) ( ) ( 1 ) ( ) ( ) ( 1 ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( s H s G s X s H s G s G s X s H s X s Y s H s X s X s X s E RET E(s) Y(s) X(s) G(s) G(s) H(s) H(s) Alimentazione di potenza ERRORE STATICO ERRORE STATICO 1 Per errore statico si intende lo scostamento, a regime, della variabile controllata Y(s) dal valore desiderato. Tale scostamento è in relazione con il segnale errore E(s) uscente dal nodo di confronto: essi hanno lo stesso valore percentuale. E’ allora possibile svolgere i calcoli sul segnale errore E(s). Prof. Capuzzimati Mario - ITIS “Magistri Cumacini” - Como Precisione a regime: errore statico Y RET (s)

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

)()(1
)(
)()(1
)()()()()()()()()()(
sHsG
sX
sHsG
sGsXsHsXsYsHsXsXsXsE RET
E(s) Y(s)X(s)
G(s)G(s)
H(s)H(s)
Alimentazione di potenza
ERRORE STATICOERRORE STATICO
1
Per errore statico si intende lo scostamento, a regime, della variabile controllata Y(s) dal valore desiderato.
Tale scostamento è in relazione con il segnale errore E(s) uscente dal nodo di confronto: essi hanno lo stesso valore percentuale.
E’ allora possibile svolgere i calcoli sul segnale errore E(s).
Prof. Capuzzimati Mario - ITIS “Magistri Cumacini” - ComoPrecisione a regime: errore statico
YRET(s)

Il calcolo dell’errore a regime richiede il calcolo del limite
dove è richiesta la conoscenza della funzione e(t), cioè della antitrasformata di E(s).
E’ possibile evitare la antitrasformazione ricorrendo al teorema del valore finale:
e sostituendo l’espressione di E(s):
Osservazioni: la precisione statica dipende quindi dal
Valore del segnale di ingresso X(s)
Guadagno d’anello G(s)•H(s)
2
e(t) et
r
lim
E(s)s lime(t) lim0
st
re
L(s)1
X(s)slim
H(s)G(s)1
X(s)slim
00
ssre
Prof. Capuzzimati Mario - ITIS “Magistri Cumacini” - ComoPrecisione a regime: errore statico

Considerazioni sul GUADAGNO GUADAGNO D’ANELLOD’ANELLO L(s) = G(s)L(s) = G(s)•H•H(s)(s)
)s(D
)s(N
s
1)s(H)s(G)s(L
n
)s(D
)s(N)s(L'
e ricavare la costante
LST = valore statico del guadagno d’anello
I sistemi con retroazione sono classificati in tipi, in funzione del numero di poli nulli presenti
nel guadagno d’anello:
n = 0 sistema tipo 0n = 1 sistema tipo 1n = 2 sistema tipo 2………
3
)s(D
)s(Nlim)s(LlimL
0s
'
0sST
Prof. Capuzzimati Mario - ITIS “Magistri Cumacini” - ComoPrecisione a regime: errore statico
In assenza di ritardi finiti, le funzioni di trasferimento sono razionali, cioè si presentano come rapporto tra polinomi:
Ai fini del calcolo dell’errore statico conviene porre:
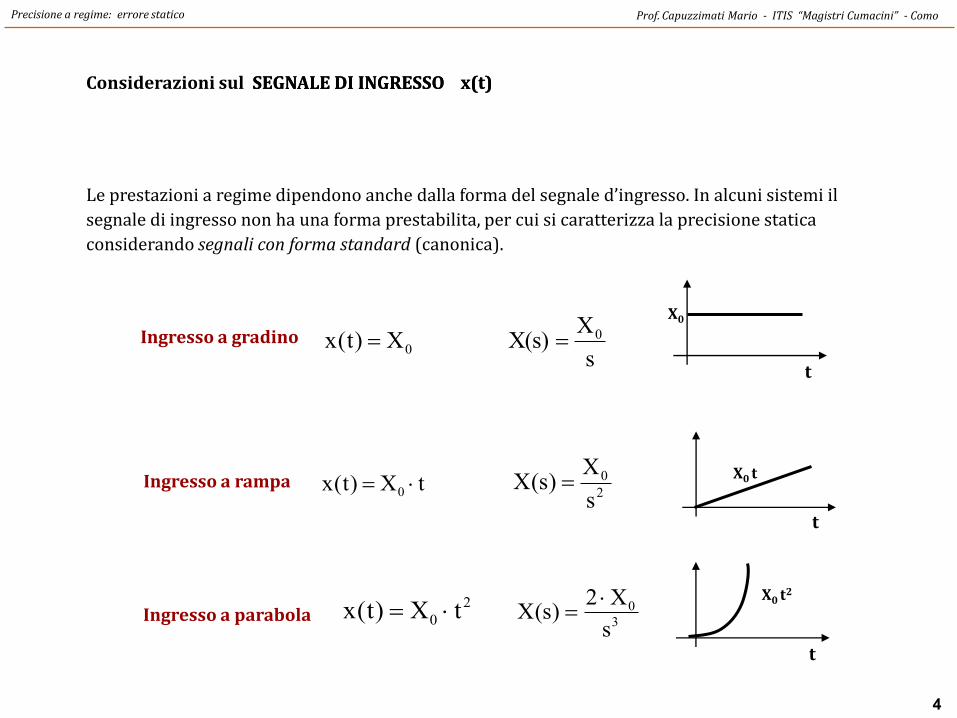
Considerazioni sul SEGNALE SEGNALE DIDI INGRESSO x(t)INGRESSO x(t)
Le prestazioni a regime dipendono anche dalla forma del segnale d’ingresso. In alcuni sistemi il
segnale di ingresso non ha una forma prestabilita, per cui si caratterizza la precisione statica
considerando segnali con forma standard (canonica).
Ingresso a gradinos
XX(s) X)t(x 0
0
X0
t
Ingresso a rampa tX)t(x 0 2
0
s
X)s(X
X0 t
t
Ingresso a parabolaX0 t
2
t
2
0 tX)t(x 3
0
s
X2)s(X
4
Prof. Capuzzimati Mario - ITIS “Magistri Cumacini” - ComoPrecisione a regime: errore statico

n = 0 Guadagno d’anello:)s(D
)s(N)s(L
ST
0
0s
0
0
0sr
L1
X
)s(D
)s(Nlim1
X
)s(L1
s
X
slime
Calcolo dell’ERRORE a regime:
Ingresso a rampa
Ingresso a parabola
Ingresso a gradino
)s(Lss
Xlim
)s(L1
s
X
slime 0
0s
2
0
0sr
)s(Lss
X2lim
)s(L1
s
X2
slime22
0
0s
3
0
0sr
Errore di accelerazione
Errore di velocità
Errore di posizione
5
SISTEMA SISTEMA TIPO 0TIPO 0 )s(L1
X(s)slime
0sr
Prof. Capuzzimati Mario - ITIS “Magistri Cumacini” - ComoPrecisione a regime: sistemi tipo 0

SISTEMA SISTEMA TIPO 0TIPO 0
Ingresso a gradinoErrore di posizione
Ingresso a rampaErrore di velocità
Ingresso a parabolaErrore di accelerazione
6
0
0
1
X
HLy
ST
r
Prof. Capuzzimati Mario - ITIS “Magistri Cumacini” - ComoPrecisione a regime: sistemi tipo 0
Errore assoluto
sull’uscita del sistema
Errore assoluto sull’uscita del sistema si
ricava dividendo quello sul nodo di
confronto er per il guadagno statico
della fdt di retroazione H0:
0
re
Hyr

STss
rL
X
sDs
sNss
X
sL
s
X
se 00
0
2
0
0
)(
)(lim
)(1lim
SISTEMA SISTEMA TIPO 1TIPO 1
n = 1 Guadagno d’anello:
Ingresso a rampa
Ingresso a parabola
Ingresso a gradino
)s(D
)s(N
s
1)s(L
0
)s(D
)s(N
s
1lim1
X
)s(L1
s
X
slime
0s
0
0
0sr
Errore di accelerazione
Errore di velocità
Errore di posizione
)s(D
)s(N
s
1ss
Xlim
)s(L1
s
X2
slime22
0
0s
3
0
0sr
7
Calcolo dell’ERRORE
)s(L1
X(s)slime
0sr
Prof. Capuzzimati Mario - ITIS “Magistri Cumacini” - ComoPrecisione a regime: sistemi tipo 1

Ingresso a gradinoErrore di posizione
8
Ingresso a rampaErrore di velocità
Ingresso a parabolaErrore di accelerazione
SISTEMA SISTEMA TIPO 1TIPO 1
0
0
HL
Xy
ST
r
Prof. Capuzzimati Mario - ITIS “Magistri Cumacini” - ComoPrecisione a regime: sistemi tipo 1
0
Errore assoluto
sull’uscita del sistemaErrore assoluto sull’uscita del sistema si
ricava dividendo quello sul nodo di
confronto er per il guadagno statico
della fdt di retroazione H0:
0
re
Hyr

n = 2 Guadagno d’anello:
Ingresso a rampa
Ingresso a parabola
Ingresso a gradino
)s(D
)s(N
s
1)s(L
2
0
)s(D
)s(N
s
1lim1
X
)s(L1
s
X
slime
20s
0
0
0sr
0
)s(D
)s(N
s
1ss
Xlim
)s(L1
s
X
slime
2
0
0s
2
0
0sr
Errore di accelerazione
Errore di velocità
Errore di posizione
ST
0
2
22
0
0s
3
0
0sr
L
X2
)s(D
)s(N
s
1ss
Xlim
)s(L1
s
X2
slime
9
Calcolo dell’ERRORE
SISTEMA SISTEMA TIPO 2TIPO 2
Prof. Capuzzimati Mario - ITIS “Magistri Cumacini” - ComoPrecisione a regime: sistemi tipo 2

10
Ingresso a gradinoErrore di posizione
Ingresso a rampaErrore di velocità
Ingresso a parabolaErrore di accelerazione
SISTEMA SISTEMA TIPO 2TIPO 2
0
02
HL
Xy
ST
r
Prof. Capuzzimati Mario - ITIS “Magistri Cumacini” - ComoPrecisione a regime: sistemi tipo 2
00
0
Errore assoluto
sull’uscita del sistema
Errore assoluto sull’uscita del sistema si
ricava dividendo quello sul nodo di
confronto er per il guadagno statico
della fdt di retroazione H0:
0
re
Hyr

TABELLA RIASSUNTIVATABELLA RIASSUNTIVA
INGRESSO TIPO DI SISTEMA
x(t) X(s) 0 1 2
Gradino
0 0
Rampa
0
Parabola
2
0 tX
tX0
0X
3
0
s
X2
2
0
s
X
s
X0
ST
0
L1
X
ST
0
L
X
ST
0
L
X2
11
NB: le espressioni che appaiono in
tabella si riferiscono ai valori assoluti
calcolati rispetto al segnale errore er :
Prof. Capuzzimati Mario - ITIS “Magistri Cumacini” - ComoPrecisione a regime
Errore di posizione
Errore di velocità
Errore di accelerazione

E(s) Y(s)X(s)
H(s)H(s)
Alimentazione di potenza
1s6s5s
1023 A(s)A(s)
Dati:
x(t) = 4 V
YID = 86
1) Dimensionare il ramo di retroazione
2) Calcolare il guadagno A0 del convertitore di potenza in modo da avere un errore a regime al 5%
3) Verificare la stabilità del sistema ricorrendo al metodo di Routh, nell’ipotesi che il convertitore sia caratterizzato da una risposta istantanea.
ESERCIZIO ESERCIZIO Traccia
12
Prof. Capuzzimati Mario - ITIS “Magistri Cumacini” - ComoPrecisione a regime: Esercizio - Traccia

ESERCIZIO ESERCIZIO Soluzione
1) Dimensionare il ramo di retroazione
Si calcola il valore statico di H(s):
2) Calcolare il guadagno statico A0 del convertitore di potenza in modo da avere un errore a regime al 5%
L’incognita A0 è nascosta all’interno dell’espressione dell’errore a regime e precisamente nella
costante LST.
Il sistema è di tipo 0, l’ingresso è un gradino, dalla specifica risulta MAXr
ST
0r e
L1
Xe
13
0465.086
4
Y
XH
ID
RIF0
Prof. Capuzzimati Mario - ITIS “Magistri Cumacini” - ComoPrecisione a regime: Esercizio - Soluzione
La costante LST risulta:
mentre l’errore massimo ammissibile è :
Per il calcolo di A0 occorre dunque risolvere la disequazione:
La cui soluzione conduce a A0 40.9
2.0405.0eMAXr
465.0AH10A)s('LlimL 0000s
ST
2.0465.0A1
4
0

3) Verificare la stabilità del sistema ricorrendo al metodo di Routh
Occorre valutare il comportamento dinamico del ramo di retroazione e del convertitore di potenza.Si ipotizza che siano entrambi privi di fenomeni dinamici, cioè che presentino una risposta immediata.
• H(s) = H0
• A(s) = A0
Si deve calcolare l’equazione caratteristica dell’intero sistema, ma prima occorre assegnare un valore al guadagno A0 del convertitore:
Ipotesi A0 = 41.
L’equazione risulta:
Tabella di Routh:
1 6
5 20.1
1.98
20.1
Non essendoci variazioni di segno nella prima colonna, il sistema risulta stabile.
Infatti le soluzioni risultano:
S1 = - 4.639S2 = - 0.181 + j 2.072S3 = - 0.181 – j 2.072
01.20s6s5s 23
14
Prof. Capuzzimati Mario - ITIS “Magistri Cumacini” - ComoPrecisione a regime: Esercizio - Soluzione

Esercizio IPOTESI: Precisione dell’1%
Ripetere i calcoli relativi ai punti 2) e 3)
Calcolo equazione caratteristica:
Tabella di Routh:
0100s6s5s 23
1 6
5 100
-14
100
Essendoci variazioni di segno nella prima colonna, il sistema risulta instabile.
Soluzioni dell’equazione caratteristica:S1 = - 6.465S2 = 0.732 + j 3.864S3 = 0.732 – j 3.864
15
Prof. Capuzzimati Mario - ITIS “Magistri Cumacini” - ComoPrecisione a regime: Esercizio
SOLUZIONE
A0 212.9 Ipotesi: A0 = 213

SOLUZIONE
Per il calcolo si parte dal vincolo della stabilità: con la tabella di Routh si individua il valore
massimo per A0, con tale valore si calcola l’errore assoluto e infine quello percentuale.
Calcolo equazione caratteristica:
Tabella di Routh:
Dal calcolo risulta: A0 62.36
Ipotesi: A0 = 62
L’errore a regime minimo per il sistema
risulta pari al
3.35%.3.35%.
1 6
5 1 + A0 0.465
5.8 – A0 0.093
1 + A0 0.465
16
0465.0A1s6s5s 0
23
NB: E’ possibile aumentare la precisione e anche migliorare il comportamento in transitorio
introducendo la regolazione PID.
Esercizio Calcolare la precisione massima consentita dal sistema
Prof. Capuzzimati Mario - ITIS “Magistri Cumacini” - ComoPrecisione a regime: Esercizio

ESERCIZIO ESERCIZIO da svolgere 11
17
E(s)Y(s)
X(s)
1s5s2
322
02.0
• Calcolare l’errore di posizione rispetto ad un ingresso di 4 V
• Verificare la stabilità del sistema (Metodo di Routh)
Prof. Capuzzimati Mario - ITIS “Magistri Cumacini” - ComoPrecisione a regime: Esercizio

18
E(s)Y(s)
X(s)
02.0
)1s5s2(s
322
• Calcolare l’errore di posizione rispetto ad un ingresso di 4 V
• Calcolare l’errore di velocità rispetto all’ingresso x(t) = 0.12 t
• Verificare la stabilità del sistema (Metodo di Routh)
Prof. Capuzzimati Mario - ITIS “Magistri Cumacini” - ComoPrecisione a regime: Esercizio
ESERCIZIO ESERCIZIO da svolgere 22

19
E(s)Y(s)
X(s)
• Calcolare l’errore di posizione rispetto ad un ingresso di 4 V
• Calcolare l’errore di velocità rispetto all’ingresso x(t) = 0.12 t
• Calcolare l’errore di accelerazione rispetto all’ ingresso x(t) = 0.03 t2
• Verificare la stabilità del sistema (Metodo di Routh)
02.0
)1s5s2(s
3222
ESERCIZIO ESERCIZIO da svolgere 33
Prof. Capuzzimati Mario - ITIS “Magistri Cumacini” - ComoPrecisione a regime: Esercizio

Esercizi Esercizi Soluzioni
20
ESERCIZIO 1
• Errore di posizione: er = 2.44 ( er% = 61 )
• Verifica di stabilità: STABILE.
ESERCIZIO 2
• Errore di posizione: 0 ( er% = 0 )
• Errore di velocità: 0.19
• Verifica di stabilità: STABILE.
ESERCIZIO 2
• Errore di posizione: 0 ( er% = 0 )
• Errore di velocità: 0
• Errore di accelerazione: 0.094
• Verifica di stabilità: INSTABILE.
Prof. Capuzzimati Mario - ITIS “Magistri Cumacini” - ComoPrecisione a regime: Esercizio
Related Documents











