,450 -26,000 0,000 flot(FP) 100% 1903 4,750 28,800 -26,000 0,000 flot(AS) 100% 1742 3,250 18,350 29,731 0,000 flot(FS) 100% 1881 3,250 28,852 29,731 0,000 FLWBT(P)pr 0% 0,0000 183,777 6,938 -19,357 0,000 FLWBT(S)pr 0% 0,0000 183,777 6,938 19,357 0,000 FDWBT(C)pr 0% 0,0000 188,700 6,650 0,000 0,000 FUWBT(P)pr 0% 0,0000 184,758 19,115 -20,987 0,000 FF(S)pr 0% 0,0000 177,283 14,676 21,491 0,000 FO(S)pr 100% 105,0 179,600 14,678 21,433 0,000 FUWBT(S)pr 0% 0,0000 187,475 19,135 20,781 0,000 LFPTpeak(1) 100% 2339 196,293 6,902 0,000 0,000 LFPTpeak(2) 100% 1144 200,145 6,845 0,000 0,000 LFPTpeak(3) 100% 1071 203,972 6,491 0,000 0,000 UFpeak 100% 7053 199,731 19,491 0,000 0,000 Carga 1 75000 106,000 20,000 0,000 0,000 DO2T(S)pp 50% 376,8 17,224 9,511 28,327 2806,645 DO2T(P)pp 50% 376,8 17,224 9,511 -28,327 2806,645 Total
Weight= 177109
LCG= 106,755 m
VCG= 13,203 m
TCG= 0,060 m
5613,29
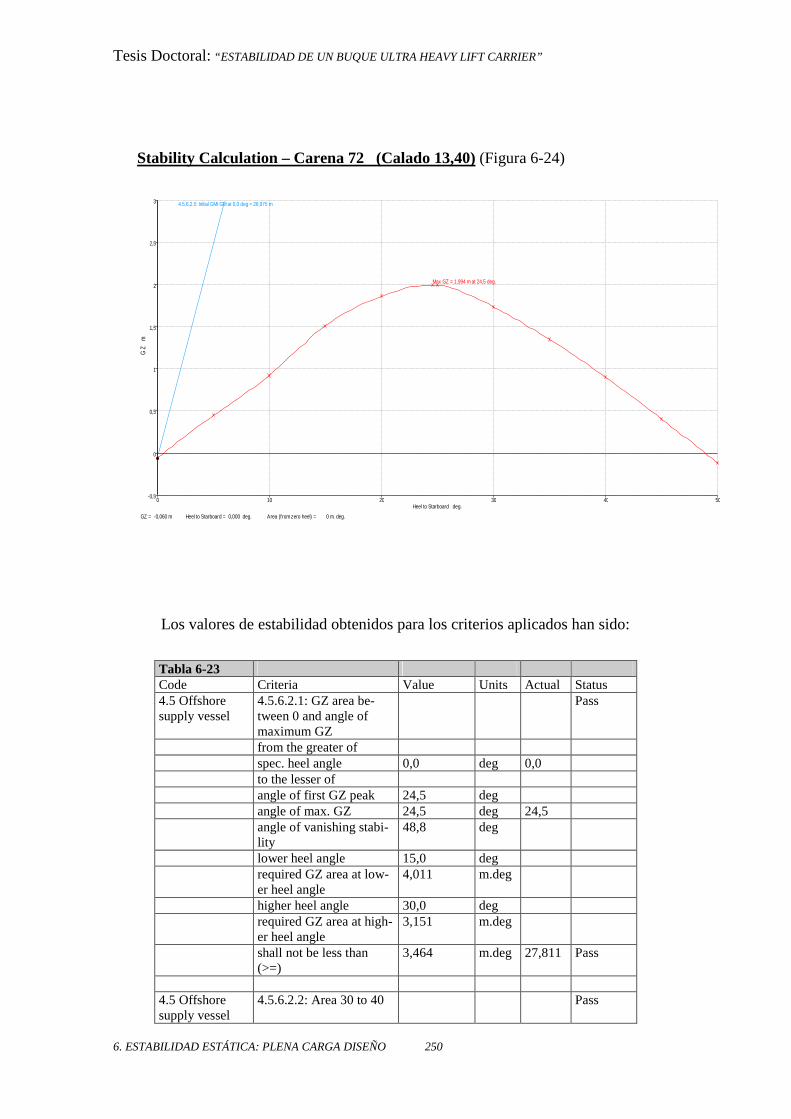
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
6. ESTABILIDAD ESTÁTICA: PLENA CARGA DISEÑO 250
Stability Calculation – Carena 72 (Calado 13,40) (Figura 6-24)
-0,5
0
0,5
1
1,5
2
2,5
3
0 10 20 30 40 50
Max GZ = 1,994 m at 24,5 deg.
4.5.6.2.5: Initial GMt GM at 0,0 deg = 28,975 m
GZ = Heel to Starboard = -0,060 m 0,000 deg. Area (from zero heel) = 0 m. deg.
Heel to Starboard deg.
GZ
m
Los valores de estabilidad obtenidos para los criterios aplicados han sido:
Tabla 6-23 Code Criteria Value Units Actual Status 4.5 Offshore supply vessel
4.5.6.2.1: GZ area be-tween 0 and angle of maximum GZ
Pass
from the greater of spec. heel angle 0,0 deg 0,0 to the lesser of angle of first GZ peak 24,5 deg angle of max. GZ 24,5 deg 24,5 angle of vanishing stabi-
lity 48,8 deg
lower heel angle 15,0 deg required GZ area at low-
er heel angle 4,011 m.deg
higher heel angle 30,0 deg required GZ area at high-
er heel angle 3,151 m.deg
shall not be less than (>=)
3,464 m.deg 27,811 Pass
4.5 Offshore supply vessel
4.5.6.2.2: Area 30 to 40 Pass
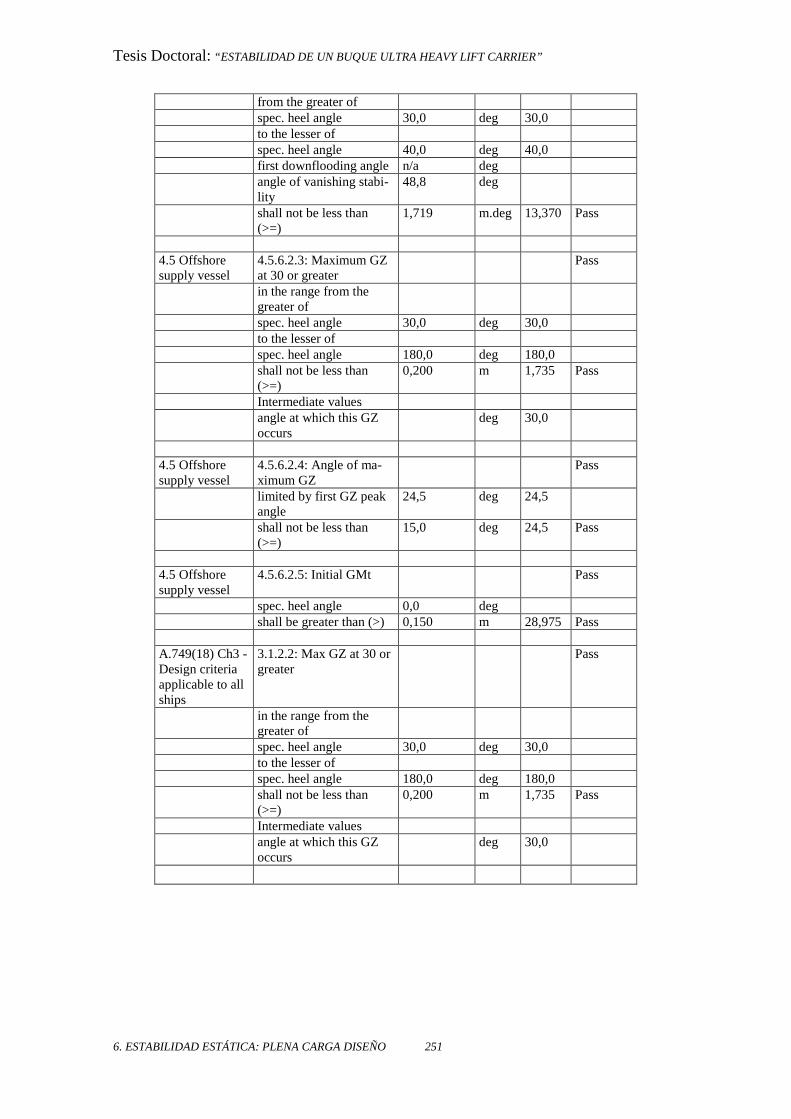
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
6. ESTABILIDAD ESTÁTICA: PLENA CARGA DISEÑO 251
from the greater of spec. heel angle 30,0 deg 30,0 to the lesser of spec. heel angle 40,0 deg 40,0 first downflooding angle n/a deg angle of vanishing stabi-
lity 48,8 deg
shall not be less than (>=)
1,719 m.deg 13,370 Pass
4.5 Offshore supply vessel
4.5.6.2.3: Maximum GZ at 30 or greater
Pass
in the range from the greater of
spec. heel angle 30,0 deg 30,0 to the lesser of spec. heel angle 180,0 deg 180,0 shall not be less than
(>=) 0,200 m 1,735 Pass
Intermediate values angle at which this GZ
occurs deg 30,0
4.5 Offshore supply vessel
4.5.6.2.4: Angle of ma-ximum GZ
Pass
limited by first GZ peak angle
24,5 deg 24,5
shall not be less than (>=)
15,0 deg 24,5 Pass
4.5 Offshore supply vessel
4.5.6.2.5: Initial GMt Pass
spec. heel angle 0,0 deg shall be greater than (>) 0,150 m 28,975 Pass A.749(18) Ch3 - Design criteria applicable to all ships
3.1.2.2: Max GZ at 30 or greater
Pass
in the range from the greater of
spec. heel angle 30,0 deg 30,0 to the lesser of spec. heel angle 180,0 deg 180,0 shall not be less than
(>=) 0,200 m 1,735 Pass
Intermediate values angle at which this GZ
occurs deg 30,0
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
6. ESTABILIDAD ESTÁTICA: PLENA CARGA DISEÑO 252
6.6. PLANTEAMIENTO DE LA ESTABILIDAD EXCESIVA DE LOS BUQUES
ESTUDIADOS EN CONDICIONES DE NAVEGACIÓN PARA EVITAR EXCESI-
VAS ACELERACIONES.
El aumento de la manga del buque lleva consigo un aumento de la estabilidad,
que una altura metacéntrica grande hace incómoda la vida a bordo y para valores muy
elevados de la misma puede hacer peligrosa la navegación (aceleraciones laterales).
Se tratará en este parágrafo de estudiar las posibles correcciones de estabilidad,
conforme a los Reglamentos y según la disposición de los tanques de estos buques. Así
mismo, se pondrá de manifiesto la insuficiencia de las mismas para corregir las altas
aceleraciones de escora en los buques aquí estudiados.
6.6.1. Movimiento de escora de los buques.
Cuantificar los movimientos de estos buques en un mar ondoso se escapa
del objetivo que aquí se propone. No obstante, se buscará determinar brevemente
el movimiento de escora de estos buques estableciendo hipótesis simplificativas
que permitan llegar a un resultado práctico, (Principles of Naval Architecture,
Section 3, 3 of Chapter IX, page 670) (Véase Bibliografia, Ref. 7) y así mismo
con hipótesis simplificativas definiremos el mar ondoso en que se mueve el bu-
que (Véase Bibliografía, Ref. 7)
6.6.1.1. Parámetros de estos buques
Si se considera un cuerpo girando en un medio homogéneo sin resis-
tencia al rozamiento y al que se le aplica un momento periódico, éste
tiende a girar alrededor de su centro de gravedad. Si fuera un cuerpo su-
mergido tal como un submarino, éste giraría alrededor de un eje que pa-
saría por su centro de gravedad. Pero si este cuerpo fuera un buque en el
que una parte del mismo está en el agua (obra viva) y otra en el aire (obra
muerta) su movimiento no tendría ningún eje fijo de giro debido al dife-
rente efecto dinámico del buque en el aire y en el agua. Desgraciadamen-

Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
6. ESTABILIDAD ESTÁTICA: PLENA CARGA DISEÑO 253
te poco se conoce cuantitativamente acerca del movimiento del eje de gi-
ro desde la posición normal a otra de escorada. Se puede decir que cuan-
do C.G. coincide con la flotación o está por encima de ella, el eje de giro
está debajo de C.G. En general estos ejes describen una superficie regla-
da curva. Se puede afirmar, entonces, que para buques de formas usuales
y pequeños ángulos de escora, el eje de giro está cerca de C.G.
Para la resolución de problemas en donde es necesario fijar la posi-
ción del eje de giro se asume que este eje pasa por el centro de gravedad.
Partiendo de estas hipótesis la ecuación diferencial del movimiento
de escora de un buque sería:
2
20
dI M
dt
θ + = ; (6-30)
donde:
I es el momento de inercia de la masa del buque en relación con un eje
longitudinal que pase por el C.G.
M es el momento del par adrizante.
θ es el ángulo de escora a partir de la posición vertical.
2I kg
∆= ; (6-31)
donde:
k es el radio de giro (radius of gyration) de la masa del buque alrededor
de un eje longitudinal que pase por el C.G.
Para pequeños ángulos de escora:
M GZ GMsen GMθ θ= ∆ = ∆ = ∆ ; (6-31)
Sustituyendo estos valores, tendremos:

Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
6. ESTABILIDAD ESTÁTICA: PLENA CARGA DISEÑO 254
2
2 20
d gGM
dt k
θ θ+ = ; (6-32)
La ecuación (6-30) representa un movimiento periódico simple,
cuyo periodo natural de balance es:
2 kT
gGMθ
π= ; (6-33);
operando tendremos:
2,007k KT
GM GMθ = = ; (6-34)
siendo K una constante característica especifica del buque, que actual-
mente es posible calcular dados los medios de computarización existen-
tes.
Si aplicamos esto a la C 72 y estimamos que la distribución de
masa interna del buque es tal que su radio de giro toma un valor en torno
al 40% de la manga, podríamos llegar al siguiente resultado:
0
2*0,40* 0,8*B BT
GM GM= = ; (6-35)
Conociendo que el GM0 = 31,64 m para un desplazamiento co-
rrespondiente al francobordo de verano, obtenemos: T0 = 10,18 s; siendo
T0 el periodo natural del buque.
Quedan así establecidos de forma estimativa los parámetros del
buque.
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
6. ESTABILIDAD ESTÁTICA: PLENA CARGA DISEÑO 255
6.6.1.2. Parámetros de ola.
El estado de la mar lo definiremos por el parámetro de ola, que
viene dado por la altura significativa de ola y el periodo de la misma.
Suponiendo olas potenciales de perfil senoidal, moviéndose en
zonas de gran profundidad (relación "profundidad/longitud de ola" ma-
yor que 0,5), es posible llegar a los siguientes resultados:
2
2
gTλπ
= (6-36);
η = πH/λ (6-37);
siendo:
η = pendiente máximo del perfil de ola;
λ = longitud de la ola (m);
H = altura significativa de ola en m.
6.6.1.3. Factor de amortiguamiento.
El factor de amortiguamiento es más difícil de estimar por los
métodos analíticos. Pueden obtenerse resultados conservadores en la
mayoría de los casos, si fijamos el factor de amortiguamiento igual a 0,1
(Véase Bibliografía, Ref.16 )
La estimación del rumbo para el que se produce la entrada en
sincronismo puede realizarse mediante la formulación que aparece en la
referencia bibliográfica (Véase Ref.16)
El sincronismo se dará cuando la frecuencia de encuentro coin-
cida con la frecuencia natural, correspondiente al movimiento conside-
rado. Si definimos el factor de sintonía Λ:

Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
6. ESTABILIDAD ESTÁTICA: PLENA CARGA DISEÑO 256
0
0
e
e
T
T
ωω
Λ = = ; (6-38)
siendo:
T0 = periodo natural del buque (s);
Te = periodo modal de la ola incidente (s);
00 cose U
g
ωω ω β= − ⋅ ⋅ ; (6-39)
0
2 gπωλ
= ; (en aguas profundas); (6-40)
Así mismo siendo:
λ = longitud de la ola (m);
ωe = frecuencia de encuentro (rad/s);
ω0 = frecuencia absoluta de la ola incidente (rads/s);
g = aceleración de la gravedad (m/s2);
U = velocidad del buque (m/s);
β = ángulo de incidencia entre la ola y el buque (180º para olas
de proa, 90º para ola de estribor y 0º para olas de popa)
Si la frecuencia de encuentro coincide con la frecuencia natural
el factor de sintonía Λ= 1.
Reduciendo la mencionada formulación a una expresión que re-
laciona tres parámetros adimensionales, se llega al siguiente resultado:
01 coso
e
T T U
Tβ
λ = =
; (6-41)
Para calcular el par escorante inducido por las olas se supone que:
• A igualdad del resto de parámetros, dicho par aumenta con rum-
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
6. ESTABILIDAD ESTÁTICA: PLENA CARGA DISEÑO 257
bo relativo respecto a las olas, siendo nulo para olas de proa a
popa y máximo para olas de través.
• A igualdad del resto de parámetros, dicho par disminuye con la
eslora del buque.
En estas condiciones es posible llegar al siguiente resultado:
2. . . .( )L
P g GM sen λη β= ∆ (6-42); (Véase Bibliografía, Ref. 16)
Siendo:
P = par inducido por las olas (N.m);
∆= desplazamiento del buque (kg);
η = pendiente máxima del perfil de ola;
L = eslora del buque (m);
λ = longitud de la ola (m)
Esta expresión da estimaciones satisfactorias para olas de través
(β) comprendida entre 30º y 150º. Sin embargo, cuando las olas inciden
sobre el buque por la proa o por la popa pueden aparecer fenómenos de
resonancia paramétrica acompañados de fuertes movimientos de balance.
Estos fenómenos tienen su origen en la desestabilización producida por la
variación de las características hidrostáticas del buque al paso de las olas.
La resonancia paramétrica es un fenómeno complejo inducido por
la interacción de movimientos verticales combinada con la presencia de
no linealidades en el modelo físico, lo que puede justificar un estudio en
profundidad del comportamiento del buque – mediante códigos software
de simulación, ensayos de canal, entre otros – para mares incidiendo lon-
gitudinalmente sobre el mismo.
Los movimientos oscilatorios dan lugar a aceleraciones angulares
(balance, cabeceo y guiñada) o aceleraciones lineales (arfada, largada y
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
6. ESTABILIDAD ESTÁTICA: PLENA CARGA DISEÑO 258
deriva). Las aceleraciones dependerán del periodo de oscilación del mo-
vimiento considerado y en el caso de oscilaciones angulares dependerán
además de la situación a bordo respecto del eje de oscilación.
Todas estas aceleraciones inducirán fuerzas en las cargas a bordo,
llamadas fuerzas de inercia.
6.6.1.4. Parámetros a tener en cuenta en la estabilidad de los buques
estudiados.
Brevemente se enunciarán los criterios básicos de estabilidad a
partir de los parámetros vistos del buque que hay que considerar para la
corrección de estabilidad.
1. En la figura 6-9 de la página 191, vemos:
GZ = GM sen θ; (6-43)
siendo θ el ángulo de balance.
Así mismo tenemos que:
GM = BM – BG; (6-44)
siendo:
BM = radio metacéntrico trasversal;
BG = distancia del centro de carena a la posición del C.G.
Sustituyendo estos valores en la fórmula (6-44):
GZ = BM sen θ - BG sen θ; (6-45)
La fórmula (6-45) se compone de dos partes: “BM sen θ”
y “BG sen θ”. La primera parte depende fundamentalmente de la
posición del centro de carena y del metacentro y se suele llamar
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
6. ESTABILIDAD ESTÁTICA: PLENA CARGA DISEÑO 259
“par de estabilidad de formas”, aludiendo con ello a las formas
del buque de las que dependen B (centro de carena) y M (meta-
centro). La segunda parte, y una vez definida la posición del cen-
tro de carena, o sea definidas en general las formas del buque, de-
pende de la posición del centro de gravedad y por ello se suele
llamar “par de estabilidad de pesos”.
Como se observa en la fórmula, la posición baja del C.G. fa-
vorece siempre la estabilidad, por eso en los buques en general
hay que evitar los pesos altos.
Como se ve en la fórmula (6-45) para determinar los valores
de GZ es necesario conocer la posición del centro de carena B pa-
ra distintas inclinaciones finitas.
2. En el parágrafo anterior, fórmula 6-6 página 191, se ha visto:
GZ = KN – KG sen θ; (6-6)
Con los brazos de palanca para distintos desplazamientos se
pueden obtener unas curvas para los diferentes ángulos de escora,
tales que en ordenadas se sitúan los valores KN y en abcisas los
desplazamientos en toneladas. Estas curvas llamadas curvas
transversales de estabilidad o curvas KN o Pantocarenas (se supo-
ne que la distancia KG es la misma para todos los distintos des-
plazamientos y se escoge lo suficientemente pequeña para que re-
sulte la estabilidad positiva, para cada uno de los desplazamientos
y un ángulo grande de inclinación). En estas curvas se ve cómo el
brazo de palanca máximo disminuye en longitud a medida que
aumenta el desplazamiento.
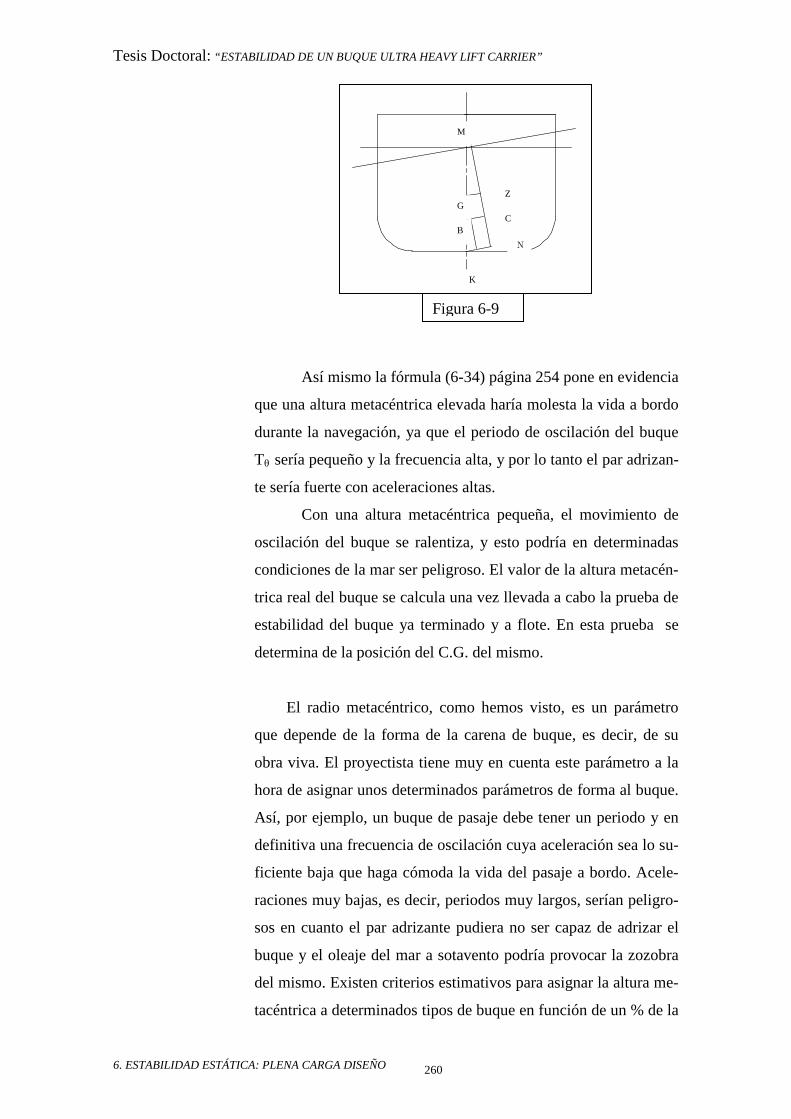
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
6. ESTABILIDAD ESTÁTICA: PLENA CARGA DISEÑO 260
Así mismo la fórmula (6-34) página 254 pone en evidencia
que una altura metacéntrica elevada haría molesta la vida a bordo
durante la navegación, ya que el periodo de oscilación del buque
Tθ sería pequeño y la frecuencia alta, y por lo tanto el par adrizan-
te sería fuerte con aceleraciones altas.
Con una altura metacéntrica pequeña, el movimiento de
oscilación del buque se ralentiza, y esto podría en determinadas
condiciones de la mar ser peligroso. El valor de la altura metacén-
trica real del buque se calcula una vez llevada a cabo la prueba de
estabilidad del buque ya terminado y a flote. En esta prueba se
determina de la posición del C.G. del mismo.
El radio metacéntrico, como hemos visto, es un parámetro
que depende de la forma de la carena de buque, es decir, de su
obra viva. El proyectista tiene muy en cuenta este parámetro a la
hora de asignar unos determinados parámetros de forma al buque.
Así, por ejemplo, un buque de pasaje debe tener un periodo y en
definitiva una frecuencia de oscilación cuya aceleración sea lo su-
ficiente baja que haga cómoda la vida del pasaje a bordo. Acele-
raciones muy bajas, es decir, periodos muy largos, serían peligro-
sos en cuanto el par adrizante pudiera no ser capaz de adrizar el
buque y el oleaje del mar a sotavento podría provocar la zozobra
del mismo. Existen criterios estimativos para asignar la altura me-
tacéntrica a determinados tipos de buque en función de un % de la
K
B
G
M
Z
C
N
Figura 6-9
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
6. ESTABILIDAD ESTÁTICA: PLENA CARGA DISEÑO 261
manga. Por ejemplo, en un buque carguero se estima entre un 2 a
3% de la manga; en un buque de pasaje normalmente tienen muy
poco GM positivo y con frecuencia no excede del 1% de la manga
entre otros. Para los buques de esta tesis no se conocen criterios
generalizados aplicables por el momento.
Los buques HLC para grandes pesos con altos C.G. como se
ha visto, necesitan mucha estabilidad y por lo tanto sus pares
adrizantes son muy elevados. Si por el contrario esta estabilidad
fuera tal que las aceleraciones que provoca pudiesen dañar la car-
ga, el buque no sería idóneo. Estamos pues ante el siguiente dile-
ma opuesto: mucha estabilidad (par adrizante grande) o bajas ace-
leraciones de escora. El problema se reduce a cómo disminuir las
aceleraciones con pares de adrizamiento grandes, problema de di-
fícil solución y que aboca necesariamente a la propuesta del capí-
tulo 7: los sistemas de estabilidad trasversal.
6.6.2. Correcciones de estabilidad reglamentarias.
Las reglamentaciones que se han visto en el parágrafo 6.1 del pre-
sente capítulo con la IMO Intact Stability Code (IMO Res. A. 749
(18)) actualizada por la IMO MSC 85/26 Add ANNEX 2, así como
la Resolución A652 (14) IMO (20 Noviembre 1985) con las corres-
pondientes reglas de SOLAS Ch.II-1, obligan la corrección de esta-
bilidad en determinados casos y tener en cuenta ciertos fenómenos.
A continuación se resumen los siguientes subparágrafos:
1. Hay una serie de fenómenos tales como la acción del viento de
través en buques con mucha superficie expuesta, la acumulación
de hielo en la obra muerta, el agua embarcada en cubierta, las ca-
racterísticas de balance, la mar de popa, etcétera, que influyen de
manera desfavorable en la estabilidad, por lo que se aconseja a la
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
6. ESTABILIDAD ESTÁTICA: PLENA CARGA DISEÑO 262
Administración que los tenga en cuenta siempre que lo juzgue
necesario.
2. Se establecen algunas medidas para disponer de un margen segu-
ro de estabilidad en todas las etapas del viaje, teniendo en cuenta
la adición de pesos, tales como los debidos a la absorción de agua
y al engelamiento (los pormenores relativos a la acumulación de
hielo producida por el engelamiento figuran en el capítulo 5) y la
pérdida de peso, tal como la debida al consumo de combustible y
provisiones.
3. Habrá que demostrar la aptitud del buque para resistir los efectos
combinados del viento de través y del balance respecto de cada
condición normal de carga, con referencia a la figura, del modo
siguiente:
a) se someterá el buque a la presión de un viento constante
que actúe perpendicularmente al plano de crujía lo que dará como
resultado el correspondiente brazo escorante (Iw1 );
b) se supondrá que a partir del ángulo de equilibrio resultante
(θo) el buque se balancea por la acción de las olas hasta alcanzar
un ángulo de balance (θ1) a barlovento. Se prestará atención al
efecto de un viento constante de forma que se eviten ángulos de
escora excesivos;
c) a continuación se someterá al buque a la presión de una rá-
faga de viento que dará como resultado el correspondiente brazo
escorante (Iw2);
d) en estas circunstancias, el área b debe ser igual o superior
al área a de la figura 3.2.2.1, “Vientos y balances intensos” del
Reglamento;
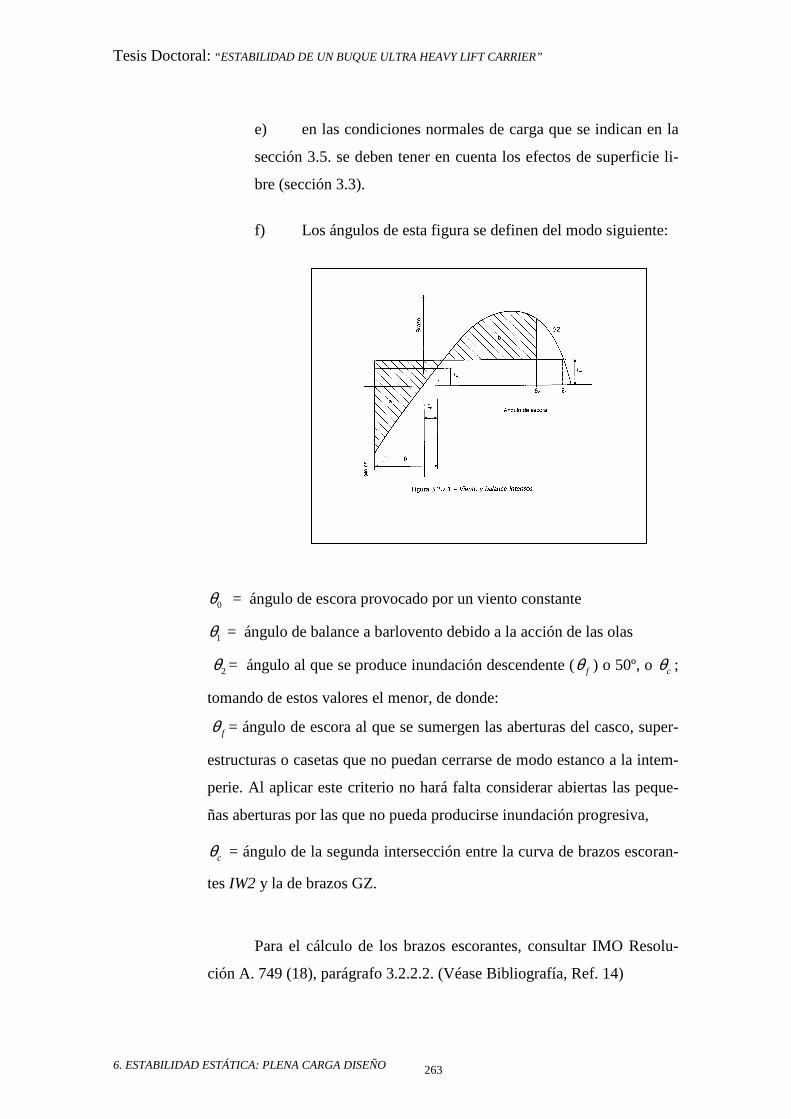
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
6. ESTABILIDAD ESTÁTICA: PLENA CARGA DISEÑO 263
e) en las condiciones normales de carga que se indican en la
sección 3.5. se deben tener en cuenta los efectos de superficie li-
bre (sección 3.3).
f) Los ángulos de esta figura se definen del modo siguiente:
0θ = ángulo de escora provocado por un viento constante
1θ = ángulo de balance a barlovento debido a la acción de las olas
2θ = ángulo al que se produce inundación descendente ( fθ ) o 50º, o cθ ;
tomando de estos valores el menor, de donde:
fθ = ángulo de escora al que se sumergen las aberturas del casco, super-
estructuras o casetas que no puedan cerrarse de modo estanco a la intem-
perie. Al aplicar este criterio no hará falta considerar abiertas las peque-
ñas aberturas por las que no pueda producirse inundación progresiva,
cθ = ángulo de la segunda intersección entre la curva de brazos escoran-
tes IW2 y la de brazos GZ.
Para el cálculo de los brazos escorantes, consultar IMO Resolu-
ción A. 749 (18), parágrafo 3.2.2.2. (Véase Bibliografía, Ref. 14)
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
6. ESTABILIDAD ESTÁTICA: PLENA CARGA DISEÑO 264
4. Para los buques suministro mar adentro (supply vessel):
a) Se tendrá presente que los criterios de estabilidad mencionados en
6.1.2.1.1 y 6.1.2.1.2 son valores mínimos, y no figuran valores máximos
recomendados. Es aconsejable evitar valores excesivos, ya que éstos po-
drían originar aceleraciones posiblemente perjudiciales para el buque, la
dotación, el equipo y el transporte de la carga en condiciones de seguri-
dad.
b) La altura metacéntrica inicial y las curvas de estabilidad se corregirán en
cuanto al efecto de las superficies libres de los líquidos de los tanques en
todas las condiciones de carga, de conformidad con las hipótesis de la
presente norma (Véase Bibliografía, Ref. 14). No obstante, la frecuencia
alta de los movimientos de escora seguirán provocando aceleraciones al-
tas.
6.6.2.1. Corrección por superficie libre del GM y de la curva GZ.
Todas las condiciones de carga se corregirán por efecto de las posi-
bles superficies libres de los líquidos contenidos en tanques, según las si-
guientes fórmulas:
sup. *liquidolibres xTanque
Buque
GM Iρ
∆ =∆
; (6-46)
siendo
xTanqueI : Momento de inercia de la superficie libre del tanque (m4)
liquidoρ : Densidad del líquido contenido en el tanque (Tm/m3)
Buque∆ : Desplazamiento del buque. (Tm)
Por tanto:
GMcorregido = GM – ∆GM ; (6-47)

Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
6. ESTABILIDAD ESTÁTICA: PLENA CARGA DISEÑO 265
Para cada condición de carga, los valores de la proyección de la
curva de los brazos adrizantes GZ sobre el plano trasversal, para cada án-
gulo de escora, se corregirán por el efecto de la superficie libre de los lí-
quidos contenidos en tanques, según la tabla de valores propuesta por el
IMO en función del momento producido.
. . . .. .fs
VM v B K
B L Hρ= (6-48)
siendo:
fsM : Momento debido a la superficie libre del tanque a 30º
(Tm.m.)
v: Volumen total del tanque (m3) B: Manga máxima del tanque (m)
Ρ: Densidad del líquido en el tanque (Tm/m3)
L: Eslora máxima del tanque (m)
H: Eslora máxima del tanque, (m)
K: Coeficiente adimensional determinado según la tabla del re-
glamento del IMO y en función de la relación B/H.
Para cada ángulo de escora se obtienen los valores siguientes:
( )fs iM
GZ∆ =∆
∑ ; (6-49)
GZcorregido = GZ – ∆GZ ; (6-50)
Los tanques para los que el valor de fsM a 30º sea menor que el
producto de 0,01 por el Peso en Rosca no es preciso que sean incluidos
en los cálculos de corrección.
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
6. ESTABILIDAD ESTÁTICA: PLENA CARGA DISEÑO 266
6.6.2.2. Corrección por la acción del viento y balances intensos.
Según la reglamentación IMO, el cálculo del ángulo de escora por
viento y balances intensos se basa en el siguiente proceso:
• Someter al buque a la presión de un viento constante que actúe
perpendicularmente al eje longitudinal lo que dará como resultado
un brazo escorante de valor w, que se traducirá en un ángulo de
equilibrio debido al efecto anterior θ0.
• A partir del ángulo de equilibrio anterior θ0, el buque se balancea
por acción de las olas un ángulo de balance de θ1 a barlovento.
• Por último, se somete el buque a la presión de una racha de viento
que dará como resultado un brazo escorante de valor Iw2.
El cálculo de los brazos escorantes debido al viento constante y al
racheado será constante para todos los ángulos de inclinación y, según la
regla, se calcularán de la siguiente forma:
1
. .( )
P A ZIw m
D= ; (6-51)
Iw2 = 1,5. Iw1 (m); (6-52)
siendo:
P= 0,0514 (Tm/m2)
A: Área proyectada de la parte del buque por encima de la flota-
ción (m2)
Z: Distancia vertical desde el C.G. del área A hasta la mitad del
calado (m)
∆: Desplazamiento (Tm)
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
6. ESTABILIDAD ESTÁTICA: PLENA CARGA DISEÑO 267
El ángulo de balance a barlovento debido a la acción de las olas,
se calcula de acuerdo con la siguiente expresión:
1 1 2109. . . . .k x x r sθ = ; (6-53)
siendo:
k = Factor igual a 1,0 cuando el buque no tiene quilla de balance.
x1 = Factor dado por la tabla 1 de la citada recomendación en re-
lación B/T.
x2 = Factor dado por la tabla 2 de la citada recomendación en
función del bloque.
r = se calcula como: r = 0,73 + 0,023.(B/T) - 0,043.(Lf/100).
Como ángulo θ2 se tomará el menor de los siguientes valores:
• Angulo mínimo de inmersión
• θc, produciéndose donde GZ sea igual a Iw2.
• 50º.
Con estos parámetros y según el criterio meteorológico, se deberá
verificar en cada caso que el área “a” es menor que el área “b) (ver figura
3.2.2.1. “Viento y Balances Intensos” pág. 263).
6.6.3. Posibles correcciones del C.G. en distintas condiciones de carga
En el parágrafo 6.3 de este capítulo se ha estudiado la influencia
de la carga y su ZG atendiendo a la normativa de estabilidad enunciada en
el parágrafo 6.1 de este capítulo y se han calculado, además, los ábacos
de estabilidad en función del peso de la carga y del ZG de la misma, en
función de los desplazamientos del buque. Pero se ha visto que el brazo
de palanca máximo disminuye en longitud a medida que aumenta el des-
plazamiento, por lo tanto, los buques con altura metacéntrica adecuada al
buque en uso en condiciones de mala mar deberán navegar con un des-
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
6. ESTABILIDAD ESTÁTICA: PLENA CARGA DISEÑO 268
plazamiento igual o cercano al correspondiente al francobordo de verano,
ya que el GM deberá ser lo suficiente grande para que el par adrizante
sea lo suficientemente alto para hacer frente a los pares escorantes del
mar ondoso y lo suficientemente pequeño para evitar aceleraciones exce-
sivas que puedan provocar daños a las personas o en la carga.
La práctica que rige la carga de un buque es siempre la de procu-
rar situar el C.G. lo más bajo posible y este principio sigue válido en las
condiciones de carga estándar que se han visto en las condiciones de car-
ga de esta tesis. Sin embargo, en los buque HLC se da el caso con relati-
va frecuencia de que el flete a transportar sea de gran volumen, alto cen-
tro de gravedad pero de peso bajo en relación con el desplazamiento má-
ximo para el francobordo de verano, por ejemplo los módulos de tubería
para una estación licuadora de gas próxima a una plataforma offshore. En
estas circunstancias los buques HLC propuestos, con desplazamientos
menores al correspondiente al francobordo de verano, tienen la posibili-
dad de utilizar el lastre de los tanques altos para aumentar el desplaza-
miento a valores iguales o próximos al desplazamiento máximo para el
francobordo de verano y para subir el C.G. y disminuir la altura metacén-
trica.
La forma operativa sería plantear previamente la condición de
carga teniendo en cuenta:
• Corregir la estabilidad del buque por superficies libres en los po-
sibles tanques almacén de combustible, aceite, etc. de la Cª de Máquinas
• Corregir las superficies de los tanques de agua (sanitarios, etc) del
buque.
• Tener en cuenta la acción del viento en función de la superficie
vélica de la carga.
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
6. ESTABILIDAD ESTÁTICA: PLENA CARGA DISEÑO 269
• Tener en cuenta la acción combinada del viento y el posible esta-
do de la mar.
Sin embargo, a pesar de todas las correcciones preceptivas por la norma-
tiva aplicada, el valor de GM seguirá siendo excesivamente alto para nave-
gar en mares de oleaje severo. Las condiciones de carga con las que se han
llevado a cabo las comprobaciones de las condiciones estándar vistas en el
parágrafo anterior, es decir, a plena carga de verano para comprobar la vali-
dez de los ábacos obtenidos, en el caso de la Carena 72 nos da valores del
GMo inicial de 31,645 m y un brazo de palanca del momento adrizante GZ
máximo de 5,082 m para un ángulo de escora de 18,2º.
Utilizando los tanques de lastre altos (a mayor altura) para la misma con-
dición de carga se obtiene una ligera disminución del GM aproximadamente
menor que el 4% del que previamente se había obtenido con condiciones de
carga utilizando los tanques bajos para el lastrado. Así como la utilización
de los tanques altos nos permitieron mejorar las condiciones de carga para
obtener un KGmax adecuado a la normativa de estabilidad, los GM son lo
suficientemente elevados que la posible disminución del GM es insuficiente
para navegar en mares severos.
6.6.4. Corrección meteorológica
No es objeto de esta tesis doctoral determinar y cuantificar el com-
portamiento de estos buques en la mar sino más bien sugerir las correccio-
nes de estabilidad aconsejables para permitir la navegación de los buques
estudiados y evitar las excesivas aceleraciones.
Las correcciones de estabilidad vistas en los parágrafos 6.6. no han
sido suficientes para disminuir el GM de forma adecuada y por lo tanto dis-
minuir la frecuencia de los pares adrizantes de estabilidad. Esto nos lleva a
considerar como posible solución limitar la navegación a mares de bonanza,

Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
6. ESTABILIDAD ESTÁTICA: PLENA CARGA DISEÑO 270
es decir, evitar la acción de la alta frecuencia de los pares escorantes del mar
ondoso en determinados mares y en determinadas estaciones del año.
Un estudio particularizado para una determinada carga en cubierta en
los HLC estudiados llevaría a considerar criterios específicos en función de
la forma geométrica de la carga, tales como altura (posición del centro de
gravedad), manga, superficie vélica, superficie de la carga fuera de los cos-
tados del buque, a considerar el coeficiente de rozamiento con la cubierta de
estiba, y en definitiva a considerar las condiciones medioambientales, tales
como el viento y el oleaje, como criterios sustanciales de operatividad. Sin
embargo, no es posible definir de forma generalizada las condiciones am-
bientales en cuanto al flete ya que en cada caso pueden modificarse sustan-
cialmente las posibles ventanas meteorológicas que para una carga serían
adecuadas y para otras no. Además, se escapan del objeto de esta tesis. Nos
limitaremos, por lo tanto, a sugerir posibles ventanas meteorológicas de na-
vegación atendiendo a los parámetros de estabilidad vistos en los buques es-
tudiados y las experiencias en buques con mangas inferiores pero también
altas.
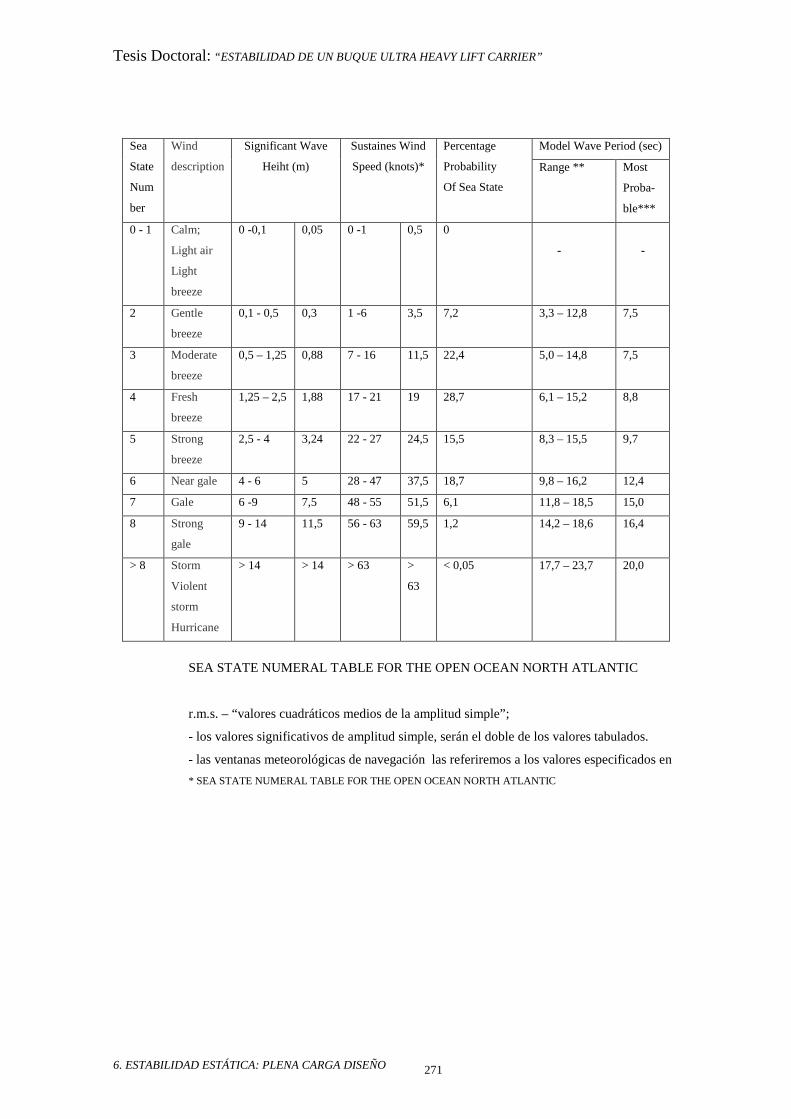
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
6. ESTABILIDAD ESTÁTICA: PLENA CARGA DISEÑO 271
Sea
State
Num
ber
Wind
description
Significant Wave
Heiht (m)
Sustaines Wind
Speed (knots)*
Percentage
Probability
Of Sea State
Model Wave Period (sec)
Range ** Most
Proba-
ble***
0 - 1 Calm;
Light air
Light
breeze
0 -0,1 0,05 0 -1 0,5 0
-
-
2 Gentle
breeze
0,1 - 0,5 0,3 1 -6 3,5 7,2 3,3 – 12,8 7,5
3 Moderate
breeze
0,5 – 1,25 0,88 7 - 16 11,5 22,4 5,0 – 14,8 7,5
4 Fresh
breeze
1,25 – 2,5 1,88 17 - 21 19 28,7 6,1 – 15,2 8,8
5 Strong
breeze
2,5 - 4 3,24 22 - 27 24,5 15,5 8,3 – 15,5 9,7
6 Near gale 4 - 6 5 28 - 47 37,5 18,7 9,8 – 16,2 12,4
7 Gale 6 -9 7,5 48 - 55 51,5 6,1 11,8 – 18,5 15,0
8 Strong
gale
9 - 14 11,5 56 - 63 59,5 1,2 14,2 – 18,6 16,4
> 8 Storm
Violent
storm
Hurricane
> 14 > 14 > 63 >
63
< 0,05 17,7 – 23,7 20,0
SEA STATE NUMERAL TABLE FOR THE OPEN OCEAN NORTH ATLANTIC
r.m.s. – “valores cuadráticos medios de la amplitud simple”;
- los valores significativos de amplitud simple, serán el doble de los valores tabulados.
- las ventanas meteorológicas de navegación las referiremos a los valores especificados en
* SEA STATE NUMERAL TABLE FOR THE OPEN OCEAN NORTH ATLANTIC
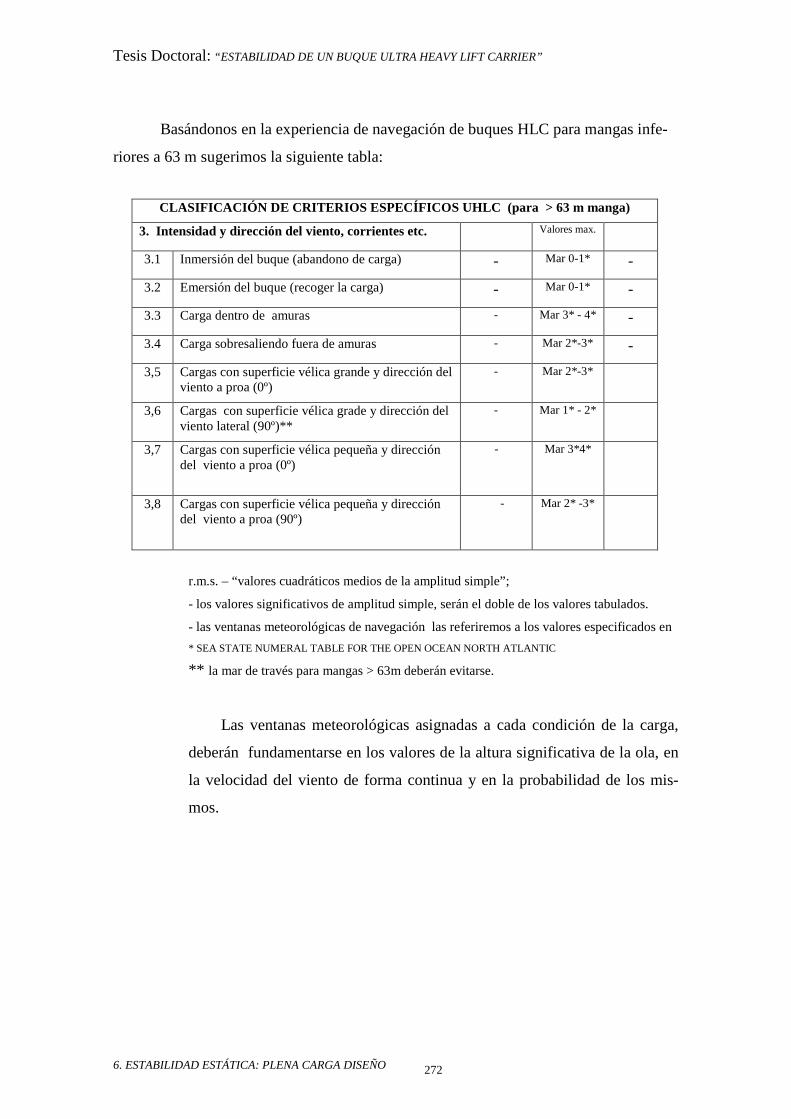
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
6. ESTABILIDAD ESTÁTICA: PLENA CARGA DISEÑO 272
Basándonos en la experiencia de navegación de buques HLC para mangas infe-
riores a 63 m sugerimos la siguiente tabla:
r.m.s. – “valores cuadráticos medios de la amplitud simple”;
- los valores significativos de amplitud simple, serán el doble de los valores tabulados.
- las ventanas meteorológicas de navegación las referiremos a los valores especificados en
* SEA STATE NUMERAL TABLE FOR THE OPEN OCEAN NORTH ATLANTIC
** la mar de través para mangas > 63m deberán evitarse.
Las ventanas meteorológicas asignadas a cada condición de la carga,
deberán fundamentarse en los valores de la altura significativa de la ola, en
la velocidad del viento de forma continua y en la probabilidad de los mis-
mos.
CLASIFICACIÓN DE CRITERIOS ESPECÍFICOS UHLC (para > 63 m manga)
3. Intensidad y dirección del viento, corrientes etc. Valores max.
3.1 Inmersión del buque (abandono de carga) - Mar 0-1* -
3.2 Emersión del buque (recoger la carga) - Mar 0-1* -
3.3 Carga dentro de amuras - Mar 3* - 4* -
3.4 Carga sobresaliendo fuera de amuras - Mar 2*-3* -
3,5 Cargas con superficie vélica grande y dirección del viento a proa (0º)
- Mar 2*-3*
3,6 Cargas con superficie vélica grade y dirección del viento lateral (90º)**
- Mar 1* - 2*
3,7 Cargas con superficie vélica pequeña y dirección del viento a proa (0º)
- Mar 3*4*
3,8
Cargas con superficie vélica pequeña y dirección del viento a proa (90º)
- Mar 2* -3*
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
6. ESTABILIDAD ESTÁTICA: PLENA CARGA DISEÑO 273
6.6.4.1 Prácticas contractuales habituales de los buques HLC.
Los fletes de las grandes cargas que transportan los HLC vienen
cubiertos por pólizas de seguro que cubren las posibles pérdidas de la
carga.
En las especificaciones técnicas de transporte se fijan las condiciones
operativas del buque en donde prima la seguridad de la carga sobre cual-
quier otra circunstancia tales como el tiempo empleado en el transporte o
la ruta.
La ruta del buque viene fijada por las condiciones de la mar lo que
implica navegar exclusivamente en determinados meses del año en fun-
ción del océano y la época de bonanza del mismo.
El capitán del buque deberá recibir informaciones meteorológicas
que prevengan con tiempo suficiente posibles tormentas o cambios de la
mar e indicando rutas alternativas adecuadas. El cambio de ruta, debido a
la previsión de posibles condiciones meteorológicas inadecuadas, forma
parte de las condiciones del flete.
Así mismos se establecen instrucciones detalladas de operación. Para
situaciones donde el cabeceo o el “slamming” presenten valores que pue-
dan influir negativamente en la carga, se reducirá máquina y se pondrá
proa a la mar.
Habrá que tener presente el ángulo de incidencia de la ola respecto a
la dirección del buque siendo aconsejable siempre que se pueda navegar
proa a la mar.
Referente al viento, no solamente habrá que tener en cuenta su inten-
sidad, sino también la persistencia y el “fetch”.
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
7. ACCIONES DE FUTURO A REALIZAR 274
CAPÍTULO 7.- ACCIONES Y ESTUDIOS FUTUROS A REALIZAR EN RELA-
CIÓN CON EL ESTUDIO DINÁMICO DE LOS BUQUES HLC.
Para justificar este capítulo bastaría volver al comienzo de la tesis en el capítulo 2,
página 11, subparágrafos 8 y 9, donde se decía:
Preveer el comportamiento de un buque de estas características en su fase de
proyecto es de por sí una necesidad hoy día en cuanto permite tomar decisiones
a tiempo, flexibilizando el mismo.(…)Actualmente está muy extendido estudiar el
comportamiento del buque en la mar de acuerdo con los planteamientos reali-
zados en el dominio de la frecuencia, y basados en la “strip theory” (teoría de
rebanadas) tomando como guía los estudios realizados por Nils Salvensen. La
validez de la teoría de las rebanadas se basa en suponer que el buque navega a
velocidades moderadas en ausencia de sustentación dinámica y que la forma de
sus cuadernas varía gradualmente a lo largo de la eslora, cuya magnitud pre-
domina sobre la de la manga o el calado.(…) En el caso de nuestros buques, ló-
gicamente la fiabilidad del método podría ser suficiente en cuanto que la veloci-
dad es relativamente pequeña, y no presentan cambios bruscos en las formas de
carena. Sin embargo, no podemos afirmar lo mismo en cuanto la magnitud de la
eslora “predomina” sobre la manga, y en cuanto la manga alcanza valores atí-
picos, presentando unas formas llenas y un coeficiente de bloque de 0,83 ale-
jándonos de formas finas. El único camino fiable sería el estudio en un canal de
pruebas, pero esto se escapa de la presente tesis doctoral y queda abierto para
futuras investigaciones.
A pesar de todas estas dificultades no se ha querido renunciar a sugerir
acciones y estudios futuros a realizar en relación con el estudio dinámico de los
buques HLC y para evaluar algunos parámetros de comportamiento.
Aunque el campo que se abre a la investigación de estos buques en general es
muy amplio se ha considerado más interesante, quizá por ser más urgente, el problema
de la corrección de la estabilidad y más concretamente de las aceleraciones de escora
navegando en mares severos. Así mismo, sería conveniente conocer previamente el
comportamiento del buque (Carena 72), sus movimientos en condiciones de navega-
ción, es decir a plena carga de diseño (cargado con plataformas de perforación o de ex-
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
7. ACCIONES DE FUTURO A REALIZAR 275
plotación de peso y C.G., estudiadas en el capítulo 6, parágrafo 6-5), y soportando la
acción del viento sobre la misma.
En segundo lugar, se ha tratado en el capítulo 6, parágrafo 6-6, la corrección de la
estabilidad y de grandes aceleraciones en condiciones de navegación. Sin embargo, se
ha dejado a propósito para este capítulo las posibles investigaciones acerca de las posi-
bles correcciones de estabilidad transversal, enunciando aquellos sistemas que presentan
posibles aplicaciones a los buques en estudio, solos o asociados a otros sistemas. Habría
sido una banalidad tratar de la elección de estos sistemas en buques HLC cuando no se
tienen noticias de la aplicación de alguno que represente una verdadera innovación.
Dentro de los sistemas de control de la estabilidad transversal se ha considerado
como línea de investigación prioritaria el estudio de los tanques activos, especialmente
el estudio de un sistema de control que además de reducir los balances de escora contro-
le las aceleraciones de los pares de adrizamiento.
7-1 ESTUDIO DINÁMICO DE LOS BUQUES HLC- ENSAYOS CON MO-
DELOS.
El problema de conocer los movimientos de los buques en estudio y espe-
cialmente la C72 cuando navega en la mar a velocidad y rumbo constantes, se
reduce al de obtener la respuesta de ese buque cuando es excitado por un tren de
olas regulares de una frecuencia determinada que incide sobre el buque con el
rumbo relativo dado.
Considerando el supuesto de una mar irregular de cresta larga habría que de-
terminar la respuesta del buque cuando navega con velocidad y rumbo relativo a
la mar, frente a trenes de olas sinusoidales de cresta larga en el ensayo. (Véase
Bibliografía, Ref. 6)
De cada ensayo con una ola regular de una frecuencia dada (ω) se obtendrán
los valores correspondientes de la función de transferencia, es decir, la ordenada
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
7. ACCIONES DE FUTURO A REALIZAR 276
del operador de amplitud de respuesta o RAO, 2
( )H ω para las condiciones de
velocidad y rumbo ensayadas. Para cada condición de navegación habrá que en-
sayar con tantas ondas regulares como ordenadas RAO se quieran obtener. Cada
uno de estos ensayos proporciona el desfase entre la respuesta medida y la exci-
tación.
La magnitud de transferencia ( )H ω es una magnitud compleja que se defi-
ne mediante dos valores: su módulo y su desfase respecto a una referencia esta-
blecida por la ola excitadora. Sus valores adimensionalizados son:
Htt(ω) = amplitud de la translación / amplitud de la ola.
Hrr(ω) = amplitud de la rotación / pendiente máxima de la ola.
Si en virtud del principio de superposición, el oleaje regular viene represen-
tado por un espectro de elevaciones, Φζζ(ω), o de pendientes, Φζ’ζ’(ω), se puede
obtener el espectro de amplitudes de los movimientos del buque en sus seis gra-
dos de libertad.
La función de transferencia, como se ha dicho anteriormente, consta de la
amplitud de la respuesta y del desfase entre cada uno de los movimientos del
buque referido a una posición de referencia de la ola excitadora. Para poder de-
terminar el movimiento absoluto de cualquier punto del buque (cuerpo rígido)
habría que componer las traslaciones del C.G. del buque con las rotaciones alre-
dedor de dicho centro de gravedad del punto en cuestión. (Véase Bibliografía,
Ref. 6)
A pesar de las hipótesis simplificadoras, los resultados suelen ser bastante
aproximados a excepción del balance que en algunos casos se distancia de la
realidad.
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
7. ACCIONES DE FUTURO A REALIZAR 277
7.2 POSIBLES ESTUDIOS DE CORRECCIÓN DE LA ESTABILIDAD EXCE-
SIVA EN LOS BUQUES HLC MEDIANTE SISTEMAS DE ESTABILIZA-
CIÓN TRANSVERSAL Y SISTEMAS DE CONTROL.
Se ha considerado la corrección de la estabilidad transversal en los buques
HLC, y específicamente las aceleraciones transversales como objeto de investiga-
ción, en cuanto que la aplicación a estos buques en particular, por sus especiales ca-
racterísticas, hace necesario emplear mecanismos adecuados de corrección en con-
diciones de plena carga de diseño, con modelos que incorporen los posibles fletes
más significativos (plataformas de perforación, plataformas de explotación, etc.) y
se estudie la acción del viento y del olaje en condiciones de navegación.
El posible trabajo de investigación se podría plantear en tres etapas (Véase
Bibliografía, Ref. 16)
• Etapa 1: Estudio del comportamiento del buque sin sistema de estabilización.
• Etapa 2: Establecer criterios de elección del sistema de estabilización apropiado
y dimensionamiento del mismo en función de los requerimientos operativos.
• Etapa 3: Diseño del sistema de control adecuado para conseguir el máximo
rendimiento del sistema de estabilización definido en la etapa 2.
Existe una amplia gama de sistemas de estabilización disponibles en la ac-
tualidad para los diferentes buques. Alguno de ellos es común a casi todos los bu-
ques, otros limitados por el tamaño y funciones del buque. Se indican muy breve-
mente aquellos más conocidos aunque se ha tratado con mayor extensión los tan-
ques activos, considerando que este sistema presenta mejores condiciones para co-
rregir los excesos de estabilidad transversal y las altas aceleraciones de escora.
7.2.1. Quillas anti-balance
Este sistema es muy utilizado en los buques de pasaje y buques militares. Su
principio de funcionamiento es muy simple: se basa en la disipación de energía que
se produce por formación de remolinos en el movimiento de balance de unas plata-
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
7. ACCIONES DE FUTURO A REALIZAR 278
bandas longitudinales dispuestas en las zonas de los pantoques. El sistema ha teni-
do una enorme difusión gracias a la excelente relación coste/eficacia que presenta.
7.2.2. Estabilizadores giroscópicos
El comportamiento de estos sistemas se basa en el concepto de precesión es-
tacionaria (Véase Bibliografía, Ref. 17)
Básicamente, cuando un cuerpo que gira a velocidad constante sobre uno de
sus ejes principales de inercia (denominado eje de rotación) es sometido a un mo-
vimiento de giro a velocidad igualmente constante alrededor de otro cualquiera de
sus ejes principales de inercia (denominado eje de precesión), se produce un mo-
mento de reacción perpendicular a los citados ejes, de valor proporcional al produc-
to de las velocidades de rotación y precesión.
Así, si situamos en el interior de un buque un cilindro de masa apreciable gi-
rando a gran velocidad sobre su eje de simetría (el cual se dispone verticalmente) y
lo hacemos precesionar lentamente alrededor de un eje horizontal situado en la di-
rección babor /estribor se producirá un momento en la dirección proa/popa tendente
a escorar el buque a una u otra banda en función del sentido que impongamos a la
velocidad de precesión. Por lo tanto, gobernando el motor encargado de hacer pre-
cesionar al giroscopio con un sistema de control adecuado, es posible producir un
momento adrizante de naturaleza periódica capaz de oponerse al momento escoran-
te inducido por las olas.
7.2.3. Aletas anti-balance de sustentación dinámica.
Este sistema de estabilización tiene un principio de funcionamiento muy sim-
ple: el par inducido por la sustentación dinámica de un par de aletas situadas en las
zonas de los pantoques equilibra el par escorante inducido por la acción de las olas
sobre el buque. El movimiento de las aletas se produce mediante un sistema de ac-
cionamiento gobernado por un sistema de control automático.
Lo normal en buques de superficie es que las aletas no sean retráctiles, tengan
una relación envergadura/cuerda cercana a la unidad y dispongan de accionamiento
hidráulico.
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
7. ACCIONES DE FUTURO A REALIZAR 279
Este sistema suele dar resultados excelentes y es muy utilizado en buques de
eslora > 100 m, pero tiene el inconveniente de que no funciona con el buque parado
o navegando a baja velocidad, ya que el efecto de sustentación dinámica es aproxi-
madamente proporcional al cuadrado de la velocidad de avance del buque.
Una variante a lo arriba descrito, no evaluada, consiste en estabilizar el buque
mediante el uso de la pala del sistema de gobierno como aleta anti-balance, siendo
esto posible gracias al hecho de que el periodo propio de balance de un buque es
normalmente mucho menor que el tiempo de respuesta en cambio de rumbo del
mismo ante una metida de pala del timón. Hasta el momento hay poca experiencia
de adaptación.
7.2.4. Tanques Activos (Véase Bibliografía, Ref. 18)
En los denominados tanques pasivos de antibalance y de acuerdo con la
densidad y viscosidad del líquido utilizado se dimensiona el tanque de forma que el
tiempo requerido para trasvasar el agua entre los tanques coincida con el período
natural del buque. No obstante, la frecuencia del movimiento de balance está deter-
minada por una combinación de las frecuencias de excitación de las olas y de la
respuesta del buque en función del lugar de navegación. Como consecuencia, el pe-
riodo de balance es posible que no coincida con el periodo natural del buque. Esta
situación puede ser superada mediante la utilización de tanques activos antibalan-
ce que incorporan un sistema de control que modifica el periodo natural del tan-
que para que coincida con el periodo natural del buque. (Bibliografía, Ref. 19)
Desde 1999 hasta la fecha un gran número de artículos técnicos han sido publi-
cados sugiriendo métodos que suponen una mejora de los tanques antibalance. En
los primeros diseños, se dotó al conducto inferior de una bomba que trasvasaba
agua entre los tanques; posteriormente y con un diseño que ha quedado como
definitivo (Bibliografía, Ref. 20), se suprimió la bomba impulsora sustituyéndola
por unas soplantes que insuflan aire a presión en la parte superior de los tanques
provocando el trasvase de agua entre ellos. Una detallada revisión de los sistemas
antibalance en buques ha sido realizada por Moaleji, y Greig. (Bibliografía, Ref.
21).
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
7. ACCIONES DE FUTURO A REALIZAR 280
Stigter (Bibliografía, Ref. 22) analiza el comportamiento de los tanques median-
te las ecuaciones de Euler, mientras que Goodrich (Bibliografía, Ref. 23), partiendo
de la formulación propuesta por Froudé (Bibliografía, Ref. 24), representa el movi-
miento combinado del buque con los tanques estabilizadores mediante dos ecuacio-
nes diferenciales, investigando la variación del amortiguamiento producido por ellos
con la frecuencia.
Kagawa (Bibliografía, Ref. 25) propone un modelo matemático basado en con-
sideraciones energéticas, mientras que Shyu y Kuo (Bibliografía, Ref. 26) utilizan el
método de Lagrange para desarrollar los procedimientos de Kagawa para encontrar
la ecuación dinámica del movimiento del fluido en el interior del tanque.
Posteriormente Abdel Gaward et al. (Bibliografía, Ref. 27) investigan la influen-
cia de la geometría del tanque sobre el ángulo de balance, concluyendo que la fre-
cuencia natural del tanque puede ser modificada variando el nivel de agua en los
mismos. Este resultado fue posteriormente desarrollado por Yousssef. (Bibliografía,
Ref. 28).
En cuanto al control, Yamagushi y Shinkai (Bibliografía, Ref. 29) utilizan un
modelo adaptativo de control por el modelo de referencia interno, mientras que
Chen et al. (Bibliografía, Ref. 30) utilizan un controlador en modo deslizante. Phai-
roth y Huang (Bibliografía, Ref. 31) utilizan diversos tipos de controladores. En
primer lugar, un controlador PD modificado donde la diferencia de altura entre los
tanques y la velocidad de transferencia de agua son las señales realimentadas. Pos-
teriormente, utilizaron un controlador lineal cuadrático (LQR) y un control genera-
lizado predictivo (GPC).
Los sistemas de control más generalizados instalados en los tanques activos
controlan el movimiento de escora limitando el ángulo de escora del buque pero
admiten incertidumbres en los parámetros que controlan la dinámica del buque tales
como las aceleraciones de escora.
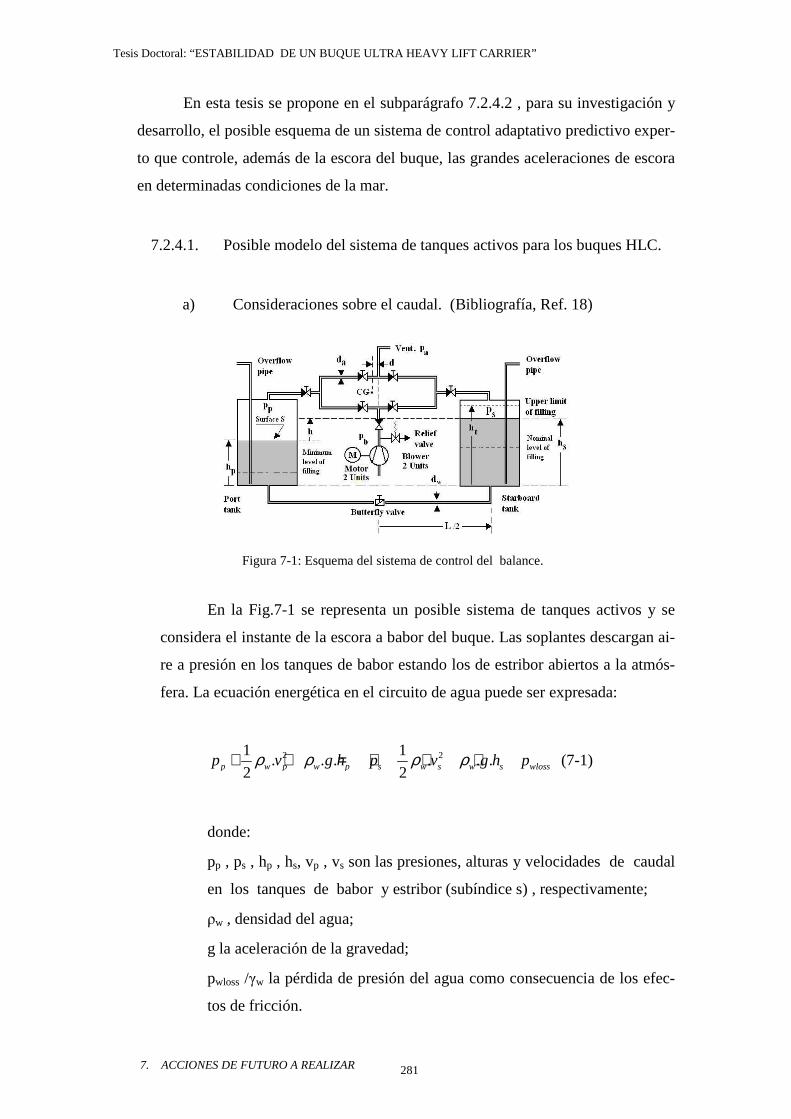
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
7. ACCIONES DE FUTURO A REALIZAR 281
En esta tesis se propone en el subparágrafo 7.2.4.2 , para su investigación y
desarrollo, el posible esquema de un sistema de control adaptativo predictivo exper-
to que controle, además de la escora del buque, las grandes aceleraciones de escora
en determinadas condiciones de la mar.
7.2.4.1. Posible modelo del sistema de tanques activos para los buques HLC.
a) Consideraciones sobre el caudal. (Bibliografía, Ref. 18)
En la Fig.7-1 se representa un posible sistema de tanques activos y se
considera el instante de la escora a babor del buque. Las soplantes descargan ai-
re a presión en los tanques de babor estando los de estribor abiertos a la atmós-
fera. La ecuación energética en el circuito de agua puede ser expresada:
2 21 1. . . . . .
2 2p w p w p s w s w s wlossp v g h p v g h pρ ρ ρ ρ+ + = + + + (7-1)
donde:
pp , ps , hp , hs, vp , vs son las presiones, alturas y velocidades de caudal
en los tanques de babor y estribor (subíndice s) , respectivamente;
ρw , densidad del agua;
g la aceleración de la gravedad;
pwloss /γw la pérdida de presión del agua como consecuencia de los efec-
tos de fricción.
Figura 7-1: Esquema del sistema de control del balance.

Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
7. ACCIONES DE FUTURO A REALIZAR 282
De la ecuación de continuidad vp = vs y después de dividir cada término
por el peso específico del agua γw, considerando la pérdida de carga pwloss / γw
en la Ec. (7-1) como nula, esta ecuación conduce a que:
p ss p
w
p ph h h
γ−
= − = (7-2)
Igualmente en el círcuito de aire la pérdida de carga haloss es:
.b p
alossap
p ph
gρ−
= (7-3)
donde pb representa la presión suministrada por las soplantes mientras
que ap es la densidad del aire en el tanque de babor. Este término está compuesto
de las pérdidas mayores y las menores.
De la Ec. (7-3),
2 2.4
. 2 2b p p p p p
apap a
p p f L v v
g d g gλ
ρ−
= ⋅ + ⋅⋅ ⋅
(7-4)
El primer término del segundo miembro representa las pérdidas mayores
debidas al rozamiento gobernadas por la ecuación de D’Arcy-Weisbach (Bi-
bliografía, Ref. 32), mientras que el segundo representa las pérdidas menores
siendo fp el coeficiente de fricción del caudal a babor, mientras que Lp y da son
la longitud y diámetro desde la soplante a los tanques de babor; ap es el coefi-
ciente de pérdidas menores de caudal hacia los tanques de babor.
De la Ec. (7-4), la presión del aire encerrado en el tanque de babor es:

Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
7. ACCIONES DE FUTURO A REALIZAR 283
2 2.4
2 2p p ap p p
p b ap apa
f L v vp p
d g g
γλ γ
⋅= − ⋅ − ⋅ ⋅
⋅ ⋅ (7-5)
Igualmente la presión ps en el tanque de estribor que está ventilado a la
atmósfera es:
2 2.4
2 2s s as s s
s a as asa
f L v vp p
d g g
γ λ γ⋅= − ⋅ − ⋅ ⋅⋅ ⋅
(7-6)
Donde pa es la presión atmosférica; λas, fs, γas, son el coeficiente de pér-
didas menores, el coeficiente de fricción del aire hacia el tanque de estribor y el
peso específico del aire en los tanques de estribor, respectivamente, mientras
que Ls representa la longitud de la tubería desde la parte superior de los tanques
de estribor hasta el final del extremo de ventilación.
Suponiendo que el compartimento del aire presurizado en el tanque de
babor es el correspondiente a un gas perfecto en condiciones isotérmicas de pe-
so específico γap está relacionado con su valor γa bajo condiciones normales de
presión pa y temperatura con la presión suministrada por las soplantes pb por
bap a
a
p
pγ γ= ⋅ (7-7)
En los tanques de estribor bajo presión atmosférica constante, los pesos
específicos están relacionados
as aγ γ= (7-8)
Después de sustituir (7-5) y (7-6) en (7-2), la presión del aire que debe
ser suministrada por los soplantes está relacionada con la diferencia de nivel en-
tre los tanques mediante una relación lineal de la forma
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
7. ACCIONES DE FUTURO A REALIZAR 284
1 2b b bp c c h= + ⋅
siendo
2
1 2
22
1 22
a s s sa as
ab
a p p pap
a
v f Lp
g dc
v f L
g d
γ λ
γλ
⋅ ⋅+ ⋅ + ⋅ =⋅ ⋅
+ ⋅ + ⋅
(7-9)
2 2
1 22
wb
a p p pap
a a
cv f L
p g d
γγ
λ=
⋅ ⋅ + ⋅ + ⋅ ⋅
(7-10)
Evidentemente la velocidad del aire hacia los tanques de babor vp de-
pende del valor del caudal suministrado por las soplantes el cual es función de
la diferencia de nivel que se requiere para corregir el balance del buque. La ve-
locidad del aire, por lo tanto, será función de las características del equipo insta-
lado. Como ejemplo se ha considerado para el estudio consultado una velocidad
de 12,73 m/s, impuesto por el número de soplantes en operación (dos unidades)
y el diámetro de la tubería de aire da = 0,3 m. El rango de variación del caudal es
pequeño por lo que esta suposición parece adecuada. La velocidad de salida del
aire a la atmósfera desde el tanque de estribor está limitada por las válvulas de
globo instaladas en este conducto. Su velocidad es considerada constante con un
valor de vs = 15,24 m/s.
b) Modelo No Lineal del balance. (Bibliografía, Ref. 18)
El movimiento de balance del buque puede ser descrito mediante una
ecuación diferencial no lineal. Según la formulación de Froude (Bibliografía,
Ref. 24), puede ser escrita como
( ) ( ) ( ) ( ),d r ah wI M M M h M t⋅Φ + Φ Φ + Φ + =ɺɺ ɺ (7-11)
donde
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
7. ACCIONES DE FUTURO A REALIZAR 285
xx xxI I I= + ∂ representa el momento virtual de inercia del buque con respecto a
las inclinaciones transversales, suma del momento de inercia debido a la masa
del buque y de la masa añadida como consecuencia de los efectos hidrodinámi-
cos;
Φi
es el ángulo de balance (el punto sobre la variable representa su derivada
con respecto al tiempo);
Mah representa el par producido por el sistema antibalance de los tanques
parcialmente llenos de agua cuya diferencia de niveles es controlada por la pre-
sión suministrada por las sopladoras;
( ),dM Φ Φɺ es el momento producido por las fuerzas disipativas generadas du-
rante el movimiento oscilatorio;
( )rM Φ representa el momento antiescora producido por el propio buque;
y ( )wM t es el momento externo producido por las olas sobre el buque.
Este momento cuando la dirección de propagación de las olas es perpen-
dicular a la dirección de movimiento del buque puede ser representado por:
20 0 cosw
h IM t
α ω π ωλ
⋅ ⋅ ⋅ ⋅= ⋅ ⋅ (7-12)
donde:
ω0 es la frecuencia de balance inicial del buque;
λ, la longitud de onda de las olas;
α0 es el coeficiente efectivo de pendiente de las olas;
h, su altura;
ω, su frecuencia.
No obstante, para un ángulo de incidencia de las olas sobre el buque dis-
tinto del contemplado, la frecuencia observada desde el buque, denominada fre-
cuencia de encuentro ωe, difiere de la frecuencia ω.
La ec. (7-12) debe modificarse en el sentido

Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
7. ACCIONES DE FUTURO A REALIZAR 286
20 0 sin cosw e
h IM t
α ω π β ωλ
⋅ ⋅ ⋅ ⋅= ⋅ ⋅ ⋅ (7-13)
Donde β es el ángulo formado por la dirección de propagación de las olas y la
dirección de movimiento del buque. Si U es la velocidad del buque bajo condi-
ciones de navegación, la frecuencia de encuentro viene dada por
20
0 cose
U
g
ωω ω β⋅= − ⋅ (7-14)
Bajo estados de la mar moderados el momento externo producido
por las olas sobre el buque puede ser representado por la suma de un gran núme-
ro de armónicos. Esta suposición transforma la Ec. (7-13) en
( )20 0
1
( ) sin cosN
nw en n
n n
hM t I tα ω π β ω ε
λ=
= ⋅ ⋅ ⋅ ⋅ ⋅ ⋅ ⋅ +∑ (7-15)
donde:
n es el índice de cada componente;
εn es una diferencia de fase distribuida en forma aleatoria en el intervalo (0-2π).
No existe un significado físico en los valores ε, pero el hecho de que
sean aleatorios introduce un elemento de probabilidad que hace que la represen-
tación sea realista.
La Ec. (7-16) para el periodo del buque en aguas tranquilas permite de-
terminar el verdadero periodo de balance. De hecho, el radio de giro (k) del bu-
que alrededor de un eje que pasa por el C.G. del buque en la dirección proa-
popa debe ser incrementado debido al efecto de la “masa añadida” debido a los
efectos de movimiento inducido en el agua. Este efecto varía con la frecuencia,
pero esta variación puede ser ignorada, incrementándose el valor de k en torno
al 5%.

Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
7. ACCIONES DE FUTURO A REALIZAR 287
Como hemos visto en el capítulo 6, ec. (6-33) página 254,
2 kT
gGMθ
π= (7-16)
donde GM representa la altura metacéntrica inicial del buque.
Su momento de inercia en el movimiento de balance del buque es
2I kg
∆= (7-17)
siendo ∆ el desplazamiento del buque.
La estimación de los coeficientes del par amortiguador es ambigua co-
mo consecuencia del carácter no lineal del movimiento.
Se propone la siguiente relación (7-18) que ha sido utilizada por varios
autores entre ellos Wright et al. (Bibliografía, Ref. 33) o Pedisic et al. (Biblio-
grafía, Ref. 34)
( ) 31 3dM d dΦ = ⋅Φ + ⋅Φɺ ɺ ɺ (7-18)
Esta relación funcional es más representativa que un modelo cuadrático.
Al mismo tiempo el par adrizante:
( ) ( )4
3 5 7 2( 1)1 3 5 7 2
1
( 1) jr
j
M GZ c c c c c j −
=
= ∆ ⋅ Φ = ∆ ⋅ ⋅Φ + ⋅Φ + ⋅Φ + ⋅Φ = ∆ ⋅ − ⋅Φ∑
(7-19)
Los valores experimentales del brazo del par GZ se pueden representar en
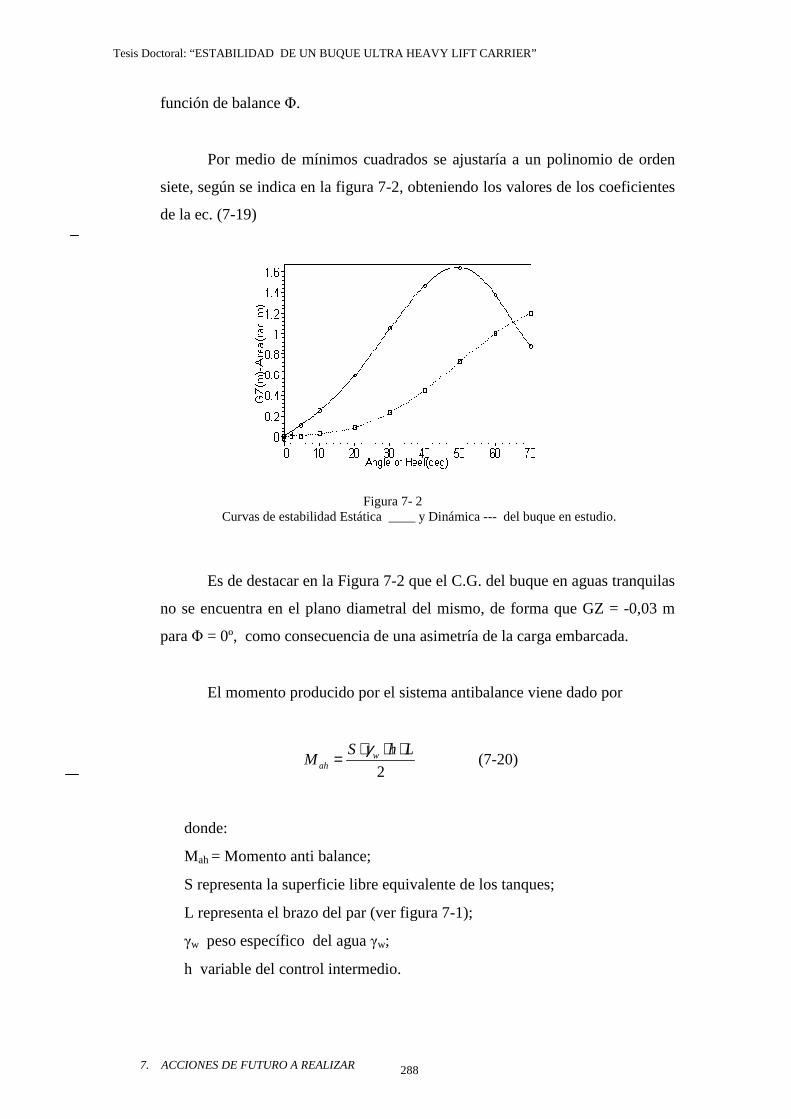
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
7. ACCIONES DE FUTURO A REALIZAR 288
función de balance Φ.
Por medio de mínimos cuadrados se ajustaría a un polinomio de orden
siete, según se indica en la figura 7-2, obteniendo los valores de los coeficientes
de la ec. (7-19)
Es de destacar en la Figura 7-2 que el C.G. del buque en aguas tranquilas
no se encuentra en el plano diametral del mismo, de forma que GZ = -0,03 m
para Φ = 0º, como consecuencia de una asimetría de la carga embarcada.
El momento producido por el sistema antibalance viene dado por
2w
ah
S h LM
γ⋅ ⋅ ⋅= (7-20)
donde:
Mah = Momento anti balance;
S representa la superficie libre equivalente de los tanques;
L representa el brazo del par (ver figura 7-1);
γw peso específico del agua γw;
h variable del control intermedio.
Figura 7- 2 Curvas de estabilidad Estática ____ y Dinámica --- del buque en estudio.
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
7. ACCIONES DE FUTURO A REALIZAR 289
Después de sustituir las ecuaciones (7-18), (7-19) y (7-20) en la
ecuación (7-11), (ecuación diferencial no lineal según la formulación de
Froude) e introduciendo 1x = Φɺ , aceleración angular, y 2x = Φ , puede ser
reescrita en una forma más adecuada como
42 2( 1)
1 1 3 1 1 2( 1) 21
jj wN
j
x x x x h Mα α β δ−−
=
= − + ⋅ ⋅ − ⋅ − ⋅ + ∑ɺ (7-21a)
2 1x x=ɺ (7-21b)
2y x= (7-21c)
donde :
h es la variable que representa el control intermedio que debe ser sumi-
nistrado por el control definitivo;
pb la presión suministrada por las soplantes;
“y” representa la salida que debe de ser controlada;
MwN representa el momento producido por las olas, normalizado por el
momento de inercia del buque wwN
MM
I= ;
( 1,3)ii
dI
Iα = = ; 2( 1)
2( 1) ( 1...4)jj
cj
Iβ −
−
∆ ⋅= = ;
2wS L
I
χδ ⋅ ⋅=⋅
Hasta aquí se ha planteado atendiendo a la formulación de Froude, la
ecuación diferencial no lineal del momento anti escora (anti heeling) producido
por los tanques activos propuestos. Sin embargo, el objeto de la investigación no
es solamente la escora, sino las aceleraciones producidas por los pares adrizan-
tes. Dejamos, pues, para un posible estudio e investigación los posibles plantea-
mientos que además del control de los movimientos de escora limite el valor de
las aceleraciones de los mismos.
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
7. ACCIONES DE FUTURO A REALIZAR 290
7.2.4.2. Propuesta de estudio de un sistema de Control Adaptativo Predictivo
Experto. (Bibliografía, Ref. 35)
El movimiento de balance visto en el parágrafo anterior se ha descrito
mediante una ecuación diferencial no lineal y por lo tanto estamos ante procesos
no lineales, multivariables con importantes interacciones, produciendo en los
movimientos dinámicos del buque tiempos de retardo puro entre sus variables de
entrada y salida.
A. Control Adaptativo Predictivo.
Los sistemas de control clásicos, de realimentación negativa PID (pro-
porcionales, integradores y derivadores), funcionan bien pero adolecen de varias
limitaciones: sus modelos no se adaptan a los cambios dinámicos del proceso,
que se aleja de los puntos de operación (éste es nuestro caso) y hacen que el sis-
tema de control clásico pierda su estabilidad y no sean capaces de aprender y
adaptarse a nuevas situaciones. Debido a ello se hace necesario un nuevo enfo-
que. Una tecnología que se inició a finales de los años 70 introdujo la herramien-
ta que daba solución a las limitaciones de los controladores PID: el control adap-
tativo predictivo.
Un Sistema de control adaptativo predictivo consta de dos bloques:
1) un bloque predictivo, que calcula la señal de control a partir de la salida
deseada generada por el bloque conductor. Este cálculo se realiza de
acuerdo con el principio de control predictivo que hace que la salida
deseada sea igual a la salida del modelo adaptativo, que es la salida pre-
dicha del proceso.
2) un bloque adaptativo (mecanismo de adaptación + modelo adaptativo)
que busca que el modelo se adapte continuamente a la dinámica del pro-
ceso.
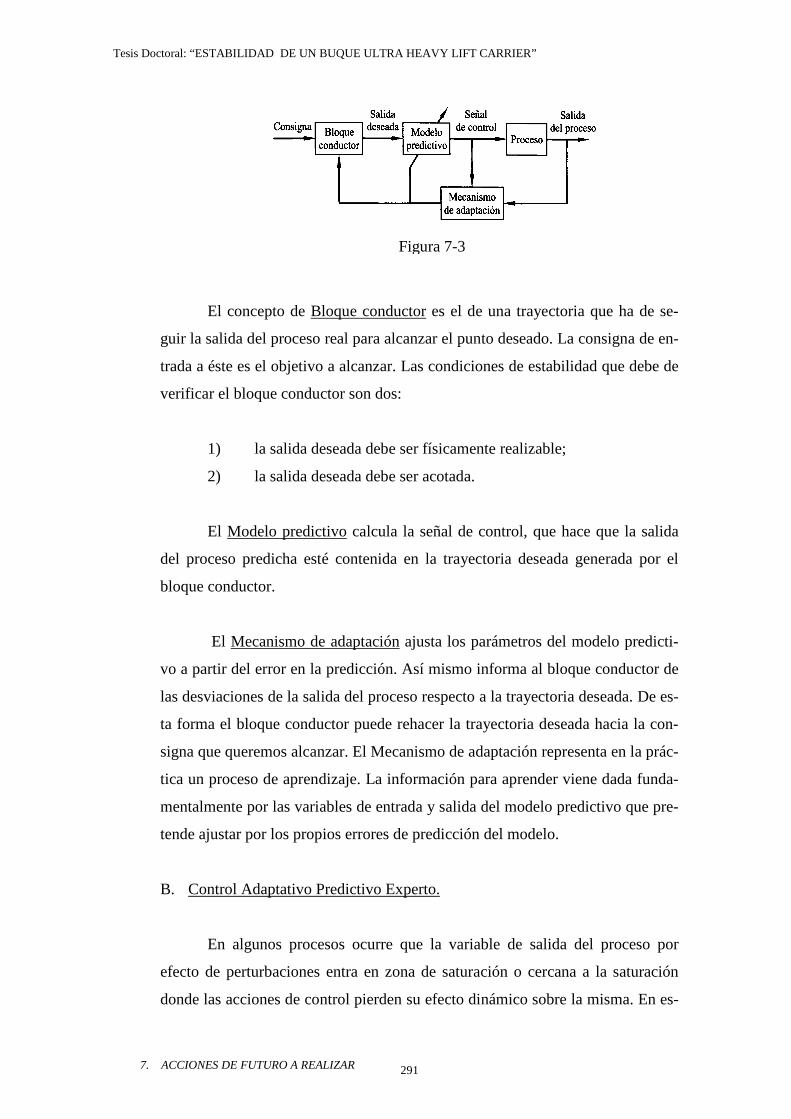
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
7. ACCIONES DE FUTURO A REALIZAR 291
El concepto de Bloque conductor es el de una trayectoria que ha de se-
guir la salida del proceso real para alcanzar el punto deseado. La consigna de en-
trada a éste es el objetivo a alcanzar. Las condiciones de estabilidad que debe de
verificar el bloque conductor son dos:
1) la salida deseada debe ser físicamente realizable;
2) la salida deseada debe ser acotada.
El Modelo predictivo calcula la señal de control, que hace que la salida
del proceso predicha esté contenida en la trayectoria deseada generada por el
bloque conductor.
El Mecanismo de adaptación ajusta los parámetros del modelo predicti-
vo a partir del error en la predicción. Así mismo informa al bloque conductor de
las desviaciones de la salida del proceso respecto a la trayectoria deseada. De es-
ta forma el bloque conductor puede rehacer la trayectoria deseada hacia la con-
signa que queremos alcanzar. El Mecanismo de adaptación representa en la prác-
tica un proceso de aprendizaje. La información para aprender viene dada funda-
mentalmente por las variables de entrada y salida del modelo predictivo que pre-
tende ajustar por los propios errores de predicción del modelo.
B. Control Adaptativo Predictivo Experto.
En algunos procesos ocurre que la variable de salida del proceso por
efecto de perturbaciones entra en zona de saturación o cercana a la saturación
donde las acciones de control pierden su efecto dinámico sobre la misma. En es-
Figura 7-3
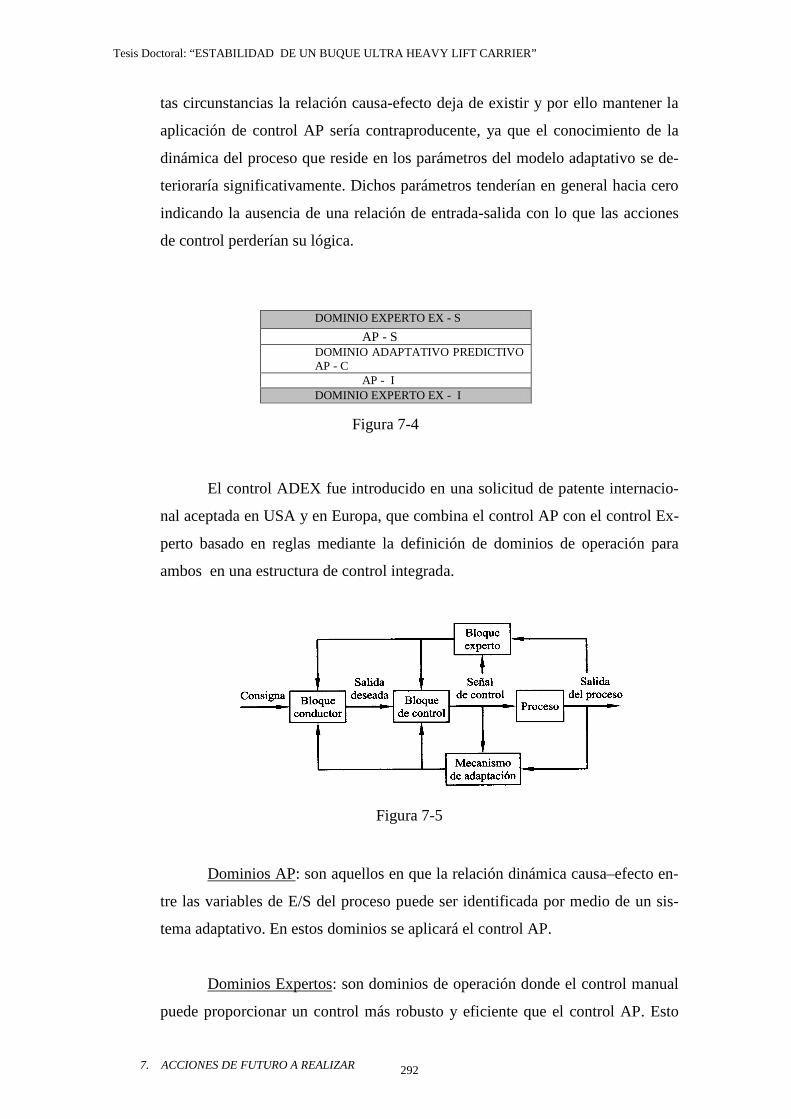
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
7. ACCIONES DE FUTURO A REALIZAR 292
tas circunstancias la relación causa-efecto deja de existir y por ello mantener la
aplicación de control AP sería contraproducente, ya que el conocimiento de la
dinámica del proceso que reside en los parámetros del modelo adaptativo se de-
terioraría significativamente. Dichos parámetros tenderían en general hacia cero
indicando la ausencia de una relación de entrada-salida con lo que las acciones
de control perderían su lógica.
El control ADEX fue introducido en una solicitud de patente internacio-
nal aceptada en USA y en Europa, que combina el control AP con el control Ex-
perto basado en reglas mediante la definición de dominios de operación para
ambos en una estructura de control integrada.
Dominios AP: son aquellos en que la relación dinámica causa–efecto en-
tre las variables de E/S del proceso puede ser identificada por medio de un sis-
tema adaptativo. En estos dominios se aplicará el control AP.
Dominios Expertos: son dominios de operación donde el control manual
puede proporcionar un control más robusto y eficiente que el control AP. Esto
DOMINIO EXPERTO EX - S
AP - S DOMINIO ADAPTATIVO PREDICTIVO AP - C
AP - I DOMINIO EXPERTO EX - I
Figura 7-4
Figura 7-5
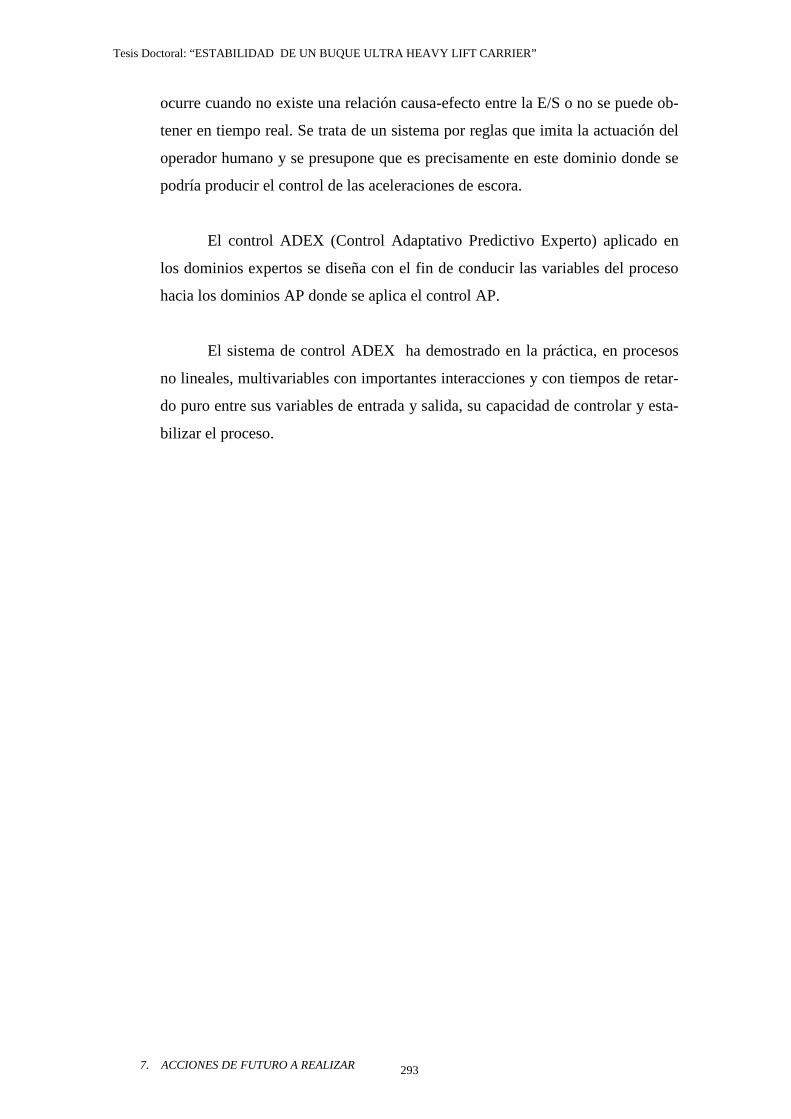
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
7. ACCIONES DE FUTURO A REALIZAR 293
ocurre cuando no existe una relación causa-efecto entre la E/S o no se puede ob-
tener en tiempo real. Se trata de un sistema por reglas que imita la actuación del
operador humano y se presupone que es precisamente en este dominio donde se
podría producir el control de las aceleraciones de escora.
El control ADEX (Control Adaptativo Predictivo Experto) aplicado en
los dominios expertos se diseña con el fin de conducir las variables del proceso
hacia los dominios AP donde se aplica el control AP.
El sistema de control ADEX ha demostrado en la práctica, en procesos
no lineales, multivariables con importantes interacciones y con tiempos de retar-
do puro entre sus variables de entrada y salida, su capacidad de controlar y esta-
bilizar el proceso.
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
8.- APORTACIONES DE LA TESIS. CONCLUSIÓN FINAL.
294
CAPÍTULO 8.- APORTACIONES DE LA TESIS.- CONCLUSIÓN FINAL.
Este capítulo pretende recopilar las conclusiones que a lo largo de esta tesis se
han puesto de manifiesto para así aportar unas conclusiones finales que permitan abrir
nuevos campos de investigación para los buques HLC.
8.1. CARENAS SISTEMÁTICAS GENERADAS Y DERIVADAS.
Se ha generado una carena con formas propias pero con unos coeficientes de di-
seño casi iguales a los del buque operativo que mayores cargas ha transportado hasta la
fecha, y por medio de transformaciones afines y transformaciones cuadráticas se ha de-
rivado otras tres carenas – la carena 63, la carena 72 y la carena 84 de mangas de 63
metros, 72 metros y 84 metros, respectivamente - lo que ha permitido obtener unas ca-
renas sistemáticas y cuantificar el KG max de cada carena en función del aumento de la
manga como único parámetro comparativo.
Para que los resultados de capacidad de flete de estos buques fueran objetivos y
fiables fue necesario, por una parte, minimizar la cantidad de lastre, siendo para ello
necesario posicionar la mínima cantidad de lastre en la posición exacta, y por otra, evi-
tar la disminución de estabilidad por corrección de superficies libres. Para su consecu-
ción:
• Se han compartimentado los tanques de lastre de los buques con tanques su-
ficientemente pequeños, disminuyendo las superficies libres y por lo tanto
mejorando la flexibilidad a la hora de lastrar el buque, para subir o bajar el
centro de gravedad con la menor cantidad de lastre. Esto ha permitido obte-
ner mejores condiciones de carga al disminuir el peso del lastre en beneficio
de la carga y mejorando, así, la estabilidad del buque.
• Se han adoptado los criterios de seguridad de “doble fondo” y “doble cubier-
ta, es decir, tanques por encima del fondo y por debajo de la cubierta de cie-
rre.
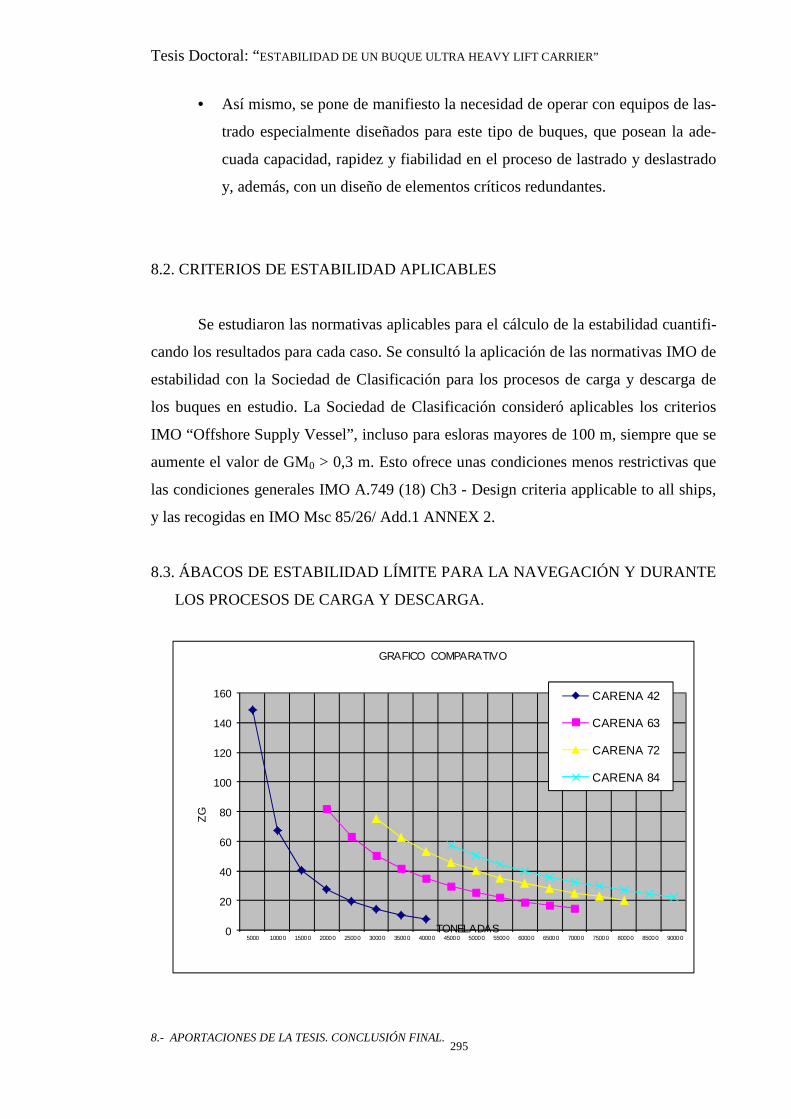
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
8.- APORTACIONES DE LA TESIS. CONCLUSIÓN FINAL.
295
• Así mismo, se pone de manifiesto la necesidad de operar con equipos de las-
trado especialmente diseñados para este tipo de buques, que posean la ade-
cuada capacidad, rapidez y fiabilidad en el proceso de lastrado y deslastrado
y, además, con un diseño de elementos críticos redundantes.
8.2. CRITERIOS DE ESTABILIDAD APLICABLES
Se estudiaron las normativas aplicables para el cálculo de la estabilidad cuantifi-
cando los resultados para cada caso. Se consultó la aplicación de las normativas IMO de
estabilidad con la Sociedad de Clasificación para los procesos de carga y descarga de
los buques en estudio. La Sociedad de Clasificación consideró aplicables los criterios
IMO “Offshore Supply Vessel”, incluso para esloras mayores de 100 m, siempre que se
aumente el valor de GM0 > 0,3 m. Esto ofrece unas condiciones menos restrictivas que
las condiciones generales IMO A.749 (18) Ch3 - Design criteria applicable to all ships,
y las recogidas en IMO Msc 85/26/ Add.1 ANNEX 2.
8.3. ÁBACOS DE ESTABILIDAD LÍMITE PARA LA NAVEGACIÓN Y DURANTE
LOS PROCESOS DE CARGA Y DESCARGA.
0
20
40
60
80
100
120
140
160
5000 10000 15000 20000 25000 30000 35000 40000 45000 50000 55000 60000 65000 70000 75000 80000 85000 90000
ZG
TONELADAS
GRAFICO COMPARATIVO
CARENA 42
CARENA 63
CARENA 72
CARENA 84
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
8.- APORTACIONES DE LA TESIS. CONCLUSIÓN FINAL.
296
La aportación más relevante de esta tesis doctoral es, probablemente, la posibili-
dad de valorar la capacidad de flete de estos buques con estabilidad reglamentaria utili-
zando los ábacos obtenidos, y esto durante la fase del desarrollo del anteproyecto del
buque, lo que permite establecer “a priori” parámetros del buque en función de los fletes
que demande el mercado y en definitiva elegir la manga del buque más idónea, en base
a las necesidades operativas. Los ábacos obtenidos de acuerdo con la normativa IMO y
la capacidad límite de transporte ponen de manifiesto que para mayores pesos y con
mayores ZGC de los mismos, cumpliendo los criterios IMO de estabilidad, necesitamos
buques de manga cada vez mayores. Estos ábacos permiten prever la manga más ade-
cuada para cada situación de transporte.
Así mismo se ha estudiado durante los procesos de carga y descarga para el ca-
lado crítico de 13,40 m, la relación del KGmax del buque en función del momento de
inercia del área de flotación del buque.
El análisis de las curvas de estabilidad pone de manifiesto un crecimiento de los
valores GM0 en función de la manga, que nos predice el posible comportamiento del
buque con mar gruesa. El aumento de la altura metacéntrica llevará consigo periodos de
escora pequeños, es decir, altas frecuencias de balance, que provocará grandes acelera-
ciones de escora. En condiciones de mar gruesa, el riesgo de pérdida de la carga pudiera
ser elevado, lo que obligará a elegir rutas y estaciones donde se pueda prever el estado
de la mar para evitar la escora de mayores ángulos del buque. A tal fin se han sugerido
ventanas meteorológicas adecuadas.
8.4. POSIBLES ACCIONES Y ESTUDIOS DE CORRECCIÓN DE ESTABILIDAD
EXCESIVA MEDIANTE SISTEMAS DE ESTABILIDAD TRANSVERSAL.
La corrección de la estabilidad de estos buques y especialmente las aceleraciones
de escora, en el supuesto de navegar circunstancialmente por mares severos, es quizá en
una prelación de orden el estudio más importante a llevar a cabo. Pero no sería posible
si no se conociese previamente el comportamiento del buque, sus movimientos cuando
navega a velocidad y rumbo constante, lo que se reduce a obtener la respuesta cuando el
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
8.- APORTACIONES DE LA TESIS. CONCLUSIÓN FINAL.
297
buque es excitado por un tren de olas regulares de una frecuencia determinada que inci-
de sobre el buque con el rumbo relativo dado.
En esta línea sugerimos dos posibles vías de estudio complementarias:
1. Determinación del espectro de amplitudes de los movimientos del buque en sus
seis grados de libertad. Estos estudios deberían llevarse a cabo teniendo en cuen-
ta las posibles plataformas a transportar en las condiciones reales de transporte
(acción del viento y del oleaje) para ventanas meteorológicas ordenadas en fun-
ción de la fuerza del mar. Consideramos que estos estudios deberían llevarse a
cabo en un canal de experiencias.
2. Corrección de la estabilidad excesiva en los buques HCL mediante sistemas de
estabilización transversal.
Para sugerir posibles vías de investigación se han estudiado los sistemas
más conocidos y se ha visto que el sistema de tanques activos presenta las mejo-
res características para el control de la escora y de las aceleraciones de la misma.
En esta línea se ha estudiado la evolución de los sistemas de estabilización
transversal y del control de los tanques activos en los diez últimos años. Se ha
propuesto un sistema de tanques activos moviendo los niveles de agua en los
tanques por medio de soplantes de aire. A partir de la ecuación energética del
circuito se llega a proponer el posible momento anti balance del sistema en estu-
dio.
El estudio del control del balance es solo el primer paso para la solución
del problema además del control de las aceleraciones de escora. En esta tesis se
ha realizado un pequeño estudio del control adaptivo predictivo y se ha sugerido
la conveniencia de investigar un sistema adaptativo predictivo experto, que ac-
tuando en el dominio experto ha demostrado en la práctica en procesos no linea-
les, multivariables con importantes interacciones, y con tiempos de retardo puro
entre sus variables de entrada y salida, su capacidad de controlar y estabilizar el
proceso.
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
8.- APORTACIONES DE LA TESIS. CONCLUSIÓN FINAL.
298
8.5. CONCLUSIÓN FINAL
En esta Tesis Doctoral hemos documentado la capacidad de flete de unos bu-
ques, algunos sin parangón en la actualidad, con unas carenas sistemáticas de mangas
crecientes. Las carenas generadas han sido específicamente creadas y diseñadas para
este tipo de buques, introduciendo modificaciones novedosas en el diseño de la popa, lo
que ha permitido trimar el buque con mínimas cantidades de lastre y conseguir condi-
ciones de carga adecuadas a los posibles fletes de futuro.
Los criterios de compartimentación, que han permitido actuar sobre el C.G del
conjunto buque–carga y trimar el buque con bajos valores de lastre, han abierto a su vez
la necesidad de estudiar nuevos sistemas y equipos de lastrado.
La sistemática operativa para predecir de la estabilidad de los HLC en función
de la carga y su C.G. durante la navegación y en los procesos de carga y descarga supo-
ne una clara ayuda en las fases de ante-proyecto y proyecto. Los ábacos obtenidos han
sido evaluados en condiciones de carga en los puntos límites de la línea del ábaco y han
puesto de manifiesto pequeñas incertidumbres en los resultados obtenidos.
Finalmente se ha enriquecido esta tesis sugiriendo futuras acciones y posibles es-
tudios a realizar en relación con el control de la estabilidad transversal mediante tanques
activos.
Consideramos que esta tesis no ha sido sino un primer paso hacia lo que un futu-
ro inmediato puede depararnos. Las dificultades de estos buques HLC para navegar con
seguridad por mares de severos oleajes harán necesaria, por una parte, la creación de
nuevas carenas, quizá con mayor francobordo, ya que las aquí propuestas han sido dise-
ñadas “ad hoc” para cuantificar la influencia de la manga en la estabilidad de las cargas
y C.G. de las mismas, y, por otra, llevar a cabo estudios de los procesos de lastrado de
forma automática y con nuevos equipos a prueba de “fallos humanos”.
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
8.- APORTACIONES DE LA TESIS. CONCLUSIÓN FINAL.
299
Las limitaciones de navegación actuales con determinadas ventanas meteoroló-
gicas hacen necesario tener una información con márgenes de tiempo adecuados, tanto
en la información como en su fiabilidad, que permita predecir ventanas meteorológicas,
que en algunos mares es sólo posible encontrar en determinados meses del año. Las
posibles correcciones de estabilidad transversal y de aceleraciones de escora que en un
próximo futuro pueden surgir de nuevas tecnologías, abre la esperanza a una navegación
más segura.
Esta tesis doctoral ofrece posibles soluciones a algunas de las necesidades de
transporte del campo energético que hoy se vislumbran. Lo que hoy no se considera
factible, para el autor es cuestión sólo de tiempo, de muy poco tiempo.
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
CAPITULO.- 9: BIBLIOGRAFÍA 300
CAPITULO 9.- BIBLIOGRAFÍA Y REFERENCIAS
9.1. BIBLIOGRAFÍA
9.1.1. - Plataformas semisumergibles
(Ref. 1) Vassalos, D.; G. Konstantopoulos, G., “ A Realistic Approach to
Semisubmersible Stability” , SNAME Transactions, Vol. 93, 1985, págs. 95-128.
(Ref. 2) Macha, J. Michael; Reid, Dale F.,“ Semisubmersible Wind Loads and Wind
Effects” , SNAME Transactions, Vol. 92, 1984, págs. 85-124.
9.1.2. - Comportamiento del buque en la Mar
(Ref. 3) Salvesen N., Tuck O.E. and Faltinsen O., “Ship Motions and Sea Loads”,
Transaction Society of Naval Architects and Marine Engineers, No. 78, 1970, págs.
250-287.
(Ref. 4) Salvesen N., “Added resistence of ship in waves”, Journal of Hydronautics No.
12, 1978, págs. 24-34.
(Ref. 5) Lloyd, A.R.J.M., Seakeeping Ship behaviour in rough weather, New York,
Ellis Horwood Limited.
(Ref. 6) González Álvarez-Campana, J. M., Comportamiento del buque en la mar,
Madrid, E.T.S.I.N, 2001.
Textos:
Fundamentos
Parte 1.- Elementos para el enfoque probabilístico de la descripción local y a
corto plazo de la mar.
Parte 2.- Olas marina: Naturaleza, Generación, Desarrollo, Formulación,
Descripción espectral y Estadística asociada.
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
CAPITULO.- 9: BIBLIOGRAFÍA 301
Parte 3.- Teoría determinista del comportamiento en la mar.- Funciones de
transferencia: su obtención.
Parte 4.- Aplicaciones.
9.1.3. - Arquitectura Naval
(Ref. 7) Principles of Naval Architectures, SNAME, 1983.
(Ref. 8) Bella, Alfio Di, Statica della Nave, Genova, Facoltà d’Ingegneria Navale,
Pubblicazioni scientifiche d’ingegneria, 1970.
9.1.4. - Reglamentos y Varios
(Ref. 9) Alvariño Castro, Ricardo; Azpiroz Azpiroz, Juan José; Meizoso Fernández,
Manuel, El Proyecto básico del buque mercante, Madrid, Colegio Oficial de Ingenieros
Navales, Fondo Editorial de Ingeniería Naval, 1997.
(Ref. 10) Convenio Internacional sobre Líneas de Carga, Londres, Organización
Marítima Consultiva Internacional, 1966
Traducida en: B.O.E. nº 192, de 10 de agosto de 1968.
Corrección de erratas en: B.O.E. nº 258, del 26 de octubre de 1968.
(Ref. 11) Resolución A469 (XII), Punto 10 b) del orden del día. Aprobada 19 de
noviembre de 1.981. Organización Marítima Internacional.
(Ref. 12) Rules for Classification of Ships Newbuildings, Part. 3, Chapters 4, Stability
and Watertight Integrity, Det Norske Veritas, July 1995.
(Ref. 13) Rules for Classification of Ships Newbuildings, Part. 5, Chapter 7, Sec. 21,
Semi-sumersible Heavy Transport Vessel, July 2011.
(Ref. 14) IMO Resolución .A. 749 (18), aprobada el 4 de noviembre de 1.993,
“Código de Estabilidad Sin Averías Para Todos los Tipos de Buques Regidos por
los Instrumentos de la OMI”. Después de varias enmiendas, ha sido modificado por
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
CAPITULO.- 9: BIBLIOGRAFÍA 302
las Resoluciones MSC 75/69 y MSC 85/26 Add. 1 ANNEX 2, 4 diciembre de 2008,
recogiéndose en la Resolución MSC 267 (85) de 4 de diciembre de 2008.
(Ref. 15) IMO Resolución A. 649 XII, aprobada el 19 de noviembre de 1.981.
“Directrices para el Proyecto y la Construcción de Buques de Suministro Mar Adentro”.
Posteriormente ha sido modificada por la Resolución MSC 267 (85) (4 de diciembre
2008) en el capítulo 2, parágrafo 2.4.
9.1.5. Posibles líneas de investigación
(Ref.16) Manrique Braojos, Jesús; Casas Alcaide, Pedro Antonio, “Estabilización
transversal en buques de guerra”, Sesiones Técnicas de Ingeniería Naval, 23 de
septiembre de 2004.
(Ref.17) Finn, Edward J.; Alonso, Marcelo, Física. Vol. 1. Mecánica, Wilmington,
Delaware, Addison-Wesley Iberoamericana, 1986.
(Ref. 18) Haro Casado, M.; Ferreiro, Ramón; Velasco, Francisco; Control del balance en
buque mediante el empleo de tanques estabilizadores, Universidad de Cádiz, Facultad de
Ciencias Náuticas.
(Ref. 19) Pérez, T., Ship Motion Control, London,
Springer-Verlag, 2005.
(Ref. 20) “Stabilization/Roll Control”, Marine Engineers Review, IMarEST. (The Institute
of Marine Engineering, Science & Technology), 33, 2002.
(Ref. 21) Moaleji, R.; Greig, R.A., On Development of Ship Anti-roll Tanks, Ocean
Engineering, 2007, Págs. 103-121.
(Ref. 22) Stigter, C., “The Performance of U-Tanks as a Passive Anti-Rolling Device”,
Royal Institution of Naval Architects, 1966, Págs., 144, 249.
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
CAPITULO.- 9: BIBLIOGRAFÍA 303
(Ref. 23) Goodrich, G. J., “Development and Design of Passive Roll Stabilizers”,
Transactions of Royal Institution of Naval Architects, 1.969, págs. 2, 180.
(Ref. 24 ) Froude, W, “On the Rolling of Ships” ̧ Transaction of Institution of Naval
Architects, 1.861, págs. 111, 81.
(Ref. 25) Kagawa, K.K.; Fugita M.; Matsuo, H.; Koukawa, “Development of Tuned Liquid
Damper for Ship Vibration”, Transaction of the West Japan Society of Naval Architects,
1989, págs. 78, 251.
(Ref. 26) Shyu, K. L.; Kuo, H. C., “Dynamic Behaviour of a U-Type Tuned Liquid
Damper”, International Shipbuildin Progress, 1966, págs. 43, 331, 345.
(Ref.27) Abdel Gaward, A. F.; Ragab, S. A.; Nayfh, A. H.; Mook, D. T., “Roll
Stabilization by Anti-Roll Passive Tanks”, Ocean Engineering, 2001, págs. 28, 457.
(Ref. 28) Youssef, K. S.; Ragab, S. A.; Nayfh, A. H.; Mook, D. T., “Design of Passive
Anti-Roll Tanks for Roll Stabilization in the non linear range”, Ocean Engineering,
2002, págs. 29, 177.
(Ref. 29) Yamagushi, S.; Shinkai, A., “An Advanced Adaptative Control System for
Activated Anti-Roll Tank”, International Journal of Offshore and Polar Engineering,
1.995, págs. 17-22.
(Ref. 30) Chen, S.; Shaw, S. W.; Khalil, H.; Troesch, A. W., “Robust Stabilization of
Large Amplitude Ship Rolling in Beams Sea”, Transaction of Asme, 22, 2000, págs.
108-113.
(Ref. 31) Phairoh, T.; Huang, J. K., “Adaptative Ship Roll Mitigation by Using a U-
Tube Tank”, Ocean Engineering, 34, 2007, págs 403 y 415.
(Ref. 32) De Nevers, Fluid Mechanics, Addison-Wesley, 1970.
Tesis Doctoral: “ESTABILIDAD DE UN BUQUE ULTRA HEAVY LIFT CARRIER”
CAPITULO.- 9: BIBLIOGRAFÍA 304
(Ref. 33) Wright, J. H. G.; Marshfield, W. B., “Ship Roll Response and Capsize
Behaviour in Beam Seas”, Transactions RINA, 122, 1979, págs. 129-148.
(Ref. 34) Pedisic Buca, M. y Senjanovic, Ivo, “Non Linear Ship Rolling and Capsizing”,
Polish Maritime Research, 57, 2006, págs. 321-331
(Ref. 35) Martín Sánchez, José Mª, y Rodellar, José, Control Adaptativo Predictivo
Experto, Madrid, Universidad Nacional de Educación a Distancia, 2005, págs. 30-67.
(Ref.36) Primo Yúfera, Eduardo, Introducción a la Investigación científica y
tecnológica, Madrid, Alianza Editorial, 1994.
Related Documents











