EMLAB 1 Chapter 1. Vector analysis

EMLAB 1 Chapter 1. Vector analysis. EMLAB 2 Mathematics -Glossary Scalar : a quantity defined by one number (eg. Temperature, mass, density, voltage,...
Dec 24, 2015
Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript
EMLAB
1
Chapter 1.Vector analysis

EMLAB
2
Mathematics -Glossary• Scalar : a quantity defined by one number (eg. Temperature, mass, density, voltage, ... )
• Vector : a quantity defined by a set of numbers. It can be represented by a magnitude and a direction. (velocity, acceleration, …)
• Field : a scalar or vector as a function of a position in the space. (scalar field, vector field, …)
Scalar field Vector field

EMLAB
3
Scalar field Vector field

EMLAB
4
Vector algebra
BABA
BABABAs
CBACBA
ABBA
ssrr
srr
)()())((
)()(
• Unit vector : ‘^’ means the unit vector.
A
AAAAA
ˆ,,ˆA A
•Components of a vector
zyx
Azyx
ˆA,ˆA,ˆA
AAA,ˆAˆAˆA
zyx
2z
2y
2xzyx
AAA
A

EMLAB
5Products of vectors
• scalar product : the result of a scalar product is a scalar.
ABBA
BABA
ABcos
A
B
• vector product : the result of a vector product is a vector which is normal to the original vectors.
ABBA
BAnBA
ABsinˆ
x
yz
The magnitude of C is the area of a parallelogram made by two vectors A and B.
EMLAB
6
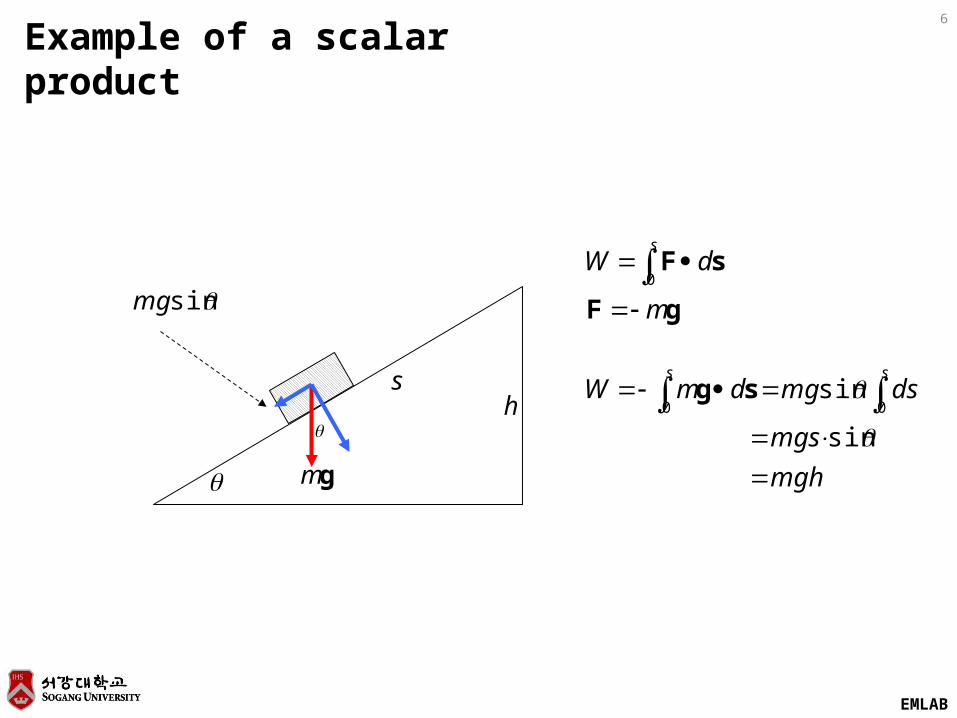
Example of a scalar product
gm
sinmg
hs
gF
sF
m
dWs
0
mgh
mgs
dsmgdmWss
sin
sin00
sg

EMLAB
7
yz
x
ˆˆ
ˆ
)(ˆ)(ˆ)(ˆ
ˆˆˆ
ˆˆˆ
xyyxzxxzzyzy
yx
yx
zx
zx
zy
zy
zyx
zyx
BABABABABABA
BB
AA
BB
AA
BB
AA
BBB
AAA
zyx
zyx
zyx
BA
Calculation of vector products
yz
x
ˆˆ
ˆ (+)
(+)
(+)
(-)
(-)(-)
(+) (-) (+)
• If rotated in the direction of x,y,z, the sign of the result is (+). If rotated in the opposite direction, the sign is (-).
• The same rule applied to other coordinate systems with change of unit vectors.
ˆˆ
r
ˆˆ
ˆ
z
(+)
(+)
(+)
(-)
(-)(-)
ˆˆ
r
ˆˆ
ˆ
z
(+)
(+)
(+)
(-)
(-)(-)
yzxzxyzyx ˆˆˆ,ˆˆˆ,ˆˆˆ
EMLAB
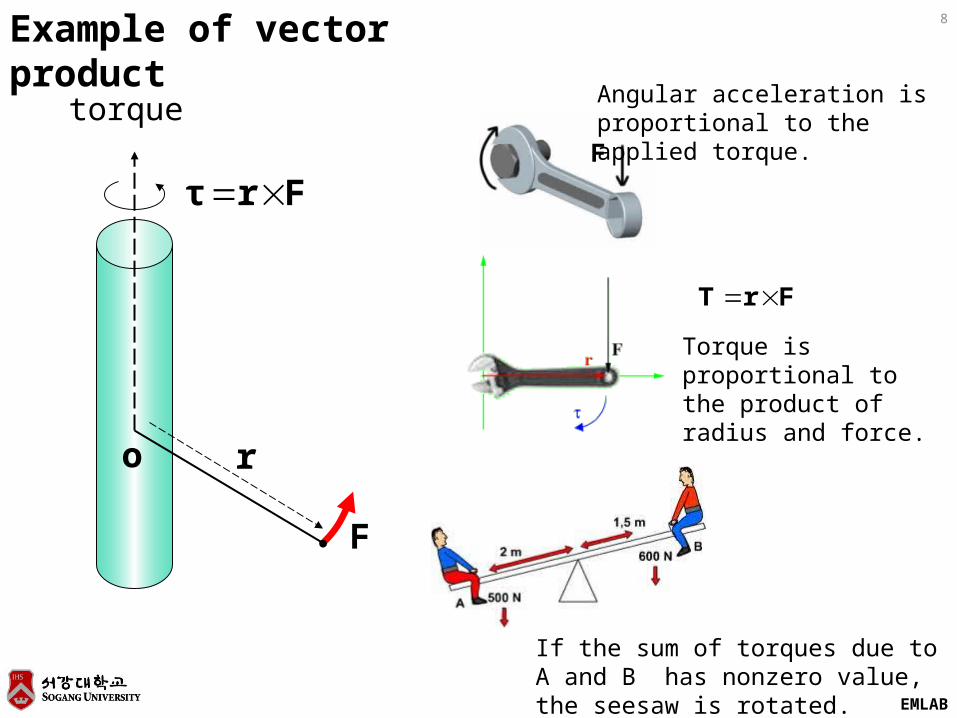
8Example of vector product
ro
F
Frτ
torque
FrT
F
Angular acceleration is proportional to the applied torque.
Torque is proportional to the product of radius and force.
If the sum of torques due to A and B has nonzero value, the seesaw is rotated.

EMLAB
9Vector identity
CBACBA
)()(
zyx
zyx
zyx
CCC
BBB
AAA
A
B
C • The order of operators and can be inter-
changed.
• The scalar triple product is equal to the volume of the parallelogram defined by the three vectors.
• Scalar triple product
The result is the same despite the change of the order of • and x interchanged.
EMLAB
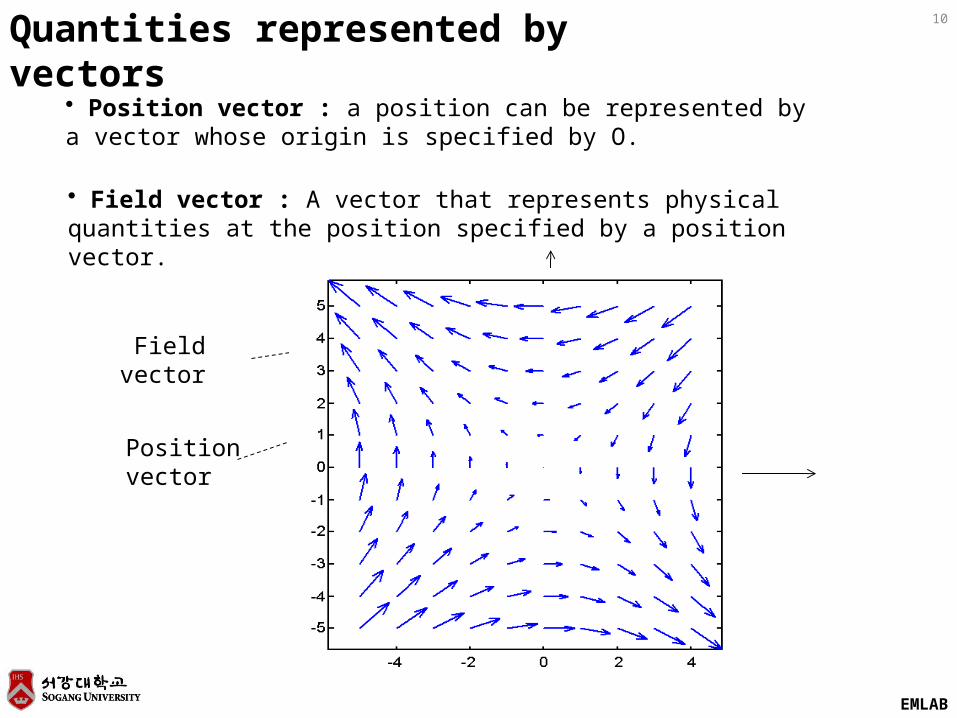
10Quantities represented by vectors
• Position vector : a position can be represented by a vector whose origin is specified by O.
• Field vector : A vector that represents physical quantities at the position specified by a position vector.
Position vec-tor
Field vector
Origin

EMLAB
11
O
Origin
Position vector
Example : Velocity
Velocity vector
EMLAB
12
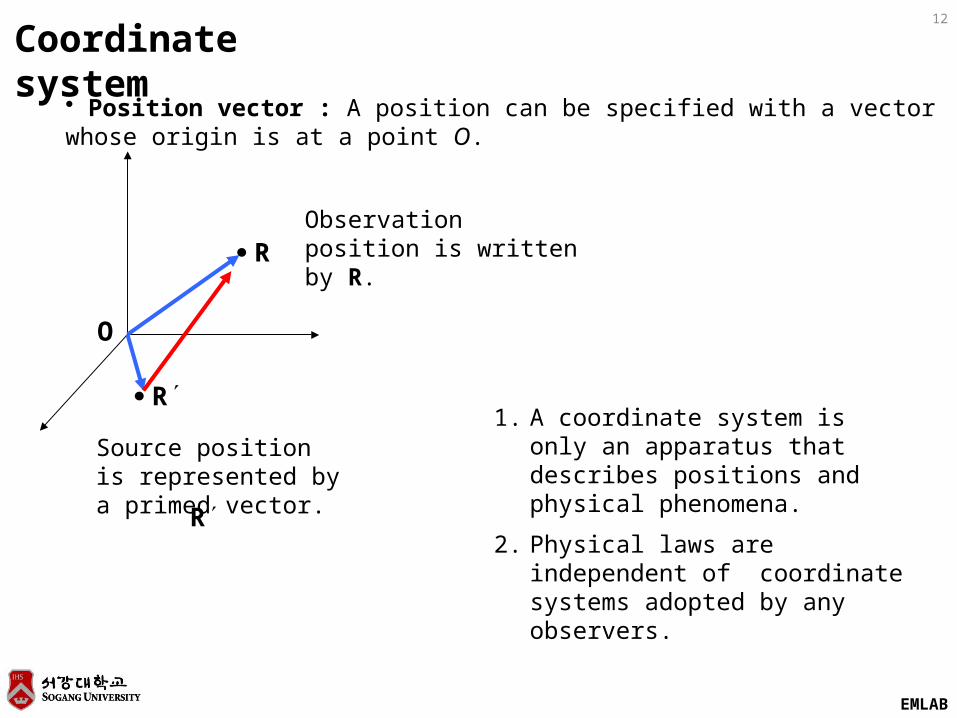
Coordinate system
• Position vector : A position can be specified with a vector whose origin is at a point O.
R
R
O
Observation position is writ-ten by R.
Source position is repre-sented by a primed vec-tor.
1. A coordinate system is only an appara-tus that describes positions and physi-cal phenomena.
2. Physical laws are independent of co-ordinate systems adopted by any ob-servers.
R

EMLAB
13
We can choose a set of unit vectors which fits a specific problem.
Some orthogonal coordinate systems and their unit vectors
y
x
z
y
x
z
ρ
rθ
x
y
constant unit vectors
The directions of two unit vectors change with ob-servation positions.
EMLAB
14
),,( zyxR
O
x
y
z),,( zR
O
x
y
z
ρ
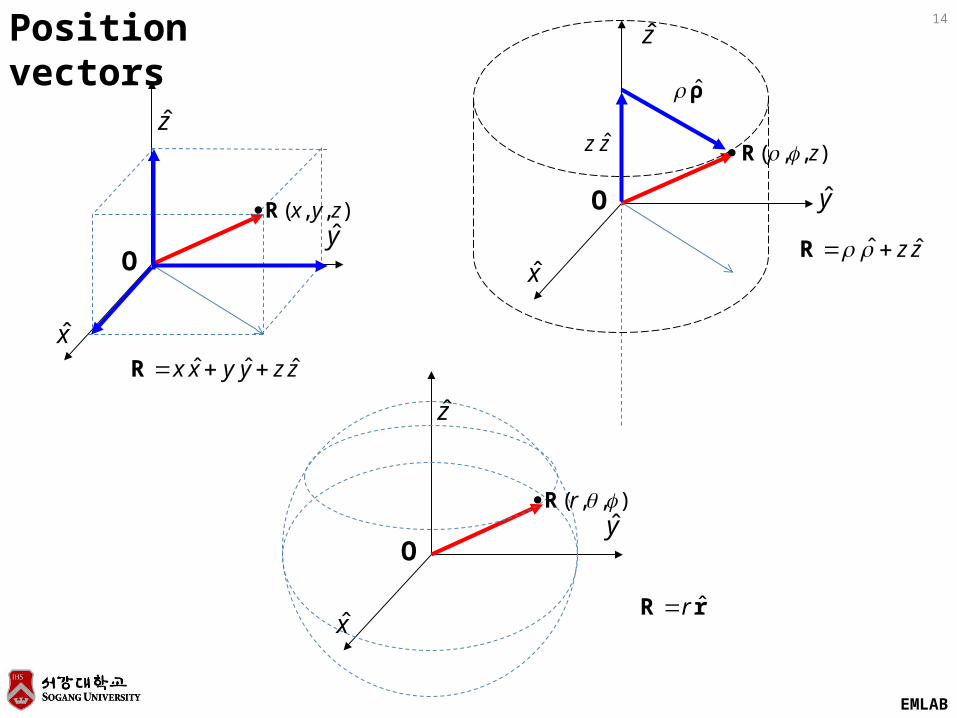
zz ˆ
zz ˆˆ R
zzyyxx ˆˆˆ R
),,( rR
O
x
y
z
rR ˆr
Position vectors

EMLAB
16
z
1ρ
1
z
2ρ 2
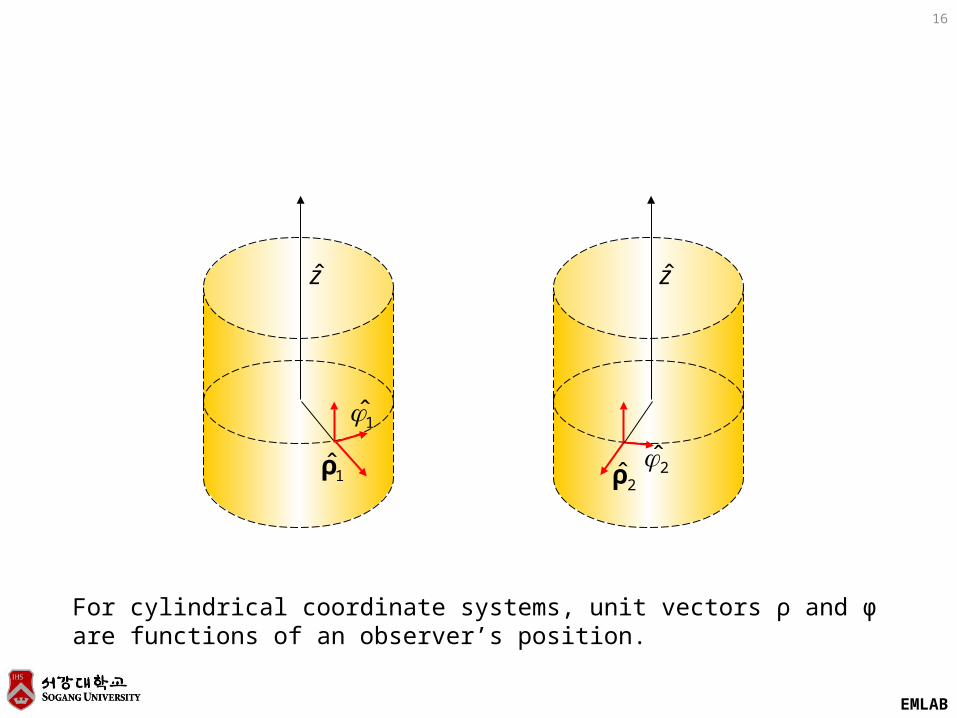
For cylindrical coordinate systems, unit vectors ρ and φ are functions of an observer’s position.
EMLAB
17
r
θ
2r
2θ
2
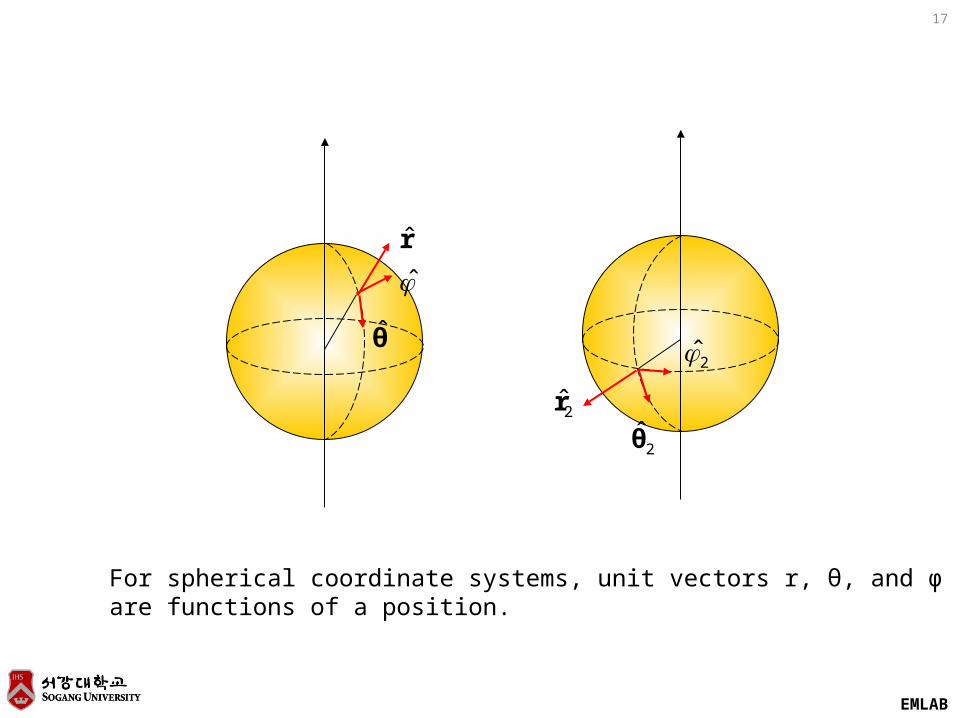
For spherical coordinate systems, unit vectors r, θ, and φ are functions of a position.
EMLAB
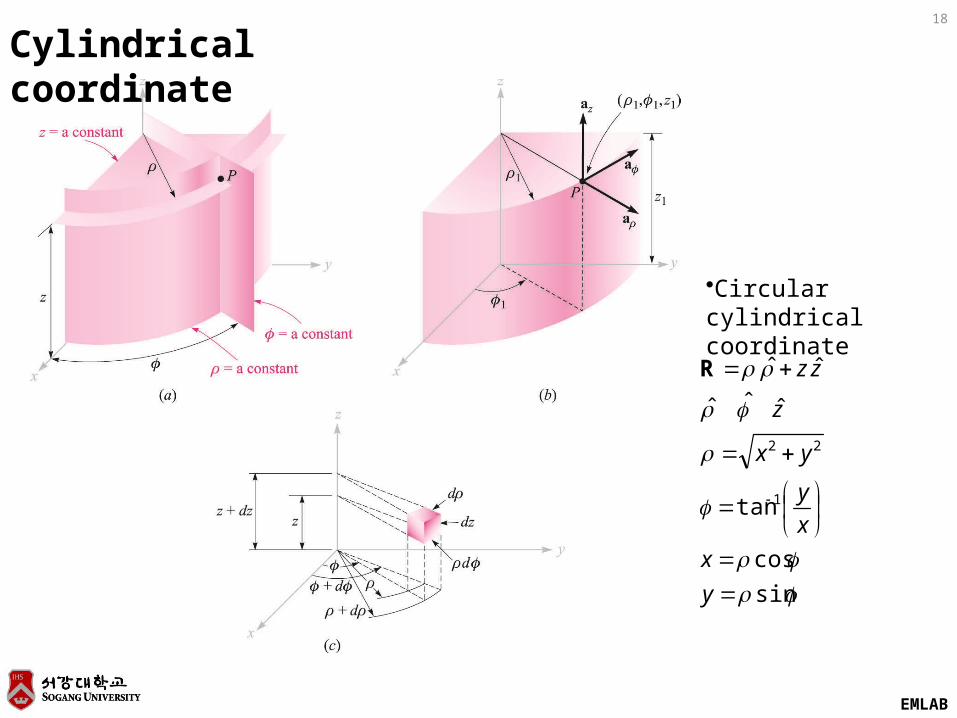
18
•Circular cylindrical coordinate
sin
cos
tan
ˆˆˆ
ˆˆ
1
22
y
x
x
y
yx
z
zzR
Cylindrical coordinate
EMLAB
19
Example D1.5.
Represent the position D(x= -3.1, y= 2.6, z= -3) using circular cylindrical coordinate system.
z
z
x
y
yx
ˆ3ˆ05.4
3
140tan
05.4
1
22
R
EMLAB
20
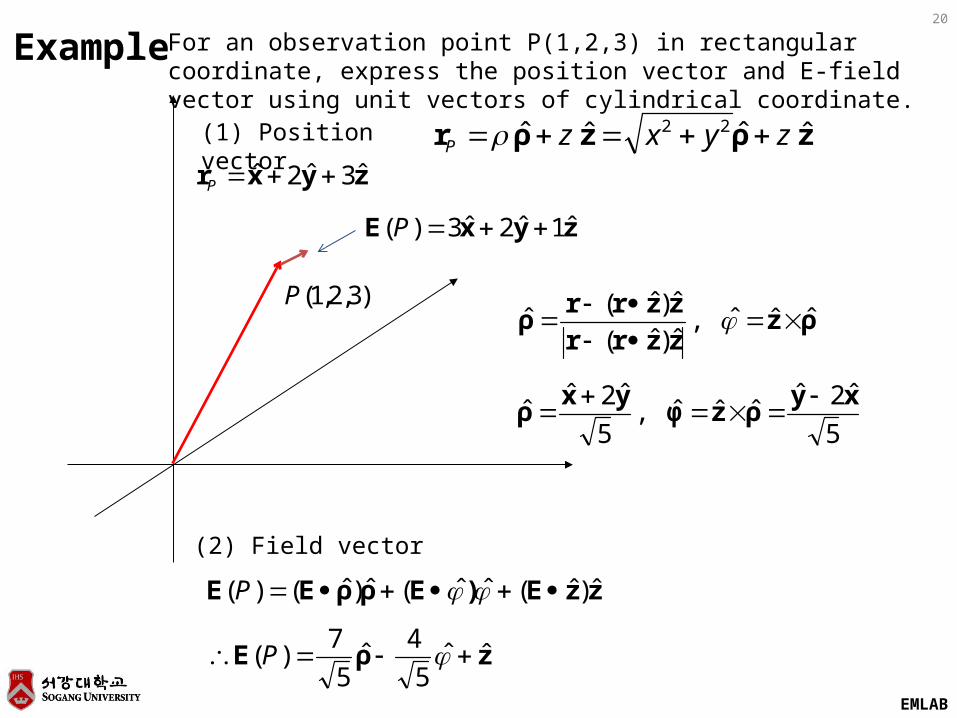
Example
)3,2,1(P
zyxr ˆ3ˆ2ˆ P
zyxE ˆ1ˆ2ˆ3)( P
zzE)EρρEE ˆ)ˆ(ˆˆ(ˆ)ˆ()( P
5
ˆ2ˆˆˆˆ,
5
ˆ2ˆˆ
xyρzφ
yxρ
ρzzzrr
zzrrρ ˆˆˆ,
ˆ)ˆ(
ˆ)ˆ(ˆ
zρzρr ˆˆˆˆ 22 zyxzP
zρE ˆˆ5
4ˆ
5
7)( P
For an observation point P(1,2,3) in rectangular coordinate, express the posi-tion vector and E-field vector using unit vectors of cylindrical coordinate.
(1) Position vector
(2) Field vector

EMLAB
21
•Spherical coordinate
cos
sinsin
cossin
tan
cos
ˆˆˆ
ˆ
1
222
1
222
rz
ry
rx
x
y
zyx
z
zyxr
r
rr
R
Spherical coordinate

EMLAB
22
rθrz
rz
r
rr ˆˆˆ,
ˆˆ
ˆˆˆ,ˆ
Example
)3,2,1(P
zyxr ˆ3ˆ2ˆ P
zyxE ˆ1ˆ2ˆ3)( P
ˆˆ(ˆ)ˆ(ˆ)ˆ()( )EθθErrEE P
5
ˆ5ˆ6ˆ3ˆˆˆ
5
ˆˆ2
145
14
ˆ2ˆˆˆ
ˆˆˆ,
14
ˆ3ˆ2ˆˆ
zyxrφθ
yxxy
rz
rzφ
zyxr
rrrr ˆ14ˆ941ˆ rP
For an observation point P(1,2,3) in rectangular coordinate, express the posi-tion vector and E-field vector using unit vectors of spherical coordinate.
(1) Position vector
(2) Field vector
14
4ˆ14
16ˆ
14
10)( θrE P

EMLAB
23
O
Origin
Position vector changed
Displacement vector
Displacement vector

EMLAB
24Rectangular coordinate
y
x
)(tr
zyxr ˆˆˆ zyx
zyxr ˆ)(ˆ)(ˆ)()( tztytxt
zyxr ˆˆˆ dzdydxd
If the position can be described by line segments, rectangular coordinate systems are convenient.
Unit vectors are parallel to x, y, z axes. Their directions are fixed. (The unit vectors are constant ones.)
0 xdx
Position vector changed
Displacement vector
O
Origin

EMLAB
25
Cylindrical coordinate
zρr ˆˆ z
zρρr ˆˆˆ dzddd
•The direction of ρ is defined as that points away from z-axis.
•Φ-direction is orthogonal to ρ.
y
x
ρr
y
x
z
ρ
φ
rzz

EMLAB
26
y
x
ρr
φ
zρr ˆˆ zy
x
)(ˆ ρ
φ
d
)(ˆ dρ
φρρρ ˆ)(ˆ)(ˆˆ ddd
?ˆ ρd
cosˆsinˆˆ
ˆ
sinˆcosˆˆ
yxρ
φ
yxρ
zφρr ˆˆˆ dzddd
Unit circle : the magnitude of unit vectors are unity.
Unit circle : the magnitude of unit vectors are unity.
EMLAB
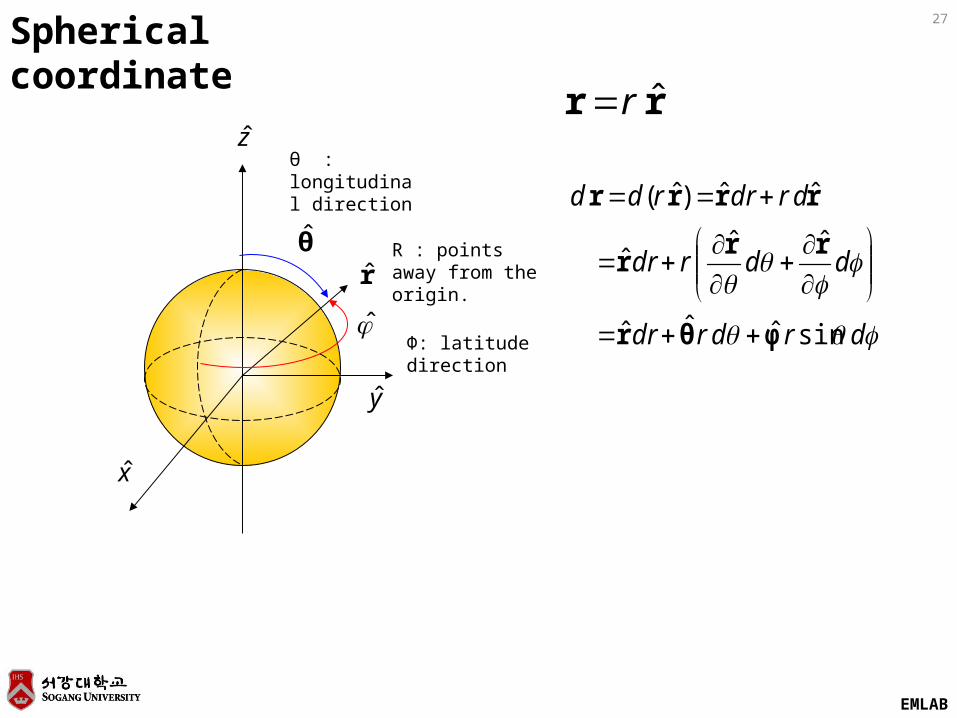
27Spherical coordinate
rθ
x
y
R : points away from the origin.
rr ˆr
drdrdr
ddrdr
drdrrdd
sinˆˆˆ
ˆˆˆ
ˆˆ)ˆ(
φθr
rrr
rrrr
zθ : longitudinal direction
Φ: latitude di-rection

EMLAB
28
z
x
d
),(ˆ r
θrrr ˆ),(ˆ),(ˆˆ dd
?ˆ
dd r
),(ˆ dr
y
)(ˆ r
φ
d
)(ˆ dr
φrrr ˆsin),(ˆ),(ˆˆ dd
x
sin :radius
drdrdrd sinˆˆˆ φθrr
θ
Unit circle : the magnitude of unit vectors are unity.

EMLAB
29Line integrals
y
x
)(tr
s
dW0
rF
F
Line integral
EMLAB
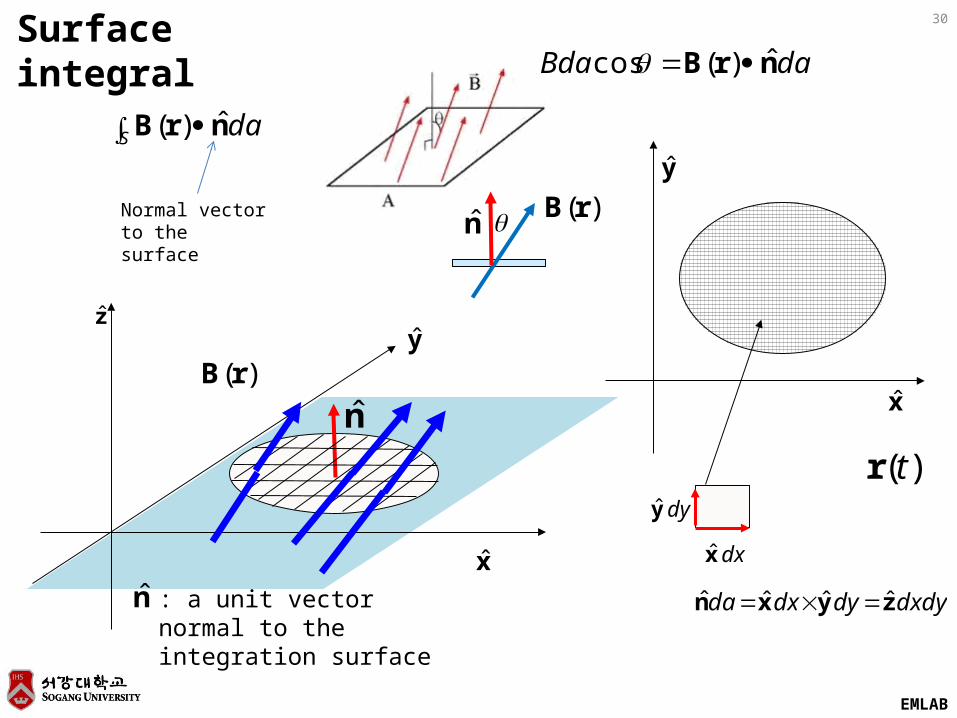
30
y
x
)(tr
)(rB
y
x
S danrB ˆ)(
Normal vector to the surface
n
: a unit vector normal to the inte-gration surface
Surface integral
z
dxx
dyy
dxdydydxda zyxn ˆˆˆˆ
daBda nrB ˆ)(cos
n)(rB
n

EMLAB
31
dz
dy
dx
The coordinate of the center of the cube is (x,y,z)
y
z
x
n
Volume integral
differential volume in rectangular co-ordinate
VVtotal dxdydzfdfm )()( rr
dxdydzd
Density

EMLAB
32
zyx
zzyyxx
ˆˆˆ
ˆˆˆ r •To represent arbitrary physical vector quantities, the number of unit vectors in a rectangular coordinate is three.
•The unit vectors are parallel to x, y, z axes and the directions are constant.
Rectangular coordinate
dzzdyydxx
zzyyxxddd
dC
ˆˆˆ
)ˆˆˆ()(
)(
rr
rrf
dxdyzdzdxydydzxd
dS
ˆˆˆ
)(
a
arf
dxdydzd
dV
)(rf
•Line integral
•Surface integral
•Volume integral

EMLAB
33
•Line integral
C zyxC
dzAdyAdxAdsA
2
2
0,2 zxy
222 ˆˆˆ zzyyxx A
3
228
222
1 2
0
222
2
0
22
0
22
dxx
xdxx
dxxx
xdxx
dxdx
dyxdxxdyydxxdzAdyAdxA
C
zyx
Example

EMLAB
34
Cylindrical coordinate1. The unit vectors for a cylindrical coordi-
nate are rho, phi, z.
2. The unit vector z is constant vector.
3. The directions of rho and phi are chang-ing with positions.
z
zz
ˆˆˆ
ˆˆ
r
dzzdd
dzzdd
zzddd
dC
ˆˆˆ
ˆˆˆ
)ˆˆ()(
)(
rr
rrf
ddzddzdzdd
dS
ˆˆˆ
)(
a
arf
dzddd
dV
)(Rf
•Line integral
•Surface integral
•Volume integral

EMLAB
35
2cosˆ)4sin(3ˆ F
3
3 dzzddd ˆˆˆ r
4
3)2cos1(
2
3)cos3(
cos2/
0
2/
0
22/
0
2
ddd
dd
rF
rF
Example Evaluate a line integral which has an integrand of F∙dr.

EMLAB
36
Spherical coordinate
ˆˆˆ
ˆ
r
rrr •Unit vectors for a spherical coordinate are r, theta, phi.
•The directions of them all change with positions.
drdrdrr
dd
rdd
d
rdrdrr
rdrdrrrrddd
dC
sinˆˆˆ
ˆˆˆ
ˆˆ)ˆ()(
)(
rr
rrf
ddrrddrrddrrd
dS
ˆsinˆsinˆ
)(
2
a
arf
dddrrd
dV
sin
)(
2
rf
•Line in-tegral
•Surface integral
•Volume integral

EMLAB
37
22 sinˆrrF
3
sin3
0
2
0
22
adrrd
drrd
aa
rF
rF
Example
x
y
zθ : longitudi-nal direction
drdrdrrd sinˆˆˆ ra
dadrdr
ar
sincossin
cossin
d
a
rdrrd
sin
sinˆˆ r
cossin
0cossinsin
0)2/(
)2/()2/(
)2/()2/(
22
222
2222
222
ar
arr
yaaxx
ayaaxx
ayax
a
EMLAB
38
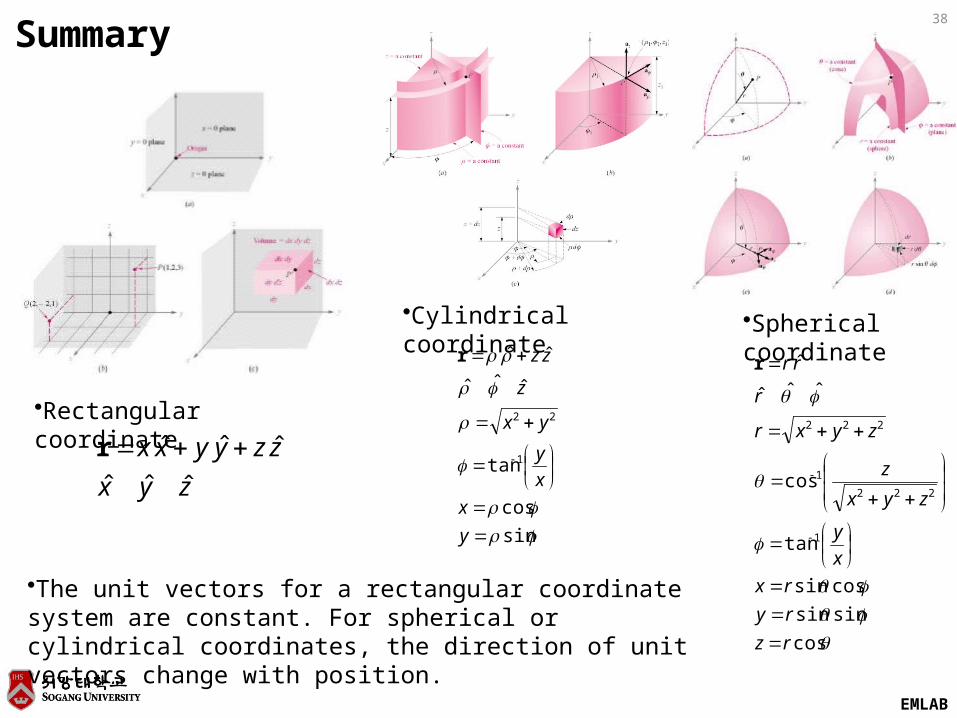
Summary
•The unit vectors for a rectangular coordinate system are constant. For spherical or cylindrical coordinates, the direction of unit vectors change with position.
•Cylindrical coordinate •Spherical coordinate
zyx
zzyyxx
ˆˆˆ
ˆˆˆ r
sin
cos
tan
ˆˆˆ
ˆˆ
1
22
y
x
x
y
yx
z
zzr
cos
sinsin
cossin
tan
cos
ˆˆˆ
ˆ
1
222
1
222
rz
ry
rx
x
y
zyx
z
zyxr
r
rr
r
•Rectangular coordinate
EMLAB
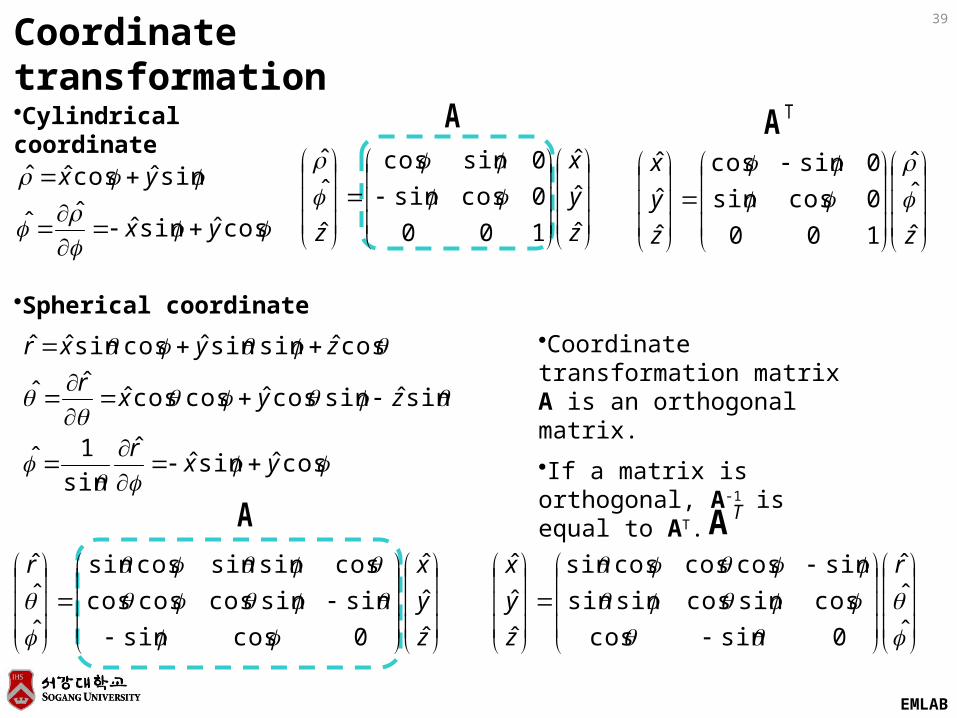
39
Coordinate transformation
cosˆsinˆˆˆ
sinˆcosˆˆ
yx
yx
z
y
x
z ˆ
ˆ
ˆ
100
0cossin
0sincos
ˆ
ˆˆ
A TA•Cylindrical coordinate
zz
y
x
ˆ
ˆˆ
100
0cossin
0sincos
ˆ
ˆ
ˆ
cosˆsinˆˆ
sin
1ˆ
sinˆsincosˆcoscosˆˆˆ
cosˆsinsinˆcossinˆˆ
yxr
zyxr
zyxr
z
y
xr
ˆ
ˆ
ˆ
0cossin
sinsincoscoscos
cossinsincossin
ˆ
ˆˆ
ˆ
ˆˆ
0sincos
cossincossinsin
sincoscoscossin
ˆ
ˆ
ˆ r
z
y
x
A TA
•Coordinate transformation ma-trix A is an orthogonal matrix.
•If a matrix is orthogonal, A-1 is equal to AT.
•Spherical coordinate
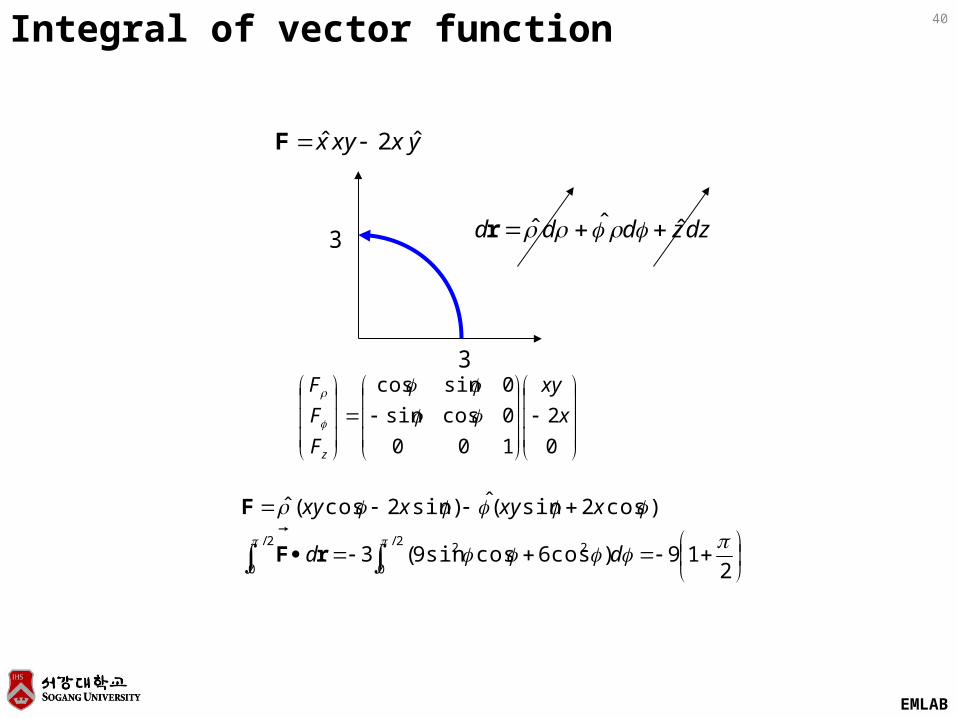
EMLAB
40Integral of vector function
yxxyx ˆ2ˆ F
3
3
0
2
100
0cossin
0sincos
x
xy
F
F
F
z
dzzddd ˆˆˆ r
2/
0
222/
0 219)cos6cossin9(3
)cos2sin(ˆ)sin2cos(ˆ
dd
xxyxxy
rF
F
Related Documents











