Energy Cost Minimization for Small Building with Renewable Energy Sources Based on Prediction Control Viktor Ten, Zhandos Yessenbayev, Akmaral Shamshimova, Albina Khakimova Nazarbayev University, NLA Almaty, 2015 Посольство Республики Корея в Казахстане Корейское научно-техническое общество «КАХАК» Казахский национальный университет им. аль-Фараби

Energy Cost Minimization for Small Building with Renewable Energy Sources Based on Prediction Control Viktor Ten, Zhandos Yessenbayev, Akmaral Shamshimova,
Jan 19, 2016
Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

Energy Cost Minimization for Small Building with Renewable Energy Sources Based on Prediction Control
Viktor Ten, Zhandos Yessenbayev, Akmaral Shamshimova, Albina Khakimova
Nazarbayev University, NLA
Almaty, 2015
Посольство Республики Корея в КазахстанеКорейское научно-техническое общество «КАХАК»
Казахский национальный университет им. аль-Фараби

Renewable Energy Test Site at Nazarbayev University, Astana, Kazakhstan

Control Plant is a combination of two subsystems:

Objectives and Implementation
Objective – simultaneously satisfied requirements: maintain the indoor temperature within a comfort zone; satisfy demand of electrical power from the electrical loads; minimize overall consumption of energy sourced by grid; minimize cost of consumed energy.
Implementation algorithm: obtain a control oriented state-space model which captures main thermal and
electric dynamics, activation of the pumps, heating coil and the connection to the grid system identification;
define operating constraints including logic constraints and limits on the system variables;
design an controller with preview capabilities on desired room temperature, electricity tariff, outside temperature and solar radiation: Model Predictive Control (MPC), Control based on Genetic Algorithm.

Electrical subsystem
Load can be powered either directly by the grid (ugrid=1) or by the battery bank through an invertor (ugrid=0)
Current generated by PV is assumed to be linearly proportional to solar radiation(coefficient obtained by a linear regression):
0.1218pv ei E
Q = 800 AhSample at Ts = 10mins

Grey-box model:
Discrete-time model structure:
11 12
21 22 23 24
32 33
42 43 44
( ) ( ) 0 0
( , ) 0 ( ) ( ) 00
c c
c rr r
a u a ua a a aA u u a u a u
a a a
2
0
00
bB
11 12
41 42
0 00 0
e e
D
e e
( 1) ( ), ( ) ( ) ( ) ( )th r c th res thx k A u k u k x k Bu k Ed k ( )
Model is nonlinear convert to a linear system with hybrid dynamics
4 possible combinations of 4 linear models combined into a switched linear system
The coefficients of matrices A, B and D were determined using a simple linear regression
( , ) {0,1} {0,1}c ru u
State vector: , ,[ ]th c out w r out roomx T T T T
Disturbance input vector: [ ]th amb ed T E
Thermal Subsystem

Controller
PV
Battery pack
Thermal model
SoC
Troom
Resistor On/OffPumps On/OffGrid/Battery
βforecast
€
SystemTamb, Ee
Iload
ipv
Uload
Overall system
Discrete states: x(k) = temperatures, state of charge at time k Discrete output: y(k) = temperature tracking error at time k Discrete disturbances: d(k) = outside T, solar radiation, tariff at time k Binary inputs: u(k)= grid/battery switch, pumps on/off, resistor on/off at time k

Optimal control problem: minimize the cost function – analogous to the overall electricity cost
1
, , ,
0
0
1
min ( )
( )
. . ( , , ) , 0,..., 1
, 1,...,
N
l k b e k grid ku
k
k k k k
i V q u
x x k
s t x f x u d k N
x k N
* * *0 1 1* { ... }Nu u u u
The input sequence for optimal behaviour
Stabilization problem: maintain all states of the system within the required ranges:
,
,
5 , 120 ,
3 , 80 ,
3 , 80 ,
20 , 23 ,
30%, 80% .
c out
w
r out
room
T C C
T C C
x T C C
T C C
S
Control Task

Model Predictive Control (MPC)
Theory behind MPC
MPC is based on iterative, finite-horizon optimization of a plant model.
At time t the current plant state is sampled and a cost minimizing control strategy is computed (via a numerical minimization algorithm) for a relatively short time horizon in the future: [t,t+T].
Specifically, an online or on-the-fly calculation is used to explore state trajectories that emanate from the current state and find (via the solution of Euler–Lagrange equations) a cost-minimizing control strategy until time t+T.
Only the first step of the control strategy is implemented, then the plant state is sampled again and the calculations are repeated starting from the new current state, yielding a new control and new predicted state path. The prediction horizon keeps being shifted forward and for this reason MPC is also called receding horizon control.

Model Predictive Control (MPC)
Principles of MPC:
Model Predictive Control (MPC) is a multivariable control algorithm that uses:•an internal dynamic model of the process•a history of past control moves and•an optimization cost function J over the receding prediction horizon, to calculate the optimum control moves.An example of a non-linear cost function for optimization is given by:
without violating constraints (low/high limits)
With:xi = i-th controlled variable (e.g. measured temperature),ri = i-th reference variable (e.g. required temperature),ui = i-th manipulated variable (e.g. control valve),wxi
= weighting coefficient reflecting the relative importance of xi,
wui = weighting coefficient penalizing relative big changes in ui, etc.

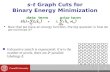
Genetic Algorithm (GA)
GA – a heuristic evolutionary optimization algorithm 1) Representation:
2) Population initialization:
3) Crossover:
4) Mutation:
5) Selection:- parents selection- best individuals selection

Genetic Algorithm (GA)
Selection
Crossover
Mutation
Renew population
Start
Initial population
Fitness evaluation
Stop?
Final population
Finish
Yes
No
Notes: 1) Population generation must
respect the constraints 2) Elitism might be used in
population generation
General procedure of GA

Genetic Algorithm (GA)
GA specifications in MATLAB
Parameter Value
Representation Binary vector u(k) = [ugrid(k), ures(k), uc(k), ur(k)] stacked together for each time k, T = 2880
Fitness function Energy cost as described above
Constraints Non-linear constraints described as above
Initialization Uniformly
Selection function Stochastic uniform (walk through random intervals)
Crossover function Scattered algorithm (mask random binary vector)
Mutation function Gaussian distribution (add a random number with mean 0)
Generation size 500 chromosomes
Elite count 2
Termination criteria Stall generation (=20) + Function tolerance (=1010)

MPC Simulation resultsController: Ts=30 mins, Prediction: 8 hours; N=16; Simulation: 5 days; Ts=10 mins Economy: ~ 3 EUR (European Tariffs)



GA Apply Simulation ResultsController: Ts=30 mins, Prediction: 8 hours; N=16; Simulation: 5 days; Ts=10 mins Economy: ~3 Euro
0 20 40 60 80 100 12019
20
21
22
23
24
time (h)
Room temperature [C]
TRoom
0 20 40 60 80 100 120
0
50
100
time (h)
Other temperatures [C]
Tcout
TroutTwater
Tamb

0 20 40 60 80 100 1200
200
400
time(h)
Solar irradiance [W/m2] and energy price qe [euro cents]
0 20 40 60 80 100 1205
10
15
0 20 40 60 80 100 120-0.5
0
0.5
1
1.5
time(h)
Grid/Battery switch, Ugrid
0 20 40 60 80 100 12054
54.5
55
55.5
56
time(h)
State of charge [%]

0 20 40 60 80 100 120-0.5
0
0.5
1
1.5
time(h)
Collector pump on/off, Uc
0 20 40 60 80 100 120-0.5
0
0.5
1
1.5
time(h)
Radiator pump on/off, Ur
0 20 40 60 80 100 120-0.5
0
0.5
1
1.5
time(h)
Heating coil on/off, Ures

Thank you for attention!
Acknowledgements
Organizers of the seminar and ‘Kahak’ staff:
Пак Иван Тимофеевич, проф., почетный президент НТО «Кахак»,Мун Григорий Алексеевич, проф., президент НТО «Кахак»,Ю Валентина Константиновна, проф., вице-президент НТО «Кахак»,Югай Ольга, зам. отв. секретаря журнала «Известия НТО Кахак», и др.
Research Team and Administration of NLA at NU:
Prof. Alex Tikhonov – Director for Center for Energy Research,Dr. Zhandos Yessenbayev – Senior Researcher,Akmaral Shamshimova – Junior Researcher,Albina Khakimova – Junior Researcher,Dana Sharipova – Research Assistant,Aliya Kusatayeva – Junior Researcher, and others.
Related Documents