ISNN2012 Energy-aware lazy scheduling algorithm for energy-harvesting sensor nodes Marco Severini • Stefano Squartini • Francesco Piazza Received: 3 April 2012 / Accepted: 10 July 2012 / Published online: 27 July 2012 Ó Springer-Verlag London Limited 2012 Abstract The main problem in dealing with energy- harvesting (EH) sensor nodes is represented by the scarcity and non-stationarity of powering, due to the nature of the renewable energy sources. In this work, the authors address the problem of task scheduling in processors located in sensor nodes powered by EH sources. Some interesting solutions have appeared in the literature in the recent past, as the lazy scheduling algorithm (LSA), which represents a performing mix of scheduling effectiveness and ease of implementation. With the aim of achieving a more efficient and conservative management of energy resources, a new improved LSA solution is here proposed. Indeed, the automatic ability of foreseeing at run-time the task energy starving (i.e. the impossibility of finalizing a task due to the lack of power) is integrated within the original LSA approach. Moreover, some modifications have been applied in order to reduce the LSA computational complexity and thus maximizing the amount of energy available for task execution. The resulting technique, namely energy-aware LSA, has then been tested in comparison with the original one, and a relevant performance improvement has been registered both in terms of number of executable tasks and in terms of required computational burden. Keywords Energy-aware approach Lazy scheduling algorithm Task scheduling Computational complexity Energy harvesting Wireless sensor networks 1 Introduction Wireless sensor networks (WSNs) have encountered a big interest among the scientific community in the last decade, and many commercial products are already avail- able on the market. One of the major challenges in certain WSN applications is represented by the capability of self- powering the network sensor nodes by means of suitable energy-harvesting (EH) techniques [1]. This is typically required to reduce the costs related to the usage of batteries or to the connection to the electrical grid. However, the nature of the energy captured from the environment is often inconstant and unpredictable, and therefore, some smart solution is required to efficiently use it for information processing at the sensor level. Two possible ways of intervention can be foreseen on purpose: the optimal dis- tribution of acquired energy to the task to be executed, with the aim of avoiding the overflow of the accumulator in idle phases and task starving under high-activity conditions, and the efficient usage of available energy, in order to maximize the amount of energy dedicated to the tasks. The most relevant energy resources requirement for energy-harvesting sensor nodes (EHNS) devices is due to networking functionalities; therefore, the biggest efforts in the scientific literature have been oriented in the recent past to keep low the computational and energetic burden of such functionalities, by proposing efficient solutions for cryp- tography [2], protocols [3], routing schemes and congestion avoidance [4–6]. Also, the problem of energy resources management has been carefully studied, and different methods have been advanced. Some of them suggest to improve the device efficiency through dynamic power management technique, as the dynamic voltage scaling and the dynamic frequency scaling [7–9], or containing the energy conversion overhead M. Severini S. Squartini (&) F. Piazza 3MediaLabs, Department of Information Engineering, Universita ` Politecnica delle Marche, Ancona, Italy e-mail: [email protected] 123 Neural Comput & Applic (2013) 23:1899–1908 DOI 10.1007/s00521-012-1088-x

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript
ISNN2012
Energy-aware lazy scheduling algorithm for energy-harvestingsensor nodes
Marco Severini • Stefano Squartini •
Francesco Piazza
Received: 3 April 2012 / Accepted: 10 July 2012 / Published online: 27 July 2012
� Springer-Verlag London Limited 2012
Abstract The main problem in dealing with energy-
harvesting (EH) sensor nodes is represented by the scarcity
and non-stationarity of powering, due to the nature of the
renewable energy sources. In this work, the authors address
the problem of task scheduling in processors located in
sensor nodes powered by EH sources. Some interesting
solutions have appeared in the literature in the recent past,
as the lazy scheduling algorithm (LSA), which represents a
performing mix of scheduling effectiveness and ease of
implementation. With the aim of achieving a more efficient
and conservative management of energy resources, a new
improved LSA solution is here proposed. Indeed, the
automatic ability of foreseeing at run-time the task energy
starving (i.e. the impossibility of finalizing a task due to the
lack of power) is integrated within the original LSA
approach. Moreover, some modifications have been applied
in order to reduce the LSA computational complexity and
thus maximizing the amount of energy available for task
execution. The resulting technique, namely energy-aware
LSA, has then been tested in comparison with the original
one, and a relevant performance improvement has been
registered both in terms of number of executable tasks and
in terms of required computational burden.
Keywords Energy-aware approach � Lazy scheduling
algorithm � Task scheduling � Computational complexity �Energy harvesting � Wireless sensor networks
1 Introduction
Wireless sensor networks (WSNs) have encountered a
big interest among the scientific community in the last
decade, and many commercial products are already avail-
able on the market. One of the major challenges in certain
WSN applications is represented by the capability of self-
powering the network sensor nodes by means of suitable
energy-harvesting (EH) techniques [1]. This is typically
required to reduce the costs related to the usage of batteries
or to the connection to the electrical grid. However, the
nature of the energy captured from the environment is often
inconstant and unpredictable, and therefore, some smart
solution is required to efficiently use it for information
processing at the sensor level. Two possible ways of
intervention can be foreseen on purpose: the optimal dis-
tribution of acquired energy to the task to be executed, with
the aim of avoiding the overflow of the accumulator in idle
phases and task starving under high-activity conditions,
and the efficient usage of available energy, in order to
maximize the amount of energy dedicated to the tasks.
The most relevant energy resources requirement for
energy-harvesting sensor nodes (EHNS) devices is due to
networking functionalities; therefore, the biggest efforts in
the scientific literature have been oriented in the recent past
to keep low the computational and energetic burden of such
functionalities, by proposing efficient solutions for cryp-
tography [2], protocols [3], routing schemes and congestion
avoidance [4–6].
Also, the problem of energy resources management has
been carefully studied, and different methods have been
advanced. Some of them suggest to improve the device
efficiency through dynamic power management technique,
as the dynamic voltage scaling and the dynamic frequency
scaling [7–9], or containing the energy conversion overhead
M. Severini � S. Squartini (&) � F. Piazza
3MediaLabs, Department of Information Engineering,
Universita Politecnica delle Marche, Ancona, Italy
e-mail: [email protected]
123
Neural Comput & Applic (2013) 23:1899–1908
DOI 10.1007/s00521-012-1088-x

[10]; others suggest how to adapt the load of the sensor node
[11], but there are also approaches that diversify the nature
of energy sources for the device powering [12, 13], and
others that suggest how to predict the energy availability
[14, 15].
Clearly, since sensor nodes are part of a network, the
same problem can be faced from the overall network per-
spective, which means maximizing the network lifetime
and coverage. However, since a network might be a fairly
complex reality, there are several aspects that require not to
be overlooked. For example, optimizing the nodes place-
ment may help to maximize the harvester performances of
the nodes [16]; also, a proper base station placement may
help in containing the energy needs of the nodes [17].
The optimization process may also involve the redundancy
of the network itself by means of a proper turnover among the
nodes in order to equalize the residual energy of the nodes
while maintaining a proper coverage of the area in terms of
communication and computational load [18–24].
While these examples adopt a run-time approach, Moser
et al. [25, 26] propose an offline optimal scheme for energy
assignment to the tasks relative to each single node. In
general, the more conservative a resource management
policy is, the bigger is the number of operations that can be
accomplished by the single WSN device and therefore the
overall network accordingly. A conservative approach can
be performed by reducing the amount of processing non-
specifically contributing to the device ‘‘throughput’’:
among these, we have the scheduling overhead [27], that is,
the computational complexity associated with the proce-
dure required for optimal task allocation, and the task that
are destined to be violated due to resource starving. This
can be achieved by integrating an offline scheduling pro-
cedure, able to guarantee an optimal resource allocation,
with a run-time control of the effective possibility to
complete a task on the basis of the available resources. This
means adopting a strategy based on the complementary
employment of offline and online scheduling schemes. In
this paper, such an innovative paradigm has been addressed
and a suitable algorithm implemented to verify its effec-
tiveness. The proposed technique has been derived from
the offline solution proposed in [25, 26], namely lazy
scheduling algorithm (LSA), and due to its capability of
predicting the task, energy starving has been named
energy-aware LSA (EA–LSA).
In Sect. 2, a brief review of the LSA approach will be
proposed, whereas Sect. 3 is devoted to the discussion of the
interventions applied to LSA to obtain the innovative
EA–LSA. Section 4 deals with the computer simulations
performed to evaluate the performances of the new algo-
rithm, in comparison with the original one, in terms
of reduced number of violated tasks and reduced com-
putational complexity. Section 5 discusses some further
relevant issues about the proposed technique, and Sect. 6
concludes the paper.
2 Lazy scheduling algorithm
The LSA approach, proposed in [25, 26] as ‘‘clairvoyant’’
algorithm, assumes the knowledge of future availability of
environmental power, described by the function PH(t), and
therefore the energy EH(t1, t2) acquired in the time interval
[t1, t2]. The overall algorithm pseudo-code is reported
below (Algorithm 1).
Jn identifies the generic nth task, and all parameters
related to it are characterized by n as follows:
• an: the arrival time, namely ‘‘phase’’
• dn: the deadline
• fn: the task completion time instant
• sn: the optimal starting time
• en: the required energy for task completion
Other relevant parameters are:
• Q: the task index set
• PS(t): the power absorbed by the device
• PH(t): the acquired power
• pd: the power drain maximum value
• EC(t): the energy stored in the accumulator
• C: the accumulator energy capacity
The optimal starting time sn is defined as the maximum
value between the two quantities s�i and s0i:
s�i ¼ di �ECðaiÞ þ EHðai; diÞ
pd
ð1Þ
s0
i ¼ di �C þ EHðs
0i; diÞ
pd
: ð2Þ
As pointed out in the algorithm pseudo-code, the routine
is able to ensure the optimal allocation of stored energy,
Algorithm 1 Lazy scheduling with pd = constant
Require: maintain a set of indices i 2 Q of all ready
but not finished tasks Ji
Ps(t) ( 0;
while (true)
dj ( min{di : i 2 Q};
calculate sj;
process task Jj with power PS(t);
t ( current time;
if t = ak then add index k to Q; end if
if t = fj then remove index j from Q; end if
if EC(t) = C then PS(t) ( PH(t); end if
if t C Sj then PS(t) ( Pd; end if
endwhile
1900 Neural Comput & Applic (2013) 23:1899–1908
123

but it is not able to guarantee the total absence of task energy
and time starving. In order to face this issue, the LSA
authors [26] suggested to employ a kind of admissibility
test aimed at verifying that the energy required by the
allocated tasks is compatible with the energy attainable
from the environment and with the device processing
capabilities.
Such a test consists in two comparisons, to check the
absence of energy and time starving, respectively: one is
between the total energy demand function A(D) relative to
the task set and the term representing the minimum energy
availability (i.e. the lowest energy variability character-
ization functions), denoted by el; the other is between the
total energy demand function and the energy drain gener-
ated by the device and calculated as pd � D, where D is the
amplitude of the time interval of interest. These compari-
sons are reported as follows:
AðDÞ� elðDÞ þ C ð3Þ
pd � max0�D
AðDÞD
ð4Þ
3 Energy-aware LSA
In this section, the new proposed LSA solution, namely
EA–LSA, will be discussed. As aforementioned, two are
the main innovative contribution w.r.t. the original algo-
rithm: one focused on the energy management and
the other oriented to the reduction in computational
complexity.
3.1 Energy management
The main limitation in (3) is that the curve el establishes the
minimum energy availability from a statistical perspective,
and therefore, it does not provide any guarantee about the
effective acquired amount of energy. It follows that even
though a task satisfies the condition in (3), this does not
mean that energy starving does not occur. If an energy
deficit takes place, since the original routine is not able to
foresee the occurrence of task starving, the task execution
will be accomplished even if it will not be finalized, thus
determining an effective usage of energy but with no useful
processing results. It seems obvious that avoiding per-
forming a task, which is not going to be completed due to
the lack of energy resources, will not affect the deadline
violation for that task, but it allows preserving useful
resources for succeeding tasks.
It can be observed that a task, characterized by the
parameters (ai, di, ei), can be completed if the available
energy (given by the sum of energy acquired during the
task execution and accumulated before the task starting
time) is equal or superior to the energy demand of that
task:
ei�ECðaiÞ þ EHðai; diÞ: ð5Þ
This constraint, preceding the actual management of
each task, gives LSA the property to be EA by expending
resources only on those tasks that can be completed. The
resulting algorithm is reported above (Algorithm 2).
It can be noted that the quantity at the right side of the
inequality expressed in (5) coincides with the numerator of
the fraction in (1); therefore, implementing such an oper-
ation requires at most a comparison and a memory slot to
store the task energy demand value.
3.2 Computational complexity
Besides the task accomplishment, also the operations
related to the algorithm execution ask for computational
resources. Within the LSA, the most relevant burden comes
from the calculation of the optimal starting time si by
means of Eqs. (1–2). Note that this operation is actually
included in the Algorithms 1 and 2 reported above.
The formula expressing the acquired energy, needed for
the calculation of s�i , as indicated in [25] is:
EHðt1; t2Þ ¼Zt1
t2
PHðtÞdt: ð6Þ
By applying (6) to the time interval [ai, di] and taking
the discrete nature of the scheduler into account, we can
derive the following:
Algorithm 2 EA-lazy scheduling with pd = constant
Require: maintain a set of indices i 2 Q of all ready
but not finished tasks Ji
Ps(t) ( 0;
while (true)
dj ( min{di: i 2 Q};
if ej [ (EC(t) ? EH(t, dj)) then remove index j from Q;
else
calculate sj;
process task Jj with power PS(t)
t ( current time;
if t = ak then add index k to Q; end if
if t = fj then remove index j from Q; end if
if EC(t) = C then PS(t) ( PH(t); end if
if t C Sj then PS(t) ( Pd; end if
endif
endwhile
Neural Comput & Applic (2013) 23:1899–1908 1901
123

EHðai; diÞ ¼Xdi
D¼ai
PHðDÞ ð7Þ
In this case, D is the discrete-time variable and PH(D) is
the vector of values describing the available input power,
obtained by sampling the continuous-time stochastic
process PH(t).
To calculate s0
i, it must be noticed that its definition
directly comes from Eq. (8) expressing the balance
between the available energy and the consumed one. By
discretizing such an equation and by means of simple
algebraic manipulation, we can easily obtain Eq. (11) to
calculate the term s0i
ðdi � s0
iÞ � pd ¼ C þ EHðs0
i � diÞ ð8Þ
C ¼Xdi
D¼s0i
pd �Xdi
D¼s0i
PHðDÞ ð9Þ
C ¼Xs0i
D¼di
pd �Xs0i
D¼di
PHðDÞ ð10Þ
C ¼Xs0i
D¼di
ðpd � PHðDÞÞ ð11Þ
The routine used to calculate s0i is therefore:
Routine Search for s0
i
energy_sum ( 0;
for D ( di : -1: s�ienergy_sum ( energy_sum ? pd - PH(D);
if C [ energy_sum then s0
i ( D else break;
Note that it has been chosen to interrupt the loop to yield
s�i observing that si is defined as the maximum value
between s�i and s0
i. Since Eqs. (7) and (11) are applied for
each task and considering that one of the quantities is
always ignored, if it would be possible to calculate only the
quantity of interest, then a significant reduction in com-
putational burden would be achieved.
For what concerns Eq. (7), it can be observed that the
computational resources for calculating s0
i increase as the time
interval [ai, di] or the sampling frequency does. Therefore,
once defined the task set and the device specifications, the
related computational complexity is fixed. It could be possi-
ble to reduce the related computational burden by approxi-
mating (7), but this would also lead to an approximated way
of working of the LSA, which is not advisable.
Regarding Eq. (11), the computational overhead due to
the s0
i term increases as C does and as pd decreases, i.e. as
one drifts away from the ideal case. However, rewriting (1)
and (2) and applying simple algebra, we have:
ðs0i � s�i Þ � pd ¼ ECðaiÞ � C þ EHðai; s0
iÞ ð12Þ
If we indicate with sC the time instant, in correspondence
of which the accumulator reaches the maximum charge,
Eq. (12) can be written as in (13). Here the terms of energy
transferred to the accumulator (14), of energy transferred to
the tasks (15) can be identified. It follows that s0
i can be
expressed as a function of s�i ; as in (16):
ðs0i � s�i Þ � pd ¼ ECðaiÞ � C þ EHðai; sCÞ þ EHðsC; s0
iÞð13Þ
C � ECðaiÞ ¼ EHðai; sCÞ ð14Þ
ðs0i � s�i Þ � pd ¼ EHðsC � s0
iÞ ð15Þ
s0
i ¼ s�i þEHðsC; s
0
iÞpd
ð16Þ
Since the PHðDÞ� 0 8D holds, there exists a quantity s00i
so that:
s00
i ¼ s�i þEHðSC; S
�i Þ
pd
ð17Þ
and therefore the following inequalities hold as well:
s�i � s00i and s
00i � s
0i.
Moving from these premises, Eq. (17) can be general-
ized as follows:
skþ1 ¼ sk þ EHðsk�1; skÞpd
ð18Þ
Equation (18) allows us to determine s0
i through a
process that, starting from s�i , increases its value till
reaching the s0i target. We can reasonably assume that the
available power in the time range [sC, s0
i] is slowly varying.
Now, since such a time range is proportional to the energy
surplus expressed in (15), it seems reasonable assuming
that PH(D) [ 0 over all range [sC, s0i]. It follows that
skþ1 [ sk and thus 9�k so that skþ1 � s0
i8k [ �k. Moreover,
observing that only discrete values are acceptable by our
routine, it is sufficient to interrupt it when the following is
satisfied:
sk þ EHðsk�1; skÞpd
� �¼ sk� �
ð19Þ
The proposed solution limits the calculation of si to the
sole term s�i when there is no energy surplus, thus reducing
the computational overhead. In contrast, when there is
exceeding energy, the routine delays si until the amount of
1902 Neural Comput & Applic (2013) 23:1899–1908
123

energy EHðsk�1; skÞ transferred to the task reduces the task
execution time, at full power, of at least one single time
instant. This means that the delay computation takes place
only if the energy surplus is enough to justify the related
overhead, enforcing a conservative management of energy
in EHSNs.
It must be observed that if the acquired energy in the
time interval [sk; s0
i] is zero, waiting for the time instant s0
i
to launch the task execution does not carry any benefit, and
thus, executing the task at the instant skþ1, which belongs
to the interval [sk; s0i], does not deteriorate the performances
w.r.t. the original solution.
The computational overhead is thus zero if the surplus
energy is low and increases as such a surplus does, that is,
when the amount of acquired energy increases. Conclud-
ing, we can calculate the amount of acquired energy by
using the following:
EHðs�;k�1i ; s�;ki Þ ¼ EHð0; s�;ki Þ � EHð0; s�;k�1
i Þ ð20Þ
Note that the related overhead is limited to two
operations.
4 Computer simulations
4.1 Experimental setup
In order to evaluate the effectiveness of the proposed
solution, some experimental tests have been performed,
putting in comparison the original LSA and the innovative
EA–LSA. All simulations have been conducted on a PC
(32-bit single-threaded processor, Windows 7 OS) and by
means of Matlab 7.12.0 software environment.
The same test condition addressed in [25, 26] has been
considered here. In particular, we specifically refer to the
task set T1 characterized by:
• Thirty tasks periodically located at 300 time instants of
distance, within a scheduling session of 3,000 time
instants.
• The arrival time, the related deadline and the energy
demand of the tasks are uniformly distributed over a
preset range.
• The absolute deadlines are uniformly distributed over a
period of 300 time instants, thus avoiding the overlap of
two T1 consecutive instances.
• The absolute task set energy demand has been normal-
ized w.r.t. the average energy acquired in one period in
order to guarantee the deadline violation.
• The vector of values used to simulate the power harvest
has been generated by selecting the positive values of a
normally distributed random variable with null mean
and unitary variance, while replacing the negative ones
with zeros, in order to have a profile similar to the one
used in [11].
Results relative to task set T2 addressed in [25, 26] are
compliant with those related to task set T1 here discussed
and therefore omitted for the sake of conciseness.
4.2 Test results: deadline violation
The test sessions have been performed by varying the
energy capacity of the accumulator and considering two
case studies for the assigned device power: pd = ? (which
is the only case considered in [25]) and pd = 2. Such a
finite power value is inferior to the maximum value of
acquired power and the minimum attainable with the
admissibility test (approximately equal to 2.5—note that
the admissibility test assumes for all task an arrival time
equal to zero, and therefore it executes an excess estimate
of the minimum device power needed to avoid the task
time starving). It must be underlined that the lower is the
available device power, the more relevant is the anticipa-
tion of the task execution time with respect to the deadline
and thus the bigger is the probability of task concurrence.
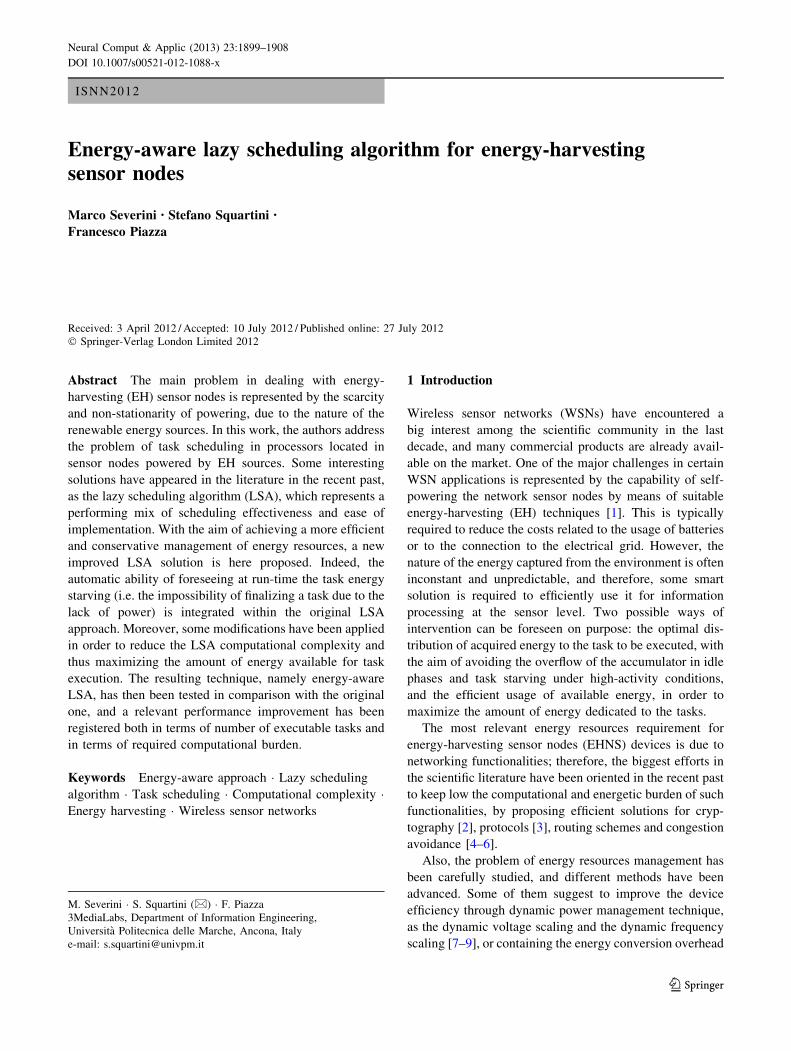
Looking at the results as shown in Figs. 1, 2 and 3, the
following observations can be made first in terms of first
deadline violation time (i.e. the time instant at which the
first deadline violation occurs):
• The two algorithms behave similarly for all C values
and for both device power case studies.
• The existing time difference corresponds to the time
interval between the task selection and its deadline, in
accordance with the fact that LSA waits for deadline
violation, whereas EA–LSA anticipates it by removing
the task when selection takes place.
Then, in terms of deadline violation number, looking at
Figs. 4 and 5, we can observe that:
Fig. 1 Scheduling time preceding the first deadline violation as a
function of the accumulator energy capacity C
Neural Comput & Applic (2013) 23:1899–1908 1903
123
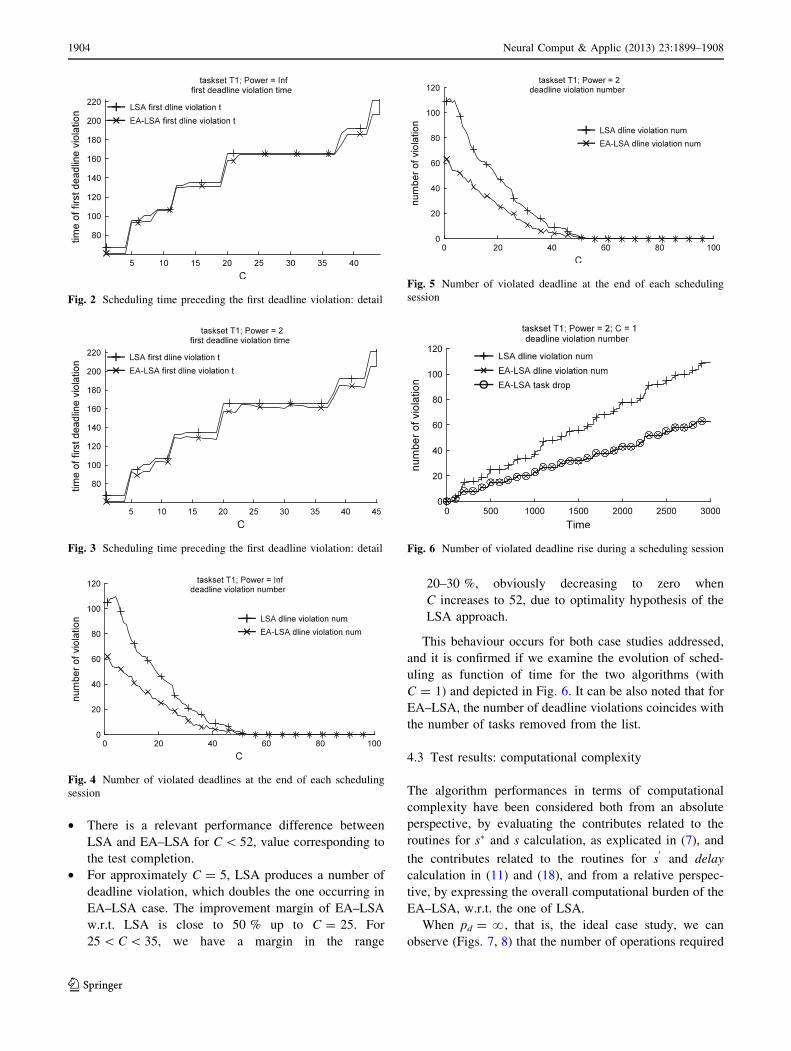
• There is a relevant performance difference between
LSA and EA–LSA for C \ 52, value corresponding to
the test completion.
• For approximately C = 5, LSA produces a number of
deadline violation, which doubles the one occurring in
EA–LSA case. The improvement margin of EA–LSA
w.r.t. LSA is close to 50 % up to C = 25. For
25 \ C \ 35, we have a margin in the range
20–30 %, obviously decreasing to zero when
C increases to 52, due to optimality hypothesis of the
LSA approach.
This behaviour occurs for both case studies addressed,
and it is confirmed if we examine the evolution of sched-
uling as function of time for the two algorithms (with
C = 1) and depicted in Fig. 6. It can be also noted that for
EA–LSA, the number of deadline violations coincides with
the number of tasks removed from the list.
4.3 Test results: computational complexity
The algorithm performances in terms of computational
complexity have been considered both from an absolute
perspective, by evaluating the contributes related to the
routines for s� and s calculation, as explicated in (7), and
the contributes related to the routines for s0
and delay
calculation in (11) and (18), and from a relative perspec-
tive, by expressing the overall computational burden of the
EA–LSA, w.r.t. the one of LSA.
When pd = ?, that is, the ideal case study, we can
observe (Figs. 7, 8) that the number of operations required
Fig. 2 Scheduling time preceding the first deadline violation: detail
Fig. 3 Scheduling time preceding the first deadline violation: detail
Fig. 4 Number of violated deadlines at the end of each scheduling
session
Fig. 5 Number of violated deadline at the end of each scheduling
session
Fig. 6 Number of violated deadline rise during a scheduling session
1904 Neural Comput & Applic (2013) 23:1899–1908
123
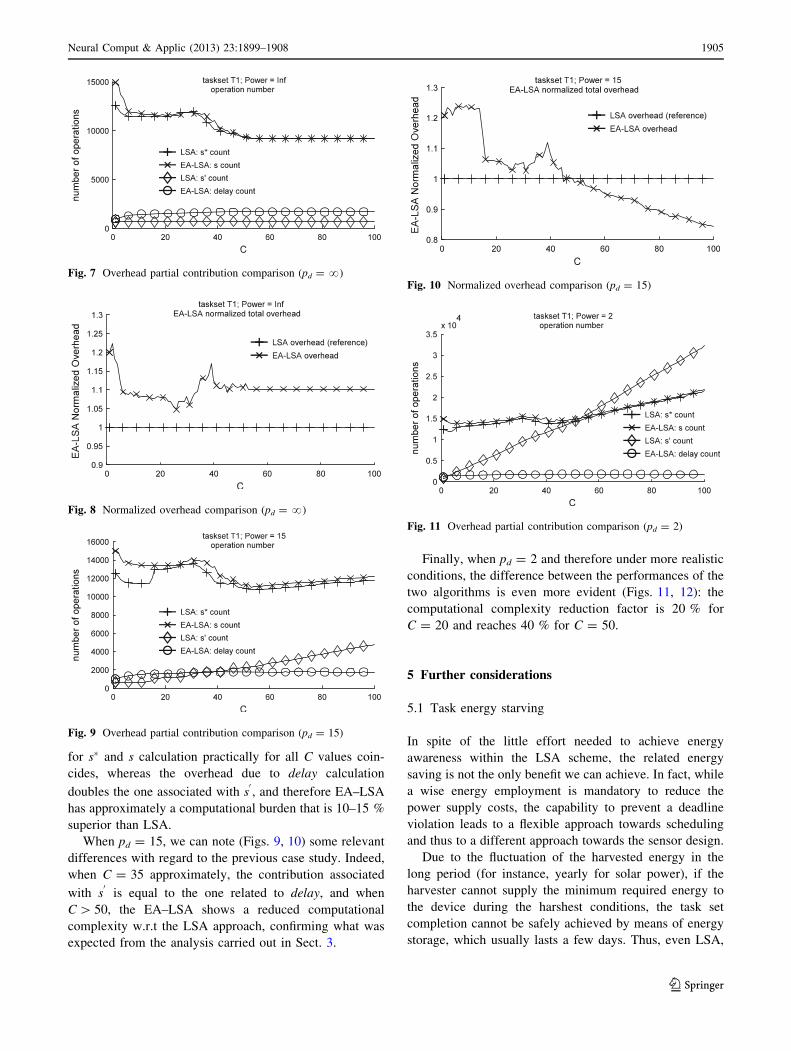
for s� and s calculation practically for all C values coin-
cides, whereas the overhead due to delay calculation
doubles the one associated with s0, and therefore EA–LSA
has approximately a computational burden that is 10–15 %
superior than LSA.
When pd = 15, we can note (Figs. 9, 10) some relevant
differences with regard to the previous case study. Indeed,
when C = 35 approximately, the contribution associated
with s0
is equal to the one related to delay, and when
C [ 50, the EA–LSA shows a reduced computational
complexity w.r.t the LSA approach, confirming what was
expected from the analysis carried out in Sect. 3.
Finally, when pd = 2 and therefore under more realistic
conditions, the difference between the performances of the
two algorithms is even more evident (Figs. 11, 12): the
computational complexity reduction factor is 20 % for
C = 20 and reaches 40 % for C = 50.
5 Further considerations
5.1 Task energy starving
In spite of the little effort needed to achieve energy
awareness within the LSA scheme, the related energy
saving is not the only benefit we can achieve. In fact, while
a wise energy employment is mandatory to reduce the
power supply costs, the capability to prevent a deadline
violation leads to a flexible approach towards scheduling
and thus to a different approach towards the sensor design.
Due to the fluctuation of the harvested energy in the
long period (for instance, yearly for solar power), if the
harvester cannot supply the minimum required energy to
the device during the harshest conditions, the task set
completion cannot be safely achieved by means of energy
storage, which usually lasts a few days. Thus, even LSA,
Fig. 7 Overhead partial contribution comparison (pd = ?)
Fig. 8 Normalized overhead comparison (pd = ?)
Fig. 9 Overhead partial contribution comparison (pd = 15)
Fig. 10 Normalized overhead comparison (pd = 15)
Fig. 11 Overhead partial contribution comparison (pd = 2)
Neural Comput & Applic (2013) 23:1899–1908 1905
123
whose main objective is ensuring the task set completion,
cannot reach this goal under those conditions. It must be
also noted that the maximum energy harvest can exceed ten
times the minimum (at least in the solar power case study
[28]); therefore, if we choose the right harvester to guar-
antee the task set completion during the harshest condi-
tions, since the energy demand remains unchanged, during
the favourable conditions we have an energy surplus that
cannot be used, meaning that in this case the harvester
represents an extra cost.
Now, as EA–LSA can foresee the task energy-starving
occurrence and drop the task that cannot be completed, the
scheduler can be designed to replace that task with a less
demanding one that can be completed instead. What we
suggest is a ‘‘fall-back’’ mechanism that automatically
reduces the load applied to the device. Simply, let us
assume that we can define a high-load task set providing,
for each of the most demanding tasks, a low-load alterna-
tive. Then, we can assign the high-load task set to the
device, to obtain the maximum energy employment, while
the device is free to ‘‘fall back’’ to the low-cost alternative
and each time the energy harvest is lacking. As added
benefit, if the tasks are interdependent, the completion of
the entire set can be achieved further avoiding energy
misspending, by means of a proper task selection.
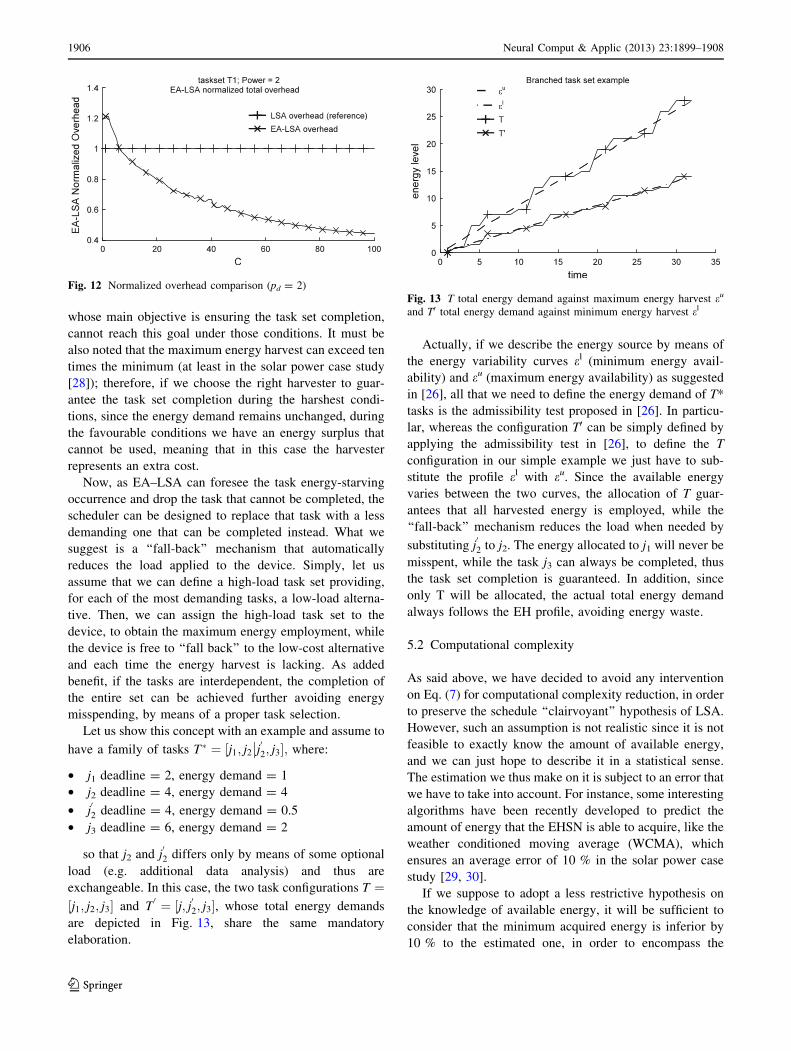
Let us show this concept with an example and assume to
have a family of tasks T� ¼ ½j1; j2 j02; j3�;�� where:
• j1 deadline = 2, energy demand = 1
• j2 deadline = 4, energy demand = 4
• j02 deadline = 4, energy demand = 0.5
• j3 deadline = 6, energy demand = 2
so that j2 and j02 differs only by means of some optional
load (e.g. additional data analysis) and thus are
exchangeable. In this case, the two task configurations T ¼½j1; j2; j3� and T
0 ¼ ½j; j02; j3�, whose total energy demands
are depicted in Fig. 13, share the same mandatory
elaboration.
Actually, if we describe the energy source by means of
the energy variability curves el (minimum energy avail-
ability) and eu (maximum energy availability) as suggested
in [26], all that we need to define the energy demand of T*
tasks is the admissibility test proposed in [26]. In particu-
lar, whereas the configuration T0 can be simply defined by
applying the admissibility test in [26], to define the T
configuration in our simple example we just have to sub-
stitute the profile el with eu. Since the available energy
varies between the two curves, the allocation of T guar-
antees that all harvested energy is employed, while the
‘‘fall-back’’ mechanism reduces the load when needed by
substituting j02 to j2. The energy allocated to j1 will never be
misspent, while the task j3 can always be completed, thus
the task set completion is guaranteed. In addition, since
only T will be allocated, the actual total energy demand
always follows the EH profile, avoiding energy waste.
5.2 Computational complexity
As said above, we have decided to avoid any intervention
on Eq. (7) for computational complexity reduction, in order
to preserve the schedule ‘‘clairvoyant’’ hypothesis of LSA.
However, such an assumption is not realistic since it is not
feasible to exactly know the amount of available energy,
and we can just hope to describe it in a statistical sense.
The estimation we thus make on it is subject to an error that
we have to take into account. For instance, some interesting
algorithms have been recently developed to predict the
amount of energy that the EHSN is able to acquire, like the
weather conditioned moving average (WCMA), which
ensures an average error of 10 % in the solar power case
study [29, 30].
If we suppose to adopt a less restrictive hypothesis on
the knowledge of available energy, it will be sufficient to
consider that the minimum acquired energy is inferior by
10 % to the estimated one, in order to encompass the
Fig. 12 Normalized overhead comparison (pd = 2)
Fig. 13 T total energy demand against maximum energy harvest eu
and T0 total energy demand against minimum energy harvest el
1906 Neural Comput & Applic (2013) 23:1899–1908
123

occurrence of energy-starving situations even in the most
unfavourable situations and guarantee the execution of all
assigned tasks. By using this simple modification, the
employment of available energy will keep the optimal
characteristics given by the flexible scheduling methodol-
ogy here discussed.
Nevertheless, admitting that our knowledge of available
energy is subject to an error, we can propose a simpler way
to calculate Eq. (7), leading to some computational
resources savings. Indeed, assuming that within the time
interval [t1, t2] of length wL, the energy increment is linear
with time as it is equal to E at t2, and we can calculate the
amount of energy acquired in the interval [ai, di], internal
to [t1, t2], by using the following:
EHðai; diÞ ¼E � ðdi � aiÞ
wL
ð21Þ
Since (21) requires at most three operations, it
introduces less computation overhead with respect to
Eq. (7) if the interval [ai, di] is longer than three time
instants, which is what typically happens in LSA
applications.
It can be thus concluded that considering a more real-
istic modelling of the problem allows us to improve the
EA–LSA performances in terms of computational com-
plexity, with a limited impact on the optimal management
of energy.
6 Conclusions
In this paper, an improved version of the LSA, suitable for
applications with EHNS, has been proposed. The new
algorithm has been named energy-aware LSA (EA–LSA)
since, due to its capability of predicting the occurrence of
task energy starving, it allows obtaining a more conser-
vative and efficient management of energy with respect to
the original LSA. Such a result allows concluding that if
a certain percentage of missed tasks is tolerated, the
EA–LSA allows using an energy accumulator with reduced
capacity (and thus price) than the one attainable with LSA
analysis.
Regarding the computational complexity, the number of
operations required by EA–LSA does not present a sig-
nificant dependence on the device characteristics, and the
improvement in performances from this perspective with
respect to the LSA increases as we move towards real
conditions (finite power device) and we augment the
energy capacity assigned to the system. The approximation
introduced to achieve such a result, consisting in detaining
the optimal starting time of task execution, does not have a
negative impact on the overall algorithm performances,
confirming the validity of adopted assumptions.
A further reduction in the computational complexity is
possible by employing an approximated evaluation of
acquired energy. Such a possibility has not been investi-
gated so far and can represent an interesting research
development for the future.
The authors are also actually involved in applying the
EA–LSA algorithm in a real embedded platform for
energy-harvesting sensor nodes (by means of the CBC-
EVAL09 module by CYMBET [31] for energy harvesting
and management and the eZ430-RF2500 Development
Tool by Texas Instrument [32] for information processing
and communications).
References
1. Beeby S, White N (2010) Energy harvesting for autonomous
systems. Artech House Publishers, Boston
2. Hagras EAAA, EI-Saied D, Aly HH (2011) Energy efficient key
management scheme based on elliptic curve signcryption for
wireless sensor networks. In: 28th National radio science con-
ference (NRSC), pp 1–9
3. Sun P, Zhang X, Dong Z, Zhang Y (2008) A novel energy effi-
cient wireless sensor MAC protocol. In: Fourth international
conference on networked computing and advanced information
management (NCM ‘08), pp 68–72
4. Liu Z, Wang L, Zhang Z, Zhang A, Jiang Z (2010) Small world-
based query mechanism. In: International symposium on intelli-
gence information processing and trusted computing (IPTC),
28–29 Oct. 2010, pp 250–253
5. Ting Y, Ang L, Jiaowen W, Zhiheng C, Zhang Q (2011) A fast
fasten control algorithm for wireless sensor networks. In: 3rd
international workshop on intelligent systems and applications
(ISA), 28–29 May 2011, pp 1–4
6. Tao LQ, Qi Yu F (2010) ECODA: enhanced congestion detection
and avoidance for multiple class of traffic in sensor networks. In:
IEEE transactions on consumer electronics, vol 56(3), pp 1387–
1394
7. Liu S, Lu J, Wu Q, Qiu Q (2011) Harvesting-aware power
management for real-time systems with renewable energy. In:
IEEE transactions on very large scale integration (VLSI) systems,
pp 1–14
8. Tuming W, Sijia Y, Hailong W (2010) A dynamic voltage scaling
algorithm for wireless sensor networks. In: 3rd international
conference on advanced computer theory and engineering (IC-
ACTE), pp V1-554–V1-557
9. Ravinagarajan A, Dondi D, Rosing TS (2010) DVFS based task
scheduling in a harvesting WSN for structural health monitoring.
In: Design, automation and test in Europe conference and exhi-
bition (DATE), pp 1518–1523
10. Liu S, Lu J, Wu Q, Qiu Q (2010) Load-matching adaptive task
scheduling for energy efficiency in energy harvesting real-time
embedded systems. In: ACM/IEEE international symposium on
low-power electronics and design (ISLPED), pp 325–330
11. Renner C, Meier F, Turau V (2012) Policies for predictive energy
management with supercapacitors. In: IEEE international con-
ference on pervasive computing and communications workshops
(PERCOM workshops), pp 314–319
12. Carli D, Brunelli D, Benini L, Ruggeri M (2011) An effective
multi-source energy harvester for low power applications. In:
Design, automation and test in Europe conference and exhibition
(DATE), pp 1–6
Neural Comput & Applic (2013) 23:1899–1908 1907
123

13. Huang C, Chakrabartty S (2011) A hybrid energy scavenging
sensor for long-term mechanical strain monitoring. In: 2011 IEEE
international symposium on circuits and systems (ISCAS),
pp 2473–2476
14. Lu J, Liu S, Wu Q, Qiu Q (2010) Accurate modeling and pre-
diction of energy availability in energy harvesting real-time
embedded systems. In: International green computing conference,
pp 469–476
15. Sharma N, Gummeson J, Irwin D, Shenoy P (2010) Cloudy
computing: leveraging weather forecasts in energy harvesting
sensor systems. In: 7th annual IEEE communications society
conference on sensor mesh and ad hoc communications and
networks (SECON), pp 1–9
16. Misra S, Majd NE, Huang H (2011) Constrained relay node
placement in energy harvesting wireless sensor networks. In:
IEEE 8th international conference on mobile adhoc and sensor
systems (MASS), pp 25–34
17. Wang F, Wang D, Liu J (2012) EleSense: elevator-assisted
wireless sensor data collection for high-rise structure monitoring.
In: Proceedings of the IEEE INFOCOM, pp 163–171
18. Zhao Y, Li F (2012) On maximizing the lifetime of wireless
sensor networks using virtual backbone scheduling. In: IEEE
transactions on parallel and distributed systems, pp 1528–1535
19. Zairi S, Zouari B, Niel E, Dumitrescu E (2012) Nodes self-
scheduling approach for maximizing wireless sensor network
lifetime based on remaining energy. In: Wireless sensor systems,
IET, pp 52–62
20. Toyoda S, Sato F (2012) Energy-effective clustering algorithm
based on adjacent nodes and residual electric power in wireless
sensor networks. In: 26th International conference on advanced
information networking and applications workshops (WAINA),
pp 601–606
21. Fateh B, Manimaran G (2010) Energy-aware joint scheduling of
tasks and messages in wireless sensor networks. In: IEEE inter-
national symposium on parallel and distributed processing,
workshops and Phd forum (IPDPSW), pp 1–4
22. Dai L, Shen Z, Chang Y (2010) DTSWC: a task scheduling
algorithm in wireless sensor networks with co-processor based on
divisible load theory. In: International conference on computer
and communication technologies in agriculture engineering
(CCTAE), vol 3, pp 494-497
23. Jin Y, Wei D, Gluhak A, Moessner K (2010) Latency and energy-
consumption optimized task allocation in wireless sensor networks.
In: IEEE wireless communications and networking conference
(WCNC), pp 1–6
24. De Pauw T, Verstichel S, Volckaert B, De Turck F, Ongenae V
(2010) Resource-aware scheduling of distributed ontological
reasoning tasks in wireless sensor networks. In: IEEE interna-
tional conference on sensor networks, ubiquitous, and trustworthy
computing (SUTC), pp 131–137
25. Moser C, Brunelli D, Thiele L, Benini L (2006) Lazy scheduling
for energy-harvesting sensor nodes. In: Fifth working conference
on distributed and parallel embedded systems, DIPES, pp 125–
134, Braga, Portugal, October 11–13 2006
26. Moser C, Brunelli D, Thiele L, Benini L (2007) Real-time
scheduling for energy harvesting sensor nodes. Real Time Syst
37(3):233–260
27. Chetto M, Zhang H (2010) Performance evaluation of real-time
scheduling heuristics for energy harvesting systems. In: The 2010
international symposium on energy-aware computing and net-
working (EaCN-2010), Hangzhou, China
28. Kruger D, Fischer S, Buschmann C (2009) Solar power
harvesting—modeling and experiences, vol 8. GI/ITG KuVS
Fachgesprach Drahtlose Sensornetze
29. Bergonzini C, Brunelli D, Benini L (2009) Algorithms for har-
vested energy prediction in batteryless wireless sensor networks.
In: 3rd international workshop on advances in sensors and
interfaces (IWASI 2009)
30. Piorno JR, Bergonzini C, Atienza D, Rosing TS (2009) Prediction
and management in energy harvested wireless sensor nodes. In:
1st international conference on wireless communication, vehic-
ular technology, information theory and aerospace and electronic
systems technology (wireless VITAE)
31. Cymbet Corporation, CBC-EVAL-09 Data Sheet (2011) [Online]
URL: www.cymbet.com/pdfs/DS-72-13.pdf
32. Texas Instruments (2009) eZ430-RF2500 development tool user’s
guide. [Online] URL: www.ti.com/lit/ug/slau227e/slau227e.pdf
1908 Neural Comput & Applic (2013) 23:1899–1908
123
Related Documents











