Emergence in Artificial Societies Evolving Communication and Cooperation in a Sugarscape world by Pieter Buzing

Emergence in Artificial Societies Evolving Communication and Cooperation in a Sugarscape world by Pieter Buzing.
Dec 13, 2015
Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

Emergence in Artificial Societies
Evolving Communication and Cooperation in a Sugarscape world
by Pieter Buzing

Plan
• What are ‘artificial societies’?
• Sugarscape
• Our goal: communication and cooperation
• Our model: VUScape
• Setup
• Results
• Conclusions

Artificial Society?
• Multi agent system– 2 levels: autonomous parts, behaviour of whole
– AS: more control over agents and world
• Artificial life– emergent behaviour
– AS: important role for individual
• Agent based simulation– AS: no “problem to solve”, like optimization
• Social modeling– interactions of agents; effects individual goals on population

Sugarscape
• Epstein & Axtell, 1996
• Torus shaped world: 50 x 50 cells
• Sugar resources [0 - 4]• Agents looking for
food• Evolution
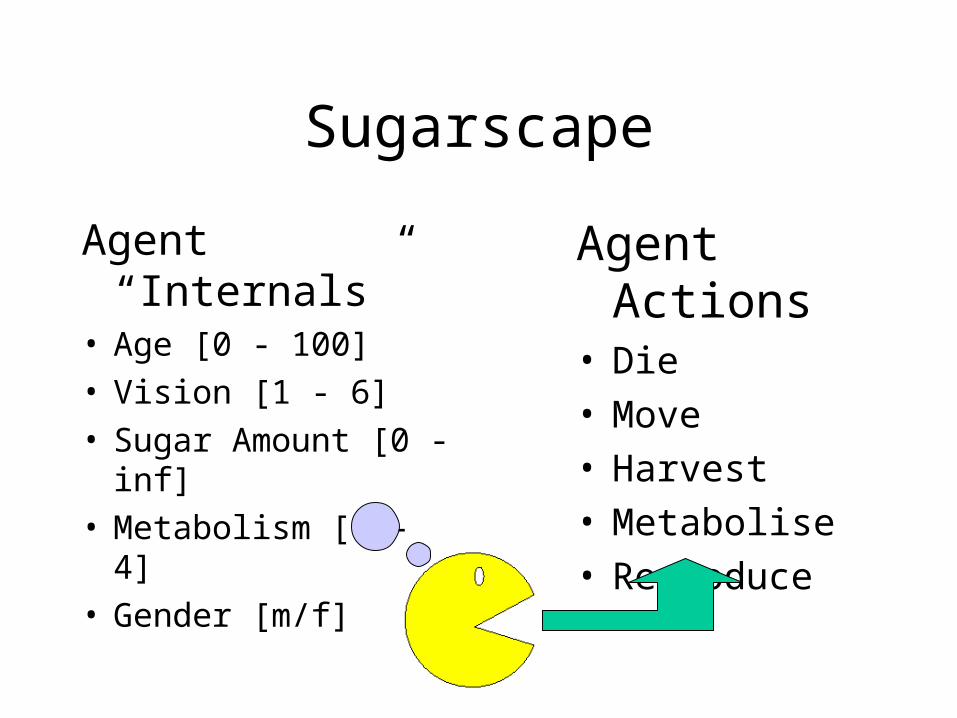
Sugarscape
Agent “Internals”• Age [0 - 100]• Vision [1 - 6]• Sugar Amount [0 - inf]• Metabolism [1 - 4]• Gender [m/f]
Agent Actions• Die• Move• Harvest• Metabolise• Reproduce

Sugarscape
Reproduction rule
• Agent has gender: male or female
• Metabolism and vision are genetic!
• Parents: <m, v> X <M, V>
• Child: <m,V>, <M,v>, <m,v> or <M,V>
• Child inherits half of parents’ sugar

Sugarscape
• Agents will tend to move towards sugarhills
• Agents with high vision are better off
• Agents with low metabolism are better off

Our Goal
• Individual:– limited harvesting capabilities (maxSugarHarvest)
– ability to talk and listen
• Emergent behaviour:– cooperation
– communication
• “If cooperation is needed then talking is beneficial and communication will emerge”

VUScape
• Had to implement own testbed: VUScape
• Model is highly based on SugarScape
• The major changes:– Sugar randomly distributed; multi-agent cells– talkPref [0 - 1] and listenPref [0 - 1] genes– Talk actions and Listen actions– MaxSugarHarvest value: cooperation threshold

VUScape: random landscape
• Instead of 2 sugar hills a random distribution• 2,500 sugar units are spread across 2,500 cells• 30% population drop; but still viable world• (because it is harder to find food?)

VUScape: limited vision range
• Vision range set to 1 instead of gene range [1-6]• Evolution of vision is not the aim of our project• local info from vision, global from communication• Short-sighted agents face a tough environment

VUScape: multiple agents
• Cooperation scheme requires multi-agent cells• Higher population size is now possible

VUScape: re-seed sugar
• Agents find food, wait there until it regenerates• We need agents that are constantly searching• Explorativeness is increased by reseeding sugar
after consumption

VUScape: sex recovery period
• To avoid possible birth explosions we implement a sex recovery period
• Recovery period of 5 yields pop decrease of 11%• Flattens the age distribution

Step 1: in need of help
IF localAmount > maxSugarHarvest
THEN inNeedOfHelp

Step 2: talking
IF inNeedOfHelp AND rand < talkPref
THEN communicate to others on x and y axis:– cell coordinates and sugar value

Step 3: listening
IF rand < listenPref
THEN listen to others on x and y axis

Step 4: cooperating
• Use obtained information in movement decision.• Two agents can conquer any pile!• Cooperation is beneficial for both parties.• Communicative agents have an advantage?

Setup
• Stepwise increase cooperative pressure and monitor the communicative gene values.
• Experiment A: no communication– Talk and listen genes disabled
• Experiment B: with communication– Talk and listen genes initiated between 0 and 1
• If communication is beneficial then an increase of talk and listen values is expected.

Results: no communication

Results: with communication

Results: listenPref
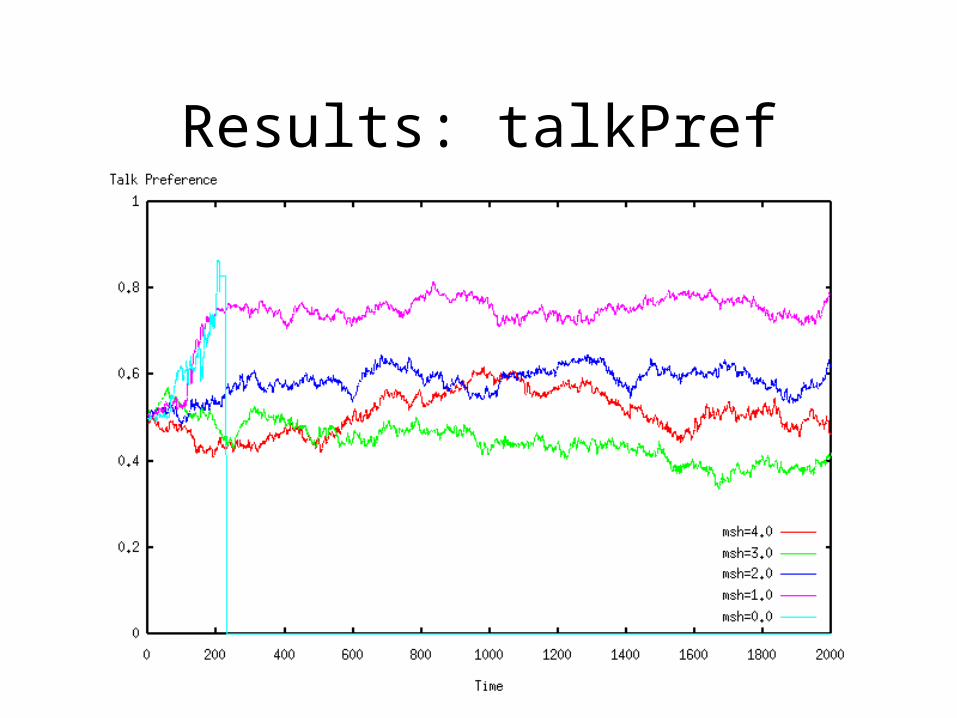
Results: talkPref

Conclusion
• Communication makes society more viable
• High talking and listening preferences give agents a selective advantage
• Higher cooperative pressure induces communication
• Future work: other topologies, communication protocols
Related Documents











