Energy Harvesting Technologies for Wireless Sensors Andrew S Holmes O ti l dS i d t D i G Optical and Semiconductor Devices Group Department of Electrical and Electronic Engineering Imperial College London 17 th World Micromachine Summit

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

Energy Harvesting Technologiesfor Wireless Sensors
Andrew S Holmes
O ti l d S i d t D i GOptical and Semiconductor Devices GroupDepartment of Electrical and Electronic Engineering
Imperial College London
17th World Micromachine Summit1

Wireless Sensor Applications
Wireless sensors very well established in certain market sectors e.g. domestic fuel monitoring
Huge opportunity for expansion in other areas such as:• Machine/process monitoring• Remote monitoring
- inaccessible/hostile environments• Intelligent buildings
HVAC lighting security- HVAC, lighting, security• Medical telemetry
- continuous, unobtrusive monitoring• Product tracking• Product tracking• Ubiquitous computing
- ad hoc sensor networks• Military surveillanceMilitary surveillance
- ‘smart dust’ concept 1 cc wireless sensor node [IMEC]
17th World Micromachine Summit2
Power Sources for Wireless Sensors
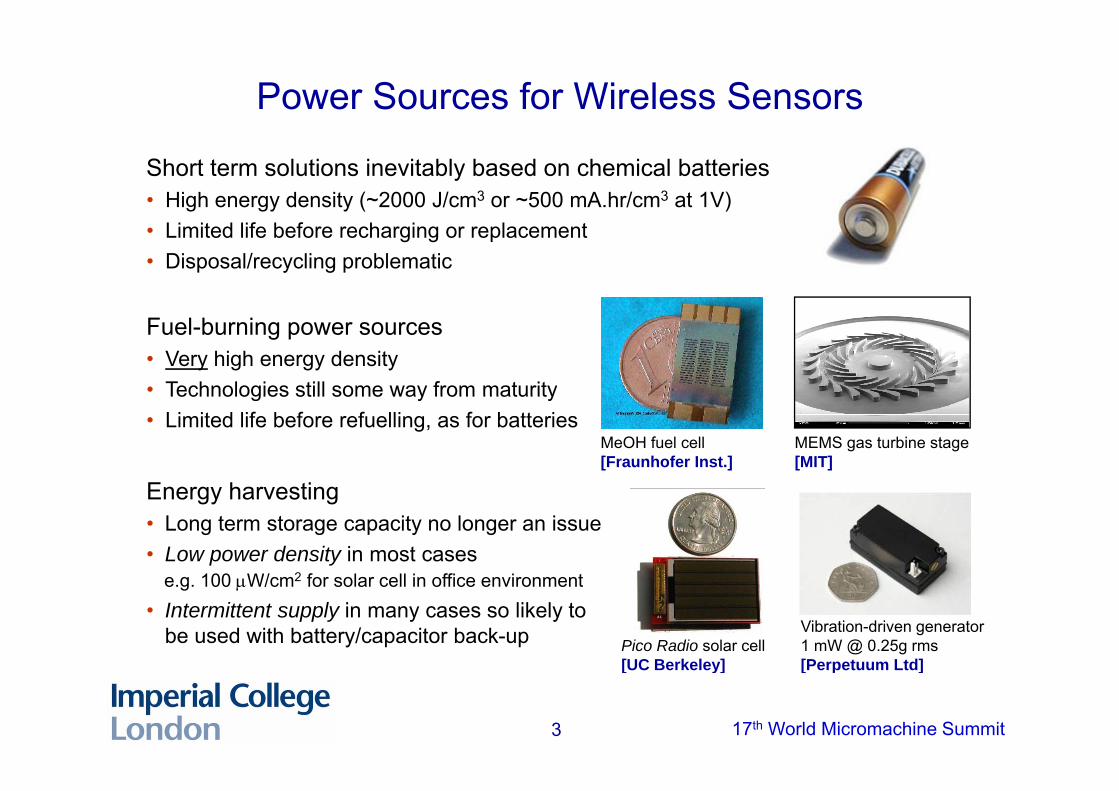
Short term solutions inevitably based on chemical batteries• High energy density (~2000 J/cm3 or ~500 mA.hr/cm3 at 1V)• Limited life before recharging or replacement • Disposal/recycling problematic
Fuel-burning power sources• Very high energy density• Technologies still some way from maturityTechnologies still some way from maturity• Limited life before refuelling, as for batteries
E h ti
MeOH fuel cell[Fraunhofer Inst.]
MEMS gas turbine stage[MIT]
Energy harvesting• Long term storage capacity no longer an issue• Low power density in most cases
100 W/ 2 f l ll i ffi i te.g. 100 W/cm2 for solar cell in office environment• Intermittent supply in many cases so likely to
be used with battery/capacitor back-up Pico Radio solar cell[UC Berkeley]
Vibration-driven generator1 mW @ 0.25g rms [Perpetuum Ltd]
17th World Micromachine Summit3
[UC Berkeley] [Perpetuum Ltd]

Energy Harvesting Technologies
Energy Source Conversion Mechanism
Electromagnetic radiationAmbient lightRadio waves (ambient or targeted)
Photovoltaic cellAntenna / Induction loopRadio waves (ambient or targeted) Antenna / Induction loop
HeatTemperature gradients Thermoelectric device or
H t iHeat engineKinetic energyMovement and vibration ElectrostaticVolume flow (of liquids or gases) Magnetic (induction)
Piezoelectric
Technology of choice will depend strongly on application environment, average power and duty cycle requirements
17th World Micromachine Summit4

Motion-driven Microgenerators
17th World Micromachine Summit5
Inertial Energy Harvesters
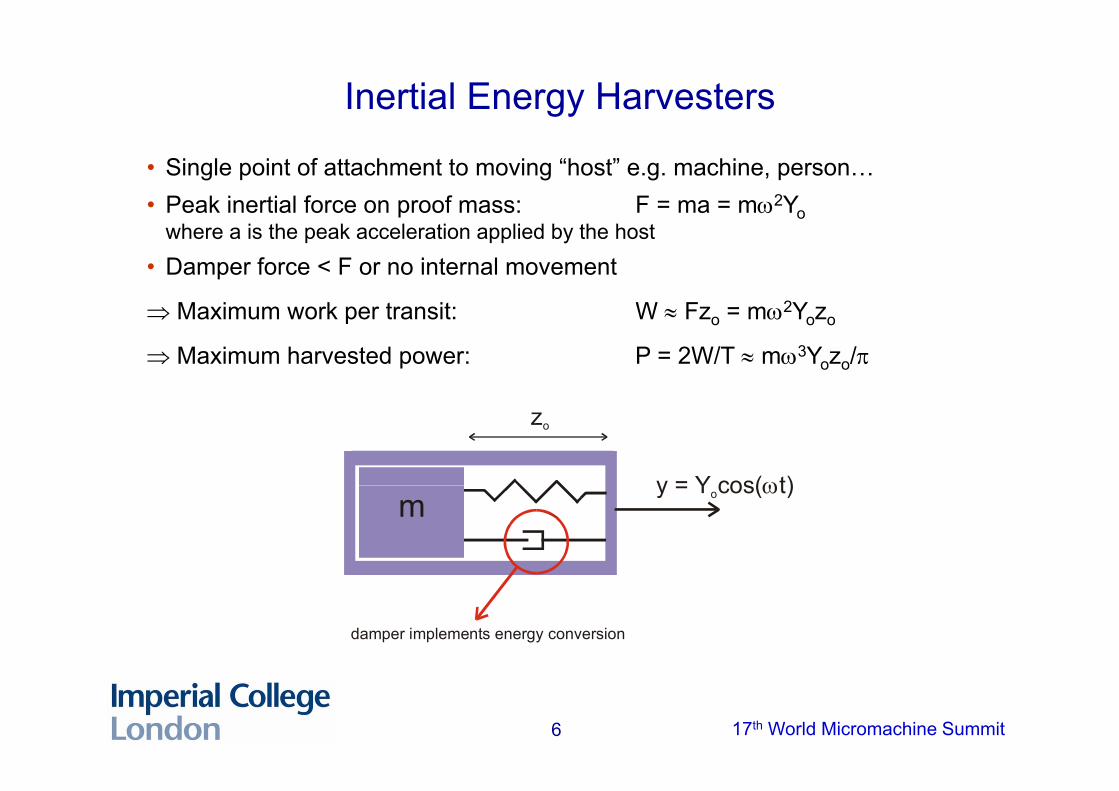
• Single point of attachment to moving “host” e.g. machine, person…• Peak inertial force on proof mass: F = ma = m2Yop o
where a is the peak acceleration applied by the host
• Damper force < F or no internal movement
M i k t it W F 2Y Maximum work per transit: W Fzo = m2Yozo
Maximum harvested power: P = 2W/T m3Yozo/
zo
y = Y cos( t)m
y = Y cos( t)o
damper implements energy conversion
17th World Micromachine Summit6

How Much Power is Available?
100000
Plot assumes: • cubic device with mass occupying half of
volume the other half allowing movement
1000
10000
100000 volume, the other half allowing movement• const. source acceleration amplitude (2Y0)
of 10 m/s2 (equiv to Y0 = 25 cm at 1 Hz)• proof mass with density 20 g/cc
1
10
100
pow
er (m
W)
f = 1 Hzf = 10 Hz sensor node *
p y g
0.01
0.1
1p
watchcellphonelaptop0.001
0.01 0.1 1 10 100 1000
volume (cc)
laptop
* For the sensor node, we are assuming a simple physical sensor (e.g. temp, pressure or motion) with short-range (e.g. within room) wireless link and low data-rate
17th World Micromachine Summit7

Comparison of Architectures
c = t f
excitation frequencyNormalised axes:
c resonant frequency
(resonant devices)
Zl/Y0 = mass travel rangeexcitation amplitude
Power = P (Watts)
m3Y02
cZl/Y0
• Resonant devices better for large generators / small displacements, operated near resonance
• Non-resonant good for large displacements, wide input frequency ranges
Mitcheson P.D., Green T.C., Yeatman E.M., Holmes A.S., “Architectures for vibration-driven micropower generators”, IEEE/ASME J. Microelectromechanical Systems 13(3), (2004), 429-440.
17th World Micromachine Summit8

Machine Powered Applications
• Resonant vibration-driven generators aimed at machine/process monitoring are the most highly developed
• Synchronous electrical machines have predictable vibration frequency, making them ideal for resonant energy harvesters
• Several commercial offerings, e.g.Several commercial offerings, e.g.
PMG17 PMG17 from Perpetuum LtdResonant generator tuned to 2nd harmonic of mains frequency – 100 or 120 Hz
55 mm diameter x 55 mm length55 mm diameter x 55 mm length
4.5 mW output power (rectified DC) at 0.1g acceleration
17th World Micromachine Summit9

Human Powered ApplicationsExcitations are slow, large in amplitude and irregular compared to those generally encountered in machine applicationsencountered in machine applications
• Non-resonant device can win at small generator sizes• Data obtained in collaboration with ETH Zurich (T. von Buren)
von Büren T., Mitcheson P.D., Green T.C., Yeatman E.M., Holmes A.S., Tröster G., “Optimization of inertial micropower generators for human walking motion”, IEEE Sensors Journal, 6(1), (2006), 28-38.
17th World Micromachine Summit10
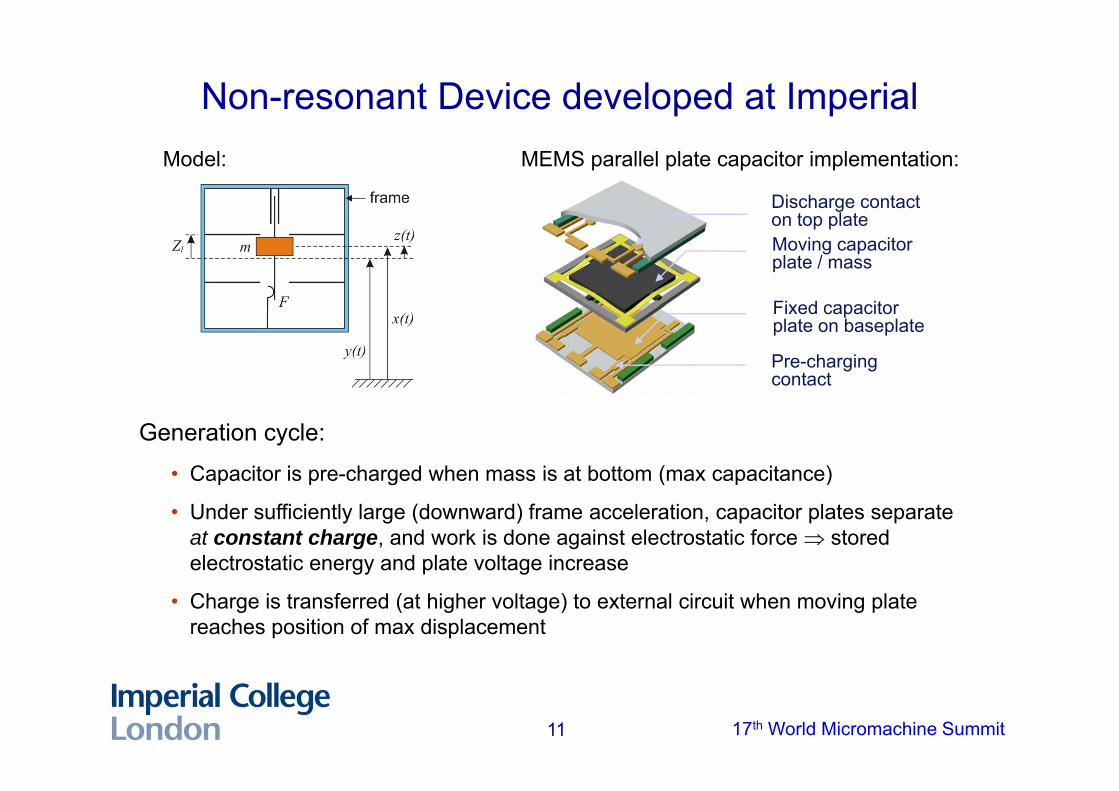
Non-resonant Device developed at Imperial
Discharge contact on top plate
Model: MEMS parallel plate capacitor implementation:
on top plateMoving capacitor plate / mass
Fixed capacitorFixed capacitor plate on baseplate
Pre-charging contact
Generation cycle:
• Capacitor is pre-charged when mass is at bottom (max capacitance)
• Under sufficiently large (downward) frame acceleration, capacitor plates separate at constant charge, and work is done against electrostatic force stored electrostatic energy and plate voltage increase
• Charge is transferred (at higher voltage) to external circuit when moving plate reaches position of max displacement
17th World Micromachine Summit11

Energy Yield per Cycle
SeparationInput phase Output phase
inputinputVCQ outputoutputVCQ
inputoutput
inputouput V
CC
V output
Generated energy:
222
21)(
21
21
21
outputoutputinputoutputoutputoutputinputinputouputoutput VCVVVCVCVCE
Generated energy:
2222inputoutput VV
17th World Micromachine Summit12

Measured Performanceshakergenerator
V lt b h i t i d• Voltage probe has input impedance >1012 and dynamically measures voltage on capacitor
voltage probe
• Net power in this experiment: 2.2 μW
17th World Micromachine Summit13

Motion-driven Harvesters – are they any good?
1.6%
1.8%
EMESPZ
Volume Figure of Merit defined as:
Useful Power Output
1%
1.2%
1.4%
V
PZFoMV = Useful Power Output
AuVol4/3Y03116
Represents ratio of output
0.6%
0.8%
1%
FoM
VRepresents ratio of output power to that of idealised generators on slide 7
As of 2008 best devices
0
0.2%
0.4%As of 2008 best devices achieved only about 2%
Better devices have emerged since but there is still a way
2000 2002 2004 2006 20080
Publication Year
since, but there is still a way to go...
Main issues are: (1) damping/transduction – need to implement stronger dampers; (2) power
Mitcheson P.D., Yeatman E.M., Kondala Rao G., Holmes A.S., Green T.C., “Energy harvesting from human and machine motion for wireless electronic devices”, Proc. IEEE 96(9), (2008), 1457-1486.
( ) p g p g p ; ( ) pconversion electronics – difficult to make efficient; (3) adaptive operation
17th World Micromachine Summit14
, ( ), ( ),

Flow-driven Microgenerators
17th World Micromachine Summit15

Energy Scavenging from Air Flow
Basic concept: wind turbines on a smaller scale (cm-scale or smaller)
E t t ki tiExtract kinetic energy from air flow
K.E. per unit vol in flow = ½V2
K.E. per sec crossing swept area is:P il = ½V2xAV = ½AV3 100
1000
10000
100000
(mW
)
CP = 0.1Betz limit (CP = 0.59)
For 1 cm-dia disc:
Pavail ½V xAV ½AVActual output power is:
P = ½AV3CP0 001
0.01
0.1
1
10
Out
put p
ower
Land vehicle
Flight vehicle
where CP = power coefficient 0.0001
0.001
0.1 1 10 100 1000
Flow speed (m/sec)
HVAC duct
17th World Micromachine Summit16

2-cm dia. Device developed at Imperial
• Ducted turbine with integrated axial-flux permanent magnet generator
• mW output power levels
• Starts at low flow speeds (~3 m/s)
• Applications in HVAC duct sensing and gas pipeline monitoring
5
6
7
er (m
W)
Tunnel
2
3
4
5
or o
utpu
t pow
Tunnel speed
10.0 m/s
0
1
2
0 1000 2000 3000 4000 5000 6000
Gen
erat
o
7.0 m/s
8.0 m/s
9.0 m/s
6.0 m/s
17th World Micromachine Summit17
Rotation speed (RPM)
Comparison with other Flow-driven Harvesters
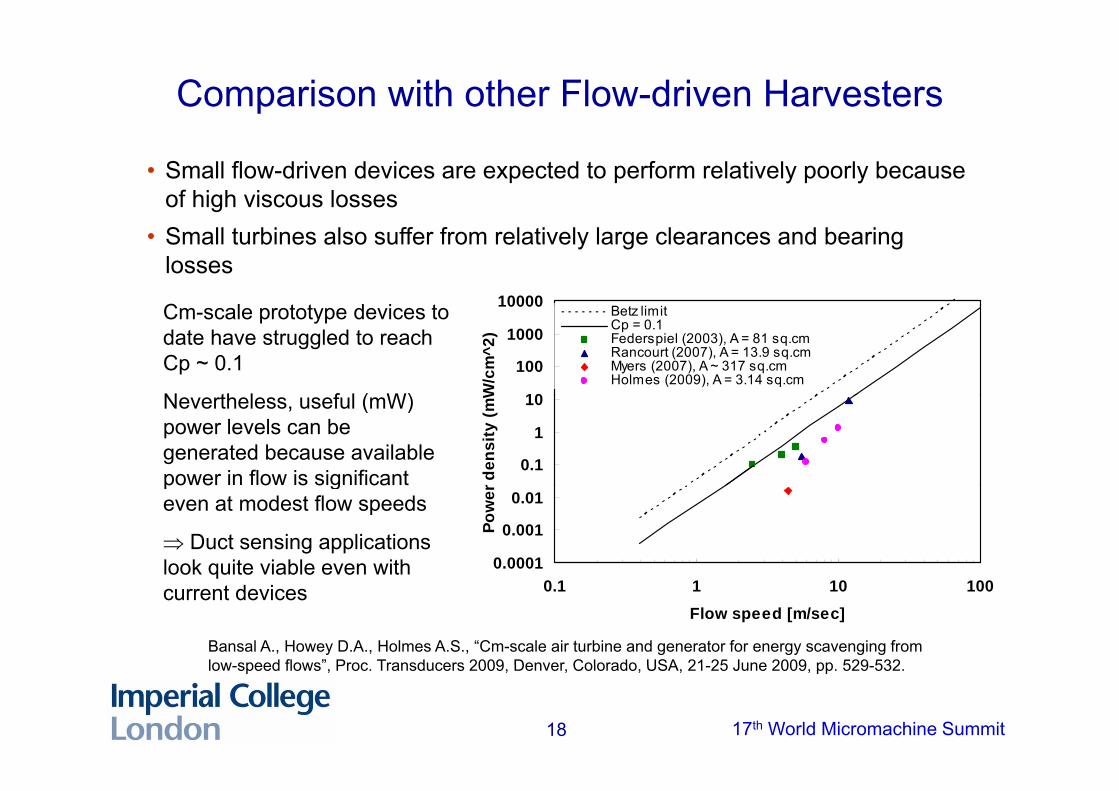
• Small flow-driven devices are expected to perform relatively poorly because of high viscous losses
• Small turbines also suffer from relatively large clearances and bearing losses
10000 B li iC l t t d i t
10
100
1000
10000
W/c
m^2
)
Betz limitCp = 0.1Federspiel (2003), A = 81 sq.cmRancourt (2007), A = 13.9 sq.cmMyers (2007), A ~ 317 sq.cmHolmes (2009), A = 3.14 sq.cm
Cm-scale prototype devices to date have struggled to reach Cp ~ 0.1
N th l f l ( W)
0.1
1
10
r den
sity
(mWNevertheless, useful (mW)
power levels can be generated because available power in flow is significant
0.0001
0.001
0.01Po
wer
po e o s s g caeven at modest flow speeds
Duct sensing applications look quite viable even with
0.1 1 10 100Flow speed [m/sec]
qcurrent devices
Bansal A., Howey D.A., Holmes A.S., “Cm-scale air turbine and generator for energy scavenging from low speed flows” Proc Transducers 2009 Denver Colorado USA 21 25 June 2009 pp 529 532
17th World Micromachine Summit18
low-speed flows , Proc. Transducers 2009, Denver, Colorado, USA, 21-25 June 2009, pp. 529-532.

HVAC Duct Sensor Concept
“Spider” mountedi id d tinside duct
Sensor arrayDistributed network of wireless sensors with peer-to-peer communication to relay data to control centre
Generator / Transceiver
data to control centre
Monitoring of:• Air flow and temp for HVAC controlAir flow and temp for HVAC control• Air-quality e.g. RH; CO2, Ammonia, VOCs
17th World Micromachine Summit19

SSummary
M ti d i h t till f i t l lMotion-driven energy harvesters are still performing at a level some way below what is theoretically achievable
Current performance is adequate for some important applications such p q p ppas machine monitoring, and commercial solutions are available
Improvements in performance will be required before harvesting power from human body motion can become viablefrom human body motion can become viable
Flow-driven devices at cm-scale also have relatively low conversion efficiencies, but the available power in the flow is such that duct sensing applications appear viable
17th World Micromachine Summit

Acknowledgements
Motion-driven Generators:Eric YeatmanEric YeatmanPaul MitchesonTim GreenPeng Miao (now with Oxford Instruments)Bernard Stark (now with University of Bristol)
Flow-driven Generators:Keith Pullen (now with City University, London)Guodong Hong (now with Microsaic Systems plc)Guodong Hong (now with Microsaic Systems plc)Anshu BansalDavid Howey
17th World Micromachine Summit
Contact
Andrew S HolmesProfessor of Micro Electro Mechanical Systems
Optical and Semiconductor Devices GroupDepartment of Electrical and Electronic EngineeringImperial College LondonExhibition Road, London SW7 2BT, UKExhibition Road, London SW7 2BT, UK
Tel: +44 (0)20 7594 6239Fax: + 44 (0)20 7594 6308Fax: + 44 (0)20 7594 6308
Email : [email protected]
Web: http://www3.imperial.ac.uk/opticalandsemidev
17th World Micromachine Summit
Related Documents





![Finale 2001d - [Perpetuum Mobile Soprano Saxophone.MUS]bruceevans.net/asax/perpmob.pdfPERPETUUM MOBILE Johann Strauss Arr. Bruce A. Evans For Sax Quartet SATB & ## 55](https://static.cupdf.com/doc/110x72/5e3e4782fd989666f4181dd4/finale-2001d-perpetuum-mobile-soprano-bruceevansnetasaxperpmobpdf-perpetuum.jpg)




