Overview Theoretical Results Numerical Results Conclusions Enhanced Compressed Sensing based on Iterative Support Detection Wotao Yin Department of Computational and Applied Mathematics Rice University Joint work with Yilun Wang Supported by ONR and NSF Wotao Yin Enhanced Compressed Sensing based on Iterative Support Detection

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

Overview Theoretical Results Numerical Results Conclusions
Enhanced Compressed Sensingbased on Iterative Support Detection
Wotao Yin
Department of Computational and Applied MathematicsRice University
Joint work with Yilun Wang
Supported by ONR and NSF
Wotao Yin Enhanced Compressed Sensing based on Iterative Support Detection
Overview Theoretical Results Numerical Results Conclusions
Notation
x : sparse signal, has ≤ k nonzero entriesb = Ax : CS measurements
`0-problem: min ‖x‖0, s.t. Ax = b. Exact recovery needs m ≥ 2kfor Gaussian A`1-problem: min ‖x‖1, s.t. Ax = b. Needs a much bigger mAlso called Basis Pursuit
Wotao Yin Enhanced Compressed Sensing based on Iterative Support Detection

Overview Theoretical Results Numerical Results Conclusions
Notation
x : sparse signal, has ≤ k nonzero entriesb = Ax : CS measurements
`0-problem: min ‖x‖0, s.t. Ax = b. Exact recovery needs m ≥ 2kfor Gaussian A`1-problem: min ‖x‖1, s.t. Ax = b. Needs a much bigger mAlso called Basis Pursuit
Wotao Yin Enhanced Compressed Sensing based on Iterative Support Detection

Overview Theoretical Results Numerical Results Conclusions The Approach Simple Examples
Outline
1 OverviewThe ApproachSimple Examples
2 Theoretical ResultsSummaryThe Null Space PropertyRecoverability Improvement
3 Numerical ResultsNoiseless measurementsNoisy measurementsA failed case
4 Conclusions
Wotao Yin Enhanced Compressed Sensing based on Iterative Support Detection

Overview Theoretical Results Numerical Results Conclusions The Approach Simple Examples
Approach
Goal: to beat the `1-minimization, i.e., basis pursuitRecover x from less measurementsRemain computationally tractable
Iterative approach:If `1-minimization fails, detect good in the (wrong) solutionRemove the discoveries from the `1-norm.T : remaining entries, ‖xT‖1 =
∑i∈T |xi |,
T C : discoveries = correct ∪ wrong, out of `1-norm.t = |T |Solve
Truncate `1-problem: minx ‖xT‖1, s.t. Ax = b.
Wotao Yin Enhanced Compressed Sensing based on Iterative Support Detection

Overview Theoretical Results Numerical Results Conclusions The Approach Simple Examples
Approach
Goal: to beat the `1-minimization, i.e., basis pursuitRecover x from less measurementsRemain computationally tractable
Iterative approach:If `1-minimization fails, detect good in the (wrong) solution
Remove the discoveries from the `1-norm.T : remaining entries, ‖xT‖1 =
∑i∈T |xi |,
T C : discoveries = correct ∪ wrong, out of `1-norm.t = |T |Solve
Truncate `1-problem: minx ‖xT‖1, s.t. Ax = b.
Wotao Yin Enhanced Compressed Sensing based on Iterative Support Detection

Overview Theoretical Results Numerical Results Conclusions The Approach Simple Examples
Approach
Goal: to beat the `1-minimization, i.e., basis pursuitRecover x from less measurementsRemain computationally tractable
Iterative approach:If `1-minimization fails, detect good in the (wrong) solutionRemove the discoveries from the `1-norm.
T : remaining entries, ‖xT‖1 =∑
i∈T |xi |,T C : discoveries = correct ∪ wrong, out of `1-norm.t = |T |Solve
Truncate `1-problem: minx ‖xT‖1, s.t. Ax = b.
Wotao Yin Enhanced Compressed Sensing based on Iterative Support Detection

Overview Theoretical Results Numerical Results Conclusions The Approach Simple Examples
Approach
Goal: to beat the `1-minimization, i.e., basis pursuitRecover x from less measurementsRemain computationally tractable
Iterative approach:If `1-minimization fails, detect good in the (wrong) solutionRemove the discoveries from the `1-norm.T : remaining entries, ‖xT‖1 =
∑i∈T |xi |,
T C : discoveries = correct ∪ wrong, out of `1-norm.t = |T |
Solve
Truncate `1-problem: minx ‖xT‖1, s.t. Ax = b.
Wotao Yin Enhanced Compressed Sensing based on Iterative Support Detection

Overview Theoretical Results Numerical Results Conclusions The Approach Simple Examples
Approach
Goal: to beat the `1-minimization, i.e., basis pursuitRecover x from less measurementsRemain computationally tractable
Iterative approach:If `1-minimization fails, detect good in the (wrong) solutionRemove the discoveries from the `1-norm.T : remaining entries, ‖xT‖1 =
∑i∈T |xi |,
T C : discoveries = correct ∪ wrong, out of `1-norm.t = |T |Solve
Truncate `1-problem: minx ‖xT‖1, s.t. Ax = b.
Wotao Yin Enhanced Compressed Sensing based on Iterative Support Detection
Overview Theoretical Results Numerical Results Conclusions The Approach Simple Examples
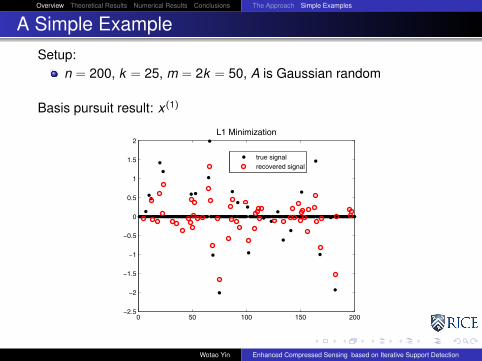
A Simple ExampleSetup:
n = 200, k = 25, m = 2k = 50, A is Gaussian random
Basis pursuit result: x (1)
0 50 100 150 200−2.5
−2
−1.5
−1
−0.5
0
0.5
1
1.5
2L1 Minimization
true signalrecovered signal
Wotao Yin Enhanced Compressed Sensing based on Iterative Support Detection
Overview Theoretical Results Numerical Results Conclusions The Approach Simple Examples
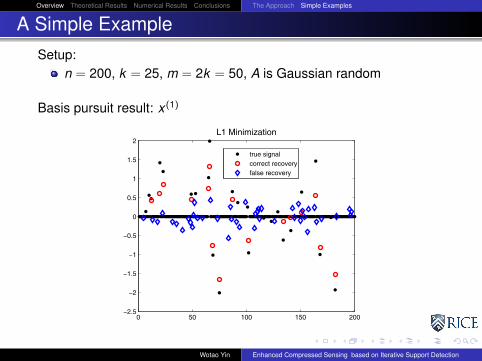
A Simple ExampleSetup:
n = 200, k = 25, m = 2k = 50, A is Gaussian random
Basis pursuit result: x (1)
0 50 100 150 200−2.5
−2
−1.5
−1
−0.5
0
0.5
1
1.5
2L1 Minimization
true signalcorrect recoveryfalse recovery
Wotao Yin Enhanced Compressed Sensing based on Iterative Support Detection

Overview Theoretical Results Numerical Results Conclusions The Approach Simple Examples
A Simple ExampleSetup:
n = 200, k = 25, m = 2k = 50, A is Gaussian random
Basis pursuit result: x (1), threshold ε = ‖x (1)‖∞/3
0 50 100 150 200−2.5
−2
−1.5
−1
−0.5
0
0.5
1
1.5
2L1 Minimization
true signalcorrect recoveryfalse recovery
Wotao Yin Enhanced Compressed Sensing based on Iterative Support Detection

Overview Theoretical Results Numerical Results Conclusions The Approach Simple Examples
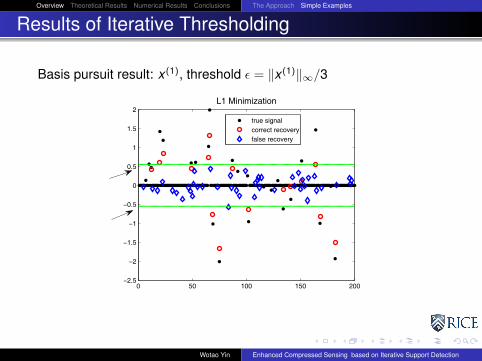
A Thresholding Framework
Initialize: j ← 1 and T = {1,2, . . . ,n}.While not converged do
1 Truncated `1-minimization:
x (j) ← min ‖xT‖1 s.t. Ax = b.
2 Support detection by thresholding:
ε← ‖x (j)‖∞/3j ,
T ← {i : |x (j)i | < ε}.
Wotao Yin Enhanced Compressed Sensing based on Iterative Support Detection
Overview Theoretical Results Numerical Results Conclusions The Approach Simple Examples
Results of Iterative Thresholding
Basis pursuit result: x (1), threshold ε = ‖x (1)‖∞/3
0 50 100 150 200−2.5
−2
−1.5
−1
−0.5
0
0.5
1
1.5
2L1 Minimization
true signalcorrect recoveryfalse recovery
Wotao Yin Enhanced Compressed Sensing based on Iterative Support Detection

Overview Theoretical Results Numerical Results Conclusions The Approach Simple Examples
Results of Iterative Thresholding
Truncated `1-result: x (2), reduced threshold ε = ‖x (2)‖∞/32
0 50 100 150 200−2.5
−2
−1.5
−1
−0.5
0
0.5
1
1.5
2Truncated L1 Minimization
true signalcorrect recoveryfalse recovery
Wotao Yin Enhanced Compressed Sensing based on Iterative Support Detection

Overview Theoretical Results Numerical Results Conclusions The Approach Simple Examples
Results of Iterative Thresholding
Truncated `1-result: x (3), reduced threshold ε = ‖x (3)‖∞/33
0 50 100 150 200−2.5
−2
−1.5
−1
−0.5
0
0.5
1
1.5
2Truncated L1 Minimization
true signalcorrect recoveryfalse recovery
Wotao Yin Enhanced Compressed Sensing based on Iterative Support Detection

Overview Theoretical Results Numerical Results Conclusions The Approach Simple Examples
Results of Iterative Thresholding
Truncated `1-result: x (4), exact recovery!
0 50 100 150 200−2.5
−2
−1.5
−1
−0.5
0
0.5
1
1.5
2Truncated L1 Minimization
true signalcorrect recovery
Wotao Yin Enhanced Compressed Sensing based on Iterative Support Detection
Overview Theoretical Results Numerical Results Conclusions The Approach Simple Examples
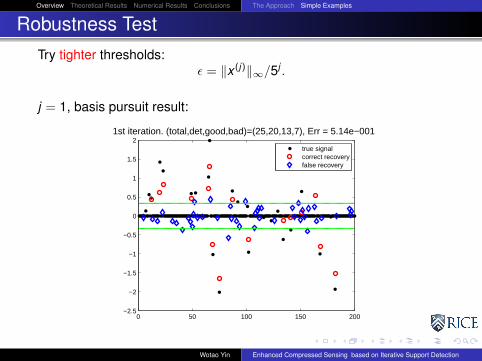
Robustness TestTry tighter thresholds:
ε = ‖x (j)‖∞/5j .
j = 1, basis pursuit result:
0 50 100 150 200−2.5
−2
−1.5
−1
−0.5
0
0.5
1
1.5
21st iteration. (total,det,good,bad)=(25,20,13,7), Err = 5.14e−001
true signalcorrect recoveryfalse recovery
Wotao Yin Enhanced Compressed Sensing based on Iterative Support Detection

Overview Theoretical Results Numerical Results Conclusions The Approach Simple Examples
Robustness TestTry tighter thresholds:
ε = ‖x (j)‖∞/5j .
j = 2, truncated `1-minimization result:
0 50 100 150 200−2.5
−2
−1.5
−1
−0.5
0
0.5
1
1.5
22nd iteration. (total,det,good,bad)=(25,27,21,6), Err = 1.29e−001
true signalcorrect recoveryfalse recovery
Wotao Yin Enhanced Compressed Sensing based on Iterative Support Detection
Overview Theoretical Results Numerical Results Conclusions The Approach Simple Examples
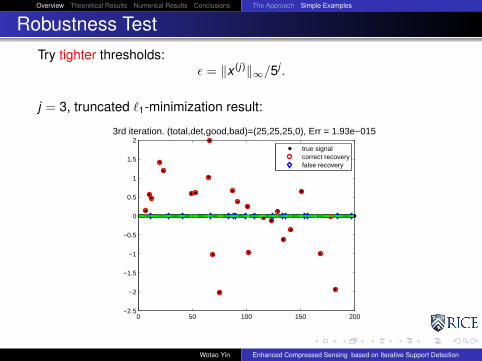
Robustness TestTry tighter thresholds:
ε = ‖x (j)‖∞/5j .
j = 3, truncated `1-minimization result:
0 50 100 150 200−2.5
−2
−1.5
−1
−0.5
0
0.5
1
1.5
23rd iteration. (total,det,good,bad)=(25,25,25,0), Err = 1.93e−015
true signalcorrect recoveryfalse recovery
Wotao Yin Enhanced Compressed Sensing based on Iterative Support Detection

Overview Theoretical Results Numerical Results Conclusions The Approach Simple Examples
Robustness TestTry tighter thresholds:
ε = ‖x (j)‖∞/5j .
j = 4, truncated `1-minimization result: exact recovery!
0 50 100 150 200−2.5
−2
−1.5
−1
−0.5
0
0.5
1
1.5
24th iteration. (total,det,good,bad)=(25,25,25,0), Err = 6.56e−016
true signalcorrect recovery
Wotao Yin Enhanced Compressed Sensing based on Iterative Support Detection

Overview Theoretical Results Numerical Results Conclusions Summary The Null Space Property Recoverability Improvement
Outline
1 OverviewThe ApproachSimple Examples
2 Theoretical ResultsSummaryThe Null Space PropertyRecoverability Improvement
3 Numerical ResultsNoiseless measurementsNoisy measurementsA failed case
4 Conclusions
Wotao Yin Enhanced Compressed Sensing based on Iterative Support Detection

Overview Theoretical Results Numerical Results Conclusions Summary The Null Space Property Recoverability Improvement
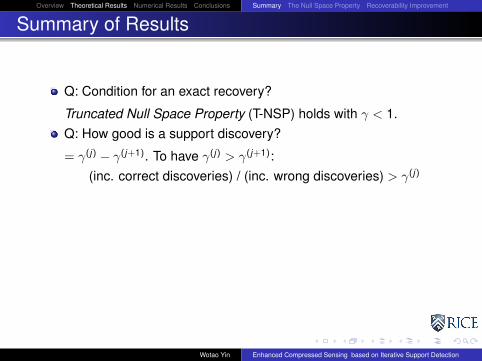
Summary of Results
Q: Condition for an exact recovery?
Truncated Null Space Property (T-NSP) holds with γ < 1.
Q: How good is a support discovery?
= γ(j) − γ(j+1). To have γ(j) > γ(j+1):(inc. correct discoveries) / (inc. wrong discoveries) > γ(j)
Q: Not knowing the exact solutionhow to have enough correct discoveries?thresholding for fast decaying signals. Ranking is not as robust.how to measure improvement?compute the size of tail.when to stop?tail is zero or small enough.
Wotao Yin Enhanced Compressed Sensing based on Iterative Support Detection
Overview Theoretical Results Numerical Results Conclusions Summary The Null Space Property Recoverability Improvement
Summary of Results
Q: Condition for an exact recovery?
Truncated Null Space Property (T-NSP) holds with γ < 1.Q: How good is a support discovery?
= γ(j) − γ(j+1). To have γ(j) > γ(j+1):(inc. correct discoveries) / (inc. wrong discoveries) > γ(j)
Q: Not knowing the exact solutionhow to have enough correct discoveries?thresholding for fast decaying signals. Ranking is not as robust.how to measure improvement?compute the size of tail.when to stop?tail is zero or small enough.
Wotao Yin Enhanced Compressed Sensing based on Iterative Support Detection

Overview Theoretical Results Numerical Results Conclusions Summary The Null Space Property Recoverability Improvement
Summary of Results
Q: Condition for an exact recovery?
Truncated Null Space Property (T-NSP) holds with γ < 1.Q: How good is a support discovery?
= γ(j) − γ(j+1). To have γ(j) > γ(j+1):(inc. correct discoveries) / (inc. wrong discoveries) > γ(j)
Q: Not knowing the exact solutionhow to have enough correct discoveries?thresholding for fast decaying signals. Ranking is not as robust.
how to measure improvement?compute the size of tail.when to stop?tail is zero or small enough.
Wotao Yin Enhanced Compressed Sensing based on Iterative Support Detection

Overview Theoretical Results Numerical Results Conclusions Summary The Null Space Property Recoverability Improvement
Summary of Results
Q: Condition for an exact recovery?
Truncated Null Space Property (T-NSP) holds with γ < 1.Q: How good is a support discovery?
= γ(j) − γ(j+1). To have γ(j) > γ(j+1):(inc. correct discoveries) / (inc. wrong discoveries) > γ(j)
Q: Not knowing the exact solutionhow to have enough correct discoveries?thresholding for fast decaying signals. Ranking is not as robust.how to measure improvement?compute the size of tail.
when to stop?tail is zero or small enough.
Wotao Yin Enhanced Compressed Sensing based on Iterative Support Detection

Overview Theoretical Results Numerical Results Conclusions Summary The Null Space Property Recoverability Improvement
Summary of Results
Q: Condition for an exact recovery?
Truncated Null Space Property (T-NSP) holds with γ < 1.Q: How good is a support discovery?
= γ(j) − γ(j+1). To have γ(j) > γ(j+1):(inc. correct discoveries) / (inc. wrong discoveries) > γ(j)
Q: Not knowing the exact solutionhow to have enough correct discoveries?thresholding for fast decaying signals. Ranking is not as robust.how to measure improvement?compute the size of tail.when to stop?tail is zero or small enough.
Wotao Yin Enhanced Compressed Sensing based on Iterative Support Detection

Overview Theoretical Results Numerical Results Conclusions Summary The Null Space Property Recoverability Improvement
Null Space Property
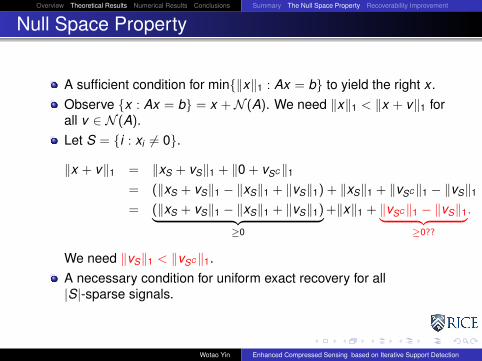
A sufficient condition for min{‖x‖1 : Ax = b} to yield the right x .
Observe {x : Ax = b} = x +N (A). We need ‖x‖1 < ‖x + v‖1 forall v ∈ N (A).Let S = {i : xi 6= 0}.
‖x + v‖1 = ‖xS + vS‖1 + ‖0 + vSC‖1
= (‖xS + vS‖1 − ‖xS‖1 + ‖vS‖1) + ‖xS‖1 + ‖vSC‖1 − ‖vS‖1
= (‖xS + vS‖1 − ‖xS‖1 + ‖vS‖1)︸ ︷︷ ︸≥0
+‖x‖1 + ‖vSC‖1 − ‖vS‖1︸ ︷︷ ︸≥0??
.
We need ‖vS‖1 < ‖vSC‖1.A necessary condition for uniform exact recovery for all|S|-sparse signals.
Wotao Yin Enhanced Compressed Sensing based on Iterative Support Detection

Overview Theoretical Results Numerical Results Conclusions Summary The Null Space Property Recoverability Improvement
Null Space Property
A sufficient condition for min{‖x‖1 : Ax = b} to yield the right x .Observe {x : Ax = b} = x +N (A). We need ‖x‖1 < ‖x + v‖1 forall v ∈ N (A).
Let S = {i : xi 6= 0}.
‖x + v‖1 = ‖xS + vS‖1 + ‖0 + vSC‖1
= (‖xS + vS‖1 − ‖xS‖1 + ‖vS‖1) + ‖xS‖1 + ‖vSC‖1 − ‖vS‖1
= (‖xS + vS‖1 − ‖xS‖1 + ‖vS‖1)︸ ︷︷ ︸≥0
+‖x‖1 + ‖vSC‖1 − ‖vS‖1︸ ︷︷ ︸≥0??
.
We need ‖vS‖1 < ‖vSC‖1.A necessary condition for uniform exact recovery for all|S|-sparse signals.
Wotao Yin Enhanced Compressed Sensing based on Iterative Support Detection

Overview Theoretical Results Numerical Results Conclusions Summary The Null Space Property Recoverability Improvement
Null Space Property
A sufficient condition for min{‖x‖1 : Ax = b} to yield the right x .Observe {x : Ax = b} = x +N (A). We need ‖x‖1 < ‖x + v‖1 forall v ∈ N (A).Let S = {i : xi 6= 0}.
‖x + v‖1 = ‖xS + vS‖1 + ‖0 + vSC‖1
= (‖xS + vS‖1 − ‖xS‖1 + ‖vS‖1) + ‖xS‖1 + ‖vSC‖1 − ‖vS‖1
= (‖xS + vS‖1 − ‖xS‖1 + ‖vS‖1)︸ ︷︷ ︸≥0
+‖x‖1 + ‖vSC‖1 − ‖vS‖1︸ ︷︷ ︸≥0??
.
We need ‖vS‖1 < ‖vSC‖1.
A necessary condition for uniform exact recovery for all|S|-sparse signals.
Wotao Yin Enhanced Compressed Sensing based on Iterative Support Detection
Overview Theoretical Results Numerical Results Conclusions Summary The Null Space Property Recoverability Improvement
Null Space Property
A sufficient condition for min{‖x‖1 : Ax = b} to yield the right x .Observe {x : Ax = b} = x +N (A). We need ‖x‖1 < ‖x + v‖1 forall v ∈ N (A).Let S = {i : xi 6= 0}.
‖x + v‖1 = ‖xS + vS‖1 + ‖0 + vSC‖1
= (‖xS + vS‖1 − ‖xS‖1 + ‖vS‖1) + ‖xS‖1 + ‖vSC‖1 − ‖vS‖1
= (‖xS + vS‖1 − ‖xS‖1 + ‖vS‖1)︸ ︷︷ ︸≥0
+‖x‖1 + ‖vSC‖1 − ‖vS‖1︸ ︷︷ ︸≥0??
.
We need ‖vS‖1 < ‖vSC‖1.A necessary condition for uniform exact recovery for all|S|-sparse signals.
Wotao Yin Enhanced Compressed Sensing based on Iterative Support Detection

Overview Theoretical Results Numerical Results Conclusions Summary The Null Space Property Recoverability Improvement
Null Space Property
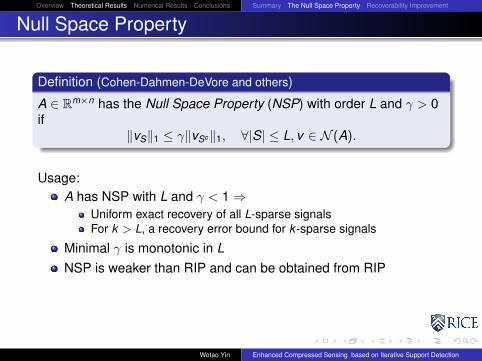
Definition (Cohen-Dahmen-DeVore and others)
A ∈ Rm×n has the Null Space Property (NSP) with order L and γ > 0if
‖vS‖1 ≤ γ‖vSc‖1, ∀|S| ≤ L, v ∈ N (A).
Usage:A has NSP with L and γ < 1⇒
Uniform exact recovery of all L-sparse signalsFor k > L, a recovery error bound for k -sparse signals
Minimal γ is monotonic in LNSP is weaker than RIP and can be obtained from RIPNSP is more essential than RIP for basis pursuit (left multiplyingA by a nonsingular matrix changes RIP but not NSP)
Wotao Yin Enhanced Compressed Sensing based on Iterative Support Detection

Overview Theoretical Results Numerical Results Conclusions Summary The Null Space Property Recoverability Improvement
Null Space Property
Definition (Cohen-Dahmen-DeVore and others)
A ∈ Rm×n has the Null Space Property (NSP) with order L and γ > 0if
‖vS‖1 ≤ γ‖vSc‖1, ∀|S| ≤ L, v ∈ N (A).
Usage:A has NSP with L and γ < 1⇒
Uniform exact recovery of all L-sparse signalsFor k > L, a recovery error bound for k -sparse signals
Minimal γ is monotonic in LNSP is weaker than RIP and can be obtained from RIPNSP is more essential than RIP for basis pursuit (left multiplyingA by a nonsingular matrix changes RIP but not NSP)
Wotao Yin Enhanced Compressed Sensing based on Iterative Support Detection

Overview Theoretical Results Numerical Results Conclusions Summary The Null Space Property Recoverability Improvement
Null Space Property
Definition (Cohen-Dahmen-DeVore and others)
A ∈ Rm×n has the Null Space Property (NSP) with order L and γ > 0if
‖vS‖1 ≤ γ‖vSc‖1, ∀|S| ≤ L, v ∈ N (A).
Usage:A has NSP with L and γ < 1⇒
Uniform exact recovery of all L-sparse signalsFor k > L, a recovery error bound for k -sparse signals
Minimal γ is monotonic in L
NSP is weaker than RIP and can be obtained from RIPNSP is more essential than RIP for basis pursuit (left multiplyingA by a nonsingular matrix changes RIP but not NSP)
Wotao Yin Enhanced Compressed Sensing based on Iterative Support Detection
Overview Theoretical Results Numerical Results Conclusions Summary The Null Space Property Recoverability Improvement
Null Space Property
Definition (Cohen-Dahmen-DeVore and others)
A ∈ Rm×n has the Null Space Property (NSP) with order L and γ > 0if
‖vS‖1 ≤ γ‖vSc‖1, ∀|S| ≤ L, v ∈ N (A).
Usage:A has NSP with L and γ < 1⇒
Uniform exact recovery of all L-sparse signalsFor k > L, a recovery error bound for k -sparse signals
Minimal γ is monotonic in LNSP is weaker than RIP and can be obtained from RIP
NSP is more essential than RIP for basis pursuit (left multiplyingA by a nonsingular matrix changes RIP but not NSP)
Wotao Yin Enhanced Compressed Sensing based on Iterative Support Detection

Overview Theoretical Results Numerical Results Conclusions Summary The Null Space Property Recoverability Improvement
Null Space Property
Definition (Cohen-Dahmen-DeVore and others)
A ∈ Rm×n has the Null Space Property (NSP) with order L and γ > 0if
‖vS‖1 ≤ γ‖vSc‖1, ∀|S| ≤ L, v ∈ N (A).
Usage:A has NSP with L and γ < 1⇒
Uniform exact recovery of all L-sparse signalsFor k > L, a recovery error bound for k -sparse signals
Minimal γ is monotonic in LNSP is weaker than RIP and can be obtained from RIPNSP is more essential than RIP for basis pursuit (left multiplyingA by a nonsingular matrix changes RIP but not NSP)
Wotao Yin Enhanced Compressed Sensing based on Iterative Support Detection

Overview Theoretical Results Numerical Results Conclusions Summary The Null Space Property Recoverability Improvement
Truncated Null Space Property
Definition (Y.-Wang)
A ∈ Rm×n has the Truncated Null Space Property (T-NSP) with t , L,and γ, written as T-NSP(t ,L, γ), if
‖vS‖1 ≤ γ‖vT\S‖1, ∀S ⊂ T , |S| ≤ L, |T | = t , v ∈ N (A).
Intuitively, T-NSP(t ,L, γ)⇔ all length-t subvectors of v ∈ N (A) satisfythe inequality of NSP(L, γ)
Theorem (Y.-Wang)
For T given , if A satisfies T-NSP(|T |,L, γ) where γ < 1, thentruncated `1-minimization over the support of T yields an exactrecovery.
Wotao Yin Enhanced Compressed Sensing based on Iterative Support Detection

Overview Theoretical Results Numerical Results Conclusions Summary The Null Space Property Recoverability Improvement
Truncated Null Space Property
Definition (Y.-Wang)
A ∈ Rm×n has the Truncated Null Space Property (T-NSP) with t , L,and γ, written as T-NSP(t ,L, γ), if
‖vS‖1 ≤ γ‖vT\S‖1, ∀S ⊂ T , |S| ≤ L, |T | = t , v ∈ N (A).
Intuitively, T-NSP(t ,L, γ)⇔ all length-t subvectors of v ∈ N (A) satisfythe inequality of NSP(L, γ)
Theorem (Y.-Wang)
For T given , if A satisfies T-NSP(|T |,L, γ) where γ < 1, thentruncated `1-minimization over the support of T yields an exactrecovery.
Wotao Yin Enhanced Compressed Sensing based on Iterative Support Detection

Overview Theoretical Results Numerical Results Conclusions Summary The Null Space Property Recoverability Improvement
Recoverability Improvement
Theorem (Y.-Wang)
Suppose A satisfies both T-NSP(t1,L1, γ1) and T-NSP(t2,L2, γ2)where t2 < t1 and γ1 and γ2 are minimal. Then,
L1 − L2
(t1 − t2)− (L1 − L2)> γ1 =⇒ γ2 < γ1.
Interpretation:t1 = |T 1|: numbers of entries in T before detectiont2 = |T 2|: numbers of entries in T after detectiont1 − t2 = decrease in |T | = increase in the total discoveriesL1 − L2 = increase in the correct discoveriesγ2 < γ1: recoverability improved (recall γ < 1⇒ exact recovery)To improve, it is sufficient to have(inc. corr. discoveries) / (inc. false discoveries) > γ1
Result is in dependent of support detectors.
Wotao Yin Enhanced Compressed Sensing based on Iterative Support Detection

Overview Theoretical Results Numerical Results Conclusions Summary The Null Space Property Recoverability Improvement
Recoverability Improvement
Theorem (Y.-Wang)
Suppose A satisfies both T-NSP(t1,L1, γ1) and T-NSP(t2,L2, γ2)where t2 < t1 and γ1 and γ2 are minimal. Then,
L1 − L2
(t1 − t2)− (L1 − L2)> γ1 =⇒ γ2 < γ1.
Interpretation:t1 = |T 1|: numbers of entries in T before detectiont2 = |T 2|: numbers of entries in T after detection
t1 − t2 = decrease in |T | = increase in the total discoveriesL1 − L2 = increase in the correct discoveriesγ2 < γ1: recoverability improved (recall γ < 1⇒ exact recovery)To improve, it is sufficient to have(inc. corr. discoveries) / (inc. false discoveries) > γ1
Result is in dependent of support detectors.
Wotao Yin Enhanced Compressed Sensing based on Iterative Support Detection

Overview Theoretical Results Numerical Results Conclusions Summary The Null Space Property Recoverability Improvement
Recoverability Improvement
Theorem (Y.-Wang)
Suppose A satisfies both T-NSP(t1,L1, γ1) and T-NSP(t2,L2, γ2)where t2 < t1 and γ1 and γ2 are minimal. Then,
L1 − L2
(t1 − t2)− (L1 − L2)> γ1 =⇒ γ2 < γ1.
Interpretation:t1 = |T 1|: numbers of entries in T before detectiont2 = |T 2|: numbers of entries in T after detectiont1 − t2 = decrease in |T | = increase in the total discoveries
L1 − L2 = increase in the correct discoveriesγ2 < γ1: recoverability improved (recall γ < 1⇒ exact recovery)To improve, it is sufficient to have(inc. corr. discoveries) / (inc. false discoveries) > γ1
Result is in dependent of support detectors.
Wotao Yin Enhanced Compressed Sensing based on Iterative Support Detection

Overview Theoretical Results Numerical Results Conclusions Summary The Null Space Property Recoverability Improvement
Recoverability Improvement
Theorem (Y.-Wang)
Suppose A satisfies both T-NSP(t1,L1, γ1) and T-NSP(t2,L2, γ2)where t2 < t1 and γ1 and γ2 are minimal. Then,
L1 − L2
(t1 − t2)− (L1 − L2)> γ1 =⇒ γ2 < γ1.
Interpretation:t1 = |T 1|: numbers of entries in T before detectiont2 = |T 2|: numbers of entries in T after detectiont1 − t2 = decrease in |T | = increase in the total discoveriesL1 − L2 = increase in the correct discoveries
γ2 < γ1: recoverability improved (recall γ < 1⇒ exact recovery)To improve, it is sufficient to have(inc. corr. discoveries) / (inc. false discoveries) > γ1
Result is in dependent of support detectors.
Wotao Yin Enhanced Compressed Sensing based on Iterative Support Detection

Overview Theoretical Results Numerical Results Conclusions Summary The Null Space Property Recoverability Improvement
Recoverability Improvement
Theorem (Y.-Wang)
Suppose A satisfies both T-NSP(t1,L1, γ1) and T-NSP(t2,L2, γ2)where t2 < t1 and γ1 and γ2 are minimal. Then,
L1 − L2
(t1 − t2)− (L1 − L2)> γ1 =⇒ γ2 < γ1.
Interpretation:t1 = |T 1|: numbers of entries in T before detectiont2 = |T 2|: numbers of entries in T after detectiont1 − t2 = decrease in |T | = increase in the total discoveriesL1 − L2 = increase in the correct discoveriesγ2 < γ1: recoverability improved (recall γ < 1⇒ exact recovery)To improve, it is sufficient to have(inc. corr. discoveries) / (inc. false discoveries) > γ1
Result is in dependent of support detectors.
Wotao Yin Enhanced Compressed Sensing based on Iterative Support Detection

Overview Theoretical Results Numerical Results Conclusions Summary The Null Space Property Recoverability Improvement
Recoverability Improvement
Theorem (Y.-Wang)
Suppose A satisfies both T-NSP(t1,L1, γ1) and T-NSP(t2,L2, γ2)where t2 < t1 and γ1 and γ2 are minimal. Then,
L1 − L2
(t1 − t2)− (L1 − L2)> γ1 =⇒ γ2 < γ1.
Interpretation:t1 = |T 1|: numbers of entries in T before detectiont2 = |T 2|: numbers of entries in T after detectiont1 − t2 = decrease in |T | = increase in the total discoveriesL1 − L2 = increase in the correct discoveriesγ2 < γ1: recoverability improved (recall γ < 1⇒ exact recovery)To improve, it is sufficient to have(inc. corr. discoveries) / (inc. false discoveries) > γ1
Result is in dependent of support detectors.
Wotao Yin Enhanced Compressed Sensing based on Iterative Support Detection

Overview Theoretical Results Numerical Results Conclusions Summary The Null Space Property Recoverability Improvement
Results for Random Sampling
Theorem (Y.-Wang, an extension to Candes-Tao and Zhang)
For Gaussian random A (or any rank-m matrix A such that BA> = 0where B ∈ R(n−m)×m is Gaussian random), a sufficient condition forexact recovery with high probability is
‖xT‖0 <C2
4m − d
1 + log n−dm−d
,
where d = n − |T | and C is an independent constant.
Application: Bound C and show that
−1 <∂RHS∂d
< 0,
leaving room for incorrect discoveries.
Wotao Yin Enhanced Compressed Sensing based on Iterative Support Detection

Overview Theoretical Results Numerical Results Conclusions Summary The Null Space Property Recoverability Improvement
Results for Random Sampling
Theorem (Y.-Wang, an extension to Candes-Tao and Zhang)
For Gaussian random A (or any rank-m matrix A such that BA> = 0where B ∈ R(n−m)×m is Gaussian random), a sufficient condition forexact recovery with high probability is
‖xT‖0 <C2
4m − d
1 + log n−dm−d
,
where d = n − |T | and C is an independent constant.
Application: Bound C and show that
−1 <∂RHS∂d
< 0,
leaving room for incorrect discoveries.
Wotao Yin Enhanced Compressed Sensing based on Iterative Support Detection
Overview Theoretical Results Numerical Results Conclusions Noiseless measurements Noisy measurements A failed case
Outline
1 OverviewThe ApproachSimple Examples
2 Theoretical ResultsSummaryThe Null Space PropertyRecoverability Improvement
3 Numerical ResultsNoiseless measurementsNoisy measurementsA failed case
4 Conclusions
Wotao Yin Enhanced Compressed Sensing based on Iterative Support Detection

Overview Theoretical Results Numerical Results Conclusions Noiseless measurements Noisy measurements A failed case
Numerical Results
Experiment 1: noiseless measurementsn = 100, m = 50k = 9, . . . ,21. Each k had 200 trials.x : sparse Gaussian signalsA: Gaussian randomSuccessful recovery declared if ‖x (j) − x‖∞ ≤ 10−3
Thresholds: ε = ‖x (j)‖∞/2j
Empirical exact recovery conditions:Basis pursuit:
k ≤ m5
With iterative support detection:
k ≤ m3
Wotao Yin Enhanced Compressed Sensing based on Iterative Support Detection
Overview Theoretical Results Numerical Results Conclusions Noiseless measurements Noisy measurements A failed case
Numerical Results
Experiment 1: noiseless measurementsn = 100, m = 50k = 9, . . . ,21. Each k had 200 trials.x : sparse Gaussian signalsA: Gaussian randomSuccessful recovery declared if ‖x (j) − x‖∞ ≤ 10−3
Thresholds: ε = ‖x (j)‖∞/2j
Empirical exact recovery conditions:Basis pursuit:
k ≤ m5
With iterative support detection:
k ≤ m3
Wotao Yin Enhanced Compressed Sensing based on Iterative Support Detection

Overview Theoretical Results Numerical Results Conclusions Noiseless measurements Noisy measurements A failed case
Numerical Results
Percentage of Successful Recoveries
8 10 12 14 16 18 20 22
0.4
0.5
0.6
0.7
0.8
0.9
1
Number of nonzeros k
Pro
babi
lity
of S
ucce
ssfu
l Rec
over
y[Gaussian,Gaussian]
plain L1 minimization1 iterations2 iterations4 iterations8 iterations
Wotao Yin Enhanced Compressed Sensing based on Iterative Support Detection

Overview Theoretical Results Numerical Results Conclusions Noiseless measurements Noisy measurements A failed case
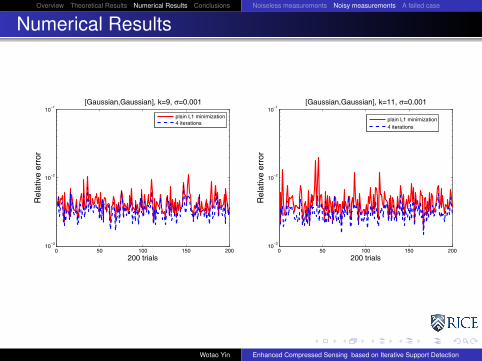
Numerical Results
Experiment 2: noisy measurementsn = 100, m = 50k = 9,11,15,19. Each k had 200 trials.x : sparse Gaussian signalsA: Gaussian randomb = Ax + z, where z ∼ N(0,0.001)
Logarithms of relative errors of x (j) to x are plottedThresholds: ε = ‖x (j)‖∞/2j
Wotao Yin Enhanced Compressed Sensing based on Iterative Support Detection
Overview Theoretical Results Numerical Results Conclusions Noiseless measurements Noisy measurements A failed case
Numerical Results
0 50 100 150 20010
−3
10−2
10−1
200 trials
Rel
ativ
e er
ror
[Gaussian,Gaussian], k=9, σ=0.001
plain L1 minimization4 iterations
0 50 100 150 20010
−3
10−2
10−1
200 trialsR
elat
ive
erro
r
[Gaussian,Gaussian], k=11, σ=0.001
plain L1 minimization4 iterations
Wotao Yin Enhanced Compressed Sensing based on Iterative Support Detection

Overview Theoretical Results Numerical Results Conclusions Noiseless measurements Noisy measurements A failed case
Numerical Results
0 50 100 150 20010
−3
10−2
10−1
100
200 trials
Rel
ativ
e er
ror
[Gaussian,Gaussian], k=15, σ=0.001
plain L1 minimization4 iterations
0 50 100 150 20010
−3
10−2
10−1
100
200 trialsR
elat
ive
erro
r
[Gaussian,Gaussian], k=19, σ=0.001
plain L1 minimization8 iterations
Wotao Yin Enhanced Compressed Sensing based on Iterative Support Detection

Overview Theoretical Results Numerical Results Conclusions Noiseless measurements Noisy measurements A failed case
Numerical Results
Experiment 3: sparse signals with nonzero = ±1, noiselessmeasurements
0 50 100 150 200−1.5
−1
−0.5
0
0.5
1L1 Minimization
true signalcorrect recoveryfalse recovery
Excessive false detections!
Wotao Yin Enhanced Compressed Sensing based on Iterative Support Detection

Overview Theoretical Results Numerical Results Conclusions Noiseless measurements Noisy measurements A failed case
Numerical ResultsExperiment 3: signals with Bernoulli nonzeros, noiselessmeasurements
8 10 12 14 16 18 20 22
0.4
0.5
0.6
0.7
0.8
0.9
1
Number of nonzeros k
Pro
babi
lity
of S
ucce
ssfu
l Rec
over
y
[Bernulli,Gaussian]
plain L1 minimization1 iterations2 iterations4 iterations8 iterations
Little improvement over basis pursuit.
Wotao Yin Enhanced Compressed Sensing based on Iterative Support Detection

Overview Theoretical Results Numerical Results Conclusions
Outline
1 OverviewThe ApproachSimple Examples
2 Theoretical ResultsSummaryThe Null Space PropertyRecoverability Improvement
3 Numerical ResultsNoiseless measurementsNoisy measurementsA failed case
4 Conclusions
Wotao Yin Enhanced Compressed Sensing based on Iterative Support Detection
Overview Theoretical Results Numerical Results Conclusions
Conclusions
ConclusionsEffective support detection improves CS recovery
In particular, iterative thresholding is effective on sparse signalswith fast decaying distribution of nonzero valuesComputationally tractable
one `1-minimization per iteration, can be warm-startedonly a small number of iterations are needed
Wotao Yin Enhanced Compressed Sensing based on Iterative Support Detection

Overview Theoretical Results Numerical Results Conclusions
Conclusions
ConclusionsEffective support detection improves CS recoveryIn particular, iterative thresholding is effective on sparse signalswith fast decaying distribution of nonzero values
Computationally tractableone `1-minimization per iteration, can be warm-startedonly a small number of iterations are needed
Wotao Yin Enhanced Compressed Sensing based on Iterative Support Detection

Overview Theoretical Results Numerical Results Conclusions
Conclusions
ConclusionsEffective support detection improves CS recoveryIn particular, iterative thresholding is effective on sparse signalswith fast decaying distribution of nonzero valuesComputationally tractable
one `1-minimization per iteration, can be warm-startedonly a small number of iterations are needed
Wotao Yin Enhanced Compressed Sensing based on Iterative Support Detection

Overview Theoretical Results Numerical Results Conclusions
On-going Work
On-going workother types of signals: images, video, etc.
other priors: ‖Φx‖p, p ≤ 1, and TV (x)
further theoretical analysis is underwayapply to greedy algorithms (OMP, ROMP, CoSaMP, ...).
Wotao Yin Enhanced Compressed Sensing based on Iterative Support Detection

Overview Theoretical Results Numerical Results Conclusions
On-going Work
On-going workother types of signals: images, video, etc.other priors: ‖Φx‖p, p ≤ 1, and TV (x)
further theoretical analysis is underwayapply to greedy algorithms (OMP, ROMP, CoSaMP, ...).
Wotao Yin Enhanced Compressed Sensing based on Iterative Support Detection
Overview Theoretical Results Numerical Results Conclusions
On-going Work
On-going workother types of signals: images, video, etc.other priors: ‖Φx‖p, p ≤ 1, and TV (x)
further theoretical analysis is underway
apply to greedy algorithms (OMP, ROMP, CoSaMP, ...).
Wotao Yin Enhanced Compressed Sensing based on Iterative Support Detection

Overview Theoretical Results Numerical Results Conclusions
On-going Work
On-going workother types of signals: images, video, etc.other priors: ‖Φx‖p, p ≤ 1, and TV (x)
further theoretical analysis is underwayapply to greedy algorithms (OMP, ROMP, CoSaMP, ...).
Wotao Yin Enhanced Compressed Sensing based on Iterative Support Detection
Overview Theoretical Results Numerical Results Conclusions
AcknowledgementsColleaguesRice: Rich Baraniuk, Volkan Cevher, Kevin Kelly, Yin ZhangColumbia: Donald Goldfarb, Shiqian Ma, Zaiwen WenUCLA: Stan Osher, Jerome Darbon, Bin Dong, Yu MaoLos Alamos: Rick Chartrand, Simon MorganAlabama: Weihong GuoStudents: Junfeng Yang, Yilun WangFunding Agencies: ONR, NSF
CS Resources: www.dsp.ece.rice.edu/cs
Our algorithms: www.caam.rice.edu/˜optimization/L1
Thank You!
Wotao Yin Enhanced Compressed Sensing based on Iterative Support Detection
Related Documents











