Av. Prof. Luciano Gualberto, trav. 3 nº. 158 – Prédio de Engenharia Elétrica – Bloco A – Térreo CEP 05508-900 – Butantã - São Paulo. Telefone: ++55 11 30377545 / Fax: ++55 11 30377536 1 EPUSP Convênio Rockwell Automation Escola Politécnica da USP ENTENDENDO E AJUSTANDO MALHAS DE CONTROLE Prof. José Jaime da Cruz São Paulo Abril 2004

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

Av. Prof. Luciano Gualberto, trav. 3 nº. 158 – Prédio de Engenharia Elétrica – Bloco A – Térreo
CEP 05508-900 – Butantã - São Paulo. Telefone: ++55 11 30377545 / Fax: ++55 11 30377536 1
EPUSP
Convênio Rockwell Automation
Escola Politécnica da USP
ENTENDENDO E AJUSTANDO MALHAS DE CONTROLE
Prof. José Jaime da Cruz
São Paulo Abril 2004

Av. Prof. Luciano Gualberto, trav. 3 nº. 158 – Prédio de Engenharia Elétrica – Bloco A – Térreo
CEP 05508-900 – Butantã - São Paulo. Telefone: ++55 11 30377545 / Fax: ++55 11 30377536 1
EPUSP
Convênio Rockwell Automation
Escola Politécnica da USP
Entendendo e Ajustando Malhas de Controle
Índice
1. PRÓLOGO ............................................................................................................................................. 1
1.1 Breve Histórico .......................................................................................................................... 1
1.2 Sistemas de Controle em Malha Aberta X Malha Fechada ...................................................... 2
1.2.1 Vantagens da operação em malha fechada ......................................................................... 2
1.2.2 Desvantagem da operação em malha fechada .................................................................... 2
1.2.3 Esquema geral de sistemas de controle em malha fechada ................................................ 3
2. TRANSFORMADA DE LAPLACE ......................................................................................................... 4
2.1 Motivação ............................................................................................................................... 4
2.2 Definição ............................................................................................................................... 4
2.3 Transformadas de Funções Usuais .......................................................................................... 6
2.4 Solução de Equações Diferenciais Lineares ............................................................................ 6
2.5 Funções de Transferência ........................................................................................................ 7
2.6 Exemplos ............................................................................................................................... 8
2.6.1 Sistema elétrico .................................................................................................................... 8
2.6.3 Sistema mecânico ................................................................................................................ 8
2.6.4 Sistema eletromecânico - MCC controlado pela armadura .................................................. 9
2.7 Diagramas de Blocos ................................................................................................................ 10
2.7.1 Detector de erro ou comparador........................................................................................... 11
2.7.2 Distúrbios em sistemas em malha fechada .......................................................................... 13
2.8 Redução de Diagramas de Blocos ........................................................................................... 13
3. RESPOSTAS TEMPORAIS ................................................................................................................... 14
3.1 Introdução ............................................................................................................................... 14
3.2 Sistemas de 1a Ordem .............................................................................................................. 15
3.2.1 Resposta a degrau ............................................................................................................... 15
3.2.2 Resposta a rampa ................................................................................................................ 16
3.3 Sistemas de 2a ordem ............................................................................................................... 17
3.3.1 Resposta a degrau ............................................................................................................... 17
3.3.2 Especificações da resposta transitória ................................................................................. 19
3.4 Erro Estacionário ....................................................................................................................... 24
3.5 Rejeição de Perturbações em Regime Estacionário ................................................................ 27
4. ESTABILIDADE ..................................................................................................................................... 28
4.1 Introdução ............................................................................................................................... 28
4.2 Critério de Routh ....................................................................................................................... 28
5. RESPOSTA EM FREQÜÊNCIA ............................................................................................................ 31
5.1 Introdução ............................................................................................................................... 31

Av. Prof. Luciano Gualberto, trav. 3 nº. 158 – Prédio de Engenharia Elétrica – Bloco A – Térreo
CEP 05508-900 – Butantã - São Paulo. Telefone: ++55 11 30377545 / Fax: ++55 11 30377536 2
EPUSP
Convênio Rockwell Automation
Escola Politécnica da USP
5.2 Conceituação de Resposta em Freqüência .............................................................................. 31
5.3 Gráficos de Resposta em Freqüência ...................................................................................... 32
5.4 Critério de Nyquist ..................................................................................................................... 36
6. PORQUE REALIMENTAÇÃO? ............................................................................................................. 38
6.1 Introdução ............................................................................................................................... 38
6.2 Modelo Exato e Sem Torque de Carga ( 0TL = ) ..................................................................... 40
6.3 Incerteza em K0 e Sem Torque de Carga ( 0TL = ) .................................................................. 40
6.4 Perturbação na Carga (Sem Incerteza em K0) ......................................................................... 42
6.5 Resposta Transitória ................................................................................................................. 43
6.6 Resumo ............................................................................................................................... 43
7. MODOS DE CONTROLE P, I E D ......................................................................................................... 44
7.1 Introdução ............................................................................................................................... 44
7.2 Controle Proporcional ............................................................................................................... 44
7.3 Controle Integral ........................................................................................................................ 47
7.4 Reset Windup ............................................................................................................................ 48
7.5 Controle Derivativo .................................................................................................................... 49
7.6 Respostas Típicas ..................................................................................................................... 52
8. SINTONIA DE CONTROLADORES ...................................................................................................... 55
8.1 Introdução ............................................................................................................................... 55
8.2 Sintonia por Tentativa e Erro .................................................................................................... 55
8.3 Método da Oscilação Mantida .................................................................................................. 57
8.4 Método de Sintonia Automática (“Autotuning”) ......................................................................... 59
8.5 Método da Curva de Reação do Sistema ................................................................................. 60
9. CONTROLADORES POR PRÉ-ALIMENTAÇÃO ................................................................................. 62
9.1 Introdução ............................................................................................................................... 62
9.2 Controle de Razão .................................................................................................................... 65
9.3 Controle por Pré-Alimentação Baseado em Modelo Estacionário............................................ 66
9.4 Controle por Pré-Alimentação Baseado em Modelo Dinâmico ................................................ 68
9.5 Sintonia de Controladores por Pré-Alimentação ...................................................................... 70
10. CONTROLE EM CASCATA .............................................................................................................. 73
10.1 Introdução ............................................................................................................................... 73
10.2 Implementação do Controle em Cascata .................................................................................. 76
10.3 Seleção e Sintonia dos Controladores em Cascata ................................................................. 77
11. CONTROLE COM TEMPO MORTO ................................................................................................. 79
11.1 Introdução ............................................................................................................................... 79
11.2 Preditor de Smith ...................................................................................................................... 80
REFERÊNCIAS BIBLIOGRÁFICAS .......................................................................................................... 83
Av. Prof. Luciano Gualberto, trav. 3 nº. 158 – Prédio de Engenharia Elétrica – Bloco A – Térreo
CEP 05508-900 – Butantã - São Paulo. Telefone: ++55 11 30377545 / Fax: ++55 11 30377536 1
EPUSP
Convênio Rockwell Automation
Escola Politécnica da USP
1. Prólogo
1.1 Breve Histórico
As primeiras aplicações de controle automático podem ser encontradas já entre 300 A.C. e 1 A.C.
na Grécia com mecanismos de reguladores flutuantes. Em 250 A.C., Philon concebeu um mecanismo
desse tipo para manter o nível de óleo constante em um lampião. O relógio de água de Ketsibios foi
outro exemplo desse tipo de mecanismo (veja figura abaixo).
Figura 1.1
C. Drebbel (1572-1633), Holanda: regulador de temperatura (primeiro sistema de controle a
realimentação de que se tem notícia na Europa Moderna) para encubadeira de ovos.
D. Pappin (1647-1712): primeiro regulador de pressão para caldeiras (1681), similar a uma válvula
de panela de pressão.
J. Watt, 1769: primeiro controlador a realimentação utilizado em processo industrial - controlador
centrífugo para regular a velocidade de máquina a vapor (figura abaixo).
vapor p/ máquina
Figura 1.2
Escala
de Tempo

Av. Prof. Luciano Gualberto, trav. 3 nº. 158 – Prédio de Engenharia Elétrica – Bloco A – Térreo
CEP 05508-900 – Butantã - São Paulo. Telefone: ++55 11 30377545 / Fax: ++55 11 30377536 2
EPUSP
Convênio Rockwell Automation
Escola Politécnica da USP
J. C. Maxwell, 1868: primeiro estudo sistemático de estabilidade de sistemas de controle.
Routh, 1877: critério de estabilidade.
Minorski, 1922: pilotagem automática de navios - estudou a estabilidade.
Black, 1927: amplificador a realimentação.
Nyquist, 1932: estudou a estabilidade com base na resposta em freqüência (resposta estacionária
a entradas senoidais).
Bode, 1938: desenvolveu metodologia de projeto de amplificadores a realimentação.
Evans, 1948: método do lugar das raízes (método gráfico que permite determinar as raízes da
equação característica de um sistema).
1.2 Sistemas de Controle em Malha Aberta X Malha Fechada
Malha Aberta: a saída não é utilizada para alterar a ação de controle. Exemplos: aquecedor
elétrico para ambientes domésticos (o usuário escolhe a posição de um botão e não a altera mais);
forno de fogão a gás doméstico.
Malha Fechada: a saída é utilizada para alterar a ação de controle, motivo pelo qual é sinônimo
de sistemas a realimentação. O controlador é um dispositivo cuja finalidade é usar o erro de um
comparador entre o valor desejado de uma certa variável e o seu valor real para calcular o valor da
variável de controle. Exemplo: geladeira doméstica (o usuário escolhe um nível de "frio" através de
um botão com escala e a temperatura se mantém aproximadamente constante, a despeito de
perturbações externas, tais como variações da temperatura ambiente, entrada de massas de ar
quente provocada pela abertura de portas, armazenamento de alimentos à temperatura ambiente,
etc).
1.2.1 Vantagens da operação em malha fechada
• insensibilidade a perturbações externas (distúrbios externos);
• insensibilidade a variações em parâmetros do sistema;
• possibilidade de utilização de componentes baratos e não precisos para obter
sistemas com desempenho de alta qualidade.
1.2.2 Desvantagem da operação em malha fechada
• possibilidade de perda de estabilidade causada, em geral, por ganhos elevados
(imagine um motorista dirigindo seu carro em uma estrada e aplicando correções
acentuadas de direção sempre que observa algum erro de rumo; note, entretanto,
que neste caso o controle em malha aberta é impraticável, já que haveria a
necessidade de conhecimento prévio de toda a trajetória).
Av. Prof. Luciano Gualberto, trav. 3 nº. 158 – Prédio de Engenharia Elétrica – Bloco A – Térreo
CEP 05508-900 – Butantã - São Paulo. Telefone: ++55 11 30377545 / Fax: ++55 11 30377536 3
EPUSP
Convênio Rockwell Automation
Escola Politécnica da USP
1.2.3 Esquema geral de sistemas de controle em malha fechada
+ _Controlador Planta
Sensor
Referência Erro Saída
Perturbações
Figura 1.3 –
Classificação geral
Os controladores são classificados em geral conforme a forma de energia principal que eles usam,
isto é, elétrica, hidráulica, pneumática, mecânica, etc.

Av. Prof. Luciano Gualberto, trav. 3 nº. 158 – Prédio de Engenharia Elétrica – Bloco A – Térreo
CEP 05508-900 – Butantã - São Paulo. Telefone: ++55 11 30377545 / Fax: ++55 11 30377536 4
EPUSP
Convênio Rockwell Automation
Escola Politécnica da USP
2. Transformada de Laplace
2.1 Motivação
Logaritmos: no curso colegial vimos que, com seu uso, é possível transformar operações
aritméticas "complicadas" em outras mais simples. Por exemplo: produtos em somas; divisões em
subtrações; exponenciações em produtos; radiciações em divisões.
Mecanismo:
1. Tomar o logaritmo da expressão "complicada";
2. Efetuar as operações "mais simples";
3. Obter o resultado desejado aplicando a transformação inversa (antilogaritmo).
Nota: esse processo funciona porque a transformação é biunívoca.
A utilidade da Transformada de Laplace reside no fato de que equações "complicadas" (equações
diferenciais lineares a coeficientes constantes) podem ser transformadas em equações mais simples
(equações algébricas). Além disso, funções usuais em controle como degraus, senóides,
exponenciais, senóides amortecidas, podem ser transformadas em funções racionais; operações
como diferenciação e integração também podem ser substituídas por operações algébricas.
Quando se resolvem equações diferenciais através da Transformada de Laplace, as condições
iniciais são consideradas automaticamente.
Por fim, através da Transformada de Laplace é possível prever o desempenho de sistemas
dinâmicos utilizando-se técnicas gráficas, sem a necessidade de se resolver as equações
diferenciais.
2.2 Definição
Dada uma função f(t), define-se:
L ( )[ ] ( ) ( ) dttfesFtf0
st ⋅∫ ⋅∆==
+∞
−
−
Diferenciação
L ( ) ( ) ( )−−⋅=
⋅0fsFstf

Av. Prof. Luciano Gualberto, trav. 3 nº. 158 – Prédio de Engenharia Elétrica – Bloco A – Térreo
CEP 05508-900 – Butantã - São Paulo. Telefone: ++55 11 30377545 / Fax: ++55 11 30377536 5
EPUSP
Convênio Rockwell Automation
Escola Politécnica da USP
f(t)
t
Figura 2.1
Integração
L ( ) ( )( )
s
df
ssF
df
0
t ∫ τ⋅τ
+=
∫∞−
τ⋅τ
−
∞−
Atraso no Tempo
L ( )[ ] ( )sFetf s ⋅=α− α−
Figura 2.2
Teorema do Valor Final
( ) ( )sFslimtflim0st
⋅=→∞→
f(t)
t
f(t−α)
α

Av. Prof. Luciano Gualberto, trav. 3 nº. 158 – Prédio de Engenharia Elétrica – Bloco A – Térreo
CEP 05508-900 – Butantã - São Paulo. Telefone: ++55 11 30377545 / Fax: ++55 11 30377536 6
EPUSP
Convênio Rockwell Automation
Escola Politécnica da USP
2.3 Transformadas de Funções Usuais
f(t) F(s)
( )tδ 1
)t(1
s1
( )t1t ⋅ 2s
1
ate−
as1+
( )tsen ω 22s ω+
ω
( )tcos ω 22s
s
ω+
( )tcose at ω⋅−
( ) 22as
as
ω++
+
Onde δ(t) representa o impulso unitário e 1(t) representa o degrau unitário.
2.4 Solução de Equações Diferenciais Lineares
Com o emprego da Transformada de Laplace obtém-se a solução completa de equações
diferenciais lineares.
R
Lv(t)
i(t)
Figura 2.3
Vejamos, através de um exemplo, como proceder.
( ) ( ) ( )tvtiRdt
tdiL =⋅+⋅

Av. Prof. Luciano Gualberto, trav. 3 nº. 158 – Prédio de Engenharia Elétrica – Bloco A – Térreo
CEP 05508-900 – Butantã - São Paulo. Telefone: ++55 11 30377545 / Fax: ++55 11 30377536 7
EPUSP
Convênio Rockwell Automation
Escola Politécnica da USP
com: ( ) 0i0i = e ( ) ( )t1tv =
i. Tomamos a Transformada de Laplace de ambos os membros da equação diferencial:
( )[ ] ( ) ( )s1
sVsIRisIsL 0 ==⋅+−⋅⋅
ii. Isolamos a função a determinar ( I(s) ):
( )
+⋅
+
+
=
LR
ss
L1
LR
s
isI 0
iii. Como o segundo termo não consta da tabela usual, reescrevêmo-lo:
( )
+
−⋅+
+
=
LR
s
1s1
R1
LR
s
isI 0
iv. Antitransformamos I(s):
( ) ( )
−⋅+⋅=
⋅−⋅− tLR
tLR
0 et1R1
eiti , ( )0t ≥
Verificações: ( ) 0i0ti == + (ok!)
( )R1
ti =∞→ (ok!)
2.5 Funções de Transferência
Definem-se, apenas para sistemas lineares e invariantes no tempo (S.L.I.T.), como sendo a
relação entre as Transformadas de Laplace dos sinais de saída e de entrada do sistema, obtidas com
condições iniciais nulas.
Figura 2.4
S.L.I.T.x(t) y(t)
( ) ( )( ) .Q.I.CsXsY
sG∆=

Av. Prof. Luciano Gualberto, trav. 3 nº. 158 – Prédio de Engenharia Elétrica – Bloco A – Térreo
CEP 05508-900 – Butantã - São Paulo. Telefone: ++55 11 30377545 / Fax: ++55 11 30377536 8
EPUSP
Convênio Rockwell Automation
Escola Politécnica da USP
2.6 Exemplos
2.6.1 Sistema elétrico
LR
i(t)
Cei(t)
eo(t)
Figura 2.5 -
Entrada: ei(t)
Saída: eo(t)
Hipóteses: elementos ideais
frequência baixa, para valer a lei de Kirchhoff
Lei de Kirchhoff (considerando C.I. nula no capacitor):
( ) ( ) ( ) ( )∫ ⋅⋅+⋅+⋅=t
0i dtti
C1
tiRdt
tdiLte
( ) ( )∫ ⋅⋅=t
0o dtti
C1
te
Transformando segundo Laplace (C.I.Q.):
( ) ( ) ( ) ( )ssI
C1
sIRsIsLsEi ⋅+⋅+⋅⋅=
( ) ( )ssI
C1
sEo ⋅=
Daí:
( ) ( )( ) 1sRCsLC
1sEsE
sG2
i
o
+⋅+⋅==
2.6.3 Sistema mecânico
k
F(t)
x(t)
m
f
Figura 2.6

Av. Prof. Luciano Gualberto, trav. 3 nº. 158 – Prédio de Engenharia Elétrica – Bloco A – Térreo
CEP 05508-900 – Butantã - São Paulo. Telefone: ++55 11 30377545 / Fax: ++55 11 30377536 9
EPUSP
Convênio Rockwell Automation
Escola Politécnica da USP
Entrada: F(t)
Saída: x(t)
Hipóteses: atrito viscoso linear
mola linear com massa desprezível
Lei de Newton:
( ) ( ) ( ) ( )dt
tdxftxktF
dt
txdm
2
2⋅−⋅−=⋅
Aplicando a Transformada de Laplace (C.I.Q.):
( ) ( ) ( ) ( )sXsfsXksFsXsm 2 ⋅⋅−⋅−=⋅⋅
Daí:
( ) ( )( ) ksfsm
1sFsX
sG2 +⋅+⋅
==
Nota: observa-se, portanto, que a função de transferência tem a mesma forma daquela do
sistema elétrico visto anteriormente.
2.6.4 Sistema eletromecânico - MCC controlado pela armadura
Ra
va(t)
ia(t)
ea(t)
if = cte
J
fω(t)T
Figura 2.7
Entrada: va(t)
Saída: ω(t)
Hipóteses: La desprezível
MCC linear
eixo rígido
atrito viscoso linear
campo MCC constante
(La: indutância da armadura; MCC: motor de corrente contínua)

Av. Prof. Luciano Gualberto, trav. 3 nº. 158 – Prédio de Engenharia Elétrica – Bloco A – Térreo
CEP 05508-900 – Butantã - São Paulo. Telefone: ++55 11 30377545 / Fax: ++55 11 30377536 10
EPUSP
Convênio Rockwell Automation
Escola Politécnica da USP
Lei de Kirchhoff:
( ) ( ) ( )tetiRtv aaaa +⋅= ⇒ ( ) ( ) ( )sEsIRsV aaaa +⋅=
Equações do MCC controlado pela armadura:
( ) ( )tKte va ω⋅= ⇒ ( ) ( )sKsE va Ω⋅=
( ) ( )tiKtT aT ⋅= ⇒ ( ) ( )sIKsT aT ⋅=
Lei de Newton (C.I.Q.):
( ) ( ) ( )tftTdt
tdJ ω⋅−=
ω⋅ ⇒ ( ) ( ) ( )sTsfsJ =Ω⋅+⋅
Dessas quatro
( ) ( )( ) ( )vTaa
T
a KKfRsJRK
sVs
sG++⋅
=Ω
=
2.7 Diagramas de Blocos
Quando definimos Funções de Transferência, fizemos a seguinte figura:
S.L.I.T.x(t) y(t)
Se, em lugar disso, representarmos o S.L.I.T. através de sua Função de Transferência (o que
sabemos ser possível de forma biunívoca), teremos:
G(s)X(s) Y(s)
Esse é, pois, o diagrama de blocos do sistema em questão. Essa representação significa que os
sinais de entrada e saída estão relacionados por:
( ) ( ) ( )Y s G s X s= ⋅
As setas representam o sentido em que se dá o fluxo dos sinais.
Uma das vantagens de se trabalhar com diagramas de blocos é que, para um sistema complexo,
podemos simplesmente interligar os diagramas dos subsistemas que o constituem (desde que não
haja carregamento).
Deve-se observar que um mesmo diagrama de blocos pode representar diferentes sistemas
físicos (da mesma forma que ocorre com Funções de Transferência!).

Av. Prof. Luciano Gualberto, trav. 3 nº. 158 – Prédio de Engenharia Elétrica – Bloco A – Térreo
CEP 05508-900 – Butantã - São Paulo. Telefone: ++55 11 30377545 / Fax: ++55 11 30377536 11
EPUSP
Convênio Rockwell Automation
Escola Politécnica da USP
2.7.1 Detector de erro ou comparador
R(s) E(s)
C(s)
+
-
R(s) E(s)
C(s)
+-ou
Somador
( ) ( ) ( )Z s X s Y s= +
Os sinais a serem adicionados ou subtraídos devem ter a mesma natureza física e as mesmas
unidades para que a operação indicada faça sentido. Por exemplo: tensões elétricas em Volts, forças
em kgf, etc.
Sistema em Malha Fechada
Na figura abaixo, o bloco G(s) tem E(s) como entrada (que depende da saída C(s)), o que
caracteriza um sistema com realimentação.
R(s) E(s) C(s)+
-G(s)
ponto de
junção
Figura 2.8
Notar que, no ponto de junção, a saída de um bloco pode ser conectada a diversos blocos ou
pontos de soma do diagrama. No entanto, sempre a entrada de cada bloco é um único sinal.
R(s): sinal de referência
C(s): sinal de saída do sistema em malha fechada
E(s): sinal de erro
No sistema em malha fechada representado acima, os sinais de referência e saída têm a mesma
natureza física.
R(s) E(s) C(s)+
-G(s)
H(s)B(s)
Figura 2.9
X(s) Z(s)
Y(s)
+
+
X(s) Z(s)
Y(s)
++ou
( ) ( ) ( )sCsRsE −=

Av. Prof. Luciano Gualberto, trav. 3 nº. 158 – Prédio de Engenharia Elétrica – Bloco A – Térreo
CEP 05508-900 – Butantã - São Paulo. Telefone: ++55 11 30377545 / Fax: ++55 11 30377536 12
EPUSP
Convênio Rockwell Automation
Escola Politécnica da USP
No entanto, muitas vezes isso pode requerer algum cuidado. Consideremos, por exemplo, um
sistema de controle do tipo piloto automático de navio, cujo objetivo é controlar o rumo de navegação.
Neste caso, o sinal de referência deve ser estabelecido pelo timoneiro que, acionando o timão, gera
um sinal na forma de uma tensão elétrica (R(s): Volts), enquanto que o sinal de saída do sistema é o
ângulo de rumo da embarcação (C(s): graus). É necessário, então, utilizar um bloco que converta
ângulo em tensão elétrica para alimentar adequadamente o detector de erro. Essa conversão é
representada pelo bloco H(s) da figura acima.
Outra função importante que pode ser desempenhada pelo bloco H(s) é a de modificar o sinal de
saída antes de compará-lo com a entrada. Essa flexibilidade é, aliás, um dos pontos chave da
engenharia de controle, pois, através da escolha adequada de H(s), pode-se, muitas vezes, fazer
com que o sistema em malha fechada se comporte de uma maneira desejada. Um dos propósitos
da engenharia de controle é, pois, estabelecer procedimentos que permitam definir o bloco H(s).
Definem-se:
• Função de Transferência de Malha Aberta: ( )( )
( ) ( )sHsGsEsB
⋅==
• Função de Transferência do Ramo Direto: ( )( )
( )sGsEsC
==
• Função de Transferência de Malha Fechada: ( )( )sRsC
=
Vejamos como a Função de Transferência de Malha Fechada se relaciona com G(s) e H(s). Do
diagrama de blocos:
( ) ( ) ( )sEsGsC ⋅=
( ) ( ) ( ) ( ) ( ) ( )sCsHsRsBsRsE ⋅−=−=
Substituindo a última expressão na anterior, vem:
( ) ( ) ( ) ( ) ( ) ( )sCsHsGsRsGsC ⋅⋅−⋅=
e portanto:
No caso de realimentação unitária (H(s)=1):
R(s) E(s) C(s)+
-G(s)
( )( )
( )( ) ( )sHsG1
sGsRsC
⋅+=
( )( )
( )( )sG1
sGsRsC
+=

Av. Prof. Luciano Gualberto, trav. 3 nº. 158 – Prédio de Engenharia Elétrica – Bloco A – Térreo
CEP 05508-900 – Butantã - São Paulo. Telefone: ++55 11 30377545 / Fax: ++55 11 30377536 13
EPUSP
Convênio Rockwell Automation
Escola Politécnica da USP
2.7.2 Distúrbios em sistemas em malha fechada
Distúrbios (ou perturbações externas) são sinais agindo no sistema, sobre os quais não se pode
atuar diretamente.
No caso do piloto automático de navios, o bloco )s(K poderia representar o controlador
juntamente com os atuadores (máquina do leme e leme). O bloco )s(G poderia representar o navio
propriamente dito. O bloco )s(H poderia representar o sensor de rumo. Nessas condições, o distúrbio
)s(N representaria os torques externos atuantes sobre a embarcação (provocados pela ação de
ventos, correntes, ondas, etc.)
R(s) E(s) C(s) +
- K
(s)
H(s)
G (s)
N(s) (distúrbio)
+ +
Figura 2.10
2.8 Redução de Diagramas de Blocos
Os diagramas de blocos podem ser redesenhados utilizando-se algumas regras simples, conforme
discutido a seguir.
1) X X-Y
Y
+
-
X-Y+Z
Z
+
+
≡ X X+Z
Z
+
+
X+Z-Y
Y
-
+
2)
G1(s) G2(s)X G1
.X G2 G1.X
≡
G2(s) G1(s)X G2
.X G1 G2.X
3)
G1(s) G2(s)X G1
.X G2 G1.X
≡ G2(s).G1(s)
X G2 G1.X
4) +G1
.XG1(s)
G2(s)+G2
.X
(G1+G2).XX
≡ G1(s)+G2(s)
X (G1+G2).X
5)
+G1(s)
-
G2(s)
≡ G
G G
1
1 21+

Av. Prof. Luciano Gualberto, trav. 3 nº. 158 – Prédio de Engenharia Elétrica – Bloco A – Térreo
CEP 05508-900 – Butantã - São Paulo. Telefone: ++55 11 30377545 / Fax: ++55 11 30377536 14
EPUSP
Convênio Rockwell Automation
Escola Politécnica da USP
3. Respostas Temporais
3.1 Introdução
Uma das vantagens da realimentação é permitir ajustar os desempenhos transitório e
estacionário de sistemas de controle.
Para projetar e analisar sistemas de controle, é necessário definir e medir o desempenho dos
sistemas. Então, com base no desempenho desejado, os parâmetros do controlador podem ser
ajustados para se atingir esse objetivo.
É necessário estabelecer uma base que permita ao analista/projetista comparar os desempenhos
de diferentes opções de sistemas de controle. Isto pode ser feito escolhendo-se sinais de entrada
particulares e comparando-se os desempenhos obtidos em cada caso.
Um bom número de critérios de projeto baseia-se nesses sinais particulares ou na resposta do
sistema a condições iniciais.
As especificações de projeto de sistemas de controle normalmente incluem vários índices de
resposta temporal para um sinal de entrada determinado, além de uma precisão especificada para
a resposta estacionária.
Muitas vezes, na prática, o sinal de referência de um sistema de controle não é conhecido a
priori (por exemplo, o controle de trajetória de robôs móveis). Pode ocorrer, inclusive, que o sinal de
referência seja de natureza aleatória. Há, naturalmente, exceções, como o caso de máquinas de
corte, foguetes lançadores de satélites, etc.
Os sinais de referência mais utilizados são o degrau, a rampa, a parábola (menos comum), o
impulso e a senóide.
O tipo de sinal mais apropriado para uma dada aplicação depende das características desta.
Assim, por exemplo, quando se altera o valor desejado para a temperatura ambiente controlada
através de um sistema do tipo ar condicionado + calefação, o degrau é um sinal apropriado. O
mesmo ocorre, por exemplo, no caso de um piloto automático de navio quando se altera
bruscamente o rumo desejado.
Por outro lado, imagine-se um sistema de posicionamento para uma antena rastreadora de
satélites. Neste caso, uma boa escolha para o sinal de referência é a rampa.
Por fim, considere-se um sistema de controle de uma suspensão ativa de automóvel. Se o
objetivo for estudar o comportamento do sistema quando o carro passar, em alta velocidade, por um
buraco, o impulso será uma escolha adequada para o sinal de distúrbio.

Av. Prof. Luciano Gualberto, trav. 3 nº. 158 – Prédio de Engenharia Elétrica – Bloco A – Térreo
CEP 05508-900 – Butantã - São Paulo. Telefone: ++55 11 30377545 / Fax: ++55 11 30377536 15
EPUSP
Convênio Rockwell Automation
Escola Politécnica da USP
3.2 Sistemas de 1a Ordem
Seja um sistema de 1a ordem com Função de Transferência:
R(s) C(s) 1
1 + ⋅ s T
Im
Re
−1
T
e condições iniciais nulas: ( )( )
T1
s
T1
Ts11
sRsC
+
=⋅+
=
3.2.1 Resposta a degrau
( ) ( )0te1tc Tt
≥−=−
• para ( ) 632.0e1TcTt 1 =−=⇒= −
• para ( )T1
0c0t =⇒= &
• ( ) ( ) 1ctclimt
=∞=∞→
0 T 2T 3T 4T 5T
1
0.632
c(t) inclinação 1/T
t
63.2
%
86.5
%
95.0
%
98.2
%
99.3
%
Figura 3.1
No caso geral, em que o degrau tem amplitude A, como conseqüência da linearidade do sistema
(condições iniciais nulas), tem-se:

Av. Prof. Luciano Gualberto, trav. 3 nº. 158 – Prédio de Engenharia Elétrica – Bloco A – Térreo
CEP 05508-900 – Butantã - São Paulo. Telefone: ++55 11 30377545 / Fax: ++55 11 30377536 16
EPUSP
Convênio Rockwell Automation
Escola Politécnica da USP
( ) ( )0te1Atc Tt
≥
−⋅=
−
Portanto:
( ) ( ) A632.0e1ATc 1 ≅−⋅= −
( )TA
0c =&
( ) Ac =∞
3.2.2 Resposta a rampa
Para entrada rampa unitária:
( ) ( )0teTTttc Tt
≥⋅+−=−
( )c t t T T e
t
T= − + ⋅−
0 T 2T 3T 4T 5T
( )e ∞
( )e t
t-T
r(t) = t
Figura 3.2
Note que, para t >> T, podemos aproximar:
( ) ( )TtTttc >>−≅
Note também, do diagrama de blocos, que:
( ) ( ) ( )tctrte −=
Portanto:
( )
−⋅=
⋅+−−=
−−Tt
Tt
e1TeTTttte
Para t suficientemente grande, e
t
T−
<< 1 e, portanto:

Av. Prof. Luciano Gualberto, trav. 3 nº. 158 – Prédio de Engenharia Elétrica – Bloco A – Térreo
CEP 05508-900 – Butantã - São Paulo. Telefone: ++55 11 30377545 / Fax: ++55 11 30377536 17
EPUSP
Convênio Rockwell Automation
Escola Politécnica da USP
( ) ( )TtTte >>≅
o que significa que há um erro estacionário.
3.3 Sistemas de 2a ordem
3.3.1 Resposta a degrau
Consideremos o sistema de 2a ordem genérico com Função de Transferência em malha fechada:
( )( )
)0(s2ssR
sCn2
nn2
2n >ω
ω+⋅ξω+
ω=
Os pólos deste sistema são as raízes de:
0s2s 2nn
2 =ω+⋅ξω+ .
Analisemos a localização dos pólos em função dos parâmetros do sistema. Temos:
−ξ±ξ−⋅ω=
ω−ωξ±ξω−= 1
2
442s 2
n
2n
2n
2n
2,1 .
Subamortecimento: 0 < ξ < 1
-σ
Im
ξωn
Re
ω ξn 12−
jωd
β
ωn
Figura 3.3
Neste caso, os pólos do sistema são:
d2
nn2,1 j1js ω⋅±σ−=ξ−ω⋅±ξω−=∆
A figura ao lado mostra a representação desses pólos no plano complexo.
Note que:

Av. Prof. Luciano Gualberto, trav. 3 nº. 158 – Prédio de Engenharia Elétrica – Bloco A – Térreo
CEP 05508-900 – Butantã - São Paulo. Telefone: ++55 11 30377545 / Fax: ++55 11 30377536 18
EPUSP
Convênio Rockwell Automation
Escola Politécnica da USP
( )β=ξ cos e ( )β=ξ− sen1 2
Nomenclatura:
ωn = freqüência natural não amortecida
ωd = freqüência natural amortecida
ξ = coeficiente de amortecimento
Vamos ver em seguida as razões dessas designações.
Aplicando um degrau unitário na entrada do sistema ( )R ss
=
1e considerando condições iniciais
nulas, a saída será:
( )( ) ( )dd
2n
jsjsssC
ω−σ+⋅ω+σ+⋅
ω=
Expandindo em frações parciais e antitransformando cada parcela (ou consultando uma tabela),
obtém-se:
( ) ( ) ( )0ttsene1
11tc d
t
2≥β+ω⋅⋅
ξ−−= σ−
O gráfico de c(t) tem o aspecto mostrado na figura abaixo.
2
0 T 2T 3T 4T
1
t
t T p = π
c(t)
1 1
2 − −
− e
t σ
ξ
1 1
2 + −
− e
t σ
ξ
0 1 < < ξ
Figura 3.4

Av. Prof. Luciano Gualberto, trav. 3 nº. 158 – Prédio de Engenharia Elétrica – Bloco A – Térreo
CEP 05508-900 – Butantã - São Paulo. Telefone: ++55 11 30377545 / Fax: ++55 11 30377536 19
EPUSP
Convênio Rockwell Automation
Escola Politécnica da USP
Nota-se que:
i. a resposta c(t) é uma oscilação amortecida;
ii. a freqüência de oscilação é ωd (daí a designação freqüência natural amortecida) e,
portanto, depende tanto de ωn quanto de ξ, sendo sempre ωd < ωn e, à medida que ξ
aumenta, ωd diminui;
iii. a envoltória das oscilações é uma exponencial amortecida com constante de tempo T
=1/σ, que também depende de ωn e ξ, e, à medida que ωn ou ξ aumentam, σ aumenta
e T diminui;
iv. o valor estacionário da resposta é ( ) 1c =∞ e, portanto, a saída é igual à entrada;
v. apenas como verificação, nota-se que:
( ) ( ) 0sen1
110c
2=β⋅
ξ−
−=
3.3.2 Especificações da resposta transitória
É grande o número de casos práticos em que as especificações de desempenho do sistema de
controle são estabelecidas com base em grandezas relacionadas à sua resposta temporal. A
resposta a degrau é, com freqüência, usada como referência para essas especificações. Além de ser
simples de testar, ela representa uma excitação bastante severa sobre o sistema, dado que a
entrada muda bruscamente de nível no instante da aplicação do degrau. Sua importância reside
tanto no estudo da resposta transitória como da resposta em regime estacionário.
As variáveis associadas à resposta temporal são definidas para a entrada degrau unitário no caso
oscilatório, por razões que serão discutidas a seguir.
São elas (vide figura):
a) tempo de subida (rise time) (tr);
b) instante de pico (peak time) (tp);
c) tempo de acomodação (settling time) (ts);
d) sobressinal máximo (maximum peak) (Mp);

Av. Prof. Luciano Gualberto, trav. 3 nº. 158 – Prédio de Engenharia Elétrica – Bloco A – Térreo
CEP 05508-900 – Butantã - São Paulo. Telefone: ++55 11 30377545 / Fax: ++55 11 30377536 20
EPUSP
Convênio Rockwell Automation
Escola Politécnica da USP
0
0.5
1Mp
c(t)
t
td tr tp ts
2% ou 5%
Figura 3.5
No caso geral, em que o degrau não é unitário, o sobressinal é definido como:
( ) ( )( )∞
∞−=
c
ctcM p
p .
É importante observar que no caso em que o degrau é unitário, 1)(c =∞ e, portanto,
1)t(cM pp −= .
Nos casos de superamortecimento ou amortecimento crítico, define-se tempo de subida
como o intervalo necessário para a resposta ir de 10% a 90% do valor estacionário.
O tempo de acomodação depende diretamente da constante de tempo mais lenta do sistema.
A razão para se definir os parâmetros da resposta transitória tomando por base o caso oscilatório
é que, em geral, deseja-se que a resposta a degrau seja rápida (tr pequeno) e com pouco
sobressinal (Mp pequeno). No entanto, esses dois requisitos são conflitantes. Por um lado, a
resposta não oscilatória seria interessante, pois Mp seria nulo; no entanto, neste caso, a resposta
seria, em muitos casos práticos, proibitivamente lenta. Em geral, tempos de subida aceitáveis são
obtidos apenas às custas de uma resposta de caráter oscilatório, o que significa existência de
sobressinal.
Até este ponto nesta seção, a discussão se deu sobre um sistema genérico, de ordem qualquer.
Daqui em diante, contudo, restringiremos nossa atenção aos sistemas de 2a ordem. A razão para isso
é que, para fins de projeto, muitas vezes se pode aproximar um sistema de ordem elevada por um de
2 a ordem. Vamos expressar cada uma das variáveis tr, tp, Mp e ts como função dos parâmetros ωn e ξ
do sistema de 2 a ordem considerado, a saber:
( )( ) 2
nn2
2n
s2ssRsC
ω+⋅ξω+
ω= .

Av. Prof. Luciano Gualberto, trav. 3 nº. 158 – Prédio de Engenharia Elétrica – Bloco A – Térreo
CEP 05508-900 – Butantã - São Paulo. Telefone: ++55 11 30377545 / Fax: ++55 11 30377536 21
EPUSP
Convênio Rockwell Automation
Escola Politécnica da USP
a) Tempo de Subida (tr):
drt
ω
β−π=
Portanto:
• quando β está fixo, para que tr seja "pequeno" é necessário que ωd (e, por
conseguinte, ωn) seja "grande";
• quando ωd está fixo, tr "pequeno" requer β "grande" (e, portanto, o sistema se torna
muito oscilatório, pois os pólos tendem a se aproximar do eixo imaginário).
ωn
-σ
Im
σ
jωd
β
Figura 3.6
b) Sobressinal máximo (Mp):
21p eM ξ−
ξ⋅π−
=
Assim, o sobressinal Mp é determinado apenas pelo coeficiente ξ.
O gráfico de Mp x ξ tem o aspecto indicado na figura abaixo.

Av. Prof. Luciano Gualberto, trav. 3 nº. 158 – Prédio de Engenharia Elétrica – Bloco A – Térreo
CEP 05508-900 – Butantã - São Paulo. Telefone: ++55 11 30377545 / Fax: ++55 11 30377536 22
EPUSP
Convênio Rockwell Automation
Escola Politécnica da USP
0 0.5 1.00
10
20
30
40
50
60
70
80
90
100
ξ
Mp (
%)
Figura 3.7
Para melhor visualizar o significado desse comportamento, a figura abaixo ilustra a resposta a
degrau do sistema de 2a ordem parametrizado em ξ.
ξ = 0.3
ξ = 0.2
ξ =0.1
ξ = 0.0
ξ = 0.4
ξ = 0.5
ξ = 0.6
ξ = 0.7
ξ = 1.0
ξ = 2.0
0 2 4 6 8 10 120
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2
ωn t
c(t)
Figura 3.8
c) Tempo de acomodação (ts):
Adotando a faixa de 2% em torno do valor estacionário para definir ts, pode-se mostrar que:
( ) ( )9.0044
T4%2tn
s <ξ<ξω
=σ
=≅
Para a faixa de 5%, por outro lado:
( ) ( )9.0033
T3%5tn
s <ξ<ξω
=σ
=≅

Av. Prof. Luciano Gualberto, trav. 3 nº. 158 – Prédio de Engenharia Elétrica – Bloco A – Térreo
CEP 05508-900 – Butantã - São Paulo. Telefone: ++55 11 30377545 / Fax: ++55 11 30377536 23
EPUSP
Convênio Rockwell Automation
Escola Politécnica da USP
Note que é possível reduzir o tempo de acomodação (que é uma medida do tempo de duração do
transitório) aumentando ωn, mesmo que ξ esteja fixo pela especificação do sobressinal.
Exemplo: considere o sistema representado na figura. Deseja-se selecionar os parâmetros p e k
de maneira que 05.0Mp ≤ e ( ) s4%2ts ≤ .
R(s) C(s)+
-( )
k
s s p⋅ +
Figura 3.9
Para:
05.0043.0M,22
p <≤≥ξ
Por outro lado:
( ) 144
%2t nn
s ≥ξω⇒≤ξω
≅
Essas duas condições definem a região admissível para a localização dos pólos de malha fechada
como sendo aquela hachurada na figura abaixo. Podemos escolher, por exemplo, j1±− . Tendo em
vista que a função de transferência de malha fechada é
kpss
k)s(R)s(C
2 ++=
Re45o
Im
-1
Figura 3.10
e identificando os polinômios
kpss)j1s)(j1s( 2 ++≡++−+ ,
resultam os valores 2=p e 2=k .

Av. Prof. Luciano Gualberto, trav. 3 nº. 158 – Prédio de Engenharia Elétrica – Bloco A – Térreo
CEP 05508-900 – Butantã - São Paulo. Telefone: ++55 11 30377545 / Fax: ++55 11 30377536 24
EPUSP
Convênio Rockwell Automation
Escola Politécnica da USP
3.4 Erro Estacionário
O desempenho de muitos sistemas de controle pode ser especificado não apenas com base na
sua resposta transitória, mas também pelo erro estacionário em relação a certos sinais de referência,
tais como degraus, rampas e parábolas. A este respeito, um conceito útil em teoria de controle é o de
tipo do sistema, que está associado a uma medida qualitativa da precisão com que o sistema é
capaz de acompanhar, em regime estacionário, as entradas acima.
Consideremos o sistema em malha fechada com realimentação unitária representado na figura
ao lado. Seja G(s) escrito na forma:
( ) ( ) ( ) ( )( ) ( ) ( )1sT1sT1sTs
1s1s1sKsG
p21N
m210
+⋅⋅+⋅+⋅
+τ⋅⋅+τ⋅+τ⋅=
Κ
Κ ,
Figura 3.11
onde os pólos na origem em malha aberta foram explicitados através do termo sN. Esta forma de
escrever a função de transferência será chamada aqui de forma de constante de tempo.
O valor de N define o tipo do sistema. Usualmente, fala-se em sistemas tipo 0, 1 ou 2,
respectivamente, para N = 0, 1 ou 2.
À medida que cresce o tipo do sistema, aumenta sua capacidade de seguir entradas, no sentido:
degrau α rampa α parábola. Em compensação, sistemas de tipos mais altos requerem
compensadores mais complexos para sua estabilização.
Para o sistema representado pelo diagrama de blocos acima, obtém-se facilmente a Função de
Transferência que relaciona E(s) a R(s):
( )( )
( )sRsG1
1sE ⋅
+=
Admitindo que o sistema em malha fechada seja estável, o Teorema do Valor Final fornece:
( ) ( ) ( )( )sG1sRs
limsEslimtelim)(e0s0st +
⋅=⋅==∞
→→∞→
R(s) E(s) C(s)+
-
G(s)

Av. Prof. Luciano Gualberto, trav. 3 nº. 158 – Prédio de Engenharia Elétrica – Bloco A – Térreo
CEP 05508-900 – Butantã - São Paulo. Telefone: ++55 11 30377545 / Fax: ++55 11 30377536 25
EPUSP
Convênio Rockwell Automation
Escola Politécnica da USP
Tabela 3.1
No caso de sistemas do tipo 0:
0K11
)(e+
=∞ (tipo 0)
1
t
r(t)
c(t)
ess
Figura 3.12
Quando se trata de sistemas dos tipos 1 ou 2:
0)(e =∞
1r(t)
c(t)
Figura 3.13
( ) ( )0ttr ≥
Tipo do Sistema 1 t
2t2
0
0K11
+
∞ ∞
1 0
0
1
K
∞
2 0 0
0K1

Av. Prof. Luciano Gualberto, trav. 3 nº. 158 – Prédio de Engenharia Elétrica – Bloco A – Térreo
CEP 05508-900 – Butantã - São Paulo. Telefone: ++55 11 30377545 / Fax: ++55 11 30377536 26
EPUSP
Convênio Rockwell Automation
Escola Politécnica da USP
Para sistemas do tipo 0,
( ) ∞=∞ e
r(t)
c(t)
t
Figura 3.14
Se o sistema é do tipo 1, então
0K1
)(e =∞ .
r(t)
c(t)
t
Figura 3.15
Por fim, no caso de sistemas do tipo 2,
0)(e =∞ .
r(t)
c(t)t
Figura 3.16
Exemplo: Um servomecanismo utilizando um motor C.C. controlado pela armadura pode ser
representado pelo diagrama de blocos ao lado. Neste caso, como se observa:
( )( )
+⋅⋅
=+⋅
=
1sp1
s
pk
pssk
sG

Av. Prof. Luciano Gualberto, trav. 3 nº. 158 – Prédio de Engenharia Elétrica – Bloco A – Térreo
CEP 05508-900 – Butantã - São Paulo. Telefone: ++55 11 30377545 / Fax: ++55 11 30377536 27
EPUSP
Convênio Rockwell Automation
Escola Politécnica da USP
e, portanto, trata-se de um sistema do tipo 1, para o qual:
pk
K0 =
Sendo assim:
• para entrada degrau unitário: 0)(e =∞
• para entrada rampa unitária: 0K
1)(e =∞
• para entrada parábola unitária: ∞=∞)(e
3.5 Rejeição de Perturbações em Regime Estacionário
Considere-se o sistema de controle em malha fechada representado na figura abaixo, em que
)(sN representa uma perturbação que age na entrada da planta.
Figura 3.17
A questão que se coloca é determinar em que condições o sistema é capaz de rejeitar a
perturbação )s(N em regime estacionário. Ou seja, em que condições o efeito em regime
estacionário da perturbação sobre a saída do sistema é nulo.
Supondo válidas as hipóteses do Teorema do Valor Final, sua aplicação neste caso leva a
)s(N)s(K)s(G1
)s(Gslim)(c
0s +=∞
→.
Após algum trabalho algébrico pode-se chegar às conclusões que se seguem.
Perturbação do tipo degrau
Se o controlador )s(K tem pelo menos um pólo na origem, o efeito da perturbação em degrau
sobre a saída em regime estacionário é nulo, independentemente do número de pólos da planta na
origem.
Perturbação do tipo rampa
Quando se deseja que o sistema de controle rejeite completamente em regime estacionário
perturbações do tipo rampa é necessário que o compensador )s(K tenha pelo menos dois pólos na
origem.
Planta Controlador
)(sC
)(sN
- + +
+ )(sR )(sK )(sG

Av. Prof. Luciano Gualberto, trav. 3 nº. 158 – Prédio de Engenharia Elétrica – Bloco A – Térreo
CEP 05508-900 – Butantã - São Paulo. Telefone: ++55 11 30377545 / Fax: ++55 11 30377536 28
EPUSP
Convênio Rockwell Automation
Escola Politécnica da USP
4. Estabilidade
4.1 Introdução
O requisito mais importante dos sistemas de controle é a sua estabilidade. Ele deve ser garantido
antes do atendimento de qualquer outra especificação relativa ao comportamento do sistema.
É imediato concluir que uma condição necessária e suficiente (C.N.S.) para a estabilidade dos
S.L.I.T. é que todos os seus pólos tenham parte real negativa (isto é, se situem no S.P.E.). Se não
fosse assim, os termos correspondentes aos pólos do S.P.D. forneceriam contribuições à saída do
tipo exponencial crescente e o sistema seria instável.
4.2 Critério de Routh
O Critério de Routh permite determinar o número de pólos de um sistema situados no S.P.D. de
maneira simples, isto é, sem ter que calcular as raízes do polinômio do denominador da Função de
Transferência.
Considere-se, então, o sistema:
( )( )
( )( )sAsB
asasasa
'bs'bs'bs'bsRsC
n1n1n
1n
0
m1m1m
1m
0 =++++
++++=
−−
−−
Κ
Κ
sendo o problema saber se A(s) tem raízes no S.P.D.
O procedimento é o seguinte:
a) escreva A(s) na forma ( ) n1n1n
1n
0 asasasasA ++++= −− Κ . Admite-se que an ≠ 0 ,
isto é, que eventuais raízes nulas de A(s) já tenham sido removidas.
b) se todos os coeficientes de A(s) estão presentes (isto é, nenhum deles é nulo),
prossiga no passo seguinte; se falta pelo menos um termo, o sistema não é estável.
c) se todos os coeficientes de A(s) têm o mesmo sinal, prossiga no passo seguinte;
caso contrário (isto é, d) arranje, então, os coeficientes do polinômio numa tabela da
seguinte forma:
ns a0 a2 a4 a6 Κ 0 Dados 1ns − a1 a3 a5 a7 Κ 0 2ns − b1 b2 b3 b4 Κ 3ns − c1 c2 c3 c4 Κ
Μ Μ Calculados 1s f1 0s g1
Tabela 4.1

Av. Prof. Luciano Gualberto, trav. 3 nº. 158 – Prédio de Engenharia Elétrica – Bloco A – Térreo
CEP 05508-900 – Butantã - São Paulo. Telefone: ++55 11 30377545 / Fax: ++55 11 30377536 29
EPUSP
Convênio Rockwell Automation
Escola Politécnica da USP
onde:
1
30211 a
aaaab
−= e
1
21311 b
baabc
−=
1
50412 a
aaaab
−= e
1
31512 b
baabc
−=
1
70613 a
aaaab
−= e
1
41713 b
baabc
−=
Μ Μ
A tabela assim construída tem formato triangular.
Critério de Routh: o número de raízes de )s(A com parte real positiva é igual ao número de
mudanças de sinal dos elementos da primeira coluna da tabela acima.
Exemplo: ( ) 5s4s3s2ssA 234 ++++=
Há duas mudanças de sinal entre os coeficientes da primeira coluna e, portanto, duas raízes com
parte real positiva ( )1.4161j0.2878 ⋅± .
s4 1 3 5
s3 2 4
s2 1 5
s1 -6
s0 5
Tabela 4.2
Exemplo: ( ) 6s11s6ssA 23 +++=
Todos os coeficientes da primeira coluna são positivos e, portanto, o sistema é estável.
s3 1 11
s2 6 6
s1 10
s0 6
Tabela 4.3
Exemplo: Considere o sistema de controle em malha fechada da figura abaixo. A questão que se
coloca é: será possível escolher k adequadamente, de forma que o sistema em malha fechada seja
estável (note que o sistema em malha aberta é instável, pois tem um pólo em s = +1).

Av. Prof. Luciano Gualberto, trav. 3 nº. 158 – Prédio de Engenharia Elétrica – Bloco A – Térreo
CEP 05508-900 – Butantã - São Paulo. Telefone: ++55 11 30377545 / Fax: ++55 11 30377536 30
EPUSP
Convênio Rockwell Automation
Escola Politécnica da USP
R(s) C(s)+
-( ) ( )
s
s s s
+
⋅ − ⋅ +
1
1 5k
Figura 4.1
A Função de Transferência de malha fechada do sistema é:
( )( )
( )( )
( )( )sAsB
ks5ks4s
1sksRsC
23=
+⋅−++
+⋅=
Tabela de Routh:
Tabela 4.4
Para a estabilidade devemos ter:
⇒
>
>−
0k
04
20k3
320
k >
Conclusão: O sistema é estável se e apenas se
320
k > .
Nota-se aqui um benefício da realimentação: um sistema instável em malha aberta pode ser
estabilizado utilizando-se um esquema de realimentação.
s3 1 k − 5
s2 4 k
s1 3 20
4
k −
s0 k

Av. Prof. Luciano Gualberto, trav. 3 nº. 158 – Prédio de Engenharia Elétrica – Bloco A – Térreo
CEP 05508-900 – Butantã - São Paulo. Telefone: ++55 11 30377545 / Fax: ++55 11 30377536 31
EPUSP
Convênio Rockwell Automation
Escola Politécnica da USP
5. Resposta em Freqüência
5.1 Introdução
A designação resposta em freqüência está associada a sistemas excitados por entradas
senoidais e considerando suas saídas em regime permanente. A importância do estudo da resposta
em freqüência reside no fato de que sinais periódicos ou não podem ser decompostos em senóides.
Os métodos de projeto baseados na resposta em freqüência são, talvez, os mais utilizados em
ambientes industriais. A razão principal para a popularidade desses métodos é que eles permitem
realizar projetos de boa qualidade na presença de incertezas no modelo da planta.
Além disso, outro fator que contribui para a popularidade desses métodos é que, em geral, o
levantamento experimental de características de resposta em freqüência é uma tarefa fácil. Medidas
de amplitudes e fases da saída de uma planta sujeita a entradas senoidais são suficientes para se
projetar um controlador.
5.2 Conceituação de Resposta em Freqüência
Consideremos um sistema com Função de Transferência G(s) e suponhamos que a entrada seja
um sinal senoidal de amplitude A e freqüência ω:
)tsen(A)t(x ω= .
Se denotarmos por ( )ωjG e ( )ωΦ , respectivamente o módulo e a fase de ( )ωjG , resulta
( ) ( ) ( )( )ωΦ+ω⋅ω⋅=∞ tsenjGAty .
Este fato mostra que:
• um sistema sujeito a uma entrada senoidal apresenta, em regime permanente, uma
saída também senoidal e de mesma freqüência que a entrada;
• a relação entre as amplitudes da saída e da entrada (ganho) é dada por ( )ωjG ;
• a diferença entre as fases da saída e da entrada (defasagem) é dada por ( ) =ωΦ ( )ωjG .
Portanto, o número complexo G(jω) caracteriza precisamente a saída estacionária do sistema. Em
resumo, dado G(s), para determinarmos ganho e defasagem do sistema numa dada freqüência ω,
basta substituirmos s = jω na expressão de G(s) e obtermos o módulo e a fase do número complexo
resultante.
X(s) Y(s)G(s)

Av. Prof. Luciano Gualberto, trav. 3 nº. 158 – Prédio de Engenharia Elétrica – Bloco A – Térreo
CEP 05508-900 – Butantã - São Paulo. Telefone: ++55 11 30377545 / Fax: ++55 11 30377536 32
EPUSP
Convênio Rockwell Automation
Escola Politécnica da USP
O ganho e a defasagem em função da freqüência definem o que se denomina resposta em
freqüência do sistema.
Exemplo: Seja o sistema cuja Função de Transferência é:
( )1sT
KsG 0
+⋅= ( )0T,K 0 >
Fazendo s = jω:
( )1Tj
KjG 0
+ω=ω
e, portanto, na freqüência ω o ganho e a defasagem são dados por:
( )( )20
T1
KjG
ω+
=ω e ( )Φ ω = ( )G jω ( )Tarctan ω−=
Desses resultados, nota-se que, para freqüências suficientemente pequenas, tem-se:
⇒<<ωT1 ( ) 0KjG ≅ω e ( ) 0≅ωΦ
Assim, K0 é o valor do ganho do sistema em baixas freqüências e a saída se apresenta
praticamente em fase com a entrada.
Por outro lado, para freqüências suficientemente elevadas:
⇒>>ωT1 ( )
TK
jG 0
ω≅ω e ( ) °−≅ωΦ 90
5.3 Gráficos de Resposta em Freqüência
Existem pelo menos duas maneiras comuns de se representar a resposta em freqüência de
sistemas, a saber, através de gráficos em escala logarítmica (Diagramas de Bode e Diagramas de
Nichols) e através de gráficos polares (Diagramas de Nyquist).
Diagramas de Bode
Os Diagramas de Bode são gráficos de ganho e defasagem em função da freqüência, esta
marcada em escala logarítmica. Uma das vantagens de se utilizar a escala logarítmica é que assim é
possível representar freqüências de ordens de grandeza muito diversas.
O ganho, frequentemente, é representado como ( )ω⋅ jGlog20 10 . Esta unidade é denominada
decibel (dB).
Exemplo: Os Diagramas de Bode do sistema cuja Função de Transferência é
( ) ( )s100s
10s100sG
2 +
+⋅=
são os seguintes:

Av. Prof. Luciano Gualberto, trav. 3 nº. 158 – Prédio de Engenharia Elétrica – Bloco A – Térreo
CEP 05508-900 – Butantã - São Paulo. Telefone: ++55 11 30377545 / Fax: ++55 11 30377536 33
EPUSP
Convênio Rockwell Automation
Escola Politécnica da USP
Bode Diagram
Frequency (rad/sec)
Pha
se (
deg)
Mag
nitu
de (
dB)
-30
-20
-10
0
10
20
30
100
101
102
103
-90
-60
-30
Figura 5.1
Determinação do Tipo do Sistema
Uma simples inspeção do Diagrama de Bode de ganho em baixas freqüências permite determinar
o tipo do sistema.
A tabela ao lado mostra a correspondência entre a declividade em baixas freqüências e o tipo do
sistema.
Declividade
dB/década
Tipo
0 0
-20 1
-40 2
Μ Μ
Tabela 5.1
Diagramas de Nyquist
Os Diagramas de Nyquist são gráficos polares de resposta em freqüência parametrizados em ω.
Em outras palavras, para cada valor de ω no intervalo 0 ≤ ≤ ∞ω , desenha-se no plano complexo o
ponto que representa G(jω).
Magnitude (dB)
Fase(graus)
Frequency (rad/sec)
Bode Diagram

Av. Prof. Luciano Gualberto, trav. 3 nº. 158 – Prédio de Engenharia Elétrica – Bloco A – Térreo
CEP 05508-900 – Butantã - São Paulo. Telefone: ++55 11 30377545 / Fax: ++55 11 30377536 34
EPUSP
Convênio Rockwell Automation
Escola Politécnica da USP
Os Diagramas de Nyquist podem ser desenhados a partir de dados retirados dos Diagramas de
Bode, pois estes são de construção mais simples e sistemática. Note, porém, que os valores de
ganho em dB devem ser modificados para seus valores originais (em unidades de engenharia)
utilizando-se a função antilogaritmo.
Exemplo: Seja o sistema
( ) ( )10j
1jG
10s1
sG+ω
=ω⇒+
=
É imediato que:
( )101
0jG0 =⋅⇒=ω
e que, para ω suficientemente grande:
( )ω
=ω⇒>>ωj1
jGsrad10
de maneira que, em altas freqüências, o Diagrama de Nyquist se aproxima da origem do plano
complexo com fase − °90 .
Para ω = 10 rad/s, por exemplo:
( )210
1jGsrad10
⋅=ω⇒=ω , ( )ωjG = − °45
Im
Re
0.05 0.1
-0.05
ω = 0
ω = 10ω → ∞
Figura 5.2
Calculando mais alguns pontos, podemos esboçar o Diagrama de Nyquist.
Neste caso, pode-se mostrar que o Diagrama de Nyquist para 0 ≤ ≤ ∞ω tem a forma de uma
semi-circunferência.
Uma vantagem dos Diagramas de Nyquist é que eles representam as características de resposta
em freqüência (ganho e fase) num único gráfico. Além disso, como veremos adiante ao estudarmos o
Critério de Nyquist, tais diagramas permitem analisar a estabilidade de sistemas em malha fechada
de forma simples e imediata.

Av. Prof. Luciano Gualberto, trav. 3 nº. 158 – Prédio de Engenharia Elétrica – Bloco A – Térreo
CEP 05508-900 – Butantã - São Paulo. Telefone: ++55 11 30377545 / Fax: ++55 11 30377536 35
EPUSP
Convênio Rockwell Automation
Escola Politécnica da USP
Por outro lado, uma de suas desvantagens é que os Diagramas de Nyquist não permitem
identificar as contribuições individuais de cada um dos fatores que compõem a Função de
Transferência.
Diagramas de Nichols
Além dos diagramas de Bode e de Nyquist, é comum utilizarem-se também os diagramas de
Nichols para representar a resposta em freqüência de um sistema. Estes diagramas são gráficos da
resposta em freqüência parametrizados em ω. Em ambos os eixos utilizam-se escalas lineares: no
eixo das abscissas marcam-se as defasagens em graus, ao passo que no eixo das ordenadas
marcam-se os ganhos em dB. Da mesma maneira que os diagramas de Nyquist, neste caso um único
gráfico contém as informações de ganho e defasagem do sistema.
Exemplo
Considere a seguinte função de transferência:
)1s(s1
)s(G+
= .
Seu diagrama de Nichols é mostrado na figura abaixo.
Figura 5.3
Os diagramas de Nichols podem ser construídos ponto a ponto, ou então a partir de leituras de
alguns pares ganho-defasagem nos diagramas de Bode.
Note-se que uma variação de ganho produz apenas um deslocamento do diagrama na vertical
(para cima, no caso de aumento de ganho e para baixo, em caso contrário), sem alterar sua forma.

Av. Prof. Luciano Gualberto, trav. 3 nº. 158 – Prédio de Engenharia Elétrica – Bloco A – Térreo
CEP 05508-900 – Butantã - São Paulo. Telefone: ++55 11 30377545 / Fax: ++55 11 30377536 36
EPUSP
Convênio Rockwell Automation
Escola Politécnica da USP
5.4 Critério de Nyquist
Figura 5.4
Consideremos o sistema em malha fechada acima, cuja Função de Transferência é dada por:
( )( )
( )( ) ( )sHsG1
sGsRsC
⋅+=
O Critério de Nyquist permite determinar se o sistema em malha fechada é estável ou não a partir
da resposta em freqüência de malha aberta, isto é, do diagrama de Nyquist de )j(H)j(G ωω .
Para isso deve-se desenhar o diagrama de Nyquist para ω entre ∞− e ∞+ (se conhecermos a
porção do gráfico correspondente ao intervalo de 0 a ∞+ , então a parte que corresponde ao
intervalo de ∞− a 0 é a simétrica da primeira em relação ao eixo real do plano complexo).
Tendo então o diagrama de Nyquist de )j(H)j(G ωω para ω entre ∞− e ∞+ basta contar o
número de voltas que o mesmo dá em torno do ponto –1+j0 no sentido anti-horário. Se esse número
de voltas for igual ao número de pólos instáveis de malha aberta (isto é, de )s(H)s(G ), então o
sistema em malha fechada será estável.
Em essência, esse é o célebre Critério de Nyquist.
Sua importância advém do fato de que a estabilidade em malha fechada pode ser inferida a partir
da resposta em freqüência de malha aberta, não sendo necessário conhecer o modelo matemático
(função de transferência) do sistema. Como em muitos casos práticos a resposta em freqüência pode
ser levantada experimentalmente aplicando-se senóides de freqüência variável na entrada do sistema
e medindo-se a amplitude e a fase da senóide de saída, o Critério de Nyquist pode ser muito útil.
Além disso, sua aplicação é simples.
Um caso relativamente comum na prática é aquele em que o sistema é estável em malha aberta.
Neste caso, o número de pólos instáveis de malha aberta é obviamente zero e, portanto, para que o
sistema em malha fechada seja estável é preciso que o Diagrama de Nyquist não circunde o ponto –
1+j0. A distância do gráfico até o ponto –1+j0 fornece uma medida de quão próximo da instabilidade
pode estar um sistema estável – deste fato se originam os conceitos de margem de ganho e margem
de fase.
Exemplo: Seja o sistema tal que
R(s) C(s)+
-G(s)
H(s)

Av. Prof. Luciano Gualberto, trav. 3 nº. 158 – Prédio de Engenharia Elétrica – Bloco A – Térreo
CEP 05508-900 – Butantã - São Paulo. Telefone: ++55 11 30377545 / Fax: ++55 11 30377536 37
EPUSP
Convênio Rockwell Automation
Escola Politécnica da USP
( ) ( )( )( )
( )0T,T,KsT1sT1
KsHsG 210
21
0 >++
=⋅
O Diagrama de Nyquist para −∞ < < +∞ω tem o aspecto indicado na figura abaixo, onde se
observa que o número de envolvimentos do ponto (-1+j0) é zero.
Figura 5.5
Como o sistema em malha aberta não tem pólos no S.P.D, está, portanto, satisfeita a condição do
Critério de Nyquist e podemos concluir que o sistema é estável em malha fechada para qualquer
valor de K > 0.
Im
Reω = 0
ω → −∞
ω → +∞
-1 + j0

Av. Prof. Luciano Gualberto, trav. 3 nº. 158 – Prédio de Engenharia Elétrica – Bloco A – Térreo
CEP 05508-900 – Butantã - São Paulo. Telefone: ++55 11 30377545 / Fax: ++55 11 30377536 38
EPUSP
Convênio Rockwell Automation
Escola Politécnica da USP
6. Porque Realimentação?
6.1 Introdução
O objetivo desta seção é mostrar algumas conseqüências importantes da realimentação, a saber:
• a redução da sensibilidade a variações na planta;
• a rejeição de perturbações;
• a melhora da resposta transitória.
É oportuno mencionar que estes não são os únicos efeitos da realimentação. Há outros
igualmente importantes, como por exemplo, a estabilização de sistemas instáveis, que não serão
considerados nesta seção.
Para isso, será utilizado um exemplo simples de um sistema de controle de velocidade, em que os
sinais de entrada são "simples" (degraus) e o controlador é igualmente "simples" (controlador
proporcional). Considere-se então o motor CC controlado pela armadura representado na figura
abaixo.
Ra
va(t)
ia(t)
ea(t)
LT
if = cte
J
fω(t)T
Figura 6.1
Definindo
vT
a
KK
JR=τ
V0 K
1K =
T
a1 K
RK = ,
pode-se mostrar que
[ ])s(TK)s(V1s
K)s( L1a
0 ++τ
=Ω ,
que, na forma de diagrama de blocos, pode ser representada por

Av. Prof. Luciano Gualberto, trav. 3 nº. 158 – Prédio de Engenharia Elétrica – Bloco A – Térreo
CEP 05508-900 – Butantã - São Paulo. Telefone: ++55 11 30377545 / Fax: ++55 11 30377536 39
EPUSP
Convênio Rockwell Automation
Escola Politécnica da USP
Figura 6.2
Considere-se um tacômetro de ganho unitário (isto é, que fornece 1 V de tensão de saída para
uma velocidade de rotação de 1 rad/s) sendo utilizado como sensor de velocidade angular. Com isso,
podemos construir um sistema de controle de velocidade em malha fechada:
Figura 6.3
O controlador acima talvez seja o mais simples dentre todos, sendo chamado de proporcional,
pois a variável de controle ( )s(Va ) é proporcional ao erro ( )s(E ). Fisicamente ele pode ser
representado por um amplificador de ganho K .
O objetivo do sistema de controle é fazer com que a velocidade do motor ( )s(Ω ) acompanhe a
velocidade de referência ( )s(rΩ ). Ou, em outras palavras, fazer com que o erro seja nulo ou
suficientemente pequeno. Na realidade, na análise a seguir será considerado apenas o caso simples
em que os sinais aplicados são degraus e será avaliada apenas a resposta do sistema em regime
estacionário (exceto na Seção 6.5).
A seguir, o sistema em malha fechada é comparado com o sistema em malha aberta para
observar alguns dos efeitos importantes da realimentação.
+
)(sΩ )(sVa +
)(sTL
1
0
+s
K
τ
1K
Sensor
Motor
)(sE )(srΩ
)(sVa
+ +
)(sTL
+
- K
1
0
+s
K
τ
1
Controlador
1K
)(sΩ

Av. Prof. Luciano Gualberto, trav. 3 nº. 158 – Prédio de Engenharia Elétrica – Bloco A – Térreo
CEP 05508-900 – Butantã - São Paulo. Telefone: ++55 11 30377545 / Fax: ++55 11 30377536 40
EPUSP
Convênio Rockwell Automation
Escola Politécnica da USP
6.2 Modelo Exato e Sem Torque de Carga ( 0TL = )
Malha Aberta
Neste caso, se escolhermos o ganho do controlador K tal que
0K1
K = ,
do Teorema do Valor Final resulta o valor da velocidade do motor em regime estacionário:
A)( =∞ω .
Portanto, o erro estacionário é nulo:
0A)()(e =−∞ω=∞ ,
o que significa que, em regime permanente, a velocidade do motor é igual à velocidade de referência.
Malha Fechada
Neste caso, o erro estacionário resulta:
AKK11
)(e0+
=∞
e, portanto,
0KK11
A)(e
+=
∞.
Se escolhermos o ganho do controlador K suficientemente grande, isto é, tal que
1KK0 >>> ,
então
1A
)(e<<
∞,
o que significa que, em regime estacionário, o erro de acompanhamento da velocidade de referência
é muito pequeno em relação a esta.
Neste ponto, parece não haver vantagem alguma do sistema em malha fechada com relação
àquele em malha aberta. Pelo contrário, se antes o acompanhamento do sinal de referência era
exato, agora passou a não sê-lo mais! Em outras palavras, se o modelo do sistema a controlar fosse
conhecido exatamente e se o sistema não estivesse sujeito a perturbações externas, o controle
poderia ser feito em malha aberta. No entanto, isto nunca ocorre na prática porque o modelo do
sistema sempre é aproximado e o sistema sempre está sujeito a perturbações externas.
6.3 Incerteza em K0 e Sem Torque de Carga ( 0TL = )
Suponhamos que o parâmetro K0 não seja conhecido exatamente, mas se apresente afetado por
uma incerteza ∆K0, de maneira que seu valor real seja K0+∆K0.

Av. Prof. Luciano Gualberto, trav. 3 nº. 158 – Prédio de Engenharia Elétrica – Bloco A – Térreo
CEP 05508-900 – Butantã - São Paulo. Telefone: ++55 11 30377545 / Fax: ++55 11 30377536 41
EPUSP
Convênio Rockwell Automation
Escola Politécnica da USP
Malha Aberta
Neste caso, o erro estacionário é
AK
K)(e
0
0∆−=∞
e, portanto,
0
0
K
K
A)(e ∆
=∞
,
o que significa que a incerteza em K0 se reflete totalmente sobre o erro estacionário. Assim, por
exemplo, um erro de 10% em K0 produz um erro de 10% em ω(∞).
Malha Fechada
Se denotarmos por ω0(∞) o valor estacionário da velocidade angular no caso de não haver erro em
K0 (isto é, ∆K0=0) e por ∆ω(∞) o desvio causado na velocidade estacionária pelo erro ∆K0,, pode-se
mostrar que
0
0
00 K
K
KK11
)()( ∆
+≅
∞ω
∞ω∆.
O fator 1/(1+KK0), que relaciona variações ∆K0/K0 com variações ∆ω(∞)/ω0(∞) é chamado de
sensibilidade.
Se escolhermos o ganho do controlador K de maneira que KK0>>1, então
0
0
0 K
K
)()( ∆
<<∞ω
∞ω∆,
o que significa que um erro em K0 se apresenta acentuadamente reduzido sobre a velocidade
estacionária.
Obs.: Deve-se lembrar que, como visto anteriormente, se KK0>>1, então ω0(∞)≅A. Para ilustrar,
suponhamos, por exemplo, que |∆K0/K0|=0,1 (ou seja, 10%) e KK0=99>>1. Neste caso,
|∆ω(∞)/ω0(∞)|≅0,001 (ou seja, 0,1%). Ainda neste caso, ω0(∞)=(99/100)A≅A e, portanto,
|∆ω(∞)/A||≅0,001 (ou seja, 0,1%). Em outras palavras, se o ganho K do controlador for
suficientemente elevado e a incerteza no ganho for de 10%, a incerteza na velocidade de rotação do
motor em malha fechada será de apenas 0,1%.
Conclusão
Se o ganho do controlador é suficientemente alto, a variação da velocidade estacionária
decorrente de variações em K0 é pequena. Em outras palavras, o erro estacionário na variável
controlada em malha fechada é significativamente menos sensível a variações em K0 do que em
malha aberta. Por esta razão, não é necessário o conhecimento preciso dos valores dos parâmetros
do sistema para se obter boa precisão no controle. Esta é uma das razões históricas do uso da
realimentação que permanece válida até os dias atuais.

Av. Prof. Luciano Gualberto, trav. 3 nº. 158 – Prédio de Engenharia Elétrica – Bloco A – Térreo
CEP 05508-900 – Butantã - São Paulo. Telefone: ++55 11 30377545 / Fax: ++55 11 30377536 42
EPUSP
Convênio Rockwell Automation
Escola Politécnica da USP
É oportuno observar que uma análise idêntica poderia ser feita considerando-se uma incerteza
presente em K. Em razão da "simetria" entre K e K0 existente nas expressões, é óbvio que se
chegaria às mesmas conclusões, isto é, o efeito da incerteza em K sobre a saída pode ser reduzido
fazendo-se o ganho K K0 suficientemente grande. A importância prática desta observação é que o
amplificador não necessita ser de ganho muito bem conhecido - basta que ele seja alto o suficiente.
De maneira mais geral, isso significa que se pode obter um desempenho do sistema em malha
fechada de alta qualidade mesmo utilizando componentes de baixa qualidade.
6.4 Perturbação na Carga (Sem Incerteza em K0)
Até aqui não consideramos a presença do torque de carga TL em nossa análise. Vejamos agora
qual é seu efeito sobre a velocidade estacionária.
Malha Aberta
Neste caso considerando o mesmo ganho escolhido em malha aberta no 1o. caso, isto é,
0K1
K = ,
e considerando que TL é um degrau de amplitude T, o erro estacionário é dado por
TKK)(A)(e 10−=∞ω−=∞ ,
sendo, pois, proporcional ao torque da carga T. É importante notar que K0 e K1 são fixos para um
dado motor e, por isso, o projetista não tem meios de reduzir o erro estacionário.
Malha Fechada
Neste caso, considerando que Ωr e TL são degraus de amplitudes A e T, respectivamente, pode-se
mostrar que o erro estacionário é dado por
TKK1
KKA
KK11
)(e0
10
0 +−
+=∞ .
Se o ganho K do controlador for escolhido de maneira que
1KK0 >>
e
100 KKKK >> ,
então o erro estacionário resulta pequeno.
Conclusão
Em malha fechada o erro estacionário é menos sensível a perturbações externas do que em
malha aberta, desde que o ganho do controlador seja suficientemente grande.

Av. Prof. Luciano Gualberto, trav. 3 nº. 158 – Prédio de Engenharia Elétrica – Bloco A – Térreo
CEP 05508-900 – Butantã - São Paulo. Telefone: ++55 11 30377545 / Fax: ++55 11 30377536 43
EPUSP
Convênio Rockwell Automation
Escola Politécnica da USP
6.5 Resposta Transitória
Malha Aberta
Neste caso, a dinâmica de malha aberta é de 1a. ordem com constante de tempo
vT
a
KK
JR=τ ,
que não depende do ganho K do controlador e, portanto, não pode ser alterada por diferentes
escolhas do valor deste ganho. Em outras palavras, é impossível, por exemplo, conseguir-se uma
resposta mais rápida do sistema através do ajuste do ganho do controlador.
Malha Fechada
Em malha fechada, a dinâmica também é de 1a. ordem. No entanto, a constante de tempo é
0KK1'
+
τ=τ
e, portanto, a resposta do sistema se torna mais rápida à medida que o ganho K do controlador
aumenta.
Obs: Em geral, é preciso ter cuidado com o uso de valores elevados de K, pois estes podem
provocar a instabilidade do sistema em malha fechada.
6.6 Resumo
A Tabela a seguir resume o estudo dos efeitos da realimentação sobre o sistema de controle de
velocidade analisado.
Caso Regime Malha Aberta Malha Fechada
Modelo Exato
Estacionário
0)(e =∞
0KK11
A)(e
+=
∞
Incerteza em K0
Estacionário
0
0
K
K
A)(e ∆
=∞
0
0
0 K
K
KK11
A)( ∆
+≅
∞ω∆
Perturbação de
Torque
Estacionário
TKK)(e 10−=∞ T
KK1
KKA
KK11
)(e0
10
0 +−
+=∞
Transitório
τ 0KK1'
+
τ=τ
Tabela 6.1
Por fim, para concluir esta seção, é oportuno mencionar que as propriedades discutidas acima
para o exemplo particular de um motor CC podem ser generalizadas para sistemas com dinâmicas
mais complexas e sinais de perturbação e de referência diferentes do degrau.

Av. Prof. Luciano Gualberto, trav. 3 nº. 158 – Prédio de Engenharia Elétrica – Bloco A – Térreo
CEP 05508-900 – Butantã - São Paulo. Telefone: ++55 11 30377545 / Fax: ++55 11 30377536 44
EPUSP
Convênio Rockwell Automation
Escola Politécnica da USP
7. Modos de Controle P, I e D
7.1 Introdução
Os três modos básicos de controle em malha fechada que são largamente empregados na prática
são o proporcional (P), o integral (I) e o derivativo (D). A figura 7.1 mostra um diagrama de blocos de
um controlador genérico. O set point é representado por uma linha tracejada já que ele é
normalmente especificado por um dial ou por um contato deslizante no painel do controlador. Além
deste set point local, alguns controladores têm uma opção de set point remoto que permite a
recepção de um sinal remoto ou de um dispositivo externo como, por exemplo, outro controlador ou
um computador digital. Os sinais de entrada e de saída do controlador são sinais contínuos
comumente do tipo elétrico, pneumático ou hidráulico.
Figura 7.1
7.2 Controle Proporcional
No controle em malha fechada, o objetivo é levar para zero o sinal de erro e(t)
)t(c)t(r)t(e −= ,
sendo r(t) o set point e c(t) o valor medido da variável controlada.
Embora a equação indique que o set point possa ser variante no tempo, na maior parte dos
problemas de controle ele é mantido constante por longos períodos de tempo.
A concepção mais elementar de um controlador e talvez a mais utilizada corresponde ao controle
proporcional. Neste caso, a saída do controlador é proporcional ao sinal de erro, isto é
)t(eK)t(u C= ,
onde CK é o ganho do controlador, normalmente adimensional. O ganho define o quanto a
variável de controle deve variar em correspondência a uma variação unitária do sinal de erro.
Os conceitos básicos por trás do controle proporcional são os seguintes:

Av. Prof. Luciano Gualberto, trav. 3 nº. 158 – Prédio de Engenharia Elétrica – Bloco A – Térreo
CEP 05508-900 – Butantã - São Paulo. Telefone: ++55 11 30377545 / Fax: ++55 11 30377536 45
EPUSP
Convênio Rockwell Automation
Escola Politécnica da USP
• o ganho do controlador pode ser ajustado de forma a tornar a saída do controlador
tão sensível quanto desejado aos desvios entre o setpoint e a variável controlada;
• o sinal de CK pode ser escolhido de forma a fazer com que a saída do controlador
aumente (ou diminua) à medida que o desvio aumenta.
O ganho CK do controlador tem seu valor ajustado depois de o controlador ter sido instalado e
colocado em operação. Para controladores de propósito geral, CK é adimensional – esta situação
ocorre quando u e e têm as mesmas unidades. Por exemplo, essas unidades poderiam estar
associadas a instrumentos eletrônicos ou pneumáticos e as variáveis medidas em ampères, volts, psi,
etc. e poderiam ser expressas como números entre 0 e 100%. Esta última representação, aliás, é
conveniente para displays gráficos e programas de computador.
Alguns controladores, em especial os modelos mais antigos, trabalham com um parâmetro
chamado banda proporcional (BP) em lugar do ganho. No caso em que CK é adimensional, a BP é
definida como
CK%100
BP = .
Note que um pequeno valor da BP corresponde a um valor elevado do ganho CK , enquanto que
um grande valor de BP corresponde a um valor diminuto de CK . A figura a seguir ilustra o efeito da
BP para um exemplo de uma válvula.
Figura 7.2

Av. Prof. Luciano Gualberto, trav. 3 nº. 158 – Prédio de Engenharia Elétrica – Bloco A – Térreo
CEP 05508-900 – Butantã - São Paulo. Telefone: ++55 11 30377545 / Fax: ++55 11 30377536 46
EPUSP
Convênio Rockwell Automation
Escola Politécnica da USP
O controlador proporcional conforme apresentado não inclui limites físicos para a variável de saída
do controlador. Uma representação mais realista é mostrada na figura abaixo. Dizemos que o
controlador satura quando sua saída atinge um determinado limite físico, seja maxu ou minu .
Figura 7.3
A função de transferência do controlador proporcional pode ser escrita de imediato como
CK)s(E)s(U
= .
Uma desvantagem do controlador proporcional é sua incapacidade, em geral, de eliminar erros
estacionários que surgem após uma mudança de set point ou uma perturbação constante na saída,
conforme ilustra a figura a seguir.
Figura 7.4
Uma forma de eliminar este problema é usando um controlador contendo um termo integral – este
modo produz um reset automático, conforme discutido adiante. No entanto, em diversas aplicações
de controle em que offsets podem ser tolerados, o controle proporcional é atraente por causa de sua
simplicidade. Por exemplo, em alguns problemas de controle de nível, a manutenção do nível de
u
umax
umin
u

Av. Prof. Luciano Gualberto, trav. 3 nº. 158 – Prédio de Engenharia Elétrica – Bloco A – Térreo
CEP 05508-900 – Butantã - São Paulo. Telefone: ++55 11 30377545 / Fax: ++55 11 30377536 47
EPUSP
Convênio Rockwell Automation
Escola Politécnica da USP
líquido exatamente no valor do set point não é necessária, uma vez que basta que o líquido não
extravase ou que o tanque se esvazie por completo.
7.3 Controle Integral
Para motivar a ação de controle integral, considere-se o exemplo de um chuveiro elétrico para o
qual se deseja controlar a temperatura da água independentemente da vazão. Admita-se que a
variável de controle seja a potência térmica fornecida à água. Se, num certo momento, a temperatura
da água atingiu o valor desejado, então a potência térmica fornecida ao resistor deve ser mantida
inalterada (um controlador proporcional não funcionaria aqui porque a potência térmica, sendo
proporcional ao erro, resultaria nula). A idéia básica então é definir um controlador tal que sua saída
permaneça constante quando o sinal de erro é nulo. Uma maneira de conseguir esta característica é
definindo a saída do controlador como sendo proporcional à integral do sinal de erro ao longo do
tempo, isto é,
∫ ττ=t
0Id)(e
T1
)t(u ,
onde IT é chamado de tempo integral ou tempo de reset e tem dimensão de tempo. Nos
controladores comerciais, o parâmetro IT é ajustável. A ação de controle integral também é
conhecida por controle de reset.
A ação de controle integral é muito usada porque ela apresenta uma importante característica
prática: a eliminação do erro estacionário. Para entender como isto ocorre, considere a equação
acima e que o sistema esteja em regime estacionário, sendo tanto o sinal de erro, como o sinal de
controle u constantes. Mas, o termo integral mostra que u variará com o tempo a menos que e(t)=0.
Portanto, quando a ação integral for usada, u atingirá um valor constante que fará com que o erro
estacionário seja nulo.
Mesmo que em geral a eliminação do erro estacionário seja um objetivo de controle importante, o
controle integral raramente é utilizado sozinho uma vez que, para que a variável de controle atinja um
valor significativo, é preciso que o erro persista por um certo tempo. Por outro lado, o controle
proporcional atua simultaneamente com a ocorrência de um erro, ou seja, o controlador proporcional
toma uma ação corretiva tão logo um erro seja detectado. Por esta razão, o controle integral é
normalmente utilizado em conjunto com o controle proporcional, constituindo esta combinação o
controlador proporcional-integral (PI):
∫ ττ+=t
0IC d)(e
T1
)t(eK)t(u ,
ou, equivalentemente, em termos de sua função de transferência,

Av. Prof. Luciano Gualberto, trav. 3 nº. 158 – Prédio de Engenharia Elétrica – Bloco A – Térreo
CEP 05508-900 – Butantã - São Paulo. Telefone: ++55 11 30377545 / Fax: ++55 11 30377536 48
EPUSP
Convênio Rockwell Automation
Escola Politécnica da USP
+=
sT1
1K)s(E)s(U
IC
A resposta de um controlador PI a um degrau unitário em e(t) é mostrada na figura abaixo.
Figura 7.5
No instante 0, a saída do controlador muda instantaneamente devido à ação proporcional. A ação
integral produz o crescimento em forma de rampa em )t(u para 0t > . Note que, quando ITt = , a
contribuição do termo integral tem o mesmo valor do termo proporcional. Dessa maneira, a ação
proporcional “repetiu” por uma vez a ação proporcional. Por essa razão, muitos controladores
comerciais são calibrados em termos de IT/1 e adotam a unidade repetições por minuto em vez de
IT , dados em minutos ou minutos para repetir. Assim, por exemplo, se 2.0TI = min, isto corresponde
a 5T/1 I = repetições por minuto.
Uma desvantagem do uso da ação integral é que ela tende a produzir respostas oscilatórias e,
portanto, reduzir a estabilidade do sistema. Uma pequena oscilação normalmente é tolerada, uma vez
que isto está em geral associado com uma rápida resposta. Os efeitos indesejáveis da ação integral
podem ser reduzidos por meio da sintonia apropriada do controlador ou incluindo a ação derivativa,
que tende a compensar os efeitos desestabilizantes.
Sintonizar um controlador PI é naturalmente mais difícil do que sintonizar um controlador P, pois
no primeiro caso há dois parâmetros a ajustar, enquanto que no último há apenas um. Como regra
geral, quanto maior o número de parâmetros a ajustar, tanto mais difícil é a sintonia do controlador.
7.4 Reset Windup
Um outro problema com a ação integral é um fenômeno conhecido como reset windup. Conforme
já mencionado, a ação integral faz com que a saída do controlador mude enquanto 0)t(e ≠ . Em vista
disso, quando um erro persistente ocorre, o termo integral pode se tornar bastante grande e a saída
do controlador pode saturar na prática. A continuação da operação de integração após o controlador
ter saturado é conhecida como reset windup ou integral windup. A figura a seguir mostra uma

Av. Prof. Luciano Gualberto, trav. 3 nº. 158 – Prédio de Engenharia Elétrica – Bloco A – Térreo
CEP 05508-900 – Butantã - São Paulo. Telefone: ++55 11 30377545 / Fax: ++55 11 30377536 49
EPUSP
Convênio Rockwell Automation
Escola Politécnica da USP
resposta típica de um controlador PI a um degrau no set point. Note que as áreas hachuradas sob a
curva dão contribuições positivas ou negativas ao termo integral, respectivamente, quando a variável
controlada está abaixo ou acima do set point. O sobressinal elevado ocorre porque o termo integral
continua a crescer até que o sinal do erro mude em 1tt = , quando então o termo integral começa a
diminuir. Somente após o termo integral se tornar suficientemente pequeno é que a saída do
controlador se afasta do limite de saturação.
Figura 7.6
Assim, o fenômeno de reset windup ocorre quando um controlador PI (ou PID) encontra um erro
persistente como, por exemplo, durante a partida de um processo de batelada (batch process) ou
após uma mudança grande do set point. Ele pode ocorrer também como conseqüência de uma
grande perturbação persistente da saída que esteja acima da capacidade de controle do sistema.
Nesta situação, uma limitação física (como, por exemplo, uma válvula de controle totalmente aberta
ou fechada) impede o controlador de reduzir o sinal de erro para zero. Obviamente é indesejável
deixar o termo integral continuar crescendo após a saturação da saída do controlador uma vez que
este já está fazendo o máximo que pode para reduzir o erro. Felizmente, os controladores comerciais
dispõem de uma função antireset windup que reduz o reset windup, interrompendo temporariamente
a integração do erro sempre que a saída do controlador satura. A integração é reiniciada apenas
quando a saída do controlador não está mais saturada.
7.5 Controle Derivativo
A ação de controle derivativa tem um caráter antecipatório, sendo sua função reagir
antecipadamente ao comportamento futuro do sinal de erro com base na sua taxa de variação. Por
exemplo, suponha que a temperatura de um reator suba de 10 graus Celsius em um período de 3
min. Obviamente este incremento é mais rápido do que os mesmos 10 graus Celsius em 30 min e
poderia indicar uma situação potencialmente fora de controle para uma reação exotérmica. Se o
reator estiver sob controle manual de um operador experiente, este anteciparia as conseqüências e
tomaria as ações corretivas apropriadas para reduzir a temperatura. Este tipo de resposta não seria

Av. Prof. Luciano Gualberto, trav. 3 nº. 158 – Prédio de Engenharia Elétrica – Bloco A – Térreo
CEP 05508-900 – Butantã - São Paulo. Telefone: ++55 11 30377545 / Fax: ++55 11 30377536 50
EPUSP
Convênio Rockwell Automation
Escola Politécnica da USP
obtenível dos controladores vistos até este ponto. Note que um controlador proporcional reage
apenas a um desvio instantâneo na temperatura, não sendo capaz de distinguir o intervalo de tempo
em que o desvio se produz. O termo integral também não ajudaria aqui porque ele geraria uma ação
corretiva com base no intervalo de tempo passado em que o erro tivesse ocorrido.
O caráter antecipatório introduzido pelo operador experiente pode ser incorporado nos
controladores automáticos fazendo a saída do controlador proporcional à taxa de variação da variável
controlada. Ou seja, a ação derivativa ideal pode ser expressa por
)t(eT)t(u D &= ,
em que DT é chamado de tempo derivativo e tem dimensão de tempo. Dessa maneira, o avanço
produzido pelo termo derivativo pode compensar o atraso introduzido por praticamente todas as
malhas de controle.
A ação derivativa nunca é utilizada sozinha, Se o fosse e se o erro fosse constante, o valor do
controle seria nulo. Então, ela sempre é usada em conjunto com um controlador proporcional ou
proporcional-integral. Em combinação com um controlador proporcional, resulta o controlador PD
[ ])t(eT)t(eK)t(u DC &+= .
Neste caso, o controlador PD tem a função de transferência
[ ]sT1K)s(E)s(U
DC += .
A figura a seguir mostra a resposta de um controlador PD a uma entrada rampa unitária.
Figura 7.7
Como se pode observar, a rampa de saída resulta adiantada de DT unidades de tempo em
relação à rampa correspondente ao controlador proporcional, o que ilustra a natureza antecipatória
introduzida pela presença do termo derivativo.
Uma outra maneira de observar essa característica é notando que a figura a seguir
KCTD KC
u(t)
t
TD

Av. Prof. Luciano Gualberto, trav. 3 nº. 158 – Prédio de Engenharia Elétrica – Bloco A – Térreo
CEP 05508-900 – Butantã - São Paulo. Telefone: ++55 11 30377545 / Fax: ++55 11 30377536 51
EPUSP
Convênio Rockwell Automation
Escola Politécnica da USP
Figura 7.8
permite calcular no instante t uma aproximação para o valor do erro no instante futuro t+TD
)t(eT)t(e)Tt(e DD &+≅+
se DT é suficientemente pequeno.
Portanto, para o controlador PD,
[ ] )Tt(eK)t(eT)t(eK)t(u DCDC +≅+= & ,
o que mostra que o controlador PD calcula uma ação de controle no instante t que é
aproximadamente a mesma que um controlador P calcularia se utilizasse o valor previsto aproximado
do erro no instante t+TD . O valor do tempo derivativo TD representa, portanto, o avanço introduzido
pela ação derivativa. Isso mostra de uma outra maneira que o termo derivativo dota o controlador de
uma capacidade de se antecipar à ocorrência do erro futuro.
Ao incorporar um caráter antecipatório à ação de controle, o modo derivativo tende a estabilizar o
sistema. O controle derivativo também tende a diminuir o erro estacionário porque é possível
trabalhar com valores mais elevados do ganho. Além disso, normalmente melhora a resposta
dinâmica do sistema, diminuindo o tempo de acomodação. No entanto, se a medida da saída é
afetada por ruído, isto é, se ela contém componentes flutuantes de alta freqüência, então a derivada
da variável medida amplifica consideravelmente o ruído, a menos que a medida seja previamente
filtrada.
A ação derivativa pode ser combinada com as ações proporcional e integral para formar o
tradicional controlador PID:
+∫ ττ+= )t(eTd)(e
T1
)t(eK)t(u D
t
0IC & ,
o qual pode ser descrito equivalentemente pela seguinte função de transferência
t+TD
o
o e(t+TD)
e(t)
t t
e(t)

Av. Prof. Luciano Gualberto, trav. 3 nº. 158 – Prédio de Engenharia Elétrica – Bloco A – Térreo
CEP 05508-900 – Butantã - São Paulo. Telefone: ++55 11 30377545 / Fax: ++55 11 30377536 52
EPUSP
Convênio Rockwell Automation
Escola Politécnica da USP
++= sT
sT1
1K)s(E)s(U
DI
C .
Um inconveniente com esta estrutura fica evidente se consideramos uma variação brusca no valor
do set point e, portanto, em e. Neste caso, o termo derivativo tende a se tornar muito grande,
provocando uma “sobrecarga” no controlador. Para evitar este comportamento indesejável, pode-se
tomar a derivada da variável controlada c em vez de a derivada do erro e, isto é,
−∫ ττ+= )t(cTd)(e
T1
)t(eK)t(u D
t
0IC &
Este método de eliminar o problema se tornou padrão em boa parte dos controladores comerciais.
7.6 Respostas Típicas
As respostas mostradas na figura a seguir ilustram o comportamento típico de um sistema
controlado após a introdução de uma perturbação externa em degrau. A variável controlada c é
mostrada como um desvio em relação ao seu valor estacionário antes da ação da perturbação. Se o
sistema opera em malha aberta, o sistema exemplificado reage lentamente até que a saída atinja um
novo valor estacionário. O controlador proporcional torna a resposta mais rápida e reduz o erro
estacionário. A adição de um termo integral elimina o erro estacionário, mas tende a fazer com que a
resposta fique mais oscilatória. A inclusão de um termo derivativo reduz tanto a intensidade das
oscilações como o tempo de resposta. É oportuno mencionar que o uso de controladores P, PI ou
PID nem sempre produz respostas oscilatórias do sistema – isto depende não apenas dos valores
particulares adotados para os parâmetros CK , IT e DT , como também da dinâmica do sistema a
controlar.
Figura 7.9
Os efeitos qualitativos de mudar os valores individuais dos parâmetros do controlador são
mostrados nas três figuras a seguir.

Av. Prof. Luciano Gualberto, trav. 3 nº. 158 – Prédio de Engenharia Elétrica – Bloco A – Térreo
CEP 05508-900 – Butantã - São Paulo. Telefone: ++55 11 30377545 / Fax: ++55 11 30377536 53
EPUSP
Convênio Rockwell Automation
Escola Politécnica da USP
Em geral, o aumento do ganho CK do controlador tende a produzir uma resposta mais rápida,
mas valores elevados do ganho podem provocar oscilações excessivas na resposta ou mesmo
causar a instabilidade do sistema. Assim, “valores intermediários” de CK em geral produzem o
“melhor” controle. Estas considerações se aplicam também aos controladores PI e PID.
Figura 7.10
O aumento do tempo integral IT normalmente faz com que os controladores Pi e PID se tornem
mais conservadores, conforme mostra a figura abaixo. Teoricamente, o erro estacionário é eliminado
para todos os valores de 0TI > , mas para valores muito altos deste parâmetro, a variável controlada
retorna ao set point muito lentamente após uma mudança brusca no set point ou a ocorrência de uma
perturbação externa.
Figura 7.11
É um pouco mais difícil generalizar a respeito do efeito do tempo derivativo DT . Para valores
pequenos de DT , seu aumento tende a melhorar a resposta, reduzindo o desvio máximo, o tempo de
resposta e a intensidade das oscilações, conforme mostrado na figura abaixo. Por outro lado, se DT

Av. Prof. Luciano Gualberto, trav. 3 nº. 158 – Prédio de Engenharia Elétrica – Bloco A – Térreo
CEP 05508-900 – Butantã - São Paulo. Telefone: ++55 11 30377545 / Fax: ++55 11 30377536 54
EPUSP
Convênio Rockwell Automation
Escola Politécnica da USP
é muito grande, o ruído de medida da variável controlada tende a ser amplificado e a resposta pode
se tornar oscilatória. Então, um valor “intermediário” de DT é desejável.
Figura 7.12
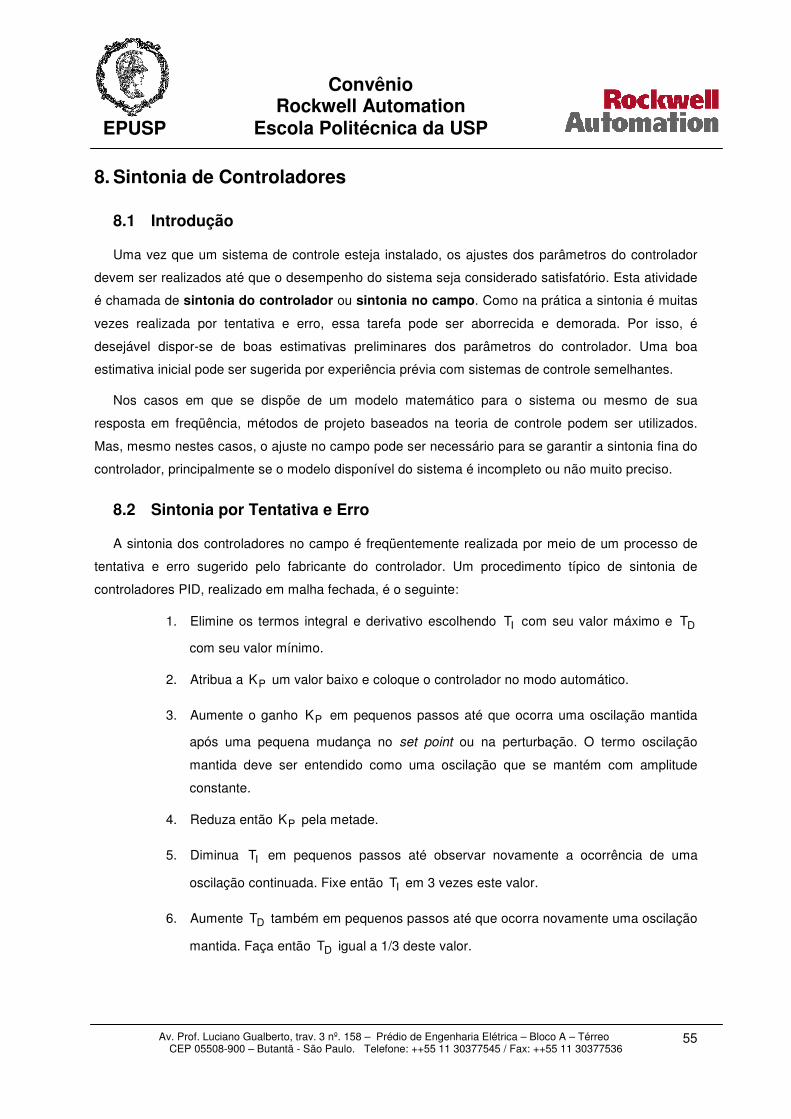
Av. Prof. Luciano Gualberto, trav. 3 nº. 158 – Prédio de Engenharia Elétrica – Bloco A – Térreo
CEP 05508-900 – Butantã - São Paulo. Telefone: ++55 11 30377545 / Fax: ++55 11 30377536 55
EPUSP
Convênio Rockwell Automation
Escola Politécnica da USP
8. Sintonia de Controladores
8.1 Introdução
Uma vez que um sistema de controle esteja instalado, os ajustes dos parâmetros do controlador
devem ser realizados até que o desempenho do sistema seja considerado satisfatório. Esta atividade
é chamada de sintonia do controlador ou sintonia no campo. Como na prática a sintonia é muitas
vezes realizada por tentativa e erro, essa tarefa pode ser aborrecida e demorada. Por isso, é
desejável dispor-se de boas estimativas preliminares dos parâmetros do controlador. Uma boa
estimativa inicial pode ser sugerida por experiência prévia com sistemas de controle semelhantes.
Nos casos em que se dispõe de um modelo matemático para o sistema ou mesmo de sua
resposta em freqüência, métodos de projeto baseados na teoria de controle podem ser utilizados.
Mas, mesmo nestes casos, o ajuste no campo pode ser necessário para se garantir a sintonia fina do
controlador, principalmente se o modelo disponível do sistema é incompleto ou não muito preciso.
8.2 Sintonia por Tentativa e Erro
A sintonia dos controladores no campo é freqüentemente realizada por meio de um processo de
tentativa e erro sugerido pelo fabricante do controlador. Um procedimento típico de sintonia de
controladores PID, realizado em malha fechada, é o seguinte:
1. Elimine os termos integral e derivativo escolhendo IT com seu valor máximo e DT
com seu valor mínimo.
2. Atribua a PK um valor baixo e coloque o controlador no modo automático.
3. Aumente o ganho PK em pequenos passos até que ocorra uma oscilação mantida
após uma pequena mudança no set point ou na perturbação. O termo oscilação
mantida deve ser entendido como uma oscilação que se mantém com amplitude
constante.
4. Reduza então PK pela metade.
5. Diminua IT em pequenos passos até observar novamente a ocorrência de uma
oscilação continuada. Fixe então IT em 3 vezes este valor.
6. Aumente DT também em pequenos passos até que ocorra novamente uma oscilação
mantida. Faça então DT igual a 1/3 deste valor.
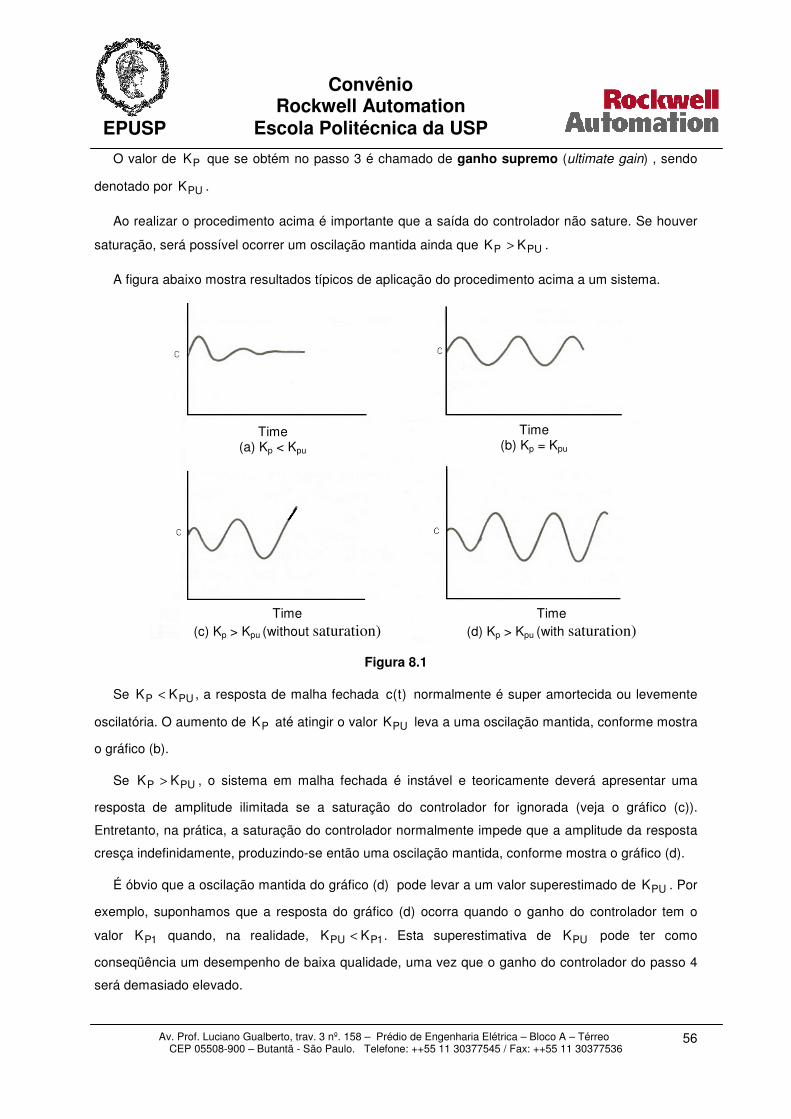
Av. Prof. Luciano Gualberto, trav. 3 nº. 158 – Prédio de Engenharia Elétrica – Bloco A – Térreo
CEP 05508-900 – Butantã - São Paulo. Telefone: ++55 11 30377545 / Fax: ++55 11 30377536 56
EPUSP
Convênio Rockwell Automation
Escola Politécnica da USP
O valor de PK que se obtém no passo 3 é chamado de ganho supremo (ultimate gain) , sendo
denotado por PUK .
Ao realizar o procedimento acima é importante que a saída do controlador não sature. Se houver
saturação, será possível ocorrer um oscilação mantida ainda que PUP KK > .
A figura abaixo mostra resultados típicos de aplicação do procedimento acima a um sistema.
Figura 8.1
Se PUP KK < , a resposta de malha fechada )t(c normalmente é super amortecida ou levemente
oscilatória. O aumento de PK até atingir o valor PUK leva a uma oscilação mantida, conforme mostra
o gráfico (b).
Se PUP KK > , o sistema em malha fechada é instável e teoricamente deverá apresentar uma
resposta de amplitude ilimitada se a saturação do controlador for ignorada (veja o gráfico (c)).
Entretanto, na prática, a saturação do controlador normalmente impede que a amplitude da resposta
cresça indefinidamente, produzindo-se então uma oscilação mantida, conforme mostra o gráfico (d).
É óbvio que a oscilação mantida do gráfico (d) pode levar a um valor superestimado de PUK . Por
exemplo, suponhamos que a resposta do gráfico (d) ocorra quando o ganho do controlador tem o
valor 1PK quando, na realidade, 1PPU KK < . Esta superestimativa de PUK pode ter como
conseqüência um desempenho de baixa qualidade, uma vez que o ganho do controlador do passo 4
será demasiado elevado.
Time (a) Kp < Kpu
Time (b) Kp = Kpu
Time (d) Kp > Kpu (with saturation)
Time (c) Kp > Kpu (without saturation)

Av. Prof. Luciano Gualberto, trav. 3 nº. 158 – Prédio de Engenharia Elétrica – Bloco A – Térreo
CEP 05508-900 – Butantã - São Paulo. Telefone: ++55 11 30377545 / Fax: ++55 11 30377536 57
EPUSP
Convênio Rockwell Automation
Escola Politécnica da USP
Quando se dispõe de um modelo do sistema, o valor de PUK pode ser calculado teoricamente.
O processo de sintonia baseado na tentativa e erro apresenta alguns inconvenientes:
1. Se é necessário um número grande de tentativas para determinar PUK , IT e DT ou
se o processo tem dinâmica lenta, esse é um processo um tanto demorado. O custo
pode ser elevado por causa da baixa produtividade do processo ou da má qualidade
da produção.
2. Pode-se objetar que esse procedimento é arriscado porque o sistema é levado até
seu limite de estabilidade. Assim, por exemplo, se durante o procedimento de sintonia
houver a ação de uma perturbação externa ou uma mudança qualquer no processo,
poderá ocorrer a instabilidade do sistema e esta provocar uma situação perigosa.
3. Alguns processos simples não apresentam um ganho supremo. Este é o caso, por
exemplo, de sistemas modelados por funções de transferência de primeira ou
segunda ordem.
8.3 Método da Oscilação Mantida
Os métodos de sintonia do tipo tentativa-e-erro baseados em oscilações mantidas podem ser
considerados como variações do famoso método de Ziegler-Nichols. Este método clássico, realizado
com o sistema em malha fechada, é provavelmente o mais conhecido dentre todos os métodos de
sintonia de controladores PID, sendo muitas vezes chamado de método do ganho supremo
(ultimate gain method).
Conforme descrição da seção anterior, o primeiro passo consiste na determinação experimental
do ganho supremo PUK . O período da oscilação mantida resultante é chamado de período supremo
(ultimate period) e será denotado aqui por UP . Os ganhos do controlador PID são então calculados a
partir de PUK e UP usando as relações de Ziegler-Nichols que constam na tabela a seguir. As regras
de sintonia do método de Ziegler-Nichols foram obtidas empiricamente com o propósito de garantirem
uma taxa de decaimento de ¼.
Controlador PK
IT
DT
P PUK50.0 ----- -----
PI PUK45.0 2.1/PU -----
PID PUK60.0 0.2/PU 0.8/PU
Tabela 8.1
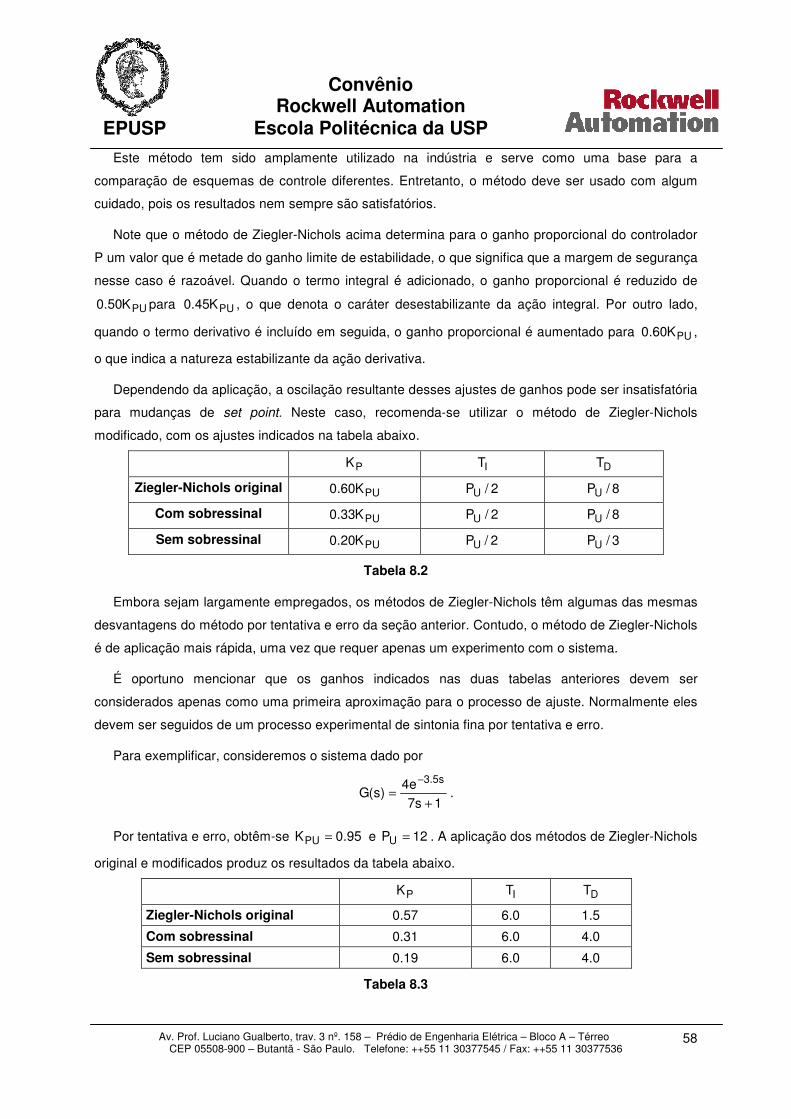
Av. Prof. Luciano Gualberto, trav. 3 nº. 158 – Prédio de Engenharia Elétrica – Bloco A – Térreo
CEP 05508-900 – Butantã - São Paulo. Telefone: ++55 11 30377545 / Fax: ++55 11 30377536 58
EPUSP
Convênio Rockwell Automation
Escola Politécnica da USP
Este método tem sido amplamente utilizado na indústria e serve como uma base para a
comparação de esquemas de controle diferentes. Entretanto, o método deve ser usado com algum
cuidado, pois os resultados nem sempre são satisfatórios.
Note que o método de Ziegler-Nichols acima determina para o ganho proporcional do controlador
P um valor que é metade do ganho limite de estabilidade, o que significa que a margem de segurança
nesse caso é razoável. Quando o termo integral é adicionado, o ganho proporcional é reduzido de
PUK50.0 para PUK45.0 , o que denota o caráter desestabilizante da ação integral. Por outro lado,
quando o termo derivativo é incluído em seguida, o ganho proporcional é aumentado para PUK60.0 ,
o que indica a natureza estabilizante da ação derivativa.
Dependendo da aplicação, a oscilação resultante desses ajustes de ganhos pode ser insatisfatória
para mudanças de set point. Neste caso, recomenda-se utilizar o método de Ziegler-Nichols
modificado, com os ajustes indicados na tabela abaixo.
PK IT DT
Ziegler-Nichols original PUK60.0 2/PU 8/PU
Com sobressinal PUK33.0 2/PU 8/PU
Sem sobressinal PUK20.0 2/PU 3/PU
Tabela 8.2
Embora sejam largamente empregados, os métodos de Ziegler-Nichols têm algumas das mesmas
desvantagens do método por tentativa e erro da seção anterior. Contudo, o método de Ziegler-Nichols
é de aplicação mais rápida, uma vez que requer apenas um experimento com o sistema.
É oportuno mencionar que os ganhos indicados nas duas tabelas anteriores devem ser
considerados apenas como uma primeira aproximação para o processo de ajuste. Normalmente eles
devem ser seguidos de um processo experimental de sintonia fina por tentativa e erro.
Para exemplificar, consideremos o sistema dado por
1s7e4
)s(Gs5.3
+=
−
.
Por tentativa e erro, obtêm-se 95.0KPU = e 12PU = . A aplicação dos métodos de Ziegler-Nichols
original e modificados produz os resultados da tabela abaixo.
PK IT DT
Ziegler-Nichols original 0.57 6.0 1.5
Com sobressinal 0.31 6.0 4.0
Sem sobressinal 0.19 6.0 4.0
Tabela 8.3

Av. Prof. Luciano Gualberto, trav. 3 nº. 158 – Prédio de Engenharia Elétrica – Bloco A – Térreo
CEP 05508-900 – Butantã - São Paulo. Telefone: ++55 11 30377545 / Fax: ++55 11 30377536 59
EPUSP
Convênio Rockwell Automation
Escola Politécnica da USP
As respostas a degraus de referência nos set points são mostradas na figura abaixo.
Figura 8.2
Verifica-se um sobressinal menor para os métodos modificados, mas mesmo no caso “Sem
sobressinal” não ocorre a eliminação completa do sobressinal. É até surpreendente que o caso “Com
sobressinal” produza uma resposta mais oscilatória que a versão original do método, a despeito do
valor menor do ganho PK - esta anomalia deve-se ao valor mais elevado do parâmetro DT .
Em resumo, pode-se dizer quer o ajuste pelo método de Ziegler-Nichols original tende a produzir
respostas oscilatórias. O método de Ziegler-Nichols modificado tende a ser mais conservador, mas
não elimina necessariamente o sobressinal.
8.4 Método de Sintonia Automática (“Autotuning”)
Há um método de sintonia automática devido a Aström e Hägglund que pode ser aplicado como
alternativa ao método de Ziegler-Nichols. Esse método tem as seguintes características:
1. O sistema é forçado por um relé que faz com que ele oscile com pequena amplitude.
A amplitude da oscilação pode ser limitada ajustando-se a amplitude das variações
da entrada.
2. Normalmente um único experimento em malha fechada é suficiente para se encontrar
o modelo dinâmico, sendo que o experimento não exige conhecimento a priori a
respeito do modelo do sistema.
3. Como o experimento é realizado com o sistema em malha fechada, ele também pode
ser aplicado a sistemas instáveis em malha aberta.
O processo de sintonia automática usa um relé com uma zona morta para gerar as oscilações do
sistema, conforme ilustrado pela figura abaixo.

Av. Prof. Luciano Gualberto, trav. 3 nº. 158 – Prédio de Engenharia Elétrica – Bloco A – Térreo
CEP 05508-900 – Butantã - São Paulo. Telefone: ++55 11 30377545 / Fax: ++55 11 30377536 60
EPUSP
Convênio Rockwell Automation
Escola Politécnica da USP
Figura 8.3
O valor de UP é obtido simplesmente medindo-se o período da oscilação.
O ganho supremo é dado por
ad4
KPUπ
= ,
onde d é a amplitude da saída do relé, ajustada pelo operador e a é amplitude medida da oscilação
do sistema.
Os valores dos ganhos do controlador são obtidos utilizando-se a mesma tabela do método de
Ziegler-Nichols original.
8.5 Método da Curva de Reação do Sistema
Este método também foi proposto por Ziegler e Nichols para a sintonia on-line de controladores.
Ele se baseia num único teste experimental que deve ser realizado com o sistema em malha aberta
(controlador no modo manual).
Produz-se um sinal do tipo degrau na saída do controlador e a resposta )t(c do sistema é
registrada. O gráfico desta resposta a degrau é chamada de curva de reação do sistema. O método
se aplica apenas no caso em que a resposta a degrau da planta em malha aberta tem o aspecto
indicado na figura abaixo, típica de um sistema de primeira ordem com atraso.
Figura 8.4
c(∞)
c(t)
t T L

Av. Prof. Luciano Gualberto, trav. 3 nº. 158 – Prédio de Engenharia Elétrica – Bloco A – Térreo
CEP 05508-900 – Butantã - São Paulo. Telefone: ++55 11 30377545 / Fax: ++55 11 30377536 61
EPUSP
Convênio Rockwell Automation
Escola Politécnica da USP
L e T são chamados na literatura, respectivamente, de tempo de retardo e "constante de tempo"
(esta, indevidamente).
Os valores dos parâmetros do compensador devem ser escolhidos conforme indicado na tabela a
seguir.
Controlador PK IT DT
P L/T ∞ 0
PI L/T9.0 3.0/L 0
PID L/T2.1 L2 L5.0
Tabela 8.4
Essas relações para a sintonia do controlador foram obtidas empiricamente com o objetivo de
conseguir uma taxa de decaimento da ordem de ¼.
O método da curva de reação do processo apresenta as seguintes vantagens:
1. É preciso realizar apenas um único experimento, não sendo necessário um processo
de tentativa e erro.
2. Os parâmetros do controlador são calculados de maneira simples.
Contudo esse método apresenta algumas desvantagens:
1. O experimento deve ser realizado em malha aberta. Portanto, se uma mudança
significativa nas condições de operação ocorre durante o teste, nenhuma ação
corretiva é executada e os resultados podem ser bastante distorcidos.
2. A obtenção precisa dos parâmetros T e L pode ser difícil se a medida da resposta do
sistema se apresenta afetada de ruído ou se um simples registrador de papel é
utilizado.
3. Este método tende a ser sensível aos erros de calibração do controlador, em
oposição ao método de Ziegler-Nichols da oscilação mantida, que é menos sensível a
erros de calibração em PK , uma vez que neste caso o ganho é ajustado durante o
experimento.
4. A resposta do sistema tende a ser oscilatória, dado que o método foi desenvolvido
para produzir uma taxa de decaimento de ¼.
5. O método não se aplica a sistemas que tenham uma resposta oscilatória em malha
aberta, uma vez que esta não tem a forma padrão apresentada na figura anterior.

Av. Prof. Luciano Gualberto, trav. 3 nº. 158 – Prédio de Engenharia Elétrica – Bloco A – Térreo
CEP 05508-900 – Butantã - São Paulo. Telefone: ++55 11 30377545 / Fax: ++55 11 30377536 62
EPUSP
Convênio Rockwell Automation
Escola Politécnica da USP
9. Controladores por Pré-Alimentação
9.1 Introdução
O controle a realimentação é uma importante técnica, cujas principais vantagens são:
1. a ação corretiva tem lugar tão logo a variável controlada se desvia do set point,
independentemente do tipo e da fonte da perturbação que causou o desvio;
2. o conhecimento a respeito do sistema a ser controlado é relativamente pequeno; em
particular, um modelo matemático do sistema não é indispensável, embora ele possa
ser muito útil para o projeto do sistema de controle.
No entanto, o controle em malha fechada apresenta também desvantagens, como:
1. não há ação corretiva alguma enquanto um desvio na variável controlada não seja
observado;
2. este esquema de controle não tem uma ação preditiva para compensar os efeitos de
perturbações conhecidas ou medidas;
3. o controle a realimentação pode não ser satisfatório para processos com grandes
constantes de tempo e/ou grandes tempos de atraso; em particular, se há a
ocorrência de perturbações grandes e freqüentes, o sistema pode operar
continuamente em regime transitório e nunca atingir o estado estacionário.
Em situações em que o controle a realimentação não é satisfatório, podem-se conseguir melhoras
significativas no desempenho do sistema de controle considerando-se adicionalmente o controle por
pré-alimentação (feedforward control). No entanto, para se usar o controle por pré-alimentação para
compensar os efeitos de perturbações, é necessário que estas sejam medidas (ou eventualmente
estimadas) em tempo real. A idéia básica é medir as perturbações mais importantes e tomar uma
ação corretiva antes que elas prejudiquem o desempenho do sistema. Para facilitar a comparação, a
figura abaixo apresenta diagramas de blocos simplificados para o controle por realimentação e por
pré-alimentação.
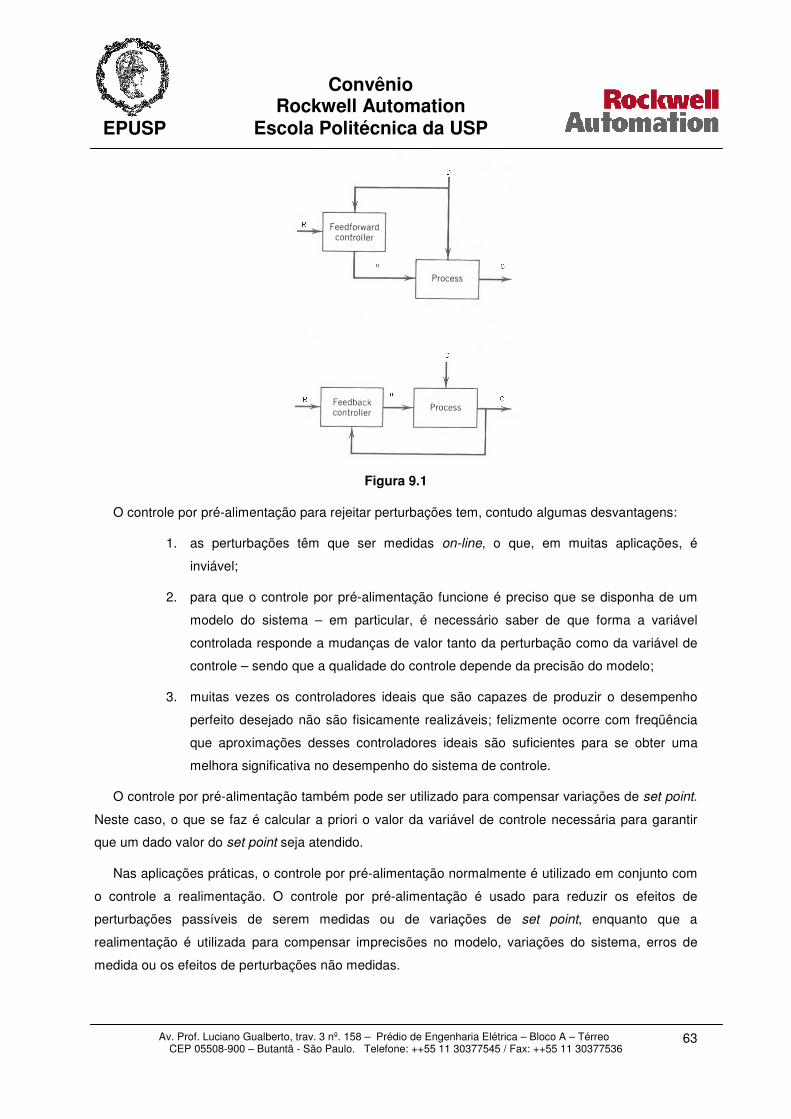
Av. Prof. Luciano Gualberto, trav. 3 nº. 158 – Prédio de Engenharia Elétrica – Bloco A – Térreo
CEP 05508-900 – Butantã - São Paulo. Telefone: ++55 11 30377545 / Fax: ++55 11 30377536 63
EPUSP
Convênio Rockwell Automation
Escola Politécnica da USP
Figura 9.1
O controle por pré-alimentação para rejeitar perturbações tem, contudo algumas desvantagens:
1. as perturbações têm que ser medidas on-line, o que, em muitas aplicações, é
inviável;
2. para que o controle por pré-alimentação funcione é preciso que se disponha de um
modelo do sistema – em particular, é necessário saber de que forma a variável
controlada responde a mudanças de valor tanto da perturbação como da variável de
controle – sendo que a qualidade do controle depende da precisão do modelo;
3. muitas vezes os controladores ideais que são capazes de produzir o desempenho
perfeito desejado não são fisicamente realizáveis; felizmente ocorre com freqüência
que aproximações desses controladores ideais são suficientes para se obter uma
melhora significativa no desempenho do sistema de controle.
O controle por pré-alimentação também pode ser utilizado para compensar variações de set point.
Neste caso, o que se faz é calcular a priori o valor da variável de controle necessária para garantir
que um dado valor do set point seja atendido.
Nas aplicações práticas, o controle por pré-alimentação normalmente é utilizado em conjunto com
o controle a realimentação. O controle por pré-alimentação é usado para reduzir os efeitos de
perturbações passíveis de serem medidas ou de variações de set point, enquanto que a
realimentação é utilizada para compensar imprecisões no modelo, variações do sistema, erros de
medida ou os efeitos de perturbações não medidas.

Av. Prof. Luciano Gualberto, trav. 3 nº. 158 – Prédio de Engenharia Elétrica – Bloco A – Térreo
CEP 05508-900 – Butantã - São Paulo. Telefone: ++55 11 30377545 / Fax: ++55 11 30377536 64
EPUSP
Convênio Rockwell Automation
Escola Politécnica da USP
Exemplo: Considere-se o caso de um chuveiro elétrico para o qual se deseja manter constante a
temperatura da água de saída (variável controlada), independentemente da vazão de saída e da
temperatura da água de entrada que alimenta o chuveiro. Admita-se que se meça a temperatura de
saída e que se atue sobre o sistema por meio de um resistor de aquecimento alimentado por um
circuito de potência a base de tiristores, fornecendo-se mais ou menos energia térmica à água
conforme a necessidade.
Um esquema simples de controle a realimentação poderia ser construído usando-se o erro entre a
temperatura desejada e a temperatura instantânea de saída da água para calcular a potência térmica
a ser fornecida pelo resistor de aquecimento. A lógica por trás do funcionamento do controlador
poderia ser a seguinte:
1. se a temperatura de saída da água está abaixo da desejada, então aumente a
potência térmica fornecida ao resistor;
2. se a temperatura de saída da água está acima da desejada, então reduza a potência
térmica fornecida ao resistor.
Neste caso, o conhecimento do modelo matemático do sistema não é imprescindível para que o
chuveiro possa operar satisfatoriamente. O ganho que definiria o quanto de potência térmica seria
escolhido para um dado desvio da temperatura poderia ser ajustado por tentativa e erro.
Consideremos agora a ação de uma perturbação externa sobre o sistema Admita-se então que o
sistema esteja operando numa certa condição e que a temperatura da água de entrada do chuveiro
subitamente caia. Neste caso, o esquema a realimentação teria que “esperar” que o efeito dessa
queda “aparecesse” na temperatura da água de saída do chuveiro para então reagir no sentido de
corrigir o desvio, aumentando a potência térmica fornecida.
Se, no entanto, dispuséssemos de um termômetro para medir a temperatura da água de entrada e
de um medidor de vazão, então, antes que a temperatura da água de saída caísse, poderíamos
calcular a priori qual deveria ser a potência térmica necessária e aplicá-la de imediato. É evidente que
para isto, além dos medidores de temperatura e vazão, seria necessário dispormos de um modelo
matemático que nos permitisse relacionar a potência térmica com a temperatura da água de entrada
e com a vazão desta.
Deixemos de lado agora a questão da rejeição de perturbações e suponhamos que o chuveiro
esteja operando numa certa condição e que a temperatura de saída da água seja aquela que se
deseja. Num certo momento o usuário, por alguma razão insondável, resolve aumentar a temperatura
desejada para o seu banho e eleva o valor do set point. Neste caso, poderíamos nos valer novamente
de um esquema de pré-alimentação para instantaneamente agirmos sobre o sistema, calculando qual
deveria ser a potência térmica a ser fornecida para a água de forma a atender ao desejo do usuário –
é óbvio neste caso que, para podermos efetuar esse cálculo, precisamos saber tanto o valor da vazão

Av. Prof. Luciano Gualberto, trav. 3 nº. 158 – Prédio de Engenharia Elétrica – Bloco A – Térreo
CEP 05508-900 – Butantã - São Paulo. Telefone: ++55 11 30377545 / Fax: ++55 11 30377536 65
EPUSP
Convênio Rockwell Automation
Escola Politécnica da USP
d’água como a temperatura de entrada. Novamente fica evidente a necessidade de termos um
modelo matemático do sistema para podermos implementar o esquema de pré-compensação.
9.2 Controle de Razão
Esta forma de controle, também conhecida por controle de relação (ratio control), é um caso
particular do controle por pré-alimentação que tem sido amplamente usado na indústria de processos.
No controle de razão o objetivo é manter num valor especificado a relação entre duas variáveis.
Sejam então duas variáveis p e q cuja razão rA ,
qp
rA = ,
se deseja controlar, em vez de controlar as duas variáveis p e q individualmente. Normalmente as
variáveis p e q são fluxos, sendo um deles manipulado (p) e o outro, não (q). O cálculo da razão rA é
realizado em termos das variáveis propriamente e não de seus desvios em relação a valores
nominais.
Como aplicações típicas do controle de razão pode-se citar os seguintes exemplos: i) manter a
relação entre dois componentes em operações de mistura (blending), ii) manter uma relação
estequiométrica de reagentes em um reator, iii) manter a relação ar-combustível num forno.
O controle de razão pode ser implementado basicamente de duas formas distintas. Na primeira
forma, esquematizada na figura a seguir, os fluxos p e q são medidos, a razão rA é calculada
utilizando um elemento divisor e o erro em relação ao valor desejado é utilizado pelo controlador para
alterar o valor da variável manipulada. O controlador K(s) tipicamente é do tipo PI cujo set point é o
valor desejado da razão. G(s) representa a dinâmica da variável manipulada.
Figura 9.2
A vantagem desta forma de implementação é que a razão entre as variáveis é efetivamente
calculada. Por outro lado, a desvantagem é que para isso é necessário utilizar o divisor, que é um
elemento não linear. Por causa disto, a forma preferida para implementar o controle de razão é
aquela representada na figura a seguir.
rA(s) q(s)
r(s) +
-
K(s) G(s)
÷
p(s)

Av. Prof. Luciano Gualberto, trav. 3 nº. 158 – Prédio de Engenharia Elétrica – Bloco A – Térreo
CEP 05508-900 – Butantã - São Paulo. Telefone: ++55 11 30377545 / Fax: ++55 11 30377536 66
EPUSP
Convênio Rockwell Automation
Escola Politécnica da USP
Figura 9.3
Neste caso, a variável não manipulada é medida e multiplicada por um ganho ajustável igual ao
valor desejado da razão. O sinal resultante desta operação é então utilizado como set point para o
controlador do fluxo manipulado. Obviamente, a vantagem deste esquema é que a não linearidade foi
removida da malha.
Note que o fluxo não manipulado q deve ser medido em ambos os esquemas de controle. Como
essa variável é não manipulada e influi no resultado do processo, não há nada em essência que o
distinga de uma perturbação e, portanto, o controle de razão não passa de uma forma simples de
controle por pré-alimentação.
9.3 Controle por Pré-Alimentação Baseado em Modelo Estacionário
O exemplo do chuveiro apresentado na seção de introdução deste capítulo constitui uma
ilustração do controle por pré-alimentação baseado em modelo estacionário. No exemplo, note que
se admitiu implicitamente o uso de um modelo estacionário para calcular a potência térmica, pois não
se considerou, por exemplo, o atraso associado ao processo de aquecimento da água - na realidade,
a temperatura da água na saída do chuveiro não responde instantaneamente às variações da
potência térmica fornecida à água.
Para melhor esclarecer o processo de definir um controlador por pré-alimentação baseado em
modelo estacionário, consideremos o exemplo do servomecanismo de controle de velocidade
discutido no Capítulo 6. Suponhamos a ausência do torque de carga ( 0TL = ) e consideremos a
existência de um controlador por pré-alimentação )s(K f com o propósito de incluir no sistema uma
ação de pré-alimentação para variações de set point.
Figura 9.4
)(sE )(srΩ
)(sVa
+ + +
- K
1
0
+s
K
τ
1
)(sK f
)(sΩ
q(s) e(s) +
-
K(s) G(s) p(s)
r

Av. Prof. Luciano Gualberto, trav. 3 nº. 158 – Prédio de Engenharia Elétrica – Bloco A – Térreo
CEP 05508-900 – Butantã - São Paulo. Telefone: ++55 11 30377545 / Fax: ++55 11 30377536 67
EPUSP
Convênio Rockwell Automation
Escola Politécnica da USP
Como estamos tratando da definição do controlador por pré-alimentação baseado em modelo
estacionário, na verdade estamos supondo que )s(K f não tenha dinâmica, reduzindo-se pois a um
ganho simples, isto é,
0ff K)s(K = .
Conforme havíamos visto no Capítulo 6, quando se aplica um degrau unitário como sinal de
referência e o controlador por pré-alimentação não existe, o valor estacionário da velocidade do eixo
do servo é
0
0
KK1
KK)(
+=∞ω
Se considerarmos agora a presença do controlador por pré-alimentação, esse valor resulta
( )0
0f0
KK1
KKK)(
+
+=∞ω .
Sendo assim, se escolhermos
0f0 K
1K = ,
resulta
1)( =∞ω .
Ou seja, a escolha apropriada do ganho de pré-alimentação com base no modelo estacionário do
motor permite fazer com que a velocidade do servo em regime permanente seja igual à velocidade de
referência.
Passamos agora a discutir o caso mais geral da pré-compensação baseada no modelo
estacionário. Para isso, consideremos o sistema representado na figura a seguir.
Figura 9.5
Se )s(G não contém integradores e )s(R é um degrau unitário, sua contribuição em regime
estacionário para a variável controlada )s(C é dada por )0(GK 0f e, portanto, para que este valor
também seja unitário, basta que
)0(G1
K 0f = .
)(sE )(sR
)(sU
+ + +
- )(sK )(sG
0fK
)(sC

Av. Prof. Luciano Gualberto, trav. 3 nº. 158 – Prédio de Engenharia Elétrica – Bloco A – Térreo
CEP 05508-900 – Butantã - São Paulo. Telefone: ++55 11 30377545 / Fax: ++55 11 30377536 68
EPUSP
Convênio Rockwell Automation
Escola Politécnica da USP
9.4 Controle por Pré-Alimentação Baseado em Modelo Dinâmico
Consideremos novamente o mesmo exemplo da seção anterior, porém agora com o compensador
dinâmico )s(K f . Neste caso,
( ))s(
KK1s
)s(KKK)s( r
0
f0 Ω++τ
+=Ω .
Para um servomecanismo, idealmente gostaríamos que a saída acompanhasse a entrada, isto é,
)s()s( rΩ=Ω .
É imediato notar que para isto basta escolher
0f K
1s)s(K
+τ= .
Nota-se que a função de transferência do pré-compensador neste caso é igual ao inverso da
função de transferência do motor. Na maior parte dos casos práticos esta solução não é
recomendada porque sua realização física exige a derivação do sinal de referência. No entanto, há
situações em que isto não é um problema. Este é o caso quando o sinal de referência é conhecido a
priori e, portanto, sua derivada também pode ser calculada antecipadamente e encarada como um
outro sinal conhecido. Um exemplo típico desta situação é o do controle de posição de robôs
manipuladores, em que as trajetórias a serem seguidas são planejadas a priori e o cálculo da
derivada pode ser feito analiticamente também a priori.
Consideremos agora o caso mais geral representado na figura a seguir.
Figura 9.6
Para este sistema, a contribuição para a saída do sinal que circula pelo ramo de pré-alimentação é
)s(R)s(K)s(G f e, portanto, a condição ideal de que )s(R)s(C = é equivalente a
)s(G)s(K 1f
−= ,
a qual representa a generalização da condição que havíamos obtido para o caso particular do
servomecanismo de velocidade.
)(sE )(sR
)(sU
+ + +
- )(sK )(sG
)(sK f
)(sC

Av. Prof. Luciano Gualberto, trav. 3 nº. 158 – Prédio de Engenharia Elétrica – Bloco A – Térreo
CEP 05508-900 – Butantã - São Paulo. Telefone: ++55 11 30377545 / Fax: ++55 11 30377536 69
EPUSP
Convênio Rockwell Automation
Escola Politécnica da USP
A inversão da função de transferência )s(G em geral também não é recomendada porque sua
realização física requer o cálculo de derivadas e valem aqui as mesmas observações feitas acima
para o exemplo do servo.
Tratemos agora do caso geral do controle por pré-alimentação para a rejeição de perturbações. A
figura a seguir representa na forma de diagrama de blocos o sistema considerado.
Figura 9.7
)s(D é uma perturbação que age sobre a saída do sistema através de uma função de
transferência )s(Gd e )s(K f , como anteriormente, é a função de transferência do compensador por
pré-alimentação. A contribuição de )(sD para a variável controlada )s(C é dada por )(sCD :
)()()(
)()()()( sD
sKsG1
sKsGsGsC fd
D+
+= .
Portanto, a condição ideal para que essa contribuição seja nula é que o numerador desta
expressão seja zero, isto é,
)s(G
)s(G)s(K d
f −= .
Esta condição pode ser interpretada da seguinte maneira. A perturbação se faz sentir sobre a
variável controlada de duas maneiras:
• ela tende a perturbar a saída através da função de transferência )s(Gd ;
• uma ação corretiva é gerada por meio do compensador )s(K f . Idealmente a ação
corretiva deve compensar exatamente o efeito da perturbação sobre a variável
controlada, cancelando-a.
Novamente aqui, dependendo das funções de transferência )s(Gd e )s(G específicas, podem
ocorrer dificuldades de implementação se o grau do polinômio do numerador do compensador )s(K f
é superior ao do denominador.
)(sD
+ + )(sE
)(sR
)(sU
+ + +
- )(sK )(sG
)(sK f
)(sC
)(sGd

Av. Prof. Luciano Gualberto, trav. 3 nº. 158 – Prédio de Engenharia Elétrica – Bloco A – Térreo
CEP 05508-900 – Butantã - São Paulo. Telefone: ++55 11 30377545 / Fax: ++55 11 30377536 70
EPUSP
Convênio Rockwell Automation
Escola Politécnica da USP
Por fim, uma observação importante a respeito da compensação por pré-alimentação é que a
estabilidade não é afetada pela presença de tais compensadores desde que )s(K f seja ele próprio
estável.
9.5 Sintonia de Controladores por Pré-Alimentação
Os controladores por pré-compensação, assim como os por realimentação, usualmente requerem
uma sintonia fina após a entrada em operação da planta controlada.
Na seção anterior nota-se que se tanto )s(Gd como )s(G são sistemas de primeira ordem, então
)s(K f tem a forma
1s
1sK)s(K
2
10ff
+τ
+τ= ,
a qual corresponde a um tipo comum de compensador por avanço ou atraso de fase, dependendo
dos valores relativos de 1τ e 2τ . Além disso, em muitos casos práticos, compensadores desse tipo
podem fornecer aproximações bastante razoáveis dos compensadores ideais. Por essas razões, o
procedimento de sintonia a seguir muitas vezes pode ser útil. No entanto, se o sistema tiver uma
dinâmica mais complicada, é possível que os resultados sejam insatisfatórios.
Passo 1: Ajuste o valor de 0fK
O esforço necessário para sintonizar um controlador pode ser reduzido significativamente quando
são utilizadas boas estimativas iniciais dos parâmetros do controlador. Uma boa alternativa para a
estimativa inicial de 0fK é calculá-la utilizando o modelo estacionário do sistema. Isto é
particularmente simples e direto no caso em que se dispõe de dados de operação em regime
estacionário do sistema em malha aberta quando o mesmo foi submetido a uma entrada em degrau e
a uma perturbação em degrau.
Para sintonizar o parâmetro 0fK , a este é inicialmente atribuído o valor estimado pelo modelo
estacionário. Em seguida, os parâmetros 1τ e 2τ devem ser colocados em seus valores mínimos,
preferencialmente zero. Em seguida, aplica-se um pequeno degrau (de 3 a 5% do valor nominal) na
perturbação e observa-se se ocorre um erro estacionário. Se sim, ajusta-se 0fK até que o erro seja
eliminado (ou reduzido a um valor desprezível na prática).
Passo 2: Determine aproximações iniciais para 1
ττττ e 2
ττττ
Os valores iniciais de 1τ e 2τ podem ser obtidos se dispõe de um modelo matemático para a
dinâmica do sistema. Assim, por exemplo, se
g
0
s
K)s(G
τ+=

Av. Prof. Luciano Gualberto, trav. 3 nº. 158 – Prédio de Engenharia Elétrica – Bloco A – Térreo
CEP 05508-900 – Butantã - São Paulo. Telefone: ++55 11 30377545 / Fax: ++55 11 30377536 71
EPUSP
Convênio Rockwell Automation
Escola Politécnica da USP
e
d
0dd s
K)s(G
τ+= ,
então podem-se usar como aproximações iniciais para 1τ e 2τ :
g1 τ=τ
d2 τ=τ .
Se não se dispõe de um modelo matemático para o sistema, as respostas em malha aberta para
degraus aplicados na planta e na perturbação podem fornecer essas estimativas iniciais de 1τ e 2τ .
Passo 3: Faça a sintonia fina de 1
ττττ e 2
ττττ
Por fim, deve-se proceder à sintonia fina de 1τ e 2τ utilizando-se um procedimento do tipo
tentativa-e-erro e aplicando-se perturbações em degrau de pequena amplitude. A resposta desejada
da variável controlada deve apresentar pequenos desvios em torno do set point de maneira que as
áreas acima e abaixo deste sejam aproximadamente iguais, conforme mostra a figura a seguir.
Figura 9.8
Para o caso de sistemas com dinâmica simples, a ocorrência desta situação indica que a diferença
21 τ−τ está correta. O restante do procedimento para reduzir o tamanho das áreas deve ser realizado
de forma que essa diferença se mantenha inalterada. Para ilustrar este procedimento, considerem-se
degraus aplicados nas perturbações e as correspondentes respostas a ilustradas a seguir.

Av. Prof. Luciano Gualberto, trav. 3 nº. 158 – Prédio de Engenharia Elétrica – Bloco A – Térreo
CEP 05508-900 – Butantã - São Paulo. Telefone: ++55 11 30377545 / Fax: ++55 11 30377536 72
EPUSP
Convênio Rockwell Automation
Escola Politécnica da USP
Figura 9.9
Para os valores iniciais de 1τ e 2τ da figura (a), a variável controlada resulta abaixo do set point.
Aumenta-se o valor de 1τ e obtém-se o resultado apresentado na figura (b), para a qual se verifica a
igualdade das áreas acima e abaixo do set point. Em seguida, alteram-se os valores de 1τ e 2τ ,
porém mantendo inalterado o valor da diferença 21 ττ − e obtém-se o resultado da figura (c), em
que os tamanhos de ambas as áreas foram reduzidos. Se este resultado é considerado satisfatório,
então pode-se parar o procedimento de sintonia.
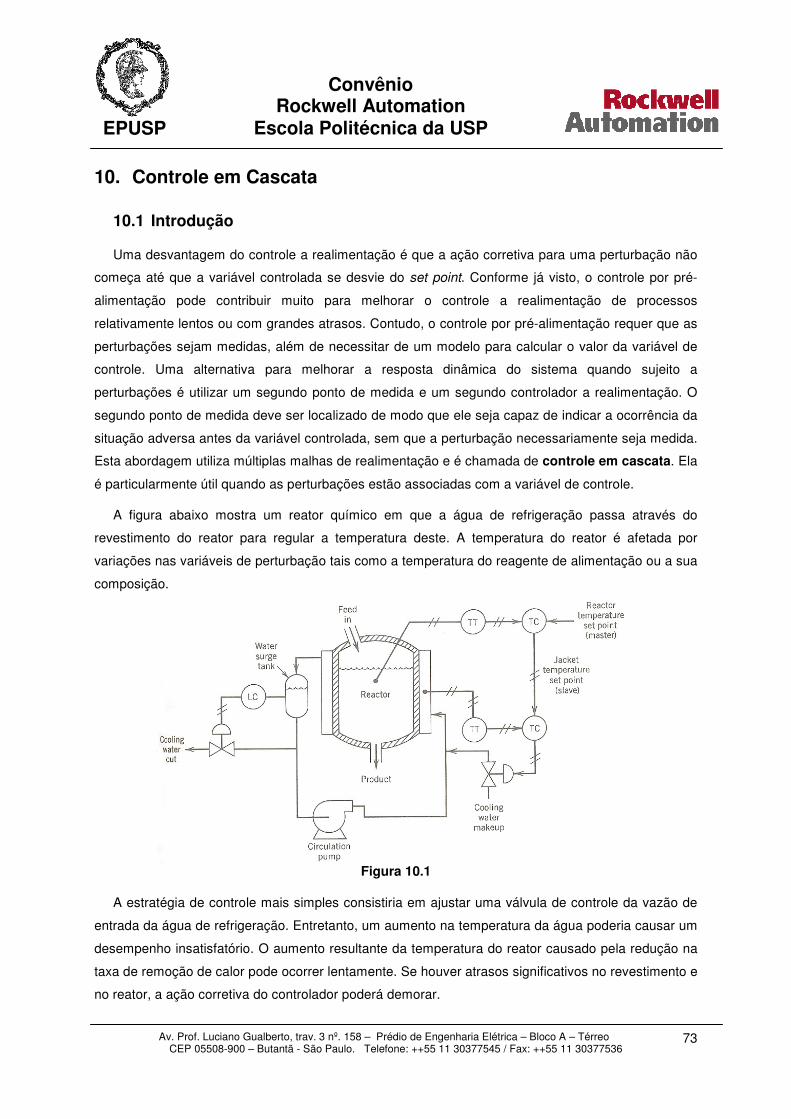
Av. Prof. Luciano Gualberto, trav. 3 nº. 158 – Prédio de Engenharia Elétrica – Bloco A – Térreo
CEP 05508-900 – Butantã - São Paulo. Telefone: ++55 11 30377545 / Fax: ++55 11 30377536 73
EPUSP
Convênio Rockwell Automation
Escola Politécnica da USP
10. Controle em Cascata
10.1 Introdução
Uma desvantagem do controle a realimentação é que a ação corretiva para uma perturbação não
começa até que a variável controlada se desvie do set point. Conforme já visto, o controle por pré-
alimentação pode contribuir muito para melhorar o controle a realimentação de processos
relativamente lentos ou com grandes atrasos. Contudo, o controle por pré-alimentação requer que as
perturbações sejam medidas, além de necessitar de um modelo para calcular o valor da variável de
controle. Uma alternativa para melhorar a resposta dinâmica do sistema quando sujeito a
perturbações é utilizar um segundo ponto de medida e um segundo controlador a realimentação. O
segundo ponto de medida deve ser localizado de modo que ele seja capaz de indicar a ocorrência da
situação adversa antes da variável controlada, sem que a perturbação necessariamente seja medida.
Esta abordagem utiliza múltiplas malhas de realimentação e é chamada de controle em cascata. Ela
é particularmente útil quando as perturbações estão associadas com a variável de controle.
A figura abaixo mostra um reator químico em que a água de refrigeração passa através do
revestimento do reator para regular a temperatura deste. A temperatura do reator é afetada por
variações nas variáveis de perturbação tais como a temperatura do reagente de alimentação ou a sua
composição.
Figura 10.1
A estratégia de controle mais simples consistiria em ajustar uma válvula de controle da vazão de
entrada da água de refrigeração. Entretanto, um aumento na temperatura da água poderia causar um
desempenho insatisfatório. O aumento resultante da temperatura do reator causado pela redução na
taxa de remoção de calor pode ocorrer lentamente. Se houver atrasos significativos no revestimento e
no reator, a ação corretiva do controlador poderá demorar.

Av. Prof. Luciano Gualberto, trav. 3 nº. 158 – Prédio de Engenharia Elétrica – Bloco A – Térreo
CEP 05508-900 – Butantã - São Paulo. Telefone: ++55 11 30377545 / Fax: ++55 11 30377536 74
EPUSP
Convênio Rockwell Automation
Escola Politécnica da USP
Para superar este problema, poder-se-ia incluir um controlador a realimentação em cascata para a
temperatura do revestimento com o seu set point determinado pelo controlador de temperatura do
reator, conforme ilustra a figura anterior. Neste esquema de controle, a temperatura do revestimento
é medida, comparada a um set point e o sinal de erro resultante é utilizado como entrada para um
controlador da temperatura da água de refrigeração, mantendo assim a taxa de remoção de calor do
reator num nível constante.
O set point do controlador e as duas medidas são utilizados para ajustar uma única variável de
controle, que é a vazão de água de refrigeração.
A principal vantagem da estratégia de controle em cascata é que uma segunda variável medida é
localizada próxima a uma potencial perturbação com o objetivo de melhorar a resposta em malha
fechada. O controle em cascata é amplamente usado na indústria de processos e tem duas
características importantes:
1. o sinal de saída do controlador mestre serve como set point do controlador escravo;
2. as duas malhas de controle a realimentação são concatenadas, com a malha
secundária (do controlador escravo) localizada no interior da primária (do controlador
mestre).
No exemplo do reator, a medida primária é a temperatura do reator, utilizada pelo controlador
mestre. A medida secundária é a temperatura do revestimento, que é transmitida ao controlador
escravo.
Como um segundo exemplo de controle em cascata, considere o problema de controle da
temperatura do forno esquematizado na figura abaixo em sua forma convencional.
Figura 10.2
Esse sistema de controle pode regular satisfatoriamente a temperatura do óleo quente a despeito
de perturbações na vazão de óleo ou na temperatura do óleo frio. No entanto, se uma perturbação
ocorre na pressão do gás combustível, a vazão deste se altera, o que prejudica a operação do forno,
mudando a temperatura do óleo quente. Só então o controlador de temperatura começa a atuar para

Av. Prof. Luciano Gualberto, trav. 3 nº. 158 – Prédio de Engenharia Elétrica – Bloco A – Térreo
CEP 05508-900 – Butantã - São Paulo. Telefone: ++55 11 30377545 / Fax: ++55 11 30377536 75
EPUSP
Convênio Rockwell Automation
Escola Politécnica da USP
corrigir a situação, ajustando a vazão de gás combustível por meio da válvula de controle. Pode-se
assim perceber que o esquema de controle a realimentação convencional produziria uma resposta
bastante lenta para mudanças na pressão do gás combustível. Esta perturbação está claramente
associada à variável de controle.
O esquema de controle da figura abaixo produzirá um melhor desempenho porque a válvula de
controle será ajustada tão logo a alteração na pressão do gás combustível seja detectada.
Figura 10.3
A melhoria de desempenho para perturbações na vazão de óleo ou na temperatura de entrada
deste pode não ser tão grande, caso em que o controle por pré-alimentação é preferível. Para o
esquema de controle em cascata, o controlador mestre é o controlador de temperatura que ajusta o
set point do controlador escravo na malha de controle de pressão. Se ocorre uma perturbação na
pressão do gás combustível, o controlador de pressão age rapidamente para manter esta em seu set
point. Uma vez que a malha de pressão responde rapidamente, a perturbação da pressão tem
pequeno efeito sobre a operação do forno e, portanto, sobre a temperatura de saída do óleo. Como
alternativa, em vez de controle de pressão, poder-se-ia utilizar controle de vazão na malha escrava
para se obter essencialmente o mesmo resultado.
O diagrama de blocos para um sistema de controle em cascata genérico é mostrado na figura
abaixo.
Figura 10.4

Av. Prof. Luciano Gualberto, trav. 3 nº. 158 – Prédio de Engenharia Elétrica – Bloco A – Térreo
CEP 05508-900 – Butantã - São Paulo. Telefone: ++55 11 30377545 / Fax: ++55 11 30377536 76
EPUSP
Convênio Rockwell Automation
Escola Politécnica da USP
O índice “1” refere-se à malha de controle primária e o “2”, à secundária. Assim, para o exemplo
do sistema de controle de temperatura do forno,
• 1C é a temperatura de saída do óleo,
• 2C é a pressão do gás combustível,
• 1L é a temperatura do óleo frio (ou vazão do óleo frio),
• 2L é a pressão do gás combustível,
• 1B é o valor medido da temperatura do óleo de saída,
• 2B é o valor medido da pressão do gás combustível,
• 1R é o set point para 1C e
• 2R é o set point para 2C .
Das duas figuras anteriores fica claro que o controle em cascata deve eliminar efetivamente os
efeitos das perturbações na pressão que entram na malha secundária (variável 2L ). Mas, o que se
pode dizer dos efeitos das perturbações como 1L que entram na malha primária? O controle em
cascata pode produzir uma melhora com relação ao esquema de controle a realimentação
convencional quando ambos os controladores foram bem sintonizados. O arranjo em cascata reduzirá
o tempo de resposta dos elementos na malha secundária, a qual, por sua vez, afeta a malha primária,
mas a melhora pode ser tênue. Conforme já dito, o controle por pré-alimentação pode ser empregado
para reduzir os erros em 1C , mas 1L tem que ser medida diretamente e um modelo relacionando 1L ,
1C e 2C é necessário.
10.2 Implementação do Controle em Cascata
Uma questão básica para a implementação de controle em cascata é como escolher a variável
secundária mais vantajosa, isto é, determinar como o processo pode ser “dividido”. Na escolha deste
ponto intermediário, há freqüentemente um grande número de possíveis escolhas à disposição do
projetista. A orientação deve ser no sentido de obter o máximo possível de atraso na malha externa e,
ao mesmo tempo, ter o maior número possível de perturbações entrando na malha interna.
Para escolher o melhor arranjo para o controle em cascata é necessário determinar quais
perturbações são mais prováveis de ocorrer. É recomendável fazer uma lista dessas perturbações em
ordem decrescente de importância. Em seguida, o projetista deve rever as várias opções de controle
em cascata possíveis e determinar qual delas se encaixa melhor nas diretrizes apresentadas no
parágrafo anterior.
A seleção da variável de controle secundária é tão importante num sistema em cascata que é
interessante listar algumas diretrizes para auxiliar nessa escolha:
Av. Prof. Luciano Gualberto, trav. 3 nº. 158 – Prédio de Engenharia Elétrica – Bloco A – Térreo
CEP 05508-900 – Butantã - São Paulo. Telefone: ++55 11 30377545 / Fax: ++55 11 30377536 77
EPUSP
Convênio Rockwell Automation
Escola Politécnica da USP
1. Fazer com que a malha secundária inclua como entradas as perturbações mais
importantes. Essas perturbações que entram na malha secundária são aquelas para
as quais o sistema de controle em cascata deve apresentar a melhora mais
acentuada em relação ao controle a realimentação convencional.
2. Fazer a malha secundária a mais rápida possível, incluindo apenas os atrasos
pequenos do sistema de controle. É desejável, embora não essencial, que a malha
interna seja no mínimo da ordem de três vezes mais rápida do que a malha externa.
3. Selecionar uma variável secundária cujos valores sejam relacionados de maneira útil
com os valores da variável primária. Durante a operação sem perturbações, a relação
entre as variáveis secundária e primária deve ser representada por uma única curva;
se esta é uma reta (dependência linear), a sintonia dos controladores é, em geral,
muito mais simples.
4. Mantendo a malha secundária relativamente rápida, procurar fazer com que ela
contenha o maior número possível de perturbações.
5. Escolher uma variável de controle secundária que permita ao controlador secundário
operar com o máximo ganho possível. Este ponto é difícil de prever.
10.3 Seleção e Sintonia dos Controladores em Cascata
Na prática, a dificuldade de sintonia cresce significativamente com o número de parâmetros a
ajustar. Assim, por exemplo, quando há um controlador PID para cada malha, o número de
parâmetros a ajustar é seis e, por isso, a sintonia é bastante mais difícil do que no caso de um único
controlador.
Para a malha interna é prática usual incluir-se o modo proporcional. Em geral, não há necessidade
de incluir o modo integral com a finalidade de eliminar o offset porque o set point para o controlador
interno será mudado continuamente pelo controlador da malha externa. Ás vezes, quando a malha
interna é de controle de vazão, inclui-se o termo integral para filtrar os sinais de transmissão de altas
freqüências que circulam pela malha.
A malha externa deve conter, em geral, o termo proporcional e, se o sistema é tal que o controle
em cascata é necessário, então é provável que o modo integral deva ser incluído nela para eliminar o
offset na malha externa.
O uso do modo derivativo em qualquer das malhas só é recomendado quando elas apresentam
um grande atraso.
A sintonia dos controladores em cascata deve ser feita de maneira usual, mas é aconselhável que
ela seja feita em primeiro lugar para a malha interna. Normalmente coloca-se o controlador da malha

Av. Prof. Luciano Gualberto, trav. 3 nº. 158 – Prédio de Engenharia Elétrica – Bloco A – Térreo
CEP 05508-900 – Butantã - São Paulo. Telefone: ++55 11 30377545 / Fax: ++55 11 30377536 78
EPUSP
Convênio Rockwell Automation
Escola Politécnica da USP
externa no modo manual e sintoniza-se o controlador da malha interna da forma que parecer mais
apropriada ao problema particular. Uma vez que a malha interna tenha sido sintonizada, então deve-
se passar à malha externa. Dessa maneira, o controlador externo “enxerga” a malha interna já
sintonizada como parte de todo o processo a controlar.

Av. Prof. Luciano Gualberto, trav. 3 nº. 158 – Prédio de Engenharia Elétrica – Bloco A – Térreo
CEP 05508-900 – Butantã - São Paulo. Telefone: ++55 11 30377545 / Fax: ++55 11 30377536 79
EPUSP
Convênio Rockwell Automation
Escola Politécnica da USP
11. Controle com Tempo Morto
11.1 Introdução
Neste capítulo estudaremos uma técnica que permite tratar o problema de controle em que o
atraso na medida da variável controlada é significativo. O problema de controle na presença de tempo
morto é considerado por muitos como um dos mais difíceis. Há, entretanto, alguns esquemas de
controle adequados para o caso de sistemas em que o tempo morto é significativo.
De um ponto de vista de resposta em freqüência, a existência de um tempo morto na malha de
controle introduz um atraso de fase na realimentação, o que tem um efeito adverso sobre a
estabilidade do sistema. Como conseqüência disso, o ganho do controlador normalmente tem que ser
inferior àquele que seria possível se não houvesse o atraso na malha. Com isso, o desempenho do
controlador tende a se deteriorar e a resposta temporal do sistema em malha fechada tende a ser
mais lenta do que aquela correspondente ao caso em que não há atraso.
Assim, considere, por exemplo, o sistema com função de transferência
)1s5)(1s3(e
)s(Gs
++=
θ−
.
A figura a seguir mostra as respostas a degrau unitário do sistema com um controlador PI na
malha para os casos em que 0=θ e 2=θ min. Para o caso em que 0=θ , os parâmetros ajustados
para o controlador foram 02.3KP = e 5.6TI = min; por outro lado, para 2=θ min, os valores
ajustados foram 23.1KP = e 0.7TI = min.
Figura 11.1
A redução de ganho do caso 2=θ min em relação ao caso 0=θ , necessária para preservar a
estabilidade do sistema, fez com que a resposta se tornasse mais lenta. A piora no desempenho é

Av. Prof. Luciano Gualberto, trav. 3 nº. 158 – Prédio de Engenharia Elétrica – Bloco A – Térreo
CEP 05508-900 – Butantã - São Paulo. Telefone: ++55 11 30377545 / Fax: ++55 11 30377536 80
EPUSP
Convênio Rockwell Automation
Escola Politécnica da USP
evidente se observarmos que o tempo de acomodação aumentou de em torno de 20 min para
aproximadamente 30 min.
11.2 Preditor de Smith
A técnica conhecida como Preditor de Smith é uma das mais conhecidas para melhorar o
desempenho de sistemas com atraso. Essa técnica pertence a uma classe mais ampla chamada de
controladores (ou compensadores) baseados no modelo (model based controllers ou model based
compensators), sendo que a designação deve-se a que a estratégia de controle utiliza os parâmetros
do modelo explicitamente. Estudos realizados mostram que o desempenho do Preditor de Smith pode
chegar a ser 30% superior ao de um controlador convencional.
A figura abaixo mostra o diagrama de blocos de um sistema de controle convencional para uma
planta em que um tempo morto θ está presente. se)s(G θ− representa o modelo da planta.
Figura 11.2
Nesse caso, a variável realimentada para o controlador é afetada pelo tempo morto, o que faz com
que o sistema seja difícil de controlar. Se a variável realimentada pudesse ser de alguma forma
colocada efetivamente fora da malha de realimentação, isto é, se o tempo morto enxergado pelo
controlador pudesse ser movido para fora da malha, então o controlador poderia ser sintonizado com
muito mais facilidade. Apesar de isto parecer uma boa idéia, na prática o sistema e seu tempo morto
não podem, em geral, ser separados como pode sugerir a figura acima.
Antes de prosseguir é oportuno notar que, se denotamos por )s(Gc a função de transferência do
controlador, a função de transferência do sistema em malha fechada no caso da figura anterior é
dada por
sc
sc
e)s(G)s(G1
e)s(G)s(Gθ−
θ−
+,
a qual mostra que o tempo morto aparece no denominador da função de transferência (equação
característica da malha fechada) e portanto, afeta a estabilidade da malha fechada.
A figura abaixo mostra um esquema em que um modelo smm e)s(G θ− da planta é incluído em
paralelo com a planta real. Note que a saída do controlador é entrada tanto da planta real como do

Av. Prof. Luciano Gualberto, trav. 3 nº. 158 – Prédio de Engenharia Elétrica – Bloco A – Térreo
CEP 05508-900 – Butantã - São Paulo. Telefone: ++55 11 30377545 / Fax: ++55 11 30377536 81
EPUSP
Convênio Rockwell Automation
Escola Politécnica da USP
seu modelo de maneira que, no caso ideal, a saída do modelo tenderia a cancelar exatamente a
saída da planta real – a saída do comparador situado mais abaixo seria nula.
Figura 11.3
Na figura a seguir, a saída do modelo da planta antes do tempo morto pode então ser usada como
o sinal de realimentação para o controlador.
Figura 11.4
Assim, no caso ideal em que o modelo representa exatamente a planta a controlar com o tempo
morto, o sistema em malha fechada pode ser representado de maneira equivalente conforme a figura
a seguir. Neste diagrama nota-se que o tempo morto aparece fora da malha de controle.
Figura 11.5
Nesta figura, se denotamos como anteriormente por )s(Gc a função de transferência do
controlador, então a função de transferência de malha fechada é dada por

Av. Prof. Luciano Gualberto, trav. 3 nº. 158 – Prédio de Engenharia Elétrica – Bloco A – Térreo
CEP 05508-900 – Butantã - São Paulo. Telefone: ++55 11 30377545 / Fax: ++55 11 30377536 82
EPUSP
Convênio Rockwell Automation
Escola Politécnica da USP
s
c
c e)s(G)s(G1
)s(G)s(G θ−
+.
Neste caso, note que o termo correspondente ao atraso foi eliminado do denominador da função
de transferência em malha fechada (e, portanto, do polinômio característico em malha fechada).
No caso mais realista em que a modelagem da planta e/ou do tempo morto são imperfeitos, a
saída do somador situado mais abaixo não é mais nula, sendo igual ao erro de modelagem, e se
soma à saída do modelo para compor o sinal de realimentação do controlador. Nesta situação,
naturalmente a técnica apresentada não funciona tão bem como no caso ideal; no entanto, o Preditor
de Smith pode ainda proporcionar uma boa melhora em relação ao controle convencional quando os
erros do modelo não são muito grandes – em torno de 30%.
Em outras palavras, uma desvantagem do Preditor de Smith é que ele é uma técnica baseada no
modelo do sistema. Se as características dinâmicas do sistema mudam significativamente, o modelo
preditivo se torna impreciso e o desempenho do controlador se deteriora, podendo chegar ao ponto
de ocorrer a instabilidade. A sugestão aqui é que o controlador seja sintonizado de maneira
conservadora para que possa acomodar possíveis erros do modelo.
Estudos realizados para um sistema de 1a. ordem com um atraso simples e um controlador PI
mostraram que, se o erro no valor do atraso utilizado pelo preditor em relação ao atraso real é
superior a 30% , então obtém-se melhor desempenho sintonizando-se o controlador da maneira
usual, isto é, sem a compensação do atraso.
O Preditor de Smith raramente é implementado na forma analógica por causa da dificuldade de se
aproximar o atraso utilizando componentes analógicos. Sendo assim, a implementação normalmente
é realizada em forma digital.
Por fim, deve-se mencionar que o Preditor de Smith muitas vezes é benéfico para o sistema
quando o mesmo está sujeito a perturbações. No entanto, em certas situações pode ocorrer que um
controlador convencional apresente melhor desempenho.

Av. Prof. Luciano Gualberto, trav. 3 nº. 158 – Prédio de Engenharia Elétrica – Bloco A – Térreo
CEP 05508-900 – Butantã - São Paulo. Telefone: ++55 11 30377545 / Fax: ++55 11 30377536 83
EPUSP
Convênio Rockwell Automation
Escola Politécnica da USP
Referências Bibliográficas
MURRIL, P.W Fundamentals of Process Control Theory, Instrument Society of América, 2a. ed.,
1991.
OGATA, K. Engenharia de Controle Moderno, Prentice-Hall do Brasil, 2a. ed., 1990.
SEBORG, D.E.; EDGAR, T.F.; MELLICHAMP, D.A. Process Dynamics and Control: Wiley Series
in Chemical Engineering, John Wiley & Sons, 1989.
Related Documents











