University of Maryland B. Balachandran & E. Magrab Review Problems For Exam#2

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

University of Maryland B. Balachandran & E. Magrab
Review Problems For Exam#2
University of Maryland B. Balachandran & E. Magrab
Chapter 3 Lagrange’s Equations of Motion
Time Response of SDOF Systems
Frequency Response of SDOF Systems
Stability of SDOF Systems
University of Maryland B. Balachandran & E. Magrab
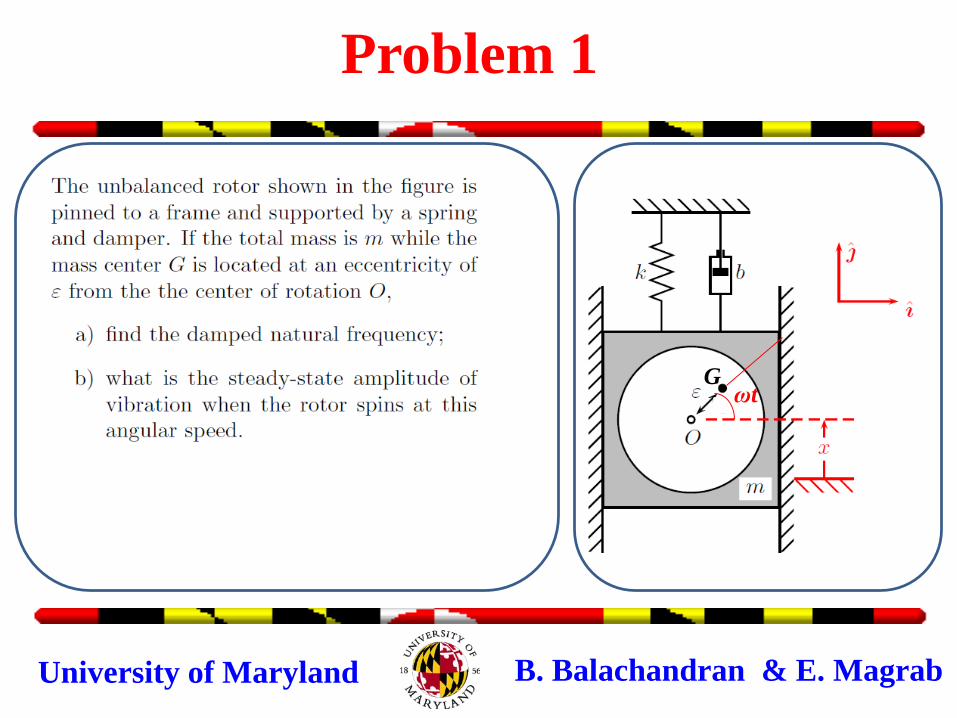
Problem 1
Gωt

University of Maryland B. Balachandran & E. Magrab
Problem 1

University of Maryland B. Balachandran & E. Magrab
Problem 1
University of Maryland B. Balachandran & E. Magrab
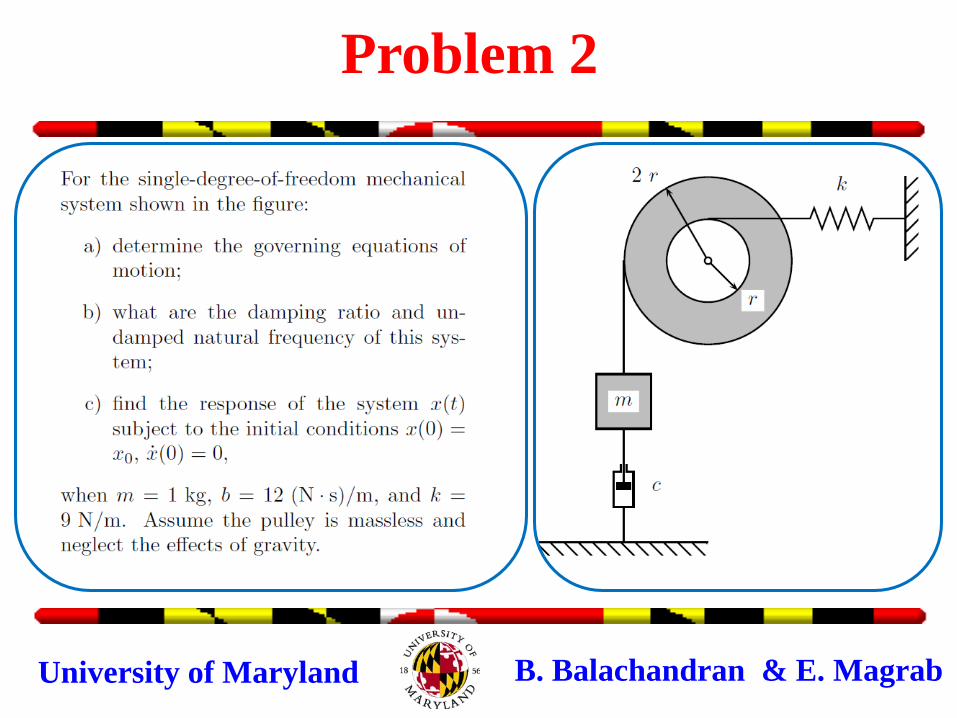
Problem 2

University of Maryland B. Balachandran & E. Magrab
Problem 2

University of Maryland B. Balachandran & E. Magrab
Problem 2
University of Maryland B. Balachandran & E. Magrab
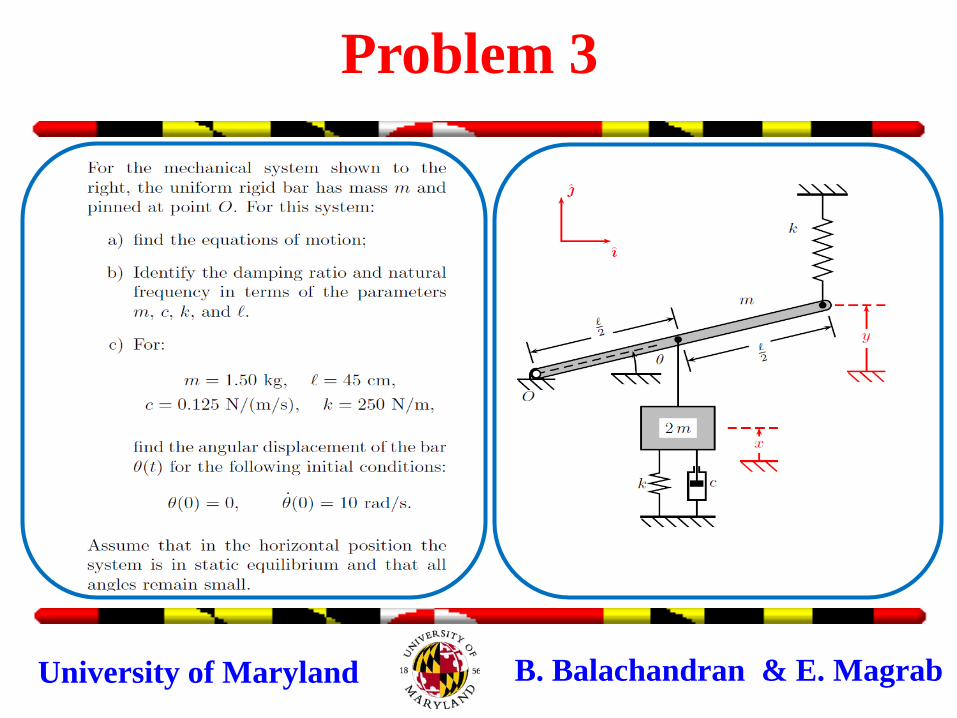
Problem 3
University of Maryland B. Balachandran & E. Magrab
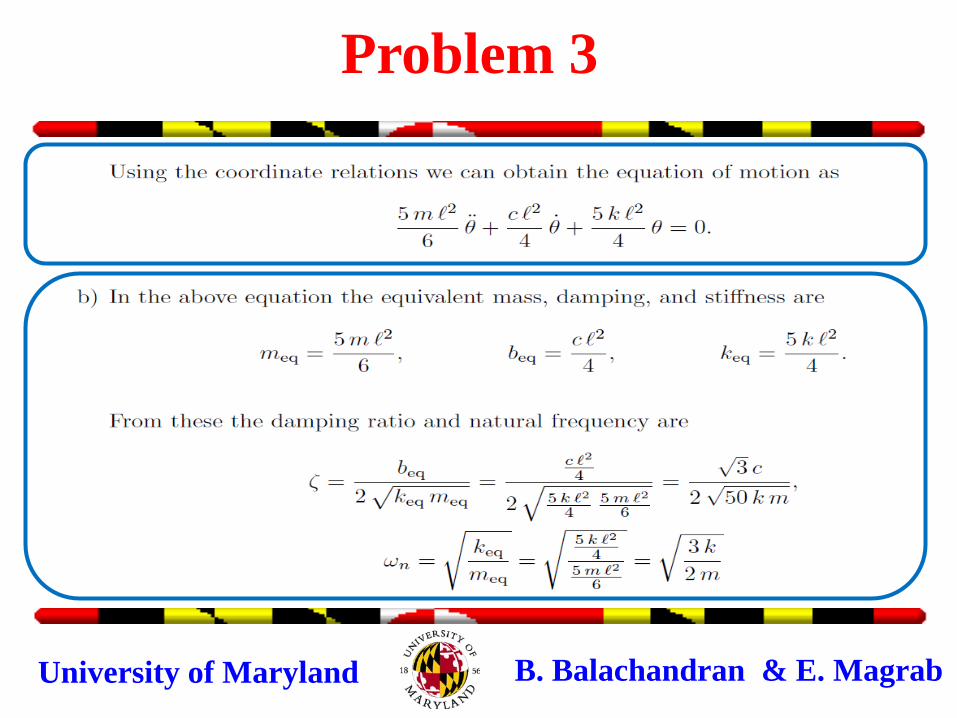
Problem 3

University of Maryland B. Balachandran & E. Magrab
Problem 3

University of Maryland B. Balachandran & E. Magrab
Problem 4
The radius of the pulley is R =100 mmand its moment of inertia is I = 0.1 kg-m2. The mass m = 5 kg, and the springconstant is k = 135 N/m. The cable doesnot slip relative to the pulley. Thecoordinate x measures the displacementof the mass relative to the position inwhich the spring is unstretched.Determine x as a function of time if c =60 N-s/m and the system is released fromrest with x = 0.

University of Maryland B. Balachandran & E. Magrab
Problem 4
Equation of Motion
University of Maryland B. Balachandran & E. Magrab
Problem 4
University of Maryland B. Balachandran & E. Magrab
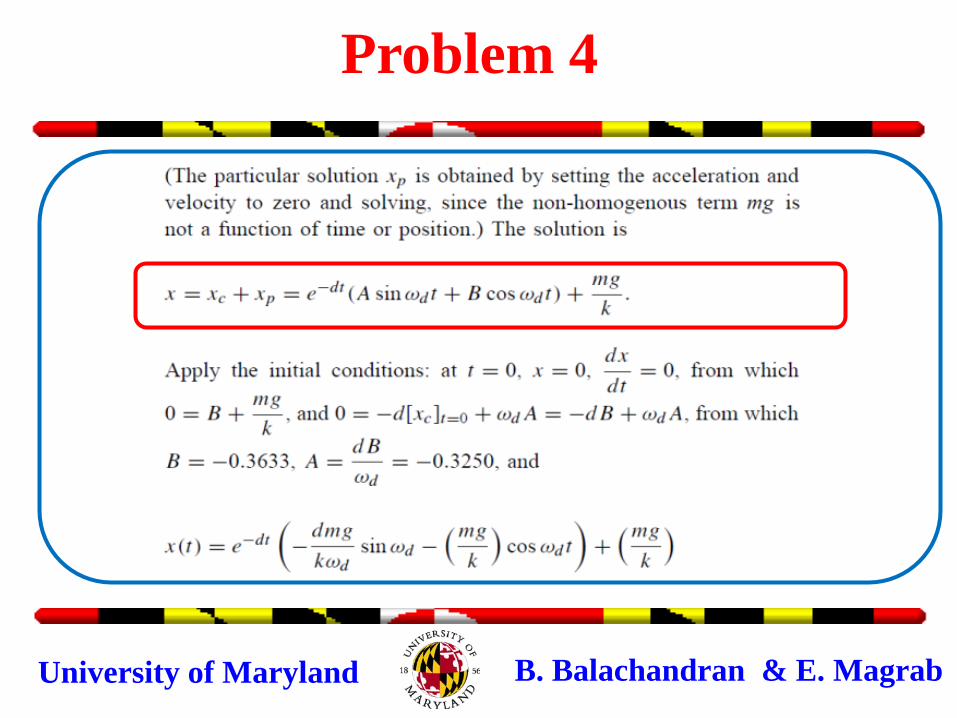
Problem 4
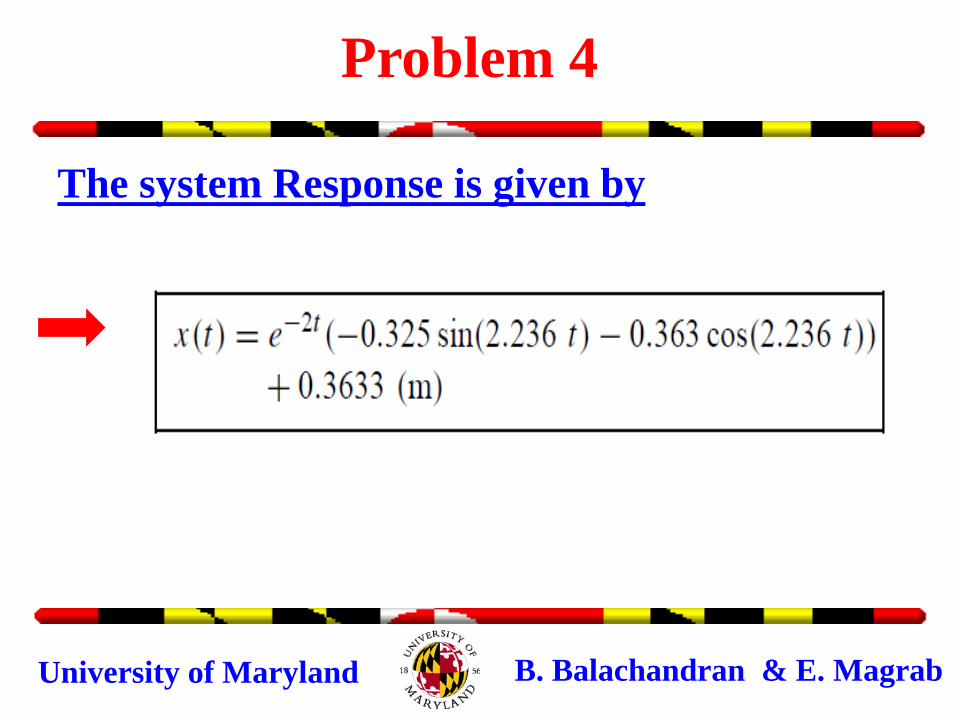
The system Response is given by
University of Maryland B. Balachandran & E. Magrab
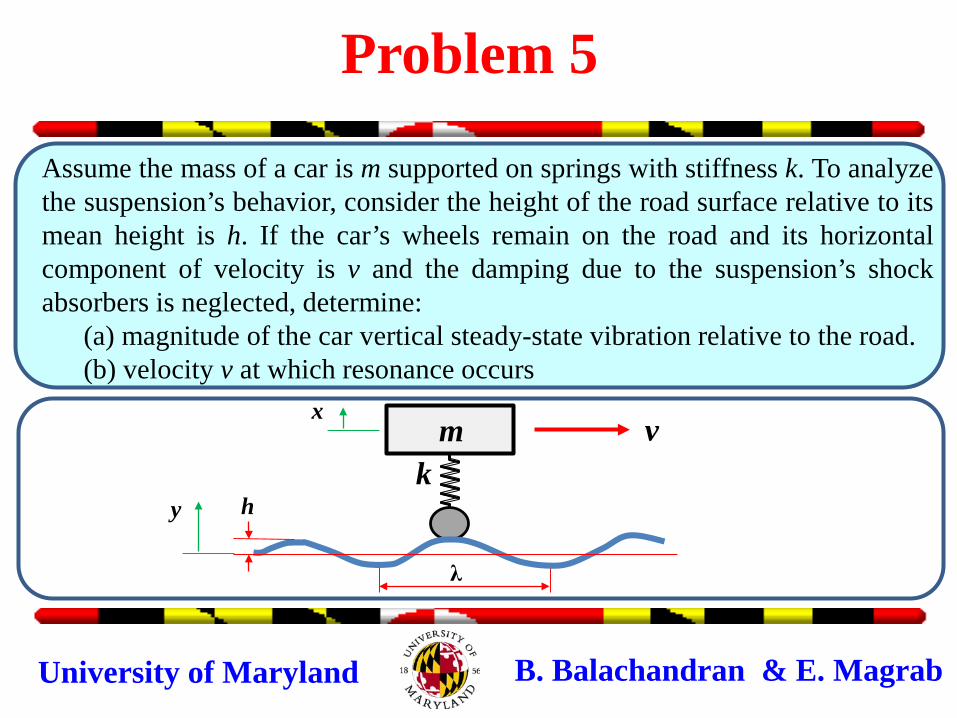
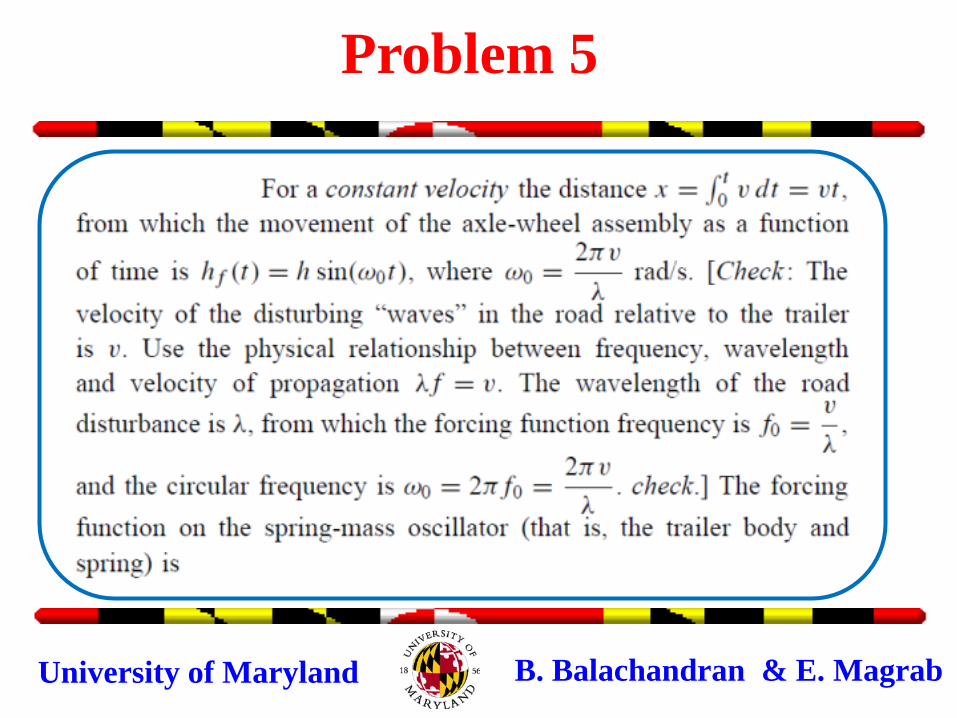
Assume the mass of a car is m supported on springs with stiffness k. To analyzethe suspension’s behavior, consider the height of the road surface relative to itsmean height is h. If the car’s wheels remain on the road and its horizontalcomponent of velocity is v and the damping due to the suspension’s shockabsorbers is neglected, determine:
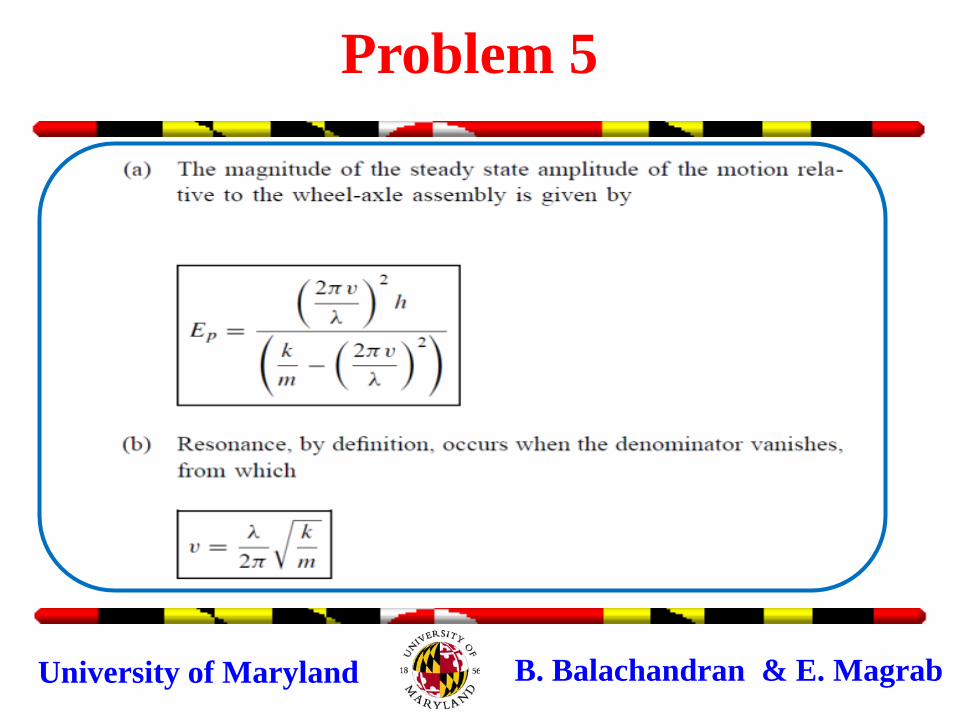
(a) magnitude of the car vertical steady-state vibration relative to the road.(b) velocity v at which resonance occurs
Problem 5
λ
h
vmk
x
y
University of Maryland B. Balachandran & E. Magrab
Problem 5
University of Maryland B. Balachandran & E. Magrab
Problem 5
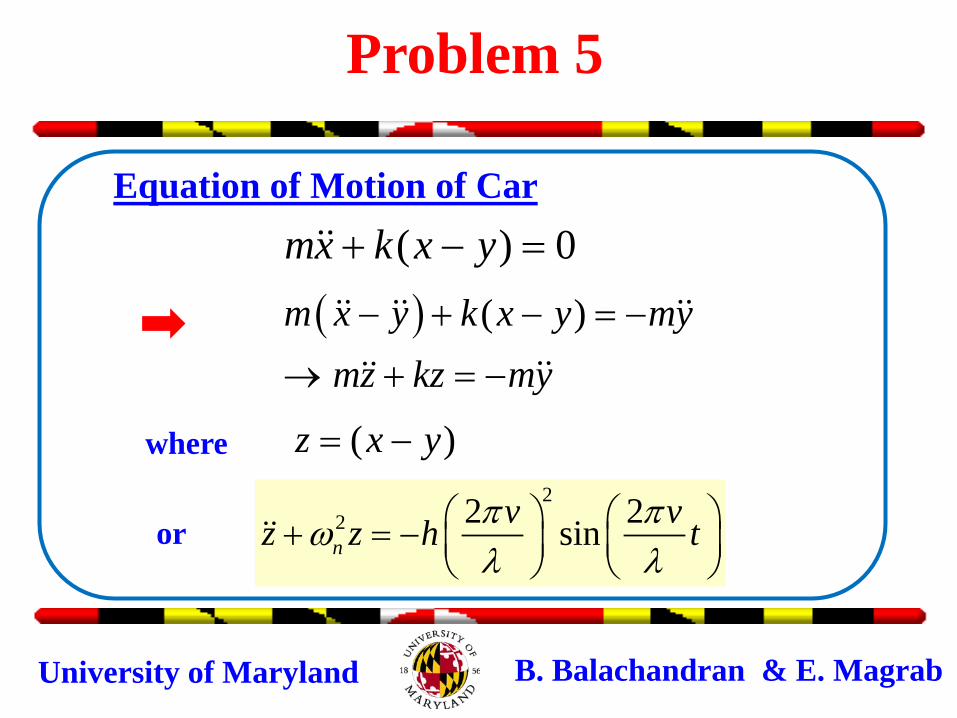
Equation of Motion of Car( ) 0mx k x y+ − =
( ) ( )m x y k x y mymz kz my− + − = −
→ + = −
where ( )z x y= −
or2
2 2 2sinnv vz z h tπ πω
λ λ + = −

University of Maryland B. Balachandran & E. Magrab
Problem 5
University of Maryland B. Balachandran & E. Magrab
Problem 5

University of Maryland B. Balachandran & E. Magrab
Problem 6
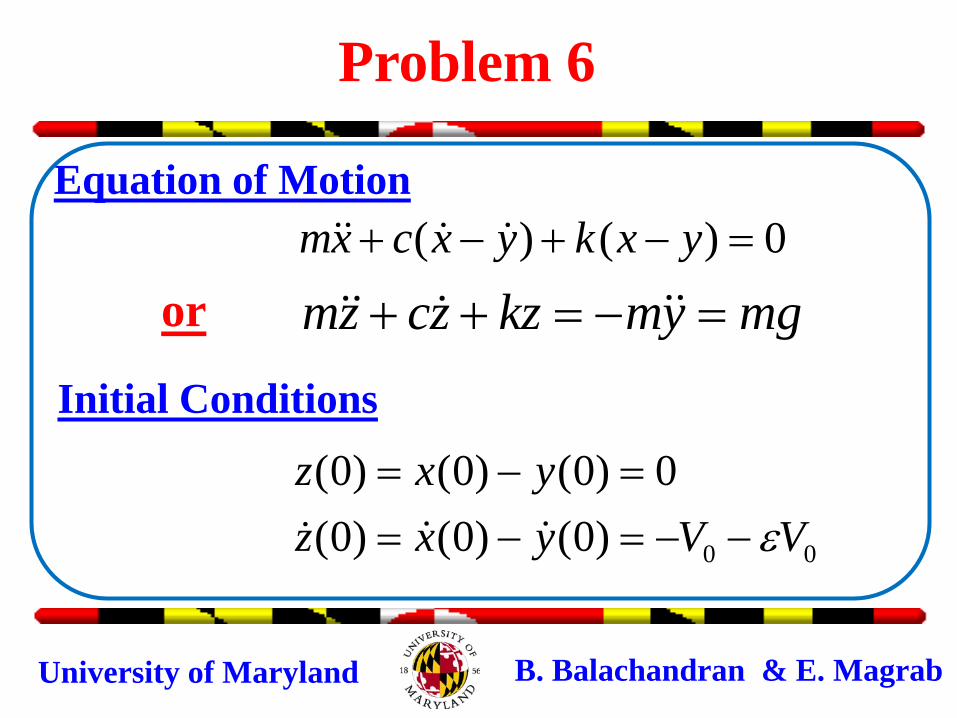
Consider the effect of dropping onto the floor a package thatresides inside a container that has a coefficient of restitution ε.If the container falls from a height h, determine the timeresponse of the motion of the package relative to the container
0 2V gh=
University of Maryland B. Balachandran & E. Magrab
( ) ( ) 0mx c x y k x y+ − + − =
Equation of Motion
or mz cz kz my mg+ + = − =
Initial Conditions
0 0
(0) (0) (0) 0(0) (0) (0)
z x yz x y V Vε
= − == − = − −
Problem 6

University of Maryland B. Balachandran & E. Magrab
m z cz k z mg+ + =
Equation of Motion
has the solutions
Homogeneous Solution
/pz mg k=Particular Solution
General Solution sin( ) /nth d hz Z e t mg kζω ω φ−= + +
( )sinnth h d hz Z e tζω ω φ−= +
Problem 6

University of Maryland B. Balachandran & E. Magrab
Problem 6
At t=0, z(0)=0
0 sin /h hZ mg kφ= +
( ) 20 1 [ sin 1 cos ]h n h hV Zε ω ζ φ ζ φ− + = − + −
0 00, (0)At t z V Vε= = − −
(1)
(2)
Solve eqns. (1) & (2) simultaneously for Zh and ϕh
University of Maryland B. Balachandran & E. Magrab
Problem 6
From eqns. (1) & (2):
( )/ sinh hZ mg k φ= −
( )2
0
1tan1h
nVg
ζφε ω
ζ
−=
+ +
(3)
(4)
and

University of Maryland B. Balachandran & E. Magrab
Problem 6
( )2/ 1 /hZ mg k cζ= − −
( )2
0
1tan1h
nVg
ζφε ω
ζ
−=
+ +
(5)and
ϕh
21b ζ= −
( ) 01 nVa
gε ω
ζ+
= +
2 2c a b= +

University of Maryland B. Balachandran & E. Magrab
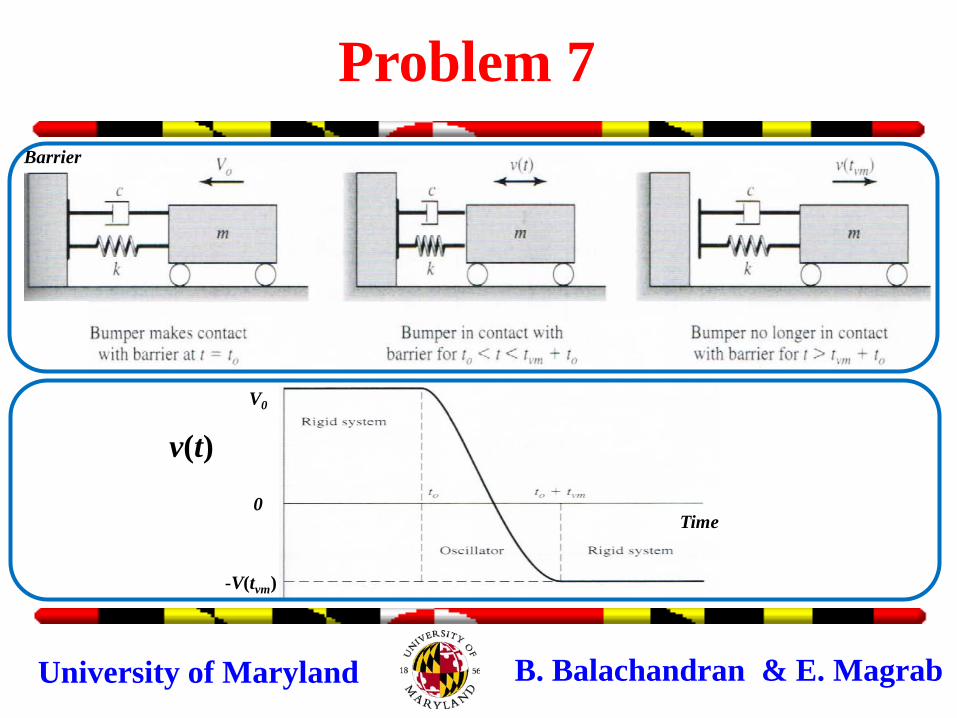
Problem 7
An underdamped single degree-of-freedom systemis travelling with a velocity Vo when its base impactsa stationary rigid wall, as shown in the figure below.Determine:
(a) - the expression of the coefficient ofrestitution ε,
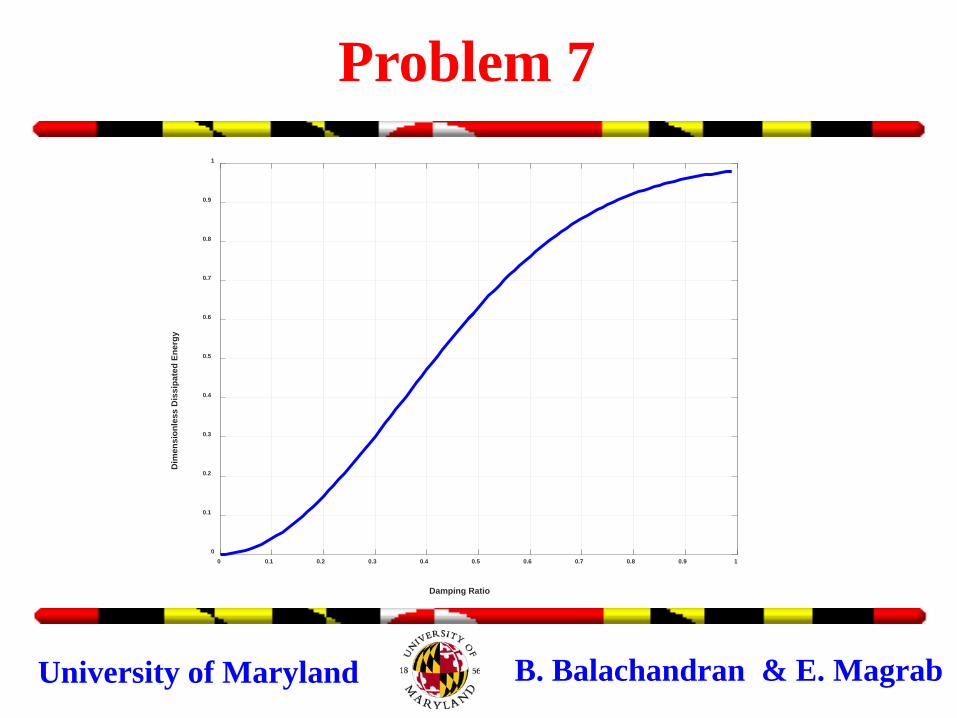
(b) – the amount of energy dissipated duringthe interval 0 < t < tvm.
University of Maryland B. Balachandran & E. Magrab
Problem 7Barrier
Time
v(t)V0
-V(tvm)
0

University of Maryland B. Balachandran & E. Magrab
Problem 7
The bumper remains in contact with the barrier if:
0kx cx+ >
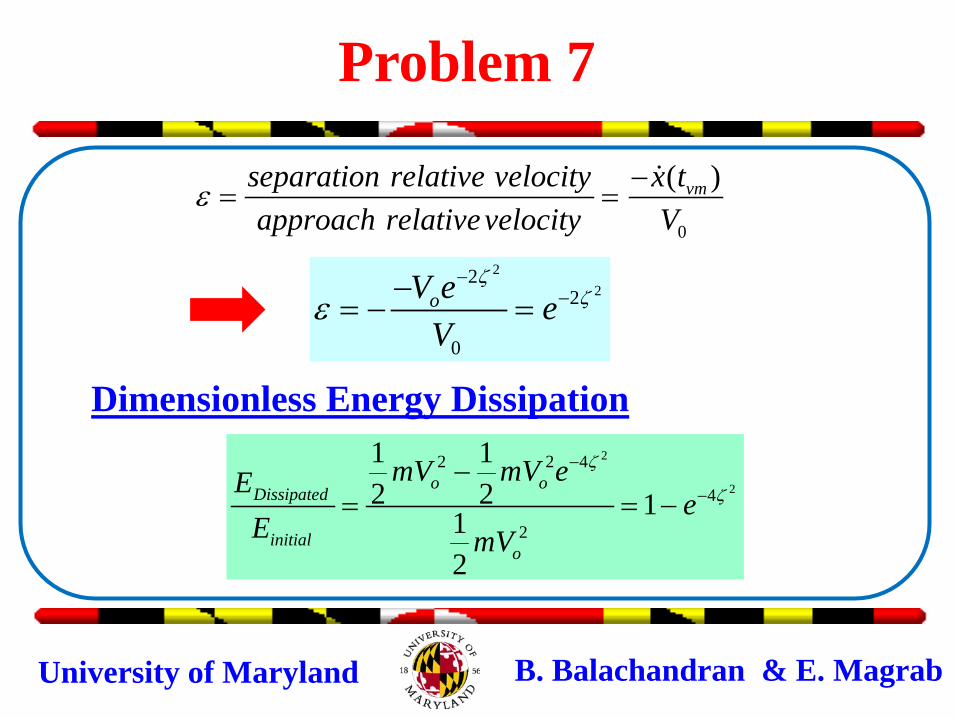
The coeff. of Restitution is given by:
0
( )vmseparation relative velocity x tapproach relativevelocity V
ε −= =

University of Maryland B. Balachandran & E. Magrab
Problem 7
22 0n nx x xζω ω+ + =
Equation of Motion
Homogeneous Solution ( )sinnth h d hx X e tζω ω φ−= +
Xh and ϕh are determined from the initial conditions x(t=0) = (0) and 0( 0)x t V= =
University of Maryland B. Balachandran & E. Magrab
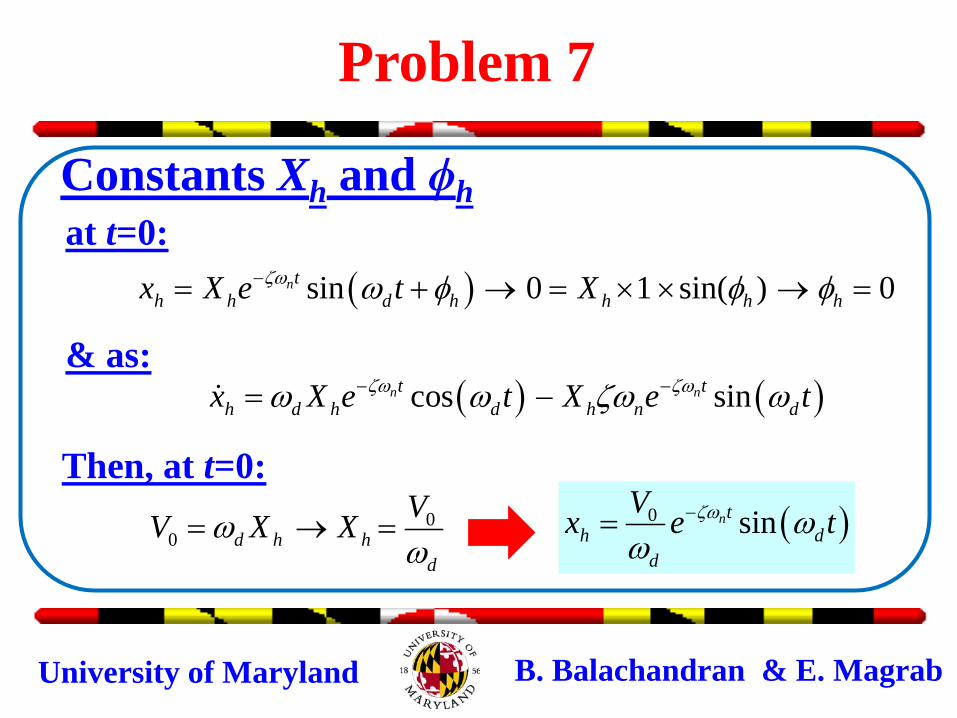
Problem 7
Constants Xh and ϕh
Then, at t=0:
( )sin 0 1 sin( ) 0nth h d h h h hx X e t Xζω ω φ φ φ−= + → = × × → =
& as:( ) ( )cos sinn nt t
h d h d h n dx X e t X e tζω ζωω ω ζω ω− −= −
at t=0:
00 d h h
d
VV X Xωω
= → = ( )0 sinnth d
d
Vx e tζω ωω
−=

University of Maryland B. Balachandran & E. Magrab
Problem 7
The bumper leaves contact with the barrier if:
0 0 02
nkkx cx x x x xc
ωζ
+ = → + = → + =
or: 2
22
2 1tan( ) sin( ) 2 11 2d dt tζ ζ
ω ω ζ ζζ−
= → = −−
( ) 22
2n
vm ox t x V e ζωζ
−= − = −
University of Maryland B. Balachandran & E. Magrab
Problem 7
0
( )vmseparation relative velocity x tapproach relativevelocity V
ε −= =
22
22
0
oV e eV
ζζε
−−−
= − =
Dimensionless Energy Dissipation2
2
2 2 4
4
2
1 12 2 11
2
o oDissipated
initialo
mV mV eEe
E mV
ζ
ζ
−
−−
= = −
University of Maryland B. Balachandran & E. Magrab
Problem 7
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
Damping Ratio
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Dim
ensi
onle
ss D
issi
pate
d En
ergy

University of Maryland B. Balachandran & E. Magrab
Problem 8
University of Maryland B. Balachandran & E. Magrab
Problem 8
Equation of Motion
Solution where
Where also

University of Maryland B. Balachandran & E. Magrab
Problem 8

University of Maryland B. Balachandran & E. Magrab
Problem 9
Derive the equation ofmotion of the spring-masssystem shown in the figure.
Determine the freeresponse of the mass subjected toan initial velocity.

University of Maryland B. Balachandran & E. Magrab
Maxwell modelStandard linear solid model
If k1 ∞ leads to Kelvin-Voigt model
Problem 9

University of Maryland B. Balachandran & E. Magrab
Equation of Motion
&
&
Problem 9

University of Maryland B. Balachandran & E. Magrab
Applying the Laplace Transform, gives
The resulting dimensionless equations, are
Problem 9
University of Maryland B. Balachandran & E. Magrab
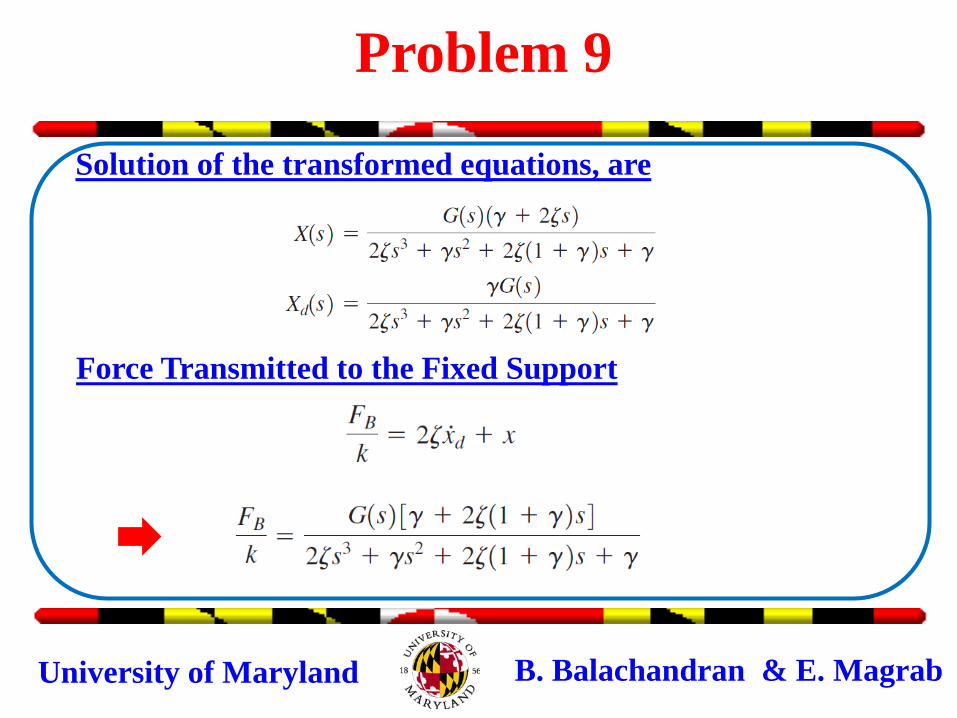
Solution of the transformed equations, are
Force Transmitted to the Fixed Support
Problem 9

University of Maryland B. Balachandran & E. Magrab
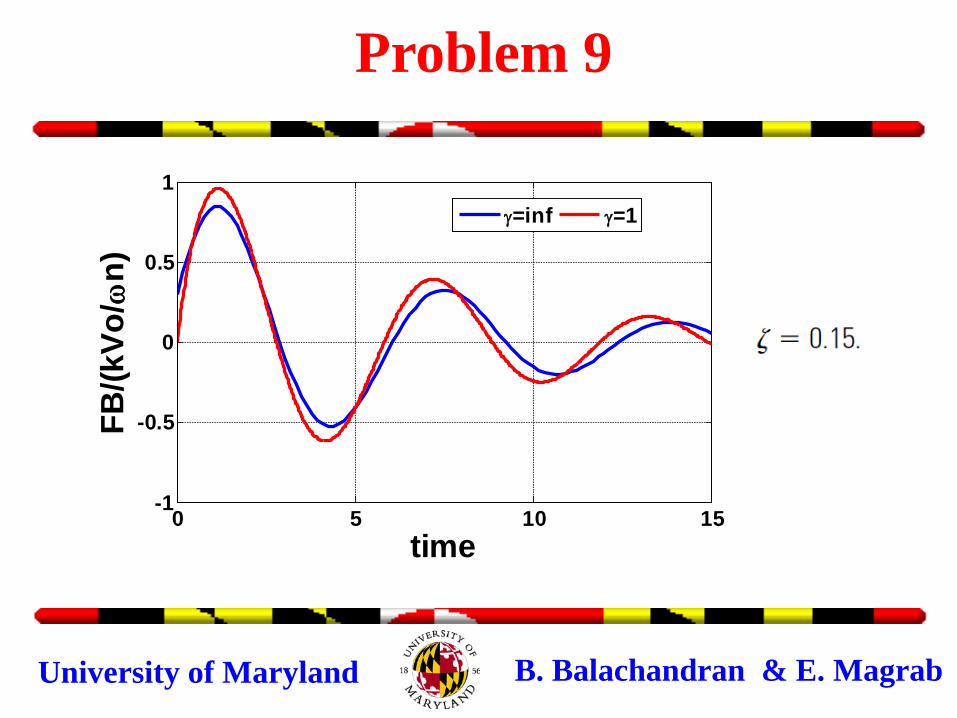
If γ → ∞
Problem 9

University of Maryland B. Balachandran & E. Magrab
Problem 9%********Review of Exam 2***************%***********Problem 6******************syms s t z gF=(1+2*z*s)/(s^2+2*z*s+1);z=0.15;FS=subs(F);ft=ilaplace(FS,s,t)t=linspace(0,15,100);fs=subs(ft);plot(t,fs,'b',T,fgt,'r','linewidth',3)hold on%*************************************
z=0.15; g=1;n=[2*z*(1+g) g];d=[2*z g 2*z*(1+g) g];[R,P,K]=residue(n,d);for ij=1:1000
t=0.015*(ij-1);fgt(ij)=R(1,1)*exp(P(1,1)*t)...
+R(2,1)*exp(P(2,1)*t)...+R(3,1)*exp(P(3,1)*t);
T(ij)=t;end%************************************
plot(T,fgt,'r','linewidth',3)xlabel('t');ylabel('FB/(kVo/\omegan)');grid
University of Maryland B. Balachandran & E. Magrab
0 5 10 15-1
-0.5
0
0.5
1
time
FB/(k
Vo/ ω
n)
γ=inf γ=1
Problem 9

University of Maryland B. Balachandran & E. Magrab
O
θ
m
L
kDerive the equation ofmotion of the pendulumsystem shown in the figure.
Study the stability of thesystem as function of thedamping coefficient c of thedamper.
Problem 10
c
k
x

University of Maryland B. Balachandran & E. Magrab
Problem 10
Kinetic Energy 2 212
T mL θ=
Potential Energy
( ) ( )
( )
2 2
2 2 2
1 1212
U k L x kx mgL cos
k L x mgL kx
θ θ
θ θ
= − + − −
= − − +
Rayleigh Dissipative Function ( )212
D c L xθ = −
University of Maryland B. Balachandran & E. Magrab
Problem 10
Equations of Motion
( ) ( )2mL kL L x mgL cL L xθ θ θ θ+ − − = − −
( ) ( )k L x kx c L xθ θ− − + = −
d L L Ddt θθ θ
∂ ∂ ∂ − = − ∂∂ ∂
d L L Ddt x x x
∂ ∂ ∂ − = − ∂ ∂ ∂
&

University of Maryland B. Balachandran & E. Magrab
Problem 10
Using the Laplace Transform
( ) ( )2 2mL s X kL L X mgL cLs L Xθ θ θ+ − − = − −
( ) ( )k L X kx cs L Xθ θ− − + = −
(1)
(2)
From eqn. (2)
2X cs kL cs k
θ+=
+(3)

University of Maryland B. Balachandran & E. Magrab
Problem 10
From eqns. (1) & (3)( )2 kL mgc k c Xs s s
m mL m m Lθ
− + + = +
( ) ( )3 2 2 2 2 22 0n nn p n ps s sω ωω ω ω ω θ
ζ ζ
+ + − + − =
Let 2 22 n n pc , k / m, g / Lm
ζω ω ω= = =
( )22
kL mgc k c cs ks s sm mL m m cs k
θ θ− + + + = + +

University of Maryland B. Balachandran & E. Magrab
Problem 10
( ) ( )3 2 2 21 11 1 2 0 p
n n
ss s s where ,sω
ζ ζ ω ω+ + −Ω + − Ω = Ω = =
Divide by , the characteristic equation becomes𝝎𝝎𝒏𝒏𝟑𝟑
Putting the characteristic equation into Root Locus form gives
( )( )( )
2 2
2 2
11 21 0 1 0
1
s N sgain
D ss sζ
+ −Ω + = → + =
+ −Ω

University of Maryland B. Balachandran & E. Magrab
Problem 10
-1.4 -1.2 -1 -0.8 -0.6 -0.4 -0.2 0 0.2
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
0.8
0.140.280.420.560.680.8
0.91
0.975
0.140.280.420.560.68
0.91
0.975
0.20.40.60.811.21.4
Root Locus
Real Axis (seconds-1
)
Imag
inar
y A
xis
(sec
onds
-1)
System: sys
Gain: 1.41
Pole: -0.707
Damping: 1
Overshoot (%): 0
Frequency (rad/s): 0.707
MATLAB
w=.5;%w=Ω2
n=[1 0 0.5-w];d=[1 0 1-w 0];rlocus(n,d)
Best Design of damperζ = 1/gain
= 1/1.414 = 0.707

University of Maryland B. Balachandran & E. Magrab
END
Related Documents











