IV-1 EKSPERIMEN KOMPARASI PROSTHETIC TANGAN BERDASARKAN PENGARUH DESAIN METACARPAL DAN PHALANX PHALANGEAL Skripsi Sebagai Persyaratan Untuk Memperoleh Gelar Sarjana Teknik GALIH EKA SANJAYA I 0305032 JURUSAN TEKNIK INDUSTRI FAKULTAS TEKNIK UNIVERSITAS SEBELAS MARET SURAKARTA 2010

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

IV-1
EKSPERIMEN KOMPARASI PROSTHETIC TANGAN BERDASARKAN PENGARUH DESAIN METACARPAL
DAN PHALANX PHALANGEAL
Skripsi Sebagai Persyaratan Untuk Memperoleh Gelar Sarjana Teknik
GALIH EKA SANJAYA
I 0305032
JURUSAN TEKNIK INDUSTRI FAKULTAS TEKNIK UNIVERSITAS SEBELAS MARET
SURAKARTA 2010

IV-2
EKSPERIMEN KOMPARASI PROSTHETIC TANGAN BERDASARKAN PENGARUH DESAIN METACARPAL
DAN PHALANX PHALANGEAL
Skripsi
GALIH EKA SANJAYA
I 0305032
JURUSAN TEKNIK INDUSTRI FAKULTAS TEKNIK UNIVERSITAS SEBELAS MARET
SURAKARTA 2010

IV-3
LEMBAR PENGESAHAN
Judul Skripsi:
EKSPERIMEN KOMPARASI PROSTHETIC TANGAN BERDASARKAN PENGARUH DESAIN METACARPAL DAN
PHALANX PHALANGEAL
Ditulis oleh: Galih Eka Sanjaya
I 0305032
Mengetahui,
Dosen Pembimbing I Dosen Pembimbing II
Ir. Lobes Herdiman, MT NIP. 19641007 199702 1 001
Ilham Priadythama, ST, MT NIP. 19801124 200812 1 002
Pembantu Dekan I Fakultas Teknik
Ketua Jurusan Teknik Industri
Ir. Noegroho Djarwanti, MT NIP. 19561112 198403 2 007
Ir. Lobes Herdiman, MT NIP. 19641007 199702 1 001

IV-4
LEMBAR VALIDASI
Judul Skripsi:
EKSPERIMEN KOMPARASI PROSTHETIC TANGAN BERDASARKAN PENGARUH DESAIN METACARPAL DAN
PHALANX PHALANGEAL
Ditulis oleh: Galih Eka Sanjaya
I 0305032
Telah disidangkan pada hari Jumat, 29 Januari 2010
Di Jurusan Teknik Industri Fakultas Teknik Universitas Sebelas Maret Surakarta,
dengan
Dosen Penguji
1. Retno Wulan Damayanti, ST, MT NIP. 19800306 200501 2 002
2. Ir. Munifah, MSIE, MT NIP. 19560101 198601 2 001
Dosen Pembimbing
1. Ir. Lobes Herdiman, MT NIP. 19641007 199702 1 001
2. Ilham Priadythama, ST, MT NIP. 19801124 200812 1 002

IV-5
SURAT PERNYATAAN
ORISINALITAS KARYA ILMIAH
Saya mahasiswa Jurusan Teknik Industri UNS yang bertanda tangan dibawah ini,
Nama : Galih Eka Sanjaya
NIM : I 0305032
Judul TA : Eksperimen Komparasi Prosthetic Tangan Berdasarkan Pengaruh
Desain Metacarpal dan Phalanx Phalangeal
Menyatakan bahwa Tugas Akhir (TA) atau Skripsi yang saya susun tidak
mencontoh atau melakukan plagiat dari karya tulis orang lain. Jika terbukti bahwa
Tugas Akhir yang saya susun mencontoh atau melakukan plagiat dapat dinyatakan
batal atau gelar Sarjana yang saya peroleh dengan sendirinya dibatalkan atau
dicabut.
Demikian surat pernyataan ini saya buat dengan sebenar-benarnya dan apabila
dikemudian hari terbukti melakukan kebohongan maka saya sanggup
menanggung segala konsekuensinya.
Surakarta, 5 Februari 2010
Galih Eka Sanjaya I 0305032

IV-6
SURAT PERNYATAAN
PUBLIKASI KARYA ILMIAH
Saya mahasiswa Jurusan Teknik Industri UNS yang bertanda tangan dibawah ini,
Nama : Galih Eka Sanjaya
NIM : I 0305032
Judul TA : Eksperimen Komparasi Prosthetic Tangan Berdasarkan Pengaruh
Desain Metacarpal dan Phalanx Phalangeal
Menyatakan bahwa Tugas Akhir (TA) atau Skripsi yang saya susun sebagai syarat
lulus Sarjana S1 disusun secara bersama-sama dengan Pembimbing 1 dan
Pembimbing 2. Bersamaan dengan syarat pernyataan ini bahwa hasil penelitian
dari Tugas Akhir (TA) atau Skripsi yang saya susun bersedia digunakan untuk
publikasi dari proceeding, jurnal, atau media penerbit lainnya baik di tingkat
nasional maupun internasional sebagaimana mestinya yang merupakan bagian
dari publikasi karya ilmiah
Demikian surat pernyataan ini saya buat dengan sebenar-benarnya.
Surakarta, 5 Februari 2010
Galih Eka Sanjaya I 0305032

IV-7
ABSTRAK
Galih Eka Sanjaya, NIM : I0305032. EKSPERIMEN KOMPARASI PROSTHETIC TANGAN BERDASARKAN PENGARUH DESAIN METACARPAL DAN PHALANX PHALANGEAL. Skripsi. Surakarta : Jurusan Teknik Industri Fakultas Teknik, Universitas Sebelas Maret, Januari 2010.
Penelitian lokal UNS telah mengembangkan tiga macam desain
prototype tangan prosthetic yang berbeda. Yang pertama adalah tangan prosthetic yang memiliki sisi kosmetik rendah dengan sistem external stressing cable dan dengan dua phalanx. Yang kedua adalah tangan prosthetic sistem internal stressing cable dengan tiga phalanx dan dengan trapezium metacarpal. Desain tangan prosthetic yang ketiga sama dengan desain tangan prosthetic yang kedua, tetapi trapezium metacarpal diganti dengan link ibu jari dan juga terdapat penambahan sistem puli untuk memperhalus gerakan pada sistem kabel. Penelitian ini bertujuan untuk menentukan tangan prosthetic yang terbaik, dilihat dari gaya tarik statis dan dinamis, dimana hal tersebut berhubungan dengan banyaknya tenaga yang kita gunakan dalam mengoperasikan tangan prosthetic.
Gaya tarik statis dan dinamis ditentukan dengan mengukur gaya tarik dari sistem kabel dengan menggunakan alat ukur force gauge. Pada penilaian gaya tarik statis, penelitian ini membutuhkan sebuah sistem pegas sebagai alat bantu dimana pegas tersebut ditekan sampai memberikan deformasi pegas pada saat tangan prosthetic dioperasikan. Sedangkan pada gaya tarik dinamis, gaya tarik diukur ketika jari tangan prosthetic digerakkan sesuai dengan enam gerakan dasar pemegangan tangan manusia. Semua tangan prosthetic diuji pada arah longitudinal axis dan sagital plane. Untuk meningkatkan keakuratan hasil, penelitian ini menggunakan factorial experiment randomized design untuk perbandingan gaya tarik dinamis.
Hasil evaluasi dari perbandingan tangan prosthetic menunjukkan bahwa tangan prosthetic pertama merupakan sistem terbaik dari hampir semua tes yang telah dilakukan karena memiliki lengan momen yang lebih panjang. Tetapi, dengan mempertimbangkan sisi kosmetik, desain tangan prosthetic yang ketiga merupakan desain terbaik dengan gaya tarik statis sebesar 11,32 Newton dan gaya tarik dinamis sebesar 24,226 Newton. Hasil ini menunjukkan bahwa dengan penambahan sistem puli, desain tangan prosthetic yang ketiga adalah tangan prosthetic kosmetik yang dapat memberikan performansi yang paling mendekati sistem terbaik secara teoritis, dalam hal ini sistem external stressing cable.
Kata kunci: tangan prosthetic, eksperimen komparasi, gaya tarik dinamis dan gaya tarik statis
xx + 108 halaman; 31 gambar, 37 tabel; 8 lampiran daftar pustaka : 14 (1984-2009)

IV-8
ABSTRACT
Galih Eka Sanjaya, NIM : I0305032. HAND PROSTHETIC COMPARISON EXPERIMENT BASED ON METACARPAL AND PHALANX PHALANGEAL DESIGN IMPACT. Thesis. Surakarta : Industrial Engineering Department, Engineering Faculty, Sebelas Maret University, January 2010.
UNS local study already developed three different design of prosthetic hand prototype. The first is a low cosmetic prosthetic with an external stressing cable and with two phalanges. The second is internal stressing cable prosthetic with three phalanges and with trapezium metacarpal. Another one is same with the second, but the trapezium metacarpal is replaced by thumb’s link and also there is an additional pulley system to assure smooth movement of the cables. The research objective is to determine which prosthetic is the best, from static and dynamic pulling force point of view, which is related to how much we must exert to operate the prosthetic.
Both static and dynamic pulling force is determined by measuring the stressing force of the cable with force gauge. In static pulling force evaluation, this research built a spring system as supporting device to treat the pushing force which deforming the spring during operation. While for the dynamic pulling force evaluation, pulling force was measured when the finger was moving to catch six basic of human grasping. All of the prosthetic are tested both of sagital plane and longitudinal axis. To enhance the accuracy of the result, this result used a factorial experiment completely randomized design for dynamic pulling force comparison.
The comparison evaluation shows that the first prosthetic is the best system for almost of the test thanks to longer moment radius. But, considering the cosmetics aspect, the third prosthetic is the true winner with 11,32 Newton of static pulling force and 24,226 Newton of dynamic pulling force. This result shows that with the additional pulley system, the third prosthetic is a cosmetics prosthetic which can perform close to the theoretically winner, external stressing cable.
Keywords : prosthetic hand, comparison experiment, dynamic and static
pulling force xx + 108 p.; 31 pictures; 37 tables; 8 attachments Reference: 39 (1994 - 2009)

IV-9
KATA PENGANTAR
Assalamu ‘alaikum Wr.Wb
Dengan segala kerendahan hati dan kebesaran jiwa, penulis panjatkan
puji syukur kepada Allah SWT yang telah melimpahkan rahmat dan karunia-Nya,
sehingga penulis dapat menyelesaikan tugas akhir ini seperti yang diharapkan.
Atas bimbingan dan bantuan dari berbagai pihak, penulis mengucapkan terima
kasih yang sebesar-besarnya kepada:
1. Allah SWT karena atas segala izin, rizki, dan rahmat-Nya penulis berhasil
menyelesaikan Laporan Skripsi ini.
2. Ibu dan Bapakku yang selalu memberi dukungan dan doa yang tak pernah
putus sehingga penulis berhasil menyelesaikan Laporan Skripsi ini. Semoga
Allah selalu menyayangi Bapak dan Ibu.
3. Bapak Ir. Lobes Herdiman, MT selaku Ketua Jurusan Teknik Industri
Universitas Sebelas Maret dan dosen pembimbing skripsi I yang selalu
memberikan ide, saran, dan nasehat dalam menyelesaikan tugas akhir ini.
4. Bapak Ilham Priadythama, ST, MT selaku dosen pembimbing skripsi II yang
selalu memberikan saran, dan perbaikan selama penyusunan tugas akhir ini.
5. Ibu Retno Wulan Damayanti, ST, MT dan Ibu Ir. Munifah, MSIE, MT selaku
dosen penguji skripsi I dan dosen penguji skripsi II yang memberikan kritik
dan saran saat seminar dan sidang tugas akhir.
6. Bapak Taufiq Rochman, STP, MT selaku Pembimbing Akademis, terimakasih
atas segala bimbingan dan nasehat yang telah bapak sampaikan.
7. Seluruh dosen Teknik Industri yang telah mewariskan indahnya ilmu Teknik
Industri kepada penulis.
8. Karyawan Teknik Industri Universitas Sebelas Maret, terima kasih atas segala
dukungan dan bantuan yang diberikan selama kuliah.
9. Keluargaku tercinta terutama untuk kedua orang tua dan saudaraku, terima
kasih banyak untuk segala dukungan dan doanya.
10. Teman-teman angkatan 2005 untuk segala kebersamaan baik dalam suka dan
duka.
11. Semua pihak yang belum tertulis di atas, yang telah banyak membantu dalam
proses pengerjaan tugas akhir ini.

IV-10
Semoga skripsi ini dapat bermanfaat bagi rekan-rekan mahasiswa maupun
siapa saja yang membutuhkannya. Penulis menyadari bahwa skripsi ini masih
jauh dari kata sempurna, dengan senang hati dan terbuka penulis menerima segala
saran dan kritik demi kesempurnaan skripsi ini.
Wassalamu ‘alaikum Wr.Wb
Surakarta, Februari 2010 Penulis

IV-11
DAFTAR ISI
ABSTRAK
ABSTRACT
KATA PENGANTAR
DAFTAR ISI
DAFTAR TABEL
DAFTAR GAMBAR
DAFTAR ISTILAH
vi
vii
viii
x
xiii
xv
xvii
BAB I PENDAHULUAN
1.1 LATAR BELAKANG
1.2 PERUMUSAN MASALAH
1.3 TUJUAN PENELITIAN
1.4 MANFAAT PENELITIAN
1.5 BATASAN MASALAH
1.6 ASUMSI PENELITIAN
1.7 SISTEMATIKA PENULISAN
BAB II TINJAUAN PUSTAKA
2.1 TANGAN MANUSIA
2.1.1 Anatomi tangan manusia
2.1.2 Gerakan Dasar Tangan Manusia
2.2 PROSTHETIC TANGAN
2.2.1 Jenis Prosthetic Tangan
2.2.2 Perkembangan Prosthetic Tangan
2.3 GAYA DAN PEGAS
2.3.1 Gaya
2.3.2 Pegas
2.4 DESAIN EKSPERIMEN
2.4.1 Factorial Experiment
2.4.2 Uji Asumsi
2.4.3 Uji Setelah Anova
I-1
I-1
I-4
I-4
I-4
I-4
I-5
I-5
II-1
II-1
II-1
II-3
II-10
II-10
II-12
II-14
II-14
II-15
II-17
II-19
II-23
II-26

IV-12
BAB III METODOLOGI PENELITIAN
3.1 IDENTIFIKASI MASALAH
3.2 PENGUMPULAN DATA
3.2.1 Penentuan Teknik Desain Eksperimen
3.2.2 Persiapan Alat dan Unit Eksperimen
3.2.3 Pengukuran Aktual Gaya Trik Statis Jari Tangan
Prosthetic
3.2.4 Pengukuran Aktual Gaya Tarik Dinamis Jari Tangan
Prosthetic
3.3 PENGOLAHAN DATA
3.3.1 Uji Asumsi
3.3.2 Uji Signifikansi
3.3.3 Uji Setelah Anova
3.3.4 Pemilihan Desain Tangan Prosthetic Berdasarkan Nilai
Gaya Tarik Statis dan Gaya Tarik Dinamis
3.4 ANALISIS DAN INTERPRETASI HASIL
3.5 KESIMPULAN DAN SARAN
BAB IV PENGUMPULAN DAN PENGOLAHAN DATA
4.1 PENGUMPULAN DATA
4.1.1 Desain Telapak Tangan Prosthetic
4.1.2 Penentuan Teknik Desain Eksperimen
4.1.3 Persiapan Alat dan Unit Eksperimen
4.1.4 Pengukuran Aktual Gaya Tarik Statis Jari Tangan
Prosthetic
4.1.5 Pengukuran Aktual Gaya Tarik Dinamis Jari Tangan
Prosthetic
4.2 PENGOLAHAN DATA
4.2.1 Uji Asumsi Dasar
4.2.2 Uji Anova
4.2.3 Uji Setelah Anova
III-1
III-2
III-4
III-4
III-8
III-9
III-10
III-10
III-10
III-11
III-11
III-11
III-11
III-11
IV-1
IV-1
IV-1
IV-11
IV-11
IV-12
IV-16
IV-22
IV-22
IV-31
IV-39

IV-13
4.2.4 Pemilihan Desain Tangan prosthetic Berdasarkan Nilai
Gaya Tarik Statis dan Gaya Tarik Dinamis
BAB V ANALISIS DAN INTERPRETASI HASIL
5.1 ANALISIS HASIL PENELITIAN
5.1.1 Analisis Desain Tangan Prosthetic
5.1.2 Analisis Gaya Tarik Statis
5.1.3 Analisis Gaya Tarik Dinamis
5.1.4 Analisis Uji Anova
5.1.5 Analisis Uji Setelah Anova
5.2 INTERPRETASI HASIL PENELITIAN
BAB VI KESIMPULAN DAN SARAN
6.1 KESIMPULAN
6.2 SARAN
DAFTAR PUSTAKA
LAMPIRAN
IV-48
V-1
V-1
V-1
V-3
V-4
V-7
V-10
V-11
VI-1
VI-1
VI-2

IV-14
DAFTAR TABEL
Tabel 2.1
Tabel 2.2
Tabel 2.3
Tabel 2.4
Tabel 3.1
Tabel 3.2
Tabel 4.1
Tabel 4.2
Tabel 4.3
Tabel 4.4
Tabel 4.5
Tabel 4.6
Tabel 4.7
Tabel 4.8
Tabel 4.9
Tabel 4.10
Tabel 4.11
Tabel 4.12
Tabel 4.13
Jenis-jenis pegas
Skema umum data sampel eksperimen faktorial
menggunakan 3 faktor dan dengan n observasi tiap sel
Anova eksperimen faktorial 3 faktor desain acak
sempurna
Skema umum daftar analisis ragam uji homogenitas
Urutan eksperimen factorial experiment completely
randomized design
Factorial experiment randomized block design
Spesifikasi berat komponen telapak tangan prosthetic
(sistem external stressing cable)
Spesifikasi berat komponen telapak tangan prosthetic
(sistem internal stressing cable tanpa puli)
Jumlah dan berat komponen yang digunakan dalam
telapak tangan prosthetic
Gaya tarik pada alat bantu pegas
Gaya tekan pada alat bantu pegas (Ftekan)
Gaya tarik statis (Ftarik statis)
Efisiensi gaya tarik statis pada masing-masing tangan
prosthetic
Objek benda eksperimen
Gaya tarikan kabel telapak tangan prosthetic pada arah
longitudinal axis
Gaya tarikan kabel telapak tangan prosthetic pada arah
sagital plane
Rekapitulasi data pengukuran gaya tarik dinamis pada
tangan prosthetic
Perhitungan uji normalitas untuk perlakuan A1B1C1
Rekapitulasi hasil uji normalitas dengan uji lilliefors
II-16
II-20
II-23
II-26
III-5
III-6
IV-4
IV-7
IV-10
IV-13
IV-14
IV-15
IV-15
IV-16
IV-17
IV-19
IV-21
IV-23
IV-25

IV-15
Tabel 4.14
Tabel 4.15
Tabel 4.16
Tabel 4.17
Tabel 4.18
Tabel 4.19
Tabel 4.20
Tabel 4.21
Tabel 4.22
Tabel 4.23
Tabel 4.24
Tabel 4.25
Tabel 4.26
Tabel 5.1
Tabel 5.2
Tabel 5.3
Tabel 5.4
Tabel 5.5
Nilai gaya tarik dinamis dikelompokkan berdasarkan
model gerakan dasar tangan manusia
Selisih absolut data gaya tarik dinamis dengan rata-
ratanya dikelompokkan berdasarkan model gerakan dasar
tangan manusia
Hasil uji homogenitas data gaya tarik dinamis,
dikelompokkan berdasarkan model gerakan dasar tangan
manusia
Hasil uji homogenitas data gaya tarik dinamis,
dikelompokkan berdasarkan arah sumbu gerakan tangan
prosthetic
Hasil uji homogenitas data gaya tarik dinamis,
dikelompokkan berdasarkan desain tangan prosthetic
Residual data gaya tarik dinamis
Anova untuk nilai gaya tarik dinamis
Hasil perhitungan anova gaya tarik dinamis
Hasil perhitungan SPSS anova gaya tarik dinamis
Rata-rata gaya tarik dinamis eksperimen dikelompokkan
berdasarkan desain tangan prosthetic
Rata-rata gaya tarik dinamis eksperimen dikelompokkan
berdasarkan model gerakan tangan manusia
Rata-rata gaya tarik dinamis eksperimen dikelompokkan
berdasarkan treatment faktor A dan faktor C
Rata-rata gaya tarik dinamis eksperimen dikelompokkan
berdasarkan treatment faktor A dan faktor C
Rekapitulasi selisih gaya tarik pada arah longitudinal axis
dan sagital plane
Rata-rata gaya tarik dinamis pada arah longitudinal axis
Rata-rata gaya tarik dinamis pada arah sagital plane
Rangkuman hasil uji homogenitas
Rekapitulasi hasil analisis variansi terhadap gaya tarik
dinamis
IV-26
IV-27
IV-28
IV-28
IV-29
IV-30
IV-34
IV-37
IV-38
IV-40
IV-42
IV-44
IV-46
V-3
V-6
V-7
V-8
V-10

IV-16
DAFTAR GAMBAR
Gambar 2.1 Struktur tulang pada tangan manusia
Gambar 2.2 Joint pada tulang manusia
Gambar 2.3 Perbedaaan jenis pemegangan power grip dan precision grip
Gambar 2.4 Model gerakan tangan cylindrical
Gambar 2.5 Model gerakan tangan lateral
Gambar 2.6 Model gerakan tangan palmar
Gambar 2.7 Model gerakan tangan hook
Gambar 2.8 Model gerakan tangan tip
Gambar 2.9 Model gerakan tangan spherical
Gambar 2.10 Bidang cardinal tubuh
Gambar 2.11 Contoh gerakan pada bidang sagital
Gambar 2.12 Contoh gerakan pada bidang frontal
Gambar 2.13 Contoh gerakan pada bidang transverse
Gambar 2.14 Passive prostheses
Gambar 2.15 Body powered prostheses
Gambar 2.16 Myoelectric devices
Gambar 2.17 Prosthetic tangan kosmetik
Gambar 2.18 Prosthetic tangan fungsional jenis prehensor dan hook
Gambar 2.19 Prosthetic tangan kosmetik dan fungsional
Gambar 2.20 Pegas ulir tekan
Gambar 3.1 Metodologi penelitian
Gambar 3.2 Tangan prosthetic dalam kondisi voluntary closing
Gambar 4.1 Deskripsi pengembangan telapak tangan prosthetic (sistem
external stressing cable)
Gambar 4.2 Proses assembling pada bagian metacarpal telapak tangan
prosthetic (sistem external stressing cable)
Gambar 4.3 Desain jari tangan prosthetic (sistem external stressing
cable)
Gambar 4.4 Deskripsi pengembangan telapak tangan prosthetic (sistem
II-2
II-2
II-4
II-5
II-5
II-6
II-6
II-7
II-7
II-8
II-9
II-9
II-9
II-10
II-11
II-12
II-13
II-13
II-14
II-16
III-1
III-9
IV-1
IV-2
IV-3

IV-17
internal stressing cable) tanpa sistem puli
Gambar 4.5 Desain metacarpal telapak tangan prosthetic (sistem
internal stressing cable) tanpa sistem puli
Gambar 4.6 Desain jari tangan prosthetic (sistem internal stressing
cable) tanpa sistem puli
Gambar 4.7 Deskripsi pengembangan telapak tangan prosthetic (sistem
external stressing cable) dengan sistem puli
Gambar 4.8 Komponen rangka metacarpal, penghubung jari, dan
metacarpal policis telapak tangan prosthetic
Gambar 4.9 Desain jari telapak tangan prosthetic
Gambar 4.10 Alat bantu pegas
Gambar 4.11 Plot nilai gaya tarik pegas pada alat bantu pegas
Gambar 4.12 Pengukuran aktual gaya tarik statis tangan prosthetic pada
arah longitudinal axis dan sagital plane
Gambar 4.13 Pengujian model gerakan cylindrical, spherical, hook, tip,
lateral, dan palmar telapak tangan prosthetic pada arah
longitudinal axis
Gambar 4.14 Pengujian model gerakan cylindrical, spherical, hook, tip,
lateral, dan palmar telapak tangan prosthetic pada arah
sagital plane
Gambar 4.15 Normal probability plot dan histogram data observasi pada
perlakuan A1B1C1
Gambar 4.16 Plot residual data gaya tarik dinamis
Gambar 4.17 Gaya tarik statis tangan prosthetic pada arah longitudinal
axis
Gambar 4.18 Gaya tarik statis tangan prosthetic pada arah sagital plane
Gambar 5.1 Jarak antara kabel dengan pusat joint jari tangan prosthetic
(r)
IV-5
IV-6
IV-6
IV-8
IV-9
IV-9
IV-12
IV-13
IV-14
IV-17
IV-19
IV-24
IV-31
IV-49
IV-49
V-4

IV-18
DAFTAR ISTILAH
A
Abduction = Melenturkan otot menjauhi sumbu tubuh (kanan-kiri)
Adduction = Melenturkan otot mendekati sumbu tubuh (kanan-kiri)
B
Belt = Sabuk pada prosthetic
C
Cable system = Penggunaan sistem kabel semi otomatis pada
prosthetic
Carpometacarpal joint = Sendi yang menghubungkan tulang carpal dengan
masing-masing jari tangan melalui metacarpal
Capitates = Tulang kecil yang menyusun bagian metacarpal
Carpal = Bagian tulang penyusun telapak tangan
Cosmetic appeal = Penampilan luar tangan prosthetic
Comfort = Nyaman
Control = Pengendalian
Cylindrical = Gerakan pemegangan dimana benda kerja berada pada
poros antara jari-jari tangan dan ditahan oleh ibu jari,
umumnya benda yang dipegang pada gerakan ini
berupa benda tabung
D
Dorsal = Titik hubungan antara ibu jari dengan metacarpal
pollicis
Distal = Jenis baris dalam tulang carpal yang terdiri dari
trapezium, trapezoid, capitates, dan hamate
E
Extension = Melenturkan otot menjauhi sumbu tubuh (depan-
belakang)
Eksternal stressing cable = Letak sistem kabel tangan prosthetic yang berada di
luar jari tangan prosthetic
F
Flexion = Melenturkan otot mendekati sumbu tubuh (depan-

IV-19
belakang)
Force = Gaya
Force gauge = Alat yang digunakan untuk mengetahui besarnya gaya
tarikan yang diperlukan untuk membuka jari-jari pada
protoype tangan prosthetic
G
Grasp = Tangan memegang benda
Gloves = Sarung tangan
H
Hook = Gerakan dimana keempat jari menahan beban yang
dilakukan secara vertikal
Hamate = Tulang kecil yang menyusun bagian metacarpal
I
Interphalangeal joint = Sendi yang menghubungkan antar phalanx pada jari
tangan
Intercarpal joint = Artikulasi antara sepasang tulang carpal
Internal stressing cable = Letak sistem kabel tangan prosthetic yang berada di
dalam jari tangan prosthetic
J
Joint = Sendi
L
Lateral = Gerakan pemegangan dimana benda kerja berada
dalam apitan antara ibu jari tangan dengan jari telunjuk
pada posisi kedua jari mengarah ke depan sedangkan
ketiga jari mengarah ke belakang, gerakan ini
digunakan ketika memegang benda dengan dimensi
yang tipis
Link = Hubungan
Longitudinal axis = Arah sumbu tubuh manusia dalam sumbu-z
Lunate = Tulang kecil yang menyusun bagian metacarpal
M
Metacarpal = Susunan tulang pada bagian telapak tangan sebagai
rumah untuk jari telunjuk, jari tengah, jari manis, dan
jari kelingking

IV-20
Metacarpal pollicis = Susunan tulang pada bagian telapak tangan sebagai
rumah untuk ibu jari
Metacarpophalangeal joint = Sendi yang menghubungkan antara metacarpal dengan
tulang phalanges
Midcarpal joint = Sendi antara dua baris tulang carpal
Myoelectric = Jenis prosthetic yang menerapkan system otomasi
dengan syaraf manusia
O
Otto Bock = Perusahaan yang bergerak di bidang orthotic-
prosthetic yang berbasis di Jerman
P
Palmar = gerakan dimana benda kerja berada di antara jari
telunjuk dan ditahan oleh ibu jari dengan arah gerakan
semua jari ke tengah, gerakan ini mirip dengan
gerakan lateral
Phalanx phalangeal = Jari tangan prosthetic
Phalanx proximalis = Bagian tulang pada jari tangan yang berhubungan
dengan telapak tangan
Phalanx media = Bagian tulang pada jari tangan yang berhubungan
dengan phalanx proximalis (ruas jari tengah)
Phalanx distalis = Bagian tulang pada jari tangan yang berhubungan
dengan phalanx media (ujung jari)
Power grip = Jenis pemegangan yang membutuhkan kekuatan jari
Precision grip = Jenis pemegangan yang membutuhkan ketelitian tinggi
Prosthetic = Alat ganti tubuh untuk bagian tubuh yang hilang
Proximal = Jenis baris dalam tulang carpal yang terdiri dari lunate,
scaphoid, dan triquetrum
R
Radius = Tulang pada bagian lengan bawah sebelah kanan
Radiocarpal joint = Sendi dimana seluruh gerakan tangan terjadi
S
Sagital plane = Arah tubuh dengan posisi dari belakang ke depan
(dalam sumbu-y)
Scapoid = Tulang kecil yang menyusun bagian metacarpal
Spherical = Gerakan pemegangan dengan benda kerja ditahan oleh

IV-21
kelima jari tangan, gerakan ini digunakan ketika
memegang benda berbentuk bola
T
Tip = Gerakan dimana benda ditahan dengan menggunakan
ibu jari tangan dan jari telunjuk, gerakan ini mirip
dengan gerakan lateral dan palmar
Trapezium = Tulang kecil yang menyusun bagian metacarpal
pollicis
Trapezoid = Tulang kecil yang menyusun bagian metacarpal
Trapeziometacarpal = Sendi yang menghubungkan antara metacarpal dengan
metacarpal pollicis
Triquetrum = Tulang kecil yang menyusun bagian metacarpal
Thumb = Ibu jari tangan
U
Ulna = Tulang pada bagian lengan bawah sebelah kiri
Upper limb prosthetic = Alat ganti tubuh untuk bagian atas tubuh
V
Voluntary closing = Sistem penarikan kabel tangan prosthetic dimana
kondisi normal tangan prosthetic dalam keadaan
membuka
Voluntary open = Sistem penarikan kabel tangan prosthetic dimana
kondisi normal tangan prosthetic dalam keadaan
menutup

IV-22
BAB I PENDAHULUAN
Pada bab ini diuraikan beberapa hal pokok mengenai penelitian ini, yaitu
latar belakang penelitian, perumusan masalah, tujuan dan manfaat penelitian,
batasan masalah dan asumsi, serta sistematika pembahasan.
1.1 LATAR BELAKANG
Tangan manusia merupakan salah satu anggota gerak tubuh manusia yang
penting dalam melakukan aktivitas sehari-hari. Tangan manusia berfungsi sebagai
alat penyeimbang dan pendukung tubuh (Tosberg, 1962). Ketiadaan tangan
menyebabkan terganggunya fungsi organ tubuh, sehingga muncul alat bantu
pengganti bagian tubuh yang hilang yang disebut dengan prosthetic. Prosthetic
tangan memiliki dua fungsi yaitu sebagai kosmetik dan sebagai alat fungsional.
Prosthetic tangan yang berfungsi sebagai kosmetik bentuknya menyerupai tangan
asli, namun tidak dapat berfungsi sebagaimana tangan normal (Weir, et.al, 2001).
Sedangkan prosthetic tangan sebagai alat fungsional, diharapkan mampu
menjalankan enam model gerakan dasar tangan manusia, yaitu cylindrical, lateral,
palmar, hook, tip, dan spherical (Martel dan Gini, 2007).
Sistem pengoperasian prosthetic tangan produksi dalam negeri masih
menggunakan sistem kabel (cable system). Sistem kabel pada prosthetic tangan
terdapat dua macam, yaitu sistem external stressing cable dan sistem internal
stressing cable. Cara kerja sistem external stressing cable dan sistem internal
stressing cable hampir sama, yaitu dengan menarik kabel pada tangan prosthetic
yang dihubungkan pada belt yang tersambung ke bahu pengguna. Ketika
pengguna menggerakkan sistem kabel, maka ibu jari pada tangan prosthetic
membuka atau menutup. Perbedaannya hanya terletak pada posisi kabel, dimana
pada sistem external stressing cable terletak di luar jari tangan prosthetic,
sedangkan pada sistem internal stressing cable terletak di dalam jari tangan
prosthetic.
Berdasarkan penelitian Wilmer Group pada Delft University of Technology,
Belanda (2000), desain upper limb prosthetic yang baik harus memiliki tiga
kriteria utama, yaitu cosmetic appeal, comfort, dan control. Cosmetic appeal

IV-23
berarti bahwa prosthetic tangan harus dapat memenuhi permintaan dari
penggunanya dari sisi penampilan luar (desain cosmetic). Selain itu, prosthetic
tangan nyaman ketika digunakan dan memiliki berat yang seringan mungkin agar
dapat meminimasi tekanan pada kulit penggunanya. Prosthetic tangan juga mudah
dioperasikan dan memiliki gaya yang rendah ketika digunakan untuk
menggenggam objek benda.
Salah satu kriteria desain tangan prosthetic yang baik adalah kemudahan
dalam pengoperasiannya. Kemudahan pengoperasian tersebut dapat dilihat dari
besarnya gaya tarik yang dibutuhkan tangan prosthetic ketika melakukan gerakan
pemegangan. Gaya tarik merupakan gaya yang dibutuhkan untuk menarik kabel
dari sistem kabel yang ada dalam tangan prosthetic agar tangan tersebut dapat
bekerja. Gaya tarik tersebut terdiri dari dua macam, yaitu gaya tarik dinamis dan
gaya tarik statis. Gaya tarik dinamis merupakan gaya yang dibutuhkan tangan
prosthetic dalam kaitannya untuk menggerakkan jari-jari tangan prosthetic sesuai
dengan model gerakan tangan manusia. Sedangkan gaya tarik statis merupakan
gaya yang dibutuhkan tangan prosthetic dalam kaitannya untuk menekan objek
benda yang dipegang. Tangan prosthetic yang baik harus memberikan gaya tarik
dinamis serta gaya tarik statis yang minimum ketika dioperasikan. Dalam hal ini
desain tangan prosthetic memegang peranan penting. Pada saat pengoperasian
untuk melakukan enam gerakan dasar tangan manusia, kebutuhan gaya tarik
dinamis dan gaya tarik statis untuk setiap desain bisa berbeda.
Rajiv Doshi, Clement Yeh, dan Maurice LeBlanc dari Palo Alto Healthcare
System, Palo Alto melakukan kajian mengenai The design and development of a
gloveless endoskeletal prosthetic hand pada tahun 1998 diperoleh hasil bahwa
desain jari tangan endoskeletal dengan tiga joint membutuhkan input gaya yang
lebih rendah 12% - 24% dalam memegang objek dibandingkan dengan jari tangan
prosthetic dengan dua joint yang dikembangkan sebelumnya oleh Otto Bock dan
Army Prosthetics Research Laboratory (APRL). Penggunaan tiga joint pada jari,
membuat area pemegangan objek lebih luas dan pergerakan jari juga lebih
realistic. Namun, kelemahan dari desain ini adalah variabilitas pemegangan objek
masih rendah karena desain ibu jari yang masih pasif.

IV-24
Penelitian ini dilakukan terhadap tiga jenis desain tangan prosthetic yang
dikembangkan oleh Agung S, Herdiman L, dan Theresia A. Perbedaan desain
tangan prosthetic terletak pada desain metacarpal dan phalanx phalangeal (jari
tangan) dari masing-masing tangan prosthetic. Desain tangan prosthetic yang
dikembangkan oleh Agung S menerapkan sistem external stressing cable. Bagian
metacarpal telapak tangan prosthetic terdiri dari dari dua komponen utama, yaitu
rangka metacarpal sebagai tempat komponen jari tangan prosthetic dan
metacarpal policis sebagai tempat komponen ibu jari pada tangan prosthetic.
Desain lima jari tangan telapak tangan prosthetic terdiri dari dua link, yaitu
phalanx proximal dan phalanx media-distalis. Kelemahan dari desain ini adalah
ibu jari (thumb) yang pasif dan tidak mampu bertemu dengan phalanx distilis
telunjuk. Phalanx media dan phalanx distilis juga didesain menjadi satu berupa
phalanx media-distilis, sehingga sulit bagi tangan prosthetic untuk menggenggam
objek dengan sudut yang aman mengikuti kontur objek yang digenggam.
Desain tangan prosthetic yang dikembangkan oleh Herdiman L menerapkan
sistem internal stressing cable. Rangka metacarpal dirancang menjadi dua
bagian, sehingga membentuk sudut pemegangan yang memudahkan pengguna
dalam memegang objek. Metacarpal policis didesain fleksibel sehingga dapat
diatur sudut kemiringannya untuk memudahkan pengguna dalam memegang
objek sesuai dengan besarnya dimensi objek. Jari tangan telapak tangan prosthetic
terdiri dari tiga link, yaitu phalanx proximal, phalanx media, dan phalanx distalis.
Pengembangan desain tangan prosthetic sistem internal stressing cable dilakukan
oleh Theresia A dengan penambahan sistem puli pada jari tangan prosthetic yang
berfungsi sebagai rel kabel sehingga memudahkan saat penarikan kabel. Bagian
metacarpal pollicis dirancang menjadi satu dengan phalanx proximalis ibu jari.
Ibu jari didesain mampu berotasi terbatas sehingga dapat bertemu dengan jari
telunjuk dan jari tengah.
Desain tangan prosthetic lokal yang dikembangkan oleh Agung S, Herdiman
L, dan Theresia A, perlu dilakukan eksperimen untuk mengevaluasi pengaruh
desain metacarpal dan phalanx phalangeal terhadap besarnya gaya tarik dinamis
dan gaya tarik statis jari tangan prosthetic pada saat melakukan enam gerakan
dasar tangan manusia. Selanjutnya dilakukan komparasi hasil pengukuran gaya

IV-25
tarik dinamis dan gaya tarik statis jari dari masing-masing tangan prosthetic. Hasil
eksperimen nantinya dapat dijadikan sebagai rekomendasi perbaikan desain
tangan prosthetic yang memberikan gaya tarik dinamis dan gaya tarik statis jari
dengan nilai yang terkecil, sehingga mampu memberikan percepatan yang
maksimal pada saat melakukan gerakan pemegangan.
1.2 PERUMUSAN MASALAH
Berdasarkan latar belakang masalah di atas, maka permasalahan dalam
penelitian ini adalah “bagaimana memilih desain tangan prosthetic berdasarkan
pengaruh desain metacarpal dan phalanx phalangeal dalam menghasilkan nilai
gaya tarik dinamis dan gaya tarik statis jari tangan prosthetic”.
1.3 TUJUAN PENELITIAN
Tujuan yang ingin dicapai dalam penelitian tangan prosthetic, yaitu:
1. Menentukan besarnya nilai gaya tarik dinamis dan gaya tarik statis dari
tangan prosthetic.
2. Menentukan rekomendasi dalam pengembangan desain tangan prosthetic
selanjutnya.
1.4 MANFAAT PENELITIAN
Penelitian ini diharapkan dapat memberikan manfaat, yaitu:
1. Memberikan bahan pertimbangan untuk pengembangan penelitian tentang
tangan prosthetic selanjutnya.
2. Memberikan estimasi gaya tarik dinamis dan gaya tarik statis yang optimal
dalam mendesain tangan prosthetic.
1.5 BATASAN MASALAH
Batasan masalah dari penelitian mengenai studi kajian pengembangan
telapak tangan prosthetic, sebagai berikut:
1. Kriteria yang digunakan dalam membandingkan ketiga jenis tangan prosthetic
adalah gaya tarik dinamis dan gaya tarik statis jari.

IV-26
2. Pengukuran aktual gaya tarik dinamis dan gaya tarik statis jari tangan
prosthetic dilakukan pada posisi arah longitudinal axis (hi gravity effect-low
friction) dan sagital plane (hi friction-low gravity effect).
3. Pengukuran gaya tarik statis dilakukan dengan thumb (ibu jari) dalam kondisi
pasif.
4. Ketiga model tangan prosthetic dikondisikan dalam sistem voluntary closing
supaya memudahkan dalam perhitungan gaya tarik dinamis dan gaya tarik
statis.
1.6 ASUMSI PENELITIAN
Asumsi penelitian diperlukan untuk menyederhanakan kompleksitas
permasalahan yang diteliti. Asumsi yang digunakan adalah pengukuran aktual
gaya tarik dinamis dan gaya tarik statis jari tangan prosthetic tidak
memperhitungkan gaya gesek yang terdapat pada sistem kabel.
1.7 SISTEMATIKA PENULISAN
Sistematika penulisan dibuat agar dapat memudahkan pembahasan
penyelesaian masalah dalam penelitian ini. Penjelasan mengenai sistematika
penulisan, dapat dijelaskan pada sub bab berikut ini.
BAB I : PENDAHULUAN
Bab ini menguraikan berbagai hal mengenai latar belakang penelitian,
perumusan masalah, tujuan penelitian, manfaat penelitian, batasan
masalah, asumsi-asumsi dan sistematika penulisan.
BAB II : TINJAUAN PUSTAKA
Bab ini menguraikan teori-teori yang dipakai untuk mendukung
penelitian, sehingga perhitungan dan analisis dilakukan secara teoritis.
Tinjauan pustaka diambil dari berbagai sumber yang berkaitan
langsung dengan permasalahan yang dibahas dalam penelitian.
BAB III : METODOLOGI PENELITIAN
Bab ini berisi tahapan yang dilalui dalam penyelesaian masalah secara
umum yang berupa gambaran terstruktur dalam bentuk flowchart sesuai

IV-27
dengan permasalahan yang ada mulai dari studi pendahuluan,
pengumpulan data sampai dengan pengolahan data dan analisis.
BAB IV : PENGUMPULAN DAN PENGOLAHAN DATA
Bab ini berisi data-data yang diperlukan untuk menyelesaikan masalah,
kemudian dilakukan pengolahan data secara bertahap.
BAB V : ANALISIS DAN INTERPRETASI HASIL
Bab ini memuat uraian analisis dan intepretasi dari hasil pengolahan
data yang telah dilakukan
BAB VI : KESIMPULAN DAN SARAN
Bab ini menguraikan target pencapaian dari tujuan penelitian dan
kesimpulan yang diperoleh dari pembahasan masalah. Bab ini juga
menguraikan saran dan masukan bagi kelanjutan penelitian.

IV-28
BAB II TINJAUAN PUSTAKA
Bab ini menguraikan teori-teori yang diperlukan dalam mendukung
penelitian. Bagian pertama bab ini membahas tentang anatomi dan gerakan
tangan manusia untuk mengetahui prinsip dan fungsi dasar tangan manusia.
Pengetahuan mengenai pengembangan prosthetic tangan diperlukan guna
menunjang pembahasan masalah. Sedangkan pengetahuan mengenai konsep
gaya dan pegas diperlukan dalam proses pelaksanaan eksperimen. Teori-
teori yang berkaitan dengan konsep dasar desain eksperimen faktorial dan
Anova diperlukan dalam proses pengolahan data dan analisa.
2.1 TANGAN MANUSIA
Tangan manusia merupakan salah satu anggota gerak tubuh manusia
yang penting dalam melakukan aktivitas sehari-hari. Tangan manusia
berfungsi sebagai alat penyeimbang dan pendukung tubuh (Tosberg, 1962).
2.1.3 Anatomi tangan manusia
Struktur penyusun tulang telapak tangan manusia terdiri dari banyak
tulang kecil yang disebut dengan bagian carpal, bagian metacarpal, dan
bagian phalanx. Tulang pada telapak tangan orang normal terdiri dari 27
tulang, yaitu delapan tulang carpal, lima tulang metacarpal, dan 14 tulang
phalanges. Pada bagian tulang carpal, terdapat tulang-tulang kecil yang
menyusun bagian tersebut, yaitu tulang lunate, tulang triquetrum, tulang
capitates, tulang scapoid, tulang trapezium, dan tulang trapezoid. Pada bagian
metacarpal, terdiri dari tulang metacarpal untuk empat jari (jari telunjuk,
jari tengah, jari manis, dan jari kelingking) serta tulang metacarpal pollicis
yang menghubungkan antara tulang trapezium pada bagian carpal dengan
phalanx distalis pada tulang ibu jari. Pada bagian jari (jari telunjuk, jari
tengah, jari manis, dan jari kelingking), terdapat tiga tulang kecil yang
menyusunnya, yaitu tulang phalanx proximalis, phalanx media, dan phalanx
distalis. Sedangkan pada ibu jari, komponen penyusun tulang jari terdiri

IV-29
dari phalanx proximalis dan phalanx distalis. Struktur tulang pada tangan
manusia dapat dilihat pada gambar 2.1.
Gambar 2.1 Struktur tulang pada tangan manusia Sumber: Papaioannaou, 2000
Pergelangan tangan terdiri dari 10 tulang carpal yang kecil tetapi dapat
dibagi berdasarkan fungsi menjadi radiocarpal dan mid-carpal joint.
Radiocarpal joint adalah artikulasi dimana seluruh gerakan tangan terjadi.
Radiocarpal joint meliputi ujung dari tulang radius dan dua tulang carpal
(tulang scapoid dan lunate), serta kontak yang minimal dengan tulang
triquetrum. Ellipsoid joint ini memberikan gerakan pada dua bidang: flexion-
extension dan radial-ulnar flexion.

IV-30
Gambar 2.2 Joint pada tangan manusia Sumber: Hamill, 2009
Pada tulang carpal terdapat dua baris utama, yaitu baris proximal dan
baris distal. Baris proximal terdiri dari tiga tulang carpal yang berperan
dalam fungsi joint dari pergelangan tangan (lunate, scaphoid, dan triquetrum)
dan tulang pisiform yang terdapat pada bagian tengah tangan. Pada baris
distal, juga terdapat empat tulang carpal, yaitu trapezium, trapezoid, capitates,
dan hamate. Artikulasi antara dua baris carpal disebut midcarpal joint, dan
artikulasi antara sepasang tulang carpal disebut intercarpal joint. Baris
proximal lebih mudah bergerak daripada baris distal.
Artikulasi carpometacarpal joint (CMC) menghubungkan tulang carpal
dengan masing-masing jari tangan melalui metacarpal. Masing-masing
metacarpal dan phalanx juga disebut sebagai sebuah ray. Terdapat beberapa
jumlah tulang dari ibu jari sampai jari kelingking, dengan ibu jari sebagai
ray pertama dan jari kelingking sebagai ray kelima. Artikulasi CMC adalah
sebuah joint yang memberikan gerakan yang lebih banyak pada ibu jari dan
gerakan yang lebih sedikit pada jari lainnya. CMC joint pada ray yang
pertama (ibu jari), adalah sebuah saddle joint yang terdiri dari artikulasi
antara trapezium.
Metacarpophalangeal joint (MCP) adalah joint yang menghubungkan
antara metacarpal dengan tulang phalanges. MCP joint memungkinkan
gerakan pada dua bidang: flexion-extension dan abduction-adduction.
Masing-masing jari memiliki dua interphalangeal joint (IP), yaitu proximal
interphalangeal (PIP) dan distal interphalangeal (DIP). Ibu jari hanya
memiliki satu IP joint karena hanya memiliki dua phalanx, yaitu proximal
dan distal phalanx (Hamill, 2009).
2.1.4 Gerakan Dasar Tangan Manusia
Kekuatan pada tangan manusia biasanya dihubungkan dengan
kekuatan pemegangan. Terdapat dua jenis pemegangan pada tangan
manusia, yaitu jenis pemegangan power grip dan precision grip (Hamill,
2009). Keterangan mengenai tiap jenis pemegangan dapat dilihat pada
gambar 2.3.

IV-31
Gambar 2.3 Perbedaan jenis pemegangan power grip dan precision grip Sumber: Hamill, 2009
Keterangan mengenai jenis pemegangan precision grip dan power grip
dapat dilihat pada penjelasan, berikut ini.
a. Precision grip,
Pemegangan precision grip membutuhkan kekuatan otot yang lebih kecil,
dimana hanya melibatkan dua joint (proximal interphalangeal joint, dan
distal interphalangeal joint) dan hanya melibatkan satu atau dua jari,
seperti gerakan menulis dan menjepit. Karakteristik dari jenis
pemegangan ini terletak pada kemampuan ibu jari dan metacarpal
pollicis. Dalam arah berlawanan ibu jari berotasi membentuk suatu jalur
yang berlawanan dengan jari telunjuk dan jari tengah. Pada umumnya,
posisi ibu jari lurus dengan jari yang lain membengkok dengan sendi
engsel pada bagian sendi metacarpophalangeal. Model gerakan yang
termasuk dalam jenis pemegangan precision grip adalah model gerakan
lateral, palmar, dan tip.
b. Power grip,
Pemegangan power grip membutuhkan kekuatan otot yang lebih besar,
dimana tiga joint jari (metacarpophalangeal joint, proximal
interphalangeal joint, dan distal interphalangeal joint) dalam posisi
mengepal. Pada jenis pemegangan power grip, ibu jari tidak berotasi dan
selalu dalam keadaan lurus, sehingga kemiringan sendi engsel pada ibu

IV-32
jari lebih kecil dibandingkan pada sendi untuk jari yang lain. Pada
umumnya, model gerakan variasi dari power grip yang sering dilakukan
oleh tangan adalah model gerakan cylindrical, spherical, dan hook.
Enam gerakan dasar tangan manusia meliputi gerakan cylindrical,
lateral, palmar, hook, tip, dan spherical. Penjelasan mengenai keenam
gerakan dasar tangan manusia, sebagai berikut:
1. Gerakan cylindrical,
Gerakan cylindrical adalah gerakan benda kerja berada diporos antara
jari-jari tangan dan ditahan oleh ibu jari, umumnya geometri benda yang
dipegang pada gerakan ini berupa silinder.
Gambar 2.4 Model gerakan tangan cylindrical Sumber: Fukaya and Toyama, 2000
Gerakan cylindrical melibatkan kelima jari tangan yang saling
berpengaruh dalam menahan benda agar tidak jatuh, sehingga tulang
jari phalanx proximalis, phalanx media, dan phalanx distalis pada tiap jari
sangat berperan dalam melakukan gerakan ini.
2. Gerakan lateral,
Gerakan lateral merupakan gerakan benda kerja berada dalam apitan
antara ibu jari tangan dengan jari telunjuk pada posisi kedua jari
mengarah ke depan sedangkan ketiga jari mengarah ke belakang.
Gambar 2.5 Model gerakan tangan lateral Sumber: Fukaya and Toyama, 2000

IV-33
Kemampuan dari jari telunjuk dan ibu jari tangan memegang peranan
penting dalam melakukan gerakan lateral, dimana benda dijepit pada
tulang jari phalanx media dan phalanx distalis dari jari telunjuk dan ibu
jari.
3. Gerakan palmar,
Gerakan palmar adalah gerakan benda kerja berada di antara jari
telunjuk dan ditahan oleh ibu jari dengan arah gerakan semua jari ke
tengah, gerakan ini mirip dengan gerakan lateral.
Gambar 2.6 Model gerakan tangan palmar Sumber: Fukaya and Toyama, 2000
Tulang jari phalanx distalis pada jari telunjuk dan ibu jari melakukan
gerakan palmar dengan menjepit benda di antara phalanx distalis kedua
jari.
4. Gerakan hook,
Gerakan hook merupakan gerakan keempat jari menahan beban yang
dilakukan secara vertikal, contoh penggunaan gerakan ini adalah ketika
jari tangan memegang handle koper.
Gambar 2.7 Model gerakan tangan hook Sumber: Fukaya and Toyama, 2000
Pada elemen gerakan hook, empat jari pada tangan meliputi jari
telunjuk, jari tengah, jari manis, dan jari kelingking menahan beban
pada saat melakukan pemegangan. Kekuatan tulang jari phalanx
proximalis, phalanx media, dan phalanx distalis pada keempat jari sangat

IV-34
berperan dalam melakukan gerakan ini, karena beban dari benda yang
dipegang sangat bergantung pada kekuatan keempat jari.
5. Gerakan tip,
Gerakan tip adalah gerakan dimana benda ditahan dengan menggunakan
ibu jari tangan dan jari telunjuk, gerakan ini mirip dengan gerakan
lateral dan palmar.
Gambar 2.8 Model gerakan tangan tip Sumber: Fukaya and Toyama, 2000
Kemampuan dari jari telunjuk dan ibu jari tangan memegang peranan
penting dalam melakukan gerakan tip, dimana benda dijepit pada tulang
jari phalanx distalis dari jari telunjuk dan ibu jari.
6. Gerakan spherical,
Gerakan spherical melakukan gerakan pemegangan dengan benda kerja
ditahan oleh kelima jari tangan, gerakan ini digunakan ketika memegang
benda berbentuk bola.
Gambar 2.9 Model gerakan tangan spherical Sumber: Fukaya and Toyama, 2000
Gerakan spherical melibatkan kelima jari agar benda yang dipegang
tidak terjatuh. Kekuatan tulang jari phalanx proximalis, phalanx media,
dan phalanx distalis pada kelima jari sangat berperan dalam melakukan

IV-35
gerakan ini, karena beban dari benda yang dipegang sangat bergantung
pada kekuatan kelima jari.
Metode yang digunakan secara universal untuk menggambarkan
gerakan manusia didasarkan pada sistem bidang dan sumbu (Hamill, 2009).
Sebuah bidang bersifat datar, permukaannya dua dimensi. Tiga bidang
imajiner diposisikan melalui tubuh pada sudut kanan sehingga mereka
saling berpotongan pada pusat massa tubuh. Ini merupakan bidang kardinal
tubuh. Berikut ketiga bidang yang saling berpotongan.
Gambar 2.10 Bidang cardinal tubuh Sumber: Hamill, 2009
Kardinal tiga bidang yang berasal dari pusat gravitasi (Hamill, 2009),
adalah:
1. Bidang sagital, yang membagi tubuh ke kanan dan kiri. Gerak bidang
sagital dapat mencakup gerakan maju dan mundur. Bidang sagital
memotong melalui pusat tubuh, sehingga gerakan dari depan ke belakang
atau belakang ke depan, termasuk berjalan lurus ke depan.

IV-36
Gambar 2.11 Contoh gerakan pada bidang sagital Sumber: Hamill, 2009
2. Bagian depan bidang (frontal), membagi tubuh ke depan dan belakang.
Karakteristik gerakan bidang frontal meliputi abduksi dan adduksi paha,
jari dan tangan. Contoh gerakannya dapat diamati pada gambar berikut:
Gambar 2.12 Contoh gerakan pada bidang frontal Sumber: Hamill, 2009
3. Bidang melintang (transverse), contoh dari gerakan pada bidang
transverse pada sumbu longitudinal joint adalah gerakan rotasi pada joint
antara ruas tulang belakang, bahu, dan pinggul. Gerakan prontion dan
supination lengan bawah pada radioulnar joint juga merupakan contoh
gerakan pada bidang transverse.
Berikut merupakan contoh-contoh gerakan bidang transverse.
Gambar 2.13 Contoh gerakan pada bidang transverse Sumber: Hamill, 2009

IV-37
2.2 PROSTHETIC TANGAN
Prosthetic merupakan alat bantu pengganti bagian tubuh manusia yang
hilang. Bentuk dan fungsi prosthetic disesuaikan dengan bagian tubuh yang
hilang. Penjelasan mengenai prosthetic tangan dapat dilihat pada sub bab, di
bawah ini.
2.2.3 Jenis Prosthetic Tangan
Ada beberapa jenis prosthetic tangan yang telah didesain selama ini.
Beberapa dari desain tangan prosthetic tersebut awalnya hanya berfungsi
sebagai kosmetik meskipun dapat digunakan untuk melakukan gerakan
pemegangan yang terbatas (Torsberg, 1962). Secara umum ada tiga kategori
dalam prosthetic tangan, yaitu passive prostheses, body powered prostheses,
dan externally powered prostheses/myoelectric devices (Herr, et.al, 2001).
1. Passive prostheses,
Passive prostheses adalah jenis pertama dari tangan prosthetic yang dibuat
pertama kali oleh Marcus Sergius pada perang Punik tahun 218-201 sebelum
Masehi. Tangan prosthetic ini mirip seperti sarung tangan atau baja pelindung
tangan, yang dibuat oleh ahli pembuat baju besi. Tangan palsu tersebut dibuat
tanpa menggunakan mesin yg dibuat oleh tenaga professional. Walaupun
sudah mempresentasikan tangan buatan manusia yang bagus, namun
kekurangannya adalah tidak bisa bergerak bebas layaknya tangan manusia
secara efektif dan alami.
Gambar 2.14 Passive prostheses Sumber: Herr, Hugh, et.al, 2001
Keuntungan dari passive prostheses adalah memiliki nilai kosmetik yang
tinggi, memiliki berat yang relatif ringan, pemeliharaan yang relatif mudah,
dan harganya yang murah.

IV-38
2. Body powered prostheses,
Body powered prostheses ditemukan tahun 1812 ketika Peter Baliff, seorang
dokter gigi asal Berlin, menemukan sebuah “terminal device” yang
dioperasikan dengan mengikatkan tangan prosthetic dengan tubuh pasien.
Body powered prostheses dioperasikan dengan mengikatkan tubuh dengan
pundak dan dijalankan dengan biscapula adduction (melingkar di punggung
dan pundak). Tangan prosthetic ini memungkinkan untuk bisa dioperasikan
karena ada alat untuk ‘membalikkan lengan’ atau proprosepsi untuk
mengarahkan dimana alat tersebut diposisikan untuk “bolak balik” dan untuk
mengetahui berapa jumlah energi yg dibutuhkan untuk menggerakkannya.
Namun masalahnya untuk menjalankan alat ini harus menggunakan tali
pengikat. Untuk mengenakan dan mengangkat peralatan ini agak sulit karena
mengganggu pakaian yg dikenakan. Jadi penggunaan alat ini kurang efektif
karena juga sulit untuk digerakkan.
Gambar 2.15 Body powered prostheses Sumber: Herr, Hugh, et.al, 2001
Sistem kabel pada body powered prostheses ada dua macam, yaitu voluntary
open dan voluntary closing (Torsberg, 1962). Pada sistem voluntary open,
kondisi awal jari tangan prosthetic dalam keadaan menutup, kemudian kabel
pada sistem tangan prosthetic ditarik sehingga jari tangan prosthetic
membuka. Sedangkan pada sistem voluntary closing, kondisi awal jari tangan
prosthetic dalam keadaan membuka, kemudian kabel pada sistem tangan
prosthetic ditarik sehingga jari tangan prosthetic menutup.

IV-39
Keuntungan dari body powered prostheses adalah memiliki tingkat reliabilitas
yang tinggi, bisa digunakan dalam berbagai kondisi lingkungan (basah, kotor,
dan berdebu), dan memiliki berat yang ringan.
3. Myoelectric devices,
Myoelectric devices adalah tangan prosthetic listrik yang ditemukan tahun
1948 oleh Rehold Reiner. Jenis ini menggunakan sensor untuk mendeteksi,
biasanya tangan prosthetic ini menggunakan sistem penerimaan syaraf melalui
elektromiografik untuk mengoperasikan motor elektrik di dalam tangan
prosthetic tersebut. Dan bisa juga untuk mengoperasikan komponen
pergelangan tangan dan siku. Aktifitas Elektromiografik (EMG) sebenarnya
berasal dari depolarisasi dan repolarisasi pada membran sel otot individu
selama proses pergerakan otot. Dengan menggunakan permukaan elektroda,
dapat memungkinkan untuk mengukur perbedaan potensi terhadap kulit
disekitar daerah teramputasi.
Gambar 2.16 Myoelectric devices Sumber: Herr, Hugh, et.al, 2001
Keuntungan dari myoelectric devices adalah mampu mengkombinasikan dua
fungsi utama tangan prosthetic (fungsi kosmetik dan alat fungsional), mampu
digunakan dalam berbagai macam posisi, dan mudah dalam pengoperasian.
2.2.4 Perkembangan Prosthetic Tangan
Pada dasarnya perkembangan tangan prosthetic dapat dibagi menjadi
tiga, yaitu perkembangan prosthetic kosmetik, perkembangan prosthetic
fungsional, dan perkembangan prosthetic gabungan dari keduanya.

IV-40
Perkembangan telapak tangan prosthetic kosmetik terus menerus dilakukan
hingga saat ini, untuk memenuhi tujuan utama prosthtetic, yaitu
menyediakan alat pengganti bagian tubuh yang hilang dan memenuhi
kebutuhan pasien beserta fungsinya.
Prosthetic kosmetik pertama kali ditemukan pada tahun 2500 sebelum
masehi dengan penemuan jari kaki palsu. Kemudian pada saat perang Punic
di tahun 218-201 sebelum Masehi, Markus Sergius membuat prosthetic
kosmetik dengan bahan dasar baja.
Gambar 2.17 Prosthetic tangan kosmetik Sumber: Johnson, 2006
Prosthetic fungsional pertama kali dibuat oleh Gotz Von Berlichingen
pada tahun 1508. Bentuk dari prosthetic tangan ini tidak menyerupai tangan
manusia, meskipun dapat menjalankan beberapa fungsi tangan. Contoh
prosthetic tangan fungsional adalah tangan jenis prehensor dan hook.
Gambar 2.18 Prosthetic tangan fungsional jenis prehensor dan hook Sumber: Johnson, 2006
Prosthetic tangan kosmetik dan fungsional memiliki bentuk yang sudah
menyerupai tangan manusia dan mampu menjalankan enam dasar gerakan
pemegangan meliputi gerakan spherical, cylindrical, hook, tip, lateral, dan
palmar. Perkembangan prosthetic tangan kosmetik dan fungsional di luar

IV-41
negeri jauh lebih maju dibandingkan prosthetic tangan buatan Indonesia saat
ini. Jerman telah mengembangkan prosthetic tangan yang dikombinasikan
dengan teknologi robot (humanoid) sejak tahun1980-an hingga saat ini.
Gambar 2.19 Prosthetic tangan kosmetik dan fungsional Sumber: Johnson, 2006
2.3 GAYA DAN PEGAS
Eksperimen pada tangan prosthetic memerlukan konsep dasar
mengenai gaya dan pegas. Selain itu, perlu diketahui mengenai konsep dasar
pegas yang digunakan sebagai alat bantu dalam penelitian ini. Berikut ini
dijelaskan lebih jauh mengenai pengertian gaya dan pegas.
2.3.3 Gaya
Gaya (force) dinyatakan dalam percepatan yang dialami oleh suatu
benda standar bila diletakkan dalam lingkungan tertentu yang sesuai
(Physics, 1999). Gaya dapat menyebabkan suatu benda bergerak dengan
arah dan percepatan tertentu. Hukum Newton berhubungan erat dengan
adanya gaya pada suatu benda.
a. Hukum Newton pertama,
Hukum Newton pertama muncul sebagai hasil jawaban pemikiran
Galileo mengenai masalah gerak dan penyebabnya. Bunyi dari
pernyataan hukum Newton pertama adalah “setiap benda akan tetap
berada dalam keadaan diam atau bergerak lurus beraturan kecuali jika ia
dipaksa untuk mengubah keadaan itu oleh gaya-gaya yang berpengaruh
padanya”. Pada dasarnya hukum Newton pertama ini memberikan
pernyataan tentang kerangka acuan pada suatu benda.
b. Hukum Newton kedua,

IV-42
Hukum Newton kedua berhubungan dengan gaya dan percepatan suatu
benda. Suatu gaya total yang bekerja pada sebuah benda dapat membuat
kelajuan benda tersebut bertambah, atau jika gaya total berlawanan arah
dengan gerak, maka gaya itu akan mengurangi kelajuan. Bunyi dari
pernyataan hukum Newton yang kedua adalah “percepatan sebuah benda
berbanding lurus dengan gaya total yang bekerja padanya dan berbanding
terbalik dengan massanya. Arah percepatan searah dengan gaya total yang
diberikan”. Pernyataan tersebut dapat disimbolkan sebagai:
m
Fa åµ ………………………………persamaan
2.1
dimana a menyatakan percepatan, m untuk massa dan ΣF untuk gaya
total. F menyatakan gaya, sehingga ΣF bermakna jumlah vektor dari
semua gaya yang bekerja pada benda.
c. Hukum Newton ketiga,
Pernyataan hukum Newton ketiga dikembangkan dari hukum Newton
kedua, yaitu berdasarkan pengamatan bahwa suatu gaya yang
diterapkan pada setiap benda adalah gaya yang diberikan oleh benda
lain. Bunyi dari pernyataan hukum Newton yang ketiga adalah
“kapanpun sebuah benda melakukan gaya pada benda kedua, benda yang
kedua melakukan sebuah gaya yang sama dan berlawanan pada yang
pertama”. Hukum ini kadang-kadang berbunyi sebagai “terhadap setiap
aksi ada suatu reaksi yang sama dan berlawanan”. Hal tersebut berlaku
secara sempurna, tapi untuk menghindari kesalahan akan sangat penting
untuk mengingat bahwa gaya aksi dan gaya reaksi bekerja pada benda
yang berbeda.
2.3.4 Pegas
Pegas adalah sebuah elemen fleksibel yang digunakan untuk
menghasilkan gaya atau torsi dan pada saat yang sama menyimpan energy
(Mott, 2004). Gaya itu dapat lurus tarik atau tekan, atau radial yang beraksi
serupa dengan gelang karet di sekeliling gulungan gambar. Pegas dapat

IV-43
dikelompokkan sesuai dengan arah dan sifat gaya yang dihasilkan ketika
pegas mengalami defleksi. Beberapa kelompok pegas, seperti tekan, tarik,
radial, dan punter, ditunjukkan dalam tabel 2.1.
Tabel 2.1 Jenis-jenis pegas
Sumber : L.Mott, 2004
Pegas yang digunakan sebagai alat bantu dalam penelitian ini adalah
pegas jenis ulir tekan. Pegas ulir tekan umumnya terbuat dari kawat bundar,
dililitkan lurus, berbentuk silindris dengan jarak bagi konstan antara lilitan
satu dengan lilitan berikutnya.
Gambar 2.21 Pegas ulir tekan Sumber: L. Mott, 2004
Hubungan antara gaya yang dihasilkan pegas dan defleksinya disebut
konstanta pegas, k. konstanta pegas dapat dihitung dengan membagi
perubahan gaya dengan perubahan defleksi.
k = ΔF/ ΔL ………………………………………...………….persamaan
2.2

IV-44
dengan; k = konstanta pegas (N/m)
ΔF = perubahan gaya (N)
ΔL = perubahan defleksi (m)
2.4 DESAIN EKSPERIMEN
Desain eksperimen merupakan langkah-langkah lengkap yang perlu
diambil jauh sebelum eksperimen dilakukan agar supaya data yang
semestinya diperlukan dapat diperoleh sehingga akan membawa kepada
analisis objektif dan kesimpulan yang berlaku untuk persoalan yang sedang
dibahas. (Sudjana, 1995).
An experiment is a test of tests in wihch purposeful changes are made to
the input variables of a process or system so that we may observe and
identify the reasons for changes that may be observed in the output
response. (Montgomery, 1997).
Beberapa istilah atau pengertian yang perlu diketahui dalam desain
eksperimen (Sudjana, 1985 ; Montgomery, 1997):
a. Experimental unit (unit eksperimen)
Objek eksperimen dimana nilai-nilai variabel respon diukur.
b. Variabel respon (effect)
Disebut juga dependent variable atau ukuran performansi, yaitu output
yang ingin diukur dalam eksperimen.
c. Faktor
Disebut juga independent variable atau variabel bebas, yaitu input yang
nilainya akan diubah-ubah dalam eksperimen.
d. Level (taraf)
Merupakan nilai-nilai atau klasifikasi-klasifikasi dari sebuah faktor.
Taraf (levels) faktor dinyatakan dengan bilangan 1, 2, 3 dan seterusnya.
Misalkan dalam sebuah penelitian terdapat faktor-faktor :
a = jenis kelamin
b = cara mengajar

IV-45
Selanjutnya taraf untuk faktor a adalah 1 menyatakan laki-laki, 2
menyatakan perempuan (a1 , a2). Bila cara mengajar ada tiga, maka
dituliskan dengan b1, b2, dan b3.
e. Treatment (perlakuan)
Sekumpulan kondisi eksperimen yang akan digunakan terhadap unit
eksperimen dalam ruang lingkup desain yang dipilih. Perlakuan
merupakan kombinasi level-level dari seluruh faktor yang ingin diuji
dalam eksperimen.
f. Replikasi
Pengulangan eksperimen dasar yang bertujuan untuk menghasilkan
taksiran yang lebih akurat terhadap efek rata-rata suatu faktor ataupun
terhadap kekeliruan eksperimen.
g. Faktor Pembatas/ Blok (Restrictions)
Sering disebut juga sebagai variabel kontrol (dalam Statistik
Multivariat). Yaitu faktor-faktor yang mungkin ikut mempengaruhi
variabel respon tetapi tidak ingin diuji pengaruhnya oleh eksperimenter
karena tidak termasuk ke dalam tujuan studi.
h. Randomisasi
Yaitu cara mengacak unit-unit eksperimen untuk dialokasikan pada
eksperimen. Metode randomisasi yang dipakai dan cara
mengkombinasikan level-level dari fakor yan berbeda menentukan jenis
disain eksperimen yang akan terbentuk.
i. Kekeliruan eksperimen
Merupakan kegagalan daripada dua unit eksperimen identik yang
dikenai perlakuan untuk memberi hasil yang sama.
Langkah-langkah dalam setiap proyek eksperimen secara garis besar
terdiri atas tiga tahapan, yaitu planning phase, design phase dan analysis
phase. (Hicks, 1993).
1. Planning Phase
Tahapan dalam planning phase adalah :
a. Membuat problem statement sejelas-jelasnya.

IV-46
b. Menentukan variabel bebas (dependent variables), yaitu efek yang ingin
diukur, sering disebut sebagai kriteria atau ukuran performansi.
c. Menentukan independent variables.
d. Menentukan level-level yang akan diuji, tentukan sifatnya, yaitu :
· Kualitatif atau kuantitatif ?
· Fixed atau random ?
e. Tentukan cara bagaimana level-level dari beberapa faktor akan
dikombinasikan (khusus untuk eksperimen dua faktor atau lebih).
2. Design Phase
Tahapan dalam design phase adalah :
a. Menentukan jumlah observasi yang diambil.
b. Menentukan urutan eksperimen (urutan pengambilan data).
c. Menentukan metode randomisasi.
d. Menentukan model matematik yang menjelaskan variabel respon.
e. Menentukan hipotesis yang akan diuji.
3. Analysis Phase
Tahapan dalam analysis phase adalah :
a. Pengumpulan dan pemrosesan data.
b. Menghitung nilai statistik-statistik uji yang dipakai.
c. Menginterpretasikan hasil eksperimen.
2.4.4 Factorial Experiment
Eksperimen faktorial digunakan bilamana jumlah faktor yang akan
diuji lebih dari satu. Eksperimen faktorial adalah eksperimen dimana semua
(hampir semua) taraf (levels) sebuah faktor tertentu dikombinasikan dengan
semua (hampir semua) taraf (levels) faktor lainnya yang terdapat dalam
eksperimen. (Sudjana, 1985).
Di dalam eksperimen faktorial, bisa terjadi hasilnya dipengaruhi oleh
lebih dari satu faktor, atau dikatakan terjadi interaksi antar faktor. Secara
umum interaksi didefinisikan sebagai ‘perubahan dalam sebuah faktor
mengakibatkan perubahan nilai respon, yang berbeda pada tiap taraf untuk

IV-47
faktor lainnya, maka antara kedua faktor itu terdapat interaksi’ (Sudjana,
1985).
Skema umum data sampel untuk desain eksperimen dapat dilihat pada
Tabel 2.1 di bawah ini.
Tabel 2.2 Skema umum data sampel eksperimen faktorial menggunakan 3 faktor dan dengan n observasi tiap sel
Faktor A Faktor C Faktor B
1 2 … a Jumlah
1
Y1111 Y2111 … Ya111
Y1112 Y2112 … Ya112
… … … …
Y111n Y211n … Ya11n
… …
… … … … … … … …
… … 1
b
Y1b11 Y2b11 Y3b11 Y4b11
Y1b12 Y2b12 Y3b12 Y4b12
… … … …
Y1b1n Y2b1n Y3b1n Y4b1n
… …
… …
… … … … … … … …
… …
1
Y1111 Y2111 … Ya111
Y1112 Y2112 … Ya112
… … … … Y111n Y211n … Ya11n
c …
…
… … … …
… … … …
…
…

IV-48
b
Y1bc1 Y2bc1 … Yabc1
Y1bc2 Y2bc2 … Yabc2
… … … … Y1bcn Y2bcn … Yabcn
Total T…1 T...2 T...3 T…a Sumber : Sudjana, 1985
Adapun model matematik yang digunakan untuk pengujian data
eksperimen yang menggunakan dua faktor dan satu blok adalah sebagai
berikut :
Yijkm = m + Ai + Bj + ABij + Ck+ ACik + BCjk + ABCijk + em(ijk) ……..2.3
dengan;
Yijkm : variabel respon
Ai : faktor desain tangan prosthetic
Bj : faktor arah sumbu gerakan tangan prosthetic
Ck : faktor model gerakan dasar tangan manusia
ABij : interaksi faktor A dan faktor B
ACik : interaksi faktor A dan faktor C
BCjk : interaksi faktor B dan faktor C
ABCijk : interaksi faktor A, faktor B, dan faktor C
em(ijk) : random error
i : jumlah faktor desain tangan prosthetic (A), i = 1, 2, 3
j : jumlah faktor arah sumbu gerakan tangan prosthetic (B), j = 1,
2
k : jumlah faktor model gerakan dasar tangan manusia (C), k=
1,2,...,6
m : jumlah observasi m = 1, 2, 3, 4, 5
Berdasarkan model persamaan (2.1), maka untuk keperluan Anova
dihitung harga-harga (Hicks, 1993) sebagai berikut :
· Jumlah kuadrat total (SStotal) :
nabc
TY
....a
i
b
j
c
k
n
lijkm
22
totalSS -= åååå .…………..…. persamaan 2.4
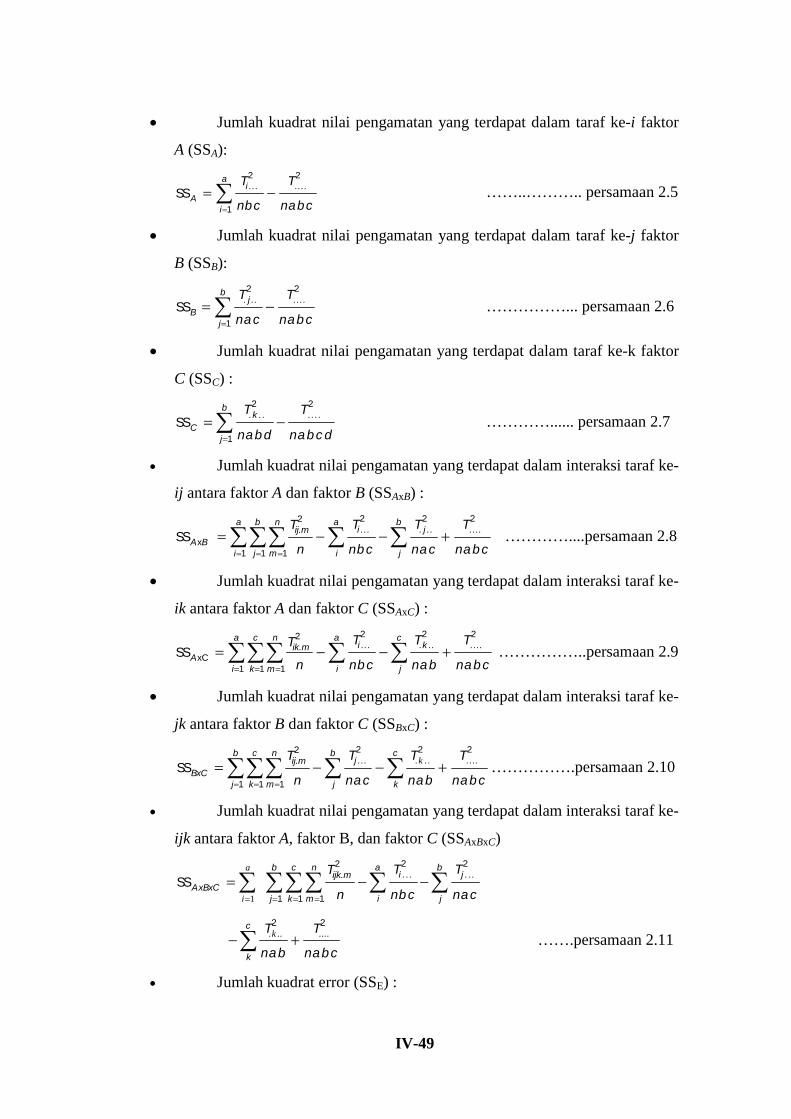
IV-49
· Jumlah kuadrat nilai pengamatan yang terdapat dalam taraf ke-i faktor
A (SSA):
å=
-=a
i
.......iA
nabc
T
nbc
T
1
22
SS ……..……….. persamaan 2.5
· Jumlah kuadrat nilai pengamatan yang terdapat dalam taraf ke-j faktor
B (SSB):
å=
-=b
j
......j.B
nabc
T
nac
T
1
22
SS ……………... persamaan 2.6
· Jumlah kuadrat nilai pengamatan yang terdapat dalam taraf ke-k faktor
C (SSC) :
å=
-=b
j
......k.C
nabcd
T
nabd
T
1
22
SS …………...... persamaan 2.7
· Jumlah kuadrat nilai pengamatan yang terdapat dalam interaksi taraf ke-
ij antara faktor A dan faktor B (SSAxB) :
nabc
T
nac
T
nbc
T
n
T ....b
j
..j.a
i
b
j
n
m
a
i
...iij.mBA
22
1 1 1
22
xSS +--= åååå å= = =
…………....persamaan 2.8
· Jumlah kuadrat nilai pengamatan yang terdapat dalam interaksi taraf ke-
ik antara faktor A dan faktor C (SSAxC) :
nabc
T
nab
T
nbc
T
n
T ....c
j
..k.a
i
c
k
n
m
a
i
...iik.mA
22
1 1 1
22
xCSS +--= åååå å= = =
……………..persamaan 2.9
· Jumlah kuadrat nilai pengamatan yang terdapat dalam interaksi taraf ke-
jk antara faktor B dan faktor C (SSBxC) :
nabc
T
nab
T
nac
T
n
T ....c
k
...b
j
c
k
n
m
b
j
...jij.mBxC
22
1 1 1
22
SS +--= åååå å= = =
k …………….persamaan 2.10
· Jumlah kuadrat nilai pengamatan yang terdapat dalam interaksi taraf ke-
ijk antara faktor A, faktor B, dan faktor C (SSAxBxC)
ååå ååå= = ==
--=b
j
c
k
n
m
b
j
...ja
i
...iijk.mAxBxC
nac
T
nbc
T
n
T
1 1 1
222
SSa
i 1
nabc
T
nab
T ....c
k
...22
+-å k …….persamaan 2.11
· Jumlah kuadrat error (SSE) :

IV-50
SSE = SStotal - SSA - SSB – SSC - SSAB – SSAC – SSBC - SSABC …..persamaan 2.12
Tabel Anova untuk eksperimen faktorial dengan tiga faktor (a, b, dan
c), dengan nilai-nilai perhitungan dalam bentuk diatas adalah sebagaimana
tabel 2.3. Pada kolom terakhir tabel 2.3, untuk menghitung harga F yang
digunakan sebagai alat pengujian statistik, maka perlu diketahui model
mana yang diambil. Model yang dimaksud ditentukan oleh sifat tiap faktor,
apakah tetap atau acak. Model tetap menunjukkan di dalam eksperimen
terdapat hanya m buah perlakuan, sedangkan model acak menunjukkan
bahwa dilakukan pengambilan m buah perlakuan secara acak dari populasi
yang ada.
Tabel 2.3 Anova eksperimen faktorial 3 faktor desain acak sempurna
Sumber Variansi Derajat Bebas (df)
Jumlah Kuadrat
(SS)
Kuadrat Tengah (MS)
F
Faktor A
Faktor B
Faktor C
Interaksi AxB
Interaksi AxC
Interaksi BxC
Interaksi
AxBxC
Error
a –1
b – 1
c –1
(a – 1)(b – 1)
(a – 1)(c – 1)
(b – 1)(c – 1)
(a–1)(b–1)(c–1)
abc(n - 1)
SSA
SSB
SSC
SSAxB
SSAXC
SSBXC
SSAXBXC
SSE
SSA/dfA
SSB/dfB
SSC/dfC
SSAxB/dfAxB
SSAxC/dfAxC
SSBxC/dfBxC
SSAXBXC/dfAxBxC
SSE/dfE
MSA/MSE
MSB/MSE
MSC/MSE
MSAxB/MSE
MSAxC/MSE
MSBxC/MSE
MSAxBxC/MSE
Total abcn SSTotal

IV-51
2.4.5 Uji Asumsi
Apabila menggunakan analisis variansi sebagai alat analisa data
eksperimen, maka seharusnya sebelum data diolah, terlebih dahulu
dilakukan uji asumsi-asumsi Anova berupa uji homogenitas variansi, dan
independensi, terhadap data hasil eksperimen.
1. Uji Normalitas
Untuk memeriksa apakah populasi berdistribusi normal atau tidak,
dapat ditempuh uji normalitas dengan menggunakan metode lilliefors
(kolmogorov-smirnov yang dimodifikasi), atau dengan normal probability –
plot.
Pemilihan uji lilliefors sebagai alat uji normalitas didasarkan oleh :
a. Uji lilliefors adalah uji kolmogorov-smirnov yang telah dimodifikasi dan
secara khusus berguna untuk melakukan uji normalitas bilamana mean
dan variansi tidak diketahui, tetapi merupakan estimasi dari data
(sampel). Uji kolmogorov-smirnov masih bersifat umum karena berguna
untuk membandingkan fungsi distribusi kumulatif data observasi dari
sebuah variabel dengan sebuah distribusi teoritis, yang mungkin bersifat
normal, seragam, poisson, atau exponential.
b. Uji lilliefors sangat tepat digunakan untuk data kontinu, jumlahnya
kurang dari 50 data, dan data tidak disusun dalam bentuk interval
(bentuk frekuensi). Apabila data tidak bersifat seperti di atas maka uji
yang tepat untuk digunakan adalah khi-kuadrat. (Miller, 1991).
c. Uji lilliefors terdapat di software SPSS yang akan membantu
mempermudah proses pengujian data sekaligus bisa mengecek hasil
perhitungan secara manual.
Langkah-langkah perhitungan uji lilliefors (Wijaya, 2000) sebagai
berikut:
a. Urutkan data dari yang terkecil sampai terbesar.
b. Hitung rata-rata ( x ) dan standar deviasi ( s ) data tersebut.
n
x
x
n
ii ÷ø
öçè
æ
=å=1
. . . . . . . . . . persamaan 2.13

IV-52
( )
1
2
2
-
-=
åån
n
XX
s . . . . . . . . . . . persamaan
2.14
c. Transformasikan data tersebut menjadi nilai baku ( z ).
( ) sxxz ii /-= . . . . . . . . . . persamaan 2.15
dimana xi = nilai pengamatan ke-i
x = rata-rata
s = standar deviasi
d. Dari nilai baku ( z ), tentukan nilai probabilitasnya P( z ) berdasarkan
sebaran normal baku, sebagai probabilitas pengamatan. Gunakan tabel
standar luas wilayah di bawah kurva normal, atau dengan bantuan Ms.
Excel dengan function NORMSDIST.
e. Tentukan nilai probabilitas harapan kumulatif P(x) dengan rumus
sebagai berikut :
nixP i /)( = . . . . . . . . . . . . . . . persamaan 2.16
f. Tentukan nilai maksimum dari selisih absolut P( z ) dan P( x ) yaitu
maks | P( z ) - P( x )| , sebagai nilai L hitung.
g. Tentukan nilai maksimum dari selisih absolut P(xi-1) dan P( z ) yaitu
maks | P(xi-1) - P( z ) |
Tahap berikutnya adalah menganalisis apakah data observasi dalam
beberapa kali replikasi berdistribusi normal. Hipotesis yang diajukan adalah
:
H0 : data observasi berasal dari populasi yang berdistribusi normal
H1 : data observasi berasal dari populasi yang tidak berdistribusi
normal
Taraf nyata yang dipilih a = 0.05, dengan wilayah kritik Lhitung > La(k-1)
. Apabila nilai Lhitung < Ltabel , maka terima H0 dan simpulkan bahwa data
observasi berasal dari populasi yang berdistribusi normal.
2. Uji homogenitas

IV-53
Uji homogenitas bertujuan menguji apakah variansi error dari tiap
level atau perlakuan bernilai sama. Alat uji yang sering dipakai adalah uji
bartlett. Namun uji bartlett dapat dilakukan setelah uji normalitas
terlampaui. Untuk menghindari adanya kesulitan dalam urutan proses
pengolahan, maka alat uji yang dipilih adalah uji levene test. Uji levene
dilakukan dengan menggunakan analisis ragam terhadap selisih absolut dari
setiap nilai pengamatan dalam sampel dengan rata-rata sampel yang
bersangkutan.
Prosedur uji homogenitas levene (Wijaya, 2000) sebagai berikut :
a. Kelompokkan data berdasarkan faktor yang akan diuji.
b. Hitung selisih absolut nilai pengamatan terhadap rata-ratanya pada tiap
level.
c. Hitung nilai-nilai berikut ini :
· Faktor Koreksi (FK) = ( ) nxi2å . . . . . . . . . . . persamaan
2.17
Dimana xi = data hasil pengamatan
i = 1, 2, . . ., n (n banyaknya data)
· JK-Faktor = FKkxi -÷÷ø
öççè
æ÷øöç
èæå 2
. . . . . . . . . . persamaan 2.18
Dimana k = banyaknya data pada tiap level
· JK-Total (JKT) = ( ) FKyi -å 2 . . . . . . . . . .
persamaan 2.19
Dimana yi = selisih absolut data hasil pengamatan dengan rata-
ratanya untuk tiap level
· JK-Error (JKE) = JKT – JK(Faktor) . . . . . . . . . .
persamaan 2.20
Nilai-nilai hasil perhitungan di atas dapat dirangkum dalam sebuah
daftar analisis ragam sebagaimana tabel 2.4 di bawah ini.
Tabel 2.4 Skema umum daftar analisis ragam uji homogenitas
Sumber Keragaman
Db JK KT F

IV-54
Faktor f JK(Faktor) JK(Faktor) / db )(
)(errorKTfaktorKT
Error n-1-f
JKE JKE / db
Total n-1 JKT
d. Hipotesis yang diajukan adalah :
H0 : 26
25
24
23
22
21 ssssss =====
H1 : Ragam seluruh level faktor tidak semuanya sama
e. Taraf nyata yang dipilih adalah α = 0.01
f. Wilayah kritik : F > F α (v1 ; v2) atau F > F0.01 (5 ; 168)
3. Uji independensi
Salah satu upaya mencapai sifat independen adalah dengan melakukan
pengacakan terhadap observasi. Namun demikian, jika masalah acak ini
diragukan maka dapat dilakukan pengujian dengan cara memplot residual
versus urutan pengambilan observasinya. Hasil plot tersebut akan
memperlihatkan ada tidaknya pola tertentu. Jika ada pola tertentu, berarti
ada korelasi antar residual atau error tidak independen. Apabila hal tersebut
terjadi, berarti pengacakan urutan eksperimen tidak benar (eksperimen
tidak terurut secara acak).
2.4.6 Uji Setelah Anova
Uji setelah Anova dilakukan apabila ada hipotesis nol (H0) yang ditolak
atau terdapat perbedaan yang signifikan antar level faktor, blok, atau
interaksi faktor-faktor. Uji setelah Anova bertujuan untuk menjawab
manakah dari rata-rata taraf perlakuan yang berbeda.
Alat uji yang biasa digunakan adalah contras orthogonal, uji rentang
Student Newman-Keuls, uji Dunnett dan uji Scheffe. Apabila ingin
menggunakan uji contras orthogonal, maka pemakaian alat uji ini sudah
harus ditentukan sejak awal (sebelum eksperimen dilakukan), termasuk
model perbandingan rata-rata perlakuan. Adapun tiga alat uji lainnya dapat

IV-55
digunakan apabila perlu setelah hasil pengolahan data menunjukkan adanya
perbedaan yang berarti antar perlakuan.
Uji Student Newman-Keuls (SNK) lebih tepat digunakan
dibandingkan uji dunnett ataupun scheffe, untuk melihat pada level mana
terdapat perbedaan dari suatu faktor yang dinyatakan berpengaruh
signifikan oleh uji Anova. Pemilihan uji dunnett atau scheffe tidak tepat
untuk melihat pada level mana terdapat perbedaan terhadap suatu faktor,
karena uji dunnett hanya digunakan untuk membandingkan suatu kontrol
dengan perlakuan lainnya, sedangkan uji scheffe lebih ditujukan untuk
membandingkan antara dua kelompok perlakuan (bukan level tunggal).
Prosedur uji Student Newman-Keuls (SNK) (Hicks, 1993) terhadap
suatu level yang pengaruhnya dinyatakan cukup signifikan adalah sebagai
berikut :
1. Susun rata-rata tiap level yang diuji dari kecil ke besar.
2. Ambil nilai mean squareerror dan dferror dari tabel Anova.
3. Hitung nilai error standar untuk mean level dengan rumus berikut :
kS error
.jY
MS= ……………. persamaan
2.21
dimana k = jumlah level
4. Tetapkan nilai a dan ambil nilai-nilai significant ranges dari Tabel
Stundentized range dengan n2 = dferror dan p = 2, 3, … ,k sehingga
diperoleh significant range (SR).
5. Kalikan tiap nilai significant range (SR) yang diperoleh dengan error
standar sehingga diperoleh least significant range (LSR).
LSR = SR x .jY
S ………….… persamaan
2.22
6. Hitung beda (selisih) mean antar dua level (akan terbentuk kK2 = k(k –
1)/2 pasang), dimulai dari mean terbesar dengan sampai dengan mean
terkecil. Bandingkan kembali beda second largest dan next smallest
dengan LSR untuk p = k – 1, demikian seterusnya sampai diperoleh kK2
perbandingan.

IV-56
BAB III METODOLOGI PENELITIAN
Metode penelitian menggambarkan langkah-langkah penelitian yang
dilakukan dalam pemecahan masalah. Adapun langkah-langkah penyelesaian
masalah adalah seperti dalam gambar 3.1.

IV-57
Gambar 3.1 Metodologi penelitian

IV-58
Kesimpulan dan Saran
Analisis dan Interpretasi Hasil Penelitian
Interpretasi Hasil Eksperimen
Range Test
Signifikan?
Ya
Tidak
A
Pemilihan Desain Tangan Prosthetic Berdasarkan Nilai Gaya Tarik Statis dan Gaya Tarik Dinamis
B
Gambar 3.1 Metodologi penelitian (lanjutan)
3.6 IDENTIFIKASI MASALAH
Tahap identifikasi masalah diawali dengan penentuan latar belakang
masalah dan perumusan masalah, tujuan dan manfaat penelitian, serta studi
pustaka mengenai tangan prosthetic, adapun uraian lebih jelasnya, sebagai
berikut:
1. Latar belakang,
Penentuan latar belakang penelitian dilakukan untuk mengetahui gambaran
permasalahan yang selanjutnya akan diangkat menjadi pokok penelitian. Pada
penelitian mengenai prosthetic tangan, dilakukan kajian terhadap desain
prosthetic tangan lokal yang telah dikembangkan sebelumnya.
Salah satu kriteria desain tangan prosthetic yang baik adalah kemudahan dalam
pengoperasiannya. Kemudahan pengoperasian tersebut dapat dilihat dari
besarnya gaya tarik yang dibutuhkan tangan prosthetic ketika melakukan
gerakan pemegangan. Gaya tarik merupakan gaya yang dibutuhkan untuk
menarik kabel dari sistem kabel yang ada dalam tangan prosthetic agar tangan
tersebut dapat bekerja. Gaya tarik tersebut terdiri dari dua macam, yaitu gaya
tarik dinamis dan gaya tarik statis. Gaya tarik dinamis merupakan gaya yang
dibutuhkan tangan prosthetic dalam kaitannya untuk menggerakkan jari-jari
tangan prosthetic sesuai dengan model gerakan tangan manusia. Sedangkan

IV-59
gaya tarik statis merupakan gaya yang dibutuhkan tangan prosthetic dalam
kaitannya untuk menekan objek benda yang dipegang. Tangan prosthetic yang
baik harus memberikan gaya tarik dinamis serta gaya tarik statis yang
minimum ketika dioperasikan. Dalam hal ini desain tangan prosthetic
memegang peranan penting. Pada saat pengoperasian untuk melakukan enam
gerakan dasar tangan manusia, kebutuhan gaya tarik dinamis dan gaya tarik
statis untuk setiap desain bisa berbeda
Desain tangan prosthetic lokal yang dikembangkan oleh Agung S, Herdiman L,
dan Theresia A, perlu dilakukan eksperimen untuk mengevaluasi pengaruh
desain metacarpal dan phalanx phalangeal terhadap besarnya gaya tarik
dinamis dan gaya tarik statis jari tangan prosthetic pada saat melakukan enam
gerakan dasar tangan manusia. Selanjutnya dilakukan komparasi hasil
pengukuran gaya tarik dinamis dan gaya tarik statis jari dari masing-masing
tangan prosthetic. Hasil eksperimen nantinya dapat dijadikan sebagai
rekomendasi perbaikan desain tangan prosthetic yang memberikan gaya tarik
dinamis dan gaya tarik statis jari dengan nilai yang terkecil, sehingga mampu
memberikan percepatan yang maksimal pada saat melakukan gerakan
pemegangan.
2. Perumusan masalah,
Berdasarkan latar belakang masalah di atas, maka permasalahan dalam
penelitian ini adalah “bagaimana memilih desain tangan prosthetic berdasarkan
pengaruh desain metacarpal dan phalanx phalangeal dalam menghasilkan nilai
gaya tarik dinamis dan gaya tarik statis jari tangan prosthetic dengan
pendekatan desain eksperimen”.
3. Tujuan penelitian,
Penelitian ini bertujuan untuk menentukan besarnya gaya tarik dinamis dan
gaya tarik statis dari tangan prosthetic. Tujuan akhir dari penelitian ini adalah
menentukan rekomendasi untuk pengembangan desain tangan prosthetic
selanjutnya.
4. Manfaat penelitian,
Manfaat yang didapat dari penelitian ini adalah memberikan bahan
pertimbangan untuk pengembangan penelitian tentang tangan prosthetic
IV-60
selanjutnya dan memberikan estimasi gaya tarik dinamis dan gaya tarik statis
yang optimal dalam mendesain tangan prosthetic.
5. Studi pustaka,
Studi pustaka dilakukan dengan tujuan untuk mendapatkan gambaran
mengenai teori-teori dan konsep-konsep yang digunakan dalam
menyelesaikan permasalahan yang diteliti dan untuk mendapatkan dasar-
dasar referensi yang kuat dalam menerapkan suatu metode yang digunakan.
Studi literatur dilakukan dengan mengeksplorasi buku-buku, jurnal,
penelitian-penelitian dan sumber-sumber lain yang terkait dengan desain
eksperimen, dan tangan prosthetic.
3.7 PENGUMPULAN DATA
Tahap pengumpulan data dimulai dengan melakukan pengukuran gaya tarik
dinamis dan gaya tarik statis jari tangan prosthetic. Pengambilan data dilakukan di
Laboratorium Perencanaan dan Perancangan Produk Teknik Industri UNS.
Metode pengumpulan data yang digunakan berupa studi lapangan (observasi),
yaitu dengan melakukan pengamatan langsung terhadap objek yang diteliti untuk
memperoleh data yang dibutuhkan. Pengukuran gaya tarik dinamis dan gaya tarik
statis jari memperhatikan faktor-faktor yang telah ditentukan dalam desain
eksperimen.
3.2.5 Penentuan Teknik Desain Eksperimen
Dalam tahap ini dilakukan penentuan teknik desain eksperimen yang
digunakan. Teknik desain eksperimen yang dipilih yaitu Factorial Experiment
Completely Randomized Design. Desain ini digunakan karena eksperimen ini
terdiri dari tiga faktor, yaitu faktor desain tangan prothestic (A), faktor arah sumbu
gerakan tangan prosthetic (B), dan faktor model gerakan dasar tangan manusia
(C). Urutan eksperimen ditentukan secara random (complete randomization)
seperti yang ditunjukkan pada tabel 3.1. misal eksperimen ke-1 dilakukan pada
kondisi desain tangan prosthtetic ke-2, arah sumbu gerakan sagital plane, dan
model gerakan hook, sedangkan eksperimen terakhir (ke-36) dilakukan pada
kondisi desain tangan prosthetic ke-1, arah sumbu gerakan sagital plane, dan

IV-61
model gerakan palmar. Eksperimen hanya dilakukan untuk pengujian terhadap
gaya tarik dinamis jari tangan prosthetic.
Tabel 3.1 Urutan eksperimen factorial experiment completely randomized design
Desain tangan prosthetic (A) A1 A2 A3 Arah sumbu
gerakan (B) Longitudinal
axis (B1)
Sagital plane (B2)
Longitudinal axis (B1)
Sagital plane (B2)
Longitudinal axis (B1)
Sagital plane (B2)
Cylindrical (C1) 13 22 26 30 28 20 Spherical (C2) 4 35 3 24 10 31 Hook (C3) 5 6 19 1 27 9 Tip (C4) 23 7 29 16 18 32 Lateral (C5) 34 14 2 33 8 17 Palmar (C6) 12 36 15 11 25 21
1. Tahap Perencanaan (Planning Phase)
a. Membuat problem statement :
Problem statement dalam penelitian ini adalah bagaimana pengaruh desain
tangan prothestic, arah sumbu gerakan tangan prosthetic, dan model
gerakan dasar tangan manusia dalam menghasilkan nilai gaya tarik dinamis
jari tangan prosthetic.
b. Menentukan variabel respon atau kriteria atau ukuran performansi.
§ Variabel respon : Gaya tarik dinamis (F), yaitu besarnya gaya yang
dibutuhkan jari-jari tangan prothestic ketika melakukan enam model
gerakan tangan manusia.
§ Unit eksperimen : tiga jenis desain tangan prosthetic.
c. Menentukan faktor-faktor yang ingin diuji pengaruhnya dalam
eksperimen.
§ Faktor yang ingin diuji: desain tangan prothestic (A), arah sumbu gerakan
tangan prosthetic (B), dan model gerakan dasar tangan manusia (C).
§ Sifatnya : semua faktor bersifat kualitatif.
d. Menentukan banyaknya level (nilai) dari setiap faktor yang diuji.
§ Banyaknya level yang diuji dari setiap faktor :
Faktor desain tangan prothestic (A) terdiri dari tiga level, yaitu desain
tangan prothestic sistem external stressing cable (A1), model tangan

IV-62
prothestic sistem internal stressing cable tanpa puli (A2), model tangan
prothestic sistem internal stressing cable dengan puli (A3).
Faktor arah sumbu gerakan tangan prosthetic (B) terdiri dari dua level,
yaitu arah longitudinal axis (B1) dan arah sagital plane (B2).
Faktor model gerakan dasar tangan manusia (C) terdiri dari enam level,
yaitu gerakan cylindrical (C1), gerakan spherical (C2), gerakan hook (C3),
gerakan tip (C4), gerakan lateral (C5), dan gerakan palmar (C6).
§ Level-level dari semua faktor dipilih secara fixed.
e. Menentukan jenis desain eksperimen yang dipakai.
§ Desain eksperimen yang dipakai adalah Factorial Experiment Completely
Randomized Design
§ Tabulasi Factorial Experiment Completely Randomized Design adalah
seperti tabel 3.2.
Tabel 3.2 Factorial experiment completely randomized design
Desain tangan prosthetic (A)
A1 A2 A3 Arah sumbu gerakan (B) Longitudinal
axis (B1)
Sagital plane (B2)
Longitudinal axis (B1)
Sagital plane (B2)
Longitudinal axis (B1)
Sagital plane (B2)
Cylindrical (C1) A1B1C1 A1B2C1 A2B1C1 A2B2C1 A3B1C1 A3B2C1
Spherical (C2) A1B1C2 A1B2C2 A2B1C2 A2B2C2 A3B1C2 A3B2C2
Hook (C3) A1B1C3 A1B2C3 A2B1C3 A2B2C3 A3B1C3 A3B2C3
Tip (C4) A1B1C4 A1B2C4 A2B1C4 A2B2C4 A3B1C4 A3B2C4
Lateral (C5) A1B1C5 A1B2C5 A2B1C5 A2B2C5 A3B1C5 A3B2C5
Palmar (C6) A1B1C6 A1B2C6 A2B1C6 A2B2C6 A3B1C6 A3B2C6
2. Tahap Desain (Design Phase)
a. Menentukan jumlah observasi atau jumlah replikasi
Masing-masing kombinasi dilakukan lima kali pengukuran.
b. Urutan eksperimen : secara random.
c. Menentukan model matematik yang menjelaskan variabel respon
Yijkm = m + Ai + Bj + ABij + Ck+ ACik + BCjk + ABCijk + em(ijk)

IV-63
dengan;
Yijkm : variabel respon
Ai : faktor desain tangan prosthetic
Bj : faktor arah sumbu gerakan tangan prosthetic
Ck : faktor model gerakan dasar tangan manusia
ABij : interaksi faktor A dan faktor B
ACik : interaksi faktor A dan faktor C
BCjk : interaksi faktor B dan faktor C
ABCijk : interaksi faktor A, faktor B, dan faktor C
em(ijk) : random error
i : jumlah faktor desain tangan prosthetic (A), i = 1, 2, 3
j : jumlah faktor arah sumbu gerakan tangan prosthetic (B), j = 1, 2
k : jumlah faktor model gerakan dasar tangan manusia (C), k= 1,2,...,6
m : jumlah observasi m = 1, 2, 3, 4, 5
d. Menentukan Hipotesis yang diuji
Hipotesis umum yang diajukan dalam eksperimen ini adalah faktor yang
berpengaruh terhadap gaya tarik dinamis jari tangan prothestic, dimana
faktor tersebut mungkin berdiri sendiri ataupun berinteraksi dengan faktor
yang lain. Hipotesis umum ini disebut sebagai hipotesis satu (H1).
Adapun hipotesis nol dari eksperimen dalam penelitian ini adalah:
H01 : = 0
Perbedaan desain tangan prosthetic tidak menimbulkan pengaruh
yang signifikan terhadap besarnya gaya tarik dinamis.
H02 : = 0
Perbedaan arah sumbu gerakan tangan prosthetic tidak
menimbulkan pengaruh yang signifikan terhadap gaya tarik
dinamis.
H03 : = 0
Perbedaan model gerakan tangan manusia tidak menimbulkan
pengaruh yang signifikan terhadap besarnya gaya tarik dinamis.
H04 : = 0
Perbedaan interaksi desain tangan prosthetic dan arah sumbu

IV-64
gerakan tangan prosthetic tidak menimbulkan pengaruh yang
signifikan terhadap besarnya gaya tarik dinamis.
H05 : = 0
Perbedaan interaksi desain tangan prosthetic dan model gerakan
tangan manusia tidak menimbulkan pengaruh yang signifikan
terhadap besarnya gaya tarik dinamis.
H06 : = 0
Perbedaan interaksi arah sumbu gerakan tangan prosthetic dan
model gerakan tangan manusia tidak menimbulkan pengaruh yang
signifikan terhadap besarnya gaya tarik dinamis.
H07 : = 0
Perbedaan interaksi desain tangan prosthetic, arah sumbu gerakan
tangan prosthetic dan model gerakan tangan manusia tidak
menimbulkan pengaruh yang signifikan terhadap besarnya gaya
tarik dinamis.
3.2.6 Persiapan Alat dan Unit Eksperimen
Alat yang digunakan pada saat pengukuran gaya tarik dinamis dan gaya
tarik statis jari tangan prosthetic, yaitu:
a. Force gauge, digunakan untuk mengetahui besarnya gaya tarikan yang
diperlukan untuk membuka jari-jari pada telapak tangan prosthetic.
b. Timbangan digital, digunakan untuk mengukur berat tiap komponen telapak
tangan prosthetic.
c. Jangka sorong, digunakan untuk mengukur dimensi tiap komponen telapak
tangan prosthetic.
d. Penggaris, digunakan untuk mengukur dimensi tiap komponen telapak tangan
prosthetic
e. Lembar pengamatan, digunakan untuk mencatat semua data hasil pengukuran
yang dilakukan dalam eksperimen.
f. Alat bantu pegas, digunakan sebagai alat bantu untuk mengukur besarnya gaya
tarik statis jari tangan prosthetic.

IV-65
Sebelum eksperimen dilakukan, perlu dilakukan beberapa persiapan pada
unit eksperimen agar ketiga jenis tangan prosthetic dalam kondisi fair (mendapat
perlakuan yang sama). Persiapan tersebut antara lain:
1. Ketiga jenis tangan prosthetic dikondisikan menjadi sistem voluntary closing
agar memudahkan dalam pengukuran gaya tarik jari tangan prosthetic, seperti
yang ditunjukkan dalam gambar 3.2.
Gambar 3.2 Tangan prosthetic dalam kondisi voluntary closing Sumber: Laboratorium P3, 2009
2. Kabel yang digunakan dalam ketiga jenis tangan prosthetic adalah kabel
nilon dengan diameter 0,23 mm.
3. Komponen pegas jari ketiga jenis tangan prosthetic terbuat dari bahan kawat
besi baja dengan ukuran diameter 0,7 cm.
3.2.7 Pengukuran Aktual Gaya Tarik Statis Jari Tangan Prosthetic
Pengukuran gaya tarik statis jari bertujuan untuk mengetahui kekuatan jari
tangan prosthetic dalam memegang objek benda. Alat ukur yang digunakan
adalah force gauge dengan alat bantu pegas. Prosedur pengukuran yang dilakukan
adalah dengan menghitung besarnya gaya tekan dari alat bantu pegas. Kemudian
dilakukan pengukuran gaya tarik yang dibutuhkan jari tangan prosthetic dalam
menekan alat bantu pegas. Nilai gaya tekan dan gaya tarik yang dihasilkan,
dibandingkan satu sama lain, dimana besarnya gaya tarik dari tangan prosthetic
diharapkan mendekati besarnya gaya tekan dari alat bantu pegas.

IV-66
3.2.8 Pengukuran Aktual Gaya Tarik Dinamis Jari Tangan Prosthetic
Gaya tarik dinamis pada tangan prosthetic diukur pada saat jari tangan
prosthetic melakukan enam model gerakan pemegangan. Gaya tarik tersebut
diukur sampai sesaat sebelum jari tangan prosthetic menyentuh objek benda yang
dipegang (gaya dinamis). Pengujian dilakukan pada dua posisi arah arah tangan
prosthetic (longitudinal axis dan sagital plane) dengan replikasi sejumlah lima
kali. Alat ukur yang digunakan dalam pengukuran gaya tarik dinamis adalah
force gauge. Pengujian dilakukan dengan enam objek benda yang berbeda
disesuaikan dengan jenis gerakan pemegangan.
3.8 PENGOLAHAN DATA
Tahap pengolahan data dilakukan setelah menentukan teknik desain
eksperimen yang digunakan dalam penelitian. Pengolahan data dimulai dengan
pengujian asumsi, pengujian signifikansi, dan pengujian setelah anova.
3.3.1 Uji Asumsi
Pengujian asumsi perlu dilakukan agar metode dalam penelitian dapat
diyakini memberikan hasil/analisis yang valid, yaitu:
1. Uji normalitas dengan metode Lilliefors,
Uji normalitas dilakukan terhadap keseluruhan data hasil observasi, dengan
tujuan untuk mengetahui apakah data hasil observasi tersebut berdistribusi
secara normal atau tidak.
2. Uji homogenitas dengan Levene Test,
Uji homogenitas dilakukan secara berpasangan antara variabel respon dengan
masing-masing faktor. Tujuan dari pengujian ini adalah untuk memastikan
bahwa variansi nilai dependent variable tidak terkonsentrasi/terkumpul pada
level tertentu dari independent variable. Uji levene dilakukan dengan
menggunakan analisis ragam terhadap selisih absolut dari setiap nilai
pengamatan dalam sampel dengan rata-rata sampel yang bersangkutan.
3. Uji independansi,
Uji independensi dilakukan untuk mengetahui bahwa error yang terjadi tidak
berkorelasi (tidak terlihat adanya pola tertentu jika error diplotkan). Setelah

IV-67
dilakukan uji asumsi-asumsi dan data hasil observasi dinyatakan normal,
homogen dan independen, maka uji signifikansi dapat dilakukan.
3.3.2 Uji Signifikansi
Data yang telah memenuhi syarat uji asumsi, kemudian dilanjutkan dengan
uji signifikansi. Uji signifikansi perbedaan kombinasi yang terbentuk dalam
penelitian ini merupakan tahap analisis dalam desain eksperimen. Pengujian ini
menggunakan metode Analysis of Variance dengan tiga faktor.
3.3.3 Uji Setelah Anova
Pengujian ini dilakukan untuk mengetahui sejauh mana perbedaan yang
terjadi dari hasil eksperimen yang telah dilakukan, dimana dalam hal ini adalah
untuk mengetahui jenis model tangan prosthetic yang terbaik dari segi gaya tarik
dinamis. Pengujian setelah Anova menggunakan uji SNK (Student Newman
Keuls).
3.3.4 Pemilihan Desain Tangan Prosthetic Berdasarkan Nilai Gaya Tarik Dinamis dan Gaya Tarik Statis Jari
Pada tahap ini dilakukan pemilihan desain tangan prosthetic dengan
mempertimbangkan nilai gaya tarik dinamis dan gaya tarik statis jari. Desain
tangan prosthetic yang dipilih adalah desain yang memiliki nilai gaya tarik
dinamis terkecil dan gaya tarik statis jari terbesar.
3.9 ANALISIS DAN INTERPRETASI HASIL
Pada tahap ini dilakukan analisis dan interpretasi hasil penelitian untuk
memberikan gambaran secara menyeluruh sebagai bahan pertimbangan dalam
rekomendasi desain tangan prosthetic.
3.10 KESIMPULAN DAN SARAN
Tahap ini merupakan bagian akhir dari penelitian yang membahas
kesimpulan dari hasil yang diperoleh serta usulan atau rekomendasi untuk
implementasi lebih lanjut dan bagi penelitian selanjutnya.

IV-68
BAB IV PENGUMPULAN DAN PENGOLAHAN DATA
Pada bab ini diuraikan proses pengambilan data dan dilanjutkan
dengan pengolahan data eksperimen. Pada bagian awal akan dibahas
karakteristik desain tangan prosthetic dan proses pelaksanaan eksperimen di
Laboratorium Perencanaan dan Perancangan Produk Teknik Industri UNS.
Selanjutnya dilakukan proses pengolahan data sesuai arahan metodologi
pada bab sebelumnya.
4.3 PENGUMPULAN DATA
Data yang dikumpulkan dalam penelitian adalah karakteristik desain
telapak tangan prosthetic (sistem external stressing cable dan sistem internal
stressing cable) yang dikembangkan sebelumnya dan penentuan teknik
desain eksperimen.
4.1.6 Desain Telapak Tangan Prosthetic
Desain telapak tangan prosthetic yang digunakan dalam penelitian ini
ada tiga jenis, yaitu desain telapak tangan prosthetic dengan sistem external
stressing cable, desain telapak tangan prosthetic dengan sistem internal
stressing cable tanpa system puli, dan desain telapak tangan prosthetic
dengan sistem internal stressing cable dengan system puli.
1. Desain Telapak Tangan Prosthetic dengan Sistem External Stressing Cable
Pengembangan desain tangan prosthetic (sistem external stressing cable)
dilakukan oleh Agung S (2009). Hasil desain telapak tangan prosthetic dapat
dilihat pada gambar 4.1 dibawah ini.
Gambar 4.1 Deskripsi pengembangan telapak tangan

IV-69
prosthetic (sistem external stressing cable) Sumber: Agung S, 2009
Desain telapak tangan prosthetic bekerja dengan sistem voluntary
opening device, dimana kondisi normal tangan prosthetic dalam keadaan
menggenggam. Sistem penarikan yang diterapkan pada telapak tangan
prosthetic menggunakan sistem kabel yang menghubungkan tangan
prosthetic dengan bahu pengguna. Pada saat bahu pengguna menarik kabel
maka komponen tuas penarik pada bagian metacarpal tangan prosthetic
menegang dan jari membuka.
Bagian metacarpal telapak tangan prosthetic terdiri dari dari dua
komponen utama, yaitu rangka metacarpal dan metacarpal policis. Rangka
metacarpal merupakan tempat komponen jari dan penghubung jari tangan
prosthetic. Pada bagian tengah rangka metacarpal terdapat sistem penarikan
kabel terhadap jari. Sedangkan metacarpal policis merupakan tempat
komponen ibu jari pada telapak tangan prosthetic. Pada komponen
metacarpal pollicis, ibu jari menempel pada bagian dorsal. Kemiringan sudut
pada bagian dorsal disesuaikan dengan anthropometri tangan responden,
yaitu sebesar 120o dalam keadaan menggenggam. Metacarpal dan metacarpal
pollicis dirangkai menjadi satu, untuk disambungkan dengan jari dengan
penghubung jari.
Gambar 4.2 Proses assembling pada bagian metacarpal telapak tangan prosthetic (sistem external stressing cable) Sumber: Agung S, 2009
Jari tangan telapak tangan prosthetic terdiri dari dua link, yaitu
phalanx proximal dan phalanx media-distalis. Pada bagian phalanx media dan
phalanx distalis jari tangan telapak tangan prosthetic dikembangkan menjadi
satu bagian menjadi phalanx media-distalis. Masing-masing jari dilengkapi

IV-70
dengan komponen penghubung jari yang berfungsi untuk menghubungkan
antara bagian jari dengan metacarpal tangan prosthetic. Setiap jari juga
memiliki pegas yang terletak antara komponen penghubung jari dengan
komponen phalanx proximalis dan komponen phalanx proximalis dengan
komponen phalanx media-distalis. Komponen pegas berfungsi untuk
mendorong komponen phalanx proximalis dan komponen phalanx media-
distalis untuk melakukan gerakan flexion-extension ketika kabel ditarik.
Dimensi untuk setiap jari pada tangan prosthetic didesain sama, kecuali
untuk dimensi ibu jari, perbedaan dimensi terletak pada panjang komponen.
Desain ibu jari tangan prosthetic masih pasif dan tidak mampu bertemu
dengan phalanx distalis jari telunjuk. Ibu jari didesain untuk mampu
melakukan gerakan flexion-extension dan abduction-adduction.
Gambar 4.3 Desain jari tangan prosthetic (sistem external stressing cable) Sumber: Agung S, 2009
Bahan utama yang digunakan pada pembuatan tangan prosthetic
adalah plastik industri jenis polyamid atau sering disebut dengan nylon.
Nylon merupakan resin dengan ikatan amida -NH-Co-, dan dari strukturnya
dapat dibagi menjadi [NH-R-NHCO-R’-CO]n dan [NH-R—CO]n. Pemilihan
bahan nylon dikarenakan bahan tersebut ringan, kuat, dan mudah dibentuk.
Nylon dikenal memiliki koefisien gesek yang rendah dan memiliki impact
resistance yang baik.
Berat telapak tangan prosthetic dipengaruhi oleh banyaknya komponen
yang menyusun telapak tangan prosthetic. Total jumlah komponen yang
menyusun telapak tangan prosthetic adalah 87 komponen. Berat total seluruh
komponen adalah 175 gram.

IV-71
Tabel 4.1 Spesifikasi berat komponen telapak tangan prosthetic (sistem external stressing cable)
Bagian Nama Komponen Jumlah
komponen Berat
(gram) Rangka metacarpal 1 27,43
Tuas penarik 1 7,31
Sekrup metacarpal 4 10,84
Poros utama 1 3,22
Pegas 1 1,86
Plat alumunium 1 50,84
Metacarpal
Tali metacarpal 1 0,26
Rangka metacarpal pollicis 1 18,29 Metacarpal pollicis Sekrup metacarpal pollicis 2 2,71
Penghubung jari 5 2,13
Phalanx proximalis 4 4,56
Phalanx proximalis ibu jari 1 1,03
Phalanx media-distalis 4 6,27 Phalanx media-distalis ibu jari
1 1,26
Pegas jari 10 3,20
Besi silinder 10 11,6
Sekrup jari 10 8,5
Cincin 10 12
Tali jari 1 0,21
Jari
Selang kabel 1 0,7
TOTAL : 175 Sumber: Agung S, 2009
2. Desain Telapak Tangan Prosthetic dengan Sistem Internal Stressing Cable
Desain telapak tangan prosthetic (sistem internal stressing cable) yang
digunakan sebagai unit eksperimen dalam penelitian ini terdiri dari dua
jenis, yaitu tangan prosthetic tanpa sistem puli dan tangan prosthetic dengan

IV-72
sistem puli. Pengembangan awal desain telapak tangan prosthetic (sistem
internal stressing cable) tanpa sistem puli dapat dilihat pada gambar 4.4.
Gambar 4.4 Deskripsi pengembangan telapak tangan prosthetic (sistem internal stressing cable) tanpa sistem puli
Desain telapak tangan prosthetic bekerja dengan sistem voluntary
opening device, dimana kondisi normal tangan prosthetic dalam keadaan
menggenggam. Sistem penarikan yang diterapkan pada telapak tangan
prosthetic menggunakan sistem kabel yang menghubungkan tangan
prosthetic dengan bahu pengguna. Pada saat bahu pengguna menarik kabel
maka sistem kabel pada bagian metacarpal tangan prosthetic menarik jari
tangan prosthetic dan jari membuka.
Bagian metacarpal telapak tangan prosthetic terdiri dari tiga komponen,
yaitu rangka metacarpal, metacarpal policis, dan komponen penghubung jari.
Rangka metacarpal dirancang menjadi dua bagian, masing-masing bagian
tersebut dirangkai menjadi satu sehingga membentuk sudut pemegangan
yang memudahkan pengguna dalam memegang objek. Metacarpal policis
merupakan tempat komponen ibu jari tangan prosthetic. Metacarpal policis
didesain fleksibel sehingga dapat diatur sudut kemiringannya untuk
memudahkan pengguna dalam memegang objek sesuai dengan besarnya
dimensi objek.

IV-73
Gambar 4.5 Desain metacarpal telapak tangan prosthetic (sistem internal stressing cable) tanpa sistem puli
Jari tangan telapak tangan prosthetic terdiri dari tiga link, yaitu
phalanx proximal, phalanx media, dan phalanx distalis. Setiap jari dilengkapi
dengan komponen penghubung jari dan pegas. Komponen penghubung jari
berfungsi untuk menghubungkan antara bagian jari dengan metacarpal pada
telapak tangan prosthetic. Komponen pegas terletak antara komponen
penghubung jari dengan komponen phalanx proximalis, komponen phalanx
proximalis dengan komponen phalanx media, dan komponen phalanx media
dengan phalanx distalis. Fungsi dari komponen pegas adalah untuk
mendorong komponen phalanx proximalis, phalanx media, dan phalanx
distalis untuk melakukan gerakan flexion-extension ketika kabel ditarik.
Dimensi untuk setiap jari pada tangan prosthetic didesain sama, kecuali
untuk dimensi phalanx distalis pada jari tengah dan jari kelingking,
perbedaan dimensi terletak pada panjang komponen.
Gambar 4.6 Desain jari tangan prosthetic (sistem internal stressing cable) tanpa sistem puli

IV-74
Bahan utama yang digunakan pada pembuatan tangan prosthetic
adalah plastik industri jenis polyamid atau sering disebut dengan nylon.
Nylon merupakan resin dengan ikatan amida -NH-Co-, dan dari strukturnya
dapat dibagi menjadi [NH-R-NHCO-R’-CO]n dan [NH-R—CO]n. Pemilihan
bahan nylon dikarenakan bahan tersebut ringan, kuat, dan mudah dibentuk.
Nylon dikenal memiliki koefisien gesek yang rendah dan memiliki impact
resistance yang baik.
Total jumlah komponen yang menyusun telapak tangan prosthetic
adalah 104 komponen. Berat total seluruh komponen adalah 201.6 gram.
Spesifikasi jumlah dan berat masing-masing komponen dapat dilihat pada
tabel di bawah ini.
Tabel 4.2 Spesifikasi berat komponen telapak tangan prosthetic (sistem internal stressing cable tanpa puli)
Bagian Nama Komponen Jumlah komponen
Berat (gram)
Rangka metacarpal 1 110.7 Telapak
Metacarpal policis 1 35 Plalanx proximalis 5 22 Phalanx media 5 22.5
Phalanx distalis ibu jari, telunjuk, dan jari manis
3 13.2
Phalanx distalis jari tengah 1 6.2 Phalanx distalis jari kelingking 1 3.1 Komponen penghubung jari 5 14.5 Pegas joint 15 1.5 Skrup joint 15 22.5
Skrup penghubung metacarpal dan komponen penghubung jari
5 5.5
Skrup penghubung metacarpal policis dan rangka metacarpal
2 2.2
Jari
Kabel jari 5 0.4 TOTAL : 259.3
Sumber: Lab.P3, 2009
Selanjutnya dilakukan pengembangan desain telapak tangan prosthetic
kosmetik (sistem internal stressing cable) oleh Anna Theresia (2009) dengan
penambahan sistem puli pada jari tangan prosthetic. Desain telapak tangan

IV-75
prosthetic kosmetik (sistem internal stressing cable) dapat dilihat pada
gambar 4.7.
Gambar 4.7 Deskripsi pengembangan telapak tangan prosthetic (sistem external stressing cable) dengan sistem puli Sumber: Theresia A, 2009
Desain telapak tangan prosthetic bekerja dengan sistem voluntary
closing device, sehingga tangan dalam keadaan extension seperti pada kondisi
tangan manusia normal. Sistem penarikan yang diterapkan hampir sama
dengan sistem penarikan pada telapak tangan prosthetic internal stressing
cable yang dibahas sebelumnya. Perbedaannya terletak pada saat bahu
pengguna menarik kabel maka sistem kabel pada metacarpal menarik jari
tangan prosthetic dan jari menutup (memegang objek).
Bagian metacarpal telapak tangan prosthetic terdiri dari beberapa
komponen, yaitu rangka metacarpal, penghubung jari, dan sekrup
penghubung jari. Rangka metacarpal merupakan komponen utama pada
bagian telapak tangan prosthetic. Penghubung jari dirangkai menjadi satu
dengan rangka metacarpal dengan menggunakan sekrup penghubung jari.
Penghubung jari berfungsi untuk menghubungkan antara bagian jari
(phalanx proximalis) dengan metacarpal pada telapak tangan prosthetic.
Bagian metacarpal pollicis dirancang menjadi satu dengan phalanx proximalis
ibu jari. Ibu jari didesain mampu berotasi terbatas sehingga dapat bertemu
dengan jari telunjuk dan jari tengah. Kemiringan sudut pada dorsal (tempat

IV-76
menempelnya phalanx distalis ibu jari pada metacarpal pollicis) disesuaikan
dengan anthropometri tangan responden, yaitu sebesar 150o dalam keadaan
voluntary closing.
(a) (b) (c)
Gambar 4.8 Komponen rangka metacarpal (a), penghubung jari (b), dan metacarpal policis (c) telapak tangan prosthetic Sumber: Theresia A, 2009
Jari tangan telapak tangan prosthetic terdiri dari tiga link, yaitu
phalanx proximal, phalanx media, dan phalanx distalis. Setiap jari tangan
tersusun dari komponen yang sama. Dimensi masing-masing phalanx pada
setiap jari tangan prosthetic didesain berbeda, disesuaikan dengan dimensi
tangan manusia. Komponen lain pada jari tangan prosthetic adalah puli dan
pegas joint. Pada sistem internal stressing cable, kabel ditautkan pada ujung
phalanx distalis, kemudian kabel ditautkan pada puli yang terdapat pada
joint jari dan bagian tengah atas phalanx proximalis dan phalanx media.
Selain sebagai tempat tautan kabel, puli juga berfungsi sebagai rel kabel
sehingga memudahkan saat penarikan kabel. Sedangkan pegas joint
berfungsi membantu memposisikan phalanx saat melakukan pemegangan.
Pegas joint juga mempengaruhi posisi telapak tangan saat dalam kondisi
diam.

IV-77
Gambar 4.9 Desain jari telapak tangan prosthetic Sumber: Theresia A, 2009
Bahan utama yang digunakan pada pembuatan tangan prosthetic
adalah plastik industri jenis polyamid atau sering disebut dengan nylon.
Nylon merupakan resin dengan ikatan amida -NH-Co-, dan dari strukturnya
dapat dibagi menjadi [NH-R-NHCO-R’-CO]n dan [NH-R—CO]n. Pemilihan
bahan nylon dikarenakan bahan tersebut ringan, kuat, dan mudah dibentuk.
Berat telapak tangan prosthetic dipengaruhi oleh banyaknya komponen
yang menyusun telapak tangan prosthetic. Total jumlah komponen yang
menyusun telapak tangan prosthetic adalah 104 komponen. Berat total
seluruh komponen adalah 201.6 gram. Spesifikasi jumlah dan berat masing-
masing komponen dapat dilihat pada tabel di 4.3.
Tabel 4.3 Jumlah dan berat komponen yang digunakan dalam telapak tangan prosthetic
Bagian Nama Komponen Jumlah
komponen Berat
(gram) Rangka metacarpal 1 47.5 Telapak
Sekrup metacarpal 1 2.3 Phalanx proximalis telunjuk, jari manis 2 7.2
Phalanx proximalis jari tengah 1 4.1
Phalanx proximalis kelingking 1 2.6
Phalanx proximalis ibu jari 1 4.0 Phalanx media telunjuk, jari manis, kelingking 3 4.5
Phalanx media jari tengah 1 1.7
Phalanx distalis 5 21.5
Puli 14 32.2
Puli media 5 8.5
Jari
Lempeng puli 24 14.4

IV-78
Skrup joint 14 29.4
Skrup puli 5 6.0 Skrup penghubung metacarpal 2 13.4
Pegas joint 14 1.4
Kabel jari 5 0.4
Pengait kabel 5 0.5
TOTAL : 201.6 Sumber: Theresia A, 2009
4.1.7 Penentuan Teknik Desain Eksperimen
Teknik desain eksperimen yang dipilih yaitu Factorial Experiment
Completely Randomized Design. Desain ini digunakan karena eksperimen ini
terdiri dari tiga faktor, yaitu faktor desain tangan prothestic, faktor arah
sumbu gerakan tangan prosthetic, dan faktor model gerakan dasar tangan
manusia. Urutan eksperimen ditentukan secara random (complete
randomization) seperti yang ditunjukkan pada tabel 3.1. Misal eksperimen
ke-1 dilakukan pada kondisi desain tangan prosthtetic ke-2, arah sumbu
gerakan sagital plane, dan model gerakan hook, sedangkan eksperimen
terakhir (ke-36) dilakukan pada kondisi desain tangan prosthetic ke-1, arah
sumbu gerakan sagital plane, dan model gerakan palmar. Eksperimen
dilakukan untuk pengujian terhadap gaya tarik dinamis jari tangan
prosthetic.
4.1.8 Persiapan Alat dan Unit Ekperimen
Alat yang digunakan pada saat pengukuran gaya tarik dinamis dan
gaya tarik statis jari tangan prosthetic, yaitu:
g. Force gauge, digunakan untuk mengetahui besarnya gaya tarikan yang
diperlukan untuk membuka jari-jari pada telapak tangan prosthetic.
h. Timbangan digital, digunakan untuk mengukur berat tiap komponen
telapak tangan prosthetic.
i. Jangka sorong, digunakan untuk mengukur dimensi tiap komponen
telapak tangan prosthetic.
j. Penggaris, digunakan untuk mengukur dimensi tiap komponen telapak
tangan prosthetic

IV-79
k. Lembar pengamatan, digunakan untuk mencatat semua data hasil
pengukuran yang dilakukan dalam eksperimen.
l. Alat bantu pegas, digunakan sebagai alat bantu untuk mengukur
besarnya gaya tarik statis jari tangan prosthetic.
Eksperimen dilakukan terhadap tiga jenis tangan prosthetic, yaitu
tangan prosthetic sistem external stressing cable, tangan prosthetic sistem
internal stressing cable tanpa sistem puli, dan tangan prosthetic sistem
internal stressing cable dengan sistem puli. Sebelum eksperimen dilakukan,
perlu dilakukan pengkondisian tangan prosthetic agar dapat
diperbandingkan. Beberapa persiapan yang dilakukan, adalah:
4. Ketiga jenis tangan prosthetic dikondisikan menjadi sistem voluntary
closing agar memudahkan dalam pengukuran gaya tarik dinamis jari
tangan prosthetic, seperti yang ditunjukkan dalam gambar 3.2.
5. Kabel yang digunakan dalam ketiga jenis tangan prosthetic adalah kabel
nilon dengan diameter 0,23 mm.
6. Komponen pegas jari ketiga jenis tangan prosthetic terbuat dari bahan
kawat besi baja dengan ukuran diameter 0,7 cm.
7. Pengujian dilakukan pada dua posisi, yakni posisi arah longitudinal axis
(hi gravity effect-low friction) dan posisi arah sagital plane (hi friction-low
gravity effect).
4.1.9 Pengukuran Aktual Gaya Tarik Statis Jari Tangan Prosthetic
Pengukuran gaya tarik statis jari bertujuan untuk mengetahui
kekuatan jari tangan prosthetic dalam memegang objek benda. Alat ukur
yang digunakan adalah force gauge dengan alat bantu pegas. Prosedur
pengukuran yang dilakukan adalah dengan menghitung besarnya gaya tekan
dari alat bantu pegas. Kemudian dilakukan pengukuran gaya tarik yang
dibutuhkan jari tangan prosthetic dalam menekan alat bantu pegas. Nilai
gaya tekan dan gaya tarik yang dihasilkan, dibandingkan satu sama lain,
dimana besarnya gaya tarik dari tangan prosthetic diharapkan mendekati
besarnya gaya tekan dari alat bantu pegas. Berikut adalah langkah-langkah
dalam pengukuran gaya tarik statis jari, yaitu:

IV-80
1. Menghitung nilai konstanta pegas dari alat bantu pegas.
Gambar 4.10 Alat bantu pegas Sumber: Lab. P3, 2009
Pengukuran konstanta pegas dilakukan dengan menggunakan alat ukur
force gauge untuk mengetahui gaya yang dihasilkan sistem alat bantu
pegas ketika ditarik dengan alat force gauge. Gaya tarik yang
ditunjukkan alat ukur force gauge merepresentasikan besarnya gaya
tekan pegas. Pengukuran gaya tersebut dilakukan dengan replikasi tiga
kali. Hasil pengukuran gaya tarik pada alat bantu pegas dapat dilihat
pada tabel 4.4.
Tabel 4.4 Gaya tarik pada alat bantu pegas
Δ x (mm) F (Newton) F rata-rata (N)
0.91 0.87 1.6 0.95
0.91
1.63 1.59 2.6 1.72
1.65
2.24 2.33 3.6 2.39
2.32
2.98 2.93 4.6 3.01
2.97
3.72 3.67 5.6 3.63
3.67
Data nilai gaya tarik kemudian diplotkan sesuai dengan Δ x, seperti yang
ditunjukkan dalam gambar 4.11.

IV-81
Gambar 4.11 Plot nilai gaya tarik pegas pada alat bantu pegas
Grafik gaya tarik menunjukkan trend linier dengan persamaan y = 0,646
x. Dimana y menunjukkan besarnya gaya tarik, sedangkan x adalah
perubahan defleksi pegas. Dari persamaan tersebut diperoleh nilai
konstanta pegas (k) adalah 0,646.
2. Menghitung gaya tekan pada sistem alat bantu pegas sesuai dengan Δ x yang
diberikan. Perhitungan gaya tersebut dilakukan dengan menggunakan rumus:
Ftekan = k . Δ x
dengan k adalah konstanta pegas dan Δ x adalah perubahan defleksi
pegas. Data hasil perhitungan gaya pada sistem alat bantu pegas
ditunjukkan pada tabel 4.5.
Tabel 4.5 Gaya tekan pada alat bantu pegas / Ftekan (N)
k (N/mm)
Δ x (mm)
Ftekan
(N)
0.646 1.6 1.03 0.646 2.6 1.68 0.646 3.6 2.33 0.646 4.6 2.97 0.646 5.6 3.62
3. Melakukan pengukuran aktual gaya tarik statis yang dibutuhakan pada jari
tangan prosthetic ketika menekan alat bantu pegas. Pengukuran dilakukan
untuk semua jenis desain tangan prosthetic pada dua posisi, yaitu posisi arah
longitudinal axis dan posisi arah sagital plane.

IV-82
i. (b)
Gambar 4.12 Pengukuran aktual gaya tarik statis tangan prosthetic pada arah longitudinal axis (a) dan sagital plane (b)
Pengukuran gaya tarik statis dilakukan dengan Δ x yang berbeda. Data
hasil pengukuran gaya tarik pada masing-masing tangan prosthetic
ditunjukkan dalam tabel 4.6.
Tabel 4.6 Gaya tarik statis/ Ftarik statis (N)
1.6 2.6 3.6 4.6 5.6Longitudinal axis 4.13 [1.03] 5.44 [1.68] 6.72 [2.33] 7.32 [2.97] 10.46 [3.62]Sagital plane 6.76 [1.03] 7.71 [1.68] 9.23 [2.33] 11.41 [2.97] 13.15 [3.62]Longitudinal axis 8.68 [1.03] 10.67 [1.68] 11.05 [2.33] 12.77 [2.97] 16.47 [3.62]Sagital plane 6.68 [1.03] 10.05 [1.68] 12.2 [2.33] 17.37 [2.97] 20.24 [3.62]Longitudinal axis 5.92 [1.03] 9.42 [1.68] 11.58 [2.33] 14.15 [2.97] 15.76 [3.62]Sagital plane 4.32 [1.03] 9.29 [1.68] 11.66 [2.33] 14.74 [2.97] 16.33 [3.62]
Tangan prosthetic sistem internal stressing cable dengan puli
Desain tangan prosthetic Arah tangan prostheticΔ x (mm) [Ftekan (N)]
Tangan prosthetic sistem eksternal stressing cableTangan prosthetic sistem internal stressing cable tanpa puli
Gaya tarik statis menunjukkan besarnya gaya yang dibutuhkan untuk
menekan alat bantu pegas. Sebagai contoh, gaya tarik statis yang
dibutuhkan pada tangan prosthetic sistem external stressing cable pada
arah longitudinal axis untuk mencapai gaya tekan 1,03 Newton pada Δ x
= 1,6 mm adalah sebesar 4,13 Newton. Idealnya gaya tarik statis harus
mendekati besarnya gaya tekan pada alat bantu pegas karena semakin
kecil gaya tarik statis maka semakin tangan prosthetic semakin mudah
dioperasikan. Berdasarkan tabel 4.6, rata-rata nilai gaya tarik statis
tangan prosthetic sistem external stressing cable lebih baik dari pada rata-
rata gaya tarik dari dua desain tangan prosthetic lainnya.
4. Menghitung efisiensi gaya tarik yang terjadi pada jari tangan prosthetic
dengan cara membagi Ftekan dan Ftarik statis.

IV-83
Tabel 4.7 Efisiensi gaya tarik statis pada masing-masing tangan prosthetic (Newton)
1.6 2.6 3.6 4.6 5.6Longitudinal axis 0.25 0.31 0.35 0.41 0.35Sagital plane 0.15 0.22 0.25 0.26 0.28Longitudinal axis 0.12 0.16 0.21 0.23 0.22Sagital plane 0.15 0.17 0.19 0.17 0.18Longitudinal axis 0.17 0.18 0.20 0.21 0.23Sagital plane 0.24 0.18 0.20 0.20 0.22
Tangan prosthetic sistem internal stressing cable dengan puli
Desain tangan prosthetic Arah tangan prosthetic Δ x (mm)
Tangan prosthetic sistem eksternal stressing cableTangan prosthetic sistem internal stressing cable tanpa puli
Contoh perhitungan efisiensi gaya tarik statis untuk tangan prosthetic
sistem external stressing cable pada arah longitudinal axis dengan Δ x =
1,6 mm, adalah:
Ftekan = 1,03 Newton
Ftarik statis = 4,13 Newton
Efisiensi gaya tarik statis = Ftekan / Ftarik statis = 1,03 / 4,13 = 0,25
Dari perhitungan efisiensi gaya tarik statis di atas, diketahui bahwa
desain tangan prosthetic sistem external stressing cable tanpa puli
memiliki rata-rata gaya tarik statis yang lebih efisien daripada desain
tangan prosthetic lainnya.
4.1.10 Pengukuran Aktual Gaya Tarik Dinamis Jari Tangan Prosthetic
Gaya tarik dinamis pada tangan prosthetic diukur pada saat jari tangan
prosthetic melakukan enam model gerakan pemegangan. Gaya tarik tersebut
diukur sampai sesaat sebelum jari tangan prosthetic menyentuh objek benda
yang dipegang (gaya dinamis). Pengujian dilakukan pada dua posisi arah
arah tangan prosthetic (longitudinal axis dan sagital plane) dengan replikasi
sejumlah lima kali. Alat ukur yang digunakan dalam pengukuran gaya tarik
dinamis adalah force gauge. Pengujian dilakukan dengan enam objek benda
yang berbeda disesuaikan dengan jenis gerakan pemegangan, seperti dalam
tabel 4.8.
Tabel 4.8 Objek benda eksperimen
Dimensi benda (mm) Model Gerakan Objek benda
Panjang Lebar Tinggi Diameter

IV-84
Cylindrical Botol minuman - - - 60.6
Spherical Bola - - 150.06 64.86
Hook Tas - 18.79 6.33 -
Tip Mur - - - 16.69
Lateral Kartu ATM 85.46 53.62 0.88 -
Palmar Pensil - - 130.85 7.09
1. Pengukuran gaya tarik dinamis pada arah longitudinal axis
Pengukuran gaya tarik dinamis dilakukan dengan menggunakan alat
force gauge. Tangan prosthetic diletakkan dalam meja bantu yang
dirancang, kemudian sistem kabel dari tangan prosthetic ditarik dengan
force gauge untuk mengetahui besarnya gaya yang dihasilkan tangan
prosthetic ketika melakukan enam model gerakan tangan. Pengukuran
gaya tarik dinamis pada arah longitudinal axis tangan prosthetic, dapat
dilihat pada gambar 4.13.
(a) (b) (c)
(d) (e) (f) Gambar 4.13 Pengujian model gerakan cylindrical (a), spherical (b),
hook (c), tip (d), lateral (e), dan palmar (e) telapak tangan prosthetic pada arah longitudinal axis Sumber: Lab. P3, 2009
Data hasil pengukuran gaya tarik dinamis pada tangan prosthetic dengan
replikasi sejumlah lima kali, dilihat pada tabel 4.9.

IV-85
Tabel 4.9 Gaya tarikan kabel telapak tangan prosthetic pada arah longitudinal axis
Dimensi benda (mm) Gaya Tarik (N)
Model Gerakan
(longitudinal axis)
p l t Ø
Tangan prosthetic
sistem external stressing
cable
Tangan prosthetic
sistem internal stressing
cable tanpa puli
Tangan prosthetic
sistem internal stressing
cable dengan puli
24.87 23.45 23.87 23.33 23.37 24.35 23.39 25.03 23.23 25.22 25.7 25.13
Cylindrical - - - 60.6
24.9 24.99 24.18
Tabel 4.9 Gaya tarikan kabel telapak tangan prosthetic pada arah longitudinal axis (lanjutan)
Dimensi benda (mm) Gaya Tarik (N)
Model Gerakan
(longitudinal axis)
p l t Ø
Tangan prosthetic
sistem external stressing
cable
Tangan prosthetic
sistem internal stressing
cable tanpa puli
Tangan prosthetic
sistem internal stressing
cable dengan
puli 34.67 34.16 18.71 34.34 35.51 17.99 34.78 35.7 16.31 35.22 34.68 17.21
Spherical - - 150.06 64.86
35.36 35.82 17.85 26.21 27.43 29.43
25 26.74 29.61 27.13 27.37 30.12 30.26 28.38 29.84
Hook - 18.79 6.33 -
27.75 26.64 28.27 47.22 39.45 20.13 47.7 37.99 20.63 44.76 39.49 21.17 47.36 36.8 22.51
Tip - - - 16.69
47.1 38.57 20.71

IV-86
37.15 46.17 21.56 35.71 47.66 22.6 36.9 43.79 20.15 34.02 47.38 21.95
Lateral 85.46 53.62 0.88 -
37.75 47.74 22.34 36.67 40.25 20 35.66 41.49 19.47 34.54 38.82 20.76 34.67 41.72 20.3
Palmar - - 130.85 7.09
36.85 40.35 18.55
2. Pengukuran gaya tarik dinamis pada arah sagital plane
Pengukuran gaya tarik dinamis pada arah sagital plane tangan
prosthetic, dapat dilihat pada gambar 4.14.
(a) (b) (c)
(d) (e) (f) Gambar 4.14 Pengujian model gerakan cylindrical (a), spherical (b),
hook (c), tip (d), lateral (e), dan palmar (e) telapak tangan prosthetic pada arah sagital plane Sumber: Lab. P3, 2009
Data hasil pengukuran gaya tarik dinamis pada tangan prosthetic dapat
dilihat pada tabel 4.10.
Tabel 4.10 Gaya tarikan kabel telapak tangan prosthetic pada arah sagital plane

IV-87
Dimensi benda (mm) Gaya Tarik (N)
Model Gerakan (sagital plane)
p l t Ø
Tangan prosthetic
sistem external stressing
cable
Tangan prosthetic
sistem internal stressing
cable tanpa puli
Tangan prosthetic
sistem internal stressing
cable dengan puli
24.06 35.33 21.84 24.41 34.94 23.71 26.4 33.21 20.37 26.41 33.89 21.47
Cylindrical - - - 60.6
25.46 36.05 20.99
Tabel 4.10 Gaya tarikan kabel telapak tangan prosthetic pada arah sagital plane (lanjutan)
Dimensi benda (mm) Gaya Tarik (N)
Model Gerakan (sagital plane)
p l t Ø
Tangan prosthetic
sistem external stressing
cable
Tangan prosthetic
sistem internal stressing
cable tanpa puli
Tangan prosthetic
sistem internal stressing
cable dengan puli
28.71 26.68 26.18 30.28 23.76 22.45 32.31 23.38 25.72 30.84 26.83 23.14
Spherical - - 150.06 64.86
29.43 24.48 22.63 32.77 27.71 27.88 35.41 28.89 26.34 35.89 27.29 28.5 32.64 28.51 29.83
Hook - 18.79 6.33 -
32.75 28.83 25.36 37.21 38.84 27.04 37.31 37.86 25.88 36.46 39.77 28.18 36.5 39.46 27.13
Tip - - - 16.69
35.69 38.58 25.52 37.9 43.34 28.03 Lateral 85.46 53.62 0.88 -
36.79 42.56 28.7

IV-88
39.28 40.82 27.93 39.82 41.61 27.81 37.42 44.25 27.07 38.01 43.88 28.31 36.61 44.77 29.36
39 43.96 30.56 38.06 43.25 28.66
Palmar - - 130.85 7.09
37.24 44.49 28.05
Rekapitulasi data pengukuran gaya tarik dinamis pada arah longitudinal
axis dan sagital plane ditunjukkan dalam tabel 4.11.
Tabel 4.11 Rekapitulasi data pengukuran gaya tarik dinamis pada tangan prosthetic

IV-89
4.4 PENGOLAHAN DATA

IV-90
Pada tahap pengolahan data dilakukan uji asumsi dasar, uji Anova,
dan uji setelah Anova untuk mengetahui tingkat signifikansi variabel respon.
Setelah itu dilakukan pemilihan desain tangan prosthetic berdasarkan nilai
gaya tarik dinamis dan gaya tarik statis jari tangan prosthetic.
4.2.5 Uji Asumsi Dasar
Uji asumsi dasar merupakan langkah awal dalam pengolahan data,
yang meliputi uji normalitas, uji homogenitas, dan uji independensi. Apabila
seluruh hasil pengujian asumsi dasar tidak terpenuhi, maka data hasil
eksperimen harus ditransformasi ke bentuk lain sehingga data hasil
transformasi memenuhi asumsi dasar. Beberapa metode transformasi data
adalah dengan cara dikuadratkan, di-akar-kan, di-log-kan, dan lainnya.
Proses pengujian asumsi dasar dilakukan terhadap data hasil pengukuran
gaya tarik dinamis pada masing-masing perlakuan.
1. Uji Normalitas
Uji normalitas dilakukan terhadap data observasi di tiap perlakuan
dengan tujuan untuk mengetahui apakah data observasi dari lima kali
pengambilan (replikasi), berdistrbusi normal. Jumlah perlakuan yang
terdapat pada eksperimen adalah 36 perlakuan. Cara perhitungan uji
normalitas sampel data observasi dilakukan dengan metode Lilliefors.
Berikut ini adalah contoh perhitungan uji normalitas pada perlakuan
A1B1C1.
Langkah-langkah perhitungan uji lilliefors, sebagai berikut :
· Urutkan data observasi dari yang terkecil sampai terbesar sebagaimana
pada kolom x tabel 4.12.
· Hitung rata-rata ( x ) dan standar deviasi (s) data tersebut.
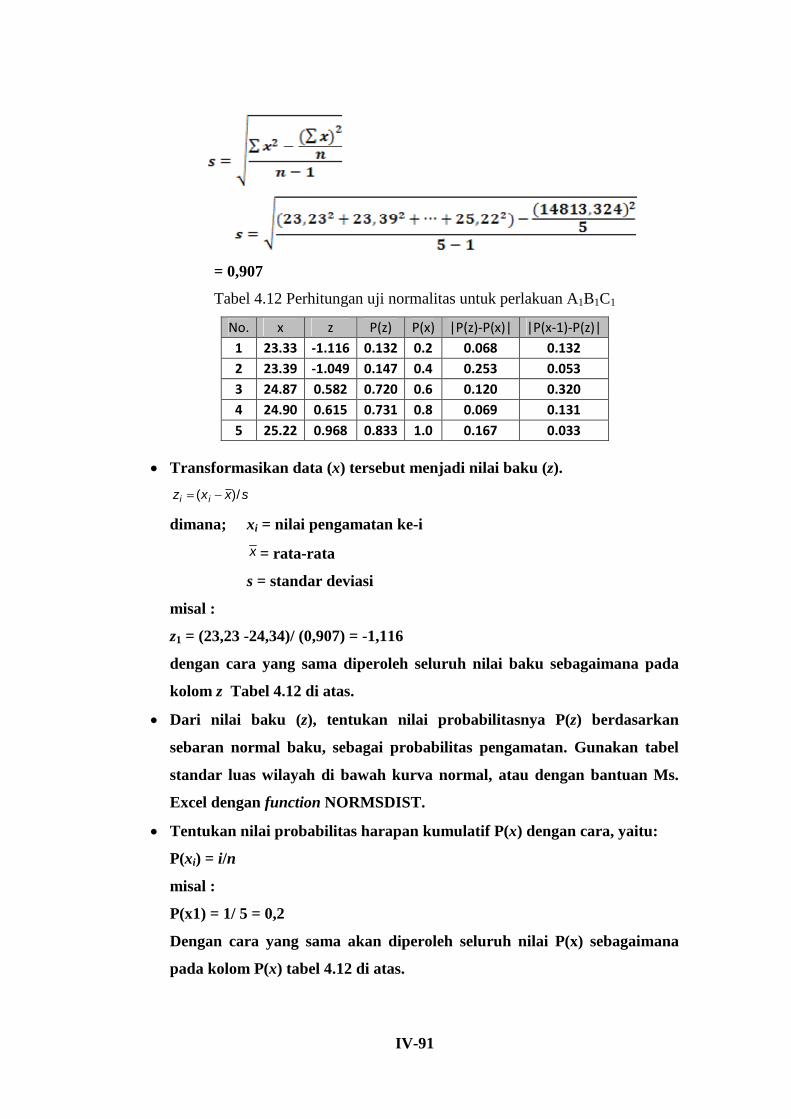
IV-91
= 0,907
Tabel 4.12 Perhitungan uji normalitas untuk perlakuan A1B1C1
No. x z P(z) P(x) |P(z)-P(x)| |P(x-1)-P(z)| 1 23.33 -1.116 0.132 0.2 0.068 0.132 2 23.39 -1.049 0.147 0.4 0.253 0.053 3 24.87 0.582 0.720 0.6 0.120 0.320 4 24.90 0.615 0.731 0.8 0.069 0.131 5 25.22 0.968 0.833 1.0 0.167 0.033
· Transformasikan data (x) tersebut menjadi nilai baku (z).
sxxz ii )/( -=
dimana; xi = nilai pengamatan ke-i
x = rata-rata
s = standar deviasi
misal :
z1 = (23,23 -24,34)/ (0,907) = -1,116
dengan cara yang sama diperoleh seluruh nilai baku sebagaimana pada
kolom z Tabel 4.12 di atas.
· Dari nilai baku (z), tentukan nilai probabilitasnya P(z) berdasarkan
sebaran normal baku, sebagai probabilitas pengamatan. Gunakan tabel
standar luas wilayah di bawah kurva normal, atau dengan bantuan Ms.
Excel dengan function NORMSDIST.
· Tentukan nilai probabilitas harapan kumulatif P(x) dengan cara, yaitu:
P(xi) = i/n
misal :
P(x1) = 1/ 5 = 0,2
Dengan cara yang sama akan diperoleh seluruh nilai P(x) sebagaimana
pada kolom P(x) tabel 4.12 di atas.

IV-92
· Tentukan nilai maksimum dari selisih absolut P(z) dan P(x), yaitu
Maks |P(z) – P(x)|, sebagai nilai Lhitung
Maks |P(z) – P(x)| = 0,253
· Tentukan nilai maksimum dari selisih absolut P(xi-1) dan P(z), yaitu
Maks |P(xi-1) – P(z)| = 0,320
Tahap berikutnya adalah menganalisis apakah ke-5 sampel data
observasi berdistribusi normal. Hipotesis yang diajukan, adalah:
H0 : Ke-5 sampel data observasi berasal dari populasi yang
berdistribusi normal
H1 : Ke-5 sampel data observasi berasal dari populasi yang tidak
berdistribusi normal
Taraf nyata yang dipilih a = 0,01, dengan wilayah kritik Lhitung > La(n).
Nilai Ltabel dari distribusi L yaitu La(n) = L0.01(5)= 0,405.
Berdasarkan hasil perhitungan, terlihat bahwa nilai Lhitung (0,253) <
Ltabel (0,405), maka terima H0 dan simpulkan bahwa ke-5 sampel data
observasi dari gaya tarik dinamis perlakuan A1B1C1 berasal dari populasi
yang berdistribusi normal.
Bentuk sebaran normal pada perlakuan diperkuat oleh normal
probability plot (P-P) dan histogram yang ditunjukkan dalam gambar 4.15
(a) (b)
Gambar 4.15 Normal probability plot (a) dan histogram data observasi pada perlakuan A1B1C1

IV-93
Contoh perhitungan uji normalitas pada perlakuan A1B1C1 cukup
memberikan gambaran mengenai cara melakukan uji normalitas dengan uji
Lilliefors. Selanjutnya rekapitulasi hasil uji normalitas pada 36 perlakuan
dapat dilihat pada tabel 4.13.
Tabel 4.13 Rekapitulasi hasil uji normalitas dengan uji Lilliefors
Perlakuan L hitung L tabel H0 Kesimpulan A1B1C1 0.253 0.405 terima normal A1B1C2 0.189 0.405 terima normal A1B1C3 0.204 0.405 terima normal A1B1C4 0.230 0.405 terima normal A1B1C5 0.164 0.405 terima normal A1B1C6 0.225 0.405 terima normal A1B2C1 0.204 0.405 terima normal A1B2C2 0.152 0.405 terima normal A1B2C3 0.356 0.405 terima normal A1B2C4 0.181 0.405 terima normal A1B2C5 0.206 0.405 terima normal A1B2C6 0.180 0.405 terima normal A2B1C1 0.245 0.405 terima normal A2B1C2 0.185 0.405 terima normal A2B1C3 0.233 0.405 terima normal A2B1C4 0.179 0.405 terima normal A2B1C5 0.237 0.405 terima normal A2B1C6 0.160 0.405 terima normal A2B2C1 0.158 0.405 terima normal A2B2C2 0.231 0.405 terima normal A2B2C3 0.183 0.405 terima normal A2B2C4 0.133 0.405 terima normal A2B2C5 0.148 0.405 terima normal A2B2C6 0.174 0.405 terima normal A3B1C1 0.188 0.405 terima normal A3B1C2 0.139 0.405 terima normal A3B1C3 0.174 0.405 terima normal A3B1C4 0.239 0.405 terima normal A3B1C5 0.180 0.405 terima normal A3B1C6 0.133 0.405 terima normal A3B2C1 0.248 0.405 terima normal A3B2C2 0.290 0.405 terima normal A3B2C3 0.159 0.405 terima normal A3B2C4 0.193 0.405 terima normal A3B2C5 0.217 0.405 terima normal A3B2C6 0.228 0.405 terima normal
2. Uji Homogenitas

IV-94
Pengujian homogenitas dilakukan dengan metode levene test, yakni
menguji kesamaan ragam data observasi antar level faktornya. Uji
homogenitas dilakukan terhadap data yang dikelompokkan berdasarkan
faktor model gerakan dasar tangan manusia, faktor arah sumbu gerakan
tangan prosthetic, dan desain tangan prosthetic.
a. Uji homogenitas antar level model gerakan dasar tangan manusia
Hipotesis yang diajukan, adalah:
H0 : s12 = s2
2 = s32 = s4
2 = s52 = s6
2
H1 : Data antar level model gerakan manusia memiliki ragam yang tidak
sama
Taraf nyata a = 0.01 dan wilayah kritik F > F0.01 (5 ; 180)
Prosedur pengujian adalah dengan mengelompokkan data berdasarkan
model gerakan dasar tangan manusia sebagaimana tabel 4.14, kemudian
dicari rata-rata tiap level model gerakan tangan manusia dan dihitung
selisih absolut nilai pengamatan terhadap rata-ratanya sebagaimana
diperoleh tabel 4.15.
Tabel 4.14 Nilai gaya tarik dinamis dikelompokkan berdasarkan model gerakan dasar tangan manusia
Model gerakan dasar tangan manusia Desain tangan prosthetic Cylindrical Spherical Hook Tip Lateral Palmar
24.87 34.67 26.21 47.22 37.15 36.67 23.33 34.34 25.00 47.70 35.71 35.66 23.39 34.78 27.13 44.76 36.90 34.54 25.22 35.22 30.26 47.36 34.02 34.67 24.90 35.36 27.75 47.10 37.75 36.85 24.06 28.71 32.77 37.21 37.90 38.01 24.41 30.28 35.41 37.31 36.79 36.61 26.40 32.31 35.89 36.46 39.28 39.00 26.41 30.84 32.64 36.50 39.82 38.06
D1
25.46 29.43 32.75 35.69 37.42 37.24 23.45 34.16 27.43 39.45 46.17 40.25 23.37 35.51 26.74 37.99 47.66 41.49 25.03 35.70 27.37 39.49 43.79 38.82 25.70 34.68 28.38 36.80 47.38 41.72 24.99 35.82 26.64 38.57 47.74 40.35 35.33 26.68 27.71 38.84 43.34 43.88 34.94 23.76 28.89 37.86 42.56 44.77 33.21 23.38 27.29 39.77 40.82 43.96 33.89 26.83 28.51 39.46 41.61 43.25
D2
36.05 24.48 28.83 38.58 44.25 44.49

IV-95
23.87 18.71 29.43 20.13 21.56 20.00 24.35 17.99 29.61 20.63 22.60 19.47 23.23 16.31 30.12 21.17 20.15 20.76 25.13 17.21 29.84 22.51 21.95 20.30 24.18 17.85 28.27 20.71 22.34 18.55 21.84 26.18 27.88 27.04 28.03 28.31 23.71 22.45 26.34 25.88 28.70 29.36 20.37 25.72 28.50 28.18 27.93 30.56 21.47 23.14 29.83 27.13 27.81 28.66
D3
20.99 22.63 25.36 25.52 27.07 28.05 rata-rata 25.785 27.838 28.959 34.767 35.540 34.477
Tabel 4.15 Selisih absolut data gaya tarik dinamis dengan rata-ratanya dikelompokkan berdasarkan model gerakan dasar tangan manusia
Model gerakan dasar tangan manusia Desain tangan prosthetic Cylindrical Spherical Hook Tip Lateral Palmar
0.915 6.832 2.749 12.453 1.610 2.193
2.455 6.502 3.959 12.933 0.170 1.183
2.395 6.942 1.829 9.993 1.360 0.063
0.565 7.382 1.301 12.593 1.520 0.193
0.885 7.522 1.209 12.333 2.210 2.373
1.725 0.872 3.811 2.443 2.360 3.533
1.375 2.442 6.451 2.543 1.250 2.133
0.615 4.472 6.931 1.693 3.740 4.523
0.625 3.002 3.681 1.733 4.280 3.583
D1
0.325 1.592 3.791 0.923 1.880 2.763
2.335 6.322 1.529 4.683 10.630 5.773
2.415 7.672 2.219 3.223 12.120 7.013
0.755 7.862 1.589 4.723 8.250 4.343
0.085 6.842 0.579 2.033 11.840 7.243
0.795 7.982 2.319 3.803 12.200 5.873
9.545 1.158 1.249 4.073 7.800 9.403
9.155 4.078 0.069 3.093 7.020 10.293
7.425 4.458 1.669 5.003 5.280 9.483
8.105 1.008 0.449 4.693 6.070 8.773
D2
10.265 3.358 0.129 3.813 8.710 10.013
1.915 9.128 0.471 14.637 13.980 14.477
1.435 9.848 0.651 14.137 12.940 15.007
2.555 11.528 1.161 13.597 15.390 13.717
0.655 10.628 0.881 12.257 13.590 14.177
1.605 9.988 0.689 14.057 13.200 15.927
3.945 1.658 1.079 7.727 7.510 6.167
2.075 5.388 2.619 8.887 6.840 5.117
D3
5.415 2.118 0.459 6.587 7.610 3.917

IV-96
4.315 4.698 0.871 7.637 7.730 5.817
4.795 5.208 3.599 9.247 8.470 6.427
jumlah 91.470 168.490 59.995 217.547 217.560 201.500
Selanjutnya dihitung nilai-nilai berikut :
· Faktor koreksi (FK) = (91,470 + 168,490 + ... + 201,500)2/180
= 5083,387
· JK-model gerakan = (91,470 2 + 168,490 2 + ... + 201,5002)/30 – FK
= 770,485
· JK-Total (JKT) = (24.872 + … + 28,052) – FK
= 3193,271
· JK-Error (JKE) = JKT – JK(model gerakan)
= 2422,785
Tabel 4.16 Hasil uji homogenitas data gaya tarik dinamis, dikelompokkan berdasarkan model gerakan dasar tangan manusia
Berdasarkan Tabel 4.16, nilai Fhitung sebesar 11,067 lebih besar Ftabel
(3.121), sehingga tolak H0 dan simpulkan bahwa data gaya tarik dinamis
antar level model gerakan dasar tangan manusia memiliki ragam yang
tidak sama (tidak homogen).
b. Uji homogenitas antar level arah sumbu gerakan tangan prosthetic,
Hipotesis yang diajukan, adalah:
H0 : s12 = s2
2
H1 : Data antar level arah sumbu gerakan tangan prosthetic memiliki
ragam yang tidak sama
Taraf nyata a = 0.01 dan wilayah kritik F > F0.01 (1 ; 180)
Prosedur perhitungan uji homogenitas antar level arah sumbu gerakan
tangan prosthetic, sama dengan pembahasan sebelumnya. Tabel 4.17
merupakan hasil perhitungan uji homogenitas antar level arah sumbu
gerakan tangan prosthetic.

IV-97
Tabel 4.17 Hasil uji homogenitas data gaya tarik dinamis, dikelompokkan berdasarkan arah sumbu gerakan tangan prosthetic
Berdasarkan Tabel 4.17, nilai Fhitung sebesar 11,359 lebih besar dari Ftabel
(6.779), sehingga tolak H0 dan simpulkan bahwa data gaya tarik dinamis
antar level model arah sumbu gerakan tangan prosthetic memiliki ragam
yang tidak sama (tidak homogen).
c. Uji homogenitas antar level desain tangan prosthetic
Hipotesis yang diajukan, adalah:
H0 : s12 = s2
2
H1 : Data antar level desain tangan prosthetic memiliki ragam yang tidak
sama
Taraf nyata a = 0.01 dan wilayah kritik F > F0.01 (2 ; 180)
Prosedur perhitungan uji homogenitas antar level desain tangan
prosthetic, sama dengan pembahasan sebelumnya. Tabel 4.18 merupakan
hasil perhitungan uji homogenitas antar level desain tangan prosthetic.
Tabel 4.18 Hasil uji homogenitas data gaya tarik dinamis, dikelompokkan berdasarkan desain tangan prosthetic
Berdasarkan Tabel 4.18, nilai Fhitung sebesar 12,541 lebih besar dari Ftabel
(4.726), sehingga tolak H0 dan simpulkan bahwa data gaya tarik dinamis
antar level desain tangan prosthetic memiliki ragam yang tidak sama
(tidak homogen).
3. Uji Independensi
Pengujian independensi dilakukan dengan membuat plot residual data
untuk setiap perlakuan berdasarkan urutan pengambilan data pada
eksperimen. Nilai residual tersebut merupakan selisih data observasi dengan

IV-98
rata-rata tiap perlakuan. Hasil perhitungan nilai residual untuk tiap
perlakuan dapat dilihat pada tabel 4.19.
Tabel 4.19 Residual data gaya tarik dinamis
No Perlakuan Gaya Tarik Dinamis (N) Rerata Residual
1 A1B1C1 24.87 23.33 23.39 25.22 24.90 24.34 0.53 -1.01 -0.95 0.88 0.56
2 A1B1C2 34.67 34.34 34.78 35.22 35.36 34.87 -0.20 -0.53 -0.09 0.35 0.49
3 A1B1C3 26.21 25.00 27.13 30.26 27.75 27.27 -1.06 -2.27 -0.14 2.99 0.48
4 A1B1C4 47.22 47.70 44.76 47.36 47.10 46.83 0.39 0.87 -2.07 0.53 0.27
5 A1B1C5 37.15 35.71 36.90 34.02 37.75 36.31 0.84 -0.60 0.59 -2.29 1.44
6 A1B1C6 36.67 35.66 34.54 34.67 36.85 35.68 0.99 -0.02 -1.14 -1.01 1.17
7 A1B2C1 24.06 24.41 26.40 26.41 25.46 25.35 -1.29 -0.94 1.05 1.06 0.11
8 A1B2C2 28.71 30.28 32.31 30.84 29.43 30.31 -1.60 -0.03 2.00 0.53 -0.88
9 A1B2C3 32.77 35.41 35.89 32.64 32.75 33.89 -1.12 1.52 2.00 -1.25 -1.14
10 A1B2C4 37.21 37.31 36.46 36.50 35.69 36.63 0.58 0.68 -0.17 -0.13 -0.94
11 A1B2C5 37.90 36.79 39.28 39.82 37.42 38.24 -0.34 -1.45 1.04 1.58 -0.82
12 A1B2C6 38.01 36.61 39.00 38.06 37.24 37.78 0.23 -1.17 1.22 0.28 -0.54
13 A2B1C1 23.45 23.37 25.03 25.70 24.99 24.51 -1.06 -1.14 0.52 1.19 0.48
14 A2B1C2 34.16 35.51 35.70 34.68 35.82 35.17 -1.01 0.34 0.53 -0.49 0.65
15 A2B1C3 27.43 26.74 27.37 28.38 26.64 27.31 0.12 -0.57 0.06 1.07 -0.67
16 A2B1C4 39.45 37.99 39.49 36.80 38.57 38.46 0.99 -0.47 1.03 -1.66 0.11
17 A2B1C5 46.17 47.66 43.79 47.38 47.74 46.55 -0.38 1.11 -2.76 0.83 1.19
18 A2B1C6 40.25 41.49 38.82 41.72 40.35 40.53 -0.28 0.96 -1.71 1.19 -0.18
19 A2B2C1 35.33 34.94 33.21 33.89 36.05 34.68 0.65 0.26 -1.47 -0.79 1.37
20 A2B2C2 26.68 23.76 23.38 26.83 24.48 25.03 1.65 -1.27 -1.65 1.80 -0.55
21 A2B2C3 27.71 28.89 27.29 28.51 28.83 28.25 -0.54 0.64 -0.96 0.26 0.58
22 A2B2C4 38.84 37.86 39.77 39.46 38.58 38.90 -0.06 -1.04 0.87 0.56 -0.32
23 A2B2C5 43.34 42.56 40.82 41.61 44.25 42.52 0.82 0.04 -1.70 -0.91 1.73
24 A2B2C6 43.88 44.77 43.96 43.25 44.49 44.07 -0.19 0.70 -0.11 -0.82 0.42
25 A3B1C1 23.87 24.35 23.23 25.13 24.18 24.15 -0.28 0.20 -0.92 0.98 0.03
26 A3B1C2 18.71 17.99 16.31 17.21 17.85 17.61 1.10 0.38 -1.30 -0.40 0.24
27 A3B1C3 29.43 29.61 30.12 29.84 28.27 29.45 -0.02 0.16 0.67 0.39 -1.18

IV-99
28 A3B1C4 20.13 20.63 21.17 22.51 20.71 21.03 -0.90 -0.40 0.14 1.48 -0.32
29 A3B1C5 21.56 22.60 20.15 21.95 22.34 21.72 -0.16 0.88 -1.57 0.23 0.62
30 A3B1C6 20.00 19.47 20.76 20.30 18.55 19.82 0.18 -0.35 0.94 0.48 -1.27
31 A3B2C1 21.84 23.71 20.37 21.47 20.99 21.68 0.16 2.03 -1.31 -0.21 -0.69
32 A3B2C2 26.18 22.45 25.72 23.14 22.63 24.02 2.16 -1.57 1.70 -0.88 -1.39
33 A3B2C3 27.88 26.34 28.50 29.83 25.36 27.58 0.30 -1.24 0.92 2.25 -2.22
34 A3B2C4 27.04 25.88 28.18 27.13 25.52 26.75 0.29 -0.87 1.43 0.38 -1.23
35 A3B2C5 28.03 28.70 27.93 27.81 27.07 27.91 0.12 0.79 0.02 -0.10 -0.84
36 A3B2C6 28.31 29.36 30.56 28.66 28.05 28.99 -0.68 0.37 1.57 -0.33 -0.94
Data residual kemudian diplotkan berdasarkan urutan pengambilan
data eksperimen seperti gambar 4.20.
Gambar 4.16 Plot residual data gaya tarik dinamis
Berdasarkan Gambar 4.16 terlihat bahwa nilai residual tersebar di
sekitar garis nol dan tidak membentuk pola khusus, sehingga dapat
disimpulkan bahwa data hasil eksperimen memenuhi syarat independensi.
Hasil uji asumsi yang dibahas di atas, diketahui bahwa data observasi
yang dilakukan memenuhi asumsi normalitas dan independensi.
Ketidakhomogenitasan data observasi tidak menimbulkan resiko yang
serius, karena jumlah kasus pada setiap samplenya adalah sama. Oleh
karena itu, data observasi tersebut dapat digunakan untuk pengolahan
analisis variansi (Anova).
4.2.6 Uji Anova
Pengujian analisis variansi (Anova) dilakukan terhadap nilai gaya tarik
dinamis untuk mengetahui apakah faktor-faktor yang diteliti berpengaruh

IV-100
signifikan terhadap variabel respon tersebut. Hipotesis umum yang diajukan
adalah ada perbedaan yang signifikan antar faktor maupun level dalam
setiap faktor yang diteliti. Hipotesis umum ini disebut sebagai hipotesis satu
(H1).
Hipotesis nol yang diajukan dalam analisis variansi, adalah:
H01 : = 0
Perbedaan desain tangan prosthetic tidak menimbulkan pengaruh
yang signifikan terhadap besarnya gaya tarik dinamis.
H02 : = 0
Perbedaan arah sumbu gerakan tangan prosthetic tidak
menimbulkan pengaruh yang signifikan terhadap gaya tarik
dinamis.
H03 : = 0
Perbedaan model gerakan tangan manusia tidak menimbulkan
pengaruh yang signifikan terhadap besarnya gaya tarik dinamis.
H04 : = 0
Perbedaan interaksi desain tangan prosthetic dan arah sumbu
gerakan tangan prosthetic tidak menimbulkan pengaruh yang
signifikan terhadap besarnya gaya tarik dinamis.
H05 : = 0
Perbedaan interaksi desain tangan prosthetic dan model gerakan
tangan manusia tidak menimbulkan pengaruh yang signifikan
terhadap besarnya gaya tarik dinamis.
H06 : = 0
Perbedaan interaksi arah sumbu gerakan tangan prosthetic dan
model gerakan tangan manusia tidak menimbulkan pengaruh yang
signifikan terhadap besarnya gaya tarik dinamis.
H07 : = 0
Perbedaan interaksi desain tangan prosthetic, arah sumbu gerakan
tangan prosthetic dan model gerakan tangan manusia tidak
menimbulkan pengaruh yang signifikan terhadap besarnya gaya
tarik dinamis.

IV-101
Model matematik yang dipakai dalam analisis ini, adalah:
Yijkm = m + Ai + Bj + ABij + Ck+ ACik + BCjk + ABCijk + em(ijk) ……(4.1)
dengan;
Yijkm : variabel respon
Ai : faktor desain tangan prosthetic
Bj : faktor arah sumbu gerakan tangan prosthetic
Ck : faktor model gerakan dasar tangan manusia
ABij : interaksi faktor A dan faktor B
ACik : interaksi faktor A dan faktor C
BCjk : interaksi faktor B dan faktor C
ABCijk : interaksi faktor A, faktor B, dan faktor C
em(ijk) : random error
i : jumlah faktor desain tangan prosthetic (A), i = 1, 2, 3
j : jumlah faktor arah sumbu gerakan tangan prosthetic (B), j = 1, 2
k : jumlah faktor model gerakan dasar tangan manusia (C), k= 1,2,...,6
m : jumlah observasi m = 1, 2, 3, 4, 5
Selanjutnya dilakukan perhitungan nilai-nilai yang dibutuhkan untuk
perhitungan Anova. Prosedur perhitungan nilai-nilai tersebut dijelaskan oleh
pembahasan di bawah ini. Adapun data yang digunakan adalah data
eksperimen nilai gaya tarik dinamis yang dapat dilihat pada tabel 4.11.
Sedangkan pengolahan data seperti pada tabel 4.20.

IV-102
Tabel 4.20 Anova untuk nilai gaya tarik dinamis (Newton)
IV - 34

1
Kemudian dilakukan perhitungan jumlah kuadrat/ sum of square (SS)
dari masing-masing faktor dan interaksinya. Proses perhitungan SS dan
hasilnya, adalah:
· Jumlah kuadrat total (SStotal) :
nabc
TY
....a
i
b
j
c
k
n
lijkm
22
totalSS -= åååå
· Jumlah kuadrat faktor desain tangan prosthetic (SSA) :
å=
-=a
i
.......iA
nabc
T
nbc
T
1
22
SS
· Jumlah kuadrat faktor arah gerakan tangan prosthetic (SSB) :
å=
-=b
j
......j.B
nabc
T
nac
T
1
22
SS
· Jumlah kuadrat model gerakan tangan manusia (SSC) :
å=
-=b
j
......k.C
nabcd
T
nabd
T
1
22
SS
· Jumlah kuadrat interaksi antara faktor A dan B (SSAxB) :
nabc
T
nac
T
nbc
T
n
T ....b
j
..j.a
i
b
j
n
m
a
i
...iij.mBA
22
1 1 1
22
xSS +--= åååå å= = =
= 166,361
· Jumlah kuadrat interaksi antara faktor A dan C (SSAxC) :

2
nabc
T
nab
T
nbc
T
n
T ....c
j
..k.a
i
c
k
n
m
a
i
...iik.mA
22
1 1 1
22
xCSS +--= åååå å= = =
= 2053,647
· Jumlah kuadrat interaksi antara faktor B dan C (SSBxC) :
nabc
T
nab
T
nac
T
n
T ....c
k
...b
j
c
k
n
m
b
j
...jij.mBxC
22
1 1 1
22
SS +--= åååå å= = =
k
= 296,945
· Jumlah kuadrat interaksi antara faktor A, B, dan C (SSAxBxC) :
nabc
T
nab
T
nac
T
nbc
T
n
T ....c
k
...b
j
c
k
n
m
b
j
...ja
i
...iijk.mAxBxC
22
1 1 1
222
SS +---= åååå ååå= = ==
ka
i 1
= 1025,679
· Jumlah kuadrat error (SSE) :
SSE = SStotal - SSA - SSB – SSC - SSAB – SSAC – SSBC - SSABC
= 10914,968 – 4482,954 – 61,098 – 2638,31 – 166,361 – 2053,945 –
296,945 - 1025,679
= 189,972
Mean of square (MS) atau disebut juga kuadrat tengah (KT), dihitung
dengan membagi antara jumlah kuadrat (SS) yang diperoleh dengan derajat
bebasnya (df).
Contoh perhitungan MS, sebagai berikut:

3
Besarnya Fhitung didapat dari pembagian antara MS faktor yang ada
dengan MSerror dari eksperimen. Contoh perhitungannya adalah sebagai
berikut :
Berpedoman pada contoh di atas, maka didapat MS dan Fhitung semua
faktor selengkapnya yang dapat dilihat pada Tabel 4.31.
Keputusan terhadap hipotesis nol didasarkan pada nilai Fhitung, yakni
hipotesis nol (H0) ditolak jika Fhitung > Ftabel dan diterima jika Fhitung < Ftabel.
Ftabel diperoleh dari tabel distribusi F kumulatif, dengan df1 = df yang
bersangkutan dan df2 = dferror, yang dapat dilihat pada lampiran.
Perhitungan Ftabel dengan menggunakan Microsoft excel dengan rumus:
= FINV(probability, df1, df2)
Contoh perhitungan Ftabel adalah Ftabel untuk arah sumbu gerakan
tangan prosthetic, df1 = 1 dan df2 = 144. Berdasarkan hasil perhitungan
Microsoft excel diperoleh Ftabel = FINV (0.01, 1, 144) = 6,814.
Tabel 4.21 Hasil perhitungan anova gaya tarik dinamis
Sumber variansi df SS MS F hitung F tabel H0
Desain tangan prosthetic (A) 2 4482.954 2241.477 23.598 4.756 tolak
Arah sumbu gerakan tangan prosthetic (B) 1 61.098 61.098 0.322 6.814 terima
Model gerakan tangan manusia (C) 5 2638.310 527.662 13.888 3.147 tolak
Interaksi AxB 2 166.361 83.180 0.876 4.756 terima
Interaksi AxC 10 2053.647 205.365 10.810 2.446 tolak
Interaksi BxC 5 296.945 59.389 1.563 3.147 terima
Interaksi AxBxC 10 1025.679 102.568 5.399 2.446 tolak
Error 144 189.972 1.319
Total 179 10914.968
Hasil perhitungan Anova gaya tarik dinamis dengan menggunakan
SPSS, dapat dilihat pada tabel 4.22.

4
Tabel 4.22 Hasil perhitungan SPSS anova gaya tarik dinamis
Tests of Between-Subjects Effects
Dependent Variable: Gaya tarik
10724.996a 35 306.428 232.275 .000
175530.714 1 175530.714 133053.5 .000
61.098 1 61.098 46.313 .000
2638.310 5 527.662 399.972 .000
166.361 2 83.180 63.051 .000
2053.647 10 205.365 155.668 .000
296.945 5 59.389 45.017 .000
1025.679 10 102.568 77.747 .000
189.972 144 1.319
186445.682 180
10914.968 179
SourceCorrected Model
Intercept
arah_sumbu
model_gerakan
desain_tangan * arah_sumbu
desain_tangan * model_gerakan
arah_sumbu * model_gerakan
desain_tangan * arah_sumbu * model_gerakan
Error
Total
Corrected Total
Type III Sumof Squares df Mean Square F Sig.
R Squared = .983 (Adjusted R Squared = .978)a.
Berdasarkan Tabel 4.22, untuk memutuskan diterima atau ditolaknya
H0 adalah dengan melihat nilai-nilai pada kolom sig (signifikansi). Diketahui
bahwa nilai signifikansi pada tabel 4.22 lebih kecil dari pada signifikansi
yang ditetapkan = 0,01, maka tolak H0 dan berarti bahwa variable faktor
berpengaruh signifikan pada variable respon.
Penggunaan Fhitung memberikan kesimpulan tentang hasil uji hipotesis
analisis variansi. Keputusan yang diambil terhadap hasil analisis variansi
data eksperimen untuk gaya tarik dinamis, yaitu:
1. Ditinjau dari faktor desain tangan prosthetic (faktor A), nilai Fhitung >
Ftabel, sehingga tolak H0 dan simpulkan bahwa pengaruh desain tangan
prosthetic terhadap gaya tarik dinamis yang dihasilkan berbeda secara
signifikan untuk setiap level yang di uji.
2. Ditinjau dari faktor arah sumbu gerakan tangan prosthetic (faktor B),
nilai Fhitung < Ftabel, sehingga terima H0 dan simpulkan bahwa pengaruh
arah sumbu gerakan tangan prosthetic terhadap gaya tarik dinamis yang
dihasilkan tidak berbeda secara signifikan untuk setiap level yang di uji.
3. Ditinjau dari faktor model gerakan tangan manusia (faktor C), nilai
Fhitung > Ftabel, sehingga tolak H0 dan simpulkan bahwa pengaruh model

5
gerakan tangan manusia terhadap gaya tarik dinamis yang dihasilkan
berbeda secara signifikan untuk setiap level yang di uji.
4. Ditinjau dari interaksi antara faktor desain tangan prosthetic (faktor A)
dan arah sumbu gerakan tangan prosthetic (faktor B), nilai Fhitung < Ftabel,
sehingga terima H0 dan simpulkan bahwa pengaruh interaksi antara
faktor desain tangan prosthetic (faktor A) dan arah sumbu gerakan
tangan prosthetic (faktor B) terhadap gaya tarik dinamis yang dihasilkan
tidak berbeda secara signifikan untuk setiap level yang di uji.
5. Ditinjau dari interaksi antara faktor desain tangan prosthetic (faktor A)
dan model gerakan tangan manusia (faktor C), nilai Fhitung > Ftabel,
sehingga tolak H0 dan simpulkan bahwa pengaruh interaksi antara
faktor arah sumbu gerakan tangan manusia (faktor A) dan model
gerakan tangan manusia (faktor B) terhadap gaya tarik dinamis yang
dihasilkan berbeda secara signifikan untuk setiap level yang di uji.
6. Ditinjau dari interaksi antara faktor arah sumbu gerakan tangan
prosthetic (faktor B) dan model gerakan tangan manusia (faktor C), nilai
Fhitung < Ftabel, sehingga terima H0 dan simpulkan bahwa pengaruh
interaksi antara faktor arah sumbu gerakan tangan prosthetic (faktor B)
dan model gerakan tangan manusia (faktor C)terhadap gaya tarik
dinamis yang dihasilkan tidak berbeda secara signifikan untuk setiap
level yang di uji.
7. Ditinjau dari interaksi antara faktor desain tangan prosthetic (faktor A),
arah sumbu gerakan tangan prosthetic (faktor B), dan model gerakan
tangan manusia (faktor C), nilai Fhitung > Ftabel, sehingga tolak H0 dan
simpulkan bahwa pengaruh interaksi antara faktor arah sumbu gerakan
tangan manusia (faktor A) dan model gerakan tangan manusia (faktor B)
terhadap gaya tarik dinamis yang dihasilkan berbeda secara signifikan
untuk setiap level yang di uji.
4.2.7 Uji Setelah Anova
Uji Anova yang dilakukan hanya menjelaskan apakah ada perbedaan
yang signifikan antar level-level atau treatment yang diuji dalam eksperimen

6
atau menjelaskan apakah variasi antar treatment itu signifikan atau tidak.
Namun demikian, bilamana terdapat faktor yang dinyatakan berpengaruh
signifikan terhadap variabel respon, maka Anova belum memberikan
informasi tentang level mana saja dari faktor tersebut yang memberikan
perbedaan, atau Anova belum bisa menggambarkan model matematis akibat
pengaruh suatu faktor terhadap variabel respon.
Informasi yang belum diberikan Anova, diberikan oleh uji setelah
Anova. Uji setelah Anova banyak jenisnya. Penggunaan salah satu jenis uji
setelah Anova disesuaikan dengan tujuan yang ingin dicapai atau informasi
yang ingin diperoleh lebih jauh. Misalnya ingin diketahui bentuk pengaruh
suatu faktor (variabel bebas/ independent) terhadap variabel respon
(dependent), maka model regresi bisa menjadi pilihan tepat.
Sesuai hasil perhitungan Anova sebelumnya, maka tujuan atau
informasi utama yang dicari lebih jauh dari hasil Anova adalah pada desain
tangan prosthetic, model gerakan tangan manusia, interaksi antara desain
tangan prosthetic dan model gerakan tangan manusia, dan interaksi antara
desain tangan prosthetic, arah sumbu gerakan tangan prosthetic, dan model
gerakan tangan manusia. Uji Student Newman-Keuls (SNK) dilakukan
untuk mengetahui pada level mana dari faktor atau interaksi faktor yang
memberikan perbedaan nilai gaya tarik dinamis dan juga menentukan level
yang terbaik dari faktor atau interaksi faktor yang memberikan perbedaan
nilai gaya tarik dinamis.
1. Uji SNK Faktor Desain Tangan Prosthetic
Uji student Newman-Keuls (SNK) terhadap desain tangan prosthetic,
dilakukan untuk perhitungan gaya tarik dinamis, dimana hasil eksperimen
menunjukkan bahwa pengaruh desain tangan prosthetic terhadap gaya tarik
dinamis berbeda secara signifikan untuk setiap level yang diuji. Prosedur uji
SNK dibahas pada pembahasan selanjutnya. Tabel 4.23 adalah rata-rata
variabel respon gaya tarik dinamis yang dikelompokkan berdasarkan desain
tangan prosthetic, kemudian diurutkan dari nilai terkecil hingga terbesar.

7
Tabel 4.23 Rata-rata gaya tarik dinamis eksperimen dikelompokkan berdasarkan desain tangan prosthetic
Desain tangan prosthetic D3 D1 D2 rata2 24.226 33.959 35.498
Selanjutnya dihitung beberapa nilai untuk keperluan perbandingan SNK :
a. Mean Squareerror = 1,319 dengan dferror = 144, diperoleh dari proses
perhitungan uji Anova.
b. Nilai error standar untuk mean level :
k = jumlah level
c. Untuk a = 0.01 dan n2 = 144 diperoleh significant range (dari tabel SNK)
P : 2 3
Range : 3.64 4.12
d. Nilai Least Significant Range (LSR) diperoleh dengan mengalikan
significant range dengan error standar.
P : 2 3
LSR : 2,413 2,731
e. Menghitung beda (selisih) antar-level secara berpasangan dan
membandingkannya dengan nilai LSR. Jika nilai selisih > LSR
menyatakan bahwa terdapat perbedaan yang signifikan antara rata-rata
interaksi tersebut. Proses perhitungan beda antar level adalah sebagai
berikut :
Desain tangan prosthetic D3 D1 D2 rata2 24.226 33.959 35.498
¡ D2 versus D3 11,272 > 2,731
¡ D2 versus D1 1,538 < 2,413
¡ D1 versus D3 9,733 > 2,413
Hasil uji SNK di atas menunjukkan bahwa ada dua kelompok data yang
berbeda dari hasil uji SNK tersebut, yaitu :
D1 D2 D3
Level desain tangan prosthetic 1 (tangan prosthetic sistem external
stressing cable) sama dengan level desain tangan prosthetic 2 (tangan

8
prosthetic sistem internal stressing cable tanpa puli), sehingga berada
dalam satu kelompok. Sedangkan level desain tangan prosthetic 3
(tangan prosthetic sistem internal stressing cable dengan puli) berbeda
dengan kedua level tersebut.
2. Uji SNK Faktor Model Gerakan Tangan Manusia
Uji student Newman-Keuls (SNK) terhadap model gerakan tangan
manusia, dilakukan untuk perhitungan gaya tarik dinamis, dimana hasil
eksperimen menunjukkan bahwa pengaruh model gerakan tangan manusia
terhadap gaya tarik dinamis berbeda secara signifikan untuk setiap level
yang diuji. Prosedur uji SNK dibahas pada pembahasan selanjutnya. Tabel
4.24 adalah rata-rata variabel respon gaya tarik dinamis yang
dikelompokkan berdasarkan model gerakan tangan manusia, kemudian
diurutkan dari nilai terkecil hingga terbesar.
Tabel 4.24 Rata-rata gaya tarik dinamis eksperimen dikelompokkan berdasarkan model gerakan tangan manusia
Model gerakan tangan manusia Cylindrical Spherical Hook Palmar Tip Lateral
rata2 25.785 27.838 28.959 34.477 34.767 35.540
Selanjutnya dihitung beberapa nilai untuk keperluan perbandingan SNK :
a. Mean Squareerror = 1,319 dengan dferror = 144, diperoleh dari proses
perhitungan uji Anova.
b. Nilai error standar untuk mean level :
k = jumlah level
c. Untuk a = 0.01 dan n2 = 144 diperoleh significant range (dari tabel SNK)
P : 2 3 4 5 6
Range : 3.64 4.12 4,40 4,60 4,76
d. Nilai Least Significant Range (LSR) diperoleh dengan mengalikan
significant range dengan error standar.
P : 2 3 4 5 6

9
LSR : 2,413 2,731 2,917 3,050 3,156
e. Menghitung beda (selisih) antar-level secara berpasangan dan
membandingkannya dengan nilai LSR. Jika nilai selisih > LSR
menyatakan bahwa terdapat perbedaan yang signifikan antara rata-rata
interaksi tersebut. Proses perhitungan beda antar level adalah:
Model gerakan tangan manusia
Cylindrical (C1)
Spherical (C2)
Hook (C3)
Palmar (C6)
Tip (C4)
Lateral (C5)
rata2 25.785 27.838 28.959 34.477 34.767 35.540
¡ C5 versus C1 9,755 > 3,156
¡ C5 versus C2 7,702 > 3,050
¡ C5 versus C3 6,581 > 2,917
¡ C5 versus C6 1,063 < 2,731
¡ C5 versus C4 0,773 < 2,413
¡ C4 versus C1 8,982 > 3,050
¡ C4 versus C2 6,930 > 2,917
¡ C4 versus C3 5,808 > 2,731
¡ C4 versus C6 0,290 < 2,413
¡ C6 versus C1 8,692 > 2,917
¡ C6 versus C2 6,639 > 2,731
¡ C6 versus C3 5,518 > 2,413
¡ C3 versus C1 3,174 > 2,731
¡ C3 versus C2 1,122 < 2,413
¡ C2 versus C1 2,053 < 2,413
Hasil uji SNK di atas menunjukkan bahwa ada dua kelompok data yang
berbeda dari hasil uji SNK tersebut, yaitu :
C1 C2 C3 C4 C5 C6
Level model gerakan tangan manusia 1 (cylindrical) sama dengan level
model gerakan tangan manusia 2 (spherical) dan level model gerakan
tangan manusia 3 (hook), sehingga berada dalam satu kelompok.
Sedangkan level model gerakan tangan manusia 4 (tip) sama dengan
level model gerakan tangan manusia 5 (lateral) dan level model gerakan
tangan manusia 6 (palmar), sehingga berada dalam satu kelompok.

10
3. Uji SNK Treatment Faktor Desain Tangan Prosthetic dan Faktor Model Gerakan Tangan Manusia
Uji student Newman-Keuls (SNK) terhadap treatment faktor desain
tangan prosthetic dan faktor model gerakan tangan manusia, dilakukan
untuk perhitungan gaya tarik dinamis, dimana hasil eksperimen
menunjukkan bahwa pengaruh treatment faktor desain tangan prosthetic
(faktor A) dan faktor model gerakan tangan manusia (faktor C) terhadap
gaya tarik dinamis berbeda secara signifikan untuk setiap level yang diuji.
Prosedur uji SNK dibahas pada pembahasan selanjutnya. Tabel 4.25 adalah
rata-rata variabel respon gaya tarik dinamis yang dikelompokkan
berdasarkan treatment faktor desain tangan prosthetic dan faktor model
gerakan tangan manusia, kemudian diurutkan dari nilai terkecil hingga
terbesar.
Tabel 4.25 Rata-rata gaya tarik dinamis eksperimen dikelompokkan berdasarkan treatment faktor A dan faktor C
Selanjutnya dihitung beberapa nilai untuk keperluan perbandingan SNK :

11
a. Mean Squareerror = 1,319 dengan dferror = 144, diperoleh dari proses
perhitungan uji Anova.
b. Nilai error standar untuk mean level :
k = jumlah level
c. Untuk a = 0.01 dan n2 = 144 diperoleh significant range (dari tabel SNK)
P : 2 3 4 5 6 7 8 9 Range : 3.64 4.12 4.4 4.6 4.76 4.88 4.99 5.08
P : 10 11 12 13 14 15 16 17 18
Range : 5.16 5.23 5.29 5.35 5.4 5.25 5.49 5.54 5.57 d. Nilai Least Significant Range (LSR) diperoleh dengan mengalikan
significant range dengan error standar.
P : 2 3 4 5 6 7 8 9 LSR : 2.413 2.732 2.917 3.050 3.156 3.235 3.308 3.368
P : 10 11 12 13 14 15 16 17 18
LSR : 3.421 3.467 3.507 3.547 3.580 3.481 3.640 3.673 3.693
e. Menghitung beda (selisih) antar-treatment secara berpasangan dan
membandingkannya dengan nilai LSR. Jika nilai selisih > LSR
menyatakan bahwa terdapat perbedaan yang signifikan antara rata-rata
treatment tersebut.
Hasil uji SNK menunjukkan bahwa ada empat kelompok data yang
berbeda, yaitu :
· Kelompok 1: A2 x C5, A2 x C6, dan A1 x C4
· Kelompok 2: A2 x C4, A1 x C6, dan A1 x C5
· Kelompok 3: A1 x C2, A2 x C2, A1 x C3, A2 x C3, A3 x C3, dan A2 x C1
· Kelompok 4: A1 x C1, A3 x C1, A3 x C4, A3 x C6, A3 x C5, dan A3 x C2
Treatment-treatment yang berada dalam satu kelompok dianggap tidak
berbeda (sama saja), sedangkan yang berbeda kelompok dianggap

12
berbeda. Kesimpulannya, jika eksperimenter menginginkan gaya tarik
dinamis yang minimum, maka dapat dipilih treatment yang termasuk
dalam kelompok 4, dimana rata-rata gaya tarik dinamis yang minimum
diperoleh dalam treatment A3 x C2 (interaksi level desain tangan
prosthetic sistem internal stressing cable dengan puli dan level model
gerakan spherical), yaitu sebesar 20,819 Newton.
.
4. Uji SNK Treatment Faktor Desain Tangan Prosthetic dan Faktor Model Gerakan Tangan Manusia
Uji student Newman-Keuls (SNK) terhadap treatment faktor desain
tangan prosthetic, faktor arah sumbu gerakan tangan prosthetic, dan faktor
model gerakan tangan manusia, dilakukan untuk perhitungan gaya tarik
dinamis, dimana hasil eksperimen menunjukkan bahwa pengaruh treatment
faktor desain tangan prosthetic (faktor A), faktor arah sumbu gerakan
tangan prosthetic (faktor B), dan faktor model gerakan tangan manusia
(faktor C) terhadap gaya tarik dinamis berbeda secara signifikan untuk
setiap level yang diuji. Prosedur uji SNK dibahas pada pembahasan
selanjutnya. Tabel 4.26 adalah rata-rata variabel respon gaya tarik dinamis
yang dikelompokkan berdasarkan treatment faktor desain tangan prosthetic,
faktor arah sumbu gerakan tangan prosthetic, dan faktor model gerakan
tangan manusia, kemudian diurutkan dari nilai terkecil hingga terbesar.
Tabel 4.26 Rata-rata gaya tarik dinamis eksperimen dikelompokkan berdasarkan treatment faktor A, faktor B, dan faktor C

13
Selanjutnya dihitung beberapa nilai untuk keperluan perbandingan SNK :
a. Mean Squareerror = 1,319 dengan dferror = 144, diperoleh dari proses
perhitungan uji Anova.
b. Nilai error standar untuk mean level :
k = jumlah level
c. Untuk a = 0.01 dan n2 = 144 diperoleh significant range (dari
tabel SNK)
P : 2 3 4 5 6 7 8 9 Range : 3.64 4.12 4.4 4.6 4.76 4.88 4.99 5.08
P : 10 11 12 13 14 15 16 17 18 Range : 5.16 5.23 5.29 5.35 5.4 5.25 5.49 5.54 5.57
P : 19 20 21 22 23 24 25 26 27

14
Range : 5.61 5.65 5.65 5.65 5.65 5.65 5.65 5.65 5.65
P : 28 29 30 31 32 33 34 35 36 Range : 5.65 5.65 5.65 5.65 5.65 5.65 5.65 5.65 5.65
d. Nilai Least Significant Range (LSR) diperoleh dengan
mengalikan significant range dengan error standar.
P : 2 3 4 5 6 7 8 9 LSR : 2.413 2.732 2.917 3.050 3.156 3.235 3.308 3.368
P : 10 11 12 13 14 15 16 17 18
LSR : 3.421 3.467 3.507 3.547 3.580 3.481 3.640 3.673 3.693
P : 19 20 21 22 23 24 25 26 27 LSR : 3.719 3.746 3.746 3.746 3.746 3.746 3.746 3.746 3.746
P : 28 29 30 31 32 33 34 35 36
LSR : 3.746 3.746 3.746 3.746 3.746 3.746 3.746 3.746 3.746
e. Menghitung beda (selisih) antar-treatment secara berpasangan
dan membandingkannya dengan nilai LSR. Jika nilai selisih > LSR
menyatakan bahwa terdapat perbedaan yang signifikan antara rata-rata
treatment tersebut.
Hasil uji SNK menunjukkan bahwa ada empat kelompok data yang
berbeda, yaitu :
· Kelompok 1: A1B1C1 dan A2B1C5
· Kelompok 2: A2B2C5, A2B2C6, A2B1C6, A1B2C6, A1B2C5, A2B1C4,
A2B2C4, A1B1C6, A1B1C5, A1B2C4, A2B1C2, A2B2C1, A1B1C2, dan A1B2C3
· Kelompok 3: A1B2C2, A1B1C3, A3B2C3, A3B2C5, A2B2C3, A3B2C6,
A3B1C3, A3B2C4, A2B1C6, A2B2C2, A1B2C1, A1B1C1, A2B1C1, A3B2C2,
A3B1C1, A3B2C1, A3B1C5, A3B1C6, A3B1C4, dan A3B1C2
Treatment-treatment yang berada dalam satu kelompok dianggap tidak
berbeda (sama saja), sedangkan yang berbeda kelompok dianggap
berbeda. Kesimpulannya, jika eksperimenter menginginkan gaya tarik
dinamis yang minimum, maka dapat dipilih treatment yang termasuk
dalam kelompok 3, dimana rata-rata gaya tarik dinamis yang minimum
diperoleh dalam treatment A3B1C2 (interaksi antara level desain tangan

15
prosthetic sistem internal stressing cable dengan puli, level arah sumbu
gerakan longitudinal axis, dan level model gerakan spherical), yaitu
sebesar 17,61 Newton.
4.2.8 Pemilihan Desain Tangan Prosthetic Berdasarkan Nilai Gaya Tarik Statis dan Gaya Tarik Dinamis
Pemilihan desain tangan prosthetic dilakukan dengan
mempertimbangkan nilai gaya tarik dinamis dan gaya tarik statis jari. Nilai
gaya tarik dinamis dipilih berdasarkan hasil Anova dari data eksperimen
yang dilakukan, sedangkan gaya tarik statis jari dipilih dengan nilai yang
terbesar dari hasil pengukuran aktual terhadap tiga desain tangan prosthetic.
Berdasarkan data hasil pengukuran aktual gaya tarik statis tangan
prosthetic pada tabel 4.6, maka gaya tarik statis masing-masing desain
tangan prosthetic pada dua arah sumbu gerakan tangan prosthetic
(longitudinal axis dan sagital plane) dapat digambarkan sebagai berikut:
Gambar 4.17 Gaya tarik statis tangan prosthetic pada arah longitudinal axis

16
Gambar 4.18 Gaya tarik statis tangan prosthetic pada arah sagital plane
Dari gambar 4.17 dan gambar 4.18, maka dapat disimpulkan bahwa
desain tangan prosthetic dengan sistem internal stressing cable tanpa puli
(desain 2) memiliki rata-rata gaya tarik statis yang lebih besar dari pada
desain tangan prosthetic sistem internal stressing cable dengan puli. Dengan
kata lain kedua desain tangan prosthetic sistem internal stressing cable
dengan puli memiliki gaya tarik statis yang lebih baik.
Kemudian berdasarkan uji setelah anova terhadap nilai gaya tarik
dinamis, diperoleh hasil bahwa desain tangan prosthetic external stressing
cable memiliki rata-rata nilai gaya tarik dinamis yang sama dengan desain
tangan prosthetic sistem internal stressing cable tanpa puli. Sedangkan desain
tangan prosthetic sistem internal stressing cable dengan puli memiliki rata-
rata nilai gaya tarik dinamis yang paling baik dibandkan dengan kedua jenis
desain tangan prosthetic lainnya.
Rekomendasi desain tangan prosthetic ditujukan untuk pengembangan
desain tangan prosthetic sistem internal stressing cable. Selain karena sudah
memenuhi sisi fungsionalitas, desain tangan prosthetic sistem internal
stressing cable juga lebih memenuhi sisi kosmetik jika dibandingkan dengan
tangan prosthetic sistem external stressing cable. Dengan mempertimbangkan
besarnya rata-rata nilai gaya tarik dinamis dan gaya tarik statis yang
dihasilkan pada masing-masing tangan prosthetic, maka desain tangan
prosthetic yang dapat dijadikan rekomendasi untuk pengembangan desain

17
tangan prosthetic selanjutnya adalah desain tangan prosthetic sistem internal
stressing cable dengan puli.

18
BAB V ANALISIS DAN INTERPRETASI HASIL
Pada bab ini membahas tentang analisis dan interpretasi hasil penelitian
yang telah dikumpulkan dan diolah pada bab sebelumnya. Analisis dan
interprestasi hasil tersebut diuraikan dalam sub bab, dibawah ini.
5.1 ANALISIS HASIL PENELITIAN
Pada sub bab ini diuraikan mengenai analisis desain tangan prosthetic,
pengukuran aktual gaya tarik statis dan pengukuran gaya tarik dinamis pada
desain tangan prosthetic, serta analisis variansi dari pengujian gaya tarik dinamis
tangan prosthetic.
5.1.1 Analisis Desain Tangan Prosthetic
Analisis mengenai desain tangan prosthetic dilakukan untuk memberikan
gambaran mengenai karakteristik dan kemampuan dari masing-masing desain
tangan prosthetic yang digunakan dalam penelitian ini.
1. Desain Tangan Prosthetic dengan Sistem External Stressing Cable
Desain tangan prosthetic yang baik harus memiliki tiga kriteria utama, yaitu
cosmetic appeal, comfort, dan control. Selain mampu memnuhi sisi fungsional,
desain tangan prosthetic juga harus mampu memenuhi sisi kosmetik. Berdasarkan
hasil eksperimen, diketahui bahwa desain tangan prosthetic dengan sistem
external stressing cable mampu memenuhi sisi fungsional dalam melakukan enam
model gerakan dasar tangan manusia. Hasil percobaan dapat dilihat pada gambar
4.13 dan gambar 4.14, dimana tangan prosthetic sistem external stressing cable
mampu melakukan gerakan cylindrical, spherical, hook, lateral, palmar, dan tip.
Jari tangan prosthetic (phalanx) terdiri dari dua link, dimana phalanx media dan
phalanx distilis dikembangkan menjadi satu bagian menjadi phalanx media-
distalis. Hal ini menyebabkan terbatasnya area pemegangan objek benda. Jenis
pemegangan power grip mampu diakomodasi dengan baik oleh telapak tangan
prosthetic, sedangkan untuk jenis pemegangan precision grip tangan prosthetic
sedikit mengalami kesulitan karena desain metacarpal pollicis masih pasif

19
sehingga bagian jari telunjuk, jari tengah, dan bagian ibu jari belum mampu
bertemu pada satu titik pemegangan.
Desain telapak tangan prosthetic dengan sistem external stressing cable
belum mampu memenuhi sisi kosmetik karena sistem kabel yang masih berada
diluar phalanx jari tangan prosthetic dan sistem voluntary closing yang digunakan
menyebabkan tangan dalam kondisi flexion sehingga tidak menyerupai tangan
normal.
2. Desain Tangan Prosthetic dengan Sistem Internal Stressing Cable
Desain tangan prosthetic dengan sistem internal stressing cable awalnya
dikembangkan tanpa menggunakan sistem puli. Pengembangan desain dilakukan
pada bagian jari tangan prosthetic yang terdiri dari tiga link. Dengan desain jari
yang menggunakan tiga link, area pemegangan objek benda lebih luas. Desain
metacarpal pada tangan prosthetic internal stressing cable tanpa sistem puli
dirancang menjadi dua bagian, masing-masing bagian tersebut dirangkai menjadi
satu sehingga membentuk sudut pemegangan yang memudahkan pengguna dalam
memegang objek. Desain tangan prosthetic internal stressing cable tanpa sistem
puli mampu memenuhi sisi fungsional karena mampu melakukan enam model
gerakan dasar tangan manusia. Sedangkan dari sisi kosmetik, desain tangan
peosthetic ini menggunakan sistem voluntary closing dan sistem kabel berada di
dalam phalanx jari tangan prosthetic sehingga menyerupai kondisi tangan
manusia normal manusia.
Pengembangan desain telapak tangan prosthetic sistem internal stressing
cable dilakukan dengan penambahan sistem puli pada jari tangan prosthetic.
Penambahan puli pada jari tangan prosthetic berfungsi sebagai tempat tautan
kabel dan sebagai rel kabel sehingga memudahkan saat penarikan kabel. Puli juga
berfungsi untuk mengurangi gesekan yang terjadi dalam sistem kabel, sehingga
rata-rata gaya tarik desain tangan prosthetic dengan sistem internal stressing
cable mendekati rata-rata gaya tarik desain tangan prosthetic dengan sistem
external stressing cable. Ibu jari juga di desain mampu berotasi terbatas sehingga
mampu bertemu dengan phalanx distalis jari telunjuk dan jari tengah.

20
5.1.2 Analisis Gaya Tarik Statis
Pengukuran gaya tarik statis jari bertujuan untuk mengetahui besarnya gaya
tarik yang dibutuhkan tangan prosthetic dalam memegang objek benda.
Berdasarkan hasil pengukuran gaya tarik statis pada tabel 4.7, diketahui bahwa
rata-rata gaya tarik statis pada tangan prosthetic system external stressing cable
dibandingkan dengan dua tangan prosthetic lainnya. Sebagai contoh, untuk
mencapai gaya tekan sebesar 1,03 Newton, tangan prosthetic sistem external
stressing cable membutuhkan gaya tarik statis 4,13 Newton pada arah
longitudinal axis dan 6,67 Newton pada arah sagital plane. Sedangkan pada
tangan prosthetic sistem internal stressing cable tanpa puli, dibutuhkan gaya tarik
statis sebesar 8,68 Newton pada arah longitudinal axis dan 6,68 Newton pada arah
sagital plane, dan pada tangan prosthetic sistem internal stressing cable tanpa
puli, dibutuhkan gaya tarik statis sebesar 5,92 Newton pada arah longitudinal axis
dan 4,32 Newton pada arah sagital plane.
Gaya tarik statis pada arah longitudinal axis dan sagital plane memiliki
selisih yang berbeda-beda pada masing-masing tangan prosthetic. Rekapitulasi
selisih gaya tarik statis pada arah longitudinal axis dan sagital plane ditunjukkan
dalam tabel 5.1.
Tabel 5.1 Rekapitulasi selisih gaya tarik pada arah longitudinal axis dan sagital plane
Selisih Ftarik statis pada arah tangan prosthetic (N) Desain tangan prosthetic
Δ x = 1.6 Δ x = 2.6 Δ x = 3.6 Δ x = 4.6 Δ x = 5.6 Tangan prosthetic sistem external stressing cable
2.63 2.27 2.51 4.09 2.69
Tangan prosthetic sistem internal stressing cable tanpa puli
1.99 0.62 1.15 4.60 3.77
Tangan prosthetic sistem internal stressing cable dengan puli
1.61 0.13 0.08 0.59 0.57
Berdasarkan tabel 5.1 diketahui bahwa tangan prosthetic sistem internal
stressing cable dengan puli memilki rata-rata selisih gaya tarik statis yang lebih
kecil dari pada dua tangan prosthetic lainnya. Misalnya, pada Δ x = 1,6 mm,
tangan prosthetic sistem internal stressing cable dengan puli hanya memiliki
selisih 1,61 Newton, sedangkan tangan prosthetic lainnya memiliki selisih 1,99

21
Newton dan 2,63 Newton. Perbedaan selisih tersebut disebabkan adanya
perbedaan berat material dari tangan prosthetic. Tangan prosthetic sistem internal
stressing cable memiliki berat material paling tinggi yaitu 259,3 gram. Disini
terjadi perbaikan bahan material pada tangan prosthetic sistem internal stressing
cable dengan berat 201,6 gram. Hal tersebut menyebabkan besarnya selisih gaya
tarik statis yang tidak signifikan pada arah longitudinal axis dan sagital plane.
Perhitungan efisiensi gaya tarik statis bertujuan untuk mengetahui tingkat
efisiensi dari gaya tarik statis yang dihasilkan oleh tangan prosthetic. Nilai
efisiensi maksimal adalah 1, sehingga hasil yang terbaik adalah nilai yang paling
mendekati 1. Berdasarkan tabel 4.7, rata-rata nilai efisiensi gaya tarik statis dari
tangan prosthetic sistem external stressing cable adalah 0,28%, sedangkan desain
tangan prosthetic sistem internal stressing cable tanpa puli adalah 0,18% dan
tangan prosthetic sistem internal stressing cable dengan puli adalah 0,20%.
5.1.3 Analisis Gaya Tarik Dinamis
Besarnya gaya tarik yang dihasilkan tangan prosthetic dipengaruhi oleh
beberapa faktor, antara lain berat material tangan prosthetic dan jarak antara kabel
dengan pusat joint jari tangan prosthetic (r). Semakin berat material dari tangan
prosthetic maka gaya yang dibutuhkan untuk menarik kabel juga semakin berat.
Jarak antara kabel dengan pusat joint ditunjukkan dalam gambar 5.1.
Gambar 5.1 Jarak antara kabel dengan pusat joint jari tangan prosthetic (r)
r r
r
External stressing cable
Internal stressing cable tanpa puli
Internal stressing cable dengan puli

22
Dalam konsep gerak rotasi terdapat istilah lengan momen (r), yaitu jarak
tegak lurus dari sumbu perputaran ke garis sepanjang tempat gaya bekerja.
Besarnya percepatan sudut (α) berbanding lurus tidak hanya dengan gaya, tetapi
berbanding lurus dengan lengan momen (r). Semakin besar lengan momen (r),
maka percepatan sudut (α) juga semakin besar. Hasil kali antara gaya (F) dengan
lengan momen (r) disebut momen gaya (τ). Jadi, pecepatan sudut suatu benda
berbanding lurus dengan momen total yang dikenakan.
Pada tangan prosthetic, lengan momen dianalogikan dengan jarak tegak
lurus kabel tangan prosthetic dengan sumbu perputaran (joint dari phalanx). Pada
tangan prosthetic sistem external stressing cable, jarak antara kabel dengan pusat
joint jari adalah r = 25 mm, sedangkan pada tangan prosthetic sistem internal
stressing cable tanpa puli r = 3 mm dan pada tangan prosthetic sistem internal
stressing cable dengan puli r = 5 mm. Untuk mencapai percepatan yang sama,
tangan prosthetic dengan nilai r yang lebih besar akan membutuhkan gaya yang
lebih kecil. Jadi, dapat disimpulkan bahwa semakin besar jarak antara kabel
dengan pusat joint jari, maka gaya tarikan kabel menjadi lebih ringan.
Pengukuran gaya tarik dinamis bertujuan untuk mengetahui besarnya gaya
yang dibutuhkan tangan prosthetic dalam kaitannya untuk menggerakkan jari-jari
tangan prosthetic sesuai dengan model gerakan tangan manusia. Pengujian
dilakukan pada dua posisi, yakni posisi arah longitudinal axis (hi gravity effect-
low friction) dan posisi arah sagital plane (hi friction-low gravity effect).
Pengukuran besarnya gaya saat melakukan pemegangan dengan menggunakan
alat force gauge.
Besarnya gaya tarik dinamis yang dihasilkan dipengaruhi oleh gesekan-
gesekan yang terjadi dalam sistem jari tangan prosthetic ketika digerakkan.
Semakin banyak gesekan yang terjadi dalam jari tangan prosthetic, maka gaya
tarik dinamis yang dibutuhkan juga semakin besar. Pengujian pada arah
longitudinal axis, pergerakan dari masing-masing link jari tangan prosthetic
mengikuti arah gravitasi bumi, sehingga gravitasi memberikan kontribusi terhadap
besarnya percepatan angular dari jari tangan prosthetic ketika digerakkan. Pada
saat jari tangan prosthetic digerakkan searah garvitasi bumi, gesekan yang terjadi

23
pada jari tangan prosthetic disebabkan oleh gesekan dalam sistem kabel di jari
tangan prosthetic dan perputaran link pada joint, dimana masing-masing link
terhubung satu sama lain dengan joint aktif. Semakin banyak link dalam jari
tangan prosthetic maka gesekan yang terjadi juga semakin banyak. Jadi, tangan
prosthetic sistem external stressing cable dengan dua link memiliki gesekan yang
lebih sedikit jika dibandingkan dengan tangan prosthetic sistem internal stressing
cable dengan tiga link. Penelitian ini belum mengkaji besarnya gaya gesek yang
terjadi dalam sistem jari tangan prosthetic yang menyebabkan terjadinya power
losses ketika tangan prosthetic dioperasikan. Hasil eksperimen pengujian gaya
tarik dinamis pada arah longitudinal axis, ditunjukkan dalam tabel 5.2.
Tabel 5.2 Rata-rata gaya tarik dinamis pada arah longitudinal axis (Newton)
Gerakan dasar tangan manusia Desain tangan prosthetic Cylindrical Spherical Hook Tip Lateral Palmar
Tangan prosthetic sistem external stressing cable
24.342 34.874 27.270 46.828 36.306 35.678
Tangan prosthetic sistem internal stressing cable tanpa puli
24.508 35.174 27.312 38.460 46.548 40.526
Tangan prosthetic sistem internal stressing cable dengan puli
24.152 17.614 29.454 21.030 21.720 19.816
Berdasarkan tabel 5.2, tangan prosthetic sistem internal stressing cable
dengan puli memiliki rata-rata gaya tarik dinamis yang lebih rendah dari pada dua
desain tangan prosthetic lainnya.
Pengujian pada arah sagital plane, pergerakan dari masing-masing link jari
tangan prosthetic melawan arah gravitasi bumi, sehingga gravitasi tidak
memberikan kontribusi terhadap besarnya percepatan angular dari jari tangan
prosthetic ketika digerakkan. Beban pada masing-masing link bertumpu satu sama
lain karena link bergerak dalam sumbu-y pada arah sagital plane. Hal tersebut
mengakibatkan gesekan pada pemegangan arah sagital plane lebih besar. Semakin
banyak link dalam jari tangan prosthetic, maka beban pada masing-masing link
semakin banyak sehingga menyebabkan gesekan yang semakin besar. Tangan
prosthetic sistem external stressing cable dengan dua link memiliki gesekan yang
lebih sedikit jika dibandingkan dengan tangan prosthetic sistem internal stressing

24
cable dengan tiga link karena beban link yang lebih sedikit. Hasil eksperimen
pengujian gaya tarik dinamis pada arah sagital plane, ditunjukkan dalam tabel 5.3.
Tabel 5.3 Rata-rata gaya tarik dinamis pada arah sagital plane(Newton)
Gerakan dasar tangan manusia Desain tangan prosthetic Cylindrical Spherical Hook Tip Lateral Palmar
Tangan prosthetic sistem external stressing cable
25.348 30.314 33.892 36.634 38.242 37.784
Tangan prosthetic sistem internal stressing cable tanpa puli
34.684 25.026 28.246 38.902 42.516 44.070
Tangan prosthetic sistem internal stressing cable dengan puli
21.676 24.024 27.582 26.750 27.908 28.988
Berdasarkan tabel 5.3, tangan prosthetic sistem internal stressing cable
dengan puli memiliki rata-rata gaya tarik dinamis yang lebih rendah dari pada dua
desain tangan prosthetic lainnya.
5.1.4 Analisis Uji Anova
Eksperimen dilakukan pada pengujian gaya tarik dinamis dilakukan dengan
metode eksperimen factorial completely randomized design dengan alat
analisisnya adalah analisis variansi. Sebelum dilakukan analisis variansi perlu
dilakukan asumsi homogenitas dan independensi pada data hasil eksperimen.
Analisis variansi memberikan informasi berupa ada tidaknya signifikansi
pengaruh yang berbeda antar perlakuan dalam percobaan terhadap gaya tarik
dinamis. Kemudian uji setelah Anova diperlukan untuk mengetahui sejauh mana
perbedaan perlakuan tersebut dinyatakan berpengaruh secara signifikan terhadap
gaya tarik dinamis dari tangan prosthetic.
Syarat yang harus dipenuhi dalam analisis variansi adalah data observasi
berdistribusi normal, variansi antar sampel homogen, dan sampel diambil secara
random. Hal ini diperlukan karena analisis variansi melakukan perbandingan
variansi dari n sampel yang berasal dari k kategori secara berpasangan, dimana
agar hasil analisis variansi tersebut valid, maka diharapkan n sampel tersebut
mempunyai variansi (ragam).

25
Eksperimen dilakukan terhadap tangan prosthetic yang terdiri dari 36
sampel, dimana masing-masing berasal dari interaksi 3 faktor, yaitu faktor desain
tangan prosthetic, faktor arah sumbu gerakan tangan prosthetic, dan faktor model
gerakan tangan manusia. Faktor desain tangan prosthetic memiliki tiga level, arah
sumbu gerakan tangan prosthetic memiliki dua level, dan model gerakan tangan
manusia memiliki enam level. Ke-36 sampel tersebut merupakan interaksi antara
level-level yang dimiliki oleh setiap faktor, dimana dalam desain eksperimen 36
sampel disebut sebagai perlakuan. Misal eksperimen dengan perlakuan pertama
adalah eksperimen pada desain tangan prosthetic ke-1, arah sumbu gerakan
longitudinal axis, dan model gerakan tangan cylindrical. Setiap perlakuan dalam
eksperimen ini dilakukan sebanyak lima kali replikasi, sehingga didapat 180 data
dalam eksperimen yang dilakukan.
Asumsi pertama yang harus dipenuhi adalah asumsi normalitas. Uji
normalitas dilakukan untuk mengetahui apakah data dari setiap perlakukn dalam
eksperimen berdistribusi normal atau tidak. Hasil uji normalitas pada tabel 4.13,
diketahui bahwa seluruh data eksperimen pada masing-masing perlakuan
berdistribusi normal, sehingga analisis variansi cukup valid untuk untuk dipakai
dalam mengolah data tersebut.
Asumsi homogenitas sesuai dengan kaidah uji levene yang digunakan dalam
penelitian ini, menyatakan perlu adanya variansi antar sampel yang homogen.
Maksudnya adalah data antara level-level yang terdapat pada kelompok faktor
yang sama, memiliki variansi yang sama. Misalnya, data varibel respon dari level
arah sumbu gerakan longitudinal axis memiliki variansi yang sama dengan level
dari arah sumbu gerakan sagital plane dalam faktor arah sumbu gerakan tangan
prosthetic. Demikian juga dengan data variabel respon pada tiap level dari faktor
lainnya, diharapkan memiliki variansi yang sama untuk memenuhi asumsi
homogenitas. Rangkuman hasil uji homogenitas dapat dilihat pada tabel 5.4.
Tabel 5.4 Rangkuman hasil uji homogenitas
Faktor Kesimpulan Desain tangan prosthetic tidak homogen Arah sumbu gerakan tangan prosthetic tidak homogen Model gerakan tangan manusia tidak homogen

26
Hasil uji homogenitas diketahui bahwa data dari semua faktor dalam
eksperimen tidak homogen. Ketidakhomogenitasan data observasi tidak
menimbulkan resiko yang serius, karena jumlah kasus pada setiap samplenya
adalah sama. Penyebab ketidakhomogenitasan data adalah karena besarnya gaya
tarik yang dihasilkan masing-masing tangan prosthetic berbeda jauh pada masing-
masing gerakan tangan dan arah sumbu gerakan. Contohnya untuk faktor model
gerakan tangan pada level gerakan cylindrical, diketahui bahwa gaya tarik
dinamis di arah sagital plane pada tangan prosthetic internal stressing cable tanpa
puli sebesar 34,684 Newton, sedangkan pada tangan prosthetic internal stressing
cable dengan puli sebesar 21,676 Newton (terdapat selisih 13,008 Newton).
Perbedaan yang cukup jauh tersebut menyebabkan variansi yang berbeda antar
level model gerakan tangan manusia.
Asumsi terakhir yang harus dipenuhi adalah asumsi independensi.
Maksudnya adalah dalam proses pengambilan data, sampel diambil secara random
atau saling independen satu sama lain. Uji independensi dilakukan berdasarkan
urutan pengambilan data dengan melakukan plot residual. Urutan pengambilan
data tersebut sesuai dengan tabel 4.19, dimana data diambil berdasarkan
pengukuran terhadap gaya tarik dinamis dari masing-masing tangan prosthetic.
Seluruh grafik plot residual data menunjukkan nilai-nilai residual tersebar merata
di sekitar titik nol (sumbu x) dan tidak terdapat pola secara khusus. Hasil
pengujian independensi menunjukkan bahwa data eksperimen independen,
sehingga dapat dilanjutkan ke pengolahan analisis variansi.
Analisis variansi memberikan informasi tentang ada tidaknya perbedaan
pengaruh yang signifikan antar level dari faktor desain tangan prosthetic, faktor
arah sumbu gerakan tangan prosthetic, dan faktor model gerakan tangan manusia
yang diteliti beserta interaksi antar level faktor-faktor tersebut. Analisis variansi
pada dasarnya adalah menguraikan variasi (ketidakseragaman) ke dalam beberapa
sumber variasi. Dalam eksperimen ini terdapat tujuh sumber variasi data di luar
random error, yaitu desain tangan prosthetic (faktor A), arah sumbu gerakan
tangan prosthetic (faktor B), model gerakan tangan manusia (faktor C), interaksi
faktor A dan B, interaksi faktor A dan C, interksi faktor B dan C, serta interaksi
faktor A, B, dan C. Signifikan atau tidak signifikannya hasil analisis variansi

27
berdasarkan sumber variasi tersebut ditunjukkan oleh variabel respon yang diuji
menggunakan uji F. Jika dari hasil uji F terbukti suatu sumber variasi hasilnya
adalah signifikan, maka dapat dikatakan bahwa sumber variasi tersebut benar-
benar menjadi salah satu penyebab adanya variasi dalam variabel respon.
Tabel 5.5 Rekapitulasi hasil analisis variansi terhadap gaya tarik dinamis
Sumber variansi Analisis variansi
terhadap gaya tarik dinamis
Desain tangan prosthetic (A) Signifikan Arah sumbu gerakan tangan prosthetic (B)
Tidak signifikan
Model gerakan tangan manusia (C) Signifikan Interaksi AxB Tidak signifikan Interaksi AxC Signifikan Interaksi BxC Tidak signifikan Interaksi AxBxC Signifikan
Tabel 5.7 merupakan rekapitulasi hasil analisis variansi yang dilakukan
terhadap gaya tarik dinamis dari desain tangan prosthetic. Signifikan berarti ada
perbedaan pengaruh antar level pada faktor maupun interaksi faktor. Faktor desain
tangan prosthetic (faktor A) adalah signifikan, maka antara masing-masing desain
tangan prosthetic memiliki perbedaan yang signifikan terhadap variabel respon
gaya tarik dinamis. Demikian juga faktor model gerakan tangan manusia (faktor
B), interaksi faktor A dan C, serta interaksi faktor A, B, dan C, adalah signifikan,
maka level dari masing-masing faktor dan interaksi faktor tersebut memiliki
perbedaan yang signifikan terhadap variabel respon gaya tarik dinamis.
5.1.5 Analisis Uji Setelah Anova
Uji SNK digunakan dalam eksperimen ini untuk mengetahui pada level
mana dari suatu faktor maupun interaksinya, dimana oleh Anova dinyatakan
berpengaruh signifikan terhadap variabel respon. Apabila hanya ada dua level
pada suatu faktor, jika dinyatakan berpengaruh secara signifikan, maka dengan
melihat rata-rata variabel respon akan diketahui pada level mana nilai gaya tarik
dinamis yang terbaik.
Berdasarkan hasil Anova, faktor maupun interaksi faktor dengan level lebih
dari dua yang berpengaruh signifikan adalah faktor desain tangan prosthetic,

28
faktor model gerakan tangan manusia, interaksi antara faktor A dan C, serta
interaksi antara faktor A, B, dan C.
Hasil uji SNK diperoleh informasi bahwa level desain tangan prosthetic 1
(tangan prosthetic sistem external stressing cable) sama dengan level desain
tangan prosthetic 2 (tangan prosthetic sistem internal stressing cable tanpa puli),
sehingga berada dalam satu kelompok. Sedangkan level desain tangan prosthetic 3
(tangan prosthetic sistem internal stressing cable dengan puli) berbeda dengan
kedua level tersebut. Berdasarkan tabel 4.23, dapat disimpulkan bahwa desain
tangan prosthetic sistem internal stressing cable dengan puli memberikan gaya
tarik dinamis yang paling baik, yaitu sebesar 24,226 Newton.
Hasil uji SNK untuk faktor model gerakan tangan manusia menunjukkan
bahwa model gerakan tangan manusia yang memberikan rata-rata gaya tarik
dinamis yang minimum adalah gerakan cylindrical (25,785 Newton), spherical
(27,838 Newton), dan hook (28,959 Newton). Hal itu terjadi karena ketiga macam
model gerakan tangan tersebut merupakan gerakan power grip, dimana objek
benda yang dipegang biasanya memiliki dimensi yang lebih besar daripada
gerakan precision grip, sehingga gaya tarik yang dibutuhkan lebih kecil.
Hasil uji SNK untuk treatment faktor desain tangan prosthetic dan faktor
model gerakan tangan manusia, menunjukkan bahwa jika diinginkan gaya tarik
dinamis yang minimum, maka dapat dipilih treatment A3 x C2 (interaksi level
desain tangan prosthetic sistem internal stressing cable dengan puli dan level
model gerakan spherical), yaitu sebesar 20,819 Newton.
Hasil uji SNK untuk treatment faktor desain tangan prosthetic, faktor arah
sumbu gerakan tangan prosthetic, dan faktor model gerakan tangan manusia,
menunjukkan bahwa jika diinginkan gaya tarik dinamis yang minimum, maka
dapat dipilih treatment A3B1C2 (interaksi antara level desain tangan prosthetic
sistem internal stressing cable dengan puli, level arah sumbu gerakan longitudinal
axis, dan level model gerakan spherical), yaitu sebesar 17,61 Newton.
5.2 INTERPRETASI HASIL PENELITIAN
Desain tangan prosthetic sistem internal stressing cable sudah mampu
memperbaiki kekurangan dari desain tangan prosthetic sistem external stressing

29
cable. Dari sisi kosmetik, desain tangan prosthetic sistem internal stressing cable
memperbaiki sistem penarikan kabel external menjadi sistem penarikan internal
(sistem kabel di dalam jari tangan prosthetic). Jumlah link jari tangan prosthetic
sistem internal stressing cable yang memiliki tiga link, lebih menyerupai link
pada tangan manusia normal daripada jumlah link pada tangan prosthetic sistem
external stressing cable yang hanya terdiri dari dua link pada setiap jarinya. Dari
sisi fungsionalitas, jumlah link tersebut juga mempengaruhi luas area pemegangan
dari tangan prosthetic, dimana jari dengan tiga link memiliki area pemegangan
yang lebih luas daripada jari dengan dua link.
Berdasarkan hasil pengukuran gaya tarik statis, desain tangan prosthetic
sistem internal stressing cable dengan puli lebih memberikan gaya tarik yang
minimum jika dibandingkan dengan tangan prosthetic sistem internal stressing
cable tanpa puli. Rata-rata efisiensi gaya tarik statis tangan prosthetic sistem
internal stressing cable dengan puli pada arah longitudinal axis dan sagital plane
tidak berbeda jauh, seperti yang ditunjukkan dalam tabel 4.8. Hal ini berarti
kemampuan tangan prosthetic sistem internal stressing cable dengan puli dalam
memegang objek benda pada semua arah gerakan sama baiknya.
Pengujian gaya tarik dinamis dari tangan prosthetic dilakukan pada dua
posisi, yakni posisi arah longitudinal axis (hi gravity effect-low friction) dan
posisi arah sagital plane (hi friction-low gravity effect). Dari hasil perhitungan
analisis variansi eksperimen, dapat diketahui bahwa perbedaan desain tangan
prosthetic (baik desain metacarpal maupun phalanx phalangeal) serta perbedaan
model gerakan tangan manusia mempengaruhi besarnya gaya tarik dinamis.
Tangan prosthetic sistem internal stressing cable dengan puli memiliki rata-rata
gaya tarik dinamis yang lebih kecil, yaitu sebesar 24,226 Newton.
Rekomendasi desain tangan prosthetic ditujukan untuk pengembangan
desain tangan prosthetic sistem internal stressing cable. Selain karena sudah
memenuhi sisi fungsionalitas, desain tangan prosthetic sistem internal stressing
cable juga lebih memenuhi sisi kosmetik jika dibandingkan dengan tangan
prosthetic sistem external stressing cable. Dengan mempertimbangkan besarnya
rata-rata nilai gaya tarik dinamis dan gaya tarik statis yang dihasilkan pada
masing-masing tangan prosthetic, maka desain tangan prosthetic yang dapat

30
dijadikan rekomendasi untuk pengembangan desain tangan prosthetic selanjutnya
adalah desain tangan prosthetic sistem internal stressing cable dengan puli.

31
BAB VI KESIMPULAN DAN SARAN
Eksperimen mengenai tangan prosthetic diperlukan untuk mengetahui
desain tangan prosthetic terbaik dalam upaya pengembangan desain tangan
prosthetic selanjutnya agar dapat memenuhi kriteria desain tangan prosthetic yang
baik terutama dari sisi pengoperasiannya. Ikhtisar hasil penelitian terangkum
dalam kesimpulan serta masukan perbaikan untuk penelitian selanjutnya tertuang
dalam saran penelitian.
6.1 KESIMPULAN
Hasil penelitian mengenai eksperimen komparasi tangan prosthetic dapat
disimpulkan, sebagai berikut:
1. Rata-rata gaya tarik dinamis yang dibutuhkan tangan prosthetic sistem
external stressing cable adalah 33,959 Newton. Sedangkan rata-rata gaya tarik
dinamis pada tangan prosthetic sistem internal stressing cable tanpa puli
adalah 35,498 Newton, dan rata-rata gaya tarik dinamis pada tangan prosthetic
sistem internal stressing cable dengan puli adalah 24,226 Newton.
2. Rata-rata gaya tarik statis yang dibutuhkan tangan prosthetic sistem external
stressing cable adalah 8,23 Newton. Sedangkan rata-rata gaya tarik statis pada
tangan prosthetic sistem internal stressing cable tanpa puli adalah 12,62
Newton, dan rata-rata gaya tarik statis pada tangan prosthetic sistem internal
stressing cable dengan puli adalah 11,32 Newton.
3. Rata-rata nilai efisiensi gaya tarik statis dari tangan prosthetic sistem external
stressing cable adalah 0,28%. Sedangkan rata-rata nilai efisiensi gaya tarik
statis pada tangan prosthetic sistem internal stressing cable tanpa puli adalah
0,18%, dan rata-rata nilai efisiensi gaya tarik statis pada tangan prosthetic
sistem internal stressing cable dengan puli adalah 0,20%.
4. Berdasarkan hasil eksperimen, dapat diketahui bahwa perbedaan desain tangan
prosthetic (baik desain metacarpal dan phalanx phalangeal) memberikan
pengaruh yang signifikan terhadap besarnya gaya tarik dinamis.
5. Dengan mempertimbangkan besarnya rata-rata nilai gaya tarik dinamis dan
gaya tarik statis yang dihasilkan pada masing-masing tangan prosthetic, maka

32
desain tangan prosthetic yang dapat dijadikan rekomendasi dalam
pengembangan desain tangan prosthetic selanjutnya adalah desain tangan
prosthetic sistem internal stressing cable dengan puli.
6.2 SARAN
Saran yang diberikan pada penelitian selanjutnya agar desain tangan
prosthetic mampu dikembangkan menjadi produk yang lebih baik, sebagai
berikut:
1. Jika diinginkan gaya tarik dinamis yang minimum, maka dapat dipilih
treatment pada kondisi desain tangan prosthetic sistem internal stressing
cable dengan puli, pada arah sumbu gerakan longitudinal axis dan model
gerakan tangan spherical.
2. Penelitian selanjutnya diharapkan mampu mengkaji faktor-faktor yang
mempengaruhi besarnya gaya gesek yang terdapat dalam tangan prosthetic,
sehingga gesekan yang terjadi pada saat pengoperasian tangan prosthetic dapat
diminimalisasi.
3. Mengacu pada rekomendasi dalam pengembangan desain tangan prosthetic
selanjutnya, yaitu desain tangan prosthetic sistem internal stressing cable
dengan puli, maka perlu dilakukan pengembangan terhadap sistem
pengoperasian tangan prosthetic dengan menerapkan prinsip semi otomatis
pada sistem tarikan kabel, sehingga beban pengguna untuk mengoperasikan
prosthetic tangan menjadi lebih ringan.

33
DAFTAR PUSTAKA
Tosberg, William A, 1992. Upper and Lower Extremity Prosthesis. Illinois: Charles C Thomas Publisher.
Papaioannou, Yiorgos and Yener N. Yeni, 2000. Joints, Biomecanics Of. Washington DC: The Catholic University of America.
Hamill, Joseph and Kathleen M. Knutzen, 2009. Biomechanical Basis of Human Movement, 3rd edition. Massachusetts: Lippintcott Williams & Wilkins.
Fukaya, N., Toyama, S., Asfour, T., Dillman, R., 2000. Design of the TUAT/Karlsruhe Humanoid Hand, Proceedings of the 2000 IEEE/RSJ International Conference on Intelligent Robots and Systems,13-19.
Hughes, Herr, et.al, 2001. Cyborg Technology - Biomimetic Orthotic and Prosthetic Technology. AI Lab, MIT, 200 Technology Square, Room 820, Cambridge.
Halliday, David, 1999. Physics, 3rd Edition. New York: John Wiley & Sons, Inc
L.Mott, Robert, 2004. Elemen-elemen Mesin dalam Perancangan Mekanis. Yogyakarta: Penerbit Andi.
Sudjana, 1995. Desain dan Analisis Eksperimen. Bandung: Tarsito.
Hicks, Charles R., 1993. Fundamental Concepts in the Design of Experiments. New York: Oxford University Press.
Montgomery, Douglas C., 1984. Design and Analysis of Experiments. New York: John Wilfey & Sons.
Miller, JC., 1991. Statistika untuk Kimia Analitik. Bandung: Penerbit ITB.
Wijaya, 2000. Analisis Statistik dengan Program SPSS 10.0. Bandung: Alfabeta.

34
Weir, Richard F., et.al, 2001. A New Externally Powered, Myoelectrically Controlled Prosthesis for Persons with Partial-Hand Amputations at the Metacarpals. Journal of Prosthetics and Orthotics, Vol. 13, No. 2.
Martell, Jimmy W.S., and Giuseppina Gini, 2007. Robotic Hands: Design Review and Proposal of New Design Process. World Academy of Science, Engineering and Technology.
Related Documents











